
P4 Multispectral - 드론 DJI - 무료 사용 설명서
기기 매뉴얼을 무료로 찾기 P4 Multispectral DJI PDF 형식.

| 브랜드 | DJI |
| 모델 | P4 Multispectral |
| 카테고리 | 드론 |
| 제품 유형 | 전문가용 멀티스펙트럴 드론 |
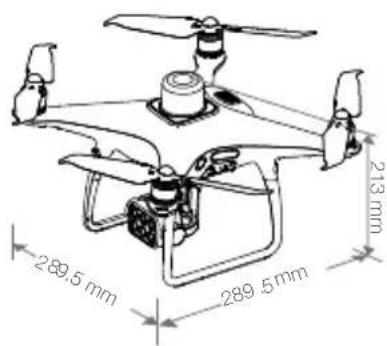
| 크기 (L x W x H) | 289,5 x 289,6 x 213 mm |
| 이륙 중량 | 1,487 g |
| 배터리 전원 | LiPo 4S, 5870 mAh, 15,2 V, 89,2 Wh |
| 충전기 전원 | AC 어댑터, 17,4 V, 160 W |
| 최대 비행 시간 | 약 27분 |
| 최대 실용 고도 | 6,000 m (19,685 ft) |
| 최대 상승 속도 | 6 m/s (자동), 5 m/s (수동) |
| 최대 하강 속도 | 3 m/s |
| 주요 기능 | 멀티스펙트럴 이미징 (6대 카메라), 통합 RTK, 다방향 장애물 감지, 최대 7km OcuSync 전송, GS Pro 앱 |
| 카메라 | 6개 1/2.9인치 CMOS 센서, 2.08 MP, 글로벌 셔터, B, G, R, RE, NIR 필터, RGB 포함 |
| 짐벌 | 3축 안정화, -90° ~ +30° 기울기 |
| 위치 | 다중 주파수 GNSS (GPS, GLONASS, BeiDou, Galileo) + RTK, 센티미터 정밀도 |
| 장애물 감지 | 전방, 후방, 하부, 적외선 (범위 0.7 - 30 m) |
| 리모컨 | OcuSync, 최대 7km (FCC), LiPo 6000mAh 배터리, 6시간 사용 |
| 지원 메모리 카드 | microSD (Class 10 또는 UHS-I), 최대 128GB |
| 유지보수 및 청소 | 부드럽고 마른 천으로 렌즈 닦기, 습기와 먼지로부터 보호 |
| 안전 | 사람 근처에서 모터 시동 금지, 비상 시 모터 정지 (CSC), 개방된 실외에서 사용 |
| 예비 부품 및 수리 가능성 | DJI A/S 센터 또는 공인 대리점에 문의 |
| 일반 정보 | 사용 설명서는 DJI 웹사이트에서 PDF로 제공, 작동 온도 0 ~ 40 °C |
자주 묻는 질문 - P4 Multispectral DJI
사용자 질문 P4 Multispectral DJI
0 질문 이 기기에 대해. 알고 있는 것에 답하거나 자신의 질문을 하세요.
이 기기에 대한 새로운 질문하기
기기 설명서 다운로드 드론 무료 PDF 형식! 매뉴얼 찾기 P4 Multispectral - DJI 전자 기기를 다시 손에 넣으세요. 이 페이지에는 기기 사용에 필요한 모든 문서가 게시되어 있습니다. P4 Multispectral 브랜드 DJI.
사용 설명서 P4 Multispectral DJI
P4 Multispectral은 다중 스펙트럼 촬영 기능을 갖춘 고정밀 드론입니다. 촬영 시스템에는 1/2.9인치 CMOS 센서 카메라 6대가 장착되어 있으며, RGB 카메라 1대, 다중 스펙트럼 카메라 어레이(카메라 5대)로 구성되어 있습니다. 모든 카메라는 글로벌 셔터, 2MP 유효 핀셀로 3축 안정화 짐벌에 장착되어 있습니다. 기체 상단의 스펙트럼 일조계는 이미지를 보정하기 위해 일사량을 실시간으로 감지하여 수집된 다중 스펙트럼 데이터의 정확도를 극대화합니다. 이미지 데이터는 식물 및 토양 상태를 분석하기 위한 다중 스펙트럼 지도를 생성하는 데사용할 수 있습니다. 기체에는 센티미터급 포지셔닝 정확도를 위해 정밀 데이터를 제공하는 DJI™ Onboard D-RTK™가 내장되어 있습니다*. 다방향장애물 감지는 전방, 후방 및 하향 비전 및 적외선 센서*에 의해 활성화됩니다.

- 짐벌 카메라 (아래의 주파대에 해당하는 카메라 6 대 포함)
a.적변 (RE) b. 근적외선 (NIR)
c. 녹색 (G) d. 가시광선 (RGB)
e.빨강 (R) f. 파랑 (B)
- 하향 비전 시스템
- Micro USB 포트
- 카메라/연동상태 표시등 및 연동버튼
- 카메라 microSD 카드 슬롯
- 전방 비전 시스템
- 적외선 감지 시스템
-
전방 LED
-
모터
10.프로펠러
11. 기체 상태 표시등
12. OCUSYNC TM안테나
13.Onboard D-RTK 안테나
14.스펙트럼 일조계
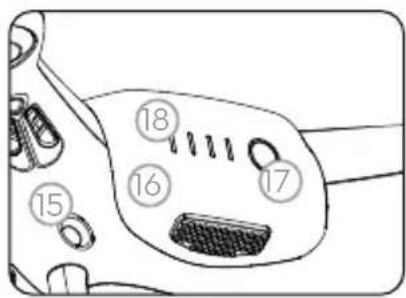
15. 후방 비전 시스템
16.인텔리전트 플라이트 배터리
17. 전원 버튼
18.배터리 잔량 표시기
*네트워크 RTK 서비스, DJI D-RTK 2 고정밀 GNSS모바일 스테이션 ( 별도 구매) 또는 후처리 동적 측량 (PPK) 데이터 ( 작동중에 RTK 신호가 약한 경우에권장 )와 함께 사용해야 합니다.
비전 및적외선 감지 시스템은 주변 환경의 영향을 받습니다.자세한 내용은 사용자 매뉴얼을 참조하십시오.
조종기
조종기에는 DJI 의 장거리 전송 기술 OcuSync 가 탑재되어 있으며, 최대 전송 범위 7km 에서 기체 및 짐벌 카메라를 제어할 수 있습니다 *. DJI GS Pro 앱을 사용하여 임무를 계획하고 수행하려면 USB 포트를 통해 조종기에 iPad 를 연결합니다. 분석을 위해 캡처된 이미지를 내보내고 다중 스펙트럼 지도를 생성합니다. 조종기는 충전식 LiPo 배터리를 사용하며, 최대배터리 사용시간은 약6 시간 *입니다.
- 전원버튼
- 리턴투 홈 (RTH) 버튼
- 조종스틱
4.상태 LED
5.배터리 잔량 LED - 전원포트
- 모바일 기기홀더
- 소형기기 위치조정 탱(휴대폰용)
9.안테나 - 핸들 바
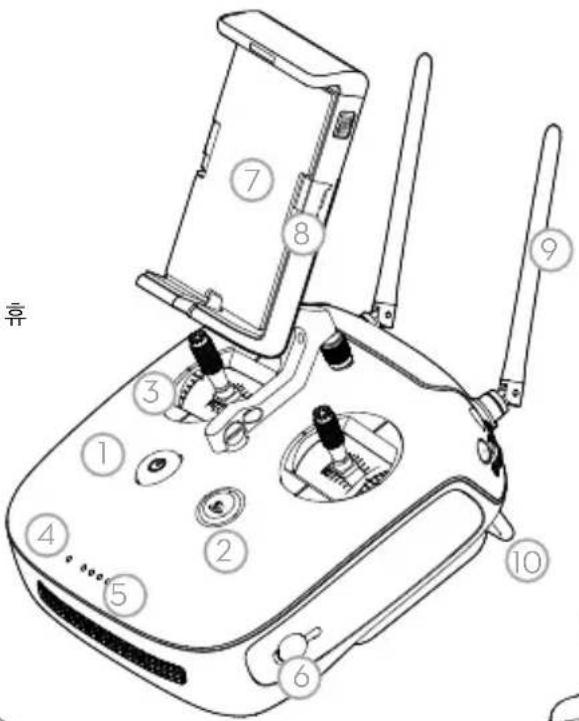
- 짐벌 다이얼
12.예비 다이얼
13.동영상 녹화 버튼 - 비행 모드 전환 스위치
15.셔터 버튼*
16.예비용 빈 버튼
17.C1 및 C2 버튼(맞춤설정가능)
18.USB 포트(모바일 기기연결용) - Micro USB포트

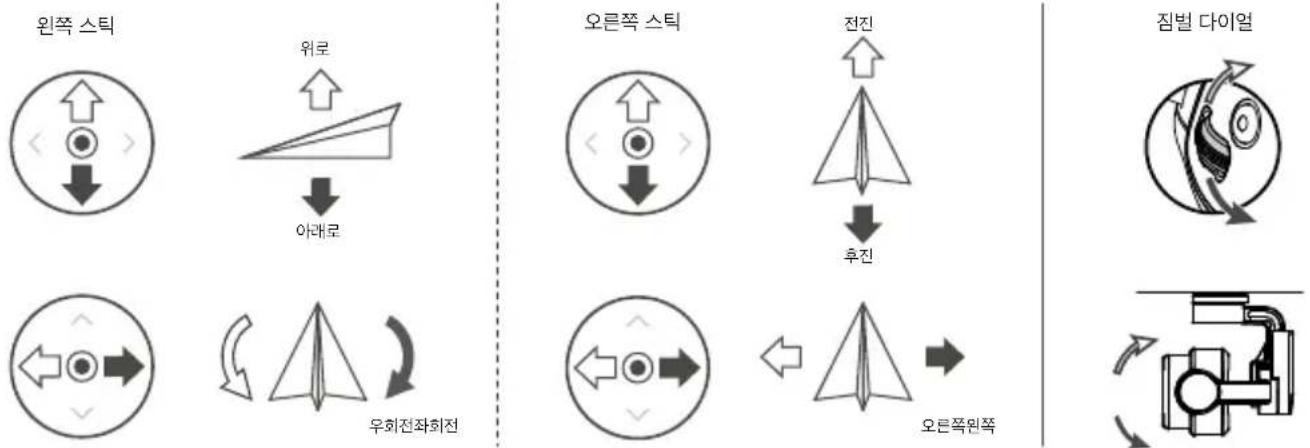
아래의 그림에서는 모드 2 를 예로 들어 각 조종 스텱 움직임에서 수행하는 기능을 보여줍니다. 왼쪽 스텱은 기체의 고도 및 비행 방향을 제어하고 오른쪽 스텱은전진, 후진, 왼쪽, 오른쪽 이동을 제어합니다. 짐별 다이얼은 카메라의 기울기를 제어합니다.
flowchart
graph LR
A["원쪽 스틱"] --> B["위로"]
B --> C["아래로"]
C --> D["우회전좌회전"]
D --> E["오른쪽 스틱"]
E --> F["전진"]
F --> G["후진"]
G --> H["오른쪽원쪽"]
H --> I["짐범 다이얼"]
* 조종기는 전자기 간섭이 없는확 트인 넓은지역의 약 120m 고도에서 최대 전송 거리 (FCC) 에 도달할 수있습니다 . 최대 작동시간은 참조용으로 실험실 환경에서 테스트되었습니다 . 사진은 서터 버튼을 완전히누를 때만 찍합니다.
P4 Multispectral사용하기
1. DJI GS Pro 앱 다운로드
P4 Multispectral과 함께 사용할 때는 DJI GS Pro 최신 버전이 필요합니다. App Store에서 DJI GS Pro*를 검색하거나 QR 코드를 스캔하여 iPad에 앱을 다운로드합니다.

P4 Multispectral을 처음으로 사용하는 경우에는 DJI GS Pro 앱을 사용하여 활성화하십시오. iPad가 인터넷에 액세스할 수 있는 상태인지 확인합니다.
* DJI GS Pro 에 대한 자세한내용을 보려면DJI 공식 웹사이트를 방문하시기 바랍니다. https://www.dji.com/ground-station-pro
2.배터리 잔량 확인
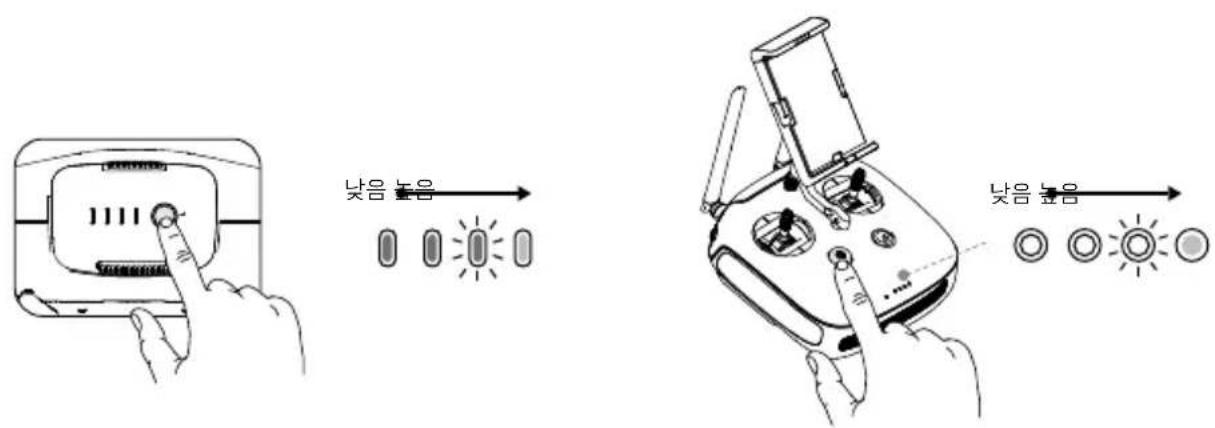
배터리 잔량을 확인하려면 한번 누릅니다. 한 번 누른 다음 다시 길게 누르면 켜지거나 꺼집니다.
3.배터리 충전
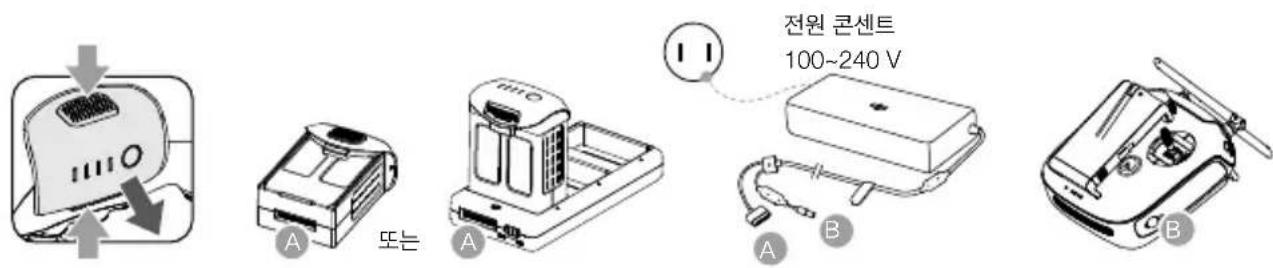

-처음사용하기전에배터리를완전히충전합니다.
-인텔리전트 플라이트 배터리가 충전 허브에 위 그림과 같이 연결되어 있는지 확인합니다.
-인텔리전트 플라이트 배터리 총전 허브의 모드 스위치가 총전 모드 위치에 놓여져 있는지 확인합니다.
4.조종기 준비

강함 약함


기체를 최적의 전송 구역 안에서 비행하도록 노력하십시오. 신호가 약하면 안테나를 조정하거나 더 가까운 곳에서 비행하십시오.
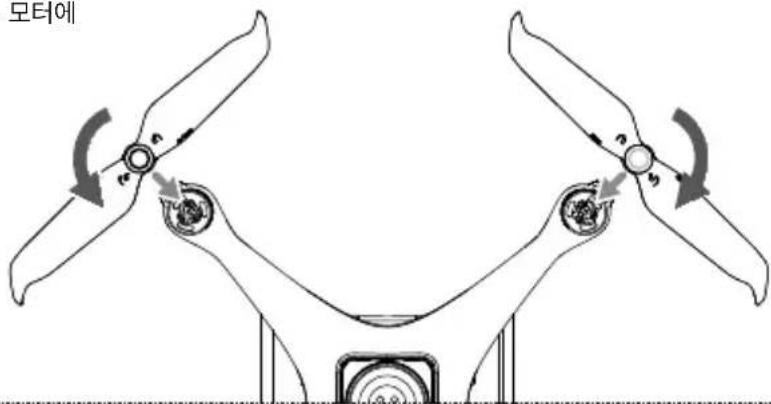
5. 이륙 준비

검은색 프로펠러 링은
검은색 점이 있는 모터
에 부착합니다.

은색 프로펠러 링은 검
은색 점이 없는 모터에
부착합니다.

프로펠러를 아래쪽으로 눌러 마운팅
플레이트에 끼우고 단단히 고정될 때
까지 잠금 방향 ⚙으로 돌립니다.

- 각 비행 전에 프로펠러가 단단히 고정되어 있는지 확인하십시오.
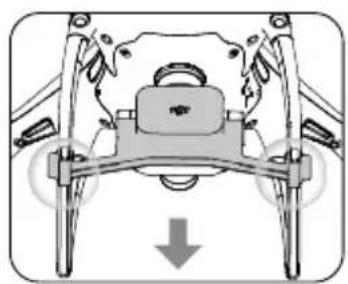
카메라에서 짐벌 클램프를 분리합니다.

조종기 및 기체의 전원을 EQUINS.

앱을 실행합니다.
6. 비행
안전한 이류을 위해 기체 상태 표시등이 녹색으로 천천히 깜박이는지 확인하십시오 (포지셔닝을 위해 RTK* 또는 GNSS 를사용).
이륙 착륙


또는




왼쪽 스텡 (모드 2)을 천천히 위로 올려 이륙 합니다.

지면에 닭을 때까지 왼쪽 스킱을 천천히 아래로 내립니다
3초 동안 누르고 있으면 모터가 정지합니다

- 회전하는 프로펠러는 위험할 수 있습니다. 회전하는 프로펠러와 모터에서 멀리 떨어져 계십시오. 협소한 공간에서나 사람이 근처에 있을 때는 모터를 작동시키지 마십시오.
-모터가 돌아가는 동안에는 조종기를 항상 손에 잡고 있으십시오.
. 비행 중 모터 정지: CSC 를 수행하여 모터를 정지합니다. 이 기능은 DJI GS Pro 에서 활성화할 수 있습니다. 손상 또는부상의 위험을 줄일 수 있도록 긴급상황에서만 비행 중에모터를 중지하십시오.
* RTK포지셔닝을 권장합니다. DJI GS Pro 에서 ‘임무 보기’ 로 이동하여 .아이콘을 누르거나 화면 상단의 ‘RTK’ 를 눌러 RTK 설정 메뉴로 이동합니다. 그런 다음 RTK데이터 소스로 D-RTK 2 또는 네트워크 RTK 계정을 선택합니다. 메뉴 하단에서 기체 RTK를 활성화합니다. 그렇게 하지 않으면 기체가 RTK데이터를 사용할 수 없습니다.
7. 작업 시작
다음 예시에는 DJI GS Pro 를 사용한 3D 지도 영역 임무에 대한 지침이 포함되어 있습니다.

3D 지도영역 임무
를 생성합니다.

임무매개변수를 구
성합니다.

카메라 설정을 구성하려면카메라 미리 보기를놀러 ‘카메라뷰’로 이동합니다*.

임무를 수행
합니다.

내보
냅니다.

지도를 생성합니다.사진을
*‘카메라 뷰’에서 다중 스펙트럼 카메라를 선택한 경우 이 임무에는 RGB 사진이 포함되지 않습니다.
사양
- 기체
이륙 무게 1487 g
대각선 거리(프로펠러 제외) 350 mm
최대 실용 상승 한계고도(해발)6000m
최대 상승 속도 6 m/s (자동 비행), 5 m/s (수동 제어)
최대 하강 속도 3 m/s
최대 속도 50 km/h (P 모드), 58 km/h (A 모드)
최대 비행 시간 약 27 분
작동 온도 0\~40℃
작동 주파수 2.4000 GHz \~ 2.4835 GHz (유럽, 일본, 한국)
5.725 GHz \~ 5.850 GHz (기타국가/지역)
전송 출력 (EIRP) 2.4 GHz: <20 dBm (CE/MIC/KCC) 5.8 GHz: <26 dBm (FCC/SPRC/NCC)
호버링 정확도범위 RTK 활성화및 올바른 작동:
수직: ±0.1 m, 수평: ±0.1 m
RTK 비활성화:
수직: ±0.1 m ( 비전포지셔닝 사용 시 ), ±0.5 m (GNSS 포지셔닝 사용 시)
수평: ±0.3 m( 비전포지셔닝 사용 시 ), ±1.5 m (GNSS 포지셔닝 사용 시)
이미지 위치보정 6 개카메라의 CMOS 중심과 Onboard D-RTK 안테나의위상 중심 상대 위치는 캘리브레이션되었으며, 각 이미지의 EXIF 데이터로 기록됩니다.
• GNSS
싱글 주파수 고감도 GNSS GPS + BeiDou + Galileo
^2 (아시아), GPS + GLONASS + Galileo ^2 (기타 지역)
| 멀티 주파수 다중 시스템고정밀 RTK GNSS | 사용주파수GPS: L1/L2, GLONASS: L1/L2, BeiDou: B1/B2, Galileo ^2 : E1/E5최초고정 시간: <50 초포지셔닝정확도 : 수직 1.5 cm + 1 ppm (RMS), 수평 1 cm + 1 ppm (RMS).1ppm은 1km 이동 시 1mm 의 오류 증가를 의미합니다.속도정확도: 0.03 m/s |
| 매핑 기능 | |
| 지상 표본 거리 (GSD) (H/18.9) cm/pixel. H | 는촬영장면에 비례한 기체고도 ( 단위 : m) 를의미합니다 . |
| 데이터 수집 속도 | 180m고도에서 단일 비행시 최대작동 영역온약 0.63km^2 이며 , GSD 는 9.52cm/pixel 입니다 . 이는 완전히 총전된배터리 (100%)가 잔량30% 까지소모되는 동안 80% 전면 오버랩비율 , 60% 측면 오버랩 비율을 유지할경우의 수치입니다 . |
| 침별 | |
| 제어 가능 범위 피치 | :-90° ~ +30° |
| 비전 시스템 | |
| 속도 범위 충분한 | 조명이 있는 지상 2m 높이에서≤50 km/h |
| 고도 범위 | 0~10 m |
| 작동 범위 | 0~10 m |
| 장애물 감지 범위 | 0.7~30 m |
| 작동 환경 선명한 | 패턴이 있는 표면및 적당한조명 (>15 러스) |
| 카메라 | |
| 센서 | 1/2.9" CMOS센서 6 개( 가시광 촬영용 RGB센서 1 개, 다중 스펙트럼 촬영용 모노크롬센서 5 개 ).센서당: 유효 피셀 2.08 MP (총 2.12 MP) |
| 필터 | 파랑(B): 450 nm ±16 nm, 녹색 (G): 560 nm ±16 nm, 빨강 (R): 650 nm ±16 nm,적변(RE): 730 nm ±16 nm, 근적외선 (NIR): 840 nm ±26 nm |
| 렌즈 | FOV (화각): 62.7°조점거리 : 5.74 mm (35mm 환산 : 40 mm), 오토포커스∞조리개: f/2.2 |
| RGB 센서 ISO 범위 | 200 ~ 800 |
| 모노크롬 센서 게인 | 1~8배 |
| 전자식 글로벌 서터 | 1/100 ~ 1/20000초 (가시광촬영), 1/100 ~ 1/10000 초 ( 다중 스펙트럼 촬영 ) |
| 최대 이미지 크기 | 1600×1300 (4:3.25) |
| 사진 파일 형식 | JPEG (가시광 촬영) + TIFF (다중 스펙트럼 촬영 ) |
| 지원 파일 시스템 | FAT32 (≤32 GB), exFAT(>32 GB) |
| 지원 SD 카드 | microSD 카드 ( 쓰기 속도 15MB/s 이상) 최대용량 : 128 GB. Class 10또는 UHS-I 등급 필요 |
| 작동 온도 | 0~40 °C |
| 조종기 | |
| 작동 주파수 | 2.4000 GHz ~ 2.4835 GHz (유럽, 일본, 한국 )5.725 GHz ~ 5.850 GHz (기타 국가 / 지역) ^11 |
| 전송 출력(EIRP) 2.4 GHz: <20 dBm (CE/MIC/KCC) | 5.8 GHz: <26 dBm (FCC/SRRC/NCC) |
| 최대 전송 거리 | FCC/NCC: 7 km, CE/MIC/KCC/SRRC: 5 km(장애물과 간섭이 없을 시 ) |
| 내장 배터리 | 6000 mAh LiPo 2S |
| 작동 전류/전압 | 1.2 A @ 7.4 V |
| 모바임 기기 홀더 대블릿 | 및 스마트폰 |
| 작동 온도 | 0~40 °C |
| 인텔리전트 플라이트 배터리 (PH4-5870mAh-15.2V) | |
| 용량 | 5870 mAh |
| 전압 | 15.2 V |
| 배터리 유형 | LiPo 4S |
| 에너지 | 89.2 Wh |
| 순 무게 | 468 g |
| 작동 온도 | -10~40 °C |
| 충전 온도 | 5~40 °C |
| 최대 충전 전력 | 160 W |
| 인텔리전트 플라이트 배터리 충전 허브 (P4CH) | |
| 전압 | 17.5 V |
| 작동 온도 | 5~40 °C |
| AC 진원어댑터 (PH4C160) | |
| 전압 | 17.4 V |
| 정격 출력 | 160 W |
[1] 현지 법률과 규정을 준수하기 위해 일부 국가 및 지역에서는 이 주파수를 사용할 수없습니다. [2] Galileo 는 추후 지원 예정입니다.
※본 뭁 스타트 가이드는 사전 고지
없이 변경될 수 있습니다.
최신 버전은 다음 웹사이트에서 다운로드하십시오.
https://www.dji.com/p4-multispectral




