MANUALE UTENTE G 600 STIGA
IT Manuale di istruzioni
10.1. WARRANTY COVERAGE....55
1.2 Panoramica del prodotto
1.2.1 Descrizione generale
Il robot rasserbs (1) è progettato e costra
l'arba di giantini in qualunque ana del qio
In funzione delle diverse caratteristiche d
può essere programmato in modo da lev
In fase di lavoro, il robot effettua la rassati
1.2 Panoramica del prodotto
1.2.1 Descrizione generale
Leve di obvino in cui unque am del giorno e della parte.
In l'anzane delle diverse contrastifiche della superficie da
paò come prognorrato in modo da lovrante su più ave.
In fase di lavoro, il robot effettua la rascatura dell'area delimitata dal flio
perimetrale (2).
text_image
A
B
C
D
2.5. INTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Rapolita e extranzione:
• Controll di lavoro
• On solo di sicurezza
Procedire:
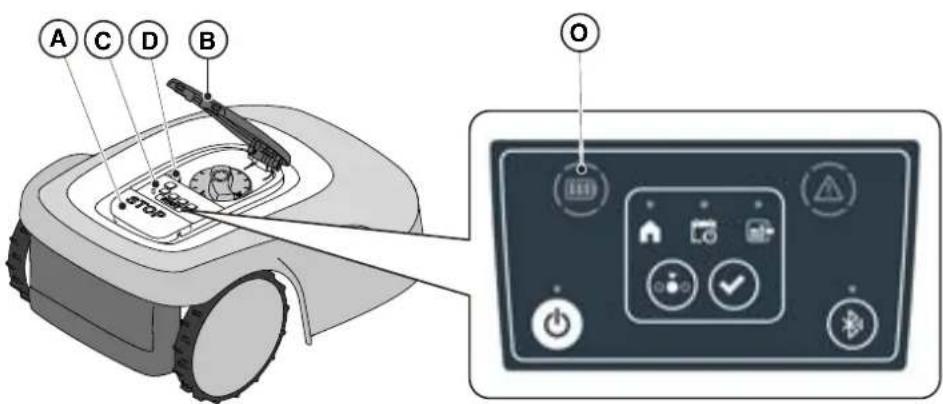
1. Verfare che la cover flattante (A) sia morda in maniera corretta. La mancrutta della cover non per nota il funzionamento del Robot.
2. Verfare che il pruttata di ametta "STOP" (B) non sistivo. Se premuto amenta l'indenta sperta cover la produttore (C) dalla corrisso di lavoro [2].
3. Verfare che il copertura di prestazione (C) alla chiusa. Se sperto non permette il funzionamento del Robot.
4. Verfare che la chiave di sicurezza (E) sia merta. Se diskinella il robot non si avola.
5. Verfare il corrisso prestazionamento a terra del robot, in caso di inclinazione accesiva o sellovamento (lavoro) di ridazzione (indino metto) acordano il motor.
6. Verfare che nel tesa di avola non si sono impedimenti (ioggetti abberatori).
1.11T 2. SICUREZZA

text_image
I:TIGA
NOTA:
Le immagine riportale per queste asione a come paramente indicative.
De la partea (A) è scadative largi compere in raggi and recorte.
• Palkogri
• Cerrazione
• Orbitering
• Eng Ub
• Protaglazione utente
3.102 ELEOON
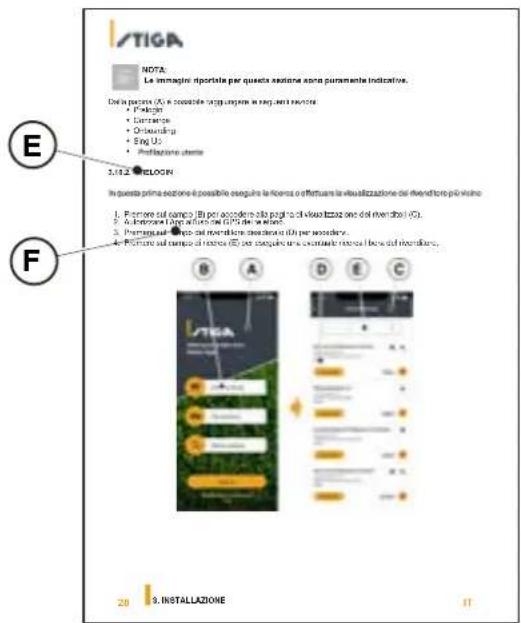
In questa prima asione è possibile eseguire la riserva o fluttare la visualizzazione dei livendore più vicine
1. Periree sul campo (B) per accadere solo pagra di visualizzazione dei livendore (C).
2. Periree sul campo (D) per accadere sul campo di visualizzazione dei livendore (E).
3. Periree sul campo di visualizzazione dei livendore (F) per accadere sul campo di visualizzazione dei livendore (G).
4. Periree sul campo di riserva (H) per accadere sul campo di visualizzazione dei livendore (I).
28 3. INSTALLAZIONE IT
4. INSTALLATION

CAUTION:
10.1. WARRANTY COVERAGE
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot tassenthe (1) è progettato e contra
d'ebio di giellini in quallungse mani del go
in funzione nelle diene caratteristiche d
pulò essore programmato in modo da ter
in fase di brone. Il robot effettua la rasolu
perimetrale (2).
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot rascena il è progettato e costare per essere automaticamente
l'ebio di giellini in quallungse mani del go o nella note.
In l'ecuera delle diene controllistiche della superiore dei roso, i'ebio
pulò essore programmato in modo da terruenza si pi'anno.
In fase di brone. Il robot effettua la assura di force colinitata sul le
perimetrale (3).
3.2. PRÉSENTATION DU PRODUIT
3.2.1. DESCRIPTION GÉNÉRALE
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facqelli e attenzatori:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se activo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei roboti. In caso di inclinazione accorvate o sofevamento (superior di notificatore) a sottano limitori.
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
text_image
TIGA
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delin piacenti (A) e possibile raggio uscire in regi del lavoro.
• Pagarzo
• Dorringer
• Drucingono
• Eng U:
• Prolazione utente
3.10.2 PROLOGI
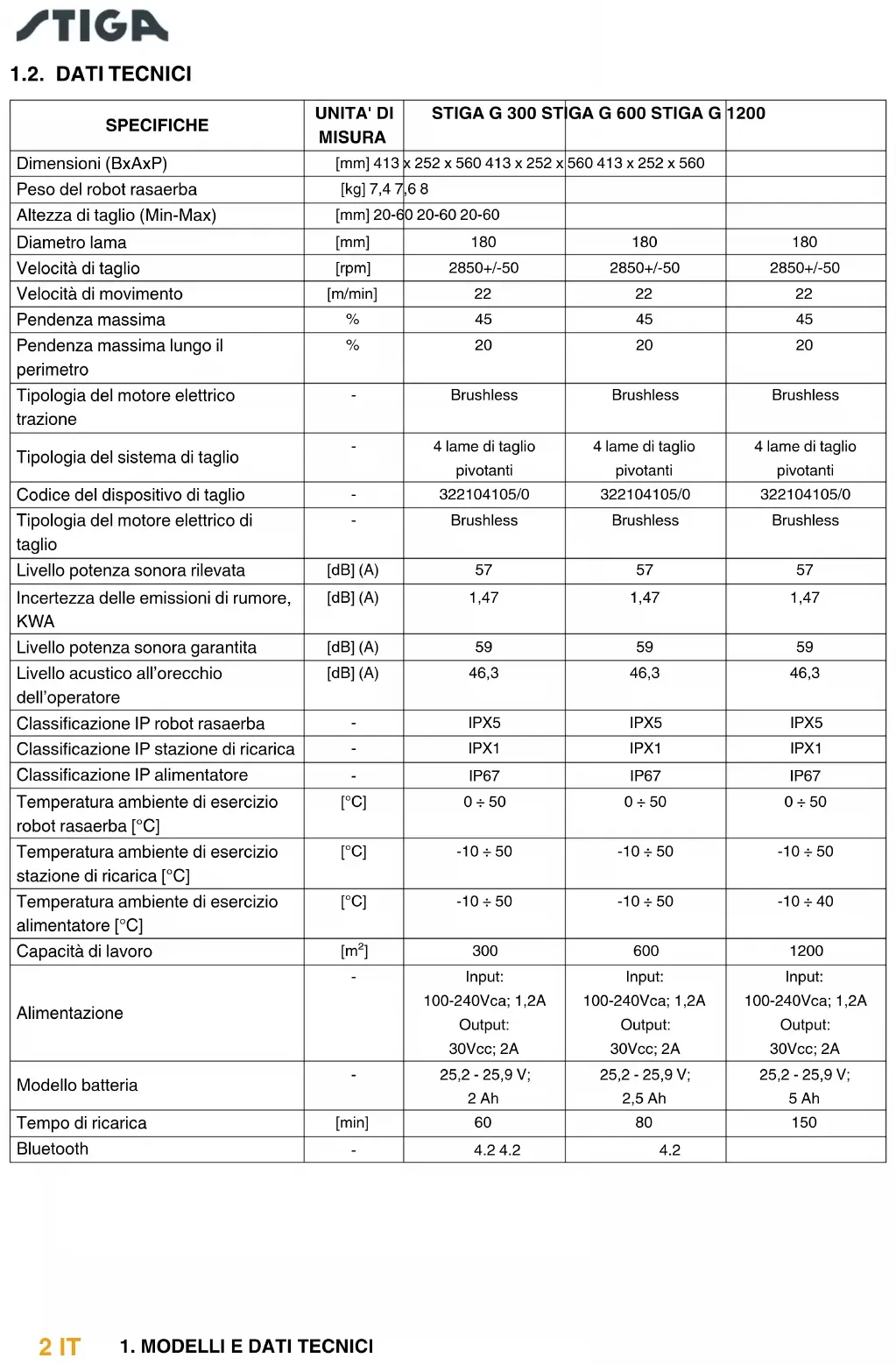
In questa prima eszione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Pareto sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altevrazione di lavoro nel GPs de le risers.
3. Portugua, il compo dei riendere notificano (D) per avvassura.
4. PEGFone sul campo di ricerca (E) per eseguire una visualizzazione dei rivendere.
B A D C
20 3. INSTALLAZIONE IT
4. INSTALLATION

AVERTISSEMENT :
10.1. COUVERTURE DE LA GARANTIE
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panorama del prodotto
1.2.1 Descritto generali
Il robot versabbe il è progettato e contra
d'ebio di giellini in quallung se come del go
in funzione nelle delle strasse caratteristiche d
piuto essere programmato in modo da lei
in fase di brone. Il robot effettu la rasolu
perimetrale (2)
1.2 Panorama del prodotto
1.2.1 Descritto generali
Il robot versabbe il è progettato e come per essere automaticamente
lebia di giellini in quallung se come del go o della rose.
In funzione delle delle strasse caratteristiche della superiore dei brone, lebino
piuto essere programmato in modo da lebanza con la riusa.
In fase di brone. Il robot effettu la trasura di forso colistata dal file
perimetrale (2)
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e attenzatore:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se attivo. Se premuto arrista i robot è aglio la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chava di sicurezza (E) sia inserta. Se diskinasta il robot non si avola.
5. Verfare il corrisso posizionamento a tema dei robot. In caso di inclinazione accosiva o sofevamento (supero di indirezione di notato metto) a sottano limitor.
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
text_image
E
F
NOTA:
Le immagini riportate per questa esione astra puramente indicative.
Delà la paretta (A) è possibile larga usione in regi del lavoro.
• Parette
• Dette
• Dilecione
• Eing U:
• Prolazione utente
3.10.2. PROLOGI
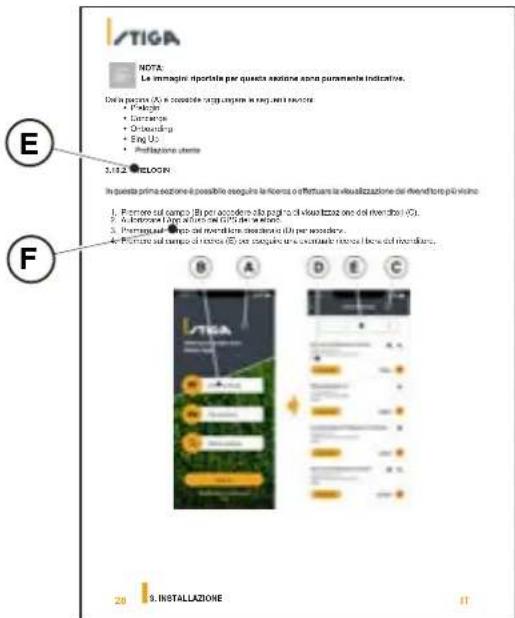
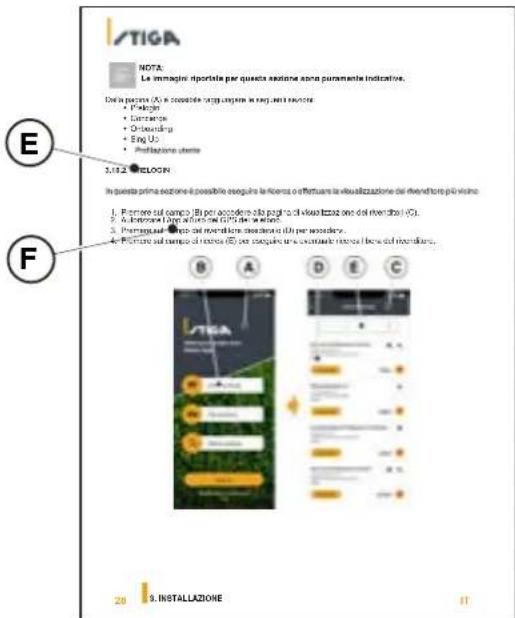
In questa prima esione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo.
1. Partame sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altostrava (L) per adornare nel GPS de la selex.
3. Partagemiamenti: del rivendere notadora (D) per assiedry.
4. Pulsione sul campo di ricerca (E) per eseguire una normale riserva l'uso del rivendere.
B A C
20 3. INSTALLAZIONE IT
4. INSTALLATION
4.1. ALLGEMEINE INSTALLATIONSHINWEISE

WARNUNG:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
IT Manuale di istruzioni

ITALIANO - ISTRUZIONI ORIGINALI
INDICE
1. MODELLI E DATI TECNICI 1
1.1. MODELLI 1
1.2. DATI TECNICI....2
2. SICUREZZA 3
2.1. INFORMAZIONI SULLA SICUREZZA 3
2.2. ISTRUZIONI DI SICUREZZA....5
2.2.1. PRATICHE OPERATIVE SICURE....5
2.2.2. FUNZIONAMENTO....5
2.3. ARRESTO E SPEGNIMENTO DEL ROBOT RASAERBA IN CONDIZIONI DI SICUREZZA ...... 7
3. INTRODUZIONE 8
3.1. INTRODUZIONE GENERALE......8
3.1.1. SCOPO DEL MANUALE......8
3.1.2. ISTRUZIONI PER LETTURA DA SMARTPHONE 8
3.2. PANORAMICA DEL PRODOTTO....9
3.2.1. DESCRIZIONE GENERALE....9
3.2.2. COMPONENTI PRINCIPALI....10
3.3. DISIMBALLAGGIO....11
3.4. SIMBOLI E TARGHETTE....12
3.5. ISTRUZIONI GENERALI DI LETTURA DEL MANUALE 13
4. INSTALLAZIONE 14
4.1. INFORMAZIONI GENERALI PER L'INSTALLAZIONE 14
4.2. COMPONENTI PER L'INSTALLAZIONE....14
4.3. VERIFICA DEI REQUISITI PER L'INSTALLAZIONE 15
4.3.1. VERIFICA DEL GIARDINO: 15
4.3.2. VERIFICHE PER L'INSTALLAZIONE DELLA BASE DI RICARICA E DELL'ALIMENTATORE: 15
4.3.3. PRINCIPALI VERIFICHE PER L'INSTALLAZIONE DEL CAVO PERIMETRALE: 17
4.4. CRITERI PER L'INSTALLAZIONE DEL CAVO PERIMETRALE 19
4.4.1. POSIZIONAMENTO DEL CAVO PERIMETRALE 19
4.4.2. DELIMITAZIONE DEGLI OSTACOLI: 21
4.4.3. PASSAGGI TRA DIVERSE ZONE DEL GIARDINO 23
4.5. INSTALLAZIONE DEI COMPONENTI 23
4.5.1. INSTALLAZIONE DEL CAVO PERIMETRALE 24
4.5.2. GIUNZIONE DEL CAVO PERIMETRALE.... 25
4.5.3. INSTALLAZIONE BASE DI RICARICA 26
4.5.4. INSTALLAZIONE DEL RESISTORE PER PICCOLI PERIMETRI 28
4.6. RICARICA ROBOT RASAERBA DOPO L'INSTALLAZIONE....29
4.7. IMPOSTAZIONI DEL PRODOTTO 30
5. FUNZIONAMENTO 35
5.1. VERIFICA DELLE SICUREZZE PER L'AVVIO DEL ROBOT RASAERBA....35
5.2. FUNZIONAMENTO MANUALE DEL ROBOT RASAERBA 36
5.3. DESCRIZIONE DEI COMANDI PRESENTI SUL ROBOT RASAERBA....37
5.3.1. ARRESTO IN SICUREZZA - PULSANTE STOP 37
5.3.2. SPEGNIMENTO IN SICUREZZA - CHIAVE DI SICUREZZA 38
5.3.3. ACCENSIONE E SPEGNIMENTO - PULSANTE ON/OFF 38
5.3.4. SELEZIONE PROGRAMMA SCHEDULATO / SINGOLO CICLO DI LAVORO - PULSANTE ..... PROGRAMMA SCHEDULATO .... 39
5.3.5. VISUALIZZAZIONE DELLO STATO BLUETOOTH E DISACCOPPIAMENTO - PULSANTE BLUETOOTH ..... 41
5.3.6. VISUALIZZAZIONE DI STATI DI ALLARME - ICONA ALLARME 41
5.3.7. VISUALIZZAZIONE DELLA CARICA DELLA BATTERIA - ICONA BATTERIA 42
5.3.8. AVVIO DEL ROBOT RASAERBA - PULSANTE START 42
5.4. FUNZIONAMENTO DELLA BASE DI RICARICA 43
5.5. CARICAMENTO BATTERIA....43
5.6. REGOLAZIONE ALTEZZA DI TAGLIO....44
6. MANUTENZIONE 45
6.1. MANUTENZIONE PROGRAMMATA 45
6.2. PULIZIA PRODOTTO 46
6.3. SOSTITUZIONE LAME DI TAGLIO 48
6.4. MANUTENZIONE INVERNALE DELLA BATTERIA E STOCCAGGIO....49
6.5. SOSTITUZIONE BATTERIA......49
7. RISOLUZIONE DEI PROBLEMI 50
7.1. PRINCIPALI MESSAGGI DA APP....51
Il presente manuale si riferisce ai modelli G 300, G 600, G 1200.
| SPECIFICHE | UNITA' DI MISURA | STIGA G 300 ST | GA G 600 STIGA G | 1200 |
| Dimensioni (BxAxP) | [mm] 413 | x 252 x 560 413 x 252 x | 560 413 x 252 x 560 | |
| Peso del robot rasaerba | [kg] 7,4 7,6 8 | | |
| Altezza di taglio (Min-Max) | [mm] 20-60 | 20-60 20-60 | | |
| Diametro lama | [mm] | 180 | 180 | 180 |
| Velocità di taglio | [rpm] | 2850+/-50 | 2850+/-50 | 2850+/-50 |
| Velocità di movimento | [m/min] | 22 | 22 | 22 |
| Pendenza massima | % | 45 | 45 | 45 |
| Pendenza massima lungo il perimetro | % | 20 | 20 | 20 |
| Tipologia del motore elettrico trazione | - | Brushless | Brushless | Brushless |
| Tipologia del sistema di taglio | - | 4 lame di taglio pivotanti | 4 lame di taglio pivotanti | 4 lame di taglio pivotanti |
| Codice del dispositivo di taglio | - | 322104105/0 | 322104105/0 | 322104105/0 |
| Tipologia del motore elettrico di taglio | - | Brushless | Brushless | Brushless |
| Livello potenza sonora rilevata | [dB] (A) | 57 | 57 | 57 |
| Incertezza delle emissioni di rumore, KWA | [dB] (A) | 1,47 | 1,47 | 1,47 |
| Livello potenza sonora garantita | [dB] (A) | 59 | 59 | 59 |
| Livello acustico all'orecchio dell'operatore | [dB] (A) | 46,3 | 46,3 | 46,3 |
| Classificazione IP robot rasaerba | - | IPX5 | IPX5 | IPX5 |
| Classificazione IP stazione di ricarica | - | IPX1 | IPX1 | IPX1 |
| Classificazione IP alimentatore | - | IP67 | IP67 | IP67 |
| Temperatura ambiente di esercizio robot rasaerba [°C] | [°C] | 0 ÷ 50 | 0 ÷ 50 | 0 ÷ 50 |
| Temperatura ambiente di esercizio stazione di ricarica [°C] | [°C] | -10 ÷ 50 | -10 ÷ 50 | -10 ÷ 50 |
| Temperatura ambiente di esercizio alimentatore [°C] | [°C] | -10 ÷ 50 | -10 ÷ 50 | -10 ÷ 40 |
| Capacità di lavoro | [m2] | 300 | 600 | 1200 |
| Alimentazione | - | Input: 100-240Vca; 1,2A Output: 30Vcc; 2A | Input: 100-240Vca; 1,2A Output: 30Vcc; 2A | Input: 100-240Vca; 1,2A Output: 30Vcc; 2A |
| Modello batteria | - | 25,2 - 25,9 V; 2 Ah | 25,2 - 25,9 V; 2,5 Ah | 25,2 - 25,9 V; 5 Ah |
| Tempo di ricarica | [min] | 60 | 80 | 150 |
| Bluetooth | - | 4.2 4.2 | 4.2 | |
2. SICUREZZA
Nella progettazione dell'apparecchiatura è stata posta particolare attenzione agli aspetti che possono provocare rischi alla sicurezza e alla salute delle persone. Scopo di queste informazioni è quello di sensibilizzare gli utenti a prevenire qualsiasi rischio, evitando i comportamenti che non rispettano le prescrizioni riportate.

PERICOLO:
Prima dell'utilizzo del robot rasaerba è necessario conoscere tutte le informazioni contenute nel presente documento.

PERICOLO:
Questo robot rasaerba non è destinato ad essere utilizzato da bambini e da persone con ridotte capacità fisiche, sensoriali o mentali o con mancanza di esperienza e conoscenza.

PERICOLO ELETTRICO:
Prima di eseguire qualsiasi intervento di regolazione o di manutenzione, scollegare l'alimentazione elettrica e azionare il dispositivo di sicurezza.

PERICOLO ELETTRICO:
Non utilizzare il robot rasaerba con il cavo di alimentazione del trasformatore danneggiato. Un cavo danneggiato può portare a contatto con parti sotto tensione. Il cavo deve essere sostituito dal Costruttore o dal suo servizio di assistenza o da una persona con qualifica adeguata, in modo da prevenire ogni rischio.

PERICOLO ELETTRICO:
Utilizzare solo caricabatteria e alimentatore forniti dal Costruttore. L'uso di un caribatteria e alimentatore non appropriati può causare scosse elettriche e/o surriscaldamento.

AVVERTENZA:
In caso di fuoriuscita del liquido dalla batteria i componenti interessati devono essere lavati con acqua / neutralizzatore.
Evitare qualsiasi contatto diretto con il liquido della batteria.
In caso di contatto con gli occhi consultare un medico.

AVVERTENZA:
Durante il funzionamento del robot rasaerba assicurarsi che nell'area operativa non vi siano persone, specialmente bambini, o\e animali domestici. In caso contrario programmare l'attività del robot rasaerba durante le ore in cui in tale zona non vi siano persone.

AVVERTENZA:
L'area operativa deve essere limitata da una recinzione non valicabile.
Rendere idonea la recinzione oppure supervisionare il robot rasaerba durante il funzionamento.

AVVERTENZA:
Utilizzare solo ricambi originali.
STIGA

AVVERTENZA:
Non modificare, non manomettere, non eludere, non eliminare i dispositivi di sicurezza installati.

ATTENZIONE:
Controllare che non siano presenti giocattoli, attrezzi, rami, indumenti, o altri oggetti sul prato che possano danneggiare l'apparecchiatura.

DIVIETO:
Non sedersi sopra il robot rasaerba.

DIVIETO:
Non sollevare mai il robot rasaerba per ispezionare la lama o per trasportarlo quando è avviato. Non introdurre le mani e i piedi sotto l'apparecchiatura.

DIVIETO:
Non utilizzare il robot rasaerba quando è in funzione un irrigatore.

DIVIETO:
Non lavare il robot rasaerba con getti d'acqua ad elevata pressione e non immergerlo, parzialmente o completamente, in acqua.

DIVIETO:
Non utilizzare il robot rasaerba se non perfettamente integro in tutte le sue parti. In caso di danneggiamenti sostituire le parti interessate.

DIVIETO:
È assolutamente vietato l'uso e la ricarica del robot rasaerba in ambienti esplosivi ed in ambienti infiammabili.

OBBLIGO:
Controllare visivamente il robot rasaerba ad intervalli regolari per assicurarsi che le lame e il meccanismo di taglio non siano usurate o danneggiate. Assicurarsi che il robot rasaerba sia in buone condizioni operative.

OBBLIGO:
Leggere attentamente tutto il manuale, in particolare tutte le informazioni che riguardano la sicurezza e accertarsi di averlo compreso completamente. Attenersi scrupolosamente alle istruzioni relative a funzionamento, manutenzione e riparazioni.

OBBLIGO:
Gli operatori che effettuano interventi di manutenzione e riparazione devono avere totale dimestichezza con le specifiche caratteristiche e norme di sicurezza del robot rasaerba.

OBBLIGO GUANTI:
Usare le protezioni individuali previste dal Costruttore, in particolare, quando si interviene sul meccanismo di taglio usare i guanti di protezione.
2.2. ISTRUZIONI DI SICUREZZA

OBBLIGO:
Leggere attentamente prima dell'utilizzo e conservare per future consultazioni.
2.2.1. PRATICHE OPERATIVE SICURE
a. Leggere attentamente le istruzioni, conoscere i comandi e l'uso corretto della macchina.
b. Non permettere mai a bambini, persone con ridotte capacità fisiche, sensoriali o mentali, o prive di esperienza e conoscenza, o persone che non hanno familiarità con queste istruzioni, di utilizzare la macchina. Le normative locali possono limitare l'età dell'operatore.
c. L'operatore, o utilizzatore, è da ritenersi responsabile per incidenti o pericoli che coinvolgono terzi o attrezzature di terzi.
Preparazione
a. Assicurarsi che il sistema automatico di delimitazione perimetrale sia installato correttamente come da indicazioni.
b. Ispezionare periodicamente l'area in cui la macchina viene utilizzata e rimuovere pietre, bastoni, cavi e qualsiasi altro oggetto estraneo che possa intralciare il funzionamento.
c. Effettuare periodicamente un'ispezione visiva delle lame, dei bulloni delle lame e del gruppo di taglio per verificare che non siano usurati o danneggiati. Sostituire le lame e i bulloni usurati o danneggiati in coppia per mantenere l'equilibrio della macchina.
d. Segnali di avvertimento devono essere collocati attorno all'area di lavoro della macchina, se è utilizzata in aree pubbliche o aperte al pubblico. I segnali devono avere il seguente testo: "Attenzione! Rasaerba automatico! Tenersi a distanza dalla macchina! Sorvegliare i bambini!".
a. Non operare la macchina con ripari difettosi o dispositivi di sicurezza non presenti, ad esempio senza protezioni.
b. Non mettere mani o piedi vicino o sotto le parti rotanti. Tenersi sempre lontano dall'apertura di scarico.
c. Non toccare le parti della macchina in movimento prima che si siano arrestate completamente.
d. Durante il funzionamento della macchina indossare sempre scarpe robuste e pantaloni lunghi.
e. Non sollevare o trasportare mai la macchina mentre il motore è in funzione.
f. Rimuovere il dispositivo di disabilitazione dall'unità:
- Prima di eliminare un'ostruzione;
- Prima di controllare, pulire o lavorare sulla macchina.
g. Non lasciare la macchina in funzione incustodita in presenza di animali domestici, bambini o altre persone nelle vicinanze.
Manutenzione e conservazione
a. Serrare bene tutti i dadi, i bulloni e le viti per un funzionamento sicuro della macchina.
b. Controllare frequentemente il robot rasaerba per usura o deterioramento.
c. Per questioni di sicurezza è necessario sostituire le parti usurate o danneggiate.
d. Assicurarsi che le lame vengano sostituite solo con ricambi idonei.
e. Assicurarsi che le batterie siano ricaricate usando il caricabatterie corretto raccomandato dal produttore. Un uso non corretto può provocare scosse elettriche, surriscaldamento o perdita di liquido corrosivo dalla batteria.
f. In caso di perdite di elettrolita lavare con acqua/agente neutralizzante e rivolgersi a un medico in caso di contatto con gli occhi, etc etc.
g. La manutenzione della macchina deve essere effettuata in conformità alle istruzioni del produttore.
Batteria / carica batteria

ATTENZIONE:
Le batterie agli ioni di litio possono esplodere o causare incendi se smontate, esposte all'acqua, fuoco o a temperature elevate o in caso di cortocircuito. Maneggiare attentamente la batteria, non smontarla ed evitare qualsiasi tipo di sollecitazione elettrica o meccanica impropria. Evitare di esporre la batteria alla luce diretta del sole.
NOTA: Si raccomanda di utilizzare solo ed esclusivamente prodotti originali forniti dal costruttore. Prodotti non originali o inadeguati possono causare il danneggiamento del robot rasaerba o pericolo per persone, animali e cose.
a. La batteria deve essere installata e/o disinstallata dal robot rasaerba solo dal rivenditore o da un centro assistenza.
b. Conservare la batteria non utilizzata in luogo sicuro lontano da fonti di calore o oggetti che possano provocare corto circuito (picchetti, viti, oggetti metallici di vario tipo).
c. Utilizzare il carica batteria lontano da superfici o sostanze infiammabili e in luoghi preferibilmente asciutti.
d. Trasportare la batteria e il carica batteria nell'imballo originale.
Tutela ambientale
NOTA: La tutela dell'ambiente deve essere un aspetto rilevante e prioritario nell'uso della macchina, a beneficio della convivenza civile e dell'ambiente in cui viviamo.
a. Smaltire imballi e parti deteriorate come previsto dalle norme locali del paese di utilizzo.
b. Smaltire le apparecchiature elettriche (Robot rasaerba, Batteria, alimentatori, etc) come da Direttiva Europea 2012/19/UE ed in conformità alle norme nazionali. Per informazioni più approfondite sullo smaltimento contattare l'Ente competente per lo smaltimento dei rifiuti domestici o il vostro rivenditore.
c. Si consiglia la raccolta differenziata di prodotti e imballaggi.
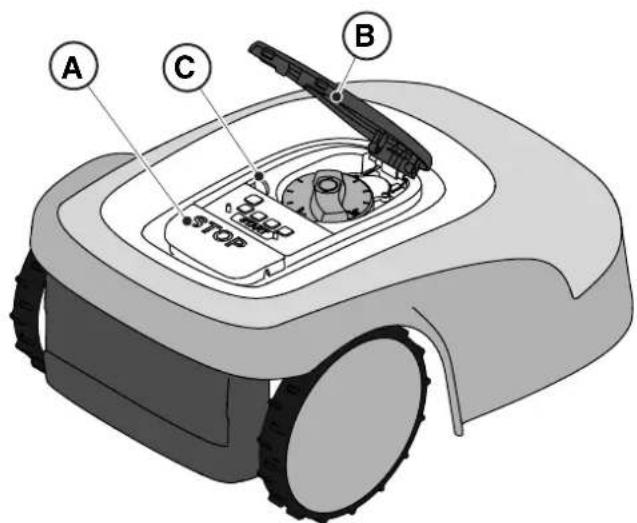
2.3. ARRESTO E SPEGNIMENTO DEL ROBOT RASAERBA IN CONDIZIONI DI SICUREZZA

OBBLIGO:
Spegnere sempre il robot rasaerba in condizioni di sicurezza prima di qualsiasi operazione di pulizia, trasporto, manutenzione.
Requisiti e obblighi:
• Chiave di sicurezza
Procedura:
- Premere il pulsante "STOP" (A) per arrestare il robot rasaerba in condizioni di sicurezza e aprire la cover di protezione (B).
- Disinserire la chiave di sicurezza (C) per spegnere il robot rasaerba in condizioni di sicurezza.
- Chiudere la cover di protezione (B).
- Il robot rasaerba è arrestato o spento in condizione di sicurezza.
text_image
A
C
B
STOP
3. INTRODUZIONE
3.1. INTRODUZIONE GENERALE
3.1.1. SCOPO DEL MANUALE
Questo manuale è parte integrante dell'apparecchiatura e ha lo scopo di fornire le informazioni necessarie all'utilizzo della stessa.
Conservare questo manuale per tutta la durata di vita dell'apparecchiatura in modo tale che sia sempre a disposizione in caso di necessità.
Il destinatario del manuale è l'utilizzatore dell'apparecchiatura, il quale è tenuto a leggere attentamente le informazioni in esso contenute ed applicarle in modo rigoroso a tutela dell'incolumità delle persone e per evitare danneggiamenti.
Le informazioni sono redatte nella lingua originale del Costruttore (italiano) e tradotte in eventuali altre lingue per esigenze legislative e/o commerciali.
Per evidenziare i testi di importanza rilevante sono stati adottati i seguenti simboli.

PERICOLO \ AVVERTENZA \ ATTENZIONE:
I pittogrammi contenuti in un triangolo con fondo giallo e tratto nero indicano un pericolo \ avvertenza\ attenzione.

DIVIETO:
I pittogrammi contenuti in un cerchio barrato con fondo bianco e tratto rosso indicano divieto.

OBBLIGO:
I pittogrammi contenuti in un cerchio con fondo azzurro indicano obbligo.
NOTA: I testi riportati con questa forma indicano una informazione tecnica di particolare importanza, da non trascurare.
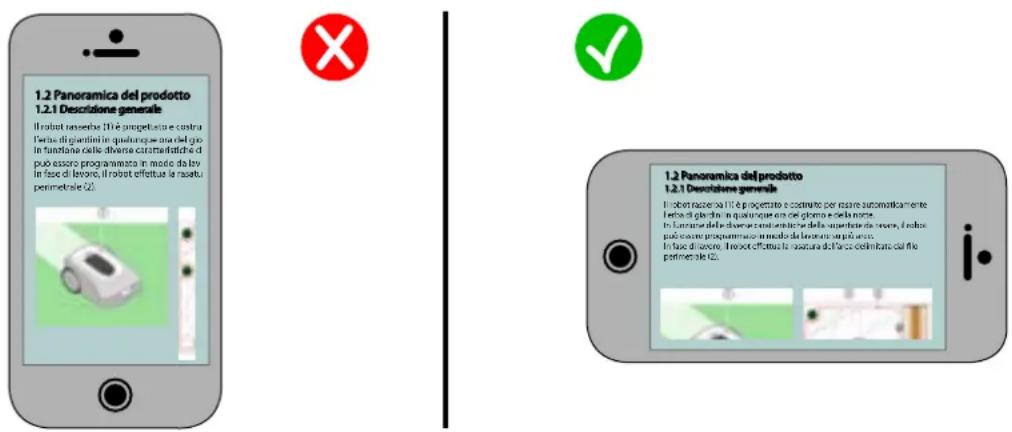
3.1.2. ISTRUZIONI PER LETTURA DA SMARTPHONE
Per una migliore leggibilità del Manuale utente, si consiglia di mantenere lo smatphone in posizione orizzontale come indicato in figura.
text_image
1.2 Panoramica del prodotto
1.2.1 Descritazione generale
Il robot assenzono (II) è progettato e contra
d'ebio di giantini in quallungono nel gio
in funzione nelle diverse caratteristiche di
puls essore programmata in modo da lov
in face di lavoro, il robot effettua la ruattu
perimetrale (2)
1.2 Panoramica del prodotto
1.2.1 Descritazione generale
Il robot assenzono (II) è progettato e Costae per maire automaticamente
refesa di giardini in quallungono nel giardini e della rama.
In l'ecce di delle stevere costematiche della svaporte dei rama, il auto
puls essore programmato in modo da lavoro si può essere.
In face di lavoro, il robot effettua la ruattu di Parza derivata del
perimetrale (2)
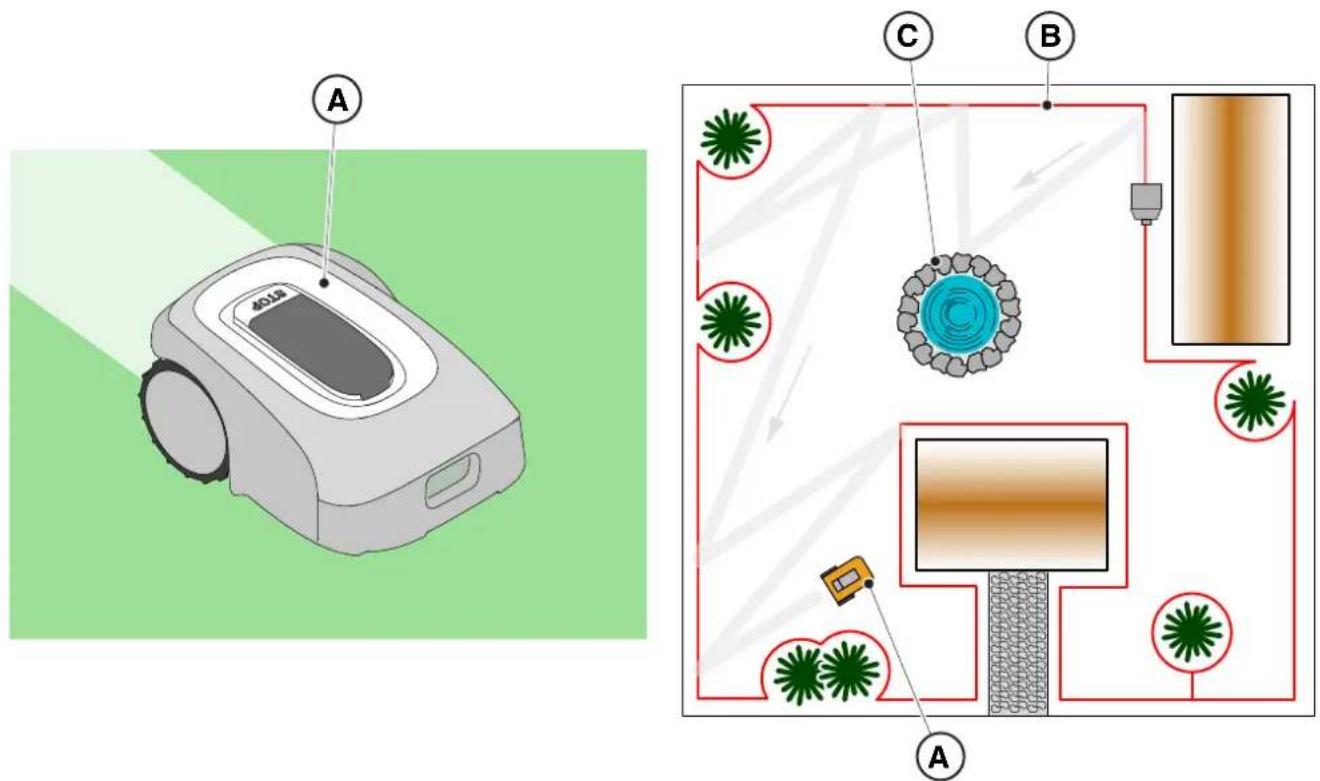
3.2. PANORAMICA DEL PRODOTTO
3.2.1. DESCRIZIONE GENERALE
Il robot rasaerba (A) è progettato e costruito per rasare automaticamente l'erba di giardini in qualunque ora del giorno e della notte.
In funzione delle diverse caratteristiche della superficie da rasare, il robot rasaerba può essere programmato in modo da lavorare su più zone delimitate dal cavo perimetrale.
In fase di lavoro, il robot rasaerba effettua la rasatura dell'area delimitata dal cavo perimetrale (B).
Quando il robot rasaerba rileva il cavo perimetrale (B) o incontra un ostacolo (C) cambia traiettoria in modo casuale.
In base al principio di funzionamento random, il robot rasaerba effettua la rasatura automatica e completa del prato delimitato.
Qualsiasi altro impiego può rivelarsi pericoloso e causare danni a persone e/o cose. Rientrano nell'uso improprio (come esempio, ma non solo): trasportare sulla macchina persone, bambini o animali; farsi trasportare dalla macchina; usare la macchina per trainare o spingere carichi; usare la macchina per il taglio di vegetazione di tipo non erboso.
text_image
A
4018
C
B
A
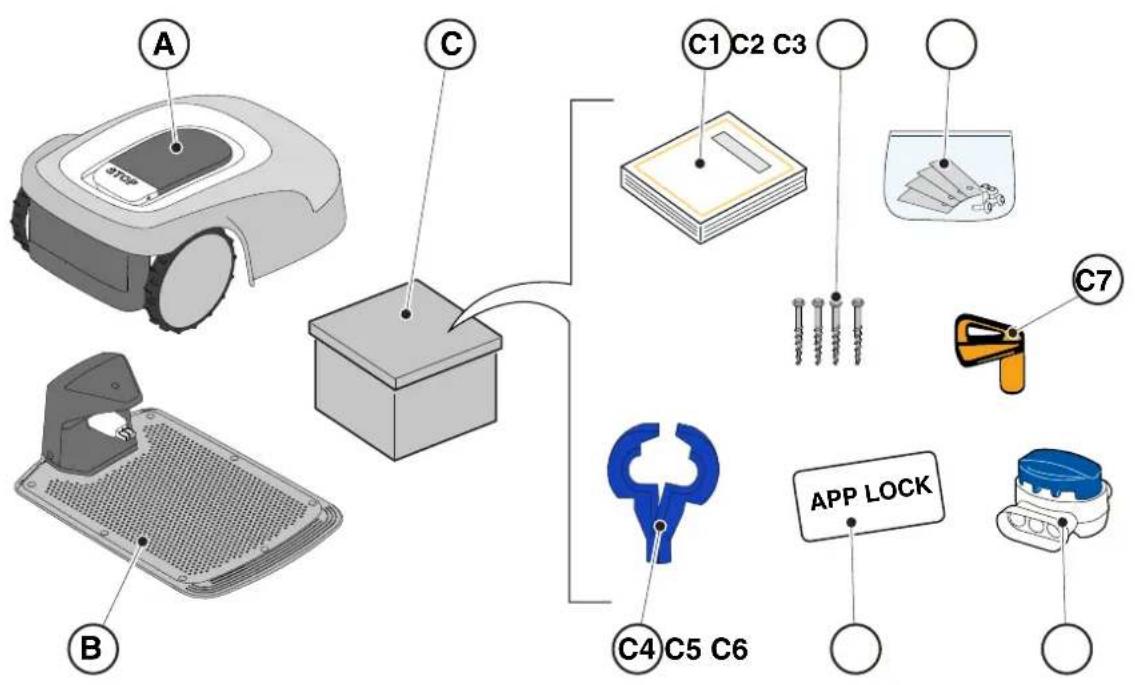
3.2.2. COMPONENTI PRINCIPALI
(A) Robot rasaerba
(B) Base di ricarica
(C) Kit di partenza
(D) Batteria (all'interno del robot rasaerba)
(E) Alimentatore della base di ricarica
(C1) Manuale di istruzioni
(C2) Viti di fissaggio della base di ricarica
(C3) Blister con lamette e viti di fissaggio
(C4) Connettori per la base di ricarica
(C5) Etichetta App Lock
(C6) Giunto per cavo perimetrale
(C7) Chiave di sicurezza
text_image
A
B
C
C1 C2 C3
C4 C5 C6
C7
APP LOCK
- Kit installazione (Opzionale per G 600 e G 1200)
(F) Cavo perimetrale
(G) Picchetti di fissaggio cavo perimetrale
(H) Giunto per cavo perimetrale
(I) Connettori per la base di ricarica
Vedi Cap. 9 "Accessori"
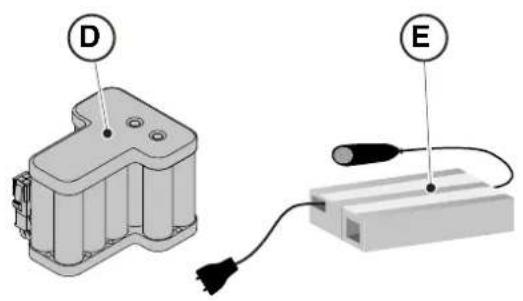
Di seguito vengono riportati tutti i passaggi per eseguire il corretto disimballaggio:
- Aprire la scatola del robot rasaerba;
- Estrarre la scatola del "Kit di partenza";
- Estrarre il cartone superiore di contenimento;
- Estrarre il robot rasaerba;
- Estrarre la base ricarica.

ATTENZIONE:
Assicurarsi di rimuovere tutto il materiale di imballaggio dal robot rasaerba prima di utilizzarlo.

ATTENZIONE:
Per evitare lesioni o danni, prestare attenzione durante il disimballo del robot rasaerba, evitando il contatto con le lame di taglio o altri elementi pericolosi.
flowchart
graph TD
A["Open Box 123"] --> B["Box 4"]
B --> C["Box 5"]
C --> D["Robot Vacuum Cleaner"]
3.4. SIMBOLI E TARGHETTE
Di seguito vengono riportati tutti i simboli presenti sul robot rasaerba:

Leggere le istruzioni per l'utente prima di avviare il funzionamento del prodotto.

ATTENZIONE:
Pericolo di proiezioni di oggetti contro il corpo.
Mantenersi a una distanza di sicurezza dalla macchina durante il funzionamento.

ATTENZIONE:
Non introdurre mani e piedi all'interno dell'alloggiamento del dispositivo di taglio.
Rimuovere il dispositivo di disabilitazione prima di intervenire sulla macchina o prima di sollevarla.

ATTENZIONE:
Non introdurre mani e piedi all'interno dell'alloggiamento del dispositivo di taglio.
Non salire sulla macchina.

DIVIETO:
Non utilizzare pulitori ad alta pressione sulla macchina per pulirla o lavarla.

DIVIETO:
Assicurarsi che non ci siano persone (soprattutto bambini, anziani o disabili) e
animali domestici nell'area di lavoro durante il funzionamento della macchina.
Tenere bambini, animali domestici e altre persone a distanza di sicurezza quando la macchina è in funzione.
Di seguito vengono riportati tutti i simboli presenti sulla Batteria:
Leggere le istruzioni per l'utente prima di avviare il funzionamento del prodotto.

Non smaltire la batteria come normale rifiuto domestico.
Smaltire la batteria negli appositi centri di raccolta autorizzati.

Non gettare la batteria nel fuoco e non esporla a fonti di calore.

Non immergere la batteria in acqua e non esporla all'umidità.
3.5. ISTRUZIONI GENERALI DI LETTURA DEL MANUALE
Di seguito vengono descritti i criteri seguiti per la redazione del presente documento.
- Titolo dell'argomento (A)
- Requisiti e attrezzature per l'esecuzione della procedura (B)
- Descrizione della procedura (C)
- Immagini descrittive della procedura (D)
- Titolo di sezione App (E)
- Procedura di navigazione App (F)
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Rapoliti e intravoltare:
• Controll di lavoro
• On via di sicurezza
Procedere:
1. Verfuro che la cover follante (A) sia morbata in maniera corretta. La mancanza della cover non per nota il funzionamento del Robot.
2. Verfuro che il privata di lavoro "STOP" (B) non si attiva. Se premuto arrada i robot se agro la cover di prodotto (C) da riscita di lavoro [2];
3. Verfuro che il copertura di prestazione (C) alla chiusa. Se spento non permetta il funzionamento del Robot.
4. Verfuro che la chiave di sicurezza (E) sia inserta. Se diskinerta il robot non si avva.
5. Verfuro il corrisso posizionamento a tema dei robot. In caso di inclinazione accessiva o siofevamento (serato di notificato) aderone font.
6. Verfuro che nel area di lavoro non si sono impedimenti (oggetti abordont).
111T 2. SICUREZZA

text_image
I:TIGA
NOTA:
Le immagine riportale per queste azione sono paramente indicative.
De la partura (A) è possibile largi compere in raggi and recorte.
• Palkogri
• Cerrazione
• Orbitering
• Eng Ub
• Protaglazione utente
3.102 ELEOON
In questa prima azione il possibile eseguire la riserva o flutturare la visualizzazione dei livendore più vicine
1. Per essere sul campa (B) per accadere allo pagi in di visualizzazione dei livendore (C).
2. Altrpvone (L) per attivi del GPC di livendore.
3. Persegual (G) per nonvatteni riserva (H) per assondere.
4. Per SICFure sul campa di riserva (I) per eseguire una accadare riserva l'uso di riservare.
B A D C
28 9. INSTALLAZIONE IT
4. INSTALLAZIONE

AVVERTENZA:
Non modificare, non manomettere, non eludere, non eliminare i dispositivi di sicurezza installati.
NOTA: Per ulteriori chiarimenti sull'installazione del prodotto contattare un rivenditore STIGA.
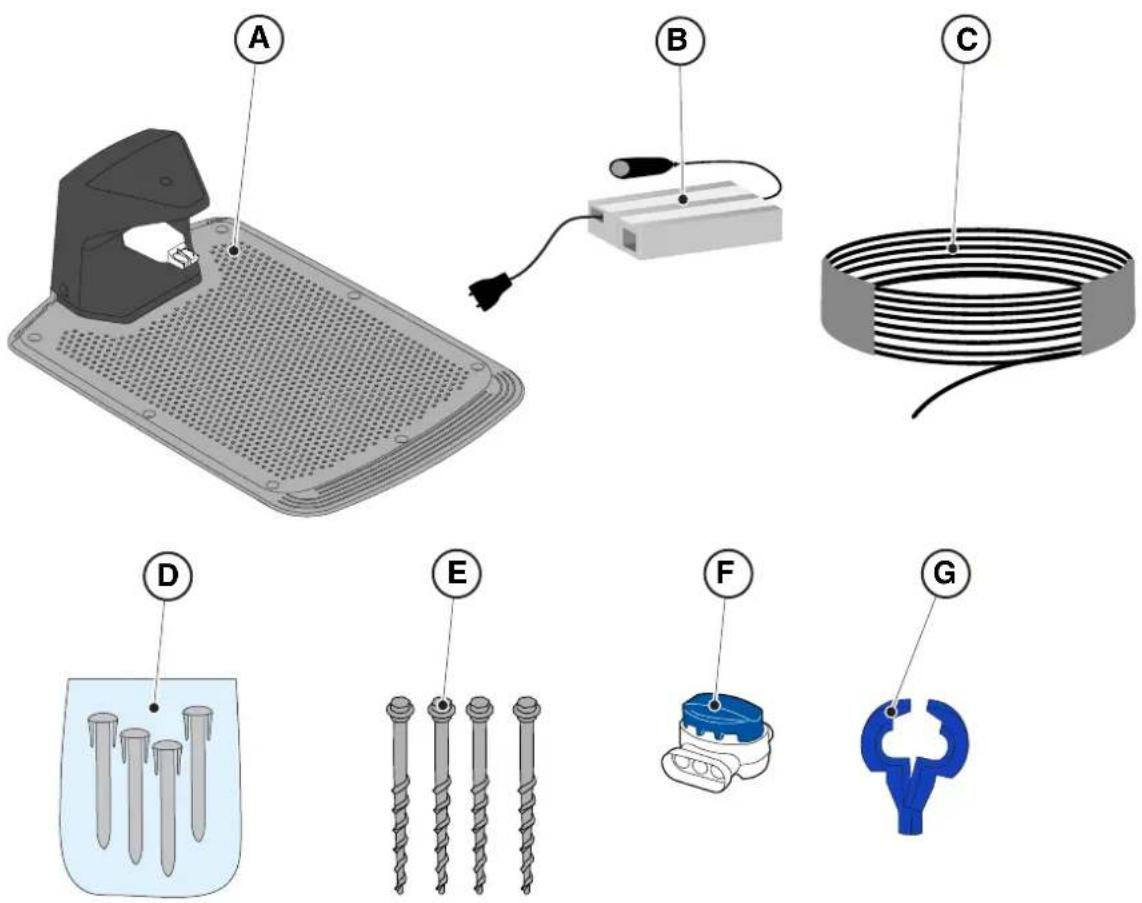
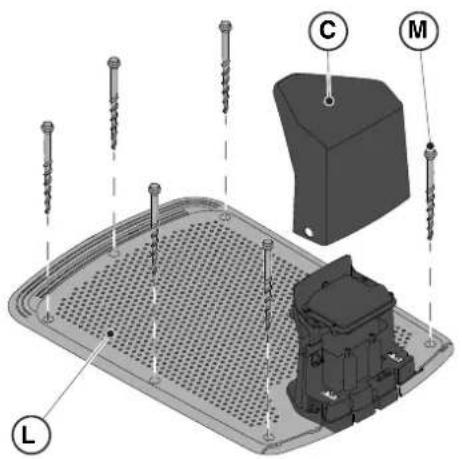
4.2. COMPONENTI PER L'INSTALLAZIONE
(A) Base di ricarica
(B) Alimentatore
(C) Cavo perimetrale (presente nel Kit installazione)
(D) Picchetti di fissaggio cavo perimetrale (presente nel Kit installazione)
(E) Viti di fissaggio base di ricarica
(F) Giunto per cavo perimetrale (presente nel Kit installazione)
(G) Connettori per base di ricarica (presente nel Kit installazione)
Vedi Cap. 9 "Accessori"
Di seguito è riportato come verificare i requisiti necessari e predisporre il giardino prima di procedere con l'installazione.
4.3.1. VERIFICA DEL GIARDINO:
- Effettuare un sopralluogo dell'intera area per una corretta rilevazione dello stato del giardino, degli ostacoli e delle zone da escludere.
- Verificare che il prato da rasare sia uniforme, privo di buche, sassi o altri ostacoli e, se necessario, effettuare le opportune opere di bonifica.
NOTA: Livellare il terreno in modo che non si formino pozzanghere a seguito di pioggia.
NOTA: Alla prima installazione, l'altezza iniziale dell'erba deve essere compresa nell'intervallo di operatività del robot rasaerba: 20-60mm. Se necessario preparare il giardino usando un rasaerba tradizionale.
4.3.2. VERIFICHE PER L'INSTALLAZIONE DELLA BASE DI RICARICA E DELL'ALIMENTATORE
 | PERICOLO ELETTRICO:Per effettuare l'allacciamento elettrico,è necessario che in prossimitàdella zona di installazione sia statapredisposta una presa di corrente.Assicurarsi che l'allacciamento allarete di alimentazione sia conforme alleleggi vigenti in materia del Paese incui viene utilizzato. |  | PERICOLO ELETTRICO:Non collegare l'alimentatore a unapresa di corrente se la spina o ilcavo sono danneggiati.Non collegare e non toccare uncavo danneggiato prima che vengascollegato dall'alimentazione.Un cavo danneggiato può portare acontatto con parti sotto tensione. |
 | PERICOLO ELETTRICO:Il circuito fornito deve essere protetto da un interruttore differenziale (RCD)con una corrente di attivazione non superiore a 30 mA. | |
Procedura:
- Predisporre al bordo del prato una zona pianeggiante per il posizionamento della base di ricarica (A), preferibilmente nella porzione di giardino più grande e in prossimità di una presa elettrica.
- Assicurarsi che ci sia sufficiente spazio per installare la base di ricarica su un tratto rettilineo del cavo perimetrale (B), in modo che la distanza della base da eventuali curve sia almeno X=200 cm, il terreno deve essere perfettamente pianeggiante e compatto in modo da evitare la deformazione del piano della base di ricarica.
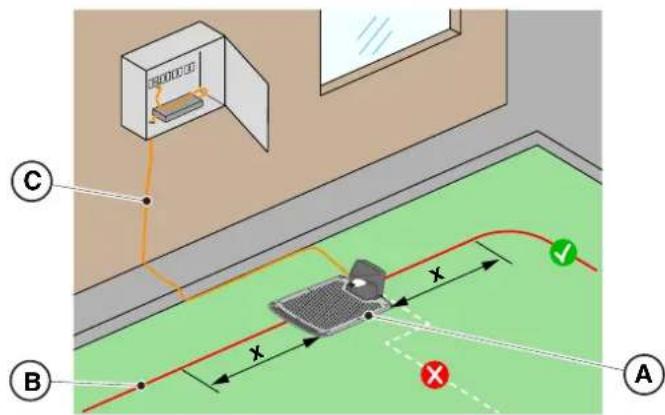
Il cavo di alimentazione (C), l'alimentatore, la prolunga e ogni altro cavo elettrico non appartenente al prodotto devono rimanere all'esterno dell'area di taglio per tenerli lontani da parti pericolose in movimento ed evitare danni ai cavi che possono portare a contatto con parti sotto tensione.
- Accertarsi che la zona scelta per l'installazione della base di ricarica (D) sia ad almeno una distanza di 400 cm dalla base di ricarica (E) di un eventuale secondo robot rasaerba.
flowchart
graph TD
A["Input"] --> B{Decision}
B -->|Yes| C["Process 1"]
B -->|No| D["Process 2"]
C --> E["Output"]
D --> E
style A fill:#f9f,stroke:#333
style E fill:#bbf,stroke:#333

ATTENZIONE:
L'eccessiva vicinanza tra due basi di ricarica potrebbe causare interferenza (Vedi Par. 4.7.14)
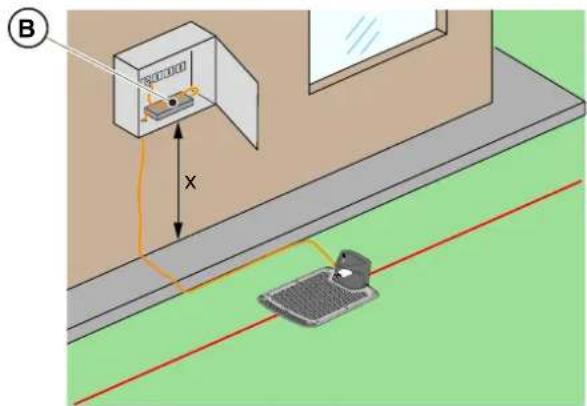
- Predisporre la zona di installazione dell'alimentatore (B) in modo che esso sia protetto dalla radiazione solare e in modo che in nessuna condizione atmosferica esso possa ritrovarsi in condizioni di immersione in acqua.
NOTA: È preferibile e consigliato installare l'alimentatore (B) in un vano chiuso e protetto da agenti atmosferici, in una posizione non facilmente raggiungibile da persone non autorizzate come bambini (X > di 160 cm).
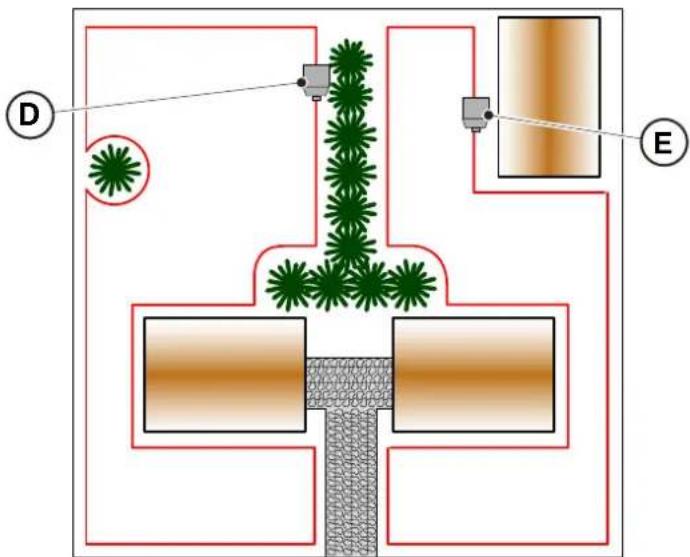
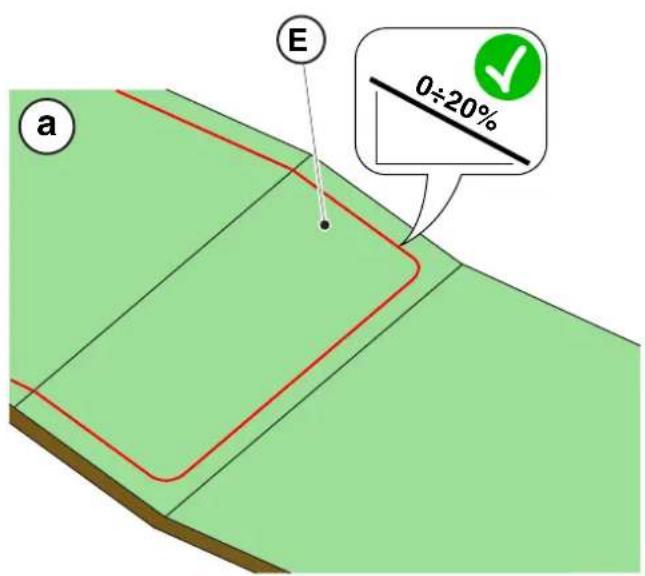
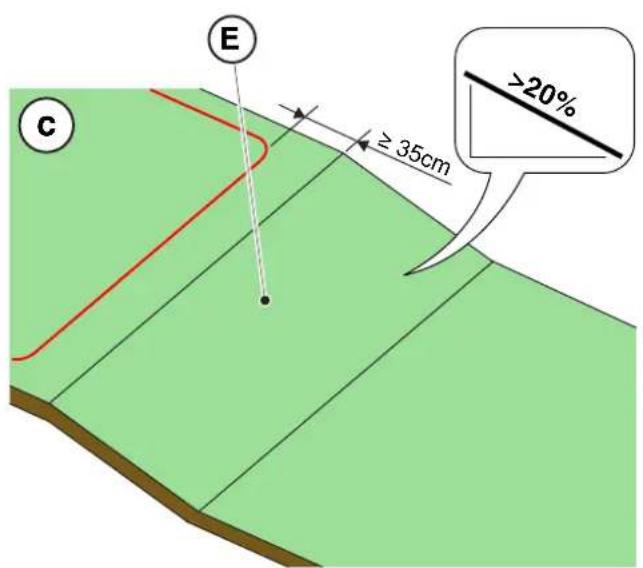
4.3.3. PRINCIPALI VERIFICHE PER L'INSTALLAZIONE DEL CAVO PERIMETRALE
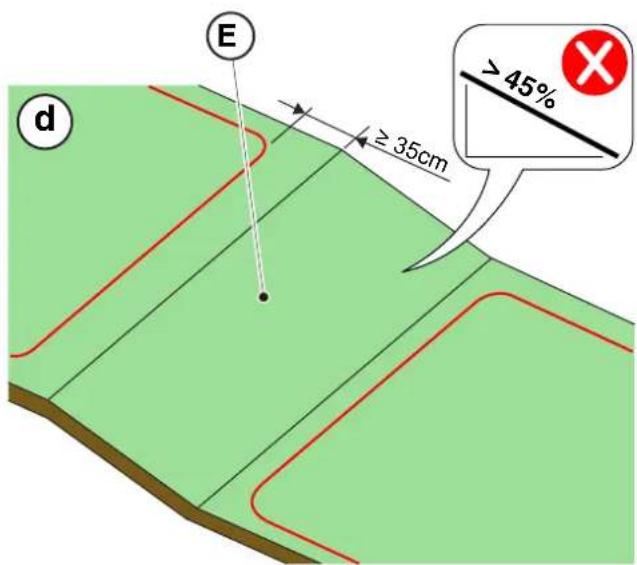
- Verificare che la pendenza massima dell'area di lavoro sia inferiore o uguale al 45% (E) e rispettare le regole riportate nelle immagini sottostanti:
a) se la pendenza è ≤ 20% il cavo perimetrale può essere installato su di essa come in figura;
b) se la pendenza è >20% e ≤ 45%, l'installazione deve includere la zona in pendenza rispettando la distanza indicata in figura;
c) se la pendenza è >20% e l'area in pendenza non fa parte della parte di giardino da tagliare, occorre rispettare la distanza indicata in figura;
d) se la pendenza è >45% occorre escludere l'area in pendenza rispettando la distanza indicata in figura.
text_image
a
E
0÷20%

text_image
E
20÷45%
≥ 35cm
b
text_image
E
≥ 35cm
>20%
C
text_image
E
≥ 35cm
d
> 45%
STIGA

ATTENZIONE:
Il robot può rasare superfici con pendenza massima del 45%.
In caso di mancato rispetto delle istruzioni, il robot potrebbe slittare e uscire dall'area di lavoro

ATTENZIONE:
Le zone che presentano pendenze superiori a quelle ammissibili non possono essere rasate. Posizionare quindi il cavo perimetrale prima della pendenza escludendo dal taglio quella zona di prato.
- Verificare tutta la superficie di lavoro: valutare gli ostacoli e le zone da escludere dall'area di lavoro (F), che dovranno essere delimitate con il cavo perimetrale (G).
4.4.1. POSIZIONAMENTO DEL CAVO PERIMETRALE
Procedura:
-
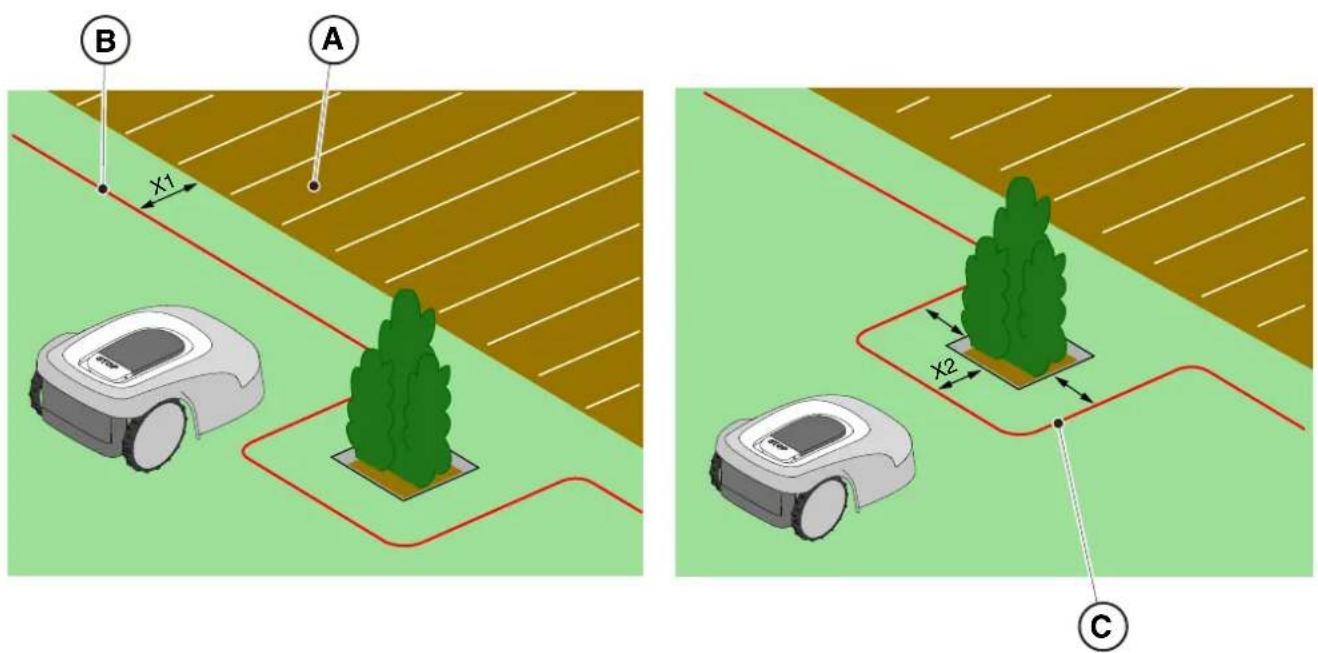
In presenza di una pavimentazione o di un vialetto (A) allo stesso livello del prato, sistemare il cavo perimetrale (B) a X1 = 5 cm dal bordo della pavimentazione.
-
In prossimità di un'aiuola a livello, un tombino metallico, un piano doccia o cavi elettrici, sistemare il cavo perimetrale (C) ad almeno X2 = 30 cm di distanza.
text_image
A
B
X1
X2
C
- Se è presente un ostacolo, ad esempio un fossato (D), una parete o un muretto (E), sistemare il cavo perimetrale (F) ad almeno X3 = 35 cm dall'ostacolo.
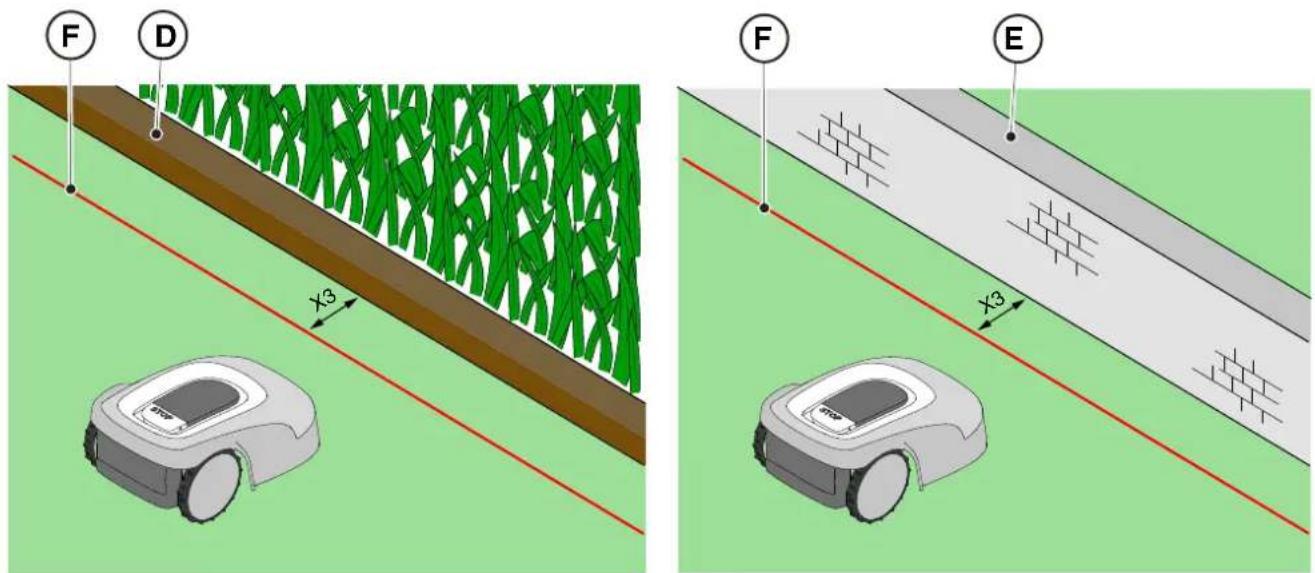
- Se è presente una siepe (G) o una pianta con radici sporgenti (H), sistemare il cavo perimetrale (F) ad almeno X4 = 30 cm.
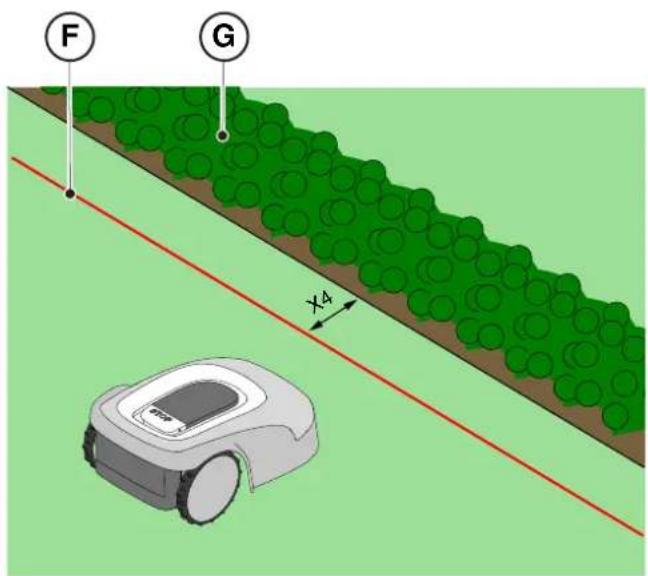
text_image
F
G
x4
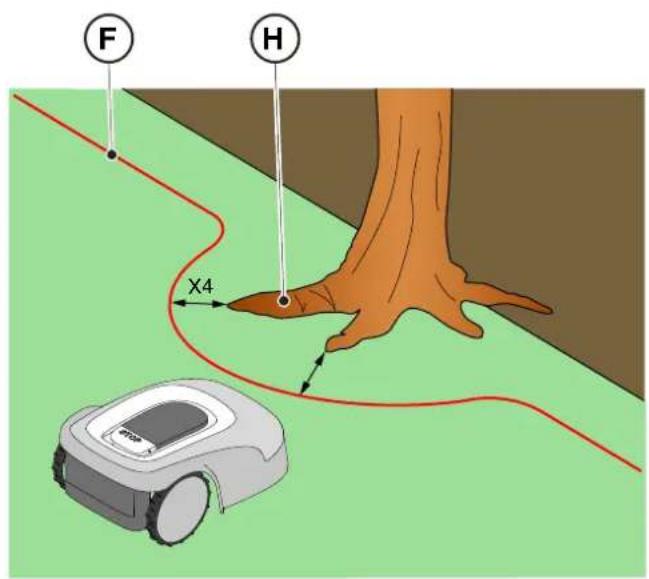
text_image
F
H
X4
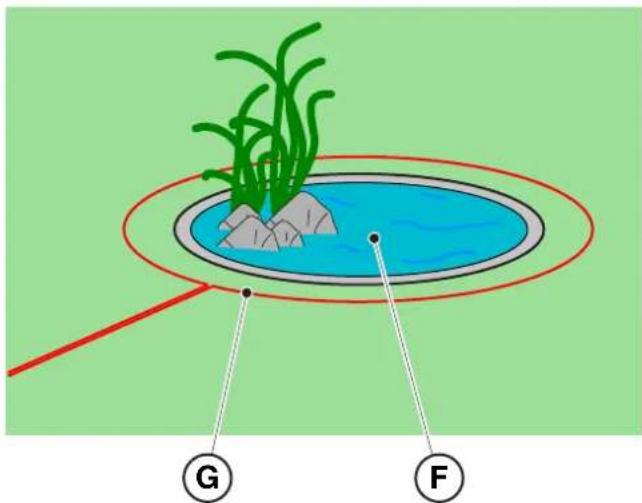
- Se è presente una piscina o un laghetto a sfioro (I), strade pubbliche non protette (L), sistemare il cavo perimetrale (F) ad almeno X5 = 90 cm.
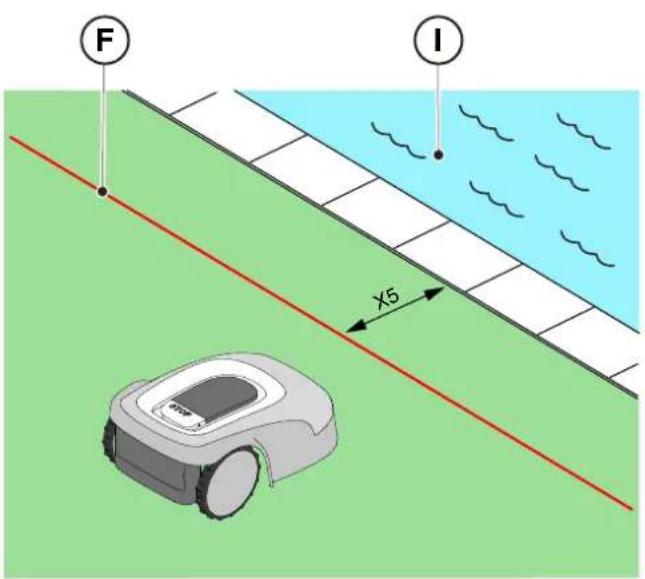
text_image
F
I
X5
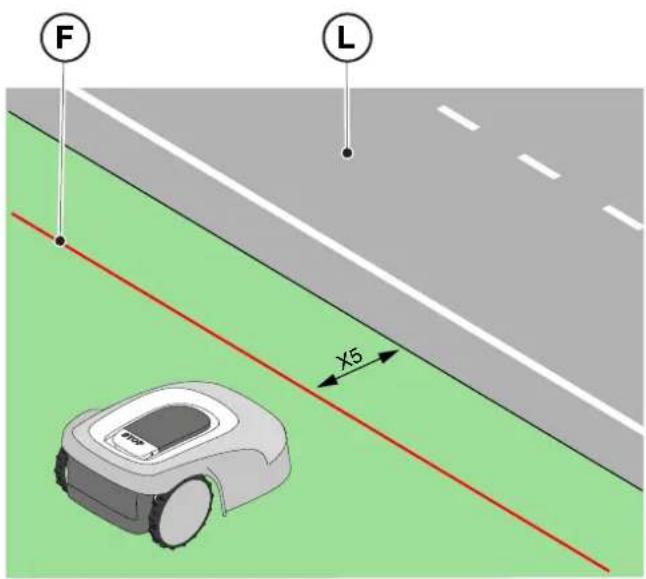
text_image
F
L
X5
- Se è presente una piscina (M) o una strada (N) alla fine di una discesa (O), sistemare il cavo perimetrale (P) ad almeno X6 = 150 cm.

ATTENZIONE:
Se la pendenza è maggiore del 45%, la zona in pendenza deve essere esclusa dall'area di taglio (Vedi Par. 4.3).
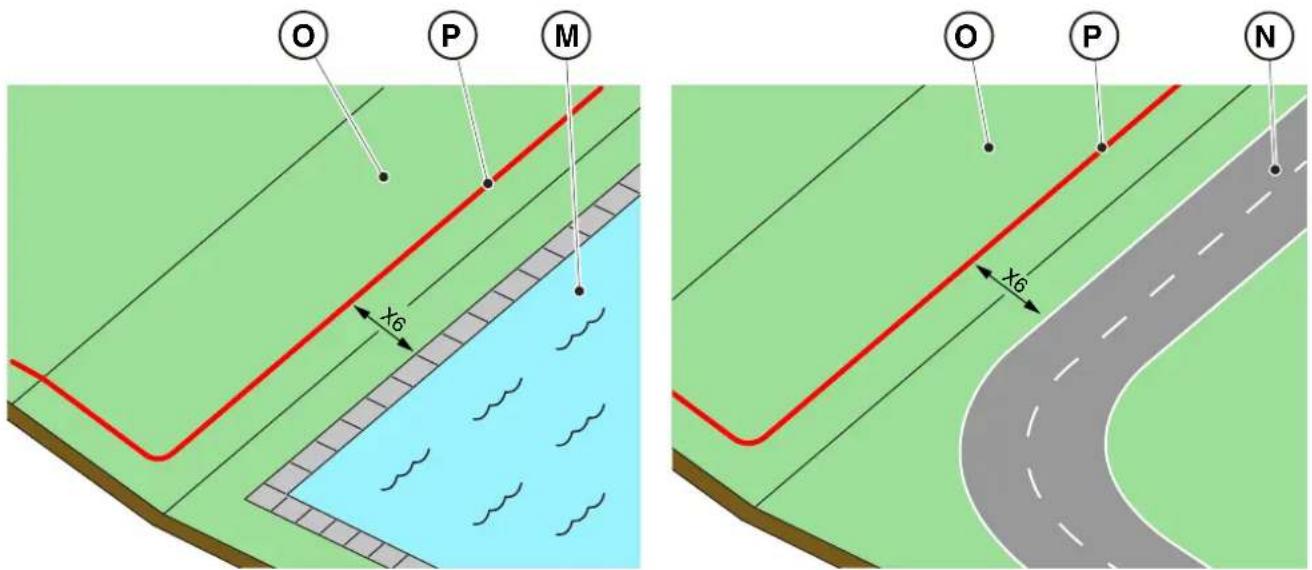
L'area operativa deve essere limitata da una recinzione non valicabile. Rendere idonea la recinzione oppure supervisionare il robot rasaerba durante il funzionamento.
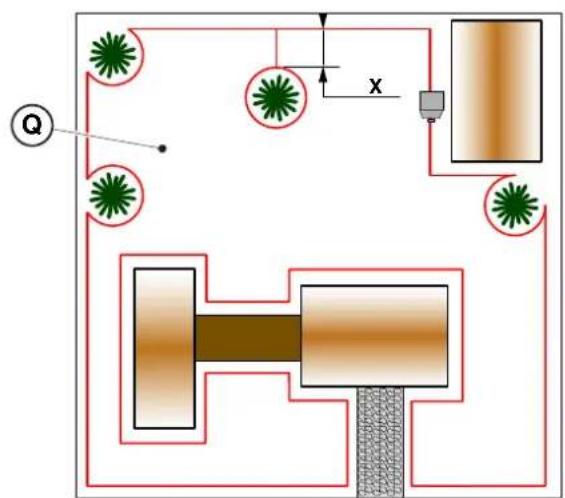
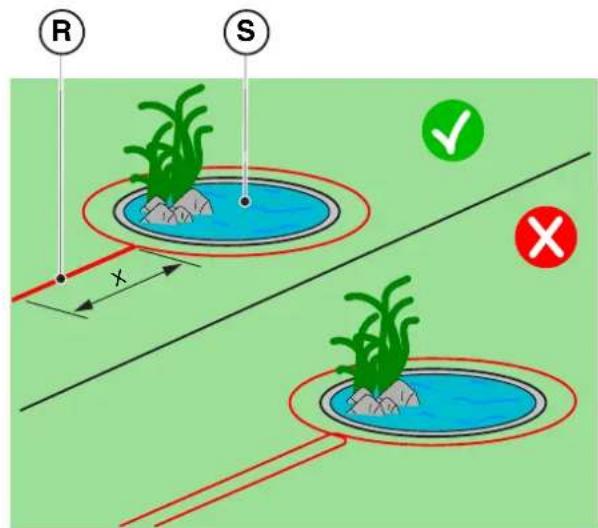
4.4.2. DELIMITAZIONE DEGLI OSTACOLI
Procedura:
- Se il passaggio minimo tra due diverse sezioni del cavo perimetrale è X ≥ 70 cm, l'ostacolo può essere delimitato come indicato in figura (Q), sovrapponendo le sezioni del cavo di andata e di ritorno senza incrociarli (R).
-
Per delimitare l'ostacolo (S):
-
Posizionare il cavo perimetrale fino all'ostacolo e aggirarlo;
- Riportare il cavo lungo il percorso precedente sovrapponendolo sotto lo stesso chiodo, senza creare incroci (R).
flowchart
graph TD
A["Valve"] --> B["Pump Gauge"]
B --> C["Pressure Gauge"]
C --> D["Flow Path"]
D --> E["Directional Flow"]
E --> F["Outlet"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#fcc,stroke:#333
style E fill:#cff,stroke:#333
style F fill:#ffc,stroke:#333
text_image
R
S
x
NOTA: Per il corretto funzionamento del robot rasaerba la lunghezza minima del cavo perimetrale sovrapposto (R) deve essere di X = 70 cm.
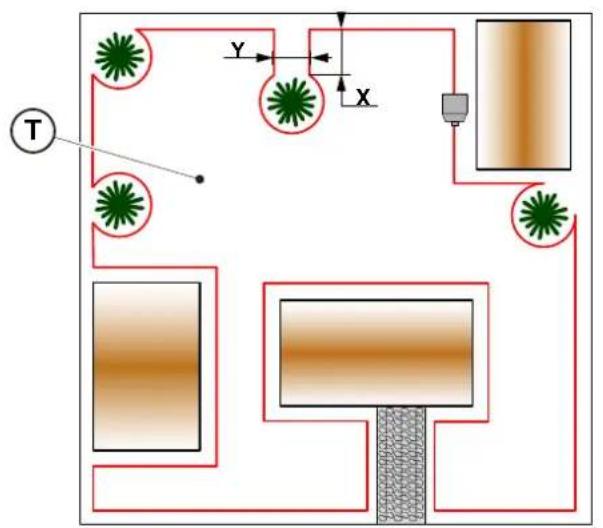
- Se il passaggio minimo tra due diverse sezioni del cavo perimetrale è X <70 cm, l'ostacolo può essere delimitato distanziando le due sezioni del cavo di andata e di ritorno di una quota Y ≥30 cm come indicato in figura (T), oppure, se l'ostacolo è sufficientemente robusto può essere lasciato non protetto come indicato in figura (U).
flowchart
graph TD
A["Central Rectangle"] --> B["Sensor"]
B --> C["Sensor"]
C --> D["Sensor"]
D --> E["Sensor"]
E --> F["Sensor"]
F --> G["Sensor"]
G --> H["Sensor"]
H --> I["Sensor"]
I --> J["Sensor"]
J --> K["Sensor"]
K --> L["Sensor"]
L --> M["Sensor"]
M --> N["Sensor"]
N --> O["Sensor"]
O --> P["Sensor"]
P --> Q["Sensor"]
Q --> R["Sensor"]
R --> S["Sensor"]
S --> T["Sensor"]
T --> U["Sensor"]
U --> V["Sensor"]
V --> W["Sensor"]
W --> X["Sensor"]
X --> Y["Sensor"]
Y --> Z["Sensor"]
Z --> A
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#fcc,stroke:#333
style E fill:#cff,stroke:#333
style F fill:#ffc,stroke:#333
style G fill:#cfc,stroke:#333
style H fill:#fcc,stroke:#333
style I fill:#ffc,stroke:#333
style J fill:#cfc,stroke:#333
style K fill:#fcc,stroke:#333
style L fill:#ffc,stroke:#333
style M fill:#cfc,stroke:#333
style N fill:#fcc,stroke:#333
style O fill:#ffc,stroke:#333
style P fill:#cfc,stroke:#333
style Q fill:#fcc,stroke:#333
style R fill:#ffc,stroke:#333
style S fill:#cfc,stroke:#333
style T fill:#fcc,stroke:#333
style U fill:#ffc,stroke:#333
style V fill:#cfc,stroke:#333
style W fill:#fcc,stroke:#333
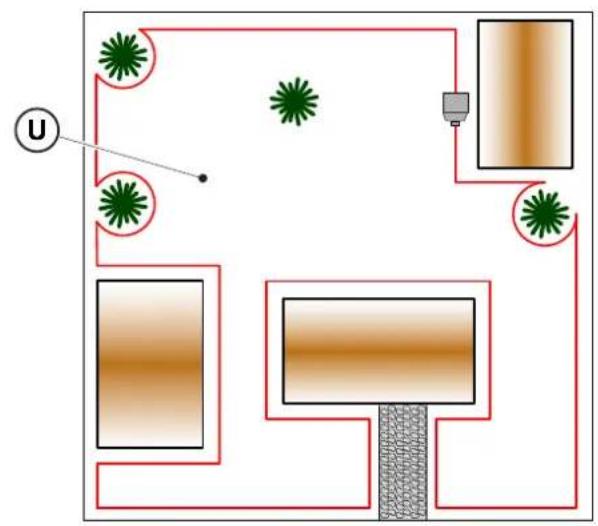
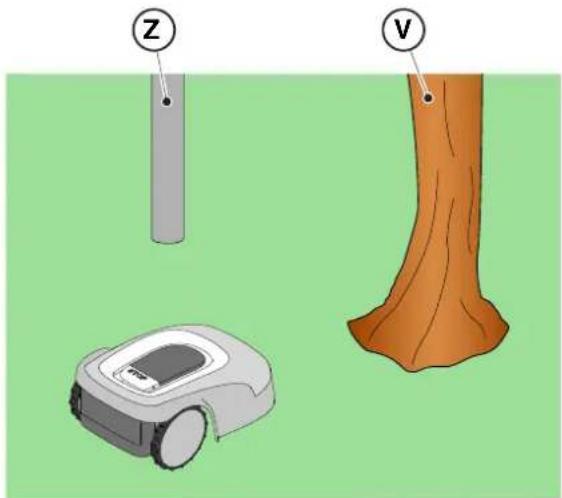
- In generale è consigliabile delimitare gli ostacoli, tuttavia se sono presenti ostacoli localizzati che resistano agli urti, ad esempio alberi senza radici sporgenti (V) o pali (Z), è possibile non delimitarli.
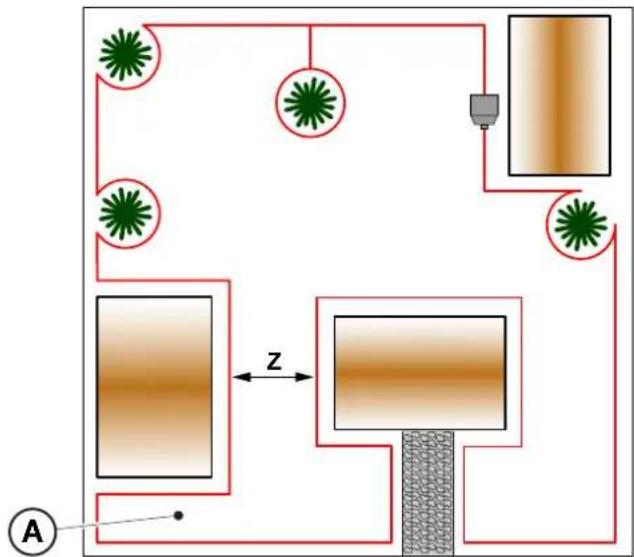
- In caso di corridoi, la distanza tra due diverse sezioni del cavo perimetrale deve essere Z ≥70 cm.
- In caso di passaggio tra due diverse sezioni di cavo Z <70 cm, la zona (A) è da considerarsi "Area Chiusa" e non è raggiungibile dal robot rasaerba in maniera automatica.
NOTA: Per la programmazione del robot rasaerba relativa alla configurazione del giardino con "Area Chiusa" si veda la procedura al Par. 4.7.5 "Closed Area".
flowchart
graph TD
A["Input Node"] --> B["Process Block"]
B --> C["Output Node"]
C --> D["Processing Unit"]
D --> E["Output Output"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#fcc,stroke:#333
style E fill:#ffc,stroke:#333
4.5. INSTALLAZIONE DEI COMPONENTI
 | PERICOLO ELETTRICO:Utilizzare solo caricabatteria e alimentatore fornito dal Costruttore. L’uso improprio può causare scosse elettriche e/o surriscaldamento. |  | AVVERTENZA:Il circuito fornito deve essere protetto da un interruttore differenziale (RCD) con una corrente di attivazione non superiore a 30 mA. |
 | PERICOLO ELETTRICO:Per effettuare l’allacciamento elettrico, è necessario che in prossimità della zona di installazione sia stata predisposta una presa di corrente. Assicurarsi che l’allacciamento alla rete di alimentazione sia conforme alle leggi vigenti in materia del Paese in cui viene utilizzato. |  | PERICOLO ELETTRICO:Collegare l’alimentazione elettrica solo al termine di tutte le operazioni di installazione.Se necessario durante l’installazione disattivare l’alimentazione elettrica generale. |
4.5.1. INSTALLAZIONE DEL CAVO PERIMETRALE
AVVERTENZA:
Pericolo di taglio mani.

AVVERTENZA:
Pericolo di pulviscolo negli
occhi.
Requisiti e Obblighi:
- Erba bassa lungo tutto il percorso • Martello
• Cavo perimetrale • Guanti
- Picchetti di fissaggio
- Occhiali
- Giunti per cavo perimetrale • Forbice da elettricista
- Pinza

OBBLIGO GUANTI:
Usare guanti di protezione per
evitare pericoli di taglio alle
mani.

OBBLIGO OCCHIALI:
Usare occhiali di protezione per
evitare pericoli di pulviscolo
negli occhi.
Procedura:
- Posizionare il cavo perimetrale (A) partendo dalla zona di installazione della base di ricarica.
- Posizionare il cavo lungo tutto il percorso fissandolo con gli appositi picchetti (B) distanziati di circa 100 cm, e rispettando i requisiti di installazione (Vedi Par. 4.3 e Par. 4.4).
- Lasciare 2 m di cavo in abbondanza per tagliarlo successivamente a misura nella fase finale di allacciamento.
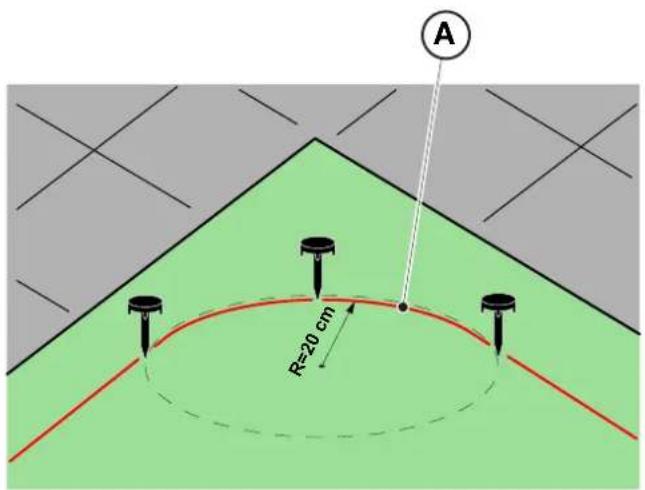
NOTA: Nei tratti non rettilinei, fare attenzione che il cavo (A) non si attorcigli. Posizionare il cavo in modo tale da formare una curvatura regolare di raggio circa 20 cm
NOTA: Il cavo perimetrale utilizzato per l'installazione deve avere una lunghezza di almeno 40 m. Se la lunghezza del cavo è inferiore, è necessario installare il resistore per piccoli perimetri. (Vedi Par. 4.5.4. e Cap. 9 "Accessori").

ATTENZIONE:
Assicurarsi che il cavo sia a contatto con il terreno lungo tutto il suo percorso per evitare che il robot rasaerba possa danneggiarlo.
Affidandosi ad un dealer STIGA, il cavo perimetrale può essere inoltre installato tramite una specifica macchina interrafilo, senza fare uso di picchetti.
4.5.2. GIUNZIONE DEL CAVO PERIMETRALE.
 | AVVERTENZA:Pericolo di taglio mani. |  | AVVERTENZA:Pericolo di pulviscolo negli occhi. |
Requisiti e Obblighi:
- Giunto per cavo perimetrale • Guanti
• Forbice da elettricista • Occhiali
- Pinza

OBBLIGO GUANTI:
Usare guanti di protezione per evitare pericoli di taglio alle mani.

OBBLIGO OCCHIALI:
Usare occhiali di protezione per evitare pericoli di pulviscolo negli occhi.
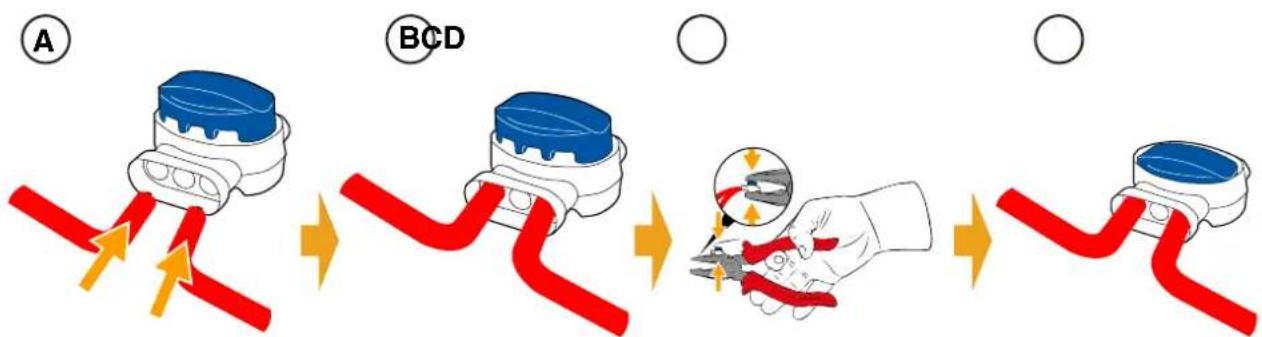
Durante l'installazione del cavo o in caso di rottura accidentale potrebbe essere necessario eseguire delle giunzioni.
Procedura:
- Scollegare la base di ricarica dall'alimentazione elettrica.
- Mettere il cavo perimetrale come da posizione (A).
- Inserire le estremità del cavo nel giunto come da posizione (B).
- Premere a fondo il pulsante sul lato superiore del giunto utilizzando un paio di pinze come da posizione (C).
- Il cavo perimetrale è correttamente installato sul giunto (D).

DIVIETO:
Non utilizzare nastro isolante o giunzioni di altro tipo che non garantiscano un corretto isolamento (capicorda, morsetti, ecc.). L'umidità del terreno provoca l'ossidazione e l'interruzione del cavo perimetrale.
text_image
A
BCD
C
4.5.3. INSTALLAZIONE BASE DI RICARICA
 | AVVERTENZA:Pericolo di taglio mani. |  | AVVERTENZA:Pericolo dipulviscolo negli occhi. |
 | PERICOLO ELETTRICO:Collegare l'alimentazione elettrica solo al termine di tutte le operazioni di installazione.Se necessario durante l'installazione disattivare l'alimentazione elettrica generale. | | |
Requisiti e Obblighi:
- Terreno pianeggiante • Terreno compatto
- Base di ricarica • Cavo perimetrale
- Alimentatore • Picchetti di fissaggio
• Cacciavite • Martello
• Forbice da elettricista • Guanti
- Occhiali
 | OBBLIGO GUANTI:Usare guanti di protezione per evitare pericoli di taglio alle mani. |  | OBBLIGO OCCHIALI:Usare occhiali di protezione per evitare pericoli di pulviscolo negli occhi. |
La base di ricarica può essere installata:
- con posa in asse al cavo perimetrale in modo che il robot possa accedervi navigando sul cavo perimetrale in senso orario.
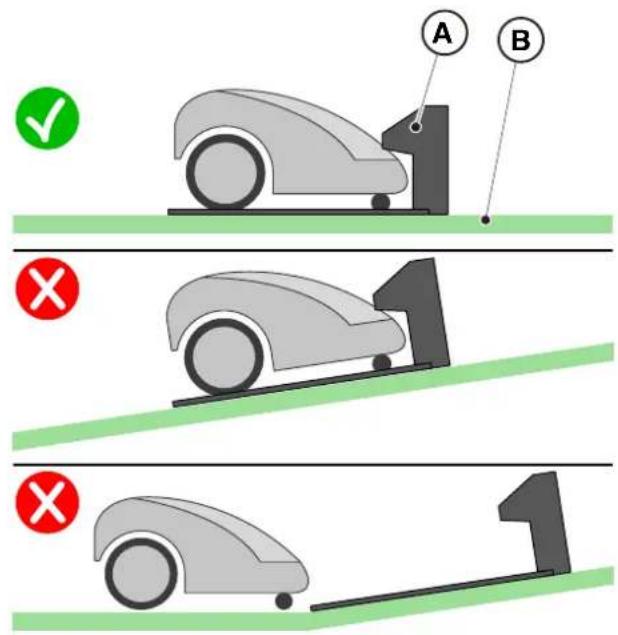
Procedura:
- Verificare i requisiti per l'installazione come indicato nel Par. 4.3.
- Se necessario preparare il terreno in modo che la superficie della base di ricarica (A) sia allo stesso livello del prato (B), il terreno deve essere perfettamente pianeggiante e compatto in modo da evitare la deformazione del piano della base di ricarica.
text_image
A
B
✓
×
1
×
1
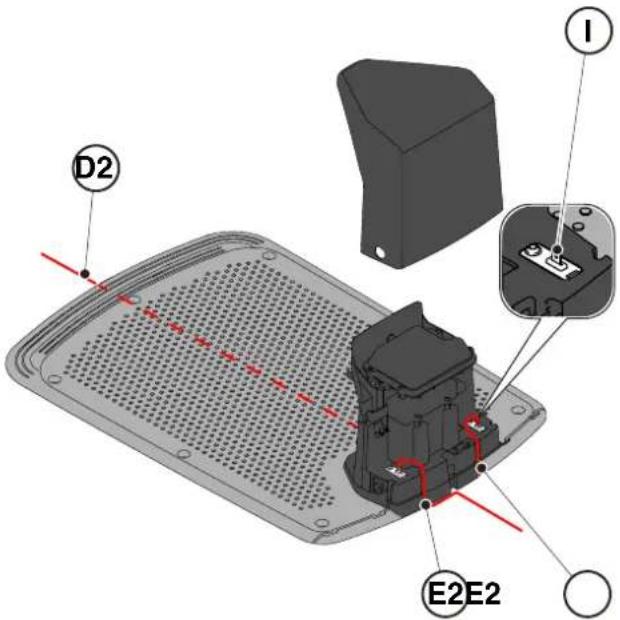
-
Rimuovere il coperchio (C).
-
Posizionare la base di ricarica:
- In asse al cavo perimetrale (D2) in modo che il robot possa accedervi navigando sul cavo perimetrale in senso orario.
- Inserire le due estremità del cavo negli appositi passaggi (E2).
text_image
D2
I
E2E2
- Tagliare a misura esatta le estremità dei cavi.
- Applicare i connettori autoperforanti sul cavo (F), (G), (H).
- Connettere i connettori ai morsetti (I).
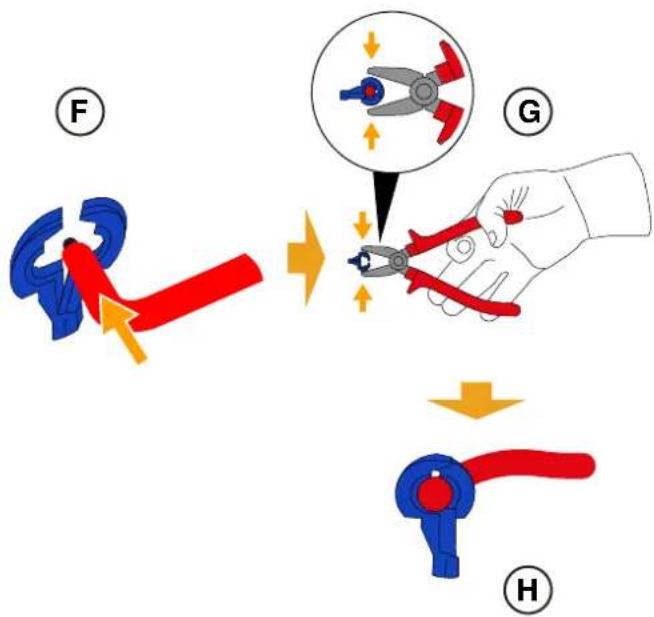
- Fissare la base di ricarica (L) al terreno con le viti di fissaggio (M).
- Riposizionare il coperchio (C).
- Collegare il connettore dell'alimentatore alla base di ricarica e quindi collegare la spina dell'alimentatore alla presa elettrica.
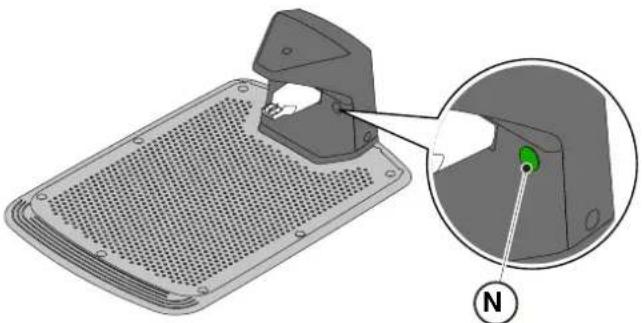
- Verificare che quando il robot rasaerba non è in base di ricarica, la spia sulla base di ricarica (N) sia accesa con luce fissa (vedi Par. 5.4)

ATTENZIONE:
Il cavo di alimentazione, l'alimentatore, la prolunga e ogni altro cavo elettrico non appartenente al prodotto devono rimanere all'esterno dell'area di taglio per tenerli lontani da parti pericolose in movimento ed evitare danni ai cavi che possono portare a contatto con parti sotto tensione.
NOTA: Se necessario, è possibile estendere il cavo che alimenta la base di ricarica utilizzando i cavi di estensione. È consentito utilizzare al massimo due cavi di estensione da 5 metri (Vedi Cap. 9 "Accessori").
4.5.4. INSTALLAZIONE DEL RESISTORE PER PICCOLI PERIMETRI
Requisiti e obblighi:
Il cavo perimetrale utilizzato per l'installazione del robot rasaerba deve avere una lunghezza di almeno 40 metri. Se la lunghezza del cavo è inferiore, è necessario installare il resistore (Vedi Cap. 9 "Accessori") in serie al cavo perimetrale.
Procedura:
Dopo aver correttamente posizionato e fissato la base di ricarica (vedi par. 4.5.3), procedere come segue:
- Rimuovere il coperchio (C)
- Tagliare a misura esatta le estremità dei cavi.
- Applicare i connettori autoperforanti sul cavo (F),(G),(H). (Vedi par. 4.5.3)
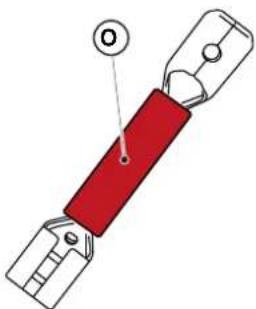
- Connettere il resistore (O) al morsetto (I) della base di ricarica.
- Connettere il rispettivo cavo perimetrale al resistore (O).
- Connettere l'altro cavo perimetrale direttamente all'altro morsetto della base di ricarica.
Requisiti e obblighi:
- Base di ricarica
Procedura:
- Ricaricare il robot rasaerba (Vedi Par. 5.5).
NOTA: Le batterie, alla prima ricarica, devono rimanere in carica per almeno 2 ore.
4.7. IMPOSTAZIONI DEL PRODOTTO
Requisiti e Obblighi:
Il funzionamento in automatico del robot rasaerba richiede una serie di impostazioni eseguibili tramite dispositivo mobile (smartphone) iOS o Android con l'App "STIGA.GO" installata.
L'app iOS è scaricabile da iOS App Store. L'app Android è scaricabile da Google Play Store.
Dall'App è possibile impostare le seguenti funzioni. Verificare in tabella le funzioni disponibili per il proprio modello:
- Avviare, fermare e forzare il rientro in base di ricarica del robot rasaerba.
- Selezionare la modalità di Lavoro in un'Area Chiusa non raggiungibile autonomamente dal robot rasaerba.
- Selezionare la modalità Lavoro Schedulato/Singolo Ciclo di Taglio.
- Programmare gli Orari di Lavoro nei giorni della settimana.
- Impostare i Punti di Inizio lavoro per rendere uniforme la copertura del giardino.
- Impostare i giorni della settimana in cui eseguire il taglio del bordo.
- Abilitare una modalità Eco a basso consumo energetico.
- Abilitare e impostare la sensibilità del Sensore Pioggia.
- Abilitare diversi utenti all'uso del robot rasaerba tramite app.
- Scegliere e contattare il proprio dealer di riferimento.
NOTA: Le immagini riportate in questa sezione sono puramente indicative e possono differire nel tempo da quelle dell'app del prodotto.
INDICE IMPOSTAZIONI DEL PRODOTTO
4.7.1. PRELOGIN 31
4.7.2. REGISTRAZIONE (SIGN UP) 31
4.7.3. ASSOCIAZIONE (PAIRING) 31
4.7.4. PAGINA PRODOTTO (DEVICE PAGE) 32
4.7.5. AREA CHIUSA (CLOSED AREA) 32
4.7.6. IMPOSTAZIONI (SETTINGS)......32
4.7.7. TAGLIO SINGOLO / PROGRAMMATO SCHEDULATO (SPOT CUT / SCHEDULED) 32
4.7.8. SESSIONI DI TAGLIO (MOWING SESSIONS).... 32
4.7.9. GO-TO-CUT POINTS 33
4.7.10. TAGLIO DEL BORDO (BORDER CUT) 33
4.7.11. ECO MODE....33
4.7.12. SENSORE PIOGGIA (RAIN SENSOR) (IN BASE AL MODELLO) 33
4.7.13. BLOCCO TASTIERA (APP LOCK) 33
4.7.14. GESTIONE UTENTE 35
4.7.15. RIVENDITORI (DEALER)...... 35
4.7.16. MESSAGGI (MESSAGES) 35
4.7.17. PROFILO (PROFILE) 35
4.7.1. PRELOGIN
Al primo accesso nell'app è possibile:
- Accedere alle pagine informative riguardanti i rivenditori e i prodotti STIGA;
- Eseguire la prima registrazione;
- Eseguire il Login per utenti già registrati.
4.7.2. REGISTRAZIONE (SIGN UP)
La sezione “Sign Up” permette la registrazione dell’utente e abilita l’accesso a tutte le funzioni dell’app.
- L'utente può eseguire l'accesso tramite il proprio account Google, Facebook e Apple, oppure creare un nuovo account compilando i campi richiesti.
- La procedura di registrazione necessita di una verifica tramite mail.
4.7.3. ASSOCIAZIONE (PAIRING)
La sezione “Pairing” permette di associare il proprio dispositivo mobile al robot rasaerba mediante connessione bluetooth.
- Premere sul bottone "aggiungi" per accedere alle pagine di associazione bluetooth.
- Seguire la procedura guidata per associare il prodotto.
- Completata l'associazione, verrà visualizzata la pagina principale del prodotto.
- Premere sul bottone "pagina prodotto" per accedere alla pagina di prodotto.
- Premere sul bottone “opzioni” per accedere alla pagina menù da cui è possibile rinominare, dissociare e connettere il Robot rasaerba, oppure scaricare il manuale d'uso.
NOTA: se il robot rasaerba non viene rilevato dal dispositivo mobile, verificare che il robot rasaerba sia acceso e che sia in prossimità del dispositivo mobile. Verificare che il robot rasaerba non sia già associato ad un altro utente.
4.7.4. PAGINA PRODOTTO (DEVICE PAGE)
La sezione “Device Page” permette di controllare lo stato del robot rasaerba, di avviarlo al lavoro o di forzare il rientro del robot rasaerba alla base di ricarica.
- Premere sul bottone "start" per avviare il robot rasaerba.
- Premere sul bottone "stop" per arrestare il robot rasaerba.
- Premere sul bottone "ritorno alla base" per forzare il rientro alla base del robot rasaerba.
- Premere sul bottone “area chiusa” per avviare il robot rasaerba al lavoro in un’area non raggiungibile autonomamente dal robot rasaerba. (Vedi Par. 4.7.5)
4.7.5. AREA CHIUSA (CLOSED AREA)
NOTA: Verificare la disponibilità di questa funzione sull'App STIGA.GO.
La sezione “Closed Area” permette di avviare il robot rasaerba in un’area chiusa normalmente esclusa dall’area di lavoro perché non raggiungibile, ma comunque delimitata dal cavo perimetrale. (Vedi Par. 4.4.3)
- Premere sul bottone dedicato per scegliere la modalità "Area chiusa".
- Disporre il robot rasaerba all'interno dell'area chiusa e seguire la procedura guidata.
NOTA: L'utente può scegliere se fare lavorare il robot rasaerba per l'intera durata dell'autonomia della batteria o per un tempo inferiore impostato manualmente.
4.7.6. IMPOSTAZIONI (SETTINGS)
La sezione “Settings” permette di accedere alla schermata di impostazioni del robot rasaerba.
- Premere sul bottone "impostazioni" per entrare nella modalità Settings.
- Selezionare la funzione di cui eseguire il settaggio.
4.7.7. TAGLIO SINGOLO / PROGRAMMATO SCHEDULATO (SPOT CUT / SCHEDULED)
Il selettore “Spot Cut/Scheduled” permette di attivare o disattivare il programma di lavoro schedulato. Il numero di ore settimanali da programmare sono suggerite dall’app in base alle dimensioni del giardino.
- Se impostato su "Scheduled" il robot rasaerba lavora secondo il programma di lavoro schedulato.
- Se impostato su "Spot Cut" il robot rasaerba lavora eseguendo un singolo ciclo di lavoro.
4.7.8. SESSIONI DI TAGLIO (MOWING SESSIONS)
La sezione “Mowing sessions” permette di programmare l’orario e le giornate di lavoro del robot rasaerba. Il numero di ore settimanali da programmare sono suggerite dall’app in base alle dimensioni del giardino.
- Premere sul selettore “taglio singolo/programmato” per accedere al menu impostazione degli orari di lavoro e selezionare un giorno della settimana.
- Premere il bottone "aggiungi tempo di taglio" per aggiungere un nuovo programma di lavoro.
- Inserire gli orari di inizio e fine lavoro e confermare.
- L'utente ha la possibilità di applicare lo stesso orario di lavoro a più giorni della settimana.
- L'orario di lavoro verrà visualizzato all'interno del giorno della settimana in cui è programmato. Premendo su ogni orario di lavoro è possibile copiarlo o cancellarlo.
NOTA: L'orologio interno del robot rasaerba viene automaticamente sincronizzato con l'orario presente sul dispositivo mobile ogni volta che il robot è connesso all'App tramite bluetooth.
4.7.9. GO-TO CUT POINTS
NOTA : Verificare la disponibilità di questa funzione sull'App STIGA.GO.
La sezione “Go-To Cut Points” permette di impostare uno o più punti di inizio di lavoro del robot rasaerba in modo da migliorare la copertura nelle diverse zone del giardino (vedi Par. 4.4). Il numero di punti di inizio lavoro impostabili dipende dal modello del robot rasaerba.
I punti di inizio lavoro sono definiti tramite i seguenti parametri:
- Distanza del punto di inizio lavoro rispetto alla base di ricarica misurata lungo cavo perimetrale.
- Direzione di raggiungimento del punto di lavoro (orario o antiorario).
- Frequenza di raggiungimento del punto di lavoro espressa in % del tempo di lavoro totale programmato settimanalmente.
4.7.10. TAGLIO DEL BORDO (BORDER CUT)
La sezione “Border cut” permette di programmare il taglio bordo del giardino in un determinato giorno.
- Scegliere i giorni in cui eseguire il taglio del bordo.
- Premere sul pulsante dedicato per abilitare la funzione.
NOTA: Il taglio del bordo può essere attivato solo per i giorni della settimana in cui il robot rasaerba è stato programmato al lavoro.
4.7.11. ECO MODE
NOTA : Verificare la disponibilità di questa funzione sull'App STIGA.GO.
La funzione “Eco mode” permette di impostare una modalità a basso consumo energetico riducendo percentualmente il tempo di lavoro del robot rasaerba rispetto alla programmazione eseguita dall’utente.
NOTA: E' consigliabile utilizzare questa funzione nei periodi dell'anno in cui l'erba cresce più lentamente.
4.7.12. SENSORE PIOGGIA (RAIN SENSOR) (IN BASE AL MODELLO)
La funzione “Rain sensor” permette di abilitare o disabilitare il sensore di pioggia presente sul robot rasaerba.
- Premere sul pulsante dedicato per abilitare la funzione.
- Scegliere tra i tre livelli di sensibilità del sensore pioggia disponibili.
4.7.13. BLOCCO TASTIERA (APP LOCK)
Per impedire l'utilizzo del robot rasaerba da parte di bambini o persone non autorizzate, è possibile bloccare il funzionamento della tastiera. In questo modo è possibile comandare il robot rasaerba solamente tramite App.
Procedura:
- Attivare o disattivare la funzione Blocco tastiera/App Lock dal menu “impostazioni” dell’app.
NOTA: Quando la funzione è attiva, il blocco tastiera rimane attivo anche se il robot rasaerba viene spento.
4.7.14. GESTIONE UTENTE
NOTA : Verificare la disponibilità di questa funzione sull'App STIGA.GO.
L'utente principale che ha eseguito la prima registrazione del prodotto può invitare altri utilizzatori alla gestione del robot rasaerba attraverso la procedura raggiungibile dal bottone dedicato.
NOTA: Gli utilizzatori aggiunti possono essere visualizzati e gestiti sempre dal menù dedicato.
NOTA: L'utente invitato deve scaricare l'App sul proprio dispositivo mobile e deve eseguire la registrazione.
4.7.15. RIVENDITORI (DEALER)
La sezione “Dealer” permette di scegliere il centro di assistenza di riferimento.
- Premendo sul bottone "dealer" si accede alla pagina da cui è possibile selezionare, tramite un elenco, il proprio Dealer di riferimento.
4.7.16. MESSAGGI (MESSAGES)
La sezione “Messages” permette di visualizzare messaggi\informazioni.
- Premendo sul bottone “messaggi” si accede alla pagina da cui è possibile visualizzare eventuali messaggi\informazioni da parte di STIGA destinati all'utente.
4.7.17. PROFILO (PROFILE)
La sezione “Profile” permette di accedere al profilo utente da cui l’utente può modificare i dati account e cambiare la password.
5. FUNZIONAMENTO
Requisiti e Obblighi:
- Installazione eseguita secondo le istruzioni (Vedi Cap.4)
- Programmazione del robot rasaerba eseguita secondo le istruzioni (Vedi Par. 4.7 per il funzionamento automatico)
- Base di ricarica alimentata • Altezza iniziale dell'erba nell'intervallo di operatività del robot rasaerba: 20-60 mm
- Batteria carica (Vedi Par. 5.5) • Altezza di taglio opportunamente regolata (Vedi Par. 5.6).
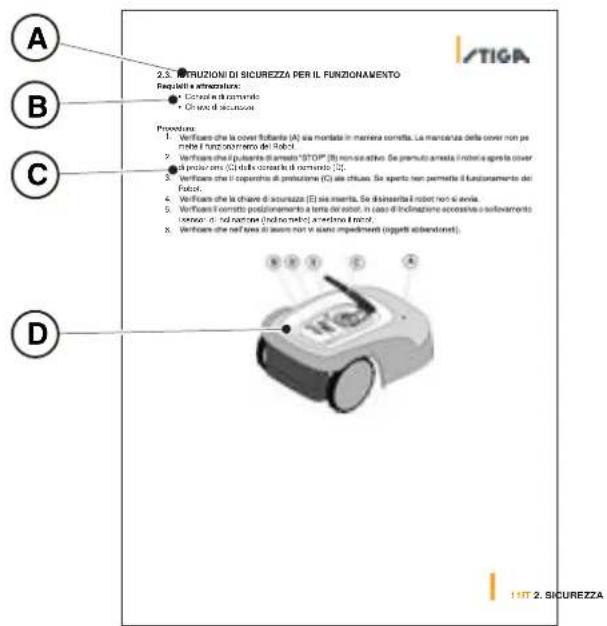
5.1. VERIFICA DELLE SICUREZZE PER L'AVVIO DEL ROBOT RASAERBA
Requisiti e obblighi:
• Chiave di sicurezza
Procedura:
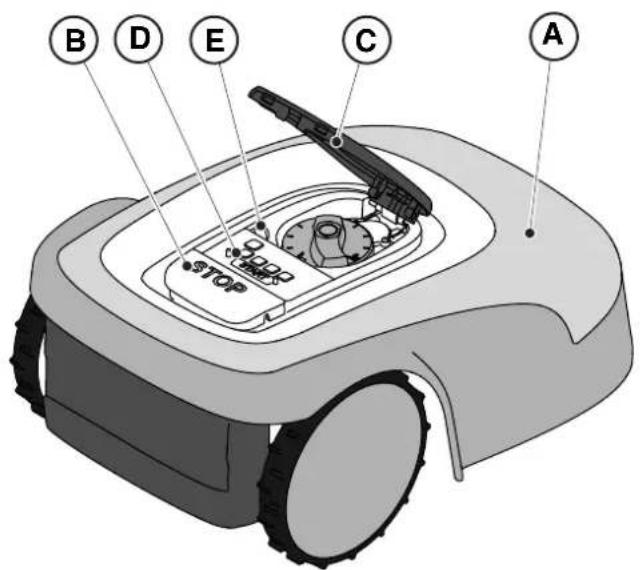
- Verificare che la cover flottante (A) sia montata in maniera corretta. La mancanza della cover non permette il funzionamento del robot rasaerba.
- Verificare che la chiave di sicurezza (E) sia inserita. Se disinserita il robot rasaerba non si avvia.
- Verificare che il pulsante di arresto " STOP" (B) non sia attivo. Se premuto, arresta il robot rasaerba e apre la cover di protezione (C) della consolle di comando (D).
- Verificare il corretto posizionamento a terra del robot rasaerba. In caso di una eccessiva inclinazione (≥ 45%) o sollevamento, i sensori di inclinazione (inclinometro) arrestano il robot rasaerba.
Il robot rasaerba può essere utilizzato senza eseguire la programmazione descritta nel Par. 4.7. In questa modalità il robot rasaerba esegue un ciclo di lavoro, ritorna in base di ricarica e vi rimane fino al successivo avvio manuale.
Procedura:
- Disporre il robot rasaerba sulla base di ricarica o comunque all'interno del perimetro dell'installazione.
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Premere il pulsante "ON/OFF" (E) per 5 secondi per accendere il robot rasaerba.
- Premere il pulsante "SELEZIONE MODALITÀ" (F), fino al lampeggio della sola icona (L).
- Premere il pulsante "CONFERMA" (G). L'icona (L) si illumina con luce fissa per confermare l'operazione.
- Chiudere la cover (B).
- Il robot rasaerba si avvierà al lavoro.
NOTA: questa modalità potrebbe non garantire una adeguata copertura del giardino, sia in termini di tempo necessario che in termini di uniformità del risultato di taglio, specialmente se il giardino ha una forma non regolare. Per raggiungere la massima efficienza del robot rasaerba è raccomandato eseguire la programmazione (Vedi Par. 4.7).
NOTA: se dopo aver premuto il pulsante “CONFERMA” (G), viene premuto il pulsante “SELEZIONE MODALITÀ”(F), le icone relative alle funzioni selezionate inizieranno nuovamente a lampeggiare, richiedendo la conferma della funzione appena selezionata. Premere il pulsante “CONFERMA” (G). Le icone ritorneranno ad illuminarsi con luce fissa.
NOTA: se la cover (B) viene aperta, sia durante il lavoro che con il robot in base, le icone relative alle funzioni selezionate lampeggiano, per indicare che è necessario confermare l'operazione prima di richiudere la cover. Se la cover viene richiusa senza premere il pulsante "CONFERMA" (G), il robot non effettuerà alcuna operazione fino ad un nuovo comando da parte dell'utente.
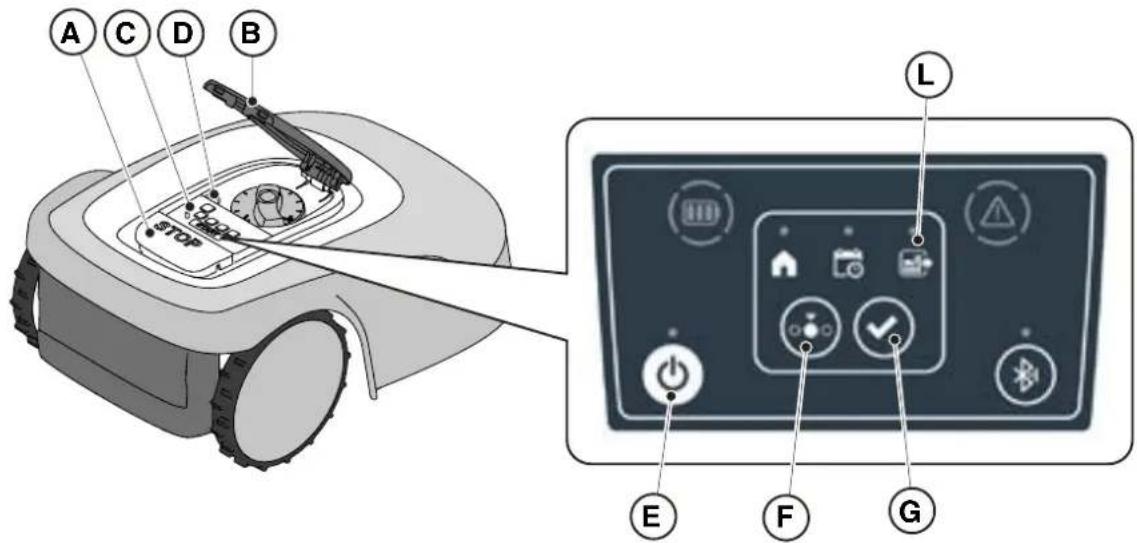
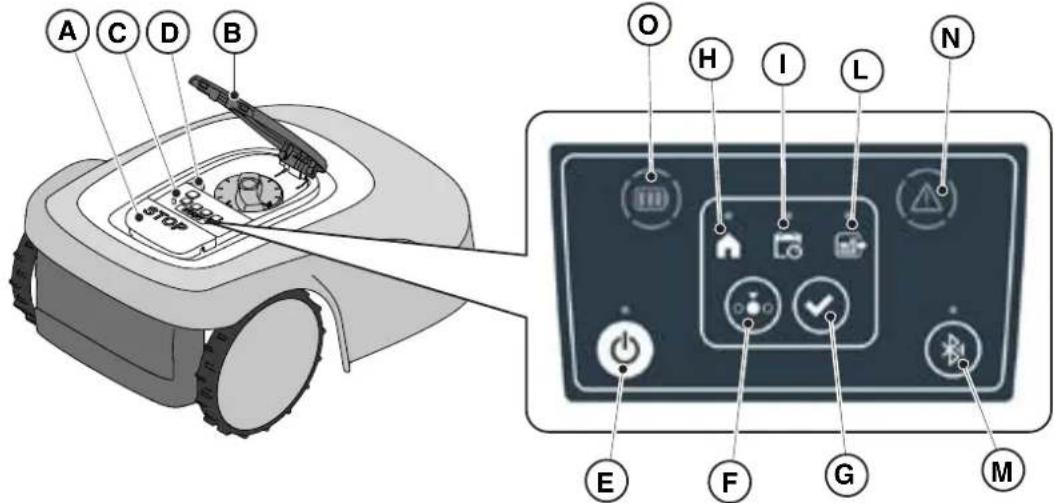
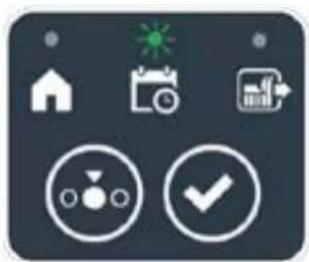
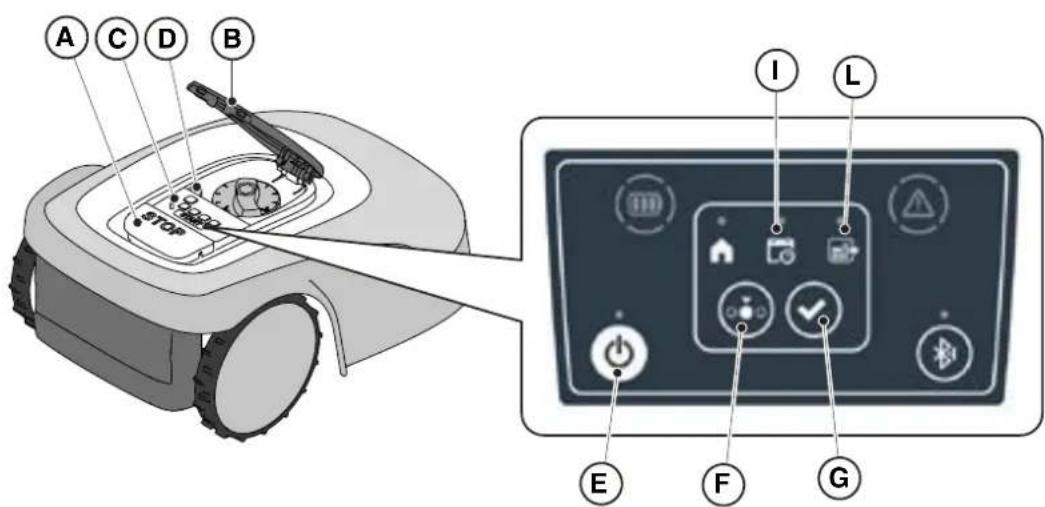
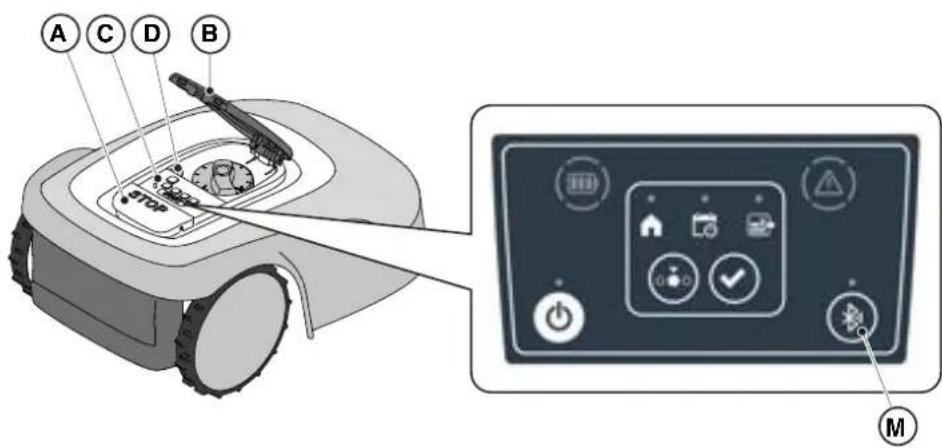
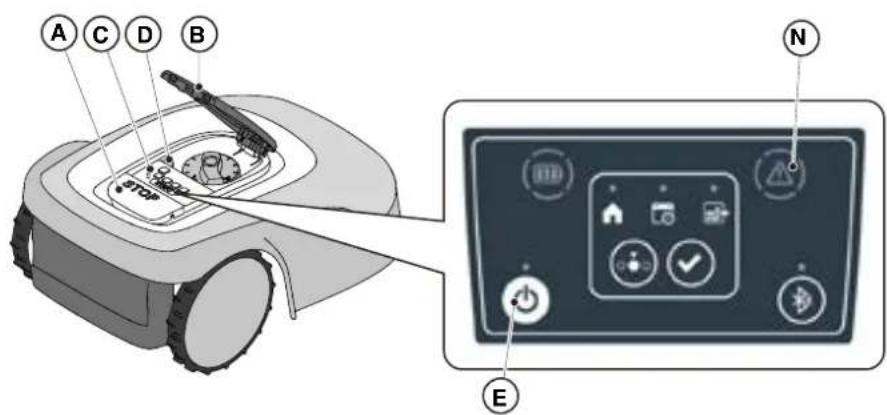
5.3. DESCRIZIONE DEI COMANDI PRESENTI SUL ROBOT RASAERBA
Elenco comandi, indicatori e loro funzione:
- Pulsante "STOP" (A): serve per l'arresto di sicurezza del robot rasaerba.
- "CHIAVE DI SICUREZZA" (D): serve per lo spegnimento di sicurezza del robot rasaerba.
- Pulsante "ON/OFF" (E): serve all'accensione e spegnimento del robot rasaerba e al reset degli allarmi.
- Pulsante “SELEZIONE MODALITÀ” (F): serve per selezionare la modalità operativa del robot rasaerba e per forzare il ritorno alla base di ricarica.
- Pulsante "CONFERMA" (G): serve a confermare la modalità operativa impostata.
- Icona luminosa “PROGRAMMA SCHEDULATO” (I): serve alla visualizzazione dell’impostazione del programma schedulato.
- Icona luminosa “SINGOLO CICLO DI LAVORO” (L): serve alla visualizzazione dell'impostazione del singolo ciclo di lavoro.
- Icona luminosa "RITORNO ALLA BASE" (H): serve a visualizzare l'impostazione del ritorno forzato in base di ricarica del robot rasaerba.
- Pulsante "BLUETOOTH" (M): serve alla visualizzazione dello stato bluetooth.
- Icona luminosa "ALLARME" (N): serve alla visualizzazione stati di allarme.
- Icona luminosa "BATTERIA" (O): serve alla visualizzazione della carica della batteria.
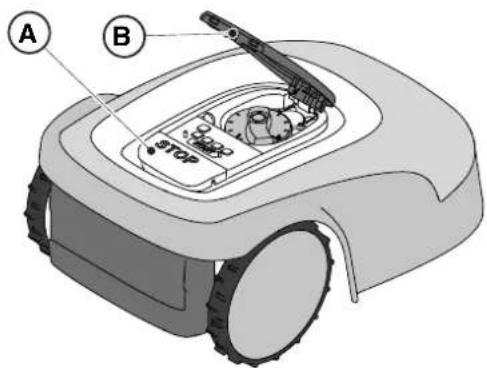
Il pulsante "STOP" (A) è un comando che arresta il robot rasaerba in condizioni di sicurezza, qualsiasi sia la sua condizione di funzionamento.
Procedura:
- Premere il pulsante "STOP" (A) mentre il robot rasaerba è in movimento o già fermo.
- Alla pressione del pulsante di "STOP" (A) il robot rasaerba si ferma e si apre la cover (B) che consente l'accesso agli altri comandi del robot.
text_image
A
B
STOP
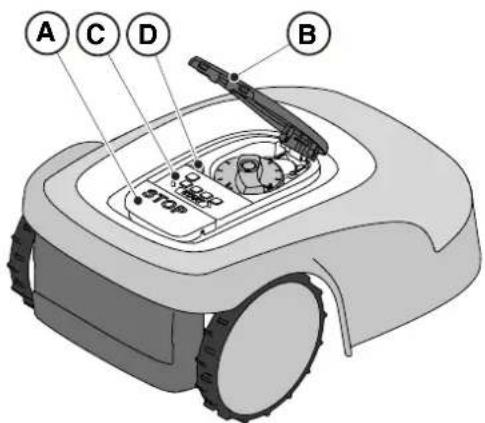
5.3.2. SPEGNIMENTO IN SICUREZZA - CHIAVE DI SICUREZZA
La chiave di sicurezza (D), tramite disinserimento, consente lo spegnimento in sicurezza del robot rasaerba.

OBBLIGO:
Rimuovere sempre la chiave di sicurezza prima di ogni operazione di regolazione dell'altezza di taglio, pulizia, trasporto e manutenzione
Procedura:
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Estrarre la chiave di sicurezza (D) e conservarla in un luogo sicuro.
- Dopo avere eseguito le operazioni di manutenzione inserire la chiave di sicurezza per poter accendere il robot rasaerba.
text_image
A C D B
STOP
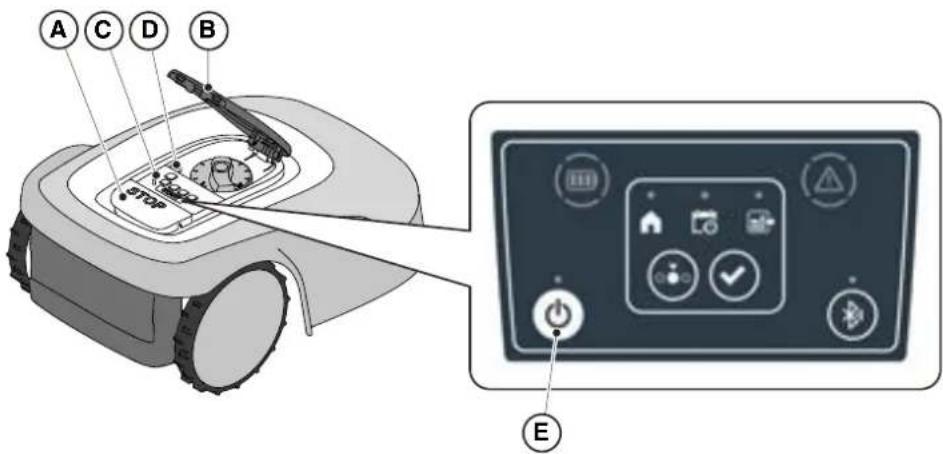
5.3.3. ACCENSIONE E SPEGNIMENTO - PULSANTE ON/OFF
Il pulsante "ON/OFF" (E) permette l'accensione e lo spegnimento manuale del robot rasaerba.
Procedura:
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Premere il pulsante "ON/OFF" (E) per 5 secondi per accendere o spegnere il robot rasaerba.
NOTA: Per l'accensione del robot rasaerba è necessario che la chiave di sicurezza (D) sia inserita.
NOTA: La rimozione della chiave di sicurezza (D) comporta lo spegnimento del robot rasaerba, anche se esso non è stato precedentemente spento tramite il tasto "ON/OFF".
NOTA: In caso di allarmi attivi, una doppia pressione del pulsante "ON/OFF" resetta gli allarmi.
Il pulsante “SELEZIONE MODALITÀ” permette di attivare o disattivare la programmazione di lavoro impostata tramite App e di selezionare il ritorno forzato in base di ricarica. Il robot rasaerba si comporta secondo le possibili selezioni di seguito descritte.
SELEZIONI TASTIERA E FUNZIONAMENTO DEL ROBOT
PROGRAMMA SCHEDULATO
Il robot rasaerba lavora seguendo la programmazione impostata tramite app.
RITORNO ALLA BASE + PROGRAMMA SCHEDULATO
Il robot rasaerba ritorna alla base di ricarica.
Il robot rasaerba riprende a lavorare dal successivo orario di partenza impostato.
SINGOLO CICLO DI LAVORO + PROGRAMMA SCHEDULATO
Il robot rasaerba esegue un singolo ciclo di lavoro forzato e al termine ritorna alla base di ricarica.
Il robot rasaerba riprende a lavorare dal successivo orario di partenza impostato.
SINGOLO CICLO DI LAVORO
Il robot rasaerba esegue un singolo ciclo di lavoro forzato e ritorna alla base di ricarica.
Il robot rasaerba rimane nella base fino ad un intervento manuale dell'utente.
RITORNO ALLA BASE + SINGOLO CICLO DI LAVORO
Il robot rasaerba ritorna alla base di ricarica.
Il robot rasaerba rimane nella base fino ad un intervento manuale dell'utente.
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Premere il pulsante "SELEZIONE MODALITÀ" (F), fino al lampeggio delle icone relative alle funzioni che si desidera attivare. Le icone relative alle funzioni selezionate lampeggiano.
- Premere il pulsante "CONFERMA" (G). Le icone relative alle funzioni selezionate si illuminano con luce fissa per confermare l'operazione.
- Chiudere la cover (B).
- Il robot rasaerba si avvierà al lavoro secondo la modalità impostata.
NOTA: se dopo aver premuto il pulsante “CONFERMA” (G), viene premuto il pulsante “SELEZIONE MODALITÀ” (F), le icone relative alle funzioni selezionate iniziano nuovamente a lampeggiare, richiedendo la conferma della funzione appena selezionata. Premere il pulsante “CONFERMA” (G). Le icone ritornano ad illuminarsi con luce fissa.
NOTA: se la cover (B) viene aperta, sia durante il lavoro che con il robot in base, le icone relative alle funzioni selezionate lampeggiano, per indicare che è necessario confermare l'operazione prima di richiudere la cover. Se la cover viene richiusa senza premere il pulsante "CONFERMA" (G), il robot non effettua alcuna operazione fino ad un nuovo comando da parte dell'utente.
NOTA: Se la batteria del robot è scarica, l'icona della batteria lampeggia con colore rosso ad indicare che non è possibile eseguire l'azione selezionata.
NOTA: Il robot rasaerba si avvia solo dopo la chiusura della cover (B).
NOTA: Il robot rasaerba raggiunge la base di ricarica con il dispositivo di taglio spento.
NOTA: il robot rasaerba può essere utilizzato nella modalità “SINGOLO CICLO DI LAVORO” anche senza eseguire la programmazione degli orari di lavoro tramite App. Questa modalità potrebbe non garantire una adeguata copertura del giardino, sia in termini di tempo necessario che in termini di uniformità del risultato di taglio, specialmente se il giardino ha una forma non regolare. Per raggiungere la massima efficienza del robot rasaerba è raccomandato eseguire la programmazione (Vedi Par. 4.7).
5.3.5. VISUALIZZAZIONE DELLO STATO BLUETOOTH - PULSANTE BLUETOOTH
Il robot rasaerba gestisce automaticamente la connessione Bluetooth con i dispositivi mobili esterni. La connessione Bluetooth è disponibile in qualsiasi momento quando il robot rasaerba è acceso. E' possibile collegare un solo dispositivo mobile alla volta al robot rasaerba tramite Bluetooth. Il robot rasaerba si disconnette automaticamente dal dispositivo alla chiusura dell'app. Il pulsante "BLUETOOTH" (M) viene utilizzato solamente dal centro assistenza per attività di diagnostica.
NOTA: Per l'associazione del dispositivo al robot rasaerba tramite Bluetooth vedere il (Par. 4.7.3 Pairing).
5.3.6. VISUALIZZAZIONE DI STATI DI ALLARME - ICONA ALLARME
L'icona luminosa "ALLARME" (N) indica un' anomalia nel funzionamento.
Procedura:
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Verificare lo stato di allarme tramite l'icona luminosa rossa (N):
- Dopo aver risolto l'anomalia, premere due volte in rapida sequenza il pulsante "ON/OFF" (E) per resettare l'allarme. L'icona luminosa (N) si spegne, ed è possibile riavviare il robot rasaerba. Se l'icona (N) non si spegne, estrarre la chiave di sicurezza (D), attendere qualche secondo e quindi riaccendere il robot rasaerba con il tasto "ON/OFF" (E). Se il problema persiste, contattare un centro assistenza.
NOTA: I dettagli sulle anomalie sono visualizzabili tramite App.
5.3.7. VISUALIZZAZIONE DELLA CARICA DELLA BATTERIA - ICONA BATTERIA
L'icona luminosa "BATTERIA" (O) permette di visualizzare lo stato di carica della batteria.
Procedura:
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
-
Verificare lo stato di carica della batteria tramite l'icona luminosa (O):
-
Icona blu: la batteria è carica (livello di carica >40 %).
- Icona rossa: la batteria si sta scaricando (livello di carica 15-40 %).
-
Icona rossa lampeggiante: la batteria è scarica (livello di carica <15%).
-
Se il robot rasaerba è in fase di ricarica, l'icona luminosa (O) lampeggia di colore blu.
NOTA: se alla pressione di un comando l'icona batteria (O) esegue un lampeggio veloce con luce rossa, l'operazione non può essere eseguita e sarà necessario caricare la batteria manualmente (Vedi cap. 5.5).
text_image
A C D B
O
5.3.8. AVVIO DEL ROBOT RASAERBA
Per l'avvio del robot rasaerba è necessario seguire la procedura descritta nel Par. 5.3.4 "SELEZIONE PROGRAMMA SCHEDULATO / SINGOLO CICLO DI LAVORO / RITORNO FORZATO IN BASE DI RICARICA – PULSANTE SELEZIONE MODALITÀ"
5.4. FUNZIONAMENTO DELLA BASE DI RICARICA
La base di ricarica è provvista di una spia luminosa (N) che si illumina come riportato di seguito:
- Spia spenta: la base di ricarica è disalimentata o il robot è in base;
- Spia con luce fissa: il cavo perimetrale è correttamente connesso alla base di ricarica e il segnale perimetrale è correttamente trasmesso;
- Spia con lampeggio lento: il cavo perimetrale non è connesso oppure è interrotto (la verifica dell'integrità del cavo perimetrale non è continua, ma è eseguita all'uscita del robot dalla base di ricarica o quando la base viene alimentata);
- Spia con lampeggio veloce: il cavo perimetrale è troppo corto (Vedi Par. 4.5.4) oppure è presente un guasto nella base di ricarica.
- Spia con doppio o triplo lampeggio veloce: la base di ricarica ha rilevato un corto circuito sui contatti di ricarica. (Vedi Cap. 7)
La procedura "CARICAMENTO BATTERIA" permette di ricaricare il robot rasaerba manualmente.
Requisiti e obblighi:
- Base di ricarica connessa alla rete elettrica.
Procedura:
- Posizionare il robot rasaerba sulla base di ricarica (R).
- Far scorrere il robot rasaerba sulla base di ricarica, fino all'innesto del connettore di ricarica (S).
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Accendere il robot rasaerba tramite il tasto "ON/OFF" (E).
- L'icona luminosa "BATTERIA" (O) lampeggia con colore blu, il robot rasaerba è in ricarica.
- Chiudere la cover (B).
- Lasciare il robot rasaerba in carica per un tempo almeno pari a quello riportato nel Par. 4.6.
NOTA: La ricarica della batteria prima dello stoccaggio invernale deve essere eseguita secondo quanto riportato nel Par. 6.4.
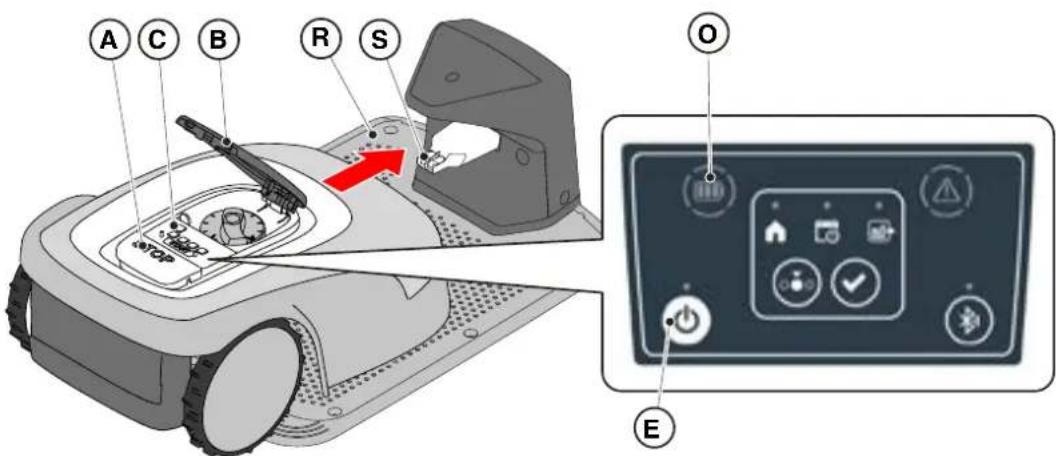
5.6. REGOLAZIONE ALTEZZA DI TAGLIO
La procedura "REGOLAZIONE ALTEZZA DI TAGLIO" descrive come regolare l'altezza delle lame di taglio.
- La lunghezza X di erba tagliata dal robot rasaerba non deve superare 10mm.
- L'intervallo di operatività del robot rasaerba è 20-60 mm (altezza di taglio).
• L'altezza iniziale dell'erba Y deve quindi essere al massimo 70mm.
Alla prima installazione o all'inizio della stagione di taglio, se necessario preparare il giardino con un
rasaerba tradizionale per portare l'altezza iniziale dell'erba a un valore adeguato.
NOTA: Se si desidera tagliare l'erba per più di 10mm, regolare l'altezza di taglio in modo che la parte di erba tagliata sia 10 mm. Abbassare ulteriormente l'altezza di taglio solo dopo che il giardino è stato rasato in maniera uniforme.
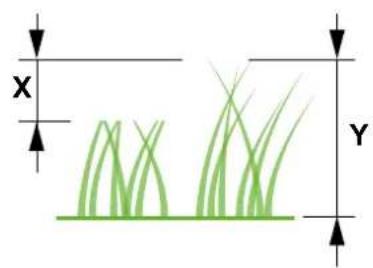
- Premere il pulsante "STOP" (A) per aprire la cover (B) ed accedere alla consolle di comando (C).
- Disinserire la chiave di sicurezza (D).
- Agire sul regolatore di altezza (P) per selezionare l'altezza di taglio desiderata in modo che la parte di erba tagliata non sia superiore a 1 cm.
- Inserire la chiave di sicurezza (D).
NOTA: Sulla manopola è presente una scala graduata da 1 a 10 (Q) da usare come riferimento.
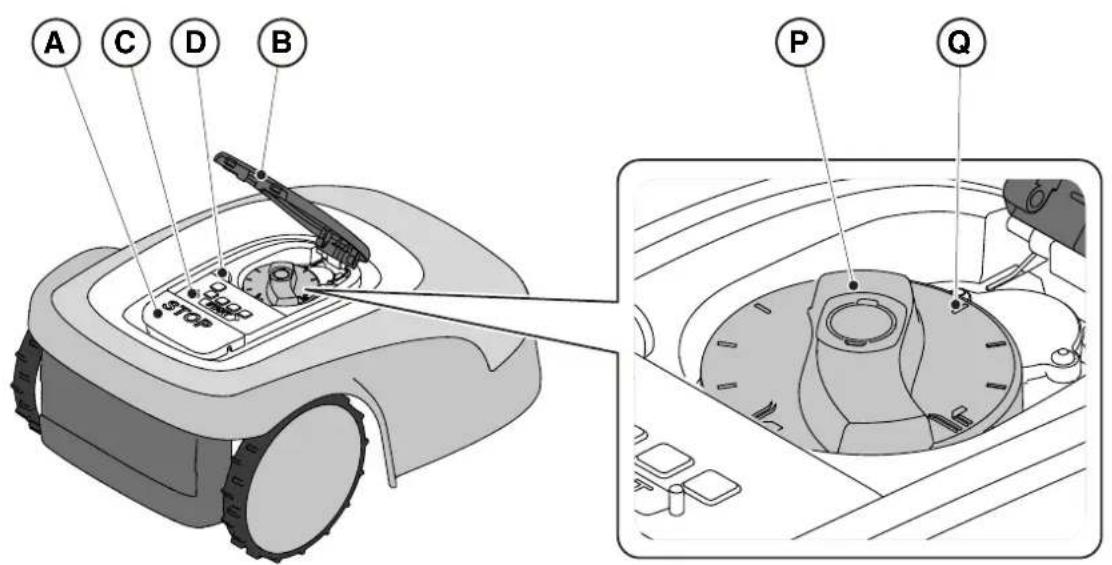
 | AVVERTENZA:Utilizzare solo ricambi originali. |  | AVVERTENZA:Non modificare, non manomettere, non eludere, non eliminare i dispositivi di sicurezza installati. |
Per un migliore funzionamento e una maggiore durata, assicurarsi di pulire regolarmente il prodotto e sostituire le parti usurate.
Eseguire gli interventi alla frequenza indicata in tabella.
| FREQUENZA COMPONENTE TIPO DI INTERVENTO RIFERIMENTO | |
| Settimanale Lama Pulire e | controllare l'efficienza | della lama. | (Vedi Par. 6.2) |
| Se la lama è piegata a causa di un urto o se usurata, sostituirla. | (Vedi Par. 6.3) |
| Contatti di ricarica Pulire ed eliminare le eventuali ossidazioni. | (Vedi Par. 6.2) |
| Mensile Robot rasaerba Effettuare la pulizia. (Vedi Par. 6.2) | |
| Base di ricarica e cavi di alimentazione Controllare usura o deterioramento e se necessario sostituirli. (Rivolgersi ad un centro assistenza autorizzato) |
| Al termine della stagione di taglio o semestrale se il robot rasaerba non è utilizzato | Batteria Eseguire la ricarica pre-stoccaggio della batteria. | (Vedi Par. 6.4) |
| Annuale o al termine della stagione di Taglio | Robot rasaerba Eseguire il tagliando presso un centro di assistenza autorizzato. | (Vedi Par. 6.1) |
E' necessario effettuare annualmente un tagliando di manutenzione presso un centro assistenza autorizzato per mantenere il robot rasaerba in buone condizioni di funzionamento.
Il tagliando prevede una serie di verifiche tra cui:
- la pulizia interna ed esterna del robot rasaerba;
- la verifica generale dello stato del robot rasaerba;
• la sostituzione di parti usurate;
- la verifica dello stato della batteria;
- la verifica delle coppie di serraggio;
- la verifica ed eventuale sostituzione dei cinematismi di urto e sollevamento e dei loro soffietti di protezione;
- la verifica ed eventuale sostituzione del soffietto in gomma di protezione del motore lama per mantenere le specifiche di protezione da infiltrazioni di acqua;
- la sostituzione delle guarnizioni di chiusura delle scocche e del vano batteria per mantenere le specifiche di protezione da infiltrazioni di acqua.
NOTA: eventuali guasti dovuti alla mancata esecuzione del tagliando annuale non verranno riconosciuti in garanzia.
6.2. PULIZIA PRODOTTO

AVVERTENZA:
Pericolo di taglio mani.

AVVERTENZA:
Pericolo di pulviscolo negli
occhi.
Requisiti e Obblighi:
- Spugna • Panno asciutto
- Sapone neutro • Guanti
- Spazzola • Occhiali
- Acqua

OBBLIGO GUANTI:
Usare guanti di protezione per
evitare pericoli di taglio alle
mani.

OBBLIGO OCCHIALI:
Usare occhiali di protezione per
evitare pericoli di pulviscolo
negli occhi.
Procedura:
- Premere il pulsante "STOP" (A) per arrestare il robot rasaerba e aprire la cover di protezione (B).
- Disinserire la chiave di sicurezza (C).
- Rimuovere la cover flottante (D) per agevolare le operazioni di pulizia.
- Pulire tutte le superfici esterne del robot rasaerba con una spugna inumidita in acqua tiepida e sapone neutro.
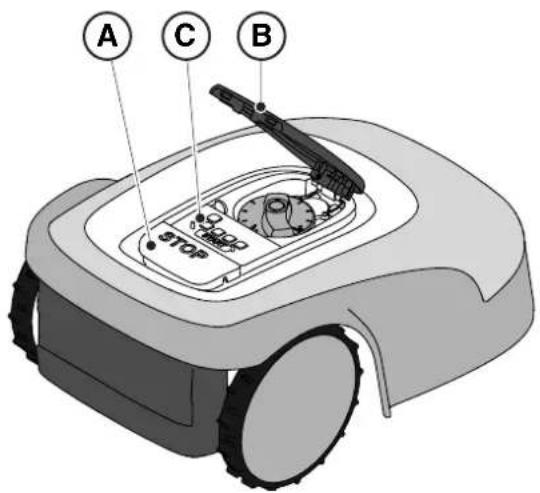
text_image
A
C
B
STOP
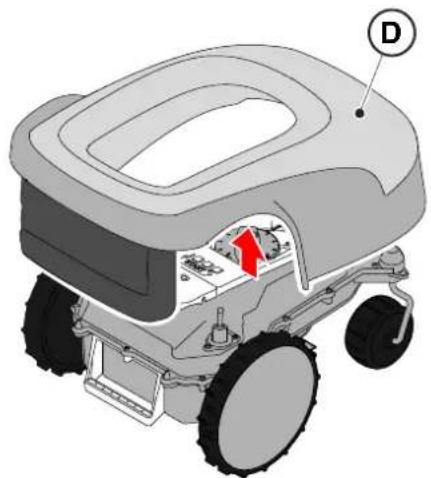
L'uso eccessivo di acqua può causare infiltrazioni danneggiando i componenti elettrici.

ATTENZIONE:
Non modificare, non manomettere, non eludere, non eliminare i dispositivi di sicurezza installati.

DIVIETO:
Non utilizzare getti d'acqua in pressione.

DIVIETO:
Per non danneggiare i componenti elettrici ed elettronici in modo irreversibile, non immergere il robot rasaerba, parzialmente o completamente, in acqua.

DIVIETO:
Non lavare le parti interne del robot rasaerba per non danneggiare i componenti elettrici ed elettronici.

DIVIETO:
Non utilizzare solventi o benzina per non danneggiare le superfici verniciate e i componenti in plastica.
- Rimuovere fango e sporco dalle ruote motrici (F).
- Pulire la parte inferiore (E) del robot rasaerba (zona lama di taglio, ruote anteriori e posteriori). Utilizzare una spazzola adeguata per rimuovere le incrostazioni e/o i residui che potrebbero ostacolare il buon funzionamento del robot rasaerba. Completare la pulizia con una spugna inumidita.
- Rimontare la cover flottante (D) facendo attenzione che sia correttamente agganciata ai supporti.
- Pulire il connettore di ricarica batterie (G).
- Pulire la base di ricarica (H) ed il connettore di contatto (I) dai residui accumulati.
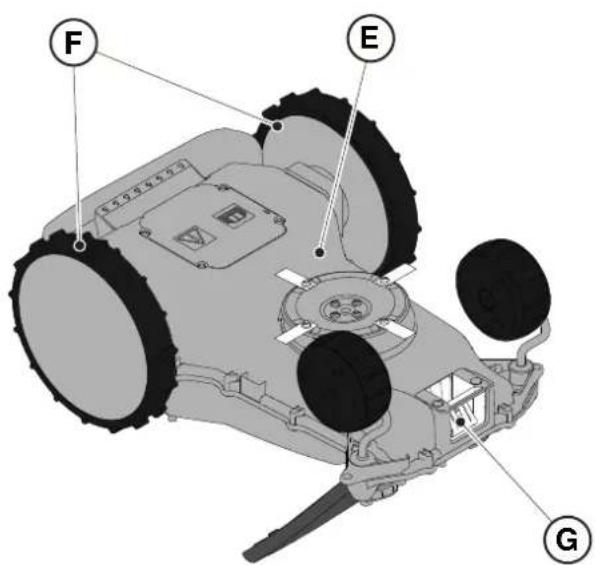
6.3. SOSTITUZIONE LAME DI TAGLIO

AVVERTENZA:
Pericolo di taglio mani.
Requisiti e Obblighi:
• Chiave di sicurezza • Chiave
• Lame di taglio • Guanti

OBBLIGO GUANTI:
Usare guanti di protezione per evitare pericoli di taglio alle mani.
Procedura:
- Premere il pulsante "STOP" (A) per arrestare il robot rasaerba e aprire la cover di protezione (B).
- Disinserire la chiave di sicurezza (C).
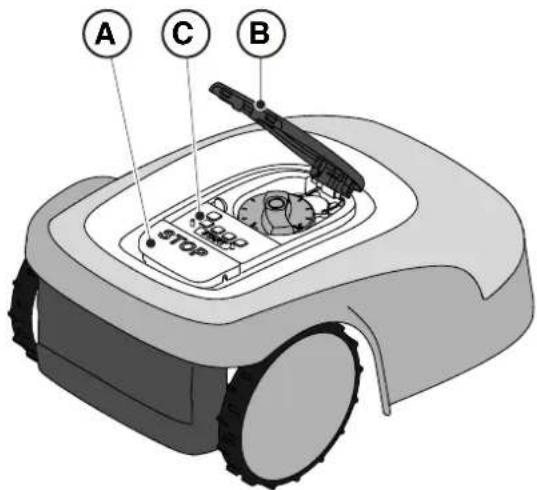
text_image
A
C
B
STOP
- Capovolgere il robot rasaerba facendo attenzione a non danneggiare la cover flottante di copertura.
- Svitare le viti di fissaggio (E).
- Sostituire le lame di taglio (D).
- Serrare le viti di fissaggio (E).
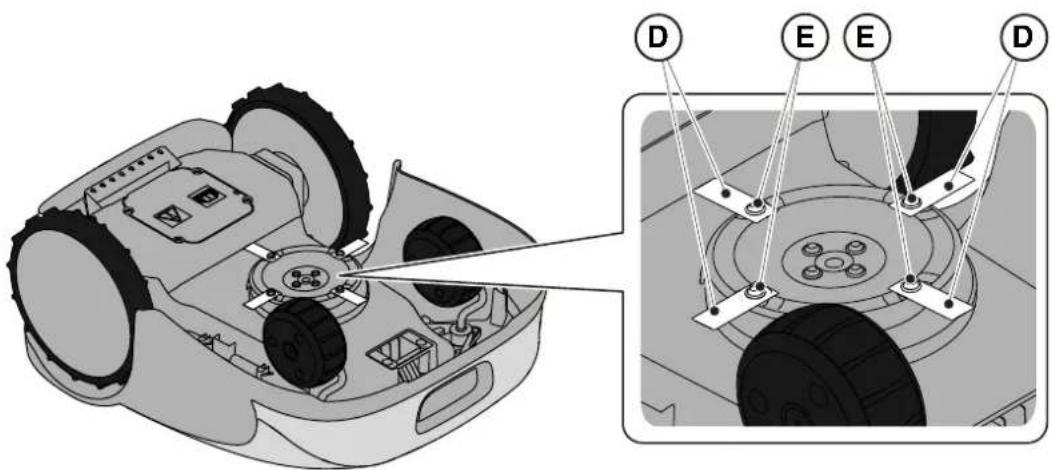
6.4. MANUTENZIONE INVERNALE DELLA BATTERIA E STOCCAGGIO
Procedura:
- Caricare la batteria secondo la procedura guidata in App, accessibile dalla pagina "Impostazioni".
- Pulire il robot rasaerba (Vedi Par. 6.2).
- Conservare il robot rasaerba in un luogo asciutto e al riparo dal gelo, assicurandosi che sia spento.
- La batteria deve essere ricaricata ogni 6 mesi e in ogni caso prima dello stoccaggio invernale.
NOTA: La procedura guidata registra in cloud l'avvenuta ricarica della batteria ed è da considerarsi conclusa se la data di avvenuta ricarica pre-stoccaggio invernale viene aggiornata.
NOTA: La registrazione della ricarica tramite procedura in app è necessaria ai fini della validità della garanzia della batteria.
NOTA: La batteria deve essere ricaricata ogni 6 mesi e in ogni caso prima dello stoccaggio invernale.

6.5. SOSTITUZIONE BATTERIA
La sostituzione della batteria è di esclusiva competenza del PERSONALE DI ASSISTENZA TECNICA DI STIGA.
Qualora fosse necessaria la sostituzione della batteria contattare un centro assistenza o il proprio rivenditore.
7. RISOLUZIONE DEI PROBLEMI

AVVERTENZA:
Arrestare il robot rasaerba e riportarlo in condizioni di sicurezza (Vedi Par. 5.3.2).
Di seguito è riportato l'elenco di eventuali anomalie che potrebbero presentarsi in fase di lavoro.
| INCONVENIENTE CAUSE RIMEDI | |
| Vibrazioni anomale.Il robot rasaerba è rumoroso. | Disco o lame di taglio danneggiate | Sostituire i componenti danneggiati (Vedi Par. 6.3). |
| Dispositivo di taglio bloccato da residui (nastri, corde, frammenti di plastica, ecc.). | Spegnere il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Sbloccare la lama di taglio. |
| L'avvio del robot rasaerba è avvenuto in presenza di ostacoli non previsti (rami caduti, oggetti dimenticati, ecc.). | Spegnere il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Rimuovere gli ostacoli e riavviare il robot rasaerba (Vedi Par. 5.3.9). |
| Motore elettrico in avaria. Sostituire | il motore, rivolgersi al centro assistenza autorizzato più vicino. |
| Erba troppo alta. Aumentare l'altezza di taglio (Vedi Par. 5.6). |
| Effettuare un taglio preliminare dell'area con un normale rasaerba (Vedi Par. 5.6). |
| Il robot rasaerba non si posiziona correttamente all'interno della stazione di ricarica. | Posizione errata del cavo perimetrale. | Verificare il collegamento della stazione di ricarica (Vedi Par. 4.5.3). |
| Cedimento del terreno in prossimità della base di ricarica. | Ripristinare il corretto posizionamento della base di ricarica. (Vedi Par. 4.5.3). |
| Il robot rasaerba si comporta in modo anomalo attorno a ostacoli perimetrati. | Cavo perimetrale posato erroneamente. | Riposizionare il cavo perimetrale correttamente (senso orario) (Vedi Par. 4.5.1). |
| Il robot rasaerba lavora in orari sbagliati. | Orario di lavoro impostato erroneamente. | Reimpostare l'orario di lavoro (Vedi Par. 4.7.8). |
| L'area di lavoro non viene rasata completamente. | Ore di lavoro insufficienti. Prolungare l'orario di lavoro (Vedi Par. 4.7.8). |
| Dispositivo di taglio con incrostazioni e/o residui. | Spegnere il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Pulire il dispositivo di taglio. |
| Lame di taglio pivotanti bloccate da incrostazioni o residui. | Spegnere il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Sostituire le lame di taglio. |
| Area della zona di lavoro eccessiva rispetto alla capacità del robot rasaerba. | Ridurre l'area di lavoro (Vedi Dati Tecnici Par. 1.2). |
| Le batterie stanno per esaurire il loro ciclo di vita. | Sostituire le batterie con ricambi originali (Vedi Par. 6.5). |
| La ricarica delle batterie non avviene in modo completo. | Pulire ed eliminare eventuali ossidazioni dai punti di contatto (Vedi Par. 6.2). Ricaricare le batterie. |
| Parti di giardino non completamente rasate. | Programmazione Cut Point errata. | Programmare correttamente i Cut Point secondari (Vedi Par. 4.7.9). |
| La spia della base di ricarica non si accende quando il robot è fuori dalla base di ricarica. | Manca la tensione di alimentazione oppure è presente un guasto nella base di ricarica. | Verificare il corretto allacciamento alla presa di corrente dell'alimentatore.Verificare l'integrità del cavo di collegamento dell'alimentatore. |
| La spia della base di ricarica si accende con lampeggio lento. | Il cavo perimetrale non è connesso oppure è interrotto | Verificare l'installazione e riparare la rottura (Vedi Par. 4.5.2) |
| La spia della base di ricarica si accende con lampeggio veloce. | Il cavo perimetrale è troppo corto oppure è presente un guasto nella base di ricarica. | Verificare che la lunghezza del cavo perimetrale sia maggiore di quanto indicato nel Par. 4.5.1. Se necessario, installare il resistore (Vedi Par. 4.5.4). Se il problema persiste contattare un centro assistenza. |
| La spia della base di ricarica si accende con doppio o triplo lampeggio veloce. | La base di ricarica ha rilevato un corto circuito sui contatti di ricarica. | Disconnettere la base di ricarica dalla rete elettrica, rimuovere eventuali cortocircuiti e pulire i contatti di ricarica della base e del robot. Riconnettere la base di ricarica alla rete elettrica. Se il problema persiste contattare un centro assistenza. |
| Sulla tastiera è accesa l'icona di Warning. | Segnala condizioni di Anomalia/ Guasto. | Consultare l'app per maggiori info o contattare un centro assistenza. |
7.1. PRINCIPALI MESSAGGI DA APP
| INCONVENIENTE CAUSE RIMEDI | |
| Sull'App compare “No Segnale” mentre il robot rasaerba è all'interno del perimetro e il led del trasmettitore nella base di ricarica è acceso. | Problema del Robot Rasaerba nella ricezione del segnale. | Contattare un centro assistenza autorizzato. |
| Sull'App compare “Fuori Perimetro”. | Pendenza eccessiva del terreno Delimitare l'area con eccessiva pendenza (Vedi Par. 4.3). |
| Cavo perimetrale posato erroneamente. | Verificare che il cavo sia installato correttamente (profondità eccessiva, vicinanza ad oggetti metallici, distanza tra il cavo che delimita due elementi, ecc..). (Vedi Par. 4.5.1). |
| Cavo perimetrale di delimitazione aree interne (aiuole, cespugli, ecc.) posato in modo errato. | Riposizionare il cavo perimetrale correttamente (aggirare l'ostacolo nello stesso verso di percorrenza del perimetro.) (Vedi Par. 4.5.1). |
| Alimentatore surriscaldato. Adottare | soluzioni adeguate per ridurre la temperatura dell'alimentatore (arieggiare o modificare la zona di installazione, ecc.) (Vedi Par. 4.3). |
| Sull'App compare "Robot Sollevato" | Il robot rasaerba risulta sollevato da terra. | Verificare che il robot rasaerba non sia bloccato o ostruito da qualche oggetto. Pulire ed eliminare eventuali residui di erba sotto la scocca che possano ostruire i sensori (Vedi Par. 6.2). |
| Sull'App compare “Errore Ruota”. | Terreno accidentato o con ostacoli che impediscono il movimento. | Verificare che il prato da rasare sia uniforme e privo di buche, sassi o altri ostacoli.In caso contrario effettuare le necessarie operazioni di bonifica (Vedi Par. 4.3). |
| Uno o entrambi i motori che azionano la trasmissione delle ruote in avaria. | Sostituire il motore, rivolgersi al centro assistenza autorizzato più vicino. |
| Sull'app compare “Erba alta” o “Errore Taglio”. | Disco di taglio bloccato o danneggiato. | Arrestare il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Sbloccare il disco di taglio da oggetti che ne provocano il blocco o sostituire il disco di taglio con uno nuovo (Vedi Par. 6.3). |
| Lame di taglio pivotanti usurate o bloccate da incrostazioni o residui. | Arrestare il robot rasaerba in condizioni di sicurezza (Vedi Par. 2.3). Sbloccare e pulire o sostituire le lame di taglio (Vedi Par. 6.3). |
| L'avvio del robot rasaerba è avvenuto in presenza di ostacoli non previsti (rami caduti, oggetti dimenticati, ecc). | Arrestare il robot rasaerba in condizione di sicurezza (Vedi Par. 2.3). Rimuovere gli ostacoli e riavviare il robot rasaerba. |
| Motore elettrico in avaria. Sostituire | il motore, rivolgersi al centro assistenza autorizzato più vicino. |
| Erba troppo alta. Aumentare l'altezza | di taglio (Vedi Par. 5.6). Effettuare un taglio perimetrale. |
| Sull’ App compare “Ribaltamento” | Il robot rasaerba si trova su una pendenza superiore ai limiti consentiti. | Escludere l'area con la pendenza oltre i limiti consentiti delimitandola (Vedi Par. 4.3) |
NOTA: Si suggerisce l'utilizzo dell'imballo originale per il trasporto su lunghe distanze.
- Premere il pulsante "STOP" (A) per arrestare il robot rasaerba e aprire la cover di protezione (B).
- Disinserire la chiave di sicurezza (C).
- Pulire il robot rasaerba come indicato al Par. 6.2 "PULIZIA PRODOTTO".
- Sollevare il robot rasaerba dall'apposita maniglia (D) e trasportarlo facendo attenzione a mantenere la lama di taglio lontano dal corpo.
- Riposizionare il robot rasaerba nell'imballo originale.
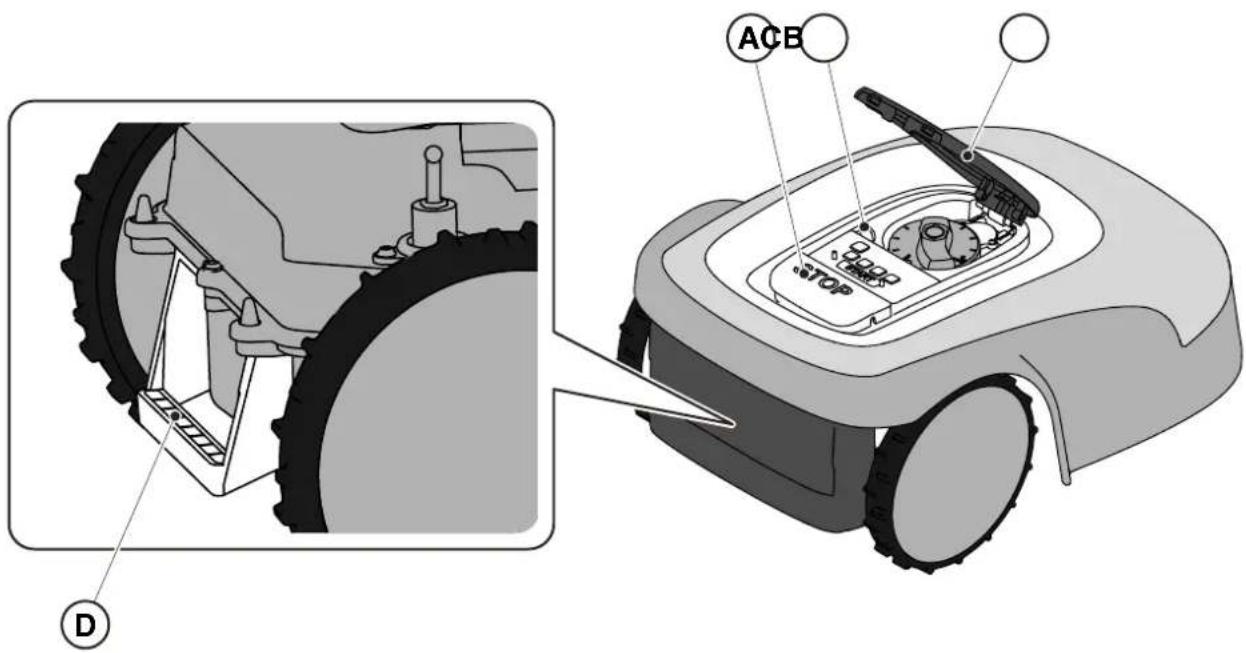
text_image
ACB
TOP
D
8.2. STOCCAGGIO
Il robot rasaerba deve essere stoccato in posizione orizzontale, in un luogo asciutto e al riparo dal gelo dopo avere eseguito la pulizia e la ricarica invernale della batteria (si veda Cap.6). Durante lunghi periodi di inattività disconnettere la base di ricarica dalla rete elettrica.
8.3. SMALTIMENTO

ATTENZIONE:
Per la rimozione della batteria dal robot rasaerba rivolgersi ad un centro assistenza autorizzato.
Procedura:
- Smaltire l'imballo del prodotto in modo sostenibile nei contenitori di raccolta preposti o presso appositi centri autorizzati alla raccolta.
- Smaltire il robot rasaerba nel rispetto dei requisiti delle norme di legge locali.
- Rivolgersi ad apposite strutture per il riciclaggio e lo smaltimento essendo il robot rasaerba rifiuto classificato RAEE (Rifiuto di Apparecchiature Elettriche ed Elettroniche).
- Smaltire le batterie vecchie o esauste in modo sostenibile nei contenitori di raccolta o presso appositi centri autorizzati alla raccolta.
9. ACCESSORI
| N. Articolo Descrizione Specifiche | |
| 1127-0009-01 Lame di taglio 12 pz | |
| 1127-0011-01 Cover della base di ricarica Per protezione aggiuntiva contro pioggia e radiazione solare |
| 1127-0010-01 Cavo di estensione per alimentatore | Cavo per l'estensione della connessione tra l'alimentatore e la base di ricarica - L=5 m |
| 1127-0020-01 Cavo di estensione per alimentatore | Cavo per l'estensione della connessione tra l'alimentatore e la base di ricarica - L=15 m |
| 1127-0012-01 KIT di installazione piccolo Cavo perimetrale ∅ 2,7 mm - L=150 m + 200 chiodi di fissaggio + 5 connettori per cavo + 5 connettori del cavo della base di ricarica |
| 1127-0013-01 KIT di installazione medio Cavo perimetrale ∅ 2,7 mm - L=300 m + 400 chiodi di fissaggio + 5 connettori per cavo + 5 connettori del cavo della base di ricarica |
| 1127-0000-01 Bobina di cavo 150 m Cavo perimetrale ∅ 2,7 mm - L=150 m |
| 1127-0001-01 Bobina di cavo 300 m Cavo perimetrale ∅ 2,7 mm - L=300 m |
| 1127-0002-01 Bobina di cavo 500 m Cavo perimetrale ∅ 3,4 mm - L=500 m |
| 1127-0006-01 Chiodi di fissaggio (100 pcs) Chiodi per fissare il cavo perimetrale - 100 pz |
| 1127-0008-01 Viti di fissaggio per base di ricarica | 8 pz |
| 1127-0004-01 Connettori per cavo Giunti per la riparazione del cavo perimetrale - 5 pz |
| 1127-0005-01 Connettori del cavo della base di ricarica | Connettori per connettere il cavo perimetrale alla base di ricarica - 5 pz |
| 122063053/0 Resistore per piccoli perimetri Resistore per installazioni con meno di 40 m di cavo perimetrale |
10. GARANZIA
10.1. COPERTURA DELLA GARANZIA
Le condizioni di garanzia sono destinate solamente ai consumatori, cioè operatori non professionisti.
La garanzia copre tutti i difetti di qualità dei materiali e di fabbricazione, accertati durante il periodo della garanzia dal vostro Rivenditore o da un Centro specializzato.
L'applicazione della garanzia si limita alla riparazione o alla sostituzione del componente ritenuto difettoso.
Si raccomanda di affidare la macchina una volta all'anno ad un'officina di assistenza autorizzata per la manutenzione, l'assistenza e il controllo dei dispositivi di sicurezza.
L'applicazione della garanzia è subordinata ad una manutenzione regolare della macchina.
La garanzia non copre i danni conseguenti a:
- Mancata familiarizzazione con la documentazione di accompagnamento (Manuali di Istruzioni).
- Uso professionale.
- Disattenzione, negligenza.
- Causa esterna (fulmine, urti, presenza di corpi estranei all'interno della macchina) o incidente.
- Uso e montaggio improprio non consentiti dal costruttore.
- Scarsa manutenzione.
- Modifica della macchina.
- Utilizzo di pezzi di ricambio non originali (pezzi adattabili).
- Utilizzo di accessori non forniti o non approvati dal costruttore (es. dispositivi di taglio).
La garanzia non copre inoltre:
- Le operazioni di manutenzione (descritte nel manuale di istruzioni).
- La normale usura di materiali di consumo come dispositivi di taglio e ruote.
- Normale usura.
- Deterioramento estetico della macchina dovuto al suo utilizzo.
- I supporti dei dispositivi di taglio.
- Danni derivanti da una installazione non conforme al manuale utente.
- Eventuale corrosione o danneggiamento del cavo perimetrale
- Danni causati da infiltrazioni di acqua dovute all'utilizzo di un dispositivo di lavaggio ad alta pressione o dall'immersione in acqua, ad esempio quando si formano pozze d'acqua da una pioggia intensa.
- Danni causati dall'errata conservazione o dall'uso improprio della batteria.
- Danni causati dall'utilizzo di batterie non originali
- Ogni spesa aggiuntiva eventualmente connessa alla riparazione in garanzia, come ad esempio il trasferimento presso l'utilizzatore, il trasporto della macchina verso il Rivenditore, il noleggio di attrezzature o la chiamata a società esterne per tutti i lavori di manutenzione del giardino durante il fermo della macchina.
L'utilizzatore è protetto dalle proprie leggi nazionali. I diritti dell'utilizzatore previsti dalle proprie leggi nazionali non sono in alcun modo limitati dalla presente garanzia.
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descrizione genielle
Il rotem rascierati (II) è programmata e costru
l'eras di giantele in qualunque era del glo
in funzione colic diverse cassettostriche di
pub essere programmato in modo da ley
in fase di lecco, il rottati effettiva le creato
perimetrote (€)


text_image
1.2 Panoramica del prodotto
1.2.1 Descolizione generale
Proton macroca il 10 progetto a costante per essere automaticamente l'arte di glora in giarico e dei glome e della nossa.
In lavorere di lavoro costituzione di la superficie da una, il rubei può essere programmato in modo da lavorare di pio area.
In fase di lavoro: Proctetetti la assura del lavoro climatico nel fine
poste del 2018
3.2. OVERZICHT VAN HET PRODUCT
3.2.1. ALGEMENE BESCHRIJVING
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e intravoltare:
• Controll di lavoro
• Chisoli di sicurezza
Possizioni:
1. Verfuro che la cover flottante (A) sia morbata in maniera corretta. La mancanza della cover non per robo il funzionamento del Robot.
2. Verfuro che il invante di lavoro "STOP" (B) non sia attiva. Se premuto arrada i roboti aglio la cover
di prodotto (C) da istra conce le di lavoro [2].
3. Verfuro che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del
Fusbit.
4. Verfuro che la chiava di sicurezza (E) sia inserta. Se diskinerta il roboti non si avola.
5. Verfuro il corrisso posizionamento a tema dei roboti. In caso di inclinazione successiva o siofevamento
(serato di indirazione (indino metto) a meridone il robot)
6. Verfuro che nel area di lavoro non si sono impedimenti (oggetti obblondant).
11T 2. SICUREZZA
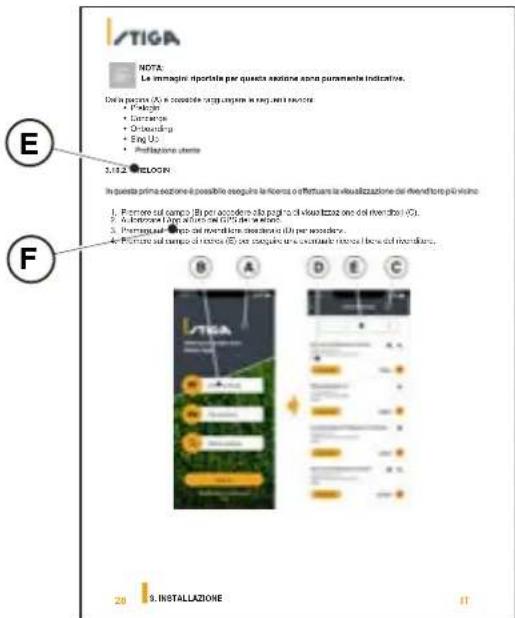
text_image
E
F
NOTA:
Le immagini riportista per questa esione senza puramente indicative.
Delà la paretta (A) è possibile larga usione in regi del lavoro.
• Paretta
• Dette
• Dette
• Eng U:
• Prolazione utente
3.10.2. PROLOGI
In questa prima esione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Partura sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altevrazione di rile di rile di RIS de la riserva.
3. Partura suve a rile del rivendere riserva (D) per avvassiva.
4. Partura sul campo di ricerca (E) per eseguire una visualizzazione dei rile del rivendere.
B A C
20 3. INSTALLAZIONE IT
4. INSTALLATIE

WAARSCHUWING:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panorama del prodotto
1.2.1 Descrizione generale
Il robot rassendo 10 è propiettato e contra l'arte di giantini in quadruzione nel giorno in funzione nelle diverse caratteristiche il può essere programmato in modo da ley in fase di lavoro. Il robot effettu le rapporto perimetroile 62.
1.2 Panorama del prodotto
1.2.1 Desiccione generale
Il robot rassendo 10 è progettato e costruto per essere automaticamente limiti gliudino in quinquone em dei gloma e della nore.
In funzione delle disvere convenzione della superiore di svena, ighesi può essere programmato in modo da lavoro sul spazioese.
In fase di lavoro. I improve effettivo la struttura di forza colistata dal fine perimetroile 62.
3.2. RESUMEN DEL PRODUCTO
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e attenzatore:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se attivo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei roboti. In caso di inclinazione accorvate o sofevamento (supero di, nel lavoro (notto meno) a sottano limito).
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
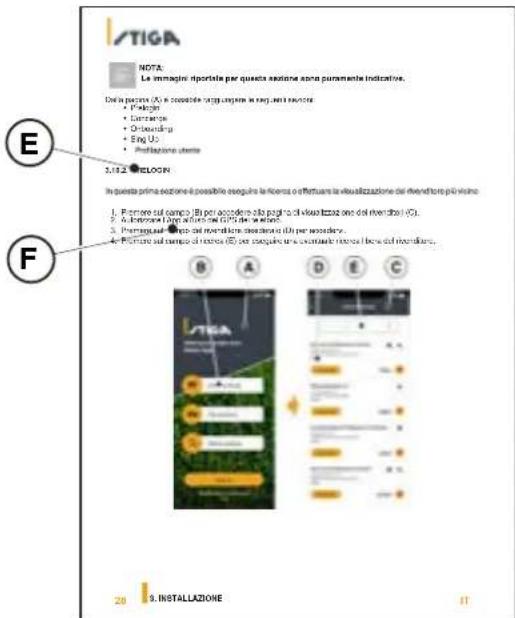
text_image
TIGA
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delà la partura (A) è possibile raggio uscire in regi del lavoro.
• Pagarzo
• Dorringer
• Drucingono
• Eng U:
• Prolazione utente
3.10.2 PROLOGI
In questa prima eszione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Partura sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altevrazione di lavoro nel GPC di lavoro.
3. Partura su svita di lavoro di lavoro di lavoro per avvassore.
4. Partura sul campo di lavoro (D) per eseguire una visualizzazione dei rivendere.
B A D C
20 3. INSTALLAZIONE IT
4. INSTALACIÓN
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
10.1. COBERTURA DA GARANTIA....55
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot rassendo IT è progettato e contra l'arte di giantini in quadrupe tra del gio in funzione nelle diverse caratteristiche di può essere programmato in modo da lov in face di lavoro, il robot effettua le rapporto perimetroile GO.
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot rassendo IT è progettato e costruto per essere automaticamente levo di glabr in quattro spesa nel glabra e della peca. In funzione delle disvere costematiche della superiore dei vices, ighesi può essere programmato in modo da lavoro con piato avies. Il foci di lavoro. I import effetti la natura di forza derivata dal poteriale GO.
3.2. PANORÂMICA DO PRODUTO
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e attenzatore:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se activo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei robot. In caso di inclinazione accorvate o sofevamento (superior di notificatore) a sottano limit.
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
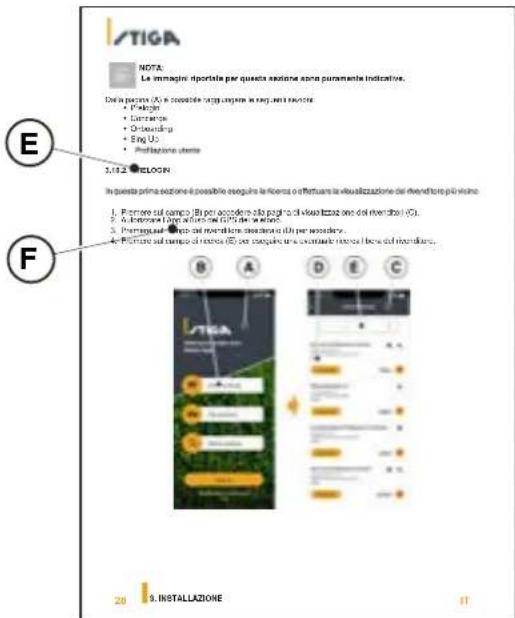
text_image
TIGA
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delin pastris (A) e possibile raggio uscire in regi del lavoro.
• Pastris
• Diversary
• Disecurazioni
• Eng U:
• Prolazione utente
3.10.2 - RECOGN
In questa prima esione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Pareto sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Autotecnato (A) per adottore nel GPs de le risers.
3. Portugua (B) per del rivendere notificano (D) per avvassura.
4. PEGFONE sul campo di ricerca (E) per eseguire una visualizzazione dei rivendere.
B A D C
20 3. INSTALLAZIONE IT
4. INSTALAÇÃO
10.1. COBERTURA DA GARANTIA
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
Batteri / batterilader

ADVARSEL:
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contra
Debre di giantini in quallungono dei gio
in funzione nelle dissece caratteristiche d
pup essere programmico in modo da lo
in fase di bravo, il robot effettore la rapprolo
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contrato per essere automaticamente
lava di giardino in quallungono dei giao e della rata.
In funzione delle dissece ambientale della superfiore dei sero, lato
piuto essere programmico in modo da levrato sul rata ovo
in fase di bravo. In robot effettore la rapprolo dell' force colistante dal
permetrale (G)
3.2. PRODUKTOVERSIKT
3.2.1. GENERELL BESKRIVELSE
text_image
A
B
C
D
2.5. INTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Rapolita e extranzione:
• Controll di lavoro
• On solo di sicurezza
Procedire:
1. Verfare che la cover follante (A) sia morda in maniera corretta. La mancrutta della cover non per nota i funzionamento del Robot.
2. Verfare che il pruttata di ametta "STOP" (B) non sistivo. Se premuto amenta l'indenta sperta cover il prodotto (C) dalla corrisso di lavoro (D).
3. Verfare che il copertura di prestazione (C) alla chiusa. Se sperto non permette il funzionamento del Robot.
4. Verfare che la chiave di sicurezza (E) sia merta. Se disinserita il robot non si avola.
5. Verfare il corrisso prestazione a terra del robot, in caso di inclinazione accesiva o sellovamento (lavoro) di ridazzione (indino metto) acordano il motor.
6. Verfare che nel tesa di avola non si sono impedimenti (ioggetti abberatori).
1.11T 2. SICUREZZA

text_image
I:TIGA
NOTA:
Le immagine riportale per queste azione aene paramente indicative.
De la partea (A) è scadative largi compere in ragi and recorte.
• Palkogri
• Cerrazione
• Orbitering
• Eng Ub
• Profilazione utente
3.102 ELEOON
In questa prima azione il possibile eseguire la riserva o flutturare la visualizzazione dei livendore più vicine
1. Per essere sul campo (B) per accordere allo paggi tra visualizzazione dei livendore (C).
2. Per essere sul campo (D) per accordere alla BPA di lavorazione.
3. Peresignati: spesi dei lavorazioni di lavorazione (B) per assorzire.
4. Per si sono sul campo di lavorazione (B) per eseguire una avviabile riserva delle livendore.
B A D C
28 9. INSTALLAZIONE IT
4. INSTALLASJON

VARSEL:
Ikke tukle med, fjerne, unnvike eller omgå de monterte sikkerhetsanordningene.
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
Batteri/batteriladdare

WARNING:
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contra
Delisi di giantini in quallungono dei gol
in funzione nelle diene caratteristiche d
pup essere programmico in modo da lo
in fase di lavoro, il robot effettore la raccato
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contratto per essere automaticamente
lava di giardini in quallungono dei golera e della rata.
In funzione delle diene caratteristiche della superiore del lavoro, lato
piuto essere programmico in modo da lavoro sul rata ovo
in fase di lavoro. In motori non unvrare di force colistante dal
permetrale (G)
3.2. PRODUKTÖVERSIKT
3.2.1. ALLMÄN BESKRIVNING
text_image
A
B
C
D
2.3. INTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Fazzioli e adrenazione:
• Conce in di siccursio
• Chieso di sicurezza
Precedenza:
1. Verfare che la cover flattante (A) sia mordate in maniera corretta. La mercantza della cover non per risso il funzione perimento del Fedot.
2. Verfare che il previsto di ametto "STOP" (N) non sia attiva. Se premuto arrista l'instata apre la cover di prodotto (C) da riscita di raccamento (L).
3. Verfare che il copertura di prestazione (C) alle chiusa. Se spento non permette il funzionamento del Fedot.
4. Verfare che la chiare di acunizza (E) sia inserta. Se disinserta il robot non si avola.
5. Verfare il corrisso podizionamento a terra dei robot. In caso di inclinazione accesiva o sellovamento i lavorato di noti raccuta (indino melo), avendono il motor.
6. Verfare che nel tera di avola non si sono impedimenti (oggetti obblomenti).
11:17 2. SICUREZZA
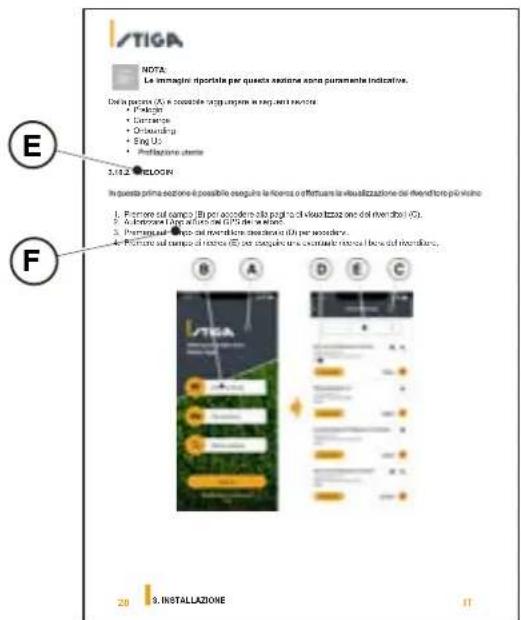
text_image
I:TIGA
NOTA:
Le immagine riportale per queste azione aene paramente indicative.
De la partea (A) è scadative largi compere in ragi and recorte.
• Palkogri
• Cerrazione
• Orbitering
• Eng Ub
• Protaggiore utente
3.102 ELEOON
In questa prima azione il possibile esquira le riserva o flutturare la visualizzazione dei livendatore più vicina
1. Per essere sul campo (B) per accordere allo pagi in di visualizzazione dei livendatore (C).
2. Per essere sul campo (D) per accordere allo pico in di visualizzazione dei livendatore (E).
3. Peresignati: spopo dei livendore riservere (G) per assondere.
4. Per si-there sul campo di riserva (H) per esquira una accordate riserva l'uso di riservere.
B A D C
28 9. INSTALLAZIONE IT
4. INSTALLATION

(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panorama del prodotto
1.2.1 Descritto generale
Il robot versabbe (11) è progettato e contra
d'ebio di gestarini in quallungse una del go
in funzione nelle delle strasse caratteristiche d
piuto essere programmato in modo da lei
in fase di brone. Il robot effettua la rasolu
perimetrale (2).
1.2 Panorama del prodotto
1.2.1 Descritto generale
Il robot versabbe (11) è progettato e costruto per essere automaticamente
lebta di gestare in quallungse una del grama e della rosta.
In funzione delle delle strasse caratteristiche della superiore dei levei, lebta
piuto essere programmato in modo da levei si spede.
In fase di brone. Il robot effettua la trasura di forza colistata dal file
perimetrale (2).
3.2. PRODUKTOVERSIGT
3.2.1. OVERORDNET BESKRIVELSE
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facqelli e attenzatori:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se attivo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei roboti. In caso di inclinazione accorvate o sofevamento (supero di, nel lavoro (notto meno) a sottano limito).
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA

text_image
NOTA:
Le immagini riportate per questa azione sono paramente indicative.
E
F
3.19.2 RELOGN
In questa prima azione il possibile eseguire la riserva o offettuare la visualizzazione dei rivendire più visimo
1. Puisare sul corso (B) per accidenza alla parte di visualizzazione dei rivendire (C)
2. Altostrazione di all'altro del GPS dei riledders.
3. Puarguardi da rimandire divedere (D) per riledders.
4. RICFiore sul corso di riserva (E) per eseguire la visualizzazione dei rivendire.
20 3. INSTALLAZIONE IT
4. INSTALLATION
4.1. GENERELLE OPLYSNINGER IFM. INSTALLATION

FORSIGTIG:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettazione e contra
Delisi di giantini in quallungono dei gol
in funzione nelle dissece caratteristiche d
pup essere programmico in modo da lo
in fase di bravo, il robot effettore la raccato
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e corrisso per essere automaticamente
lere di giardino in quallungono dei golera e della racc.
In funzione delle dissece ambientale della superfiore del corso, l'or
e non conve progermente in modo da levrato sul spidiare.
In fase di corso, l'orvo effettore la raccata dell'orvo colistante dal
permetrale (G)
3.2. TUOTTEEN YLEISKATSAUS
3.2.1. YLEINEN KUVAUS
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facqelli e attenzatori:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se activo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei roboti. In caso di inclinazione accorvate o sofevamento (superior di notificatore) a sottano limitori.
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
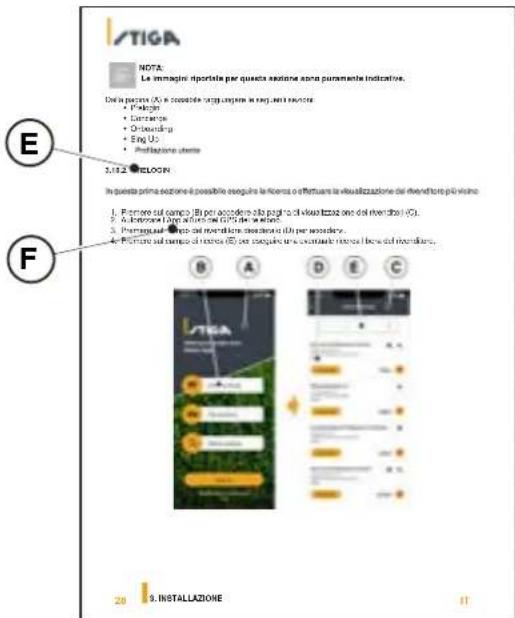
text_image
E
F
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delà la paretta (A) è possibile largi progress in regi del lavoro.
• Parette
• Ducture
• Distrumenti
• Eng U:
• Prolazione utente
3.10.2. PROLOGI
In questa prima esione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo.
1. Partame sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altostrava (L) per adornare nel GPS de la redo.
3. Partagem su base del rivendere notadora (D) per assidire.
4. Pulsione sul campo di ricerca (E) per eseguire una normale riserva l'uso del rivendere.
B A C
20 3. INSTALLAZIONE IT
4. ASENNUS
4.1. ASENNUSTA KOSKEVAA YLEISTIETOA

HUOMIO:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descrittione generali
Il robot assenzire (II) è progettare e contra
Debute di giardini in qualinque e non del gio
in funzione nelle diversa caratteristiche d
pub essore programmico in modo da lo
in fase di lavoro, il robot effettore la ruotto i
perimetrose (I).
1.2 Panoramica del prodotto
1.2.1 Descrittione generali
Il robot assenzire (II) è progettare e Costa per more automaticamente
dette di giardini in qualinque e non del giao e nella rone.
In funzione delle disaconi costitutiche della superiore dei sere, lebo
piuto come programmico in modo da lavoro si più avano.
In fase di lavoro, il robot effettore la ruotto di lavoro di forza colistato del
perimetrose (I).
3.2. PŘEHLED O PRODUKTU
3.2.1. OBECNÝ POPIS
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e attenzatore:
• Controll di lavoro
• Chiesci di sicurezza
Possizioni:
1. Verfare che la cover flattante (A) sia montata in maniera corretta. La mancanza della cover non per risso il funzionamento del Robot.
2. Verfare che il privante di lavoro "STOP" (B) non se activo. Se premuto arrasta i roboti aggre la cover di prodotto (C) dalla corrente di lavoro [32].
3. Verfare che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfare che la chave di sicurezza (E) sia inserta. Se diskinasta i roboti non si avola.
5. Verfare il corrisso posizionamento a tema dei robot. In caso di inclinazione accorvate o sofevamento (superior di notificatore) a sottano limit.
6. Verfare che nel area di lavoro non si sono impedimenti (oggetti abbandonati).
11T 2. SICUREZZA
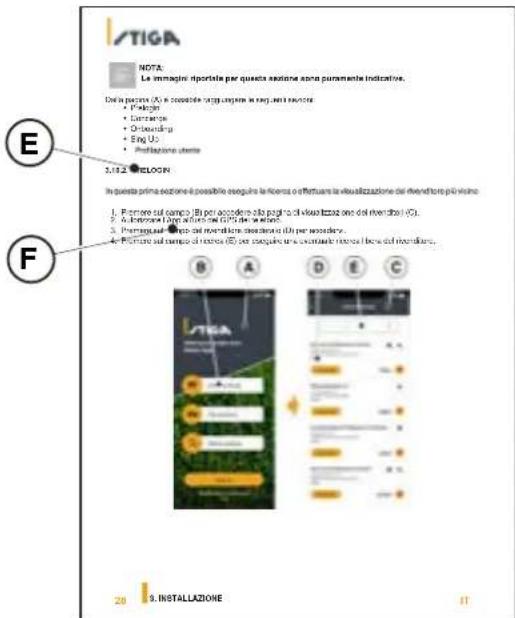
text_image
TIGA
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delin piacenti (A) e possibile raggio uscire in regi del lavoro.
• Pagarzo
• Dorringer
• Drucingono
• Eng U:
• Prolazione utente
3.10.2 PROLOGI
In questa prima eszione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Pareto sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altevrazione di lavoro nel GPs de le risers.
3. Portuguaia - compo dei riendere notificano (D) per avvassura.
4. PEGFONE sul campo di ricerca (E) per eseguire una visualizzazione dei rivendere.
B A D C
20 3. INSTALLAZIONE IT
4. INSTALACE
4.1. VŠEOBECNÉ POKYNY PRO INSTALACI

VAROVÁNÍ:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contra
Debre di giantini in quallungono dei gio
in funzione nelle dissece caratteristiche d
pup essere programmico in modo da lo
in fase di bravo, il robot effettore la rapprolo
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contrato per essere automaticamente
lava di giardini in quallungono dei giao e della rata.
In funzione delle dissece ambientale della superfiore da seva, latoa
pup essere programmico in modo da levrato sul rata ovo
in fase di bravo. In robot effettore la rapprolo dell' force colistante dal
permetrale (G)
3.2. OPIS PRODUKTU
3.2.1. OPIS OGÓLNY
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e intravoltare:
• Controll di lavoro
• Chisoli di sicurezza
Possizioni:
1. Verfuro che la cover flattante (A) sia morbata in maniera corretta. La mancanza della cover non per robo il funzionamento del Robot.
2. Verfuro che il invante di lavoro "STOP" (B) non sia attiva. Se premuto arrada i roboti agno la cover
di prodotto (C) da istra conce la di lavoro [24].
3. Verfuro che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del Robot.
4. Verfuro che la chiava di sicurezza (E) sia inserta. Se diskinerta il roboti non si avola.
5. Verfuro il corrisso posizionamento a tema dei roboti. In caso di inclinazione successiva o siofevamento
lavoro di indirazione (indino metto) a meridone l'Orto.
6. Verfuro che nel area di lavoro non si sono impedimenti (oggetti obblondenti).
11T 2. SICUREZZA
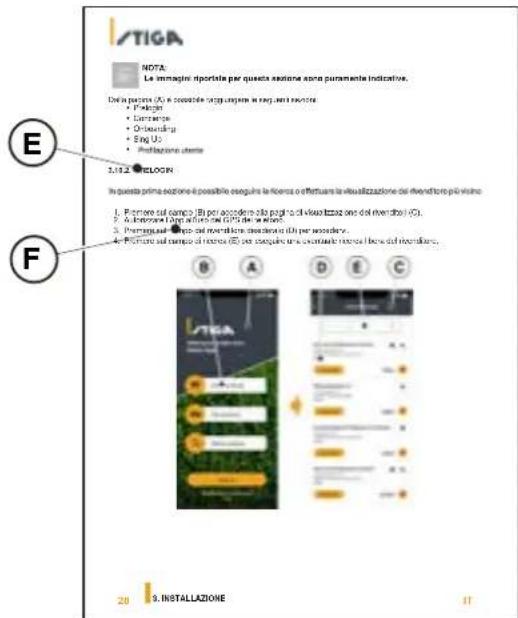
text_image
TIGA
NOTA:
Le immagini riportate per questa azione sono paramente indicative.
Delà la partura (A) è possibile largi uscire in regi del lavoro.
• Pledger
• Derrante
• Onboarding
• Eng U:
• Postazione utente
3.19.2 RELOGN
In questa prima azione il possibile eseguire le riserva o offettuare la visualizzazione dei rivendatore più visimo
1. Pagmente sul campo (B) per accidenza alla puglia di visualizzazione dei rivendatore (C)
2. Altostrazione di all'altro del GPS del lavoro.
3. Puarguardi di lavoro del rivendatore di lavoro (D) per lavoro.
4. RICFiore sul lavoro di lavoro (E) per eseguire la visualizzazione dei rivi del lavoro.
B A D C
20 3. INSTALLAZIONE IT
4. INSTALACJA

POUCZENIE:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descrizione generali
Il robot assensible: Il è progettare e contra
d'uso di giantini in qualinaria una degio
in funzione nelle differenti comegliedò è d
può essore programista in modo da lo
in fase di lavoro. Il robot effettu is notato
permetrale (€)


text_image
1.2 Panorama del prodotto
1.2.1 Desolutiva generale
I cannot recognize la 10.6 progettato e costituto per essere automaticamente l'uso di vinire in giologica con dei glione e della norte.
In lavorazione della disorse e costituto alla superiore da norte, i doni adottare programmato immodile da fisecicolo di norte.
In fase di norte, I non è costituto la risunza dell'arte delittenti dal parte (e 1).
3.2. A TERMÉK ÁTTEKINTÉSE
text_image
A
B
C
D
2.5. INSTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Facilità e intravoltare:
• Controll di lavoro
• Chisoli di sicurezza
Possizioni:
1. Verfuro che la cover flattante (A) sia morbata in maniera corretta. La mancanza della cover non per robo il funzionamento del Robot.
2. Verfuro che il invante di lavoro "STOP" (B) non sia attiva. Se premuto arrada i roboti aglio la cover
di prodotto (C) da istra conce la di lavoro [24].
3. Verfuro che il copertura di prestazione (C) sia chiusa. Se spento non permette il funzionamento del
Fusbit.
4. Verfuro che la chiava di sicurezza (E) sia inserta. Se diskinerta il roboti non si avola.
5. Verfuro il corrisso posizionamento a tema dei roboti. In caso di inclinazione successiva o siofevamento
lavoro di indirazione (indino metto) a meridone l'Orto.
6. Verfuro che nel area di lavoro non si sono impedimenti (oggetti obblondenti).
11T 2. SICUREZZA
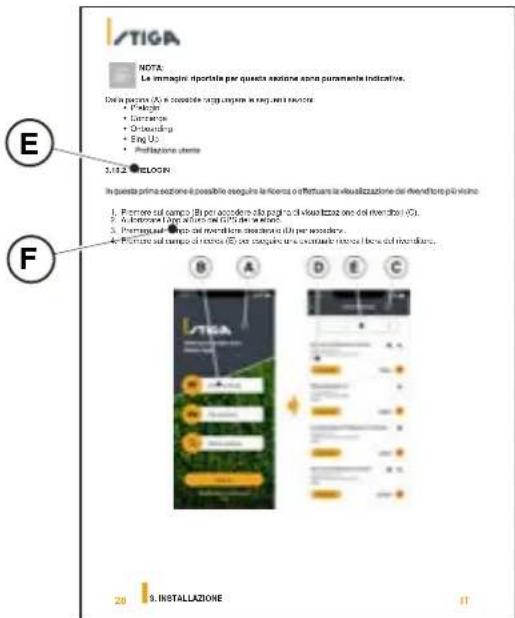
text_image
TIGA
NOTA:
Le immagini riportate per questa esione senza puramente indicative.
Delin piacenti (A) e possibile raggio uscire in regi del lavoro.
• Pagarzo
• Dorringer
• Drucingono
• Eng U:
• Prolazione utente
3.10.2 PROLOGI
In questa prima eszione è possibile eseguire la ricerca o offettuare la visualizzazione dei rivendere più visimo
1. Pareto sul campo (B) per accidenire alla priorità di visualizzazione dei rivendere (C).
2. Altevrazione di lavoro nel GPs de le risers.
3. Portuguaia - compo dei riendere notificano (D) per avvassura.
4. PEGFONE sul campo di ricerca (E) per eseguire una visualizzazione dei rivendere.
B A D C
20 3. INSTALLAZIONE IT
4. TELEPÍTÉS
4.1. ÁLTALÁNOS TUDNIVALÓK A TELEPÍTÉSHEZ

FIGYELMEZTETÉS:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson
Sunn. Pab
CE
171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot assenzire l'Ve progettare e contra
Delà di giantini in quallunganeone del gio
In funzione nelle dienei caratteristiche d
pulò essere programmico in modo da tre
in fase di breve, il robot effettuare la riusato
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot assenzire l'Ve progettare e contratto per essere automaticamente
lere di giantini in quallunganeone del glora e della riusato.
In funzione nelle dienei caratteristiche della superiore dei sterei, leche
pulò essere programmico in modo da riusato sul riusato.
In fase di breve, il robot effettuare la riusato dell'Ve coelittare dal file
permetrale (G)
3.2. TOOTEÜLEVAADE
3.2.1. ÜLDINE KIRJELDUS
text_image
A
B
C
D
2.5. INTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Rapolita e extranzione:
• Controll di lavoro
• On solo di sicurezza
Procedere:
1. Verfare che la cover flattante (A) sia morda in maniera corretta. La mancrutta della cover non per nota il funzionamento del Robot.
2. Verfare che il pruttata di ametta "STOP" (B) non sistivo. Se premuto amenta l'indenta sperta cover il prodotto (C) dalla corrisso di lavoro (D).
3. Verfare che il copertura di prestazione (C) alla chiusa. Se sperto non permette il funzionamento del Robot.
4. Verfare che la chiave di sicurezza (E) sia merta. Se diskinella il robot non si avola.
5. Verfare il corrisso prestazione a terra dei robot, in caso di inclinazione accesiva o sellovamento (lavoro) di ridazzione (indino metto) acordano i motor.
6. Verfare che nel tesa di avola non si sono impedimenti (ioggetti abberatori).
1.11T 2. SICUREZZA
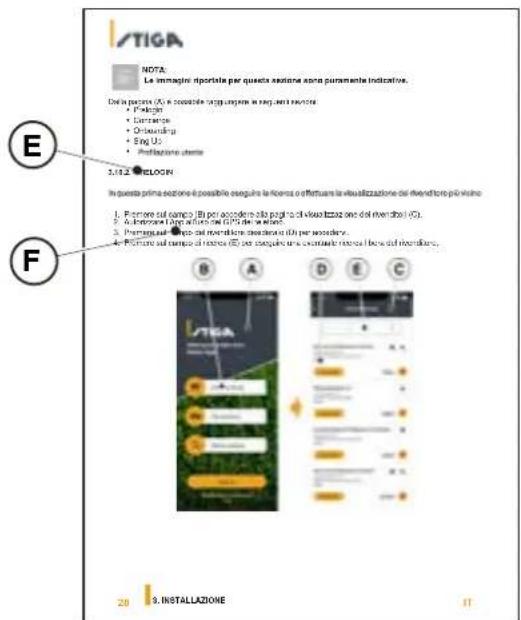
text_image
I:TIGA
NOTA:
Le immagine riportale per queste azione aene paramente indicative.
De la partea (A) è scadative largi compere in ragi and recorte.
• Palkogri
• Cerrazione
• Orbitering
• Eng Ub
• Protaglazione utente
3.102 ELEOON
In questa prima azione il possibile eseguire la riserva o flutturare la visualizzazione dei livendore più vicine
1. Per essere sul campa (B) per accadere allo pagi in di visualizzazione dei livendore (C).
2. Alterscoco l'orga all'arte del GPC dei livendres.
3. Peresquival: spolo dei livendore innessere (D) per assondere.
4. Per PCFure sul campa di riserva (E) per eseguire una accadare riserva leve di risendere.
B A D C
28 9. INSTALLAZIONE IT
4. PAIGALDAMINE
4.1. ÜLDTEAVE PAIGALDAMISE KOHTA

HOIATUS:
(Direttiva Macchine 2006/42/CE, Allegato II, parte A)
- La Società: ST. S.p.A. – Via del Lavoro, 6 – 31033 Castelfranco Veneto (TV) – Italy
- Dichiara sotto la propria responsabilità, che la macchina:
Robot rasaerba
a) Tipo / Modello Base: SRSW01
c) Numero di Serie: 22A••RMO000001 ÷ 99L••RMO999999
d) Motore: a batteria
- È conforme alle specifiche delle direttive:
• MD: 2006/42/EC
• EMCD: 2014/30/EU
• RoHS II: 2011/65/EU - 2015/863/EU
• RED: 2014/53/EU
- Riferimento alle norme armonizzate:
EN 60335-1:2012 / AC:2014 / A11:2014 / A13:2017 /
A1:2019 / A2:2019 / A14:2019
EN IEC 63000:2018
EN 303 447 V1.2.0
EN 50636-107:2015 / A1 / A2
EN 301 489-17 V3.2.4
EN 62479:2010
EN 55014-1:2017 / A11:2020
EN 55014-2:2015
EN 61000-3-2:2019
EN 61000-3-3:2013 / A1:2019
EN 300 328 V2.2.2
i) Ampiezza di taglio:
18 cm
n) Persona autorizzata a costituire il Fascicolo Tecnico:
ST. S.p.A.
Via del Lavoro, 6
31033 Castelfranco Veneto (TV) - Italia
o) Castelfranco Veneto, 01/12/2022 CEO Stiga Group
Sean Robinson

171514280/1
text_image
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contra
Debre di giantini in quallungono dei gio
in funzione nelle dissece caratteristiche d
pup essere programmico in modo da lo
in fase di bravo, il robot effettore la rapprolo
permetrale (G)
1.2 Panoramica del prodotto
1.2.1 Descritione generale
Il robot asservise 10% progettato e contrato per essere automaticamente
lava di giardini in quallungono dei giao e della rata.
In funzione delle dissece ambientale della superfiore dei sero, lato
piuto essere programmico in modo da levrato sul rata ovo
in fase di bravo. In robot effettore la rapprolo dell' force colistante dal
permetrale (G)
3.2. OSVRT NA PROIZVOD
3.2.1. OPĆENIT OPIS
text_image
A
B
C
D
2.5. INTRUZIONI DI SICUREZZA PER IL FUNZIONAMENTO
Rapolita e extranzione:
• Controll di lavoro
• On solo di sicurezza
Procedire:
1. Verfare che la cover flattante (A) sia morda in maniera corretta. La mancrutta della cover non per nota il funzionamento del Robot.
2. Verfare che il pruttata di ametta "STOP" (B) non sistivo. Se premuto amenta l'indenta sperta cover il prodotto (C) dalla corrisso di lavoro (D).
3. Verfare che il copertura di prestazione (C) alla chiusa. Se sperto non permette il funzionamento del Robot.
4. Verfare che la chiave di sicurezza (E) sia merta. Se disinserita il robot non si avola.
5. Verfare il corrisso prestazione a terra dei robot, in caso di inclinazione accesiva o sellovamento (lavoro) di ridazzione (indino metto) acordano i motor.
6. Verfare che nel tesa di avola non si sono impedimenti (ioggetti abberatori).
1.11T 2. SICUREZZA