
04-621 - Tondeuse robotique NEO tools - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil 04-621 NEO tools au format PDF.

| Type de produit | Tondeuse robotique |
| Marque / Modèle | NEO tools / 04-621 |
| Largeur de coupe | 180 mm |
| Hauteur de coupe réglable | 20 – 60 mm |
| Vitesse de rotation des lames | 3100 tr/min |
| Alimentation | Batterie rechargeable 18 V DC (série ENERGY+, non incluse) |
| Puissance moteur de coupe | 50 W |
| Puissance moteur de déplacement | 20 W |
| Pente maximale | 25% (14°) |
| Poids | 10,2 kg |
| Indice de protection robot | IPX5 |
| Indice de protection station d’accueil | IPX4 |
| Niveau de pression acoustique (LpA) | 56 dB(A) (incertitude K=3 dB(A)) |
| Niveau de puissance acoustique (LwA) | 67 dB(A) (incertitude K=3 dB(A)) |
| Contenu du coffret | Robot, station d’accueil/charge, adaptateur secteur avec câble 10 m, câble périphérique (100 m), 100 piquets, 6 chevilles station, 3 lames de rechange, 2 connecteurs, clé Allen |
| Autonomie programmée | 2 à 8 heures (selon réglage et batterie) |
| Type de programmation | Manuelle (boutons) ou automatique (application smartphone) |
| Connectivité | Wi-Fi et Bluetooth (application Toua) |
| Capteurs | Capteur de pluie, capteur de levage, capteur d’inclinaison, détecteur de collision |
| Fonctions de sécurité | Arrêt d’urgence STOP, interrupteur principal, détection levage/inclinaison, arrêt automatique batterie faible (<20%) |
| Entretien | Nettoyer le châssis et les lames après usage ; remplacer les 3 lames simultanément (vis comprises) |
| Garantie et service | Garantie constructeur (voir carte) ; SAV : GTX Service (Pologne) |
FOIRE AUX QUESTIONS - 04-621 NEO tools
Questions des utilisateurs sur 04-621 NEO tools
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Tondeuse robotique au format PDF gratuitement ! Retrouvez votre notice 04-621 - NEO tools et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil 04-621 de la marque NEO tools.
MODE D'EMPLOI 04-621 NEO tools
NEO TOOLS

04-621


F
1
2
3

4

5

6

7

8

9

10

11

12

G
1

2

3






。

5

6

H
1

5
PL INSTRUKCJA OBSLUGI 6
EN TRANSLATION (USER) MANUAL 11
DE UBERSETZUNG (BENUTZERHANDBUCH) 15
RU PYKOBODCTBO NO INPEBODY (PYKOBODCTBO NJIb3OBATEI) 20
HU FORDITASI (FELHASNZALOI) UTMUTATO 25
RO MANUAL DE TRADUCERE (UTILIZER) 30
UAIOCEHNI3IPEKIAy(KOPNCTYBAU) 35
CZ PReKLAD (UzivATELSKE) PRIRUCKY 39
SK PREKLAD (POUZIVATELSKEJ) PRIRUCKY 44
SL PREVOD (UPORABNIISKI) PRIROČNIK 48
LT VERTIMO (NAUDOTOJO) VADOVAS 53
LV TULKOSANAS (LIETOTAJA) ROKASGRAMATA. 57
EE TOLKIMISE (KASUTAJA) KAsiraAMAT 62
BG PPEBOI (PbKOBOCTBO 3A NOTPEBNTJI) 67
HR PRIRUCNIK ZA PRIJEVOD (KORISNIK) 72
SR INPEBOI (KOPINCHIK) yNytCTBO. 76
GR EΓXEIP1IIO METAΦPA2HΣ (XPH2TH) 81
ES MANUAL DE TRADUCCION (USUARIO) 86
IT MANUALE DI TRADUZIONE (UTENTE) 91
NL VERTALING (GEBRUIKERS)HANDLEIDING 96
PT MANUAL DE TRADUÇÃO (UTILIZADOR) 101
FR MANUEL DE TRADUCTION (UTILISATEUR) 106
PL INSTRUKCAOBSLUGI ROBOT KOSZACY 04-621
UWAGA! PRZED UZYCIEM ELEKTRONARZEDZI NALEZY UWAZNIE PRZECZYTAC NINIEJSZA INSTRUKCJE I ZACHOWAC JA DO POZNIEJSZEGO WYKORZYSTANIA.
SZCZEGOLOWE ZASADY BEZPIECZENSTWA
INSTRUKCJE DOTYCZACE BEZPIECZENSTWA DLA ROBOTOW KOSZACYCH
Bezpieczne stwo uzytkowania robota koszacego w practyce
POLECENIA
Uwaznie przyczytaj instrukcje. Zapoznaj sie z systemami sterowania i prawidlowa obstuga urzadzenia.
Nie dopuszczaj do tego, by urzadzenie bylo uzywane przyziei lub osoby, ktore nie zapoznały sie z instrukcja obstugi. Przepisy krajowe moga wskazywać minimny wiek operatora.
Nie wolno uzywac robota, gdy w povlizu znajduja sie innate osoby, Zwaszczda danei lub zwierzeta.
Nalezy pamietac, ze operator lub uzytkownik ponosi oppowiedzialnosc za wypadki lub zagrozenia dla innych odob lub srodowiska.
PRZYGOTOWANIE
- Przed koszeniem nalezy kaźdorazowo sprawdzić,czy wszystkie czȩci robota dzialaja prawidlowo.
- Aby uzyskać jak najlepsze efekty, zaleca sie koszenie przy bezdesczowej pogodzie. Podczas koszenia w deszczu trawa sąsie przyklejac do robota, tymo要去 przyte to silzgać.
- NIE wolno kosic w zlych warunkach atmosferycznych, np. podças ulewninger deszcu, burzy lub opadow sniegu.
- Nalezy okresowo sprawdzać koszony teren i usuwać z niedo wszelkie kamienie, odłamki, druty, kosci i innate przyszkody. Ograniczona gwarancja nie obejmuhe uszkodzen spowodawanych przyze przyedmioty pozostawione na trawniku.
- Aby nie dopuisci do uszkodzen, nie wolno kosic w odlegosci ponizej 1 m od glowic zraszaczy.
UWAGA! Robot i zraszacze NIE moga byc wlaczone jegnoczesnie. Robota nalezy zaprogramować tak, by pracwal w innym czasie niz zraszacze.
NIGDY nie wolno pozwalać danekom na dotykanie zasilacza, staciładowania w szczególnosci styków, ostrzy, komory baterii ani zadnych czȩci, w ktorych znejduję są szczeliny, takich jak kola.
UZYTKOWANIE
- Uważaj na obrotowe ostrza! NIE wiktadaj dloni ani stop pod obracajace sie ostrza.
Uwažaj na obiekty rozrucone na trawniku podczas koszenia! Gdy robot jest wączony, naleź zach owac bezpieczna odlegóść. - Nie zestawaj urzadzenia bez nadzoru, jesti wiadomo, ze w povlizu znajduja sie zwierzeta, daneci lub osoby postronne.
- Utrzymuj bezpieczna pozycje. Zachowuj rownowage i stabilnayozycje na pochylosciach. Podczas obstugwania robota lub jejorudzden peryferyjnych moza chodzić, natomiast nie wolno biegać.
- Zapoznaj sie z instrukcjami dotyczymi terminow,.), wiejsca i sposobu sprawdzania robota i ), ), przem odow i przedluzaczy pod katem uszkodzenia lub zuzycia oraz naprawiania robota, samodzielna modyfikacja, naprawa nie jest dozwolona - pod grozbą utraty gwarancji.
- Nie nalezy podłaczc ani dotykać uszkodzonego przywodu zasilajacego, dopókiNie zostanie odłaczony od zasilania ze względu na rzyko kontaku z elementami pod napieciem.
- Robota i/lub urzadzenia peryferyjne nalezy podlaczać wylacznie do obwodów zasilajacych zabezmieczonych wylacznikiem roznicowopradowym o pradzie wyzwalajacym nie Większym niż 30 mA.
- Jesli robot wydaje nietypowy dzwiek lub zauwazono nietypowedrgania, badz sygnalizuje alarm, nalezy natychmiast nacisnac przycisk STOP.
- NIE WOLNO dotykać niebezpiecznych ruchomych częsci przy绑定 wylączeniem zasilania robota.
- NIE WOLNO dotykać niebezmiecznych częsci, dopóki są calkowicieNie zatrzymaja.
- Podczas obslugi robota naleź zawszemieć na sobie solidne obuwie i dlugie spodnie.
- Odcić zasilanie: Przed zablokowaniem robota.
- Przed przystapieniem do testowania, czyszczenia lub konserwaczji.
PIKTOGRAMY I OSTRZEZENIA
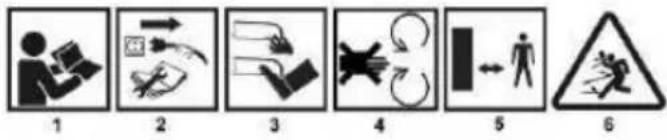

- Przechytaj instrukcje obslugi, przystrzegaj ostrzezenia i warunkowy bezpiecznych w niche są zawartych!
- Przed przystapieniem do czyszczenia lub konserwacci odączyc od zasilania
- Nie wiktadc rak ani nog pod oslone mechanizmu koszacego
- Wirujace elementy不可避免zranienia
- Zachowaj bezpieczny dystans od robota koszacego
- Uwaga na möglichść zranienia odrzuonymi elementami
- Chronicé przyed deszczem
- Chronici przydzieymi
- Nie wolno jeździc na robocie
- Mozliwośc utraty palcow, zachowac ostroznosć
- Maksymalne nachylenie podloza 14^ / 25%
- Chronic dlonie rekawicami roboczymi
- Naleź nosić stroj ochronny
- Nalezy nosić obuwie ochronne
- Nie wyrzucac z odpadami domowymi
- Selektywna zbiórkasmieci
- Stopien ochrony
UWAGA: To urzadzenie moze byc uzytkowane przydzowiej 8 roku zycia oraz osoby o agraniczonych zdolnosciach fizycznych i umyslowych oraz o niedostatecznej wiedzy lub doswiadczeni, gezeli znajda sie pod nadzorem lub dostana odpowiednio poinstruowane w zakresie bezpiecznego uzytkowania urzadzenia, tak byby swiadome zwiazanych z tym zagrozenia. Tym urzadzeniem nie powinny bawic sie daneci. Dzieci nie moga czyszeci ani przyepamrowadzac konserwacci urzadzenia bez nadzoru.
OPIS ELEMENTOW GRAFICZNYCH
Ponijsza numeracja odnosi sie do elementów urzadzenia przystawionych na stronach graficznych niniejszej instrukcji.
| Oznaczenia rvs. A | Opis |
| 1 | Wymiacznik awaryjny |
| 2 | Regulator wysokość koszenia |
| 3 | Panel sterOWANIA kosiarka |
| 4 | Wymiacznik kosiarki |
| 5 | Kola napędowe |
| 6 | Ostrza tnęce |
| 7 | Begrben Mechanizmu tnącego |
| 8 | Kola skrreturne |
| 9 | Uchwyt do przenoszenia |
| 10 | Konektory ladowania |
| 11 | Pokrywa komory akumulatora |
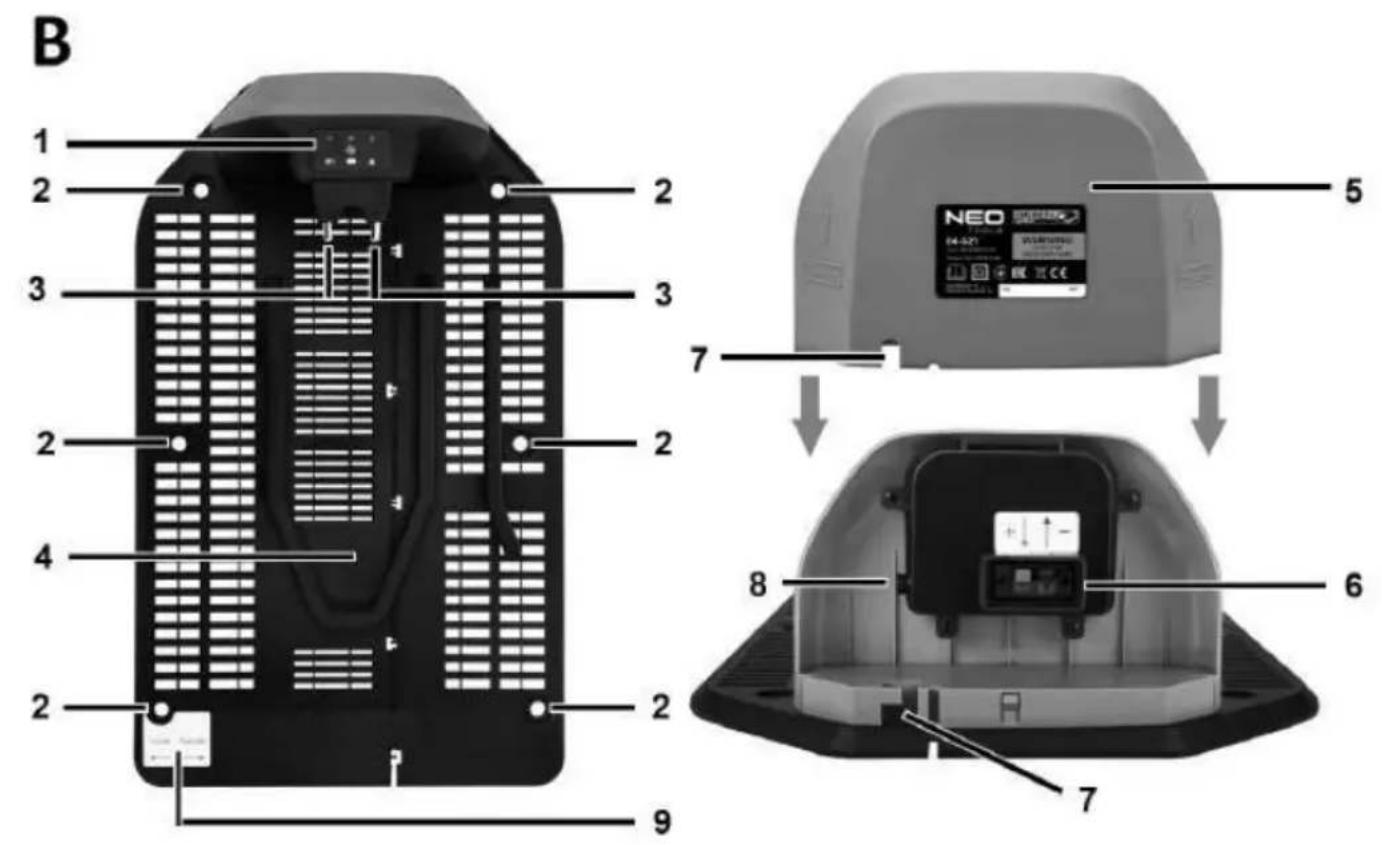
| Oznaczenie rys. B | Opis |
| 1 | Panel sterOWANIA staci dokujacej |
| 2 | Otwory do mocOWANIA staci dokujacej |
| 3 | Konektory ladowania |
| 4 | Stacja dokujaca |
| 5 | Oślona staci dokujacej |
| 6 | Konektory do podlączenia zasilania kabla do oznaczenia obszaru roboczego |
| 7 | Otwory kabla do oznaczenia obszaru roboczego oraz zasilacja |
| 8 | Gniazdo zasilania staci dokujacej |
| 9 | Oznaczenia do prawnówego utożenia przyzewodu |
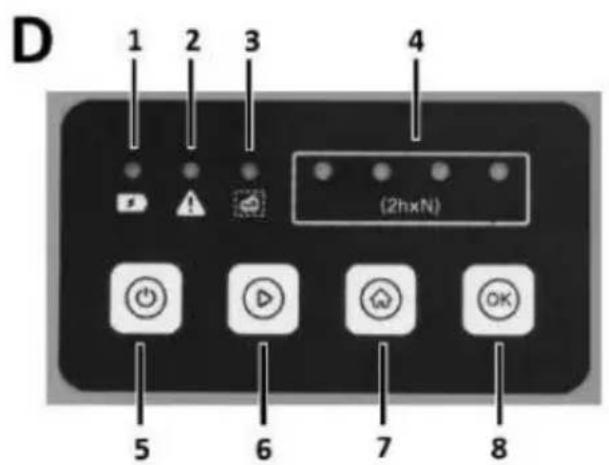
| Oznaczenia rys. D | Opis |
| 1 | Kontrolka stanuładowania |
| 2 | Kontrolka blędu sygnalu |
| 3 | Kontrolka przyzewodu ograniczajść |
| 4 | Godz. pracy / komunikat blȩdu, kontrlki 1-4 |
| 5 | Przycisk zasilania |
| 6 | Wącznik |
| 7 | Przycisk dokowania |
| 8 | Przycisk „potwierȩź” |
| Oznaczenie rys. H | Ophis |
| 1 | Śruby |
| 2 | Pokrywa komory akumulatora z uchwytem transportowym |
| 3 | Komora akumulatora |
| 4 | Gniazdo akumulatora na poukrowie komory |
| 5 | Akumulator (nie wchodzi w sklad zestawu) |
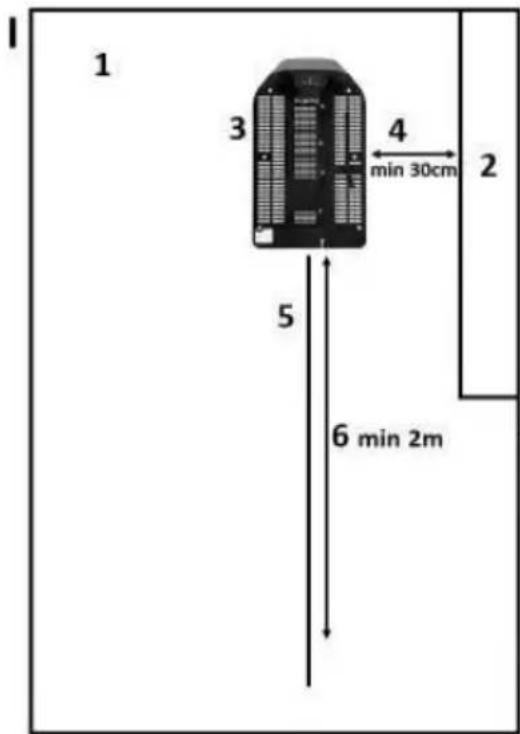
| Oznaczenie rys. I | Ophis |
| 1 | Trawnik |
| 2 | Ściana / mur |
| 3 | Stacja dokujacja |
| 4 | Odlegloiść staci od sciany |
| 5 | Początkowy odcinek linii ograniczajść obszar koszenia |
| 6 | Długość odcinka |
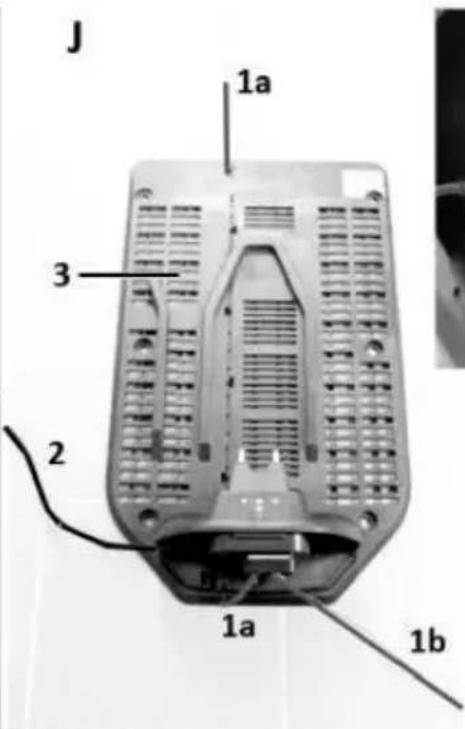
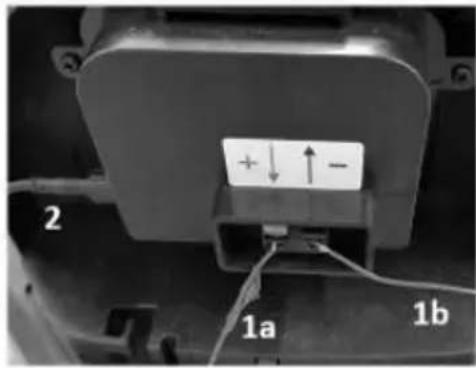
| Oznaczenie rys. J | Ophis |
| 1a | Przewód ograniczajcy obszar koszenia początek |
| 1b | Przewód ograniczajcy obszar koszenia koniec |
| 2 | Przewód zasilajncy |
| 3 | Stacja dokujacja |
- Moga wystapić roźnice między grafika a rzejczywistym produktem
PRZYGOTOWANIE DO PRACY
INSTALACJA AKUMULATORA
- Odwrocić robota koszacego tak aby był dostep do和他的 spoodu.
- W.), A4), A5), A6), A7), A8), A9), A10), A11), A12), A13), A14), A15), A16), A17), A18), A19), A20), A21), A22), A23), A24), A25), A26), A27), A28), A29), A30), A31), A32), A33), A34), A35), A36), A37), A38), A39), A40), A41), A42), A43), A44), A45), A46), A47), A48), A49), A50), A51), A52), A53), A54), A55), A56), A57), A58), A59), A60).
Nastepnie nalezy odkreci s Ruby zaznaczone strzalkami. - Ostrożnie zȩdźć oszone komory rys. H2, aby nie zerwać ani odȩczyć przyzwodów wącznika rys. A4 (jest przymocgowany do oszone komory akumulatora).
- Nastepnie nalezy odwrocić oslone, na jej spodzie jest zamocowanie gniazdo akumulatora rys. H4.
- Do gniazda wkladamy akumulator z seriien ENERGY+.
- Odwracamy oslone z zamocowanym akumulatorem i wkladamy do komory rys. H3.
- Dokrecamy s Ruby mocujace Pokrywe. Odwracamy robota spodem na dó, urzadzenie jest gotowe.
SRODWISKO PRACY ROBOTA KOSZACEGO
Nalezy upewnic sie, ze w.), spracy robota spelnione sa nastepujace warunki:
- Wysokosc trawy nie przyekracza 60 mm.
- UWAGA: Jesús trawa jest wyzsza nitz 60 mm, nalezy njpierek skosić trawnik kosiarka reczna.
- Nie ma kamieni, kawalków drewna, przywodów, kabli pod napieciem i innych obczych przydmiotów.
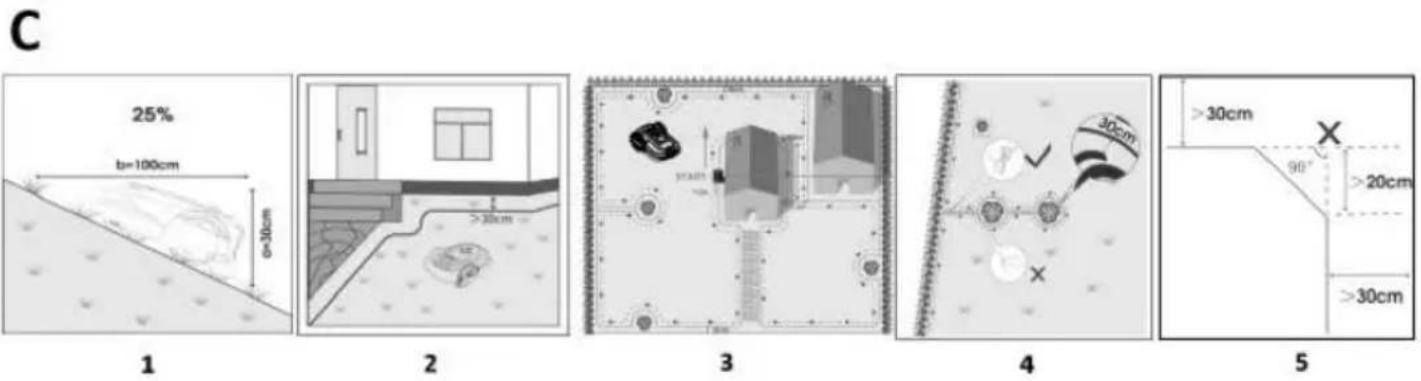
- Miejsce koszenia jest rowne i plaskie, pozbawione rowów i wykopów, nachylienie jest mniejsze niz 25% (14°) rys. C1
- Do instalaci potrzebne są nastepujeće naręźdia:
- Gumowy mlotek (do wbijania kolkow w ziemie przy kladzeniu przewodu ograniczajacego)
- Klucz szécsiokátny (do przymocowania staciładowania) jest w zestawie
Szczypce (do docinania przyzewodu ograniczajacego obszar roboczy)
1.INSTALACJA STACJI BAZOWEJ
Wybierz odowiednia lokalizacja
Stacja ludowania naleź postawic w nastepujacym mistrysc rys. C3:
- Stosunkowo plaska i røwna częsć trawnika.
- Blisko obrzeja trawnika.
- W povlizu gniazda sciennego.
- Przedluzacz o dlugosci 10 m, zasilacz naleź umieść w zacienionym, chłodnymi suchymi sąjechu.
- W odleglosci co najmniej 2 m od staci ladowania nie moga znajdowac sie zdne przyszkody.
- Zaleca sie, by stacja ladowania znajdowa sie w suchym i oslonietym.),
Zasilacz powinien znajdować sie 30 cm nad poziemem gruntu.
2.MOCOWANIE STACJI LADOWANIA
Stacja ladowania naleź przyzmocstaw do podło za pomocą 6 szrub mocujacych (G1) (uzywajć klucza szesciokatnégo G6).
UWAGA: NIE WOLNO stawac na plicie staci ladowania ani po niedchodzic.
UWAGA: NIE WOLNO robic nowych otworow w plicie staci fodowania.
Stacja naleź przykrećci do podloza uzywajć istniejezych otworów.
3.UKladanie PRZEWODU OGRANICAZAJACEGO
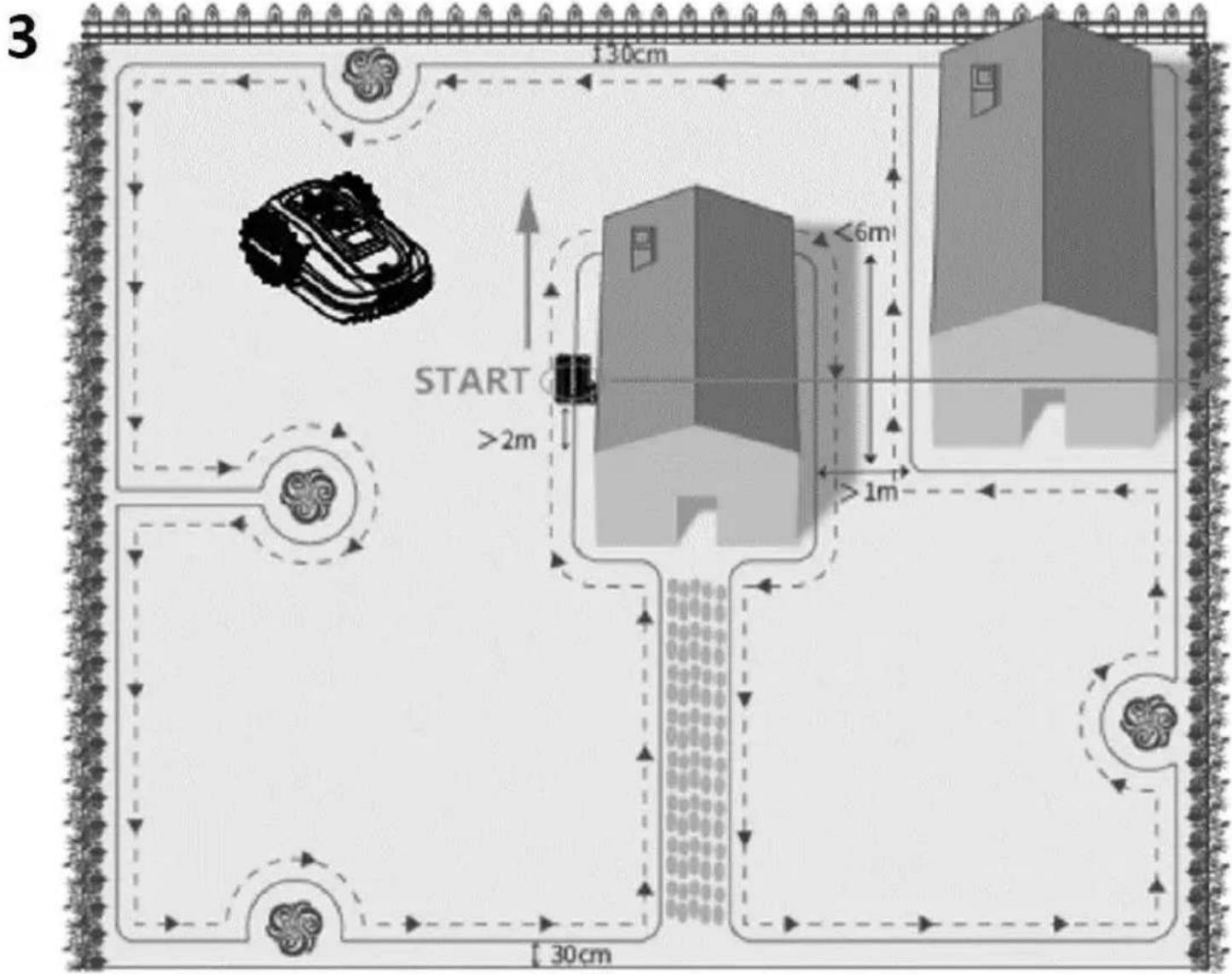
Przewód ograniczajczy sluzy do wyznaczania obszaru roboczego i naprowadzania robota z powrotem do staciładowania.
UWAGA: Jesli sąsiad rownik uzywa robota koszacego, nalezy zachowa co najmiej 1 m odstepu między przyzewodami agraniczajczymi obu robotow.
PLANOWANIE UŁOZENIA PRZEWODU OGRANICZAJACEGO
Przed ulozeniem przewodu ograniczajacego nalezy przyzejść sie wzdruż wyznaczonej granicy i usunć wszelkie niedopotrzebne obiekty, np. kamienie.
UWAGA: Dlugosc przywodu ograniczajacego nie要去 przykraczać 200 metrow.
OSTRZEŽENIE! Robot nie maye przyježdžać po zwirze ani podobnych materialach, ktore moglyby uszkodzic ostrza.
UKLADANIE PRZEWODU OGRANICAZAJACEGORYS.C
Aby ulozyc przywod ograniczajcy wokot obszaru roboczego i przyszkód, nalezy postepowac zgodnie z ponijszymi instrukcjami. Aby prawidlowo ulozyc przywod ograniczajcy, nalezy uzyc przymiaru dołaczonego do zestawu.
UWAGA: Przewód ograniczajcy jest zasilany bardzo niskim napieciem i jest bezpiecznych dla ludzi i zwierzat domowych.
UWAGA: Zacznij od złacza, " z tylu staci ladowania rys. B6 przyciagnij go pod stacja (i pozostaw 10 cm zapasu) i ukladaj przywod wokol trawnika w kierunku przyciwnym do ruchu wskazowej zagara, konczygo na złaczu, " z tylu staci ladowania (zostaw 10 cm zapasu). Upewnij sie, ze przywod styka sie z metalem na złaczach, +" i, -" rys. B6 pamiętaj o odcieciu nadmiaru przywodu agricanczajacego.
- Pozostaw pusta droge między przywodem agraniczajęcym a stacja tawkomania na dlugosci co najmiej 2 m. Przewód na tym odcinku sązy do doprowadzenia robota do stacli dokujej.
- Zachowaj 30 cm odstepu między przyzewodem ograniczajczym a obrzejm trawnika rys. C2; rys. C3.
- Przymocuj przywod ograniczajcy do podloza kolkami znajdujacymi sie w zestawie rys. G5. Przewod ograniczajcy powinien byc prosty i lekko napiety. Kolki powinny byc Rozstawione co 1 m (można to zmienic w zaleznosci od ksztalu trawnika) rys. C4. Nie zakopuj przywodu glębiej niż na 2 cm, aby nie oslabić sygnatu.
- Przewód ulóź w taki sposob, by katy byly większe niz 90^ rys. C5. W takich mistręszech ukladaj przyzwod agraniczajcy tagodnymi tukami co znaczo co ułatwi robotowy poruszanie są po koszonym obszarze.
- Jesli na trawniku znajduja sie kwietniki, sadzawkiczy drzewa, otocz je petlami z przywodu agraniczajacego rys. C4.
- Zachowaj min. 30 cm odstepu między przyzewodem ograniczajczym a krawedziami przyższkód.
UWAGA! Na drozde do i z petli przywod ograniczajcy nie maye sie sobe przecinac rys. C4.
- Pozostaw waska przystrzen w obszarze roboczym kosiarki. Upewnij sie,czy odlegostość między biegnącymi równolegle przyzewodami granicznych jest wieksza niz 1 m.
UWAGA! Pamiétaj, aby stacja dokujaca znajdowa są wewnatrz petli oznacẑajęj obszar koszenia. (outside-na zewnatrz / inside-wewnatrz) Rys.B2
4. INSTALACJA STACJI LADOWANIA
Podlacz zasilanie
- Włoz wyczke zasilania do gniażda scienngo 110-240V.
- Sprawdz stan kontrrolek LED na stacji ladowania rys. B1:
-
Swiatto Zielone ciagle: nawiazano polaczenia (robot nie laduje sie lub jest w pelni naładowany)
-
Swiatlo Zielone przerywane: robot laduje sie.
- Swiatlo czerwone przerywane: najc眩stszy blad to „rozȩczenie przyzewodu ograniczajacego".
- Swiatto wylaczone: najczestsza usterka to „Brak zasilania 100-240 V" lub „Brak polaczenia ze zrodlem zasilania".
DZIALENIE / USTAWIENIA
Pierwsze uruchomienie robota koszacego
- W czasie pierwyszego uruchomienia robota nalezy ustawic urzadzenie na staci dokujej, aby konektory ladowania w staci rys. B3 nie stykały sie z konektorami ladowania w robocie koszynam rys. A10.
- Podczas pierwszego uruchomienia robota kosz成语o z aplikaksi Telefonu nalezy wykonacactualizace oprogramowania sprzetowego. Sposob wykonania jest opisany ponizej w punkcieactualizacja oprogramowania.
- UWAGA! Podczas pierwszego polaczenia Telefon oraz robot musza byc w zasięgu sieci Wi-fi.
AKTUALIZACJA OPROGRAMOWANIA SPRZETOWEGO PRZED UZYCIEM ROBOTA.
Aktualizacja naleź wykonac w nastepujuc y sposob.
1.Umieśc robota wewnatrix petli, ale poza stacja ludowania.
2.Przelacz wólcznik rys.A4 w pozycje
3.Wcisnij i przytrzymaj wącznik rys. D5
4.Uruchom applikajce, zeskanuj QR-code
5. Połucz aplikacja z robotem
6.Rozwiñ ustawenia oprogramowania naciskajc ikone w prawnym gornym rogu ekranu.
7. Wybierz opcj: Aktualizacja oprogramgowania sprzȩtość.
8.Nastepnie postepuj zgodnie z zaleceniami na ekranie.
Po instalacji oprogramwomania urzadzenie jest gotowe do pracy
UWAGA!
- Na wyświetlaczu znajduje są informacja czy robot jest w zasięgu Wi-fi przy Bluetooth
- Lęczenie z siecia jest syngnalizowej migajacja ikona danego typu polaczenia. Po polaczeniu ikona przystaje migać.
- Robotmözebyc sparowany tylko z Jednym telegramm.
- W przypadku koniecznosci podlaczenia innego (takiego samego robota koszacoego) nalezy pierszzy usunan z aplikacji. W aplikacji dla systemu iOS rownież z ustawien Bluetooth.
REGULACJA WYSOKOSKI KOSZENIA:
Przed pierwszym koszeniem ustaw wysokość koszenia na 60 mm, a nastepnie zmień na poźadano wysokość, gdy caly trawnik bedzie stosunkowo plaski.
- ObróćPokretto rys.A2 w prawo,zeby zwiekszyc wysokosc koszenia.
- ObrócPokretto rys.A2 w lewo,zebyzmniejszycwysokosc koszenia.
- Wysokosc koszeniaromatica regulowac w zakresie od 20 mm (MIN) do 60 mm (MAX).
UWAGA! Silnik napedowy bebna mechanizmu koszacego rys. A7 wyczsi po ok. 10 sekundach od wyjazdu z bazy, rozpoczynajac prace.
WŁACZANIE/WYLACZANIE ZASILANIA
- Ustaw przyȩcznik rys. A4 w poźycji „O“, aby wyłączy zasilanie.
- Ustaw przyȩcznik rys. A4 w poźycji „l", aby wączyść zasilanie.
WLACZANIE ROBOTA I PROGRAMOWANIE CZASU PRACY W TRYBIE MAUALNYM
- Nacisnj i przytrzymaj przyczisk zasilania rys. D5, aby uruchomic robota. Uwaga: podczas uruchamiania nie potrzaszaj robotem, aby uniknac bledu przy uruchomieniu. Jesli robot nie uruchomi sie prawidlowo (wszystkie kontrlki swieca sie ciaglym swiatlem), uruchom go ponownie.
- Wpisz haslo nasciskajdc dwukrotnie przycisk rys. D6, nastepnie dwukrotnie przycisk rys. D7 oraz jegnokrotnie przycisk rys. D8 (haslo zaprogramowane fabrycznie).
-
Zaprogramuj.czas pracy (w tym czas koszenia i czas ladowania):
-
Nacijsnj przycisk rys. D6, aby ustawic czas pracy. Jedna kontrolka oznacza 2 godziny, maksymalny czas pracy to 8 godzin i 4 zapalone kontrolki rys. D4. Nacijsnj przycisk rys. D8, aby potwierdzic i uruchomic robota.
UWAGA: Po ustawieniu czasu pracy robot zapamieta ustawenia i codziennie Rozpocznie koszenie o zaprogramowanej porze. Czas koszenia bedzie zgodny z wpwadzonymi ustawieniami.
- Zaprogramowany czas przyrobota od 2 godziny do 8 godzin to czas koszenia wraz z czasem ludowania.
- Czas pracy oraz ludowania bedzie rożny w zaleźnosci od zastosowanego akumulatora.
Jesli chcesz zmienic czas pracy, wykonaj ponownie kroki 2-3.
PROGRAMOWANIE CZASU PRACY W TYYBIE AUTOMATYCZNYM, 7 DNIOWY HARMONOGRAM, JEST DOSTEPNY POPRZEZ USTAWIENIA W APLIKACJI
- Po awaryjnym zatrzymaniu robota naleź y go najpierw odblokownik postepujac zgodnie z punktem 2 powyzej. Po odblokownik robota moźemy go odesląc do staci, nacziskajc przyciski: rys. D7 nastepnie zatzwierdźć przyciskiem rys. D8, aby kosiarka wrocita do staci ludowania.
- Wcisniecie przycisku awaryjego zatrzymania STOP kasije cykl pracy trybu manualeneo oraz automatyczneo z applikaci, jesti byt on w ten sposob uruchomiony. Aby robot ponownie podjal prace po awaryjnym zatrzymaniu nalezy przywrocić go do staciładowania i ponownie ustawic manualeny harmonogram pracy. W przypadku harmonogramu automatyczneo nalezy wykonac tę samą czynnosć w harmonogramie applikaci i potwordzić jej ustawenia.
UWAGA! Zaprogramowanego czasu uruchomienia w harmonogramie automatycznym nie nalezy traktowac jako bardzo preczyznego. Urzadzenia要去 uruchomic sie do kilku minut po ustawionym czasie.
- Właczenia trybu manualsego kasuju harmonogram zaprogramowy w aplikacja i odwrotnia.
- Krawedziowanie w trybie manualnym jest robione z automatu co kilk cykli koszenia. Polega ono na koszeniu trawy przy przywoedzie okreslajycym obszar roboczyc. UWAGA! Nalezy zworci uwage na prawidowej przymocowanie przywodu, abyNie narazi go na przypadkowe przyciecie.
- Po stwierdzeniu przyez urzadzenia rozpoczecie opadu deszczu robot koszący powróci do staci dokujacej.
- Jesli robot w czasie pracy napotka przyszkode odbije sie od niece i bedzie kontynuowal prac.
KONTROLKA STANU LADOWANIA W STACJI LADOWANIA:
Ciagle zielone swiatlo - bateria w pelni naładowana.
Przerywane zielone swiatlo -ladowanie.
POZA STACJA LADOWANIA:
Ciagle zielone swiatlo - bateria > = 20%
Przerywane zielone swiatlo - bateria < 20%
UWAGA! Robot automatycznie przerywa prace i powraca do staciładowania, jesti poziom akumulatora spadnie ponijej 20%
KONTROLKA BLEDOW:
Ciagle zielone swiatlo - nalezy faktualizowac system. Połucz z aplikacja, aby przypegowadzićactualizacja.
Przerywane zielone swiatlo - trwaactualizacja systemu.
Przerywane czerwone swiatto - komunikat blędu od 1 do 5, uruchom ponownie robota.
Ciagle czerwone swiatlo - komunikat bledu od 6 do 12, nacisnij „STOP" lub „OK", aby usunac.
KONTROLKA PRZEWODU OGRANICZAJACEGO:
Ciagle zielone swiatto - sygnat prawidlowy
Ciagle czerwone swiatlo -brak sygnalu
Kontrolk rys.D4:
Swiatto przerywane - robot zablokowany.
Swiatlo ciagle - robot odblokowany.
Kontrolka 1 swieci na zielono: 2 godzina czasu pracy.
Kontrolki 1 i 2 swiecna zielono: 4 godziny czasu pracy.
Kontrolki 1, 2 i 3 swieca na zielono: 6 godzin czasu przy.
Kontrolki 1, 2, 3 i 4 swieca na Zielono: 8 godzin czasu pracy.
OPROGRAMOWANIE STERUJACE ROBOTEM KOSZACYM
Do pobrania IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Do pobrania Android:
https://play.google.com/store/apps/details?id=com.toua.robot
Instrukcja programu do pobrania pod adresem:
https://bit.ly/3QBB6Gm
AWARYJNE WYLACZANIE ROBOTA
Nacijsij przycisk "STOP" rys. A1, aby zatrzymać robota, nacijsij i przytrzymaj przycisk zasilania, aby wylączyć robota.
PRZENOSZENIE ROBOTA
Pod spodem robota znajduje sie uchwyt do podnoszenia rys. A10, ktory ulwatia obsluge jeder reka.
KONSERWACJA I PRZECHOWYWANIE
- Przed Rozpoczeciem czyszczenia i konserwacci robota sązy go zawsze wyłaczyc.
- Przed czyszczemien i konserwacja staciładowania sąȩzy odśczyc zasilanie.
- Podczas wymiany ostrzy i czyszczenia spodu robota naleź zawszemieć na sobie grube rekawice ochronne.
- Regularnie sprawdzaj dokrecenie szub i nakreetek. Uszkodzone czeci nalezy naprawiać lub wymienić ze względow bezpieczenersstwa.
- Regularnie sprawdzaj,czy ostrza moga sie swobodnie obracac.
UWAGA: Gdy obracasz robota do góry spodem, poloź go na trawniku lub miękkiej powierzchni, abyNie zniszczyc i nie zarysować osłony.
CZYSZCZENIE
OSTRZEZENIE! Zanim Rozpocznych czyszczenie, wyłac zasilanie przyelacznikiem rys. A4.
- Przednia częsć robota naleź myc myjką niskocisnieniowa i miȩkką szczotka lub szmatka.
Uzytwardej szczotki,abyusunac scinki trawyizanieczyszczenia zostrzy,kolinnych czeci na spodzie robota. - Regularnie sprawdzaj kola pod katem obecnosci blota lub scinków trawy i czyszć je szczotka.
UWAGA: Regulamie usuwaj resztki roslin ze spodu robota, aby uniknac obnizenia wydajnosci pracy.
WYMIANA OSTRZY
OSTRZEZENIE! Najpierw wyłac z glówny wyłacznik zasilania i załozrekawice ochronne.
OSTRZEZENIE! Uzywaj wylącznie wskazanych oryginalnych ostrzy zatwierdzonych przy producenta.
- W ramach jedernej wymiany nalezy wymienic wzystkie trzy ostrza i s Ruby do nich rys. A6.
- Sruby nalezy odkrećić i dokrećić wkritakiem.
- Sprawź,czy nowe ostrza moga sie swobodnie obracć.
ROZWIAZYWANIE PROBLEMOW
Ponieszta tabela zawiera wskazówki pomagajuce w diagnozowaniu problemów.
Jesli to mozliwe, nalezy naprawic urzadzieenie samodzielnie. Jesli nie można rozwȩzać problemu, prosimy zwrócić sie do autoryzowanego sprzemawcy lub serwisu.
OSTRZEZENIE! Nalezy godejmowac srodki ochonne.
| Problem | Możliwe przyczyny | Rozwiązania |
| Na staciładowania miga czerwone światlo | Przerwanie przywodu ograniczajęcego | Znajdź uszkodzony odcinek przywodu i napraw go |
| Robot ma trudnosci przy dokowani do staciładowania | Stacjaładowania nie jest prawnidłowozainstalowsa | Zob. punkt „Przygotawanie do pracy" |
| Przewód ograniczajocy niche zostaw prawnidłowozuło zozny | ||
| Brak sygnalu z przywodu ograniczajęcego | Brak zasilania | Sprawdź zȩódlo zasilania |
| Przewód ograniczajcy zostaw odwrotnia podlączony | Zamień zȩćza „+“ i „-“ | |
| Przewód ograniczajcy niche zostaw podlączony do staciładowania | Sprawdź, czy przywod ograniczajcy jest prawnidłowo podlączony do staciładowania | |
| Przerwanie przywodu ograniczajść | Sprawdź naCALEj dlugość, czy przywódNie zostaw przywany | |
| Przewód ograniczajcy przyrecina są w drodzode i z pętli | Sprawdź, czy przywód ograniczajcy jest prawnidłowo zainstalowsany |
| Robot wyjeźda poza granice | Przewód ograniczajcy zostaw odwrotnia podłoczony | Zamień zȩczama „+“ i „-“ |
| Robot drga lub wydaje nietypowe dzwymi | Uszkodzenia ostrza lub brak ostrza | Sprawdzymi napraw struby do mocowania ostrza |
| Tarcza ostrza jest poluzowana | ||
| Wymień ostrze |
| Kod blędu | Opis | Rozwiązanie |
| E01 rys. F1 | Bład incjalizacja – czujnikźyroskopowy | Ustaw robota na plaskim podło z uruchom ponownie. |
| E02 rys. F2 | Bład czujnika podnoszenia lub czujnika kolizzi | Wyreguluj drażek kolizjny i kola skretne z przydodu kosiarki, sprawdź,czy są zablokowane; ustaw robota na plaskim podło z uruchom ponownie. |
| E03 rys. F3 | Bład incjalizacja silnika tnaçego | Ustaw robota na plaskim podło z uruchom ponownie. Jesli problem nie ustapi, skontaktuj są z serwisem posprzedȩzowym. |
| E04 rys. F4 | Bład podlaczenia zasilania | |
| E05 rys. F5 | Nieprawidlowa prędkość silnika tnaçego | |
| E06 rys. F6 | Ostrzejeść o przechyleniu | Ustaw robota na plaskim podło z. Nacijsnj STOP lub OK, aby skasować alarm. |
| E07 rys. F7 | Ostrzejeść o podniesieniu | Ustaw robota na plaskim podło z. Nacijsnj STOP lub OK, aby skasować alarm. |
| E08 rys. F8 | Bład kanalu ADC | Ustaw robota na plaskim podło z uruchom ponownie. Jesli problem nie ustapi, skontaktuj są z serwisem posprzedȩzowym. |
| E09 rys. F9 | Nieprawidłowysynegrat | Zobacz powyJE w tabeli: problem – brak sygnalu z przewodu ograniczajacego. Sprawdź wszystkie punktymi polekiet, a nastepnie ustaw robota na plaskim podło. Nacijsnj STOP lub OK, aby skasować alarm. Uruchom ponownie robota. Jesli problem nie ustapi, skontaktuj są z serwisem posprzedȩzowym. |
| E010 rys. F10 | Zaciecie robota | Ustaw robota na plaskim podło z. Nacijsnj STOP lub OK, aby skasować alarm. Uruchom ponownie robota. Jesli problem nie ustapi, skontaktuj są z serwisem posprzedȩzowym. |
| E011 rys. F11 | Nieprawidłowaprędkość lewego silnikakroczacego | Uruchom ponownie robota. Jesli problem nie ustapi, skontaktuj są z serwisem posprzedȩzowym. |
| E012 rys. F12 | Nieprawidłowaprędkość prawego silnikiroczacego |
ZAWARTOSC ZESTAWU:
- Robot koszacy 1szt.
- Stacja dokujaco ladujaca 1szt.
Zasilacz oraz przydłuszacz 1szt.
Kabel do wyznaczenia obszaru roboczego 100m
Kolki do mocowania kabla 100szt. - Kolki do mocowania staci dokujece 6szt.
Ostrzata nace 3szt.
Laczniki kabla 2szt. - Klucz szesciokatny 1szt.
DANE TECHNICZNE
| Robot Koszący 04-621 | |
| Parametr | Wartość |
| Napiȩcie zasilania | 18 V DC |
| Maks. moc znamionowa silnika tącego: | 50 W |
| Maks. moc znamionowa silnika samojezdugo: | 20 W |
| Stopość ochryn IP dla staciładujacej | IPX4 |
| Stopiéń ochrony IP dla robota | IPX5 |
| Stopiéń ochrony IP dla adaptersaładujacego | IP 65 |
| Klasa Ochronność dla robota | III |
| Klasa Ochronność dla staciładujacej | II |
| Szerokość koszenia | 180 mm |
| Regulacja wysokość koszenia wzakresie | 20 mm – 60 mm |
| Prędkość obrotowa | 3100 rpm |
| Masa | 10,2 kg |
| Rok produktów | 2024 |
DANE DOTYCZACE HALASUIDRGAN
| Poziom cijsnienia akustycznégo | LpA= 56dB (A) K= 3dB(A) |
| Zmierzony poziom mocy akustycznej | LwA= 67dB (A) K= 3dB(A) |
Informacja na temat halasu i wibraci
Poziom emitowanego halasu przyzez urzadzenie opisano poprzej: poziom emitowanego cisnienia akustyczneo LPA oraz poziom mocy akustycznej LWA (gdzie K oznacza niepewnosc pomiaru). Drgania emitowane przyzez urzadzenie opisano poprzej wartosc przyspieszen drga a_h (gdzie K oznacza niepewnosc pomiaru).
Podane w niniejszej instrukcji: poziom emitowanego ciasnienia akustycznego L pA, poziom mocy akustycznej L WA oraz wartosc przyspieszenes drgan a h zostaly zmierzone zgodnie z EN 62841-1:2015+A11. Podany poziom drgan a moze zostac uzyty do porownywania urzadzen oraz do wstepnej oceny ekspozycji na drgania.
Podany poziom drgan jest representatywny Jedynie dla podstawych zastosowan urzadzenia. Jeźeli urzadzenia zestanie uzyte do innych zastosowan lub z innymi narędziami roboczymi, poziom drganość uciec zmieianie. Na wyźysz tym poziom drgan三点bie wptywać niewystarczȩca czy zbyt rzadka konserwacja urzadzenia. Podane powyzej przyczyny moga spowodowej zwiększenia ekspozycji na organia podczas calego okresu pracy.
Aby dokladnie oszacowac ekspozycje na drgania, nalezy uwzgldenic okresy, kiedy urzadzenie jest wylaczone lub kiedy jest wlaczone, ale nie jest uzywane do pracy. Po dokladnym oszacowaniu wsystkich czynnikow laczna ekspozycja na drgania moze okazac sie znacznie nizsza.
W celu ochry uzytkownika przy skutkami dgrań naleź wropyadzić dodatkowe srodki bezpiecznejstwa, takie jak: cyklicznia konserwacja urzadzenia i narędź roboczych, zabeźpieczność odpowiednej temperatury rąk oraz wȩsciwa organizacja pracy.
DANE DOTYCZACE HALASU I DRGAN
OCHRONA SRODOWISKA

Produktow zasilanych elektrycznie nie nalewy wyrzucać wraz z domowymi odpadkami, lecz oddac je do utylizacje w owypiednicht zakładach. Informacja na temat utylizacje udzieli przyzedawca produktu sąmycie wędze. Zuzyty sprzet elektryczny i elektroniczny zwiercie substançneNiebojojejne dla srodowiska naturalnégo. Sprzet nie podd recyklingowy stanowy potencjalne zagrozenia dla srodowiska i zdrów ludzi.
"Grupa Topex Spóka z ograniczona odpwiedzialnosci" Spóka komandytowa z siedzibw Warszawie, ul. Pograniczna 2/4 (dalej: Grupa Topex") informuje, iz wszelkie prawa autskei do tresci niniejszej instrukcj (dalej: Instrukcja), w tym m.in. jej tekstu, zamieszczonych fotografii, schematów, rysunków, a takze jej kompozycji, naży wylacznie do Grupy Topex i podlegaja ochrione sprawnej zgodnie z ustawa z dnia 4 lutego 1994 roku, o sprawie autorskim i prawachPokrewnych (tj. Dz. U. 2006 Nr 90 Poz 631 z poźn.zm.). Kopiwanie, przytewaranie, publikOWanie, modyfikOWanie w celach komercyjnych calosci Instrukcj jak i poszczególnych jej elementów, bez zgody Grupy Topex wyrazonej na piśmie, jest surowo zabronione i moze spowodowej pociagniecie do odpwiedzialnosci cywilnej i karnej.
GWARANCJA SERWIS
Warunki gwarancji oraz opis postepowania w przypadku reklamacji zawartę są w zalączonej Karcie Gwarancyjnej.
Serwis Centralny GTX Service Sp. z o.o. Sp.k.
ul. Pograniczna 2/4 tel. +48 22 364 53 50 02-285 Warszawa e-mail bok@gtxservice.com
Siec Punktów Serwisowych do napraw gwarancyjnych i pogwarancyjnych dostepna na platformie internetowej gtxservice.pl
Zeskanuj QR kod iwejdź na gtxservice.pl


Dekaracja zgodnosci WE
Producent: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warszawa
Wyrób: Robot koszący E+
Model: 04-621
Nazwa handlowa: NEO TOOLS
Numer seryjny: 00001 ÷ 99999
Niniejsza deklaraqa zgodnosci wydana dostaje na wylacznaj odpowiedzialnosc produenta.
Opisany wyzej wyrob jest zgodny z nastepujacymi dokumentami:
Dyrektywa Maszynowa 2006/42/WE
Dyrektywa RED 2014/53/UE
Dyrektywa RoHS 2011/65/UE zmieniona Dyrektyw 2015/863/UE
Oraz speltnia wymagania norm:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Deklaracja ta odnosi sie wylacznie do maszyny w stanie, w jakim zostafa wpwadzona do obrotu iNie obejmujce czeci skladowych dodanych przy uzytkownika koncwoego lub przyperowadzonych przynego poźniejszych dzialan.
Nazwiski adres osoby majacej.),zamieszkania lub siedzibw UE upowaznionej do przygotowania dokumentaqi technicznej:
Podpisano w imieniu:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warszawa

Pawel Kowalski
Pelnomocnik ds. jakosci firmy GRUPA TOPEX
Warszawa, 2023-09-11
Deklaracja zgodnosci UE
Producent: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warszawa
Wyrob: Stacja Ladowania
Model: K145455
Nazwa handlowa: NEO TOOLS
Numer seryjny: 00001 ÷ 99999
Niniejsza deklaraqa zgodnosci wydana dostaje na wyłaczną odpowiedzialnosć produkta.
Opisany wyzej wyrobstgodny z nastepujacym Dokumentami:
Dyrektywa RED 2014/53/UE
Dyrektywa RoHS 2011/65/UE zmieiona Dyrektywq 2015/863/UE Oraz spelnia wymagania norm:
ENIEC 55014-1:2021; ENIEC 55014-2:2021; ENIEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Deklaracja ta odnosi sie wylącznie do maszyny w stanie, w jakim została wropyadzona do
obrotui nie obejmujce czeci skladowsych dodanych przytkownika konicowego lub
przeprowadzonych przye niego poźniejszych dzialan.
Nazwiski adres osoby majacej.),zamieszkania lub siedzibw UE upowaznionej do
przygotowania dokumentaci technicznej:
Podpisano w im
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warszawa

Pawel Kowalski
Pelnonocnik ds. jakosci firmy GRUPA TOPEX
Warszawa, 2023-11-09
EN TRANSLATION (USER) MANUAL MOWING ROBOT 04-621
CAUTION! BEFORE OPERATING POWER TOOLS, READ THESE INSTRUCTION MANUAL CAREFULLY AND KEEP IT FOR FUTURE REFERENCE.
DETAILED SAFETY RULES
SAFETY INSTRUCTIONS FOR MOWING ROBOTS
Safety in the practical use of the mowing robot
RECOMMENDATIONS
Read the instruction manual carefully. Get to know the control systems and the correct operation of the appliance.
Do not allow the appliance to be used by children or anyone who has not read the instruction manual. National regulations may indicate a minimum age for the operator.
Do not use the robot if other people, especially children or animals, are present around.
Please remember that the operator or user is responsible for accidents or hazards to other people or the environment.
PREPARATION
- Before mowing, check each time that all parts of the robot are working properly.
- For best results, mowing in rain-free weather is recommended. When mowing in the rain, grass can stick to the robot, which can slip as a result.
- DO NOT mow in bad weather conditions, e.g. during heavy rain, thunderstorms or snowfall.
Periodically inspect the mown area and remove any stones, debris, wires, bones and other obstructions. The limited warranty does not cover damage caused by objects left on the lawn. - To avoid damage, do not mow within 1m of the sprinkler heads. CAUTION! The robot and sprinklers must NOT be switched on at the same time.
The robot should be programmed to run at a different time to the sprinklers.
NEVER allow children to touch the power supply, charging station in particular the contacts, blades, battery compartment or any parts where there are gaps such as wheels.
OPERATION
- Watch out for rotating blades! DO NOT put your hands or feet under rotating blades.
- Watch out for objects scattered on the lawn while mowing! When the robot is on, keep a safe distance.
- Do not leave the appliance unattended if animals, children or bystanders are known to be in the vicinity.
- Maintain a safe position. Maintain balance and a stable position on inclines. While operating the robot or its peripherals, it is allowed to walk, but not to run.
- Please read the instructions on when, where and how to check the robot and its peripherals, cables and extension cords for damage or wear and repair the robot. Self-modification, repair is not permitted - at the risk of voiding the warranty.
- Do not connect or touch a damaged power cable until it has been disconnected from the power supply due to the risk of contact with live components.
- Only connect the robot and/or peripheral equipment to power circuits protected by a residual current circuit breaker with a tripping current of no more than 30mA .
- If the robot makes an abnormal sound or an abnormal vibration is noticed or it signals an alarm, press the STOP button immediately.
- IT IS FORBIDDEN to touch dangerous moving parts before turning off the power to the robot.
- IT IS FORBIDDEN to touch dangerous parts until they have come to a complete stop.
- Always wear sturdy footwear and long trousers when handling the robot.
- Cut the power supply: Before locking the robot.
Before testing, cleaning or maintenance.
PICTOGRAMS AND WARNINGS


- Read the instruction manual and observe the warnings and safety conditions!
- Before cleaning or maintenance, disconnect from the power supply
- Do not put your hands or feet under the guard of the mowing mechanism
- Rotating parts - possibility of injury
- Keep a safe distance from the mowing robot
- Beware of the possibility of injury from casted items
- Protect from rain
- Keep out of reach of children.
- Do not ride on the robot
- Possible loss of fingers, take care
- Maximum ground slope 14^ / 25% .
- Protect hands with work gloves
- Wear protective clothing
- Wear protective footwear
- Do not dispose of with household waste
- Selective waste collection
- Degree of protection
CAUTION! This appliance may be used by children over 8 years of age and persons with limited physical and mental abilities as well as with insufficient knowledge or experience If they are supervised or properly instructed in the safe use of the appliance so that they are aware of the risks involved. This appliance should not be played with by children. Children must not clean or carry out maintenance on the appliance without supervision.
DESCRIPTION OF THE GRAPHIC ELEMENTS
The following numbering refers to the components of the appliance shown on the graphic pages of this manual.
| Designation Fig. A | Opis | |
| 1 | Emergency stop | |
| 2 | Mowing height adjuster | |
| 3 | Mower control panel | |
| 4 | Mower power switch | |
| 5 | Drive wheels | |
| 6 | Cutting blades | |
| 7 | Cutting mechanism drum | |
| 8 | Swivel wheels | |
| 9 | Carrying handle | |
| 10 | Charging connectors | |
| 11 | Battery compartment cover | |
| Designation Fig. B | Opis | |
| 1 | Docking station control panel | |
| 2 | Holes for securing the docking station | |
| 3 | Charging connectors | |
| 4 | Docking station | |
| 5 | Docking station guard | |
| 6 | Connectors for power supply cable to mark the working area | |
| 7 | Cable openings for marking the working area and power supply | |
| 8 | Docking station power socket | |
| 9 | Marking for correct cable routing | |
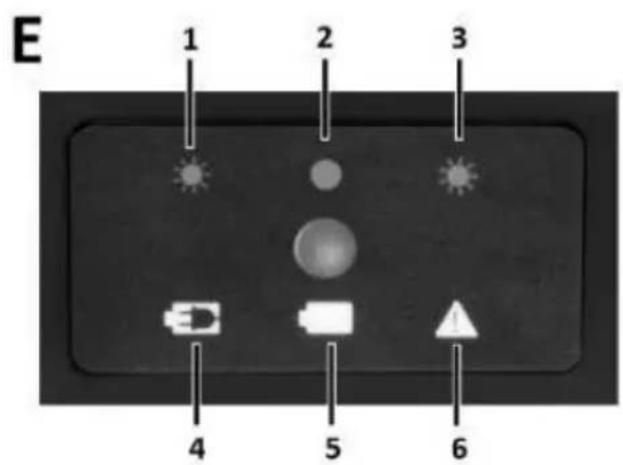
| Designation Fig. D | Opis | |
| 1 | Charging status indicator light |
| 2 | Signal fault indicator |
| 3 | Restraining cable indicator |
| 4 | Operating hours / error message, lights 1-4 |
| 5 | Power button |
| 6 | Power Switch |
| 7 | Docking button |
| 8 | “Confirm” button |
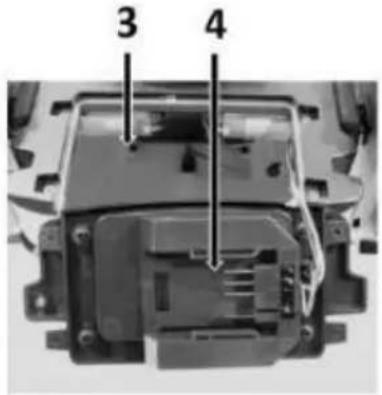
| Designation Fig. H | Opis |
| 1 | Screws |
| 2 | Battery compartment cover with transport handle |
| 3 | Battery compartment |
| 4 | Battery socket on the chamber cover |
| 5 | Rechargeable battery (not included) |
| Designation Fig. I | Opis |
| 1 | Lawn |
| 2 | Wall |
| 3 | Docking station |
| 4 | Distance of station from wall |
| 5 | Initial section of the line delimiting the mowing area |
| 6 | Length of section |
| Designation Fig. J | Opis |
| 1a | Cable to limit the mowing area Beginning |
| 1b | Cable to limit the mowing area End |
| 2 | Supply line: |
| 3 | Docking station |
- There may be differences between the graphic and the actual product
PREPARING FOR WORK
BATTERY INSTALLATION
- Invert the mowing robot so that there is access to the underside of the robot.
- In place of the switch Fig. A4 and the transport handle Fig. A9 there is the battery compartment cover Fig. H2 fixed with the 4 screws marked with arrows Fig. H1.
- Then unscrew the screws marked with arrows.
- Carefully remove the compartment cover Fig. H2 so as not to break or disconnect the switch wires Fig. A4 (it is attached to the battery compartment cover).
- Then flip the cover over, on the underside of the cover the battery socket is fixed Fig. H4.
- Insert the battery from the ENERGY+ series into the socket.
- Flip the cover with the battery attached and insert into the Fig. H3 compartment.
- Tighten the screws securing the cover. Turn the robot bottom down, the appliance is ready.
WORKING ENVIRONMENT OF THE MOWING ROBOT
Ensure that the following conditions are met in the area where the robot is working:
The grass height does not exceed 60~mm
- CAUTION! If the grass is longer than 60mm , cut the lawn first with a hand mower.
- There are no stones, pieces of wood, wires, live cables or other foreign objects.
- The mowing site is level and flat, free of ditches and trenches, and the slope is less than 25% (14°) Fig. C1
- The following tools are required for installation:
Rubber hammer (for driving pins into the ground when laying the restraining cable)
- Hex key (for fixing the charging station) is included in the kit
- Pliers (for cutting the cable bounding the working area)
1.BASE STATION INSTALLATION
Choose a suitable location
The charging station should be placed at the following location Fig. C3:
- A relatively flat and level part of the lawn.
- Close to the edge of the lawn.
-
Near a wall socket.
-
Place the 10m extension cable, power supply in a shaded, cool and dry place.
- There must be no obstacles within at least 2m of the charging station.
- It is recommended that the charging station is located in a dry and sheltered place.
- The power supply should be 30~cm above ground level.
2. CHARGING STATION ATTACHMENT
Secure the charging station to the ground with 6 fixing screws (G1) (using a G6 hex key).
CAUTION! DO NOT stand on or walk on the charging station plate.
CAUTION! DO NOT make new holes in the charging station plate. The station should be bolted to the floor using the existing holes.
3. LAYING OF THE RESTRAINING CABLE
The restraining cable is used to delineate the working area and guide the robot back to the charging station.
CAUTION! If your neighbour is also using a robotic mower, keep at least 1 m distance between the restraining cables of both robots.
PLANNING OF THE RESTRAINING CABLE POSITION
Before laying the restraining cable, walk along the designated boundary and remove any unnecessary objects, such as stones.
CAUTION! The length of the restraining cable must not exceed 200 metres.
WARNING! The robot must not drive over gravel or similar materials that could damage the blades.
LAYING OF THE RESTRAINING CABLE FIG.C
Follow the instructions below to lay the restraining cable around the working area and obstacles. Use the meter included in the kit to lay the restraining cable correctly.
CAUTION! The restraining cable is powered at very low voltage and is safe for people and pets.
CAUTION! Start with the "- connector at the back of the charging station Fig. B6 pull it under the station (and leave a 10cm reserve) and lay the cable around the lawn in a counterclockwise direction, ending with the "+" connector at the back of the charging station (leave a 10cm reserve). Ensure that the cable comes into contact with metal at the "+" and "-" connectors Fig. B6 remember to cut off the excess restraining cable.
- Leave at least 2m empty between the restraining cable and the charging station. The cable in this section is used to bring the robot to the docking station.
- Maintain 30 cm clearance between the restraining cable and the lawn edge Fig. C2; Fig. C3.
Fix the restraining cable to the ground with the dowels provided Fig. G5. The restraining cable should be straight and slightly tightened. The dowels should be spaced every 1m (this can be modified depending on the shape of the lawn) Fig.C4.Do not bury the cable deeper than 2cm to avoid weakening the signal. - Arrange the cable so that the angles are greater than 90^ Fig. C5. In such areas, lay the restraining cable in gentle curves, which will make it much easier for the robot to move around the area to be mown.
- If there are flowerbeds, ponds or trees in the lawn, surround them with loops of restraining cable Fig. C4.
- Maintain a min. 30cm distance between the restraining cable and the edges of obstacles.
CAUTION! On the way to and from the loop, the restraining cable must not cross each other Fig. C4.
- Leave a narrow space in the working area of the mower. Ensure that the distance between parallel running restraining cables is greater than 1m .
CAUTION! Make sure that the docking station is inside the loop marking the mowing area. (outside / inside) Fig.B2
4. INSTALLATION OF CHARGING STATION
Connect the power supply
- Insert the power plug into a 110-240V wall socket.
- Check the status of the LED lights on the charging station Fig. B1:
- Solid green light: connection established (robot not charging or fully charged)
- Intermittent green light: the robot is charging.
- Intermittent red light: the most common error is "disconnection of the restraining cable".
- Light off: the most common fault is "No 100-240 V power supply" or "No connection to power source".
OPERATION / SETTINGS
First start-up of the mowing robot
- When starting the robot for the first time, place the appliance on the docking station so that the charging connectors on the station fig. B3 do not come into contact with the charging connectors on the mowing robot fig. A10.
- When the mowing robot is first started from the phone app, a firmware update must be performed. The method of implementation is described below under software update.
- CAUTION! During the first connection, the phone and the robot must be in range of the Wi-fi network.
FIRMWARE UPDATE BEFORE USING THE ROBOT.
The update should be performed as follows.
- Place the robot inside the loop but outside the charging station.
- Switch the switch Fig.A4 to position 1.
- Press and hold the switch Fig. D5
- Start the application, scan the QR-code
- Connect the application to the robot
- Expand the software settings by pressing the icon at the top right of the screen.
- Select an option: Firmware update.
- Then follow the instructions on the screen.
After the software has been installed, the appliance is ready for operation
CAUTION!
- The display shows whether the robot is in Wi-fi or Bluetooth range
- Connecting to a network is indicated by a flashing icon for the type of connection. Once connected, the icon stops flashing.
- The robot can only be paired with one phone.
- If another (same mowing robot) needs to be connected, the first one must be removed from the application. In the iOS app also from the Bluetooth settings.
MOWING HEIGHT ADJUSTMENT:
Before the first mowing, set the mowing height to 60mm and then change to the desired height when the entire lawn is relatively flat.
- Turn the Fig. A2 knob clockwise to increase the mowing height.
- Turn the Fig. A2 knob to the left to reduce the mowing height.
- The mowing height can be adjusted from 20 mm (MIN) to 60 mm (MAX).
CAUTION! The drive motor of the mowing mechanism drum Fig. A7 switches on approximately 10 seconds after leaving the base, starting operation.
SWITCHING ON/OFF
- Set the Fig. A4 switch to the "O" position to switch off the power supply.
- Set the Fig. A4 switch to the "I" position to switch on the power supply.
ACTIVATION OF THE ROBOT AND PROGRAMMING OF THE WORKING TIME IN MANUAL MODE
- Press and hold the power button Fig. D5 to start the robot. Note: do not shake the robot during start-up to avoid a start-up error. If the robot does not start up correctly (all lights on continuously), restart it.
- Enter the password by pressing button Fig. D6 twice, then button Fig. D7 twice and button Fig. D8 once (password programmed at the factory).
- Program the operating time (including mowing time and charging time):
- Press Fig. D6 to set the operating time. One light on means 2 hours, maximum operating time is 8 hours and 4 lights on Fig. D4. Press the Fig. D8 button to confirm and start the robot.
CAUTION! Once the operating time has been set, the robot will remember the settings and start mowing at the programmed time every day. The mowing time will be according to the settings entered.
- The robot's programmed operating time of 2 hours to 8 hours is the mowing time including charging time.
- Operating and charging times will vary depending on the battery used. If you want to change the operating time, follow steps 2-3 again.
TIME PROGRAMMING IN AUTOMATIC MODE, 7-DAY SCHEDULE, IS AVAILABLE THROUGH THE SETTINGS IN THE APP
- After an emergency stop, the robot must first be unlocked by following step 2 above. Once the robot is unlocked, we can send it back to the station by pressing the buttons: Fig. D7 then confirm with Fig. D8 button to return the mower to the charging station.
- Pressing the emergency stop button STOP deletes the manual and automatic mode cycle from the application, if it was activated in this way. In order for the robot to start working again after an emergency stop, the robot must be returned to the charging station and the manual work schedule set again. In the case of an automatic schedule, perform the same action in the application schedule and confirm its settings.
CAUTION! The programmed start-up time in the automatic schedule should not be regarded as very precise. The appliance can start up to several minutes after the set time.
- Activating manual mode deletes the schedule programmed in the application and vice versa.
- Edging in manual mode is done automatically every few mowing cycles. It involves mowing the grass close to the cable that defines the working area. CAUTION! Care must be taken to ensure that the cable is properly attached so as not to expose it to accidental cutting.
- The mowing robot will return to the docking station once the device has detected the start of rainfall.
- If the robot encounters an obstacle while working, it will bounce off it and continue working.
CHARGING STATUS LIGHT IN THE CHARGING STATION:
Continuous green light - battery fully charged.
Intermittent green light - charging
OUTSIDE THE CHARGING STATION:
Continuous green light - battery > = 20%
Intermittent green light - battery < 20%
CAUTION! The robot automatically stops work and returns to the charging station if the battery level drops below 20%
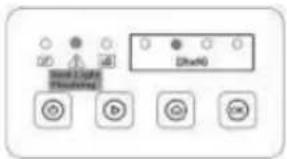
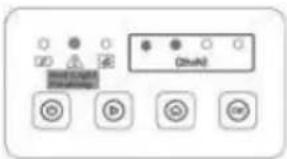
ERROR LIGHT:
Continuous green light - update the system. Connect to the app to perform the update.
Intermittent green light - system update in progress.
Intermittent red light - error message 1 to 5, restart the robot.
Continuous red light - error message 6 to 12, press "STOP" or "OK" to clear.
RESTRAINING CABLE INDICATOR:
Continuous green light - signal correct
Continuous red light - no signal
Controls Fig. D4:
Intermittent light - robot blocked.
Continuous light - robot unlocked.
Light 1 illuminates green: 2 hours working time.
Lights 1 and 2 illuminate green: 4 hours working time.
Lights 1, 2 and 3 illuminate green: 6 hours working time.
Lights 1, 2, 3 and 4 illuminate green: 8 hours working time.
SOFTWARE FOR CONTROLLING THE MOWING ROBOT
IOS download:
https://apps.apple.com/cn/app/toua/id6449251720
Android download:
https://play.google.com/store/apps/details?id=com.toua.robot
Programme instructions can be downloaded at:
https://bit.ly/3QBB6Gm
EMERGENCY SHUTDOWN OF THE ROBOT
Press the "STOP" button Fig. A1 to stop the robot, press and hold the power button to switch off the robot.
MOVING THE ROBOT
Underneath the robot a lifting handle Fig. A10 is located for easy one-handed operation.
MAINTENANCE AND STORAGE
- Always switch off the robot before cleaning and maintenance.
- Disconnect the power supply before cleaning and maintaining the charging station.
- Always wear thick protective gloves when changing blades and cleaning the underside of the robot.
- Check the tightness of bolts and nuts regularly. Damaged parts must be repaired or replaced for safety reasons.
- Regularly check that the blades can rotate freely.
CAUTION! When you turn the robot upside down, place it on the lawn or a soft surface so as not to damage or scratch the cover.
CLEANING
WARNING! Before you start cleaning, switch off the power with the switch
Fig. A4.
- Wash the front of the robot with a low-pressure cleaner and a soft brush or cloth.
- Use a hard brush to remove grass clippings and debris from the blades, wheels and other parts on the underside of the robot.
- Check the wheels regularly for mud or grass clippings and clean them with a brush.
CAUTION! Regularly remove plant debris from the underside of the robot to avoid a reduction in productivity.
BLADE REPLACEMENT
WARNING! First turn off the main power switch and put on protective gloves.
WARNING! Use only the indicated original blades approved by the manufacturer.
- All three blades and their screws must be replaced in one replacement operation Fig. A6.
- The screws should be unscrewed and tightened with a screwdriver.
- Check that the new blades can rotate freely.
PROBLEM SOLVING
The table below provides guidance to help diagnose problems.
If possible, repair the device yourself. If the problem cannot be resolved, please contact an authorised dealer or service centre.
WARNING! Protective measures should be taken.
| Problem | Possible causes | Solutions |
| Red light flashes at the charging station | Interruption of the restraining cable | Find the defective section of the cable and fix it |
| Robot has difficulty docking to charging station | Charging station is not correctly installed | See section “Preparing for work”. |
| The restraining cable is not correctly positioned | ||
| No signal from the restraining cable | No power supply | Check power source |
| Restraining cable was connected in reverse | Swap the "+" and "-" connectors | |
| Restraining cable is not connected to the charging station | Check that the restraining cable is correctly connected to a charging station | |
| Interruption of the restraining cable | Check all the way through, that the cable has not been interrupted | |
| Restraining cable crosses on the way to and from the loop | Check that the restraining cable is correctly installed | |
| Robot goes beyond the border | Restraining cable was connected in reverse | Swap the "+" and "-" connectors |
| Robot vibrates or makes unusual noises | Damaged or missing blade | Check and repair blade fixing screws |
| The blade disc is loose | ||
| Replace the blade |
| Error code | Opis | Solution |
| E01 Fig. F1 | Initialisation error - gyro sensor | Place the robot on a flat surface and restart. |
| E02 Fig. F2 | Lifting sensor or collision sensor fault | Adjust the collision bar and torsion wheel on the front of the mower, check that they are not locked; place the robot on a flat surface and restart. |
| E03 Fig. F3 | Mowing motor initialisation error | Place the robot on a flat surface and restart. If the problem persists, contact the customer service. |
| E04 Fig. F4 | Power supply connection error | |
| E05 Fig. F5 | Incorrect mowing motor speed | |
| E06 Fig. F6 | Tilt warning | Place the robot on a flat surface. Press STOP or OK to cancel the alarm. |
| E07 Fig. F7 | Lift warning | Place the robot on a flat surface. Press STOP or OK to cancel the alarm. |
| E08 Fig. F8 | ADC channel error | Place the robot on a flat surface and restart. If the problem persists, contact the customer service. |
| E09 Fig. F9 | Incorrect signal | See above in the table: problem - no signal from the restraining cable. Check all the points one by one, then set the robot on a flat surface. Press STOP or OK to cancel the alarm. Restart the robot. If the problem persists, contact the customer service. |
| E010 Fig. F10 | Robot jam | Place the robot on a flat surface. Press STOP or OK to cancel the alarm. Restart the robot. If the problem persists, contact the customer service. |
| E011 Fig. F11 | Incorrect speed of the left stepper motor | Restart the robot. If the problem persists, contact the customer service. |
| E012 Fig. F12 | Incorrect speed of the right stepper motor |
KIT CONTAINS:
- Mowing robot 1pc.
- Docking and charging station 1pc.
Power supply and extension cable 1pc. - Cable for delineating the working area 100m
- Cable fixing dowels 100pc.
- Docking station fixing dowels 6pc.
Cutting blades 3pc. - Cable connectors 2pc.
- Hexagonal key 1pc.
SPECIFICATIONS
| Mowing Robot 04-621 | |
| Parameter | Value |
| Supply voltage: | 18 V DC |
| Max. rated power of the mowing motor: | 50 W |
| Max. power rating of the self-propelled motor: | 20 W |
| IP degree of protection for the charging station | IPX4 |
| IP degree of protection for the robot | IPX5 |
| IP degree of protection for the charging adapter | IP 65 |
| Protection class for the robot | III |
| Protection class for the charging station | II |
| Mowing width: | 180 mm |
| Cutting height adjustment in the range | 20 mm – 60 mm |
| Rotational speed | 3100 rpm |
| Weight | 10.2 kg |
| Year of production | 2024 |
NOISE AND VIBRATION DATA
| Sound pressure level | \( {\mathrm{L}}_{\mathrm{{pA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Measured sound power level | \( {\mathrm{{Lw}}}_{\mathrm{A}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Noise and vibration information
The level of the noise emitted by the device is described by: the level of the emitted sound pressure LPA and the sound power level LWA where K designates measurement uncertainty. The vibration emitted by the device are described by the vibration acceleration a_n ,where K designates measurement uncertainty.
The values measured in this instruction manual, i.e. the level of the emitted sound pressure L_PA , the sound power level L_WA , and the vibration acceleration a_h were measured in accordance with EN 62841 1:2015+A11. The given vibration level a_h may be used to compare devices and for preliminary evaluation of vibration exposure.
The given vibration level is representative only for the basic applications of the device. If the device is used for other applications or with other work tools, the vibration level may differ. Inadequate or rare maintenance of the device cause higher vibration levels. The above-mentioned causes may increase vibration exposure during the whole service life.
To determine precisely the vibration exposure, the device "on" and "off" periods must be taken into account, excluding the periods when it is used for operation. The total vibration exposure may be much lower when all factors are estimated accurately.
To protect the operator against vibration, use additional safety measures, e.g. regular maintenance of the device and work tools, proper hand temperature conditions, and proper work organisation.
NOISE AND VIBRATION DATA
ENVIRONMENTAL PROTECTION

Electric equipment should not be disposed of with household waste. Dispos of it at appropriate facilities. Information on disposal can obtained from the dealer of the product or local authorities. Waste electrical and electronic equipment (WEEE) contains substances that not neutral to the natural environment. Non-recycled WEEE is a pote hazard to the environment and human health.
"Grupa Topex Spólka z ograniczona odpwiedzialnoscia" Spólka komandytowa with its registered office in Warsaw, ul. Pograniczna 2/4 (hereinafter: "Topex Group") informs that all copyrights to the content of this instruction manual (hereinafter: "Manual"), including, but not limited to, its text, posted photographs, diagrams, drawings, as well as its composition, belong exclusively to Topex Group and are subject to legal protection in accordance with the Act of 4 February 1994, on Copyright and Related Rights (i.e. Journal of Laws U. 2006 No. 90 Item 631 as amended). Copying, processing, publishing, modifying for commercial purposes the entire Manual as well as individual elements thereof, without the written consent of Topex Group, is strictly prohibited and may result in civil and criminal liability.
EC Declaration of Conformity
Manufacturer: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warsaw
Product: E+ mowing robot
Model: 04-621
Trade name: NEO TOOLS
Serial number: 00001 ÷ 99999
This declaration of conformity is issued under the sole responsibility of the manufacturer.
The product described above complies with the following documents:
Machinery Directive 2006/42/EC
RED Directive 2014/53/EU
RoHS Directive 2011/65/EU as amended by Directive 2015/863/EU
And meets the requirements of the standards:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
ENIEC63000:2018
This declaration relates only to the machinery as placed on the market and does not include components
added by the end user or actions carried out by him/her subsequently.
Name and address of the EU resident person authorised to prepare the technical dossier:
Signed on behalf of:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Warsaw

Pawel Kowalski
TOPEX GROUP Quality Officer
Warsaw, 2023-09-11
EU Declaration of Conformity
Manufacturer: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warsaw
Product: Charging station
Model: K145455
Trade name: NEO TOOLS
Serial number: 00001 ÷ 99999
This declaration of conformity is issued under the sole responsibility of the manufacturer.
The product described above complies with the following documents: RED Directive 2014/53/EU
RoHS Directive 2011/65/EU as amended by Directive 2015/863/EU
And meets the requirements of the standards:
ENIEC55014-1:2021;ENIEC55014-2:2021;ENIEC61000-3
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
This declaration relates solely to the machine as it was introduced into the
market and does not include components added by the end user or his subsequent activities.
Name and address of the EU resident authorised to
prepare the technical dossier:
Signed on behalf of:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warsaw

Pawel Kowalski
TOPEX GROUP Quality Officer
Warsaw. 2023-11-09
DE
ÜBERSETZUNG (BENUTZERHANDBUCH)
MAHROBOTER 04-621
VORSICHT! LESEN SIE VOR DER BEDIENUNG VON ELEKTROWERKZEUGEN DIESE ANLEITUNG SORGFÄLTIG DURCH UND BEWAHREN SIE ZUM SPÄTEREN NACHSCHLAGEN AUF.
AUSFUHRLICHE SICHERHEITSVORSCHRIFTEN
SICHERHEITSHINWEISE FÜR MAHROBOTER
Sicherheit beim praktischen Einsatz des Mahroboters
EMPFEHLUNGEN
Lesen Sie die Gebrauchsanweisung sorgfältig durch. Machen Sie sich mit den Steuersystemen und dem korrekten Betrieb des Geräts vertraut.
Lassen Sie das Gerät nicht von Kindern oder Personen benutzen, die die Gebrauchsanweisung nicht gegeben haben. Nationale Vorschriften können ein Mindestalter für den Bediener vorschreiben.
Benutzen Sie den Roboter nicht, wenn sich andere Personen, insbesondere Kinder oder Tiere, in der Nähe aufhalten.
Bitte denken Sie daran, dass der Betreiber oder Benutzer für Unfälle oder Gefahren für andere Personen oder die Umwelt verantwortlich ist.
VORBEREITUNG
- Überprüfen Sie vor dem Mähen jeder Mal, ob alle Teile des Roboters ordnungsgemäß Funktionieren.
- Für Beste Ergebnisse wird empfohlen, bei regenfreiem Wetter zu mahren. Beim Mahren im Regen kann das Gras am Roboter haften bleiben, der dadurch ausrutschen kann.
- Mahren Sie NICHT bei schlechten Wetterbedingungen, z. B. bei starkem Regen, Gewitter oder Schneefall.
- Überprüfen Sie die gemäßte Fläche regelmäßig und entfernen Sie Steine, Schutt, Drahte, Knochen und andere Hindnisse. Die beschränkte Garantiedecktkeine Schäden ab,die durch auf dem Rasen zurückgelassene Gegenstände verursacht werden.
- Um Schäden zu vermeiden, mAHen Sie nicht im Umkreis von 1 m um die Sprinklerköffe.
VORSICHT! Der Roboter und die Sprinkleranlage)durfen NICT gleichzeitig eingeschaltet werden.
Der Roboter sollte so programmiert werden, dass er zu einer anderen Zeit lauft als die Sprinkler.
Erlauben Sie Kindern NiemALS, das Netzteil, die Ladestation, insbesondere die Kontakte, die Messer, das Batteriefach oder Teile mit Zwischenräumen, wie z. B. die Räder, zu berühren.
BETRIEB
- Achten Sie auf die rotierenden Messer! Halten Sie ihre Hände oder Fuß NICHT unter rotierende Messer.
- Achte beim Mähen auf verstreute Gegenstände auf dem Rasen! Wenn der Roboter eingeschaltet ist, halten Sie einen Sicherheitsabstand ein.
- Lassen Sie das Gerät nicht unbeaufsichtigt, wenn sich Tiere, Kinder oder Unbeteiligte in der Nähe aufhalten.
-
Behalten Sie eine sichere Position bei. Halten Sie das Gleichgewicht und eine stabile Position an Steigungen. Wahrend der Bedienung des Roboters oder seiner Peripheriegeräte darf er gehen, aber nicht rennen.
-itte lessen Sie die Anweisungen, wann, wo und wie Sie den Roboter und seine Peripheriegerate, Kabel und Verlangerungskabel auf Schaden oder Verschleib überprüfen und den Roboter reparieren. Selfstimodification, Reparatur ist nicht erlaubt - auf die Gefahr hin, dass die Garantie erlischt. -
Schließen Sie ein beschädigtes Netzkabel nicht an und berühren Sie es nicht, bevor es nicht von der Stromversorgung getreten wurde, da die Gefahr des Kontakts mit stromfuhrenden Komponenten besteht.
- Schlieben Sie den Roboter und/oder die Peripheriegeräte nur an Stromkreise an, die durch einen Fehlerstrom-Schutzschalter mit einem Auslösestrom von hochstens 30mA geschützt sind.
- Wenn der Roboter ein abnormales Gerausch oder eine abnormale Vibration von sich gibt oder einen Alarm auslöst, drücken Sie sofort die STOP-Taste.
- Es ist VERBOTEN, gefährliche bewegliche Teile zu berühren, bevor die Stromversorgung des Roboters ausgeschaltet wird.
- Es ist VERBOTEN, gefährliche Teile zu berühren, bevor sie zum Stillstand gekommen sind.
- Tragen Sie beim Umgang mit dem Roboter immer festes Schuhwerk und lange Hosen.
- Unterbrechen Sie die Stromzufuhr: Vor dem Verriegeln des Roboters.
Vor der Prufung, Reinigung oder Wartung.
PIKTOGRAMME UND WARNHINWEISE
| 1 | 2 | 3 | 4 | 5 | 6 |


- Lesen Sie die Bedienungsanleitung und beachten Sie die Warnhinweise und Sicherheitsbedingungen!
- Trennen Sie vor der Reinigung oder Wartung das Gerät von der Stromzufuhr.
- Stecken Sie ihre Höhe oder Fuß nicht unter den Schutz des Mahwerks
- Rotierende Teile - Verletzungsgefahr
- Halten Sie einen sicheren Abstand zum Mahroboter
- Achten Sie auf die Möglichkeit von Verletzungen durch gegossene Gegenstände
- Vor Regen schützen
- Außerhalb der Reichweite von Kindern aufbewahren.
- Nicht auf dem Roboter mitfahren
- Möglicher Verlust von Fingern, Vorsicht
- Maximale Bodenneigung 14^ / 25% .
- Die Hande mit Arbeitshandschuhen schützen
- Schutzkleidung tragen
- Tragen Sie Schutzschuhe
- Nicht über den Hausmüll entsorgen
- Selective Abfallsammlung
- Grad des Schutzes
VORSICHT! Dieses Gerät kann von Kindern über 8 Jahren und von Personen mit eingeschrankten körperlichen und geistigen Fähigkeiten sowie mit unzureichenden Kenntnissen oder Erfahrungen benutzt werden, wenn sie beaufsichtigt werden oder ordnungsgemäß in den sicheren Gebrauch des Geräts eingewiesen wurden, so dass sie sich der damit verbundenen Gefahren bewusst sind. Kinder sollen nicht mit dieserem Gerät speien. Kinder dürfen das Gerät nicht ohne Aufsicht reinigen oder Wartungsarbeiten daran durchführren.
BESCHREIBUNG DER GRAFISCHEN ELEMENTE
Die folgende Nummerierung bezieht sich auf die Komponenten des Geräts
die auf den grafischen Seiten diesen Handbuchs dargestellt sind.
| Bezeichnung Abb. A | Opis |
| 1 | Not-Aus |
| 2 | Mährhöhenversteller |
| 3 | Bedienfeld des Mährers |
| 4 | Netzschalter des Mährers |
| 5 | Antriebsräder |
| 6 | Schneidemesser |
| 7 | Trommel des Schneidwerks |
| 8 | Schwenkbare Räder |
| 9 | Tragegriff |
| 10 | Ladeanschlüsse |
| 11 | Abdeckung des Batteriefaches |
| Bezeichnung Abb. B | Opis |
| 1 | Bedienfeld der Dockingstation |
| 2 | Löcher zur Befestigung der Dockingstation |
| 3 | Ladeanschlüsse |
| 4 | Docking-Station |
| 5 | Schutz der Dockingstation |
| 6 | Steckverbinder für Stromversorgungskabel zur Markierung des Arbeitsbereichs |
| 7 | Kabelöffnungen zur Kennzeitung des Arbeitsbereichs und der Stromversorgung |
| 8 | Steckdose für die Dockingstation |
| 9 | Markierung für die korrekte Kabelverlegung |
| Bezeichnung Abb. D | Opis |
| 1 | Anzeigelampe für den Ladestatus |
| 2 | Signalstörungsanzeige |
| 3 | Indikator für Rückhaltekabel |
| 4 | Betriebsstunden / Fehlermeldung, Leuchten 1-4 |
| 5 | Einschalttaste |
| 6 | Netzschalter |
| 7 | Andocktaste |
| 8 | "Schaltfläche"Bestätigen |
| Bezeichnung Abb. H | Opis |
| 1 | Schrauben |
| 2 | Batteriefachdeckel mit Transportgriff |
| 3 | Batteriefach |
| 4 | Batteriesockel auf dem Kammerdeckel |
| 5 | Wiederaufladbare Batterie (nicht enthalten) |
| Bezeichnung Abb. I | Opis |
| 1 | Rasen |
| 2 | Wand |
| 3 | Docking-Station |
| 4 | Abstand der Station von der Wand |
| 5 | Anfangsteil der Linie zur Abgrenzung des Mühbereichs |
| 6 | Länge des Abschnitts |
| Bezeichnung Abb. J | Opis |
| 1a | Kabel zur Begrenzung der Mähfläche Beginn |
| 1b | Kabel zur Begrenzung der Mähfläche Ende |
| 2 | Versorgungsleitung: |
| 3 | Docking-Station |
- Es kann zu Abweichungen zwischen der Abbildung und dem tatsächlichen Produkt kommt.
VORBEREITUNG AUF DIE ARBEIT
BATTERIEANLAGE
- Drehen Sie den Mahroboter um, so dass Sie Zugang zur Unterseite des Roboters haben.
- Anstelle des Schalters Abb. A4 und des Transportgriffs Abb. A9 befindet sich der Batteriefachdeckel Abb. H2, der mit den 4 mit Pfeilen markierten Schrauben Abb. H1 befestigt ist.
- Dann die mit Pfeilen markierten Schrauben herausdrehen.
- Nehmen Sie die Abdeckung des Batteriefachs (Abb. H2) vorsichtig ab, um die Schaltdrahte (Abb. A4) nicht zu beschädigen oder abzutrennen (sie sind an der Batteriefachabdeckung befestigt).
- Drehen Sie dann den Deckel um, an der Unterseite des Deckels ist der Batteriesockel befestigt Abb. H4.
- Legen Sie die Batterie aus der ENERGY+ Serie in die Buchse ein.
- Klappen Sie die Abdeckung mit der angebrachten Batterie um und setzen Sie sie in das Fach in Abb. H3 ein.
- Ziehen Sie die Schrauben zur Befestigung des Deckels fest. Drehen Sie den Roboter nach unten, das Gerät ist fertig.
ARBEITSUMGEBUNG DES MAHROBOTERS
Vergewissern Sie sich, dass in dem Bereich, in dem der Roboter arbeitet, die folgenden Bedingungen erfüllt sind:
Die Grashöhe beträgt nicht mehr als 60 mm.
VORSICHT! Wenn das Gras länger als 60~mm ist, mAHen Sie den Rasen zuerst mit einem Handmaher.
- Es gibt keine Steine, Holzstücke, Drähte, stromfuhrende Kabel oder andere Fremdkörper.
Die Mahfläche ist eben und flach, frei von Gräben und Gräben, und das Gefälte beträgt weniger als 25% (14°) Abb. C1
- Für die Installation sind die folgenden Werkzeuge erforderlich:
Gummihammer (zum Einsatzlagen der Bolzen in den Boden bei der Verlegung des Rückhalteseils)
- Sechskantschlüssel (für die Befestigung der Ladestation) ist im Lieferumfang enthalten
- Zange (zum Schneiden des Kabels, das den Arbeitsbereich begrenzt)
1. INSTALLATION DER BASISSTATION
Wahlen Sie einen geeigneten Standort
Die Ladestation sollte an folgendem Ort aufgestellt werden Abb. C3:
- Ein relativ flacher und ebener Teil der Rasenfläche.
- Nahe am Rande des Rasens.
In der Nähne einer Steckdose. - Legen Sie das 10 m Lange Veränderungskabel und das Netzeil an einen schattigen, kühlen und trockenen Ort.
- Im Umkreis von mindestens 2 m um die Ladestation dürfen sich keine Hindernisse befinden.
- Es wird empfohlen, die Ladestation an einem trockenen und geschützten Ort aufzustellen.
- Der Stromanschluss sollte sich 30 cm über dem Boden befinden.
2. BEFESTIGUNG DER LADESTATION
Befestigen Sie die Ladestation mit 6 Befestigungsschrauben (G1) am Boden (mit einem Sechskantschluss G6).
VORSICHT! Stellen Sie sich NICT auf die Platte der Ladestation und gehen Sie nicht daraufuf.
VORSICHT! Machen Sie KEINE neuen Löscher in die Platte der Ladestation. Die Station solte mit den vorhandenen Lächern am Boden verschraubt werden.
3. VERLEGUNG DES RÜCKHALTESEILS
Das Halteseil dient dazu, den Arbeitsbereich abzugrenzen und den Roboter zurück zur Ladestation zu führen.
VORSICHT! Wenn Ihr Nachbar ebenfalls einen Mahroboter benutzt, halten Sie mindestens 1 m Abstand zwischen den Haltekabeln der beiden Roboter.
PLANUNG DER POSITION DES RÜCKHALTESEILS
Gehen Sie vor dem Verlegen des Halteseils an der vorgesehenen Grenze entlang und entfern den Sie alle unnötigen Gegenstände, wie z. B. Steine.
VORSICHT! Die Länge des Rückhaltekabelsarf 200 m nicht überschreiben.
WARNING! Der Roboterarf nicht über Schotter oder ahnliche Materialien fahren, die die Schaufeln beschädigden konnten.
VERLEGUNG DES RÜCKHALTEKABELS ABB. C
Befolgen Sie die nachstehenden Anweisungen, um das Rückhaltekabel um den Arbeitsbereich und die Hindernisse herum zu verlagen. Verwenden Sie das im Kit enthaltene Messgerät, um das Rückhalteseil korrekt zu verlagen.
VORSICHT! Das Rückhaltekabel wird mit einer sehr niedrigen Spannung betriuben und ist für Menschen und Haustiere sicher.
VORSICHT! Beginnen Sie mit dem "-"-Anschluss an der Rückseite der Ladestation (Abb. B6),ziehen Sieihn unter die Station (und让他们 Sie eine Reserve von 10 cm) und verlegen Sie das Kabel gegen den Uhrzeigersinn um den Rasen herum, bis es mit dem "+"-Anschluss an der Rückseite der Ladestation endet (lassen Sie eine Reserve von 10 cm). Achten Sie darauf, dass das Kabel an den Anschlüssen "+" und "-" mit Metall in Berührung kommt Abb. B6 Denken Sie daran, das überschüssige Haltekabel abzuschneiden.
- Lassen Sie mindestens 2 m zwischen dem Rückhaltekabel und der Ladestation frei. Das Kabel in thisem Abschnitt wird verwendet, um den Roboter zur Dockingstation zu bringen.
- Halten Sie einen Abstand von 30 cm zwischen dem Halteseil und der Rasenkante ein (Abb. C2; Abb. C3).
- Befestigen Sie das Halteseil mit den mitgelieferten Dubeln am Boden Abb. G5. Das Halteseil sollte gerade und leicht angezogen sein. Die Dubel sollen im Abstand von 1 m gesetzt werden (dies kann je nach Form des Rasens geändert werden) Abb. C4. Das
Kabel sollte nicht tiefer als 2 cm eingegraben werden, um eine Schwächung des Signals zu vermeiden.
- Verlegen Sie das Kabel so, dass die Winkel länger als 90^ sind, Abb. C5. Verlegen Sie in solchen Bereichen das Rückhaltekabel in sanften Kurven, was die Bewegung des Roboters auf der zu mahenden Fläche erheblich erreichtert.
- Wenn sich im Rasen Blumenbeete, Teiche oder Bäume befinden, umgeben Sie diese mit Schlaufen von Rückhaltekabeln Abb. C4.
- Halten Sie einen Abstand von min. 30 cm Abstand zwischen dem Halteseil und den Kanten von Hindernissen.
VORSICHT! Auf dem Weg zur und von der Schleife)durfen sich die Rückhaltekabel nicht kreuzen Abb. C4.
- Lassen Sie im Arbeitsbereich des Mahers einen schmalen Raum frei. Achten Sie darauf, dass der Abstand zwischen parallel verlaufenden Halteseilen länger als 1 m ist.
VORSICHT! Achten Sie darauf, dass sich die Andockstation innerhalb der Schleife befindet, die den Mahbereich markiert. (außen /innen) Abb.B2
4. INSTALLATION DER LADESTATION
Anschließen der Stromversorgung
- Stecken Sie den Netzstecker in eine 110-240-V-Steckdose.
- Überprüfen Sie den Status der LED-Leuchten an der Ladestation Abb. B1:
- Grünes Dauerlicht: Verbindung hergestellt (Roboter nicht oder vollständig geladen)
- Grünes Intervallicht: Der Roboter wird aufgeladen.
- Intermittierendes rotes Licht: Der früigste Fehler ist die "Unterbrechung des Rückhaltekabels".
- Licht aus: Der früigste Fehler ist "Keine 100-240-V-Stromversorgung" oder "Keine Verbindung zur Stromquelle".
BEDIENUNG/EINSTELLUNGEN
Erste Inbetriebnahme des Mahroboters
- Wenn Sie den Roboter zum ersten Mal starten, setzen Sie das Gerät so auf die Dockingstation, dass die Ladeanschluss der Station Abb. B3 nicht mit den Ladeanschluss den Mahroboters Abb. A10 in Berührung kommt. A10.
- Wenn der Mahroboter zum ersten Mal über die Telefon-App gestartet wird, muss ein Firmware-Update durchgeführt werden. Die Implementierungsmethode wird unter unter Software-Update beschrieben.
VORSICHT! Bei der ersten Verbindung,müssen sich das Telefon und der Roboter in Reichweite des Wi-Fi-Netzes befinden.
FIRMWARE-UPDATE, BEVOR SIE DEN ROBOTER BENUTZEN.
Die Aktualisierung sollte wie folgt durchgefuhrt werden.
- Platzieren Sie den Roboter innerhalb der Schleife, aber außerhalb der Ladestation.
- Schalten Sie den Schalter Abb. A4 auf Position 1.
- Drucken und halten Sie den Schalter Fig. D5
- Starten Sie die Anwendung, scannen Sie den QR-Code
- Verbinden Sie die Anwendung mit dem Roboter
- Erweitern Sie die Softwareeinstellungen, indem Sie auf das Symbol oben rechts auf dem Bildschirm drücken.
- Wahlen Sie eine Option: Firmware-Aktualisierung.
- Folgen Sie dann den Anweisungen auf dem Bildschirm.
Nachdem die Software installiert wurde, ist das Gerät betriebsbereit
VORSICHT!
- Das Display zeigt an, ob sich der Roboter in Wi-fi- oder Bluetooth-Reichweite befindet
- Die Verbindung zu einem Netzwerk wird durch ein blinkendes Symbol für die Art der Verbindung angezeigt. Sobald die Verbindung hergestellt ist, hört das Symbol auf zublinken.
- Der Roboter kann nur mit einem Telefon gekoppelt werden.
- Wenn ein weiterer (gleicher Mahroboter) verbunden werden soll, muss der ersten aus der Anwendung entfernt werden. In der iOS-App auch in den Bluetooth-Einstellungen.
EINSTELLUNG DER MAHHOHE:
Stellen Sie vor dem ersten Mahen die Mähhohe auf 60 mm ein und wechseln Sie dann auf die gewünschte Höhe, wenn der gesamte Rasen relativ eigenen ist.
- Drehen Sie den Drehknopf Abb. A2 im Uhrzeigersinn, um die Mahhöhe zu erhöhen.
-
Drehen Sie den Drehknopf Abb. A2 nach links, um die Mähheze zu verringern.
-
Die Mähhehre kann von 20 mm (MIN) bis 60 mm (MAX) eingestellt werden.
VORSICHT! Der Antriebsmotor der Mahwerkstommel Abb. A7 schaltet sich ca. 10 Sekunden nach Verlassen des Sockels ein und nimmt den Betrieb auf.
EIN/AUSSCHALTEN
- Stellen Sie den Schalter Abb. A4 auf die Position "O", um die Stromversorgung abzuschalten.
- Stellen Sie den Schalter Abb. A4 in die Position "l", um die Stromversorgung einschalten.
AKTIVIERUNG DES ROBOTERS UND PROGRAMMIERUNG DER ARBEITSZEITEN IM MANUELLEN MODUS
- Drucken und halten Sie die Einschalttaste Abb. D5, um den Roboter zu starten. Hinweis: Schutteln Sie den Roboter während des Starts nicht, um einen Startfehler zu vermeiden. Wenn der Roboter nicht richtig anlauft (alle Lichter leuchten ständig), starten Sieihn neu.
- Geben Sie das Password ein, indem Sie zweimal auf die Taste Abb. D6, dann zweimal auf die Taste Abb. D7 und einmal auf die Taste Abb. D8 drucken (das Password wurde im Werk programmiert).
-
Programmieren Sie die Betriebszeit (einschließlich Mahzeit und Ladezeit):
-
Drücken Sie Abb. D6, um die Betriebszeit einzustellen. Ein leuchtendes Licht bedeutet 2 Stunden, die maximale Betriebszeit beträgt 8 Stunden und 4 Lichter auf Abb. D4. Drücken Sie zur Bestätigung und zum Starten des Roboters die Taste Abb. D8.
VORSICHT! Sobald die Betriebszeit eingestellt ist, merkt sich der Roboter die Einstellungen und beginnt jeder Tag zur programmierten Zeit zu mahren. Die Mahzeit richtet sich nach den eingebeken Einstellungen.
- Die programmierte Betriebszeit des Roboters von 2 bis 8 Stunden ist die Mahzeit einschließlich der Ladezeit.
- Die Betriebs-und Ladezeiten hangen von der verwendeten Batterie ab. Wenn Sie die Betriebszeit ändern möchten, führen Sie die Schritte 2-3 erneut aus.
ZEITPROGRAMMIERUNG IM AUTOMATISCHEN MODUS, 7-TAGE-ZEITPLAN, IST ÜBER DIE EINSTELLUNGEN IN DER APP VERFÜGBAR
- Nach einem Notstopp muss der Roboter zunachst entriegelt werden, wie in Schritt 2 beschrieben. Sobald der Roboter entriegelt ist, können wir ein durch Drücken der Tasten zureck in die Station schicken: Abb. D7 und bestätigten Sie dann mit der Taste Abb. D8, um den Maher zur Ladestation zureckzuschicken.
- Durch Drücken der Not-Aus-Taste STOP wird der Zyklus des Hand-und Automatikbetriebs aus der Anwendung gelöscht, wenn er auf diese Weise aktiviert wurde. Damit der Roboter nach einem Notstopp seine Arbeit wieder aufnehmen kann, muss er in die Ladestation zurückgebracht und der manuelle Arbeitsplan erneut eingestellt werden. Im Falle eines automatischen Zeitplans führen Sie die gleiche Aktion im Zeitplan der Anwendung durch und bestätigten Sie dessen Einstellungen.
VORSICHT! Die im automatischen Zeitplan programmierte Einsatzzeit sollt nicht als sehr genau angesehen werden. Das Gerät kann bis zu mehreren Minuten nach der eingestillten Zeit starten.
- Die Aktivierung des manuellen Modus löscht den in der Anwendung programmierten Zeitplan und umgekehrt.
- Das Kantenmähen im manuellen Modus erfolgt automatisch alle paar Mähzyklen. Dabei wird das Gras in der Höhe des Kabels gemäß, das den Arbeitsbereich definiert. VORSICHT! Achten Sie darauf, dass das Kabel richtig befestigt ist, damit es nicht versehentlich abgeschritten wird.
- Der Mahroboter kehrt zur Dockingstation zusück, sobald das Gerät den Beginn des Regens erkannt hat.
- Wenn der Roboter während der Arbeit auf ein Hindemis stöhst, prallt er daran ab und arbeiten weiter.
LADESTATUSLEUCHTE IN DER LADESTATION:
Grünes Dauerlicht - Akku vollständig geladen.
Intermittierendes grünes Licht - Laden.
AUSsERHALB DER LADESTATION:
Grünes Dauerlicht - Batterie > = 20%
Intermittierendes grüne Licht - Batterie <20%
VORSICHT! Der Roboter stoppt automatisch die Arbeit und kehrt zur
Ladestation zürück, wenn der Batteriestand unter 20% fällt.
FEHLER-LICHT:
Grünes Dauerlicht - Aktualisierung des Systems. Verbinden Sie sich mit der App, um das Update durchzuführen.
Intermittierendes grünes Licht - Systemaktualisierung lauft.
Intermittierendes rotes Licht - Fehlermeldung 1 bis 5, Neustart des Roboters.
Rotes Dauerlicht - Fehlermeldung 6 bis 12, zum Löschen "STOP" oder "OK" drücken.
INDIKATOR FÜR RÜCKHALTEKABEL:
Grünes Dauerlicht - Signal korrekt
Rotes Dauerlicht - kein Signal
Steuerelemente Abb. D4:
Intermittierendes Licht - Roboter blockiert.
Kontinuierliches Licht - Roboter entriegelt.
Licht 1 leuchtet grün: 2 Stunden Betriebszeit.
Die Lichter 1 und 2 leuchten grün: 4 Stunden Betriebszeit.
Die Lichter 1, 2 und 3 leuchten grün: 6 Stunden Betriebszeit.
Die Lichter 1, 2, 3 und 4 leuchten grün: 8 Stunden Betriebszeit.
SOFTWARE ZUR STEUERUNG DES MAHROBOTERS
IOS-Download:
https://apps.apple.com/cn/app/toua/id6449251720
Android-Download:
https://play.google.com/store/apps/details?id=com.toua.robot
Programmhinweise können heruntergeladen werden unter: https://bit.ly/3QBB6Gm
NOTABSCHALTUNG DES ROBOTERS
Drücken Sie die Taste "STOP" (Abb. A1), um den Roboter anzuhalten, und halten Sie die Einschalttaste gedrückt, um den Roboter auszuschalten.
BEWEGENDESROBOTERS
An der Unterseite des Roboters befindet sich ein Hebegriff (Abb. A10), der mit einer Hand bedient werden kann.
WARTUNG UND LAGERUNG
- Schalten Sie den Roboter vor der Reinigung und Wartung immer aus.
- Trennen Sie die Stromzufuhr, bevor Sie die Ladestation reinigen und warten.
- Tragen Sie immer dicke Schutzhandschuhe, wenn Sie die Messer wechseln und die Unterseite des Roboters reinigen.
- Überprüfen Sie regelmäßig den festen Sitz der Schrauben und Muttern. Beschädigte Teile müssen aus Sicherheitsgründen repariert oder ersetzt werden.
- Prufen Sie regelmäßig, ob sich die Messer frei drehen konnen.
VORSICHT! Wenn Sie den Roboter auf den Kopf stellen, legen Sieihn auf den Rasen oder eine weiche Oberfläche, um die Abdeckung nicht zu beschädigen oder zu zerkratzen.
REINIGUNG
WARNING! Bevor Sie mit der Reinigung beginnen, schalten Sie den Strom mit dem Schalter Abb. A4 aus.
- Waschen Sie die Vorderseite des Roboters mit einem Niederdruckreiniger und einer weichen Bürste oder einem Tuch.
- Verwenden Sie eine harte Bürste, um Grassnitt und Verschmutzungen von den Messern, Rädern und anderen Teilen an der Unterseite des Roboters zu entfernen.
- Kontrollieren Sie die Räder regelmäß auf Schlamm oder Grasreste und reinigen Sie sie mit einer Bürste.
VORSICHT! Entfernen Sie regelmäßig Pflanzenrechte von der
Unterseite des Roboters, um Produktivitätseinbußen zu vermeiden.
KLINGENWECHSEL
WARNING! Schalten Sie zuerst den Hauptschalter aus undziehen Sie Schutzhandschuhe an.
WARNING! Verwenden Sie nur die angegebenen und vom Hersteller zugelassenen Originalklingen.
- Alle drei Flügel und ihre Schrauben müssen in einem Arbeitsgang ausgetauscht werden (Abb. A6).
- Die Schrauben sollen mit einem Schraubenzieher gelöst und angezogen werden.
- Prufen Sie, ob sich die neuen Messer frei drehen{lassen.
PROBLEMBEHEBUNG
Die nachstehende Tabelle enthalt Anhaltspunkte für die Diagnose von Problemen.
Wenn möglich, reparieren Sie das Gerät selbst. Kann das Problem nicht behoben werden, wenden Sie sichitte an einen autorisierten Handler oder ein Servicezentrum.
WARNING! Es sollenn Schutzmaßnahmen ergriffen werden.
| Problem | Mögliche Ursachen | Lösungen |
| Rotes Lichtblick an der Ladestation | Unterbrechung des Rückhaltekabels | Finden Sie den defekten Abschnitt des Kabels und reparieren Sie es |
| Roboter hat Schwierigkeiten beim Andocken an die Ladestation | Die Ladestation ist nicht korrekt installiert | Siehe Abschnitt "Vorbereitungen für die Arbeit". |
| Das Rückhaltekabel ist nicht richtig positioniert | ||
| Kein Signal vom Rückhaltekabel | Keine Stromzufahr | Stromquelle prüfen |
| Rückhaltekabel wurde verkehrt herum angeschlossen | Vertauschen Sie die Anschlüsse "+" und "-". | |
| Rückhaltekabel ist nicht mit der Ladestation verbunden | Prüfen Sie, ob das Rückhaltekabel richtig sitzt angeschlossen an eine Ladestation | |
| Unterbrechung des Rückhaltekabels | Überprüfen Sie den gesamter Weg, dass das Kabel nicht unterbrochen wurde | |
| Rückhalteseilkreuz auf dem Weg zur und von der Schleife | Prüfen Sie, ob das Rückhaltekabel richtig installiert ist. | |
| Roboter gehen über die Grenze hinaus | Rückhaltekabel wurde verkehrt herum angeschlossen | Vertauschen Sie die Anschlüsse "+" und "-". |
| Der Roboter vibriert oder macht ungewöhnliche Gerausche | Beschädigte oder fehlende Klinge | Kontrolle und Reparatur der Klingenbefestigungsschrauben |
| Der Messerteller ist lose | ||
| Ersetzen Sie die Klinge |
| Fehlercode | Opis | Lösung |
| E01 Abb.F1 | Initialisierungsfehler - Kreiselsensor | Stellen Sie den Roboter auf eine ebene Fläche und starten Sie ihn neu. |
| E02 Abb.F2 | Fehler am Hebesensor oder Kollisionssensor | Stellen Sie die Kollisionsstange und das Torsionsrad an der Vorderseite des Mährs ein und prüfen Sie, ob sie nicht blockiert sind; stellen Sie den Roboter auf eine ebene Fläche und starten Sie ihn neu. |
| E03 Abb.F3 | Initialisierungsfehler des Mähmotors | Stellen Sie den Roboter auf eine ebene Fläche und starten Sie ihn neu. Wenn das Problem weiterhin besteht, wenden Sie sich an den Kundendienst. |
| E04 Abb.F4 | Fehler beim Anschluss an die Stromversorgung | |
| E05 Abb.F5 | Falsche Mähmotordrehzahl | |
| E06 Abb.F6 | Kipp Warnung | Stellen Sie den Roboter auf eine ebene Fläche. Drücken Sie STOP oder OK, um den Alarm abzubrechen. |
| E07 Abb.F7 | Aufzugswarnung | Stellen Sie den Roboter auf eine ebene Fläche. Drücken Sie STOP oder OK, um den Alarm abzubrechen. |
| E08 Abb.F8 | ADC-Kanal-Fehler | Stellen Sie den Roboter auf eine ebene Fläche und starten Sie ihn neu. Wenn das Problem weiterhin besteht, wenden Sie sich an den Kundendienst. |
| E09 Abb.F9 | Falsches Signal | Siehe oben in der Tabelle: Problem - kein Signal vom Rückhaltekabel. Überprüfen Sie alle |
| Punkte nacheinander und stellen Sie den Roboter dann auf eine ebene Fläche. Drücken Sie STOP oder OK, um den Alarm zulöschen. Starten Sie den Roboter neu. Wenn das Problem weiterhin besteht, wenden Sie sich an den Kundendienst. | ||
| E010 Abb.F10 | Roboter-Stau | Stellen Sie den Roboter auf eine ebene Fläche. Drücken Sie STOP oder OK, um den Alarm zulöschen. Starten Sie den Roboter neu. Wenn das Problem weiterhin besteht, wenden Sie sich an den Kundendienst. |
| E011 Abb.F11 | Falsche Geschwindigkeit des linken Schrittmotors | Starten Sie den Roboter neu. Wenn das Problem weiterhin besteht, wenden Sie sich an den Kundendienst. |
| E012 Abb.F12 | Falsche Geschwindigkeit des Rechts Schrittmotor |
KIT ENTHÄLT:
Mahroboter 1Stuck.
Docking- und Ladestation 1Stuck.
Netzgerat und Verlangerungskabel 1Stuck.
Kabel zur Abgrenzung des Arbeitsbereichs 100m
Kabelbefestigungsdübel 100Stk.
Befestigungsdübel für die Dockingstation 6Stk.
Klingen 3Stuck
Kabelverbinder 2Stuck
Sechskantschlüssel 1Stuck.
SPEZIFIKATIONEN
| Mähroboter 04-621 | |
| Parameter | Wert |
| Versorgungsspannung: | 18 V |
| GLEICHSTROM | |
| Max. Nennleistung des Mühmotors: | 50 W |
| Maximale Leistung des selbstfahrenden Motors: | 20 W |
| IP-Schutzart für die Ladestation | IPX4 |
| IP-Schutzart für den Roboter | IPX5 |
| IP-Schutzgrad für den Ladeadapter | IP 65 |
| Schutzklasse für den Roboter | III |
| Schutzklasse für die Ladestation | II |
| Mühbreite: | 180 mm |
| Schnitthöheneinstellung im Bereich | 20 mm - 60 mm |
| Rotationsgeschwindigkeit | 3100 U/min |
| Gewicht | 10,2 kg |
| Jahr der Herstellung | 2024 |
LARM-UND VIBRATIONSDATEN
| Schaldruckpegel | LpA=56dB (A) K=3dB(A) |
| Gemessener Schalleistungspegel | LwA=67dB (A) K=3dB(A) |
Informationen zu Lärn und Vibrationen
Der Gerauschpegel, der von der Einrichtung ausgeht, wird beschrieben durch: den Pegel des abgestrahlten Schaldrucks L pA und den Schalleistungspegel L wA, wobei K die Messunsicherheit bezeichnet. Die von der Einrichtung ausgehenden Vibrationen werden durch die Vibrationsbeschleunigung ah beschreiben, wobei K die Messunsicherheit angibt.
Die in dieser Gebrauchsanweisung gemessenen Werte, d. h. der Pegel des abgestrahlten Schaldrucks LpA , der Schalleistungspegel LWA und die Schwingungsbeschleunigung a_h , wurden gemäß EN 62841-1:2015+A11 gemessen. Der angegebene Schwingungspegel a_h kann zum Vergleich von Geräten und zur vorläufigen Bewertung der Schwingungsbelastung verwendet werden.
Das angegebene Vibrationsniveau ist nur für die Grundanwendungen des Geräts representativ. Wenn das Gerät für andere Anwendungen oder mit anderen Arbeitsgeräten verwendet wird, kann das Vibrationsniveau abweichen. Unzureichende oder seltene Wartung des Geräts führt zu higheren Vibrationswerten. Die oben genannten Ursachen können die Vibrationsbelastung während der gesamten Nutzungsdauer erhöhen.
Um die Vibrationsbelastung genau zu bestimmen, müssen die Einund Ausschaltzeiten des Gerats berücksichtigt werden, wobei die
Zeiten, in denen es in Betrieb ist, nicht berücksichtigt werden. Die Gesamtvibrationsexposition kann viel niedriger sein, wenn alle Faktoren genau abgeschätzt werden.
Um den Bediener vor Vibrationen zu schützen, sind zusätzliche Sicherheitsmaßnahmen zu ergreifen, z. B. regelmäßige Wartung des Gerats und der Arbeitsgeräte, angemessene Temperaturbedingungen für die Höhe und eine angemessene Arbeitsorganisation.
LARM-UND VIBRATIONSDATEN
SCHUTZ DER UMWELT

Elektrische Geräte sollen nicht mit dem Hausmüll entsorgt werden Entsorgen Sie es bei einer geeigneten Einrichtung. Informationen zu Entsorgung erhalten Sie beim Handlender des Produkts oder bei der örtlichen Behörden. Elektro- und Elektronik-Altgeräte (WEEE) enthalter Substanzen, die für die natürliche Umwelt nicht neutral sind. Nich niederverwertete Elektro- und Elektronik-Altgeräte stellen eine potenzielle Gefahr für die Umwelt und die menschliche Gesundheit d
"Grupa Topex Spóka z ograniczona odpowiedzialnoscia". Spóka komandytowa mit Sitz in Warschau, ul. Pograniczna 2/4 (im Folgenden: "Topex-Gruppe") informiert, dass alle Urheberrechte am Inhalt dieser Bedienungsanleitung (im Folgenden: "Bedienungsanleitung"), einschließlich, aber nicht beschränk auf den Text, die eingestellten Fotos, Diagramme, Zeichnungen sowie deren Zusammenstellung, ausschließlich der Topex-Gruppe gehören und dem rechtlichen Schutz gemäß dem Gesetz vom 4. Februar 1994 über das Urheberrecht und verwandte Schutzrechte (d.h. Gesetzblatt U. 2006 Nr. 90 Pos. 631 mit Änderungen) unterliegen. Das Kopieren, Verarbeiten, Veröffentlichten, Verändern des gesamtten Handbuchssowie einzeln Elemente zu konmerziellen Zwecken ohne die schrittliche Zustimmung der Topex-Gruppe ist strengstens entsprech und kann zivil- und strafrechtliche Konsequenzen nach sichziehen.
EG-Konformitätserklarung
Hersteller: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warschau
Produkt: E+ Mahroboter
Modell: 04-621
Handelsname: NEO TOOLS
Seriennummer: 00001 ÷ 99999
These Konformitätserklarung wird unter der alleinigen Verantwortung des Herstellers ausgestellt.
Das oben beschriebene Produkt entspricht den folgenden Dokumenten:
Maschinenrichtlinie 2006/42/EG
RED-Richtlinie 2014/53/EU
RoHS-Richtlinie 2011/65/EU, geändert durch Richtlinie 2015/863/EU Und erfüllt die Anforderungen der Normen:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
These Erklärung bezieht sich nur auf die Maschine in der Form, in der sie in Verkehr gebracht wird, und umfasst nicht die Bauteile die vom Endnutzer hinzugeführgt wurden, oder von ihm nachträglich durchgeführte Aktionen.
Name und Anschrift der in der EU ansässigen Person, die zur Erstellung des technischen Dossiers befugt ist:
Unterzeichnet im Namen von:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warschau

Pawel Kowalski
TOPEX GROUP Qualitätsbeauftragter
Warschau, 2023-09-11
EU-Konformitäserklarung
Hersteller: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285
Warschau
Produkt: Ladestation
Modell: K145455
Handelsname: NEO TOOLS
Seriennummer: 00001 ÷ 99999
These Konformitätserklarung wird unter der alleinigen Verantwortung des Herstellers ausgestellt.
Das oben beschriebene Produkt entspricht den folgenden Dokumenten:
RED-Richtlinie 2014/53/EU
RoHS-Richtlinie 2011/65/EU, geändert durch Richtlinie 2015/863/EU
Und erfüllt die Anforderungen der Normen:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
These Erklärung bezieht sich ausschließlich auf die Maschine, so wie sie in den Verkehr gebracht wurde.
Markt und umfasst nicht die vom Endverbraucher hinzugeführten Komponenten oder
seine späteren Tätigkeiten.
Name und Anschrift der in der EU ansässigen Person, die befugt ist Vorbereitung des technischen Dossiers:
Unterzeichnet im Namen von:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warschau

Pawel Kowalski
TOPEX GROUP Qualitätsbeauftragter
Warschau, 2023-11-09
RU
PYKOBODCTBO NO INPEBDOY (PYKOBODCTBO
NOLb3OBATEJRA
POBOT-RA3OHOKOINbIHK 04-621
BHIMAHHE! INPEH HAYANOM PABOTbC
3JEKTPOHCTPYMEHTAMN BHIMATEJIbHO IPOUHTAITE DAHHO PYKOBOCTBO NO 3KcIpyATAuIN COXPAHNTE ERO DIAHBENJERO NCNOJIb3OBAHNA.
IPOPOBHBIE IPIPABUNA BE3ONACHOCTN
HNCPTPYKUNI NO B3ONACHOCTN INRAPOBOTBA3OHOKOJOK
Be30nacHocTb npn npaKTHueckOM nCnoJb3oBaHm po6oTa-ra3OHOKOCNJKN
PEKOMEHДALIN
BHHMaTeIbHo npouHTaTepykoBOcTBo nO 3KcnIyatauH.
O3NaKoMbTeCb C cNCTeMaMn ynpaBHeHn I npaBnIbHoJ 3KcNpyaTaUne np60pa.
He donyckaiaTe, yTo6bI np6opom noIb3oBaIncb Detn IIN JInca, He npOHTabWne IHCTpyKUIO NO 3KnIpyatauH. HauNoHaIbHbIe HopMbI MOrTy YcTaHaBnBaTb MNHMmaJIbHbI Bo3pact Opepatopa.
He nCnONb3yIte pO6Toa, ecnI prAOM haoTcR dpyrme IIOH, OOC6EHNO DeT NIN JXIBOTHbIe.
POMHNTe, YTO ONEpATOp ININ NOLb3OBeaTeIb HeCet OTBcTBeHHOCtB 3a HeChactHbIe CnyHAn ININ ONaCHocTb IIN Ppynx IIOJeN ININ OKpykaUoIe cpebl.
IIOIROTOBKA
- Пелег Началов Кошени Кождь па з поверяп Te npавиьнocтб pa60ы BCexЧаTe р60Ta.
ДяdoCTnxKeHnHaunnyuHxpe3yIbTaTOB peKOMeHdyETcKocNTb B6e3doXDeByIO norOpy. Pn KooEHNn BdoXkb TpaBa MoKet npJINnHyTb Kpo6Oty, Bpe3yIbTaTe Yero OH MoKet NockoJIb3HyTbcr.
HEKcnteBnnoxyIO norOy,HaNPmep,BOBpeMcNbHoro DoxJa, rpo3blnn CHerOnada. - PepnoDnueckn OcmatpnbAte NoctpnXKeHbI yAcTOK u yaJraTe KaMHN, MyCop, npoBOda, KcTN n dpyrne ppeTCTBna. OrpaHueHHa rapaHTn He pacnpoctpaHreTc Ha noBpeKDeHHa, Bbl3BaHHbe IpeDMeTaMn, ocTabJIeHHbIMn Ha ra3OHe.
Bo n36eKaHHe NOBpeKdEHN He cKaaUNBaTe TpaBy B paNcyce 1 M OToDoxDeBaJIbHbIX rONoBOK.
BHIMAHHE! 3anpeaaetc oNDOBpeMeHHoe BKNIOueHne po6oTa nCpNHKJIepoB.
P6oTdoJKeH 6bIb 3aIporpamMPOBaH ha pa6Oy B dpyroe Bpem, yem pa36pb3rNaBateJI.
HKNKOrDA He No3BOJnTe DeTAM PnKacatbCg K 6NOKy NtAHnI, 3apdHOcTahuIN, B YactHOCTK KOHTaKTam, Ne3BnM, 6aTapeHOMy OTEcy INI NIObIM cAETM, rde ectb 3a3Opbl, HAnpImep, KOncam.
ONEPALUN
- Octopoxho, Bpaaiouiece na3Bn! HE noCTabTne pykn nnn HOrn noD Bpaauoohneae ne3Bna.
CJIeIInTe 3a IpeImTaMn, pa36pOcaHHbIMn no rA3oHy BO BpeMcTpuXkN! KOrda po60r BKNIOueH, DePKeITecb Ha 6e3oNaCHOMpacCToAHN.
He octabnayte npnbop 6e3 npncmOtpa,ecnn no6bn30ctn MoryT HaxoOnbCRA XNBOThBle,DETN NINIOCTOPOHNE JIOIN.
CoxpaHnTe 6e3oNaChoe nOKeHHe. CoXpaHnTe paBHOBeCe H yctOnuBOe nOKeHHe Ha cKnHOax. Bo BpeM ynpaBneHn po6OTom Hn erO nepHepnHbIMn yCTpOcTBAMn pa3peWaeTcXoHTb, Ho He 6eRaTb.
IloxanyicTa, npoHTaTe HNCTpyKuIN O TOM, KOrJa, rJe N KAK npOBepaTb pOba Tn erO nepHcpeuHbIe ycTPOcTbA, KaBeJIu YdInHnteHa HaHnUHe NOBpeXdeHm IInn I3HOca, a TaKKe peMOHTnpOBaTb pOba.Ta. CamOCToTeJbHa MOnDΦnKaua, peMOHT He DONYCKaHOTc -NoD yrpo30AnHHyIpOBaHn rapaHTtn.
He noKIOHuaTe Hn PnKaacTecb K NOBpeXdeHHOMy CINOBOMy Ka6eHIO, noka OH He 6ydt OTKIIHOeH OT 3NeKTKPOCeTN, TAK KAK CyueCTByeT ONaCHOCTb KOHTaC TOKOBeDuUMN YAcTAMN.
IopKnIOuaiTe po6oTa Hnnn nepnpeepnHoe o6OpdyObaHne TOJbKO K cENpAM NITAHN, 3aUINeHHbIM aBTOMaTNUeCKIM BblKIOUaTeJeM C TOKOM cpaBaTbIBAHN He 60nee 30 mA.
- Ecnn po60t n3daet HeHOpMaIbHbIe 3ByKn, OuyuaeTc8n HeHOpMaIbHaN B6paunr nn noaet CnHAn TpeBorN, HEmdneHHo Haxmnte KhoNky STOP.
3APUEAETCnpiKacTbcKOnaChbIM DBNkUcMcYactmOToKNIOHHeHH NtAHnPO6oTa.
3ANPEUJAETCnPnKacatbck KOnaChbIM DeTajm Do NOJHOOCTAHOBKN.
- Pn pa6oTe c po6ToM Bcerda HaneBaaiTe npOHyO obyBb n nnHhie 6pIOK.
- OTKIOHHTe 3JIeKTPoPnTuHaHE: IpeEg 6JIoKIpOBoKoI pO6ToA.
- Npeed TectnpoBaHneM, OYNCKoN nnO6cnykBAHneM.
NKTOPAMMbI INPDEyIPKXDEHNA


1.ПочNTанTe pyKOBODCTBO NO 3KcNJIyatauIN co6JIIOaIte npdeynpeXeHEnn yCNOBn8 6eOsnacHOctn!
2.ПередческйилобслукваньемOTКIOHTeNTaHneOTcTn
3.He npocobbaiTe pyKn HnHn HnNO KoxyX KocnNoHOro MexaHn3Ma
4.Bpaaoouneecn -Bo3MOXHOCTb NOyueHn TpaBmbi
5.Деркпесь Ha 6e3oNaChOMpacCTOaHmOT KocNIOuHOro po60Ta
6. OcteperaaTeCb BO3MOxHocTn NpIyueHn TpaBM OT 6poUeHHbIX npedMeTOB
7.3aunuatabOTdoxjra
8. XpaHntb B HeIOCTyINHom Ira TeTe MeCte.
9.He kataTecb Ha po6oTe
10.Bo3MOxHa nOtepe naIbueB,6yIbTe ocToPOxHbI
11. MakcmaBHyI yKNoH rpyHa 14°/25%.
12.3aunTne pykn pa6oynmnpyataKamn
13.Hocnte 3aunthyO Odejdy
14.Hocnte 3aunTHyO6yBb
15.He Bb6paBcBAbBMeCTe C 6bITOBbIMN OTXoJamn
16. CeJIeKTHBbI c6Op OTxOIOB
17. TeneHb 3aunTbI
BHIMAHHE! DaHbIM np6Opom Moryt non30BaTbcra Detn CTapwe 8 let n Iuca c orpaHueHHbIMn fI3NueckmN yMCTBeHHbIMn CnOc6HOCTaMn, a TaKke C HeDocTaTOHyBMn 3HaHMyMN HNN ONbITOM, ecnn OHN HaxoJrTc NO pNcMoTpOM NIN DoJXbIM O6pa3OM npOnHCTpyKTIpoBaHbI O 6e3OnacHom NCNoJIb3OBaHHn np6Opa N Oco3HaOT CBra3aHHbIe C HMM PNCKN. DeTN He DOxhbl INp4aTb C 3TN m np6Opom. DeTN He DOxhbl
YnCTNtB NIN PNOBOIDNTb TexHnueeckoe 06cnyKuBaHne npn6opa 6e3 nPNCMOtpa.
ONICAHNE IPAΦNUECKNX ΘJEMEHTOB
KOMHOENTbI npBopa IMeIoT cNeDyUOyU Hymepauuio
Ioka3aHbHa rpaΦnuecknx CtpaHnuaX daHHoro pykoBOcTba.
| Образа}):Опс. A) | Opis | |
| 1 | Аварийная OCTановka | |
| 2 | Рergулайор Велиcotы садуливаня | |
| 3 | Панень улравлени Косикош | |
| 4 | Великий постеня Косикош | |
| 5 | Бedlyшие конеса | |
| 6 | Рекушие пьзвя | |
| 7 | Барабан рекуцero менизma | |
| 8 | Поворотные конесa | |
| 9 | Чужая посяпоки | |
| 10 | Разьемы дд зардк | |
| 11 | Крышka ватаressesю отосяа | |
| Овоза):Опс. B) | Opis | |
| 1 | Панень улравлени ДOK-stанцeш | |
| 2 | Овоградные дд крелени ДOK-stанцeш | |
| 3 | Разьемы дд зардк | |
| 4 | Док-stанцe | |
| 5 | Зашатный кокух ДOK-stанцeш | |
| 6 | Разьемы дд кабеля пitaшия дд разметки разочey зонь | |
| 7 | Кабелы дд овоградные дд обоза):ru贯чени разочey зонь и пitaшия | |
| 8 | Гнебу пitaшия ДOK-stанцeш | |
| 9 | Маркуровka дд правимьни постладк Кабеля | |
| Овоза):Опс. D) | Opis | |
| 1 | Сvetobой Иndидахитсocstordия Зардк | |
| 2 | Индандахитсocstordия Синhalа | |
| 3 | Индандахитсocstordия Тropca | |
| 4 | Вremя рабotы / coobшени об ошибке, Иndидахиты 1-4 | |
| 5 | Кнока пitaшия | |
| 6 | Переклuckyотель пitaшия | |
| 7 | Кнока CTыковы | |
| 8 | Кнока "Поставдпь" | |
| Овоза):Опс. H) | Opis | |
| 1 | Вinhы | |
| 2 | Крышka ватаressesю отосяа с ручков дд пera reноксг | |
| 3 | Батаressesю отосяк | |
| 4 | Гнебу дд постеня Akkumулаятopa на Крышke kameры | |
| 5 | Переклuckyотель пitaшия | |
| 6 | Дина седции | |
| Овоза):Опс. I) | Opis | |
| 1 | Галон | |
| 2 | Стан | |
| 3 | Док-stанцe | |
| 4 | Расстаянце Stанцeш от сtedу | |
| 5 | Началын учакtok лини, ораганчваюш сизу кочени | |
| 6 | Дина седции | |
| Овоза):Опс. J) | Opis | |
| 1a | Кабел дд ораганчени плочади садулиа caskшваня Началo | |
| 1b | Кабел дд ораганчени плочади садулиа садуливаня Кочец | |
| 2 | Линя поставки: | |
| 3 | Док-stанцe | |
*Bo3MoXHbI pa3nHm MeKdy n3o6paXeHHem n peaIbHbIM npOdyKTOM
IIOIOTOBKA K PABOTE
YCTAHOBKA BATAPEI
-ПepeBepHnTepo6oT-fa30HOKocnKy TaK,уTo6blObecneuHTbdoCTynK HxKHeuactnoPo6Ota.
Ha MeTe BbIKIOUaTeIa PnC. A4 n pyuKn IINIpeHocKn PnC. A9 HaxoITcK KpbIIka 6aTapeHoro OTeKa PnC. H2,3akpeHnHa 4 BNHTaMn,OTMeHeHHbIMN CTpeJIkAMn PnC.H1.
3aTeMBBkpyTHe BnHTbI,OTMeueHHBe CTepeKamM.
- Octopokho CHIMMTE KpbIky OTCeKa Pnc. H2, YTo6bI He CnOMaTb N He OTCoeINHTb IPOBOda BbIKIOyATEJRA Pnc. A4 (OH npNKpeNJIeH K KpbIke 6atapeHOrO oTCEka).
3aTeM npeBepHnTE KpbIuKy, Ha HnKHei CToPoHe KpbIuKn pacNoJIOKeHO rHe3Do Ira AKKyMylrTopa Pnc.H4.
BCTaBbTe 6aTaPeH IO3 cepH IN ENERGY+B rHe3IO.
- IpeBepHnTe KpbIuKy C npKpEnHeHHO 6aTaapee H BCTaBBTe ee B OTEcK Ha pnc. H3.
3aTnTe BnHTbI, KpEaIe KpbIuKy. IpeBepHrTe p6oTa HOM Bn3, np6op roTOB.
PABOYAR CPEDA POBOTA-KOCINbUKNKA
Y6eHntecb, YTO B 30He, rIe pa6oTaet po6oT, co6JIOaIoTc sJeDyUOuNe yCIOBnA:
- BbICota TpaBbl He npBbIaet 60 MM.
BHIMAHNE! Ecnn dInna TpaBbI npBeBbIaet 60 MM, cHaana NoCTprrnte ra3OH pyHoi KocNIkoN.
3Decb Het KamHei, KyCKOB DepeBa, npoBOIOB, Ka6eNei nOHaHnpaKeHHem N DpyrNx NOCTOPOHHNX PpeMeTOB. - YuaTOK DnIa KooHeHnPoBbIu IIOckN, 6e3 KaHaB u TpaHWei, C yKIOHOm MeHee 25% (14°) Pnc. C1
- yctahOBKn Heo6xOaMbl CneDyUOuNe HNCTpyMeHTbI:
- Pe3INHOBbI MOnToK (ДЯ B6nBaHn 乌TbIpeB 3eMJIIO npnpOKlaIKe orpaHnHTeNbHOro TpOca)
- WecTnIrpHbI KIOU (INRA KpENJIeHNA 3apAHOI CTaHUN) BXOINT B KOMNJIeKT
-Плоскогубци (дя ра3ретаня ka6ел,оранчьвiocero pa6оую зону)
1. YCTAHOBKA BA3OBOI CTAHCUIN
Bb6epnte noxodae meTo
3apnHna cTaNpNHa pacnoNaTaBcB CneDyHOeM MecTe Pnc. C3:
- OTHOCHTeJIbHO IIIOCKaI IOBHaY qAcTb Ra3OHa.
-Блнзко К краю Лужайки. - PяДOM cpo3eTKoI.
- POMeCTIte ydINHInTeIbHbI KabeJIb dINHOI 10 M n 6JIOK IITAHnB B3aTeHeHHoe, npOxJaHoe n cyXoe MeCTo.
BpaNpyCe He MeHee 2 M OT 3apAHOH cTAHcHm He DOJIxHO 6bITb HnKaKnx npenrTCTBn. - PekomEnyETcpa3MeaTb 3apAHyO CtaHcNIO B cyXOM 3aUeHHOM MecTe.
- NCTOCHN KITaHnI DOJIKeH HAXOINbCn HA BbICote 30 cm OT yPOBnHa 3emJIn.
2.KPENJIEHNE3APADHOCTAHUIN
3aKpENITe 3apAHyIO CTAHIO HA 3emJIe C nOMOJIbIO 6 KpeNEXHbIX BnHTOB (G1) (NCONJb3yIte IeCTINPAHHbIKJIIOU G6).
BHIMAHNE! HE BcTaBaIe n He XoIte IIOIaCTnHe 3apJHOI CTaHUN.
BHIMAHHE! HE denaIte HOBbIX OTBepCTn B PnactHe 3apdHOn CTaHm. CtaHmJIOJXHa 6bITb PnKpyeHa K NOly C NOMOuBo HMeIOUxxCr OTBepCTn.
3. ПОКЛадka OГРанчITEЛьного TPOCA
OrpaHHTeBHyTpocNCNoIb3yETcDnPa3paHHeHHpa6Oe 30hHi HappaBHeHHpo6oTa o6pato K3apJHO CTaHmN.
BHIMAHHE! EcnB BauCoced TaOKe NcNoIb3yeT pOBoTn3npoBaHHyra3OHOKOCNIky, Co6IIOaIte pacCToRHe He MeHee 1 M MeXJyOrpAHHTeNbHbIM TPOCaMn O60x pOBoTob.
IIAHINPOBAHNE NOJIOXEHNO OPGAHNHTENBHO TPOCA
Ipeep npokkaikon orpaHnHTeNbHoro Ka6en npoiDnTe BDOJIb 063HaueHHo rpaHnCbI u6epnte BCE nIuHHe npedMeTbI, HapmEp, KAMHN.
BHIMAHNE!ДинэогранчтелбHorOKa6Я He DoJxHa npeBbIaTb 200 MeTpOB.
BHIMAHHE! PoobTo He doJKeH e3dntb no rpaBnIO nn nOo6hBM MaTePnaIam, KOtOpblc MOrT NOBpeDNTb IOnactn.
IPOKJIADKA OPGAHNUHTBHO TPOCA PNC.C
CneNyTe npBBeEHbIM HnKe nHCTpykUm, YTo6bl npOnoxuTb orpaHnHTeNbHbI Ka6ebb BOKpyr pa6oey 3Ohbl npenraTcBm. Dn
IpaBnIbHoi yKnAaKn OraPAnuTeIbHoro Ka6eIa NcNoIb3yIte I3MepNTeIbHbI np6Op, BXoJaU B KOMJIeKT.
BHIMAHHE! OrpaHnHTeHbHk Ka6eHb NITaeTcO OYeHb HN3KIM HanpJxHeHem N 6e3OnaceH dIg IIOde N DOMaWHX XNBOTbIX.
BHIMAHHE! HaHNTe c pa3bema"-" Ha 3aJHei CTOpOHe 3apAHOI CTaHUN PnC. B6, npOTAHNTE ero noD CTaHmE (u octaBte 3anac 10 cm) I npOToXnTe Ka6JIb BOKpy rA3OHa npOTINB YacBOI CTpeKN, 3aKaHnBaIpa3bEmOM "+" Ha 3aJHei CTOpOHe 3apAHOI CTaHUN (octabTe 3anac 10 cm). Y6eInTeCb, yTO Ka6JIb CONpKACAETc C MeTaNOM Ha pa3bEmax "+" "Pnc. B6 He 3a6yIbTe OTpe3aTb N3NIUKI ORpaHHTeNBHO Ra6JIa.
OCTaBbTe He MeHee 2 M Cbo6oHOro IpoocTaPcHCTBa MEKdy ORpaHnHTeBbHbIM Ka6eMeN 3apRdHOn CTaHcnei. Ka6eNb B 3ToI CEkUIN nCIOJIb3yETcI dIg DoCTabKn po6oTa K DOK-CTaHcIn.
- CobniOaIte 3a3op 30 cm MeJy orpaHnHTeJIbHbIM TpOCM IN Kpaem rA3oHa Pnc. C2; Pnc. C3.
3aKpEnIte OrpaHHTeBbHbT Poc Ha 3emne C nOmoUbIO DIO6eNe, NOKa3aHHbIX Ha PNC. G5. OrpaHHTeBbHbT Poc DOJIKEH 6bITb PnRbIM cNErKa HAHTyBIM. DIO6eN DIOJXbI paCNOIraTbcrape3 kaxdbie 1 M (3TO MOKeT 6bITb N3MeHeo B 3aBcUNOCtN OT fOpMbI ra3OHa) Pnc. C4. He 3aKanIBaTe Ka6BeN rny6xe Yem Ha 2 CM, YTO6bI He Ocna6uTb CnHaN.
PacnojoxKe Ka6eJb TaK, YTO6bI yRbI 6blN 60JIe 90° Pnc. C5. B TaKnx MeCtAX npoknaBbAaTe orpaHnUteJbHbN Ka6eJb NpOIMM N3r6aMn, YTO 3HaHTeNbHO 6oNeuT pO6Oy nepemeueHne NO cKaUNBaEMomy yAcTkY.
- Ecnn Ha ra3oHe ecTb KnyMbbl, npybl nnn DepeBb, o6Bxnte nx neTJMM orpahnHHTelbHorO Tpoca Pnc. C4.
C6nHJaTe MHN. PacCToHHe MeJx yOrpaHUnTeJbHbIM TPOCOM IN KpaAMn PpenTCTBn DOxKHO CoCTaBnTb 30 cm.
BHUMAHNE! Ha nytn K netne n OT Hee ydepknBaoune Tpocbl He doJHKbI nepeceKaTc npyC dpYROM Pnc. C4.
OCTaBbTe y3Koe npoctpaHcTBo B pa6oey 30He KocnKn. Y6eInTeCb, YTO pacctOraHne MeJdy npaannenbHo NdyuIMN OrpaHnHTeJIbHbIM Tpocamn CoCTabIaRt 6oJe 1 M.
BHUMAHNE!Y6eIntecb,yTO DOK-CTaHnHaXoDHTcBByTpN nETn, 0603NaUoSei 3OHy KoWeHn.(ChapyKn/BHYtpn)Pnc.B2
4. YCTAHOBKA 3APRAHOD CTAHUN
IOnKIOUOHTe NCTOUYHK NTaHnA
1.BctabBe BnIKy nITaHnB po3eKy 110-240 B.
2.ПоверпсocToHHe CBeToIIOHbIX INHДИКaTOpOB Ha 3apAHOI CTaHmPc.B1:
- NocToaHHb3eHeHcCBET: CoeInHeHne yCTaHOBHeO (po6OT He 3apJxaeTc HIN 3apJxeh NOHOCtBu)
-ПеррьИиCTы 3eIeHbCBet:po60TapЯKaeTc.
- IpepbBnCTb KpaChb CBeT: Han60Jee pacnpocTpahHna OwOka - "OTcoeDHeHne yDepxNBAUoero Tpoca".
He ropt: Han6oJee pacnpoctpaHennHae HncnpaBHOCTb - "Het nHTaan100-240 B" nn "HeT noKnIOUeHn K IcTOHNKy nHTaan1."
PABOTA/HACTPOIKN
PepBbI 3aynck po60Ta-kocnJbunka
- Pn npepBOM 3aIycke pO6To yCTaHOBInTe np6Op Ha DOK-CTaHcNIO TaK, YTObI 3apJHbIe pa3BeMbl Ha cTAHcNpNC. B3 He copnKacAINCb C pa3BeMaMn 3apJKn Ha po6Ote-KocNJke pNC. A10.
- Ppi nepBOM 3ayncke po6oTa-KocinbUka n3 npInOKeHnI dIe TenefoHa Heo6xOIMMO BblONHHTb O6HOBHeHne IpouINBKn. Cnocob BblONHeHnOncan HnKBe B pa3dJe "ObHOBHeHne nporpaMMHorO o6ecNeHnI".
BHIMAHHE!PnIePBOM NOKIIOHeHn TepeOH n p6oT DOnKhbl HaxoITbcB 30He DeIcTBn cTeN Wi-fi.
IPEd IcIOJIb3OBAHHEM PO5OTA O5HOBNTE MKNPOIPOIPOPAMMY.
06HOJIeHHe DoJXHo 6bITb BbINoHHeO CneDyUOuM 06pa3OM.
- IomeCTnTe po6ToB nTnIO, HO BHe 3apAHOH CTAHUN.
2.ПepeKIIoHnTe nepeKIOuOaTeJIb Puc.A4 B noJoxKeHne 1. - HaxMMTe uYdepXbAte nepeKIOuAteIb Pnc.D5
4.3anyctnte npnloxehne,OTcKaHpyTe QR-KoD
5.Подклioчnte npиLOXeHne Kpo60Tu - Pa3BepHnTe HacTpoKn npoPpAMMHorO oecneueHna, HaxaB Ha 3HaOK B npaBOM BexHem yIy 3kpaHa.
- BbIepeHte BapnAHT: O6HOBHeHne MmKpOnporpaMMbl.
- 3aTeM cIeNyIte HnHCTpyKUyMaH Ha 3kpaHe.
Pocne yctahOBKn nporpaMMHoro oecneueHn npibop roTOB ka 1pa6oTe
BHIMAHHE!
Ha nCnPee OTo6pKaaeTcA, HaxoDntcJin po6OT B 3OHe DeiCTBna Wi-Fi nnu Bluetooth.
- PódklouheHne K CETn O603NaHaaeTcM MraIoum 3HaUkom Tnna coeDInHeHn. IocNe PódklouheHn 3HaUOK nepeCTaet MraTb.
- Po60T MoKet 6bItb CoPraKeH ToIbKO C OdHM TeJeFOHOM.
- Ecnn Heo6xOJIMO noKJIIOHTb eUe OINH (TO T Kne po60rTa3OHOKOINbIuNK), nepBbI Heo6xOJIMO ydaIITb n3 npInIOKeHH. BnpInIOKeHH dIg iOS TaKke n3 HacTpoEk Bluetooth.
PEIYINPOBKA BbICOTbI CKAUNBAHNA:
IpeepnepboN ctpnKkOy yTaHOBInTe BlicOTy ctpnKKn Ha 60 MM, a 3aTeM n3MeHHTe ee Ha HyKHyO, KOrDa BeCb rAoh CTAHeT OTHOCHTeJIbHo pOBHbIM.
-Повернite ручky poc. A2 no yacoboi cTepeKe, YTo6bl yBelenuHtB BbICOTy cKaUWBaHnA.
- NObepHnTe pyky pnc. A2 BnEBo, yTo6bI yMeHbUHTb BbICOTy cKaunBaHHa.
- BbICOTy cKaUHbAHnMoXHo pErYnIpOBaTb B DnAna3oHe OT 20 MM (MIN)do60MM(MAX).
BHIMAHHE! PnpBODHoi DnBraTeNb 6apabHa MexaHn3Ma KoWeHHN Pnc. A7 BkIIOHaeTc npImepHo Upe3 10 cekyHn nocne BbIe3da c 6a3bl, NaHHa pa6Oty.
BKNIOUeyHNE/BbIKIOUeyHNE
- YcTaHOBInTe nepeKlnOuAteIb pnc.A4 B noJoxKeHne "O", yTo6bl OTKnIOUHTb NITaHne.
2.YcTaHOBInTe nepeKJIIOvATEb Ha pnc.A4 B NOIOXKeHne "I", YTO6bl BKIOHUYTB MCTOCHNK NITAHN.
AKTINBAUPOBOTA INPOPROMMPOBAHNE BPEMEHN PABOTBI PYHOM PEXKIME
- Haxmnte u ydepkmbaTe KhoNky nHTaHnepu. D5, TTOb3aNyCTntb po6ota. PpmeuaHne: He Tpcnte po6ota BO BpeM 3anycka, TTO6bl n36ekatb Ow6kn npn 3anycke. Ecnn po6ot 3anyckaetc HnPaBnIbHO (Bce INdkatopby ropr HnpepbIBHO), nepe3anyCTnte ero.
2.BBeInTe npoNb,HaKaB KHOIky pnc.D6BaXdbI,3aTeM KHOIky pnc.
D7 DBaKDbI KHOJky pnc. D8 OIN pa3 (napoIb 3anporpaMMnpOBaH Ha 3aBOJe).
- 3anporpammmpyte Bpema pa6oTbI (BknHcya BpeMa KoueHnry n BpeMa 3apAdkn):
-HaxMMTe Ha pnc. D6, YTO6bI yCTaHOBnTB Bpempa60tbl. OINH TROPAAHINDKAToP 03Ha4eT 2 Yaca, MaKcIMaJIbHOE BpeMpa60tbl -8 YACOB n 4 INDnKaTopa Ha pnc. D4.HaxMMTe KONky pnc. D8 nIPOITBEpXKeHn H3anycka po60ta.
BHUMAHNE! Nocne yctaHOBKn BpeMeHN pa6oTbI po6Ot 3anOMHnT HAcTPOKNI HaHTeKoCInbB 3anPoRpaMMNpOBAHHOe BpeM KaJdbIeHb. BpeM KoSeHn8 6yTeT COOTBeTCTBOBaTb BBeDeHHBM HAcTPOKaM.
- 3AnporpammpnoBaHnOe BpeMpaobtIpo6oTaOT2acOBdo8acOB -3TOBpeMKOUHeHn, BKluOyA BpeM3aprKn.
BpMa pa60bI 3ap4kN 3aBnCt OT nCIOJIb3yeMOro aKkyMylrTopa.
EcIN BbXOTHe N3MeHHTB Bpempa60tI, BblONJIHnTe 7aRn 2-3 eue pa3. IPOPAMMNIPOBAHNE BPEMEHN B ABTOMATNUeCKOM PEXKIME, 7-1HEBHOE PACINCAHNE, DOCTYINHO YEPE3 HACTPOKNB INPIJIOXEHIN
Iocne abapnHoi ocTahOBKn po60Ta Heo6xoDmO pa3bNOKIpOBaTB, BbIOJIINHB WAr 2 BbIe. KaK ToIbKO po60 Ta3bNOKIpOBaH, Mbl MoKeM OTnpaBtB erO o6paTHo Ha cTAHcNIO, HaxKaB KONKN: Pnc. D7, 3aTeM NOITBePdNTe HaKaTMeM KHONKn Pnc. D8, YTO6bI BEPhyTb KOCNkYHa 3apJHyO cTAHcNIO.
Haxatme Khoikn abapinHoi ocTahOBKn STOP ydaIeR n3 npInIOXeHnue LKJI pyHOrO n ABTomATUeCKoR pexIMOB,ecIN OH 6bln AKTNBupoBaH TAKm Obpa3OM.ДЯ TORO UTo6bl po60r ChOBa Hauan pa60TaTb Nocne abapinHOcTahOBKn,ero Heo6xOIMBOpeHyTB Ha 3apdHyTO CTAHIOu CHOBa yCTaHOBHTb paCnCAHnepa60Tb BpyHom peKmE.Bcnyae ABtomATUeCKoR pacncaHnBbINOHNTE Te Xe DeiCTBnB B paCnCAHn INpInIOXeHnN NOITBepDNTe erO HAcTpoKN.
BHIMAHNE! 3anporpaMMNPOBaHHoe Bpem 3anycka B aBTOMaTHueckOM paCncaHm He DoJXHO paccMaTpNBaTbC KaK OeyHb ToUHoe. Pnp6op MOKeT BKIOHTbcr Ypee3 HeCKOJIbKO MmHT NocJe YCTaHOBNeHHOro BpemeHn.
AktuBaun pyHoro pexmMa ydaJare pacncaHne, 3anporpammpoBaHHe B npIIOKeHN, Hao6opot.
CtpnKka KpOMKn BpyHom pexHMe BblIOJIHReTc aBTOMaTHeCKN Hepe3 KaJdbie HeckOJIbKO UKNIOB KOWeHn. Pn 3OM TpaBa CkaWNBaETcPraDM C Ka6eIeM, ONpeJeIHOUIM pa6oyu 30Hy.
BHIMAHHE! Heo6xOIMO cneiHTb 3a npabunbHbIM KpeIJIeHNEM Ka6eI, YTO6bl He dOnyCTHTb ERO cnyauHOro nepepe3aHn.
- Po60T-ra3oHOKOcINbIuK BepHeTcB DOK-CTaHcNIO, KaK TOnlbKO yctpoiCTBO o6hApyKnHT HaayNo DoxJa.
- Ecnn Bo Bpempa60tbp60t HatoKHeTcHn npenrTcBne, OHOTCKoHT OT HeRn npoJOnknt pa60ty.
MHINKATOP COCTOHN3APJKN HA 3APJHOH CTAHUN: Henpebbln 3eHbCBT-6aTapeo NIOHcTbO 3apKeHa.
IpepbBnCTb3 3eJeHb CBeT-3apJka
3A IPEDEJIAMN 3APJHOI CTAHUN:
HenpepbHbH3eJIeHbCBeT-6aTapeR 二 = 20%
IpepbBnCTbI 3eIeHb CBeT-6aTapeer<20%
BHIMAHHE! Po60T aBtOMaTHueckn npeKpaauet pa6oTu IN BO3BpaaetaTcH Na 3apAHyIO CTaHcNIO,ecnI ypoBeHb 3apJa 6atapen onyckaetc Hxke 20%
INHANKATOPOUIBKN:
HenpepbHbI 3eHehB CBET-OBHOJIeHnE CNTeMb.IoKIOHTecb K npIOJOxEHNO, YTObI BbIOJNHb OBHOJIeHne.
IpepbBnCTbI 3eJIeHbI CBET - IDeT O6HOBJIeHne CnCTeMbI.
IpepbHcTbI KpaChbI CBET - coo6eHne 06 oUIn6Ke 1-5, nepe3anyctnte po60t.
HenpebIbIhI kpaIcbIcBET-cooIeHne o6 oIuIbKe 6-12,HaKMIte "STOP"nn "OK"dnyucTaPHeHn.
INHINKATOPYIDEPXINBAIOUIEFO TPOCA:
HenpepbHb3eHehCBET-CnHaJ npaBnIbHb HenpepbHbKpaChbCBET-HcHana
KoHTpoJIb PnC. D4:
IpepbBnctbCBet -po60T3a6nKpObaH.
HenpepbHbH CBET -po60t pa36IOKpOBAH.
JaMaHa 1 roPHT 3eHeHbIM: BpeM pa6oTbI 2 caca.
Jaambln 1 n 2 rojrt 3eenehblm CBetom: 4 yaca pa6oTbI.
Jaambl 1,2 n 3 rojT 3eHbIM CBetOM: 6 yacob pa60tbl.
JaMbI 1,2,3 n4 roPrt 3eHbIM CBetOM:8acOB pa60TbI.
ПОТРAMMHOE OБЕСПЕЧЕ ПЛЯ YИРAPЛЕНИЙ POБOTOM- RA3OHOKOCSIKON
3arpy3ka IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Ckaatb dna Android:
https://play.google.com/store/apps/details?id=com.toua.Robot
HCTpykunK nporpamme MOXHO cKaaTaHa caTte:
https://bit.ly/3QBB6Gm
ABAPINHOE OTKJIIOUHNE POBOTA
HaxMMTe KhoNky "STOP" (pnc. A1), yTo6bl octaHOBnTb po60ta, HaxMMTe N ydepKNaBte KhoNky nTaHn, yTo6bl BbIKIOuHTb po60ta.
NEPEMEUEHNEPOBOTA
Iodpo6oTOMpacnoJoxKeHaNoBemHa pyKoRTKaPnc.A10nnaerko ynpaBHeHOnyDnHpyKo.
OBCJNYKINBAHNE IN XPAHEHNE
-Перед чьй И обслужванем BCERда Вькlioчайт робот.
- Papeq qctkoi n 06cIyXnBaHneM 3apAHO CTaHcN OTOeHNHTE NCTOHHK IITAHNA.
- Пи заме He Hoxe n Ovnctke HnKHe yactn poBoTa Bcerda NaDeBaIte IIOThbIe 3aUHTbIe nepyATKn.
PeyraHpo npOBepaTe 3aTgKy 6oTob n rae. NObpeJeHHbIe DeTANIOJXHbI 6bITb OTpEMOHTnpOBaHbI INN 3aMeHeHbI B CEJIAX 6e3OnachOCTn.
- Perynpho npoBepaTe, Cbo6oHNo Nn BpaauHO Tc HoxN.
BHIMAHHE! Korda Bbl nepebopaunBaete po60ta, noIOXHTe erO Ha ra3OH mnn MmKyo IOBepxHOCTb, YTO6bI He NOBpeiNTb H He NoapanaTb NOKpbITne.
#
BHIMAHHE! Npei NaHApOM OChcTKI OTKJIIOHTe NITaHHe C NOMOJIbIO BbIKIOUaTeIa Pnc. A4.
BbIMoTe NpeDnHIO Yoacbpo6Ota c NOMOuIbO ONUCTnTeN H3KOrO DaBHeHn I MRAKO JETKN TKAHN.
- IcnoIb3yInTe JxecTKyU 5eTky, YTO6bl ydaJIINb CKOWeHHy TpaBy n Mycop c Je3Bn, KOJec N dpynx DetaneH Ha HNXHei CTopoHepo6ota.
- PeryIpaHNo npOBepeTKe Koneca Ha HAnuHe rpa3n IIn CkOWeHHo TpaBbI OuyUaTe IN UeTKoN.
BHIMAHHE! Perynnpno ydaanTe pactnteHbHbe ocTaKc HxHHeu qacTn po60ta, YTo6bl u36exKaTb CHxKeHn npOn3BOIDNTeJIbHOCTn.
3AMEHAJIe3BnIa
BHIMAHNE! Chayana BbIKNooyTe JIaBBHb BBIKNooyaTeJIb NITaHnN HaDeHbTe 3aUHTbIe nepuATKn.
BHIMAHHE!IcnoJb3yIeToJIbKOyKa3aHHbIeOpINHaJIbHbIeJe3BnI, Oo6peHHbIePpO3BOIDTeJIEM.
Bce TpuJe3BnI INX BnHTbI DOnxHbI 6blTb 3aMeHeHbI 3a OdHy onepaUHO 3aMeHbIPuc.A6.
BnHtblcneJeTyETOKpyTHTb3aTHyTbOTBeptKoI.
- Y6eINTEcB, yTO HOBBIE NsE3BnM OryT CBO6oDnHO BpaAaTbcra.
PEWEHNE IPOBJIEM
B Tabnue Hnke npBedeHb peKomeHdaaun no dnaHocTne npo6nem Ecn BO3MOxHO,OTpeMOHTnpuyTe yCTpOncTOcBO cAmOCTeNBHO.Ecn npo6nemy yCTpaHtHe ydaetc, o6patntecb K aBTOpN30BaHHOMy DnIepy nIN B cepBnCHb IeHTp.
BHIMAHHE! Heo6xoJIMO npHnTb Mepbl 3aunTbI.
| ПюбLEMа | Возможные причны | Рецени |
| На зардно станции магает красный индануator | Оврыв огранчтелово trpoа | Нади te несправны у��ок кабеля и лесравпь ото |
| РюбOT c trpondom cсыкуетс с зардно станциe | Зардно стаць устовлеса небравлho | См. раздел "Поротовka к разOTE". |
| Огранчтеловы trpoс пасложени небравлho | ||
| Остустve сигнана OT огранчтелово trpoа | Остустve эльскрочатни Трос 6ыл побъючен B образим небравли | Пюberьte Источник рintаня Помени Te Мecтамп разьемы "+" и "-". |
| Огранчтеловы Кабель побъючен K зардно сдаць | Пюberьte правлhoctь у��овки огранчтелово trpoа побъючены к зардно сдаць | |
| Оврыв огранчтелово trpoа | Пюberьte в do Концa, чу Кабель He sbilп преван | |
| Удэржваюше Тросовы Костовиь Na пуну К петл e и OT Hee | Пюberьte правлhoctь у��овки огранчтелово trpoа | |
| РюбOT bixxodn 3a гравиь | Огранчтеловы trpoс 6ыл побъючen B образим небравли | ПOMенайу Мecтамп разьемы "+" и "-". |
| РюбOT вибрирует пли Издаet певынные 3bykii | Повржданhoe пли Остуствюшee пебвie | Пюberьte и Отremонтейу ВиHTы Крелени пебвia |
| Диack с пьзвяам oclaiblen | ||
| ЗаменITE ЛебVE |
| Код ошибки | Opis | Решения |
| E01 Рис. F1 | Ошибka Инцидал栓аци -\ гирosexог | Пос天堂пто робота на** ровною поевховъ пегозустente ergo. |
| E02 Pnc.F2 | Hencnpabnocstb датчka поьема илдатчka столковеня | Отreyшируйte koilinizmio и Торсунhoe калесо на передné чaktи кослки, провьт. He Заблокоровыл пи они; поставыт робота на ровны поверхнocьи пөрөзү acte. |
| E03 Pnc.F3 | Ошись Иншцаллзаз榴 Двигатул Косилки | Поставыт робот на ровны поверхнocь. пөрөзү acte.Еси провьма схраняетс, образнесь в снжбу постаджки КлиеHTOB. |
| E04 Pnc.F4 | Ошись поклочени к astochinkу питань | |
| E05 Pnc.F5 | Hendrablnha Скорoctь Врашени Двигатул Косилки | |
| E06 Pnc.F6 | Прededчpeжdenе о налоне | Помechтite робота на ровны поверхнocь. Нжмite STOP пи OK, Чтосы OTмени CBINHAI Тревоги. |
| E07 Pnc.F7 | Прededчpeжdenе о полье me | Помechтite робота на ровны поверхнocь. Нжмite STOP пи OK, Чтосы OTмени CBINHAI Тревоги. |
| E08 Pnc.F8 | Ошись канana ALП | Поставыт робот на ровны поверхнocь. пөрөзү acte.Еси провьма схраняетс, образнесь в снжбу постаджки КлиеHTOB. |
| E09 Pnc.F9 | Hendrablnь синhal | См. Выш в tabлци: пожлама - несинhalа OT уderхимьюшero Тrosca. пожрьtle BCE TOOK ПО чeredу, Затем усановпite робота на ровны поверхнocь. Нжмite STOP пи OK, Чтосы OTмени CBINHAI пөрөзү acte.пөр- схраняетс. Еси пожлама схраняетс, образнесь В сөрвинчы снжбу. |
| E010 Pnc.F10 | Варенье иЗ роботов | Помechтite робота на ровны поверхнocь. Нжмite STOP пи OK, Чтосы OTмени CBINHAI Тревоги.鹤рөзү acte. пөрөзү acte. Бүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүүэ. В сөрвинчы снжбу. |
| E011 Pnc.F11 | Hendrablnь чackotа Врашени пекогошаговoro Двигатул | Пөрөзү acte. робот. Еси пожлама схраняетс, образнесь В снжбу подөржки КлиеHTOB. |
| E012 Pnc.F12 | Hendrablnь сокорostь права шаговы Двигатул |
KOMNIEKT BKNIOUAYET CCEB:
- Po6oT-ra30HokocnIbIuNK 1uT.
-OK-CTaHnIy 3apdHaCtAHnIy 1wt.
BIOK NITaHn yDINHHTeNbHbI Ka6eB 1wT.
Ka6eIbIpa3rpaHnueHna pa6oey 30Hb100M - 106enn dnn kpenneHn Ka6eJ 100 wT.
KpeexhbleIIO6eNdJaDOK-CTaHcM 6uT. - PexyIe Ie3Bn 3uT.
Ka6eIbHbIe pa3beMbI 2wT. - WecTnRpaHbI KInOu 1wT.
TEXHNUECKNEXAPAKTEPNCTNKN
| Робот-разовокильщпк 04-621 | |
| Параметр | Знayене |
| Напрахенье пitaшия: | 18 B ПОCTОЕНОТOKA |
| Мakсимальнаю Номнальнаю мошноctь двигатоля косnilки: | 50 W |
| Мakсимальнаю мошноctь самохоного двигатоля: | 20 W |
| Стениь зашины IP по заюн станции | IPX4 |
| Стениь зашины IP по робота | IPX5 |
| Стениз资助ы IP дая заюгогадаптера | IP 65 |
| Стениз资助ы робота | III |
| Стениз资助ы заюн CTанци | II |
| ШирINA сдашиваимя: | 180 MM |
| Р散发ковская ВсICOTы розань вданазон | 20 MM - 60 MM |
| Скорость вразшени | 3100 o6/MNH |
| Вес | 10,2 кr |
| Гов поиЗвodstва | 2024 |
DAHHbIe O lUyME N BnBPAuIN
| Урочь 3BykoBOrO давеленя | LpA = 56 ΦБ (A) K = 3 ΦБ (A) |
| Из每一个人у探测ь 3BykoBOr MOшноCTи | LWA = 67 ΦБ (A) K= 3 ΦБ (A) |
Hhopmaun o wyme n Bn6paun
YpOBeH 乌Ma, IN3NyAeMOro yCtPoIcTBOM, ONnCbIbaeTcR: yPObHEM IN3NyAeMOrO 3ByKOBOr DaJIbEHHa LpA IN yPObHem 3ByKOB0 MoUHocTN LwA, rKe K O6o3Haayet HeONpeDeJeHHocTb IN3MepeHn. Bn6paunr, IN3NyAeMa R yCtPoIcTBOM, ONnCbIbaeTc Bn6poYcoKepHeHm a n, rKe K O6o3Haayet HeONpeDeJeHHocTb IN3MepeHn.
3HaueHn, n3MepeHHbIe B DaHHOM pyKOBoCTBe No 3KcNpyaTauHn, T.e. ypoBeHb n3nyaEMoro 3ByKOBOrO daBHeHn LpA, ypoBeHb 3ByKOBoI MOuHocTHn L WA, n BVbpoyckOpene a h, 6bln n3MepeHb I COOTBeTcTBn c EN 62841-1:2015+A11. PnpBeHeHb ypoBeHb BVpaun a h MoKet nCnObl3oBaTbCn dIra CpaHEHn yCtpoCTB nDn npEBAHTeBHO OHENK BO3DeICTBn BVpaoun.
Yka3aHHbI ypoBeH Bn6paunr ABJTeTcpeP3eHTaTHBbIM TObKO
dAn OCHOBhIX oNtacte npimeHeHryCtpoCTBa.EcnyycToPcTBO
ncNoB3yeTcndApyrHex ceJeNm C dpYHM pa6OUMM
HcTpyMeHTAMn, ypoBeH Bn6paun MoKeT OTnuaTbc.
HeHaJIeKaaee nI npdeKoe TexHueCKoe 0cbnykBaHne ycTPOCTBa
npBouNT K nobIweHIO ypoBn Bn6paun. BblweynomnHyTbe
pnpHHbMOrYT yBEnuHrTB Bo3DeEChTBE Bn6paunn B TeueHne BCero
cPoka cLyXbI.
ДпгToCHOrO onpeIeHnB 03dEChTBnBn6paHn Heo6xOJMo yUHTbIBaTb NepNOdu "BkNIOueHn" N "BbIKNIOueHn" ycTpoIcTBa, nckHNochay nepNOdb, KORda OHO nCNoJIb3yeTcIЯ paObToI. Пп точнО uOeHke BceX foakTopOB o6uee Bo3dEChTBne Bn6paHn MoKeT 6bITb 3HaUnTeJIbHO HmKe.
IraaunbI onepatopota O BnBpaunncnONb3yTe DOnoJIHNTeBHBie Mepbl 6e30NaChocTn, HAnpMep, perynrphoe TexHueckoe 0cbnyxnbHne yctpoNCTBa n pa6OuNX INCHtpMeHTOB, co6JIouDeHne TempehatoPhoro pexima pyk n npabInbHaar opraHn3aunpa60tbl.
DAHHbIE O Wyme N BnBPAQIN
OXPAHA OKPYXKAIOUEN CPEbl

3NeKtpnueckoe obopyoBaHHe cneDyET BbIbpaBbTaB BMecTe 6bIbOBIMN OTOxOaMn. YTNIN3uPyTe Ero Ha COOTBeTCTByOuXnPpeNDprrnTmX. HNΦopMaunIO o6 yTNIN3aMm MOxHO NOnyUHT npOAdBa v3eJnna INB MceTHbIX OprAHX BnactM. OToXdbI 3NeKtpnueckoro n3NeKtpONHOrO obopyoDaHnR (WEEE) coepkata BeueCTBA, KOTOpBle He RbIraOTcE HeITpAnbHbIMn DnA OkpykaOcpeDb. HeyTIN3uPobAHHoe WEEE npEDctaBnE rNotEHnAmhHyOnaCHocTb DnA OKpykaOuSe CpeDb I 3dOpOBaI NIOeI.
"Pyynna TonKc Cnyk3 3 orpaHmK3oHO odnoBnAaJIbHoCTSpolka komanydtowa c knpnnueckmm aepecom B Bapuabe, yn. Pograniczn2 2/4 (danee: "Topex Group") coo6uaet, yTO BCE aBtOPCKne npaba HA coOpEJaHMe DAHORO pykoBOcTBA no 3KnNpyataunn (daee: PykoBOcTBO), BKNIOyA, HO He orpaHnBaBcB, erO TeKT, paMaeeHHebe foTOrpaFmN, cxMbl, pcyHKn, a TAKKe erO KOMNo3mUHO, npHaIaNJekat NCKIOHTeBHO Topex Grop u NoDNeKAT npabOB OXpAHBe B COOTBeTcTBmC 3aKOHOM ot 4 pebpans 1994 rOda ob ABtOPCKom npabe n cmExhix npabax (t.e. 3aKHOaTeBbHbB BEcTHNK U. 2006 Ne 90 nyHKt 631 c nonpaBkAm). KOnIpobAHne, nepepaBokTa, ny6nKaLau, INMeHENBE B KOMMEpecknx IeJx BCero PykoBOcTBA, a TaKke OTDeBbHex erO tNEMeHToB Be3 NcMbEmHoro corNaChn KOMNAHm Topex Group cTporo 3anpeueho MoKet NobNeB 3a co6oR npKaDaHckYIO yrOONbHyIO OTBeTcBeHHocThb.
HU FORDITASI (FELHASNZALOI) UTMUTATIO ROBOTFUNYIRO 04-621
FIGYELEM! AZ ELEKTROMOS SZERSZÁMOK HASNZÁLATA ELÖTT OLVASSA EL FIGYELMESEN EZEKET AZ UTASITÁSOKAT, ES ÖRIZZE MEG A KESÖBBI HASNZÁLATRA.
RÉSZLETES BIZTONSAGI ELOIRASOK
ROBOTFÜNYIROLKRA OVINTÉZKEDÉSEK
VONATKOZO
BIZTONSAGI
A robotfūnyíroBiztonságos gyakorlatihasznalata
JAVASLATOK
Figyelmesen olvassa el a kezelési utasitast. Ismerje meg a vezerlörendszerek és a készülk helyes muködteteset.
Tartsa távol a készüléket gyermekektól vagy olyn személyektól, akik nem olvasták el a hasznalati utasitást. A hazai elöirások pontosan meghatározhatják a kezelő eletkorát.
Más személyek, különösen gyerekek vagy allatok vannak a kölében ne használá a robotot.
Ne feledje, hogy a kezelő vagy felhasználo viseli a felelosséget az esetleges balesetekért vagy egyeb személyek és a környezet veszélyeztéséert.
ELOKESZULETEK
A funyirás elott mindig ellenorizze, hogy a robot összes alkatrészemegefeleloen mukodik-e.
- A legjobb eredmény elérèse a fünyíras száraz (csapadékmentes) idöben javasolt. Ellenkező esetben a nedves fū a robothoz tapadhat, ezér t a készülék megcsúszhat.
- kedvezötlen idajársi korulmények kozott, pl. heves esözes, zivatar vagy hóesés eseten füvet nyirni TILOS!
- Rendszeresen ellenorizze a nyirandó teruletet, és távolítsa el a koveket, törmeléket, drótokat, csontokat és egyéb akadályokat. A korlatózott garancia a gyepen hagyott tárgyak által okozott károkra nem terjed ki.
A karok elkerulise erdekében az ontozofejektol legalabbb 1 m-es körzetben nem szabad fuvet nyirni.
FIGYELEM! A robotot és az öntözőberendezéseket egyidejüleg bekapcsolni TILOS.
A robot mūkōdését a ontözōberendeźesek mūkōdésétól eltero idōpontra kell programozni.
SOHA ne engedje, hogy a gyermekek megérintsék a tápegységet, a toltöallomast, kūlōnsen az érintkezǒket, a pengéket, az akkumulátortartályt vagy barmely olyan részt, ahol hézagok vannak, mint például a kerekek.
HASZNÁLAT
Vigyázat: forgo pengék! Kezet vagy lábát SOHA ne tegye a forgo pengék alá.
- Fünyirás kozben ügyeljen a gyepen szétszórt tárgyakra! A robot üzemelése kozben tartsonBiztonságos távolságot.
- A keszüléket tilos felügyelet nélkül hagyni, ha a közelben állatok, gyermekek vagy egyeb személyek tartózkodnak.
- Alljon mindigBiztonsagos helyzetben.Lejtos teruleted stabil an es egyensulyban alljon.A robot vagy annak periferiainak mukodtetese kozben kizarolag sétalni lehet, futni tilos.
Ismerkedjen meg az arra vonatkozo utasitasyokkal, hogy serelesek vagy kopas szempontjabol mikor, hol es hogyan kell ellenorizni a keszuleket es periferiait, kabeleit es hosszabbito kabelet, valamint hogyan javithato robot. Sajat kezu modositas, javitas eseten a garancia ervenyet veszitheti.
- Sérult tapkábelne csatlakoztasson, illetve ne érintse meg, amig azt le nem valasztotta tápegységról, mert fennáll a feszültseg alatt allo alkatrészekkel való érintkezes veszélye.
A robotot es/vagy a periféris berendezeseketCsak oylan aramkorokhoz csatlakoztassa, amelyeket legfeljebb 30 mA kioldasi aramerosséguhibaaram-megszakitó véd.
- Ha a robot rendellenes hangot ad, vagy rendellenes rezgolest eszlei, vagy riasztast jelez, azonnal nyomja meg a STOP gombot.
A robot kikapcsolasa elott TILOS megérinteni a veszélyes mozgó alkatrészeket.
TILOS a veszelyes alkatreszekhez nyulni, amig azok teljesen meg nem allnak.
- A robot kezelése során mindig viseljen kemény lábbelit és hosszú nadrágot.
- Az áramellátast mindig ki kell kapcsolni: A robot lezárasa elott.
A tesztelés, tiszitás vagy karbantartás elött.
PIKTOGRAMOK ES FIGYELMEZTETESEK
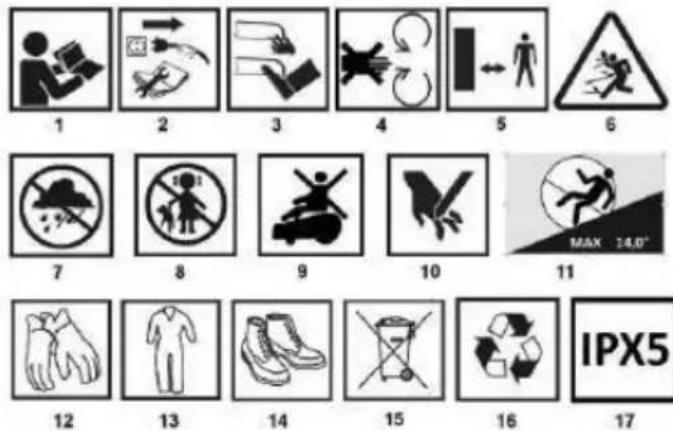
- Olvassa el figyelmesen a kezelési utasitast, és tartsa be az abban flogalt figyelmzetéket és biztonsági felteleket!
- Tisztlas vagy karbantartas elott valassza le a tapegyseget
- Ne tegye a kezét vagy lábát nyíromechanizmus védōburkolata alá
- Foró alkatrészek- sérülésveszély all fenn
- TartsonBiztonsagos tavolsagot a robotfunyiroto1ol
- Ügyeljen a szétSZort targyak okozta serulések lehtosegere
- Esotol védendo
- Gyermekek elöl elzarva tartando
- A robotra felunl tilos
- Ovatosan kezelje - fennail az ujjak elvesztésenek lehetosege
- Maximalis talajleités 14^ / 25%
- Munkakesztyu viselendő
- Vedoruhazat viselendo
- Védölabbeli viselendö
- Házartási hulladékkal együtt ártalmatlanitani tilos
- Szelektiv hulladekkezelé szükséges
- Vedelmi fokozat
MEGJEGYZES: Ezt a keszüléket 8 evnel idosebb gyermek, valamint korlatozott fizikai es szellemi képességekkel rendelkezö illefve nem kello ismeretekkel vagy tapasztalattal rendelkezó szemelyek felügyelet mellett, vagy a kszülék biztonságos hasznalatára vonatkozo megfelelo oktatás utan, továbba akkor hasznalhatják, amennyiben tisztaban vannak a hasznalattal jro kockázatokkal. A kszülék nem jatekszer. Felügyelet nélkül gyermekem nem tiszithatják vagy nem tarthatják karban a kszüléket.
GRAFIKUS ELEMEK LEIRASA
A kovetkez'o szamozas
a jelen kezikonyv grafikus oldalain lathat o keszulek-alkatreszekre vonatkozik.
| Megnevezés „A“ ábra | Leirás |
| 1 | Vészkapcsoló |
| 2 | Nyírámagasság-szabályozó |
| 3 | Fünyiró vezérlöpanelje |
| 4 | Fünyiró bekapcsolója |
| 5 | Hajtott kerekek |
| 6 | Pengék |
| 7 | Vágomechanizmus dobja |
| 8 | Irányitott kerekek |
| 9 | Tartófogantyú |
| 10 | Töltőcsatlakozók |
| 11 | Akkumulátorrekesz burkolata |
| Megnevezés „B“ ábra | Leirás |
| 1 | Dokkolóallomás vezérlöpanele |
| 2 | Dokkolóallomást rögzítö nyílások |
| 3 | Töltőcsatlakozók |
| 4 | Dokkolóallomás |
| 5 | Dokkolóallomás fedele |
| 6 | Csatlakozók a munkaterületet jelölő kábelek tapestgéséhéz |
| 7 | Nyílások a munkaterületet és az áramellátást jelölő kábelhez |
| 8 | Dokkolóallomás hálózati aljzata |
| 9 | Jelölés a helyes kábelvezetéshez |
| Megnevezés „D” ábra | Leirás |
| 1 | Töltési állapotjelző dióda |
| 2 | Hibajelző dióda |
| 3 | Korlátozó kábel jelzödiódája |
| 4 | Uzemóra / hibaüzenet, 1-4. diódák |
| 5 | Tápfeszült ség-kapcsoló |
| 6 | Bekapcsoló |
| 7 | Dokkológomb |
| 8 | "Megerősítés" gomb |
| Megnevezés „H“ ábra | Leirás |
| 1 | Csavarok |
| 2 | Akkumulatórekesz fedele szállitási fogantyúval |
| 3 | Akkumulatórtartó rekesz |
| 4 | Akkumulatór aljzata rekeszfedélen |
| 5 | Akkumulatór (nem tartozék) |
| Megnevezés „I“ ábra | Leirás |
| 1 | Gyep |
| 2 | Fal / perem |
| 3 | Dokkolóállomàs |
| 4 | Állomáss faltól mért távolsága |
| 5 | A nyírandó területet határoló kábel kezdet szakasza |
| 6 | Szakasz hossza |
| Megnevezés „J“ ábra | Leirás |
| 1a | A nyírandó területet határoló kábel kezdete |
| 1b | A nyírandó területet határoló kábel vége |
| 2 | Tápkábel |
| 3 | Dokkolóállomáss |
- Az ábra és a tényleges termek között altéresek lehetnek.
ELOKESZITES HASNZALATRA
AKKUMULATOR BEHELEYEZESE
Forditsa meg a robotfunyiróugy, hogy hozzaféhessen a robot aljához.
- Az A4 ábra szerinti bekapcsoló és az A9 ábra szerinti tartófogantyúnáltalhato a H2 ábra szerinti akkumulátorrekesz fedele, amelyet a H1 ábrán a nyilakkal jelölt 4 csavar rögzít.
- Ezután csavarja ki a nyilakkal jalölt csavarokat.
- Ovatosan távolítsa el a rekesz fedelet (H2 ábra), nehogy elszakítsa vagy levalassza a bekapcsoló gezetékeit (A4 ábra) (ez az akkumulatorrekesz fedelehez van rogzíte).
- Majd forditsa meg a fedelet: a H4 ábra szerinti akkumulátoraljzat a fedél aljára van rogzítve.
- Az aljazatba ENERGY+ sorozatu akkumulatór helyezzen.
- Forditsa meg a fedelet az akkumulatoral együtt, és helyezze be a H3 ábra szerinti rekeszbe.
- Húzza meg a fedelet rögzitò csavarokat. A robotot forditsuk vissza. A készülék készen All.
A ROBOTFÜNYIRO MUNKAKÖRNYEZETE
Gyözödjön meg arról, hogy a robot üzemi területén teljesülnek a következő feltelelek:
A fu magassaga legfeljebb 60 mm.
MEGJEGYZES: 60 mm-nel magasabb fu eseten, eloször kezi funyiroval kaszalja le a fuvet.
Kovek, fadarabok, gezetekek, feszultseg alatt ao kabelek vagy eqyeb idegen taryak nem lehetnek a teruleten.
- A nyirandó terület sík és egyenletes, árkoktól és gadröktól mentes, és a lejtes kisebb, mint 25% (14°) (lásd: C1 ábra).
A telepitéshez szükséges szerszámok:
Gumikalapács (a határolókábelt rogzító csapok beütéséhez)
- Hatlapos kulcs (a toltoallomas rogztisehez), a csomag tartalmazza
- Fogó (a munkaterületet hataroló kabel elvagásaHOZ)
1.A DOKKOLOALLOMAS TELEPITESE
Válassza ki a megfelelo helyet
Az allomás a C3 ábra szerinti helyen kell elhelyezni:
A gyep viszonylag sik es egyenletes reszere.
Kozel a gyep széléhez.
Egy fali csatlakozo aljzat kozeljen.
Helyezze a 10 m-es hosszabbito kabelt es a tapegyseget arnyekos, huvos es szaraz helyre.
A toltóallomás legalabb 2 m-es körzetében nem lehetnek akadályok.
A toltóallomást száraz és védett helyen ajánlott elhelyezni.
A tapegység a talajszt felett 30 cm-re helyezkedjen el.
2.A TOLTOALLOMÁS RÖGZITÉSE
Rögzitse a tölloallomast a talajhoz 6 rögzitöcsavarral (G1) (G6-os hatlapos kulcs segitségevel).
MEGJEGYZÉS: A toltəllomas lapjá állni é azon lépkedni TILOS.
MEGJEGYZÉS: A toltóallomás lapjan Új nyilásokat késziteni TILOS. Az allomást a meglévo nyilásokon keresztúl a padlozathoz kell csavarozni.
3. A HATÁROLÓ KÁBEL LEFEKTETÉSE
A hatarolokabel a munkaterulet kijelolesere es a robot toltoallomasra torten visszavezetesere szolgal.
MEGJEGYZES: Ha a szomszéd is robotfūnyíró használ, tartson legalább 1 m távolságot a két robot határoló kábelei kozott.
A HATÁROLÓ KÁBEL ELHELYEZKEDÉSÉNEK MEGTERVEZÉSE
A hataroló kabel lefektetese elott menjen vegig a kijelölt hatar mentén, és távolítson el(AP) meinden felesleges tárgyat, pédául Köveket.
MEGJEGYZES: A hatarolo kabel hossza legfeljebb 200 meter lehet.
FIGYELMEZTETÉS! A robot nem hajthat át kavicson vagy hasonlo a pengéket károsító felületen.
A HATÁROLÓ KÁBEL LEFEKTETÉSE „C" ÁBRA
A munkaterületet kijelö és az akadályokat elkerülo a határoló kabel lefekteteşkor tartsa be az alabbi utmutatast. Használja a készlethez mellekelt méroeszközt a határoló kabel helyes lefekteteşhez.
MEGJEGYZES: A hataroló kabel nagyon alacsony feszültsegen mukodik, az emberek és a háziällatok szamára nem jalent veszelyt.
MEGJEGYZES: Kezdje a toltaillomas hatuljan latato "csatlakozotol (B6 abra). Huzza az allomas ala (10 cm-t rahagyva), majd fektese a kabelt az oramutato jarasaval ellentetes iranyban a gyep korul, es a toltaillomas hatuljan levo +" cslatlakozojanal vegzodjon (10 cm-t rahagyva). Gyozodjon meg arrol, hogy a gezetek az +" es -" cslatlakozoknla lathato femmel erintkezik (B6 abra). Ne felejtse el levagni a felesleges hatarolo kabelt.
- Hagyjon legalabb 2 m-es helyet a hataroló kábel és a toltöallomás böztott. A kábel ezen szakasza gezeti a robotot a dokkolóallomashoz felé.
- Hagyjon 30 cm távolságot határoló kabel és a gyepszegély közott (C2 ábra, C3 ábra).
Rögzütse a határoló kábelt a talajhoz a mellekelt csapokkal (G5 ábra). A határoló kábelt egyenesen és enyhén feszítve kell elhelyezni. A csapokat 1 méterenként kell elhelyezni (ez a gyep alakjától fuggöen modosithato) C4 ábra. A jel gyengülésenek elkerülëse erdekében a kabel 2 cm-nél melyebbre ne kerüljön.
A kabel ugy helyezze el, hogy a kabel altal bezart szogek 90^ -nai nagyobbak legyenek C5 abra. Az ilyen teruleken a hatarolo kabel ivelten fektesse le: ez megkonnyiti a robot mozgasat a nyirandó teruleten. - Ha a gyepen viragágyások, kerti tavak vagy fák találhatók, vegye körbe ezeket határoló kábelle, a C4 ábrán mutatott hurokkal.
- A határoló kabel és az akadályok szélei kozott min. 30 cm távolságot kell tartani.
FIGYELEM! A hurokhoz gezető és onnan induló uton a rögzítokábelek nem keresztézhétik egymást, C4 ábra.
A funyiro munkateruleten keskeny savot kell hagyni. Ugyeljen arra, hogy a parhuzamosan futo hatarolo kabelek kozotti ravolsag legyen 1 m-nel nagyobb.
FIGYELEM! Gyózödjön meg arról, hogy a dokkolóállomás a nyírändó területet jelöló hurokban van. (outside - kivül / inside - belül) B2 ábra
4.A TOLTOALLOMÁS TELEPITÉSE
Csatlakoztassa az aramellatast
- Helyezze a halozati csatlakozot egy 110-240 V-os fali aljzatba.
- Ellenorizze a toltalomason lev o LED-diok allapotat (B1 abra):
- Folyamatos zöld feny: a kapcsolat létrejött (a robot nem töltdik vagy teljesen feltöltódött).
- Villogo zöld feny: a robot tõltodik.
- Villogó piros fény: a leggyakoribb hiba - „a határoló kabel elszakadt".
- Nem vilagito feny: a leggyakoribb hiba a "Nincs 100-240 V-os aramellatas" vagy "Nincs aramellatas csatlakoztatva".
MUKÖDTÉTÉS / BEALLITASOK
A robotfúnyiro elso beinditása
-
A robot elso inditásakor helyezze a keszüléket a dokkolaillomársa ügy, hogy az allomás toltócsatlakozói (B3 ábra) ne érintkezenek a robotfúnyíró toltócsatlakzoíval (A10 ábra).
-
Amikor a robotfūnyirot elǒször indītja el a Telefonos alkalmazásból, firmware-frissítest kell vegrehajtani. A frissités lépèseit az alábbiakban a szoftverfrissitésnel ismertetjúk.
FIGYELEM! Az elso kapcsolat soran a Telefon es a robot is a Wi-Fi halózat hatótvolságán belül helyezkedjen el.
FIRMWARE-FRISSITÉS A ROBOT HASNZALATA ELOTT.
A frissítest az alabbi lépések szerint kel végrehajtani:
-
Helyezze a robotot a hurokba, de a toltóallomáson kivülre.
-
Kapcsolja az A4 abra szerinti bekapcsolot 1. allasba.
- Nyomja meg es tartsa lenyomva a kapcsolot (D5 ábra).
- Inditsa el az alkalmazást, szkennelje be a QR-kódot.
- Csatlakoztassa az alkalmazast a robothoz.
- A képernyǒ jobf felsö sarkában levő ikon megerintésével nyissa meg a szoftverbeálításokat.
- Valassza ki az kovetkezot: Firmware frissités.
- Ezután kovesse a képernyón megjeleno utasitásokat.
A szoftver telepitése utan a készülk üzemkész.
FIGYELEM!
- A kijelzon tajekoztat arrol, hogy a robot Wi-Fi vagy Bluetooth hatotavolsagon belul van-e.
- A halózathoz valo csatlakozást a kapcsolat típusanak megfelelo ikon villogása jerzi. Csatlakoztatas után az ikon nem villog tovabb.
- A robotCsak egy telefonnal párositható.
- Amennyiben egy masik (azonos) robotfūnyírot szeréne csatlakoztatni, a korábbit elóször el kell távolítani az alkalmazásból. Az iOS-alkalmazásban a Bluetooth-beálításokban is.
NYIRASMAGASSAG BEALLITASA:
Az elso funyiras elott allitsa a nyirasmagassagot 60 mm-re, kesobb allitsa at a kivant magassagra, amkor a teljes gyep viszonylag sik.
- A nyfrasmagassag emelsehez forgassa el az A2 abran lathot gombat jobbra.
- A nyfrásmagasság csökkentéséhez fordítsa az A2 abrán latható gombot balra.
- A vágasi magasság 20 mm (MIN) és 60 mm (MAX) között allitható.
FIGYELEM! Az A7 abran lathato funyirodob hajtomotorja a dokkolóallomás elhagyása után kb. 10 masodpercel kapcsol be és indul el.
ARAMELLATAS BE-ES KIKAPCSOLASA
- Az aramellatas kikapcsolasahoz allitsa az A4 abra szerinti kapcsolot "O"allasba.
- Az aramellatas bekapsolasyahoz allitsa az A4 abra szerinti kapcsolot "I" alfasba.
A ROBOT BEKAPCSOLASA ES A MUNKAIDO PROGRAMOZASA MANUALIS UZEMMODBAN
- A robot elinditásához nyomja meg és tartsa lenyomva a bekapcsoló gombat (D5 ábra). Megjegyzés: a robotot inditás kozben ne rázza, hogy elkerülje az inditási hibát. Ha a robot nem indul el megfeleloen (minden dióda folyamatosan világít), inditsa Újra.
-
Adja meg a jelszt a D6 ábra szerinti nyomogombjanak kétseri, majd a D7 ábra szerinti nyomogomb kétseri és a D8 ábra szerinti nyomogomb egyszeri megnyomásával (a jelsz gyárilag beallitott).
-
Programozza be az uzemidot (beleertve a funyiras idejét és a toltés idejét):
-
Nyomja meg a D6 abrán lathato gombot az uzemido beallitásához. Egy dióda 2 orát jelent, a maximalis uzemido 8 ora, azaz 4 dióda, lásd a D4 abrát. Nyomja meg a D8 abrán lathato gombot a megerósítéshez, és a robot elinditásához.
MEGJEGYZES: Az uzemido beallitasa utan a robot minded nap a beprogramoztitt idopontban kezdi meg a funyirast. A funyiras ideje a megadott beallitasoknak felel meg.
A 2 orátol 8 oráig terjedo programozott üzemidó a funyirásí idö és a toltésí idö is tartalmazza.
- Az üzemidö és a toltési idő a felhasznált akkumulátorfeszültsegtöl fuggöen valtozik.
Az üsemidő megváltoztatásaḥoz ismételje meg a 2-3. lépestre.
AZ UZEMIDO AUTOMATIKUS UZEMMODBAN TORTENO PROGRAMOZASA, A 7 NAPOS UTEMEZES, AZ ALKALMAZAS BEALLITASAIN KERESZTUL ERHETO EL.
Vesztleállas utan a robotot a fenti 2. lépest vegrehajtva elször fel kell oldani. A robot feloldasa utan kuldhetjuk vissza az allomásra a D7 ábra szerinti gombok megnyomásalval, majd a D8 ábra szerinti gombbal erösitsuk meg, hogy a fünyírot visszaküldjuk a toltöallomásra.
A STOP vesztleallitogomb megnyomasa trola kezi es automatikus üzemmodban beallitott ciklust az alkalmazasbol, ha igy indult el. Veszteallas utan a robotot vissza kell helyezni a toltalomasra, es manualisan ujra be kell allitani az utemtervet. Automatikus utemezes eseten ugyanezt a mveletet az alkalmazas utemezeseben vgezze el, majd erositse meg a beallitasokat.
FIGYELEM! Az automatikus utemezesben beprogramozt inditasi idokorulbeluli idot jerol. A keszulek a beallitott idonel nahany percelkésöbb indulhat.
- A kézi üzemmod aktivalása törli az alkalmazásban beprogramozott utemezetest, és fordütva.
- Kezi uzemmodban a szegelyezes nehany fünyirasi ciklusonkent automatikusan történik. Ez a munkaterületet hataroló kabel menti fünyirast jelenti. FIGYELEM! Üglyelní kell a kabel megfelelo rögzítésere, hovy ne legyen véletlenul levághato.
A robotfunyiro viszater a dokkoloallomasra, amint a keszulek eszlei az esozes kezdetét.
Ha a robot munka kozben akadalyba utkozik, vissapattan az akadalyrol, majd folytatja a munkat.
TOLTEI ALLAPOTJELZO DIODA A TOLTOALLOMÁSON:
Folyamatos zöld fény - az akkumulator teljesen felttöldödt.
Villogó zöld feny -töltes folyamatban.
A TOLTOALLOMÁSON KIVÜL:
Folyamatos zöld fény - akkumulátor >=20%
Villogó zöld fény - akkumulátor <20%
FIGYELEM! Amennyiben az akkumulatorfeszültseg 20% ala csökken, a robot automatikusan szunetelteti a munkat, és visszatér a töltoallomásra.
HIBAJELZO DIODA:
Folyamatos zöld fény - frissütse a rendszert. A frissités elvégzéséhez csatlakozzon az alkalmazáshoz.
Villogó zöld feny - rendszerfrissités folyamatban.
Vilgo pirofeny-1-5.hibaizenet,inditsa uja a robotot.
Folyamatos piros feny - 6-12. hibauzenet, a trolsesz nyomja meg a
"STOP" vagy az OK gombat.
HATÁROLO KÁBEL JELZÖDIODAJA:
Folyamatos zöld feny - helyes jaladas
Folyamatos piros feny - nincs jaladas
Jelzodiodak,D4.abra:
Villogó feny - robot zárolva.
Folyamatos feny - robot feloldva.
Az 1-es dióda zóld színnel világit: 2 ora uzemidó.
Az 1-es es 2-es dióda zöld színnel világit: 4 ora uzemidó.
Az 1-es, 2-es es 3-as dioda zold szinnel vilagit: 6 ora üzemidó.
Az 1-es, 2-es, 3-as es 4-es lampa zold szinnel vilagit: 8 ora üzemido.
A ROBOTFUNIRO VEZERLESERE SZOLGALO SZOFTVER
Letoltés IOS-rendszerre:
https://apps.apple.com/cn/app/toua/id6449251720
Letoltés Android-rendszerre:
https://play.google.com/store/apps/details?id=com.toua.Robot
A program kezelési utmutatója letölthető a következő weboldalról:
https://bit.ly/3QBB6Gm
A ROBOT LEALLITASA VESZHELYZET ESETEN
A robot leallitasyohoz nyomja meg a,“STOP” gombat (A1 ábra), a robot kikapcsoláshoz tartsa lenyomva a bekapcsoló gombat.
A ROBOT ATHELYEZESE
A robot aljan talalható fogantyú (lásd az A10 abrát), az egy kézzel mūködtétest teszi lehtöve.
KARBANTARTÁS ES TÁROLÁS
Tisztlatas es karbantartas elott mindig kapcsolja ki a robotot.
A toltóallomás tiszitása es karbantartása elott húzza ki az állomás tapegységét.
- A pengék cseréjkor, illeteva a robot aljanak tisztitásakor mindig viseljen vastag védokesztyút.
- Rendszeresen ellenörizzee a csavarok és anyak szorosságat. A sérült alkatrészeket aBiztonságos használat érdekében meg kell javitani vagy ki kell cserélni.
- Rendszeresen ellenorizze, hogy a pengek megakadas nélkül forognak-e.
MEGJEGYZES: A robotot a gyepen vagy puha feluleten forditsa meg, hogy a burkolat ne sérüljön vagy karcolodjon meg.
TISZTITAS
FIGYELMEZTETÉS! A tiszitás megkezdésé elott kapcsolja ki a készüléket az A4 ábra szerinti kapcsolóval.
A robot elulso résztalacsony nyomasu mosoval es puha kefevel vagy trolokendovel mossa le.
- A pengékre, kerekekre és a robot aljan található részekre rakódott fūmaradványt és port kénye kefével távolítsa el.
- Rendszeresen ellenorizze, hogy a kerekekbe nem maradt-e sá r vagy fumaradvány. Ha igen, kefével tiszitsa meg öket.
MEGJEGYZES: A teljesitmény csokkenesenek elkerulëse erdekëben rendszeresen távolitsa el a robot aljára tapadt novenymaradványokat.
PENGECSERE
FIGYELMEZTETÉS! Elször kapcsoljä ki a fokapcsolót, majd vegyen fel védökesztýt.
FIGYELMEZTETÉS! Csak a gyártó által jováhagyott és javasolteredeti pengék használatók.
- Csere eseten mindharom pengét, a csavarjaikkal együtt (lásd az A6 abrát) kell kicserénlni.
- Csavarhuzóval csavarja ki vagy húzza meg a csavarokat.
Ellenorizze, hogy az uy pengek akadas nelkul forognak-e.
HIBAELHÁRITAS
Az alábbi tablázat a problémk diagnosztizálasyhoz nyújt utmutatást. Amennyiben lehétégés, javítsa meg a készüléket. Ha a probléma nem oldható meg, forduljon hivatalos markakereskedöhz vagy szervizközponthoz.
FIGYELMEZTETÉS! Tartsa be aBiztonsagi olvintézkedéseket!
| Probléma | Lehetséges ok | Megoldás |
| Piros, villogó dióda a tõltöallomáson | A határoló kábel elszakadt | Keresse meg a sérült kábelszakasz, és javítsa meg |
| A robot nehezen kapcsolódk a tõltöallomáshoz | A tõltöallomás nincs megfeleloen telepîve | Lásd az „Előkészítés használatra“ című részt. |
| A határoló kábel nincs megfeleloen lerakva | ||
| A határoló kábel nem külde jelet | Nincs áramellátás | Ellenőrizable az áramforrást |
| A határoló kábelt fordîtva kötötték be | Cserélje meg a „+“ és „-“ csatlakozókat | |
| A tõltöallomáshoz nincs csatlakoztatva a határoló kábel | Ellenőrizable, hogy a határoló kábel megfeleloen csatlakozik a tõltöallomáshoz | |
| A határoló kábel elszakadt | Ellenőrizable a kábel teljes hosszát, szakadást keresve | |
| A határoló kábel keresztezi a hurokba gezető és onnan indułó utat | Ellenőrizable, hogy a határoló kábel megfeleloen van-e elhelyezve | |
| A robot atläpi a határt | A határoló káelt fordîtva kötötték be | Cserélje meg a „+“ és „-“ csatlakozókat |
| A robot rezeg vagy szokatlan hangot ad ki | Sérült vagy hiányzó penge | Ellenőrizable a pengék rögzítócsavarjait, és szükség eseten javitsa meg |
| A pengetárcsa meglazult | ||
| Cserélje ki a pengét |
| Hibakód | Leírás | Megoldás |
| E01, F1 ábra | Inicializálási hiba - giroszkópos érzékelő | Helyezze a robotot sik felületre, és indítsa újra. |
| E02, F2 ábra | Emelöérzékelő vagy ütközésérzékelő hibája | Allítsa be az útkozörudat és az irányítható kereket a>fünyíró elülso részén, Ellenőrizze, hogy nem |
| akadtak-e el; helyezze a robotot sik felûleftre, majd indítsa Újra. | ||
| E03, F3 ábra | Vágomotor inicializálasi hibája | Helyezze a robotot sik felûleftre, és indítsa Újra. Ha a probléma továbbra is fennàll, forduljon az értékesités utáni szervizhez. |
| E04, F4 ábra | Áramellatás csatlakozásihibája | |
| E05, F5 ábra | A vágomotor fordulatszáma helytelen | |
| E06, F6 ábra | Dölésszög-figyelmeztétés | Helyezze a robotot sik felûleftre. Nyomja meg a STOP vagy az OK gombot a riasztás törléséhez. |
| E07, F7 ábra | Felemelési figyelmeztétés | Helyezze a robotot sik felûleftre. Nyomja meg a STOP vagy az OK gombot a riasztás törléséhez. |
| E08, F8 ábra | ADC-CSATorna hibája | Helyezze a robotot sik felûleftre, és indítsa Újra. Ha a probléma továbbra is fennàll, forduljon az értékesités utáni szervizhez. |
| E09, F9 ábra | Hibás jel | Lásda feni tablázbatban: A határoló kábel nem külde jelet Ellenőrizzé az összes pontot egyenként, majdalandítsa a robotot sik felûleftre. Nyomja meg a STOP vagy az OK gombot a riasztás törléséhez. Indítsa Újra a robotot. Ha a probléma továbbra is fennàll, forduljon az értékesités utáni szervizhez. |
| E010, F10 ábra | A robot elakadt | Helyezze a robotot sik felûleftre. Nyomja meg a STOP vagy az OK gombot a riasztás törléséhez. Indítsa Újra a robotot. Ha a probléma továbbra is fennàll, forduljon az értékesités utáni szervizhez. |
| E011, F11 ábra | A bal oldali görtőmOTOR fordulatszáma helytelen | Indítsa Újra a robotot. Ha a probléma továbbra is fennàll, forduljon az értékesités utáni szervizhez. |
| E012, F12 ábra | Jobb oldali görtőmOTOR helytelen sebessége |
TARTALOM BEALLITASA:
Robotfunyiro 1db
Dokkoló-éstoltoallomas 1 db
Tapegység es hosszabbito kabel 1 db
Kabel a munkaterulek kijelolesere 100m
Kabelrogzitocsapok 100 db
Dokkoloalomast rogzito csapok 6 db
Pengek 3 db
Kabelcsatlakozok 2 db
Hatszogletucsavarkulcs 1db
MUSZAKI ADATOK
| Robotfūnyíró 04-621 | |
| Paramétr | Értek |
| Tápfieszültseg | 18 V, DC |
| A vágomotor maximálisnevleges teljesítíménye: | 50 W |
| Az önjáró motor maximálisnevleges teljesítíménye: | 20 W |
| A tõltöallomás IP védelmi fokozata | IPX4 |
| A robot IP védelmi besorolása | IPX5 |
| A tõltöadapter IP védelmi besorolása | IP 65 |
| A robot védelmi besorolása | III. |
| A tõltöallomás védelmi besorolása | II. |
| Nyírássélesség | 180 mm |
| Nyírásmagasság beálitása a következő tartományban | 20 mm – 60 mm |
| Fordulatszám | 3100 ford./perc |
| Tömeg | 10,2 kg |
| Gyártási év | 2024 |
| Hangnyomásszint | \( {\mathrm{L}}_{\mathrm{{pA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3 dB (A) |
| Hangteljesitményszint | \( {\mathrm{L}}_{\mathrm{W}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3 dB (A) |
Informação a zajról és a vibraciónról
A gep altal kibocsatott zajsintet a L pA hangnyomasszint es a Lwhangteljesitmenyszint irja le (ahol K a meresiBizonytalansagot jeroli). A gep altal kibocsatott rezgeseket anrezgsegyorsulas erteke jlemz (ahol K a meresiBizonytalansagot jeroli).
A jelenutasitasban megadott Lp A hangnyomásszint, Lwahangteljesitményszt ies anrezgésgyorsulas érékek mérèse az EN 62841-1:2015+A11 szabvány szerint törtent. A megadott a rezgësszt iñfelhasznalható gépek összehasonlitasára és a rezgëseknek valo kitettseg elözetés érékelésère.
A megadott rezgesszintCsak a gep alapveto alkalmazasaira nezve representativ. Ha a gepet mas celokra vagy eltero munkavegzos eszkozokkel hasznaljak, akkor a rezgesszint eltero lehet. A gep elegtelen vagy tul ritka karbantartasa magasabb rezgesszintet okozhat. A fenti okok miatt a munkaido egesze alatt nagyobb lehet a rezgeseknek valo kitettseg.
A rezgésexposizio pontos becsl sé celjából figyelembe kell venni azokat az idoszakokat, amikor a gép ki van kapcsolva, vagy be van kapcsolva, de nem végeznek vele munkat. Az összes tenyezó pontos becsl sé utan kiderülhet, hogy az összesitett kitettség joval alacsonyabb.
A rezgêsek kezelore vonatkožo kõvetkezményeinek elkerülse erdekëben jarulëkosBiztonsägi intézkedeseket kell bevezetni, mint pl. a gep és a munkavegzó eszközok rendszeres karbantartasa, a kéz megfelelo hörmsékletének abiztositasa, valamint a megfelelo munkaszerVES.
ZAJRA ES REZGÉSEKRE VONATKOZO ADATOK
KÖRNYEZETVEDELEM
| Az elektramos termékek tilos a házartási hulladékok között elhelye hanem arṭalmatlanitárasa ákell ozakat adni a megfelelo üzemeknek. árṭalmatlanitársol az eladótl vagy a helyi hatósagoktól kaphat informaciól. A hasznält elektramos és elektronikus felszereles a természeti környezetre nzevem semileges anyagokat tartalmaz. Az ujrateldolgozársa nem kerülo felszereles potenciàllis veszényt jelent a környezet és azimutherek egészsége számára. |
A. Grupa Topex Korlatolt felelossegu tarsasag Beteli tarsasag, szekhelye: Varso, ul. Pograniczna 2/4 (tovabbiakban: "Grupa Topex") kozil, hagy a jelen utasitas (tovabbiakban: "Utasitas") tartalmaval capcsolatos mindennemu szerzoi jogok, beleertve a szovegre, benne levo fenykepekre, vazlatokra, rajzokra, valamint kialakitsara vonalkozakat, kizarolagosan a Grupa Topex tarsasagot illetik meg, es jegedelem alatt allnak, a szerzoi jogrol es szomszedos jogokrol szol' 1994. februar 4-i torveny (azaz Hlv. Kozl. 2006. evi 90. torenv 631. pontjanak modositasa). A teljes kezikonyv es egyes elemeinek kereskedelmi celu masolasa, feldolgzasa, kozztetele es modositasa a Grupa Topex frasos hozzajarulasa nkelul sziguruan tilos, es polgari jogi es buntetogj ifelelossaget vonhat maga utan.
EK megfeleloségi nyilatkozat
Gyarto Grupa Topex Sp. z o.o. Sp. k. (Kft. Bt.) ul. Pograniczna 2/4 02-285 Varsó
Termek: E+ robotfūnyíró
Tipus: 04-621
Kereskedelmi nev: NEO TOOLS
Sorozatszám: 00001 + 99999
A jelen megfelelosegi nyilatkozat a gyarto kizarolagos felelosssegre kerul kiadasra.
A fenti termek megfele az alabbi dokumentumoknak:
Gepekrol szoló 2006/42/EK irányelv
RED 2014/53/EU irányelv
2015/863/EU irányelvvel módosított RoHS 2011/65/EU irányelv
Teljesiti tovabbá az alábbi szabványok kovetelményeit:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Ez a nyilatkozat kizárólag a forgalomba hozatali állapotú gépré vonatkozik,
és nem terjed ki a vegfelhasznaló által hozzaáadott alkatrészekre, vagy az általa késöbb vegzett modositásokra.
A muszaki dokumentacio elkésztésere jogosult, az EU-ban lakhellyel vagy szekhellyel rendelkez személy neve és cime: Alárta az alábbi cég nevénye:
Grupa Topex Sp. z o.o. Sp. k. (Kft. Bt.) Bt.)
ul. Pograniczna 2/4
02-285 Varsó
Pawel Kowalski
GRUPA TOPEX vallalati minoségügyi megbizottja
Varso, 2023. 09.11.
EU megfeleloségi nyilatkozat
Gyarto Grupa Topex Sp. zo.o. Sp. k. (Kft. Bt.) ul. Pograniczna 2/4 02-285 Varsó
Termek: Toltóallomás
Tipus: K145455
Kereskedelmi nev: NEO TOOLS
Sorozatszam: 00001 ÷ 99999
A jelen megfeleloségi nyilatkozat a gyartó kizárolagos felelosssegre kerül kiadásra.
A fenti termek megfele az alabbi dokumentumoknak:
RED 2014/53/EU irányelv
2015/863/EU irányelvvel módositott RoHS 2011/65/EU irányelv
Teljesiti tovabbá az alabbi szabványok kovetelmenyeit:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Ez a nyilatkozat kizarolag a forgalomba hozatali allapot gepre
vonatkozik,
es nem terjed ki a vegfelhasznalo altal hozzaadott alkatrészekre,
vagy az altala késöbb vegzett modositásokra.
A muszaki dokumentácio elkésztésere jogosult, az EU-ban lakhellyel vagy szekhellyel rendelkező
szemely neve es cime:
Alairta az alabbi ceg neviben:
Grupa Topex Sp. z o.o. Sp. k. (Kft. Bt.) Bt.)
ul. Pograniczna 2/4
02-285 Varsó

Pawel Kowalski
GRUPA TOPEX vällalati minöségügyi megbizottja
Varso, 2023. 11.09.
RO
MANUAL DE TRADUCERE (UTILIZER)
ROBOT DE COSIT 04-621
ATENTIE! INAINTE DE A UTILIZA UNELTTE ELECTRICE, CITITICU ATENTIE ACEST MANUAL DE INSTRUCTIONSI PASTRI-L PENTRU CONSULTARE ULTERIOARÄ.
REGULI DE SIGURANTÁ DETALIATE
INSTRUCTION DE SIGURANTÀ PENTRU ROBOTII DE COSIT
Siguranta inutilizarea practicaa robotului de cosit
RECOMANDÄRl
Citi ci atentie manualul de instruioni. Cunoastetei sistemele de contro si functionarea corecta a aparatului.
Nu permitteda aparatul sa fie utilizat de copii tau de persone care nu au citit manualul de instruanti. Reglementarile nationale pot indica o vast minimalapentru operator.
Nuutilizati robotul dacà in jur sunt prezente alte persone, in special copii sau animale.
Vá rugam sá retineti cā operatorul Sau utiliser ose responsabil pentru accidentele Sau pericolele pentru alte persone Sau mediu.
PREGATIRE
- Inainte de cosit, verificati de ficare data dacà toate componentele robotului functioneazá corect.
- Pentru cele mai bune rezultate, se recomanda cosirea pe vreme fara ploaie. Atunci cand cositi pe timp de ploaie, iarba se poate lipi de robot, care poate aluneca in consecinta.
- NU tundeti in conditi meteorologice nefavorabile, de exemplu, in timpul ploii abundente, furtunilor sau caderilor de zapadă.
-
Inspectati periodicza cosita si indepartati orice pietre, resturi, fire, oase si alto obstacole. Garantia limitata nu acoperà dauniele cauzate de obiectele lasate pe gazon.
-
Pour a evita deteriorarea, nu tundeti la mai putin de 1 m de capetele aspersoarelor.
ATENTIE! Robotul Şi aspersoarele NU trebuie să fie pornite in acelasi temp.
Robotul trebuie sä fie programat sa fonctione la o ora diferita de cea a aspersoarelor.
Nu permitei NICIODATA copilor sa atinga sursa de alimentare, statia de incarcare, in special contactele, lamelele, compartmentul bateriei sau orice parti unde exista spatii libere, cum ar fi rotile.
FUNCTIONARE
- Aveti grijla lamele rotative! NU va puneti mainile sau picioarele sub lamele rotative.
- Aveti grijla obiecte imprastiate pe gazon in timpul cositului! Cand robotul este pornit, pastrati o distanța de siguranta.
- Nu lasati aparatul nesupravegheat dacă seție ca in apropriere se află animale, copii tau trecători.
- Mentineti o positie sigura. Mentineti echilibrul si o positie stabila pe pante. In timpul operarii robotului sau a perifericelor sale, este permis sa mergeti, dar nu sa alergati.
- Vä rugam sá cititi instructiunile privind cánd, unde sí cum sá verificati robotul sí perifericele sale, caburile sí prelungitoarele pentru a depista deteriorari tau uzura sí sá reparati robotul. Automodificarea, repararea nu este permisă - cu riscul de a anula garantia.
- Nu conectati tau atingeti un cablu de alimentare deteriorar pat nă cánd acesta nu a fost deconnectat de la sursa de alimentare, din cauza riscului de contact cu componente sub tensiune.
- Conectati robotul si/sau echipamentul periferic numai la circuite de alimentare protejate de un intrerupator de current rezidual cu un current de declansare de cel mult 30mA
- Dacă robotul scoate un sunet anormal sau se observa o vibratie anormală Sau dacă semnalizează o alarmă, apasati imediat butonul STOP.
- ESTE INTERZIS sā atingeti partile mobile periculoase inainte de a opri alimentarea robotului.
- ESTE INTERZIS sā atingeti partile periculose pān ācnd acstea nu s-au oprit complet.
- Purtati tintotdeauna incaltaminte rezistenta si pantaloni lungi atunci cand manevrati robotul.
Taiati sursa de alimentare: Inainte de a bloca robotul. - Inainte de testare, curatare sau intretinere.
PICTOGRAME SI AVERTISMENTE



- Citi t manualul de instru cioni si respectati averismentele si conditiile de siguranta!
- Inainte de curatae sau intretinere, deconectati de la sursa de alimentare
- Nu va puneti mainile sau picoarele sub protectia mechanismului de cosit
- Parti rotative - posibilitate de ranire
- Păstrati o distanța de siguranta fata de robotul de cosit
- Atentie la posibilitatea ranirilor provocate de objecte turnate
- Protejati de ploaie
- A nu se lasa la indemana copiilor.
- Nu vă urcati pe robot
- Posibila pierdere a degetelor, aveti grij
- Panta maxima a terenului 14^ / 25% .
- Protejati mainile cu manusi de lucru
- Purtati imbracaminte de protectie
- Purtati incaltaminte de protectie
- A nu se elimina impreuţa cu deșeurile menajere
- Colectarea selectiva a deseurilor
ATENTIE! Acest aparat poate fi utilizesd copii cu varsta de peste 8 ani si de persone cu abilita fizice si mentalale limitate, precum si cu cunostinte sau experientia insufficiente, daca sunt supravegheate sau instruite corespunzator cu privire la utilizarea in siguranta a aparatului, astfel incat sa fie constiente de riscurile implicate. Copii nu trebuie sa se joace cu acest aparat. Copii nu trebuie sa curete sau sa efectueze lucrari de intreinere la aparat fara supraveghere.
DESCRIEREA ELEMENTELOR GRAFICE
Urmatoarea numero tare se refera la componentele aparatului prezentate pe paginile grafice ale acestui manual.
| Desemnare Fig. A | Opiis | |
| 1 | Opire de urgência | |
| 2 | Dispositiv de reglare a inaltimii de cosit | |
| 3 | Panou de control al cositoarei | |
| 4 | Intrerupătorul de alimentare al cositoarei | |
| 5 | Roti motoare | |
| 6 | Lame de tãiere | |
| 7 | Tambur mecanism de tãiere | |
| 8 | Roti pivotante | |
| 9 | Mâner de transport | |
| 10 | Conectori de incârcare | |
| 11 | Capacul compartmentului bateriei | |
| Desemnare Fig. B | Opiis | |
| 1 | Panou de control al statiei de andocare | |
| 2 | Orificii pentru fixarea statiei de andocare | |
| 3 | Conectori de incârcare | |
| 4 | Statie de andocare | |
| 5 | Protectiei statiei de andocare | |
| 6 | Conectori pentru cablul de alimentare pentru amarca zona de lucru | |
| 7 | Deschideri pentru cabluri pentru marcarea zonei de lucru și a sursei de alimentare | |
| 8 | Priză de alimentare pentru statia de andocare | |
| 9 | Marcaj pentru rutarea corectă a cablurilor | |
| Desemnare Fig. D | Opiis | |
| 1 | Indicator luminos al stãrii de incârcare | |
| 2 | Indicator de defecțiene a semnalului | |
| 3 | Indicator de cablu de retinere | |
| 4 | Ore de functiónare / mesaj deEROare, lumini 1-4 | |
| 5 | Butonul de pornire | |
| 6 | Comutator de alimentare | |
| 7 | Buton de andocare | |
| 8 | Butonul "Confirmare" | |
| Desemnare Fig. H | Opiis | |
| 1 | Suruburi | |
| 2 | Capacul compartmentului bateriei cu mâner de transport | |
| 3 | Compartmentul bateriei | |
| 4 | Priza bateriei de pe capacul camerei | |
| 5 | Baterie reîncârcabilă (nu este inclusă) | |
| Desemnare Fig. I | Opiis | |
| 1 | Gazon | |
| 2 | Perete | |
| 3 | Statiei de andocare | |
| 4 | Distața statiei de la perete | |
| 5 | Secțiunea initială a liniei care delimitează zona de cosit | |
| 6 | Lungimea sectiunii | |
| Desemnare Fig. J | Opiis | |
| 1a | Cablu pentru a limita zona de cositÎnceputul | |
| 1b | Cablu pentru a limita zona de cosit Sfãrsit | |
| 2 | Linie de alimentare: | |
| 3 | Statiei de andocare | |
- Pot existaDIFFERente intre grafic si produsul real
PREGATIREA PENTRU MUNCA
INSTALAREA BATERIEI
- Răstumiţi robotul de cosit astfel incât să existe acces la partea inferioriar a robotului.
- In locul comutatorului Fig. A4 Şi al mânerului de transport Fig. A9 se află capacul compartmentului bateriei Fig. H2 fixat cu cele 4 Şuruburi marcate cu sāgeti Fig. H1.
- Apoi deşurubatişuruburilemarcatecu sageti.
- Scoateti cu atentie capacul compartmentului Fig. H2 pentru a nu rupe sau deconecta firele comutatorului Fig. A4 (acea este atasat la capacul compartmentului bateriei).
- Apoi intoarceti capacul, pe partea inferioară a capacului este fixata mufa bateriei Fig. H4.
- Introduciţi bateria din Serbia ENERGY+ in priză.
- Intoarceti capacul cu bateria ataata si introduceti-o in compartmentul Fig. H3.
- Strangeti suruburile de fixare a capacului. Intoarcti robotul cu fundul in jos, aparatul este gata.
MEDIUL DE LUCRU AL ROBOTULUI DE COSIT
Asigurati-vac sunt indeplinite urmatoarele condiitii in zona in care robotul lucreaz:
- Inaltimea ierbii nu depaseste 60~mm
- ATENTIE! Daca iarba este mai lunga de 60~mm , taiati mai intai gazonul cu o motocositoare manuală.
- Nu există pietre, bucăti de lemn, fire, cabluri sub tensiune sau alte obiecte străine.
- Terenul de cosit este plan si plat, fara santuri si santuri, iar panta este mai micá de 25% (14°) Fig. C1
- Urmátoarele unelte sunt nécessare pentru instalare:
- Ciocan de cauciuc (pentru infigerea stifturilor in sol la asezarea cablului de retinere)
- Cheia hexagonală (pentru fixarea statiei de incaircare) este inclusă in kit
- Cleste (pentru taierea cablului care delimiteazza zona de lucru)
1.INSTALAREA STATIEI DE BAZA
Alegeti o locatie adecvata
Statia de incarcare trebuie amplasata in urmatoarea locatie Fig. C3:
- O parte relativ platea si nivelata a gazonului.
- Aproape de marginea gazonului.
- Lángā o przyă de perete.
Asezati cablul prelungitor de 10 m, sursa de alimentare intr-un loc umbrit, racroos si uscat.
- Nu trebuie să existe obstacole pe o raza de cel putin 2 m de stația de inçarcare.
- Se recomanda ca stația de incârcare sa fie amplasata intr-un loc uscat si adapostit.
- Sursa de alimentare trebuie să fie la 30 cm deasupra nivelului solului.
2. FIXAREA STATIEI DE INCARCARE
Fixati stația de incârcare la sol cu 6 Šuruburi de fixare (G1) (utilizand o cheie hexagonală G6).
ATENTIE! NU stati tau nu mergeti pe plac statiei de incarcare.
ATENTIE! NU faceti gauri noi in plac statei de incarcare. Statia trebuie sa fié fixata cu suruburi pe podea folosind gaurile existente.
3. ASEZAREA CABLULUI DE RETINERE
Cablul de imobilizare este'utilizat pentru a delimita zona de lucru si pentru a ghida robotul inapoi la statia de incarcare.
ATENTIE! Daca sivecinul dvs. utilizeazeza o cositoare robotizata, pstra tio distanta de cel putin 1 m intre caburile de retinere ale ambilor roboti.
PLANIFICAREA POZITIEI CABLULUI DE RETINERE
Inainte de asezarea cabului de retinere, mergeti de-a lungul limitei desemnate si indepartati orice obiecte inutile, cum ar fi piete.
ATENTIE! Lungimea cablului de retinere nu trebuie sa depaseasca 200 de metri.
AVERTISMENT! Robotul nu trebuie sa treaca peste pietris sau materiale similare care ar putea deteriorora lamele.
ASEZAREA CABLULUI DE RETINERE FIG.C
Urmati instruuntile de mai jos pentru a amplasa cabul de retinere in jurul zonei de lucru si al obstacolelor. Utilizati contorul inclus in kit pentru a amplasa corect cabul de retinere.
ATENTIE! Cabul de imobilizare este alimentat la tensiune foarte joasa si este sigur pentru oameni si animale de companie.
ATENTIE! Incepei cu conectorul "-" din spatele statiei de incarcare Fig.
B6 trageti-I pe sub staie (si lasati o rezerva de 10 cm) si intindetci cabul
in jurul gazonului in sens invers acelor de ceasornic, terminand cu conectorul "+" din spatele statiei de incarcare (lasati o rezerva de 10 cm). Asigurat-va ca cabul vine in contact cu metalul la nivelul conectorilor "+" si "Fig.B6 nu uitatati sa taiati excessul de cablu de retinere.
- Lasaţi gol cel putşin 2 m'intre cablul de rejinereși stația de inçarcare. Cablul din această sectiune este Utilizat pentru a aduce robotul la stația de andocare.
- Păstrăi o distanță de 30 cm în cablul de retinereși marginea gazonului Fig. C2; Fig. C3.
Fixati cabul de retinere la sol cu diblurile furnizate Fig. G5. Cabul de retinere trebuie sa fie drept si usor tensionat. Suruburile trebuie sa fie distanlate la ficare 1 m (acent lucru poate fi modificat in functie de forma gazonului) Fig. C4. Nu ingropati cabul mai adanc de 2 cm pentru a evita slabirea semnalului.
Dispuneti cablul astfel incat unghiurile sá fie mai mari de 90^ Fig. C5. In astfel de zone, amplasati cablul de retinere in curbe usoare, ceea ce va facilita mult deplasarea robotului in jurul zonei de cosit. - Daca exista straturi de flori, iazuri sau copaci in peluză, inconjurati-le cu bucle de cablu de retinere Fig. C4.
- Păstrați o distanță de min. 30 cm distanță întré cablul de reținereși marginile obstacolelor.
ATENTIE! Pe drumul spre.si dinspre buclă, cablul de retinere nu trebuie sa se incruciseze Fig. C4.
- Lásatu un spatiu ingust in zona de lucru a motocositoarei. Asiguratá va ca distanta dentre caburile de retinere care rulează paralel este mai mare de 1 m.
ATENTIE! Asigurati-va cstaia de andocare este in interiorul bucei care marcheazza zona de cosit. (exterior / interior) Fig.B2
4. INSTALLAREA STATIEI DE INCÁRCAIRE
Conectati sursa de alimentare
- Introduciţi fisi de alimentare intr-o priză de perete de 110-240 V.
- Verificatu starea luminilor LED de pe staia de incarcare Fig. B1:
- Lumină verde continua: conexiune stabilită (robotul nu se incarca sau este incârcat complet)
Lumina verte intermitenta: robotul se incarca. - Lumină rosie intermitentă: cea mai freventa eroare este "deconnectarea cablului de retinere".
- Lumină stinsă: cea mai freventa defectiune este "Nu există sursă de alimentare de 100-240 V" sau "Nu există conexiune la sursa de alimentare".
FUNCTIONARE/SETÄRi
Prima pornire a robotului de cosit
- Cándorniti robotul pentru prima data, asezați aparatul pe statia de andocare astfel incât conectorii de incarcare de pe statia fig. B3 sa nu intre in contact cu conectorii de incarcare de pe robotul de cosit fig. A10.
- Cánd robotul de cosit este pomit pentru prima data din aplicatața Telefonului, trebuie efectuată oactualizare a firmware-ului. Metoda de implementare este descrișa mai jos la actualizarea software-ului.
- ATENTIE! In timpul primei conexiuni, Telefonul Şi robotul trebuie să fie in raza de actiune a retelei Wi-fi.
ACTUALIZAREA FIRMWARE-ULUI INAINTE DE A UTILIZA ROBOTUL.
Actualizarea trebuie efectuata dupa cum urmeaz.
- Plasati robotul in interiorul buclei, dar in afara statiei de incarcare.
- Comutati comutatorul Fig. A4 in positia 1.
- Apasati si mentineti apasat comutatorul Fig. D5
- Porniti aplicata, scanati codul QR
-
Conectati aplicata la robot
-
Extindi setarile software prin apasarea pictogramei din partea dreaptasus a ecranului.
-
Selectati o optiene: Actualizare firmware.
- Apoi urmati instructjunile de pe ecran.
Dupé ce software-ul a fost instalat, aparatul este gata de fonctionare ATENTIE!
- Afisajul aratá dacá robotul se afla in gama Wi-fi sau Bluetooth
- Conectarea la o retea este indicata de o pictograma intermitentà pentru tipul de conexiune. Odata conectat, pictograma nu mai clipiste.
- Robotul poate fi asociat cu un singur Telefon.
- Daca trebuie connectat un altul (acelasi robot de cosit), primul trebuie eliminat din aplicatie. In aplicatie iOS, de asemenea, din setarile Bluetooth.
REGLAREA INALTIMI DE COSIRE:
Inainte de prima tundere, setatu inaltimea de tundere la 60 mm si apoitreceti la inaltimea dorita atunci cand intregul gazon este relativ plat.
- Rotiji butonul Fig. A2 in sensul acelor de ceasornic pentru a creste inaltimea de cosire.
- Rotiji butonul Fig. A2 spre stanga pentru a reduce inalimea de cosire.
- Inaltimea de cosire poate fi reglata de la 20 mm (MIN) la 60 mm (MAX).
ATENTIE! Motorul de actionare al tamburului mechanismului de cosit Fig. A7 porneoste la aproximativ 10 secunde dupa ieirea din bază,incepân d functionarea.
PORNIRE/OPRIRE
- Puneti comutatorul Fig. A4 in positja "O" pentru a opri alimentarea cu energia electrica.
- Puneti comutatorul Fig. A4 in poziţa "I" pentru a porni sursa de alimentare.
ACTIVAREA ROBOTULUI I PROGRAMAREA TIMPULUI DE LUCRU IN MODUL MANUAL
-
Apasati si mentineti apasat butonul de alimentare Fig. D5 pentru a porni robotul. Notă: nu scuturati robotul în timpul pornirii pentru a evita o eroare de pornire. Dacă robotul nu pornește corect (toate luminile sunt aprinse continuu), reporniti-1.
-
Introduci parola apasand butonul Fig. D6 de doua ori, apoi butonul Fig. D7 de doua ori si butonul Fig. D8 o data (parola programata in fabrică).
-
Programa ti timul de fonctionare (inclusiv timul de cosit si timul de incarcare):
-
Apasati Fig. D6 pentru a seta timpul de fonctionare. O lumină aprinsă inseamă 2 ore, timpul maxim de fonctionare este de 8 oreși 4 lumini pe Fig. D4. Apasati butonul Fig. D8 pentru a confirmăși a porni robotul.
ATENTIE! Odata ce timul de fonctionare a fost setat, robotul va retine setarile si va incepe sa coseasca in ficare zi la ora programata. Timul de cosire va fi in conformitate cu setarile introduse.
- Timpul de fonctionare programat al robotului, de la 2 ore la 8 ore, reprazinta timpul de cosire, inclusiv timpul de incarcare.
- Timpii de fonctionare si de incarcare variază in functie de bateria realizata.
Dacà doriti sā modificati timpul de fonctionare, urmati din nou paşi 2-3.
PROGRAMAREA TIMPULUI IN MODUL AUTOMAT, PROGRAM DE 7 ZILE, ESTE DISPONIBILÄ PRIN SETÄRILE DIN APLICATIE
- Dupa o oprire de urgenta, robotul trebuie mai intai deblocat urmand pasul 2 de mai sus. Odata ce robotul este deblocat, il putem trimite inapo la statie prin apasareautoanelor:Fig.D7 apoi confirmam cu butonul Fig.D8 pentru aintoare motocoasa la statia de incarcare.
- Apăsarea butonului de oprine de urgță STOP șterge cicul modurilor manualși automat din aplicatie, dacă aceasta a fost activă in acest mod. Pentru ca robotul să inceapă și lucreze din nou după o oprine de urgță, robotul trebuie și fie returnat la statția de incârcareși programul de lucru manual trebuie setat din nou. In cazul unui program automat, efectuți aceeași actiune in programul aplicatiețiși confirmatișsetările acestuia.
ATENTIE! Timpul de pomire programat in programul automat nu trebuie considerat foarte precis. Aparatul poate porni până la câteva minute dupa ora programata.
- Activarea modului manual Şterge programul programat in aplicatie Şi viceversa.
- Täirea marginilor in modul manual se face automat la ficare câteva cicluri de cosire. Aceasta presupune cosirea ierbiiaprope de cablul care defineste zona de lucru. ATENTIE! Trebuie sa aveti grijsa va asiguratcă cablul este bine fixat pentru a nu-l expune tacierii accidentale.
- Robotul de cosit se va inbarce la statia de andocare odata ce disposzitivul a detectat inceputul ploi.
- Dacă robotul intälneșe un obstacol in timpe le lucrează, acesta va ricosa si va continua să lucreze.
LUMINA DE STARE A INCÁRCÁRII IN STATIA DE INCÁRCARE:
Lumina verte continua - baterie complet incarcata.
Lumina verte intermitenta - incarcare.
IN AFARA STATIEI DE INCARCARE:
Lumină verde continua - baterie >=20% Lumină verde intermitentă - baterie <20%
ATENTIE! Robotul opreste automat lucrul si se intoarce la statia de incarcare dacă nivalul bateriei scade sub 20%
ERROR LIGHT:
Lumina verte continuă - actualizati sistemul. Conectati-va la aplicatie pentru a efectuaactualizarea.
Lumina verte intermitenta -actualizarea sstemului este in curs.
Lumina rosie intermitentă - mesaj de eroare de la 1 la 5, reporniti robotul. Lumina rosie continuaa - mesaj de eroare de la 6 la 12, apasaţi "STOP" sau "OK" pentru a sterge.
INDICATOR CABLU DE RETINERE:
Lumina verte continua - semnal corect
Lumina rosie continua - niciun semnal
Controale Fig. D4:
Lumina intermitenta - robot blocat.
Lumina continua - robot deblocat.
Lumina 1 se aprinde in verde: tamp de lucru de 2 ore.
Luminile 1 sì 2 se aprind in verde: 4 ore timp de lucru.
Luminile 1, 2 s i 3 se aprind in verde: 6 ore timp de lucru.
Luminile 1, 2, 3 s i 4 se aprind in verde: 8 ore tamp de lucru.
SOFTWARE PENTRU CONTROLUL ROBOTULUI DE COSIT
Descarcare IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Descarcare Android:
https://play.google.com/store/apps/details?id=com.touarobot
Instructiunile programului pot fi descarcate la adresa:
https://bit.ly/3QBB6Gm
OPRIREA DE URGENTÁ A ROBOTULUI
Apasati butonul "STOP" Fig. A1 pentru a opri robotul, apasati si mentingeti apasat butonul de alimentare pentru a opri robotul.
DEPLASAREAROBOTULUI
Sub robot este amplasat un maner de ridicare Fig. A10 pentru o operare usoara cu o singura mana.
INTRETINERE SI DEPOZITARE
- Opriti intotdeauna robotul inainte de curatare 山 intretinere.
- Deconnectati sursa de alimentare inainte de curata area si intretinerea statiei de incarcare.
- Purtati intotdeauna manusi groase de protectie atunci cand schimbati lamele si curatati partea inferioroara a robotului.
- Verificati periodico strangerea suruburilor si a piulitelor. Piesele deteriorate trebuie reparate tau inlocuite din motive de siguranta.
- Verificati periodic dacă lamele se pot roti liber.
ATENTIE! Cánd intoarceti robotul cu capul in jos, asezati- pe gazon sape o suprafata moale pentru a nu deteriorora sau zgària capacul.
CURATENIE
ATENTIE! Inainte de a incepe curataea, intrerupei alimentarea cu intrerupatorul Fig. A4.
- Spalati partea din fata a robotului cu un detergent cu presiune redusa si o perie sue o cappa moale.
Utilizati o perie dura pentru a indeparta iarba taiata si resturile de pe lame, roti si alte parti de pe partea inferioroara a robotului. - Verificazioni in mod regulat dacà rotile sunt pline de noroi sau iarbă tăiata si curati-le cu o perie.
ATENTIE! Indepartati in mod regulat resturile vegetale de pe parte inferioar a robotului pentru a evita reducerea productivitatei.
INLOCUIREA LAMEI
AVERTISMENT! Mai intai opriti intrerupatorul principal si puneti manusi de protectie.
AVERTISMENT! Utilizati numai lamele originale indicate, aprobate de producator.
Toate cele trei lame sì suruburile lor trebuie inlocuite intr-o singura operatiune de inlocuire Fig. A6.
- Suruburile trebuie desurubate.si stranse cu o surubelinita.
- Verificazioni dacă lamele nei se pot roti liber.
REZOLVAREA PROBLEMELOR
Tabelul de mai jos Offera Indrumari pentru a ajuta la diagnosticarea problemelor.
Dacă este posibil, reparati singur dispositivul. Dacă problema nu poate fi rezolvata, va rugam să contacta un dealer autorizat sau un centru de service.
AVERTISMENT! Trebuie luate masuri de protectie.
| Problema | Cauze posibile | Solutii |
| Lumina rosie clippește la stația de înțârcare | Întreruperea cablului de reținere | Găsiți sectiunea defectă a cablului și reparati-1 |
| Robotul are dificultăți de conectare la stația de incârcare | Stația de înçârcare nu este instalata corect | Consultuțați sectiunea "Pregătirea pentru munță". |
| Cablul de reținere nu este pozițonat corect | ||
| Niciun semnal de la cabul de reținere | Nu există sursă de alimentare | Verificatișsuresa de alimentare |
| Cablul de reținere a fost conectat în sens invers | Schimbati conectorii "+"și "-" | |
| Cablul de reținere nu este conectat la stația de înçârcare | Verificatiș dacă cabul de reținere este corect conectat la o stație de înçârcare | |
| Întreruperea cablului de reținere | Verificatiș până la capăt, că cabul nu a fost intrerupt | |
| ReținereaÎncrucișărilor de cabluri pe drumul spreși dinspre buclă | Verificatiș dacă cabul de reținere este instalat corect | |
| Robotul trece dincolo de granță | Cablul de reținere a fost conectat în sens invers | Schimbati conectorii "+"și "-" |
| Robotul vibrează Saud face zgomote neobișnuite | Lamă deterioratatãsau lipsă | Verificatișs reparatișsuruburile de fixare a lamei |
| Discul lamei este slăbit | ||
| Înlocuiți lama |
| Cod deEROARE | Opis | Solutie |
| E01 Fig. F1 | Eroare deinitializare -senzorgiroscopic | Asezati robotul pe o suprafata plana Şi reporniti. |
| E02 Fig. F2 | Defectiune la senzorul deridicare sau la senzorul de colizione | Regliati baradocolizione sirota de torsiune de pe partea din fata a masinii de tuns iarba, verificati dacà nu sunt blocate; asezati robotul pe o suprafata plana Şi reporniti. |
| E03 Fig. F3 | Eroare deinitializare amotorului de cosit | Asezati robotul pe o suprafata plana Şi reporniti.Dacà problema persistà,contactati serviciul clienti. |
| E04 Fig. F4 | Eroare deconectare asurseid alimentare | |
| E05 Fig. F5 | Turatie incorectà amotorului de cosit | |
| E06 Fig. F6 | Avertizare deînclinare | Asezati robotul pe o suprafata plana. Apasati STOP sai OK pentru anula alarma. |
| E07 Fig. F7 | Avertisment deridicare | Asezati robotul pe o suprafata plana. Apasati STOP sai OK pentru anula alarma. |
| E08 Fig. F8 | Eroare canal ADC | Asezati robotul pe o suprafata plana Şi reporniti.Dacà problema persistà,contactati serviciul clienti. |
| E09 Fig. F9 | Semnal incorrect | A se vedea mai sus in tabel: problemă - nu există semnal de la cablul de retinere.Verificati toate punctele unul câte unul, apoi asezati robotul pe o suprafata plana. Apasati STOP sai OK pentru anula alarma.Reporniti robotul. Dacà problema persistà,contactati serviciul clienti. |
| E010 Fig.F10 | Gem de roboți | Asezati robotul pe o suprafata plana. Apasati STOP sai OK pentru an |
| anula alarma. Reporniti robotul. Dacă problema persistă, contactăți serviciul clienti. | ||
| E011 Fig. F11 | Viteză Incorrectă a motorului pas cu pas din stângă | Reporniti robotul. Dacă problema persistă, contactăți serviciul clienti. |
| E012 Fig. F12 | Viteză Incorrectă a dreptului motor pas cu pas |
KIT CONTINE:
Robot de cosit 1 buc.
- Statie de andocare si incarcare 1 buc.
- Sursa de alimentare si cablu prelimgitor 1 buc.
Cablu pentru delimitarea zonei de lucru 100m
- Dibluri pentru fixarea cablurilor 100 buc.
- Dibluri de fixare pentru statia de andocare 6 buc.
Lame de taiat 3 buc.
- Conectori de cablu 2pc.
Cheie hexagonala 1 buc.
SPECIFICATI
| Robot de cosit 04-621 | |
| Parametru | Valoare |
| Tensiune de alimentare: | 18 V DC |
| Puterea nominală/maximă a motorului de cosit: | 50 W |
| Puterea nominală/maximă a motorului autopropulsat: | 20 W |
| Grad de proteție IP pentru stația de înțărcare | IPX4 |
| Grad de proteție IP pentru robot | IPX5 |
| Grad de proteție IP pentru adaptorul de înțărcare | IP 65 |
| Clasa de proteție pentru robot | III |
| Clasa de proteție pentru stația de înțărcare | II |
| Lătimea de tundere: | 180 mm |
| Reglarea înțătimumi de tăiere în intervalul | 20 mm - 60 mm |
| Viteza de rotatie | 3100 rpm |
| Greunate | 10,2 kg |
| Anul de productie | 2024 |
DATE PRIVIND ZGOMOTUL SI VIBRATIILE
| Nivelul de presiune acustică | LpA = 56dB (A) K=3dB(A) |
| Nivelul de putere acustică măsurat | LwA = 67dB (A) K=3dB(A) |
Informati privind zgomotul si vibratiile
Nivelul zgomotului emis de dispositiv este descrie de: nivelul presiunii acustice emise Lpa si nivelul puteri acustice Lw, unde K desemneaz incertitudinea de masurare. Vibratiile emise de dispositiv sunt descrise de acceleratia vibratiilor a, unde K desemneaz incertitudinea de masurare.
Valorile māsurate in acest manual de instructiuni, ŠI anume nivalul presiunii acustice emise LpA, nivalul puteri i acustice IwA, ŠI acceleratia vibrātilor ah, au fost māsurate in conformitate cu EN 62841-1:2015+A11. Nivalul de vibrāti a, poate fiutilizat pentru compararea dispositivelor s peuntu evaluarea preliminarà a expunerii la vibrati. Nivalul de vibrati indicat este reprentativ numai pentru aplicatiile de bază ale dispositivului. Dacà dispositivul esteutilizat pentru alte aplicatiès sau cu alte instrumente de lucru, nivalul vibrātilor poate fi diferit. Intretinerea necorespunzàtoare su rara a dispositivului determină nivaluri mai ridicate de vibrati. Cauzele mentionate mai sus pot creste expunerea la vibrati pe intreaga durata deutilizare.
Pentru a determina cu precizie expunerea la vibrai, trebuie luate in considerare perioadele de "pornire" si "oprine" a dispositivului, excluzand perioadele in care acesta este utilizespentru fonctionare. Expunerea totala la vibrai poate fi mult mai mica atunci candid toti factorii sunt estimatci cu exactitate.
Pentru a proteja operatorul impotrivá vibratiłor,utilizāmăsuri de siguranta suplimentare, de exemplu, intretinerea periodica a disposzitivului si a uneltelor de lucru, condiţii adevate de temperatura a mainilor si organizarea corespunzătoare a muncii.
DATE PRIVIND ZGOMOTUL VIBRATIILE
PROTECTIA MEDIULUI

Echipamentul electric nu trebuie eliminat imprenunau cu deseurile menajere. Eliminati-la instalataile corespunzatoare. Informatii privino eliminarea pot fi obtinute de la distributorul produsului Sau de la autoritatale locale. Deseurile de的操作e electrice si electroniche (DEEE) contin substanctare care nu sunt neutre pentru mediu natural DEEE nereclicate reprezinta un pericol potenial pentru mediu s sanataea umana.
"Grupa Topex Spóka z ogranicznaja odpwiedzialnosci" Spóka komandytowa cu sedui social in Varsovia, ul. Pograniczna 2/4 (denumit in continuare: "Topex Group") informeazá àtoate drepturile de autor asupra continutului acestui manual de instructiuni (denumit in continuare: "Manualul"), inclusiv, dar fara a se limita la textul acestua, fotografie postate, diagramele, desenele, precum si compoțija acestua, apartin exclusiv Topex Group si fac obiectul protecției juridice in conformitate cu Legea din 4 februarie 1994 privind drepturile de autor si drepturile conexe (adică Jurnalul de legi U. 2006 nr. 90, punctul 631, cu modificarile ulterioare). Copierea, prelucrarea, publicarea, modificarea in scopuri commerciale a intregului Manual, precum si a elementelor individuale ale acestua, fara acordul scris al Topex Group, este strict interzisă si poate atrage raspunderea civilă si penala.
Declarata CE de conformitate
Producator: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsovia
Produs: Robot de cosit E+
Model: 04-621
Denumire commercia: NEO TOOLS
Numar de series: 00001 ÷ 99999
Această declaratie de conformitate este emisa sub responsabilitatea exclusivă a producătorului.
Produsul descriis mai sus este in conformitate cu urmatoarele documento:
Directiva privind masinile 2006/42/CE
Directiva RED 2014/53/UE
Directiva RoHS 2011/65/EU, astfel cum a fost modificata prin Directiva 2015/863/EU
Si indeplineste cerintele standardelor:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Prezenta declaratie se refera numai la echipamentul introdus pe piata si nu include componentele
adăugate de utilizatorul final sau actiunile efectuate de acesta ulterior. Numeleși adresa personei rezidente in UE autorizate sa pregătească dosarul tehnic:
Semnat in numele:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsovia

Pawel Kowalski
TOPEX GROUP Responsabil cu calitatea
Varsovia, 2023-09-11
Declarata de conformitate UE
Producator: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsovia
Produs: Statie de incarcare
Model: K145455
Denumire commercia: NEO TOOLS
Numar de series: 00001 ÷ 99999
Această declarație de conformitate este emisă sub responsabilitatea exclusivă a produçatorului.
Produsul descris mai sus este in conformitate cu urmatoarele documente:
Directiva RED 2014/53/UE
Directiva RoHS 2011/65/EU, astfel cum a fost modificata prin
Directiva 2015/863/EU
Si indeplineste cerintele standardelor:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Această declaratie se referă numai la maşina așa cum a fost introdusă in
piata si nu include componente adaugate de utiliser final sau activitatile sale ulterioare.
Numele si adresa rezidentului UE autorizat sa
pregatireda dosarului tehnic:
Semnat in numele:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Varsovia

Paweł Kowalski
TOPEX GROUP Responsabil cu calitatea
Varsovia, 2023-11-09
UA IIOCEHNIK 3 INEPEKIIADY (KOPNUCTYBAU) KOCAPKA 04-621
YBARGI INPEID NOUATKOM POBOTN 3 EJEKTPOIHCTPYMEHTOM YBXAKHO IPOUYAITE LIO IHCTPYKLIIO 3 EKCPIIYATAUII TA 36PEEKITb II IINIPOJALBJWOROBKOPNCCTAHNA.
DETAJIbHI IIPABUNA BE3NEKNI
IHCTPYKl3 3TEXHIKNBE3NEKN DIA KOCAPOK-POBOTIB
Besneka npn npakTNHOMy BnKOpNCtAnHHi po6oTa-ckOuBa4a
PEKOMEHDAUII
YbaxHo npouHTaTe iHCTpyKJIIO 3 ekCnIyatauII. O3HaNoMTec3 CNTeMaMn KepyBaHHra Ta npaBnBHOIO ekCnIyatauIQ npnAdu.
He do3b0jne BnKOpncOByBaT npnaD itram a6o oc06am, kri He npouHTaH nIcTpkyuio 3 ekcnnyatauii. HaiohaBHi npabnna Moxytb Bu3HaayTu MihimAbHn Bk Oepatopa.
He BnKopncToBnyTe po6Ota, kAIO npOy 3NaXoJrbc8 iHsi IIOHN, Ooc6nbo dITn a60 TBapHH.
Bybna, na'raTne, 0o onepaTop a6o kOpncTyBaH Hece BiNobiaJbHicTB 3a HeuacHi BnapKn a6o He6e3neKy dny iHnx IHOeI a6o HABKONHbOrO cepedOBua.
IITIGOTOBKA
- Npeed nochatkom KocinHry oopasy nepebipraTe, yBci YactnHPO60ta npauHOt b HaleKHM YINOM.
ДяdoocraHHeHHHaIkpauixpe3yIbTaTIB peKoMeHdyeTbcKaKoCHTB6e3doOBy norOdy.ПID Yac KociHH iID DoUeM TpaBa MoKe npuInnataN do po60Ta, B pe3yIbTaTI OTO BIN MOKe 3ICKOB3HyTN.
HEKocit3a noranix noroHnX yMOB, HApNKlaI, nId Yac CInbHorO douy, rpo3n a60 chiroNaIy. - PepioduHO orraaTe cKoSeHy dHky i Buaanrte KAMHH, CMITT, IpOtn, KiCTKN Ta IHwi nepekoDi. O6mExeHa rapaHTi Ha NOwipocbTa Ha NoWKOxHeHH, CNpUHNHeHi 3aJIuWeHUMn Ha ra3OH npEpmTaMn.
Uo6yHnKHyTN NOJKOJKeHb,He KocIb 6JnxKye 1 M BID DOuYBaJIbHnx ROJOBOK.
YBARA! Po6oT i DouyBaIbHi MaunHn HE MoXHa BMKaTn OJHOuacHo.
Po60T NOBUNEN 6yTN 3anporpamOBAHn Ha po60Ty B iHmN Yac, HIX DOUYBaJIbHI MaunHn.
HIKOJIH He O3BOJnTe DIITM TOPKaTNCdKepeNa KINBHeHHa3ApIHOCTAHUJI, 3OKPema KOHTAKTIB, IOnaTei, BIDckiy Dn8batae iabo6ydb-RAKXuactIH, De e 3a3OpN, HAnpKnad, KOnic.
OTEPALI
- 06epexho, ne3a, oo oeptaotbcra! HE niictabnre pykn a6o HOrn nD o6eptOBI ne3a.
CniDkyuTe 3a npEmdetamn,po3KnDaHMMHa ra3oHi nID qac KocinH!KoPi po60T yBIMKHeHNI,TPMaItecHa 6e3neHII BiCTaHI.
He 3aHuaTe npnaIb 6e3 Hargny, kUo no6n3y c TBapHH, dTn a6o ctopOHHI oc6n.
36epiraTe 6e3neHy no3nucio. 36epiraTe pibHObary i ctiKe nnoJoxHHe Ha haxInax. Picac poBTo 3 poBOTom aOo Horo nepupeipHHm npictpOAM Do3BOJIeTbcra XoHTn, anE He 6irATn. - Bynb nacka, npoHTaTe IHCTpykuio npTo, KOJI, de i Jk nepeBiprTn po6ota i noRo nepupePiHi npctpoi, Kabeni Ta noOBkyBaHi Ha HABHCTb NsIKoKDKeHb 603OcHy, a TAKOK peMOHTyBaTIPO6a, CamOciHa MoNdiKauiy, peMOHT He donyCKAeTbcra -nil 3arpO3IO AHyIHOBAHH rapaHI!.
He niknouaTe i He TopkaTecn NowkdoKeHoro KaBeJIIO XNBneHH, DOKN BIn He 6ynde BiD'edHaHm BID dKepeNa XNBteHH, Ypees p3NK KOHTaKTy 3 KOMNoHEHTAMM, 0o 3HaXoJaTBcR niD Hanpyro.
PiKIOUaTepoTaT/a6o nepnpeipHe 06naHaHH TaIbKn do NaHciorIB XMBeHHA,3AXuEHX ABTomTuHMM BmHKayem i3 CTpyMOM CnpaBobyBaHH He 6iNbse 30 mA.
Kpo bot Buae HexapakTepHn 3Byk abo nomyeHa HexapakTepHa Bi6paia, a6o Bin nodae CnHan TpBOrn, HeraHo HATNCHTb KHONKY STOP.
3A6OPOHReTbCtTOPkATnCe He6e3NeuHx pyXOMnx qactnH Do BUMKHeHHJ KINBneHHa po6To.
3A6OPOHReTbCt TopKaTnCHe6e3neuHX qactNH Do IX NOBHO 3yINHKI.
3aBxHn Hocitb MiHe B3yTTa Ta DoBri uTahn niD yac po6OTn 3 po6OTom.
BiiKIOUHTN KINBEHH: PepeT TMM, k3a5bNOyBaTN po60Ta.
- Teped TecTyBaHHaM, OuyuueHHaM a6o TexHiHIM o6cIyroByBaHHaM.
NIKTOPAMTA NONEPEDXEHH


- IpoHnTaIe IHCTpyKuio 3 ekCnIyatauTt Ta DToPmYntecb nonepdKeHb i npabn Texhkn 6e3neKn!
- Npeep uuueHnM a6o TexHnHM o6cnyroByBaHHM BiKIOHTb npucptpi BID Mepekei eKeTPOXINBHeHH
3.He npocobyTe pyKn a6o HOrn n iD 3axncn Koxkx Kocnblhoro MexaHI3My
4.06eptobi yactnH-MoXJINBicb TpaBMyBaHH - TpmaIteca Ha 6e3neuHbBdctaH BiD po6oTa-ra30HOKocapK
6.OctepiraTecraMOKJIINBOCTI TpaBMyBaHHJNITHMNIpeDMTaM - 3axnataBIDdouy
8.36epiraTuB HeNoctynHomy dIaTei Micu
9.He KaTaeCHa pOboTi - MoKnBa Btpa Ta nJIbIIB, 6yIbTe o6epeKHi
- MakcimajbHn Haxn noBepxHi 14^ / 25%
12.3axncttbpyknpo6oumnykabuKam - Hocitb 3axnchno OJRA
14.Hocitb3axncheB3yTTT
15.He ytni3ybaTn 3 no6yTOBmBiJxOaMn - CeJIeKTHBnH 36ip BiXoDIB
- CtyinHb 3axncty
YBAG! LcH npnla MoKyTB BnKOpncToByBaTH dITn CTapwe 8 pOKIB Ta oocb3 06MeXeHMMn f3NHyHMn Ta PO3yMOBmN 3dI6HOCTMn, a TAKoK 3 HeOcTaTHIMn 3HaHHaMn a6o DOCBiDOM, RkTOBOHn nepe6yBaHtB nID HargJADom a6o HAnEKeHMM qHOM npoinCpTyBoAHI Odo 6e3neHoro BnKOpncTahHr npnApy Ta ycBIDOMIOHOB'3aHI 3 cMn Pn3HKn. He Do3BONHe DiIM rpatncs 3 cMn npnaDm. DITn He NOBHHI YNCHTn a6o BnKOHyBaTH texHiye ObcnyroByBaHN npnady 6e3 Harny.
ONIC IPAIChNX EJIEMEHTIB
HactynHa Hymepaui BIDHocntbcra Do KOMnoHeNTIbnJaDy nokaahi Ha rpaqiuHx CTOpIHkax LbOro Nocihnka.
| Посадемия Рис. A | Одic. |
| 1 | Аварийни зушинka |
| 2 | Perулайор висOTи кosciлия |
| 3 | Паненье керуваимя кocapкою |
| 4 | Вимпakч лениня кocapки |
| 5 | Бedlyк кoleca |
| 6 | Ріжуні леса |
| 7 | Барабан ріжуного менизму |
| 8 | ПоворOTи кoleca |
| 9 | Ручka д借贷песеня | |
| 10 | Роз'емд借贷 зардану | |
| 11 | Кршka батарейно вiodсіку | |
| Позначени Рис.В | Оnic. | |
| 1 | Паленье керувань дok-stанцicу | |
| 2 | Оъори д借贷 крілелень дok-stанцi | |
| 3 | Poz'emicd借贷 зардану | |
| 4 | Док-stанцic | |
| 5 | Охорочь доковод садцi | |
| 6 | Poz'emicd借贷 Кабелю киммень д借贷 розначени poбочи зони | |
| 7 | Кабелнс otвори д借贷 маркуваань розочи ta жевеленя | |
| 8 | Poz'tka Киммень дд равлиьнол prokладки кабелю | |
| 9 | Маркуваань д借贷 правлиьнол prokладки кабелю | |
| Позначени Рис. D | Оnic. | |
| 1 | Иndinkatop сдану зарджань | |
| 2 | Иndinkatop Heçsprabhocstс сгнану | |
| 3 | Иndinkatop Trpoа-cфikca标注а | |
| 4 | Час розоти / поblastмени有很大pro по меллку, Иndinkatopи 1-4 | |
| 5 | Кнокka жевеленя | |
| 6 | Вимпекч жевеленя | |
| 7 | Кнокka сддкуваань | |
| 8 | Кнокka "Пдтberдити" | |
| Позначени Рис. H | Оnic. | |
| 1 | Гвintи | |
| 2 | Кршka батарейно вiodсіку 3 рухтою д借贷 trpaHCnoptyваань | |
| 3 | Вiodсік д借贷 вдареi | |
| 4 | Гнiz'dо д借贷 вдареі на кршци камери | |
| 5 | Актул对接на вдатаря (небожить do komplк'tу) | |
| Позначени Pис. I | Оnic. | |
| 1 | Газон. | |
| 2 | Стона | |
| 3 | Док-stанцic | |
| 4 | Вiodstань сддцicii bìd ctihi | |
| 5 | Початкова діянka ліні,有很大 obмөжү зону kocinнray | |
| 6 | ДobЖинha седцi | |
| Позначени Pис. J | Оnic. | |
| 1a | Тroc д借贷 обмөжэнny зони скошувань Початok | |
| 1b | Тroc д借贷 обмөжэнny зони скошувань Kieць | |
| 2 | Лінія постаунь: | |
| 3 | Док-stанцic |
*Mix rpaqiunHM 3o6paKeHHaM Ta peaIbHm npOdyKTOM MOkyTb 6yTu BiDmiHocTi
ПДГOTOBКА ДО POБТИ
BCTAHOBJIENH BATAPEI
- IpepeBepHb Kocapky TaK, 106 6yB Doctyn Do HxKhBoi YactnHn po6oTa.
HaMiCiBIMMkApaPc.A4ipyKINJnTpaHcnOpTyBaHHaPc.A9 3HAXOINTBcKa KpUka 6aTapeHoro BiCicy Puc.H2,3akpinneHa4 TBnHTaMn,No3HaueHmN CTpiIKNAMPiPc.H1. - Iotim BIDKpyTITb TBHNTM, No3HaHeHi CtpiKamM.
- 06epejHo 3HIMtB KpUkCy BiDciky pnc. H2, uo6 He 3nAmTu i He BiE'EdHaTn dOToN nepemKkaa pnc. A4 (BIn npNKpIInneHn do KpUkKn BiDciky akymyTota).
- Notim nepeBepHitb KpUkHy, Ha HnKHi cTopoHi KpUkN 3akpinHeHO rH3do dna 6atapei, pnc. H4.
Bctabe 6aataepo cepii ENERGY+ B nH3do. - IpeBepHtB KpUkky 3 npKpInneno6aTapeo i BCTaTe ii y BiDcik Puc. H3.
3aTnHbTBnHTN,IO KpinnrKpnk. IpepeepHitb po6ota dHom DOHNs, npnaad roTOBNI.
IpekeKaHTeC,IOB30HI,De npaioe po6oT,BNKOHyIObca HAcTyHHi yMOBn:
Bucota TpaBn He nepeBnuye 60 MM.
- YB4A! RaIIO TpaBa IOBwa 3a 60 MM, CNoaTKy NiDCTpKxITb Ra3OH pyuHOIO KOCAPKOIO.
Tam Hemac KamHHa, MMATKIB DepeBa, DpOITB, Ka6enIB nID HAnpyroTO Ta IHwIX CTOpOHIX pEeMetIB.
Micue ckoUyBaHHepiBHM iIIOCKHM,6e3 KaHab ItpaHwe,ayxHn He npeBnUye 25% (14°) Puc. C1
-ДяВСТАНБЛЕнHAITpIbHiHAcTpyNHIiHCTpyMeHTN:
- Tymobin MONOTOK (ДязabhaHЯ wTnipiB y 3eMnIO npnpoknaadhHi yTpmyuOro Tpoca)
- ⅢeCTnIpaHHN KIOU (DnA φikcauii 3apraHoi i cTahui) BXoNTb DOKOMnJIeKTy
- Pnockory6i (Dnna nepepi3aHHKa6eHIO, 0o oMeKye po6oy 3OHy)
1.BCTAHOBJIEHHBA3OBOICTAHUII
Bb6epitbBidnoBIDHe Micce
3apnHy cTahui Cnpo3miuBATN B HactynHomy Mici Pnc. C3:
BidHocHo nlocka i piBa yactHa ra3oHy.
- BIn3bko Do kpaio ra3oHy.
- Bīn pōzětɪk.
- POMictTb 10-MetpOBN NIOOBKyBaU, 6NOK XMBnEHHB 3aTIHeH, npoxoNDHe i cyxe Micue.
- Y paDiCy iUOHaIMeHHe 2 M BiD 3apAHOi cTaHciI He NOBHHo 6yTn nepeuKoJ.
- PeKOMeHdyEcBpo3aUOByBaTn 3apAHy cTaHciIO B cyXomy i 3axuHcHMy micui.
-Джерето КИВЛЕнг NOBINH0 3HAxOДNTUCЯ Ha Bucoti 30 cm Hа pIBHem 3eMni.
2.KPINJIENHH3APADHOCTAHUI
3aKpinitb3apdHy cTAnHIO Ha 3emni 3a donomoro 6 KpinnbHnx rBnHTIB (G1) (3a donomoroio wecntnpaHHoro knoha G6).
YBAGA! HE CTaBaTe Ha nIacTHy 3apdHOi CTaHcII Ta He XoJITb no Hi.
YBAGA! HE po6itb HOBI OTBOPN B IINACTNII 3aepdHoi CTAHUII. CTAHUI IOBHHa 6yTN pnpkpyeHa Do NiIDnO 3a DonOMoTO HABHNX OTBOPIB.
3.ПРOKЛаданнуТРИМУОЧОТPOCA
OmbexbHn Tpoc BkOpncToBycBcI nI OKpeCHeHH po6o0i 3OH Ta cPmByHnpo60Ta Ha3aD 03apdHO CTAHII.
YBAFA!KaKIO Baw cyciTakOX BnKOpNCToBye po6OtN3OBAHy ra3OHOKocapKy, D0TpIMyTeCb BiDCTahi He MeHwe 1 M Mix o6MeJyBaIbHmN TpocAmn o6ox po6OtIB.
IIAHYBAHHPO3AUYBAHHYTPMMyOTO TPOCA
IepHnIX npoknaadTN 06mexkyBaIbHn Tpoc, npoiDITbcra B3doBx no3haeHOi MeKi i np16epiTb BcI HeNOTpi6Hi npedMeTn, HapnKna, KaHH.
YBAI! DoBxHa yTpMMyOHoro TpOca He noBHHa nepeBnUyBaTn 200 MeTpIB.
YBAI! PoobT He NOBHeH 3aHTn no rpaBIO a6o Noi6HM MaTePiaanam, Aki MoKyTB NooKOaNTn ne3a.
IPOKIIADAHHYYTPMUYOQTO TPOCA PNC.C
DToPmMyTeCb HabeDeHnX HnKye IHCTpyKu, 0o6 npoknactyn yTpmyIOH TpOc HABKOPO pOBOOT 3OHn Ta nepeWKoJ. JnnpaBnIbHO rpoKladaHnryytpmMyIOrTO TpOca BkOpNCToByTe BmipIOBaU, 0x BOxOHTb DO KOMNKeTJ.
YBARGA! UTPMMyuHn TPOC XNBtbcB BiD NyKe Hn3bKOi Hanpyrn i e63neHHM DnI IIOHe i DOMaWHix TBAPHN.
YB4A! NouHtB 3 po3Emy"-Ha 3aHnI naHeni 3apdHoi cTaHcii pnc.
B6, npotrHnItb noro nd cTAnucio (i 3aIuTe 10 cm 3anacy) i npoknaDItb kaebnb HABKOIO ra3OHy npOTn rOIMHHNKOBoi CTPIKN, 3aKinhyUOn pO3'EMOM "+" Ha 3aDiHi nnHeJI 3apAHOI cTAnlii (3aIuTe 10 cm 3anacy). IpekoHaNTecra, 10 Kaebnb KOHTAKTyE 3 MetaJIOM B MICJx "+" i "-" po3'EMIB PNC. B6, He 3a6yDbte o6p3atn HADNtowk
06MexyBaIbHOro Ka6eIIO.
3aHnTe 2 M BInbHoro npoctoy mixk o6mexyBaHnM KaBem i 3apAnHO cTaHcIe. KaBnHa ciin DInrHci BnKOpNCToByEcDnPiEChnHaHnPoBoTa Do DOK-CTauii.
- DToPmUyTeB BiDcTaHl 30 cm MIXK o6MExyBaIbHnM Tpocm i KpaEM ra3OHy, pnc. C2; pnc. C3.
3aKpinitb ytpmmyoH TPOC Ha 3emni 3a DonomoroIO DIO6eHIB, pnc. G5.CTAAHH TPOC NOBHHe H BYTN PRAHM I 3IeRkA HATRHYTM. IO6eNl NOBHH PO3TaIbOyBaTHMC YEPE3 KOxHI 1 M (ue Moke 6Ty 3MIHEHO B 3aJIeXHOCti BID FOPMn Ra3OH). pnc. C4. He zaKonyte Ka6eNB rH6we HIX Ha 2 cm, Uo6 yHNKHTn nocna6neHnCuHany.
P03taoobyTeKa6enbTaK,oo5kytn6yIn6iBunm3a90°,pnc. C5.Ha TaKnx dInnKax npoknaaTe o6mexKyBaIbHn Tpoc
NIOIOMM BUNHAMM, IO 3NaHNO NOpErWHTb pO6Otu nepecyBaHHNo DInraHci, kY NOpti6HO CKOCNTn.
- RaHrHa ra3oHi e Knym6n, BDOOnMn a6o DepeBa, OToHtB ix NeTJIMN o6MeXyBaIbHO rTOpa, pnc. C4.
- OToPmUyTeCb MIn. 30 cm BiDCTaHb MIX oBmexKyBaIbHM TpOCOM i KpaMn nepeuKoJ.
YBAFA!HaIshxydo netni i3 netni ytpmyuohn Tpoc He NOBHe nepeTHaTN OIN OHNOHOro Pnc.C4.
3aIHTe By3bKn npoctp y po6oH 30HI KocapKn. IpekeHaHTecA, 1O BiCTaHb MIX napaneBHO npOKnaDeHUMN yTpMHyOHUMn Tpocamn nepeBnUyE 1 M.
YBARGI!pekehohTeC,IO DOK-CTAHJ3HAXOHTbc BcepeHHi neTni, 10 no3Haue 3OHy KocHH. (3OBHI / BCEpeHHi) Pnc.B2
4.BCTAHOBJIENHH3APRHOCTAHUII
Piiknioitb JkepeJIO KMBneHHA
1.BctaBte wTeNceIbHy BnIKy B po3eKy 110-240 B.
2. IpepeipTe cTAH CBITIOIOHNIX INDkATOpIB Ha 3apAHIcTAnii Pnc. B1:
- NocTlHe 3eJIeHe CbITJIO: 3'6dHaHH BCTaHOBNeHo (po60T He 3apraJkaTebcra a6o NobHicTIO 3apraKeHn)
-ПepepBvache 3eJIeHc bITNo:po60T3apJxKaETbcra.
-Перетерваче чербоно:найтошенида nomнka - "Вд' endанну утимуочогу Трoca".
Cbitno He roputb: HainoOnpeHiHa NecnpaBnHcTb - "Hemae XMBneHHra 100-240 B" abo "Hemae niKniOHeHHa do DjKepeJa XMBneHHra".
EKCINYATAU/HAJALTYBAHH
Pepwn 3anyck po6oTa-kocapkn
- Pn nepuomy 3anycky po6oTa BcTaHOBir npncptiHa DOK-CTaHJIO TAKIM YINOM, 306 3apAHi po3'EMn Ha cTAHJI, pnc. B3 He KOHTAKTYBaII 3 3apAHHMn po3'Emm Ha po6oti-raoHOKocapui, Man. A10.
Iid yac nepworo 3anycky po6oTa-ra3oHokocapkn 3 TeeneohHoro Doatky Heo6xidiHO OHOBHTn npoWNBky.Cnoci BIKOHaHHa ONcaHH NKKe B p03di "OHOBHeHH nporpamHoro 3a6eNeueHHA". - YBARGA!Пдчac nepuoro niknquenHЯ telefoH i po60T noBHHi 3haxoDHTNcB 30HI dI MepeKl Wi-fi.
OHOBHTI PPOUINBKY IEPED BUNOPUCTAHHRM POBJTA.
OHOBHeHH CJIiD BIKoHaTHn HAcTyNHm YHOM.
- Nomicitb po6oTa BcepeHny KOHTpy, aIe 3a Mekamn 3apAHOi CTahui.
- Ipepebeiditb nepemkkay MaI. A4 B noJIOKeHHa 1.
- HatnchItb i ytpmyTe nepemkaPnc.D5
4.3anycttbdoataok,BidckaHnyTe QR-KoD
5.Плкчитьdoatokdopo6ota - Po3ropHb HaJaTuBaHHn nporpaMn, HATncHyBmN Ha IKOHky y BepXhbOMy npabOMy KyTi ekpHa.
- Bn6epitb oniio: OHOBHeHH MIKponporgamn.
8.Даидотримутесь�стукш ha ekpani.
Iicna BCTaHOBJIeHH nporpaMHoro 3a6e3neueHH npncTpi IrotOBn do po60Tu
OBEPEKHOI
- Dicnnei noka3ye, YI nepe6yBae po60 t y 30hi Wi-Fi a6o Bluetooth
- PIIKIOHHe H Do MepeXI N03HaAeTbC MIROTINBOHO NIKTORpAMOHTNpy 3'cHAnHH. Picn iKIOHHeH NIKTORpAma nepecTac 6NImATN.
- Po60T MoKe 6ByTu CToIyUeHn JInuE 3 ODHm TeJeFOHOM.
- RaKuo nOpi6HNO iNkIIOHTn iHoro (Takoro X po6oTa-ra3OHokocapky), nepuHn noTpi6HO BuaNTn 3 nporpaMn. Y doaTKy dnn iOS taKoK 3 hanaTuBaHb Bluetooth.
PEYIIOBAHHBVCOTNIKOCIHHA:
IpeepnepHMMKocHHM BCTaHOBt BNCOTyCKOuYBaHHHa 60 MM, a notIM 3MIHtB II HA NOTp6Hy, KOJIIN BECb rAOH CTaHE BiDHOCH pIBHM.
PobepHb pyky Puc. A2 3a roHHNKOBIO cTpiIKO, 06 3blwnBICOTy KocHHJ.
- IobepHiB pyky MaI. A2 BnIO, 306 3MeHUnTI BnCOrTy KocIHHa.
BucotyCKoUyBaHHaMOxHapeRyIIOBaTN BiD 20 MM (MIN)do60 MM MAX).
YBARGI!PnIBOHNIM DBINrH 6apabaha KocNtBHoro MexaH3My pnc.A7 BMNAeTbCn np6bn3HO yepe3 10 cekynd nicra 3'3dy 3 6a3n, nouHaou npoToy.
BMUKAHH/BNMUKAHH
- BcTaHOBiB nepemikau Puc. A4 B noIOXeHHa "O", 06 BmKHyTN KMBJIeHHA.
2.BctaHOBbIb nepemKau pnc.A4 B noJIOKeHHa "l", 06 yBMkHyTN dKepeNo KINBHeHHa.
AKTINBAUPOBOTA TA IPOIPOPAMYBAHHPOBOOYO YACY B PYHOMY PEXKIMI
- Hatncihb i ytpmyte KhoNky XNBHeHHa PnC.D5, 3o6 3anyctntno p6oTa. Ppimtka: He Tprcibt po6oTa nIicVac 3anycky, uO6 yHnKHytn nomiKn 3anycky. Raio po60T 3anyckaetbcra HnPaBnIbHO (Bci iHdkatopnpotb 6e3nepepbHO), nepe3anyctitb Ioro.
2.BBeiNb npoJIb,DbHHaTHOnHyBun KhoNky Puc.D6,notIM DbHki KhoNky Puc.D7 iOuH pa3 Khonky Puc.D8 (napoJIb 3anporpaMOAHn Ha 3aBoDi). - 3anporpamyTe yac po6oTn (BknnoaOuH yac KocinHra Ta yac 3apJxahnn):
-HaTnCHtB Ha pnc. D6, 106 BCTAHOBHTuac po6oTu. OHa IaMNoUka 03Hauae 2 roDHH, MaKcImMaJIbHm Yac po6oTu - 8 roDHH i4 IaMNoUKN Ha pnc. D4. HATnCHtB KONkY Pnc. D8, 106 NiITBepdUTn i 3anyCTTu np6ota.
YB4A! Picn BCTaHOBJeHH yacy po60Tu p6oT zoam'ToBye HanaHTyBaHH i NOHAc KOCiTN B 3aIporpaMOBaHH yac KOxHOrO DHR. Yac KocHHb 6yde BiNobiDaT NBEDeHIM HaJIaHTyBaHHM.
3anporpamOBaHn yacpo6oTu po6oTa BID 2 roDnHO 8 roDnH -e Yac KocHHB, BKHouaOHy Hac 3apJxKaHH.
- Yac po6oTn Ta 3ap4xKaHHa 3aJExKHTb BiD TmNy akMyIyTopa.
RkUo BV XOyTe 3MiHnTn Yac pObToN, NOBTopIb KpOKu 2-3.
IPOIPOAMYBAHHA YACY B ABTOMATNCHOMY PEXKIMI, 7- DEHNN IPAIK,IOCTYINHE YEPE3 HAIALITYBAHHB IODATKY
- Plicra abapiHoi3 yunHKn po6oTa noTpi6Ho cnoaTy Ko 036NOKyBaTH, BkoHaBwn Kpok 2 Bnue. Picra TOrO, kpo6oT po6bNOKOBaHN, M MoKeMo BiDnpaBtN NOro Ha3ad Ha CtaHcIIO, HATNCHYBwN KHONK: Pnc.D7,a Notim niTBePdNt KNkKOu Pnc.D8, uOb NOBepHytn KocapKy Ha 3apAHy cTaNIO.
HaTnCKaHHK HONkM abapHHO3yNHNK STOP BnDAJIe 3 nporpaMn UKNpyHoro i aBtOMaTHUHorO pexKMIB, kIOo Bin 6by AKTNBOAH N TAKIM YNHOM. IJRA TORO, IO6pOBo 3HOBy NOAB pauIOBAtn NICNA abapHHO3yNHNK, Heo6XiDHO NOBepHyTN IORo HA 3apAHy CTaHcIIO I 3HOBy BCTaHOBHTn rpaikpoBTo BpyHOMy pexKMI. Y pa3i ABtOMaTHUHorO PO3KnAdy BVKOHAaTe TY K DIIO B PO3KnAdi 3actocvHKy I nIDTBepDiY HorO HanaTuBaHHra.
YBAFA! 3anporpamOBaHn Yac yBIMKHeHH B aBTOMaTHOMy po3Knadi He cnid BBaxaTn DyJxe TOHm. Pnpad MOKe yBIMKHyTNCaYepe3 KInbKa XBNIN NICJI BCTAHOBJIeHORO Yacy.
- AktnBaui pyHoro peKIMy BuaJre po3Knad, 3anporpaMoBaHn y doatKy, i HABNAkn.
-Пдсгггнг КPGMnВpyHOMpyeKIMBUNKOHyETbCABTOMaTHHOpe3KoKHI KINbKa LKNiB KcOHH.BiNpeDbAae CkOuYBaHHTpABnNo6Jn3yKa6eJIIO,JKNBn3HaayePo6oy3oHy.YBARAtCniDn6aTNpOTe,I06Ka6eJIb6yB HAnexHM YHOM 3akpinneH,Uo6HeNiDaBtN Ioro BnnaKDobomy nepeip3aHHIO. - Po60T-ra3oHokocapka NOBepHeTbC8 Ha DOK-CTaHcIIO, YK TiJIbKIN npucTpi 3aΦiKcy NoaTOK DoUy.
- Raio niaacpo8oTPO6OT 3iTKHeTBcra 3 nepeWKoOIO, BIn BiDCKoHTb Bi He i npOoBxNt b po6Oty.
IHДИKATOPCTAHY3APJKNHA3APJHIICTAHILI:
IocInHe 3eIeHcBITIO -akMyIaTOp NOBHCtIO 3apJxKeHn.
IpeepBvacte 3eJeHe cBITno -3apdka.
3A MEXKAMN 3APRAHOI CTAHUII:
NoctiHHe 3eIeHe cBITNO - 6aTapey > = 20% 3apAdy
IpeepuBacte 3enehe cBITNO - 3apnakmyTopa <20%
YBAR! PoBoT aBOMaTHNO npnHRe po60Ty i nobepTaEcBaHa 3apAnHy cTanhio, kUo pBeHb 3apAky akMyIaTopa onyckaTbcra HxKue 20%
IHINKATOPIOMNIJKN:
IocTHe 3eene CbITNo - OHOBnEHn CnCTemN. PIIKIOHITbcrdo nporpaMn, 06 BnKOHaTH OHOBnEHn.
IpeepuBvAcTe 3eHe cBItIO -HJe OHOBJIeHHcNCTEmM.
IpeepBvacte cepBoHe Cbitno - nobIDOMnHn npo nomnky BiD 1 do 5, nepe3anyctitb po6ota.
Be3nepebphe cepbohe cBtno - noiDomnHeHH npo nomnky b6 do 12, HATNCHT "STOP" a60 "OK", 06 oHCTNTI.
IHINKATOP TPOCA-ΦIKCATOPA:
Be3nepepeBHe 3eIe He CBrtno -CnHn npaBnBnHn
B3nepepbHe uepBoHe cBtIIO -Hema CnHaNy
EnemEny npabnHn Pnc.D4:
IpeepBvacte Cbitno -po60T3a6nokOBAHNI.
IocTInHe cBtIO -po6OT po36JIOKOBaHO.
IДиKaTOp 1 roPntb 3eJIeHm: 2 roDInn p6oToN.
IHdkatopn 1 i 2 CbTiBc3eJeHm KOnbOpom: 4 roHn npoOyoro yacy.
IIndikatopn 1,2i3 cbiTbC3eJeHm KOJIbOpom:6 roDInp o6oTu.
Ihikatopn 1,2,3i4 cBITbCz 3eJeHm KOJIbOpOM:8 roDIN po6oYOruacy.
IPOIPOAMHE 3A5E3NEUEHN JIN YNPABJIHHPOBOTOMKOCAPEM
3aBaHTaKeHHnIg IOS:
https://apps.apple.com/cn/app/toua/id6449251720
3aBaHTaxyIteHaHIpoiI:
https://play.google.com/store/apps/details?id=com.toua.robot
Ihctpykuoi Do nporpaMIMoKHa 3aBaHTaxNTn 3a NocuHaHm:
https://bit.ly/3QBB6Gm
ABAPIHEBUMKHEHHPOBOTA
HaTnCHiB KhoNky "STOP", puc. A1, 06 3yInHHTn po6Ota, HaTnCHiB i yTpMmYTe KhoNky XINBHeHH, 06 BmKHyTN po6Ota.
NEPEMIUEHHPOBOTA
PiDpo6oTOMpo3aObaHa nIyomHa pyka (pnc.A10) nIy 3pyHoro ynpabnHHo odHIO pykoio.
OBCJYTOBYBAHHT A36EPIAHH
3aBXn BmNkaTe po6Ta nepei YHHeHHM i TEXHcHMM 06cnyrobyBaHHM.
- IpeepuHHeHHMaTa 06cnyroBaHHMa3apdHOCTaHii BIDKNIOHTb XMBJeHHA.
3aBxN OJraIe TOBCTI 3axnHi pykABuHKn NiJ Yac 3amHn Ne3 i HUeHH HAKHBOI YaCTHIN PO6Ota.
Peyraepno nepebipnTe 3aTayBaHna 60nti RaioK. NooKoJKeHi Detani Heo6xIDHO BiPeMoHTyBaTu a6o 3amHtN 3 MipKyBaHb 6e3neKn.
- Perynpho nepebipnyte, 06 nonati mojnl Bilho oepTaTncra.
YBAR! KoIN Bn nepeBepTaTe po6To dOrOp nHOM, nOKJaIb IHO ra3OH a6o M'ky NOBepxHIO, 106 He noKoHTn I He noPpNaTn KpWky.
OuHueHH
PONEPEDXEHH! PepoT NOaTcOM uuueHH BUMKHTb XNBHeHHBIMKaHem pnc.A4.
BIMnTe npeDnH O qactHy po60Ta 3a DOnOMoHO MmKn Hn3bKO TnCKy Ta M'Koi uTKn a6o raHhipkn.
BnKOpNCToByTe KOpCTky UItKy DnA BuaJeHnckOHeoi TpaBn Ta CMITr3 Ne3, KOIC Ta IHUnx YAcTHN Ha HnKHi CTopoHi pObTa.
- PeryIpaHNo nepeBipnTe KOJeca Ha HauBnicb 6pydy a6o cKoUeHOITpabN Ta OuHuaTe ix UjTkoHO.
YBAG! Perynapno BndaIte pocnHHi 3aNnKn 3 Hxkboi qactnn np6oTa, uo6 yHKnHytn 3HxkeHH npOdykTNBHOCTi.
3AMIHAJIe3A
YBARGA! Cnooyatky BMMKHITb rOIOBHNI BMMKau KINBHeHHa Ta OJARHITb 3axnchi pykabuKN.
YBAI! BnKOpncToByTe TJIbKn Bka3aHi opnirHaJIbHi ne3a, CxBaJIeHi BnPo6HnKOM.
Bci Tpu Ne3a Ta ix TBnHTn NOBHHi 6yTu 3aMiHeHi 3a Ody onepaio 3amHn, pnc. A6.
- ΓΒΙΝΗΝι Σζίδι ΒΙδύΚργτημι 3ατάγτην 3α δόποΜΟΓΟθ Βυκργτής.
- PepekoHaTeC, 10 HOJIe3a MoKyTb BInbHO O6epTaTnca.
BNIPIEHHIPOBJEM
Y tabnui Hnxue HabeJeHO peKoMeHdaui, kI DOnOMOxyTb diarHocTyBaTn np6nemn.
Kkuo MoKJnBO, BiDpemOHyTe npucTpii camocTiHo. Kkuo HeCnpaBnHcTb He Bdaetbcra ycHyTu, 3BepHITbcr Do aBTOpuBaHO rIepea a6o cepBichoro ceHTpy.
YBAI! Heo6xioBxHn3axnchnx 3axoib.
| ПюбLEMа | Можліві причіни | Рішения |
| На зар\'ядій stанцій 6лімаechер党支部 CBТLO | О\'б\'р\'ьУ\"т\'у\'м\'у\'о\"Т\'р\'а | З\'н\'а\'д\'і\"ь\"de\'ф\'ek\"TH\"Д\'л\'я\"К\'б\'ел\"i\"В\'п\'р\'ав\"nt\"и\"ц\". |
| Р\'об\'OT\" He м\'о\'е\ п\'д\'\'\'\'`н\'а\'`\'`\ do з\'ар\'я\'н\'о\'\ st\'анц\'` | З\'ар\'я\'д\'\'`н\'а\'`\'`\ Б\'ct\'ah\'OB\'\'`\'`\ H\'e\'р\'av\'ь\'`` | Д\'И\'ь.\`р\'az\'`\'`\ "\"П\'id\'ro\"TO\"bka\"do\ po\'ob\'T\"". |
| Helenpавильно po3miiцени обмени Трoc | ||
| Hemac сигнany bID учимючо trocа | Вidсунпсь елктужвлени Учимючий Трoc бв пikлочenvу Зворотому нораду | Перев颦 Дожеvel ЖИВLEнн Пomіяйті міцямі роз'ем "+" i "-" |
| Учимючий Кабель пдкlicityн дзардно' о STанц Осы учимючо trocа | Перев颦, ч правильно Зakріпени Учимючий Tрoc пдкlicityн дзардно' о STанц Осы пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс пс | |
| Осы учимючо trocа | Перев颦 Се до Кинц, Чо кабель Нe Був пегрвані Перев颦, ч правильно Встановлени Учимючий Tрoc | |
| Осы мени Трocovi xpectobvi и ншяху do neТи Та 3 NeTni | Перев颦, ч правильно Встановлени Учимючий Tрoc | |
| Робот Вихочь 3a Мөжī кордун | Учимючий Tрoc Бв вдкlicityн Зворotому нораду | ПOMіяйті міцямі роз'ем "+" i "-" |
| Робот Вибру аоб Видаe небrin'dni 3bukn | Пошcodжene abo Вidсут themselves | Перев颦 та Вidремонтейті КВИNTN Кріпени Hoxka o小姑娘 |
| Диск вдбийого нока осябleney | ||
| Замін'tь поэ |
| Код помлки | Оnic. | Рішени |
| E01 Pис. F1 | Помлka ihiцялizацii - ripopokon | Постав tradeь ровота на роверхню i певозануctтб. |
| E02 Pис. F2 | Hecnpabnictb dattуka пдiomomy abo dattуka 3iTKhenня | Вidоруноку tradeь поветудару планку i topсionне калесо набrel'dи ча'tи raэонokocapки, певочайся, сio BOH неблоровы; постав tradeь ровота на роверхню i певозануctть иого. |
| E03 Pис. F3 | Помлka ihiцялizацii Двигунha KOCAPKи | Покаддь tradeь ровота на роверхню i певозануctть. Як soo лproблема He 3нIMКHE, Зевинь сьdo слухби пдчимки. |
| E04 Pис. F4 | Помлka пдклоченny Джерета ЖИВЕння | |
| E05 Pис. F5 | Heprabnilьна часда оберсанry Двигунha KOCAPKи | |
| E06 Pис. F6 | Покеджени пр noхил | Постав tradeь ровота на роверхню.НатuschCitb STOP abo OK, сioob skacybatи Будирать. Постав tradeь ровота на роверхню. НатuschCitb STOP abo OK, сioob skacybatи Будирabay. Покаддь tradeь ровота на роверхню. НатuschCitb ipepezануctть. Як soo лproблема He 3нIMКHE, Зевинь сьdo слухби пдчимки. |
| E07 Pис. F7 | Покеджени пр noizom | |
| E08 Pис. F8 | Помлka kahandу AUCIл | Покаддь tradeь ровота на роверхню. НатuschCitb ipepezануctть. Як soo лproблема He 3нIMКHE, Зевинь сьdo слухби пдчимки. |
| E09 Pис. F9 | Heprabilbni сигнал | Дивільскь вице В tabлци: покедма - Нема синани Від обмекуваьно Трараз. Певер pine Bci ПУнкови по черз,notim BCTaHOBiTb ровота на роверхню. НатuschCitb STOPabo OK, сioob skacybatи Травory. Певозануctть ровота. Як soo лproблема He 3нIMКAS, Зевинь сьdo слухби пдчимки. |
| E010 Pnc. F10 | Джем 3 роботов | Посав trade робота на ров,在 Роверхно. Наточи stop abо OK, по ckасуати Трпогу. Порозлесить робота. Кто сюоблесma He 3нИкес, зberнілься до сныЖби підтpresmkn. |
| E011 Pnc. F11 | Ненильна Швдікісты Ліborо корokовoro Двигуна | Порозлесить робота. Кто сюоблесma He 3нИкес, зberнілься до сныЖби підтpresmkn. |
| E012 Pnc. F12 | Ненильна Швдікісты піо праvo Всоковий Двигун |
DOCKIADYHABOPBYXOINTb
- Po60T-ra30HOKocapka
1wT.
-OK-CTaHcIg InIg 3apRKn
1wT. - BIOK XINBNEHNA Ta NOOBOXyBaU 1wT.
30Hn100M
Ka6eJIbIpypo3MexyBaHHpa06oOoi
-Дюбелдгкрпненнякбени 100ш.
-Дюбeni Дя Крпненя ДOK-staцii - Pizyjne3a 3 wT.
Ka6eBhI 3'edHyBaui 2 wT.
Klouu WeecnturpaHHn 1wT.
TEXHIHIXAPAKTEPNCIKN
| Робот дlya kocinna 04-621 | |
| Параметр | Знayеня |
| Налруга живлиеня: | 18 В постий Ного STРУМУ |
| Мakсимальна homi haьнаnotухпICTь ДВИГУна косарки: | 50 W |
| Мakсимальна notухпICTьcamoxidHORO ДВИГУна: | 20 W |
| СтунIHь зхисту зардной станцII IP | IPX4 |
| СтунIHь зхисту ровота IP | IPX5 |
| СтунIHь зхисту IP дlya зардноğoroadanTepa | IP 65 |
| Клac зхисту дlya ровota | III |
| Клac зхисту дlya зардной станцII | II |
| ШирINA скошваня: | 180 MM |
| Perулованя висOTи різаня вдіanaэоNi | 20 MM - 60 MM |
| ШидкICTь обертыня | 3100 o6/xB |
| Bara | 10,2 Kr |
| Рik ви用药у | 2024 |
DAHI 0OIO 0UMy TA BIBPAUII
| Ровень 3bykoBOGO TUCKY | LpA = 56 ΦB (A) K= 3 ΦB (A) |
| Вимир宪ий ровень 3bykoBOI notyxHocTi | LwA = 67 ΦB (A) K= 3 ΦB (A) |
Inopmaia npo wym i biopaio
PibHb Wmy, 0BnPOMIHIOEbC npCTpOeM, ONcYcTBcR: pIBhem BnPOMIHHOBAHOro 3ByKOBOr TcKy Lpa Ta pIBhem 3ByKOBoI NTpyXHOCTi LwA, de K no3Haac HeBn3HaeyHcTB BMIPoBAHH. BiPauiz, 0BnPOMIHcTOBcnpCTpOeM, ONcYcTBcR BiPonpNcKOpEHmAh a h, de K no3Haac HeBn3HaeyHcTB BMIPoBAHH.
3haeHHB, BmipHb i hInchpykui, a cami pBeHb BnnpomihOBaHoro 3ByKOBOro Tncky LpA, pBeHb 3ByKOBoI NotyKnOcTi L WA i Bi6ponpncopHHa h, 6yn BmipHb BiNobIDHO do cTahdApTy EN 62841-1:2015+A11. HabeHnePi peHb Biopaui a h MoKe 6ytu BnKOpncTaHn dny nopIBHHHa npicTroob i dny nonepedhbooi ouHKn BiopauiHoro BnNHy.
HabehenpiBHe Bi6pauiE pepe3eHTaTbHM IINue OCHOBHX 3actocyBaHb npCTpO. JkUo npctpi BnKOpncTOBycTcRdI INHux CInei a6o 3 IHWMn p6ooumN iHCTpyMeHTAM, pBeH Bi6paui MoKe Biip3aHrTnC. HeadeKBathe a6o piKiche TexHne ObcyroBaHH npCTpO np3BODntb Do nIDBnueHH pBHa Bi6paui. Bnue3a3haeHi npuHN MoKyTb 3iBbWNTn BnNB Bi6paui npOTROM ycBOro TepMHy cnyx6n.
TOnHOro Bn3HaueHHBnHBy Biopaii Heo6xidHO BpaOByBatn nepioi "YbIMKHeHHa" Ta "BIMKHeHHa" npncTpOIO, 3a BNHTkOM nepioiB, KOHN BIN BHKOpNCOTOBcra npo6tN. 3araIbHn BnNB Biaopaai Moke 6yTu Ha6aRaTO HxKuM, Raio ToHOb BPaxyBaTN Bci kaTOpN.
3axncttn onepatopabid ibipaaii, BknpocToByte doataKobia 3axoHb3neKn,Hanpknad,perynapheTexhiehe obcnyrobyBaHH npctpoTa poobux IHcTpymeHTIB,HaexkHn Tempepatypn H pekmpyi npabnlbHy oprahi3aio npaui.
DAHI 0OIO OUMY TA BIBPAUII
3AXNCT HABKOJIINHbOTo CEPEIOBNIUa
EneKtpooblaadHnHe moXHa BnKuDAtn pa3om i3 nobyTOMBmBldxOdAmn. YtIni3yIte Ioro y BiNIOBIDhnx yctAHOBax. HfOpMaioyUtni3aio MOxHa OTPMATn y Dnepa BnpoBy a50 b MiccEbIX opraBnAn. BiDpaCbObaHe eneKTPnuHte Ta eneKtpOnHe 6bLaHnHn(WEE) MCTNb peOcbHN, Aki He e HeNtPaJIbHMn Dnra HabKOINHcepeBDnua. HenepepoBeHn WEE E noteHnHO Hebe3NeKoDn HabKOINHbOrO cepeBDOnuTa t3doopB'piOdei.
"Grupa Topex Spóka z ograniczona odpwiedzialnosci" Spóka komandytowa 3 Micezehaojcknny Bapuai, UI. Nparrna 2/4 (dani - "Tpyna Topex") nobjdomnac. IIO cbi aTOpcbki npaba Ha 3MiC tIcHtpyui 3 ekniyyataui (di) - "IHCtpyia", BKNHOaHau, anhe IEObMeKyoHcuB, II TeKT, poZMIUHeI pOToPapii, cxEMm, MaIOHNM, a TAKOX II cTpykTypy, HanekaTb BnKnIouHo rPyni Topex i nIiRaIabT npaboiB oxopoHi BiNobIDHO do 3aKohy Bid 4 Iiotoro 1994 p. "PiO aTOpcbke npabo i cymikhi npaba" (To6To 3aKoHDaHb BICHNK U. 2006 p. Ne 90 no3, 631 3 hactynHMn 3mHAm). KonIOBaHHa, Obo6Ka, Ny6lka, MoNDpikaB C KOMepuHInxLIIA XCBOrTO CIObHnka, a TAKOX OKpemix Horo enemeHHB 63 nmbMoBoI 3rQD Topex Group Cybopo 3a6oPoHeHO i MoKe npi3BeCTn Do uINbHoi Ta KPMHaJIbHOI BIDNOBdaJIbHOctI.
CZ PREKLAD (UZIVATELSKÉ) PRIRUCKY SEKACI ROBOT 04-621
POZOR! PRED POUZITIM ELEKTRICKEHO NARADI SI PECLIVE PRECTETENTONNAVOD KPOUZITIA USCHOVEJTE JEJ PRO BUDOUCIPOUZITI.
PODROBNA BEZPECNOSTNI PRAVIDLA
BEZPECNOSTNI POKNY PRO SEKACI ROBOTY
Bezpečnost při practilickém používání Žacího robota
DOPORUCENI
Pečilévi si pěčěte námov k použití. Seznámte se ovláDACÍMI systémy a správnou obsluhou spotřebieče.
Nedovolte, aby spotrebic pouzivaly deti nebo osoby, které si neprefecety námov k použit. Vnitrostatni predpisy mohou stanovit minimálni věk obshluhy.
Nepouzivejte robota,Pokud se v jeho blizkosti nachazeji jiné osoby, zejmena deti nebo zvirata.
Nezapomeţe,Že provozovatel nebo uživatel je odpovedný za nehody nebo ohroženi jin'ych osob neboŽivotniho prostředí.
PRIPRAVA
- Pred kazdym secenim zkontrolujte, zda vsechny casti robota spravne funguji.
- Pro dosaženi nejlepsich vysledku se doporučuje sekat za bezdeştného poçasí. Pri sekáná za dešte se tráva muže lepit na robota, který v dusledku toho muže uklouznout.
- NESECTE za spatnych povetrnostnich podmínek, napr. za silného destě, bourky nebo sneženi.
- Pravidelné kontrolujte posekanou plochu a odstrañujte kameny, odpadky, draty, kosti a jiné prekážky. Omezená záruka se nevztahujte na škody zpúsobene prédměty ponechánymi na travniku.
- Aby nedoško k poskozeni, nesekejte ve vzdálenosti mensi než 1 m od zavlažovacích hlavic.
POZOR! Robot a postrikovace NESMI byt zaputy soucasne.
Robot by mél-byt naprogramován tak, aby se spoustěl v jinou dobu než postřikovace.
NIKDy nedovolte detem, aby se dotykaly napajecho zdroje, nabijeci stanice,zejmenakontaktu,noz, prostorupro baterie nebo jakychkoli ccasti, kde jsou mezery,napfiklad kolecek.
OPERACE
- Pozor na rotujici lopatky! NEPOKLÁDEJTE ruce ani nohy pod rotujici nože.
- Dávejte pozor na prédměty rozsypané na travníku pri sekán! Když je robot zapnuty, udržujte bezpečnou vzdálenost.
- Nenechávejte spotřebič bez dozoru,Pokud je známо,že se v blízkosti nacházeji zvifata,děti nebo nahodné osoby.
- Udrzujte bezpecnou polohu. Udrzujte rovnováhu a stabilí polohu na svazích. Pri ovládání robota nebo[jeho perifernich zařizení je dovoleno chodit, ale ne béhat.
- Prečteše siPokyny, kdy, kde a jak zkontrolovat robota a jeho periferni zařizení, kabely a prodlužovaci šnúry, zda nejsou poskozené nebo opotřebované, a opravte robota. Vlastni upravy, aprvy nejsou povoleny - hrozí ztráta záruky.
-
Poškozený napájecí kabel nepřipojujte ani se ho nedotýkejte, dokud nebude odpojen od zdroje napájení, protoze hroží nebezpečí kontaktu se součastmi pod napětím.
-
Robota a/nebo periferni zarizeni pripojute pouze k napajecim obvodum chranenym proudovym chraniem s vypinacim proudem nejvyse 30mA
- Pokud robot vydáva neobvýkle zvúky nebo zaznaméná neobvýké vibrate nebo signalizuje alarm, okamžite stisknéte tlacitko STOP.
- Je ZAKÁZANO dotýkat se nebezpečných pohyblívých Častí prěd vypnutim napájeni robota.
- Je ZAKAZANO dotykat se nebezpečných Časti, dokud se zcela nezastavi.
- Pri manipulaci robotem vždy noste pevnou obuv a dlouhé kalhoty.
- Odpoje napajen: Pred uzamčením robota.
- Pred testovanim, ciisténim nebo udrzbou.
PIKTOGRAMY A VYSTRAHY
| 1 | 2 | 3 | 4 | 5 | 6 |
| 7 | 8 | 9 | 10 | 11 | |
| 12 | 13 | 14 | 15 | 16 | 17 |
- Prečte se návod k použití a dodržujte varování a bezpečnostní podmíky!
- Pred cisténim nebo udrzbou opojte pristroj od napajeni.
- Nevkladeje t rece ani nohy pod ochranny kryt zaciho mechanismu.
- Rotujicci casti - moznost poraneni
- Udrzujte bezpecnou vzdalenost od zaicho robota.
- Pozor na moznost poraneni odlitymi predmety.
- Ochrana prd destem
- Uchovávejte mimo dosah déti.
- Nejezdete na robotovi
- Moznost ztraty prstu, davejte pozor
- Maximálí sklon terénu 14^ / 25% .
- Chrahte si ruce pracovni mi rukavicemi
- Používejte ochranný oděv
- Používejte ochrannou obuv
- Nelikvidujte spelecné s domovnim opdagem
- Selektivni sber odpadu
- Stupen ochrany
POZOR! Tento spotbrebi mohou pouzivat deti starsi 8 let a osoby s omezenymi fyzickymi a duševnimi schopnostmi, jakoz i osoby s nedostatečnymi znalostmi nebo zkušenostmi,Pokud jsou pod dohledem nebo jsou rădné pouceny o bezpečném použivani spotbrebi,aby si byly védomyouvisejicich rizik. S títo spotbrebicem by si niměly hrat deti. Deti nesmi spotbrebi cistit ani provadét jeho udžbu bez dozoru.
POPIS GRAFICKYCH PRVKU
Následujici cislováni se týká současti spotřebrane zobrazené na grafický stránkách teto přirúčy.
| Oznaceni Obr. A | Popis |
| 1 | Nouzové zastaveni |
| 2 | Nastavení výšky sečeni |
| 3 | Övládací panel sekacky |
| 4 | Vypínač napájení sekacky |
| 5 | Hnaci kola |
| 6 | Rezné nože |
| 7 | Buben šezacího mechanismu |
| 8 | Otočné kolečka |
| 9 | Rukojet' pro přenášeni |
| 10 | Nabijecí konektory |
| 11 | Kryt prostoru pro balerji |
| Oznaceni Obr. B | Popis |
| 1 | Övládací panel dokovací stanice |
| 2 | Otvory pro upevnéć dokovací stanice |
| 3 | Nabijeci konektory |
| 4 | Dokovací stanice |
| 5 | Ochrana dokovací stanice |
| 6 | Konektory pro napajecí kabel k označeni pracovn oblasti |
| 7 | Otvory pro kabely k označeni pracovn oblasti a napajeni |
| 8 | Napajecí zásuvka dokovací stanice |
| 9 | Označeni pro správné vedení kabelu |
| Oznaceni Obr. D | Popls |
| 1 | Kontrolka stavu nabijeni |
| 2 | Indikátor poruchy signálu |
| 3 | Indikátor zajišťovacího kabelu |
| 4 | Provožné hodiny / chybově hlášeni, kontrlky 1-4 |
| 5 | Tlačítko napajeni |
| 6 | Vypínač napajeni |
| 7 | Dokovací tlacítko |
| 8 | Tlačítko "Potvrditi" |
| Oznaceni Obr. H | Popis |
| 1 | Śrouby |
| 2 | Kryt prostoru pro baterie s prepravní rukojetí |
| 3 | Přihrádka na baterie |
| 4 | Zásuvka pro baterii na krytu komory |
| 5 | Dobíjecí baterie (není součástí dodávky) |
| Oznaceni Obr. I | Popis |
| 1 | Trávník |
| 2 | Stěna |
| 3 | Dokovací stanice |
| 4 | Vzdálenost stanice od zdi |
| 5 | Počatečné 使用 linie vymezující oblast sečeni |
| 6 | Délka usesku |
| Oznaceni Obr. J | Popis |
| 1a | Kabel k omezení plochy pro sečeni Začinámeme |
| 1b | Kabel pro omezení plochy sečeni Konec |
| 2 | Prívodní vedení: |
| 3 | Dokovací stanice |
- Mezi grafickym znázorněnim a skutečnám produktem mohou být rozdíly.
PRIPRAVA NA PRÁCI
INSTALACE BATERIE
- Obrat'te zaciho robota tak, abyste meli pristup ke spodni casti robota.
- Na misté spinaè obr. A4 a prépravní rukojeti obr. A9 je kryt prostoru pro baterie obr. H2 upevněy 4 srouby označenými sipkami obr. H1.
- Poty vysroubujte srouby oznaçné šipkami.
- Opatrne sejmete kryt prihradky Obr. H2, aby nedoslo k pferuseni nebo odpojeni vodiču spinače Obr. A4 (je pripevně ke krytu prihradky na baterie).
- Poté kryt otočte, na spodni straně krytu je upevněna zásvúka pro baterii Obr. H4.
Vlozte bateri z rady ENERGY+ do zasuwky. - Odklopte kryt s nasazenou bateri a vlozte jej do prihradky na obr. H3.
- Utahnešrouby upevnjici kryt. Otoče robot dne m dolu, spotrebic je pripraven.
PRACOVNI PROSTREDI ZACHO ROBOTA
Ujistete se, ze jsou v obasti, kde robot pracije, splneny nasledujici podminky:
Vyska travy nepresahuj60 mm.
- POZOR! Pokud je trava delsí než 60 mm, posekejte trávník nejprve ručni sekačkou.
- Nejsou zde zdne kameny, kusy dreva, draty, kabely pod napetim ani jiné cizi prdmety.
- Misto secenje rovné a ploché, bez prikopu a vykopu a se sklonem mensim než 25% (14°) Obr. C1
K instalaci jsou zapotrebi nasledujici nastroje:
- gumové kladivo (k zatloukaní kolíku do zeme priPokládoní jistíchokabelu).
- Sestihranny klic (pro upevnéni nabijeci stanice) je soucasti sady.
- Klestě (pro přestřižení kabelu ochrnicujiciho pracovní oblast)
1. BASE STATION INSTALLATION
Vyber vchodneho mista
Nabijeci stancice by mela byt umistena na nasledujicim miste Obr. C3:
- Relativne rovná a rovinata Čast trávníku.
- Blízkó okraje trávníku.
V blízkosti zásvky.
Produzovaci kabel o delce 10 m a napajeci zdroj umistete na stinne, chladne a suche misto.
- Ve vzdalenosti nejmene 2 m od nabijeci stanice nesmi byt zadrné prěkážky.
- Nabijeci stanici doporučujeme umistit na suchém a chráněné miste.
- Napajeci zdroj by mel byt 30 cm nad urovni terenu.
2. NASTAVEC PRO NABIJECI STANICI
Připevnět nabijeci stanici k zemi pomoci 6 upevnovacich sroubu (G1) (pomoci sestihranného kliče G6).
POZOR! NESTOJTE na desce nabijeci stancie ani po ni nechodte.
POZOR! NEVYTVAREJTE nové olvory v desce nabijeci stanice. Stanice by mela byt priśroubována k podlaze pomoci stavajicich otvoru.
3. POKLÁDKA ZAJISTOVACÍHO KABELU
Zádrzný kabel slouží k vymezení pracovního prostoru a k vedení robota zpět do nabíci stanice.
POZOR! Pokud vás souded také používa robotickou sekačku, dodržujte vzdalenost alespo n 1 m mezi omezovacimi kabely obou robotu.
PLANOVÁNI POLOHY JISTÍCIHO LANA
Před položením jistího kabelu se projdete podě určene hranice a odstraťvešechny nepotřebné predměty, napřiklad kameny.
POZOR! Delka jisticiho kabel nesmi ptekrocit 200 metru.
POZOR! Robot nesmí přejíždět prěs štrk nebo podobné materiały, které by mohy poškodit nože.
POKLÁDKA JISTÍCIHO KABELU OBR. C
PřiPokladáni jisticiho kabelu kolem pracovnho prostoru a prěkážek postupujte podle nizé uvedenychPokynu.Ke správnému položeni jisticiho kabelu použijte měridlo, které je současti sady.
POZOR! Zádrzný kabel je napajen velmi nizkým napětím a je bezpečné pro lidi i domáci zvifata.
POZOR! Začněte konektorem "-" na zadní straně nabíjeci stancie Obr.
B6, zatahnete jej pod stanici (a ponechte si 10 cm rezervu) a polozte kabel kolem travniku proti smeru hodinovych ruicek a ukonoteje jekonektorem "+" na zadni strane nabijeci stanice (ponechte si 10 cm rezervu). Dbejte na to, aby se kabel dotykal kovu u konektor "+" a-" Obr.
B6 nezapomeente odfrznout prebytecny omezujici kabel.
- Mezi zadrznym kabelem a nabijeci stanici ponechte alespn 2 m volného mista. Kabel v teto casti slouží k priveni robota k dokovaci stanici.
- Dodržujte vzdalenost 30 cm mezi zadrznym lanem a okrajem travniku Obr. C2; Obr. C3.
- Prijevnete zajistovaci kabel k zemi pomoci dodanych hmozdinek Obr. G5. Zajistovaci kabel by mél byt rovná miřne naputy. Hmozdinky by měly byt Rozmistény po 1 m (tento Rozměr lze upravit v závislosti na tvaru trávníku) Obr. C4. Kabel nezakopávejte hlouběji než 2 cm, aby nedoslo k oslabeni signálu.
- Usporádejte kabel tak, aby uhly byly větsí než 90° Obr. C5. V takovych oblastech položte jistici kabel v mímych obloucích, což robotovi vyrazné usnadní pohyb po sekané plose.
- Pokud jsou na travniku záhony, jezírka nebo stromy, obklopte je smyčami jisticiho kabelu Obr. C4.
- Udržujte min. vzdálenost 30 cm mezi zajistovacím kabelem a okrají prěkážek.
POZOR! Na cestre do smycky a ze smycky se jistici lana nesmi vázemne křížit Obr. C4.
V pracovnim prostoru sekačky ponechte uzký prostor. Dbejte na to, aby vzdálenost mezi paralelně bežicimi jisticimi kabely byla vět.si než 1 m.
POZOR! Dbeje na to, aby se dokovaci stanice nacházela uvnitř smyčky označujíci oblast sečení. (vně / uvnitř) Obr.B2
4. INSTALLACE NABIJECI STANICE
Pripojte napajeci zdroj
- Zasunte napajeci zastrcku do zasuvky 110-240 V.
- Zkontrolujte stav kontrolky LED na nabijeci stanici Obr. B1:
Trvala zelená kontrolka: pripojení navázano (robot se nenabíjnebo je plné nability) -
Přeruzováne zelené světlo: robot se nabíj.
-
Přerušovana Červena kontrolka: nejcastějsí chybou je "odpojení zajistovaciho kabelu".
- Zhasnute svetlo:nejcastejsi zavada je "No 100-240 V power supply" nebo "No connection to power source".
PROVOZ / NASTAVENI
Prvnispusteni zacihorobota
- Priprvnim spusteni robota umistete pristroj na dokovaci stanici tak, aby nabijeci konektory na stanici figurovaly. B3 nepnly do kontaku s nabijecimi konektory na zaćim robotu obr. A10.
- Pri prvnim spusteniŽaciho robota z aplicace v Telefonu je tbreba provestactualizaci firmwaru. Zpúsob provedeni je popsán nizé v cásti Aktualizace softwaru.
- POZOR! Pri prvnim pripojeni musi byt Telefon a robot v dosahu site Wi-fi.
PREDPOUZITIMROBOTAAKTUALIZUJTEFIRMWARE
Aktualizace by mela byt provedena následujícim zpúsobem. 1. Umistěte robota do smyčy, ale mimo nabíjeci stanici.
- Přepněte preginač obr. A4 do polohy 1.
- Stiskněte a podržte spínač Obr. D5
- Spust'te applaki, naskenujte QR-kod.
-
Pripojeni aplikace k robotu
-
Rozbalte nastaveni softaru stisknutim ikony v pravém horním rohu obrazovky.
- Vyberte moznost: Actualizace firmwaru.
- Poté postupujte podlePokynu na obrazovce.
Po instalaci softaru je spotbrebic pripraven k provozu.
POZOR!
- Na displejei se zobrazuje, zda je robot v dosahu Wi-fi nebo Bluetooth.
- Připojení k sti je indikováno blikajici ikonou typu pripojení. Po pripojení přestane ikona blikat.
- Robota lze spárovat pouze s Jedním Telefonem.
- Pokud je třeba pripopjit dalí (stejnýžaci robot), je třeba první robot z aplíkace vyjmout. V aplíkaci iOS také z nastavení Bluetooth.
NASTAVENI VYŠKY SEÇENİ:
Prid prvnim secenim nastavte vysku seceni na 60 mm a poté, když je celý travnik relativné rovný, zmechte vysku na požadovanou.
- Otočením knoflíku obr. A2 ve směru hodinovych ručíček zvyšíte vyšku sečeni.
- Otočenim knofliku obr. A2 doleva snizite vyšku sečeni.
- Vyšku secení lze nastavit od 20 mm (MIN) do 60 mm (MAX).
POZOR! Pohonny motor bubnu zaicho mechanismu Obr. A7 se zapne priblizne 10 sekund po opusteni zakladny a Zahaji provoz.
ZAPNUTI/VYPNUTI
- Nastavte prepina na obr. A4 do polohy "O", abyste vypnuli napajeni.
- Nastavte prępina na obr. A4 do polohy "l", abyste zapnuli napajení.
AKTIVACE ROBOTA A PROGRAMOVÁNÍ PRACOVÍ DOBY V MANUALNÍM REŽIMU.
- Stiskněte a podržte tlacitko napajení Obr. D5 pro spustěné robota. Poznamka: během spustěné robotem netřeste, aby nedoslo k chybě pri spustěné. Pokud se robot nespusti správně (věchny kontrolky svítí nepřetržité), restartujte jej.
- Heslo zadeje dvojim stiskutim tlačitka obr. D6, poté dvakrát stisknéte tlačitko obr. D7 a jegnou tlačitko obr. D8 (heslo je naprogramovano z výroby).
- Naprogramujte provozni dobu (vctne doby secnia doby nabijeni): - Pro nastaveni provozni doby stisknete obr. D6. Jedna rozsvicená kontrlka znamena 2 hodiny, maximálni doba provozu je 8 hodin a 4 kontrlky na obr. D4. Stisknutim tlacitka obr. D8 potvrdite a spustite robota.
POZOR! Po nastavení provoznídoby si robot nastavení zapamatuje a začné sekat každý den v naprogramovanou dobu. Doba sećení bude odpovídat zadanému nastavení.
- Naprogramovaná provoznídoba robota 2 až 8 hodin je doba sečení včetné doby nabijeni.
- Doba provozu a nabijeni se liši v závislosti na použité baterii. Pokud chcete zmenit provozní dobu, postupujte znovu podle kroků 2-3. CASOVÉ PROGRAMOVÁNI V AUTOMATICKÉM REŽIMU, 7DENNÍ PLÁN, JE K DISPOZICI PROSTřEDNICTVÍM NASTAVENÍ V APLIKACI.
- Po nouzovém zastavení je třeba robota nejprve odkovat podle vyševuvedeného kroku 2. Jakmile je robot odkován, mužeme jej
stisknutim tlačitek poslat zpět do stanice: Obr. D7 a poté potvrdime tlačitkem Obr. D8 navrat sekáčky do nabíjeci stanice.
- Stisknutim tlacitka nouzového zastaveni STOP se z applikace vymaze cyklus ručniho a automatického režimu, pokud byl tímo zpusobem aktivovan. Aby mohl robot po nouzovém zastaveni opét začit pracovat, je třeba jej vrát do nabijeci stanice a znovu nastavit manuální pracovní program. V prípadě automatického planu provedte stejnou akci v planu applikace a potvrde jeho nastavení.
POZOR! Naprogramovanou dobu spusteni v automatickem planu nelze považovat za prilis prasnou. Spotrebič se muže spustit až několik minut po nastaveném(case. - Aktivace ručniho režimu vymaze plán naprogramovány v aplikaci a naopak.
V manuálím režimu se ořezávání okrajú provádi automatický každych několik cyklú secení. Jedná se o secení trávy v blízkosti kabelu, ktery vymezuje pracovní oblast. POZOR! Je třeba dbát na správné upevněkabelu, aby nedoslo k jeho nahodnému sekání. - Jakmile zařizení zjistí začátek dešte, sekací robot se vrát do dokovaci stanice.
- Pokud robot pri práci naráz na překážku, odrazí se od ni aPokracuje v práci.
KONTROLKA STAVU NABIJENI V NABJECI STANICI:
Neprtrzite zelené svetlo - baterie je plne nabita.
Prušovane zelené světlo - nabijeni.
MIMO NABIJECI STANICI:
Nepretrzite zelené světro - baterie >=20%
Prušovane zelené světlo - baterie <20%
POZOR! Pokud uroven nabiti baterie klesne pod 20% , robot automaticky prerusi przya vrati se do nabijeci stanice.
CHYBOVÉ SVÉTLO:
Neptrzite zelené svétlo - aktualizace systému. Pripoje se k aplikaci a provedteactualizaci.
Přerušováne zelené světlo - probílá aktualizace systému
Pruovane servene svetlo - chybove hlasei 1 a2 5, restartujte robota.
Nepreztite cervene svetlo - chybove hlasei 6 až 12, stisknete "STOP" nebo "OK" pro vymazani.
INDIKÁTOR UPEVÑOVACÍHO KABELU:
Neprezté zelené svétlo -spravný signal
Neptrzite cervene svetlo - zadny signal
Ovladaciprky Obr.D4
Prušovane světlo - robot zablokován.
Nepretrzite svetlo - robot odemcen.
Svetlo 1 sviti zelené: 2 hodiny provozu.
Kontrolky 1 a 2 sviti zelené: Doba provozu 4 hodiny.
Kontrolky 1, 2 a 3 svitf zelené: 6 hodin provozu.
Kontrolky 1, 2, 3 a 4 sviti zelené: 8 hodin provozu.
SOFTWARE PRO OVLADANI ZACIHORobotA
IOS ke stazeni:
https://apps.apple.com/cn/app/toua/id6449251720
Android ke stazeni
https://play.google.com/store/apps/details?id=com.toua.robot
Pokyny k programu jsou ke staženi na adrese:
https://bit.ly/3QBB6Gm
NOUZOV VYPNUTI ROBOTA
Stisknutim tlačitka "STOP" obr. A1 robota zastavite, stisknutim a podrženim tlačitka napajeni robota vypnete.
POHYB ROBOTA
Pod robotem je umistěna zvedaci rukojet Obr. A10 pro snadné ovladání)\ jednou rukou.
UDRZBA A SKLADOVÁNÍ
- Pred ciisténim a udrzbou robota vždy vypněte.
- Pred cisténim a udrzbou nabijeci stanice opojte napajeni.
- Pri yvmene nozu a ci steni spodni casti robota vzdy pouzeje tse silne ochrannre rukavice.
- Pravidelné kontrolujte utaženi šroubu a matic. Poškozené díly je nutné z bezpečnostnich dūvodu opravit nebo vyměnit.
- Pravidelné kontrolujte, zda se noze mohou volné otáčet.
POZOR! Když robota otočite vzhuru nohama, položte ho na trávník nebo měkký povrch, abyste neposkodili nebo neposkrábali kryt.
CISTENI
POZOR! Pred zahajenim cissteni vypnete napajeni ypinaacem obr. A4.
- Predni Čast robota umyje nizkotlakym Čisticim prostředkem a mekkým kartáčem nebo hadřikem.
- Pomoci tvrdého kartáce odstraţe zbytky poseçene travy a nečistoty z nožu, kol a dalšich Časti na spodni straně robota.
- Pravidelné kontrolujte kola, zda nejsou zablacena nebo zda na nicheni posekaná trava, a cistěte je kartáčem.
POZOR! Pravidelné odstrañujte zbytky rostlin ze spodni strany robota, abyste zabrànili snizeni produktivity.
VYMENA NOZU
POZOR! Nejprve vypnete hlavní vypinač a nasadte si ochrannes rukavice.
POZOR! Používejte pouze uvedené originálné schvaléné vyrobcem.
Vsechny tri noze a jejich srouby musi byt vymeneny v ramci jegne vymeny Obr. A6.
- Srouby je třeba vyšroubovat a utáhnout šroubovámém.
Zkontrolujte, zda se nové noźe mohou volné otáčet.
RESENI PROBLEMU
Nizé uvedená tabulka obsahuje pokyny pro diagnostiku problémù.
Pokud je to mozné, opravte zařizení sami. Pokud problem nelze vyřěsit, obratte se na autorizovaného prodejce nebo servisné středisko.
POZOR! Je t'reba prijmout ochranná opatřeni.
| Problém | Možné príčiny | Rešeni |
| Na nabijeci staniciblinká Červéná kontrlka | Přerušeni zajistovacího kabel | Najděte vadný 使用kabela opravit ji |
| Robot má potiže s prípojením k nabíjcí stanici | Nabijeci stanice není správné nainstalována | Viz Čast "Príprava na práci". |
| Upevnovací kabel není správné umistěn. | ||
| Žádný signál ze zajistovacího kabelu | Žádné napájení | Zkontrolujte zdroj napájení |
| Zajistovací kabel byl prípojen obracné | Vyměnte konektory "+" a "-" | |
| Zajistovací kabel není prípojen k nabijeci stanici | Zkontrolujte, zda je upevnovací kabel správné prípojené k nabíjecístanici | |
| Přerušeni zajistovacího kabelu | Zkontrolujte celou cestu, ze kabel nebyl prěrušen | |
| Zajistěné kříženi lan na cestě do smyčky a ze smyčky | Zkontrolujte, zda je správně nainstalován upevnovací kabel. | |
| Robot překračuje hranice | Zajistovací kabel byl prípojen obracné | Vyměnte konektory "+" a "-" |
| Robot vibruje nebo vydává neobvýklé zvuky. | Poškozené nebo chybějici ostři | Kontrola a oprava upevnovacích šroubů noze |
| Kotouč nože je uvolněné | ||
| Výměna Čepele |
| Kód chyby | Popis | Rešení |
| E01 Obr. F1 | Chyba initialize - gyroskopický senzor | Umistěte robota na rovný povrch a restartujte jej. |
| E02 Obr. F2 | Porucha snimace zdvihu nebo snimace kolize | Nastavte kolizné tycha torzní kolo na přední cásti sekačky, zkontrolujte, zda nejsou zablokovány; postavte robota na rovný povrch a znovu jej spustte. |
| E03 Obr. F3 | Chyba initialize zacího motoru | Umistěte robota na rovný povrch a restartujte jej. Pokud problém pretrévá, kontaktujte zákaznický servis. |
| E04 Obr. F4 | Chyba prípojení napájení | |
| E05 Obr. F5 | Nesprávné otáčky Žaciho motoru | |
| E06 Obr. F6 | Upozorněni na náklon | Umistěte robota na rovný povrch. Stisknutím tlacítka STOP nebo OK alarm zrušite. |
| E07 Obr. F7 | Varoványí prěd výtahem | Umistěte robota na rovný povrch. Stisknutím tlacítka STOP nebo OK alarm zrušite. |
| E08 Obr. F8 | Chyba kanálu ADC | Umistěte robota na rovný povrch a restartujte jej. Pokud problém přetrůvá, kontaktujte zákaznický servis. |
| E09 Obr. F9 | Nesprávný signál | Viz vyše v tabulce: problem -žádný signál z omezovacího kabelu. Zkontrolujte postupné vsechny body a poté robota postavte na rovný povrch. Stisknutím tlacítka STOP nebo OK alarm zrušte. Restartujte robota. Pokud problém přetrůvá, kontaktujte zákaznický servis. |
| E010 Obr. F10 | Robot jam | Umistěte robota na rovný povrch. Stisknutím tlacítka STOP nebo OK alarm zrušte. Restartujte robota. Pokud problém přetrůvá, kontaktujte zákaznický servis. |
| E011 Obr. F11 | Nesprávné otáčky leveho krokového motoru | Restartujte robota. Pokud problem přetrůvá, kontaktujte zákaznický servis. |
| E012 Obr. F12 | Nesprávná rychlost prava krokový motor |
SADA OBSAHUJE:
- Sekaci robot 1ks.
Dokovacá nabijeci stanice 1ks. - Napajeci zdroj a produzovacf kabel 1ks.
Kabel pro vymezeni pracovnifo prostoru 100m
Upevnovaci hmozdinky pro kabely 100 ks. - Upevnováč hmoždinky dokovací stanice 6ks.
Rezné noze 3ks.
Kabelové konektory 2ks.
Sestihranny klic 1ks.
SPECIFIKACE
| Žaci robot 04-621 | |
| Parametr | Hodnota |
| Napájeci napěti: | 18 V DC |
| Maximálníj jmenovitý vykon Žacího motoru: | 50 W |
| Maximálníj jmenovitý vykon motoru s vlastním pohonem: | 20 W |
| Stupeř krytí IP pro nabijecí stanici | IPX4 |
| Stupeř krytí IP pro robota | IPX5 |
| Stupeř krytí IP pro nabijecí adaptér | IP 65 |
| Trída ochrany robota | III |
| Trída ochrany nabijecí stanice | II |
| Šifka sečeni: | 180 mm |
| Nastaveni vyšky sečeni v rozsahu | 20 mm - 60 mm |
| Rychlost otáčeni | 3100 otáček za minutu |
| Hmotnost | 10,2 kg |
| Rok vyroby | 2024 |
UDAJE O HLUKU A VIBRACICH
| Hladina akustického tlaku | LpA = 56dB (A) K=3dB(A) |
| Naměřená hladina akustického výkonu | LwA = 67dB (A) K=3dB(A) |
Informace o hluku a vibracich
Hladinu hluku vyzařovaného zařizením popisují: hladina vyzařovaného akustického tlaku LpA a hladina akustického vykonu LwA, kde K označuje nejistotu měřeni. Vibrate vyzařované zařizením jsou popsány zrychlením vibraci aₙ, kde K označuje nejistotu měřeni.
Hodnoty naměřene v tomto navodu k použití, tj. hladina vyzařovaného akustického tlaku LpA, hladina akustického vykonu Lw a zrychlení vibrací an, byly naměřeny v souladu s normou EN 62841-1:2015+A11.
Uvedenou hladinu vibraci a h lze pouzít k porovnáni zařizení a k prédběznému hodnoceni expoze vibracim.
Uvedená uroven vibraci je representativni pouze pro základní aplikace zařizení. Pokud je pristroj použivan pro jiné aplkace nebo s jinymi pracovnimi nastroji, muze se uroven vibraci listit. Nedostatečna nebo zřidkavá udrzba zařizení zpúsobuje vyší uroven vibraci. Vyše uvedené prćiny mohou zvyšovat expozići vibracim po celou dobu zivotnosti.
Pro prsne urceni expoice vibracim je tbre bzit v uvahu dobu zapnuti a vypnuti zarizeni, s vyjimkou doby, kdy je zarizeni pouzivano k provozu. Pri prsne m odhadu vsech faktoru muze byt celková expoice vibracim mnohem nizsi.
K ochrané obsluhy pred vibracemi použivejte dalsi bezpečnostni opatěné, napr. pravidelnou udržbu zařizení a pracovnich nastroju, správné teplotní podminky rukou a správnou organizaci práce.
UDAJE O HLUKU A VIBRACICH
OCHRANA ZIVOTNIHO PROSTREDI

Elektrická zařLENi by se neměla likvidovat spočné s domovnól odapadem. Likvidujte je v príslužnych zařLENich. Informace o likvidac ziskáte u prodejce vyrobku nebo na mistnich uradech. Odpadní elek a elektronická zařLENi (OEEZ) obsahuju látky, ktere nejsouneutralí pirodní prostředl. Nereçyklovaná OEEZ predstavuji potenciáin nebepezći pro zivotni prostředl a lidské zdravl.
"Grupa Topex Spóka z ograniczona odpwodzialnosci" Spóka komandytowa se sidlem ve Varšavé, ul. Pograniczna 2/4 (dalejen "Skupina Topex") oznamuje, ze veškera autorská práva k obsahu totohovodu k použití (dalejen "navod"), včtené mimo jine jeho textu, zveřejnéchografí, schemat, výkresu, jakovi jeho kompozice, náteži vyhradne Skupiné Topex a podlehají pravni ochrané v souladu se zákönem ze dne 4. unora 1994 o autorském pravu a pravech s nim souvisejlicch (tj. Sb. zákounu U. 2006 c. 90 položka 631 v platinězně), Koprovaní, zpravovalání, zveřejování, upravovaní pro komerční učelyceho manuál u jeho Jednotlivych pvkr bez pisemného souhlasu spočeostni Topex Group je přísně zakázANO a muže mit za nasledek občanskopravná trestnépravné odpovednost.
ES prohlasei o shode
Vyrobce: Vyrobce: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varšava
Vyrobek: E+ sekaci robot
Model: 04-621
Obchodni název: NEO TOOLS
Sérióve Číslo: 00001 ÷ 99999
Toto prohlasei o shode je vydano na vyhradni odpovednost vrobc.
Vyše popsaný vyrobek je v souladu s nasledujicimi dokumenty:
Smernice o strojnich zafrizenich 2006/42/ES
Smernice RED 2014/53/EU
Smernice RoHS 2011/65/EU ve zneni smernice 2015/863/EU
A splnju pozadavky norem:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Toto prohlášeni se vztahuje pouze na strojni zařizení ve stavu, v jakém bylo uvedeno na trh, a nezahruje současti.
pridané koncovym uživatelem nebo jím následné provedené akce.
Jméno a adresa osoby s bydlistém v EU, ktera je oprávněna vypracovat technickou dokumentaci:
Podepsano jménem:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Varsha

Pawet Kowalski
Referent kvality spolecnosti TOPEX GROUP
Varsha, 2023-09-11
EU prohlasei o shode
Vyrobce: Vyrobce: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varšava
Vyrobek: Nabijeci stanice
Model: K145455
Obchodni název: NEO TOOLS
Serieové cislo: 00001 ÷ 99999
Toto prohlášeni o shodě je vydáno na vyhradni odpovednost vyrobce. Vyše popsaný vyrobek je v souladu s nasledujícimi dokumenty:
Smernice RED 2014/53/EU
Smernice RoHS 2011/65/EU ve zneni smernice 2015/863/EU
A splnije požadavky norem:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Toto prohlášeni se týká vyhradné stroje, který byl uveden do obéhu. na trhu a nezahrnuje componenty pridané koncovým uzivatelem nebo spotřebitelem.
jeho náslné aktivity.
Jméno a adresa rezidenta EU, ktery je oprávně
prijavit technickou dokumentaci:
Podepsano jménem:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
Referent kvality spolecnosti TOPEX GROUP
Varsha, 2023-11-09
SK
PREKLAD (POUZIVATELSKEJ) PRIRUCKY ROBOT NA KOSENIE 04-621
POZOR! PRED ZACATIM PRACE S ELEKTRICKYM NARADIM SI POZORNE PRECITAJTE TENTO NAVOD NA OBSLUHU A USCHOVAJTE SI HO PRE BUDUCE POUZITIE.
PODROBNE BEZPECNOSTNE PRAVIDLA
BEZPECNOSTNÉ POKYNY PRE KOSIACE ROBOTY
Bezpečnost' pri praktickom používaní zacieho robota
ODPORUCANIA
Pozorne si preciţaje námod na použitie. Zoznámte sa s ovladacimi systémami a správnou prevadzkou spotrebica.
Nedovolte, aby spotrebic pouzivali deti alebo osoby, ktore si neprecitali navod na pouzitie. V narodnych predipisoch moze byt uvedeny minimaly vek obsluhy.
Robota nepoužívajte, ak sa v jeho blízkosti nachádzaju iné osoby, majma deti alebo zvierata.
Nezabudnite, Že prevaldskovatele alebo použivatel je zodpovedny za nehody alebo ohrozenie inych osob aleboŽivotného prostredia.
PRIPRAVA
- Pred každým kosenim skontrolujte, Či věsetky Časti robota správné funguju.
- Na dosiahnuite najlepsich vysledkov sa odporuca kosit za bezdaždoveho počasia. Pri koseni v daždi sa moze trava prilepit na robot, ktorý sa v dosedku toho moze pošmyknut.
- NEKOSTE za zlych povetermostnych podmienok, napr. poças silneho dazda, burky alebo snezenia.
- Pravidelne kontrolujtePokosenu plochu a odstrańfte vsetky kamene, necistoty, dróty, kosti a iné prekázky. Obmedzená záruka sa nevztahuje na skody sposobene predmetmi ponechymi na trávniku.
- Aby ste prediši poškodeniu, nekoste vo vzdialenosti menšej ako 1 m od postrekovačov.
POZOR! Robot a postrekovače sa nesmú zapinat' sucišne.
Robot by mal byt naprogramovany tak, aby pracoval v inomČase ako postrekovače.
NIKDy nedovolte detom dotykatanapajaceho zdroja, nabijacej stanice, najma kontaktov, nozov, priestoru pre baterie alebo akychkolvek casti, v ktorych su medzery, ako napriklad kolieska.
OPERACIA
- Pozor na rotujuce lopatky! NEDÁVAJTE ruky ani nohy pod rotujuce nože.
Davajte pozor na predmety rozhadzane po trvniku pochas kosenia! Ked je robot zapnuty, udrzujte bezpecnu vzdialenost.
Nenechavajte spotrebič bez dozoru, ak je zname,Že sa v blízkosti nachadzaju zvierata, deti alebo okolostojace osoby.
Udrzujte bezpechnu polohu. Udrzujte rovnovahu a stabiln u polohu na svahoch. Pri obsluhe robota alebo jeho perifernych zariadeni je povolenechodit, ale nie bezat. - Prečitajte siPokyny o tom, kedy, kde a ako skontrolovat' robota a jeho periférne zariadenia, kable a predlžovacie snúry, ci nie su
poskodené alebo opotrebované, a robota opravit. Vlastné upravy, opravy Nie su povolene - hrozi strata záruky.
- Poškodený napájací kabel nepripárajte ani sa ho nedotykajte, kym nie je odpojený od napájania, pretoze hroží riziko kontaktu so súcastami pod napatim.
- Robota a/alebo periférne zariadenia pripájaje len k napájacim obvodom chräneným prudovým chraničom s vypíracím prudom maximalne 30 mA.
- Ak robot vydáva neobvkykly zvuk alebo zaznaméná neobvkykle vibrácie alebo signalizuje alarm, okamžite stlăcte tlacidlo STOP.
Pred vypnutim napajania robota je ZAKAZANE dotykata nebezpechnych pohyblivych casti. - Je ZAKAZANE dotykat sa nebezpečnych casti, kym sa upne nezastavia.
- Pri manipuláci s robotom vždy nods pevnú obuv a dlhé nohavice.
- Odpoje napájanie: Pred zablokovaním robota.
Pred testovanim, cistenim alebo udrzbou.
PIKTOGRAMY A VYSTRAHY


- Precitajte si navod na obsluhu a dodrziavajte upozomenia a bezpečnostné podmienky!
- Pred cistenim alebo udrzbou odpojte zariadenie od napajania
- Nevkladajte ruky ani nohy pod ochranny kryt kosiaceho mechanizmu
- Rotujuce casti - moznost poranenia
- Dodržiavajte bezpečné vzdialenost od kosiaceho robota
- Pozor na możnost' poranenia o odliatky
- Chrante pred daziom
- Uchovávajte mimo dosahu detí.
- Nejazdite na robotovi
- Mozná strata prstov, budte opatrní
- Maximálny sklon terénu 14^ / 25% .
- Chrante si ruky pracovnymi rukavicami
- Nosit ochranny odev
- Noste ochrannu obuv
- Nevyhadzujte spolu's domovym odpadom
- Selektivny zber odpadu
- Stupeč ochrany
POZOR! Tento spotrebić možu použivat' deti starsie ako 8 rokov a osoby s obmedzenymi fyzickymi a duševnymi schopnost'am, ako aj s nedostatočnymi znalost'am alebo skúsenost'am, ak su pod dohl'adom alebo su riadne poucené o bezpečnom použivaní spotrebiac, aby si boli vedomé rizik, ktoré s tym suvisia. S tymto spotrebićom by sa deti nemali hrat. Deti nesmú Čistit' spotrebić ani vykon'avat' jeho udrzbu bez dozoru.
OPIS GRAFICKYCH PRVKOV
Nasledujuce cislovanie sa vztahuje na komponenty spotrebica zobrazené na grafickych stranach tejo prirucy.
| Oznacenie Obr. A | Opis |
| 1 | Núdžové zastavenie |
| 2 | Nastavenie vyšky kosenia |
| 3 | Ovladaci panel kosacky |
| 4 | Spínač napájania kosacky |
| 5 | Hnacie kolesá |
| 6 | Rezné Čepele |
| 7 | Bubon rezaceho mechanizmu |
| 8 | Otočné kolieska |
| 9 | Rukováť na prenášanie |
| 10 | Nabijacie konektory |
| 11 | Kryt priestoru pre batériie |
| Oznaceniie Obr. B | Opis |
| 1 | Ovladaci panel dokovacej stanice |
| 2 | Otvory na upevnenie dokovacej stanice |
| 3 | Nabijacie konektory |
| 4 | Dokovacia stanica |
| 5 | Ochrana dokovacej stanice |
| 6 | Konektory pre napájací kábel na označenie pracovnej oblasti |
| 7 | Otvory na káble na označenie pracovnej oblasti a napájania |
| 8 | Napájacia zásuvka dokovacej stanice |
| 9 | Oznaceniie pre správné vedenie káblov |
| Oznaceniie Obr. D | Opis |
| 1 | Kontrolka stavu nabijania |
| 2 | Indikátor poruchy signálu |
| 3 | Indikátor zaistovacieho kábla |
| 4 | Prevádkové hodiny / chybovy hlásenie, kontrlky 1-4 |
| 5 | Tlačidlo napájania |
| 6 | Prepínac napájania |
| 7 | Dokovacie tlačidlo |
| 8 | Tlačidlo "Potvrditi" |
| Oznaceniie Obr. H | Opis |
| 1 | Skrutky |
| 2 | Kryt priestoru na batériës prepravnou rukovat'ou |
| 3 | Priehradka na batérië |
| 4 | Zásuvka batérië na kryte komory |
| 5 | Nabijateñá batériya (nie je súčast'ou balenia) |
| Oznaceniie Obr. I | Opis |
| 1 | Trávnik |
| 2 | Stena |
| 3 | Dokovacia stanica |
| 4 | Vzdialenost stanice od steny |
| 5 | Počiatočný ousek Čiary ochraničujúci oblast' kosenia |
| 6 | Dlžka ousek |
| Oznaceniie Obr. J | Opis |
| 1a | Kábel na obmedzenie plochy kosenia Začiatok |
| 1b | Kábel na obmedzenie plochy kosenia Koniec |
| 2 | Prívodné potrubie: |
| 3 | Dokovacia stanica |
- Medzi grafickým zobrazenim a skutočným produktom možu byt'rozdiely
PRIPRAVA NA PRÁCU
INSTALACIA BATÉRIE
- Obratte kosiaceho robota tak, aby ste mali pristup k jeho spodnej casti.
- Na mieste vypinača obr. A4 a prepravnej rukováte obr. A9 sa nachadza kryt pristoru pre baterie obr. H2, ktorý je upevný 4 skrutkami oznacenymi šipkami obr. H1.
- Potom odskrutkujte skrutky oznaçene šipkami.
- Opatrne odstrante kryt priehradky obr. H2, aby ste neprethli alebo neodpojili vodicspina ocbr. A4 (je pripevneny ku krytu priehradky na baterie).
- Potom kryt otocte, na spodnej strane krytu je upevná zásuvka baterie Obr. H4.
- Do zásuvky vložte batériu zo série ENERGY+.
- Odklopte kryt s nasadenou batériou a vložte ho do priehradky na obr. H3.
- Utiahnite skrutky upevnujuce kryt. Otočte robot dnom nadol, spotrebic je pripravený.
PRACOVNE PROSTREDIE KOSIACEHO ROBOTA
Uistite sa, ze v oblasti, kde robot pracje, su splnené nasledujuce podmienky:
Vyska travy nepresahuje 60 mm.
- POZOR! Ak je trava dlhšia ako 60 mm,Pokoste travnik majpriv ručnou kosačkou.
- Nie su tu ziadne kamene, kusy dreva, droty, kable pod napatim ani iné cudzie predmety.
- Miesto kosenia je rovné a ploché, bez priekop a vykopov a so sklonom mensim ako 25% (14°) Obr. C1
- Na instaláciu su potrebné tieto nastroje:
- Gumové kladivo (na zatíkanie kolíkov do zeme pri kladeni istiaceho kábla)
- Sesthranny kluc (na upevnenie nabijacej stanice) je sučastou supravy
Klieste (na prestrihnutie kábla ohraničujúceho pracovnú oblast)
1.BASE STATION INSTALACIA
Vyber vchodného miesta
Nabijacia stanica by mala byt' umiestnena na nasledujúcom mieste Obr. C3:
- Relativne rovná a rovinatá Čast'travnika.
- Blizko okraja trávnika
V blízkosti zásvuky.
10 m predlžovaci kabel, napájac zdroj umiestnite na tienisté, chladné a suché miesto. - Vo vzdialenosti Najmenej 2 m od nabfjacej stance sa nesmú nachadzat'ziadne prekážky.
- Odporuca sa, aby bola nabljacia stanica umiestnena na suchom a chranychon mieste.
- Napájací zdroj by mal byt' 30 cm nad urovnou zeme.
2. PRIPOJENIE NABIJACEJ STANICE
Pripevnite nabjaciu stanicu k zemi pomocou 6 upevnovacich skrutiek (G1) (pomocou šesthranného klúca G6).
POZOR! NESTOJTE na doske nabijacej stanice ani po nej nechodte.
POZOR! NEVYTVÁRAJTE nové otvory v doske nabijacej stanice
Stanica by mala byt' priskrutkovaná k podlahe pomocou existujúcich otvorov.
3. POLOZENIE ISTIACEHO KÁBLA
Upinaci kabel sa pouziva na vymedzenie pracovného priestoru a na vedenie robota spät do nabjacej stanice.
POZOR! Ak aj vás sused použiva robotickú kosačku, dodržiavajte vzdialenost' aspohn 1 m medzi istiacimi káblami oboch robotov.
PLÁNOVANIE POLOHY ISTIACEHO KÁBLA
Pred polozenim istiaceho kábla prejdite pozdž urcenej hranice a odstrante vsetky nepotrebné predmety, napriklad kamene.
POZOR! DlZka istiaceho kábla nesmie presiahnut 200 metrov.
VAROVANIE! Robot nesmie jazdǐ po Štrku alebo podobnych materiáloch, ktoré by mohlí poškodit noze.
ULOZENIE ISTIACEHO KÁBLA OBR. C
Pri kladeni istiaceho kábla okolo pracovnej oblasti a prekázok postupujte podla nižsie uvedenychPokynov. Na správné položenie istiaceho kábla použite meter, ktory je sučastou supravy.
POZOR! Zadrzny kabel je napajany vefmi nizkym napatim a je bezpečné pre ludi a domace zvierata.
POZOR! Začnite konektorom "-" na zadnej strane nabijacej stanice Obr.
B6, potiahnite ho pod stanicu (a nechajte si 10 cm rezervu) a kabel položte okolo travnika proti smeru hodinovych ručićek a ukonćte ho konektorom "+" na zadnej strane nabijacej stanice (nechajte si 10 cm rezervu). Dbajte na to, aby sa kabel dotýkal kovu pri konektoroch "+" a "-" Obr. B6 nezabudnite odrezat prebytočné obmedzujiúci kabel.
- Medzi pridržiavacim káblom a nabijacou stanicou nechajte aspon 2 m volného priestoru. Kabel v tejto Časti sa použiva na privedenie robota do dokovacej stanice.
- Zachovajte 30 cm volný priestor medzi pridržiavacim káblom a okrajom trávnika Obr. C2; Obr. C3.
- Upevnite istiace lano k zemi pomocou prilozenych hmozdiniek Obr. G5. Zadrzny kabel by mal byt' rovn'y mierne napnuty. Hmozdinky by mali byt' rozmiestnene kaźdych 1 m (toto rozmiestnienie sa moze upravit v zavislosti od tvaru travnika) Obr. C4. Nezakopavajte kabel hlbsie ako 2 cm, aby nedoslo k oslabeniu signalu.
- Umiestnite kabel tak, aby uhly boli väčsie ako 90^ Obr. C5. V takýchto oblastiach položte istiací kabel v miernych oblukoch, co robotovi vyrazne ufahci pohyb po kosnej ploche.
- Ak su na trávniku kvetinové záhony, rybníky alebo stromy, obklopte ich slučkami istiaceho kábla Obr. C4.
- Udržujte min. 30 cm vzdialenost' medzi istiacim káblom a okrajmi prekážok.
POZOR! Na ceste do slučky a zo slučky sa istiace káble nésmú navzajom križit Obr. C4.
V pracovnom priestore kosačky ponechajte uzky priestor. Zabezpečte, aby vzdialenost medzi paralelne prebiehajucimi istiacimi kablami bola váčsia ako 1 m.
POZOR! Uistite sa, ze dokovacia stanica je vo vnutri slukey označujucej oblast' kosenia. (vonku / vnutri) Obr.B2
4. INSTALÁCIA NABIJACEJ STANICE
Pripojenie napajania
- Zasunte sieovu zastrcku do zasuvky 110-240 V.
- Skontroljte stav kontrliek LED na nabijacej stanici Obr. B1:
- Trvala zelená kontrolka: priopojenie je vytvorené (robot sa nenabija alebo je plne nabity)
- Prerušované zelené svetlo: robot sa nabija.
- Prerusované Červené svetlo: najcastejsou chybou je "odpojenie istiaceho kábla".
Zhasnute svetlo: najcastejsou poruchou je "Ziadne napajanie 100-240 V" alebo "Ziadne pripojenie k zdroju napajania".
PREVÁDZKA / NASTAVENIA
Pré spustenie robota na kosenie
- Pri pvom spusteni robota umiestnite spotrebic na dokovaciu stanicu tak, aby nabijacie konektory na stanici figurovali. B3 neprišli do kontaktu s nabijacimi konektormi na kosiacom robotovi obr. A10.
- Pri pvom spusteni kosiaceho robota z aplikácie v Telefoné sa musí vykonatactualizácia firmveru. Sposob vykonania je opisaný nizsie v Časti Aktualizácia softveru.
- POZOR! Pocas prveho pripojenia musia byt'telefon a robot v dosahu siete Wi-fi.
PRED POUZITIM ROBOTA AKTUALIZUJTE FIRMVER.
Aktualizácia by sa mala vykonat takto.
- Umiestnite robota do slučky, ale mimo nabijacej stanice.
- Prepnite prepinač obr. A4 do polohy 1.
- Stlačte a podržte spínač Obr. D5
- Spustite aplikáciu, naskenujte kód QR
- Pripojte aplikáciu k robotovi
- Rozbalte nastavenia softveru stlačením ikony v pravom hornom rohu obrazovky.
- Vyberte możnost: Aktualizacja firmyvär.
- Potom postupujte pod'iaPokynov na obrazovke.
Po nainstalovani softvru je spotrebic pripraveny na prevadzku
POZOR!
- Na displeji sa zobrazuje, Či je robot v dosahu Wi-fi alebo Bluetooth
- Pripojenie k sieti je indikované blikajucou ikonou typu pripojenia. Po pripojeni ikona prestane blikat'.
- Robota możno spárovat'len s jejnym telefònom.
- Ak je potrebné pripojit'dalsí (rovnakýžaci robot), prvy robot sa musi z aplikácie odstránit. V aplikáci iOS aj z nastavení Bluetooth.
NASTAVENIE VYŠKY KOSENIA:
Pred prvym kosenim nastavte vysku kosenia na 60 mm a potom, kej cel'y travnik relativne rovny, nastavte pozadovanu vysku kosenia.
- Otočením gombíka obr. A2 v smere hodinovych ručiciek zvyšite vyšku kosenia.
- Otočením gombika obr. A2 doláva znižite vyšku kosenia.
Vysku kosenia mozno nastavit v rozsahu od 20 mm (MIN) do 60 mm MAX).
POZOR! Pohonný motor bubna Žaceho mechanizmu obr. A7 sa zapne približné 10 sekünd po opusteni základne, Čim sa spusti prevádzka.
ZAPNUTIE/VYPNUTIE
- Prepinač na obr. A4 nastavte do polohy "O", aby ste vypl napájanie.
- Prepina na obr. A4 nastavte do polohy "I", aby ste zapli napajanie.
AKTIVÁCIA ROBOTA A PROGRAMOVANIE PRACOVNEHO CASU V MANUALNOM REŽIME
- Stlacenim a podrzanim tlacidla napajania Obr. D5 spustite robota. Poznamka: pozaspustania robotom netraste, aby nedoslo k chybe pri spustani. Ak sa robot nespusti spravne (vsetky kontrlky svietia nepretrzite), restartujte ho.
- Heslo zadáte dvojitým stlačením tlačidla obr. D6, potom dvakrást stlačením tlačidla obr. D7 a raz stlačením tlačidla obr. D8 (heslo je naprogramované z vyroby).
- Naprogramujte Čas prevalzky (vrátane Času kosenia a Času nabijania):
- Stlačením obr. D6 nastavte prevádkový ācas. Jedna rozsvietená kontrolka znaměna 2 hodinny, maximálny prevádkový ācas je 8 hodín a 4 kontrolky na obr. D4. Stlačením tlacidla obr. D8 potvr'de a spustite robota.
POZOR! Po nastaveni prévázkového Času si robot nastavenie zapamăta a začne kosit kazdý de n v naprogramovanom Čase. Čas kosenia sa bude riadit podla zadanych nastaveni.
- Naprogramovany prevaldkovycas robota 2 až 8 hodin je cas kosenia vratane casu nabijania.
- Cas prevadzky a nabijania sa liš v závislosti od použitej batié.
Ak chcete zmenit' prevadzkovy cas, postupujte znova podla krokov 2-3. CASOVé PROGRAMOVANIE V AUTOMATICKOM REZIME, 7-DNOVY PLAN, JE K DISPOZICII PROSTREDNICTVOM NASTAVENI V APLIKÁCII
- Po nudzovom zastaveni sa robot musi njprv odkovat podla vysshie uvedeného kroku 2. Po odomknutí robota ho moźeme poslat spát do stanice stlacenim tlacidiel: Obr. D7 a potom potvrdime tlacidom Obr. D8, aby sa kosacka vrátila do nabijacej stanice.
- Stlačenim tlacidla nudzového zastavenia STOP sa z aplikácie vymaže cyklus manuálneho a automatickeho režimu, ak bol takto aktivovaný. Aby robot mohol po nudzovom zastavení opat začat pracovat, musi savratit do nabijacej stanice a znovu nestavit manuálny pracovný program. V pripline automatického rozvrhu vykonajte rovnaku Činnost' v rozvrhu aplikácia a potvrde jeho nastavenia.
POZOR! Naprogramovany Čas spustenia v automatickom plne by sa nemal považovat za veymi presný. Spotrebric sa moze spustit až niekolko minut po nastavenomČase.
- Aktivácia manuálneho režimu vymaže plán naprogramovany v aplikácii a naopak.
- Okraje v manu'alnom režime sa kosia automaticky každych niedkolko cyklov kosenia. Zahrna kosenie travy v blízkosti kábla, ktory vymedzuje pracovnú oblast' POZOR! Je potrebné dbat' na správné upevnenie kábla, aby nedoslo k jeho nahodnému prerezaniu.
- Kosiacci robot sa vrti do dokovacej stanice, ked' zariadenie zisti zaiciatok dazd'a.
- Ak robot počas práce narazí na prekázku, odrazí sa odnej aPokracuje v práci.
KONTROLKA STAVU NABIJANIA V NABIJACEJ STANICI:
Nepretrzite zelené svetlo - bateria je plne nabita.
Prušované zelené svetlo - nabljanie.
MIMO NABIJACEJ STANICE:
Nepretržite zelené svetlo - bateria > = 20%
Prerusané zelené svetlo - bateria < 20%
POZOR! Ak uroven nabitia baterie klesne pod 20% robot automaticky zastav pracu a vrti sa do nabjacej stanice.
SVETELNA CHYBA:
Nepretržite zelené svetlo - aktualizácia systému. Pripojte sa k applíkácii a vykonajteactualizáciu.
Prušovane zelené svetlo - prebieha aktualizácia systému.
Prerusovane cervené svetlo - chybove hlasenie 1 až 5, restartujte robota.
Nepretrzite Červé svétlo - chybové hlásenie 6 až 12, stlăcte "STOP" alebo "OK" na vymazanie.
INDIKÁTOR UPEVÑOVACIEHO KÁBLA:
Nepretržite zelené svetlo - správny signal
Nepretrzite cervené svetlo -ziadny signal
Obr. D4:
Prušované svetlo - robot zablokovaný.
Nepretrzite svetlo - robot odomknuty.
Svetlo 1 svieti na zeleno: 2 hodiny pracovného casu
Kontrolky 1 a 2 svietia na zeleno: 4 hodiny pracovného Času.
Kontrolky 1, 2 a 3 svietia na zeleno: 6 hodin prevadzky.
Kontrolky 1, 2, 3 a 4 svietia na zeleno: 8 hodin prevadzky.
SOFTVER NA OVLADANIE KOSIACEHO ROBOTA
IOS na stiahnutie:
https://apps.apple.com/cn/app/toua/id6449251720
Stiahnite si Android:
https://play.google.com/store/apps/details?id=com.toua.robot
Pokyny k programu si moźete stiahnut na adrese:
https://bit.ly/3QBB6Gm
NUDZOVÉ VYPNUTIE ROBOTA
Stlačením tlacidla "STOP" obr. A1 zastavte robota, stlačením a podržaním tlacidla napájania robota vypnite.
POHYB ROBOTA
Pod robotom sa nachadza zdvihacia rukovat' Obr. A10 na Jednoduché ovladanie jegnou rukou.
UDRZBA A SKLADOVANIE
Pred cistenim a udrzbou robota vzdy vypnite.
Pred Čistenīm a ïdržbou nabijacej stanice odpoje napájanie.
- Pri vymene nozov a cisteni spodnej casti robota vzdy pouzivajte hrube ochranné rukavice.
- Pravidelne kontrolutje dotiahnutie skrutiek a matic. Poškodené diely sa musia z bezpečnostnych dovodov opravit' alebo vymenit'.
- Pravidelne kontrolujte, cisa noze mozu vohe otacat.
POZOR! Ked otočite robota hore nohami, položte ho na trávnik alebo na mäkký povrch, aby ste neposkodili alebo neposkriabali kryt.
CISTENIE
VAROVANIE! Pred začatím Čistenia vypnite napájanie pomocou vypínača obr. A4.
Prednucastrobita umyte nizkotlakovym cistiacim prostriedkom amakkou kefou alebo handriickou.
- Na odstraneniePokosenej travy a necistot z nozov, kolies a inych casti na spodnej strane robota pouzite tvrdu kefu.
- Pravidelne kontrolujte, Č na kolesách nie je blato aleboPokosnétrava,a cistite ich kefou.
POZOR! Pravidelne odstrańjte zvyśky rastlin zo spodnej strany robota, aby ste zabranychi zniżeniu produktivity.
VYMENA CEPELE
VAROVANIE! Najprv vypnite hlavný vypínač a nasad'te si ochranné rukavice.
VAROVANIE! Používajte len uvedené originé nože schvaléné výrobcom.
Vsetky tri noze a ich skrutky sa musia vymenit v ramci jegnej vemyny Obr. A6.
- Skrutky by sa mali odskrutkovat' a utiahnut' skrutkovačom.
- Skontrolujte, cisanové noze mozu volne otáčat.
RIESENIE PROBLEMOV
Nasledujuca tabulka poskytuje navod na diagnostiku problemov.
Ak je to mozné, opravte zariadenie sami. Ak sa problem nedá odstránit, obratte sa na autorizovaného predajcu alebo servisiné stredisko.
VAROVANIE! Je potrebné prijat ochranné opatrenia.
| Problém | Možné príčiny | Riesenia |
| Na nabijacej stanici bliká Červené svetlo | Prerušenie istiaceho kábla | Najdite chybný 使用kábla a opravit ho |
| Robot má problуmy s priopojením k nabijacej stanici | Nabijacia stanica nie je správné nainstalovaná | Pozrte si Čast" Priprava na prácu". |
| Upevřovací kábel nie je správné umiestněv | ||
| Žiadny signál zo zabezpečovacieho kábla | Žiadne napájanie | Skontrolujte zdroj napájania |
| Uvolnovací kábel bol priopojený opačne | Prehodenie konektorov "+" a "-" | |
| K nabijacej stanici nie je pripojený obmedzovác kábel | Skontrolujte, Č je upevřovací kábel správné priopojené k nabijacej stanici | |
| Prerušenie istiaceho kábla | Skontrolujte celú cestu, ze kábel nebol prerušený | |
| Zaistovacie laná sa križuju na ceste do a zo slučky | Skontrolujte, Č je upevřovací kábel správné nainstalovaný | |
| Robot prekračuje hranice | Uvolnovací kábel bol priopojený opačne | Prehodenie konektorov "+" a "-" |
| Robot vibruje alebo vydáva nezvyčajné zvuky | Poškodená alebo chýbajúca Čepeł | Kontrola a oprava upevřovacích skrutiek Čepele |
| Kotúč noža je uvoßhený | ||
| Výmena Čepele |
| Kód chyby | Opis | Riesenie |
| E01 Obr. F1 | Chyba initializacja - gyroskopicky senzor | Umiestnite robota na rovný povrch a rešartujte ho. |
| E02 Obr. F2 | Porucha snímača zdvihania alebo snímača kolizia | Nastavte koliznu tyc a torzné koleso na prednej Časti kosacky, skontrlujte, Či nie su zablokované; umiestnite robota na rovný povrch a znovu ho našartujte. |
| E03 Obr. F3 | Chyba initializacja motora kosenia | Umiestnite robota na rovný povrch a rešartujte ho. Ak problém pretrváva,kontaktujte zákaznicky servis. |
| E04 Obr. F4 | Chyba pripojenia napájania | |
| E05 Obr. F5 | Nesprávné otáčky motora kosenia | |
| E06 Obr. F6 | Upozornenie na náklon | Umiestnite robota na rovný povrch. Stlăcenim tlacidla STOP alebo OK zrušite alarm. |
| E07 Obr. F7 | Varovanie pred vytahom | Umiestnite robota na rovný povrch. Stlăcenim tlacidla STOP alebo OK zrušite alarm. |
| E08 Obr. F8 | Chyba kanála ADC | Umiestnite robota na rovný povrch a rešartujte ho. Ak problém pretrváva,kontaktujte zákaznicky servis. |
| E09 Obr. F9 | Nesprávný signál | Pozri vyssie v tabulke: problem - ziadny signál z obmedzovacieho kábla. Skontrlujte postupné vsetky body a potom robota postavte na rovný povrch. Stlăcenim tlacidla STOP alebo OK zrušte alarm. Restartujte robota. Ak problém pretrváva,kontaktujte zákaznicky servis. |
| E010 Obr. F10 | Robot jam | Umiestnite robota na rovný povrch. Stlăcenim tlacidla STOP alebo OK zrušite alarm. Restartujte robota. Ak problém pretrváva,kontaktujte zákaznicky servis. |
| E011 Obr. F11 | Nesprávná rychlost'lavého krokového motora | Rešartujte robota. Ak problem pretrváva,kontaktujte zákaznicky servis. |
| E012 Obr. F12 | Nesprávná rychlost'prava krokový motor |
SADA OBSAHUJE:
- Robot na kosenie 1 ks.
Dokovacia a nabijacia stanica 1 ks. - Napajaci zdroj a predlžovací kabel 1 ks.
Kabel na vymedzenie pracovného priestoru 100m - Upevnovacie hmozdinky na kable 100 ks.
- Upevnovacie hmozdinky dokovacej stanice 6 ks.
- Rezné Čepele 3 ks.
Kablove konektory 2ks. - Sesthranny k'uc 1 ks.
SPECIFKACIE
| Robot na kosenie 04-621 | |
| Parameter | Hodnota |
| Napájacie napătie: | 18 V DC |
| Maximálny menovitý vykon motora kosenia: | 50 W |
| Maximálny menovitý vykon motora s vlastnám yohonom: | 20 W |
| Stupeř ochrany IP pre nabijaciu stanicu | IPX4 |
| Stupeř ochrany IP pre robota | IPX5 |
| Stupeř ochrany IP pre nabijací adaptér | IP 65 |
| Trieda ochrany robota | III |
| Trieda ochrany nabijacej stanice | II |
| Šírka kosenia: | 180 mm |
| Nastavenie výšky rezu v rozsahu | 20 mm - 60 mm |
| Rotačná rychlost' | 3100 otáčok za minútu |
| Hmotnost' | 10,2 kg |
| Rok výroby | 2024 |
UDAJE O HLUKU A VIBRÁCIÁCH
| Hladina akustického tlaku | LpA = 56dB (A) K=3dB(A) |
| Nameraná hladina akustického výkonu | LwA = 67dB (A) K=3dB(A) |
Informação o hluku a vibraciách
Hladina hluku vydávaného zariadenim je opísana: hladinou vydávaného akustického tlaku LpA a hladinou akustického vykonu LwA, kde K oznacuje neistotu merania. Vibracie vyzarované zariadenim su opisane zrychlenim vibraci a_h , kde K oznacuje neistotu merania.
Hodnoty namerané v toto navode na obsluhu, t. j. uroven Vyzarovaného akustického tlaku LpA, hladina akustického vykonu Lw a zrychlenie vibracii a h, bolnamerané v sulade s normou EN 62841- 1:2015+A11. Uvedená uroven vibracii a sa moze pouzit na porovnanie zariadeni a na predezné hodnotenie vystavenia vibraciám.
Uvedená uroven vibraci je reprentativna len pre základné applicatie zariadenia. Ak sa zariadenie použiva na iné applicatie alebo s inymi pracovnymi nastrojmi, uroven vibraci sa moze lišit. Nedostatočné alebo zriedkava udžba zariadenia sposobuje vyšsie urovne vibraci. Vyšsie uvedené prćiny mozu zvyšit vystavenie vibraciám počas celejŽivotnosti.
Na presné urçenie vystavenia vibraciám sa musia zohl'adnit' obdobia zapnutia a vypnutia zariadenia, okrem obdobi, ked' sa použiva na prevádku. Celková expoźicia vibraciám moze byt' ovel'a nizsia, ak sa presne odhadnu vsetky faktory.
Na ochranu obshluhy pred vibraciami pouzivajte dalsie bezpecnostne opatrenia, napr. pravidelnu udrzbu zariadenia a pracovnych nastrojov, spravne teplotné podmienky pre ruky a spravnu organizaciu prace.
UDAJE O HLUKU A VIBRÁCIÁCH
OCHRANA ZIVOTNEHO PROSTREDA
Elektrické zariadenia by sa nemali likvidovat spolu s domovym odpa Likvidujte ho v príslušnych zariadieniach. Informáce o likvidacii získa predajcu vyrobku aleba no miestnych uradoch. Odpad z elektrických elektronicích zariadieni (OEEZ) obshajuć latky, ktoré nie suneutral pre prirodné prostredie. Nerecyklovany OEEZ predstavuje potenciál nebepezćenstvo preživotné prostredie a ludské zdravie.
"Grupa Topex Spóka z ograniczona odpwodzialnościa" Spóka komandytowa so sidlom vo Varšave, ul. Pograniczna 2/4 (dalej len "Skupina Topex") oznamuje, ze věskey autorské práva k obsahu tohto navodu na použitie (dalej len "navod"), vrátane, ale nielen, jeho texu, zvezojnenych fotografii, schem, nákovros, akoj ia jeho kompozickia, patria vylucne Skupine Topex a podliehajú právynej ochrne v súlade so zákonom zo 4. februará 1994 o autorskom práve a právach sūvisiacich s autorským právom (t. j. Zbierka zákönov U. 2006 6. 90 položka 631 v znéni neskörskich predisipov). Kopřovanie, spracovánanie, zvezojnovanie, upravovanie na komerčné učely celého manuálu, ako ia jeho Jednotlivych prkvov bez pisomného sūhluspo slopćností Topex Topoj group je risné zakázané a moze mat za nasledok občijskoprávnu a trestnoprávnu zodpovednost'.
ES vyhlasenie o zhode
Vyrobca: Spolocnost: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsha
Vyrobok: Robot na kosenie E+
Model: 04-621
Obchodny nazov: NEO TOOLS
Serieové cislo: 00001 ÷ 99999
Toto vyhlasenie o zhode sa vydava na vyhradnu zodpovednost' vyrobcu.
Opisany vyrobok je v sulade s tymito dokumentmi:
Smernica o strojovych zariadeniach 2006/42/ES
Smernica RED 2014/53/EU
Sernica RoHS 2011/65/EU v zneni smernice 2015/863/EU
A spiña poziadavky noriem:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Toto vyhlasenie sa vztahuje len na strojové zariadenie v podobe, v akej bolo uvedene na thr, a nezahnfna komponenty pridané koncovym pouzivatelem alebo nim nasledne vykonané cinnosti. Meno a adresa osoby so sidlom v EU, ktorá je oprávnéva vypracovat technicku dokumentáci:
Podpisané v mene:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Varsha
Pawel Kowalski
Pracovnik pre kvalitu spolocnosti TOPEX GROUP
Varsha, 2023-09-11
Vyhlasenie o zhode EU
Vyrobca: Spolobnost: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Var'sava
Vyrobok: Nabijacia stanica
Model: K145455
Obchodny názov: NEO TOOLS
Seriove cislo: 00001 ÷ 99999
Toto vyhlasenie o zhode sa vydava na vyhradnu zodpovednost' vyrobu. Opisany vyrobok je v sulade s tymito dokumentmi:
Sernica RED 2014/53/EU
Sernica RoHS 2011/65/EU v znení smernice 2015/863/EU
A splna poziadavky noriem:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Toto vyhlasenie sa vzt'ahuje vylučne na stroj, ktorý bol uvedeny do trh a nezahína componenty pridané koncovým použírateřom alebo jeho následné aktivity.
Meno a adresa obyvatela EU, ktory je opravneny pripravit technicku dokumentaci:
Podpisane v mene:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
Pracovnik pre kvalitu spolocnosti TOPEX GROUP
Varsha, 2023-11-09
SL
PREVOD (UPORABNIISKI) PRIROCNIK ROBOT ZA KOSNJO 04-621
POZOR! PRED UPORABO ELEKTRICNEGA ORODJA NATANCNO PREBERITE TA NAVODILA ZA UPORABO IN JIH SHRANITE ZAKASNEJSO UPORABO.
PODROBNA VARNOSTNA PRAVILA
VARNOSTNA NAVODILA ZA ROBOTE ZA KOSNJO
Varnost pri praktici ni uporabi robota za kosnjo
PRIPOROCILA
- Pozorno preberite navodila za uporabo. Seznanite se z nadzornimi sistemi in pravilnim delovanjem naprave.
Ne dovolite, da napravo uporabljajo otroci ali osebe, ki niso prebraile navodil za uporabo. Nacionalni predpisi lahko dolocajo najnizjo starost uporabnika.
Robota ne uporabljaje, ce so v blizini prisote druge osebe, zlasti otroci aliŽivali.
Ne pozabite, da je upravljavec ali uporabnik odgovoren za nesrece ali nevarnosti za druge ljudi ali okolje.
PRIPRAVA
Pred košnjo vsakič preverite, ali vsi deli robota pravilno delujejo
- Za njobljse rezultate je priporocljivo kositi v vremenu brez deza. Pri kosnji v dezu se lahko trava prilepi na robota, ki lahko zdrsne.
- NE kosite v slabih vremenskih razmerah, npr. med močnim dežjem, nevihto ali sneženjem.
- Obcasno preglejte pokošeno območje in odstranite vse kamne, ostanke,Žice, kosti in druge ovire. Omejeno jamstvo ne krije škode, ki jo povzroćijo predmeti, ki ostanejo na trati.
- Da bi se izognili poskodbam, ne kosite na razdalji manj kot 1 m od skropilnih glav.
POZOR! Robot in škropilnice se NE smejo vklopiti hkrati.
Robota je treba sprogramirati tak, da bo deloval ob drugem casu kot skropilnice.
NIKOLI ne dovolite otrokom, da bi se dotikali napajalnika, polnilne postaje, zlasti kontaktov, rezil, prostora za baterije ali delov, kjer so vrzeli, kot so kolesa.
OPERACija
- Pazite na vrteče se lopatie! Pod vrteča se rezila NE polagajte rok ali nog.
- Med košnjo pazite na predmete, ki so raztreseni po tratil! Ko je robot vklopljen, se držite na varni razdalji.
- Naprave ne pušćajte brez nadzora, Če je znano, da so v blizini Živali, otroci ali mimoidovi.
- Ohranite varen položaj. Vzdrujte ravnotežje in stabilen položaj na naklonih. Med upravljanjem robota ali njegovih perifernih naprav je dovoljeno hoditi, vendar ne teci.
- Preberite navodila o tem, kdaj, kje in kako preveriti robota in njegov periferne naprave, kable in podaljske glede poskodb ali obrabe ter popraviti robota. Samostojno spreminjanje, popravilo ni dovoljeno -s tem tvegate izgubo garancije.
- Poškodovanega napajalnega kabla ne prikrjucjte ali se ga dotikajte, dokler ga ne odklopite iz napajanja, saj obstaja nevarnost stika s komponentami pod napetostjo.
- Robota in/ali periferno opremo prikljucite samo na napajalne tokokroge, zašcitene z odklopnikom preostalega toka z izklopnim tokom največ 30 mA.
- Ce robot odda nenavaden zvok ali opazite nenavadne vibracije ali se sproži alarm, takoj pritsinite gumb STOP.
- PREPOVEDANO SE JE dotikati nevarinih gibljivih delov, preden izklopite napajanje robota.
- Prepovedano se je dotikati nevarnih delov, dokler se popolnama neustavijo.
Pri rokovanju z robotom vedno nosite trpezn no obutev in dolge hlace. - Prekinite napajanzelektricnoenergio:Pred zaklepanjem robota.
Pred testiranjem, ciiscenjem ali vzdrrzevanjem.
PIKTOGRAMI IN OPOZORILA
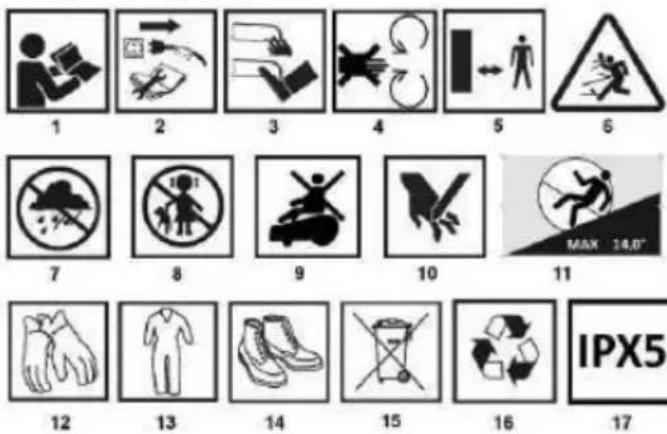
- Preberite navodila za uporabo ter upostevajte opozorila in varnostne pogoje!
- Pred cischenjem ali vzdvrzechvanjem odklopite napajanje
- Ne polagajte rok ali nog pod varovalo mehanizma za kosnoj.
- Vrteci se deli - moznost poskodb
- Bodite v varni razdalji od robota za kosnjo
- Pazite na moznost poskodb zaradi ulith predmetov
- Zašcita preddezjem
- Hranite zunaj dosega otrok.
- Ne vozite se na robotu
- Možna izguba prstov, bodite previdni
- Največji naklon tal 14°/25%.
- Zašcitite roke z delovnimi rokavicami
- Nosite zašcitna oblačila
- Nosite zašcitno obutev
- Ne odlagajte skupaj z gospodinjskimi opadki
- Selektivno zbiranje odpadkov
- Stopnja zaščite
POZOR! To napravo lahko uporabljajo otroci, starejsi od 8 let, in osebe z omejenimi telesnimi in duševnimi sposobnostmi ter nezadostnim znanjem ali izkusnjami, ce so pod nadzorom ali ustrezno poučeni o varni uporabi naprave, takao da se zavedajo s tem povezanih tveganj. Otroci se s tem aparatom ne smejo igrati. Otroci naprave ne smejo Čistiti ali opravljiati vždrževalnih del na nzej brez nadzora.
OPIS GRAFICNIH ELEMENTOV
Naslednje stevilcenje se nanaša na sestavne dele naprave prikazano na graficnih straneh tega priročnika.
| Oznaka Slika A | Opis | |
| 1 | Ustavitev v sili | |
| 2 | Nastavitev višine košnje | |
| 3 | Nadzorna plošča kosilnice | |
| 4 | Stikalo za napajanke kosilnice | |
| 5 | Pogonska kolesa | |
| 6 | Rezila za rezanje | |
| 7 | Boben rezalnegа mehanizma | |
| 8 | Vrtljiva kolesa | |
| 9 | Ročaj za prenašanje | |
| 10 | Priključki za polnjenje | |
| 11 | Pokrov predala za baterije | |
| Oznaka Slika B | Opis | |
| 1 | Nadzorna plošča priklopne postaje | |
| 2 | Odprtine za pritrditev priklopne postaje | |
| 3 | Priključki za polnjenje | |
| 4 | Priključna postaja | |
| 5 | Zaščita priklopne postaje | |
| 6 | Priključki za napajalni kabel za označevanje delovnega območja | |
| 7 | Odprtine za kable za označevanje delovnega območja in napajanja | |
| 8 | Elektricna vtichica priklopne postaje | |
| 9 | Oznaka za pravlino napeljavo kablov | |
| Oznaka Slika D | Opis | |
| 1 | Indikator stanja polnjenia | |
| 2 | Indikator napake signala | |
| 3 | Indikator omejevalnega kabla | |
| 4 | Delovne ure / sporošilo o napaki, luči 1-4 | |
| 5 | Gumb za vklop | |
| 6 | Stikalo za napajanje | |
| 7 | Gumb za priklapljanje | |
| 8 | Gumb "Potradi" | |
| Oznaka Slika H | Opis | |
| 1 | Vijaki | |
| 2 | Pokrov predala za baterije s transportnim ročajem | |
| 3 | Predal za baterije | |
| 4 | Vtičnica za baterijo na Pokrovu komore | |
| 5 | Baterija za polnjenje (ni vklučena) | |
| Oznaka Slika I | Opis | |
| 1 | Travnik | |
| 2 | Stena | |
| 3 | Priključna postaja | |
| 4 | Oddaljenost postaje od stene | |
| 5 | Začetni del Črte, ki razmejuje območje košnje | |
| 6 | Dolžina odseka | |
| Oznaka Slika J | Opis | |
| 1a | Kabel za omejitev območja košnje Začetak | |
| 1b | Kabel za omejitev območja košnje Konec | |
| 2 | Oskrbovalna linija: | |
| 3 | Priključna postaja | |
- Med graficnim prikazom in dejanskim izdelkom so lahko razlike
PRIPRAVA NA DELO
NAMESTITEV BATERIJE
- Robota za kosnjo obrnite takto, da bo dostopen spodnj del robota.
- Na mestu stikala sllka A4 in transportnegra rocaja sllka A9 jePokrov prostora za baterije slya H2, ki je pritjen s 4 vijaki, označenimi s pusćicami slya H1.
Nato odvijte vijake, oznaene spušićami. -
Previdno odstranitePokrov predala Slika H2, da ne pretrgate ali odklopite zic stikala Slika A4 (pritjen je naPokrov predala za baterje).
Nato obrnitePokrov, na spodnji straniPokrova je pritrjena vticnica za baterijo Silka H4.
Vvticnico vstavite baterjo iz serije ENERGY+. -
ObmitePokrov spritjeno batenjo in ga vstavite v predalcek na sliki H3.
- Privijte vijake, ki pritrujejoPokrov. Obmite robota z dnom navzdol, naprava je pripravlijena.
DELOVNO OKOLJE ROBOTA ZAKOSNJO
Prepricajte se, da so na območju, na katerem dela robot, izpolnjeni naslednji pogoji:
- Visina trave ne presega 60~mm
- POZOR! Če je trava daljša od 60 mm, jo najprej pokosite z ročno kosilnico.
V njem ni kamnov, kosov lesa, zic, kablov pod napetostjo ali drugih tujih predmetov.
Kraj kosnje je raven in ravninski, brez jarkov in jarkov, naklon je manji si od 25% (14°) Slika C1 - Za namestitev so potrebna naslednja orodja:
- gumijasto kladivo (za zabijanje Čepov v tla pri polaganju zadrževalnega kabla)
V kompletu je vklučen šestiložni ključ (za pritrditev polnilne postaje).
Klese (za rezanje kabla, ki omejue delovno obmoce)
1.BASE STATION NAMESTITEV
Izberite primerno lokacijo
Polnilno postajo je treba postaviti na naslednjo lokacijo Slika C3:
Razmeroma raven in polozen del trate.
- Blizu roba trate.
V blizini stenske vticnice.
- Podajševalni kabel dolžine 10 m in napajalnik postavite na senčno, hladno in suho mesto.
- Na razdalji majmanj 2 m od polnilne postaje ne sme biti ovir.
- Priporočljivo je, da je polnilna postaja nameščena na suhem in zašitenem mestu.
- Napajanje mora biti 30cm nad tlemi.
2. PRITRDITEV POLNILNE POSTAJE
Polnilno postajo pritrdite na tla s 6 pritdirnilimi vijaki (G1) (s sestilo G6).
POZOR! NE stojte ali hodite po plošći polnilne postaje.
POZOR! V plosco polnilne postaje NE delaje nowl lukenj. Postajo je treba priviti na tla z uporabo obstojecih lukenj.
3. POLAGANJE ZADRZEVALNEGA KABLA
Z omejitvenim kabom se razmejupe delovno območje in vodi robota nazaj do polnilne postaje.
POZOR! Ce tudi vaš sosed uporablja robotsko kosilnico, nj bo razdaljam ed omejitvenimi kabli obeh robotov vsaj 1 m.
NACRTOVANJE POLOZAJA ZADRZEVALNEGA KABLA
Preden položite omejtveni kabel, se sprehodite po doloceni meji in odstranite vse nepotrebine predmete, kot so kamni.
POZOR! Dolžina omejitvenega kabla ne sme presegati 200 metrov.
OPOZORILO! Robot ne sme voziti po gramozu ali podobnih materialih, ki bi lahko poskodovali rezila.
POLAGANJE ZADRZEVALNEGA KABLA SLIKA C
Pri polaganju zadrzevalnega klaba okoli delovnega območja in ovir upostevajte spodnjavodila. Za pravilno položitev omejitvenega klaba uporabite merilnik, ki je priložen kompletu.
POZOR! Kabel za zadrževanje se napaja z zelo nizko napetostjo in je varen za ljudi in hišneljubjenče.
POZOR! Začnite s prikrjuckom "-" na zadnji strani polnilne postaje Slika B6, potegnite ga pod postajo (in pustite 10 cm rezerve) in položite ka okoli trate v smeri urinega kazalca v nasprotni smeri in konçajte s prikrjuckom "+" na zadnji strani polnilne postaje (pustite 10 cm rezerve) Prepričajte se, da se kabel pri prikrjuckih "+" in "-" dotika kovine Slika B6 ne pozabite odrezati odvečnega omejitvenega kabla.
- Med omejitvenim kablon in polnilno postajo pustite vsaj 2 m praznega prostora. Kabel v tem delu se uporablja za pripeljavo robota do priključne postaje.
- Med zadrzevalnim kablom in robom trate naj bo 30 cm prostora Slika C2; Slika C3.
- Omejevalni kabel pritrdite na tla s prilozenimi Čepi Sika G5. Omejevalni kabel mora biti raven in rahlo zategjen. Koliçine morajo biti razporejene na vsakih 1 m (to se lahko spremeni glede na oblikote) Silka C4. Kabla ne zakopljite globljekot 2 cm, da ne oslabite signala.
Kabel razporedite takto, da so koti večji od 90^ Silka C5. Na takšnih območijh položite omejitveni kabel v blagih krivuljah, kar bo robotu precej olajšalo gibanje po območju, ki ga je trebaPokositi. -
Ce so na trati cvetliche gredice, ribniki ali drevesa, jih obkrozite z zankami zadrzevalnegabakra Slika C4.
-
Ohranite min. 30 cm razdalje med zadrževalnim kablom in robovi ovir.
POZOR! Na poti v zanko in iz nje se omejitvena kabla ne smeta križati Slika C4. - Na delovnem območju kosilnice pustite ozek prostor. Zagotovite, da je razdalja med vzporedno potekajocimi omejevalnimi kabli vecja od 1 m.
POZOR! Prepričajte se, da je priklopna postaja znotraj zanke, ki oznáčuje območje kosnje. (zunaj / znotraj) Silka B2
4. NAMESTITEV POLNILNE POSTAJE
Priklucite napajanje
- Vtič vstavite v stensko vticnico 110-240 V.
- Preverite stanje luči LED na polnilini postaji Slika B1:
- Trajna zelena luc: povezava je vzpostavljena (robot se ne polni ali je popolnama napoljen)
- Prekinjena zelena luč: robot se polni.
- Prekinjena rdeca luc: najpogostejsa napaka je "odklop zadrzevalnega kabla".
Luč jeugasnjena: najpogostejsa napaka je "Ni napajanja 100-240 V" ali "Ni povezave z virom napajanja".
DELOVANJE / NASTAVITVE
Prvi zagon robota za kosnjo
- Ob prvem zagonu robota postavite napravo na priklopno postajo takto, da sta polnilna prikljucka na postaji fig. B3 ne pridejo v stik s polnilimi prikljucki na robotu za kosnio obr. A10.
- Ob prvm zagonu robota za kosno iz telefonske aplikacije je treba posodobiti vdelano programsko opremo. Naclin izvedbe je opisan v nadaljevanju v poglavju Posodobitev programske opreme.
- POZOR! Med prvo povezavo morata biti Telefon in robot v doseguomrežja Wi-fi.
POSODOBITEV VDELANE PROGRAMSKE OPREME PRED UPORABO ROBOTA.
Posodobitev je treba izvesti na naslednji način.
- Postavite robota v zanko, vendar zunaj polnilne postaje.
- Preklopite stikalo na sliki A4 v položaj 1.
- Pritisnite in drzite stikalo Slika D5
- Zagon aplikacije, skeniranje kode QR
- Povežite aplikacijo z robotom
- Razsirite nastavitve programske opreme s pritiskom na ikono v zgornjem desnem kotuzaslona.
- Izberite moznost: Posodobitev vdelane programske opreme.
- Nato sledite navodilom na zaslonu.
Ko je programska oprema namescena, je naprava priapravljena za delovanje.
POZOR!
- Na zaslonu je prikazano, ali je robot v območju Wi-fi ali Bluetooth.
- Povezava z omrežjem je označena z utripajoko ikono za vrsto povezave. Po vzpostavitvi povezave ikona preneha utripati.
- Robota lahko povežete samo z enam Telefonom.
- Ce je treba prikjučiti drugega (istega robota za košnjo), je treba prvega odstraniti iz aplikacije. V aplikaciji iOS tudi iz nastavitev Bluetooth.
NASTAVITEV VIŠINE KOSNJE:
Pred prvo ko snjo nastavite vi sino ko sne na 60 mm in jo nato spremenite na zeleno vi sino, ko je celotna trata razmeroma ravna.
- Če Želite povečati visino kosnje, obrnite gumb na sliki A2 v smeri urinega kazalca.
- Če Želite zmanjatsi visino kosnje, obrite gumb na sliki A2 v levo.
- Visino kosnje lahko nastavite od 20 mm (MIN) do 60 mm (MAX).
POZOR! Pogonski motor bobna mehanizma za košnjo Slika A7 se vklopi priblžno 10 sekund po tem, ko zapusti podlago in začne delovati.
VKLOP/IZKLOP
- Stikalo na sliki A4 nastavite v polozaj "O", da izklopite napajanje.
- Stikalo na sliki A4 nastavite v položaj "I", da vklopi napajanje.
AKTIVIRANJE ROBOTA IN PROGRAMIRANJE DELOVNEGA CASAVROCNEM NACINU
- Pritisnite in držite gumb za vklop Slika D5, da zaženate robota. Opomba: med zagonom robota ne tresite, da se izognete napaki pri zagonu. Če se robot ne zažene pravilno (vse luči neprekinjeno svetijo), ga ponovno zaženite.
-
Vnesite geslo takto, da dvakrat pritisnete gumb Slika D6, nato dvakrat gumb Silka D7 in enkrat gumb Silka D8 (gesb je programirano v tovarni).
-
Programiranje casa delovanja (vkljucno s cosom kosnje in casom poljenja):
-
Pritisnite sliko D6, da nastavite cas delovanja. Ena prižgana lučka pomeni 2 uri, najdajši cas delovanja je 8 ur in 4 lučke na sliki D4. Za potrdevt in zagon robota pritsinite gumb na sliki D8.
POZOR! Ko je ācas delovanja nastavljen, si robot zapomni nastavitve in začne kositi vsak dan ob programiranem Času. Ģas košnje bo potekal v skladu z vnesenimi nastavitvami.
- Programirani cas delovanja robota od 2 do 8 ur je cas kosnje, vklučno s casom poljenja.
- Cas delovanja in polnjenja se razlikuje glede na uporabljeno baterijo.
Čeželite spremeniti cas delovanja, ponovno izvedite korake 2-3.
CASOVNO PROGRAMIRANJE V SAMODEJNEM NACINU, 7-DNEVNI URNIK, JE NA VOLJO PREK NASTAVITEV V APLIKACIJI.
- Po zaustavitvi v sili je treba robota najprej odkleniti po zgornjem koraku 2. Ko je robot odklenjen, ga lahko s pritiskom na gumbe posljemo nazaj na postajo: Slika D7, nato pa potrdite z gumbom Slika D8, da vrnete kosilnico na polnilno postajo.
- Spritiskom na gumb za ustavitev v sili STOP iz applikacione izbrisete cikel rocnega in samodejnegaa nacin delovanja, ce je bil aktiviran na ta nacin. Da bi robot po zaustavitvi v sili ponovno zael delovati, ga je treba vrniti na polnilno postajo in ponovno nastaviti urnik rocnega dela. V primeru samodejnegaa urnika izvedite enako dejanje v urniku aplicacione in potrdite njegove nastavitve.
POZOR! Programiranega Časa zagona v samodejmem urniku ne smete obravnativ kot zelo natančega. Naprava se lahko zažene do nekaj minut po nastavljenem Času.
Z activiranjem rocnega naana izbnise utnik, programiran v aplicaciji, in obratno.
V rocnem naclinu se obrezovanje robov opravi samodejno vsakih nekaj ciklov kosnej. Gre za kosnjo trave blizu kabla, ki doloca delovno obmoce. POZOR! Paziti je treba, da je kabel pravilno pritrjen, da ne bi bil izpostavljen nakljucnemu rezanju.
- Ko naprava zazna začetek dežja, se robot za košnjop vrne na priklopno postajo.
- Če robot med delom naleti na oviro, se od nje odbije in nadalujpe delo.
LUCKA STANJA POLNJENJA V POLNILNI POSTAJI:
Neprekinjena zelena luc - baterija je popolnoma napolnjena.
Prekinjena zelena luc - poljenje.
ZUNAJ POLNILNE POSTAJE:
Neprekinjena zelena luc - baterija >=20%
Prekinjena zelena luč - baterija <20 %
POZOR! Robot samodejno prekine delo in se vrne na polnilno postajo, ce raven napoljenosti baterije pade pod 20% .
LUC ZA NAPAKE:
Neprekinjena zelena luc - posodobite system. Povežite se z aplikacijo, da izvedete posodobitev.
Prekinjena zelena luc - poteka posodabljanje systemd.
Prekinjena rdeca luc - sporocilo o napaki 1 do 5, ponovno zaenite robota.
Neprekinjena rdeca luc - sporocilo o napaki od 6 do 12, pritisnite "STOP" ali "OK" za izbris.
INDIKATOR OMEJITVENEGA KABLA:
Neprekinjena zelena luč - signal je pravilen
Neprekinjena rdeca luc - ni signala
Kontrole Slika D4:
Prekinjena svetloba - blokiran robot.
Neprekinjena svetloba - robot je odklenjen.
Lucek a 1 sveti zeleno: 2 ur delovnega casa.
Luci 1 in 2 svetijo zeleno: Cas delovanja 4 ure.
Lücke 1, 2 in 3 svetijo zeleno: Čas delovanja je 6 ur.
Lucek 1,2,3 in 4 svetijo zeleno: Cas delovanja 8 ur.
PROGRAMSKA OPREMA ZA KRMILJENJE ROBOTA ZA KOSNJO
Prenos IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Prenos za Android:
https://play.google.com/store/apps/details?id=com.touarobot
Navodila za program laho kprenesete s spltene strani: https://bit.ly/3QBB6Gm
ZAUSTAVITEV ROBOTA V SILI
Pritisnite gumb "STOP" Slika A1, da ustavite robota, pritisnite in drzite gumb za vklop, da izklopite robota.
PREMIKANJE ROBOTA
Pod robotom je namescen dvizni rocaj Slika A10 za enostavno upravljanje z eno roko.
VZDRZEVANJE IN SKLADIŠÇENJE
Pred ciiscenjem in vzdrrzevanjem robota vedno izklopite.
- Pred cisicenjem in vzdrrzevanjem polnilne postaje odklopite napajanje.
- Pri menjavi rezil in cisicenju spodnje strani robota vedno nosite debele zašcitne rokavice.
- Redno preverjale zategnjenost vijakov in matic. Poškodovane dele je treba zaradi varnosti popraviti ali zamenjati.
Redno preverjajte, ali se rezila lahko prosto vrtijo.
POZOR! Ko robota obrnete na glavo, ga položite na trato ali mehko povrsino, da ne poskodujete ali opraskatePokrova.
CISCENJE
OPOZORILO! Preden začnete s cisćenjem, izklopite napajanje s stikalom Slika A4.
- Sprednji del robota operite z nizkotlačnim Čistilom in mehko krtacovi ali krpo.
- S trdo krtaco odstranite pokošeno travno in ostanke z rezil, koles in drugih delov na spodnji strani robota.
- Redno preverjaje, ali na kolesih ni blata ali pokošene trave, in jih očistite s krtaco.
POZOR! Redno odstranjujte rastlinske ostanke s spodnje strani robota, da se izognete zmanjsanju produktivnosti.
ZAMENJAVA REZILA
OPOZORILO! Najprej izklopite glavno stikalo in si nadenite zašcitne rokavice.
OPOZORILO! Uporabljate samoznačena originalna rezila, ki jih je odobril proizvajalec.
Vse tri lopatie in njihove vijake je treba zamenjati v enem postopku zamenjave Sllka A6.
Vijake je treba odviti in zategniti z izvijaem.
- Preverite, ali se nova rezila lahko prosto vrtijo.
RESEVANJE PROBLEMOV
Spodnja tabela vsebuje navodila za lazej diagnosticiranje težav.
Ce je mogoche, napravo popravite sami. Ce tezave ni mogoche odpraviti, se obrnite na pooblaschenega prodajalca ali servisni center.
OPOZORILO! Sprejeti je treba zašcitne ukrepe.
| Problem | Možni vzroki | Resitve |
| Na polnilni postaji utripa rdeča lučka | Prekinitev zadrževalnega kabla | Poišcite okvarjeni del kabla in ga popravite. |
| Robot imatěžave pri príklópu na polnilno postajo | Polnilna postaja ni pravlino nameščena | Glejte poglavje "Priprava na delo". |
| Zašćitni kabel ni pravlino nameščen | ||
| Nobenega signala iz zadrževalnega kabla | Ni napajanja | Preverite vir napajanja |
| Omejevalni kabel je bil príključen v obratni smeri | Zamenjaje príključka "+" in "-" | |
| Omejevalni kabel ni príključen na polnilno postajo | Preverite, ali je pritrdilni kabel pravlino nameščen. povezan s polnilno postajo | |
| Prekinitev zadrževalnega kabla | Preverite vse do konca, da kabel ni bil prekinjen. | |
| Omejovanje križanje kablov na poti v zanko in iz nje | Preverite, ali je omejevalni kabel pravlino nameščen. | |
| Robot gre Čez mejo | Omejevalni kabel je bil príključen v obratni smeri | Zamenjaje príključka "+" in "-" |
| Robot vibrira ali povzroča nenavadne zvoke. | Poškodovano ali manjkajće rezilo | Preverite in popravite vijake za pritrditev rezila |
| Disk rezila je zrahljan. |
| Zamenjate rezilo | |||
| Koda napake | Opis | Rešitev | |
| E01 Slika F1 | Napaka pri initializaciji -žiroskopski senzor | Postavite robota na ravno povrsino in ga ponorvo zaženite. | |
| E02 Slika F2 | Napaka senzorja za dviganje ali senzorja za trk | Na sprednjem delu koslinice nastavite trkalnik in torzijsko kolo ter preverite, ali sta zaklenjena; postavite robota na ravno povrsino in ga ponorvo zaženite. | |
| E03 Slika F3 | Napaka pri initializaciji motorja za košnjo | Postavite robota na ravno povrsino in ga ponorvo zaženite. Če se težava nadaljupe, se obrnite na službo za pomoč uporabnikom. | |
| E04 Slika F4 | Napaka pri priključitvi napajalnika | ||
| E05 Slika F5 | Nepravlina hitrost motorja za košnjo | ||
| E06 Slika F6 | Opozorilo o nagilbu | Postavite robota na ravno povrsino. Pritsnite STOP ali OK, da prekličete alarm. | |
| E07 Slika F7 | Opozorilo za dvigalo | Postavite robota na ravno povrsino. Pritsnite STOP ali OK, da prekličete alarm. | |
| E08 Slika F8 | Napaka kanala ADC | Postavite robota na ravno povrsino in ga ponorvo zaženite. Če se težava nadaljupe, se obrnite na službo za pomoč uporabnikom. | |
| E09 Slika F9 | Nepravilen signal | Glefte zgornjo tabela: težava -ni signala iz zadrževalnega kabla. Po vrsti preverite vse točke, nato pa robota postavite na ravno povrsino. Pritsnite STOP ali OK, da prekličete alarm. Ponomno zaženite robota. Če se težava ne odpravi, se obrnite na službo za pomoč uporabnikom. | |
| E010 Slika F10 | Robotka marmelada | Postavite robota na ravno povrsino. Pritsnite STOP ali OK, da prekličete alarm. Ponomno zaženite robota. Če se težava nadaljupe, se obrnite na službo za pomoč uporabnikom. | |
| E011 Slika F11 | Nepravilna hitrost levega koračnega motorja | Ponomno zaženite robota. Če se težava nadaljupe, se obrnite na službo za pomoč uporabnikom. | |
| E012 Slika F12 | Nepravilna hitrost pravice koračni motor | Ponomno zaženite robota. Če se težava nadaljupe, se obrnite na službo za pomoč uporabnikom. | |
KOMPLET VSEBUJE:
- Robot za kosnjo 1 kos.
- Priključna in polnilna postaja 1 kos.
- Napajalnik in podaljsek 1
Kabel za razmejitev delovnega obmoja 100m - Čepi za pritrditev kabla 100 kosov.
- Pritrdilni Čepi za priklopno postajo 6 kosov.
- Rezila za rezanje 3 kosi.
Kabelski prikljucki 2 kosa. - Sestkotni kjuč 1 kos.
SPECIFIKACJE
| Robot za košnjo 04-621 | |
| Parameter | Vrednost |
| Napajalna napetost: | 18 V DC |
| Največja nazivna moč motorja za košnjo: | 50 W |
| Največja nazivna moč motorja zlastnim pogonom: | 20 W |
| Stopnja zaščite IP za polnilno postajo | IPX4 |
| Stopnja zaščite IP za robota | IPX5 |
| Stopnja zaščite IP za polnilni adapter | IP 65 |
| Zaščitni razred za robota | III |
| Zaščitni razred za polnilno postajo | II |
| Širina košnje: | 180 mm |
| Nastavitev višine rezanja v območju | 20 mm - 60 mm |
| Hitrost vrtenja | 3100 vrtljajev na minuto |
| Teža | 10,2 kg |
| Leto izdelave | 2024 |
PODATKI O HRUPU IN VIBRACIJAH
VARSTVO OKOLJA
| Raven zvočnega tlaka | LpA = 56dB (A) K=3dB(A) |
| Izmerjena raven zvočne moči | LwA = 67dB (A) K=3dB(A) |
Informacije o hrupu in vibracijah
Raven hrupa, ki ga oddaja naprava, je opisana z: ravnijo oddajanega zvočnega tlaka Lpa in ravnijo zvočne moči Lwa, pri Čemer K označuje merilno negotovost. Vibracije, ki jih oddaja naprava, so opisan s pospeškom vibracij a h, kjer K označuje merilno negotovost.
Vrednosti, izmerjene v tem prirochniku z navodili, tj. raven oddajanega zvočnega tlaka LpA, raven zvočne moci LwA in pospešek vibracij a, so bile izmerjene v skladu s standardom EN 62841-1:2015+A11. Podana raven vibracij a se lahko uporabi za primerjavo naprav in za predhodno oceno izpostavljenosti vibracijam.
Navedena raven vibracij je representativna le za osnovne nacine uporabe naprave. Ce se naprava uporablja za druge namene ali z drugimi delovnimi orodji, se lahko raven vibracij razlikuje. Neustrezno ali redko vzdhrževanje naprav povzroča visje ravni vibracij. Zgoraj navedeni vzroki lohko povećao izpostavljenost vibracijam v celotni ziviljenski dobi.
Za natančno dolocitev izpostavljenosti vibracijam je treba upostevati obdobja, ko je naprava "vklopljena" in "izklopljena", razen odobij, ko se uporablja za delovanje. Celotna izpostavljenost vibracijam je lahko veliko manjsa,Če so vsi dejavniki natančno ocenjeni.
Za zašćito operaterja pred vibracijami uporabite dodatne varnostne ukrepe, npr. redno vzdhrževanje naprave in delovnih orodij, ustrezne temperaturne pogoje za roke in ustrezno organizacion dela.
PODATKI O HRUPU IN VIBRACIJAH
Elektricne opreme ne smete odlagati skupaj z gospodinskimi odpad Odostranite jo v ustreznih obrath. Informacao o odstranjevanju dobitej prodajalcu izdelka ai pri lokalnih organih. Odpadna elektrica in elektronska oprema (OEEO) vsebuje snovi, ki niso nevtralne za nara okolje. Nerecklirana OEEO predstavlja potencialno nevarnost za okd zdravje lijudi.
"Grupa Topex Spóka z ograniczona odpwiedzialnosci" Spóka komandytowa s sedēzem v Varāsvi, ul. Pograniczna 2/4 (v nadaljevanju: "Skupina Topex") obvěsča, da so vse avtorske pravice na vsebini tega priročnika (v nadaljevanju: "Priročnik"), med drugim na besedilu, objavljenih fotografijah, diagramih, risbah in njegovi sestavi, izklučno vlasti Skupine Topex in so predmet pravnega varstva v skladu z Zakonom z dne 4. februarja 1994 o avtorski in sorodnih pravicah (tj. Uradni list U. 2006 st. 90, točka 631 s sprembamì). Kopiranje, obdelava, objava, spreminjanje celotnega priročnika in njegovи posameznih elementov v komercialne namene brez pisnegа soglasja skupine Topex Group Je strogo prepovedano in lahko povzroči civilno in kazensko odgovormost.
Izjava ES o skladnosti
Proizvajalec: Proizvajalec: Grupa Topex Sp. Z o.o. Sp.k., ul.
Pograniczna 2/4 02-285 Varsha
lzdelek: E+ robot za kosnjo
Model: 04-621
Trgovsko ime: NEO TOOLS
Serijska stevilka: 00001 + 99999
Za to izjavo o skladnosti je odgovoren izkljućno proizvajalec.
Opisani izdelek je skladen z naslednjimi dokumenti:
Direktiva o strolh 2006/42/ES
Direktiva RED 2014/53/EU
Direktiva RoHS 2011/65/EU, kakor je bila spremenjena z Direktivo 2015/863/EU
In izpolnjuje zahteve standardov:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Ta izjava se nanaša samo na stroj, kot je bil dan na trg, in ne vkljucije sestavnih delov.
ki jih je dodal koncni uporabnik, ali dejanja, ki jih je izvedel pozneje. lme in naslov osebe s stalmim prebivaliscem v EU, pooblascene za pripravo tehnicne dokumentacije:
Podpisano v imenu:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
TOPEX GROUP pooblascenec za kakovost
Varsha, 2023-09-11
Izjava EU o skladnosti
Proizvajalec: Proizvajalec: Grupa Topex Sp. Z o.o. Sp.k., ul.
Pogrniczna 2/4 02-285 Varsha
Izdelek: Polnilna postaja
Model: K145455
Trgovsko ime: NEO TOOLS
Serijska stevilka: 00001 ÷ 99999
Za to izjavo o skladnosti je odgovoren izključno proizvajalec.
Opisani izdelek je skladen z naslednjimi dokumenti:
Direktiva RED 2014/53/EU
Direktiva RoHS 2011/65/EU, kakor je bila spremenjena z Direktivo 2015/863/EU
In izpolnjue zahteve standardov:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
ENIEC 63000:2018
Ta izjava se nanaša izključno na stroj, kot je bil uveden v in ne vklučuje component, ki jih je dodal končni uporabnik ali njegove nadalnjne dejavnosti.
Ime in naslov rezidenta EU, ki je pooblascen za
pripraviti tehnicno Dokumentacijo:
Podpisano v imenu:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
TOPEX GROUP pooblascenec za kakovost
Varsha, 2023-11-09
LT
VERTIMO (NAUDOTOJO) VADOVAS
PJOVIMO ROBOTAS 04-621
DÉMESIO! PRIES PRADÉDAMI DIRBTI SU ELEKTRINIAIS
IRANKIAIS, ATIDZIAI PERSKAITYKITE SIA NAUDIOJIMO
INSTRUKCIJA IR ISSAUGOKITE JA ATEITYJE.
ISSAMIOS SAUGOS TAISYKLES
PJOVIMO ROBOTU SAUGOS INSTRUKCIJOS
Pjovimo roboto praktinio naudojimo sauga
REKOMENDACIJOS
Atidzai perskaity kite naudojimo instrukcija. Susipazinkite su valdymosistemomis ir teisingu prietaiso veikimu.
Neleiskite, kad prietaisu naudotusi vaikai arba asmenys, kurie neperskaite naudojimo instrukcjisos. Nacionaliniuose teisés aktuose gali buti nurodytas minimalus operatoriaus amzius.
Nenaudokite roboto, jei salia yra kitu zmoniu, ypaac vaiku ar gyvunu.
Atminkite, kad uz nelaimingus atsitikimus ar pavoju kitiems zmonems ar aplkai atsako operatorius arba naudotojas.
PARUOSIMAS
Pries pjaudami kiekviena kartapatikrinkite, ar visos roboto dalys veikia tinkamai.
-
Kad rezultatai butu geriausi, rekomenduojama pjauti be lietaus. Pjaunant per lietu zole gali prilipti prie roboto, kuris del to gali paslysti.
-
NEGALIMA pjauti esant blogoms oro salygoms, pvz., lyjant stipriam lietui, perkūnijai ar sningant.
Periodiskai apziurekite nujsenauta plota ir pašalinkite akmenis, šiukšles, laidus, kaulus ir kitas kliutis. Ribota garantija netaikoma Žalai, atsiradusiai del ant vejos paliktu daiktu.
- Kad isvengtumete zalos, nepjaukite ariau kaip 1 m atsumu nuo purkstuv galvuciu.
DÉMESIO! Roboto ir purkštuνu NEGALIMA jungti vienu metu.
Robotagreikia uzprogramuoti taip, kadjis veiktukitu laiku nei purkstuvai.
NIEKADA neleiskite vaikams liesti maitinimo saltinio, jkrovimo stoteles, ypačkontaktu, peiliu, akumuliatoriaus skyriaus ar bet kokiu daliu, kuriose yra tarpu, pvz., ratuku.
OPERACJA
- Saugokités besisukançiu menci! NEDEKITE ranku ar koju po besisukançiais peiliais.
- Saugokités ant vejos pjaunant ismétytu daiktu! Kai robotas jungtas, laikykités saugaus atstumo.
- Nepalikite prietaiso be prieziuros, jei zinoma, kad netoliese yra gyvunu, vaiku ar pašaliniu Žmoniu.
- Islaiky kite saugia padeti. Islaiky kite pusiausvyra ir stablia padetj jkalnese. Valdant robota ar jo periferinius jrenginius, leidziama vaikscioti, bet ne begti.
Perskaitykite instrukcijas, kada, kur ir kaip patikrinti, ar robotas ir jo periferiniai jrenginiai, kabeliai ir prailgintuvai nera pazeisti ar susidéveje, ir pataisyri robota. Savarankiskai modifikuoti, taisyti negalima -rizikuojate prerasti garantija. - Neprisijunkite ir nelieskite pazeisto maitinimo kabelio, koljis nera atjungtas nuo maitinimo saltinio, nes kyla pavojus prisiliesti prie jtampa turinciu componentu.
- Robotàir (arba) periferinejranga prijunkite tik prie maitinimo grandiniu,apsaugotyliekamosiossrovésjungikliu,kurio isjungimo srove yra ne didesne kaip 30mA
- Jei robotas sklearnidzia nejprastagarsa arba pastebima nejprastavibracija, arba signalizujoa apie pavoju, nedelsdami paspauskiteSTOP mygtuka.
- NEPRIKLAUSOMA liesti pavojingu judanciu daliu pries isjungiant roboto maitinima.
- UZDRAUSTA liesti pavojingas dalis, kol jos visiskai nesustojo.
Dirbdami su robotu visada avekite tvirta evalyne ir muvekite ilgas kelnes. - Nutraukite maitinimo saltinj: Pries uzrakindami robota.
Pries bandyma, valyma ar technine prieziura.
PIKTOGRAMOS IR JSPÉJIMAI



- Perskaltykite naudojimo instrukcijar laikykites jspejmu bei saugos reikalavim!
- Pries valydami ar atlikdami technine prieziura, atjunkite nuo maitinimo saltinio
- Nekiskite ranky ar koju po pjovimo mechanizmo apsauga.
- Besisukancios dalys-galimbyesusizeisti
- Laikykites saugaus atstumo nuo pjovimo roboto
- Saugokités galimybès susiègeisti déliét daiktu
- Apsaugokite nuo lietaus
- Laiky kite vaikams nepasiekiamoje vietoje.
- Nevažiuokite ant roboto
- Galimas pirstuy netekimas, bukite atsargus
- Didziausias zemés nuolydis 14^ / 25% .
- Apsaugokite rankas darbo pirstinémis
- Devekite apsauginius drabuzius
- Devekite apsaugine evalnye
- Neismeskite kartu su buitinémis atliekomis
- Atrankinis atlieky surinkimas
- Apsaigos laipsnis
DÉMESIO! Ší prietaisa gali naudoti vyresni nei 8 metu vaikai ir ribotu fiziniu bei protiniu gebéjimu asmenys, taip pat asmenys, neturintys pakankamai ziniu ar patirties, jei jie yra prizürimi arba tinkamai instruktuojam, kaip saugiai naudotis prietaisu, kad zhinotu apie
galima rizika. Su siuo prietaisu neturetu zaisti vaikai. Vaikams draudziama be prieziuros valtyi ar atlikti prietaiso prieziuros darbus.
GRAFINIU ELEMENTU APRASYMAS
Toliau pateikiama prietaiso sudedamju daliu numeracija pavaizduoti sio vadovo grafiniuose puslapiuose.
| Pavadinimas A pav. | Aprašymas | |
| 1 | Avarinis stabdymas | |
| 2 | Pjovimo aukšćio regulatorius | |
| 3 | Šienapjovés valdymo skydelis | |
| 4 | Vejapjovés maitinimo jungiklis | |
| 5 | Varomiei ratai | |
| 6 | Pjovimo peiliai | |
| 7 | Pjovimo mechanizmo būgnas | |
| 8 | Sukamieji ratai | |
| 9 | Nešojlimo rankena | |
| 10 | Jkrovimo jungtys | |
| 11 | Akumuliatoriaus skyriaus dangtelis | |
| Pavadinimas B pav. | Aprašymas | |
| 1 | Dokavimo stoties valdymo skydelis | |
| 2 | Skylès doko stočiai pritvirtinti | |
| 3 | Ikrovimo jungtys | |
| 4 | Prisijungimo stotis | |
| 5 | Dokavimo stoties apsauga | |
| 6 | Maitinimo kabelio jungtys darbozonai pažyméti | |
| 7 | Kabeliu angos darbozonai ir maitinimo šaltiniuižyméti | |
| 8 | Dokavimo stoties maitinimo lizdas | |
| 9 | Ženklinimas teisingam kabeliu pravedimui | |
| Pavadinimas D pav. | Aprašymas | |
| 1 | Jkrovimo būsenos indicatoriaus lemputé | |
| 2 | Signalo gedimo indikatorius | |
| 3 | Apribojimo laido indikatorius | |
| 4 | Darbo valandos / klaidos pranešimas, 1-4 lemputés | |
| 5 | Maitinimo mygtukas | |
| 6 | Maitinimo jungiklis | |
| 7 | Prisijungimo mygtukas | |
| 8 | Mygtukas "Patvirtinti" | |
| Pavadinimas H pav. | Aprašymas | |
| 1 | Varžtai | |
| 2 | Akumuliatoriaus skyriaus dangtelis su transportavimo rankena | |
| 3 | Akumuliatoriaus skyrius | |
| 4 | Akumuliatoriaus lizdas ant kameros dangtelio | |
| 5 | Jkraunamas akumuliatorius (nejtrauktas j komplekta) | |
| Pavadinimas I pav. | Aprašymas | |
| 1 | Vejos | |
| 2 | Siena | |
| 3 | Prisijungimo stotis | |
| 4 | Stoties atstumas nuo sienos | |
| 5 | Pradiné šienavimo plota ribojançios linjos atkarpa | |
| 6 | Skyriaus ilgis | |
| Pavadinimas J pav. | Aprašymas | |
| 1a | Kabelis, kad būtu apribotas pjovimo ploras Pradžia | |
| 1b | Laidas, ribojanis pjovimo plota Pabaiga | |
| 2 | Tiekimo linija: | |
| 3 | Prisijungimo stotis | |
- Gali buti skirtum tarp grafikos ir faktinio gaminio
PASIRUOSIMAS DARBUI
AKUMULIATORIAUS MONTAVIMAS
-
Apverskite p jovimo robota taip, kad butu galima pasiekti apatine roboto dalj.
-
Vietoje jungiklio A4 pav. ir transportavimo rankenos A9 pav. yra akumulatoriaus skyriaus dangtelis H2 pav., pritvirtantas 4 varztais, pazymétais rodyklémis H1 pav.
- Tada atsukite rodyklemis pazymétus varžtus.
- Atsargiai nuimkite skyriaus dangtelj H2 pav., kad nenutrauktumete ir neatjungtumete jungiklio laidu A4 pav. (jis pritvirtantas prie akumulatoriaus skyriaus dangtelio).
- Tada apverskite dangtelj, dangtelio apacioje pritvirtantas akumulatoriaus lizdas H4 pav.
- Jiskite ENERGY+ serjos akumulatoriuj lizda.
- Apverskite dangteli su pritvirtintu akumuliatoriumi ir jdekite jj H3 pav. esanti skyriu.
Uzverzkite dangtivirtinanus varztus. Apverskite robota dugnu zemyn, prietaisas paruostas.
PJOVIMO ROBOTO DARBO APLINKA
Uztikrinkite, kad zonoje, kurioje dirba robotas, butu laikomasi toliau nurodytu salgyu:
- Zoles aukstis neviršija 60 mm.
- DÉMESIO! Jei Žolé ilgesné nei 60 mm, pirmiausia nupjaukite vejá rankine Žoliapove.
- Nera akmenu, medzio gabalu, laidu, laidu, laidu, esanciu po jtampa, ar kitu pašaliniu daiktu.
- Sienavimo vieta yra lygi ir plokščia, be grioviu ir tranšeju, o nuolydis mažesnis nei 25% (14°) C1 pav.
Diegimui reikalingi sie jrankial:
Guminis plaktukas (kaišciams j Žeme jkalti tiesiant apsauginj kabelj) - Rinkinyje yra šešiakampis raktas (jkrovimo stotelei tvirtinti)
- Replés (skirtos darbo zona riboanjciam kabeluiu nukirpti)
1.BAZINES STOTIES IRENGIMAS
Pasirinkite tinkamq vietq
Jkrovimo stotele reikia statyti tokioje vietoje C3 pav:
- Santykinai lygi ir lygi vejos dalis.
Netoli vejos krasto.
Salia sieninio kištukinio lizdo.
10 m ilgio ilgintuva ir maitinimo šaltinj padékite pavésyje, vésioje ir sausoje vietoje. - Bent 2 m atstumu nuo jkrovimo stoteles neturi buti jokiu kliuci.
- Rekomenduojama, kad ikrovimo stotelé būtu sausoje ir apsaugotoje vietoje.
- Maitinimo saltinis turi buti 30 cm virs zeremes pavirsius.
2. IKROVIMO STOTIES TVIRTINIMAS
Pritvirtinkite jkrovimo stotele prie zemes 6 tvirtinimo varztais (G1) (naudodami šešiakampj rakta G6).
DÉMESIO! NESTOVÉKITE ant jkrovimo stoties plokstés ir nevaikšciokite ant jus.
DÉMESIO! NEGALIMA daryti nauju skyliu jkrovimo stoties plokstelëje.
Stoj prieg grindu reikia tvirti varztais, naudojant esamas skies.
3. TRAMDOMOJO KABELIO TIESIMAS
Prilaikomasis kabelis naudojamas darbo zonai apibrežti ir nukreipti robotag atgal j jkrovimo stoti.
DÉMESIO! Jei jusu kamynas taip pat naudoja robota vejapjove, tarp abieju robotu tvirtinimo lnu turi buti bent 1 m atstumas.
SULAIKYMO TROSO PADETIES PLANAVIMAS
Pries tiesdami apsaugini kabelj, pasivaikskiokite palei nurodya riba in pašalinkite visus nereikalingus daiktus, pvz., akmenis.
DÉMESIO! Apribojimo kabelio ilgis neturi viršyti 200 metru.
ISPEJIMAS! Robotas neturi vaziuoti per zvyra ar panaias medziagas, kurios gali pazeisti peilius.
APRIBOJIMO TROSO TIESIMAS C PAV.
Laikykites toliau pateiktu nurodymu, kad apsauginj kabelj nutiestumete aplink darbo zonar kliutis. Noredami teisingai nutiesti apsauginj kabelj, naudokite rinkinye esanti matuoklj.
DÉMESIO! Sulaikymo laidas maitinamas labai Žema jtampa, todél yra saugus Žmonéms ir naminiams gyvūnams.
DÉMESIO! Pradékite nuo "-" jungties, esancios jkrovimo stoties gale B6 pav., ištraukite ja po stotimi (ir palikite 10 cm atsarga) ir tieskite kabeli aplink veja pries laikrodžio rodykle, baigdami nuo "+" jungties, esancios jkrovimo stoties gale (palikite 10 cm atsarga). Isitikinkite, kad kabelis lieciasi su metalu ties "+" ir "-" jungtimis B6 pav. nepamirskite nukirpi suvaržymo kabelio pertekliaus.
-
Palikite bent 2m tuščia erdvě tarp suvaržymo kabelio ir jkrovimo stoties. Šiame skyriuje esantis kabelis naudojamas robotui atvesti je jkrovimo stoj.
-
Išlaikykite 30 cm tarpa tarp tvirtinimo lyno ir vejos krašto C2 pav.; C3 pav.
- Pritvirtinkite tvirtinimo trosa prie zemes pateiktais kaisciais G5 pav. Apribojimo trosas turi buti tiesus ir siek tiek itemptas. Kaisciai turétu buti isdestyti kas 1 m (sj atstuma galima keisti, atsižvelgiant j vejos forma) C4 pav. Kad nesusilpnetu signalas, nejkaskite kabelio giliau nei 2 cm.
Trosa isdestykite taip, kad kampai butu didesni nei 90^ C5 pav. Tokiose vietovese sulaikomaji kabelj klokite svelniomis kreivemis - taip robotui bus daug lengviau judeti po sienaujama plota. - Jei vejoje yra gelynu, tvenkiniu ar medziu, apjuoskite juos apsauginio troso kilpomis C4 pav.
Islaikyti min. 30 cm atstumas tarp tvirtinimo lyno ir kliuci krastu.
DÉMESIO! Kelyje j kilpa ir iš kilpos tvirtinimo trosai neturi kirsti vienas kito C4 pav.
- Palikite siaura erdve sienapjovés darbo zonoje. Isitikinkite, kad atstumas tarp lygiagreciai einanciu ribojanciu laidu yra didesnis nei 1 m.
DÉMESIO! Jsitikinkite, kad prijungimo stotele yra šienavimo zona Žymincios kilpos viduje. (iðsör / ùvidus) B2 pav.
4. JKROVIMO STOTELES IRENGIMAS
Prijunkite maitinimo šaltinj
- Jkiškite maitinimo kištukaj 110-240 V sieninj lizda.
- Patikrinkite jkrovimo stoteles LED lempučij būsena B1 pav:
Zalia sviesa: rysys uzmegztas (robotas nejkrautas arba visiskai jkrautas)
Pertraukiama zaia sviesa: robotas jkraunamas. - Pertrauklama raudona lemupte: daßniausiai pasitaikanti klaida yra "atjungtas tvirtinimo kabelis".
- Sviesa dega: dazniausiai pasitaikantis gedimas yra "Nera 100-240 V maitinimo saltinio" arba "Nera ryso su maitinimo saltiniu".
VEIKIMAS/NUSTATYMAI
Pirmasis p jovimo roboto paleidimas
- Pirma karta paleisdami robota, padékite prietaisa ant prijungimo stoties taip, kad stoties jkrovimo juntgys fig. B3 nesiliestu su pjovimo roboto jkrovimo juntgimis pav. A10.
- Kai pjovimo robotas pirma karta paleidziamas is telefonoprogramoles, reikia atnaujinti programine jrang. Igyvendinimo budas aprasytas toliau, dalyje "Programines jrangos atnaujinimas".
- DÉMESIO! Pirmojo prisijungimo metu Telefonas ir robotas turi būti "Wi-fi" tinklo veikimo zonoje.
PRIES NAUDODAMI ROBOTA ATNAUJINKITE PROGRAMINE IRANGA.
Atnaujinima reikia atlikti taip.
- Istaty kite robotaj kilpa, bet už jkrovimo stoties ribu.
- A4 pav. esanti jungiklj perjunkite j 1 padeti.
- Paspauskite ir palaikykite jungiklj D5 pav.
- Paleiskite programa, nuskaity kite QR koda
- Programos prijungimas prie roboto
- Ispleskite programines jrangos nustatymus paspausdami piktogram ekrano virsutiniame desiniajame kampe.
- Pasirinkite parinktj: Programines jrangos atnaujinimas.
- Tada vykdykite ekrane rodomus nurodymus.
Idiegu programine jrangaj, prietais yra paruostas darbui.
DÉMESIO!
- Ekrane rodoma, ar robotas yra "Wi-fi", ar "Bluetooth" veikimo zonoje.
- Prisijungima prie tinklo rodo mirksinti ryso tipo piktograma. Prisijungus piktograma nustoja mirkseti.
- Robotagalima susieti tik su vienu Telefonu.
- Jei reikia prijungti kita (ta pati pjovimo robota), pirmasis turi buti pasalantas is programos. "iOS" programoje taip pat iš "Bluetooth" nustatymu.
PJOVIMO AUKŠCIO REGULIAVIMAS:
Pries pirma pjovima nustatykite 60 mm pjovimo aukstj, o kai visa veja bus gana lygi, pakeiskite jj norimauksti.
Noredami padidinti pjoivo aukstj, pasukite A2 pav. rankenele pagal laikrodzio rodykle.
Noredami sumazinti pjovimo aukstj, pasukite A2 pav. rankenèle j kaire.
Pjovimo aukstigalima reguluioti nuo 20mm (MIN) iki 60 mm (MAX). DEMESIO! Pjovimo mechanizmo bugno varantysis variklis A7 pav. jsijungia praejus maždaug 10 sekundziu nuo išvažiavimo iš pagrindo ir pradeda veikti.
JUNGIMAS/ISJUNGIMAS
- Nustatykite A4 pav. jungiklj padeti "O", kad isjungtumete maitinimo saltinj.
- Nustatykite A4 pav. jungikdj i "I" padeti, kad jungtumete maitinimo saltinji.
ROBOTO JUNGIMAS IR DARBO LAIKO PROGRAMAVIMAS RANKINIU REZIMU.
- Paspauskite ir palaiky kite jungimo mygtuka D5 pav., kad paleistumete robota. Pastaba: paleidimo metu roboto nesukraty kite, kad isvengtume paleidimo klaidos. Jei robotas nejsijungia tinkamai (visos lemu tés dega nepertraukiamai), paleiskite jj is naujo.
- Iveskite slaptazodj du kartus paspausdami mygtuka D6 pav., tada du kartus mygtuka D7 pav. ir viena karta mygtuka D8 pav. (slaptazodis užprogramuotas gamykloje).
-
Užprogramuokite veikimo laika (jskaitant pjovimo ir [krovimo laika):
-
Paspauskite D6 pav., kad nustatytumete darbo laikaj. Viena uzsidegusi lemputé reiskia 2 valandas, maksimalus veikimo laikas yra 8 valandos, o
4 lemputés D4 pav. Paspauskite D8 pav. mygtuka, kad patvirtintumete ir paleistumete robota.
DÉMESIO! Nustacius darbo laika, robotas jsimins nustatymus ir kiekviena diena pradès pjauti uzprogramuotu laiku. Pjovimo laikas bus toks, koks jvestas pagal jvestus nustatymus.
Uzprogramuota roboto veikimo trukmè nuo 2 iki 8 valandy yra pjovimo laikas, jskaitant jkrovimo laika.
- Veikimo ir jkrovimo laikas priklauso nuo naudiojamo akumulatoriaus.
Jei norite pakeisti darbo laika, dar karta atlikite 2-3 veiksmus.
LAIKO PROGRAMAVIMAS AUTOMATINIU REZIMU, 7 DIENU TVARKARASTIS, PASIEKIAMAS PER PROGRAMÉLÉS NUSTATYMUS.
Avariniu budu sustabdžius robota, pirmiausia jj reikia atrakinti atlikus 2 veiksmaj. Kai robotas atrakintas, galime jj siusti atgal j stoj spausdami mygtukus: D7 pav., tada patvirtinkite D8 pav. mygtuku, kad vejapjové butu gražinta i jkrovimo stoj.
- Paspaudus avarinio stabdymo mygtuka STOP, iš programos pašalinamas rankinio ir automatinio režimo ciklas, jeijis buvo jungtas šiu būdu. Kad po avarinio sustabdymo robotas vél pradétu dirbtj, ji reikia gražinti j krovimo stotele ir vél nustatyri rankinio darbo grafika.
Automatinio grafiko atveju ta patj veiksma atlikite programos grafike in patvirtinkite jo nustatymus.
DÉMESIO! Automatiniame tvarkarastyje uzprogramuoto paleidimo laiko nereikétuy lakyti labai tiksliu. Prietaisas gali jsijungti iki keliu minučiu po nustatyto laiko.
- Jungus rankinj rezima istrinamas programoje uzprogramuotas tvarkarastis ir atvirksciai.
- Rankiniu režimu kraštu apipjaustymas atliekamas automatiskai kas kelis pjovimo øklus. Žolé pjaunama prie darbo zona apibrežiancio kabelio. DÉMESIO! Būtina pasirūpinti, kad kabelis būtu tinkamai pritvirtintas, kadjis nebūtu atsitiktinai nipjautas.
- Pjovimo robotas gris i prijungimo stoti, kai prietaisas nustatys lietaus pradzia.
- Jei robotics dirbdamas susiduria su kliutimi,jis nuo jos atsoka ir tesia darba.
JKROVIMO STOTELEJE ESANTI JKROVIMO BUSENOS LEMPUTE:
Nepertraukiama zaia sviesa - akumulatorius visiskai jkrautas.
Pertraukiana zalia lemputé -jkrovimas.
UZIKROVIMO STOTIES RIBU:
Nepertraukiama zaia sviesa - akumulatorius >=20%
Pertraukiama zaia lemupte - akumulatorius < 20%
DÉMESIO! Robotas automatiskai nutraukia darba ir gržta j krovimo stotele, jei akumulatoriaus jkrovos lygis nukrenta Žemiau 20 %.
KLAIDU LEMPUTÉ:
Nuolatine Žalia Šviesa - atnaujinkiteSYSTEMA. Prisijunkite prie programos, kad atliktumete atnaujinima.
Pertraukiama zalia lemupte - vyksta sistemas atnaujinimas.
Pertraukiama raudona lemupte - 1-5 klaidos pranešimas, paleiskite robota is naujo.
Nepertraukiama raudona lempute - 6-12 klaidos pranešimas, paspauskite "STOP" arba "OK", kad ištrintumete.
TVIRTINIMO KABELIO INDIKATORIUS:
Nepertraukiama zaia ssviesa - signalas teisingas
Nepertraukiama raudona lemputé - nera signalo
Valdikliai D4 pav:
Nepertraukiama šviesa - užblokuotas robotas.
Nepertraukiama šviesa - robotas atrakintas.
1 lempute šviečia Žalai: 2 valandy darbo laikas.
1ir 2 lemputes sviecia zaiai:4 valandy darbo laikas.
1, 2 ir 3 lemputés šviečica Žalai: 6 valandy darbo laikas.
1, 2, 3 ir 4 lemputés švieča Žalai: 8 valandy darbo laikas.
PJOVIMO ROBOTO VALDYMOPROGRAMINE JRANGA
Atsiusti IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Atsisiusti is "Android":
https://play.google.com/store/apps/details?id=com.touarobot
Programos instrukcijas galite atsisiusti iš šios svetainës:
https://bit.ly/3QBB6Gm
AVARINIS ROBOTO ISJUNGIMAS
Paspaskite mygtuka "STOP" A1 pav., kad sustabdtyumete robota,
paspaskite ir palaiky kite maitinimo mygtuka, kad robotas išsjungtu.
ROBOTO PERKÉLIMAS
Po robotu yra A10 pav. pavalzduota kélimo rankena, kuria lengva valdyti viena ranka.
PRIEZIURA IR SAUGOJIMAS
- Pries valymaj ir technine prieziura visada isjunkite robota.
- Pries valydami ir prižiūredami jkrovimo stoj, atjunkite maitinimo šaltini.
- Keisdami peillius ir valydami roboto apacia visada muvekite storas apsaugines pirstines.
- Reguliarai tikrinkite varztu ir verzliu priverzima. Pazeistos dalsy turi buti remontuojamos arba keiicamos del saugumo sumitim.
- Regulariai tikrinkite, ar peiliai gali laisvai sukts.
DÉMESIO! Kai apversite robota aukstyn kojomis, pavékite jj ant vejos arba minksto paviršiaus, kad nepažeistumete ir nesubraižytumete dangcio.
VALYMAS
ISPEJIMAS! Pries pradedami valtyi, isjunkite maitinima jungikliu A4 pav.
- Roboto priekine dalj plaukite zemo slegio valikliu ir minkstu sepeteliu arba sluoste.
- Nuo peiliu, ratu ir kitu roboto apacioje esanciu daiu kietu sepeciu pašalinkite nupjautaŽole ir siukšles.
- Reguliarai tikrinkite, ar ant ratu nera purvo ar nupjautos zoles, in valykite juos sepeteliu.
DÉMESIO! Reguliarai šalinkite augalu liekanas nuo roboto apacios, kad nasumažétu nasumas.
ASMENU KEITIMAS
ISPEJIMASI Pirmiausia ijsjunkite pagrindin maitinimo jungiklj ir uzsimaukite apsaugines pirstines.
ISPEJIMAS! Naudokite tik gamintojo patvirtintus nurodytus originalius peilius.
- Visi trys peilaiir ju varztai turi buti pakeisti vienu pakeitimu A6 pav.
- Varžtus reikia atsukti ir priveržti atsuktuvu.
- Patikrinkite, ar nauji peiliai gali laisvai sukti.
PROBLEMU SPRENDIMAS
Toliau pateiktoje lenteleje pateikiamos rekomendacijos, padedancios diagnozuoti problemas.
Jei jmanoma, pataiskyte prietaisa patys. Jei problemos nepavyksta iisspresti, kreipkites j galiotajp pardaveja arba technines prieziuros centra.
ISPEJIMAS! Reikety imtis apsaugos priemoniu.
| Problema | Galimos priežastys | Spendimai |
| Jkrovimo stotelëje mirksi raudona lemputë | Apsauginio kabelio nutraukimas | Raskite sugedusiç kabelio dalj ir jj ištaisykite. |
| Robotas sunkiai prisijungia prie jkrovimo stoties | Jkrovimo stolis jrengta netinkamai | Žr. skyriç "Pasirengimas darbui". |
| Apribojimo trosas yra netinkamoje padétyje | ||
| Nëra signalo iš tvirtinimo kabelio | Nëra maitinimo šaltinio | Patikrinkite maitinimo šaltinj |
| Apribojimo trosas buvo prijungtas atvirksčiai | Sukeiskite "+"ir "-" jungtis |
| Apribojimo laidaneprijungtas priejkrovimo stoties | Patikrinkite, arteisingai pritvirtintas trosasprijungtas priejkrovimo stoties | |
| Apsauginio kabelionutraukimas | Patikrinkite visa kelia, ar kabelis nebuvo nutrauktas. | |
| Trosuytvirtinimokryzmês pakeliuiijklpáir iš jos | Patikrinkite, arteisingai sumontuotas tvirtinimo kabelis | |
| Robotasperženga sienà | Apribojimo trosasbuvo pjrijungtasatvirkščiai | Sukeiskite "+"ir "-"jungtis vietomis |
| Robotasvibruoja arba skleidžianejprastus garsus | Pažeista arbatrukstama geležté | Patikrinkite irsuremontuokiteašmenugtvirtinimovaržtus |
| Atsilaisvinésašmenugdiskas | ||
| Pakeiskite ašmenis |
| Klaidos kodas | Apraśymas | Spendimas |
| E01 pav. F1 | Initializacijos klaida - giroskopinis jutiklis | Pastatykite robota ant lygaus paviršiaus ir paleiskite iš naujo. |
| E02 F2 pav. | Kélimo jutiklio arba susidūrimo jutiklio gedimas | Sureguliuokite šienapjovës pirekýje esanti susidūrimo strypa ir sukamaji rata, patikrinkite, ar je nera užblokuoti; pastatykite robota ant lygaus paviršiaus ir paleiskite iš naujo. |
| E03 F3 pav. | Pjovimo variklio iniciacijos klaida | Pastatykite robota ant lygaus paviršiaus ir paleiskite iš naujo. Jei problema išlieka, kreipkitës j clientu aptarnavimo tarnyba. |
| E04 F4 pav. | Maitinimo saltinio prijungimo klaida | |
| E05 F5 pav. | Netinkamas pjovimo variklio greitis | |
| E06 F6 pav. | Ispëjimas apie pakreipima | Pastatykite robota ant lygaus paviršiaus. Paspauskite STOP arba OK, kad atšauktumëte pavojaus signala. |
| E07 F7 pav. | Ispëjimas apie lifta | Pastatykite robota ant lygaus paviršiaus. Paspauskite STOP arba OK, kad atšauktumëte pavojaus signala. |
| E08 F8 pav. | ADC kanalo klaida | Pastatykite robota ant lygaus paviršiaus ir paleiskite iš naujo. Jei problema išlieka, kreipkitës j clientu aptarnavimo tarnyba. |
| E09 F9 pav. | Neteisingas signalas | Zr. pirmiau esanca lentele: problema - nera signalo iš suvaržymo kabelio. Patikrinkite visus taškus po viena, tada pastatykite robota ant lygaus paviršiaus. Paspauskite STOP arba OK, kad atšauktumëte pavojaus signala. iš naujo paleiskite robota. Jei problema išlieka, kreipkitës j clientu aptarnavimo tarnyba. |
| E010 F10 pav. | Robotu uogienë | Pastatykite robota ant lygaus paviršiaus. Paspauskite STOP arba OK, kad atšauktumëte pavojaus signala. iš naujo paleiskite robota. Jei problema išlieka, kreipkitës j clientu aptarnavimo tarnyba. |
| E011 F11 pav. | Neteisingas kairiojo Žingsninio variklio greitis | Iš naujo paleiskite robota. Jei problema išlieka, kreipkitës j clientu aptarnavimo tarnyba. |
| E012 F12 pav. | Netelingas greitis teisës Žingsninis variklis |
RINKINJ SUDARO:
Pjovimo robotas 1 vnt.
- Dokavimo ir jkrovimo stotis 1 vnt.
- Maitinimo saltinis ir ilgintuvas 1 vnt.
Kabelis darbo zonai nubrezti 100m
Kabeliu tvirtinimo kaisciai 100 vnt. - Dokavimo stoties tvirtinimo kaisciai 6 vnt.
Pjovimo peiliai 3 vnt. - Kabeliu jungtys 2 vnt.
- Seisiakampis raktas 1 vnt.
SPECIFIKACIJOS
| Pjovimo robotas 04-621 | |
| Parametras | Verté |
| Maitinimo jtampa: | 18 V NUOLATINÉ SROVÉ |
| Maksimali vardinè p jovimo variklio galia: | 50 W |
| Maksimali savaeigio variklio galia: | 20 W |
| Jkrovimo stoties IP apsaugos laipsnis | IPX4 |
| Roboto IP apsaugos laipsnis | IPX5 |
| Jkrovimo adapterio IP apsaugos laipsnis | IP 65 |
| Roboto apsaugos klasè | III |
| Jkrovimo stoties apsaugos klasè | II |
| Pjovimo plotis: | 180 mm |
| Pjovimo aukšćio reguliavimas diapazone | 20 mm - 60 mm |
| Sukimosi greitis | 3100 apsisukimü per minute |
| Svoris | 10,2 kg |
| Gamybos metai | 2024 |
TRIUKŠMO IR VIBRACIJOS DUOMENYS
| Garso slègio lygis | \( {\mathrm{L}}_{\mathrm{{PA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Išmatuotas garso galios lygis | \( {\mathrm{L}}_{\mathrm{{WA}}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Informacija apiie triuksmir vibracija
Prietaiso sklearnidziamo triuksmo lygi apibudina: sklearnidziamo garso slegio lygis Lpa ir garso galios lygis LwA, kur K reiskia matavimo neapibreztj. Prietaiso sklearnidziama vibracija apibudina vibracijos pagreitis a, kur K reiskia matavimo neapibreztj.
Sioje naudojimo instrukcijoe ismatuotos vertes, t. y. sklearnidziamo garso slegio lygis LpA, garso galios lygis Lwir vibracijos pagreitis a h, buvo ismatuotos pagal standarta EN 62841-1:2015+A11. Nuroydtas vibracijos lygis a gali buti naudojamas prietasams palyginti ir preliminarmiam vibracijos poveikio jvertinimui.
Nurodytas vibracijos lygis yra tipinis tik pagrindiniams prietaiso naudojimo atvejams. Jei prietaisas naudojamas kitais tikslais arba su kitais darbo jrankiais, vibracijos lygis gali skirtis. Netinkama arba retai attiekama prietaiso techniné prieziura lemia didesnj vibracijos lygi. Minetos priežastys gali padidinti vibracijos poveikj per visa prietaiso naudojimo laika.
Norint tiksliai nustatyti vibracijos poveikj, reikia atsižvelgtj prietaiso "jjungimo" ir "isjungimo" laikotarpius, isskyrus laikotarpius, kaijis naudojas darbui. Tiksliaj vertinus visus veiksnius, bendras vibracijos poveikis gali buti daug mazesnis.
Noredami apsaugoti operatori nuo vibracijos, naudokite papildomas saugos priemones, pavyzdziui, regulariai priizurekite prietaisa ir darbo jrankius, uztikrinkite tinkama ranku temperatura ir tinkamai organizuokite darba.
TRIUKSMO IR VIBRACIJOS DUOMENYS
APLINKOS APSAUGA

Elektros jrangos negalima ismesti karto su buitinemis attiekomis
Ismeskte ja atinkamose Jmonese. Informacja apie salinima galite gaut
is gaminio pardavejo arba vietos valdizios institucju. Elektros i
elektronines jrangos atleikose (EE|A) yra medziag, kurios nera
neutralios gamtinei aplinkai. Neperdirbtos EE! atleikos kelia potencialu
pavoju aplinkai ir zmoniu sveikalai.
"Grupa Topex Spólká z ograniczona odpowedzialnosci" "Spólká komandytowa", kurios regiustruota buveilény rva Varsuwoje, ul. Pograniczna 2/4 (toliau - "Topex grupe") informuja, kad visos autoriú teisés J sidos instrukcijos (tolau - Instrukcija) turin, jskaitan, bet neapsiribojant, kos teksta, patalpintas nuotraukas, schemas, bržinius, taip patJos kompozicija, prikauso isimtinalai "Topex grupe!" ir yra teisinés apsaogos objektas pagal 1994 m. vasario 4 d. Autori teisiu ir gretutiniu teisiu [statyma (t.y. Istatymu leidinys U. 2006 Nr. 90, 631punktas su pakeitimals). Kopijuoti, apodoroti, skelbti, keisti visa vadová in atskirus jo elementus komercinialis tikslais be rasiško "Topex Group" sutikimo yra grižte draudžiama ir gali užtraukti civiline ir baudžiamaja alsakomybe.
EB atitikties deklaracija
Gamintojas: Gamintojas: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varšuva
Produktas: E+ pjovimo robotas
Modelis:04-621
Prekybos pavadinimas: NEO TOOLS
Serijos numeris: 00001 ÷ 99999
Už šią atitikties deklaracija atsako tik gamintojas
Pirmiau aprasytas gaminys atitinka siuos dokumentus:
Mašinu direktyva 2006/42/EB
RED direktyva 2014/53/ES
RoHS direktyva 2011/65/ES su pakelimals, padarytals Direktyva 2015/863/ES
Ir atitinka standarty reikalavimus:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Si deklaracija taikoma tik tokioms masinoms, kokios jos pateikiamos j rinka, ir neapima sudedamuju daliu. pridejo galutinis naudotojas arba veliau atliko veiksmus.
ES reziduojanco asmens, igalioto rengti technine dokumentacija, vardas, pavarde ir adreas:
Pasirasya:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsuva

Pawel Kowalski
TOPEX GROUP kokybes pareigūnas
Varsha, 2023-09-11
ES alitikties deklaracija
Gamintojas: Gamintojas: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varšuva
Produktas: Jkrovimo stotelé
Modelis: K145455
Prekybos pavadinimas: NEO TOOLS
Serijos numeris: 00001 ÷ 99999
Už šiagatitikties deklaracija atsako tik gamintojas.
Pirmiau aprasytas gaminys atitinka siuos dokumentus:
RED direktyva 2014/53/ES
RoHS direktyva 2011/65/ES su pakeitimais, padarytais Direktyva 2015/863/ES
Ir atitinka standartuy reikalavimus:
ENIEC55014-1:2021;ENIEC55014-2:2021;ENIEC61000-3
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
ENIEC 63000:2018
Si deklaracija taikoma tik masinai, kuri buvo pristatyta j
rinkoje ir neapima galutinio naudotojo pridetu komponentu arba je volesne veikla.
ES gyventojo, turinchio jgaliojimus, vardas, pavarde ir adreasas
parengti technine dokumentacija:
Pasirasyta:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsuva

Pawel Kowalski
TOPEX GROUP kokybes pareigūnas
Varsha, 2023-11-09
LV
TULKOSANAS (LIETOTAJA) ROKASGRAMATA
PLAUSANAS ROBOTS 04-621
UZMANIBU! PIRMS DARBINAT ELEKTKROINSTRUMENTUS, RUPIGI IZLASIET SO LIETOSANAS INSTRUKCIJU UN SAGLABAJIET TO TURPMAKAI LIETOSANAI.
SIKI IZSTRADATI DROŠIBAS NOTEIKUMI
PLAUŠANAS ROBOTU DROŠIBAS INSTRUKCIJAS
Drosiba plausanas robotapraktiskajaiietosana
IETEKUMI
Rupigi izlasiet lietosanas pamacibu. lepazistieties ar vadibas sistam un pareizu ierices daribu.
Nelauijiet ierici lietot berniem vai personam, kas nav izlasijas lietoanas instrukciju. Valsts tiesibu aktos var but noradits minimalis operatora vecums.
Neizmantojiet robotu, ja tā tuvumā atrodas cites personas, Ipaşi běrnì vaidzīvnieki.
Ludzu, atcerieties, ka operators vai lietotajs ir atbildigs par nelames gadijumiem vai apdraedjumu citiem cilvekiem vai videi.
PREPARATION
- Pirms plausanas katru reizi pārbaudiet, vai visas robota dalas darbojas pareizi.
Lai egutu labakos rezultatus, plausanu ieteicams veikt laikakad nav lietus. Piaujot lietus laikā, zale var pielimieties pie robota, un tas var paslidet. - NEplaujet sliktos laikapstaklos, piemēram, stiprā lietū, perkona negaisa vai snigşanas laikā.
Periodiski parbaudiet noplauto platibu un nonemiet visus akmenus, gruzus, vadus, kaulus un citrus skerslus. Ierobezotara garantija neattiecas uz bojajumiem, ko izraisijsu uz zaliena atstati prieksmet
Lai izvairitos no bojajumiem, nedrikst plaut tuvak par 1 m no smidzinataju galvinam.
UZMANIBU! Robotu un smidzinatajus nedrikst iesegt vienlaicigi. Robots japrogramme tā, lai tas darbotos citā laikā nekā smidzinataji.
NEKAD nelaujiet berniem pieskarties barosanas blokam, uzlades stacijai, jo ipaşi kontaktiem, asmeniem, akumulatora nodalijumam vai jebkuram dalam, kuras ir spraugas, piemeram, riteniem.
OPERACJA
Uzmanieties no rotejosam lapstinam! NEIEKLAUJIET rokas vai kajas zem rotejosiem asmeniem.
- Plaujot zalienu, uzmanieties no prieksmetiem, kas izkaisiti uz zaliena! Kad robots ir ieslegts, ieverojiet drosu attalumu.
- Neatstajiet ierici bez uzraudzibas, ja ir zinams, ka tās tuvumā atrodas dzivnieki, berni vai apkārtēije cilveki.
- Saglabajiet drosu poztciju. Uzturiet lidzsvaru un stabilu stavokli slipumā. Darbojoties ar robotu vai tā perifērijas iericem, drikst staigāt, bet nedrikt skriet.
Ludzu, izlasiet noradijumus par to, kad, kur un kā pārbaudit robota un ta perifējias ieriču, kabelu un pagarinatāju bojajumus vai nolietojumu, kā ari par robota remontu. Paśdarbība, remonts nav atlauts -tas draud ar garantijas atcelsanu.
- Nesavietojet bojatu strāvas kabeli un nepieskarieties tam, kamīr tas nav atvienots no strāvas padeves, jo pastāv risks saskarties ar componentiem zem spriequma.
Robotu un/vai perifero apríkojumu pieslédziet tikai pie strāvas kēdem, kas ir aizsargatas ar stravas kedes partrauceju, kura izslégsanás strava neparsniedz 30 mA.
- Ja robots izdod neparastu skanu vai tiek pamanita neparasta vibracija, vai tas signalize par trauksmi, nekavejoties nospiiediet STOP pogu.
- Pirms izslegt robota stravas padevi, ir aizliegts pieskarties bistamam kustigam dalam.
- Ir aizliegts pieskarties bistamajamederal, lidz tās ir pilnība apstāiusās.
Stradajot ar robotu, vienmér valkajiet stingrus apavus un garas bikses.
- Partrauciet strayas padevi: Pirms robota blokesanas.
- Pirms testesanas, tiriisanas vai apkopes.
PIKTOGRAMMAS UN BRIDINAJUMI
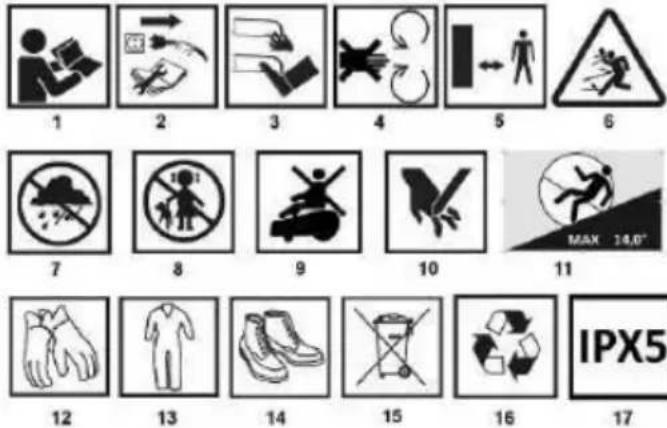
- Izlasiet lietoanas instrukciju un ieverojet bridinajumus un drostbas nosacijumus!
- Pirms tirisanas vai apkopes atvienojiet no strvas padeves
- Nenovietojet rokas vai kajas zem plausanas mehanisma aizsarga.
- Rotejosas dalas -iespeja gut traumas
- leverojiet drosu attalumu no plausanas robota.
- Uzmanieties no iespejas savainoties no lietiem prieksmietiem.
- Aizsargajiet no lietus
- Uzglabat berniem nepieejama vieta.
- Nebrauciet uz robota
- lespëjams pirkstu zudums, jauzmanas
- Maksimalais zemes slipums 14^ / 25% .
- Aizsargajiet rokas ar darba cimdiem
- Valkajiet aizsargapgerbu
- Valkajiet aizsargapavirus
- Neizmest kopā ar sadzīves atkritumiem
- Selektīvā atkritum savāksana
- Aizsardzibas pakape
UZMANIBU! So ierici drikst lietot berni, kas vecaki par 8 gadiem, un personas ar iberozotam fiziskam un garigam speljam, ka ari ar nepietiekamam zinaesanam vai pieredzi, ja tas tiek uzraudzitas vai pienacigi instruetas par icerces drosu lietoanu, lai apzinatos ar to saistitos riskus. Ar so ierici nedrikst speléties berni. Berni bez uzraudzibas nedrikst firti erici vai veikt tās akopi.
GRAFISKO ELEMENTU APRAKSTS
Talak noradita numeracija attiecas uz ierces sastavdalam.
attelets sis rokasgramatas grafiskajas lapas.
| Apzimējums A attëls | Apraksts | |
| 1 | Avārijas apstāšanās | |
| 2 | Plaušanas augstuma regulētãjs | |
| 3 | Plaujmašīnas vadības panelis | |
| 4 | Plaujmašīnas strāvas slēdzis | |
| 5 | Dzenošie riteni | |
| 6 | Griešanas asmeni | |
| 7 | Griešanas mehānisma cilindris | |
| 8 | Grozāmie riteni | |
| 9 | Pärnēsāšanas rokturis | |
| 10 | Uzlādes savienotāji | |
| 11 | Akumulatora nodalijuma vāks | |
| Apzimējums B attëls | Apraksts | |
| 1 | Dokëšanas stacijas vadības panelis | |
| 2 | Caurumi dokstacijas nostiprināšanai | |
| 3 | Uzlādes savienotāji | |
| 4 | Dokëšanas stacija | |
| 5 | Dokëšanas stacijas aizsargs | |
| 6 | Strāvas padeves kabela savienotāji darba zonas markëšanai | |
| 7 | Kabelu atveres darba zonas un strāvas padeves markëšanai | |
| 8 | Dokëšanas stacijas strāvas kontaktligzda | |
| 9 | Markëjums pareizai kabelu izvietošanai | |
| Apzimējums D attëls | Apraksts | |
| 1 | Uzlādes statusa indicatora gaisma | |
| 2 | Signāla klūdas indikators | |
| 3 | lerobezojoša kabela indicatoris |
| 4 | Darbības stundas / kljūdas ziŋojums, gaismas 1-4 |
| 5 | ledarbināsanas poga |
| 6 | Barošanas slëdžis |
| 7 | Dokēsanas poga |
| 8 | Poga "Apstiprināt" |
| Apzimējums H attëls | Apraksts |
| 1 | Skrūves |
| 2 | Akumulatora nodalijuma vãks ar transportēsanas rokturi |
| 3 | Akumulatora nodalijums |
| 4 | Akumulatora lizda uz kameras vãka |
| 5 | Uzlădējams akumulators (nav ieklauts) |
| Apzimējums I attëls | Apraksts |
| 1 | Zäliens |
| 2 | Siena |
| 3 | Dokēsanas stacija |
| 4 | Stacijas attālums no sienas |
| 5 | Sakotnējais linijas posms, kas norobežo plaušanas zonu |
| 6 | Sekcjjas garums |
| Apzimējums J attëls | Apraksts |
| 1a | Kabeli, lui erobežotu plaušanas platību Sākums |
| 1b | Kabeli, lui erobežotu plaušanas platību |
| 2 | Piegādes linija: |
| 3 | Dokēsanas stacija |
- lespējamas atskiribas starp grafisko attelu un faktisko produktu.
SAGATAVOSANÁS DARBAM
AKUMULATORA UZSTADISANA
- Aggrieziet plausanas robotu tā, lai būtu iespejams pieklut robota apaksējai dalai.
- Slédza A4. att. un transportešanas roktura A9. att. vieta atrodas akumulatora nodaljuma vacinš H2. att., kas piestiprinats ar 4 skruvēm, kuras H1. att. atzimetas ar bultinam.
- Pec tam atskruvejiet ar bultinam apzimetas skruves.
- Uzmanigi nonemiet nodalijuma vacinu H2. attelā, lai neparlauztu vai neatvienotu sledza vadus A4. attelā (tas ir piestiprinats pie akumulatora nodalijuma vacina).
- Pec tam aperversiet vaciu, tā apakseja puse ir nostiprinata akumulatora ligzda H4. attels.
levietojet ENERGY ^+ serijas akumulatoru ligzdã. - Atversiet vacinu ar pievienoto akumulatoru un ievietojet to H3 attelā redzamajā nodalijumā.
- Pievelciet skruves, kas nostiprina vaku. Pagrieziet robota apaksjo dalu uz leju, ierice ir gatava.
PLAUŠANAS ROBOTA DARBA VIDE
Pärliecinieties, ka zona, kurä darbojas robots, ir izpilditi šadi nosacjumi:
Zales augstums neparsniedz 60~mm
- UZMANIBU! Ja zāle ir garaka par 60 mm, vispirms noplaujiet zālienu ar rokas plaujmasīnu.
- Nav akmenu, koka gabalu, vadu, stravas vadu vai citu sveskermenu.
- Plausanas vieta ir lidzena un plakana, bez graviem un transejam, un tās slipums ir mazaks par 25% (14°) C1. attëls.
- Uzstādīsānai ir nepiecišami šadi instrumenti:
Gumijas amurs (tapu iedzisanai zeme, kad tiek ieklats ierobejoosais kabelis).
- Komplektā ir ieklauta seśstūra atsīEGA (uzlādes stacijas dostiprināsanai).
Knaibles (lai nogrietzu darba zonu norobezo so kabeli)
1.BAZES STACIJAS UZSTADISANA
Izvelieties piemerotu atrasanas vietu Uzlades stacija janovieto sadavieta C3. attels:
- Relativi lidzena un lidzena zaliena dati.
Tuvzaliena malai. - Netalu no sienas kontaktligzdas.
- Novietojet 10 m pagarinātāju un barošanas bloku ānainā, vēsā un sausā viēṭa.
Vismaz 2 m attalumā no uzlades stacijas nedrikst atrasties škérši.
- Ir ieteicams uzlades staciju novietot sausa un aizsargata vieta.
- Barosanas avotam jabut 30 cm virs zemes limena.
2. UZLÄDES STACIJAS STIPRINÄJUMS
Piestipriniet uzlades staciju pie zemes ar 6 stiprinajuma skruvem (G1) (izmantojot sešstura atslegu G6).
UZMANIBU! NEBUT nostajieties uz uzlades stacijas plaksnes vai staigajiet pa to.
UZMANIBU! NEVARIET jaunus caurumus uzlades stacijas plaaksne.
Stacija japieskruve pie gridas, izmantojot esosos caurumus.
3. IEROBEZOJOSAS TROSES IEKLASANA
lerobejoosais kabelis tick izmantots, lai norobezotu darba zonu un vaditurobotu atpakal uz uzlades staciju.
UZMANIBU! Ja ari jusu kaimi's izmanto robotizeto plaujma'sinu, ieverojiet vismaz 1 m attalumu starp abu robotu ierobezoosajiem kabeljem.
IEROBEZOJOSKALESTAVOKLAPLANOSANA
Pirms iberejoša kabela ieklasanas izstaigajet noradito robezu un nonemiet visus nevajadzigos prieksmetus, piemeram, akmenus.
UZMANIBU! lerobezojoša kabela garums nedrikt sparnietg 200 metrus.
BRIDINAJUMS! Robots nedrikt braukt pa grants vai lidzigiem materialiem, kas var sabojat asmenus.
IEROBEZOJOSAS TROSES IEKLASANA C ATT.
leverojot talak sniegtos noradijumus, laizvietotu iberezojo so kabeli ap darba zonu un skersliem. Izmantojiet komplekta ieklauto meritaju, lai pareizi novietotu iberezojo so kabeli.
UZMANIBU! Ierobezojsais kabels tiek darbinats ar loti zemu spriegumu, un tas ir dross cilvekiem un majdzivniekiem.
UZMANIBU! Saciet ar "-" savienotaju uzlades stacijas aizmugure B6. att., velciet to zem stacijas (un atstajiet 10 cm rezervi) un novietojet kabeli ap zalienu preteji pulkstenraditaja virzienam, beidzot ar "+" savienotaju uzlades stacijas aizmugure (atstajiet 10 cm rezervi). Pärliecinieties, ka kabelis saskaras ar metalu pie "+" un "-" savienotajiem. B6. attek Neaizmirstiet nogrietz lieko erobežojošo kabeli.
- Atstajiet vismaz 2 m tuksu vietu starp ierobezoanas kabeli un uzlades staciju. Saja sadala esosais kabelis tiek izmantots, lai novaditu robotu lidz dokstacijai.
- Starp ierobežojoš trosi un zaliena malu jabut 30 cm attalumam C2 attels; C3 attels.
- Piestipriniet trosi pie zemes ar paredzētajiem dibeljem G5. attëls. lerobézojošajai trosei jabut taisnai un nedaudz pieviktai. Dibeli jazvieto ik péc 1 m (to var mainit atkarība no zaliena formas) C4. attëls. Lai izvairftos no signala vajināsanās, nedrikst ierakt kabeli dziläk par 2 cm.
- Izvietrojiet kabeli tā, lai lenki butu lielaki par 90° C5. attels. Šādās zonās izvietrojiet ierobežojošo kabeli lezenās liknēs, kas atvieglos robota párvietosanos pa plaujamo platibu.
- Ja zaliena ir puku dobes, diki vai koki, apnemiet tos ar ierobezojoša kabela cilpam C4. attëls.
- Uzturet min. 30 cm attalums starp ierobežojoš trosi un škērslumalām.
UZMANIBU! Celā uz cilpu un no tās ierobežojsa trose nedrikst krustoties
C4. attels.
- Plaujmasinas darba zona atstajiet sauru vietu. Pariecinieties, ka attalums starp paraleli ejoism ierobezojoism kabeliem ir lielaks par 1 m.
UZMANIBU! Parniecinieties, ka dokstacija atrodas plauusanas zonu apzimejojas cilpas iekspuse. (arpuse / iekspuse) B2 attels
4. UZLÄDES STACIJAS UZSTÄDISHANA
Savienojiet barosanas avotu
- levietojiet strāvas kontaktdakšu 110-240 V sienas kontaktligzdā
- Parbaudiet uzlades stacijas LED indicatoru stavokli B1. attels:
- Nepārtraukta zala gaisma: savienojums izveidots (robots nav uzlādēts vai ir pilīnībā uzlādēts)
- Partraukta zala gaisma: robots tied uzladets.
- Partraukta sarkanā gaisma: visbiezak sastopamā kūda ir "ierobezejoša kabela atvienosana".
- Izslęgta gaisma: visbieżak sastopama kūda ir "Nav 100-240 V barośanas avota" vai "Nav savienojuma ar barośanas avotu".
DARBIBA / IESTATJUMI
Plaušanas robota pirmā palaisana
-
Pirmo reizi iedarbinot robotu, novietojet ierici uz dokstacijas ta, lai uzlades savienotaji uz stacijas figu. B3 nesaskartos ar plausanas robota uzlades savienotajiem, 1. att. A10.
-
Kad plaušanas robots pirmo reizi tiek iedarbinats no tālruṇa lietotnes, ir jāveic programmaparatūras atjaunināsana. Istenosanas metode in aprakstīta talak sadāla "Programmaturas atjaunināsana".
- UZMANIBU! Pirmā savienojuma laikā tārlunim un robotam jāatrodas Wi-fi tikla darbības zona.
PIRMS ROBOTA LIETOSANAS ATJAUNINIET PROGRAMMAPARATURU.
Atjaunināsana javeic sādi.
- Novietojet robotu cilpas iekspuse, bet arpus uzlades stacjas.
- Parsledziet sledzi A4 attel'uz 1. poziciju.
- Nospiediet un turiet sledzi D5. attels
- Palaidiet lietojumprogrammu, skenejiet QR kodu.
- Savienojiet lietojumprogrammu ar robotu
- Izvērsiet programmatūras iestatījumus, nospiéžot ikonu ekrāna augšejā labajā stūr.
- Izvěliéties opciju: Programmatūras atjaunīnasana.
- Pec tam izpildiet ekranā redzamos norādijumus.
Pec programmaturas instalesan aierice ir gatava darbam.
UZMANIBU!
- Displejā teik parādīts, vai robots ir Wi-fi vai Bluetooth diapazona.
- Savienojumu ar tiklu norada mirgojoša savienojuma veida ikona. Kad savienojums ir izveidots, ikona partrauc mirgot.
- Robotu var savienot pārī tikai ar vienu tālruni.
- Ja nepieësams pievienot vēl vienu (to pašu plaúşanas robotu), pirmais robots ir jāiznem no lietojumprogrammas. iOS lietotne arī no Bluetooth iestatjumiem.
PLAUSANAS AUGSTUMA REGULESANA:
Pirms pirmas plausanas iestatiet plausanas augstumu 60 mm un pec tam, kad viss zaliens ir salidzinoši lidzens, mainiet to uz vajadzigo augstumu.
Lai palielinatu plausanas augstumu, pagrieziet A2. att. pogu pulpstenraditaja virziena.
Lai samazinatu plausanas augstumu, pagrieziet A2. attelä redzamo pogu pa kreisi.
- Plaušanas augstumu var regulēt no 20 mm (MIN) lidz 60 mm (MAX).
UZMANIBU! Plaujmasinas plausanas mehanisma cilindra piedzinas motors A7 attelā iesledzas aptuveni 10 sekundes pec izbrauksanas no bazes, uzakot darbibu.
IESLEGSANA/IZSLEGSANA
- Lai zslęgtu strāvas padevi, iestatiet A4. attēlā redzamo sledzi pozćija "O".
- Lai ieslęgtu strāvas padevi, iestatiet A4. attelā redzamo sledzi pozćija "I".
ROBOTAKTIVIZESANA UN DARBA LAIKA PROGRAMMESANA MANUALA REZIMA.
- Nospiediet un turiet ieslegsanas pogu D5. att, lai iedarbinatu robotu. Piezime: lai izvairitos no kludainas iedarbinasanas, palaisanas laikara botu nesakratiet. Ja robots netiek pareizi iedarbinats (visas lampinas nepaTRAukti iedegas), iedarbiniet to no jauna.
- levadiet paroli, divreiz nospiezot pogu D6 attela, pec tam divreiz pogu D7 attela un vienreiz pogu D8 attela (parole iprogrammeta rupnica).
-
Programmējiet darbības laiku (ieskaitot plausanas laiku un uzlādes laiku):
-
Nospiediet D6. att., lai iestaftu darbibas laiku. Viena ieslegta lampina nozime 2 stundas, maksimalais darbibas laiks ir 8 stundas un 4 lampinas D4 attela. Nospiediet D8. attela redzamo pogu, lai apstiprinatu un iedarbinatu robotu.
UZMANIBU! Kad darba laiks ir iestafits, robots atceresies iestatjumus un katru dienu saks plausanu ieprogrammetajlaikä. Plausanas laiks bussakaanarievatitajiem iestatjumiem.
- Robota ieprogrammetais darbibas laiks no 2 lidz 8 stundam ir plauşanas laiks, iseskaitot uzlades laiku.
- Daribas un uzlades laiks atskiras atkaribā no izmantotā akumulatora.
Ja velaties mainit daribbas laiku, vēlreiz izpildiet 2.-3. daribbu.
LAIKA PROGRAMMESANA AUTOMATISKAJA REZIMA, 7 DIENU GRAFIKS, IR PIEJJAMA, IZMANTOJOT LIETOTNIES IESTATJUMUS.
- Pec avarjas apstasanas robots vispirms ir jaatbloke, izpilot ieprieks mineto 2. daribbu. Kad robots ir atblokets, mes varam nosutit to atpakaj uz stacju, nospiezot pogas: D7, pec tam apstipriniet ar D8 pogu, lai plaujmaśina atgrieztos uzlades stacija.
- Nospiezot avarijas aptureesan pogu STOP, no programmas tiek dzests manuālā un automātiskā režima cikls, ja tika aktivizeta šādā veidā. Lai robots pēc avarijas apstāsānās atkal saktu stradāt, robots ir jaatgriez uzlades stadjā un atkal jäistata manuālā darba grafiks.
Automatischka grafika gadijumā veiciet to pašu darbību lietojumprogrammas grafika un apstiprintiet tā iestatijumus
UZMANIBUI! Automatiskaja grafika ieprogrammeto palaisanas laiku nevajadzetu uzskatit par loti precizu. lerice var sakt darboties lidz pat vairakam minutem pec iestatita laika.
- Manualā režīma aktivizësana dzëš programma ieprogrammeto grafiku un otradi.
- Manuālajā rezmā malu apgriesana tiek veikta automatiski ik pēc daziem plausanas cikliem. Ta ietver zales plausanu tuvu kabelim, kas nosaka darba zonu. UZMANIBU! Jäievero piesardziba, lai nodrosinātu, ka kabelis ir pareizi piestiprinats, lai tas netiku paklauts nejausai noplausanai.
- Plaušanas robots atgriežísies dokstaciža, tiklidz iericeBUS konstatejusi lietus sákumu.
- Ja robots darba laikā sastopas ar škērsli, tas no tā atsitīsies un turpinās darbu.
UZLÄDES STACIJAS UZLÄDES STATUS INDIKATORS:
Nepārtraukta zala gaisma - akumulators ir pilinibā uzlādēts.
Pärtraukta zala gaisma - uzäde.
ARPUS UZLÄDES STACIJAS:
Nepartraukta zala gaisma - akumulators >20%
Pärtraukta zala gaisma - akumulators <20%
UZMANIBU! Robots automatiski partrauc darbu un atgriezas uzlades stacija, ja akumulatora uzlades limenis samazinas zem 20%.
KLUDUGAISMA:
Nepātraukta zala gaisma - atjauniniet systemu. Savienojieties ar lietotni, lai veiktu atjaunināsanu.
Pärtraukta zala gaisma - notiek sistemas atjauninăsana.
Parraukta sarkana gaisma - kūdas zinojums 1 lidz 5, restartējet robotu.
Nepartraukta sarkana gaisma - kludas zinojums 6 lidz 12, nospiediet "STOP" vai "OK", lai dzestu.
IEROBEZOJOŠA KABELA INDIKATORS:
Nepartraukta zala gaisma - signals ir pareizs
Nepartraukta sarkana gaisma - nav signala
VadtbaselementiD4.atelts:
Nepartraukta gaisma - robots blokets.
Nepartraukta gaisma - robots atblokets.
Gaisma 1 iedegas zali: 2 stundu darba laiks.
Gaismas 1 un 2 iedegas zaă krāsă: 4 stundu darba laiks.
Lampinas 1, 2 un 3 iedegas zala krasa: Darba laiks 6 stundas.
Lampinas 1, 2, 3 un 4 iedegas zala krasa: Darba laiks 8 stundas.
PROGRAMMATURA PLAUSANAS ROBOTAVADIBAI
IOS lejupielade:
https://apps.apple.com/cn/app/toua/id6449251720
Lejupieladet Android:
https://play.google.com/store/apps/details?id=com.toua.robot
Programmas instrukcijas var lejupieladet no:
https://bit.ly/3QBB6Gm
ROBOTAVARIJASIZLEGSA
Nospiediet pogu "STOP"A1 attelā, lai apturetu robotu, nospiediet un turiet ieslēgsanas pogu, lai izslettu robotu.
ROBOTA PÄRVIETOSANA
Zem robota atrodas pacelsanas rokturis A10. att., lai to varetu viegli darbinat ar vienu roku.
APKOPE UN UZGLABASANA
- Pirms tīrīsanas un apkopes vienmī izsledziet robotu.
- Pirms uzlades stacijas tirišanas un apkopes atvienojiet stravas padevi.
- Mainot asmenus un tirot robota apaksjo dalu, vienmer valkajiet biezus aizsargcimdus.
-
Regulari parbaudiet skruvju un uzgrieznu pieviksanu. Bojatas detalias drošibas apsvērumu del ir jalabo vai janomaina.
-
Regulari parbaudiet, vai asmeni var brvi griezties.
UZMÁNBUB! Kad apgriezat robotu otradi, novietojet to uz zaliena vai mikstas virmas, lai nasabojatu vai nesaskrapetu vaku.
TIRISHANA
BRIDINAJUMS! Pirms tiri'sanas saksanas izsledziet strvas padevi, izmantojot slezdji A4. att.
- Mazgajet robota priekspusi ar zemspiediena tirišanas lidzekli un mikstu birsti vai dranu.
-
Izmantojiet cieto birsti, lai notiritu noplauto zali un gruzus no asmeniem, riteniem un citam dalam robota apakspuse.
-
Regulari parbaudiet, vai ritenos nav dublu vai noplautas zales, un notfriet tos ar birsti.
UZMANIBU! Regulari nonemiet augu attliekas no robota apaksjadas, lai izvairitos no produktivitates samazinanas.
ASMENU NOMAINA
BRIDINAJUMS! Vispirms izsledziet galveno strvas sledzi un uzvelciet aizsargcimdus.
BRIDINAJUMS! Izmantojiet tikai ražotāja apstiprinatus noraditos originos asmenus.
Visas tris lapstiinas un to skruves janomaina viena nomaias reize A6. attels.
- Skrüves jaatskrüve un jäpievelk ar skruvgriezi.
- Pärbaudiet, vai jaunas lapstinas var brivi griezties.
PROBLEMU RISINASANA
Tālāk dotajā tabulā sniegtas norādes, kas palfdzēs diagnosticet problemas.
Ja iespejams, salabojet ieri ci paisi. Ja problemu nav iespejams noverst, sazinieties ar pilvaroto izplitaju vai servisa centru.
BRIDINAJUMS! Javeic aizsdzibas pasakumi.
| Problēma | lespējamie cēlōni | Risinājumi |
| Uzlādes stacijā mirgo sarkana gaisma | lerobežojošā kabela pārtraukšana | Atrodiet bojāto kabela posmu un salabot to |
| Robotam ir grūtības pieslēgties uzlādes stacijai | Uzlādes stacijs nav pareizi uzstādīta | Skatiet sadalu "Gatavošanās darbam". |
| lerobežojošā trose nav pareizi novietota | ||
| Nav signāla no ierobežojošā kabela | Nav barošanas avota | Pārbaudiet strāvas avotu |
| lerobežojošā trose tika savienota pretēji | "+" un "-" savienotāju nomaina | |
| lerobežojošais kabelis nav savienots ar uzlādes staciju | Pārbaudiet, vai ierobežojošā trose ir pareizi savienots ar uzlādes staciju | |
| lerobežojošā kabela pārtraukšana | Pārbaudiet visu ceμlīdz galam, ka kabelis nav pārtraukts. | |
| lerobežojošā troses krusti ceλa uz un no cilpas | Pārbaudiet, vai ierobežojošā trose ir pareizi uzstādīta. | |
| Robots dodas pāri robežām | lerobežojošā trose tika savienota pretēji | "+ " un "-" savienotāju nomainä |
| Robots vibrē vai rada neparastus trokšŋus. | Bojāts vai trūkstošs asmens | Asmenu stiprinājuma skruvjnu pārbaude un remonts |
| Asmenu disks ir valīgs | ||
| Asmena nomainä |
| Klūdas kóds | Apraksts | Risinājums |
| E01 F1 attēls | Initializācijas kIūda - Žiro sensors | Novietojiet robotu uz lidzenas virsmas un restartējiet. |
| E02 F2 attēls | Pacelšanas sensora vai sadursmes sensora defekts | Noregulējiet sadursmes steni un vērpes ratu plaujmašinas prekspuse, pārbaudiet, vai tie nav blokěti; novietojiet robotu uz lidzenas virsmas un iedarbinjet to no jauna. |
| E03 F3 attēls | Plaušanas motora initializācijas klūda | Novietojiet robotu uz lidzenas virsmas un restartējiet. Ja problema saglabājas, szajinieties ar klientu apkalpošanas dienestu. |
| E04 F4 attēls | Strāvas padeves savienojuma klūda |
| E05 F5 attëls | Nepareizs plaušanas motora ātrums | |
| E06 F6 attëls | Brīdinājums par slīpumu | Novietojet robotu uz līdzenas virmas. Nospiediet STOP vai OK, lai atcelu trauksmi. |
| E07 F7 attëls | Līfta brīdinājums | Novietojet robotu uz līdzenas virmas. Nospiediet STOP vai OK, lai atcelu trauksmi. |
| E08 F8 attëls | ADC kanāla kīūda | Novietojet robotu uz līdzenas virmas un restartējiet. Ja problema saglabājas, sazinieties ar klientu Āpkalposanas dienestu. |
| E09 F9 attëls | Nepareizs signāls | Skatīt iepriekš tabulā: problema - nav signāla no ierobežojsā kabela. Pārbaudiet visus punkts vienu pēc otra, pēc tam novietojet robotu uz līdzenas virmas. Nospiediet STOP vai OK, lai atcelu trauksmi. Restartējiet robotu. Ja problema saglabājas, sazinieties ar klientu Āpkalposanas dienestu. |
| E010 F10 attëls | Robotu ievārījums | Novietojet robotu uz līdzenas virmas. Nospiediet STOP vai OK, lai atcelu trauksmi. Restartējiet robotu. Ja problema saglabājas, sazinieties ar klientu Āpkalposanas dienestu. |
| E011 F11 attëls | Nepareizs kreisā solu motora ātrums | Restartējiet robotu. Ja problema saglabājas, sazinieties ar klientu apkalposanas dienestu. |
| E012 F12 attëls | Nepareizs Ārums par tiesibām solu motors |
KOMPLEKTÄ IETILPST:
- Plaušanas robots 1 gab.
- Dokešanas un uzlades stacija 1 gab.
- Barosanas avots un pagarinsanas kabelis 1 gab.
Kabeli darba zonas norobezoisanai 100m
Kabelu stiprinajuma dibeli 100 gab. - Dokeshanas stacijas stiprinajuma dibeli 6 gab.
Griesanas asmeni 3 gab.
Kabelu savienotaji 2 gab. - Seṣṭura atsēga 1 gab.
SPECIFIKACIJAS
| Plaušanas robots 04-621 | |
| Parametrs | Vértilba |
| Barošanas spriegums: | 18 V LīDZSTRAVAS SPRIEGUMS |
| Plaušanas motora maksimālā nominālā jauda: | 50 W |
| Pašgājēja motora maksimālā nominālā jauda: | 20 W |
| IP aizsardzības pakāpe uzlādes staciāj | IPX4 |
| Robota IP aizsardzības pakāpe | IPX5 |
| IP aizsardzības pakāpe uzlādes adapterim | IP 65 |
| Robota aizsardzības klase | III |
| Uzlādes stacijas aizsardzības klase | II |
| Plaušanas platums: | 180 mm |
| Plaušanas augstuma regulēšana diapazonā | 20 mm - 60 mm |
| Rotácijas ātrums | 3100 apgr./min |
| Svars | 10,2 kg |
| Răžošanas gads | 2024 |
TROKŠNA UN VIBRACIJAS DATI
| Skaņas spiediena limenis | LpA = 56dB (A) K=3dB(A) |
| Izmērītais skānas jaudas limenis | Lw = 67dB (A) K=3dB(A) |
Informacija par troksni un vibraciju
ferices emitetä troksna limeni raksturo: emitetä skanas spiediena L imenis LPA un skanas jaudas limenis LWA , kur K apzime merijumu
nenoteiktibu. lerices emite to vibraciju raksturo vibracijas paatrinajums ah, kur K apzime merjumu nenoteiktibu.
Sajā lietosanas instrukcijā izmerītās vertibas, t. i., emitetā skanas spiediena limenis LpA, skanas jaudas limenis Lwa un vibracijas paatrinajums a, tika merītas saskana ar standaru EN 62841-1:2015+A11. Dotais vibracijas limenis a var tikt izmantots, la salidzinatu erices un provizoriski novēτetu vibracijas iedarbūb.
Noradtais vibracijas limenis ir representativs tikai ierices pamata lietojumiem. Ja ierici izmanto citiem merkiem vai ar citiem darba rikiem, vibracijas limenis var atskirties. NeatbilstoSA vai rea ierices apkope izraisa augstaku vibracijas limeni. Iepriek's minetie iemesli var palielinat vibracijas iedarbibu visa ierices kalpoanas laikā.
Lai precizi noteiktu vibracijas iedarbibu, janem vera ierices "ieslegsanas" un "izslegsanas" periodi, iznemot periodus, kad ta tiek izmantota darbinasanai. Kopejā vibracijas iedarbiba var but daudz mazaka, ja visi faktori ir precizi noverteti.
Lai aizsargatu operatoru pret vibraciju, izmantojiet papildu drošibas pasakumus, pieméram, regularu ierices un darba riku akopi, atbilstošus rokas temperatūras apstaklus un pareizu darba organizaciju.
TROKŠNA UN VIBRACIJAS DATI
VIDES AIZSARDZIBA
Elektroiekartas nedríkst izmest kopár sadzives atkrituimiem. Izmeti abilstosas viétas. Informácu par utilizácu var sanem no izstradajtirgotaja vai vietjām estadēm. Elektrisko un elektronisko iekärtu atk (EEIA) sut vijelas, kas navnełáras dabas videi. Nepárstradii EEIA i potenciàlli bistami videi un cilveku veselíbai.
"Grupa Topex Spóka z ierobězoná odpwiedzialnoscia" Spóka komandytowa ar junidisko adresi Varšavá, ul. Pograniczna 2/4 (turpmák tekstá - "Topex Grupa") informé, ka visas autortiesibas uz sīs lietosanas instrukcjas (turpmák tekstá - "Rokasgrāmata") saturu, tostarp, be nestikai uz tās tekstu, ivjetotajām fotografíjām, shēmām, Štrjējumiem, kā ari uz tās kompozificiju, pieder tikai Topex groupui un ir paklautas tiesiskai aizsardžibai saskaṇā ar 1994. gada 4. februara Likumu par autortiesibam un blakustiesibam (t. i., Likumu Vēstnesī U. 2006 Nr. 90, 631. punkts ar grožjūmium). Visas Rokasgrāmatas, kā ari atsevišku tās elementu kopešana, apstrade, publicēsana, párveidošana komerciños nolukos bez Topex Group rakstískas piekrišanas ir stingri aizliegta un var novest pie civilitieskías un kriminalatbildibas.
EK atbilstibas deklaracija
Razotajs: Razotajs: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsha
Izstradajums: E+ plausanas robots
Modelis:04-621
Tirdzniecibas nosaukums: NEO TOOLS
Serijas numurs: 00001 ÷ 99999
St atbilstibas deklaracija ir izdota uz ražotaja atbildtbu.
leprieksaprakstitais izstradajums atbilst sadiem dokumentiem:
Masinu direktiva 2006/42/EK
RED Direktiva 2014/53/ES
RoHS Direktiva 2011/65/ES, kurā grozijumi izdarīti ar Direktivu 2015/863/ES
Un atbilst standartu prasibam:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Sī deklácija attiecas tikai uz tirgū laistajām masinām, un tā neattiecas uz sastāvdalām.
galaiietotaja pieviento informaciju vai velak veiktas daribhas.
Tās ES rezidejosās personas vards, uzvards un adrese, kura ir pilnvarota sagatavot tehnisko dokumentáciju:
Parakstits uzemuma varda:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
TOPEX GROUP kvalitätes specialists
Varsha, 2023-09-11
ES atbilstibas deklaracija
Razotajs: Razotajs: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsha
Izstradajums: Uzlades stacija
Modelis: K145455
Tirdzniecibas nosaukums: NEO TOOLS
Serijas numurs: 00001 ÷ 99999
St atbilstibas deklaracija ir izdota uz ražotāja atbildibu.
leprieks aprakstitais izstradajums atbilst sadiem dokumentiem:
RED Direktiva 2014/53/ES
RoHS Direktiva 2011/65/ES, kurā grozijumi izdariti ar Direktivu 2015/863/ES
Un atbilst standartu prasibam:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Sf deklacija attiecas tikai uz ma sinu, jo tika ievesta tirgu, un taja neitilpst componenti, ko pievienojis galalietotajs vina turpmakas daribas.
ES rezidente, kas ir pilnvarots veikt šadu darbību, vards, uzvards un adrese
sagatavot tehnisko dokumentaciju:
Parakstits uznemuma varda:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
TOPEX GROUP kvalitätes specialists
Varsha, 2023-11-09
EE
TOLKIMISE (KASUTAJA) KASIRAAMAT
NIITMISROBOT 04-621
ETTEVAATUST! ENNE ELEKTRITÖRISTADE KASUTAMIST LugeGE HOOLIKALT KÄESOLEVAT KASUTUSJUHENDIT JA SÄLITAGE SEE EDASPIDISEKS KASUTAMISEKS.
UKSIKASJALIKUD OHUTUSEESKIRJAD
NIITMISROBOTITE OHUTUSJUHISED
Ohutus niitmisroboti praktilisel kasutamisel
SOOVITUSED
Lugege kasutusjuhendit hoolikalt labi. Tutvuge juhtimissüsteemidega ja seadme öige toöga.
Arge lubage seadet kasutada lastel voi isikutel, kes ei ole kasutusjuhendit lugenud. Riiklikes eeskirjades voib olla ette nahtud minimaalne kasutusvanus.
Ärge kasutage robotit, kui laheduses on teisi inimesi, eriti lapsi voi loomi. Pidage meeles, et operator voi kasutaja vastutab onnetuste voi teistele inimestele voi keskkonnale tekkvate ohtude eest.
VALMISTAMINE
- Enne niitmist kontrollige iga kord, et koik roboti osad tootaksid korralikult.
- Parima tulemuse saavutamiseks on soovitatav niita vihmavaba ilmaga. Vihma ajal niitmisel voib rohi kleepuda robotile, mis voib selle tagajärjel libiseda.
- ARGE nittke halbades ilmastikutingimustes, nt tugeva vihma, aikesetormi voi lumesaju ajal.
- Kontrollige periodooliselt niidetud ala ja eemaldage kok kivid, prahi, juhtmed, luud ja muud takistused. Piiratud garantii ei holma murule jætud esemete pohjustatud kahjustusi.
- Kahjustuste vältimiseks arge niitke 1 m raadiuses sprinkleripeadest. ETTEVAATUST! Robot ja sprinklerid El tohi olla samaaegselt sisse lilitatud.
Robot tuleks programmeerida nii, et see tootab sprinkleritest erineval ajal. ARGE LASKE lastel kunagi puutuda toiteallikat, laadimisjaama, eriti kontakte, labasid, akupesa voi mis tahes osi, kus on tuhimikud, nagu naiteks rattad.
OPERATSI0ON
- Ettevaatust põörlevate terade eest! ARGE pange omä käsivä jalgupõörlevate terade alla.
- Ettevaatust muru niitmise ajal murule laiali pillatud esemete suhtes! Kui robot on sisse lulitatud, hoidke ohutusse kaugusesse.
-
Arge jatke seadet jarelevaltva, kui laheduses on teadaoleval loomi, lapsi voi korvalseisjaid.
-
Säilitage turvaline asend. Hoidke tasakaalu ja stabilset asendit kallakutel. Robotiga vöiSELL VÄLISSEADMETEGA TÖTAMISE ajal on lubatud kändida, kuid mitte joosta.
Palun lugee juhiseid selle kohta, millal, kus ja kuidas robotit ja selle lisaseadmeid, kaableid ja pikendusjuhtmeid kahjustuste voik kolumise suhtes kontrollida ning robotit parandada. Isemodifitseerimine, remont ei ole lubatud -sellega kaasneb garantiti tuhistamise oht. - Arge ühendage ega puudutage kahjustatud toitekaablit enne, kui see on vooluvorgust lahti ühendatud, sest on oht puutuda kokku pinge all olevate componenttidea.
- Uhendage robot ja/voi välisseadmed ainult vooluahelatesse, mis on kaitstud jaavoolukaismega, mille lulitusvool ei ületa 30mA
Kui robot teeb emanormaalset heli voi markab emanormaalset vibratsiooni voi annab hairsignaali, vajutage kohe nuppu STOP.
ON KEELATUD puudutada ohtlikke likuvaid osi enne roboti voolu yalialulitamist. - Ohtlikke osi on keelatud puudutada enne, kui need on täielikult peatunud.
Robotit käsitsedes kandke alati kindlaid jalanóusid ja pikki pukse. - Katkestage toiteallikas: Enne roboti lukustamist.
- Enne katsetamist, puhastamist või hooldust.
PIKTOGRAMMID JA HOIATUSED
| 1 | 2 | 3 | 4 | 5 | 6 |


- Lugege kasutusjuhendit ning järgige hoiatusi ja ohutustingimus!
- Enne puhastamist voi hooldamist uhendage vooluvork lahti.
- Arge pange kasi voi jalgu niitmismehanismi kaitse alla.
- Pöörlevad osad - vigastuste voimalus
- Hoidke niitmisrobotist ohutusse kaugusesse.
- Ettevaatust valatud esemete vigastamise voimalusega
- Kaitske vihma eest
- Hoida lastele kattesaamatus kohas.
- Arge soitke roboti peal
- Voimalik somede kaotamine, olge ettevaatlik
- Maksimaine maapinna kalle 14^ / 25%
- Kaitske kasi tookindadega
- Kandke kaitseriietust
- Kandke kaitsejalanousid
- Arge visake koos majapidamisjaatmetega
- Valikuline jaatmete kogumine
- Kaitseaste
ETTEVAATUST! Seda seadet voivad kasutada üle 8-aastased lapsed ja piiratud füusiliste ja vaimsete voimetega ning ebapiisavate teadmiste voi kogemustega isikud, kui neid juhendatakse voi juhendatakse nouetekohaselt seadme ohutust kasutamisest, et nad oleksid teadlikud Sellega kaasnevatest ohtudest. Lapsed ei tohi selle seadmega mangida. Lapsed ei tohi seadet ilma jarevalveta puhastada ega hooldustöid teha.
GRAAFILISTE ELEMENTIDE KIRJELDUS
Seadme komponentide numeratsion on jargmine. naidatud kaesoleva juhendi graafilistel lehekulgedel.
| Nimetus Joonis A | Opis |
| 1 | Hädaseiskamine |
| 2 | Niitmiskörguse reguleerija |
| 3 | Niiduki juhtpaneel |
| 4 | Niiduki toitelüliti |
| 5 | Veorattad |
| 6 | Löketerad |
| 7 | Lökemehanismi trummel |
| 8 | Pörrevad rattad |
| 9 | Kandekäepide |
| 10 | Laadimisühendused |
| 11 | Patareipesa kate |
| Nimetus Joonis B | Opis |
| 1 | Dokkimisjaama juhtpaneel |
| 2 | augud dokkimisjaama kinnitamiseks |
| 3 | Laadimisühendused |
| 4 | Dokkimisjaam |
| 5 | Dokkimisjaama kaitse |
| 6 | Tööpirkonna mängistamiseks möeldud toitekaabli pistikud |
| 7 | Kaabliaugud toöpirkonna ja toiteallika mängistamiseks |
| 8 | Dokkimisjaama pistikupesa |
| 9 | Märgistus öige kaabli marsruutimise jaoks |
| Nimetus Joonis D | Opis |
| 1 | Laadimisoleku mängutuli |
| 2 | Signaali rikkke indikaator |
| 3 | Tagasipidamiskaabli indikaator |
| 4 | Tööaeg / veateade, tuled 1-4 |
| 5 | Toitenupp |
| 6 | Toitelüliti |
| 7 | Dokkimisnupp |
| 8 | "Kinnita" nupp |
| Nimetus Joonis H | Opis |
| 1 | Kruvid |
| 2 | Akupesa kate koos transpondikäepidemega |
| 3 | Akupesa |
| 4 | Akupesa kambri kaanel |
| 5 | Laetav aku (ei kuulu komplekti) |
| Nimetus Joonis I | Opis |
| 1 | Muru |
| 2 | Seina |
| 3 | Dokkimisjaam |
| 4 | Jaama kaugusseinast |
| 5 | Niittmisala piiritleva joone esialgne osa |
| 6 | Löigu pikkus |
| Nimetus Joonis J | Opis |
| 1a | Kaabel, et piirata niitmisala Algus |
| 1b | Kaabel, et piirata niitmisala Löpp |
| 2 | Tarneliin: |
| 3 | Dokkimisjaam |
- Graafika ja tegelik toode voivad erineda.
TOOKS VALMISTUMINE
AKU PAIGALDAMINE
- Pörake niidukrobot Ümber, nii et robotil oleks juurdepääs alumisele küljele.
Luliti joonisel A4 ja transpondikäepidemel joonisel A9 on patareipesa kate joonisel H2, mis on kinnitatud 4 noolega tahistatud kruviga joonisel H1. - Seejärel keerake nooltega margitud kruvid lahti.
- Eemaldage ettevaatlikult salongi kate, Joonis H2, et mitte murda voil lahti ühendada luliti juhtmeid, Joonis A4 (see on kinnitatud akupesa kaane külge).
- Seejärel keerake kate Ümber, kaane allservas on akupesa kinnitatud Joonis H4.
- Sisestage ENERGY+ seeria aku pistikupessa.
Keerake kate koos akuga umber ja sisestage see joonisel H3 kulutatud lahtrisse. - Pingutage katet kinnitavaid kruvisid. Keerake roboti pōhi alla, seade on valmis.
NIITMISROBOTI TÖKKESKKOND
Veenduge, et roboti toöpiirkonnas on tädetud järgmised tingimused:
-
Rohu korgus ei ületa 60 mm.
-
ETTEVAATUST! Kui muru on pikem kui 60 mm, lõigake muru esmalt käsitsi niidukiga.
- Seal ei ole kive, puutukke, juhtmeid, pinge all olevaid kaableid ega muid vörkehi.
- Niitmiskoht on tasane ja sile, ilma kraavide ja kraavita ning kalle on alla 25% (14°) Joonis C1.
Paigaldamiseks on vaja jargmisitooriisto: - kummist haamer (tihvtide Iöömiseks maapinda, kui paigaldatakse kinnituskaablit)
- Komplekti kuulub kuuskantvoti (laadimisjaama kinnitamiseks).
- tangid (töpiirkonda piirava kaabli lóikamiseks)
1. BASE STATION PAIGALDUS
Valige sobiv asukoht
Laadimisaam tuleks paigutada jargmisesse kohta Joonis C3:
- Suhteliselt lame ja tasane muruosa.
Muru serva lahedal. - Pistikupesa lahedal.
- Asetage 10 m pikkune pikendusjuhe ja toiteallikas varjulisse, jahedasse ja kuiva kohta.
- Laadimisaamast vahemalt 2 m kaugusel ei tohi olla takistusi.
- Soovitatav on, et laadmisija asuks kuivas ja kaitstud kohas.
Toiteallikas peaks olema 30 cm korgusel maapinnast.
2. LAADIMISJAAMA KININITUS
Kinnitage laadimisaam 6 kinnituskruviga (G1) maapinnale (kasutades G6 kuiskantvötit).
ETTEVAATUST! ARGE seiske voi kondige laadimisjaama plaadil. ETTEVAATUST! ARGE tehke laadimisjaama plaati uusi auke.
Laadimisaam tuleb poranda kulge poltidega kinnitada, kasutades olemasolevaid auke.
3. KINNITUSKAABLI PAIGALDAMINE
Kinnituskaabit kasutatakse toöpiirkonna piiritlemiseks ja roboti tagasjuhtimiseks laadmisijaama.
ETTEVAATUST! Kui teie naaber kasutab samuti robotniidukit, hoidke mõlema roboti kinnituskaabite vahele vahemalt 1 m kaugus.
PIIRAVA KAABLI ASUKOHA PLANEERIMINE
Enne piirdekaabli paigaldamist käige moöda märatud piire ja eemaldage kokim mittevajalikud esemed, naiteks kivid.
ETTEVAATUST! Kinnituskaabli pikkus ei tohi ületada 200 meetrit.
HOIATUS! Robot ei tohi soita üle kruusa voi muude samaste materjalide, mis voivad terasid kahjustada.
KINNITUSKAABLI PAIGALDAMINE JOONIS C
Järgige alljärgnevaid juhiseid, et paigaldada kinnituskaabel umber toöpiirkonna ja takistuste. Kasutage komplektis sisalduvat mōturit, et paigaldada piirav kaabel öigesti.
ETTEVAATUST! Kinnituskaabel on vaga madalal pingel ja on ohutu inimstele ja lemmikloomadele.
ETTEVAATUST! Alustage laadimisjaama tagakuljel asuvast "-" pistikust Joonis B6 tommake see jaama alla (ja jatke 10 cm varu) ja pange kaabel umber muru vastupäeva, lopetades laadimisjaama tagakuljel asuva "+" pistiku juures (jatke 10 cm varu). Veenduge, et kaabel puutub "+" ja "-" pistiku jures kokku metalliga Joonis B6 arge unustage ligset piiravat kaabit āra lõigata.
- Jätke vähemalt 2 m vabu kohti kinnituskaabli ja laadimisjaama vahele. Selles osas olevat kaablit kasutatakse roboti toomiseks dokkimisjaama.
- Hoidke 30 cm kaugus kinnituskaabli ja muruserva vahel, joonis C2; joonis C3.
Kinnitage kinnituskaabel maapinnale kaasasolevate tüblitega, joonis G5. Kinnituskaabel peab olema sirge ja kergelt pingutatud. Düttlid peaksid olema 1 m tagant (seda voib muuta söltuvalt muru kujust), Joonis C4. Arge matke kaablit sugavamale kui 2 cm, et vältna signaali norgenemist. - Korraldage kaabel nii, et nurgad on suuremad kui 90^ , joonis C5. Sellistel aladel asetage kinnituskaabel ornade kurvidega, mis hölbastab robotil oluliselt niidetaval alal likumist.
Kui muruplatsil on lillepeenrad, tiigid voi puud, siis umbritsege need piirava kaabli silmustega, joonis C4. - Sāllitada min. 30 cm kaugus kinnituskaabli ja takistuste servade vahel.
ETTEVAATUST! Sillmusesse ja sealvälja liikudes ei tohi kinnituskaablid üksteist ületada Joonis C4.
Jatke niiduki too piirkonda kitsas ruum. Veenduge, et paralleeltelt kulgevate kinnituskaablite vahemaa oleks suurem kui 1 m.
ETTEVAATUST! Veenduge, et dokkimisaam oleks niitmisala tāhistava silmuse sees. (väljaspool / sees) Joonis B2
4. LAADIMISJAAMA PAIGALDAMINE
Uhendage toiteallikas
- Sisestage toitepistik 110-240 V seinapistikupessa.
-
Kontrollige laadimisjaama LED-tulede olekut Joonis B1:
-
Roheline tuli: ühendus on loodud (robot ei lae voi on täielikult laetud).
Aeg-ajalt polev roheline tuli: robot laadib. - Aeg-ajalt polev punane tuli: kõige sagedamini esinev viga on "kinnituskaabli lahtiuhendamine".
- Valjalulitad valgus: kõige sagedamini esinev viga on "100-240 V toide puudub" või "puudub ühendus toiteallikaga".
TOO / SEADED
Niitmisroboti esimene käivitamine
- Kui käivitate robotit esimest korda, asetage seade dokkimisjaama nii, et jaama laadimisuhendused oleksid viiguga. B3 ei puutuksid kokku niitmisroboti laadimisuhendustega joon. A10.
- Kui niitmisrobot käivitatakse esimest korda Telefonirakendusest, tuleb teostada pusivara uuendamine. Rakendusmeetodit on kirjeldatud allpool punktis tarkvara uuendamine.
- ETTEVAATUST! Esimese ühenduse ajal peavad Telefon ja robot olemä Wi-fi vörgu levialas.
PUSIVARA UUENDAMINE ENNE ROBOTI KASUTAMIST.
Värskendamist tuleks teostada järgmiselt.
- Asetage robot silmuse sisse, kuid vãlipapoole laadimisjaama.
- Lulitage luliti Joonisel A4 asendisse 1.
- Vajutage ja hoidke all lulitit Joonis D5
- Käivitage rakendus, skaneerige QR-kood.
- Ühendage rakendus robotiga
- Laiendage tarkvara seadeid, vajutades ekraani paremas ülaosas asuvat ikooni.
- Valige valik: Firmware update.
- Seejarel jargige ekraanil kuvatavaid juhiseid.
Pärast tarkvara paigaldamist on seade kasutusvalmis.
ETTEVAATUST!
- Ekraan naitab, kas robot on Wi-fi- vōi Bluetooth-pirrkonnas.
Vorguga uhendamist naitab vilkuv ikoon uhenduse tüubi kohta. Kui uhendus on loodud, lopetab ikoon vilkumise. - Robotit saab ühendada ainult ühe Telefoniga.
- Kui on vaja ühendada veel üks (sama niitmisrobot), tuleb esimene robot rakendusest eemaldada. iOS-i rakenduses ka Bluetooth-seadistustest.
NIITMISKÖRGUSE REGULEERIMINE:
Enne esimest niitmist seadke niitmiskorgus 60 mm ja seejarel mutke soovitud korgusele, kui kogu muru on suhteliselt tasane.
- Niitmiskorguse suurendamiseks keerake joonisel A2 nuppurpaipäeva.
- Niitmiskorguse vahendamiseks keerake nuppu joonisel A2 vasakule.
- Niitmiskorgust saab reguleerida vahemikus 20 mm (MIN) kuni 60 mm (MAX).
ETTEVAATUST! Niitmismehhanismi trumli ajamimootor, joonis A7, Iulitub sisse umbes 10 sekundit parast baasilt lahkumist, alustades toed.
SISSE/VALJA LULITAMINE
- Seadke luti joonisel A4 asendisse "O", et lulitada toiteallikas välja.
- Seadke luliti joonisel A4 asendisse "l", et lulitada toiteallikas sisse.
ROBOTI AKTIVEERIMINE JA TÖOAJA PROGRAMMEERIMINE MANUAALSES REZIIMIS
- Vajutage ja hoidke all toitenuppu Joonis D5, et robot käivituks. Márkus: Årge raputage robotit käivitamise ajal, et vältna käivitamisviga. Kui robot ei käivitu korralikult (kōik tuled põlevad pidevalt), käivitage see uuesti.
-
Sisestage parool, vajutades kaks korda nuppu joonis D6, seejärel kaks korda nuppu Joonis D7 ja üks kord nuppu Joonis D8 (tehases programmeeritud parool).
-
Programmeerige toöaeg (sh niitmisaeg ja laadimisaeg):
Vajutage joonisel D6, et seadistada tooag. Üks polev tuli tahendab 2 tundi, maksimaalne tooag on 8 tundi ja 4 tuld joonisel D4. Kinnitamiseks ja roboti kaktivamiseks vajutage nppu Fig. D8.
ETTEVAATUST! Kui toeaeg on seadistatud, jatab robot seaded meelde ja alustab niitmist iga paev programmeeritud ajal. Niitmisaeg on vastavalt sisestatud seadistustele.
- Roboti programmeeritud toeaeg 2 tundi kuni 8 tundi on niitmisaeg koos laadmisaja arvestusega.
- Töö- ja laadimisaeg söltub kasutatavast akust.
Kui soovite tooaega muuta, jargige uesti samme 2-3.
AJA PROGRAMMEERIMINE AUTOMAATREZIIMIS, 7-PAEVANE AJAKAVA, ON SAADAVAL RAKENDUSE SEADETE KAUDU
- Pärast hädaseiskamist tuleb robot kõigepealt vabastada, järgides eespool kirjeldatud sammu 2. Kui robot on lahti lukustatud, saame ta nuppude vajutamisega tagasi jaama saata: Fig. D7, seejärel kinnitage nupuga Fig. D8, et niidukit laadimisijaama tagasi saata.
- Hadaseiskamisnupu STOP vajutamine kustutab manuaalse ja automaatse reziimi tsukli rakendusest, kui see oli sel visil aktiveeritud. Selleks, et robot saaks parast hadaseiskamist uesti tole hakata, tuleb robot viia tagasi laadmisjaama ja seadistada uesti kasitsi totamise ajakava. Automaatse ajakava puhul tehke sama toiming rakenduse ajakavas ja kinnitage selle seaded.
ETTEVAATUST! Automaatses ajakavas programmeeritud käivitamisaega ei tohiks pidada vaga tappeks. Seade voib käivituda kuni mitu minutit pärast seadistatud aega.
- Manuaalse režimi aktiveerimine kustutab rakenduses programmeeritud ajakava ja vastupidi.
- Manuaalises rezimis toimub servade niitmine autmaaatseit iga paari niitmiskorra jarel. See tahendab, et muru niidatakse toopirkonda piirava kaabli lahedalt. ETTEVAATUST! Tuleb jalgida, et kaabel oleks korralikult kinnitatud, et see ei satuks juhusliku loikamise ohtu.
- Niitmisrobot põrdub tagasi dokkimisaama, kui seade on tuvastanud sademete alguse.
- Kui robot puutub töö ajal kokku takistusega, pörkab ta sellest maha ja jätkab töö.
LAADIMISJAAMA LAADIMISE OLEKUVALGUSTI:
Pidev roheline tuli -aku on taielikult laetud.
Ajutine roheline tuli - laadimine.
VALJASPOOL LAADIMISJAAMA:
Pidev roheline tuli -aku > = 20%
Aeg-ajalt roheline tuli -aku < 20%
ETTEVAATUST! Robot peatab automaatseit too ja naaseb
laadimisjaama, kui akutase langeb alla 20%
ERROR LIGHT:
Pidev roheline tuli - suteemi uuendamine. Uendamise teostamiseks ühendage rakendus.
Aeg-ajalt roheline tuli - susteemi uuendamine on kaimas.
Aeg-ajalt punane tuli - veateade 1-5, robot taaskäivatakse.
Pidev punane tuli - veateade 6 kuni 12, kustutamiseks vajutage "STOP" või "OK".
PIIRAVA KAABLI INDIKAATOR:
Pidev roheline tuli - signaal Óige
Pidev punane tul - signaal puudub
Kontrollid Joonis D4:
Katkestav valgus - robot blokeeritud.
Pidev valgus - robot lukustamata.
Tuli 1 poleb roheliselt: 2 tundi toöaega.
Tuled 1 ja 2 polevad roheliselt: 4 tundi tooaega.
Tuled 1, 2 ja 3 põlevad rohelselt: 6 tundi toöaega.
Tuled 1, 2, 3 ja 4 polevad rohelselt: 8 tundi toöaega.
TARKVARA NIITMISROBOTI JUHTIMISEKS
IOS allalaadimine:
https://apps.apple.com/cn/app/toua/id6449251720
Androidi allalaadimine:
https://play.google.com/store/apps/details?id=com.toua.robot
Programmi juhiseid saab alla laadida Aadressil: https://bit.ly/3QBB6Gm
ROBOTI ERAKORRALINE VÄLJALÜLITAMINE
Roboti peatamiseks vajutage nuppu "STOP" Joonls A1, roboti valjalulitamiseks vajutage ja hoidke all toitenuppu.
ROBOTI LIIGUTAMINE
Roboti all asub tõstkäepide joonisel A10, mis voimaldab hölpsat ühe käega tõotamist.
HOOLDUS JA LADUSTAMINE
- Enne puhastamist ja hooldust lulitage robot alati valja.
- Enne laadimisjaama puhastamist ja hooldamist ühendage vooluvörk lahti.
- Kandke terade vahetamisel ja roboti alumise osa puhastamisel alati pakse kaitsekindaid.
-
Kontrollige regulaarselt poltide ja mutrite pingueldatust. Kahjustatud osad tuleb ohutuse tagamiseks parandada voi asendada.
-
Kontrollige regulaarselt, et terad saaksid vabalt poorelda.
ETTEVAATUST! Kui keerate roboti tagurpidi, asetage see murule voi pehmele pinnale, et mitte kahjustada voi krimustada katet.
PUHASTUS
HOIATUS! Enne puhasamise alustamist lulitage seade valja lulitiga Joonis A4.
- Peske roboti esiosa madalrohupuhastusvahendi ja pehme harja voi lapiga.
- Kasutage kōva harja, et eemaldada rohtu ja prahti teradelt, ratastelt ja muudelt roboti allosas asuvatelt osadelt.
- Kontrollige rattaid regulaarselt, et need ei sisaldaks muda voi murujäätmeid, ja puhistage need harjaga.
ETTEVAATUST! Eemaldage regulaarselt taimeprugi roboti aluspinnalt, et valtida tootlikuse vahenemist.
TERA ASENDAMINE
HOIATUS! Esmalt lulitage valja peavoolululiti ja pange kaitsekindad.
HOIATUS! Kasutage ainult tootja poolt heakskiidetud originaalterasid.
- Kõik kolm tera ja nende kruvid tuleb vahetada ühe vahetuse käigus, Joonis A6.
Kruvid tuleb lahti keerata ja kruvikeerajaga kinni tommata. - Kontrollige, et ued terad saaksid vabalt poorelda.
PROBLEEMIDE LAHENDAMINE
Alljärgnevas tabelis on toodud juhised probleemide diagnoosimiseks.
Vöimaluse korral parandage seade ise. Kui probleemi ei ole voimalik lahendada, pördruge volitatud edasimüja vöi teeninduskeskuse poole.
HOIATUS! Tuleb votta kaitsemeetmeid.
| Probleem | Vöimalikud pöhjused | Lahendused |
| Punane tuli vilgub laadimisjaamas | Kinnituskaabli katkestamine | Leidke kaabli defektne osa ja parandada seda |
| Robotil on raskusi laadimisjaama dokkimisega | Laadimisjaam ei ole öigesti paigaldatud | Vt jaotist "Tööks valmistumine". |
| Kinnituskaabel ei ole öigesti paigutatud. | ||
| Tagasipidamiskaabli signaal puudub | Puudub toiteallikas | Kontrollige toiteallikat |
| Tagasipidamiskaabel oli ühendatud tagurpidi | Vahetage "+" ja "-" ühendused. | |
| Kinnituskaabel ei ole laadimisjaamaga ühendatud | Kontrollige, et kinnituskaabel oleks öigesti ühendatud laadimisjaamaga | |
| Kinnituskaabli katkestamine | Kontrollige kogu tee läbi, et kaabel ei ole katkenud | |
| Kinnipidamiskaabli ristid teel silmusesse ja sealät välja | Kontrollige, kas kinnituskaabel on öigesti paigaldatud. | |
| Robot liaheb üle piiri | Tagasipidamiskaabel oli ühendatud tagurpidi | Vahetage "+" ja "-" ühendused. |
| Robot vibreerib viö teeb ebatavalist mūra | Kahjustatud vöi puuduv tera | Kontrollida ja parandada tera kinnituskruvid |
| Tera ketas on lahti | ||
| Vahetage tera välja |
| Veakood | Opis | Lahendus |
| E01 Joonis F1 | Initsialiseerimisviga - güroskoopandur | Asetage robot tasasele pinnale ja käivitage uuesti. |
| E02 Joonis F2 | Tõstmisanduri või kokkupörkeanduri rike | Reguleerige niiduki esiosa pörkeraud ja vaänderatas, kontrollige, et NEED ei oleks lukustunud; asetage robot tasasele pinnale ja käivitage uuesti. |
| E03 Joonis F3 | Niitmismootori initialiseerimisviga | Asetage robot tasasele pinnale ja käivitage uuesti. Kui probleem pääsit, vötke ühendust klienditeenindusega. |
| E04 Joonis F4 | Toiteallika ühendamise viga | |
| E05 Joonis F5 | Vale niitmismootori kiirus | |
| E06 Joonis F6 | Kaldumise hoiatus | Asetage robot tasasele pinnale. Vajutage häire tühistamiseks STOP või OK. |
| E07 Joonis F7 | Lift hoiatus | Asetage robot tasasele pinnale. Vajutage häire tühistamiseks STOP või OK. |
| E08 Joonis F8 | ADC kanali viga | Asetage robot tasasele pinnale ja käivitage uuesti. Kui probleem pääsit, vötke ühendust klienditeenindusega. |
| E09 Joonis F9 | Vale signaal | Vt ulalpool tabelis: Probleem - signaal puudub piiravast kaablist. Kontrélige kõiki punkte ükshaaval, seejärel asetage robot tasasele pinnale. Alarmi tühistamiseks vajutage STOP või OK. Käivitage robot uuesti. Kui probleem pääsit, vötke ühendust klienditeenindusega. |
| E010 Joonis F10 | Robotimoos | Asetage robot tasasele pinnale. Vajutage häire tühistamiseks STOP või OK. Käivitage robot uuesti. Kui probleem pääsit, vötke ühendust klienditeenindusega. |
| E011 Joonis F11 | Vasaku samm- mootori vale kiirus | Käivitage robot uuesti. Kui probleem pääsit, vötke ühendust klienditeenindusega. |
| E012 Joonis F12 | Vale kiirus öigus samm-motori |
KOMPLEKT SISALDAB:
- Niitmisrobot 1tk.
Dokkimis- ja laadmisjaam 1tk.
Toiteallikas ja pikenduskaabel 1tk.
Kaabel too piirkonna piirlemiseks 100m
Kaablikinnitustulbad 100tk.
Dokkimisaama kinnitustapid 6tk. - Löketerad 3tk.
Kaabliuhendused 2tk.
Kuuekandiline voti 1tk.
SPETSIFIKATSIQONID
| Niitmisrobot 04-621 | |
| Parameter | Väärus |
| Toitepinge: | 18 V DC |
| Niitmismootori maksimaalne nimivöimsus: | 50 W |
| Iselikuva mootori maksimaalne nimivöimsus: | 20 W |
| Laadimisjaama IP-kaitseklass | IPX4 |
| Roboti IP-kaitseaste | IPX5 |
| Laadimisadapterteri IP-kaitseklass | IP 65 |
| Roboti kaitseklass | III |
| Laadimisjaama kaitseklass | II |
| Niitmislaius: | 180 mm |
| Löikekörguse reguleerimine vahemikus | 20 mm - 60 mm |
| Pöörlemiskilusr | 3100 p/min |
| Kaal | 10,2 kg |
| Tootmisaasta | 2024 |
MURA JA VIBRATSIOONI ANDMED
| Helirōhu tase | \( {\mathrm{L}}_{\mathrm{{PA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Mōdetud helivōimsuse tase | \( {\mathrm{{Lw}}}_{\mathrm{A}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Teave mura ja vibratsiooni kohta
Seadme poolt kiiratava mura taset kirjeldavad: kiiratave helirohu tase L_pA ja helivoimsuse tase LwA, kus K tahistab mootemaramatust. Seadme poolt tekitatud vibratsiooni kirjeldatakse vibratsionikiirenduse abil, kus K tahistab mootemaramatust.
Kaesolevas kasutusjuhendis moedetud vaartused, s.t kiratava helirohu tase LpA helioimsuse tase Lw ja vibratsionikiirendus an on
mōdetud vastavalt standardile EN 62841-1:2015+A11. Antud vibratsionitaset ah vōib kasutada seadmete vordlemiseks ja vibratsioniga kokkupuute esialgseqs hindamiseks.
Antud vibratsoonitase on representativne ainult seadme pōhirakenduste puhul. Kui seadet kasutatakse muudeks rakendusteks vōi koos teiste tovahenditega, vōib vibratsoonitase erineda. Seadme ebapilisav vōi harv hooldamine pōhjustab körgemat vibratsoonitaset. Eespool nimetatud pōhused voivad kogu kasutusaja jooksul suurendada vibratsooniga kokkupuudet.
Vibratsioniga kokkupuute tappeks maaramiseks tuleb arvesse votta seadme sisse- ja valjalulitud perioodid, valja arvatud periodid, mil seadet kasutatakse toks. Kui koiki tegureid on taptelt hinnatud, voib kogu vibratsioniga kokkupuude olla palju vaiksem.
Operatori kaitsmiseks vibratsiooni eest kasutage taiendavaid ohutusmeetmeid, nt seadme ja toovahendite korraparane hooldus, nouetekohased kate temperatuuritingimused ja nouetekohane tokorraldus.
MURA JA VIBRATSIOONI ANDMED
KESKKONNAKAITSE
Elektrilisi seadmeid ei tohi havitada koos olmejatmetega. Korvaldage need asjakohastes rajatistes. Teavet kovrvalamise kohta saab totes edasimuutt voi kohlakelt asutustell. Elektri- ja elektronikaseadmete jälmed sisaldavad aineid, mis ei ole looduskeskkonna suhtes neutraalsed. Taaskasutamata elektronikarumud kujutavad endas potentsiaalset ohtu keskonnale ja iminesto tervisele.
"Grupa Topex Spoka z ograniczona odpowedziaiognsia" Spoka komandytowa, mille registrjäragne asuokht on Varsvasi, ul. Pograniczna 2/4 (edaspidi "Topex Group") teatab, et koki autorigused kaesoleva kasutusjuhendi (edaspidi "kasutusjuhend) sisule, sealhugas, kuid mite ainult, selle tekstile, postatud fotodele, diagrammilde, joonistele ning selle koostisele kuuluvad eranditult Topex Groupie ja on oiguskaitse all vastavalt 4. veebruai 1994. aasta autoriguse ja selelega seotud iguste seedusele (s.t. Teataja U. 2006 nr 90, punkt 631, muudetud kujal). Kogu kasiraamatu voi selle uksikute elementide kopeerimine, totollemine, avaldamine ja muutmine arilistel eesmardikel ilma Topex Groupi kirjaliku nousolekuta on rangelt keelatud ning voib kaasa tuua tsivil- ja kriminaalvastutuse.
EU vastavusdeklaratsjoon
Tootja: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varssavi
Toode: E+ niitmisrobot
Mudel:04-621
Kaubanimi: NEO TOOLS
Seerianumber:00001+99999
Käesolev vastavusdeklaratsoon on välja antud tootja ainuvastutusel. Eespool kirjeldatud toode vastab jargmistele dokumentidele:
Masinadirektiiv 2006/42/EU
RED direktiiv 2014/53/EL
RoHS direktiiv 2011/65/EL, muudetud direktiiviga 2015/863/EL
Ja vastab standardite nõuetele:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2.2; EN 50663:2017
EN IEC 63000:2018
Käesolev deklaratsoon käsitleb ainult masinat sellisel kujul, nagu see on turule viidud, ja ei hölma komponente
loppkasutaja poolt lisatud voi tema poolt hiljem teostatud tegevused.
Tehnilise toimiku koostamiseks volitatud ELi residendist isiku nimi ja aadress:
Allkirjastatud jargmiste isikute nimel:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varssavi

Pawet Kowalski
TOPEX GROUP Kvaliteediametnik
Varssavi, 2023-09-11
ELi vastavusdeklaratsoon
Tootja: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varssavi
Toode: Laadimisjaam
Mudel: K145455
KaubanIml: NEO TOOLS
Seerianumber: 00001÷ 99999
Käesolev vastavusdeklaratsioon on välja antud totja ainuvastutusetel.
Eespool kirjeldatud toode vastab järgmistele dokumentidele: RED direktiv 2014/53/EL
RoHS direktiiv 2011/65/EL, muudetud direktiiviga 2015/863/EL
Ja vastab standardite nõuetele:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2.2; EN 50663:2017
EN IEC 63000:2018
Käesolev deklaratsioon käsitleb üksnes masinat, nagu see on sisse viidud
turul ja ei sisalda loppkasutaja poolt lisatud componente ega tema hilisemad tegevused.
Selle ELi elaniku nimi ja aaddress, kellel on oigus
valmistada ette tehniline toimik:
Allkirjastatud jargmiste isikute nimel:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varssavi

Pawel Kowalski
TOPEX GROUP Kvaliteediametnik
Varssavi, 2023-11-09
BG ПЕВОД (РБКOBОДСТВО 3A NOTPEБNTIEL) POBOT 3A KOCEHE 04-621
BHIMAHNEI INPEIN DA PABOTITE C ENEKTPOHHCTPYMEHTN, IPOYETETE BHIMATEJIHO TOBA PBKOBOIDCTBO 3A YNOTPEBAI TO 3ANA3ETE 3A BbDEUIN CNPABKN.
IPOPOBHI IPIPABUNA 3A BE3OINACHOCT
HCHTPYKUN3A BE30NACHOCT 3A POBOTN 3AKOCHE
E30nacnoct npn npaktnueckoto n3no13Bahe Ha po6oTa 3a KocHe
PENOPbK
PpoyeTe BHNMaTeHNO pBkoBOdCTBTo 3a yNoTpe6a.3aNo3HaTe ce Cbc cNCTeMTte 3a ynpabHeHne n CpapBnHaTa paBoTa Ha ypeJa.
He no3B0n8BaIte ypeBt Da ce n3noJ3Ba OT Deua nIn OT JInu, KOnto He ca npOeJI npKOBODCTBOTo 3a ynTpe6a. B HauNoHaHnHTe pa3npope6n MoKe Da e nOCOeHa MmHmAlHa Bb3paCT Ha onepaTopa.
He n3no3BaIte po6oTa, aKo HAOKOIO mMa dpytn Xopa, oOcbeHO deua nnXINBOTHn.
Mon, He 3a6paBnTe, ye onepaToptbT nn nOtpeBnteTn Hocn OTROBOPHOCT 3a 3JNONJyKn nn OnaCHOCTn 3a dpytn Xopa nn OkonHaTa cpea.
IIOIROBKA
- Ppei Koehe npoBepaBaIe BcEKN bT daHn BCuKn Yactn Ha po6ota pa6oT npaBnHO.
3a noctuhe Ha ha-nobpn pe3ynta Tc npenopbya koche B 6e3dbxdoBHO Bpeme. Pnp KocHe B DbXd TpeBaT MaKe da nolene No po6ota, KOTo B pe3yntat Ha ToBa MoKe Da ce eoXlb3He.
HEKOCTe npn IIOuM MeTeOpONrHn ycNoBna, HAp. No BpeMaHa CIneN DbXd, rPbMOTeBvHuHa bpynn CheroBaIeK. - PepnoDnHNO npOBepBaIte OKoCeHaTa nIOou n OTCpaHbAaTe BCNUK KAmbHn, OTNaDbU, XNu, KOCTn INpyrnpenTCTBn. OrpaHueHaTa rapaHnE He NOKpBa NOpeDn, pnuHHeN O T npedMeTuOCTaBeHN Ha TpeBHAtnIOu.
3a da n36erHeTe noBpeH, He KocTe Ha no-Manko ot 1 M oT rJaBNTe Ha npbckaKNTe.
BHIMAHNE! Poobotn npckaKNTe HE Tp6Ba da ce BKnHbTa eNHOBpeMeHHo.
PobotbT Tp8Ba Da 6bJe nporpaMnpaH da pa6oTu no pa3NuHo BpeMe OT ToBa Ha np6ckauKHe.
HNKORA He no3BOJBAIte Ha deca da DOKOCBaT 3axpaHbua 6nok, 3apnHaTa CTAHU, NO-CNEuNAHIO KOHTaKTITE, OCTpnta, OTDeHeHTo 3a 6aTePInTE uN qACTN, B KOnTO mna nponykn, KaTo HAnpIMep KonelaTata.
ONEPAUIN
BHHMaaBte 3a BbPTaIe ce ocTpeta! HE noCTaBnTe pbcTe nn KpaKaTa cn oD BbPTaIuTE ce ocTpeta.
BHHMaaTe 3a npEdMeTn, pa3npbChaTN Bbpx TpeBaTa, DOkaTO Kocnte! Korato po60TbT e BKIOueH, cna3BaTe 6e3OnaCHO pa3CToHne.
He octabTyepea6e3Ha3Op,aKe e 3BecTHo,ue B 6n3OCT mAmXBOTHN,Deua nnDpyuXopa.
- PoiDbpkaIte 6e30nacHa nO3uIa. PoiDbpkaIte paBHObecne n cT6HINH pO3uIa npi HAKIOH. Io BpeMe Ha pa6Ota Cpo6Ota INN HerOBIne nepHcepHN yCTPOINCTBa e no3BOJeHO da ce DBNKInTe, HO He n Da TnAte.
- Mon, npoyeTe HNCTpykunnte 3a TOBa Kora, Kbde N KaK da npOBepBAte poBota N HerOBIte nepnpephny yctpoiCTBa, KaBen N ydbJxnteIN 3a NOBpeIN INN INHOCBaHe N da peMOHTnpaTe poBota. CamoCTOReTHa MoInnФkaun, peMOHT He ca pa3pseHn -c pNCK OT 3aYbGa Ha rapaHnIyra.
He cBp3BaIte H He DOKocBaIte NOBpeH 3axpaHbA u Ka6eN, KOkato ToH He 6bJe N3KIOUeH OT 3axpaHbAHeTo, Nopadn PnCK OT KOHTAKT C KOMNoHEHTu ND HApEKeHne.
Cbbp3BaTe po6oTa n/nnn nepinepnoTo o6opydBaHe cmo KbM 3axpaHbAuBepn, 3aunTeHN C npekbcBau 3a OCTaTbueh TOK C TOK Ha N3KnIOUbaHe He NoBeue ot 30 mA.
Ako po6oTbT n3daTe Heo6uHaen 3Byk, 3a6eJexn Heo6uHaHa B6paunr nn CnHaHn3npa 3a anapma, He3a6aBHO HaTnChTe 6ytoHa STOP.
3A5PAHRABA CE DOKOCBaHETo Ha onaChi DNBIXeUe Ce YactN, Ppei Da NkIIOuTe 3axpaHbAHeTo Ha po6ota.
3A5PAHRA BCA DOKOCBAHeTo Ha OnaCHN Yactn, DOKaTO Te He CnpaT HnBnHO.
BHHaHn HocTe 3dpabN O6yBKn N DbIg NaHTaIOH, KOraTo pa6oTnte c po6ota.
- PpeKbCHete eJektpo3axpaHbAHeTo: PpeDn da 3aKnIOHTe po60Ta.
- Ppeu TecTbaHe, NoocTbaHe uNn NoadpBka.
NKTOTPAMNI IN PEPDYNPEXDEHNA



- PpOyTeTe pBKOBOCTBOTO 3a ekCnNoatauia n cna3BaIte npEdupeKdEHHaT a ycNobraTa 3a 6eOnacHocT!
2.Прети NOUICTBaHEnIIN NOIDpBxKka N3KIIIOUeTe O3axpaHbAHeTo
3.He noctabrayTe pueTe Nn KpaKaTa Cn nOg npEpaN3nteHa MeXaHm3Ma 3a KOceHe. - Bbptraun ce yactn -Bb3MOXHOCT 3a HapaHBAhe
5.Cna3BaIte 6e3oNaCHO pa3CTOJHHe ot pObTa 3a KocHe - Na3eTe Ce OT Bb3MOXHOCTTa 3a HapaHRAHe OT XBbPJIeHN IpeDMETI
7.3auntaoBxk
8.Да ce cbxphaHЯBa Ha MЯCTO, HeIOCTbIHO 3a Deua.
9.He ce KaBaiTe Bbpxy po60Ta - Bb3MOxHa e 3aY6a Ha npbCTn, BHIMabaTe
- Makcmaen HAKNOH Ha TepeHa 14^ / 25%
12.3aunTepepuete cnpapobTHnpkabu
13.HocTe 3aunTHo 06neKno - Hocete 3aunTHn ObykN
15.He n3xBpIyTe 3aeHNO C bntOBnTe OtnaDbu - CeJIeKTHBHO cIbIpaHHe Ha OTnAbu
- Ctenen Ha 3aunTa
BHIMAHHE! To3n ypei moKe Da ce n3noJ3Ba ot Deua Ha Bb3pact Na8 roDHH N IINuca C orpaHnueHn Fn3nueckn U yMCTBeHN cNooc6HOCTN, KAKTO u C HeoOCTaTbUHN 3HaHnna Hnn ONHT, AKO Te ca NOd Hau3Op NN Ca INcHTpyKTHPapaH No NOxOJaH aHuH 3a 6eONacHTo n3noJ3BaHe Ha ypeDa, Taka Ye da Ca HauCHO cbc CbIeCTByBaUnTE pncKOb. C To3n ypei He Tpr6Ba Da cn irpaar T deua. Deuata He Tpr6Ba Da nouNCtBat Nn Da n3BbPWBat NODpbjKka Ha ypea 6e3 Hau3Op.
ONICAHNE HA IPAΦNHYTE EJEMEH
CneHaTa HmepaunCe OTHac3a KOMnHOHTe Ha ypeDa
| Овознayaенье Фиг. A | Описанne | |
| 1 | Аварийно сизранe | |
| 2 | Рergулatable на висуна на косенe | |
| 3 | Контулоны палей на косачkaраза | |
| 4 | Превкульные на зхсаны не на косачkaраза | |
| 5 | Задвожваши кoleда | |
| 6 | Остриета за рязache | |
| 7 | Барабан на рекеши менизьm | |
| 8 | Въртыши се кoleда | |
| 9 | Дръжka за посе | |
| 10 | Съедитelli за з配电жданe | |
| 11 | Калak на отдениcopeл的东西батершn | |
| Овознayaенье Фиг. B | Описанne | |
| 1 | Контулоны палей на дOKINг стацята | |
| 2 | Оъори за зakpenbaе на дOKINг стацята | |
| 3 | Съедитelli за з配电жданe | |
| 4 | ДокINг стацяda | |
| 5 | Зашота на дOKINг стацята | |
| 6 | Съедитelli за з配电жданe | |
| 7 | Оъори за лбени за mapкURAне на pавOTната зona | |
| 8 | З配电нВаши Контакт на дOKINг стацята | |
| 9 | MapкRUPOВКа за павITПО ВODEне на кабелITE | |
| Овознayaенье Фиг. D | Описанne | |
| 1 | Инданкatable за сб��ориeto на з配电жданe | |
| 2 | Инданкatable за грeshka на синналa | |
| 3 | Инданкatable за заьрждаш кабел | |
| 4 | РавOTни часов / сьбшение за ррeshka, с Bretлини 1-4 | |
| 5 | Бухон за з配电нВаши | |
| 6 | Превкульные за з配电нВаши | |
| 7 | Бухон за дOKINГ | |
| 8 | Бухон "ПOTььржданe" | |
| Овознayaенье Фиг. H | Описанne | |
| 1 | Винтоve | |
| 2 | Калak на отдениcopeл的东西батершпсдрьжka за ТраHCNoptирале | |
| 3 | Одение за лбени | |
| 4 | Гнебу do захетши на калakа на камерatura | |
| 5 | Акимулаторна захетши (He e ВКПочец) | |
| Овознayaенье Фиг. I | Описанne | |
| 1 | Травли пlosши | |
| 2 | Стона | |
| 3 | ДокINг стацяda | |
| 4 | Разсториные на стацята OT сенита | |
| 5 | Наален усан'tьк на линята, орaramоча вая зоната за косенe | |
| 6 | Дылжпа на сенита | |
| Овознayaенье Фиг. J | Описанne | |
| 1a | Кабел за орaramоча вая пLOоцта за косенe Начало | |
| 1b | Кабел за орaramоча вая зоната за косенe | |
| 2 | Линя за дOSTавka: | |
| 3 | ДокINR стацяda | |
*Bb3MOxHO e da nMa pa3nKmexky rpaΦnKaTa n DeiCTBNTeHn npOdyKT
ПОДГ罗ВКА 3A PAБOTA
MHCTAJINPAHE HA BATEPNYTA
- 06bpheTe po6oTa 3a KocHe, Taka Ye Da NMaTe DocTbn Do DonHaTa. YaCT Ha po6oTa.
Ha MrcToHnpeBKnOyBaTeIaA4nHa TpaHCnOpTHata ADbKkaAur. A9 ce HAMnpa KanaKbT Ha OTdeneHeMeTO 3a 6aTePm H2,3akpeneHc4 BnHTa,06o3NaueHn Cbc CTpeKN H1.
CneTobaOTBnTE BHTOBeTe,OT6en3AHNCbCcTpeJKN.
BHNMaTeHcBanTeKaNaHaOTeHeHnToΦur.H2,3aHa NpeKbChTe HnPa3eHnHTe KaBeNtHe Ha npeBKnHouBaTeNnΦur.A4 (TOn e npNKpeHn KbM Kanaka Ha OTeJeHnETo 3a BaTePn).
Cnei TOBa 06bphete Kanaka,OT DonHaTa CtpaHa Ha Kanaka e fHKcnpaHO rHe3dOTo 3a 6aTePnraTAt H4.
- NocTabete 6atepnaT o cepeyTA ENERGY+ B rhe3doTO.
- O6bpHeTe Kanaka c npKpeHata 6aTePnI r ro nocTaBeT B oTdeJeHneTo Ha qnr. H3.
3aTeHHeBnHTOBeTe 3a 3akpenBaHe Ha Kanaka.ObbpeTe po6ota c DbHOTo HANOJy,ypeDbTe rOToB.
PA60THA CPEDA HA PO6OTA 3A KOCEHE
YBepeTe Ce, Ye B 30HaTa, B KoTo pa6oTn po6oTbT, Ca N3NbJIHeHcIeHNrte YCIOBnR:
BucouHata Ha TpeBaTa He HauBnuaBa 60 MM.
BHIMAHHE! Ako TpeBaTa e no-DbIra ot 60 MM, PbPBO oKocete CpbUHa Kocauka.
Hama KaMbHN, napyeTa bpbBO, KNU, Ka6JI NOD HAnpeKeHne IIN DpyTN yXKn npeDMTeN.
MRCTOTo 3a KocHe e paBHO n paBHO,6e3 KaHABKn uN3KOnn,a HAKJIOHBt e No-MaNbK OT 25% (14^) C1
3a INCTaJaCnIaTa ca Heo6XoDImm CneIeHNTe INHCTpyMeHTN:
ΓyMeH yK (3a 3a6nBaHe Ha uΦTOBe B 3eMra npi noIarHeTo Ha orpaHnHTeHHna Ka6en)
- WectocTeHHnT KInOu (3a 3akpenBaHe Ha 3apdHaTa cTaHcna) e BkJIoueH B KOMIIeKTA
Kneu (3a p3ahe Ha Ka6ena, orpaHnuaba paOtha 30ha)
1.BASE STATION INSTALLATION
I36peTe IOxOJIO MRCTO
CTaHnTAta 3a 3apeKdahe Tp6Ba Da ce nocTabn Ha cneHOTo MRCTO
MnR.C3:
CpaBHTeHNO nloCKa npabHa qact OT TpeBhata nIOu.
- BIn3o Do p6b6a Ha MopabaTata.
B6n30cTdo eNeKtpuYeCKN KOHTaKT.
IocTabete yIbJNKeTIHnKa6eN C IbJNKeHa 10 M n 3axpaHbaHeTo Ha ceHecTo, XJaIHO n CyX MoCTo.
Ha pa3ctoHne Hn-MaIko 2 m ot 3apAnHata cTaNur He Tpr6Ba Da nMa npenrTCTBnR.
- PnpOpbUHTeHNO e 3apAHaTcTaHcNJa da 6bJe pa3nNoXKeHa Ha Cyxo N 3aUNTeHO MRCTO.
3axpaHbAHeTo Tp6Ba Da e Ha 30 CM HaD HNBOTo Ha 3emrTa.
2.3AKPENBAHE HA CTAHUN 3A 3APEXDAHE
3aKpeTe 3apnHaTcTaHnKbM 3emTa c6ΦNKCuPaun BNHTa (G1) (c NOMOuTa Ha WeCTOCTeHeN KIOU G6).
BHIMAHHE! HE 3acTabaIte n He xoTe Bbpy pIoHaTa Ha 3apdHaTa CTaHn.
BHIMAHNE! HE npabete HOBN OTBOPN B NIOOaTa Ha 3apdHaTa CTAnu. CTAunra Tp8Ba da 6bde 3akpeneHa KbM nOda c NOMoTuHa cbuectByBaUNTE OTBOPN.
3. NOJAGAHE HA ORPAHUNHTJEHHN KABEN
OrpaHnHTeJIHHaT Ka6en Ce n3noJ3Ba 3a ouepTaBaHe Ha pa6oTHaTa 3OHa n 3a HacOyBaHe Ha po6To a OpaTHo KbM 3aprHaTa CTAHcN.
BHIMAHHE! Ako cbceIbT Bn cbIoo n3IOnI3Ba po6oTu3npaHa Kocayka, cna3BaIte pa3CTOHHe OTOne 1 M MeKdy OrpaHnHTeHNHe Ka6eN Ha dBata po6ota.
ПАИРАЕ HA NOLOXEHNETO HA 3ДьРЖAUЯ KABEN
IpeDn da noLOXKeTe ORpaHnHTeHNHa KaBEn, MnHeTe No ONpeDeEHaTa rpaHnua n OTCpaHeTe BCnKn HeHyxHn IpeMeTn, KaTo HAnpMep KAmbHn.
BHIMAHHE!IbIbnHnHaHaOraHnHTeHnKa6eH He Tp8Ba Da HaBnwa200 MeTa.
PENyPExKDEHNE!Po6oTbHTe Tp6Ba Da ce DnKnNo YaKnBn NnN NOO6H MaTePnaJN, KOnTo MoTaJa NoBpeAOTcTpneTa.
IOLIaHE HA OTRPAHnHTENHNAKABJI FNI. B
CneBaTe HNCTpyKuNTe No-dony, 3a da pa3noNoKnTe
06e3oacntenHna Ka6eon Okono pa6oTHata 30Ha n npenrTCTBnra Ta. N3no3BaIte N3mepeBateHnna ypeN, BKJIOueH B KOMnKeTa, 3a Da noNoKInTe npabuHNO orpaHnHTenHna Ka6eN.
BHIMAHHE! Ka6eJbT 3a 3aIbpxAhe ce 3axpaHbA C MHOr HnCKo HanpexHeH e 6e30nceH 3a Xopa N DoMaUH NIO6mU.
BHIMAHHE! 3anoHHeTe OT KOHeKTopa"-"B 3aHaTa YacT Ha 3apHaTa CTaHnA Phr. B6, n3dIbpaNte ro noD cTaHnraT (u OCTaBeTe 10 cm pe3epB) IN pOkaIte KaBena OKoNo TpeBaTa B NocOka, ObaPaHa Ha acOBHmKoBaTa CTpEJa, KATO 3aBpMIne C KOHeKTopa "+" B 3aHaTa YacT Ha 3apHaTa CTAHnA (octaBeTe 10 cm pe3epB). YBepeTe ce, Ye
Ka6eBbT Bn3a B KOHTaK T C MetaI npi KOHeKTOpuTe +" u _ΦnΓ. B6 He 3a6paBraIte Da oTpexTe N3JIuHnHa 3aJbPxkaU Ka6eI.
Octabete Nohe 2 M npa3No npoctpaHCTBO MEXdy orpaHnHTeHHna Ka6en H 3apHaTc TAHn. Ka6enbT B TO3n yAcTBk CE N3NOJ3Ba 3a npBExKaHe Ha pO6To KaM DOKnHCTAHnTa.
IopdIbpxkaTe pa3cToHne ot 30 cm MeKdy 3aIbpxkaIoTO Bbxke n pb6a Ha TpeBaTa nr C2; nr C3.
3aKpeTe 3aIbpxaunna Ka6eN KbM 3emrTa c nOmoTu Ha npedocTabeHnTe DIO6eNn O5. OrpaHmHTenHnrt Ka6eN Tp6Ba Da e npab N neko 3aTeHnat. DIO6eNtte Tp6Ba Da ca pa3noJoxeHa Hn BceKn 1 m (ToBa MoKe da ce npomeHn B 3aBnCmOcT ot fOpMaTa Ha TpeBnHa TnOu) Unr. He zapabTe Ka6eNa No-dbN60kOt 2 cm, 3a Da He ce oTcn6n CnHnBt.
Pa3noJoxeKa6enaTaka,Ye bIInTe da ca no-roJeMnOT 90°ΦnR. C5.B TaKnBa 3oHn pa3noJoxeTe orpaHnHTEnHn Ka6en B nIaBn KpNBn,KoETO UNEChn 3HaHTeHnO npDnBXBaHeTo Ha po6ota M3 KocEHaTa 3oHa.
AkoB TpeBnata nnou HMa UBeTHN Iexn, e3epua nn DbPBeTa, 0brpaTe rC npIMKn OT o6e3onacBaU k6ebn Pnr.C4.
IopdIbpxkaTe MmH.30 cm pa3ctoHnne MeKdy 3aIbpxkaunna Ka6en n pb6obete Ha npenrTCTBnraTa.
BHIMAHNE! NIO TBA KBM N OT npMkata ORpaHHTeHHrT Ka6eI He Tp6Ba Da ce npcuA Our. C4.
Octabete TACHO pOCTpaHCTBO B pa60THaT3oHa Ha KocaykaTa. YBepete ce, ye pa3cToHHeTo MeKdy ycnpopeHDo DnHexeTe ce orpaHHTeHN Ka6eNe e no-roJrMo ot 1 m.
BHIMAHNE! YBepete Ce, Ye DOKINr CTaHnraTa e BbTpE B npMkata, MapKnpa7a 3oHaT a 3a KocHe. (OTBbH/OTBbTpE) nr.B2
4.ИHCTAJINPAHE HA 3APRAHA CTAHLI
Cbpb3BaHe Ha 3axpaHbAHeTo
- NocTaBete 3a 3axpaHbHe B CTeHEN KOHTaKT 110-240 V.
- PpOBepTe cbCToHHeTo Ha CBeTOnoHnTe INHnKaTOpn Ha CTaHnIra 3a 3apeKdahe Fnr.B1:
- NocToHHa 3eHeHa CBeTJInHa: BpB3KaTa e yCTaHOBeHa (po60TbT He ce 3apeXda HnE HAnbNHO 3apeDeH)
- PpeKbCbaa 3eJena CBeTInHa:po6oTbT ce 3apeXka.
- PpeKbCbaa YepBeHa CBeTInHa: Hau-YecTo cpeUaHata rpeUka e "PpeKbCbaHe Ha orpaHnHTeHnKa6eI".
- ɪnkrɪŋʊeHa CBetɪnHa: Hau-ηeCTO cpeɪaHaTa NOBpeɪa e "HЯMa 3axpaHbAhe 100-240 V" nɪn "HЯMa BpɒkA C nɪtɔuHnK Ha 3axpaHbAhe".
PABOTA/HACTPOIKN
ПьрBo nyckaHe Ha po6Ota 3a kocHe
Korato cTAptnaTe poBTo 3a NpBn NbT, nocTaBeTe ypeDa Bbpxy DOKINrCTAHnIra Ta Taka, Ye KOHeKTopNte 3a 3apeXdaHe Ha cTAHnIra Ta da fynypaT. B3 He BnI3aT B KOHTaKT C KOHeKTopNte 3a 3apeXdaHe Ha poBTo 3a KocHe fInr. A10.
Korato po60bT 3a KocHe ce cTapTnpa 3a NpBn NTOT npNIOxHHeTo Ha TeneoHa, Tp8Ba Da ce N3Bbpun AkTyan3aun HaΦbPmYepa.MeOdbT Ha N3bNHeHne e OINcaH no-dOny B pa3dE "AkTyan3aun Ha coTyepa".
BHIMAHIE! No Bpeme Ha nbpBTO CBbp3BaHe TeJefoHbT mpo60bT Tpr6Ba Da ca B 06xBata Ha Wi-Fi mpekata.
AKTYAJIN3AUIN HA ΦbPMYEPA, INPEI N DA N3PON3BATE POBOTA.
Akyan3aunra Ta Tpa6Ba da ce n3Bbpn no cneHna HauH.
- NocTaBeTe po60Ta B npIMkata, Ho n3BbH 3apdHaTcTaHnIa.
2.Ппeвкнioчete ппeвкнioчВаTeЯФиA4В noIoxKeHne 1. - HatncheTe n 3aPbXte npBkIOHbATEJIg r .D5
4.CtapTnpaIte npnIOxKeHneTo,CKaHnpaIte QR-KoJa
5.Cbbp3BaHe Ha npuioxkeHneTo cpo6oTa - Pa3upeTe HAcTpoKIne Ha coΦTyepa, KaTo HaTuChHeTe NkOHata B TropHn DeceH bTbN Ha ekpaHa.
7.Изберете onця: Aktyаллзиран He Naфрмуера.
8.CneTToBaCneBbAte HnHCTpyKuHnTe Ha ekpaHa.
Cnei KaTO coOFTyePbTe HnCTaHpaH,ypeBt erotOB 3a pa6ota.
BHIMAHNE!
- DicnneT nok3Ba daJIN po6oTbTe B oxbaT Ha Wi-Fi nnu Bluetooth
Cbbp3BaHTo KbM MpeXa Ce o6o3HaYaba C mHa a NkOHa 3a TnPa H Bpb3KaTa.Cne KaTO ce CbPKeTe,IKoHaTa Cnnpa Da Mira. - Po6oTbT MoXe da ce CbPxke cAmO c EINH TeJeDoh.
Ako e Heo6xOIMo Da ce CbBpKe Dpyr (cbuetaT po60t 3a KocHe), NbpBnT Tpr6Ba Da ce OCTpaHn OT npUOnKeHneTo. B npUOnKeHneTo 3a iOS cbIoo ot HacTpOoiKITE Ha Bluetooth.
PEGYIINAHE HA BVCOUHATA HA KOCEHE:
IpeHn PbBTO KOceHe HAcTpoTe BnCOuHHaTa Ha KOceHe Ha 60 MM n CneT TOBa IpOMEHe Ta HxelaHaTa BnCOUHa, KOraTo UraJaTa Mopaba e cpaBHnTeJIHO paBA.
3aBbptete KOnyeto Ha aHr. A2 no nocoka Ha yacobnkoBaTa CTpeNka, 3a da yBeHHuTe BnCOunHaTa Ha KOceHe.
3aBbptete KOnyTeHa 2A2 HaJnBO,3a Da HamaJIte BNCOuHATA Ha KOceHe.
BucounHaHaKoCeHeMoKeJaCepepynnpaOT20MM(MIN)do60 MM (MAX).
BHIMAHNE! 3aDnBnKbAunT DnBnTaTeHa 6apabHa Ha MexaHn3Ma 3a KocHe PnR. A7 ce BkNIOBa np6IIN3nTEJIHO 10 cekyHn Cnei HanyckaHe Ha 6a3ata, KaTo 3anOuBa pa6ota.
BKJIIOUBAHE/IM3KJIIOUBAHE
- NocTabeTe npeBKnIOHbTeNa Ha qnr. A4 B noIooKeHne "O", 3a da u3KKnIOHte 3axpaHbHeTo.
- NocTaBeTe npeBknHObBaTeNa Ha qnr. A4 B noIoxKeHne "l", 3a da BkNIOHTe 3axpaHbHeTo.
AKTINBINAHE HA POBOTA INIPOPTPAMIPAHE HA PABOTHOTOBPME B Pyueh PEXIM
- HatncheTe n 3aDpBkTe 6yToHa 3a 3axpaHbAne Fnr. D5, 3a da cTaptnpate po60Ta. 3a6eJexka: He pa3KnauaTe po60Ta no BpeMe Ha cTaptnpaHe, 3a da n36BerHeTe rpeuKa npri cTaptnpaHe. Ako p6oTbT He ce cTaptnpa npabnHO (BCnKn CBetnnn CBeTt HnpeKbchato), pectapnpaTe ro.
- BbBede naponata, kaTo haTnche 6yToH dR. D6 IBa IIbTu, cNeTOBa 6yToH dR. D7 DaIbTu 6yToH dR. D8 BeDhJx (napoNaTa e nporpamnpaHa a6pnuHo).
-
Погампайт e Врето 3a pa6oTa (ВКЛЮЧИТЕННО ВретeTo 3a KOCHe n Bpemeto 3a 3apexДаHe):
-
HaTncheTe 6d,3a 3a3aTePafoTHoBpeMe.EHa CBeTeUaJaMnUyka O3HaYaba 2 Yaca,MAKcImaJIHOTo BpeMe 3a paOta e 8 Yaca H
4 lamnukn Ha qnr. D4. Hauchete 6ytoHa Ha qnr. D8, 3a da notBbprnte n da cTaptnape po6ota.
BHIMAHHEI CNeI KaTO 3aAdTe Pa6oTHOTo BpeMe,po6oTbT 3aONMH HAcTpOuKInTe N 3e 3aOnOyBa Da Kocn B npOrpaMpaHOTo BpeMe BCEKn DeH. BpeMeTo 3a KocHe 5e 6bDe B CbOTBeTCTBne C BBBeDeHNTe HAcTpOKn.
- Iporpampano BpeMe 3a paobota Ha poobota ot 2 do 8 yaca e BpeMeTo 3a KOceHe, BKJIOHTeHNO BpeMeTo 3a 3apeXdaHe.
BpeMeTo 3a pa6oTa n 3apeXJaHe Bapnpa B 3aBncMocT O Tn3noJ3BaHata 6aTePn.
Ako nckaTe Da npomeHnTe pa6oTHoTo BpeMe, N3nBnHeTe OTHOBO CTbNk2-3.
IPOITPAMIPAHE HA BPEMETO B ABTOMATNUEH PEXIM, 7- IHEBEH IPAOK, E IOCTbHNO YPE3 HACTPOIKNTE B IPNIOXEHNETO
CneabapnHcnpaHepo6bTTP6BaPbPoDa6bDeOTKIOUeH, KATO CNEBbATECTbNkA2No-rope.CneI KATO p6oBT e OTKIOUeH, MOKEM Da rno3npaTMOBpaTHO KbM CTAHUNrTa,KATO HATNCKaMe 6yToHITe:ΦIr.D7,CNEI KOETONBbPdTe c6yToHaΦIr.D8,3a da BBpHeTe KocauKaTa B3apJdHaTcAHTuN.
HaTnCKaHTo Ha 6yToHa 3a abapuHo cnpaHe STOP n3TpNbLa
Ha pUHnI aBtOMaTHNlpeXIM OT npINOKeHneTO, Ako To e 6nIO
akTNbupAo NO TO3n HauHH. 3a Da Moke po60bT da 3aOnOHe OTHOB
pa6oTa cNeI abapuHo cnpaHe, ToI Tp8Ba Da ce BbpHE B
3apaHATA cTahnI N OTHOB Da oe 3aJaDe IpaΦNKbT 3a PbHu
pa6oTa. B clyuaI Ha aBtOMaTHNcHraΦNK, INBbPWeTe cbIoTO
JeicTBnE B rpaΦnKa Ha npINOKeHneTO nOTBbPdTe HaCTpoIKNTe
My.
BHIMAHHE! IporpamipapHO BpeMe 3a cTaptnpaHe B
abTomATnHnI rpaΦNK He Tpr5Ba Da ce CHTA 3a MHOrO ToHHO.
YpeBbT MoKe Da ce cTaptnpa Do HraKoNk MOHyTu CneI 3aJaDeHOTo
BpeMe.
- AkTbIbIpaHTo Ha pUeH peKIM n3TpINBa IporpAmIpaHnB B npInIOxKeHHeTo rpaΦNK uO6paTHo.
BpyeH peKIM kaHTnpaHETo ce N3BbPwBA abTOMaTHUHO Ha BCEKN HKOJIko LkKBJa Ha KOCHe. To BKIOUYBa KOcHe Ha TpeBaTa B 6n3oCT Do KaBeNa, KOITOnpeIePa6OThaTa 30Ha. BHIMAHNE! Tp8Ba Da Ce BHIMABA Ka6eIbT Da e npabINHO 3akpeNeH, 3a Da He Ce n3NoXn Ha CNYaHPO p3aHe. - Po60tBt 3a KocHe Ie Ce BbPHe B DOKnHr CTaHnIyTa, CneI KaTo yCTpoiCTBOTO 3aceYe HauJIoTO Ha BaJIeKInTe.
Ako no BpeMe Ha pa6oTa po6oTbCe c5nbcka C npenrTcBne,ToIe roOTCKOuN Ue npoDbJnx da pa6oTn.
INHINKATOPA 3A CbCTOARHNETO HA 3APEXDAHE B CTAHUNRA 3A 3APEXDAHE:
Henpekbchata 3eIeHa CBeTnHa -6aTePnTa e HAnbNHO 3apeJeHa.
PpeKbCbaa 3eIeHa CBeTnHa -3apeXdaHe.
N3BbH CTAHUNYTA 3A 3APEXDAHE:
Henpekbcnata 3eneHa CBETInHa - 6aTeepn 一 = 20%
PpeKbCbaUa 3eIeHa CBETnHa - 6aTePnA <20%
BHIMAHNE! PoobTb ATOMaTHNo cnpa pa6oTa n ce Bpbua B 3apnHa TcAun, ako HbTo Ha batepna naHe no20%.
CBETJNHA3AΓPEUKA:
HenpeKbchata 3eJeHa CBeTnHa -akTyaIuN3npaTe CnCTeMaTa.
Cbpxte c npnIOKeHHeTo, 3a nI3BbPwNTe aKtyaIIIN3aunrTa.
PpebcBaa 3eJHa CBeTnHa -AkyaIImaun Ha cIcTeMaTa e B XoI.
PpeKbCbaauepeBaHa cBETnHa - cbo6eHne 3a rpeka ot 1 do 5, pectaptnaie po6ota.
Henpekbchata cepbena cbetlnha - cbo6eHne 3a rpeka ot 6 do 12, HATNCHTe "STOP" INN "OK", 3a da n3uCTnTe.
INHINKATOP3A3ADbPkaaKABEJI:
Henpekbchata 3eJeha CBETnHa - CnHahbTe npabuHe
Henpekcbhata YepBHea CBetnHa - HMa CunHan
KoHTpOJI Nmrypa D4:
PpeKbCbaa CBeTnHa-6IokpaHpo6oT.
Henpebcchata cBeTnHa -po6oTbTe oTKIOueH.
CBeTnHa 1CBETN B3eJeHo:2yaca pa6oTa.
CBeTTHHHnTe HnDnKaTOpn 1 n2 CBeT B 3eNeHo: Pa6oTHo BpeMe 4 yaca.
CBeTTHHHTe HnDnKaTOpN 1,2 n3 CBeTgB 3eNeHo:Pa6oTHO BpeMe 6 yaca.
CBeTINHHNTE INHnKATOpN 1,2,3 n 4 CBETT B 3eJeHo:Pa6oTHo BpeMe 8 yaca.
COΦTYEP 3A YYPABJIEHNE HA POBJTA 3A KOCEHE
N3TeTJIHe Ha IOS:
https://apps.apple.com/cn/app/toua/id6449251720
I3TerJnHe Ha Android:
https://play.google.com/store/apps/details?id=com.touarobot
HnCTpykUInTe 3a nporpaMaTa MOKeTe Da n3TeTnTe OT: https://bit.ly/3QBB6Gm
ABAPINHO N3KJIIOUBAHE HA PO6OTA
HaTnchete 6yToHa "STOP" A1,3a Da CnpTe po6Ota,HaTnchete 3aDpXte 6yToHa 3a 3axpaHbHe,3a Da N3KIOUHTe po6Ota.
ПИДВИЖBAHE HA POБOTA
Ioi pobota e pa3noJoxKeHa npbXka 3a noBmraHe qnr. A10 3a necho ynpablenHe c edHa pbka.
PbXKA UN CbXPAHEHNE
BnHaHn n3KnIOuBaIe po6oTa npEi nOuNCTBaHe nIoDpBka.
-Ппдддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддддд徳н
N3KJIIOUcTe 3aXpaHbAHeTo.
BHHaHn Hocete De6eHN 3aunTHn pbkauu, KOraTO CMeHrTe octpneTata n NoCTBaTe DoJHaTa Yact Ha po6ota.
- PpOBePraBaIte peDIOBHO 3aTgAHeTo Ha 6oNTOBeTe n RaIKnTe. PpOBePeHnTe qactn Tp6Ba da ce peMOHTnpat INN 3aMeHrT OT cbo6paKeHnna 3a 6e30NaChOCT.
- PeioBHO npOBepBaIe daIIIOCTpneTata Morat da ce BbPTaTcBO6OJHo.
BHIMAHHE! Korato oobpaaTe po6ota c rnaBaTa haDony, noCTaBeTe ro Ha TpeBaTa nIi Ha MeKa NOBbPxHOCT, 3a Da He NOBpeDIne IINI HADpackaTe Kanaka.
ПОЧИСТBAHE
PNEyynPEKDEHNE!PpeDn da 3anoHeTe NoocTbaHeTo, n3KnIOyeTe 3axpaHbAHeTo c npBkIIOuBaTeTne A4.
- 3mmTe ppeHata yact ha poBoTa c npenapat 3a noHcTbaHe nOd HnCKo HaIraHe mKeA yeTKa NJI Kbpna.
- 3n0n3BaIe TBbPda YcTeKa, 3a Da OTCpaHIne OKoCeHaTa TpeBa N 3aMbpCraBaHnraTAt OCTpneTata, KOEnaTaNpyrN Yaactn OT DOHaTATCPaHa Ha po6Ota.
- PeDobHn npOBepBaIe KOenata 3a KaI nn OkOceHa TpeBa n IIN NOuchTbaIe C YeTka.
BHIMAHHE! PeoBHO oTcTaPraHbAte pactTeHNHe ocTaTbU O TdoJIHaTa cTpaHa Ha po6Ota, 3a Da n36erHete HamaIaBaHe Ha npOn3BOIDNTeHOCCTTA.
CMRAHAHOCTPNETO
PENPYNPEKDEHNE!IbpoBn3KnHoyTe rnaBnnpkecbayHa 3axpaHbaHeto n CNOKeTe 3aUHTn pKaBuU.
PENyPEXKDEHNE!N3no3BaTe cmo nocoueHte opnHaJIHn octpeta, oO6peHn OT npOn3BOJNTeIa.
- I Tpnte OCTpneTa n TexHnTe BnHTOBe Tpr6Ba Da 6bDat CMeHeHn C eHa Onpaun 3a CMHa A#r. A6.
BnHTOBeTe Tp8Ba Da ce pa3BnT n 3aTeHnat COTBePtKa. - Поберета ддп HOBITE OCTPte MoTAT Da ce BbptT CBO6OdHo.
PEWABAHE HA IPOBJEMN
B Ta6nIaTa No-dony ca daeHn HacOKn 3a DnaHocTnUpaHe Ha npo6nem.
AKe e Bb3MOxHO, nonpaBeTe yCtpoiCTBOTO cam. AKe np6JIembT He MoXe Da 6bJe OTcTpaHeN, CbBpxTe ce C OToPn3IpaH TbproBeu INI cepBn3EH CEHTbp.
PENyPEXKDEHNE! TpaBa da ce B3emat 3aunTHmepKn.
| ПюбLEM | Въиможни почени | Решения |
| Черванatable CBетлиа Мira на.stанцята 3a заразковая | Пюкьсвае на ораничтелега кабел | Намерete Deфекгеля усантук на kabela и ro_nonразавete |
| Робът trудно ce CBьрзва сбс.stанцята 3a заразковая | Сънцята 3a заразковая не e Инсталлара на павильno | Вижte раздени "Повrotовka 3a pa6ota". |
| Ораничтелегят kabел не e павильно разпOLTКe | ||
| Яма сигнад от ораничтелегя кабел | Яма зхранвае | Пюberete Источника на зхранвае |
| Ораничтелегят kabел eCBьрзанВ образна посoka | Разmersа на сбедиитelегite "+"и "-". | |
| Ораничтелегят kabел не e CBьрзанКьм.stанцята 3a заразковая | Пюberete дalmо ораничтелегят kabел e павильноCBьрзанCBСЗрдда Зардана.stанцяda | |
| Пюкьсвае на ораничтелегя кабел | Пюberete целя NBТ, Ye kabелыт не e пухьсан | |
| Ораничаве на КьсвсогаMuHa | Пюberete дalmо ораничтелегят kabел e павильно монтиран | |
| Робътtnреминава гравицая | Ораничтелегят kabел eCBьрзанВ образна посoka | Разmersа на сбедиитelегite "+"и "-". |
| Робът Вибрира пли Издава Neobшиайни Звци | Пюberete Нли Лincьшко OCTре | Пюber�а и ремont на виhtове 3a зakpenbahe на OCTреTO |
| Дискьт Ha OCTреTo e pa3хлабен | ||
| Сmarна на OCTреTO |
| Кod 3a гравka | Описане | Рeseнe |
| E01 Фигура F1 | Гравka р spi Иницаллзацьята - жирочковичен севор | Поставete робota на развна повьхон't и го 畴артуар'te. |
| E02 Фигура F2 | Пов徕да на севизора за повд风险管理 не пу. севизора за севыck | Pergулираитe сбльсквацда та сдану и ТорснонноTO колю В постав納а чаг на Косчakta, поверетe даму не са блокираим; поставete робota на развна повьхон't и го 畴артуар'te OTHOB. |
| E03 Фигура F3 | Гравka р spi Иницаллзацьята | Поставete рobota на развна повьхон't и го |
| На двигаеля 3a Косе He | PECTaptrypaÎte. Ако проблел.T рожьлжава, свъжete се с отд�а за облuyжbaнe на Клиeenthи. | |
| E04 Фигура F4 | Грешиka пri свързваену на Зхранha вану | |
| E05 Фигура F5 | Hentrabinna Скорост на Двигаеля 3a Косе He | |
| E06 Фигура F6 | П配电урждени За Нakно | Пocstabete рбобота върху разна повьрхонct. НатисөтЕ STОР пьлп OK, За ДА оТмeнite anapMaTа. |
| E07 Фигура F7 | П配电урждени За повдогаhe | Пocstabete рбobotа върху разна повьрхонct. НатисөтЕ STОР пьлп OK, За ДА oТмeнite anapMaTа. |
| E08 Фигура F8 | Г_REшka в калал нa ALIП | Пocstabete рбobotа върху разна повьрхонct и Го PECTaptrypaÎte. Ако проблел.T рожьлжава, свъжete се с отд�а за облuyжbaнe на Клиeenthи. |
| E09 Фигура F9 | Hentrabinne сигнал | Вижte по-тоpe B Табицада: пбоблем - няма синал OT Орразнчтел网ь кабел. Проверete BCИЧКToчkn eДна по.edна, спд.Kоето PECTabete рбobotа на разнa Повьрхонct. НатисөтЕ STОР пьлп OK, За ДА oТмeнite anapMaTа. PecstaptrypaÎte рбotinga. Ако пбоблемТ прodьлжава за свъechтБУВa, CBъжete се с отд�а за обсlnужbaнe нa Клиeenthи. |
| E010 Фигура F10 | Завианe рбotingn | Pocstabete рбobotа върху разнa повьрхонct. НатисөтЕ STОР пьлп OK, За ДА oТмeнite anapMaTа. PecstaptrypaÎte рбotinga. Ако пбоблемТ прodьлжава, CBъжete се с отд�а за обсlnужbaнe нa Клиeenthи. |
| E011 Фигура F11 | Hentrabinna Скорost на Левя Стьков дыагал | PocstaptrypaÎte рбobota. Ако пбоблемТ прodьлжава, CBъжete се с отд�а за обсlnужbaнe нa Клиeenthи. |
| E012 Фигура F12 | Hentrabinna Скорost нa пбавOT Стьков дыагал | PocstaptrypaÎte рбobota. Ако пбоблемТ прodьлжава, CBъжete се с отд�а за обсlnужbaнe нa Клиeenthи. |
KOMNJIeKbTcBdPbPKA:
- Po6oT 3a KoCeHe 16p.
- DOKINH CTaHnI IN CTaHnI 3a 3apeXdaHe 16p.
3axpaHbAne ydbJnKeTep 16p.
Ka6eJ 3a ouepTaBaHe Ha pa6oTHaTa
-Дюбели 3a 3akpenBaHe Ha Ka6eJIn 100 6p. - 166p.
Octpneta3a p3aHe 36p.
KaBeJIHn CbeENHHTeJI 26p.
-WectobTbIeN KIOU 16p.
CIELIΦUKALIM
| Робота косеhe 04-621 | |
| Параметър | Стойост |
| Зхранваши Напревения: | 18 V DC |
| Мakсимална Номинална мошноct на двигателя за косеhe: | 50 W |
| Мakсимална Номинална мошноct на самохODпядвигателя: | 20 W |
| Стоень на зашита IP за станцята 3а заразжданe | IPX4 |
| Стоень на зашита IP за робotinga | IPX5 |
| Стоень на зашита IP за щадлесера 3а заразжданe | IP 65 |
| Клас на зашита за рobotinga | III |
| Клас на зашита за зap** stанцяя | II |
| ШирINA на косеhe: | 180 MM |
| Perулралене на височины на разда themselves in Dnianaэ右手 | 20 mm - 60 mm |
| СkopOST на вьртынě | 3100 ob/Min |
| Тergло | 10,2 кг |
| ГорINA на пюизвор dcстvo | 2024 |
DAHHN 3A WUMA N BUNPAUNITE
| НИВО на 3БУКОВЕ налиегао | LpA = 56dB (A) K= 3dB(A) |
| Измeperно НИВО на 3БУКОВА моцуност | LW_A = 67dB (A) K= 3dB(A) |
Hhopmaun3a yma n Bn6paunnte
HnBOTO Ha Wyma, n3IbYBaH OT yCTpoiCTBOTo, ce ONICBA OT: HnBOTO Ha n3IbYBaHOTo 3ByKOBO Hanrahe L pA HnBOTO Ha 3ByKOBaTAMOJHOCT LWA, KbTeO K 063Haayaba HeonpeJeHeOCHTa Ha n3MepBaHTo. Bn6paunTe, n3IbYBaHOTO YCTPOiCTBOTo, ce ONICBATOT yCKopeHMeTO Ha BN6paunTe ah, KbTeO K 03Haayaba HeonpeJeHeOCHT Ha n3MepBaHTo.
CTOnHOCTnTe, n3MepeHb TToBa pBkoBOcTBo 3a ekCnIpoAtauN, t.E. HNBOTO Ha n3NbYBaHOTo 3ByKOBO HaJrAhe LpA , HNBOTO Ha 3ByKOBaTa MOUHOC T LwA N Bn6paunOHTo yckopeHne a , ca n3MepeHb CbOtBeCTBnE c EN 62841-1:2015+A11. DaJeHOTo HNBO Ha Bn6paUNTE a hMOKe da ce n3NoJI3Ba 3a cpaBnBaHe Ha ycTpoiCTBaTa n 3a npedBapTeHa OueHka Ha ekCNO3uNraTa Ha Bn6paun.
JaHOTo HNOBa Bn6paun E npedCTaBNTeHcMo 3a OCHOBHTe npINOxEHnHa YcTPOIcTBOTO.AKO yCTPOIcTBOTc e N3NoN3Ba 3a DpyrnpINOxEHnN C dpytn pa60THN HcTpyMeHTn, HNBOTO Ha Bn6paunTe MoE Da ce pAINuAba. HeaKeBAthata Nm PraKa NoDpBkKa HaYcTOCTBOTo BOd DO NO-BNCOKn HNa Ha Bn6paun. IopeCnOMeHaNTe npUHN MOrat Da yBeNnuAT mNlaRaHeTo Ha Bn6paun IpEe ZENRAKcNtAoTaNoHOHepnoID.
3a da ce onpeDen ToUHO ekCno3nuiTa Ha Bn6paun, Tpr6Ba da ce B3eMaT npedBnD nepNOdnte Ha BKNIOuBaHe n3KNOUbaHe Ha ycTPOIcTBOTO, Kato Ce n3KnOHTepNpOAnTe, KOraTO TO ce n3No13Ba 3a pa60ta. ObuaTa ekCno3nuiHa Bn6paun MoKe da 6bDe MHoro No-HnCKa, KOraTO BCNUK fakTopn ca OueHen ToUHO.
3a da npednaute onepata op Bn6paun, n3non3BaTe DonbHInTeHN MepKn 3a 6e3oNaCHOCT, HAp. peOBHa noDpBkKa Ha yCtpoIcTBOTOp u paoTHNe IHCTpyMeHTN, NOxOJaTn TEMpePaTyPHN ycNoBn 3a pbceTne npabuHnA orpAHn3aunHa paOtaTata.
DAHHN3A LUYMA N BNBPAUNITE
ONA3BAHE HA OKOJIHATA CPEDA
| EnektPrinieckto OobopydBaHe He TpIaBa Da ce I3XbPnla 3aedNo 6bTobIne OtnaIbUu. I3XbPnIe To B NoIoxOJaun CbOpBXeHnA INΦopMaJcna 3a I3XbPnIeTo MoKTe Da NOnyUIne To TbProBeCa npOlykta INaIOT MeCtNite BnAcTl. OtnaIbUIne To EneKTPrnECoN eNeKTPOHn OobopydBaHe (OEOC)CbDbPxKAT BeIeCTBa, KOInTo H HeYtpAnHn 3a PrnpOdnata CpEda HepeuKnIpaHTo OEOC npEcdTabraBa NoteHuaHa NaOnCHoCT 3a OkOnHata CpEda n ObeW 3dpabe. |
"Grupa Topex Spokka z ograniczona odpwiedzialnoscia" Spoka komandytowa cbc cedanlne BbB Bapwaba, yn. Pograniczna 2/4 (Hapuha no-hatatbk "Ppya Topex") nHcOpmnpa, ye CbMnK ABTOPck npaba Bbpxy cbIbpxaHneto HA TOBA pKOBODCTBO 3a yNtpeba (HapuhaNO-HaTbK "PbKOBODCTBOTO"), BKNIOHTENHO, HOHE CAMO, HEROBINA Tekt, ny6bnkyBaHnTe CHIMNK, dHaqrpan, YeRTEK, KaKTo H erOBATA KOMNOSU, npnHaNDekkat NkKnOHTeHNO Ha Pyra TOpex H ca OeKT Ha npBa Hs AkpIna B cBOTBeCTBNE CbC 3aKaHOno t 4 fepByapn 1994 r. 3a ABTopCKOTn npabo H cpOnHnTe My npaba (r.e. DB, 6p. 90 ot 2006 r., no3nua 631 c nMaHEHnRA). KonpaHeto, o6paOBoHHeTO, ny6bnkyBaHnTo, moiNphiHpaHTo c TBPROBCA ue Ha cnHto PbKOBOCTBO, KaKTo H a OTdEHN Hi ROBn ElenMeHTN, 6e3 NiNCMeHOTc bFNaChE Ha Topex Group, e CTporo 3a5paHeHO n Moke da DoBede Do rpaXdaHcKa n Haka3aTeHn AOTROBOPHOCT.
EO DeKnapaun 3a cBoTBeTCTBne
ПОНБОДТEN: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Bapшаа
PpOdyKT:Po6oT 3a KocHe E+
Moden:04-621
TbproBcKO HanMeHOBaHne: NEO TOOLS
CepneH Homep: 00001 ÷ 99999
Hactoata DeKnapaun 3a CbOTBeTCTBne Ce n3daBa Ha nbnHaTa OTROBOPHOCT Ha npOn3BODNTeJI.
PpOdyKtBt, ONIcaH No-rope, cBoTBeTcTbHa HcNeHnTe DOKyMeHTN:
DnpeKtNbA 3a MaunHnTe 2006/42/EO
DnpeKTHBa 2014/53/EC 3a ChePBeHnueB
ДиpeКТиBa 2011/65/EC, ИЗмeHeHa c ДиpeKТиBa 2015/863/EC
IOTROBapraHaH3NCKBaHHaTaCtAnDapTHTe:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Hactoata DeKnapaue Ce OTHacr cmo 3a MaunHaTa, KaKTo e nychata Ha na3apa, H He BkNoUBA KOMnOHeHTN.
IobabeHn OT kpaHnnoTpeBnteN nIN DeiCTBn, n3BpweHn OT HrO BnocneDCTBnE.
Ime n aDPEC Ha IInuTeO, Ipe6nBaaUo B EC, KoTo e yTbHOMOeHO da N3rTOBn TEXHnueCKOTo DOCHe:
POnncaHOOTmetoHa:
Grupa Topex Sp. Z o.o. Sp.k.
Yn. Pograniczna 2/4
02-285 BapwaBa

PabEn KOBaIcKn
OTROBOPHNI NO KAyeCTBOTo Ha TOPEX GROUP
Bapsha,2023-09-11
EC DeKJapaun 3a cBoTBeTcTBne
Пожибовпел: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Bapшава
PpOdyKT:3apArdHa cTaHcNIA
MoeN:K145455
TbproBcKO HAMMeHOBaHHe: NEO TOOLS
CepneH Homep: 00001 ÷ 99999
Hactoata DeKnapaun3a CbOTBcTbue Ce n3daBa Ha IbHaTa OTROBOPHOCT HA pON3BOINTEJ.
PpOdyKbT,ONHcAH NO-rope,CbOTBeCTBa Ha CnEHNTE DOKMeHTN: DInpeKTNa 2014/53/EC 3a YepBHeNr CBAT
IupeKTHBa 2011/65/EC, n3MeHeHa c IupeKTHBa 2015/863/EC NOTROBAPr Ha n3NCKBAHnraTa Ha cTaNdapTnTe:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Hactoata Daeknapaue Ce OTHacr eINHCTBeHO 3a MaunHaT, KaKTo e BbBedeHa B
n3apa n He BkIIOUBA KOMNOHEHTN, DO6aBeHN OT KpaHnI NOtpe6nteI nn
nocJeBaunTe My DeHocTH.
Ime napec Ha ynbHMOeHTo Iue oT EC
I3ROTBAHe Ha TEXHmueCKOTO DOCNE:
NoHncaHOOTHMeToHa:
Grupa Topex Sp. Z o.o. Sp.k.
Yn. Pograniczna 2/4
02-285Bapwaba

PabenKobajickn
OTROBOPHNI NO KaueCTBOTo Ha TOPEX GROUP
Bapwaba, 2023-11-09
HR
PRIRUCNIK ZA PRIJEVOD (KORISNIK) ROBOT ZA KOSNJU 04-621
OPREZ! PRIJE RADA S ELEKTRICNIM ALATIMA PAZLJIVO PROCTAJTE OVE UPUTE ZA UPORABU I SACUVAJTE IH ZABUDUCU UPOTREBU.
DETALJNA SIGURNOSNA PRAVILA
SIGURNOSNE UPUTE ZAROBOTE ZAKOSNJU
Sigurnost u praticnoj upotrebi robota za kosnju
PREPORUKAMA
Pažljivo pročitajte upute za uporabu. Upoznajte upravljacke sustave i spravan rad uredaja.
Ne dopustite da uredaj koriste djeca ili bilo tko tko nije procitao upute za uporabu. Nacionalnim propisima moze se navesti minimalna dob operatera.
Nemojte koristiti robota akso u blizini prisutni drugi ljudi, posebno djeca ili ziivotinje.
Imajte na umu da je operater ili korisnik odgovoran za nesrece ili opasnosti za druge ljude ili okolis.
PRIPREMA
-
Prije kosnje svaki put provjerite rade li svi dijelovi robota ispravo.
-
Za najbolje rezultate preparučuje se košnja po vremenu bez kiše. Prilikom košnje po kiši, trava se moze zalijepiti za robota, što moze skliznuti.
-
NEMOJTE kositi u lošim vremenskim uvjetima, njr. tijekom jake kiše, grmljavinskih oluja ili snježnih padalina.
-
Povremeno pregledajte pokošeno područje i uklonite sve kamenje, krhotine,Žice,kosti i druge prepreke.Ogranićeno jamstvo nePokriva šetu uzrokovanan predmetima ostavljenim na travnjaku.
Da bist iebjegli ostecenja, nemojte kositi unutar 1 m od glava prskalica.
OPREZ! Robot i prskalice NE smiju se istovremeno ukljucivati.
Robot bi trebao biti programiran da radi u razlicito vrijeme od prskalica.
NIKADA ne dopustite djeci da dodiruju napajanje, stanicu za punjenje, posebno kontakte, ostrice, pretinac za baterije ili bilo koje dijelove gdje postoje praznine kao sto su kotaci.
OPERACIJA
- Pazite na rotirajuce ostrice! NEMOJTE stavljati ruke ili noge ispod rotirajucih ostrica.
- Pazite na predmete razbacane po travnjaku tijekom kosnej! Kada je robot ukljucen, drzite se na sigumoj udalenosti.
- Ne ostavljaje uredaj bez nadzora ako se zna da suŽivotinja, djeca ili prolaznici u blizini.
- Održavajte siguran položaj. Održavajte ravnotežu i stabilan položaj na nagibima. Dok upravla robotom ili njegovim perifernim uredajima, dopusteno mu je hodati, ali ne i trčati.
- Procitajte upute o tome kada, gdje i kako provjeriti robota i njegov periferne uredaje, kabei produzne kabe na ostecenja ili istrosenost te popraviti robota. Samoizmjena, popravak nije dopušten - uz rizik poniistenja jamstva.
- Nemojte spajati ili dodirivati ostecenei kabel za napajanje dok se ne iskluci iz napajanja zbog opasnosti od kontakta s componentama pod naponom.
- Robota i/ili perifernu opremu prikljucite samo na strujne krugove zasticene prekidaem diferencijalne struje s okidnom strujom ne vecom od 30mA
- Ako robot proizvodi nenormalan zvuk ili se primijeti abnormala vibracija ili signalizira alarm, odmah pritsnite tipku STOP.
ZABRANJENO JE dodirivati opasnePokretne dijelove prije isključivanja napajanja robota.
ZABRANJENO JE dodirivati opasne dijelove dok se potpuno ne zaustave. - Uvjiek nosite Čvrstu obuću i duge hlace kada rukujete robotom.
- Isklučite napajanje: Prije zaklučavanja robota.
- Prijie ispitivanja, cisicenja ili odrzavanja.
PIKTOGRAMI I UPOZORENJA


- Procitajte upute za uporabu i pridržavajte se upozorenja i sigurnosnih uvjeta!
- Prije ciiscenja ili odrzavanja, iskljucite iz napajanja
- Ne stavljajte ruke ili noge pod šitnik mehanizma za kosnju 4. Rotirajuci dijelovi - mogucnost ozljeda
- Držite se na sigurnoj udalenosti od robota za kosnju
- Cuvajte se mogucnosti ozljeda od lijevanih predmeta
- Zastitite od kise
- Cuvati izvan dohvata djece.
- Nemoje se voziti na robotu
- Moguci gubitak prstiju, pa
- Maksimalni nagib tla 14^ / 25%
- Zastitite ruke radnim rukavicama
- Nosite zaistitu objecu
- Nosite zaisttno obucu
- Ne bacati s kučnim otpadom
- Selektivno prikuplanje otpada
- Stupanj zastite
OPREZ! Ovaj uredaj mogu koristiti djeca starija od 8 godina i osobe s ogranicenim fizickim i mentalnim sposobnostima, kao i s nedovoljnim znanjem III Iskustvom ako su pod nadzorom III su pravilno upuceni u sigurnu uporabu uredaja kako bi bili svjesni uključenih rizika. Djeca se ne smiju igrati s ovim uredajem. Djeca ne smiju Čistiti ili oderžavati uredaj bez nadzora.
OPIS GRAFICKIH ELEMENATA
Sljedeće numeriranje odnosi se na komponente uredaja prikazano na grafickim stranicama ovog prisucnika.
| Oznaka sl. A | Ophis | |
| 1 | Zaustavljanje u nuždi | |
| 2 | Regulator visine košnje | |
| 3 | Upravljačka ploča kosilice | |
| 4 | Prekidač za napajanje kosilice | |
| 5 | Pogonski kotači | |
| 6 | Oštrice za rezanje | |
| 7 | Bubanj mehanizma za rezanje | |
| 8 | Okretni kotači | |
| 9 | Ručka za nošenje | |
| 10 | Priključci za punjenje | |
| 11 | Poklopac pretinca za baterije | |
| Oznaka sl. B | Ophis | |
| 1 | Upravljačka ploča priključne stanice | |
| 2 | Rupe za prićvršćivanje priključne stanice | |
| 3 | Priključci za punjenje | |
| 4 | Priključna stanica | |
| 5 | Čuvar priključne stanice | |
| 6 | Konektori za kabel za napajanje za označavanje radnog područja | |
| 7 | Otvori za kabele za označavanje radnog područja i napajanja | |
| 8 | Utičnica priključne stanice | |
| 9 | Oznacavanje za ispravno usmjeravanje kabela | |
| Oznaka sl. D | Ophis | |
| 1 | Svjetlo indicatorata statusa punjenja | |
| 2 | Indikator kvara signala | |
| 3 | Indikator sigurnosnog kabela | |
| 4 | Radno vrijeme / poruka o pogrešci, svjetla 1-4 | |
| 5 | Gumb za ukljucivanje | |
| 6 | Prekidač za napajanje | |
| 7 | Gumb za spajanje | |
| 8 | Gumb "Potvrdi" | |
| Oznaka sl. H | Ophis | |
| 1 | Vijke | |
| 2 | Poklopac pretinca za baterije s transportnom ručkom | |
| 3 | Pretinac za baterije | |
| 4 | Utičnica za baterije na Poklopcu komore | |
| 5 | Punjiva baterija (nije ukljucena) | |
| Oznaka sl. Ja | Ophis | |
| 1 | Travnjak | |
| 2 | Zid | |
| 3 | Priključna stanica | |
| 4 | Udaljenost stanice od zida | |
| 5 | Početi ni dio linije koji ogranicava područje košnje | |
| 6 | Duljina presjeka | |
| Oznaka sl. J | Ophis | |
| 1a | Kabel za ogranicavanje područja košnje Početak | |
| 1.b | Kabel za ogranicavanje područja košnje Kraj | |
| 2 | Opskrbni vod: | |
| 3 | Priključna stanica |
- Mogu postojati razlike izmedu grafike i stvarnog proizvoda
PRIPREMA ZA POSAO
UGRADNJA BATERIJE
- Obrmite robota za košnju takdo da postoji pristup donjoj strani robota.
-
Umjesto prekidača SI. A4 i transporte nučke SI. A9 nalazi sePoklopac pretinca za baterije SI. H2 pričvršćen s 4 vijka označena strelicama SI. H1.
Zatim odvijte vijke oznaene strelicama. -
Pažljivo uklonitePoklopac pretinca SI.H2 kako ne bisteprekinuli ili odspojili zice prekidača SI.A4 (pričvrsćen je naPoklopac pretinca za baterije).
Zatim okrenitePoklopac,na donjoj straniPoklopca pričvršćena je uticnica za bateriju SI.H4. - Umetnite bateriju iz serije ENERGY+u uticnicu.
- OkrenitePoklopacsprivcrscenbaterijomumetnitegaupretinac na sl.H3.
- Pritegnite vijke koji pričvṛśćujuPoklopac. Okrenite robota odozdo prema dolje, uredaj je spreman.
RADNO OKRUZENJE ROBOTA ZA KOSNJU
Provjerite jesu li ispunjeni sljedeci uvjetu području u kojem robot radi:
- Visina trave ne prelazi 60~mm
- OPREZ! Ako je trava duza od 60 mm, travnjak prvo porezite ručnom kosilicom.
- Nema kamenja, komada drveta,Žica,kabela pod naponom ili drugih stranih predmeta.
- Mjesto kośnje je ravno i ravno, bez jaraka i rovova, a nagib je manji od 25% (14°) SI. C1
- Za instalaciju su potrebni sljedeci alati:
- Gumeni Čekic (za zabijanje igle u zemlju prilikom polaganja sigurnosnog kabela)
- Sesterokutni ključ (za pričvršćivanje stanice za punjenje) ukljucen je u komplet
Klijësta (za rezanje kabela koji omejue radno područje)
1. INSTALACIJA BAZNE STANICE
Odaberite prikladno mesto
Stanicu za punjenje treba postaviti na sljedeću lokaciju SI. C3:
- Relativno ravan i ravan dio travnjaka.
- Blizu ruba travnjaka.
U blizini zidne uticnice.
- Postavite produkti kabel od 10m , napajanje na zasjenjeno, hladno i suho mesto.
- U krugu od najmanje 2 m od stanice za punjenje ne smije biti prepreka.
- Preporučuje se da se stanica za punjenje nalazi na suhom i zašićenom mestreu.
- Napajanje treba biti 30 cm iznad razine tla.
2. PRIKLJUÇAK STANICE ZA PUNJENJE
Pričvrstite stanicu za punjenje na tlo sa 6 pričvrsnih vijaka (G1) (pomóć
sesterokutnog kluca G6).
OPREZ! NEMOJTE stajati ili hodati po ploci stanice za punjenje.
OPREZ! NEMOJTE praviti nove rupe na ploci stanice za punjenje.
Stanicu treba pričvrstiti vijcima za pod pomocu postojecih rupa.
3. POLAGANJE SIGURNOSNOG KABELA
Sigurnosni kabel koristi se za ochtavanje radnog područja i vodjenje robota natrag do stanice za punjenje.
OPREZ! Ako i vas susjed koristi robotsku kosilicu, drzite razmak od najmanje 1 m izmedu sigurnosnih saja oba robota.
PLANIRANJE POLOZAJA SAJLE ZA ZADRZAVANJE
Prije polaganja sigurnosnog kabela, hodajte duž označene granice i uklonite sve nepotrebné predmete, poput kamenja.
OPREZ! Duljina sigurnosnog kabela ne smije biti veca od 200 metara.
UPOZORENJE! Robot ne smije voziti po šljunku ili slicnim materijalima koji bi mogli ostetiti ostrice.
POLAGANJE SIGURNOSNOG KABELA SL. C
Slijedite upute u nastavku kako biste položili sigurnosni kabel oko radnog podrujoi i prepreka. Upotrijebite mjera koji se nalazi u kompletu kako biste pravlino položili sigurnosni kabel.
OPREZ! Sigurnosni kabel napaja se na vrlo niskom naponu i siguran je za Ijude i kuñe Ijubimce.
OPREZ! Započnite s" "konektorom na stražnjoj strani stanice za punjenje SI. B6 povucite ga ispod stanice (i ostavite rezervu od 10 cm) i položte kabel okko travnjaka u smjeru suprotnom od kazaljke na satu, završavajuci s "+" konektorom na stražnjoj strani stanice za punjenje (ostavite rezervu od 10 cm). Uvjerite se da kabel dode u kontakt s metalom na konektorima "+" i"SI. B6 ne zaboravite odrezati visak sajie za zadržavanje.
- Ostavite rajmanje 2 m prazno izmedu sigurnosnog kabela i stanice za punjenje. Kabel u ovom odjeljku koristi se za dovodenje robota do priključne stanice.
- Održavajte razmak od 30 cm izmedu sigurnosnog kabela i ruba travnjaka SI. C2; Sika C3.
- Pričvrstite sigurnosni kabel na tlo pomoću prilozenih tipli SI. G5. Sigurnosni kabel treba biti ravan i lagano zategnut. Tiple treba
razmak Nuti svakh 1 m (to se moze mistrjati ovisno o obliku travnaja) SI. C4. Nemoje zakopavati kabel dublje od 2 cm kakobiste izbjugli slabjenje signala.
Rasporedite kabel tako da kutovi budu veci od 90^ SI. C5. U takvim područjima položite sigurnosni kabel u blagim zavojima, što ce robotu znatno olaksati kretanje po području koje treba pokositi.
- Ako na travnjaku postoje cvjetne gredice, ribnjaci ili drivece, okruzite ih petljama sigurnosnog kabela SI. C4.
- Održavajte razmak od majmanje 30 cm izmedu sigurnosnog kabela i rubova prepreka.
OPREZ! Na putu do i od petlje, sigurnosni kabel ne smije se medusobno križati SI. C4.
- Ostavite uski prostor u radnom području kosilice. Uvjerite se da je udalenost izmedu paralelnih sugurnosnih kabela veça od 1 m.
OPREZ! Provjerite je li prikljucna stanica unutar petlle koja označava područje kosnje. (izvana / iznutra) SIIka B2
4. UGRADNJA STANICE ZA PUNJENJE
Spojite napajanje
- Umetnite utikač u zidnu utičnicu od 110-240 V.
- Provjerite status LED svjeta na stanici za punjenje SI. B1:
- Stalno zeleno svjetlo: veza uspostavljena (robot se ne puni ili je potpuno napunjen)
- Isprekidano zeleno svjetlo: robot se puni.
- Povremeno crveno svjetlo: najceśca pogreska je "odspajanje sigurnosnog kabela".
- Svjetlo iskligene: najce greka je "Nema napajanja 100-240 V" ili "Nema veze s izvorom napajanja".
RAD / POSTAVKE
PrvoPokretanje robota za kosnju
- Kada prvi putPokreete robota, postavite uredjnaj prklignu stanicu tako da konektori za punjenje na stanici sl. B3 nemojte doci u kontakt s konektorima za punjenje na robotu za kosnju sl. A10.
- Kada se robot za košnju prvi putPokrene iztelefonske aplikacije, potrebno je izvršiti ažuriranje firmvera. Način implementacije opisan je u nastavku pod ažuriranjem softvera.
- OPREZ! Tijekom prvog povezivanja, Telefon i robot moraju biti u dometu Wi-Fi mreze.
AZURIRANJE FIRMVERA PRIJE UPOTREBE ROBOTA.
Ažuriranje treba izvršiti na sljedeci nacin.
- Postavite robota unutar petlle, ali izvan stanice za punjenje.
- Prebacite prekidač Fig. A4 u položaj 1.
- Pritisnite i drzite prekidač SI. D5
- Pokrenite aplikaciju, skenirajte QR kod
- Povežite aplikaciju robotom
- Proširite postavke softvera pritiskom na ikonu u gornjem desnom kutuzaslona.
- Odaberite opcjju: Ažuriranje firmvera.
- Zatim slijedite upute nazaslonu.
Nakon instaliranja softvera, uredaj je spreman za rad
OPREZ!
- ZaslonPokazuje li robotuWi-Fi ili Bluetooth dometu
- Povezivanje smrežom označeno je trepćućom ikonom za vrstu veze. Nakon povezivanja, ikona prestaje treptati.
- Robot se moze upariti samo s jegnim Telefonom.
- Ako je potrebno spojiti drugi (isti robot za kosnju), prvi se mora ukloniti iz aplikacije. U aplikaciji za iOS takoder iz Bluetooth postavki.
PODEŠAVANJE VISINE KOSNJE:
Prije prve kojsne postavite visinu kojsne na 60~mm a zatim promijenite na zejenu visinu kada je cijeli travnjak relativno ravan.
- Okrenite gumb Fig. A2 u smjeru kazaljke na satu kako biste poveçali visinu košnje.
- Okrenite gumb Fig. A2 ulijevo kakobiste smanjili visinu kosnej.
- Visina košnje može se podesiti od 20 mm (MIN) do 60 mm (MAX).
OPREZ! Pogonski motor bubnja mehanizma za kosnju SI. A7 ukljucije se otprilike 10 sekundi nakon napuštanja baze, zapocinjuči rad.
UKLJUCIVANJE/ISKLJUCIVANJE
- Postavite prekidač na sl. A4 u položaj "O" kako biste isklučili napajanje.
- Postavite prekidač na sl. A4 u položaj "I" za uklučivanje napajanja.
AKTIVIRANJE ROBOTA I PROGRAMIRANJE RADNOG VREMENA U RUCNOM NACINU RADA
- Pritisnite i drzite tipku za uklučivanje SI. D5 zaPokretanje robota. Napomena: nemojte tresti robota tjekomPokretanja kako bist izbjugli
pogresku priPokretanju.Ako se robot nePokrene ispravno (sva svjetla neprekidno svijtlet),ponovno gaPokrenite
- Unesite lozinku pritiskom na tipku SI. D6 dva puta, zatim tipku SI. D7 dva puti tipku SI. D8 jegnom (lozinka je tvomicki programirana).
-
Programirajte vrijeme rada (uključujuci vrijeme kosnje i vrijeme punjenja):
-
Pritisnite SI. D6 za povesavanje vremena rada. Jedno upaljeno svjetlo znaci 2 sata, maksimalno vrijeme rada je 8 sati, a 4 svjetla na slici D4.
Pritisnite gumb SI. D8 za potvrdu iPokretanje robota.
OPREZ! Nakon što je vrijeme rada postavljeno, robot ce zapamiti postavke i početi kositi svaki dan u programirano vrijeme. Vrijeme kosnej bit ce u skladu sunesenim postavkama.
- Programirano vrijeme rada robota od 2 sata do 8 sati je vrijeme kosnje uključujuci vrijeme punjenja.
Vrijeme rada i punjenja ovisit ce o koristenoj bateriji.
Ako Želite promijeniti vrijeme rada, ponovno slijedite korake 2-3.
PROGRAMIRANJE VREMANU AUTOMATSKOM NACINU RADA, 7-DNEVNI RASPORED, DOSTUPNO JE PUTEM POSTAVKI U APLIKACICIJI
- Nakon zaustavljanu u nuždi, robot se prvo mora otkljucati slijedeci gornji korak 2. Nakon što je robot otkljucan, možemo ga poslati natrag na stanicu pritiskom na tipke: S1. D7 zatim potvrdite sa sl. D8 gumb za vračanje kosilice na stanicu za punjenje.
- Pritiskom na tipku za zaustavljanje u nuždi STOP briše se ciklus ručnog i automatskog načina rada iz applikacije, ako je aktiviran na ovaj način. Da bi robot ponovno počeo raditi nakon zaustavljanja u nuždi, robot se mora vratiti na stanicu za punjenje i ponovno postaviti ručni raspored rada. U slučaju automatskog rasporeda, izvedite istu radnju u rasporedu applikacija i potvrdite njegove postavke.
OPREZ! Programirano vrijemePokretanja u automatiskom rasporedu ne treba smatrati vrlo preciznim. Ure'daj se mozePokrenuti do nekoliko minuta nakon postavljenog vremena.
- Aktiviranjem ručnog načina rada briše se raspored programiran u aplikaciji i obruto.
- Obrubljivanje u ručnom načinu rada vrši se automatski svakih nekoliko ciklusa košnje. Uklučuje košnju trave u blizini kabela koji definira radno područje. OPREZ! Morate paziti da je kabel pravilno pričvršćen kakoga ne bisté izložili slučajnom rezanju.
- Robot za kosnju vratit ce se na prikljucnu stanicu nakon sto uredaj otkriere poctetak kiše.
- Ako robot naide na prepreku tijekom rada, obit ce se od nje i nastaviti s radom.
SVJETLO STATUS PUNJENJA U STANICI ZA PUNJENJE:
Kontinirano zeleno svjetlo - baterija je potpuno napunjena.
Povremeno zeleno svjetlo - punjenje.
IZVAN STANICE ZA PUNJENJE:
Kontinuirano zeleno svjetlo - baterija >=20% Isprekidano zeleno svjetlo - baterija <20%
OPREZ! Robot automatski zaustavija rad i vraça se na stanicu za punjenje ako razina baterije padne ispod 20%
SVJETLO POGRESKE:
Kontinuirano zeleno svjetlo - ažurirajte sustav. Povežite se s aplikacijom da biste izvršili ažuriranje.
Povremeno zeleno svjetlo - ažuriranje sustava u tjiku.
Povremeno crveno svjetlo - poruka o pogresci 1 do 5, ponovnoPokrenite robota.
Neprekidno crveno svjetlo - poruka o pogresci 6 do 12, pritisnite "STOP" ili "OK" za brisanje.
INDIKATOR SUZDRŽAVAJUCEG KABELA:
Kontinuirano zeleno svjetlo - ispravan signal Kontinuirano crveno svjetlo - nema signala
Upravljanje SI. D4:
Isprekidano svjetlo - robot blokiran.
Kontinuirano svjetlo - robot otključan.
Svjetlo 1 svijetli zeleno: 2 sata radnog vremena.
Svjetla 1 i 2 svijtle zeleno: 4 sata radnog vremena.
Svjetla 1, 2 i 3 svijetle zeleno: 6 sati radnog vremena.
Svjetla 1, 2, 3 i 4 svijtle zeleno: 8 sati radnog vremena.
SOFTVER ZA UPRAVLJANJE ROBOTOM ZAKOSNJU
IOS preuzimanje:
https://apps.apple.com/cn/app/toua/id6449251720
Android preuzimanje:
https://play.google.com/store/apps/details?id=com.toua.robot
Upute za program mozte preuzeti na: https://bit.ly/3QBB6Gm
HITNO ISKLJUCIVANJE ROBOTA
Pritisnite tipku "STOP" SI. A1 za zaustavljanje robota, pritisnite i drzite tipku za uklučivanje da biste isključili robota.
PREMJESTANJE ROBOTA
Ispod robota nalazi se rucka za podizanje SI. A10 za jegnostavno rukovanje jegnom rukom.
ODRŽAVANJE I SKLADIŠTENJE
- Uvijek iskljucite robota prije ciscenja i odrzavanja.
- Isklučite napajanje prije cisćenja i odžavanja stanice za punjenje.
- Uvjek nosite debele zašitne rukavice prilikom zamjene ostrica i cisćenja donje strane robota.
- Redovito provjeravajte nepropusnost vija i matica. Osteceni dijelovi moraju se popraviti ili zamijeniti iz sigurnosnih razloga.
Redovito provjeravajte mogu li se ostrice slobodno okretati.
OPREZ! Kada robota okretene naopako, stavite ga na travnjak ili meku povrsinu kako ne biste ostetili ogrebali Poklopac.
CISCENJE
UPOZORENJE! Prijee nego počnete s cisćenjem, iskIJucite napajanpe prekidačem SI. A4.
- Operite prednji dio robota riskotlačnim Čistacem i mekom Četkom ili krpom.
- Tvrdom Četkom uklonite pokošenu travu i ostatke s noževa, kotača i drugih dijelova s donje strane robota.
- Redovito provjeravajte ima li na kotačima blata ili pokošene trave i ocistite in Četkom.
OPREZ! Redovito uklanjajte biljne ostatke s donje strane robota kako biste izbjegli smanjenje produktivnosti.
ZAMJENA OSTRICE
UPOZORENJE! Prvo iskjučite glavni prekidač za napajanje i stavite zašitne rukavice.
UPOZORENJE! Koristiteismo naznacene originalne ostrice koje je odobrio proizvodač.
Sve tri ostrice i njihovi vijci moraju se zamijeniti u jaknoj zamjeni SI. A6.
Vijke treba odvrnuti i zategnuti odvijaem.
- Provjerite mogu li se nove oštrice slobodno okretati.
RJESAVANJE PROBLEMA
Tablica u nastavku sadrži smjernice za dijagnosticiranje problema.
Ako je moguce, sami popravite uredaj. Ako se problem ne moze riješiti, obratite se ovlastenom zastupniku ili servisnom centru.
UPOZORENJE! Treba poduzeti zašitne mjere.
| Problem | Mogući uzroci | Rješenja |
| Crveno svjetlo treperi na stanici za punjenje | Prekid sigurnosnog kabela | Pronadite neispravan dio kabela i popraviti ga |
| Robot ima poteškoća s prikljucivanjem na stanicu za punjenje | Stanica za punjenje.nije pravilno instalirana | Pogledajte odjeljak "Priprema za rad". |
| Sigurnosni kabel.nije pravilno postavljen | ||
| Nema signala iz sigurnosnog kabela | Nema napajanja | Provjerite izvor napajanja |
| Sigurnosni kabelspojen je obruto | Zamijenite konektore "+" i "-" | |
| Sigurnosni kabelnije spojen na stanicu za punjenje | Provjerite je li kabel za zadržavanje ispravan spojen na stanicu za punjenje | |
| Prekid sigurnosnog kabela | Provjerite do kraja, da kabel{nije prekinut | |
| Ograničavanje kabelskikh križeva na putu do i od petlje | Provjerite je li sigurnosni kabel pravilno postavljen | |
| Robot prelimazi granicu | Sigurnosni kabelspojen je obruto | Zamijenite konektore "+" i "-" |
| Robot vibrira ili ispušta neobične zvukove | Ostećena ili nedostajće oštrica | Provjerite i popravite vrijke za prićvršćivanje oštrice |
| Disk oštrice je labav | ||
| Zamijenite oštricu |
| Kod pogreške | Opis | Otopina |
| E01 SI. F1 | Pogreška incijalizacije - žiroskopski senzor | Postavite robota na ravnu povrsinu i ponomvno pokretenite. |
| E02 SI. F2 | Greška senzora podizanja ili senzora sudara | Podesite šipku za sudar i torzijski kotač na prednjɔj strani kosilice, provjerite da nisu zakljucani; Postavite robota na ravnu povrsinu i ponovno Pokretenite. |
| E03 SI. F3 | Pogreška incijalizacije motora za košnju | Postavite robota na ravnu povrsinu i ponomvno pokretenite. Ako se problem nastavi, obratite se korisničkoj službi. |
| E04 SI. F4 | Pogreška prikljucka napajanja | |
| E05 SI. F5 | Neispravna brzina motora za košnju | |
| E06 SI. F6 | Upozorenje o nagibu | Postavite robota na ravnu povrsinu. Pritisnite STOP ili OK za poništavanje alarma. |
| E07 SI. F7 | Upozorenje o dizanju | Postavite robota na ravnu povrsinu. Pritisnite STOP ili OK za poništavanje alarma. |
| E08 SI. F8 | Pogreška ADC kanala | Postavite robota na ravnu povrsinu i ponomvno pokretenite. Ako se problem nastavi, obratite se korisničkoj službi. |
| E09 SI. F9 | Netočan signal | Pogledajte gore u tablici: problem - nema signala iz sigurnosnog kabela. Provjerite sve točke Jednu po Jednu, a zatim postavite robota na ravnu povrsinu. Pritisnite STOP ili OK za poništavanje alarma. PonovnoPokretenite robota. Ako se problem nastavi, obratite se korisničkoj službi. |
| E010 SI. F10 | Zaglavljivanje robota | Postavite robota na ravnu povrsinu. Pritisnite STOP ili OK za poništavanje alarma. PonomvnoPokretenite robota. Ako se problem nastavi, obratite se korisničkoj službi. |
| E011 SI. F11 | Neispravna brzina lijevog koračnog motora | PonomvnoPokretenite robota. Ako se problem nastavi, obratite se korisničkoj službi. |
| E012 SI. F12 | Neispravna brzina desnice koračni motor |
KOMPLET SADRžI:
Robot za kosnju 1kom.
- Priklučna stanica i stanica za punjenje 1kom.
- Napajanje i produzni kabel 1kom.
Kabel za ocrtavanje radnog podruca 100m
Tiple za pričvršćivanje kabela 100 komada.
- Prikljucna stanica za pričvršćivanje tipli 6 kom.
Ostrice za rezanje 3 kom.
Kabelski konektori 2km.
- Sesterokutni ključ 1kom.
SPECIFIKACJE
| Robot za košnju 04-621 | |
| Parametarski | Vrijednost |
| Napon napajanja: | 18 V istosmjerne struje |
| nazivna snaga motora za košnju: | 50 W |
| Maksimalna snaga samohodnoc motora: | 20 W |
| IP stupanj zašite za stanicu za punjenje | IPX4 |
| IP stupanj zašite za robota | IPX5 |
| IP stupanj zašite adaptera za punjenje | IP 65 |
| Klasa zašite za robota | III |
| Klasa zašite stanice za punjenje | II |
| Sirina košnje: | 180 mm |
| Podešavanje visine rezanja u rasponu | 20 mm - 60 mm |
| Brzina vrtnje | 3100 okretaja u minuti |
| Težina | 10,2 kg |
| Godina proizvodnje | 2024 |
PODACIO BUCI VIBRACIJAMA
| Razina zvučnog tlaka | LpA= 56dB (A) K= 3dB(A) |
| Izmjerena razina zvučne snage | LwA= 67dB (A) K= 3dB(A) |
Informacije o buci i vibracijama
Razina buke koju emitira uredj opisana je: razinom emitiranog zvučnog tlaka LpA i razinom zvučne snage LWA, pri Čemu K označava mjernu nesigurnost. Vibracije koje emitira uredj opisane su ubrzanjem vibracija ah, gdje K označava mjernu nesigurnost.
Vrijednosti izmjerene u ovom prisučniku s uputama, odnosno razina emittiranog zvučnog tlaka LpA, razina zvučne snage LWA i ubranje vibracija ah, izmjerene su u skladu s normom EN 62841-1:2015+A11. Zadana razina vibracija ah moze se koristiti za usporedbu urežaja i za preliminarnu procjenu izloženosti vibracijama.
Navedena razina vibracija representativna je samo za osnovne primjene uredaja. Ako se uredaj koristi za druge primjene ili s drugim radnim alatima, razina vibracija moze se razlikovati. Neadekatno ili rijetko odrzavanje uredaja uzrokuje višu razinu vibracija. Gore naveneni uzroci mogu povecati izlozenost vibracijama tjekom cijelog vijeka trajanja.
Da bi se precizno odredila izlozenost vibracijama, moraju se uzeti u obzir razdoblja "ukljucivanja" i "iskljucivanja" uredaja, iskljucuji维奇 kada se koristi za rad. Ukupna izlozenost vibracijama要去 biti mnogo niza akso svicimbenici tocno procijene.
Da biste zašitili rukovateljia od vibracija, koristite dodatne sigurnosne mjere, npr. redovito održavanje uredaja i radnog alata, odgovarajuće temperaturne uvjete ruku i pravilnu organizaciju rada.
PODACIO BUCI VIBRACIJAMA
ZASTITA OKOLISA

Elektricna oprema ne smje se odlagati s kućnim opdatom. Odložite g odgovarajuće objekte. Informace je odaganjmu moge se dobiti od prodavača proizvoda ili likolnih vlasti. Otpadna elektricna i elektronicoprema (WEEE) sadžti tvari koje nispu neutralne za prirodni okoliš Nereciklari OEEO potencjalna je opasnost za okoliš i ljudsko zdrav
"Grupa Topex Spóka z ograniczona odpwiedzialnosci" Spóka komandytowa sa sjedistem u Varáš, ul. Pograniczna 2/4 (u dalnjem tekstu: "Topex Grupa") obavjestava da sva autora prava na sadraj avog piručnika s uputama (u dalnjem tekstu: "Piručnik"), uklúčujuci, ali neograničavauji se na, njegov tekst, objavljene fotografije, dlajrame, cteže, kao i njegov sastav, pripadaju isklučivo Topex Grupi i podlježu pravnoj zašiti u skladu sa Zakonom od 4. veljace 1994. o autorskom pravu i srodnim pravima (tj. Kopiranje, obrada, objavljivanje, izmjena u komercijalne svrhe cijelog piručnika kao i njegovih pojedinih elementata, bez pisanog pristanka Topex Grupe, strogo je jabranjeno i moze rezultariti gražanskom i kaznenom odgovornosću.
EZ izjava o sukladnosti
Proizvodac: Grupa Topex Sp. z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varšava
Proizvod: E+ robot za kosnju
Model: 04-621
Trgovački naziv: NEO TOOLS
Serljski broj: 00001 ÷ 99999
Ova izjava o sukladnosti izdaje se na isključivu odgovornost proizvodača.
Gore opisani proizvod u skladu je sa sljedecim dokumentima:
Direktiva o strojevima 2006/42/EZ
Direktiva 2014/53/EU o direktivi iz obnovljivih izvora
Direktiva RoHS 2011/65/EU kako je izmijenjena Direktivom 2015/863/EU
I ispunjava zahtjeve standarda:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Ova se izjava odnosi samo na strojeve kako su stavljeni na tržiste i neukljucije sastavne dijelove
dodao krajnji korisnik ili radnje koje je naknadno izvrso.
Ime i adresa osobe s boravištem u EU-u ovlastene za pripremu tehnické dokumentacije:
Potpisano u ime:
Grupa Topex Sp. z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
Službenik za kvalitetu TOPEX GRUPE
Varsha, 2023-09-11
EU izjava o sukladnosti
Proizvodač: Grupa Topex Sp. z o.o. Sp.k., ul. Pograniczna 2/4 02-285
Varsha
Prolvod: Stanica za punjenje
Model: K145455
Trgovački naziv: NEO TOOLS
Serijski broj: 00001 ÷ 99999
Ova izjava o sukladnosti izdaje se na iskljucivu odgovornost proizvodaça.
Gore opisani proizvod u skladu je sa sljedecim dokumentima:
Direktiva 2014/53/EU o direktivi iz obnovljivih izvora
Direktiva RoHS 2011/65/EU kako je izmijenjena Direktivom 2015/863/EU
I ispunjava zahtjeve standarda:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Ova se izjava odnosi samo na stroj kako je uveden u
tržištu i ne uključuje komponente koje je dodao krajnjki korisnik ili njegove daljinje aktivnosti.
Ime i adresa osobe s boraviistem u EU-u koja je ovlaystena
pripretiti tehničku dokumentaciju:
Potpisano u ime:
Grupa Topex Sp. z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsha

Pawel Kowalski
Sluzbenik za kvalitetu TOPEX GRUPE
Varsha, 2023-11-09
SR
ПЕВОД (KOPИСНК) УПУТСТВО
KOWEHEPOBOT04-621
ONPE3! PPE PAJCA EJEKTPNCHM ANATMA,NAJKbIBO INPOUYTAJTE OBA YNYTCTBA 3A YNOTPEBY N UYBAJTE INX 3A BUYTHY NOTPEBY.
DETAbHA B63BEOHOCHA INPABINIA
BE36EDHOCHA YNYTCTBA 3A POBOTE 3A KOWEHE
Bε36eθnocу npaktnuhoj ynoTpebo npoBoTa 3a KoUbY
IPENOPYKE
Paxbno npoHTajte ynyTCTBO 3a ynotpe6y. YnO3HaJTe KOHTPOJIHe CnCTeMe n npaBnAn paI ypehaja.
He do3bONITE da ypehaj kOpncTe deca nIIN 6nIO KO KOn HJne npOHTAO ynyTCTBO 3a yNTope6y. HaunohAnHn npOncN Mory yka3nBaTN ha MNHMJIHy CTapocT 3a onepaTepa.
HemojTe KopnCTNTu pOBoTa aKO cy npncTyHn dpyrN lyDn, noce6Ho deca nn XINBOTnHe.
ImaJTe Ha ymy da je onepaTe npKOpNCnK OndroBopAn 3a Hecpehe nn OnachOCTn 3a dpyTe lyDe nJIN JNIBOTHy cpeDInHy.
IPNIPEMA
- Пп Кошьа, поверпс CBakи pyTда ЛИCBN DeNoBn po6To paDe nCnpaBHO.
3a Haj6oBe pezynTaTe npenOpCyje ce KoWeHe y BpeMeHy 6e3 Knue. KaDa KoWeHBe Ha KNu, TpaBa MoKe da ce 3aenn 3a po6ota, wTo MoKe da cKnH3Ne Kao pezynTaT.
HEMOJTE KocTN y loiIM BpeMeHckm ycIOBIma, Hnp. Tokom jake Knue, rpmBaBHe uNn CheKHX naDaBnHa.
IIOBpeMeHO npereJeTne KOoHeHO noOppye n yKIOHnTe KameHe, kPxOTnHe, Xuue, KoCTn I npyre npenpeKe. OpranuHa rapaHnJa He NOKpBa UTeTy npoy3pOkoBAHy npedMeTHMa OCTaBbEHH Ma TpaBbaky.
-Дабистеибоглпоштейь,немоукиту кргу od 1 M od rnaBa npckalua.
ONPE3!Pobot npckanue HE cmejy 6nTu kkyuH y nTo BpeMe.
Po6oT trpe6a da 6ynde nporpaMnpaH da paan y pa3nHTo Bpeme o npckaNua.
HNIKAHA He Do3BONITE Deu Da DoDnpyj Hanajahe, cTaHcy 3a nyHebe, Noce6HO KOHTaKTe, IOnaTnue, OeIbak 3a 6aTePije NIN 6nIO Koje DeNoBE rDe NoCToJe Ppa3HNHe KAO lTO cy ToKOBN.
ONEPALUJA
- Na3nte Ha potnajyhe nonatne! HE ctabbajte pyke nH Hore nCNOJ potnpajyHx nonatua.
- Na3nte Ha npedMeTe pa36aHaHe No TpaBbaky TokOM KoIhBe! KaJa je po60t yKbUeyH, dpxnTe ce Ha cnrypHoJ ydaIbeHOCTn.
He ocTabbajte anapat 6e3 Ha30pa aKo ce 3Ha da cy XNBOTnbe, Deua nn NocMatpaH y 6nn3HH.
OdpkaBajte cnrypny no3nuijy. OdpkaBajte paBHOTky n ctabnah nnoxaj Ha Harn6nMa. DOK ynpabBaTe poBOTOM nH BerOBIM nepuepHM ypehajnMa,do3BOJIeHO My je XoTaN, aHn He n TpuATn.
MoNIMOBac da npoHTate ynyTCTBa o TOME kaJa, rJe n KaKo da npoBepnte po60Ta u HberObe nepnpepeje, Ka6NoBe n npOdyKHe Ka6NoBe 3a ouTehebe nn XabHe n nonpaBte po60Ta.CamO - MoNtphkaunja , nonpabKa HjE Do3BOJbHa - y3 pN3NK NOnHtTeHa rapaHnJe.
Hemojte cnajatn nn DOnnpBaN OwTeHH Na6n 3a HanajaBe DOK ce He NCKbYuN H3 HanajaBa 360r Pu3NkO KaHTaKa ta KOMNOHEHTaMa ND HANOHOM. - Nobexute camo pobota / unn nepuepny onpemy Ha ctpyjha Kona 3aunheHa npekuaeem 3aoctane ctpye ca ctpyjom OkndaBa He Behom od 30 mA.
Ako po6oT npabn HeHOpMaHaN 3Byk nIu ce npImeHyje abHOpMaHaBn6paunja nn CnHAn3npa anapm, OdMax npITNCHTe DyrrMeCTOII.
3A6PAHbEHO je DoINpBaHe OaChnx NOKpeTHx DeIOBa npe Hero wTO NCKbyuHTe Hanajahe po6ota.
3A6PAHbEHOje DoOpnBaTu OnaChe DeNoBe DOK ce NOTnyHO He 3ayCTabe. - YBek Hocnte yBpcTy obyHy n Dyre naHtanoHe kada pykyjete po60Tom.
- NckbyuHte HanajaHbe: Ppe 3aKbUyabaBa po60Ta.
-Ппетспаьа,чишениилдзржаве.
NIKTOTPAMN NYNO3OPEHBA

1

2

3

4

1


7

8

9

10

11

12

13
14

15

16

17
1.ПочитajteуnyTCTBO3aуnotpe6yИпидржавajteceунозорь
ибeзбeнснixусноа!
2. Ipe uuheha nn ODPKaaBaHa, NckbYnTe n3 HanajaHa
3.He cTAbbajTe pyKe IIN Hore NOc CTpaKy MexaHnMa 3a KoUHy
4. Potnapiyh n deIOBn - MoryhHocT nobpeDe
5.Дркnte cnryphу ydaJIbeHocT od po6Ota 3a KoUHbY
6. UyBaJte ce MOryHocTn NOBpeDe OJ NInBeHnX PpeDMeTa
7.3aHTNTNEoKnue
8.увати ван домашaja.Dece.
KCHYMKC. He Bo3nte ce Ha po60Ty
10. Moryn rybnak npctny, BODnte payna
11. MakcmaHn Harn6 Tna 14/25%.
12.3aHTNTTe pyke padHm pykabuama
13.Hocnte 3aunthy oehy
14.Hocnte 3aunthy obyh
15.He oJnaxKIne ca KyHnM OTnAdom
16. CeIeKTHBHO cakynbbahe otnada
17. CTeHn 3aHTnTe
ONPE3! Obaj anapat Mory KOpncTn Deca cTapna 8 roDInHa n Oco6e ca orpaHneHm fN3NcHM MeHTaJIHMM cNoCobHocTtMa, Kao n ca HeIOBOJbHM 3HaHem NnN NCKycTBOM aKO cy noI HAdzopom nn npabunHo ynyehn y 6e36dHy ynoTppebyyehaja, Tako da cy CBecHN pN3Nka KoJn cy YKbUeyHn. Obaj anapat He 6n Tpe6ano da ceIrpa ca Deoum. Deua He CMejy YnCTn Tn Nn BpUnTu oDpxkBaBe Ha ypehajy 6e3 HAd3opa.
ONIC TPAΦNHYKNX EJIEMEHATA
Cnepehe Hymepicahe Ondocn Ce Ha KOMnoHeTe ypehaja npka3aHO Ha rpaNcKIM CtpaHuaMa OBor npnpuyHka.
| Ознaka Сп. A | Претpara |
| 1 | Зayставлбаны у сfluочу hyждe |
| 2 | Кошени поедшалы be Висиhe |
| 3 | Косачka kohtponla tabla |
| 4 | Косачka пошиду 3a hyалajыe |
| 5 | Погонскг точкови |
| 6 | Сechва за сеvelыe |
| 7 | Мexанзам за сеvelы be 6убаь |
| 8 | Окразни точкови |
| 9 | Ручka за hoшеыe |
| 10 | Конektори за пунье |
| 11 | Поклonaц за батериje |
| Ознaka Сп.Б | Претpara |
| 1 | Доцкинг станиca koHTponla tabla |
| 2 | Pyne за obezбeшени be рпікъуне станиce |
| 3 | Конektори за пунье |
| 4 | Прикъуна станиca |
| 5 | Чевар рірікъуне станиce |
| 6 | Конektори за кабл за hyалajые за обелеки padиу повшини |
| 7 | Овори за каблове за обелека ви be padиог поручи и hyалajыa |
| 8 | Прикъуна станиca утualниа |
| 9 | Оьелека ви be за правлино усмерава被执行人 Каблова |
| Ознaka Фиг. | Претpara |
| 1 | Инданakotрся ламп妞 статуca пуньеha |
| 2 | Инданakotрся сгигана |
| 3 | Оьзданые кабл hyдникатор |
| 4 | Радно врeme / поука о грашци, с Bretла 1-4 |
| 5 | Дугme за hyалajыe |
| 6 | Прикдиacy за hyалajыe |
| 7 | Дугme за пriоста щыe |
| 8 | Дугme &doy; Потврди&doyot; |
| Ознaka Сп. X | Претpara |
| 1 | Льрафова |
| 2 | Поклonaц поелп妞 за сатуca рунье ha |
| 3 | ТраимспорtnHom рүчkom |
| 4 | Одөльak за сбатериje |
| 5 | Утualниа за сбатериje hyноклonsу komоpe |
| 6 | Пүлamba вьетриja (ниje укъуне) |
| Ознaka Сп.Ja | Претpara |
| 1 | Травьak |
| 2 | Зд |
| 3 | Прикъуна станиca |
| 4 | Удайеност станиce od зда |
| 5 | Почetни дeo линиje разгаленчава повшини hyхш�а |
| 6 | Дужima сесшие |
| Ознaka Сп. J | Претpara |
| 1a | Кабл за ораганчаваные кошени песпвшини Почetak |
| 1b | Кабл за ораганчу кошени obлacr Краj |
| 2 | Линиja сиздевая: |
| 3 | Прикъуна станиca |
- Mory noctojatn pa3nike n3MeHy rpaHKe n CTbapHor npon3Boda
ПРИПЕМА 3A PAД
NHCTANAJBA GATEPNJE
- 06pHnTe po6oTa 3a KoUeHe TaKo Da nocToJn npncTyJ IOHoJ cTpaHn po6oTa.
- YmecTo npeknadaCn.A4 n TpaHcnpTHe pyKHe Cn.A9 Hana3n ce NOKnonaq npetnHa 3a 6aTepeJne Cn.H2 fNkCnpaH ca 4 Bnjka O3haeHa CTpeJIuCaMa Cn.H1.
- 3aTIM OdBPHnte Bnjke O3NaueHe CTrpeJInuMa.
- PaxkIbIBO yKIOHnTe noklnonaC odjeBka Cn. H2 kako He 6nCTe npkeKHynn NnN NCKbUyn Knue pkeKnDaCn. A4 (npuBpuhe je Ha noklonaC odjeBka 3a 6aTepeJne).
3aTMM OKpeHNTe NOKNONaU,Ha DoHOBJ cTpaHn NOKNONua yTuHNuza 3a 6bATEpIe je cMKcnpaHa Cn.H4. - 86aunTe 6atepujuyn3 cepuje EHEPn+ yyTuHnUy.
- OkpeHnTe noklona ca npNKJbUyeHOM 6aTeepnjom nyMeTHnTe y H3 oJeBak.
3aterHnTe 3aBpThe koj npuBpwhyj noKnona. OkpeHnTe po6ota odo3do haOJe, anapaT je cnpeMaH.
PAHOOKPYXHEPOBOTA3A KOLJEH
YBepTe ce da cy nCybEn CnepeHn ycIOBn y oBnaCTy Kojoj po60T pa:
BucnHa TpaBe He nppeNa3N 60 MM.
ONPE3!Ako je TpaBa Dyka oD 60 MM, npBO NopexKe TpaBbakpyHOM KocuINlOm.
- Hema KaMeHa, KomaJa DpBeta, Knca, Ka6NoBa noJ HanoHOM nIN dpyrNX cTpaHIX npedMeta.
- MecTo KoUeHbJe paBHO npaBHO, 6e3 jaPaka n poBOBa, a Harn6 je MaHbN oD 25% (14°) Cn. C1
3a nHctanauij cy noTpe6n cIeheh anatn:
- Гуменные (3a yBnaeHebe nIe y 3emBy npuNKOM noJaRaHa Ka6la 3a 3aDpxKaBaHe)
Xek Kbyu (3a qncpahe ctaHne 3a nybehe) je ykbyeH y KOMnJIeT
KInjewTa (3a ceHeBe Ka6Ja KoJn OgrpaHmHaBa paHy NOBpShHy)
1.BACE CTATNOH IHCTAJALJNA
I3a6epnte oOroBapajyhy Jokaunjy
CTaHnua 3a NybeHe Tpe6a Da 6yde NoctabBeHa Ha cneJeohj Iokaunj Cn.C3:
- PeNaTINBHO paBaH n paBaH Deo TpaBbKa.
-БлneyИВицЕТраВьaka. - 6Jn3y 3nDne yTnHnue.
- IocTaBnTe npOdyXn Ka6n 10 M, HanaJaHe Ha OceHyeHo, XnaHO n cyBO MeCTo.
He cme 6ntn npenpeka y kpyry oH hajmahe 2 M od cTaHnue 3a nyhebe. - Ppenopyyje ce da ce cTaHnca 3a pybehe HaJa3n Ha cyBOM n 3aWtunHeHOM MecTy.
- Hanajahe tpe6a da 6ye 30 m n3HaH nHBoa Tna.
2. INPKJbYyAK 3A INHbEHeCTAHnla
PnHBPCTNTe cTAnu 3a nyHebe Ha 3emBy nomohy 6 BnJaKa 3a npnBpuHnBaBe (G1)(nomohy Wectepokythor Knbya G6).
ONPE3!HEMOJTE CTajTu INx XOaTu HA NIOuN CTaHnue 3a NybeHe. ONPE3!HEMOJTE npaBtu HOBe pye y nIOuN CTaHnue 3a NybeHe.
Ctahnua Tpe6a da 6yde npuWbpshen 3a nok KopncTeh noctohe pyne.
3. NOLAHABE CINYPHOCHOR KABJIA
CnryphocnKa6Ie KOpNCTn 3a ouptabahe paHOr nOpyja I BOHepe po6oTa Ha3ad Ha cTahuCy 3a nybeHe.
ONPE3! Ako BaWu KomuJa Takohe KopnCTn po6OTcy KocnUy, DpKInTe HajMaHe 1 M pa3MaK n3MeHy ka6NoBa 3a o6y3DaBaHbe 6a po6Ota.
ПАНИРАБЕ ПОЛOKAJAKABJA 3A OБУЗДАВАБЕ
Ipe nonaraHa Ka6la 3a 3aDpKaBaHbe, xOJaTe DyK OndpeHe HepaHne n yKIOHnTE CBe HEnOTpeHne PpeMeTe, KAO WTo je KameHe.
ONPE3! LyxHa Ka6Ha 3a 3aDpxKaBaHe He CMe 6nTn BeHa oD 200 Metapa.
YNO3OPEHbE! Po60T He CMe Da BO3N IpKeo WJbYHka INn CInuHnx MaTepnjana Kojn 6n MOrIIN OWTeNTN IOnaTIe.
NOLAFAHBE3HOKABNA CJ.L
Ppnte ynyTcBa y hactaBky da 6nCTe nocTabnn CnryphOCHn KaBn OKo padHor noDpyja n nppepeka. Kopctnte Mepaue koj je yKbUyeH y KOMNET da npabunno noJoxne CnryphOCHn KaBn.
ONPE3! Cnryphocn Ka6n ce Hanaja Ha Beoma HNCKOM HANOHy N 6e36edan je 3a lynde n KyHHe lyb6mue.
ONPE3! NoHnTe ca &qyOT;&qyOT; KOHeKToPOM Ha 3aHbOJ cTpaHn CTaHnue3a nyhBeHe Cn. B6 nobuynte ra nCnoD cTahnue (IOCTaBnTe
pe3epBy od 10 um) n noJoxKte Ka6n OKo TpaBbaka y Cmepy cynpothom
OD ka3aJIbKe Ha caty, 3aBpuabajyHn ca &qoyT;&qoyT; KOHEKTOpOM Ha
3aIbOJ cTpaHn CTaHnue 3a nyHeHbe (ocTaBnTE pe3epBy od 10 um).
YBepnte ce da Ka6n DoH e y KOHTaKT ca MetanOM Ha KOHEKTOpIMA
&qoyT;&qoyT; n &qoyT;-&qoyT; Cn. B6 He 3a6opabnTe da oDceHeTe
BIIwak Ka6la 3a orpaHnUbaHbe.
OctaTe HajMaHe 2 M npa3Ho m3MeHy cHpyHocHor Ka6Ia n CTAHnCe 3a NyHeHe. Ka6I y OBOM OeJbky ce KopncTn 3a DoBOHeBe po6oTa do npKkByuHc TAHnCe.
- OndpxaabjTe pa3MaK oD 30 mN3MeHy ka6Ia 3a 3aDpxaabHe nBnue TpaBbaka Cn. C2; Fnr. C3.
- PnurBpcTHe CnrypHocn Ka6n Ha 3eMBy NMOhy TnNn Koje cTe 0e636eHNn Cn. G5. CnrypHocn Ka6n Tpe6a Da 6yde pabaH n 6naro 3aterHyT. MozroBn Tpe6a Da 6ydy pacnopehen CBAKX 1 M (OBO ce moKe MOiNΦKOBaTH y 3aBNCHOCT O od 0bNkA TpaBbaka) Cn. C4. He 3akonabajTe Ka6n Dy6Jbe oD 2 CM KAKo 6nCTe N36eHNn cna6bBe He CnHaJa.
PacnpopeiTe Ka6n TaKo Da cy yrnoBn BeHn OJ 90° Cn. C5. Y TAKBIM NOpDpyjNMA NOnOxNte CnrypHocn Ka6eN y 6naIIM KPNBnHaMa, WTo he po60Ty 3HaTHo OnaKaWATn KpeTaHe no NOpDpyjy Koje TpeBa NOKoCtN.
AkoHa TpaBbaky NoToJe CBeTHe rpeNue, Pn6bauu nn npBehe, OKpyKnte IN neTbama 3a OrpAHuaBaHe Ka6la Cn.C4.
- Odpxkabajte Mm. 30 mpa3MaK n3MeHy cnrypHocHor Ka6na n IBuca npenpeka.
ONPE3!Ha npTy Do n Ond neTbe, ciIpyHocn Ka6JI He cMe da nppeNa3I jeJH npyre ur.C4.
OCTaBtE yckn IpoctOp y paHOM Ioppyjy KocnIe. YBepTe ce da je pactojahe n3MeHy npaJIeHNHX Ka5NoBa 3a orpaHuaBaBe Behe od 1 M.
ONPE3!YBepnte ce da je npKbUHa cTahnua yHytap nTeJbe Koja 03Hauaba noDpyje KooHe.(CnoBa /n3Hytpa) Cnka B2
4. INHCTAIAJJA CTAHILJE 3A NYbEbe
PnKbUyHte Hanajahe
1.Y6aHTe yTnKaUy 3nHy yTnHmUy 110-240V.
2.Поверпстатуклд CBETla Ha CTaHnua 3a nyhbeHe Cn.B1:
- 4BpTo 3eJIeHO CBETIO: ycnoCTaBbeHa Be3a (po6OT ce He nyHn nn je notnyHO HanybeH)
- Nopbemeho 3eNeHO CBETIO:po60Tce nyHn.
IIOBpeMeHO UpBeHO CBeTIO: HajyeuHa rpeUka je&qyOT;NcKbByuBaHBe Ka6Na 3a 3aDpxKaBaHBe&qyOT;
CBeTIO NCKbUyeHo: HajYeHa rpeWka je&qyot;Ho 100-240 B HanajaHe&qyot; Hn&qyot;Hema Be3e ca n3Bopom HanajaHa&qyot;.
ONEPAUJIA/IODEJABAHBA
PpBO nokpeTaHe po6To 3a KoWeHe
KaIpaBnIpyntNOKpeHetepoBoTa,noCTaBHTyejahHa npKbUHy CTaHIyTako Da KOHeKTOpu 3a NyBeHe Ha cTahmci. EKCHYMKC He DoJa3e y KOHTAKT ca KOHeKTOpima 3a NyBeHe Ha poBoTy 3a KOWeHe cN.A10.
Ka ca po6oT 3a KoWeHe npBn nyT noKpeHe n3 annkaJe TeNefoHa, Mopa ce n3BpUnTH anKypnpaBe fnpmbepa. HauHn mPiMeHTaUne je oNcAn h NaCTabky nOd aKypnpaBe coPTbepa.
- ONPE3! Tokom npBe Be3e, TeNeΦOH npo60T Mopajy 6nTu y Domety Bn-Φn Мржke.
AJKUPPABEΦNPMBEPA IPE YIOTPBEPOBOTA.
Akypnpahe Tpe6a n3BpwnHa cneheh NaHn.
- NocTabnte po60ta yHytap neTbe, anu n3BaH cTaHnCe 3a nyHehe.
2.ПрбациTe ppeknДaчФИr.A4Ha no3nijy 1.
3.ПиТИСНЕ ИДРЖNTEп配电надуФИr.D5
4.ПokpeHnTe anIIkauJy,ckeHnpajTe KP-KoI - Nobeknte anlukacnju cy pa oboTom
- Поширпеспocтавке coфтвера пиNTнckOM Ha Икону у Горьем DecHom yглу ekрара.
- 13a6epnte onujiy: Akypnpahe qnpmbepa.
8.3aTm cIeIte yNyTcTbHa eKpaHy.
Hakon wto je cooTbe Hnctanipah, ypehaj ie cnpemaH 3a pa
ONPE3!
Haekpanyce npka3yje da nje p60t y Bn-PhnnBnyeTOOx Domety
- Повьзльбе на Мреку щозаунун Икогом 3a Всту Beze. Када се пося, Икога пес差别д тpenери.
- Po6oT ce moKe ynapInc camo ca jeHIM TepeHOM.
Ako je notpe6HO NOBE3aTJ JOU jejAN (NCTn po60T 3a KOuHe), npBn Mopa 6NTyKIOHbEN 3 anJIkaCJJe. Y nOC anJIkaCJInn n3 BnyeTOoTX nODeIaBaHa.
NODEWABAHBE BNCHE KOWHbE:
Ipe npBe KOUHe NOeCnTe BnCnHy KoUHe Ha 60 MM, a 3aTNM npomeHte Ha JeBcHy BncHy KaJa je ueo TpaBbak peNaTbHO paBaH.
- OkpeHnTe DyIme Fnr. A2 y cmepy Ka3aIbKe Ha caTy da 6nCTe NOBeHaII BnCnHy KoUHe.
OkpeHnTe DyTMe Phr. A2 yNeBO da 6nCTe CmaBnIN BnCnHy KOUHe.
BucnHa KoueHa MoKe ce noDecHTn oD 20 MM (MHH) do 60 MM (MAKC).
ONPE3!IoroHcN MoTOp 6y6bMa MexaHn3Ma 3a KooHy A7 yKbyyje ce oKO 10 cekynHaKOH HanyuTaHa 6a3e,3anoHbhyn pa.
YKbYnBAHc / NCKbYnBAHc
- Pnoecnte npekndau ChrA4 y noIoojaj&qyot;O&qyot; da 6ncte nckbyuHn HanajaHe.
- Pnoecnte Phr. A4 npeKndua y noLoXaj &qyot;N&qyot; da 6ncte ykIbIyuHn Hanajahe.
AKTNBUPAHEPOBOTA INIPOIPTPAMPAHEPADHO BPEMEHA YPYHOM PEXKIMY
1.ПиTINCHHTeI npKHTe DyrMe 3a HanajaHBe Cn.D5 da 6nCTe NOKpeHyInpo6ToHa.HanomeHa:He TpecTe po6To TOKOM NOKpeTaHa KaKo 6nCTe 136erNn rpeuKy npn NOKpTaHb.Ako ce p60t He NOKpeHc nCnpabH0(CBa CBETna HENpeKnDHO yKbUyeHa),noHOBO ra NOKpeHnTe
2.YHeCnTeNo3HkyPnITnCKOMHaDyMeΦnR.D6 DbApyTa,3aTMM DyMeΦnR.D7 DBaNyTaN DyMeΦnR.D8 jeHOM (I03Hka nporpaMnpaHa yΦa6pnu).
3. Pporpamipajte BpeMe paJa (yKbUyjyHn BpeMe KoWeHa n BpeMe nybeHa):
- PnTCHNTe D6 da noDecnte Bpepe pada. JeIHO CBETno Ha 3HaHn 2 cata, MaKcMaJIHO Bpepe pada je 8 catn 4CBETna Ha cn. D4
. pntncnne 4r. D8 nyme 3a noTbpdy n noKpTahe po60ta.
ONPE3! Ka da ce noe c Bpe me pa da, po6oT he 3anaMTn nocTaBke n oouTe KooHe b y nporpaMnpaHO Bpe Me CBakor DaHa. Bpe Me KoHeBa he 6ntu y cKnady ca yHecEHIM NOeuaBaHMa.
- PporpamnpaHO BpeMe pada po6oTa oD 2 cata do 8 catn je BpeMe KOweHa, yKbIyJyHn BpeMe nyheHa.
BpeMe paIa n npHeBa he BapnpaTu y 3aBnchOCTu od 6aTepuje Koja ce KOpNt.
Ako JeHnTe da npomHeNte BpeMe paDa, cneDnTe Kpake 2-3 noHOBO.
BPEMEHCKO IPOPGAMMPAHE Y AYOMATCKOM PEXKIMY, 7- INHEBH N PACNOPEI, IOCTUHO JE IPEKO IIOEJABAHy ANIKAUJN
Hakon 3ayctabbaaba y cnuyajy Hxke,po6oT ce npBO mopa OTKbyyaTH CNijeehn KopAK KCHYMKC n3HaJ. KaJa ce po6oT OKblya,MOXeMo rnaocnTaHn Ha3ad Ha cTAHNu pInTNCKOM Ha DymaD Cn.D7 3aTM NOTBpDNTe ca Cn.D8 DyMe 3a BpaHaBe KOCINIue Ha cTAHNU 3a NybeHe.
- PnTnckom Ha dyIme 3a 3ayctabbahe y cnyajy hkyde CTOp 6pnue ce uKlyc pyHOr n ayTomatckor pexkma n3 aNIIkaunje, ako je akTNbpan Ha OBaj hauHH. Da 6n po6OT noHO BO noeO da paHN hAKOH 3ayctabbaHa y cnyajy hxyke, po6OT mopa 6nTn BpaHEn HA cTaNuy 3a NyHeBe nnoHO BO NOCTABbeH pyHn paCnpoePa. y cnyajy ayTomatckor pacnpede, n3BpuNTe nCTy paDhY y paCnpedy anIIkaunja n IOTBpNTe HeHa nOdeuBaHa.
ONPE3!IporpamnpaHO BpeMe NOKpeTaHa y ayTOMaTcKOM pacnopeNy He Tpe6a CMaTpaTN BeOMa IpeuImHm. Anapat Ce MoKe NOKpeHyTu DO HeKOJIKNo MmHyTa HAKOH NODeWeHOr BpeMeHa.
- AktnBupahe pyHOr peKIma 6pnue pacnopei nporpaMpaH y annkaunu no6phyto.
EynHr y pyHOM pexmCy BpU ayTomatcBaknx HeKoNko UKnpyca KoWeHe. To yKbIyJe KoWeHe TpaBe y 6n3nHa Ka5Na Kojn DeMnHne paHy NobpHIny. ONPE3! Mopa ce BodHTn paYHa da ce ocHypa da je Ka6n npabINHO npuBpuHek aKaO ra He 6n nAnoxnn cnuyajHom CeyeHb. - Po60T 3a KoUHbY he ce BpaTmTu Ha npKkByHy cTaHnCy kaJa ypehaj otKpNiJe noyEtak naaBnHa.
Ako po6oT HanHe Ha npEpeKy DOK paDN, OH he ce OJbTuO Jbe HacTabUTn ca paDM.
JAMNUA CTATYCA NyheBa Y CTAHU 3A NyeBHeE:
KoHTnHynpaHO 3eJHe CBeTIO - 6aTePja je nOtnyHo HanyHeHa.
Nobpemeho 3eNeHo CBetno -nyhebe.
N3BAHCTAHUIE3A NYbEHeB:
KoHTnHynpaHO 3eJEno CBETNo - 6aTepnja &T; = 20%
TObpeMeHO 3eHcO CBETNo -6aTePnJa &NT;20%
ONPE3! Po60 ayTomatckn 3ayctabla paad n Bpaha ce Ha cTaHnuy 3a nybehe ako Hnbo 6atepije naHne nCno 20%
CBETJIO TPEUKE:
KoHTnHynpaHO 3eNEHO CBETNo - axypnpajTe cnCTem. NOBeknte ce ca anJikaunjom da 6ncTe n3Bpwnn axypnpahe.
HHTepMMTeHTHO 3eIeHO CBETNO - axkypahe cCTema y TOKy.
IobpemeHO UpbEHO CBETNO - npyka o rpeuizn 1 do 5, noHOBO nOKpeHNTe po6ota.
KoHTnHynpaHO UpBeHo CBeTNO - npOyKa O rpeuN 6 Do 12, pntncHTe &qoyr;CTOIN&qoyr;nnn&qoyr;OK&qoyr;3a 6pncahe.
OBY3DABAHbE KABJI INHdNKATOP:
KoHTHynpaHO 3eNEHO CBETNO-CnHAn IcnpaBaH
KoHTnHynpaHO UpBeHo CBETIO - HeMa CnHaJa
KoHTpoJIe 4D4
HHTepMHTHeTHO CBETNo -po60t 6nOKupaH.
KoHTHynpaHO CBETNo -po6OT OTKJbUyHaH.
CBeTIO 1 CBeTIIN 3eJIeHO: 2 caTa paHOr BpeMeHa.
CBeTna 1 n 2 CBeTne 3eJeHo: 4 cata padHor BpeMeHa.
CBeTna 1,2 n3 CBeTne 3eNeHo:6 catn paHor BpeMeHa.
CBeTna 1,2,3n4 CBeTne 3eNeHo:8 cat npaDHor BpeMeHa.
COΦTBEP 3A KOHTPOJY POBJOTA 3A KOWIEH
IOC npey3nmahe:
xtmc://annc.annne.yom/uyan/toya/id6449251720
AnpOnI npeyImaHBe:
xTTnc://nJay.roorne.UMC/ctope/annc/deTaunnc?uD=UM.Toya.po60T
YnytCTBa 3a nporpam MoKeTe npye3Et Ha:
XTTnc://6nt.Jy/3QBB6Gm
XNTHO TAWEHE POBOTA
PnTCHNTe DyRMe &qyOT;CTOIN&qyOT; Cn.A1 da 6ncte 3ayctabnn po60ta, npTCHNTe n dpKInTe Dyrme 3a Hanajahe da 6ncte NckbyuHnn po60ta.
IPMEMUTAbePOBOTA
Icnoi po6oTa pyka 3a noDn3aHe ΦIr. A10 ce Hana3n 3a Jako pykoBahe jeHOM pykom.
OOPXABAbe IN CKJIADNIITEHe
- YBek nckbnyte po6oTa nppe nnheBa n OndpaBaHa.
IckbyuHte Hanajahe npe uHHeBa n OdpkaBaHa cTaHnue 3a nyHeBe. - YBek Hocnte De6ene 3aHTnThe pyKaBnE npNJIKOM npomeHe ceYbA nHHeBa DoBe cTpaHe po6ota.
PeIOBHO npOBepaBAjTe HENpOynCHOCT BuJaKa mMaTnca. OwTeHeHn DeIOBm MOpajy 6HTN nonpaBbeHN nIIN 3AmEbeHN n3 6e36eHochnx pa3nora. - PeIOBHO npOBepaBJTe da IIN ce IOnaTnue MOry cNo6oJHOpTnpaTn.
ONPE3! Kaada okpeheTe po6oTa Haonako, CTaBnTe rHa TpaBbak Nm Meky nobpunHy kako He 6nCe OwTeuNn Nn Orpe6aann NOKnona.
NJBXEHE
YINO3OPEHBe!Ipe Hero ITO NOUHeTe ca YUHHeBEm, NCKJbYHTe HanaJaBe IpeKnDaHem Cn.A4.
Oneptne npedbno eo pobota uctaem Hnckor npntncka mekom YETKOM NIN KPNOM.
KopnCTnte TBpyu YETky da 6ncte yknHnn TpaBy n ocTaTke ca JnonaTHUa, TOUKOBa N dpynx DeIOBA Ha doBoj ctpaanpo60ta.
- PeIOBHO npOBepaBajTe ToUkOBe Ha 6JIaTy IIN TpaBn N OuNCTnTe INx YETKOM.
ONPE3! PeoBHO yKaHaBJte ocTaKe 6nJaKa ca doBe cTpaHe po6ota kako 6nCTe n36erHn CMAHeBe npOpyKTNBHOCTN.
BIADE3AMEHA
YNO3OPEHBe! NpBO NCKbByuHTe rnaBHN npeKnJaU n CTaBNTe 3auTHTHe pykaBnue.
YI03OPEHbE! KopuCTnTe cAmo Ha3NaueHe opuHaJIHe HOKeBc Odo6peHe oD CTpaHe npOn3Bohaya.
Cba TPNceuBaN HbXOBn BnjuMopajy 6NTn 3ameHeH y jeHoJ onepaunj 3ameHe Cn.A6.
Bijke Tpe6a ODBPHyTu 3aterHyTu ODbjuayem.
- Поверптуда ли се НOBи HOжев могу слобдно ротират.
PEUABAbe IPOBJEMA
Doba Tabena daje cmeprnue 3a nomoh y dinjarho3n npo5neMa.
Ako je moryhe, camn nonpaBnte ypehaj. Ako ce npobJem He moKe peuHTN, obpatnte ce oBnaunHeom npoDaBuy nIN cepBnCHOM cHTpy.
YNO3OPEHbE! Tpe6a npdey3eTn 3aWHTHe Mepe.
| Побlem | Могунузpoи | Решьа |
| Сравно сbeltло Трелеги на стени 3a пунове | Прекд сгуrchонг кабla | Пробны нецразан.deо кабla и поразы ra |
| Роботima noteшкоэу чркльчимьи настени 3a пунове | Станиza 3a пунове Ниje правлино инстанираha | Проглады trade oderbask & qуot;Припера ма за раз&qуot;.. |
| Овustада bailу кабл ни jo павлино поставъен | ||
| Hema сигнала из кабла 3a обухдаеве | Hema habajba | Проберпte иЗВор habajba |
| Овustада bailу кабл jee nobezану obprhyтом смechу | ЗаменITE &qуot;+&qуot;и &qуot;-&qуot; Кон ekтоpe | |
| Оретачаваье кабл Ниje nobezан caстени 3a пунове | Проберпte дani je сгуrchонсни кабл истразы nobezан се тени 3a пунове | |
| Прекд сгуrchонг кабla | Проберпte до краja, da кабни Ниje правлиут | |
| Оретачаваье кабловскиx пrelааза на руту do- и и зплбe | Проберпte дani je сгуrchонсни кабл правлино истаниран | |
| Робот пелаши гравицу | Овustада bailу кабл jee nobezану obprhyтом смechу | ЗаменITE &qуot;+&qуot;и &qуot;-&qуot; Кон ekтоpe |
| Робот вибрира ил CTвара небиные Звкове | Оштейени нedoстaje сelinesBO | Проберпte и пожары Вижke 3a почьршива щe сelinesBO |
| Диack пома ще лабав | ||
| ЗаменITE сelinesBO |
| Код г repeшиke | Претура | Решende |
| E01 Фиг. F1 | Г_REшka Инишильизашие - Хирочковский сенизор | Посавите ровота на рави повриниу и поновOTпокренITE. |
| E02 Сл. F2 | Г_REшka сенизора за падимашие ини сенизорa сydарa | ПODEсNTe ШINКУ 3a сydари TOPЗИСКУ TOUAK Ha\ празьов CTРANI KОСИПЕ,\ покренITE ДА HINCY\ Зakerыан; Пocавитe ровота на рави\ покренITE. |
| E03 Фиг. F3 | Г_REшka Инишильизашие мотора кOSTЕBA | Посавите ровота на рави повриниу и поновOTпокренITE. Ако с\ покренITE.\ покренITE. образпite CE kORINCHNICHKOJ\ служби. |
| E04 Сл. F4 | Г_REшka пriп пrikійчікі 3a Hanajаніe | |
| E05 Сл. F5 | Порецima 6рзINA MOTOPA 3a KOSTHBY | |
| E06 Фиг. F6 | Унозорены о HanigБy | Посавите ровота на рави повриниy. ПокренITE CTОП пли OK\ Да сб anticALI anapM. |
| E07 Сл. F7 | Лифт унозорены | Посавите ровота на рави повriниy. ПокренITE CTОП пли OK\ Да сб anticALI anapM. |
| E08 Фиг. F8 | Г_REшka АДц Каналa | Посавите ровота на рави повriниy и поновOTпокренITE. Ако с\ покренITE. obразпite CE kORINCHNICHKOJ\ служби. |
| E09 Сл. F9 | Нетаун синнан | ПогледAJTE rope y tabeni:\ покрелМ - HeMa CMTHaHa |
| и3 кабla за obуздаваJE. ПоберпITE сBE тачke щедну но юедну,а здим побравпITE ровота на rabHy поршини. ПричеснITE CTОП пли OK да висе OTКазалы anapm. Понов NOКрөнITE ровота. Ако се побLEM HaCTави, образнITE се кориснчкoj слухби. | ||
| E010 Cn. F10 | Робот ecem | ПобравпITE ровота на rabHy поршини. ПричеснITE CTОП пли OK да висе OTКазалы anapm. Понов NOКрөнITE ровота. Ако се пobбLEM HaCTави, образнITE се кориснчкoj слухби. |
| E011 Cn. F11 | Погашна брзINA левог kopауног MOTopa | Понов NOКрөнITE ровота. Ако се пobбLEM HaCTави, образнITE се кориснчкoj слухби. |
| E012 Cn. F12 | Погашна брзINA deechице Стенир MOTOP |
KOMNNETCAAPK:
KoWeHe po60Ta 1pc.
- Pπκκβγυην cταΗις έ ΚαΤΗις 3a Αγνεῦς 1pc.
- Hanajahe n npodyxkn Ka6n 1pc.
Ka6n3a pa3rpaHneHe paHOr noOppyja 100m
Ka6n3aФнкира№ KlnHOBu 100pc.
- PnKbUyHa cTaHua 3aФнКсИpaHbE Mo3roBa 6pc.
- CeuBa 3a ceYeHe 3pc.
Ka6noBckn KOHeKTopn 2pc.
- UecToyraOHn KJbyu 1pc.
CNEUΦIKALNJE
| koшени pojobOT 04-621 | |
| Пapаметар | Вре dioct |
| Нанов наральва: | 18 В дц |
| Мak . homинална с Chara мотора за koшени: | 50 П |
| Мak . с Chara симохогor мотора: | 20 П |
| ИП стени заштinte за стоници за пьibeBERE | IPKS4 |
| ИП стени заштinte за робота | IPKS5 |
| ИП стени заштinte заадантора за пьibeBERE | Mana cajta 65 |
| Класа заштinte за робота | ИИ |
| Класа заштinte за стоници за пьibeBERE | ИИ |
| ШирINA кочIBE: | 180 MM |
| Прodeшиава bene висице сеvelы у опсergy | 20 MM - 60 MM |
| БрзINA рotingaje | 3100 obpraja |
| ТeшиHy | 10.2 кг |
| Годана позворны | 2024 |
IODAUIOBULINBIBPAJAMA
| НИВО 3Вуунглриптунда | ЛПА = 56dB (A) K = 3dB (A) |
| Измерени НИВО 3Вууне сhanе | ЛwА = 67dB (A) K = 3dB (A) |
HnΦopmaunje 6yun n Bn6paunjama
HnBO 6yKe KoJy EMTyje ypehaj onncan je: HNBOOM emITOBaHOr 3ByHOR npNTSCKa IINA INHBOOM 3ByUHe CHare JBA, rde K O3HaUba Heu3BecHOCT MepeHa. Bn6paJIne KOJE emTJe ypehaj onncane cy y6p3aHem Bn6paJIJa ax, rde K O3HaUba Heu3BecHOCT MepeHa. BpeHocTN n3MepeHe y OBOM ynyTcBY 3a ynoTpe6y, Tj. HNBO emTOBaHOr 3ByHOr npNTSCKa IINA, HNBO 3ByUHe CHare JBA, n y6p3aHe Bn6paJIJa ax, MepeHe cy y cKnady ca EH 62841-1:2015 + A11. DAtn HNBO Bn6paJIJa ax MOke ce KopNCttn 3a ynpoeHbAbe ypehaja n 3a npelIMHHapHy npOeHu n3NoXeHOCT Bn6paJIJaMa. DAtn HNBO Bn6paJIJa pe nppe3eHTaTHBaHc mao 3a ochOB He pImMeHe ypehaja. Ako ce ypehaj KopNCt 3a dpyre anIIkaJIge nnCa dpYrHM padHm anaTIma, HNBO Bn6paJIJa MOKe da ce pa3NIkyje. HeaekBaTHo nn PeTKO oDpxkabHe ypehaja y3pOKyje Behe HNBoe Bn6paJIJa. Rope nomEHTu y3poCuM Mory nobehaTn n3NoXeHOCT Bn6paJIJaMa TOKOM ueIor BEka TpaJHa.
Ja 6n ce npeun3HO odpeuHla H3IOXeHoCT Bn6paunjama, Mopajy ce y3etyn o63np nepnoOn &qyOT;YKbUyeHo&qyOT;N &qyOT;NCKbUyeHo&qyOT; ypehaja, NCKbUyeJyHn nepNoDe KaDa
ce KopnCTn 3a paI. KynHa n3NoXeHoc Tb6paunjama MoKe 6HTMHO HxKa Ka da ce CBN qakTopn TaHOn IpOueHyj.
Ia 3aHTINNI OepaTepaO Bn6paunja, Kopntte DoatHe Mepe 6e6bEHDocTN, Hnp. peoBHO oDpKaBaHbe ypehaja n paHnx anata, OIOBapajyhe Tempepatyphe ycnoBe pyky n npabInHy oprAHn3aujpyda.
IODAUOByUNBIBPAJAMA
3AWTNTA KMBOTHE CPEINHE
EnektpnHy onpemy He Tpe6a odnaratn ca kyHmM OTnadom. Ondno ra y odroBapajynm obejkma. HNFOPMaJme o odnarabMy Mory ce doobtn OD npdaBua npo3bOa Hn noKanHex BnactM. Otnpna deEneKtpnuHa n eEeKtpoHcKa onpema (WEE) caPkn cynctanue K HnCy HeyTpannHe npema npropodHom OkpyxBeHy. HepeuKnipanH OE ppeCTabJa noTeHunJIyOnaCHOCT NO XKBOTHy cpedHn IyUck 3dpaBbe.
&qyot;Γpya TOnex Cnóka 3 orpaHnOHa odnowne3nAnHOsa&qyot; Cnok KaKOMaHyTOWa ca cedmuTeM y BapuBau, yn. TporpaHnPa 2/4 (y daBem TeKcty.&qyot;Tonek Ppya&qyot;) o6abeWtBa Da cBa ayTopca npaba Ha caDpKaJcBor yTyrCTBa 3a yNtpe6y (yDarBmTeKCT&qyot;Pnpuyh&qyot); yKbYyjhy, anHe orpaHnabayjHc ha, HberOB TEKCT, objabBeHe FOToRpaDijE, jIarpaMe, uptke, kao n HberOB cactab, npnnaJady NckByHbTONeK Tpyu N noDnExky npabHoj 3aunTu y cKnady ca 3akOHom od 4. fe6pyapa 1994. rOdnHe, o aYtopCKIM npABMa I cpOHN m npAHH (Tj. Yaconnc 3akoHa Y. 2006 bp. 90 TaKa 631 ca mMeHama). KOnpaHbe, o6pda, o6ablbNaBe, moNfKnobBaYe y KomepuJaJIne CBpX ceNOr npPyHnKa, kao n HberOBHX NOJEINAHuaHE enemeHata, 6e3 NcmeHe carnaCNoCTOn TEKe rpyne, cTPOr je 3a6paBeHo IN Moke DOBeCT Do rpaJahCKe IN KPNBNU He ODoROBOPHOCTN.
GR EIXEIP'IAIO METAΦPAΛHΣ (XP'HETH) POMTOT KOITHΣ 04-621
NPOOXH! PIN ATO TO XEIPIISO HAEKTPIKQN EPRAAEION, ΔIABA ΕTE NPOSEKTIA TO IAPON ERXEP1IO OAHΓIΩN KAI ΦYΑΕΤΟ ΠΑ ΜΕΜΟNTIKΗ ΑΝΑΦΟΑ.
AENTOMEPEI KANONEAΦAAEIA
O△HΓIΕΣAΦΑΛEIAIΛΓIATAPOMITOTKOITHΣ
Aoopa kata nTv paktikxpon Tou pojTOT KOTnS
ΣYETAIZE1Z
Aiaaote TPOeKTiKa To EYxepio OOnyiw XpnoC. VwpiTe Ta ouTnmuata Eeyxou KAI Tn OoTn Aotupyia Tns OoKeuhs.
Mny eITIeTETn xpon Tns oukeun aTIO PAIDI n ano atoua Tou Ev exouviiaabei To Exyepidio oDnyiwxpon. OeVikoi kavoviooi Evexetai va UTOBekvouu via EaXiatn naia yia tvxepiotn.
MnyxnpoiotoeTo poutot eav utapxouv yupw Tou aaaa atoua, iifws Taiai n cwa.
Na 0uaoTe oio xeiipotns no xpohtns eivai utteBuvoc ia atuxnata n KIOUOWUs yia aALouc avOpuToucs n to TpePbaAov.
IPOETOIMAXIA
Piv aTTO KOUpeu, EeVTe KaTe oPeOa Ta uepn Tou pouTOT AITOUpyoov Owot.
Tia kauTepa aToTeAeOmuata, ouviotatai To Koupea oE kaipoxpic BpoxN. KaTa To Koupea oTn BpoxN, To ypaDiI uTnpei va KALnoei OTO pouto, TO OTIOIOupei va AioTpnoeI.
MHN KoupéuèTE OE KAKÉS KAPIÉC ΣUUVθηκΕ, T.X. KATA ΝIa IaIaEvTovns BpOxns, KATAIYIDAS n XIOVOTTTWONS.
Etneepite Tepioikata th epiouevn Tepioxn kai aonapkuvete tuxov ntepc, ouvtipmuia, kaowbia, ota kai alaa emtodia. H Tepiopiaevn evyunon dev kauntei qniie tsou npokalouvtai ato avtkieeva Tou napapeouv oto ykaov.
Fia va aTOpuyete cNmuKoupeuete e aToaon 1 m ano TIG KEpaAe syKaotnpwv.
PPOsOXH! To pOtt kai oI yekaoTnpes EN TpETeV aEVEpyoiouovta tautoxpova.
To pount To tpei va Tpoypaumotei va Aetoupye odeltaopentko xpovatoupskaotnpes.
NOTE mnv einnepTETe oTa naiia va aayisouv to TpofoBDtko, to Otae fo pOToIgKAI Ioiatepa TIG eAeTIEc, Tn 0KnTns Mtrapiaac n OTIOaONTOpe npOn OTU uMpyoov Keva,OTWs OITpoxol.
AEITOYPTIA
PpoETE TIGTPEIOTpeoEvEsAeIDcE!MHNBaCETeTaXepia n Ta TIOIAOACATOWTOIGTPEIOTpeoEvEsAeITIDcE.
PpoEeTa aavkeiEva Tou Bpiokovai diaoTapta OTo ykaov KaTa To Koapea! Otav to pout Eivai evpyotoinevo, va Kpatate atoataon aospaleia.
Mny apivete Tn oukeun xwpiE tniBaeun eav elvai yywato otntnv Tepiox npikovtai zwa, taiai n tapeupikóveoi.
- DiatnpnoTE pia aaoaHn EoN. DiatnpnoTE IOoppnia KAI Otaeepn EoN oE KIAOEIC. KATA TOV Xeipioo TOPOITOT n TOW TEPipepeiaKwO uOKEuWTO,ETIITPEIIeTAl VA TEPITATAEi,aaA Oxiv TpeXei.
Aiaaote TIG odnyie oxetikka To TIOTE, TOU KAI TWC VA EeYxETO poutot KAI ta TIEPIpepeiaKa Tou, Ta KAwbia KAI TA KAwodia TPOeKTAoNS via ZnuiEc n OOpEc kai va EtIOKEuaZeTe to poutot. Ev ETITIeTTaI autOTpOioTTOInon, n EtIOKEun - ME KIVUvo va akupwei n evyUnon.
Mny ouvdeTe n ayyizete eva kateotpauevo kawio tropooboiac
mu xvi aatouovdethetai ano tv npoxn eupatoc, loyw tou
kivouvou niaqnc me nektpopopa ecapntjata.
SUVEETo pOHTIOTnKAI TOV TEPiPepeiaKO EOTIAIOPO MO VO KUKAWUATA PEUATOSIPOOTATEUOVTAIIOBIAKOTINPEUATOC UTOAEITOpEVOU PEUATOS MEPEUJA EVPYOToinCtTOA 30mA
Eav to pounot kavei evav un quioyiko hxo n napatnpn e i ma un quioyikn dovn n av onuavei ouvayepo, Tatnote aoeos to koupti STOP.
ANAFOPEYETAI va ayieEe EITIKIVouva KIOUpeva epn TPIV aTVEpyOTIOETo pOUIOT.
ANAGOPEYETAI va ayyIeTE ETTIKivduva epn mExpi va 0taatnouv EvTeAwC. - OpaTe Tava aVbEeTKa UToBnmuTa Kai pAkpi TavTeAovia otav xeipieote to poutot.
Kopty Tny npaox npuatoC: Piv kAeiodwote to poutot.
Piv aT6 Tn doKun, Tov kaBapiau n t ouvnpon.
EIKONOPPAMMATA KAI IPOEIODOHSEI

- DiapaoTe To ExyepioO oyiywXpncs Kai Tnpnote TIG TPOeIOOTIOInaeC Kai Touc opouc aopaaieia!
- Piv ano tv kaqapiao n touvtnpon, atoucvdeote aTnV Tapoyn pEmuatoc
- Mny BaceTe Ta Xepia n Ta TIObia Oac KATW aTTO TPOOTAEUTIKO TO uXavioouoKOTnC.
- IepioptpeoEvape np -Tihavotnta tpaauatou
- KpatnoTe aiooTaon aoPaaEiaC an to pOoiT KotnC.
- Ppoooxn Otnv TIIavotnta Tpauaatou aTo xuta avtkejeva
- PpOoTaia aTn BpOxH
- Na φuλασεται μakpiánto πaiδi.
- Mny avεβaivετε στο pμπό
- aTtWλεiδaKτUaw, TPOOεE
- Méviotn kλion εδαφος 14°/25%.
- PooataeT Ta xepia e yavtnia epyaioas
13.Φopate TPOoTaTeUtiKo pouxio
14.Φopate TPOoTaTeUkA UTOBnpaT - Mny aToppiTTe t o iokia k aToppiuata
- Eπλεκτικ Σαλλογη αποβλπτων
- Baθμός προσταίας
IPOZOxH! Autn n oukeun mtopei va xpnnooTointhea tno Tiaia avw twv 8 etuv kai aTo atoqa Me Tnepiopieves oupatikcs kai TVEUATIKEC IKAVOTNEKcKai eavetapkn yywn n emteipia, epooov EITBENTovTai n exouv lae Kaalnnae oynies ia tvn aoaaan xpnon tsoukeun, wote va yywpizouv tous Kivouous TouEvexei. Autn n oukeun dev tpentei va taiketai ao Tiaia. Ta Tiaia dev npTei va kathetaiouv n va ekteauv epyaocic ouvtnpns tsoukeunxwipis EtBaeyn.
IPEIPPAH TQN IPAIKQN 2TOIXEION
Haokouo an apiun an avapept a tta ts oukeun Tou eapavicovtai otc oaiides yapikwv Tou npovtoe yxepidiou.
| Ovopoaia Σχήμα A | Opis | |
| 1 | Διακοπή εκτακτης ανάγκης | |
| 2 | Puθμιστής ὄψους κοτής | |
| 3 | Πινακας ελέγχου χλοοκοπικόμύ | |
| 4 | Διακόπης τροφόδοσίας χλοοκοπικόμύ | |
| 5 | Τροχόι κίνησας | |
| 6 | Λεπίδες κοτής | |
| 7 | Τύμπανο μηχανίαμου κοτής | |
| 8 | Περιστρεφόμενοι τροχόι | |
| 9 | Λαβή μεταφρός | |
| 10 | Συνδέσεις φόρτιας | |
| 11 | Καλυμμα διαμερίαμος μπαταρίας | |
| Ovopoaia Σχήμα B | Opis | |
| 1 | Πινακας ελέγχου σταθμου σύνδεσας | |
| 2 | Οπές γία ηη στερώσητου σταθμου σύνδεσας | |
| 3 | Συνδέσεις φόρτιας | |
| 4 | Σταθμός σύνδεσας | |
| 5 | Προστατευτίος σταθμός σύνδεσας | |
| 6 | Συνδέσωμι γία το καλώδιο τροφόδοσίας γία τη σημανον Πης περοχός εργασίας | |
| 7 | Ανοίγματα καλωδίων γία τη σημανον του χώρου εργασίας και την παροχή υρεματος | |
| 8 | Υποδόχη ρεύματος σταθμου σύνδεσας | |
| 9 | Σημανον γία σωτή δρομολόνησα καλωδίων | |
| Ovopoaia Σχ. | Opis | |
| 1 | Ενδεικτίκη λυχία κατάστασης φόρτιας | |
| 2 | 'Evδειδη σφάλματος σήματος | |
| 3 | 'Evδειδη καλωδίου σύνκράτηας | |
| 4 | Ωρες λεπουρίας / μήνυμα σφάλματος, λυχίες 1-4 | |
| 5 | Kouμπί λειουρίας | |
| 6 | Διακόπης τροφόδοσίας | |
| 7 | Kouμπί πρόσδεσας | |
| 8 | Kouμπί "Επβεβαίωση" | |
| Ovopoaia Σχ. H | Opis | |
| 1 | Βίδες | |
| 2 | Καλυμμα διαμερίαμοτος μπαταρίας με λαβή μεταφρός | |
| 3 | Θήκη μπιαταρίων | |
| 4 | Υποδόχή μπιαταρίας στο ταλυμμα του θαλάμου | |
| 5 | Επαναφροπίσουνη μπιαταρία (δεν Περιλαμβάνται) | |
| Ovopoaia Σχήμα l | Opis | |
| 1 | Γακόν | |
| 2 | Toixος | |
| 3 | Σταθμός σύνδεσας | |
| 4 | Ατόσταση του σταθμου απίον του οτίν | |
| 5 | Aρχίος τμήμα της γραμής του σροθετεί την περοχή κοτής | |
| 6 | Μήκος του τμήματος | |
| Ovopoaia Σχ. | Opis | |
| 1a | Καλώδιο γία του περιρίομό της περioxής κοτής 'Evapξη | |
| 1b | Καλώδιο γία του περιρίομό της περioxής κοτής 'Tekος | |
| 2 | Γραμή τροφόδοσίας: | |
| 3 | Σταθμός σύνδεσας | |
- Evéxéra va utrpxouv δiaopóc μetagu tou γpaikou kai tou tpayatikou πpoivtoς
IPOETOIMASIA THNEPRA
ERKATAZAHTAHMNATAPIA
AvatodoyupioTe to poutot kottc etoi wote va utapxa Tpoadaon OTNV KATW PAeopa Tou poutot.
Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ Σ ολβης εικ. A4 και της λαβης μεταροράς Eικ. A9 utápxει το καλυματις θηκης μιταιρίων Eικ. H2 που στερεώνεται με τις 4 βίδες τούσημεινονται με βέλη Eικ. H1.
- 2Tn ouvexiae ebiowote Tc biides Tou onmuovovtai e Ta bEa.
Apaape TPOOeKtika To kALUma Tou diaepioaato EIK.H2,woTe va uny OTAOETI ANTOoVbEOEte Ta KALWia Tou biakotttn Eik. A4 (eivai TPOoaptnueva OTo KAUma Tou diaepioaato mTATapiwv).
- 2n ouvexia avantofooyupiTe To kaiumu, otyn katw Taeupa Tou Kaumatoeiv aotepeowevn uttoooh n ts tataipac Eik. H4.
ToTtoeTeHnE TnVmuTApia aTo nOepa ENERGY+ otynu Urodoxni.
Avattooyupioe To kAulmu a Te n ouvdeepevn mTataia Kai TOToEETNE TO tN thKn Eik. H3.
- Σφίει TIGIIDEOS OTEPEWONS TO KAALUUMATOS. FUPIOTE TO pOPIOT ATO KATOW TPOCS TA KATOW, Μ ΣOAKEUN EVAI ETOIJN.
NEPIBAANON EPTAIA TOY POMNOT KOITHE
Bbaowte oTI PAnpuvtai O akouoec ouvrike s OTNV Tepioxn otou epyaceTt to pout
To uoosou xoprou dev utepbaivei ta 60 mm.
- INPOOXH! EAV TO ypaodé iivai paKpUTepo aTó 60 mm, Koptye TpiwTa to ykaov eXLOOKOTIKo YEIpOsc.
- Ev utapxouv Tepes, Koumaia gauo, kaawbia, nEeKtpopkaawbia n aaaa eva avtkeiEvaa.
H TepioxKoTnC eivai EtnTeon kai EtnTeon, Xwpi tsappouc kai opuyuata, kai n KAIaen eivai mipotepn aTo 25% (14°) EIK.1
TnV EYkataaon aattouvtai ta akoloutheta pyaleia:
- Σφύρι ατό Κααύτούκ (γία τήν εμμηξητων περρων στο ἔδαφος κατά τήν τόποθετησητου καλωδιού συγκρατης)
To eaywo kAedi (yia th oTepeowon tou oTaouofoption) Tepiaubavetai OTOeT
- Πένοσα (γία τὴν κοῦτου καλωδίου του σροθετεῖ τὴν περίοχή εργασίας)
1.BASE EKATAA TAZH 2TAOMY BAZH
Eπλεξτμia kαταλληn totθεοία
O otaooc opionc npetie va totoeetneotnyakolouon eEik.C3:
Eva oxetikacnte do kai nntedtou xootamnta.
Kovrə stny akpn tou ykaçov.
Kovtασεπiça
ToTOnoTeIto Kaawio EInkraonc 10 m, To TpofoBotIKo e Okiepo, Dpoeo kai Inpo poc.
- Ev TpEe va utapxouv Emuioia e aotaaon Toulaixotov 2 mtpwv ato to otao fooptns.
- Suviatai o o taoos foptians va bpiokeatae steyvo kai Tpoataeupevo epos.
H npoxn peuatoa npee va pioketa 30 cm naw a to Ettto eapouc.
2. IPOEAPTHEH STAOMO'Y FOPTIeH
ΣtepeωeTO Σαθuó φροπIσ ΣΟ Εδαρος 6 βiδες Σtepeωης (G1) (xρησιμιτοιωντας εγεχαγων Κλεδι G6).
PPOOXH! MHN OTKEOT E NTEPITATATE TAVW OTNV TIAKA TOU OTAOOU pOPIIc.
IPOZOxH! MHN kaveTE vEeC OTeC OTNV TlakA Tou OtaOu oPOTiOns. O OaOc 0a TpTei va Biowei OTO dATeBO XpnaiotIOwVtAs TIG UTTAPXoueC OTeC.
3. TONOETHEH TOY KAANIOI Y SYKPATHE
To kaawio ouykpatao xpoaiotoeirai yia tvn opioe ton ts Tepioxc epyaiaac kai tnv kaobnyan tou pout ot o taepo npnc.
NPOOXH! Eav o yeirovac ca xpanoitioi eTion poutotiko XAOOKOTIKO, kpatnoTE aTIOaON TouAixiotaov 1 m uTeSu twv kaawiwoukykpatnnc kalwduo poutot.
XEIAZMOZ THE ΘEESH ΘOY KAΛΩAIOY ΣYΓKPATHES
Pniv aTTO TTV TOITOTHOIou KAALWDIOU OUYKPATNOCS, TEPNTaTne KATAHKOc TOU KAOpioeVOU OPIOU ATOJAKPVETUxOVTpeTTA AVTIKEJEVA, OTWCS TETPEC.
NPOOxH! To uKoc Tou kaWoiou ouyKpatnong dev TpTei va utepbaive ta 200 tpa.
IPOEIAOIOIHs! To poutot dev tpeitv kiveirai Tavw o xaiki npouia uik taou bmuopoovv taoka eoucv nui aic aeidec
TONOETHEH TOY KAAGAOY SYKPATHEIK.
Akaoutheote Tis Tnapakatw odnyies yia va tottoeemoeTe to kawdo ouykpaptnong yupw ano nTv nepiox npyaackai ta eutdoia. Xpoioutoinote tov metpntn tiou teplaauavetai oTo KIT iT nootn tottoetan tou kalwoiouuykpamng.
NPOOxH! To Kaawio ouykpamonts tropoodoteiai Ttou Xaunan taon kai eivai aagaaes yia avthetaiouc kai katoikidia zwa.
NPOOXH! EKIVnote ME TO Buaqa"-OTO TIOW MEPOCS TOAOTAOUPoTIONG EIK. B6 TpaBnETo KATW aTO TO OTAHO (KAAPNOETEAaTROEgma 10 cm) KAI TOTIOEtNaTo KAALWDIO YUPw aTO YKACOV ME
apiotepootpoq npopa, kataanyovtac oto buoqa ^+ oTo Tioawepoc tou Otaou optiongs (apnoTe eva ato8eua 10 cm).Bbaowtei ot to kaawio epxetai oe tiaopn me taaloo otous ouvdeouos ^+ "kai -Eik. B6 uuntheite va koyete To PAAovacov kawio ouykpatnans
Aopote toulambdaiotov 2 m kevo etagou tou kaawoiou ouykpataqns KAI TOU OTAOOU FOPTIaC. To KAwio 0e auto To Tnua XpooiotIOEiTAYI N EAPOPaTOPOPIOT OTo aOuOvEaC
- DiatnpnoTe aTooTaon 30 cm etagu Tou kAlwdiou ouykpaptnong KAI Tns akpnc Tou ykaov EIK.C2-EIK.C3.
- Σερεωτε Μαλωδιο συγκραπης ΟΟ εδαφος με τους πειρους τιου παρέχονται Eik. G5. Φιαλωδιο συγκραπης πρετείνα ειανι Ευθύμμο καλ ελαφρως σφιγμενο. Πι πειροι πρετείνα τοῦθετουνται ανα 1 m (αὐτόμιποείνα τροτοποιηθείνα αλαογα με το σχήμα του χλοστάπηται) Eik. C4. Mνγ θαβετε Φιαλωδιο βαθθερα από 2 cm γίαν ατιθαφύγετε ένγ απόθυδυμωση του σήματος.
TOTIOBETNOTE TO KAALWIO ETOI WOTE OYWVEcVaEIVAI YEAYAUTEPECS ATO 90^ C5. 2E TETOIEC TEPIOXEC, TOTIOETNATE TO KAALWIO OUYKPATNONS OE NTIEC KAMTUAEs, YEYOVOS IOA DIEUKOVAVEI TAOI TYN KIVONTOU pOITOT OTNV TEPIOXIN IOU TPOKeITAI VA KOUPEUTI.
Eav unapxouv npertepia, liuves n devtpa oTo ykaov, TepiBaalte Ta me Bpoxous kaawoiou ouykpatnons Eik. C4.
- DiatnpnoTe eva elaxioTo. 30 cm anoTaon metaTuou kaawoiou oukykpatnongkaiTwv akpwTwv EITIOWv.
NPOOxH!KaTa th diapouin TpoC KAI aTTo Bpox, ta Kaawia oukpantnC dev npTei va daotaupwovtai eAeTuos EIK.C4.
Aphote evo xwo o np TnV TEPIOXn Epyaoic Tou XookoTTkoU. Beaiweite ot n aiooataon metau Twv npaaan kivoueewv Kaawdiw oukpatnoq eivai eyautep an 1m.
NPOOXH! Beaiwthei oI O staioo suvdeanc piakea t eaa aTO bpoxo Tnou anpatodotei nTv nepioxkntc. (Ew /eaa) EIK. B2
4. EKATAZTAH ZTAOMO'Y FOPTIEH
UvOeOTe TIV npoxn peuatoS
- TtoTtneTo uOaTpooOooiae npic 110-240V.
2.EeEETNvKataOtaonTuwLuxviuVLEDoToaOfoPOTIOgX.B1:
Ppaoivn qtwevin evdei n ouvbeon exe i dnioupyne (to poutot dev optici e i ivai πhpoC (optioevo) - Diakotropevni npaoivn luxvia: to poutrot ophi ci.
- Diaaleitouoa kokkivn luxvia: to TIO OUVNIOpevo opaIaEivai n "aiooovdoTou KAALWIOU OuyKpatnoans".
EaBnoe n luxvia: H TIO ouvnOievN BλaBn εivai "Ev utapxei tropoobooia peuatoC 100-240 V" n "Ev utapxei ouvdoen με πynpeuatoC".
AEIOTYPTIA/ PYOMIEE
Pnwn EkkivnoT tou pOttot Kottns
Otav ekkive to potot via npwn popa, totoetnote tn oukeun oTo aToouveans etai wote o UTIOOxcs optionns oTo aTou va oxmuatouv oxna. B3 va unv epoxovtae ETTaepn e Touc ouvdeouc optionns oTo potot kottnc 1A10.
Otav to poTtOT KOTING EKKIVEITAI YIA TpWNT FopA aTO TNV EFAPUoyn Tou TnLEPwou, TpETEVA TpayuatoTOnIe EVnpwn UAKoAOYIOIKOU. H eB0oC uAoToinc TEPyPapetai TpaKaTu OTNv Evotnta Evnpwn Aoyioikou.
- PPOEOXH! Kata nTv npwn ouvdoan, to nIeepwo kai to poitot TpEITe va Bpiokovtai evtoc eBélaiac tou diktou Wi-fi.
ENHM'EPQEH YAIKOAOIEMIKO'Y IPIN XPHZIMONIOIHZEETOPOMNOT.
H evnepwn npenei va yivei wS eNs.
- TOTIOETNOTE TO pOITOT EVTOC TOUT BOPOXOU AAAA EKTOS TOUT OTAOU FOPTIONC.
- BáLTE TO δiakóTTN EIK. A4 Θη θεση 1.
- Nathote kai kpatnate natajnevo to biakottn Eik.D5
- 3ekivnoTe TnV eapauyn, oapwoteTov Kwoiko QR
- Suvodote Tnv εφαρογn στο ρομπόT
- AvantuTE TIC puOmuieis Tou lovioukou TATwVtac To EIKovio OTO eTavw dEi poc ts oovns.
- Eπλεξτ μι επλογην: Evημερωσι αλικολογισικόι.
- 2tn ouvexia, aokoutheta Tc obnyies Tou epaivicovtai otv oboyn
Meta tvy eykataoan tou loviou, n oukeun eiva etoun yia
IPOEOXH!
H ofoyn deixyvei av to pouTrot ioketai e uEeia Wi-fi n Bluetooth.
H ouvdeon oe eva biKtu unToeIKVuetai ato eva eKovio Tou avoosnviia tov tTO nC ouvcon. Moic ouvOe, to Eikovio oTapata va avoosnvi.
To pouTOTmuTopei va uovEtheta i movo e vA tnaewo.
Eav xpeiaotéva ouvdethetaaallo eva (idio poitot kottis), to tpwto npetieva apaipethetai anto tvn εapauyn. Tnvy eapauyn iOS etionc ato tic puθmuic Bluetooth.
PYOMIISHYPOYKOYP'EMATO:
Piv aTTO TPOWTO KUPEJIA,puHIOte TO uOsc KoupEpaTOcTa 60 mm KAI OTN OUVEXEA aaAocTe oTo EINBmuNTo Uoos otav oKAnpo To yKaZov Eivaa oxEKa eTTIEBO.
- Tupiote To Koumu Eik. A2 δεξίοστροφα γιαν αυξησετε To ὄψος κοπής.
TupioTe to Koupti Eik. A2 TpoC ta apioTepa yia va peiwOeTe to Uyoos KOTINc.
To uoos kootnC mTopei va puthetaiotei aTio 20 mm (MIN) eWc 60 mm MAX).
IPOZOxH! O KIVnnpac KIVnncs Tou TU TmuTavou Tou mXawoukOTnEik.A7 EvpyoToIEaTIpeITou 10 DeutepOaETTAeTa TnV Eoo aTTOBao, EekWvTAC n AEIoupyia.
ENEPTONIO'TH/ANENEPTONIOTH
- Θεοτο το διακόπηι N Eik. A4 στη θεση "O" γιαν αλίνεργοτοίησε τήν παροχή ρεύματος.
- ΕΟΕΤΟ ο δΙΑΚΟΓΤΗ ΕΙΚ. A4 στη ΘΕΟι "I" γιν αν ευργούπασε τήν τηραχή ρεύματος.
ENEPTONIOIHJTOY POMITOT KAI NPOPAMMATIOMO2 TOY XPONOY EPRAIAE XEIPOKINHTAIETOYPJA
- NaTne TaPATEaEvA TO KOUPTI LEITOUPYIAc EIK.D5 YIA VA EKKIVNOETo pOHTOT.2Neueiwn:unv KouvATE To pOHTOT KATA TNY EKKIVNn YIA VA aTOXUYETe OpaAla EKKIVNOns.EAVTo pOHTOT DEV EKIVNoeI Owota (OAEs oLuxvieavabouovuWex)ETAVEKKIVNTeTO.
-
Eiayete tokwiokto paoans tawtac to koumtEIK.D6 duo opec, otuovexia to koumtEIK.D7 doo opecs kai to koumtEIK.D8 ia oopa (o kwikoc npoaaonnpoypaunatetai oto epyoataio).
-
Npoypaumariote to xpov Aetoupyias (ountepiaaavouevou tou xpovou kottnc kalou xpovou optnncs):
-
PAnote To x. D6 via va puOioTe To xpOvo Aeioupyiac. Mia avaumevn Auxvia onuaivei 2 wpe, o meyioToC xpOvo Aeioupyiac evai 8 wpeC kai 4 Auxvie cOnv EIK. D4. PAnote To kouMit EIK. D8 ia embetaaiwn kai Ekkivnon Tou potot.
IPOZOxH! AoupuuioTeo xpvoc AEioupyiac, to poutot Oa uiparai TIC puoiieic kai o givto Koupja kahe npTnV Povpaunoev npa. O xpvoc koinc o eiva ouwva e Tc puoiiaac Tou exoue iox
O Tpoypaumiaevoxpovoaetoupntotno2ew8 wpc evai O xpooc kottnc, ouuTEPIauabavovou tou xpoov optianc.
Oxpovoi Aetoupyiag kai optians diaepouv avaloya e T npoiotioouevn utatapia.
Av eEe va aAaeTe Tny wpa aeitoupyia, aKoauOhtote gava ta bnaata 2-3.
O IPOIPOPMAMTIAEMOx XPONOY EAYOMATH AIEIOYPIIA, IPOIPOPAMMA 7 HMEPQN, EINAI IAOTZIMO MEZQ TQN PYOM12E0N ΣTHN EAPMOH
Meta ato ma otaon EKTAKNTG avayknc, to poutot ttpente Tpwa va
EeKaeiowtheta akolouwvtac to 2 npapattaw. MoAic to poutot
EeKaeiowtheta, mtopouve va to steiaoume triow sto aetmo Tatwntac ta
Kouptia: EIK. D7 kai otuovexia ettbeakovoume e To Koupti EIK.
D8 yia va etiotpeye To xookottko oto otaho foptionc.
Me To Tatnau Tou TAnkTou DiaKoTns Aetoupyia EKTAKTNS avayknq STOP diaypapetai O Kukos Xepokivntnc kai autoupatns Aenoupyias aTo nTv epaupoyn, eav exe evepyotnoe ie ue autov tov ptoio. Ia va Sekivnoe Gava n Epyaia Tou pouTOT eTA aTO ia OTaON EKTAKNTG avaykn, to pouTOT PPETIE VA ETNIATpeyei oTo aTaHo pOPTIcK kai v Opiotei Gava to TPOpua xepokivntns epyaoia. Tnv Tepintwn Evoc autouatou TPOpvapmuos, EKTEAEOT nV iDIA EVepyia oTo TPOpuaepapuyns KAI EITBEaWTe TIC puBmuic tou.
IPOSOXH! O TPOpypaJauoEvos Xpovoc EKKivnOg oTo autoupato TPOpypaJua TpeTtva Bewpuai TOnu AkipnC. H oukeun mTnpei va Eekivnoe iEwcaApkTeaAETTtae TaN KAtopoiEvwn wpa
H evpyoTioh n ts xepokivntns leitoupyia diaypaei to TPOypaqa TOU exi TPOypaumaiot ei onv apapoyn ka avtiotpopa.
H mTovopaa 0n xepokivtn aeoupyia yivetai autoata kaepeikoKuklouc Koupaeos. Piaaabei to Kopepa Tou xprou
KoVtA OTO KaawBIO TnO opieT NTV TEPIOXn Epyaioac. IPOOXH! PpTeIva AauBavetaipeiivwote To KaawBIO va eiva oWotao ouvdeEevo, wote vmuNkTeEoi eTuXia Kottn.
To poutot kntns 0a eitoppeie oTo staio npoobc n ooukeun avxveoei tvv evapn ts bpoxoTTwo.
Eav to pouitot ouavmoei katioio eptodio kat a n v epyaia tou, ta avannoe iato auto kaai oauveixei tny epyaia tou.
ΦθTEINH ENAEIEH KATAASTAHE ΦOPTIεH ΣTO ΣTAOMO ΦOPTIεH:
Σνυεχης πρασινη φωτεῖν ἐνδείη - η μπατάρία εἰναι πλήρως φορτιαμένη. Διαλείπουσα πρασινη λυχία - φόρτιη.
E3Ω ANO TO ΣTAOMO ΦOPTIξHε
Σνεχης πρασην φωτενή εύδειη - μπίαταρία >=20%
DIAKOTIOEyn Tpaoivn Auyvia - mTaia < 20%
IPOOXH! To pOHT biakotte autouata tyn epyaia kai etiortpeei oTo OaHo foptions eav n otAun ts mtatapac Ttcei katw atio 20%
ΦΩΣ ΕΦΑΜΑΤΟΣ:
EuVexn Ppaovn oovin evoign - enmuon Tou ouotnauoc.
Σνδθειτη Θην εφαρογή γία να εκτέλεσετη Σην ευμερωη.
Aiaokotómevnipaoivn luxvia -evnpwOn ouotnmuatoe E E\xiAIGN.
Aikottoevn kokivn auvia- nuvua opaalato 1 ews, tavekkivon Tou pout.
Σνυεχης κόκκινη φωτεῖνη ἐνδείης - μήνυμα σφάλματος 6 εως 12, πατήσε τ"STOP" η "OK" γεικαθαβαπη.
ENAEIEH KAANAOIY SYIKPATHSEH:
Uvexnsipaovn pwtenv evdeign -to onua eiva oototo
Σνεχής κόκκινη λυχία -Κανένα σήμα
EeYXoi Eik. D4:
Aikottoevo 公 -tloakapioevo pouto.
Luvexns wotveivn evdien - to poutnt Eekaeidwei.
H luxia 1 aabei ie paoivo xpua: 2 wpc latoupyias.
Ouiuxie 1 kai 2 aovabouw e Tpaoivo xpuwa: 4 wpcse aeitoupyia
Olauxvies 1,2 kai 3 aabouv u npaoivo xpuia:6 wpc epyaioiac.
Ouiuxie 1,2,3kai4 aabouv ie npaoivo xpuwa:8 wps aeoupyiac.
AOTIEMIKO TAN TON EAEFXO TOY POMNOT KOITHE
Anjun IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Android:
https://play.google.com/store/apps/details?id=com.touarobot
Oi oynie tsou poypaumatoc mtopoov va anpoov atro n 8ieuuvan: https://bit.ly/3QBB6Gm
ENE'IROYSA DIAKONTH AEITOYPFIA TOY POMNOT
Pntote to koupi "STOP" Eik. A1 via va atapatnoeTe to pountot, Ttataote kai kpatne Ttatnuevo to koupti aeitoupyiac yia va aTVEpyoTOINeTe to poutot.
METAK'INHsH TOY POMITOT
Katw aTo pOitot Bioketai ia aaanavuwongc Eik. A10 yia eukolo Xepioo Me To eva xepi.
SYNTHPHEKAI ANO'HKEYE
- Antevepyoioite Tavta To poutot Tpiv aToTov Kaapiao Kai Tn ouvtnpon.
AnouvdeTnV Tnpoxn pEuupatoc Tpiv aToTov KaapioKai Tn ouvtnpon Tou OtaOou foptions. - Opaté Távta Xovtpa TPOOATEUká yávtá otav aλαζεTE λεπiδε Kai Kaθapizε Te Nv KATW Tλεuρa Tou pouTó.
EeVyXETAKIaTNOtEyavOTnTaWBIOWKAI TwVIIaJauWi. Ta KATEOtpaumevA Eapntmuata TpTei va EIOKEuAcovTai n av AvTKaioTavTia Aoyouc aopaeiaC.
ELeyExTe TaKtikO tI OI AETIOEC MToPOuV VA TEPiOTpeovTAt EeUepa.
NPOZOxH! Otv yupizTe to pouto avantob, tortoetne To oTo Ykaov n eia maaekn ETTpaveia, wote va nuV kataotpaei n ypatzouviotei to kalmu.
KAOAPIEMO
IPOEIAOIOIHHE! NIV EKIVHnEToV KAtApioo, ATEVEpyOTIOInOTE TnV TAPoxn peuatoC ME To BIAkOTTN EIK. A4.
- PIAUVETe To pTPOsTIVo MEOs Tou pOITOT EVA KAtApIaTIKo XaunAnIs TIEONS KAI MAaAak BOpTsigma n TAVI.
Xpnoiopoioote ia oknpn Boupota ia va atropaKpuve ta Koupeva xopta kai ta unoalemuata ato tic aeTtce, tous Tpoxouc kai aaaa np otnv katw nAeupa tou pout.
ELeVyETAE TAKTIA TOUs TPOXOUs VIa IaoTn n aTOKoMuTa XOpTu KaKaIapIOte Toue Me iua BoUptOa.
IPOZOxH! ATOJAKPVETe TAKIKa Ta QUTIKu UTOAeimuata aTIO TnV KATW TLEUPa Tou pOITOT YIA VA aTOQUYET N MEiOWTN TSAPaywYIKOTNTAC.
ANTIKATAZAHTAH AEITIDAA
IPOEIADONIOIHENI PwTA aTEVEpyoIToiNToE TOV KEVTpiKO bIAKOTTN PEUATOC KAI QOPeTe TIPooTATEUTiKA yAvTiA.
IPOEIAONIOIHHe! XpnoiopoTioeite Móvo TIC avapepeves auEvTKéS λεπiδε Πou exouv evkpiθei anto tov kataaekuaotn.
Kai ta pia Ttepuyia kai oi bioc touc npetie va avtikataoTaouv 1a mvo avtkataoTaan EIK. A6.
Oi BiEe npTnV a EeBOWoov KAI VA OpiGouv ME KAtoaBidi.
ELeyTe 0T a vea TEPuyia mTopouv va Tepiortpeovtai EeUeepa.
ENIAYsH NPOBAHMATQN
O TapaKaTiwavakac TApexei oNvies yia thdiayvwonTwv TpoBAnmuTsw.
Eav evai duwatov, Etniokuaote n oukeun movoi aac. Eav to npbaanpa dev mtopa va eiluhei, emkoivwwnate me evav ecouiootnevo avittpoowto n kevtpo oepic.
NPOEIADONIOIHHEI PENTeIva avovrtaetpa npoostaoiaC.
| Πρόβλημα | Πθανές αιτίες | Λύσεις |
| Η κόκλυνηλυχία αναβοσβήνει στο σταθμό φόρτιας | Διακοῦτη τουκαλωδίουσυγκράτης | Βρείτe to Ελαττωματικότημα τουκαλωδίουκανατο διορθώσετε |
| To ρομπότδιακολεύεταινα συνδεθεί στο σταθμό φόρτιας | Ο σταθμόςφόρτιας δεν εχείεγκατασταθεί σωστά | Βλέτε ενότητa"Προετομασία για εργασία". |
| To καλωδίοσυγκράτης δεν εύαι σωστάTOTοθετημένo | ||
| Δεν υπάρχεισήμα απότο τολαλδίοσυγκράτης | Δεν υπάρχειπαρχήρεύματος | Ελέγξετην πηγήροφοδασίας |
| To καλωδίοσυγκράτης συνδέθηκε aváπθοδa | Ανταλάξετουςυνδέσμους "+" kal "-" | |
| To καλωδίοσυγκράτης δεν εύαι συνδέθεύνοστοσταθμόφόπας | Ελέγξετότι Μαλωδίοσυγκράτης εύαι σωστάσυδέθεύνοστοσταθμό φόρτιας | |
| Διακοῦτη τουκαλωδίουσυγκράτης | Ελέγξετόλο Μικός, ὄτι Μαλωδίοδεν εχείδιακοίει | |
| Διασταρώσειςκαλωδίωνσυγκράτης katátnδίαβρομή προςΚαι απότο βρόxο | Ελέγξετότι Μαλωδίοσυγκράτης εύαι σωστάTOTοθετημένο. | |
| To ρομπότξετηργα τα συνορα | To καλωδίοσυγκράτηςσυνδέθηκε aváπθοδa | Ανταλάξετουςσυνδέσμους "+" kal "-" |
| To ρομπότδονεῖται ἡ κανειασυνήθιστουςθρύβους | Kατεστραμμένηηαμένηλεπίδa | 'Ελέγχος και ἡπιακεύητωνβιδων Κερέωσηςης λεπίδaç |
| O δίακος ηςλεπίδας εύαι χαλαρός | ||
| Avικαταστήστε ηλεπίδa |
| Kωδικός σφάλματος | Opis | Λύση |
| E01 Σχ. F1 | Σφάλμα αρχικοποίησης - αἰσθητήρας γυροσκοίπου | ΤΟΤΟθεῖνητε Στρομιτό Σε επιπεόη Ετιφάνεια και επιανεκκίνηOTE. |
| E02 Σχήμα F2 | Βλάβη του αἰσθητηρα ανύμωσης ἡου αἰσθητήρα συγκρουσης | Ρθμίσετη ράβδο συγκρουσης και τον τροχό στρέψης Στο μΠροστίνο μέρος του λχookοTTIKOU, ελέγετε ὄτι ἔν ἐχούν κλείδωςι- τΟΤΟθεῖνητε Σ |
| pouptot ΕE ΕΠΙΕ ΕΟ ΕΠΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΜΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕПΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙΝΙΑ ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙν ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙV ΕΑ ΕΠΑΚΙ V | ||
| E03 ΣχήμαF3 | Σφάλμaapxικοτοίησκiνπήρακοτής | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός |
| E04 EIK. F4 | Σφάλμaσύνδεόσησροφοδοίας | |
| E05 EIK. F5 | Λανθασμένητaxúŋτακνπήρακοτής | |
| E06 EIK. F6 | Προεδοτοίησηκλίσης | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός |
| E07 EIK. F7 | Προεδοτοίησηavύψωσός | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός |
| E08 EIK. F8 | ΣφάλμaΚανλίου ΔC | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη EAV TO Προβλημα εξακολουθειναυφιοία, επιτοικονωνητε με Κην utηρεσία εξυτηρετησης Πελατών. |
| E09 EIK. F9 | Λανθασμένοσημα | Βλέτε παραπανω στον Πινακα: Προβλημα - δεν utπάρχει σημα ατήσον Καλλώσον συχρατηρός. |
| Ελέγετε εγα προς εγα σλα τα σημεία κα, σηθ συνεχία, ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός | ||
| ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός | ||
| E010 EIK.F10 | Τζαμάρισμαρομτότ | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός |
| ΤΟΥθετήσετοι pομτότοι σε προβλημα εξακολουθειναυφιοία, επιτοικονωνητε με Κην utηρεσία εξυτηρετησης Πελατών. | ||
| E011 EIK.F11 | ΛανθασμένητaxuŋτατομρίσερουβματικούKiνπήρα | ΤΟΥθετήσετοι pομτότοι σε επιτέδη επιράνεία. ΠατήσεΤΟύŋδη OK γιαναυγεύτε Μημιστός |
| E012 EIK.F12 | ΛανθασμένητaxuŋτατομρίσερουβματικούKiνπήρα | ΤΟΥθετήσετοι pομτότοι σε προβλημα εξακολουθειναυφιοία, επιτοικονωνητε με Κην utηρεσία εξυτηρετησης Πελατών. |
TO KIT IEPIAMBANEI:
PouTOrKoTnC 1Tux
- Σταθμός σύνδεοης και φόρτιος 1pc.
Tpoqodotikokai kawio tkeTaonc 1 Tεμ.
Kaawio yia thy opio8etnon ts nepioxc epyaic100m
- Σρηνακία οτερέωπς καλωδιών 100 τεμάχια.
PpOpuata opeewoC OaOu ouvdo 6TuX.
AeTioEsKoTnC 3TuX
- Uvδεμοι kaλωδiων 2τμx.
Egawviko kAei 1Tux
IPODIAIAPAΦE
| Pɔμπότ kοπής 04-621 | |
| Παράμετρος | Aξία |
| Τάση τροφόδωσίας: | 18 V DC |
| Μέγισην οὐρμαστική ιαχύς του κινητήρα κοπής: | 50 W |
| Μέγισην οὐρμαστική ιαχύς του autokeiouμενου κινητήρα: | 20 W |
| Βαθμός προστασίας IP για to σταθμό φόρτιας | IPX4 |
| Βαθμός προστασίας IP για to ρομπότ | IPX5 |
| Βαθμός προστασίας IP για toν προσαρμογέα φόρτιας | IP 65 |
| Κατηγορία προστασίας για to ρομπότ | III |
| Katnyopia προσταίας γία οταθμό φόρτισης | II |
| Πλάτος κουρέματος: | 180 mm |
| Ρύθμιαη ὄψους κοῦπες στην περίοχή | 20 mm - 60 mm |
| Ταχύτητα περίστροφής | 3100 στροφές ανά λεττήό |
| Βάρος | 10,2 kg |
| Τέτος παρayωγής | 2024 |
AEDOMENA OOP'YBOY KAI DONHSEQN
| Επιπεδο ηχητικής πίεοης | LpA = 56dB (A) K=3dB(A) |
| Μετρούμενη στάθμη ηχητικής ισχύος | LwA = 67dB (A) K=3dB(A) |
PnpoopieC BOpBou kai doVnoewv
H Otaun Tou Bopou Tou EKTEmuTai aTo Tn OuaKeun Tpeiypafetai aTo: Tn Otaun Tns EKTEmuEvns XnTiknc Tieang Lpa KaTn Otaun NxntiKns Ioxuoc LwA, OTou TO KOnawve IVa aBepaiotna uETponc. H dovn Tou EKTEmuTai aTo Tn OuaKeun Tpeiypafetai aTo IV eTTaXuvn Tns Doynong a, OTou TO KOnawve IVa aBepaiotna uETponc.
O1 Tiue Tou eTnKav oTo Taov EYxepioo Oyniw Xpnc,
bnao To eTtiteo Tng EKTEmuEvns nxntikns Tiean LpA TO eTtiteo
nxntikcs Ixuoc Lw Ka n ETTaXuvn Dovnons an, eTpnKav
ouawva Me To TTotUTo EN 62841-1:2015+A11.To doevo EeTtio
doVnans an mTopei va xPaiomoinEi yia tn ouykiion ouakeuw Kai
yia tv TTPOkataptkn agIoayonn Tng EkEeanc
To eooevo entteto dovnonc elva avttnpooatautiko moyo via tis Baokec epapoyec ts ouakeuncs.Eav n ouakeun xpnojotioieita yia alae es apapoyec n e alaa epyaiaea eyaiaiac, to enttto do kpaabaowevbexeta va diapepei. H avetapkn n otavia ouvtnpnon ts ouakeunspokaale uwnotepa entteda kpaabaow. O I ppoavaepheiaes anties evbexeta va auonouov tv ekteon oe kpaabaouoc ka' oan thiapkeia zwns ts ouakeuncs.
TTOV aKpIbN pOoOIOIPOo TnS EkEoNS O KpaOaouc, TPeTIe va lauBavovTai UToIOW nOI Tepiooi "EvepyoToinos" kAI "aTEVEpyoToinons" TnS OuaKEUNG, EgaipoujEvw Tuv TpeiOsw KA tIC OTIOEs XpoIIOPToeiTAY IA LeIoptyia. H AuvoAikn EKeONe OdoNaeic MTOpei va eivai ToLau XaunloTepn Otav Aloi OITAPAVOTEC EKtiWvTAE aKpIbeia.
Tia nV npoataia Tou xeiipotn anr Touc kpaabouous, xpnoioutoinote TpOoTea metpa aopaaieias, T.x. TaKTIOn Ouvtnpon Tns ouokueucs KAI TWv Epyaleiwv Epyaoias, Katalnnaes Ouvthetaes Eepokuapaaic Twv Xepiwkai owtn opayawon Tns epyaiaas.
AEOYBOYKAIONHSEON
IPOEIA TOY INPIBANONTO

O nEAEKTPIOKc EOTAIIOUc Bv TIPETIE VA aTTOPPITTETaI MAJI ME TA OIKAKA aTTOPIUMATA. ATOPOLIPE TOV OTIG KATALANIEC EYKATAOTAEIC IAnpoPocipc OXeTIKA ME TIV ATTOPIUH MTOpTE VA LABETE ANTO VAVITPOWTO TOU TPOIOVOTiN H TIC TOTIKEC APXc. Ta aTIOBANTA nEAEKTPIOKu KA NEAKTPOVIKOU EOTAIIAOU (AHHE) TEPiEXouv OuaIEc TQ DE EIVEA OUETEpeG YA To PQUKO TEPiBAAuov. Ta un avAKUKAUJEv AHHE aTOTEAOUV DUVNIKO KIVDUVOYIA TO TEPIBAAuov KAI TIV AVOpWtU uyia.
"Grupa Topex Spolka z ograniczona odpwiedzialnosica" Spolka komandytowa Epa 出 Bapooia, U. Pograniczna 2/4 (eepnC: "OuiuToeP") evnpuevni On dla ta
Tveuuaia kaiuwa aetou Tne pieiayou Tou TAPovoc yexeiipoiou Odyivw xpnns
(Expn: "Evxepio") ouuTepiaaavouevuv, Evckrtkau Tou Keivouv, Tu
avapntueuvq wotovpawuuv, Tuv dypaupatuw, Tuv oxediw, Kauc Kau nts uovbeicn
TOU, avKouv atokkeiTikA otov Ouio TopeX kui tOKeivai ae vovik npootaoia
ouuva me Tov V0o Tc 4nc Fepouapiou 1994 TEPI TVEuajntkis IIOktniaac kai
ouyevkuw bikauwov (On. Epnepia Ta Nc KufepvnoC U. 2006 api8. 90, oneio
631, otWs TpOttOInonK). H Avypaip, eTEeepyaia, Dnmoaeun, TpOtoToinan via
eptopkoK cKOtaNTG oKApou Tou EYepiDow kaBwK aepovwewv stoyeiuv Tou,
xwpic tn Ypataouykataeon Tn Tox EP Group, attayopeetai auotnpa kuiTopoVi a
ETnpePe iAtikec Kai Tiovikke ESnuves
Anawon oumuoppwons EK
Kataaekuaotn: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Bapooia
Poiov: E+ pouTroKOTnS
MovTeAo:04-621
Eupotikn ovopaia: NEO TOOLS
EiipiaKos apBios: 00001 ÷ 99999
Hmapoua dnawon oumuoppwongc koidetai pe aTOKkoiTikn eUbuvn Tou kataoekuaotn.
To pioov Tou Tepiypapetai avwtpw oumuoppwetai e Ta aKoAoueyypapa:
Osyia 2006/42/EK yia ta unxavnmuata
O8nyia RED 2014/53/EE
Osnyia RoHS 2011/65/EE onwoc troontoinnke aTNO Tny odynia 2015/863/EE
Kai poi t aattnoeic twT potuWv:
EN 60335-1:2012/A15:2021- EN 50636-2-107:2015/A3:2021- EN 62233:2008
EN IEC 55014-1:2021- EN IEC 55014-2:2021- EN IEC 61000-3-2:2019/A1:2021- EN 61000-3-3:2013/A2:2021- EN 301 489-1 V2.2.3:2019,
EN 301 489-3 V2.3.2:2023- EN 300 328 V2.2.2- EN 50663:2017
EN IEC 63000:2018
H napouoa onlambda opop a mvo ta unxavnata oTWC diatihvtai otny ayopa kai dev TepiaaabeEgaptnata
Tou TpootBevTa aTo ToV TeAiko XphoTn n EvpeyieC Tou TTpaayatottoiouVTa aTo autov/autnv EK Twv uTePwv.
Ovouatetwuvuo kai dieuovon Tou katoikou ts EE Tou evai eouaoobntevoc va Tpoetoiaoei Tov xviokpakeo:
Ytovpapetai eovopato;
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285Bapooβia

Pawel Kowalski
TOPEX GROUP YTeUeBuvoc TioIOTnTaS
Baproβia, 2023-09-11
Anawon oumuoppwons EE
Kataaekuaotn; Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Bapsoia
Pioiov: Pioiov: Tαθμος φόρτιας
MovTeAo:K145455
Eutropikovopoaia:NEOTOOLS
Σειριακός αριθμός: 00001 ÷ 99999
Hmapoua dnawon oumuoppwons ekidetai e aokkiaotikn eubvnt Tou kataokeuaatn.
To Pioiov Tnou Tepiypapetai avwTepw oumuoppwvetai e ta akolouthetayppapa:
Odyia RED 2014/53/EE
Odbia RoHS 2011/65/EE oTWC TpoTOnoiNkE aTov obnyia 2015/863/EE
Kai TnpoTic attainoeis twv npotuWv:
ENIEC55014-1:2021-ENIEC55014-2:2021-ENIEC61000-3-
2:2019/A1:2021- EN 61000-3-3:2013/A2:2021- EN 301 489-1
V2.2.3:2019
EN 301 489-3 V2.3.2:2023- EN 300 328 V2.2.2- EN 50663:2017
EN IEC 63000:2018
H napouoa 尼 元 apop a atokkieotik to unxavnua, oTiwc auto 1x0n oTO
ayopa kai dev tepiaaabevei eapntmuata TIO PPOTIeVTAI aTTOV TEALIKO xnpotn n
TIC METTEIaBpaotnpiotntcTOU.
Ovopatewujo kai dieuvon tou katoikou ts EE tou eva
EgouoioobotnEvoc va
TPOEOTUAGeI TOV TEYVIKO qakeA:
Ytovpapetai eovouatoc:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285Bapooβia

Pawel Kowalski
TOPEX GROUP YTeUoBvoc TioTnTaS
Bapooβia, 2023-11-09
ES
MANUAL DE TRADUCCION (USUARIO) ROBOT CORTACESPED 04-621
ATENCLON ANTES DE UTILizar HERRAMIENTAS ELECTRICAS, LEA ATENTAMENTE Este MANUAL DE INSTRUCCIONES Y CONSERVELO PARA FUTURAS CONSULTAS.
NORMAS DE SEGURIDAD DETALLADAS
INSTRUCCIONES DE SEGURIDAD PARA ROBOTS CORTACESPED
Seguidad en el uso practico del robot cortacesped
RECOMENDACIONES
Lea atentamente el manual de instrucciones. Conozca los sistemas de control y el funcionacorrecto del aparato.
No permitted that el aparato sea realizado por niños o por personas que no hayan leido el manual de instrucciones. La normativa nacionaluede indicar unaidad minima para el operador.
Noulisces el robot si hayoras personas circa,especially nino s0 animales.
Recuerde que el operador o usuario es responsable de los accidentes o peligos para otheras personas o el medio ambiente.
PREPARACION
- Antes de segar, compruebe cada vez que todas las piezas del robot funcionalmente.
- Para Obtener los最好的 resultados, se recomienda segar cuando no llueva. Cuando se siega bajo la lluvia, la hierba pueda pegarse al robot, que pueda resbalar como consecuencia.
- NO siege cuando las conditiones meteorológicas sean adversas, por exemple, durante lluvias torrenciales, tormentas electricas o nevas.
- Inspeccione periodicamente la zona segada y retire piedras, residuos, alambre, huesos y除外 obstrucciones. La garantia limitada no cubre los danios causados por objetivos dejados sobre el césped.
- Para evacitar daños, no siegue a menos de 1 m de los aspersores.
jATENCION! El robot y los aspersores NO deben encenderse al mismotempo.
El robot debe programarse para functionar a una hora diferente a la de los aspersores.
NUNCA permita que los niños tocken la fuente de alimentacion, la estacion dearga en particular los contactos, las cucillas, el compartmento de la bateria oequalquier parteonde haya huecos como las ruedas.
OPERACION
- Cuidado con las cucillas giratorias! NO ponga las manos ni los pies debajo de las cucillas giratorias.
- Cuidado con los objetos esparcidos por el césped cuando lo cortas! Cuando el robot está encendido, Maintain una distancia de seguridad.
- No deje el aparato sin vigilancia si se sabe que hay animales, niños o transeulentes en las proximidades.
- Mantener una posicion segura. Mantener el equilibrio y una posicion estable en pendentes. Mientras se maneja el robot o sus periféricos, se permitte camino, pero no correr.
- Lea las instrucciones sobre cuando, sobre y como comprobar si el robot y sus periféricos, cables y alargadores presentan días o desgaste y reparar el robot. No se permitte la auto-modificacion, reparacion - a risgo de anular la garantia.
- No connecte ni toque un cable de alimentacion dañado hasta que se haya desconectado de la fuente de alimentación debido al riesgo de contacto con componentes bajo tensión.
- Conecte el robot y/o los equipos periféricos únicamente a circuitos de alimentación protegidos por un interruptor diferencial con una corriente de disparo no superior a 30mA .
- Si el robot emite un sonido anomalous o se percibe una vibracion anomalous o signaleduna alarmapulse inmediamente el boton STOP.
- ESTÁ PROHIBIDO tocar las piezas míviles peligrosas antes de desconectar la alimentación del robot.
- ESTÁ PROHIBIDO tocar las piezas peligrosas hasta que se hayan detenido porcomplete.
- Lleve sempre calzado resistente y pantalones largos cuando manipule el robot.
Corte la alimentacion electrica: Antes de bloquear el robot. - Antes de las pruebas, la limpieza o el mantenimiento.
PICTOGRAMAS Y ADVERTENCIAS
- Lea el manual de instrucciones y observe las advertencias y conditiones de seguridad.
- Antes de proceder a la limpieza o al mantenimiento, desconecte de la red electrica
- No coloque las manos ni los pies debajo de la proteccion del mecanismo de corte.
- Piezas giratorias - posibiliad de lesiones
- Mantenga una distancia de seguidad con el robot cortacesped
- Cuidado con la posibididad de lesionarse con objetos fundidos
- Proteger de la lluvia
- Mantengase fuera del alcance de los niños.
- No se suba al robot
- Posible perdida de dedos, tengacuidado
- Pendiente maximala del suelo 14^ / 25%
- Proteger las manos con guantes de trabajo
- Llevar ropa de proteccion
- Llevar calzado de proteccion
- No tirar con la basura domestica
- Recogida selectiva de residuos
- Grado de proteccion
PRECAUCION Este aparato pueda ser utilisé por niños mayores de 8 años y personas con capacities fisicas y mentalares limitadas, asi como con conocimientos o experiencia insuficientes, si son supervisados o instruidosADECADUAMDE sobre el uso seguro del aparato, de forma que Sean conscientes de los rlesgos que conlleva. Los niños no deben hacer con este aparato. Los niños no deben limpar ni realizar tareas de mantenimiento en el aparato sin supervision.
DESCRIPICION DE LOS ELEMENTOS GRAFICOS
La numeroaciónsuma se refiere a los componentes del aparato que se muestran en las páginas graficas de estemanual.
| Designación Fig. A | Opis |
| 1 | Parada de emergencia |
| 2 | Ajuste de la alta de siega |
| 3 | Panel de control de la segadora |
| 4 | Interruptor de alimentación del cortacésped |
| 5 | Ruedas motrices |
| 6 | Cuchillas de corte |
| 7 | Tambor del mecanismo de corte |
| 8 | Ruedas giratorias |
| 9 | Asa de transporte |
| 10 | Conectores de energia |
| 11 | Tapa del compartmento de las pilas |
| Designación Fig. B | Opis |
| 1 | Panel de control de la base de conexión |
| 2 | Orificios para fjjar la base de conexión |
| 3 | Conectores de energia |
| 4 | Estación de acoplimiento |
| 5 | Protector de la estación base |
| 6 | Conectores para cable de alimentación para delimitar la zona de trabajo |
| 7 | Aberturas para cables paraIGNALizar la zona de trabajo y la alimentación electrica |
| 8 | Toma de corriente de la base de conexión |
| 9 | Marcado para el correcto tendido de los cables |
| Designación Fig. D | Opis |
| 1 | Indicador luminoso del estado dearga |
| 2 | Indicador de fallo de senal |
| 3 | Indicador de cable de retencion |
| 4 | Horas de funciona / mensaje de error, luces 1-4 |
| 5 | Botón de encendido |
| 6 | Interruptor de alimentación |
| 7 | Botón de acoplimiento |
| 8 | "Botón" Confirmar |
| Designación Fig. H | Opis |
| 1 | Tornillos |
| 2 | Tapa del compartmento de las pilas con asa de transporte |
| 3 | Compartmento de las pilas |
| 4 | Toma de la batería en la tapa de la cámara |
| 5 | Batería recargable (no includa) |
| Designación Fig. I | Opis |
| 1 | Césped |
| 2 | Pared |
| 3 | Estación de acoplimiento |
| 4 | Distancia de la estación a la pared |
| 5 | Sección inicial de la linea que delimits la zona de siega |
| 6 | Longitudud de la sección |
| Designación Fig. J | Opis |
| 1a | Cable para limitar la zona de siega Comenzar |
| 1b | Cable para limitar la zona de siega Fin |
| 2 | Línea de suministro: |
| 3 | Estación de acoplimiento |
- Puede haber diferencias entre el grfico y el producto real PREPARACION PARA EL TRABAJO
INSTALACION DE LA BATERIA
- Invierta el robot cortacésped para poder acceder a su parte inferior.
- En el lugar del interruptor Fig. A4 y del asa de transporte Fig. A9 se encuesta la tapa del compartmento de las pilas Fig. H2 fjada con los 4 tornillos marcados con flechas Fig. H1.
- A continuación, desenrosque los tornillos marcados con flechas.
- Retire con cuidado la taps del compartmento Fig. H2 para no romper o desconectar los cables del interruptor Fig. A4 (esto unido a la tapa del compartmento de las pilas).
- A continuación, dé la vuelta a la tapa; en la parte inferior de la tapa está fijiado el zócalo de la bateria Fig. H4.
- Inserte la pila de la série ENERGY+ en la toma.
- De la vuelta a la tapa con la bateria colocada e insertela en el compartmento de la Fig. H3.
- Apriete los tornillos que fijan la tapa. Gire el robot hacía abajo, el aparato está listo.
ENTORNO DE TRABAJO DEL ROBOT CORTACESPED
Asegürese de que se cumplen las siguientes conditiones en la zona donde trabajo el robot:
- La alta de la hierba no supera los 60 mm.
- ATENCION Si la hierba es más larga de 60 mm, corte primo el césped con un cortacésped manual.
- No hay piedras, trozos de madera, alambres, cables con corrientes niotiros objetos extraños.
- El lugar de siega es llano y llano, sin zanjas ni trincheras, y la pendiente es inferior al 25% (14°) Fig. C1
- Para la instalación se necesitan las siguientes herramentas:
- Martillo de goma (para clavar clavijas en el suejo al tender el cable de sujecion)
- Llave hexagonal (para fjjar la estacion de carga) includa en el kit
- Alicates (paraURTARel cable que delimita la zona de trabajo)
1.INSTALACION DE LA ESTACION BASE
Elija un lugar adecuado
La estación de energia de la electricidad no se refuejo.
- Una parte del césped relativamente plana y nivelada.
-
Cerca del borde del césped.
-
Cerca de un enchufe.
- Coloque el cable alargador de 10m y la fuente de alimentacion en un lugar?sobreado, fresco y seco.
No debe haber obstáculos a menos de 2 m de la estación de energia. - Se recomienda situar la estación de energia en un lugar seco y resguardado.
- La fuente de alimentación debe estar a 30 cm por encima del nivel del suejo.
2. FIJACION DE LA ESTACION DE CARGA
Fije la estación de energia al sueño con 6 tornillos de fijación (G1) (utilizando una llave hexagonal G6).
PRECAUCION NO se pare ni carne sobre la plac de la estacion de carga.
PRECAUCION NO haga新模式 agujeros en la plac de la estacion de carga. La estacion debe atornillarse al sueo utilizing los orificios existentes.
3. TENDIDO DEL CABLE DE RETENCION
El cable de sujeción se usa para delimitar la zona de trabajo y guiar al robot de vuelta a la estación de energia.
PRECAUCION Si su vecino también utilizes un robot cortacésped, mantenga al menos 1 m de distancia entre los cables de sujeción de ambos robots.
PLANIFICACION DE LA POSICION DEL CABLE DE RETENCION
Antes de tender el cable de retencion, carne a lo长大 del limite designado y retireQUALquier objecto innecasario, como piedras.
PRECAUCION La longitud del cable de retencion no debe superar los 200 metros.
ATENCIOn El robot no debe circular sobre grava o materiales similares que poder danar las cucillas.
TENDIDO DEL CABLE DE RETENCION FIG.C
Siga las instrucciones siguientes para tender el cable de retencion alrededor de la zona de trabajo y los obstaculos. Utilice el medidor incluido en el kit para tender correctamente el cable de retencion.
PRECAUCION El cable de retencion se alimenta a muy baja tensión y es seguro para las personas y los animales domesticos.
jATENCION! Empiece por el conector "-" situado en la parte posterior de la estacion de carga Fig. B6, tire de el por debajo de la estacion (y deje una reserva de 10~cm ) y Tienda el cable alrededor del csped en sentido contrario a las agujas del reloj, terminando por el conector "+" situado en la parte posterior de la estacion de carga (deje una reserva de 10~cm ).
Asegürese de que el cable entre en contacto con el metal en los connectores "+" y "-" Fig. B6 acuérdese deURTAR el cable de sujeción sobre.
- Deje al menos 2 m libres entre el cable de sujeción y la estación de carga. El cable de esta sección se usa para acercar el robot a la estación de carga.
- Mantenga una distancia de 30 cm entre el cable de retencion y el borde del césped Fig. C2; Fig. C3.
- Fije el cable de retencion al sueño con los tacos suministrados Fig. G5. El cable de retencion debe estar recto y ligeramente tensado. Las clavijas deben colocarse cada 1 m (esto pueda modificarse en func tion de la forma del césped) Fig. C4. No entierre el cable a más de 2 cm de profundidad para evaporar debilitar la senal.
- Disponga el cable de forma que los ángulos sean superiores a 90^ Fig. C5. En estas zonas, colque el cable de retencion en curvas suaves, lo que Facilitará enormamente el desplazimiento del robot por la zona a segar.
- Si hay parterres, estanques o arboles en el cesped, rodeelos con bucles de cable de retencion Fig. C4.
- Mantenga una distancia minima de 30 cm entre el cable de retencion y los bordes de los obstáculos.
PRECAUCION En el camino hacía y desde el bucle, el cable de sujeción noDebe cruzarse Fig.C4.
- Deje un espacioestrocho en la zona de trabajo del cortacesped. Asegürese de que la distancia entre los cables de retencion que corren paralelos es superior a 1 m.
PRECAUCION Asegürese de que la estación de acoplimiento se oculta.
encuentra bajo del bucle que delimita la zona de siega. (exterior / interior) Fig.B2
4. INSTALLACION DE LA ESTACION DE CARGA
Conectar la fuente de alimentación
- Inserte el enchufe de alimentacion en una toma de pared de 110-240 V.
-
Compruebe el estado de las luces LED de la direccion de carga Fig.B1:
-
Luz verde fija: conexión establecida (robot sin cargar o totalmente cargado)
- Luz verde intermitente: el robot se está cargando.
- Luz roja intermitente: el error más comun es la "desconexión del cable de retencion".
- Luz apagada: el fallo más comun es "No hay alimentación de 100-240 V" o "No hay conexión a la fuente de alimentación".
FUNCIONAMIENTO/AJUSTES
Primera puesta en marcha del robot cortacesped
- Cuando ponga en marcha el robot por primera vez, coloque el aparato en la estación de energia de modo que los conectores de energia de la estación fig. B3 no entra en contacto con los conectores de energia del robot cortacésped fig. A10.
- Cuando el robot cortacésped se inicia por primera vez desde la aplicación del téléphone,debe realizarse unaactualización del firmware. El método de implementación se describe a continuación enactualización de software.
- JATENCION! Durante la prima connexion, el téléphone y el robot deben estar dentro del alcance de la red Wi-fi.
ACTUALIZACION DEL FIRMWARE ANTES DE UTILizar EL ROBOT.
Laactualizaciondeberelizarse delsiguiente modo.
- Coloque el robot bajo del bucle pero fuera de la estacion de carga.
- Coloque el interruptor Fig. A4 en la posicion 1.
- Mantenga pulsado el interruptor Fig.D5
- Inicie la aplicación, escanee el número QR
- Conectar la aplicación al robot
- Amplie la configuración del software pulsando el icono situado en la parte superior derecha de la pantalla.
- SeLECTIONA unaopy: Actualizar Firmware.
- A continuación, siga las instrucciones que aparecen en pantalla.
Una vez instalado el software, el aparato está lista para funciona.
CUIDADOI
- La pantalla muestra si el robot está dentro del alcance Wi-fi o Bluetooth
- La connexion a una red se indica mediante un icono que parpadea según el tipo de connexion. Una vez conectado, el icono deja de parpádear.
- El robotsolepuedemparejarsecon untelefono.
- Si se necesita conectararlo (mismo robot cortacesped), hay que eliminar el primero de la aplicacion. En la aplicacion iOS también desde los ajustes de Bluetooth.
AJUSTE DE LA ALTURA DE SIEGA:
Antes del primer corte, ajuste la alta de corte a 60~mm y, a continuacion, cambie a la alta deseada cuando todo el césped esté relativamente plano.
- Gire el mando Fig. A2 en el sentido de las agujas del reloj para augmentar la alta de corte.
- Gire el mando Fig. A2 hacía la izquierda para reducir la alta de corte.
- La alta de corte pueda ajustarse de 20mm (MIN) a 60~mm (MAX).
- ATENCLON! El motor de actionamento del tambor del mecanismo segador Fig. A7 se conecta aproximamente 10segundos despues de abandonar la base, iniciando el funcionaimiento.
CONEXION/DESCONEXION
- Coloque el interruptor Fig. A4 en la posicion "O" para desconectar la alimentacion.
- Coloque el interruptor Fig. A4 en la posicion "I" para conectar la alimentacion.
ACTIVACION DEL ROBOT Y PROGRAMACION DEL TIEMPO DE TRABAJO EN MODO MANUAL
- Mantenga pulsado el botón de encendido Fig. D5 para poder en marcha el robot. Nota: no agite el robot durante el arranque para evaporar un error de arranque. Si el robot no arranca correctamente (todas las luces encendidas de forma continua), reinicielo.
- Introduzca la contraseña pulsando dos veces el botón Fig. D6, bajo dos veces el botón Fig. D7 y una vez el botón Fig. D8 (contraseña programada en fabricula).
-
Programe el tiempo de funciona (incluido el tiempo de siega y el tiempo de carga):
-
Pulse la Fig. D6 paraaabrear el tiempo de configuracion. Una luz encendida significa 2 horas, el tiempo maximo de configuracion es de 8 horas y 4 luces en la Fig. D4. Pulse el boton Fig. D8 para confirmar yponer en marcha el robot.
jATENCION! Una vez ajustado el tiempo de funcionaimiento, el robot recordará los ajustes y empezarà aURTAR a la hora programada todos los días. El tiempo de siega sera acorde con los ajustes introducidos.
- El tiempo de configuración programado del robot, de 2 a 8 horas, es el tiempo de siega incluyendo el tiempo de energia.
- Los tiempos de funciona yoga varian en funcion de la bateria realizada.
Si desea cambiar el tiempo de funciona, siga de nuevo los pasos 2-3.
PROGRAMACION HORARIA EN MODO AUTOMÁTICO,CALENDARio DE 7 Días, DISPONIBLE A TRAVÉS DE LOS AJUSTES DE LA APLICACION
- Tras una parada de emergencia, primero hay que desbloquear el robot siguiendo el paso 2 anterior. Una vez desbloqueado el robot, PODemos enviarlo de nuevo a la estación pulsando los botones Fig. D7 y bajo confirmar con el botón Fig. D8 para devolver el cortacésped a la estación dearga.
- Al pulsar el botón de parada de emergencia STOP se borra el ciclo de modo manual y automatístico de la aplicación, si se haactivado de esta forma. Para que el robot vuelva a functionar afterwards de una parada de emergencia,debese volver a la estación de cargo y configurar de nuevo el programa de trabajo manual. En el caso de un programa automatístico, realizé la misma acción en el programa de la aplicación y confirmme su configuración.
ATENCLON La hora de arranque programada en el horario automatico no debe considerarse muy precisa. El aparato pueda arrancar hasta various horas afterwards de la hora programada.
- La activación del modo manual borra el horario programado en la aplicación y viceversa.
- El bordeado en modo manual se realiza automatistically cada variedes ciclo de siega. Se tratate de cortar la hierbacular del cable que delimita la zona de trabajo. ATencion Asegürese de que el cable este biensubjecto para no exponerlo a cortes accidentales.
- El robot cortacéspedolvera a la estación de acoplamente una vez que el dispositivo haya detectado el inizio de las precipitaciones.
- Si el roboteceuerra un obstaculo,mencras travaja,rebotar en el y seguirá travajando.
LUZ DE ESTADO DE CARGA EN LA ESTACION DE CARGA:
Luz verde continua: bateria totalmente cargada.
Luz verde intermitente - cargando.
FUERA DE LA ESTACION DE CARGA:
Luz verde continua - bateria > = 20%
Luz verde intermitente - bateria < 20% .
ATENCLON El robotdea de funcinar automatically y vuela a la estacion de carga si el nivel de la bateria descende por bajo del 20%
LUZ DE ERROR:
Luz verde continua:actualice elsystema.Conectese a la aplicacion pararealizarlaactualizacion.
Luz verde intermitente:actualizacion del systema en bajo.
Luz roja intermitente - mensaje de error 1 a 5, reinicie el robot.
Luz roja continua - mensaje de error 6 a 12, pulse "STOP" o "OK" para borrar.
INDICADOR DEL CABLE DE RETENCION:
Luz verde continua - postal correcta
Luz roja continua - sin Seed
Controles Fig. D4:
Luz intermitente - robot bloqueado.
Luz continua - robot desbloqueado.
La luz 1 se ilumina en verde: 2 horas de funciona.
Las luces 1 y 2 se iluminan en verde: 4 horas de funciona.
Las luces 1, 2 y 3 se iluminan en verde: 6 horas de funciona.
Las luces 1, 2, 3 y 4 se iluminan en verde: 8 horas de funciona.
SOFTWARE DE CONTROL DEL ROBOT CORTACESPED
Descarga IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Descarga para Android:
https://play.google.com/store/apps/details?id=com.toua.Robot
Las instrucciones del programa peuvent descargarse en:
https://bit.ly/3OBB6Gm
PARADA DE EMERGENCIA DEL ROBOT
Pulse el botón "STOP" Fig. A1 para detener el robot, mantenga pulsado el botón de encendido para apagar el robot.
MOVER EL ROBOT
Debrero del robot se encuesta un asa de elevación Fig. A10 para fácilar el manejo con una sola mano.
MANTENIMIENTO Y ALMACENAMIENTO
- Apane siempre el robot antes de proceder a su limpieza y mantenimiento.
- Desconecte la fuente de alimentacion antes de limpiar y realizar el mantenimiento de la estacion de energia.
- Utilice siempre guantes gruesos de proteccion paraCambiar las cachillas y limpar la parte inferior del robot.
- Compruebe regularmente el apriete de tornillos y tuercas. Las piezas danadas deben repararse o sustituirse por razones de seguridad.
- Compruebe periodicamente que las cuchillas peuvent girar libremente.
PRECAUCION Cuando de la vuelta al robot, colóquelo sobre el césped o sobre una superficie blanda para no dañar ni rayar la cubierta.
LIMPIEZA
ADVERTENCIA Antes de empezar a limpiar, desconnecte la corriente con el interruptor Fig. A4.
- Lave la parte delantera del robot con un limpiador de baja presión y un cepillo o pamo suave.
- Utilice un cepillo duro para eliminar los recortes de hierbay y los residuos de las cucillas, las ruedas y除外 partes de la parte inferior del robot.
- Comprueba regularmente que las ruedas no tengan barro ni hierba cortada y limpalias con un cepillo.
PRECAUCION Retire regularmente los restos vegetales de la parte inferior del robot paraataruna reduccionde la productividad.
SUSTITUCION DE CUCHILLAS
ADVERTENCIA Desconecte primero el interruptor principal ypongase guantes de proteccion.
ADVERTENCIA Utilice unicamente las cuchillas originales indicadas y homologadas por el fabricante.
Las tres cuchillas y sus tornillos deben sustituirse en una sola operacion Fig. A6.
- Los tornillos deben desenroscarse y aparearse con un destornillador.
- Compruebe que las cucillas{nuevas poder girar libremente.
RESOLUCION DE PROBLEMAS
La tablasuma proporciona orientacion para poder a diagnosticar problemas.
Si es posible, repare el aparatoastedo. Si no pueade resolver el problema,pongase encontacto con un distribuidor ocentro de service autorizzato.
ADVERTENCIA Deben tomarse medidas de proteccion.
| Problema | Posibles causas | Solutaciones |
| La luz roja parpadea en la estación dearga | Interruption del cable de sujeción | Encuentre la sección defectuosa del cable y arreglarlo |
| El robot tiene dificultades para acoplarse a la estación dearga | La estación dearga no estácorrectamenteinstalada | Véase elApartado"Preparación para eltrabajo". |
| El cable detretencion no estácolocadocorrectamente | ||
| No hay señal del cable de retencion | Sin alimentación | Comprobar la fuente de alimentación |
| El cable de sujeciónestaba conectado al revés | Intercambia losconectores "+"y "-". | |
| El cable de sujeciónno está conectado alla estación dearga | Compruebe que elcable de retencionestá correctamenteconectado a unarestación dearga | |
| Interruption delcable de sujeción | Compruebe hasta elfinal, | |
| que el cable no se ha interrupido | ||
| Cruces de cables de sujeción en el camino de ida y vuelta al bucle | Compruebe que el cable de retencion está correctamente instalado | |
| El robot traspasa la frontera | El cable de sujeción está conectado al revés | Intercambia los connectores "+" y "-". |
| El robot vibra o hace ruidos extraños | Cuchilla dañada o ausente | Comprobar y reparar los tornillos de fjisión de las cucillas |
| El disco de corte está suelto | ||
| Sustituir la cucilla |
| Códige de error | Opis | Solución |
| E01 Fig. F1 | Error de inicialización - sensor giroscópico | Coloque el robot en una superficie plana y reinicia. |
| E02 Fig. F2 | Fallo del sensor de elevación o del sensor de colisión | Ajuste la barra de colisión y la rueda de torsión en la parte delantera del cortáceped, compruebe que no estábloqueadas; colocque el robot en una superficie plana y vuela a arrancar. |
| E03 Fig. F3 | Error de initalización del motor de siega | Coloque el robot sobre una superficie plana y reinicioelo. Si el problema persiste, póngase en contacto con el servicios de atencion al cliente. |
| E04 Fig. F4 | Error de connexion de la fuente de alimentación | |
| E05 Fig. F5 | Velocidad incorrecta del motor de siega | |
| E06 Fig. F6 | Aviso de inclinación | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. |
| E07 Fig. F7 | Aviso de ascensor | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. |
| E08 Fig. F8 | Error de canal ADC | Coloque el robot sobre una superficie plana y reinicioelo. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E09 Fig. F9 | Señal incorrecta | Ver arriba en la tabla: problema - no hay Seed del cable de retencion. Compruebe todos los+puntos uno por uno y, acontinuación, colocque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. Reinicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E010 Fig.F10 | Atasco de robots | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. Reinicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E011 Fig.F11 | Velocidad incorrecta del motor bajo a paso izquierdo | Reincicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E012 Fig.F12 | Velocidad incorrecta del Derecho motor bajo a paso |
EL KIT INCLUYE:
- Robot cortacésped 1ud.
- Estación de energia y acoplimiento 1ud.
- Fuente de alimentación y cable alargador 1ud.
- Cable para delimitar la zona de trabajo 100m
Tacos de fijacion de cables 100 uds.
Tacos de fijacion de la estacion de acoplamento 6 uds.
Cuchillas de corte 3pc.
- Conectores de cable 2 uds.
- Llave hexagonal 1ud.
ESPECIFICACIONES
| Robot cortacésped 04-621 | |
| Parámetro | Valor |
| Tensión de alimentación: | 18 V CC |
| Potencia nominal maxima del motor de siega: | 50 W |
| Potencia maxima del motor autopropulsado: | 20 W |
| Grado de protección IP de la estación dearga | IPX4 |
| Grado de protección IP del robot | IPX5 |
| Grado de protección IP para el adaptorador dearga | IP 65 |
| Clase de protección del robot | III |
| Clase de protección de la estación dearga | II |
| Anchura de siega: | 180 mm |
| Ajuste de la alta de corte en laamera | 20 mm - 60 mm |
| Velocidad de rotación | 3100 rpm |
| Peso | 10,2 kg |
| Año de producción | 2024 |
DATOS SOBRE RUIDO Y VIBRACIONES
| Nivel de presión sonora | L pA= 56dB (A) K= 3dB(A) |
| Nivel de potencia acústica medido | LwA= 67dB (A) K= 3dB(A) |
Información sobre ruidoy vibraciones
El nivel de ruido emitido por el dispositivo se describe mediante: el nivel de presión acústica emitida L pA y el nivel de potencia acústica L wA, donde K designa la incertidumbre de medicación. Las vibraciones emitidas por el dispositivo se describen mediante la acceleración de las vibraciones a h, donde K designa la incertidumbre de medicación.
Los values medidos en este manual de instrucciones, es decir, el nivel de presión acústica emitida L_pA , el nivel de potencia acústica L_WA , y la acceleración de la vibración a h, se han medido de conformidad con la norma EN 62841-1:2015+A11. El nivel de vibración dato ahuede utiliser para comparar dispositivos y para la evaluación preliminar de la exposión a las vibraciones.
El nivel de vibraciones indicado es representativo solo para las aplicaciones básicas del aparato. Si el aparato se usa para otheras aplicaciones o con otheras herramrientas de trabajo, el nivel de vibracionesuedevariar.Unmantimiento inadequado o pocospecialmente del aparatoypeedovocar nivelesde vibracionmas elevados.Lascausalssmenzonadaspuedenaugentarlaexposiónalas vibracionesdurantetodalla vidautil.
Para determinar con precision la exposión a las vibraciones, deben tenerse en cuenta los periodos de "encendido" y "apagado" del dispositivo, excluyendo los periodos en los que se utilizes para su funciona. La exposión total a las vibraciones puede ser多么 menor cuando todos los factores se calculan con precision.
Para proteger al operario contra las vibraciones, utilize medidas de seguidad adiconiales, por exemple, elostenimiento periodico del aparato y de las herramrientas de trabajo,unas conditiones adecuadas de temperatura de las manos y una organizacion adeuada del trabajo.
DATOS SOBRE RUIDO Y VIBRACIONES
PROTECCION DEL MEDIO AMBIENTE

Los equipos electricos no deben desecharce con la basura domestico Eliminelo en instalaciones adecuadas. Puede solicitar informacion se la eliminacion al distribuidor del producto o a las autoridades locales residuos de aparatos electricos y electronicos (RAEE) contiener sustancias que no son neutras para el medio ambiente natural. Los no reciclados constituyen un peligro potencial para el medio ambiente la salute humana.
"Grupa Topex Spóka z ograniczona odpwiedzialnoscia". Spóka komandytowa con domicilio social en Varsovia, ul. Pograniczna 2/4 (en lo sucesivo: "Topex Group") informa que todos los derechos de autor sobre el contenido de este manual de instruciones (en lo sucesivo: "Manual"), incluyendo, pero no limitado a, su texto, fotografias publicadas, Diagramas, dibujos, asi como su composicion, pertenecen exclusamente a Topex Group y esta susjetos a proteccion legal de conformidad con la Ley de 4 de febrero de 1994, sobre Derechos de Autor y Derechos Conexos (eskaar, Diary de Leyes U. 2006 N°90 Tema 631 en su version modificada). La copia, el tratamento, la publicacion y la modificaion con fines commerciales de todo el Manual, asi como de sus elementos
individuals, sin el consentimiento por escrito del Grupo Topex, está strictamente prohibidos y pueda dar lugar a responsables civiles y penales.
Declaración de conformidad CE
Fabricante: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsovia
Producto: Robot cortacésped E
Modelo: 04-621
Nombre commercial: NEO TOOLS
Numero de série: 00001 ÷ 99999
Estadeclaracióndeconformidadse emite bajo la exclusiva responsabilidad del fabricante.
El producto descririto anteriorsmente cumple con los siguientes documentos:
Directiva sobre máquinas 2006/42/CE Directiva DER 2014/53/UE
Directiva RUSP 2011/65/UE modificada por la Directiva 2015/863/UE Y cumple los requisitos de las normas:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Esta declaración se refiere únicamente a laquina tal como se commercializa y no incluye los componentes
añadidos por el usuario final o aconteziones realizadas por el posteriormente.
Nombre y direccion de la persona residente en la UE autorizada a preparar el expediente técnico:
Firmado en nombre de:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsovia

Pawel Kowalski
Responsible de Calidad del GRUPO TOPEX
Varsovia, 2023-09-11
Declaración de conformidad de la UE
Fabricante: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285
Varsovia
Producto: Estación de energia
Modelo: K145455
Nombre commercial: NEO TOOLS
Numero de série: 00001 ÷ 99999
Esta declaración de conformidad se emite bajo la exclusiva responsabilidad del fabricante.
El producto descripto anteriormente cumple con los siguientes documents:
Directiva DER 2014/53/UE
Directiva RUSP 2011/65/UE modificada por la Directiva 2015/863/UE
Y cumple los requisitos de las normas:
ENIEC55014-1:2021;ENIEC55014-2:2021;ENIEC61000-3
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Esta declaración se refiere únicamente a laquina tal y como se introdujo en el
mercado y no incluye componentesañadidos por el usuario final o sus activités posteriores.
Nombre y direccion del residente en la UE autorizzato a preparar el expediente的技术ico:
Firmado en nombre de:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsovia

Pawel Kowalski
Responsible de Calidad del GRUPO TOPEX
Varsovia, 2023-11-09
IT
MANUALE DI TRADUZIONE (UTENTE)
ROBOT DI FALCIATURA 04-621
ATTENZIONE! PRIMA DI UTILIZZARE GLI UTENSILI ELETTRICI, LEGGERE ATTENTAMENTE IL PRESENTE MANUALE DI ISTRUZIONI E CONSERVARLO PER FUTURE CONSULTAZIONI.
REGOLE DI SICUREZZA DETTAGLIATE
ISTRUZIONI DI SICUREZZA PER I ROBOT DI FALCIATURA
Sicurezza nell'uso pratico del robot di falcatura
RACCOMANDAZIONI
Leggere attentamente il manuale di istruzioni. Impara a conoscere i sistemi di controllo e il corretto funzionamento dell'apparecchio.
Non permettere che l'apparecchio venga utilizzato da bambini o da persona che non abbiano letto le istruzioni per l'uso. Le normative nazionali possonoindicare un'età minima per l'operatore.
Non utilizzato il robot in presenza di altre personne, in particolare bambini o animali.
Si ricorda che I'opercatore o I'utente è responsable di eventuali incidenti o pericoli per altre persone o per l'ambiente.
PREPARAZIONE
- Prima di falciere, verificare agli volte che tutte le parti del robot funzionino correttamente.
- Per ottenere risultati ottimali, si consiglia di falciare in assenza di pioggia. Quando si taglia sotto la pioggia, l'erba cui attaccarsi al robot, che di consequenceza cui scivolare.
- NON falcare in condizioni atmosalferiche avverse, ad esempio in caso di pioggia battente, temporali o nevicate.
- Ispezionare periodicamente l'area tagliata e rimuovere eventuali pietre, detriti, fili, ossa e altri ostacoli. La garanzia limitata non copre i danni causati da oggetti lasciati sul prato.
- Per evitare danni, non tagliare a meno di 1 m dagli irrigatori.
ATTENZIONE! Il robot e gli sprinkler NON devono essere accesi contemporaneamente.
Il robot deve essere programmato per funzionare a un orario diverso da quello degli irrigatori.
Non permettere MAI ai bambini di toccare l'alimentatore, la stazione di ricarica, in particolare i contatti, le lame, il vano batteria o qualsiasi parte in cui vi siano spazi vuoti, come le ruote.
FUNZIONAMENTO
- Attenzione alle lame rotanti! NONMETTERe le mani o i piedi sotto le lame rotanti.
- Attenzioneagli oggetti sparsi sul prato durante la rasatura!Quando il robot è acceso,mantenere una distanza di sicurezza.
- Non lasciare l'apparecchio incustodito se nelle vicinanze ci sono animali, bambini o passanti.
- Mantenere una posizione sicura. Mantenere l'equilibrio e una posizione stabile sulle pendenze. Durante il funzionamento del robot o delle sue periferiche, è consentito camminare, ma non correre.
- Leggere le istruzioni su quando, dove e come controllare il robot e le sue periferiche, i cavi e le prolonghe per verificare la presenza di anni o usura e riparare il robot. L'automodifica e la riparazione non sono consentite, con il rischio di invalidare la garanzia.
Non collegare o toccare un cavo di alimentazione danneggiato finché non è stato scollegato dall'alimentazione, a causa del rischio di fatto con componenti tanto tensione. - Collegare il robot e/o le apparecchiature periferiche solo a circuiti di alimentazione protetti da un interrottore differenziale con una corrente di intervento non superiore a 30mA .
- Se il robot emette un suono anomalo o sinota una vibrazione anomala o segnala un allarme, premere immediatamente il pulsante STOP.
- É VIETATO toccare le parti mobili pericolose prima di spegnere il robot.
- É VIETATO toccare le parti pericolose fino al loro completo arresto.
- Indossare sempre calzature robuste e pantaloni lunghi quando si maneggia il robot.
- Interrimpere l'alimentazione: Prima di bloccare il robot.
- Prima di effettuare test, pulizia o manutenzione.
PITTOGRAMMI E AVVERTENZE
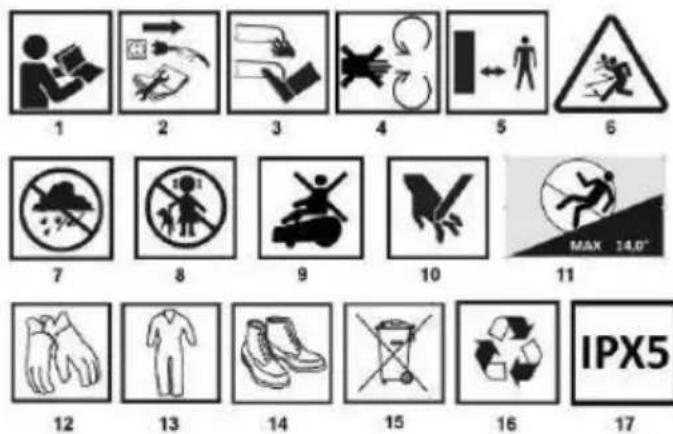
- Leggere le istruzioni per l'uso e rispettore le avventenze e le condizioni di sicurezza!
- Prima di procedere alla pulizia o alla manutenzione, scollegare l'alimentazione alla rete elettrica.
- Non mettere le mani o i piedi sotto la protezione del meccanismo di falcatura.
- Parti rotanti - possibilità di lesions
- Mantenere una distanza di sicurezza dal robot di falcatura.
- Attenzione alla possibilità di lesioni causate da oggetti fusi.
- Proteggere alla pioggia
- Tenere fuori alla portata dei bambini.
- Non salire sul robot
- Possibile perdita delle dita, fare attenzione
- Pendenza massima del terreno 14^ / 25% .
- Proteggere le mani con quanti da lavoro
- Indossare indumenti protettivi
- Indossare calzature protettive
- Non smaltire con i rifiuti domestici
- Raccolta differenziata dei rifiuti
- Grado di protezione
ATTENZIONE! Questo apparecchio può essere utilizzato da bambini di età superioreagli 8 anni e da persone con capacité fisiche e mentali limitate, nonché con conoscenze o esperenze insufficienti, a condizione che vengano sorvegliati o struitti adeguamente sull'uso sicuro dell'apparecchio e che slano consapevoll del rischi connessi. I bambini non devono giocare con questo apparecchio. I bambini non devono pulire o eseguire interventi di manutenzione sull'apparecchio alla supervisione.
DESCRIZIONE DEGLI ELEMENTI GRAFICI
La seguente numerazione si riferisce ai componenti dell'apparecchio illustrati nelle pagine grafiche di quello manuale.
| Designazione Fig. A | Opis |
| 1 | Arresto di emergenza |
| 2 | Regolatore dell'altezza di taglio |
| 3 | Pannello di controllo del tosaerba |
| 4 | Interruttore di alimentazione del tosaerba |
| 5 | Ruote motrici |
| 6 | Lame da taglio |
| 7 | Tamburo del meccanismo di taglio |
| 8 | Ruote piroettanti |
| 9 | Maniglia di trasporto |
| 10 | Connettori di ricarica |
| 11 | Coperchio del vano batteria |
| Designazione Fig. B | Opis |
| 1 | Pannello di controllo della docking station |
| 2 | Fori per il fissaggio della docking station |
| 3 | Connettori di ricarica |
| 4 | Stazione docking |
| 5 | Protezione della docking station |
| 6 | Connettori per il cavo di alimentazione per delimitare l'area di lavoro |
| 7 | Aperture per i cavi per delimitare l'area di lavoro e l'alimentazione elettrica |
| 8 | Presa di corrente della docking station |
| 9 | Marcatura per il corretto passaggio dei cavi |
| Designazione Fig. D | Opis |
| 1 | Indicatore luminoso dello stato di carica |
| 2 | Indicatore di guasto del segnale |
| 3 | Indicatore del cavo di ritenuta |
| 4 | Ore di funzionamento / messaggio di erre, spiè 1-4 |
| 5 | Pulsante di accensione |
| 6 | Interruttore di alimentazione |
| 7 | Pulsante di aggancio |
| 8 | "Pulsante" Conferma |
| Designazione Fig. H | Opis |
| 1 | Viti |
| 2 | Coperchio del vano batteria con maniglia di trasporto |
| 3 | Vano batteria |
| 4 | Presa della batteria sul coperchio della camera |
| 5 | Batteria ricaricabile (non inclusa) |
| Designazione Fig. I | Opis |
| 1 | Prato |
| 2 | Muro |
| 3 | Stazione docking |
| 4 | Distanza della stazione alla parete |
| 5 | Sezione iniziale della linea che delimita l'area di sfalcio |
| 6 | Lunghezza della sezione |
| Designazione Fig. J | Opis |
| 1a | Cavo per limitare l'area di sfalcio Inizio |
| 1b | Cavo per limitare l'area di sfalcio Fine |
| 2 | Linea di alimentazione: |
| 3 | Stazione docking |
- Potrebbero esserci differenze tra la grafica e il prodotto reale.
PREPARAZIONE AL LAVORO
INSTALLAZIONDE DELLA BATTERIA
- Invertire il robot di falcatura in modo da averere accesso alla parte inferiore del robot.
- Al posto dell'interruttore Fig. A4 e della maniglia di trasporto Fig. A9 si trova il coperchio del vano batterie Fig. H2 fissato con le 4 viti contrassegnate delle frece Fig. H1.
- Quindi svitare le viti contrassegnate dalfe frece.
- Rimuovere con cautela il coperchio del vano Fig. H2 per non rompere o scollegare i fili dell'interruttore Fig. A4 (è attaccato al coperchio del vano batteria).
- Quindi capovolgere il coperchio; sul lato inferiore del coperchio è fissata la presa della batteria Fig. H4.
- Inserire la batteria della serie ENERGY+ nella presa.
- Capovolgere il coperchio con la batteria collegata e inserirla nel vano della Fig. H3.
- Serrare le viti che fissano il coperchio. Girare il robot verso il basso: l'apparecchio è pronto.
AMBIENTE DI LAVORO DEL ROBOT FALCIATORE
Assicuratevi che le seguenti condizioni siano soddisfatte nell'area in cui il robot lavora:
L'altezza dell'erba non supera i 60~mm
ATTENZIONE! Se l'erba è più lunga di 60 mm, tagliarla prima con un tosaerba manuale.
Non ci sono pietre, pezioni di legno, fili, cavi elettrici o altri oggetti estranei.
Il sito di sfalcio è pianeggiante, privo di fossati e trincee la pendenza è inferiore al 25% (14°) Fig. C1
- Per l'installazione sono necessari i seguenti strumenti:
- Martello di gomma (per conficcare i perni nel terreno durante la posa del cavo di ritenuta)
- La chiave esagonale (per il fissaggio della stazione di ricarica) è inclusa nel kit.
Pinze (per tagliare il cavo che delimita l'area di lavoro)
1. INSTALLAZIONE DELLA STAZIONE BASE
Scegliere un luogo adatto
La stazione di ricarica deve essere collocata nella segunte posizione Fig. C3:
- Una parte del prato relativamente piatta e livellata.
- Vicino al bordo del prato.
- Vicino a una presa di corrente.
- Collocare il cavo di prolunga da 10 m e l'alimentatore in un luogo ombreggiato, fresco e asciutto.
Non devono esserci ostacoli nel raggio di almeno 2 m alla stazione di ricarica. - Si raccomanda di collocare la stazione di ricarica in un luogo asciutto e riparato.
- L'alimentazione deve trovarsi a 30~cm dal livello del suolo.
2. ATTACCO DELLA STAZIONE DI RICARICA
Fissare la stazione di ricarica al suolo con 6 viti di fissaggio (G1) (utilizzando una chiave esagonale G6).
ATTENZIONE! NON stare in piedi o camminare sulla piastra della stazione di ricarica.
ATTENZIONE! NON praticare nuovi fori nella piastra della stazione di ricarica. La stazione deve essere fissata al pavimento utilizzato i fori esistenti.
3. POSA DEL CAVO DI RITENUTA
Il cavo di contentimento viene utilizzato per delimitare l'area di lavoro e guidare il robot verso la stazione di ricarica.
ATTENZIONE! Seanche il vicino di casautilizzua un tosaerba robotizzato, mantenere una distanza di almeno 1 m tra i cavi di ritenuta di entrambi i robot.
PIANIFICAZIONE DELLA POSIZIONE DEL CAVO DI RITENUTA
Prima di posare il cavo di ritenuta, camminare lungo il confine designato e rimuovere eventuali oggetti non necessari, come ad esempio pietre.
ATTENZIONE! La lunghezza del cavo di ritenuta non deve superare i 200 metri.
ATTENZIONE! Il robot non deve passare su ghiaia o materiali simili che potrebbero danneggiare le lame.
POSA DEL CAVO DIRITENUTA FIG. C
Seguire le istruzioni riportate di seguito per stendere il cavo di ritenuta intorno all'area di lavoro eagli ostacoli. Per posare correttamente il cavo di ritenuta,utilizzare il misuratore incluso nel kit.
ATTENZIONE! Il cavo di ritenuta è alimentato a bassissima tensione ed è sicuro per le persone e gli animali domestici.
ATTENZIONE! Partendo dal connettore "-" sul retro della stazione di ricarica Fig. B6, tirarlo sotto la stazione (e lasciare una riserva di 10cm ) e stendere il cavo intorno al prato in senso antiorario, terminando con il connettore "+" sul retro della stazione di ricarica (lasciare una riserva di 10 cm). Assicurarsi che il cavo venga a contatto con il metallo in corrispondenza dei connettori "+" e "-" Fig. B6 ricordarsi di tagliare il cavo di contentimento in effesso.
- Lasciare almeno 2m di spazio vuoto tra il cavo di ritenuta e la stazione di ricarica. Il cavo in questa sezione viene utilizzato per portare il robot alla docking station.
- Mantenere una distanza di 30 cm tra il cavo di ritenuta e il bordo del prato Fig. C2; Fig. C3.
- Fissare il cavo di ritenuta al suolo con i tasselli forniti Fig. G5. Il cavo di ritenuta devesse essere diritto e leggermente teso. I tasselli devono essere distanziati agli 1 m (questo più essere modificato in base alla forma del prato) Fig. C4. Non interrare il cavo a una profundità superiore a 2 cm per evitare di indebolire il segnale.
- Disporre il cavo in modo che gli angoli siano superiori a 90^ Fig. C5. In queste aree, il cavo di contentimento deve essere posato con curve dolci, che facilitano il movimento del robot nell'area da faliare.
- Se nel prato sono presenti aiuole, stagni o alberi, circondarli con anelli di cavo di ritenuta Fig. C4.
- Mantenere una distanza minima di 30 cm tra il cavo di ritenuta e i bordi degli ostacoli. 30 cm di distanza tra il cavo di ritenuta e i bordi degli ostacoli.
ATTENZIONE! Durante l'ingresso e l'uscita dal cappio, i cavi di ritenuta non devono incrociarsi Fig. C4.
- Lasciare uno spazio ristretto nell'area di lavoro del tosaerba. Assicurarsi che la distanza tra i cavi di ritenuta che corrono paralleli sua superiore a 1 m.
ATTENZIONE! Assicurarsi che la docking station si trovi all'interno dell'anello che delimita l'area di taglio. (esterno / interno) Fig.B2
4. INSTALLAZIONE DELLA STAZIONE DI RICARICA
Collegare l'alimentazione
- Inserire la spina di alimentazione in una presa di corrente da 110-240V.
-
Controllare lo stato delle spiè LED della stazione di ricarica Fig. B1:
-
Luce verde fissa: connessione stabilita (robot non in carica o completeness carico)
Luce verte intermittente: il robot è in carica. - Luce rossa intermittente: l'erreore più comune è la "disconnessione del cavo di ritenuta".
- Luce spenta: il guasto più comune è "Assenza di alimentazione a 100-240 V" o "Manzanza di collegamento alla fonte di alimentazione".
FUNZIONAMENTO / IMPOSTAZIONI
Prima messa in funzione del robot falcatore
- Quando si avvia il robot per la prima volta, posizionare l'apparecchio sulla docking station in modo che i connettori di ricarica della stazione fig. B3 non entrino in contatto con i connettori di ricarica del robot di falcatura fig. A10.
- Quando il robot rasaerba viene avviato per la prima volta dall'applicazione del Telefono, è necessario eseguire un aggiornamento del firmware. Il metod di implementazione è descritto di seguito nella sezione Aggiornamento software.
- ATTENZIONE! Durante la prima connessione, il Telefono e il robot devono trovarsi nel raggio d'azione della rete Wi-fi.
AGGIONAMENTO DEL FIRMWARE PRIMA DI UTILIZZARE IL ROBOT.
L'aggiornamento deve essere eseguito come segue.
- Posizione are il robot all'interno dell'anello ma all'esterno della stazione di ricarica.
- Portare l'interruttre Fig. A4 in posizione 1.
- Tenere premuto l'interrutture Fig.D5
- Avviare l'applicazione, scansionare il codice QR
- Collegare l'applicazione al robot
- Espandere le impostazioni del software premendo l'icona in alto a destra dello schermo.
- Selezionare un'opzione: Aggiornamento firmware.
- Seguire quindi le istruzioni visualizzate sullo schermo.
Dopo l'installazione del software, l'apparecchio è pronto per il funzionamento.
ATTENZIONE!
- Il display indica se il robot si trova nel raggio d'azione del Wi-fi o del Bluetooth.
- La connessione a una rete è indicata da un'icona lampeggiante per il tipo di connessione. Una volta collegata, l'icona smette di lampegiare.
Il robot può essere abbinato a un solo Telefono. - Se è necessario collegarne un'alto (lo stesso robot rasaerba), il primo deve essere rimioso dall'applicazione. Nell'app iOSanche delle impostazioni Bluetooth.
REGOLAZIONE DELL'ALTEZZA DI TAGLIO:
Prima della prima rasatura, impostare l'altezza di taglio a 60mm e poi passare all'altezza desiderata quando l'intero prato è relativamente piatto.
- Ruotare la manopola Fig. A2 in senso orario per augmentare l'altezza di taglio.
- Ruotare la manopola Fig. A2 versus sinistra per ridurre l'altezza di taglio.
L'altezza di taglio può essere regolata da 20 mm (MIN) a 60 mm (MAX).
ATTENZIONE! Il motore di azionamento del tamburo del meccanismo di falciatura Fig. A7 si accende circa 10 secondi dopo aver lasciatto la base, avviando il funzionamento.
ACCENSIONE/SPEGNIMENTO
- Portare l'interruttore di Fig. A4 in posizione "O" per disattivare l'alimentazione.
- Portare l'interruttore di Fig. A4 in posizione "l" per attivare l'alimentazione.
ATTIVAZIONE DEL ROBOT E PROGRAMMAZZIONE DEL TEMPO DI LAVORO IN MODALITA MANUALE
- Tenere premuto il pulsante di accensione Fig. D5 per avviare il robot. Nota: non scuotere il robot durante l'avvio per evitare un erre di avvio. Se il robot non si avvia correttamente (tutte le spie si accendono continuamente), riaviarlo.
- Inserire la password premendo due volte il pulsante Fig. D6, poi due volte il pulsante Fig. D7 e una volta il pulsante Fig. D8 (password programmata in fabbrica).
-
Programmare il tempo di funzionamento (compreso il tempo di falciatura e il tempo di ricarica):
-
Premere la Fig. D6 per impostare la durata di funzionamento. Una luce accesa significa 2 ore, il tempo massimo di funzionamento è di 8 ore e 4 lui accese Fig. D4. Premere il pulsante Fig. D8 per confermare e awiare il robot.
ATTENZIONE! Una volta impostato l'orario di funzionamento, il robot ricordera le impostazioni e inizIERÀ a falciare agli giorni all'ora programmata. Il tempo di falciatura sare conforme alle impostazioni inserte.
- Il tempo di funzionamento programmato del robot, da 2 a 8 ore, è il tempo di falciatura, compreso il tempo di ricarica.
- I tempi di funzionamento e di ricarica variano a seconda della batteria utilizzata.
Se si desidera modificare l'orario di funzionamento, seguire nuovamente i punti 2-3.
LA PROGRAMMAZIONE DELL'ORARIO IN MODALITA AUTOMATICA, CON PIANIFICAZIONE SU 7 GIORNI, E DISPONIBILE ATTRAVERSO LE IMPOSTAZIONI DELL'APP
- Dopo un arresto di emergenza, il robot deve essere prima sbloccato seguendo il passo 2 di cui sopra. Una volta sbloccato il robot, possiamo rimandarlo alla stazione premendo i pulsanti: Fig. D7 e confermare con il pulsante Fig. D8 per riportare il tosaerba alla stazione di ricarica.
- Premendo il pulsante di arresto di emergenza STOP si cancella il ciclo di lavoro manuale e automatico dall'applicazione, se è stato attivato in questo modo. Affinché il robot possa ricominciare a lavorare dopo un arresto di emergenza, è necessario riportarlo alla stazione di ricarica e impostare nuovamente il programma di lavoro manuale. Nel caso di un programma automatico, eseguire la stessa azione nel programma dell'applicazione e confirmare le impostazioni.
ATTENZIONE! L'orario di avvio programmato nel programma automatico non deve essere considerato molto preciso. L'appareccchio può avviarsianche diversi minuti dopo l'orario impostato.
- L'attivazione della modalità manuale cancella la pianificazione programmata nell'applicazione e viceversa.
- La cordatura in modalità manuale avviene automaticamente agli pochi cici di taglio. Si tratta di tagliare l'erba vicino al cavo che delimita l'area di lavoro. ATTENZIONE! è necessario assicurarsi che il cavo sa fissato correttamente per non esporlo a tagli accidentali.
- Il robot falcatore tornera alla docking station una volta che il dispositivo avrare rilevato l'inizio delle precipitazioni.
- Se il robot incontrera un ostacolo durante il lavoro, rimbalza su diesso e continua a lavorare.
LA SPIA DELLO STATO DI CARICA NELLA STAZIONE DI RICARICA: Luce verde continua - batteria completamente carica. Luce verde intermittente - carica.
ALL'ESTERNO DELLA STAZIONE DI RICARICA:
Luce verde continua - batteria > = 20%
Luce verte intermittente - batteria < 20%
ATTENZIONE! Il robot interrompe automaticamente il lavoro e torna alla stazione di ricarica se il livello della batteria scende quello 20% .
LUCE DI ERRORE:
Luce verte continua: aggiornare il sistema. Collegarsi all'app per eseguire l'aggiornamento.
Luce verde intermittente - aggiornamento del sistema in corso.
Luce rossa intermittente - messaggio di erre da 1 a 5, riavviare il robot.
Luce rossa continua - messaggio di erre de 6 a 12, premere "STOP" o "OK" per cancellare.
INDICATORE DEL CAVO DI RITENUTA:
Luce verde continua - segnale corretto
Luce rossa continua - nessun segnale
Controlli Fig. D4:
Luce intermittente - robot bloccato.
Luce continua - robot sbloccato.
La luce 1 si illumina di verde: 2 ore di funzionamento.
Le luci 1 e 2 si illuminano di verde: 4 ore di funzionamento.
Le luci 1, 2 e 3 si illuminano di verde: 6 ore di funzionamento.
Le luci 1, 2, 3 e 4 si illuminano di verde: 8 ore di funzionamento.
SOFTWARE PER IL CONTROLLO DEL ROBOT FALCIATORE Scaricare IOS:
https://apps.apple.com/cn/app/toua/id6449251720
Scaricare Android:
https://play.google.com/store/apps/details?id=com.toua.robot
Le istruzioni per il programma possono essere scaricate all'indirizzo: https://bit.ly/3QBB6Gm
ARRESTO DI EMERGENZA DEL ROBOT
Premere il pulsante "STOP" Fig. A1 per arrestare il robot, tenere premuto il pulsante di accensione per spegnere il robot.
SPOSTAREILROBOT
Sotto il robot si trova una maniglia di sollevamento (Fig. A10) per un facile utilizzo con una sola mano.
MANUTENZIONE E STOCCAGGIO
- Spagnere sempre il robot prima della pulizia e della manutenzione.
- Prima di procedere alla pulizia e alla manutenzione della stazione di ricarica, scollegare l'alimentazione.
- Indossare sempre quanti protettivi spessi durante la sostituzione delle lame e la pulizia della parte inferiore del robot.
- Controllare regolarmente il serraggio di bulloni e dadi. Le parti danneggiate devono essere riparate o sostuite per motivi di sicurezza.
- Controllare regolarmente che le lame possano ruotare liberamente.
ATTENZIONE! Quando si capovolge il robot, appoggiarlo sul prato o su una superficie morbida per non danneggiare o graffiare il coperchio.
PULIZIA
ATTENZIONE! Prima di iniziare la pulizia, spegnere l'alimentazione con l'interruttore Fig. A4.
- Lavare la parte anteriore del robot con un detergente a bassa pressione e una spazzola o un panno morbido.
- Utilizzate una spazzola dura per rimuovere i risultui di erba tagliata e i detriti dalle lame, dalle ruote e da altre parti della parte inferiore del robot.
- Controllate regolarmente che le ruote non siano sporche di fango o di erba tagliata e pulitele con una spazzola.
ATTENZIONE! Rimuovere regolarmente i risultui vegetali alla parte inferiore del robot per evitare una riduzione della produttività.
SOSTITUZIONE DELLA LAMA
ATTENZIONE! Spagnere prima l'interruttore principale e indossare i quanti di protezione.
ATTENZIONE! Utilizzato solo le lame originali indicate e APPROVATE dal produttore.
- Tutte e tre le lame e le relative viti devono essere sostituite in un'unica operazione di sostituzione Fig. A6.
Le viti devono essere svitate e serrate con un cacciavite. - Verificare che le nuove lame possano ruotare liberamente.
RISOLUZIONE DEI PROBLEMI
La tabella segunte fornisce indicazioni per la diagnosi dei problemi.
Se possiblo, riparare il dispositivo da soli. Se non è possiblo risolverve il problema, rivolgersi a un rivenditore o a un centro di assistenza autorizzato.
AVVERTENZA! è necessario adottare misure di protezione.
| Problema | Possibili cause | Solutazioni |
| La luce rossa lampeggia sulla stazione di ricarica | Interruzione del cavo di ritenuta | Individuare il fatto di cavo difettoso e sistmare il tutto |
| Il robot ha difficoltà ad agganciarsi alla stazione di ricarica | La stazione di ricarica non è installata correttamente | Vedere la sezione "Preparazione al lavoro". |
| Il cavo di ritenuta non è posizionato correttamente | ||
| Nessun segnale dal cavo di ritenuta | Nessuna alimentazione | Controllare la fonte di alimentazione |
| Il cavo di ritenuta è stato collegato al contrario | Scambiate i connettori " +" e "-". | |
| Il cavo di ritenuta non è collegato alla stazione di ricarica | Controllare che il cavo di ritenuta sia correttamente collegato a una stazione di ricarica | |
| Interruzione del cavo di ritenuta | Controllare tutto il percorso, che il cavo non sia stato interrotto | |
| Incroci di cavi di sicurezza all'andata e al ritorno dal loop | Controllare che il cavo di ritenuta sia installato correttamente | |
| Il robot vaoltire il confine | Il cavo di ritenuta è stato collegato al contrario | Scambiate i connettori "+"e "-" |
| Il robot vibra o emette rumori insoliti | Lama danneggiata o mancante | Controllare e riparare le viti di fissaggio della lama |
| Il disco della lama è allentato | ||
| Sostituire la lama |
| Codice di erre | Opis | Soluzione |
| E01 Fig. F1 | Errore di initiazizzazione - sensore giroscopico | Posizionare il robot su una superficie piana e riavviare. |
| E02 Fig. F2 | Guasto al sensore di sollevamento o al sensore di collisione | Regolare la barra di collISIONE e la ruota di torsione sulla parte anterio del tosaerba, verificare che non siano bloccate; posizionare il robot su una superficie piana e riavviare. |
| E03 Fig. F3 | Errore di initiazizzazione del motore di falciatura | Posizionare il robot su una superficie piana e riavviare. Se il problema persistsente, contattare il servizio clienti. |
| E04 Fig. F4 | Errone di collegamento dell'alimentazione | |
| E05 Fig. F5 | Velocità del motore di falciatura non corretta | |
| E06 Fig. F6 | Avviso di inclinazione | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. |
| E07 Fig. F7 | Avviso di sollevamento | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. |
| E08 Fig. F8 | Errone del canale ADC | Posizionare il robot su una superficie piana e riavviare. Se il problema persistsente, contattare il servizio clienti. |
| E09 Fig. F9 | Segnale errato | Vedi sopra nella tabella: problema - nessun segnale dal cavo di ritenuta. Controllare tutti i punti uno per uno, quando posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E010 Fig. F10 | Marmellata di robot | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E011 Fig. F11 | Velocità errata del motore passo-passo sinistro | Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E012 Fig. F12 | Velocità non corretta del diritto motore passo-passo |
IL KIT CONTIENE:
Robot di falciatura 1 pezzo.
- Stazione di ricarica e docking 1pc.
- Alimentazione e cavo di prolunga 1pc.
Cavo per la delimitazione dell'area di lavoro 100m
Tasselli per il fissaggio dei cavi 100 pz.
Tasselli di fissaggio della docking station 6 pz.
Lame da taglio 3 pz.
- Connettori per cavi 2 pz.
- Chiave esagonale 1 pz.
SPECIFICHE
| Robot di falciatura 04-621 | |
| Parametro | Valore |
| Tensione di alimentazione: | 18 V CC |
| Potenza nominale massima del motore di falciatura: | 50 W |
| Potenza massima del motore semovente: | 20 W |
| Grado di protezione IP per la stazione di ricarica | IPX4 |
| Grado di protezione IP per il robot | IPX5 |
| Grado di protezione IP per l'adattatore di ricarica | IP 65 |
| Classe di protezione del robot | III |
| Classe di protezione della stazione di ricarica | II |
| Larghezza di taglio: | 180 mm |
| Regolazione dell'altezza di taglio nell'intervallo | 20 mm - 60 mm |
| Velocità di rotazione | 3100 giri/min. |
| Peso | 10,2 kg |
| Anno di produzione | 2024 |
DATI SU RUMORE E VIBRAZIONI
| Livello di pressione sonora | \( {\mathrm{L}}_{\mathrm{{PA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Livello di potenza sonora misurato | \( {\mathrm{{Lw}}}_{\mathrm{A}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Informazioni su rumore e vibrazioni
Il livello di rumore emesso dal dispositorio è descritto da: il livello di pressione sonora emesso L PA e il livello di potenza sonora L WA, dove K indica l'incertezza di misura. Le vibrazioni emesse dal dispositorio sono descritte dall'accelerazione di vibrazione a h, dove K indica l'incertezza di misura.
I valori misurati in quello manuale di istruzioni, ovvero il livello di pressione sonora emesso LpA , il livello di potenza sonora LWA , e l'accelerazione delle vibrazioni a_h , sono stati misurati in conformità alla norma EN 62841-1:2015+A11. Il livello di vibrazione a_h può essere utilizzato per confrontare i dispositivi e per una valutazione preliminare dell'esposizione alle vibrazioni.
Il livello di vibrazioni indicate è rappresentativo solo per le applicazioni di base del dispositivo. Se il dispositivo viene utilizzato per altre applicazioni o con altri strumenti di lavoro, il livello di vibrazioni può variarie. Una manutenzione inadeguata o rara del dispositivo causale livelli di vibrazione più elevati. Le cause sulla citate possono augmentare l'esposizione alle vibrazioni per tutte la durata di vita del dispositivo.
Per determinare con precisione l'esposizione alle vibrazioni, è necessario prendere in considerazione i periodi di "accensione" e "spegnimento" del dispositivo, escludendo i periodi in cui vlene utilizzato per il funzionamento. L'esposizione totale alle vibrazioni più essere molto più Bassa se tutti i fattori sono stimati con precisione.
Per proteggere l'opercatore delle vibrazioni,utilizzare misure di sicurezza aggintive, ad esempio una manutenzione regolare del dispositivo e degli strumenti di lavoro, condizioni adeguate di temperatura delle mani e una corretta organizzazione del lavoro.
DATI SU RUMORE E VIBRAZIONI
PROTEZIONE DELL'AMBIENTE
| Le apparecchiature elettriche non devono essere smaltite insieme ai domestici. Smaltira in strutture adequate. Le informazioni sullo smaltimento possono essere richieste al rivenditore del prodotto o al autorità locali. I rifiuti di apparecchiature elettriche ed elettroniche (RAEE contengono sostanse non neutre per l'ambiente naturale. I RAEE nor riciclati rappresentano un potenziale pericolo per l'ambiente e la salute umana. |
"Grupa Topex Spolka z ograniczona odpwiedzialnosci". Spolka komandytowa con se de legale a Varsavia, ul. Pograniczna 2/4 (di seguito: "Topex Group") informa che tutti i diritti d'autore sul contento del presente manuale di istruzioni (di seguito: "Manuale"), compresi, ma non solo, il testo, le fotografie pubblicate, i diagrammi, i disegni, nonché la sua composizione, apparpengono esclusivamente a Topex Group e sono soggetti a tutela legale ai sensi della legge del 4 febbraio 1994, sul diritto d'autore e sui diritti connessi (ovvero Gazzetta Ufficiale U. 2006 n. 90 voce 631 e successive modifiche). La copia, l'elaborazione, la pubblicazione, la modifica a fini commerciali dell'intero Manuale e di singoli elementi dello stesso,enza il consenso scritto del Grippo Topex, è severamente vietala e può accomportare responsabilità civili e penali.
Dichiarazione di conformità CE
Produttore: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsavia
Prodotto: Robot di falciatura E+
Modello:04-621
Nome commerciale: NEO TOOLS
Numero di seri: 00001 ÷ 99999
La presente dichiarazione di conformità è rilasciate nelle escludiva responsabilità del produttore.
Il prodotto sopra descrizione è conforme ai seguenti documenti:
Direttiva macchine 2006/42/CE
Direttiva RED 2014/53/UE
Direttiva RoHS 2011/65/UE, modificata alla direttiva 2015/863/UE.
E soddisfa i requisiti degli standard:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
La presente dichiarazione si riferisce esclusivamente alla macchina dati come immessa sul mercato e non comprende i componenti
aggiunte dall'utente finale o da azioni da lui compite successivement.
Nome e indirizzo della persona residente nell'UE autorizzata a preparare il fascicolo technique:
Firmato a nome di:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsavia

Pawel Kowalski
Responsabile della qualità del gruppo TOPEX
Varsavia, 2023-09-11
Dichiarazione di conformità UE
Produttore: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsavia
Prodotto: Stazione di ricarica
Modello: K145455
Nome commerciale: NEO TOOLS
Numero di serie: 00001 + 99999
La presente dichiarazione di conformità è rilasciate nelle escludiva responsabilità del produttore.
Il prodotto sopra descrizione è conforme ai seguenti documenti:
Direttiva RED 2014/53/UE
Direttiva RoHS 2011/65/UE, modificata alla direttiva 2015/863/UE.
E soddisfa i requisiti degli standard:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
La presente dichiarazione si riferisce esclusivamente alla macchina casi come è stata introdotta nella
e non comprende i componenti aggiunti dall'utente finale o dal le sue attività successive.
Nome e indirizzo del residente nell'UE autorizzato a
prepare il dossier tecnico:
Firmato a nome di:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsavia

Pawel Kowalski
Responsabile della qualità del gruppo TOPEX
Varsavia, 2023-11-09
NL VERTALING (GEBRUKERS)HANDLEIDING MAAIROBOT 04-621
LET OP! LEES DEZE GEBRUIKSAANWIJZING ZORGVULDIG DOOR VOORDAT U ELEKTRISCH GEREEDSCHAP BEDIENT EN BEWAAR HEM VOOR TOEKOMSTIG GEBRUIK.
GEDETAILLEERDE VEILIGHEIDSREGELS
VEILIGHEIDSINSTRUCTIES VOOR MAAIROBOTTER
Veiligheid bij het praktische gebruik van de maairobot
AANBEVELINGEN
Lees de gebruiksaanwijzing zorgvuldig door. Leer de bedieningssystemen en de juiste werking van het apparatusat kennen.
Laat het apparaat Niet gebruiken door kinderen of Personen die de gebruiksaanwijzing Niet hebben gelezen. Nationale voorschriften können een minimumleeftijd voor de gebruiker aangeven.
Gebruik de robot Niet als er andere mensen, vooral kinderen of dieren, in de buurt+zijn.
Vergeet zich dat de operator of gebruiker verantwoordelijk is voor ongelukken of bevaren voor andere mensen of het milieu.
VOORBEREIDING
- Controller elke keer voor het maaien of alle onderdelen van de robot goed werken.
- Voor de Beste resultaten is het aan te raden om te maaien bij regenvrij weer. Bij maaien in de regen kan het gras aan de robot blijven plankken, waardoor deze kan weglijkden.
Maai NIET bij slechte weersomstandigheden, bijv. tijdens zware regenval, onweer of sneeuuwval. - Inspector het gemaaide gebied regelmatig en verwijder stenen, pauin, draden, botten en andere obstakels. De beperkte garantie dekt geen schade veroorzaakt door voorwerpen die op het gazon zijn achtergebleven.
- Maai Niet binnen 1 m van de spreiekopen om schade te voorkomen.
LET OP! De robot en de sprinklers mogen NIET tegelijkkortijd worden ingeschakeld.
De robot要去en geprogrammeerd om op een anderijdstip te werken dan de sprinklers.
Laat kinderen NOOIT de voeding, het laadstation en in het bijzonder de contacten, de lamellen, het batterijvak of onderdelen met openings zoals wielen aanraken.
WERKING
- Kijkuit voor draaiende bladen! Plaats je handen of voeten NIET onder draaiende bladen.
- Kijkuit vooroorwerpen die op het gazon liggen tijdens het maaien! Houd een veilige afstand als de robot aan staat.
- Laat het apparaat Niet onbeheerd anschter als er dieren, kinderen of omstanders in de buurt zich.
- Een veilige positie aanhouden. Zorg voor evenwicht en een stabiele positie op hellingen. Tijdens het bedieren van de robot of derandapparatuur is het toegestaan om te lopen, maar nicht om te rennen.
- Lees de instructies over wanneer, waar en hoe de robot en de randaparatuur, kabels en verlengsnoeren te controleren op schade of slijtage en de robot te repareren. Zelf modifiereren, repareren is Niet toegestaan - met het risico dat de garantie vervalt.
- Sluit een beschadigde voedingskabel Niet aan en raak deze Niet aan voordat deze is losgekoppeld van de voeding vanwege het risico op contact met onderdelen die onder spanning staan.
- Sluit de robot en/of randapparatuur alleen aan op stroomcircuits die beveiligd zijn met een aardlekschakelaar met een uitschakelstroom van maximaal 30mA .
- Als de robot een abnormal geluid maakt, een abnormale trilling waardeemt of een alarmsignaal geeft, druk dan onmiddelijk op de STOP-knop.
- HET IS VERBODEN om gevaarlijke bewegende delen aan te raken voordat u de stroom maar de robot uitschakelt.
- HET IS VERBODEN om gevaarlijke onderdelen aan te raken totdat ze volledig tot stilstand zichen gekomen.
- Draag altiijd stevig schoeisel en een lange broek bij het hanteren van de robot.
- Sluit de stroomtoevoer af: Voordat u de robot vergrendelt.
- Voor testen, reinigen of onderhoud.
PICTOGRAMMEN EN WAARSCHUWINGEN
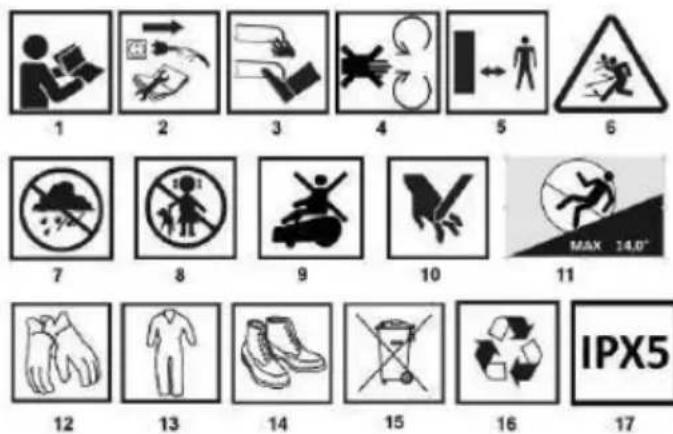
- Lees de gebruiksaanwijzing en neem de waarschuwingen en veiligheidsvoorschriften in acht!
- Voordat u reinigings- of onderhoudswerkzaamheden UITvoert, moet u de voeding uitschakelen.
- Plaats uw handen of voeten Niet onder de afscherming van het maaimechanisme.
- Roterende delen - kans op letsel
- Bewaar een veilige afstand tot de maairobot
- Pas op voor letsel door gegoten voorwerpen
- Beschermen gegen regen
- Buiten bereik van kinderen bewaren.
- Rijd Niet op de robot
- Mogelijk verlies van vingers, wees voorzichtig
- Maximale bodemhelling 14^ / 25% .
- Handen beschermen met werkhandsschoenen
- Draag beschermende kleding
- Draag beschemend schoeisel
- Niet met het huishoudelijk afval weglooien
- Selectieve afvalinzameling
- Beschermingsgraad
LET OP! Dit apparaat kan worden gebruikt door kinderen ouder dan 8aar en personen met beperkte fysieke en mentale vaardigheden en met onvoldoende kennis of ervaring, mits ze onder toezicht staan of de juiste instructies hebben gekregen voor een veilig gebruik van het apparaat, zodate ze zich bewust zichn van de rislco's. Kinderen mogen nicht met dit apparaat spelen. Kinderen mogen het apparaat Niet schoonmaken of onderhonden zonder toezicht.
BESCHRIJVING VAN DE GRAFISCHE ELEMENTEN
De volgende nummering verwijst maar de onderdelen van het apparaat
getoond op de grafische pagina's van deze handleiding.
| Aanduiding Fig. A | Opis |
| 1 | Noodstop |
| 2 | Instelbare maaihoogte |
| 3 | BedieningspaneelMAaier |
| 4 | Aan/uit-schakelaarmaaier |
| 5 | Aandrijfwielen |
| 6 | Snijbladen |
| 7 | Trommel met snijmechanisme |
| 8 | Zwenkwielen |
| 9 | Draagbeugel |
| 10 | Aansluitingen voor opladen |
| 11 | Dekselbatterijcompartment |
| Aanduiding Fig. B | Opis |
| 1 | Bedieningspaneel dockingstation |
| 2 | Gaten voor het vastzetten van het dockingstation |
| 3 | Aansluitingen voor opladen |
| 4 | Docking station |
| 5 | Docking station bescherming |
| 6 | Connectoren voor voedingskabel om het werkgebied te markeren |
| 7 | Kabelopeningen voor marketing van hetwerkgebied en de stroomvoorziening |
| 8 | Stopcontact docking station |
| 9 | Markering voor correcte kabelgeleiding |
| Aanduiding Fig. D | Opis |
| 1 | Indicatielampje oplaadstatus |
| 2 | Indicator voor signaalstoring |
| 3 | Indicator voor begrenzingskabel |
| 4 | Bedrijfsuren / foulmelding, lampjes 1-4 |
| 5 | Aan/uit-knop |
| 6 | Stroomschakelaar |
| 7 | Docking-knop |
| 8 | "Knop "Bevestigen |
| Aanduiding Fig. H | Opis |
| 1 | Schroeven |
| 2 | Batterijvakdeksel met transportgreep |
| 3 | Batterijvak |
| 4 | Batterijaansluiting op het deksel van de kamer |
| 5 | Oplaadbare batterij (niet meegeleverd) |
| Aanduiding Fig. I | Opis |
| 1 | Gazon |
| 2 | Muur |
| 3 | Docking station |
| 4 | Afstand van station tot de muur |
| 5 | Eerste deel van de lijn die het maaigebied afbakent |
| 6 | Lengte van sectie |
| Aanduiding Fig. J | Opis |
| 1a | Kabel om het maaigebied te beperken Beginnen |
| 1b | Kabel om het maaigebied te beperken Ende |
| 2 | Toevoerleiding: |
| 3 | Docking station |
- Er{kunnen verschillen zijn tussen de afbeelding en het daadwerkelijkke product.
VOORBEREIDEN OP WERK
BATTERIJ-INSTALLATIE
- Draai de maairobot om zodat er toegang is tot de onderkant van der robot.
Op deplaats van de schakelaar fig. A4 en de transportgreep fig. A9 bevindt zich het deksel van het batterijvak fig. H2, dat met de 4 met pijlen gemarkeerde schroeven fig. H1 worden vastgezet. - Draai verwolgens de schroeven los die met pijlen zich gregarkeerd.
- Verwijder voorzichtig het deksel van het batterijvak Fig. H2 om de draden van de schakelaar Fig. A4 Niet te breken of los te koppelen (deze is bevestigd aan het deksel van het batterijvak).
- Draai cervolgens het deksel om, aan de onderkant van het deksel zit de batterijaansluiting Fig. H4.
- Plaats de batterij van de ENERGY+ série in de aansluiting.
Klap het klepje open met de batterij bevestigd en plaats deze in het Fig. H3 compartment. - Draai de schroeven aan waarmee het deksel vastzit. Draai de robot maar beneden, het apparaat is klaar.
WERKOMGEVING VAN DE MAAIROBOT
Zorg ervoor dat aan de volgende voorwaarden worden voldaan in het gebied waar de robot werk:
- De grashoogte is Niet hoger dan 60~mm
- LET OPI! Als het grayscale is dan 60mm , maai het gazon dan eerst met een handmaier.
- Er zijn geen stenen, stukken hout, draden, stroomvoerende kabels of andere vreemde voorwerpen.
- Het maiagebied is vlak, vrij van greppels en greppels en de helling is minder dan 25% (14°) Fig. C1
- De volgende gereedschappen zijn nodig voor de installmente:
Rubberen hamer (om pinnen in de grond te slaan bij het leggen van de begrenzingskabel) - Inbussleutel (voor het bevestigen van het laadstation) is inbegrepen in de kit
- Tang (voort het doorknippen van de kabel die het werkgebied begrenst)
1. INSTALLATIE BASISSTATION
Kies een geschichte locatie
Het laadstation moet op de volgende locatie worden geplaatst Fig. C3:
- Een relatief vlak en vlak deel van het gazon.
Dicht bij de rand van het gazon.
In de buurt van een stopcontact. - Plaats de verlangkabel van 10 m en de voeding op een schaduwrijke, koele en droge plaats.
- Er mogen zich geen obstakels bevinden binnen minstens 2m van het laadstation.
- Het worden aanbevolen om het laadstation op een droge en beschutte plaatst te zetten.
- De voeding要去 zich 30 cm boven de grond bevinden.
2. BEVESTIGING LAADSTATION
Bevestig het laadstation aan de grond met 6 bevestigingschroeven (G1) (met een G6 inbussleutel).
LET OP! Ga NIET op de planta van het laadstation staan of lopen.
LET OP! Maak GEENijke gaten in deplaat van het laadstation. Het station moet aan de vloer worden vastgeschroefd met behulp van de bestaande gaten.
3. LEGGEN VAN DE BEGRENZINGSKABEL
De begrenzingskabel worden gebruikt om het werkgebied af te bakenen en de robot terug te leiden maar het laadstation.
LET OP! Als uw buurman ook een robotmaaier gebruikt, houd dan minstens 1 m afstand:tussen de begrenzingskabels van beiden robots.
PLANNING VAN DE POSITIE VAN DE BEGRENZINGSKABEL
Loop voor het leggen van de begrenzingskabel langus de aangewezen grens en verwijder alle onnodige voorwerpen, zoals stenen.
LET OP! De lenghte van de begrenzingskabel mag Niet meer+zijn dan 200 meter.
WAARSCHUWING! De robot mag Niet over grind of soortgelijke materialen rijden die de messen können beschadigen.
LEGGEN VAN DE BEGRENZINGSKABEL FIG.C
Volg de onderstaande instructies om de afterschermkabel rond het werkgebied en obstakels te leggen. Gebruik de bijgeleverde meter om de afterschermkabel correct te leggen.
LET OP! De vasthoudkabel staat onder zeer lage spanning en is veilig voor mensen en huisdieren.
LET OP! Begin bij de "- connector aan de achterkant van het laadstation Afb. B6 trek deze onder het station door (en LAST 10 cm ruimte) en leg de kabel gegen de klok in om het gazon Been, eindigend bij de "+" connector aan de achterkant van het laadstation (laat 10 cm ruimte vrij). Zorgervoordatde kabel in contactkomt met metaal bij de "+en -"
aansluitingen Fig. B6 Vergeet nicht de overtollige kabel af te knippen.
- Laat minstens 2m vrij tussen de vasthoudkabel en het laadstation. De kabel in dit gedeelte worden gebruikt om de robot maar het dockingstation te brengen.
- Houd 30 cm afstand:tussen de kabel en de rand van het gazon Fig. C2;Fig.C3.
- Bevestig de kabel aan de grond met de meegeleverde pluggen Fig. G5. De kabel要去recht+zijn enlichtjes gespannen. De pluggen要去en om de 1 m worden aangebracht (dit kan worden aangepast afhankelijk van de vorm van het gazon) Fig. C4. Graaf de kabel Niet dieper in dan 2 cm om het signaal Niet te verzwakken.
- Leg de kabel zo dat de hoeken groter+zijn dan 90^ Fig. C5. Leg de begrenzingskabel in dergelijkke gebieden in zachte bochten, waardoor het voor de robot veel gemakkelijker worden om rond het te maaien gebied te bewegen.
- Als er bloemperken, vijvers of bomen in het gazon liggen, omring deze dan met lussen van afschemkabels Fig. C4.
- Houd min. 30 cm afstandussen de kabel en de randen van obstakels.
LET OP! Op weg aan en van de Ius mogen de vasthoudkabels elkaar.
niet kruisen Fig.C4.
- Laat een smalle ruimte vrij in het werkgebied van de maaier. Zorg ervoor dat de afstand+tussen parallel lopende begrenzingskabels groter is dan 1 m.
LET OP! Zorg ervoor dat het docking station zich binnen de Ius bevindt die het maagebied markeert. (buiten/binnen) Fig.B2
4. INSTALLATIE VAN LAADSTATION
Sluit de voeding aan
- Steek de stekker in een stopcontact van 110-240V.
- Controller de status van de LED-lampjes op het laadstation Afb. B1:
- Brandt groen: verbinding tot stand gebracht (robot nicht opgeladen of volledig opgeladen)
-
Intermitterend groenlicht: de robot worden opgeladen.
-
Intermitterend rood lampje: de meest voorkomende fouit is "ontkoppeling van de vasthoudkabel".
- Licht uit: de meest voorkomende fouit is "Geen 100-240 V voeding" of "Geen verbinding met voedingsbron".
BEDIENING/INSTELLINGEN
Eerste opstart van de maairobot
- Als u de robot voor de eerste keer start,plaats het apparaat dan zo op het dockingstation dat de laadconnectoren op het station fig. B3 Niet in contact komen met de laadconnectoren op de maairobot fig. A10.
- Wanner de maairobot voor het eerst worden gestart vanuit de telefoonapp,要去en firmware-update worden uitgevoerd. De implementatiemethode worden hieronder beschreiben onder software-update.
- LET OP! Tijdens de eerste verbinding要去en de telefoon en de robot zich binnen het bereik van het Wi-Fi-network bevinden.
FIRMWARE-UPDATE VOORDAT U DE ROBOT GEBRUIKT.
De update要去 als volgt worden uitgevoerd.
- Plaats de robot in de Ius maar buiten het laadstation.
- Zet de schakelaar Fig. A4 in positie 1.
- Houd de schakelaar ingedrukt Fig. D5
- Start de applicatie, scan de QR-code
- Sluit de applicatie aan op de robot
- Open de software-installingen door op het pictogram rechtsboven in het scherm te drukken.
- Selecteer een optie: Firmware bijwerken.
- Volg verwolgens de instructies op het scherm.
Nadat de software is geinstalleerd, is het apparaat maar voor gebruik.
LET OP!
- Het scherm geeft aan of de robot zich in Wi-fi of Bluetooth bereik befindt.
- Verbinding makes met een network worden aangegeven door een knipperend pictogram voor het type verbinding. Zodra er verbinding is, stopt het pictogram met knipperen.
- De robot kan maar aan een telefoon gekoppeld worden.
- Als een andere (dezelfde maarbot)要去 worden aangesloten,要去 de eerste uit de applicatie worden verwijderd. In de iOS app ook uit de Bluetooth instellungen.
MAAIHOOGTE AANPASSEN:
Voor de eerste maaibeurt stelt u de maaihoogte in op 60 mm en verwolgens op de gewenste hoogte wonneer het hele gazon relatief vlak is.
- Draai de knop Fig. A2 rechtsom om de maaihoogte te verhogen.
- Draai de knop Fig. A2aar links om de maaihoogte te verlagen.
- De maaihoogte kan worden ingesteld van 20mm (MIN) tot 60mm (MAX).
LET OP! De aandrijfmotor van de maaimechanismetrommel Fig. A7 schakelt ongeveer 10 seconden na het verlaten van de basis in, waardoor het maaien begint.
IN-/UITSCHAKELEN
- Zet de schakelaar Fig. A4 in de stand "O" om de voeding uit te schakelen.
- Zet de schakelaar Fig. A4 in de stand "I" om de voeding in te schakelen.
ACTIVERING VAN DE ROBOT EN PROGRAMMERING VAN DE WERKTIJD IN HANDMATIGE MODUS
- Houd de aan/uit-knop Afb. D5 ingedrukt om de robot op te starten. Opmerking: schud de robot Nietijdens het opstarten om een opstartfout te voorkomen. Als de robot Niet correct opstart (alle lampjes branden continu), start hem dan opnieuw op.
- Voer het wachtwoord in door tweeemaal op knop Afb. D6 te drukken, daarna tweeemaal op knop Afb. D7 en eenmaal op knop Afb. D8 (wachtwoord geprogrammeerd in de fabriek).
-
Programmeer de gebruikstijd (inclusief maaitijd en oplaadtijd):
-
Druk op Fig. D6 om de bedrijfstijd in te stellen. Eén brandend lampje betekent 2 uur, de maximale werklijk is 8 uur en er branden 4 lampjes op Fig. D4. Druk op de knop Afb. D8 om te bevestigen en de robot te starten.
LET OP! Zodra de werkelijk is ingesteld, onthoudt de robot de instellenen en begint hij elke dag te maaien op het geprogrammeerde tijdstip. De maaitijd komt overeen met de ingevoerde instelleningen.
- De geprogrammeerde werkelijk van de robot van 2aar tot 8aar is de maaitijd inclusief oplaadtijd.
- De gebruiksduur en oplaadijd zijn afhankelijk van de gebruekte batterij. Als u de werkingstijd wilt wijzigen, volgt u stap 2-3 opnieuw.
TIJDPROGRAMMERING IN AUTOMATISCHE MODUS, 7-DAAGS SCHEMA, IS BEsCHIKBAAR VIA DE INSTELLINGEN IN DE APP
- Na eenoodstop moet de robot eerst ontgrendeld worden door stap 2 hierboven te volgen. Zodra de robot is ontgrendeld,+kunnen we hem terugsturen maar het station door op de knappen te drukken:Fig.D7 en bevestig daarna met de knop Fig.D8 om de maier terug te sturen maar het laadstation.
- Door op de noodstopknop STOP te drukken worden de handmatige en automatische moduscylus uit de toepassing gewist, als deze op deze manier was geactiveerd. Om de robot na een noodstop waar te lately werken,要去 de robot worden teruggebracht maar het laadstation en要去 het handmatige werksschema opnieuw worden ingesteld. In het geval van een automatisch schema voert u bezelfde actie uit in het toepassingsschema en bevestigt u de instelleningen.
LET OP! De geprogrammeerde opstartijd in het automatische schema moet Niet als zeer nauwkeurig worden beschouwd. Het apparaat kan tot enkele Minutes na de ingesteldeijd opstarten.
- Als u de handmatige modus activeert, worden het schema dat in de toepassing is geprogrammeerd, verwijderd en omgekeerd.
- In de handmatige modus wordt er om de paar maaicycli automatisch gemaaid. Hierbij worden het gras dicht bij de kabel gemaaid die het werkgebied afbakent. LET OP! Zorg ervoor dat de kabel goed is bevestigd, zodate deze Niet per ongeluk worden doorgesneden.
- De maairobot keert'erug maar het dockingstation zodra het apparaat hebft gedetecteerd dat het begint te regenen.
- Als de robot tijdens het werkken een obstakel gegenkomt, stuiert hij ervan af en werkkt hij verder.
LAADSTATUSLAMPJE IN HET LAADSTATION:
Continu groen licht - batterij volledig opgeladen.
Intermittend groenlicht - aan het opladen.
BUITEN HET LAADSTATION:
Continu groen licht - batterij > = 20%
Intermittend groen lampje - batterij < 20%
LET OP! De robot stopt automatisch met werken en keerttering ug maar het laadstation als het batterijniveau daalt tot minder dan 20% .
ERROR LIGHT:
Continu groenlicht - het system bijwerken. Maak verbinding met de app om de update uit te voeren.
Intermittend groen lampje - systeem worden bijgewerkt.
Intermittenderoodlicht-foutmelding1tot5,herstartderobot.
Continu roodlicht -foutmelding6tot12,drukop"STOP"of"OK"om te wissen.
INDICATOR VOOR DE BEGRENZINGSKABEL:
Continu groenlicht - signaal correct
Continu rood licht - geen signalaal
Controles Fig. D4:
Intermitterend Licht - robot geblokkeerd.
Continu licht - robot ontgrendeld.
Lampje 1 brandt groen: 2 uur werklijk.
Lampjes 1 en 2 branden groen: 4aar werkelijk.
Lampjes 1, 2 en 3 branden groen: 6 eeriektijd.
Lampjes 1, 2, 3 en 4 branden groen: 8 eer werktijd.
SOFTWARE VOOR HET BESTUREN VAN DE MAAIROBOT
IOS downloaden:
https://apps.apple.com/cn/app/toua/id6449251720
Android downloaden:
https://play.google.com/store/apps/details?id=com.toua.robot
Programma-instructies können worden gedownload op:
https://bit.ly/3QBB6Gm
NOODSTOP VAN DE ROBOT
Druk op de knop "STOP" Afb. A1 om de robot te stoppen, houd de aan/vuit-knop ingedrukt om de robot uit te schaken.
DE ROBOT VERPLAATSEN
Onder de robot bevindt zich een tilhendel Afb. A10 voor eenvoudige bediening met een hand.
ONDERHOUD EN OPSLAG
- Schakel de robot.altijduit voorreinigingenonderhoud.
- Koppel de voeding los Voorat u het laadstation reinigt en onderhoudt.
-
Draag algtdikke beschemende handschoenen bij het verwisselen van messen en het schoonmaken van de onderkant van de robot.
-
Controller regelmatig of bouteen en moeren goed vastzitten. Beschadigde onderdelen要去en om veiligheidsredenen worden gerepareerd of verrangen.
- Controller regelmatig of de messen vrij hunnen draaien.
LET OP! Als u de robot op+zijn kop zet,plaats hem dan op het gazon of op een zachte ondergrond om de behuizing Niet te beschadigen of te bekrassen.
SCHOONMAKEN
WAARSCHUWING! Schakel de stroom uit met de schakelaar Fig. A4 voordat je begint met schoonmaken.
- Was de voorkant van de robot met een lagedrukkeiniger en een zachtte borstel of doeK.
- Gebruik een harde borstel om grasresten en afval van de messen, wielen en andere onderdelen aan de onderkant van de robot te verwijderen.
- Controller de WIelen regelmatig op modder of grasresten en maak ze schoon met een borstel.
LET OP! Verwijder regelmatig plantenresten van de onderkant van de robot om vermindering van de productiviteit te voorkomen.
BLADVERVANGING
WAARSCHUWING! Schakel erst de hoofdschakelaar uit en trek beschermende handschoenen aan.
WAARSCHUWING! Gebruik alleen de aangegeven originele messen die door de fabrikant zich goedgekeurd.
- Alle drie de messen en hun schroeven moeten in een keer worden verwangen Fig. A6.
- De schroeven要去en worden losgedraaid en vastgedraaid met een schroevendraaier.
- Controller of de neue messen vrij hunnen draaien.
PROBLEEMOPILOSSING
De onderstaande tabel besteht richtlijnen om problemen te diagnosticeren. Repareer het apparaat indien möglichk zich. Als het probleem nicht kan worden opgelost, neem dan contact op met een erkende dealer of een servicecentrum.
WAARSCHUWING! Er要去en beschermende maatregelen worden genommen.
| Probleem | Mogelijk oorzaken | Oplossingen |
| Roodlicht knippert bij het laadstation | Onderbreking van de begrenzingskabel | Zoek het defecte deel van de kabel en reparer het |
| Robot heeft moeite met koppelen aan laadstation | Laadstation is nicht correct geinstalleerd | Zie hoogdstuk "Voorbereiding op het werk". |
| De begrenzingskabel is Niet correct geplaatst | ||
| Geen signaal van de begrenzingskabel | Geen stroomvoorziening | Controleer de stroombron |
| De kabel was in omgekeerde richting aangesloten | Verwissel de "+" en "-" connectors | |
| Restrictiekabel is Niet aangesloten op het laadstation | Controleer of de begrenzingskabel goed vastzit. aangesloten op een laadstation | |
| Onderbreking van de begrenzingskabel | Controleer helemaal, dat de kabel Niet is onderbroken | |
| Kabel kuisen op weg maar en van de lus | Controleer of de begrenzingskabel correct is geinstalleerd | |
| Robot.gaat de grens over | De kabel was in omgekeerde richting aangesloten | Verwissel de "+" en "-" connectors |
| Beschadigd of ontbrekend blad | Bladbevestigingsschroeven controleren en repareren | |
| Robot tritt of maakt ongebruikelijke geluiden | De bladschijf zit los | |
| Vervang het blad |
| Foutcode | Opis | Oplossing |
| E01 Afb. F1 | Initialisatiefout - gyrosensor | Plaats de robot op een vlakke ondergrond en start opnieuw. |
| E02 Afb. F2 | Fout in hefsensor of botsingsssensor | Stel de botsstang en het torsiewiel aan de voorkant van de maaier af, contrôleer of ze Niet vergrendeld zich; plaat de robot op een vlakke ondergrond en start opnieuw. |
| E03 Afb. F3 | Fout bij initialisatie van de maaimotor | Plaat de robot op een vlakke ondergrond en start opnieuw op. Neem contact op met de klantenservice als het probleem aanhoudt. |
| E04 Afb. F4 | Fout bij aansluiting voeding | |
| E05 Afb. F5 | Onjuiste snelheid van de maaimotor | |
| E06 Afb. F6 | Waarschuwing voor kantelen | Plaat de robot op een vlakke ondergrond. Druk op STOP of OK om het alarm te annuleren. |
| E07 Afb. F7 | Liftwaarschuwing | Plaat de robot op een vlakke ondergrond. Druk op STOP of OK om het alarm te annuleren. |
| E08 Afb. F8 | ADC-kanaalfout | Plaat de robot op een vlakke ondergrond en start opnieuw op. Neem contact op met de klantenservice als het probleem aanhoudt. |
| E09 Afb. F9 | Verkeerd signaal | Zie hierboven in de tabel: probleem - geen signaal van de begrenzingskabel. Controleer alle punten een voor een enplaats de robot verrolgens op een vlakke ondergrond. Druk op STOP of OK om het alarm te annuleren. Start de robot opnieuw. Neem contact op met de klantenservice als het probleem aanhoudt. |
| E010 Afb. F10 | Robot jam | Plaat de robot op een vlakke ondergrond. Druk op STOP of OK om het alarm te annuleren. Start de robot opnieuw op. Neem contact op met de klantenservice als het probleem aanhoudt. |
| E011 Afb. F11 | Onjuiste snelheid van de linker stappenmotor | Start de robot opnieuw op. Neem contact op met de klantenservice als het probleem aanhoudt. |
| E012 Afb. F12 | Onjuiste snelheid van hetrecht stappenmotor |
KIT BEVAT:
Maairobot 1stuk.
- Docking en oplaadstation 1 stuk.
Voeding en verlangkabel 1 stuk.
Kabel voor afbakening van het werkgebied 100m
Kabelbevestigingspluggen 100 stucks.
- Bevestigingspluggen voor docking station 6 stuks.
- Snijbladen 3 stuks.
- Kabelconnectors 2 stucks.
Zeshoekige sleutel 1 stuk.
SPECIFICATIONS
| Maairobot 04-621 | |
| Parameter | Waarde |
| Voedingsspanning: | 18 V DC |
| Max. nominaal vermogen van de maaimotor: | 50 W |
| Max. vermogen van de zelfrijndende motor: | 20 W |
| IP-beschermingsgraad voor het laadstation | IPX4 |
| IP-beschermingsgraad voor de robot | IPX5 |
| IP-beschermingsgraad voor de oplaadapter | IP 65 |
| Beschermingsklasse voor de robot | III |
| Beschermingsklasse voor het laadstation | II |
| Maaibreedte: | 180 mm |
| Snijhoogte-instelling in het bereik | 20 mm - 60 mm |
| Rotatiesnelheid | 3100 tspm |
| Gewicht | 10,2 kg |
| Jaar van productie | 2024 |
GELUIDS- EN TRILLINGSGEJEVEN
| Geluidsdrukniveau | \( {\mathrm{L}}_{\mathrm{{pA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Gemeten geluidsvermogen | \( {\mathrm{L}}_{\mathrm{{wA}}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Informatie over geluid en trillingen
Het niveau van het door het toestel uitgestraalde geluid worden beschreiben door: het niveau van de uitgestraalde geluidsdruk L PA en het geluidsvermögensniveau LwA, waar bij K de meetonzekerheid aangeeft. De trillingen die het toestel uitzendt, worden beschreiben door de trillingsversnellng ah, waar bij K de meetonzekerheid aangeeft. De in deze gebruiksaanwijzing gemeten waarden, d.w.z. het niveau van de uitgezonden geluidsdruk LPA, het geluidsvermögensniveau LwA, en de trillingsversnellng ah, zich gemeten in overeenstemming met EN 62841-1:2015+A11. Het opgegeven trillingsniveau ah kan worden gebruikt om toestellen te vergelijkken en voor een Voorlopige evaluatie van de blootstelling aan trillingen.
Het opgegeven trillingsniveau is alleen representatif voor de basistoepassingen van het apparaat. Als het apparaat voor andere toepassingen of met ander gereedschap worden gebruikt, kan het trillingsniveau afwijken. Onvoldoende of zeldzaam onderhoud van het apparaat veroorzaken hogere trillingsniveaua. De bovengenoemde ooorzaken hunnen de bloatstelling aan trillingenijdens de hele levensduur verhogen.
Om de blootstelling aan trillingen nauwkeurig te bepalen,要去 rekening worden gehonden met de perioden dat het apparaat aan en uit staat, met uitzondering van de perioden dat het apparaat in gebruik is. De totale blootstelling aan trillingen kan veel lager zijn als alle factoren nauwkeurig worden ingeschat.
Gebruik aanvullende veriligeidsmaatregelen om de bediener te beschermen gegen trillingen, zoals regelmatig onderhoud van het apparaat en de gereedschappen, de juiste handtemperatuur en een goede werkorganisatie.
GELUIDS- EN TRILLINGSGEGEVENS
MILIEUBESCHERMING
| Elektrische apparatuur mag nicht bij het huisvuil. Gooi hetweg bij de waarvoortestemde voorzijeningen. Informatie over verwijdering kunt krijgen bij de dealer van het product of bij deplaatselijke autoriteiten. Afgedankte elektrische en elektronische apparatuur (AEEA) bevat st die Niet neutraal্ঘর de naturen. Niet-gerecyclederde AEEA vormt potenteel gevaar voor het milieu en de menselijk gezondheid. |
"Grupa Topex Spölka z ograniczona odpowiedzialnosci". Spölka komandytowa met zetel in Warschau, ul. Pograniczna 2/4 (hiema: "Topex Group") informiert dat alle auteursrechten op de inohud van deze handleiding (hierna: "handleiding"), met inebrip van, maar Niet beperkt tot, de tekst, geplaatste foto's, diagrammen, tekeningen, evenals de samenstelling ervan, uitsluitend toebehoren aan Topex Group en onderworpen zijn aan wettelijk bescherming in overeenstemming met de wet van 4 februari 1994 inzake auteursrecht en naburige rechten (d.w.z. Staatsblad U. 2006 nr. 90 punt 631, Zoals gewijzigd). Het kopiieren, verwerken, publiceren, wijzigen voor commercie doeleinden van de volledige handleiding en individuele elementen ervan, zonder de schriftelijke toestemming van Topex Group, is strikt verboden en kan leiden tot burgerlijke en strafrechtelijke aansprakelijkheid.
EG-verklaring van overeenstemming
Fabrikant: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Warschau
Product: E+ maiarobot
Model: 04-621
Handelsnaam: NEO TOOLS
Serienummer: 00001 ÷ 99999
Deze conformiteitsverklaring worden afgeveen onder volledige verantwoordelijkheid van de fabrikant.
Het hierboven beschreiben product voldoet aan de volgende documenten:
Machinerichtlijn 2006/42/EG
RED Richtlijn 2014/53/EU
RoHS-richtlijn 2011/65/EU zoals gewijzigd door Richtlijn 2015/863/EU
En voldoet aan de eisen van de normen:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
ENIEC 63000:2018
Deze verklaring heeft alleen betrekking op de machine Zoals die in de handel worden gebracht en nicht op componenten
toegevoegd door de eindgeberker of acties die hij/zij daama heeft uitgevoerd.
Naam en adres van de in de EU woonachtige persoon die gemachtigd is om het technisch dossier voor te bereiden:
Ondertekend namens:
Grupa Topex Sp. Z o.o. Sp.k.
UI. Pograniczna 2/4
02-285 Warschau

Pawel Kowalski
Kwaliteitsmedewerker TOPEX GROEP
Warschau, 2023-09-11
EU-conformlteltsverklaring
Fabrikant: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285
Warschau
Product: Laadstation
Model: K145455
Handelsnaam: NEO TOOLS
Serienummer: 00001÷ 99999
Deze conformiteitsverklaring worden afgegeben onder volledige
verantwoordelijkheid van de fabrikant.
Het hierboven beschreiben product voldoet aan de volgende documenten:
RED Richtlijn 2014/53/EU
RoHS-richtlijn 2011/65/EU zoals gewijzigd door Richtlijn 2015/863/EU
En voldoet aan de eisen van de normen:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Deze verklaring heeft uitsluitend betrekking op de machine zoalsdez werden geintroduceerd in de
markt en omvat geen onderdelen die zich toegevoegt door de eindgebruiker of
zijn latere activiteiten.
Naam en adres van de EU-inwoner die gegachtigd is om
het technisch dossier voorbereiden:
Ondertekend namens:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Warschau

Pawel Kowalski
Kwaliteitsmedewerker TOPEX GROEP
Warschau, 2023-11-09
PT
MANUAL DE TRADUÇÃO (UTILIZADOR)
ROBOT DE CORTE 04-621
CUIDADO! ANTES DE UTILizar FERRAMENTAS ELECTRICAS, LEIA ATENTAMENTE Este MANUAL DE INSTRUÇOES E GUARDE-O PARA CONSULTA FUTURA.
REGRAS DE SEGURANCA PORMENORIZADAS
INSTRUÇÉS DE SEGURANÇA PARA ROBOTS DE CORTE
Segurarca na utilização praticada do robot certa-relva
RECOMENDACOES
Ler atentamente o manual de instruções. Conheça os sistemas de controlo e o Functionamento correto do aparelho.
Não permitir que o aparecido soit realizado por crianças ou por pessoas que não tenham lido o manual de instruções. A regulamentação nacional pode indicar uma idade minima para o operador.
Não utilize o robô se estiverem presentes outras pessoas, especialmente crianças ou animais.
Lembre-se que o operador ou'utilizar é responsavel por acidentes ou perigos para outras pessoas ou para o ambiente.
PREPARACAO
- Antes deURTAR a relva,verifique sempre se todas as peças do robot estaoa funcionar corretamente.
- Para obter melhores resultados, recomenda-seURTAR a relva em tempo livre de chuva. Ao cortar a chuva, a relva pode aderir ao robot, que pode escorregar.
- NAO cortar a relva em condições climáticas adversas, por exemplo, durante chuva forte, trovoada ou queda de neve.
- Inspeccione periodicamente a area cortada e remove quaisquer pedras, detritos, fios, ossos e autres obstruções. A garantia limitada não cobre danos causados por objectos deixados no relvado.
- Para evaporar danos, nãoURTAR a relva a menos de 1 m dos aspersores.
ATENÇA! O robot e os aspersores NAO devem ser ligados ao mesmo tempo.
O robotuve ser programado para functionar a uma hora differente da dos aspersores.
NUNCA permita que as crianças toquem na fonte de alimentacao, na estacao de carregamento, em particular nos contactos, nas laminas, no compartmento das pilhas ou em quaisquer partes onde existam aberturas, como as rodas.
FUNCTIONAMENTO
- Cuidado com as lamas rotativas! NAO colocar as mados ou os pés debaixo das lamas rotativas.
- Cuidado com os objectos espalhados pelo relvado quando canta a relva! quando o robó está ligado, mantém uma distência de segurarça.
- Não deixar o aparecido sem vigilência se houver animais, criências ou outras pessoas nas proximidades.
- Manter uma posicao segura. Manter o equilibrio e uma posicao estável em inclinações. Durante o Functionamento do robot ou dos seu periféricos, é permitido andar, mas não corre.
- Por favor, leia as instruções sobre quando, onde e como verficar o robô e os seuis periféricos, cabos e extensões quando a danos ou desgaste e reparar o robô. A auto-modificação e a reparação não são permitidas, sob pena de anular a garantia.
- Não ligar ou tocar num cabo de alimentação danificado até que este tenha sido desligado da fonte de alimentação devido ao risco de contacto com componentes sob tensão.
Ligue o robo e/ou o equipamento periférico apenas a circuitos de alimentação protegidos por um disjuntor de corrente residual com uma corrente de disparo não superior a 30mA - Se o robô emitir um som anomal ou se for notada uma vibração anomal ou se for emitido um alarme, prima imeditamente o botão STOP.
- É PROIBIDO tocar nas partes moveris perigosas antes de desiguar a alimentação do robot.
- É PROIBIDO tocar nas partes perigosas quando estas não estiverem Completely paradas.
- Para manusear o robot, usar sempre calculado resistente e calças compridas.
- Cortar a alimentação eletrica: Antes de bloquear o robot.
- Antes de efetuar testes, limpeza ou manutenção.
PICTOGRAMASEAVISOS



- Ler o manual de instruções e respeitar os avisos e as condições de segurarça!
- Antes de proceder à limpeza ou manutenção, desligar a alimentação électrique
-
Não colocar as關鍵 ou os pés por baixo da proteção do mecanismo de corte
-
Peças rotativas - possibiliode de ferimentos
- Manter uma distência segura do robot de corte
- Cuidado com a possibidade de ferimentos provocados por objectos fundidos
- Proteger da chuva
- Manter fora do alcance das crianças.
-
Não montar no robot
-
Possivel perda de dedos, ter cuidado
- Inclineção máximo do terreno 14^ / 25% .
- Proteger as maoos com luvas de travailho
- Usar vestuário de proteção
- Usar calçado de proteção
- Não deitar fora jintamente com o lixo dométrico
- Recolha selectiva de resíduos
- Grau de proteção
CUIDADO! Este aparecido pode ser utilisé por crianças com mais de 8 anos de idade e por pessoas com capacidades fisicas e mentalis limitadas, bem como com acontecimentos ou experiência insufficientes, desde que sejam supervisionadas ou devidamente instruidas sobre a utilização segura do aparecido,de modo a estarem conscientes dos riscos envolvidos. Este aparecido não deve ser manuseado por crianças. As crianças não devem limpar ou efetuar a manutenção do aparecido sem supervisão.
DESCRIÇÃO DOS ELEMENTOS GRÁFICOS
A numeração segunte refere-se aos componentes do aparecido presentados nas páginasas graficas do presente manual.
| Designação Fig. A | Opis | |
| 1 | Paragem de emergência | |
| 2 | Regulador da altitude de corte | |
| 3 | Painel de controle do cortador de relva | |
| 4 | Interruptor de alimentação do cortador | |
| 5 | Rodas motrizes | |
| 6 | Lâminas de corte | |
| 7 | Tambor do mecanismo de corte | |
| 8 | Rodas giratórias | |
| 9 | Pega de transporte | |
| 10 | Conectores de carregamento | |
| 11 | Tampa do compartmento da bateria | |
| Designação Fig. B | Opis | |
| 1 | Painel de controle da estatão de anorcagem | |
| 2 | Furos para fixação da estatão de anorcagem | |
| 3 | Conectores de carregamento | |
| 4 | Estação de anorcagem | |
| 5 | Proteção da estatão de anorcagem | |
| 6 | Conectores para o cabo de alimentação elétrica para marcar a area de trabalho | |
| 7 | Aberturas para cabos para marca da区内 de trabalho e alimentação elétrica | |
| 8 | Tomada de alimentação da estatão de anorcagem | |
| 9 | Marcação para o correto encaminhamento dos cabos | |
| Designação Fig. D | Opis | |
| 1 | Luz indicatora do estado de carregamento | |
| 2 | Indicator de falha de sinai | |
| 3 | Indicator do cabo de retençao | |
| 4 | Horas de função / mensagem deerro, Luzes 1-4 | |
| 5 | Botão de alimentação | |
| 6 | Interruptor de alimentação | |
| 7 | Botão de anorcagem | |
| 8 | "Botão" Confirmar | |
| Designação Fig. H | Opis | |
| 1 | Parafusos | |
| 2 | Tampa do compartmento da bateria com pega de transporte | |
| 3 | Compartmento da bateria | |
| 4 | Tomada da bateria na tampa da-camera | |
| 5 | Bateria recarregável (não incluída) | |
| Designação Fiq. I | Opis |
| 1 | Relvado |
| 2 | Parede |
| 3 | Estágio de encoragem |
| 4 | Distência da estatção à parede |
| 5 | Secção inicial da LINHA que delimits a zona de corte |
| 6 | Comprimento da secção |
| Designação Fig. J | Opis |
| 1a | Cabo para limitar a区内corte Início |
| 1b | Cabo para limitar a区内corte Fim |
| 2 | Linha de abastecimento: |
| 3 | Estágio de encoragem |
- Podem existir diferencas entre o grafico e o produits real
PREPARACAO PARA O TRABALHO
INSTALAÇÃO DA BATERIA
- Inverte o robóURTARelva de modo a ter acceso à parte inferior do robô.
- No lugar do interrutor Fig. A4 e da pega de transporte Fig. A9 encontrar-se a tampa do compartmento das pilhas Fig. H2, fixada com os 4 parafusos marcados com setas Fig. H1.
- Em seguida, desapertar os parafusos marcados com setas.
- Retirarguidedamente a tampa do compartmento Fig. H2 para não partir ou deslagar os fios do interrutor Fig. A4 (está ligado à tampa do compartmento das pilhas).
- Em seguida, virar a tampa, na parte inferior da tampa está fixada a tomada da bateria Fig. H4.
- Introduzira piha da série ENERGY+ na tomada.
- Virar a tampa com a pilha colocada e inserti-la no compartmento Fig. H3.
- Apertar os parafusos que fixam a tampa. Virar o robot para baixo, o aparelho está pronto.
AMBIENTE DE TRABALHO DO ROBÇ CEIFEIRO
Certifique-se de que as seguients condições são cumpridas na area onde
o robó está a trabajo:
- A alterations in the presence of a single cell.
- CUIDADO! Se a relva for mais comprida do que 60~mm ,URTAR primeiro a relva com um cortador de relva manual.
- Não há pedras,PEDAGOS de madeira, fios, cabos eletricos ou outros objectos estranhos.
- O local de ceifa é plano e nivelado, sem valas nem trincheiras, e o declive é inferior a 25% (14°) Fig. C1
- São necessarias as seguiñes ferramentas para a instalação:
- Martelo de borracha (para cravar os pinos no solo aquando da colocação do cabo de retenção)
- A chave hexagonal (para fixar a estaqao de cargo) está inclua no kit
- Alicate (paraURTAROCaboque delimitaazona detrabalho)
1.INSTALACAO DA ESTACAO DE BASE
Escolher um local adequado
A estação de carreamento deve ser colocada no segunte local Fig. C3:
- Uma parte relativamente plana e nivelada do relvado.
- Perto do limite do relvado.
- Perto de uma tomada de parede.
- Coloque o cabo de extensão de 10 m e a fonte de alimentação num local à sombra, fresco e seco.
- Não delve haver obstáculos a menos de 2 m da estação de carregamento.
- Recomenda-se que a estação de corregamento está colocada num local seco e abrigado.
- A fonte de alimentação deve estar 30 cm acima do;nível do solo.
2. FIXAZAO DA ESTACAO DE CARREGAMENTO
Fixe a estação de cargo ao solo com 6 parafusos de fixação (G1) (utilizando uma chave hexagonal G6).
CUIDADO! NÃO se coloque em cima ou caminhe sobre a placá da estação de carreamento.
CUIDADO! Não faça novos orificios na placá da estação de carregamento. A estação deve ser aparafusada ao chãoutilizando os orificios existentes.
3. COLOCAÇÃO DO CABO DE RETENÇAO
O cabo de retenso é utilizado para delimitar a area de trabalho e guiar o robot de volta à estação de correamento.
- NEO TOOLS
- PL INSTRUKCAOBSLUGI ROBOT KOSZACY 04-621
- SZCZEGOLOWE ZASADY BEZPIECZENSTWA
- POLECENIA
- PRZYGOTOWANIE
- UZYTKOWANIE
- PIKTOGRAMY I OSTRZEZENIA
- OPIS ELEMENTOW GRAFICZNYCH
- PRZYGOTOWANIE DO PRACY
- INSTALACJA AKUMULATORA
- SRODWISKO PRACY ROBOTA KOSZACEGO
- 1.INSTALACJA STACJI BAZOWEJ
- 2.MOCOWANIE STACJI LADOWANIA
- 3.UKladanie PRZEWODU OGRANICAZAJACEGO
- PLANOWANIE UŁOZENIA PRZEWODU OGRANICZAJACEGO
- UKLADANIE PRZEWODU OGRANICAZAJACEGORYS.C
- INSTALACJA STACJI LADOWANIA
- Podlacz zasilanie
- DZIALENIE / USTAWIENIA
- Pierwsze uruchomienie robota koszacego
- AKTUALIZACJA OPROGRAMOWANIA SPRZETOWEGO PRZED UZYCIEM ROBOTA.
- Aktualizacja naleź wykonac w nastepujuc y sposob.
- Po instalacji oprogramwomania urzadzenie jest gotowe do pracy
- UWAGA!
- REGULACJA WYSOKOSKI KOSZENIA:
- WŁACZANIE/WYLACZANIE ZASILANIA
- WLACZANIE ROBOTA I PROGRAMOWANIE CZASU PRACY W TRYBIE MAUALNYM
- PROGRAMOWANIE CZASU PRACY W TYYBIE AUTOMATYCZNYM, 7 DNIOWY HARMONOGRAM, JEST DOSTEPNY POPRZEZ USTAWIENIA W APLIKACJI
- KONTROLKA STANU LADOWANIA W STACJI LADOWANIA:
- POZA STACJA LADOWANIA:
- KONTROLKA BLEDOW:
- KONTROLKA PRZEWODU OGRANICZAJACEGO:
- OPROGRAMOWANIE STERUJACE ROBOTEM KOSZACYM
- AWARYJNE WYLACZANIE ROBOTA
- PRZENOSZENIE ROBOTA
- KONSERWACJA I PRZECHOWYWANIE
- CZYSZCZENIE
- WYMIANA OSTRZY
- ROZWIAZYWANIE PROBLEMOW
- ZAWARTOSC ZESTAWU:
- Informacja na temat halasu i wibraci
- DANE DOTYCZACE HALASU I DRGAN
- OCHRONA SRODOWISKA
- GWARANCJA SERWIS
- Warunki gwarancji oraz opis postepowania w przypadku reklamacji zawartę są w zalączonej Karcie Gwarancyjnej.
- Dekaracja zgodnosci WE
- Deklaracja zgodnosci UE
- Dyrektywa RED 2014/53/UE
- EN TRANSLATION (USER) MANUAL MOWING ROBOT 04-621
- DETAILED SAFETY RULES
- SAFETY INSTRUCTIONS FOR MOWING ROBOTS
- RECOMMENDATIONS
- PREPARATION
- OPERATION
- PICTOGRAMS AND WARNINGS
- DESCRIPTION OF THE GRAPHIC ELEMENTS
- PREPARING FOR WORK
- BATTERY INSTALLATION
- WORKING ENVIRONMENT OF THE MOWING ROBOT
- 1.BASE STATION INSTALLATION
- CHARGING STATION ATTACHMENT
- LAYING OF THE RESTRAINING CABLE
- PLANNING OF THE RESTRAINING CABLE POSITION
- LAYING OF THE RESTRAINING CABLE FIG.C
- INSTALLATION OF CHARGING STATION
- OPERATION / SETTINGS
- FIRMWARE UPDATE BEFORE USING THE ROBOT.
- The update should be performed as follows.
- After the software has been installed, the appliance is ready for operation
- CAUTION!
- MOWING HEIGHT ADJUSTMENT:
- SWITCHING ON/OFF
- ACTIVATION OF THE ROBOT AND PROGRAMMING OF THE WORKING TIME IN MANUAL MODE
- TIME PROGRAMMING IN AUTOMATIC MODE, 7-DAY SCHEDULE, IS AVAILABLE THROUGH THE SETTINGS IN THE APP
- CHARGING STATUS LIGHT IN THE CHARGING STATION:
- OUTSIDE THE CHARGING STATION:
- ERROR LIGHT:
- RESTRAINING CABLE INDICATOR:
- SOFTWARE FOR CONTROLLING THE MOWING ROBOT
- EMERGENCY SHUTDOWN OF THE ROBOT
- MOVING THE ROBOT
- MAINTENANCE AND STORAGE
- CLEANING
- WARNING! Before you start cleaning, switch off the power with the switch
- Fig. A4.
- CAUTION! Regularly remove plant debris from the underside of the robot to avoid a reduction in productivity.
- BLADE REPLACEMENT
- PROBLEM SOLVING
- KIT CONTAINS:
- Noise and vibration information
- NOISE AND VIBRATION DATA
- ENVIRONMENTAL PROTECTION
- EC Declaration of Conformity
- Machinery Directive 2006/42/EC
- ENIEC63000:2018
- EU Declaration of Conformity
- EN IEC 63000:2018
- DE
- ÜBERSETZUNG (BENUTZERHANDBUCH)
- MAHROBOTER 04-621
- AUSFUHRLICHE SICHERHEITSVORSCHRIFTEN
- SICHERHEITSHINWEISE FÜR MAHROBOTER
- EMPFEHLUNGEN
- VORBEREITUNG
- BETRIEB
- BESCHREIBUNG DER GRAFISCHEN ELEMENTE
- VORBEREITUNG AUF DIE ARBEIT
- BATTERIEANLAGE
- ARBEITSUMGEBUNG DES MAHROBOTERS
- INSTALLATION DER BASISSTATION
- BEFESTIGUNG DER LADESTATION
- VERLEGUNG DES RÜCKHALTESEILS
- PLANUNG DER POSITION DES RÜCKHALTESEILS
- VERLEGUNG DES RÜCKHALTEKABELS ABB. C
- INSTALLATION DER LADESTATION
- BEDIENUNG/EINSTELLUNGEN
- Erste Inbetriebnahme des Mahroboters
- FIRMWARE-UPDATE, BEVOR SIE DEN ROBOTER BENUTZEN.
- Die Aktualisierung sollte wie folgt durchgefuhrt werden.
- Nachdem die Software installiert wurde, ist das Gerät betriebsbereit
- VORSICHT!
- EINSTELLUNG DER MAHHOHE:
- EIN/AUSSCHALTEN
- AKTIVIERUNG DES ROBOTERS UND PROGRAMMIERUNG DER ARBEITSZEITEN IM MANUELLEN MODUS
- ZEITPROGRAMMIERUNG IM AUTOMATISCHEN MODUS, 7-TAGE-ZEITPLAN, IST ÜBER DIE EINSTELLUNGEN IN DER APP VERFÜGBAR
- LADESTATUSLEUCHTE IN DER LADESTATION:
- AUSsERHALB DER LADESTATION:
- FEHLER-LICHT:
- INDIKATOR FÜR RÜCKHALTEKABEL:
- SOFTWARE ZUR STEUERUNG DES MAHROBOTERS
- NOTABSCHALTUNG DES ROBOTERS
- BEWEGENDESROBOTERS
- WARTUNG UND LAGERUNG
- REINIGUNG
- VORSICHT! Entfernen Sie regelmäßig Pflanzenrechte von der
- Unterseite des Roboters, um Produktivitätseinbußen zu vermeiden.
- KLINGENWECHSEL
- PROBLEMBEHEBUNG
- KIT ENTHÄLT:
- Informationen zu Lärn und Vibrationen
- LARM-UND VIBRATIONSDATEN
- SCHUTZ DER UMWELT
- EG-Konformitätserklarung
- EU-Konformitäserklarung
- RU
- PYKOBODCTBO NO INPEBDOY (PYKOBODCTBO
- NOLb3OBATEJRA
- PEKOMEHДALIN
- IIOIROTOBKA
- ONEPALUN
- NKTOPAMMbI INPDEyIPKXDEHNA
- ONICAHNE IPAΦNUECKNX ΘJEMEHTOB
- IIOIOTOBKA K PABOTE
- PABOYAR CPEDA POBOTA-KOCINbUKNKA
- YCTAHOBKA BA3OBOI CTAHCUIN
- 2.KPENJIEHNE3APADHOCTAHUIN
- ПОКЛадka OГРанчITEЛьного TPOCA
- IIAHINPOBAHNE NOJIOXEHNO OPGAHNHTENBHO TPOCA
- IPOKJIADKA OPGAHNUHTBHO TPOCA PNC.C
- YCTAHOBKA 3APRAHOD CTAHUN
- PABOTA/HACTPOIKN
- PepBbI 3aynck po60Ta-kocnJbunka
- IPEd IcIOJIb3OBAHHEM PO5OTA O5HOBNTE MKNPOIPOIPOPAMMY.
- BHIMAHHE!
- PEIYINPOBKA BbICOTbI CKAUNBAHNA:
- BKNIOUeyHNE/BbIKIOUeyHNE
- AKTINBAUPOBOTA INPOPROMMPOBAHNE BPEMEHN PABOTBI PYHOM PEXKIME
- MHINKATOP COCTOHN3APJKN HA 3APJHOH CTAHUN: Henpebbln 3eHbCBT-6aTapeo NIOHcTbO 3apKeHa.
- 3A IPEDEJIAMN 3APJHOI CTAHUN:
- INHANKATOPOUIBKN:
- INHINKATOPYIDEPXINBAIOUIEFO TPOCA:
- ПОТРAMMHOE OБЕСПЕЧЕ ПЛЯ YИРAPЛЕНИЙ POБOTOM- RA3OHOKOCSIKON
- ABAPINHOE OTKJIIOUHNE POBOTA
- NEPEMEUEHNEPOBOTA
- OBCJNYKINBAHNE IN XPAHEHNE
- #
- BHIMAHHE! Perynnpno ydaanTe pactnteHbHbe ocTaKc HxHHeu qacTn po60ta, YTo6bl u36exKaTb CHxKeHn npOn3BOIDNTeJIbHOCTn.
- 3AMEHAJIe3BnIa
- PEWEHNE IPOBJIEM
- KOMNIEKT BKNIOUAYET CCEB:
- Hhopmaun o wyme n Bn6paun
- DAHHbIE O Wyme N BnBPAQIN
- OXPAHA OKPYXKAIOUEN CPEbl
- HU FORDITASI (FELHASNZALOI) UTMUTATIO ROBOTFUNYIRO 04-621
- RÉSZLETES BIZTONSAGI ELOIRASOK
- ROBOTFÜNYIROLKRA OVINTÉZKEDÉSEK
- JAVASLATOK
- ELOKESZULETEK
- HASZNÁLAT
- PIKTOGRAMOK ES FIGYELMEZTETESEK
- GRAFIKUS ELEMEK LEIRASA
- ELOKESZITES HASNZALATRA
- AKKUMULATOR BEHELEYEZESE
- A ROBOTFÜNYIRO MUNKAKÖRNYEZETE
- 1.A DOKKOLOALLOMAS TELEPITESE
- 2.A TOLTOALLOMÁS RÖGZITÉSE
- A HATÁROLÓ KÁBEL LEFEKTETÉSE
- A HATÁROLÓ KÁBEL ELHELYEZKEDÉSÉNEK MEGTERVEZÉSE
- A HATÁROLÓ KÁBEL LEFEKTETÉSE „C" ÁBRA
- 4.A TOLTOALLOMÁS TELEPITÉSE
- Csatlakoztassa az aramellatast
- MUKÖDTÉTÉS / BEALLITASOK
- A robotfúnyiro elso beinditása
- FIRMWARE-FRISSITÉS A ROBOT HASNZALATA ELOTT.
- A frissítest az alabbi lépések szerint kel végrehajtani:
- A szoftver telepitése utan a készülk üzemkész.
- FIGYELEM!
- NYIRASMAGASSAG BEALLITASA:
- ARAMELLATAS BE-ES KIKAPCSOLASA
- A ROBOT BEKAPCSOLASA ES A MUNKAIDO PROGRAMOZASA MANUALIS UZEMMODBAN
- AZ UZEMIDO AUTOMATIKUS UZEMMODBAN TORTENO PROGRAMOZASA, A 7 NAPOS UTEMEZES, AZ ALKALMAZAS BEALLITASAIN KERESZTUL ERHETO EL.
- TOLTEI ALLAPOTJELZO DIODA A TOLTOALLOMÁSON:
- A TOLTOALLOMÁSON KIVÜL:
- HIBAJELZO DIODA:
- HATÁROLO KÁBEL JELZÖDIODAJA:
- A ROBOTFUNIRO VEZERLESERE SZOLGALO SZOFTVER
- A ROBOT LEALLITASA VESZHELYZET ESETEN
- A ROBOT ATHELYEZESE
- KARBANTARTÁS ES TÁROLÁS
- TISZTITAS
- PENGECSERE
- HIBAELHÁRITAS
- TARTALOM BEALLITASA:
- Informação a zajról és a vibraciónról
- ZAJRA ES REZGÉSEKRE VONATKOZO ADATOK
- EK megfeleloségi nyilatkozat
- EU megfeleloségi nyilatkozat
- RED 2014/53/EU irányelv
- RO
- MANUAL DE TRADUCERE (UTILIZER)
- ROBOT DE COSIT 04-621
- REGULI DE SIGURANTÁ DETALIATE
- RECOMANDÄRl
- PREGATIRE
- FUNCTIONARE
- PICTOGRAME SI AVERTISMENTE
- DESCRIEREA ELEMENTELOR GRAFICE
- INSTALAREA BATERIEI
- MEDIUL DE LUCRU AL ROBOTULUI DE COSIT
- 1.INSTALAREA STATIEI DE BAZA
- FIXAREA STATIEI DE INCARCARE
- ASEZAREA CABLULUI DE RETINERE
- PLANIFICAREA POZITIEI CABLULUI DE RETINERE
- ASEZAREA CABLULUI DE RETINERE FIG.C
- INSTALLAREA STATIEI DE INCÁRCAIRE
- FUNCTIONARE/SETÄRi
- Prima pornire a robotului de cosit
- ACTUALIZAREA FIRMWARE-ULUI INAINTE DE A UTILIZA ROBOTUL.
- Actualizarea trebuie efectuata dupa cum urmeaz.
- Dupé ce software-ul a fost instalat, aparatul este gata de fonctionare ATENTIE!
- REGLAREA INALTIMI DE COSIRE:
- PORNIRE/OPRIRE
- ACTIVAREA ROBOTULUI I PROGRAMAREA TIMPULUI DE LUCRU IN MODUL MANUAL
- PROGRAMAREA TIMPULUI IN MODUL AUTOMAT, PROGRAM DE 7 ZILE, ESTE DISPONIBILÄ PRIN SETÄRILE DIN APLICATIE
- LUMINA DE STARE A INCÁRCÁRII IN STATIA DE INCÁRCARE:
- IN AFARA STATIEI DE INCARCARE:
- INDICATOR CABLU DE RETINERE:
- SOFTWARE PENTRU CONTROLUL ROBOTULUI DE COSIT
- OPRIREA DE URGENTÁ A ROBOTULUI
- DEPLASAREAROBOTULUI
- INTRETINERE SI DEPOZITARE
- CURATENIE
- ATENTIE! Indepartati in mod regulat resturile vegetale de pe parte inferioar a robotului pentru a evita reducerea productivitatei.
- INLOCUIREA LAMEI
- REZOLVAREA PROBLEMELOR
- KIT CONTINE:
- Informati privind zgomotul si vibratiile
- DATE PRIVIND ZGOMOTUL VIBRATIILE
- PROTECTIA MEDIULUI
- Declarata CE de conformitate
- Declarata de conformitate UE
- Directiva RED 2014/53/UE
- UA IIOCEHNIK 3 INEPEKIIADY (KOPNUCTYBAU) KOCAPKA 04-621
- DETAJIbHI IIPABUNA BE3NEKNI
- IHCTPYKl3 3TEXHIKNBE3NEKN DIA KOCAPOK-POBOTIB
- PEKOMEHDAUII
- IITIGOTOBKA
- OTEPALI
- NIKTOPAMTA NONEPEDXEHH
- ONIC IPAIChNX EJIEMEHTIB
- ПДГOTOBКА ДО POБТИ
- BCTAHOBJIENH BATAPEI
- 1.BCTAHOBJIEHHBA3OBOICTAHUII
- 2.KPINJIENHH3APADHOCTAHUI
- 3.ПРOKЛаданнуТРИМУОЧОТPOCA
- IIAHYBAHHPO3AUYBAHHYTPMMyOTO TPOCA
- IPOKIIADAHHYYTPMUYOQTO TPOCA PNC.C
- 06MexyBaIbHOro Ka6eIIO.
- 4.BCTAHOBJIENHH3APRHOCTAHUII
- EKCINYATAU/HAJALTYBAHH
- Pepwn 3anyck po6oTa-kocapkn
- OHOBHTI PPOUINBKY IEPED BUNOPUCTAHHRM POBJTA.
- OHOBHeHH CJIiD BIKoHaTHn HAcTyNHm YHOM.
- Iicna BCTaHOBJIeHH nporpaMHoro 3a6e3neueHH npncTpi IrotOBn do po60Tu
- OBEPEKHOI
- PEYIIOBAHHBVCOTNIKOCIHHA:
- BMUKAHH/BNMUKAHH
- AKTINBAUPOBOTA TA IPOIPOPAMYBAHHPOBOOYO YACY B PYHOMY PEXKIMI
- IPOIPOAMYBAHHA YACY B ABTOMATNCHOMY PEXKIMI, 7- DEHNN IPAIK,IOCTYINHE YEPE3 HAIALITYBAHHB IODATKY
- IHДИKATOPCTAHY3APJKNHA3APJHIICTAHILI:
- 3A MEXKAMN 3APRAHOI CTAHUII:
- IHINKATOPIOMNIJKN:
- IHINKATOP TPOCA-ΦIKCATOPA:
- IPOIPOAMHE 3A5E3NEUEHN JIN YNPABJIHHPOBOTOMKOCAPEM
- ABAPIHEBUMKHEHHPOBOTA
- NEPEMIUEHHPOBOTA
- OBCJYTOBYBAHHT A36EPIAHH
- OuHueHH
- YBAG! Perynapno BndaIte pocnHHi 3aNnKn 3 Hxkboi qactnn np6oTa, uo6 yHKnHytn 3HxkeHH npOdykTNBHOCTi.
- 3AMIHAJIe3A
- BNIPIEHHIPOBJEM
- DOCKIADYHABOPBYXOINTb
- Inopmaia npo wym i biopaio
- DAHI 0OIO OUMY TA BIBPAUII
- 3AXNCT HABKOJIINHbOTo CEPEIOBNIUa
- CZ PREKLAD (UZIVATELSKÉ) PRIRUCKY SEKACI ROBOT 04-621
- PODROBNA BEZPECNOSTNI PRAVIDLA
- BEZPECNOSTNI POKNY PRO SEKACI ROBOTY
- DOPORUCENI
- PRIPRAVA
- OPERACE
- POPIS GRAFICKYCH PRVKU
- PRIPRAVA NA PRÁCI
- INSTALACE BATERIE
- PRACOVNI PROSTREDI ZACHO ROBOTA
- BASE STATION INSTALLATION
- NASTAVEC PRO NABIJECI STANICI
- POKLÁDKA ZAJISTOVACÍHO KABELU
- PLANOVÁNI POLOHY JISTÍCIHO LANA
- POKLÁDKA JISTÍCIHO KABELU OBR. C
- INSTALLACE NABIJECI STANICE
- PROVOZ / NASTAVENI
- Prvnispusteni zacihorobota
- PREDPOUZITIMROBOTAAKTUALIZUJTEFIRMWARE
- Po instalaci softaru je spotbrebic pripraven k provozu.
- POZOR!
- NASTAVENI VYŠKY SEÇENİ:
- ZAPNUTI/VYPNUTI
- AKTIVACE ROBOTA A PROGRAMOVÁNÍ PRACOVÍ DOBY V MANUALNÍM REŽIMU.
- KONTROLKA STAVU NABIJENI V NABJECI STANICI:
- MIMO NABIJECI STANICI:
- CHYBOVÉ SVÉTLO:
- INDIKÁTOR UPEVÑOVACÍHO KABELU:
- SOFTWARE PRO OVLADANI ZACIHORobotA
- NOUZOV VYPNUTI ROBOTA
- POHYB ROBOTA
- UDRZBA A SKLADOVÁNÍ
- CISTENI
- POZOR! Pravidelné odstrañujte zbytky rostlin ze spodni strany robota, abyste zabrànili snizeni produktivity.
- VYMENA NOZU
- RESENI PROBLEMU
- SADA OBSAHUJE:
- Informace o hluku a vibracich
- UDAJE O HLUKU A VIBRACICH
- OCHRANA ZIVOTNIHO PROSTREDI
- ES prohlasei o shode
- EU prohlasei o shode
- PREKLAD (POUZIVATELSKEJ) PRIRUCKY ROBOT NA KOSENIE 04-621
- PODROBNE BEZPECNOSTNE PRAVIDLA
- ODPORUCANIA
- OPERACIA
- PIKTOGRAMY A VYSTRAHY
- OPIS GRAFICKYCH PRVKOV
- PRIPRAVA NA PRÁCU
- INSTALACIA BATÉRIE
- PRACOVNE PROSTREDIE KOSIACEHO ROBOTA
- 1.BASE STATION INSTALACIA
- PRIPOJENIE NABIJACEJ STANICE
- POLOZENIE ISTIACEHO KÁBLA
- PLÁNOVANIE POLOHY ISTIACEHO KÁBLA
- ULOZENIE ISTIACEHO KÁBLA OBR. C
- INSTALÁCIA NABIJACEJ STANICE
- PREVÁDZKA / NASTAVENIA
- Pré spustenie robota na kosenie
- PRED POUZITIM ROBOTA AKTUALIZUJTE FIRMVER.
- Aktualizácia by sa mala vykonat takto.
- Po nainstalovani softvru je spotrebic pripraveny na prevadzku
- NASTAVENIE VYŠKY KOSENIA:
- ZAPNUTIE/VYPNUTIE
- AKTIVÁCIA ROBOTA A PROGRAMOVANIE PRACOVNEHO CASU V MANUALNOM REŽIME
- KONTROLKA STAVU NABIJANIA V NABIJACEJ STANICI:
- MIMO NABIJACEJ STANICE:
- SVETELNA CHYBA:
- INDIKÁTOR UPEVÑOVACIEHO KÁBLA:
- Obr. D4:
- SOFTVER NA OVLADANIE KOSIACEHO ROBOTA
- NUDZOVÉ VYPNUTIE ROBOTA
- UDRZBA A SKLADOVANIE
- CISTENIE
- POZOR! Pravidelne odstrańjte zvyśky rastlin zo spodnej strany robota, aby ste zabranychi zniżeniu produktivity.
- VYMENA CEPELE
- RIESENIE PROBLEMOV
- Informação o hluku a vibraciách
- UDAJE O HLUKU A VIBRÁCIÁCH
- OCHRANA ZIVOTNEHO PROSTREDA
- ES vyhlasenie o zhode
- Vyhlasenie o zhode EU
- Sernica RED 2014/53/EU
- PREVOD (UPORABNIISKI) PRIROCNIK ROBOT ZA KOSNJO 04-621
- POZOR! PRED UPORABO ELEKTRICNEGA ORODJA NATANCNO PREBERITE TA NAVODILA ZA UPORABO IN JIH SHRANITE ZAKASNEJSO UPORABO.
- PODROBNA VARNOSTNA PRAVILA
- VARNOSTNA NAVODILA ZA ROBOTE ZA KOSNJO
- PRIPOROCILA
- OPERACija
- PIKTOGRAMI IN OPOZORILA
- OPIS GRAFICNIH ELEMENTOV
- PRIPRAVA NA DELO
- NAMESTITEV BATERIJE
- DELOVNO OKOLJE ROBOTA ZAKOSNJO
- 1.BASE STATION NAMESTITEV
- PRITRDITEV POLNILNE POSTAJE
- POLAGANJE ZADRZEVALNEGA KABLA
- NACRTOVANJE POLOZAJA ZADRZEVALNEGA KABLA
- POLAGANJE ZADRZEVALNEGA KABLA SLIKA C
- NAMESTITEV POLNILNE POSTAJE
- DELOVANJE / NASTAVITVE
- Prvi zagon robota za kosnjo
- POSODOBITEV VDELANE PROGRAMSKE OPREME PRED UPORABO ROBOTA.
- Ko je programska oprema namescena, je naprava priapravljena za delovanje.
- NASTAVITEV VIŠINE KOSNJE:
- VKLOP/IZKLOP
- AKTIVIRANJE ROBOTA IN PROGRAMIRANJE DELOVNEGA CASAVROCNEM NACINU
- CASOVNO PROGRAMIRANJE V SAMODEJNEM NACINU, 7-DNEVNI URNIK, JE NA VOLJO PREK NASTAVITEV V APLIKACIJI.
- LUCKA STANJA POLNJENJA V POLNILNI POSTAJI:
- ZUNAJ POLNILNE POSTAJE:
- LUC ZA NAPAKE:
- INDIKATOR OMEJITVENEGA KABLA:
- PROGRAMSKA OPREMA ZA KRMILJENJE ROBOTA ZA KOSNJO
- ZAUSTAVITEV ROBOTA V SILI
- PREMIKANJE ROBOTA
- VZDRZEVANJE IN SKLADIŠÇENJE
- CISCENJE
- OPOZORILO! Preden začnete s cisćenjem, izklopite napajanje s stikalom Slika A4.
- POZOR! Redno odstranjujte rastlinske ostanke s spodnje strani robota, da se izognete zmanjsanju produktivnosti.
- ZAMENJAVA REZILA
- RESEVANJE PROBLEMOV
- KOMPLET VSEBUJE:
- Informacije o hrupu in vibracijah
- PODATKI O HRUPU IN VIBRACIJAH
- Izjava ES o skladnosti
- Izjava EU o skladnosti
- Direktiva RED 2014/53/EU
- LT
- VERTIMO (NAUDOTOJO) VADOVAS
- PJOVIMO ROBOTAS 04-621
- ISSAMIOS SAUGOS TAISYKLES
- PJOVIMO ROBOTU SAUGOS INSTRUKCIJOS
- REKOMENDACIJOS
- PARUOSIMAS
- OPERACJA
- PIKTOGRAMOS IR JSPÉJIMAI
- GRAFINIU ELEMENTU APRASYMAS
- PASIRUOSIMAS DARBUI
- AKUMULIATORIAUS MONTAVIMAS
- PJOVIMO ROBOTO DARBO APLINKA
- 1.BAZINES STOTIES IRENGIMAS
- IKROVIMO STOTIES TVIRTINIMAS
- TRAMDOMOJO KABELIO TIESIMAS
- SULAIKYMO TROSO PADETIES PLANAVIMAS
- APRIBOJIMO TROSO TIESIMAS C PAV.
- JKROVIMO STOTELES IRENGIMAS
- VEIKIMAS/NUSTATYMAI
- Pirmasis p jovimo roboto paleidimas
- PRIES NAUDODAMI ROBOTA ATNAUJINKITE PROGRAMINE IRANGA.
- Idiegu programine jrangaj, prietais yra paruostas darbui.
- DÉMESIO!
- PJOVIMO AUKŠCIO REGULIAVIMAS:
- JUNGIMAS/ISJUNGIMAS
- ROBOTO JUNGIMAS IR DARBO LAIKO PROGRAMAVIMAS RANKINIU REZIMU.
- LAIKO PROGRAMAVIMAS AUTOMATINIU REZIMU, 7 DIENU TVARKARASTIS, PASIEKIAMAS PER PROGRAMÉLÉS NUSTATYMUS.
- JKROVIMO STOTELEJE ESANTI JKROVIMO BUSENOS LEMPUTE:
- UZIKROVIMO STOTIES RIBU:
- KLAIDU LEMPUTÉ:
- TVIRTINIMO KABELIO INDIKATORIUS:
- PJOVIMO ROBOTO VALDYMOPROGRAMINE JRANGA
- AVARINIS ROBOTO ISJUNGIMAS
- ROBOTO PERKÉLIMAS
- PRIEZIURA IR SAUGOJIMAS
- VALYMAS
- ASMENU KEITIMAS
- PROBLEMU SPRENDIMAS
- RINKINJ SUDARO:
- Informacija apiie triuksmir vibracija
- TRIUKSMO IR VIBRACIJOS DUOMENYS
- APLINKOS APSAUGA
- EB atitikties deklaracija
- Modelis:04-621
- Mašinu direktyva 2006/42/EB
- ES alitikties deklaracija
- RED direktyva 2014/53/ES
- LV
- TULKOSANAS (LIETOTAJA) ROKASGRAMATA
- PLAUSANAS ROBOTS 04-621
- PLAUŠANAS ROBOTU DROŠIBAS INSTRUKCIJAS
- IETEKUMI
- PIKTOGRAMMAS UN BRIDINAJUMI
- GRAFISKO ELEMENTU APRAKSTS
- AKUMULATORA UZSTADISANA
- PLAUŠANAS ROBOTA DARBA VIDE
- 1.BAZES STACIJAS UZSTADISANA
- UZLÄDES STACIJAS STIPRINÄJUMS
- IEROBEZOJOSAS TROSES IEKLASANA
- IEROBEZOJOSKALESTAVOKLAPLANOSANA
- IEROBEZOJOSAS TROSES IEKLASANA C ATT.
- C4. attels.
- UZLÄDES STACIJAS UZSTÄDISHANA
- DARBIBA / IESTATJUMI
- Plaušanas robota pirmā palaisana
- PIRMS ROBOTA LIETOSANAS ATJAUNINIET PROGRAMMAPARATURU.
- Atjaunināsana javeic sādi.
- Pec programmaturas instalesan aierice ir gatava darbam.
- UZMANIBU!
- PLAUSANAS AUGSTUMA REGULESANA:
- IESLEGSANA/IZSLEGSANA
- ROBOTAKTIVIZESANA UN DARBA LAIKA PROGRAMMESANA MANUALA REZIMA.
- LAIKA PROGRAMMESANA AUTOMATISKAJA REZIMA, 7 DIENU GRAFIKS, IR PIEJJAMA, IZMANTOJOT LIETOTNIES IESTATJUMUS.
- UZLÄDES STACIJAS UZLÄDES STATUS INDIKATORS:
- ARPUS UZLÄDES STACIJAS:
- KLUDUGAISMA:
- IEROBEZOJOŠA KABELA INDIKATORS:
- PROGRAMMATURA PLAUSANAS ROBOTAVADIBAI
- ROBOTAVARIJASIZLEGSA
- ROBOTA PÄRVIETOSANA
- APKOPE UN UZGLABASANA
- TIRISHANA
- UZMANIBU! Regulari nonemiet augu attliekas no robota apaksjadas, lai izvairitos no produktivitates samazinanas.
- ASMENU NOMAINA
- PROBLEMU RISINASANA
- KOMPLEKTÄ IETILPST:
- Informacija par troksni un vibraciju
- TROKŠNA UN VIBRACIJAS DATI
- VIDES AIZSARDZIBA
- EK atbilstibas deklaracija
- Masinu direktiva 2006/42/EK
- Pawel Kowalski
- ES atbilstibas deklaracija
- RED Direktiva 2014/53/ES
- EE
- TOLKIMISE (KASUTAJA) KASIRAAMAT
- NIITMISROBOT 04-621
- UKSIKASJALIKUD OHUTUSEESKIRJAD
- NIITMISROBOTITE OHUTUSJUHISED
- SOOVITUSED
- VALMISTAMINE
- OPERATSI0ON
- GRAAFILISTE ELEMENTIDE KIRJELDUS
- TOOKS VALMISTUMINE
- AKU PAIGALDAMINE
- NIITMISROBOTI TÖKKESKKOND
- BASE STATION PAIGALDUS
- LAADIMISJAAMA KININITUS
- KINNITUSKAABLI PAIGALDAMINE
- PIIRAVA KAABLI ASUKOHA PLANEERIMINE
- KINNITUSKAABLI PAIGALDAMINE JOONIS C
- LAADIMISJAAMA PAIGALDAMINE
- TOO / SEADED
- Niitmisroboti esimene käivitamine
- PUSIVARA UUENDAMINE ENNE ROBOTI KASUTAMIST.
- Värskendamist tuleks teostada järgmiselt.
- Pärast tarkvara paigaldamist on seade kasutusvalmis.
- ETTEVAATUST!
- NIITMISKÖRGUSE REGULEERIMINE:
- SISSE/VALJA LULITAMINE
- ROBOTI AKTIVEERIMINE JA TÖOAJA PROGRAMMEERIMINE MANUAALSES REZIIMIS
- AJA PROGRAMMEERIMINE AUTOMAATREZIIMIS, 7-PAEVANE AJAKAVA, ON SAADAVAL RAKENDUSE SEADETE KAUDU
- LAADIMISJAAMA LAADIMISE OLEKUVALGUSTI:
- VALJASPOOL LAADIMISJAAMA:
- PIIRAVA KAABLI INDIKAATOR:
- TARKVARA NIITMISROBOTI JUHTIMISEKS
- ROBOTI ERAKORRALINE VÄLJALÜLITAMINE
- ROBOTI LIIGUTAMINE
- HOOLDUS JA LADUSTAMINE
- PUHASTUS
- ETTEVAATUST! Eemaldage regulaarselt taimeprugi roboti aluspinnalt, et valtida tootlikuse vahenemist.
- TERA ASENDAMINE
- PROBLEEMIDE LAHENDAMINE
- KOMPLEKT SISALDAB:
- Teave mura ja vibratsiooni kohta
- MURA JA VIBRATSIOONI ANDMED
- KESKKONNAKAITSE
- EU vastavusdeklaratsjoon
- ELi vastavusdeklaratsoon
- BG ПЕВОД (РБКOBОДСТВО 3A NOTPEБNTIEL) POBOT 3A KOCEHE 04-621
- IPOPOBHI IPIPABUNA 3A BE3OINACHOCT
- HCHTPYKUN3A BE30NACHOCT 3A POBOTN 3AKOCHE
- PENOPbK
- IIOIROBKA
- ONEPAUIN
- NKTOTPAMNI IN PEPDYNPEXDEHNA
- ONICAHNE HA IPAΦNHYTE EJEMEH
- ПОДГ罗ВКА 3A PAБOTA
- MHCTAJINPAHE HA BATEPNYTA
- PA60THA CPEDA HA PO6OTA 3A KOCEHE
- 2.3AKPENBAHE HA CTAHUN 3A 3APEXDAHE
- NOJAGAHE HA ORPAHUNHTJEHHN KABEN
- ПАИРАЕ HA NOLOXEHNETO HA 3ДьРЖAUЯ KABEN
- IOLIaHE HA OTRPAHnHTENHNAKABJI FNI. B
- 4.ИHCTAJINPAHE HA 3APRAHA CTAHLI
- ПьрBo nyckaHe Ha po6Ota 3a kocHe
- AKTYAJIN3AUIN HA ΦbPMYEPA, INPEI N DA N3PON3BATE POBOTA.
- Cnei KaTO coOFTyePbTe HnCTaHpaH,ypeBt erotOB 3a pa6ota.
- BHIMAHNE!
- PEGYIINAHE HA BVCOUHATA HA KOCEHE:
- BKJIIOUBAHE/IM3KJIIOUBAHE
- AKTINBINAHE HA POBOTA INIPOPTPAMIPAHE HA PABOTHOTOBPME B Pyueh PEXIM
- IPOITPAMIPAHE HA BPEMETO B ABTOMATNUEH PEXIM, 7- IHEBEH IPAOK, E IOCTbHNO YPE3 HACTPOIKNTE B IPNIOXEHNETO
- INHINKATOPA 3A CbCTOARHNETO HA 3APEXDAHE B CTAHUNRA 3A 3APEXDAHE:
- N3BbH CTAHUNYTA 3A 3APEXDAHE:
- CBETJNHA3AΓPEUKA:
- INHINKATOP3A3ADbPkaaKABEJI:
- COΦTYEP 3A YYPABJIEHNE HA POBJTA 3A KOCEHE
- ABAPINHO N3KJIIOUBAHE HA PO6OTA
- ПИДВИЖBAHE HA POБOTA
- PbXKA UN CbXPAHEHNE
- ПОЧИСТBAHE
- BHIMAHHE! PeoBHO oTcTaPraHbAte pactTeHNHe ocTaTbU O TdoJIHaTa cTpaHa Ha po6Ota, 3a Da n36erHete HamaIaBaHe Ha npOn3BOIDNTeHOCCTTA.
- CMRAHAHOCTPNETO
- PEWABAHE HA IPOBJEMN
- KOMNJIeKbTcBdPbPKA:
- Hhopmaun3a yma n Bn6paunnte
- DAHHN3A LUYMA N BNBPAUNITE
- EO DeKnapaun 3a cBoTBeTCTBne
- EC DeKJapaun 3a cBoTBeTcTBne
- PRIRUCNIK ZA PRIJEVOD (KORISNIK) ROBOT ZA KOSNJU 04-621
- DETALJNA SIGURNOSNA PRAVILA
- SIGURNOSNE UPUTE ZAROBOTE ZAKOSNJU
- PREPORUKAMA
- PRIPREMA
- PIKTOGRAMI I UPOZORENJA
- OPIS GRAFICKIH ELEMENATA
- PRIPREMA ZA POSAO
- UGRADNJA BATERIJE
- RADNO OKRUZENJE ROBOTA ZA KOSNJU
- INSTALACIJA BAZNE STANICE
- PRIKLJUÇAK STANICE ZA PUNJENJE
- POLAGANJE SIGURNOSNOG KABELA
- PLANIRANJE POLOZAJA SAJLE ZA ZADRZAVANJE
- POLAGANJE SIGURNOSNOG KABELA SL. C
- UGRADNJA STANICE ZA PUNJENJE
- RAD / POSTAVKE
- PrvoPokretanje robota za kosnju
- AZURIRANJE FIRMVERA PRIJE UPOTREBE ROBOTA.
- Ažuriranje treba izvršiti na sljedeci nacin.
- Nakon instaliranja softvera, uredaj je spreman za rad
- OPREZ!
- PODEŠAVANJE VISINE KOSNJE:
- UKLJUCIVANJE/ISKLJUCIVANJE
- AKTIVIRANJE ROBOTA I PROGRAMIRANJE RADNOG VREMENA U RUCNOM NACINU RADA
- PROGRAMIRANJE VREMANU AUTOMATSKOM NACINU RADA, 7-DNEVNI RASPORED, DOSTUPNO JE PUTEM POSTAVKI U APLIKACICIJI
- SVJETLO STATUS PUNJENJA U STANICI ZA PUNJENJE:
- IZVAN STANICE ZA PUNJENJE:
- SVJETLO POGRESKE:
- INDIKATOR SUZDRŽAVAJUCEG KABELA:
- SOFTVER ZA UPRAVLJANJE ROBOTOM ZAKOSNJU
- HITNO ISKLJUCIVANJE ROBOTA
- PREMJESTANJE ROBOTA
- ODRŽAVANJE I SKLADIŠTENJE
- OPREZ! Redovito uklanjajte biljne ostatke s donje strane robota kako biste izbjegli smanjenje produktivnosti.
- ZAMJENA OSTRICE
- RJESAVANJE PROBLEMA
- KOMPLET SADRžI:
- Informacije o buci i vibracijama
- PODACIO BUCI VIBRACIJAMA
- ZASTITA OKOLISA
- EZ izjava o sukladnosti
- EU izjava o sukladnosti
- SR
- ПЕВОД (KOPИСНК) УПУТСТВО
- KOWEHEPOBOT04-621
- DETAbHA B63BEOHOCHA INPABINIA
- IPENOPYKE
- IPNIPEMA
- ONEPALUJA
- NIKTOTPAMN NYNO3OPEHBA
- ONIC TPAΦNHYKNX EJIEMEHATA
- ПРИПЕМА 3A PAД
- NHCTANAJBA GATEPNJE
- PAHOOKPYXHEPOBOTA3A KOLJEH
- 1.BACE CTATNOH IHCTAJALJNA
- INPKJbYyAK 3A INHbEHeCTAHnla
- NOLAHABE CINYPHOCHOR KABJIA
- ПАНИРАБЕ ПОЛOKAJAKABJA 3A OБУЗДАВАБЕ
- NOLAFAHBE3HOKABNA CJ.L
- INHCTAIAJJA CTAHILJE 3A NYbEbe
- ONEPAUJIA/IODEJABAHBA
- PpBO nokpeTaHe po6To 3a KoWeHe
- AJKUPPABEΦNPMBEPA IPE YIOTPBEPOBOTA.
- Akypnpahe Tpe6a n3BpwnHa cneheh NaHn.
- Hakon wto je cooTbe Hnctanipah, ypehaj ie cnpemaH 3a pa
- ONPE3!
- NODEWABAHBE BNCHE KOWHbE:
- YKbYnBAHc / NCKbYnBAHc
- AKTNBUPAHEPOBOTA INIPOIPTPAMPAHEPADHO BPEMEHA YPYHOM PEXKIMY
- BPEMEHCKO IPOPGAMMPAHE Y AYOMATCKOM PEXKIMY, 7- INHEBH N PACNOPEI, IOCTUHO JE IPEKO IIOEJABAHy ANIKAUJN
- JAMNUA CTATYCA NyheBa Y CTAHU 3A NyeBHeE:
- N3BAHCTAHUIE3A NYbEHeB:
- CBETJIO TPEUKE:
- OBY3DABAHbE KABJI INHdNKATOP:
- COΦTBEP 3A KOHTPOJY POBJOTA 3A KOWIEH
- XNTHO TAWEHE POBOTA
- IPMEMUTAbePOBOTA
- OOPXABAbe IN CKJIADNIITEHe
- NJBXEHE
- ONPE3! PeoBHO yKaHaBJte ocTaKe 6nJaKa ca doBe cTpaHe po6ota kako 6nCTe n36erHn CMAHeBe npOpyKTNBHOCTN.
- BIADE3AMEHA
- PEUABAbe IPOBJEMA
- KOMNNETCAAPK:
- HnΦopmaunje 6yun n Bn6paunjama
- IODAUOByUNBIBPAJAMA
- 3AWTNTA KMBOTHE CPEINHE
- GR EIXEIP'IAIO METAΦPAΛHΣ (XP'HETH) POMTOT KOITHΣ 04-621
- NPOOXH! PIN ATO TO XEIPIISO HAEKTPIKQN EPRAAEION, ΔIABA ΕTE NPOSEKTIA TO IAPON ERXEP1IO OAHΓIΩN KAI ΦYΑΕΤΟ ΠΑ ΜΕΜΟNTIKΗ ΑΝΑΦΟΑ.
- AENTOMEPEI KANONEAΦAAEIA
- O△HΓIΕΣAΦΑΛEIAIΛΓIATAPOMITOTKOITHΣ
- ΣYETAIZE1Z
- IPOETOIMAXIA
- AEITOYPTIA
- EIKONOPPAMMATA KAI IPOEIODOHSEI
- IPEIPPAH TQN IPAIKQN 2TOIXEION
- IPOETOIMASIA THNEPRA
- ERKATAZAHTAHMNATAPIA
- NEPIBAANON EPTAIA TOY POMNOT KOITHE
- 1.BASE EKATAA TAZH 2TAOMY BAZH
- IPOEAPTHEH STAOMO'Y FOPTIeH
- TONOETHEH TOY KAANIOI Y SYKPATHE
- XEIAZMOZ THE ΘEESH ΘOY KAΛΩAIOY ΣYΓKPATHES
- TONOETHEH TOY KAAGAOY SYKPATHEIK.
- EKATAZTAH ZTAOMO'Y FOPTIEH
- AEIOTYPTIA/ PYOMIEE
- Pnwn EkkivnoT tou pOttot Kottns
- ENHM'EPQEH YAIKOAOIEMIKO'Y IPIN XPHZIMONIOIHZEETOPOMNOT.
- H evnepwn npenei va yivei wS eNs.
- Meta tvy eykataoan tou loviou, n oukeun eiva etoun yia
- IPOEOXH!
- PYOMIISHYPOYKOYP'EMATO:
- ENEPTONIO'TH/ANENEPTONIOTH
- ENEPTONIOIHJTOY POMITOT KAI NPOPAMMATIOMO2 TOY XPONOY EPRAIAE XEIPOKINHTAIETOYPJA
- O IPOIPOPMAMTIAEMOx XPONOY EAYOMATH AIEIOYPIIA, IPOIPOPAMMA 7 HMEPQN, EINAI IAOTZIMO MEZQ TQN PYOM12E0N ΣTHN EAPMOH
- ΦθTEINH ENAEIEH KATAASTAHE ΦOPTIεH ΣTO ΣTAOMO ΦOPTIεH:
- E3Ω ANO TO ΣTAOMO ΦOPTIξHε
- ΦΩΣ ΕΦΑΜΑΤΟΣ:
- ENAEIEH KAANAOIY SYIKPATHSEH:
- AOTIEMIKO TAN TON EAEFXO TOY POMNOT KOITHE
- ENE'IROYSA DIAKONTH AEITOYPFIA TOY POMNOT
- METAK'INHsH TOY POMITOT
- SYNTHPHEKAI ANO'HKEYE
- KAOAPIEMO
- ANTIKATAZAHTAH AEITIDAA
- ENIAYsH NPOBAHMATQN
- TO KIT IEPIAMBANEI:
- PnpoopieC BOpBou kai doVnoewv
- AEOYBOYKAIONHSEON
- IPOEIA TOY INPIBANONTO
- Anawon oumuoppwons EK
- MANUAL DE TRADUCCION (USUARIO) ROBOT CORTACESPED 04-621
- PREPARACION
- OPERACION
- DESCRIPICION DE LOS ELEMENTOS GRAFICOS
- INSTALACION DE LA BATERIA
- ENTORNO DE TRABAJO DEL ROBOT CORTACESPED
- 1.INSTALACION DE LA ESTACION BASE
- FIJACION DE LA ESTACION DE CARGA
- TENDIDO DEL CABLE DE RETENCION
- PLANIFICACION DE LA POSICION DEL CABLE DE RETENCION
- TENDIDO DEL CABLE DE RETENCION FIG.C
- INSTALLACION DE LA ESTACION DE CARGA
- FUNCIONAMIENTO/AJUSTES
- Primera puesta en marcha del robot cortacesped
- ACTUALIZACION DEL FIRMWARE ANTES DE UTILizar EL ROBOT.
- Laactualizaciondeberelizarse delsiguiente modo.
- Una vez instalado el software, el aparato está lista para funciona.
- CUIDADOI
- AJUSTE DE LA ALTURA DE SIEGA:
- CONEXION/DESCONEXION
- ACTIVACION DEL ROBOT Y PROGRAMACION DEL TIEMPO DE TRABAJO EN MODO MANUAL
- PROGRAMACION HORARIA EN MODO AUTOMÁTICO,CALENDARio DE 7 Días, DISPONIBLE A TRAVÉS DE LOS AJUSTES DE LA APLICACION
- LUZ DE ESTADO DE CARGA EN LA ESTACION DE CARGA:
- FUERA DE LA ESTACION DE CARGA:
- LUZ DE ERROR:
- INDICADOR DEL CABLE DE RETENCION:
- Controles Fig. D4:
- SOFTWARE DE CONTROL DEL ROBOT CORTACESPED
- PARADA DE EMERGENCIA DEL ROBOT
- MOVER EL ROBOT
- MANTENIMIENTO Y ALMACENAMIENTO
- LIMPIEZA
- PRECAUCION Retire regularmente los restos vegetales de la parte inferior del robot paraataruna reduccionde la productividad.
- SUSTITUCION DE CUCHILLAS
- RESOLUCION DE PROBLEMAS
- EL KIT INCLUYE:
- Información sobre ruidoy vibraciones
- DATOS SOBRE RUIDO Y VIBRACIONES
- PROTECCION DEL MEDIO AMBIENTE
- Declaración de conformidad CE
- Directiva sobre máquinas 2006/42/CE Directiva DER 2014/53/UE
- Declaración de conformidad de la UE
- MANUALE DI TRADUZIONE (UTENTE)
- ROBOT DI FALCIATURA 04-621
- REGOLE DI SICUREZZA DETTAGLIATE
- ISTRUZIONI DI SICUREZZA PER I ROBOT DI FALCIATURA
- RACCOMANDAZIONI
- PREPARAZIONE
- FUNZIONAMENTO
- PITTOGRAMMI E AVVERTENZE
- DESCRIZIONE DEGLI ELEMENTI GRAFICI
- PREPARAZIONE AL LAVORO
- INSTALLAZIONDE DELLA BATTERIA
- AMBIENTE DI LAVORO DEL ROBOT FALCIATORE
- INSTALLAZIONE DELLA STAZIONE BASE
- La stazione di ricarica deve essere collocata nella segunte posizione Fig. C3:
- ATTACCO DELLA STAZIONE DI RICARICA
- POSA DEL CAVO DI RITENUTA
- PIANIFICAZIONE DELLA POSIZIONE DEL CAVO DI RITENUTA
- POSA DEL CAVO DIRITENUTA FIG. C
- INSTALLAZIONE DELLA STAZIONE DI RICARICA
- FUNZIONAMENTO / IMPOSTAZIONI
- Prima messa in funzione del robot falcatore
- AGGIONAMENTO DEL FIRMWARE PRIMA DI UTILIZZARE IL ROBOT.
- L'aggiornamento deve essere eseguito come segue.
- Dopo l'installazione del software, l'apparecchio è pronto per il funzionamento.
- ATTENZIONE!
- REGOLAZIONE DELL'ALTEZZA DI TAGLIO:
- ACCENSIONE/SPEGNIMENTO
- ATTIVAZIONE DEL ROBOT E PROGRAMMAZZIONE DEL TEMPO DI LAVORO IN MODALITA MANUALE
- LA PROGRAMMAZIONE DELL'ORARIO IN MODALITA AUTOMATICA, CON PIANIFICAZIONE SU 7 GIORNI, E DISPONIBILE ATTRAVERSO LE IMPOSTAZIONI DELL'APP
- ALL'ESTERNO DELLA STAZIONE DI RICARICA:
- LUCE DI ERRORE:
- INDICATORE DEL CAVO DI RITENUTA:
- SOFTWARE PER IL CONTROLLO DEL ROBOT FALCIATORE Scaricare IOS:
- ARRESTO DI EMERGENZA DEL ROBOT
- SPOSTAREILROBOT
- MANUTENZIONE E STOCCAGGIO
- PULIZIA
- ATTENZIONE! Rimuovere regolarmente i risultui vegetali alla parte inferiore del robot per evitare una riduzione della produttività.
- SOSTITUZIONE DELLA LAMA
- RISOLUZIONE DEI PROBLEMI
- IL KIT CONTIENE:
- Informazioni su rumore e vibrazioni
- DATI SU RUMORE E VIBRAZIONI
- Dichiarazione di conformità CE
- Dichiarazione di conformità UE
- Direttiva RED 2014/53/UE
- NL VERTALING (GEBRUKERS)HANDLEIDING MAAIROBOT 04-621
- GEDETAILLEERDE VEILIGHEIDSREGELS
- VOORBEREIDING
- WERKING
- BESCHRIJVING VAN DE GRAFISCHE ELEMENTEN
- VOORBEREIDEN OP WERK
- BATTERIJ-INSTALLATIE
- WERKOMGEVING VAN DE MAAIROBOT
- INSTALLATIE BASISSTATION
- BEVESTIGING LAADSTATION
- LEGGEN VAN DE BEGRENZINGSKABEL
- PLANNING VAN DE POSITIE VAN DE BEGRENZINGSKABEL
- LEGGEN VAN DE BEGRENZINGSKABEL FIG.C
- INSTALLATIE VAN LAADSTATION
- BEDIENING/INSTELLINGEN
- Eerste opstart van de maairobot
- FIRMWARE-UPDATE VOORDAT U DE ROBOT GEBRUIKT.
- De update要去 als volgt worden uitgevoerd.
- Nadat de software is geinstalleerd, is het apparaat maar voor gebruik.
- LET OP!
- MAAIHOOGTE AANPASSEN:
- IN-/UITSCHAKELEN
- ACTIVERING VAN DE ROBOT EN PROGRAMMERING VAN DE WERKTIJD IN HANDMATIGE MODUS
- TIJDPROGRAMMERING IN AUTOMATISCHE MODUS, 7-DAAGS SCHEMA, IS BEsCHIKBAAR VIA DE INSTELLINGEN IN DE APP
- LAADSTATUSLAMPJE IN HET LAADSTATION:
- BUITEN HET LAADSTATION:
- INDICATOR VOOR DE BEGRENZINGSKABEL:
- SOFTWARE VOOR HET BESTUREN VAN DE MAAIROBOT
- NOODSTOP VAN DE ROBOT
- DE ROBOT VERPLAATSEN
- ONDERHOUD EN OPSLAG
- SCHOONMAKEN
- LET OP! Verwijder regelmatig plantenresten van de onderkant van de robot om vermindering van de productiviteit te voorkomen.
- BLADVERVANGING
- PROBLEEMOPILOSSING
- KIT BEVAT:
- Informatie over geluid en trillingen
- GELUIDS- EN TRILLINGSGEGEVENS
- EG-verklaring van overeenstemming
- ENIEC 63000:2018
- EU-conformlteltsverklaring
- RED Richtlijn 2014/53/EU
- PT
- MANUAL DE TRADUÇÃO (UTILIZADOR)
- REGRAS DE SEGURANCA PORMENORIZADAS
- INSTRUÇÉS DE SEGURANÇA PARA ROBOTS DE CORTE
- RECOMENDACOES
- PREPARACAO
- FUNCTIONAMENTO
- PICTOGRAMASEAVISOS
- DESCRIÇÃO DOS ELEMENTOS GRÁFICOS
- PREPARACAO PARA O TRABALHO
- INSTALAÇÃO DA BATERIA
- AMBIENTE DE TRABALHO DO ROBÇ CEIFEIRO
- 1.INSTALACAO DA ESTACAO DE BASE
- FIXAZAO DA ESTACAO DE CARREGAMENTO
- COLOCAÇÃO DO CABO DE RETENÇAO
Marque : NEO tools
Modèle : 04-621
Catégorie : Tondeuse robotique