
Agras T30 - ドローン DJI - 無料のユーザーマニュアル
デバイスのマニュアルを無料で見つける Agras T30 DJI PDF形式.
| 製品タイプ | 農業用散布ドローン |
| ブランド | DJI |
| モデル | Agras T30 |
| 寸法(展開時) | 2858 × 2685 × 790 mm(アームとプロペラ展開時) |
| 寸法(折り畳み時) | 1170 × 670 × 857 mm(アームとプロペラ折り畳み時) |
| 総重量(バッテリー除く) | 26.3 kg |
| 最大離陸重量(液剤散布時) | 66.5 kg(海抜) |
| 最大離陸重量(粒剤散布時) | 78 kg(海抜) |
| タンク容量 | 30 L |
| スプレーヤー数 | 16 |
| 最大散布流量 | 7.2 L/min(ノズルXR11001VS) |
| 飛行バッテリー | |
| ホバリング時間 | 20.5 分(離陸重量36.5 kg時) |
| 最大飛行速度 | 10 m/s |
| 通信距離 | 最大7 km(FCC) |
| レーダーシステム | 全方向デジタルレーダー + 上向きレーダー |
| 保護等級 | IP67 |
| 動作温度 | 0〜45 °C |
| 主な機能 | 自動散布、ルート計画、障害物回避、自動帰還、地形追従 |
| メンテナンスと清掃 | 使用後の水洗い、ノズルとフィルターの清掃 |
| 安全 | 強風時の飛行禁止、地域規制の遵守、農薬の慎重な使用 |
| 部品と修理 | 交換部品あり(プロペラ、バッテリー、ノズル、フィルター); DJIまたは認定センターによる修理 |
| 送信機 | Smart Controller Enterprise、5.5インチ画面、内蔵+外部バッテリー、4時間駆動 |
よくある質問 - Agras T30 DJI
ユーザーの質問 Agras T30 DJI
0 質問 この機器について。知っているものに答えるか、ご自身の質問をしてください。
この機器について新しい質問をする
デバイスの取扱説明書をダウンロード ドローン 無料でPDF形式で!マニュアルを見つける Agras T30 - DJI 電子デバイスをもとに戻しましょう。このページにはデバイスの使用に必要なすべての書類が掲載されています。 Agras T30 ブランド DJI.
使用説明書 Agras T30 DJI
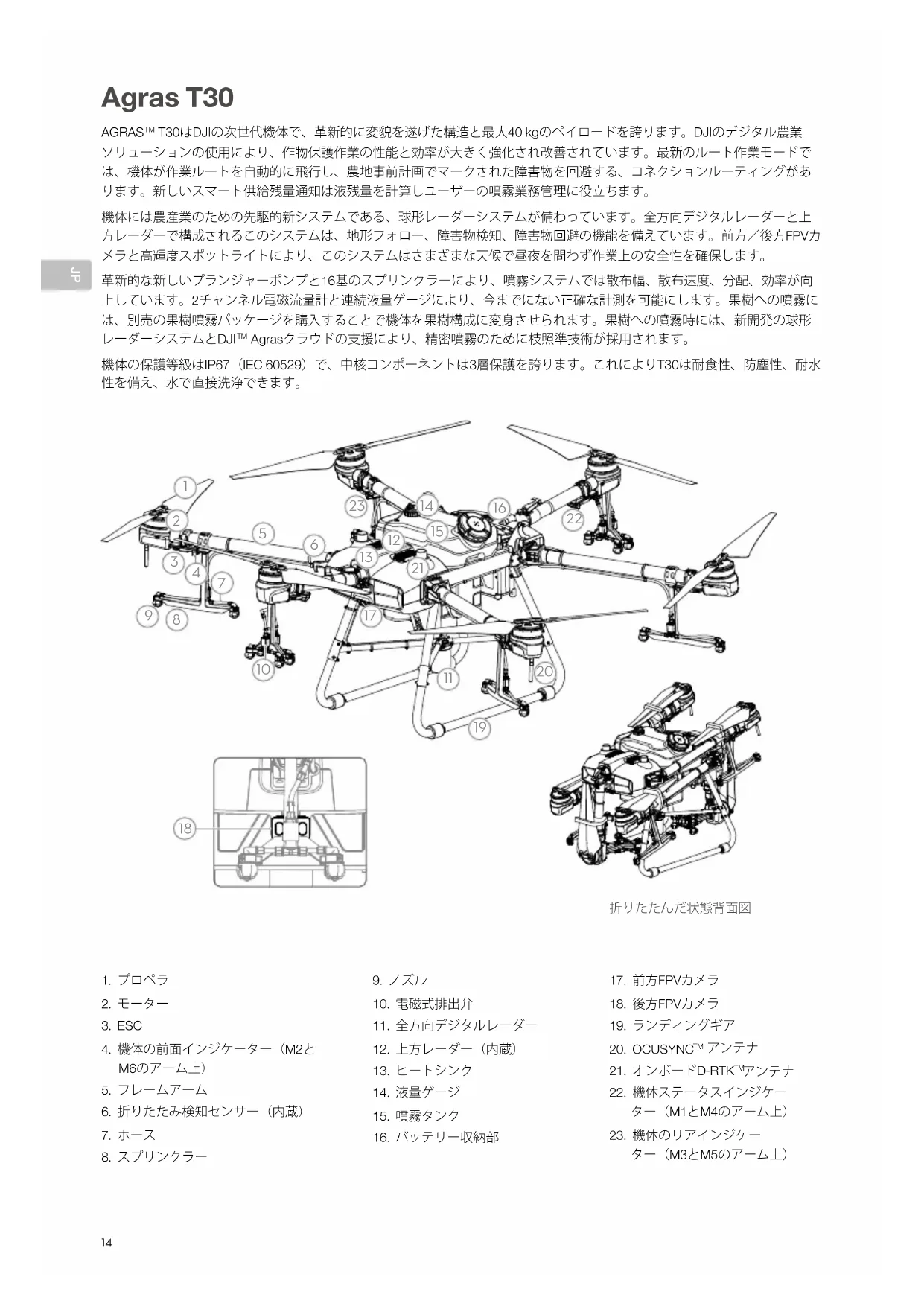
AGRAS™ T30はDJIの次世代機体で、革新的に変貌を遂げた構造と最大40 kgのペイロードを誇ります。DJIのデジタル農業ソリューションの使用により、作物保護作業の性能と効率が大きく強化され改善されています。最新のルート作業モードでは、機体が作業ルートを自動的に飛行し、農地事前計画でマークされた障害物を回避する、コネクションルーティングがあります。新しいスマート供給残量通知は液残量を計算しユーザーの噴霧業務管理に役立ちます。
機体には農産業のための先駆的新システムである、球形レーダーシステムが備わっています。全方向デジタルレーダーと上方レーダーで構成されるこのシステムは、地形フォロー、障害物検知、障害物回避の機能を備えています。前方/後方FPVカメラと高輝度スポットライトにより、このシステムはさまざまな天候で昼夜を問わず作業上の安全性を確保します。
革新的な新しいプランジャーポンプと16基のスプリンクラーにより、噴霧システムでは散布幅、散布速度、分配、効率が向上しています。2チャンネル電磁流量計と連続液量ゲージにより、今までにない正確な計測を可能にします。果樹への噴霧には、別売の果樹噴霧パッケージを購入することで機体を果樹構成に変身させられます。果樹への噴霧時には、新開発の球形レーダーシステムとDJITM Agrasクラウドの支援により、精密噴霧のために枝照準技術が採用されます。
機体の保護等級はIP67(IEC 60529)で、中核コンポーネントは3層保護を誇ります。これによりT30は耐食性、防塵性、耐水性を備え、水で直接洗浄できます。
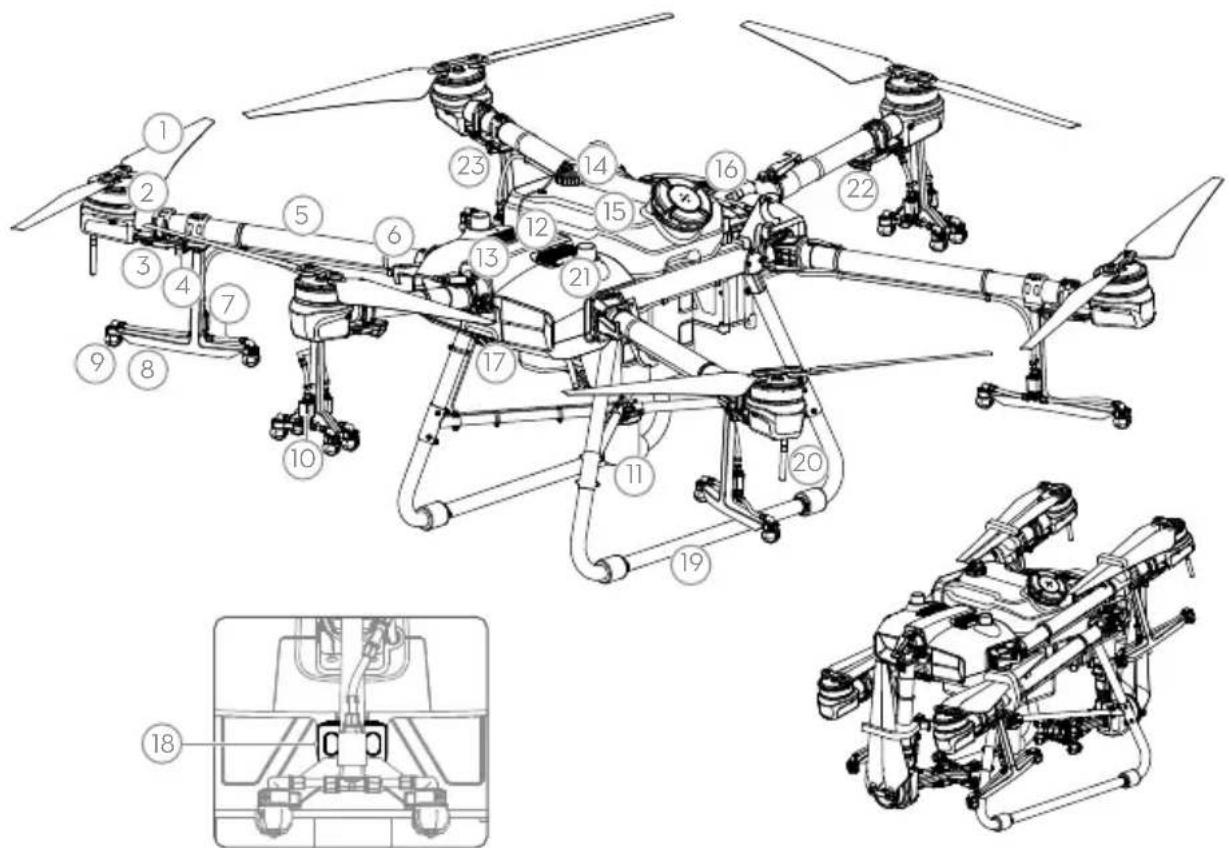
- ブロペラ
- モーター
- ESC
- 機体の前面インジケーター(M2とM6のアーム上)
- フレームアーム
- 折りたたみ検知センサー (内蔵)
- ホース
-
スプリンクラー
-
ノズル
- 電磁式排出弁
- 全方向デジタルレーダー
- 上方レーダー(内蔵)
- ヒートシンク
- 液量ゲージ
- 噴霧タンク
-
バッテリー収納部
-
前方FPVカメラ
- 後方FPVカメラ
- ランディングギア
- OCUSYNC™ アンテナ
- オンボードD-RTK™アンテナ
- 機体ステータスインジケーター (M1とM4のアーム上)
- 機体のリアインジケーター(M3とM5のアーム上)
送信機
スマート送信機EnterpriseはDJI OcuSync Enterprise伝送技術を採用し、最大伝送距離は4 km*を誇り、Wi-FiとBluetoothに対応しています。送信機には5.5インチの明るい専用画面が装備され、また最新のDJI Agras内蔵アプリによりスムーズで簡単に使える体験が得られます。RTKドングルが送信機に接続されているときには、センチメートルレベルの精度で作業を計画できます。送信機の複数機制御モード*は、複数の機体の同時操作を調整でき、パイロットは非常に効率的に作業することができます。内蔵バッテリーと外付けバッテリーはどちらも、送信機に電力を供給するのに使用することができます。送信機の稼働時間は最大4時間で、長時間で高負荷の作業に最適です。
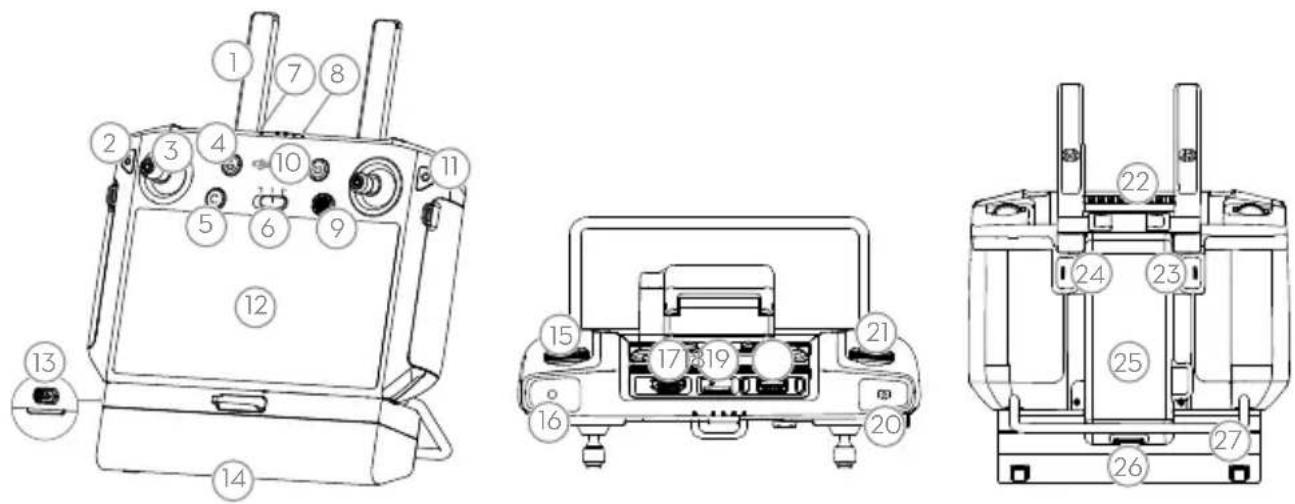
- アンテナ
- 戻る/機能ボタン
- 操作スティック
- RTHボタン
- ボタンC3(カスタム可能)
- フライトモードスイッチ
- ステータスLED
- バッテリー残量LED
-
5Dボタン(カスタム可能)
-
電源ボタン
- 確認ボタン
- タッチスクリーン
- USB-C充電ポート
- ドングル収納部カバー
- 噴霧流量ダイヤル
- 噴霧ボタン
- HDMIポート
-
microSDカードスロット
-
USB-Aポート
- FPV/マップ切替ボタン
- 予備ダイヤル
- 排気口
- ボタンC1 (カスタム可能)
- ボタンC2 (カスタム可能)
- バッテリーカバー
- バッテリーカバー解除ボタン
- ハンドル
下図では「モード1」を例にして、各操作スティックの動きで実行される機能を説明しています。モード1では、左スティックで機体の前後の動きと向きを制御し、右スティックで高度と左右の動きを制御します。
左スティック 右スティック 前方


後方
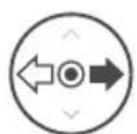

左旋回



* 送信機は、高度約2.5 mで電磁波干渉のない開けた環境下で、最大伝送距離(FCC/NCC:7 km、SRRC:5 km、CE/KCC/MIC(日本):4 km)に達することができます。
複数機体制御モードの使用時には現地の法令と規制を必ず順守してください。
安全飛行
ご自身や周りの人々の安全を守るため、基本的な飛行ガイドラインを理解することが重要です。
- 開けた場所で飛行:電柱、電力線、その他の障害物に注意してください。水辺、人や動物の周辺や頭上では、飛行させないでください。
- どんなときでも制御を維持:送信機から手を雛さずに、飛行中の機体の制御を維持してください。これは、ルート作業モード/A-Bルート作業モード/スマートReturn-to-Homeなどのインテリジェント機能を使用している場合でも同様です。
- 目視内を維持:常に機体を目視内(VLOS)に入るようにしてください。視界を遮る可能性のある建物や他の障害物の後ろを飛行させることは避けてください。
- 機体の高度を監視:有人飛行機や他の航空交通の安全のために、地域の法令や規制に従って、高度100 m未満の高度で飛行させてください。

GEOゾーンなどの不可欠な安全機能についてはhttps://www.dji.com/flysafeを参照してください。

飛行環境の条件
- 風速が18 km/hを超える場合に機体を使用して噴霧しないでください。
- 強風(28 km/h超)、12時間雨量が25 mmを超える豪雨、雪、霧などの悪天候時に機体を使用しないでください。
- 海抜4.5 kmを超えて飛行しないでください。
- DJI Agrasアプリは現在のステータスと機体の周辺状況に応じてタンクのペイロード重量制限をインテリジェントに推奨します。タンクに材料を追加するときには推奨ペイロード重量制限を超えないようにしてください。推奨値を超えると、飛行安全性に影響を及ぼすことがあります。
- 作業中、強いGNSS信号を受信し、D-RTKアンテナを遮るものがないことを確認してください。
Return-to-Home (RTH)
機体は以下の状況で自動的にホームポイントに戻ります:
スマートRTH:ユーザーがRTHを長押ししたとき。
フェールセーフRTH:送信機信号が失われたとき。*
機体の20 m以内に障害物がある場合、機体は減速し、制動してホバリング状態になります。機体はRTHを終了し、その後の指示を待ちます。
ルート作業中にRTHがトリガーされると、農地の計画時に追加された障害物を回避するよう、機体はRTHに対する飛行経路を計画できます。
* 送信機信号が失われた時に機体はRTHするかホバリングします。動作についてはアプリで設定できます。フェールセーフ RTHはRTHが設定されているときにのみ使用可能です。

- 障害物回避は機体が姿勢モードのときには無効にされています。GNSS信号が弱いときなどの状況でこのモードに入ります。障害物回避は、レーダーモジュールが正常に動作しない環境で機体を使用しているときには信頼できない場合があることに注意してください。前述の状況では、特に注意してください。
農薬の使用
- 粉末状の農薬は使用しないでください。噴霧システムの耐用年数が短くなる可能性があります。
- 農薬には毒性があり、健康に深刻な危険をもたらします。農薬の使用の際は、必ず農薬に記載されている指示に従ってご使用ください。
- ストレーナーの詰まりを避けるため、噴霧タンクに注ぐ前に、浄水を使用して農薬を混合し、混合液をろ過してください。
- 農薬の効果的な使用は、農薬の濃度、噴霧量、噴霧距離、機体速度、風速、風向、温度、湿度によって左右されます。農薬を使用する際は、すべての要因を考慮してください。
- 作業中に、人、動物、または周囲の環境の安全性を損なわないでください。

ご自身や周りの人々の安全を守るため、基本的な飛行ガイドラインを理解することが重要です。必ず免責事項と安全に関するガイドラインをお読みくださるようお願いします。
T30の使用
1. インテリジェント フライトバッテリーの準備
純正のDJIフライトバッテリー(モデル:BAX501-29000mAh-51.8V)のみを使用してください。飛行前にバッテリー残量を確認し、対応するマニュアル文書に従って充電してください。

M2アームとM6アームを広げ、2個のアームロックを締め付けます。指を挟まないようにしてください。
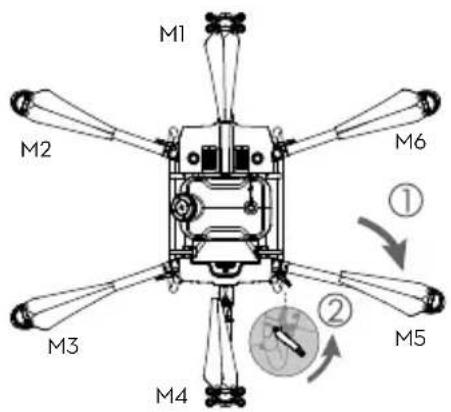
M3およびM5アームを展開し、次にM1およびM4を展開し、4個のアームロックを締め付けます。指を挟まないようにしてください。
カチッという音がするまで、インテリジェント フライトバッテリーを機体に挿入します。

- バッテリーが機体にしっかり挿入されていることを確認してください。バッテリーは、機体の電源が入っていないときにのみ挿入または取り外してください。
- バッテリーを取り外すには、クランプを押し下げたままでバッテリーを持ち上げます。
- M3アームとM5アームを折りたたみ、次にM2アームとM6アームを折りたたみます。アームは機体の両側の保管クランプに確実に挿入するようにしてください。そうしない場合、アームが破損する恐れがあります。摩耗や傷を減らすため、M1およびM4アームはゆっくりと上下させてください。
3. 送信機の準備
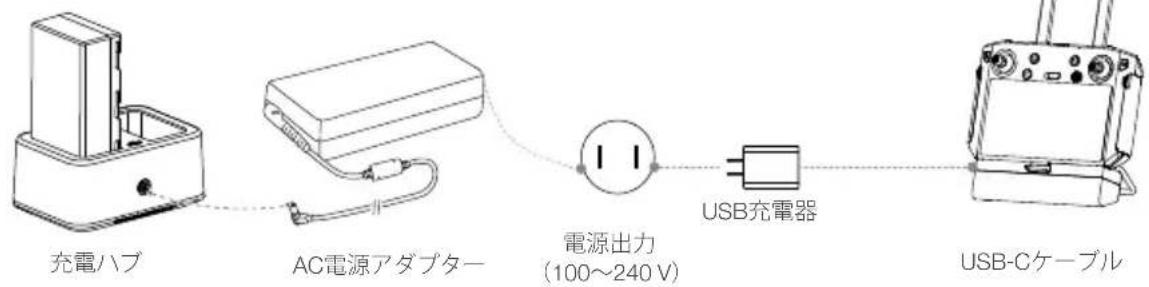
バッテリーの充電
充電ハブとAC電源アダプターを使用して、外部インテリジェント バッテリーを充電します。USB充電器とUSB-Cケーブルを使用して、送信機の内部バッテリーを充電します。初回使用時にはバッテリーを完全に充電してください。
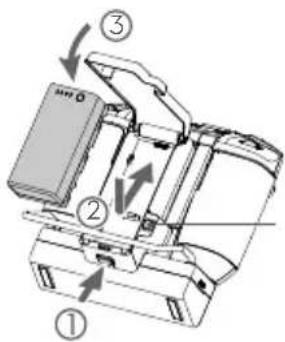
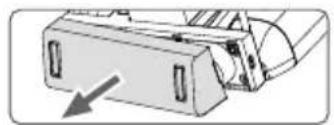
外部バッテリーの装着
① 送信機背面にあるバッテリーカバー解除ボタンを下に押して、カバーを開きます。
② インテリジェント バッテリーを収納部に挿入し、上方向に押します。
③ カバーを閉じます。

- インテリジェント バッテリーを取り外すには、バッテリー解除ボタンを押したままバッテリーを押し下げます。
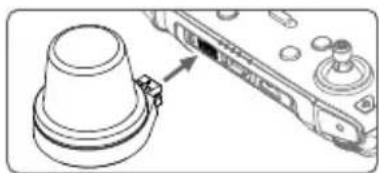
- 必ずDJIで承認されたドングルをご使用ください。ドングルは様々なネットワーク規格に対応しています。選択したモバイル ネットワーク プロバイダーに対応するSIMカードを使用して、計画した使用レベルに応じたモバイル データ プランを選択します。
- ドングルとSIMカードを使用すると、送信機は特定のネットワークやプラットフォーム(DJI Agras管理プラットフォームなど)にアクセスできます。必ず正しく挿入してください。正しく使用しない場合、ネットワークにアクセスできません。
SIMカードがドングルに挿入されたことを確認してください。ドングルをUSBポートに挿入してドングルをテストします。*

* テスト手順:送信機の電源ボタンを押した後、もう1回長押しして送信機の電源を入れます。DJI Agrasの◎をタップして、ネットワーク診断を選択します。ネットワークチェーン内のすべてのデバイスのステータスが緑色で表示されている場合、ドングルとSIMカードは適切に機能しています。
RTKドングルの取り付け
RTK計画方法を使用して作業エリアを計画する場合、送信機のUSB-AポートにRTKドングルを取り付けます。
送信機の電源ボタンを1回押して、内部バッテリー残量を確認します。ボタンを1回押し、次に2秒間長押しすると電源オンまたは電源オフになります。
バッテリー残量を確認するには、外部インテリジェントバッテリーのバッテリー残量ボタンを1回押します。

- 外部インテリジェント バッテリーを使用する場合にも、内部バッテリーにある程度の電力があることを確認する必要があります。電力がない場合、送信機の電源を入れることができません。
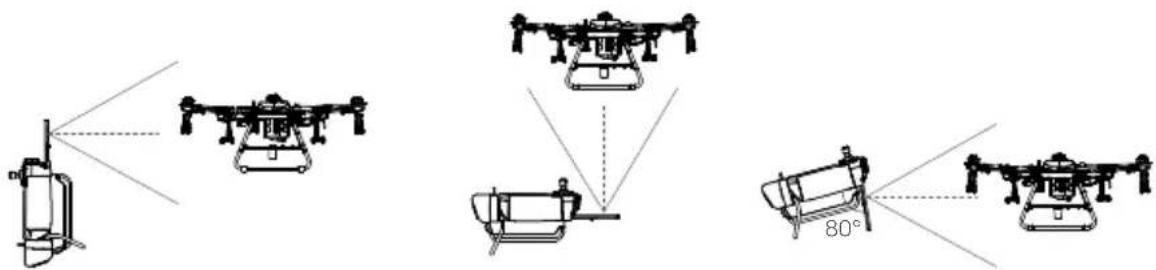
アンテナの調整
アンテナを立てて、角度を調整します。送信機の信号強度は、アンテナの位置に影響を受けます。送信機と機体間の接続を最適にするために、アンテナと送信機の背面との間の角度が必ず80°または180°になるようにしてください。
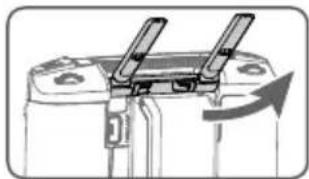
機体が最適な伝送範囲から出ないようにしてください。信号が弱い場合は、アンテナを調整するか、機体をより近い範囲で飛ばしてください。
最適な伝送範囲
- 送信機と同一の周波数帯を利用する無線機器は使用しないでください。
- RTKドングルをRTK計画に使用する場合、計画の完了後にモジュールを送信機から取り外す必要があります。そうしない場合、送信機の通信性能に影響します。
4. 離陸準備
A. 機体の後面を自分のほうに向けて、機体を屋外の平らな地面に置きます。
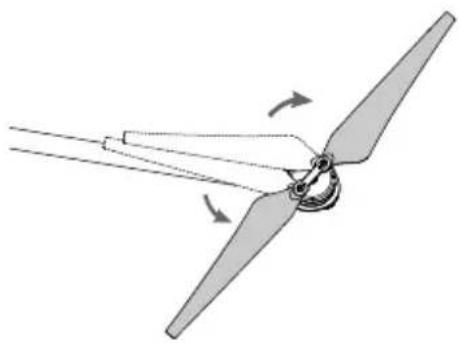
B. プロペラがしっかりと取り付けられていること、モーターとプロペラの中または上に異物がないこと、プロペラのブレードとアームが展開されていること、およびアームロックがしっかりと締め付けられていることを確認します。
C. 噴霧タンクとフライトバッテリーがしっかりと固定されていることを確認します。
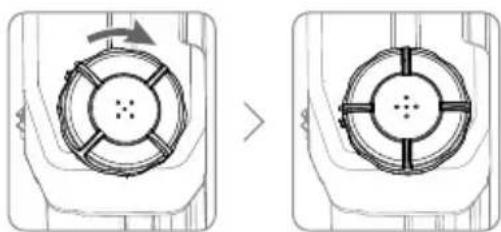
D. 噴霧タンクに液体を注ぎ、ふたを締めます。ふたの十字の線が水平と垂直方向に揃っていることを確認してください。
E. 送信機の電源を入れ、DJI Agrasアプリが起動していることを確認してから、機体の電源を入れます。
- 初めて使用するときには、DJI Agrasアプリを使用して機体をアクティベートしてください。DJIアカウントとインターネット接続が必要です。
コンパスのキャリブレーション
コンパスのキャリブレーションが必要であるというプロンプトがアプリで表示されたら、をタップし、次にをタップし、最下部までスワイプします。[高度な設定]→[IMU]→[コンパス キャリブレーション]の順で選択します。[コンパス キャリブレーション]で[キャリブレーション]をタップし、画面の指示に従います。
ホースに溜まった空気の排出
T30は自動空気排出機能を搭載しています。溜まった空気を排出する必要がある場合は、噴霧ボタンを2秒間長押しします。溜まった空気が完全に排出されるまで、機体は自動的に排出を行います。
AP
流量計のキャリブレーション
初めて使用する前には流量計のキャリブレーションを必ず行ってください。そうしない場合、噴霧性能に悪い影響が出る恐れがあります。
A. 準備
① 噴霧タンクに約2Lの水をいれます。
② 自動空気排出機能を使用して溜まった空気を排出します。ユーザーは溜まった空気を手動で排出することもできます。噴霧ボタンを押して溜まった空気を噴霧し、溜まった空気の排出が終わったときにこのボタンを再度押します。
B. キャリブレーション
①アプリ内で、[作業を実行]をタップして作業ビューに移動します。☆を順にタップして、上にスワイプしてから流量計キャリブレーションセクションの右側にある[キャリブレーション]をタップします。
②[キャリブレーション開始]をタップしてキャリブレーションを開始します。キャリブレーションは完了まで25秒かかり、結果はアプリで表示されます。
- キャリブレーションが正常に終了すればユーザーは次の作業に進むことができます。
- キャリブレーションに失敗した場合には、[?]をタップして問題を表示し、解決してください。問題が解決したら再度キャリブレーションします。
5. 飛行
アプリで操作画面に移動します。強いGNSS信号があり、システム ステータスバーにマニュアルルート(GNSS)またはマニュアルルート(RTK)が表示されていることを確認してください。*それ以外の場合、機体は離陸できません。
機体が自動的に離陸して作業を実行するには、農地計画を作成し、離陸前に操作を選択しておくことをお勧めします。詳細については、「作業の開始」セクションを参照してください。他のシナリオでは手動で離着陸します。
離陸
コンビネーション スティック コマンド(CSC)を実行してから、スロットルスティックを上に倒すと離陸します。


または



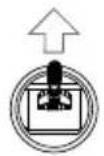
スロットルスティック
(モード1の右スティック)
着陸
着陸するには、スロットルスティックを下に倒して、機体が地面に着くまで機体を下降させます。モーターの停止方法は2通りあります。
方法1:機体が着陸したら、スロットルスティックを下に倒し続けます。モーターは3秒後に停止します。
方法2:機体が着陸したら、スロットルスティックを下に倒し、モーター始動の時と同じCSCコマンドを実行すると、モーターが停止します。モーターが停止したら両スティックを離します。
*RTKポジショニングを推奨します。アプリ内で、作業ビューに移動してをタップし、RTKをタップして、機体RTK測位を有効にし、RTK信号を受信する方法を選択します。

方法1 方法2




または



- 回転しているプロペラは危険です。回転しているプロペラやモーターから離れてください。近くに人がいる場所や狭い場所では、モーターを始動させないでください。
- モーターの運転中には送信機の制御を維持してください。
- 飛行中にモーターを緊急停止しないでください。ただし、緊急停止することで破損や怪我のリスクを低減できるような緊急の場合を除きます。
- モーターを停止には、方法1を推奨します。方法2を使用してモーターを停止する場合、機体が完全に地面に接していないと転倒することがあります。方法2を実行する場合は、十分に注意してください。
- 着陸後、送信機の電源を切る前に機体の電源を切ってください。
作業の開始
作業エリアと障害物エリアを測量し、設定を行うと、DJI Agrasアプリは内蔵のインテリジェント作業計画システムを使用し、ユーザーの入力に基づいて飛行ルートを作成します。ユーザーは、フィールド計画後に作業を呼び出すことができます。機体は自動的に作業を開始し、計画された飛行ルートに従います。
複雑な地形の使用シーンでは、Phantom 4 RTKおよびDJI TERRA™を使用して、飛行ルートを計画してから、DJI Agrasアプリにルートをインポートして操作することができます。詳細については、Agras T30ユーザーマニュアルを参照してください。
フィールド計画
DJI Agrasアプリは、ウェイポイント/障害物/キャリブレーションポイントに機体を飛行させたり、送信機/RTKドングルを取り付けた送信機/RTKデバイスをこれらのポイントまで持ち歩いたりすることで、飛行経路の計画をサポートします。以下のルートは、RTKドングルが接続された送信機を持ってポイントまで歩いて計画をたてる例を説明しています。計画する前に、RTKドングルが送信機に取り付けられていることを確認してください。

送信機の電源を入れます。
DJI Agrasを起動します。

計画フィールドをタップし、
[RTKを持って歩く]を選択して、
[RTKドングルを持って歩く]の
順に選択します。

RTK設定では、RTK信号の受信方法を選択し、対応する設定を構成してください。画面上部の機体ステータスバーが緑色であることを確認してください。

送信機を持って作業エリアの境界に沿って歩き、曲がり角でウェイポイントを追加 C2 をタップします。

順番に各障害物まで歩いて[障害物モードC1]をタップします。*

障害物の周りを歩き、障害物の周囲の数箇所で障害物を追加 C2 をタップします。*

[ウェイポイントC1]をタップして、作業エリアに端点を追加するために戻ります。

[フィールド編集] をタップして、クロスヘアを使用してポイントを追加し、距離とルート間隔を設定し、アイコンをタップまたはドラッグしてルートの方向を調整します。

フィールド計画を保存します。
* 作業エリア内外に障害物があればすべてマークできます。
計画が終了したら、送信機の[戻る]ボタンを押しホーム画面に戻ります。
作業の実行

送信機と機体の電源を入れます。

アプリのホーム画面で [作業の実行]をタップ します。

目をタップして、農地リストから農地を選択します。

編集をタップして、ウェイポイントと飛行ルートを再度編集します。

パラメーターを設定して、確認します。

[開始]をタップします。[使用]をタッコロネ作業コンルーティング高度を設定することにより自動離陸高度を設定し、スライダーを移動して離陸します。機体は自動的に作業を実行します。


- 開けた場所でのみ離陸し、動作環境に応じて適切な自動離陸高度を設定してください。
- 作業は、操作スティックを少しでも動かすと、一時停止になります。機体はホバリングし中断地点を記録します。その時点から機体は手動で制御できます。作業を継続するには、コストの[実行]タグから再度選択します。その後、機体は中断地点に自動的に戻り、作業を再開します。中断地点に戻るときは、機体の安全に注意してください。
- ルート作業モードでは、機体は障害物を回避できます。これはデフォルトで無効になっていますが、アプリで有効にできます。この機能が有効な場合、機体が障害物を検出すると、機体は減速して障害物を回避し、元の飛行経路に戻ります。
- ユーザーは、アプリで作業が完了した後に機体が実行する作業を設定できます。
その他の作業モードと機能
「A-Bルート」、「手動」、「手動プラス」作業モードと、「コネクションルーティング」、「作業再開」、「システムデータ保護」、「タンクを空にする」、「スマート供給通知」などの機能の使用方法に関する詳細についてはAgras T30ユーザーマニュアルを参照してください。
6. メンテナンス
噴霧作業を行った各日の終わりに機体が正常の温度に戻った後、機体と送信機のすべての部分を清掃します。作業完了直後には機体を清掃しないでください。
A. 噴霧タンクに浄水または石鹸水を満たし、タンクが空になるまでノズルから水を噴霧します。このステップをさらに2回繰り返します。
B. 噴霧タンクストレーナー、ノズルストレーナー、ノズルを取り外して清掃し、詰まりを取り除きます。その後、それらを浄水に12時間浸します。
C. 水で機体を直接洗えるようにするため、機体構造が完全に接続されていることを必ず確認します。水を満たした噴霧ウォッシャーを使用して機体本体を洗浄し、柔らかいブラシまたは濡れた布で拭いてから、乾いた布を使用して残った水を拭き取ることをお勧めします。
D. モーター、プロペラ、ヒートシンクにごみや殺虫剤液がある場合は、濡れた布で拭いてから、乾いた布を使用して残った水をふき取ります。
E. 送信機の表面と画面は、水で絞ったきれいな濡れ布で拭いてください。
製品メンテナンスの詳細については、免責事項と安全に関するガイドラインを参照してください。

詳細については、Agras T30ユーザーマニュアルをダウンロードしてください:
2145 mm 2858×2685×790 mm(アームとプロペラ展開時) 2030×1866×790 mm(アーム展開時、プロペラ折りたたみ時) 1170×670×857 mm(アームとプロペラ折りたたみ時)
- 推進システム
モーター
最大電力
3600 W/ローター
ESC
最大動作電流(連続)
60 A
折りたたみ式プロペラ (R3820)
直径×ピッチ
38×20インチ
- 噴霧システム
噴霧タンク
積載容量
動作ペイロード
ノズル
モデル
完全積載時:30 L
完全積載時:30 kg
数量
最大噴霧速度
XR11001VS(標準)、XR110015VS(別売オプション)
散布幅
TX-VK4/ZX-VK4(果樹構成でのオプション、別売)
液滴サイズ
16
流量計
測定範囲
XR11001VS:7.2 L/分、XR110015VS:8 L/分
エラー
4~9 m (ノズル×12、作物の上空1.5~3 m)
測定可能な液体
XR11001VS:130~250 μm、XR110015VS:170~265 μm(動作環境と噴霧率に依存)
- 全方向デジタルレーダー
モデル
0.25\~20L/分
動作周波数
<±2%
消費電力
導電率 > 50 μS/cm (水道水や水を含む農薬などの液体)
伝送電力 (EIRP)
RD2424R
高度検知&地形フォロー[1]
SRRC / NCC / FCC / MIC (日本) / KCC / CE : 24.05~24.25 GHz 12 W
SRRC:13 dBm以下、NCC/MIC(日本)/KCC/CE/FCC:20 dBm以下
高度検知幅:1~30 m
安定化動作範囲:1.5~15 m
山岳モードでの最大傾斜:35°
障害物回避[1]
障害物検知範囲:1.5~30 m
FOV:水平:360°、垂直:±15°
作業条件:7 m/s以下の速度で、障害物の上1.5 m以上を飛行
安全距離制限:2.5 m(制動後のプロペラ前部と障害物の距離)
障害物回避方向:水平方向の全方向の障害物を回避
IP等級 IP67
- 上方レーダー
モデル
RD2414U
動作周波数
SRRC / NCC / FCC / MIC (日本) / KCC / CE : 24.05\~24.25 GHz
消費電力
4 W
伝送電力(EIRP)
SRRC:13 dBm以下、NCC/MIC(日本)/KCC/CE/FCC:20 dBm以下
| 障害物回避[1] | 障害物検知範囲:1.5~15 mFOV:80°作業条件:機体から上方にある障害物までの距離が1.5mを超えている場合の離陸、着陸、上昇時に使用可能。安全制限距離:2m(制動後の機体最上部と障害物最下部との間の距離)障害物回避方向:上方 |
IP等級 IP67
- FPVカメラ
FOV 水平:129°、垂直:82° 解像度
FPVスポットライト
- 飛行パラメーター
| 動作周波数 | SRRC / NCC / FCC / CE / MIC (日本) / KCC : 2.400~2.4835 GHz |
| SRRC / NCC / FCC / CE : 5.725~5.850 GHz[2] | |
| 伝送電力(EIRP) | 2.4 GHz |
SRRC/CE/MIC(日本)/KCC:20dBm以下、FCC/NCC:31.5dBm以下
5.8 GHz
総重量(バッテリーを除く) FCC / SRRC / NCC : 29.5 dBm以下、CE : 14 dBm以下 26.3 kg
最大離陸重量 噴霧時の最大離陸重量:66.5 kg(海抜ゼロ地点での測定)
散布時の最大離陸重量:78 kg(海抜ゼロ地点での測定)
ホバリング精度(GNSS信号の強 D-RTK有効時:水平:±10 cm、垂直:±10 cm
い状態) D-RTK無効時:
水平:±0.6 m、垂直±0.3 m(レーダーモジュール有効時:±0.1 m)
RTK/GNSS動作周波数 RTK: GPS L1/L2、GLONASS F1/F2、BeiDou B1/B2、Galileo E1/E5
GNSS : GPS L1, GLONASS F1, Galileo E1
バッテリー DJI認定フライトバッテリー (BAX501-29000mAh-51.8V)
最大消費電力 13000 W
ホバリング時間 ^[3] 20.5分(離陸重量36.5 kg、29000 mAh/バッテリー搭載時)
7.8分(離陸重量66.5 kg、29000 mAhバッテリー搭載時)
最大倾斜角度 15°
最大動作速度 7 m/s
最大飛行速度 10 m/s(強GNSS信号)
最大風圧抵抗 8 m/s
運用限界高度(海拔) 4500 m
推獎動作環境湿度 93%未満
推獎動作環境溫度 0℃~45℃
- 送信機
| モデル | RM500-ENT |
| 画面 | 5.5インチ画面、1920×1080、1000 cd/m ^2 、Androidシステム |
| RAM 4GB | |
| 内蔵バッテリー | 18650 Li-ion (5000 mAh @ 7.2 V) |
| GNSS GPS + GLONASS消費電力 | 18 W |
動作環境溫度 0℃\~45℃
充電環境溫度 5℃\~40℃
保管環境温度 -30℃~60℃(内蔵バッテリの電力が40%~60%で保管1カ月以内のもの)
OcuSync Enterprise 動作周波数 SRRC / NCC / FCC / CE / MIC(日本)/ KCC:2.400~2.4835 GHz
SRRC / NCC / FCC / CE : 5.725\~5.850 GHz ^[2]
最大伝送距離(障害物、電波干渉 FCC/NCC:7 km、SRRC:5 km、MIC(日本)/KCC/CE:4 km のない場合)
| 伝送電力(EIRP) | 2.4 GHz |
| SRRC/CE/MIC(日本)/KCC:20 dBm以下、FCC/NCC:30.5 dBm以下 | |
| 5.8 GHz | |
| SRRC:21.5 dBm以下、FCC/NCC:29.5 dBm以下、CE:14 dBm以下 | |
| Wi-Fi | |
| プロトコル | Wi-Fi Direct、Wi-Fi Display、802.11a/g/n/ac |
| Wi-Fi (2×2 MIMO) | |
| 動作周波数 | 2.400~2.4835 GHz |
| 5.150~5.250 GHz[2] | |
| 5.725~5.850 GHz[2] | |
| 伝送電力(EIRP) | 2.4 GHz |
| SRRC/CE:18.5 dBm、NCC/FCC/MIC(日本)/KCC:20.5 dBm | |
| 5.2 GHz | |
| SRRC/NCC/FCC/CE/MIC(日本):14dBm、KCC:10 dBm | |
| 5.8 GHz | |
| SRRC/NCC/FCC:18 dBm、CE/KCC:12 dBm | |
Bluetooth
| プロトコル | Bluetooth 4.2 |
| 動作周波数 | 2.400~2.4835 GHz |
| 伝送電力(EIRP) | SRRC / NCC / FCC / CE / MIC(日本)/KCC:6.5 dBm |
- 送信機インテリジェント バッテリー
| モデル | WB37-4920mAh-7.6V |
| バッテリータイプ | 2S LiPo |
| 容量 | 4920 mAh |
| 電圧 | 7.6 V |
| 電力量 | 37.39 Wh |
| 充電環境温度 | 5°C~40°C |
- インテリジェント バッテリー充電ハブ
| モデル | WCH2 |
| 入力電圧 | 17.3~26.2 V |
| 出力電圧および電流 | 8.7 V、6 A |
| 動作環境温度 | 5°C~40°C |
- AC電源アダプター
| モデル | A14-057N1A |
| 入力電圧 | 100~240V、50/60 Hz |
| 出力電圧 | 17.4 V |
| 定格出力 | 57 W |
[1] レーダー有効射程距離は、障害物の材質/位置/形状などによって異なります。
[2] 5.8 GHzおよび5.2 GHz周波数帯の使用は、現地の規制によって使用が禁止されている場合があります。一部の国では、5.2GHz周波数帯の使用は屋内でのみ利用可能です。
[3] ホバリング時間は、風速 3 m/s 未満、温度 25°C (77°F)、海抜約 0m で測定した値です。これは参考値です。データは環境によって異なる場合があります。実際の結果は試験結果とします。
Agras T30





- 送信機
- 安全飛行
- 飛行環境の条件
- Return-to-Home (RTH)
- 農薬の使用
- T30の使用
- インテリジェント フライトバッテリーの準備
- 送信機の準備
- バッテリーの充電
- 外部バッテリーの装着
- RTKドングルの取り付け
- アンテナの調整
- 離陸準備
- コンパスのキャリブレーション
- ホースに溜まった空気の排出
- AP
- 流量計のキャリブレーション
- 準備
- 飛行
- 離陸
- 着陸
- 作業の開始
- フィールド計画
- 作業の実行
- その他の作業モードと機能
- メンテナンス
- - 推進システム
- - 噴霧システム
- - 全方向デジタルレーダー
- - 上方レーダー
- - FPVカメラ
- - 飛行パラメーター
- - 送信機
- Agras T30
ブランド : DJI
モデル : Agras T30
カテゴリ : ドローン