
AT1-7500X - Växelriktare Vevor - Gratis bruksanvisning och manual
Hitta enhetens manual gratis AT1-7500X Vevor i PDF-format.

Användarfrågor om AT1-7500X Vevor
0 fråga om denna apparat. Svara på dem du kan eller ställ din egen.
Ställ en ny fråga om denna apparat
Ladda ner instruktionerna för din Växelriktare i PDF-format gratis! Hitta din manual AT1-7500X - Vevor och ta tillbaka ditt elektroniska enhet i hand. På denna sida publiceras alla dokument som behövs för att använda din enhet. AT1-7500X av märket Vevor.
BRUKSANVISNING AT1-7500X Vevor
Teknisk support och e-garanticertifikat www.vevor.com/support
Inverter
MODELL:AT1-7500X
Vi fortsetter att vara engagerade i att ge dig verktyg till konkurrenskraftiga priser. "Spara halften", "halva priset" aller andra liknande uttryck som anvands av oss representarara bara en uppskattning av besparingar du kan dra nytta av att kopa vissa verktyg hos oss jamfort med de stora toppmärkena och betyder inte nodvändigtvis att tacka alla kategorier av verktyg som erbjuds av oss. Du paminns vänligen om att noggrant kontrollera nar du gör en beställning hos oss om du faktiskt sparar halften i jämforelse med de främsta stora varumärkena.
VEVOR®
TOUGH TOOLS, HALF PRICE
Inverter
MODELL:AT1-7500X

BEHÖVER HJÄLP? KONTAKTA OSS!
Har du produitfrågor? Behöver du teknik support? Kontakta oss gärna: Teknik support och e-
garanticertifikat www.vevor.com/support
Detta ar den ursprungliga instruktionen, las alla instruktioner noggrant innan du anvander den. VEVOR reserverar sig for en tydlig talkning av var anvandarmanual. Utseendet på Produkten ar beroende av den produit du fatt. Ursakta oss att vi intekommen att informera dig igen om det finns nagoon teknik eller mjukvaruuppateringar på.Var produit.
VIKTIGA SÄKERHETSÄTGÄRDER

Läs alla sakerhetsvarningar, instruktioner, illustrationer och specifikationer som medfoljerenna växelriktare. Misslyckas med att följa alla instruktionerna nedan kan leda till elektriska stötar, brand och/eller allvarlig skada.
WARNING:
Denna utrustning ar en högspänningsenhet, fösök inte góra det demontera denna utrustning Near som helst for att undvika fara. Efter en enchet Om den externa omkopplaren inte startar om encheten, kontakta din Återförsäljare for hantering.
WARNING: RISK FÖR ELEKTRISK STÖT OCH BRAND!
- Underlåtenhet att följa denna instruktion kan resultera i ett elektriskt fel, brand och elstöt.
- MONTERA INTE.
- Sank inte vãxelriktaren i vatten.
- Anslut inte två eller flera transformatorer parallellt
- Anslut strömförsörningsenheten direkt till att GFCI vátuttag.
- Använd inte en förlängningssladd
- Installation av denna växelriktare och tillhörande ledninger måste göras av en kvalificerace elektriker i enlighet med alla tillämpliga elföreskrifter.
WARNING:
Änderingar eller modifieringar avenna enchet som inte uttryckligen godkänts av parten ansvarig forfterlevnad kan ogiltigforklara användarens behörighet att driva utrustning.
SPARA DESSA INSTRUKTIONER
FCC-information
VARNING: Änderingar eller modifieringar som inte uttryckligen godkänts av parten ansvarig for afterlevnad kan ogiltigforklara användarens behörighet att använda utrustning!
Denna enchet uppfyller del 15 av FCC-reglerna. Driften ar foremål for foljande två villkor:
1) Denna produit kan orsaka skadliga störningar.
2) Denna produit måste acceptera alla mottagna störningar, inklusive störningar som kan orsaka öönskad Funktion.
WARNING: Ändringar eller modifieringar avenna produit inte uttryckligen godkänd av parten.ansvarig För afterlevnad kan ogiltigforklara användarens behörighet att anvandaprodukten.
Obs: Denna produit har testats och befunnits folja granserna for en digital enchet av klass B i enlighet med del 15 av FCC-reglerna, dessa granser ar utformade for att ge rimligt skydd mot skadlig störning i en bostadsanläggning.
Denna produit genererar, anvander och kan utstråla radiofrekvensenergi, och om den inte installeras och används i enlighet med instruktionerna, kan orsaka skadliga störningar på radiokommunikation. Det finns dock ingen garantera att störningar intekommen att inträffi en viss installation. Om dettaprodukten orsakar skadliga störningar på radio eller TV
mottagning, vilket kan bestämmas genom att stanga av och på produiten användaren uppmuntras att försöka korrigera störningen av en eller flera av de foljande Åtgårder. Y Rikta
om eller flytta mottagningsantennen. y Oka avstandet
mellanprodukten och mottagaren. y Anslutprodukten till ett uttag på en
annan krets an den till vilken
mottagaren ar ansluten.
y Radfraga aterforsaljaren aller en erfaren radio-/TV-tekniker for bistand.
Korrekt avfallschantering

Denna produit omfattas av bestammelserna i det europeiska direktivet 2012/19/EG. Symbolen som visar en soptunna korsad genom indikerar att Produkten kraver separat avfall insamling i Europeiska unionen. Detta gällerprodukten
och alla tillbehör märkta medenna symbol. Produktter märkta som sādana fär inte slängas tillsammans med vanligt hushállsavfall utan maste tas till en insamlingsställe for atervinning av elektrisk och elektronisk utrustning
1. Produktinformation
Manualen innehälter försiktighetsatgärder och vägledning För val av användartyp, installation, parameterinstalling, idrifttagning på plats, feldiagnos och dagligt unterhäll och underhäll
1.1 Inverter-serien
| AT901-serien | Bromsmotstånd | |||||
| Modell | Adaptiv motor | ProduktionAktuell: A | I | Ohm | ||
| KW | HP | |||||
| 22 901-7K5G1 | 7.5 | 10 | 34,0 | 600 | 40 | |
1.2 Produktspecifikation
| Projekt | Standard | |
| GrundlägandeFungera | System | Aktuell vektor universell frekvensomvandlare |
| Drive | Mögelöfremmenschättning avinnahuierstandenzh Funktion. | |
| Mæxtarada | Vektorkontroll: 0-500Hz | |
| Frekvens | V/F-kontroll: 0-3200Hz. | |
| Bärare | 0,5KHz-16KHz | |
| Frekvens | Bärfrekvensen kan justeras | |
| Frekvens | Bürgsmathematischergebnis Hz äbelastningen | |
| upplösning | Simuleringsinställning: ±0,025 % | |
| UmlösningKontrollage Vektorkontroll med öppen slinga (SVC) | ||
| V/F styrning | ||
| Startmoment | Typ-G-läge: 0,3Hz/150 % (SVC). | |
| Typ-P-läge: 0,3Hz/100 % 1y | ||
| Räckvidd für ADJ | 100(SVC) ±0,5 | |
| Seebahelastigkeit | %(SVC) | |
| öogestehnetkapacitet | Typ G:150% märkström 120s;180% für 1T0ypse P:120% | |
| märkström für 60s;150% für 3Asutomatisch | ||
| Vridmomentet ökar | vridmomentökning; MTharneueawl | |
| V/F-kurva | taoyrsq:usetrianicgrhetalsinee::0m.1u%lti-- | |
| Curve Acc/Dec-läge | brieje.notes; Sjukstefalrælefvitiusa och2retardationsläge, 2fyra Acc/Dec-tider, Acc/Dec-tidsinterval 0,0-6500,0s | |
| DC-bromsing | Bromsfrekvens: 0,00Hz-Maximal frekvens;Bromsid::0s-36.0s Bromströmvärde:0.0% -100.0% | |
| Juridisk kontroll | Jogg frekvensområde: 0,00Hz-50,00Hz;Acc & Dec tid: 0,0s-6500,0s. | |
| Upp till 16 segmenthaltishetskörningar med en inbyggd PLC aller styrning | ||
| terminalinbyggd PID | Det kan enkelt realisera processtyrningens slutnastyrsystem | |
| AVR-funktion När ingängsspänningen jitter kan utspänningen automatiskt | ||
| Stallkontroll | bällanikgonantatt Begränserne automatisker spänningsutlösing | |
| Snabb strömbegrändende | Minimera overströmsfelet och skydda frekvensomformarenormala drift | |
| Vridmomentgräns | Begränsa vridmomentet automatiskt under drift Omedelba | |
| effekt forhindra stellverbindisinningspeasstecht behveldaktimomentana | ||
| Tieartanfgegedobfaco.k0Menine-r6g5y00.0Min. | ||
| Drift | Kommandokalla | Kontrollpanel, kontrollterminal, seriell port, kan växlas påflera sätt |
| Frekvens källa | Panelpotentiometer, nummer angivet, extern analog spänning/strömingång och seriell portingång.kan växlas på flera sätt | |
| Ingängsterminal Fem | digitala ingängar 1 analog | |
| kvantitetsingångsterminal; | ||
| En 0-10V spänning eller 0-20mA strömingång; | ||
| Produktion Terminal | 1 digital utgang | |
| 1 reläutgang (TA,TB,TC) | ||
| 1 analog utgang, stöder 0-10V eller 0-20mA spänningsutgång | ||
| Skydd fungera | Kortslutningsdetektering av ström på motor, skydd För ingängs- och utgangsfasförlust, överströmsskydd, överspänningsskydd, underspänningsskydd, överhettningskydd och överbelastningsskydd, etc. | |
| Slinga Miljön | Använd plats | Inomhus, inte direkt solljus, inget damm, frätande gas, brännbar gas, oljedimma, ønga, vatten eller salt, etc. |
| Ovanfor havet nivå | under 1000m 2C116699 | |
| Omgivende temperatur | -10 yy ~ + 40 yy (omgivningstemperaturen ar 40 yy ~ 50 yy, ∀nlogen minska mängden) | |
| fuktighet | Mindre ¬n 95% RH, vattenfri kondensation | |
| vibrera | Mindre ¬n 5,9 m/s (0,6 g) | |
1.3 Beskrivning av styrslingan och huvudslingans terminal
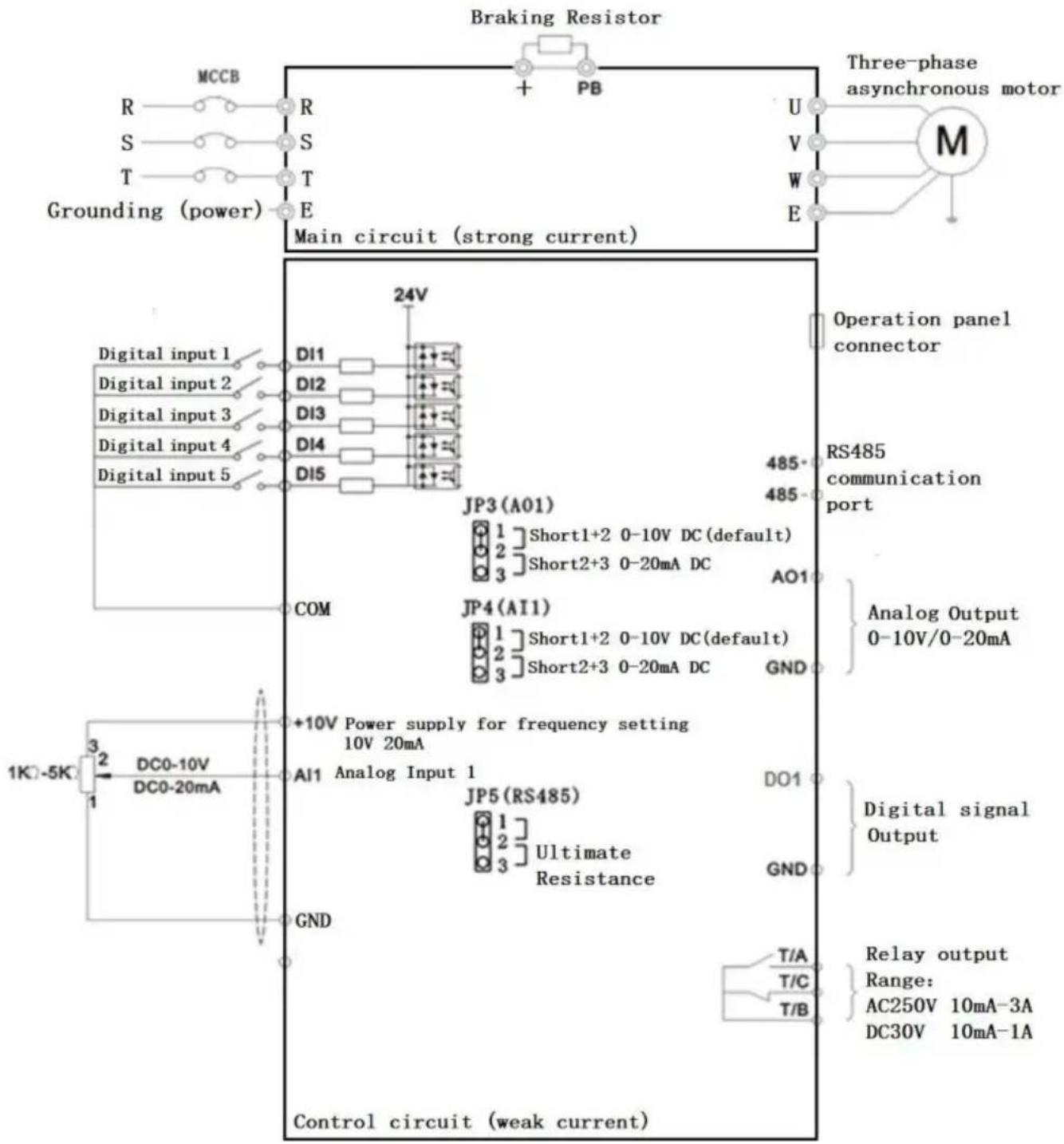
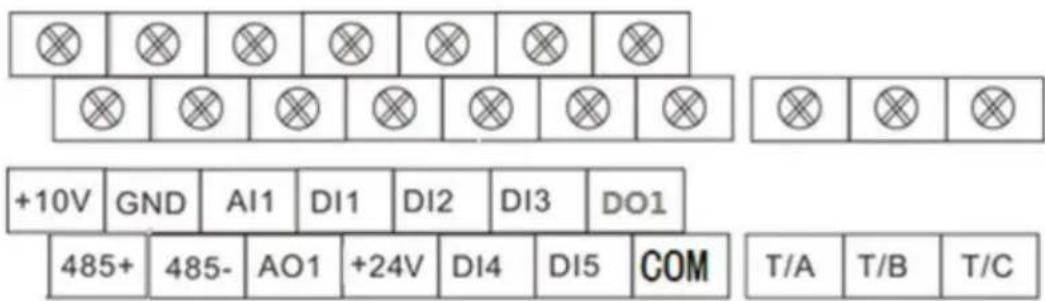
Figur 1-3-1 0,75-11,0KW kopplingsschema styrterminalbeskrivning
2. Drift och visning
Beskrivning av Funktionsdiktorlampa
Hz: Indikatorlama for frekvensdisplay
y V: Spanningsindikatorlampa
y A: Strömindikatorlampa
y ERR: felindikatorlampa
F/R: Fram- och bakatindikatorlampa
L/R: Kontrollampa for kommunikation
RUN: Korindikatorlampa
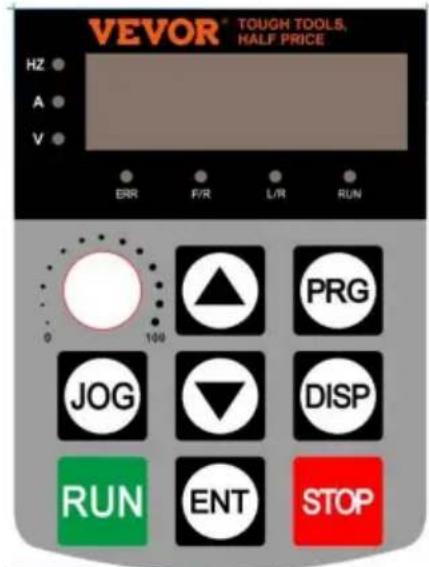
| Nyckelsymbol | Namn | Funktionsdeklaration |
| PRG | Programmeringnyckel | Meny går in eller ut, med parametermodifying |
| ÖNHN | Bestämnyckel | Gå in i menyn och bekräftapatarameterinställning |
| ï | Övre nyckel | Ökning av data aller funktionsskoder |
| ï | Ner-tangenten | Minskande data aller funktionskoder |
| DISP | Shift-tangenten | Välj parametermodieringsbiten ochvisa innehålet |
| SIKT | Kör nyckeln | Starta vãxelrikreten under tangentbordetdriflöge |
| STOPP | Stopp/Äterställ-knapp | Stopp/Äterställningsfunktion, |
| JOGGA | Jogga nyckel | Begrängsad till funktionskoden P08.01 |
Stall in parametermetoden:
- Tryck på PRG -knappen für att visa P 0.00, 2. Knapparna
y y och DISP valjer parameternumret som sha andras, och
ENTER -tangenten anger parametern,
-
y y och DISP- tangenterna andrar parametervarden, ENTER- tangenten sparar parametrar, 4. Om du behover andra andra parametrar, upprepa steg 2,3, sasom modifiering slUTForande, aterga till frekvensgransnittet med PRG -tangenten.
-
Sammanfattningstabell over Funktionella parametrar:
| P00, Övervakningsgrupp | |||
| P00.00 | löpfrekvens | 0,00 ~ 320,00 HzP01.22=2- | |
| P00.01 | Ställ in frekvensen | 0,0 ~ 3200,0 Hz (P01.22=1) - | |
| P00.02 | Samlingsskena spänning (V) | 0,0V ~ 3000,0V | - |
| P00.03 | Utpänning (V) | 0V ~ 1140V | - |
| P00.04 | Utström (A) | 0,00A-655,35A | - |
| P00.05 | Uteffekt (kW) | 0 ~ 32767 | - |
| P00.06 | Utgående vridmoment (%) | -200,0 % y 200,0 % | - |
| P00.07 | OF ingängstillstand | 0 ~ 32767 | - |
| P00.08 | DO-utgangstillstand | 0 ~ 1023 | - |
| P00.09 | AI1 spänning (V) | 0,01V | - |
| P00.10 AI2 Spänning (V) aller ström (mA) | 0,00V ~ 10,57V0,00mA ~ 20,00mA | - | |
| P00.12 | räknä värde | 0 ~ 65535 | - |
| P00.13 | Längdärde | 0 ~ 65535 | - |
| P00.14 | Visning av lasthastighet | 0 ~ 65535 | - |
| P00.15 | PID-inställning | 0 ~ 65535 | - |
| P00.16 | PID-feedback | 0 ~ 65535 | - |
| P00.17 | PLC-steg | 0 ~ 65535 | - |
| P00.18 | Pulsingängsfrekvens | 0 ~ 100 kHz | - |
| P00.19 | Äterkopplingshestighet (Hz) | -320,00 Hz ~ 320,00 Hz | - |
| P00.20 | Körtid kvar | -320,00Hz 650,00kHz | - |
| P00.21 | AI1 Spänning före korrigering | 0,000V ~ 10,570V | - |
| P00.22 | AI2 Spänning/ström förekorrektion | 0,000V ~ 10,570V0.000mA ~ 20,000mA | - |
| P00.24 | linjär hastighet | 0 ~ 65535m/min | - |
| P00.25 | Aktuell effekttid | 0 ~ 6500 min | - |
| P00.26 | Aktuell körtid | 0,0 ~ 6500,0 Min | - |
| P00.28 | Kommunikationsinställning | -100,00 % y 100,00 % | - |
| P00.30 | Frekvens X Display | 0,00 Hz ~ 500,00 Hz | - |
| P00.31 | Frekvens Y Display | 0,00 Hz ~ 500,00 Hz | - |
| P00.32 Visa valfritt minnesadressvärde | 0 ~ 65535 | - | |
| P00.35 | Målvridmoment, (%) | 0,0°y 359,9° | - |
| P00.37 | Effektfaktor Vinkel | - | |
| P00.39 Målsponning für VF-separering | 0V ~ Motorns märkspenning | - | |
| P00.40 Utpänning av VF-separering | 0V ~ Motorns märkspenning | - | |
| P00.41 | IN-ingångsstatusdisplay | - | - |
| P00.42 | DO-inmatningsstatusdisplay | - | - |
| P00.43 | DI-funktionssstatusdisplay 1 | (funktion 01. Funktion 40)- | - |
| P00.44 Visuell display für DI-funktionssstatus 2 | (Funktion 41. Funktion 80)- | - | |
| P00-45 | felmeddelande | - | - |
| P00-59 | Ställ in frekvensen på (%) | -100,00 % yy 100,00 % | - |
| P00-60 | Löpfrekovens (%) | -100,00 % yy 100,00 % | - |
| P00-61 | Växelrikartillständ | 0 ~ 65535 | - |
| y—modifierbar parameter under alla förhållanden y—inte modifierbar parameter under körstatus •—den faktiska detekterade parametern, inte modifierbar | ||||
| FC | namn | Ställ in räckvidd | Fabrik värde | äandra |
| P01 Grundläggande funktionsgrupp | ||||
| P01.00 | G/P typ | 1: Typ G (konstant vridmomentbelastning modell) 2: Typ P (flätt och vattenpump modell) | 1 y | |
| P01.01 | 1. Motorstyrningläge | 0: Hastighetssensorlös vektor Kontrollera 2: V/F styrmodell | 2 y | |
| P01.02 | Driftkommando | 0: Manöverpanelens körkommando kanal ("L/R" lyser slätt) | 0 y | |
| kanal | 1: Terminal Run-kanal ("L/R" lyser)2: Kommunikationskommando kanal("L/R"-lampor blinkar) | |||
| P01.03 | Huvudfrekvens källa X | 0: Digital set (fürinställd frekvens P01.08, knappsats y/yy knapp, strömavbrott)1: Digital set (fürinställd frekvens P01.08, knappsats y/yy knapp, strömavbrottsminne)2: Al1 analog set (0-10V); 3: Al2 analog set (0-10V aller 20mA);4: Panelpotentiometer; 5:Pulsuppsättning (0~50KHZ DI5);6: Flerstegshastighetskörningssats 7: Enkel PLC-sats;8: PID-kontrollset;9: Kommunikationsset. | 4 yy | |
| P01.04 | Sekundär frekvenskälla och | Samma som P01.03(Huvudfrekvenskälla X ) installd | 0 yy | |
| P01.05 | Begränsa urvalet av Y;när frekvensöverlagring | 0: Jämfört med yP01.10y Maximal frekvens 1: Relativt till frekvenskällan X | 0 yy | |
| P01.06 | Gräns für Y;när frekvensöverlagring | 0 % ~150 % | 100 % yy | |
| P01.07 | Frekvenskälla | Ensiffra: Val av frekvenskälla0: Huvudfrekvenskälla X1: Huvud- och sekundärdrift | 00 | |
| resultat (driftsförhällandet bestäms av tio sifror)2: Huvudfrekvens X och Y-omkopplare für sekundär frekvens 3: Växla mellan huvud frekvens X och Main och Sekundärer operationsresultat4: Frekvensen Y växlar med Huvud- och sekundärdrift resultatTio sifror: Frekvensdriftsrelation mellan X och Y0:X+Y1:X-Y2: Maximal av de två, 3: Minimum av de två. | ||||
| P01.08 | Prepositionsfrekvens | 0.00Hz y Maximal frekvens yP01.10y | 50.00Hz | y |
| P01.09 Löpriktning | 0: Konsekvent riktning, 1:Motsatt riktning | 0 y | ||
| P01.10 | Maximal utfrekvens | Vektor: 50.00Hz ~ 500.00HzV/F: 50,00 Hzy2000,00 Hz | 50.00Hz | y |
| P01.11 | Övre gränsfrekvens källa | 0: yP01.12y Setup 1: AI1Setup 2yAI2Setup 3: AI3Setup 4: Puls set (0~50KHZ DI5); 5: Kommunikationsinställningar | 0 y | |
| P01.12 | Övre gränsfrekvens | yP01.14y y yP01.10y | 50.00Hz | y |
| P01.13 | Övre gränsfrekvensförsprüning | 0.00Hz y yP01.10y | 0,00 Hz y | |
| P01.14 | Nedre grans frekvens | 0,00 Hz yyP01.12y | 0,00 Hz y | |
| P01.15 Bärfrekvens | Bärvågsfrekvens Justera med temperaturen | 0,5 kHz ~ 16,0 kHz | För modell y | |
| P01.16 | 0: Nej, 1: Ja | 1 y | ||
| P01.17 | Accelerationstid 1 | 0,00s ~ 650,00syyP01.19=2y0,0s y 6500,0syyP01.19=1y0s ~ 65000syyP01.19=0yReferensfrekvensyyP01.25y | För model | y |
| P01.18 | Retardationstid 1 | y | ||
| P01.19 | Tidsenhet av Acceleration och retardationstid | 0:1 sekunder 1: 0,1 sekunder 2: 0,01 sekunder | 1 y | |
| P01.21 | Bias frekvens av frekvens Y+när superposition | 0.00Hz y Maximal utfrekvens yyP01.10y | 0,00 Hz y | |
| P01.22 | Upplösning av Frekvens | Upplösning av alla frekvenserkommandon. | 2 y | |
| P01.23 | Stäng av minne für Digital frekvensinställning | 0: Inget minne 1: Minne | 0 y | |
| P01.24 | Val av motorparametergrupp 1, ppp 1: Motorparametergrupp 2. | 0: Motorparametergrupp 1, ppp 1: Motorparametergrupp 2. | 0 y | |
| P01.25 | Hänvisning frekvens av Acceleration och retardationstid | 0: Maximal frekvensyyP01.10y 1: Inställningsfrekvens 2:100Hz | 0 y | |
| P01.26 | Körning frekvensinstruktio 1: Ställ in frekvens UPP/NER | 0: Driftsfrekvens, | 0 y | |
| riktmärke | ||||
| P01.27 | Kommandokälla bunte frekvenskälla | Ensiffrig: Bindningsfrekvens För manöverpanelens kommando val av källa0: Ingen bindning 1: Digital set 2:Al1 3:Al2 4:Al35: Pulsuppsätting (0~50KHZ DI5);6: Flersegmentthastighet;7: Enkel PLC8:PID9: Kommunikationsuppsätting Tiosiffrig: Terminalkommando bindningsfrekvenskälla urval100 sifror: val av källa für kommunikationskommandobindande frekvensTusentalsiffror: Kör automatisch bindningsfrekvenskällan urval | 0000 y | |
| P02 Asynchronmotor parametergrupp 1 | ||||
| P02.00 | Motortyp | 0: Vanlig asynchronmotor,1: Variabel frekvensasynchronmotor | 0 y | |
| P02.01 | Nominell effekt av motor | 0,1kW ~ 400,0kW | Enligt till Modell Av Inverter | y |
| P02.02 | Märksänning på Motor | 1V ~ 2000V | y | |
| P02.03 | Märkström av Motor | 0,01A-655,35A(Invertereffekt <=55kW)0,1A-6553,5A(Invertereffekt > 55kW) | y | |
| P02.04 | Nominell frekvens av motor | 0,01Hz y Maximal utfrektiven öyP01.10y | öy | |
| P02.05 | Nominell hastigkeit på motor | 1 rpm ~ 65535 rpm | öy | |
| P02.06 | Statormotständ av motor | 0,001y y 65,535y (Invertereffekt <=55kW) 0,0001y y 6,5535y (Invertereffekt> 55kW) 0,001y y 65,535y | Inställning Parameter | öy |
| P02.07 | Rotormotständ av Motor | (Invertereffekt <=05,000) 1yKW 6,5535y (växelriktureffekt> 55kW) 0,01mH ~ 655,35mH | öy | |
| P02.08 | Lackagemotständ av Motor | (Invertereffekt <=55kW) 0,001Mh ~ 65,535mH (Invertereffekt> 55kW) 0,1mH | öy | |
| P02.09 | Ömsesidigt motständ av Motor | ~ 6553,5mH (Invertereffekt <=55kW) 0,01mH ~ 655,35mH (Invertereffekt > 55kW) | öy | |
| P02.10 | Tom ström av motorn | 0.01A y P02.03 (växelriktureffekt <=55kW) 0.1A ~ P02.03 (Invertereffekt > | öy | |
| P02.37 Inställningsval | 55kW) 0: ingen Funktion 1: Installling vid stillastående motor 1 2: Dynamisk installing av motor 3: Installling vid helt stillastående motor 2 | 0 y | ||
| P03 Vektorkontrollparametr für motorgrupp1 | ||||
| P03.00 | Hastighetsslinga proportionell 1 | 1 ~ 100 | 30 y | |
| P03.01 | Integrationstidför hastighetsslinga 1 | 0.01s ~ 10.00s | 0,50 s y | |
| P03.02 | Växlingsfrekvens1 | 0.00 y yP03.05y | 5.00Hz y | |
| P03.03 | Hastighetsslinga proportionell 2 | 20 y | ||
| P03.04 | Integrationstidför hastighetsslinga 2 | 0.01s ~ 10.00s | 1.00s y | |
| P03.05 | Växlingsfrekvens2 | P03.02 yMaximal utfrekvensyP01.10y | 10.00Hz y | |
| P03.06 | Vektorkontroll avskiftvinsten | 50 % ~ 200 % | 100 % y | |
| P03.07 | SVC-momentfilteringstid konstanter | 0,000 s ~ 0,100 s | 0,050 s y | |
| P03.09 | Vridmoment övre gränskälla underhastighetskontrollläge | 0: P03.10 installng 1yAl1; 2yAl2;3: Al3;4: Pulset (DI5);5: Kommunikationsinstalling;6: MIN (Al1, Al2)7: MAX (Al1, Al2) | 0 y | |
| P03.10 | Övre vridmomentgränsumerhadighetkontrollläge | 0,0 % ~ 200,0 % | 150,0 % y | |
| P03.13 | Proportionell vinst paxeexcitationreglering | 0 ~ 60 000 | 2000 y | |
| P03.14 | Integral Förstärkningav excitationreglering | 0 ~ 60 000 | 1300 y | |
| P03.15 | Proportionell vinst | 0 ~ 60 000 | 2000 y | |
| av vridmomentreglering | ||||
| P03.16 | Inbyggd f overstårkning av vridmomentreglering | 0 ~ 60 000 | 1300 y | |
| P04 V/F-kontrollparametrar | ||||
| P04.00 VF-kuvansinställning | 0: linjär kurva V/F1: Flerpunktskurva V/F2: Minskande vridmomentkurva 1 (kvadratkurva)3: Minskande vridmomentkurva 2 (1,2 effekt)4: Minskande vridmomentkurva 2 (1,4 effekt)6: Minskande vridmomentkurva 2 (1,6 effekt)8: Minskande vridmomentkurva 2 (1,8 effekt)10: VF helt separationsläge11: VF semi-separation lage 0,0% | 0 y | ||
| P04.01 | (Automatiskt lyftmoment);0,1 %-30,0 % | After modell y | ||
| P04.02 | 0.00Hz yMaximal utfrekvens yP01.10y | 50,00 Hz y | ||
| P04.03 | 0.00Hz y yP04.05y | 0,00 Hz y | ||
| P04.04 | 0,0 % ~ 100,0 % | 0,0 % y | ||
| P04.05 | yP04.03y y yP04.07y | 0,00 Hz y | ||
| P04.06 | Momentf overstårkningsinställning Momentf overstårkningsgränspunkt | 0,0 % ~ 100,0 %Flerpunkts V/F Frekv.1 | 0,0 % y | |
| P04.07 | Flerpunkts V/F Frekv. | ÄP04.05yy Motorklassad frekvens ÄP02.04y | 0,00 Hz y | |
| P04.08 | 3 Flerpunkts V/F | 0,0 % ~ 100,0 % | 0,0 % y | |
| P04.09 | Spänning 3 V/F-kontroll Slirfrekvenskompensation | 0,0 % ~ 200,0 % | 0,0 % y | |
| P04.10 | V/F över excitationsvinst | 0 ~ 200 | 64 y | |
| P04.11 | Svängning undertryckande vinst För V/F | 0 ~ 100 | After model y | |
| P04.13 | Spänningskälla av VF sepererade | 0: Digitala inställingar yP04.14yy 1:Al1 2:Al2 3:Al3 4: Pulsinställning (DI5) 5: Flera instruktioner 6: Enkel PLC 7: PID 8:COMMUNICATION Inställing Obs: 100,0 %, motvarsande motorn's märksänning | 0 y | |
| P04.14 | Spänning für VF-separering | 0V y Motors märksänning | 0V y | |
| P04.15 | Spänningsökningstid För VF-separation | 0,0s ~ 1000,0s Obs: Tid;när 0V stiger till motorn's märksänningy 0.0s | 0,0s y | |
| P04.16 | Spänning stadstid För VF-separation | ~ 1000.0s Obs: Tid;när märksänningen För motorn ar 0V | 0,0s y | |
| P04.17 | Avständningsläge av VF-separation | 0: Frekvensen och spänningsfallet till 0分开; 1: Frekvensen faller after Spänningsfall till 0 - 18 - | 0 y | |
| P04.18 | Överströmsstoppaktionsström | 50 % ~ 200 % | 150 % y | |
| P04.19 | Undertryckande avÖver nuvarande stall | 0: Inaktivera,1: Aktivera. | 1 | y |
| P04.20 | Suppressionsvinst av Overnuvarande stall | 0 ~ 100 | 20 y | |
| P04.21 | Ersättningskoefficient påhandling övernuvarande stall | 50 % ~ 200 % | 50 % y | |
| P04.22 | Överspänningsstoppaktionssprüning | 650.0V ~ 800.0V | 760,0V y | |
| P04.23 | Undertryckning av | 0: Inaktivera,1: Aktivera. | 1 y | |
| P04.24 | 0 ~ 100 | 30 y | ||
| P04.25 | överspänningsstoppssuppressions Frekv. Förstärkning av översprüningsstopp Suppression | 30 y | ||
| P04.26 | Maximal höjningfrekvensgräns fürÖversprüningsstopp | 0 ~ 50 Hz | 5Hz y | |
| Grupp P05, Ingångsparametrar | ||||
| P05.00 | DI1 ansluttingfungera | 0: Ingen funktion;1: Kör fremt (FWD) ellerSpring;2: Backörning (REV) ellerOmkopplare fremt/bak;t3: tre-tråds körkontroll 4: fremt jogkontroll (FJOG)5: Omvänd jogkontroll (RJOG) | 1 | y |
| 6: Frekv. Öka (Terminal UPP)7: Frekv. minska(Terminal DOWN)8: Gratis avständningskontroll9: ExternÄterställningssignalingång (RST)10: Avbryt drift; 11: Externtfel normalt öppen (NO) ingång 12: Multi-speed 1 13:Multi-speed 2 14: Multi-speed 3 15: Multi-speed4 16: ACC/DEC-tidsval1 (TT1)17: ACC/DEC tidsval 2 (TT2)18: Frekvenskälla switch 19: UPP/NER Frekv. nollrensning(terminal, tangentbord)20: Kör commando Switchterminal 121: VFD ACC/DEC förbjuder22: PID-kontroll Paus23: PLC-tillstand Återställs24: Pendelfrekvens Paus25: Räknarinmatning26: Räknaren Återställs27: Ingång forlängdräkning28: Längdäterställning29: Vridmomentkontrl (Avaktiverad30: Pulsinställning (endast DI5-burkinställning, P05.04=30)31: Reserverad;32: DC-bromsning omedelbart;33: Extern felingång (normalt |
| stängd, NC)34: FrekvensändringAktiverar35: PID-ingångssignal omvänd;36: Extern parkeringsterminal 137: Kör kommando Switchterminal 238: PID-integral Paus;39: Frekvens X vãxlar med denförintälda frekvensen40: Frekvens Y vãxlar med denförintälda frekvensen41: Motorvalsplint 143: Omkopplaren für PID-parametrar44: Användardefinierat fel 145: Användardefinierat fel 246: Hastighetskontroll /Momentkontrollbrytare47: Nödstopp48: Extern parkeringsterminal 249: Längsamt Åt DC-bromsning50: Körtiden rensad;51: Tvãtrådskontroll / Tretrådsstyrningkontrollbrytare52: Återföring avaktiverad; | ||||
| P05.01 | DI2 terminalfunktionell | 4 y | ||
| P05.02 | DI3 terminalfunktionell | 9 y | ||
| P05.03 | DI4 terminalfunktionell | 12 y | ||
| P05.04 | DI5 terminalfungera(endast DI5 kan | 13 y | ||
| inställning av puls Funktion, P05.04=30) | ||||
| P05.10 DI-filtreringstid | 0.000 s ~ 1.000 s | 0,010s y | ||
| P05.11 | Terminalstyrning Lage | 0: Tvãtrådskontrolläge 1,1: Tvãtrådskontrolläge 2,2: Tretrådskontrolläge 1,3: Tretrådskontrolläge 2. | 0 y | |
| P05.12 | Frekvensjusteringsstegstorlek | 0,001 Hz/s ~ 65,535 Hz/s | 1,00 Hz/s y | |
| P05.13 | Min. ingäng av Alkurva 1 | 0,00V y P05.15 | 0,00V y | |
| P05.14 | Motsvarandevärdet på Al-kurvan1:s min. ingäng | -100,0 % y +100,0 % | 0,0 % y | |
| P05.15 | Max. ingäng av Alkurva 1 | P05.13 y +10.00V | 10.00V y | |
| P05.16 | Motsvarandevärdet på Al-kurvan1:ans Max. | -100,0 % y +100,0 % | 100,0 % y | |
| P05.17 | ingäng Al-kurva 1 filtreringtid | 0.00s ~ 10.00s | 0,10s y | |
| P05.18 | Al-kurva 2:s min-input | 0.00V ~ P05.20 | 0,00V y | |
| P05.19 | Motsvarandevärdet på Al-kurvan2:s min. input | -100,0 % y +100,0 % | 0,0 % y | |
| P05.20 Max. ingäng für Al2 | P05.18 y +10.00V | 10,00V y | ||
| P05.21 | Motsvarandevärdet på Al-kurvan2:a Max. input | -100,0 % y +100,0 % | 100,0 % y | |
| P05.22 | Al-kurva 2-filtering tid | 0.00s ~ 10.00s | 0,10s y | |
| P05.23 | Al-kurva 3:s min. input | -10.00V y P05.25 | -10,00V y | |
| P05.24 | Motsvarande värdet på Al-kurvan 3:s min. ingäng | -100,0 % y +100,0 % | 0,0 % y | |
| P05.25 | Max. ingäng av Al kurva 3 | P05.23 y +10.00V | 10,00V y | |
| P05.26 | Motsvarande värdet på Al-kurvan 3:or Max. | -100,0 % y +100,0 % | 100,0 % y | |
| P05.27 | ingäng Al kurva 3 tid | filtrering 0.00s ~ 10.00s | 0,10s y | |
| P05.28 | Min. värdet av Pulsingång | -10.00V y P05.25 | 0,00V y | |
| P05.29 | Motsvarande värdet av Pulse's Min. input | -100,0 % y +100,0 % | 0,0 % y | |
| P05.30 | Max. värdet av Pulsingång | P05.23 y +10.00V | 10,00V y | |
| P05.31 | Motsvarande värdet av Pulse's Max. | -100,0 % y +100,0 % | 100,0 % y | |
| P05.32 | ingäng Pulsfiltering tid | 0.00s ~ 10.00s | 0,10s y | |
| P05.33 Val | av Al-kurva | Enkelbit: Val av Al1-kurva1: Jag har 1 horor(14.00, se P05.13 ~ P05.16.)2: Jag har 2 horor(14.00, se P05.18 ~ P05.21.)3: Jag har 3 horor(14.00, se P05.23 ~ P05.26.) | 321 y | |
| 4: Jag har 4 horor(16.00, se P24.00-P24.07)5: Jag har horor 4(16.00, se P24.08-P24.15)Tio bitar: Al2 kurvval (samma som Singlebit 1~5)Hundra bitar: Val av Al3-kurva(samma som oven) | ||||
| P05.34 | Al储量minimumingänginställningurval | Enkelbit: Al1 under Min.ingänginställning 0: Motsvarandevarande på Min. ingäng 1: 0,0 %Tio bitar: Al2 under Min.ingänginställning (samma som Single bit 1~2)Hundra bitar: Al3 under Min.ingänginställning (samma som oven) | 000 y | |
| P05.35 DI1 | fördröjningstid | 0,0s ~ 3600,0s | 0,0s y | |
| P05.36 DI2 | fördröjningstid | 0,0s ~ 3600,0s | 0,0s y | |
| P05.37 DI3 | fördröjningstid | 0,0s ~ 3600,0s | 0,0s y | |
| P05.38 | DI1-DI5 terminalgiltiglagesval | 0: Hög nivå effektiv, 1: Låg nivå effektivenkel bit: DI1;Tio bitar: DI2;Hundratals bitar: DI3;Tusen bitar: DI4,Tio tusen bitar: DI5 | 00 000 y | |
| P05.39 | DI6-D17 terminalgiltiglagesval | 0: Hög nivå effektiv, 1: Lågnivå effektivenkelbit: DI6, | 00 000 y | |
| Tio bitar: DI7 | ||||
| Grupp P06, utgangsparametr | ||||
| P06.01 | DO1-utgangfunktionsval | 0: Ingen utgang1: Driftindikator; 2:Felutgang (für gratis avständningsfel)3: Frekv. nivådetekteringssignal 1(P14T1)4: Frekvensankomstindikator (FAR)5: VFDnollhastighetskörning (vid körning)6: Motoröverbelastning Tidig varning7: Inverter överbelastningTidig varning8: The Set Count anländer9: Det angivna antelet har uppnåttts10: Längden är uppnädd11: PLC-cykeln är klar12: Ackumulerad gängtidanländer13: Frekvensbegränsning14: Vridmomentbegränsning15: Redo att springa16:Al1>Al217: Utgångsfrekovens.;när Ölbrerånsa18: Utgångsfrekovens.;när den nedregängsen (vid körning)19: Undertryckstilländ utgang 20: Kommunikationsinställning 21: Platsenär klar (reserverad) - 25 - | 0 y | |
| P06.02 | KontrollstyrelsenRela(TA-TB-TC)FungeraUrval | 2 y | ||
| 22: Lage)närhet(reserverad)23:Nollhastighetskörning 2(utmatas även vid avstängning)24:Ackumulerad starttidanländer25:Frekv.nivådetekteringssignal2(P14T2)26:Utgångsfrekvens.1{nàde 27:Utgångsfrekvens.2nàdd 28:utgånsström 1nàdd 29:utgånsström2nàdd 30:regelbundetnàdd 31:ingångssignal AI1överskridande 32:lastfall 33:VDFgår omvänd 34:nollströmstillständ35:Power-modulentemperatur anländer36:Utströmutanfor gräns37:Utgångsfrekvens.nar nedergåns(avstängning ocksa utgang)38:Felutgång(alla fel)39:Motor overhettningTidig varning40:Donna gängtidkommen41:Felutgång(gratisavstängningsfel och ingen undertryckutgang) | ||||
| P06.07 | Val av AO1-utgångsfunktion | 0:Driftsfrekv.,1:Ställ in frekv. | 0þ | |
| P06.08 | Val av AO2-utgångsfunktion | 2:Utrström,3:Utgåendevidmoment,4:Uteffekt,5:Utpänning, | 1þ | |
| 6: Ingängspulsfrekvens.7: AI18: AI29: AI310: Längd11: Räknevärde12: Kommunikationsinställning,13: Motorhastigkeit14: Utgängsström. (100,0 %Motsvarande 1000.0A)15: Utpänning (100,0 %Motsvarande 1000.0V)16: Motors utgängende vridmoment(Procentandel av verkligtarilyi förhällande till motorstyrkan)17: VFD utgängende vridmoment(Procentandel av verkligtarilyi förhällande till VFD-betyg) | ||||
| P06.10 | AO1 noll-biaaskoefficient | -100,0 % ð +100,0 % | 0,0 % ð | |
| P06.11 | AO1 vinst | -10.00 ð +10.00 | 1.00 ð | |
| P06.12 | AO2 noll-biaaskoefficient | -100,0 % ð +100,0 % | 0,0 % ð | |
| P06.13 | AO2 vinst | -10.00 ð +10.00 | 1.00 ð | |
| P06.17 | DO-utgangsfördröjningtid | 0,0s ~ 3600,0s | 0,0s ð | |
| P06.18 | RELÄ-utgangfördröjningstid | 0,0s ~ 3600,0s | 0,0s ð | |
| P06.19 | RELA2 utgangfördröjningstid | 0,0s ~ 3600,0s | 0,0s ð | |
| P06.22 | DO-utgang giltigstatusval | 0: Positiv logik, 1: AntilogikSingle Bit: GÖRTio bitar: RELÄ1 | 00 000 ð | |
| Hundra bitar: RELÄ2 | ||||
| P07 grupp, start- och stoppkontrollparametr | ||||
| P07.00 Startläge | 0: Direktstart1: Börja med hastighetssparning2: DC-bromsning + start vid startfrekvens | 0 y | ||
| P07.01 | Hastighetssparning metod | 0: Börja med avständningen frekvens1: Börja med arbetsfrekvensen2: Börja på max frekvens | 0 y | |
| P07.02 | Speed of Speed spärning | 1 ~ 100 | 20 y | |
| P07.03 Startfrekvens | 0,00 Hz-10,00 Hz | 0,00 Hz y | ||
| P07.04 | Start-frekvenshall tid | 0,0s ~ 100,0s | 0,0s y | |
| P07.05 | DC-bromströmvid upstart | 0 % ~100 % | 0 % y | |
| P07.06 | DC-bromsid kl upstart | 0,0s ~100,0s | 0,0s y | |
| P07.07 | Accelererande ochInbromsande lage | 0: linjärt Acc/Dec-läge1: S-kurva Acc/Dec-läge A2: S-kurva Acc/Dec-läge B | 0 y | |
| P07.08 | Tidsforhällande für start segment i S kurva | 0.0%yy100.0%-P07.09y | 30,0 % y | |
| P07.09 | Tidsforhällande für start segment i S kurva | 0.0%yy100.0%-P07.08y | 30,0 % y | |
| P07.10 | Stoppläge | 0yBrota till stopp 1yUtrullning till stopp | 0 y | |
| P07.11 | Frekvens tröskel für DC broms | 0.00Hz ~ Maximal frekvens. yP01.10y | 0,00 Hz y | |
| P07.12 | DC-bromsfördröjning tid | 0,0s ~ 100,0s | 0,0s y | |
| P07.13 DC | bromsström | 0 % ~ 100 % | 0 % y | |
| P07.14 | DC-bromsid kl stopp | 0,0s ~ 100,0s | 0,0s y | |
| P07.15 | DC-broms utnytjandegrad | 0 % ~ 100 % | 100 % y | |
| P07.18 | Hastighetsspärning nuvarande | 30 % ~ 200 % | y | |
| P08 Grupptangentbord och skärmparametrar | ||||
| P08.01 M | nyckelfunktion | 0: M-nyckeln ar ogiltig 1: Växla mellan fjärrkontroll Kontroll (terminal erler kommunikationskontroll) och manöverpanelskontroll, Near yP01.02y =1 eller 2 2: FWD/REV-omkopplare 3: FJOG (joggning framåt) 4: RJOG (omvänd jogkontroll) | 0 y | |
| P08.02 | STOPP/ÄTERSTÄLL nyckelfunktion | 0: STOP/RES-tangenten Gäller endast i panelstyrningsläge 1: STOP/RES-knappen Alltid giltig | 1 y | |
| P08.03 | LED visar parameter 1in Driftstatus | 0000yFFFF Bit00: Körfrekvens 1 (Hz) Bit01: Ställa in frekvens (Hz) Bit02: Bussspänning (V) | 1F y | |
| Bit03: Utpänning (V)Bit04: Utström (A)Bit05: Uteffekt (kW)Bit06: Utgående vridmoment (%)Bit07: DI-ingångsstatusBit08: DO-utgångsstatusBit09: Al1-spänning (V)Bit10: Al2-spänning (V)Bit11: Al3-spänning (V)Bit12: RäknevärdeBit13: LängdvärdeBit14: Visning av lasthastighetBit15: PID-inställningar | ||||
| P08.04 | LED visar parameter 2in Driftstatus | 0000yFFFFBit00: PID-ÅterkopplingBit01: PLC-stegBit02: PULSE Ingångsfrekvens (kHz)Bit03: Körfrekvens 2 (Hz)Bit04: Återstående körtidBit05:Al1-korrigerad frontspänning (V)Bit06:Al2-korrigerad frontspänning (V)Bit07:Al3-korrigerad frontspänning (V)Bit08: LinjehastighetBit09: Aktuell effekttid (Timme)Bit10: Aktuell körtid (min)Bit11:PULSE Ingångsfrekvens (Hz)Bit12: Kommunikationsinställning Värde | 0 y | |
| Bit13: Kodaråterkopplingshastighet (Hz) Bit14: Huvudfrekvens X Display (Hz) Bit15: Sekundär frekvens Y Display (Hz) | ||||
| P08.05 | parameter i Stopp status | 0000yFFFF Bit00: Ställ in frekvens (Hz) Bit01: Bussspänning (V) Bit02: DI-ingångsstatus Bit03: DO-utgångsstatus Bit04: AI1-spänning (V) Bit05: AI2-spänning (V)LED-displayer Bit06: AI3-spänning (V) Bit07: Räknevärde Bit08: Längdvärde Bit09: PLC-steg Bit10: Lastbastighet Bit11: PID-inställningar Bit12: PULSE Ingångsfrekvens (kHz) | 33 y | |
| P08.06 | Lastbastighet visningsfaktor | 0,0001 ~ 6,5000 | 1 0000 y | |
| P08.07 | Strömmodul temperatur | 0,0 y ~ 100,0 y | - | • |
| P08.08 | Produktnummer | - | - | • |
| P08.09 | Kumulative körtid | Oh ~ 65535h | - | • |
| P09 grupp, hjälpfunktion | ||||
| P09.00 Joggfrekvens | 0.00Hz ~ Maximal frekvens. yP01.10y | 2.00Hz y | ||
| P09.01 | Jogga Acc tid | 0,0s ~ 6500,0s | 20.0s y | |
| P09.02 | Jogga dec tid | Rekommenderad tid:0,4-4,0KW 7,5S5,5-30,0KW 15.0S37.0 ~ 132.0KW 40.0S160.0-630.0KW 60.0S | 20.0s y | |
| P09.03 | Accelerationstid2 | 15,0 | y | |
| P09.04 | Retardationstid2 | y | ||
| P09.05 | Accelerationstid3 | y | ||
| P09.06 | Retardationstid3 | y | ||
| P09.07 | Accelerationstid4 | y | ||
| P09.08 | Retardationstid4 | y | ||
| P09.09 Hoppfrekv. 1 | 0.00Hz ~ Maximal frekvens.yP01.10y | 0,00 Hz y | ||
| P09.10 Hoppfrekv. 2 | 0,00 Hz y | |||
| P09.11 | Hopp frekv.räckvidd | 0,01Hz y | ||
| P09.12 | Positivt ochOmvänd dōtdid | 0,0s ~ 3000,0s | 0,0s y | |
| P09.13 | Motsattfrekvenstillständ | 0: Tillåtet; 1:Förbjuda | 0 y | |
| P09.14 | När inställingenfrekv. är lagre anden nedre gräsen forfrekv. | 0: Kör med en nedre gränsfrekvens1: Stop2: nollhastighetsdrift | 0 y | |
| P09.15 | Släpp kontroll | 0,00 Hz -10,00 Hz | 0,00 Hz y | |
| P09.16 | Miljökumulativ kraft | Oh ~ 65000h | Oh y | |
vid ankomsttid
| P09.17 | Miljö kumulativ | Oh ~ 65000h | Oh y | |
| ankomst | löpande P09.18 Startskydd | 0: Oskyddad; | 0 y | |
| P09.19 | Frekvens detektrionsvärde 1 (P14T1) | 0.00Hz ~ Maximal frekvens. yP01.10y | 50.00 Hz | y |
| P09.20 | Frekvensdetekteringsfördröjningsvärde (P14T1) | 0,0 % ~ 100,0 % (P14T1-nivå) | 5,0 % y | |
| P09.21 | Frekvens nár upptäckt bredd | 0,0 % ~ 100,0 % (Maximal frekvens) | 0,0 % y | |
| P09.22 | Frekvenschoppningsfunktion Under Acc och dec. | 0: Ogiltig, 1: giltig | 0 y | |
| P09.25 | Växlingsfrekv. av accelerationstid 1 och tid 2 | 0.00Hz ~ Maximal frekvens. yP01.10y | 0,00 Hz y | |
| P09.26 | Växlingsfrekv. av retardationstid 1 och tid 2 | 0.00Hz ~ Maximal frekvens. yP01.10y | 0,00 Hz y | |
| P09.27 | Terminal Jog-prioritet | 0: Ogiltig, 1: giltig | 0 y | |
| P09.28 | Frekvens detektrionsvärde 2 (P14T2) | 0.00Hz ~ Maximal frekvens | 50.00 Hz | y |
| P09.29 | Frekvensdetekteringsfördröjningsvärde (P14T2) | 0,0 % ~ 100,0 % (P14T2-nivå) | 5,0 % y | |
| P09.30 | Godtycklig ankomstfrekvens | 0.00Hz ~ Maximal frekvens | 50.00 Hz | y |
| detektionsvärde 1 | ||||
| P09.31 | Godtyckligankomstfrekvens detekterad bredd 1 | 0,0 % ~ 100,0 % (Maximal frekvens) | 0,0 % ü | |
| P09.32 | Godtyckligankomstfrekvensdetektionsvärde 2 | 0.00Hz ~ Maximal frekvens | 50.00Hz | ü |
| P09.33 | Godtyckligankomstfrekvensupptäckt bredd 2 | 0,0 % ~ 100,0 % (Maximal frekvens) | 0,0 % ü | |
| P09.34 | Nollströmdetektionsnivå | 0,0 % ~ 300,0 %100,0 % motsvarar motorns märkström | 5,0 % ü | |
| P09.35 | Fördröjningstid påAktuell detektera | 0,01s ~ 600,00s | 0,10s ü | |
| P09.36 | Nuvarande värde påutgang overnuvarande | 0,0 % (upptäcker inte)0,1 % ~ 300,0 % (motorsmärkström) | 200,0 % ü | |
| P09.37 | Fördröjningstid påUtgäng overaktuell detektion | 0,00s ~ 600,00s | 0.00s ü | |
| P09.38 | Godtyckligankomstström 1 | 0,0 % ~ 300,0 % (motorsmärkström) | 100,0 % ü | |
| P09.39 | GodtyckligANKOMSTnuvarande 1 bredd | 0,0 % ~ 300,0 % (motorsmärkström) | 0,0 % ü | |
| P09.40 | GodtyckligANKOMSTnuvarande 2 | 0,0 % ~ 300,0 % (motorsmärkström) | 100,0 % ü | |
| P09.41 | GodtyckligANKOMSTnuvarande 2 bredd | 0,0 % ~ 300,0 % (motorsmärkström) | 0,0 % ü | |
| P09.42 | Timer Funktionurval | 0: Ogiltig, 1: giltig | 0 ü | |
| P09.43 Timer körtid | 0: P09.44 inställing, | 0 ü | ||
| urval | 1:Al12: Al23: Al3Analogt ingängsomräge motvarsaryyP09.44yy | |||
| P09.44 | Timer igängtid | 0,0 min ~ 6500,0 min | 0,0 min yy | |
| P09.45 | Al1 ingängsppänning skyddsvärde nedregårs | 0.00V ~ P09.46 | 3,10V yy | |
| P09.46 | Al1 ingängsppänning skyddsvärde övregräns Over | P09.45 ~ 10.00V | 6,80V yy | |
| P09.47 | temp.skyddsvärde | 0yy ~ 100 yy | 75yy | |
| P09.48 | Kyllläktkontrollera | 0: Fläkten gár under VDF-drift1: Kör alltid+när ström på; | 0 yy | |
| P09.49 | Vakna frekvens | Vilolagesfrekvens (P09.51) ~Maximal frekvens.yP01.10yy | 0,00 Hz yy | |
| P09.50 | Vakna föseningtid | 0,0s ~ 6500,0s | 0,0s yy | |
| P09.51 Sömnfrekvens | 0,00 Hz ~ Wake-Up Frequency yP09.49yy | 0,00 Hz yy | ||
| P09.52 Fördröjningsid För sömn | 0,0s ~ 6500,0s | 0,0s yy | ||
| P09.53 | Ankomsttid För detta drift | 0,0 ~ 6500,0 Min | 0,0 min yy | |
| P09.54 | Korrigeringsfaktor av uteffekt | 0,00 % ~ 200,0 % | 100,0 % yy | |
| P10 grupp Fel och skydd | ||||
| P10,00 | Motor überbelastning skydd | 0: Inaktivera, 1: Aktivera | 1 | \( \breve{y} \) |
| P10.01 | Motor überbelastning skyddsvinst | 0.20 ~ 10.00 | 1.00 \( \breve{y} \) | |
| P10.02 | Motor überbelastning tidig varning faktor | 50 ~ 100 % | 80 % \( \breve{y} \) | |
| P10.07 | Kortslutning till jordskydd Norway strömmen År på | 0: Inaktivera, 1: Aktivera | 1 \( \breve{y} \) | |
| P10.08 | Bromsenheter startspänning | 650.0V ~ 800.0V | 690V \( \breve{y} \) | |
| P10.09 | Automatisch fel Återställa tider | 0 ~ 20 | 0 \( \breve{y} \) | |
| P10.10 | GÖR Åtgård urval under automatiskt fel Återställa | 0: Ingen Åtgård 1: Action | 0 \( \breve{y} \) | |
| P10.11 | Intervall für Automatisch fel Återställa | 0,1 s ~ 100,0 s | 1,0s \( \breve{y} \) | |
| P10.12 | Ingängsfasforlustskydd/Indragningsskyddforall kraftrelä | Single Bit: Ingängsfasforlustskydd 0: Inaktivera, 1: Aktivera Tio bitar: Indragningsskyddforall kraftrelä0: Inaktivera, 1: Aktivera | 11 \( \breve{y} \) | |
| P10.13 | Utgängsfasforlustskydd | 0: Inaktivera, 1: Aktivera | 1 | \( \breve{y} \) |
| P10.14 | Första gängen misslyckande typ | 0: Inget fel 1: (Reserverad) | - | - |
| P10.15 | Andra misslyckandet typ | 2: Überström i Acc-processen3: Überström i decemberprocessen4: Überström i konstant hastigkeit5: Overspänning i Acc-process6: Overspänning i decemberprocessen7: Overspänning i konstant hastigkeit8: Buffertmotständ überbelastning9: Underspänning10: VFD überbelastning11: Motor überbelastning12: Ingångsfasförlust13: Ulgångsfasförlust14: Strömmodulen ar üverhettad15: Externt fel16: Kommunikationsundantag17: Strömreläet ar onormalt18: Onormal strömdetektering19: Motorinställningen ar onormal21: Parameterläsa och skrivannantag22: Annan hardvara onormal23: Motorkortslutning till jord26: Run-time ankomst27: Användaranpassat fel 128: Användaranpassat fel 229: Starttiden kommt30: Lastfall31: Runtime PID-äterkoppling,gär fölorad40: Timeout für snabb flödesgräns41: Växla motorn under drift42: Hastighetsavvikelsen ar für stor | - | - | |
| P10.16 | Tredje (senaste) feltypen | - | - | ||
| 43: Motor überhastigabet | |||||
| P10.17 | Frekvens vid det tredje (senaste) felet | - | - | • | |
| P10.18 | Aktuell vid tredje (senaste) felet | - | - | • | |
| P10.19 | Bussspänning vid det tredje (senaste) felet | - | - | • | |
| P10,20 | Ingångsterminal status på trean (senast) fel | - | - | • | |
| P10.21 | Utgångsterminal status på trean (senast) fel | - | - | • | |
| P10.22 | Invertern status på trean (senast) fel | - | - | • | |
| P10.23 | Starttid für det tredje (senaste) misslyckandet | - | - | • | |
| P10.24 | Körtid für tredje (senaste) misslyckandet | - | - | • | |
| P10.27 | Frekvens vid andra misslyckandet | - | - | • | |
| P10.28 | Aktuell vid andra misslyckandet | - | - | • | |
| P10,29 | Bussspänning vid andra felet | - | - | • | |
| P10.30 | Ingångsterminal status für andra misslyckandet | - | - | • | |
| P10.31 | Utgångsterminal status vid andra misslyckandet | - | - | • | |
| P10.32 | Invertern status vid andra misslyckandet | - | - | • | |
| P10.33 | Starttid För det andra misslyckandet | - | - | • | |
| P10,34 | Körtid För andra misslyckandet | - | - | • | |
| P10,37 | Frekvens vid första misslyckandet | - | - | • | |
| P10,38 | Aktuell vid Första fel | - | - | • | |
| P10,39 | Busspänning vid första felet | - | - | • | |
| P10,40 | Ingångsterminal status Först fel | - | - | • | |
| P10.41 | Utgångsterminalens status vid den Första fel | - | - | • | |
| P10.42 | Invertern status Först fel | - | - | • | |
| P10,43 | Starttid für det Första misslyckandet | - | - | • | |
| P10.44 | Körtid För | - | - | • | |
| första misslyckandet | |||||
| P10,47 | Felskydd handling urval 1 | Enkelbit: Motoröverbelastning (Err11)Tio bitar: Ingångsfasförlust, (Err12)Hundra bitar: Utgångsfasförlust,(Err13)Tusen bitar: Externt fel(Err15)Tio tusen bitar:Kommunikationsundantag,(Err16)0: Coast to stop; 1:Stopp vid stopplägeYP07.10Y 2:Fortsätt köra; | 00 000 y | ||
| P10,48 | Felskydd handling urval 2 | Enkelbitar/hundrabitar/tusenbitar:(Reserverad)Tio bitar: Parameterlås ochskriv undantag (Err21)Tio tusen bitar: Run-timeankomst (Err26)0: Coast to stop; 1:Stop by Stop-lägeYP07.10Y Single | 00 000 y | ||
| P10,49 | Felskydd handling urval 3 | Bit: User Custom fel 1 (Err27)Ten Bit:: Användaranpassat fel 2(Err28)Hundra bitar: Starttidanländer (Err29)Tusen bitar: Lastfall (Err30)0: Coast to stop; 1:Stop by Stop-lägeYP07.10Y 2: Hoppattill 7% av den nominella frekvensen.av motorn och Fortsätt att,gå, Kör tillbaka till inställd frekv. nag | 00 000 y |
| belastningsåtervinning Tio tusen bitar: PID-feedback förlust (Err31) 0: Coast to stop; 1: Stopp vid stopplägeP07.10' | ||
| 2: Fortsätt körå; | ||
| P10,50 | Val av felskyddsätgård 4 | Enkelbit: Hastighetsavvikelsen for stor (Err42) Tio bitar: Motoröverfart (Err43) Hundra bitar: (Reserverad) Tusen bitar: hastighetsåterkopplingsfel 0: Coast to stop; 1: Stopp vid stopplägeP07.10' 2: Fortsätt körå; 0: Aktuell |
| P10,54 | Fortsätt körafrekv. val vid fel | frekvens 1: Installningsfrekvens 2: Kör vid övre gränsfrekvens 3: Kör vid nedre gränsfrekvens 4: Kör vid onormal reserv frekvens |
| P10,55 | Onormal reserv frekvens | 0,0%~100,0% (100,0% motsvarar Max frekv yP01.10' |
| P10,59 | Omedelbar kraftutan avbrott | 0: Ogiltig 1: Minska hastighet; 2: Retardationsstopp |
| P10,60 | Pausenbedömningssponning För Instant power non-stop | 80,0 % y 100,0% (Standard bussppänning) |
| P10,61 | Spänningsåtervinning Domstid För Omedelbar kraft | 0,00s ~ 100,00s |
| nonstop | ||||
| P10,62 | Bedömningssspänningen für Instant power non-stop | 60,0 % ~ 100,0 % (Standard bussspänning) | 80,0 % y | |
| P10,71 | Vinst av Instant ström non-stop | 0 ~ 100 | 40 y | |
| P10,72 | Väsentlig koefficient på Omedelbar kraftutan avbrott | 0 ~ 100 | 30 y | |
| P10,73 | Retardationstid av Instant power non-stop | 0 ~ 300,0s | 20.0s y | |
| P10,63 | Lastfallsskydd urval | 0: Ogiltig,1: giltig | 0 y | |
| P10,64 | Nivå För detektering av belastningsfall | 0,0 ~ 100,0y | 10,0 % y | |
| P10,65 | Lastfall upptäcktstid | 0,0-60,0s | 1,0s y | |
| P10,67 | Överhastighet detektriesvärde | 0,0 % ~ 50,0 % (Max frekv yP01.10y) | 20,0 % y | |
| P10,68 | Tid För upptäckt av overhastighet | 0,0s: Ej detekterbar0,1-60,0s | 1,0s y | |
| P10,69 | Detektionen värde För Speed avvikelse ochsástor | 0,0 % ~ 50,0 % (Max frekv yP01.10y) | 20,0 % y | |
| P10,70 | Detektionen dags För Speed avvikelse ochsástor | 0,0s: 0,1 ~ 60,0s | 5,0s y | |
| P11 grupp PID fonction | ||||
| P11.00 PID-ingångskanal | 0: P11.01 inställning1: AI12: AI23: AI34: Pulsinställning (DI5)5: Kommunikationsinställning6: Flerstegshastighet7: Inställningar für tangentbordskodare | 0 y | ||
| P11.01 Digitalreferensingångsinställning | 3.00 y | |||
| P11.02 PID-feedbackkanal | 0: AI11: AI22: AI33: AI1-AI24: Pulsinställning (DI5)5: Kommunikationsinställning6: AI1+AI27yMAXy|AI1|, |AI2|y8yMIN y|AI1|, |AI2|y | 0 y | ||
| P11.03 PID-polaritet | 0: Positiv riktning,1: Negativ riktning | 0 y | ||
| P11.04 Omfång av PIDfeed-back | 0 ~ 100,00 kg | 10.00 y | ||
| P11.05 Proportionell vinstKP02 | 0,0 ~ 100,0 | 20.0 y | ||
| P11.06 IntegrationstidTi1 | 0.01s ~ 10.00s | 14.00 y | ||
| P11.07 DerivattidTdl | 0.000 s ~ 10.000 s | 0.000-tal y | ||
| P11.08 PID-omkastnings cutoff frekv | 0,00 ~ Maximal frekvens | 2.00Hz y | ||
| P11.09 Gräsen für PIDavvikelse | 0,0 % ~ 100,0 % | 1,0 % y | ||
| P11.10 | Differentialbegränsare av PID | 0,00 % ~ 100,00 % | 0,10 % y | |
| P11.11 | Änderingstid für PID-ingängssignal | 0,00 ~ 650,00s | 0.00s y | |
| P11.12 | PID-feedback filteringstid | 0.00 ~ 60.00s | 0.00s y | |
| P11.13 | PID-utgangens filteringstid | 0.00 ~ 60.00s | 0.00s y | |
| P11.15 | Proportionell vinst KP03 | 0,0 ~ 100,0 | 20.0 y | |
| P11.16 | Integrationstid Ti2 | 0.01s ~ 10.00s | 14.00 y | |
| P11.17 | Derivattid Td2 | 0.000 s ~ 10.000 s | 0.000-tal y | |
| P11.18 | PID parameterväxling villkor | 0: Ingen switch1: Omkoppling via DI-terminalen2: Automatisch omkoppling enl avvikelsen | 0 y | |
| P11.19 | PID parameterväxling Avvikelse 1 | 0,0 % y P11,20 | 20,0 % y | |
| P11.20 | PID parameterväxling Avvikelse 2 | P11,19 ~ 100,0 % | 80,0 % y | |
| P11.21 | Initialtärde für PID | 0,0 % ~ 100,0 % | 0,0 % y | |
| P11.22 | Hålltid für PID initial | 0,00 ~ 650,00s | 0.00s y | |
| P11.23 | Max positiv avvikelse på två produktion | 0,00 % ~ 100,00 % | 1,00 % y | |
| P11.24 | Max avvikelse avvikelse på två produktion | 0,00 % ~ 100,00 % | 1,00 %储能 | |
| P11.25 | PID-integralegenskapen | Single Bit: Integral separation0: Ogiltig, 1: giltigTio bitar:+när frekvensennär gränserna0: Fortsätt integrerad reglering,1: Stoppa integrerad reglering | 00 y | |
| P11.26 | PID-feedbackförlustdetekteringvärden | 0,1 % ~ 100,0 % (0,0%:Ej upptäckt) | 0,0 %储能 | |
| P11.27 | PID-feedbackförlustdetekteringtid | 0,0s ~ 20,0s | 0,0s y | |
| P11.28 | PIDstängningdrift | 0: Stopputan PID-drift,1: Stopp med PID-drift | 0 y | |
| P12 grupp - Svängfrekvens, Fast langd och Räknings | ||||
| P12.00 | Läge für Swingfreq inställning | 0: I forhällande till centralen frekvensyP01.07y 1:Relativt till maxfrekvensenyP01.10y | 0 y | |
| P12.01 | Omfängforsvängningsfrekvens | 0,0 % ~ 100,0 % | 0,0 %储能 | |
| P12.02 | Räckvdden Förhoppfrekvensen | 0,0 % ~ 50,0 % | 0,0 %储能 | |
| P12.03 | Cykel avsvängningsfrekvens | 0,1s ~ 3000,0s | 10,0s y | |
| P12.04 | Uppgangsid Förswing freqstriangulära vög | 0,1 % ~ 100,0 % | 50,0 %储能 | |
| P12.05 | Inställningsländg | 0m ~ 65535m | 1000m y | |
| P12.06 | Verklig langd | 0m ~ 65535m | 0m y | |
| P12.07 | Antal pulser per meter | 0,1 ~ 6553,5 | 100,0 y | |
| P12.08 | Inställningsräkningsvärde | 1 ~ 65535 | 1000 y | |
| P12.09 | Anger Count värde | 1 ~ 65535 | 1000 y | |
| P13 grupp Flerstegshastighet, enkel PLC | ||||
| P13.00 | Flerstegshastighet 0 (MS0) | -100,0 % y 100,0 % (Maxfrekvens yP01.10y) | 0,0 % y | |
| P13.01 | Flerstegshastighet 1 (MS1) | 0,0 % y | ||
| P13.02 | Flerstegshastighet 2 (MS2) | 0,0 % y | ||
| P13.03 | Flerstegshastighet 3 (MS3) | 0,0 % y | ||
| P13.04 | Flerstegshastighet 4 (MS4) | 0,0 % y | ||
| P13.05 | Flerstegshastighet 5 (MS5) | 0,0 % y | ||
| P13.06 | Flerstegshastighet 6 (MS6) | 0,0 % y | ||
| P13.07 | Flerstegshastighet 7 (MS7) | 0,0 % y | ||
| P13.08 | Flerstegshastighet 8 (MS8) | 0,0 % y | ||
| P13.09 | Flerstegshastighet 9 (MS9) | 0,0 % y | ||
| P13.10 | Flerstegshastighet 10 (MS10) | 0,0 % y | ||
| P13.11 | Flerstegshastighet 11 (MS11) | 0,0 % y | ||
| P13.12 | Flerstegshastighet 12 (MS12) | 0,0 % y | ||
| P13.13 | Flerstegshastighet 13 (MS13) | 0,0 % y | ||
| P13.14 | Flerstegshastighet 14 (MS14) | 0,0 % y | ||
| P13.15 | Flerstegshastighet 15 (MS15) | 0,0 % y | ||
| P13.16 | Enkelt PLC-driftläge | 0: Slut på enstaka operation1: Slutvärde vid slutet av enstaka operation2: Cykla alltid | 0 y | |
| P13.17 | PLC kör tillständ sparas after strömavstängning | Single Bit:;när Power fallertio bitar:när Stopp0: Spara inte1: Spara. | 00 y | |
| P13.18 | Flerstegshastighet 0 körtid | 0.0syhyy6553.5syh | 0,0s (h) y | |
| P13.19 | Acc/Dec tid För MS 0 | 0 ~ 3 | 0 y | |
| P13.20 | Flerstegshastighet 1 körtid | 0.0syhyy 6553.5syh | 0,0s (h) y | |
| P13.21 | Acc/Dec tid För MS 1 | 0 ~ 3 | 0 y | |
| P13.22 | Flerstegshastighet 2 körtid | 0.0syhy ~ 6553.5syh | 0,0s (h) y | |
| P13.23 | Acc/Dec tid För MS 2 | 0 ~ 3 | 0 y | |
| P13.24 | Flerstegshastighet 3 körtid | 0.0syhy ~ 6553.5syh | 0,0s (h) y | |
| P13.25 | Acc/Dec tid für | 0 ~ 3 | 0 y | |
| MS 3 | ||||
| P13,26 | Flerstegshastighet 4 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,27 | Acc/Dec tid für MS 4 | 0 ~ 3 | 0 ŷ | |
| P13,28 | Flerstegshastighet 5 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,29 | Acc/Dec tid für MS 5 | 0 ~ 3 | 0 ŷ | |
| P13,30 | Flerstegshastighet 6 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,31 | Acc/Dec tid für MS 6 | 0 ~ 3 | 0 ŷ | |
| P13,32 | Flerstegshastighet 7 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,33 | Acc/Dec tid für MS 7 | 0 ~ 3 | 0 ŷ | |
| P13,34 | Flerstegshastighet 8 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,35 | Acc/Dec tid für MS 8 | 0 ~ 3 | 0 ŷ | |
| P13,36 | Flerstegshastighet 9 körtid | 0.0syyhū ~6553.5syyhū | 0,0s (h) ŷ | |
| P13,37 | Acc/Dec tid für MS 9 | 0 ~ 3 | 0 ŷ | |
| P13,38 | Flerstegshastighet 10 körtid | 0.0syyhū ~ 6553.5syyhū | 0,0s (h) ŷ | |
| P13,39 | Acc/Dec tid für MS 10 | 0 ~ 3 | 0 ŷ | |
| P13,40 | Flerstegshastighet 11 körtid | 0.0syyhūy6553.5syyhū | 0,0s (h) ŷ | |
| P13,41 | Acc/Dec tid für MS 11 | 0 ~ 3 | 0 ŷ | |
| P13,42 | Flerstegshastighet 12 körtid | 0.0sýhý ~ 6553.5sýhý | 0,0s (h) y | |
| P13,43 | Acc/Dec tid für MS 12 | 0 ~ 3 | 0 y | |
| P13,44 | Flerstegshastighet 3 körtid | 0.0sýhý ~ 6553.5sýhý | 0,0s (h) y | |
| P13,45 | Acc/Dec tid für MS 3 | 0 ~ 3 | 0 y | |
| P13,46 | Flerstegshastighet 14 körtid | 0.0sýhý ~ 6553.5sýhý | 0,0s (h) y | |
| P13,47 | Acc/Dec tid für MS 14 | 0 ~ 3 | 0 y | |
| P13,48 | Flerstegshastighet 15 körtid | 0.0sýhý ~ 6553.5sýhý | 0,0s (h) y | |
| P13,49 | Acc/Dec tid für MS 15 | 0 ~ 3 | 0 y | |
| P13,50 | Enhet für flerstegshastighetens tid | 0: s (sekunder) 1: h (timmar) | 0 y | |
| P13,51 | Signalkälla für Flerstegshastighet 0 (MSO) | 0: Parameter yP13.00y 1: AI1 2: AI2 3: AI3 4: Puls (DI5) 5: PID 6: Prepositionsfrekvens yP01.08y 7: Kan modifieras med y/y-tangenten | 0 y | |
| P14 grupp RS485 Kommunikationsparametrar | ||||
| P14.00 | Baudhistighetsinställning für RS485 | Enkelbit: MODBUS 0:300BPS 1:600BPS 2:1200BPS 3:2400BPS 4:4800BPS 5:9600BPS 6:19200BPS 7:38400BPS | 5 y | |
| 8:57600BPS 9:115200BPS | ||||
| P14.01 | MODBUS-data formatera | 0: Ingen kontroll (8.N-2)1: Paritetskontroll (8.E-1)2: Udda check (8.O-1)3: Ingen kontroll (8.N-1) | 0 y | |
| P14.02 Lokal adress | 0ïsändningsadress1y247y(MODBUS) | 1 | y | |
| P14.03 | MODBUSSvarsfördröjning | 0 ~ 20 ms | 2 y | |
| P14.04 | Timeout tid fürRS485 | 0.0: Ogiltig0,1 ~ 60,0 s | 0,0 y | |
| P14.05 | MODBUSVal av protokoll | 0: Icke-standard MODBUSprotokoll1: Standard MODBUS-protokoll | 1 | y |
| P14.06 | NuvarandeUpplösning på 485läsa | 0:0,01A1:0,1A | 0 y | |
| Grupp P15 Specialparametrar für vattenförsörjning med konstant try | ||||
| P15.00 | Enkelmakrofelsökningfungera | 0: Ingen funktion1: En drivning två pumpar2: Vattenförsörjning ibygngadsgemenskapen3: Hotellvattenförsörjning4:Brandvattenförsörjning | 0 | y |
| P15.01 | Vaknatryck | 5: Booster pump 6: Djupt vattenpung 0~ SÖmntryckKG(1KG=0,1Mpa) | 2,50 kg y | |
| P15.02 | Fördröjningstid påVakna | 0,0s-6500,0s | 0s y | |
| P15.03 Sömtryck | Vakna upp pres yP15.01y ~Manometerområde (0.1Mpa) | 3,50 kg y | ||
| P15.04 Fördröjningsid für sömn | 0,0s-6500,0s | 60,0s y | ||
| P15.05 | Tryckproportionellkoppling | 0: Inaktivera;1: Aktivera | 1 | y |
| P15.06 | Vakna uppptryckskillnad | 0~100.0Bar(Kg,0.1Mpa) | 0,50 kg y | |
| P15.07 | Skillnad i sömntryck | 0~100,0 bar (Kg) | 0,50 kg y | |
| P15.08 | Övertrycksarmvärde | 0,00~Träckvidd KG(1KG=0,1Mpa=1Bar) | 9,00 kg y | |
| P15.09 | Fördröjningsid avÖvertrycklarm | 0-6553,5S | 0,0S y | |
| P15.10 | Lågt trycklarmvärde | 0,00~Träckvidd KG(1KG=0,1Mpa=1Bar)Parametern öppnar larmet forlågtrycksråckvidd. | 0,0 kg y | |
| P15.11 | Fördröjningsidfor lögtrycksalarm | 0-6553,5S | 20.0S y | |
| P15.12 | vattenintagstarttryck | 0~Manometerområde KG Öppna vattenintagstart-stopp-kontroll via P01.02=3Vatteninloppet måste användaströmsensor for Al2För spänningsensorn, byt Al2-bygeln | 3,00 kg | y |
| P15.13 | Inloppsavstängningtryck | 0~Manometerområde KG(Bar) | 3,20 kg y | |
| P15.14 | Antalhjalppumpar | 0~3 | 0 y | |
| P15.15 | väntetid påHjalppump | 0~1000,0S | 60.0S y | |
| tänds | ||||
| P15.16 | Väntetid für hjälppumpens brytare | 0~1000,0S | 5.0S y | |
| P15.17 | RO1 Relä PÅ frekvensinställning | 0~50HZNär värdet)när värdetReläetkommen att PÅ | 50.00 y | |
| P15.18 | RO1 Relä AV frekvensinställning | 0~50HZNär värdet)när värdetReläetkommen att AV | 30.00 y | |
| P15.19 | Signalkalla För Vattenivå kontrller | 0: Funktionen ar inte giltig1:Al12: Al23: Al3P15.19=1~3 ,The(P15.20,P15.21,P15.22,P15.23)inställingen ar giltig, P15.19=0, parametrar ej giltiga. 0,0- | 0 y | |
| P15,20 | Sömnventil För vattenivån Kontrller | 100,0 %Signalen ar mindre anenna parameter fortsätt¥P15.21y tid, sönn och varning für fullt vatten (ErrH) | 25,0 % y | |
| P15.21 | Full vattenivà drojsmål | 0~1000.0S yP15.20'yfördröjning tidsinställning. | 6.0S y | |
| P15.22 | Vattentömningsfördrä nivâregulator | 0~1000.0S I tillständet für varning für fullt vatten (ErrH), Norwayvåkontrollsignalen ar högre an P15.20 och fortsätter ning für vatten yP15.22y gänger, ar varningen for fullt vatten klar och äterställs till det normala ange. | 60.0S y | |
| P15,23 | Bedömningsvärdeför skada påhydraulonsd(vattenivåkontroll) | 0,0% : Ogiltig Funktion.0,1-100,0 %::när vattenivastyrenhetens signal ar större änyP15.23-y-showen.(E.tSF)fel och stäng av | 0,0 % y | |
| P15,24 | Vattenbristskyddfungera | 0: Inaktivera;1: Aktivera och bedömefter frekvens och tryck | 0 y | |
| P15,25 | Vattenbristfelkontrollvärde | 0.00 y Installningsvärde KG(Bar/0.1Mpa)Gäller:när P15.19=1, Vattenbristenbestäms:när Återkopplingenvärdet ar mindre än detta värde | 0,50 y | |
| P15,26 | Vattenbristskyddupptäcktfrekvens | 0-50,00 HZGäller:när P15.19=1:nardriftfrekvensen ar större än ulli kema medenna frekvens, och trycketär lagre än ulla med 15,25, Domarevattenbrist. | 50.00 y | |
| P15,27 | Fördröjningstidfor vattenbristskyddupptäckt | 0y6553.5SFördröjningstid for vattenbrifslarmDom. | 10 y | |
| P15,28 | (Bar/0,1Mpa) fürinkommande vatten | 0y Manometerområde KG Effektivt tryck | 3.00 y | |
| P15,29 | Inkommande vattenupptäcktstid | 0y9999SDags För inkommande vattenupptäckt | 20.0S y | |
| P15,30 | Vattenläckageoch starta omavvikelsebelopp | 0y Manometerområde KG (bar/0,1Mpa) | 0 | y |
| P15.31 | Vattenlackage och starta sedan retruvärde | 0' ŷ Manometerområde KG (bar/0,1Mpa) | 0' ŷ | |
| P15,32 | Vattenlackage och starta sedan retruvärde upptäcktstid | 0: NO-funktion 0.1.10.0S | 2.0S' ŷ | |
| P15,33 | Viloläge | 0: Inaktivera1: Sov)när trycket ar högreedish somntrycket; 2: Sömn)när lopfrevensen ar högre Swedish somnfrekvensen (påverkas av P15.29)3: Sov)när trycket ar högre Swedish somntrycket och lopfrevensen ar minde Swedish somnfrekvensen. | 0 | ' ŷ |
| P15,34 | Sömnutgängsfrektvens | 0' ŷP01.12 | 20,0 Hz' ŷ | |
| P17-grupp Funktionskodhantering | ||||
| P17.00 | Användarlösenord | 0 ~ 65535 | 0' ŷ | |
| P17.01 | Parameter initiering | 0: Ingen operation01: Återställ fabrikparametr, exclusive motorparametr 02: rensa registrieringsinformation | 0' ŷ | |
| P17.04 | Funktionenkodenalandrar fastigheter | 0: Modifierbar1: Ej modifierbar | 0' ŷ | |
| P18 grupp Momentkontrollparametr | ||||
| P18.00 | Hastighet/vridmoment kontrolläge | 0: Hastighetskontroll,1: Momentkontroll | 0' ŷ | |
| P18.01 | Momentinställning val av källa under vridmoment kontrolläge | 0: Digitala installingar 1: (P18.03) 1: AI1 2: AI2 3: AI3 4: PLUS-inställning 5: Kommunikationsinställning 6: MIN (AI1, AI2) 7: MAX (AI1, AI2) | 0 yy | |
| P18.03 | Digital inställning under vridmomentkontrolläget | -200,0 % yy 200,0 % (P18,01=0) 150,0 % yy | ||
| P18.05 | Max framåt frekv För Vridmomentkontroller | 0.00Hz yy Maxfrekvens¥P01.10¥ 50.00Hz yy | ||
| P18.06 | Max omvänd frekv För Vridmomentkontroller | 0.00Hz yy Maxfrekvens¥P01.10¥ 50.00Hz yy | ||
| P18.07 | Vridmomentkontroller Acc tid | 0,00s ~ 65000s | 0.00s yy | |
| P18.08 | Vridmomentkontroller Dec tid | 0,00s ~ 65000s | 0.00s yy | |
| P23 grupp Styroptimeringsparametrar | ||||
| P23.00 | Övre gränsfrekvens För DPWM-omkopplare | 5.00Hz yy Maxfrekvens¥P01.10¥ 8.00Hz yy | ||
| P23.01 | PWM-modulering läge | 0: Asynkron modulering, 1: Synkron modulering | 0 yy | |
| P23.03 | Slumpmüssig PWM djup | 0: Ogiltig slumpmüssig PWM 1 ~ 10: Slumpmüssigt djup av PWM-bärvågsfrekvens | 0 yy | |
| P23.04 | Snabbt flöde begränsande | 0: Inaktivera, 1: Aktivera | 1 yy | |
| P23.06 | Undersprüningvärdeinställning | 200,0V ~ 2200,0V | 350V y | |
| P23.09 | ÖvertryckVärdeinställning | 200,0V ~ 2200,0V | 270V y | |
| P23.10 | Automatisch bärarefrekvensändring klåg frekvens | 0: Inaktivera,1: Aktivera | 1 y | |
| P23.11 | Noll hastigeltöpande utgangkontrollera | 0: Inaktivera,1: Aktivera | 1 y | |
| P23.12 | Känsliget avEffektfasförlustskydd | 0-30,0 % | 13,0 % y | |
| P24 grupp Al kurvinställning | ||||
| P24.00 | Minsta ingäng avkurva 4 | Al-10.00VyP24.02 | 0,00V y | |
| P24.01 | Motsvarandeförhällande på P24.00 | -100,0 %y+100,0 % | 0,0 % y | |
| P24.02 | Att vända 1 avJag har horor 4 | P24.00-P24.04 | 3,00V y | |
| P24.03 | Motsvarandeförhällandet P24.02 | -100,0 %y+100,0 % | 30,0 % y | |
| P24.04 | Att vända 2 avJag har horor 4 | P24.02-P24.06 | 6,00V y | |
| P24.05 | Motsvarandeförhällandet P24.04 | -100,0 %y+100,0 % | 60,0 % y | |
| P24.06 | Max ingäng avJag har horor 4 | P24,06y+10,00V | 10.00V y | |
| P24.07 | Motsvarande förhällandet P24,06 | -100,0 % ð+100,0 % | 100,0 % ð | |
| P24.08 | Minsta ingång av kurva 5 | -10.00VþP24.10 | -10,00V ð | |
| P24.09 | Motsvarande förhällande på P24,08 | -100,0 % ð+100,0 % | -100,0 % ð | |
| P24.10 | Vänd 1 av Al kurva 5 | P24.08-P24.12 | -3,00V ð | |
| P24.11 | Motsvarande förhällande på P24,10 | -100,0 %-100,0 % | -30,0 % ð | |
| P24.12 | Att fylla 2 av Al-kurvan 5 | P24.10-P24.14 | 3,00V ð | |
| P24.13 | Motsvarande förhällande på P24,12 | -100,0 %-100,0 % | 30,0 % ð | |
| P24.14 | Max ingång av Al-kurvan 5 | P24,12 ð+10,00V | 10.00V ð | |
| P24.15 | Motsvarande förhällandet P24,14 | -100,0 %-100,0 % | 100,0 % ð | |
| P24.24 | Hoppa punkt av den Al1 | -100,0 %-100,0 % | 0,0 % ð | |
| P24,25 | Hoppa utbud av den Al1 | 0,0 %-100,0 % | 0,5 % ð | |
| P24,26 | Hoppa punkt av Al2 | -100,0 %-100,0 % | 0,0 % ð | |
| P24,27 | Hoppa utbud av Al2 | 0,0 %-100,0 % | 0,5 % ð | |
| P24,28 | Hoppa punkt av Al3 | -100,0 %-100,0 % | 0,0 % ¥ | |
| P24,29 | Hoppa utbud av Al3 | 0,0 %-100,0 % | 0,5 % ¥ | |
| P30-grupp Korrigering ffor Al och AO | ||||
| P30,00 | Al1 Uppmätt spänning 1 | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30.01 | Al1 displayspänning 1 | 0,500V-4,000V | Fabrikskorrigering | ŷ |
| P30.02 | Al1 uppmätt spänning 2 | 6 000 V-9,999 V | Fabrikskorrigering | ŷ |
| P30.03 | Al1 displayspänning 2 | 6 000 V-9,999 V | Fabrikskorrigering | ŷ |
| P30.04 | Al2 Uppmätt spänning 1 | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30,05 | Al2 displayspänning 1 | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30.06 | Al2 uppmätt spänning 2 | 6 000 V-9,999 V | Fabrik korrektion | ŷ |
| P30.07 | Al2 displayspänning 2 | 6 000 V-9,999 V | Fabrik korrektion | ŷ |
| P30.08 | Al3 Uppmätt spänning 1 | -9.999V~10.000V | Fabrik korrektion | ŷ |
| P30,09 | Al3 displayspänning 1 | -9.999V~10.000V | Fabrik korrektion | ŷ |
| P30.10 | Al3 uppmätt spänning 2 | -9.999V~10.000V | Fabrikskorrigering | ŷ |
| P30.11 | AI3 displayspanning 2 | -9.999V~10.000V | Fabrik korrektion | ŷ |
| P30.12 | AO1 målsponning 1 | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30.13 | AO1 Mätt | 0,500V-4,000V | Fabrikskorrigering | ŷ |
| P30.14 | spänning 1 AO1 målsponning 2 | 6 000 V-9,999 V | Fabrikskorrigering | ŷ |
| P30.15 | AO1 Mätt | 6 000 V-9,999 V | Fabrik korrektion | ŷ |
| P30.16 | spänning 2 AO2 målsponning 1 | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30.17 | AO2 Mätt | 0,500V-4,000V | Fabrik korrektion | ŷ |
| P30.18 | spänning 1 AO2 målsponning 2 | 6 000 V-9,999 V | Fabrik korrektion | ŷ |
| P30.19 | AO2 Mätt | 6 000 V-9,999 V | Fabrik korrektion | ŷ |
spanning 2
4. Fellarm och motatgärder
| Visar felnamn | Möjlig orsak till fel | Felsökning | |
| Err01 | Kraftmodulskydd | Motoreffektenär für hög eller ledninger kortslutting oder Strömmodulen skadad | Ta bort motorkabeln och starta denigen. Om det finns nagot problem, reparera växelriktaren |
| Err02 | Undersprüningsfel | Ingängsspänngenär onnormal erller strömreläetär intere inkopplat oder spanningsdetekteringen | Kontrolera nätspänngen erller sok service是从 tillverkaren |
| fel | |||
| Err31 | Överspänning under acceleration | Ingångsspänningen ar onormal | Kontrolera strömförsörjningen |
| Starta om Near motorn roterar | Ställ in att starta after DC-bromsning | ||
| Err32 | Överspänning under retardation | Retardationstiden ar für kort | Förläng retardationstiden |
| Ingångsspänningen ar onormal | Kontrolera strömförsörjningen | ||
| Err33 | Överspänning vid konstant hastighet | Ingångsspänningen ar onormal | Kontrolera strömförsörjningen |
| Err60 | Inverter überbelastning | Felaktiginställning av V/F-kurva eller vridmoment. | Justera V/F-kurvan och vridmoment Förstärkningen |
| Låg inspänning. | Kontrolera nitspänningen | ||
| Accelerationstiden ar für kort | Förläng accelerationstiden | ||
| Motorbelastningen ar for tung | Välj en mer kräftfull Inverter | ||
| Err61 | Överström under acceleration | Accelerationstiden ar für kort | Förläng accelerationstiden |
| Inverterns effekt ar für liters | Välj Inverter med hög effektnivå | ||
| Felaktiginställning av V/F-kurva eller vridmoment. | Justera V/F-kurvan eller vridmoment Förstärkningen | ||
| Err62 | Överström under retardation | Retardationstiden ar für kört | Förläng retardationstiden |
| Inverterns effekt ar für liters | Väljväxelriktare med hög effektnivå | ||
| Err63 | Överström vid konstant hastigkeit | Låg inspänning. | Kontrolera nätspänningen |
| motorstopp eller belastningsmutation ar für stor | Kontroleralasten | ||
| Inverterns effekt ar für liters | Välj en mer kräftfull Inverter | ||
| Err64 | Motor überbelastning | Felaktiginställning av V/F-kurva eller vridmoment. | Justera V/F-kurvan eller vridmoment Förstärkningen |
| Låg inspänning. | Kontrolera nätspänningen | ||
| motorstopp eller belastningsmutation ar für stor | Kontroleralasten | ||
| Motornsvorbelastningskyddskoefficient ar inte korrekt inställd | Ställ in motörns überbelastningskyddskoefficient korrekt | ||
| Err65 | Våg För vågströmbegränsningsfel | Samma sak med motorÖverbelastning | Samma sak med motorÖverbelastning |
| Err40 | maskinvarufel | Vatten, insetker etc | omstart kan inte ätergå till fabriksreparationen |
| Err41 | EEPROMR/W-fel | EEPROM-koppling | Sök en service frän tillverkaren |
| Err42 | Kontroleraströmavbrott | Ingångströmförsörjningen liggerinte inom specifikationsområdet | Justera spänningen tillspecifikationskraven |
| Err46 | Aktuelltdetekteringsfel | Strömsamplingskretsfel | Sök en service frän tillverkaren |
| Fel på drivkretsen | Sök en service frän tillverkaren | ||
| Err11 | Externutrustningsfel1 | Externt felingång 1 arstängd | Koppla bort den externafelterminalen och ätgärda felet(var uppmärksam for attkontrollera orsaken) |
| Err12 | Kommunikation n misslyckande | 485 Kommunikationmisslyckades | Kontrollera 485-anslutningen |
| Err13 | Ackumuleradkörtidanländer | Den ackumulerade drifftidennár det inställda värdet | Rensa reckord avParameterinitieringsfunktion |
| Err15 | Externutrustningsfel2 | Externt felingång 2 arstängd | Koppla bort den externafelterminalen och ätgärda felet(var uppmärksam for attkontrollera orsaken) |
| Err16 | Power on-tidenkommen | Den ackumulerade effekten på tidnár det inställda värdet | Parameterinitieringsfunktionrensa poster |
| Err17 | Kontakt/reläfel | Ingängsfel på extern utrustning | Koppla bort den externa felterminalen och ätgårda felet (var uppmärksam für att kontrollera orsaken) |
| Err08 | Strömmodulen överhettad | Dälig kylfläkt eller overhettad omgivningstemperatur | Kontrollera fläkten eller värmeavledning eller vänta på kylning für att försöka iven |
| Err90 | Omkopplingsmotorfel | Däligkontakt av motorledningen ellerväxla miellörningtor och vãxelrikture | Omriktaren@måste anslutas direkt till motornfor att kontrollera att motorledningenärlös |
| Err91 | Kortslutningsfel i jord | Kort till jordfel | Koppla bort jordledningen (var uppmärksam for att kontrollera orsaken) |
| Err92 | Ingängsfasförlust | Kontrollera ingäende kräftledning | Sök en service是从 tillverkaren |
| Err93 | Utgängsfasförlust | utgangsströmfollust eller en faskretsr for att detektera strömär onormal | Kontrollera utspänningen och Kontrollera utmatningsledningen |
| Err94 | Motorns överhastighetsfel | Motorhastigheten overstiger den normala havigheten | Kontrollera om lasten har annan kraft |
| Err95 | Hastighetsavvikelse misslyckande | Hastighetsgapetärfor stortän den normala havigheten | Kontrollera motorbelastningen |
| Err96 | PID-feedback fändust under körning | Däligkontakt med PID-sensorsignalen | Kontrollera sensorsignalen |
| Err97 | Lastfallsfel | Motorledningenär fränkopplad | Kontrollera motorledningen |
| Err98 | Motor över temperatur | Motornöverhettas | Kontrollera motortemperaturen |
| Err99 | Motoravstämning fel | Motorparametrarnaär inte installda enligtnamnskylten ellermotorledningenär)dalgkontakta | Ställ in motornparametrar enligtnamnskylten ochkontrollera ledningen fränVäxelriktare till motorn |
| ErrH1 | Vattenbrist | Vattenbristfel | Kontrolera om det saknas vatten |
| ErrH2 | Fullt vattenidig varning | Vattnetär fullt | Återställ normalt vattentryck |
| ErrH3 | Högt vattentryckfel | Tvinga avständningsfel | För högt vattentryck, kontrolleravattentrycket |
5. Installningsbeskrivning
När P17.00 ar installd på icede, parameterskyddslosenordet ar installd. Du maste ange losenordet innan du andrar parametrarna.
Avbryt losenordet och P17.00 maste stallas in pa 0.
Parametermenyn i användaranpassat parameterläge ar inte losenord skyddas.
Gruppen P01yP23 ar grundlaggande
Inställningsvärdet fürenna parameter kan andras nar omriktaren ar Stopp och körtillstand; "y":
Det installda vardet forenna parameter kan inte andras narrvaxelriktaren ar i drifttillstand;
Värdet på parametern är det faktiska detekterade postvärdet och kan inteändras; ***:
Det betyder att parametern ar "Manufacturer Parameter" och ar begränsad till tillverkarens inställning for att forbjuda användaren fran att använda.
Tillverkad i Kina
VEVOR
TOUGH TOOLS, HALF PRICE
Teknisk support och e-garanticertifikat www.vevor.com/support




