
Agras T20 - Dron DJI - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato Agras T20 DJI en formato PDF.
| Tipo de producto | Dron agrícola de pulverización |
| Marca | DJI |
| Modelo | Agras T20 |
| Dimensiones (desplegado) | 2509 × 2213 × 732 mm |
| Dimensiones (plegado) | 1100 × 570 × 732 mm |
| Peso (sin batería) | 21,1 kg |
| Peso máx. al despegue | 47,5 kg |
| Batería de vuelo | AB3-18000mAh-51,8V (LiPo 14S) |
| Autonomía en vuelo estacionario | 15 min (27,5 kg) / 10 min (42,6 kg) |
| Capacidad del tanque | 20 L |
| Caudal de pulverización máx. | 6 L/min (según boquillas) |
| Alcance de transmisión | 5 km (FCC) / 3 km (CE) |
| Sistema de posicionamiento | GNSS + RTK (GPS, GLONASS, BeiDou, Galileo) |
| Evitación de obstáculos | Radar digital omnidireccional (horizontal) |
| Índice de protección | IPX6 (global) / IP67 (componentes electrónicos) |
| Temperatura de funcionamiento | 0 a 40 °C |
| Funciones principales | Pulverización automática, planificación de vuelo, modos Itinerario y A-B, retorno al punto de partida inteligente |
| Mantenimiento y limpieza | Limpiar el tanque, boquillas, hélices y motores después de cada uso con agua limpia o jabonosa |
| Seguridad | No volar sobre personas/animales, evitar vientos >28 km/h, respetar las zonas GEO |
| Piezas de repuesto y reparabilidad | Hélices, boquillas, batería, tanque, motores y ESC reemplazables |
| Información general | Dron profesional para agricultura, radiocontrol Smart Controller 2.0 con pantalla táctil 5,5" |
Preguntas frecuentes - Agras T20 DJI
Preguntas de los usuarios sobre Agras T20 DJI
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Dron en formato PDF gratis! Encuentra tus instrucciones Agras T20 - DJI y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. Agras T20 de la marca DJI.
MANUAL DE USUARIO Agras T20 DJI
Guía de inicios rápidos
aee aen eae ene aeene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene ene
unununununununununununununununununununununununununun
uauuunauu uuaaguiuulilawwn M3 uae M5 nau annuuaanM2 uae M6 aauuunauanadmou unuaaoun M1 uae M4 uun
3.
7
WuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWuWwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUwUw
nnaaannnnnnaaennnnn
1 nndnaaennnnnneannnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
②
③

-
mnae 4G

Jauuueaui DUI suaanu u aonrassn rnuunagulnaannnnae lnnnnnne nnnnne nnnnne nnnnne nnnnne
aannnnnne nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
aannnnnne
aennnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne
999

Jodhansoulwrit
nennnnnne nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
mraiaeaaeRTK
uiee eae aee RTK 0000000000000000000000000000000000000000000000000000000000
nnaaennnnne nannnnnne annnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn

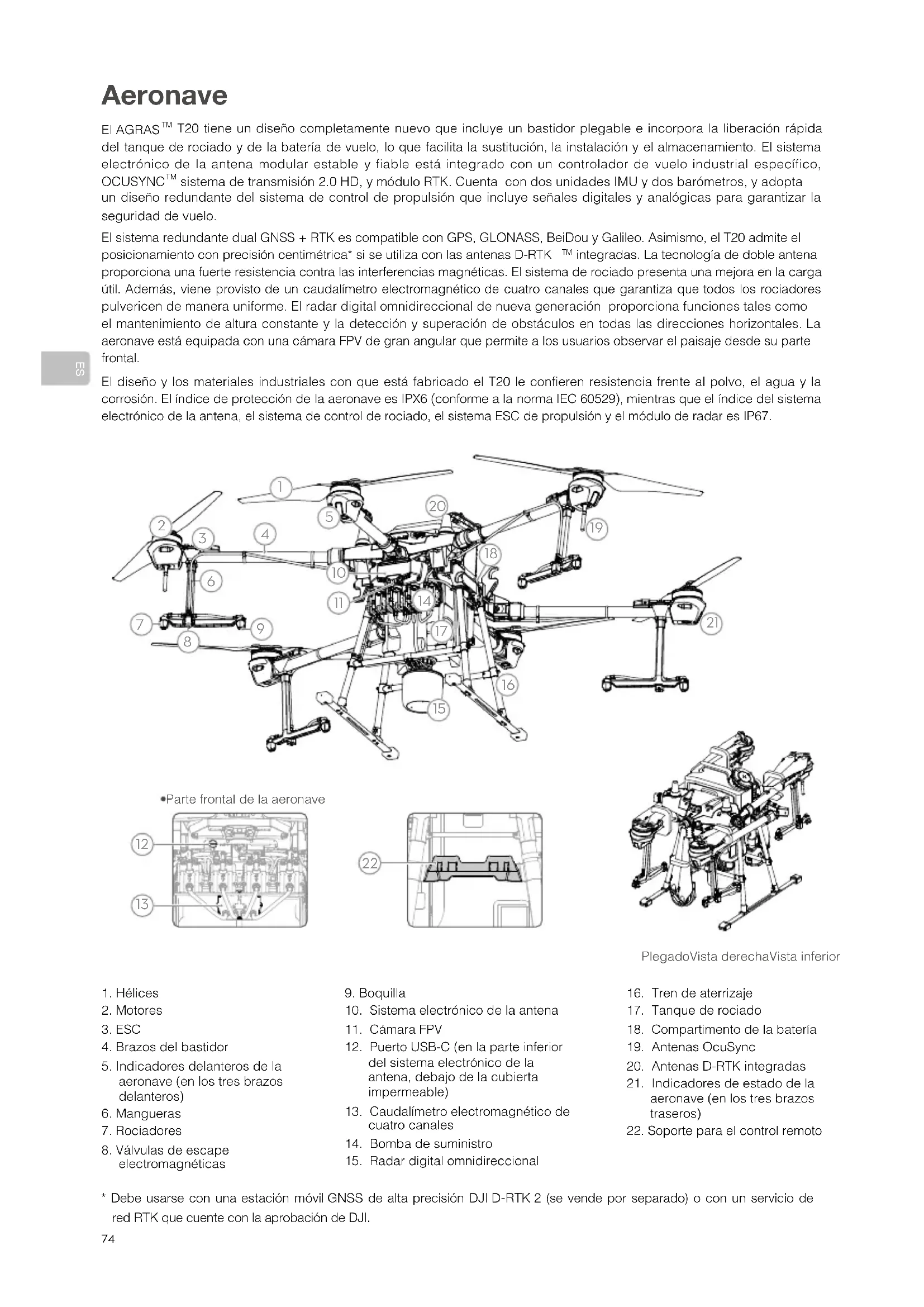
El AGRAS™ T20 tiene un Diseño Completely nuevo que incluye un bastardor plegable e incorporates la liberación rápida del tanque de rociado y de la batería de vuelo, lo que Facilita la sustitución, la instalación y el almacenimiento. El sistema electrónico de la antenna modular estable y fiable está integrado con un controlador de vuelo industrialístico, OCUSYNC™ problema de transmisión 2.0 HD, y modulo RTK. Cuenta con dos unidades IMU y dos barómetros, y adopts un Diseño redunda del problema de control de propulsión que incluye senales digitales y analógicas para garantizar la seguridad de vuelo.
El planta redunda dual GNSS + RTK es compatible con GPS, GLONASS, BeiDou y Galileo. Asimismo, el T20 admite el positional con precision centimétrica" si se usa con las antenas D-RTK™ integras. La Tecnología de doble antenna proportionsa una fuerte resistencia contra las interferencias magnéticas. El planta de rociado presenta una mejora en la energia可用. Además, viene provisto de un caudalmetro electromagnético de quatre canales que garantiza que todos los rociadores pulvericen de manière uniforme. El radar digital omnidirectional de nueva generación proportora functions tales como el mantenimiento de alta constante y la detectión y superación de obstáculos en todas las direccionesizontales. La aeronave está equipada con una CAMERA FPV de gran angular que permit a los sistemas observar el paisaje desde su parte frontal.
El diseño y los materiales industriales con que está fabricado el T20 le confieren resistencia frente al polvo, el agua y la corrosión. El indice de protección de la aeronave es IPX6 (conforme a la norma IEC 60529), cuando que el indice del sistemas electrónico de la antenna, el sistema de control de rociado, el sistema ESC de propulsion y el modulo de radar es IP67.
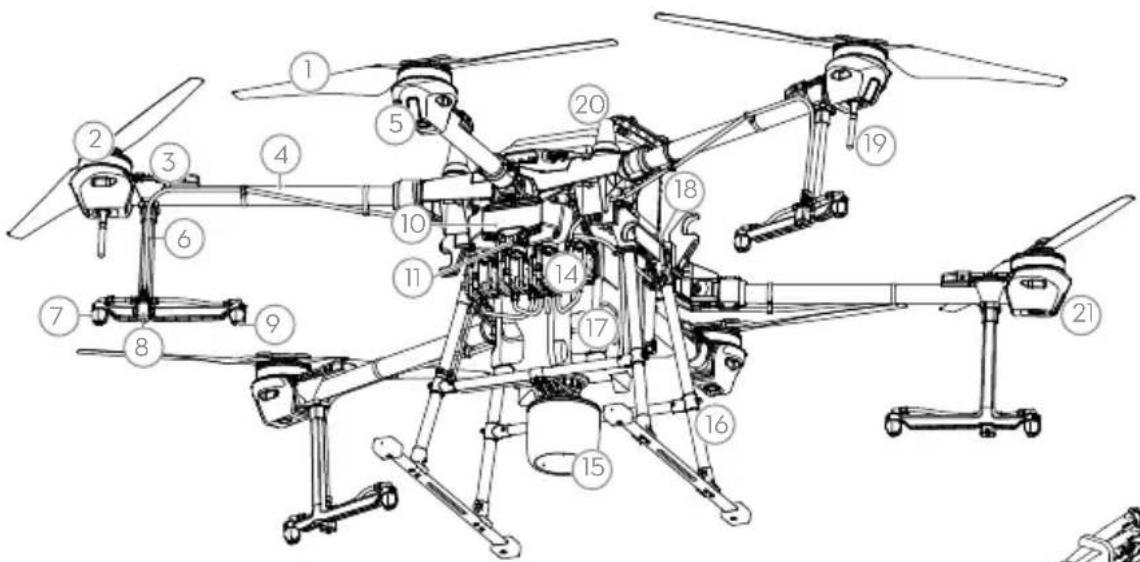
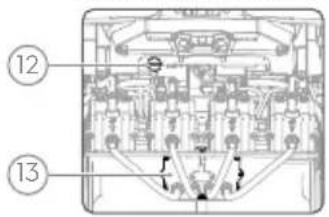
- Parte frontal de la aeronave
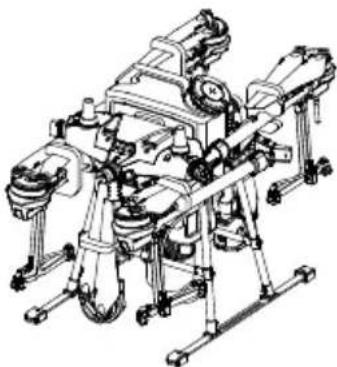
PlegadoVista derechaVista inferior
- Hélices
- Motores
- ESC
- Brazos del bastidor
- Indicadores delanteros de la aeronave (en los tres brazos delanteros)
- Mangueras
- Rociadores
-
Valvulas de escape electromagnéticas
-
Boquilla
- Sistema electrónico de la antenna
- Camara FPV
- Puerto USB-C (en la parte inferior del sistemas electrónico de la antenna, bajo de la cubierta impermeable)
- Caudalimetro electromagnétique de quatre canales
- Bomba de suministro
-
Radar digital omnidirectional
-
Tren de aterrizaje
- Tanque de rociado
- Compartimento de la bateria
- Antenas OcuSync
- Antenas D-RTK integradas
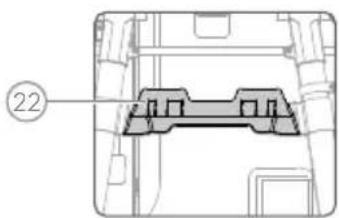
- Indicadores de estado de la aeronave (en los tres brazos traseros)
- Soporte para el control remoto
Control remoto
El control remoto Smart Controller 2.0 utilizes el Sistema de transmisión OcuSync 2.0 de DJI™, presenta una distancia de control maxima de 5km^ y es compatible con functions Wi-Fi y Bluetooth. Está equipado con una pantalla luminosa dedicada de 5.5ulgadas que integra la aplicación DJI Agras, con lo que se mejoran notablemente la suavidad y la estabilidad. Se podran planificar operaciones con precision centimétrica si se connecta el adaptor RTK al control remoto. El modo de control de multiaeronave del control remoto se pueda usar para coordinar el funcionaimiento de hasta tres aeronaves a la vez, lo que permite a los pilotos trabajo de forma eficaz. Para alimentar el control remoto se pueda usar tanto la batería integrada como una bateria externa. La autonomía de la aeronave es de 4 horas, con lo que se cumplen los requisitos existecidos para operaciones de largduración y alta densidad.
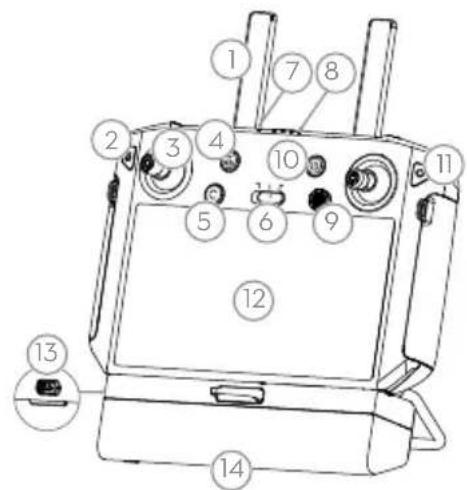

- Antenas
- Botón de retroceso/botón de funciona
- Palancas de control
- Botón RPO
- Boton C3 (personalizable)
- Selector de modo de:vuelo
- Led de estado
- Ledes de nivel de bateria
- Botón 5D (personalizable)
- Boton de encendido
-
Botón de confirmación
-
Pantalla tactil
-
Puerto de energia USB-C
-
Cubierta del compartmento del adaptor
-
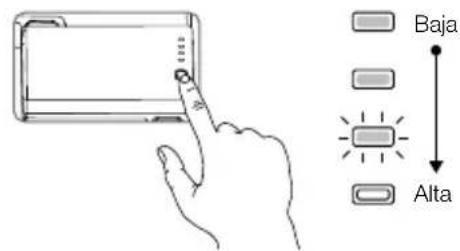
Dial de velocidad de rociado
-
Botón de rociado
-
Puerto HDMI
-
Ranura para tarjeta microSD
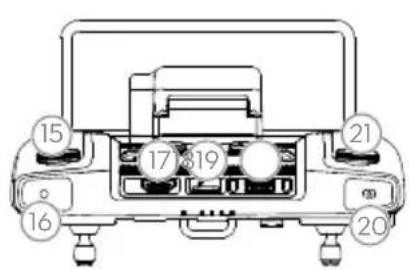
19.Puerto USB-A
-
Botón de cambio entre FPV y.mapa
-
Dial de eficiencia de
funcionamento - Rejilla de ventilación
- Botón C1 (personalizable)
- Botón C2 (personalizable)
- Tapa de la bateria
- Botón de liberación de la tapa de la bateria
- Asa
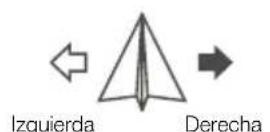
En lasuma imagen se muestra la function de cada uno de los movimientos de las palancas de control, utilizing el Mode 2 como ejemplo. En el Modo 2, la palanca izquierda controla la altitud y la orientacion de la aeronave, cuando que la palanca derecha controla los movimientos hacía delante, aftas, izquierda y derecha.

Palanca izquierda Palanca derecha
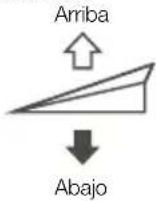




Adelante

- El control remoto puede lograr susolestores de alcance de transmisión -FCC/NCC: 5 km (3.11 mi); CE/KCC/MIC/SRRC: 3 km (1.86 mi)—en zonas abiertas sin interferencias electromagnéticas y a una altitude 2.5 m (8.2 ft) aproximamente.
Asegürese de cumplir la legislación y normativas locales al utilizar el modo de control multiaeronave.
Vuelo Seguro
Es importante conocer algumas directricesbasicas de vuelo, tanto para su seguidad como para la de quienes le rodean.
- Vuel en espacios abiortos: Preste atencion a los postes de red elctrica, las lineas de tension y otheros obstaculos. Evite volar por encima o en las cercanias de agua, personas o animales.
- Mantenga el control en todo momento: No aparece las manos del control remoto y mantenga el control de la aeronave durante el vuelo, incluo cuando se utilizes functions inteligentes, como los modos de funciona Trayectoria y Trayectoria A-B, y Regreso al punto de origen inteligente.
- No pierda de vista la aeronave en ningun caso: Mantenga la aeronave bajo su alcance visual (VLOS, por sus siglas en ingles) en todo momento y evite volar detrás de edificios u otheros obstáculos que能把an bloquear la visiOn de esta.
- Controle su altitud: Por la seguridad de las aeronaves tripuladas y el resto del trafico aereo, vuela a altitudes inferiores a 30 m (98 ft) y de acuerdo con toda la legislacion y normativas locales.

Visit https://www.dji.com/flysafe si desea Obtener mas informacion acerca de funcciones crticas de segudad como las zonas GEO.
Aspectos que se deben tener en cuenta para el vuelo
- NO utilise la aeronave para rociar con vientos que exceedan los 18km / h (11 mph).
- NO utilise la aeronave en conditiones climatologicas adversas, como vientos que superen los 28~km / h (17 mph), lluvias intensas (precipitationes superiores a 25 mm o [0.98 in] en 12 horas), nieve o niebla.
- Laaltitude maxima de functiomento recomendada es de 2 km (6560 ft) sobre el nivel del mar.NO vuele a mas de 3 km (9842 ft) sobre el nivel del mar.
- Una vez que laaltitude de configuracion alcanza 1 km (3280 ft), la capacité de carga util del tanque de rociado se reduce en 2kg .Por cada kilometro adicular,la capacité de carga util se reducir a en otros 2kg
- Asegürese de que, durante el pilotaje, la Signals GNSS sea intensa y de que las antenas D-RTK esten libres de obstrucciones.
Regreso al punto de origen (RPO)
La aeronave volverá al punto de origen automatistically en las siguientes situaciones.
Smart RTH (RPO integlente): Se pulsa el boton RPO.
Failsafe RTH (RPO de seguridad): Se ha perdido la seals del control remoto.*
Si aparece un obstáculo en un radio de 20 m con besoin a la aeronave, esta desaceler y, a continuación, se detiene y se pone en vuelo estacionario. Si la aeronave detecta un obstáculo a menos de 6 m de distancia cuando desaceler, retrocede hasta colocarse aunos 6 m de este y se pone en vuelo estacionario. La aeronave sale del procedimiento de RPO y aguarda a que se den más ordinenses.
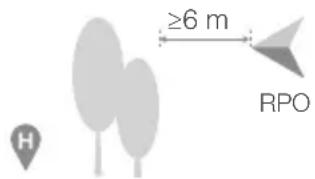
- Si RPO de seguridad está desactivado (que es la configuración predeterminada en la aplicación DJI Agras), la aeronaveenta en vuelo estacionario en caso de que se pierda la señal del control remoto.

- Elistema anticolisión se desactiva en el modo Atti (que se activa automatistically en casos como cuando la seals GNSS esblemado débil) y no está disponible si el entorno de funciona no es adecuado para el modulo de radar. Es necessario adoptar especials precauiones en los siguientes casos.
Uso de pesticidas
- Evite el uso de pesticidas en polvo tanto como sea posible, ya que pueda reducir la vida util del systema de rociado.
- Los pesticides son venenos y representan un grave riesgo para la seguidad. Utilcelos siguiendo estrectamente sus indicaciones de uso.
- Utilice agua limpia para mezclar el pesticida y filtrle la mezcla antes de averterla en el tanque de rociado para evaporar que el filtrso se atasque.
- La eficacion de los pesteridas depende de la densidad del pesterida, la velocidad de rociado, la distancia de rociado, la velocidad de la aeronave, la velocidad del viento y la direcction del viento. Considere todos these factores al usar pesteridas.
5 NO comprometa la seguridad de las personas, los animales ni el medio ambiente durante la operacion.

Es importante poderalgas directricesbasicas de vuelo,anto para su segudad como para la de quienes le rodean.
No olvide leer el documento de renunciation de responsabilitad y directrices de seguidad.

Uso del T20
1. Preparación de la Bateria de Vuelo Inteligente
Utilice únicamente baterías de vuelo oficiales de DJI (modelo AB3-18000mAh-51.8V). Verifique el nivel de bateria antes de volar y cagruela de acuerdo con las directrices dispuestos en el documento correspondiente.
m
2. Preparación de la aeronave
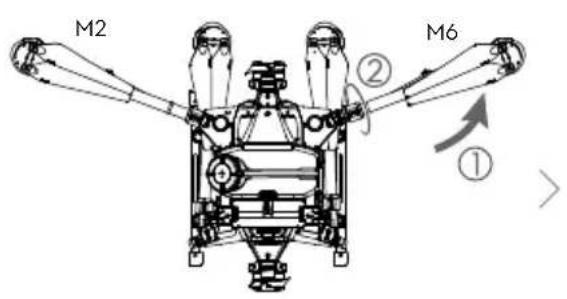
Despliegue los brazos M2 y M6, y apriete los dos manguitos de los brazos.
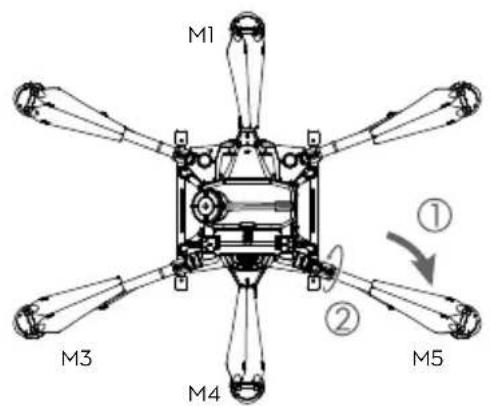
Despliegue los brazos M3 y M5, seguidos de M1 y M4, y a continuacion apriete los manguits de los cinco brazos.
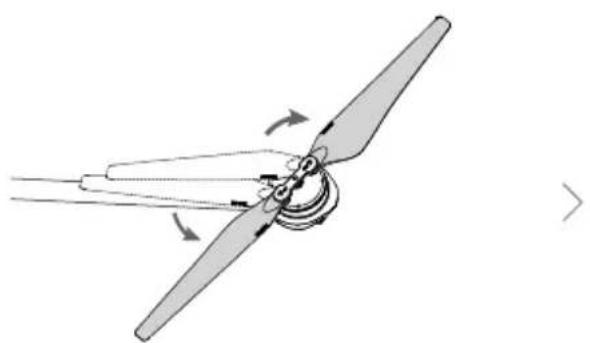
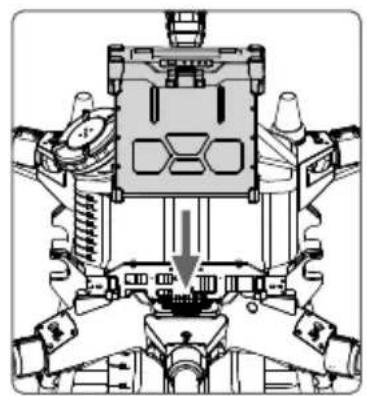
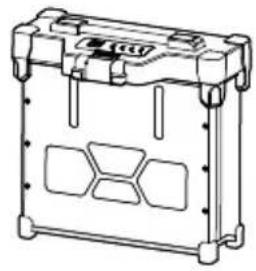
Despliegue las palas de las hélices. Inserte la Bateria de Vuelo Inteligente en la aeronave hasta que escuche un cig.

- Asegürese de que la bateria se inserte con firmeza en la aeronave. Solo inserte o extraiga la bateria cuando la aeronave esté apagada.
- Para extraer la bateria, mantenga presionado el cierre y, a continuacion, extragala por arriba.
- Al plegar los brazos, asegürese de plegar primero los brazos M3 y M5 y fuego los brazos M2 y M6. De lo contrario, los brazos podriani dañarse. Levante y bajo los brazos M1 y M4 con suavidad para reducir el desgaste.
3. Preparación del control remoto
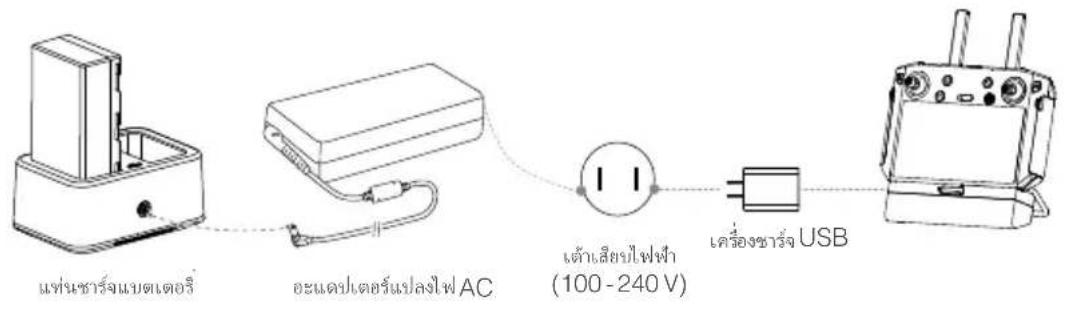
Carga de las baterias
Cargue la Bateria Inteligente externa con el centro de cargo y el adaptor de corriente de CA. Cargue la bateria interna del control remoto con el cargador USB y el cable USB-C. Cargue Completely las baterias antes del primer uso.
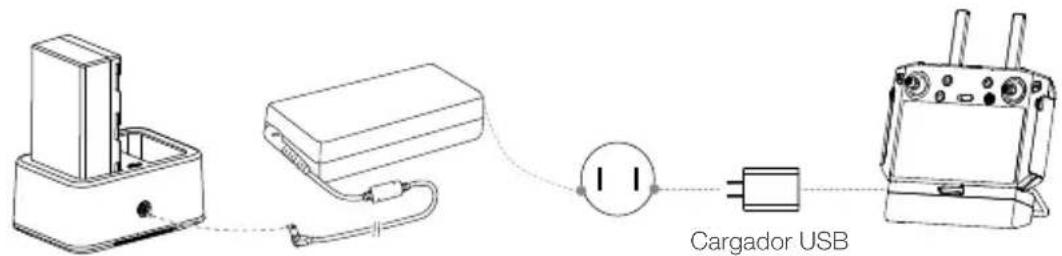
Centro de cargo de baterias Adaptador de corriente CA Toma de corriente (100-240 V)
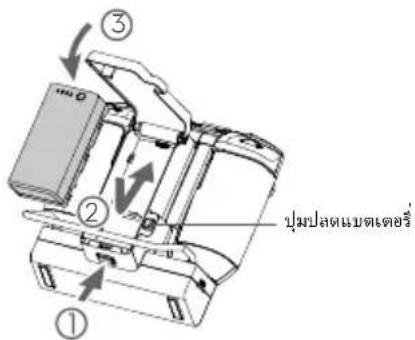
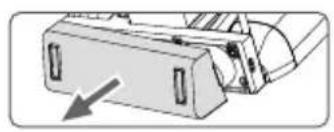
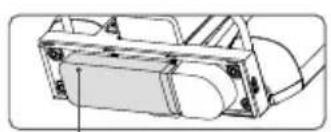
Inserción de la bateria externa
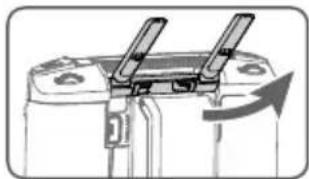
① Presione el boton de liberacion de la tapa de la bateria, situado en la parte posterior del control remoto, paraAbrir la tapa.
② Introduzca la Bateria Inteligente en el compartmento y empujela hacía la parte superior.
③ Cierre la tapa.
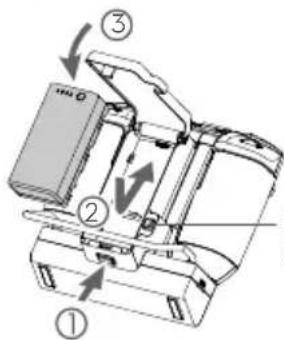
Botón de liberación de bateria

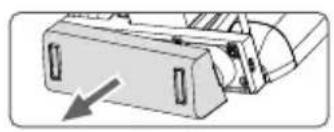
- Para extraer la Bateria Inteligente, mantenga pulsado el boton de liberacion de la bateria y, a continuacion, empuje la bateria hacia abajo.
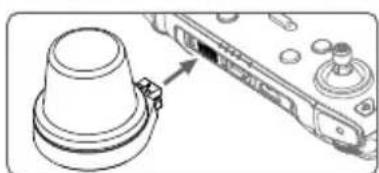
Instalacion del adaptor 4G y la tarjeta SIM

- Utilice solamente adaptadores que@cuenten con la aprobacion de DJI. El adaptador es compatible con various estandares de red. Utilice una tarjeta SIM que sea compatible con el proveedor de red móvil elegido y seleccione un plan de datos moviles conforme al nivel de uso previsto.
- El adaptor y la tarjeta SIM permitted que el control remoto acceda a determinadas redes y plataformas, como la plataforma DJI AG. Asegúrese de emplearlos correctamente. De lo contrario, no seoulda disponible de acceso a Internet.
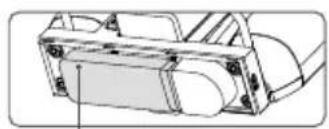
Retire la tapa del compartmento del adaptor.
Inserte el adaptor en el puerto USBhabio introducido en el primo la tarjeta SIM. Entoces, haga una prueba con el adaptor*.
Adaptador

Vuelva colocar la tapa firmamente.
- Procedimiento de prueba: Pulse una vez el botón de encendido,whelming a pulsarlo y esta vez mantengalo pulsado para encender el control remoto. En la aplicación DJI Agras, toque y selección "Network Diagnostics" (Diagnostico de red). El adaptor y la tarjeta SIM funciona correctamente si el estado de todos los dispositivos en la cadena de red se muestra en verde.
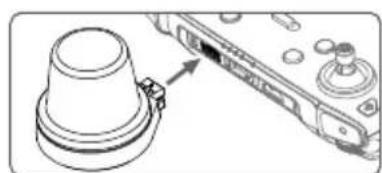
Inserción del adaptor RTK
Cuando vaya a usar el método de planificación RTK para planificar el area de operación, inserte el adaptor RTK en el puerto USB-A del control remoto.
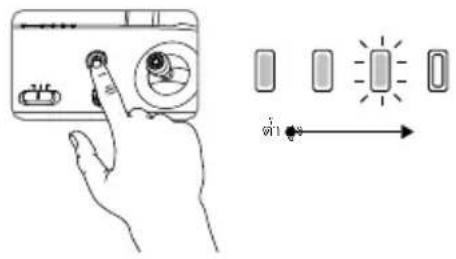
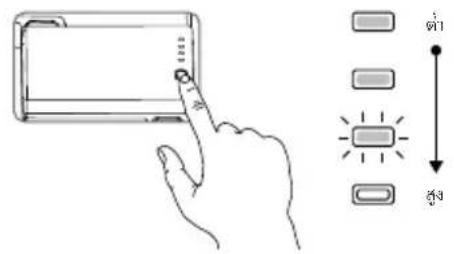
Comprobación de los niveles de batería
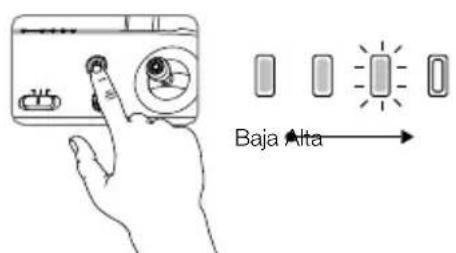
Presione el boton de encendido del control remoto una vez para comprobar el nivel de la bateria interna. Presione una vez,whelming a presionar y mantenga presionado durante dos segundos para encender o apagar. Presione el boton del nivel de bateria de la Bateria Inteligente externa una vez para comprobar el nivel.

- Si va a utiliser una Bateria Inteligente externa, no olvide asegurar de que la bateria internaonga algo de carga. De lo contrario, el control remoto no se podra encender.
器
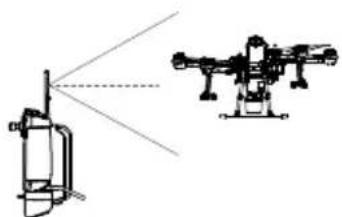
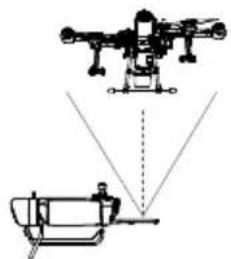
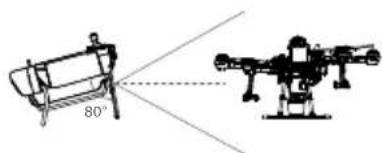
Ajuste de las antenas
Levante las antenas y ajustelas. La posicón de las antenas afecta a la intensidad de la senal del control remoto. Cuando el ángulo entre las antenas y la parte posterior del control remoto sea de 80^ o 180^ , seoulda alcancar el rendimiento optimo de communicatoraciones entre el control remoto y la aeronave.
Intente mantener la aeronave bajo de la zona de transmisión optima. Si la SERIAL es débil, ajuste las antenas o vuede con la aeronave más cerca.
Zona de transmisión optima

- Evite usar dispositivos inalámbricos que usen las mismas bandas de Frequencia que el control remoto.
- Si el adaptor de RTK se usa para planificacion de Campos, el modulo se debe desconectar del control remoto una vez que haya concluded la planificacion. De lo contrario, el rendimiento de comunaciones del control remoto se va afectado.
4. Preparación para el despegue
A. Colque la aeronave en una superficie plana de un espacio abierto de modo que su parte trasera quede orientada hacua usted.
B. Asegürese de que las hélices estén bien montadas, de que no haya objetos extraños bajo o sobre los motores y las hélices, de que las palas y los brazos de la hélice estén desplegados y de que los manguitos de los brazos estén firmamente apretados.
C. Asegürese de que el tanque de rociado y la bateria de vuelo estén colocados firmamente en su lugar.
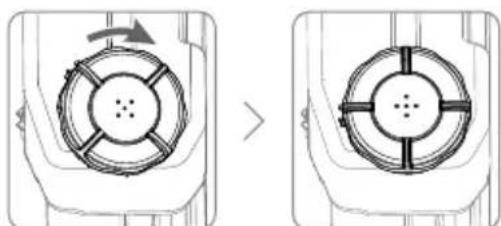
D. Llene el tanque de rociado con el liquido pertinente y, al terminar, apriete la taps. Asegúrese de que las quatre lines de la taps queden en posición horizontal y vertical.
E. Encienda el control remoto, asegúrese de que se haya abierto la aplicación DJI Agras y, a continuación, encienda la aeronave.

Internet
- Cuando vaya a utiliser la aeronave por primera vez, activela con la aplicacion DJI Agras. Necesitara una cuenta DJI y connexion a internet.
Calibración de la brujula
Cuando la aplicacion indique que es necessario calibrar la brujula, pulse ,undo ,deslice a la parte inferior y seleccione Advanced Settings (Configuracion avanzada),undo Sensors (Sensores).Toque Calibration (Calibracion) en la seccion de calibracion de la brujula,undo siga las instrucciones en pantalla.

- NO calibre la brujula alli donte haya probabilitadades de se produzca una fuerte interferencia magnetica. Se incluyen areas donte hay postes de tension o paredes con refuerzos de acero.
NO Ileve consigo materiales ferromagnéticos, como llaves o Telefonos moviles, durante la calibración.
Calibración del caudalímetro
Asegürese de calibrar el caudalmetro antes de utilizar el rociado por primera vez. De lo contrario, el rendimiento del rociado podra verse afectado seriamente.
A. Preparación para la calibración: Descarga de las burbujas que haya en las mangueras
① Llene el tanque de rociado con aproximadamente 2 L de agua.
② Descargue las burbujas con ].a tion de descarga automatica de burbujas y siguiendo las descripiones recogidas en la seccion "Descarga de las burbujas que queden en las mangueras", dispuesta mas adelante. Tamanen es possible descargar las burbujas manualmente. Presione el boton de rociado para pulverizar las burbujas; una vez que se hayan descargado todas, presionelo de nuevo.
B. Calibración del caudalímetro
En la aplicacion, toque "Ejecutar operation", de modo que acceda a "Operation View" (Vista de camara). Toque; a continuacion, toque "Calibracion", en la parte derecha de la seccion del caudalmetro.
La calibración se inicia automatistically. Después de 25 segundos, el的结果ado de la calibración se muestra en la aplicación.
- Cuando la calibracion se haya completado correctamente, seoulda procerar a pilotar la aeronave.
- Si la calibración falla, toque “?” para visualizar el problema y resolverlo. Una vez resuelto el problema, repita la calibración.
Descarga de las burbujas que haya en las mangueras
El T20iene equipado con una referencia de descarga automatica de burbujas. Cuando sea necessario descargar las burbujas, mantenga presionado el boton de rociado durante dos segundos. La aeronave libera liquido automatically hasta que se hayan descargado todas las burbujas.
5. Vuelo
En la aplicacion, yaya a "Operation View" (Vista de camar), Aseguere de que haya una senal GNSS fuerte y de que la barra de estado del systema indique Manual Route (Ruta manual) (GNSS) o Manual Route (Ruta manual) (RTK).* De lo contrario, la aeronave no podra despegar.
Para que la aeronave ejecte operaciones de forma automatica, es recomendable haber realizado previamente un plan o estudio spécifique respecto de un camino de cultivo. Consulte la sección "Operaciones de inicio" para Obtener más informacion. En el resto de los casos, proceda al despegue y al aterrizaje de forma manual.
Despegue
Efectue el commando de palancas combinado (CSC) y presione la palanca del acelerador hacia arriba para despegar.


O BIEN




Palanca del accelerador (palanca izquierda en Modo 2)
Aterrizaje
Para aterrizar, empuje la palance de aceleracion hasta que la aeronave toque el sueo. Hay dos métodos para parar los motores.
Mete 1: Cuando la aeronave haya aterrizado, empuje la palance del acelerador hacia abajo y mantenga presionado. Los motores se paran transcurridos 3 s.
Método 2: Cuando la aeronave haya aterrizado, mueva la palanca del acelerador hacía abajo y efectue el mesmo CSC que se utilizes para arrancar los motores. Suelte las dos palancas una vez que se detenga los motores.
- Se recomienda usar el posicionamento RTK. En la aplicación, vaya a “Operation View” (Vista de lácema), toque y RTK para activar “RTK de la aeronave” y selección un método de recepción de senales RTK.



O BIEN


Método 1 Météo 2

- Las helices en rotacion peuvent ser peligrosas. Mantengase alejado de las helices y motores en rotacion. NO arranque los motores en espacios cerrados o cuando haya personasURT.
- Mantenga las manos en el control remoto cuando los motores estén girando.
- Nunca detenga los motores en pleno vuelo, a menos que se produzca una situacion de emergencia en la que esta maniobra pueda reducir el riesgo de daños o lesiones.
- Se recomienda usar el método 1 para detener los motores. Si se usa el método 2 para detener los motores, la aeronave pourrait vacar si no está posada en tierra por completeo. Utilice el método 2 con precaución.
- Tras el aterrizaje, apague la aeronave antes de apagar el control remoto.
Inicio de las operaciones
En primer lugar, haga medicaciones del area de operacion y de los obstaculos y configure los ajustes pertinentes. En segudo lugar, generate una ruta de vuelo a partir de esta informacion por medio del systematigente de planificacion de operaciones que DJI Agras trae integrado. Se podran carrger operaciones una vez que se haya planificado el terreno. La aeronave comienza a operar de forma automatica y sige la ruta de vuelo prevista.
En caso de que el terreno sea accidentado, se peut recurrir a la aeronave Phantom 4 RTK y a la aplicacion DJI Terra™ para planificar rutas de vuelo en 3D y, más adelante, importarlas a la aplicacion DJI Agras para executar la operacion. Consulte el manual de usuario del Agras T20 para Obtener más informacion.
Planificación de Campos
La aplicacion DJI Agras permite la planificacion de rutas de vuelo dirigiendo la aeronave hacia punto de trayectoria, obstaculos y punto de calibracion o dirigendose a pie a qualquera de these指点 levando consigo el control remoto, un control remot equipment con un adaptor RTK o un dispositivo RTK. La ruta explicada a continuacion se ha planificado caminando hacia los起点 con un control remot que leva connectado un adaptor RTK. Antes de proceder a la planificacion, aseguese de haber insertado el adaptor RTK en el control remot.

Encienda el control remoto. Abra DJI Agras.

Toque Campo del plan, seleccione Caminar con RTK y bajo Walk with RTK Dongle (Caminar con adaptor RTK).

En los ajustes de RTK, selección un método de recepción de señas RTK y configure los ajustes correspondientes. Asegúrese de que la barra de estado de la aeronave, situada en la parte superior de la pantalla, presente color verde.

LLEVando consigo el control remoto, recorra a pie el limite del area de operacion y toque Añadir trayectoria C2 en los+puntos de giro.

Dirjase a pie a todos los obstáculos* y, con cada uno, toque Modo de obstáculo C1'.

Rodee el obstáculo y toque Añadir obstáculo C2 en various punto de la trayectoria de rodeo*.

Toque Modo de
trayectoria C1 para
volver a fin deregarar
puntos limitos al area
de operación.

Dirjase a pie a la
ubicacion todos los
puntos de calibracion y, con cada uno de
estos,toque Punto de
calibracion.

Las trayectorias y las rutas de vuelo se pueda editor. Ajuste con precision las posiciones de las trayectorias, configure la distancia y el interlineado y defina la direccion de la ruta tocando o arrastrando el icono

Guarde el plano del camino.
Una vez que haya terminado de planificar, pulse en la esquina superior izquierda de la pantalla para volver a la pantalla de inicio.
- Si hay obstáculos en el area de operación.

- Los+pintos de calibracion sirven para rectificar sesgos en la ruta de vuelo occasionados por desviaciones de posiconcimiento. Eija uno o various punto de referencia fijos de cara a la calibracion, como una clavija de metal o unamarca evidente, que sean fácilmente identificables para la rectificacion de la inclinacion al executar la operacion.
Llevar a cabo una operación

Lleve la aeronave a uno de los+puntos de calibracion.

Presione Ejectar
Operación en la pantalla de inicio de la aplicación.

Toque y seleccione el Campo en la lista de Campos.

Toque Editor para volver a editar las trayectorias y la ruta de vuelo.

Toque Invocar y, a continuacion, toque Rectificar la compensacion.

Presione Start.

Configure los parámedos de la operación y, a continuación, confirmelos.

Establezca la alta de despegue automatico y mueva el control deslizante para despegar. La aeronave ejecta la operacion automatistica.

- Despegue únicamente en和地区 abiertas, y establezca una alta de despegue automatico que se adecue al entorno de funcionaimiento.
- Cualquier operacion se suepe pausar con un ligero movimiento de la palanca de control. La aeronave realizara vuelo estacionario y registrar a el punto de interruptacion; a continuacion, podra controlarse manually. Para continuar con la operation, seleccionela-Newamente desdela etiqueta Executing (Enexecution) en la lista y la aeronave volvera al punto de interruptacion automatically y reanudar la operation. Preste atencion a la seguidad de la aeronave cuando regrese esta al punto de interruptacion.
- En el modo Route Operation, la aeronave可以选择 sortear obstáculos, una función que está deshabilitada de forma predeterminada y que pueda habilitarse en la aplicación. Si la funciona está habitada y la aeronave detecta un obstáculo, reduciría la velocidad y lo sorteará. Luego, regresará a la ruta de vuelo original.
- La aplicacion permite definir que action executar la aeronave afterwards de terminada la operacion.
Más发展模式 de funciona
Consulte el manual de usuario del Agras T20 para Obtener más información sobre losodos de funciona. Trayectoria A-B, Manual y Manual Plus.
Más sistemas

Operation Resumption (Reanudar el trabajo)

System Data Protection (Proteger datos de sistemas)

Tanque vacio
Consulte el manual de usuario del Agras T20 para Obtener más información.
6. Mantenimiento
Limpie todas las partes de la aeronave y del control remoto a diario e inmediamente après de rociar:
- Llene el tanque de rociado con agua limpia o agua jabonosa y rocie el agua a工程技术 de las boquillas hasta que el tanque se vacie. Realice este paso dos veces más.
- Desacople el conector del tanque de rociado y extraiga el tanque, para limpiarlos. Retire el filtro del tanque de rociado, los filros de la boquilla y las boquillas para limpiarlos y eliminarrialquierobstruccion.Despues,sumerjalos enagua limpia durante 12 horas.
- Use a pistola de lavado llena de agua para limpiar el cuerpo de la aeronave y limpiela con un capillo suave o un paño humedo antes de quitar las manchas de agua con un paño seco.
- Si hay polvo o pesticida liquido en los motores y las helices, limpielos con un paño humedo antes de quitar las manchas de agua con un paño seco.
- Una vez al día y al terme de las operaciones con la aeronave, limpie la superficie y pantalla del control remoto con un pañó humedo limpio que haya sidoEscurido.
Para mas informacion, consulte los apartados Renuncia de responsabilitad y Directrices de seguridad en el mantenimiento del producto.
Especillasiones
- Modelo de produits 3WWDZ-15.1B
Aeroestuctura
Distancia maximala diagonal entre 1883 mm
ejes
Dimensiones 2509× 2213× 732mm (Brazos y helices desplegados)
1795 × 1510 × 732 ~mm (Brazos desplegados y helices plegadas)
1100 × 570 × 732 ~mm (Brazos y helices plegados)
- Sistema de propulsion
Motores
Tamañodel estátor 100× 15mm
KV 75 rpm/V
Empujemax.13.5 kg/motor
Potencia maximal 2400 W/rotor
Peso 666 g
ESC
Corrente max. de 40 A
funcionamento (Continua)
Voltaje max. de funciona 58,8 V (14S LiPo)
Hélices plegables (R3390)
Diametro × rosca 83.82× 22.86cm (33× 9 in)
Peso (por hélice) 90 g
- Sistema de rociado
Tanque de rociado
Volumen Completo: 20 L
Capacidad de energia Completa: 20kg
Boquilla
Modelo XR11001VS (de série); XR110015VS, XR11002VS (opciones, se comparan por separado)
Cantidad 8
Velocidad max. de rociado XR11001VS: 3.6 L/min; XR110015VS: 4.8 L/min; XR11002VS: 6 L/min
Diámetro de rociado 4-7 m (ocho boquillas, a una alta de 2-3 m por encima de los cultivos)
Tamaño de las gotas XR11001VS: 130-250 μm; XR110015VS: 170-265 μm; XR11002VS: 190-300 μm (en func del entorno de funciona y de la velocidad de rociado)
Caudalimetro
Rango de medicación 0.25-20 L/min
Error <±2%
Liquido medible Conductividad >50~ S / cm (liquidos como el agua corrente o pesticidas que contenga angua)
Detectione de altitud y Altura Alcance de detectione de altitud: 1-30 m
constante [1] Rango de estabilización: 1.5-15 m
Pendiente max.: 35^
Sistema anticolisión[1] Alcance de detectacion de obstaculos: 1.5-30 m
Campo de visión (FOV): Horizontal: 360^ , vertical: ± 15^
Condieones de functiomento: Vuelo a una altitud por encima de los 1.5 m con respecto a la superficie a una velocidad inferior a 7 m/s
Distancia de seguridad: 2.5 m (Distancia entre el frente de las helices y el obstáculo tras frenar)
Nivel IP IP67
- Camara FPV
Campo de visión (FOV) Horizontal: 98^ ; vertical: 78^
Resolución 1280x960 a 30 fps
Foco FPV Campo de visión (FOV): 110°; brillo max.: 12 lux a 5 m con luz directa
- Parámetros de vuelo
| Frecuencia de configuracion de OcuSync 2.0[2] | CE/MIC/KCC/FCC/NCC/SRRC: 2.4000-2.4835 GHz FCC/NCC/SRRC: 5.725-5.850 GHz |
| Potencia del transmisor (PIRE) de OcuSync 2.0 | 2.4 GHz SRRC/CE/MIC/KCC: 18.5 dBm; FCC/NCC: 25.5 dBm 5.8 GHz SRRC/FCC/NCC: 25.5 dBm |
| Peso total (sin bateria) 21.1 kg | |
| Peso max. de despegue 47.5 kg (al nivel del mar) | |
| Relación max. empuje-peso 1.70 (peso de despegue de 47.5 kg) | |
| Rango de precisión en vuelo estacional | D-RTK activado: Horizontal: ±10 cm, Vertical: ±10 cm |
| (Con Seed GNSS intensa) | D-RTK desactivado: Horizontal ±0.6 m, vertical ±0.3 m (si el modulo del radar está Activado: ±0.1 m) |
| Frecuencia de configuracion | RTK: GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2, Galileo E1/E5[3] |
| RTK/GNSS | GNSS: GPS L1, GLONASS F1, Galileo E1[3] |
| Bateria Bateria de vuelo con aprobacion de DJI (AB3-18000mAh-51.8V) | |
| Consumo electrico max. 8300 W | |
| Consumo electrico en vuelo estacional | 6200 W (con un peso de despegue de 47.5 kg) |
| Tiempo en vuelo estacional[4] | 15 min (con un peso de despegue de 27.5 kg con una batería de 18 000 mAh) 10 min (con un peso de despegue de 42.6 kg con una batería de 18 000 mAh) |
| Ángulo de inclinación max. 15° | |
| Velocidad max. de configuracion | 7 m/s |
| Velocidad max. de vuelo 10 m/s (con Seed GNSS intensa) | |
| Resistencia max. al viento 8 m/s | |
| Altitud max. de vuelo 2000 m | |
| Temperatura de configuracion recommendada | De 0 a 40 °C (de 32 a 104 °F) |
Controlremoto
| Modelo RM500-AG | |
| Pantalla Pantalla de 5.5 pulgadas, 1920×1080, 1000 cd/m | 2, systemd Android |
| Memoria RAM 4 GB LPDDR4 | |
| Memoria ROM 32 GB + almacenimiento ampliable. | |
| Se admiten tarjetas microSD. | |
| Capacidad máximo: 128 GB. La memoria debe tener una clasificacion UHS-I con un grado 3 de velocidad. | |
| Batería integra de 18 650 de 100 de litio (5000 mAh a 7.2 V) | |
| GNSS | GPS+GLONASS |
| Consumo electrico | 18 W |
| Temperatura de functionamento | De -10 a 40 °C (de 14 a 104 °F) |
| Temperatura de energia | De 5 a 40 °C (de 40 a 104 °F) |
| Temperatura de almacenimiento | De -30 a 25 °C (de -22 a 77 °F) |
| OcuSync 2.0 | |
| Frecuencia de functionamento[2] | CE/MIC/KCC/FCC/NCC/SRRC: 2.4000-2.4835 GHz |
| FCC/NCC/SRRC: 5.725-5.850 GHz | |
| Alcance de transmisión | FCC/NCC: 5 km; SRRC/MIC/KCC/CE: 3 km (sin obstáculos, libre de interferencias) |
| Transmisor de potencia (PIRE) | 2.4 GHz |
| SRRC/CE/MIC/KCC: 18.5 dBm; FCC/NCC: 25.5 dBm | |
| 5.8 GHz | |
| SRRC/FCC/NCC: 25.5 dBm | |
| Wi-Fi | |
| Protocolo | Wi-Fi Direct, Pantalla Wi-Fi, 802.11a/g/n/ac |
| Compatible de Wi-Fi con 2×2 MIMO | |
Frecuencia de funciona 2.4000-2.4835 GHz
5.150-5.250 GHz
5.725-5.850 GHz
Transmisor de potencia (PIRE) 2.4 GHz
- Centro de cargo de Baterias Inteligentes
Modelo WCH2
Voltaje de entrada 17.3-26.2 V
Voltaje y corrente de calidad 8.7 V, 6 A
Temperatura de funciona De 5 a 40^ (de 40 a 104^ )
- Adaptador de corrente de CA
Modelo A14-057N1A
Voltaje de entrada 100-240 V, 50/60 Hz
Voltaje de calidad 17.4 V
Potencia nominal 57 W
[1] El alcance efectivo del radar depende del material, la posicón, la forma y otheras propiédades del obstáculo.
[2] La legislación de algunos País prohibe el uso de las frequencias de 5.8 y de 5.2 GHz. En algunos País, la banda de frequencies de 5.2 GHz está permitteda únicamente para el vuelo en interiores.
[3] La compatibiliad con elsystema Galileo estará disponible en el futuro.
[4] Este tiempo en vuelo estacionario se ha calculado al nivel del mar con velocidades del viento inferiores a 3 m/s.
Appareil
Alcance de detectao de obstaculos: 1,5 a 30 m
estacionario D-RTK desabilitado:
Horizontal: ± 0,6m Vertical: ± 0,3m (modulo Radar habilto: ± 0,1m )





- 3.
- 7
- nnaaannnnnnaaennnnn
- mnae 4G
- mraiaeaaeRTK
- Control remoto
- Vuelo Seguro
- Aspectos que se deben tener en cuenta para el vuelo
- Regreso al punto de origen (RPO)
- Uso de pesticidas
- Uso del T20
- Preparación de la Bateria de Vuelo Inteligente
- Preparación de la aeronave
- Preparación del control remoto
- Carga de las baterias
- Inserción de la bateria externa
- Instalacion del adaptor 4G y la tarjeta SIM
- Inserción del adaptor RTK
- Comprobación de los niveles de batería
- Ajuste de las antenas
- Preparación para el despegue
- Calibración de la brujula
- Calibración del caudalímetro
- Descarga de las burbujas que haya en las mangueras
- Vuelo
- Despegue
- Aterrizaje
- Inicio de las operaciones
- Planificación de Campos
- Llevar a cabo una operación
- Más发展模式 de funciona
- Más sistemas
- Mantenimiento
- Especillasiones
- - Parámetros de vuelo
- Controlremoto
- - Centro de cargo de Baterias Inteligentes
- - Adaptador de corrente de CA
- Appareil
Marca : DJI
Modelo : Agras T20
Categoría : Dron