Ninebot S - 滑板车 SEGWAY - 免费用户手册
免费查找设备手册 Ninebot S SEGWAY PDF格式.

| 产品类型 | 自平衡电动滑板车/个人机器人 |
| 品牌 | Segway |
| 型号 | Ninebot S (Loomo) |
| 尺寸 | 650 x 310 x 570 mm (高 x 宽 x 深) |
| 净重 | 19 kg |
| 电池容量 | 329 Wh |
| 电池类型 | 锂离子 42节 18650格式 |
| 充电时间 | 约3小时 |
| 最高速度(车辆模式) | 18 km/h |
| 最高速度(机器人模式) | 8 km/h |
| 最大用户负载 | 25 - 100 kg |
| 推荐驾驶者身高 | 130 - 200 cm |
| LCD屏幕 | 4.3英寸,480 x 800像素 |
| 处理器 | Intel Atom Z8750 (4核,2.56 GHz) |
| 内存 | 4 GB |
| 内部存储 | 64 GB |
| 操作系统 | 修改版Android 5.1 |
| 传感器 | Intel RealSense ZR300,高清1080p摄像头,5个麦克风,超声波,红外,触控,惯性测量单元 |
| 连接性 | Wi-Fi,蓝牙,USB Type-C 3.0 |
| 电源 | 输入100-240 V AC,输出58.8 V DC |
| 主要功能 | 自平衡车辆模式,机器人模式,远程驾驶,人员跟随,摄影助手 |
| 维护 | 用湿布清洁;轮胎充气35-50 PSI;请勿使用溶剂 |
| 安全 | 必须佩戴头盔;请勿超过重量限制;请勿自行修理 |
| 备件 | 仅使用Segway Robotics认可的部件 |
常见问题 - Ninebot S SEGWAY
用户关于以下问题的提问 Ninebot S SEGWAY
0 问题 关于此设备。回答您知道的问题或提出自己的问题。
提出关于此设备的新问题
下载您的设备说明 滑板车 免费PDF格式!查找您的手册 Ninebot S - SEGWAY 并重新掌握您的电子设备。本页发布了使用您的设备所需的所有文档。 Ninebot S 品牌 SEGWAY.
用户手册 Ninebot S SEGWAY
- 产品及配件说明 01
- 硬件功能示意图 02
- 基础使用说明 04
- 搬运说明 07
- 连接说明 08
- 功能概览 09
- 骑行指导 10
- 安全警告 12
- 安全须知 15
- 日常保养和维护 17
- 型号参数表 18
1. 产品及配件说明
① Loomo 机器人

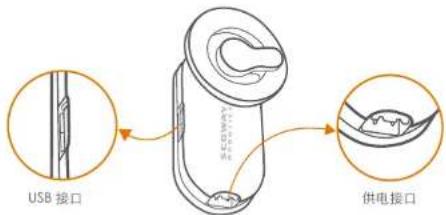
② 硬件扩展器(可选择): 可接入USB 2.0设备和24V(1A限制)电源

③ USB 3.0 Type-C 数据线(可选择):用于连接至电脑(兼容USB 2.0)

④ AC / DC充电器:
额定输入电压:100\~240V AC, 50/60Hz
额定输出电压:58.8V
额定功率:120W
充电标准时长:3小时
⑤ 延长气嘴;
用于轮胎充气

⑥ 清洁布(可选择):适用于液晶屏清洁

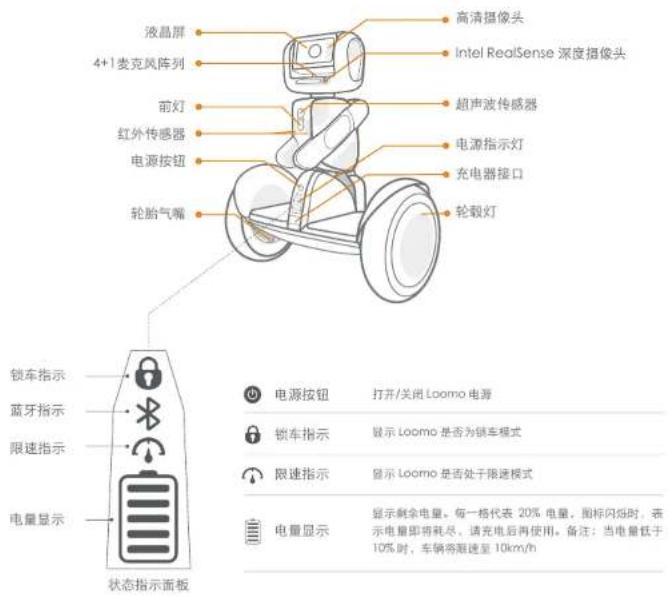
- 硬件功能示意图

| 变形按钮 | 通过此按钮可切换机器人模式与平衡车模式 |
| 双耳触控板 | 轻扣头部两侧双耳触控区可以返回默认状态 |
| 头部触控区 | 在机器人与平衡车模式下均可通过手扶头部触控区推行机器人 |
| 提手 | 当按住提手里内置开关,会暂时关闭 Loomo 的引擎,以保障用户搬运时的安全。 |
3. 基础使用说明
3.1 开关机步骤及机器人平衡车模式说明

- 开机:
请保持 Loomo 直立,然后按下电源按钮,点亮电源指示灯后,Loomo 开机进入自平衡状态。
- 关机:
按下电源按钮即可关机。请注意,Loomo会在关机后立刻失去自平衡能力。所以在关机时请手扶Loomo,以确保安全。若被骑行时,按下电源按钮不能将Loomo关机。
- 切换状态:
Loomo 具有两种模式:平衡车模式(SBV 模式 Self-Balancing-Vehicle)和机器人模式。SBV 模式适用于个人出行,机器人模式下 Loomo 可以运行机器人功能。您可以通过 Loomo 头部上的变形按钮切换模式。
强制关机:
当Loomo长时间无响应时,长按电源键5秒左右,直到听到警示音,之后,Loomo将自动在30s内强制关机。
3.2 充电说明

充电注意事项:仅可在机器人关机时充电。

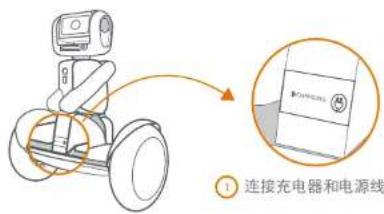



打开充电接口的橡胶保护盖
③ 将充电器接口插入充电接口

为了避免电池长期不充电失去活性,导致Loomo无法正常充电,请保证Loomo电池充电至充满状态的两次间隔时间不超过6个月。
3.3 硬件拓展附件(可选择)
可接入USB 2.0设备,供电口可提供24V(1A限制)的电力。

① 取下硬件扩展槽接口上的橡胶保护盖。

② 将附件对准接口,用力按紧。

③ 旋转旋钮固定该附件。
4. 搬运说明

Loomo开机时,请确保使用提手搬运Loomo(如图所示)。
搬运时请勿从指泥板处提起,或直接抱起Loomo。搬运会影响Loomo的平衡系统,很容易导致车轮失控,导致飞快旋转。因此,错误的搬运方式会对您和您附近的人造成伤害。使用内部含有开关的提手进行Loomo的搬运,可暂时关闭底盘引擎,从而确保搬运安全。

当您需要推行Locmo时,请手扶Locmo头部触控区进行推行。
为了维持原地自平衡状态,Locomo会抵抗外力的干扰。若使用非正确的推行方法,您会感觉到较大的阻力。

请勿尝试将 Loom 直接推上台阶或其他障碍物。
5. 连接说明
下载 Loomo 移动端APP应用,并将Loomo与移动设备进行连接。
Loomo与移动设备有两种连接模式以适用于不同的应用场景:
- Wi-Fi模式:用户可以将移动设备与Loomo接入同一个Wi-Fi网络,建立通信连接。
- 热点模式:Loomo 打开一个本地热点,用户将移动设备接入该热点建立和 Loomo 的连接。

flowchart
graph TD
A["Robot"] -->|Wireless Signal| B["Satellite"]
B --> C["Smartphone"]
Wi-Fi 模式

在Wi-Fi模式下,Loomo和移动设备都可以连接至互联网。然而,在您开启热点模式时,无论Loomo还是移
动设备都会失去互联网连接。所以,我们推荐使用Wi-Fi模式连接至Loomo。
在Loamo的主程序界面,您可以进行两种连接模式的切换。
6. 功能概览
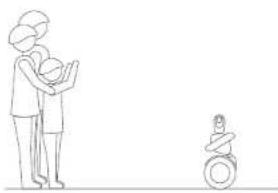
Loomo 可以是你的摄影助手,以独特视角记录你的生活。
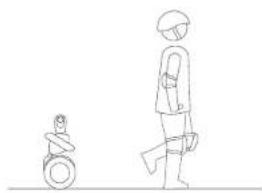
Loomo可以紧跟你的步伐,陪伴你去任何地方。

Loomo可以通过手机进行遥控,随着你的心意而行动。
7. 骑行指导
警告
骑行人员体重需在20kg\~100kg内,身高需在130cm\~200cm内。

佩戴安全帽和护具可最大程度降低骑行过程中可能带来的伤害。
完成激活后,App中将有更详细的骑行教程,跟随引导步骤逐步练习骑行或参照以下图文学习步骤进行练习。
注意
若需要新手教学,您需要事先下载手机应用程序。
注意
在骑上Loomo前请务必阅读并理解安全警告和安全须知。绝大部分的意外摔倒和失去平衡摔伤都是超速或急加速行为造成。
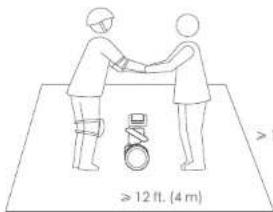
初次驾驶,请在开阔场地通过他人辅助下上车。

2 单脚踏上脚踏板,同时将身体重心保持在地面上,注意避免小腿或膝盖推动脚控(机器人躯干),导致意外转向。
注意
必须从车后上下车

3 缓慢地把重心挪到脚踏板上,听到提示音起,Loomo 即处于平衡状态,随后可将另一只脚也踩上脚踏板。

4 双脚同时踏上脚踏板,保持身体放松,站直并平视前方。
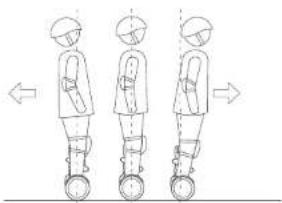
5 缓慢地前后移动身体重心来控制前进、后退。
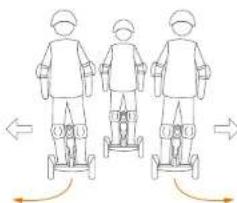
6 通过左(右)腿轻靠脚控来控制转向,注意障碍物,避免碰到轮胎。
8. 安全警告

避免轮胎碰到周围障碍物,否则将导致轮胎飞转和车辆失控。
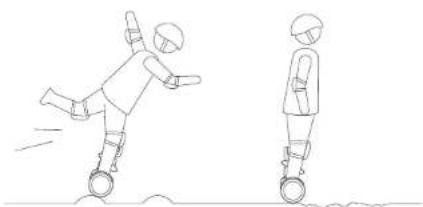
遇到减速带/电梯门槛/坑洼路面等,请勿零速或高速通过,否则可能导致轮胎打滑或卡死;崎岖路面请保持中低速(3\~10km/h)。稍微屈膝能让您更好的适应以上路面。
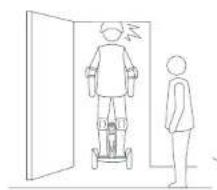
注意门框 / 电梯等高处障碍物,避免撞伤头部。
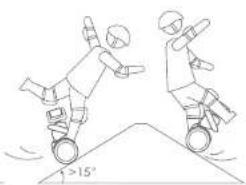
请勿在大于15度的坡道骑行,Loomo可能因力量不足而翻倒。

禁止在超过2cm的积水中驾驶。水中行驶极易打滑失控,并有可能损坏Loomo内部电路。
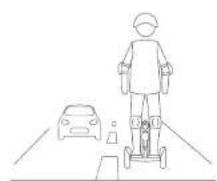
禁止骑行Loomo驶入机动车道和人车混流的住宅小区。

禁止超速驾驶,超速时车辆会后仰报警(并启动限速机制),此时请立即减速,否则车辆可能会因功率不足而失去平衡摔倒。

禁止急加速或急刹车。请勿以俯仰角度超过5°或以超过4km/h/s的加速度加速。
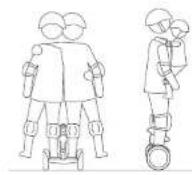
禁止孕妇骑行,禁止多人同时骑行一台loomo,禁止怀抱儿童骑行。
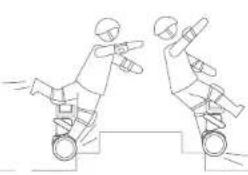

禁止尝试做出任何特技动作,请时刻保持双脚同时在脚踏板上。
禁止在骑行过程中尝试跳跃或飞车等危险行为。
禁止在低摩擦力的表面上进行骑行。(例如:湿滑路面、松软的沙石路面、冰面等)
9. 安全须知
- Loomo 可以作为平衡车使用。如果您在此前未使用过类似的设备,请仔细阅读说明书中的图文介绍。对于因缺乏经验或不按照安全须知导致所受的伤害及事故,纳恩博公司和赛格威机器人公司将不承担任何直接责任和连带责任。
Ⅱ. 同时您需要理解:一旦将Locmo驶上公共道路或其他公共场合,即使您完全遵照本安全驾驶指南操作,也可能面临因他人或交通工具的违规驾驶/不当操作所导致的风险。就像步行或骑自行车也有可能受到其他交通工具的伤害一样;与所有车辆一样,驾驶Locmo速度越快,刹车所需要的距离越长,在一些光滑地面上紧急刹车还可能导致车轮打滑而失去平衡甚至摔倒。因此在驾驶过程中保持警惕、保持适当的速度,与其他人和交通工具保持合理的安全距离是非常重要的,当驶入不熟悉的地形前,请保持警惕并低速行驶。
Ⅲ. 骑行时请尊重行人的路权。避免惊吓行人,尤其是儿童,从行人后方经过时,提醒行人并在通过时减速,尽可能从行人左侧(对于车辆靠右行驶的国家地区适用)通过。与行人面对面时,保持在右方并降低速度。
IV. 在尚无电动平衡车相关国家标准和法规的国家和地区驾驶时,请您务必严格遵守本手册对于驾驶者的安全要求。对于违反本手册所提示的使用行为导致的一切财物、人身损失、事故、法律纠纷,及其他一切造成利益冲突的不利事件,纳恩博公司和赛格威机器人公司将不承担任何直接责任和连带责任。
V. 请勿将 Loomo 转借给不会操作的人员使用,以免出现摔伤风险。请务必对朋友的安全负责,把 Loomo 交给朋友使用前,请告知 TA 必须佩戴安全护具,并参考 APP “新手指导” 部分视频,对 TA 进行新手教学。
VI. 请在每次驾驶前对 Loomo 进行基本的检查,如果发现明显的零件松动、电池异常、轮胎缓慢漏气或者过度磨损、转向发出异常响动或者转向失灵等异常情况,请立即停止使用,切勿强行骑行。请使用 APP 进行 Loomo 故障诊断,并向您的销售方取得联系,以获得专业指导意见或维修保养服务。
VII. 在骑行过程中,请尽量佩戴安全头盔。使用经认证的自行车头盔或滑板头盔,将头盔固定带调节至合适程度,能够为您的头部提供良好的保护。在首次骑行时,您必须佩戴安全头盔。
VIII. 不要在任何可能遇到儿童,行人、宠物、车辆、自行车或其他障碍物和潜在危险的地区尝试您的首次骑行。
IX. 注意!随时留意您的Locomo的前方——您的眼睛是您安全避免障碍物和低摩擦力表面(包括但不限于湿地、松散的沙子、松散的砾石和冰面)的最佳工具。
X. 为了减少受伤的风险,您必须阅读并遵守本文档中的所有“注意”和“警告”内容。以安全的速度骑行。在任何情况下,您都不应该在机动车辆的道路上骑行,并请遵守以下安全说明:
A. 以下人群不适宜骑行Loomo
任何14岁以下或60岁以上的人士,14\~18岁之间的青少年应在成年人的陪同下进行骑行。
任何受酒精或毒品影响的人士。
- 患有不宜剧烈活动疾病的人士。
任何在平衡机能或运动能力存在问题而导致平衡能力会受到干扰的人士。
- 任何在身高及体重要求之外的人士(要求参见骑行指导)
B. 使用本产品时,请遵守当地的法律法规。请勿在当地法律禁止的地方使用。
C. 为了保障骑行的安全,您必须可以清楚的观察到前方的情况和行人。
D. 请勿在雪地里、雨中,或是在潮湿、泥泞、冰冷的地方等任何过于光滑的路面进行骑行。请勿越过障碍物(沙子,松散的砾石或木棒)。否则可能导致影响平衡性或降低摩擦力。
E. 禁止过快的加速或减速。禁止在 Loomo 已经报警或上翘减速时继续加速。禁止尝试超出限速机制继续加速。
XI. 如果充电端口潮湿,请勿插入电源线。
XII. 充电时请使用电涌抑制器,以保护您的 Loomo 免受电源浪涌和电压尖峰的损坏。只能使用 Segway Robotics 提供的充电器。不要使用任何其他产品的充电器。
XIII. 请勿改装您的Loomo。仅可使用Segway Robotics指定的零件或附件。对Loomo的改装可能会干扰Loomo的正常运作导致严重的人身伤害或机器损坏,并可导致保修项目失效。
XIV. 请勿坐在Loomo的头上,这可能严重损坏您的Loomo。
10. 日常保养和维护
清洁和储存
如果机器人表面出现污渍,使用软布蘸取少量清水擦拭即可;如出现难以清洁的污渍,可使用牙膏涂抹并用软刷反复刷洗,然后用湿布清洁。车身塑料件如有划伤,也可使用砂纸或其他研磨材料打磨。
提示
请勿使用酒精、汽油、煤油或其他有腐蚀性、挥发性的化学溶剂清洗机器人,否则将会严重损坏机器人的外观和内部结构。清洁机器人时,禁止使用压力水枪喷淋冲刷。
警告
清洁机器人前,请确保 Loomo 处于关机状态,且已经拔掉充电电缆并扣严充电口橡胶盖,否则可能触电或由于内部进水导致严重故障。
在不使用时,尽量在室内干燥、阴凉处存放机器人,避免长时间在户外存放。阳光暴晒/过热/过冷的户外环境都会加速机器人外观和轮胎的老化,减少机器人及其电池组的使用寿命。
轮胎胎压
轮胎胎压建议值:35-50Psi(或241-345kPa)。补气时请保持两侧胎压平衡。
电池保养
不要在规定的温度范围之外存储电池或给电池充电。不要丢弃或毁坏电池。可以通过查看电池上的铭牌来了解更多信息,请根据当地的环保法规处理电池。维护良好的电池在长距离骑行后仍能保持良好的性能。在每次使用后及时进行充电,避免电量完全耗尽再充电。室内温度22℃时使用电池性能最佳。低于0℃的温度下使用电池,可能导致电池性能降低。
提示
充满电的机器大约在待机 120~180 天之后会耗尽其储存的电量。低电量的机器人大约在待机30~60天之后会耗尽其存储的电量。每次使用后记得给机器人充电。电池完全放电可能会对电池产生永久性的损伤,并且这种损坏是不可恢复的。电池内部有智能芯片记录电池的充放电情况,由于长时间不充电造成的损坏将无法再次充电,且无法享受免费保修。
警告
我们建议不要在低于0℃的温度条件下骑行,因为低温会限制机器人的最大功率或扭矩,并可能会造成人身伤害或财产损失。不要试图拆卸电池。
注意防火。本产品不含用户可维修零件,若机器人长时间暴露于紫外线、雨水环境等恶劣的天气下可能会损坏机器人的外壳材料,在不使用时请将机器人存放在室内。
- 型号参数表
| 硬件参数 | 描述 |
| 体积 | 高×长×宽:650×310×570mm |
| 净重 | ~19 kg (~42 磅) |
| 电池容量 | 329 Wh |
| 电池仓 | 42颗18650锂电池 |
| 最高速度 | 机器人模式8km/h(4.3 mph),平衡车模式18km/h(11 mph) |
| 头部转动范围 | 左右视角±150°,俯仰视角-90~180°。原点为屏幕超向正前方 |
| 液晶显示屏 | 4.3英寸,480×800像素 |
| 工作温度 | 0~35°C (32~95°F) |
| 载重范围 | 25~100kg (55~220磅) |
| 平台参数 | 描述 |
| 处理器 | 英特尔 Atom 系列 28750 处理器,4 核 64 位,2.56GHz |
| 操作系统 | 基于 Android 5.1 的定制系统 |
| 内存 | 4GB |
| 容量 | 64GB |
| USB 接口 | USB 3.0 Type-C |
| 扩展槽 | USB 2.0,24V 电源 (最大 1A) |
| 传感器参数 | 描述 |
| RealSense ZR300 | 实时30Hz RGB深度图像流&鱼眼图像IMU数据流(室内&室外) |
| 高清摄像头 | 1080p 30Hz 104° FOV |
| 麦克风阵列 | 4+1麦克风阵列,支持语音定位和语音识别 |
| 超声波传感器 | 检测前方障碍物距离 |
| 红外传感器 | 用于地面悬旋检测 |
| 触摸传感器 | 位于机器人头部两侧和背面的三个触摸传感器 |
| 里程计 | 左右轮增量为4° |
| 编码器 | 霍尔&磁编码器可测量每个关节角度和基于车轮的里程计 |
| 惯性测量单元 | 提供相机稳定功能以及姿态反馈 |