SRI990 - Instrument de mesure industrielle SCHNEIDER - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil SRI990 SCHNEIDER au format PDF.

| Type de produit | Positionneur analogique pour servomoteur |
| Marque | Schneider |
| Modèle | SRI990 |
| Signal d'entrée | 4-20 mA |
| Sortie analogique (recopie de position) | 4-20 mA, technique deux fils (option Q) |
| Alimentation pneumatique | Air d'alimentation 1,4 à 6 bar, air propre, déshuilé, sans poussière ni eau |
| Alimentation électrique (fins de course inductifs) | 8 V CC |
| Zone de travail | ±45° autour de la position centrale |
| Montage | Sur servomoteurs linéaires (NAMUR, direct) ou rotatifs |
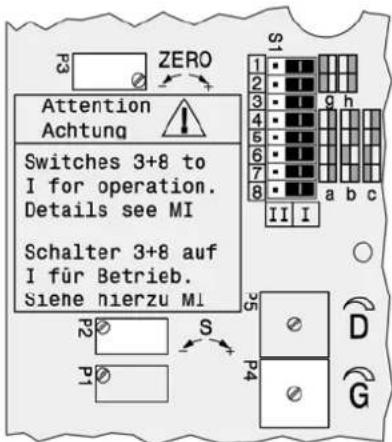
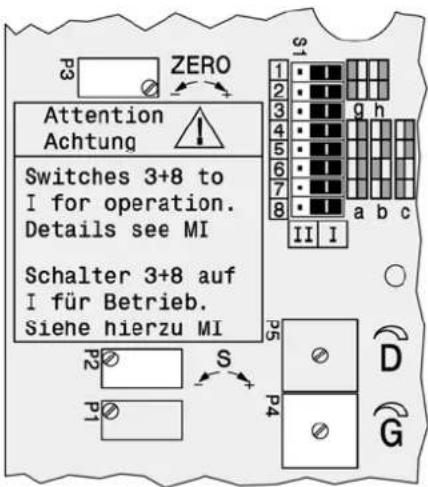
| Réglages | Zéro (P3), course (P2), gain (P4), sens de rotation (micro-switch 1+2) |
| Fins de course | Capteurs inductifs deux fils selon DIN 19234 ou NAMUR ; micro-contacts (option V) |
| Configuration micro-switch | 8 micro-switch : sens de rotation, signal entrée, plage de mesure |
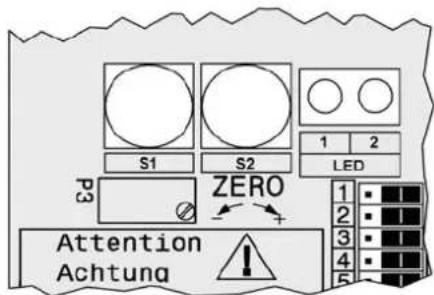
| Transmetteur de position | Configuration par boutons-poussoirs S1/S2 pour 4 mA et 20 mA |
| Entretien | Vérifier la propreté de l'air d'alimentation ; aucune pièce nécessitant une maintenance régulière dans la notice |
| Sécurité | Respecter les documents EX EVE0001, PSS EVE0105 et MI EVE0105 |
| Documents associés | Manuel d'utilisation complet et fiches techniques disponibles en ligne |
FOIRE AUX QUESTIONS - SRI990 SCHNEIDER
Questions des utilisateurs sur SRI990 SCHNEIDER
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Instrument de mesure industrielle au format PDF gratuitement ! Retrouvez votre notice SRI990 - SCHNEIDER et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil SRI990 de la marque SCHNEIDER.
MODE D'EMPLOI SRI990 SCHNEIDER
Guide rapide d'utilisation. . . . . . . . . . . . . . . . . . . . . . . . . . . (Français)
Guida rapida ..... (Italiano)
SRI990 Positionneur analogique
Ces instructions sont une aide pour une mise en service rapide. Pour plus d'informations sur le produit veuillez vous reporter aux documents standards « manuel d'utilisation » et « fiches techniques » disponibles sur internet.
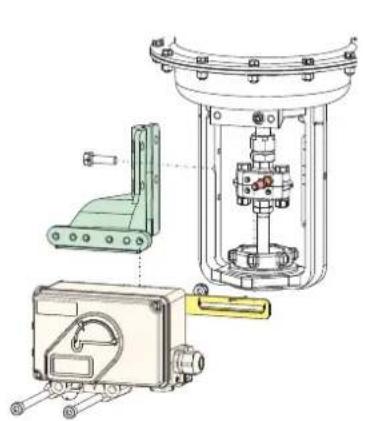
1. Montage sur servomoteur
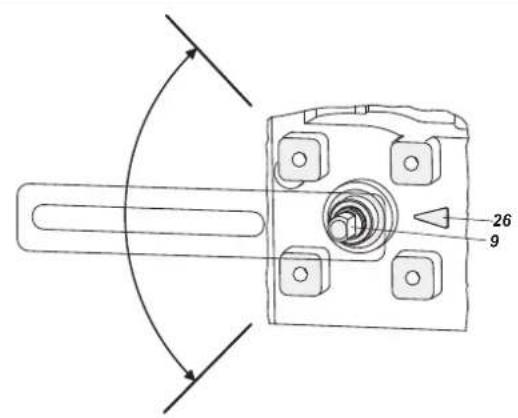
En fonctionnement la flèche 26 doit toujours pointer le méplat de l'axe de traversée 9. La zone de travail est de ± 45° autour de la position centrale.
1.1 Montage sur servomoteurs linéaires
Montage NAMUR Montage direct Montage NAMUR - à gauche - - à droite -
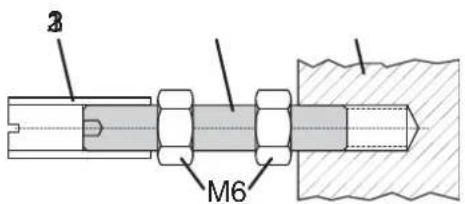
Levier d'accouplement pour servomoteurs linéaires:
Le doigt d'accouplement B doit se trouver dans la lumière du levier d'accouplement A et le ressort de compensation F doit être en contact avec le doigt d'accouplement.
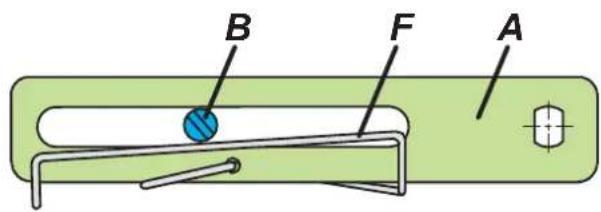
Doigt d'entrainement B:
1 douille filetée
2 tige
3 pièce d'accouplement
Life Is ⏻n
Foxboro™
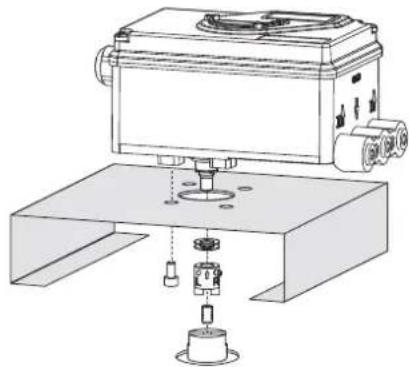
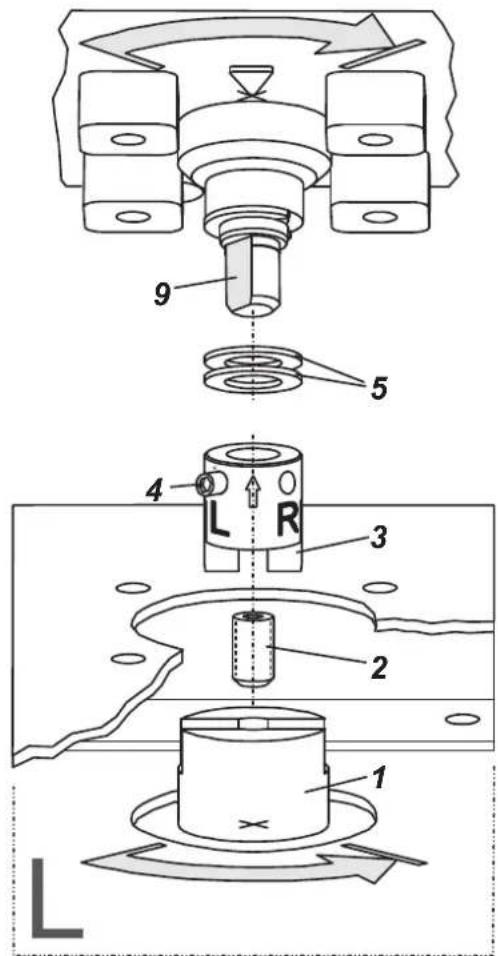
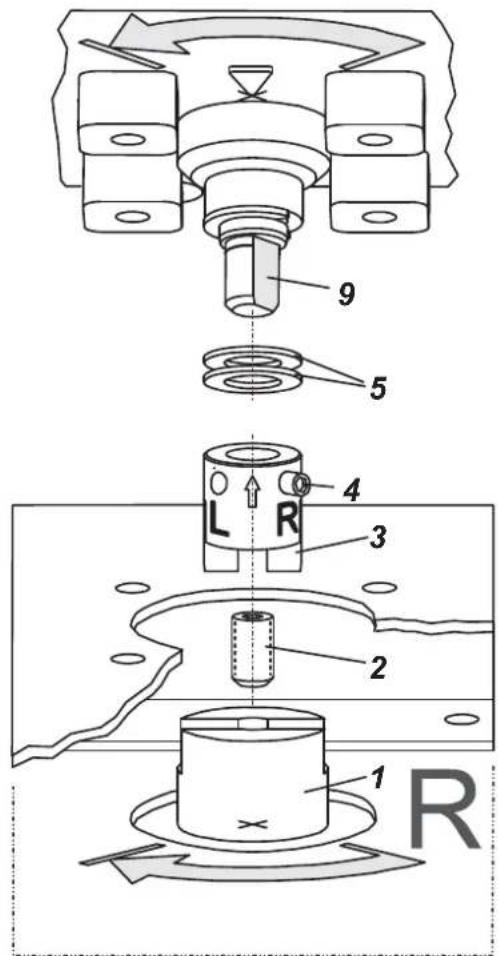
1.2 Montage sur servomoteurs rotatifs
- Ne pas visser la vis 4 contre le filetage de l'axe de traversée 9, mais sur le méplat!
- En fonctionnement le méplat de l'axe de traversée 9 doit tourner devant la flèche 26.
- L'axe du servomoteur 1 s'allonge sous l'effet de la chaleur produite lors du fonctionnement du servomoteur. C'est pourquoi l'adaptateur 3 doit être monter de façon à ce qu'il y ait, entre lui et l'axe de transmission 1, un jeu d'environ 1 mm. Ce jeu peut être obtenu en ajoutant un nombre approprié de rondelles 5 sur l'axe de traversée 9.
Servomoteur, sens de rotation anti-horaire
Servomoteur, sens de rotation horaire
2 Raccordements pneumatiques
Air d'alimentation (s) : 1,4 à 6 bar (en respectant la pression de travail maximum du servomoteur) air propre, déshuilé, sans poussière et eau!
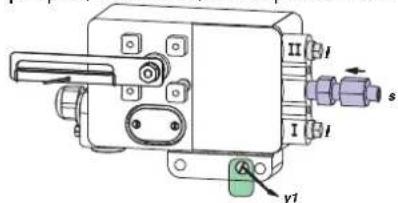
Simple effet, montage direct Simple effet Double effet s air d'alimentation y1, y2 sorties pneumatiques (--) fermé
3. Raccordements électriques
Les recommandations de sécurité du document EX EVE0001 ainsi que les recommandations de la PSS EVE0105 et de la MI EVE0105 doivent être observées !
3.1 Signal d'entrée

Signal 4-20 mA
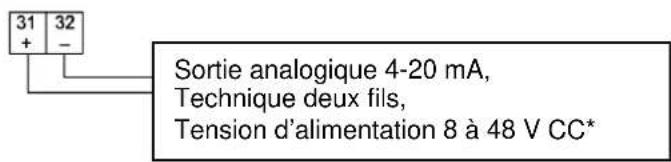
3.2 Recopie de position 4-20 mA (SRI990-xxQ)
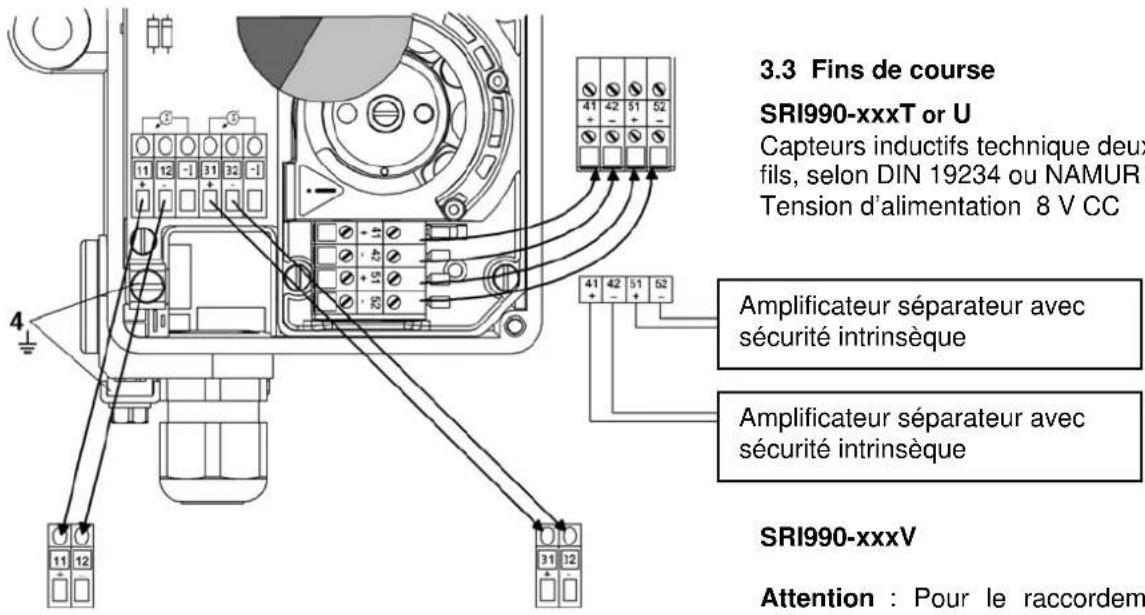
3.3 Fins de course
SRI990-xxxT or U
Capteurs inductifs technique deux fils, selon DIN 19234 ou NAMUR Tension d'alimentation 8 V CC
Amplificateur séparateur avec sécurité intrinsèque
Amplificateur séparateur avec sécurité intrinsèque
SRI990-xxxV
Attention : Pour le raccordement des micro-contacts respecter les recommandations de la MI (instructions de mise en service) et du document EX EVE0001.
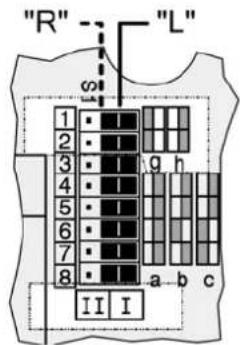
4 Mise en marche du positionneur (au moyen des mirco-switch et potentiomètres)
4.1 Réglage initial
Après le montage sur le servomoteur, les raccordements pneumatiques et électriques faits, procéder comme ceci: Au début tous les micro-switch doivent être en position I. Cette configuration signifie, signal d'entrée 4-20mA et rotation du levier anti-horaire.

4.2 Configuration du sens de rotation du levier de feedback

Le sens est défini par la rotation du levier de la position 0% à la position 100% en regardant le positionneur en face
avant.
Micro-switch 1+2 sur "R" si nécessaire.
R= right turn (Horaire)
L= left turn (Anti-horaire)
4.3 Configuration du zéro, course et gain
a) Appliquer 4 mA en entrée.
b) Tourner le potentiomètre P3 (ZERO) jusqu'à ce que le servomoteur commence à bouger de sa position 0%.
Rotation P3 vers la droite: augmenter le point zéro
Rotation P3 vers la gauche: diminuer le point zéro
c) Appliquer 20 mA en entrée.
d) Tourner le potentiomètre P2 pour la course (S) jusqu'à ce le servomoteur soit exactement dans sa position finale 100%.
Rotation P2 vers la droite: augmenter la course
Rotation P2 vers la gauche: diminuer la course
e) Le gain du positionneur est donné par le potentiomètre P4. Ajuster le gain de façon à avoir un positionnement stable du servomoteur.
f) Contrôler de nouveau les réglages du zéro et de la course.
5 Réglage et mise en marche du transmetteur de position 4–20 mA
Une fois le raccordement électrique du transmetteur de position réalisé, les deux LED s'allument.
Ajuster le départ de la gamme de mesure (4 mA)
a) Déplacer le servomoteur en position de départ (0%).
b) Appuyer sur le bouton-poussoir S1 « Config Output 4 mA » pendant plus de deux secondes. Pendant ce temps la LED 1 s'allument. Après deux secondes, les deux LED s'allument à nouveau, la valeur pour 0% - 4 mA est sauvegardée.
Ajuster la fin de la gamme de mesure (20 mA)
a) Déplacer le servomoteur en position 100% de la course.
b) Appuyer sur le bouton poussoir S2 « Config Output 20mA » pendant plus de deux secondes. Pendant ce temps la LED 2 s'allument. Au bout de deux secondes, les deux LED s'allument à nouveau, la valeur pour 100% - 20 mA est sauvegardée.
4.3 Podešavanje nule, opsega i pojačanja
a) Podesite 4 mA na ulaz.
b) Okrenite potenciometar P3 za podešavanje nulte tačke (ZERO) sve dok aktuator ne započne kretanje iz svoje krajnje pozicije. Okretanje P3 na desno: nulta tačka se povećava Okretanje P3 na levo: nulta tačka se smanjuje.
c) Podesite 20 mA na ulaz.
d) Okrenite potenciometar P2 za opseg (S) sve dok aktuator stvarno ne dostigne svoju krajnju poziciju Okretanje P2 na desno: opseg se povećava. Okretanje P2 na levo: opseg se smanjuje.
e) Pojačavačka petlja pozicionera se podešava potenciometrom P4. Fino podesiti pojačanje tako da aktuator ne osciluje za konstantnu ulaznu vrednost.
f) Ponovo proveriti podešavanje nule i opsega.