
Agras T20 - Drone DJI - Manual de utilização gratuito
Encontre gratuitamente o manual do aparelho Agras T20 DJI em formato PDF.
| Tipo de produto | Drone agrícola de pulverização |
| Marca | DJI |
| Modelo | Agras T20 |
| Dimensões (aberto) | 2509 × 2213 × 732 mm |
| Dimensões (fechado) | 1100 × 570 × 732 mm |
| Peso (sem bateria) | 21,1 kg |
| Peso máx. na decolagem | 47,5 kg |
| Bateria de voo | AB3-18000mAh-51,8V (LiPo 14S) |
| Autonomia em voo pairado | 15 min (27,5 kg) / 10 min (42,6 kg) |
| Capacidade do reservatório | 20 L |
| Vazão de pulverização máx. | 6 L/min (conforme bicos) |
| Alcance de transmissão | 5 km (FCC) / 3 km (CE) |
| Sistema de posicionamento | GNSS + RTK (GPS, GLONASS, BeiDou, Galileo) |
| Prevenção de obstáculos | Radar digital omnidirecional (horizontal) |
| Índice de proteção | IPX6 (geral) / IP67 (componentes eletrônicos) |
| Temperatura de operação | 0 a 40 °C |
| Funções principais | Pulverização automática, planejamento de voo, modos Rota e A-B, retorno ao ponto de partida inteligente |
| Manutenção e limpeza | Limpar o reservatório, bicos, hélices e motores após cada uso com água limpa ou sabão |
| Segurança | Não voar sobre pessoas/animais, evitar ventos >28 km/h, respeitar as zonas GEO |
| Peças de reposição e reparabilidade | Hélices, bicos, bateria, reservatório, motores e ESC substituíveis |
| Informações gerais | Drone profissional para agricultura, rádio controle Smart Controller 2.0 com tela sensível ao toque de 5,5" |
Perguntas frequentes - Agras T20 DJI
Perguntas dos utilizadores sobre Agras T20 DJI
0 pergunta sobre este aparelho. Responda às que conhece ou faça a sua.
Faça uma nova pergunta sobre este aparelho
Baixe as instruções para o seu Drone em formato PDF gratuitamente! Encontre o seu manual Agras T20 - DJI e retome o controlo do seu dispositivo eletrónico. Nesta página estão publicados todos os documentos necessários para a utilização do seu dispositivo. Agras T20 da marca DJI.
MANUAL DE UTILIZADOR Agras T20 DJI
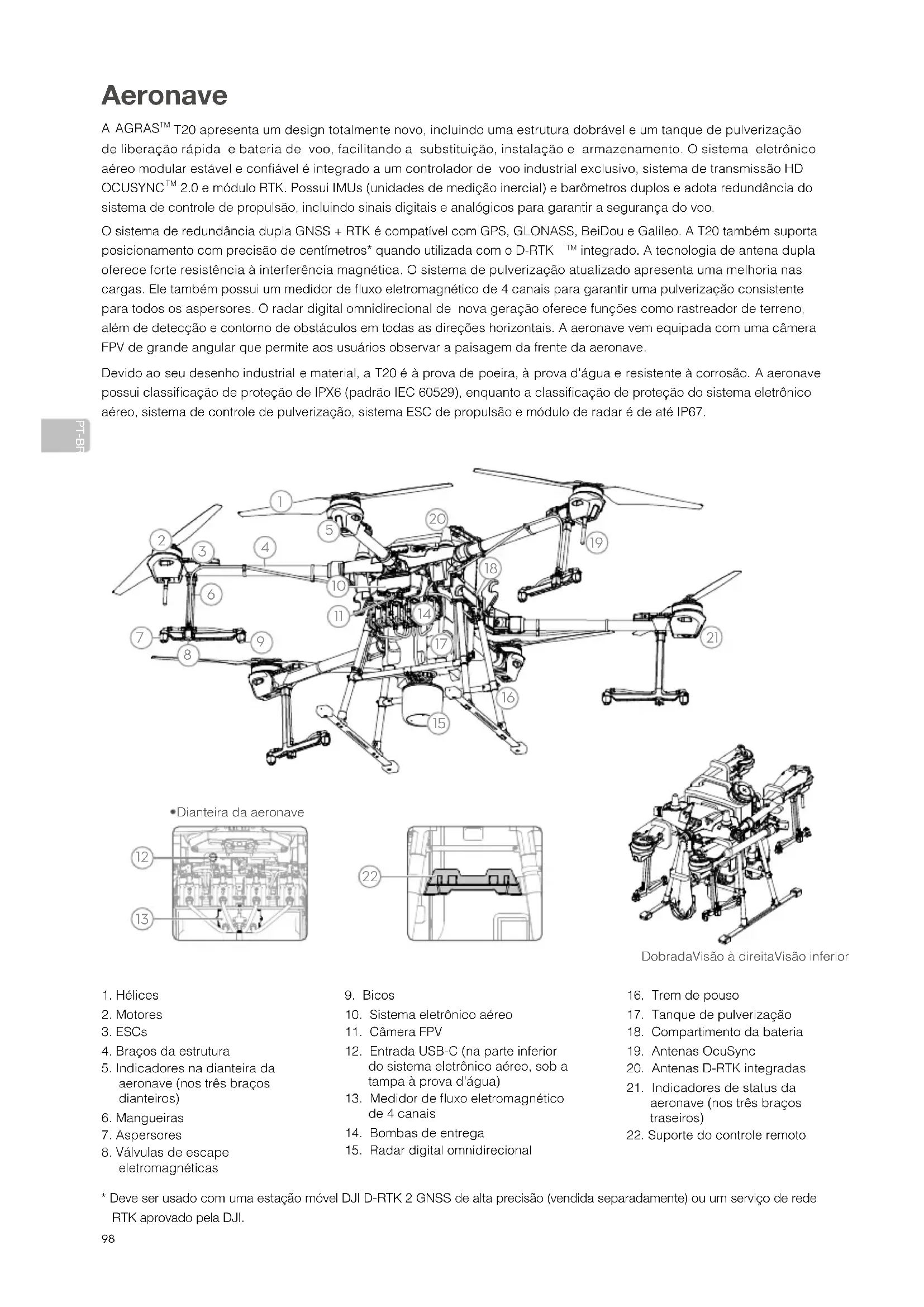
A AGRAS T20 apareça um design totalmente novo, incluindo uma estruturaogravel e um tanque de pulverização de liberação rapié e bateria de voo, facilitando a substituiçao, instalaçao e armazenamento. Osystema eletrónico aereo modular estável e confiavel é integrado a um controlador de voo industrial exclusivo,istema de transmissao HD OCUSYNC 2.0 e modulo RTK. Possui IMUs (unidades de medicacao inercial) e barometros duplos e adota reduundancia do sistema de controle de propulsao, incluindo sinais digitais e analógicos para garantir a seguranca do voo.
O Sistema de redundaencia dupla GNSS ^+ RTK é compativel com GPS, GLONASS, BeiDou e Galileo. A T20 tambem suporta posiconamento com precisao de centimetros* quando utilizeada com o D-RTK ^M integrado. A technologia de antenna dupla oferece forte resistencia a interferencia magnetica. O Sistema de pulverizacao atualizado aparea uma melhoria nas cargas. Eelthemposui um medidor de fluxo eletromagnetico de 4 canais para garantir um pulverização consistente para todos os aspersores. O radar digital omnidirecional de nova geração oferece funcoes como rastreador de terreno, lemde detecao e contorno de obstaculos em todas as direcsoes horizontais. A aeronave vem equipada com um camera FPV de grande angular que permite acos osuarios observar a paisagem da fronte da aeronave.
Devido ao seu desenso industrial e material, a T20 é àprove de poeira, àprove d'agua e resistente à corrosão. A aeronave possui classificacao de protecao de IPX6 (padra IEC 60529), quando a classificacao de proteao do systema eletrico aereo,istema de controde pulverizacao,SYSTEMA ESC de propulsao e modulo de radar e de até IP67.
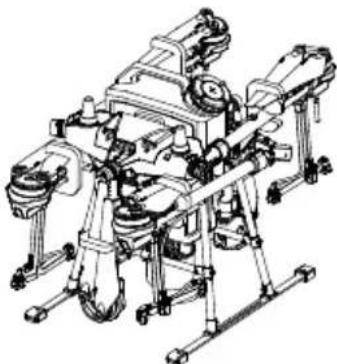
DobradaVisão à direitaVisão inferior
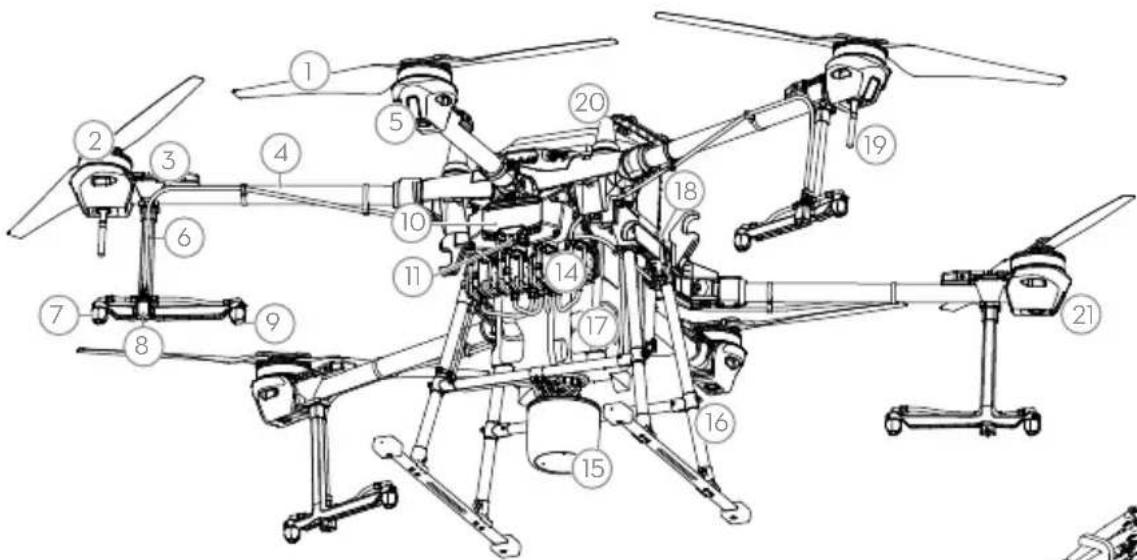
- Helices
- Motores
- ESCs
- Braços da estrutura
- Indicadores na dianteira da aeronave (nos tres braços dianteiros)
- Mangueiras
- Aspersores
-
Valvulas de escape eletromagnéticas
-
Bicos
- Sistema eletronico aereo
- Camera FPV
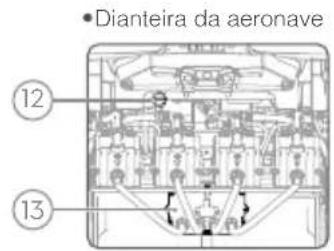
- Entrada USB-C (na parte inferior do Sistema eletrónico aereo, sob a tampa à prova d'água)
- Medidor de fluxo eletromagnétique de 4 canais
- Bombas de entrega
-
Radar digital omnidirectional
-
Trem de pouso
- Tanque de pulverização
- Compartimento da bateria
- Antenas OcuSync
- Antenas D-RTK integradas
- Indicadores de status da aeronave (nos tres braços traseiros)
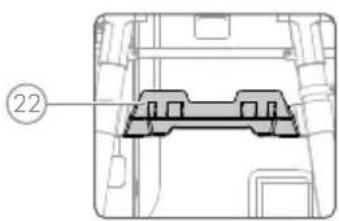
- Suporte do controle remoto
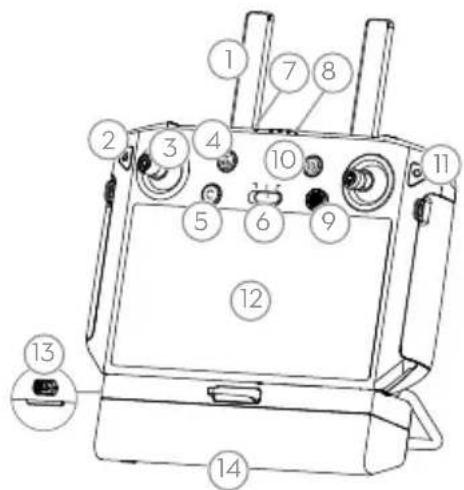
Controle remoto
O Controle Inteligente 2.0 utilize oSYSTEMA de transmissao OcuSync 2.0 da DJI TM, tem uma distancia maxima de controle de ate 5km^* e suporta Wi-Fi e Bluetooth. O controle remoto é equipado com umaTELa exclusiva e brilhante de 5,5 polegadas com o aplicativo DJI Agras integrado, o que melhora significativamente a suavidade e a estabilitadde. Com o dongle RTK connectado ao controle remoto, usuarios podem planejar operacoes com precisao de centimetros. O modo de controle de varias aeronaves* do controle remoto pode ser uso para coordenar a operacao de ate tres aeronaves ao mesmo tempo, permitindo que os pilotos travahem com eficicencia. Tanto a bateria interna quando a externa podem ser usadas para fazerer energia ao controle remoto. O tempo total de funcaoamento e de ate 4 horas, o que atende plenamente aos requisitos para operacoes longas e de alta intensidade.

中
- Antenas
- Botão Voltar/botão Funcão
- Pinos de contrôle
- Botao RTH
- Botão C3 (personalizavel)
- Interruptor do modo de voo
- LED de status
- LEDs de nivel da bateria
- Botão 5D (personalizavel)
- Botão Liga/desiga
-
Botao Confirmar
-
Tela sensivel ao toque
- Entrada de carreamento USB-C
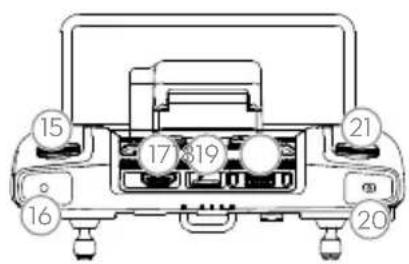
- Tampa do compartmento do dongle
- Indicador da taxa de pulverização
- Botão de pulverização
- Entrada HDMI
-
Compartimento de cartão microSD
-
Entrada USB-A
- Botão de alteração FPV/Mapa
- Botão de eficiência de trabalho
- Saia de ar
- Botao C1 (personalizavel)
- Botão C2 (personalízavel)
- Tampa da bateria
- Botão de liberação da tampa da bateria
- Alca
A figura abaixo minha funcão que cada movimento dos pinos de controle executa, usingo o Modo 2 como exemple. No modo 2, o pino esquerdo controla a altitude e a orientação da aeronave, quando o pino direito controla os movimentos pararente, paraTRS, para a esquerda e para a direita.

Pino esquerdo Pino direito
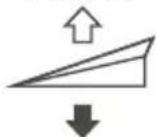
Para cima
Para baixo
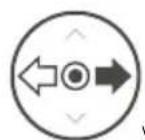

Virar a esquerda
Viraràdireita


Para fremte
Para tras


Esquerda
Direita
- O controle remoto alcança a sua distência de transmissão Tmaxa (FCC/NCC: 5 km; CE/KCC/MIC/SRRC: 3 km) em uma area aberta sem interferência eletromagnética e a uma altitude de aproximamente 2,5 m (8,2 pés).
Certificque-se de aderir as leis e regulamentoao locais ao usar o modo Controle de varias aeronaves.
Fly Safe
É importante que você compreenda algumas diretrizes tíbas de voo, tanto para a sua proteção como para a segurar das pessoas à sua volta.
- Voe em espacos abertos: Preste atencao a postes de energia, linhas de tensao e outros obstaculos. NAO voe acima ou proximo de agua, pessoas ou animais.
- Mantenha o controle a todo momento: Mantenha as mãos no controle remoto e mantenha o controle da aeronave quando ela estiver em voo, mesmo ao utilizes funções inteligentes, como os modelos de operação Rota e Rota A-B e returno à base (RTH) inteligente.
- Mantenha o campo de visão: Mantenha a aeronave dentro do seu campo de visão (VLOS) o tempo todo, evitando voar por vez de predios ou outros obstáculos que obstruaam sua visão.
- Monitore sua altitude: Para a seguranga de aeronaves tripuladas e outro tipo de trafego aereo, voe em altitudes inferiores a 30m (98 pés) e de acordo com todas as leis e regulamenti locais.

Para mais informações sobre itens críticos de segurança, tais como zonas GEO, acesss e site http://www.dji.com/ flysafe.
Considerações sobre voos
- NAO utilize a aeronave para pulverizar com ventos superiores a 18km / h
- NAO utilize a aeronave em condições climáticas adversas, como ventos superiores a 28 km/h, chuva forte (taxa de precipitação superior a 25 mm em 12 horas), neve ou neblina.
- A altitude de operacao maxima recomendada e 2 km (6.560 pés) acima do nivel do mar. NAO voe além de 3 km (9.842 pés) acima do nivel do mar.
- Quando a altitude de operacao atingir 1 km (3.280 pés), a capacidade de cargo do tanque de pulverização sera reduzida em 2kg . Para cada km adicular, a capacidade de cargo sera reduzida em mais 2kg .
- Certifique-se de que Haj a sinal GNSS for e que as antenas D-RTK este jam desobstruidas durante a operacao.
A aeronave returnará automaticamente para o Ponto de origem nos casos a seguir:
Smart RTH: Você pressiona o botão RTH.
RTH à prova de falhas: Ha perda do sinal do controle remoto.*
Se houver um obstáculo em até 20 m da aeronave, a aeronave irá desacelerar, parar e fazer voo estacionário. Se a aeronave chegar a 6 m do obstáculo durante a desaceleração, a aeronave irá parar, Voor paraTRS a uma distência de aproximamente 6 m do obstáculo e fazer voo estacionário. A aeronave saira do procedimento de RTH e aguardar mais comandos.
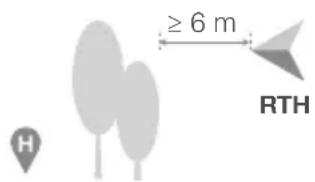
- Se o RTH à prova de falhas estiver desativado (a configuraçao padrão no aplicativo DJI Agras), a aeronave fará voo estacionario no lugar quando houver perda do sinal do controle remoto.

- A funcão que evita obstáculos é desabilitada no Modelo Atitude (ATTI) (que a aeronave entra em situações como quando o sinai GNSS estiver fraco) e não está disponible se o ambiente operacional não for adequado para o modulo de radar. Cuidado adicional é necessário em tais situações.
Uso de pesticidas
- Evite ao maior o uso de pesticidas em po, poi eles podem reduzir a vida util do systeme de pulverização.
- Pesticidas são venenosos e aparecem sérios ricos à segurar. Use-os apenas em estrita conformidade com as espécificações.
- Use agua limpa para misturar o pesticida e filtrlo orlquido misturado antes de despejar no tanque de pulverização, evitando bloqueio doimento.
- O uso eficaz de pecificas depende da densidade do pesterica, taxa de pulverizacao, distancia de pulverizacao, velocidade da aeronave, velocidade e direcao do vento. Considere todos os fatores ao usar pecificas.
- NAO comprometa a segurar de pessoas, animais ou do meio ambiente durante a operacao.

É importante que você compreenda algumas diretrizes tíbasas de voo, tanto para a sua proteção como para a segurar das pessoas à sua volta.
Certifique-se de ler a Isença de Responsabilitáde Diretrizes de Segurarca.
Como usar a T20
1. Preparo da bateria de voo inteligente
Use apenas baterias de voo oficials da DJI (modelo:
AB3-18000mAh-51,8V. Verifique o nivel da bateria antes do voo e
carregue-a de acordo com o documento correspondente.
2. Preparo da aeronave
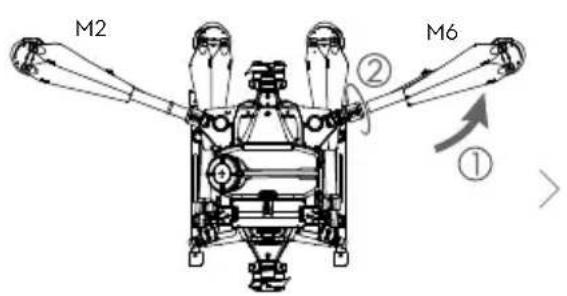
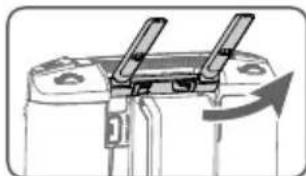
Desdobre os braços M2 e M6 e aperte as das gordas dos braços.
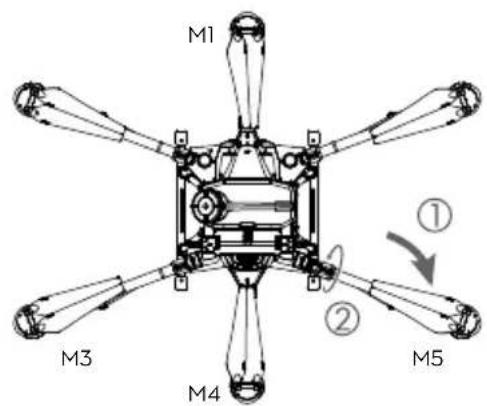
Desdobre os braços M3 e M5, os braços M1 e M4 e, em seguida, aparez as quatre gordas.
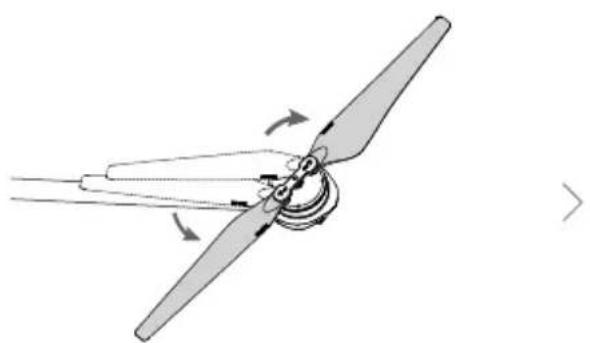
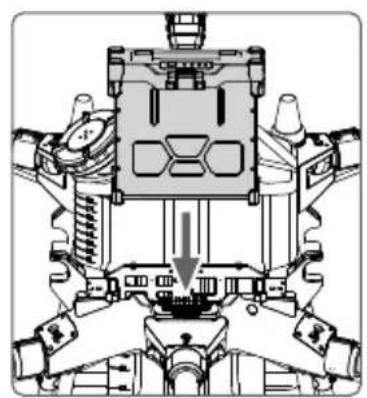
Desdobre as pás das hélices. Insira a bateria de voo inteligente na aeronave até ouvir um clique.

- Certifique-se de que a bateria esteja inserida com firmeza na aeronave. Insira ou remove a bateria somente quando a aeronave estiver desligada.
- Para remover a bateria, pressione e segure a braçadeira e levante a bateria.
- Ao cruzar os braços, certificque-se de fazer os braços M3 e M5 primeiro e, em seguida, os braços M2 e M6. Caso contrário, os braços podem ser danificados. Levante e abaixe os braços M1 e M4 suavamente para reduzir o desgaste.
3.Preparo do controle remoto
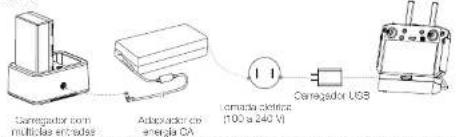
como carregar as baretas
Cagoure a canto inegiente, corte e umido o corretoe ao multo emendos o e cipredico CA. Cagoure a horemiro no corto e corto umido o corretoe Udo e um Cabo Udo-C. Cagoure loissemao a ouzerais aridos de tucupu
Commonarabateria externa
- Pista removera a horta Inegroto, pereiro e moniteria pereirado e batas de lheropias da horta a, z en seguido, emureir a horta para batei.
como montar o dongle 4Geocan3o SIM
- Use acerias complles proximas eul. DOL ollcifre cefire surive a viciare dapeles de reel u un carit 101 comploymo o provider de rde mole exocho a selection um plano de diaos mole de escondo o n mei
C o n s e c u t i o n 2013 SMI certifier that o c o m p r e c t o f remo r r o r a t e re l e v e r - p l a t i o n a r e s p e c i e s, cum lae - chagrata UI AG. Oertipu-tie du la sate de remarier: Cotes contors, cote sere et rite est échéable.

Tnre sampa do compentimento da dongie.

Como verificar os niveis da bateria

Pressione o botao liga/desiga do controle remoto uma vez para vericar o nivel da bateria atual. Pressione uma vez, pressione novamente e segure por bois segundos para ligar ou desligar.
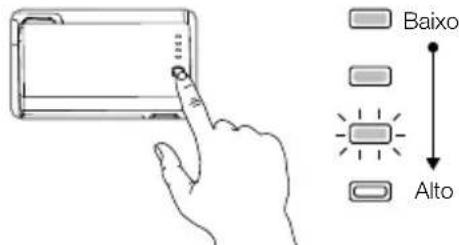
Pressione o botao do nivel da bateria uma vez na bateria inteligente externa para vericar o nivel da bateria.

- Ao usar a Bateria Inteligente externa, ainda é necessario assegurar que a bateria interna tenha algumaarga carga. Caso contrário, o controle remoto não poderá ser ligado.
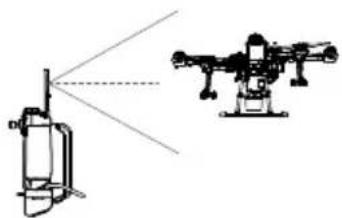
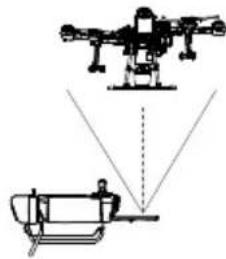
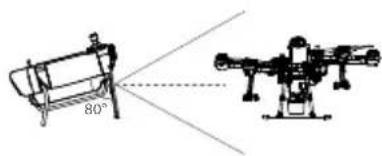
Ajuste das antennas
Levante as antenas e ajuste-as. A potência do sinal do controle remoto é afetada pelasposicao das antenas. Quando o angulo entre as antenas e a traseira do controle remoto for de 80^ ou 180^ , a conexao entre o controle remoto e a aeronave podera atingir seu desempenho ideal.
Tente manter a aeronave dentro da faixa de transmissao ideal. Se o sinal estiver frac, ajuste as antenas ou voe proximo da aeronave.
Zona de transmissao ideal

- Evite usar dispositivos sem fio que usem as mesmas bandas de frequência que o controle remoto.
- Se o dongle RTK for uso para planejamento de campo, o[móulo deve ser desconectado do controle remoto antes o planejamento ser concluso. Caso contrário, isso afetará o desempenho de comunicação do controle remot.
4. Preparation para decolagem
A. Coloque a aeronave em terreno plano e aberto, com a parte traseira da aeronave voltada para você.
B. Certifique-se de que as helices estejam montadas com seguranca, que nao haja objetos estranhos dentro ou sobre os motores e as helices, que as pae e os braços da helice estejam desdobrados e as protecences dos braços estejam apertadas com firmeza.
C. Certifique-se de que o tanque de pulverização e a bateria de você esteam colocados com firmeza.
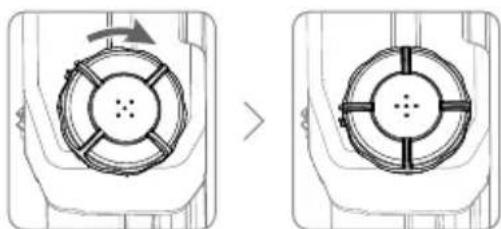
D. Despeje o liquido no tanque de pulverização e aperte a tampa. Certifique-se de que as quatre linhas da capa estejam alinhadas na direção horizontal ou vertical.
E. Ligue o controle remoto, certifique-se de que o aplicativo DJI Agras esteja aberto e, em seguida, ligue a aeronave.

Internet
- Ao usaronga primaira vez, ative a aeronave usingo aplicativo DJI Agras. Sua conta DJI sera necessaria, assim como conexao a internet.
Calibracao da bussola
Quando o aplicativo avisar que a calibracao da bussola é necessaria, clique em deposito em, deslize para baixo e selecione Configurações avançadas e, em seguida, Sensores. Clique em Calibracao na parte de calibracao da bussola e sigas as instruções naanela.

- NAO tente calibrar sua bussola onde houver chance de forte interferencia magnetica. Isso inclui areas ond existam postes ou paredes com reforços de aço.
- NÃO carregue com você mecanis ferromagnéticos, como chaves ou celulas, durante a calibração.
Calibracao do medidor de fluxo
Certificque-se de calibrar o medidor de fluxo antes da sua primarya operacao. Caso contrario, o desempenho de pulverização pode ser afetado negativamente.
A. Preparação antes da calibração: Descarga de bolhas nas mangueiras
① Encha o tanque de pulverização com aproximadamente 2litros de água.
Use a func do descarga automatica de bolhas para descarregar bolhas de acordo com as descriacoes na sequo Descarga de bolhas nas mangueiras, abaixo. Os 用户s temem poderm descarregar as bolhas manualmente. Pressione o botao de pulverização para borrifar as bolhas e pressione o botão novamente quando todas as bolhas foram eliminadas.
B. Calibração do medidor de fluxo
① No aplicativo, clique em Executar Operação para entra na Visualização de Operação. Clique em e depois em e clique em Calibração à direita da�� do medidor de fluxo.
② A calibracao comearac automaticamente. Apos 25 segundos, o resultado da calibracao sera exibido no aplicativo.
- Depois de calibrar com Successo, os 用户os poderão prossseguir com a operação.
- Se a calibração falhar, clique em “?” para visualizar e resolver o problema. Depois, calibre novamente.
Descarga de bolhas nas mangueiras
A T20 possui umo funcao de descarga automatica de bolhas. Quando for necessario descarregar as bolhas, pressione e segure o botao pulverizador por bois segundos. A aeronave ira descarregar automaticamente ate que as bolhas sejam totalmente descarregadas.
5. Voo
No aplicativo, entre em Visualização da operação. Certifique-se de que Hajia sinal GNSS forte e que a barra de status do)...sistema indique Rota manual (GNSS) ou Rota manual (RTK).* Caso contrário, a aeronave não poderá decolar.
Recomenda-secriar um plano para um campo e selecionar uma operacao para permitir que a aeronave decole e execute a operacao automaticamente. Para obter mais informacoes, consulte a segao Iniciando operacoes. Em outros casos, decole e pousemanualmente.
Decolagem
Execute um Comando combinado do joystick (CSC) e empurre o pino do acelerador para decolar.


OU




Pino do accelerator (pino esquero no Modo 2)
Aterrissagem
Para pousar, puxe o pino do acelerador para baixo até que a aeronave toque no solo. Ha bois métodos para parar os motores.
Méto 1: Quando a aeronave tiver pousado, pressione e segure o pino do acelerador para baixo. Os motores param apso tres segundos.
Méto 2: Quando a aeronave pousar, pressione o pino do acelerador e execute o mesmo CSC que foi uso para dar parte nos motores. Solte ambos os pinos assim que os motores pararem.
- O posicaoamento RTK é recomendado. No aplicativo, está Visualização de operação, clique em ● Depois em RTK parahabiliar o RTK para aeronave e selecionar um método para receber sinais RTK.



OU

Método 1 Método 2

- Hélices em movimento podem ser perigosas. Fique longe dos motores e das hélices quando estiverem girando.
Não ligue os motores em和地区 confinadas ou quando couver pessoas proxies. - Mantenha as mãos no controle remoto quando os motores estiverem girando.
- NAO pare os motores durante o voo, a menos que sera uma situação de emergência e fazê-lo reduzir o risco de danos ou ferimentos.
- O método 1 é o método recomendado para interromper os motores. Ao utilizes o Método 2 para interromper os motores, a aeronave pode capotar se não estiver completeness em solo. Use o Método 2 com cautela.
- Após o pouso, desligue a aeronave antes de desligar o controle remoto.
Operações iniciais
Depois que a area de operacao e os obstaculos forem medidos e as configurações forem configuradas, o DJI Agras usara umsystema de planejamento de operacao intigente integiente integrado para produzir um rota de voo com base na entrada do usuario. Os alguros podem solicitar um operacao apso planejar um campo. A aeronave iniciar a operacao automaticamente e seguir a rota de voo planejada.
Em cenarios com terreno complicado, os 用户s podem usar o Phantom 4 RTK e o DJI TERRA™ para planejar rotas de voo 3D e, em seguida, importar as rotas ao aplicativo DJI Agras para operacao. Consulte o Manual do Usuario do Agras T20 para mais informacoes.
Planejamento de campo
O aplicativo DJI Agras ofere suporte ao planejamento de rotas de voo, ao pilotar a aeronave ate pontos de referencia, obstaculos e points de calibracao, ou ao caminhar por esses pontos carregando um controle remoto, um controle remoto com um dongle RTK ou um dispositivo RTK. A rota a seguir foi planejada caminhando ate os pontos com um controle remoto que possui um dongle RTK conectado. Antes de planejar, certifique-se de que o dongle RTKosteja montado ao controle remoto.

Ligue o controle remoto.
Inieie o DJI Agras.

Clique em Planejar campo, selezione Caminhar com o RTK, e Caminhar com o Dongle RTK.

Nas configurações RTK, seleção um método para RECEIVER sinais RTK e defina as configurações correspondentes. Certifique-se de que a barra de status da aeronave na parte superior daanela esteja verde.

Caminhe com o controle remoto ao lado do limite da area de operacao e clique em Adicionar Pontos de referencia C2 em pontos de inflexao.

Caminhe até cada obstáculo* por vez e clique em Modo Obstáculo C1.

Contorne o obstáculo e clique em Adicionar Obstáculo C2 em various pontos ao redor do obstáculo.

Clique em Modelo Pontos de referencia C1 para retomar e adicional pontos de borda a area de operacao.

Caminhe ato local de cada punto de calibracao e clique em Ponto de calibracao.

Os pontos de referencia e a rota de voo podem ser editados. Ajuste as posicaoes dos pontos de referencia, configura a distancia e o espaçoamento entre linhas e ajuste a direcao da rota arrastando ouolicando no icone

Salve o planejamento de camino.
Depois de terminar o planejamento, clique em no canto superior esquerdo daanela para returnar aanela inicial.
- Se houver algoqum obstaculo na area de operacao.

- Os pontos de calibracao são usados para reticular tendencias de rota de voo causadas por desvios de posicionamento. Escolha um ou mais pontos de referencia fixos para calibracao, como um pino de metal ou marcador obvio que sera fácil de identicular para reticularizacao de tendencias ao usar a operacao.

Como executar uma operação

Leve a aeronave para um dos pontos de calibracao.

Clique em Executor的操作a naanela inicialdo aplicativo.

Clique em seleciono o campo na lista de Campos.

Clique em Editor para editor os pontos de referencia e a rota de voo novamente.

Clique em Solicitar
e(before clique)
em Reticular compensacao.

Clique em Iniciar.

Defina os parâmetros da operação e confirmé.

Defina a altera de decolagem automatica e mova o controle deslizante para decolar. A aeronave executará a operação automaticamente.

- Decole apenas em和地区 abertas e define uma altitude de decolagem automatica apropriadna de acordo com o ambiente operacional.
- Uma operação pode ser pausada ao mover ligeiramente os pinos de controle. A aeronave fara voo estacionário e registrará o punto de interrupção, e então a aeronave poderá ser controlada manualmente. Para continuar a operação, seleciono-o novamente na etiqueta Executando na lista e a aeronave retornará ao punto de interrupção automaticamente e continuará a operação. Preste atençao à segurarca da aeronave ao returnar a um考点 de interrupção.
- No modo de Operação de rota, a aeronave é capaz de contornar obstáculos, o que está desativado por padrão e pode ser ativado no aplicativo. Se a função estiverHBilitada e a aeronave detectar obstáculos, a aeronave reduzirá a velocidade e contornar os obstáculos e, em seguida, returnar à rota de voo original.
Os 用户们 podir definir a ação que a aeronave executarapós a operação ser conclusão no aplicativo.
Maisemodedooperacao
Consulte o Manual do uso do Agras T20 para obter mais informacoes sobre a Rota A-B, manual e modos de operacao. Manual Plus.
Mais funções

Retomada da的操作

Proteção de dados do sistema

Tanque Vazio
Consulte o Manual do Usuario do Agras T20 para mais informacoes.
6. Manutenção
Limpe todas as partes da aeronave e o controle remoto diariamente e imeditamente après a pulverização:
- Encha o tanque de pulverização com água limpa ou água com sabão e pulverize a águairos bicos até o tanque esvaziar. Repita a etapa mais das vezes.
- Retire o tanque de pulverização e o conector do tanque de pulverização para limpa-los. Remova o filtro do tanque de pulverização, os filros dos bicos e os bicos para limpa-los e eliminar qualquer bloqueio. Em seguida, pergulhe-os em agua limpa por 12 horas.
- Use uma lavadora de pulverização cheia deágua para limpar o corpo da aeronave e passue uma escova macia ou pano émido antes de limpar manchas deágua com um pano seco.
- Se couver poira ou liquido de pesticida nos motores e helices, limpe-os com um pano umido antes de limpar manchas de agua com um pano seco.
- Limpe a superficie e a tela do controle remoto com um pano umido limpo que tenha sido torcido com agua diariamente apso as operacoes.
Consulte a Isencao de Responsabilitad e Diretrizes de Seguranca para obter mais informacoes sobre a manutenao do produits.
Especificações
- Modelo do produit 3WWDZ-15.1B
Estrutura
Distancia diagonal entre eixos 1.883 mm
max.
Dimensoes 2.509× 2.213× 732mm (Braos e helices desdobrados)
1.795 × 1.510 × 732 ~mm (Braços desdobrados e helices dobradas)
1.100 × 570 × 732 ~mm (Braçoes hélices dobrados)
- Sistema de propulsao
Motores
Dimensoes do estator 100× 15mm
KV 75 rpm/V
Impulso max. 13,5 kg/rotor
Potência max. 2.400 W/rotor
Peso 666 g
ESCs
Corrente maxima de 40 A
funcionamento (continua)
Tensão maxima de 58,8 V (14S LiPo)
Hélices dobráveis (R3390)
Diametro x Inclinação 84 × 23 cm (33 × 9 pol.)
Peso (helice unica) 90g
- Sistema de pulverização
Tanque de pulverização
Volume Cheio: 20 litres
Carga operacional Cheio: 20kg
Bicos
Modelo XR11001VS (Padrao); XR110015VS, XR11002VS (Optional, adquirar separadamente)
Quantidade 8
Taxa maxima de pulverização XR11001VS: 3,6 l/min, XR11001VS: 4,8 l/min, XR11002VS: 6 l/min
Largura de pulverização 4 a 7 m (8 bicos a uma alta entre 2 a 3 m acima de plantações)
Tamanho da gota XR11001VS: 130 a 250 m XR110015VS: 170 a 265 m XR11002VS: 190 a 300 m (Sujeito ao ambiente operacional e a taxa de pulverização)
Medidor def
Faixa de medicacao 0,25 a 20 l/min
Erro <±2%
Liquido mensuravel Condutividade >50~ S / cm (Liquidos como agua da tomeira ou pesticidas que contem agua)
Potência do transmisso (EIRP) MIC/KCC/CE/FCC/NCC: < 20 dBm
Consumo de energia 18 W
Detecao de altitude e Seguir Faixa de detecao de altitude: 1 a 30 m terreno[1] Faixa de funcaoamento da estabilacao: 1,5 a 15 m Inclinao maxima no modo Montanhao: 35^
Condições deestrctionamento:Voar a mais de 1,5 m sobre a superficie abaixo a umavelocidade inferior a 7 m/s
Distancia de seguranca: 2,5 m (distancia entre a frente das helices e o obstaculo apsoa a frenagem)
Direção para evitar obstáculos: evita obstáculos omnidirecionalmente na direção horizontal Classificação IP IP67
- Camera FPV
FOV Horizontal: 98^ Vertical: 78^

Resolucao 1.280 x 960 30 qps
Quick Track FPV FOV: 110^ , Brilho maioro: 12 lux a 5 m de luz direta
- Parametros de voo
Frequencia de funciona CE/MIC/KCC/FCC/NCC/SRRC:2,4000a 2,4835 GHz
Potência do transmissor 2,4 GHz
OcuSync 2.0 (EIRP) SRRC/CE/MIC/KCC: 18,5 dBm, FCC/NCC: 25,5 dBm
5,8 GHz
Peso total (excluindo a bateria) 21,1 kg
Peso max. de decolagem 47,5 kg (a;nivel do mar)
Taxa max. de peso-impulso 1,70 (peso de decolagem de 47,5 kg)
Alcance de precisao em voo D-RTK habilito: Horizontal: ± 10 cm, Vertical: ± 10 cm
Frequência de funcionamento RTK: GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2, Galileo E1/E5[3]
RTK/GNSS GNSS: GPS L1, GLONASS F1, Galileo E1
Bateria Bateria de voo aprovada pela DJI (AB3-18000mAh-51,8 V)
Consumo de energia max. 8.300 W
Consumo de energia em voo 6.200 W (peso de decolagem de 47,5 kg)
estacionario
Duração do voo estacionário[4] 15 min (peso de decolagem de 27,5 kg com bateria de 18.000 mAh)
10 min (peso de decolagem de 42,6 kg com bateria de 18.000 mAh)
Angulo de inclinação max. 15°
Velocidade maxima de 7 m/s
funcionamento
Velocidade maxima de voo 10 m/s (com sinal GNSS forte)
Resistência max. ao vento 8 m/s
Altura max. de service acima do 2.000 m
nivel do mar
Temperatura de funciona 0^ a 40^
recomendada
- Controle remoto
Modelo RM500-AG
Tela Tela de 5,5 polegadas, 1.920× 1.080 1.000 cd/m
RAM 4 GB LPDDR4
ROM 32 GB + armazenamento escalável;
suporte a cartoes microSD;
Capacidade maxima: 128 GB. necessario classificacao de velocidade UHS-I Grau 3
Bateria integrada 18650 Li-ion (5.000 mAh a 7,2 V)
GNSS GPS+GLONASS
Consumo de energia 18 W
Temperatura de funciona -10a 40oC
Temperatura de corregamento 5^ a 40^
Temperatura de armazenamento -30° a 25 °C
OcuSync 2.0
Frequencia de funciona CE/MIC/KCC/FCC/NCC/SRRC:2,4000 a 2,4835 GHz
FCC/NCC/SRRC:5,725a5,850GHz
Distência max. de transmissão FCC/NCC: 5 km, SRRC/MIC/KCC/CE: 3 km (Sem obstruções, livre de interferências)
Potência do transmissor (EIRP) 2,4 GHz
Frequência deestrutura
2,4000 a 2,4835 GHz
5,150 a 5,250 GHz
5,725 a 5,850 GHz
Potência do transmissor (EIRP) 2,4 GHz
Frequência deestrutura 2,4000 a 2,4835 GHz
Potência do transmissor (EIRP) SRRC/FCC/NCC/CE/MIC/KCC: 6,5 dBm
- Bateria integiente do controle remoto
Modelo WB37-4920mAh-7,6V
Tipodebateria2S LiPo
Capacidade 4.920 mAh
Tensao 7,6 V
Energia 37,39 Wh
Temperatura de corregamento 5^ a 40^
- Carregarador com multiplas entradas para bateria intolerente
Modelo WCH2
Voltagem de entrada 17,3 a 26,2 V
Tensao e corrente de saia 8,7 V,6 A
Temperatura de funciona 5^ a 40^
- Adaptador de energia CA
Modelo A14-057N1A
Voltagem de entrada 100 a 240 V, 50 a 60 Hz
Tensão de saía 17,4 V
Potência nominal 57 W
[1] O alcance efetivo do radar varia dependendo do material, posicao, forma e outras propriedades do obstaculo.
[2] Transmissões em 5,8 GHz e 5,2 GHz são proibidas em outros paises devido às regulamentações locais. Em outros paises, a faixa de frequência de 5,2 GHz sé é permitida para uso em ambientes fechados.
[3] O suporte para Galileo estará disponible em uma data posterior.
[4]Duraçao do voo estacionario adquirida ao nivel do mar com velocidade do vento inferior a 3m / s

FacebookYouTube






- Controle remoto
- Fly Safe
- Considerações sobre voos
- Uso de pesticidas
- Como usar a T20
- Preparo da bateria de voo inteligente
- Preparo da aeronave
- 3.Preparo do controle remoto
- como carregar as baretas
- Commonarabateria externa
- como montar o dongle 4Geocan3o SIM
- Como verificar os niveis da bateria
- Ajuste das antennas
- Preparation para decolagem
- Calibracao da bussola
- Calibracao do medidor de fluxo
- Descarga de bolhas nas mangueiras
- Voo
- Decolagem
- Aterrissagem
- Operações iniciais
- Planejamento de campo
- Como executar uma operação
- Maisemodedooperacao
- Mais funções
- Manutenção
- Especificações
- - Parametros de voo
- - Controle remoto
- - Bateria integiente do controle remoto
- - Carregarador com multiplas entradas para bateria intolerente
- - Adaptador de energia CA
Marca : DJI
Modelo : Agras T20
Categoria : Drone