
AT1-7500X - Falownik Vevor - Bezpłatna instrukcja obsługi
Znajdź bezpłatnie instrukcję urządzenia AT1-7500X Vevor w formacie PDF.

Pytania użytkowników dotyczące AT1-7500X Vevor
0 pytanie dotyczące tego urządzenia. Odpowiedz na te, które znasz, lub zadaj własne.
Zadaj nowe pytanie dotyczące tego urządzenia
Pobierz instrukcję dla swojego Falownik w formacie PDF za darmo! Znajdź swoją instrukcję AT1-7500X - Vevor i weź swoje urządzenie elektroniczne z powrotem w ręce. Na tej stronie opublikowane są wszystkie dokumenty niezbędne do korzystania z urządzenia. AT1-7500X marki Vevor.
INSTRUKCJA OBSŁUGI AT1-7500X Vevor
Wsparcie techniczn e certyfikat gwarancj elektronicnej www.vevor.com/support
Falownik
MODEL:AT1-7500X
Nadal staramy sieofferowacPaanswunarzedzia w konkurencyjnych cenach. "Oszczedz poowe",Poowa ceny' lub innepodobne wyrazenia uzywane przyez nas stanowia jedynie szacunkowe oszczednosci, jakie mozes uzyska,cupujucu nas okreslone narzedzia w porownaniu z glownymi markami i niekoniecznie oznaczaja one objecie wszystkich kategorii narzedzi offeringsh przez nas. Uprzejmie przypominamy,aby dokladnie sprawdzi,czy skladajucu nas zamowienie faktycznie oszczedzasz poowe w porownaniu z glownymi markami.
VEVOR®
TOUGH TOOLS, HALF PRICE
Falownik
MODEL:AT1-7500X

POTRZEBUJESZ POMOCY? SKONTAKTUJ SIE Z NAMI!
Masz pytania dotyczne produktu? Potrzebujesz wsparcia technicznego? Skontaktuj sie zami: Wsparcie
techniczne i certyfikat E-Gwarancji www.vevor.com/support
To jest oryginalna instrukcja, przy uzyciem naleź wyzażne przechytać wszystkie instrukcje. VEVOR zastrzega sąbie jasność interpretacja naszej instrukcji obśglu. Wygliad produktu三点茲ę od produktu, kółory otrzymałe. Prosimi o wybaczenia, ze nie poinformujemy Cie三点 ponownie, sąli w naszym produktie pojawość są jakiekolwiekactualizacje technologiczne lub oprogramOWANIA.
WAZNE ZABEZPIECZENIA

Przechytaj wsystkie ostrzezenia dotyczne bezpiecznych, instrukcje, ilustracje i specyfikacje dostarczone z tym falownikiem. Nieprzestrzeganie wsystkich ponieszte instrukcje moga spowodować porazenie prądem, pożar i/lub powazne obrażenia.
OSTRZEZENIE:
To urzadzenie jest urzadzeniem wysokiego napiecia, nie nalewy podejmować przy其所 podłoczania. rozmontuj ten spreź t w dowolnym momencie, abyunikacja niebezpieczeniastwa. Po urzadzeniu awarii, jesti zewétrzny przyłącznik nie uruchomi ponownie urzadzenia, skontaktuj są z odsprzemiedawca do obśugi.
OSTRZEZENIE: RZYKO PORAZENIA PRADEM ELEKTRYCZNYM I POZARU!
- Niedostosowanie sie do tej instrukcji besoin spowodować awarie elektryczna, pożar i porazenie przem.
- NIE ROZMONTOWYWAC.
- Nie zanurzaj falownika.
- Nie nalezy (£aczyć rɔwnolegle dwoch lub wiecj transformerów.
- Podlacz zasilacz bezposrednio do gniazdka GFCI w.), narażonym na wilgoć.
- Nie uzywaj przyędztuzacza
- Instalacjakiego falownika i związaneano z nim okablowania musi wykonać wykwalifikowy elektryka zgodnia ze wzystkimi obowychymi normami elektrycznych.
OSTRZEZENIE:
Zmiany lub modyfikacja tej jegnostki, które nie zostaly wyraźnie zatwierdzone przyez strone odpowiedzialny za zgodnosćMZe uniewaźnic uprawniena uzytkownika do korzystania z uslugi sprezt.
ZAPISZ TE INSTRUKCJE
Informacja FCC
UWAGA: Zmiany lub modyfikacja, na które strona nie wyrażna wyrażnej zgody odpowiedzialny za zgodnosćMZe uniewaźnic prawo uzytkownika do korzystania z urȩdzenia sprzęt!
To urzadzenie jest zgodne z częcią 15 przypeśów FCC. Eksploataacja podlegaNatestpuće dwa warunki:
1) Produkt ten要去 powodowej szkodliwe zakłocenia.
2) Produkt ten musi akzeptowa wszelkie odbierane zaklocenia, w tym: zaklocenia mogace powodowa niepoźadane dzialanie.
OSTRZEJEZENIE: Zmiany lub modyfikacja untogo produktu nie są wyraźnie zabronione.
zatwierdzone przyez strone odpowiedzialny za zgodnosćMZe uniewaźnic prawa uzytkownika
upowaźniaie do obstugi produktu.
Uwaga: Ten produkt zostal przytestowany i uznany za zgodny z limitami urzadzenia cyfrowe klasy B zgodnie z czecią 15 przypeśów FCC. Niniejsze ograniczenia są zaprojektowane tak, aby zapewnić rozsȩdną ochrone przyd szkodliwymi zakłoceniami w instalacji mieszkaniowej.
Ten produit generuje, wykorzystuje i besoinememitowacenergioczestotliwosci radiowej,但是他nie zostanie zainstalowany i uzyty zgodnie z instrukcja, besoin spowodawaczkodliwe zaklocenia w komunikacoes radiowej. Nie ma jaknak
gwarantuj, ze w konkretnej instalacji nie wystapiąźadne zakłocenia. Ješli to produkt powoduje szkodliwe zakłocenia w odbiorze sygnatu radiowej lub telewizyjniego odbior, kóryMZa ustalić poprzej wyłaczenia i wynczenia produktu,
Uzytkownik jest zachecany do podęcia próby skorygowania zlokćen za pomocząjdego lubwczejznastepujacych sposobów: nastepujaceŚrodki
ostrożnosci. Zmień orientacja lub połozenia anteny
odbiorczej. Zwiększ odlegość między produktem a odiornikiem. Podźczprodukt do gniażdka w innym obwodzie niż ten, do którego jest podźczony. Odiornik jest podźczony.
W celu uzyskania informaci skontaktuj sie ze sprezedawcag lub doświadczonym technikiem radiowo-telewizyjnym. pomoc.
Prawidłowa utylizacja

Niniejszy produkt podlega postanowieniom Dyrektywy Europejskiej 2012/19/WE. Symbol przystawiajczy przykreslony kosz na smieci przyez wskazuje, ze produkt wymaga oddzielnego składowania zbiórkaw Unii Europejskiej. Dotyczy produktu
i wszystkie akcesoria oznaczone tym symbolem. Produktty oznaczone jako takie
nie wolno wyrzuać razem z normalnymi oppadami domowymi, leczNSE je oddac do punktu zbiórki oppadów. punkt zbiórki urzadzen elektrycznych i elektronicznych do recyclkingu
1. Informacja o produktie
W instrukcji podano srodki ostrożnosci i wskazówki dotyczne wyboru typu uzytkownika, instalacja, ustawianie parametrów, uruchomienie obiektu, diagnostyka usterek i codzienna konserwacja i utrzymanie
1.1 Seria inwerterów
| Seria AT901 | Rezystor hamowania | |||||
| Model | Silnik adaptacyjny | Wyjscie Aktualny:A | W | Om | ||
| KW | HP | |||||
| 22 901-7K5G1 | 7,5 | 10 | 34,0 | 600 | 40 | |
1.2 Specyfikacja produktu
| Projekt | Standard | |
| PodstawowyFunkcjonowac | System | Uniwersalny przytetwornik częstotliwość wiekora prȩdu |
| Prowadzić | Wysyszcji prawnaczenia wysyszczenia wysycjnej wysciemianosci. | |
| mydajnańcyCzȩstotliwość | Sterownik wektorowy: 0-500Hz | |
| Sterownik V/F: 0-3200Hz. | ||
| PrzewoźnikCzȩstotliwość | 0,5KHz-16KHz | |
| Czȩstotliwość nośna sąbz.Regulowana | ||
| Czȩstotliwośćrezolucja | Ustawianie zȩrowe od obcieżenia | |
| Ustawienie symulacje: ±0,025% | ||
| rezolucjaTryb sterowania Stero- wnanie wektorowe w petli otwartej (SVC) | ||
| Sterowanie V/F | ||
| Moment(PCZ) | Tryb typu G:0,3 Hz/150% (SVC). | |
| Tryb typu P:0,3 Hz/100% 1:100(SVC) | ||
| Zakres ADJ | ±0,5%(SVC) | |
| Brodluków(PCZ) | ||
| pełodzac(PCZ)pojemnosć | Typ G:150% prȩdu znamionowego 120 s;180% przyez 1T0ypsE P: | |
| 120% przydu znamionowego przyez 60 s;150% przyez 3Aautomatyczny | ||
| Wzrost momentu obrotowego | wzrost momentu obrotowego; | |
| Krzyswa V/F | MTharneueawl taoysq: sinusoida gregoriańska:0m.1u%lti-- | |
| Krzyswa Acc/ Tryb dekompressyjny | Pedsiperszania zwaśniem wypol imin lub 1k7zywji S2)cztery czasy przyspieszania/zwalniania, zakres czasu przyspieszania/zwalniania 0,0-6500,0 s | |
| Hamowanie prȩdom stalym | Czȩstotiwość hamowania:0,00 Hz - czȩstotiwość maksymalna; Czas hamowania:0,0s-36,0s Wartość prȩdu hamowania:0,0%-100,0% | |
| Kontrola prawna | Zakres czȩstotiwość biegu:0,00 Hz-50,00 Hz; | |
| Czas przyspieszania i zwalniania:0,0s-6500,0 s. | ||
| Do 16 przybiegow segmentowych z wbudowanym sterownikiem PLC lub sterowaniem | ||
| wbudowy PID terminala | Można Łatwo zrealizowej proces sterowania systemem sterowania w petli zamkiȩtej | |
| Funkcja AVR Gdy wystepuropa wahania napięcia wejsciwowego, napiȩcie wyjsciowe sąze | ||
| Kontrola przyciągnięca | Rydowiny zwaśniem zwaśniem wypol imin lub 1k7zywji S2)czystym wyzwalaniom przyciąwiwny. | |
| Szybki prȩd ogranizacja | Zminimalizuji awarie nadmiernego przydu i chroń normalny przyce przycie zȩstotiwość | |
| Ograniczenia momentu obrotowego | Automatyczne ogranizyenie momentu obrotowego podczas przycy. | |
| i kontrola Natachmiastowa moc zapalięga zȩstemiajewywiepniwuadpradytazyjnu wychybatychmiastowa | ||
| Chronometraż | ||
| Operacyjny | Rozkaz zȩódź | Panel sterowania, terminal sterowania, port szeregowy,我不想 przelącać na wiele spoobów |
| Częstotliwość zródló | Potencjometr panelowy, podana liczba, zewnegrzne wejscie analogowe napiȩcia/prȩdu i wejscie portu szeregowego.MZNA przyłączać na wiele sposobów | |
| Zacisk wejsciowy Pięc | cyfrowych zacisków wejsciowych, 1 | |
| zacisk wejsciowy wielkość analogowej; | ||
| Jedno wejscie napiȩciewe 0-10 V lub prȩdowe 0-20 mA; | ||
| Wyjscie Terminal | 1 cyfrowy terminal wyjscieowy | |
| 1 zacisk wyjsciewy przykaźnika (TA,TB,TC) | ||
| 1 analogowy terminal wyjscieowy, obstrugućny napiȩcie wyjsciewie 0-10 V lub 0-20 mA | ||
| Ochrona fungcjonowa | Wykrywanie zwarcia silnika podczas wączania, ochrona przydanikiem fazy wejscieowej i wyjscieowej, ochrona przy nadmiernym prȩdem, ochrona przy przyȩcieiem, ochrona przy zbyt niskim napiȩciem, ochrona przy przyegrzaniem i ochrona przy przyȩzenia imtp. | |
| Pęła Środkowisko | Użyjjejbiejsca | W pomieszczeniu, bez bezpośredniago swiatła stonecznégo, kurzu, gazów zȩcych, gazów palnych, mgły olejowej, pary, wody lub soli itp. |
| Ponad morzem poziom | poniȩj 1000m 2C116699 | |
| Otoczenia temperatura | -10°C ~ + 40°C (temperatura otoczenia wynosi 40°C ~50°C, sąȩzyzmniejszyść wartość) | |
| wilgotność | Poniȩje 95% RH, kondensacja bezwodna | |
| wibrować | Mniej niż 5,9 m/s (0,6 g) | |
1.3 Opis petli sterowania i zacisku petli glównej
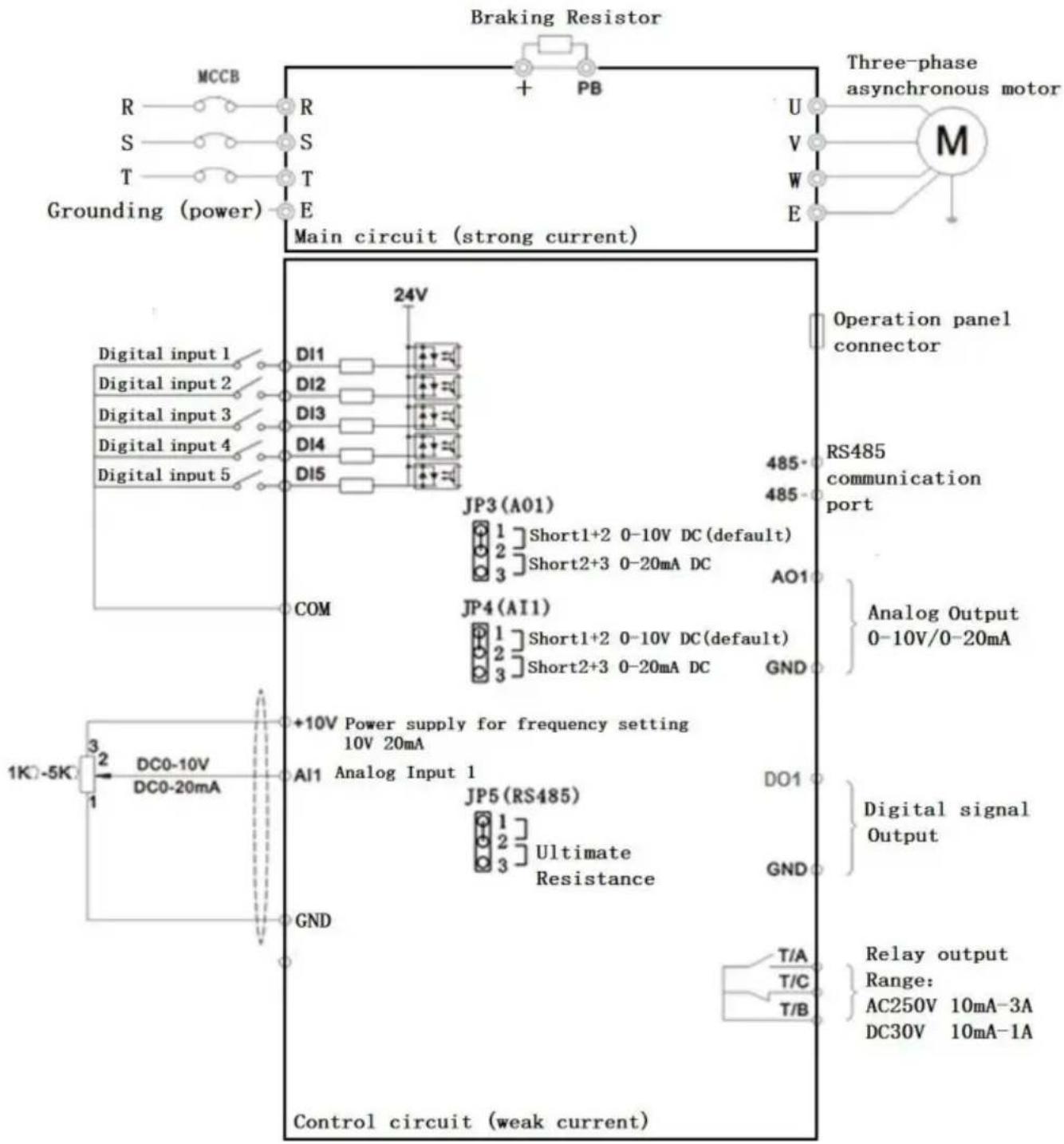
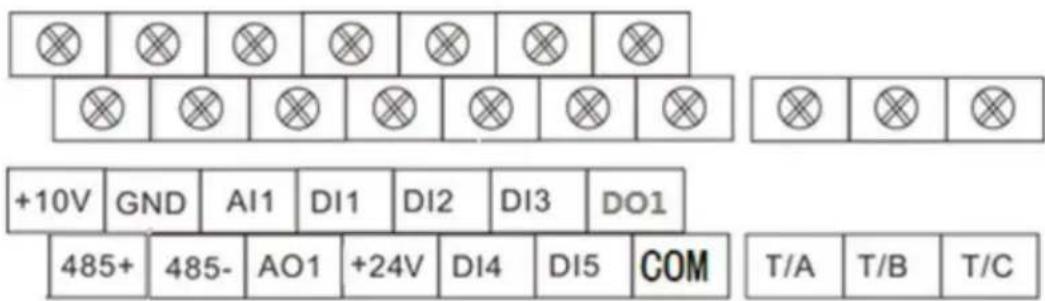
Rysunek 1-3-1 Schemat okablowania 0,75-11,0 kW Opiszacisku sterujucego
2. Obsługa i wyświetlacz
Opis lampki kontrlnej funkcjji
Hz: Lampka kontrlna wyświetlacza czestotliwość
V: Kontrolka napiecia
A: Kontrolka pradu
ERR:kontrolka usterki
F/R:Kontrolka jazdy do przodu i do tyfu
L/R: Kontrolka kontroli komunikacoes
RUN: Kontrolka pracy
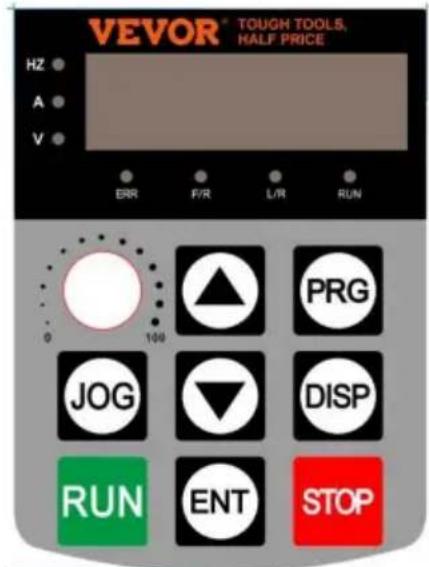
| Symbol klucza | Nazwa | Deklaracja funkcjı |
| PRG | Programowanie klawisz | Wejscie do menu lub wyjscie ziedo z parametrem modyfikacja |
| laryngologia | Okreslić klawisz | Wejdź do menu i potwierdz ustawianie parametrów |
| Górnny klawisz | Zwiększenia danych lub kodów funkcjı | |
| Klawisz w dó† | Malejacze dane lub kody funkcjı | |
| wyświetrić | Klawisz Shift | Wybierz bit modyfikatora parametu i wyświetl zawartość |
| uruchomic | Uruchom klucz | Uruchom falownik pod klawiatura tryb przycay |
| zatrzymywość SIE | Klawisz Stop/Reset Zatrzymanie/setowanie operacje, | Ograniczone do kodu funkcjı P08.01 BIEC TRUCHTEM |
| Klawisz jog |
Ustaw metode parametru:
- Naciśnij przycisk PRG, aby wyświetcie P 0,00, 2. Za pomocaj
przycisków i DISP wybierz numer parametru, który chcesz zmodyfikować, a nastepnie
Klawisz ENTER wpwadza parametr,
- Klawisz i DISP modyfikuja wartosci parametrów, klawisz ENTER zapisuje parametry. 4. Ješli konieczna
jest modyfikacja innych parametrów, powtorz kroki 2, 3, takie jak modyfikacja
zakońcenie, Powróć do interfejsu częstotliwość za pomoczą klawiszka PRG.
- Tabela podsumowujęca parametry fungcjonalne:
| P00, Grupa monitorujucka | |||
| P00.00 | częstotliwość biegu | 0,00 320,00 Hz (P01.22=2) - | |
| P00.01 | Ustaw czȩstotliwość | 0,0 3200,0 Hz (P01.22=1) - | |
| P00.02 | Napiȩcie szyny zbiorczej (V) | 0,0 V 3000,0 V | - |
| P00.03 | Napiȩcie wyjSciowe (V) | 0 V 1140 V | - |
| P00.04 | Prȩd wyjSciowy (A) | 0,00A ~ 655,35A | - |
| P00.05 | Moc wyjSciowa (kW) | 0 32767 | - |
| P00.06 | Moment wyjSciowy (%) | -200,0% 200,0% | - |
| P00.07 | Stan wejSciowy OF | 0 32767 | - |
| P00.08 | Stan wyjScija DO | 0 1023 | - |
| P00.09 | Napiȩcie AI1 (V) | 0,01 V | - |
| P00.10 AI2 | Napiȩcie (V) lub prȩd (mA) | 0,00 V 10,57 V 0,00 mA 20,00 mA | - |
| P00.12 | wartość liczbowa | 0 65535 | - |
| P00.13 | Wartość dlągość | 0 65535 | - |
| P00.14 | Wyświetlacz przyȩdość iadowania | 0 65535 | - |
| P00.15 | Ustawienie PID | 0 65535 | - |
| P00.16 | Sprȩzenia zwrotne PID | 0 65535 | - |
| P00.17 | Etap PLC | 0 65535 | - |
| P00.18 | Czystotliwość wejSciowa impulsu | 0 ~ 100kHz | - |
| P00.19 | Prȩdkość spreȩzenia zwrotnégo (Hz) | -320,00 Hz ~ 320,00 Hz | - |
| P00.20 | Pozostaly CZAS wykonania | -320,00 Hz 6500,3200 Hz | - |
| P00.21 | AI1 Napiȩcie przyced korektą | 0,000 V 10,570 V | - |
| P00.22 | AI2 Napiȩcie/Prȩd przyced korekta | 0,000 V 10,570 V 0,000 mA 20,000 mA | - |
| P00.24 | prȩdkość liniowa | 0 65535 m/min | - |
| P00.25 | Aktualny CZAS zasilania | 0 6500 minut | - |
| P00.26 | Aktualny CZAS trwania | 0,0 ~ 6500,0 Min | - |
| P00.28 | Ustawienia komunikacja | -100,00% 100,00% | - |
| P00.30 | Częstotliwość X Wyswietlacz | 0,00 Hz ~ 500,00 Hz | - |
| P00.31 | Czȩstotliwość Y Wyswietlacz | 0,00 Hz ~ 500,00 Hz | - |
| P00.32 Wyswietl dowolna wartość adresu pAMIJI | 0 65535 | - | |
| P00.35 | Docelowy moment obrotowy (%) | 0,0° 359,9° | - |
| P00.37 | WspÓrzynnik mocy Kąt | - | |
| P00.39 Docelowe napiȩcie Rozdzielajuće VF | 0V ~ Napiȩcie znamionowe silnika | - | |
| P00.40 Napiȩcie wyjsciowe separacje VF | 0V ~ Napiȩcie znamionowe silnika | - | |
| P00.41 Wyswietlanie stanu wejscia IN | - | - | |
| P00.42 Wyswietlacz stanu wejscia DO | - | - | |
| P00.43 Wyswietlacz statusu funkcjä DI 1 | (funkcjä 01. funkcjä 40)- | - | |
| P00.44 Wyswietlacz wizualny stanu funkcjä DI | 2 (Funkcjä 41. Funkcjä 80)- | - | |
| P00-45 komunikat o blędzie | - | - | |
| P00-59 Ustaw czȩstotliwość (%) | -100,00% 100,00% | - | |
| P00-60 Czȩstotliwość biegu (%) | -100,00% 100,00% | - | |
| P00-61 Stan inwertera | 0 65535 | - | |
| —parametr modyfikowalny w dowolnych warunkach —niemodyfikowalny parametr w stanie działania · —rzeczywisty wykryty parametr, niemodyfikowalny | ||||
| FC | nazwa | Ustaw zakres | Fabryka wartość | modyfikować |
| P01 Podstawowa grupa funkcyjna | ||||
| P01.00 | Typ G/P | 1: Typ G (stały moment obciążenia) model) 2: Typ P (wentylator i pompa wodna) model) | 1 | |
| P01.01 | 1. Sterowanie silnikiem tryb | 0: Prędkość bezczujnikowa Wektor Kontrola 2: Model sterOWANIA V/F | 2 | |
| P01.02 | DziaŁanie rozkaz | 0: polecenie uruchomienia panelu operocyjngo kanat (Światra „L/R” wyłączone) | 0 | |
| kanał | 1: Kanat kończyw y (Światy „L/R" wączone) 2: Polecenie komunikacja nje kanał (Migajace Światy „L/R") | |||
| P01.03 | Głowna czȩstotliwość zȩdło X | 0: Zestaw cyfrowy (ustawiona czȩstotliwość P01.08, klawisz / na klawiaturze, zanik zasilania) 1: Zestaw cyfrowy (ustawiona wstawne) czȩstotliwość P01.08, klawisz / na klawiaturze, pAMIĆ spadku mocy) 2: Zestaw analogowy AI1 (0-10 V); 3: Zestaw analogowy AI2 (0-10 V lub 20 mA); 4: Potencjometr panelowy; 5: Zestaw impulsów (0 50 KHZ DI5); 6: Zestaw prȩdkość wielostopniowej 7: Zestaw prostego PLC; 8: Zestaw sterownikia PID; 9: Zestaw komunikacja jny. | 4 | |
| P01.04 | Zȩdło czȩstotliwość w tymnej I | Tak samo jak w ustawieniu P01.03 (głowne zȩdło czȩstotliwość X) | 0 | |
| P01.05 | Ogranicz wybor Y, gdy sątepuje superpozycja czȩstotliwość | 0: W porównani do P01.10 Maksymalna czȩstotliwość 1: W stosunku do zȩdła czȩstotliwość X | 0 | |
| P01.06 | Granica Y, gdy superpozycja czȩstotliwość | 0% 150% | 100% | |
| P01.07 źdło czȩstotliwość | Pojedyncza cyfra: Wybór zȩdła czȩstotliwość 0: Głowne zȩdło czȩstotliwość X 1: Operacja glówna i pomocnicza | 00 | ||
| wyniki (relacja operaci jest określana przyez dziesiéćcyfr)2: Głowna czȩstotliwość X i Przełacznik czȩstotliwość w tymnej Y3: Przełacznie sądzy glównymi czȩstotliwość X i Main i Wyniki operaci w tymnych 4: Cȩstotliwość Y przyȩcza są Operacja glówna i pomocniczaDynikiDziesiéć cyfr: Cȩstotliwość relacje operacyjnej X i Y0:X+Y1:X-Y2: Maksimum z Dwojga, 3: Minimum z Dwojga. | Z | |||
| P01.08 | Cȩstotliwość przyimkBów | 0,00 Hz Maksymalna czȩstotliwość P01.10 | 50,00Hz | |
| P01.09 Kierunek biegu | 0: Spójny kierunek, 1:Przeciwny kierunek | 0 | ||
| P01.10 | Maksymalna czȩstotliwość wyjsciowa | Wektor: 50,00 Hz ~ 500,00 HzP/F: 50,00 Hz2000,00 Hz | 50,00Hz | |
| P01.11 | Górna czȩstotliwość granicznaźródló | 0: P01.12 Ustawienia 1:AI1 Ustawienia2: AI2 Ustawienia3: AI3 Ustawienia4: Ustawienie impulsu (0 50KHZ DI5);5: Ustawienia komunikacja | 0 | |
| P01.12 | Górna czȩstotliwość graniczna | P01.14 P01.10 | 50,00Hz | |
| P01.13 | Górna granica czȩstotliwość odchynia | 0,00 Hz P01.10 | 0,00 Hz | |
| P01.14 | Dolna granica częstotliwość | 0,00 Hz P01.12 | 0,00 Hz | |
| P01.15 | Czȩstotliwość nośna | 0,5 kHz 16,0 kHz | Dla modelu | |
| P01.16 | Czȩstotliwość nośna Dostosuj za pomocamy temperatury | 0: Nie,1: Tak | 1 | |
| P01.17 | Czas przyspieszania 1 | 0,00 s 650,00 s (P01.19=2) 0,0 s 6500,0 s P01.19=1 0 s 65000 s (P01.19 = 0) Czȩstotliwość odniesienia P01.25 | Dla modelu | |
| P01.18 | Czas zwalniania 1 | |||
| P01.19 | Jednostka czasu Przyspieszemenie i czas zwalniania | 0:1 towary drugiej jakosci 1:0,1 sekundy 2:0,01 sekundy | 1 | |
| P01.21 | Czȩstotliwość polaryzacji czȩstotliwość y nałozenia | 0,00 Hz Maksymalna gdy czȩstotliwość wyjsciowa P01.10 | 0,00 Hz 0 | |
| P01.22 | Rozdzielczość Czȩstotliwość | Rozdzielczość wyszystkich czȩstotliwość polecenia. | 2 | |
| P01.23 | Wydędzanie zasilania pAMIęć dla Ustawienie czȩstotliwość cyfrowej | 0: BrakAMIącie 1: PAMIęć | 0 | |
| P01.24 | Wybor grupy parametrów silni | 0: Grupa parametrów silnika 1, ka 1: Grupa parametrów silnika 2. | 0 | |
| P01.25 | Odniesienie czȩstotliwość Przyspieszemenie i czas zwalniania | 0: Maksymalna czȩstotliwość P01.10 Ustawianie czȩstotliwość 2:100Hz | 0 | |
| P01.26 | Czas wykonania instrukacja czȩstotliwość GÓRA/DÓL | 0: Cźȩstotliwość operaci, 1: Ustawianie czȩstotliwość | 0 | |
| reper | ||||
| P01.27 | źródló polecenia w pakiecieźródló czȩstolwość | Pojedyncza cyfra: Częstotliwość wierzania polecen panelu operacynjego wybór zȩdla0: Brak wierzania 1: Zestaw cyfrowy 2:AI1 3:AI2 4:AI35: Zestaw impulsów (050KHZ DI5); 6: Prȩdkość wielu segmentów; 7: Prosty PLC8:PID9: Zestaw komunikacjany Dziesieć cyfr:źródló czȩstotliwość wierzania polecenia terminala wybór100 cyfr: wybór zȩdla czȩstotliwość wierzania polecen komunikacjanych Cyfra tysiaca: automatyczne uruchomienie zȩdla czȩstotliwość wybór | 0000wiąȩcej | |
| P02 Grupa parametrów silnika asynchroniczkiego 1 | ||||
| P02.00 | Typ silnika | 0: Zwykły silnik asynchroniczny, 1: Silnik asynchroniczny o zmiennesj czȩstotliwość | 0 | |
| P02.01 | Moc znamionowa silnik | 0,1 kW 400,0 kW | Wedlug do Model ZFalownik | |
| P02.02 | Napiȩcie znamionowe Silnik | 1V 2000V | ||
| P02.03 | Prȩd znamionowy Silnik | 0,01A ~ 655,35A(Moc falownika <=55kW)0,1 A ~ 6553,5 A(Moc falownika > 55kW) | ||
| P02.04 | Częstotliwość znamlonowa silnikowy | 0,01 Hz Maksymalna czȩstotliwość wyjsciowa P01.10 | |||
| P02.05 | Prȩdkość znamionowa silnik | 1 obr./min 65535 obr./min | |||
| P02.06 | Rezystancja stojana silnikowy | 0,001Ω 65,535Ω (Moc falownika <=55kW) 0,0001Ω 6,5535Ω (Moc falownika >55kW) 0,001Ω | Strojenie Parametr | ||
| P02.07 | Opól wirnika Silnikowy | 65,535Ω (Moc falownika <=55kW) 0,0001Ω 6,5535Ω (Moc falownika >55kW) 0,01mH 655,35mH | |||
| P02.08 | Odpornyść na przyciekanie Silnikowy | (Moc falownika <=55kW) 0,001Mh 65,535mH (Moc falownika > 55 kW) 0,1 | |||
| P02.09 | Wzajemny opól Silnikowy | mH 6553,5 mH (Moc falownika <= kW) 0,01mH 655,35mH (Moc falownika > 55kW) | |||
| P02.10 | Prȩd jołowy Silnik | 0,01 A P02.03 (Moc falownika <=55 kW) 0,1 A P02.03 (Moc falownika > 55 kW) | |||
| P02.37 Wybór strojenia | 0: brak dzialania 1: Strojenie przy silniku hieruchomym 1 2: Strojenie dynamiczne silnika 3: Strojenie przy silniku calkowicie hieruchomym 2 | 0 | |||
| P03 Parametry sterOWANIA wekTOROWEgo grupy silników 1 | |||||
| P03.00 | Pętla prȩdkość proportcjonalna 1 | 1 100 | 30 | ||
| P03.01 | Czasintegracja piętli prędkość 1 | 0,01 sek. 10,00 sek. | 0,50 sek. | ||
| P03.02 | Cȩstotiwość przyłączenia 1 | 0,00 | P03.05 | 5,00 Hz | |
| P03.03 | Pȩta prȩdkości proporcjonalna 2 | 1 | 100 | 20 | |
| P03.04 | Czasintegracja piętli prȩdkości 2 | 0,01 sek. 10,00 sek. | 1,00 sek. | ||
| P03.05 | Cȩstotiwość przyłączenia 2 | P03.02 Maksymalnaczȩstotiwość wyjsciowa P01.10 | 10,00 Hz | ||
| P03.06 | Kontrola wektorowawzmocznie zmiary biegów | 50% | 200% | 100% | |
| P03.07 | Czas filtratwniamomentu obrotowej SVCstate | 0,000 s | 0,100 s | 0,050 sek. | |
| P03.09 | Górnny limit momentu obrotowejźródlą poniȩjkontrola prȩdkoscietryb | 0: UstawienieP03.10 1: AI1; 2: AI2;3: AI3;4: Zestaw impulsów (DI5);5: Ustawienie komunikacje;6: MIN (AI1, AI2)7: MAKS. (AI1, AI2) | 0 | ||
| P03.10 | Górnny limit momentuobrotowej przy prȩdkoscietryb sterowania | 0,0% | 200,0% | 150,0% | |
| P03.13 | Proporcjonalny zyskobudzeniaregulacja | 0 | 60000 | 2000 | |
| P03.14 | Całkowy zyskwozbudzeniaregulacja | 0 | 60000 | 1300 | |
| P03.15 Wzmocnienie proporcjonalne | 0 | 60000 | 2000 | ||
| Zregulações momentu obrotowego | |||||
| P03.16 | Człkowite wzmocnienieregulazioni momentu obrotowego | 0 60000 | 1300 | ||
| P04 Parametry sterowania V/F | |||||
| P04.00 Ustawuminium krzywej VF | 0: krzywa liniowa V/F1: Krzywa wielepunktowa V/F 2:Krzywa malejacego momentu obrotowego1 (krzywa kwadratowa)3: Malejacza krzywa momentuobrotowego 2 (moc 1,2)4: Malejacza krzywa momentuobrotowego 2 (moc 1,4)6: Malejacza krzywa momentuobrotowego 2 (moc 1,6)8: Malejacza krzywa momentuobrotowego 2 (moc 1,8)10: Tryb człkowitego oddzielenia VF11: Tryb półseparacje VF 0,0% | 0 | |||
| P04.01 | Ustawuminium wzmocnieniamomentu | (automatyczny moment podnoszenia)0,1% 30,0% | Wedlug modelu | ||
| P04.02 | obrotowej Punktodciecia | 0,00 Hz Maksymalnaczestotliwość wyjsciowa P01.10 | 50,00 Hz | ||
| P04.03 | wzmocnienia momentuobrotowego | 0,00 Hz P04.05 | 0,00 Hz | ||
| P04.04 | Wielopunktowe V/FCzȩstotiwość 1 | 0,0% 100,0% | 0,0% | ||
| P04.05 | Wielopunktowe V/FNapiȩcie 1 | P04.03 P04.07 | 0,00 Hz | ||
| P04.06 | Wielopunktowe V/FCzȩstotiwość 2 Wielopunktowe V/F Napiȩcie 2 | 0,0% 100,0% | 0,0% | ||
| P04.07 | Wielopunktowa | P04.05 Moc znamionowa silnikaczęstotliwość P02.04 | 0,00 Hz | ||
| P04.08 | czȩstotliwość V/F 3 Wielopunktowa | 0,0% 100,0% | 0,0% | ||
| P04.09 | czȩstotliwość V/F 3 Sterowanie V/F Kompensacja czȩstotiwość poślizgu | 0,0% 200,0% | 0,0% | ||
| P04.10 | V/F ponad wzmocnienie wzbudzenia | 0 200 | 64 | ||
| P04.11 | Oscylacja wzmocnienie tłowienia dla V/F | 0 100 | Wed.§ug modelu | ||
| P04.13 | Zhórdź napiȩcia przyez | 0: Ustawienia cyfrowe P04.141:AI1 2: AI23: AI34: Ustawienie pulsu (DI5)5: Instruktura wielokrotna6: Prosty PLCOddzielony VF7: PID8: komunikacja UstawienieUwaga: 100,0%, co odpowiadaznamionowemu napiȩciu silnika | 0 | ||
| P04.14 | Napiȩcie do separaciy VF | 0V Napiȩcie znamionowe silnika | 0V | ||
| P04.15 | Czas narastania napiȩcia separaciy VF | 0,0 s ~ 1000,0 sUwaga: Czas, w króym 0 V wzrasta do napiȩcie znamionowe silnika. | 0,0 s | ||
| P04.16 | Czas dorp napiȩcia separaciy VF | 0,0 s 1000,0 sUwaga: Czas, gdy napiȩcie znamionowe silnika spadnie do 0 V | 0,0 s | ||
| P04.17 | Tryb wyłączenia separaciy VF | 0: Cȩstotliwość i napiȩcie spadaja do 0 osobno;1: Cȩstotliwość spada po Spadek napiȩcia do 0 - | 0 | ||
| P04.18 | Przeciȩzenia prȩdowe prȩd akci | 50% 200% | 150% | ||
| P04.19 | TłumieniePrzeciȩzenia prȩdowe | 0: Wymiącz,1: Wymiącz. | 1 | ||
| P04.20 | Zysk tłumieniawynosi ponadobecne stoisko | 0 100 | 20 | ||
| P04.21 | Odszkodowaniewspołeczynnikakcja Ponadobecne stoisko | 50% 200% | 50% | ||
| P04.22 | Działyanieprzejność | 650,0 V 800,0 V | 760,0 V | ||
| P04.23 | napȩcieTłumienie | 0: Wymiącz,1: Wymiącz. | 1 | ||
| P04.24 | przejnośćTłumienieWzmocnienie | 0 100 | 30 | ||
| P04.25 | czȩstotliwośćprzejnośćTłumienie Wzmocnienie napiȩcie przejność | 0 100napiȩcie napiȩcie przejność | 30 | ||
| P04.26 | Maksymalny wzrosto graniczenia czȩstotliwość dlaZatrzymanie spowodowej przypieciem | 0 50 Hz | 5Hz | ||
| Grupa P05, Parametry wejsciowe | |||||
| P05.00 | Zacisk DI1funkcjonować | 0: Brak faktcj;1: Jazda do przyd u (FWD) lubDziałyanie;2: Bieg wsteczny (REV) lubPrzelącznik przyód/tyf3: sterowania trójpruszwodowe 4:sterownikie biegiem do przyd u (FJOG)5: Sterownikie biegiem wstecznych (RJOG) | 1 | ||
| 6: Zwiększenia czȩstotliwość (zacisk UP)7: Zmielejszenia czȩstotliwość(Terminal DOWN)8: Beźplażtna kontrola wyłączania9: Wejscie sygnalu resetu zewnegrznych (RST)10: Zawieszenia pracy; 11: Zewnegrznych będ, wejscie normalnie otwartec(NO) 12: Wielobiegowe 1 13: Wielobiegowe 2 14: Wielobiegowe 3 15: Wielobiegowe 4 16: Wyborczysu ACC/DEC 1 (TT1)17: Wyborczysu ACC/DEC 2 (TT2)18: Przelącznik zȩdla czȩstotliwość 19: GÓRA/DÓL Zerowanie czȩstotliwość (zacisk, klawiatura)20: Uruchom polecenie Switch terminal 121: Zakaz ACC/DEC VFD22: Pauza sterowania PID23: Resetowanie stanu PLC24: Cȩstotliwość wahadla Pauza25: Wejscie licznika26: Resetowanie licznika27: Wejscie licznika dędgość 28: Resetowanie dędgość29: Wymiarcze sterowania momentem obrotowym 30: Ustawienie impulsu (tylkodIS molest ustawic, P05.04=30)31: Zarezerwowane;32: Natachmiastowe hamowanie prȩdom stały;33: Zewnegrznych sygnat wejsciowy bledu (normalne |
| zamkniète, NC)34: Modyfikacja czȩstotliwośćUozóliewia35: Odwrócony sygnat wejsciowy PID;36: Zewnętrzny terminal parkingowy 137: Uruchom polecenie Switchterminal 238: Pauza calki PID;39: Cȩstotliwość X przyłącza są zczȩstotliwość ustawIONa fabrycznia40: Cȩstotliwość Y przyłącza są zczȩstotliwość ustawIONa fabrycznia41: Zacisk wyboru silnika 143: Przelącznik parametrów PID44: Będ zdefiniowych przy bez uzytkownika 145: Będ zdefiniowych przy bez uzytkownika 246: Przelącznik kontrli prędkość/momentu obrotowej47: Zatrzymanie awaryjne48: Zewnȩtrzny terminal parkingowy 249: Powolne hamowanie prȩdom stały50: Czas wykonania wyczyszczony;51: Sterowanie dwuprzewodowe / trójpruszewodoweprzyȩcznik sterujucy52: Wymiarcz cofanie; | ||||
| P05.01 | Zacisk DI2funkcjonalny | 4 | ||
| P05.02 | Zacisk DI3funkcjonalny | 9 | ||
| P05.03 | Zacisk DI4funkcjonalny | 12 | ||
| P05.04 | Zacisk DI5funkcjonować(tylko DI5MZE) | 13 | ||
| ustawienie pulsu funkcja, P05.04=30) | ||||
| P05.10 Czas filtrwnania DI | 0,000 s 1,000 s | 0,010 s | ||
| P05.11 | Kontrola terminala Tryb | 0: Tryb sterowania dwuprzewodowej 1, 1: Tryb sterowania dwuprzewodowej 2, 2: Tryb sterowania trójprzewodowej 1, 3: Tryb sterowania trójprzewodowej 2. | 0 | |
| P05.12 | Częstotliwość krok regulacityjny rozmiar | 0,001 Hz/sek. 65,535 Hz/sek. | 1,00 Hz/sek. | kunde |
| P05.13 | Min. wejscie AI krzywa 1 | 0,00 V P05.15 | 0,00 V | |
| P05.14 | Odpowiedni wartosci krzywej AI 1 Min. wiejscie | -100,0% +100,0% | 0,0% | |
| P05.15 | Maks. wiejscie AI krzywa 1 | P05.13 +10,00 V | 10,00 V | |
| P05.16 | Odpowiedni wartosci krzywej AI Maksymalna wartosci 1 | -100,0% +100,0% | 100,0% | |
| P05.17 | wejscia krzywej AI 1 filtrwniancazas | 0,00 sek. 10,00 sek. | 0,10 sek. | |
| P05.18 | Min. krzywa AI 2 wiejscie | 0,00 V P05.20 | 0,00 V | |
| P05.19 | Odpowiedni wartosci krzywej AI 2 Min. wiejscie | -100,0% +100,0% | 0,0% | |
| P05.20 Ma ksymalne wiejscie AI2 | P05.18 +10,00 V | 10,00 V | ||
| P05.21 | Odpowiedni wartosci krzywej AI Maksymalne wiejscie 2 | -100,0% +100,0% | 100,0% | |
| P05.22 | Filtrowanie krzywej AI czas | 2 | 0,00 sek. | 10,00 sek. | 0,10 sek. | |
| P05.23 | Min. krzywa AI 3 wiejscie | -10,00 V | P05.25 | -10,00 V | ||
| P05.24 | Odpowiedni wartość krzywej AI 3 Min. wiejscie | -100,0% | +100,0% | 0,0% | ||
| P05.25 | Maks. wiejscie AI krzywa 3 | P05.23 | +10,00 V | 10,00 V | ||
| P05.26 | Odpowiedni wartość krzywej AI Maksymalna krzywa | -100,0% | +100,0% | 100,0% | ||
| P05.27 | wiejsciowa AI 3 3 filtrowanie czas | 0,00 sek. | 10,00 sek. | 0,10 sek. | ||
| P05.28 | Wartość min. Wiejscie impulsowe | -10,00 V | P05.25 | 0,00 V | ||
| P05.29 | Odpowiedni wartość impulsu Min. wiejscie | -100,0% | +100,0% | 0,0% | ||
| P05.30 | Maksymalna wartość Wiejscie impulsowe | P05.23 | +10,00 V | 10,00 V | ||
| P05.31 | Odpowiedni wartość impulsu Maksymalne | -100,0% | +100,0% | 100,0% | ||
| P05.32 | wiejscie Filtrowanie impulsów czas | 0,00 sek. | 10,00 sek. | 0,10 sek. | ||
| P05.33 Wybór krzywej AI | Pojedynczy bit: wybór krzywej AI1: Mam 1 Dziwki (14:00, patrz P05.13 ~ P05.16.) 2: Mam 2 Dziwki (14:00, patrz P05.18 ~ P05.21.) 3: Mam 3 Dziwki (14:00, patrz P05.23 ~ P05.26.) | 321 | ||||
| 4: Mam 4 Dziwki(16:00, patrz P24.00 P24.07)5: Mam Dziwki 4(16:00, patrz P24.08 P24.15)Dziesieć bitów: wybór krzywej AI2 (tak samo jak pojedynczy bit 1~5)Sto bitów: wybór krzywej AI3(to samo co powyȩjej) | ||||
| P05.34 | AI jest poniȩzejminimalnyustawienia wiejsciowewybór | Pojedynczy bit: AI1 poniȩzej Ustawieniemin.weitacja 0: Wartość odpowyadajność min.wejosciu 1: 0,0%Dziesieć bitów: AI2 poniȩzej Minimalneustawienieweitosciwo (takie samo jak pojedynczy bit 1~2)Sto bitów: AI3 poniȩzej Minimalne ustawieniewejosciowe (takie samo jak powyȩjej) | 000 | |
| P05.35 Czas opóznienia DI1 | 0,0 s ~ 3600,0 s | 0,0 s | ||
| P05.36 Czas opóznienia DI2 | 0,0 s ~ 3600,0 s | 0,0 s | ||
| P05.37 Czas opóznienia DI3 | 0,0 s ~ 3600,0 s | 0,0 s | ||
| P05.38 | Zacisk DI1-DI5waźnywybór trybu | 0: Wysoki poziom skutecznosci, 1: Niskipoziom skutecznosciPojedynczy bit: DI1;Dziesieć bitów: DI2;Bit setny: DI3;Tysiąc bitów: DI4,Dziesieć tysięcy bitów: DI5 | 00000 | |
| P05.39 | Zacisk DI6-D17waźnywybór trybu | 0: Wysoki poziom skutecznosci, 1: Niskipoziom skutecznyPojedynczy bit: DI6, | 00000 | |
| Dziesieć bitów: DI7 | |||||
| Grupa P06, Parametry wyjsciowe | |||||
| P06.01 | Wyjscie DO1 wybr fungcjki | 0: Brak wyjscia1: Wskaźnik pracy; 2: Wyjscie będu (do bezplatnégo wylączenia będu)3: Sygnal wykrywania poziomuczȩstotiwość 1 (P14T1)4: Wskaźnik przybycieczȩstotiwość (FAR)5: Praca VFD przyzerowej prędkości (podczas pracy)6: Przemiestanie silnika Wczesne ostrzejanie7: Przemiestie falownikawczesne ostrzejanie8: Nadchodzi Set Count9: Osiągnieto okresłona liczbę10: Osiągnieto dlugość11: Cykl PLC jest zakończyny12: Łęczny czas trwania przybywa13: Ograniczenia czȩstotiwość14: Ograniczenia momentu obrotowej15: Gotowy do uruchomienia16:AI1>AI217: Czosstotiwość wyjsciowa osiąga górną granice limit18: Czosstotiwość wyjsciowa osiągdolny limit (podczas pracy)19: Wyjscie stanu pod ciasnieniem 20: Ustawienie komunikacje 21: Lokalizacja jest kompletna (zarezerwowana) -25 - | 0 | ||
| P06.02 | Plyta sterownikiczPrzekaźnik(TA-TB-TC)FunkcjonowaWybór | 2 | |||
| 22: Bliskość lokalizacja (zarezerwowana) 23: Praca z prędkości zerowa 2 (również wyjscie po wyłaczeniai) 24: Łarczy czas w��zenia przybywa 25: Sygnat wykrywania poziomu czȩstotiwość 2 (P14T2) 26: Osiąnieto czȩstotiwość wyjsciowa 1 27: Osiąnieto czȩstotiwość wyjsciowa 2 28: Osiąnieto przy wyjsciowy 1 29: Osiąnieto przy wyjsciowy 2 30: Osiąnieto regularnie 31: Przekroczenia sygnatu wejsciwoego Al 32: Spadek obráżenia 33: Odwrotna praca VFD 34: Stan zerowego prȩdu 35: Moduł zasilania temperatura osiaga 36: Prȩd wyjsciowy poza limitem 37: Cȩstotliwość wyjsciowa osiaga dolny limit (wyźyczenia również wyjscie) 38: Wyjscie będu (wszymstkie będy) 39: Przeegrzanie silnika Wczesne ostrzejeżenie 40: Nadchodzi ten czas przy wyjscie będu (bezplatune) będ wyźyczenia i brak pod (ci.§nienie wyjsciowe) | ||||
| P06.07 | Wybrć fungcjwi wyjscia AO1 | 0: Cȩstotiwość operacyjna, 1: Cȩstotiwość zadana. | 0 | |
| P06.08 | Wybrć fungcjwi wyjscia AO2 | 2: Prȩd wyjsciowy, 3: Moment wyjsciowy, 4: Moc wyjsciowa, 5: Napiȩcie wyjsciowe, | 1 | |
| 6: Czosztolwość impulsów wojciechych.7: AI1 8: AI29:AI310: Długosity11: Wartość liczbowa12: Ustawienia komunikacja,13: Prȩdkość silnika14: Prȩd wyjsciowy. (100,0%Odpowiada 1000,0A)15: Napiȩcie wyjsciowe (100,0% (Odpowiada 1000,0 V)16: Moment wyjsciowy silnika(Procent wartość rzejczywistej w stosunku do mocy silnika)17: Moment obrotowy wyjsciowy VFD(Procent wartość rzejczywistej w stosunku do mocy znamionowej VFD) | ||||
| P06.10 | AO1 z zerowym odchyleniem współczynnik | -100,0% +100,0% | 0,0% | |
| P06.11 | Wzmocnienie AO1 | -10,00 +10,00 | 1,00 | |
| P06.12 | AO2 z zerowym odchyleniem współczynnik | -100,0% +100,0% | 0,0% | |
| P06.13 | Wzmocnienie AO2 | -10,00 +10,00 | 1,00 | |
| P06.17 | Opólznienie wyjsscia DO CZAS | 0,0 s ~ 3600,0 s | 0,0 s | |
| P06.18 | Wyjscie przykaźnikowe CZAS opólznienie | 0,0 s ~ 3600,0 s | 0,0 s | |
| P06.19 | Wyjscie RELAY2 CZAS opólznienie | 0,0 s ~ 3600,0 s | 0,0 s | |
| P06.22 | Wyjscie DO jest prawnodowe wybór statusu | 0: Logika dodatnia, 1: Antylogika Pojadynczy bit: DODziesieć bitów: RELAY1 | 00000 | |
| Sto bitów: RELAY2 | ||||
| Grupa P07, parametry sterowania Start i Stop | ||||
| P07.00 Tryb uruchamiania | 0: Start bezposgcdni1: Zacznij od sledzenia prędkosci2: Hamowanie prądem stalym + start przyczȩstotiwość poczȩkowej | 0 | ||
| P07.01Śedzenia prędkosci metoda | 0: Rozpocznych od wylączeniaczȩstotiwość1: Zacznij od czȩstotiwośćci roboczej2: Zacznij od maksimumczȩstotiwość | 0 | ||
| P07.02Prȩdkość siedzenia prȩdkosci | 1 100 | 20 | ||
| P07.03 Czȩstotiwość poczȩkowa | 0,00 Hz ~ 10,00 Hz | 0,00 Hz | ||
| P07.04Czȩstotiwość poczȩkowaczas utrzymania | 0,0s ~ 100,0s | 0,0s | ||
| P07.05Prȩd hamowania DC przy uruchomieniu | 0% 100% | 0% | ||
| P07.06Czas hamowania prȩdom stalym przy uruchomienie | 0,0s ~ 100,0s | 0,0s | ||
| P07.07PrzyspieszemenieITryb zwalniania | 0: liniowy tryb przyspieszania/zwaliniania1: Krzywa S Tryb przyspieszania/zwaliniania A2: Krzywa S Tryb przyspieszania/zwaliniania B | 0 | ||
| P07.08Wspołczynnik czasu startu segment w S krzywa | 0,0% 100,0%-P07.09 | 30,0% | ||
| P07.09Wspołczynnik czasu startu segment w S krzywa | 0,0% 100,0%-P07.08 | 30,0% | ||
| P07.10 | Tryb zatrzymania | 0: Zwalnaj, aby sie zatrzymać 1: Zwolnij, aby sie zatrzymać | 0 | |
| P07.11 | Czȩstotliwość próg DC hamulec | 0,00 Hz ~ Maksymalna czȩstotliwość. P01.10 | 0,00 Hz | |
| P07.12 | Opieznienie hamowania prȩdom stalym CZAS | 0,0 s ~ 100,0 s | 0,0 s | |
| P07.13 Prȩd hamowania DC | 0% 100% | 0% | ||
| P07.14 | Czas hamowania prȩdom stalym przy wędkomwoc zie | 0,0 s ~ 100,0 s | 0,0 s | |
| P07.15 | Hamulec DC wskaznik wykorzystania | 0% 100% | 100% | |
| P07.18 | Śledzenia prȩdkość aktualny | 30% 200% | ||
| Klawiatury grupy P08 i parametry wyświetlania | ||||
| P08.01 Funkcja kluczza M | 0: Klawisz M jest nieprawidowej1: Przelączanie między trybem zdalmym Sterowanie (sterowanie terminalem lub komunikacja) i sterowanie panelem operacyjnym, gdy P01.02 =1 lub 22: Przelącznik FWD/REV3: FJOG (sterowanie ruchem do przyodu)4: RJOG (sterowanie biegiem wstecznych) | 0 | ||
| P08.02 STOP/RESET funkcja kluczowa | 0: Klawisz STOP/RES. Waźny tylko w trybie sterowania panelem.1: Przycisk STOP/RES Zawsze wąźny | 1 | ||
| P08.03 Parametr wyświetlacza LED Status operaggi | 0000 FFFFBit00: Czwestotliwość robocza 1 (Hz)1in Bit01: Ustawianie czȩstotliwość (Hz) Bit02: Napiȩcie magistrali (V) | 1 piétr | ||
| Bit03: Napiȩcie wyjsciowe (V) Bit04: Prȩd wyjsciowy (A) Bit05: Moc wyjsciowa (kW) Bit06: Moment wyjsciowy (%) Bit07: Stan wejscia DO Bit08: Status wyjscia DO Bit09: napiȩcie AI1 (V) Bit10: napiȩcie AI2 (V) Bit11: napiȩcie AI3 (V) Bit12: Wartość liczbowa Bit13: Wartość dlągość Bit14: Wyświetlanie prędkości lągowania Bit15: Ustawienia PID | ||||
| P08.04 | Parametr wyświetlacza LED Status operaci | 0000 FFFF Bit00: spreȩzenia zwrotne PID Bit01: Etap PLC Bit02: Częstotiwość wejsciowa IMPULSU (kHz) Bit03: Częstotiwość przylicity 2 (Hz) Bit04: Pozostaność czas wykonania Bit05:AI1-skorygowane napiȩcie przyedianie (W) Bit06:AI2-skorygowane napiȩcie przyedianie 2in (W) Bit07:AI3-skorygowane napiȩcie przyedianie (W) Bit08: Prȩdkość linii Bit09: Aktualny.czas mocy (Godzina) Bit10: Bzieȩcy czas wykonania (min) Bit11: Częstotiwość wyjsciowa PULSE (Hz) Bit12: Ustawienia komunikacja Wartość | 0 | |
| Bit13: Prędkość sprejiangzenia zwrotnégo enkodera (Hz) Bit14: Głowny wyświetlacz czȩstotliwość (Hz) Bit15: Cȩstotliwość w tymna Y Wyswietlacz (Hz) | ||||
| P08.05 | parametr w Stop status Bit07: Wartość licezbowa | 0000 FFFF Bit00: Ustaw czȩstotliwość (Hz) Bit01: Napiȩcie magistrali (V) Bit02: Stan wiejscia DI Bit03: Status wyjscia DO Bit04: napiȩcie AI1 (V) Bit05: napiȩcie AI2 (V)Wyswietlacce LED Bit06: Napiȩcie AI3 (V) 33 | ||
| Bit08: Wartość dlugość Bit09: Etap PLC Bit10: Prȩdkość ladowania Bit11: Ustawietenia PID Bit12: Cȩstotliwość wejsciowa PULSE (kHz) | ||||
| P08.06 | Prȩdkość ladowania wspóćznik wyswielmetania | 0,0001 6,5000 | 1,0000 | |
| P08.07 | Moduł zasilania temperatura | 0,0°C 100,0°C | - | • |
| P08.08 Numer produktu | - | - | • | |
| P08.09 | Łączny CZAS trwania | Oh 65535h | - | • |
| Grupa P09, funcka pomocnicza | ||||
| P09.00 Cȩstotliwość biegu próbnego | 0,00 Hz ~ Maksymalna czȩstotliwość. P01.10 | 2,00 Hz | ||
| P09.01 0,0 s~6500.0 sCzas przypieższamajog | Lata 20.0 | |||
| P09.02 | Czas na jogging | Zalecany czas:0.4 4.0KW 7,5 sek.5.5 30.0KW 15,0 S37,0 132,0 kW 40,0 s160,0 630,0 kW 60,0 sek. | Lata 20.0 | |
| P09.03 | Czas przyspieszania2 | 15,0 | ||
| P09.04 | Czas zwalniania2 | |||
| P09.05 | Czas przyspieszania3 | |||
| P09.06 | Czas zwalniania3 | |||
| P09.07 | Czas przyspieszania4 | |||
| P09.08 | Czas zwalniania4 | |||
| P09.09 Częstotliwość przyszekoku 1 | 0,00 Hz ~ Maksymalna czȩstotliwość.P01.10 | 0,00 Hz | ||
| P09.10 Częstotliwość przyszekoku 2 | 0,00 Hz | |||
| P09.11 | Cȩstotliwość przyszekoku.zakres | 0,01 Hz | ||
| P09.12 | Pozytywne i Odwróć martwegoczas | 0,0 s ~ 3000,0 s | 0,0 s | |
| P09.13 | Odrwraćczystotliwośćpozwolenie | 0: Dozwolone; 1:Zakazać | 0 | |
| P09.14 | Kiedy ustawienieczȩstotliwość jest niższa niżdolna granica;cȩstotl. | 0: Uruchom przy niższej czȩstotliwość granicznej1: Zatrzymaj są2: praca przy zerowej przydkość | 0 | |
| P09.15 | Kontrola upuszczania | 0,00 Hz ~ 10,00 Hz | 0,00 Hz | |
| P09.16 | Ustawieniec monoc skumulowana | Oh 65000h | Oh | |
o godzinie przyjazdu
| P09.17 | Ustawienie łuczyny | Oh 65000h | Oh | |
| biegu P09.18 Ochrona startu | 0: Niezabezpieczony; | 0 | ||
| P09.19 | Częstotliwość wartość wykrywania 1 (P14T1) | 0,00 Hz ~ Maksymalna;cżestotliwość. P01.10 | 50,00 Hz | |
| P09.20 | Wartość opólzniednia wykrywania;cżestotliwość (P14T1) | 0,0% ~ 100,0% (poziom P14T1) | 5,0% | |
| P09.21 | Cȩstotliwość dociera do wykryta szerokość | 0,0% ~ 100,0% (maksymalna cżestotliwość) | 0,0% | |
| P09.22 | Funkacja przeskakiwania;cżestotliwość Podczas Accom i Grudzień | 0: Nieprawidowy, 1: prawidowy | 0 | |
| P09.25 | Cȩstotliwość przyłączenia czas przyspieszania 1 i czas 2 | 0,00 Hz ~ Maksymalna;cżestotliwość. P01.10 | 0,00 Hz | |
| P09.26 | Cȩstotliwość przyłączenia czas zwalniania 1 i czas 2 | 0,00 Hz ~ Maksymalna;cżestotliwość. P01.10 | 0,00 Hz | |
| P09.27 | Priorytet Jog terminala | 0: Nieprawidowy, 1: prawidowy | 0 | |
| P09.28 | Cȩstotliwość wartość wykrywania 2 (P14T2) | 0,00 Hz ~ Maksymalna;cżestotliwość | 50,00 Hz | |
| P09.29 | Wartość opólzniednia wykrywania;cżestotliwość (P14T2) | 0,0% ~ 100,0% (poziom P14T2) | 5,0% | |
| P09.30 | Dowolna cȩstotliwość przy & wymiemiecie zęstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstotliwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwość przy & wymiemiecie zȩstolniwoość Przycytrycie wychydrzećy są politydotharyngi zęstotliwość zȩstotliwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwoość Przycytrycie wychydrzećy są politydomy zȩstotliwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość z}}}, Przycytrycie wychydrzećy są politydomy zȩstotliwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstol niwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwoiec zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość z}}}, Przycy trycie są politydomy zȩstotliwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstelniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniwość zȩstolniWOJZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI/ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI DZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZITZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZII ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZITZE ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZILZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZI ZIL Przycytrycie są politydomy zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość z要闻 Przycytrycie są politydomy zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstowicny zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość z Peripheral Przycytrycie są politydomy zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstolniwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwoiec zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zȩstotliwość zizuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zimuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumohoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zumuhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zuluhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zulhoje zULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJEZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE ZULHOJOJE | |||
| wartość wykrywania 1 | ||||
| P09.31 | Wykryto dowolnagleęstotliwość przybycia, szerokość | 0,0% ~ 100,0% (maksymalna czȩstotliwość) | 0,0% | |
| P09.32 | Dowolna czȩstotliwość przy wartość wykrywania 2 | otów 00 Hz ~ Maksymalna czȩstotliwość | 50,00 Hz | |
| P09.33 | Dowolna czȩstotliwość przy wykryto szerokość 2 | 0,0% ~ 100,0% (maksymalna czȩstotliwość) | 0,0% | |
| P09.34 | Prȩd zerowy poziom wykrywania | 0,0% 300,0% 100,0% odpowiada znamionowemu prȩdowy silnika | 5,0% | |
| P09.35 | Czas opółznienia Wykrywanie prȩdu | 0,01 sek. 600,00 sek. | 0,10 sek. | |
| P09.36 | Obecna wartość wyjscie ponad aktualny | 0,0% (Nie wykryto) 0,1% ~ 300,0% (prȩd znamionowy silnika) | 200,0% | |
| P09.37 | Czas opółznienia Wyjscie ponad Wykrywanie prȩdu | 0,00 sek. 600,00 sek. | 0,00 sek. | |
| P09.38 | Arbitralny prȩd przybycia 1 | 0,0% ~ 300,0% (prȩd znamionowy silnika) | 100,0% | |
| P09.39 | Arbitralne przybocycie biejeća szerokość 1 | 0,0% ~ 300,0% (prȩd znamionowy silnika) | 0,0% | |
| P09.40 | Arbitralne przybocycie obecny 2 | 0,0% ~ 300,0% (prȩd znamionowy silnika) | 100,0% | |
| P09.41 | Arbitralne przybocycie biejeća szerokość 2 | 0% ~ 300,0% (prȩd znamionowy silnika) | 0,0% | |
| P09.42 | Funkcja timera wybór | 0: Nieprawidłowy, 1: prawidłowy | 0 | |
| P09.43 Czas dzialania timera | 0: Ustawuminium P09.44, | 0 | ||
| wybór | 1:AI12: AI23: AI3Zakres wejósca analogowegoodpwiada P09.44 | |||
| P09.44 | Timer uruchomionyczas | 0,0 Min. ~ 6500,0 Min | 0,0 minuty | |
| P09.45 | Dolna granica wartośćzabezpieczenia napiȩciawejosciwogo AI1 | 0,00 V P09.46 | 3,10 V | |
| P09.46 | Wartosc górnego limituzabezpieczenia napiȩciawejosciwogo | P09.45 10,00 V | 6,80 V | |
| P09.47 | AI1 Zabezpieczenieprzed przyegrzaniem Wartosć | 0°C 100°C | 75°C | |
| P09.48 | Wentylator chłodźcykontrola | 0: Wentylator pracje podczadziażania VDF1: Zawsze działa, gdy zasilanie jest sączonaNA; | 0 | |
| P09.49 | Czȩstotliwośćwybudzania | Czȩstotliwość hibernaNji (P09.51) ~Maksymalna czȩstotliwość P01.10 | 0,00 Hz | |
| P09.50 | Opólznienie wybudzianiczas | 0,0 s ~ 6500,0 s | 0,0 s | |
| P09.51 | Czȩstotliwość snu | 0,00 Hz ~ Czȩstotliwość wybudzianiaP09.49 | 0,00 Hz | |
| P09.52 CZasopólznienia uspienia | 0,0 s ~ 6500,0 s | 0,0 s | 0,0 s | |
| P09.53 | Czas przybycia tegodzia)—ianie | 0,0 ~ 6500,0 Min | 0,0 minuty | |
| P09.54 | Wspólczynnik korekcjiMoc wyjsciowa | 0,00% 200,0% | 100,0% | |
| Grupa P10 Będ i ochrona | ||||
| P10.00 | Przeciȩzenia silnika ochrona | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P10.01 | Przeciȩzenia silnika zysk ochrony | 0,20 10,00 | 1,00 | |
| P10.02 | Przeciȩzenia silnika wczesne ostrzejanie czynnik | 50 100% | 80% | |
| P10.07 | Zwarcie do ochrona uziemienia po wymiarceniu zasilania | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P10.08 | Jednostka hamulcowa napięcie pouchyckiwoe | 650,0 V 800,0 V | 690V | |
| P10.09 | Automatyczna uterka czasy resetowania | 0 20 | 0 | |
| P10.10 | Zrób Dzielenie wybr odśpoczas automatyczna uterka nastawic | 0: Brak akcjki 1: Akcjki | 0 | |
| P10.11 | Interwał dla Automatyczna uterka nastawic | 0,1 sek. 100,0 sek. | 1,0 s | |
| P10.12 | Zabezpieczenersie przy utrata fazy wejiSciowej/ Zabezpieczenersie przy wymiąniem przyzański mozy | Pojedynczy bit: ochrona przy utrata fazy wejiSciowej 0: Wymiarcz, 1: Wymiarcz Dziesieć bitów: zabezpieczenersie przykaźnika mocy przy wymiarcz, 1: Wymiarcz | 11 | |
| P10.13 | Zabezpieczenersie przy utrata fazy wywiSciowej | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P10.14 | Pierwsza porówna typ | 0: Brak będu 1: (Zarezerwowane) | - | - |
| P10.15 | Druga porażka typ | 2: Nadmierny prąd w procesie Acc3: Nadmiar prądu w procesie grudniowym4: Nadmiar prądu przy stały matażeniuprędkość5: Przepićie w procesie Acc6: Przepićie w procesie dekompressyjniym7: Przepićie przy stały prȩdkości8: Przeciȩzenia rezystancji bufora9: Podnapiȩcie10: Przeciȩzenia VFD11: Przeciȩzenia silnika12: Utrata fazy wejsciowej13: Utrata fazy wyjsciowej14: Moduł zasilania jest przyegrzany15: Będ zewétrzny16: Wyjiatek komunikacyjniny17: Przekaquznik zasilania jest nieprawidłowyy18: Wykrywanie nieprawidłowego prądu19: Strojenie silnika jest nieprawidłowey21: Odczyt i zapis parametrówwyjiatek22: Inne nieprawidłowe dzialanie spreźtu23: Zwarcie silnika do masy26: Przybycle w czasie wykonywomania27: Będ uzytkownika niestandardowy 128: Będ uzytkownika niestandardowy 229: Nadchodzi czas wączenia zasilania30: Zrzut Ładunku31: Utracono spreȩzenia zwrotne PID w czasie pracyy40: Szybki limit przypieplywu przykroczy limit czasu41: Przelączanie silnika podczaspracy42: Odchylienie prȩdkość jest zbyt duź | |
| P10.16 | Trzechi(najnowszy) typ usterki | ||
| 43: Nadmierna prędkość obrotowa silnika | ||||
| P10.17 | Częstotliwość,trzechiej(najnowszej) awarii | - | - | • |
| P10.18 | Aktualny wtrzechia(najnowsza) usterka | - | - | • |
| P10.19 | Napiȩcie magistrali przy trzechiej(najnowszej) awarii | - | - | • |
| P10.20 | Zacisk wyjiangowystatus na trzechim(najnowsze)awaria | - | - | • |
| P10.21 | Zacisk wyjiangowystatus na trzechim(najnowsze)awaria | - | - | • |
| P10.22 | Falownikstatus na trzechim(najnowsze)awaria | - | - | • |
| P10.23 | Czas wączenia zasilania dla trzechia(najnowsza) awaria | - | - | • |
| P10.24 | Czas trwania dla trzechia(najnowsza) awaria | - | - | • |
| P10.27 | Częstotliwość wdruga porówna | - | - | • |
| P10.28 | Aktualny wdruga porówna | - | - | • |
| P10.29 | Napiȩcie magistrali przy drugi będ | - | - | • |
| P10.30 | Zacisk wiejsciowy status dla druga porówna | - | - | • |
| P10.31 | Zacisk wyjsciowy status w druga porówna | - | - | • |
| P10.32 | Falownik status w druga porówna | - | - | • |
| P10.33 | Czas wączenia zasilania dla druga porówna | - | - | • |
| P10.34 | Czas trwania dla druga porówna | - | - | • |
| P10.37 | Częstotłowość w pierwsza porówna | - | - | • |
| P10.38 | Aktualny na pierwszym awaria | - | - | • |
| P10.39 | Napiȩcie magistrali przy pierwszej awarii | - | - | • |
| P10.40 | Zacisk wiejsciowy status na pierwszym sąjeuwawaria | - | - | • |
| P10.41 | Stan terminala wyjsciowy na pierwszym awaria | - | - | • |
| P10.42 | Falownik status na pierwszym sąjeuwawaria | - | - | • |
| P10.43 | Czas wączenia zasilania dla pierwsza porówna | - | - | • |
| P10.44 | Czas trwania dla | - | - | • |
| pierwsza porażka | ||||
| P10.47 | Ochrona przyawariam działanie wybór 1 | Pojedynczy bit: Przeciȩzenia silnika (Err11)Dziesieć bitów: utrata fazy wejsciowej (Err12)Sto bitów: utrata fazy wyjsciowej, (Bław 13)Tyszac bitów: bław zewétrzny (Bław 15)Dziesieć tysiȩcy bitów: Wyjatek komunikacja jny (Err16)0: Zatrzymanie na biegu jałowym; 1: Zatrzymanie w trybie zatrzymania P07.10 | 00000 | |
| P10.48 | Ochrona przyawariam działanie wybór 2 | 2: Kontynuowanie jazdy; Pojedynczy bit/Stobitów/Tyszac bitów: (Zarezerwowane)Dziesieć bitów: odczyt parametrów i wyjatek zapisu (Err21)Dziesieć tysiȩcy bitów: czas wykonania przybycie (Err26)0: Zatrzymanie na biegu jałowym; 1: Zatrzymanie w trybie zatrzymania | 00000 | |
| P10.49 | Ochrona przyawariam działanie wybór 3 | P07.10 Pojedynczy bit: Niestandardowy blad uzytkownika 1 (Err27)Dziesieć bitów: Bław uzytkownika niestandardowy 2 (Bław 28)Sto bitów: czas wączenia przybywa (Err29)Tyszac bitów: spadek obciȩzenia (Err30)0: Zatrzymanie na biegu jałowym; 1: Zatrzymanie w trybie zatrzymania P07.10 2: Przejść do 7% czȩstotliwość znamionowej silnika i kontynuacje pracy, powróć do czȩstotliwość zadnej, gdy | 00000 | |
| odzyskiwanie obciañenia Dzieść tysiȩcy bitów: spreȩzenia zwrotne PID strata (Err31) 0: Zatrzymanie na biegu jałowym; 1: Zatrzymanie w trybie Stop P07.10 2: | ||||
| P10,50 | Wybor dane烂nia zabezmieczażęgo przy了一些 | Kontynuowanie jazdy; Pojedynczy bit: Odchylenie prędkość jest zbyt duje (Err42) Dzieść bitów: Nadmierna prȩdkość silnika (Err43) Sto bitów: (Zarezerwowane) Prędkość bitów: sąd spreȩzenia zwrotné prȩdkości (Err52) 0: Zatrzymanie na biegu jałowym; 1: Zatrzymanie w trybie zatrzymania P07.10 | 00000 | |
| P10.54 | Kontynuuj wybor czȩstotliwość w przypadku awarii | 2: Kontynuowanie pracy; 0: Bieȩca czȩstotliwość 1: Ustawiona czȩstotliwość 2: Praca przy gornej czȩstotliwość granicznej 3: Praca przy dolnej czȩstotliwość granicznej 4: Praca czȩstotliwość | 0 przy nieyawidowej rezerw | |
| P10.55 | Rezerwa nienormalna czȩstotliwość | 0,0%~100,0% (100,0% opdowiesta maksymalnej czȩstotliwość P01.10 | 100,0% | |
| P10.59 | Natychmiastowa moc bez przycerwy | 0: Nieyawidowy 1: Zmniejsz prȩdkość; 2: Zatrzymanie zwalniania | 0 | |
| P10.60 | Pauza napiȩcie osȩdu natychmiastowej moc bez przycerwy | 80,0% 100,0% (Standardowe napiȩcie magistrali) | 90,0% | |
| P10.61 | Odzyskiwanie napiȩcia Czas sądu Natychmiastowa moc | 0,00 sek. 100,00 sek. | 0,50 sek. | |
| nieprzerwanie | ||||
| P10.62 | Napiȩcie osądu natychmiastowej | 60,0% ~ 100,0% (Standardowe napiȩcie magistrali) mocy non-stop | 80,0% | |
| P10.71 | Zysk natychmiastowy mocNieprzerwana | 0 100 | 40 | |
| P10.72 | Całka wspÓlczynnik Natychmiastowa moc bez przyzewy | 0 100 | 30 | |
| P10.73 | Czas zwalniania natychmiastowej mocy bez przyzewy | 0 ~ 300,0 s | 20.0s | |
| P10.63 | Zabeśćciezie przechupliem odunku wybor | 0: Nieprawidowy, 1: zańy | 0 | |
| P10.64 | Poziom wykrywania upadku odunku | 0,0 100,0 | 10,0% | |
| P10.65 | Zrzut odunku czas wykrycia | 0,0 ~ 60,0 s | 1,0 s | |
| P10.67 | Przekroczenia prędkość wartosci wykrywania | 0,0% ~ 50,0% (Maksymalna czȩstotliwość P01.10 ) | 20,0% | |
| P10.68 | Czas wykrywania przyzekroczenia prȩdkości | 0,0 s: Niewykrywalne 0,1 ~ 60,0 s | 1,0 s | |
| P10.69 | Wykrywanie wartosci dla prȩdkości odchylienieetz duźny | 0,0% ~ 50,0% (Maksymalna czȩstotliwość P01.10 ) | 20,0% | |
| P10.70 | Wykrywanie czas na prȩdkość odchylienieetz duźny | 0,0 s: 0,1 ~ 60,0 s | 5,0 s | |
| Funkcja PID grupy P11 | ||||
| P11.00 Kanal wejsciowy PID | 0: Ustawienie P11.011: AI12: AI23: AI34: Ustawienie pulsu (DI5)5: Ustawienia komunikacja6: Prędkość wielostopniowa7: Ustawienia kodera klawiatury | 0 | ||
| P11.01Ustawienie wejsciady odnieszentriesia cyfrowego | 0,0-10,00 | 3,00 | ||
| P11.02Sprzejność zworotne PIDkanal | 0: AI11:AI22: AI33: AI1-AI24: Ustawienie pulsu (DI5)5: Ustawienia komunikacja6:AI1+AI27: MAKS. (|AI1|, |AI2|)8:MIN |AI1|, |AI2|) | 0 | ||
| P11.03Polaryzacja PID | 0: Kierunek pozytywny,1: Kierunek negatywny | 0 | ||
| P11.04Zakres PIDinformacja zworotna | 0 100,00 kg | 10,00 | ||
| P11.05Wzmocznie proporcjalneKPO2 | 0,0 100,0 | 20,0 | ||
| P11.06Czas integracjaTi1 | 0,01 sek. 10,00 sek. | 2,00 sek. | ||
| P11.07Czas pochodnyTd1 | 0,000 s 10,000 s | 0,000 s | ||
| P11.08Odwrócenie PIDczȩstotiwość odciecia | 0,00 ~ Maksymalna czȩstotiwość | 2,00 Hz | ||
| P11.09Granica PIDodchylenie | 0,0% 100,0% | 1,0% | ||
| P11.10 | Ogranicznik rożnicowy PID | 0,00% | 100,00% | 0,10% | |
| P11.11 | Czas zmiany sygnatu wejosciwogo PID | 0,00 | 650,00 sek. | 0,00 sek. | |
| P11.12 | Sprzejność zwrotne PID czas filtrrowania | 0,00 | 60,00 sek. | 0,00 sek. | |
| P11.13 | Czas filtrrowania wyjscia PID | 0,00 | 60,00 sek. | 0,00 sek. | |
| P11.15 | Wzmocnienie proportcjonalne KP03 | 0,0 | 100,0 | 20,0 | |
| P11.16 | Czas integracja Ti2 | 0,01 sek. | 10,00 sek. | 2,00 sek. | |
| P11.17 | Czas pochodny Td2 | 0,000 s | 10,000 s | 0,000 s | |
| P11.18 | PID-y przyłączanie parametrów warunki | 0: Brak przyłącznika 1: Prȩłȩczanie za pomoczą terminala DI 2: Automatyczne przyłączanie zgodnia z odchylenie | 0 | ||
| P11.19 | PID-y przyłączanie parametrów Odchylenie 1 | 0,0% | P11.20 | 20,0% | |
| P11.20 | PID-y przyłączanie parametrów Odchylenie 2 | P11.19 | 100,0% | 80,0% | |
| P11.21 | Wartość początkowa PID | 0,0% | 100,0% | 0,0% | |
| P11.22 | Czas utrzymywania Początkowy PID | 0,00 | 650,00 sek. | 0,00 sek. | |
| P11.23 | Maksymalne dodatnie odchylenie dwóch wyjscie | 0,00% | 100,00% | 1,00% | |
| P11.24 | Maksymalne odchylenie odchylenie dwóch wyjść | 0,00% 100,00% | 1,00% | |
| P11.25 | Własność calkowa PID | Pojedynczy bit: Separacja calkowa0: Nieprawidów, 1: prawidówDziesiéć bitów: gdy czȩstotliwość osiaga granice0: Kontynuuj regulacja calkowa, 1: Zatrzymaj regulacja calkowa | 00 | |
| P11.26 | Sprzejność zwrotne PID wykrywanie strat wartość | 0,1% ~ 100,0% (0,0%: Nie wykryto) | 0,0% | |
| P11.27 | Sprzejność zwrotne PID wykrywanie strat czas | 0,0 s ~ 20,0 s | 0,0 s | |
| P11.28 | PID-y zamknęcie działyanie | 0: Zatrzymanie bez działyania PID, 1: Zatrzymaj działyanie PID | 0 | |
| Grupa P12 - Cȩstotliwość wahan, Stała dlągość i Liczenia | ||||
| P12.00 | Tryb ustawiania czȩstotliwość Swing | 0: Wźeglodem Środka czȩstotliwość P01.07 1: W stosunku do czȩstotliwość maksymalnej P01.10 | 0 | |
| P12.01 | Zakres czȩstotliwość wahan | 0,0% 100,0% | 0,0% | |
| P12.02 | Zakres czȩstotliwość skoku | 0,0% 50,0% | 0,0% | |
| P12.03 | Cykl czȩstotliwość wahan | 0,1 sek. 3000,0 sek. | 10,0 s | |
| P12.04 | Czas narastania czȩstotliwość wahadłowafa fali trójk(ATREJ) | 0,1% 100,0% | 50,0% | |
| P12.05 | Ustawianie dlugosci | 0m 65535m | 1000m | |
| P12.06 | Rzeczywista dlugosci | 0m 65535m | 0m | |
| P12.07 | Liczbametr | 0,1 6553,5 | 100,0 | |
| P12.08 | Ustawienie liczbywartość | 1 65535 | 1000 | |
| P12.09 | Okresla wartośćliczbowa | 1 65535 | 1000 | |
| Grupa P13 Prędkość wielostopniowa, prosty PLC | ||||
| P13.00 | Prȩdkość wielostopniowa0 (MSO) | -100,0% 100,0% (Maksymalnaczestotliwość P01.10 ) | 0,0% | |
| P13.01 | Prȩdkość wielostopniowa1 (MS1) | 0,0% | ||
| P13.02 | Prȩdkość wielostopniowa2 (MS2) | 0,0% | ||
| P13.03 | Prȩdkość wielostopniowa3 (MS3) | 0,0% | ||
| P13.04 | Prȩdkość wielostopniowa4 (MS4) | 0,0% | ||
| P13.05 | Prȩdkość wielostopniowa5 (MS5) | 0,0% | ||
| P13.06 | Prȩdkość wielostopniowa6 (MS6) | 0,0% | ||
| P13.07 | Prȩdkość wielostopniowa7 (MS7) | 0,0% | ||
| P13.08 | Prȩdkość wielostopniowa8 (MS8) | 0,0% | ||
| P13.09 | Prȩdkość wielostopniowa9 (MS9) | 0,0% | ||
| P13.10 | Prȩdkość wielostopniowa10 (MS10) | 0,0% | ||
| P13.11 | Prędkość wielostopniowa 11 (MS11) | 0,0% | ||
| P13.12 | Prȩdkość wielostopniowa 12 (MS12) | 0,0% | ||
| P13.13 | Prȩdkość wielostopniowa 13 (MS13) | 0,0% | ||
| P13.14 | Prȩdkość wielostopniowa 14 (MS14) | 0,0% | ||
| P13.15 | Prȩdkość wielostopniowa 15 (MS15) | 0,0% | ||
| P13.16 | Prosty trybDNA ziałania PLC | 0: Koniec pojedynczej operaju 1: Wartość końcowa na końcu pojedynczej operaju 2: Zawsze są za rowerze | 0 | |
| P13.17 | Zapisywanie stanu pracy PLC po wymiączeniu zasilania | Pojedynczy bit: gdy zaniknie zasilanie Ten Bit: kiedy Stop 0: Nie zapisano 1: Oszcżędzanie. | 00 | |
| P13.18 | Prȩdkość wieloetapowa 0 czas pracy | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) | |
| P13.19 | Czas przyspieszania/zwalniania MS 0 | 0 3 | 0 | |
| P13.20 | Prȩdkość wielostopniowa 1 czas wykonania | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) | |
| P13.21 | Czas przyspieszania/zwalniania MS 1 | 0 3 | 0 | |
| P13.22 | Prȩdkość wielostopniowa 2 czas wykonania | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) | |
| P13.23 | Czas przyspieszania/zwalniania MS 2 | 0 3 | 0 | |
| P13.24 | Prȩdkość wielostopniowa 3 czasy pracy | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) | |
| P13.25 Czas | przyspieszania/zwalniania | 0 3 | 0 | |
| MS 3 | ||||
| P13.26 | Prędkość wielostopniowa4 czas wykonania | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.27 | Czas przyspieszania/zwalnianiaMS 4 | 0 | 3 | 0 |
| P13.28 | Prȩdkość wielostopniowa 5-stopniowy czas przyc | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.29 | Czas przyspieszania/zwalnianiaMS 5 | 0 | 3 | 0 |
| P13.30 | Prȩdkość wielostopniowa6 czas wykonania | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.31 | Czas przyspieszania/zwalnianiaMS 6 | 0 | 3 | 0 |
| P13.32 | Prȩdkość wielostopniowa7 czas wykonania | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.33 | Czas przyspieszania/zwalnianiaMS 7 | 0 | 3 | 0 |
| P13.34 | Prȩdkość wielostopniowa8, czas przyc | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.35 | Czas przyspieszania/zwalnianiaMS 8 | 0 | 3 | 0 |
| P13.36 | Prȩdkość wielostopniowa9 czas wykonania | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.37 | Czas przyspieszania/zwalnianiaMS 9 | 0 | 3 | 0 |
| P13.38 | Prȩdkość wielostopniowa10 czas przyc | 0,0 s godz. | 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.39 | Czas przyspieszania/zwalnianiaMS 10 | 0 | 3 | 0 |
| P13.40 | Prȩdkość wielostopniowa11 czas wykonania | 0,0 s godz.6553,5 s godz. | 0,0 sek. (godz.) | |
| P13.41 | Czas przyspieszania/zwalnianiaMS 11 | 0 | 3 | 0 |
| P13.42 | Prędkość wielostopniowa 12 czas przyc | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.43 | Czas przyspieszania/zwalniania MS 12 | 0 3 | 0 |
| P13.44 | Prȩdkość wielostopniowa 3 czasy przyc | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.45 | Czas przyspieszania/zwalniania MS 3 | 0 3 | 0 |
| P13.46 | Prȩdkość wielostopniowa 14 czas wykonania | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.47 | Czas przyspieszania/zwalniania MS 14 | 0 3 | 0 |
| P13.48 | Prȩdkość wielostopniowa 15 czas wykonania | 0,0 s godz. 6553,5 s godz. | 0,0 sek. (godz.) |
| P13.49 | Czas przyspieszania/zwalniania MS 15 | 0 3 | 0 |
| P13,50 | Jednostka prȩdkość wielostopniowej Acc/Dec czas | 0: s (sekundy) 1: h (godziny) | 0 |
| P13.51 | Zródźny sygnatu Prȩdkość wielostopniowa 0 (MS0) | 0: Parametr P13.00 1:AI1 2:AI2 3: AI3 4: Puls (DI5) 5: PID 6: Częstotliwość prepozycji P01.08 7: Mnżna ja modyfikacja za pomoczenia / | 0 |
| Parametry komunikacje RS485 grupy P14 | |||
| P14.00 | Ustawienie szybkosci transmisji dla RS485 | Pojedynczy bit: MODBUS 0:300BPS 1:600BPS 2:1200BPS 3:2400BPS 4:4800BPS 5:9600BPS 6:19200BPS 7:38400BPS | 5 |
| 8:57600BPS 9:115200BPS | ||||
| P14.01 | Dane MODBUS format | 0: Brak kontroli (8.N-2)1: Kontrola parzystość (8.E-1)2: Nieparzysta kontrola (8.O-1)3: Brak kontroli (8.N-1) | 0 | |
| P14.02 Adres lokalny | 0: adres Rozgloszeniowy1 247: (MODBUS) | 1 | ||
| P14.03 | MODBUSOpólzniecie odpowiedzi | 0 20 ms | 2 | |
| P14.04 | Czas przykroczenia limitu czasuRS485 | 0.0: Nieprawidowej0,1~60,0s | 0,0 | |
| P14.05 | MODBUSWybór protokoło | 0: Niestandardowy MODBUSprotokóf1: Standardowy protokóf MODBUS | 1 | |
| P14.06 | AktualnyUchwała 485Czytać | 0:0,01 A1:0,1 A | 0 | |
| Grupa P15 Parametry spejalne dla stałego ciasnienia wody zasilajȩcej | ||||
| 15,00 zł | Proste debugowanie maku:funkcjonować | 0: Brak funkcji1: Jeden napęd, dwie pompy 2: Zaopatrzenia w wode w budynku wspólnotowym3: Zaopatrzenia w wode hotelowa 4: Zaopatrzenia w wode przechiwpożarowa 5: Pompa | 0 | |
| P15.01 | BudzićSci ci;nienie | wspomagajuca 6: Pompa wody glębokiejKG(1KG=0,1Mpa) | 0~ Ciasnienie sru2,50 KG | P15.0 |
| P15.02 | Czas opólznieniaBudzićsi | 0,0 s ~ 6500,0 s | 0s | |
| P15.03 Ci;nienie snu | Obudź ciasnienie P15.01 ~Zakres manometru (0,1Mpa) | 3,50 KG | ||
| P15.04 Czas opóznienia uspienia | 0,0 s ~ 6500,0 s | Lata 60. | ||
| P15.05 | CiechnienieSprzejzeniaproporcjonalne | 0: Wymiarcz;1: Wymiarcz | 1 | |
| P15.06 | BudzićScięciarnienieróżnica | 0 ~ 100,0 barów (kg, 0,1 MPa) | 0,50 kg | |
| P15.07 | Róźnica ciȩnienia snu | 0 ~ 100,0 barów (kg) | 0,50 kg | |
| P15.08 | Wartozć alarmunadciȩnienia | 0,00~Zakres manometru KG(1KG=0,1Mpa=1Bar) | 9,00 kg | |
| P15.09 | Czas opóznieniaNadciȩnieniealarm | 0-6553.5S | 0,0 S | |
| P15.10 | Niskie ciȩnieniewartozć alarmowa | 0,00~Zakres manometru KG(1KG=0,1Mpa=1Bar)Parametr ten uruchamia alarmniskiego ciȩnienia. | 0,0 kg | |
| P15.11 | Czas opóznieniaalarmu niskiego ciȩnienia | 0-6553.5S | 20,0 S | |
| P15.12 | Pobór wodyciȩnieniełątkowe | 0~Zakres manometru KG Otwórzsterowanie start-stop dopływu wody za pomocą P01.02=3Dopływny wody musi byc wykonany czujnik przydu AI2W przypadku czujnika napiȩcia sąȩzyzmienić zworke AI2 | 3,00 kg | |
| P15.13 | Zamkniȩcie wlotuciȩnienie | 0~Zakres manometru KG(Bar) | 3,20 KG | |
| P15.14 | Liczbaczas oczekiwania | 0~3 | 0 | |
| P15.15 | pomp pomocniczychPompa pomocnicza | 0 ~ 1000,0 S | 60,0 S | |
| włącza są | ||||
| P15.16 | Czas oczekiwania na zaȩczenia pompy pomocniczej | 0 ~ 1000,0 S | 5,0 S | |
| P15.17 | Ustawienie czȩstotliwość wȩczania przykaźnika RO1 | 0~50 Hz Po angiȩcieu wartosci Przekȩznik zostanie wȩczony | 50,00 | |
| P15.18 | Ustawienie czȩstotliwość wȩczenia przykaźnika RO1 | 0~50 Hz Po angiȩcieu wartosci Przekȩznik zostanie wȩczony | 30,00 | |
| P15.19 | Zȩdło sygnatu Poziom wody kontractor | 0: Funkcja jest nieprawidowej 1:AI1 2: AI2 3: AI3 P15.19=1~3, Ustawuminium (P15.20, P15.21, P15.22, P15.23) jest prawniedowej, P15.19=0, parametryNie | 0 | |
| P15.20 | Zawór do spania dla Poziom wody Kontractor | są prawniedowej. 0,0100,0% Sygnat jest mniejeść nigten parametr kontynuuj P15.21 czas, ostrzeżenie o uspieleniu i pehnym nawodnieniu (ErrH) | 25,0% | |
| P15.21 | Peńy poziom wody opóźnienie | 0 ~ 1000,0 S Opȩznienie P15.20 ustawuminium czasu. | 6,0 S | |
| P15.22 | Općznienie opróznienie wody dla regulator poziomu | 0 ~ 1000,0 S W stanie ostrzeżenia o peñnym poziomie wody (ErrH), gdy sygnat kontrō poziomu wody jest większy nig的例子 P15.20 iość razy P15.22, ostrzeżenie o peñnym poziomie wody znika i powraca do normy państwo. | 60,0 S | |
| P15.23 | Wartosci osodu dla uszkodzenia sony hydraulicznej (sterownik poziomu) | 0,0%: Funkcja nieprawidłowia. 0,1 100,0%: gdy poziom wody sygnat kontrolera jest wisyszy nitzPokaz P15.23 ,(E.tSF)blaź i wyłaczenia | 0,0% | |
| P15.24 | Ochrona przyd niedoborem wody fungcjonować | 0: Wymiarcz; 1: Wymiarcz i oceń według czȩstotliwość i ciasnienia | 0 | |
| P15.25 | Niedobór wody wartość kontrolna blędu | 0,00 Wartosci ustawiania KG (Bar/0,1Mpa)Ważne, gdy P15.19=1. Niedobóró wody jest okreslany, gdy spreȩzenia zworinne wartość jest mniejsza od tej wartość | 0,50 | |
| P15.26 | Ochrona przyd niedoborem wody wykrywanie czȩstotliwość | 0 ~ 50,00 HzWażne, gdy P15.19=1, gdy Cȩstotliwość pracy jest wisysza lub现阶段owy temszy zworne 15,25.Ocen niedobóró wody. | 50,00 | |
| P15.27 | Opólznienie czasu ochroy przyd niedoborem wody wykrywanie | 0-6553,5 sek. Opólznienie alarmu o niedoborze wody Ocena. | 10 | |
| P15.28 | ciasnienie (Bar/0,1Mpa) | Zakres manometru 0 KG Efektywne wody dopłyjawość | 3,00 | |
| P15.29 | Woda dopłyjawca czas wykrycia | 0 9999S Czas na wodę dopłyjawość wykrywanie | 20,0 S | |
| P15.30 | Wyciek wody i uruchom ponownie kwota odchylenia | Zakres manometru 0 KG (Bar/0,1Mpa) | 0 | |
| P15.31 | Wyciek wodya nastepnie Rozpocznychwartosci zworacana | Zakres manometru OKG (Bar/0,1Mpa) | 0 | |
| P15.32 | Wyciek wody i nastepnie Rozpocznychwartosci zworacanaczas wykrycia | 0: Brak funckji0.1.10.0S | 2,0S | |
| P15.33 | Tryb uspienia | 0: Wymiarcz1: Sen, gdy cijsnienie jestwczyksze od cijsnienia snu; 2:Sen, gdy czȩstotliwość biegu jestmniejsza od czȩstotliwosci snu (na co wptywa P15.29)3: Sen, gdy presja jestwczyksza od presji snu, acżestotliwość biegania jestmniejsza od czȩstotliwosci snu. | 0 | |
| P15.34 | CȩstotliwośćwyjSci snu | 0 P01.12 | 20,0 Hz | |
| Grupa P17 Zaradzanie kodem funkcjonalnym | ||||
| P17.00 Haslo uzytkownika | 0 65535 | 0 | ||
| P17.01 Parametrinicjalizacja | 0: Brak operaci01: Przyworć parametry fabryczne, zwymićzeniem parametrów silniki02: Wymiść informacja orekordzie | 0 | ||
| P17.04 Funkcjakod modyfikujeWymiarsci | 0: Można modyfikować1: Nie można modyfikować | 0 | ||
| Grupa P18 Parametry sterowania momentem obrotowym | ||||
| P18.00 Tryb sterowania prędkość/momentem obrotowym | 0: Kontrola prȩdkość,1: Kontrola momentarily obrotowej | 0 | ||
| P18.01 | Ustawienie momentu obrotowego wybór zródla podimentem obrotowym tryb sterOWANIA | 0: Ustawienia cyfrowe 1: (P18.03) 1:AI1 2: AI2 3: AI3 4: Ustawienie PLUSE 5: Ustawienia komunikacja 6: MIN (AI1, AI2) 7: MAKS. (AI1, AI2) | 0 | |
| P18.03 | Ustawienia cyfrowe w trybie kontroli momentum obrotowe | -200,0% 200,0% (P18.01=0) 150,0% | ||
| P18.05 | Maksym częstotliwość do przydUn SterOWANIE MOMENT omobrotowym | 0,00 Hz Maksymalna czȩstotliwość | P01.10 50,00 Hz | |
| P18.06 | Maksym odwrotna czȩstotliwość dla SterOWANIE MOMENT omobrotowym | 0,00 Hz Maksymalna czȩstotliwość | P01.10 50,00 Hz | |
| P18.07 | Kontrola momentu obrotowego Czas akcesu | 0,00 s 65000 s | 0,00 sek. | |
| P18.08 | Kontrola momentu obrotowego Czas grudniowy | 0,00 s 65000 s | 0,00 sek. | |
| Grupa P23 Parametry optymalizacje sterOWANIA | ||||
| 23,00 z‡ | Górna granica czȩstotliwość dla Przelącznik DPWM | 5,00 Hz Maksymalna czȩstotliwość | P01.10 | 8,00 Hz |
| P23.01 | Modulacja PWM tryb | 0: Modulacja asynchroniczna, 1: Modulacja synchroniczna | 0 | |
| P23.03 | Losowy PWM glówność | 0: Nieprawidowej losowy PWM 1 10: Losowa glówność czȩstotliwość nośnej PWM | 0 | |
| P23.04 | Szybki przypełowy ograniczajcy | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P23.06 | Podnapiȩcie Ustawuminium wartość | 200,0 V 2200,0 V | 350 V | |
| P23.09 | Nadciąnienie Ustawuminium wartość | 200,0 V 2200,0 V | 270 V | |
| P23.10 | Automatyczny nośnik zmiana czȩstotiwość przy niska czȩstotiwość | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P23.11 | Prędkość zerowa biełącze wyjscie kontrola | 0: Wymiarcz, 1: Wymiarcz | 1 | |
| P23.12 | Wrażliwość Utrata fazy mocy ochrona | 0-30,0% | 13,0% | |
| Ustawuminium krzywej AI grupy P24 | ||||
| 24,00 z‡ | Minimalne wejscie AI krzywa 4 | -10,00 V P24,02 | 0,00 V | |
| P24.01 | Odpowiedni stosunek P24,00 | -100,0%+100,0% | 0,0% | |
| P24.02 | Obrót 1 z Mam Dziwki 4 | 24,00-24,04 z‡ | 3,00 V | |
| P24.03 | Odpowiedni stosunek P24,02 | -100,0%+100,0% | 30,0% | |
| P24.04 | Obrót 2 z Mam Dziwki 4 | P24.02 P24.06 | 6,00 V | |
| P24.05 | Odpowiedni stosunek P24,04 | -100,0% +100,0% | 60,0% | |
| P24.06 | Maksymalne wiejscie Mam Dziwki 4 | P24.06+10,00 V | 10,00 V | |
| P24.07 | Odpowiedni stosunek P24,06 | -100,0% +100,0% | 100,0% | |
| P24.08 | Minimalne wejscie AI krzywa 5 | -10,00 VP24,10 | -10,00 V | |
| P24.09 | Odpowiedni stosunek P24,08 | -100,0% +100,0% | -100,0% | |
| P24.10 | Obrót 1 AI krzywa 5 | P24.08 P24.12 | -3,00 V | |
| P24.11 | Odpowiedni stosunek P24,10 | -100,0% 100,0% | -30,0% | |
| P24.12 | Obrót 2 z krzywa AI 5 | P24.10 P24.14 | 3,00 V | |
| P24.13 | Odpowiedni stosunek P24,12 | -100,0% 100,0% | 30,0% | |
| P24.14 | Maksymalne wejscie krzywa AI 5 | P24.12 +10,00 V | 10,00 V | |
| P24.15 | Odpowiedni stosunek P24,14 | -100,0% 100,0% | 100,0% | |
| P24.24 | Punkt skoku AI1 | -100,0% 100,0% | 0,0% | |
| P24.25 | Zakres skoku AI1 | 0,0% 100,0% | 0,5% | |
| P24.26 | Punkt skoku AI2 | -100,0% 100,0% | 0,0% | |
| P24.27 | Zakres skoku AI2 | 0,0% 100,0% | 0,5% | |
| P24.28 | Punkt skoku AI3 | -100,0% 100,0% | 0,0% | |
| P24.29 | Zakres skoku AI3 | 0,0% 100,0% | 0,5% | |
| Korekta grupy P30 dla AI i AO | ||||
| 30,00 z‡ | AI1 Zmierzono napiȩcie 1 | 0,500 V 4,000 V | Fabryka korekta | |
| P30.01 | AI1 wyświetla napiȩcie 1 | 0,500 V 4,000 V | Korekta fabryczna | |
| P30.02 | Zmierzono AI1 napiȩcie 2 | 6,000 V 9,999 V | Korekta fabryczna | |
| P30.03 | AI1 wyświetla napiȩcie 2 | 6,000 V 9,999 V | Korekta fabryczna | |
| P30.04 | Zmierzono AI2 napiȩcie 1 | 0,500 V 4,000 V | Fabryka korekta | |
| P30.05 | Napiȩcie wyświetlacza AI2 1 | 0,500 V 4,000 V | Fabryka korekta | |
| P30.06 | Zmierzono AI2 napiȩcie 2 | 6,000 V 9,999 V | Fabryka korekta | |
| P30.07 | Napiȩcie wyświetlacza AI2 2 | 6,000 V 9,999 V | Fabryka korekta | |
| P30.08 | AI3 Zmierzono napiȩcie 1 | -9,999 V 10,000 V | Fabryka korekta | |
| P30.09 | Napiȩcie wyświetlacza AI3 1 | -9,999 V 10,000 V | Fabryka korekta | |
| P30.10 | Zmierzono AI3 napiȩcie 2 | -9,999 V 10,000 V | Korekta fabryczna | |
| P30.11 | Napiȩcie wyświetlacza AI3 2 | -9,999 V 10,000 V | Fabryka korekta | |
| P30.12 | Napiȩcie docelowe AO1 1 | 0,500 V 4,000 V | Fabryka korekta | |
| P30.13 | AO1 Wymierzony | 0,500 V 4,000 V | Korekta fabryczna | |
| P30.14 | napiȩcie 1 Napiȩcie docelowe AO1 2 | 6,000 V 9,999 V | Korekta fabryczna | |
| P30.15 | AO1 Wymierzony | 6,000 V 9,999 V | Fabryka korekta | |
| P30.16 | napiȩcie 2 Napiȩcie docelowe AO2 1 | 0,500 V 4,000 V | Fabryka korekta | |
| P30.17 | AO2 Wymierzony | 0,500 V 4,000 V | Fabryka korekta | |
| P30.18 | napiȩcie 1 Napiȩcie docelowe AO2 2 | 6,000 V 9,999 V | Fabryka korekta | |
| P30.19 | AO2 Wymierzony | 6,000 V 9,999 V | Fabryka korekta | |
napiecie 2
4. Alarm awarii iŚrodki zaradczé
| Wyȩwietla | nazwa będu | Możliwa przyczyna awarii | Rozwiptywanie problemów |
| Będ01 | Ochrona modułuzsilania | Moc silnika jest zbyt wysoka lub nastapito zwarcie w okablowaniu lub Uszkodzony moduł zasilania | Odzćz przywość silnika i uruchom go ponownie. Jeźli jest jakość problem, napraw falownik |
| Będ02 | Będ podnapięciowy | Napiȩcie wejsciowe jest nieprawidowej lub przyckaźnik zasilania nie jest wączony lub nie sąna wykryć napiȩcia. | Sprawdź napiȩcie zasilania lub skontaktuż są z serwisem producenta |
| wada | |||
| Błąd31 | Nadmierne napiȩcie podczas przyspieszania | Napiȩcie wejsciowe jest nieprawidowej | Sprawȩ zasilanie wiejsciowe |
| Uruchom ponownie, gdy silnik zaćnia są obracć | UstawIONy do uruchomienia po hamowaniu przem stalym | ||
| Błąd32 | Nadmierne napiȩcie podczas zwalniania | Czas zwalniania jest zbyt krÓtki | Wydręz czas zwalniania |
| Napiȩcie wejsciowe jest nieprawidowej | Sprawȩ zasilanie wiejsciowe | ||
| Błąd33 | Nadmierne napiȩcie przy statej prędkość | Napiȩcie wejsciowe jest nieprawidowej | Sprawȩ zasilanie wiejsciowe |
| Błąd60 | Przech)i)—zenia falownikia | Nieprawidowej ustawienie krzywej V/F lub momentu obrotowej. | Dostosuj krzywa V/F i wartość wzmocnienia momentu obrotowej |
| Niskie napiȩcie wiejsciowe. | Sprawȩ napiȩcie zasilania | ||
| Czas przyspieszania jest zbyt krÓtki | Wydrȩ zcas przyspieszania | ||
| Obczy)—zenia silnika jest zbyt duź | Wybierz mocniejszy Falownik | ||
| Błąd 61 | Nadmiar przypodczas przyspieszania | Czas przyspieszania jest zbyt krÓtki | Wydrȩ zcas przyspieszania |
| Moc falownika jest zbyt mała | Wybierz falownik o wysokim poziomie mocy | ||
| Nieprawidowej ustawuminium krzywej V/F lub momentu obrotowego. | Dostosuj krzywa V/F lub wartość wzmocnienia momentu obrotowego | ||
| Będ62 | Nadprés吓得 podczas zwalniania | Czas zwalniania jest zbyt krótki | Wyȩź czas zwalniania |
| Moc falownika jest zbyt mała | Wyjbierz falownik o wysokim poziomie mocy | ||
| Będ63 | Nadprés przy stałe prędkości | Niskie napiȩcie wejsciowe. | Sprawź napiȩcie zasilania |
| zatrzymanie silnika lub mutateda obciȩzenia jest zbyt duza | Sprawź obciȩzenia | ||
| Moc falownika jest zbyt mała | Wyjbierz mocniejszy Falownik | ||
| Będ 64 | Przemȩzenia silnika | Nieprawidowej ustawuminium krzywej V/F lub momentu obrotowego. | Dostosuj krzywa V/F lub wartość wzmocnienia momentu obrotowego |
| Niskie napiȩcie wejsciowe. | Sprawź napiȩcie zasilania | ||
| zatrzymanie silnika lub mutateda obciȩzenia jest zbyt duza | Sprawź obciȩzenia | ||
| WspÓlczynnik zabweziecie przemȩeniowedo silnika nie jest ustawiony prȩdwowo | Ustaw poprawnie wspÓlczynnik zabweziecie przemȩeniowedo silnika | ||
| Błąd65 | Błąd ograniczajcy prȩd fala po fali | Tak samo z silnikiem Przechość | Tak samo z silnikiem Przechość |
| Błąd 40 | awaria spreȩtu | Woda, owady itp. | ponowne uruchomienie nie sąze wzniewic naprawy do ustawié fabrycznych |
| Błąd 41 | EEPROM Błąd odczytu/zapisu | Z到账EEPROM | Skorzystaj z serwisu produkta |
| Błąd42 | Kontrola awarii zasilania | Zasilanie wejsciowe nie mięsci są w zakresie specyfikacje | Dostosuj napiȩcie do wymagań specyfikacje |
| Błąd46 | Błąd wykrywania prȩdu | Błąd obwodu pobierania próbek prȩdu | Skorzystaj z serwisu produkta |
| Awaria obwodu napȩdowego | Skorzystaj z serwisu produkta | ||
| Błąd 11 | Awaria spreȩtu zewétrzngo 1 | Zacisk wejsciowy usterki zewétrznej 1 jest zamkniety | Odlącz zacisk usterki zewétrznej i usuń usterkte (zwróć uwage na jej przyczyne) |
| Błąd 12 | Błąd komunikacja | 485 Komunikacja nie powiodła są | Sprawȩ完整性 485 |
| Błąd 13 | Zgromadzony czas wykonania jest juź dostęny | Łączyść czas przyca osiąga wartość zadaną | Wyczyśćrekord wedlug Funkcja incjalizacje parametrów |
| Błąd 15 | Awaria spreȩtu zewétrzngo 2 | Zacisk wejsciowy usterki zewétrznej 2 jest zamkniety | Odlącz zacisk usterki zewétrznej i usuń usterkte (zwróć uwage na jej przyczyne) |
| Błąd 16 | Czas na zasilanie nadchodzi | Łączyść czas sączenia mocy osiąga ustawIONA wartość | Funkcja incjalizacje parametrów wyczyśćrekordy |
| Błąd 17 | Awaria styku/przekaźnica | Błąd zacisk wusterki zewnegrznej i usuń usterkę (zwróć uwage na jej przyczyne) | Odlącz zacisk usterki zewnegrznej i usuń usterkę (zwróć uwage na jej przyczyne) |
| Błąd08 | Przegrzany modl zasilania | Wadliwy wentylator chłodźcy lub przyegrzane otoczenia | Sprawdź wentylator lub odpradowataniecieła lub sączekaj na ostygniȩcie, aby próbowość ponownie |
| Błąd 90 | Błąd przyłącznia silnka w czasie pracy | Słaby kontakt linii silnika lub przyłącznika między silnikiem a falownikiem | Falownik musi być bezpośrednio podlaczony do silnka, aby sprawdźć, czy przyzewód silnka jest luźny |
| Błąd91 | Zwarcie doziemne | Zwarcie doziemne | Odlącz przyzewód uziemiazćy (zwróć uwage na przyczyne) |
| Błąd92 | Utrata fazy wiejsciowej | Sprawdź liniec zasilania wyjsciowej | Skorzystaj z serwisu producenta |
| Błąd93 | Utrata fazy wiejsciowej | utrata mocy wyjsciowej linii lub obwoź fazowy do wykrywnia prȩdu jest nieprawidłowy | Sprawdź napiȩcie wyjsciowej i sprawdź liniec zasilania wyjsciowej |
| Błąd94 | Awaria nadmiernej przydkość obrotowej silnka | Prędkość silnika przykracza normalna przydkość | Sprawdź, czy obciañenie ma inneczasilanie |
| Błąd95 | Błąd odchylenia przydkość | Róznica przydkość jest zbyt duź w porównianu do normalnej przydkość | Sprawdź obciañenie silnika |
| Błąd96 | Utrata przyȩzenia zwrotnégo PID w czasie pracy | Słabykontakt z sygnatem czujnika PID | Sprawdź sygnat czujnika |
| Błąd97 | Błąd Rozstawania | Linia silnika jest odłączona | Sprawdź liniec silnika |
| Błąd98 | Silnik przyegrzany | Silnik sie przyegrzewsia | Sprawdź temperaturę silnika |
| Błąd99 | Strojenie silnika wada | Parametry silniki nie są ustawione zgodnie z tabliczka znamionowa lub linia samochodowa jest w zlym stanie kontakt | Ustaw silnik parametry według tabliczka znamionowa i sprawdź przywoód od Falownik do silnika |
| Błąd H1 | Woda brak | Niedobór wody awaria | Sprawdź,czyNie brakuje wody |
| Błąd H2 | Pełna woda wczesne ostrzeżenie | Woda jest pełna | Przyworć normalność wodciasnienie |
| Błąd H3 | Wysoka woda ciasnienie awaria | Wymuszone wyłączenia nie powiodło są | Za wysoka woda ciasnienie, sprawdź ciasnienie wody |
5. Opis konfigurazioni
Gdy parametr P17.00 jest ustawiony na wartosci rożna od 0, haslo ochryny parametru jest ustawione. Musisz w povadzić haslo przydomyfikacja parametrów.
Anuluj haslo iustaw P17.00 na 0.
Menu parametrów w trybie niestandardowych parametrów uzytkownika nie jest chronione haslem chroniony.
Grupa P01 P23 to podstawowy parametr funkcj, grupa
P00 to parametr funkcji monitorujuacej.
Symbole w tabeli funkcji sə opisane w nastepujacy sposób: „ :
Wartosc ustawionę togo parametruMZnazmienic, gdy falownik jest
Stan zatrzymania i pracy;
"": Ustawionej wartoscikiego parametru nie są za mnienic, gdy falownik jest w trybie przy jest w stanie uruchomionnym;
"": Wartość parametru jest rzejczycy wymipty wartość rekordu i nie są za zmieiu; "":
Oznacza to, ze parametr jest „Parametrem producenta" i jest
ograniczone do ustawien producenta uniemozliwiajacych uzytkownikowski korzystanie z urzadzenia.
Wyprodukowano w Chinach
VEVOR
TOUGH TOOLS, HALF PRICE
Wsparcie technicznie i certyfikat gwarancji elektronicznej www.vevor.com/support
VEVOR®
TOUGH TOOLS, HALF PRICE
Technische ondersteuning en e-garantiecertificaat www.vevor.com/support
Omvormer
MODEL:AT1-7500X




