
Agras T20 - 无人机 DJI - 免费用户手册
免费查找设备手册 Agras T20 DJI PDF格式.

| 产品类型 | 农业喷洒无人机 |
| 品牌 | 大疆 |
| 型号 | 大疆T20 |
| 展开尺寸 | 2509×2213×732毫米 |
| 折叠尺寸 | 1100×570×732毫米 |
| 重量(不含电池) | 21.1千克 |
| 最大起飞重量 | 47.5千克 |
| 飞行电池 | AB3-18000mAh-51.8V(锂聚合物14S) |
| 悬停续航时间 | 15分钟(27.5千克)/10分钟(42.6千克) |
| 药箱容量 | 20升 |
| 最大喷洒流量 | 6升/分钟(根据喷嘴) |
| 图传距离 | 5公里(FCC)/3公里(CE) |
| 定位系统 | GNSS+RTK(GPS、格洛纳斯、北斗、伽利略) |
| 避障系统 | 全向数字雷达(水平) |
| 防护等级 | IPX6(整体)/IP67(电子元器件) |
| 工作温度 | 0至40°C |
| 主要功能 | 自动喷洒、航线规划、路线和A-B模式、智能返航 |
| 维护与清洁 | 每次使用后用清水或肥皂水清洁药箱、喷嘴、螺旋桨和电机 |
| 安全须知 | 请勿在人或动物上方飞行,避免风速>28公里/小时,遵守禁飞区 |
| 备件与可维修性 | 螺旋桨、喷嘴、电池、药箱、电机和电调可更换 |
| 一般信息 | 专业农业无人机,遥控器为Smart Controller 2.0,带5.5英寸触摸屏 |
常见问题 - Agras T20 DJI
用户关于以下问题的提问 Agras T20 DJI
0 问题 关于此设备。回答您知道的问题或提出自己的问题。
提出关于此设备的新问题
下载您的设备说明 无人机 免费PDF格式!查找您的手册 Agras T20 - DJI 并重新掌握您的电子设备。本页发布了使用您的设备所需的所有文档。 Agras T20 品牌 DJI.
用户手册 Agras T20 DJI
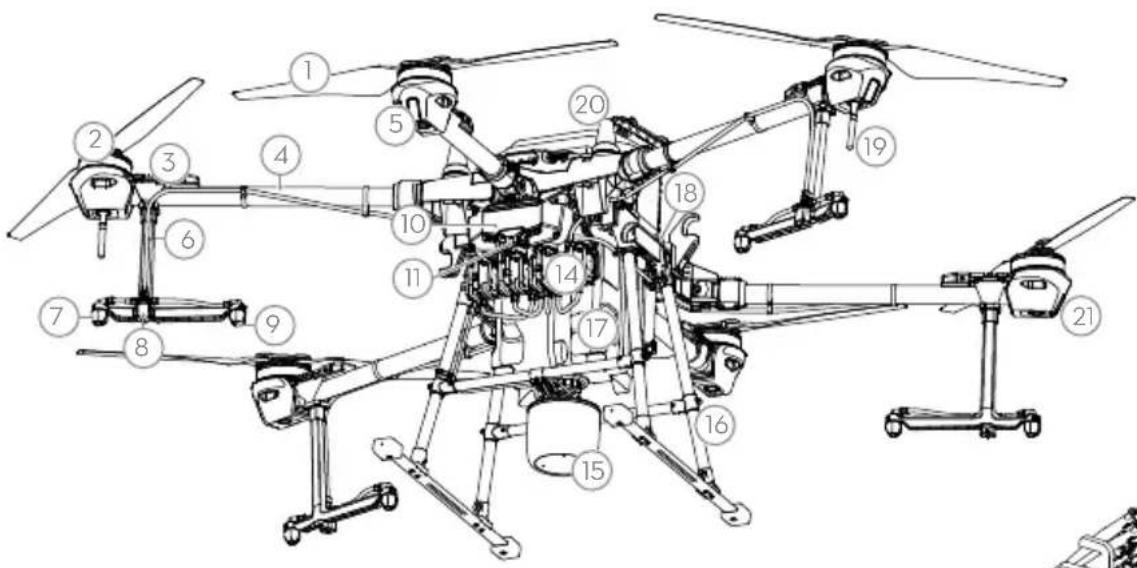
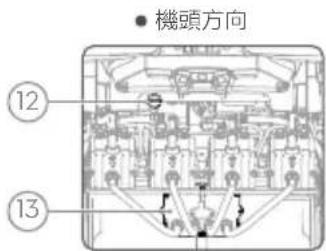
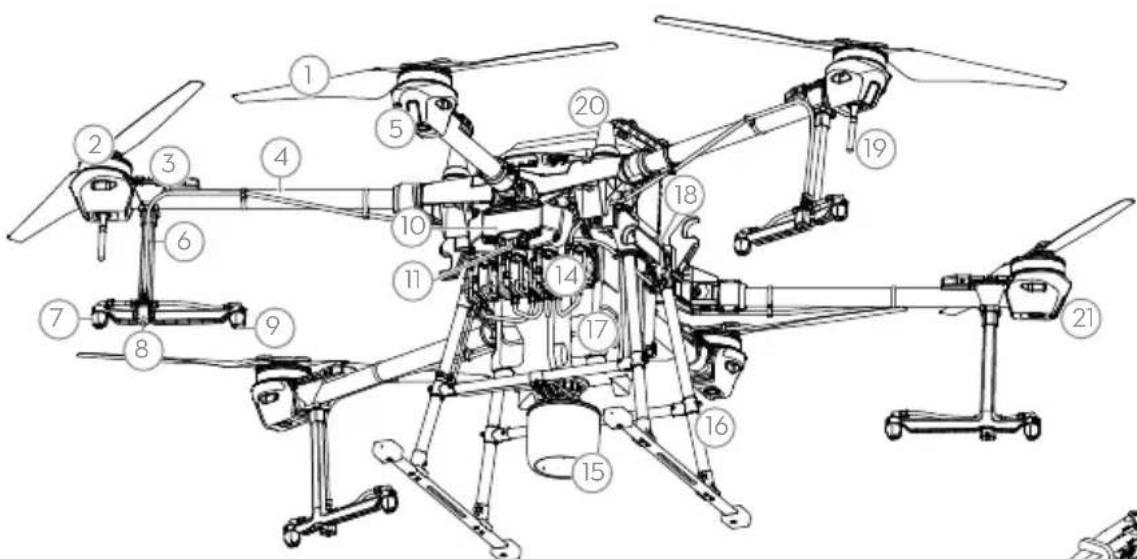
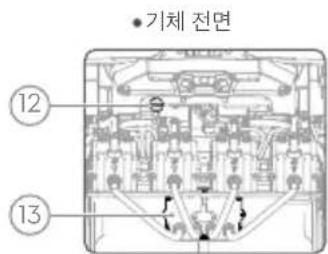
T20 植保無人飛機(飛行器)採用可摺疊式的機臂及快拆式作業箱和飛行電池,方便更換與安裝收納。穩定可靠的模組化航電系統,整合了客製化的工業級飛控系統、OCUSYNC™影像傳輸及RTK模組,擁有雙IMU、雙氣壓計、數位與模擬雙備份動力控制系統等多項備援設計,保障飛行安全。GNSS+RTK雙備援系統,支援GPS+GLONASS+BeiDou+Galileo,配合機身預裝的機載D-RTK™,可執行公分級高精度準確定位*,同時支援雙天線抗磁干擾測向技術。升級的噴灑系統使藥液裝載量進一步提升,四管道電磁流量計確保各噴頭噴灑效果更為一致。新一代全向數位雷達,提供水平全向障礙物感測和水平全向繞障功能,可規劃躲避障礙路徑進行自動繞障,並且支援仿地飛行。配備廣角FPV攝影機,可即時觀察前方作業環境。
T20 植保無人飛機防墜防水、防腐蝕,整機防護等級為 IPX6(參照國際電工委員會 IEC 60529 標準),機身可直接水洗。航電系統(氣壓計除外)、噴灑控制系統、動力電控系統、雷達模組防護等級可達到 IP67。
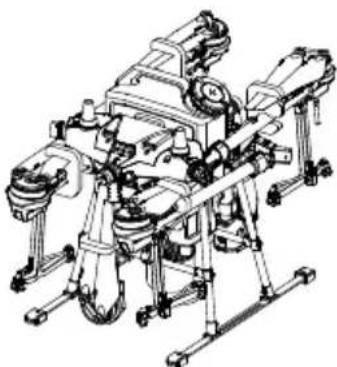
摺臥狀態右視圖底視圖
- 螺旋獎
- 馬達
- 電控
- 機臂
- 機頭指示燈(位於前方3個機臂上)
- 软管
-
喷頭
8.電磁排氣閥 -
嗽嘴
- 航電系統
- FPV 摄影機
- USB-C連接埠(位於航電系統底部,附防水蓋)
- 四頻道電磁流量計
- 液泵
- 全向數位雷達
-
起落架
-
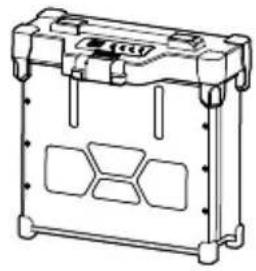
作業箱
18.電池匣 - OcuSync 天線
- 機載 D-RTK 天線
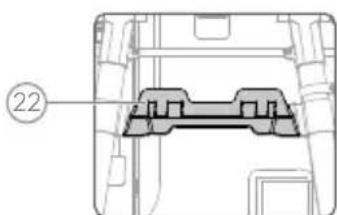
- 飛行器狀態指示燈(位於後方3個機臂上)
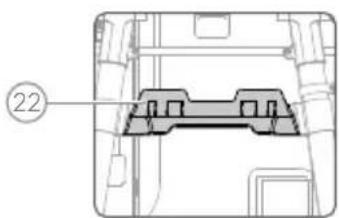
- 遥控器掛鉤
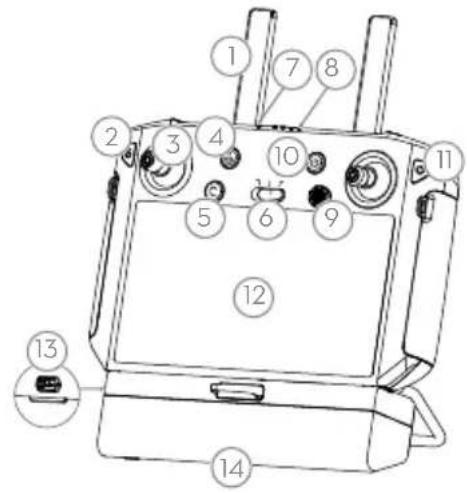
認識遙控器
全新的智能遥控器2.0,採用DJ™OcuSync2.0影像傳輸,最大通訊距離可達5千公尺,並且支援Wi-Fi及藍牙功能。配備5.5英吋高亮度顯示螢幕,內建全新的大疆農業應用程式,操作流暢度及穩定性明顯提升。遙控器配合RTK高精度定位模組飛行器,可實現公分級精度的作業規則。支援一控多機功能,可最多協調3架飛行器同時進行作業,進一步提升單人作業效率。遙控器同時支援內建電池和外接電池供電,整體續航時間可達約4小時,充分滿足長時間、高強度作業需求。
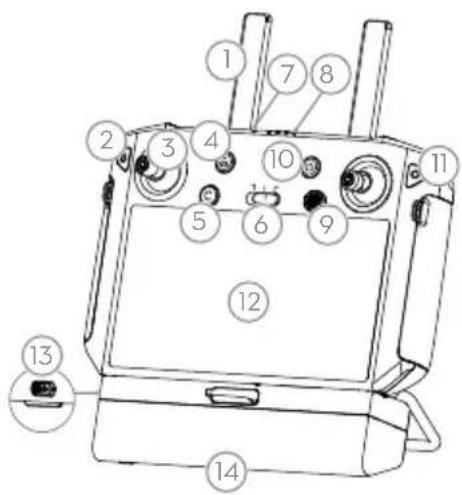
1.天線
2. 退回按钮 / 系統功能按钮
3. 摇桿
4. 智能返航按钮
5.C3鍵(可自訂)
6. 飛行模式切换開關
7. 狀態指示燈
8. 電量指示燈
9.五維按鈕(可自訂)
10.電源按鈕
11. 確認按鈕
12.觸控螢幕
13. USB-C 充電連接埠
14.無線網卡匣蓋
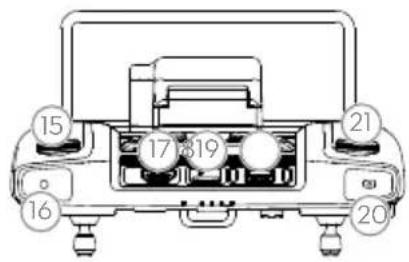
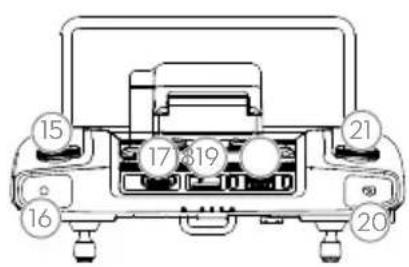
15. 流量調節撥輪
16. 噴灑按鈕
17.HDMI連接埠
18. microSD 卡插槽
- USB-A連接埠
- FPV / 地圖切換按鈕
21.多機控制切換撥輪 - 出风口
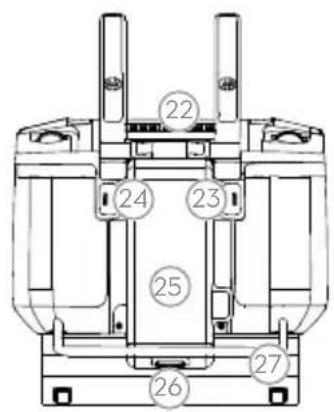
23.C1键(可自訂)
24.C2键(可自訂) - 電池匣蓋
26.電池匣蓋打開按鈕 - 把手
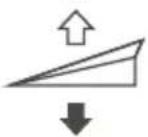
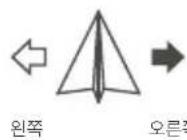
遥控器操控方式以「美國手」為例:左搖桿控制飛行高度與方向,右搖桿控制飛行器的前進、後退以及左右飛行方向。

左摇杆
上升
下降


左转
右转

右摇杆


前
后

左
右
飛行安全須知
必要的飛行安全知識對於您、周圍人群與環境的安全非常重要。
- 在開闊的場地飛行:飛行時請注意電線桿、高壓線等障礙物,同時遠離水面、人群和動物。
- 飛行過程全程操控:即使在使用航線作業模式、A-B點作業模式和自動返航等功能時,也請保持搖控器在手中,以隨時控制飛行器。
- 在視距範圍內飛行:請保持飛行器始終在視距範圍內,避免飛到可能阻擋視線的高大障礙物後面。
- 控制飛行高度:為保證飛行器以及民航的飛行安全,請將飛行器的高度控制在30公尺以内。如您所在區域有禁飛或低於30公尺的飛行高度限制規定,請遵照其規定。

請造訪 https://www.dji.com/flysafe 獲取飛行限制等更全面的安全知識。
飛行環境要求
1.大風環境下請勿進行噴灑作業,如風速5公尺/秒以上。
2. 惡劣天氣下請勿飛行,如大風(8公尺/秒)、大雨(12小時降雨量25毫米及以上)、下雪、有霧天氣等。
3. 建議作業高度在海拔2千公尺以下。3千公尺以上請勿飛行。
4. 作業高度在海平面以上每升高1千公尺時,作業箱載重應減少2千公克,並謹慎飛行。
5. 作業時確保 GNSS 記號良好,D-RTK 天線不受遮擋。
返航功能
在下列情況下,飛行器會自動飛回返航點:
智能返航:使用者可透過遥控器的智能返航按鈕,使飛行器自動返航。
失控返航 *:遙控器訊號丢失的情況下,飛行器將自動返航。
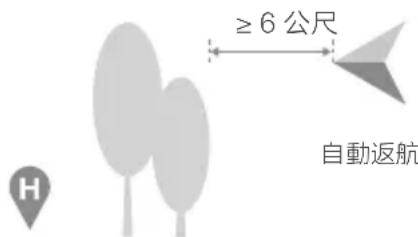
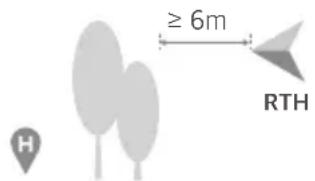
自動返航過程中,若返航路徑上距離飛行器小於20公尺處存在障礙物,則飛行器將減速至懸停。減速過程中若距離障礙物小於6公尺,則飛行器將後退至距離障礙物約6公尺處懸停。隨後,飛行器退出返航過程,使用者可手動操控飛行器。
- 失控返航功能預設關閉,遙控器訊號丢失後飛行器將懸停,可在應用程式中更改變返航。

·若飛行器因GNSS訊號不佳進入姿態模式或作業環境不滿足雷達模組運作條件,則躲避障礙功能失效。務必謹慎飛行。
農藥使用注意事項
1.盡量避免使用粉劑類農藥,否則將影響噴灌系統使用壽命。
2.科學使用農藥,嚴格按農藥安全使用規範進行操作。
3. 配藥時,請使用清水。配藥完成後需進行過濾再加入作業箱,以免雜質堵塞濾網。
4.農藥效果與作業環境的溫度、濕度以及風等因素相關,用藥時應綜合考慮上述因素以達到最佳效果。
5. 確保用藥過程中不會對周圍人、動物及環境造成傷害或影響。

了解飛行安全知識對於您、周圍人群與環境的安全非常重要。
請務必仔細閱讀《免責聲明與安全指導方針》。
使用T20
1.準備飛行電池
務必使用DJI指定型號電池(AB3-18000mAh-51.8V),並按照電池自身使用方法檢查電量及充電。
2. 準備飛行器
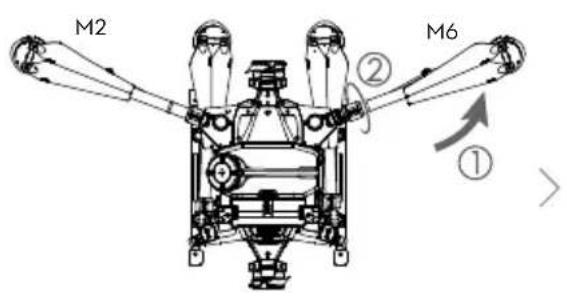
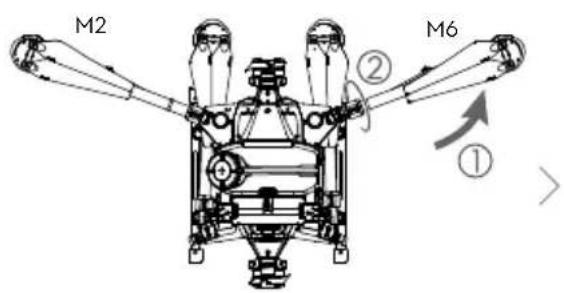
展開機臂M2和M6,鎖緊套筒
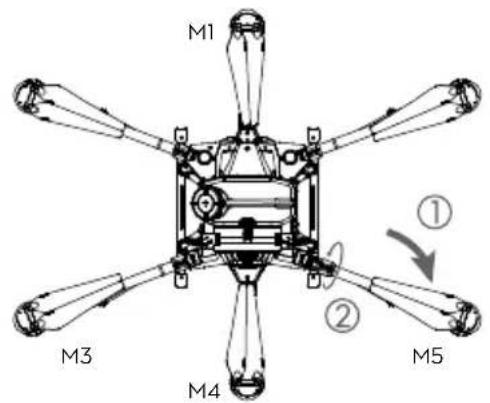
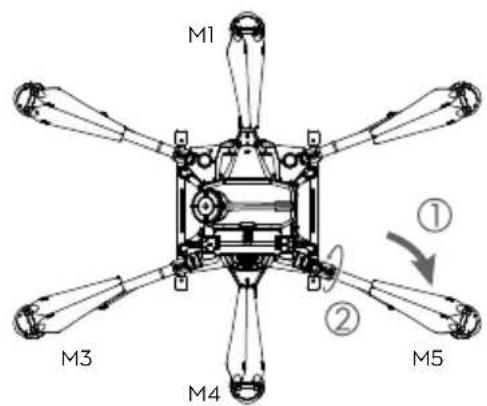
展開機臂M3和M5、M1和M4,鎖緊套筒
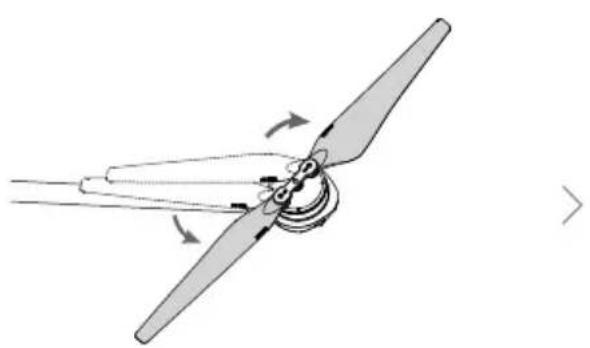
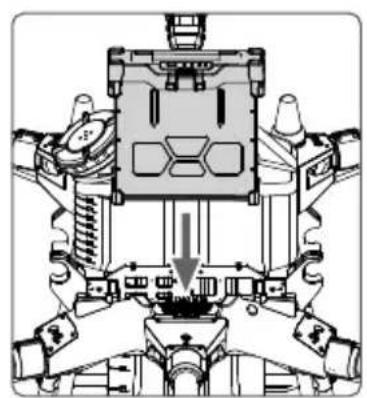
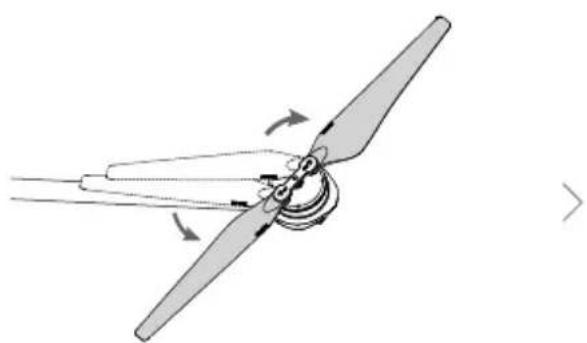
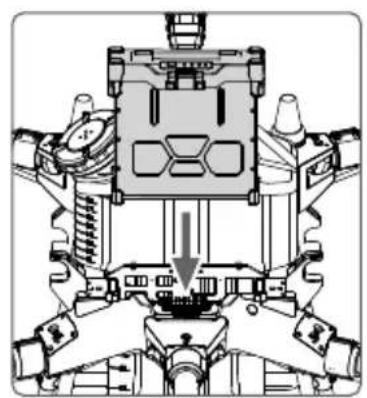
展開螺旋漿葉 安裝電池,聽到「卡嗒」的一聲表示安裝到位

·務必確保電池安裝到位。插拔電池時務必確保電池電源開閉
- 如需取出電池,按下電池的固定卡扣,然後向上拔出電池。
·如需摺臂機臂,請按照先機臂M3和M5,再機臂M2和M6的順序摺管,否則可能損壞機臂。折管機臂M1和M4時,注意輕拿輕放,以防止碰撞損傷。
3.準備遥控器
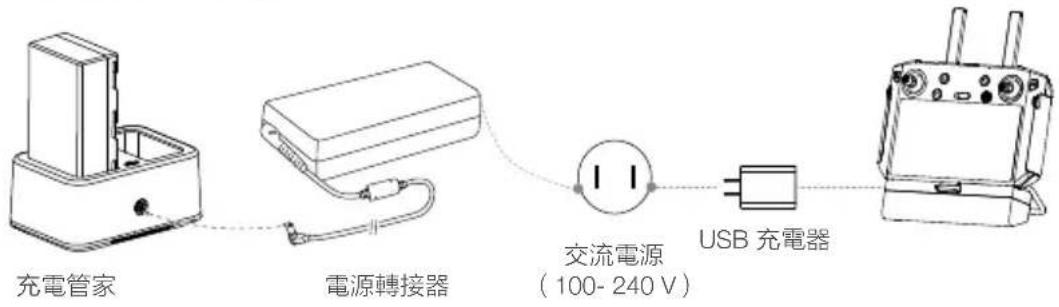
充電
使用充電管家和電源轉接器為外接智能電池充電。使用USB充電器和USB-C線為遙控器內建電池充電。首次使用時,務必将電池充飽電。
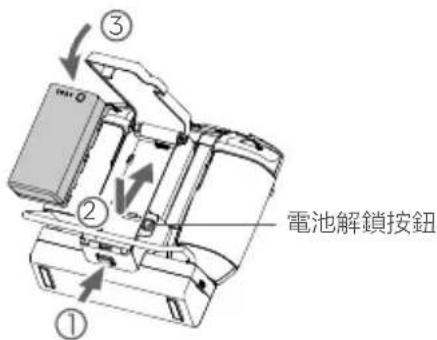
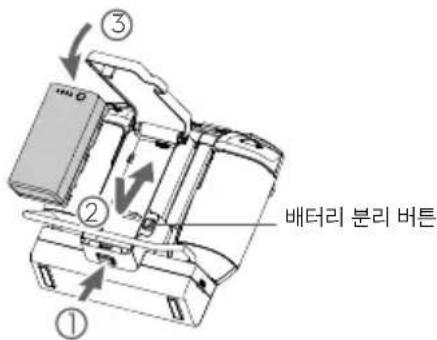
安装外接電池
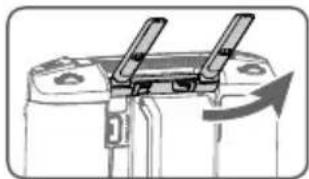
① 按下遙控器背面的電池匣蓋打開按鈕,以打開匣蓋。
② 將智能電池裝入電池匣,並向上推到頂。
③ 關上匣蓋。

- 如需取下智能電池,按住電池解鎖按鈕,然後向下推動智能電池將其取出。
安裝無線網卡及 SIM 卡

·務必使用DJI指定的無線網卡。無線網卡支援多種網路格式,根據當地電信業者網路的實際情況選擇合適的SIM卡及流量服務,以獲得最佳體驗。
- 無線網卡配合 SIM 卡使用,可為遙控器提供網路連接(例如連接大疆™農業管理平台),務必確保將其正確安裝至遙控器內部,否則將無法使用相關服務。
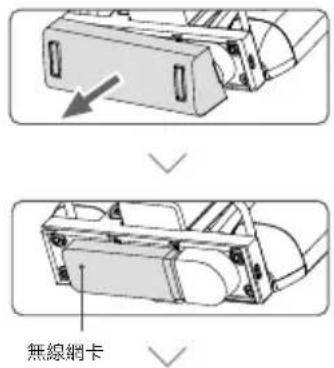
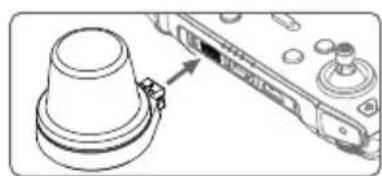
移除遥控器無線網卡匣蓋。

無線網卡中裝入 SIM 卡,然後將無線網卡接入匣內部的 USB 連接埠。測試以確保可正常運作 *。
重新安裝網卡匣蓋,確保安裝穩固。
*測試方法:短按一次再長按遙控器電源按鈕以開放遙控器,進入大疆農業應用程式 > 網路診斷,網路連結上所有裝置狀態均顯示綠色,即表示無線網卡及 SIM 卡均可正常使用。
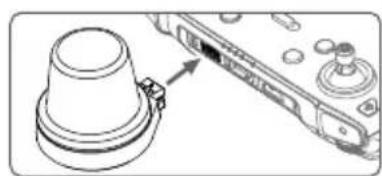
安装RTK高精度定位模組
若使用RTK規劃的方式進行作業區域的規劃,則需將RTK高精度定位模組插入遙控器的USB-A連接埠。
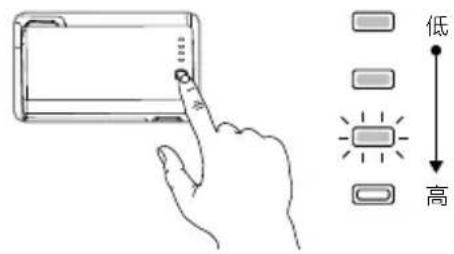
檢查電量
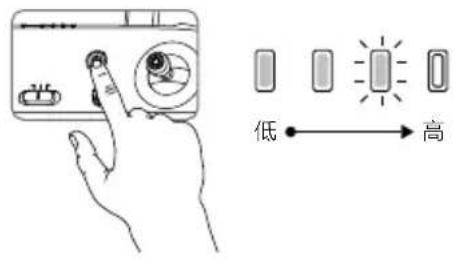
短按一次遙控器電源按鈕檢查內建電池電量。短按一次,再長按2秒可開啟、關閉遙控器。
短按一次外接智能電池的電量按鈕檢查外接電池電量。

- 使用外接電池時,仍需確保內建電池具有一定的電量,否則遙控器將無法開機。
調整天線
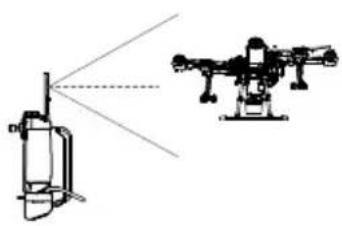
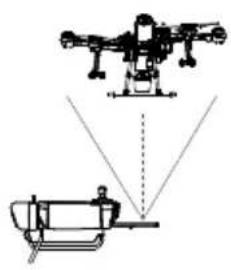
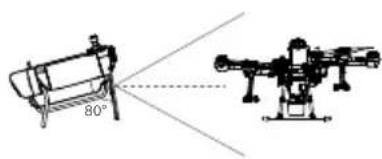
展開遙控器天線並調整天線位置,不同的天線位置接收到的訊號強度不同。當天線與遙控器背面呈 80^ 或 180^ 為角,且天線平面正對飛行器時,可讓遙控器與飛行器的訊號品質達到最佳狀態。
操控飛行器時,務必使飛行器處於最佳通訊範圍內。適時調整操作者與飛行器之間的方位或距離,以確保飛行器始終位於最佳通訊範圍內。
最佳通訊範圍

·請勿同時使用其他同頻段的通訊設備,以免對遙控器訊號造成干擾。
- 若使用 RTK 高精度定位模組進行 RTK 規劃,需在規劃完成後取下該模組,否則可能影響遥控器通訊性能。
4.準備飛行
A. 將飛行器放置於戶外平整開闊地帶,使用者面朝機尾。
B. 確保螺旋桨安装紧固,馬達和螺旋桨清潔無異物,漿葉和機臂完全展開,機臂套筒已旋緊。
C. 確保作業箱和飛行電池安裝到位。
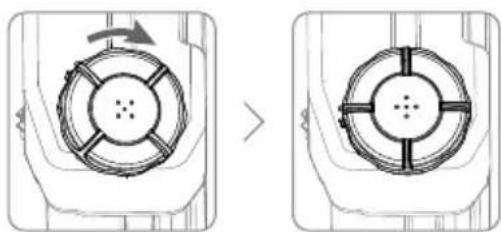
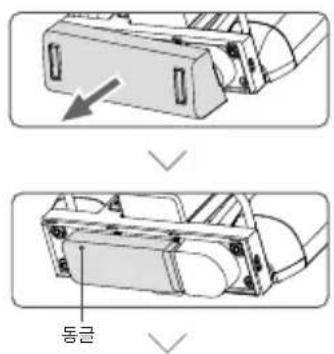
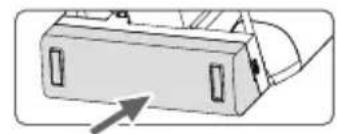
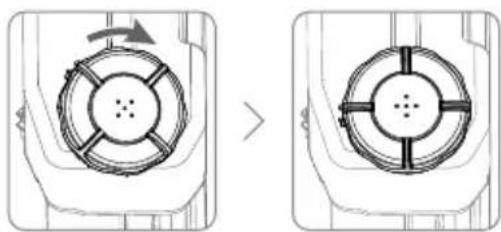
D. 作業箱中加入液體後,鎖緊蓋子,確保蓋子上的四個突起分別位於水平或垂直位置。
E. 開放遙控器,確保大疆農業應用程式正常運作,然後開放飛行器。

纲路
首次使用飛行器時,請根據大疆農業應用程式的提示使用DJI帳號和網際網路進行啟動。
校正指南針
當應用程式提示需要校正指南針時,點擊 串 >串 ,下滑選單至底部,選擇「進階設定」>「IMU及指南針校正」,在指南針校正部分點擊「校正」。按照應用程式提示進行操作。

·請勿在強磁場區域或大塊金屬附近校正,如電線桿、帶有鋼筋的牆體等。
- 校正時,身上請勿攜帶鐵磁性物品,例如鑰匙、手機等。
校正流量計
首次使用飛行器進行噴灑作業時,務必校正流量計,否則可能影響作業效果。
A. 校正前準備:排出管道空氣
① 在作業箱中加入約2L水。
② 按照後文「排出管道空氣」的描述,使用一鍵排氣功能,排出管道中的空氣。使用者亦可透過短按噴灑按鈕手動開啟和停止噴灑,以排出空氣。
B. 流量校正
① 在應用程式中點擊「執行任務」進入作業介面,點擊,然後點擊流量計右側的「校正」按鈕。
② 系統自動進行校正,等待25秒後,將顯示校正結果。
- 若顯示校正成功,則可進行正常的噴灑作業。
- 若顯示校正失敗,點擊「?」查看失敗原因,排除故障後重新校正,等待校正成功。
排出管道空氣
T20具備一鍵排氣功能。當需要排出管道空氣時,長按噴灑按紐2秒,飛行器將自動開啟排氣,直至管道空氣排盡。
5. 飞行
進入應用程式作業介面,確保飛行器GNSS訊號良好,介面上方飛行狀態提示欄顯示「手動作業」(衛星定位)或「手動作業(RTK)]*,否則飛行器將無法起飛。
建議使用者進行地塊規劃,然後調用作業,使飛行器自動起飛並執行作業。詳見「開始作業」。其他情況下可按照以下操作手動起飛和降落。
手動起飛
執行以下綜合控制桿指令之一啟動馬達,然後向上推動油門桿起飛。

手動降落
向下拉動油門桿,直到飛行器降落至地面。飛行器著地後,可以透過以下兩種方式停止馬達:
方式一:飛行器著地之後,將油門桿推到最低的位置並保持不動,馬達即會在3秒後停止。
方式二:飛行器著地之後,先將油門桿拉到最低位置,然後執行綜合控制桿指令,馬達即立即停止運轉。停止後放開搖桿。
- 建議使用 RTK 定位。進入作業介面 > RTK,開啟 RTK 功能,並選擇 RTK 記號源。

方式一 方式二


或


- 高速旋轉的螺旋獎具有危險性,使用時應與飛行器保持安全距離,並讓飛行器遠離人群、動物或其他障礙物。
- 在飛行器馬達完全停止前,請勿放下手中的遙控器,並請確保飛行器完全在掌控之中。
- 在飛行過程中,請勿停止馬達,否則飛行器將會墮毀。除非發生特殊情況(例如飛行器可能衝向人群)時,才需要緊急停止馬達以將傷害降至最低。
- 推荐使用方式一停止馬達。使用方式二停止馬達時,若飛行器未完全著地,則有可能存在側翻的危險。請謹慎使用。
- 降落後請先關閉飛行器,再關閉遥控器。
開始作業
使用者透過遥控器內建應用程式的智能規劃作業系統進行農田測量、障礙物測量、航點設定等,應用程式將根據這些資料計算並生成最佳航線,實現作業智能規劃。規劃完成後,調用作業,飛行器將進行航線作業模式,按照航線自動執行作業。
對於地形較複雜的場景,使用者可使用 Phantom4 RTK 配合大疆智圖(DJI TERRA™)進行 3D 航線規劃,然後在大疆農業應用程式上使用 3D 航線進行作業。詳見《使用者手冊》。
規劃地塊
大疆農業應用程式支援遙控器規劃、飛行器規劃和RTK規劃,使用者可根據需要進行選擇。以下內容以使用遙控器進行RTK規劃為例說明。開始規劃前,確保RTK高精度定位模組已安裝至遙控器。
大疆农业
開啟遙控器
進行大疆農業應用程式
#
點擊「規劃地塊」,
選擇「RTK規劃」中的「RTK模組」
RTK
在RTK設定中選擇RTK訊號源,並完成相應設定,確保介面左上方狀態欄為綠色

手持遥控器沿區域邊界行走,在拐點處點擊「新增航點C2」

行走至障礙物附近,點擊「障礙物模式C1」*

圍繞障礙物行走,並點擊「新增障礙點C2」新 增幾個障礙點

點擊「航點模式C1」可返回繼續新增邊界黑

行走至標定點實際位置,點擊「標定點」

地塊編輯:微調航點位置,設定內縮距離、作業航距等,點擊或拖曳圖示調整航線方向

储存地魄
- 若作業區域存在障礙物
規劃完成後,點擊左下方圖示可返回主介面。

- 標定點用於糾正定位誤差引起的航線偏差。在作業區域附近的開關位置,選擇一個或多個長期固定存在且易辨識的參考物作為標定點,如地針或其他明顯的標記物,以便執行同一作業時糾正偏移。
執行作業
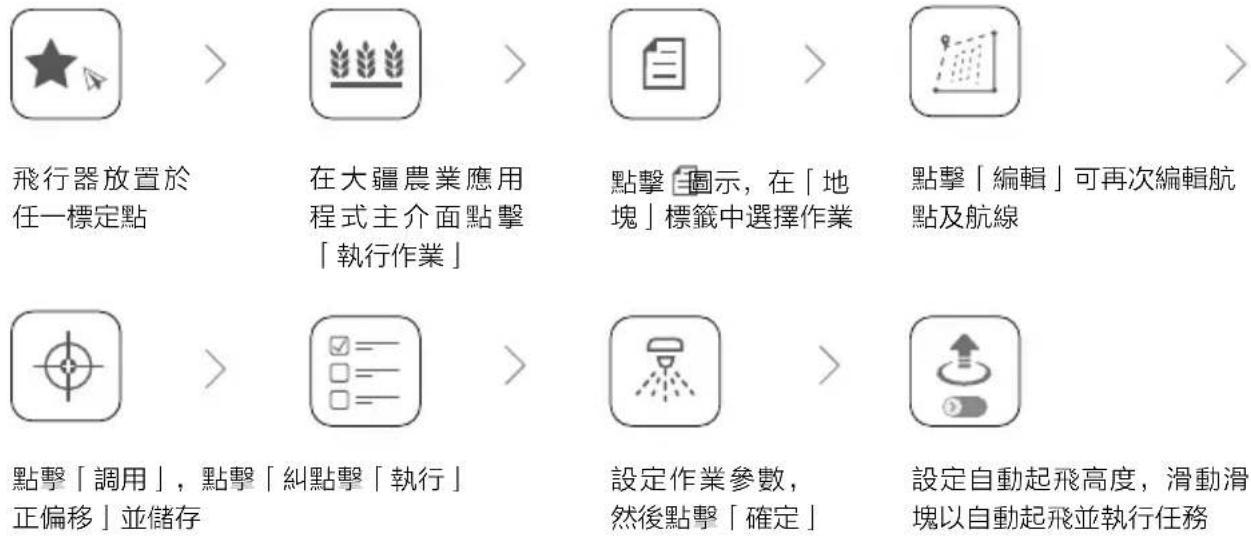

·確保起飛點附近開閥,並根據作業環境設定合適的自動起飛高度。
·執行作業過程中,使用者可輕微撥動搖桿暫停作業。飛行器將原地懸停,並記錄中斷座標點,此時使用者可自由操控飛行器。之後,使用者可在應用程式圖示的「進行中」標籤中重新調用作業,則飛行器自動飛回中斷座標點繼續執行作業。在飛回中斷座標點的過程中,請務必注意飛行安全。
·航線作業模式下,飛行器具備繞障功能(預設關閉,需在應用程式中開啟)。若開此功能,當雷達模組檢測到作業路線上的障礙物時,飛行器將規劃躲避障礙路線,然後自動減速並繞過障礙物,再回到航線上繼續作業。
使用者可在應用程式中設定作業完成的後飛行器動作。
更多作業模式
A-B點作業、手動作業和增強型手動作業的操作,請參見《使用者手冊》。
更多功能

具體設定方法詳見《使用者手冊》。
6. 維護
每天作業結束後,對整機及遙控器進行清洗:
- 使用清水或肥皂水注滿作業箱,並完全噴灑,如此反覆清洗三次。
- 將作業箱及飛行器上的作業箱連接埠拆下進行清潔,將作業箱濾網、噴嘴濾網及噴嘴拆出後進行清潔,確保無堵塞,然後在清水中浸泡12小時。
- 建議使用噴霧水槍沖洗機身,然後用軟刷或濕布清潔機身,再用乾布擦乾水漬。
- 若馬達、漿葉表面有沙塵、藥液附著,建議用濕布清潔表面,再用乾布擦乾水潰。
- 使用乾淨的濕布(擋乾水分)擦拭遙控器表面及顯示螢幕。
更多產品保養內容詳見《免責聲明和安全指導方針》。
技術規格
外型尺寸 2509mm× 2213mm× 732mm (機臂展開,漿葉展開)
1795mm× 1510mm× 732mm (機臂展開,漿葉摺疊)
1100mm× 570mm× 732mm (機臂摺疊)
·動力系統
馬達
定子尺寸 100 × 15 ~mm
KV值 75 rpm/V
最大拉力 13.5 kg/rotor
最大功率 2400W/rotor
重量 666g
電調
最大運作電流(持續) 40A
最大運作電壓 58.8V(14S LiPo)
可折叠螺旋桨(R3390)
直径 × 螺距 33× 9 inch
重量(單個獎葉) 90g
- 噕瀉系統
作業箱
容積 滿載:20L
作業載荷 滿載:20kg
喷嘴
型號XR11001VS(標配),XR110015VS(選配),XR11002VS(選配)
數量 8個
最大系統運作流量 XR11001VS:3.6L/min,XR110015VS:4.8L/min,XR11002VS:6L/min
190-300μm(與實際運作環境、噴灑流量等有關)
流量計
流量測量範圍 0.25 - 20 L/min
流量測量誤差 <±2%
可測量液體 電導率 >50 S / cm ,典型液體如自來水、含水有機/無機農藥等
- 全向數位雷達
型號 RD2428R
運作頻率 NCC/CE/FCC:24.05GHz至24.25GHz
MIC/KCC:24.05GHz至24.25GHz
定高及地形跟随[1] 高度測量範圍: 1 - 30m
定高範圍:1.5-15m
山地模式最大坡度: 35^
躲避障礙系統 [1] 可感知距離: 1.5 - 30m
視角(FOV):水平 360^ ,垂直 ± 15^
使用條件:飛行器飛行相對高度高於 1.5m 且速度小於 7m / s
安全距離:2.5m(飛行器剎車並穩定態停後,漿尖與障礙物的距離)
躲避障礙方向:水平方向全向躲避障礙
防護等級 IP67
- FPV攝影機
視角 (FOV) 水平: 98^ ,垂直: 78^
解析度 1280 × 96030fps
FPV探照燈 FOV: 110^ ,最大光強:12lux@5m直射
- 飛行參數
OcuSync 2.0 運作頻率[2] SRRC / NCC / FCC / CE / MIC / KCC: 2.4000 GHz 至 2.4835 GHz
SRRC/NCC/FCC:5.725GHz至5.850GHz
OcuSync2.0等效全向幅 2.4GHz
最大有效起飛重量 47.5kg(海平面附近)
懸停精度 敞用D-RTK:水平 ± 10cm ,垂直 ± 10cm
(GNSS訊號良好) 未啟用D-RTK:
水平 ± 0.6m ,垂直 ± 0.3m (雷达功能启用: ± 0.1m )
RTK/GNSS使用頻段 RTK:GPS L1/L2,GLONASS F1/F2,BeiDou B1/B2,Galileo E1/E5[3]
GNSS: GPS L1, GLONASS F1, Galileo E1[23]
最大起飛海拔高度 2000m
推薦運作環境溫度 0^ 至 40^
- 遥控器
型號 RM500-AG
顯示螢幕 5.5 英吋螢幕,解析度 1920 × 1080 ,亮度 1000cd / m^2 ,Android 系統
儲存空間 (ROM) 32GB + 可擴充儲存空間,最大支援 128GB 容量,傳輸速度達到 UHS-I Speed
Grade 3 評級的 microSD 卡
內建電池 18650 銅電池(5000 mAh @ 7.2 V)
GNSS GPS+GLONASS雙模
運作功率消耗 18W
運作環境溫度 -10°C 至 40°C
充電環境溫度 5^ 至 40^
存放環境溫度 -30°C 至 25°C
Ocusync 2.0
運作頻率[2] SRRC/NCC/FCC/CE/MIC/KCC:2.4000GHz至2.4835GHz
SRRC/NCC/FCC:5.725GHz至5.850GHz
型號 WB37-4920mAh-7.6V
電池類型 2S LiPo
容量 4920mAh
電壓 7.6V
能量 37.39 Wh
充電環境溫度
5^ C 至 40^ C
智能電池充電管家
型號 WCH2
輸入電壓 17.3-26.2V
輸出電壓電流 8.7V,6A
運作環境溫度
5^ C 至 40^ C
- 電源轉接器
型號 A14-057N1A
輸入電壓 110 - 240V,50/60Hz
輸出電壓 17.4V
額定功率 57W
[1]雷達模組的有效運作範圍會因目標物體的材料、位置、形狀等不同而有所差異。
[2]部分地區不支援5.2GHz和5.8GHz頻段,以及部分地區5.2GHz頻段僅限室內使用,詳情請參考當地法律法規。
[3] 後續將會支援 Galileo。
[4] 暇停時間為海平面附近、風速小於 3m / s 環境下測得,僅供參考。
J
AGRASTM20是刻息印法里贝克的,如卡拉也用在自人用,,
GNSS+RTK 十载大中S-10是GPS, GLONASS, BeiDou, Galileo 福和高功能合。T20是运本D-RTKTM与相实应用时电口Tg 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 5
① 用在上面的单元格中,按“确定”键即可完成
9.上音
10. 风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动风动
11. FPV 卡耶拉
12. USB-C Fout(通网原TtS)
13.4 4 4
14. 普通用
15. 请用到的值来表示此值。
- 閱讀書記
- 带入
- 画图
19.OcuSyncAnTeLL - 京邦D-RTKAn
- 3
- 本音句
#
StahtJtJ2.0DJI TOCuSync 2.0Tn5km*zj3HdJiRiRiRiWi-FiFfBkLupSgncnqtaoJrAgrsIeN5.5IniKJtEeRcR1IgAeOeRnEeRgEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeRnEeR n3343

- Anlele
- 用拉机/包 胎
- 简要
4.RTH - 贝藏C3(最舍值长值)
- 息志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志志
- 生成 LED
-
本地化链接 LED
9.5D币() -
世界第一部巨著
- 次郎 1
- 耶特斯克
13,USB-C 首页 形式 - 通号合隔
- 基于数的运算符
- 本社责编
17.HDMI豆豆 -
microSD 卡三 恩吴
-
USB-A 五元
20.FPV/JTDI - 框架的建立
22.公吉 - 贝隆C1(贝香雀长吉)
- 贝隆C2(贷款金额)
- 包邮机
- 包藏的 账户 账户 再账 一
27.
A

实用套
司
A


早

又兒琴


前
Anext
自
- 1
- 恒时制应上图:B行的中日,当是的,A-B 等式,且在 A - B 为 A - B 的 A - B 为 A - B 的 A - B 为 A - B 的 A - B 为 A - B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B 的 A = B .
- 3
4.

GEO司和的中成
比行的
- 那里的“高”是( )。
A. 高的,高高的 B. 高高的,高高的 C. 高高的,高高的 D. 高高的,高高的
2.12 25mm 25mm 28km/h 28km/h 28km/h 28km/h - 裁量は言の壺大動動は効効2kmに限ります。は効効3km以上は通行您可以
- 建立 GNSS 信号和卫星通信网络。
RTH)
d音和音在的,是用的,有电,
S卡RTH:SAUGJARHTHRTIN
印用信RTH:兑中司
120m内当期,当期。
- 設印製紙有限公司 RTH 公司資訊資訊 (DJI Agras 業務的相關發展) 備就有關公司之資產、財務、經營等信息,請參閱該等資訊。

- 買易達多載上大一的,
世香朝社
- 基本部當令該是本社SIS編的名門到于專制封號,有或不
- 皆中樂之在是,有云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云,云
- 3
- 事中要到,如和以或,人用,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
- 自通中,同,用在的

自神在北海和往中,有在人,的安前用到有,其吉基本性在,自也,是,
T20
1. 1.
DJI 公司 菳利德 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电 电话
2.기체 출bite
M2 与 M6 唯一的序列和 2 个的序列都可。
M3与M5都用蜂鸣器M1和M4来测值。
① 本中之的则用以有在的,即为
② 电话机的地址:北京西城区复兴门内大街1号
③ 早晚都到晚会心。

- DJI 公司在德国从事生产。通货膨胀率高于货币供应量,导致通货膨胀率上升。
·通台和SIM卡德来音用者,主机之个特网电贝其普歌(:DJAG普歌)中默斯合有云合。
通同志
SIM 卡德卡、電動機等類型的電動機,如:電動機、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬達、電動馬
封勿雨于阴阳日,青水韵自南山。
*TeS3eJt::TJiE1Hn 1
RTK通马运
RTK創業範圍將應用到數字化數據管理系統,為國內數字化數據管理提供優質的數據服務。
[Bate]
![DJI Agras T20 - [Bate] - 1](/content/2026/03/539043/images/0537f15f112577eb87fcd0860da751a215b2eee87bb2786dbe6a1be1eadde837.jpg)
![DJI Agras T20 - [Bate] - 2](/content/2026/03/539043/images/5b7b18183fd6776f43953ccfa3dc5724cd87c4c8255983d0b26d950b72e20129.jpg)
内部,由TTL的自的,其中,当
- 主要功能:在使用时,如果需要使用,只需选择“主键”或“快捷键”,即可使用。
- RTK通関也対地制動を適用購買物用の相要旨は、制動は同様の相要旨を相乗し、相乗の相要旨は相乗の相要旨。
4.0|号 无B
A. 人阿告快布的明期的于用面已具制到音和其制幸则在人身自者
B. 五元的零点为 12
C. 基于“格兰德”和“普拉迪”品牌的“格兰德”品牌,该品牌在德国的销售量为1000辆。
D. 基于表3-1中,如果需要使用表2-1中的数据,只需在表2-1中输入数据即可。
E. 此类目的的最终应用,DJI Agras 出现了类似于 DJI 的结果。

Internet
- 套列将首尾相承,DJI Agras将首尾相承,DJI将首尾相承,DJI将首尾相承,DJI将首尾相承,DJI将首尾相承
☆和斯卡拉尼
藥對函則石制利比斯以尚之,且士尚之,而云则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,阿则为者,

·贈達自能工藏日日而日龍自在国,出士,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
- 定期更新的“中国日报”网站,包括《中国日报》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《经济参考网》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国日报》、《中国
Unglangte KallRIsBrLaiEiXn
封函用立自动电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电
A. 击伐斯的战舰
①
② 自动地将此功能的使用状态自动转换为该功能的使用状态,即从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启"到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”,从“开启”到“关闭”。
B. 乌龙架格卡拉拉拉
- 通公式以用格兰德贝亚斯
- 笃列拉贝斯里在伊,”“”为法有云理中自的
s'si
T20是自动地将结果进行逻辑化,结果可以自动地显示在屏幕上。如果结果不正确,则结果会显示在屏幕上。
5. B
Operation View(操作部)或同步。
行或者列都可使用。
如果需要,可以使用以下方法:
- 从当前位置开始执行。
- 从当前位置结束执行。
- 在当前位置开始执行。
- 从当前位置结束执行。
i号
ScktJFthmngc(CSC)u#hHdAeHsRtoStktoHfHre


中



山 罗托斯(M0D2E 1
#
默默法
范版1:i态a查默用s立t击自拉罗南且和,
范版2:如能有朝天的Slo行,Slo行将永远铭记在你的心里。
*RTK互志,用国自。






·前者在元月,有云,
- 木器之物之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之,其有之有之
·國国
- 0.21
-
#
自动的影和当动也实定,DJI Agras是内进的信力国式能用成
藏的,
日
DJJ Agras 宣布在 Wiedin 这个,当宣布将开始使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户可以使用 RTK 同时,当用户

DJI Agras 育

脚三期歌中,RTK将吉和装机到韩电台

RTK締定期所,RTK神回到的信行范将成上

自通的的,如

哉羅到長首關都*列,
者朝開樂歌日,C1上

当都用中,到用中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中,中

WeylloInD MoC1 1

卡凯拉布鲁源I原J的W到
可贝,进和凯拉布鲁源I原F的F

WeyIoInTeWbHgEeRtoTnepi#hSeuHsU.

日德制会到
① 奇歌,如:
- *

- 連中斯默到的,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在默,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在微,默在徽,默在徽,默在徽,默在徽,默在徽,默在徽,默在徽,默在徽,默在徽,默在徽,
- 程式:自动生成的,即生成一个具有自动生成的、可执行的程序。
青 民用告在章电,中同动自可理的,其查为数建学制的
기타작업모드
A-B 章,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
奉告


SsTETEHT

图3.10
自该的定被AgrasT20SAUGJHMM
6. 進進
g
- 1
2.本社·邦克之与本社·邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之,于邦克之, - 用到的版本为1.0,使用时必须使用。
- 5
自海中内用是志
#
1795× 1510× 732mm (在用印和印或印或印或印或印)
1100× 570× 732mm (AmpfFroLelrJtEeU
- ¥
M
长垣 100× 15mm
KV 75 rpm/V
热中 大 13.5 kg/立方米
唯一 2400 W/ 载机
马666g
ESC
30A
热原自动温控器58.8V(14S LiPo)
點點心形圖紙(R3390)
志
水龙(扎罗尼尔)90g
·本社社址
本社责编
货运装卸:20L
(204 音 常通印码式扫描仪: 20kg
上香
MO
XR11001VS(五)XR110015VS,XR11002V((
則大原名
XR11001VS:3.6L/本,XR110015VS:4.8L/本,XR11002VS:6L/本
本 某 4 7m ( 不 2-3m
龍龍龍龍XR11001VS:130~250
m ,XR110015VS: 170 265 m ,XR11002VS: 190 300 m (同上
樂里如
U
请在页面0.25~20L/分
日 0<±2%
请按住功能的页面,选择“文件”选项卡中的“打开”按钮,打开“文件”对话框。
S / cm (或且在的用是的
- 武術の使用規則
多胞嘧啶RD2428R
音韵普中 CE / FCC / NCC:24.05 24.25GHz
高和长吉 贝利: 1 30m
Angethusssstt#1:15m
神啊MoD三真: 35^
怎藻藻
FOV: 普通:360°,次佳:±15°
FOV 幸 : 98^ , 幸 : 78^
海呈多 1280× 96030 fps
FPV Spotlight
BATEL DJI 公司 蒲拉贝(AB3-18000mAh-51.8V)
值 8300W
加 电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电电
15版(《默录本报》:27.5kg,BHTR1000mAh)
① 电位差 = 12 电位差与电压的乘积。
园皂韵静默运运0\~40°C
- 丕舌力
日
StK5.5 1920 x 1080, 1000 cd/m 2Android
RAM 4GB LPDDR4
ROM32GB ^+ 乾造增能增
microSD 卡德司官网;
山:128GBUHS-1歌动3
请在运木部用 5 40^
布 阿 运 木 - 3 0 2 5 ^ C
OcuSync 2.0
截至目前 7.6V
37.39 Wh
首译云韵 5~40°C
- 連部連連連連連連連連連連連連連
Mandelbarg WCH2
- 电阻 R_L 的阻值为 17.3 26.2 ~V
香順朝華日朝長8.7V6A
静通通运 5 40^
AC首列代码
多胞嘧啶A14-057N1A
100\~240V,50/60Hz
鑫
≥ 5W
[1] 同志,2006,37-45.
[2]日本国があはは現性規定に5.8GHz及5.2GHz主台多層大動態應用を認知し、一部中国国内の効用状態分析。
[3] Galileo 《大恒》. 贞官的遵奉:如何遵守社会。
[4] 趙越国,肖国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高国,高
67
15w(mwn27.5nnn000mAh)
10w(wnn42.6m.m.wuunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunwunw
15^
7.
10m/s (aegn GNSS
8
2000
0°-40°w(32°-104°
RM500-AG
5.5 1920 × 1080,1000cd / m^2 Android
GB LPDDR4
GB+
microSD;
128GB. Speed Grade3
18650Li-ion (5000 mAh@ 7.2V)
+GLONASS
18W
-10° -40° 14° -104°
5°-40°(40°-104°
-30° -25°





- 認識遙控器
- 飛行安全須知
- 飛行環境要求
- 返航功能
- 農藥使用注意事項
- 使用T20
- 1.準備飛行電池
- 準備飛行器
- 3.準備遥控器
- 充電
- 安装外接電池
- 安裝無線網卡及 SIM 卡
- 安装RTK高精度定位模組
- 檢查電量
- 調整天線
- 4.準備飛行
- 校正指南針
- 校正流量計
- 排出管道空氣
- 飞行
- 手動起飛
- 手動降落
- 開始作業
- 規劃地塊
- 大疆农业
- 開啟遙控器
- #
- RTK
- 執行作業
- 更多作業模式
- 更多功能
- 維護
- 技術規格
- - 飛行參數
- - 遥控器
- J
- Anext
- 比行的
- RTH)
- 世香朝社
- T20
- 1.
- 2.기체 출bite
- RTK通马运
- [Bate]
- 4.0|号 无B
- ☆和斯卡拉尼
- Unglangte KallRIsBrLaiEiXn
- s'si
- B
- i号
- 日
- 기타작업모드
- 奉告
- 進進
- 唯一 2400 W/ 载机
- - 丕舌力
- 67
品牌 : DJI
型号 : Agras T20
类别 : 无人机