RM6112 - Codeur rotatif IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil RM6112 IFM au format PDF.

| Type de produit | Codeur rotatif |
| Marque | IFM |
| Modèle | RM6112 |
| Tension d'alimentation | 10...30 V DC |
| Vitesse de rotation maximale | 10 000 tr/min |
| Vitesse de rotation électrique maximale | 6 000 tr/min |
| Type d'arbre | Arbre plein ou arbre creux |
| Raccordement | 17 broches avec blindage |
| Compatibilité des signaux | TTL, RS485 |
| Longueur maximale du câble | 100 m (câble blindé) |
| Fonction principale | Conversion de mouvements de rotation en valeurs numériques |
| Mesure | Position angulaire et nombre de tours |
| Transmission des données | Impulsion et données synchrones série |
| Protection lors du montage | Mettre l'installation hors tension et éviter les chocs sur l'arbre |
| Signal incrémental | Impulsion et donnée avec niveaux TTL |
FOIRE AUX QUESTIONS - RM6112 IFM
Questions des utilisateurs sur RM6112 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Codeur rotatif au format PDF gratuitement ! Retrouvez votre notice RM6112 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil RM6112 de la marque IFM.
MODE D'EMPLOI RM6112 IFM
efector40
Fonctionnement et caractéristiques
Le codeur convertit des mouvements de rotation en valeurs numériques digitales. Chaque tour et chaque position angulaire est donné comme valeur numérique.
Ces valeurs permettent de mesurer des mouvements angulaires et de déterminer des positions et le nombre de tours.
- Alimentation 10... 30V DC
- vitesse de rotation maxi: 10.000tr/mn.
- vitesse rot. maxi élec. 6.000tr/mn.
Montage

Mettre l'installation hors tension. Ne pas mettre en marche le moteur lors du montage.
Eviter les coups sur l'arbre; ne pas utiliser une lime ou un outil similaire: l'appareil risque d'être détruit.
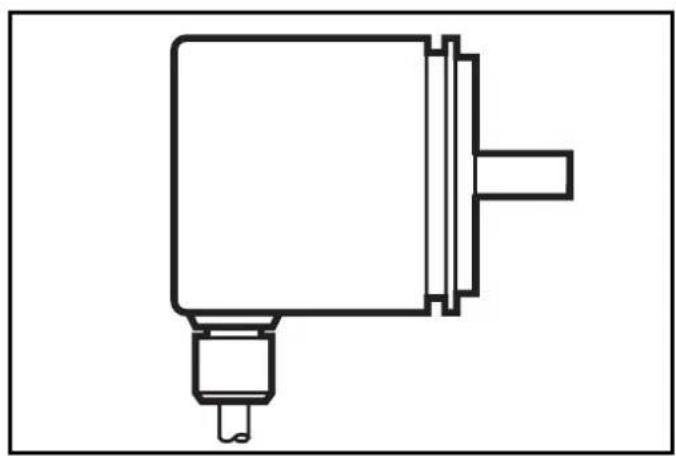
Montage codeur à arbre plein
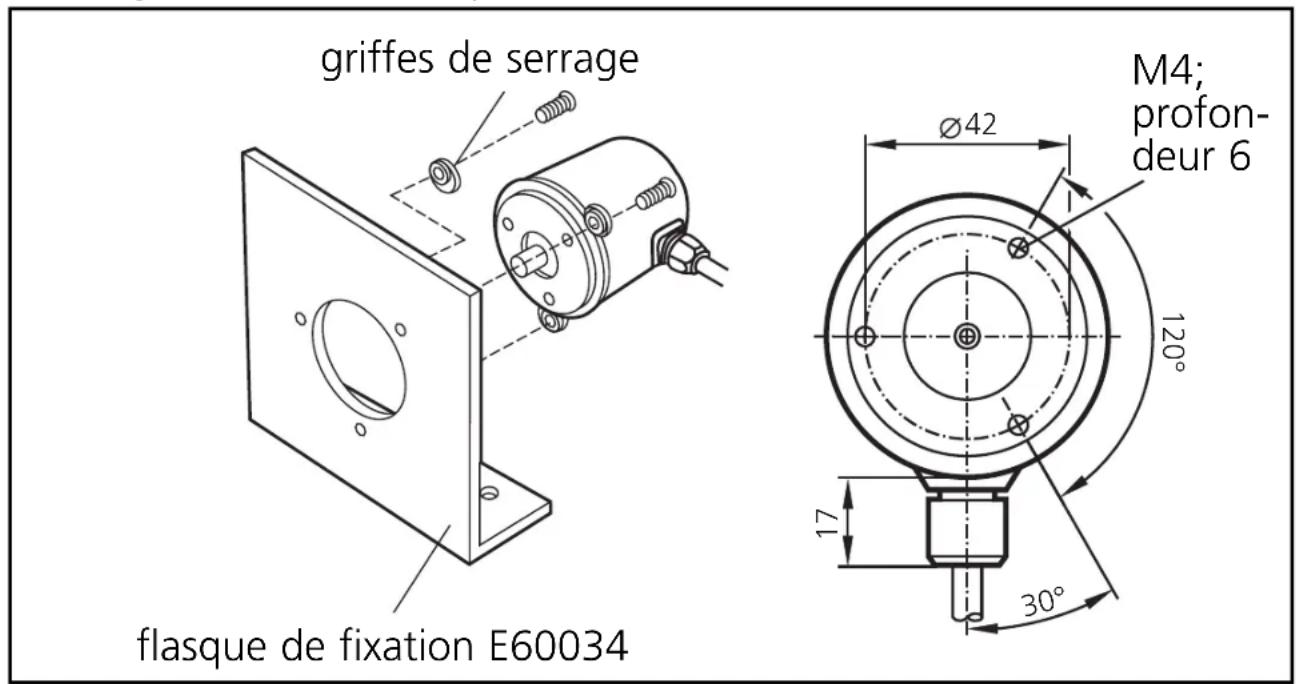
Monter un accouplement flexible entre le codeur et le moteur afin d'empêcher que l'arbre ou les roulements soient endommagés.
En cas de mesure de déplacement avec une roue de mesure, fixer le codeur et la roue de mesure sur le bout d'un bras monté de manière flexible.
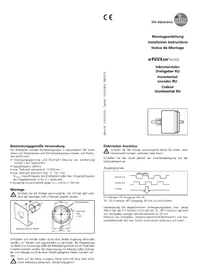
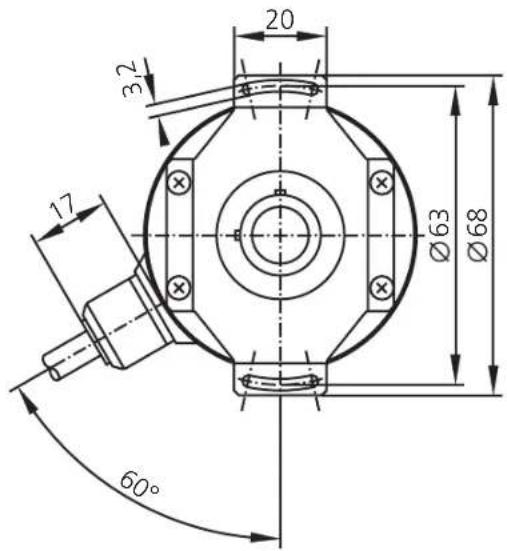
Montage codeur à arbre creux
accouplement stator
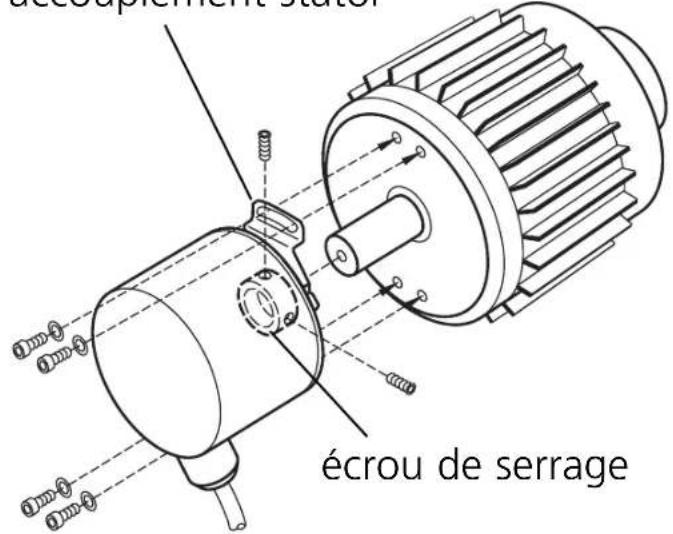
- Dévisser l'écrou de serrage sur le codeur.
- Introduire le codeur dans l'arbre (10mm au minimum; 19mm au maximum) et fixer l'accouplement stator à l'aide de quatre vis M3.
- Visser l'écrou de serrage.
Raccordement électrique

Mettre l'installation hors tension avant le raccordement / débranchement du raccordement par cable ou connecteur ; raccordement :
| broche 1 | broche 2 | broche 3 | broche 4 | broche 5 | broche 6 | broche 7 | broche 8 | broche 9 |
| — | noir | rot | — | vert | brun | brun/vert | violet | jaune |
| n.c. n. | c. n.c. n. | c. n.c. n. | c. 10...30V | UP | impulsion | impulsion | ||
| broche 10 | broche 11 | broche 12 | broche 13 | broche 14 | broche 15 | broche 16 | broche 17 |
| blanc/vert | blindage | bleu/noir | rouge/noir | gris | vert/noir | jaune/noir | rose |
| 0V Un | boîtier | B (+) | B (-) | données | A (+) | A (-) | données |
Extension par câble blindé; longueur maximale 100m; installer séparément des sources parasites (distance minimale env. 20cm). Relier le boîtier du codeur, le connecteur / le bornier et l'électronique d'exploitation via le blindage et relier à la terre.
Entrée des données:
Signaux compatibles TTL, impulsion et impulsion transférés de l'amplificateur de ligne selon RS 485
Sortie des données:
synchronisation série, signaux compatibles TTL, données et données
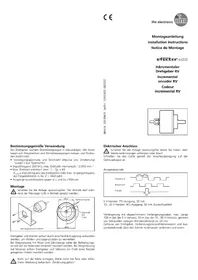
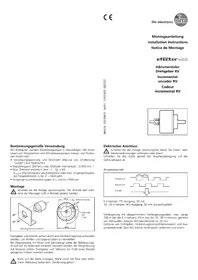
Signaux incrémentaux
Cycle pour un mot de données T = 0,9 à 11μs (impulsion) / t1 > 0,45μs / t2 ≤ 0,4μs (sans prolongateur) t3 = 12 à 35μs (intervalle)
Au repos, le câblage d'impulsion et de données est au niveau haut. Sur le premier front descendant de l'impulsion, la valeur de mesure instantanée est mémorisée. Le transfert des données s'effectue sur le premier front montant de l'impulsion.
Après le transfert d'un mot de données complet, la sortie de données reste au niveau bas jusqu'à ce que le codeur soit prêt pour appeler une nouvelle valeur de mesure (t3). Si pendant ce temps une nouvelle demande de données est faite (impulsion), les données déjà transférées le sont encore une fois.
Dans ce cas, la sortie de données est au niveau bas entre le bit de poids faible (LSB) du premier transfert et le bit de poids fort (MSB) du deuxième transfert.
En cas d'interruption du transfert de données (impulsion = niveau haut pour t ≥ t3) une nouvelle valeur de mesure est mémorisée sur le prochain front descendant de l'impulsion. Le module électronique enregistre les données sur le front montant de l'impulsion.