
FREELEXO CAM PLUS - Rasenmäher EINHELL - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts FREELEXO CAM PLUS EINHELL als PDF.

| Produkttyp | Mähroboter |
| Marke | Einhell |
| Modell | FREELEXO CAM PLUS |
| Gewicht | 8,75 kg |
| Schnittbreite | 18 cm |
| Schnitthöhe | 20 bis 60 mm, stufenlos verstellbar |
| Maximale Steigung | 25 % |
| Akkuspannung | 18 V (Power-X-Change) |
| Schutzart | IPX4 |
| Schalldruckpegel | 46 dB(A) |
| Schallleistungspegel | 57 dB(A) |
| Anzahl der Messer | 3 |
| Stromversorgung Ladestation | 100-240 V ~ 50/60 Hz, Ausgang 24 V / 1,5 A |
| Konnektivität | Wi-Fi, Bluetooth, GNSS |
| Sensoren | Kamera, Regen, Abstand, Magnet, Heben, Neigung |
| Bereichsbegrenzung | Visuell/optisch (ohne Randdraht), Magnetband optional |
| Empfohlene Fläche | Ca. 500 m² (8 h Mähen pro Tag) |
| Lieferumfang | Mäher, Ladestation, Netzteil, Führungskabel, Ersatzmesser, Magnetband, Befestigungszubehör, Dokumentation |
| Wartung | Reinigung mit feuchtem Tuch; Messer ca. alle 3 Monate ersetzen |
| Sicherheit | Hauptschalter, PIN-Code, automatischer Stopp bei Heben oder Hindernis |
Häufig gestellte Fragen - FREELEXO CAM PLUS EINHELL
Benutzerfragen zu FREELEXO CAM PLUS EINHELL
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Rasenmäher kostenlos im PDF-Format! Finden Sie Ihr Handbuch FREELEXO CAM PLUS - EINHELL und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. FREELEXO CAM PLUS von der Marke EINHELL.
BEDIENUNGSANLEITUNG FREELEXO CAM PLUS EINHELL
D Originalbetriebsanleitung Mahrboter
Art.-Nr.: 34.139.76 I.-Nr.: 21013
-2-


-7-
12b
13
A
B
C
D






H
E



1
G

J
D
Inhaltsverzeichnis
- Sicherheitshinweise
- Gerätebeschreibung und Lieferumfang
- Bestimmungsgemäß Verwendung
- Technische Daten
- Inbetriebnahme
- Bedienung
- Reinigung, Wartung und Ersatzteilbestellung
- Lagerung
- Transport
- Entsorgung und Wiederverwertung
- Anzeige der Ladestation und Fehlerbehebung
- Anzeige des Mahroboters und Fehlerbehebung
- Datenschutzhinweise FREELEXO CAM PLUS
- Anzeige Ladegerät
Gefahr! - Zur Verringerung des Verletzungsrisikos Bedienungsanleitung lesen.
Dieses Gerät darf nicht von Kindern benutzt werden. Dieses Gerät kann von Personen mit verringten physischen, sensorischen oder mentalen Fähigkeiten oder Mangel an Erfahrung und Wissen benutzt werden, wenn sie beaufsichtigt oder bezüglich des sicheren Gebrauchs des Gerätes unterwiesen wurden und die daraus resultierenden Gefahren verstehen. Kinder dürfen nicht mit dem Gerät speilen. Reinigung und Benutzer-Wartung dürfen nicht von Kindern durchgeführt werden.
D
Gefahr!
Beim Benutzten von Geräten müssen einige Sicherheitsvorkehrungen eingehalten werden, um Verletzungen und Schäden zu verhindern. Lesen Sie diese Bedienungsanleitung / Sicherheitshinweise deshalb sorgfältig durch. Bewahren Sie die sie gut auf, damit Ihr den Informationen jederzeit zur Verpfugung stehen. Falls Sie das Gerät an andere Personen übergeben sollenen, händigen Sie diese Bedienungsanleitung / Sicherheitshinweiseitte mit aus. Wir übernehmen keine Haftung für Unfälle oder Schäden, die durch Nichtbeachten dieser Anleitung und den Sicherheitshinweisen entstehen.
1. Sicherheitshinweise
Die entsprechenden Sicherheitshinweise fänden Sie im beiliegenden Heftchen!
Warning!
Lesen Sie alle Sicherheitshinweise, Anweisungen, Bebildungen und technischen Daten, mit denen diese Elektrowerkzeug versehen ist. Versaumnisse bei der Einhaltung der nachfolgenden Anweisungen konnen elektrischen Schlag, Brand und/oder schwere Verletzungen verursachen.
Bewahren Sie alle Sicherheitseinweise und Anweisungen für die Zukunft auf.
Erklärung der verwendeten Symbole (siehe Bild 13)
A. WARNING - Vor Betrieb der Maschine die Bedienungsanleitung durchlen!
B. WARNING - Beim Betrieb der Maschine entsprechenden Sicherheitsabstand einhalten!
C. WARNING - Vor der Durchführung von Arbeiten an der Maschine oder vor dem Anheben der Maschine Sperrvorrichtung betätgien! ACHTUNG - Rotierende Messer nicht berühren!
D. WARNING - Nicht auf der Maschine mitfahren! ACHTUNG - Rotierende Messer nicht berühren!
E. Schutzklasse II (Doppelisolierung).
F. Lagerung der Akkus nur in trockenen Räumen mit einer Umgebungstemperatur von +10^ - +40^ . Akkus nur in geladenem Zustand lagern (mind. 40% geladen).
G. Schutzklasse III
H. Träge Sicherung 2 A
I. Nur für den Gebrauch in trockenen Räumen.
J. WARNING: Zum Laden der Batterie nur das
abnehmbare Netzteil NT24/1 / PS24/1 benutzen, das mit thisem Gerat gefelert wurde.
Achtung!
Ziehen Sie während eines Gewitters den Netzstecker und trennen Sie das Leitkabel von der Ladestation.
2. Gerätebeschreibung und Lieferumfang
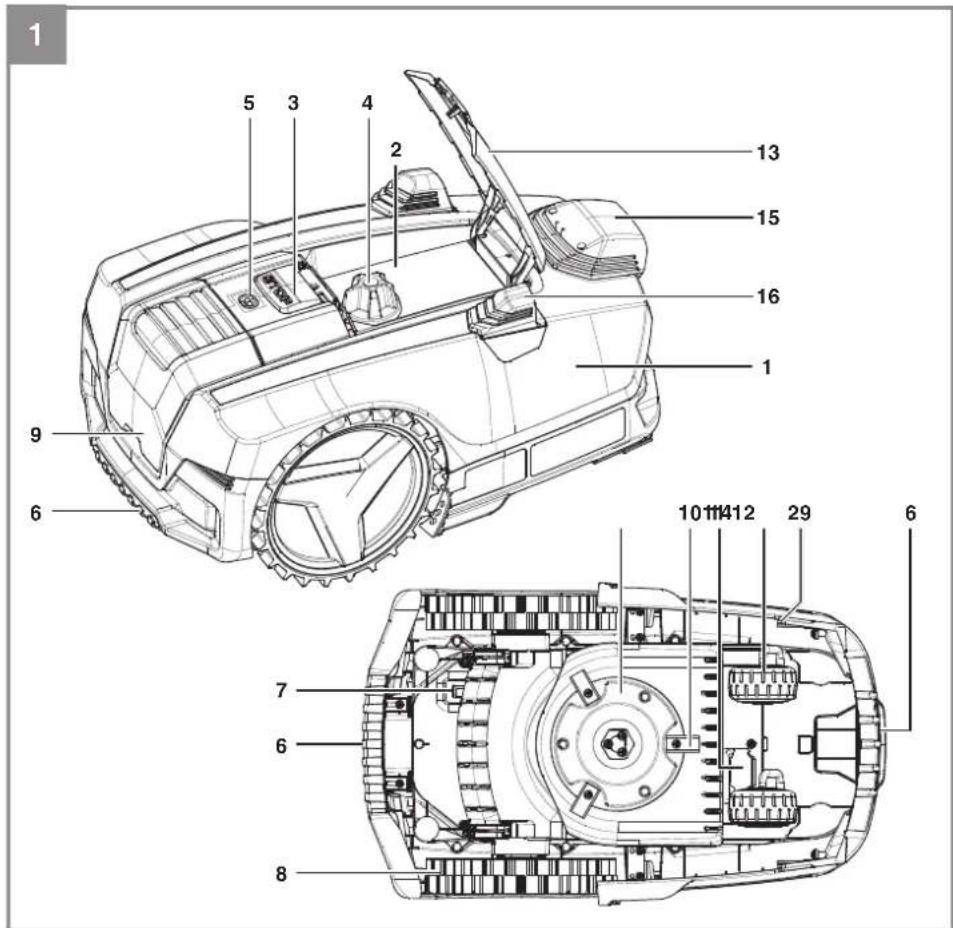
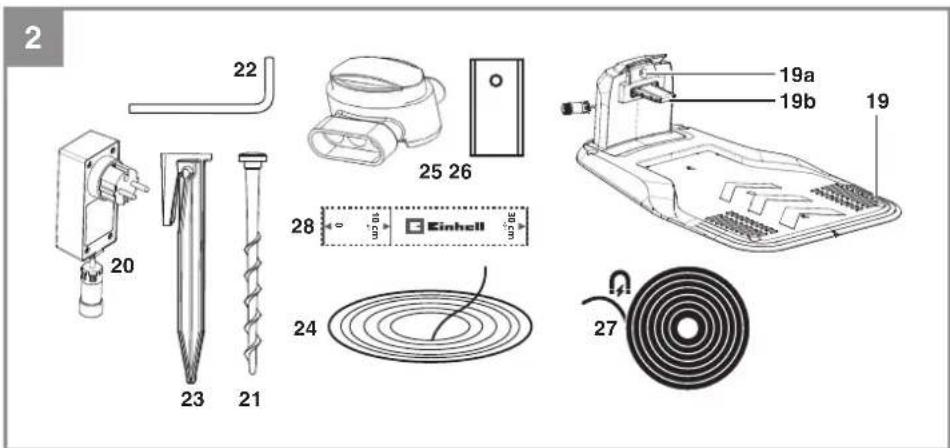
2.1 Gerätebeschreibung (Bild 1/2)
-
STOP-Taste/Entriegelungstaste der Bedienfeldabdeckung
-
Mahroboter
- Bedienfeld
- Schnitthohenverstellung
- Regensensor
- Tragegriff
- Hauptschalter
- Hinterrad
- Akkufachdeckel
- Klingen
- Messerscheibe
- Vorderrad
- Bedienfeldabdeckung
- USB-Anschluss
- Kameraeinheit
- Abstandssensoren
- Ladestation
19a. Ladestation LED-Anzeige
19b. Ladestation Ladestift - Netzteil(-kabel)
- Befestigungsschraube
- Sechskantschlüssel
- Befestigungshaken
- Leitkabel
- Kabelverbinder
- Ersatzklingen
- Magnetband
- Lineal (zum Heraustrennen)
- Magnetensor
2.2 Lieferumfang und Auspacken
Bitte überprüfen Sie die Vollständigkeit des Artikels anhand des beschriebenen Lieferumfangs. Bei Fehlteilen wenden Sie sichitte spätestens innerhalb von 5 Arbeitstagen nach Kauf des Artikels unter Vorlage eines gultigen Kaufbeleges an unser Service Center oder an die Verkaufsstelle, bei der Sie das Gerät erworben haben.itte beachten Sie hierzu die Gewährleistungstabelle in den Service-Informationen am Ende der Anleitung.
D
- Öffnen Sie die Verpackung undnehmen Sied das Gerät vorsichtig aus der Verpackung.
- Entfernen Sie das Verpackungsmaterial sowie Verpackungs-/und Transportsicherungen (falls vorhanden).
- Überprüfen Sie, ob der Lieferumfang vollständig ist.
- Kontrollieren Sie das Gerät und die Zubehörsteile auf Transportschäden.
Bewahren Sie die Verpackung nach Mochigkeit bis zum Ablauf der Garantiezeit auf.
Gefahr!
Gerat und Verpackungsmaterial sind kein Kinderspielzeug! Kinder)durfen nicht mit Kunststoff beuteln, Folien und Kleinteilen spielien! Es besteht Verschluckungs- und Erstickungsgefahr!
Lieferumfang, Montagematerial und Zubehör (teilweise nicht im Lieferumfang enthalten):
Den Lieferumfang entnehmer Sieitte dem beigelegten Informationsblatt zum Lieferumfang.
Mahrboter
Netzteil(-kabel)
Ladestation
Befestigungsschrauben (4 Stuck)
Ersatzklingen
Befestigungshaken
Leitkabel
Kabelverbinder
Magnetband
- Sechskantschlüssel
Akku
Lineal (zum Heraustrennen)
Originalbetriebsanleitung
- Sicherheitshinweise
Benötigte Hilfsmittel
(nicht im Lieferumfang enthalten)
Hammer
Zange
Abisolierzange
- Wasserwaage(optional)
3. Bestimmungsgemäß Verwendung
Der Mahroboter ist für die private Benutzung im Haus- und Hobbygarten geeignet und ausschlieBlich für das Mühen von Rasenfl achen bestimmt.
Die Maschinearf nur nach ihrer Bestimmung verwendet werden. Jede weitere darüber hinausgehende Verwendung ist nicht bestimmungsgemäß. Für daraus hervorgerufene Schaden oder Verletzungen aller Art haftet der Benutzer/Bediener und nicht der Hersteller.
Bitte beachten Sie, dass unsere Geräte bestimmungsgemäß nicht für den gewerblichen, handwerklichen oder industriellen Einsatz konstruiert wurden. Wir übernehmen keine Gewährleistung, wenn das Gerät in Gewerbe-, Handwerks- oder Industriebetrieben sowie bei gleichzusetzenden Tätigkeiten eingesetzt wird.
4. Technische Daten
Spannung 18V
Motordrehzahl. 3400min
Schutzart IPX4
Schutzklasse . III
Gewicht 8,75 kg
Schnittbreite 18 cm
Anzahl der Klingen 3
Max. Steigung 25%
Schaldruckpegel LdA 46 dB (A)
Unsicherheit K 2,3 dB
Schalleistungspegel L_WA 57 dB (A)
Unsicherheit K 2,3 dB
Schnitthohenverstellung .... 20-60 mm; stufenlos
Leitkabelantenne
Betriebsfrequenzband: 0-148,5 KHz
Maximale Sendeleistung: 67,05 dBuA/m
WIFI:
Betriebsfrequenzband: 2400-2483,5 MHz
Maximale Sendeleistung: 20dBm
Bluetooth:
Betriebsfrequenzband: 2400-2483,5 MHz
Maximale Sendeleistung: 10dBm
GNSS:
Betriebsfrequenzband: 1559-1610MHz
D
Netzteil
Eingangsspannung: 100-240 V ~ 50/60 Hz
Ausgangsspannung: 24 V d. c.
Ausgangsstrom: 1,5 A
Schutzklasse: II/回
Die Gerauschwerte wurden entsprechend den Normen EN ISO 3744:1995 und ISO 11094:1991 ermittelt.
Warning!
Dieses Gerät erzeugt während des Betriebs ein elektromagnetisches Feld. Dieses Feld kann unter bestimmen Umständen aktive oder passive medizinische Implantate beeinträchtigen. Um die Gefahr von ernsthaften oder tödlichen Verletzungen zu verringern, empfehlen wir Personen mit medizinischen Implantaten ihren Arzt und den Hersteller vom medizinischen Implantat zu konsultieren, bevor das Gerät bedient wird.
5. Inbetriebnahme
Lesen Sie die gesamte Betriebsanleitung, bevor Sie mit der Installation des Mahroboters beginnen. Die Qualität der Installation wirkt sich direkt auf das resultierende Mahergebnis aus.
5.1 Funktionprinzip
Folgen Sie sorgfältig der Bedienungsanleitung um einen korrekten und sicheren Betrieb des Mahroboters zu gewährleisten.
Der Mahroboter wählte seine Richtung zufällig. Der Garten wird bzw. komplett gemäht, indem der Mahroboter alle Bereiche erreicht, welche nicht von Abgrenzungen und Hindernissen ausgeschlossen sind. Wenn der Mahroboter feststellt, dass er an einer Rasengrenze angelangt ist oder ein Hindernis erkennt, ändert der Mahroboter seine Richtung und mächt zufällig in eine andere Richtung weiter. Über die Sensorik erkennt der Mahroboter Hindernisse sowie die Flüche des Rasens, wodurch sich der Mahroboter frei im Arbeitsbereich bewogen kann.
Der Mahroboter besitzt eine Kameraeinheit, welche Bilder des vor ihm liegenden Bereichs geniert und diese verarbeitet. Dabei wird der vor ihm liegende Bereich undersucht und geprüft, ob es sich hierbei um Mahläche oder Rasengrenze
bzw. um ein Hindernis handelt. Solange der vor ihm liegende Bereich als Mahfliche bewertet wird, bewegt sich der Mahroboter mit eingeschalteten Mahwerk graDEaus. Wird der Bereich als Rasengrenze bzw. Hindernis bewertet, stoppt der Mahroboter, pruft erneut den Mahbereich und beginn in einer zufälligen Richtung wieder zu Mahen. Der Mahbereich muss sorgfältig überprüft und angepasst werden, damit der Mahroboter genugend Raum hat zu erkennen, wo der Mahbereich endet. Die Rasengrenzen müssen klar defi niert sein, damit der Mahroboter in seiner Reaktionszeit diese eindeutig erkennen kann.
Das verlegte Leitkabel (24) dient zum punktgenauen Andocken in die Ladestation (19) und stellt während des Mahbetriebs keine Grenze dar. Der Mahroboter muss sich daher auf einer Rasafläche mit klaren optischen oder physischen Grenzen befänd. Damit der Mahroboter das Leitkabel (24) und anschließend die Ladestation (19) fi ndet, muss sich der Mahroboter zu Erstinbetriebnahme des Mahvorgangs in der Ladestation (19) befänd. Über ein globales Navigationssatellitensystem (GNSS) bestimmt er die Position der Ladestation (19). Wird die Position der Ladestation (19) verändert, muss der Mahroboter zwingend erneut in der Ladestation (19) zur Kalibriierung positioniert werden. Stellen Sie richer, dass keine Abschirmung oder Überdachung die Positionsbestimmung verhindert. Vermeiden Sie, dass die Ladestation (19) neben hohen Gebäden positioniert wird. Unter Umständen ist hier eine Kalibriierung auf Grund eines mangelnden Signals nicht möglich.
Bei niedrigem Ladezustand des Akkus kehrt der Mahroboter zur Ladestation (19) zurück. Mit Hilfe des GNSS-Modul bestimmt der Mahroboter seine Enternung zur Ladestation (19) und suchen diese. Triff t der Mahroboter auf seinem Weg zur Suchschleife auf eine Gartengrenze oder Hindernisse, so speichert der Mahroboter seine Position ab und eine Kartierung des Mahbereichs erfolgt. Dadurch fi ndet der Mahroboter bei fortlaufender Nurzung Schneller zur Ladestation (19) zurück. Am Leitkabel (24) angekommen fahrth der Mahroboter uber seine Drahterkennungssensoren bis hin zur Ladestation (19). Je nach GartengrObe und Komplextät kann dieser Vorgang eine Minute nauern.
Ebenfalls wird über das globale Navigationssatellitensystem (GNSS) die standortspezifi sche Infor
D
mation zu Sonnenaufgang/-untergang abgefragt. Ausreichend Tageslicht ist für die störungsfreie Funktion des Mahroboters zwingend erforderlich. Prüfen Sie die Linse der Kameraeinheit (15) regelmäß auf Verunreigungen.
5.2 Sensoren
Der Mahroboter ist mit mehreren Sicherheitssensoren ausgestattet. Über die Sensoren kann sich der Mahroboter in seinem Mahbereich bewegen.
Hebesensor:
Falls der Mahroboter von hinten um mehr als 30^ vom Boden angehoben wird, oder ein Vorderad (12) den Bodenkontakt verliert, werden der Mahroboter und die Rotation der Klingen (10) sofort gestopt.
Neigungssensor:
Falls der Mahroboter sich stark in eine Richtung neigt, werden der Mahroboter und die Rotation der Klingen (10) sofort gestopt.
Hindernissensor:
Der Mahroboter erkennt Hindernisse auf seinem Weg. Wenn der Mahroboter mit einem Hindernis kollidiert, werden der Mahroboter und die Rotation der Klingen (10) sofort gestoppt und er fahr ruckwarts weg vom Hindernis.
Kameraeinheit:
Der Mahroboter verfügt über eine Kameraeinheit (15), welche den vor ihm liegenden Mahbereich (circa 1m^2 ) analysiert. Die Kamera ist damit auf den Untergrund gerichtet, womit im Bildbereich befindende Objekte mit einer maximalen Höhe von 50 cm abgebildet werden. Das zu verarbeitende Bildmaterial wird nur local und temporär auf dem Mahroboter gespeichert und laufend überschreiben. Der Mahroboter kann Hindernesse und den Arbeitsbereich erkennen, in denen sich kein Rassen mehr befinden. Wenn der Mahroboter auf ein Hindernis trift oder keinen Rassen mehr detektiert, stoppt er und beginn in einer zufälligen Richtung wieder zu mahren. Aufgrund der Kameraeinheit, ist es nicht möglich, dass der Mahroboter in der Dammerung bzw. in der Nach Arbeitet. Das gewährte Arbeitsfensster sollte bereits zu einer Tageszeit liegen in der Tageslicht herrschrt, damit der Mahroboter zuverlässig arbeiten kann. Dadurch werden auch dammerungsaktive Kleintiere wie z.B. Igel geschützt.
Abstandssensoren:
Der Mahroboter ist mit Abstandssensoren (16) ausgestattet, mit denen er Hindermisse auf seinen Weg detektieren kann. Trift der
Mahrboter auf ein Hindernis, stoppt er und beginnt in eine zufällige Richtung wieder zu mahren.
- Magnetbandsensor
Der Mahroboter ist mit einem Magnetband-sensor (29) ausgestattet und erkennt ein auf dem Boden liegenden Magnetband (27). Trifft der Mahroboter auf ein Magnetband, stoppt er und beginn in eine zufällige Richtung wieder zu mehen. Das Magnetband dient als virtuelle Grenze, wodurch sich Gartenbereiche einrichten setzen in denen der Mahroboter nicht mehen soll.
Regensensor:
Der Mahroboter ist mit einem Regensensor (5) ausgestattet, um zu verhindern, dass der Mahroboter im Regen arbeitet. Der Mahroboter kehrt zur Ladestation (19) zurück, wenn Regen erkannt wird, und wird Dort komplett aufgeladen. Nachdem der Regensensor (5) wieder getrocknet ist, bleibt der Mahroboter gemäß der voreingestelltener Verzogerungszeit in der Ladestation (19). Erst dann nimmt er die Arbeit wieder auf, sofern er sich noch in einem aktiven Zeitfenster befindet. Ist der Regensensor (5) aktiviert, (empfohlen, um den Rasen zu schonen) so ist im Display (50) eine helle Wolke zu sehen. Hat der Sensor ausgelöst, erscheidiert eine dunkle Wolke mit Regentropfen. Schlieben Sie die beiden Metallsensoren nicht mit Metall oder einem anderen leitfahigen Material kurz. Dies beeinträchtigt die korrekte Funktion des Mahroboters.
GNSS-Modul
Der Mahroboter bestimmt seine Position und die Position der Ladestation (19) über ein globales Navigationssatellitensystem (GNSS). Dies hilt, dass der Mahroboter wieder zugruck in die Ladestation (19) findet.
Uber das GNSS-Modul kann der Mahroboter die lokalen Zeiten für Sonnenaufgang und -untergang bestimmen, wodurch der Mahroboter nicht während der Damberung und in der Nacht mühen kann. Dadurch kann der Mahroboter mit seiner Kameraeinheit (15) zuverlösig arbeiten.
Mit dem GNSS-Modul bestimmt der Mahroboter jederzeit seinen Abstand zur Ladestation (19). Der Mahroboterarf sich maximal 1000m von der Ladestation (19) entfernen, ansonsten erscheint eine Fehlermeldung am Display und der Mahroboter kann im Hauptflächen-Modus nicht betrieben werden. Für den Betrieb im Nebenflächen-Modus ist die Entfernung zur Ladestation (19) nicht
D
relevant.
WI-FI:
Der Mahroboter verfügbar über ein Bluetooth WLAN Modul. Der Zustand bzw. die Signalstärke des WLAN's wird am Display entsprechend angezeigt.
5.3 Vorbereitung
Bei einer Rasenhöhe über 60 mm muss der Rassen gekürzt werden, um den Mahroboter nicht übermäßig zu belasten und die Betriebseffizienz zu beeinträchtigen. Verwenden Sie dazu einen konventionellen Rasenmaher oder einen Trimmer. Entfernen Sie alle losen Gegenstände vom Rassen, welche durch den Mahroboter beschadigt werden können oder den Mahroboter beschädigten können.
Überprüfen Sie den Mahbereich und dessen Rasengrenze sowie Bereiche welche nicht gemäß werden sollen. In den folgenden Kapiteln dieser Betriebsanleitung fänden Sie Informationen darüber, wie Sie eindeutige Rasengrenzen defi nieren konnen und bestimmte Bereiche schützen konnen. Einige Hindernisse konnen vom Mahroboter früherzeitig erkannt werden und müssen nicht aufwendig geschlossen werden.
Halten Sie folgende Werkzeuge bereit: Hammer, Zange, Abisolierzange und Wasserwaage (optional).
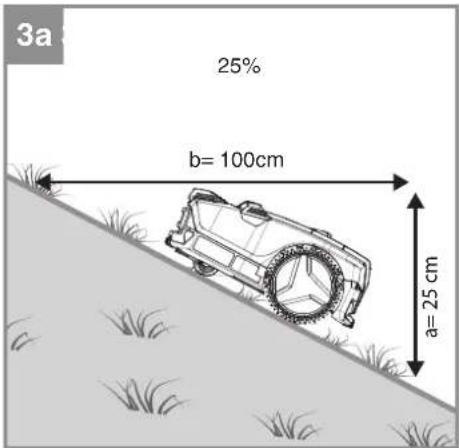
5.3.1 Berechnung der Steigung des Rasens
Der Mahroboter kann Steigungen von bis zu 25% überwinden. Vermeiden Sie deshalb steilere Steigungen. Die Steigung lasst sich mit der überwundenen Höhe über die Distanz bestimmten (Bild 3a).
Beispiel: a / b = 25cm / 100cm = 25%
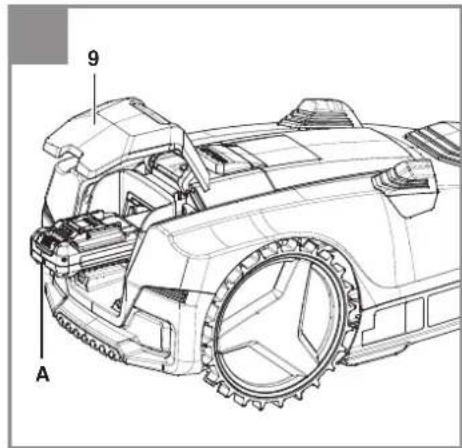
Für den Betrieb des Mahroboters wird ein Akku (A) der Power-X-Change-Serie benötigt. Ach-tung: Der Akku (A) kann je nach Modellvariente nicht im Lieferumfang Ihres Mahroboters enthalten sein.
Öff nen Sie den Akkufachdeckel (9). Drücken Sie die Rasttaste des Akkus (A) und schiben Sie den Akku (A) in die dafür vorgesehene Akkaufnahme. Schlieben Sie den Akkufachdeckel (9) und achten Sie auf korrektes Einrasten (Bild 3b). Zum Entfernen des Akkus (A) Off nen Sie den Akkufachdeckel (9). Drucken Sie die Rasttaste des Akkus (A) undziehen Sie den Akku (A) hersus.
5.4 Ladestation
5.4.1 Standort der Ladestation
Ermitteln Sie zunachst den besten Standort für die Ladestation (19). Es wird eine Außensteckdose benötigt, welche permanent Strom liefert, damit der Mahroboter immer Funktioniert. Die Ladestation (19) muss auf einer ebenen Oberfläch auf Höhe der Grasnarbeplatziert werden. Achten Sie darauf, dass der Bereich fl ach und trocken ist. Positionieren Sie Ladestation (19) bestenfalls am Rande des Mahbereichs. Achten Sie darauf, dass das Netzkabel der Ladestation (19) nicht im Mahbereich verlegt wird oder gegebenenfalls eingebaren werden muss, damit eine Beschädigung durch den Mahroboter vermieden wird.
Positionieren Sie die Ladestation (19) mit dem Leitkabel (24) möglichst gut zugänglich aus allen Bereichen und auf einer freienden Fläche ohne Hindernisse. Vermeiden Sie die Ladestation (19) in schwer erreichbare Ecken oder durch Engstellen abgegrenzte Bereiche zu positionieren. Stellen Sie sich, dass der Mahroboter in der Ladestation eine ausreichende Verbindung zum WLAN hat. Der maximale Abstand der Ladestation (19) zu einer Rasengrenzearficht nicht mehr als 1000 m betragen. Dies dient zur erhöhten Sicherheit gegen Diebstahl. Bei großerer Entfernung erscheidt eine Fehlermeldung am Display (50) und der Mahroboter kann im Hauptfl achen-Modus nicht betreiben werden. Fur den Betrieb im Nebenfl achen-Modus ist die Entfernung zu Ladestation (19) nicht relevant.
Es wird eine maximale Entfernung der Rasengrenze zur Ladestation (19) von nicht mehr als 50m empfohlen, damit ein effi. zienter und automatischer Mahvorgang garantiert ist. Bei zunehmender Entfernung zur Ladestation (19), kann es vorkommen, dass die Rest-Akkuladung des Mahroboters nicht mehr ausreicht, dass der Mahroboter bis zur Ladestation (19) fahren kann. Verwenden Sie bei größeren Mahflichen einen Akku mit einer hoheren Akkukapazität.
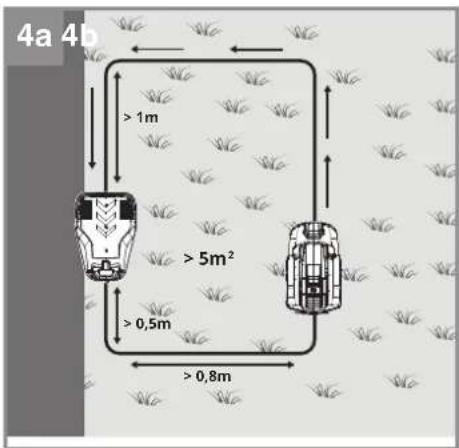
Wahlen Sie einen Platz im Schatten aus, da der Akku am besten in einer kühlen Umgebung geladen wird. Hohe Gebäude bzw. Bäume konnen, dass GNSS-Signal verschlechtern, sodass den Mahrboter nicht mehr selbstständig in die Ladestation (19) zurückfndet. Halten Sie daher entsprechend Abstand zu hohen Gebäuden bzw. Bäumen und achten Sie daraufuf, dass die Ladestation (19) sich unter freiem Himmel befindet. Achten Sie zusätzlich daraufuf, dass das Leitkabel (24) mind. 1 m vor der Ladestation (19) und mind. 0.5m hinter der Ladestation (19) gerade verlegt wird (Bild 4a). Kurven direkt vor der Ladestation
D
(19) konnen zu Schwierigkeiten beim Andocken zum Ladevorgang führen.
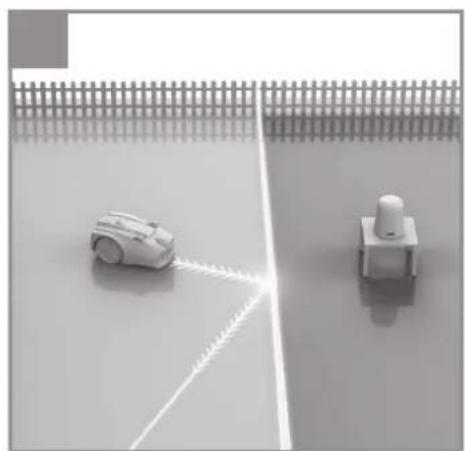
5.4.2 Lokalisierung der Ladestation
Wenn der Akku fast leer ist, kehrt der Mahroboter zur Ladestation (19) darüber, indem er nach dem Leitkabel (24) sicht. Der Mahroboter vergleich mithilfe von GNSS in regelmäßigen Abständen seine Ist-Position mit der kalibrierten Ladestations-Position. Der Mahroboter fahrnt in Richtung Ladestation (19) und sicht sich in mehreren Schritten das Leitkabel (24). Dabei stoppt der Mahroboter immer wieder und fahrht gegebenenfalls in eine andere Richtung weiter um zum Leitkabel (24) zu gelangen. Erreicht der Mahroboter die Naze des Leitkabels (24), so beginnt er mit Hilfe von Drehbewegungen und der Signalstarke des Leitkabels (24) die Position dessen zu detek-tieren.
Trifft der Mahroboter während des Mahens auf ein Hindernis oder eine Rasengrenze, wird diese Position eingespeichert. Dabei entstehen eine Kartierung, welche dem Mahroboter hilft, die Ladestation (19) schneller zu finden.
Wenn der Mahroboter das Leitkabel (24) erreicht hat, folgt er diesen gegen den Uhrzeigersinn bis zur Ladestation (19). Achten Sie deshalb darauf, die Ladestation (19) korrekt ausgerichtet zu platzieren (Bild 4a).
5.4.3 Anschluss der Ladestation an das Netze-teil
- Bevor Sie die Ladestation (19) mit der Stromversorgung verbinden, stellen Sie safer, dass die Netzspannung 100-240 V bei 50/60 Hz beträgt.
- Verbinden Sie das Netzeil (20) direkt mit einer Steckdose. Nutzen Sie das Kabel für keine andere Anwendung.
- Verwenden Sie kein beschädigtes Netzteil (20). Wenden Sie sich bei Schäden an Kabeln oder am Netzteil (20) sofort zum Aus-tausch an einen autorisierten Fachmann.
- Laden Sie den Mahroboter nicht in feuchter Umgebung auf. Laden Sie den Mahroboter nicht bei Temperaturen über 40^ oder unter 5^ auf.
- Halten Sie den Mahroboter und das Netzteil (20) fern von Wasser, Wärmequellen und Chemikalien. Halten Sie das Kabel des Netzteils (20) fern von scharfen Kanten, um Schäden zu vermeiden.
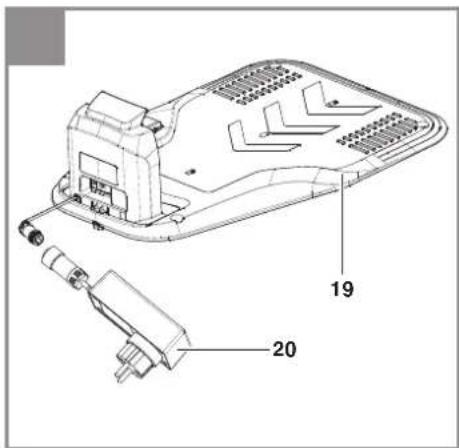
- Verbinden Sie das Netzteil (20) mit der Ladestation (19) (Bild 4b).
- Stellen Sie den Mahroboter mit eingeschalte
tem Hauptschalter (7) und Akku in die Ladestation (19) und laden Sie hin vor dem ersten Betrieb voll auf.
5.4.4 Informationen zum Ladevorgang
Der Mahroboter kehrt in einer der folgenden Situationen zur Ladestation (19) zurück:
- Sie senden den Mahroboter manuell zurück.
Der Akkuladezustand sinkt auf unter 30% .
Die tägliche Arbeitszeit ist zu Ende.
Der Regensensor hat ausgelöst.
Der Mahroboter ist überhitzt.
Es beginnt zu Dammern, wodurch die Kameraeinheit nicht mehr richtig arbeiten kann.
Dabeiucht der Mahroboter nach dem Leitkabel (24) und fahrthann selbstständig im Gegenuhr-zeigersinn am Leitkabel (24) bis zur Ladestation (19).
Während des Ladevorgangs des Akkus leuchtet die LED-Anzeige (19a) an der Ladestation rot. Ist der Akku vollständig geladen so leuchtet die LED-Anzeige (19a) an der Ladestation (19) grun. Ein Batteriesymbol zeigt zusätzlich die Akkukapazitat im Display an. Wird der Akku geladen, so erscheint in Blitz im Batteriesymbol.
Solletse sich beim Zurückfahren zur Ladestation (19) ein Hindernis auf dem Leitkabel (24) befinden, bleibt der Mahroboter nach mehreren Versuchen vor dem Hindernis stehen und kann nicht zurück zur Ladestation (19) gelangen. Entfern Sie alle Hindernisse auf dem Leitkabel (24).
Falls die Temperatur des Akkus 45^ überschreitet, wird der Ladevorgang abgebrochen, um Schaden am Akku zu vermeiden. Nachdem die Temperatur wieder gesunden ist, wird der Ladevorgang automatisch fortgesetzt.
Falls die Temperatur der Steuerung des Mahroboters 65^ überschreitet, kehr der Mahroboter in die Ladestation (19) zurück. Nachdem die Temperatur wieder gesunken ist, wird die Arbeit entsprechend der Einstellungen wiederaufgenommen.
Falls der Akku leer wird, bevor der Mahroboter zur Ladestation (19) zurückkehrt, kann der Mahroboter nicht mehr gestartet werden. Bringen Sie den Mahroboter zurück zur Ladestation (19) und halten Sie den Hauptschalter (7) eingeschaltet. Der Mahroboter wird automatisch aufgeladen.
D
5.5 Leitkabel
ACHTUNG! Ein durchtrennetes Leitkabel und Folgeschäden unterliegen nicht der Garantie!
5.5.1 Verlegung des Leitkabels
Das Leitkabel (24) kann sowohl auf dem Boden als auch im Boden verlegt werden. Bei hartem oder trockenem Boden konnen die Befestigungshaken (23) beim Einschlagen brechen. Bewässern Sie den Rasen vor der Installation des Leitkabels (24), wenn der Boden sehr trocken ist.
Installation auf dem Boden
Legen Sie das Leitkabel (24) fest auf den Boden und befestigen Sie es mit den beilie-genden Befestigungshaken (23). Die Position des Leitkabels (24) konnen Sie in den ersten Wochen der Nutzung des Mahroboters noch anpassen. Nach einiger Zeit wird das Leitkabel (24) jedoch vom Gras überwachsen sein und nicht mehr zu sehen sein. Installieren Sie das Leitkabel (24) mit einem maximalen Abstand von 1 m zwischen den Befestigungshaken (23). Vermeiden Sie Situationen bei denen das Leitkabel (24) nicht am Boden aufliegt. Stellen Sie safer, dass das Leitkabel (24) durch den Mahroboter nicht durchtrennt werden kann. Der Mahroboter wird während des Mahvorgangs das Leitkabel mit eingeschalteten Mahwerk überfahren.
Installation im Boden
Graben Sie das Leitkabel (24) bis zu 5 cm tief ein. Dadurch wird das Beschädigden das Leitkabels (24) beispelsweise beim Vertikutieren oder Lüften verhindert.
Achtung!
Da das Leitkabel (24) nicht immer an der Rasengrenze verlegt wird, ist es wichtig sich die Position des Leitkabels (24) zu merken, um es bei späteren Gartenarbeiten nicht zu beschädigen. Legen Sie gegebenenfalls eine Skizze an oder dokumentieren Sie den Aufbau mit Fotos. Falls das Leitkabel (24) nicht im Boden eingegraben wurde, sollenn Sie im Bereich des Leitkabels (24) nicht Vertikutieren und Lüften, um eine Beschäftigung zu vermeiden.
5.5.2 Installation der Suchschleife
Das Leitkabel (24) bildet eine Suchschleife, mit der der Mahroboter wieder zugruck zur La-destation (19)findet.
Das Leitkabel (24) mind. 1 m vor der Ladestation (19) und mind. 0,5 m hinter der Ladestation (19) gerade verlegen (Bild 4a). Kurven direkt vor der Ladestation (19) können zu Schwierigkeiten beim Andocken zum Lade
vorgang führen.
Die Mindestfläche, die das Leitkabel (24) einschließlich, solte mindestens mind. 5m^2 betragen (Bild 4a). Es wird empfohlen, die gesamte Länge des Leitkabels (24) zu nutzen und möglichst in einer quadratischen Fläche zu verlegen. Die Suchschleife soll so ausgerichtet werden, dass der Mahroboter aus dem Bereich des Gardens gut zur Ladestation (19) gelangen kann.
Der Abstand zwischen zwei Leitkabeln (24) sollte mind. 0,8 m betragen (Bild 4a).
Das Leitkabel (24) sind sich nicht kreuzen.
- Achten Sie daraufuf, dass sich keine Hindernisse auf dem Leitkabel (24) befinden.
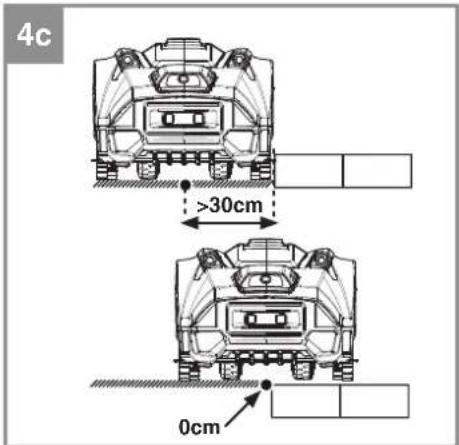
- Achten Sie darauf, dass links und rechts neben dem Leitkabel (24) ca. 30 cm keine Hindernisse befinden (Bild 4c). Halten Sie Abstand zur Gartengrenze sowie zu hohen Pflastersteinen. Veräußer der Weg ebenerdig zur Rasenfläche, konnen Sie das Leitkabel (24) ohne Abstand dazu verlegen.
5.6 Verbinden der Ladestation
SchlieBen Sie die Verlegung des kompletten Leit-kabels (24) ab, bevor Sie das frei Ende mit der Ladestation (19) verbinden.
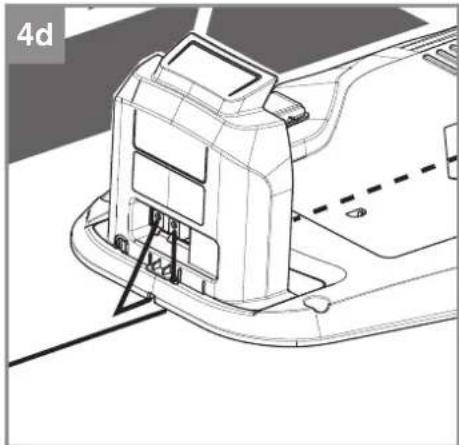
Ziehen Sie den Netzstecker, bevor Sie das Leitkabel (24) an der Ladestation (19) anschließen. Das Leitkabel ist bereits zum Teil an der Ladestation vormontiert. So ist das Leitkabel bereits unter der Ladestation verlegt und mit dem linken schwarzen Anschluss verbunden. Überprüfen Sie diese Verbindung auf festen Sitz.
Fuhren Sie nach dem Verlegen des Leitkabels (24) das frei Ende durch das Loch und verbinden theseis mit dem rechten, roten Anschluss (Bild 4d).
Achtung! Das Leitkabel (24)arf sich nicht kreuzen!
Stellen Sie anschließend die Verbindung mit der Stromversorgung her. Die LED-Anzeige (19a) an der Ladestation (19) sollte nach der korrekten Installation konstant grün leuchten. Wenn die LED nicht leuchtet, prufen Sie zunachst die Anschluse.
Falls die LED bzw leuchtet, aber nicht konstant grün, lessen Sie die Tabelle „Anzeige Ladestation und Fehlerbehebung" am Ende dieser Betriebsanleitung.
D
5.7 Mahbereich - Hindernisse und Grenzden des Mahbereichs
5.7.1 Rasengrenze
Der Mahbereich muss eine eindeutige und vollständig umlaufende Rasengrenze besitzen. Machen Sie sich mit den Mochglichkeiten der Defini nition einer Rasengrenze, welche in thisem Kapitel beschrieben wird, vertraut. Starten Sie abschlieBend an einem beliebigen Punkt der Rasengrenze mit der Uberprüfung der Gartengrenze und folgen Sie dieser im Kreis bis Sie wieder am Startpunkt angelangen.
Bereiche innerhalb der Arbeitsfläche, welche ausgeschlossen werden sollen, müssen ebenso mit einer eindeutigen Rasengrenze umschlossen sein. Gehen Sie dazu wie bei den äußerten Grenzen des Mahbereichs vor.
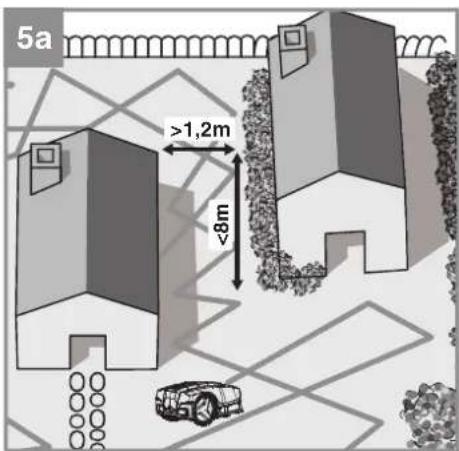
- Engstellen
Falls die Rasenfläche eine Engstelle enthalt, kann Ihr Mahroboter darin arbeiten, solange der Korridor eine Breite von mindestens 1,2 m und eine Länge von maximal 8 m hat (Bild 5a). Bei langen und schmalen Engstellen, kann es dazu kommt, dass der Mahroboter nicht mehr zur Ladestation (19) zurückfindet.
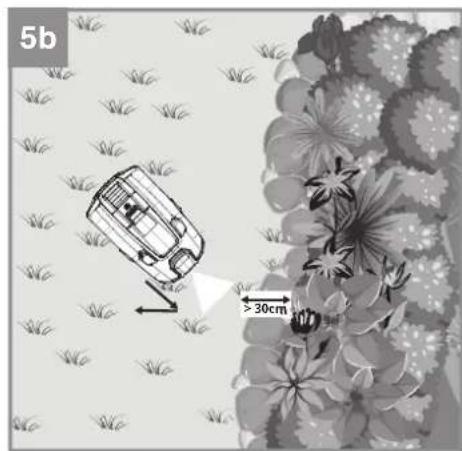
Abstand an der Rasengrenze
Wenn sich der Mahroboter der Rasengrenze nahert, wird dies durch die Kameraeinheit (15) vorne im Mahroboter erkannt. Der Abstand in der kein Rasen mehr vorhanden ist sollte mindestens 30~cm betragen (Bild 5b). Achten Sie daraufuf, dass kein Höhenunterschied an der Rasengrenze existiert, da der Mahroboter erst über die exakte Rasengrenze hinausfahren kann, bevor er stoppt und in eine neue Richtung weiterfahr. Tiefergelege Beete oder erhöhte Steinkanten konnen zu Beschädigungen am Mahroboter führen. Kontrollieren Sie regelmäßig die Rasengrenzen, ob diese nicht zugewachsen sind, daß st der Mahroboter den Mahbereich verlassen kann. Die Rasengrenze kann ebenso mit ebenen Wegsteinen umrandet werden, wodurch eine klare Abgrenzung zum Mahbereich entstehen.
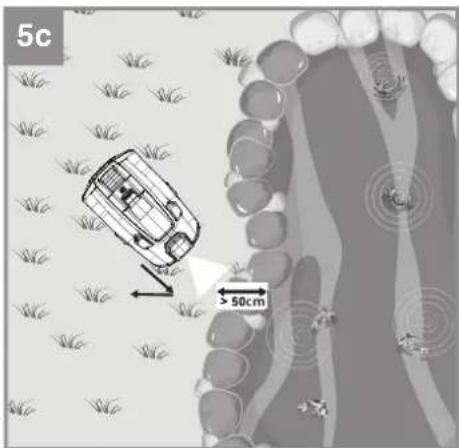
Abstand an der Rasengrenze mit Wasser Grundsatzlich erkennt der Mahroboter die Rasengrenze wie oben beschrieben zuverlassig. Dennoch kann es passieren, dass der Mahroboter die Rasengrenze weiter überfahr, weshalb wir eine Enternung der Rasengrenze zu Wasser (Teich, Pool etc.) von etwa 50~cm empfehlen (Bild 5c). Um den Mahroboter zuverlassig zu schützen, empfehlts es sich alternativ den Bereich mit Wasser mit Hilfe
einer erhöhten Umrandung zu schützen.
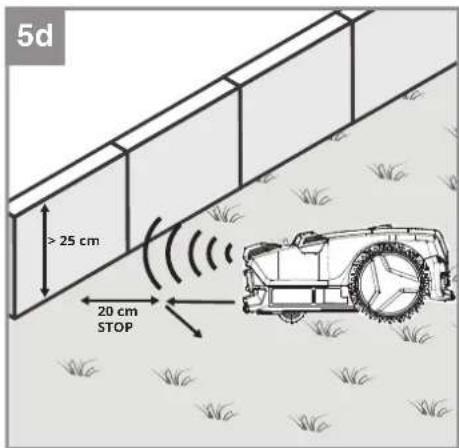
- Rasengrenze mit erhöhen Rand über 25 cm. Über die Abstandssensoren (16) erkennt der Mahroboter Hindernisse die eine Mindesthöhe von 25 cm haben (Bild 5d). Dadurch konnen Sie auch ihre Rasengrenze mit Hilfe von erhöhen Hindernissen eingrenzen. Der Mahroboter stoppt in einem Abstand von circa 20 cm vor dem Hindernis und dreht, um den Mähvorgang in eine andere Richtung fortzusetzen. Achtung! - Dadurch mächt der Mahroboter nicht bis zur Rasengrenze und es bleibt ein nicht gemäther Bereich von ca. 20 cm.
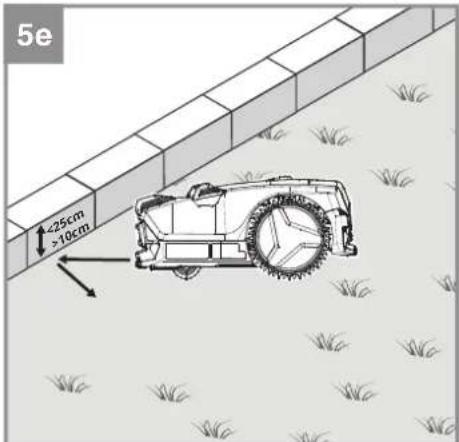
- Rasengrenze mit erhöhten Rand über 10 cm
Über die Kollisionssensoren kann der Mahroboter auch mit Hindernissen unter 25 cm kollidieren. Damit kann entsprechens eine Rasengrenze definiert werden. Achten Sie darauf, dass es sich hierbei um eine stabile Umrandung von mindestens 10 cm handelt (Bild 5e).
5.7.2 Hinderisse
Hindernisse sind Objekte, welche sich im Mühbereich befänden. Über die Sensoren kann der Mahroboter weitere Hindernisse erkennen. Weiche, instabile und wertvolle Gegenstände müssen gegebenensfalls geschützt werden. Vergleichen Sie dazu wie oben beschrieben die Möglichkeit zur Abgrenzung der Rasengrenze.
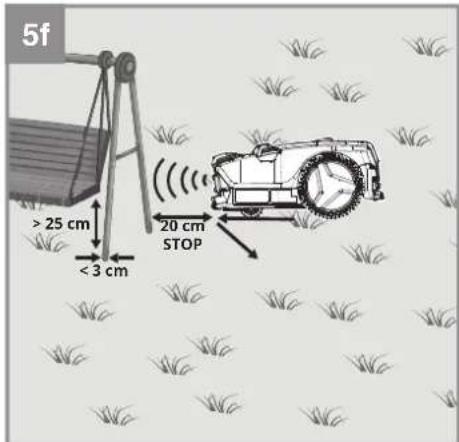
- Hindernisse mit einer Höhe über 25 cm (Bild 5f)
Feste Hindernisse mit einer Höhe über 25 cm und einer Mindestbreite von 3 cm, z. B. Bäume, Wände, Zäune, Gartenmöbel etc., werden von den Abstandssensoren (16) erkannt. Triftt der Mahroboter auf ein Hindernis, stoppt dieser und setzen seinen Mahvorgang in eine andere Richtung fort. Dabei werden ca. 20 cm bis zu einem Hindernis nicht gemaht.
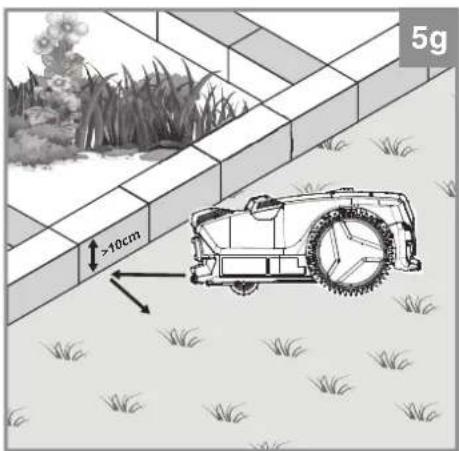
- Hindernisse mit einer Höhe unter 25 cm (Bild 5g)
Wird ein Hindernis nicht von den Abstandssensoren (16) erkannt, so kollidiert der Mahroboter mit dem Hindernis und die Kollisionssensoren lösen aus. Der Mahroboter stoppt und setzen ihren Mahvorgang in eine andere Richtung fort. Die Hindernisse mussene Höhe von mindestens 10 cm aufweisen. Schützen Sie empfindliche und unstabile Objekte mit einer Umrandung.
D
Steine und niedrige Hindernisse unter 10 cm
Steine, Felsen und niedrige Hindernisse unter 10cm im Mahbereich müssen geschützt werden, da sie durch den Mahroboter sonst überfahren werden können. Andernfalls kann es zu Beschädigung und Blockierung des Mahroboters kommt. (siehe Kapitel „Rasengrenze")
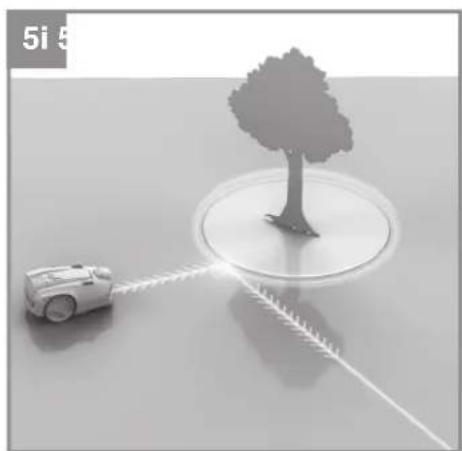
Bäume werden durch den Mahroboter wie Hindernisse behandelt. Sollten allerdings Baumwurzeln mit einer Höhe von weniger als 10 cm aus dem Boden hervorstehen, sollte dieser Bereich geschützt werden. Dies verhindert, dass Schäden an den Wurzeln sowie am Mahroboter auftreten.
5.7.3 Magnetband (Bild 5h-5l)
Hindernisse, welche das vom Mahroboter ausgesendete Abstandssignal schlecht reflektieren können (z.B. Zaun, Hecke) werden teilweise nicht oder erst sehr später erkannt. Hindernisse mit schwachen optischen Kontrast zur Mahflichen konnen ebenfalls schwer erkannt werden. Für eine kontaktlose und sichere Richtungsänderung des Mahroboters kann dieser Bereich oder das Objekt mit dem Magnetband (27) geschützt werden.
Das Magnetband (27) dient als mobile und temporäre Grenze in Ihrm Mahbereich. Die im Mahrboter eingebauten Magnetsensoren erkennen das Magnetband (27) und drehen an dessen Grenze ab. Dadurch setzen sich Gartenbereiche ausgrenzen, die nicht angefahren werden sollen, wie z.B.:
- Kurzfriste Abgrenzung eines Bereichs im Garten für eine Gartenparty, welcher vorübergehend nicht angefahrenen werden soll.
- Aufstellen eines Trampolins oder Schwimmbeckens über die Sommermonate im Mahbereich.
Ein neu gepflanzter Baum ist noch sehr empfindlich und soll in der ersten Zeit vor Zusammenstoßen mit dem Mahroboter geschützt werden. - Saisonal soll im Garten eine Blumenwiese entstehen, welche Insekten lockt. Diese Bereich soll vom Mahroboter nicht befahren werden und bereits bei der Entstehung geschlossen werden.
In einem Bereich wird neuer Rasen angesät und dieser soll anfangs noch geschützt werden. Der Untergrund ist noch nicht gefestigt und es soll sich zunachst eine kräftige Gras-narbe ausselden.
Verlegen Sie das Magnetband (27) im Abstand von weniger Zentimetern zum entspruchenden Bereich bzw. Objekt. Kurzen Sie das Magnetband (27) je nach Bedarf (minimale Länge 50 cm).
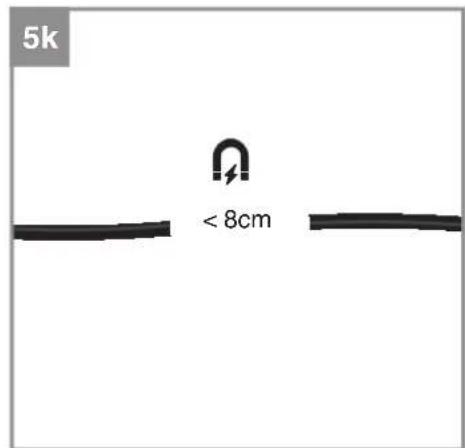
Damit eine zusammenhängende Grenze aus mehreren Magnetbandelementen sicher erkannt wird, sollte der maximale Abstand zwischen den jeweiligen Enden 8 cm nicht übersritten werden (Bild 5k). Stellen Sie safer, dass die äußere Grenze des Mahbereichs durch eine optische bzw. physische Abtrennung defi niert ist. Fixieren Sie das Magnetband (27) mit Befestigungshaken (23) auf dem Boden in einem maximalen Abstand von 1 m.
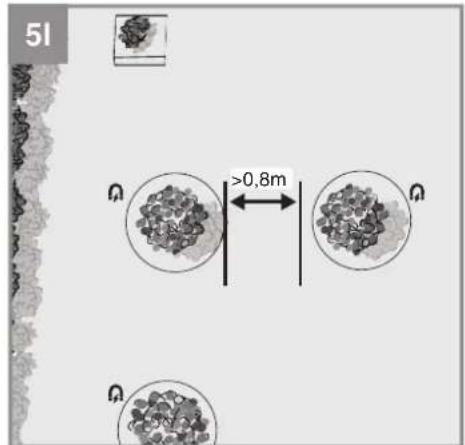
Halten Sie einen Abstand von mindestens 80 cm zum Leitkabel (24) sowie zwischen zwei unabhängigen Begrenzungsbereichen, damit der Mahrboter problemlos hindurch fahren kann. (Bild 5l).
Vermeiden Sie das Verlegen des Magnetbandes (27) an Steigungen, da hier der Mahroboter über den Begrenzungsbereich hinausratschen kann und somit die Grenze nicht erkannt wird.
Das Magnetband (27) kann genauso wie auch das Leitkabel (24) sowohl auf dem Boden als auch im Boden ca. 5 cm tief installiert werden. Achten Sie darauf, dass Magnetband (27) nicht zu tief im Boden verlegt wird, da ansonsten eine zuverlüssige Erkennung durch den Mahrboter nicht mehr gewährleistet werden kann.
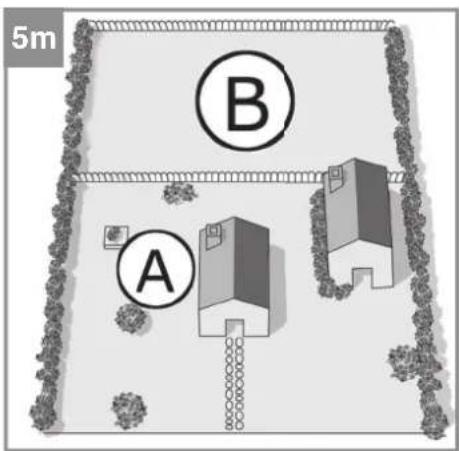
5.7.4 Haupt- und Nebenfläche (Bild 5m)
Als Nebenfl äche (B) wird ein Arbeitsbereich bezeichnet, der nicht direkt mit der Hauptfl äche (A), z.B. einer Engstelle, verbunden ist. Der Mahroboter kann eine Nebenfl äche nicht direkt und selbstständig erreichen.
Um die Nebenfläche (B) mühen zu können, müssen Sie den Mahroboter manuell in die Nebenfläche (B) tragen. Der Mahroboter muss über den Hauptschalter (7) eingeschaltet sein. Starten Sie dfort das gewünschte Mahprogramm und wahlen Sie im Untermenü „Nebenfläche" aus (siehe „Einstellungen des Mahroboters"). Der Mahroboter wird in der Nebenfläche (B) nicht versuchen zur Ladestation (19) zurück zu fahren, wenn der Akkuladezustand niedrig ist. Der Mahroboter mächt bis der Akku erschöpf ist. Im Anschluss muss entweder der Akku geladen oder der Mahroboter zurück in die Ladestation (19) getragen werden.
Achtung!
Der Mahroboter darf sich maximal 1000 m von der Ladestation (19) entfern, ansonsten er
D
scheint eine Fehlermeldung am Display (50) und der Mahroboter kann im Hauptfl achen-Modus nicht betrieben werden. Fur den Betrieb im Nebenfl achen-Modus ist die Entfernung zu Ladestation (19) nicht relevant.
5.7.5 Abstand zu fremden Mahflichen
Halten Sie einen Abstand zu fremden Mahfli achen (z.B. Nachbarn), welche mit einem Begrenzungsdraht betrieben werden. Das durch den Begrenzungsdraht erzeugte Signal, kann beim Rückfi nden des Mahroboters in seine Ladestation (19) zu Problem führen.
5.8 GNSS-Modul
5.8.1 Ladestations-Position kalibrieren
Damit der Mahroboter wieder zur Suchschleife und der Ladestation (19) zurückfndet, muss der Mahroboter die Position der Ladestation (19) mit Hilfe eines globalen Navigationssatellitensystems (GNSS) kalibrieren.
Dazu stellen Sie den betriebsbereiten Mahroboter mit eingeschalteten Hauptschalter (7) in die La-destation (19). Wahlend des Kalibrierungsablaufs schwenkt das GNSS-Symbol im Display (50). Sobald dieser Vorrang erfolgreich abgeschlossen ist leuchtet das GNSS-Symbol dauerhaft oder blinkt wenn das Signal schwach ist. Dieser Vorgang kann eine Minute beanspruchen. Stellen Sie richer, dass keine Abschirmung oder Überdachung die Positionsbestimmung verhinder. Vermeiden Sie, dass die Laestation (19) befinden hohen Gebäuden positioniert wird. Halten Sie entsprechend Abstand zu hohen Gebäuden und Bäumen. Unter Umständen ist hier eine Kalibrierung auf Grund einer schlechten Signalabdeckung nicht möglich.
5.8.2 Kartierung
Soll der Mahroboter zur Ladestation (19) zurückkehren, so bestimmt dieser mit Hilfe des GNSS-Modul seine Entfernung zur Ladestation (19). Triff t der Mahroboter auf dem Weg zur Ladestation (19) auf eine Gartengrenze oder Hindemisse, so speichert der Mahroboter seine Position ab und eine Kartierung des Mahbereichs erfolgt. Dadurch fi ndet der Mahroboter bei fortlaufender Nutzung schneller zur Ladestation (19) zurück.
5.8.3 Karte loschen
Um alle GNSS-Informationen auf Ihr Mähroboter zu loschen, wahren Sie im Einstellungsmenu den Punkt „Maherprotokoll“, anschließend ist der Punkt „Karte loschen" auszuwahlen und zu
bestätigen. Nun muss der Mahroboter zurück in die Ladestation (19) gebracht werden, um die Position der Ladestation (19) neu zu kalibrieren. Sollten Sie im Garten größere Anpassungen des Mahbereichs durchfahren, so empfi eht es sich die Karte des Mahroboters zu Löschen. Außer dem kann die Karte des Mahroboters witterungsbedingt durch gelbe Stellen im Rasen in den Sommermonaten, sowie von herunterfallendem Laub im Herbst beeinf! usst werden. Löschen Sie auch in diesen Fälle die Karte wie oben beschreiben. Wir empfehlen in solchen Fälle das aussetzten des Automatikbetriebs und die Verwendung des Gerätes im Nebenfl achenmodus an geeigneten Stellen des Gartens.
5.9 Gartengrenzen und deren Qualität
Um den sicheren Betrieb Ihres Mahroboters ohne einen Begrenzungsdraht zu gewährleisten, überprüft der Mahroboter die Grenzen des Mahbereichs mit der Kamaerinheit (15). Die Kamaerinheit (15) analysiert den vor ihm liegenden Mahbereich (ca. 1m^2 ). Triff t der Mahroboter auf eine Grenze des Mahbereichs, so kann der Mahroboter anhand von Parametern einen Grenz-Qualitätswert bestimmen.
5.9.1 Initialisierungsfahrt - Inbetriebnahme Achten Sie darauf, dass der Akku des Mahroboter zu Beginn der Initialisierungsfahrt vollständig geladen ist.
Dadurch kann der Mahroboter die Bestimmung eines Referenzwertes in einem Vorgang abschieden. Reichte eine Akuladung fur die Initialisierungsfahr nicht aus, so fahr t der Mahroboter selbstständig zur Ladestation (19) zurück und fuhrte seine Fahrt beim nachsten Startvorgang automatisch fort. Fur die Bestimmung der Zuverlösigkeit der Mahbereichsgrenzen, muss fur den Betrieb des Mahroboters ein individueller Referenzwert je Mahbereich erstellt werden.
Zur Bestimmung des Referenzwertes bewegt sich der Mahroboter wie gewöhnlich im Mahbereich zufällig in eine Richtigung. Triff t der Mahroboter auf eine Grenze oder ein Hindernis, so stoppt dieser und bewertet den vor ihm liegenden Mahbereich. Anschließlich bewegt sich der Mahroboter in einer zufälligen Richtigung fort.
Aus Sicherheitsgründen erfolgt die Initialisierungsfahrt mit ausgeschalteten Mahwerk.
Trifft der Maher auf eine Grenze des Mahbereichs wird diese bewertet und im Display entsprechend angezeigt. Dabei signalisiert ein dauerhaft erscheinendes Rasensymbol am Display eine zu
D
verlässige Grenze, während ein permanent blinkendes Symbol eine unsichere Grenze darstellt. Für eine zuverlässige Bestimmung des Referenzwertes sind mindestens 200 Kontakte mit einer Grenze des Mahbereichs notig. Nach mehr als 200 Kontakten wird der Grenz-Qualitätswert auf seine Zuverlösigkeit überprüft. Entscheidet der Mahroboter, dass der Wert noch nicht ausreichend zuverlüssig ist, so führt der Mahroboter seine Initialisierungsfahr für weitere 200 Kontakte fort.
War die Initialisierungsfahrt erfolgreich und ein zuverlüssiger Grenz-Qualitätswert konnte erstellt werden, so beginnt der Mahroboter entsprechend seiner Mahzeiteinstellung den Mahbereich zu mahren.
Konnte kein zuverlassiger Referenzwert erstellt werden, so stoppt der Mahroboter und es erscheidine eine Fehlermeldung am Display (50). Überprüfen Sie die Grenzen des Mahbereich und korrigieren Sie Grenzen, welche sich nicht eindeutig vom Mahbereich unterscheiden setzen.
Achten Sie darauf, dass sich der Mahbereich eindeutig vom umliegenden Bereich unterscheidet. Löschen Sie zunachst den existierenden Referenzwert (siehe 5.9.4), um anschließend die Initialisierung zu wiederholen.
5.9.2 Überprüfung der Grenz-Qualität im Betrieb
Im automatischen Betrieb des Mahers überprüft der Mahroboter in regelmäßigen Abständen, ob sich der aktuelle Grenzqualitätswert des Mahbereichs im Vergleich zu seinem in der Initialisierungsfahrt bestimmen Referenzwert verändert hat. Sofern sich die Grenzqualität der Rasenfläche stark verschlechtert hat, bleibt der Mahroboter in der Ladestation stehen und zeigt dies in einer entsprechenden Fehlermeldung am Display an.
Leitkabelsymbol leuchtet dauerhaft
Der Mahrobote befni dent sich innerhalb oder in der Nane der Suchschleife. Oder der Macher steht in der Ladestation (19), wird jedoch nicht geladen.
Leitkabelsymbol blinkt
Der Mahroboter befindet sich weltweg von der Sutschscheife oder die Stromversorgung zur Ladestation (19) wurde unterbrochen. Das Leitkabel (24) wurde falsch angeschlossen oder beschädigt.Der Maher steht in der Ladestation (19) und wird geladen.
5.9.3 Betrieb des Mahroboters in Nebenflächen
Der Mahroboter kann einen individuellen Grenz-Qualitätswert für die Hauptfläche und die Nebenfläche erstehen. Daher ist es nöttig auf jeder neuen Nebenfläche eine Initialisierungsfahrt durchzuführen. Es ist nur erlaubt den Mahroboter auf einer Nebenfläche zu benutzen. Wollen Sie mit dem Mahroboter auf einen weiteren Nebenfläche mühen, so ist es zwingend notwendig den Grenz-Qualitätswert für die Nebenfläche zulöschen und eine Initialisierungsfahrt durchzuführen.
5.9.4 Löschen der Werte
Nach einer längerem Mahpause konnen sich die Grenz-Qualitätswerte verändert haben, was zu Fehler in derCOMMenden Saison führen kann. Es wird davon empfohlen den Grenz-Qualitätswert jeges Jahr am Anfang der Saison zu loschen und einen neuen Referenzwert zu bestimmen. Dadurch kann ein sicherer und zuverlüssiger Betrieb des Mahroboters gewährleistet werden.
Um die Referenzwerte auf Ihrm Mahroboter zu löschen, wahren Sie im Einstellungsmenu den Punkt „Maherprotokoll“, anschließend ist der Punkt „Grenzwerte löschen“ auszuwahlen und zu bestätigen.
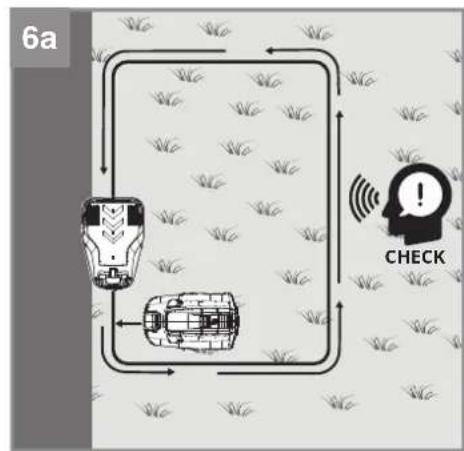
5.10 Einsatzen und Prufen der Installation 5.10.1 Überprüfung der Installation von Leitkabel und Ladestation (Bild 6a)
Sobald die LED-Anzeige (19a) an der Ladestation (19) grün leuchtet, ist der Mahbereich für den Mahroboter bereit.itte stellen Sie zuerst sicher, dass die Befestigungshaken (23) am Leitkabel (24) kompletteingeschlagen sind.
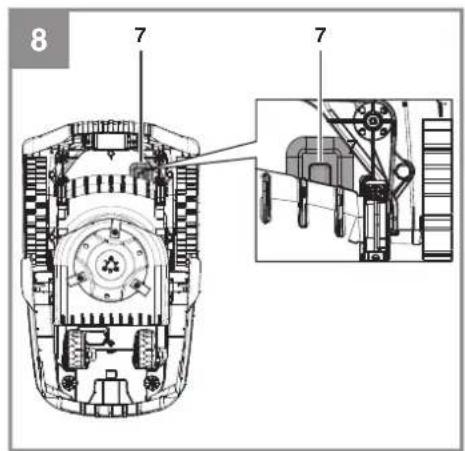
Stellen Sie den Mahroboter in einem geringen Abstand hinter die Ladestation (19) in die Suchschleife, um möglichst die komplette Distanz des Leitkabels (24) zu überprüfen. Der Mahroboter soll sie sich damit noch nicht auf dem Leitkabel (24) befinden und dem Leitkabel (24) zugewandt stehen. Schalten Sie den Hauptschalter (7) ein (ON) (Bild 8).
Drucken Sie die STOP-Taste (3) und offen Sie die Bedienfeldabdeckung (13). Entsperren Sie den Mahroboter mit Hilfe der PIN (siehe Kapitel "Sperrvorrichtung / PIN"). Drucken Sie die Taste "MODE" (52). Wahlen Sie anschliebend mit den Navigationstasten (55) den Punkt „zur Ladestation" und bestätigten Sie mit der Taste "OK" (56).
Drucken Sie die Taste, START (53) und schlieben Sie anschließend die Displayabdeckung.
D
Jetztucht der Mahroboter nach dem Leitkabel (24) um zur Ladestation (19) zu fi den. Dabei fahrht er zuerst nach vorne bis der Mahroboter am Leitkabel (24) angekommen ist. Gegebenenfalls kann der Mahroboter zuvor kurz stoppen, um sich neu zu orientieren. Daraufhin folgt der Mahroboter dem Leitkabel (24) gegen den Uhrzeigersinn. Achten Sie darauf, dass keine Gegenstände auf dem Leitkabel (24) liegen.
Der Akku des Mahroboters wird nun vollständig geladen. Falls Probleme beim Andocken bestehen, kann es sein, dass Sie die Ladestation (19) in ihrer Ausrichtung neu positionieren,müssen,bis das Andocken ohne Probleme Funktioniert. Mit der roten STOP-Taste (3) konnen Sie den Mahroboter jederzeit anhalten. Nach dem Betätigen der STOP-Taste (3) wird der Mahroboter gestopt und wartet auf weitere Anweisungen. Überprüfen Sie auBerdem Stellen mit groBer Entfernung zur Suchscheife oder durch Engstellen verbundene Bereiche.Wiederholen Sie den Vorgang, wie oben beschrieben und schicken Sie den Mahroboter zurück zur Ladestation (19).
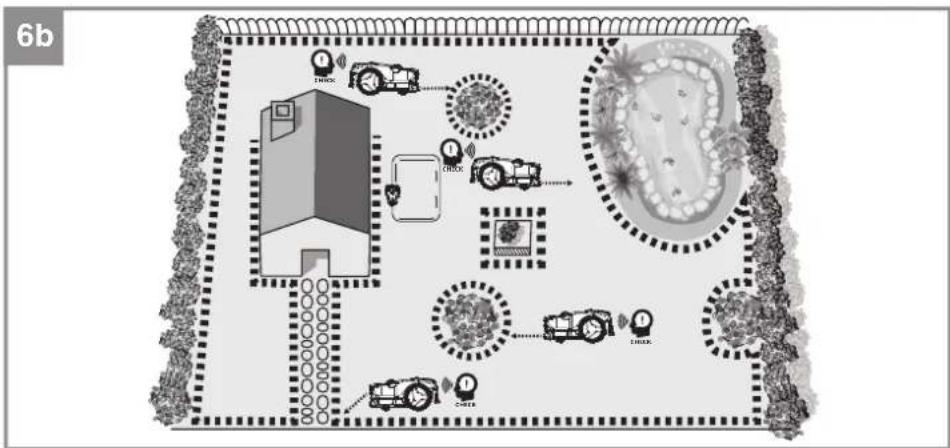
5.10.2 Überprüfung des Mahbereichs (Bild 6b)
Um die Grenzen des Mahbereichs zu überprüfen, gehen Sie entlang der Rasengrenze und überprüfen Sie ob der Mahbereich vollständig mit Abgrenzungen bzw. Hindernissen umgeben ist. Wiederholen Sie thisbenso mit allen Bereichen, die ausgeschlossen werden sollen, wie z.B. Blumenbeete, Pool, Teich, und überprüfen Sie, ob diese eindeutig an allen Stellen abgegrenzt sind. Bei kritischen Stellen, bei denen Sie nicht sich sind, ob der Mahroboter thesekennen kann, empfi eht es sich diese Stellen zu überprüfen. Dazu stellen Sie den Mahroboter 1 m entfern't zu der uberprüfenden Stelle auf. Dabei solte der Mahroboter der zu überprüfenden Stelle zugewandt sein. Überprüfen Sie ebenso Bereiche, welche durch ein Magnetband (27) geschützt sind. Anschließlich den Maher starten, wie in Kapitel 6.5.3 beschrieben. Der Mahroboter fahr zunachst nach vorne und sollte dann die Rasengrenze oder das Hindernis erkennen. Sie konnen den Vorgang jederzeit mitilde der STOP-Taste (3) abbrechen. Wiederholen Sie thisden Vorhang mit allen Stellen bei denen sie sich unsicher sind.
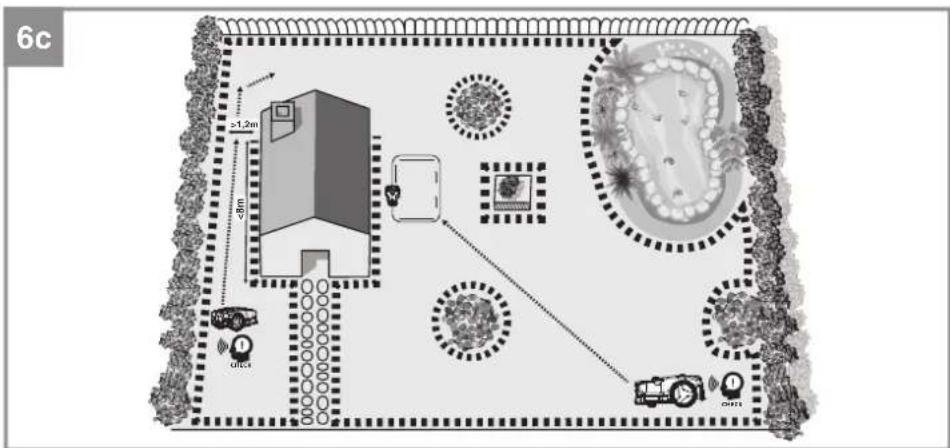
5.10.3 Überprüfung der Position der Ladestation (Bild 6c)
Prufen Sie die Position der Ladestation (19), in dem Sie den Mahroboter nach abgeschlossener Kalibrierung an verschiedene Stellen der
Rasenfläche positionieren und hijn anschlieBend die Ladestation (19) suchen lassen. Schicken Sie nun den Mahrboter zurück zur Ladestation, wie in Kapitel 6.5.4 beschreiben. Sie konnen den Vorgang jederzeit mit Hilfe der STOP-Taste (3) abbrechen. Passen Sie gegebene falls den Bereich, die Verlegung des Leitkabels (24) sowie die Position der Ladestation (19) an.
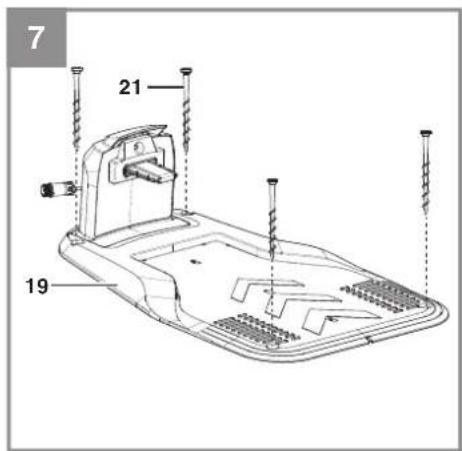
5.11 Befestigung der Ladestation
Nachdem die ordnungsgemäß Funktion des Mahroboters gewährleistet ist und eine passende Position für die Ladestation (19) gefunden wurde, muss die Ladestation (19) mit den Befestigungsschrauben (21) fi xiert werden. Schrauben Sie die Befestigungsschrauben (21) mit dem Sechskantenschlüssel (22) komplett in den Boden (Bild 7).
5.12 Akku-Kapazitätsanzeige
Drucken Sie auf den Schalter für Akku-Kapazitätsanzeige. Die Akku-Kapazitätsanzeige signalisiert Ohnen den Ladezustand des Akkus anhand von 3 LEDs (Bild 12b).
Alle 3 LED's leuchten:
Der Akku ist voll aufgeladen.
2 oder 1 LED(s) leuchten
Der Akku verfügbar über ausreichende Restladung.
1 LED blinkt:
Der Akku ist leer, laden Sie den Akku auf.
Alle LED's blinken:
Die Temperatur des Akkus ist unters written. Enternen Sie den Akku vom Gerat und halten Sie den Akku einen Tag bei Raumtemperatur liegen. Tritt der Fehler wieder auf, so wurde der Akku tiefentladen und ist defekt. Enternen Sie den Akku vom Gerat. Ein defekter Akku dar nicht mehr verwendet bzw. geladen werden.
Achtung!
Wenn Sie einen Multi-Ah Pack (z.B. 4-6Ah) verwenden, stellen Sie diesenitte immer auf die höhere Kapazität. Durch die schonende Ladung und Entladung beim Mahroboter ist die Nutzung der geringeren Kapazität zur Veränderung der Lebensdauer nicht notwendig.
5.13 Laden des Akkus mit dem Ladegerat Im normalen Betrieb wird der Akku (A) des
Mahrboters über die Ladestation (19) geladen.
Für die unabhängige Verwendung des Akkus (A) der Power-X-Change-Serie, kann dieser auch im
D
externen Ladegerät Power-X-Charger geladen werden. Achtung! - Das Ladegerät (B) kann je nach Modellvariante nicht im Lieferumfang Ihrches Mahroboters enthalten sein.
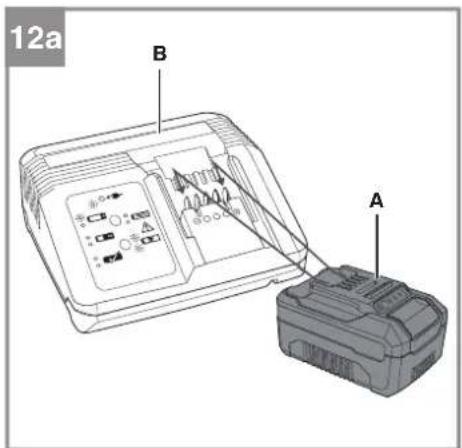
- Vergleichen Sie, ob die auf dem Typenschild angegebene Netzspannung mit der vorhänden Netzspannung übereinstimmt. Stecken Sie den Netzstecker des Ladegerats (B) in die Steckdose. Die grüne LED beginnnt zu blinken.
- Stecken Sie den Akku (A) auf das Ladegerät (B) (Bild 12a).
- Unter Punkt „Anzeige Ladegerät“ fänden Sie eine Tabelle mit den Bedeutungen der LED Anzeige am Ladegerät.
Während des Ladens kann sich der Akku etwas erwarten. Dies ist jeder normal.
Sollte das Laden des Akku-Packs nicht möglich sein, überprüfen Sieitte
ob an der Steckdose die Netzspannung vorhanden ist.
ob ein einwandfrei Kontakt an den Lade-kontakten vorhanden ist.
Solle das Laden des Akku-Packs immer noch nicht möglich sein, bitten wir Sie,
dasLadegerat
und den Akku-Pack an unseren Kundendienst zu senden.
Für einen fachgerechten Versand kontaktieren Sieitte unseren Kundendienst oder die Verkaufsstelle,bei der das Gerat erworben wurde.
Beachten Sie beim Versand oder Entsorgung von Akkus bzw. Akkugerät, dass diese einzeln in Kunststoff beutel verpackt werden, um Kurzschlüsse und Brand zu vermeiden!
Im Interesse einer langen Lebensdauer des Akku-Packs sollenn Sie für eine rechtzeitige Wiederauf-ladung des Akku-Packs sorgen. Dies ist auf jeder Fall notwendig, wenn Sie feststellen, dass die Leistung des Gerats nachlasiest. Entladen Sie den Akku-Pack nie vollständig. Dies führt zu einem Defekt des Akku-Packs!
6. Bedienung
6.1 Hauptschalter
Der Mahroboter ist mit einem Hauptschalter (7) ausgestattet. Schalten sie den Mahroboter über den Hauptschalter (7) ein (ON) und aus (OFF) (Bild 8). Nach dem Einsatz des Mahroboters wird dieser mit der PIN verriegelt.
6.2 Bedienfeld
Der Mahroboter wurde bereits worksbeitig programmiert und Standardeinstellungen daran vorgenommen. Diese können bei Bedarf allerdings verändert werden. Auch wenn die Werkseinstellungen für die meisten Gärten geeignet sind, sollenn Sie sich mit den verfügbaren Optionen trotzdem vertraut machen.
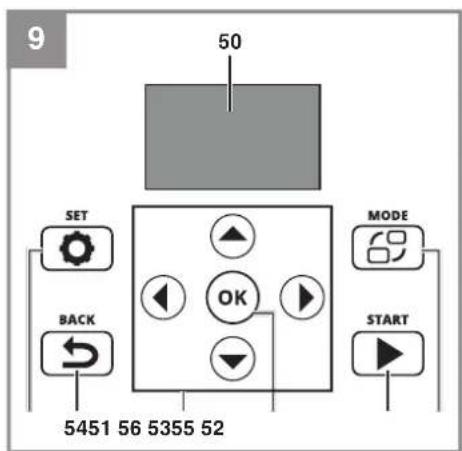
Erklärung des Bedienfelds mit LCD-Anzeige (Bild 9)
-
LCD-Display
-
Taste, SET" - Einstellungs-Taste
- Taste „MODE“ – Mahprogramm-Taste
- Taste "START" - Start-Taste
- Taste „BACK" – Zurück-Taste
- Navigationstasten
- Taste, OK" Bestätigungs-Taste
6.3 Schnitthöhenverstellung
Achtung! Das Verstellen der Schnitthöhe sind nur bei ausgeschalteten Mahroboter vorgenommen werden. Drücken Sie dazu die STOP-Taste (3). Der Mahroboter ermitteligt über die Schnitthohenverstellung (4) eine stufenlose Anpassung der Schnitthöhe zwischen 20 und 60mm , welche auf der Skala abgelesen werden kann.
Bei einer Rasenhöhe über 60 mm muss der Rasaun auf mindestens 60 mm gekürzt werden, um den Mahroboter nicht übermäßig zu belasten und die Betriebseffi zienz zu beeinträchtigen. Verwenden Sie dazu einen konventionellen Rasenmaher oder einen Trimmer.
Nach Abschluss der Installation kann die Schnitthöhe über die Schnitthöhenverstellung (4) angepasst werden. Beginnen Sie immer mit einer hohenen Schnitthöhe und reduzieren Sie diese in kleinen Schritten bis zur gewünschten Höhe.
6.4 Sperrvorrichtung / PIN
Die Sperrvorrichtung verhindert eine nicht autorisierte Nutzung des Mahroboters ohne einen gültigen Code. Dazu müssen Sie einen persönlichen vierstelligen Sicherheitscode eingeben.
D
Entriebelung
Bevor Sie den Mahroboter in Betriebnehmen, mussen Sie die korrekte PIN eingeben (StandardPIN:0-0-0-0).Geben Sie die PIN mithilfe der Navigationstasten (55) ein.
Standard PIN:Neue PIN:
0000
PINändern
Um die PIN zu ändern, gehen Sie wie folgt vor: 1. Entriegeln Sie das Bedienfeld.
2. Drücken Sie zunachst die Taste, SET (51), um Einstellungen vorzunehmen.
3. Navigieren Sie im Menu des LCD-Displays (50) mit den Navigationstaten (55) zum Punkt „Allgemein" und anschließend „PIN-Code"
4. Geben Sie zuerst die aktuelle PIN (StandardPIN 0-0-0-0) mithilfe der Navigationstasten (55) ein.
5. AnschlieBend geben Sie mithilfe der Navigati- onstasten (55) ihre personliche PIN ein.
6. Bestätigen Sie die vorgenommenen Einstellungen.
7. Wiederholen Sie Schritt 5. und 6., um die neue PIN zu bestätigen.
8. Achtung! Notieren Sie die neue PIN!
PIN anfordern bei Verlust
Halten Sie die Quittung und die Seriennummer des Mahroboters bereit. Sie brauchen diese, um ihre PIN zu erhalten!
Variante A:
- Drucken Sie im verriegelten Status die Taste SET" (51) fur 6 Sekunden.
- Die PUK wird nun im Display (50) angezeigt.
- Wenden Sie sich an den Kundendienst, um ihre PIN zu erhalten.
Variante B:
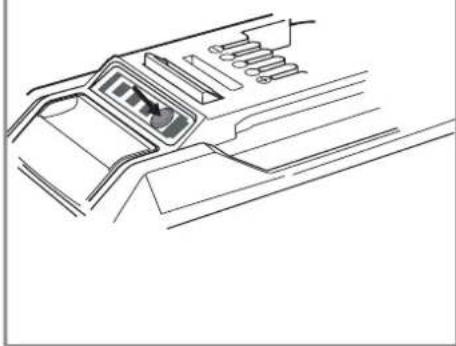
- SchlieBen Sie am USB-Anschluss (14) wie abgebildet einen leeren USB-Stick an (Bild 11).
- Der Mahroboter speichert automatisch die PUK auf ihren USB-Stick ab und beendet den Vorgang mit einem Pfeifton.
- Ziehen Sie den USB-Stick ab. Lesen Sie die Daten auf dem USB-Stick an einem Computer aus. Durch den Mahroboter wurde eine Textdatei (^*.txt) erstellt. Diese Datei enthalt eine PUK, einen persönlichen Code. Wenden Sie sich an den Kundendienst, um ihre PIN zu erhalten.
6.5 Einstellungen des Mahroboters
Im Hauptmenu des LCD-Displays (50) fi nden Sie die aktuellen Datum- und Uhrzeiteinstellungen des Mahroboters, sowie den aktuellen Akkuzustand. Ebenso wird der Status des Regensensors, des Drahtsignals, dem ausgewählten Modus, das GNSS und WLAN in der Symbolleiste angezeigt. Über das Bedienfeld haben Sie die Optionen, mit der Taste SET" (51) Einstellungen am Mahroboter durchzufahren und mit der Taste "MODE" (52) den Mahroboter mit entsprechlichen Mahprogrammen zu starten. Wechseln Sie mit den Navigationstaten (55) zur gewünschten Stelle, um Einstellungen vorzunehmen. Drucken Sie die BACK-Taste (54) um das jeweilige Menu zu verlassen.
6.5.1 Mahprogramme - Taste „MODE" (52)
Im „MODE“ Menu können Sie mit Hilfe der Navigationstaten (55) zwischen den beiden Betriebsarten Manuell und Zeitplan wahlen sowie den Maher zurück zur Ladestation schicken.
Manuell:
Hier konnen Sie außerhalb des eingestellen Zeitplans wahren, ob Sie den Mahroboter normal mAHen lessen wollen oder ob Spotmowing ausgefuhr werden soll. Sie haben jeweils die Moglichkeit zwischen Hauptfläche und Nebenkfläche zu wahren. Genauere Informationen zu den beiden Flächen fänden Sie im Kapitel „Inbetriebnahme" unter dem Punkt „Haupt- und Nebenkfläche“
Spot-Mowing
Es kann vorkommen, dass Ihr Mahroboter manche Stellen nicht ausreichend grundlich mächt. Stellen Sie den Mahroboter an eine gewünschte Stelle und starten Sie den Mahroboter. Der Mahroboter wird dann beginnen den Rasen spalformig zu mahren, bis er auf ein Hindernis, oder die Kamera keine zu mahende Rasenfläche erkennt. Der Maher fahrtn nun so lange weiter bis der Akku leer ist und kehrt in die Ladestation zurück.
Zurück zur Ladestation
Schicken Sie ihren Mahroboter zurück in die Ladestation (19) wie in Kapitel 6.5.4 beschrieben.
Zeitplan:
Das Arbeitsfenster des Mahers ist durch Sonnenaufgang und -untergang begrenzt. Die aktuellen Werte sind unter dem Menu „Zeitplan" am Display dargestellt.
Liegt die eingestellte Startzeit vor der dargestellen Sonnenaufgangszeit (links oben am Display), so wird der Mahroboter erst zur Sonnenaufgangs-
D
zeit den Mahrbetrieb beginnen.
Liegt das eingestellte Mahende nach der dargestellen Sonnenuntergangszeit (rechts oben am Display) so wird der Mahroboter bereits zur dargestellen Uhrzeit zur Ladestation zurückkehren und nicht zur definierten.
Wichtig!
Die vom Mahroboter errechnete Sonnen Auf- und Untergangszeit wird mit einer 30 minütigen Sicherheitszeit dargestellt um einen fehlerfrei Betrieb zu gewährleisten.
Sie können in thisem Modus mit Hilfe der Navigationstasten (55) die Mahzachten pro Tag einstehen. Pro Tag konnen Sie zwei Mahfenster definieren. Sie konnen die definierten Mahfenster auf andere Tage übertragen, oder auch jeder Tag individuell planen.
Sofern Sie zwei Mahfenster an einem Tag einstellen, * durren sich die Mahfenster nicht überlappen außerdem sind die Mahfenster innerhalb eines Tages zu generieren. Die Mahzeiten * durren sich nicht bis in den nachsten Tag hinein erstrecken.
Möchten Sie ein eingestelltes Mahfenster entfernen so,müssen Sie das Mahfenster auf 00:00-00:00 einstehen.
Für die Mahzeiteinstellung wird als grober Richtwert 8 Stunden pro Tag bei 500m2 empfohlen. Je nach Gartengröbe und Komplexitat ist die gewährte Arbeitszeit anzupassen.
6.5.2 Einstellungen - „SET“ Taste
Mit der Taste, SET" (51) konnen Sie grundlegende Einstellungen an Ihr hem Mahrboter vornehmen. Wechseln Sie mit den Navigationstasten (55) zur gewünschen Stelle und bestätigen oder verwerten Sie die vorgenommen Einstellungen anschließend mit der Taste, OK" (56) oder der BACK-Taste (54).
Rückfahrweg
Die Rückfahrstrecke die der Mahroboter aus der Ladestation (19) führt kann eingestellt werden. Der Mahroboter führt entsprechend der eingestalten Distanz erst ruckwarts, bevor er in die Mahnfliche dreht. Stellen Sie safer, dass der Mahroboter durch die eingestellte Rückfahrstrecke, den Mahbereich hierdurch nicht verlasset.
Regensensor
Der Regensensor (5) lassst sich über diese Einstellung programmieren. Die werksseltige Standardeinstellung für den Sensor ist „Ein". Sie können den Regensensor (5) aktivieren bzw. deaktivieren und dessen Verzögerungszeit ein-
stellen. Die Verzogerungszeit defi niert die Zeit, welche der Mahroboter nach dem Abtrockneden des Regensensors (5) weiterhin in der Ladestation (19) bleibt.
Maherprotokoll
Bei dieser Untertpunkt konnen Sie den Fehlerspeicher einheiten sowie die Karte loschen, Grenzwerte loschen oder die Bilder loschen.
Allgemein
-
PIN-Code: Sie können die PIN des Mahroboters ändern und ihre persönliche PIN verwenden. Dazu gehen Sie wie im Kapitel „Sperrvorrichtung / PIN" beschrieben vor. Achtung! Notieren Sie die neue PIN.
-
Datum & Zeit: Wechseln Sie mithilfe der Navigationstasten (55) an die entsprechende Stelle und nehmen Sie die gewünschten Einstellungen vor.
-
Sprache: Wechseln Sie mithilfe der Navigati-. onstasten (55) zur gewünschten Sprache.
-
Softwareversion: Hier ist die aktuelle Softwareversion des Mahroboters vermerkt.
APP-Link
Bei dieser Untertpunkt konnen Sie die Wi-Fi-Verbindung des Mahroboters mit Hilfe ihres Smartphones einrichten. AuBerdem konnen Sie die Wi-Fi-Verbindung zurücksetzten und Informationen zur Wi-Fi-Verbindung erhalten.
Zurücksetzen
Hier kann der Mahroboter auf Werkseinstellungen zureckgesetzt werden, bzw. werden alle vorgenommenen Einstellungen gelöscht und auch die Wi-Fi Verbindung aufgehoben.
6.5.3 Startvorgang
- Drucken Sie die STOP-Taste (3) und offen nen Sie die Displayabdeckung (23) vollständig.
- Entriegeln Sie das Bedienfeld (2).
- Wahlen Sie über die Taste, MODE (52) das gewünschte Mahprogramm sowie die jeweilige Arbeitsfläche aus.
- Drucken Sie die Taste, START (53)
- Schlieben Sie die Displayabdeckung (23).
Der Mahroboter arbeitet nun entsprechend dem eingestellen Betriebsmodus. Wahrend der Arbeitszeit wird der Akkuladezustand auf dem LCD-Display (50) angezeigt. Sobald der Akkuladezustand auf 30% fällt, keht der Mahroboter automatisch zur Ladestation (19) zureck.
D
Hinweis: Für den Betrieb des Mahroboter ist ein Referenzwert des Qualitätswert notig.
Dieser wird wie im Kapitel,Gartengrenzen - Grenz-Qualitatswert" beschreiben bestimmt, weshalb der Mahroboter zunachst mit ausgeschalteten Mahwerk beginnnt. Werde der Wert einmal bestimmt, so beginnt der Mahroboter mit dem Startvorgang nach der eingestallen The Mahzeiteinstellung.
6.5.4 Abbrechen des Mahvorgangs
- Drucken Sie die STOP-Taste (3), um den Mahroboter saref anzuhalten.
- Off nen Sie die Displayabdeckung (23) vollständig.
- Entriegeln Sie das Bedienfeld (2).
- Drucken Sie die Taste, MODE (52) und wahlen Sie „Zur Ladestation", um den Mahroboter zur Ladestation (19) zurückzusenden.
- Drucken Sie die Taste "START" (53).
- SchlieBen Sie die Displayabdeckung (23).
6.5.5. STOP-Status:
Durch Drucken der STOP-Taste (3) bef indet sich der Mahroboter in einem STOP-Status, welcher im LCD-Display (50) angezeigt wird. Der Mahroboter pausiert seinen Mahbetrieb bis dieser wieder aufgehoben wird.
Nach Entregelung des Bedienfeldes (2) erscheint ein Fenster, welches die Aufhebung des STOP-Status vorschlägt. Durch Bestätigung ist der Status aufgehoben. Andernfalls bleibt der Mahroboter gestoppt. Wird der Mahroboter gestartet oder zurück zur Ladestation (19) geschickt, wird der STOP-Status ebenfls aufgehoben. Schlieben Sie die Displayabdeckung (23).
6.6 Steuerung des Mahroboters mit Hilfe der Einhell Connect App
Mit Hilfe der Einhell Connect App konnen Sie den Mahroboter bequem von überall steuern. Laden Sie sich dazu die App unter den folgenden Links bzw. QR-Codes herunter:
iOS: http://qr.einhell.com/12e103ce

Android: http://qr.einhell.com/176c0443

Verbinden Sie den Mahroboter mit ihrer Smartphone und folgen Sie den angezeigten Schritten.
Hinweise Zur Verbindung:
Um das Gerät zu registrierten, muss am Bedienfeld die Taste „Set“ (51) gedruckt werden. Klicken Sie sich mit den Navigationstaten (55) nach unten und wahren Sie das Untermenü „APP-Link“ aus.
Zur Registrierung von Geräten wird ein Benutzerkonto in der Einhell Connect App besteht.
- Der Standort des Gerätes muss freiigegeben werden, um die Bluetooth-Verbindung zu nutzen.
Um den Mahroboter zu registrieren, starten Sie den Kopplungsmodus über das Maher Display. Sie werden in der App ausfuhrlich durch den Registrierungsprozess geleitet.
Koppeln Sie den Mahroboter ausschlieBlich innerhalb der Einhell Connect App.
Die Reichweite einer Bluetooth-Verbindung ist begrenzt. Bleiben Sie dazu zur Erstinbetriebnahme in der Höhe des Mabers.
7. Reinigung, Wartung und Ersatzteilbestellung
Gefahr!
Vor allen Reinigung- und Wartungsarbeiten ist das Gerat spannungsfrei zu schalten, hierzu ziehen Sie den Netzstecker aus der Steckdose und schalten das Gerat uber den Hauptschalter (7) aus (OFF) (Bild 8). Entnehmer sie außer dem Akku (A) aus dem Mahroboter (Bild 3b). Vorsicht! Arbeitshandschuhe/TRagen!
7.1 Reinigung
- Halten Sie Schutzvorrichtungen, Luftschlitze und Motorengehäuse so staub- und schmutzfrei wie möglich. Reiben Sie das Gerät mit einem sauberen Tuch ab oder blasen Sie es mit Druckluft bei niedrigem Druck aus.
Der Mahroboter darf nicht mit flieBendem Wasser, insbesondere unter Hochdruck, ge
D
reinigt werden.
- Reinigen Sie das Gerät regelmäßig mit einem feuchten Tuch und etwas Schmierseife. Verwenden Sie keine Reinigungs- oder Lösungsmittel; diese können die Kunststoffeile des Gerätes angreiben. Achten Sie daraufuf, dass kein Wasser in das Geräteinnere gelangen kann.
Säubern Sie den Mahroboter möglichst mit Bürsten oder Lappen. - Kontrollieren Sie die Beweglichkeit der Klin-gen (10) und der Messerscheibe (11).
- Verwenden Sie zur Reinigung der Ladekontakte am Mahroboter (1) und Ladestation (19) Reinigungsmittel für Metall oder ein sehr feines Schleifpapier. Säubern Sie diese, um einen effizienten Ladevorgang zu gewährleisten.
7.2 Wartung
- Kontrollieren Sie regelmäßig die Linse der Kameraeinheit (15) auf Verschmutzungen und reinigen Sie diese. Besonderss durch Regenfälle kann es zu Verschmutzung der Linse kommt. Verwendten Sie dazu keine aggressiven Reinings- oder Lösungsmittel.
Abgenutzte oder beschädigte Klingen (10) sowie deren Befestigungsschrauben sind immer satzweise zu ersetzen. - Ersetzen Sie verschlissene oder beschädigte Teile.
- Für eine large Lebensdauer sollen alle Schraubteile sowie die Räder und Achsen gereinigt und anschließend geölten.
Die regelmäßige Pflege des Mahroboters sichert nicht nur lange Zeit seine Haltbarkeit und Leistungsfähigkeit, sondernträgt auch zu einem sorgfälligen und einfachen Mahren Ihres Rasens bei.
Die am stärksten dem Verschleib ausgesetzten Bauteile sind die Klingen (10). Prufen Sie regelmäß den Zustand der Klingen (10) sowie die Befestigung derselben. Sollen übermäßige Vibrationen des Mahroboters auftreten, kann dies bedeuteten, dass die Klingen (10) beschädigt sind bzw. durch Stöße verfortmet werden. Sind die Klingen (10) abgenutz oder beschädigt, müssen diese sofort ausgewechselt werden. - Kontrollieren Sie regelmäßig das Schnittbild des Rasens. Durch unscharfe Klingen werden Grashalme nur unsauber abgeschritten. Dadurch kann der Rasen an der Oberfläche leicht vertrocknen und wird braun. Wechseln Sie davon die Klingen regelmäßig, um einen
sauberen und geraden Schnitt zu erhalten.
- Kontrollieren Sie regelmäßig die Unterseite des Mahroboters auf Verschmutzungen. Reinigen Sie den Mahroboter regelmäßig. Beseitigen Sie stärkere Verunreinigungen umgehend.
In den ersten Wochen nach der Inbetriebnahme und vorherigem Mähen mit einem konventionellen Rasenmaher, kann es schnell zu starken Verunreinigungen Ihres Mahroboters kommt. Kontrollieren Sie dazu die Unterseite Ihres Mahroboters in dieser Zeitraum hαufiger.
Kürzen Sie den Rasen nur inkleinen Schritten, um eine starke Verunreinigung zu vermeiden. - Im Geräteinneren befinden sich keine weiteren zu wartenden Teile.
7.2.1 Auswechseln der Klingen
Den Akku vor dem Messerwechsel abziehen. Verwenden Sie nur Originalklingen, da andern-falls Funktion und Sicherheit nicht gewährleistet sind.
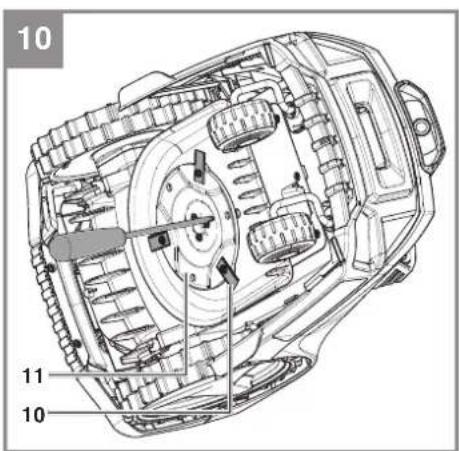
Der Mahroboter ist mit drei an einer Messerscheibe (11) montierten Klingen (10) ausgestattet. Diese Klingen (10) haben eine Lebensdauer von bis zu 3 Monaten (wenn keine Hindernisse getroff en werden).itte ersetten Sie alle drei Klingen (10) gleichzeitig, um eine Beeintrachtigung der Effi zienz und Balance Ihres Gerätes auszuschreiben.
Zum Wechseln der Klingen (10) gehen Sie wie folgt vor (Bild 10)-Achtung! - Handschuhe tragien:
- Blockieren Sie mit einem Schraubendreher die Rotation der Messerscheibe (11). Stecken Sie hierfür den Schraubendreher durch die vorgesehenen LÖcher in der Messerscheibe (11) und dem Schutzkamm.
- Losen Sie die Befestigungsschrauben.
- Nehmen Sie die Klingen (10) ab und ersetzen Sie diese gegen neue. Ersetzen Sie alle drei Klingen (10) immer satzweise.
- AnschlieBendziehen Sie die Befestigungsschraube wieder fest. Stellen Sie sich, dass sich die neuen Klingen (10) frei drehen las-ten.
Führn Sie regelmäßige eine allgemeine Kontrolle des Mahroboters durch und entfern Sie alle angesammelten Rückstände. Vor jedem Saisonstart den Zustand der Klingen (10) unbedingt überprüfen. Wenden Sie sich bei Reparaturen an unsere Kundendienstelle. Verwenden Sie nur Original Ersatzteile.
D
7.2.2 Software Update
Wenn Sie die Software updaten möchten, kopieren Sie die neue Software auf einen leeren USB-Stick (gegebenvelfalls den USB-Stick zuvor formatieren). Stellen Sie sicher, dass der Akku vollständig geladen ist, bevor Sie folgende Schritte ausführten.
- Stellen Sie den Mahroboter in den Mühbereich. Der Mahroboterarf sich beim Software-Update nicht in der Ladestation befänden.
- Schlieben Sie am USB-Anschluss wie abgebildet einen USB-Stick an (Bild 11).
- Der Mahroboter startet nun das Update der Software und zeigt den aktuellen Status an.
- Ist der Update-Vorgang abgeschlossen, ziehen Sie den USB-Stick ab und starten Sie den Mahroboter über den Hauptschalter (7) neu.
Alternative kann das Software-Update auch über die Einhell Connect App durchgeführt werden. Wahlen Sie in der APP „Einstellungen" aus und anschließend „Firmware Update" und folgen Sie den weiteren Anweisungen in der APP.
7.2.3 Reparatur des Leitkabels
Trennen Sie zunachst die Ladestation (19) von der Stromversorgung. Sollte es zu einer Durchtrennung des Leitkabels (24) an einer beliebigen Stelle kommt, verwenden Sie zur Reparatur die beiliegendes Kabelverbinder (25). Dazu führen Sie beide Enden des durchtrennten Leitkabels (24) in den Kabelverbinder (25) ein und drücken him mit der Hilfe einer Zange zusammen.
Verbinden Sie den Netzstecker mit der Steckdose. Überprüfen Sie anschließend anhand der LED-Anzeige (19a) an der Ladestation (19) die Funktion.
7.3 Ersatzteilbestellung:
Bei der Ersatzleilbestellung sollen folgende An-gaben gemacht werden:
Typ des Gerätes
Artikelnummer des Gerätes
- Ident-Nummer des Gerätes
- Ersatzteilnummer des erforderlichen Ersatzteils
Aktuelle Preisere und Infos fnden Sie unter www.Einhell-Service.com
Ersatzklingen Art.-Nr.: 34.140.20
8. Lagerung
Laden Sie den Akku (A) vor der Lagerung über den Winter vollständig auf und schalten Sie den Mahroboter über den Hauptschalter (7) aus (OFF). Entnehmen Sie den Akku (A) aus dem Gerät. Trennen Sie das Netzeil (20) von der Stromversorgung und der Ladestation (19).
Das Leitkabel (24) kann über den Winter im Freien gelassen werden. Stellen Sie allerdings sicher, dass die Anschlüsse gegen Korrosion geschützt sind. Trennen Sie dazu die Anschlüsse des Leitkabels (24) von der Ladestation (19).
Lagern Sie das Gerät und dessen Zubehör an einem dunklen, trockenen und frostfreien sowie für Kinder unzugänglichen Ort. Die optimale Lager-temperatur liegt zwischen 5^ und 30^ . Bewahren Sie das Gerät in der Originalverpackung auf.
9. Transport
Schalten Sie das Gerät über den Hauptschalter (7) aus (OFF) (Bild 8).
- Bringen Sie, falls vorhanden, Transportschutzvorrichtungen an.
Schützen Sie das Gerät gegen Schäden und starke Vibrationen, die insbesondere beim Transport in Fahrzeugen auftreten.
- Sichern Sie das Gerät gegen Verrutschen und Kippen.
- Tragen Sie den Mahroboter am Tragegriff (6) mit der Messerscheibe (11) vom Körper per weg gerichtet.
10. Entsorgung und Wiederverwertung
Das Gerät befindet sich in einer Verpackung, um Transportschäden zu verhindern. Diese Verpackung ist Rohstoff und ist somit wiederverwendbar oder kann dem Rohstoff kreislauf zurückgeführten werden. Das Gerät und dessen Zubehör bestehen aus verschiedenen Materialien, wie z.B. Metall und Kunststoff e. Defekte Geräte gehören nicht in den Hausmüll. Zur fachgerechten Entsorgung sollte das Gerät an einer geeigneten Sammelstelle abgegeben werden. Wenn l'Hnen keine Sammelstelle besteht ist, sollenn Sie bei der Gemeindeverwaltung nachfragen.
D

Nur für EU-Länder
Das Symbol des durchgestrichen Mülleimers besagt, dass ces Elektro- bzw. Elektronikgerät am Ende seiner Lebensdauer nicht im Hausmüll entsorgt werden darf, sondern vom Endnutzer einer getrennten Sammlung zugeführrt werden muss.
Zur Rückgabe stehen in Ihrer Höhe kostenfreie Sammelstellen für Elektroaltgeräte sowie ggf. weitere Annahmeststellen für die Wiederverwendung der Geräte zur Verfügung. Die Adressen können Sie von ihrer Stadt- bzw. Kommunalverwaltung erhalten.
Auch Vertreiber mit einer Verkaufsfläche für Elektro- und Elektronikgeräte von mindestens 400 Quadratmetern sowie Vertreiber von Lebensmitteln mit einer Gesamtverkaufsfläche von mindestens 800 Quadratmetern, die mehrmals im Kalenderjahr oder dauerhaft Elektro- und Elektronikgeräte anbieten und auf dem Markt bereitstellen, sind verpflichtet unentgeltlich alte Elektro- und Elektronikgeräte zureckzunehmen. Diese müssen bei der Abgabe eines neuen Elektro- oder Elektronikgerätes an einen Endnutzter ein Altgerät des Endnutzers der gleichen Geräteart, das im Wesentlichen die gleichen Funktionen wie das neue Gerät erfüllt, am Ort der Abgabe oder in unmittelbarer Höhe hierzu unentgeltlich zureück zunehmen sowie ohne Kauf eines Elektro-oder Elektronikgerätes auf Verlangen des Endnutzers bis zu drei Altgeräte pro Geräteart, die in keiner äußerten Abmessung länger als 25 Zentimeter sind, im Einzelhandelsgeschäft oder in unmittelbarer Höhe hierzu unentgeltlich zureick zu halten. Bei einem Vertrieb unter Verwendung von Fernkommunikationsmitteln gelten als Verkaufsflächen des Vertreibers alle Lager- und Versandflächen. Informieren Sie sich auch bei ihrem Handl über die Rücknahmagemöglichkeiten vor Ort.
Sofern das alte Elektro- bzw. Elektronikgerät personenbezogene Daten enthalt, sind Sie selbst für deren Lösung verantwortlich, bevor Sie es zugruckgeben.
Sofern dies ohne Zerstörung des alten Elektro- oder Elektronikgerätes möglich ist, entnehmer Sie die此种e Batterien oder Akkus sowie Altlampen, bevor sie es zur Entsorgung zusückgeben, und führen diese einer separaten Sammlung zu.
Der Nachdruck oder sonstige Vervielfaltigung von Dokumentation und Begleitpapieren der Produkte, auch auszugsweise, ist nur mit ausdrücklicher Zustimmung der Einhell Germany AG zulässig.
Technische Änderungen vorbehalten
D
11. Anzeige der Ladestation und Fehlerbehebung
| LED-Anzeige (19a) | Beschreibung Lösung | |
| Aus - Keine Stromver-sorgung - Prüfen Sie die Stromversorgung | ||
| Leuchtet Grün - Bereit zum Mähen - Akku vollständig geladen - Leitkabel (24) angeschlos-SEN | ||
| Blinkt Grün - Leitkabel (24) durchtrennt - Untersuchen | Sie das Leitkabel (24) auf einen Bruch | |
| Leuchtet Rot - Akku wird geladen - Warten Sie, bis der | Akku vollständig gela-den ist. | |
| Blinkt Rot - Störung an der Station - Prüfen sie die Zuleitung der Ladestation | ||
12. Anzeige des Mahroboters und Fehlerbehebung
Fehlermeldung des Mahroboters im LCD Display (50)
| Fehler Mögliche Ursache | Beseitigung | |
| Kein Signal | - Leitkabel (24) falsch ange-schlossen - Keine Stromversorgung - Leitkabel (24) durchtrennt | Prüfen Sie, ob die LED-Anzeige (21) an der Ladestation (19) grün leuchtet. - Stellen Sie safer, dass das Leitkabel (24) korrekt und mittig unter der Ladestation (19) verlegt ist. - Prüfen Sie die Position der Ladestation (19). |
| Außerhalb | - Der Mahroboter erkennt keine Rasenfläche oder Ra-sengrenze und befindet sichDMAher außerhalb des Mähbe-reichs | Drücken Sie die Stop-Taste um die Diplaaya-bdeckung (13) zu öffnen. Starten Sie den Mähvorgang über das Bedienfeld neu. - Stellen Sie safer, dass sich der Mahro-boter im Mähbereich befinden, überprüften Sie die akt. Stelle auf welcher der Mahro-boter liegen geblieben ist. |
| Batteriefehler | - Bei dem Mahroboter ist ein Batteriefehler aufgetreten - Akku lassst sich nicht laden - Akku hat das Ende seiner Lebensdauer erreicht | - Stellen Sie safer, dass der Akku richtig montiert wurde. - Prüfen Sie, ob der Hauptschalter (7) eingeschaltet (ON) ist, während sich der Mahroboter in der Ladestation (19) befin-det. - Prüfen Sie die Position der Ladestation (19). Tauschen Sie falls erforderlich den Akku aus. |
D
| Fehler Mögliche Ursache Beseitigung | ||
| Batterie-Tempera-turfehler | Zu hohe / zu niedrige Akkutem- peratur bzw. Übertemperatur der Steuerung - Bei einer Batterietemperatur über 65 °C kehrt der Mahro-boter zur Ladestation (19) darüber. - Bei einer Batterietemperatur über 45 °C oder unter 0 °C wird der Ladevorgang ge-stoppt und der Mahroboter wartet an der Ladestation (19). | - Verlegen Sie die Arbeitszeit im Sommer auf die frühen Morgenstunden und ver- meiden Sie den Betrieb des Mahroboters während der freißen Stunden des Tages. - Nach dem Abkühlen des Akkus bzw. der Steuerung in den zulässigen Tempera-turbereich, kehrt der Mahroboter auto-matisch in den programmierten Betrieb darüber. |
| Mäher angehoben - | Hebesensor kontinuierlich für 10 Sekunden ausgelösst | Drücken Sie die STOP-Taste (3), um die Displayabdeckung (23) zu öff nen. Starten Sie den Mahvorgang über das Bedienfeld (2) neu: - Falls dieser Fehler*häufiger auftritt, prüfen Sie den Mahbereich auf Hindernisse mit ihrer Höhe über 10 cm und entfernen Sie diese oder trennen Sie die Hindernisse mit dem Magnetband(27) vom Mahbereich ab. |
| Mäher blockiert - | Hindernissensor innerhalb einer Minute mehrfach akti-viert - Hindernissensor für 10 Se-kunden dauerhaft aktiviert - Hindernissensor während der Fahrt darüber zu Ladesta- tion (19) dreimal aktiviert | Drucken Sie die STOP-Taste (3), um die Displayabdeckung (23) zu öff nen. Starten Sie den Mahvorgang über das Bedienfeld (2) neu: - Prüfen Sie, ob der Mahroboter durch ein Hindernis blockiert oder zwischen Bäumen, Büchen etc. eingeklemmt ist. Beseitigen Sie das Hindernis oder vermei- den Sie diesen Bereich. - Falls dieser Fehler*häufiger auftritt, prüfen Sie die Verlegung des Leitkabels (24). Achten Sie besonders auf erge Winkel, Korridore, Zäune, Felsen etc. und passen Sie das Layout des Leitkabels (24) an, falls erforderlich. - Prüfen Sie, ob das Gras zu hoch ist und der Mahroboter blockiert wird. Mahen Sie das Gras in thisem Fall auf unter 60 mm. |
D
| Fehler Mängliche Ursache Beseitigung | ||
| Zu nahe an Station - | Mährboter wurde zu nahe an der Ladestation (19) zu- rückgeschickt. | Drücken Sie die STOP-Taste (3), um die Displayabdeckung (13) zu öff nen. Starten Sie den Mährvorgang über das Bedienfeld (2) neu: - Der Mährboter sollte mit einem Mindest-abstand von 2 m zurück zur Ladestation (19) geschickt werden. |
| Umgefallen - Mährboter wurde für 10 Se-kunden dauerhaft gekippt - Mährboter für längerere Zeit in eine RichtungGENeigt | Drücken Sie die STOP-Taste (3), um die Displayabdeckung (13) zu öff nen. Starten Sie den Mährvorgang über das Bedienfeld (2) neu: - Bringen Sie den Mährboter auf eine ebe-ne Fläche und starten Sie ihn neu. - Falls der Mährboter aufgrund eines steilen Abhangs im Mährbereich gekippt ist, sichern Sie diese Stelle mit Hilfe des mitgelieferten Magnetbands (27) ent-sprechend ab, um starke Steigungen zu umfahren. | |
| Radfehler - Hinterträder (8) wurden durch ein Hindernis angehoben - Hinterträder (8) konnen sich durch unebenen Rasen frei drehen | Drücken Sie die STOP-Taste (3), um die Displayabdeckung (23) zu öff nen. Starten Sie den Mährvorgang über das Bedienfeld (2) neu: - Bringen Sie den Mährboter auf eine ebe-ne Fläche und starten Sie ihn neu | |
| STOP-Knopf Fehler Die Displayabdeckung (13) ist geöff net, aber die STOP-Taste (3) wurde nicht ausgelöst | Drücken Sie die STOP-Taste (3), um die Displayabdeckung (13) zu öff nen. Starten Sie den Mährvorgang über das Bedienfeld (2) neu: - Überprüften Sie, dass sich die Displayabdeckung (13) mit der STOP-Taste (3) frei öff nen und schließenlässt. - Überprüften Sie die Funktionalität der STOP-Taste (3). | |
D
| Fehler Mögliche Ursache Beseitigung | ||
| PCB Übertemperatur | Zu hohe / zu niedrige Akkutem- peratur bzw. Übertemperatur der SteuerungBei einer Batterietemperatur über 65 °C kehrt der Mahro-boter zur Ladestation (19)zarück.Bei einer Batterietemperatur über 45 °C oder unter 0 °C wird der Ladevorgang gestoppt und der Mahroboter wartet an der Ladestation (19). | - Verlegen Sie die Arbeitszeit im Sommer auf die frühen Morgenstunden und ver- meiden Sie den Betrieb des Mahroboters während der freißen Stunden des Tages.Nach dem Abkühlen des Akkus bzw. der Steuerung in den zulässigen Tempera-turbereich, keht der Mahroboter auto-matisch in den programmierten Betrieb zarück. |
| Regen - Der Regensensor (5) hat ausgelöst. | - Warten Sie bis der Mahroboter trocken ist.- Eine detaillierte Beschreibung zum Sen-sor ist in Kapitel 5.2 nachzulesen. | |
| Sensorfehler (Leit-kabel-, Abstands-, Magnetsensor) | - Mahroboter wurde aufgrund eines Sensorfehlers ange-halten | Schalten Sie den Hauptschalter (7) aus (OFF) und wieder ein (ON), um den Mahro-boter neu zu starten. |
| Motorfehler/ Motorüberstrom | - Mahroboter aufgrund eines Überstroms im Motor oder eines Motorfehlers angehalten | Schalten Sie den Hauptschalter (7) aus (OFF) und wieder ein (ON), um den Mahro-boter neu zu starten.Prufen Sie die Höhe des Grases im Mahbereich und mahen Sie bei Bedarf mit einem konventionellen Rasenmähler das Gras auf unter 60 mm.Erhöhen Sie die Schnitthöhe. Beginnen Sie immer mit einer höheren Schnitthöhe und reduzieren Sie diese in kleinen Schritt-ben bis zur gewünschten Höhe.Untersuchen Sie die Messerscheiben (11) und Räder auf Verschmutzung und reini-gen Sie diese Teile gründlich.Prufen Sie die Hinterräder und die Messerscheibe (11) auf Blockaden. Falls Sie diese Blockaden nicht länger können, wenden Sie sich an den zuständigen Kundendienst. |
| Betriebsfehler - Mahroboter wurde aufgrund eines Betriebsfehlers ange-halten | Schalten Sie den Hauptschalter (7) aus (OFF) und wieder ein (ON), um den Mahro-boter neu zu starten. | |
| Schlechte Grenze Der | - Mahroboter befni ndet sich in der Ladestation oder inner-halb der Suchschleife und die Abweichung zum Referenz-Qualitätswert hat sich stark verschlechtert. | Überprüfen Sie die Grenzen des Mahbereichs. Anschließlich den Referenzwertlöschen und eine neue Initialisierung des Grenz-Qualitätswert durchführren. |
D
| Fehler Mängliche Ursache Beseitigung | ||
| Kein Kamera Signal | Der Mahroboter empfängt kein Signal von der Kameraeinheit | Schalten Sie den Hauptschalter aus (OFF) und wieder ein (ON) um den Mahroboter neu zu starten. |
| Zuweit entwickelt Der Mahroboter ist zuweit von der Ladestation (19) entwickelt | Bringen Sie den Mahroboter in den Mahbe-reich, welcher in der Höhe der Ladestation ist. Schalten die den Hauptschalter aus (OFF) und wieder ein (ON) um den Mahro-boter neu zu starten. | |
| Zunahme am Mag-netband | Der Mahar erkennt ein Mag-netbandsignal in unmittelbarer Höhe | Der Mahroboter muss zum Starten mindes- tens 1m vom Magnetband entfern't sein. |
Wi-Fi-Symbol:
| Fehler Mögliche Ursache Beseitigung | ||
| WLAN-Symbol durchgestrichen | Mährboter empfängt kein WLAN-Signal | - Starten Sie den Mährboter neu - Überprüfen Sie die WLAN Verbindung - Richten Sie ggf. die WLAN Verbindung neu ein. |
| WLAN-Signal schwach | Der Mährboter reagiert stark zeitverzögert, oder reagiert nicht. | Überprüfen Sie die WLAN Abdeckung in ihrem Garten. |
GNSS-Symbol:
| Fehler Mögliche Ursache Beseitigung | ||
| GNSS-Symbol durchgestrichen Keine GPS Daten | Mährboter empfängt kein GNSS-Signal | Achten Sie darauf, dass der Mährboter sich im freien befi ndet und das GNSS Signal nicht abgeschirmt wird |
| GNSS-Symbol blinkt | GNSS-Signal ungenau Blinkt das | GNSS Signal dauerhaft ist das empfangen Signal sehr schwach (Abschirmung durch Gebäude/Boom) und die Position in der Ladestation soll angepasst werden. |
| GNSS-Symbol schwängt | Der Mährboter such nach einer GNSS-Verbindung und kalibriert die Positionierung der Ladestation. | Warte bis die Kalibrierung abgeschlossen ist. |
Fehlersuche
| Fehler Mögliche Ursache Beseitigung | ||
| Der Mährboter steht im Mährbereich. Der Mährboter{ländsich nicht einschalten. | - Akkuspannung zu gering - Fehler am Stromkreis oder der Elektronik | - Bringen Sie den Mährboter zum Aufl aden zur Ladestation (19) zürück. - Schalten Sie den Hauptschalter (7) an (ON). - Wenden Sie sich an den Kundendienst. |
| Der Mährboter kann nicht in die Ladestation fahren. | - Ladestation (19) nicht korrekt installiert. | - Stellen Sie safer, dass die LED-Anzeige (19a) an der Ladestation (19) grün leuchtet. - Stellen Sie safer, dass das Leitkabel (24) an der Ladestation (19) angeschlossen ist und das vordere Leitkabel (24) mittig unter der Ladestation (19) verlegt ist. - Stellen Sie safer, dass die Ladestation (19) korrekt positioniert ist. |
| Der Mährboter ist sehr laut. | - Klingen (10) beschädigt - An den Klingen (10) haften weitere Fremdstoff e an - Mährboter zu nah an Hindernis- sen gestartet - Messerantrrieb oder Antriebsmo- tor beschädigt - Andere Teile des Mährboters beschädigt | - Tauschen Sie die Klingen (10) aus. Die 3 Klin-gen (10) müssen gleichzeitig getauscht werden. - Die Betriebseffi zienz des Mährboters hängt von der Scharfe der Klingen (10) ab. Halten Sie die Klingen (10) deshalb in gutem Zustand. - Schalten Sie den Mährboter sich aber und tragen Sie Arbeitshandschuhe, während Sie die Klingen (10) reinigen, um Schnittverletzungen zu vermeiden. - Lassen Sie den Motor durch den Kundendienst reparieren oder austauschen. |
| Der Mährboter bleibt in der Ladestation. Der Mährboter kehr immere wieder zur La- destation zugruck. | - Falsche Arbeitszeiteinstellungen - Der Akkuladezustand ist zu ge- ring und sinkt auf unter 30%. - Der Regensensor hat ausgelöst. - Der Mährboter ist überhitzt. - Es beginnnt zu Dammern, wo- durch die Kameraeinheit nicht mehr richtig arbeiten kann. | - Prüfen Sie die Arbeitszeiteinstellungen. - Der Mährboter beginn und beendet seine Ar- beit je nach eingestelltem Zeitfenster. Außerhalb dieser Zeififensters bleibt der Mährboter in der Ladestation (19). |
| Der Mährboter kann die Ladestation (19) nicht fi nden | - Die Ladestation (19) befni ndet sich an einer Position, an der nur ein schwaches GNSS-Signal empfangen wird - Hinderisse in unmittelbarer Höhe zur Leitkabelschleife ver- hindern das Anfahren der Schlei- fe. | - Passen Sie die Position der Ladestation (19) an und Löschen Sie wie in der Bedienungsanlei- tung beschreiben die Kartierung. - Passen Sie die Form der Leitkabelschleihe an / Vergroßern Sie die Leitkabelschleihe. |
ACHTUNG! Ein durchtrenntes Leitkabel und Folgeschäden unterliegen nicht der Garantie!
D
Fehlerische Magnetband (27)
| Fehler Mögliche | Ursache Beseitigung | |
| Mährboter erkennt das Magnetband (27) nicht und fahrth darüber hinweg. | - Das Magnetband (27) ist zu tief im Boden verlegt.- Das Magnetband (27) fonctioniert nicht richtig, weil die Außentemperatur zu hoch ist. | - Verlegen Sie das Magnetband (27) auf dem Boden oder ca. 5 cm im Boden.- Warten Sie, bis sich die Temperatur abgekühlt hat. Vermeiden Sie den Betrieb des Mährboters während der bereits Stun-den des Tages. |
| Der Mährboter stoppt bzw. fahrth unkontrolliert in der Höhe des Begren-zungsbereichs. | - Das Magnetband (27) ist zu nahe am Leitkabel (24) ver-legt. Die Distanz zwischen zwei unabhängigen Begren-zungsbereichen mit Magnet-band (27) ist zu gering.- Im Mährbereich kommt es aufgrund von elektrischen Kabeln zu Störungen. | - Halten Sie einen Abstand von mindestens 80 cm zwischen dem Leitkabel (24) und dem Magnetband (27) oder zwischen zwei Begrenzungsbereichen ein.- Vermeiden Sie elektrische Kabel die im Mährbereich verlaufen. Positionieren Sie die Ladestation (19) am Rand des Mährbereichs. Halten Sie einen Abstand zu fremden Mähl achen (z.B. Nachbarn), welche mit einem Begrenzungsdraht be-trieben werden. |
| Der Mährboter dringt in den Be-grenzungsbereich ein. | - Der Mährboter rutsch über das Magnetband (27). | - Vermeiden Sie es, das Magnetband (27) an Steigungen zu verlagen.- Achten Sie auf die angegebenen Installa-tionsbedingungen. |
D
13. Datenschutzhinweise FREELEXO CAM PLUS
Die Einhell Germany AG freut sich über ihre Nutzung des FREELEXO CAM PLUS Mahroboters. Der Schutz Personenbezogener Daten ist uns ein wichtiges Anliegen. Im Nachfolgenden beschreiben wir, welche Daten im Allgemeinen bei Nutzung des Geräts verarbeitet werden.
Standort der Ladestation
Der Mahroboter speichert lokal am Gerat den über GNSS-Positionsbestimmung ermittelten Standort der Ladestation. Diese wird benötigt, um das Gerat nach Abschluss der Maharbeit zurück zur Ladestation bzw. zum Leitkabel zu navigieren. Im Servicefall, kann diese Information über das Logifie physisch am Gerats ausgegeben werden.
- Zeitpunkt Sonnenaufgang/Sonnenuntergang
Der Mahroboter speichert lokal am Gerat den über GNSS-Positionsbestimmung ermittelten Zeitpunkt des Sonnenaufgangs bzw. Sonnenuntergangs. Dies wird benotigt, damit das Gerat nur in einem Zeitinterval gestartet werden kann, in dem die Kameraeinheit Bilder generieren kann, mit ausreichender Helligkeit. Im Servicefall, kann diese Information über das Logfile physisch am Gerat ausgegeben werden.
Bilder der Kameraeinheit
Der Mahroboter speichert lokal am Gerat, Bilder welche über die Kameraeinheit generiert wurden. Dies wird systemseitig benotigt, um den Algorithmus des Mahroboters stetig zu verbessern. Am Maher befinden sich Bilder, welche während der letzten 15 Minuten Maharbeit generiert wurden. Diese Datensatz wird laufend umberschreiben. Behindet sich der Maher in der Ladestation werden keine Bilder generiert. Im Servicefall, konnen diese Bilder local ausgegeben werden, um aufgetretene Fehler nachvollziehen zu konnen. Diese Bilder werden anschließend gelöscht.
Sie konnen selbst, sowohl die standortspezifischen Informationen, als auch die generierten Bilder vom Gerät loschen. Betätigten Sie die Taste SET und wahren Sie das Unternü MaHerprotokoll aus. Anschließen konnen Sie über „Karte loschen" die Standortinformationen am Gerät entfernen bzw. über „Bilder loschen" die gespeicherten Bilder der Kamera loschen.
Eine ausfuhrliche Dokumentation zu unseren Datenschutzrichtlinien führen Sie auf unserer Homepage unter Datenschutz.
D
14. Anzeige Ladegerät
| Anzeigestatus | Bedeutung und Maßnahme | |
| Rote LED Grüne LED | ||
| Aus Blinkt Betriebsbereitschaft | Das Ladegerät ist an das Netz angeschlossen und betriebsbereit, Akku ist nicht im Ladegerät | |
| An Aus Laden | Das Ladegerätlädt den Akku im Schnellladebetrieb. Die entsprechenden Ladezeiten fienden Sie direkt am Ladegerät. Hinweis! Je nach vorhandener Akkuladung konnen die tatsächlichen Ladezeiten von den angegebenen Ladezeiten etwas abweichen. | |
| Aus An Der Akku ist aufgeladen und einsatzbereit. (READY TO GO) | Danach wird bis zur vollständigen Ladung auf eine Schonladung um-geschaltet. Lassen Sie hierzu den Akku etwa 15 min. länger am Ladegerät. Maßnahme: Entnehmer Sie den Akku aus dem Ladegerät. Trennen Sie das Lade-gerät vom Netz. | |
| Blinkt Aus Anpassungsladung | Das Ladegerät befni ndet sich im Modus für schonende Ladung. Hierbei wird der Akku aus Sicherheitsgründen langsamer geladen und benötigt mehr Zeit. Dies kann folgende Ursachen haben: - Akku wurde sehr lange Zeit nicht mehr geladen. - Die Akkutemperatur liegt nicht im Idealbereich zwischen 10° C und 45°C. Maßnahme: Warten Sie bis der Ladevorgang abgeschlossen ist, der Akku kann trotzdem weiter geladen werden. | |
| Blinkt Blinkt Fehler | Ladevorgang ist nicht mehr möglich. Der Akku ist defekt. Maßnahme: Ein defekter Akku darf nicht mehr geladen werden. Entnehmer Sie den Akku aus dem Ladegerät. | |
| An An Temperaturstörung | Der Akku ist zu heiß (z. B. direkte Sonnenbestrahlung) oder zu kalt (unter 0° C). Maßnahme: Entnehmer Sie den Akku und bewahren Sie diesen 1 Tag bei Raumtemperatur (ca. 20°C) auf. | |
D
Service-Informationen
Wir unterhalten in allen Ländern, welche in der Garantieurkunde benannt sind, kompetente Service-Partner, deren Kontakte Sie der Garantieurkunde entnehmer. Diese stehen Ohnen für alle Service-Belange wie Reparatur, Ersatzteil- und Verschleibeil-Versorgung oder den Bezug von Verbrauchsmaterialien zur Verfügung.
Es ist zu beachten, dass bei thisem Produkt folgende Teile einem gebrauchsgemäßen oder natürlichen VerschleiB unterliegen bzw. folgende Teile als Verbrauchsmaterialien bestehtigt werden.
| Kategorie Beispiel | |
| Verschleiße*Akku | |
| Verbrauchsmaterial/Verbrauchsteile*Klingen | |
| Fehlteile |
- nicht zwingend im Lieferumfang enthalten!
Bei Mängel oder Fehlern bitten wir Sie, den Fehlerfall im Internet unter www.Einhell-Service.com anzumelden.itte achten Sie auf eine genaue Fehlerbeschreibung und beantwerten Sie dazu in jedem Fall folgende Fragen:
- Hat das Gerät bereits einmal Funktioniert oder war es von Anfang an defekt?
- Ist Ihnen vor dem Auftreten des Defektes etwas aufgefallen (Symptom vor Defekt)?
- Welche Fehlfunktion weist das Gerät ihrer Meinung nach auf (Hauptsymptom)?
Beschreiben Sie diese Fehlfunktion.
GB
Table of contents
Træk magnetbändet (27) i en afstand pa fá centimeter hen til det passende omrade erler den passende genstand. Afkort magnetbändet (27) afhängigt af behov (minimal laengde 50 cm). For at en sammenhängende grænse af fl ere magnetbändelementer registreres sikkert, bor den maksimale afstand mellem de págeldende endere不同程度 der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fälligkeit der fällitivity der fälligkeit der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällitivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällIVITY der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällativity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fällivity der fälllicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der fällicity der
Alle LED-lamper blinker:
Beskriv venligst fejlfunktionen.
S
Beskriv den felaktiga Funktionen.
CZ
Obsah
4. Technische gegevens
Spanning 18V
Motortoreal .3400 min-1
Beschermklasse IPX4
Beschermklasse III
Gewicht 8,75 kg
Snijbreedte 18 cm
Aantal klingen 3
Max. helling 25%
Geluidsdrukniveau L_PA 46 dB (A)
Onzekerheid K 2,3 dB
Geluidsdrukniveau Lw 57 dB (A)
Onzekerheid K 2,3 dB
Maahoogteverstelling 20-60 mm; traploos
Leikabelantenne
Alle 3 LEDs branden:
Utripajo vse lucke LED:
Prekoračili ste temperaturo akumulatorija. Akumulator odstranite od naprave in ga pustite en dan stati pri sobni temperaturi. Če se pojav nanopaka, se akumulator globoko izprazni in je okvarjen. Akumulator odstranite od naprave. Okvarjenega akumulatorja vec ne smete uporabljati in poliniti.
Pozor!
YnobsEIEc yia n ouvdsen:
Tia va kataxwpiaete TN oukeun npentei va niutei oTO xeiopntpio To nKtpo,Set" (51).Kavete Kuk e Ta nKtpa nOnynos (55)npoc Ta katw kei EneEeTe to UOeou APP-Link
Tia tvkataxwpion oukeuwxieacetai evac loyapiao xepiotn otnv eapouyn Einhell Connect App.
H eon tnc ouakeunoc npenei va eykpiyia va xpoaiountnei n ovd8enbluetooth.
Ia va yivei n kataxwipion Tc poinotikn XLOOKOTIKNc mXAVNc EKKIVNOTE Tnv LEITOUPYIA ouMLeEnc meoW Tc OboVNC. TmV eapuoyn taKo0dnyntheite avauTuKaia tv Nkataxwipion.
H ouvdo n ts poutotikx lookottikn mxaavc va yevta atokkiaotka kai mvo evtos n efapouoyin Einell Connect App.
H eBéEia iac ouvBcncs bluetooth eivai πeipoiouevn. Ia tov loyo autov va uivete KaTaNpWtn theon oLe aetoupyia kovTa OTNV pOITIKXLOOKOTIKmXavn.
7. Kaapioooc, ouvtnpon kai npayyelia avtalaktkowv
Kivδuvoc!
Piv anto oles tic epyaoic katoipoukai ouvtnpnnc n unxavn va unv elaiuntoa. Byalte to fic anto tny npia kain antevepyonotte tn oukeun me Tov kevtpiokdeltaknttn7 (OFF) (Eik.8).EKTc autou aphiote tn matapia A) ano tyn poutiknyaoqntnn unxavn (Eik.3b).
Ppoooh! Na opate npoatautka yavta epyaiaac!
7.1 Kaθαρισμός
Na kpatate 0oio nio eveepa ano okvn kaakapaoiesivetataouotjmuata
GR
npoataic, tic oxiaou kai to keluoc tou potep. kouniTe T ouakeun me eva kaapopavi, n kaapotiTe to epiievo aepa o xann
ISC GmbH · Eschenstraße 6 · D-94405 Landau/Isar
Landau/Isar, den 26.08.2024

Bolley. Chen
BobbyChen/Product Management Andreas Weichselgartner/General Manager
First CE:2023
Art-No.:34.139.76
I-No.:21013

- D
- Inhaltsverzeichnis
- Gefahr!
- Sicherheitshinweise
- Warning!
- Erklärung der verwendeten Symbole (siehe Bild 13)
- Achtung!
- Gerätebeschreibung und Lieferumfang
- Gerätebeschreibung (Bild 1/2)
- Lieferumfang und Auspacken
- Lieferumfang, Montagematerial und Zubehör (teilweise nicht im Lieferumfang enthalten):
- Benötigte Hilfsmittel
- Bestimmungsgemäß Verwendung
- Technische Daten
- Leitkabelantenne
- WIFI:
- Bluetooth:
- GNSS:
- Netzteil
- Inbetriebnahme
- Funktionprinzip
- Sensoren
- Hebesensor:
- Neigungssensor:
- Hindernissensor:
- Kameraeinheit:
- Abstandssensoren:
- - Magnetbandsensor
- Regensensor:
- GNSS-Modul
- Vorbereitung
- Berechnung der Steigung des Rasens
- Standort der Ladestation
- Lokalisierung der Ladestation
- Anschluss der Ladestation an das Netze-teil
- Informationen zum Ladevorgang
- Leitkabel
- Verlegung des Leitkabels
- Installation auf dem Boden
- Installation im Boden
- Installation der Suchschleife
- Verbinden der Ladestation
- Mahbereich - Hindernisse und Grenzden des Mahbereichs
- Rasengrenze
- - Engstellen
- Abstand an der Rasengrenze
- - Rasengrenze mit erhöhten Rand über 10 cm
- Hinderisse
- - Hindernisse mit einer Höhe über 25 cm (Bild 5f)
- - Hindernisse mit einer Höhe unter 25 cm (Bild 5g)
- Magnetband (Bild 5h-5l)
- Haupt- und Nebenfläche (Bild 5m)
- Abstand zu fremden Mahflichen
- GNSS-Modul
- Ladestations-Position kalibrieren
- Kartierung
- Karte loschen
- Gartengrenzen und deren Qualität
- Initialisierungsfahrt - Inbetriebnahme Achten Sie darauf, dass der Akku des Mahroboter zu Beginn der Initialisierungsfahrt vollständig geladen ist.
- Aus Sicherheitsgründen erfolgt die Initialisierungsfahrt mit ausgeschalteten Mahwerk.
- Überprüfung der Grenz-Qualität im Betrieb
- Leitkabelsymbol leuchtet dauerhaft
- Leitkabelsymbol blinkt
- Betrieb des Mahroboters in Nebenflächen
- Löschen der Werte
- Einsatzen und Prufen der Installation 5.10.1 Überprüfung der Installation von Leitkabel und Ladestation (Bild 6a)
- Überprüfung des Mahbereichs (Bild 6b)
- Überprüfung der Position der Ladestation (Bild 6c)
- Befestigung der Ladestation
- Akku-Kapazitätsanzeige
- Alle 3 LED's leuchten:
- oder 1 LED(s) leuchten
- LED blinkt:
- Alle LED's blinken:
- Laden des Akkus mit dem Ladegerat Im normalen Betrieb wird der Akku (A) des
- Für einen fachgerechten Versand kontaktieren Sieitte unseren Kundendienst oder die Verkaufsstelle,bei der das Gerat erworben wurde.
- Beachten Sie beim Versand oder Entsorgung von Akkus bzw. Akkugerät, dass diese einzeln in Kunststoff beutel verpackt werden, um Kurzschlüsse und Brand zu vermeiden!
- Bedienung
- Hauptschalter
- Bedienfeld
- Erklärung des Bedienfelds mit LCD-Anzeige (Bild 9)
- Schnitthöhenverstellung
- Sperrvorrichtung / PIN
- Entriebelung
- Standard PIN:Neue PIN:
- PINändern
- PIN anfordern bei Verlust
- Variante A:
- Variante B:
- Einstellungen des Mahroboters
- Mahprogramme - Taste „MODE" (52)
- Manuell:
- Spot-Mowing
- Zurück zur Ladestation
- Zeitplan:
- Wichtig!
- Einstellungen - „SET“ Taste
- Rückfahrweg
- Regensensor
- Maherprotokoll
- Allgemein
- APP-Link
- Zurücksetzen
- Startvorgang
- Abbrechen des Mahvorgangs
- STOP-Status:
- Steuerung des Mahroboters mit Hilfe der Einhell Connect App
- Hinweise Zur Verbindung:
- Reinigung, Wartung und Ersatzteilbestellung
- Reinigung
- Wartung
- Auswechseln der Klingen
- Software Update
- Reparatur des Leitkabels
- Ersatzteilbestellung:
- Lagerung
- Transport
- Entsorgung und Wiederverwertung
- Anzeige der Ladestation und Fehlerbehebung
- Anzeige des Mahroboters und Fehlerbehebung
- Datenschutzhinweise FREELEXO CAM PLUS
- Standort der Ladestation
- - Zeitpunkt Sonnenaufgang/Sonnenuntergang
- Bilder der Kameraeinheit
- Anzeige Ladegerät
- Service-Informationen
- GB
- Table of contents
- Alle LED-lamper blinker:
- S
- CZ
- Obsah
- Technische gegevens
- Leikabelantenne
- Alle 3 LEDs branden:
- Utripajo vse lucke LED:
- Pozor!
- YnobsEIEc yia n ouvdsen:
- Kaapioooc, ouvtnpon kai npayyelia avtalaktkowv
- Kivδuvoc!
- Kaθαρισμός
- GR
Marke : EINHELL
Modell : FREELEXO CAM PLUS
Kategorie : Rasenmäher