
AT1-7500X - Onduleur Vevor - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil AT1-7500X Vevor au format PDF.

| Caractéristiques Techniques | Détails |
|---|---|
| Type d'appareil | Groupe électrogène |
| Puissance maximale | 7500 W |
| Type de moteur | Moteur à essence |
| Capacité du réservoir | 25 L |
| Autonomie | 8 heures à pleine charge |
| Dimensions | 60 x 45 x 45 cm |
| Poids | 70 kg |
| Sorties disponibles | 2 x 230V, 1 x 12V |
| Niveau sonore | 65 dB à pleine charge |
| Utilisation recommandée | Camping, chantiers, secours d'urgence |
| Maintenance | Vidange d'huile régulière, nettoyage du filtre à air |
| Sécurité | Protection contre les surcharges, arrêt automatique en cas de faible huile |
| Garantie | 2 ans |
FOIRE AUX QUESTIONS - AT1-7500X Vevor
Questions des utilisateurs sur AT1-7500X Vevor
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Onduleur au format PDF gratuitement ! Retrouvez votre notice AT1-7500X - Vevor et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil AT1-7500X de la marque Vevor.
MODE D'EMPLOI AT1-7500X Vevor
Nous continu ons aou engager ayou fournir des ouils a des prix competitifs. Economise la moitié « Moitié prix » ou toute autre expression similaire utilise par nos ne representation qu'une estimation des economies que you pourriez realiser en achetant certains ouils chez nous par rapport aux grandes marques et ne couvre pas necessitiesairement toutes les catégories d'outils que nos proposons. Nous you rappelons de bien vouloir vérifier soigneusement lorsque you passez une commande chez nous si you economisez reallement la moitié par rapport aux grandes marques.
VEVOR®
TOUGH TOOLS, HALF PRICE
Onduleur
MODELE:AT1-7500X

BESOIN D'AIDE? CONTACTEZ-NOUS!
Vous avez des questions sur nos produits? Vous avez besoin d'assistance technique? N'hésitez pas
à nous contacter: Assistance technique et certificat de garantie électronique www.vevor.com/support
Il s'agit de la notice d'utilisation d'origine. Veuillez tire attentivement toutes les instructions du manuel avant de l'utiliser. VEVOR se reserve le droit d'interpréter clairément notre manuel d'utilisation. L'apparce du produit dépend du produit que vous avez reçu. Veuillez nous excuser, nous ne vous informerons plus en cas de mise à jour technologique ou logicielle de notre produit.
MESURES DE SECURITE IMPORTANTES

Lisez tous les avertissements de sécurité, instructions, illustrations et specifications fournies avec cet onduleur. Le non-respect de toutes les les instructions enumeratedes ci-dessous peuvent entraîner un choc électrique, un incendie et/ou des blessures graves.
AVERTISSEMENT:
Cet équipement est un apparéil à haute tension, veuilles ne pas tenter de démonTZ cet équipement à tout moment pour éviter tout danger. Àpès un apparéil panne, si le commutateur externe ne parvient pas à redémarrer l' apparéil, veuilles contacter votre revendeur pour la manutention.
AVERTISSEMENT: RISQUE DE CHOC ÉLECTRIQUE ET D'INCENDIE!
- Le non-respect de cette instruction peut entrainer une panne électrique, incendie et électrocution.
- NE PAS DÉMONTER.
- Ne pas immerger l'onduleur.
- Ne connectez pas deux ou plusieurs transformateurs en parallele
- Branchez le bloc d'alimentation directement sur une prise GFCI pour endroit humide.
- N'utilisez pas de rallonge
- L'installation de cet onduleur et le cablage associé doivent être effectuels par un technicien qualifié. électricien en conformité avec tous les codes électriques applicables.
AVERTISSEMENT :
Les changements ou modifications apportés à cette unité non expressément approuvés par le parti responsable de la conformité pourrait annuler l'autorité des utilisateurs à exploiter le équipement.
CONSERVEZ CES INSTRUCTIONS
Informations de la FCC
ATTENTION: Les changements ou modifications non expressement approuvés par la partie responsable de la conformité pourrait annuler l'autorité de l'utilisateur à exploiter le équipement!
Cet apparéil est conforme à la partie 15 des règles de la FCC. Son fonctionnement est soumis à les deux conditions suivantes:
1) Ce produit peut provoquer des interférences nuisibles.
2) Ce produit doit accepter toute interférence reçue, y compris interférences pouvant entraîner un fonctionnement indésirable.
AVERTISSEMENT: Les changements ou modifications apportés à ce produit non expressément approuvé par le parti. responsable de la conformité pourrait annuler l'autorisation de l'utilisateur autorisation d'exploiter le produit.
Remarque: Ce produit a ete teste et juged conforme aux limites de un appeareil numerique de classe B conformement à la partie 15 des regles de la FCC. Ces limites sont concus pour fournir une protection raisonnable contre les interferences nuisibles dans une installation residentielle.
Ce produit génére, utilise et peut émettre de l'énergie radiofréquence, et s'il n'est pas installé et utilisé conformément aux instructions, peut provoquer interférences nuisibles aux communications radio. Cependant, il n'este aucune garantir qu'aucune interfeurrence ne se produit dans une installation particulière. Si cela le produit provoque des interférences nuisibles avec la radio ou la télévision réception, qui peut être déterminée en éteignant et en rallumant le produit, le l'utilisateur est encourageda essayer de corriger l'interfERENCE par une ou plusieurs des mesures suivantes.
Réorienter ou déplacer l'antenne de réception. Augmenter
la distance entre le produit et le recepteur. Connecter le produit à une prise
sur un circuit différent de celui auquel il est connecté.
le récepteur est connecté.
Consultez le revendeur ou un technician radio/TV experimenté pour assistance.
Élimination correcte

Ce produit est soumis aux dispositions de la directive européen 2012/19/CE. Le symbole représentant une poubelle à roulettes barrée à travers indique que le produit nécessite un tri sélectif collecte dans l'Union européen. Ceci s'applique au produit
et tous les accessoires marqués de ce symbole. Produits marqués comme tels ne peut pas été jeté avec les ordures menagères normales, mais doit être apporté dans un point de collecte pour le recyclage des appareils électriques et électroniques
1. Informations sur le produit
Le manuel fournit des précautions et des conseils pour la sélection du type d'utilisateur, installation, paramétrage, mise en service sur site, diagnostic des pannes et entretien quotidien et maintenance
1.1 Série d'ondulesurs
| Série AT901 | Résistance de freinage | |||||
| Modèle | Moteur adaptatif | Sortir Courant:A | DANS | Ohm | ||
| KW | HP | |||||
| 22 901-7K5G1 | 7.5 | 10 | 34.0 | 600 | 40 | |
1.2 Spécifications du produit
| Projet | Standard | ||
| Basique Fonction | Système | Convertisseur de fréquence universel à vecteur de courant | |
| Conduire | Écartainheurie pion navelvendemperanceet de finition. | ||
| Performance | Contrôle vectoriel : 0-500 Hz | ||
| Fréquence | Contrôle V/F : 0-3200Hz. | ||
| Transporteur | 0,5 kHz à 16 kHz | ||
| Fréquence | La fréquence porteuse peut être ajustée | ||
| Fréquence résolution | Régrêtsquencen: forationz de la charge | ||
| Paramètre de simulation : ±0,025 % | |||
| résolution Mode de contrôle | contrôle vectoriel en boucle ouverte (SVC) | ||
| Projet | Standard | ||
| Contrôle V/F | |||
| Couple de démarrage | Mode Type-G: 0,3 Hz/150 % (SVC). | ||
| Mode Type-P: 0,3 Hz/100 % 1:100 | |||
| Gamme d'ADJ | (SVC) ± 0,5 % | ||
| Vitesse stable | (SVC) | ||
| Sériesargecapacité | Type G: 150 % de courant nominal pendant 120 s; 180 % pendant | ||
| 1 T0ypse P: 120 % de courant nominal pendant 60 s; 150 % pendant | |||
| Augmentation du couple | 3 T0ypse Augmentation automatique du | ||
| Courbe V/F | couple; MTharnueawl taoysq: usetrianicgrhetalsinee:; | ||
| Courbe Acc/Mode déc | Modèle d'accessionnement de décalssation descomptes sur 4cm15s, qu'en 2)temps d'accélération/décélération, plage de temps d'accélération/décélération0.0-6500.0s | ||
| Freinage CC | Fréquence de freinage: 0,00 Hz - Fréquencemaximale; Temps de freinage: 0,0 s - 36,0 sValeur du courant de freinage: 0,0 % - 100,0 % | ||
| Contrôle légal | Plage de fréquence de jogging: 0,00 Hz-50,00 Hz; | ||
| Temps d'accélération et de décalésation: 0,0 s à 6500,0 s. | |||
| Jusqu'à 16 segments de vitesse avec un automate ou un contrôle intégré | |||
| terminalPID intégré | Il peut facilement réaliser le système de contrôle enboucle fermée de contrôle de processus | ||
| Fonction AVR Lorsque | la tension d'entrée fluctue, la tension de sortie peut être | ||
| Contrôle du décrochage | automatically maintain constante le couvert et la tensionfréquents en cas de surtension. | ||
| Courant rapidelimitant | Minimisez le début de surintensité et protégEZ le fonctionnementnormal du convertisseur de fréquence | ||
| Limits de couple | Limiter automatiquement le couple pendant le fonctionnement | ||
| et contrôle instantanée | plurisquitterdoparticipationautocamtsinfantérestas de surintensité | ||
| mingleaSceht itheve | edtim, loeardanfegedobf0c.k0Menine-r6g5y00.0Min. | ||
| Opérationnel | Commandedsource | Panneau de commande, terminal de commande, port série, peutetre commuté de plusieurs manières | |
| Fréquence source | Potentiamètre de panneau, numéro donné, entrée de tension/courant analogique externe et entrée de port série. peut être commuté de plusieurs manières | ||
| Terminal d'entrée Cinq terminaux d'entrée numériques 1 | |||
| terminal d'entrée de quantité analogique; | |||
| Une entrée de tension 0-10 V ou de courant 0-20 mA; | |||
| SortirTerminal | 1 borne de sortie numérique | ||
| 1 borne de sortie relais (TA, TB, TC) | |||
| 1 terminal de sortie analogique, prénant en charge une sortie de tension de 0 à 10 V ou 0 à 20 mA | |||
| Protectionfonction | Décetion de court-circuit du moteur sous tension, protection contre la perte de phase d'entrée et de sortie, protection contre les surintensités, protection contre les surtensions, protection contre les sous-tensions, protection contre la surchauffe et protection contre les surcharges, etc. | ||
| BoucleL'environnement | Utiliser le lieu | À l'intérieur, pas de lumière directe du soleil, pas de poussière, de gaz corrosif, de gaz combustible, de brouillard d'huile, de vapeur, d'eau ou de sel, etc. | |
| Au dessus de la merniveau | moins de 1000 m 2C116699 | ||
| Ambianttempérature | -10 ~ + 40 (la température ambiente est de 40 ~ 50 veuillez diminuier la quantité) | ||
| humidité | Moins de 95 % HR, condensation anhydrite | ||
| vibrer | Moins de 5,9 m/s (0,6 g) | ||
1.3 Description de la boucle de régulation et du terminal de la boucle principale
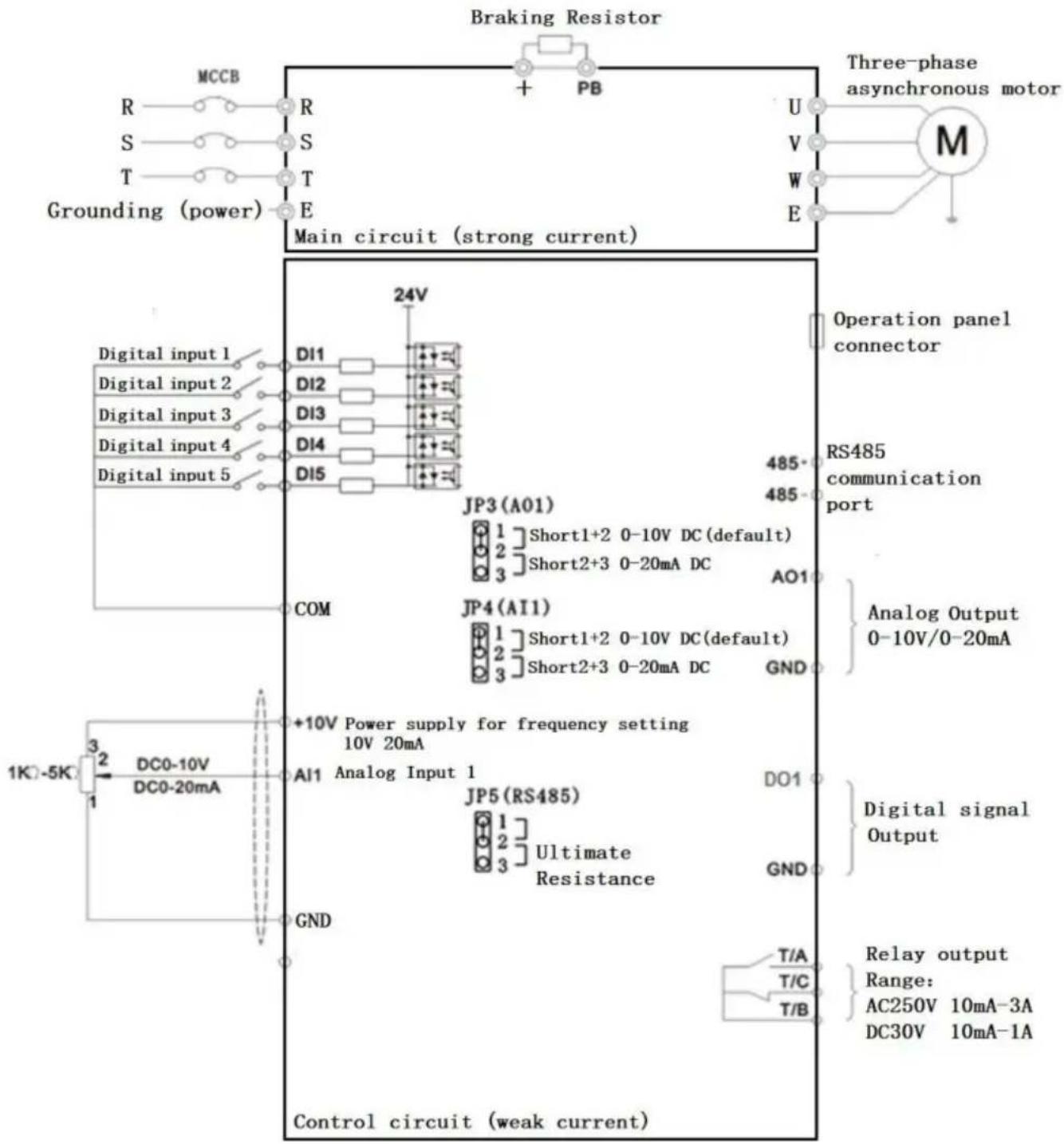
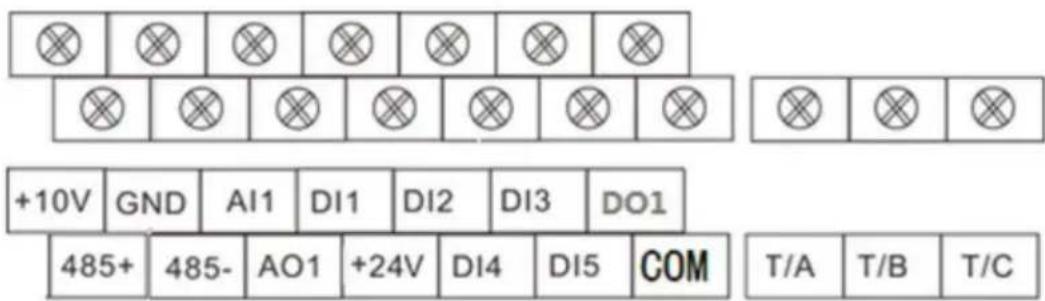
Figure 1-3-1 Description du terminal de commande du schema de cablage 0,75-11,0 kW
2. Fonctionnement et affichage
Description duvoyant lumineux de fonction
Hz:voyant d'affichage de fréquence
V: Temoin de tension
A: Témoin lumineux de courant
ERR:voyant de défaut
F/R: Témoin de marche avant et arrêté
G/D: Témoin lumineux de contrôle de communication
RUN: Témoin de fonctionnement
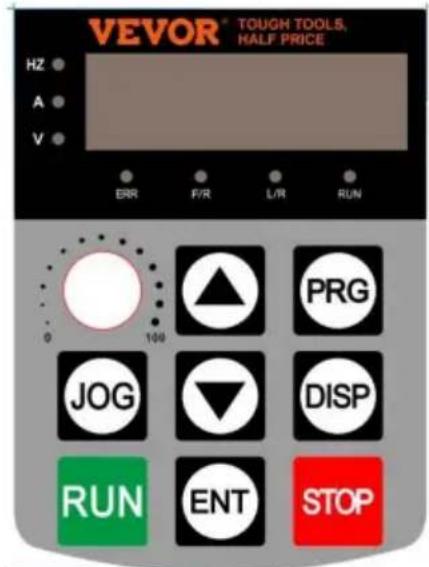
| Symbole de clé | Nom | Déclaration de fonction |
| PRG | Programmation clé | Menu entre ou sort, avec paramètre modification |
| ORL | Déterminer le clé | Entrez dans le menu et confirmez le réglage des paramètres |
| ▲ | Touchche supérieure | Increment des codes de données ou de fonction |
| ▼ | Touchche vers le bas | Données décroissantes ou codes de fonction |
| AFFICHAGE | Touchche Maj | Sélectionnez le bit modifieur de paramètre et le afficher le contenu |
| COURIR | Exécutez la clé | Démarrer l'onduleur sous le clavier mode de fonctionnement |
| ARRÊT | Touchche Stop / Reset Opération d'arrêt / de réinitialisation, | |
| Touchche de jogging | Limité au code de fonction P08.01 FARE DU JOGGING | |
Définir la méthode des paramètres :
- Appuyez sur le bouton PRG pour afficher le P 0.00, 2. Les
touches et DISP selectionnent le numero de parametre a modifier, et le
La touche ENTRE permet d'acceder au parametre,
- Les touches et DISP modifie les valeurs des parametes, la touche ENTER enregistre les parametes,
-
Si vous doivent modifier d'autres paramètres, repêze les étapes 2, 3, telles que la modification achèvement, Retour à l'interface de fréquence en utilisant la touche PRG.
-
Tableau récapitulatif des paramètres fonctionnels :
| P00, Groupe de surveillance | |||
| P00.00 | fréquence de fonctionnement | 0,00 320,00 Hz (P01.22 = 2) - | |
| P00.01 | Régler la fréquence | 0,0 3200,0 Hz (P01.22 = 1) - | |
| P00.02 | Tension du jeu de barres (V) | 0,0 V à 3000,0 V | - |
| P00.03 | Tension de sortie (V) | 0 V ~ 1140 V | - |
| P00.04 | Courant de sortie (A) | 0,00A~655,35A | - |
| P00.05 | Puissance de sortie (kW) | 0 32767 | - |
| P00.06 | Couple de sortie (%) | -200,0% 200,0% | - |
| P00.07 | DE l'état d'entrée | 0 32767 | - |
| P00.08 | État de sortie DO | 0 1023 | - |
| P00.09 | Tension AI1 (V) | 0,01 V | - |
| P00.10 AI2 | Tension (V) ou courant (mA) | 0,00 V à 10,57 V0,00 mA à 20,00 mA | - |
| P00.12 | compter la valeur | 0 65535 | - |
| P00.13 0 | 65535 Valeur de longueur | - | |
| P00.14 | Affichage de la vitesse de chargement | 0 65535 | - |
| P00.15 | Réglage PID | 0 65535 | - |
| P00.16 | Rétroaction PID | 0 65535 | - |
| P00.17 | Étape PLC | 0 65535 | - |
| P00.18 0 à 100 kHz fréquence d'entrée d'impulsion | - | ||
| P00.19 | Vitesse de rétroaction (Hz) | -320,00 Hz ~ 320,00 Hz | - |
| P00.20 | Temps d'exécution restant | -320,0 Hz 6500,0 MHz 0 Hz | - |
| P00.21 | AI1 Tension avant correction | 0,000 V ~ 10,570 V | - |
| P00.22 | AI2 Tension/Courant avant correction | 0,000 V ~ 10,570 V0,000 mA à 20,000 mA | - |
| P00.24 | vitesse linéaire | 0 65535 m/min | - |
| P00.25 | Puisance actuelle heures | 0 6500 min | - |
| P00.26 | Durée de fonctionnement actuelle | 0,0 ~ 6500,0 Min | - |
| P00.28 | Paramètre de communication | -100,00% 100,00% | - |
| P00.30 | Affichage de la fréquence X | 0,00 Hz ~ 500,00 Hz | - |
| P00.31 | Affichage de la fréquence Y | 0,00 Hz ~ 500,00 Hz | - |
| P00.32 Afficher n'importe qu'elle valeur d'adresse mémoire | 0 65535 | - | |
| P00.35 | Couple cible, (%) | 0,0° à 359,9° | - |
| P00.37 | Facteur de puissance Angle | - | |
| P00.39 Tension cible de séparation VF | 0 V ~ Tension nominale du moteur | - | |
| P00.40 Tension de sortie du VF séparant | 0 V ~ Tension nominale du moteur | - | |
| P00.41 | Affichage de l'état de l'entrée IN | - | - |
| P00.42 | Affichage de l'état de l'entrée DO | - | - |
| P00.43 | Affichage de l'état de la fonction DI 1 | (fonction 01. fonction 40)- | - |
| P00.44 Affichage visuel de l'état de la fonction DI (2) | Fonction 41. Fonction 80)- | - | |
| P00-45 | message d'erreur | - | - |
| P00-59 | Définir la fréquence de (%) | -100,00% 100,00% | - |
| P00-60 | Fréquence de fonctionnement (%) | -100,00% 100,00% | - |
| P00-61 | État de l'onduleur | 0 65535 | - |
| —paramètre modifiable dans n'importe qu'elle condition —paramètre non modifiable sous l'état d'exécution •- le paramètre réellement détecté, non modifiable | ||||
| FC | nom | Définir la plage | Usine valeur | modifier |
| P01 Groupe fonctionnel de base | ||||
| P01.00 | Type G/P | 1: Type G (charge à couple constant) modèle) 2: Type P (ventilateur et pompé à eau modèle) | 1 | |
| P01.01 | 1. Contrôle moteur mode | 0: vecteur sans capteur de vitesse Contrôle 2: Modèle de contrôle V/F | 2 | |
| P01.02 | Opération commande | 0: commande d'exécution du panneau de commande canal (voyants « L/R » éteints) | 0 | |
| canal | 1: Canal Terminal Run (voyants « L/R » allumés) 2: Commande de communication canal (Feax « L/R » clignotants) | |||
| P01.03 | Fréquence principale source X | 0: Ensemble numérique (fréquence préréglée P01.08, touche ▲/▼ du clavier, perte de puissance) 1: Ensemble numérique (fréquence préréglée P01.08, touche ▲/▼ du clavier, mémoire de coupure de courant) 2: ensemble analogique AI1 (0-10 V); 3: ensemble analogique AI2 (0-10 V ou 20 mA); 4: potentiamètre de panneau; 5: ensemble d'impulsions (0 à 50 kHz DI5); 6: ensemble de vitesse à plusieurs étages 7: ensemble PLC 8: Ensemble de contrôle PID; 9: Ensemble de communication. | 4 | |
| P01.04 | Source de fréquence secondaire ET | Identique au réglage P01.03 (Source de fréquence principale X) | 0 | |
| P01.05 | Limiter la sélection de Y lorsque superposition de fréquence | 0: Par rapport à la fréquence maximale de P01.10 1: Par rapport à la source de fréquence X | 0 | |
| P01.06 | Limits de Y lorsque superposition de fréquence | 0% ~ 150% | 100% | |
| P01.07 | Source de fréquence | Un seul chiffre: Sélection de la source de fréquence 0: Source de fréquence principale X 1: Fonctionnement principal et secondaire | 00 | |
| résultats (la relation d'opération est déterminée par dix chiffres)2: Fréquence principale X et Commutateur de fréquence secondaire en Y3: Basculer entre le mode principal fréquence X et principale et Résultats de l'opération secondaire4: La fréquence Y commute avec Fonctionnement principal et secondaire résultatsDix chiffres: Relation de fonctionnement de fréquence de X et Y0:X+Y1: XY2: Maximum des Deux, 3: Le minimum des deux. | ||||
| P01.08 | Fréquence des prépositions | 0,00 Hz ~ Fréquence maximaleP01.10 | 50,00Hz | |
| P01.09 Sens de marche | 0: Direction cohérente, 1:Sens opposé | 0 | ||
| P01.10 | Fréquence de sortie maximale | Vecteur: 50,00 Hz ~ 500,00 HzV/F: 50,00 Hz2000,00Hz | 50,00Hz | |
| P01.11 | Fréquence limite supérieure source | 0: P01.12 Configuration 1:Al1 Configuration2: Al2 Configuration3: Al3 Configuration4: Réglage des impulsions (0 50KHZ DI5);Configuration de la communication | 05: | |
| P01.12 | Fréquence limite supérieure | P01.14 P01.10 | 50,00Hz | |
| P01.13 | Biais de fréquence limite supérieure | 0,00 Hz ~ P01.10 | 0,00 Hz | |
| P01.14 | Liminé inférieure fréquence | 0,00 Hz ~ P01.12 | 0,00 Hz | |
| P01.15 | Fréquence porteuse | 0,5 kHz à 16,0 kHz | Pour le modele | |
| P01.16 | Fréquence porteuseAjuster avecla température | 0: Non, 1: Oui | 1 | |
| P01.17 | Temps d'accélération1 | 0,00 s ~ 650,00 s (P01.19 = 2)0,0s 6500,0s P01.19=10 s ~ 65 000 s (P01.19 = 0) | Pour le modele | |
| P01.18 | Temps de décélération1 | Fréquence de référence P01.25 | ||
| P01.19 | Unité de temps deAccélération ettemps de décélération | 0: 1 secondes1: 0,1 seconde2: 0,01 seconde | 1 | |
| P01.21 | Fréquence de polarisationde la fréquence Ylorsquesuperposition | 0,00 Hz ~ Fréquence desortinge maximale P01.10 | 0,00 Hz | |
| P01.22 | Résolution deFréquence | Résolution de toutes les fréquences commands. | 2 | |
| P01.23 | Éteindremémoire pourRéglage de fréquencenumérique | 0: Pas de mémoire 1: Mémoire | 0 | |
| P01.24 | Sélection du groupe de paramètres du moteur | 0: Groupe de paramètres moteur 1,1: Groupe de paramètres moteur 2. | 0 | |
| P01.25 | Référencefréquence deAccélération ettemps de décélération | 0: Fréquence maximale P01.10 1:Fréquence de réglage2: 100 Hz | 0 | |
| P01.26 | Durée d'exécutioninstructionde fréquenceHAUT/BAS | 0: Fréquence de fonctionnement,1: Réglage de la fréquence | 0 | |
| référence | ||||
| P01.27 | Source de commandé groupé source de fréquence | Chiffre unique: fréquence de liaison des commandes du panneau de commande sLECTION de la source0 : Aucune liaison 1 : Ensemble numérique2 : AI1 3 : AI2 4 : AI35 : Ensemble d'impulsions (0 50KHZ DI5)6 : Vitesse multi-segments ;7 : API simple8 : PID9 : Ensemble de communicationDix chiffres : source de fréquence de liaison de commande de terminal sélection100 chiffres : sélection de la source de fréquence de liaison de commande de communicationMille chiffres : exécuter automatiquementla source de fréquence de liaison sélection | 0000 | |
| Groupe de paramètres 1 du moteur asynchrone P02 | ||||
| P02.00 | Type de moteur | 0 : Moteur asynchrone ordinaire,1 : Moteur asynchrone à fréquence variable | 0 | |
| P02.01 | Puisance nominale de moteur | 0,1 kW à 400,0 kW | Selon au Modèle De la Onduleur | |
| P02.02 | Tension nominale de Moteur | 1 V à 2000 V | ||
| P02.03 | Courant nominal de Moteur | 0,01A~655,35A(Puisance de l'ondueur <=55kW)0,1A ~ 6553,5A(Puisance de l'ondueur > 55kW) | ||
| P02.04 | Fréquence nominale du moteur | 0,01 Hz ~ Fréquence de sortie maximale P01.10 | ||
| P02.05 | Vitesse nominale de moteur | 1 tr/min ~ 65 535 tr/min | ||
| P02.06 | Résistance du stator du moteur | 0,001Ω 65,535Ω (Puissance de l'onduleur <= 55 kW) 0,0001Ω 6,5535Ω (Puissance de l'onduleur> 55 kW) | Réglage Paramètre | |
| P02.07 | Résistance du rotor du moteur | 0,001Ω 65,535Ω (Puissance de l'onduleur <= 55 kW) 0,0001Ω 6,5535Ω (Puissance de l'onduleur> 55 kW) | ||
| P02.08 | Résistance aux fuites du moteur | 0,01mH 655,35mH (Puissance de l'onduleur <=55kW) 0,001 Mh 65,535 mH (Puissance de l'onduleur> | ||
| P02.09 | Résistance mutuelle du moteur | 55kW) 0,1mH 6553,5mH (Puissance de l'onduleur <= 55kW) 0,01 mH 655,35 mH (Puissance de l'onduleur > 55kW) | ||
| P02.10 | Courant à vide de le moteur | 0,01 A P02.03 (Puissance de l'onduleur <= 55 kW) 0,1 A ~ P02.03 (Puissance de l'onduleur > 55 kW) | ||
| P02.37 | Sélection de réglage | 0: pas de fonctionnement 1: Réglage lorsque le moteur est à l'arrêt 1 2: Réglage dynamique du moteur 3: Réglage lorsque le moteur est complètement à l'arrêt 2 | 0 | |
| P03 Paramètres de contrôle vectoriel du groupe moteur 1 | ||||
| P03.00 | Boucle de vitesse proportionnelle | 1 à 100 | 30 | |
| P03.01 | Temps d'intégration de la boucle de vitesse 1 | 0,01 s à 10,00 s | 0,50 s | |
| P03.02 | Fréquence de commutation 1 | 0,00 P03.05 | 5,00 Hz | |
| P03.03 | Boucle de vitesse proportionnelle | 1 à 1002 | 20 | |
| P03.04 | Temps d'intégration de la boucle de vitesse 2 | 0,01 s à 10,00 s | 1,00 s | |
| P03.05 | Fréquence de commutation 2 | P03.02 Fréquence de sortie maximale P01.10 | 10,00 Hz | |
| P03.06 | Contrôle vectoriel de le gain de décalage | 50% 200% | 100% | |
| P03.07 | Temps de filtrage du couple SVC constantes | 0,000 s ~ 0,100 s | 0,050 s | |
| P03.09 | Limite supérieure de coupe source sous contrôle de vitesse mode | 0 : P03.10 réglage 1 : AI1 ; 2 : AI2 ; 3 : AI3 ; 4 : Réglage d'impulsions (DI5) ; 5 : Cadre de communication ; 6 : MIN (AI1, AI2) 7 : MAX (AI1, AI2) | 0 | |
| P03.10 | Limite supérieure de couple sous régime mode de contrôle | 0,0% 200,0% | 150,0% | |
| P03.13 | Gain proportionnel de excitation règlement | 0 60000 | 2000 | |
| P03.14 | Gain intégral d'excitation règlement | 0 60000 | 1300 | |
| P03.15 | Gain proportionnel | 0 60000 | 2000 | |
| de régulation du couple | ||||
| P03.16 | Gain intégral de la régulation de couple | 0 60000 | 1300 | |
| Paramètres de contrôle V/F P04 | ||||
| P04.00 Réglage de la courbe VF | 0 :courbe linéaire V/F1 :Courbe multipoint V/F2 :Courbe de couple décroissanté1 (Courbe carrée)3 :Courbe de couple décroissanté 2(puissance 1,2)4 : Courbe de couple décroissanté 2(puissance 1,4)6 : Courbe de couple décroissanté 2(puissance 1,6)8 : Courbe de couple décroissanté 2(puissance 1,8)10 : Mode de séparation complèteVF11 : Mode semi-separation VF 0,0 | 0 | ||
| P04.01 | Réglage de | % (couple de levage automatique) ;0,1% à 30,0% | Par modèle | |
| P04.02 | l'amplification de couple Point | 0,00 Hz ~ Fréquence desortinge maximale P01.10 | 50,00 Hz | |
| P04.03 | de coupure de | 0,00 Hz ~ P04.05 | 0,00 Hz | |
| P04.04 | l'amplification de couple | 0,0% 100,0% | 0,0% | |
| P04.05 | Fréquence V/Fmultipoint | P04.03 P04.07 | 0,00 Hz | |
| P04.06 | 1 Tension V/Fmultipoint 1 Fréquence V/F multipoint 2 Tension V/F multipoint | 0,0% 100,0% | 0,0%2 | |
| P04.07 | Fréquence V/F multipoint | P04.05 Puisance nominale du moteur fréquence P02.04 | 0,00 Hz | |
| P04.08 | 3 Tension V/F multipoint 3 | 0,0% 100,0% | 0,0% | |
| P04.09 | Contrôle V/F Compensation de fréquence de glissement | 0,0% 200,0% | 0,0% | |
| P04.10 | V/F terminé gain d'excitation | 0 200 | 64 | |
| P04.11 | Oscillation gain de suppression pour V/F | 0 100 | Par modele | |
| P04.13 | Source de tension par | 0: Paramètres numériques P04.14 1:Al1 2 Al2 3 Al3 4: Réglage de l'impulsion (DI5) 5: Instruction multiple 6: API simpleVF séparé 7: Le PID 8: paramètre de communication Remarque: 100,0%, correspondant à la tension nominale du moteur | 0 | |
| P04.14 | Tension pour la séparation VF | 0 V ~ Tension nominale du moteur | 0V | |
| P04.15 | Temps de montée en tension de la séparation | 0,0 s 1 000,0 s Remarque: heures à laquelle 0 V monte à VF tension nominale du | 0,0s | |
| P04.16 | Temps de chute de tension de la séparation | moteur. 0,0 s ~ 1 000,0 s Remarque: Temps pendant lequel la tension VF nominale du moteur tombe à 0 V | 0,0s | |
| P04.17 | Mode d'arrêt de séparation VF | 0: La fréquence et la tension chutent à 0 séparément; 1: La fréquence chute après la Chute de tension à | 0 | |
| P04.18 | Décrochage par surintensité courant d'action | 50% 200% | 150% | |
| P04.19 | Suppression de Décrochage par surintensité | 0 : Désactiver, 1 : Activer. | 1 | |
| P04.20 | Gain de la suppression de décrochage actuel | 0 100 | 20 | |
| P04.21 | Compensation coefficient de action terminée décrochage actuel | 50% 200% | 50% | |
| P04.22 | Action de décrochage en cas de surtension | 650,0 V 800,0 V | 760,0 V | |
| P04.23 | Tension de suppression du décrochage en cas de | 0 : Désactiver, 1 : Activer. | 1 | |
| P04.24 | surtension Gain de fréquence de suppression du décrochage | 0 100 | 30 | |
| P04.25 | en cas de surtension Gain de tension de suppression du décrochage | 0 100 en cas de surtension | 30 | |
| P04.26 | Élévation maximale limite de fréquence pour Décrochage en cas de surtension | 0 à 50 Hz | 5 Hz | |
| Groupe P05, Paramètres d'entrée | ||||
| P05.00 | Borne DI1 fonction | 0 : Aucune fonction ; 1 : Marche avant (FWD) ou En cours d'exercution; 2 : Marche arrêté (REV) ou Interrupteur marche avant/arrêté 3 : commande de marche à trois fils 4 : commande de marche avant par à-coups (FJOG) 5 : Contrôle de marche arrêté (RJOG) | 1 | |
| 6: Augmentation de fréquence (borne UP)7: Diminution de fréquence (TerminalDOWN)8: Contrôle d'arrêt gratuite9: Entrée de signal de réinitialisationexterne (RST)10: Suspendre le fonctionnement;11: Entrée normalement ouverte (NO) de défautexterne 12:Multi-vitesse 1 13: Multi-vitesse 2 14: Multi-vitesse 315: Multi-vitesse 4 16:Sélection de temps ACC/DEC1 (TT1)17: Sélection de l'heure ACC/DEC 2 (TT2)18: Commutateur de source de fréquence19: HAUT/BAS Remise à zéro de lafréquence (borne, clavier)20: Commutateur de commande Exécuterterminal 121: Interdiction VFD ACC/DEC22: Pause du contrôle PID23: Réinitialisation de l'état de l'automate24:Pause de fréquence du pendule25: Entrée du compteur26: Réinitialisation du compteur27: Entrée de comptage delongueur 28: Réinitialisationde longueur 29: Désactivation du contrôlede couple 30: Réglage des impulsions (seul DI5peut effectuer le réglage, P05.04=30)31: Réservé;32: Freinage CC immédiat;33: Entrée de défaut externe (normalement |
| fermé (NC)34 : Modification de fréquencePermet35 : signal d'entrée PID inversé ;36 : Terminal de stationnement extérieur137 : Commutateur de commande d'exécutionterminal 238 : Pause intégrale PID ;39 : La fréquence X commute avecla fréquence prédéfinie40 : La fréquence Y change avecla fréquence prérégée41 : Borne de sélection du moteur143 : Le commutateur de paramètres PID44 : Défaut définir par l'utilisateur 145 : Erreur définié par l'utilisateur 246 : Interrupteur de contrôle devitesse / de couple47 : Arrêt d'urgence48 : Parking extérieur terminal 249 : Freinage CC lent50 : Temps d'exécution effacé ;51 : Commande à deux fils / Commande à trois interrupteur de commande52 : Désactivation de l'inversion ; | ||||
| P05.01 | Borne DI2fonctionnel | 4 | ||
| P05.02 | Borne DI3fonctionnel | 9 | ||
| P05.03 | Borne DI4fonctionnel | 12 | ||
| P05.04 | Borne DI5fonction(seul DI5 peut | 13 | ||
| réglage du pouls fonction, P05.04=30) | ||||
| P05.10 Temps de filtrage DI | 0,000 s ~ 1,000 s | 0,010s | ||
| P05.11 | Contrôle des terminaux Mode | 0: Mode de contrôle à deux fils 1, 1: Mode de contrôle à deux fils 2, 2: Mode de contrôle à trois fils 3: Mode de contrôle à trois fils | 0 1, 2. | |
| P05.12 | Fréquence étape de réglage taillie | 0,001 Hz/s 65,535 Hz/s | 1,00 Hz/s | |
| P05.13 | Entrée minimale de l'IA courbe 1 | 0,00 V ~ P05.15 | 0,00 V | |
| P05.14 | Correspondant valeur de la courbe AI 1 Entrée min. | -100,0% +100,0% | 0,0% | |
| P05.15 | Entrée max. de l'IA courbe 1 | P05.13 +10,00 V | 10,00 V | |
| P05.16 | Correspondant valeur de la courbe AI Courbe d'entrée | -100,0% +100,0% | 100,0% | |
| P05.17 | AI max. 1 filtrage temps | 0,00 s à 10,00 s | 0,10 s | |
| P05.18 | Courbe AI 2's Min. saisir | 0,00 V ~ P05.20 | 0,00 V | |
| P05.19 | Correspondant valeur de la courbe AI Entrée min. 2 | -100,0% +100,0% | 0,0% | |
| P05.20 | Entrée max. de AI2 | P05.18 +10,00 V | 10,00 V | |
| P05.21 | Correspondant valeur de la courbe AI Entrée max. 2's | -100,0% +100,0% | 100,0% | |
| P05.22 | Courbe Al 2 filtrage temps | 0,00 s à 10,00 s | 0,10 s | |
| P05.23 | Courbe Al 3's Min. saisir | -10,00 V ~ P05,25 | -10,00 V | |
| P05.24 | Correspondant valeur de la courbe Al 3's Entrée min. | -100,0% +100,0% | 0,0% | |
| P05.25 | Entrée max. de l'IA courbe 3 | P05.23 +10.00V | 10,00 V | |
| P05.26 | Correspondant valeur de la courbe Al Courbe d'entrée | -100,0% +100,0% | 100,0% | |
| P05.27 | Al max. 3 filtrages temps | 0,00 s à 10,00 s | 0,10 s | |
| P05.28 | Valeur minimale de Entrée d'impulsion | -10,00 V ~ P05,25 | 0,00 V | |
| P05.29 | Correspondant valeur de Pulse Entrée min. | -100,0% +100,0% | 0,0% | |
| P05.30 | Valeur max. de Entrée d'impulsion | P05.23 +10.00V | 10,00 V | |
| P05.31 | Correspondant valeur de Pulse Entrée max. | -100,0% +100,0% | 100,0% | |
| P05.32 | Filtrage des impulsions temps | 0,00 s à 10,00 s | 0,10 s | |
| P05.33 | Sélection de la courbe | Bit unique: sélection de la courbe Al 1: j'ai 1pute(14h00, voir P05.13 ~ P05.16.)Al 2: j'ai 2putes(14h, voir P05.18 ~ P05.21.)3: j'ai 3putes(14h00, voir P05.23 ~ P05.26.) | 321 | |
| 4 : j'ai 4 putes(16h, voir P24.00 P24.07)5 : j'ai des putes 4(16h, voir P24.08 P24.15)Dix bits : sélection de la courbe Al2 identique à celle du bit unique 1 a 5)Cent bits : sélection de courbe Al3(le même que ci-dessus) | ||||
| P05.34 | L'IA est en dessous le minimum réglage d'entrée sélection | Bit unique : Al1 en dessous du réglage d'entréeminimum 0 : Valeur correspondante del'entréeminimum 1 : 0,0%Dix bits : Al2 en dessous du réglage d'entréeminimum (identique au bit unique 1~2)Cent bits : Al3 en dessous du réglage d'entréeminimum (le même que ci-dessus) | 000 | |
| P05.35 Délai de DI1 | 0,0 s ~ 3 600,0 s | 0,0s | ||
| P05.36 Délai de DI2 | 0,0 s ~ 3 600,0 s | 0,0s | ||
| P05.37 Délai de DI3 | 0,0 s ~ 3 600,0 s | 0,0s | ||
| P05.38 | Borne DI1-DI5 valideréslection du mode | 0 : niveau efficace élevé, 1 : niveauefficace faibleBit unique : DI1 ;Dix bits : DI2 ;Des centaines de bits : DI3 ;Mille bits : DI4,Dix mille bits : DI5 | 00000 | |
| P05.39 | Borne DI6-DI7 valideréslection du mode | 0 : Niveau efficace élevé, 1 : Faibleniveau efficaceBit unique : DI6, | 00000 | |
| Dix bits : DI7 | ||||||
| Groupe P06, Paramètres de sortie | ||||||
| P06.01 | Sortie DO1 sélection de fonction | 0: Aucune sortie1: Indicateur de fonctionnement; 2: Sortie de début (pour défaut d'arrêt libre)3: Signal de détction de niveau de fréquence 1 (P14T1)4: Indicateur d'arrivée de fréquence (FAR)5: Fonctionnement à vitesse nulle du VFD (en fonctionnement)6: Alerte précoce de surcharge du moteur7: Surcharge de l'onduleurAlerte précoce8: Le décompte des sets arrive9: Le nombre spécifique est atteint10: La longueur est atteinte11: Le cycle PLC est terminé12: Temps de fonctionnement accumulé arrive13: Limitation de fréquence14: Limitation de couple15: Prêt à courir16: AI1>AI217: La fréquence de sortie atteint la limite supérieurelimite18: La fréquence de sortie atteint la limiteinférieure (lors de l'exécution)19: Sortie état sous pression 20: Paramètrede communication 21: Localisationcomplète (réservée) - 25 - | 0 | |||
| P06.02 | Panneau de contrôleRelais(TA-TB-TC)FonctionSélection | 2 | ||||
| 22: Proximate de l'emplacement (réservé) 23: Fonctionnement à vitesse nulle 2 (également en sortie lors de l'arrêt) 24: Temps de mise sous tension accumulé arrive 25: Signal de détention de niveau de fréquence 2 (P14T2) 26: Fréquence de sortie 1 atteinte 27: Fréquence de sortie 2 atteinte 28: Courant de sortie 1 atteint 29: Courant de sortie 2 atteint 30: Atteint régulièrement 31: Dépassement du signal d'entrée Al 32: Chute de charge 33: Fonctionnement inverse du VFD 34: État de courant nul 35: Le module d'alimentation la température arrive 36: Courant de sortie hors limite 37: Fréq. de sortie atteint la limite inférieure (arrêt également sortie) 38: Sortie de début (tous les défauts) 39: Surchauffe du moteur Pré-alerte 40: Ce temps de fonctionnement arrive 41: Sortie de début (pour libre début d'arrêt et pas de sous pression de sortie) | ||||||
| P06.07 | Sélection de la fonction de sortie AO1 | 0: Fréquence de fonctionnement, 1: Fréquence définie. | 0 | |||
| P06.08 | Sélection de la fonction de sortie AO2 | 2: Courant de sortie, 3: Couple de sortie, 4: Puissance de sortie, 5: Tension de sortie, | 1 | |||
| 6: Fréquence d'impulsion d'entree | ||||||
| 7 AI1 | 8 AI2 | |||||
| 9 AI3 | ||||||
| 10: Longueur | ||||||
| 11: Valeur de comptage | ||||||
| 12: Réglage de la communication, | ||||||
| 13: Vitesse du moteur | ||||||
| 14: Courant de sortie. (100,0 % | ||||||
| Correspondant à 1000,0A) | ||||||
| 15: Tension de sortie (100,0 % | ||||||
| (Correspondant à 1000,0 V) | ||||||
| 16: Couple de sortie du moteur | ||||||
| (Pourcentage de la valeur réelle | ||||||
| par rapport à la puissance du moteur) | ||||||
| 17: Couple de sortie du variateur de fréquence | ||||||
| (Pourcentage de la valeur réelle | ||||||
| par rapport à la puissance nominale du VFD) | ||||||
| P06.10 | AO1 à polarisation nulle coefficient | -100,0% | +100,0% | 0,0% | ||
| P06.11 | Gain AO1 | -10,00 | +10,00 | 1,00 | ||
| P06.12 | AO2 à polarisation nulle coefficient | -100,0% | +100,0% | 0,0% | ||
| P06.13 | Gain AO2 | -10,00 | +10,00 | 1,00 | ||
| P06.17 | Délai de sortie DO temps | 0,0 s ~ 3 600,0 s | 0,0s | |||
| P06.18 | Sortie RELAIS temps de retard | 0,0 s ~ 3 600,0 s | 0,0s | |||
| P06.19 | Sortie RELAY2 temps de retard | 0,0 s ~ 3 600,0 s | 0,0s | |||
| P06.22 | Sortie DO validesselection de statut | 0: Logique positive, 1: Anti-logique Bit unique: DO Dix bits: RELAY1 | 00000 | |||
| Cent Bits: RELAY2 | ||||||
| Groupe P07, Paramètres de contrôle de démarrage et d'arrêt | ||||||
| P07.00 Mode de démarrage | 0: Démarrage direct1: Commencez par suivre la vitesse2: freinage CC + démarrage à la fréquence de démarrage | 0 | ||||
| P07.01 Suivi de vitessemethode | 0: Commencer par l'arrêtfréquence1: Commencez par la fréquence de travail2: Commencer au maximumfréquence | 0 | ||||
| P07.02 Suivi de la vitessede la vitesse | 1 à 100 | 20 | ||||
| P07.03 Fréquence de démarrage | 0,00 Hz ~ 10,00 Hz | 0,00 Hz | ||||
| P07.04 Fréquence de démarragatempts de maintainen | 0,0s 100,0s | 0,0s | ||||
| P07.05 Courant de freinage CCau démarrage | 0% ~ 100% | 0% | ||||
| P07.06 Temps de freinage CCàdémarrer | 0,0s ~ 100,0s | 0,0s | ||||
| P07.07 AccélérationetMode décalération | 0: mode Acc/Dec linéaire1: Courbe S Mode Acc/Dec A2: Courbe S Mode Acc/Dec B | 0 | ||||
| P07.08 Rapport de temps de démarragesegment en Scourbe | 0,0% 100,0%-P07.09 | 30,0% | ||||
| P07.09 Rapport de temps de démarragesegment en Scourbe | 0,0% 100,0%-P07.08 | 30,0% | ||||
| P07.10 | Mode d'arrêt | 0: Ralentissez pour arrêté 1: Ralentissez pour arrêté | 0 | |||
| P07.11 | Fréquence seuil de DC frein | 0,00 Hz ~ Fréquence maximale P01.10 | 0,00 Hz | |||
| P07.12 | Retard de freinage CC temps | 0,0 s 100,0 s | 0,0s | |||
| P07.13 Courant de freinage CC | 0% 100% | 0% | ||||
| P07.14 | Temps de freinage CC arrêt | à 0,0 s 100,0 s | 0,0s | |||
| P07.15 | Frein à courant continu taux d'utilisation | 0% 100% | 100% | |||
| P07.18 | Suivi de vitesse actuel | 30% 200% | ||||
| Claviers de groupe et paramètres d'affichage P08 | ||||||
| P08.01 Fonction de la touche M | 0: La touche M n'est pas valide1: Basculer entre la télécommande Contrôle (contrôle du terminal ou de la communication) et contrôle du panneau de commande, lorsque P01.02 = 1 ou 22: Interrupteur marche avant/arrête3: FJOG (commande de marche avant)4: RJOG (Contrôle de marche arrêté) | 0 | ||||
| P08.02 | ARRÊT/RÉINITIALISATIONfonction clé | 0: La touche STOP/RES n'est valable qu'en mode de contrôle du panneau1: La touche STOP/RES Toujours valide | 1 | |||
| P08.03 | Affichage LED paramètre 1in État de fonctionnement | 0000 FFFFBit00: Fréquence de fonctionnement 1 (Hz)Bit01: Réglage de la fréquence (Hz)Bit02: Tension du bus (V) | 1F | |||
| Bit03: Tension de sortie (V)Bit04: Courant de sortie (A)Bit05: Puissance de sortie (kW)Bit06: Couple de sortie (%)Bit07: état de l'entrée DIBit08: état de sortie DOBit09: Tension AI1 (V)Bit10: Tension AI2 (V)Bit11: Tension AI3 (V)Bit12: valeur de comptageBit13: valeur de longueurBit14: Affichage de la vitesse de chargementBit15: Paramètres PID | ||||||
| P08.04 | Affichage LED paramètre 2in État de fonctionnement | 0000 FFFFBit00: Rétroaction PIDBit01: étape PLCBit02: PULSE Fréquence d'entrée (kHz)Bit03: Fréquence de fonctionnement 2 (Hz)Bit04: Temps d'exécution restantBit05: AI1-tension avant corrigerée(V)Bit06: AI2-tension avant corrigerée(V)Bit07: AI3-tension avant corrigerée(V)Bit08: Vitesse de la ligneBit09: Puissance actuelle et heures(Heure)Bit10: Durée d'exécution actuelle (min)Bit11: PULSE Fréquence d'entrée (Hz)Bit12: Paramètres de communication Valeur | 0 | |||
| Bit13: Vitesse de rétroaction du codeur (Hz) Bit14: Affichage de la fréquence principale (Hz) Bit15: Fréquence secondaire Y Affichage (Hz) | X | |||||
| P08.05 | Écrans LED paramètre dans Stop statut | 0000 FFFF Bit00: Régler la fréquence (Hz) Bit01: Tension du bus (V) Bit02: état de l'entrée DI Bit03: état de sortie DO Bit04: Tension AI1 (V) Bit05: Tension AI2 (V) Bit06: tension AI3 (V) Bit07: Valeur de comptage Bit08: Valeur de longueur Bit09: étape PLC Bit10: Vitesse de chargement Bit11: Paramètres PID Bit12: PULSE Fréquence d'entrée (kHz) | 33 | |||
| P08.06 | Vitesse de chargement facteur d'affichage | 0,0001 6,5000 | 1,0000 | |||
| P08.07 | Module de puissance température | 0,0 100,0 | - | • | ||
| P08.08 | Numéro de produit | - | - | • | ||
| P08.09 | Cumulatif Durée de fonctionnement | 0h ~ 65535h | - | • | ||
| Groupe P09, fonctionauxiliaire | ||||||
| P09.00 | Fréquence de jogging | 0,00 Hz ~ Fréquence maximale P01.10 | 2,00 Hz | |||
| P09.01 | Temps d'acculturation du jogging | 0,0 s ~ 6 500,0 s | 20,0s | |||
| P09.02 | Heure de décembre du jogging | Durée recommandée : 0,4 ~ 4,0 kW 7,5 S 5,5 ~ 30,0 kW 15.0S 37,0 132,0 kW 40,0 S 160,0 à 630,0 kW 60,0 S | 20,0s | |||
| P09.03 | Temps d'accélération 2 | 15.0 | ||||
| P09.04 | Temps de décélération 2 | |||||
| P09.05 | Temps d'accélération 3 | |||||
| P09.06 | Temps de décélération 3 | |||||
| P09.07 | Temps d'accélération 4 | |||||
| P09.08 | Temps de décélération 4 | |||||
| P09.09 | Fréquence de saut 1 | 0,00 Hz ~ Fréquence maximale P01.10 | 0,00 Hz | |||
| P09.10 | Fréquence de saut 2 | 0,00 Hz | ||||
| P09.11 | Fréquence de saut gamme | 0,01 Hz | ||||
| P09.12 | Positif et Mort inversée temps | 0,0s 3000,0s | 0,0s | |||
| P09.13 | Inverse fréquence autorisation | 0: Autorisé ; 1: Interdire | 0 | |||
| P09.14 | Lorsque le réglage la fréquence est inférieure la limite inférieure de féq. | 0: fonctionner à une fréquence limite inférieure à 1: Arrête 2: fonctionnement à vitesse nulle | 0 | |||
| P09.15 | Contrôle des chutes | 0,00 Hz ~ 10,00 Hz | 0,00 Hz | |||
| P09.16 | Paramètre puissance cumulée | Oh ~ 65000h | Oh | |||
a l'heure d'arrivée
| P09.17 | Paramètrecumulatif | Oh ~ 65000h | Oh | |
| P09.18 Protection de démarrage | 0: Non protégé; | 0 | ||
| P09.19 | Fréquencevaleur de détction 1(P14T1) | 0,00 Hz ~ Fréquence maximaleP01.10 | 50,00Hz | |
| P09.20 | Valeur d'écalage deltéction de fréquence (P14T1) | 0,0% ~ 100,0% (niveau P14T1)P14T1) | 5,0% | |
| P09.21 | Fréquenceatteint lelargeur détectée | 0,0% ~ 100,0% (fréquencemaximale) | 0,0% | |
| P09.22 | Fonction desaut de fréquencePendant Acc etDéc. | 0: non valide, 1: valide | 0 | |
| P09.25 | Fréquence de commutation detemps d'accélération1 et le temps 2 | 0,00 Hz ~ Fréquence maximaleP01.10 | 0,00 Hz | |
| P09.26 | Fréquence de commutation detemps de décelération1 et le temps 2 | 0,00 Hz ~ Fréquence maximaleP01.10 | 0,00 Hz | |
| P09.27 | Priorité duterminal Jog | 0: non valide, 1: valide | 0 | |
| P09.28 | Fréquencevaleur de détction (P14T2) | 0,00 Hz ~ Fréquence maximale | 50,00Hz | |
| P09.29 | Valeur derécalage deltéction de fréquence (P14T2) | 0,0% ~ 100,0% (niveau P14T2)P14T2) | 5,0% | |
| P09.30 | Fréquenced'arrivée arbitraire | 0,00 Hz ~ Fréquence maximale | 50,00Hz | |
| valeur de détention | 1 | |||
| P09.31 | Fréquence d'arrivée arbitraire déetectée largeur 1 | 0,0% ~ 100,0% (fréquence maximale) | 0,0% | |
| P09.32 | Fréquence d'arrivée arbitraire valeur de détention 2 | 0,00 Hz ~ Fréquence maximale | 50,00 Hz | |
| P09.33 | Fréquence d'arrivée arbitraire largeur déetectée 2 | 0,0% ~ 100,0% (fréquence maximale) | 0,0% | |
| P09.34 | Courant nul niveau de détention | 0,0% 300,0%100,0 % correspond au courant nominal du moteur | 5,0% | |
| P09.35 | Temps de retard de Détction de courant | 0,01 s à 600,00 s | 0,10 s | |
| P09.36 | Valeur actuelle de sortie sur actuel | 0,0% (non détecté)0,1% ~ 300,0% (courant nominal du moteur) | 200,0% | |
| P09.37 | Temps de retard de Sortie terminée Détction actuelle | 0,00 s ~ 600,00 s | 0,00 s | |
| P09.38 | Courant d'arrivée arbitraire 1 | 0,0% ~ 300,0% (courant nominal du moteur) | 100,0% | |
| P09.39 | Arrivée arbitraire largeur actuelle 1 | 0,0% ~ 300,0% (courant nominal du moteur) | 0,0% | |
| P09.40 | Arrivée arbitraire courant 2 | 0,0% ~ 300,0% (courant nominal du moteur) | 100,0% | |
| P09.41 | Arrivée arbitraire largeur actuelle 2 | 0,0% ~ 300,0% (courant nominal du moteur) | 0,0% | |
| P09.42 | Fonction minuterie sélection | 0 : non valide, 1 : valide | 0 | |
| P09.43 Durée d'exécution du minuteur | 0 : réglage P09.44, | 0 | ||
| sélection | 1:Al12:Al23:Al3La plage d'entrée analogue correspond au P09.44 | |||
| P09.44 | Minuterie en marche temps | 0,0Min ~ 6500,0Min | 0.0Min | |
| P09.45 | Valeur de limite inférieure de protection de la tension d'entrée Al1 | 0,00 V ~ P09,46 | 3,10 V | |
| P09.46 | Valeur limite supérieure de protection de la tension d'entrée | P09.45 10.00V | 6,80 V | |
| P09.47 | Al1 Protection contre la surchauffe Valeur | 0 100 | 75 | |
| P09.48 | Ventilateur de refroidissement contrôle | 0 : ventilateur en marche pendant le fonctionnement du VDF1 : Toujours en marche lorsque l'alimentation sur; | 0 | |
| P09.49 | Fréquence de réveil | Fréquence d'hibernation (P09.51) ~ Fréquence maximale P01.10 | 0,00 Hz | |
| P09.50 | Retard de réveil temps | 0,0 s ~ 6 500,0 s | 0,0s | |
| P09.51 | Fréquence du sometimeil | 0,00 Hz ~ Fréquence de réveil P09.49 | 0,00 Hz | |
| P09.52 | Délambda de mise en veille | 0,0 s ~ 6 500,0 s | 0,0s | |
| P09.53 | Heure d'acciviée de ce opération | 0,0 ~ 6500,0Min | 0.0Min | |
| P09.54 | Facteur de correction de la puissance de sortie | 0,00% 200,0% | 100,0% | |
| Groupe P10 D'éfait et protection | ||||
| P10.00 | Surcharge du moteur protection | 0: Désactiver, 1: Activer | 1 | |
| P10.01 | Surcharge du moteur gain de protection | 0,20 10,00 | 1,00 | |
| P10.02 | Surcharge du moteur alerte précoce facteur | 50 100% | 80% | |
| P10.07 | Court-circuit à protection de terre lors de la mise sous tension | 0: Désactiver, 1: Activer | 1 | |
| P10.08 | Unité de freinage tension de démarrage | 650,0 V 800,0 V | 690V | |
| P10.09 | Défaut automatique temps de réinitialisation | 0 20 | 0 | |
| P10.10 | Agir sélectionpendant défaut automatique réinitialiser | 0: Aucune action 1: Action | 0 | |
| P10.11 | Intervalle pour Défaut automatique réinitialiser | 0,1 s à 100,0 s | 1,0s | |
| P10.12 | Protection contre la perte de phase d'entrée/Protection contre le déclenchement du relais de puissance | Bit unique: protection contre la perte de phase d'entrée 0: Désactiver, 1: Activer Ten Bit: protection contre le déclenchement du relais de puissance 0: Désactiver, 1: Activer | 11 | |
| P10.13 | Protection contre la perte de phase de sortie | 0: Désactiver, 1: Activer | 1 | |
| P10.14 | Premier échec taper | 0: Pas de faute 1: (Réserve) | • | |
| P10.15 | Deuxième éché taper | 2: Surintensité dans le processus Acc3: Surintensité dans le processus de déc.4: Surintensité en constantevitesse5: Surtension dans le processus Acc6: Surtension dans le processus de déc.7: Surtension à vitesse constante8: Surcharge de la résistance tampon9: Sous-tension10: Surcharge du variateur de fréquence11: Surcharge du moteur12: Perte de phase d'entrée13: Perte de phase de sortie14: Le module d'alimentation est surchauffé15: Défaut externe16: Exception de communication17: Le relais de puissance est anormal18: D'étection de courant anormal19: Le réglage du moteur est anormal21: Lecture et écriture des paramètresexception22: Autre matériel anormal23: Court-circuit du moteur à la terre26: Arrivée à l'heure d'exécution27: Erreur personnelisée de l'utilisateur 128: Erreur personnelisée de l'utilisateur 229: L'heure de la mise sous tension arrivé30: Chute de charge31: Le retour d'information PID d'exécution est perdu40: Délai d'expiration de la limite de début rapide41: Commutez le moteur pendant lefonciptionnement42: L'écart de vitesse est trop important | . | |
| P10.16 | Troisième typede défaut (le plus récent) | . | ||
| 43 : Survitesse du moteur | ||||
| P10.17 | Fréquence à la troisième panne (la plus récente) | • | ||
| P10.18 | Actuel à la troisième défaut (le plus récent) | • | ||
| P10.19 | Tension du bus au troisième défaut (le plus récent) | • | ||
| P10.20 | Borne d'entrée statut au troisième (le plus récent) échec | • | ||
| P10.21 | Borne de sortie statut au troisième (le plus récent) échec | • | ||
| P10.22 | L'onduleur statut au troisième (le plus récent) échec | • | ||
| P10.23 | Temps de mise sous tension pour le troisième (le plus récent) échec | • | ||
| P10.24 | Durée d'exécution du troisième échec (le plus récent) | • | ||
| P10.27 | Fréquence à la deuxième échec | • | ||
| P10.28 | Actuel à la deuxième échec | • | ||
| P10.29 | Tension du bus à deuxieme faute | la | • | |
| P10.30 | Borne d'entrée statut pour le deuxième échec | • | ||
| P10.31 | Borne de sortie statut à la第二种 échec | • | ||
| P10.32 | L'onduleur statut à la第二种 échec | • | ||
| P10.33 | Temps de mise sous tension pour le第二种 échec | • | ||
| P10.34 | Durée d'exercution du第二种 échec | • | ||
| P10.37 | Fréquence à la première échec | • | ||
| P10.38 | Courant au premier échec | • | ||
| P10.39 | Tension du bus à la première panne | • | ||
| P10.40 | Borne d'entrée statut au premier échec | • | ||
| P10.41 | État du terminal de sortie au premier échec | • | ||
| P10.42 | L'onduleur statut au premier échec | • | ||
| P10.43 | Temps de mise sous tension pour le premier échec | • | ||
| P10.44 | Durée d'exécution du | • | ||
| premier échec | ||||
| P10.47 | Protection contre les pannes action sélection 1 | Bit unique: surcharge du moteur (Err11)Dix bits: perte de phase d'entrée (Err12)Cent bits: perte de phase de sortie,(Err13)Mille bits: D'éfaut externe(Err15)Dix mille bits:Exception de communication(Err16)0: Route jusqu'àl'arrêt; 1: Mode arrêt par arrêtP07.10 2: | 00000 | |
| P10.48 | Protection contre les pannes action sélection 2 | Continuer à courir; Un seul bit/Cent bits/Mille bits: (Réserve)Dix bits: paramètre lu etException d'écriture (Err21)Dix mille bits: durée d'exécutionarrivée (Err26)0: Arrêt en roue libre;1: Mode arrêt par arrêt P07.10 Bit | 00000 | |
| P10.49 | Protection contre les pannes action sélection 3 | unique: D'éfaut personnelé de l'utilisateur 1 (Err27)Dix bits: erreur personnelé de l'utilisateur 2(Err28)Hundred Bit: Temps de mise sous tensionarrive (Err29)Mille bits: chute de charge (Err30)0: Arrêt en rouelibre; 1: Arrêt en mode Stop P07.102: Saut à 7 % de la fréquence nominale du moteur et mainien dufonctionnement, retour à la fréquence définie lorsque | 00000 | |
| récapération de chargeDix mille bits : rétroaction PIDperte (Err31)0: Arrêt en roulelibre ; 1: Arrêt en mode Stop P07.102: Continuer à | ||||
| P10.50 | Sélection de l'action de protection contre les défauts | rouler ; Bit unique : Écart de vitesse trop important (Err42)Dix bits : survitesse du moteur (Err43)Cent Bit : (Réservé)4Mlle bits : erreur de retour de vitesse (Err52)0: Arrêt en roue libre;1: Arrêt en mode Stop P07.10 2:Continuer à fonctionner ; | 00000 | |
| P10.54 | Continuer à exécuter la sélection de fréquence en cas d'éché | 0: La fréquence actuelle 1: Lafréquence de réglage 2:Fonctionnement à la fréquence limite supérieure 3: Fonctionnement à la fréquence limite inférieure 4: Fonctionnement à une réservé anorfréquence | 0 | |
| P10.55 | Réserve anormalefréquence | 0,0%~100,0% (100,0% correspond à la fréquence maximale P01.10 | 100,0% | |
| P10.59 | Puissance instantanée sans interruption | 0: Invalid 1: Réduisez le vitesse; 2: Arrêt par décélération | 0 | |
| P10.60 | La Pause tension de jugement de puissance instantanée sans interruption | 80,0 % 100,0 % (tension de bus standard) | 90,0% | |
| P10.61 | Rétablissement de la tensionLe temps du jugement Puissance instantanée | 0,00 s à 100,00 s | 0,50 s | |
| sans escale | ||||
| P10.62 | La tension de jugement de la puissance instantanée sans interruption | 60,0 % ~ 100,0 % (tension de bus standard) | 80,0% | |
| P10.71 | Gain instantané puissance non-stop | 0 100 | 40 | |
| P10.72 | Intégral coefficient de Puissance instantanée sans interruption | 0 100 | 30 | |
| P10.73 | Temps de décelération de Puissance instantanée non-stop | 0 300,0 s | 20,0s | |
| P10.63 | Protection contre les chutes de charge sélection | 0: Invalide, 1: valide | 0 | |
| P10.64 | Niveau de détention de chute de charge | 0,0 100,0 % | 10,0% | |
| P10.65 | Chute de charge temps de détention | 0,0 ~ 60,0 s | 1,0s | |
| P10.67 | Survitesse valeur de détention | 0,0% ~ 50,0% (Fréquence max. P01.10 ) | 20,0% | |
| P10.68 | Temps de détention de survitesse | 0,0 s: non détectable 0,1 ~ 60,0 s | 1,0s | |
| P10.69 | La détction valeur pour la vitesse déviation aussi grand | 0,0% ~ 50,0% (Fréquence max. P01.10 ) | 20,0% | |
| P10.70 | La détction l'heure de la vitesse déviation aussi grand | 0,0s: 0,1 ~ 60,0s | 5,0s | |
| Fonction PID du groupe P11 | ||||
| P11.00 | Canal d'entrée PID | 0: paramètre P11.011 AI12AI23 AI34: Réglage de l'impulsion (DI5)5: Cadre de communication6: Vitesse à plusieurs niveaux7: Paramètres de l'encodeur du clavier | 0 | |
| P11.01 | Réglage de l'entrée de référence numérique | 0,0 à 10,00 | 3,00 | |
| P11.02 | Rétroaction PID canal | 0 AI11 AI22AI33: AI1-AI24: Réglage de l'impulsion (DI5)5: Cadre de communication6: AI1 + AI27: MAX (|AI1|, |AI2|)8 MIN |AI1|, |AI2| | 0 | |
| P11.03 | Polarité PID | 0: Sens positif,1: Sens négatif | 0 | |
| P11.04 | Plage de PID-retour | 0 100,00 kg | 10,00 | |
| P11.05 | Gain proportionnelKP02 | 0,0 100,0 | 20.0 | |
| P11.06 | Temps d'intégrationTi1 | 0,01 s à 10,00 s | 2,00 s | |
| P11.07 | Temps dérivéTd1 | 0,000 s ~ 10,000 s | 0,000 s | |
| P11.08 | Inversion PIDfréquence de coupure | 0,00 ~ Fréquence maximale | 2,00 Hz | |
| P11.09 | La limite du PIDdéviation | 0,0% 100,0% | 1,0% | |
| P11.10 | Limiteur différentiel du PID | 0,00% 100,00% | 0,10% | |
| P11.11 | Temps de changement du signal d'entrée PID | 0,00 à 650,00 s | 0,00 s | |
| P11.12 | Rétroaction PID temps de filtration | 0,00 à 60,00 s | 0,00 s | |
| P11.13 | Le temps de filtrage de la sortie PID | 0,00 à 60,00 s | 0,00 s | |
| P11.15 | Gain proportionnel KP03 | 0,0 100,0 | 20.0 | |
| P11.16 | Temps d'intégration Ti2 | 0,01 s à 10,00 s | 2,00 s | |
| P11.17 | Temps dérivé Td2 | 0,000 s ~ 10,000 s | 0,000 s | |
| P11.18 | Le PID commutation des paramètres conditions | 0: Pas de commutateur1: Commutation via le terminal DI2: Commutation automatique selon la déviation | 0 | |
| P11.19 | Le PID commutation des paramètres D'éviation 1 | 0,0% P11,20 | 20,0% | |
| P11.20 | Le PID commutation des paramètres D'éviation 2 | P11,19 100,0 % | 80,0% | |
| P11.21 | Valeur initiale du PID | 0,0% 100,0% | 0,0% | |
| P11.22 | Temps de maintainen de PID Initial | 0,00 à 650,00 s | 0,00 s | |
| P11.23 | Écart positif maximal de deux sorting | 0,00% 100,00% | 1,00% | |
| P11.24 | Écart maximal déviation de deuxvoir | 0,00% 100,00% | 1,00% | |
| P11.25 | La propriété intégrale PID | Bit unique: séparation intégrale0 : non valide, 1 : validerix bits : lorsque la fréquenceatteint les limites0 : Continuer la régulation intégrale,1 : Arrêteur la régulation intégrale | 00 | |
| P11.26 | Rétroaction PIDdetection de perte valeurs | 0,1% ~ 100,0% (0,0% : (Non détention) | 0,0% | |
| P11.27 | Rétroaction PIDdetection de perte temps | 0,0 s 20,0 s | 0,0s | |
| P11.28 | Le PIDfermeropération | 0 : Arrêt sans fonctionnement PID,1 : Arrêt avec le fonctionnement PID | 0 | |
| Groupe P12 - Fréquence de swing, longueur fixe et comptage | ||||
| 12h00 | Mode de réglage de lafréquence de swing | 0 : Par rapport au centreFréquence P01.07 1 :Par rapport à la fréquencemaximale P01.10 | 0 | |
| P12.01 | Plage defréquences de swing | 0,0% 100,0% | 0,0% | |
| P12.02 | La plage defréquence de saut | 0,0% 50,0% | 0,0% | |
| P12.03 | Cycle defréquence de swing | 0,1 s à 3000,0 s | 10,0s | |
| P12.04 | Temps de montée deonde triangulairede la fréquence de swing | 0,1% 100,0% | 50,0% | |
| P12.05 | Réglage de la longueur | 0 m à 65 535 m | 1000m | |
| P12.06 | Longueur réelle | 0 m à 65 535 m | 0m | |
| P12.07 | Nombre d'impulsions par mètre | 0,1 6553,5 | 100,0 | |
| P12.08 | Nombre de paramètres valeur | 1 65535 | 1000 | |
| P12.09 | Spécifie la valeur du compte | 1 65535 | 1000 | |
| Groupe P13 Vitesse à plusieurs étages, PLC simple | ||||
| 13h00 | Vitesse à plusieurs niveaux 0 (MS0) | -100,0% 100,0% (Fréquence max. P01.10 ) | 0,0% | |
| P13.01 | Vitesse à plusieurs niveaux 1 (MS1) | 0,0% | ||
| P13.02 | Vitesse à plusieurs niveaux 2 (MS2) | 0,0% | ||
| P13.03 | Vitesse à plusieurs niveaux 3 (MS3) | 0,0% | ||
| P13.04 | Vitesse à plusieurs niveaux 4 (MS4) | 0,0% | ||
| P13.05 | Vitesse à plusieurs niveaux 5 (MS5) | 0,0% | ||
| P13.06 | Vitesse à plusieurs niveaux 6 (MS6) | 0,0% | ||
| P13.07 | Vitesse à plusieurs niveaux 7 (MS7) | 0,0% | ||
| P13.08 | Vitesse à plusieurs niveaux 8 (MS8) | 0,0% | ||
| P13.09 | Vitesse à plusieurs niveaux 9 (MS9) | 0,0% | ||
| P13.10 | Vitesse à plusieurs niveaux 10 (MS10) | 0,0% | ||
| P13.11 | Vitesse à plusieurs niveaux 11 (MS11) | 0,0% | ||
| P13.12 | Vitesse à plusieurs niveaux 12 (MS12) | 0,0% | ||
| P13.13 | Vitesse à plusieurs niveaux 13 (MS13) | 0,0% | ||
| P13.14 | Vitesse à plusieurs niveaux 14 (MS14) | 0,0% | ||
| P13.15 | Vitesse à plusieurs niveaux 15 (MS15) | 0,0% | ||
| P13.16 | Mode de fonctionnement PLC | 0: Fin d'une opération unique1: Valeur finale à la fin d'une opération unique2: Toujours faire du vêlo | 0 | |
| P13.17 | Sauvegarde de l'état de fonctionnement de l'automate après une mise hors tension | Bit unique: en cas de chute de puissanceDix bits: quand s'arrête0: Ne pas enregistrer1: Sauvegarde. | 00 | |
| P13.18 | Vitesse à plusieurs étages, autonomie 0 | 0,0 s (h) à 6 553,5 s (h) | 0,0 s (h) | |
| P13.19 | Temps d'accélération/décélération de MS 0 | 0 3 | 0 | |
| P13.20 | Vitesse à plusieurs niveaux 1 durée d'exéciution | 0,0 s (h) à 6 553,5 s (h) | 0,0 s (h) | |
| P13.21 | Temps d'accélération/décélération de MS 1 | 0 3 | 0 | |
| P13.22 | Vitesse à plusieurs niveaux 2 durées d'exéciution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.23 | Temps d'accélération/décélération de MS 2 | 0 3 | 0 | |
| P13.24 | Autonomie à plusieurs niveaux, vitesse 3 | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.25 Temps d'accélération/décélération de | 0 3 | 0 | 0 | |
| MS 3 | ||||
| P13.26 | Vitesse à plusieurs niveaux4 durées d'exécution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.27 | Temps d'accéléation/décélération deMS 4 | 0 3 | 0 | |
| P13.28 | Autonomie à plusieurs niveaux, vitesse 5 | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.29 | Temps d'accéléation/décélération deMS 5 | 0 3 | 0 | |
| P13h30 | Vitesse à plusieurs niveaux6 durées d'exécution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.31 | Temps d'accéléation/décélération deMS 6 | 0 3 | 0 | |
| P13.32 | Vitesse à plusieurs niveaux7 durée d'exécution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.33 | Temps d'accéléation/décélération deMS 7 | 0 3 | 0 | |
| P13.34 | Vitesse à plusieurs niveaux, 8heures d'autonomie | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.35 | Temps d'accéléation/décélération deMS 8 | 0 3 | 0 | |
| P13.36 | Vitesse à plusieurs niveaux9 durée d'exécution | 0,0 s (h) ~ 6 553,5 s (h) | 0,0 s (h) | |
| P13.37 | Temps d'accéléation/décélération deMS 9 | 0 3 | 0 | |
| P13.38 | Vitesse à plusieurs niveaux 10heures d'autonomie | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.39 | Temps d'accéléation/décélération deMS 10 | 0 3 | 0 | |
| P13.40 | Vitesse à plusieurs niveaux11 durée d'exécution | 0,0 s (h) à 6 553,5 s (h) | 0,0 s (h) | |
| P13.41 | Temps d'accéléation/décélération deMS 11 | 0 3 | 0 | |
| P13.42 | Vitesse à plusieurs niveaux 12 durée d'exercution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.43 | Temps d'accelération/décélation de MS 12 | 0 3 | 0 | |
| P13.44 | Autonomie à plusieurs niveaux, vitesse 3 | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.45 | Temps d'accelération/décélation de MS 3 | 0 3 | 0 | |
| P13.46 | Vitesse à plusieurs niveaux 14 durée d'exercution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.47 | Temps d'accelération/décélation de MS 14 | 0 3 | 0 | |
| P13.48 | Vitesse à plusieurs niveaux 15 durée d'exercution | 0,0 s (h) ~ 6553,5 s (h) | 0,0 s (h) | |
| P13.49 | Temps d'accelération/décélation de MS 15 | 0 3 | 0 | |
| P13.50 | Unité de vitesse à plusieurs étages Acc/temps | 0: s (seconds) 1: h (heures) | 0 | |
| P13.51 | Source du signal de Vitesse à plusieurs niveaux 0 (MSO) | 0: Paramètre P13.00 1 AI1 2 AI2 3 AI3 4: Pouls (DI5) 5: PID 6: Fréquence des prépositions P01.08 7: Peut être modifiée par la touche ▲/▼ | 0 | |
| Paramètres de communication RS485 du groupe P14 | ||||
| 14h00 | Réglage du début en bauds pour RS485 | Bit unique: MODBUS 0: 300 BPS 1: 600 BPS 2: 1 200 BPS 3: 2 400 BPS 4: 4 800 BPS 5: 9 600 BPS 6: 19 200 BPS 7: 38 400 BPS | 5 | |
| 8 : 57 600 BPS 9 : 115 200 BPS | ||||
| P14.01 | Données MODBUS format | 0 : Aucune vérification (8.N-2)1 : Contrôle de parité (8.E-1)2 : Vérification impaire (8.O-1)3 : Pas de contrôle (8.N-1) | 0 | |
| P14.02 | Adresse locale | 0 : adresse de diffusion1247(MODBUS) | 1 | |
| P14.03 | MODBUSDélai de réponse | 0 à 20 ms | 2 | |
| P14.04 | Délai d'expiration deRS485 | 0.0 : non valide0,1 ~ 60,0 s | 0,0 | |
| P14.05 | MODBUSSélection du protocole | 0 : MODBUS non standardprotocole1 : Protocole MODBUS standard | 1 | |
| P14.06 | ActuelRésolution du 485lire | 0 : 0,01 A1 : 0,1 A | 0 | |
| Groupe P15 Paramètres spéciaux pour l'alimentation en eau à pression constante | ||||
| 15,00 P | Déboge de macro simplefonction | 0 : Aucune fonction1 : Un entrainement pour deuxpompes 2 : Alimentation en eau de lacommunautédu bâtiment 3 : Alimentationen eau de l'hôtel 4 :Alimentation en euid'incendie 5 : Pompe de | 0 | |
| P15.01 | Réveillez-vouspression | surpression 6 : Pompe à eau profonde 0~KG (1 kg = 0,1 MPa) | Pression de veille2,50 kg | P15.0 |
| P15.02 | Temps de retard deréveillez-vous | 0,0 s ~ 6 500,0 s | 0s | |
| P15.03 | Pression du sommeil | Réveil pres P15.01 ~ Plagede manomètre (0,1 MPa) | 3,50 kg | |
| P15.04 Délai de mise en veille | 0,0 s ~ 6 500,0 s | 60,0s | ||
| P15.05 | PressionLiaison proportionnelle | 0: Désactiver;1: Activer | 1 | |
| P15.06 | Réveillez-vous pression différence | 0 ~ 100,0 bars (kg, 0,1 MPa) | 0,50 kg | |
| P15.07 | Différence de pression de sommell | 0 ~ 100,0 bars (kg) | 0,50 kg | |
| P15.08 | Valeur d'alarme de surpression | Plage de manomètre 0,00~KG(1KG=0,1Mpa=1Bar) | 9,00 kg | |
| P15.09 | Temps de retard de Suppression alarme | 0-6553.5S | 0,0S | |
| P15.10 | Basse pression valeur d'alarme | Plage de manomètre 0,00~KG(1KG=0,1Mpa=1Bar)Le paramètre ouvre l'alarme de basse pression. | 0,0 kg | |
| P15.11 | Délai de temporisation de l'alarme de basse pression | 0-6553.5S | 20.0S | |
| P15.12 | Consommation d'eau pression de démarrage | 0~Plage de manomètre KG Ouvrir le contrôle marche-arrêt de la prise d'eau via P01.02=3L'arrivée d'eau doit utiliser le capteur de courant de l'Al2Pour le capteur de tension, changez le cavalier Al2 | 3,00 kg | |
| P15.13 | Fermeture d'admission pression | Plage de mesure de pression 0~KG(Bar) | 3,20 kg | |
| P15.14 | Nombre de pompes auxiliaires | 0~3 | 0 | |
| P15.15 | temps d'accente de Pompeux auxiliaire | 0 ~ 1000.0S | 60.0S | |
| s'allume | ||||
| P15.16 | Temps d'atte nt pour l'interrupteur de la pompe auxiliaire | 0 ~ 1000.0S | 5.0S | |
| P15.17 | Réglage de la fréquence d'activation du relais RO1 | 0 à 50 HzLorsqu'il atteint la valeur, leLe relais s'allumera | 50,00 | |
| P15.18 | Réglage de la fréquence d'arrêt du relais RO1 | 0 à 50 HzLorsqu'il atteint la valeur, leLe relais s'eteint | 30,00 | |
| P15.19 | Source du signal de Niveau d'eau contrôleur | 0: la fonction n'est pas valide1: AI12 AI23 : AI3P15.19=1~3 ,Le(P15.20, P15.21, P15.22, P15.23) le réglage est valide, P15.19=0, paramètres non valides. | 0 | |
| P15.20 | Vanne de sommeil pour le niveau d'eau Contrôleur | 0,0 100,0%Le signal est inférieur à ce paramètre continue P15.21 temps, veille et avertissement de plein d'eau (ErrH) | 25,0% | |
| P15.21 | Niveau d'eau plein retard | 0 ~ 1000.0S Le retard de P15.20 réglage de l'heure. | 6.0S | |
| P15.22 | Délai de vidange de l'eau pour l'eau contrôleur de niveau | 0 ~ 1000.0S Dans l'état d'ajretissement de niveau d'eau plain (ErrH), lorsque le signal du contrôleur de niveau d'eau est supérieur à P15.20 et continue P15.22 fois, l'avertissement de niveau d'eau plein est effacé et rétabli à la État. | 60.0Snormale | |
| P15.23 | Valeur de jugement pour les dommages causés par la sonde hydraulique (contrôleur de niveau d'eau) | 0,0% : Fonction non valide. 0,1 à 100,0 % : lorsque le niveau d'eau le signal du contrôleur est supérieur à celui affché par P15.23 (E.tSF) défaut et arrêt | 0,0% | |
| P15.24 | Protection contre la pénurie d'eau fonction | 0 : Désactiver ; 1 : Activer et juger par fréquence et | 0 | |
| P15.25 | Pénurie d'eau valeur de contrôle de défaut | pression 0,00 Valeur de réglage KG (Bar/0,1 Mpa) Valable lorsque P15.19=1, la pénurie d'eau est déterminée lorsque le retour la valeur est inférieure à cette valeur | 0,50 | |
| P15.26 | Protection contre la pénurie d'eau détéction fréquence | 0 ~ 50,00 Hz Valable lorsque P15.19=1 lorsque la fréquence de fonctionnement est supérieure ou égale à cette fréquence et la pression est inférieure ou égale à 15,25, jugez la pénurie d'eau. | 50,00 | |
| P15.27 | Délambda de protection contre le manque d'eau détéction | 0 6553.5S Délai de temporisation pour jugement d'alarme de défaut de manque d'eau. | 10 | |
| P15.28 | Pression effective entrante | 0 Plage de manomètre KG (Bar/0,1Mpa) de l'eau | 3,00 | |
| P15.29 | Eau entrante temps de détéction | 0 ~ 9999S Heure d'arrivée de l'eau détéction | 20.0S | |
| P15.30 | Fuite d'eau et redémarrer montant de l'écart | Plage de mesure de pression 0 (Bar/0,1Mpa) | KG 0 | |
| P15.31 | Fuite d'eau et puis démarrez le valeur de return | Plage de mesure de pression OKG (Bar/0,1Mpa) | 0 | |
| P15.32 | Fuite d'eau puis démarrage du valeur de return temps de détction | 0 : AUCUNE fonction 0.1.10.0S | 2.0S | |
| P15.33 | Mode veille | 0 : Désactiver1 : Dormir lorsque la pression est supérieure à la pression de sommeil ;2 : Dormir lorsque la fréquence de course est inférieure à la fréquence des sommeil (affecté par P15.29)3 : Dormez lorsque la pression est supérieure à la pression de sommeil et que la fréquence de course est inférieure à la fréquence de sommeil. | 0 | |
| P15.34 | Fréquence de sortie du sommeil | 0P01.12 | 20,0 Hz | |
| Groupe P17 Gestion du code fonctionnel | ||||
| P17.00 Mot de passeruse utilisateur | 0 65535 | 0 | ||
| P17.01 | Paramètre initialisation | 0 : Aucune opération01 : Restaurer les paramètres d'usine, à l'exclusion des paramètres du moteur02 : effacer les informations d'enregistrement | 0 | |
| P17.04 | La fonction le code modifie propriétés | 0 : Modifiable1 : Non modifiable | 0 | |
| Groupe P18 Paramètres de contrôle du couple | ||||
| 18h00 | Mode de contrôle de la vitesse/du couple | 0 : Contrôle de la vitesse,1 : Contrôle du couple | 0 | |
| P18.01 | Réglage du couple de serrage sélection de la source sous couple mode de contrôle | 0: Paramètres numériques 1: (P18.03) 1 AI1 2AI2 3: AI3 4: Paramètre PLUSE 5: Paramètre de communication 6: MIN (AI1, AI2) 7: MAX (AI1, AI2) | 0 | |
| P18.03 | Réglage numérique sous le mode de contrôle | -200,0% 200,0% (P18,01=0) 150,0% | 50,0% | |
| P18.05 | Le Max fréquence directe pour Contrôles de couple | 0,00 Hz ~ Fréquence maximale | P01.10 | 50,00 Hz |
| P18.06 | Le Max fréquence inverse pour Contrôles de couple | 0,00 Hz ~ Fréquence maximale | P01.10 | 50,00 Hz |
| P18.07 | Contrôle du couple Temps d'acc | 0,00 s ~ 65 000 s | 0,00 s | |
| P18.08 | Contrôle du couple Heure de décembre | 0,00 s ~ 65 000 s | 0,00 s | |
| Groupe P23 Paramètres d'optimisation du contrôle | ||||
| P23.00 | Fréquence limite supérieure pour Commutateur DPWM | 5,00 Hz ~ Fréquence maximale | P01.10 | 8,00 Hz |
| P23.01 | Modulation PWM mode | 0: Modulation asynchrone, 1: Modulation synchrone | 0 | |
| P23.03 | PWM aléatoire profondeur | 0: PWM aléatoire non valide 1 10: Profondeur aléatoire de la fréquence porteuse PWM | 0 | |
| P23.04 | Débit rapide limitant | 0: Désactiver, 1: Activer | 1 | |
| P23.06 | Sous-tensionRéglage de la valeur | 200,0 V ~ 2 200,0 V | 350V | |
| P23.09 | SurpressionRéglage de la valeur | 200,0 V ~ 2 200,0 V | 270V | |
| P23.10 | Transporteur automatiquechangement de fréquence àbasse fréquence | 0 : Désactiver,1 : Activer | 1 | |
| P23.11 | Vitesse zérosortie en cours d'exécutioncontrôle | 0 : Désactiver,1 : Activer | 1 | |
| P23.12 | Sensibilité dePerte de phase de puissanceprotection | 0 à 30,0 % | 13,0% | |
| Réglage de la courbe Al du groupe P24 | ||||
| P24.00 | Entrée minimale de l'IACourbe 4 | -10,00 V ~ P24,02 | 0,00 V | |
| P24.01 | Correspondantrapport de P24,00 | -100,0% +100,0% | 0,0% | |
| P24.02 | Tournier 1 desJ'ai des putes 4 | P24.00 P24.04 | 3,00 V | |
| P24.03 | Correspondantrapport de P24,02 | -100,0% +100,0% | 30,0% | |
| P24.04 | Tournier 2 de laJ'ai des putes 4 | P24.02 P24.06 | 6,00 V | |
| P24.05 | Correspondantrapport de P24,04 | -100,0% +100,0% | 60,0% | |
| P24.06 | Entrée maximale duJ'ai des putes 4 | P24.06 +10.00V | 10,00 V | |
| P24.07 | Correspondant rapport de P24,06 | -100,0% +100,0% | 100,0% | |
| P24.08 | Entrée minimale de l'IA courbe 5 | -10,00 V ~ P24,10 | -10,00 V | |
| P24.09 | Correspondant rapport de P24,08 | -100,0% +100,0% | -100,0% | |
| P24.10 | Tour 1 de l'IA courbe 5 | P24.08 P24.12 | -3,00 V | |
| P24.11 | Correspondant rapport de P24.10 | -100,0% 100,0% | -30,0% | |
| P24.12 | 2ème anniversaire la courbe d'IA 5 | P24.10 P24.14 | 3,00 V | |
| P24.13 | Correspondant rapport de P24,12 | -100,0% 100,0% | 30,0% | |
| P24.14 | Entrée max. de la courbe d'IA 5 | P24.12 +10.00V | 10,00 V | |
| P24.15 | Correspondant rapport de P24,14 | -100,0% 100,0% | 100,0% | |
| P24.24 | Point de saut de le AI1 | -100,0% 100,0% | 0,0% | |
| P24.25 | Portée de saut de le AI1 | 0,0% à 100,0% | 0,5% | |
| P24.26 | Point de saut de le AI2 | -100,0% 100,0% | 0,0% | |
| P24.27 | Portée de saut de le AI2 | 0,0% à 100,0% | 0,5% | |
| P24.28 | Point de saut de l'Al3 | -100,0% 100,0% | 0,0% | |
| P24.29 | Portée de saut de l'Al3 | 0,0% à 100,0% | 0,5% | |
| Groupe P30 Correction pour l'IA et l'AO | ||||
| P30.00 | AI1 Mesuré tension 1 | 0,500 V à 4,000 V | Usine correction | |
| P30.01 | Tension d'affichage Al1 1 | 0,500 V à 4,000 V | Correction d'usine | |
| P30.02 | AI1 mesuré tension 2 | 6,000 V à 9,999 V | Correction d'usine | |
| P30.03 | Tension d'affichage Al1 2 | 6,000 V à 9,999 V | Correction d'usine | |
| P30.04 | AI2 mesuré tension 1 | 0,500 V à 4,000 V | Usine correction | |
| P30.05 | Tension d'affichage Al2 1 | 0,500 V à 4,000 V | Usine correction | |
| P30.06 | AI2 mesuré tension 2 | 6,000 V à 9,999 V | Usine correction | |
| P30.07 | Tension d'affichage Al2 2 | 6,000 V à 9,999 V | Usine correction | |
| P30.08 | AI3 Mesuré tension 1 | -9,999 V à 10,000 V | Usine correction | |
| P30.09 | Tension d'affichage Al3 1 | -9,999 V à 10,000 V | Usine correction | |
| P30.10 | AI3 mesuré tension 2 | -9,999 V à 10,000 V | Correction d'usine | |
| P30.11 | Tension d'affichage AI3 2 | -9,999 V à 10,000 V | Usine correction | |
| P30.12 | Tension cible AO1 1 | 0,500 V à 4,000 V | Usine correction | |
| P30.13 | AO1 Mesuré | 0,500 V à 4,000 V | Correction | d'usine |
| P30.14 | Tension 1 Tension cible AO1 2 | 6,000 V à 9,999 V | Correction | d'usine |
| P30.15 | AO1 Mesuré | 6,000 V à 9,999 V | Usine correction | |
| P30.16 | Tension 2 Tension cible AO2 1 | 0,500 V à 4,000 V | Usine correction | |
| P30.17 | AO2 Mesuré | 0,500 V à 4,000 V | Usine correction | |
| P30.18 | Tension 1 Tension cible AO2 2 | 6,000 V à 9,999 V | Usine correction | |
| P30.19 | AO2 Mesuré | 6,000 V à 9,999 V | Usine correction | |
tension 2
4. Alarme de défaut et contre-mesures
| Affiche le | nom du defaulted | Cause possible de l'échec | Dépannage |
| Err01 | Protection du module de puissance | La puissance du moteur est trop élevé ou le câblage est en court-circuit Module d'alimentation endommagé | Retirez le cable du moteur et redémarrez-le. En cas de problème, réparez l'onduleur |
| Err02 | Défaut de sous-tension | La tension d'entrée est anormale ou le relais d'alimentation n'est pas engagé ou la détction de tension | Vérifiez la tension d'alimentation ou contactez le fabricant pour有關ir une assistance. |
| faute | |||
| Err31 | Surtension lors de l'accéléation | La tension d'entrée est anormale | Vérifiez l'alimentation d'entrée |
| Redémarrer lorsque le moteur tourne | Prêt à démarrer après freinage CC | ||
| Err32 | Surtension pendant la décélération | Le temps de décélération est trop court | Prolonger le temps de décélération |
| La tension d'entrée est anormale | Vérifiez l'alimentation d'entrée | ||
| Err33 | Surtension à vitesse constante | La tension d'entrée est anormale | Vérifiez l'alimentation d'entrée |
| Err60 | Surcharge de l'onduleur | Mauvais réglage de la courbe V/F ou du couple. | Ajustez la courbe V/F et la quantité de suralimentation du couple |
| Faible tension d'entrée. | Vérifiez la tension d'alimentation | ||
| Le temps d'accéléation est trop court | Prolonger le temps d'accéléation | ||
| La charge du moteur est trop lourde | Sélectionnez un plus puissant Onduleur | ||
| Err61 | Surintensité pendant l'accéléation | Le temps d'accéléation est trop court | Prolonger le temps d'accéléation |
| La puissance de l'ondueur est trop faible | Sélectionnez un ondueur avec un niveau de puissance élevé | ||
| Mauvais réglage de la courbe V/F ou du couple. | Ajustez la courbe V/F ou la quantité d'augmentation du couple | ||
| Err62 | Surintensité pendant la décelération | Le temps de décelération est trop court | Prolonger le temps de décelération |
| La puissance de l'ondueur est trop faible | Sélectionnez l'ondueur avec un niveau de puissance élevé | ||
| Err63 | Surintensité à vitesse constante | Faible tension d'entrée. | Vérifiez la tension d'alimentation |
| le calage du moteur ou la mutation de charge est trop importante | Vérifiez la charge | ||
| La puissance de l'ondueur est trop faible | Sélectionnez un plus puissant Ondueur | ||
| Err64 | Surcharge du moteur | Mauvais réglage de la courbe V/F ou du couple. | Ajustez la courbe V/F ou la quantité d'augmentation du couple |
| Faible tension d'entrée. | Vérifiez la tension d'alimentation | ||
| le calage du moteur ou la mutation de charge est trop importante | Vérifiez la charge | ||
| Le coefficient de protection contre les surcharges du moteur n'est pas réglié correctement | Régler correctement le coefficient de protection contre les surcharges du moteur | ||
| Err65 | Défaut de limitation de courant où par whence | Pareil avec le moteur Surcharge | Pareil avec le moteur Surcharge |
| Err40 | dysfonctionnement matériel | Eau, insectes, etc. | le redémarrage ne peut pas reprendre la réparation d'usine |
| Err41 | Mémoire EEPROMÉchec R/W | Attelage EEPROM | Demander un service au fabricant |
| Err42 | Contrôler les pannes de courant | L'alimentation d'entrée n'est pas dans la plage de specifications | Ajuster la tension aux exigences de Specification |
| Err46 | Défaillance de la détention de courant | Défaut du circuit d'échantillonnage de courant | Demander un service au fabricant |
| Panne du circuit d'entrainment | Demander un service au fabricant | ||
| Err11 | Panne d'équipement externe 1 | La borne d'entrée de défaut externe 1 est fermée | Débranchez le terminal de défaut externe et éliminez le défaut (faites attention à vérifier la cause) |
| Err12 | Échec de la communication | 485 La communication a échéué | Vérifiez la connexion 485 |
| Err13 | Le temps d'exécution accumulé arrive | Le temps de fonctionnement cumulé atteint la valeur définie | Effacer le dossier par Fonction d'initialisation des paramètres |
| Err15 | Panne d'équipement externe 2 | La borne d'entrée de défaut externe 2 est fermée | Débranchez le terminal de défaut externe et éliminez le défaut (faites attention à vérifier la cause) |
| Err16 | L'heure de mise sous tension arrive | La durée de mise sous tension cumulée atteint la valeur définie | Fonction d'initialisation des paramètres pour effacer les enregistre |
| Err17 | Défaillance contact/relais | Défaut du terminal d'entrée de l'équipement externe | Débranchez le terminal de défaut externe et éliminez le défaut (faites attention à vérifier la cause) |
| Err08 | Surchauffe du module d'alimentation | Ventilateur de refroidissement défectueux ou température ambiente surchauffée | Vérifiez le ventilateur ou la dissipation de chaleur ou attendez qu'il refroidisse avant de réessayer |
| Err90 | Défaut de commutation du moteur pendant le fonctionnement | Mauvais contact de la ligne du moteur ou commutateur entre le moteur et l'onduleur | L'onduleur doit être directement connecté au moteur pour vérifier que la ligne du moteur est lâche |
| Err91 | Défait de court-circuit à la terre | Défaut de court-circuit à la terre | Débrancher la ligne de terre (faire attention à vérifier la cause) |
| Err92 | Perte de phase d'entrée | Vérifiez la ligne électrique d'entrée | Demander un service au fabricant |
| Err93 | Perte de phase de sortie | perte de ligne de puissance de sortie ou un circuit de phase pour détecter un courant anormal | Vérifiez la tension de sortie et vérifiez la ligne d'alimentation de sortie |
| Err94 | Pannde survises du moteur | La vitesse du moteur dépasse la vitesse normale | Vérifiez si la charge dispose d'une autre alimentation |
| Err95 | Échec de déviation de vitesse | L'écart de vitesse est trop grand par rapport à la vitesse normale | Vérifiez la charge du moteur |
| Err96 | Perte de rétroaction PID lors de l'exécution | Mauvais contact avec le signal du capteur PID | Vérifiez le signal du capteur |
| Err97 | Défaut de chute de charge | La ligne du moteur est déconnectée | Vérifiez la ligne du moteur |
| Err98 | Surchauffe du moteur | Le moteur surchauffe | Vérifier la tempête du moteur |
| Err99 | Réglage du moteur faute | Les paramètres du moteur ne sont pas définis en fonction de la plaque signalétique ou la ligne de moteur est en mauvais état contact | Régler le moteur paramètres selon la plaque signalétique et vérifier le fil du Onduleur vers le moteur |
| ErrH1 | Eau pénurie | Panne due à une pénurie d'eau | Vérifiez le manque d'eau |
| ErrH2 | Pleine eau Rétablir警告 précoce | l'eau normale L'eau est pleine | pression |
| ErrH3 | Niveau d'eau élevé pression éché | Échec de l'arrêt forcé | Eau trop haute pression, vérifiez la pression de l'eau |
5. Description de l'installation
Lorsque le P17.00 est défini sur une valeur différente de 0, le mot de passé de protection des paramètres est défini. Vous doivent enter le mot de passage avant de modifier les paramètres.
Annulez le mot de passer et le P17.00 doit'être régle sur 0.
Le menu des paramètres en mode paramètre personnelisé utilisé est pas protégé par un mot de passage protégé.
Le groupe P01~P23 est le paramètre de fonction de base, le
groupe P00 est le paramètre de fonction de surveillance.
Les symboles dans le tableau des fonctions sont décrites comme suit : « » : La
valeur définie pour ce paramètre peut etre modifiee lorsque l'onduleur est
État d'arrêt et de fonctionnement;
« » : la valeur définie pour ce paramètre ne peut pas etre modifie lorsque l'onduleur
est en etat d'execution; « »:
la valeur du paramètre est la valeur d'enregistrement détectée réelle et
ne peut pas etre modifie;
: cela signifie que le parametre est le « Paramètre du fabricant » et est
limité au réglage du fabricant pour interdire à l'utilisateur de fonctionner.
Fabrique en Chine
VEVOR
TOUGH TOOLS, HALF PRICE
Assistance technique et certificate de garantielectronique www.vevor.com/support




