
Agras T30 - Zumbido DJI - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato Agras T30 DJI en formato PDF.
| Tipo de producto | Dron agrícola de pulverización |
| Marca | DJI |
| Modelo | Agras T30 |
| Dimensiones (desplegado) | 2858 × 2685 × 790 mm (brazos y hélices desplegados) |
| Dimensiones (plegado) | 1170 × 670 × 857 mm (brazos y hélices plegados) |
| Peso total (sin batería) | 26.3 kg |
| Peso máximo al despegue (pulverización) | 66.5 kg (al nivel del mar) |
| Peso máximo al despegue (esparcimiento) | 78 kg (al nivel del mar) |
| Capacidad del depósito | 30 L |
| Número de pulverizadores | 16 |
| Caudal máximo de esparcimiento | 7.2 L/min (boquillas XR11001VS) |
| Batería de vuelo | |
| Autonomía (estacionario) | 20.5 min (con 36.5 kg al despegue) |
| Velocidad máxima de vuelo | 10 m/s |
| Alcance de transmisión | Hasta 7 km (FCC) |
| Sistema de radar | Radar digital omnidireccional + radar orientado hacia arriba |
| Índice de protección | IP67 |
| Temperatura de funcionamiento | 0 a 45 °C |
| Funciones principales | Pulverización automática, planificación de ruta, evitación de obstáculos, retorno al punto de partida, seguimiento del terreno |
| Mantenimiento y limpieza | Limpieza con agua después de cada uso, limpieza de boquillas y filtros |
| Seguridad | No volar con viento fuerte, respetar las regulaciones locales, usar pesticidas con precaución |
| Piezas de repuesto y reparabilidad | Piezas disponibles (hélices, baterías, boquillas, filtros); reparación por DJI o centros autorizados |
| Radiocontrol | Smart Controller Enterprise, pantalla de 5.5 pulgadas, batería interna+externa, autonomía 4 h |
Preguntas frecuentes - Agras T30 DJI
Preguntas de los usuarios sobre Agras T30 DJI
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Zumbido en formato PDF gratis! Encuentra tus instrucciones Agras T30 - DJI y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. Agras T30 de la marca DJI.
MANUAL DE USUARIO Agras T30 DJI
Guía de inicio rápido
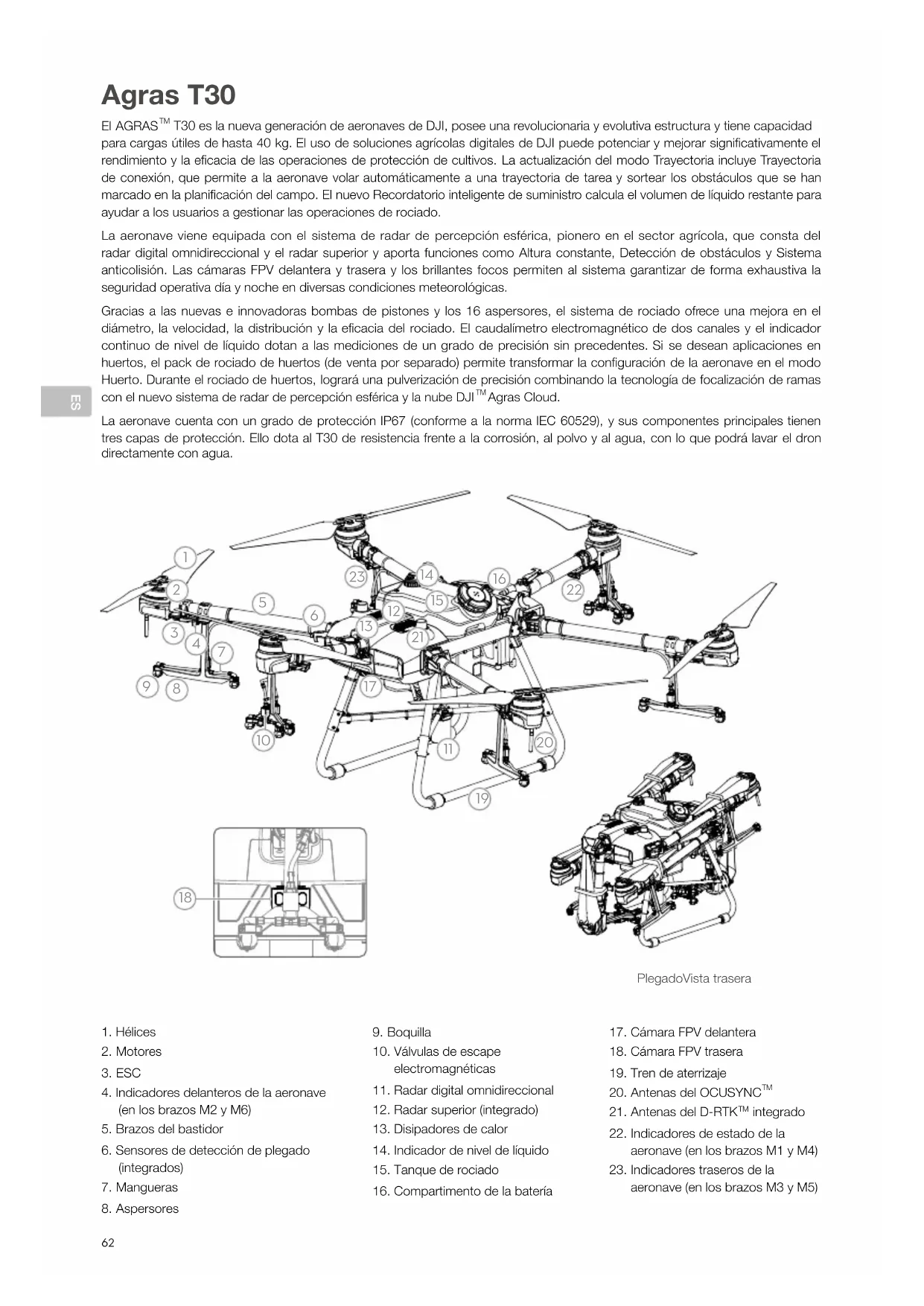
El AGRAS™ T30 es la nueva generación de aeronaves de DJI, posee una revolucionaria y evolutiva estructura y tiene capacidad para cargas útiles de hasta 40 kg. El uso de soluciones agrícolas digitales de DJI puede potenciar y mejorar significativamente el rendimiento y la eficacia de las operaciones de protección de cultivos. La actualización del modo Trayectoria incluye Trayectoria de conexión, que permite a la aeronave volar automáticamente a una trayectoria de tarea y sortear los obstáculos que se han marcado en la planificación del campo. El nuevo Recordatorio inteligente de suministro calcula el volumen de líquido restante para ayudar a los usuarios a gestionar las operaciones de rociado.
La aeronave viene equipada con el sistema de radar de percepción esférica, pionero en el sector agrícola, que consta del radar digital omnidireccional y el radar superior y aporta funciones como Altura constante, Detección de obstáculos y Sistema anticolisión. Las cámaras FPV delantera y trasera y los brillantes focos permiten al sistema garantizar de forma exhaustiva la seguridad operativa día y noche en diversas condiciones meteorológicas.
Gracias a las nuevas e innovadoras bombas de pistones y los 16 aspersores, el sistema de rociado ofrece una mejora en el diámetro, la velocidad, la distribución y la eficacia del rociado. El caudalímetro electromagnético de dos canales y el indicador continuo de nivel de líquido dotan a las mediciones de un grado de precisión sin precedentes. Si se desean aplicaciones en huertos, el pack de rociado de huertos (de venta por separado) permite transformar la configuración de la aeronave en el modo Huerto. Durante el rociado de huertos, logrará una pulverización de precisión combinando la tecnología de focalización de ramas con el nuevo sistema de radar de percepción esférica y la nube DJI™ Agras Cloud.
La aeronave cuenta con un grado de protección IP67 (conforme a la norma IEC 60529), y sus componentes principales tienen tres capas de protección. Ello dota al T30 de resistencia frente a la corrosión, al polvo y al agua, con lo que podrá lavar el dron directamente con agua.
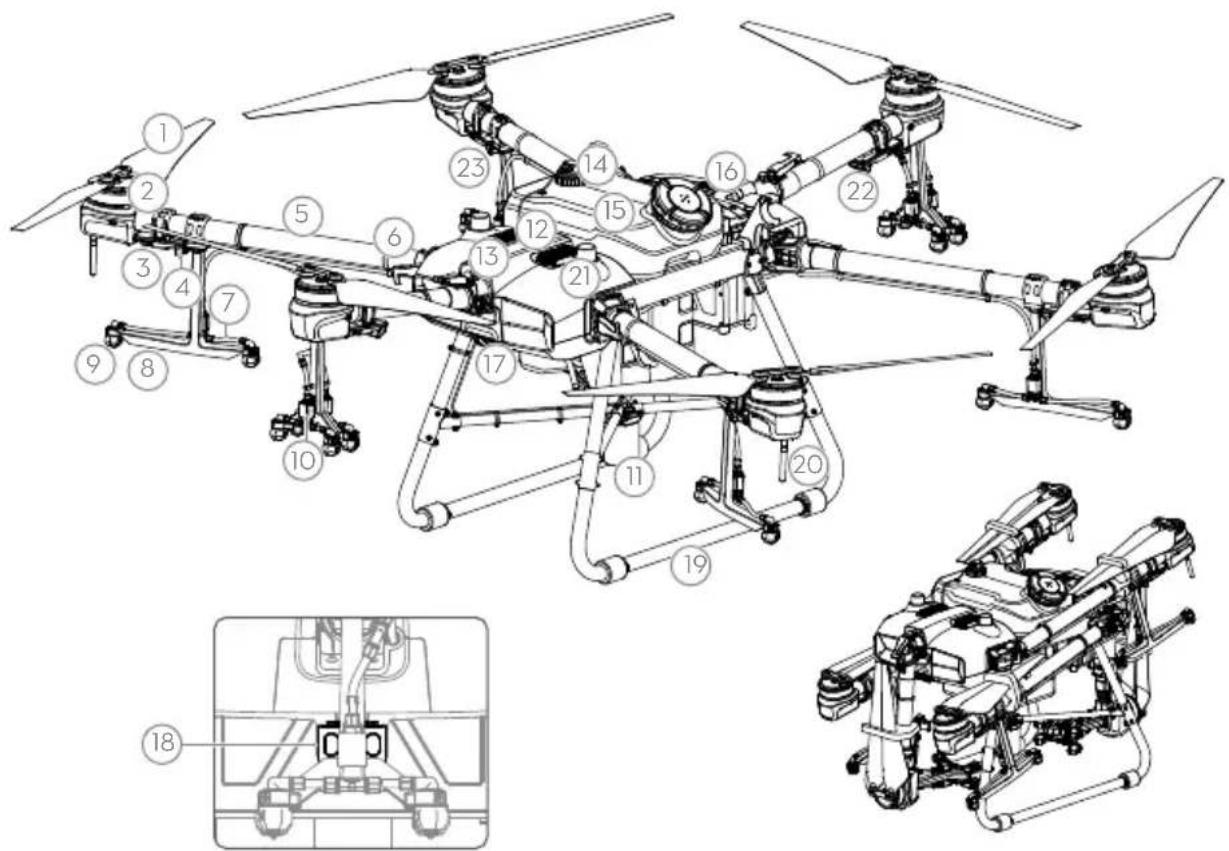
- Hélices
- Motores
- ESC
- Indicadores delanteros de la aeronave (en los brazos M2 y M6)
- Brazos del bastidor
- Sensores de detección de plegado (integrados)
- Mangueras
-
Aspersores
-
Boquilla
- Válvulas de escape electromagnéticas
- Radar digital omnidireccional
- Radar superior (integrado)
- Disipadores de calor
- Indicador de nivel de líquido
- Tanque de rociado
-
Compartimento de la batería
-
Cámara FPV delantera
- Cámara FPV trasera
- Tren de aterrizaje
- Antenas del OCUSYNC ^TM
- Antenas del D-RTK ^TM integrado
- Indicadores de estado de la aeronave (en los brazos M1 y M4)
- Indicadores traseros de la aeronave (en los brazos M3 y M5)
Control remoto
El control remoto Smart Controller Enterprise emplea la tecnología de transmisión DJI OcuSync Enterprise, tiene un alcance de transmisión de hasta 7 km* y admite Wi-Fi y Bluetooth. Además, cuenta con una pantalla luminosa de 5.5 pulgadas e integra la actualizada aplicación DJI Agras, con lo que tendrá una experiencia ágil y sencilla. Se podrán planificar operaciones con precisión centimétrica si se conecta el adaptador RTK al control remoto. El modo de control multiaeronave* del control remoto sirve para coordinar el pilotaje de varias aeronaves a la vez, lo que permite a los pilotos trabajar de forma eficaz. Para alimentar el control remoto se pueden utilizar tanto la batería integrada como una batería externa. El tiempo de funcionamiento máximo del control remoto es de cuatro horas, lo que convierte a este dispositivo en opción ideal para operaciones largas y de alta intensidad.
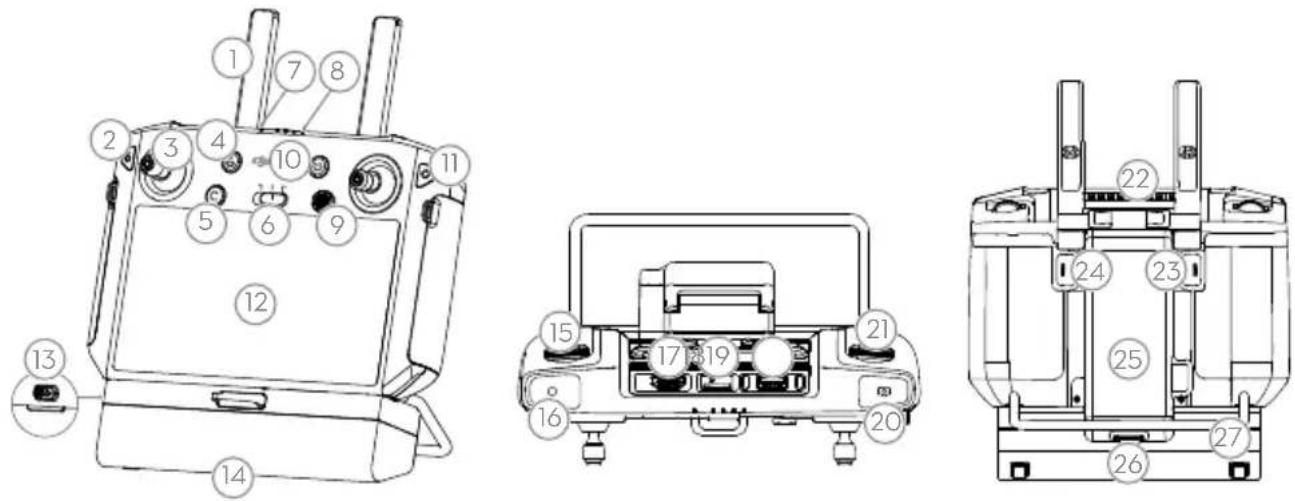
- Antenas
- Botón de retroceso/de función
- Palancas de control
- Botón RPO
- Botón C3 (personalizable)
- Selector de modo de vuelo
- Led de estado
- Ledes de nivel de batería
-
Botón 5D (personalizable)
-
Botón de encendido
- Botón de confirmación
- Pantalla táctil
- Puerto de carga USB-C
- Cubierta del compartimento del adaptador
- Dial de velocidad de rociado
- Botón de rociado
- Puerto HDMI
-
Ranura para tarjeta microSD
-
Puerto USB-A
- Botón de cambio entre FPV y mapa
- Dial reservado
- Rejilla de ventilación
- Botón C1 (personalizable)
- Botón C2 (personalizable)
- Tapa de la batería
- Botón de liberación de la tapa de la batería
- Asa
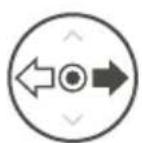
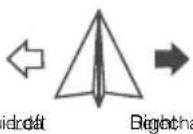
En la siguiente imagen se muestra la función de cada uno de los movimientos de las palancas de control, utilizando el Modo 2 como ejemplo. En el Modo 2, la palanca izquierda controla la altitud y la orientación de la aeronave, mientras que la derecha controla los movimientos hacia adelante, atrás, izquierda y derecha.
Palaneft StickerBigRatick derecha
Adiba





Hacia adelante
Forward

* El control remoto puede lograr sus mejores resultados de alcance de transmisión — FCC/NCC: 7 km (4.35 mi); SRRC: 5 km (3.11 mi); CE/KCC/MIC: 4 km (2.49 mi)— en zonas abiertas sin interferencias electromagnéticas y a una altitud de 2.5 m (8.2 ft) aproximadamente.
Asegúrese de cumplir la legislación y normativas locales al utilizar el modo de control multiaeronave.
Vuelo seguro
Es importante conocer algunas directrices básicas de vuelo, tanto por su seguridad como por la de quienes le rodean.
- Vuelo en zonas abiertas. Preste atención a los postes de red eléctrica, las líneas de tensión y otros obstáculos. Evite volar por encima o en las cercanías de agua, personas o animales.
- Mantenga el control en todo momento. No aparte las manos del control remoto y mantenga el control de la aeronave durante el vuelo, incluso cuando se utilicen funciones inteligentes, como los modos de funcionamiento Trayectoria y Trayectoria A-B, y Regreso al punto de origen inteligente.
- Mantenga el alcance visual con la aeronave. Mantenga la aeronave dentro su alcance visual (VLOS, por sus siglas en inglés) en todo momento y evite volar detrás de edificios u otros obstáculos que puedan bloquear la visión de esta.
- Controle la altitud de su aeronave. Por la seguridad de las aeronaves tripuladas y el resto del tráfico aéreo, vuele a altitudes inferiores a 100 m (328 ft) y de acuerdo con toda la legislación y normativas nacionales.

Visite https://www.dji.com/flysafe si desea obtener más información acerca de funciones críticas de seguridad como las zonas GEO.

Requisitos del entorno de vuelo
- NO utilice la aeronave para rociar con vientos que excedan los 18 km/h (11 mph).
- NO utilice la aeronave en condiciones climatológicas adversas, como vientos que superen los 28 km/h (17 mph), lluvias intensas superiores a 25 mm (0.98 in) en 12 horas, nieve o niebla.
- NO vuele a más de 4.5 km (14 763 ft) sobre el nivel del mar.
- La aplicación DJI Agras suele recomendar inteligentemente el límite de peso de la carga útil del tanque en función del estado y del entorno actuales de la aeronave. No supere el límite de peso de la carga útil recomendado al añadir material al tanque; de lo contrario, la seguridad del vuelo se podría ver afectada.
- Asegúrese de que, durante el pilotaje, la señal GNSS sea intensa y de que las antenas del D-RTK estén libres de obstrucciones.
Regreso al punto de origen (RPO)
La aeronave volverá al punto de origen automáticamente en las siguientes situaciones.
RPO inteligente: se mantiene presionado el botón RPO.
RPO de seguridad: se pierde la señal del control remoto.*
Si aparece un obstáculo en un radio de 20 m con respecto a la aeronave, esta desacelera, frena y entra en vuelo estacionario. La aeronave sale del RPO y aguarda a que se den más órdenes.
Si el procedimiento RPO se activa durante el modo Trayectoria, la aeronave puede trazar una ruta de vuelo de modo que el RPO sortee los obstáculos añadidos al planificar un campo.
* La aeronave regresa al punto de origen o entra en vuelo estacionario en caso de pérdida de la señal del control remoto. La acción que ejecutar en este caso se establece en la aplicación. RPO de seguridad solo está disponible si se establece RPO.

- El sistema anticolisión se desactiva cuando la aeronave está en modo Atti, en el que entra, por ejemplo, cuando la señal GNSS es débil. Tenga en cuenta que el sistema anticolisión no es fiable si pilota la aeronave en entornos en los que el módulo de radar no puede funcionar con normalidad. Es necesario adoptar especiales precauciones en los siguientes casos.
Uso de pesticidas
- Evite el uso de pesticidas en polvo tanto como sea posible, ya que pueden reducir la vida útil del sistema de rociado.
- Los pesticidas son venenosos y representan un grave riesgo para la seguridad. Utilícelos solo siguiendo estrictamente sus indicaciones de uso.
- Utilice agua limpia para mezclar el pesticida y filtre la mezcla antes de verterla en el tanque de rociado para evitar que el filtro se atasque.
- El uso efectivo de pesticidas depende de los siguientes factores: densidad del pesticida, velocidad de rociado, distancia de rociado, velocidad de la aeronave, velocidad del viento, dirección del viento, temperatura y humedad. Considere todos estos factores al usar pesticidas.
- NO comprometa la seguridad de las personas, los animales ni el medio ambiente durante la operación.

Es importante conocer las directrices básicas de vuelo, tanto por su seguridad como por la de quienes le rodean. Asegúrese de leer el documento de renuncia de responsabilidad y directrices de seguridad.
Uso del T30
1. Preparación de la Batería de Vuelo Inteligente
Utilice únicamente baterías de vuelo oficiales de DJI (modelo BAX501-29000mAh-51.8V). Verifique el nivel de carga de la batería antes de volar y cárguela de acuerdo con las directrices dispuestas en el documento correspondiente.
2. Preparación de la aeronave
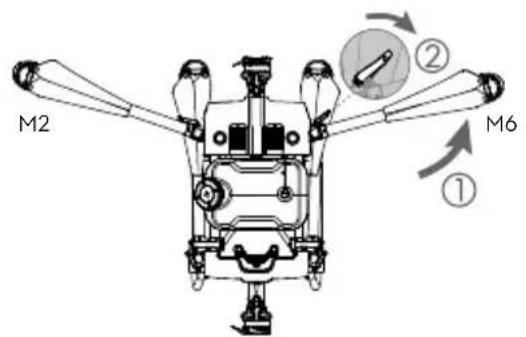
Despliegue los brazos M2 y M6 y apriete los seguros correspondientes. Procure no pillarse los dedos.
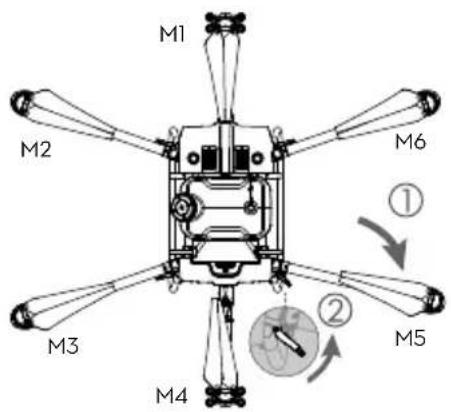
Despliegue los brazos M3 y M5, seguidos de los brazos M1 y M4, y apriete los seguros de los cuatro. Procure no pillarse los dedos.
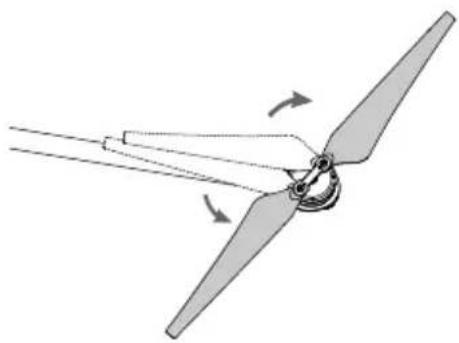
Despliegue las palas de las hélices.
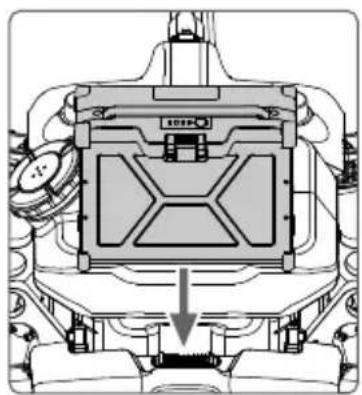
Inserte la Batería de Vuelo Inteligente en la aeronave hasta que escuche un clic.

- Asegúrese de que la batería se inserte con firmeza en la aeronave. Solo inserte o extraiga la batería cuando la aeronave esté apagada.
- Para extraer la batería, mantenga presionado el cierre y extráigala por arriba.
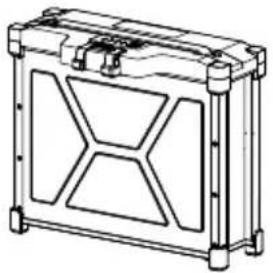
- Pliegue primero los brazos M3 y M5 y luego los brazos M2 y M6, y asegúrese de que todos ellos queden insertados en los soportes de almacenamiento que hay a ambos lados de la aeronave; de lo contrario, los brazos podrían sufrir desperfectos. Levante y baje los brazos M1 y M4 con suavidad para reducir el desgaste.
3. Preparación del control remoto
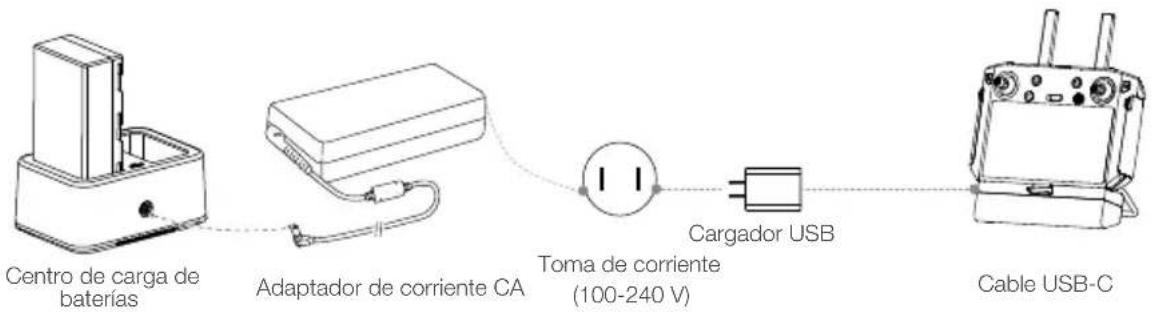
Carga de las baterías
Cargue la Batería Inteligente externa con el centro de carga y el adaptador de corriente de CA. Cargue la batería interna del control remoto con el cargador USB y el cable USB-C. Cargue completamente las baterías antes del primer uso.
Inserción de la batería externa
① Presione el botón de liberación de la tapa de la batería, situado en la parte posterior del control remoto, para abrir la tapa.
② Introduzca la Batería Inteligente en el compartimento y empújela hacia arriba.
③ Cierre la tapa.

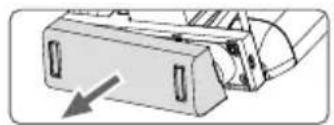
- Para extraer la Batería Inteligente, mantenga presionado el botón de liberación de la batería y empuje la batería hacia abajo.
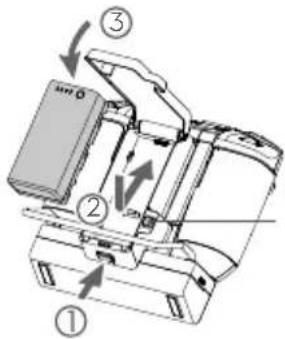
Botón de liberación de batería
Instalación del adaptador 4G y la tarjeta SIM

- Utilice solamente adaptadores que cuenten con la aprobación de DJI. El adaptador es compatible con varios estándares de red. Utilice una tarjeta SIM compatible con el proveedor de red móvil elegido y seleccione un plan de datos móviles conforme al nivel de uso planificado.
- El adaptador y la tarjeta SIM permiten que el control remoto acceda a determinadas redes y plataformas, como la plataforma de gestión DJI Agras. Asegúrese de insertarlos correctamente. De lo contrario, no se podrá disponer de acceso a Internet.
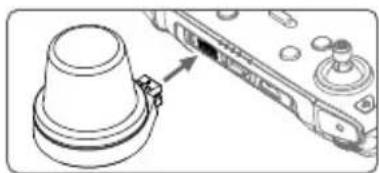
Asegúrese de que la tarjeta SIM quede insertada dentro del adaptador. Inserte el adaptador en el puerto USB y haga una prueba con el adaptador.*

Vuelva a colocar la tapa firmemente.
* Procedimiento de prueba: presione una vez el botón de encendido del control remoto y, a continuación, vuelva a presionarlo, pero esta vez manténgalo presionado para encender el control. En la aplicación DJI Agras, toque y seleccione "Network Diagnostics" (Diagnóstico de red). El adaptador y la tarjeta SIM funcionan correctamente si el estado de todos los dispositivos en la cadena de red se muestra en verde.
Inserción del adaptador RTK
Cuando vaya a utilizar el método de planificación RTK para planificar el área de operación, inserte el adaptador RTK en el puerto USB-A del control remoto.
Comprobación de los niveles de batería
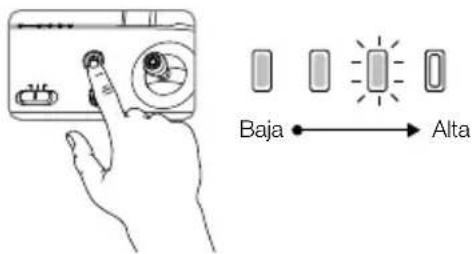
Presione el botón de encendido del control remoto una vez para comprobar el nivel de la batería interna. Presiónelo una vez, vuelva a presionarlo y manténgalo presionado durante dos segundos para encender o apagar la batería.
Presione el botón del nivel de batería de la Batería Inteligente externa una vez para comprobar el nivel.

- Si va a utilizar una Batería Inteligente externa, no olvide asegurarse de que la batería interna tenga algo de carga. De lo contrario, el control remoto no se podrá encender.
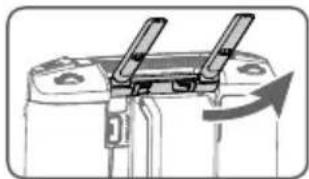
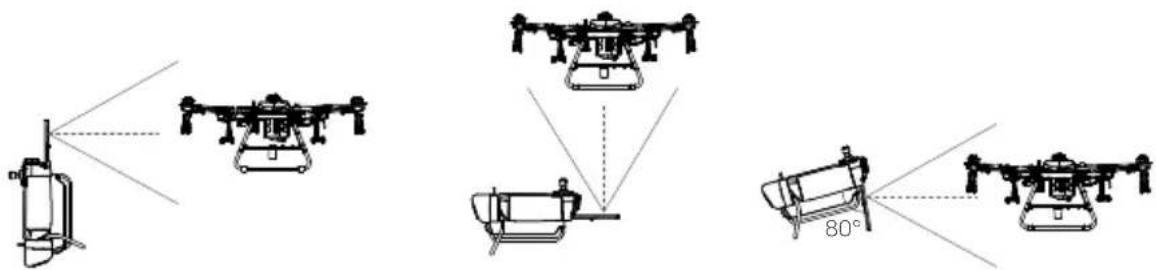
Ajuste de las antenas
Levante y ajuste las antenas. La posición de las antenas afecta a la intensidad de la señal del control remoto. Para obtener una comunicación óptima entre el control remoto y la aeronave, asegúrese de que el ángulo entre las antenas y la parte posterior del control remoto sea de 80° o 180°.
Intente mantener la aeronave dentro de la zona de transmisión óptima. Si la señal es débil, ajuste las antenas o vuele con la aeronave más cerca.
Zona de transmisión óptima
- Evite usar dispositivos inalámbricos que usen las mismas bandas de frecuencia que el control remoto.
- Si el adaptador RTK se utiliza para el método de planificación RTK, el módulo se debe desconectar del control remoto una vez que haya concluido la planificación. De lo contrario, el rendimiento de comunicaciones del control remoto se verá afectado.
4. Preparación para el despegue
A. Coloque la aeronave en una superficie plana de un espacio abierto de modo que su parte trasera quede orientada hacia usted.
B. Asegúrese de que las hélices estén bien montadas, de que no haya objetos extraños dentro de los motores y las hélices o sobre cualquiera de estos, de que las palas y los brazos de la hélice estén desplegados y de que los seguros de los brazos estén firmemente apretados.
C. Asegúrese de que el tanque de rociado y la batería de vuelo estén colocados firmemente en su lugar.
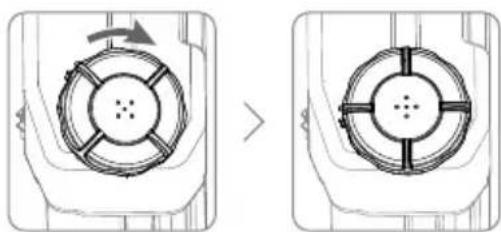
D. Llene el tanque de rociado con el líquido pertinente y, al terminar, apriete la tapa. Asegúrese de que las cuatro líneas de la tapa queden en posición horizontal y vertical.
E. Encienda el control remoto, asegúrese de que se haya abierto la aplicación DJI Agras y encienda la aeronave.
- Cuando vaya a utilizar la aeronave por primera vez, activía con la aplicación DJI Agras. Necesitará una cuenta DJI y conexión a Internet.
Calibración de la brújula
Cuando la aplicación le indique que es necesario calibrar la brújula, toque seguido de y deslice el dedo hacia abajo. Seleccione “Advanced Settings” (Ajustes avanzados), “IMU” y “Compass Calibration” (Calibración de la brújula). Toque “Calibration” (Calibración) en la sección de calibración de la brújula y siga las instrucciones que se muestran en la pantalla.
Descarga del aire atrapado en las mangueras
El T30 viene equipado con una función de descarga automática de aire atrapado. Cuando sea necesario descargar el aire atrapado, mantenga presionado el botón de rociado durante dos segundos. La aeronave libera líquido automáticamente hasta que se haya descargado todo el aire atrapado.
Calibración del caudalímetro
Asegúrese de calibrar el caudalímetro antes de usar la aeronave por primera vez. De lo contrario, el rendimiento del rociado podría verse afectado seriamente.
A. Preparación
① Llene el tanque de rociado con aproximadamente 2 l de agua.
② Libere el aire que quede aún dentro de las mangueras mediante la función de descarga automática de aire atrapado. También es posible descargar manualmente el aire atrapado; para ello, presione el botón de rociado de modo que se pulverice el aire atrapado y vuelva presionarlo una vez que todo ese aire se haya liberado.
B. Calibración
① En la aplicación, toque “Execute Task” (Ejecutar operación), de modo que acceda a “Operation View” (Vista de cámara). Toque seguido de , deslice el dedo hacia arriba y toque “Calibration”, en la parte derecha de la sección del caudalímetro.
② Toque “Start Calibration” (Iniciar calibración) para empezar a calibrar. La calibración suele tardar 25 segundos en completarse, y sus resultados se muestran en la aplicación.
- Los usuarios podrán proceder a pilotar la aeronave una vez que la calibración se haya completado correctamente.
- Si la calibración falla, toque “?” para visualizar el problema y resolverlo. Repita la calibración tras haber resuelto el problema.
5. Vuelo
En la aplicación, vaya a “Operation View” (Vista de cámara). Asegúrese de que haya la señal GNSS sea intensa y de que la barra de estado del sistema indique “Manual Route (GNSS)” (Trayectoria manual: GNSS) o “Manual Route (RTK)” (Trayectoria manual: RTK)*; de lo contrario, la aeronave no podrá despegar.
Para que la aeronave despegue y ejecute operaciones de forma automática, es recomendable haber realizado previamente una planificación de un campo de cultivo y haber escogido el tipo de operación. Consulte la sección "Inicio de las operaciones" para obtener más información. En cualquier otro caso, ejecute manualmente el despegue y el aterrizaje.
Despegue
Efectúe el comando de palancas combinado (CSC) y presione la palanca del acelerador hacia arriba para despegar.


O BIEN




Palanca del acelerador (palanca izquierda en Modo 2)
Aterrizaje
Para aterrizar, empuje la palanca de aceleración hasta que la aeronave toque el suelo. Hay dos métodos para parar los motores.
Método 1: cuando la aeronave haya aterrizado, mueva la palanca del acelerador hacia abajo y sujétela en esa posición. Los motores se pararán transcurridos 3 s.
Método 2: cuando la aeronave haya aterrizado, mueva la palanca del acelerador hacia abajo y efectúe el mismo CSC que se utilizó para arrancar los motores. Suelte las dos palancas una vez que se detengan los motores.
* Se recomienda utilizar el posicionamiento RTK. En la aplicación, vaya a "Operation View" (Vista de cámara), toque ⚙ y RTK para activar "Aircraft RTK Positioning" (Posicionamiento RTK de la aeronave) y seleccione un método de recepción de señales RTK.

flowchart
graph LR
A["Device Icon"] --> B["Screen Icon"]
B --> C["Screen Icon"]
C --> D["Screen Icon"]
D --> E["O BIEN"]
Método 1 Método 2

- Las hélices en rotación pueden ser peligrosas. Manténgase alejado de las hélices y motores en rotación. NO arranque los motores en espacios cerrados o en caso de que haya personas en las inmediaciones.
- No suelte el control remoto mientras los motores estén en funcionamiento.
- Nunca detenga los motores en pleno vuelo, a menos que se produzca una situación de emergencia en la que esta maniobra pueda reducir el riesgo de daños o lesiones.
- Se recomienda utilizar el método 1 para detener los motores. Si se utiliza el método 2 para detener los motores, la aeronave podría volcar si no está posada en tierra por completo. Utilice el método 2 con precaución.
- Tras el aterrizaje, apague la aeronave antes de apagar el control remoto.
Inicio de las operaciones
En primer lugar, haga mediciones del área de operaciones y de los obstáculos y configure los ajustes pertinentes. En segundo lugar, genere una trayectoria de vuelo a partir de esa información por medio del sistema inteligente de planificación de operaciones que la aplicación DJI Agras trae integrado. Se podrán cargar operaciones una vez que se haya planificado el terreno. La aeronave comienza a operar de forma automática y sigue la ruta de vuelo prevista.
En caso de que el terreno sea accidentado, se puede recurrir a la aeronave Phantom 4 RTK y a la aplicación DJI TERRA™ para ejecutar las operaciones, ya que permiten planificar trayectorias de vuelo e importar trayectorias a la aplicación DJI Agras. Consulte el manual de usuario del Agras T30 para obtener más información.
Planificación de campos
La aplicación DJI Agras permite la planificación de rutas de vuelo dirigiendo la aeronave hacia puntos de trayectoria, obstáculos y puntos de calibración o dirigiéndose a pie a cualquiera de estos puntos llevando consigo el control remoto, un control remoto equipado con un adaptador RTK o un dispositivo RTK. La ruta explicada a continuación se ha planificado caminando hacia los puntos con un control remoto que lleva conectado un adaptador RTK. Antes de proceder a la planificación, asegúrese de haber insertado el adaptador RTK en el control remoto.

Encienda el control remoto.
Abra DJI Agras.

Toque Plan Field (Planificar campo), y seleccione Walk with RTK (Caminar con RTK) y Walk with RTK Dongle (Caminar con adaptador RTK).

En los ajustes de RTK, seleccione un método de recepción de señales RTK y configure los ajustes correspondientes. Asegúrese de que la barra de estado de la aeronave, situada en la parte superior de la pantalla, presente color verde.

Llevando consigo el control remoto, recorra a pie el límite del área de operaciones y toque Add Waypoint C2 (Añadir trayectoria C2) en los puntos de giro.

Diríjase a pie a todos los obstáculos y, con cada uno, toque Obstacle Mode C1 (Modo de obstáculo C1)*.

Rodee el obstáculo y toque Add Obstacle C2 (Añadir obstáculo C2) en varios puntos de la trayectoria de rodeo*.

Toque Waypoint C1 (Modo de trayectoria C1) para volver a fin de agregar puntos limítrofes al área de operaciones.

Toque Field Editing (Edición de campo) para usar el punto de mira para añadir puntos, configurar la distancia y el intervalo de vuelo, y ajuste la dirección de la ruta tocando o arrastrando el ícono

Guarde la planificación del campo.
* Se pueden marcar todos los obstáculos que haya dentro y fuera del área de operaciones.
Una vez que haya terminado la planificación, presione el botón de retroceso del control remoto para volver a la pantalla de inicio.
Llevar a cabo una operación

Encienda el control remoto y la aeronave.

Toque Execute Task (Ejecutar operación) en la pantalla de inicio de la aplicación.

Toque y seleccione el campo en la lista de campos.

Toque Editar para volver a editar las trayectorias y la ruta de vuelo.

Presione Use, defina los parámetros de la operación y confírmelos.

Presione Start. Defina la altura de despegue automático estableciendo

"Connection Routing Altitude" (Altitud de trayectoria de conexión) y mueva el control deslizante para despegar. La aeronave ejecuta la operación automáticamente.

- Despegue únicamente en zonas abiertas, y establezca una altura de despegue automático que se adecue al entorno de funcionamiento.
- Cualquier operación se puede pausar con un ligero movimiento de la palanca de control. La aeronave entra en vuelo estacionario y registra el punto de interrupción, tras lo cual se podrá controlar la aeronave manualmente. Para reanudar la operación, selecciónela de nuevo en la etiqueta "Executing" (Ejecutando) de la lista 📄. La aeronave regresa automáticamente al punto de interrupción y reanuda la operación. Preste atención a la seguridad de la aeronave cuando regrese esta al punto de interrupción.
- En el modo Route Operation, la aeronave puede sortear obstáculos, una función que está deshabilitada de forma predeterminada y que puede habilitarse en la aplicación. Si la función está habilitada y la aeronave detecta obstáculos, esta reduce la velocidad, los sortea y regresa a la ruta de vuelo original.
- La aplicación permite a los usuarios definir qué acción ejecuta la aeronave después de terminada la operación.
Modos de funcionamiento y funciones adicionales
Consulte el manual de usuario del Agras T30 para obtener más información sobre los modos de funcionamiento Trayectoria A-B, Trayectoria manual y Manual Plus y sobre el uso de funciones como Trayectoria de conexión, Reanudar operaciones, Protección de datos del sistema, Tanque vacío y Recordatorio inteligente de suministro.
6. Mantenimiento
Limpie todas las piezas de la aeronave y del control remoto al término de cada jornada de rociado, una vez que la aeronave haya recuperado su temperatura normal en reposo. NO limpie la aeronave inmediatamente después de haber terminado las operaciones.
A. Llene el tanque de rociado con agua limpia o agua jabonosa y rocíela a través de las boquillas hasta que el tanque se vacíe. Repita este paso dos veces más.
B. Retire el filtro del tanque de rociado, los filtros de la boquilla y las boquillas para limpiarlos y eliminar cualquier obstrucción. Después, sumérjalos en agua limpia durante 12 horas.
C. Asegúrese de que la estructura de la aeronave esté ensamblada por completo de modo que se pueda lavar directamente con agua. Se recomienda utilizar una pistola de lavado llena de agua para limpiar el cuerpo de la aeronave y limpiarlo con un cepillo suave o un paño húmedo antes de quitar los restos de agua con un paño seco.
D. Si queda polvo o pesticida líquido sobre los motores, las hélices o los difusores de calor, límpielos con un paño húmedo antes de quitar los restos de agua con un paño seco.
E. Limpie la superficie y la pantalla del control remoto con un paño húmedo limpio que haya sido escurrido.
Para obtener más información sobre el mantenimiento del producto, consulte el documento "Renuncia de responsabilidad y directrices de seguridad".

Descargue el manual de usuario del Agras T30 en la página siguiente para obtener más información:
- Modelo de producto 3WWDZ-30A
- Aeroestructura
Distancia máxima diagonal entre 2145 mm
ejes
Dimensiones 2858 × 2685 × 790 mm (brazos y hélices desplegados)
2030 × 1866 × 790 mm (brazos desplegados y hélices plegadas)
1170 × 670 × 857 mm (brazos y hélices plegados)
- Sistema de propulsión
Motores
Potencia máxima 3600 W/rotor
ESC
Corriente máx. de funcionamiento 60 A
(continua)
Hélices plegables (R3820)
Diámetro × rosca 96.52 × 50.8 cm (38 × 20 in)
- Sistema de rociado
Tanque de rociado
Volumen A plena carga: 30 l
Capacidad de carga A plena carga: 30 kg
Boquilla
Modelo XR11001VS (de serie); XR110015VS (opcional, se compra por separado),
TX-VK4/ZX-VK4 (opcional para el modo Huerto, se compra por separado)
Cantidad 16
Velocidad máx. de rociado XR11001VS: 7.2 l/min; XR110015VS: 8 l/min
Diámetro de rociado 4-9 m (12 boquillas, a una altitud de 1.5-3 m por encima de los cultivos)
Tamaño de las gotas XR11001VS: 130-250 μm; XR110015VS: 170-265 μm (en función del
entorno de funcionamiento y de la velocidad de rociado)
Caudalímetro
Rango de medición 0.25-20 l/min
Error < ± 2%
Líquido medible Conductividad >50 μS/cm (líquidos como el agua corriente o pesticidas que contengan agua)
• Radar digital omnidireccional
Modelo RD2424R
Frecuencia de funcionamiento SRRC/NCC/FCC/MIC/KCC/CE: 24.05-24.25 GHz
Consumo eléctrico 12 W
Potencia de transmisión (PIRE) SRRC: ≤13 dBm; NCC/MIC/KCC/CE/FCC: ≤20 dBm
Detección de altitud y Altura Alcance de detección de altitud: 1-30 m
constante ^[1] Rango de estabilización: 1.5-15 m
Pendiente máx.: 35°
Sistema anticolisión ^[1] Alcance de detección de obstáculos: 1.5-30 m
FOV, campo de visión: Horizontal: 360°, vertical: ±15°
Condiciones de funcionamiento: Vuelo a una altura superior a 1.5 m por
encima del obstáculo a una velocidad inferior a 7 m/s
Distancia del límite de seguridad: 2.5 m (espacio entre el frente de las hélices
y el obstáculo tras el frenado)
Dirección del sistema anticolisión: omnidireccional en el plano horizontal
Protección IP IP67
- Radar superior
Modelo RD2414U
Frecuencia de funcionamiento SRRC/NCC/FCC/MIC/KCC/CE: 24.05-24.25 GHz
Consumo eléctrico 4 W
Potencia de transmisión (PIRE) SRRC: ≤13 dBm; NCC/MIC/KCC/CE/FCC: ≤20 dBm
Sistema anticolisión ^[1]
Alcance de detección de obstáculos: 1.5-15 m
FOV, campo de visión: 80°
Condiciones de funcionamiento: disponible en el despegue, en el aterrizaje y en el ascenso cuando haya un obstáculo por encima de la aeronave a una altura superior a 1.5 m con respecto a esta.
Distancia del límite de seguridad: 2 m (espacio entre el punto más alto de la aeronave y el punto más bajo del obstáculo tras el frenado)
Dirección del sistema anticolisión: superior
Protección IP
IP67
- Cámaras FPV
Campo de visión (FOV) Horizontal: 129°, vertical: 82°
Resolución 1280 × 720 a 15-30 fps
Focos FPV FOV, campo de visión: 120°; brillo máx.: 13.2 lux a 5 m con luz directa
- Parámetros de vuelo
Frecuencia de funcionamiento SRRC/NCC/FCC/CE/MIC/KCC: 2.4000-2.4835 GHz
Potencia de transmisión (PIRE) 2.4 GHz
Peso total (excluida la batería) 26.3 kg
Peso máx. de despegue Peso máx. de despegue para rociado: 66.5 kg (al nivel del mar)
Peso máx. de despegue para esparcido: 78 kg (al nivel del mar)
Rango de precisión en vuelo estacionario (con señal GNSS
D-RTK activado: Horizontal: ±10 cm, Vertical: ±10 cm
intensa)
D-RTK desactivado:
Frecuencia de funcionamiento del RTK/GNSS
Horizontal ±0.6 m, vertical ±0.3 m (si el módulo del radar está activado: ±0.1 m)
RTK: GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2, Galileo E1/E5
GNSS: GPS L1, GLONASS F1, Galileo E1
Batería Batería de vuelo con aprobación de DJI (BAX501-29000mAh-51.8V)
Consumo eléctrico máx. 13 000 W
Tiempo en vuelo estacionario ^[3]
20.5 min (con un peso de despegue de 36.5 kg con una batería de 29 000 mAh)
7.8 min (con un peso de despegue de 66.5 kg con una batería de 29 000 mAh)
Ángulo de inclinación máx. 15°
Velocidad máx. de funcionamiento 7 m/s
Velocidad máx. de vuelo 10 m/s (con buena señal GNSS)
Resistencia máx. al viento 8 m/s
Altitud máx. de vuelo 4500 m
Humedad de funcionamiento <93 % recomendada
Temperatura de funcionamiento De 0 a 45 °C (de 32 a 113 °F) recomendada
- Control remoto
Modelo RM500-ENT
Pantalla
5.5 pulgadas, 1920 × 1080, 1000 cd/m², sistema Android 4 GB
Memoria RAM
18 650 de iones de litio (5000 mAh a 7.2 V) GPS+GLONASS
Batería integrada
GNSS
Consumo eléctrico 18 W
Temperatura de funcionamiento
De 0 a 45 °C (de 32 a 113 °F)
Temperatura ambiente de carga
De 5 a 40 °C (de 41 a 104 °F)
Temperatura de almacenamiento De -30 a 60 °C (de -22 a 140 °F) (almacenamiento máximo de un mes con una carga de la batería integrada de entre el 40 y el 60 %)
OcuSync Enterprise
Frecuencia de funcionamiento SRRC/NCC/FCC/CE/MIC/KCC: 2.4000-2.4835 GHz
obstáculos ni interferencias)
Potencia de transmisión (PIRE) 2.4 GHz
Frecuencia de funcionamiento 2.4000-2.4835 GHz
5.150-5.250 GHz ^[2]
5.725-5.850 GHz ^[2]
Potencia de transmisión (PIRE) 2.4 GHz
Frecuencia de funcionamiento 2.4000-2.4835 GHz
Potencia de transmisión (PIRE) SRRC/NCC/FCC/CE/MIC/KCC: 6.5 dBm
• Batería Inteligente del control remoto
Modelo WB37-4920mAh-7.6V
Tipo de batería 2S LiPo
Capacidad 4920 mAh
Voltaje 7.6 V
Energía 37.39 Wh
Temperatura ambiente de carga De 5 a 40 °C (de 41 a 104 °F)
- Centro de carga de Baterías Inteligentes
Modelo WCH2
Voltaje de entrada 17.3-26.2 V
Voltaje y corriente de salida 8.7 V, 6 A
Temperatura de funcionamiento De 5 a 40 °C (de 41 a 104 °F)
- Adaptador de corriente de CA
Modelo A14-057N1A
Voltaje de entrada 100-240 V, 50/60 Hz
Voltaje de salida 17.4 V
Potencia nominal 57 W
[1] El alcance efectivo del radar depende del material, la posición, la forma y otras propiedades del obstáculo.
[2] La legislación de algunos países prohíbe el uso de las frecuencias de 5.8 y de 5.2 GHz. En algunos países, la banda de frecuencias de 5.2 GHz está permitida únicamente para el vuelo en interiores.
[3] Este tiempo en vuelo estacionario se ha calculado al nivel del mar con velocidades del viento menores de 3 m/s y una temperatura de 25 °C (77 °F). Solo como referencia. Los datos pueden variar en función del entorno. Los resultados serán los probados.
Agras T30
Corrente máxima de funcionamento 60 A
(continua)
Horizontal: ± 0,6 m, Vertical: ± 0,3 m (módulo Radar habilitado: ± 0,1 m)
Consumo de energía máx. 13.000 W
Tipo de bateria 2S LiPo





- Control remoto
- Vuelo seguro
- Requisitos del entorno de vuelo
- Regreso al punto de origen (RPO)
- Uso de pesticidas
- Uso del T30
- Preparación de la Batería de Vuelo Inteligente
- Preparación de la aeronave
- Preparación del control remoto
- Carga de las baterías
- Inserción de la batería externa
- Instalación del adaptador 4G y la tarjeta SIM
- Inserción del adaptador RTK
- Comprobación de los niveles de batería
- Ajuste de las antenas
- Preparación para el despegue
- Calibración de la brújula
- Descarga del aire atrapado en las mangueras
- Calibración del caudalímetro
- Preparación
- Calibración
- Vuelo
- Despegue
- Aterrizaje
- Inicio de las operaciones
- Planificación de campos
- Llevar a cabo una operación
- Modos de funcionamiento y funciones adicionales
- Mantenimiento
- - Cámaras FPV
- - Parámetros de vuelo
- - Control remoto
- OcuSync Enterprise
- • Batería Inteligente del control remoto
- - Centro de carga de Baterías Inteligentes
- - Adaptador de corriente de CA
- Agras T30
Marca : DJI
Modelo : Agras T30
Categoría : Zumbido