
AT1-7500X - Wechselrichter Vevor - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts AT1-7500X Vevor als PDF.

Benutzerfragen zu AT1-7500X Vevor
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Wechselrichter kostenlos im PDF-Format! Finden Sie Ihr Handbuch AT1-7500X - Vevor und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. AT1-7500X von der Marke Vevor.
BEDIENUNGSANLEITUNG AT1-7500X Vevor
Technischer Support und E-Garantie-Zertifikat www.vevor.com/support
Wechselrichter
MODELL:AT1-7500X
Wir sind weiterhin bestrebt, Ihnen Werkzeuge zu wettbewerbsfähigen Preisen anzubieten. "Sparen Sie die Hälfte", "Halber Preis" oder andere ähnliche Ausdrücks, die wir verwenden, stellen nur eine Schätzung der Ersparnis dar, die Sie beim Kauf bestimmter Werkzeuge bei uns im Vergleich zu den größten Topmarken erzielen können, unddecken nicht unbedingt alle von uns angebotenen Werkzeugkategorien ab. Wir möchten Sie freundlich daran erinnern, bei ihrer Bestellung bei uns sorgfältig zu prufen, ob Sie im Vergleich zu den größten Topmarken tatsächlichen die Hälfte sparen.
VEVOR®
TOUGH TOOLS, HALF PRICE
Wechselrichter
MODELL:AT1-7500X

Brauchen Sie Hilfe? Kontaktieren Sie uns!
Haben Sie Fragen zum Produkt? Benötigen Sie technischen Support?itte kontaktieren Sie uns:
Technischer Support und E-Garantie-Zertifikat www.vevor.com/support
Dies ist die Originalanleitung.itte lessen Sie alle Anweisungen sorgfaltig durch,bevor Sie das Gerät in Betriebnehmen.VEVOR besteht sich eine klare Auslegung unserer Bedienungsanleitung vor.Das Erscheinungsbild des Produkts richtet sich nach dem Produkt,das Sie erhalten haben.Bitte verzeihen Sie uns,dass wir Sie nicht erneut informieren, wenn es Technologie- oder Software-Updates fur unser Produkt gibt.
WICHTIGESICHERHEITSHINWEISE

Lesen Sie alle Sicherheitshinweise, Anweisungen, Abbildungen und Die Nichtbeachtung aller Spezifikationen these Wechselrichters Die folgenden Anweisungen konnen zu Stromschlag, Brand oder und/oder schwere Verletzungen.
WARNING:
Bei dieser Gerät handelt es sich um ein Hochspannungsgerät. Versuchen Sie nicht,
Dieses Gerät kann jederzeit zerlegt werden, um Gefahren zu vermeiden. Nach einem Gerätedefekt
Wenn der externe Schalter das Gerät nicht neu starten kann, wenden Sie sichitte an ihren
Die Abwicklung erfolgt über den Wiederverkäufer.
WARNING: STROMSCHLAG- UND BRANDGEFAHR!
- Die Nichtbeachtung dieser Anweisung kann zu einem elektrischen Defekt führen, Feuer und Stromschlag.
- NICHT ZERLEGEN.
- Wechselrichter nicht untertauchen.
- Schlieben Sie nicht zwei oder mehr Transformatoren parallel an
- Stecken Sie das Netzteil direkt in eine GFCI-Steckdose für feuchte Standorte.
- Verwenden Sie kein Verlängerungskabel
- Die Installation dieser Wechselrichters und die dazugehörige Verkabelung müssen von einem qualifizierten Elektriker unter Einhaltung aller geltenden Elektrovorschriften.
WARNING:
Änderungen oder Modifikationen an thisem Gerät, die nicht ausdrücklich von der Partei genehmigt wurden. Die für die Einhaltung der Vorschriften verantwortlichen Personen können zum Erlöschen der Berechtigung des Benutzers zum Betrieb des Ausrüstung.
BEWAHREN SIE DIESE ANWEISUNGEN AUF
FCC-Informationen
ACKTUNG: Änderungen oder Modifikationen, die nicht ausdrücklich von der Partei genehmigt wurden Konformitätsverantwortung kann zum Erlösenchen der Berechtigung des Benutzers zum Betrieb des Ausrüstung!
Dieses Gerät entspricht Teil 15 der FCC-Bestimmungen. Der Betrieb unterliegt die folgenden beiden Bedingungen:
1) Dieses Produkt kann schädliche Störungen verursachen.
2) Dieses Produkt muss alle Störungen akzeptieren, einschließlich
Störungen, die zu unerwänschtem Betrieb führen können.
ACKTUNG: Änderungen oder Modifikationen an thisem Produkt, die nicht ausdrücklich von der für die Einhaltung verantwortlichen Partei genehmigt werden, kann zum Erlöschen der Berechtigung zum Betrieb des Produkts.
Hinweis: Dieses Produkt wurde getestet und entspricht den Grenzwerten für ein digitales Gerät der Klasse B gemäß Teil 15 der FCC-Regeln. Diese Grenzwerte sind so konzipiert, dass sie einen angemessenen Schutz gegen schädliche Störungen bieten in einer Wohnanlage.
Dieses Produkt erzeugt und verwendet Hochfrequenznergie und kann diese auch ausstrahlen. Wenn die Installation und Verwendung nicht gemäß den Anweisungen erfolgt, kann dies zu Störungen des Funkverkehrs. Es gibt jedoch keine
garantieren, dass bei einer bestimmten Installation keine Störungen auftreten. Wenn dies Das Produkt verursacht keine Störungen beim Radio- oder Fernsehempfang.
Empfang, der durch Aus- und Einschalten des Produkts überprüft werden kann,
Der Benutzer wird aufgefordert, die Störung durch eine oder mehrere der folgenden Maßnahmen zu beheben: folgende Maßnahmen. y
Richten Sie die Empfangsantenne neu aus oder stellen Sie sie
woanders auf. y Vergroßern Sie den Abstand zwischen Produkt und Empfänger. y Schlieben
Sied das Produkt an eine Steckdose an, die zu einem anderen Stromkreis gehört als der, an den das Produkt angeschlossen ist der Receiver ist angeschlossen.
y Wenden Sie sich an den Handler oder einen erfahrenen Radio-/Fernsehtechniker für Hilfe.
Richtige Entsorgung

Dieses Produkt unterliegt den Bestimmungen der europäischen Richtlinie 2012/19/EG. Das Symbol einer durchgestrichenen Mülltonne durch bedeutet, dass das Produkt einer getrennten Entsorgung unterliegt Sammlung in der Europäischen Union. Dies gilt für das Produkt
und alle mit thisem Symbol gekennzeichneten Zubehörteile. Als solche gekennzeichnete Produkte dürfen nicht mit dem normalen Hausmüll entsorgt werden, sondern müssen in einer Sammelstelle für das Recycling von elektrischen und elektronischen Geräten
1. Produktinformationen
Das Handbuch enthalt Vorsichtsmaßnahmen und Hinweise zur Auswahl des Benutzertypes. Installation, Parametrierung, Inbetriebnahme vor Ort, Fehlerdiagnose und tägliche Wartung und Instandhaltung
1.1 Wechselrichterserie
| AT901-Serie | Bremswiderstand | |||||
| Modell | Adaptiver Motor | Ausgabe Aktuell:A | IN | Ohm | ||
| KW | HP | |||||
| 22 901-7K5G1 | 7.5 | 10 | 34,0 | 600 | 40 | |
1.2 Produktspezifikation
| Projekt | Standard | |
| Basic Funktion | System | Stromvektor-Universalfrequenzumsetzer |
| Fahrenheit | mitochenfreteurienzahlen Leistungskausholderung. | |
| Maximag | Vektorsteuerung: 0-500 Hz | |
| Frequenz | V/F-Steuerung: 0 - 3200 Hz. | |
| Träger | 0,5 kHz - 16 kHz | |
| Frequenz | Die Trägerfrequenz kann eingestellt werden | |
| Frequenz | Automatiechstenrechnender Belastung | |
| Auflösung | Simulationseinstellung: ±0,025 % | |
| Auflösung Regelungsmodus: Offene Vektorregelung (SVC) | ||
| V/F-Steuerung | ||
| Anlaufdrehmoment | Typ-G-Modus: 0,3 Hz/150 % (SVC). | |
| Typ-P-Modus: 0,3 Hz/100 % 1:100 | ||
| Bereich von ADJ | (SVC) ±0,5 % | |
| Stabiele Schwindigkeit | (SVC) | |
| Überleitung Kapazität | Typ G:150 % Nennstrom für 120 s; 180 % für 1T0ypse P:120% Nennstrom für 60 s; 150 % für 3Aautomatische | |
| % Nennstrom für 60 s; 150 % für 3Aautomatische | ||
| Drehmometeranstieg | Drehmometerhöhung; MTharnueawl | |
| V/F-Kurve | taoyrsq:usetrianicgrhetalsinee::0m.1u%lti--p3o0i.n0t%; | |
| Kurve Acc/Dec-Modus | Beselkunzäles-V#/Kerweger(104.4), 6,19Grad und 6der S-Kurve, vier Beschleunigungs-/Verzügerungszeiten, Beschleunigungs-/Verzügerungszeitbereich 0,0-6500,0 s | |
| Gleichstrombremsung | Bremsfrequenz: 0,00 Hz - Maximalfrequenz; Bremszeit: 0,0 s - 36,0 s Bremsstromwert: 0,0 % - 100,0 % | |
| Gesetzliche Kontrolle | Jog-Frequenzbereich: 0,00 Hz - 50,00 Hz; Beschleunigungs- und Verzügerungszeit: 0,0 s - 6500,0 s. | |
| Bis zu 16 Segmentgeschwindigkeitsläufe mit integrierter SPS oder Steuerung | ||
| Terminal eingebauter PID | Es kann nicht realisieren die Prozesssteuerung geschlossener Regelkreis | |
| AVR-Funktion: Wenn | die Eingangsspannung schwankt, kann die | |
| Stallkontrolle | Ausgangsspannung, sparschaften wertstand autahaltsen begrenzt, um früiges Auslösen aufgrund von Überspannung zu verhindern. | |
| Schneller Strom Begrenzung | Minimieren Sie den Überstromfehler und schützen Sie den normalen Betrieb des Frequenzumrichters | |
| Drehmomentgrenze | Automatische Drehmomentbegrenzung während des Betriebs. | |
| Sozigkeitschernversorgung | Bej, eine rechtsächsrechtig ausstehmal ausfallübbiter strome zu verhindern. | |
| Umwirgrechung der Stromversorgung erforderlich. | ||
| Betrieb | BefehlQuelle | Bedienfeld, Bedienterminal, Serieille Schnittstelle, kann auf verschiedene Arten umgeschaltet werden |
| Frequenz Quelle | Panelpotentiometer, Nummer angegeben, externer analoger Spannungs-/Stromeingang und serieller Port-Eingang.Kann auf verschiedene Arten umgeschaltet werden | |
| Eingangsanschlüsse: | Fünf digitale Eingangsanschlüsse, 1 | |
| analoger Mengen-Eingangsanschluss; | ||
| Ein 0-10-V-Spannungs- oder 0-20-mA-Stromeingang; | ||
| Ausgabe Terminal | 1 digitaler Ausgangsanschluss | |
| 1 Relaisausgangsklemme (TA, TB, TC) | ||
| 1 analoger Ausgangsanschluss, darüber 0-10 V oder 0-20 mA Spannungsausgang | ||
| Schutz Funktion | Erkennung von Kurzschlüssen beim Einsatz des Motors, Schutz vor Phasenverlust am Eingang und Ausgang, Überstromschutz, Überspannungsschutz, Unterspannungsschutz, Überhitzungsschutz und Überlastschutz usw. | |
| Schleife Die Umwelt | Ort verwenden | Innenbereich, keine direkte Sonneneinstrahlung, kein Staub, keineätigenden oder brennbaren Gase, kein Ölnebel, kein Dampf, kein Wasser oder Salz usw. |
| Über dem Meer Ebene | unter 1000m 2C116699 | |
| Umgebung Temperatur | -10 °C bis +40 °C (Umgebungstemperatur ist 40 °C bis 50 °C,itte verringern Sie die Menge) | |
| Luftfeuchtigkeit | Weniger als 95 % relative Luftfeuchtigkeit, wasserfreie Kondensation | |
| vibrieren | Weniger als 5,9 m/s (0,6 g) | |
1.3 Beschreibung der Steuerschleife und des Hauptschleifenanschlusses
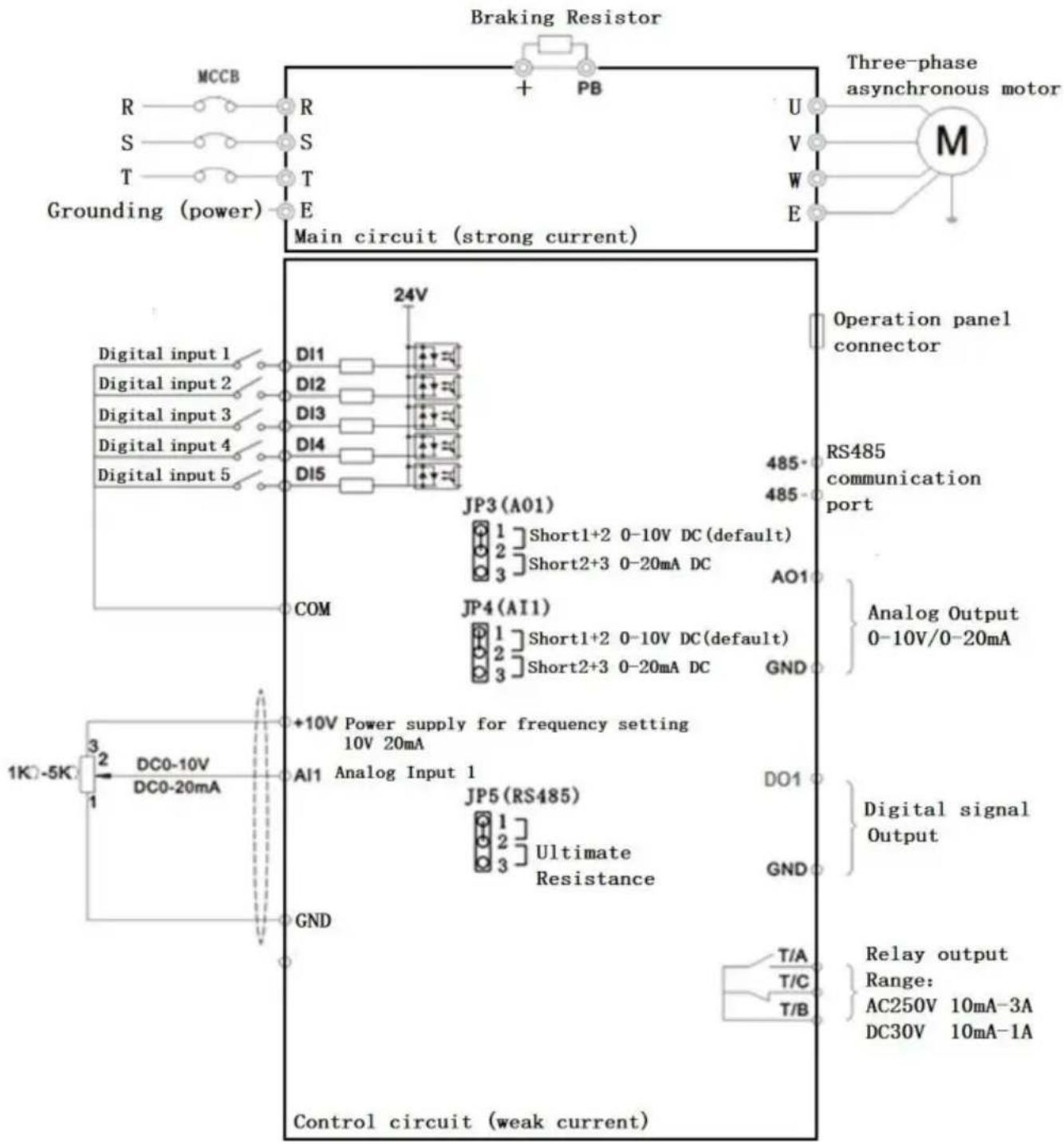
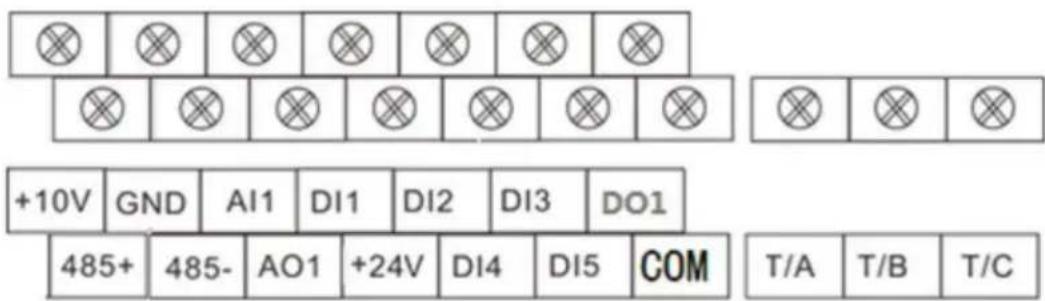
Abbildung 1-3-1 0,75-11,0 kW Schaltplan Steuerklemenbeschreibung
2. Bedienung und Anzeige
Beschreibung der Funktionsanzeigelampe
Hz:Frequenzanzeige-Kontrollleuche
V : Spannungsanzeigelampe
y A: Stromanzeigelampe
y ERR: Störungsanzeigelampe
F/R: Vorwarts- und Rückwartskontrolleuche
/ : Kontrollleuche für Kommunikationssteuerung
y RUN: Betriebskontrolleuche
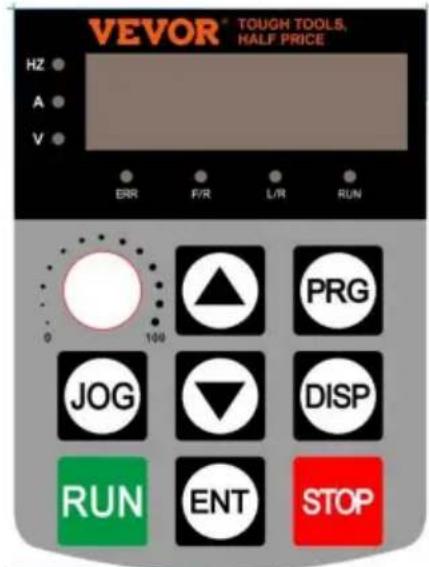
| Schlüsselsymbol | Name | Funktionsdeklaration |
| PRG | Programmierung Schlüssel | Menü betreten oder verlassen, mit Parameter Änderung |
| HNO | Bestimmen Sie die Schlüssel | Rufen Sie das Menu auf und bestätigten Sie die Parameteinstellung |
| dehy | Obere Taste | Inkrementieren von Daten- oder Funktionscodes |
| dehy | Ab-Taste | Abnehmende Daten- oder Funktionscodes |
| ANZEIGE | Umschalttaste | Wählen Sie das Parametermodifiziererbit und die Inhalt anzeigen |
| LAUFEN | Führten Sie den Schlüssel aus | Starten Sie den Wechselrichter unter der Tastatur Betriebsart |
| STOPPEN | Stop-/Reset-Taste Betrieb | stoppen/reseten, |
| JOGGEN | Jog-Taste | Beschränkt auf den Funktioncode P08.01 |
Legen Sie die Parametermethode fest:
- Drücken Sie die Taste PRG, um P 0.00 anzuzeigen. 2. Wahlen
Sie mit den Tasten y y und DISP die zu andernde Parameternummer aus.
Mit der ENTER-Taste wird der Parameter eingegeben.
- y y und DISP Tastenändern Parameterwerte, ENTER Taste Parameter speichern, 4. Wenn Sie andere Parameterändern müssen, wiederholen Sie 2,3, Schritte, wie Änderung
Nach Abschluss der Arbeiten kehren Sie mit der Taste PRG zur Frequenzschnittstelle zusück.
- Übersichtstabelle der Funktionparameter:
| P00, Überwachungsgruppe | |||
| P00.00 | Lauffrequency | 0,00 ð 320,00 Hz (P01.22 = 2) - | |
| P00.01 | Stellen Sie die Freqenz ein | 0,0 ð 3200,0 Hz (P01.22 = 1) - | |
| P00.02 | Sammelschienenspannung (V) | 0,0 V ð 3000,0 V | - |
| P00.03 | Ausgangsspannung (V) | 0 V bis 1140 V | - |
| P00.04 | Ausgangsstrom (A) | 0,00 A bis 655,35 A | - |
| P00.05 | Ausgangsleistung (kW) | 0 ð 32767 | - |
| P00.06 | Ausgangsdrehmoment (%) | -200,0 % ð 200,0 % | - |
| P00.07 | OF-Eingangszustand | 0 ð 32767 | - |
| P00.08 | DO-Ausgangszustand | 0 ð 1023 | - |
| P00.09 | AI1 Spannung (V) | 0,01 V | - |
| P00.10 AI2 | Spannung (V) oder Strom (mA) | 0,00 V ð 10,57 V0,00 mA ð 20,00 mA | - |
| P00.12 | Zähwert | 0 ð 65535 | - |
| P00.13 | Längenwert | 0 ð 65535 | - |
| P00.14 | Drehzahlanzeige laden | 0 ð 65535 | - |
| P00.15 | PID-Einstellung | 0 ð 65535 | - |
| P00.16 | PID-Rückmeldung | 0 ð 65535 | - |
| P00.17 | SPS-Stufe | 0 ð 65535 | - |
| P00.18 | Pulseingangsfrequency | 0 ~ 100 kHz | - |
| P00.19 | Rückkopplungsgeschwindigkeit (Hz) | -320,00 Hz ~ 320,00 Hz | - |
| P00.20 | Verbleibende Laufzeit | -320,00 MHz MHz Hz | - |
| P00.21 | AI1 Spannung vor der Korrektur | 0,000 V ð 10,570 V | - |
| P00.22 | AI2 Spannung/Strom vorKorrektur | 0,000 V ð 10,570 V0,000 mA ð 20,000 mA | - |
| P00.24 | Lineargeschwindigkeit | 0 ð 65535 m/Min | - |
| P00.25 | Aktuelle Leistung Zeit | 0 bis 6500 Min | - |
| P00.26 | Aktuelle Laufzeit | 0,0 ð 6500,0 Min | - |
| P00.28 | Kommunikationseinstellungen | -100,00 % ð 100,00 % | - |
| P00.30 | Frequenz X Anzeige | 0,00 Hz bis 500,00 Hz | - |
| P00.31 | Frequenz Y Anzeige | 0,00 Hz bis 500,00 Hz | - |
| P00.32 Einen beliebigen Speicheradresswert anzeigen | 0 yy 65535 | - | |
| P00.35 | Zieldrehmoment, (%) | 0,0°yy 359,9° | - |
| P00.37 | Leistungsfaktor Winkel | - | |
| P00.39 Zielspannung der VF-Trennung | 0 V ~ Motornennspannung | - | |
| P00.40 Ausgangsspannung der VF-Trennung | 0 V ~ Motornennspannung | - | |
| P00.41 | Statusanzeige des IN-Eingangs | - | - |
| P00.42 | DO-Eingangsstatusanzeige | - | - |
| P00.43 | DI-Funktion Statusanzeige 1 | (Funktion 01. Funktion 40)- | - |
| P00.44 DI-Funktionstatus optische Anzeige 2 | (Funktion 41. Funktion 80)- | - | |
| P00-45 | Fehlermeldung | - | - |
| P00-59 | Stellen Sie die Häufigkeit (%) ein. | -100,00 % yy 100,00 % | - |
| P00-60 | Ausführungshäufigkeit (%) | -100,00 % yy 100,00 % | - |
| P00-61 | Wechselrichterzustand | 0 yy 65535 | - |
| ü-verenderbarer Parameter unter allen Bedingungen ü- nicht veränderbarer Parameter im Ausführungsstatus -der aktuell erkannte Parameter, nicht veränderbar | ||||
| FC | Name | Bereich festlegen | Fabrik Wert | ändern |
| P01 Basische Funktionelle Gruppe | ||||
| P01.00 | G/P-Typ | 1: Typ G (konstante Drehmomentbelastung Modell) 2: Typ P (Lüfter und Wasserpumper Modell) | 1 ü | |
| P01.01 | 1. Motorsteuerung Modus | 0: Geschwindigkeitssensorloser Vektor Kontrolle 2: V/F-Steuerungsmodell | 2 ü | |
| P01.02 | Betrieb Befehl | 0: Befehl zum Ausführten über das Bedienfeld Kanal ("L/R"-Leuchten aus) | 0 ü | |
| Kanal | 1: Terminal Run-Kanal ("L/R" leuchtet)2: KommunikationsbefohlKanal(L/R"-Lichter blinken) | |||
| P01.03 | HauptfrequenzQuelle X | 0: Digital eingestellt (voreingestellteFrequenz P01.08, Tastenfeld y/yy,Stromausfall)1: Digitaleinstellung (voreingestellteFrequenz P01.08, Tastenfeld y/yy,Speicher für Leistungsabfall)2: AI1 Analog-Set (0-10yV);3: AI2 Analog-Set (0-10yV oder20ymA);4: Panel-Potentiometer; 5:Impuls-Set (0-50ykHz DI5); 6:Mehrstufiger Geschwindigkeitslauf-Set 7: Einfaches PLC-Set;8: PID-Regelung eingestellt;9: Kommunikationssatz. | 4 yy | |
| P01.04 | SekundärfrequenzquelleUND | Wie P01.03(Hauptfrequenzquelle X) eingestellt | 0 yy | |
| P01.05 | Auswahl einschränken aufY beiFrequenzüberlagerung | 0: Im Vergleich zur yP01.10yMaximalfrequenz 1:Relativ zur Freqenzquelle X | 0 yy | |
| P01.06 | Grenze von Y, wennFrequenzüberlagerung | 0 % y 150 % | 100 % yy | |
| P01.07 Frequenzquelle | Eine Ziffer: Freqenzquellenauswahl0: Hauptfrequenzquelle X1: Haupt- und Nebenbetrieb | 00 | ||
| Ergebnisse (Operationsbeziehung wird durch zehn Ziffern bestimmt)2: Hauptfrequenz X und Sekundärfrequenz Y-Schalter3: Umschalten zwischen Haupt-Frequency X und Main und Ergebnisse der Sekundäroperation 4: Die Freqenz Y wechsel mit Haupt- und NebenbetriebErgebnisseZehn Ziffern: Freqenzoperationsbeziehung von X und Y0:X+Y1:X-Y2: Maximum von beiden, 3:Das Minimum von beiden. | ||||
| P01.08 | Präpositionshäufigkeit | 0,00 Hz y Maximale Freqenz yP01.10y 50,00Hz | y | |
| P01.09 Laufrichtung | 0: Konstante Richtung, 1: Gegenrichtung | 0 y | ||
| P01.10 | Maximale Ausgangsfrequenz | Vektor: 50,00 Hz ~ 500,00 HzV/F: 50,00 Hzy2000,00 Hz | 50,00Hz | y |
| P01.11 | Obere Grenzfrequency Quelle | 0: yP01.12y Einstellung 1: AI1 Einstellung2: AI2 Einstellung3: AI3Einstellung 4: Impulseinstellung (0y50KHZ DI5); 5: Kommunikations-Setup | 0 y | |
| P01.12 | Obere Grenzfrequency | yP01.14yy yP01.10y | 50,00Hz | y |
| P01.13 | Oberer Grenzwert für Frenzbias | 0,00 Hz y yP01.10y | 0,00 Hz y | |
| P01.14 | Untergrenze Frequenz | 0,00 Hz y P01.12y | 0,00 Hz y | |
| P01.15 Trägerfrequenz | 0,5 kHz y 16,0 kHz | Für Modell y | ||
| P01.16 | Trägerfrequenz Mit der Temperatur anpassen | 0: Nein,1: Ja | 1 y | |
| P01.17 | Beschleunigungszeit 1 | 0,00 s - 650,00 s (P01.19 = 2) 0,0 s y 6500,0 s (P01.19=1) 0 s bis 65000 s (P01.19 = 0) | Für Model | y |
| P01.18 | Verzögerungszeit 1 | Referenzfrequenz yP01.25y | y | |
| P01.19 | Zeiteinheit von Beschleunigung und Verzögerungszeit | 0:1 Sekunden 1: 0,1 Sekunden 2: 0,01 Sekunden | 1 y | |
| P01.21 | Bias-Frequency der Frequenz Y bei Überlagerung | 0,00 Hz y Maximale Ausgangsfrequency yP01.10y | 0,00 Hz y | |
| P01.22 | Auflösung von Frequenz | Auflösung aller Freqizen Befehle. | 2 y | |
| P01.23 | Ausschalten Speicher für Digitale Frequenzeinstellung | 0: Kein Speicher 1: Speicher | 0 y | |
| P01.24 | Auswahl der Motorparametergruppe | 0: Motorparametergruppe 1, Befehle: Motorparametergruppe 2. | 0 y | |
| P01.25 | Referenz Häufigkeit von Beschleunigung und Verzögerungszeit | 0: Maximale Freqenz yP01.10y 1: Einstellfrequency 2:100Hz | 0 y | |
| P01.26 | Laufzeit Frequenzanweisung AUF/AB | 0: Betriebsfrequenz, 1: Freqenz einstellen | 0 y | |
| Benchmark | ||||
| P01.27 | BefehlsquellegebündtFrequenzquelle | Einstellige Zahl: Häufigkeit derBefehlsbindung im BedienfeldQuellenauswahl0: Keine Binding 1: Digitales Set2:Al1 3:Al2 4:Al35: Impulssatz (0-y50KHZ DI5);6: Mehrsegmentgeschwindigkeit;7: Einfache SPS8: PID-Wert9: KommunikationssetZehnstellige Zahl: Quelle derTerminalbefehlsbindungsfrequencyAuswahl100-stellig: KommunikationsbefohlBinding FrequenzquellenauswahlTausenderstelle: AutomatischesAusführten der BindungsfrequencyAuswahl | 0000 y | |
| P02 Asynchronmotor Parametergruppe 1 | ||||
| P02.00 | Motortyp | 0: gewöhnlicher Asynchronmotor,1: Asynchronmotor mitvariabler Frecenz | 0 y | |
| P02.01 | Nennleistung vonMotor | 0,1 kW y 400,0 kW | NachzurModellVon denWechselrichter | y |
| P02.02 | Nennspannung vonMotor | 1 V bis 2000 V | y | |
| P02.03 | Bemessungsstrom vonMotor | 0,01 A bis 655,35 A(Wechselrichterleitung <=55kW)0,1A~6553,5A(Wechselrichterleitung >55kW) | y | |
| P02.04 | Nennfrequenzdes Motors | 0,01 Hz - MaximaleAusgangsfrequencydehydration | dehydration | |
| P02.05 | Nenndrehzahl vonMotor | 1 U/mindehydration65535 U/min | dehydration | |
| P02.06 | Statorwiderstanddes Motors | 0,001dehydration65,535dehydration(Wechselrichterleistung<= 55 kW) 0,0001dehydration6,5535dehydration(Wechselrichterleistung > 55 kW) 0,001dehydration | dehydration | |
| P02.07 | Rotorwiderstanddes Motors | 65,535dehydration(Wechselrichterleistung <= 55kW) 0,0001dehydration6,5535dehydration(Wechselrichterleistung > 55 kW)0,01 mHdehydration655,35 | dehydration | |
| P02.08 | Dichttheitdes Motors | mH(Wechselrichterleistung <=55kW)0,001 mAh bis 65,535 mH(Wechselrichterleistung > 55 | dehydration | |
| P02.09 | Gegenseitiger Widerstanddes Motors | kW) 0,1 mHdehydration6553,5 mH(Wechselrichterleistung <= 55 kW)0,01 mHdehydration655,35 mH(Wechselrichterleistung > 55kW) | dehydration | |
| P02.10 | Leerlaufstrom vonder Motor | 0,01 AdehydrationP02.03(Wechselrichterleistung <= 55 kW)0,1 A bis P02.03(Umrichterleistung | dehydration | |
| P02.37 Tuning-Ausbuhl | > 55kW) 0: KeinBetrieb 1: Optimierung beiMotorstillstand 1 2:Dynamische Optimierung desMotors 3: Optimierung bei Motorstillstand 2 | 0dehydration | ||
| P03 Vektorregelungsparameter der Motorgruppe 1 | ||||
| P03.00 | Drehzahlreglerproportional 1 | 1 bis 100 | 30dehydration | |
| P03.01 | Drehzahlregler-Integrationszeit 1 | 0,01 s储能 10,00 s | 0,50 s储能 | |
| P03.02 | Schaltfrequenz1 | 0,00 y储能 P03.05y | 5,00 Hz y | |
| P03.03 | Drehzahlreglerproportional 2 | 1 bis 100 | 20 y | |
| P03.04 | Geschwindigkeitsregler-integrationszeit 2 | 0,01 s储能 10,00 s | 1,00 s y | |
| P03.05 | Schaltfrequenz2 | P03.02 yMaximale Ausgangsfrequenz yP01.10y | 10,00 Hz y | |
| P03.06 | Vektorsteuerung vondie Schaltverständigung | 50 % y 200 % | 100 % y | |
| P03.07 | SVC-Drehm对象滤波时间 Konstanten | 0,000 s储能 0,100 s | 0,050 s y | |
| P03.09 | Drehmoment-ObergrenzQueelle unterDrehzahlregelungModus | 0: P03.10 Einstellung1: AI1; 2: AI2;3: AI3;4: Impulssatz (DI5);5: Kommunikationseinstellungen;6: MIN (AI1, AI2)7: MAX (AI1, AI2) | 0 y | |
| P03.10 | Obere Drehmomentgrenzenuter DrehzahlSteuermodus | 0,0 % y 200,0 % | 150,0 % y | |
| P03.13 | Proportionaler GewinnvonErregungVerordnung | 0 y 60000 | 2000 y | |
| P03.14 | Integraler Verständigungsgewinnder AnregungVerordnung | 0 y 60000 | 1300 y | |
| P03.15 | Proportionalverständigung | 0 y 60000 | 2000 y | |
| von Drehmomentregelung | ||||
| P03.16 | Integralverständigung der Drehmomentregelung | 0 yy 60000 | 1300 y | |
| P04 V/F-Steuerparameter | ||||
| P04.00 VF-Kurveneinstellung | 0: lineare Kurve V/ F1: Mehrpunktcurve V/F 2:Kurve 1 mit abnehmendemDrehmoment (quadratische Kurve)3: Kurve 2 mit abnehmendem Drehmoment(1,2 Leistung)4: Kurve 2 mit abnehmendem Drehmoment(1,4 Leistung)6: Kurve 2 mit abnehmendem Drehmoment(1,6 Leistung)8: Kurve 2 mit abnehmendem Drehmoment(1,8 Leistung)10: VF vollständig getrennter Modus11: VF-Halbtretnungsmodus 0,0 | 0 y | ||
| P04.01 | Einstellung der | % (Automatisches Hubdrehmoment);0,1 % bis 30,0 % | Nach Model | y |
| P04.02 | 0,00 Hz y MaximaleAusgangsfrequency yP01.10y | 50,00 Hz y | ||
| P04.03 | Drehmomentverständigung | 0,00 Hz y yP04.05y | 0,00 Hz y | |
| P04.04 | Abschallpunkt der | 0,0 % y 100,0 % | 0,0 % y | |
| P04.05 | DrehmomentverständigungMehrpunkt- | yP04.03y y yP04.07y | 0,00 Hz y | |
| P04.06 | V/F-Frequenz 1Mehrpunkt-V/F-Spannung | 0,0 % y 100,0 %Mehrpunkt-V/F-Frequenz 2 Mehrpunkt-V/F-Spannung 2 | 0,0 % y | |
| P04.07 | Mehrpunkt V/F Freq. 3 | ëP04.05ëy ð Motorleistung Frequenz ðP02.04ëy | 0,00 Hz ð | |
| P04.08 | Mehrpunkt V/F Spannung | 0,0 % ð 100,0 % | 0,0 % ð | |
| P04.09 | 3 V/F Steuerung Schlupffrequencykompensation | 0,0 % ð 200,0 % | 0,0 % ð | |
| P04.10 | V/F Über Anregungsverständigung | 0 ð 200 | 64 ð | |
| P04.11 | Schwingung Unterrückungsgewinn für V/F | 0 ð 100 | Nach Model ð | |
| P04.13 | Spannungsquelle durch VF getrennt | 0: Digitale Einstellungen ðP04.14ëy 1:Al1 2:Al2 3:Al3 4: Impulseinstellung (DI5) 5: Mehrfachanweisung 6: Einfache SPS 7: Der PID 8: Kommunikation Einstellung Hinweis: 100,0%, entspricht der Motornennspannung | 0 ð | |
| P04.14 | Spannung für VF-Trennung | 0 V ð Motornennspannung | 0 V ð | |
| P04.15 | Spannungsanstiegszeit der VF-Trennung | 0,0 s ð 1000,0 s Hinweis: Zeit, wenn 0V steigt auf Nennspannung des Motors. | 0,0s ð | |
| P04.16 | Spannungsabfallzeit der VF-Trennung | 0,0 s ð 1000,0 s Hinweis: Zeitpunkt, an dem die Nennspannung des Motors auf 0 V fällt | 0,0s ð | |
| P04.17 | Abschaltmodus der VF-Trennung | 0: Frequenz und Spannung fallen getrennt auf 0; 1: Frequenz sinkt nach dem Spannungsabfall auf 0 - | 0 ð | |
| P04.18 | ÜberstromstillstandAktionsstrom | 50 %dehy200% | 150 %dehy | |
| P04.19 | Unterrückung vonÜberstromstillstand | 0: Deaktivieren,1: Aktivieren. | 1 | dehy |
| P04.20 | Unterrückungsgewinn von Über0dehy100 | 20dehy | ||
| P04.21 | EntschädigungKoeffizient vonAktion überaktueller Stand | 50 %dehy200% | 50 %dehy | |
| P04.22 | Überspannungs-Blockier-Aktionsspannung | 650,0 V - 800,0 V | 760,0 Vdehy | |
| P04.23 | Unterrückung vonÜberspannungs-Blockier- | 0: Deaktivieren,1: Aktivieren. | 1dehy | |
| P04.24 | Frequenzveränderungder Unterrückungvon Überspannungs-Blockier | 0dehy100 | 30dehy | |
| P04.25 | Spanningsveränderungder Unterrückung vonÜberspannungs-Blockier-Spanningsveränderung | 0dehy100 | 30dehy | |
| P04.26 | Maximaler AnstiegFrequenzgrenze fürÜberspanningsstillstand | 0dehy50 Hz | 5 Hzdehy | |
| P05-Gruppe, Eingabeparameter | ||||
| P05.00 | DI1-Klemme Funktion | 0: Keine Funktion;1: Vorwärtlauf (FWD) oderLäuft;2: Rückwärtlauf (REV) oderVorwärtis-/Rückwärtschalter3: Dreidraht-Laufsteuerung 4:Vorwärtis-Jog-Steuerung (FJOG)5: Rückwärtis-Jog-Steuerung (RJOG) | 1 | dehy |
| 6: Freqenzerhöhung (Klemme nach oben)7: Frequenz verringern (KlemmENACH UNTEN)8: Freie Abschaltsteuerung9: Externer Reset-Signaleingang(RST)10: Betrieb unterbrechen; 11:Externer Fehler, normalerweise offener (NO)Eingang 12:Mehrfachgeschwindigkeit1 13: Mehrfachgeschwindigkeit2 14: Mehrfachgeschwindigkeit3 15: Mehrfachgeschwindigkeit4 16: ACC/DEC-Zeitauswahl 1 (TT1)17: ACC/DEC-Zeitauswahl 2 (TT2)18: Frequenzquellenschalter 19: UP/DOWN Frequenz Nulllöschen(Terminal, Tastatur)20: Befehlssalter ausführtenKlemme 121: VFD ACC/DEC verbieten22: PID-Regelung Pause23: PLC-Zustand zugückgesetzt24: Pendelfrequency Pause25: Zählereingang26: Zähler zugückgesetzT27: Längenzähleingang 28:Längenrücksetzung29: Drehmomentregelung deaktivieren30: Impulseinstellung (nur DI5 kanneingestellt werden, P05.04=30)31: Reserviert;32: Gleichstrombremsung(sofort);33: Externer Fehlereingang (normalerweise |
| geschlossen-NCy34: FrequenzänderungErmöglicht35: PID-Eingangssignal umgekehrt;36: Außenparkplatz Terminal 137: Befehlsschalter ausführtenTerminal 238: PID-Integral-Pause;39: Frequenz X schaltet mit dervoreingestellen Trenquenz40: Frequenz Y schaltet mit dervoreingestellen Trenquenz41: Motorausbahl Klemme 143: Der PID-Parameterschalter44: Benutzerdefinieter Fehler 145: Benutzerdefinieter Fehler 246: Schalter für Drehzahlregelung/Drehmomentregelung47: Not-Halt48: Außenparkplatz Terminal 249: Langsame Gleichstrombremsung50: Laufzeit gelöscht;51: Zweidrahtsteuerung / DreidrahtsteuerungSteuerschalter52: Umkehrspere; | ||||
| P05.01 | DI2-AnschlussFunktionalityt | 4 y | ||
| P05.02 | DI3-KlemmeFunktionalityt | 9 y | ||
| P05.03 | DI4-KlemmeFunktionalityt | 12 y | ||
| P05.04 | DI5-KlemmeFunktion(nur DI5 kann | 13 y | ||
| Einstellung Puls Funktion, P05.04=30) | ||||
| P05.10 DI-Filterzeit | 0,000 s储能 1,000 s | 0,010s储能 | ||
| P05.11 | Terminalsteuerung Modus | 0: Zweidraht-Steuergesmodus 1,1: Zweidraht-Steuergum Modus 2,2: Dreidraht-Steuergum Modus 1,3: Dreidraht-Steuermodus 2. | 0 y | |
| P05.12 | Frequenz Einstellschnitt Höhe | 0,001 Hz/s - 65,535 Hz/s | 1,00 Hz/s y | |
| P05.13 | Min. KI-Einsatz Kurve 1 | 0,00 V储能 P05.15 | 0,00 V储能 | |
| P05.14 | Entsprechend Wert der Al-Kurve 1er Min. Eingang | -100,0 %储能 +100,0 % | 0,0 %储能 | |
| P05.15 | Max. Eingang von Al Kurve 1 | P05.13 y +10,00 V | 10,00 V储能 | |
| P05.16 | Entsprechend Wert der Al-Kurve 1er Max. | -100,0 %储能 +100,0 % | 100,0 %储能 | |
| P05.17 | Eingang Al Kurve 1 Filterung Zeit | 0,00 s储能 10,00 s | 0,10 s储能 | |
| P05.18 | Min. der KI-Kurve 2. Eingang | 0,00 V储能 P05.20 | 0,00 V储能 | |
| P05.19 | Entsprechend Wert der Al-Kurve 2er Min. Eingang | -100,0 %储能 +100,0 % | 0,0 %储能 | |
| P05.20 Max. | Eingang von Al2 | P05.18 y +10,00 V | 10,00 V储能 | |
| P05.21 | Entsprechend Wert der Al-Kurve 2er Max. Eingang | -100,0 %储能 +100,0 % | 100,0 %储能 | |
| P05.22 | Al-Kurve 2-Filterung Zeit | 0,00 s yy 10,00 s | 0,10 s yy | |
| P05.23 | Min. der KI-Kurve 3. Eingang | -10,00 V yy P05.25 | -10,00 V yy | |
| P05.24 | Entsprechend Wert der Al-Kurve 3er Min. Eingang | -100,0 % yy +100,0 % | 0,0 % yy | |
| P05.25 | Max. Eingang von Al Kurve 3 | P05.23 yy +10,00 V | 10,00 V yy | |
| P05.26 | Entsprechend Wert der Al-Kurve 3's Max. Eingang | -100,0 % yy +100,0 % | 100,0 % yy | |
| P05.27 | Al Kurve 3 Filterung Zeit | 0,00 s yy 10,00 s | 0,10 s yy | |
| P05.28 | Min. Wert von Impulseingang | -10,00 V yy P05.25 | 0,00 V yy | |
| P05.29 | Entsprechend Wert von Pulse Min. Eingabe | -100,0 % yy +100,0 % | 0,0 % yy | |
| P05.30 | Max. Wert von Impulseingang | P05.23 yy +10,00 V | 10,00 V yy | |
| P05.31 | Entsprechend Wert von Pulse Max. | -100,0 % yy +100,0 % | 100,0 % yy | |
| P05.32 | Eingangsimpulsfilterung Zeit | 0,00 s yy 10,00 s | 0,10 s yy | |
| P05.33 AI Kurvenauswahl | Einzelbit: Al1-Kurvenauswahl1: Ich habe 1 Hure(14:00 Uhr, siehe P05.13 ~ P05.16)2: Ich habe 2 Huren(14:00 Uhr, siehe P05.18 ~ P05.21)3: Ich habe 3 Huren(14:00 Uhr, siehe P05.23 ~ P05.26) | 321 yy | ||
| 4: Ich habe 4 Huren(16:00 Uhr, siehe P24.00ÄP24.07)5: Ich habe Huren 4(16:00 Uhr, siehe P24.08ÄP24.15)Zehn Bit: Al2-Kurvenauswahl (dasselbe wie Einzelbit 1-5)Hundert Bit: Al3-Kurvenauswahl(das gleiche wie oben) | ||||
| P05.34 | Die KI ist unter das MinimumEingangseinstellungAuswahr | Einzelbit: Al1 unter Min.-Eingangseinstellung 0: EntsprechenderWertvon Min.-Eingang 1: 0,0%Zehn Bit: Al2 unter Min.Eingangseinstellung (dasselbe wie Hunderterbit: Al3 unter Min.Eingangseinstellung (wie oben) | 000 yEinzelbit 1-2) | |
| P05.35 DI1 | Verzögerungszeit | 0,0 s储能 3600,0 s | 0,0s储能 | |
| P05.36 DI2 | Verzögerungszeit | 0,0 s储能 3600,0 s | 0,0s储能 | |
| P05.37 DI3 | Verzögerungszeit | 0,0 s储能 3600,0 s | 0,0s储能 | |
| P05.38 | Klemme DI1-DI5gültigModusauswahl | 0: Hohes effektives Niveau, 1: Piedrigess effektives NiveauEinzelbit: DI1;Zehn Bit: DI2;Hunderterbit: DI3;Tausend Bit: DI4,Zehntausend Bit: DI5 | 00000 y | |
| P05.39 | Klemme DI6-DI7gültigModusauswahl | 0: Hohe Wirksamkeit, 1: Piedrig Niveau effektivEinzelbit: DI6, | 00000 y | |
| Zehn Bit: DI7 | |||||
| P06-Gruppe, Ausgabeparameter | |||||
| P06.01 | DO1-Ausgang Funktionauswahl | 0: Kein Ausgang 1: Betriebsanzeige; 2: Fehlerausgang (für frei en Abschaltfehler)3: Frequenzpegel-Erkennungssignal 1 (P14T1)4: Frequenzankunftsanzeige (FAR)5: VFD-Nulldrehzahlbetrieb (beim Betrieb)6: Motorüberlastung Frühwannung7: Wechselrichterüberlastung Frühwannung8: Der Set Count kommt9: Der angegebene Zählerstand ist erreicht10: Länge erreicht11: Der PLC-Zyklus ist abgeschlossen2 y12: Kumulierte Laufzeit kommt an13: Frequenzbegrenzung14: Drehmomentbegrenzung15: Betriebsbereit16: AI1 > AI217: Ausgangsfrequenz erreicht Obergrenze Limit18: Ausgangsfrequenz erreicht Untergrenze (beim Betrieb)19: Unterdruck-Statusausgabe 20: Kommunikationseinstellung 21: Standort ist abgeschlossen (reserviert) - | 0 y | ||
| P06.02 | Steuerplatine Relais (TA-TB-TC) Funktion Auswahl | ||||
| 22: Standortnahme (reserviert)23: Stillstand 2 (wird auch beim Herunterfahren ausgegeben)24: Kumulierte Einschaltzeitkommen an25: Frequenzpegel-Erkennungssignal2 (P14T2)26: Ausgangsfrequenz 1 erreicht27: Ausgangsfrequenz 2 erreicht28: Ausgangsstrom 1 erreicht 29:Ausgangsstrom 2 erreicht 30: Regulärerreicht 31: EingangssignalAl1 übersritten 32: Lastabfall 33:VFD-Rückwärtslauf 34:Nullstromzustand35: Das Power-ModulTemperatur erreicht 36:Ausgangsstrom außerhalb desGrenzwertes 37: Ausgangsfrequenzerreicht Untergrenze (Abschaltung auch Ausgang)38: Fehlerausgang (alle Fehler)39: MotorüberhitzungVorwarnung40: Diese Laufzeit wird erreicht41: Fehlerausgang (für frei Abschaltfehler und kein Unter Druckausgang) | ||||
| P06.07 | Auswahl der AO1-Ausgangsfunktion | 0: Betriebsfrequenz, 1:Eingestellte Frequenz | 0 yy | |
| P06.08 | Auswahl der AO2-Ausgangsfunktion | 2: Ausgangsstrom, 3: Ausgangsdrehmoment,4: Ausgangsleistung,5: Ausgangsspannung, | 1 yy | |
| 6: Eingangspulsfrequenz.7:Al1 8:Al29:Al310: Länge11: Zähwert12: Kommunikationseinstellung,13: Motordrehzahl14: Ausgangsstrom. (100,0 %Entspricht 1000,0A)15: Ausgangsspannung (100,0%Entspricht 1000,0 V)16: Motorausgangsdrehmoment(Prozentsatz des tatsächlichen Wertesbezogen auf die Motorleistung)17: VFD-Ausgangsdrehmoment(Prozentsatz des tatsächlichen Wertes relativ zur VFD-Bewertung) | ||||
| P06.10 | AO1 Null-BiasKoeffizient | -100,0 % ð +100,0 % | 0,0 % ð | |
| P06.11 | AO1-Verstärkung | -10,00 ð +10,00 | 1,00 ð | |
| P06.12 | AO2 Null-BiasKoeffizient | -100,0 % ð +100,0 % | 0,0 % ð | |
| P06.13 | AO2-Verstärkung | -10,00 ð +10,00 | 1,00 ð | |
| P06.17 | DO-AusgangsverzögerungZeit | 0,0 s ð 3600,0 s | 0,0s ð | |
| P06.18 | RELAY-AusgangVerzögerungszeit | 0,0 s ð 3600,0 s | 0,0s ð | |
| P06.19 | RELAY2-AusgangVerzögerungszeit | 0,0 s ð 3600,0 s | 0,0s ð | |
| P06.22 | DO-Ausgang gültigStatusauswahl | 0: Positive Logik, 1: Anti-LogiKeinzelbit: DOZehn Bit: RELAY1 | 00000 ð | |
| Hundert Bit: RELAY2 | ||||
| P07-Gruppe, Start- und Stopp-Steuerungssparameter | ||||
| P07.00 Startmodus | 0: Direktstart1: Beginnen Sie mit der Geschwindigkeitsverfolgung2: Gleichstrombremsung + Start mitStartfrequenz | 0 yy | ||
| P07.01 | GeschwindigkeitsverfolgungVerfahren | 0: Beginnen Sie mit dem HerunterfahrensFrequenz1: Beginnen Sie mit derArbeitsfrequenz2: Beginnen Sie mit dem MaximumFrequenz | 0 yy | |
| P07.02 | Geschwindigkeit derGeschwindigkeitsverfolgung | 1 bis 100 | 20 yy | |
| P07.03 Startfrequenz | 0,00 Hz bis 10,00 Hz | 0,00 Hz yy | ||
| P07.04 | Start-HäufigkeitHaltezeit | 0,0 s yy 100,0 s | 0,0s yy | |
| P07.05 | DC-Bremsstrombeim Start | 0 % yy 100 % | 0 % yy | |
| P07.06 | DC-Bremszeit beiStart-up | 0,0 s bis 100,0 s | 0,0s yy | |
| P07.07 | BeschleunigenUndVerzögerungsmodus | 0: linearer Acc/Dec-Modus1: S-Kurve Beschleunigungs-/Verzögerungsmodus A2: S-Kurve Beschleunigungs-/Verzögerungsmodus B | 0 yy | |
| P07.08 | Zeitverhältnis von StartSegment in SKurve | 0,0 %yy100,0 %-P07.09y | 30,0 % yy | |
| P07.09 | Zeitverhältnis von StartSegment in SKurve | 0,0 %yy100,0 %-P07,08y | 30,0 % yy | |
| P07.10 | Stoppmodus | 0: Abbremsen bis zum Stillstand 1: Ausrollen bis zum Stillstand | 0 yy | |
| P07.11 | FrequenzSchwellenwert von DCBremse | 0,00 Hz ~ Maximalfrequenz.yP01.10y | 0,00 Hz yy | |
| P07.12 | DC-BremsverzögerungZeit | 0,0 s yy 100,0 s | 0,0s yy | |
| P07.13 DC | Bremsstrom | 0 % yy 100 % | 0 % yy | |
| P07.14 | DC-Bremszeit beistoppen | 0,0 s yy 100,0 s | 0,0s yy | |
| P07.15 | GleichstrombremseAuslastungsgrad | 0 % yy 100 % | 100 % yy | |
| P07.18 | Geschwindigkeitsverfolgungaktuell | 30 % yy 200 % | yy | |
| P08 Gruppe Tastaturen und Anzeigeparameter | ||||
| P08.01 M-Tastenfungkction | STOPP/RESETTastenfungkction | 0: Die M-Taste ist ungültig1: Umschalten zwischen RemoteSteuerung (Terminal-oder Kommunikationssteuerung)und Bedienfeldsteuerung, wennyyP01.02y =1 oder 22: FWD/REV-Schalter3: FJOG (Vorwärts-Jog-Steuerung)4: RJOG (Rückwärts-Jog-Steuerung) | 0 yy | |
| P08.02 | 0: Die STOP/RES-Taste Nur gültigPanel-Steuerungsmodus1: Die Taste STOP/RESgültig | 1 yy | ||
| P08.03 | LED zeitParameter 1 anBetriebsstatus | 0000yFFFFBit00: Lauffrequency 1 (Hz)Bit01: Frenzeneinstellung (Hz)Bit02: Busspannung (V) | 1F yy | |
| Bit03: Ausgangsspannung (V) Bit04: Ausgangsstrom (A) Bit05: Ausgangsleistung (kW) Bit06: Ausgangsdrehmoment (%) Bit07: DI-Eingangsstatus Bit08: DO-Ausgangsstatus Bit09: AI1 Spannung (V) Bit10: AI2 Spannung (V) Bit11: AI3 Spannung (V) Bit12: Zählwert Bit13: Längenwert Bit14: Drehzahlanzeige laden Bit15: PID-Einstellungen | ||||
| P08.04 | LED zeigt Parameter 2in an Betriebsstatus | 0000yFFFF Bit00: PID-Rückmeldung Bit01: PLC-Stufe Bit02: PULS Eingangsfrequency (kHz) Bit03: Lauffrequency 2 (Hz) Bit04: Restlaufzeit Bit05:Al1-korrigierte Frontspannung (V) Bit06:Al2-korrigierte Frontspannung (V) Bit07:Al3-korrigierte Frontspannung (V) Bit08: Leitungsgeschwindigkeit Bit09: Aktuelle Leistung Zeit (Stunde) Bit10: Aktuelle Laufzeit (Min) Bit11:PULSE Eingangsfrequency (Hz) Bit12: Kommunikationseinstellung Wert | 0 y | |
| Bit13: Encoder-Rückkopplungsgeschwindigkeit (Hz)Bit14: Hauptfrequenz X Anzeige (Hz)Bit15: Sekundärfrequenz Y Anzeige (Hz) | ||||
| P08.05 | Parameter in Stop Status Bit07: Zähwert | 0000yFFFFBit00: Eingestellte Freqenz (Hz)Bit01: Busspannung (V)Bit02: DI-EingangsstatusBit03: DO-AusgangsstatusBit04: AI1 Spannung (V)Bit05: AI2 Spannung (V)LED-AnzeigenBit06: AI3 Spannung (V) | 33 y | |
| Bit08: LängenwertBit09: PLC-StufeBit10: Geschwindigkeit ladenBit11: PID-EinstellungenBit12: PULS Eingangsfrequency (kHz) | ||||
| P08.06 | Ladegeschwindigkeit Anzeigefaktor | 0,0001 y 6,5000 | 1,0000 y | |
| P08.07 | Leistungsmodul Temperatur | 0,0y y 100,0y | - | • |
| P08.08 | Produknummer | - | - | • |
| P08.09 | Kumulative Laufzeit | 0 Std. - 65.535 Std. | - | • |
| P09 Gruppe, Zusatzfunktion | ||||
| P09.00 Tippfrequenz | 0,00 Hz ~ Maximalfrequenz.yP01.10y | 2,00 Hz y | ||
| P09.01 | Jog-Beschleunigungszeit | 0,0 s y 6500,0 s | 20,0s y | |
| P09.02 | Jog Dec-Zeit | Empfohlene Zeit: 0,4 bis 4,0 kW 7.5 Sokunden | 20,0s y | |
| P09.03 | Beschleunigungszheit 2 | 5,5 ~ 30,0 kW 15,0S | 15,0 | y |
| P09.04 | Verzögerungszeit 2 | 37,0 y 132,0 kW, 40,0 Sek. | y | |
| P09.05 | Beschleunigungszheit 3 | 160,0y 630,0KW 60,0S | y | |
| P09.06 | Verzögerungszeit 3 | y | ||
| P09.07 | Beschleunigungszheit 4 | y | ||
| P09.08 | Verzögerungszeit 4 | y | ||
| P09.09 Sprungfrequenz 1 | 0,00 Hz ~ Maximalfrequenz. yP01.10y | 0,00 Hz y | ||
| P09.10 Sprungfrequenz 2 | 0,00 Hz y | |||
| P09.11 Sprungfrequenz. Reichweite | 0,01 Hz y | |||
| P09.12 Positiv und Umgekehrter Tod Zeit | 0,0 s y 3000,0 s | 0,0s y | ||
| P09.13 | Umkehren Frequenz Erlaubnis | 0: Erlaubt; 1: Verbieten | 0 y | |
| P09.14 | Wenn die Einstellung Frequenz ist niedriger als die untere Grenze von Freq. | 0: Betrieb mit niedrigerer Grenzfrequenz 1: Stopp 2: Stillstandsbetrieb | 0 y | |
| P09.15 | Drop-Steuerung | 0,00 Hz bis 10,00 Hz | 0,00 Hz y | |
| P09.16 | Einstellung kumulative Leistung | Oh y 65000h | Oh y | |
zur Ankunftszeit
| P09.17 | Einstellungkumulativ | Oh y 65000h | Oh y | |
| P09.18 Startschutz | Laufende Ankunft | 0: Ungeschützt; | 0 y | |
| P09.19 | FrequenzErkennungswert 1(P14T1) | 0,00 Hz ~ Maximalfrequenz.yP01.10y | 50,00Hz | y |
| P09.20 | Verzögerungswertder Freqenzerkennung (P14T1) | 0,0 % ~ 100,0 % (P14T1-Niveau) | 5,0 % y | |
| P09.21 | Frequenzerreicht dieErkannte Breite | 0,0 % ~ 100,0 % (MaximaleFrequenz) | 0,0 % y | |
| P09.22 | FrequenzsprungsfunktionWährend Acc undDez. | 0: Ungültig, 1: gültig | 0 y | |
| P09.25 | Schaltfrequenz vonBeschleunigungsszeit1 und Zeit 2 | 0,00 Hz ~ Maximalfrequenz.yP01.10y | 0,00 Hz y | |
| P09.26 | Schaltfrequenz vonVerzögerungsszeit1 und Zeit 2 | 0,00 Hz ~ Maximalfrequenz.yP01.10y | 0,00 Hz y | |
| P09.27 | Terminal Jog-Priorität | 0: Ungültig, 1: gültig | 0 y | |
| P09.28 | FrequenzErkennungswert 2(P14T2) | 0,00 Hz ~ Maximalfrequenz | 50,00Hz | y |
| P09.29 | Verzögerungswertder Freqenzerkennung (P14T2) | 0,0 % ~ 100,0 % (P14T2-Niveau) | 5,0 % y | |
| P09.30 | BeliebigeAnkunftsfrequency | 0,00 Hz ~ Maximalfrequenz | 50,00Hz | y |
| Erkennungswert 1 | ||||
| P09.31 | BeliebigeAnkunftsfrequency erkannte Breite 1 | 0,0 % ~ 100,0 % (MaximaleFrequenz) | 0,0 % y | |
| P09.32 | BeliebigeAnkunftsfrequency Erkennungswert 2 | 0,00 Hz ~ Maximalfrequency | 50,00Hz | y |
| P09.33 | BeliebigeAnkunftsfrequency erkannte Breite 2 | 0,0 % ~ 100,0 % (MaximaleFrequenz) | 0,0 % y | |
| P09.34 | NullstromErkennungsstufe | 0,0 % y 300,0 %100,0% entspricht demMotornennstrom | 5,0 % y | |
| P09.35 | Verzügerungszeit vonStromerkennung | 0,01 s y 600,00 s | 0,10 s y | |
| P09.36 | Aktueller Wert vonAusgabe überaktuell | 0,0 % (Nicht erkannt)0,1 % ~ 300,0 % (Motornennstrom) | 200,0 % y | |
| P09.37 | Verzügerungszeit vonAusgabe überStromerkennung | 0,00 s y 600,00 s | 0,00 s y | |
| P09.38 | BeliebigerAnkunftssstrom 1 | 0,0 % ~ 300,0 % (Motornennstrom) | 100,0 % y | |
| P09.39 | Willkürliche Ankunftaktuelle 1 Breite | 0,0 % ~ 300,0 % (Motornennstrom) | 0,0 % y | |
| P09.40 | Willkürliche Ankunftaktuell 2 | 0,0 % ~ 300,0 % (Motornennstrom) | 100,0 % y | |
| P09.41 | Willkürliche AnkunftStrom 2 Breite | 0,0 % ~ 300,0 % (Motornennstrom) | 0,0 % y | |
| P09.42 | TimerfungionAuswahl | 0: Ungültig, 1: gültig | 0 y | |
| P09.43 Timerlaufzeit | 0: P09.44 Einstellung, | 0 y | ||
| Auswahr | 1:Al12: Al23: Al3Analoger Eingangsbereich entsprichtyP09.44y | |||
| P09.44 | Zeitgeber lauft Zeit | 0,0 Min. y 6500,0 Min | 0,0Min y | |
| P09.45 | Unterer Grenzwert fürden Schutzwert derEingangsspannung A1 | 0,00 V y P09.46 | 3,10 V y | |
| P09.46 | Al1 | P09.45 y 10,00 V | 6,80 V y | |
| P09.47 | Eingangsspannungsschutzwert Obergrenze Übertemperaturschutz Wert | 0y y 100 yEingangsspannungsschutzwert Obergrenze Übertemperaturschutz Wert | 75y y | |
| P09.48 | KühlgeblaseKontrolle | 0: Lüfter lauft während VDF lauft1: Immer in Betrieb, wenn StromAn; | 0 y | |
| P09.49 | Weckfrequenz | Ruhezustandsfrequenz (P09.51) ~ Maximalfrequenz yP01.10y | 0,00 Hz y | |
| P09.50 | WeckverzögerungZeit | 0,0 s y 6500,0 s | 0,0s y | |
| P09.51 Schlafhäufigkeit | 0,00 Hz ~ Weckfrequenz yP09.49y | 0,00 Hz y | ||
| P09.52 Einschlafterverzogungszeit | 0,0 s y 6500,0 s | 0,0s y | ||
| P09.53 | Ankunftszeit这点esBetrieb | 0,0 y 6500,0 Min | 0,0Min y | |
| P09.54 | Korrekturfaktorder Ausgangsleistung | 0,00 % y 200,0 % | 100,0 % y | |
| P10 Gruppe Fehler und Schutz | ||||
| P10.00 | Motorüberlastung Schutz | 0: Deaktivieren,1: Aktivieren | 1 | \( \ddot{\mathbf{y}} \) |
| P10.01 | Motorüberlastung Schutzgewinn | 0,20 \( \ddot{\mathbf{y}} \) 10,00 | 1,00 \( \ddot{\mathbf{y}} \) | |
| P10.02 | Motorüberlastung FrühwnavourFaktor | 50 - 100 % | 80 % \( \ddot{\mathbf{y}} \) | |
| P10.07 | Kurzschluss zu Erdungsschutz beim Einsatzalten | 0: Deaktivieren,1: Aktivieren | 1 \( \ddot{\mathbf{y}} \) | |
| P10.08 | BremseinheitStartspannung | 650,0 V - 800,0 V | 690 V \( \ddot{\mathbf{y}} \) | |
| P10.09 | Automatischer FehlerResetzeiten | 0 \( \ddot{\mathbf{y}} \) 20 | 0 \( \ddot{\mathbf{y}} \) | |
| P10.10 | Aktion ausführtenAuswahl währendautomatischer Fehlerzurücksetzen | 0: Keine Aktion1: Aktion | 0 \( \ddot{\mathbf{y}} \) | |
| P10.11 | Interval für Automatischer Fehlerzurücksetzen | 0,1 s \( \ddot{\mathbf{y}} \) 100,0 s | 1,0s \( \ddot{\mathbf{y}} \) | |
| P10.12 | Eingangsphasenausfallschutz/Leistungsrelais-Einzugsschutz | Einzelbit: Schutz vor Phasenverlustam Eingang0: Deaktivieren,1: AktivierenZehn Bit: Leistungsrelais-Anzugsschutz0: Deaktivieren,1: Aktivieren | 11 \( \ddot{\mathbf{y}} \) | |
| P10.13 | Schutz vorPhasenverlust am Ausgang | 0: Deaktivieren,1: Aktivieren | 1 | \( \ddot{\mathbf{y}} \) |
| P10.14 | Erstmaliger MisserfolgTyp | 0: Kein Fehler1: (Reserviert) | - | |
| P10.15 | Zweiter Misserfolg Typ | 2: Überstrom im Acc-Prozess3: Überstrom im Dec-Prozess4: Überstrom im DauerbetriebGeschwindigkeit5: Überspannung im Acc-Prozess6: Überspannung im Dec-Prozess7: Überspannung bei konstanterGeschwindigkeit8: Pufferwiderstand überlastet9: Unterspannung10: VFD-Überlastung11: Motorüberlastung12: Eingangsphasenverlust13: Ausgangsphasenverlust14: Leistungsmodul ist überhitzt15: Externer Fehler16: Kommunikationsausnahme17: Leistungsrelais ist anormal18: Abnormale Stromerkennung19: Die Motorabstimmung ist abnormal21: Parameter lesen und schreibenAusnahme22: Andere Hardware anormal23: Motor Kurzschluss nach Masse26: Laufzeitankunft27: Benutzerspezifischer Fehler 128: Benutzerspezifischer Fehler 229: Die Einschaltzeit ist gekommen30: Lastabfall31: Laufzeit-PID-Feedback Goes verloren40: Zeitüberschreitung der Schnelldurchflussgrenze41: Motor während des Betriebsschalten42: Drehzahlabweichung zu groß | . | |
| P10.16 | Dritter(jüngster) Fehlertype | . | ||
| 43: Motordrehzahl zu hoch | ||||
| P10.17 | Häufigkeit beim dritten (jüngsten) Ausfall | • | ||
| P10.18 | Aktuell bei der dritter (letzter) Fehler | • | ||
| P10.19 | Busspannung beim dritten (letzten) Fehler | • | ||
| P10.20 | Eingangsanschluss Status am dritten (aktuellste) Versagen | • | ||
| P10.21 | Ausgangsanschluss Status am dritten (aktuellste) Versagen | • | ||
| P10.22 | Der Wechselrichter Status am dritten (aktuellste) Versagen | • | ||
| P10.23 | Einschaltdauer für der dritte (jüngste) Misserfolg | • | ||
| P10.24 | Laufzeit für die dritter (letzter) Fehler | • | ||
| P10.27 | Frequenz an der zweiter Fehler | • | ||
| P10.28 | Aktuell bei der zweiter Fehler | • | ||
| P10.29 | Busspannung am zweiter Fehler | · | ||
| P10.30 | Eingangsanschluss Status für die zweiter Fehler | · | ||
| P10.31 | Ausgangsanschluss Status bei der zweiter Fehler | · | ||
| P10.32 | Der Wechselrichter Status bei der zweiter Fehler | · | ||
| P10.33 | Einschaltdauer für der zweite Misserfolg | · | ||
| P10.34 | Laufzeit für die zweiter Fehler | · | ||
| P10.37 | Frequenz an der erster Misserfolg | · | ||
| P10.38 | Strom am ersten Versagen | · | ||
| P10.39 | Busspannung beim ersten Ausfall | · | ||
| P10.40 | Eingangsanschluss Status auf der ersten Versagen | · | ||
| P10.41 | Ausgabe des Klemmenstatus am ersten Versagen | · | ||
| P10.42 | Der Wechselrichter Status auf der ersten Versagen | · | ||
| P10.43 | Einschaltdauer für der ersten Misserfolg | · | ||
| P10.44 Laufzeit für die | · | |||
| erster Misserfolg | ||||
| P10.47 | Fehlerschutz Aktion Auswahr 1 | Einzelbit: Motorüberlastung (Err11) Zehn Bit: Eingangsphasenverlust, (Err12) Hundert Bit: Ausgangsphasenverlust, (Err13) Tausend Bit: Externer Fehler (Err15) Zehntausend Bit: Kommunikationsausnahme (Err16) 0: Ausrollen bis zum Stopp; 1: Stoppen durch Stoppmodus | 00000 y | |
| P10.48 | Fehlerschutz Aktion Auswahr 2 | yP07.10 y 2: Weiterlaufen; Einzelbit/Hundertbit/Tausendbit: (Reserviert) 10 Bit: Parameter lesen und Schreibausnahme (Err21) Zehntausend Bit: Laufzeit Ankunft (Err26) 0: Auslaufen bis zum Stopp; 1: Stopp durch Stoppmodus | 00000 y | |
| P10.49 | Fehlerschutz Aktion Auswahr 3 | yP07.10 y Einzelbit: Benutzerdefinieter Fehler 1 (Err27) Zehn Bit:: Benutzerspezifischer Fehler 2 (Err28) Hundert Bit: Einschaltzeit kommt an (Err29) Tausend Bit: Lastabfall (Err30) 0: Auslaufen bis zum Stillstand; 1: Stoppen durch Stoppmodus yP07.10 y 2: Auf 7 % der Nennfrequenz des Motors springen und weiterlaufen halten, dann zur eingestillten Frequenz zusückkehren | 00000 y | |
| Lastrückgewinnung Zehntausend Bit: PID-Rückmeldung Verlust (Err31) 0: Ausrollen bis zum Stillstand; 1: Anhalten durch Stoppmodus ÄP07.10Ä 2: | ||||
| P10,50 | Auswahr der Fehlerschutzmaßnahme | Weiterlaufen; Einzelbit: Drehzahlabweichung zu groß 10 Bit: Motordrehzahl zu hoch (Err43) Hundert Bit: (Reserviert) Zuausend Bit: Drehzahlrückmeldungsfehl 0: Ausrollen bis zum Stillstand; 1: Stopp durch Stoppmodus ÄP07.10Ä 2: | 00000 Ä | |
| P10.54 | Bei Fehler die Frequenzauswahl weiter ausführten | Weiterlaufen; 0: Die aktuelle Frequenz 1: Die eingestellte Frequenz 2: Betrieb mit der oberen Grenzfrequenz 3: Betrieb mit der unteren Grenzfrequenz 4: Betrieb mit anormaler Reserve Frequenz | 0 Ä | |
| P10.55 | Abnormale Reserve Frequenz | 0,0 % ~ 100,0 % (100,0 % entspricht der maximalen Frequenz ÄP01.10Ä | 100,0 % Ä | |
| P10.59 | Sofortige Leistung ohne Unterbrechung | 0: Ungültig 1: Reduzieren Sie die Geschwindigkeit; 2: Verzögerungsstopp | 0 Ä | |
| P10.60 | Die Pause Beurteilungsspannung von Instant Power Non-Stop | 80,0 % Ä 100,0 % (Standard- Busspannung) | 90,0 % Ä | |
| P10.61 | Spannungswiederkehr Urteilszeitpunkt von Sofortige Leistung | 0,00 s Ä 100,00 s | 0,50 s Ä | |
| ununterbrochen | ||||
| P10.62 | Die Beurteilungsspannung von Instant Power | 60,0 % - 100,0 % (Standard-Busspannung)Non-Stop | 80,0 % y | |
| P10.71 | Gewinn von Instant Leistung ohne Unterbrechung | 0 y 100 | 40 y | |
| P10.72 | Integral Koeffizient von Sofortige Leistung ohne Unterbrechung | 0 y 100 | 30 y | |
| P10.73 | Verzögerungszeit von sofortiger Leistung ohne Unterbrechung | 0 y 300,0 s | 20,0s y | |
| P10.63 | Lastabfallschutz Auswahl | 0: Ungültig, 1: gültig | 0 y | |
| P10.64 | Lastabfall-Erkennungspegel | 0,0 y 100,0 % | 10,0 % y | |
| P10.65 | Lastabfall Erkennungszeit | 0,0-60,0 s | 1,0s y | |
| P10.67 | Überdrehzahl Erkennungswert | 0,0 % - 50,0 % (Max. Frequenz yP01.10y) | 20,0 % y | |
| P10.68 | Überdrehzahl-Erkennungszeit | 0,0 s: Nicht erkennbar 0,1-60,0 s | 1,0s y | |
| P10.69 | Die Erkennung Wert für Geschwindigkeit Abweichung zu groß | 0,0 % - 50,0 % (Max. Frequenz yP01.10y) | 20,0 % y | |
| P10.70 | Die Erkennung Zeit für Geschwindigkeit Abweichung zu groß | 0,0 s: 0,1 ~ 60,0 s | 5,0s y | |
| P11 Gruppe PID-Funktion | ||||
| P11.00 PID-Eingangskanal | 0: P11.01 Einstellung1:Al12:Al23:Al34: Impulseinstellung (DI5)5: Kommunikationseinstellungen6: Mehrstufige Geschwindigkeit7: Tastatur-Encoder-Einstellungen | 0 y | ||
| P11.01 | Einstellung des digitalen Referenzeingangs | 0,0 y 10,00 | 3,00 y | |
| P11.02 | PID-RückmeldungKanal | 0:Al11:Al22:Al33: Al1-Al24: Impulseinstellung (DI5)5: Kommunikationseinstellungen6: Al1 + Al27: MAX ( |Al1|, |Al2|)8:MIN y|Al1|, |Al2|y | 0 y | |
| P11.03 | PID-Polarität | 0: Positive Richtung,1: Negative Richtung | 0 y | |
| P11.04 | PID-BereichRückmeldung | 0 y 100,00 kg | 10,00 y | |
| P11.05 | Proportionale VerständigungKP02 | 0,0 y 100,0 | 20,0 y | |
| P11.06 | IntegrationszeitTi1 | 0,01 s y 10,00 s | 2,00 s y | |
| P11.07 | VorhaltzeitTd1 | 0,000 s y 10,000 s | 0,000 s y | |
| P11.08 | PID-UmkehrGrenz Frequenz | 0,00 ~ Maximale Freqenz | 2,00 Hz y | |
| P11.09 | Die Grenze der PIDAbweichung | 0,0 % y 100,0 % | 1,0 % y | |
| P11.10 | Differenzialbegrenzer von PID | 0,00 %dehy 100,00 % | 0,10 %dehy | |
| P11.11 | Änderungsszeit des PID-Eingangssignals | 0,00dehy 650,00 s | 0,00 sdehy | |
| P11.12 | PID-Rückmeldung Filterzeit | 0,00dehy 60,00 s | 0,00 sdehy | |
| P11.13 | Die PID-Ausgangsfilterzeit | 0,00dehy 60,00 s | 0,00 sdehy | |
| P11.15 | Proportionale Veränderung KP03 | 0,0dehy 100,0 | 20,0dehy | |
| P11.16 | Integrationszeit Ti2 | 0,01sdehy 10,00 s | 2,00 sdehy | |
| P11.17 | Vorhaltzeit Td2 | 0,000sdehy 10,000 s | 0,000 sdehy | |
| P11.18 | Der PID Parameterumschaltung Automatische Umschaltung nach die Abweichung | 0:Kein Schalter1:Schalter über die DI-KlemmeBedingungen | 0dehy | |
| P11.19 | Der PID Parameterumschaltung Abweichung 1 | 0,0 %dehy P11,20 | 20,0 %dehy | |
| P11.20 | Der PID Parameterumschaltung Abweichung 2 | P11,19dehy 100,0 % | 80,0 %dehy | |
| P11.21 Anfangswert des PID | 0,0 %dehy 100,0 % | 0,0 %dehy | ||
| P11.22 | Haltezeit von PID-Anfang | 0,00dehy 650,00 s | 0,00 sdehy | |
| P11.23 | Maximale positive Abweichung von Zwei Ausgabe | 0,00 %dehy 100,00 % | 1,00 %dehy | |
| P11.24 | Maximale Abweichung Abweichung von Zwei Ausgabe | 0,00 %dehy 100,00 % | 1,00 %dehy | |
| P11.25 | Die PID- Integraleigenschaft | Einzelbit: Integraltrennung 0: Ungültig, 1: gültig Zehn Bit: wenn die Freqenz stößt an die Grenzen 0: Integralregelung fortsetzen, 1: Integralregelung stoppen | 00dehy | |
| P11.26 | PID-Rückmeldung Verlusterkennung Werte | 0,1 % bis 100,0 % (0,0 %: Keine Erkennung) | 0,0 %dehy | |
| P11.27 | PID-Rückmeldung Verlusterkennung Zeit | 0,0 sdehy 20,0 s | 0,0sdehy | |
| P11.28 | Der PID abschalten Betrieb | 0: Stopp ohne PID-Betrieb, 1: Stopp mit PID-Betrieb | 0dehy | |
| P12-Gruppe -Schwingfrequenz, Feste Länge und Zahlen | ||||
| P12.00 | Modus der Swing- Frequenzeinstellung | 0: Relativ zur Zentrale FrequenzdehyP01.07dehy 1: Relativ zur Max-Frequency dehyP01.10dehy | 0dehy | |
| P12.01 | Bereich der Swing-Frequency | 0,0 %dehy 100,0 % | 0,0 %dehy | |
| P12.02 | Der Bereich der Sprungfrequenz | 0,0 %dehy 50,0 % | 0,0 %dehy | |
| P12.03 | Zyklus der Schwungfrequenz | 0,1 s bis 3000,0 s | 10,0sdehy | |
| P12.04 | Anstiegszeit von Swing- Frequenz-Drieckswelle | 0,1 %dehy 100,0 % | 50,0 %dehy | |
| P12.05 | Länge einstellen | 0 m ü 65.535 m | 1000 m ü | |
| P12.06 | Tatsächliche Länge | 0 m ü 65.535 m | 0m ü | |
| P12.07 | Anzahl der Impulse pro Meter | 0,1 ü 6553,5 | 100,0 ü | |
| P12.08 | Einstellen der Anzahl Wert | 1 - 65.535 | 1000 ü | |
| P12.09 | Gibt den Zähwert an | 1 - 65.535 | 1000 ü | |
| P13-Gruppe Mehrstufige Geschwindigkeit, einfache SPS | ||||
| P13.00 | Mehrstufige Geschwindigkeit 0 (MS0) | -100,0 % ü 100,0 % (Maximale Frenz yP01.10y) | 0,0 % ü | |
| P13.01 | Mehrstufige Geschwindigkeit 1 (MS1) | 0,0 % ü | ||
| P13.02 | Mehrstufige Geschwindigkeit 2 (MS2) | 0,0 % ü | ||
| P13.03 | Mehrstufige Geschwindigkeit 3 (MS3) | 0,0 % ü | ||
| P13.04 | Mehrstufige Geschwindigkeit 4 (MS4) | 0,0 % ü | ||
| P13.05 | Mehrstufige Geschwindigkeit 5 (MS5) | 0,0 % ü | ||
| P13.06 | Mehrstufige Geschwindigkeit 6 (MS6) | 0,0 % ü | ||
| P13.07 | Mehrstufige Geschwindigkeit 7 (MS7) | 0,0 % ü | ||
| P13.08 | Mehrstufige Geschwindigkeit 8 (MS8) | 0,0 % ü | ||
| P13.09 | Mehrstufige Geschwindigkeit 9 (MS9) | 0,0 % ü | ||
| P13.10 | Mehrstufige Geschwindigkeit 10 (MS10) | 0,0 % ü | ||
| P13.11 | Mehrstufige Geschwindigkeit 11 (MS11) | 0,0 % y | ||
| P13.12 | Mehrstufige Geschwindigkeit 12 (MS12) | 0,0 % y | ||
| P13.13 | Mehrstufige Geschwindigkeit 13 (MS13) | 0,0 % y | ||
| P13.14 | Mehrstufige Geschwindigkeit 14 (MS14) | 0,0 % y | ||
| P13.15 | Mehrstufige Geschwindigkeit 15 (MS15) | 0,0 % y | ||
| P13.16 | Einfacher SPS-Betriebsmodus | 0: Ende der Einzeloperation 1: Endwert am Ende der Einzeloperation 2: Immer Rad fahren | 0 y | |
| P13.17 | Speicherung des Betriebszustands der SPS nach dem Ausschalten | Einzelbit: bei Stromausfall Zehn Bit: Wann Stopp 0: Nicht speichern 1: Speichern. | 00 y | |
| P13.18 | Mehrstufige Geschwindigkeit 0 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.19 | Acc/Dec-Zeit von MS 0 | 0 y 3 | 0 y | |
| P13.20 | Mehrstufige Geschwindigkeit 1 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.21 | Acc/Dec-Zeit von MS 1 | 0 y 3 | 0 y | |
| P13.22 | Mehrstufige Geschwindigkeit 2 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.23 | Acc/Dec-Zeit von MS 2 | 0 y 3 | 0 y | |
| P13.24 | Mehrstufige Geschwindigkeit 3 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.25 Beschleunigungs-/Verzögerungszeit von | 0 y 3 | 0 y | ||
| MS 3 | ||||
| P13.26 | Mehrstufige Geschwindigkeit4 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.27 | Acc/Dec-Zeit vonMS 4 | 0 y 3 | 0 y | |
| P13.28 | MehrstufigeGeschwindigkeit 5 Laufzeit | 0,0 s (h) - 6553,5 s (h)Laufzeit | 0,0 s (h) y | |
| P13.29 | Acc/Dec-Zeit vonMS 5 | 0 y 3 | 0 y | |
| P13.30 | Mehrstufige Geschwindigkeit6 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.31 | Acc/Dec-Zeit vonMS 6 | 0 y 3 | 0 y | |
| P13.32 | Mehrstufige Geschwindigkeit7 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.33 | Acc/Dec-Zeit vonMS 7 | 0 y 3 | 0 y | |
| P13.34 | MehrstufigeGeschwindigkeit 8 Laufzeit | 0,0 s (h) - 6553,5 s (h)Laufzeit | 0,0 s (h) y | |
| P13.35 | Acc/Dec-Zeit vonMS 8 | 0 y 3 | 0 y | |
| P13.36 | Mehrstufige Geschwindigkeit9 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.37 | Acc/Dec-Zeit vonMS 9 | 0 y 3 | 0 y | |
| P13.38 | MehrstufigeGeschwindigkeit 10 Laufzeit | 0,0 s (h) - 6553,5 s (h)Laufzeit | 0,0 s (h) y | |
| P13.39 | Acc/Dec-Zeit vonMS 10 | 0 y 3 | 0 y | |
| P13.40 | Mehrstufige Geschwindigkeit11 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.41 | Acc/Dec-Zeit vonMS 11 | 0 y 3 | 0 y | |
| P13.42 | Mehrstufige Geschwindigkeit 12 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.43 | Acc/Dec-Zeit von MS 12 | 0 y 3 | 0 y | |
| P13.44 | Mehrstufige Geschwindigkeit 3 Laufzeit | 0,0 s (h) - 6553,5 s (h) Laufzeit | 0,0 s (h) y | |
| P13.45 | Acc/Dec-Zeit von MS 3 | 0 y 3 | 0 y | |
| P13.46 | Mehrstufige Geschwindigkeit 14 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.47 | Acc/Dec-Zeit von MS 14 | 0 y 3 | 0 y | |
| P13.48 | Mehrstufige Geschwindigkeit 15 Laufzeit | 0,0 s (h) - 6553,5 s (h) | 0,0 s (h) y | |
| P13.49 | Acc/Dec-Zeit von MS 15 | 0 y 3 | 0 y | |
| P13,50 | Einheit der Beschleunigung/ Verzögerung der mehrstufen Geschwindigkeit Zeit | 0: s (Sekunden) 1: h (Stunden) | 0 y | |
| P13.51 | Signalquelle von Mehrstufige Geschwindigkeit 0 (MS0) | 0: Parameter yP13.00y 1:Al1 2:Al2 3:Al3 4:Impuls (DI5) 5:PID 6:Häufigkeit der Präposition yP01.08y 7: Kann mit der Taste y/y geändert werden | 0 y | |
| P14 Gruppe RS485 Kommunikationsparameter | ||||
| P14.00 | Baudrateneinstellung für RS485 | Einzelbit: MODBUS 0: 300 BPS 1: 600 BPS 2: 1200 BPS 3: 2400 BPS 4:4800 BPS 5:9600 BPS 6: 19200 BPS 7: 38400 BPS | 5 y | |
| 8: 57600 BPS 9: 115200 BPS | ||||
| P14.01 | MODBUS-Daten Format | 0: Keine Prüfung (8.N-2)1: Paritätsprüfung (8.E-1)2: Ungerades Schach (8.O-1)3: Keine Prüfung (8.N-1) | 0 y | |
| P14.02 Lokale Adresse | 0: Broadcast-Adresse1y247: (MODBUS) | 1 | y | |
| P14.03 | MODBUSReaktionsverzögerung | 0 y 20 ms | 2 y | |
| P14.04 | Timeout-Zeit vonRS485 | 0,0: Ungültig0,1 ~ 60,0 s | 0,0 y | |
| P14.05 | MODBUSProtokollauswahl | 0: Nicht-Standard-MODBUSProtokoll1: Standard-MODBUS-Protokoll | 1 | y |
| P14.06 | AktuellAuflösung von 485lesen | 0:0,01 A1:0,1 A | 0 y | |
| P15-Gruppe Spezielle Parameter für die Wasserversorgung mit konstantem Dn | ||||
| 15,00 € | Einfaches Makro-Debugging Funktion | 0: Keine Funktion1: Ein Antrieb für zweiPumpen 2: Wasserversorgung in derGebäudegemeinschaft 3:Hotelwasserversorgung4:Löschwasserversorgung | 0 | y |
| P15.01 | AufwachenDruck | 5: Druckerhöhungspumpe 6: Tiefenwasserpumpe 0KG (1 kg = 0,1 MPa) | 0 | Ruhed |
| P15.02 | Verzügerungszeit vonAufwachen | 0,0 s bis 6500,0 s | 0s y | |
| P15.03 Schlafdruck | Weckdruck yP15.01y ~Druckmessbereich (0,1 MPa) | 3,50 kg y | ||
| P15.04 Einschlagverzögerungszeit | 0,0 s bis 6500,0 s | 60,0s y | ||
| P15.05 | DruckProportionallenkung | 0: Deaktivieren;1: Aktivieren | 1 | y |
| P15.06 | AufwachenDruckUnterschied | 0 ~ 100,0 Bar (kg, 0,1 MPa) | 0,50 kg y | |
| P15.07 | Schlafdruckunterschied | 0 ~ 100,0 Bar (kg) | 0,50 kg y | |
| P15.08 | Überdruck-Alarmwert | 0,00 ~ Druckmessbereich KG(1KG=0,1Mpa=1Bar) | 9,00 kg y | |
| P15.09 | Verzögerungszeit vonÜberdruckAlarm | 0-6553,5S | 0,0S y | |
| P15.10 | NiederdruckAlarmwert | 0,00 ~ Druckmessbereich KG(1KG=0,1Mpa=1Bar)Der Parameter aktiviert den Alarmbei Unterdruckerreichung. | 0,0 kg y | |
| P15.11 | Niederdruckalarm-Verzögerungszeit | 0-6553,5S | 20,0S y | |
| P15.12 | WasseraufnahmeAnlaufdruck | 0~Druckmessbereich KG Öffnen Sie die Start-Stopp-Steuerung der Wasserzufuhr überP01.02=3Der Wasserzulauf mussStromsensor des Al2Für den SpannungssensorändernSie den Al2-Jumper | 3,00 kg | y |
| P15.13 | EinlassabschaltungDruck | 0~Druckmessbereich KG(Bar) | 3,20 kg y | |
| P15.14 | Anzahl derHilfspumpen | 0 bis 3 | 0 y | |
| P15.15 | Warteseit vonHilfspumpe | 0~1000,0S | 60,0S y | |
| schaltet ein | ||||
| P15.16 | Wartezeit für den Hilfspumpenschalter | 0~1000,0S | 5,0S y | |
| P15.17 | RO1 Relais EIN Frenzeinstellung | 0~50Hz Wenn der Wert erreicht ist, Relais wird eingeschaltet | 50,00 y | |
| P15.18 | RO1 Relais AUS Frenzeinstellung | 0~50Hz Wenn der Wert erreicht ist, Relais wird AUS | 30,00 y | |
| P15.19 | Signalquelle von Wasserstand Regler | 0: Funktion ist ungültig 1:Al1 2:Al2 3: Al3 P15.19=1~3 ,Die (P15.20,P15.21,P15.22,P15.23) Einstellung ist gültig, P15.19=0, Parameter ungültig. 0,0 - | 0 y | |
| P15.20 | Schlafventil für der Wasserstand Regler | 100,0 % Das Signal ist kleiner als dieser Parameter, weiter yP15.21y Zeit, Ruhezustand und Warnung bei vollem Wasserstand (ErrH) | 25,0 % y | |
| P15.21 | Voller Wasserstand Verzögerung | 0~1000,0S Verzögerung von yP15.20y Zeiteinstellung. | 6,0S y | |
| P15.22 | Wasser leer Verzögerung für Wasser Niveauregler | 0~1000,0S Wenn im Zustand „Wasserstandwannung" (ErrH) das Signal des Wasserstandsreglers größter als P15.20 ist und die folgenden yP15.22y-Male wiederholt werden, wird die „Wasserstandwannung" gelöscht und der Normalzustand wiederhergestellt. | 60,0S y | |
| P15.23 | Beurteilungswert fürHydrauliksondenschaden (Wasserstandregel) | 0,0 %: Ungütige Funktion.0,1y100,0%: wenn WasserstandDas Reglersignal ist größter als inyP15.23y angegeben (E.tSF). | 0,0 % y | |
| P15.24 | Schutz vorWassermangelFunktion | 0:Deaktivieren; 1: Aktivierenund anhand von Freqenz | 0 y | |
| P15.25 | WassermangelFehlerprüfung | und Druck beurteilen 0,00 yEinstellwert KG (Bar/0,1 MPa)Gültig, wenn P15.19 = 1. DerWassermangel wirdfestgestellt, wenn die RückmeldungWert ist kleiner als dieser Wert | 0,50 y | |
| P15.26 | Schutz vorWassermangelErkennungFrequenz | 0~50,00 HzGültig, wenn P15.19 = 1 ist, wenndie Betriebsfrequenz ist größeroder gleich dieser Freqenz undder Druck ist kleiner oder gleich 15,25.Beurteilen Sie denWassermangel. | 50,00 y | |
| P15.27 | VerzögerungszeitdesWassermangelschErkennung | 0y6553,5SVerzögerungszeit für Wassermangel-Fehleralarm - Beurteilung. | 10 y | |
| P15.28 | (Bar/0,1Mpa) deseingehen Wassers | 0yDruckmessbereich KG Effektiver Druckhenden Wassers | 3,00 y | |
| P15.29 | Einlaufendes WasserErkennungszeit | 0~9999SZeit für einlaufendes WasserErkennung | 20,0S y | |
| P15.30 | Wasserleckund neu startenAbweichungsbetrag | 0yDruckmessbereich KG (Bar/0,1 MPa) | 0 | y |
| P15.31 | Wasserleck und starten Sie dann die Rückgabewert | 0-yyDruckmessbereich KG (Bar/0,1 MPa) | 0 y | |
| P15.32 | Wasserleck und starten Sie dann die Rückgabewert Erkennungszheit | 0: KEINE Funktion 0.1.10.0S | 2,0S y | |
| P15.33 | Schlafmodus | 0: Deaktivieren 1: Schlafen, wenn der Druck größer als der Schlafdruck ist; 2: Schlafen, wenn die Lauffrequency kleiner als die Schlaffrequency ist (betroffen von P15.29) 3: Schlafen, wenn der Druck/higher als der Schlafdruck und die Lauffrequency geringer als die Schlaffrequency ist. | 0 | y |
| P15.34 | Frequenz der Sleep-Ausgabe | 0~P01.12 | 20,0 Hz y | |
| P17-Gruppe Funktionales Codemanagement | ||||
| P17.00 | Benutzerkennwort | 0 y 65535 | 0 y | |
| P17.01 | Parameter Initialisierung | 0: Keine Operation 01: Werkparameter wiederherstellen, ausgenommen Motorparameter 02: Datensatzinformationenlöschen | 0 y | |
| P17.04 | Die Funktion Codeändert die Eigenschaften | 0: Modifizierbar 1: Nicht änderbar | 0 y | |
| P18-Gruppe Drehmomentregelungsparameter | ||||
| P18.00 | Drehzahl-/Drehmoment-Regelmodus | 0: Geschwindigkeitsregelung, 1: Drehmomentregelung | 0 y | |
| P18.01 | Drehmorenteinstellung Quellenauswahl unter Drehmoment Steuermodus | 0: Digitale Einstellungen 1: (P18.03) 1:Al1 2:Al2 3:Al3 4:PLUSE-Einstellung 5:Kommunikationseinstellung 6:MIN (Al1, Al2) 7:MAX (Al1, Al2) | 0 y | |
| P18.03 | Digitale Einstellung im Drehmomentkontrollmodus | -200,0 % y 200,0 % (P18.01=0) 150,0 % y | ||
| P18.05 | Der Max Vorwärtsfrequenz für Drehmomentregler | 0,00 Hz y Max. Frequenz yP01.10y 50,00 Hz y | ||
| P18.06 | Der Max Rückwärtsfrequenz für Drehmomentregler | 0,00 Hz y Max. Frequenz yP01.10y 50,00 Hz y | ||
| P18.07 | Drehmomentregelung Acc-Zeit | 0,00 s y 65000 s | 0,00 s y | |
| P18.08 | Drehmomentregelung Dez Zeit | 0,00 s y 65000 s | 0,00 s y | |
| P23-Gruppe Regeloptimierungsparameter | ||||
| 23,00 € | Obere Grenzfrequency für DPWM-Schalter | 5,00 Hz y Max. Frequenz yP01.10y 8,00 Hz y | ||
| P23.01 | PWM-Modulation Modus | 0: Asynchrone Modulation, 1: Synchrone Modulation | 0 y | |
| P23.03 | Zufällige PWM Tiefe | 0: Ungültiges zufälliges PWM 1 y 10: Zufällige Tiefe der PWM- Trägerfrequenz | 0 y | |
| P23.04 | Schneller Durchfluss Begrenzung | 0: Deaktivieren, 1: Aktivieren | 1 y | |
| P23.06 | UnterspannungWert Einstellung | 200,0 V - 2200,0 V | 350 V y | |
| P23.09 | ÜberdruckWerteinstellung | 200,0 V - 2200,0 V | 270 V y | |
| P23.10 | Automatischer TrägerFrequenzänderung bei niedrige Freqenz | 0: Deaktivieren,1: Aktivieren | 1 y | |
| P23.11 | Nullgeschwindigkeitlaufende AusgabeKontrolle | 0: Deaktivieren,1: Aktivieren | 1 y | |
| P23.12 | Sensibilität vonLeistungsphasenverlustSchutz | 0y30,0 % | 13,0 % y | |
| P24-Gruppen-Al-Kurveneinstellung | ||||
| 24,00 € | Minimaler Input derKurve 4 | -10,00 VyP24,02 | 0,00 V y | |
| P24.01 | EntsprechendVerhältnis von P24,00 | -100,0 % bis +100,0 % | 0,0 % y | |
| P24.02 | Drehen 1 derIch habe Huren 4 | P24.00yP24.04 | 3,00 V y | |
| P24.03 | EntsprechendVerhältnis von P24.02 | -100,0 % bis +100,0 % | 30,0 % y | |
| P24.04 | Drehen 2 derIch habe Huren 4 | P24.02 - P24.06 | 6,00 V y | |
| P24.05 | EntsprechendVerhältnis von P24.04 | -100,0 % bis +100,0 % | 60,0 % y | |
| P24.06 | Max. Eingangsleistung desIch habe Huren 4 | P24.06y+10.00V | 10,00 V y | |
| P24.07 | Entsprechend Verhältnis von P24.06 | -100,0 % bis +100,0 % | 100,0 % ü | |
| P24.08 | Minimaler Input der Kürve 5 | -10,00 VyyP24,10 | -10,00 V ü | |
| P24.09 | Entsprechend Verhältnis von P24.08 | -100,0 % bis +100,0 % | -100,0 % ü | |
| P24.10 | 1. Geburtstag der KI Kurve 5 | P24.08 - P24.12 | -3,00 V ü | |
| P24.11 | Entsprechend Verhältnis von P24.10 | -100,0 %y100,0 % | -30,0 % ü | |
| P24.12 | 2. Geburtstag die KI-Kurve 5 | Teil 24.10 bis Teil 24.14 | 3,00 V ü | |
| P24.13 | Entsprechend Verhältnis von P24.12 | -100,0 %y100,0 % | 30,0 % ü | |
| P24.14 | Max. Eingabe von die KI-Kurve 5 | P24.12y+10.00V | 10,00 V ü | |
| P24.15 | Entsprechend Verhältnis von P24.14 | -100,0 %y100,0 % | 100,0 % ü | |
| P24.24 | Sprungpunkt von der Al1 | -100,0 %y100,0 % | 0,0 % ü | |
| P24.25 | Sprungweite von der Al1 | 0,0 % bis 100,0 % | 0,5 % ü | |
| P24.26 | Sprungpunkt von der Al2 | -100,0 %y100,0 % | 0,0 % ü | |
| P24.27 | Sprungweite von der Al2 | 0,0 % bis 100,0 % | 0,5 % ü | |
| P24.28 | Sprungpunkt von der Al3 | -100,0 %'y100,0 % | 0,0 %'y | |
| P24.29 | Sprungweite von der Al3 | 0,0 % bis 100,0 % | 0,5 %'y | |
| P30-Gruppenkorrektur für die Al und AO | ||||
| 30,00 € | Al1 gemessenSpannung 1 | 0,500 V - 4,000 V | FabrikKorrektur | 'y |
| P30.01 | Al1Anzeigespannung 1 | 0,500 V - 4,000 V | Werkskorrektur | 'y |
| P30.02 | Al1 gemessenSpannung 2 | 6,000 V - 9,999 V | Werkskorrektur | 'y |
| P30.03 | Al1Anzeigespannung 2 | 6,000 V - 9,999 V | Werkskorrektur | 'y |
| P30.04 | Al2 gemessenSpannung 1 | 0,500 V - 4,000 V | FabrikKorrektur | 'y |
| P30.05 | Al2Anzeigespannung 1 | 0,500 V - 4,000 V | FabrikKorrektur | 'y |
| P30.06 | Al2 gemessenSpannung 2 | 6,000 V - 9,999 V | FabrikKorrektur | 'y |
| P30.07 | Al2Anzeigespannung 2 | 6,000 V - 9,999 V | FabrikKorrektur | 'y |
| P30.08 | Al3 gemessenSpannung 1 | -9,999'Vy-yy10,000'V | FabrikKorrektur | 'y |
| P30.09 | Al3Anzeigespannung 1 | -9,999'Vy-yy10,000'V | FabrikKorrektur | 'y |
| P30.10 | Al3 gemessenSpannung 2 | -9,999'Vy-yy10,000'V | Werkskorrektur | 'y |
Spannung 2
| P30.11 | AI3 Anzeigespannung 2 | -9,999dehy4-10,000yV | Fabrik Korrektur | y |
| P30.12 | AO1 Zielspannung 1 | 0,500 V - 4,000 V | Fabrik Korrektur | y |
| P30.13 | AO1 Gemessen | 0,500 V - 4,000 V | Werkskorrektur | y |
| P30.14 | Spannung 1 Zielspannung 2 | 6,000 V - 9,999 V | Werkskorrektur | y |
| P30.15 | AO1 Gemessen | 6,000 V - 9,999 V | Fabrik Korrektur | y |
| P30.16 | Spannung 2 AO2 Zielspannung 1 | 0,500 V - 4,000 V | Fabrik Korrektur | y |
| P30.17 | AO2 Gemessen | 0,500 V - 4,000 V | Fabrik Korrektur | y |
| P30.18 | Spannung 1 AO2 Zielspannung 2 | 6,000 V - 9,999 V | Fabrik Korrektur | y |
| P30.19 | AO2 Gemessen | 6,000 V - 9,999 V | Fabrik Korrektur | y |
4. Störungsmeldung und Gegenmaßnahmen
| Zeigt den Fehlernamen an | Mögliche Fehlerursache | Fehlerbehebung | |
| Fehler01 | Schutz des Leistungsmodus | Motorleistung zu hoch oder Kurzschluss in der Verkabelung oder Leistungsmodul beschädigt | Entfern den das Motorkabel und starten Sie den Motor erneut. Wenn ein Problem auftritt, reparieren Sie den Wechselrichter |
| Err02 | Unterspannungsfehl | Die Eingangsspannung ist annormal oder das Leistungsrelais ist nicht aktiviert oder die Spannungserkennung | Überprüfen Sie die Versorgungsspannung oder wenden Sie sich an den Hersteller. |
| Fehler | |||
| Fehler31 | Überspannung beim Beschleunigen | Die Eingangsspannung ist annormal | Überprüfen Sie die Eingangsstromversorgung |
| Neustart, wenn der Motor dreht | Eingestellt auf Start nach Gleichstrombremsung | ||
| Err32 | Überspannung beim Abbremsen | Die Verzögerungszeit ist zu kurz | Verlängern Sie die Verzögerungszeit |
| Die Eingangsspannung ist annormal | Überprüfen Sie die Eingangsstromversorgung | ||
| Fehler33 | Überspannung bei konstanter Drehzahl | Die Eingangsspannung ist annormal | Überprüfen Sie die Eingangsstromversorgung |
| Fehler60 | Wechselrichterüberlastung | Falsche Einstellung der V/F-Kurve oder des Drehmotions. | Passen Sie die V/F-Kurve und den Drehmoment-Boost-Wert an |
| Niedrige Eingangsspannung. | Überprüfen Sie die Versorgungsspann | ||
| Die Beschleunigungseit ist zu kurz | Verlängern Sie die Beschleunigungszeit | ||
| Die Motorlast ist zu hoch | Wählen Sie einen leistungsstärker Wechselrichter | ||
| Err61 | Überstrom während der Beschleunigung | Die Beschleunigungseit ist zu kurz | Verlängern Sie die Beschleunigungszeit |
| Die Wechselrichterleistung ist zu gering | Wechselrichter mit hoher Leistung auswahlen | ||
| Falsche Einstellung der V/F-Kurve oder des Drehmoments. | Passen Sie die V/F-Kurve oder den Drehmoment-Boost-Betrag an | ||
| Fehler62 | Überstrom während der Verzögerung | Die Verzögerungszeit ist zu kurz | Verlängern Sie die Verzögerungszeit |
| Die Wechselrichterleistung ist zu gering | Wahlen Sie den Wechselrichter mit hoher Leistung | ||
| Fehler63 | Überstrom bei konstanter Drehzahl | Niedrige Eingangsspannung. | Überprüfen Sie die Versorgungsspannung |
| Motorstillstand oder Laständerung ist zu groß | Überprüfen Sie die Last | ||
| Die Wechselrichterleistung ist zu gering | Wahlen Sie einen leistungsstärkerten Wechselrichter | ||
| Err64 | Motorüberlastung | Falsche Einstellung der V/F-Kurve oder des Drehmoments. | Passen Sie die V/F-Kurve oder den Drehmoment-Boost-Wert an |
| Niedrige Eingangsspannung. | Überprüfen Sie die Versorgungsspannung | ||
| Motorstillstand oder Laständerung ist zu groß | Überprüfen Sie die Last | ||
| Der Motorüberlastschutzkoeffizient ist nicht richtig eingestellt | Stellen Sie den Motorüberlastschutzkoeffizienten richtig ein | ||
| Fehler65 | Welle für Welle strombegrenzender Fehler | Das Gleiche gitt für den Motor Überlast | Das Gleiche gitt für den Motor Überlast |
| Err40 | Hardwarefehler | Wasser, Insekten usw. | Neustart kann nicht wieder aufgenommen werden zusück zur Fabrik Reparatur |
| Fehler41 | EEPROM R/W-Fehler | EEPROM-Anhängerkupplung | Wenden Sie sich an den Hersteller |
| Err42 | Stromausfall kontrollieren | Die Eingangsstromversorgung liegt nicht im Spezifikationsbereich | Passen Sie die Spannung an die Spezifikationsanforderungen an |
| Err46 | Aktueller Erkennungsfehler | Fehler im Stromabtastkreis | Wenden Sie sich an den Hersteller |
| Fehler im Antriebsstichtreis | Wenden Sie sich an den Hersteller | ||
| Fehler11 | Externer Geräteausfall 1 | Externer Fehlereingang Klemme 1 ist geschlossen | Den externen Fehleranschluss abklemmen und den Fehler beheben (acht den Sie darauf, die Ursache zu ermitteln). |
| Err12 | Kommunikation und Misserfolg | 485 Kommunikation fehlgeschlagen | Überprüfen Sie die 485-Verbindung |
| Err13 | Die kumulierte Laufzeit kommt an | Die kumulierte Laufzeit erreicht den eingeselten Wert | Datensatzlöschen durch Parameterinitialisierungsfunktion |
| Fehler15 | Externer Geräteausfall 2 | Externer Fehlereingang Klemme 2 ist geschlossen | Den externen Fehleranschluss abklemmen und den Fehler beheben (acht den Sie darauf, die Ursache zu ermitteln). |
| Err16 | Die Einschaltzeit ist gekommen | Die kumulierte Einschaltdauer erreicht den eingeselten Wert | Parameterinitialisierungsfunktion Datensätzelöschen |
| Err17 | Kontakt-/Relaisfehler | Fehler am Eingangsanschluss des externen Geräts | Den externen Fehleranschluss abklemmen und den Fehler beheben (achten Sie darauf, die Ursache zu ermitteln). |
| Err08 | Leistungsmodul überhützt | Schlechter Kühlerlüfter oder überhützte Umgebungstemperatur | Überprüfen Sie den Lüfter oder die Wärmeableitung oder warten Sie, bis er abgekühlt ist, und versuchen Sie es erneut. |
| Err90 | Motorfehler zur Laufzeit schalten | Schlechter Kontakt der Motorleitung oder des Schalters zwischen Motor und Wechselrichter | Der Wechselrichter muss direkt an den Motor angeschlossen werden, um zu prufen, ob die Motorleitung locker ist |
| Fehler91 | Erdschlussfehler | Erdschluss | Erdungsleitung abklemmen (auf die Ursache achten) |
| Fehler92 | Eingangspasenverlust | Eingangsstromleitung prüfen | Wenden Sie sich an den Hersteller |
| Fehler93 | Phaserverlust am Ausgang | Verlust der Ausgangsstromleitung oder ein Phasenkreis zur Erkennung von Strom ist abnormal | Überprüfen Sie die Ausgangsspannung und die Ausgangsstromleitung. |
| Err94 | Motor-Überrehzahlfehler | Die Motordrehzahl übersteigt die normale Drehzahl | Prüfen Sie, ob die Last über andere Leistungsquellen verfügt. |
| Err95 | Geschwindigkeitsabweichung | Der Geschwindigkeitsunterschied ist zu groß im Vergleich zur normalen gebrachte windigkeit | Überprüfen Sie die Motorlast |
| Fehler96 | PID-Rückkopplungsverlust | Schlechter Kontakt mit dem PID-Sensorsignal zur Laufzeit | Überprüfen Sie das Sensorsignal |
| Fehler97 | Lastabfallfehler | Motorleitung ist getrennt | Überprüfen Sie die Motorleitung |
| Fehler98 | Übertemperatur des Motors | Der Motor überhützt | Motortemperatur prüfen |
| Fehler99 | Motortuning Fehler | Die Motorparameter sind nicht festgelegt nach das Typenschild oder die Motorleitung ist in schlechtem Kontakt | Stellen Sie den Motor Parameter nach das Typenschild und Überprüfen Sie die Leitung von der Wechselrichter zum Motor |
| ErrH1 | Wasser Mangel | Wassermangel | Auf Wassermangel prüfen |
| ErrH2 | Volles Wasser Vorwarnung | Das Wasser ist voll | Normales Wasser wiederherstellen Druck |
| ErrH3 | Hochwasser Druck Versagen | Fehler beim erzwungenen Herunterfahren | Zu hohes Wasser Druck, überprüfen Sie die Wasserdruck |
5. Setup-Beschreibung
Wenn P17.00 auf einen Wert ungleich 0 eingestellt ist, wird das Parameterschutzpassword ist eingestellt. Vor dem Ändern der Parameter müssen Sie das Password eingeben.
Das Password muss aufgehoben und P17.00 auf 0 gesetzt werden.
Das Parametermenü im benutzerdefinierten Parametermodus ist kein Password geschützt.
Die Gruppen P01-P23 sind Basisfunktionssparameter, die
Gruppen P00 sind Überwachungsfunktionsparameter.
Die Symbole in der Funktionstabelle werden wie folgt beschrieben: ^ : Der
eingestellte Wert these Parameters kann geändert werden, wenn der Wechselrichter
Stopp- und Betriebszustand;
^ : Der eingestellte Wert thesegendert werden, wenn der Wechselrichte befindet sich im laufenden
Zustand; "": Der Wert des Parameters ist der tatsächlich erkannte Datensatzwert und kann nicht geändert
werden; **: Es bedeutet, dass der Parameter der "Herstellerparameter" ist und beschränkt auf die Herstellereinstellung, die den Benutzer an der Bedienung hinder.
In China hergestellt
VEVOR
TOUGH TOOLS, HALF PRICE
Technischer Support und E-Garantie-Zertifikat www.vevor.com/support
VEVOR®
TOUGH TOOLS, HALF PRICE
Stel de parametermethode in:
funktionsparameter, P00-gruppen übervakar Funktionssystem.
Symbolerna i Funktionstabellen beskrivs enligt foljande: "y":




