
AIROS 550S - 电气柜 Mirka - 免费用户手册
免费查找设备手册 AIROS 550S Mirka PDF格式.

| 产品类型 | 电气柜(电机驱动箱) |
| 品牌 | Mirka |
| 型号 | AIROS 550S |
| 机柜尺寸(长 x 高 x 深) | 380 x 300 x 210 mm |
| 电机驱动器尺寸 | 72 x 30 x 200 mm(不含DIN导轨支架) |
| 含DIN导轨支架尺寸 | 95 x 55 x 210 mm |
| 电源输入 | 48 VDC(46–50 VDC),最大10 A,350 W |
| 网关辅助电源 | 24 VDC |
| 工具速度范围 | 1000–10000 rpm |
| 控制接口 | Modbus RTU (RS-485)、Profinet I/O 或 EtherNet/IP(通过可选网关)、4位数字输入(15–33 VDC) |
| 继电器输出 | 单极常开,250 VAC / 125 VDC,10 A |
| 保护功能 | 过载、过热、欠压/过压、工具接线故障 |
| 工作环境温度 | 0 至 40 °C |
| 环境湿度 | 最大相对湿度95%(无冷凝) |
| 存储温度 | -20 至 80 °C |
| 防护等级 | IP40 |
| 保修 | 1年,涵盖制造缺陷和材料缺陷 |
| 制造商 | Mirka Ltd, Jeppo, Finland |
| 符合规范 | EN 61439-1/2, EN 61800-3, EN IEC 63000, 指令 2014/35/EU, 2014/30/EU, 2011/65/EU |
常见问题 - AIROS 550S Mirka
用户关于以下问题的提问 AIROS 550S Mirka
0 问题 关于此设备。回答您知道的问题或提出自己的问题。
提出关于此设备的新问题
下载您的设备说明 电气柜 免费PDF格式!查找您的手册 AIROS 550S - Mirka 并重新掌握您的电子设备。本页发布了使用您的设备所需的所有文档。 AIROS 550S 品牌 Mirka.
用户手册 AIROS 550S Mirka
| Mirka Ltd, 66850 Jeppo, Finland根据我们的唯一责任声明,Mirka"产品(如下所列,特定型号请参见"技术数据"表)(与此声级相关)符合以下标准或其他规范性文件:EN61439-1:2011,EN61439-2:2011,EN61800-3:2004+A1:2012,ENIEC 63000.2018 符合指令 2014/35/EU,2014/30/EU,2011/65/EU | ||||
| 产品:Mirka"电机驱动柜 | ||||
| Jeppo2025年02月19日发布地点和日期 | MIRKA公司 | Stefan Qdberg,普波执行官 | 制造类/供应商Mirka Ltd6.6850 Jeppo,Finland电话+358 20760 2111传真+358 20760 2290www.mirka.com | |
原始说明课文。我们保留不经事先通知而更改本手册的权利。
保修
Mrka 保证您购买的部件没有制造和材料缺陷。
Mrka 部件的保修期为自购买之日起1年。保修仅涵盖制造和材料缺陷。
如果您购买的部件出现因制造缺陷、材料或工艺引起的问题,Mrka将根据本手册载列的保修条款和条件,免费予以维修。为确保部件保修有效,务必按照操作说明使用,维护和操作部件。
条款和条件
Mika 提供的部件保修涵盖材料和工艺上的缺陷。
保修涵盖的部件:
- 电机驱动
-砂磨装置
-激光装置
·电源
、遇侵雷圣
zh
符号
| CE | 符合欧盟相关标准 |
| 警告上有电 |
安装概述
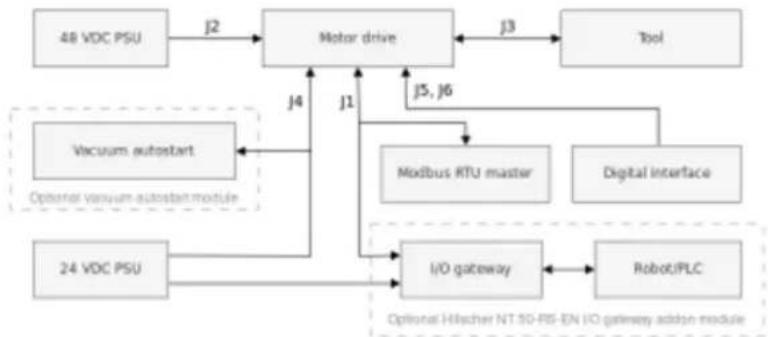
flowchart
graph TD
A["48 VDC PSU"] -->|j2| B["Motor drive"]
C["24 VDC PSU"] -->|j4| B
D["Vacuum autostart"] -->|j1| B
E["I/O gateway"] -->|j5, j6| F["Modbus RTU master"]
G["RobotIPLC"] --> H["Optional Hilfischer NT 50-RS-EN I/O gateway add-on module"]
B -->|j3| I["Tool"]
B -->|j4| J["Modbus RTU master"]
B -->|j5, j6| K["Digital interface"]
综述
·连接 48 VDC 电源至电机驱动(12 连接头)。
·连接工具至电机驱动(J3连接头)。
■ 不建议在长度超过10米的工具上使用屏蔽电缆。
Modbus RTU 接口
是过载保护
是过热保护
输入接口
Modbus RTU (RS-485)
Profinet I/O(网关模块)
EtherNet/IP(网关模块)
4 位元数字输入 (15-33 VDC)
输出接口
单极,非锁定 N/O 继电器,250 VAC/125 VDC,10 A
0-40℃环境温度
最高 95% 湿温相对度,不腐蚀,不滴水湿度
-20 至 80 ℃ 储存温度
IP40IP 等级
380 x 300 x 210 mm(宽 x 高 x 深)电机驱动柜
72 x 30 x 200 mm(宽 x 高 x 深)电机驱动
安装在 DIN 导轨支架中的电机驱动
95 x 55 x 210 mm (宽 x 高 x 深)
安全说明
必须由合格电气技工进行电气安装!
电机驱动仅适用于固定装置。
请勿对电机驱动或工具的任何部分进行任何耐压测试。已在工厂对产品安全进行了全面测试。
在接触电机驱动(设置跳线和类似行为)之前,请使用防静电腕确保自己接地,以避免静电电压放电对电机驱动造成损害。
在机柜上进行任何工作之前,请务必断开电源。
警告
请务必确保所有交直流电源均正确接地,电机驱动不能与带电电源电压接触。

建议采用外部紧急停止回路。
运行工具之前

在启动工具之前,检查工具是否安装正确,并确保电机驱动安装正确。
电机驱动概览
电机驱动印刷电路板连接头、按钮、跳线、指示器、安装孔和尺寸
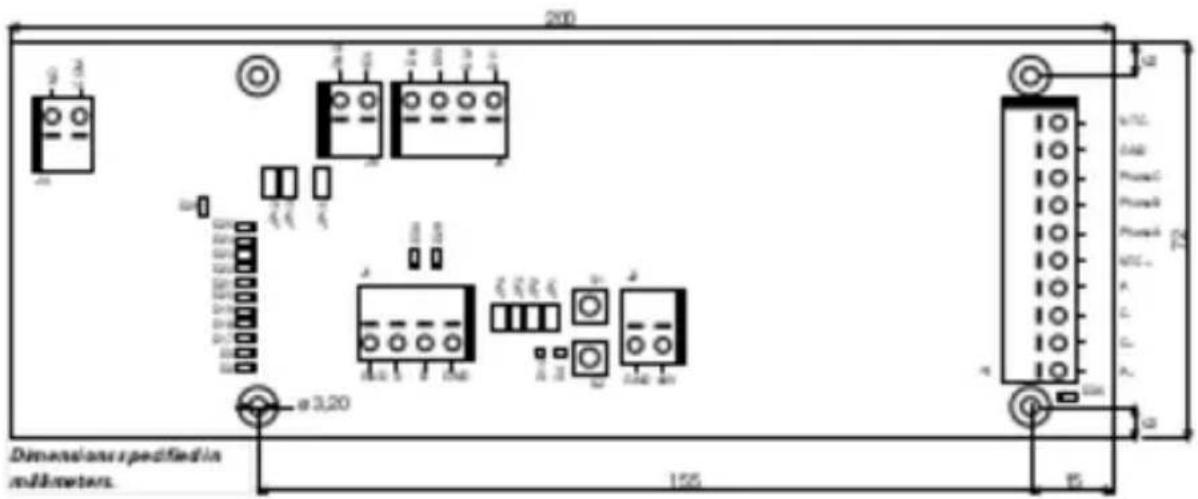
电机驱动印刷电路板安装在DIN导轨支架{该支架可以连接至标准35x7.5毫米的EN50022 DIN导轨}中,但电机驱动印刷电路板可以从该支架上拆卸下来,并使用安装孔进行安装。如果使用安装孔,建议在安装电机驱动印刷电路板时使用20毫米的金属压铆螺母柱和10毫米的M3螺丝。
建议对连接到任何连接头上的每根电线使用10毫米带塑料套筒的套圈。然后,借助一个小平头螺丝刀(刀片宽度3.5毫米,刀片厚度0.6毫米),可以很容易地将电线插入连接头并释放。
连接头说明
| 连接头 | 接口类型 | Description |
| J1 | GND | 接地 |
| J1 | A | Modbus RTU RS-485 (A) |
| J1 | B | Modbus RTU RS-485 (B) |
| J1 | GND | 接地 |
| 连接头 | 接口类型 | Description |
| J2 | GND | 接地 |
| J2 | 48V | 48 VDC 输入 |
| 连接头 | 接口类型 | 电机电缆颜色 |
| J3 | P+ | 白 |
| J3 | C+ | 粉 |
| J3 | C- | 反 |
| J3 | P- | 绿 |
| 连接头 | 接口类型 | 电机电缆颜色 |
| J3 | NTC+ | 棕(0.25 平方毫米) |
| J3 | Phase A | 棕(0.25 平方毫米) |
| J3 | Phase B | 蓝 |
| J3 | Phase C | 黑 |
| J3 | GND | 机柜接地 |
| J3 | NTC- | 黄 |
| Shield | 接地,Mrika 机柜内 X2 | |
| 连接头 | 接口类型 | Description |
| J4 | COM | 继电器 COM |
| J4 | NO | 继电器 NO |
| 连接头 | 接口类型 | Description |
| J5 | DI1 | 数显转速控制输入位 1 |
| J5 | DI2 | 数显转速控制输入位 2 |
| J5 | DI3 | 数显转速控制输入位 3 |
| J5 | DI4 | 数显转速控制输入位 4 |
| 连接头 | 接口类型 | Description |
| J6 | ISV | IS VDC 输出 |
| J6 | GND | 接地 |
| 按钮说明 | ||
| 按钮 | Description | |
| S1 | 自测按钮 | |
| S2 | 复位按钮 | |
图中不明确
如果数显转速控制接口启用,此灯亮起。D24
如果设置了警报状态标志,此灯亮起。D25
继电器状态指示灯。D26
Modbus RTU 接收指示灯。D29
Modbus RTU 传输指示灯。D30
D36 工具线路可能出现故障。当检测到工具 C + / C - / P + / P- 线路中可能存在故障时,变为红色。
转速设定值显示
100004000AIROS 650 CV/NV
AIROS 550 CV/NV
AIROS 350 CV/NV
80004000AIROP 312 NV
AIROS 150 NV
AIOS 130 NV
100005000 AIOS 353 CV/NV
30001000AIRP 300
转速LED激活不同设定值的转速(转/分钟)位图
| 设定值 | DI1D四晃每分钟转速 | 工具每分钟转速 | 工具每分钟转速 | 钟转速 | D21D20D19D18D17D | |||||||||||
| 4000-10000 | 4000-8000 | 5000-10000 | 1000-3000 | |||||||||||||
| 1 | 0 | 0 | 0 | 1 | 4000 | 4000 | 5000 | 1000 | X | |||||||
| 2 | 0 | 0 | 1 | 0 | 4500 | 4333 | 5417 | 1167 | X | |||||||
| 3 | 0 | 0 | 1 | 1 | 5000 | 4666 | 5834 | 1334 | X | X | ||||||
| 4 | 0 | 1 | 0 | 0 | 5500 | 4999 | 6251 | 1501 | X | X | ||||||
| 5 | 0 | 1 | 0 | 1 | 6000 | 5332 | 6668 | 1668 | X | X | X | |||||
| 6 | 0 | 1 | 1 | 0 | 6500 | 5665 | 7085 | 1835 | X | X | X | |||||
| 7 | 0 | 1 | 1 | 1 | 7000 | 5998 | 7502 | 2002 | X | X | X | X | ||||
| 8 | 1 | 0 | 0 | 0 | 7500 | 6331 | 7919 | 2169 | X | X | X | X | ||||
| 9 | 1 | 0 | 0 | 1 | 8000 | 6664 | 8336 | 2336 | X | X | X | X | X | |||
| 10 | 1 | 0 | 1 | 0 | 8500 | 6997 | 8753 | 2503 | X | X | X | X | X | |||
| 11 | 1 | 0 | 1 | 1 | 9000 | 7330 | 9170 | 2670 | X | X | X | X | X | X | ||
| 12 | 1 | 1 | 0 | 0 | 9500 | 7663 | 9587 | 2837 | X | X | X | X | X | X | ||
| 13 | 1 | 1 | 0 | 1 | 10000 | 8000 | 10000 | 3000 | X | X | X | X | X | X | X |
位图
| DI4 | DI3 | DI2 | DI1 |
| 0 | 0 | 0 | 0 |
| 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 1 |
操作
停止
运行,无速度变化
运行,无速度变化
Modbus RTU 从机地址显示
D22 D21 D20 D19 D18 D17 D3 D2
跳线说明
未设置JP2
未设置JP3
未设置JP4
未设置JP13
预留以供将来使用未设置JP1
如果设置,将 270 的终端电阻器连接在 Modbus RTU 引脚 A 和引脚 B 之间。
如果设置,将 10k 的下拉电阻器连接至 Modbus RTU 引脚 B。
如果设置,将 10k 的上拉电阻器连接至 Modbus RTU 引脚 A。
如果设置,数显转速控制功能启用。未设置JP12
如设置,D2-D3·D17-D22指示灯将输出当前Modbus RTU从机地址,而不是转速设定值。
重置为出厂设置。未设置JP15
工具线缆连接头引脚分配
| 未使用PE(绿色-黄色,1.0 | |
| mm^2 | |
| A相1(棕色,1.00 | |
| mm^2 | |
| B相2(蓝色,1.00 | |
| mm^2 | |
| C相3(黑色,1.00 | |
| mm^2 | |
| C-A(灰色,0.25 | |
| mm^2 | |
| C+B(粉色,0.25 | |
| mm^2 | |
| P-C(绿色,0.25 | |
| mm^2 | |
| NTC- | |
| C(黄色,0.25 mm^2 ) | |
| NTC+D(棕色,0.25 | |
| mm^2 | |
| P+E(白色,0.25 | |
| mm^2 |
NTC-和P一起连接至连接头内的同一引脚。
Hillscher NT 50-RS-EN 适配器电缆引脚分配(孔式DSUB-9)
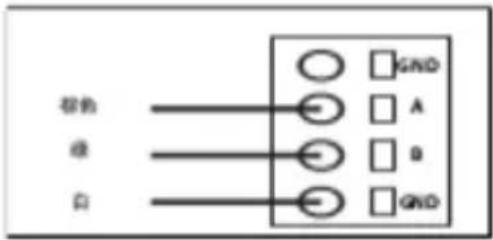
| 引脚(颜色) | Description |
| 1{白色,WH} | 接地 |
| 4{棕色,BN} | Modbus RTU {A,RxD/TxD+} |
| 5{绿色,GN} | Modbus RTU {B,RxD/TxD-} |
| 屏蔽装置 | 屏蔽装置 |
端子排连接(固件版本3.05及更新版本)
Enable-State :
为使砂磨机能够运行,端子排4必须连接到机器人/PLC的24V输出端,而端子排6则应连接到机器人/PLC的0V输出端。
为了提高安全性,如果机器人遇到问题导致其停止,可将Enable-State输出设置为低电平。这将自动停止砂磨/抛光头。
应按照说明使用机柜随附的3米长2芯电缆连接Enable-State
真空自动启动模块:
客户可以集成选配的 Mirka 自动启动模块 (MIA6519011),以实现除尘器的自动启动/停止功能。为此,将端子排 5 连接到自动启动模块上的正 (+) 端子,将端子排 7 连接到负 (-) 端子。
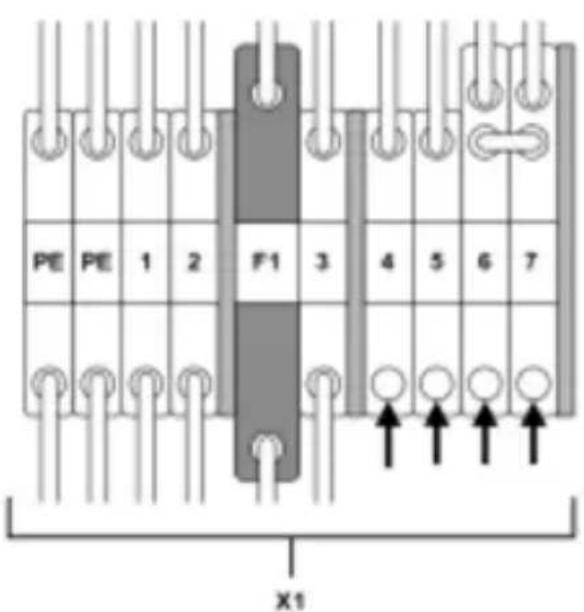
| 功能/连接 | 端子排 |
| Enable-State 机器人/PLC输出 24V | X1:4 (连接到引脚JS、DH) |
| 机器人/PLC 0V | X1:6 |
| 自动启动模块 + | X1:5 (连接到引脚J4、NO) |
| 自动启动模块 - | X1:7 |
Modbus RTU
支持 RS-485 接口的 Modbus RTU 被用来与电机驱动通信。电机驱动被配置为 Modbus RTU 从机设备,默认从机地址为 86。如果从机地址与另一个 Modbus RTU 从设备冲突,则可以更改从机地址。
电机驱动上的 J1 连接头用于 Modbus RTU 通信。建议使用屏蔽双绞线,屏蔽装置仅在一点(通常在主设备上)接地。J1 连接头的引脚 A 相当于 RxD/TxD+,引脚 B 相当于 RxD/TxD-。
RS-485 配置
19200波特率
偶数奇偶性
1停止位
8数据位
线圈寄存器(F1、F5、F15)
| 00001 - 00012 | Uint16 | 数字输出 | 预留线圈 1-11,以供将来使用。 |
| 线圈 12 是位于电机驱动上的继电器。 |
输入寄存器 (F4)
输入寄存器30001-30016专用于驱动器。示例:“转速下降计数”是指连接到电机驱动器的所有工具的“转速下降计数”总数。
| 转速下降计数Uint1630001 | 转速从设定值下降超过25%的次数。 | ||
| 暖工具计数Uint1630002 | 工具温度超过“暖”限制—79°C的次数。 | ||
| 暖电机驱动计数Uint1630003 | 电机驱动温度超过“暖”限制—73°C的次数。 | ||
| 热工具计数Uint1630004 | 工具温度超过“热”限制—134°C的次数。 | ||
| 热电机驱动计数Uint1630005 | 电机驱动温度超过“热”限制—117°C的次数。 | ||
| 停止工具计数Uint1630006 | 工具温度超过“停止”限制—142°C的次数。 | ||
| 停止电机驱动计数Uint1630007 | 电机驱动温度超过“停止”限制—123°C的次数。 | ||
| 电压超出范围计数Uint1630008 | 输入电压未在44至52VDC范围内的次数。 | ||
| 30009 | Uint16 | 过电流低计数 | 电流超过15.1A的次数。 |
| 30010 | Uint16 | 过电流中计数 | 电流超过18.2A的次数。 |
| 运行时间超过60秒的次数。长用时计数Uint1 | |||
| 中等用时计数Uint1630012 | 运行时间介于20秒至60秒之间的次数。 | ||
| 运行时间不足20秒的次数。短用时计数Uint1 | |||
| 使用小时Uint1630014 | 使用的小时数。 | ||
| 使用分钟Uint1630015 | 使用的分钟数。 | ||
| 使用秒钟Uint1630016 | 使用的秒钟数。 | ||
| 30017 | Int16 | 电流 | 电流,单位毫安。 |
| 30018 | Uint16 | 转速 | 转速(转/分钟)。 |
| 工具温度的单位是°C。工具温度Uint1630019 | |
| 电机驱动温度的单位是°C。电机驱动温度Uint | |
| 固件版本Char[20]30021-30030 | 固件版本和创建日期,如“2.0,1月18日14:00”。 |
| 部件版本Char[18]30031-30039 | 部件版本和电机驱动识别号,如“AI1.3 123456” |
| 电机驱动序列号Char[14]30040-30048 | 电机驱动序列号,如“749474379001” |
| 报警状态标志Uint1630047 | 报警状态标志在任何时候均可能是以下多个数值的组合。请分别查看各个位,确定当前触发的报警类型。如果警报触发的原因不再存在,此标志将在5秒钟后自动清除。0x0000=未触发0x0001=工具过热0x0002=电机驱动过热0x0004=过电流0x0008=欠电压0x0010=过电压0x0020=自测运行0x0040=转速下降0x0080=电流过高0x0100=正在更换工具0x0200=工具线路可能出现故障0x0400=恢复出厂设置模式0x0800=已禁用写入保护0x1000=工具断开(通信中断)* |
| 工具IDUint1630061 | |
| 工具最小转速Uint1630062 | |
| 工具最大转速Uint1630063 | |
| 工具有标签Uint1630064 | |
| 工具序列号Char[14]30065-30071 | |
| 工具垫直径Uint1630174* | |
| 工具Z偏移Uint1630175* | |
| 工具偏摆,单位毫米。工具偏摆Uint1630176 | |
| 工具重量Uint1630177* | |
| 工具重心工具重心Uint1630178* | |
| 工具垫宽度Uint1630179* | |
| 工具垫长度Uint1630180* | |
| 工具固件版本 | 固件版本,例如0.04 |
| 工具型号名称Char[10]30181-30193* |
* 要求固件版本为 3.05 或更新版本,工具固件为 0.05 或更新版本。
保持寄存器(F3、F6、F16)
| 设备名称Char[20]40001-40010 | 最长19个可打印字符,如“AIMD 749474379001”。 |
| 转速设定值Uint1640011 | 速度设定值,而非实际速度,介于工具的最小和最大转速之间。电机驱动状态,有以下组合:操作Uint164000x0001=运行0x0002=停止*0x0004=开*0x0008=关0x0010=工具更换开始0x0020=工具更换结束0x0040=禁用写入保护0x0080=启用写入保护当写入新状态值时,该数值只能是单一状态,而不是多种状态组合,例如“启动+运行”不能同时写入。 |
| 从机地址Uint1640013 | 默认值为86,但如有需要,可以更改。 |
* 固件版本 3.05 或更新版本不包含
Profinet I/O 或 EtherNet/IP 网关 (Hilscher NT 50-RS-EN)
如果电机驱动器需要作为 Profinet I/O 或 EtherNet/IP 设备连接,则可以使用 Hilscher NT 50-RS-EN 网关。网关通过网关上的 DSUB-9 连接头和电机驱动上的 J1 连接头与电机驱动相连。以下是网关上 DSUB-9(X2 连接头)的引脚分配:
参考电位,电源接地接地1
接收数据/发送数据正极RxD/TxD+4
接收数据/发送数据负极RxD/TxD-5
10 kΩ 的上拉电阻器在内部连接至“RxD/TxD +”网关。
10 kΩ 的下拉电阻器在内部连接至“RxD/TxD -”网关。
可以在Hilscher公司网站下载有关网关和配置工具的详细文档:www.hilscher.com
配置
作为 Profinet I/O 从设备或 EtherNet/IP I/O 适配器时,Mirka 会预先配置网关。Hilscher 公司的“SYCON.net”软件可以用来重新配置设备。Hilscher 公司的“Ethernet Device Setup”软件可以用来更改网络配置。通常需要在配置更改后,重新分配 IP 地址。
Profinet 的默认网络配置
IP 地址
192.168.2.191
| 子网掩码 | 255.255.255.0 |
| 默认网关 | 0.0.0.0 |
| 设备名称 | mt50anpns |
| 输入大小 | 118 |
| 102{架件版本3.05或更新版本} | |
| 输出大小 | 5 |
EtherNet/IP 的默认网络配置
| IP 地址 | 192.168.125.110 |
| 名称 | MinkENIP |
| 输入组件 | 101 |
| 输入大小 | 102 |
| 输出组件 | 100 |
| 输出大小 | 5 |
Profinet I/O 到 Modbus RTU 信号映射 突件版本 3.04 或更旧版本
| 名称 | Modbus 寄存器 | 数据长度 | 触发器 | Profinet I/O | 数据长度 |
| SetRelay | 00012 | 1个线圈 | 更改的数据 | 1 | 1字节输出 |
| SetSpeedRegister | 40011 | 1个寄存器 | 更改的数据 | 2 | 1字输出 |
| SetOperationRegister | 40012 | 1个寄存器 | 更改的数据 | 3 | 1字输出 |
| DeviceName | 40001-40010 | 10个寄存器 | 循环10秒 | 4 | 10字输入 |
| CommonInputs | 30017-30020 | 4个寄存器 | 循环1秒 | 5 | 4字输入 |
| Misclnputs | 30001-30016 | 16个寄存器 | 循环5秒 | 6 | 16字输入 |
| AlarmStatus | 30047 | 1个寄存器 | 循环1秒 | 7 | 1字输入 |
| FirmwareVersion | 30021-30030 | 10个寄存器 | 循环10秒 | 8 | 10字输入 |
| PartVersionSerialNumber | 30031-30046 | 16个寄存器 | 循环10秒 | 9 | 16字输入 |
| GetSpeedRegister | 40011 | 1个寄存器 | 循环1秒 | 10 | 1字输入 |
EtherNet/IP驱动器固件版本3.05或更新版本
| 类型 | 名称 | 数据类型 | 数据长度 | Modbus 地址 |
| 输入 | 最大转速(转/分钟) | UINT16 | 1 字 | FC4 62 |
| 输入 | 工具有标签 | 位 | 1 字 | FC4 63 |
| 输入 | 工具序列号 | CHAR | 14 字节 | FC4 64-71 |
| 输入 | 始道程(毫米) | UINT16 | 1 字 | FC4 173 |
| 输入 | 工具Z偏移(毫米) | UINT16 | 1 字 | FC4 174 |
| 输入 | 工具偏摆(毫米) | UINT16 | 1 字 | FC4 175 |
| 输入 | 工具重量(克) | UINT16 | 1 字 | FC4 176 |
| 输入 | 工具COG Z偏移(毫米) | UINT16 | 1 字 | FC4 177 |
| 输入 | 始宽度(毫米) | UINT16 | 1 字 | FC4 178 |
| 输入 | 始长度(毫米) | UINT16 | 1 字 | FC4 179 |
| 输入 | 工具固件版本 | CHAR | 6 字节 | FC4 180-182 |
| 输入 | 工具型号名称 | CHAR | 20 字节 | FC4 183-192 |
| 输入 | 驱动器固件 | CHAR | 6 字节 | FC4 20-23 |
| 输入 | 工具使用小时数 | UINT16 | 1 字 | FC4 99 |
| 输入 | 工具使用秒数 | UINT16 | 1 字节 | FC4 100 |
| 输入 | 工具使用分钟数 | UINT16 | 1 字节 | FC4 100 |
| 输入 | 工具使用短计数 | UINT32 | 2 字 | FC4 101-102 |
| 输入 | 工具使用中计数 | UINT32 | 2 字 | FC4 103-104 |
| 输入 | 工具使用长计数 | UINT32 | 2 字 | FC4 105-106 |
西门子TIA PortalV14网关映射示例3.04或更旧版本
以下是TIA Portal V14的屏幕截图,显示如何将网关映射到系统中。GSDML文件位于可从hilscher.com下载的网关解决方案DVD中,用于将HilscherNT 50RS-EN网关添加到您的系统中。
当电机驱动器处于“启用状态”时,可以通过发送“运行状态”命令来写入转速设定值,并将状态设置为“运行状态”。这将令工具以设定值转速运行。通过发送“停止状态”命令将电机驱动器设置为“停止状态”,以停止工具。
建议连续监控平均转速、平均电流、工具温度、电机驱动温度和报警状态标志。这将有助于检测操作过程中是否存在任何问题。
启动和停止工具的顺序示例(固件版本 3.04 及更旧版本):
- 写入 4 (0x0004) 至“操作”寄存器,这将把电机驱动器设置为“启用状态”。
- 写入 4000 (0x0FA0) 至“转速设定值”寄存器,这将把转速设定值设置为 4,000 rpm。
- 写入1(0x0001)至“操作”寄存器,这将把电机驱动设置为“运行状态”,工具将开始运行。
- 写入2(0x0002)至“操作”寄存器,这将把电机驱动设置为“停止状态”,工具将停止运行。
- 写入 8 (0x0008) 至“操作”寄存器,这将把电机驱动器设置为“禁用状态”。
启动和停止工具的顺序示例(固件版本 3.05 及更新版本)*:
- 把引脚 DI1(端子排 4)设置为高电平 (15-33 VDC),这将把电机驱动器设置为启用状态。
- 写入 4000 (0x0FA0) 至“转速设定值”寄存器,这将把转速设定值设置为 4,000 rpm。
- 写入1(0x0001)至“操作”寄存器,这将把电机驱动设置为“运行状态”,工具将开始运行。
- 写入2(0x0002)至“操作”寄存器,这将把电机驱动设置为“停止状态”,工具将停止运行。
- 把引脚 DI1 设置为低电平 (GND),这将把电机驱动器设置为禁用状态。
*详细连接信息请参见“端子排连接(固件版本3.05及更新版本)”章。
数字接口
电机驱动也可以通过数字接口控制,而不是ModbusRTU,但缺点是使用数字接口时没有反馈。如需启用数字接口,则需设置JP12跳线。
连接头 J5 用作数字接口的输入。如果将 15-33 VDC 的电压施加到输入引脚上,则输入被视为高水平。如果电压低于 12 VDC 或输入持续浮动,则输入被视为低水平。连接器 J6 的接地引脚必须在系统之间连接。如有需要,J6 连接头还可用于提供 15 VDC 控制电压。
数字接口操作
请参见电机驱动概览一章中的转速设定值显示表。
自测功能
当按下S1按钮时,电机驱动将进行快速自我测试。报警状态标志将设置为6(自测运行)。如果温度和电压在限值范围内,D4和D14指示灯将闪烁绿灯。如果温度或电压未在限值范围内,则该等指示灯将闪烁红灯。
ath
复位功能
可随时按下复位按钮S2,让电机驱动复位。这本质上就像开关电源一样。
恢复出厂设置功能
如有需要,可将电机驱动中存储的配置恢复为出厂默认设置。此操作将恢复出厂时分配的Modbus从机地址,并将已知最近的工具配置恢复为出厂默认设置。请按以下步骤恢复出厂设置:
- 设置跳线JP15。
2 按下并按住S2按钮5秒钟。
3 移除JP15。
写入保护
“设备名称”和“从机地址”的保持寄存器通常为只读,以防误写入。如需更改这些寄存器,操作步骤如下:
- 写入 64(0x0040) 至“操作”寄存器,禁用写入保护。
2 写入新值至“设备名称”或“从机地址”保持寄存器。
3 写入 128 (0x0080) 至“操作”寄存器,启用写入保护。
安全停止/紧急停止
电机驱动本身没有检测或响应外部安全停止/紧急停止信号的输入。可在电机驱动附近安装合适的接触器,用于连接或切断工具线缆A相、B相和C相线路。
实时工具更换功能
同一台电机驱动可以搭配多种工具使用,但任何时候都只能连接一个工具。更换工具的步骤如下:
- 写入 2 (0x0002) 至“操作”寄存器,使工具停止运行。
2 写入 16(0x0010) 至“操作”寄存器,通知电机驱动您打算断开当前安装的工具。
- 第1款转折从电机面上板下当前安装的工具
故障排除指南
| ·检查J2上是否有48VCD,极性是否正确。电机驱动不启动。 | |
| 工具不启动。 | ·*检查电机驱动器是否处于“启动状态”(D14未闪烁)。·**检查DI1是否已启用(D14未闪烁)。·检查电机驱动是否处于“运行状态”(D4亮绿灯)。·检查工具的电缆组件:引脚是否连接正确? *3.04和更旧版本 **3.05和更新版本 |
| 工具突然停止。 | ·检查报警状态标志。·检查电机驱动和工具温度。·检查工具是否过载。 |
| Modbus RTU通信不工作。 | ·检查是否未设置JP1和JP12。·检查波特率、奇偶校验、停止位和数据位。·检查发送/接收指示灯D29和D30;总线上有流量时,该等指示灯会闪烁。·检查引脚A和引脚B是否连接正确。·检查是否添加终端电阻器(JP2)、引脚A下拉电阻器(JP3)、引脚B上拉电阻器(JP4)来解决这个问题。·检查从机地址(设置JP13跳线并使用指示灯D2-D3·D17-D22读取当前地址)。 |
| I/O网关通信不工作。 | ·检查是否未设置JP1和JP12。·检查网关网络配置·检查24VDC电源。·检查Modbus RTU适配器电缆是否连接正确。 |
| 数显转速控制器接口不工作。 | ·检查是否未设置JP1。·检查是否已设置JP12。·检查高输入电压,该数值应介于15-33VDC之间。·检查低输入电压,该数值应接近零伏特。·检查接地连接。 |
| D36指示灯为红色,或工具速度太快/太慢。 | ·检查J3上的C+/C-/P+/P-线路。 |
处置信息
危险
拔下电源线,使多余的电动工具不可使用。
遵守关于处理和循环利用废弃机器、包装和配件的国家/地区特定适用法规。
仅限欧盟:请勿将电动工具丢弃到家居废弃物中。为遵守关于废弃电子和电气设备的欧盟指令并依法实施,已达使用寿命的电动工具必须单独收集并送回环保回收站。
如需有关 REACH·RoHS 和我们企业社会责任的更多信息,请访问 www.mirka.com




