
Agras T10 - Dron DJI - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato Agras T10 DJI en formato PDF.
| Tipo de producto | Dron agrícola de pulverización |
| Marca | DJI |
| Modelo | Agras T10 (3WWDZ-10A) |
| Dimensiones (brazos y hélices desplegados) | 1958 × 1833 × 553 mm |
| Dimensiones (brazos y hélices plegados) | 600 × 665 × 580 mm |
| Peso máximo al despegue | 24,8 kg (a nivel del mar) |
| Capacidad del depósito de pulverización | 8 L (carga útil 8 kg) |
| Batería recomendada | Batería de Vuelo Inteligente T10 BAX501-9500-51.8 (9500 mAh, 51,8 V) |
| Autonomía en vuelo estacionario | 19 min (con 16,8 kg al despegue) / 9 min (con 24,8 kg) |
| Velocidad de vuelo máxima | 10 m/s (con señal GNSS fuerte) |
| Velocidad de funcionamiento máxima | 7 m/s |
| Resistencia al viento máxima | 8 m/s |
| Techo práctico máximo | 4 500 m sobre el nivel del mar |
| Alcance de transmisión del radiocontrol | Hasta 7 km (FCC) en zona despejada |
| Sistema de posicionamiento | GNSS (GPS+GLONASS+BeiDou+Galileo) + D-RTK (centimétrico) |
| Sensores de detección de obstáculos | Radar digital omnidireccional (360°) + radar orientado hacia arriba |
| Cámaras FPV | Delantera y trasera, resolución 1280×720, 15-30 fps |
| Índice de protección | IP67 (equipo y componentes principales) |
| Mantenimiento y limpieza | Limpieza con agua después de cada jornada de uso; desmontaje y remojo de las boquillas y tamices |
| Temperatura de funcionamiento recomendada | 0 a 45 °C |
| Humedad recomendada en funcionamiento | < 93 % |
Preguntas frecuentes - Agras T10 DJI
Preguntas de los usuarios sobre Agras T10 DJI
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Dron en formato PDF gratis! Encuentra tus instrucciones Agras T10 - DJI y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. Agras T10 de la marca DJI.
MANUAL DE USUARIO Agras T10 DJI
Guia de Inicio Rápido
v1.2
Contents
EN Quick Start Guide 2
JP イイックスentaトガイド 14
TH 26
VI Huóng dān Khoi dong Nanh 38
DE Kurzanleitung 50
ES Guia de inicio=rápido 62
FR Guide de démarrage rapide 74
PT-BR Guia de Inicio Rápido 86
Aircraft
Pin thong minh cua bó dieu khién tu xa
Model WB37-4920mAh-7.6V
Loai pin 2S LiPo
Cóng suát 4920mAh
Dien ap 7,6V
Nang Iuong 37,39Wh
Nhiét do mi truong sac 5^ den 40^ (41^ den 104^)
Coc sac Pin Thong minh
Model WCH2
Dien ap Dau vao 17,3 - 26,2V
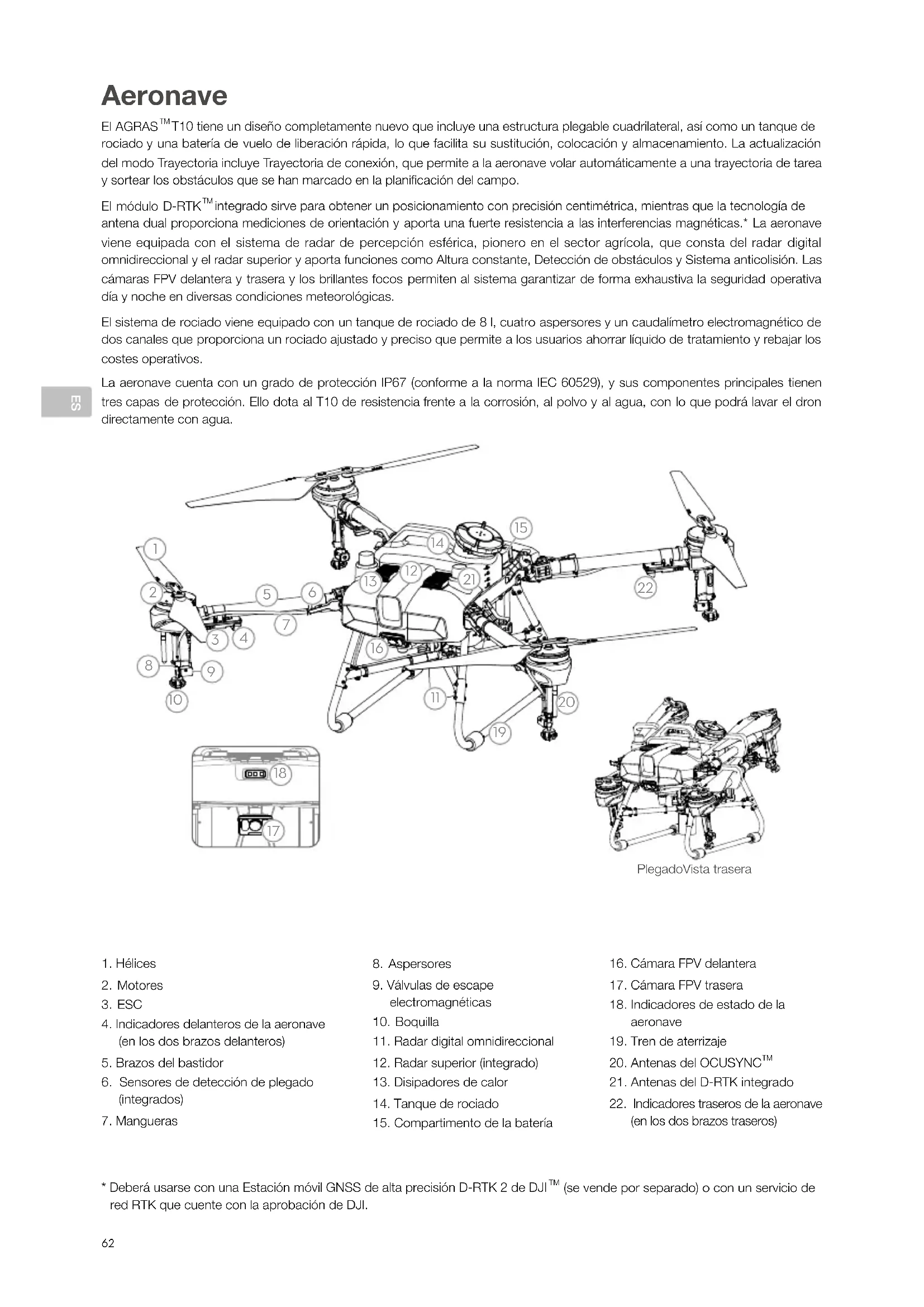
El AGRAS™T10 tiene un Diseño Completely nuevo que incluye una estrutura plegable cuadrilateral, como un tanque de rociado y una batería de vuelo de liberación rápida, lo que Facilita su sustitución, colocacion y almacenamento. Laactualizacion del modo Trayectoria incluye Trayectoria de conexión, que permite a la aeronave volar automatistically a una trayectoria de tarea y sortear los obstaculos que se han marcado en la planificacion del camino.
El modulo D-RTK™ integrado serve para Obtener un positionalamento con precision centimétrica, cuando que la Tecnología de antenna dual proportionsa medicaciones de orientación y aporta una fuerte resistencia a las interferencias magnéticas. La aeronaveiene equipada con el sistema de radar de percepción esferica, pionero en el sector agrícola, que consta del radar digital omnidireccional y el radar superior y aporta functions como Altura constante, Deteción de obstáculos y Sistema anticolisión. Las cármas FPV delantera y trasera y los brillantes focos permiten al sistemas garantizar de forma exhaustiva la seguridad operativa día y noche en diversas conditiones meteorológicas.
Elistema de rociadoiene equipado con un tanque de rociado de 81, quatre aspersores y un caudalmetro electromagnetico de dos canales que proportiona un rociado ajustado y preciseo que permite a los usuario ahorrar liquido de tratamente yrebajar los costes operativos.
La aeronave cuenta con un grado de proteccion IP67 (conforme a la norma IEC 60529), y sus componentes principalesienen tres capas de proteccion. Ildo dota al T10 de resistencia frete a la corrosion, al polvo y al agua, con lo que podra lavar el dron directamente con agua.
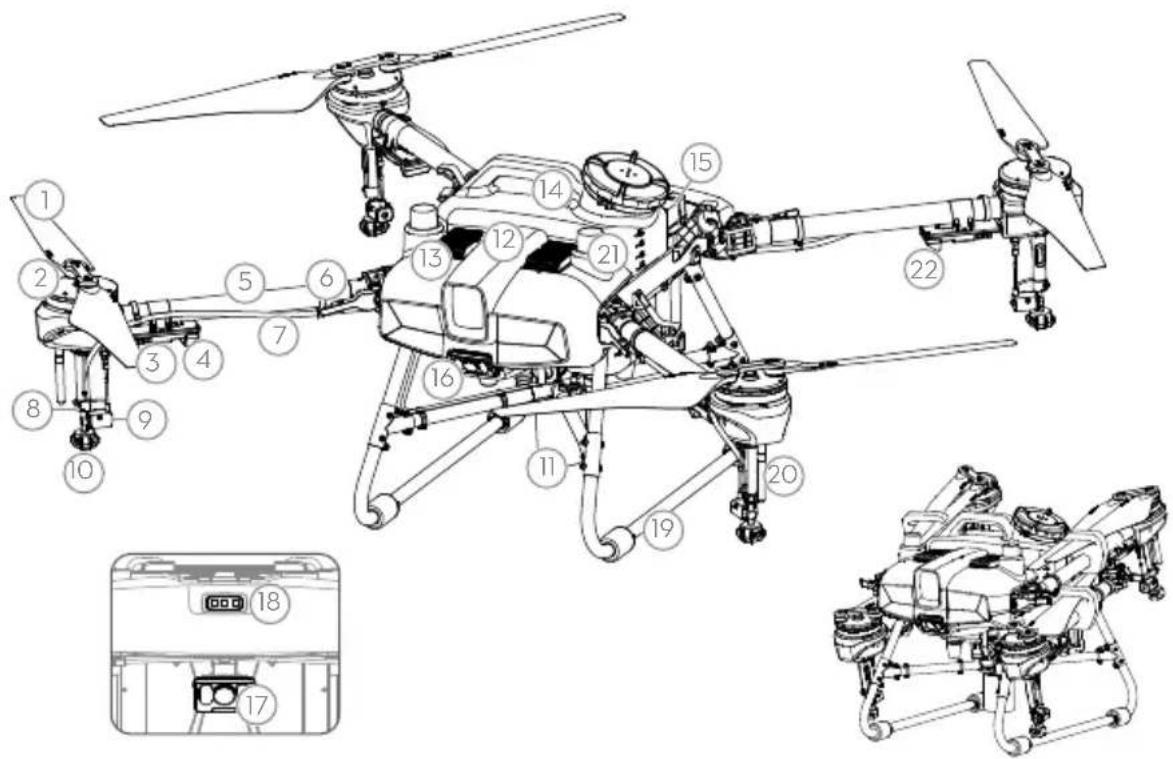
PlegadoVistabrasera
- Helices
- Motores
- ESC
- Indicadores delanteros de la aeronave (en los dos brazos delanteros)
- Brazos del bastidor
- Sensores de detectación de plegado (integrados)
-
Mangueras
-
Aspersores
- Valvulas de escape electromagnéticas
- Boquilla
- Radar digital omnidirectional
- Radar superior (integrado)
- Disipadores de calor
- Tanque de rociado
-
Compartimento de la bateria
-
Camara FPV delantera
- Camara FPV trasera
- Indicadores de estado de la aeronave
- Tren de aterrizaje
- Antenas del OCUSYNC™
- Antenas del D-RTK integrado
- Indicadores traseros de la aeronave (en los dos brazos traseros)
Controlremoto
El control remoto Smart Controller Enterprise emplee a technologia de transmisio DJOcuSync Enterprise,iene un alcance de transmisio de hasta 7km^ y admite Wi-Fi y Bluetooth. Ademas, conta con una pantalla luminosa de 5.5 pulgadas e integra la actualiza aplicacion DJI Agras, con lo que技术支持 a experiencia agil y sencilla. Se podran planificar operaciones con precision centimetrica si se conecta el adaptador RTK (se vendte por separado) al control remoto. El mode de control multiaeronave del control remoto sirve para coordinar el pilotaje de varias aeronaves a la vez, lo que permite a los pilotos travajar de forma eficaz. Para alimentar el control remoto se pueda utilizear tanto la bateria integrada como una bateria externa. El tiempo de configuracion maximum del control remoto es de quatre horas, lo que convierte a este dispositivo en option ideal para operaciones largas y de alta intensidad.
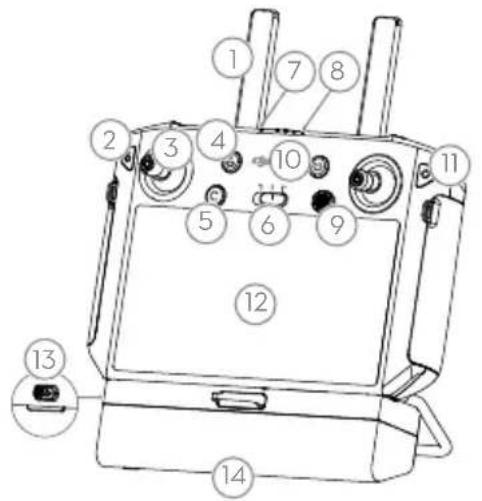
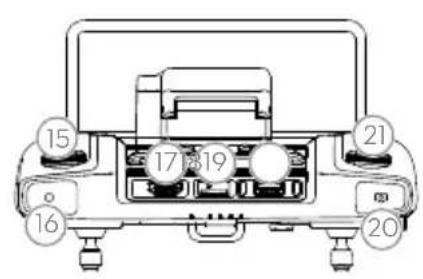

- Antenas
- Botón de retroceso/de funciona
- Palancas de control
- Botón RPO
- Botón C3 (personalizable)
- Selector de modo de vuelo
- Led de estado
- Ledes de niveau de bateria
- Botón 5D (personalizable)
-
Botón de encendido
-
Botón de confirmación
- Pantalla tactil
- Puerto de energia USB-C
- Cubierta del compartmento del adaptordo
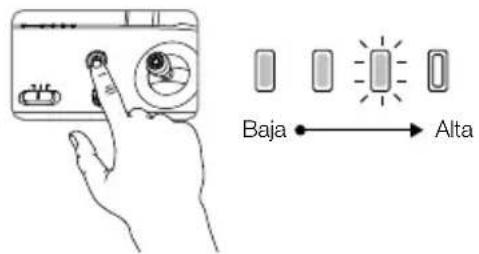
- Dial de velocidad de rociado
- Botón de rociado
- Puerto HDMI
- Ranura para tarjeta microSD
-
Puerto USB-A
-
Botón de cambio entre FPV y.mapa
- Dial reservado
- Rejilla de ventilación
- Botón C1 (personalizable)
- Botón C2 (personalizable)
- Tapa de la bateria
- Botón de liberación de la tapa de la bateria
- Asa
En lasuma imagen se muestra la func n de cada uno de los movimientos de las palancas de control,utilizing el Modo 2 como ejemplo. En el Modo 2, la palanca izquierda controla la altitud y la orientacion de la aeronave,)millas que la derecha controla los movimientos hacia adelante, aftas, izquierda y derecha.

Paladina Stiofelegirstica derecha Aipia



Girar a Buxuieitia


Hapigwente
Bacitaxeltrs


Izquiered
Bigtcha
- El control remoto puede lograr susolestores de alcance de transmisión -FCC/NCC: 7 km (4.35 mi); SRRC: 5 km (3.11 mi); CE/KCC/MIC: 4 km (2.49 mi)—en zonas abiertas sin interferencias electromagnéticas y a una altitude 2.5 m (8.2 ft) aproximadamente.
Asegürese de cumplir la legislación y normativas locales al utilizar el modo de control multiaeronave.
Vuelo seguro
Es importante conocer algumas directrices BASicas de vuelo, tanto por su seguidad como por la de quienes le rodean.
- Vuelo en zonas abiertas. Preste atencion a los postes de red electrica, las lineas de tension y ○ros obstaculos. Evite volar por encima o en las cercanias de agua, personas o animales.
- Mantenga el control en todo momento. No aparece las manos del control remoto y mantenga el control de la aeronave durante el vuelo, incluo cuando seutilicenfunidadesinteligentes,como los modos defuncionamento Trayectoriay TrayectoriaA-B,y Regreso al punto de origen intolerente.
- Mantenga el alcance visual con la aeronave. Mantenga la aeronave bajo su alcance visual (VLOS, por sus siglas en ingles) en todo momento y evite volar detrás de edificios u otros obstáculos que pueda bloquear la visión de esta.
- Controle la altitud de su aeronave. Por la seguidad de las aeronaves tripuladas y el resto del trafico aereo, vuele a altitudes inferiores a 100 m (328 ft) y de acuerdo con toda la legislacion y normativas naciales.

Visite https://www.dji.com/flysafe si desea Obtener mas informacion acerca de functions criticas de seguridad como las zonas GEO.

m
Requisitos del entorno de vuelo
- NO utilise la aeronave para rociar con vientos que exceedan los 18 km/h (11 mph).
- NO utilise la aeronave en conditiones climatologicas adversas, como vientos que superen los 28 km/h (17 mph), lluvias intensas superiores a 25 mm (0.98 in) en 12 horas,ieve o niebla.
- NO vuede a mas de 4.5 km (14 763 ft) sobre el nivel del mar.
- La aplicacion DJI Agras suele recomendar inteligentamente el limite de peso de la carga util del tanque en funcion del estado y del entorno actuales de la aeronave. No supere el limite de peso de la carga util recomendado al anadir material al tanque; de lo contrario, la segudad del vuelo se podria ver afectada.
- Asegürese de que, durante el pilotaje, la SERIAL GNSS sea intensa y de que las antenas del D-RTK esten libres de obstrucciones.
Regreso al punto de origen (RPO)
La aeronave bajo el punto de origen automatistically en las siguientes situaciones.
RPO integlente: se mantiene presionado el botón RPO.
RPO de seguridad: se pierde la seals del control remoto.
Si aparece un obstaculo en un radio de 20 m con respecto a la aeronave, esta desacelera, frena yenta en vuelo estacionario. La aeronave sale del RPO y aguarda a que se den mas ordenes.
Si el procedimiento RPO se activa durante el modo Trayectoria, la aeronave pueda trazar una ruta de vuelo de modo que el RPO sortee los obstaculos anadidos al planificar un camino.
- La aeronave regresa al punto de origen oenta en vuelo estacionario en caso de perdida de la senal del control remoto. La。,a。,que ejectar en este caso se estabace en la aplicacion.RPO de seguridad solo esta disponible si se estabace RPO.

- El Sistema anticolisión se desactiva cuando la aeronave está en modo Atti, en el que entra, por exemple, cuando la SERIAL GNSS es débil. Tenga en cuenta que el Sistema anticolisión no es fiable si pilota la aeronave en entornos en los que el modulo de radar no pueda functionar con normalidad. Esnecessary adoptar especialas precauiones en los siguientes casos.
Uso de pesticidas
- Evite el uso de pesticidas en polvo tanto como sea posible, ya que pueda reducir la vida util del systema de rociado.
- Los pesticidas son venenosos y representan un grave risgo para la seguidad. Utilcelos solo suguiendo estrectamente sus indicaciones de uso.
- Utilice agua limpia para mezclar el pesticida y filtrle la mezcla antes de averterla en el tanque de rociado para evaporar que el filtrso se asasque.
- El uso efectivo de pesticides depende de los siguientes factores: densidad del pesticide, velocidad de rociado, distancia de rociado, velocidad de la aeronave, velocidad del viento, direccion del viento, temperatura y humedad. Considere todos这些东西 factores al usar pesticides.
- NO comprometa la seguridad de las personas, los animales ni el medio ambiente durante la operacion.

Es importante conocer las directrices bássicas de vuelo, tanto por su seguridad como por la de quienes le rodean. Asegürese de leer el documento de renunciation de responsabilidad y directrices de seguridad.
Uso del T10
1. Preparación de la Batería de Vuelo Intigidente
Utilice únicamente las baterías de vuelo oficiales de DJI enumeradas a continuación. Verifique el nivel de cargo de la bateria antes de volar y cárguela de acuerdo con las directrices dispuestos en el documento correspondiente.
Bateria de Vuelo Inteligente del T10: BAX501-9500-51.8 (recomendada)
Bateria de Vuelo Inteligente del T20: AB3-18000mAh-51.8V
Bateria de Vuelo Inteligente del T16: AB2-17500mAh-51.8V
2. Preparación de la aeronave
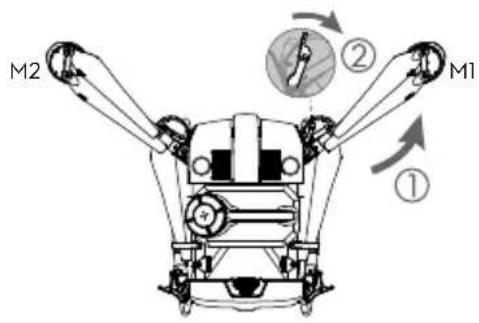
Despliegue los brazos M1 y M2 y apriete los seguros correspondientes. Procure no pillarse los dedos.
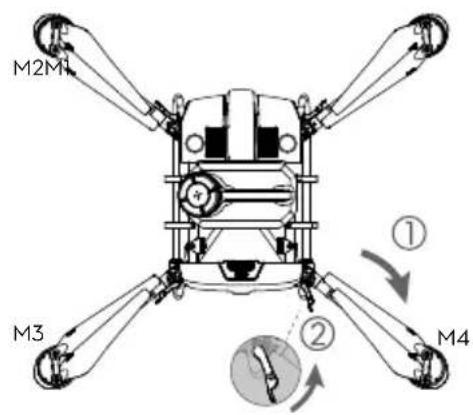
Despliegue los brazos M3 y M4 y apriete los seguros correspondentes. Procure no pillarse los dedos.
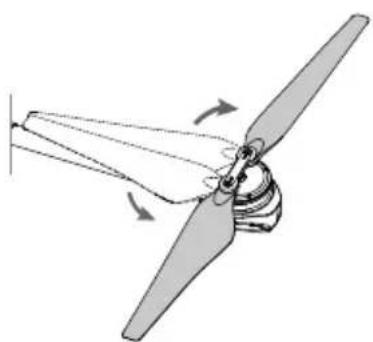
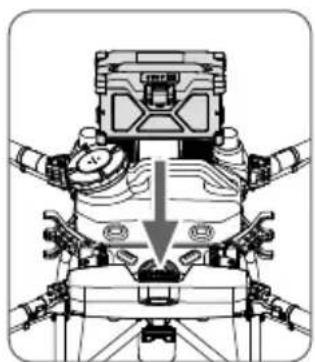
Despliegue las palas de las hélices. Inserte la Batería de Vuelo Inteligente en la aeronave hasta que escuche un cig.

- Asegürese de que la bateria se inserte con firmeza en la aeronave. Solo inserte o extraiga la bateria cuando la aeronave está apagada.
- Para extraer la bateria, mantenga presionado el cierre y extragala por arriba.
- Pliegue primero los brazos M3 y M4 y bajo los brazos M1 y M2, y asegürese de que todos ellos queden insertados en los soportes de almacenimiento que hay a sido lados de la aeronave; de lo contrario, los brazos podrnan sufrir desperfectos.
3. Preparación del control remoto
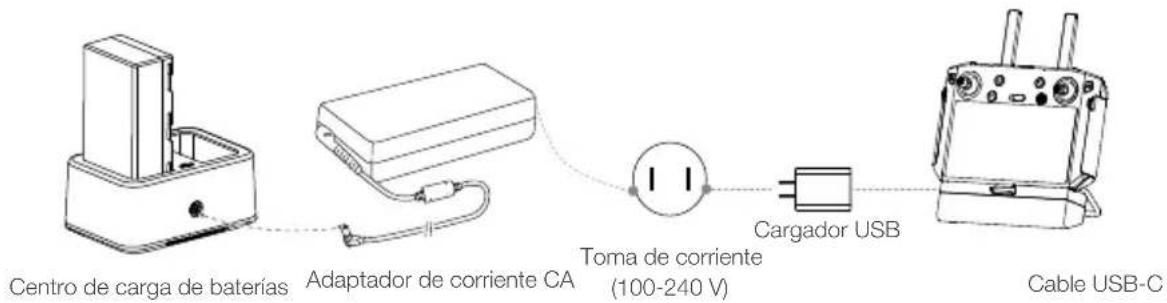
Carga de las baterias
Cargue la Bateria Inteligente externa con el centro de cargo y el adaptador de corriente de CA. Cargue la bateria interna del control remoto con el cargador USB y el cable USB-C. Cargue Completely las baterias antes del primer uso.
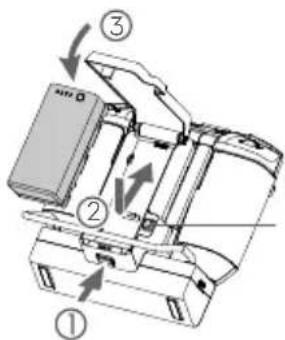
Inserción de la bateria externa
Presione el boton de liberacion de la tapa de la bateria, situado en la parte posterior del control remoto, para abrir la tapa.
② Introduzca la Bateria Inteligente en el compartmento y empujela.hacia arriba.
③ Cierre la tappeda.

- Para extraer la Bateria Inteligente, mantenga presionado el botón de liberación de la batería y empuje la batería hacía abajo.
Botón de liberación de bateria
Instalación del adaptordo 4G y la tarjeta SIM

- Utilice solamente adaptadores que@cuenten con la aprobacion de DJI. El adaptador es compatible con various estandares de red. Utilice una tarjeta SIM compatible con el proveedor de red movil elegido y seleccione un plan de datos moviles conforme al nivel de uso planificado.
- El adaptador y la tarjeta SIM permiten que el control remoto acceda a determinadas redes y plataformas, como la plataforma de gestion DJI Agras. Asegürese de insertarlos correctamente. De lo contrario, no se podra disponible de acceso a Internet.
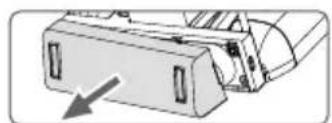
Retire la tapa del compartmento del adaptor.
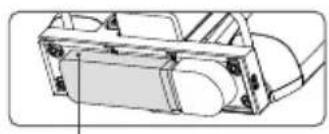
Asegürese de que la tarjeta SIM quede insertada bajo el adaptor. Inserte el adaptor en el puerto USB yonga una prueba con el adaptor.*
Adaptador

Vuelva a colocar la tapa firmamente.
- Procedimiento de prueba: presione una vez el botón de encendido del control remot y, a continuación, vuelva a presionarlo, pero esta vez manténgalo presionado para encender el control. En la aplicación DJI Agras, toque y selección "Network Diagnostics" (Diagnóstico de red). El adaptor y la tarjeta SIM funciona con correctamente si el estado de todos los dispositivos en laadena de red se muestra en verde.
Comprobación de los niveles de batería

Presione el boton de encendido del control remoto una vez para comprobar el nivel de la bateria interna. Presionelo una vez,whelming a presionarlo y mantengalo presionado durante dos segundos para encender o apagar la bateria.
Presione el boton del nivel de bateria de la Bateria Inteligente externa una vez para comprobar el nivel.

- Si va a utiliser una Bateria Inteligente externa, no olvide asegurar de que la bateria internaonga algo de carga. De lo contrario, el control remoto no se podra encender.
m
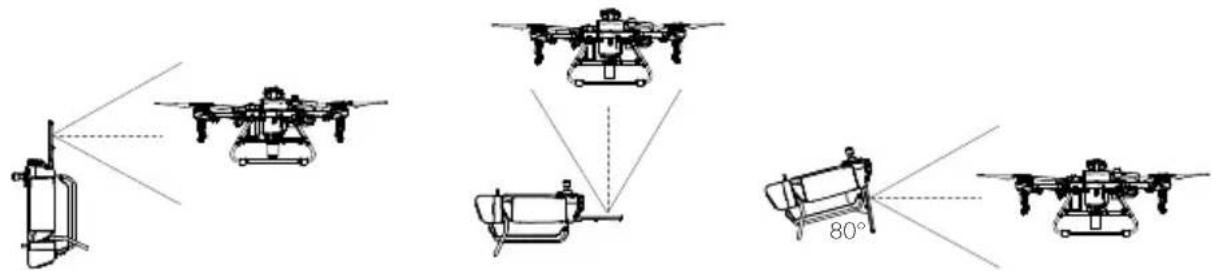
Ajuste de las antenas
Levante y ajuste las antenas. La posicón de las antenas afecta a la intensidad de la seals del control remoto. Para Obtener una��unicación optima entre el control remoto y la aeronave, asegürese de que el ángulo entre las antenas y la parte posterior del control remoto sea de 80^ o 180^
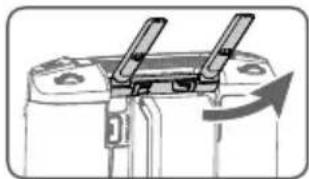
Intente Maintender la aeronave bajo de la zona de transmisión optima. Si la seals en débil, ajuste las antenas o vuede con la aeronave mas cerca.
Zona de transmisión optima

- Evite usar dispositivos inalábricos que usen las mismas bandas de Frequencia que el control remoto.
- Si el adaptor de RTK se usa para el método de planificación RTK, el modulo se debe desconectar del control remoto una vez que haya conclusido la planificacion. De lo contrary, el rendimiento de comunaciones del control remoto se va afectado.
4. Preparación para el despegue
A. Coloque la aeronave en una superficie plana de un espacio abierto de modo que su parte trasera quede orientada hacua usted.
B. Asegürese de que las hélices estén bien montadas, de que no haya objetos extraños dentro de los motores y las hélices o sobre cualesra de这些东西, de que las palas y los brazos de la hélice estén desplegados y de que los seguros de los brazos estén firmamente apretados.
C. Asegürese de que el tanque de rociado y la bateria de vuelo estén colocados firmamente en su lugar.
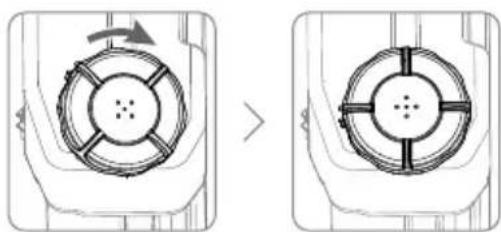
D. Llene el tanque de rociado con el liquido pertinente y, al terminar, apriete la tapa. Asegúrese de que las quatre lines de la tapa queden en posición horizontal y vertical.
E. Encienda el control remoto, asegúrese de que se haya abierto la aplicación DJI Agras y encienda la aeronave.

- Cuando vaya a utiliser la aeronave por primera vez, actúa con la aplicación DJI Agras. Necesitará una cuenta DJI y connexión a Internet.
Calibración de la brújula
Cuando la aplicacion le indique que es necessario calibrar la brujula, toque seguido de y deslice el dedo hacia abajo. Seleccione "Advanced Settings" (Ajustes avanzados), "IMU" y "Compass Calibration" (Calibracion de la brujula). Toque "Calibration" (Calibracion) en la seccion de calibracion de la brujula y siga las instrucciones que se muestran en la pantalla.
Descarga del aire atrapado en las mangueras
El T10iene equipado con una direccion de descarga automatica de aire atrapado. Cuando seanecessary descargar el aire atrapado, mantenga presionado el boton de rociado durante dos segundos. La aeronave libera liquido automatamente hasta que se haya descargado todo el aire atrapado.
Calibración del caudalímetro
Asegürese de calibrar el caudalímetro antes de usar la aeronave por primera vez. De lo contrario, el rendimiento del rociado podra verse afectado seriamente.
A. Preparación
① Llene el tanque de rociado con aproximadamente 21 de agua.
Libere el aire que quede aun dentro de las mangueras mediate la funci de descarga automatica de aire atrapado. Tanti en es posible descargar manualmente el aire atrapado; para ello, presione el boton de rociado de modo que se pulverice el aire atrapado y vuela presionarlo una vez que todo esaire se haya liberado.
B. Calibración
① En la aplicación, toque "Execute Task" (Ejecutar operation), de modo que acceda a "Operation View" (Vista de lácama). Toque ♦®, deslice el dedo hacía arriba y toque "Calibration", en la parte derecha de la sección del caudalímetro.
Toque "Start Calibration" (Iniciar calibracion) para empezar a calibrar. La calibracion suele tardar 25 segundos en completeness, y sus resultados se muestran en la aplicacion.
- Los)."
- Si la calibración falla, toque “?” para visualizar el problema y resolverlo. Repita la calibración tras haber resuelto el problema.
5. Vuelo
En la aplicacion, vaya a "Operation View" (Vista de camar), Asegürese de que haya la seals GNSS sea intensa y de que la barra de estado del systema indique "Manual Route (GNSS)" (Trayectoria manual: GNSS) o "Manual Route (RTK)" (Trayectoria manual: RTK)*; de lo contrario, la aeronave no podra despegar.
Para que la aeronave despegue y execute operaciones de forma automática, es recommendable haber realizado previamente una planificacion de un Campo de cultivo y haber escogido el tipo de operation. Consulte la seccion "Inicio de las operaciones" para Obtener mas informacion. Enequalier otto caso, execute manualmente el despegue y el aterrizaje.
Despegue
Efectue el commando de palancas combinado (CSC) y presione la palanca del accelerator hacer ariba para despegar.


O BIEN



Palanca del accelerador lanca izquierda en Modo 2)
Aterrizaje
Para aterrizar, empuje la palanca de aceleracion hasta que la aeronave toque el sueo. Hay dos métodos para parar los motores.
Mete 1: cando la aeronave haya aterrizado, meva la palance del acelerador hac a bajo y sujete la en esa posicion. Los motores se paran transcurridos 3 s.
Méto 2: c a h y a trrz, mva la pana del acelerador hcia abo y efectue el mmo CSC que seutilzo para arrancar los motores. Suelte las dos palancas una vez que se detengan los motores.
- Se recomienda usar el posicionamento RTK. En la aplicación,SEA a "Operation View" (Vista de lármara), toque y RTK para activar "Aircraft RTK Positioning" (Posicionamento RTK de la aeronave) y selección un método de recepción de senales RTK.

Método 1 Método 2







- Las helices en rotacion peuvent ser peligrosas. Mantengase alejado de las helices y motores en rotacion. NO arranque los motores en espacios cerrados o en caso de que haya personas en las inmediaciones.
- No suele el control remoto cuando los motores estén en funciona.
- Nunca detenga los motores en pleno vuelo, a menos que se produzca una situacion de emergencia en la que esta maniobra pueda reducir el riesgo de daños o lesiones.
- Se recomienda usar el método 1 para detener los motores. Si se usa el método 2 para detener los motores, la aeronave pourrait volcar si no está posada en tierra porcomplete. Utilice el método 2 con precaución.
- Tras el aterrizaje, apague la aeronave antes de apagar el control remoto.
Inicio de las operaciones
En primer lugar, haya medicaciones del area de operaciones y de los obstáculos y configurue los ajustes pertinentes. En segundo lugar, generate una trayectoria de vuelo a partir de esta informacion por medio del systema inteligente de planificacion de operaciones que la aplicacion DJI Agras trae integrado. Se podran carrgar operaciones una vez que se haya planificado el terreno. La aeronave comienza a operar de forma automática y sigue la ruta de vuelo prevista.
En caso de que el terreno sea accidentado, se peutecurrir a la aeronave Phantom 4 RTK y a la aplicacion DJI TERRA™ para executar las operaciones, ya que permiten planificar trayectorias de vuelo e importar trayectorias a la aplicacion DJI Agras. Consulte el manual de usuario del Agras T10 para Obtener mas informacion.
Planificación de Campos
La aplicacion DJI Agras permite la planificacion de rutas de vuelo dirigiendo la aeronave hacia punto de trayectoria, obstaculos y punto de calibracion o dirigendose a pie a qualquera de these指点 llvando consigo el control remoto, un control remoto equipado con un adaptorador RTK o un dispositivo RTK. La ruta explicada a continuacion se ha planificado caminando hacia los punto con un control remoto.
Al conectar el adaptor RTK (se vend e por separado) al puerto USB-A del control remoto, se podra seleccionar "Walk with RTK" (Caminar con RTK) durante la planificacion del campo para planificar operaciones con precision centimetrica. El resto de los pasos son los mismos que los recogidos en las instrucciones para caminar portando el control remoto.

Encienda el control remoto. Abra DJI Agras.




Espere hasta que la signaled GNSS sea intensa. La precision del posiconcimientouede variar en ± 2 metros.
Toque Plan Field (Planificar Campo) y seleccione Walk with RC (Caminar con el control remoto).

LLEVando consigo el control remoto, recorra a pie el limite del area de operaciones y toque Add Waypoint C2 (Añadir trayectoria C2) en los+puntos de giro.




Rodee el obstáculo y toque Add Obstacle C2 (Añadir obstáculo C2) en various punto de la trayectoria de rodeo*.
Dirjase a pie a todos los
obstáculos y, con cada uno,
toque Obstacle Mode C1 (Modo
de obstáculo C1)*.

Toque Waypoint C1 (Modo de trayectoria C1) para volver a fin de/agregar能找到哪些点?
puntos limitos al area de operaciones.




Toque Field Editing (Edicion de campo) para usar el punto de mira paraañadir+puntos, configurar la distancia y el intervalo de vuelo, y ajuste la direccion de la ruta tocando o arrastrando el icono
Guarde la planificacion del camino.
* Se puede marcar todos los obstáculos que haya dentro yURT a la area de operaciones.
Una vez que haya terminado la planificacion, presione el boton de retroceso del control remoto para volver a la pantalla de inicio.
Llevar a cabo una operación

Encienda el control remoto y la aeronave.

Toque Execute Task (Ejecutar operation) en la pantalla de inicio de la aplicacion.

Toque y seleccione el camino en la lista de Campos.

Toque Editor para volver a editar las trayectorias y la ruta de vuelo.

los parámetros de la operación y confirmelos.

Daffina la.altura de despegue automatico estableciendo "Connection Routing Altitude" (Altitud de trayectoria de conexion) y mueva el control deslizante para despegar. La aeronave ejecta la operation automatically.

- Despegue únicamente en zonas abiertas, y establezca una alta de despegue automatico que se adecue al entorno de funcionaimiento.
- Cualquier operacion se possible pausar con un ligero movimiento de la palanca de control. La aeronave entra en vuelo estacionario y registra el punto de interruptacion, tras lo cui se podra controlar la aeronave manually. Para reanudar la operation, seleccionela de nuevo en la etiqueta "Executing" (Ejecutando) de la lista. La aeronave regresa automatically al punto de interruptacion y reanuda la operation. Preste atencion a la seguidad de la aeronave cuando regrese esta al punto de interruptacion.
- En el modo Route Operation, la aeronave可以选择 sortear obstáculos, una función que está deshabilitada de forma predeterminada y que pueda habilitarse en la aplicación. Si la funciona está habitilada y la aeronave detecta obstáculos, esta reduce la velocidad, los sortea y regresa a la rutra de vuelo original.
- La aplicacion permite a los usuario definir que action ejecta la aeronave antes de terminada la operacion.
Modos de funciona y functions adiconiales
Consulte el manual de usuario del Agras T10 para Obtener más información sobre los发展模式 de configuración Trayectoria A-B, Trayectoria manual y Manual Plus y sobre el uso de sistemas como Trayectoria de conexión, Reanudar operaciones, Protección de datos del sistema y Tanque vacio.
6. Mantenimiento
Limpie todas las piezas de la aeronave y del control remoto al terme do cada jornada de rociado, una vez que la aeronave haya recuperado su temperatura normal en reposo. NO limpie la aeronave inmediamente afterwards de haber terminado las operaciones.
A. Llene el tanque de rociado con agua limpia o agua jabonosa y rociela a工程技术 de las boquillas hasta que el tanque se vacie. Repita este paso dos veces más.
B. Desacople el conector del tanque de rociado de dicho tanque, para limpiar ambos elementos. Retire el filtro del tanque de rociado, los filros de la boquilla y las boquillas para limparlos y eliminarrialquierobstruccion.Despues,sumerjalos en agua limpia durante 12 horas.
C. Asegürese de que la estructura de la aeronave esté ensamblada por Completely de modo que se pueda lavar directamente con agua. Se recomienda utiliser una pistola de lavado llena de agua para limpiar el cuerpo de la aeronave y limpiarlo con un cepillo suave o un paño humedo antes de quitar los restos de agua con un paño seco.
D. Si queda polvo o pesticida liquido sobre los motores, las helices o los difusores de calor, limpielos con un paño humedo antes de quitar los restos de agua con un paño seco.
E. Limpie la superficie y la pantalla del control remoto con un paño humedo limpio que haya sido escurrido.
Para Obtener mas informacion sobre el mantenimiento del producto, consulte el documento "Renancia de responsabilidad y directrices de segundad".

Descargue el manual de usuario del Agras T10 en la page希望大家都可以 tener más information: https://www.dji.com/t10/downloads
Especificaciones
- Modelo de producto 3WWDZ-10A
Aeroestuctura
Distancia maxima diagonal 1480 mm
entre ejes
Dimensiones 1958× 1833× 553mm (brazos y helices desplegados)
1232 × 1112 × 553 ~mm (brazos despleados y helices plegadas)
600 × 665 × 580 ~mm (brazos y helices plegados)
- Sistema de propulsion
Motores
Potencia maxima 2500 W/rotor
ESC
Corrente max. de 32 A
funcionamento (continua)
Hélices plegables (R3390)
Diametro × rosca 83.82× 228.6cm (33× 90 in)
- Sistema de rociado
Tanque de rociado
Volumen A plenaarga:81
Capacidad de energia A plena energia: 8 kg
Boquilla
Modelo XR11001VS (de série); XR110015VS, XR11002VS (optional, se compra por
separate)
Cantidad 4
Velocidad max. de rociado XR11001VS: 1.8 l/min; XR110015VS: 2.4 l/min; XR11002VS: 3 l/min
Diametro de rociado 3-5.5 m (4 boquillas, a una altitude 1.5-3 m por encima de los cultivisos)
Tamaño de las gotas XR11001VS: 130-250 μm; XR110015VS: 170-265 μm; XR11002VS: 190-300 μm
(enfuncion del entorno de funciona y de la velocidad de rociado)
Caudalimetro
Rango de medicación 0.25-20 l/min
Error < ± 2%
Liquido medible Conductividad >50~ S / cm (liquidos como el agua corriente o pesticidas que
contengan agua)
- Radar digital omnidireccional
Modelo RD2424R
Frecuencia de
Potencia de transmisión (PIRE)
Alcance de detectacion de altitud: 1-30 m
Sistema anticolisión[1]
Rango de estabilización: 1.5-15 m
Pendiente max.: 35^
Alcance de detectación de obstáculos: 1.5-30 m
FOV,repo de visiOn:Horizontal: 360^ vertical: ± 15^
Condieones de functiionamento: Vuelo a una altura superior a 1.5 m por encima del
obstáculo a una velocidad inferior a 7m / s
Distancia del limite de seguidad: 2.5m (espacio entre elante de las helices y el
obstáculo tras el frenado)
Dirección del sistema anticolisión: omnidirectional en el plano horizontal
Protection IP IP67
- Radar superior
Modelo RD2414U
Frecuencia de
Potencia de transmisión (PIRE)
Sistema anticolisión1)
Alcance de detectación de obstáculos: 1.5-15 m
FOV, Campo de visión: 80^
Condieones de functionamento: disponible en el despegue, en el aterrizaje y en el ascenso cuando haya un obstáculo por encima de la aeronave a una alta superior a 1.5 m con besoin a esta.
Distancia del limite de seguidad: 2 m (espacio entre el punto más alto de la aeronave y el punto más bajo del obstáculo tras el frenado)
Dirección del sistema anticolisión: superior
Protection IP IP67
- Camaras FPV
Campo de visión (FOV) Horizontal: 129^ , vertical: 82^
Resolución 1280 × 720 a 15-30 fps
Focos FPV FOV, Campo de visión: 120^ ; brillo max.: 13.2 lux a 5 m con luz directa
- Parámetros de vuelo
Frecuencia de
Potencia de transmisión
2.4 GHz
(PIRE)
Peso max. de despegue 24.8 kg (al nivel del mar)
Rango de precision en D-RTK activado: Horizontal: ± 10 cm, Vertical: ± 10 cm
vuelo estacionario (con D-RTK desactivado:
señal GNSS intensa) Horizontal ±0.6 m, vertical ±0.3 m (si el modulo del radar está activado: ±0.1 m)
Frecuencia de RTK: GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2, Galileo E1/E5
funcionamento del RTK/ GNSS: GPS L1, GLONASS F1, Galileo E1
GNSS
Bateria Bateria de vuelo aprobada por DJI (BAX501-9500-51.8, AB3-18000mAh-51.8V, o
AB2-17500mAh-51.8V)
Tiempo en vuelo 19 min (con un peso de despegue de 16.8 kg con una bateria de 9500 mAh)
estacionario[3] 9 min (con un peso de despegue de 24.8 kg con una bateria de 9500 mAh)
Ángulo de inclínación max. 15°
Velocidad max. de 7 m/s
funcionamento
Velocidad max. de vuelo 10 m/s (con buena SERIAL GNSS)
Resistencia max. al viento 8 m/s
Altitud max. de vuelo 4500 m
Humedad de funciona < 93%
recomendada
Temperatura de De 0 a 45^ (de 32 a 113 F)
funccionamento recomendada
Controlremoto
Modelo RM500-ENT
Pantalla 5.5 pulgadas, 1920× 1080 1000 cd/m
Memoria RAM 4 GB
Bateria integrada 18650 de iones de litio (5000 mAh a 7.2 V)
GNSS GPS+GLONASS
Consumo elcctrico 18W
Temperatura de De 0 a 45^ (de 32 a 113 F)
funcionamento
Temperatura ambiente de De 5 a 40^ (de 41 a 104^ )
carga
| Temperatura de almacenimiento | De -30 a 60 °C (de -22 a 140 °F) (almacenimiento máximo de un mes con unaarga de la bateria integrada de entre el 40 y el 60%) |
| OcuSync Enterprise | |
| Frecuencia de funciona}= | SRRC/NCC/FCC/CE/MIC/KCC: 2.4000-2.4835 GHz |
| SRRC/NCC/FCC/CE: 5.725-5.850 GHz[2] | |
| Alcance de transmisión max. (sin obstáculos niinterferencias) | FCC/NCC: 7 km; SRRC: 5 km; MIC/KCC/CE: 4 km |
| Potencia de transmisión (PIRE) | 2.4 GHz |
| SRRC/CE/MIC/KCC: ≤20 dBm; FCC/NCC: ≤30.5 dBm | |
| 5.8 GHz | |
| SRRC: ≤21.5 dBm; FCC/NCC: ≤29.5 dBm; CE: ≤14 dBm | |
| Wi-Fi | |
| Protocolo Wi-Fi Direct, Pantalla Wi-Fi, 802.11a/g/n/ac | |
| Frecuencia de funciona}= | Wi-Fi con 2×2 MIMO |
| 2.4000-2.4835 GHz | |
| 5.150-5.250 GHz[2] | |
| 5.725-5.850 GHz[2] | |
| Potencia de transmisión (PIRE) | 2.4 GHz |
| SRRC/CE: 18.5 dBm; NCC/FCC /MIC/KCC: 20.5 dBm | |
| 5.2 GHz | |
| SRRC/NCC/FCC/CE/MIC: 14 dBm; KCC: 10 dBm | |
| 5.8 GHz | |
| SRRC/NCC/FCC: 18 dBm; CE/KCC: 12 dBm | |
| Bluetooth | |
| Protocolo Bluetooth 4.2 | |
| Frecuencia de funciona}= | 2.4000-2.4835 GHz |
| Potencia de transmisión (PIRE) | SRRC/NCC/FCC/CE/MIC/KCC: 6.5 dBm |
- Bateria Inteligente del control remoto
Modelo WB37-4920mAh-7.6V
Tip de bateria 2S LiPo
Capacidad 4920 mAh
Voltaje 7.6 V
Energia 37.39 Wh
Temperatura ambiente de De 5 a 40^ (de 41 a 104^ )
carga
- Centro de energia de Baterias Inteligentes
Modelo WCH2
Voltaje de entrada 17.3-26.2 V
Voltaje y corriente de salute 8.7 V, 6 A
Temperatura de De 5 a 40^ (de 41 a 104^ )
funcionamento
Adaptador de corriente de CA
Modelo A14-057N1A
Voltaje de entrada 100-240 V, 50/60 Hz
Voltaje de salute 17.4 V
Potencia nominal 57 W
[1] El alcance efectivo del radar depende del material, la posicón, la forma y otheras propiédades del obstáculo.
[2] La legislación de algunos páises prohibe el uso de las Frequencias de 5.8 y de 5.2 GHz. En algunos páises, la banda de frequencies de 5.2 GHz está permittedamente para el vuelo en interiores.
[3] Este tiempo en vuelo estacionario se ha calculado al nivel del mar con velocidades del viento menos de 3 m/s y una temperatura de 25^ (77 °F). Solo como referencia. Los datos peuvent variar en función del entorno. Los resultados serán los probados.
Appareil
funacionento (continua)
estacionario (com sinal GNSS forte)
D-RTK desabilitado:
Horizontal: ± 0,6m Vertical: ± 0,3m (modulo Radar habilido: ± 0,1m )





- Contents
- Aircraft
- Pin thong minh cua bó dieu khién tu xa
- Coc sac Pin Thong minh
- Controlremoto
- Vuelo seguro
- m
- Requisitos del entorno de vuelo
- Regreso al punto de origen (RPO)
- Uso de pesticidas
- Uso del T10
- Preparación de la Batería de Vuelo Intigidente
- Preparación de la aeronave
- Preparación del control remoto
- Carga de las baterias
- Inserción de la bateria externa
- Instalación del adaptordo 4G y la tarjeta SIM
- Comprobación de los niveles de batería
- Ajuste de las antenas
- Preparación para el despegue
- Calibración de la brújula
- Descarga del aire atrapado en las mangueras
- Calibración del caudalímetro
- Preparación
- Calibración
- Vuelo
- Despegue
- Aterrizaje
- Inicio de las operaciones
- Planificación de Campos
- Llevar a cabo una operación
- Modos de funciona y functions adiconiales
- Mantenimiento
- Especificaciones
- Aeroestuctura
- - Sistema de propulsion
- Motores
- ESC
- Hélices plegables (R3390)
- - Sistema de rociado
- Tanque de rociado
- Boquilla
- Caudalimetro
- - Radar digital omnidireccional
- - Radar superior
- - Camaras FPV
- - Parámetros de vuelo
- - Bateria Inteligente del control remoto
- - Centro de energia de Baterias Inteligentes
- Adaptador de corriente de CA
- Appareil
Marca : DJI
Modelo : Agras T10
Categoría : Dron