
04-621 - Robot cortacésped NEO tools - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato 04-621 NEO tools en formato PDF.

| Tipo de producto | Cortacésped robótico |
| Marca / Modelo | NEO tools / 04-621 |
| Ancho de corte | 180 mm |
| Altura de corte ajustable | 20 – 60 mm |
| Velocidad de rotación de las cuchillas | 3100 rpm |
| Alimentación | Batería recargable 18 V CC (serie ENERGY+, no incluida) |
| Potencia motor de corte | 50 W |
| Potencia motor de desplazamiento | 20 W |
| Pendiente máxima | 25% (14°) |
| Peso | 10,2 kg |
| Índice de protección robot | IPX5 |
| Índice de protección estación de carga | IPX4 |
| Nivel de presión acústica (LpA) | 56 dB(A) (incertidumbre K=3 dB(A)) |
| Nivel de potencia acústica (LwA) | 67 dB(A) (incertidumbre K=3 dB(A)) |
| Contenido del paquete | Robot, estación de carga, adaptador de corriente con cable de 10 m, cable perimetral (100 m), 100 estacas, 6 clavijas de estación, 3 cuchillas de repuesto, 2 conectores, llave Allen |
| Autonomía programada | 2 a 8 horas (según ajuste y batería) |
| Tipo de programación | Manual (botones) o automática (aplicación smartphone) |
| Conectividad | Wi-Fi y Bluetooth (aplicación Toua) |
| Sensores | Sensor de lluvia, sensor de elevación, sensor de inclinación, detector de colisión |
| Funciones de seguridad | Parada de emergencia STOP, interruptor principal, detección de elevación/inclinación, parada automática por batería baja (<20%) |
| Mantenimiento | Limpiar el chasis y las cuchillas después del uso; reemplazar las 3 cuchillas simultáneamente (tornillos incluidos) |
| Garantía y servicio | Garantía del fabricante (ver tarjeta); SAT: GTX Service (Polonia) |
Preguntas frecuentes - 04-621 NEO tools
Preguntas de los usuarios sobre 04-621 NEO tools
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Robot cortacésped en formato PDF gratis! Encuentra tus instrucciones 04-621 - NEO tools y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. 04-621 de la marca NEO tools.
MANUAL DE USUARIO 04-621 NEO tools
OPIS ELEMENTOW GRAFICZNYCH
ATENCLON ANTES DE UTILizar HERRAMIENTAS ELECTRICAS, LEA ATENTAMENTE Este MANUAL DE INSTRUCCIONES Y CONSERVELO PARA FUTURAS CONSULTAS.
NORMAS DE SEGURIDAD DETALLADAS
INSTRUCCIONES DE SEGURIDAD PARA ROBOTS CORTACESPED
Seguidad en el uso practico del robot cortacesped
RECOMENDACIONES
Lea atentamente el manual de instrucciones. Conozca los sistemas de control y el funcionacorrecto del aparato.
No permitted that el aparato sea realizado por niños o por personas que no hayan leido el manual de instrucciones. La normativa nacionaluede indicar unaidad minima para el operador.
Noulisces el robot si hayoras personas circa,especially nino s0 animales.
Recuerde que el operador o usuario es responsable de los accidentes o peligos para otheras personas o el medio ambiente.
PREPARACION
- Antes de segar, compruebe cada vez que todas las piezas del robot funcionalmente.
- Para Obtener los最好的 resultados, se recomienda segar cuando no llueva. Cuando se siega bajo la lluvia, la hierba pueda pegarse al robot, que pueda resbalar como consecuencia.
- NO siege cuando las conditiones meteorológicas sean adversas, por exemple, durante lluvias torrenciales, tormentas electricas o nevas.
- Inspeccione periodicamente la zona segada y retire piedras, residuos, alambre, huesos y除外 obstrucciones. La garantia limitada no cubre los danios causados por objetivos dejados sobre el césped.
- Para evacitar daños, no siegue a menos de 1 m de los aspersores.
jATENCION! El robot y los aspersores NO deben encenderse al mismotempo.
El robot debe programarse para functionar a una hora diferente a la de los aspersores.
NUNCA permita que los niños tocken la fuente de alimentacion, la estacion dearga en particular los contactos, las cucillas, el compartmento de la bateria oequalquier parteonde haya huecos como las ruedas.
OPERACION
- Cuidado con las cucillas giratorias! NO ponga las manos ni los pies debajo de las cucillas giratorias.
- Cuidado con los objetos esparcidos por el césped cuando lo cortas! Cuando el robot está encendido, Maintain una distancia de seguridad.
- No deje el aparato sin vigilancia si se sabe que hay animales, niños o transeulentes en las proximidades.
- Mantener una posicion segura. Mantener el equilibrio y una posicion estable en pendentes. Mientras se maneja el robot o sus periféricos, se permitte camino, pero no correr.
- Lea las instrucciones sobre cuando, sobre y como comprobar si el robot y sus periféricos, cables y alargadores presentan días o desgaste y reparar el robot. No se permitte la auto-modificacion, reparacion - a risgo de anular la garantia.
- No connecte ni toque un cable de alimentacion dañado hasta que se haya desconectado de la fuente de alimentación debido al riesgo de contacto con componentes bajo tensión.
- Conecte el robot y/o los equipos periféricos únicamente a circuitos de alimentación protegidos por un interruptor diferencial con una corriente de disparo no superior a 30mA .
- Si el robot emite un sonido anomalous o se percibe una vibracion anomalous o signaleduna alarmapulse inmediamente el boton STOP.
- ESTÁ PROHIBIDO tocar las piezas míviles peligrosas antes de desconectar la alimentación del robot.
- ESTÁ PROHIBIDO tocar las piezas peligrosas hasta que se hayan detenido porcomplete.
- Lleve sempre calzado resistente y pantalones largos cuando manipule el robot.
Corte la alimentacion electrica: Antes de bloquear el robot. - Antes de las pruebas, la limpieza o el mantenimiento.
PICTOGRAMAS Y ADVERTENCIAS
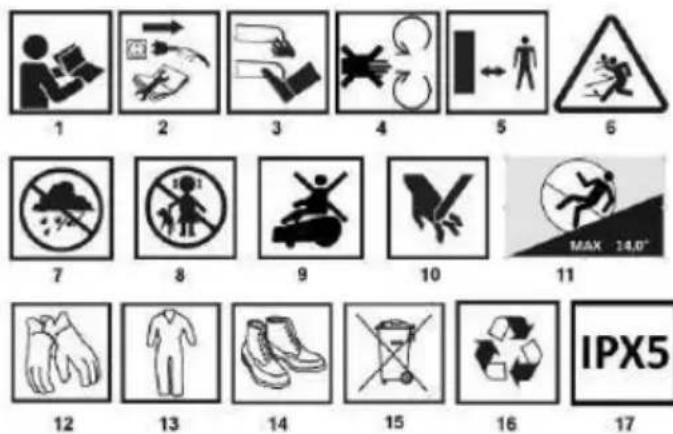
- Lea el manual de instrucciones y observe las advertencias y conditiones de seguridad.
- Antes de proceder a la limpieza o al mantenimiento, desconecte de la red electrica
- No coloque las manos ni los pies debajo de la proteccion del mecanismo de corte.
- Piezas giratorias - posibiliad de lesiones
- Mantenga una distancia de seguidad con el robot cortacesped
- Cuidado con la posibididad de lesionarse con objetos fundidos
- Proteger de la lluvia
- Mantengase fuera del alcance de los niños.
- No se suba al robot
- Posible perdida de dedos, tengacuidado
- Pendiente maximala del suelo 14^ / 25%
- Proteger las manos con guantes de trabajo
- Llevar ropa de proteccion
- Llevar calzado de proteccion
- No tirar con la basura domestica
- Recogida selectiva de residuos
- Grado de proteccion
PRECAUCION Este aparato pueda ser utilisé por niños mayores de 8 años y personas con capacities fisicas y mentalares limitadas, asi como con conocimientos o experiencia insuficientes, si son supervisados o instruidosADECADUAMDE sobre el uso seguro del aparato, de forma que Sean conscientes de los rlesgos que conlleva. Los niños no deben hacer con este aparato. Los niños no deben limpar ni realizar tareas de mantenimiento en el aparato sin supervision.
DESCRIPICION DE LOS ELEMENTOS GRAFICOS
La numeroaciónsuma se refiere a los componentes del aparato que se muestran en las páginas graficas de estemanual.
| Designación Fig. A | Opis |
| 1 | Parada de emergencia |
| 2 | Ajuste de la alta de siega |
| 3 | Panel de control de la segadora |
| 4 | Interruptor de alimentación del cortacésped |
| 5 | Ruedas motrices |
| 6 | Cuchillas de corte |
| 7 | Tambor del mecanismo de corte |
| 8 | Ruedas giratorias |
| 9 | Asa de transporte |
| 10 | Conectores de energia |
| 11 | Tapa del compartmento de las pilas |
| Designación Fig. B | Opis |
| 1 | Panel de control de la base de conexión |
| 2 | Orificios para fjjar la base de conexión |
| 3 | Conectores de energia |
| 4 | Estación de acoplimiento |
| 5 | Protector de la estación base |
| 6 | Conectores para cable de alimentación para delimitar la zona de trabajo |
| 7 | Aberturas para cables paraIGNALizar la zona de trabajo y la alimentación electrica |
| 8 | Toma de corriente de la base de conexión |
| 9 | Marcado para el correcto tendido de los cables |
| Designación Fig. D | Opis |
| 1 | Indicador luminoso del estado dearga |
| 2 | Indicador de fallo de senal |
| 3 | Indicador de cable de retencion |
| 4 | Horas de funciona / mensaje de error, luces 1-4 |
| 5 | Botón de encendido |
| 6 | Interruptor de alimentación |
| 7 | Botón de acoplimiento |
| 8 | "Botón" Confirmar |
| Designación Fig. H | Opis |
| 1 | Tornillos |
| 2 | Tapa del compartmento de las pilas con asa de transporte |
| 3 | Compartmento de las pilas |
| 4 | Toma de la batería en la tapa de la cámara |
| 5 | Batería recargable (no includa) |
| Designación Fig. I | Opis |
| 1 | Césped |
| 2 | Pared |
| 3 | Estación de acoplimiento |
| 4 | Distancia de la estación a la pared |
| 5 | Sección inicial de la linea que delimits la zona de siega |
| 6 | Longitudud de la sección |
| Designación Fig. J | Opis |
| 1a | Cable para limitar la zona de siega Comenzar |
| 1b | Cable para limitar la zona de siega Fin |
| 2 | Línea de suministro: |
| 3 | Estación de acoplimiento |
- Puede haber diferencias entre el grfico y el producto real PREPARACION PARA EL TRABAJO
INSTALACION DE LA BATERIA
- Invierta el robot cortacésped para poder acceder a su parte inferior.
- En el lugar del interruptor Fig. A4 y del asa de transporte Fig. A9 se encuesta la tapa del compartmento de las pilas Fig. H2 fjada con los 4 tornillos marcados con flechas Fig. H1.
- A continuación, desenrosque los tornillos marcados con flechas.
- Retire con cuidado la taps del compartmento Fig. H2 para no romper o desconectar los cables del interruptor Fig. A4 (esto unido a la tapa del compartmento de las pilas).
- A continuación, dé la vuelta a la tapa; en la parte inferior de la tapa está fijiado el zócalo de la bateria Fig. H4.
- Inserte la pila de la série ENERGY+ en la toma.
- De la vuelta a la tapa con la bateria colocada e insertela en el compartmento de la Fig. H3.
- Apriete los tornillos que fijan la tapa. Gire el robot hacía abajo, el aparato está listo.
ENTORNO DE TRABAJO DEL ROBOT CORTACESPED
Asegürese de que se cumplen las siguientes conditiones en la zona donde trabajo el robot:
- La alta de la hierba no supera los 60 mm.
- ATENCION Si la hierba es más larga de 60 mm, corte primo el césped con un cortacésped manual.
- No hay piedras, trozos de madera, alambres, cables con corrientes niotiros objetos extraños.
- El lugar de siega es llano y llano, sin zanjas ni trincheras, y la pendiente es inferior al 25% (14°) Fig. C1
- Para la instalación se necesitan las siguientes herramentas:
- Martillo de goma (para clavar clavijas en el suejo al tender el cable de sujecion)
- Llave hexagonal (para fjjar la estacion de carga) includa en el kit
- Alicates (paraURTARel cable que delimita la zona de trabajo)
1.INSTALACION DE LA ESTACION BASE
Elija un lugar adecuado
La estación de energia de la electricidad no se refuejo.
- Una parte del césped relativamente plana y nivelada.
-
Cerca del borde del césped.
-
Cerca de un enchufe.
- Coloque el cable alargador de 10m y la fuente de alimentacion en un lugar?sobreado, fresco y seco.
No debe haber obstáculos a menos de 2 m de la estación de energia. - Se recomienda situar la estación de energia en un lugar seco y resguardado.
- La fuente de alimentación debe estar a 30 cm por encima del nivel del suejo.
2. FIJACION DE LA ESTACION DE CARGA
Fije la estación de energia al sueño con 6 tornillos de fijación (G1) (utilizando una llave hexagonal G6).
PRECAUCION NO se pare ni carne sobre la plac de la estacion de carga.
PRECAUCION NO haga新模式 agujeros en la plac de la estacion de carga. La estacion debe atornillarse al sueo utilizing los orificios existentes.
3. TENDIDO DEL CABLE DE RETENCION
El cable de sujeción se usa para delimitar la zona de trabajo y guiar al robot de vuelta a la estación de energia.
PRECAUCION Si su vecino también utilizes un robot cortacésped, mantenga al menos 1 m de distancia entre los cables de sujeción de ambos robots.
PLANIFICACION DE LA POSICION DEL CABLE DE RETENCION
Antes de tender el cable de retencion, carne a lo长大 del limite designado y retireQUALquier objecto innecasario, como piedras.
PRECAUCION La longitud del cable de retencion no debe superar los 200 metros.
ATENCIOn El robot no debe circular sobre grava o materiales similares que poder danar las cucillas.
TENDIDO DEL CABLE DE RETENCION FIG.C
Siga las instrucciones siguientes para tender el cable de retencion alrededor de la zona de trabajo y los obstaculos. Utilice el medidor incluido en el kit para tender correctamente el cable de retencion.
PRECAUCION El cable de retencion se alimenta a muy baja tensión y es seguro para las personas y los animales domesticos.
jATENCION! Empiece por el conector "-" situado en la parte posterior de la estacion de carga Fig. B6, tire de el por debajo de la estacion (y deje una reserva de 10~cm ) y Tienda el cable alrededor del csped en sentido contrario a las agujas del reloj, terminando por el conector "+" situado en la parte posterior de la estacion de carga (deje una reserva de 10~cm ).
Asegürese de que el cable entre en contacto con el metal en los connectores "+" y "-" Fig. B6 acuérdese deURTAR el cable de sujeción sobre.
- Deje al menos 2 m libres entre el cable de sujeción y la estación de carga. El cable de esta sección se usa para acercar el robot a la estación de carga.
- Mantenga una distancia de 30 cm entre el cable de retencion y el borde del césped Fig. C2; Fig. C3.
- Fije el cable de retencion al sueño con los tacos suministrados Fig. G5. El cable de retencion debe estar recto y ligeramente tensado. Las clavijas deben colocarse cada 1 m (esto pueda modificarse en func tion de la forma del césped) Fig. C4. No entierre el cable a más de 2 cm de profundidad para evaporar debilitar la senal.
- Disponga el cable de forma que los ángulos sean superiores a 90^ Fig. C5. En estas zonas, colque el cable de retencion en curvas suaves, lo que Facilitará enormamente el desplazimiento del robot por la zona a segar.
- Si hay parterres, estanques o arboles en el cesped, rodeelos con bucles de cable de retencion Fig. C4.
- Mantenga una distancia minima de 30 cm entre el cable de retencion y los bordes de los obstáculos.
PRECAUCION En el camino hacía y desde el bucle, el cable de sujeción noDebe cruzarse Fig.C4.
- Deje un espacioestrocho en la zona de trabajo del cortacesped. Asegürese de que la distancia entre los cables de retencion que corren paralelos es superior a 1 m.
PRECAUCION Asegürese de que la estación de acoplimiento se oculta.
encuentra bajo del bucle que delimita la zona de siega. (exterior / interior) Fig.B2
4. INSTALLACION DE LA ESTACION DE CARGA
Conectar la fuente de alimentación
- Inserte el enchufe de alimentacion en una toma de pared de 110-240 V.
-
Compruebe el estado de las luces LED de la direccion de carga Fig.B1:
-
Luz verde fija: conexión establecida (robot sin cargar o totalmente cargado)
- Luz verde intermitente: el robot se está cargando.
- Luz roja intermitente: el error más comun es la "desconexión del cable de retencion".
- Luz apagada: el fallo más comun es "No hay alimentación de 100-240 V" o "No hay conexión a la fuente de alimentación".
FUNCIONAMIENTO/AJUSTES
Primera puesta en marcha del robot cortacesped
- Cuando ponga en marcha el robot por primera vez, coloque el aparato en la estación de energia de modo que los conectores de energia de la estación fig. B3 no entra en contacto con los conectores de energia del robot cortacésped fig. A10.
- Cuando el robot cortacésped se inicia por primera vez desde la aplicación del téléphone,debe realizarse unaactualización del firmware. El método de implementación se describe a continuación enactualización de software.
- JATENCION! Durante la prima connexion, el téléphone y el robot deben estar dentro del alcance de la red Wi-fi.
ACTUALIZACION DEL FIRMWARE ANTES DE UTILizar EL ROBOT.
Laactualizaciondeberelizarse delsiguiente modo.
- Coloque el robot bajo del bucle pero fuera de la estacion de carga.
- Coloque el interruptor Fig. A4 en la posicion 1.
- Mantenga pulsado el interruptor Fig.D5
- Inicie la aplicación, escanee el número QR
- Conectar la aplicación al robot
- Amplie la configuración del software pulsando el icono situado en la parte superior derecha de la pantalla.
- SeLECTIONA unaopy: Actualizar Firmware.
- A continuación, siga las instrucciones que aparecen en pantalla.
Una vez instalado el software, el aparato está lista para funciona.
CUIDADOI
- La pantalla muestra si el robot está dentro del alcance Wi-fi o Bluetooth
- La connexion a una red se indica mediante un icono que parpadea según el tipo de connexion. Una vez conectado, el icono deja de parpádear.
- El robotsolepuedemparejarsecon untelefono.
- Si se necesita conectararlo (mismo robot cortacesped), hay que eliminar el primero de la aplicacion. En la aplicacion iOS también desde los ajustes de Bluetooth.
AJUSTE DE LA ALTURA DE SIEGA:
Antes del primer corte, ajuste la alta de corte a 60~mm y, a continuacion, cambie a la alta deseada cuando todo el césped esté relativamente plano.
- Gire el mando Fig. A2 en el sentido de las agujas del reloj para augmentar la alta de corte.
- Gire el mando Fig. A2 hacía la izquierda para reducir la alta de corte.
- La alta de corte pueda ajustarse de 20mm (MIN) a 60~mm (MAX).
- ATENCLON! El motor de actionamento del tambor del mecanismo segador Fig. A7 se conecta aproximamente 10segundos despues de abandonar la base, iniciando el funcionaimiento.
CONEXION/DESCONEXION
- Coloque el interruptor Fig. A4 en la posicion "O" para desconectar la alimentacion.
- Coloque el interruptor Fig. A4 en la posicion "I" para conectar la alimentacion.
ACTIVACION DEL ROBOT Y PROGRAMACION DEL TIEMPO DE TRABAJO EN MODO MANUAL
- Mantenga pulsado el botón de encendido Fig. D5 para poder en marcha el robot. Nota: no agite el robot durante el arranque para evaporar un error de arranque. Si el robot no arranca correctamente (todas las luces encendidas de forma continua), reinicielo.
- Introduzca la contraseña pulsando dos veces el botón Fig. D6, bajo dos veces el botón Fig. D7 y una vez el botón Fig. D8 (contraseña programada en fabricula).
-
Programe el tiempo de funciona (incluido el tiempo de siega y el tiempo de carga):
-
Pulse la Fig. D6 paraaabrear el tiempo de configuracion. Una luz encendida significa 2 horas, el tiempo maximo de configuracion es de 8 horas y 4 luces en la Fig. D4. Pulse el boton Fig. D8 para confirmar yponer en marcha el robot.
jATENCION! Una vez ajustado el tiempo de funcionaimiento, el robot recordará los ajustes y empezarà aURTAR a la hora programada todos los días. El tiempo de siega sera acorde con los ajustes introducidos.
- El tiempo de configuración programado del robot, de 2 a 8 horas, es el tiempo de siega incluyendo el tiempo de energia.
- Los tiempos de funciona yoga varian en funcion de la bateria realizada.
Si desea cambiar el tiempo de funciona, siga de nuevo los pasos 2-3.
PROGRAMACION HORARIA EN MODO AUTOMÁTICO,CALENDARio DE 7 Días, DISPONIBLE A TRAVÉS DE LOS AJUSTES DE LA APLICACION
- Tras una parada de emergencia, primero hay que desbloquear el robot siguiendo el paso 2 anterior. Una vez desbloqueado el robot, PODemos enviarlo de nuevo a la estación pulsando los botones Fig. D7 y bajo confirmar con el botón Fig. D8 para devolver el cortacésped a la estación dearga.
- Al pulsar el botón de parada de emergencia STOP se borra el ciclo de modo manual y automatístico de la aplicación, si se haactivado de esta forma. Para que el robot vuelva a functionar afterwards de una parada de emergencia,debese volver a la estación de cargo y configurar de nuevo el programa de trabajo manual. En el caso de un programa automatístico, realizé la misma acción en el programa de la aplicación y confirmme su configuración.
ATENCLON La hora de arranque programada en el horario automatico no debe considerarse muy precisa. El aparato pueda arrancar hasta various horas afterwards de la hora programada.
- La activación del modo manual borra el horario programado en la aplicación y viceversa.
- El bordeado en modo manual se realiza automatistically cada variedes ciclo de siega. Se tratate de cortar la hierbacular del cable que delimita la zona de trabajo. ATencion Asegürese de que el cable este biensubjecto para no exponerlo a cortes accidentales.
- El robot cortacéspedolvera a la estación de acoplamente una vez que el dispositivo haya detectado el inizio de las precipitaciones.
- Si el roboteceuerra un obstaculo,mencras travaja,rebotar en el y seguirá travajando.
LUZ DE ESTADO DE CARGA EN LA ESTACION DE CARGA:
Luz verde continua: bateria totalmente cargada.
Luz verde intermitente - cargando.
FUERA DE LA ESTACION DE CARGA:
Luz verde continua - bateria > = 20%
Luz verde intermitente - bateria < 20% .
ATENCLON El robotdea de funcinar automatically y vuela a la estacion de carga si el nivel de la bateria descende por bajo del 20%
LUZ DE ERROR:
Luz verde continua:actualice elsystema.Conectese a la aplicacion pararealizarlaactualizacion.
Luz verde intermitente:actualizacion del systema en bajo.
Luz roja intermitente - mensaje de error 1 a 5, reinicie el robot.
Luz roja continua - mensaje de error 6 a 12, pulse "STOP" o "OK" para borrar.
INDICADOR DEL CABLE DE RETENCION:
Luz verde continua - postal correcta
Luz roja continua - sin Seed
Controles Fig. D4:
Luz intermitente - robot bloqueado.
Luz continua - robot desbloqueado.
La luz 1 se ilumina en verde: 2 horas de funciona.
Las luces 1 y 2 se iluminan en verde: 4 horas de funciona.
Las luces 1, 2 y 3 se iluminan en verde: 6 horas de funciona.
Las luces 1, 2, 3 y 4 se iluminan en verde: 8 horas de funciona.
SOFTWARE DE CONTROL DEL ROBOT CORTACESPED
Descarga IOS:
Descarga para Android:
https://play.google.com/store/apps/details?id=com.toua.Robot
Las instrucciones del programa peuvent descargarse en:
PARADA DE EMERGENCIA DEL ROBOT
Pulse el botón "STOP" Fig. A1 para detener el robot, mantenga pulsado el botón de encendido para apagar el robot.
MOVER EL ROBOT
Debrero del robot se encuesta un asa de elevación Fig. A10 para fácilar el manejo con una sola mano.
- Apane siempre el robot antes de proceder a su limpieza y mantenimiento.
- Desconecte la fuente de alimentacion antes de limpiar y realizar el mantenimiento de la estacion de energia.
- Utilice siempre guantes gruesos de proteccion paraCambiar las cachillas y limpar la parte inferior del robot.
- Compruebe regularmente el apriete de tornillos y tuercas. Las piezas danadas deben repararse o sustituirse por razones de seguridad.
- Compruebe periodicamente que las cuchillas peuvent girar libremente.
PRECAUCION Cuando de la vuelta al robot, colóquelo sobre el césped o sobre una superficie blanda para no dañar ni rayar la cubierta.
LIMPIEZA
ADVERTENCIA Antes de empezar a limpiar, desconnecte la corriente con el interruptor Fig. A4.
- Lave la parte delantera del robot con un limpiador de baja presión y un cepillo o pamo suave.
- Utilice un cepillo duro para eliminar los recortes de hierbay y los residuos de las cucillas, las ruedas y除外 partes de la parte inferior del robot.
- Comprueba regularmente que las ruedas no tengan barro ni hierba cortada y limpalias con un cepillo.
PRECAUCION Retire regularmente los restos vegetales de la parte inferior del robot paraataruna reduccionde la productividad.
SUSTITUCION DE CUCHILLAS
ADVERTENCIA Desconecte primero el interruptor principal ypongase guantes de proteccion.
ADVERTENCIA Utilice unicamente las cuchillas originales indicadas y homologadas por el fabricante.
Las tres cuchillas y sus tornillos deben sustituirse en una sola operacion Fig. A6.
- Los tornillos deben desenroscarse y aparearse con un destornillador.
- Compruebe que las cucillas{nuevas poder girar libremente.
RESOLUCION DE PROBLEMAS
La tablasuma proporciona orientacion para poder a diagnosticar problemas.
Si es posible, repare el aparatoastedo. Si no pueade resolver el problema,pongase encontacto con un distribuidor ocentro de service autorizzato.
ADVERTENCIA Deben tomarse medidas de proteccion.
| Problema | Posibles causas | Solutaciones |
| La luz roja parpadea en la estación dearga | Interruption del cable de sujeción | Encuentre la sección defectuosa del cable y arreglarlo |
| El robot tiene dificultades para acoplarse a la estación dearga | La estación dearga no estácorrectamenteinstalada | Véase elApartado"Preparación para eltrabajo". |
| El cable detretencion no estácolocadocorrectamente | ||
| No hay señal del cable de retencion | Sin alimentación | Comprobar la fuente de alimentación |
| El cable de sujeciónestaba conectado al revés | Intercambia losconectores "+"y "-". | |
| El cable de sujeciónno está conectado alla estación dearga | Compruebe que elcable de retencionestá correctamenteconectado a unarestación dearga | |
| Interruption delcable de sujeción | Compruebe hasta elfinal, | |
| que el cable no se ha interrupido | ||
| Cruces de cables de sujeción en el camino de ida y vuelta al bucle | Compruebe que el cable de retencion está correctamente instalado | |
| El robot traspasa la frontera | El cable de sujeción está conectado al revés | Intercambia los connectores "+" y "-". |
| El robot vibra o hace ruidos extraños | Cuchilla dañada o ausente | Comprobar y reparar los tornillos de fjisión de las cucillas |
| El disco de corte está suelto | ||
| Sustituir la cucilla |
| Códige de error | Opis | Solución |
| E01 Fig. F1 | Error de inicialización - sensor giroscópico | Coloque el robot en una superficie plana y reinicia. |
| E02 Fig. F2 | Fallo del sensor de elevación o del sensor de colisión | Ajuste la barra de colisión y la rueda de torsión en la parte delantera del cortáceped, compruebe que no estábloqueadas; colocque el robot en una superficie plana y vuela a arrancar. |
| E03 Fig. F3 | Error de initalización del motor de siega | Coloque el robot sobre una superficie plana y reinicioelo. Si el problema persiste, póngase en contacto con el servicios de atencion al cliente. |
| E04 Fig. F4 | Error de connexion de la fuente de alimentación | |
| E05 Fig. F5 | Velocidad incorrecta del motor de siega | |
| E06 Fig. F6 | Aviso de inclinación | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. |
| E07 Fig. F7 | Aviso de ascensor | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. |
| E08 Fig. F8 | Error de canal ADC | Coloque el robot sobre una superficie plana y reinicioelo. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E09 Fig. F9 | Señal incorrecta | Ver arriba en la tabla: problema - no hay Seed del cable de retencion. Compruebe todos los+puntos uno por uno y, acontinuación, colocque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. Reinicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E010 Fig.F10 | Atasco de robots | Coloque el robot sobre una superficie plana. Pulse STOP u OK para cancelar la alarma. Reinicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E011 Fig.F11 | Velocidad incorrecta del motor bajo a paso izquierdo | Reincicie el robot. Si el problema persistsiste, póngase en contacto con el servicios de atencion al cliente. |
| E012 Fig.F12 | Velocidad incorrecta del Derecho motor bajo a paso |
EL KIT INCLUYE:
- Robot cortacésped 1ud.
- Estación de energia y acoplimiento 1ud.
- Fuente de alimentación y cable alargador 1ud.
- Cable para delimitar la zona de trabajo 100m
Tacos de fijacion de cables 100 uds.
Tacos de fijacion de la estacion de acoplamento 6 uds.
Cuchillas de corte 3pc.
- Conectores de cable 2 uds.
- Llave hexagonal 1ud.
ESPECIFICACIONES
| Robot cortacésped 04-621 | |
| Parámetro | Valor |
| Tensión de alimentación: | 18 V CC |
| Potencia nominal maxima del motor de siega: | 50 W |
| Potencia maxima del motor autopropulsado: | 20 W |
| Grado de protección IP de la estación dearga | IPX4 |
| Grado de protección IP del robot | IPX5 |
| Grado de protección IP para el adaptorador dearga | IP 65 |
| Clase de protección del robot | III |
| Clase de protección de la estación dearga | II |
| Anchura de siega: | 180 mm |
| Ajuste de la alta de corte en laamera | 20 mm - 60 mm |
| Velocidad de rotación | 3100 rpm |
| Peso | 10,2 kg |
| Año de producción | 2024 |
DATOS SOBRE RUIDO Y VIBRACIONES
| Nivel de presión sonora | L pA= 56dB (A) K= 3dB(A) |
| Nivel de potencia acústica medido | LwA= 67dB (A) K= 3dB(A) |
Información sobre ruidoy vibraciones
El nivel de ruido emitido por el dispositivo se describe mediante: el nivel de presión acústica emitida L pA y el nivel de potencia acústica L wA, donde K designa la incertidumbre de medicación. Las vibraciones emitidas por el dispositivo se describen mediante la acceleración de las vibraciones a h, donde K designa la incertidumbre de medicación.
Los values medidos en este manual de instrucciones, es decir, el nivel de presión acústica emitida L_pA , el nivel de potencia acústica L_WA , y la acceleración de la vibración a h, se han medido de conformidad con la norma EN 62841-1:2015+A11. El nivel de vibración dato ahuede utiliser para comparar dispositivos y para la evaluación preliminar de la exposión a las vibraciones.
El nivel de vibraciones indicado es representativo solo para las aplicaciones básicas del aparato. Si el aparato se usa para otheras aplicaciones o con otheras herramrientas de trabajo, el nivel de vibracionesuedevariar.Unmantimiento inadequado o pocospecialmente del aparatoypeedovocar nivelesde vibracionmas elevados.Lascausalssmenzonadaspuedenaugentarlaexposiónalas vibracionesdurantetodalla vidautil.
Para determinar con precision la exposión a las vibraciones, deben tenerse en cuenta los periodos de "encendido" y "apagado" del dispositivo, excluyendo los periodos en los que se utilizes para su funciona. La exposión total a las vibraciones puede ser多么 menor cuando todos los factores se calculan con precision.
Para proteger al operario contra las vibraciones, utilize medidas de seguidad adiconiales, por exemple, elostenimiento periodico del aparato y de las herramrientas de trabajo,unas conditiones adecuadas de temperatura de las manos y una organizacion adeuada del trabajo.
DATOS SOBRE RUIDO Y VIBRACIONES
PROTECCION DEL MEDIO AMBIENTE

Los equipos electricos no deben desecharce con la basura domestico Eliminelo en instalaciones adecuadas. Puede solicitar informacion se la eliminacion al distribuidor del producto o a las autoridades locales residuos de aparatos electricos y electronicos (RAEE) contiener sustancias que no son neutras para el medio ambiente natural. Los no reciclados constituyen un peligro potencial para el medio ambiente la salute humana.
"Grupa Topex Spóka z ograniczona odpwiedzialnoscia". Spóka komandytowa con domicilio social en Varsovia, ul. Pograniczna 2/4 (en lo sucesivo: "Topex Group") informa que todos los derechos de autor sobre el contenido de este manual de instruciones (en lo sucesivo: "Manual"), incluyendo, pero no limitado a, su texto, fotografias publicadas, Diagramas, dibujos, asi como su composicion, pertenecen exclusamente a Topex Group y esta susjetos a proteccion legal de conformidad con la Ley de 4 de febrero de 1994, sobre Derechos de Autor y Derechos Conexos (eskaar, Diary de Leyes U. 2006 N°90 Tema 631 en su version modificada). La copia, el tratamento, la publicacion y la modificaion con fines commerciales de todo el Manual, asi como de sus elementos
individuals, sin el consentimiento por escrito del Grupo Topex, está strictamente prohibidos y pueda dar lugar a responsables civiles y penales.
Declaración de conformidad CE
Producto: Robot cortacésped E
Modelo: 04-621
Nombre commercial: NEO TOOLS
Numero de série: 00001 ÷ 99999
Estadeclaracióndeconformidadse emite bajo la exclusiva responsabilidad del fabricante.
El producto descririto anteriorsmente cumple con los siguientes documentos:
Directiva sobre máquinas 2006/42/CE Directiva DER 2014/53/UE
Directiva RUSP 2011/65/UE modificada por la Directiva 2015/863/UE Y cumple los requisitos de las normas:
EN 60335-1:2012/A15:2021; EN 50636-2-107:2015/A3:2021; EN 62233:2008
EN IEC 55014-1:2021; EN IEC 55014-2:2021; EN IEC 61000-3-2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1 V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Esta declaración se refiere únicamente a laquina tal como se commercializa y no incluye los componentes
añadidos por el usuario final o aconteziones realizadas por el posteriormente.
Nombre y direccion de la persona residente en la UE autorizada a preparar el expediente técnico:
Firmado en nombre de:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsovia

Pawel Kowalski
Responsible de Calidad del GRUPO TOPEX
Varsovia, 2023-09-11
Declaración de conformidad de la UE
Producto: Estación de energia
Modelo: K145455
Nombre commercial: NEO TOOLS
Numero de série: 00001 ÷ 99999
Esta declaración de conformidad se emite bajo la exclusiva responsabilidad del fabricante.
El producto descripto anteriormente cumple con los siguientes documents:
Directiva DER 2014/53/UE
Directiva RUSP 2011/65/UE modificada por la Directiva 2015/863/UE
Y cumple los requisitos de las normas:
ENIEC55014-1:2021;ENIEC55014-2:2021;ENIEC61000-3
2:2019/A1:2021; EN 61000-3-3:2013/A2:2021; EN 301 489-1
V2.2.3:2019;
EN 301 489-3 V2.3.2:2023; EN 300 328 V2.2.2; EN 50663:2017
EN IEC 63000:2018
Esta declaración se refiere únicamente a laquina tal y como se introdujo en el
mercado y no incluye componentesañadidos por el usuario final o sus activités posteriores.
Nombre y direccion del residente en la UE autorizzato a preparar el expediente的技术ico:
Firmado en nombre de:
Grupa Topex Sp. Z o.o. Sp.k.
Ul. Pograniczna 2/4
02-285 Varsovia

Pawel Kowalski
Responsible de Calidad del GRUPO TOPEX
Varsovia, 2023-11-09
IT
AMBIENTE DI LAVORO DEL ROBOT FALCIATORE
CUIDADO! ANTES DE UTILizar FERRAMENTAS ELECTRICAS, LEIA ATENTAMENTE Este MANUAL DE INSTRUÇOES E GUARDE-O PARA CONSULTA FUTURA.
REGRAS DE SEGURANCA PORMENORIZADAS
INSTRUÇÉS DE SEGURANÇA PARA ROBOTS DE CORTE
o robó está a trabajo:

- OPIS ELEMENTOW GRAFICZNYCH
- PREPARACION
- OPERACION
- DESCRIPICION DE LOS ELEMENTOS GRAFICOS
- INSTALACION DE LA BATERIA
- ENTORNO DE TRABAJO DEL ROBOT CORTACESPED
- 1.INSTALACION DE LA ESTACION BASE
- FIJACION DE LA ESTACION DE CARGA
- TENDIDO DEL CABLE DE RETENCION
- PLANIFICACION DE LA POSICION DEL CABLE DE RETENCION
- TENDIDO DEL CABLE DE RETENCION FIG.C
- INSTALLACION DE LA ESTACION DE CARGA
- FUNCIONAMIENTO/AJUSTES
- Primera puesta en marcha del robot cortacesped
- ACTUALIZACION DEL FIRMWARE ANTES DE UTILizar EL ROBOT.
- Laactualizaciondeberelizarse delsiguiente modo.
- Una vez instalado el software, el aparato está lista para funciona.
- CUIDADOI
- AJUSTE DE LA ALTURA DE SIEGA:
- CONEXION/DESCONEXION
- ACTIVACION DEL ROBOT Y PROGRAMACION DEL TIEMPO DE TRABAJO EN MODO MANUAL
- PROGRAMACION HORARIA EN MODO AUTOMÁTICO,CALENDARio DE 7 Días, DISPONIBLE A TRAVÉS DE LOS AJUSTES DE LA APLICACION
- LUZ DE ESTADO DE CARGA EN LA ESTACION DE CARGA:
- FUERA DE LA ESTACION DE CARGA:
- LUZ DE ERROR:
- INDICADOR DEL CABLE DE RETENCION:
- Controles Fig. D4:
- SOFTWARE DE CONTROL DEL ROBOT CORTACESPED
- PARADA DE EMERGENCIA DEL ROBOT
- MOVER EL ROBOT
- LIMPIEZA
- PRECAUCION Retire regularmente los restos vegetales de la parte inferior del robot paraataruna reduccionde la productividad.
- SUSTITUCION DE CUCHILLAS
- RESOLUCION DE PROBLEMAS
- EL KIT INCLUYE:
- Información sobre ruidoy vibraciones
- DATOS SOBRE RUIDO Y VIBRACIONES
- PROTECCION DEL MEDIO AMBIENTE
- Declaración de conformidad CE
- Directiva sobre máquinas 2006/42/CE Directiva DER 2014/53/UE
- Declaración de conformidad de la UE
- AMBIENTE DI LAVORO DEL ROBOT FALCIATORE
- REGRAS DE SEGURANCA PORMENORIZADAS
- INSTRUÇÉS DE SEGURANÇA PARA ROBOTS DE CORTE
Marca : NEO tools
Modelo : 04-621
Categoría : Robot cortacésped