
04-621 - Tosaerba robot NEO tools - Manuale utente e istruzioni gratuiti
Trova gratuitamente il manuale del dispositivo 04-621 NEO tools in formato PDF.

| Tipo di prodotto | Tagliaerba robotico |
| Marca/Modello | NEO tools / 04-621 |
| Larghezza di taglio | 180 mm |
| Altezza di taglio regolabile | 20 – 60 mm |
| Velocità di rotazione delle lame | 3100 giri/min |
| Alimentazione | Batteria ricaricabile 18 V CC (serie ENERGY+, non inclusa) |
| Potenza motore di taglio | 50 W |
| Potenza motore di spostamento | 20 W |
| Pendenza massima | 25% (14°) |
| Peso | 10,2 kg |
| Grado di protezione robot | IPX5 |
| Grado di protezione stazione di ricarica | IPX4 |
| Livello di pressione acustica (LpA) | 56 dB(A) (incertezza K=3 dB(A)) |
| Livello di potenza acustica (LwA) | 67 dB(A) (incertezza K=3 dB(A)) |
| Contenuto della confezione | Robot, stazione di ricarica, alimentatore con cavo 10 m, cavo perimetrale (100 m), 100 picchetti, 6 tasselli per stazione, 3 lame di ricambio, 2 connettori, chiave Allen |
| Autonomia programmata | Da 2 a 8 ore (a seconda delle impostazioni e della batteria) |
| Tipo di programmazione | Manuale (pulsanti) o automatica (app smartphone) |
| Connettività | Wi-Fi e Bluetooth (app Toua) |
| Sensori | Sensore pioggia, sensore sollevamento, sensore inclinazione, rilevatore di collisioni |
| Funzioni di sicurezza | Arresto di emergenza STOP, interruttore principale, rilevamento sollevamento/inclinazione, arresto automatico batteria scarica (<20%) |
| Manutenzione | Pulire il telaio e le lame dopo l'uso; sostituire le 3 lame contemporaneamente (viti incluse) |
| Garanzia e assistenza | Garanzia del produttore (vedere scheda); Assistenza: GTX Service (Polonia) |
Domande frequenti - 04-621 NEO tools
Domande degli utenti su 04-621 NEO tools
0 domanda su questo apparecchio. Rispondi a quelle che conosci o fai la tua.
Fai una nuova domanda su questo apparecchio
Scarica le istruzioni per il tuo Tosaerba robot in formato PDF gratuitamente! Trova il tuo manuale 04-621 - NEO tools e riprendi in mano il tuo dispositivo elettronico. In questa pagina sono pubblicati tutti i documenti necessari per l'utilizzo del tuo dispositivo. 04-621 del marchio NEO tools.
MANUALE UTENTE 04-621 NEO tools
Lumina verte continua - baterie complet incarcata.
Lumina verte intermitenta - incarcare.
IN AFARA STATIEI DE INCARCARE:
Stiahnite si Android:
MANUALE DI TRADUZIONE (UTENTE)
ROBOT DI FALCIATURA 04-621
ATTENZIONE! PRIMA DI UTILIZZARE GLI UTENSILI ELETTRICI, LEGGERE ATTENTAMENTE IL PRESENTE MANUALE DI ISTRUZIONI E CONSERVARLO PER FUTURE CONSULTAZIONI.
REGOLE DI SICUREZZA DETTAGLIATE
ISTRUZIONI DI SICUREZZA PER I ROBOT DI FALCIATURA
Sicurezza nell'uso pratico del robot di falcatura
RACCOMANDAZIONI
Leggere attentamente il manuale di istruzioni. Impara a conoscere i sistemi di controllo e il corretto funzionamento dell'apparecchio.
Non permettere che l'apparecchio venga utilizzato da bambini o da persona che non abbiano letto le istruzioni per l'uso. Le normative nazionali possonoindicare un'età minima per l'operatore.
Non utilizzato il robot in presenza di altre personne, in particolare bambini o animali.
Si ricorda che I'opercatore o I'utente è responsable di eventuali incidenti o pericoli per altre persone o per l'ambiente.
PREPARAZIONE
- Prima di falciere, verificare agli volte che tutte le parti del robot funzionino correttamente.
- Per ottenere risultati ottimali, si consiglia di falciare in assenza di pioggia. Quando si taglia sotto la pioggia, l'erba cui attaccarsi al robot, che di consequenceza cui scivolare.
- NON falcare in condizioni atmosalferiche avverse, ad esempio in caso di pioggia battente, temporali o nevicate.
- Ispezionare periodicamente l'area tagliata e rimuovere eventuali pietre, detriti, fili, ossa e altri ostacoli. La garanzia limitata non copre i danni causati da oggetti lasciati sul prato.
- Per evitare danni, non tagliare a meno di 1 m dagli irrigatori.
ATTENZIONE! Il robot e gli sprinkler NON devono essere accesi contemporaneamente.
Il robot deve essere programmato per funzionare a un orario diverso da quello degli irrigatori.
Non permettere MAI ai bambini di toccare l'alimentatore, la stazione di ricarica, in particolare i contatti, le lame, il vano batteria o qualsiasi parte in cui vi siano spazi vuoti, come le ruote.
FUNZIONAMENTO
- Attenzione alle lame rotanti! NONMETTERe le mani o i piedi sotto le lame rotanti.
- Attenzioneagli oggetti sparsi sul prato durante la rasatura!Quando il robot è acceso,mantenere una distanza di sicurezza.
- Non lasciare l'apparecchio incustodito se nelle vicinanze ci sono animali, bambini o passanti.
- Mantenere una posizione sicura. Mantenere l'equilibrio e una posizione stabile sulle pendenze. Durante il funzionamento del robot o delle sue periferiche, è consentito camminare, ma non correre.
- Leggere le istruzioni su quando, dove e come controllare il robot e le sue periferiche, i cavi e le prolonghe per verificare la presenza di anni o usura e riparare il robot. L'automodifica e la riparazione non sono consentite, con il rischio di invalidare la garanzia.
Non collegare o toccare un cavo di alimentazione danneggiato finché non è stato scollegato dall'alimentazione, a causa del rischio di fatto con componenti tanto tensione. - Collegare il robot e/o le apparecchiature periferiche solo a circuiti di alimentazione protetti da un interrottore differenziale con una corrente di intervento non superiore a 30mA .
- Se il robot emette un suono anomalo o sinota una vibrazione anomala o segnala un allarme, premere immediatamente il pulsante STOP.
- É VIETATO toccare le parti mobili pericolose prima di spegnere il robot.
- É VIETATO toccare le parti pericolose fino al loro completo arresto.
- Indossare sempre calzature robuste e pantaloni lunghi quando si maneggia il robot.
- Interrimpere l'alimentazione: Prima di bloccare il robot.
- Prima di effettuare test, pulizia o manutenzione.
PITTOGRAMMI E AVVERTENZE
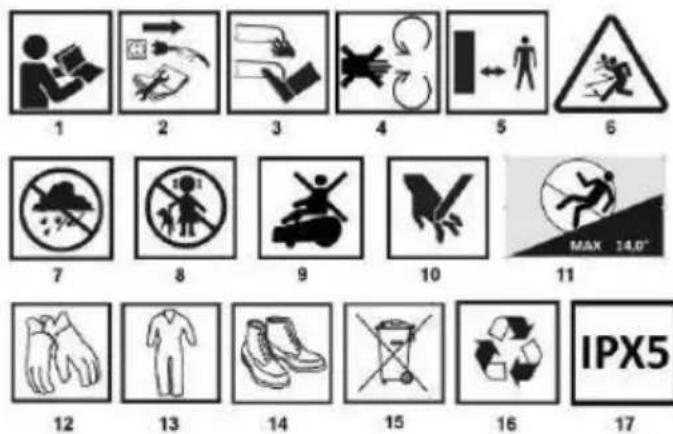
- Leggere le istruzioni per l'uso e rispettore le avventenze e le condizioni di sicurezza!
- Prima di procedere alla pulizia o alla manutenzione, scollegare l'alimentazione alla rete elettrica.
- Non mettere le mani o i piedi sotto la protezione del meccanismo di falcatura.
- Parti rotanti - possibilità di lesions
- Mantenere una distanza di sicurezza dal robot di falcatura.
- Attenzione alla possibilità di lesioni causate da oggetti fusi.
- Proteggere alla pioggia
- Tenere fuori alla portata dei bambini.
- Non salire sul robot
- Possibile perdita delle dita, fare attenzione
- Pendenza massima del terreno 14^ / 25% .
- Proteggere le mani con quanti da lavoro
- Indossare indumenti protettivi
- Indossare calzature protettive
- Non smaltire con i rifiuti domestici
- Raccolta differenziata dei rifiuti
- Grado di protezione
ATTENZIONE! Questo apparecchio può essere utilizzato da bambini di età superioreagli 8 anni e da persone con capacité fisiche e mentali limitate, nonché con conoscenze o esperenze insufficienti, a condizione che vengano sorvegliati o struitti adeguamente sull'uso sicuro dell'apparecchio e che slano consapevoll del rischi connessi. I bambini non devono giocare con questo apparecchio. I bambini non devono pulire o eseguire interventi di manutenzione sull'apparecchio alla supervisione.
DESCRIZIONE DEGLI ELEMENTI GRAFICI
La seguente numerazione si riferisce ai componenti dell'apparecchio illustrati nelle pagine grafiche di quello manuale.
| Designazione Fig. A | Opis |
| 1 | Arresto di emergenza |
| 2 | Regolatore dell'altezza di taglio |
| 3 | Pannello di controllo del tosaerba |
| 4 | Interruttore di alimentazione del tosaerba |
| 5 | Ruote motrici |
| 6 | Lame da taglio |
| 7 | Tamburo del meccanismo di taglio |
| 8 | Ruote piroettanti |
| 9 | Maniglia di trasporto |
| 10 | Connettori di ricarica |
| 11 | Coperchio del vano batteria |
| Designazione Fig. B | Opis |
| 1 | Pannello di controllo della docking station |
| 2 | Fori per il fissaggio della docking station |
| 3 | Connettori di ricarica |
| 4 | Stazione docking |
| 5 | Protezione della docking station |
| 6 | Connettori per il cavo di alimentazione per delimitare l'area di lavoro |
| 7 | Aperture per i cavi per delimitare l'area di lavoro e l'alimentazione elettrica |
| 8 | Presa di corrente della docking station |
| 9 | Marcatura per il corretto passaggio dei cavi |
| Designazione Fig. D | Opis |
| 1 | Indicatore luminoso dello stato di carica |
| 2 | Indicatore di guasto del segnale |
| 3 | Indicatore del cavo di ritenuta |
| 4 | Ore di funzionamento / messaggio di erre, spiè 1-4 |
| 5 | Pulsante di accensione |
| 6 | Interruttore di alimentazione |
| 7 | Pulsante di aggancio |
| 8 | "Pulsante" Conferma |
| Designazione Fig. H | Opis |
| 1 | Viti |
| 2 | Coperchio del vano batteria con maniglia di trasporto |
| 3 | Vano batteria |
| 4 | Presa della batteria sul coperchio della camera |
| 5 | Batteria ricaricabile (non inclusa) |
| Designazione Fig. I | Opis |
| 1 | Prato |
| 2 | Muro |
| 3 | Stazione docking |
| 4 | Distanza della stazione alla parete |
| 5 | Sezione iniziale della linea che delimita l'area di sfalcio |
| 6 | Lunghezza della sezione |
| Designazione Fig. J | Opis |
| 1a | Cavo per limitare l'area di sfalcio Inizio |
| 1b | Cavo per limitare l'area di sfalcio Fine |
| 2 | Linea di alimentazione: |
| 3 | Stazione docking |
- Potrebbero esserci differenze tra la grafica e il prodotto reale.
PREPARAZIONE AL LAVORO
INSTALLAZIONDE DELLA BATTERIA
- Invertire il robot di falcatura in modo da averere accesso alla parte inferiore del robot.
- Al posto dell'interruttore Fig. A4 e della maniglia di trasporto Fig. A9 si trova il coperchio del vano batterie Fig. H2 fissato con le 4 viti contrassegnate delle frece Fig. H1.
- Quindi svitare le viti contrassegnate dalfe frece.
- Rimuovere con cautela il coperchio del vano Fig. H2 per non rompere o scollegare i fili dell'interruttore Fig. A4 (è attaccato al coperchio del vano batteria).
- Quindi capovolgere il coperchio; sul lato inferiore del coperchio è fissata la presa della batteria Fig. H4.
- Inserire la batteria della serie ENERGY+ nella presa.
- Capovolgere il coperchio con la batteria collegata e inserirla nel vano della Fig. H3.
- Serrare le viti che fissano il coperchio. Girare il robot verso il basso: l'apparecchio è pronto.
Assicuratevi che le seguenti condizioni siano soddisfatte nell'area in cui il robot lavora:
L'altezza dell'erba non supera i 60~mm
ATTENZIONE! Se l'erba è più lunga di 60 mm, tagliarla prima con un tosaerba manuale.
Non ci sono pietre, pezioni di legno, fili, cavi elettrici o altri oggetti estranei.
Il sito di sfalcio è pianeggiante, privo di fossati e trincee la pendenza è inferiore al 25% (14°) Fig. C1
- Per l'installazione sono necessari i seguenti strumenti:
- Martello di gomma (per conficcare i perni nel terreno durante la posa del cavo di ritenuta)
- La chiave esagonale (per il fissaggio della stazione di ricarica) è inclusa nel kit.
Pinze (per tagliare il cavo che delimita l'area di lavoro)
1. INSTALLAZIONE DELLA STAZIONE BASE
Scegliere un luogo adatto
La stazione di ricarica deve essere collocata nella segunte posizione Fig. C3:
- Una parte del prato relativamente piatta e livellata.
- Vicino al bordo del prato.
- Vicino a una presa di corrente.
- Collocare il cavo di prolunga da 10 m e l'alimentatore in un luogo ombreggiato, fresco e asciutto.
Non devono esserci ostacoli nel raggio di almeno 2 m alla stazione di ricarica. - Si raccomanda di collocare la stazione di ricarica in un luogo asciutto e riparato.
- L'alimentazione deve trovarsi a 30~cm dal livello del suolo.
2. ATTACCO DELLA STAZIONE DI RICARICA
Fissare la stazione di ricarica al suolo con 6 viti di fissaggio (G1) (utilizzando una chiave esagonale G6).
ATTENZIONE! NON stare in piedi o camminare sulla piastra della stazione di ricarica.
ATTENZIONE! NON praticare nuovi fori nella piastra della stazione di ricarica. La stazione deve essere fissata al pavimento utilizzato i fori esistenti.
3. POSA DEL CAVO DI RITENUTA
Il cavo di contentimento viene utilizzato per delimitare l'area di lavoro e guidare il robot verso la stazione di ricarica.
ATTENZIONE! Seanche il vicino di casautilizzua un tosaerba robotizzato, mantenere una distanza di almeno 1 m tra i cavi di ritenuta di entrambi i robot.
PIANIFICAZIONE DELLA POSIZIONE DEL CAVO DI RITENUTA
Prima di posare il cavo di ritenuta, camminare lungo il confine designato e rimuovere eventuali oggetti non necessari, come ad esempio pietre.
ATTENZIONE! La lunghezza del cavo di ritenuta non deve superare i 200 metri.
ATTENZIONE! Il robot non deve passare su ghiaia o materiali simili che potrebbero danneggiare le lame.
POSA DEL CAVO DIRITENUTA FIG. C
Seguire le istruzioni riportate di seguito per stendere il cavo di ritenuta intorno all'area di lavoro eagli ostacoli. Per posare correttamente il cavo di ritenuta,utilizzare il misuratore incluso nel kit.
ATTENZIONE! Il cavo di ritenuta è alimentato a bassissima tensione ed è sicuro per le persone e gli animali domestici.
ATTENZIONE! Partendo dal connettore "-" sul retro della stazione di ricarica Fig. B6, tirarlo sotto la stazione (e lasciare una riserva di 10cm ) e stendere il cavo intorno al prato in senso antiorario, terminando con il connettore "+" sul retro della stazione di ricarica (lasciare una riserva di 10 cm). Assicurarsi che il cavo venga a contatto con il metallo in corrispondenza dei connettori "+" e "-" Fig. B6 ricordarsi di tagliare il cavo di contentimento in effesso.
- Lasciare almeno 2m di spazio vuoto tra il cavo di ritenuta e la stazione di ricarica. Il cavo in questa sezione viene utilizzato per portare il robot alla docking station.
- Mantenere una distanza di 30 cm tra il cavo di ritenuta e il bordo del prato Fig. C2; Fig. C3.
- Fissare il cavo di ritenuta al suolo con i tasselli forniti Fig. G5. Il cavo di ritenuta devesse essere diritto e leggermente teso. I tasselli devono essere distanziati agli 1 m (questo più essere modificato in base alla forma del prato) Fig. C4. Non interrare il cavo a una profundità superiore a 2 cm per evitare di indebolire il segnale.
- Disporre il cavo in modo che gli angoli siano superiori a 90^ Fig. C5. In queste aree, il cavo di contentimento deve essere posato con curve dolci, che facilitano il movimento del robot nell'area da faliare.
- Se nel prato sono presenti aiuole, stagni o alberi, circondarli con anelli di cavo di ritenuta Fig. C4.
- Mantenere una distanza minima di 30 cm tra il cavo di ritenuta e i bordi degli ostacoli. 30 cm di distanza tra il cavo di ritenuta e i bordi degli ostacoli.
ATTENZIONE! Durante l'ingresso e l'uscita dal cappio, i cavi di ritenuta non devono incrociarsi Fig. C4.
- Lasciare uno spazio ristretto nell'area di lavoro del tosaerba. Assicurarsi che la distanza tra i cavi di ritenuta che corrono paralleli sua superiore a 1 m.
ATTENZIONE! Assicurarsi che la docking station si trovi all'interno dell'anello che delimita l'area di taglio. (esterno / interno) Fig.B2
4. INSTALLAZIONE DELLA STAZIONE DI RICARICA
Collegare l'alimentazione
- Inserire la spina di alimentazione in una presa di corrente da 110-240V.
-
Controllare lo stato delle spiè LED della stazione di ricarica Fig. B1:
-
Luce verde fissa: connessione stabilita (robot non in carica o completeness carico)
Luce verte intermittente: il robot è in carica. - Luce rossa intermittente: l'erreore più comune è la "disconnessione del cavo di ritenuta".
- Luce spenta: il guasto più comune è "Assenza di alimentazione a 100-240 V" o "Manzanza di collegamento alla fonte di alimentazione".
FUNZIONAMENTO / IMPOSTAZIONI
Prima messa in funzione del robot falcatore
- Quando si avvia il robot per la prima volta, posizionare l'apparecchio sulla docking station in modo che i connettori di ricarica della stazione fig. B3 non entrino in contatto con i connettori di ricarica del robot di falcatura fig. A10.
- Quando il robot rasaerba viene avviato per la prima volta dall'applicazione del Telefono, è necessario eseguire un aggiornamento del firmware. Il metod di implementazione è descritto di seguito nella sezione Aggiornamento software.
- ATTENZIONE! Durante la prima connessione, il Telefono e il robot devono trovarsi nel raggio d'azione della rete Wi-fi.
AGGIONAMENTO DEL FIRMWARE PRIMA DI UTILIZZARE IL ROBOT.
L'aggiornamento deve essere eseguito come segue.
- Posizione are il robot all'interno dell'anello ma all'esterno della stazione di ricarica.
- Portare l'interruttre Fig. A4 in posizione 1.
- Tenere premuto l'interrutture Fig.D5
- Avviare l'applicazione, scansionare il codice QR
- Collegare l'applicazione al robot
- Espandere le impostazioni del software premendo l'icona in alto a destra dello schermo.
- Selezionare un'opzione: Aggiornamento firmware.
- Seguire quindi le istruzioni visualizzate sullo schermo.
Dopo l'installazione del software, l'apparecchio è pronto per il funzionamento.
ATTENZIONE!
- Il display indica se il robot si trova nel raggio d'azione del Wi-fi o del Bluetooth.
- La connessione a una rete è indicata da un'icona lampeggiante per il tipo di connessione. Una volta collegata, l'icona smette di lampegiare.
Il robot può essere abbinato a un solo Telefono. - Se è necessario collegarne un'alto (lo stesso robot rasaerba), il primo deve essere rimioso dall'applicazione. Nell'app iOSanche delle impostazioni Bluetooth.
REGOLAZIONE DELL'ALTEZZA DI TAGLIO:
Prima della prima rasatura, impostare l'altezza di taglio a 60mm e poi passare all'altezza desiderata quando l'intero prato è relativamente piatto.
- Ruotare la manopola Fig. A2 in senso orario per augmentare l'altezza di taglio.
- Ruotare la manopola Fig. A2 versus sinistra per ridurre l'altezza di taglio.
L'altezza di taglio può essere regolata da 20 mm (MIN) a 60 mm (MAX).
ATTENZIONE! Il motore di azionamento del tamburo del meccanismo di falciatura Fig. A7 si accende circa 10 secondi dopo aver lasciatto la base, avviando il funzionamento.
ACCENSIONE/SPEGNIMENTO
- Portare l'interruttore di Fig. A4 in posizione "O" per disattivare l'alimentazione.
- Portare l'interruttore di Fig. A4 in posizione "l" per attivare l'alimentazione.
ATTIVAZIONE DEL ROBOT E PROGRAMMAZZIONE DEL TEMPO DI LAVORO IN MODALITA MANUALE
- Tenere premuto il pulsante di accensione Fig. D5 per avviare il robot. Nota: non scuotere il robot durante l'avvio per evitare un erre di avvio. Se il robot non si avvia correttamente (tutte le spie si accendono continuamente), riaviarlo.
- Inserire la password premendo due volte il pulsante Fig. D6, poi due volte il pulsante Fig. D7 e una volta il pulsante Fig. D8 (password programmata in fabbrica).
-
Programmare il tempo di funzionamento (compreso il tempo di falciatura e il tempo di ricarica):
-
Premere la Fig. D6 per impostare la durata di funzionamento. Una luce accesa significa 2 ore, il tempo massimo di funzionamento è di 8 ore e 4 lui accese Fig. D4. Premere il pulsante Fig. D8 per confermare e awiare il robot.
ATTENZIONE! Una volta impostato l'orario di funzionamento, il robot ricordera le impostazioni e inizIERÀ a falciare agli giorni all'ora programmata. Il tempo di falciatura sare conforme alle impostazioni inserte.
- Il tempo di funzionamento programmato del robot, da 2 a 8 ore, è il tempo di falciatura, compreso il tempo di ricarica.
- I tempi di funzionamento e di ricarica variano a seconda della batteria utilizzata.
Se si desidera modificare l'orario di funzionamento, seguire nuovamente i punti 2-3.
LA PROGRAMMAZIONE DELL'ORARIO IN MODALITA AUTOMATICA, CON PIANIFICAZIONE SU 7 GIORNI, E DISPONIBILE ATTRAVERSO LE IMPOSTAZIONI DELL'APP
- Dopo un arresto di emergenza, il robot deve essere prima sbloccato seguendo il passo 2 di cui sopra. Una volta sbloccato il robot, possiamo rimandarlo alla stazione premendo i pulsanti: Fig. D7 e confermare con il pulsante Fig. D8 per riportare il tosaerba alla stazione di ricarica.
- Premendo il pulsante di arresto di emergenza STOP si cancella il ciclo di lavoro manuale e automatico dall'applicazione, se è stato attivato in questo modo. Affinché il robot possa ricominciare a lavorare dopo un arresto di emergenza, è necessario riportarlo alla stazione di ricarica e impostare nuovamente il programma di lavoro manuale. Nel caso di un programma automatico, eseguire la stessa azione nel programma dell'applicazione e confirmare le impostazioni.
ATTENZIONE! L'orario di avvio programmato nel programma automatico non deve essere considerato molto preciso. L'appareccchio può avviarsianche diversi minuti dopo l'orario impostato.
- L'attivazione della modalità manuale cancella la pianificazione programmata nell'applicazione e viceversa.
- La cordatura in modalità manuale avviene automaticamente agli pochi cici di taglio. Si tratta di tagliare l'erba vicino al cavo che delimita l'area di lavoro. ATTENZIONE! è necessario assicurarsi che il cavo sa fissato correttamente per non esporlo a tagli accidentali.
- Il robot falcatore tornera alla docking station una volta che il dispositivo avrare rilevato l'inizio delle precipitazioni.
- Se il robot incontrera un ostacolo durante il lavoro, rimbalza su diesso e continua a lavorare.
LA SPIA DELLO STATO DI CARICA NELLA STAZIONE DI RICARICA: Luce verde continua - batteria completamente carica. Luce verde intermittente - carica.
ALL'ESTERNO DELLA STAZIONE DI RICARICA:
Luce verde continua - batteria > = 20%
Luce verte intermittente - batteria < 20%
ATTENZIONE! Il robot interrompe automaticamente il lavoro e torna alla stazione di ricarica se il livello della batteria scende quello 20% .
LUCE DI ERRORE:
Luce verte continua: aggiornare il sistema. Collegarsi all'app per eseguire l'aggiornamento.
Luce verde intermittente - aggiornamento del sistema in corso.
Luce rossa intermittente - messaggio di erre da 1 a 5, riavviare il robot.
Luce rossa continua - messaggio di erre de 6 a 12, premere "STOP" o "OK" per cancellare.
INDICATORE DEL CAVO DI RITENUTA:
Luce verde continua - segnale corretto
Luce rossa continua - nessun segnale
Controlli Fig. D4:
Luce intermittente - robot bloccato.
Luce continua - robot sbloccato.
La luce 1 si illumina di verde: 2 ore di funzionamento.
Le luci 1 e 2 si illuminano di verde: 4 ore di funzionamento.
Le luci 1, 2 e 3 si illuminano di verde: 6 ore di funzionamento.
Le luci 1, 2, 3 e 4 si illuminano di verde: 8 ore di funzionamento.
SOFTWARE PER IL CONTROLLO DEL ROBOT FALCIATORE Scaricare IOS:
Le istruzioni per il programma possono essere scaricate all'indirizzo: https://bit.ly/3QBB6Gm
ARRESTO DI EMERGENZA DEL ROBOT
Premere il pulsante "STOP" Fig. A1 per arrestare il robot, tenere premuto il pulsante di accensione per spegnere il robot.
SPOSTAREILROBOT
Sotto il robot si trova una maniglia di sollevamento (Fig. A10) per un facile utilizzo con una sola mano.
MANUTENZIONE E STOCCAGGIO
- Spagnere sempre il robot prima della pulizia e della manutenzione.
- Prima di procedere alla pulizia e alla manutenzione della stazione di ricarica, scollegare l'alimentazione.
- Indossare sempre quanti protettivi spessi durante la sostituzione delle lame e la pulizia della parte inferiore del robot.
- Controllare regolarmente il serraggio di bulloni e dadi. Le parti danneggiate devono essere riparate o sostuite per motivi di sicurezza.
- Controllare regolarmente che le lame possano ruotare liberamente.
ATTENZIONE! Quando si capovolge il robot, appoggiarlo sul prato o su una superficie morbida per non danneggiare o graffiare il coperchio.
PULIZIA
ATTENZIONE! Prima di iniziare la pulizia, spegnere l'alimentazione con l'interruttore Fig. A4.
- Lavare la parte anteriore del robot con un detergente a bassa pressione e una spazzola o un panno morbido.
- Utilizzate una spazzola dura per rimuovere i risultui di erba tagliata e i detriti dalle lame, dalle ruote e da altre parti della parte inferiore del robot.
- Controllate regolarmente che le ruote non siano sporche di fango o di erba tagliata e pulitele con una spazzola.
ATTENZIONE! Rimuovere regolarmente i risultui vegetali alla parte inferiore del robot per evitare una riduzione della produttività.
SOSTITUZIONE DELLA LAMA
ATTENZIONE! Spagnere prima l'interruttore principale e indossare i quanti di protezione.
ATTENZIONE! Utilizzato solo le lame originali indicate e APPROVATE dal produttore.
- Tutte e tre le lame e le relative viti devono essere sostituite in un'unica operazione di sostituzione Fig. A6.
Le viti devono essere svitate e serrate con un cacciavite. - Verificare che le nuove lame possano ruotare liberamente.
RISOLUZIONE DEI PROBLEMI
La tabella segunte fornisce indicazioni per la diagnosi dei problemi.
Se possiblo, riparare il dispositivo da soli. Se non è possiblo risolverve il problema, rivolgersi a un rivenditore o a un centro di assistenza autorizzato.
AVVERTENZA! è necessario adottare misure di protezione.
| Problema | Possibili cause | Solutazioni |
| La luce rossa lampeggia sulla stazione di ricarica | Interruzione del cavo di ritenuta | Individuare il fatto di cavo difettoso e sistmare il tutto |
| Il robot ha difficoltà ad agganciarsi alla stazione di ricarica | La stazione di ricarica non è installata correttamente | Vedere la sezione "Preparazione al lavoro". |
| Il cavo di ritenuta non è posizionato correttamente | ||
| Nessun segnale dal cavo di ritenuta | Nessuna alimentazione | Controllare la fonte di alimentazione |
| Il cavo di ritenuta è stato collegato al contrario | Scambiate i connettori " +" e "-". | |
| Il cavo di ritenuta non è collegato alla stazione di ricarica | Controllare che il cavo di ritenuta sia correttamente collegato a una stazione di ricarica | |
| Interruzione del cavo di ritenuta | Controllare tutto il percorso, che il cavo non sia stato interrotto | |
| Incroci di cavi di sicurezza all'andata e al ritorno dal loop | Controllare che il cavo di ritenuta sia installato correttamente | |
| Il robot vaoltire il confine | Il cavo di ritenuta è stato collegato al contrario | Scambiate i connettori "+"e "-" |
| Il robot vibra o emette rumori insoliti | Lama danneggiata o mancante | Controllare e riparare le viti di fissaggio della lama |
| Il disco della lama è allentato | ||
| Sostituire la lama |
| Codice di erre | Opis | Soluzione |
| E01 Fig. F1 | Errore di initiazizzazione - sensore giroscopico | Posizionare il robot su una superficie piana e riavviare. |
| E02 Fig. F2 | Guasto al sensore di sollevamento o al sensore di collisione | Regolare la barra di collISIONE e la ruota di torsione sulla parte anterio del tosaerba, verificare che non siano bloccate; posizionare il robot su una superficie piana e riavviare. |
| E03 Fig. F3 | Errore di initiazizzazione del motore di falciatura | Posizionare il robot su una superficie piana e riavviare. Se il problema persistsente, contattare il servizio clienti. |
| E04 Fig. F4 | Errone di collegamento dell'alimentazione | |
| E05 Fig. F5 | Velocità del motore di falciatura non corretta | |
| E06 Fig. F6 | Avviso di inclinazione | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. |
| E07 Fig. F7 | Avviso di sollevamento | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. |
| E08 Fig. F8 | Errone del canale ADC | Posizionare il robot su una superficie piana e riavviare. Se il problema persistsente, contattare il servizio clienti. |
| E09 Fig. F9 | Segnale errato | Vedi sopra nella tabella: problema - nessun segnale dal cavo di ritenuta. Controllare tutti i punti uno per uno, quando posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E010 Fig. F10 | Marmellata di robot | Posizionare il robot su una superficie piana. Premere STOP o OK per annullare l'allarme. Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E011 Fig. F11 | Velocità errata del motore passo-passo sinistro | Riavviare il robot. Se il problema persistsente, contattare il servizio clienti. |
| E012 Fig. F12 | Velocità non corretta del diritto motore passo-passo |
IL KIT CONTIENE:
Robot di falciatura 1 pezzo.
- Stazione di ricarica e docking 1pc.
- Alimentazione e cavo di prolunga 1pc.
Cavo per la delimitazione dell'area di lavoro 100m
Tasselli per il fissaggio dei cavi 100 pz.
Tasselli di fissaggio della docking station 6 pz.
Lame da taglio 3 pz.
- Connettori per cavi 2 pz.
- Chiave esagonale 1 pz.
SPECIFICHE
| Robot di falciatura 04-621 | |
| Parametro | Valore |
| Tensione di alimentazione: | 18 V CC |
| Potenza nominale massima del motore di falciatura: | 50 W |
| Potenza massima del motore semovente: | 20 W |
| Grado di protezione IP per la stazione di ricarica | IPX4 |
| Grado di protezione IP per il robot | IPX5 |
| Grado di protezione IP per l'adattatore di ricarica | IP 65 |
| Classe di protezione del robot | III |
| Classe di protezione della stazione di ricarica | II |
| Larghezza di taglio: | 180 mm |
| Regolazione dell'altezza di taglio nell'intervallo | 20 mm - 60 mm |
| Velocità di rotazione | 3100 giri/min. |
| Peso | 10,2 kg |
| Anno di produzione | 2024 |
DATI SU RUMORE E VIBRAZIONI
| Livello di pressione sonora | \( {\mathrm{L}}_{\mathrm{{PA}}} = {56}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
| Livello di potenza sonora misurato | \( {\mathrm{{Lw}}}_{\mathrm{A}} = {67}\mathrm{\;{dB}}\left( \mathrm{\;A}\right) \mathrm{K} = \) 3dB(A) |
Informazioni su rumore e vibrazioni
Il livello di rumore emesso dal dispositorio è descritto da: il livello di pressione sonora emesso L PA e il livello di potenza sonora L WA, dove K indica l'incertezza di misura. Le vibrazioni emesse dal dispositorio sono descritte dall'accelerazione di vibrazione a h, dove K indica l'incertezza di misura.
I valori misurati in quello manuale di istruzioni, ovvero il livello di pressione sonora emesso LpA , il livello di potenza sonora LWA , e l'accelerazione delle vibrazioni a_h , sono stati misurati in conformità alla norma EN 62841-1:2015+A11. Il livello di vibrazione a_h può essere utilizzato per confrontare i dispositivi e per una valutazione preliminare dell'esposizione alle vibrazioni.
Il livello di vibrazioni indicate è rappresentativo solo per le applicazioni di base del dispositivo. Se il dispositivo viene utilizzato per altre applicazioni o con altri strumenti di lavoro, il livello di vibrazioni può variarie. Una manutenzione inadeguata o rara del dispositivo causale livelli di vibrazione più elevati. Le cause sulla citate possono augmentare l'esposizione alle vibrazioni per tutte la durata di vita del dispositivo.
Per determinare con precisione l'esposizione alle vibrazioni, è necessario prendere in considerazione i periodi di "accensione" e "spegnimento" del dispositivo, escludendo i periodi in cui vlene utilizzato per il funzionamento. L'esposizione totale alle vibrazioni più essere molto più Bassa se tutti i fattori sono stimati con precisione.
Per proteggere l'opercatore delle vibrazioni,utilizzare misure di sicurezza aggintive, ad esempio una manutenzione regolare del dispositivo e degli strumenti di lavoro, condizioni adeguate di temperatura delle mani e una corretta organizzazione del lavoro.
DATI SU RUMORE E VIBRAZIONI
PROTEZIONE DELL'AMBIENTE
| Le apparecchiature elettriche non devono essere smaltite insieme ai domestici. Smaltira in strutture adequate. Le informazioni sullo smaltimento possono essere richieste al rivenditore del prodotto o al autorità locali. I rifiuti di apparecchiature elettriche ed elettroniche (RAEE contengono sostanse non neutre per l'ambiente naturale. I RAEE nor riciclati rappresentano un potenziale pericolo per l'ambiente e la salute umana. |
"Grupa Topex Spolka z ograniczona odpwiedzialnosci". Spolka komandytowa con se de legale a Varsavia, ul. Pograniczna 2/4 (di seguito: "Topex Group") informa che tutti i diritti d'autore sul contento del presente manuale di istruzioni (di seguito: "Manuale"), compresi, ma non solo, il testo, le fotografie pubblicate, i diagrammi, i disegni, nonché la sua composizione, apparpengono esclusivamente a Topex Group e sono soggetti a tutela legale ai sensi della legge del 4 febbraio 1994, sul diritto d'autore e sui diritti connessi (ovvero Gazzetta Ufficiale U. 2006 n. 90 voce 631 e successive modifiche). La copia, l'elaborazione, la pubblicazione, la modifica a fini commerciali dell'intero Manuale e di singoli elementi dello stesso,enza il consenso scritto del Grippo Topex, è severamente vietala e può accomportare responsabilità civili e penali.
Dichiarazione di conformità CE
Produttore: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsavia
Prodotto: Robot di falciatura E+
Modello:04-621
Nome commerciale: NEO TOOLS
Numero di seri: 00001 ÷ 99999
La presente dichiarazione di conformità è rilasciate nelle escludiva responsabilità del produttore.
Il prodotto sopra descrizione è conforme ai seguenti documenti:
Direttiva macchine 2006/42/CE
Direttiva RED 2014/53/UE
Direttiva RoHS 2011/65/UE, modificata alla direttiva 2015/863/UE.
E soddisfa i requisiti degli standard:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
La presente dichiarazione si riferisce esclusivamente alla macchina dati come immessa sul mercato e non comprende i componenti
aggiunte dall'utente finale o da azioni da lui compite successivement.
Nome e indirizzo della persona residente nell'UE autorizzata a preparare il fascicolo technique:
Firmato a nome di:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsavia

Pawel Kowalski
Responsabile della qualità del gruppo TOPEX
Varsavia, 2023-09-11
Dichiarazione di conformità UE
Produttore: Grupa Topex Sp. Z o.o. Sp.k., ul. Pograniczna 2/4 02-285 Varsavia
Prodotto: Stazione di ricarica
Modello: K145455
Nome commerciale: NEO TOOLS
Numero di serie: 00001 + 99999
La presente dichiarazione di conformità è rilasciate nelle escludiva responsabilità del produttore.
Il prodotto sopra descrizione è conforme ai seguenti documenti:
Direttiva RED 2014/53/UE
Direttiva RoHS 2011/65/UE, modificata alla direttiva 2015/863/UE.
E soddisfa i requisiti degli standard:
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
La presente dichiarazione si riferisce esclusivamente alla macchina casi come è stata introdotta nella
e non comprende i componenti aggiunti dall'utente finale o dal le sue attività successive.
Nome e indirizzo del residente nell'UE autorizzato a
prepare il dossier tecnico:
Firmato a nome di:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsavia

Pawel Kowalski
Responsabile della qualità del gruppo TOPEX
Varsavia, 2023-11-09
NL VERTALING (GEBRUKERS)HANDLEIDING MAAIROBOT 04-621
LET OP! LEES DEZE GEBRUIKSAANWIJZING ZORGVULDIG DOOR VOORDAT U ELEKTRISCH GEREEDSCHAP BEDIENT EN BEWAAR HEM VOOR TOEKOMSTIG GEBRUIK.
GEDETAILLEERDE VEILIGHEIDSREGELS
VEILIGHEIDSINSTRUCTIES VOOR MAAIROBOTTER
BATTERIJ-INSTALLATIE
- IN AFARA STATIEI DE INCARCARE:
- MANUALE DI TRADUZIONE (UTENTE)
- ROBOT DI FALCIATURA 04-621
- REGOLE DI SICUREZZA DETTAGLIATE
- ISTRUZIONI DI SICUREZZA PER I ROBOT DI FALCIATURA
- RACCOMANDAZIONI
- PREPARAZIONE
- FUNZIONAMENTO
- PITTOGRAMMI E AVVERTENZE
- DESCRIZIONE DEGLI ELEMENTI GRAFICI
- PREPARAZIONE AL LAVORO
- INSTALLAZIONDE DELLA BATTERIA
- INSTALLAZIONE DELLA STAZIONE BASE
- La stazione di ricarica deve essere collocata nella segunte posizione Fig. C3:
- ATTACCO DELLA STAZIONE DI RICARICA
- POSA DEL CAVO DI RITENUTA
- PIANIFICAZIONE DELLA POSIZIONE DEL CAVO DI RITENUTA
- POSA DEL CAVO DIRITENUTA FIG. C
- INSTALLAZIONE DELLA STAZIONE DI RICARICA
- FUNZIONAMENTO / IMPOSTAZIONI
- Prima messa in funzione del robot falcatore
- AGGIONAMENTO DEL FIRMWARE PRIMA DI UTILIZZARE IL ROBOT.
- L'aggiornamento deve essere eseguito come segue.
- Dopo l'installazione del software, l'apparecchio è pronto per il funzionamento.
- ATTENZIONE!
- REGOLAZIONE DELL'ALTEZZA DI TAGLIO:
- ACCENSIONE/SPEGNIMENTO
- ATTIVAZIONE DEL ROBOT E PROGRAMMAZZIONE DEL TEMPO DI LAVORO IN MODALITA MANUALE
- LA PROGRAMMAZIONE DELL'ORARIO IN MODALITA AUTOMATICA, CON PIANIFICAZIONE SU 7 GIORNI, E DISPONIBILE ATTRAVERSO LE IMPOSTAZIONI DELL'APP
- ALL'ESTERNO DELLA STAZIONE DI RICARICA:
- LUCE DI ERRORE:
- INDICATORE DEL CAVO DI RITENUTA:
- SOFTWARE PER IL CONTROLLO DEL ROBOT FALCIATORE Scaricare IOS:
- ARRESTO DI EMERGENZA DEL ROBOT
- SPOSTAREILROBOT
- MANUTENZIONE E STOCCAGGIO
- PULIZIA
- ATTENZIONE! Rimuovere regolarmente i risultui vegetali alla parte inferiore del robot per evitare una riduzione della produttività.
- SOSTITUZIONE DELLA LAMA
- RISOLUZIONE DEI PROBLEMI
- IL KIT CONTIENE:
- Informazioni su rumore e vibrazioni
- DATI SU RUMORE E VIBRAZIONI
- Dichiarazione di conformità CE
- Dichiarazione di conformità UE
- Direttiva RED 2014/53/UE
- NL VERTALING (GEBRUKERS)HANDLEIDING MAAIROBOT 04-621
- GEDETAILLEERDE VEILIGHEIDSREGELS
- BATTERIJ-INSTALLATIE
Marca : NEO tools
Modello : 04-621
Categoria : Tosaerba robot