
AIROS 550S - Szafa elektryczna Mirka - Bezpłatna instrukcja obsługi
Znajdź bezpłatnie instrukcję urządzenia AIROS 550S Mirka w formacie PDF.

| Typ produktu | Szafa elektryczna (skrzynka sterowania silnikiem) |
| Marka | Mirka |
| Model | AIROS 550S |
| Wymiary szafy (dł. x wys. x gł.) | 380 x 300 x 210 mm |
| Wymiary napędu silnika | 72 x 30 x 200 mm (bez wspornika DIN) |
| Wymiary z wspornikiem DIN | 95 x 55 x 210 mm |
| Zasilanie elektryczne | 48 VDC (46–50 VDC), 10 A maks., 350 W |
| Zasilanie pomocnicze dla bramki | 24 VDC |
| Zakres prędkości narzędzia | 1000–10 000 obr./min |
| Interfejsy sterowania | Modbus RTU (RS-485), Profinet I/O lub EtherNet/IP (przez opcjonalną bramkę), wejścia cyfrowe 4-bitowe (15–33 VDC) |
| Wyjście przekaźnikowe | Jednobiegunowe, N/O, 250 VAC / 125 VDC, 10 A |
| Zabezpieczenia | Przeciążenie, przegrzanie, pod/ nadnapięcie, błąd okablowania narzędzia |
| Temperatura otoczenia podczas pracy | 0 do 40 °C |
| Wilgotność otoczenia | HR maks. 95% (bez kondensacji) |
| Temperatura przechowywania | -20 do 80 °C |
| Stopień ochrony IP | IP40 |
| Gwarancja | 1 rok, obejmuje wady produkcyjne i materiałowe |
| Producent | Mirka Ltd, Jeppo, Finlandia |
| Zgodność normatywna | EN 61439-1/2, EN 61800-3, EN IEC 63000, dyrektywy 2014/35/UE, 2014/30/UE, 2011/65/UE |
Często zadawane pytania - AIROS 550S Mirka
Pytania użytkowników dotyczące AIROS 550S Mirka
0 pytanie dotyczące tego urządzenia. Odpowiedz na te, które znasz, lub zadaj własne.
Zadaj nowe pytanie dotyczące tego urządzenia
Pobierz instrukcję dla swojego Szafa elektryczna w formacie PDF za darmo! Znajdź swoją instrukcję AIROS 550S - Mirka i weź swoje urządzenie elektroniczne z powrotem w ręce. Na tej stronie opublikowane są wszystkie dokumenty niezbędne do korzystania z urządzenia. AIROS 550S marki Mirka.
INSTRUKCJA OBSŁUGI AIROS 550S Mirka
pl Instrukcje dot. użytkowania....82
Deklaracja zgodności
Mirka Ltd, 66850 Jeppo, Finlandia
oświadcza, pod rygorem pełnej odpowiedzialności, że niżej wymienione produkty Mirka® (patrz „Dane Techniczne” dla danego modelu), których dotyczy niniejsza deklaracja, są zgodne z wymaganiami poniższych standardów oraz innych dokumentów normatywnych: EN 61439-1:2011, EN 61439-2:2011, EN 61800-3:2004+A1:2012, EN IEC 63000:2018 zgodnie z przepisami dyrektyw 2014/35/UE, 2014/30/UE, 2011/65/UE.
Produkty: Szafa napędowa Mirka®
Jeppo 19-02-2025 r.
Miejsce i data wystawie- nia

Stefan Sjöberg, Dyrektor GeneralnyFirma
Producent/Dystrybutor
Mirka Ltd
66850 Jeppo, Finlandia
Tel. +358 20 760 2111
Tłumaczenie oryginalnej wersji instrukcji. Zastrzegamy sobie prawo do zmiany treści podręcznika bez uprzedzenia.
Gwarancja
Mirka gwarantuje, że Twoje części są wolne od wad produkcyjnych i materiałowych.
Części Mirka objęte są roczną gwarancją od daty zakupu. Gwarancja obejmuje wyłącznie wady produkcyjne i materiałowe.
W przypadku wystąpienia problemu wynikającego z wady fabrycznej lub wadliwego wykonania, Mirka bezpłatnie naprawi daną część zgodnie z warunkami gwarancji określonymi w niniejszym dokumencie. Aby gwarancja na części była ważna, część musi być używana, konserwowana i obsługiwana zgodnie z instrukcją obsługi.
Warunki
Gwarancja Mirka na części obejmuje wady materiałowe i wykonawcze.
Części objęte gwarancją:
•naped
• jednostka szlifierska
• jednostka polerska
•zasilacz
• brama komunikacyjna
Gwarancja nie obejmuje:
- wszelkich uszkodzeń wynikających z lub spowodowanych podczas transportu, odbioru dostawy, instalacji, rozruchu, niewłaściwego użytkowania, zaniedbania podczas użytkowaniu lub konserwacji, wypadków, ekspozycji na niedopuszczalną temperaturę otoczenia, działanie kwasów, wody, nieodpowiedniego przechowywania, nadmiernego wstrząsu lub działania niezgodnego ze specyfikacjami.
- wad wynikających z zastosowania części zamiennych, akcesoriów lub komponentów innych niż oryginalne części zamienne lub akcesoria Mirka.
- części ulegających normalnemu zużyciu, takich jak: podkładki, uszczelki, złączki wydechu, łożyska, gumowe mocowania, kable sygnałowe lub kable zasilające.
- części, które były modyfikowane lub naprawiane (przez serwis inny niż autoryzowany przez firmę Mirka) oraz części częściowo lub całkowicie zdemontowanych.
Do zmiany, rozszerzenia lub uzupełnienia podanych warunków gwarancji jest upoważniona wyłącznie Mirka.
Producent nie ponosi odpowiedzialności za szkody wtórne będące wynikiem przestoju, strat produkcyjnych, obrażeń lub szkód majątkowych.
Roszczenie gwarancyjne należy złożyć w możliwie najkrótszym czasie. Roszczenie gwarancyjne należy złożyć w okresie gwarancji.
Symbole
| CE | Produkt zgodny z odpowiednimi normami UE |
 | Uwaga: Elektryczność |
Przegląd dot. instalacji
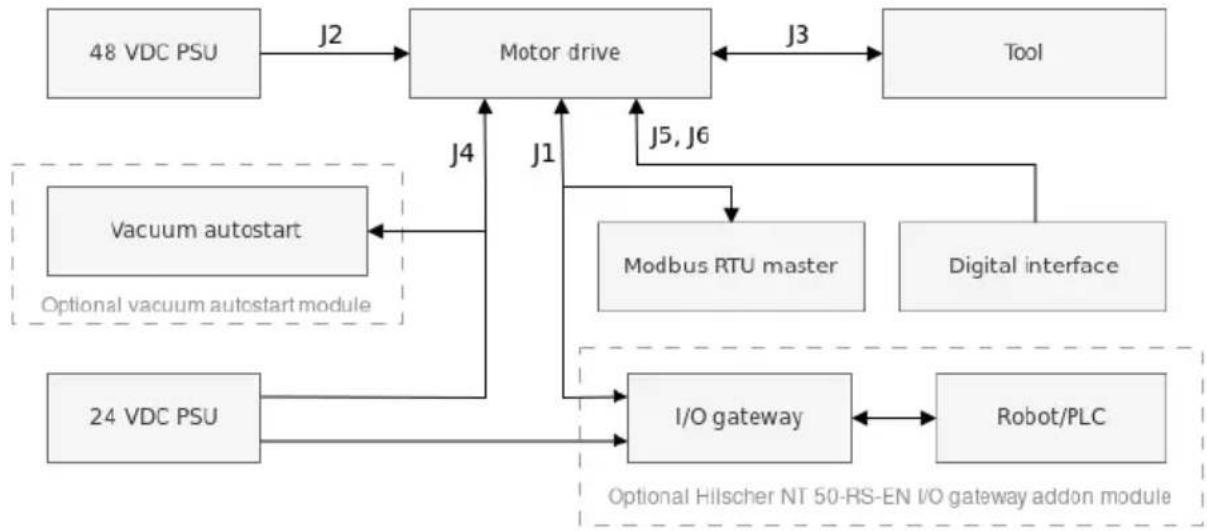
flowchart
graph TD
A["48 VDC PSU"] -->|J2| B["Motor drive"]
B -->|J3| C["Tool"]
D["24 VDC PSU"] -->|J4| B
E["Vacuum autostart"] -->|J1| B
F["Modbus RTU master"] -->|J5, J6| B
G["Digital interface"] --> B
H["I/O gateway"] -->|J1| B
I["Robot/PLC"] -->|J1| B
J["Optional vacuum autostart module"] -->|J4| B
K["Optional Hilischer NT 50-RS-EN I/O gateway addon module"] -->|J1| B
Informacje ogólne
- Podłącz zasilanie 48 VDC do napędu silnikowego (złącze J2).
- Podłącz narzędzie do napędu silnikowego (złącze J3).
UWAGAI Stosowanie do tego narzędzia ekranowanego kabla o długości powyżej 10 metrów nie jest zalecane.
Interfejs Modbus RTU
- Użyj złącza J1 do podłączenia napędu silnikowego do magistrali Modbus RTU.
Bramka I/O do interfejsu Modbus RTU
- Podłącz zasilanie 24 VDC do bramki i podłącz kabel adaptera DSUB-9 pomiędzy bramką (złącze X2) a napędem silnikowym (złącze J1).
Cyfrowy interfejs sterowania
- Użyj złącza J6 do podłączenia wspólnego GND pomiędzy systemami.
- Użyj złącza J5, aby wybrać działanie wykorzystujące cztery cyfrowe sygnały wejściowe.
Interfejs przekaźnika
- Piny przekaźnika N/O (normalnie otwartego) są dostępne na złączu J4.
Dane techniczne napędu silnikowego
| Napięcie wejściowe | |
| Znamionowe napięcie wejściowe | 48 VDC |
| Zakres napięcia wejściowego | 46 – 50 VDC |
| Maksymalny prąd wejściowy | 10 A |
| 350 WMoc znamionowa | |
| Regulator prędkości | |
| Zakres prędkości | 1000 – 10 000 obr./min |
| Zabezpieczenie | |
| TakZabezpieczenie przeciwprzepięciowe | |
| TakZabezpieczenie przed przegrzaniem | |
| Przekładki | |
| Interfejsy wejściowe | Modbus RTU (RS-485)Profinet I/O (modułbramki)4-bitowe wejścia cyfrowe (15-33 VDC) |
| Interfejsy wyjściowe | Jednopolowy, niezatrzaskowy przekaźnik N/O, 250 VAC/125 VDC, 10 A |
| Środowisko | |
| Temperatura otoczenia | 0 – 40 °C |
| Wilgotność | Maksymalnie 95 % RH, niekorozyjne, brak kapiącej wody |
| Temperatura przechowywania | -20 – 80 °C |
| IP40Klasa ochrony IP | |
| Wymiary | |
| Szafa napędowa | 380 x 300 x 210 mm (szer. x wys. x gł.) |
| Napęd | 72 x 30 x 200 mm (szer. x wys. x gł.) |
| Napęd silnikowy montowany w uchwycie na szynęDIN | 95 x 55 x 210 mm (szer. x wys. x gł.) |
Instrukcje dot. bezpieczeństwa

Instalacja elektryczna musi zostać wykonana przez wykwalifikowanego elektryka!

Napęd silnikowy jest przeznaczony wyłącznie do instalacji stałych.

Nie należy przeprowadzać żadnych testów wytrzymałości elektrycznej na żadnej części napędu silnikowego ani narzędziu. Produkt został w pełni przetestowany fabrycznie pod kątem bezpieczeństwa.

Przed dotknięciem napędu silnikowego (w celu ustawienia zworek itp.), aby uniknąć uszkodzenia napędu w wyniku wyładowania elektrostatycznego, należy uziemić swoje ciało za pomocą antystatycznej opaski na nadgarstek.

Przed rozpoczęciem jakichkolwiek prac w szafie sterowniczej zawsze odłącz zasilanie.
Ostrzeżenia

Upewnij się, że wszystkie źródła zasilania AC/DC są odpowiednio uziemione i że napęd silnikowy nie ma możliwości wejścia w kontakt z zasilaniem sieciowym pod napięciem.

Zaleca się zastosować zewnętrzny obwód zatrzymania awaryjnego.
Przed uruchomieniem narzędzia

Przed uruchomieniem narzędzia upewnij się, że narzędzie zostało prawidłowo zamontowane oraz że napęd silnikowy został prawidłowo zainstalowany.
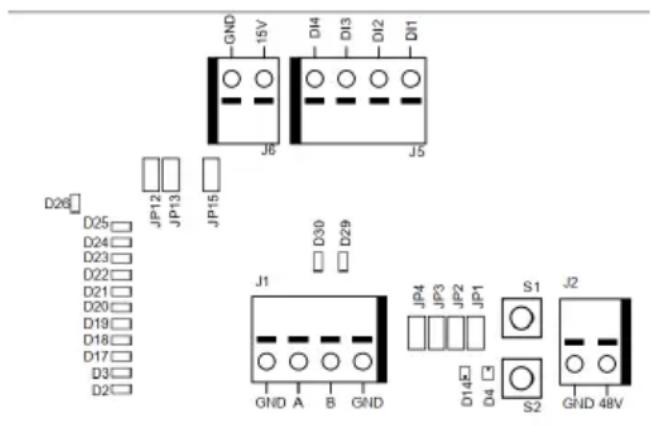
Opis napędu silnikowego
Złącza płytki PCB napędu silnikowego, przyciski, zworki, wskaźniki, otwory montażowe i wymiary
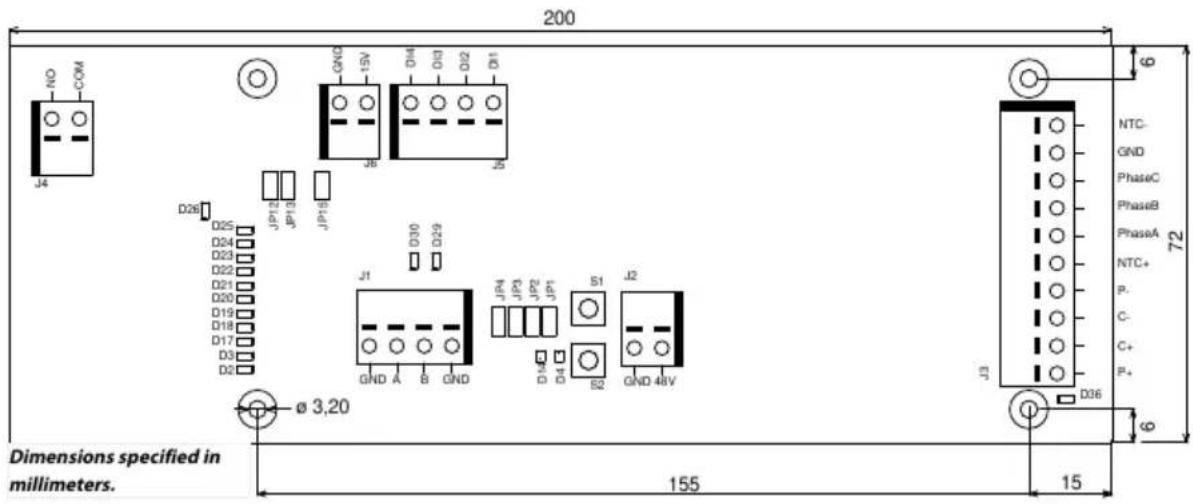
Płytka PCB napędu silnikowego jest zamontowana w uchwycie na szynie DIN, który można przymocować do standardowej szyny DIN 35 x 7,5 mm EN50022. Można ją jednak również zdjąć z uchwytu i zamontować bezpośrednio z wykorzystaniem otworów montażowych. Jeśli wykorzystywane są otwory montażowe, podczas montażu płytki PCB napędu silnikowego zaleca się użycie metalowych kołków dystansowych 20 mm i śrub M3 10 mm.
Dla każdego przewodu podłączonego do złącza zaleca się stosować nasadkę 10 mm z plastikową tuleją. Przewody można następnie łatwo wcisnąć do złączy i zwolnić za pomocą małego płaskiego śrubokręta (szerokość końcówki 3,5 mm, grubość końcówki 0,6 mm).
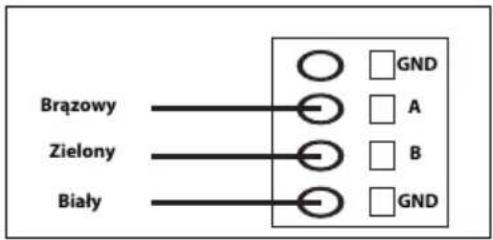
Opis złącza
| OpisPINZłącze | ||
| GNDGNDJ1 | ||
| Modbus RTU RS-485 (A)AJ1 | ||
| Modbus RTU RS-485 (B)BJ1 | ||
| GNDGNDJ1 | ||
| OpisPINZłącze | ||
| GNDGNDJ2 | ||
| Wejście 48 VDC48VJ2 | ||
| Kolor przewodu silnikaPINZłącze | ||
| BiałyP+J3 | ||
| RóżowyC+J3 | ||
| SzaryC-J3 | ||
| ZielonyP-J3 | ||
| Brązowy, (0,25 mm2)NTC+J3 | ||
| Brązowy, (0,25 mm2)Phase AJ3 | ||
| J3 | NiebieskiPhase B | |
| Phase CJ3 | Czarny | |
| J3 | GND | Uziemienie szafy |
| J3 | NTC- | Żółty |
| Shield | Połączone z uziemieniem, X2 w szafie Mirka | |
| OpisPINZłącze | ||
| J4 | COM | Przekaźnik COM |
| J4 | NO | Przekaźnik NO |
| OpisPINZłącze | ||
| J5 | DI1 | Cyfrowe wejście sterowania prędkością – bit 1 |
| J5 | DI2 | Cyfrowe wejście sterowania prędkością – bit 2 |
| J5 | DI3 | Cyfrowe wejście sterowania prędkością – bit 3 |
| J5 | DI4 | Cyfrowe wejście sterowania prędkością – bit 4 |
| OpisPINZłącze | ||
| Wyjście 15 VDC15VJ6 | ||
| J6 | GNDGND | |
Opis przycisku
| Przycisk | Opis |
| S1 | Przycisk autotestu |
| S2 | Przycisk reset |
Opis wskaźnika
| Wskaźnik | Opis |
| D2 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 1 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 1. |
| D3 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 3 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 2. |
| D4 | Wskaźnik stanu narzędzia. Świeci na czerwono, gdy narzędzie jest zatrzymane, świeci na zielono, gdy narzędzie jest uruchomione. |
| D14 | Wskaźnik stanu napędu silnikowego. Świeci się na zielono, gdy napęd silnikowy znajduje się w trybie WŁ. Miga na zielono, gdy napęd silnikowy znajduje się w trybie WYŁ.OpisWskaźnik |
| D17 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 5 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 3. |
| D18 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 7 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 4. |
| D19 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 9 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 5. |
| D20 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 11 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 6. |
| D21 | Wskaźnik prędkości zadanej – świeci, jeśli aktywna jest prędkość zadana 13 Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 7. |
| D22 | Wskaźnik adresu urządzenia podrzędnego (slave) Modbus RTU, bit 8. |
| D23 | Świeci, jeśli wskaźniki D2–D3, D17–D22 znajdują się w trybie adresu urządzenia podrzędnego Modbus RTU. |
| D24 | Świeci, gdy włączony jest cyfrowy interfejs sterowania prędkością. |
| D25 | Świeci, gdy ustawiona jest flaga stanu alarmu. |
| D26 | Wskaźnik stanu przekaźnika. |
| D29 | Wskaźnik odbioru Modbus RTU. |
| D30 | Wskaźnik transmisji Modbus RTU. |
| D36 | Możliwa usterka okablowania narzędzia. Zmienia kolor na czerwony, gdy zostanie wykryty potencjalny błąd w okablowaniu narzędzia C+/C-/P+/P-. |
Wyświetlanie nastawy prędkości
| Narzędzie | Prędkość min. (obr./min) | Prędkość maks. (obr./min) |
| AIROS 550 CV/NV | 100004000AIROS 650 CV/NV | |
| AIROS 350 CV/NV | ||
| AIROS 150 NV | 80004000AIROP 312 NV | |
| AIOS 130 NV | ||
| 100005000AIOS 353 CV/NV | ||
| 30001000AIRP 300 |
| kość zada-na | Mapa bitowaPręd- | Prędkość dla różnych wartości zadanych (obr./min) | Wskaźniki LED prędkości aktywne | |||||||||||||
| DI4 | DI3 | DI2 | DI1 | Prędkość obrotowa narzędzia (obr./min) | Prędkość obrotowa narzędzia (obr./min) | Prędkość obrotowa narzędzia (obr./min) | Prędkość obrotowa narzędzia (obr./min) | D2 | D3 | D17 | D18 | D19 | D20 | D21 | ||
| 4000-10000 | 4000-8000 | 5000-10000 | 1000-3000 | |||||||||||||
| 1 | 0 | 0 | 0 | 1 | 4000 | 4000 | 5000 | 1000 | X | |||||||
| 2 | 0 | 0 | 1 | 0 | 4500 | 4333 | 5417 | 1167 | X | |||||||
| 3 | 0 | 0 | 1 | 1 | 5000 | 4666 | 5834 | 1334 | X | X | ||||||
| 4 | 0 | 1 | 0 | 0 | 5500 | 4999 | 6251 | 1501 | X | X | ||||||
| 5 | 0 | 1 | 0 | 1 | 6000 | 5332 | 6668 | 1668 | X | X | X | |||||
| 6 | 0 | 1 | 1 | 0 | 6500 | 5665 | 7085 | 1835 | X | X | X | |||||
| 7 | 0 | 1 | 1 | 1 | 7000 | 5998 | 7502 | 2002 | X | X | X | X | ||||
| 8 | 1 | 0 | 0 | 0 | 7500 | 6331 | 7919 | 2169 | X | X | X | X | ||||
XXXXX23368336666480001(
XXXXX250387536997850001
XXXXXX26709170733C
XXXXXX283795877663
XXXXXXXX300010
| DziałanieMapa bitowa | ||||
| DI1DI2DI3DI4 | ||||
| Zatrzymany0000 | ||||
| 1 | 1 | 1 | 0 | Uruchom, bez zmiany prędkości |
| 1 | 1 | 1 | 1 | Uruchom, bez zmiany prędkości |
Wyświetlanie adresu urządzenia podrzędnego (slave) Modbus RTU
| BIT 8 | BIT 7 | BIT 6 | BIT 5 | BIT 4 | BIT 3 | BIT 2 | BIT 1 |
| D2D3D17D18 |
D2D3D17D18D19D20D21
Opis zworki
| Zworki | Domyślne | Opis |
| JP1 | Nie ustawiono | Przeznaczone do wykorzystania w przyszłości |
| JP2 | Nie ustawiono | Jeśli ustawiono, rezystor końcowy 270 Ω jest podłączony do pinów A i B Modbus RTU. |
| JP3 | Nie ustawiono | Jeśli ustawiono, rezystor obniżający 10 kΩ jest podłączony do pinu B Modbus RTU. |
| JP4 | Nie ustawiono | Jeśli ustawiono, rezystor podciągający 10 kΩ jest podłączony do pinu A Modbus RTU. |
| JP12 | Nie ustawiono | Jeśli ustawiono, funkcja cyfrowego sterowania prędkością jest włączona. |
| JP13 | Nie ustawiono | Jeśli ustawiono, wskaźniki D2–D3, D17–D22 będą wyprowadzać aktualny adres urządzenia podrzędnego (slave) Modbus RTU zamiast wartości zadanej prędkości. |
| JP15 | Nie ustawiono | Przywróć ustawienia fabryczne. |
Wyprowadzenie złącza kabla narzędzia
| Pin (kolor, rozmiar) | Opis |
| PE (zielono-żółty, 1,0 mm2) | Nie zastosowano |
| 1 (brązowy, 1,00 mm ) | Faza A |
| 2 (niebieski, 1,00 mm ) | Faza B |
| 3 (czarny, 1,00 mm ) | Faza C |
| A (szary, 0,25 mm ) | C- |
| B (różowy, 0,25 mm ) | C+ |
| C (zielony, 0,25 mm ) | P- |
| C (żółty, 0,25 mm ) | NTC- |
| D (brązowy, 0,25 mm ) | NTC+ |
| E (biały, 0,25 mm ) | P+ |
UWAGA! NTC– i P– są podłączone do tego samego PINu wewnątrz złącza.
Wyprowadzenie kabla adaptera Hilscher NT 50-RS-EN (żeński DSUB-9)
| OpisPIN (kolor) | |
| GND1 (biały, WH) | |
| 4 (brązowy, BN) | Modbus RTU (A, RxD / TxD+) |
| 5 (zielony, GN) | Modbus RTU (B, RxD / TxD-) |
| OstonaOSŁONA |
Połączenia na listwie zaciskowej (Firmware v. 3.05 i nowsze)
Enable-State:
Aby szlifierka mogła działać, zacisk 4 musi być podłączony do wyjścia 24V z robota/PLC, a zacisk 6 do potencjału 0V robota/PLC.
W celu zwiększenia bezpieczeństwa pracy, sygnał Enable-State może zostać ustawiony na poziom niski w przypadku wystąpienia usterki robota, prowadzącej do jego zatrzymania. W takiej sytuacji nastąpi automatyczne zatrzymanie głowicy szlifierskiej/polerskiej.
Do podłączenia sygnału Enable-State należy użyć 3-metrowego kabla 2-żyłowego dostarczonego razem wraz z szafa sterowniczą – zgodnie z instrukcją.
Modułautomatycznego uruchamiania odkurzacza:
W celu umożliwiaenia automatycznego włączania/wyłączania odkurzacza, istnieje możliwość podłączenia opcjonalnego modułu Mirka AutoStart (MIA6519011). W tym celu należy połączyć listwę zaciskową 5 z zaciskiem dodatnim (+) w module AutoStart, a listwę zaciskową 7 z zaciskiem ujemnym (-).
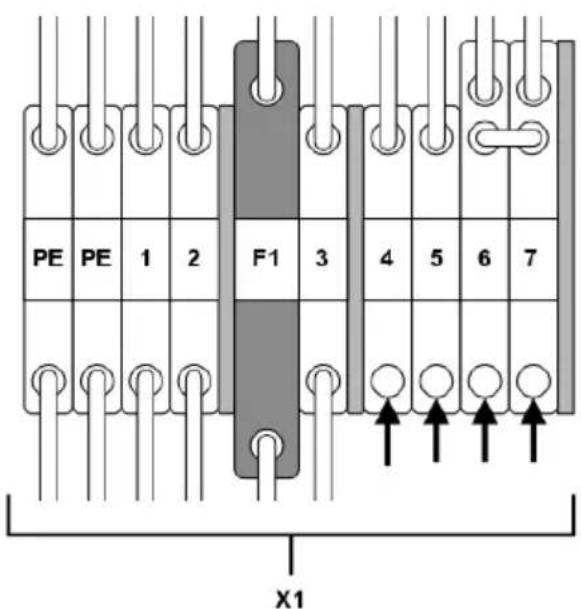
| Listwa zaciskowaFunkcja/Połączenie | |
| Sygnał Enable-State z robota/PLC – wyjście 24V | X1:4 (połączenie z pinem J5, DI1) |
| X1:6Robot/PLC 0V | |
| Moduł AutoStart + | X1:5 (połączenie z pinem J4, NO)X1:7ModułAutoStart – |
Modbus RTU
Protokół Modbus RTU na łączu RS-485 jest używany do komunikacji z napędem silnikowym. Napęd silnikowy jest skonfigurowany jako urządzenie podrzędne (slave) Modbus RTU, a domyślny adres podrzędny to 86. Adres urządzenia podrzędnego (slave) można zmienić, jeśli znajduje się on w konflikcie z innym urządzeniem podrzędnym (slave) Modbus RTU.
Złącze J1 na napędzie silnikowym jest używane do komunikacji Modbus RTU. Zaleca się stosować ekranowaną skrętkę dwużyłową, a ekran powinien być uziemiony tylko w jednym punkcie, zwykle w urządzeniu nadrzędnym (master). Pin A złącza J1 jest odpowiednikiem RxD / TxD+, a pin B jest odpowiednikiem RxD / TxD-.
Konfiguracja RS-485
| 19200SZYBKOŚĆTRANSMISJI | |
| RÓWNAPARZYSTOŚĆ | |
| 1BITY STOPU | |
| 8BITY DANYCH |
Rejestry cewek (F1, F5, F15)
| OpisNazwaTyp danychAdres | |||
| 00001 - 00012 | Uint16 | Wyjścia cyfrowe | Cewki 1–11 są przeznaczone do wykorzystania w przyszłości.Cewka 12 to przekaźnik znajdujący się na napędzie silnikowym. |
Rejestry wejść(F4)
UWAGA! Rejestry wejściowe 30001–30016 są specyficzne dla danego napędu. Przykład: Licznik spadków prędkości obrotowej – całkowita liczba spadków prędkości obrotowej dla wszystkich narzędzi podłączonych do napędu silnika.
UWAGA! * Wymagana wersja firmware: min. 3.05 (napęd) i 0.05 (narzędzie).
| OpisNazwaTyp danychAdres | |||
| Liczba spadków obr./minUint1630004 | Ile razy temperatura narzędzia izazba ilości spadków prędkości o ponad 25 % względem wartości zadanej. | ||
| Uint1630002 | Liczba przekroczeńlimitu (poziom ciepły) temp. narzędzia | Ile razy temperatura narzędzia przekroczyła limit 79 °C (poziom ciepły). | |
| Uint1630003 | Liczba przekroczeńlimitu (poziom ciepły) temp. napędu silnikowego | Ile razy temperatura napędu silni-kowego przekroczyła limit 73 °C (poziom ciepły). | |
| Uint1630004 | Liczba przekroczeńlimitu (poziom gorący) temp. narzędzia | Ile razy temperatura narzędzia przekroczyła limit 134 °C (poziom gorący). | |
| Uint1630005 | Liczba przekroczeńlimitu (poziom gorący) temp. napędusilnikowego | Ile razy temperatura napędu silni-kowego przekroczyła limit 117 °C (poziom gorący). | |
| Uint1630006 | Liczba przekroczeńlimitu (poziom stop) temp. narzędzia | Ile razy temperatura narzędzia przekroczyła limit 142 °C (poziom stop). | |
| Uint1630007 | Liczba przekroczeńlimitu (poziom stop) temp. napędu silnikowego | Ile razy temperatura napędu silni-kowego przekroczyła limit 123 °C (poziom stop). | |
| 30008 | Uint16 | Napięcie poza zakresem | Ile razy wartość napięcia wejściowo- wego nie mieściła się w zakresie od 44 do 52 VDC. |
| OpisNazwaTyp danychAdres | |||
| Uint1630009 | Liczba wystąpieńprzetężenia (poziom niski) | Ile razy prąd przekroczył wartość 15,1 A. | |
| Uint1630010 | Liczba wystąpieńprzetężenia (poziom średni) | Ile razy prąd przekroczył wartość 18,2 A. | |
| Uint1630011 | Liczba wystąpień długiego czasu działania | Liczba przypadków, wktórychczas działania przekroczył 60 sekund. | |
| Uint1630012 | Liczba wystąpieńśredniego czasu działania | Liczba przypadków, wktórych czas działania wynióśl od 20 do 60 sekund. | |
| Uint1630013 | Liczba wystąpień krótkiego czasu działania | Liczba przypadków, wktórych czas działania był krótszy niż 20 sekund. | |
| 30014 | Uint16 | Czas użytkowania w godzinach | Ilość godzin czasu użytkowania. |
| 30015 | Uint16 | Czas użytkowania w minutach | Ilość minut czasu użytkowania. |
| 30016 | Uint16 | Czas użytkowania w sekundach | Ilość sekund czasu użytkowania. |
| 30017 | Int16 | Napięcie | Prąd w mA. |
| 30018 | Uint16 | Prędkość obrotowa | Prędkość w obr./min. |
| 30019 | Uint16 | Temperatura narzędzia | Temperatura narzędzia w °C. |
| 30020 | Uint16 | Temperatura napędu silnikowego | Temperatura napędu silnikowego w °C. |
| 30021-30030 | Char[20] | Wersja oprogramowania | Wersja oprogramowania i data kompilacji, np. „2.0 Jan 18 14:00”. |
| 30031-30039 | Char[18] | Wersja części | Wersja części inumer identyfikacyjny napędu silnikowego, np. „Al1.3 123456” |
| 30040-30046 | Char[14] | Numer seryjny napędu silnikowegoFlaga stanu alarmuUint1630047 | Numer seryjny napędu silnikowego, np. „749474379001”Flaga stanu alarmu może w dowolnym momencie odpowiadać kombinacji wartości z poniższej listy. Sprawdź poszczególne bity, aby określićtyp alarmów, które są w danym momencie wyzwalane. Ta flaga jestautomatycznie usuwana po 5 sekundach, jeśli przyczyna wyzwolenia alarmu ustala.0x0000 = Nie uruchomiono0x0001 = Przegrzane narzędzie0x0002 = Przegrzany napęd silnikowy0x0004 = Przetężenie0x0008 = Zbyt niskie napięcie0x0010 = Przepięcie0x0020 = Autotest uruchomiony0x0040 = Spadek obrotów0x0080 = Wysoki prąd0x0100 = Zmiana narzędzia w toku0x0200 = Możliwa usterka okablowania narzędzia0x0400 = Tryb przywracania usta-wieńfabrycznych0x0800 = Ochrona przed zapisem wyłączona0x1000 = Narzędzie odłączone (brak komunikacji)* |
| ID narzędziaUint1630061 | |||
| 30062 | Uint16 | Min. prędkość narzędzia | |
| 30063 | Uint16 | Maks. prędkość narzędzia | |
| 30064 | Uint16 | Dostępna etykieta narzędzia | |
| 30065-30071 | Char[14] | Numer seryjny narzędziaŚrednica talerzaUint1630174* | |
| 30175* | Uint16 | Korekta Z narzędzia | |
| 30176* | Uint16 | Orbita narzędziaWaga narzędziaUint1630177* | Orbita narzędzia w mm |
| 30178* | Uint16 | ŚC narzędzia | Środek ciężkości narzędzia |
| Uint1630179* | Szerokość talerza | ||
| 30180* | Uint16 | Długość talerza | |
| 30181-30183* | Char[3] | Wersja firmware narzędzia | Wersja firmware, np. „0.04” |
| 30181-30193* | Char[10] | Nazwa modelu narzędzia | |
Rejestry przechowywania (F3, F6, F16)
| OpisNazwaTyp danychAdres | |||
| Nazwa urządzeniaChar[20]40001-40010 | Mymalna długość 19 znaków drukowalnych, np. „AIMD 749474379001”. | ||
| 40011 | Uint16 | Nastawa prędkości | Zadana prędkość-nie rzeczywista - mieści się w zakresie między mi-nimalną a maksymalną prędkością narzędzia. |
| DziałanieUint1640012 | Stan napędu silnikowego, może być kombinacją następujących:0x0001 = URUCHOM0x0002 = ZATRZYMAJ*0x0004 = WŁ.*0x0008 = WYŁ.0x0010 = ROZPOCZĘCIE ZMIANY NARZĘDZIA0x0020 = KONIEC ZMIANY NARZĘ-DZIA0x0040 = WYŁĄCZ OCHRONĘ ZA-PISU0x0080 = WŁĄCZ OCHRONĘ ZAPI-SUUWAGA! Podczas zapisywania nowej wartości stanu, wartość jest tylko pojedynczym stanem, a nie kombinacjąwielu stanów, np. kombinacja WŁ.+URUCHOM nie może zostać zapisana jednocześnie. | ||
| Uint1640013 | Adres urządzenia podrzędnego (slave) | Wartość domyślna to 86, ale w ra-zie potrzeby można ją zmienić. | |
UWAGA! * Funkcja niedostępna w wersji firmware 3.05 lub nowszej
Bramka Profinet I/O lub EtherNet/IP (Hilscher NT 50-RS-EN)
Jeśli napęd silnika ma zostać podłączony jako urządzenie Profinet I/O lub EtherNet/IP, można zastosować bramkę Hilscher NT 50-RS-EN. Bramka jest połączona z napędem silnikowym za pomocą złącza DSUB-9 na bramce i złącza J1 na napędzie silnikowym. Poniżej znajduje się pinout dla DSUB-9 (złącze X2) znajdującego się na bramce:
| OpisySygnałPINRS-485 | ||||
 | 1 | GND | Potencjałodniesienia, masa źródła zasilania | |
| RxD / TxD+4 | Odbieraj dane / przesyłaj dane pozytywne | |||
| RxD / TxD-5 | Odbieraj dane / przesyłaj dane negatywne | |||
Rezystor podciągający 10 kΩ jest podłączony wewnętrznie w bramce do „RxD / TxD+”.
Rezystor obniżający 10 kΩ jest podłączony wewnętrznie w bramce do „RxD / TxD-”.
Szczegółową dokumentację dotyczącą bramki i narzędzi konfiguracyjnych można pobrać ze strony internetowej Hilscher: www.hilscher.com
Konfiguracja
Bramka jest wstępnie skonfigurowana przez firmę Mirka jako urządzenie podrzędne (slave) Profinet I/O lub adapter EtherNet/IP I/O. Do rekonfiguracji urządzenia można użyć firmware'u „SYCON.net” firmy Hilscher. Do zmiany konfiguracji sieci można użyć firmware'u „Ethernet Device Setup” firmy Hilscher. Po zmianie konfiguracji adres IP zwykle wymaga ponownego przypisania.
Domyślna konfiguracja sieci dla Profinet
| 192.168.2.191ADRES IP | |
| 255.255.255.0MASKA PODSIECI | |
| 0.0.0.BRAMA DOMYŚLNA | |
| nt50enpnsNAZWA URZĄDZENIA | |
| 118ROZMIAR WEJŚCIA | |
| 102 (Firmware w wersji 3.05 lub nowszej) | |
| 5ROZMIAR WYJŚCIA |
Domyślna konfiguracja sieci dla EtherNet/IP
| ADRES IP | 192 168 125 110 |
| MirkaENIPNAZWA | |
| 101ZESPÓŁWEJŚCIOWY | |
| 102ROZMIAR WEJŚCIA | |
| 100ZESPÓŁWYJŚCIOWY | |
| 5ROZMIAR WYJŚCIA |
Mapowanie sygnałów Profinet I/O do Modbus RTU firmware w wersji 3.04 lub starszej
| Nazwa | Rejestr Modbus | nych | Profinetwe/wyW | Plugheśd Dług | |
| nych | |||||
| 1 cewka00012 | SetRelayione da-ne | 1 | 1 bajt wyjścia | ||
| 1 rejestr40011 | SetSpeedRegisterne | 2 | 1 słowo wyjścia | ||
| 1 rejestr40012 | SetOperationRegisterne | 1 słowo wyjścia | |||
| DeviceName | 40001-40010 | 10 rejestrów | Cyklicznie co 10sek. | 4 | 10 słów wejścia |
| CommonInputs | 30017-30020 | 4 rejestry | Cyklicznie co 1sek. | 5 | 4 słowa wejścia |
| MiscInputs | 30001-30016 | 16 rejestrów | Cyklicznie co 5sek. | 6 | 16 słów wejścia |
| 1 rejestr30047 | Alakrictusco 1sek. | 7 | 1 słowo wejścia | ||
| FirmwareVersion | 30021-30030 | 10 rejestrów | Cyklicznie co 10sek. | 8 | 10 słów wejścia |
| PartVersionSerialNumber | 30031-30046 | 16 rejestrów | Cyklicznie co 10sek. | 9 | 16 słów wejścia |
| 1 rejestr40011 | GetSpiedRegistersek. | 10 | 1 słowo wejścia | ||
| 1 rejestr40012 | GetOperationRegistersek. | 1 słowo wejścia | |||
| ReadCoils | 00001-00012 | 12 cewek | Cyklicznie co 1sek. | 12 | 2 bajty wejścia |
Napęd Profinet I/O z firmwarem w wersji 3.05 lub nowszej
| Slot | Typ | Nazwa | Typ danych | Długość danych | Adres Modbus |
| Slot 1 | 1 bajt wyjścia | Wyjście cyfrowe (przekaźnik) | BIT | 1 bajt | FC5 11 |
| Slot 2 | 2 bajt wyjścia | Nastawa prędkości (obr./min) | UINT16 | 1 słowo (word) | FC6 10 |
| Slot 3 | 2 bajt wyjścia | Działanie | BIT | 1 słowo (word) | FC6 11 |
| Slot 4 | 8 bajtów wejścia | Prąd silnika (mA) | UINT16 | 1 słowo (word) | FC4 16 |
| Prędkość obroto-wa silnika (obr./min) | UINT16 | 1 słowo (word) | FC4 17 | ||
| Temp. silnika (°C) | UINT16 | 1 słowo (word) | FC4 18 | ||
| Temp. napędu (°C) | UINT16 | 1 słowo (word) | FC4 19 | ||
| Slot 5 | 8 bajtów wejścia | Oprogr. napędu | CHAR | 6 bajt | FC4 20-23 |
| Slot 6 | 2 bajty wejścia | AlarmStatus | BIT | 1 słowo (word) | FC4 46 |
| Slot 7 | 4 bajty wejścia | Nastawa prędkości (obr./min) | UINT16 | 1 słowo (word) | FC3 10 |
| Działanie | BIT | 1 słowo (word) | FC3 11 | ||
| Slot 8 | 8 bajtów wejścia | ID narzędzia | UINT16 | 1 słowo (word) | FC4 60 |
| Prędkość min. (obr./min) | UINT16 | 1 słowo (word) | FC4 61 | ||
| Prędkość maks. (obr./min) | UINT16 | 1 słowo (word) | FC4 62 | ||
| Dostępna etykieta narzędzia | BIT | 1 słowo (word) | FC4 63 | ||
| Slot 9 | 16 bajtów wejścia | Nr seryjny narzędzia | CHAR | 14 bajtów | FC4 64-71 |
| Slot 10 | 8 bajtów wejścia | Średnica talerza (mm) | UINT16 | 1 słowo (word) | FC4 173 |
| Korekta Z narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 174 | ||
| Orbita narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 175 | ||
| Waga narzędzia (g) | UINT16 | 1 słowo (word) | FC4 176 | ||
| Slot 11 | 32 bajty wejścia | Korekta COG narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 177 |
| Szerokość talerza (mm) | UINT16 | 1 słowo (word) | FC4 178 | ||
| Długość talerza (mm) | UINT16 | 1 słowo (word) | FC4 179 | ||
| Oprogr. narzędzia | CHAR | 6 bajt | FC4 180-182 | ||
| Nazwa modelu narzędzia | CHAR | 20 bajtów | FC4 183-192 | ||
| 16 bajtów wejścia | Slożka pracy narzędzia (w godzinach) | UINT16 | 1 słowo (word) | FC4 99 | |
| Czas pracy narzędzia (w sekundach) | UINT8 | 1 bajt | FC4 100 | ||
| Czas pracy narzędzia (w minutach) | UINT8 | 1 bajt | FC4 100 | ||
| Liczba krótkich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 101-102 | ||
| Liczba średnich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 103-104 | ||
| Liczba długich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 105-106 |
Firmware napędu EtherNet/IP w wersji 3.05 lub nowszej
| Typ | Nazwa | Typ danych | Długość danych | Adres Modbus |
| Wyjście | Wyjście cyfrowe (przekaźnik) | BIT | 1 bajt | FC5 11 |
| Wyjście | Nastawa prędkości (obr./min) | UINT16 | 1 słowo (word) | FC6 10 |
| Wyjście | Działanie | BIT | 1 słowo (word) | FC6 11 |
| Napięcie wejściowe | 2 słowo (word) | |||
| Napięcie wejściowe | Prąd silnika (mA) | UINT16 | 1 słowo (word) | FC4 16 |
| Napięcie wejściowe | Prędkość obrotowa silnika (obr./min) | UINT16 | 1 słowo (word) | FC4 17 |
| Napięcie wejściowe | Temp. silnika (°C) | UINT16 | 1 słowo (word) | FC4 18 |
| Napięcie wejściowe | Temp. napędu (°C) | UINT16 | 1 słowo (word) | FC4 19 |
| Napięcie wejściowe | AlarmStatus | BIT | 1 słowo (word) | FC4 46 |
| Napięcie wejściowe | Nastawa prędkości (obr./min) | UINT16 | 1 słowo (word) | FC3 10 |
| Napięcie wejściowe | Działanie | BIT | 1 słowo (word) | FC3 11 |
| Napięcie wejściowe | ID narzędzia | UINT16 | 1 słowo (word) | FC4 60 |
| Napięcie wejściowe | Prędkość min. (obr./min) | UINT16 | 1 słowo (word) | FC4 61 |
| Napięcie wejściowe | Prędkość maks. (obr./min) | UINT16 | 1 słowo (word) | FC4 62 |
| Napięcie wejściowe | Dostępna etykieta narzędzia | BIT | 1 słowo (word) | FC4 63 |
| Napięcie wejściowe | Nr seryjny narzędzia | CHAR | 14 bajtów | FC4 64-71 |
| Napięcie wejściowe | Średnica talerza (mm) | UINT16 | 1 słowo (word) | FC4 173 |
| Napięcie wejściowe | Korekta Z narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 174 |
| Napięcie wejściowe | Orbita narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 175 |
| Napięcie wejściowe | Waga narzędzia (g) | UINT16 | 1 słowo (word) | FC4 176 |
| Napięcie wejściowe | Korekta COG narzędzia (mm) | UINT16 | 1 słowo (word) | FC4 177 |
| Typ | Nazwa | Typ danych | Długość danych | Adres Modbus |
| Napięcie wejściowe | Szerokość talerza (mm) | UINT16 | 1 słowo (word) | FC4 178 |
| Napięcie wejściowe | Długość talerza (mm) | UINT16 | 1 słowo (word) | FC4 179 |
| Napięcie wejściowe | Wersja firmware narzędzia | CHAR | 6 bajt | FC4 180-182 |
| Napięcie wejściowe | dzia | FC4 183-19220 bajtówCHARNazwa | ||
| Napięcie wejściowe | Firmware napędu | CHAR | 6 bajt | FC4 20-23 |
| Napięcie wejściowe | Czas pracy narzędzia (w godzinach) | UINT16 | 1 słowo (word) | FC4 99 |
| Napięcie wejściowe | Czas pracy narzędzia (w sekundach) | UINT16 | 1 bajt | FC4 100 |
| Napięcie wejściowe | Czas pracy narzędzia (w minutach) | UINT16 | 1 bajt | FC4 100 |
| Napięcie wejściowe | Liczba krótkich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 101-102 |
| Napięcie wejściowe | Liczba średnich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 103-104 |
| Napięcie wejściowe | Liczba długich cykli pracy narzędzia | UINT32 | 2 słowo (word) | FC4 105-106 |
Przykład mapowania bramki w środowisku Siemens TIA Portal V14 (oprogramowane w wersji 3.04 lub starszej)
Poniżej znajduje się zrzut ekranu z TIA Portal V14 pokazujący, jak można zmapować bramkę do systemu. Aby dodać obsługę bramki Hilscher NT 50-RS-EN do swojego systemu, pobierz z hilscher.com obraz Gateway Solution DVD, zawierający plik GSDML.
| Device overview | ||||||||||
| ... | Module | Rack | Slot | I address | Q address | Type | Article no. | Firmware | ||
| nt50enpns | 0 | 0 | NT 50-EN/PNS | 3.4 x | ||||||
| PNIO | 0 | 0 X1 | nt50enpns | |||||||
| SetRelay | 0 | 1 | 63 | 1 Byte Output | ||||||
| SetSpeedRegister | 0 | 2 | 64...65 | 2 Byte Output | ||||||
| SetOperationRegister | 0 | 3 | 66...67 | 2 Byte Output | ||||||
| DeviceName | 0 | 4 | 68...87 | 20 Byte Input | ||||||
| CommonInputs | 0 | 5 | 88...95 | 8 Byte Input | ||||||
| MiscInputs | 0 | 6 | 96...127 | 32 Byte Input | ||||||
| AlarmStatus | 0 | 7 | 128...129 | 2 Byte Input | ||||||
| FirmwareVersion | 0 | 8 | 130...149 | 20 Byte Input | ||||||
| PartVersion | 0 | 9 | 150...169 | 20 Byte Input | ||||||
| SerialNumber | 0 | 10 | 170...181 | 12 Byte Input | ||||||
| GetSpeedRegister | 0 | 11 | 182...183 | 2 Byte Input | ||||||
| GetOperationRegister | 0 | 12 | 184...185 | 2 Byte Input | ||||||
| ReadCoils | 0 | 13 | 186...187 | 2 Byte Input | ||||||
Podstawowa obsługa dla Modbus RTU
Przed uruchomieniem narzędzia napęd silnika musi być włączony. Pierwszą czynnością, jaką należy wykonać, jest ustawienie parametru napędu silnika na aktywny. Sposób wykonania tej operacji różni sięw zależności od wersjifirmware. W wersjach wcześniejśzych niż 3.05 należy wysłać do napędu polecenie aktywacji napędu, natomiast w wersji 3.05 i nowszych sygnał aktywacji jest przypisany do wejścia cyfrowego DI1. Nie ma obowiązku wysyłania sygnału dezaktywacji przed odłączeniem zasilania od napędu silnika.
Po aktywacji napędu możliwe jest ustawienie zadanej prędkości oraz przełączenie urządzenia w tryb aktywnej pracy, poprzez wysłanie odpowiedniej komendy. To spowoduje, że narzędzie będzie pracować z zadaną prędkością. Aby zatrzymać narzędzie, ustaw napęd silnikowy w stan ZATRZYMAJ, poprzez wysłanie polecenia stanu ZATRZYMAJ.
Zaleca się ciągłe monitorowanie średniej prędkości, średniego natężenia prądu, temperatury narzędzia, temperatury napędu silnikowego oraz flagi stanu alarmu. Pomoże to wykryć, czy podczas pracy występują jakieś problemy.
Przykładowa sekwencja uruchamiania i zatrzymywania narzędzia (Firmware w wersji 3.04 lub starszej):
- Wpisz 4 (0x0004) do rejestru operacji – napęd silnikowy zostanie ustawiony na stan aktywacji.
- Wpisz 4000 (0x0FA0) do rejestru „Speed set-point“ – prędkość zadana zostanie ustawiona na wartość 4,000 obr./min.
- Wpisz 1 (0x0001) do rejestru „Operation” – napęd silnikowy zostanie ustawiony na stan URUCHOM i narzędzie uruchomi się.
- Wpisz 2 (0x0002) do rejestru „Operation“ – napęd silnikowy zostanie ustawiony na stan ZATRZYMAJ i narzędzie przestanie działać.
- Wpisz 8 (0x0008) do rejestru operacji – napęd silnikowy zostanie ustawiony na stan dezaktywacji.
Przykładowa sekwencja uruchamiania i zatrzymywania narzędzia (Firmware w wersji 3.05 lub nowszej)*:
- Aby przełączyć napęd silnika w stan aktywacji, ustaw pin DI1 (listwa zaciskowa 4) na stan wysoki (15–33 VDC).
- Wpisz 4000 (0x0FA0) do rejestru „Speed set-point“ – prędkość zadana zostanie ustawiona na wartość 4,000 obr./min.
- Wpisz 1 (0x0001) do rejestru „Operation” – napęd silnikowy zostanie ustawiony na stan URUCHOM i narzędzie uruchomi się.
- Wpisz 2 (0x0002) do rejestru „Operation” – napęd silnikowy zostanie ustawiony na stan ZATRZYMAJ i narzędzie przestanie działać.
- Aby przełączyć napęd silnika w stan dezaktywacji, ustaw pin DI1 na stan niski (GND).
* Więcej informacji znajduje się w rozdziale „Połączenia na listwie zaciskowej (Firmware v. 3.05 i nowsze)”.
Interfejs cyfrowy
Napęd silnikowy może być również sterowany z poziomu interfejsu cyfrowego zamiast Modbus RTU, jednak przy korzystaniu z interfejsu cyfrowego nie dochodzi do sprzęenia zwrotnego. Aby włączyć interfejs cyfrowy, należy ustawić zworkę JP12.
Złącze J5 jest używane jako wejście interfejsu cyfrowego. Jeśli do pinu wejściowego zostanie przyłożone napięcie między 15–33 VDC, wejście takie jest uważane za wysokonapięciowe. Jeśli wartość napięcia wynosi poniżej 12 VDC lub jeśli wejście zostało skonfigurowane jako „pływające”, wejście takie jest uważanie za niskonapięciowe. Pin GND złącza J6 musi zostać podłączony między systemami. W razie potrzeby złącze J6 może być również wykorzystane do zapewnienia napięcia sterującego 15 VDC.
Operacje interfejsu cyfrowego
Szczegóły dotyczące prędkości zadanej są dostępne w tabeli w rozdziale „Opis napędu silnikowego”.
Funkcja autotestu
Po przyciśnięciu przycisku S1 napęd silnikowy wykona szybki autotest. Flaga stanu alarmu zostanie ustawiona na 6 (uruchomiony autotest). Jeśli wartości temperatury i napięcia mieszczą się w limitach, wskaźniki D4 i D14 będą migać na zielono. Jeśli wartości temperatury lub napięcia nie mieszczą się w limitach, wskaźniki będą migać na czerwono.
Funkcja resetowania
Przycisk resetowania S2 można nacisnąć w celu natychmiastowego zresetowania napędu silnikowego. Zasadniczo jest to to samo, co wyłączenie i ponowne włączenie zasilania.
Funkcja przywracania ustawieńfabrycznych
Konfigurację zapisaną w napędzie silnikowym można w razie potrzeby zresetować do ustawień fabrycznych. Spowoduje to przywrócenie fabrycznie skonfigurowanego adresu urządzenia podrzędnego (slave) Modbus, a ostatnia znana konfiguracja narzędzia zostanie zresetowana do domyślnych ustawień fabrycznych. Aby przywrócić ustawienia fabryczne, wykonaj następujące kroki:
- Ustaw zworkęJP15.
- Naciśnij i przytrzymaj przycisk S2 przez 5 sekund.
- UsuńJP15.
Ochrona przed zapisem
Rejestry przechowujące „Device name” i „Slave address” są zwykle ustawione jako tylko do odczytu, aby zapobiec przypadkowym zapisom w tych rejestrach. Jeśli którykolwiek z tych rejestrów wymaga zmiany, wykonaj następujące kroki:
- Wpisz 64 (0x0040) do rejestru „Operation“, aby wyłączyć ochronę przed zapisem.
- Wpisz nową wartość do rejestrów przechowujących „Device name” lub „Slave address”
- Wpisz 128 (0x0080) do rejestru „Operation“, aby włączyć ochronę przed zapisem.
Bezpieczne zatrzymanie/zatrzymanie awaryjne
Sam napęd silnikowy nie posiada żadnych wejść przeznaczonych do wykrywania lub reagowania na zewnętrzny sygnał bezpiecznego zatrzymania/zatrzymania awaryjnego. W pobliżu napędu silnikowego można zastosować odpowiedni stycznik, aby podłączyć lub odłączyć przewody okablowania narzędzia dla faz A, B i C.
Funkcja zmiany narzędzia „na bieżąco”
Z tym samym napędem silnikowym można używać wielu narzędzi, ale w konkretnym momencie do napędu silnikowego można podłączyć tylko jedno narzędzie. Jeśli chcesz zamienić narzędzie, wykonaj następujące czynności:
- Zatrzymaj narzędzie, wpisując 2 (0x0002) do rejestru „Operation”.
- Wpisz 16 (0x0010) do rejestru „Operation”, aby napęd silnikowy wiedział, że zamierzasz odłączyć aktualnie podłączone narzędzie.
-
Odczekaj 1 sekundę przed odłączeniem aktualnie podłączonego narzędzia od napędu silnikowego.
-
Odłącz aktualnie podłączone narzędzie od napędu silnikowego.
-
Podłącz następne narzędzie do napędu silnikowego.
-
Wpisz 32 (0x0020) do rejestru „Operation“, aby napęd silnikowy wiedział, że zostało podłączone nowe narzędzie.
-
Odczekaj 1 sekundę przed uruchomieniem nowego narzędzia.
Funkcje ochronne
| PowódTryb ochrony | |
| Narzędzie przechodzi w tryb mniejszej mocy | Temperatura napędu silnikowego przekracza 117 °CTemperatura narzędzia przekracza 134 °CNadmierne obciążenie |
| Narzędzie zatrzymuje się całkowicie | Temperatura napędu silnikowego przekracza 123 °CTemperatura narzędzia przekracza 142 °CStan przeciążenia |
Instrukcja naprawy
| Zalecane proceduryObjawy | |
| Napęd silnikowy nie włącza się. | • Upewnij się, że na złączu J2 jest napięcie 48 VDC i że polaryzacja jest prawidłowa. |
| Narzędzie nie uruchamia się. | • *Upewnij się, że napęd silnika znajduje się w stanie ON (wł.) (D14 nie miga).• **Upewnij się, że wejście D11 jest aktywne (D14 nie miga).• Upewnij się, że napęd silnikowy znajduje się w stanie URUCHOM (D4 świeci na zielono).• Sprawdź okablowanie narzędzia: czy piny są podłączone prawidłowo?*Dotyczy wersji 3.04 i starszych**Dotyczy wersji 3.05 i nowszych |
| Narzędzie nagle się zatrzymuje. | • Sprawdźflagęstanu alarmu.• Sprawdź temperaturę napędu i narzędzia.• Sprawdź, czy narzędzie nie jest przeciążone. |
| Komunikacja Modbus RTU nie działa. | • Upewnij się, że nie ustawiono JP1 i JP12.• Sprawdź szybkość transmisji, parzystość, bity stopu i bity danych.• Sprawdź wskaźniki nadawania/odbioru D29 i D30 – migają, gdy magistrala jest aktywna.• Upewnij się, że piny A i B zostały połączone prawidłowo.• Sprawdź, czy dodanie rezystora końcowego (JP2), rezystora obniżającego pinu A (JP3), rezystora podciągającego pinu B (JP4) rozwiązuje problem.• Sprawdź adres urządzenia podrzędnego (ustaw zworkę JP13 i skorzystaj ze wskaźników D2–D3, D17–D22, aby odczytać aktualny adres). |
| Komunikacja bramki I/O nie działa. | • Upewnij się, że nie ustawiono JP1 i JP12.• Sprawdźkonfiguracjębramy sieciowej• Sprawdźzasilanie 24 VDC.• Upewnij się, że kabel adaptera Modbus RTU został prawidłowo podłączony. |
| Interfejs cyfrowego regulatora prędkości nie działa. | • Upewnij się, że nie ustawiono JP1.• Upewnij się, że ustawiono JP12.• Sprawdź napięcie na wejściu wysokoprądowym, powinno wynosić 15–33 VDC.• Sprawdź napięcie na wejściu niskoprądowym, powinno być bliskie zeru.• Sprawdź podłączenie masy (GND). |
| Wskaźnik D36 świeci na czerwono lub prędkość narzędzia jest zbyt wysoka/niska. | • Sprawdź okablowanie C+/C-/P+/P- na J3. |
Utylizacja urządzenia
NIEBEZPIECZEŃSTWO

Przed przystąpieniem do składowania elektronarzędzia należy usunąć jego przewód zasilający.
Należy przestrzegać obowiązujących przepisów krajowych dotyczących utylizacji i recyklingu zużytych maszyn, opakowańi akcesoriów.
Tylko UE: Elektronarzędzi nie należy wyrzucać wraz z odpadami komunalnymi. Zgodnie z przepisami dyrektyw europejskich dotyczących zużytego sprzętu elektrycznego i elektronicznego, oraz zgodnie z przepisami lokalnego prawa, narzędzia elektryczne po ustaniu okresu eksploatacji należy gromadzić oddzielnie i przekazywać do ekologicznych zakładów recyklingu.
Więcej informacji na temat rozporządzenia REACH i dyrektywy RoHS oraz naszej społecznej odpowiedzialności biznesu można znaleźć na stronie www.mirka.com




