
AT1-7500X - Inverter Vevor - Manuale utente e istruzioni gratuiti
Trova gratuitamente il manuale del dispositivo AT1-7500X Vevor in formato PDF.

Domande degli utenti su AT1-7500X Vevor
0 domanda su questo apparecchio. Rispondi a quelle che conosci o fai la tua.
Fai una nuova domanda su questo apparecchio
Scarica le istruzioni per il tuo Inverter in formato PDF gratuitamente! Trova il tuo manuale AT1-7500X - Vevor e riprendi in mano il tuo dispositivo elettronico. In questa pagina sono pubblicati tutti i documenti necessari per l'utilizzo del tuo dispositivo. AT1-7500X del marchio Vevor.
MANUALE UTENTE AT1-7500X Vevor
Supporto tecnico e certificato di garanzia elettronica www.vevor.com/support
Invertitore
MODELLO:AT1-7500X
"Risparmia la metà", "Meta prezzo" o qualsiasi altra espressione simile da nei utilizzata rappresenta solo una stima del risparmio che potresti ottenere acquistando determinati utensili con nei rispetto ai principali marchi principali e non significiva necessariamente coprire tutte le categorie di utensili da nei offerti. Ti ricordiamo gentilmente di verificare attendamente quando effettui un ordine con nei se stai effettivamente risparmiando la metà rispetto ai principali marchi principali.
VEVOR®
TOUGH TOOLS, HALF PRICE
Invertitore
MODELLO:AT1-7500X

HAI BISOGNO DI AIUTO? CONTATTACI!
Hai domande sul prodotto? Hai bisogno di supporto technique? Non esitare a contattarci: Supporto
technico e certificato di garanzia elettronica www.vevor.com/support
Questa è l'istruzione originale, si prega di leggere attendamente tutte le istruzioni del manuale prima di utilizzato. VEVOR si riserva una chiara interpretazione del nostro manuale utente. L'aspetto del prodotto sare soggetto al prodotto ricevuto. Vi preghiamo di perdonarci se non vi informeremo di nuovo se ci sono aggiornamenti technologici o software sul loro prodotto.
IMPORTANT MISURE DI SICUREZZA

Leggere tutte le avventenze di sicurezza, le istruzioni, le illustrazioni e specifiche fornite con questo inverter. La mancata osservanza di tutte le istruzioni elencate di seguito possono causare scosse elettriche, incendi e/o lesioni gravi.
AVVERTIMENTO :
Questa apparecchiatura è un dispositivo ad alta tensione, si prega di non tentare di smontare esta apparecchiatura in qualsiasi momento per evitare pericoli. Dopo che un dispositivo guasto, se l'interruttore esterno non riesce a riavviare il dispositivo, contattare il rivenditore per la gestione.
ATTENZIONE: PERICOLO DI SCOSSE ELETTRICHE E INCENDIO!
- La mancata osservanza di但这a struzione potrebbe causare un guasto elettrico, incendio ed elettrocuzione.
- NON SMONTARE.
- Non immergere l'inverter.
- Non collegare due o più trasformatori in parallelo
- Collegare l'alimentatore direttamente a una presa GFCI per ambienti umidi.
- Nonutilizzareuna prolonga
- L'installazione di questo inverter e del relativo cablaggio deve essere eseguita da personale qualificato elettricista in conformità con tutti i codici elettrici applicabili.
AVVERTIMENTO :
Cambiamenti o modifiche a但这a unità non espressamente approvati alla parte responsabile della conformità potrebbe invalidare l'autorità degli utenti di operare il attrezzatura.
SALVA QUESTE ISTRUZIONI
Informazioni FCC
ATTENZIONE: Cambiamenti o modifiche non espressamente approvati alla parte responsabile della conformità potrebbe invalidare l'autorità dell'utente di utilizzato il attrezzatura!
Questo dispositivo è conforme alla Parte 15 delle Norme FCC. Il funzionamento è soggetti le due condizioni seguenti:
1) Questo prodotto più causare interferenze dannose.
2) Questo prodotto delve accettare qualsiasi interferenza ricevuta, inclusa interferenze che potrebbero causare un funzionamento indesiderato.
ATTENZIONE: Cambiamenti o modifiche a quello prodotto non espressamente approvato alla parte responsabile della conformità potrebbe invalidare l'utente autorità di utilizzare il prodotto.
Note: quello prodotto è stato testato e ritenuto conforme ai limiti per un dispositivo digitale di Classe B ai sensi della Parte 15 delle Norme FCC, Questi limiti sono progettati per fornire una protezione ragionevole contro interferenze dannose in un'installazione residenziale.
Questo prodotto genera, utilizes e può irradiare energia a radiofrequenza e se non installato e utilizzato seconde le istruzioni, può causare interferenza dannosa alle comunicazioni radio. Tuttavia, non vi è alcuna garantire che non si verifichino interferenze in una particolare installmente. Se questo il prodotto provoca interferenze dannose alla radio o alla televisione ricezione, che può essere determinata accendendo e spegnendo il prodotto, il l'utente è incoraggiato a provare a correggere l'interferenza con uno o più dei seguenti misure. y
Riorientare oriposizionare I'antenna ricevente.
Aumentare la distanza tra il prodotto e il ricevitore. y Collegare il prodotto a una presa su un circuito diverso da quello a cui è collegato. il ricevitore è connesso.
y Consultare il rivenditore o un techniciano radio/TV esperto per assistenza.
Smaltimento corretto

Questo prodotto è soggetti alle disposizioni della Direttiva Europea 2012/19/CE. Il simbolo raffigurante un bidone della spazzatura barrato attraverso indica che il prodotto richiede un rifiuto separatore raccolta nelle'Unione Europea. Ciò vale per il prodotto
e tutti gli accessori contrassegnati con quello symbolo. Prodotti contrassegnati come tal non possono essere smaltiti insieme ai normali rifiuti domestici, ma devono essere portati in un punto di raccolta per il riciclaggio di apparecchiature elettriche ed elettroniche
1. Informazioni sul prodotto
Il manuale fornisce precauzioni eindicazioni per la selezione del tipo di utente,
installazione, impostazione dei parametri, messa in servizio del site, diagnosi dei guasti e
manutenzione e mantenimento giornaliero
1.1 Serie inverter
| Serie AT901 | Resistenza di frenatura | |||||
| Modello | Motore adattivo | Produzione Corrente:A | IN | Ohm | ||
| CHiogramma | CV | |||||
| 22 901-7K5G1 | 7.5 | 10 | 34.0 | 600 | 40 | |
1.2 Specifiche del prodotto
| Progetto | Standard | |
| Di base Funzione | Sistema | Convertitore di frequenza universale vettoriale di corrente |
| Guidare | Aerobranchiafusioneefficienzaestazionimodunizazione | |
| PrestazioneFrequenza | Controllo vettoriale: 0-500Hz | |
| Controllo V/F: 0-3200Hz. | ||
| VettoreFrequenza | Da 0,5 kHz a 16 kHz | |
| La frequenza portante più essere regolata | ||
| Frequenzarisoluzione | http://postazione.comilie.it/891011carico | |
| Impostazione simulazione: ±0,025% | ||
| risoluzioneModalità di controllo | Controllo vettoriale ad anello aperto (SVC) | |
| Controllo V/F | ||
| Coppià di spunto | Modalità Tipo G: 0,3 Hz/150% (SVC). | |
| Modalità tipo P: 0,3 Hz/100% 1: 100 | ||
| Gamma di ADJ | (SVC) ± 0,5% (SVC) | |
| Velecità stabile | ||
| Grenazione capacità | Tipio G: 150% corrente nominale 120 s; 180% per 1Topsy P: | |
| 120% corrente nominale per 60 s; 150% per 3A Aumento automatico | ||
| Aumento della copbia | della copbia; MTharnueawl | |
| Curva V/F | taoyrsq:usetrianicgrhetalsinee; 0m.1u%lti--p3o0i.n0t%; N | |
| Curva Acc/ Modalità Dec | Modalità rdisecelerazione14, decelerazione in linea o curva a S, quattro tempi Acc/Dec, intervallo di tempo Acc/Dec | |
| Frenatura a corrente continua | Frequenza di frenata: 0,00 Hz - Frequenza massima; Tempo di frenata: 0,0 s - 36,0 s Valore corrente di frenata: 0,0% -100,0% | |
| Controllo legale | Gamma di frequenza jog: 0,00Hz-50,00Hz; | |
| Tempo di accelerazione e decelerazione: 0,0 s-6500,0 s. | ||
| Velocità fino a 16 segmenti con PLC o controllo integrati | ||
| PID incorporato nel terminale | Può realizare facilemente il systema di controllo a circuito chiuso del controllo di processo | |
| Funzione AVR In caso | di instabilità della tensione di ingresso, la tensione di uscita | |
| Controllo di stallo | può generare valghe e manutenazionate per le corrente frequenti interventi di sovratensione. | |
| Currente velocere limitante | Ridurre al minimo il guasto da sovracorrente e proteggere il normale funzionamento del convertitore di frequenza | |
| Limite di copbia | Limitare automaticamente la copbia durante il funzionamento. | |
| Potenza lstantanea per | prdivinverne iantasse che dovvo, cattentee, oppando l'interruzione | |
| fermigiarima di poter | effettare l'operazione. | |
| Operativo | Comando fonte | Pannello di controllo, terminale di controllo, porta seriale, più essere commutato in più modi |
| Frequenza fonte | Potenziometro del pannello, numero indicato, ingresso analogico esterno di tensione/corrente e ingresso della porta serialle. Può essere commutato in più modi | |
| Terminale di ingresso | Cinque terminali di ingresso digitali | |
| 1 terminale di ingresso di quantità analogica; | ||
| Un ingresso di tensione 0-10 V o di corrente 0-20 mA; | ||
| Produzione terminale | 1 terminale di uscita digitale | |
| 1 terminale di uscita relè (TA, TB, TC) | ||
| 1 terminale di uscita analogico, che supporta l'uscita di tensione 0-10 V o 0-20 mA | ||
| Protezione funzione | Rilevamento di cortocircuito del motore all'accensione, protezione alla perdita di fase in ingresso e in uscita, protezione da sovracorrente, protezione da sovratensione, protezione da sottotensione, protezione da surriscaldamento e protezione da sovraccarico, ecc. | |
| Ciclo L'ambiente | Usa ilippo | Al chiuso, non esesto alla luce solare diretta, non esesto a polvere, gas corrosivi, gas combustibili, nebbia d'olio, vapore, acqua o sale, ecc. |
| Sopra il mare livello | sotto i 1000m 2C116699 | |
| Ambiente temperatura | -10y ~ + 40y (la temperature ambiente è 40y ~50y, si preca di ridurre la quantità) | |
| umidità Inferiore al 95%RH, condensazione anidra | ||
| vibrare | Meno di 5,9 m/s (0,6 g) | |
1.3 Descrizione del circuito di controllo e del terminale del circuito principale
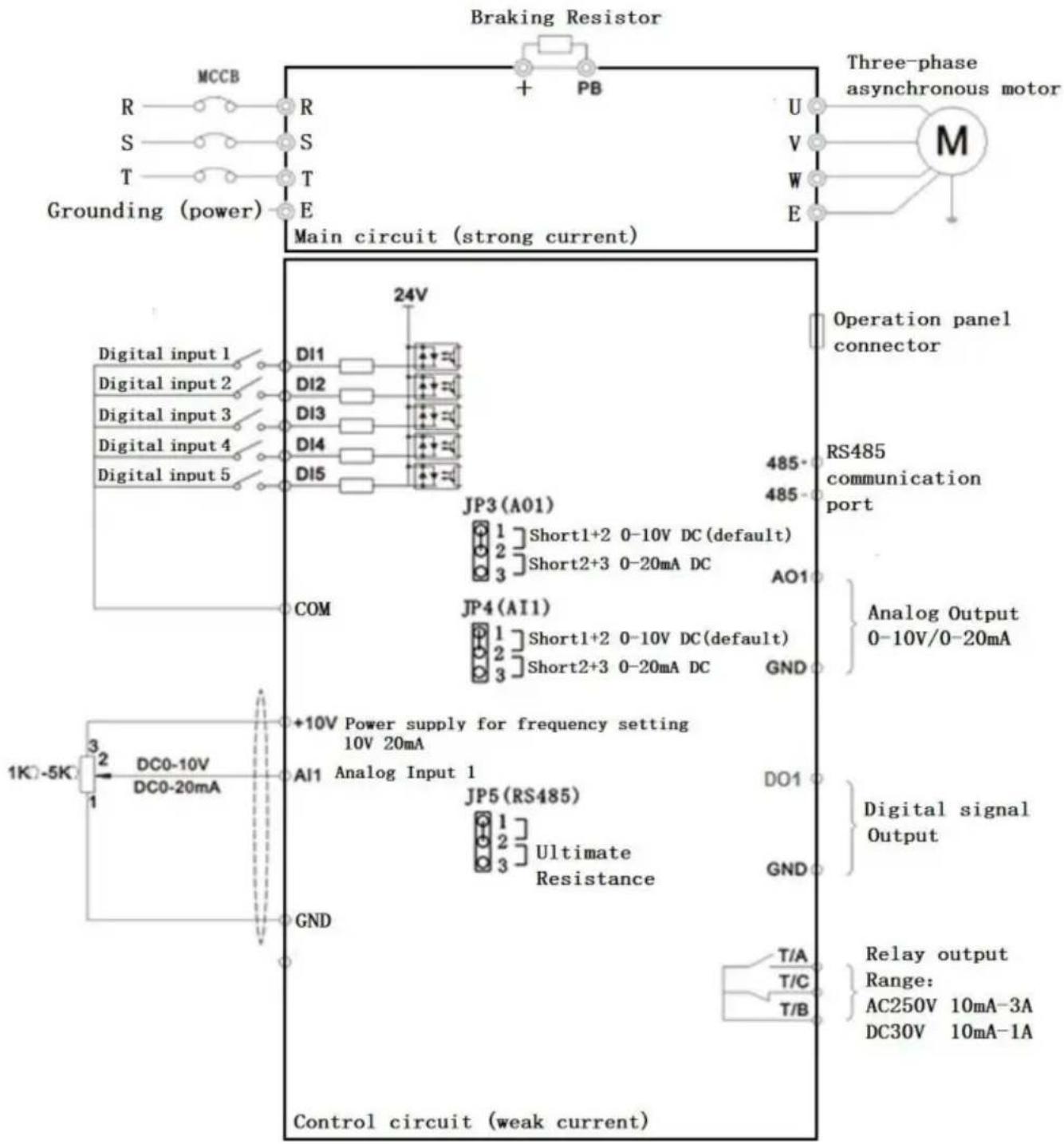
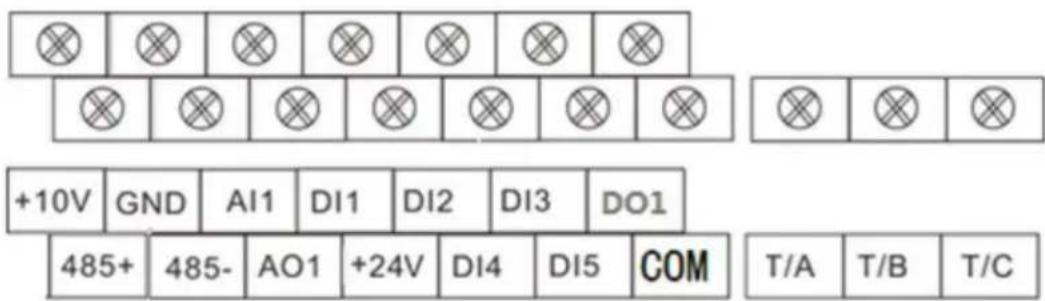
Figura 1-3-1 Schema elettrico 0,75-11,0 kW descrizione del terminale di controllo
2. Funzionamento e visualizzazione
Descrizione della spia luminosa di funzione
Hz: Spia luminosa di visualizzazione della frequenza
y V: Spia luminosa di tensione
y A: Spia luminosa di corrente
y ERR: spia di segnalazione guasto
F/R: Spia di marcia avanti e retromarcia
L/R: Spia luminosa di controllo della comunicazione
y RUN: Spia di marcia

| Simbolo chiave | Nome | Dichiarazione di funzione |
| PRG | Programmazione chiave | Menu entra o esce, con parametro modifica |
| ORL | Determinare il chiave | Entra nel menu e conferma la impostazione dei parametri |
| ž | Tasto superiore | Incremento dei codici dati o funzione |
| ž | Tasto giù | Diminuzione dei dati o dei codici funzione |
| DISP | Tasto Maiusc | Selezionare il bit modificatore del parametro e il visualizzare i contentuti |
| CORRERE | Esegui la chiave | Avviare l'inverter fatto la tastiera modalità di funzionamento |
| FERMARE | Tasto Stop/Reset Arresto/reset del funzionamento, | |
| JOG | Tasto di spostamento | Limitato al codice funzione P08.01 |
Imposta il metodo del parametro:
- Premere il tasto PRG per visualizzare P 0.00, 2. I tasti yy e
DISP selezionano il numero del parametro da modificare e il
Il tasto INVIO inseisce il parametro,
- I tasti y e DISP modificano i valori dei parametri, il tasting ENTER salva i parametri, 4. Se è necessario modificare altri parametri, ripetere i passaggi 2, 3, come la modificata
completamento, Ritornare all'interfaccia di frequenza utilizzato il tasto PRG.
C
| P00.30 | Frequenza X Visualizzazione | 0,00 Hz ~ 500,00 Hz | - |
| P00.31 | Visualizzazione della frequenza Y | 0,00 Hz ~ 500,00 Hz | - |
| P00.32 Visualità qualsiasi valore di indirizzo di memoría | 0 ~ 65535 | - | |
| P00.35 | Coppia target, (%) | 0,0°y 359,9° | - |
| P00.37 | Fattore di potenza Angolo | - | |
| P00.39 Tensione target di separazione VF | 0V ~ Tensione nominale del motore | - | |
| P00.40 Tensione di uscita della separazione VF | 0V ~ Tensione nominale del motore | - | |
| P00.41 | Visualizzazione dello stato dell'ingresso IN | - | - |
| P00.42 | Visualizzazione dello stato di input DO | - | - |
| P00.43 | Visualizzazione dello stato della funzione DI 1 | (funzone 01. funzione 40)- | - |
| P00.44 Visualizzazione dello stato della funzione DI 2 (Funzione 41. Funzione 80)- | - | ||
| P00-45 | messaggio di erreore | - | - |
| P00-59 | Imposta la frequenza di (%) | -100,00% y 100,00% | - |
| P00-60 | Frequenza di esecuzione (%) | -100,00% y 100,00% | - |
| P00-61 | Stato dell'inverter | 0 ~ 65535 | - |
| dd—parametro modificabile in qualsiasi condizionedd—parametro non modificabile in stato di esecuzione ·-parametro effettivamente rilevato, non modificabile | ||||
| FC | nome | Imposta intervallo | Fabrica valore | modificare |
| P01 Gruppo funzionale di base | ||||
| P01.00 | Tipo G/P | 1: Tipo G (carico a coppiia costante)modello)2: Tipo P (ventilatore e pompa dell'acqua modello) | 1 y | |
| P01.01 | 1. Controllo motore modalità | 0: Vettore sansa sensore di velocitàControllare2: Modello di controllo V/F | 2 y | |
| P01.02 | Operazione lavoro | 0: Comando di esecuzione del pannello operativo canale (luci "L/R" spente) | 0 y | |
| canale | 1: Canale di esecuzione terminale (luci "L/R" accese)2: Comando di communicatesione canale(luci "L/R" lampeggianti) | |||
| P01.03 | Frequenza principalefonte X | 0: Set digitale (frequenza preimpostataP01.08, tasto tastiera y/y, perdita di potenza)1: Set digitale (frequenza preimpostataP01.08, tasto tastiera y/y, memoriacaduta di potenza)2: set analogico AI1 (0-10 V); 3:set analogico AI2 (0-10 V o 20mA); 4:potenziometro del pannello;5: set di impulsi (0y50 KHZ DI5); 6: setdi esecuzione della velocitàmultistadio 7: set PLC complice;8: Set di controllo PID;9: Set di comunità. | 4 y | |
| P01.04 | Sorgente difrequenza secondariaE | Uguale al set P01.03(sorgente di frequenza principale X) | 0 y | |
| P01.05 | Limita la selezione diY quando lasovrapposizione di frequenza | 0: Rispetto alla frequenza massimayP01.10y 1: Relativo alla sorgente di frequenza Xfrequenza | 0 y | |
| P01.06 | Limite di Y quandosovrapposizione di | 0% y150%frequenza | 100% y | |
| P01.07 Sorgente di frequenza | Cifra singola: selezione della sorgente di frequenza0: Sorgente di frequenza principale X1: Funzionamento principale e secondario | 00 | ||
| risultati (la relazione operativa è determinata da dieci cifre)2: Freqenza principale X e Interruttore Y di frequenza secondaria3: Passare tra principale frequenza X e Principale e Risultati dell'operazione secondaria4: La frequenza Y commuta con Funzionamento principale e secondario risultatiDieci cifre: Relazione di funzionamento della frequenza di X e Y0:X+Y1:XY2: Massimo dei due, 3: Il minimo dei due. | ||||
| P01.08 | Frequenza delle preposizioni | 0,00 Hz y Frequenza massima yP01.10 | 0y 50,00Hz | y |
| P01.09 Direzione di marcia | 0: Direzione coerente, 1:Direzione opposta | 0 y | ||
| P01.10 | Frequenza massima di uscita | Vettore: 50,00 Hz ~ 500,00 HzV/F: 50,00 Hz y2000,00 Hz | 50,00Hz | y |
| P01.11 | Frequenza limite superiore fonte | 0: yP01.12y Impostazione 1:Al1 Impostazione2: Al2 Impostazione3: Al3 Impostazione4: Impulso impostato (0y50KHZ DI5); 5: Impostazione della comunità | 0 y | |
| P01.12 | Frequenza limite superiore | yP01.14yy yP01.10y | 50,00Hz | y |
| P01.13 | Limite superiore di frequenza di polarizzazione | 0,00 Hz yyP01.10y | 0,00 Hz y | |
| P01.14 | Limite inferiore frequenza | 0,00 Hz yyP01.12y | 0,00 Hz y | |
| P01.15 | Frequenza portante | Da 0,5 kHz a 16,0 kHz | Per il modello y | |
| P01.16 | Frequenza portante Regolare con la temperatura | 0: No, 1: Si | 1 y | |
| P01.17 | Tempo di accelerazione 1 | 0,00 s y 650,00 syyP01.19=2y0,0 s y 6500,0 syyP01.19=1y | Per il modello | y |
| P01.18 | Tempo di decelerazione 1 | 0s y 65000syyP01.19=0yFrequenza di riferimentoyyP01.25y | y | |
| P01.19 1 | Unità di tempo di Actelorazionale e tempo di decelerazione | 0: 1 secondi2: 0,01 secondi | 1 y | |
| P01.21 | Frequenza di polarizzazione della frequenza Y quando sovrapposizione | 0,00 Hz y Freqenza di uscita massimayP01.10y | 0,00 Hz y | |
| P01.22 | Risoluzione di Freqenza | Risoluzione di tutte le frequenze comandi. | 2 y | |
| P01.23 | Spegnimento memoria per Impostazione della frequenza digitale | 0: Nessuna memoria 1: Memoria | 0 y | |
| P01.24 | Selezione del gruppo di parametri del motore | 0: Gruppo parametri motore 1, 1: Gruppo parametri motore 2. | 0 y | |
| P01.25 | Riferimento frequenza di Accelerazione e tempo di decelerazione | 0: Freqenza massimaP01.10y 1: Impostazione frezza 2:100Hz | 0 y | |
| P01.26 | Durata istruzione di frequenza SU/GIù | 0: Freqenza di funzionamento, 1: Impostazione della frequenza | 0 y | |
| segno di riferimento | ||||
| P01.27 | Sorgente del comando in bundle sorgente di frequenza | Cifra singola: frequenza di associazione dei comandi del pannello operativo selezione della fonte0: Nessun legame 1: Set digitale 2:Al1 3:Al2 4:Al35: Impostazione impulsi (0y50KHZ DI5);6: Velocità multisegmento;7: PLC semplice8:PID9: Set di comunità di meccanicaDieci cifre: sorgente di frequenza di associazione del comando terminale selezione100 cifre: selezione della sorgente di frequenza di associazione del comando di comunità Cifra mille: esegue automaticamente la sorgente di frequenza di legame selezione | 0000 y | |
| P02 Gruppo parametri motore asincrono 1 | ||||
| P02.00 | Tipo di motore | 0: Motore asincrono ordinario,1: Motore asincrono a frequenza variabile | 0 y | |
| P02.01 | Potenza nominale di motore | 0,1 kW ~ 400,0 kW | Secondo alModello DelInvertitore | y |
| P02.02 | Tensione nominale diMotore | Da 1 V a 2000 V | y | |
| P02.03 | Corrente nominale diMotore | 0,01 A ~ 655,35 A(Potenza inverter <=55kW)0,1 A ~ 6553,5 A(Potenza inverter> 55kW) | y | |
| P02.04 | Frequenza nominale di motore | 0,01 Hz Freqenza di uscita massima P01.10y | y | |
| P02.05 | Velocità nominale di motore | 1 giri al minuto y 65535 giri al minuto | y | |
| P02.06 | Resistenza dello statore di motore | 0,001 y 65,535 y (Potenza inverter <=55kW) 0,0001 y y 6,5535 y (Potenza inverter> 55kW) 0,001 y 65,535 y (Potenza) | messa a punto Parametro | y |
| P02.07 | Resistenza del rotore del motore | inverter <=55kW) 0,0001 y y 6,5535 y (Potenza inverter> 55kW) 0,01mH y 655,35mH | y | |
| P02.08 | Resistenza alle perdite del motore | (Potenza inverter <=55kW) 0,001Mh ~ 65,535mH (Potenza inverter> 55kW) | y | |
| P02.09 | Resistenza reciproca del motore | 0,1mH y 6553,5mH (Potenza inverter <=55kW) 0,01mH ~ 655,35mH (Potenza inverter> 55kW) | y | |
| P02.10 | Corrente a vuoto di il motore | 0,01 A y P02,03 (Potenza inverter <=55 kW) 0,1A ~ P02,03 (Potenza inverter> 55kW) 0: | y | |
| P02.37 Sezione della messa a punto | nessuna operazione 1: Sintonizzazione a motore fermo 1 2: Sintonizzazione dinamica del motore 3: Sintonizzazione a motore completamente fermo 2 | 0 y | ||
| P03 Parametri di controllo vettoriale del gruppo motore 1 | ||||
| P03.00 | Anello di velocità proporzionale | Da 1 a 100 | 30 y | |
| P03.01 | Tempo di integrazione del ciclo di velocità 1 | 0,01 secondi y 10,00 secondi | 0,50 secondi |
| P03.02 | Frequenza di commutazione 1 | 0,00 y yP03.05y | 5,00 Hz y |
| P03.03 | Anello di velocità proporzionale | Da 1 a 100 | 20 y |
| P03.04 | Tempo di integrazione del ciclo di velocità 2 | 0,01 secondi y 10,00 secondi | 1.00s y |
| P03.05 | Frequenza di commutazione 2 | P03.02 yFrequenza di uscita massima yP01.10y | 10,00 Hz y |
| P03.06 | Controllo vettoriale di il guadagno di spostamento | 50% y 200% | 100% y |
| P03.07 | Tempo di filtraggio della copbia SVC costanti | 0,000s y 0,100s | 0,050 secondi y |
| P03.09 | Limite superiore della coppa fonte sotto controlo della velocità modalità | 0: Impostazione P03.101: AI1; 2: AI2;3: AI3;4: Set di impulsi (DI5);5: Impostazione della comunità;6: MINIMO (AI1, AI2)7: MASSIMO (AI1, AI2) | 0 y |
| P03.10 | Limite di coppiasuperiore sostvo velocità modalità di controllo | 0,0% y 200,0% | 150,0% y |
| P03.13 | Guadagno proportionale dieccitazioneregolamento | Da 0 a 60000 | 2000 y |
| P03.14 | Guadagno integrale di eccitazioneregolamento | Da 0 a 60000 | 1300 y |
| P03.15 Guadagno proportionale | Da 0 a 60000 | 2000 y | |
| Di regolazione della coppa | ||||
| P03.16 | Guadagno integrale della regolazione della coppa | Da 0 a 60000 | 1300 y | |
| P04 Parametri di controllo V/F | ||||
| P04.00 Impostazione della curva VF | 0: curva lineare V/F1: Curva multipunto V/F2: Curva di copbia decrescente 1 (curva quadrata)3: Curva di copbia decrescente 2 (potenza 1,2)4: Curva di copbia decrescente 2 (potenza 1,4)6: Curva di copbia decrescente 2 (potenza 1,6)8: Curva di copbia decrescente 2 (potenza 1,8)10: Modalità di separazione completa VF11: Modalità semi-separazione VF | 0 y | ||
| P04.01 | Impostazione | 0,0% (Copbia di sollevamento automatica);0,1% y30,0% | Per modello y | |
| P04.02 | dell'aumento di copbia Punto di | 0,00 Hz yFrequenza di uscita massimayP01.10y | 50,00 Hz y | |
| P04.03 | interruzione | 0,00 Hz y yP04.05y | 0,00 Hz y | |
| P04.04 | dell'aumento di copbia | 0,0% y 100,0% | 0,0% y | |
| P04.05 | Frequenza V/F multi-punto 1 | yP04.03y y yP04.07y | 0,00 Hz y | |
| P04.06 | Tensione V/F multi-punto 1 Freqenza | 0,0% y 100,0%V/F multi-punto 2 Tensione V/F multi-punto 2 | 0,0% y | |
| P04.07 | Frequenza V/F multi-punto 3 | èP04.05èyè Motore nominale frequenza èP02.04è | 0,00 Hz è | |
| P04.08 | Tensione V/F multi-punto 3 | 0,0% è 100,0% | 0,0% è | |
| P04.09 | Controllo V/F Compensazione della frequence di scorrimento | 0,0% è 200,0% | 0,0% è | |
| P04.10 | V/F sopra guidagno di eccitatione | Da 0 a 200 | 64 è | |
| P04.11 | Oscillazione guidagno di suppressione per V/F | Da 0 a 100 | Per modello | è |
| P04.13 | Sorgente di tensione da VF separato | 0: Impostazioni digitali èP04.14è1:Al1 2:Al23:Al34: Impostazione impulso (DI5)5: Istruzione multipla6: PLC semplice7: Il PID8: impostazione della通讯ica Nota: 100,0%, corrispondente alla tensione nominale del motore | 0 è | |
| P04.14 | Tensione per la separazione VF | 0V è Tensione nominale del motore | 0V è | |
| P04.15 | Tempo di salute della tensione di separazione | 0,0 è 1000,0 sNota: tempo in cui 0 V sale a VF tensione nominale del | 0.0s è | |
| P04.16 | Tempo di separazione della tensione di DORP | motoreè 0,0 s è 1000,0 sNota: tempo in cui la tensione nominale del motore scende a 0 V | 0.0s è | |
| P04.17 | Modalità di spegnimento di separazione FV | 0: La frequenza e la tensionescendono a 0 separatamente;1: La frequenza diminuiscebero ilCaduta di tensione a | 0 è | |
| P04.18 | Stallo da sovracorrente azione corrente | 50% y 200% | 150% y | |
| P04.19 | Soppressione di Stallo da sovracorrente | 0: Disabilita,1: Abilita. | 1 | y |
| P04.20 | Guadagno di suppressione di altre stallo attuale | Da 0 a 100 | 20 y | |
| P04.21 | Compensazione coeffiente di azione finita stallo attuale | 50% y 200% | 50% y | |
| P04.22 | Azione di stallo da sovratensione | 650,0 V ~ 800,0 V | 760,0 V y | |
| P04.23 | Soppressione della tensione di stallo da | 0: Disabilita,1: Abilita. | 1 y | |
| P04.24 | sovratensione Guadagno di frequenza della | Da 0 a 100 | 30 y | |
| P04.25 | soppressione dello stallo da sovratensione Guadagno di tensione della | Da 0 a 100 | 30 y | |
| P04.26 | Aumento massimo limite di frequenza per Stallo da sovratensione | 0 ~ 50 Hz | 5 Hz y | |
| Gruppo P05, parametri di input | ||||
| P05.00 | Terminale DI1 funzione | 0: Nessuna funzione;1: Marcia in avanti (FWD) o Corsa;2: Retromarcia (REV) o Interruttore avanti/indietro3:CONTROLI di marcia a tre fili 4:CONTROLI di avanzamento jog (FJOG)5: CONTROLLO jog inverso (RJOG) | 1 | y |
| 6: Aumento di frequenza (Terminale SU)7: Diminuzione della frequenza(Terminale GIù)8: Controllo di spegnimento gratuite9: Ingresso segnale di resetesterno (RST)10: Sospendi operazione; 11:Ingresso normalmente aperto (NO) perguasto esterno12: Multi-velocità 1 13:Multi-velocità 2 14: Multi-velocità 3 15: Multi-velocità4 16: Sezione tempoACC/DEC 1 (TT1)17: Sezione tempo ACC/DEC 2 (TT2)18: Interruttore sorgente di frequenza 19:SU/GIù Azzeramento freuenzaterminale, tastiera)20: Esegui dato Switchterminale 121: VFD ACC/DEC proibito22: Pausa controlo PID23: Ripristino dello stato del PLC24: Freqenza del pendolo Pausa25: Ingresso contatore26: Azzeramento del contatore27: Ingresso conteggio lunghezza28: Azzeramentolunghezza 29: Disabilita controlo coppia30: Impostazione impulso (solo DI5 piùimpostare, P05.04=30)31: Riservato;32: Frenatura CC immediata;33: Ingresso di guasto esterno (normalmente |
| chiuso, NC)34: Modifica della frequenzaAbilita35: Segnale di ingresso PID invertito;36: Parcheggio esterno terminal137: Esegui dato Switchterminale 238: Pausa integrale PID;39: La frequenza X commuta conla frequenza preimpostata40: Freqenza Y commuta con lafrequenza preimpostata41: Morsetto selezione motore 143: L'interrottore dei parametri PID44: Errore definito dall'utente 145: Errore definito dall'utente 246: Interruttore di controllo dellavelocità/coppia47: Arresto di emergenza48: Parcheggio esterno terminal249: Frenata lenta in corrente continua50: Tempo di esecuzione azzerato;51: Contollo a due fili / Tre filiinterrottore di controllo52: Disattivazione inversionione; | ||||
| P05.01 | Terminale DI2funzionale | 4 y | ||
| P05.02 | Terminale DI3funzionale | 9 y | ||
| P05.03 | Terminale DI4funzionale | 12 y | ||
| P05.04 | Terminale DI5funzione(solo DI5 vuò | 13 y | ||
| impostazione impulsofunizione,P05.04=30) | ||||
| P05.10 Tempo di filtraggio DI | 0,000 s' 1,000 s | 0,010 y | ||
| P05.11 | Controllo terminaleModalità | 0: Modalità di controllo a due fili 1,1: Modalità di controllo a due fili 2,2: Modalità di controllo a tre fili 1,3: Modalità di controllo a tre fili 2. | 0 y | |
| P05.12 | Frequenzafase di regolazionemisurare | 0,001 Hz/s y 65,535 Hz/s | 1,00 Hz/s y | |
| P05.13 | Min. immissione di Alcurva 1 | 0,00 V y P05,15 | 0,00 V y | |
| P05.14 | Correspondentevalore della curva Al1's Min. input | -100,0% y +100,0% | 0,0% y | |
| P05.15 | Max. input di Alcurva 1 | P05.13 y +10.00V | 10,00 V y | |
| P05.16 | Correspondentevalore della curva Al1's Max. input AI | -100,0% y +100,0% | 100,0% y | |
| P05.17 | curva 1 filtraggiotempo | 0,00s y 10,00s | 0,10 secondi y | |
| P05.18 | Curva AI 2 Min. ingressso | 0,00 V ~ P05,20 | 0,00 V y | |
| P05.19 | Correspondentevalore della curva AlIngresso minimo 2 | -100,0% y +100,0% | 0,0% y | |
| P05.20 Ingresso massimo di AI2 | P05.18 y +10.00V | 10,00 V y | ||
| P05.21 | Correspondentevalore della curva AIIngresso massimo 2 | -100,0% y +100,0% | 100,0% y | |
| P05.22 | Filtraggio della curva Altempo | 2 0,00s y 10,00s | 0,10 secondi y | |
| P05.23 | Curva Al 3's Min. ingressso | -10,00 V y P05,25 | -10,00 V y | |
| P05.24 | Corrispondentevalore della curva Al3's Min. input | -100,0% y +100,0% | 0,0% y | |
| P05.25 | Max. input di Alcurva 3 | P05.23 y +10.00V | 10,00 V y | |
| P05.26 | Corrispondentevalore della curva Al3's Max. input AI | -100,0% y +100,0% | 100,0% y | |
| P05.27 | curva 3 filtraggiotempo | 0,00s y 10,00s | 0,10 secondi y | |
| P05.28 | Valore minimodiIngresso impulsivo | -10,00 V y P05,25 | 0,00 V y | |
| P05.29 | Corrispondentevalore di PulseIngresso minimo | -100,0% y +100,0% | 0,0% y | |
| P05.30 | Valore massimo diIngresso impulsivo | P05.23 y +10.00V | 10,00 V y | |
| P05.31 | Corrispondentevalore di PulseFiltraggio impulsi | -100,0% y +100,0% | 100,0% y | |
| P05.32 | in ingresso massimatotempo | 0,00s y 10,00s | 0,10 secondi y | |
| P05.33 Selezione della curva AI | Bit singolo: selezione della curva AI1: Ho 1 buttana(14:00, vedere P05.13 ~ P05.16.)2: Ho 2 buttane(14:00, vedere P05.18 ~ P05.21.)3: Ho 3 buttane(14:00, vedere P05.23 ~ P05.26.) | 321 y | ||
| 4: Ho 4 puttane(ore 16:00, vedere P24.00yP24.07)5: Ho delle puttane 4(16:00, vedere P24.08yP24.15)Dieci bit: selezione della curva Al2(uguale a Single bit 1~5)Cento bit: selezione della curva Al3(lo stesso di sopra) | ||||
| P05.34 | L'IA è moltoil minimoimpostazione di input selezione | Bit singolo: Al1 sotto l'impostazione di inputmin. 0: valore corrispondente dell'sinputmin.1: 0,0%Dieci bit: Al2ILT'impostazionedi inputminima (lo stesso di Singolo bit 1~2)Cento bit: Al3ILT'impostazione diinputminima (uguale a quella sopra) | 000 y | |
| P05.35Tempo di ritardo DI1 | 0,0 y 3600,0 s | 0.0s y | ||
| P05.36Tempo di ritardo DI2 | 0,0 y 3600,0 s | 0.0s y | ||
| P05.37Tempo di ritardo DI3 | 0,0 y 3600,0 s | 0.0s y | ||
| P05.38 | Terminale DI1-DI5validoselectione della modalità | 0: Livello alto efficace, 1: Livello bassoefficaceSingolo bit: DI1;Dieci bit: DI2;Centinaia di bit: DI3;Mille bit: DI4,Diecimila Bit: DI5 | 00000 y | |
| P05.39 | Terminale DI6-D17validoselectione della modalità | 0: Livello alto efficace, 1: Bassolivello efficaceSingolo bit: DI6, | 00000 y | |
| Dieci bit: DI7 | ||||
| Gruppo P06, parametri di output | ||||
| P06.01 | Uscita DO1 selezione della funzione | 0: Nessuna uscita 1: Indicatore di esecuzione; 2: Uscita di erre (per erre di arresto Gratis)3: Segnale di rilevamento del livello di freuenza 1 (P14T1)4: Indicatore di arrivato della freuenza (FAR)5: VFD a velocità zero (durante il funzionamento)6: Sovraccarico motore Preallarme7: Sovraccarico dell'inverterAllerta precoce8: Arriva il conteggio dei set9: Il conteggio specificato è stato raggiunto10: La lunghezza è raggiunta11: Il ciclo del PLC è completato12: Tempo di esecuzione accumulato arrivata13: Limitazione della frequenza14: Limitazione della coppiia15: Pronti a corrente16:Al1>Al217: La Frequenza di uscita raggiunge il valore superiore limite18: La Frequenza di uscita raggiunge il limite inferiore (durante l'esecuzione)19: Stato di uscita sotto pressione 20: Impostazione della comunità impostazione della comunità impostazione della comunazione21: Posizione completa (riservata)-25- | 0 y | |
| P06.02 | Scheda di controllo Staffetta (TA-TB-TC) Funzione Selezione | 2 y | ||
| 22: Prossimità della posizione (riservato)23: Funzionamento a velocità zero 2(uscitaanche in caso di spegnimento)24: Tempo di accensione accumulatoin arrivesignenza 2(P14T2)27: Freqenza di uscita 2 raggiunta28: Corrente di uscita 1 raggiunta 29:Corrente di uscita 2 raggiunta 30:Raggiunto regolarmente 31:Superamento del segnale dingresso Al1 32:Caduta del carico 33: Inversione delmarcia VFD 34: Stato di corrente zero35: Il modulo di potenzatemperatura arrivata 36:Corrente di uscita fuori limite 37: Lafreqenza di uscita raggiunge il limiteinferiore (spagnimento ancche dell'uscita)38: Uscita di erre (tutti gli erre)39: Suriscaldamento motorePreallarme 40: Arriva quellotempodi esecuzione 41: Uscita di erreerorre di spegnimento e nessun sostopressione di uscita) | ||||
| P06.07 | Selezione dellafunzione di uscita AO1 | 0: Frequenza di funzionamento, 1:Frequenza impostata. | 0 y | |
| P06.08 | Selezione dellafunzione di uscita AO2 | 2: Corrente di uscita,3: Coppia di uscita,4: Potenza di uscita,5: Tensione di uscita, | 1 y | |
| 6: Freqenza impulso in ingresso.7:Al1 8:Al29:Al310: Lunghezza11: Valore del conteggio12: Impostazione della comunicazione,13: Velocità del motore14: Corrente di uscita. (100,0%Corrispondente a 1000.0A)15: Tensione di uscita (100,0%Corrispondente a 1000,0 V)16: Coppia di uscita del motore(Percentuale del valore effettivoin relazione alla potenza del motore)17: Coppia di uscita VFD(Percentuale del valore effettivo rispetto alla classificazione VFD) | ||||
| P06.10 | AO1 zero-biascoeffidente | -100,0% y +100,0% | 0,0% y | |
| P06.11 | Guadagno AO1 | -10,00 y +10,00 | 1,00 y | |
| P06.12 | AO2 zero-biascoeffidente | -100,0% y +100,0% | 0,0% y | |
| P06.13 | Guadagno AO2 | -10,00 y +10,00 | 1,00 y | |
| P06.17 | Ritardo di uscita DOtempo | 0,0 y 3600,0 s | 0.0s y | |
| P06.18 | Uscita RELI£tempo di ritardo | 0,0 y 3600,0 s | 0.0s y | |
| P06.19 | Uscita RELAY2tempo di ritardo | 0,0 y 3600,0 s | 0.0s y | |
| P06.22 | DO output validoselezione dello stato | 0: Logica positiva, 1: Anti-logicasingolo bit: DODieci bit: RELAY1 | 00000 y | |
| Cento Bit: RELAY2 | ||||
| Gruppo P07, parametri di controllo di avvio e arresto | ||||
| P07.00 Modalità di avvio | 0: Avvio diretto1: Inizia con il monitoraggio della velocità2: Frenatura in corrente continua + avvio alla frequenza di avvio | 0 y | ||
| P07.01 | Monitoraggio della velocitàmetodo | 0: Inizia con lo spegnimento frequenza1: Inizia con la frequenza di lavoro2: Inizia al massimo frequenza | 0 y | |
| P07.02 | Velocità di tracciamento della velocità | Da 1 a 100 | 20 y | |
| P07.03 | Frequenza di avvio | 0,00 Hz ~ 10,00 Hz | 0,00 Hz y | |
| P07.04 | Frequenza di avviotempo di attesa | 0,0 y 100,0 s | 0.0s y | |
| P07.05 | Corrente di frenata CCall'avvio | 0% y100% | 0% y | |
| P07.06 | Tempo di frenata CCavvio | 0,0 s ~ 100,0 s | 0.0s y | |
| P07.07 | AccelerandoEModalità di decelerazione | 0: modalità Acc/Dec lineare1: Curva S Acc/Dec modalità A2: Curva S Acc/Dec modalità B | 0 y | |
| P07.08 | Rapporto temporale di iniziosegmento in Scurva | 0,0%y100,0%-P07.09y | 30,0% y | |
| P07.09 | Rapporto temporale di iniziosegmento in Scurva | 0,0%y100,0%-P07.08y | 30,0% y | |
| P07.10 | Modalità di arresto | 0yRallenta per fermarti 1yProcedi per inerzia per fermarti | 0 y | |
| P07.11 | Frequenza soglia di DC freno | 0,00Hz ~ Frequenza massima.yP01.10y | 0,00 Hz y | |
| P07.12 | Ritardo freno CC tempo | 0,0 y 100,0 s | 0.0s y | |
| P07.13 Corrente di frenatura CC | 0% y 100% | 0% y | ||
| P07.14 | Tempo di frenata CC termare | a 0,0 y 100,0 s | 0.0s y | |
| P07.15 | Freno CC tasso di utilizzo | 0% y 100% | 100% y | |
| P07.18 | Monitoraggio della velocità attuale | dal 30% al 200% | y | |
| Tastiere di gruppo P08 e parametri di visualizzazione | ||||
| P08.01 Funzione tasting M | 0: Il tasting M non è valido1: Passare da remotoControllo (controllo terminale o di comunità) e controllo del pannello operativo, quando yP01.02y =1 o 22: Interruttore FWD/REV3: FJOG (controllo jog in avanti)4: RJOG (controllo jog inverso) | 0 y | ||
| P08.02 | ARRESTO/RESET funzione chiave | 0: Il tasting STOP/RES Valido solo in modalità di controllo del pannello1: Il tasting STOP/RES sempre valido | 1 y | |
| P08.03 | Il LED visualità il parametro 1in Stato operativo | 0000yFFFFBit00: Frequenza di esecuzione 1 (Hz)Bit01: Impostazione della frequenza (Hz)Bit02: Tensione del bus (V) | 1F y | |
| Bit03: Tensione di uscita (V)Bit04: Corrente di uscita (A)Bit05: Potenza in uscita (kW)Bit06: Coppia di uscita (%)Bit07: stato ingresso DI Bit08: Stato dell'uscita DO Bit09: Tensione AI1 (V)Bit10: Tensione AI2 (V)Bit11: Tensione AI3 (V)Bit12: Valore del conteggio Bit13: Valore lunghezzaBit14: Visualizzazione della velocità di caricamentoBit15: Impostazioni PID | ||||
| P08.04 | Il LED visualità il parametro 2in Stato operativo | 0000yFFFFBit00: feedback PIDBit01: Fase PLCBit02: Frequenza di ingresso IMPULSO (kHz)Bit03: Frequenza di esecuzione 2 (Hz)Bit04: Tempo di esecuzione rimanenteBit05:Al1-tensione frontale corretta (V)Bit06: Al2-corretto tensione frontale (V)Bit07:Al3-tensione frontale corretta (V)Bit08: Velocità della linea Bit09: Tempo di alimentazione attuale (Ora)Bit10: Tempo di esecuzione corrente (min)Bit11:PULSE Frequenza di ingresso (Hz)Bit12: Impostazione della comunità Valore | 0 y | |
| Bit13: Velocità di feedback dell'encoder (Hz) Bit14: Visualizzazione della frequenza principale (Hz) Bit15: Freqenza secondaria Y Schermo (Hz) | X | |||
| P08.05 | parametro in Stop stato | 0000yFFFF Bit00: Imposta frequenza (Hz) Bit01: Tensione del bus (V) Bit02: stato ingresso DI Bit03: Stato dell'uscita DO Bit04: Tensione AI1 (V) Bit05: Tensione AI2 (V)Display Bit06: tensione AI3 (V) Bit07: Valore conteggio Bit08: Valore lunghezza Bit09: Fase PLC Bit10: Velocità di caricamento Bit11: Impostazioni PID Bit12: Freqenza di ingresso PULSE (chilogrammi) | a LED 33 y | |
| P08.06 | Velocità di caricamento fattore di visualizzazione | 0,0001 y 6,5000 | 1.0000 y | |
| P08.07 | Modulo di potenza temperatura | 0,0y y 100,0y | - | • |
| P08.08 | Numero del prodotto | - | - | • |
| P08.09 | Cumulativo tempo di esecuzione | 0 ore y 65535 ore | - | • |
| Gruppo P09, funzione ausiliaria | ||||
| P09.00 | Frequenza di jog | 0,00Hz ~ Frequenza massima. yP01.10y | 2,00 Hz y | |
| P09.01 | Tempo di acc. di jog | 0,0 y 6500,0 s | 20.0 y | |
| P09.02 | Tempo di jogging Dec | Tempo consigliato: 0,4 ~ 4,0 kW 7.5S 5,5 ~ 30,0 kW 15.0S 37,0 y 132,0 kW 40,0 S 160,0 - 630,0 kW 60,0 S | 20.0 y | |
| P09.03 | Tempo di accelerazione 2 | 15.0 | y | |
| P09.04 | Tempo di decelerazione 2 | y | ||
| P09.05 | Tempo di accelerazione 3 | y | ||
| P09.06 | Tempo di decelerazione 3 | y | ||
| P09.07 | Tempo di accelerazione 4 | y | ||
| P09.08 | Tempo di decelerazione 4 | y | ||
| P09.09 | Frequenza di salute 1 | 0,00Hz ~ Frequenza massima. yP01.10y | 0,00 Hz y | |
| P09.10 | Frequenza di salute 2 | 0,00 Hz y | ||
| P09.11 | Frequenza di salute. allineare | 0,01 Hz y | ||
| P09.12 | Positivo e Morto inverso tempo | 0,0 y 3000,0 s | 0.0s y | |
| P09.13 | Inversione frequenza permesso | 0: Consentito; 1: Vietare | 0 y | |
| P09.14 | Quando l'impostazione la frequenza è inferiore a il limite inferiore di frequenza | 0: Esegui a una frequenza limite inferiore 1: Fermati 2: funzionamento a velocità zero | 0 y | |
| P09.15 | Controllo delle cadute | 0,00 Hz ~ 10,00 Hz | 0,00 Hz y | |
| P09.16 | Collocamento potenza cumulativa | 0 ore y 65000 ore | Oh y | |
all'orario di arrivato
| P09.17 | Collocamento cumulativo | 0 ore y 65000 ore | Oh y | |
| P09.18 Protezione partenza | arrivo in corsa valore di rilevamento 1 (P14T1) | 0: Non protetto; | 0 y | |
| P09.19 | 0,00Hz ~ Frequenza massima. yP01.10y | 50,00 Hz | y | |
| P09.20 | Valore di ritardo di rilevamento della freuenza (P14T1) | 0,0% ~ 100,0% (livello P14T1) | 5,0% y | |
| P09.21 | Freuenza raggiunge il larghezza rilevata | 0,0% ~ 100,0% (frequenza massima) | 0,0% y | |
| P09.22 | Funzione di salute di freuenza Durante Acc e Dicembre | 0: non valido, 1: valido | 0 y | |
| P09.25 | Freuenza di commutazione di tempo di accelerazione 1 e tempo 2 | 0,00Hz ~ Freuenza massima. yP01.10y | 0,00 Hz y | |
| P09.26 | Freuenza di commutazione di tempo di decelerazione 1 e tempo 2 | 0,00Hz ~ Freuenza massima. yP01.10y | 0,00 Hz y | |
| P09.27 | Priorità Jog terminale | 0: non valido, 1: valido | 0 y | |
| P09.28 | Freuenza valore di rilevamento 2 (P14T2) | 0,00 Hz ~ Freuenza massima | 50,00 Hz | y |
| P09.29 | Valore di ritardo di rilevamento della freuenza (P14T2) | 0,0% ~ 100,0% (livello P14T2) | 5,0% y | |
| P09.30 | Freuenza di arrivo arbitria | 0,00 Hz ~ Freuenza massima | 50,00 Hz | y |
| valore di rilevamento 1 | ||||
| P09.31 | Frequenza di arrivato arbitrazione rilevata larghezza 1 | 0,0% ~ 100,0% (frequenza massima) | 0,0% y | |
| P09.32 | Frequenza di arrivato arbitrazione valore di rilevamento 2 | 0,00 Hz ~ Frequenza massima | 50,00 Hz | y |
| P09.33 | Frequenza di arrivato arbitrazione larghezza rilevata 2 | 0,0% ~ 100,0% (frequenza massima) | 0,0% y | |
| P09.34 | Corrente zero livello di rilevamento | 0,0% y 300,0%100,0% corrisponde alla corrente nominale del motore | 5,0% y | |
| P09.35 | Tempo di ritardo di Rilevamento corrente | 0,01s y 600,00s | 0,10 secondi y | |
| P09.36 | Valore attuale di uscita su attuale | 0,0% (Non rilevato)0,1% ~ 300,0% (Corrente nominale del motore) | 200,0% y | |
| P09.37 | Tempo di ritardo di Uscita altre Rilevamento corrente | 0,00s y 600,00s | 0,00 secondi y | |
| P09.38 | Corrente di arrivato arbitrazione 1 | 0,0% ~ 300,0% (Corrente nominale del motore) | 100,0% y | |
| P09.39 | Arrivo arbitrario larghezza corrente 1 | 0,0% ~ 300,0% (Corrente nominale del motore) | 0,0% y | |
| P09.40 | Arrivo arbitrario attuale 2 | 0,0% ~ 300,0% (Corrente nominale del motore) | 100,0% y | |
| P09.41 | Arrivo arbitrario larghezza corrente 2 | 0,0% ~ 300,0% (Corrente nominale del motore) | 0,0% y | |
| P09.42 | Funzione timer selezione | 0: non valido, 1: valido | 0 y | |
| P09.43 Tempo di esecuzione del timer | 0: Impostazione P09.44, | 0 y | ||
| sezione | 1:Al12: Al23: Al3L'intervalle di ingressso analogicocorrissonde ayyP09.44y | |||
| P09.44 | Timer in esecuzionetempo | 0,0 Min y 6500,0 Min | 0,0 minuti | y |
| P09.45 | Limite inferiore del valoredi protezione della tensione di ingresso AI1 | 0,00 V ~ P09,46 | 3,10 V y | |
| P09.46 | Limite superiore del valoredi protezione della tensione di | P09.45 y 10.00V | 6,80 V y | |
| P09.47 | inglesso AI1Protezione da sovratemperatura Valore | 0y y 100y | 75y y | |
| P09.48 | Ventola di raffreddamentocontrollare | 0: ventola in funzione durantel'esecuzione del VDF1: Sempre in funzione quando manca l'alimentazioneSU; | 0 y | |
| P09.49 | Frequenza di sveglia | Frequenza di ibernazione (P09.51) ~Frequenza massimaP01.10y | 0,00 Hz y | |
| P09.50 | Ritardo di svegliatempo | 0,0 y 6500,0 s | 0.0s y | |
| P09.51 Freqenza del sonno | 0,00 Hz ~ Frequenza di riattivazioneyP09.49y | 0,00 Hz y | ||
| P09.52 Tempo di ritardo del sonno | 0,0 y 6500,0 s | 0.0s y | ||
| P09.53 | Orario di arrivato di quostooperazione | 0,0 ~ 6500,0Min | 0,0 minuti | y |
| P09.54 | Fattore di correzionedi potenza di uscita | 0,00% y 200,0% | 100,0% y | |
| Guasto e protezione del gruppo P10 | ||||
| P10.00 | Sovraccarico del motore protezione | 0: Disabilita,1: Abilita | 1 | \( \breve{y} \) |
| P10.01 | Sovraccarico del motore guidagno di protezione | 0,20 y 10,00 | 1,00 \( \breve{y} \) | |
| P10.02 | Sovraccarico del motore allerta precoce fattore | 50 y 100% | 80% \( \breve{y} \) | |
| P10.07 | Cortocircuito a protezione di terra quando si accende l'alimentazione | 0: Disabilita,1: Abilita | 1 \( \breve{y} \) | |
| P10.08 | Unità frentensione di avviamento | 650,0 V ~ 800,0 V | 690V \( \breve{y} \) | |
| P10.09 | Guasto automatico tempi di ripristino | Da 0 a 20 | 0 \( \breve{y} \) | |
| P10.10 | Fai azione selezione durante guasto automatico reset | 0: Nessuna azione1: Azione | 0 \( \breve{y} \) | |
| P10.11 | Intervallo per Guasto automatico reset | 0,1s \( \breve{y} \) 100,0s | 1,0s \( \breve{y} \) | |
| P10.12 | Protezione da perdita di fase di ingresso/Protezione di trazione del relè di potenza | Bit singolo: protezione da perdita di fase di ingresso0: Disabilita,1: AbilitaTen Bit: Protezione di trazione del relè di potenza0: Disabilita,1: Abilita | 11 \( \breve{y} \) | |
| P10.13 | Protezione contro la perdita di fase di uscita | 0: Disabilita,1: Abilita | 1 | \( \breve{y} \) |
| P10.14 | Primo fallimento tipo | 0: Nessun erre1: (Riservato) | - | |
| P10.15 | Secondo fallimento tipo | 2: Sovracorrente nel processo Acc3: Sovracorrente nel processo Dec4: Sovracorrente in costante velocità5: Sovratensione nel processo Acc6: Sovratensione nel processo Dec7: Sovratensione a velocità costante8: Sovraccarico della resistenza del buffer9: Sottotensione10: sovraccarico VFD11: Sovraccarico del motore12: Perdita di fase in ingresso13: Perdita di fase di uscita14: Il modulo di alimentazione è surriscaldato15: Guasto esterno16: Eccezione di comunità e conuicazione17: Il relè di potenza è anomalo18: Rilevamento corrente anomala19: La messa a punto del motore è anomala21: Lettura e scrittura dei parametri eccezione22: Altro hardware anomalo23: Cortocircuito motore a terra26: Arrivo in orario di esecuzione27: Errore personalizzato dell'utente 128: Errore personalizzato dell'utente 229: Arriva il momento dell'accensione30: Caricare la caduta31: Il feedback PID in fase di esecuzione è person40: Timeout del limite di flusso velocice41: Ascendere il motore durante il funzionamento42: La deviazione della velocità è troppo grande | · | |
| P10.16 | Terzo (il più recente) tipo di guasto | · | ||
| 43: Sovravelocità del motore | ||||
| P10.17 | Frequenza al terme (pù recente) quasto | • | ||
| P10.18 | Corrente al terzo (il più recente) quasto | • | ||
| P10.19 | Tensione del bus al terzo (più recente) quasto | • | ||
| P10.20 | Terminale di ingressso stato al terme (più recente) fallimento | • | ||
| P10.21 | Terminale di uscita stato al terme (più recente) fallimento | • | ||
| P10.22 | L'inverter stato al terme (più recente) fallimento | • | ||
| P10.23 | Tempo di accensione per il terme (il più recente) fallimento | • | ||
| P10.24 | Tempo di esecuzione per il terzo (il più recente) fallimento | • | ||
| P10.27 | Frequenza al secondo fallimento | • | ||
| P10.28 | Corrente al secondo fallimento | • | ||
| P10.29 | Tensione del bus al secondo erre | • | ||
| P10.30 | Terminale di ingresso stato per il secondo fallimento | • | ||
| P10.31 | Terminale di uscita stato al secondo fallimento | • | ||
| P10.32 | L'inverter stato al secondo fallimento | • | ||
| P10.33 | Tempo di accensione per il secondo fallimento | • | ||
| P10.34 | Tempo di esecuzione per il secondo fallimento | • | ||
| P10.37 | Frequenza al primo fallimento | • | ||
| P10.38 | Currente al primo fallimento | • | ||
| P10.39 | Tensione del bus al primo guasto | • | ||
| P10.40 | Terminale di ingresso stato al primo fallimento | • | ||
| P10.41 | Stato del terminale di uscita al primo fallimento | • | ||
| P10.42 | L'inverter stato al primo fallimento | • | ||
| P10.43 | Tempo di accensione per il primo fallimento | • | ||
| P10.44 Tempo di esecuzione per il fallinie | • | |||
| primo fallimento | ||||
| P10.47 | Protezione da guasti azione selezione 1 | Bit singolo: sovraccarico motore (Err11)Dieci bit: perdita di fase di ingresso, (Err12)Cento bit: perdita di fase di uscita,(Errore13)Thousand Bit: Errore esterno(Err15)Diecimila Bit:EccEDURE di comunità, (Err16)0: Arresto per inerzia;1: Arresto in modalità StopyP07.10y 2:Continua a funzionare; | 00000 y | |
| P10.48 | Protezione da guasti azione selezione 2 | Bit singolo/Cento bit/Migliaia bit: (Riservato)Dieci bit:lettura dei parametri eeccezione di scrittura (Err21)Diecimila Bit: Tempo di esecuzionearrivo (Err26)0:Arresto per inerzia;1:Arresto tramite modalità StopyP07.10y | 00000 y | |
| P10.49 | Protezione da guasti azione selezione 3 | Bit singolo: Errore personalizzato dall'utente 1 (Err27)Ten Bit:: Errore personalizzato dell'utente 2(Errore28)Cento bit: tempo di accensionearriva (Err29)Thousand Bit: Caduta di carico (Err30)0:Arresto per inerzia;1:Arresto tramite modalità StopyP07.10y2: Salta al 7% della frequenza nominale del motore e continua a funzionare,torna alla frequenza impostata quando | 00000 y | |
| recupero del carico Diecimila Bit: feedback PID perdita (Err31) 0: Arresto per inerzia; 1: Arresto tramite modalità StopP07.10' 2: Continua a | ||||
| P10.50 | Selezione azione di protezione guasti 4 | funzionare; Bit singolo: Deviazione di velocità troppo grande (Err42) Ten Bit: Sovravelocità del motore (Err43) Cento Bit: (Riservato) Thousand Bit: Errore di feedback della velocità (Err52) 0: Arresto per inerzia; 1: Arresto tramite modalità StopP07.10' 2: Continua a | 00000 y | |
| P10.54 | Continua a selezionare la frequenza in caso di | funzionare; 0: Frequenza corrente 1: Frequenza impostata 2: Funzionamento alla frequenza limite superiore 3: Funzionamento alla frequenza limite inferiore 4: Funzionamento con riserva anomala frequenza | 0 y | |
| P10.55 | Riserva anomala frequenza | 0,0%~100,0% (100,0% corrisponde alla frequenza massima yP01.10y) | 100,0% y | |
| P10.59 | Potenza istantanea alla interruzioni | 0: Non valido 1: Ridurre il velocità; 2: Arresto di decelerazione | 0 y | |
| P10.60 | La pausa tensione di giudizio di potenza istantanea alla interruzioni | 80,0% y 100,0% (Tensione bus standard) | 90,0% y | |
| P10.61 | Recupero della tensione Tempo del giudizio di Potenza istantanea | 0,00s y 100,00s | 0,50 secondi y | |
| non-stop | ||||
| P10.62 | La tensione di giudizio della potenza istantanea non-stop | 60,0% ~ 100,0% (Tensione bus standard) | 80,0% y | |
| P10.71 | Guadagno istantaneo potenza sensa sosta | Da 0 a 100 | 40 y | |
| P10.72 | Integrante coefficiente di Potenza istantanea sensa interruzioni | Da 0 a 100 | 30 y | |
| P10.73 | Tempo di decelerazione di potenza istantanea sensa sosta | 0 ~ 300,0 s | 20.0 y | |
| P10.63 | Protezione contro la caduta del carico selezione | 0: Non valido, 1: valido | 0 y | |
| P10.64 | Livello di rilevamento della caduta del carico | 0,0 y 100,0% | 10,0% y | |
| P10.65 | Caduta del carico tempo di rilevamento | 0,0 ~ 60,0 s | 1,0s y | |
| P10.67 | Eccessiva velocità valore di rilevamento | 0,0% ~ 50,0% (frequenza massima yP01.10y) | 20,0% y | |
| P10.68 | Tempo di rilevamento della velocità eccessiva | 0,0 s: non rilevabile 0,1 ~ 60,0 s | 1,0s y | |
| P10.69 | La rilevazione valore per la velocità deviazione troppo grande | 0,0% ~ 50,0% (frequenza massima yP01.10y) | 20,0% y | |
| P10.70 | La rilevazione tempo per la velocità deviazione troppo grande | 0,0s: 0,1 ~ 60,0s | 5.0s y | |
| Funzione PID del gruppo P11 | ||||
| P11.00 Canale di ingressso PID | 0: impostazione P11.011:Al12:Al23:Al34: Impostazione impulso (DI5)5: Impostazione della comunità6: Velocità multistadio7: Impostazioni dell'encoder della tastiera | 0 y | ||
| P11.01 | Impostazione dell'ingressodi riferimento digitale | 0,0 y 10,00 | 3,00 y | |
| P11.02 | Feedback PID canale | 0:Al11:Al22:Al33: Al1-Al24: Impostazione impulso (DI5)5: Impostazione della comunità6: Al1+Al27: MASSIMO (|Al1|, |Al2|)8yMIN y|Al1|, |Al2|y | 0 y | |
| P11.03 | Polarità PID | 0: Direzione positiva,1: Direzione negativa | 0 y | |
| P11.04 | Gamma di PID feedback | 0 y 100,00 KG | 10.00 y | |
| P11.05 | Guadagno properzionale KP02 | 0,0 y 100,0 | 20.0 y | |
| P11.06 | Tempo di integrazione Ti1 | 0,01 secondi y 10,00 secondi | 2.00s y | |
| P11.07 | Tempo derivativo Td1 | 0,000 s y 10,000 s | 0,000 secondi y | |
| P11.08 | Inversione PID Frequenza di taglio | 0,00 ~ Frequenza massima | 2,00 Hz y | |
| P11.09 | Il limite del PID deviazione | 0,0% y 100,0% | 1,0% y | |
| P11.10 | Limitatore differenziale di PID | 0,00% y 100,00% | 0,10% y | |
| P11.11 | Tempo di modificazione del segnale di ingresso PID | 0,00 y 650,00s | 0,00 secondi y | |
| P11.12 | Feedback PIDtempo di filtraggio | 0,00 y 60,00 secondi | 0,00 secondi y | |
| P11.13 | Tempo di filtraggio dell'uscita PID | 0,00 y 60,00 secondi | 0,00 secondi y | |
| P11.15 | Guadagno proportionale KP03 | 0,0 y 100,0 | 20.0 y | |
| P11.16 | Tempo di integrazione Ti2 | 0,01 secondi y 10,00 secondi | 2.00s y | |
| P11.17 | Tempo derivativo Td2 | 0,000 s y 10,000 s | 0,000 secondi y | |
| P11.18 | II PIDcommutazione dei parametri condizioni | 0: Nessun interrottore1: Commutazione tramite terminale DI2: Commutazione automatica secondo la deviazione | 0 y | |
| P11.19 | II PIDcommutazione dei parametri Deviazione 1 | 0,0% y P11.20 | 20,0% y | |
| P11.20 | II PIDcommutazione dei parametri Deviazione 2 | P11.19 y 100,0% | 80,0% y | |
| P11.21 Valore iniziale del PID | 0,0% y 100,0% | 0,0% y | ||
| P11.22 | Tempo di mantenimento di PID Iniziale | 0,00 y 650,00s | 0,00 secondi y | |
| P11.23 | Deviazione positiva massima di due produzione | 0,00% y 100,00% | 1,00% y | |
| P11.24 | Deviazione massa deviazione di due produzione | 0,00% y 100,00% | 1,00% y | |
| P11.25 | La proprietà integrale PID | Singolo bit: separazione integrale0: non valido, 1: validoTen Bit: quando la frequenza raggiunge i limiti0: Continua la regolazione integrale, 1: Arresto della regolazione integrale | 00 y | |
| P11.26 | Feedback PID rilevamento delle perdite valori | 0,1% ~ 100,0% (0,0%: Non rilevamento) | 0,0% y | |
| P11.27 | Feedback PID rilevamento delle perdite tempo | 0,0 y 20,0 s | 0.0s y | |
| P11.28 | Il PID fermare operazione | 0: Arrestoswana funzionamento PID, 1: Arresto con funzionamento PID | 0 y | |
| Gruppo P12 - Freqenza di oscillazione, lunghezza fissa e conteggio | ||||
| P12.00 | Modality di impostazione della frequenza di oscillazione | 0: Relativo al Centro frequenzaP01.07y 1: Relativo alla frequenza massima yP01.10y | 0 y | |
| P12.01 | Gamma di frequenza di oscillazione | 0,0% y 100,0% | 0,0% y | |
| P12.02 | La gamma della frequenza di salute | 0,0% y 50,0% | 0,0% y | |
| P12.03 | Ciclo di frequenza dello swing | 0,1s y 3000,0s | 10.0 y | |
| P12.04 | Tempo di salute di onda triangolare della frequenza di oscillazione | 0,1% y 100,0% | 50,0% y | |
| P12.05 | Impostazione della lunghezza | 0m y 65535m | 1000 metri y | |
| P12.06 | Lunghezza effettiva | 0m y 65535m | 0m y | |
| P12.07 | Numero di impulsi per metro | 0,1 y 6553,5 | 100,0 y | |
| P12.08 | Impostazione conteggio valore | 1 y 65535 | 1000 y | |
| P12.09 | Specifica il valore del conteggio | 1 y 65535 | 1000 y | |
| Gruppo P13 Multistadio velocità, PLC semplice | ||||
| Ore 13.00 | Velocità multistadio 0 (0 unità) | -100,0% y 100,0% (frequenza massima yP01.10y) | 0,0% y | |
| P13.01 | Velocità multistadio 1 (MS1) | 0,0% y | ||
| P13.02 | Velocità multistadio 2 (MS2) | 0,0% y | ||
| P13.03 | Velocità multistadio 3 (MS3) | 0,0% y | ||
| P13.04 | Velocità multistadio 4 (MS4) | 0,0% y | ||
| P13.05 | Velocità multistadio 5 (MS5) | 0,0% y | ||
| P13.06 | Velocità multistadio 6 (MS6) | 0,0% y | ||
| P13.07 | Velocità multistadio 7 (MS7) | 0,0% y | ||
| P13.08 | Velocità multistadio 8 (MS8) | 0,0% y | ||
| P13.09 | Velocità multistadio 9 (MS9) | 0,0% y | ||
| P13.10 | Velocità multistadio 10 (MS10) | 0,0% y | ||
| P13.11 | Velocità multistadio 11 (MS11) | 0,0% y | ||
| P13.12 | Velocità multistadio 12 (MS12) | 0,0% y | ||
| P13.13 | Velocità multistadio 13 (MS13) | 0,0% y | ||
| P13.14 | Velocità multistadio 14 (MS14) | 0,0% y | ||
| P13.15 | Velocità multistadio 15 (MS15) | 0,0% y | ||
| P13.16 | Modalità di funzionamento PLC complice | 0: Fine della singola operazione1: Valore finale alla fine della singola operazione2: Andare sempre in bicicletta | 0 y | |
| P13.17 | Salvataggio dello stato di esecuzione del PLC dopo lo spegnimento | Bit singolo: quando la potenza cala Ten Bit: quando Stop 0: Non salvare1: Risparmio. | 00 y | |
| P13.18 | Velocità multistadio 0 runtime | 0,0sýhýy6553,5sýhý | 0,0 secondi | (ore) y |
| P13.19 | Tempo di acc/dic SM 0 | 0 y3 | 0 y | |
| P13.20 | Velocità multistadio 1 tempo di esecuzione | 0,0sýhý y 6553,5sýhý | 0,0 secondi | (ore) y |
| P13.21 | Tempo di acc/dic SM 1 | Da 0 a 3 | 0 y | |
| P13.22 | Velocità multistadio 2 tempi di esecuzione | 0,0sýhý y 6553,5sýhý | 0,0 secondi | (ore) y |
| P13.23 | Tempo di acc/dic SM 2 | Da 0 a 3 | 0 y | |
| P13.24 | Velocità multistadio 3 runtime | 0,0sýhý y 6553,5sýhý | 0,0 secondi | (ore) y |
| P13.25 | Tempo di acc/dec. | Da 0 a 3 | 0 y | |
| SM 3 | ||||
| P13.26 | Velocità multistadio4 tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.27 | Tempo di acc/dicSM 4 | Da 0 a 3 | 0 û | |
| P13.28 | Velocità multistadio5 runtime | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.29 | Tempo di acc/dicSM 5 | Da 0 a 3 | 0 û | |
| P13.30 | Velocità multistadio6 tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.31 | Tempo di acc/dicSM 6 | Da 0 a 3 | 0 û | |
| P13.32 | Velocità multistadio7 tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.33 | Tempo di acc/dicSM 7 | Da 0 a 3 | 0 û | |
| P13.34 | Velocità multistadio 8 tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.35 | Tempo di acc/dicSM 8 | Da 0 a 3 | 0 û | |
| P13.36 | Velocità multistadio9 tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.37 | Tempo di acc/dicSM 9 | Da 0 a 3 | 0 û | |
| P13.38 | Velocità multistadio 10tempi di esecuzione | 0,0sýhþ ñ 6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.39 | Tempo di acc/dicSM 10 | Da 0 a 3 | 0 û | |
| P13.40 | Velocità multistadio11 tempi di esecuzione | 0,0sýhþüy6553,5sýhþ | 0,0 secondi | (ore) û |
| P13.41 | Tempo di acc/dicSM 11 | Da 0 a 3 | 0 û | |
| P13.42 | Velocità multistadio 12 tempi di esecuzione | 0,0syyh' y 6553,5syyh' | 0,0 secondi | (ore) y |
| P13.43 | Tempo di acc/dic SM 12 | Da 0 a 3 | 0 y | |
| P13.44 | Velocità multistadio 3 runtime | 0,0syyh' y 6553,5syyh' | 0,0 secondi | (ore) y |
| P13.45 | Tempo di acc/dic SM 3 | Da 0 a 3 | 0 y | |
| P13.46 | Velocità multistadio 14 tempi di esecuzione | 0,0syyh' y 6553,5syyh' | 0,0 secondi | (ore) y |
| P13.47 | Tempo di acc/dic SM 14 | Da 0 a 3 | 0 y | |
| P13.48 | Velocità multistadio 15 tempi di esecuzione | 0,0syyh' y 6553,5syyh' | 0,0 secondi | (ore) y |
| P13.49 | Tempo di acc/dic SM 15 | Da 0 a 3 | 0 y | |
| P13.50 | Unità di velocità multistadio Acc/Dec tempo | 0: s (secondi) 1: h (ore) | 0 y | |
| P13.51 | Sorgente del segnale di Velocità multistadio 0 (0 unità) | 0: Parametro yP13.00y 1:Al1 2:Al2 3:Al3 4: Impulso (DI5) 5: PID 6: Frequenza preposizione yP01.08y 7: Puo essere modificato con il tasto y/y | 0 y | |
| Parametri di communicatesione RS485 del gruppo P14 | ||||
| Ore 14.00 | Impostazione della velocità in baud per RS485 | Singolo bit: MODBUS 0:300 BPS 1:600 BPS 2:1200 BPS 3:2400 BPS 4:4800BPS 5:9600BPS 6:19200 BPS 7:38400 BPS | 5 y | |
| 8: 57600 BPS 9: 115200 BPS | ||||
| P14.01 | Dati MODBUS formato | 0: Nessun controlo (8.N-2)1: Controllo di parità (8.E-1)2: Controllo dispari (8.O-1)3: Nessun controlo (8.N-1) | 0 y | |
| P14.02 Indirizzo locale | 0: indirizzo di trasmissione1y247y(MODBUS) | 1 | y | |
| P14.03 | MODBUSRitardo di risposta | 0 y 20 ms | 2 y | |
| P14.04 | Tempo di timeout di Tipo RS485 | 0.0: Non valido0,1 ~ 60,0 s | 0,0 y | |
| P14.05 | MODBUSSelezione del protocollo | 0: MODBUS non standardprotocollo1: Protocollo MODBUS standard | 1 | y |
| P14.06 | AttualeRisoluzione del 485Leggere | 0:0,01A1: 0,1 A | 0 y | |
| Gruppo P15 Parametri speciali per l'approvvigionamento idrico a pressione cos | ||||
| 15,00€ | Semplice debug delle macro funzione | 0: Nessuna funzione1: Una unità due pompé 2:Fornitura idrica nella comunità edilizia3: Fornituraidrica dell'hotel 4: Fornituraidrica antincendio 5:Pompa booster 6:Pompa per acque | 0 | y |
| P15.01 | Svegliati pressione | profonde 0~ Pressione di suspensione yKG(1KG=0,1Mpa) | P15.04y2,50 KG y | |
| P15.02 | Tempo di ritardo di Svegliati | 0,0 s ~ 6500,0 s | 0s y | |
| P15.03 | Pressione del sonno | Pressione di riattivazione yP15.01y~ Intervallo del manometro (0,1 MPa) | 3,50 KG y | |
| P15.04 Tempo di ritardo del sonno | 0,0 s ~ 6500,0 s | Anni '60 y | ||
| Pagina 15.05 | Pressione collegamento proportionale | 0: Disabilita;1: Abilita | 1 | y |
| Pagina 15.06 | Svegliati pressione differenza | 0~100,0Bar(Kg,0,1Mpa) | 0,50 KG y | |
| P15.07 | Differenza di pressione del sonno | 0~100,0 Bar(Kg) | 0,50 KG y | |
| Pagina 15.08 | Valore di allarme sovrappressione | 0,00~Intervallo del manometro KG(1KG=0,1Mpa=1Bar) | 9,00 KG y | |
| P15.09 | Tempo di ritardo di Sovrappressione allarme | 0-6553.5S | 0,0S y | |
| Pagina 15.10 | Bassa pressione valore di allarme | 0,00~Intervallo del manometro KG(1KG=0,1Mpa=1Bar)Il parametro après l'allarme di raggiungimento bassa pressione. | 0,0 KG y | |
| Pagina 15.11 | Tempo di ritardo dell'allarme di bassa pressione | 0-6553.5S | 20.0S y | |
| Pagina 15.12 | Assunzione di acqua pressione di avviamento | 0~Intervallo manometro pressione KGApriere il controllo avvio-arresto aspirazione acqua tramite P01.02=3L'ingresso dell'acqua deve utilizzato il sensore di corrente dell'A12Per il sensore di tensione, cancellare il ponticello Al2 | 3,00 KG | y |
| Pagina 15.13 | Arresto dell'ingresso pressione | 0~Intervallo manometro KG(Sbarra) | 3,20 kg y | |
| Pagina 15.14 | Numero di tempo di attesa | Da 0 a 3 | 0 y | |
| Pagina 15.15 | delle pompè ausiliariie Pompa ausiliaria | 0~1000,0S | 60.0S y | |
| sì accende | ||||
| Pagina 15.16 | Tempo di attesa per l'interruttore della pompa ausiliaria | 0~1000,0S | 5.0S y | |
| Pagina 15.17 | Impostazione della frequenza di attivazione del relè | 0~50Hz Quando raggiunge il valore, il RO1 Il relè si accenderà | 50,00 y | |
| Pagina 15.18 | Impostazione della frequenza di spegnimento del relè RO1 | 0~50Hz Quando raggiunge il valore, il Il relè si spegnerà | 30,00 y | |
| Pagina 15.19 | Sorgente del segnale di Livello dell'accua controllore | 0: La funzione non è valida 1:Al1 2:Al2 3: Al3 P15.19=1~3 ,II (P15.20,P15.21,P15.22,P15.23) l'impostazione è valida, P15.19=0, parametri non validi. 0,0y | 0 y | |
| Pagina 15.20 | Valvola di sospensione per il livello dell'accua Controllore | 100,0% Il segnale è inferiore a quello parametro continuayP15.21y tempo, Sleep e avviso di acqua piena (ErrH) | 25,0% y | |
| Pagina 15.21 | Livello dell'accua pieno ritardo | 0~1000,0S Ritardo di yP15.20y impostazione dell'ora. | 6.0S y | |
| Pagina 15.22 | Ritardo di svotamento dell'accua per regolatore di livello | 0~1000,0S Nello stato di avviso di acqua piena (ErrH), quando il segnale del controller del livello dell'accua è maggiore di l'accua P15.20 e continua yP15.22y volte, l'avviso di acqua piena viene cancellato e ripristinato alla normalità stato. | 60.0S y | |
| Pagina 15.23 | Valore di giudizio per danni alla sonda idraulica (regolatore del livello dell'accua) | 0,0%: Funzione non valida. 0,1y100,0%: quando il livello dell'accua il segnale del controller è maggiore di quanto migliorata yP15.23y (E.tSF) guasto e spegnimento | 0,0% y | |
| Pagina 15.24 | Protezione alla carenza d'accua funzione | 0: Disattiva; 1: Abilita e valuta in base alla freuenza e alla | 0 y | |
| 15,25€ | Carenza d'accua valore di controllo dell'errore | pressione 0,00 y Valore di impostazione KG (Bar/0,1 Valido quando P15.19=1, la carenza d'accua è determinata quando il feedback il valore è inferiore a quello valore | MPa) 0,50 y | |
| Pagina 15.26 | Protezione alla carenza d'accua rilevamento freuenza | 0~50.00HZ Valido quando P15.19=1 quando la frequenza di funzionamento è magniore o uguale a quella freuenza e la pressione è minore o uguale a 15,25, valutare la carenza di acqua. | 50,00 y | |
| Pagina 15.27 | Tempo di ridardo della protezione alla carenza d'accua rilevamento | 0y6553.5S Giudizio sul tempo di ridardo per l'allarme di guasto per mancanza d'accua. | 10 y | |
| Pagina 15.28 | effettiva (Bar/0,1 MPa) | 0yIntervallo manometro KG Pressione dell'accua in entrata | 3,00 y | |
| Pagina 15.29 | Acqua in entrata tempo di rilevamento | 0y9999S Tempo per l'arrivo dell'accua rilevamento | 20.0S y | |
| 15,30€ | Perdita d'accua e ricominciare importo della deviazione | 0yIntervallo manometro KG (Bar/0,1 MPa) | 0 | y |
| Pagina 15.31 | Perdita d'acqua e poi iniziare il valore di ritorno | 0 ū Intervallo manometro KG (Bar/0,1 MPa) | 0 y | |
| Pagina 15.32 | Perdita d'acqua e quindi avviare il valore di ritorno tempo di rilevamento | 0: NESSUNA funzione 0.1.10.0S | 2.0S y | |
| Pagina 15.33 | Modalità di suspensione | 0: Disabilita 1: Dormire quando la pressione è maggiore della pressione del sonno; 2: Dormire quando la frequenza corsa è inferiore alla frequenza del sonno (influenzato da P15.29) 3: Dormire quando la pressione è maggiore della pressione del sonno e la frequenza della Corsa è minore della freuenza del sonno. | di 0 | y |
| Pagina 15.34 | Frequenza di uscita in modalità Sleep | 0 yP01.12 | Frequenza 20,0 Hz y | |
| Gruppo P17 Gestione del codice funzionale | ||||
| P17.00 Password utente | 0 y 65535 | 0 y | ||
| P17.01 | Parametro initializzazione | 0: Nessuna operazione 01: Ripristina i parametri di fabbrica, esclusi i parametri del motore 02: cancella le informazioni del record | 0 y | |
| P17.04 | La funzione il codice modificata proprietà | 0: Modificabile 1: Non modificabile | 0 y | |
| Parametri di controllo della copbia del gruppo P18 | ||||
| Ore 18.00 | Modalità di controllo velocità/coppia | 0: Controllo della velocità, 1: Controllo della copbia | 0 y | |
| P18.01 | Impostazione della copbia selezione della fonte nelle coppi modalità di controllo | 0: Impostazioni digitali1: (P18.03)1:Al12:Al23: Al34: Impostazione PLUSE5: Impostazione della comunità6: MINIMO (Al1, Al2)7: MASSIMO (Al1, Al2) | 0 y | |
| P18.03 | Impostazione digitale in modalità controlo copbia | -200,0% y 200,0% (P18.01=0) 150,0% | y | |
| P18.05 | Il massimo frequenza in avanti per Controlli di copbia | 0,00Hz y Frequenza massimaP01.10y | 50,00Hz y | |
| P18.06 | Il massimo frequenza inversa per Controlli di copbia | 0,00Hz y Frequenza massimaP01.10y | 50,00Hz y | |
| P18.07 | Controllo della copbia Tempo di acc. | 0,00s y 65000s | 0,00 secondi y | |
| P18.08 | Controllo della copbia Ora di dicembre | 0,00s y 65000s | 0,00 secondi y | |
| Parametri di ottimizzazione del controllo del gruppo P23 | ||||
| 23,00€ | Frequenza limite superiore per Interruttore DPWM | 5,00 Hz y Frequenza massimaP01.10y | 8,00 Hz y | |
| P23.01 | Modulazione PWM modalità | 0: Modulazione asincrona,1: Modulazione sincrona | 0 y | |
| P23.03 | PWM casuale profondità | 0: PWM casuale non valido1 y 10: Profondità casuale della frequenza portante PWM | 0 y | |
| P23.04 | Flusso velocethe limitante | 0: Disabilita,1: Abilita | 1 y | |
| P23.06 | Sottotensione Impostazione del valore | 200,0 V ~ 2200,0 V | 350V y | |
| P23.09 | Sovrapressione Impostazione del valore | 200,0 V ~ 2200,0 V | 270V y | |
| Pagina 23.10 | Trasportatore automatico variazione di frequenza a bassa frequenza | 0: Disabilita, 1: Abilita | 1 y | |
| Pagina 23.11 | Velocità zero uscita in esecuzione controllare | 0: Disabilita, 1: Abilita | 1 y | |
| Pagina 23.12 | Sensibilità di Perdita di fase di potenza protezione | 0y30,0% | 13,0% y | |
| Impostazione della curva Al del gruppo P24 | ||||
| 24,00€ | Input minimo dell'IAcurva 4 | -10,00 VyP24,02 | 0,00 V y | |
| P24.01 | Corrispondente rapporto di P24.00 | -100,0%y+100,0% | 0,0% y | |
| P24.02 | Compio 1 anno Ho delle puttane 4 | Da 24,00 a 24,04 sterline | 3,00 V y | |
| P24.03 | Corrispondente rapporto di P24.02 | -100,0%y+100,0% | 30,0% y | |
| P24.04 | Compio 2 anni Ho delle puttane 4 | P24.02yP24.06 | 6,00 V y | |
| P24.05 | Corrispondente rapporto di P24.04 | -100,0%y+100,0% | 60,0% y | |
| P24.06 | Ingresso massimo del Ho delle puttane 4 | P24.06y+10.00V | 10,00 V y | |
| P24.07 | Corrispondente rapporto di P24.06 | -100,0% ð+100,0% | 100,0% ð | |
| P24.08 | Input minimo dell'IAcurva 5 | -10,00 VþP24,10 | -10,00 V ð | |
| P24.09 | Corrispondente rapporto di P24.08 | -100,0% ð+100,0% | -100,0% ð | |
| 24,10 € | Accensione 1 dell'IAcurva 5 | P24.08þP24.12 | -3,00 V ð | |
| Pagina 24.11 | Corrispondente rapporto di P24.10 | -100,0% ð100,0% | -30,0% ð | |
| Pagina 24.12 | Compio 2 anni la curva Al 5 | P24.10þP24.14 | 3,00 V ð | |
| Pagina 24.13 | Corrispondente rapporto di P24.12 | -100,0% ð100,0% | 30,0% ð | |
| Pagina 24.14 | Ingresso massimo di la curva Al 5 | P24.12 ð+10.00V | 10,00 V ð | |
| Pagina 24.15 | Corrispondente rapporto di P24.14 | -100,0% ð100,0% | 100,0% ð | |
| P24.24 | Punto di salto di l'Al1 | -100,0% ð100,0% | 0,0% ð | |
| 24,25€ | Gamma di salto di l'Al1 | 0,0% ð100,0% | 0,5% ð | |
| Pagina 24.26 | Punto di salto di l'Al2 | -100,0% ð100,0% | 0,0% ð | |
| Pagina 24.27 | Gamma di salto di l'Al2 | 0,0% ð100,0% | 0,5% ð | |
| Pagina 24.28 | Punto di salute di l'A13 | -100,0% y100,0% | 0,0% y | |
| 24.29 pagine | Gamma di salute di l'A13 | 0,0% y100,0% | 0,5% y | |
| Correzione del gruppo P30 per Al e AO | ||||
| 30,00€ | Al1 Misurato tensione 1 | 0,500 Vy4,000 V | Fabbrica correzione | y |
| 30,01 sterline | Al1 visualità tensione 1 | 0,500 Vy4,000 V | Correzione di fabbrica | y |
| 30,02 € | Al1 misurato tensione 2 | 6.000 Vy9.999 V | Correzione di fabbrica | y |
| 30,03 € | Al1 visualità tensione 2 | 6.000 Vy9.999 V | Correzione di fabbrica | y |
| 30,04€ | Al2 Misurato tensione 1 | 0,500 Vy4,000 V | Fabbrica correzione | y |
| 30,05€ | Al2 visualità tensione 1 | 0,500 Vy4,000 V | Fabbrica correzione | y |
| 30,06 pagine | Al2 misurato tensione 2 | 6.000 Vy9.999 V | Fabbrica correzione | y |
| 30,07 pagine | Al2 visualità tensione 2 | 6.000 Vy9.999 V | Fabbrica correzione | y |
| 30,08€ | Al3 Misurato tensione 1 | -9,999 Vy10,000 V | Fabbrica correzione | y |
| 30,09€ | Al3 visualità tensione 1 | -9,999 Vy10,000 V | Fabbrica correzione | y |
| 30,10 sterline | Al3 misurato tensione 2 | -9,999 Vy10,000 V | Correzione di fabbrica | y |
| Pagina 30.11 | AI3 visualizzazione tensione 2 | -9,999 Vž10,000 V | Fabbrica correzione | ž |
| Pagina 30.12 | Tensione target AO1 1 | 0,500 Vž4,000 V | Fabbrica correzione | ž |
| Pagina 30.13 | AO1 Misurato | 0,500 Vž4,000 V | Correzione di fabbrica | ž |
| Pagina 30.14 | tensione 1 Tensione target AO1 2 | 6.000 Vž9.999 V | Correzione di fabbrica | ž |
| 30,15 sterline | AO1 Misurato | 6.000 Vž9.999 V | Fabbrica correzione | ž |
| Pagina 30.16 | tensione 2 Tensione target AO2 1 | 0,500 Vž4,000 V | Fabbrica correzione | ž |
| Pagina 30.17 | AO2 Misurato | 0,500 Vž4,000 V | Fabbrica correzione | ž |
| Pagina 30.18 | tensione 1 Tensione target AO2 2 | 6.000 Vž9.999 V | Fabbrica correzione | ž |
| Pagina 30.19 | AO2 Misurato | 6.000 Vž9.999 V | Fabbrica correzione | ž |
tensione 2
4. Allarme di guasto e contromisure
| Visualizza | il nome dell'errore | Possibile causa del fallimento | Risoluzione dei problemi |
| Err01 | Protezione del modulo di potenza | La potenza del motore è troppo alla o il cablaggio è in cortocircuito Modulo di alimentazione danneggiato | Rimuovere il filo del motore e riavviarlo. Se c'è quello problema, riparare l'inverter |
| Errore02 | Guasto sottotensione | La tensione di ingressso è anomala o il relè di potenza non è attivato o il rilevamento della tensione | Controllare la tensione di alimentazione o rivolgersi al produttore per assistenza |
| colpa | |||
| Err31 | Sovratensione durante l'accelerazione | La tensione di ingressso è anomala | Controllare l'alimentazione in ingressso |
| Riavviare quando il motore gira | Impostato per l'avvio après la frenata in corrente continua | ||
| Errore32 | Sovratensione durante la decelerazione | Il tempo di decelerazione è troppo breve | Estendere il tempo di decelerazione |
| La tensione di ingressso è anomala | Controllare l'alimentazione in ingressso | ||
| Err33 | Sovratensiona a velocità costante | La tensione di ingressso è anomala | Controllare l'alimentazione in ingressso |
| Err60 | Sovraccarico dell'inverter | Impostazione non corretta della curva V/F o della copbia. | Regolare la curva V/F e la quantità di copbia incrementata |
| Bassa tensione di ingressso. | Controllare la tensione di alimentazione | ||
| Il tempo di accelerazione è troppo breve | Estendere il tempo di accelerazione | ||
| Il carico del motore è troppo pesante | Seleziona un più potente Invertitore | ||
| Errore61 | Sovracorrente durante l'accelerazione | Il tempo di accelerazione è troppo breve | Estendere il tempo di accelerazione |
| La potenza dell'inverter è troppo piccola | Selezionale Inverter con livello di potenza elevato | ||
| Impostazione non corretta della curva V/F o della coppa. | Regolare la curva V/F o la quantità di aumento della coppa | ||
| Err62 | Sovracorrente durante la decelerazione | Il tempo di decelerazione è troppo breve | Estendere il tempo di decelerazione |
| La potenza dell'inverter è troppo piccola | Selezionale l'inverter con livello di potenza elevato | ||
| Err63 | Sovracorrente a velocità costante | Bassa tensione di ingressso. | Controllare la tensione di alimentazione |
| stallo del motore o mutazione del carico troppo grande | Controllare il carico | ||
| La potenza dell'inverter è troppo piccola | Seleziona un più potente Invertitore | ||
| Errore64 | Sovraccarico del motore | Impostazione non corretta della curva V/F o della coppa. | Regolare la curva V/F o la quantità di aumento della coppa |
| Bassa tensione di ingressso. | Controllare la tensione di alimentazione | ||
| stallo del motore o mutazione del carico troppo grande | Controllare il carico | ||
| Il coefficiente di protezione da sovraccarico del motore non è impostato correttamente | Impostare correttamente il coefficiente di protezione da sovraccarico del motore | ||
| Err65 | Guasto limitante la corrente onda per onda | Lo stesso vale per il motore Sovraccarico | Lo stesso vale per il motore Sovraccarico |
| Errore40 | malfunzionamento dell'h | Acqua, insetti, ecc. | riavviare non è possibile riprendere la riparazione in fabbrica |
| Err41 | Memoria EEPROM Errore R/W | Aggancio EEPROM | Richiedi un servizio al produttore |
| Errore42 | Controllo interruzione di corrente | L'alimentazione in ingressso non rientra nell'intervallo delle specifiche | Adattare la tensione ai requisiti delle specifiche |
| Errore46 | Errore di rilevamento della corrente | Guasto al circuito di campionamento della corrente | Richiedi un servizio al produttore |
| Guasto del circuito di azionamento | Richiedi un servizio al produttore | ||
| Err11 | Guasto dell'apparecchiatura esterna 1 | Il terminale di ingressso di guasto esterno 1 è chiuso | Scollegare il terminale di guasto esterno e cancellare il guasto (prestareattenzione a controllare la causa) |
| Errore12 | Comunicazione n fallimento | 485 Comunicazione fallita | Controllare la connessione 485 |
| Errore13 | Arriva il tempo di esecuzione accumulato | Il tempo di esecuzione cumulativo raggiunge il valore impostato | Cancella record tramite Funzione di initializingazione dei parametri |
| Err15 | Guasto apparecchiatura esterna 2 | Il terminale di ingressso di guasto esterno 2 è chiuso | Scollegare il terminale di guasto esterno e cancellare il guasto (prestareattenzione a controllare la causa) |
| Errore16 | Arriva l'orario di accensione | Il tempo di accensione cumulativo raggiunge il valore impostato | La funzione di initiazizzazione dei parametri cancella i record |
| Errore17 | Guasto del contatto/relè | Guasto al terminale di ingresso dell'apparecchiatura esterna | Scollegare il terminale di guasto esterno e cancellare il guasto (prestare attenzione a controlare la causa) |
| Errore08 | Modulo di potenza surriscaldato | Ventola di raffreddamento difettosa o temperatura ambiente surriscaldata | Controllare la ventilà o la dissipazione del calore o attendere che si raffreddi per riprovare |
| Errore90 | Guasto al motore di commutazione durante il runtime | Contatto scadente della linea del motore o dell'interruttore tra motore e inverter | L'inverter deve essere collegato direttamente al motore per verificare che la linea del motore sia allentata |
| Err91 | Guasto di cortocircuito a terra | Cortocircuito verso terra | Scollegare la linea di terra (fare attenzione a controlare la causa) |
| Err92 | Perdita di fase in ingressso | Controllare la linea di alimentazione in ingresso | Richiedi un servizio al produttore |
| Err93 | Perdita di fase di uscita | perdita della linea di potenza in uscita o un circuitto di fase per il rilevamento della corrente è anomalo | Controllare la tensione di uscita e controlare la linea di alimentazione in uscita |
| Errore94 | Guasto per sovravelocità del motore | La velocità del motore supera la velocità normale | Controllare se il carico ha另一 potenza |
| Errore95 | Errore di deviazione della velocità | Il divario di velocità è troppo grande rispetto alla velocità normale | Controllare il carico del motore |
| Err96 | Perdita di feedback PID durante l'esecuzione | Scarso contatto con il segnale del sensore PID | Controllare il segnale del sensore |
| Err97 | Guasto di caduta del carico | La linea del motore è scollegata | Controllare la linea del motore |
| Err98 | Sovratemperatura del motore | Il motore si surriscalda | Controllare la temperature del motore |
| Err99 | Messa a punto del motore colpa | I parametri del motore non sono impostati secondo la targa o la la linea del motore è in cattive condizioni contatto | Impostare il motore parametri secondo la targa e controllare il cavo dal Inverter al motore |
| ErroreH1 | Acqua carenza | Guasto per mancanza d'acqua | Controllare la mancanza di acqua |
| ErroreH2 | Acqua piena Ripristinare l'accua normale allerta precoce | L'acqua è piena | pressione |
| ErroreH3 | pressione fallimento | Errore di arresto forzato | Acqua troppo altaAcqua alta pressione, controllare il pressione dell'accua |
5. Descrizione dell'installazione
Quando P17.00 è impostato su un valore diverso da 0, la password di protezione dei parametri è impostato. É necessario-immettere la password prima di modificare i parametri.
Annullando la password, P17.00 dovrè essere impostato su 0.
Il menu dei parametri in modalità parametri personalizzati dall'utente non è password protetto.
Il gruppo P01yP23 è un parametro della funzione di base, il
gruppo P00 è un parametro della funzione di monitoraggio.
I symboli nella tabella delle funzioni sono descritti come segue: "y": Il valore
impostato di questo parametro può essere modificato quando l'inverter è
Stato di arresto e di esecuzione;
"yy": il valore impostato di quello parametro non può essere modificato quando l'inverter
è nello stato di esecuzione;
"\": il valore del parametro è il valore effettivo del record rilevato e
non può essere modificato;
"*": significa che il parametro è il "Parametro del produttore" ed è
limitato all'impostazione del produttore per impedire all'utente di azionarlo.
Made in China
VEVOR
TOUGH TOOLS, HALF PRICE
Supporto tecnico e certificato di garanzia elettronica www.vevor.com/support
VEVOR®
TOUGH TOOLS, HALF PRICE
Soporte专业技术o y certificate de garantia electrònica www.vevor.com/support
Inversor
MODELO:AT1-7500X




