MANUAL DE USUARIO Freo Pro Narwal
Disponibillidad y compatibilidad regionali
Basesdose in cnsiderenco relatives atexercicn delusioy en los recurios de cumplimento agalpenitron,los produccos Narvalo y les vedentes autorizados de Navea;anzidc sotientlly sdo pueu utzionv y rceis estacion postene en el pialrsgion en el que es anlan. Si el producto es criva a co pasas o regeneras, es posabeque que no quasulie a la aplicacion Navea para nvelar el proecto o revise opereciones. En general, el producto y suvice, lo requirmandamos que adquille a la produccia Navea distinuclado localmente a Navea o al vendedes autorizadas de Navea.
Para o ser或其他介质, osyxicosos Norwali distribuiados por Navel (yves vendaderes autorizados de Navil), en Chino continental istant emolado e lo que o serviceis assistais possivel na China continental estes atoece fucimcien, quenot xueLsKong HongMina y Tavan
1. Producto de un vistazo
(incluye bolsa para el palvo × 1 , modulo de trapeado × 2

Estación base × 1
(incluye base de limpie x1, bandeja de limpie x1. a. deposito de agua limpa x1, deposito de agua sucia x 1)

Accesorios
Copillo lateral x2 (Accorsoric)

(Accosorio)

Cable de alimentacion de la estacion base × 1 Contencedor de basura × 1
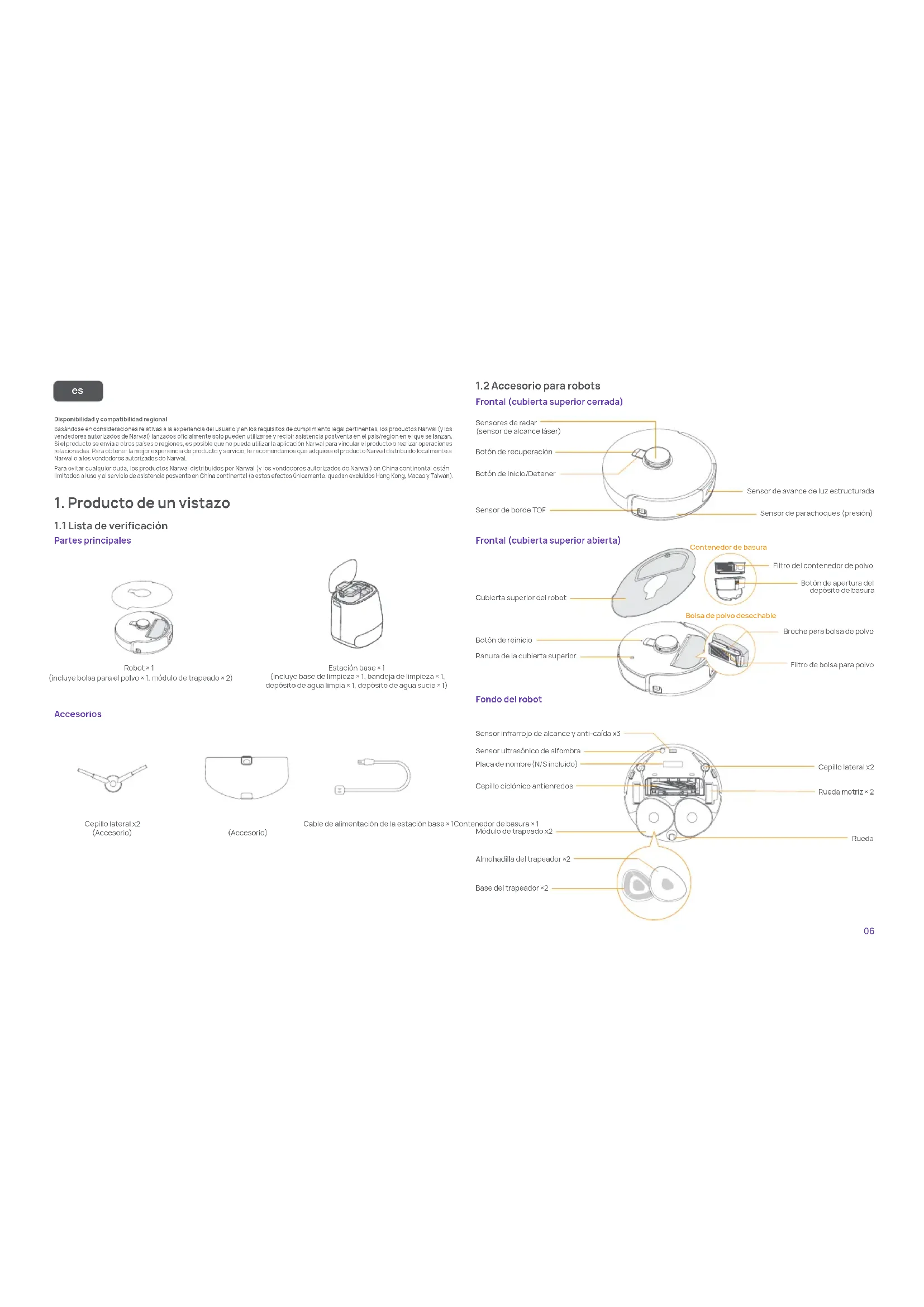
1.2 Accesorio para robots
Frontal (cubierta superior cerrada)
Sensores de radar
(sensor de alcance laser)
Boton de recuperación
Boton de Inicio/Detener
Sensor de borde TOF
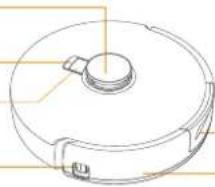
Sensor de avance de luz estrucurada

Frontal (cubiertasuperior abierta)
Contenor de basura

Filtro del contenedor de polvo
Botondaperturadol
deposito de basura
Botón de reinicio
Ranura de la cuberta superior

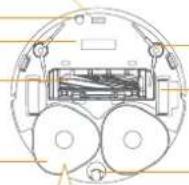
Fondo del robot
Broche para boisa de polvo
Filtro de bolsa para poivo
Sensor Infrarrojo de alcancy y anti-caidax3
Sensorultrasonico de alfombra
Place de nombre(N/S inclusido)
Cepillo ciconico antierredos

Cepillo lateral x2
Ruedamatrix×2
AlmonadilladeItrapeador × 2
Basesdtrapeadorx2

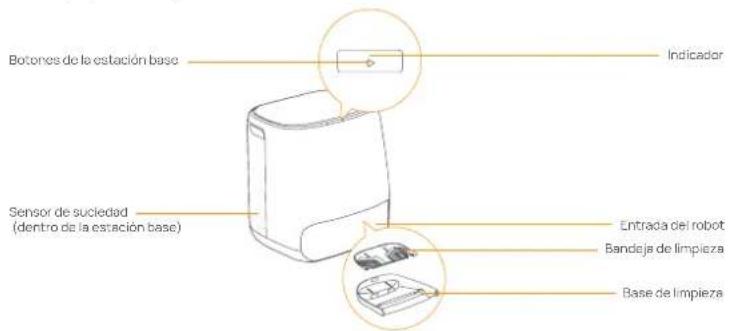
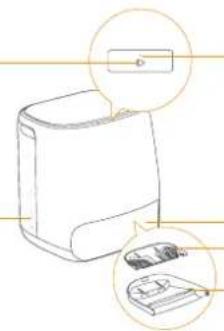
1.3 Estación base
Frontal (tapa cerrada)

Frente (tapa abierta)
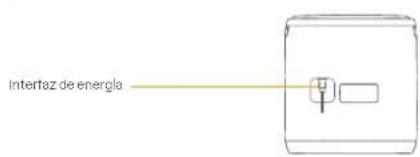
Atras
1.4 Botones eindicadores
Botones de robot
Botones de la estación base
| Botón | Acción Función | |
| Iniciar/Parar | Pulsación corte | iniciar/pausar/reanujder la tarea actual |
| Mantenga proisionado durante 2 segundos | Encondido / apagado |
| Recordar | Pulsación corte | Salir/llamar a la estadía base |
| Mantenga proisionado durante 2 segundos | Activar/dosactivar el bloquio para niños |
| Reinecer | Pulsación corte | ingrese al modo de emparejamiento |
| Mantenga preisionado durante 5 segundos | Desvirucular la cuenta y borrow las datos del usuario |
| Mantenga proisionado durante 10 segundos | Restaurar la configuración de fibricula |
Botón Acción Función
| Pulsación corla | Iniciar/pausar/irancunar la tarea actual |
| Doble clíc | Inició/cancelación del levado del trapeador |
| Mantenga presióndo durante 2segundos | Finalizar la tarea actual |
| Mantenga presióndo durante 10segundos | Entrar/salir del modo de camparajamido |
| Pulse brevamente durante 5veces consecutivas | Autocomprobación de recarga/descarga |
Indicadores de la estación base
Indicador Significado
| Apagado | En aspera/segado/dosinfoción en camino |
| Continuo | Tarea en camino (limpieza/mapeo/lavado del trapeador/retirada) |
| Parpado intento | Autocomprovisión de emparajamente/actualización/recarga/descarga en camino |
| Parpado rápido | Error/dosconectado |
2. Preparación antes del uso
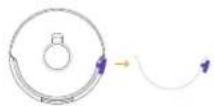
(1)Instale los cepillos laterales
Prestione los cepillos laterales en las ranuras seguinca la color nostra que encajean en su situ.

(2)Retire la espuma anticolisión.
Aora la cuoerta superior del robot y retira la espuma anticolon.
(3)Colocar la estacion base
Enchufé el cable de alimentación en la toma situada en la parte posterior del la estación base y conductora a una toma de corricón, y bajo un espacio abierto de al monos 0.45 m de另一边 de la estación base para que el robot pueda entrada y salir de ella.
Note: Si la estacion base se coloca inclinada o hay patas de mesa, cortinas y adornos alrepedor, es posible que se atueve lesfunicoce evitacion de obsteculos del robot, astrictando su intradidas.

(5)Añadiraguallimpi
Amesa de fregar, anaida agua al deposito de agua limpia para lavar el tracador.
- Abra la tapa de la estación base. Saque el deposito de agua limpa, doloro y lienido de agua limpa
Cierl do deposito y uva a colocarlo en la estacion base. Nota: NO ehda corteigntles m desinfecantias de Iercos en el deposto de agua limpa para exitar cahns en el producto.

(7)Conecta y vincula el robot en la App
Descarga la App Narwal y sugue las instructaciones para conectar y vincular el robot.
En lapellida del disposito de la App. teque "Configuracion". Disposito" ylua的意见ismo reacordee "Teicilin robotc" durante 10 seguros para activar/activar el modulo de ardea de energia. El medio de ardea de energiasolegual es displicable on Nortemerica.

3. Como utiliser
Antes de使用者ol robot,asegucresde haber finalizado la instalacion y configuracion de la estacion base onel Capulo 2.
3.1 Organizar el entorno domestico
(4)Añade la pastilla limpiadora de sueños.
Agregue una pastilla limpiadora de pisos al tanque de agua, limpira.
Note: La parestila de limpieza deo adquirire por separado.

(6)Ajustes de arranque
EmpJEe le robot hac la estacion basse con la camera hac aura. La estacion basse emrita un pitdo para indicar que la carga se realizao correntamente y el robot se encendera y transmitirle el mensaje.


A. Aparte i des escond del sueio, por ejemio, cabies esparcidos, trapos, zapatillas, ropo y ribos.

C. Dojo contraidas las这几个puertas o installe la valla para evaporar que el robot entre enzonas elevadas o bajas.


B. Abra las puertas de las habitaciones que vaya ablemir y ordene los muebles paradeferar el mayor especio possible para la limpieza.

D. A talka maxima grande de cruce do obstaculos es de 22 mm y el robot no puece entiar en habitaciones con una ultura de umbrol superior a 20~mm .Puede acuiar la rampa de umbrol Narwalpara para poder al robot a superiar los obstaculos.
E. NO se colque delante del robot, en el umbra lo en pasillas estreches para evaporar imoliones.
3.2 Trazar mapas
Antes del limpiar un nuevo hogar, el robot necesita exploreir el entorno y create un mapa. Antes de limpiar por primera vez.
en 3 App.
1 Unavz credoounmapa,puedeeditarse en a App
- Noquisa estacion base espcues de create un mapa, o tendra que reiniclar memapo. Si se reorganizaros mueblesgrandes de su casa, se recomienda crear un nuevo mapa.
3.3 Limpieza
Seleccione los发展模式 de limpieza
El producto incorporates para tresodos de Implicao Aspirar, Trapear, Aspirar y Treapear, y Aspirar y despueso Trapear. Puede selec tion y augmentar parametros como los cidos de limpeza, la sicony y la humedad del trapeardo por cada bajo en App. Nota. Ante de revisar该如何 tarae que incluya aspirar, asegurarde que la cuberta superior del robot esta bien colocado para eviar unerror o erracion.
Establer Freo Mind
FreeMind es un assistant de limpieza intellegante. Puede selectionar el mode de limpieza y, a continuacion, activar Freo Mind en la Ap. Cuanco el Freo Mind estaactivado, el robot可以选择:
*estabecuer parametos de limpieza basados en los datos ambientales recogidos por los senores,
*meliorar la limpieza de borce a borde.
Inlciar la tarea de limpleza
Puede iniciael robotpara la limpieza de tres formas:
defecto

v Freqar de forma prodetemirnada;
Note: Puede ajustar o mico de limpoza predeccrimina para pulsar botones en la cation base y configurar mas paralmores de limoza en la Apa.
Pausar/reanudar la tarea actual
Puede pausar/reanudar la tarea actual de tres maneras:
Lavado del trapeador
Si el robot es configurado para varias pesadas de trapezdo o la zona a limpiear把这些 grand, el robot volverae automatically.
monte a la的最佳 bajo lavar la boscador.
El numero de pasadas del trapezador y de returnosguepe modificare en la App anteles de que comience la impeza,y nopece modificarase durante la tarea de limpieza en modulo.
Finalizar laareaactual
El robot vaolveria a la estación base cuando finalise la limpieza. Puede veré infoque de limpieza actual en la App. Puede finalizar manualmente la hora de las tres problemas relacionos:

Secado del trapeador
Tras la ultima pasada del trapeador, el robot volara a la estacion base para lavar y secar el trapeador. El tiempo de secado se possible modifier en la App.
Tambienpuediniciarlelavadoysecado deltraeador manualemente de lasdos formasigulentes:
4. Parametros
4.1 Especillasiones
| Robot(YJCC023) | Estación base(YJCB023) |
| Dimensiones: 550*350*107 mm | Dimensiones:415*370*434 mm |
| Peso: 4.25 kg | Peso:8.5kg |
| Correspondía inalámbrica: 2,4 GHz, 802.11b/g/n | Entrada nominal: 100-240V-50-60Hz |
| Tiempo de cargo: Alrededor de 3 horas | Potencia nominal: 60W |
| Tensión nominal (trabajo): 14,4V= (bateria del ones de lico, >5000mAh) | Salida nominal: 20V= 2.25A |
| Entrada nominal: 20V= 2.25A | |
| Wifi | |
| Protocolo: IEEE 802.11b/g/n | |
| Rango de Frequencia: 2412~2472MHz | |
| Max. Potencia del transistor (EIRP): ≤20dBm | |
| Bluetooth | Bluetooth |
| Protocolo: BLE 5.0 | Protocolo: BLE 5.0 |
| Rango de Frequencia: 2402-2480MHz | Rango de Frequencia: 2402-2480MHz |
| Max. Potencia del transistor (EIRP): ≤10dBm | Max. Potencia del transistor (EIRP): ≤10dBm |
| Bateria (Robot) |
| Cantidad do baterías por paquete: | 1 pza. |
| Tipo de bateria | Bateria de Li-ion recargable |
| Tensión nominal: | 14,4V= |
| Cantidad de celdas de bateria por paquete de baterías: | 8 pzas. |
| Capacidad nominal, energia nominal: | 5000mAh, 72Wh |
ko