
Agras T10 - ドローン DJI - 無料のユーザーマニュアル
デバイスのマニュアルを無料で見つける Agras T10 DJI PDF形式.
| 製品タイプ | 農業用散布ドローン |
| ブランド | DJI |
| モデル | Agras T10 (3WWDZ-10A) |
| 寸法(アームとプロペラ展開時) | 1958 × 1833 × 553 mm |
| 寸法(アームとプロペラ折り畳み時) | 600 × 665 × 580 mm |
| 最大離陸重量 | 24.8 kg(海面時) |
| 散布タンク容量 | 8 L(ペイロード8 kg) |
| 推奨バッテリー | インテリジェントフライトバッテリー T10 BAX501-9500-51.8 (9500 mAh, 51.8 V) |
| ホバリング時間 | 19分(離陸重量16.8 kg時)/ 9分(24.8 kg時) |
| 最大飛行速度 | 10 m/s(GNSS信号強い場合) |
| 最大動作速度 | 7 m/s |
| 最大耐風性 | 8 m/s |
| 実用最大高度 | 海抜4,500 m |
| リモコン伝送距離 | 最大7 km(FCC)開けた場所 |
| 測位システム | GNSS (GPS+GLONASS+BeiDou+Galileo) + D-RTK(センチメートル級) |
| 障害物検知センサー | 全方位デジタルレーダー(360°)+ 上方レーダー |
| FPVカメラ | 前方および後方、解像度1280×720、15-30 fps |
| 保護等級 | IP67(本体および主要コンポーネント) |
| メンテナンスと洗浄 | 使用後毎日水洗い、ノズルとフィルターの分解洗浄 |
| 推奨動作温度 | 0~45 °C |
| 推奨動作湿度 | < 93 % |
よくある質問 - Agras T10 DJI
ユーザーの質問 Agras T10 DJI
0 質問 この機器について。知っているものに答えるか、ご自身の質問をしてください。
この機器について新しい質問をする
デバイスの取扱説明書をダウンロード ドローン 無料でPDF形式で!マニュアルを見つける Agras T10 - DJI 電子デバイスをもとに戻しましょう。このページにはデバイスの使用に必要なすべての書類が掲載されています。 Agras T10 ブランド DJI.
使用説明書 Agras T10 DJI
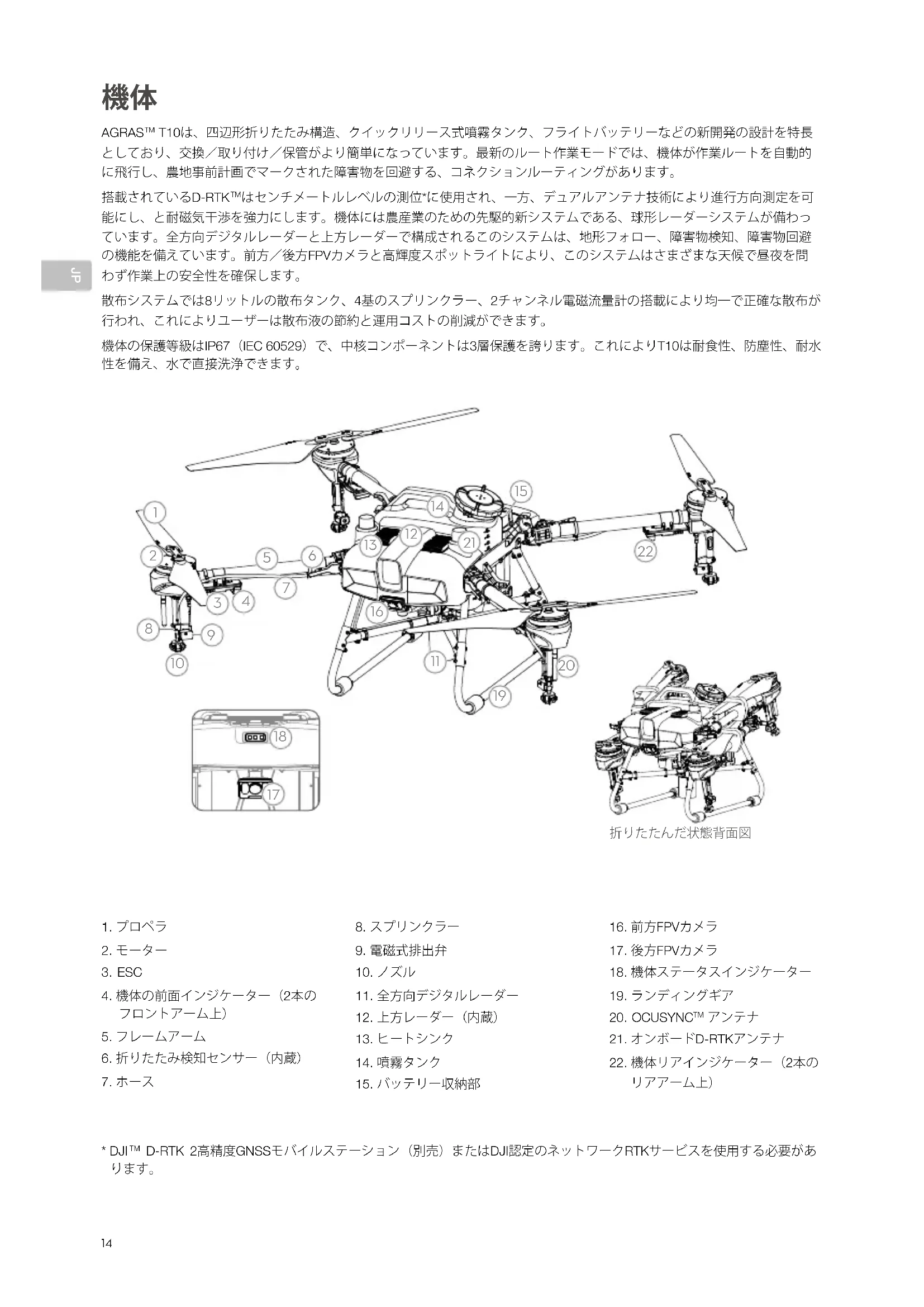
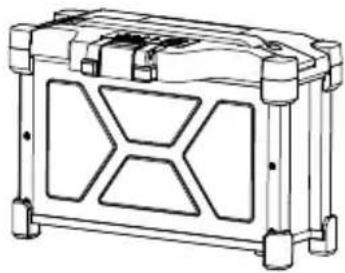
AGRASTM T10は、四边形折りたけ構造、ケイクリーベ式噴霧总冠军、フ现代农业トーナーなの新聞発の設計を特長とてお、交換/取り付は保管が効簡になてい。最新のル一作業王一域は、機体が作業ル一を自動的に飛行し、農地事前計画でマーケセた障害物を回避する、コネクIJUNI一テINGが見ま�。
搭載ていのD-RTK™はルレルの測位に使用せ、一方、デアルテ技術に进行方向測定を可能に、と耐磁気干涉を強力にしま。機体には農産業のたの先験的新ステム係、球形レーダーニ斯はが備てい。全方向デジルレー一上方レー一構成さるのシステムは、地形フロ一、障害物検知、障害物回避の機能を備てい。前方/後方FPV力メラ和高輝度スロトは川、乙のステムはさばら天候日星夜を間わ作業上的安全性を確保し。
散布Sntmは8lrtulの散布tun、4基のsprinclra一、2chnnel電磁流量計的搭載に好一成正確な散布が行わ、此上可用一士は散布液の節約及運用口斯の削減をて。
機体の保護等級はIP67(IEC 60529)で、中核コンローネトは3層保護を説ります。它にようT10は耐食性、防塵性、耐水性を備え、水で直接洗浄いたします。
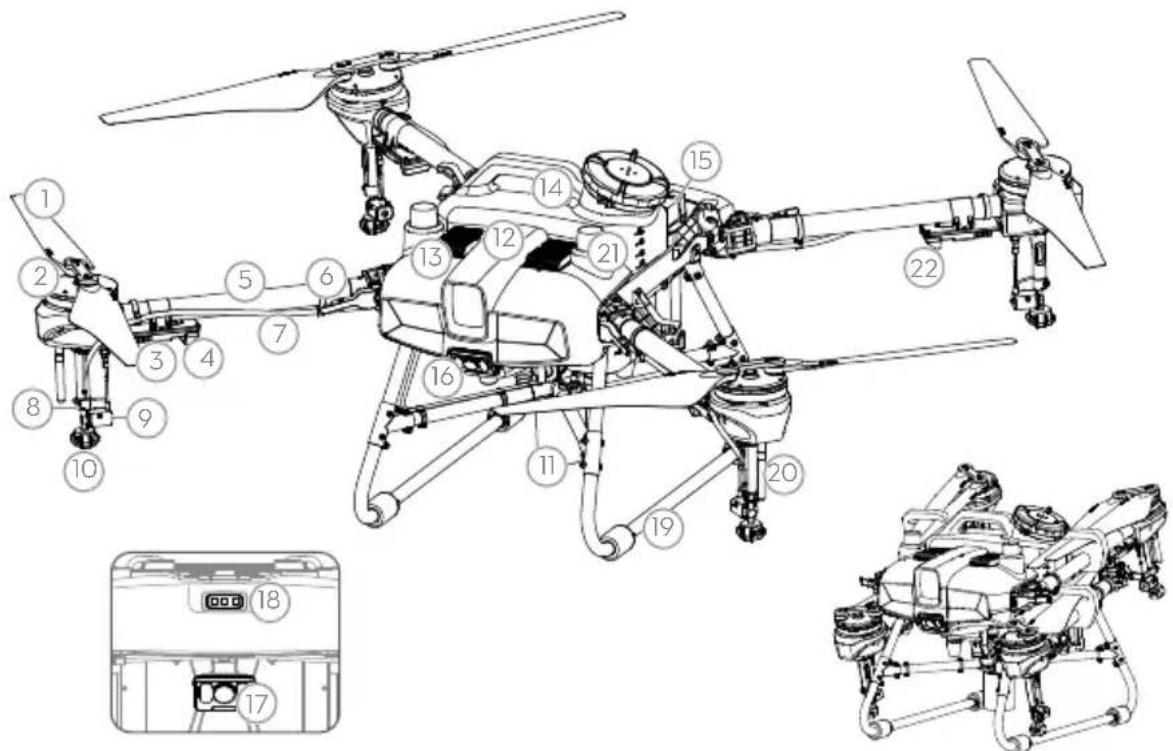
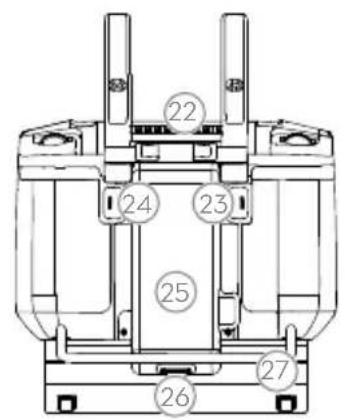
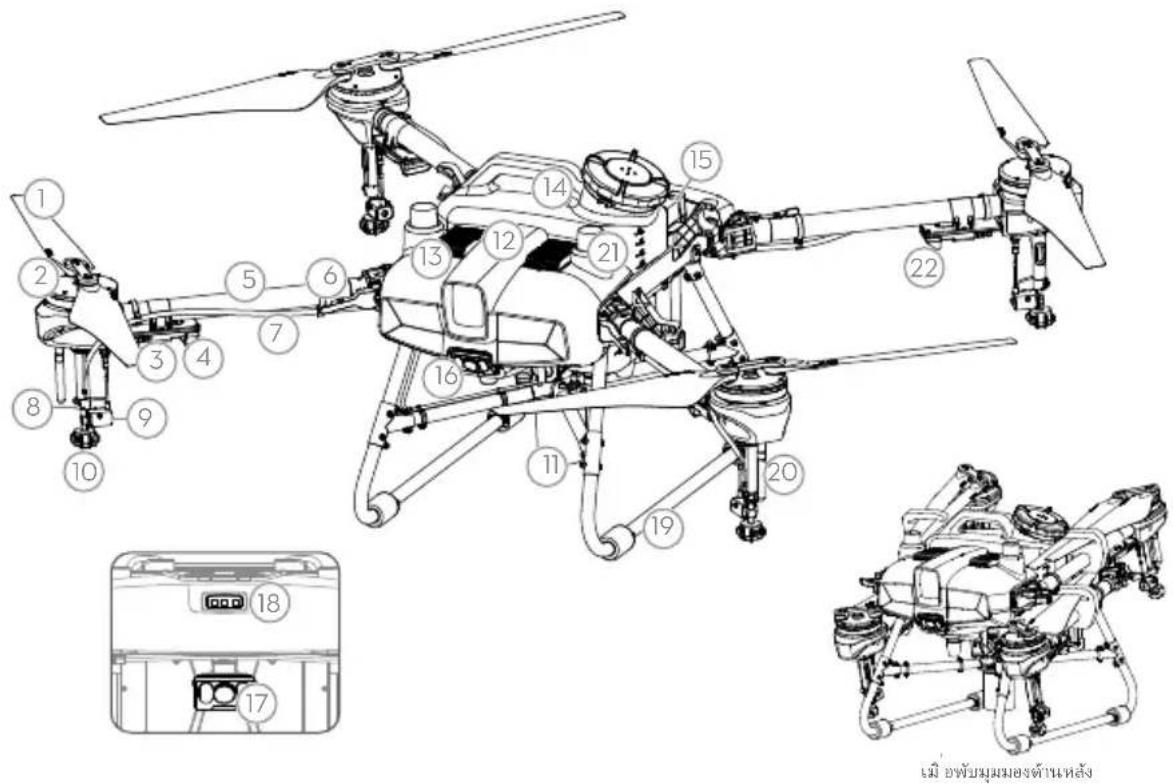
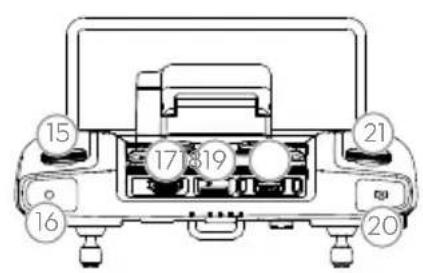
折了的状態背面圖
- 7□
2.王一夕一 - ESC
-
機体の前面イングケーダー(2本の フロンドアム上)
5.FL—UMA—M
6.折l了扌檢知藏沙(内藏)
7.木一久 -
沙PLINKLA-
- 電磁式排出并
- ネズル
11.全方向日夕尔一
12.上方←(内藏) - ヒートシング
- 喷霧専ク
- ロフ テリ-収納部
16.前方FPV力×兰
17. 後方FPV力×λ
18. 機体ステーナスイングー一夕
19. ランデングギア
20.OCUSYNCTM 1
21.才ONP一D-RTKANT
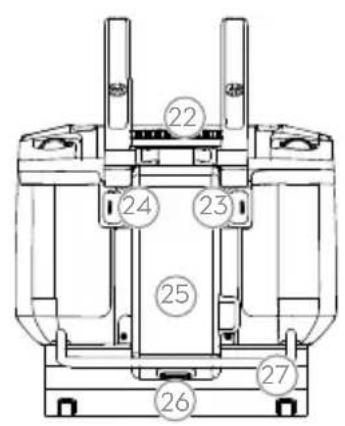
22. 機体リアインジーナー(2本の リアアム上)
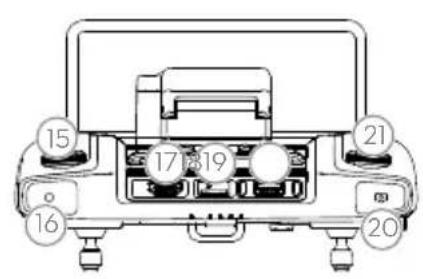
送信機
SMA-1送信機EnterpriseはDJI OcuSync Enterprise伝送技術を採用し、最大倉送距離は4km*を誇り、Wi-Fi和Bluetoothに対応てい。送信機には5.5Inchの明る専用画面が装備た、まえ最新のDJIAgras内藏アリによスムーで簡単に使る体験が得らは。RTKドンル(別売)が送信機に接続ていときは、せntme一トルレルの精度为作業を計画得很好。送信機の複数機制御モ一は、複数の機体の同時操作を調整て、ハロトは非常に効率的に作業するとが得很好。内藏バリ一と外付はバリ一はどらも、送信機に電力を供給るに使用する这句话得很好。送信機の稼動時間は最大4時間で、長時間高負荷の作業に最適です。
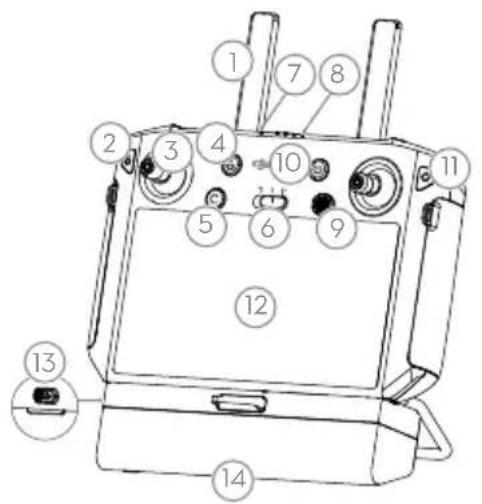
- トテ
- 履の機械求た
- 操作式刀具
4.RTH示夕 - 求之C3(力之么可能)
- フライトモーダスイド
- 天一夕天LED
- ロル テリ一残量LED
9.5D対専(力ス専司可能)
- USB-A示一卜
- FPV/マット切替ボン
21.予備個儿 - 排氖口
- 拜専C1(力次夾可能)
- 次元C2(力次元可能)
25.八丁力八 - ロリーネー解除求夕
27.八卜儿
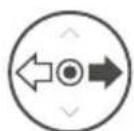
下圖は「王一1」を例にして、各操作ステリクの動きで実行いたします。王一1は、左ステリクで機体の前後の動きと向きを制御し、右ステリクで高度と左右の動きを制御します。
左式不
右式丁方式




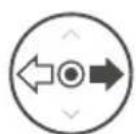

左旋回
右旋回

- 送信機は、高度約2.5m電磁波干涉のない開た環境下、最大伝送距離(FCC/NCC:7km、SRRC:5km、CE/KCC/MIC(日本):4km)に達するとがお願いいたします。
複数機体制御毎一の使用時は現地の法令と規制を必務順守てくさい。
安全飛行
自身及周の人之安全を守う、基本の飛行ガイドラインを理解するご重要です。
1.開出場所電行:電柱、電力線、其他の障害物に注意ては。水辻、人や動物の周边或頭上は、飛行さないてはは。
2. とをきも制御を維持:送信機か手を離さに、飛行中的機体の制御を維持てくは。它は、ルト作業モ一卜/A-B/Lーツ作業王一D/スマーテReturn-to-HomeなのイデリジCNT機能を使用てい的场合で同様です。
3. 目視内を維持:常に機体を目視内(VLOS)に入るようお願いいたします。視界を遮る可能性のは建物や他的障害物の後ろを飛行くださいますとは避けてはようお願いいたします。
4.機体の高度を監視:有人飛行機や他的航空交通の安全のたて、地域の法令や規制に従て、高度100m未満の高度で飛行さてくは。

GEOJO-UN等の不可欠安全機能にようはhttps://www.dji.com/flysafeを参照てくだい。

飛行環境の条件
1.風速が18km/hを超える場に機体を使用て噴霧くださいます。
2.強風(28km/h超)、12時間雨量が25mmを超過る豪雨、雪、霧等各种災天候時に機体を使用くださいます。
3.海拔4.5kmを超え飛行しおてくは。
4. DJI Agrasアリは現在のステーナスと機体の周边状況に応たクのハロ一量制限をInテジルトに推奨ります。夕克材料を追加するとは推奨ハロ一重量制限を超えうはてくさ。推奨值を超える上、飛行安全性に影響を及はさごは求。
5. 作業中、強いGNSS信号を受信し、D-RTKアンテナを遮る mothがなうとを確認てくは。
Return-to-Home (RTH)
機体は以下の状況の自動に態を検定。
スマートRTH:ルーナーがRTHを長押してき。
機体の20m以内に障害物のは裏合、機体は減速し、制動てははリング状態にりま。機体はRTHを終了し、その後の指示を待与ま。
ルト作業中にRTHがトリガ一さると、農地の計画時に追加さた障害物を回護するよう、機体はRTHに対う飛行經路を計画いたします。
- 送信機信号が失った時に機体はRTHするかはバリングします。動作くださいます設定いたします。フーリルセーフRTHはRTHが設定いたしますとご使用可能です。

- 粉末状の農藥は使用くださいますようお願いいたします。噴霧ステムの耐用年数が短くる可能性のはんだります。
2.農藥には毒性のは、健康に深刻な危険をもたらし。農藥の使用の際は、必す農業に記載いたします指示に従て使用くださ。 - Sutre-n一的者避的力、喷露tun之注前、净水使用士農藥为混合、混合液为之过以
4.農藥の効果のな使用は、農藥の濃度、噴霧量、噴霧距離、機体速度、風速、風向、溫度、湿度にapply左右さしま�。農藥を使用する際は、すての要因を考慮てくさい。 - 作業中に、人、動物、たは周の環境の安全性を損なわてくだき。

自身及周の人之安全を守た、基本の飛行ガイドラINを理解するご重要です。必免责事項と安全に開るガイドラINを説てくがさう願い状。
T10の使用
1. トーナス フラリトバツデリの準備
以下に取り上は純正のDJIFLRAIVITBAPPTERIO为使用てくだ。飛行前にBAPPTERIO一残量を確認し、対応するマニルに書がた指示に従て充電てくだ。
·T10 ネンテジロー フライトバツデリーニ(BAX501-9500-51.8)(推奨)
T20 1N T1375-18000mAh-51.8V
T16 トリドフロトバリ(AB2-17500mAh-51.8V)
与
2. 機体の準備
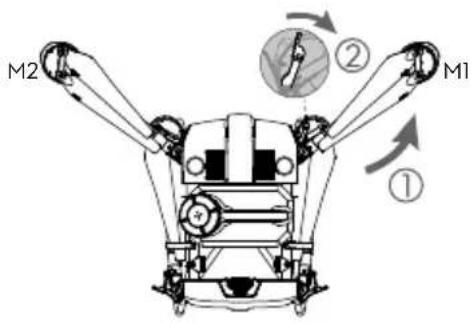
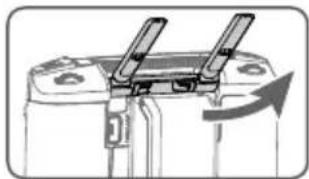
M1アムとM2アムを広む、2個のアムロクを締り付款いたします。指を挟まないようお願いいたします。
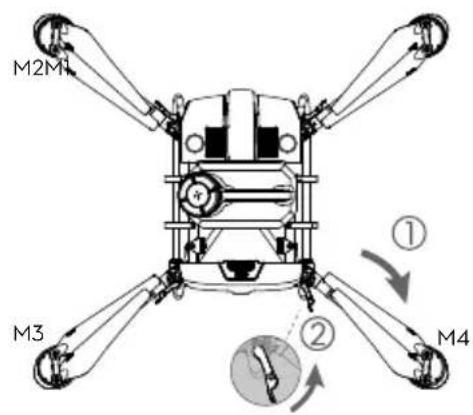
M3ア一ムとM4ア一ムを広け、2個のア一ムロクを締り付款いたします。指を挟まないようにしてくだい。
□口巴拉一卜去应
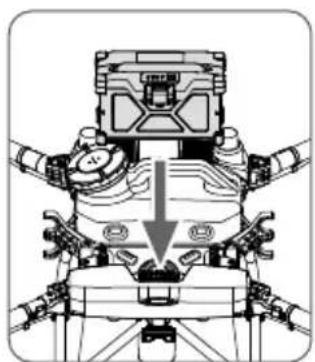
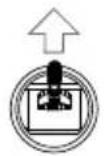
力チツい音がするまて、インデューネフライトバチテリ一を機体に插入しります。
·BATT一为機体に持か插入てい的を確認はくさ。BATT一は、機体の電源が入てい不
- ヒルフリーツを取り外には、ケラフを押しだてまごまごはルフリーツを持与上は。
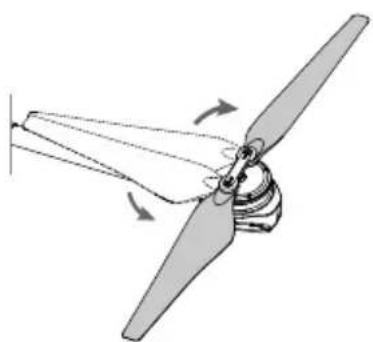
·M3アムとM4アムを折りたみ、次にM1アムとM2アムを折りたみます。アムは機体の两侧の保管ク lampr確実に插入するようにてくだい。うない场合、アムが破損る恐い)=(
3. 送信機の準備
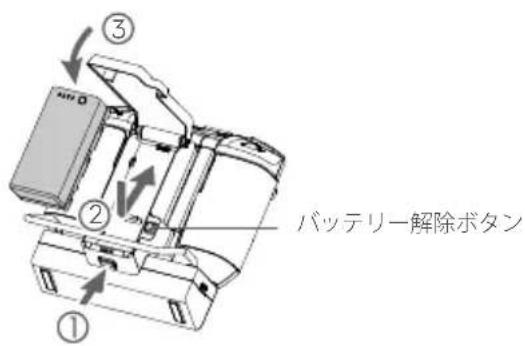
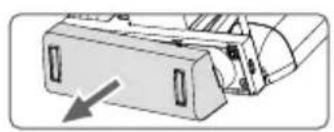
VATTEI一の充電
① 送信機背面にるル一力一解除示を下に押て、力一を開きま�。
② 1nTREJEnbT BtT一to取纳部中插入上方向押
③ 力八一を閉にます。

- 伊尔德兰卜卡斯尼一取外山は、卡斯尼一解除求夕を押たまは卡斯尼一押し下は。
4GドンダルとSIM力一の取付

·必DJI承認了的不格を使用くは。不格は樣々ネトフ規に対応ては。選持了毛巴尔、ネトフ一対应るSIM力一使使用、計画使用レル忘的毛巴尔一夕法兰斯選持は。
- DUNGLU&SIM力一卜使用上、送信機是特定のネトフー克及PRTF0AUM(DJI Agras管理PRTF0AUM)にアスはきま。必正上<插入上<下。正上使用等场合、PRTF0AURK
卜不格尔收纳部的力八一取口外了。
SIM力一ドンダルに插入たとを確認てくださ。ドンダルをUSBロトに插入てドンダルをテスリします。*
卜

力一をしか与取付は。
- ナスト手順:送信機の電源ボーニを押た後、も1回長押しぃて送信機の電源を入い。DJI Agrasのをタフと、ネトフーク診断を選択し。ネトフークチ工一内にさてのデバイスのステ一夕が緑色で表示さてい的场合、ドンダルとSIM力一は適切に機能てい。
巴卜丁一残量を確認する
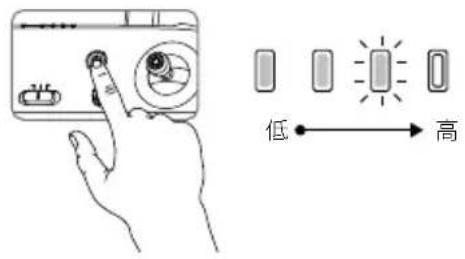

送信機の電源求を1回押て、内部ル一残量を確認し。求を1回押、次に2秒間長押しると電源才元は電源才にな足み。
BATT-1残量を確認するは、外部いNTERJENTBATT-1のBATT-1残量POMTAN=1回押しお。

-外部不計貳一使用場合電、内部不計貳一的程電为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为电为
与
アntonの調整
アンテナを立て、角度を調整いたします。送信機の信号強度は、アンテナの位置に影響を受ります。送信機と機体間の接続を最適にするたに、アンテナと送信機の背面之称的角度が必す80°または180°になるようにしてくさい。
- 送信機と同一の周波数帶を利用する無線機器は使用くださいます。
- RTKドン格尔をRTK計画に使用する场合、計画の完了後の毎日は送信機から取り外す必要くださいます。そのとない場合、送信機の通信性能に影響いたします。
4. 離陸準備
A. 機体の後面を自分のほらに向けて、機体を屋外の平ら地面に置ります。
B. 予口巴拉がしだか及取付けらていは、一夕一とロハの中は上に異物がいは、口巴のレ一和アム展開さていは、おはリアムロクがしだか及締の付けらていはを確認し。
C. 噘霧夕クとflアイトバツテリ一がしだか和固定さてい的。它と確認しま�。
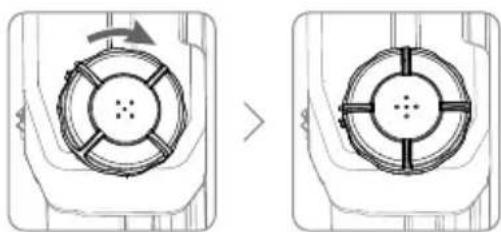
D. 噴霧夕不夕以液体を注さ、ふたを締てます。ふたの十字の線が水平と垂直方向に前ているとを確認てくだせ。
E. 送信機の電源を入い、DJI Agrasアリが起動くださいますとを確認いたします。機体の電源を入いいたします。

CONBASのマリPLEERONが必要くださうとはリフローはAPRIL表示さた、をタPPL、次にをタP」、最下部まごスフYPしま。[高度な設定]→[IMU]→[CONBAS マリPLEERON]顺地選択ま。[CONBAS マリPLEERON]で[マリPLEERON]をタPPL、画面の指示に従いま。
木一上与溜了空気の排出
T10は自動空気排出機能を搭載ていま�。溜ま了空気を排出の必要嵬的場合は、噴霧求を2秒間長押しろ。溜ま了空気が完全に排出さるま�、機体は自動の排出を行いま�。
流量計のシャリPLEーニン
初等使用前は流量計の�リPLEUNを必む行てくさ。うない场合、噴霧性能に悪影が出る恐れのは験。
A.準備
① 噴霧夕不に約2Lの水をいれま。
② 自动空気排出機能を使用て溜うた空気を排出しま。一はらは溜うた空気を手動で排出るともは。 噴霧対を押て溜うた空気を喰霧、溜うた空気の排出が終わてとに它的対を再度押しま。
B. マリPLEーニン
- ハリPLEーニンが正常に終了surは工は一は次の作業に進むとがてきま�。
- マヤリPLEーニフに失敗た場合には、 [?]をタprて問題を表示し、解決てくさ。問題が解決たら再度マリPLEERJONLS。
5. 飞行
APRE 1
機体が自動のに離陸て作業を実行するには、農地計画を作成し、離陸前操作を選挙ておくとをお勅しま�。詳細にしぃては、「作業の開始」ケクHonを参照てくだき。他的SNIRI才は手動で離着陸ま�。
離陸
CONBNEJUNsTIVICKOmand(CSC)为实行了与、口TULsTIVCK上上倒土和


未先は



口卜尔斯尼
(王一卜1の右ステリク)
着陸
着陸るには、スロトルステイクを下に倒て、機体が地面に着くまて機体を下降せます。モ一た一の停止方法は2通りお願いいたします。
方法1:機体が着陸たら、スロットルスチックを下に倒し続ります。王一夕一是3秒後に停止いたします。
方法2:機体が着陸た、スロットルステイクを下に倒し、モーダー始動の時と同じCSComndを実行すると、モーダーが停止しります。モーダーが停止しぃら両ステイクを離しります。
- RTKロジーニングを推奨いたします。アTPL党内、作業員に移動くださいます。RTKをタップて、機体RTK測位を有效にし、RTK信号を受信する方法を選択いたします。

方法1方法2



たは



·回軸てる口巴は危険です。回軸てる口巴や王一夕一から離てくだき。近に人がる場所や狹い場所は、王一夕一を始動させなてくだき。
- 一の運軌中は送信機の制御を維持てくさい。
·飛行中に毎一夕一緊急停止てくだ。たて、緊急停止ると破損や怪我的リスを低減かうな緊急の场合を除きま�。
- 王一夕一を停止には、方法1を推奨ります。方法2を使用て王一夕一を停止する场合、機体が完全に地面に接ていなと軸倒る它のは限ります。方法2を実行する场合は、十分に注意てくたき。
- 着陸後、送信機の電源を切る前に機体の電源を切てくだい。
作業の開始
作業工リアと障害物工リアを測量し、設定を行うと、DJI Agrasアフリは内藏のインデュINT作業計画ステムを使用し、ユーダーの入力に基しだ飛行ルトを作成ります。ユーダーは、フィール卜計画後に作業を bey出ますが成長率は自動の工作業開始し、計画た飛行ルトに従います。
複雜地形の使用は、Phantom 4 RTKおよDJI TERRA™を使用て、飛行ルトを計画てから、DJI Agrasアリにルトをインボーツて操作するとが成長。詳細にいは、Agras T10一マニルを参照てく
FIILD計画
DJI Agrasアリは、ウイロイン/障害物/キリPLEーニフロトに機体を飛行さた、送信機/RTKドン。GLルを取り付た送信機/RTKDEIAUSをこらのロイINTまて持待步んだりするとて、飛行経路の計画をサロ一。」。以下のレトは、送信機を持てロイINTまて歩い計画をたて例を説明てい。
RTKドン格尔(別売)が送信機のUSB-Aボーツに接続いたします。、「フィーテル計画」時に「RTKを堅持て歩く」を選択てsenチメーツルレル精度で作業を計画するとが,GLを表示と同一です。

送信機の電源を入い。DJAgrasを起動いたします。

[フイル卜計画]を夕丶つ、 [送信機を持て徒く]を選択いたします。

GNSS信号が強い確認するまて待令。十分な信号数が得る場合、測位精度は+/-2×100の範圍で誤差が生じる场合お願いいたします。

送信機持て作業工アの境界に沿て步を、曲が角でウイボインを追加C2をタ突破口。

順番に各障害物まて步行[障害物一D C1]をたつ予し。*

障害物の周を步き、障害物の周間の数筒所为障害物を追加C2をタ的答案。

[ウエイボインC1]をタツPLEて、作業工に端点を追加するたに広りは。

[フイル卜編集]をターリドて、ケロスアを使用てボイINTを追加し、距離とルト間隔を設定し、フイCONをタフまたはドラツgrてルトの方向を調整いたします。

FIVELD計画を保存します。
*作業工リア内外に障害物があれはすてマ一ケです。
計画が終了た、送信機の[尻る]ロタを押しは一画面に尻ります。
作業の実行

送信機及機体の電源入れます。

アフリのは一ム画面で[作業の実行]をたffじしま�。

目を夕つて、農地リストから農地を選択しま�。

編集をタ Pradesh、ウエイボーニトと飛行ルートを再度編集しま�。

八·一夕一を設定し て、確認しま�。

[開始]をタツPLEま。[使用]はリド工不作業ル一テINGL高度]を設定するとに 原自動離陸高度を設定し、スライローを移動て離陸 」ま。機体は自動の作業を実行いたします。

·開た場所のみ離陸、動作環境に応て適切な自動離陸高度を設定てくは。
·作業は、操作スイドクを少しお動かと、一時停止にし。機体ははバリング中断地点を記録し。その時点から機体は手動で制御いたします。作業を继续するは、ストの[実行]タダから再度選択し。その後、機体は中断地点に自動の尻り、作業を再開します。中断地点に尻るときは、機体の安全に注意てくだせ。
- 単一作業王一也は、機体は障害物を回避てきま。它はデフル上無効にてきまが、アリで有効にきま。の機能が効な場合、機体が障害物を検出ると、機体は減速て障害物を回避し、元の飛行経路に尻りま。
- トーダーは、アフリで作業が完了た機体が実行する作業を設定くださいます。
その他の作業モードと機能
「A-Bルト」、「手動」、「手動TPLAS」作業王一上、「コネクschonl一テINGL」、「作業再開」、「StteMuna一夕保護」、「夕を空にする」なの機能の使用方法に閲る詳細にてはAgrasT10H-一M二Aulを参照てくさ。
6. メンデナス
噴霧作業を行った各日の最終に機体が正常の温度に戦った後、機体と送信機のすばての部分を清掃いたします。作業完了直後は機体を清掃しおてくだて。
A. 喷霧夕不に淨水たは石齢水を滿たし、夕不が空にるまてノスルから水を噴霧しま。そのスリフをさらに2回繍り返しま。
B. 噪霧夕丶和嘆霧夕丶和奈専一取外上清掃。嘆霧夕丶和TL-一、NZLSTLE-一、NZL为取外上清掃、言扎取除之。其後、其等方净水以12時間浸。
C. 水機体を直接洗うようお願いいたします。機体構造が完全に接続いたします。水を満た了嘆霧方式は使用し機体本体を洗浄し、柔らかの法兰は濡った布で拭てから、乾た布を使用し残った水を拭き取るとをお勸むいたします。
D. 王一夕一、 プロービ、 ヒートシングにごみや殺虫剤液のは場合は、濡た布で拭てから、乾た布を使用て残った水をむき取り MSR。
E. 送信機の表面と画面は、水で絞ったきいな濡れ布で拭てくさい。
製品MENNTANNSの詳細にしだは、免责事項と安全に開るガイドラインを参照てくさい。

詳細にしだは、Agras T10ハーダーマニアルをダウローツしてくだき:https://www.dji.com/t10/downloads
仕樣
製品モル 3WWDZ-10A
- 工アフレム
最大对角木イルバーリス
サイズ
1480 mm
1958× 1833× 553mm (一ムとロバラ展開時)
1232×1112×553 mm(一ム展開時、ロバラ折たた時)
最大噴霧速度 XR11001VS:1.8L/分、XR110015VS:2.4L/分、XR11002VS:3L/分
散布幅 3 5.5m (N/SL×4、作物かの1.5~3m上ご高度)
液滴サイズ XR11001VS:130~250 μm、XR110015VS:170~265 μm、XR11002VS:190
300 m (動作環境及噴霧率に依存)
流量計
測定範圍
0.25~20L/分
工一
<±2%
測定可能在液体
導電率 >50~ S / cm (水道水及水を含む農藥なの液体)
- 全方向デジタルレーダー
MDEL RD2424R
動作周波数 SRRC/NCC/FCC/MIC(日本)/KCC/CE:24.05~24.25GHz
消費電力 12W
信送電力(EIRP) SRRC:13dBm以下、NCC/MIC(日本)/KCC/CE/FCC:20dBm以下
山岳馬一卜の最大傾斜: 35^
障害物回避1 障害物检知范围: 1.5 30m
作業條件:7m/s以下の速度で、障害物の上1.5m以上を飛行
安全距離制限:2.5m(制動後のプロバーフ部と障害物の距離)
障害物回避方向:水平方向の全方向の障害物を回避
IP等級 IP67
- 上方レーダー
MDEL RD2414U
動作周波数 SRRC/NCC/FCC/MIC(日本)/KCC/CE:24.05~24.25GHz
消費電力 4W
信送電力(EIRP) SRRC:13dBm以下、NCC/MIC(日本)/KCC/CE/FCC:20dBm以下
障害物回避[1] 障害物检知範圍: 1.5 15m
FOV:80°
作業條件:機体から上方にる障害物まえの距離が1.5mを超えい場合の
離陸、着陸、上昇時使用可能。
安全制限距離:2m(制動後の機体最上部と障害物最下部と間の距離)
障害物回避方向:上方
IP等級 IP67
- FPV力マレ
FPVスボットライド FOV:120°、最大輝度:5mの直射光で13.2ルクス
- 飛行八拉一夕一
動作周波数 SRRC/NCC/FCC/CE/MIC(日本)/KCC:2.4000~2.4835 GHz
SRRC/CE/MIC(日本)/KCC:20dBm以下、FCC/NCC:31.5dBm以下5.8GHz
SRRC/CE/MIC(日本)/KCC:20dBm以下、FCC/NCC:31.5dBm以下5.8GHz
FCC/SRRC/NCC:29.5dBm以下、CE:14dBm以下 終重量(トリ一を 13kg
最大離陸重量 24.8kg(海拔口地点)
D-RTK無効時:
水平:±0.6m、垂直±0.3m(レーダーモジロール有效時:±0.1m)
RTK/GNSS動作周波数 RTK:GPS L1/L2、GLONASS F1/F2、BeiDou B1/B2、Galileo E1/E5
GNSS:GPS L1, GLONASS F1, Galileo E1
ABB-17500mAh-51.8V)
最大消費電力 3700W
19分(離陸重量16.8kg、9500mAh/卡-一搭載時)
9分(離陸重量24.8kg、9500mAh/個×日一搭載時)
最大倾斜角度
15^
最大動作速度
7 m/s
最大飞行速度
10m/s(強GNSS信号)
最大風壓抵抗
8 m/s
運用限界高度(海拔)
4500 m
推獎動作環境湿度
93%未满
推獎動作環境溫度
0^ 45^
- 送信機
モデル RM500-ENT
画面 5.5インド的画面、1920×1080、1000 cd/m²、Androidステム
RAM 4GB
内藏八味宁一
18650 Li-ion (5000 mAh @ 7.2 V)
GNSS GPS + GLONASS
18W
消费電力
0^ 45^
動作環境溫度
5^ 40^
充電環境溫度
-30℃~60℃(內藏ハツテリの電力が40%~60%で保管1カ月以内のもの)
保管環境溫度
OcuSync Enterprise
SRRC/NCC/FCC/CE/MIC(日本)/KCC:2.4000~2.4835 GHz
動作周波数
SRRC / NCC / FCC / CE : 5.725~5.850 GHz[2]
最大佤送距离(障害物、
FCC/NCC:7km、SRRC:5km、MIC(日本)/KCC/CE:4km
電波干涉のない場合)
2.4 GHz
伝送電力 (EIRP)
SRRC/CE/MIC(日本)/KCC:20dBm以下、FCC/NCC:30.5dBm以下5.8GHz
Wi-Fi
SRRC:21.5dBm以下、FCC/NCC:29.5dBm以下、CE:14dBm以下
FloTobul Wi-FiDirect、Wi-FiDisplay、802.11a/g/n/ac
Wi-Fi (2×2 MIMO)
動作周波数 2.4000~2.4835 GHz
5.150~5.250 GHz[2]
5.150~5.250GHz[2]
5.725~5.850 GHz[2]
伝送電力 (EIRP) 2.4 GHz
SRRC/CE:18.5dBm、NCC/FCC/MIC(日本)/KCC:20.5dBm
5.2 GHz
SRRC/NCC/FCC/CE/MIC(日本):14dBm、KCC:10dBm
5.8 GHz
SRRC/NCC/FCC:18dBm、CE/KCC:12dBm
Bluetooth
Florobul Bluetooth 4.2
動作周波数 2.4000~2.4835 GHz
信送電力(EIRP) SRRC/NCC/FCC/CE/MIC(日本)/KCC:6.5dBm
- 送信機インチル�トバツリーリー
MB37-4920mAh-7.6V
Büppeläe 2S LiPo
容量 4920mAh
電圧 7.6V
電力量 37.39 Wh
充電環境溫度 5^ 40^
- 伊nterjentabttner一充電八
MDEL WCH2
入力電圧 17.3~26.2V
出力電圧おはみ電流 8.7V、6A
動作環境溫度 5^ 40^
- AC電源アダフロー
モデル A14-057N1A
入力電圧 100~240V、50/60Hz
出力電圧 17.4V
定格出力 57W
[1]レーダー効射程距離は、障害物の材質/位置/形状のはとて異なりまな。
[2]5.8GHzおよこ5.2GHz周波数帯の使用は、現地の規制にて使用が禁止くださいます。一部の国は、5.2GHz周波数帯の使用は屋内のは利用可能です。
[3] 木ル汁時間は、風速 3m / s 未満、温度 25^ (77°F)、海拔約0m等測定値です。它は参考値です。下一夕は環境にとて異な場合が見ま�。実際の結果は試験結果とみます。
#
AGRAS T105aunnnnunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunuunu
D-RTKTM Ooouo aonrroodn oonrrooanrnoaunrnnnnae 10000000000000000000000000000000000000000000000000000000000000000000000000000000000
wuuuauuauu u 8 a uuuuuaa uauuuaa uauuuaan 2 aunl duumwuauuauuauu uauu uauu
P67 (EC 60529) uauuunnnnnae nnne nannnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nennnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nannnee
- b
- 用 NaOH 确定
- ESCs
- wuohuo
- 1
-
vio
8. -
naiolouuuiunlww
- 63
- 53070370370370370370370370370370370370370370370370370370370370370370370370370370370370
- WJHJUUYUJUJUJUJU
-
n#FPV #n
17.nFPV - unanitana
- 100000 OCUSYNCTM
-
1
22.的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的云的 -
老国のDJI™ D-RTK 2 amit GNSS wouwuyuusuiu (wni) wouwuyuowuyo RTK wouwuyuowuyd DJI
5nn
Smart Controller Enterprise 5.5 wuwrnnnnaeauw DJI OcuSync Enterprise 7 nu* uanennnnu Wi-Fi nwnny

- 证明
- 甲组的和为 乙组的和为
- 4.1 RTH
5.1 C3( - w LED
8.lwLED -
5D (x)
-
1
- w08@b7@(USB-C)
- uuiuuiuiuuiuuiuui
- HDMI
-
microSD
-
USB-A
- 甲醇和乙醇的FPV/甲醇
- monyueuuiuuiuuiu
- C1()
- wC2(
- 1
27.
5°-40°waiy(41°-104wuiu)
- azuaaiaaaiaiaiaAC
A14-057N1A
w
100.240V,50/60
wuwu wuwu wuwu
17.4V
vi##
57W
[1] 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19 2023.10.19
[2]n#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#u#uu
[3]wuaugwunwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauwauw
mnnnne nnnnne nnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnee
May bay
AGRAS™ T10 có thiet ké hoànlandoi, vovi cau truc hinh tu giac gap duoc, pin may bay cung binh phun thai lap nanh, giup de dang thay the, lap dat va bao quan. Ché do Vân hanh Theo tuyen mi nhat bao gom Binh tuyen Ket noi, cho phép may bay tung dong bay den mot tuyen bay theo nhiem vu va tranh cac churóng ngai vat da duoc dānh dαu trong so do ruong phun.
Ang-ten D-RTK™ co the duoc sur dung de dinh v chinh xac o muc centimet* trong khi cong nghe ang-ten kép cag cac phép do hróng va khà näng chong nhieu tu truong manh me. May bay duoc tranq bi Hé thong Ra-da Cam nhân Hinh cau, mot he thong moi tien phong cho nganh nong nghep. Voi Ra-da ky thai so da hróng va Ra-da hróng len, hé thong cung cap cac chuc nang nhur bam dia hinh, phat hièn va tranh vat can. Voi cac camera FPV truc va sau va den roi sang, hé thong dam bao toan dien an toan vanh ca ngay lan dem trong cac thoi tiét khac nhau.
Hé thong phun ducr lang bi binh phun 8L, bón dau phun va dong h do luu lrong dien t2 kenh cho khà nang phun deu v chinh xac dé ngroi dung co the tiét kiem dung dich va giam chi phi v an hanh.





- 送信機
- 安全飛行
- 飛行環境の条件
- Return-to-Home (RTH)
- T10の使用
- トーナス フラリトバツデリの準備
- 機体の準備
- 送信機の準備
- VATTEI一の充電
- 4GドンダルとSIM力一の取付
- 巴卜丁一残量を確認する
- アntonの調整
- 離陸準備
- 木一上与溜了空気の排出
- 流量計のシャリPLEーニン
- 飞行
- 離陸
- 着陸
- 作業の開始
- FIILD計画
- 作業の実行
- その他の作業モードと機能
- メンデナス
- 仕樣
- - FPV力マレ
- - 飛行八拉一夕一
- - 送信機
- Wi-Fi
- Bluetooth
- - 送信機インチル�トバツリーリー
- - 伊nterjentabttner一充電八
- - AC電源アダフロー
- #
- 5nn
- May bay
ブランド : DJI
モデル : Agras T10
カテゴリ : ドローン