RM6112 - Drehgeber IFM - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts RM6112 IFM als PDF.
| Produkttyp | Drehgeber |
| Marke | IFM |
| Modell | RM6112 |
| Versorgungsspannung | 10...30 V DC |
| Maximale Drehzahl | 10 000 U/min |
| Maximale elektrische Drehzahl | 6 000 U/min |
| Wellentyp | Vollwelle oder Hohlwelle |
| Anschluss | 17-polig mit Abschirmung |
| Signalverträglichkeit | TTL, RS485 |
| Maximale Kabellänge | 100 m (geschirmtes Kabel) |
| Hauptfunktion | Umwandlung von Drehbewegungen in digitale Werte |
| Messung | Winkelposition und Umdrehungszahl |
| Datenübertragung | Impuls und synchrone serielle Daten |
| Schutz bei Montage | Anlage spannungsfrei schalten und Stöße auf die Welle vermeiden |
| Inkrementalsignal | Impuls und Daten mit TTL-Pegeln |
Häufig gestellte Fragen - RM6112 IFM
Benutzerfragen zu RM6112 IFM
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Drehgeber kostenlos im PDF-Format! Finden Sie Ihr Handbuch RM6112 - IFM und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. RM6112 von der Marke IFM.
BEDIENUNGSANLEITUNG RM6112 IFM
Bestimmungsgemäß Verwendung
Der Drehgeber wandelt Drehbewegungen in digitale Zahlenwerte. Jege Umdrehung und jeder Winkelstellung der Umdrehungen wird als Zahlenwert ausgegeben.
Mit den Werten setzen sich Winkelbewegungen messen, Positionen und Anzahl der Umdrehungen bestimmen.
- Versorgungsspannung 10 ... 30V DC
- max. Drehzahl elektrisch: 6000U/min.
- max. Drehzahl mechanisch: 10 000U/min.
Montage

Schalten Sie die Anlage spannungsfrei. Der Antrieb damit während der Montage nicht in Betrieb gesetzt werden.
Nicht auf die Welle schlagen; Welle nicht mit Feile oder ähnlich Werkzeug behandeln: Zerstörungsgefahr!
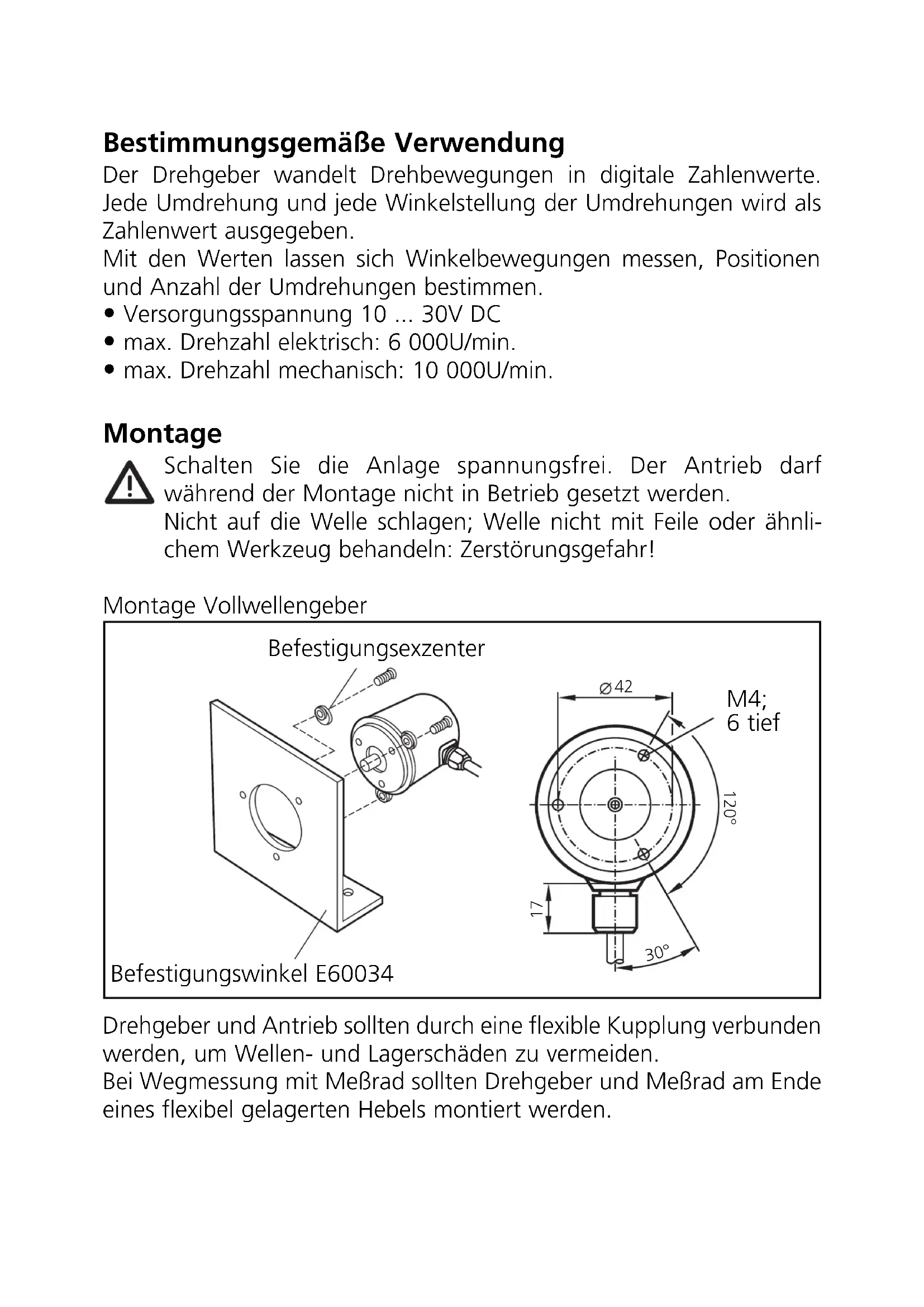
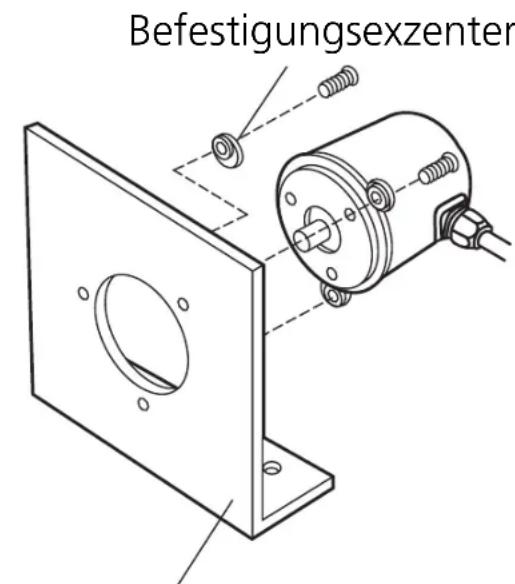
Montage Vollwellengeber
Befestigungswinkel E60034
Drehgeber und Antrieb sollen durch eine flexible Kupplung verbunden werden, um Wellen- und Lagerschäden zu vermeiden.
Bei Wegmessung mit Meßrad sollen den Drehgeber und Meßrad am Ende eines flexibel gelagerten Hebels montiert werden.
Montage Hohlwellengeber
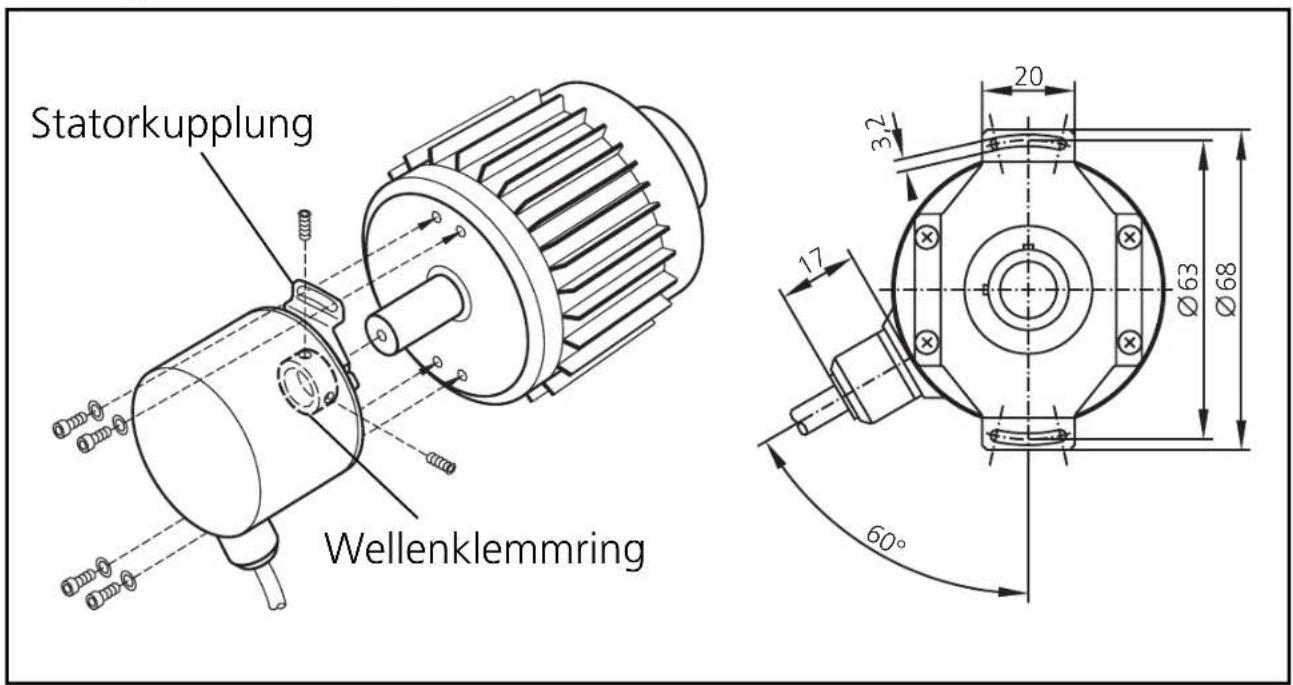
- Losen Sie die Schrauben zur Wellenklemmung.
- Schieber den Drehgeber auf die Welle (min. 10mm, max. 19mm) und befestigen Sie die Statorkupplung durch vier Schrauben M3.
- Ziehen Sie die Schrauben zur Wellenklemmung fest.
Elektrischer Anschluß
Schalten Sie die Anlage spannungsfrei bevor Sie Kabel- oder Steckerverbindungen offen. Anschlußbelegung:
| Pin 1 | Pin 2 | Pin 3 | Pin 4 | Pin 5 | Pin 6 | Pin 7 | Pin 8 | Pin 9 |
| — | schwarz | rot | — | grün | braun | braun/grün | violett | gelb |
| n.c. n. | c. n.c. n. | c. n.c. n. | c. 10...30V | UP | Takt Takt | |||
| Pin 10 | Pin 11 | Pin 12 | Pin 13 | Pin 14 | Pin 15 | Pin 16 | Pin 17 |
| weiß/ grün | Schirm | blau/ schwarz | rot/ schwarz | grau | grün/ schwarz | gelb/ schwarz | rosa |
| 0V Un | Gehäuse | B (+) | B (-) | Datum | A (+) | A (-) | Daten |
Verlängerung mit abgeschirmtem Verlangerungskabel; max. Länge 100m; getrennt von Störquellen verlegen (Mindestabstand ca. 20cm). Gehäuse von Drehgeber, Verbindungsstecker / Klemmkasten und Auswerteelektronik über den Schirm miteinander verbinden und erden.
Codesignal Dateneingang:
TTL-kompatible Signale Takt und Takt aus Treiber nach RS 485
Codesignal Datenausgang:
Synchron-serial, TTL-kompatible Signale Daten und Daten
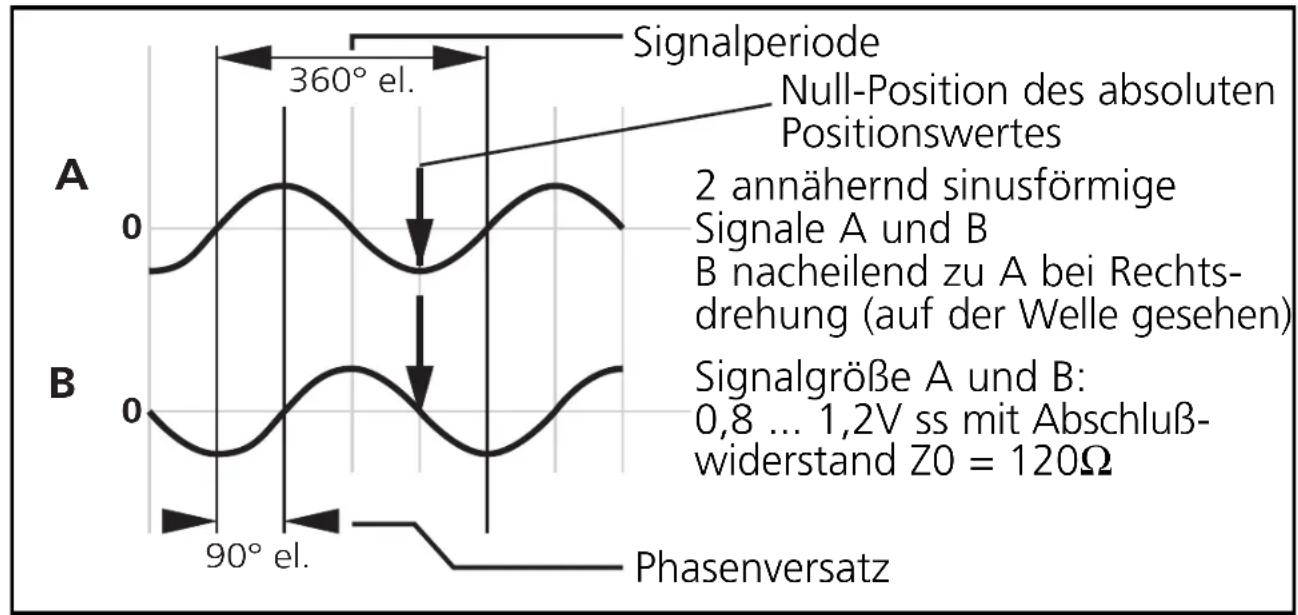
Inkrementalsignale
Ansteuerung eines Datenworts
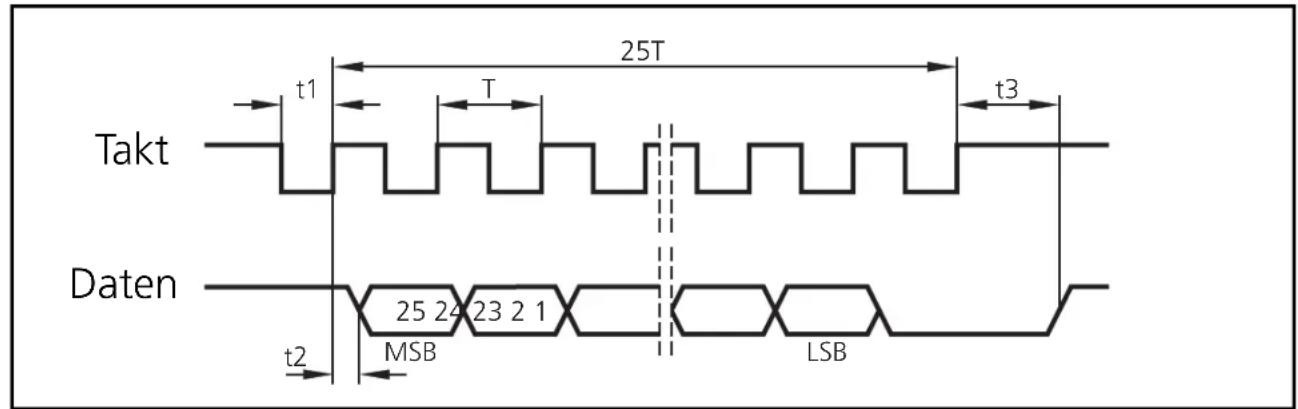
T = 0,9 bis 11μs (Takt) / t1 > 0,45μs / t2 ≤ 0,4μs (ohne Veränderungskabel)
t3 = 12 bis 35μs (Warteseit)
Im Ruhezustand liegen Takt- und Datenleitung auf dem High-Pegel. Mit der ersten fallenden Taktflanke wird der aktuelle Meßwert gespeichert. Die Datenübertragung erfolgt mit der ersten steigenden Taktflanke.
Nach Übertragung eines vollständigen Datenwertes bleibt der Datenausgang auf dem Low-Pegel, bis der Code-Drehgeber für einen neuen Meßwertabrfuch bereit ist (t3). Kommt während dieser Zeit eine neue Datenausgabe-Anforderung (Takt), werden die bereits ausgegebenen Daten nochmals ausgegeben.
In thisem Fall ist zwischen LSB der ersten und MSB der zweiten Übertragung der Datenausgang auf dem Low-Pegel.
Bei einer Unterbrechung der Datenausgabe (Takt = High für t ≥ t3) wird mit der nächsten Taktflanke ein neuer Meßwert gespeichert. Die Folgeelektronik übernimmt mit der steigenden Taktflanke die Daten.