
Agras T10 - Drone DJI - Manual de utilização gratuito
Encontre gratuitamente o manual do aparelho Agras T10 DJI em formato PDF.
| Tipo de produto | Drone agrícola de pulverização |
| Marca | DJI |
| Modelo | Agras T10 (3WWDZ-10A) |
| Dimensões (braços e hélices desdobrados) | 1958 × 1833 × 553 mm |
| Dimensões (braços e hélices dobrados) | 600 × 665 × 580 mm |
| Peso máximo de decolagem | 24,8 kg (no nível do mar) |
| Capacidade do tanque de pulverização | 8 L (carga útil 8 kg) |
| Bateria recomendada | Bateria de Voo Inteligente T10 BAX501-9500-51.8 (9500 mAh, 51,8 V) |
| Autonomia em voo pairado | 19 min (com 16,8 kg de decolagem) / 9 min (com 24,8 kg) |
| Velocidade máxima de voo | 10 m/s (com sinal GNSS forte) |
| Velocidade máxima de operação | 7 m/s |
| Resistência máxima ao vento | 8 m/s |
| Teto prático máximo | 4 500 m acima do nível do mar |
| Alcance de transmissão do controle remoto | Até 7 km (FCC) em área aberta |
| Sistema de posicionamento | GNSS (GPS+GLONASS+BeiDou+Galileo) + D-RTK (centimétrico) |
| Sensores de detecção de obstáculos | Radar digital omnidirecional (360°) + radar orientado para cima |
| Câmeras FPV | Dianteira e traseira, resolução 1280×720, 15-30 fps |
| Índice de proteção | IP67 (aparelho e componentes principais) |
| Manutenção e limpeza | Limpeza com água após cada dia de uso; desmontagem e imersão dos bicos e peneiras |
| Temperatura de operação recomendada | 0 a 45 °C |
| Umidade recomendada em operação | < 93 % |
Perguntas frequentes - Agras T10 DJI
Perguntas dos utilizadores sobre Agras T10 DJI
0 pergunta sobre este aparelho. Responda às que conhece ou faça a sua.
Faça uma nova pergunta sobre este aparelho
Baixe as instruções para o seu Drone em formato PDF gratuitamente! Encontre o seu manual Agras T10 - DJI e retome o controlo do seu dispositivo eletrónico. Nesta página estão publicados todos os documentos necessários para a utilização do seu dispositivo. Agras T10 da marca DJI.
MANUAL DE UTILIZADOR Agras T10 DJI
Consumo eletrico 4 W
Consumo eletrico max. 3700 W
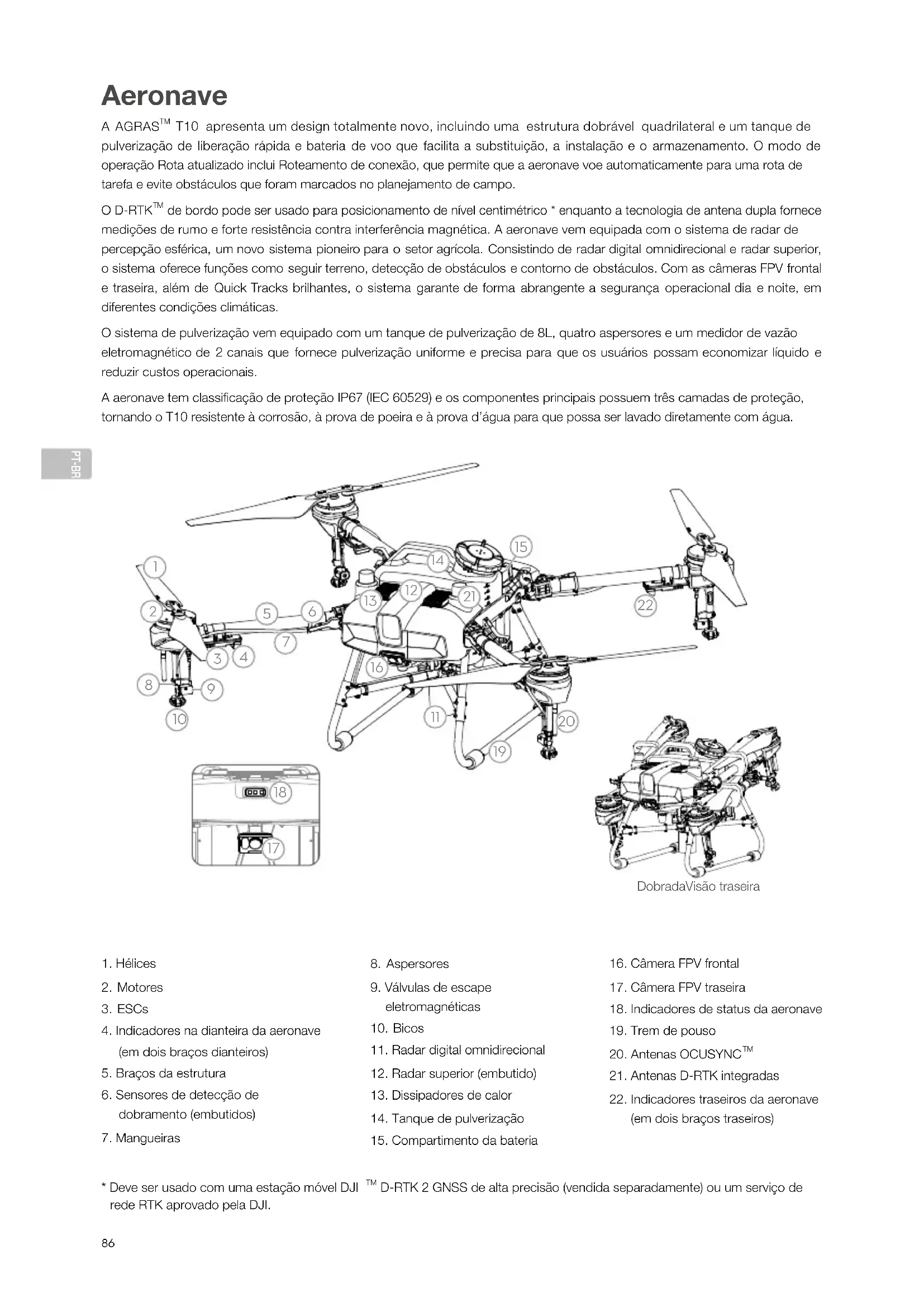
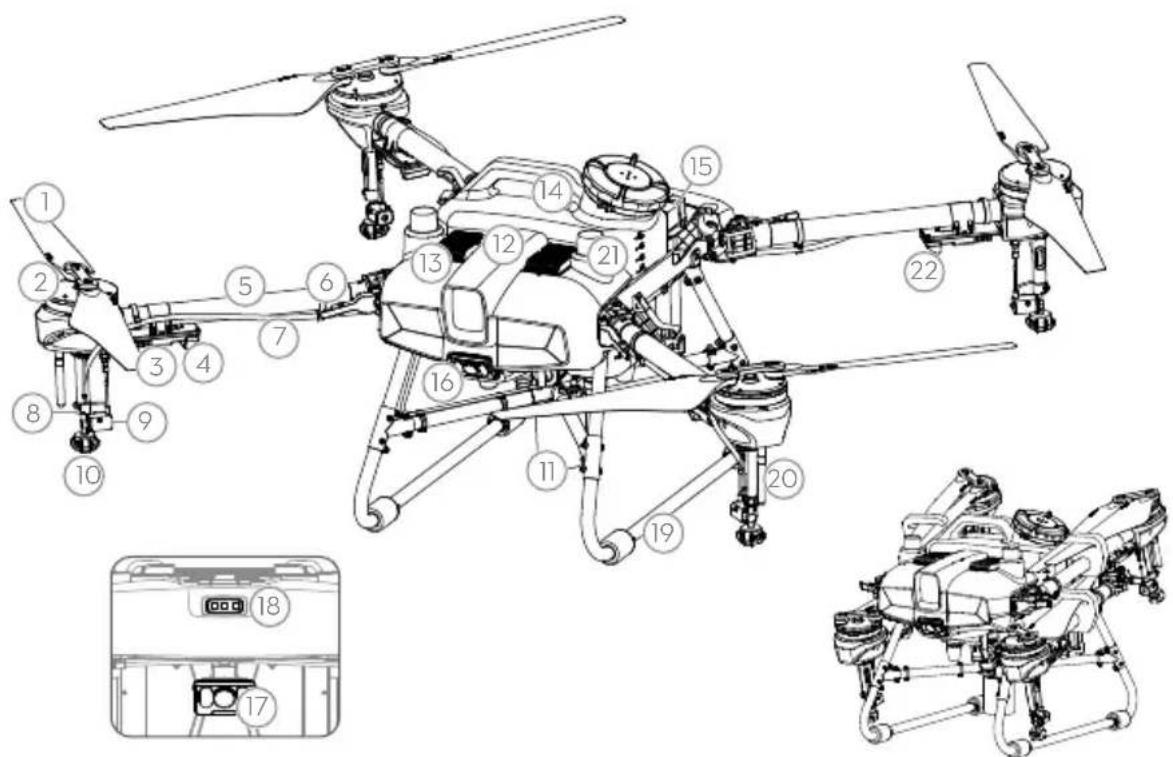
A AGRAS™ T10 presenta um design totalmente novo, incluindo uma estruturaogravel quadrilateral e um tanque de pulverização de liberação rapiida e bateria de voo que facilita a substituição, a instalação o armazenamento. O modo de operação Rota atualizado inclui Roteamento de conexão, que permit que a aeronave voe automaticamente para uma rota de tarefa e evite obstáculos que foram marcados no planejamento de campo.
O D-RTK™ de bordo pode ser uso para posicónamento de nível centimétrico * quando a Tecnologia de antenna dupla fomece medicoes de rumo e forte resistência contra interferência magnética. A aeronave vem equipada com o Sistema de radar de percepção esferica, um novoSYSTEMA pioneiro para o setor agrícola. Consistindo de radar digital omnidirectional e radar superior, o Sistema oferece funções como seguir terreno, detectao de obstáculos e contomo de obstáculos. Com as cameras FPV frontal e traseira, àslem de Quick Tracks brilhantes, o Sistema garanthe de forma abrangente a seguranca operacional dia e noite, em不同类型 condições climáticas.
O Sistema de pulverização vem equipado com um tanque de pulverização de 8L, quatro aspersores e um medidor de vazão eletromagnétrico de 2 canais que fornece pulverização uniforme e precisa para que os 用户s possam economizar liquido e reduzir custos operacionesis.
A aeronave tem classificacao de protecao IP67 (IEC 60529) e os componentes principais possuem tres camadas de protecao, tornando o T10 resistente a corrosao, a prova de poeira e a prova d'agua para que possa ser lavado diretamente com agua.
PT-BP
DobradaVisãoestraseira
- Helices
- Motores
- ESCs
- Indicadores na dienteira da aeronave (em dois braços dianteiros)
- Braços da estrutura
- Sensores de detectação de dobramento (embutidos)
-
Mangueiras
-
Aspersores
- Valvulas de escapeeletromagnéticas
- Bicos
- Radar digital omnidirectional
- Radar superior (embutido)
- Dissipadores de calor
- Tanque de pulverização
-
Compartimento da bateria
-
Camera FPV frontal
- Cärma FPV traseira
- Indicadores de status da aeronave
- Trem de pouso
- Antenas OCUSYNC™
- Antenas D-RTK integradas
-
Indicadores traseiros da aeronave (em doit braços traseiros)
-
Deve ser uso com uma estação móvil DJI™ D-RTK 2 GNSS de alta precisão (vendida separadamente) ou um服务于 rede RTK aprovado pela DJI.
Controle Remoto
O Smart Controller Enterprise uses technology to transmit DJI OcuSync Enterprise, tem distancia max. de transmissao de ate 7km^* e suporta Wi-Fi e Bluetooth. O controle remoto conta com umaanela exclusiva e brillhante de 5,5 polegadas e vem com a atualização do aplicativo DJI Agras integrado, proportionando uma experiência tranquilha e fácil de usar. As operações podem ser planejadas com precisão de niven centimetro quando o dongle RTK (vendido separamente) é conectado ao controle remoto. O modo Controle de varias aeronaves do controle remoto pode ser uso para coordenar a operationao de varias aeronaves ao mesmo tempo, permitindo que os pilotos travahem com eficiência. Tanto a bateria interna quando a externa pode ser usadas para fornecer energia ao controle remoto. O controle remoto oferece tempo de funcaoamento de ate 4 horas, tornando-o ideal para operacoes longas e de alta intensidade.
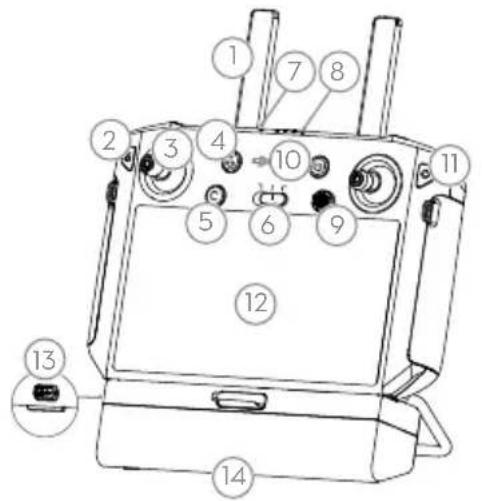
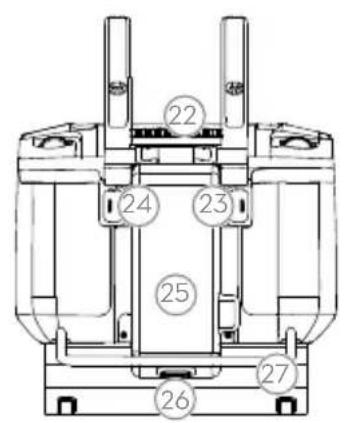
- Antenas
- Botão funcção/voltar
- Pinos de controle
- Botão RTH
- Botão C3 (personalizavel)
- Interruptor de modo de voo
- Status de LED
- LEDs de nível da bateria
- Botão 5D (personalízavel)
-
Botão liga/desiga
-
Botão Confirmar
- Tela de toque
- Entrada de carreamento USB-C
- Tampa do compartmento do dongle
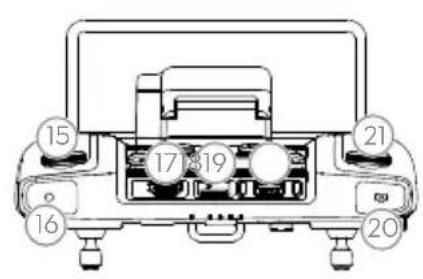
- Indicador da taxa de pulverização
- Botão de pulverização
- Entrada HDMI
- Compartimento de cartão microSD
-
Entrada USB-A
-
Botão de alteração FPV/Mapa
- Botão Reservado
- Saida de ar
- Botão C1 (personalízavel)
- Botão C2 (personalização)
- Tampa da bateria
- Botão de liberação da tampa da bateria
- Alca
A figura abaixo minha a funcao que cada movimento dos pinos de controle executa, usingo o Modo 2 como exemple. No Modo 2, o pino esquerdo é uso para controlar a altitude e a orientacao da aeronave, quando o pino direito controla os movimentos pararente, paraTRS, para a esquerda e para a direita.
* O controle remoto alcanca a sua distancia de transmissao maxima (FCC/NCC: 7 km; SRRC: 5 km; CE/KCC/MIC: 4 km) em.
area aberta sem interfencia eletromagnetica e a uma altitude de aproximamente 2,5 m (8,2 pés).
Certifique-se de aderir as leis e regulamentoacoes locais ao uso o modo Controle de varias aeronaves.
Fly Safe
É importante que você compreenda algumas diretrizes tíbas de voo, tanto para a sua proteção como para a segança das pessoas à sua volta.
- Voo em areas abertas: preste atencao a postes de energia, linhas de tensao e outros obstaculos. NAO voe acima ou proximo de aqua, pessoas ou animais.
- Mantenha o controle o tempo todo: mantenha as mês no controle remoto e mantenha o controle da aeronave quando ela estiver em voo, mesmo ao utilizear funções inteligentes, como osiros de operação Rota e Rota A-B e retorno à base (RTH) inteligente.
- Mantenha o campo de visão: mantenha a aeronave dentro do seu campo de visão (VLOS) o tempo todo, evitando Voor por vezes de prediços ou outros obstáculos que obstruem a sua visão.
- Monitore sua altitude: para a seguranga de aeronaves tripuladas e outro tipo de trafego aereo, voe em altitudes inferiores a 100m (328 pés) e de acordo com todas as leis e regulamentos locais.

Visite o site https://www.dji.com/flysafe para mais informações sobre itenscriticos de segurarca,ais como zonas GEO.

Requisitos ambientais de voo
附件
- NAO utilize a aeronave para pulverizar com ventos superiores a 18km / h
- NAO utilize a aeronave em condições climáticas adversas, como ventos superfiores a 28 km/h, chuva forte com taxa de precipitacao superior a 25 mm em 12 horas, neve ou neblina.
- NAO voe alem de 4.5 km acima do nivel do mar.
- O aplicativo DJI Agras recomendará o peso limite para cargas do tanque de forma inteligente, de acordo com o status atua da aeronave e os arredores. Não exceeda o limite de peso de cargoutil recomendado ao adcionar material ao tanque. Caso contrario, a segurarca do yoo pode ser afetada.
- Certificque-se de quehawkinsal GNSSforte equeas antenas D-RTK estejamdesobstruidas durante a operacao
A aeronave returnará automaticamente para o Ponto de origem nos casos a seguir:
Smart RTH: o usuário pressiona e mantém pressionado o botão RTH.
RTH à prova de falhas: há perda do sinal do controle remoto.*
Se houver um obstáculo em até 20 m da aeronave, a aeronave vai desacelerar, frear e fazer voo estacionário. A aeronave saira do procedimento de RTH e aquardara comandos adiconais.
Se o RTH for acontecido durante as operações de rota, a aeronave pode planejar uma rota de voo para o RTH contornar os obstáculos adiconados ao planejar um campo.
- A aeronave fara RTH ou pairar se o sinal do controre remoto for perdido. A ação pode ser definida no aplicativo. O RTH à prova de falhas somente está disponível quando RTH estiver definido.

- O desvio de obstáculos é desabilitado quando a aeronave estiver no modo Altitude (ATTI), no qual entra em situações como quando o sinal GNSS estiver frac. Observe que o desvio de obstáculos não é confiavel ao'utilizar a aeronave em ambientes em que o modulo de radar não pode operar normalmente. Cuidado adicional é necessário em tais situações.
Uso de pesticidas
- Evite ao maximo o uso de pesticidas em po, poi eles podem reduzir a vida util do systema de pulverização.
- Pesticidas são venenosos e aparem sérios ricos à segurar. Use-os aparas em estrita conformidade com as espécificações.
- Use agua limpa para misturar o pesticida e filtrre o liquido misturado antes de despejar no tanque de pulverização, evitandobloqueio do filtrro.
- O uso eficaz de pecificas depende da densidade do pesterica, da taxa de pulverizacao, distancia de pulverizacao, velocidade da aeronave, velocidade do vento, direcao do vento, temperatura e umidade. Considere todos os fatores ao usar pecificas.
- NAO comprometa a segurance de pessoas, animais ou do meio ambiente durante a operacao.

É importante que você compreenda algumas diretrizes基礎s de voo, tanto para a sua proteção como para a segurarca de pessoas à sua volta. Certifique-se de ler a Isença de Responsabilitad e Diretrizes de Segurarca..
Uso da T10
1. Preparo da bateria de voo inteligente
Utilize開放asbateriasdevoooficiaisdDJllistadasabaixo.Verifique o navel da bateriaanste do vooecarregue-a de acordo com as instruções no manual correspondente.
T10 Bateria de voo inteligente BAX501-9500-51.8 (recomendado)
T20 Bateria de voo inteligente AB3-18000mAh-51.8V
T16 Bateria de voo intelligente AB2-17500mAh-51.8V
2. Preparo da aeronave
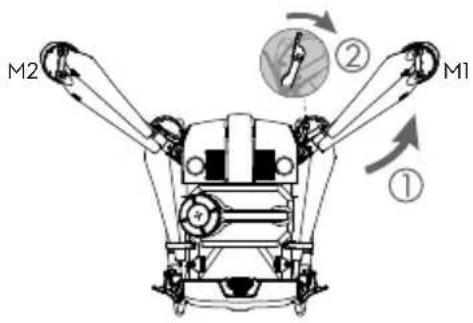
Desdobre os braços M1 e M2 e prenda as两大 travas dos braços. Evite prender os dedos.
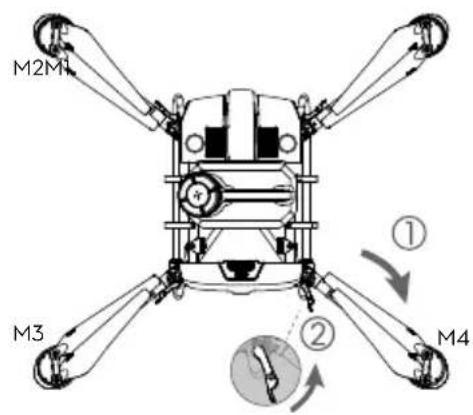
Desdobre os braços M3 e M4 e prenda as两大 travas dos braços. Evite prender os dedos.
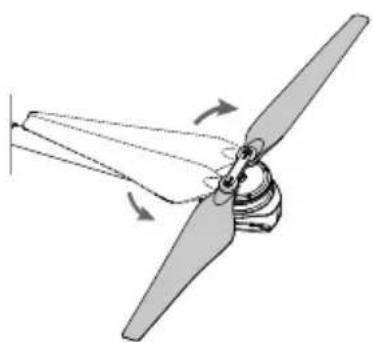
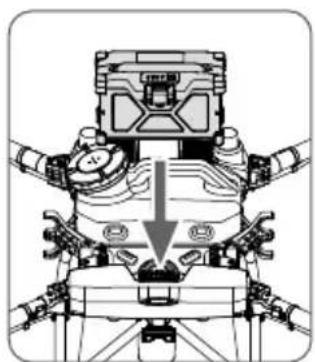
Desdobre as pás das hélices. Insira a bateria de voo intelligente na aeronave até ouvir um clique.

- Certifique-se de que a bateria esteja inserida com firmeza na aeronave. Insira ou remove a bateria somente quando a aeronave estiver desligada.
- Para remove a bateria, pressione e segure a braçadeira e levante a bateria.
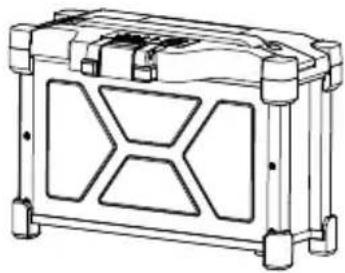
- Dobre os braços M3 e M4 e, em seguida, os braços M1 e M2, e certifique-se de que os braços sejam inseridos nas braçadeiras de armazenamento em outros os lados da aeronave. Caso contrário, os braços podem ser danificados.
3. Preparo do controle remoto
Carregue a bateria integente externa using o carregaror com multiplas entradas e o adaptador CA. Carregue a bateria interna do controle remoto using o carregaror USB e o cabo USB-C. Carregue totalmente as baterias antes de usa-las pela primarya vez.
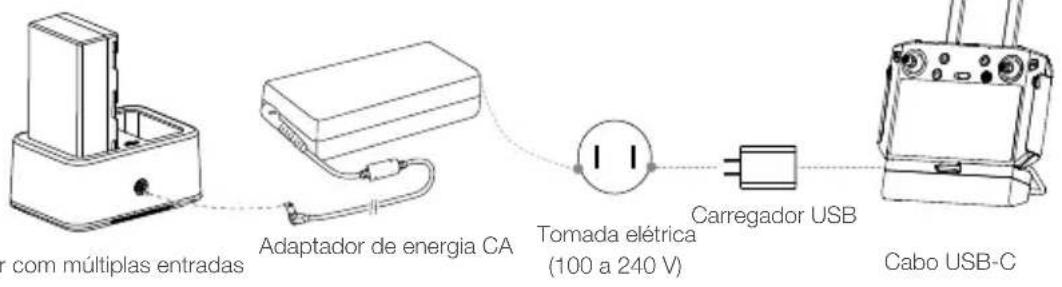
Carregador com multiplas entradas
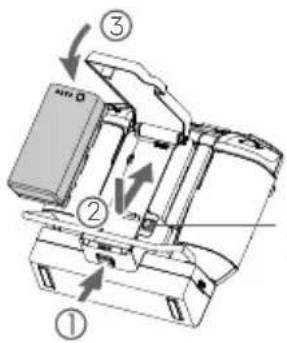
Montagem da bateria externa
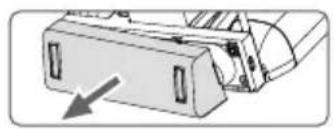
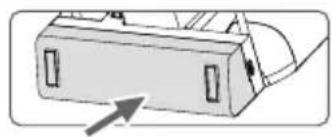
① Pressione o botão de liberação da tampa da bateria na parte traseira do controle remoto para Abrir a tampa.
② Insira a Bateria Inteligente no compartmento e empurre-a para cima.
③ Feche a tampa.

- Para remove a bateria inteligente, pressione e mantenha pressionado o botão de liberação da bateria e, em seguida, empurre a bateria para baixo.
Botao deliberacao da bateria
Montagem do dongle 4G e do cartão SIM

- Use apenas dongles aprovados pela DJI. O dongle oferece suporte a various padros de rede. Use um cartao SIM compativel com o provedor de rede molevel escolhido e selecione um plano de dados moves de acordo com o navel de uso planejado.
- O dongle e o cartão SIM permitem que o controle remoto acesse redes e plataformas especicas, como a plataforma de gerenciamento DJI Agras. Certifique-se de inserti-los corretoamente. Caso contrario, o acesso à rede não está disponível.
Certifique-se de que o cartão SIM esteja inserido no dongle. Insira o dongle na entrada USB e testo o dongle.*
Dongle
- Procedimento de teste: pressione o botão Liga/desiga no controle remoto e, em seguida, pressione novamente e mantenha-o pressionado para ligar o controle remoto. No DJI Agras, toque em e selecione Network Diagnostics (Diagnostico de rede). O dongle e o cartao SIM funcionalo corretemente se o status de todos os dispositivos na rede foramicosados em verde.
Verificacao dos niveis da bateria
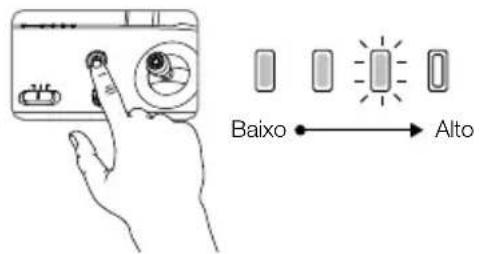

Pressione o botao liga/desliga do controle remoto uma vez para vericar o;nvel da bateria atual. Pressione uma vez, pressione novamente e mantenha-o pressionado por bois segundos para ligar ou desligar.
Pressione o botao do nivel da bateria uma vez na bateria inteligente externa para vericar o nivel da bateria.

- Ao usar a Bateria Inteligente externa,ndoné necessario assegurar que a bateria interna tenha alguma carga. Caso contrario, o controle remoto não poderá ser ligado.
Ajuste das antennas
Levante e ajuste as antenas. A potência do sinal do controle remoto é afetada pela posicao das antenas. Para obter uma conexão ideal entre o controle remoto e a aeronave, certifique-se de que o ângulo entre as antenas e a parte traseira do controle remoto sera de 80^ ou 180^ .
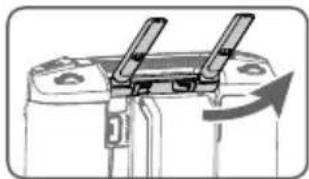
Tente fazer a aeronave dentro da faixa de transmissao ideal. Se o sinal estiver frac, ajuste as antenas ou voe a aeronave mais proximo.
Zona de transmissao ideal


- Evite usar dispositivos sem fio que usem as mesmas bandas de frequência que o controle remoto.
- Se o dongle RTK for uso para planejamento RTK, o[móulo]ve ser desconectado do controle remoto apso o planejamento ser concluso. Caso contrario, isso afetar o desempenho de comunicação do controle remoto.
4. Preparo para decolagem
A. Coloque a aeronave em terreno plano e aberto, com a parte traseira da aeronave voltada para você.
B. Certificque-se de que as hérices estejam presas com segurarca, que não haja objetos estranhos dentro ou sobre os motores e as hérices, que as pás e os braços da hélice estejam desdobrados e as travas dos braços estejam apertadas com firmeza.
C. Certifique-se de que o tanque de pulverização e a bateria de você esteam colocados com firmeza.
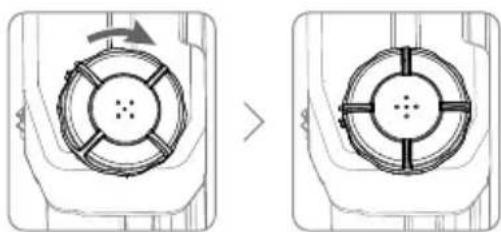
D. Despeje liquido no tanque de pulverização e aperte a tampa. Certifique-se de que as quatre linhas da capa estejam alinhadas na direção horizontal ou vertical.
E. Ligue o controle remoto, certifique-se de que o aplicativo DJI Agras esteja aberto e, em seguida, ligue a aeronave.

- Ao usoPGA primeira vez, ative a aeronave usingo aplicativo DJI Agras. Uma conta DJI e conexao a internet sao necessarias.
Calibracao da bussola
Quando o aplicativo avisar que calibracao da bussola e necessaria, toque em , depuis em e deslize para baixo. Selecione Advanced Settings (Configurações avançadas) e, em seguida, UMI e Compass Calibration (Calibracao da bussola). Toque em Calibration (Calibracao) em Compass Calibration (Calibracao da bussola) e siga as instruções naanela.
Descargando ar preso nas mangueiras
A T10 tem uma funcao de descarga automatica de ar preso. Quando for necessario descarregar o ar preso, pressione e mantenha pressionado o botao de pulverização por bois segundos. A aeronave descarregará automaticamente até que o ar preso sera totalmente descarregado.
Calibracao do medidor de fluxo
Certifique-se de calibrar o medidor de fluxo antes de uso-lo pela primarya vez. Caso contrario, o desempenho de pulverização pode ser afetado negativamente.
A. Preparativos
① Encha o tanque de pulverização com aproximadamente 2litros deágua.
② Use a funcão automática de descarga de ar preso para descarregar o ar preso. Os sistemas podem descarregar o ar preso manualmente. Pressione o botão de pulverização para pulverizar o ar preso e pressione o botão novamente quando todo o ar preso for descarregado.
B. Calibracao
① No aplicativo, toque em Execute Task (Executor tarefa) para entrada em Operation View (Visualização de operação). Toque em earethospa,arraste para cima e toque em Calibration a direita da sequao do medidor de fluxo.
Toque em Start Calibration (Iniciar calibracao) para fazer. A calibracao sera conclusa apso 25 segundos e os resultados seront exibidos no aplicativo.
- Os pessoas podem prosseguir assim que a calibração for concuía com succès.
- Se a calibracao falhar, toque em "?" para visualizar e resolver o problema. Calibre novamente assim que o problema for resolvesido.
5. Voo
No aplicativo, entre em Operation View. Certificque-se de que Hajasinal GNSS forte e que a barra de status do systema indique "Manual Route (GNSS)" (Rota manual) ou "Manual Route (RTK)".* Caso contrario, a aeronave não pode decolar.
Recomenda-se Criar um plano para um campo e selecionar uma operacao antes da decolagem para que a aeronave decole automaticamente e execute uma operacao. Para obter mais informacoes, consulte a segao Inicio das operacoes. Em outros cenarios, decole e pouse manualmente.
Decolagem
Execute um Comando combinado do joystick (CSC) e empurre o pino do acelerador para decolar.


OU




Pino do accelerator (stick esquerdo no Modo 2)
Pouso
Para pousar, puxe o pino do acelerador para baixo até que a aeronave toque no solo. Ha dois métodos para parar os motores.
Méto 1: quando a aeronave tiver pousado, pressione e segure o pino do acelerador. Os motores param antes qués segundos.
Méto 2: quando a aeronave pousar, pressione o pino do acelerador e execute o mesmo CSC que foi uso para dar partida nos motores. Solte eles os pinos assim que os motores pararem.
- O positionalamento RTK é recomendado. No aplicativo, não até Operation View, toque em , quando em RTK para habiliar o posicionamento RTK da aeronave e selecione um método para receber sinais RTK.






Método 1 Método 2

- Hélices em movimento podem ser perigosas. Fique longe dos motores e das hélices quando estiverem girando.
NÃO ligue os motores em和地区 confinadas ou quando houver pessoas proxies. - Mantenha o controle do controle remoto quando os motores estiverem funciona.
- NÃO pare os motores durante o voo, a menos que seja uma situação de emergência e fazê-lo reduzirá o risco de danos ou ferimentos.
- Recomenda-se usar o Método 1 para parar os motores. Ao utilizes o Método 2 para interromper os motores, a aeronave pode capotar se não estiver completeness em solo. Use o Método 2 com cautela.
- Após o pouso, desligue a aeronave antes de desligar o controle remoto.
Inicio das operacoes
Depois que a area de operacao e os obstaculos foram medidos e as configurações foram feitas, o aplicativo DJI Agras usa umsystema de planejamento de operacao intelligente integlente integrado para produzir um rota de voo com base na entrada do usuario. Os sistemas podem solicitar uma operacao antes planejar um campo. A aeronave iniciar a operacao automaticamente e seguir a rota de voo planejada.
Em cenarios com terreno complicado, o Phantom 4 RTKe o DJI TERRA TM poder ser usados para planejar rotas de voo e importar as rotas ao aplicativo DJI Agras para operacao. Consulte o Manual do Usoario do Agras T10 para mais informacoes.
Planejamento de campo
O aplicativo DJI Agras ofere suporte ao planejamento de rotas de voo, ao pilotar a aeronave ate pontos de referencia, obstaculos e pontos de calibracao, ou ao caminhar por esses pontos carregando um controle remoto, um controle remoto com um dongle RTK ou um dispositivo RTK. A rota a seguir foie planejada caminhando ate os pontos com um controle remoto.
Quando o dongle RTK (vendido separadamente) é connectado à porta USB-A no controle remoto, "Walk with RTK" pode ser的选择ado durante o planejamento de campo para planejar operações com precisão centimétrica. As etapas restantes são as vezes que as instruções para caminhar com um controle remoto.

Ligue o controle remoto.
Incicie o DJI Agras.

Toque em Plan Field (Planejar Campo), selecione Walk with RC.

Espere até que o sinal GNSS sera forte. A precisão de posicionamento pode variar em +/- 2 metros.

Caminhe com o controle remoto ao lado do limite da area de operacao e toque em Add Waypoint C2 (Adicionar Pontos de referencia C2) em pontos de inflexao.

Caminhe até cada obstáculo por vez e toque em Obstacle Mode C1 (Modo Obstáculo C1).

Contorne o obstáculo e toque em Add Obstacle C2 (Adicionar Obstáculo C2) em various pontos ao redor do obstáculo.

Toque em Waypoint C1 para returnar e adcionar pontos de borda a area de operacao.

Toque em Field Editing (Edicao de Campo) para usar a mira para adiconar pontos, configurar a distancia e o espaçoamento de rota e ajuste a direcao de rota tocando ou arrastando o icono

Salve o planejamento de campo.
- Quaisquer obstáculos dentro ou fora da area de operação pode ser marcados.
Execuçao de uma operacao

Ligue o controlememo t e a aeronave.

Toque em Execute Task (Executor tarefa) na tela inicial do aplicativo.

Toque em e seleciono o Campo na lista de Campos.

Toque em Edit (Editor) para editor os pontos de referencia e a rota de voo novamente.

defina os parâmetros da operação e confirmé.

Toque em Start (Iniciar). Toque em Use (Use), de Roteamento de conexão no aplicativo e mova o controle deslizante para decolar. A aeronave executará a operação automaticamente.
图

- Decole apenas em和地区 abertas e define uma altitude de decolagem automatica apropriadna de acordo com o ambiente operacional.
- Uma operação pode ser pausada ao mover ligeiramente os pinos de controle. A aeronave fara voo estacionário e registrar o punto de interrupção. Depois disso, a aeronave poderá ser controlada manually. ParaContinuar a operação, seleciona-a novamente nas etiquetas em execuçao na lista . Aeronave returnar ao punto de interrupção automaticamente e retomar a operação. Preste atenço à segurar da aeronave ao returnar a um考点de interrupção.
- No modo de operação Rota, a aeronave é capaz de contornar obstáculos, o que está desativado por padrão e pode ser"Ativado no aplicativo. Se a função estiverHBilitada e a aeronave detectar obstáculos, a aeronave reduzirávelocidade econtornarosobstáculose, em seguida,returnarà rota de voo original.
- Os 用户们都可以随时访问或使用该网站的任何内容。
Maisemodedooperacaoefuncoes
Consulte o Manual do Usuario Agras T10 para obter mais informacoes sobre a Rota A-B, Manual e Modos de operacao. Manual Plus, alem de como usar funcaoes como Roteamento de conexao, Retomada da operationo, Protecao de dados do systema e Esvaziar tanque.
6. Manutenção
Limpe das as partes da aeronave e o controre remoto no final de cada dia de pulverização, depuis que a aeronave returnar à temperatura normal. Não limpe a aeronave imeditamente antes a conclusão das operações.
A. Encha o tanque de pulverização com água limpa ou água com sabão e pulverize a água pelos bicos até o tanque esvaziar. Repita a etapa mais两大 vezes.
B. Retire o tanque de pulverização e o conector do tanque de pulverização para limpa-los. Remova o filtro do tanque de pulverização, os filtros dos bicos e os bicos para limpa-los e eliminar qualquer bloqueio. Em seguida, mergerhe-os em água limpa por 12 horas.
C. Certifique-se de que a estrutura da aeronave esteja completeness conectada para que possa ser lavada diretamente com agua. Recomenda-se o uso de uma lavadora em spray cheia de agua para limpar o corpo da aeronave e com uma escova macia ou pano umido antes de removei os residuos de agua com um pano seco.
D. Se houver poeira ou liquido de pesticida nos motores, helices ou dissipadores de calor, limpe-o com um pano umido antes de remover os residuos de agua restantes com um pano seco.
E. Limpe a superficie e a tela do controle remoto com um pano umido limpo que tenha sido torcido com agua.
Consulte a lsença de Responsabilitá de Diretrizes de Segança para obter mais informações sobre a manutençao do produits.

Baixe o manual do usuario da Agras T10 para obter mais informations: https://www.dji.com/t10/downloads
Especificações
- Modelo do produits 3WWDZ-10A
Estrutura
Distancia diagonal entre eixos max. 1.480 mm
Dimensoes 1.958× 1.833× 553mm (braço e hélices desdobrados)
1.232 × 1.112 × 553 ~mm (braços desdobrados e helices dobradas)
600 × 665 × 580 ~mm (braços e hélices dobrados)
- Sistema de propulsão
Motores
Potência max. 2.500 com rotor
ESCs
Corrente maxima de 32A
Hélices dobráveis (R3390)
Diâmetro × inclinação 33× 90 polegadas
- Sistema de pulverização
Tanque de pulverização
Volume Totalmente carregado: 8 litres
Carga operacional Totalmente carregado: 8kg
Bicos
Modelo XR11001VS (padão), XR110015VS, XR11002VS (optional, adquirir separadamente)
Quantidade 4
Taxa maxima de pulverização XR11001VS: 1,8 l/min, XR11001VS: 2,4 l/min, XR11002VS: 3 l/min
Largura da pulverização 3 a 5,5 m (4 bicos a uma alta entre 1,5 a 3 m acima de cultivos)
Tamanho da gota XR11001VS: 130 a 250~ m , XR110015VS: 170 a 265~ m , XR11002VS:190
a 300 m (sujeto ao ambiente operacional e a taxa de pulverização)
Medidor de fluxo
Faixa de medicacao 0,25 a 20 l/min
Err < ± 2%
Liquido mensuravel Condutividade >50~ S / cm (liquidos como agua da tomeira ou pesticidas que contem agua)
Frequências deestrutura SRRC/NCC/FCC/MIC/KCC/CE:24,05a 24,25GHz
Consumo de energia 12 W
Potência de transmissão (EIRP) SRRC: ≤13 dBm, NCC/MIC/KCC/CE/FCC: ≤20 dBm
Detecao de altitude e Seguir Faixa de detecao de altitude: 1 a 30 m
terreno Faixa de functiimento da estabilização: 1,5 Inclinação Tmaxima no modo Montanhá: 35^
Detecao de obstaculos Alcance de detecao de obstaculos: 1,5 a 30 m
FOV: Horizontal: 360^ , Vertical: ± 15^
Condições deestrctionamento:voar a mais de 1,5 m sobre o obstáculo a umavelocidade inferior a7m/s
Distência do limite de segurarça: 2,5 m (distência entre a fronte das helices e o obstáculo après a frenagem)
Direção de desvio de obstáculo: desvio de obstáculo omnidirecional na direção horizontal
Classificacao IP IP67
- Radar superior
Modelo RD2414U
Frequencias de funciona SRRC/NCC/FCC/MIC/KCC/CE: 24,05 a 24,25 GHz
Consumo de energia 4 W
Potência de transmissão (EIRP) SRRC: ≤13 dBm, NCC/MIC/KCC/CE/FCC: ≤20 dBm
Detecção de obstáculos
Alcance de detectação de obstáculos: 1,5 a 15 m
FOV: 80^
Condições deestrutura:disponível durante a decolagem,pouso esubida quando um obstáculo estiver a mais de 1,5 m acima da aeronave.
Distência do limite de segurança: 2 m (distência entre o punto mais alto da aeronave e o punto mais baixo do obstáculo après a frenagem)
Direção para fazer obstáculos: para cima
Classificacao IP IP67
- Cameras FPV
Quick Tracks FPV FOV: 120°, Brilho máximo: 13,2 lux a 5 m de luz direta
- Parâmetros de voo
Frequencies de funciona SRRC/NCC/FCC/CE/MIC/KCC: 2,4000 a 2,4835 GHz
Potência de transmissão (EIRP) 2,4 GHz
Peso max. de decolagem 24,8 kg (a;nível do mar)
Alcance de precisao em voo
D-RTK habilido: Horizontal: ± 10 cm, Vertical: ± 10 cm
Frequência deestrutura
RTK: GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2, Galileo E1/E5
RTK/GNSS
GNSS: GPS L1, GLONASS F1, Galileo E1
BATERIA Bateria de voo aprovada pe
ela DJI (BAX501-9500-51.8, AB3-18000mAh
Duração do voo estacionário[3]
19 min (peso de decolagem de 16,8 kg com bateria de 9.500 mAh)
9 min (peso de decolagem de 24,8 kg com bateria de 9.500 mAh)
Ángulo de inclinação max. 15°
Velocidade maxima de
7 m/s
funccionamento
Velocidade maxima de voo 10 m/s (com sinal GNSS forte)
Resistência max. ao vento 8 m/s
Altura max. de service acima do 4.500 m
nivel do mar
Umicidade de operacao
<93%
recomendada
Temperatura de operacao
0^ a 45^ C
recomendada
- Controle remoto
Modelo RM500-ENT
Tela Tela de 5,5 polegadas, 1.920× 1.080 1.000 cd/m², Sistema Android
RAM 4GB
Bateria integrada 18650 Li-ion (5.000 mAh a 7,2 V)
GNSS GPS+GLONASS
Consumo de energia 18 W
Temperatura de funciona 0^ a 45^
Temperatura do ambiente de 5^ a 40^
carregamento
Temperatura de armazenamento -30° a 60 °C (Armazenamento por no máximo um mês com bateria embutida com energia de 40% a 60%)
OcuSync Enterprise
Frequências deestrutura SRRC/NCC/FCC/CE/MIC/KCC:2,4000a 2,4835 GHz
(sem obstruções, livre de
interferências)
Potência de transmissão (EIRP) 2,4 GHz
Potência de transmissão (EIRP) 2,4 GHz
Potência de transmissão (EIRP) SRRC/NCC/FCC/CE/MIC/KCC: 6,5 dBm
- Bateria integente do controle remoto
Modelo WB37-4920mAh-7.6V
Tipodebateria2S LiPo
Capacidade 4.920 mAh
Tensao 7,6V
Energia 37,39 Wh
Temperatura do ambiente de 5^ a 40^
carregamento
- Carregarador com multiplas entradas para bateria intolerente
Modelo WCH2
Tensão de entrada 17,3 a 26,2 V
Tensão e corrente de saía 8,7 V, 6 A
Temperatura de funciona 5^ a 40^
Adaptador de energia CA
Modelo A14-057N1A
Tensão de entrada 100 a 240 V, 50 a 60 Hz
Tensão de saída 17,4 V
Potência nominal 57 W
[1] O alcance efetivo do radar varia dependendo do material, posicao, forma e outras propriedades do obstaculo.
[2] Frequências 5,8 e 5,2 GHz são proibidas em outros paises devido às regulamenteções locais. Em outros paises, a faixa de frequência de 5,2 GHz sé permitida para uso em ambientes fechados.
[3] Duraçao do voo estacionario adquirida no nivel do mar com velocidade do vento inferior a 3 m/s e temperatura de 25^ Apenas para referencia. Os dados podem variar dependendo do ambiente. Os resultados reais devem seguir os testes.

WE ARE HERE FOR YOU

DJI Support





- Controle Remoto
- Fly Safe
- Requisitos ambientais de voo
- Uso de pesticidas
- Uso da T10
- Preparo da bateria de voo inteligente
- Preparo da aeronave
- Preparo do controle remoto
- Montagem da bateria externa
- Montagem do dongle 4G e do cartão SIM
- Verificacao dos niveis da bateria
- Ajuste das antennas
- Preparo para decolagem
- Calibracao da bussola
- Descargando ar preso nas mangueiras
- Calibracao do medidor de fluxo
- Preparativos
- Calibracao
- Voo
- Decolagem
- Pouso
- Inicio das operacoes
- Planejamento de campo
- Execuçao de uma operacao
- Maisemodedooperacaoefuncoes
- Manutenção
- Especificações
- Estrutura
- - Sistema de propulsão
- - Sistema de pulverização
- Medidor de fluxo
- - Radar superior
- - Cameras FPV
- - Parâmetros de voo
- - Controle remoto
- OcuSync Enterprise
- - Bateria integente do controle remoto
- - Carregarador com multiplas entradas para bateria intolerente
- Adaptador de energia CA
- WE ARE HERE FOR YOU
Marca : DJI
Modelo : Agras T10
Categoria : Drone