
AIROS 550S - Armario eléctrico Mirka - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato AIROS 550S Mirka en formato PDF.

| Tipo de producto | Armario eléctrico (caja de accionamiento motor) |
| Marca | Mirka |
| Modelo | AIROS 550S |
| Dimensiones del armario (L x A x P) | 380 x 300 x 210 mm |
| Dimensiones del accionamiento motor | 72 x 30 x 200 mm (sin soporte DIN) |
| Dimensiones con soporte DIN | 95 x 55 x 210 mm |
| Alimentación eléctrica | 48 VDC (46–50 VDC), 10 A max, 350 W |
| Alimentación auxiliar para pasarela | 24 VDC |
| Rango de velocidad de la herramienta | 1000–10 000 rpm |
| Interfaces de control | Modbus RTU (RS-485), Profinet I/O o EtherNet/IP (a través de pasarela opcional), entradas digitales de 4 bits (15–33 VDC) |
| Salida de relé | Unipolar, N/O, 250 VAC / 125 VDC, 10 A |
| Protección | Sobrecarga, sobrecalentamiento, subtensión/sobretensión, fallo de cableado de herramienta |
| Temperatura ambiente de funcionamiento | 0 a 40 °C |
| Humedad ambiente | HR máx. 95 % (sin condensación) |
| Temperatura de almacenamiento | -20 a 80 °C |
| Grado de protección | IP40 |
| Garantía | 1 año, cubre defectos de fabricación y materiales |
| Fabricante | Mirka Ltd, Jeppo, Finlandia |
| Conformidad normativa | EN 61439-1/2, EN 61800-3, EN IEC 63000, directivas 2014/35/EU, 2014/30/EU, 2011/65/EU |
Preguntas frecuentes - AIROS 550S Mirka
Preguntas de los usuarios sobre AIROS 550S Mirka
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Armario eléctrico en formato PDF gratis! Encuentra tus instrucciones AIROS 550S - Mirka y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. AIROS 550S de la marca Mirka.
MANUAL DE USUARIO AIROS 550S Mirka
Declaración de conformidad
Mirka Ltd, 66850 Jepua, Finlandia
declara bajo su única responsabilidad que los productos Mirka® (enumerados a continuación, ver la tabla «Datos técnicos» para el modelo correspondiente) a los que se refiere esta declaración son conformes a las siguientes normativas u otros documentos reglamentarios: EN 61439-1:2011, EN 61439-2:2011, EN 61800-3:2004+A1:2012, EN IEC 63000:2018 conforme a las normativas 2014/35/UE, 2014/30/UE y 2011/65/EU.
Productos: Mirka® Compartimento de accionamiento del motor
Jepua 19-02-2025
Lugar y fecha de emisión

Compañía
Stefan Sjöberg, CEO
Fabricante / Proveedor
Mirka Ltd
Traducción de las instrucciones originales Nos reservamos el derecho a efectuar cambios en este manual sin previa notificación
Garantía
Mirka garantiza que sus componentes están libres de defectos materiales y de fabricación.
Los componentes de Mirka tienen una garantía de 1 año a partir de la fecha de compra. La garantía cubre únicamente los defectos materiales y de fabricación.
En caso de ocurrir algún problema causado por un defecto material de fabricación o de un empleado, Mirka reparará su herramienta sin coste alguno de acuerdo con los términos y condiciones de la garantía indicados aquí. Para que la garantía de sus componentes siga siendo válida, la herramienta se debe usar, mantener y operar conforme a las instrucciones de manejo.
Términos y condiciones
La garantía de componentes de Mirka cubre defectos materiales o causados por un empleado.
Componentes que cubre la garantía:
- accionamiento del motor
• equipo de lijado
• equipo de pulido
- fuente de alimentación
•pasarela de comunicación
La garantía no cubre:
- cualquier daño causado o debido al transporte, la recepción de la entrega, la instalación, la puesta en servicio, el uso indebido, la negligencia en el uso o el mantenimiento, accidentes, exposición a temperatura ambiente extrema inaceptable, ácidos, agua, almacenaje poco adecuado, impacto excesivo o funcionamiento fuera de las especificaciones nominales.
- defectos causados por piezas de recambio, accesorios o componentes que no sean piezas de recambio o accesorios originales de Mirka.
- artículos con un desgaste y rotura normales tales como: plato de soporte, el sello del freno, la instalación de escape, los rodamientos, el soporte de goma, el cable de señal o el cable de alimentación.
- componentes que hayan sido: modificados, reparados o que se haya intentado reparar (por alguien que no sea el servicio autorizado de Mirka), componentes parcial o totalmente desmontados.
Nadie excepto Mirka tiene autoridad para cambiar, extender o añadir nada a los términos y condiciones establecidos de la garantía.
El fabricante no se considerará responsable de las consiguientes compensaciones por daños relacionados con tiempo de rendimiento perdido, pérdidas en la producción, lesiones o daños en la propiedad.
Los reclamos por artículos en garantía deben enviarse a la mayor brevedad posible. Los reclamos por artículos en garantía deben enviarse dentro del periodo de garantía.
Símbolos
| CE | Cumple con las normativas aplicables de la UE |
 | Advertencia: Electricidad |
Tabla de información de la instalación
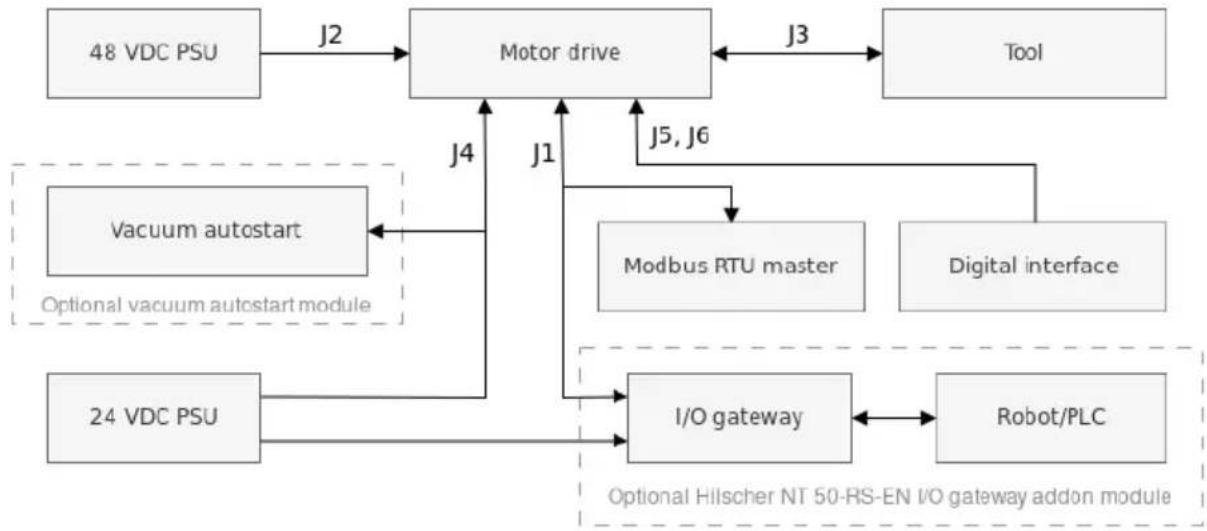
flowchart
graph TD
A["48 VDC PSU"] -->|J2| B["Motor drive"]
B -->|J3| C["Tool"]
D["24 VDC PSU"] -->|J4| B
E["Vacuum autostart"] -->|J1| B
F["Modbus RTU master"] -->|J5, J6| B
G["Digital interface"] --> B
H["I/O gateway"] -->|J1| B
I["Robot/PLC"] -->|J5, J6| B
J["Optional vacuum autostart module"] -->|J4| B
K["Optional Hilischer NT 50-RS-EN I/O gateway addon module"] -->|J1| B
General
- Conecte la fuente de alimentación de 48 V (CC) al accionamiento del motor (conector J2).
- Conecte la herramienta al accionamiento del motor (conector J3).
AVISO! No se recomienda utilizar un cable apantallado con herramientas de más de 10 m de longitud.
Interfaz Modbus RTU
- Utilice el conector J1 para conectar el accionamiento del motor al bus Modbus RTU.
Pasarela I/O a interfaz Modbus RTU
- Conecte la fuente de alimentación 24 V (CC) a la pasarela y conecte el cable adaptador DSUB-9 entre la pasarela (conector X2) y el accionamiento del motor (conector J1).
Interfaz de control digital
- Utilice el conector J6 para conectar el GND común entre los sistemas.
- Utilice el conector J5 para seleccionar la operación utilizando las cuatro señales digitales de entrada.
Interfaz de relé
- Los pitones de relé N/O se encuentran en el conector J4.
Datos técnicos para el accionamiento del motor
| Entrada | |
| Tensión de entrada nominal | 48 V (CC) |
| Rango de tensión de entrada | 46 - 50 V (CC) |
| Corriente máxima de entrada | 10 A |
| 350 WPotencia nominal | |
| Control de velocidad | |
| Rango de velocidad | 1000-10 000 rpm |
| Protección | |
| Protección frente a sobrecarga | Sí |
| Protección frente a exceso de calor | Sí |
| Interfaces | |
| Interfaces de entrada | Modbus RTU (RS-485)Profinet I/O (módulo de pasarela)EtherNet/IP (módulo de pasarela)Entradas digitales de 4 bits (15-33 V CC) |
| Interfaces de salida | Acceso único, relé N/O sin retención, 250 V (CA)/125 V (CC), 10 A |
| Medioambiental | |
| Temperatura ambiente | 0 - 40 °C |
| Humedad | Máximo 95 % HR (humedad relativa), no corrosivo, sin goteo de agua |
| Temperatura de almacenamiento | De -20 a 80 °C |
| IP40Clase IP | |
| Medidas | |
| Compartimento de accionamiento del motor | 380 x 300 x 210 mm (anchura x altura x profundidad) |
| Accionamiento del motor | 72 x 30 x 200 mm (anchura x altura x profundidad) |
| Accionamiento del motor instalado sobre un soporte con raíl DIN | 95 x 55 x 210 mm (anchura x altura x profundidad) |
Instrucciones de seguridad

¡La instalación eléctrica debe ser realizada por un electricista competente!

El accionamiento del motor ha sido diseñado solo para instalaciones fijas.

No realice pruebas de resistencia de tensión en ninguna pieza del motor o de la herramienta. La seguridad del producto ha sido plenamente testada en la fábrica.

Asegure su propia toma de tierra poniéndose una muñequera antiestática antes de tocar el accionamiento del motor (al colocar los puentes o similares) para evitar daños producidos por descargas electrostáticas en el accionamiento del motor.

Desconecte siempre la alimentación antes de realizar cualquier tarea en el compartimento.
Advertencias

Asegúrese de que todas las fuentes de alimentación CA-CC tengan la toma de tierra adecuada y que el accionamiento del motor no pueda entrar en contacto con la tensión de red a la vista.

Es recomendable usar un circuito externo de parada de emergencia.
Antes de poner en marcha la herramienta

Antes de poner en marcha la herramienta, compruebe que esté correctamente instalada y que el accionamiento del motor esté correctamente instalado.
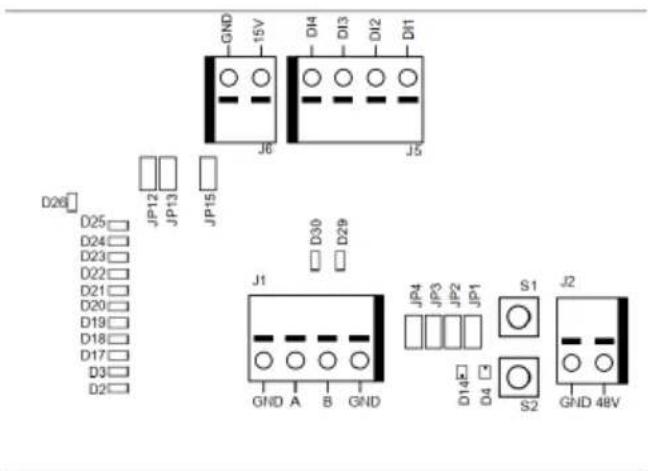
Tabla de información del compartimento de accionamiento del motor
Conectores de PCB (placa de circuito impreso), botones, puentes, indicadores, agujeros de instalación y medidas del accionamiento del motor
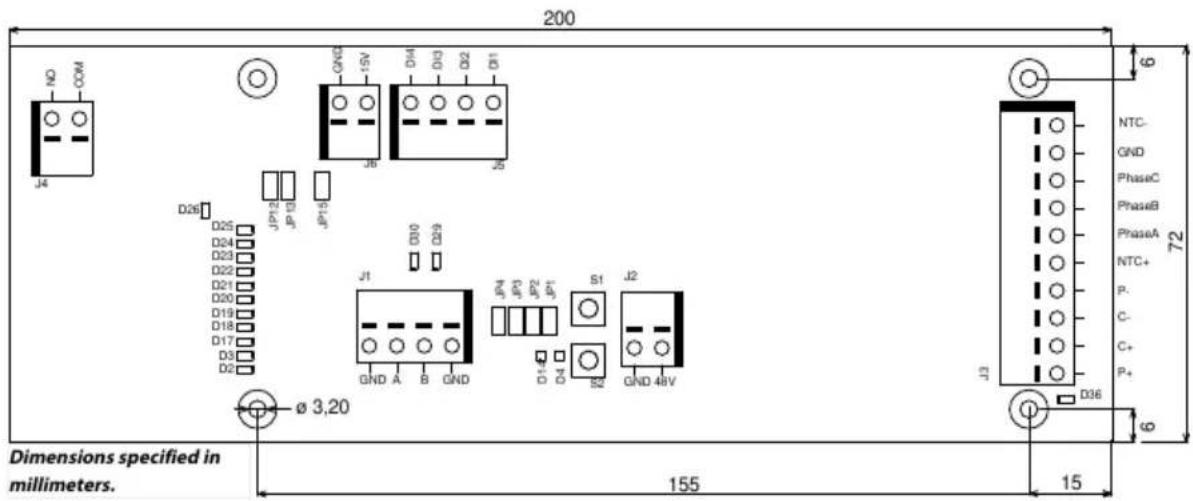
La PCB del motor viene instalada en un soporte de raíl DI que se puede acoplar a un raíl DIN estándar EN50022 de 35 x 7,5 mm, pero la PCB del accionamiento del motor se puede extraer de este soporte y colocarse utilizando los agujeros de instalación. Si se utilizan los agujeros de instalación, se recomienda el uso de separadores metálicos de 20 mm y tornillos M3 de 10 mm para instalar la PCB del accionamiento del motor.
Se recomienda el uso de casquillos de 10 mm con una cubierta de plástico para cada cable que vaya conectado a alguno de los conectores. Los cables se pueden llevar así hacia los conectores y soltarse con ayuda de un pequeño destornillador de cabeza plana (anchura de hoja de 3,5 mm, grosor de hoja 0,6 mm).
Descripción del conector
| DescripciónPitónConector | ||
| GNDGNDJ1 | ||
| Modbus RTU RS-485 (A)AJ1 | ||
| Modbus RTU RS-485 (B)BJ1 | ||
| GNDGNDJ1 | ||
| GNDGNDJ2 | ||
| J2 | 48V | Entrada de 48 V (CC) |
| Conector | Pitón | Color de cable del motor |
| BlancoP+J3 | ||
| RosaC+J3 | ||
| GrisC-J3 | ||
| VerdeP-J3 | ||
| Marrón, (0,25 mm ^2 )NTC+J3 | ||
| J3 | Marrón, (0,25 mm ^2 )Phase A | |
| J3 | Phase B | Azul |
| J3 | Phase C | Negro |
| GNDJ3 | Compartimento, tierra | |
| J3 | NTC- | Amarillo |
| Shield | Conectado a tierra, X2 en el compartimento Mirka |
| DescripciónPitónConector | ||
| J4 | COM | Relé COM |
| J4 | NO | Relé NO |
| DescripciónPitónConector | ||
| J5 | DI1 | Bit de entrada de control de velocidad digital 1 |
| J5 | DI2 | Bit de entrada de control de velocidad digital 2 |
| J5 | DI3 | Bit de entrada de control de velocidad digital 3 |
| J5 | DI4 | Bit de entrada de control de velocidad digital 4 |
| DescripciónPitónConector | ||
| J6 | 15V | Salida de 15 V (CC) |
| GNDGNDJ6 | ||
Descripción del botón
| Botón | Descripción |
| S1 | Botón de autoprueba |
| S2 | Botón de reseteado |
Descripción del indicador
| Indicador | Descripción |
| D2 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 1 está activo. Indicador de dirección secundaria de Modbus RTU, bit 1. |
| D3 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 3 está activo. Indicador de dirección secundaria de Modbus RTU, bit 2. |
| D4 | Indicador de estado de la herramienta Se pone rojo cuando se detiene la herramienta, se pone verde cuando la herramienta está en funcionamiento.DescripciónIndicador |
| D14 | Indicador de estado del accionamiento del motor. Se pone verde cuando el accionamiento del motor está en estado ENCENDIDO. Parpadea cuando el accionamiento del motor está en estado APAGADO. |
| D17 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 5 está activo. Indicador de dirección secundaria de Modbus RTU, bit 3. |
| D18 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 7 está activo. Indicador de dirección secundaria de Modbus RTU, bit 4. |
| D19 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 9 está activo. Indicador de dirección secundaria de Modbus RTU, bit 5. |
| D20 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 11 está activo. Indicador de dirección secundaria de Modbus RTU, bit 6. |
| D21 | Indicador de punto de ajuste de velocidad, se enciende si el punto de ajuste 13 está activo. Indicador de dirección secundaria de Modbus RTU, bit 7. |
| D22 | Indicador de dirección esclava de Modbus RTU, bit 8. |
| D23 | Se enciende cuando el modo indicador D2-D3, D17-D22 es la dirección esclava de Modbus RTU. |
| D24 | Se enciende cuando está activada la interfaz de control de velocidad digital. |
| D25 | Se enciende cuando está activada la señal de estado de alarma. |
| D26 | Indicador de estado del relé. |
| D29 | Indicador de recepción de Modbus RTU. |
| D30 | Indicador de transmisión de Modbus RTU. |
| D36 | Posible error en el cableado de la herramienta. Se pone rojo cuando se detecta un posible error en el cableado C+/C-/P+/P- de la herramienta. |
Pantalla del punto de ajuste de velocidad
| Herramienta | Velocidad mínima (rpm) | Velocidad máxima (rpm) | ||||||||||||||
| AIROS 550 CV/NV | 100004000AIROS 650 CV/NV | |||||||||||||||
| AIROS 350 CV/NV | ||||||||||||||||
| AIROS 150 NV | 80004000AIROP 312 NV | |||||||||||||||
| AIOS 130 NV | ||||||||||||||||
| 100005000AIOS 353 CV/NV | ||||||||||||||||
| 30001000AIRP 300 | ||||||||||||||||
| Velocidad ajus-tada | Mapa de bits | Velocidad con distintos puntos de ajuste (rpm) | Leds de velocidad activos | |||||||||||||
| DI4 | DI3 | DI2 | DI1 | Régimen de la he-ramienta | Régimen de la he-ramienta | Régimen de la he-ramienta | Régimen de la he-ramienta | D2 | D3 | D17 | D18 | D19 | D20 | D21 | ||
| 4000-10000 | 4000-8000 | 5000-10000 | 1000-3000 | |||||||||||||
| 1 | 0 | 0 | 0 | 1 | 4000 | 4000 | 5000 | 1000 | X | |||||||
| 2 | 0 | 0 | 1 | 0 | 4500 | 4333 | 5417 | 1167 | X | |||||||
| 3 | 0 | 0 | 1 | 1 | 5000 | 4666 | 5834 | 1334 | X | X | ||||||
| 4 | 0 | 1 | 0 | 0 | 5500 | 4999 | 6251 | 1501 | X | X | ||||||
| 5 | 0 | 1 | 0 | 1 | 6000 | 5332 | 6668 | 1668 | X | X | X | |||||
| 6 | 0 | 1 | 1 | 0 | 6500 | 5665 | 7085 | 1835 | X | X | X | |||||
| 7 | 0 | 1 | 1 | 1 | 7000 | 5998 | 7502 | 2002 | X | X | X | X | ||||
| XXXXX216979196331750000018 | ||||||||||
| XXXXX233683366664800010 | ||||||||||
| XXXXX250387536997850001 | ||||||||||
| XXXXXX267091707330 | ||||||||||
| XXXXXX283795877663 | ||||||||||
| XXXXXXXX300010 |
| FuncionamientoMapa de bits | ||||
| DI1DI2DI3DI4 | ||||
| Detenido0000 | ||||
| 1 | 1 | 1 | 0 | En marcha, sin cambio de velocidad |
| 1 | 1 | 1 | 1 | En marcha, sin cambio de velocidad |
Muestra de dirección esclava de Modbus RTU
Descripción del puente
| Puentes | De serie | Descripción |
| JP1 | No ajustado | Reservado para futuro uso |
| JP2 | No ajustado | Cuando está ajustado, se conecta un resistor terminal de 270 Ω en los pitones A y B de Modbus RTU. |
| JP3 | No ajustado | Cuando está ajustado, se conecta un resistor a masa de 10 Ω en el pitón B de Modbus RTU. |
| JP4 | No ajustado | Cuando está ajustado, se conecta un resistor de polarización de 10 Ω al pitón A de Modbus RTU. |
| JP12 | No ajustado | Cuando está ajustado, se activa la prestación de control de velocidad digital. |
| JP13 | No ajustado | Cuando está ajustado, los indicadores D2-D3 y D17-D22 usarán como salida la actual dirección esclava de Modbus RTU en vez del punto de ajuste de velocidad. |
| JP15 | No ajustado | Resetear a los ajustes de fábrica. |
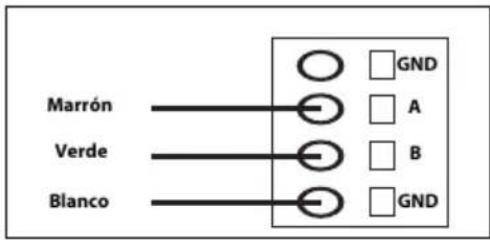
Pitón conector de salida del cable de la herramienta
| Pitón (color, tamaño) | Descripción |
| PE (verde-amarillo, 1,0 mm2) | No utilizado |
| 1 (marrón, 1,00 mm ) | Fase A |
| 2 (azul, 1,00 mm ) | Fase B |
| 3 (negro, 1,00 mm ) | Fase C |
| A (gris, 0,25 mm ) | C- |
| B (rosa, 0,25 mm ) | C+ |
| C (verde, 0,25 mm ) | P- |
| C (amarillo, 0,25 mm )ño) | NTC-DescripciónPitón (color, tama- |
| mm ) | NTC+D (marrón, 0,25 |
| P+E (blanco, 0,25 mm ) |
AVISO! NTC-y P-se conectan juntos al mismo PITÓN dentro del conector.
Pitón de salida de cable adaptador Hilscher NT 50-RS-EN (hembra DSUB-9)
| DescripciónPITÓN (color) | |
| GND1 (blanco, WH) | |
| 4 (marrón, BN) | Modbus RTU (A, RxD / TxD+) |
| 5 (verde, GN) | Modbus RTU (B, RxD / TxD-) |
| TORA | Cubierta protectoraCUBIERTA PROTEC- |
Conexiones de bloque de terminales (firmware v. 3.05 y posteriores)
Estado Enable:
Para que funcione la lijadora, el bloque de terminales 4 debe estar conectado a una salida de 24 V del robot/PLC, mientras que el bloque de terminales 6 debe conectarse a 0 V en el robot/PLC.
Para mejorar la seguridad, la salida de estado Enable puede ajustarse a bajo nivel si el robot se encuentra con un problema que provoque su detención. Ello detendrá de forma automática el cabezal de lijado/pulido.
El cable de 3 metros y 2 polos suministrado con el compartimento debe usarse para habilitar el estado Enable de acuerdo con las instrucciones
Módulo AutoStart de extracción:
Los clientes pueden integrar el módulo opcional Mirka AutoStart (MIA6519011) para habilitar la función de arranque/parada automática del extractor de polvo. A tal fin, conecte el bloque de terminales 5 al terminal positivo (+) del módulo AutoStart y el bloque de terminales 7 al terminal negativo (-).
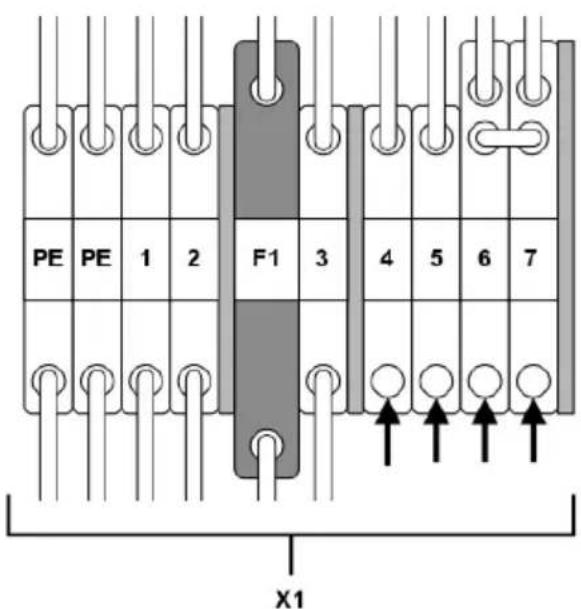
| Bloque de terminalesFunción/Conexión | |
| Estado Enable, robot/PLC, salida de 24 V | X1:4 (conectado a la clavija J5, DI1) |
| X1:6Robot/PLC, 0 V | |
| Módulo AutoStart + | X1:5 (conectado a la clavija J4, NO)X1:7Módulo AutoStart - |
Modbus RTU
El Modbus RTU sobre el RS-485 se utiliza para comunicarse con el accionamiento del motor. El accionamiento del motor se configura como dispositivo esclavo del Modbus RTU, y la dirección esclava por defecto es 86. La dirección esclava se puede cambiar cuando entra en conflicto con otro dispositivo esclavo Modbus RTU.
El conector J1 del accionamiento del motor se emplea para la comunicación con Modbus RTU. Se recomienda usar un cable doble trenzado y blindado, y la cubierta protectora debe llevar toma de tierra solo en una punta, normalmente en el dispositivo maestro. El pitón A del conector J1 es equivalente a RxD / TxD+, y el pitón B es equivalente a RxD / TxD-.
Configuración RS-485
| 19200VELOCIDAD DE TRANSMISIÓN | |
| IGUALPARIDAD | |
| 1BITS DE PARADA | |
| 8BITS DE DATOS |
Registros de bobina (F1, F5, F15)
| DescripciónNombreTipo de dato | |||
| 00001 - 00012 | Unidad 16 | Salidas digitales | Las bobinas 1-11 se reservan para usos futuros.La bobina 12 es el relé localizado en el accionamiento del motor. |
Registros de entrada (F4)
AVISO! Los registros de entrada 30001-30016 son específicos del accionamiento. A modo de ejemplo: "Recuento de caída de R.P.M." alude al número total de "recuento de caída de R.P.M." del conjunto de herramientas conectadas al accionamiento del motor.
| DescripciónNombreTipo de dato | |||
| 30001 | Unidad 16 | Recuento de caída de R.P.M. | El número de veces que la velocidad ha caído del punto de ajuste en más del 25 %. |
| Unidad 1630002 | Recuento de templanza de herramientas | El número de veces que la temperatura de la herramienta ha superado el límite de «templanza», 79 °C. | |
| Unidad 1630003 | Recuento de templanza del accionamiento del motor | El número de veces que la temperatura del accionamiento del motor ha superado el límite de «templanza», 73 °C. | |
| Unidad 1630004 | Recuento de calentamiento de la herramienta | El número de veces que la temperatura de la herramienta ha superado el límite de «calentamiento», 134 °C. | |
| Unidad 1630005 | Recuento de calentamiento del accionamiento del motor | El número de veces que la temperatura del accionamiento del motor ha superadoel límite de «calentamiento», 117 °C. | |
| Unidad 1630006 | Recuento de parada de la herramienta | El número de veces que la temperatura de la herramienta ha superado el límite de «parada», 142 °C. | |
| Unidad 1630007 | Recuento de parada del accionamiento del motor | El número de veces que la temperatura del accionamiento del motor hasuperado el límite de «parada», 123 °C. | |
| Unidad 1630008 | Recuento de tensiónfuera de ran-go | El número de veces que latensión de entrada no ha estado entre 44 y 52 V (CC). | |
| 30009 | Unidad 16 | Recuento bajo de sobrecorriente | El número de veces que la corriente ha superado los 15,1 A. |
| 30010 | Unidad 16 | Recuento medio de sobrecorriente | El número de veces que la corriente ha superado los 18,2 A. |
| 30011 | Unidad 16 | Recuento de uso largo | El número de veces que el tiempo de funcionamiento ha sido superior a 60 segundos. |
| 30012 | Unidad 16 | Recuento de uso medio | El número de veces que el tiempo de funcionamiento ha estado entre 20 y 60 segundos. |
| 30013 | Unidad 16 | Recuento de uso corto | El número de veces que el tiempo de funcionamiento hasido inferior a 20 segundos. |
| 30014 | Unidad 16 | Horas de tiempo de uso | Parte de horas de tiempo de uso. |
| 30015 | Unidad 16 | Minutos de tiempo de uso | Parte de minutos de tiempo de uso. |
| 30016 | Unidad 16 | Segundos de tiempo de uso | Parte de segundos de tiempo de uso. |
| 30017 | Int16 | Corriente | Corriente en mA. |
| 30018 | Unidad 16 | Velocidad | Velocidad en rpm. |
| 30019 | Unidad 16 | Temperatura de la herramienta | Temperatura de laherramienta en °C. |
| Unidad 1630020 | Temperatura del accionamiento del motor | Temperatura del accionamiento del motor en °C. | |
| 30021-30030 | Char[20] | Versión del firmware | Versión del firmware y fecha de fabricación, p.ej. «2.0 18 Ene 14:00». |
| 30031-30039 | Char[18] | Versión de pieza | Versión de pieza y número de identificación del accionamiento del motor, p. ej. «Al1.3 123456» |
| 30040-30046 | Char[14] | Número de seriedel accionamiento del motor | Número de seriedel accionamiento del motor, p. ej. «749474379001» |
| 30047 | Unidad 16 | Señal de estado de alarma | La señal de estado de alarma puede daren cualquier momento una combinación de valores de la siguiente lista. Compruebe los bits individuales paradeterminar el tipo de alarmas que se están activando en este momento. Esta señal se detiene automáticamente al cabo de 5 segundos si la causa que activó la alarma ya no está presente. 0x0000 = No activada 0x0001 = Herramientasobrecalentada 0x0002 = Accionamiento del motor sobrecalentado 0x0004 = Sobrecorriente 0x0008 = Tensión insuficiente 0x0010 = Exceso de tensión 0x0020 = Autopruebaen funcionamiento 0x0040 = Caída de R.P.M. 0x0080 = Corriente alta 0x0100 = Cambio de herramienta en progreso 0x0200 = Posible error de cableado en la herramienta 0x0400 = Modo de reseteado de fábrica 0x0800 = Protección contra escritura desactivada 0x1000 = Herramienta desconectada (pérdida de comunicación)* |
| 30061 | Unidad 16 | Identificador de herramienta | |
| 30062 | Unidad 16 | Velocidad mínima de herramienta | |
| 30063 | Unidad 16 | Velocidad máxima de herramienta | |
| Unidad 1630064 | Etiqueta de herramienta disponible | ||
| 30065-30071 | Char[14] | Número de serie de herramienta | |
| 30174* | Unidad 16 | Diámetro de plato de herramienta | |
| 30175* | Unidad 16 | Compensación Z de herramienta | |
| 30176* | Unidad 16 | Órbita de herramienta | Órbita de herramienta en mm |
| 30177* | Unidad 16 | Peso de herramienta | |
| 30178* | Unidad 16 | CoG de herramienta | Centro de gravedadde herramienta |
| 30179* | Unidad 16 | Ancho de plato de herramienta | |
| Longitud de plato de herramienta | Unidad 1630180* | ||
| Char[3]30181-30183* | Versión de firmwareherramienta | Versión de firmware, por ejemplo, "0.04" | |
| Char[10]30181-30193* | Nombre de modelodeherramienta | ||
AVISO! * Requiere firmware versión 3.05 o posterior y firmware de herramienta 0.05 o posterior.
Registros de tenencia (F3, F6, F16)
| DescripciónNombreTipo de dato | |||
| Nombre del dispositivoChar[20]40001-40010 | Longido máxima de 19 caracteres imprimibles, p.ej. «AIMD 749474379001». | ||
| 40011 | Unidad 16 | Punto de ajuste de velocidad | Punto de ajuste de velocidad, no la real, entre la velocidadde herra-mienta mínima y máxima. |
| FuncionamientoUnidad 1640012 | Estado del accionamiento del motor, puede ser una combina-ción de los siguientes:0x0001 = EN MARCHA0x0002 = DETENIDO*0x0004 = ON*0x0008 = OFF0x0010 = INICIO DE CAMBIO DE HERRAMIENTA0x0020 = FIN DE CAMBIO DE HE-RRAMIENTA0x0040 = DESACTIVAR PROTEC-CIÓN CONTRA ESCRITURA0x0080 = ACTIVAR PROTECCIÓNCONTRA ESCRITURAAVISO! Al escribir un nuevo esta-do de valor, el valor solopuedeser un único estado, no una combina-ción de múltiples estados, p. ej.ENCENDIDO + EN MARCHA no se pueden escribir simultáneamente. | ||
| Dirección esclavaUnidad 1640013 | En caso de necesidad se pueden cambiar los defectos hasta 86. | ||
AVISO! * No incluido en firmware 3.05 o posterior
Pasarela Profinet I/O o EtherNet/IP (Hilscher NT 50-RS-ES)
Si el accionamiento del motor debe ir conectado a un dispositivo Profinet I/O, se puede usar la pasarela Hilscher NT 50-RS-EN. La pasarela va conectada al accionamiento del motor mediante el conector DSUB-9 de la pasarela, y el conector J1 en el accionamiento del motor. Más abajo se muestra la clavija de salida de DSUB-9 (conector X2) ubicada en la pasarela:
| DescripcionesSeñalPitónR | |||
 | 1 | GND | Potencial de referencia, to-ma de tierra de fuente de alimentación |
| RxD / TxD+4 | Recibir datos / Transmitir datos positivo | ||
| RxD / TxD-5 | Recibir datos / Transmitir datos negativo |
Un resistor de polarización de 10 kΩ va conectado internamente en la pasarela a «RxD / TxD+».
Un resistor a masa de 10 kΩ va conectado internamente en la pasarela a «RxD / TxD-».
Puede descargarse documentación detallada sobre la pasarela y las herramientas de configuración en el sitio web de Hilscher: www.hilscher.com.
Configuración
La pasarela viene configurada previamente de Mirka como dispositivo secundario Profinet I/O o adaptador EtherNet/IP I/O. Puede utilizarse el software "SYCON.net" de Hilscher para reconfigurar el dispositivo. Puede utilizarse el software "Ethernet Device Setup" de Hilscher para cambiar la configuración de la red. Normalmente deberá reasignarse la dirección IP tras un cambio de configuración.
Configuración de red predeterminada para Profinet
| 192.168.2.191DIRECCIÓN IP | |
| 255.255.255.0MÁSCARA DE SUBRED | |
| 0.0.0.0PASARELA POR DEFECTO | |
| nt50enpnsNOMBRE DEL DISPOSITIVO | |
| 118TAMAÑO DE ENTRADA | |
| 102 (firmware v. 3.05 o posterior) | |
| 5TAMAÑO DE SALIDA |
Configuración de red predeterminada para EtherNet/IP
| 192.168.125.110DIRECCIÓN IP | |
| MirkaENIPNOMBRE | |
| 101MONTAJE DE ENTRADA | |
| 102TAMAÑO DE ENTRADA | |
| 100MONTAJE DE SALIDA | |
| 5TAMAÑO DE SALIDA |
Firmware 3.04 o anterior para asignación de señales de Profinet I/O a Modbus RTU
| Nombre | Registro de Modbus | datos | Longitud de I/O | Longitud de L | L |
| ReléAjustado | 00012 | 1 bobina | Datos cambia-dos | 1 | 1 byte salida |
| AjustarVelocidadRegistro | 40011 | 1 registro | Datos cambia-dos | 2 | 1 palabra salida |
| AjustarOperaciónRegistro | 40012 | 1 registro | Datos cambia-dos | 3 | 1 palabra salida |
| NombreDispositivo | 40001-40010 | 10 registros | Cíclicamente 10 seg. | 4 | 10 palabras sali-da |
| EntradasComunes | 30017-30020 | 4 registros | Cíclicamente 1 seg. | 5 | 4 palabras sali-da |
| EntradasMisc | 30001–30016 | 16 registros | Cíclicamente 5 seg. | 6 | 16 palabras sali-da |
| Nombre | Registro de Modbus | datos | Profinet I/OInter | Lupogriduahajetud datos | |
| 1 registro30047 | EstadoAlarma seg. | 7Cíclicamente 1 | 1 palabra entra-da | ||
| Versión de firmware | 30021–30030 | 10 registros | seg. | 8Cíclicamente 10 | 10 palabras sali-da |
| NúmeroSerieVersiónPieza | 30031–30046 | 16 registros | seg. | 9Cíclicamente 10 | 16 palabras sali-da |
| dad | 1 registro40011 | ConseguirRegistroseg. | Velícicamente 1 | 1 palabra entra-da | |
| ción | 1 registro40012 | ConseguirRegistroseg. | Velícicamente 1 | 1 palabra entra-da | |
| 12 bobinas00001 | LeerBobinasseg. | 2 bytes entrada12Cíclicamen | |||
Firmware 3.05 o posterior para unidad Profinet I/O
| Tipo de datos Nominal y Tijos de datos | Dirección de Modbuss | |||||
| Slot 1 | 1 byte salida | Salida digital (re-lé) | BIT | 1 byte | FC5 11 | |
| Slot 2 | 2 bytes, salida | Punto de ajuste de velocidad (rpm) | UINT16 | 1 palabra | FC6 10 | |
| Slot 3 | 2 bytes, salida | Funcionamiento | BIT | 1 palabra | FC6 11 | |
| 8 bytes, entrada Slot Corriente de motor (mA) | UINT16 | 1 palabra | FC4 16 | |||
| Régimen de motor (rpm) | UINT16 | 1 palabra | FC4 17 | |||
| Temperatura de motor (°C) | UINT16 | 1 palabra | FC4 18 | |||
| Temperatura de accionamiento (°C) | UINT16 | 1 palabra | FC4 19 | |||
| 8 bytes, entrada Slot Arm. acciona- miento | CHAR | 6 bytes | FC4 20-23 | |||
| Slot 6 | 2 bytes, entrada | EstadoAlarma | BIT | 1 palabra | FC4 46 | |
| 4 bytes, entrada Slot Unto de ajuste de velocidad (rpm) | UINT16 | 1 palabra | FC3 10 | |||
| Funcionamiento | BIT | 1 palabra | FC3 11 | |||
| 8 bytes, entrada Slot Identificador de herramienta | UINT16 | 1 palabra | FC4 60 | |||
| Velocidad mínima (rpm) | UINT16 | 1 palabra | FC4 61 | |||
| Velocidad máxima (rpm) | UINT16 | 1 palabra | FC4 62 | |||
| Etiqueta de herramienta disponible | BIT | 1 palabra | FC4 63 | |||
| Slot 9 | 16 bytes, entrada | N.o serie de herramienta | CHAR | 14 bytes | FC4 64-71 | |
| Tipo de datosNom | Tipo de datos | Dirección de Modbuss | |||
| 8 bytes, entradaSlot 10(mm) | FC4 1731 palabraUINT16Diáme | ||||
| de herramienta(mm) | FC4 1741 palabraUINT16Comp | ||||
| Órbita de herramienta (mm) | UINT16 | 1 palabra | FC4 175 | ||
| Peso de herramienta (g) | UINT16 | 1 palabra | FC4 176 | ||
| 32 bytes, entradaSlot 11COG Z de herramienta (mm) | FC4 1771 palabraUINT16Comp | ||||
| Ancho de plato(mm) | UINT16 | 1 palabra | FC4 178 | ||
| (mm) | FC4 1791 palabraUINT16Longit | ||||
| FC4 180-1826 bytesCHARFirm. | |||||
| lo de herramienta | FC4 183-19220 bytesCHARNom | ||||
| 16 bytes, entradaSlot 12s de uso de herramienta | UINT16 | 1 palabra | FC4 99 | ||
| Segundos de uso de herramienta | UINT8 | 1 byte | FC4 100 | ||
| Minutos de uso de herramienta | UINT8 | 1 byte | FC4 100 | ||
| Recuento breve de uso de herramienta | UINT32 | 2 palabras | FC4 101-102 | ||
| Recuento intermedio de uso de herramienta | UINT32 | 2 palabras | FC4 103-104 | ||
| Recuento largo de uso de herramienta | UINT32 | 2 palabras | FC4 105-106 | ||
Firmware de unidad EtherNet/IP 3.05 o posterior
| Tipo | Nombre | Tipo de datos | Longitud de datos | Dirección Modbus |
| Salida | Salida digital (relé) | BIT | 1 byte | FC5 11 |
| Salida | Punto de ajuste de velocidad (rpm) | UINT16 | 1 palabra | FC6 10 |
| Salida | Funcionamiento | BIT | 1 palabra | FC6 11 |
| Entrada | 2 palabras | |||
| Entrada | Corriente de motor (mA) | UINT16 | 1 palabra | FC4 16 |
| Entrada | Régimen de motor (rpm) | UINT16 | 1 palabra | FC4 17 |
| Entrada | Temperatura de motor (°C) | UINT16 | 1 palabra | FC4 18 |
| Entrada | Temperatura de accionamiento (°C) | UINT16 | 1 palabra | FC4 19 |
| Entrada | EstadoAlarma | BIT | 1 palabra | FC4 46 |
| Tipo | Nombre | Tipo de datos | Longitud de datos | Dirección Modbus |
| Entrada | Punto de ajuste de velocidad (rpm) | UINT16 | 1 palabra | FC3 10 |
| FC3 111 palabraBITFuncionamiento | ||||
| Entrada | mienta | FC4 601 palabraUINT16Identificado | ||
| Entrada | (rpm) | FC4 611 palabraUINT16Velocidad n | ||
| Entrada | (rpm) | FC4 621 palabraUINT16Velocidad n | ||
| Entrada | ta disponible | FC4 631 palabraBITEtiquetadeherrar | ||
| Entrada | ta | FC4 64-7114 bytesCHARN.° serie del | ||
| Entrada | Diámetro de plato (mm) | UINT16 | 1 palabra | FC4 173 |
| Entrada | Compensación Z de herramienta (mm) | UINT16 | 1 palabra | FC4 174 |
| Entrada | (mm) | FC4 1751 palabraUINT16Órbita de h | ||
| Entrada | Peso de herramienta (g) | UINT16 | 1 palabra | FC4 176 |
| Entrada | de herramienta (mm) | FC4 1771 palabraUINT16Compensa | ||
| Entrada | Ancho de plato (mm) | UINT16 | 1 palabra | FC4 178 |
| Entrada | Longitud de plato (mm) | UINT16 | 1 palabra | FC4 179 |
| Entrada | Versión de firmware de herramienta | CHAR | 6 bytes | FC4 180-182 |
| Entrada | Nombre de modelo de herramienta | CHAR | 20 bytes | FC4 183-192 |
| Entrada | Firmware de unidad | CHAR | 6 bytes | FC4 20-23 |
| Entrada | mienta | FC4 991 palabraUINT16Horas de us | ||
| Entrada | Segundos de uso de herramienta | UINT16 | 1 byte | FC4 100 |
| Entrada | Minutos de uso de herramienta | UINT16 | 1 byte | FC4 100 |
| Entrada | Recuento breve de uso de herramienta | UINT32 | 2 palabras | FC4 101-102 |
| Entrada | Recuento intermedio de uso de herramienta | UINT32 | 2 palabras | FC4 103-104 |
| Entrada | Recuento largo de uso de herramienta | UINT32 | 2 palabras | FC4 105-106 |
Ejemplo de asignación de pasarela Siemens TIA Portal V14 3.04 o posterior
Más abajo se incluye una captura de pantalla de TIA Portal V14 que muestra la manera de asignar la pasarela al sistema. Encontrará el archivo GSDML en el DVD de soluciones de pasarela que puede descargar en hilscher.com para añadir compatibilidad con la pasarela NT 50-RS-EN de Hilscher en su sistema.
| Device overview | ||||||||||
| Y | ... | Module | Rack | Slot | I address | Q address | Type | Article no. | Firmware | |
| nt50enpns | 0 | 0 | NT 50-EN/PNS | 3.4 x | ||||||
| PNHO | 0 | 0 X1 | nt50enpns | |||||||
| SetRelay | 0 | 1 | 63 | 1 Byte Output | ||||||
| SetSpeedRegister | 0 | 2 | 64...65 | 2 Byte Output | ||||||
| SetOperationRegister | 0 | 3 | 66...67 | 2 Byte Output | ||||||
| DeviceName | 0 | 4 | 68...87 | 20 Byte Input | ||||||
| CommonInputs | 0 | 5 | 88...95 | 8 Byte Input | ||||||
| MiscInputs | 0 | 6 | 96...127 | 32 Byte Input | ||||||
| AlarmStatus | 0 | 7 | 128...129 | 2 Byte Input | ||||||
| FirmwareVersion | 0 | 8 | 130...149 | 20 Byte Input | ||||||
| PartVersion | 0 | 9 | 150...169 | 20 Byte Input | ||||||
| SerialNumber | 0 | 10 | 170...181 | 12 Byte Input | ||||||
| GetSpeedRegister | 0 | 11 | 182...183 | 2 Byte Input | ||||||
| GetOperationRegister | 0 | 12 | 184...185 | 2 Byte Input | ||||||
| ReadCoils | 0 | 13 | 186...187 | 2 Byte Input | ||||||
Funcionamiento básico del Modbus RTU
El accionamiento del motor debe haberse encendido para poder poner en marcha la herramienta. La primera operación que debe realizarse es situar el accionamiento del motor en estado Enabled. Esta operación difiere a partir del firmware versión 3.05. En las versiones anteriores debe enviarse un comando "Accionamiento encendido" al accionamiento del motor, mientras que en las versiones posteriores viene consignada la clavija digital DI1 como estado Enabled. No es obligatorio enviar el comando de estado Disabled antes de interrumpir la alimentación del accionamiento del motor.
Con elaccionamiento del motor encendido puede introducirse el punto de ajuste de velocidad y definirse el estado como RUN enviando el comando de estado RUN. Esto hará que la herramienta opere a la velocidad establecida. Para detener la herramienta, sitúe el accionamiento del motor en estado STOP enviando el comando de estado STOP.
Es recomendable monitorizar continuamente el promedio de velocidad, el promedio de corriente, la temperatura de la herramienta, la temperatura del accionamiento del motor y la señal de estado de alarma. Esto ayudará a detectar si hay algún problema presente durante su funcionamiento.
Secuencia de ejemplo para poner en marcha y detener la herramienta (firmware v. 3.04 y anteriores):
- Introduzca 4 (0x0004) en el registro "Operación". De este modo se ajustará el accionamiento del motor en el estado Enabled.
- Escriba 4000 (0x0FA0) en el registro de «Punto de ajuste de velocidad»; de este modo se ajustará la velocidad a 4000 r.p.m.
- Escriba 1 (0x0001) en el registro de «Funcionamiento»; de este modo el accionamiento del motor se ajustará al estado EN MARCHA, y la herramienta empezará a funcionar.
- Escriba 2 (0x0002) en el registro de «Funcionamiento»; de este modo el accionamiento del motor se ajustará al estado DETENIDO, y la herramienta se detendrá.
- Introduzca 8 (0x0008) en el registro "Operación". De este modo se ajustará el accionamiento del motor en el estado Disabled.
Secuencia de ejemplo para poner en marcha y detener la herramienta (Firmware v. 3.05 y posteriores)*:
- Sitúe la clavija DI1 (bloque de terminales 4) a nivel alto (15-33 V CC). De este modo se ajustará el accionamiento del motor en el estado Enabled.
- Escriba 4000 (0x0FA0) en el registro de «Punto de ajuste de velocidad»; de este modo se ajustará la velocidad a 4000 r.p.m.
- Escriba 1 (0x0001) en el registro de «Funcionamiento»; de este modo el accionamiento del motor se ajustará al estado EN MARCHA, y la herramienta empezará a funcionar.
- Escriba 2 (0x0002) en el registro de «Funcionamiento»; de este modo el accionamiento del motor se ajustará al estado DETENIDO, y la herramienta se detendrá.
- Sitúe la clavija DI1 a nivel bajo (GND). De este modo se ajustará el accionamiento del motor en el estado Disabled.
* Vea el capítulo "Conexiones de bloque de terminales (firmware v. 3.05 y posteriores)" para información detallada sobre las conexiones.
Interfaz digital
El accionamiento del motor se puede controlar también mediante la interfaz digital en vez del Modbus RTU, pero con el inconveniente añadido de que al usar la interfaz digital no hay retroalimentación. Para activar la interfaz digital, debe ajustarse el puente JP12.
El conector J5 se utiliza como entrada a la interfaz digital. La entrada se considera alta si se aplica una tensión entre 15 y 33 V (CC) al pitón de entrada. La entrada se considera baja si la tensión está por debajo de 12 V (CC) o si la entrada queda flotando. Debe conectarse el pitón GND del conector J6 entre los sistemas. El conector J6 debe utilizarse también para suministrar una tensión de control de 15 V (CC) en caso de necesidad.
Operaciones de interfaz digital
Consulte la tabla Pantalla del punto de ajuste de velocidad en el capítulo Tabla de información del compartimento de accionamiento del motor.
Función de autoprueba
Manteniendo pulsado el botón S1, el accionamiento del motor realizará una rápida autoprueba. La señal del estado de alarma se ajustará a 6 (autoprueba en marcha). Los indicadores D4 y D14 parpadearán en verde si las temperaturas y las tensiones están dentro de los límites. Si las temperaturas o las tensiones no están dentro de los límites, entonces los indicadores parpadearán en rojo.
Función de reseteado
Se puede pulsar momentáneamente el botón de reseteado S2 para resetear el accionamiento del motor. Esto es básicamente lo mismo que encender y apagar el equipo.
Función de reseteado de fábrica
La configuración guardada en el accionamiento del motor se puede resetear a los ajustes de fábrica en caso de necesidad. De este modo se restaurará la dirección esclava asignada de fábrica, y la última configuración conocida de la herramienta se reseteará a los ajustes por defecto de fábrica. Siga estos pasos para realizar un reseteado de fábrica:
- Seleccione el puente JP15.
- Mantenga pulsado S2 durante 5 segundos.
- Quite JP15.
Escribir protección
Los registros de tenencia de «Nombre del dispositivo» y «Dirección esclava» suelen ser solo de lectura, para evitar que se escriba accidentalmente en estos registros. Si es preciso cambiar alguno de estos registros, siga estos pasos:
-
Escriba 64 (0x0040) en el registro de «Funcionamiento» para desactivar la protección contra escritura.
-
Escriba el nuevo valor en los registros de tenencia de «Nombre del dispositivo» o «Dirección esclava».
- Escriba 128 (0x0080) en el registro de «Funcionamiento» para activar la protección contra escritura.
Parada de seguridad / E-Stop
El propio accionamiento del motor no tiene entradas para detectar o reaccionar ante una señal externa de parada de seguridad / E-Stop. Se puede usar un contactor adecuado y colocarlo cerca del accionamiento del motor para conectar o desconectar los cables de fase A, B y C de la herramienta
Función de cambio de herramienta sobre la marcha
Se pueden usar múltiples herramientas con el mismo accionamiento del motor, pero solo se puede conectar una herramienta al accionamiento del motor en cada momento. Al cambiar de una herramienta a otra, siga estos pasos:
- Detenga la herramienta escribiendo 2 (0x0002) en el registro «Funcionamiento».
- Escriba 16 (0x0010) en el registro «Funcionamiento» para que el accionamiento del motor sepa que está intentando desconectar la herramienta acoplada en este momento.
- Espere 1 segundo antes de desconectar del accionamiento del motor la herramienta acoplada en este momento.
- Desconecte del accionamiento del motor la herramienta acoplada en este momento.
- Conecte la siguiente herramienta al accionamiento del motor.
- Escriba 32 (0x0020) en el registro «Funcionamiento» para que el accionamiento del motor sepa que se ha acoplado la nueva herramienta.
- Espere 1 segundo antes de poner en marcha la nueva herramienta.
Prestaciones de protección
| MotivoModo de protección | |
| La herramienta introduce menos potencia | El accionamiento del motor es superior a 117 °CLa temperatura de la herramienta es superior a 134 °CCarga excesiva |
| La herramienta se detiene por completo | El accionamiento del motor es superior a 123 °CLa temperatura de la herramienta es superior a 142 °CEstado de sobrecarga |
Guía de solución de problemas
| Procedimientos recomendadosSíntoma | |
| El accionamiento del motor no está encendido. | Compruebe que en J2 haya 48 V (CC) presentes y que la polaridad sea correcta. |
| La herramienta no se pone en marcha. | * Compruebe que el accionamiento del motor se encuentre en estado ON (D14 no parpadea).** Compruebe que DI1 está encendido (D14 no parpadea).Compruebe que el accionamiento del motor esté en estado de EN MARCHA (D4 está en verde).Compruebe el montaje del cable en la herramienta: ¿están bien conectados los pitones? * 3.04 y anteriores** 3.05 y posteriores |
| La herramienta se detiene de repente. | Compruebe la señal de estado de alarma.Compruebe las temperaturas del accionamiento del motor y de la herramienta.Compruebe si la herramienta sufre sobrecarga. |
| Lacomunicación conelModbus RTUno está funcionando. | Compruebe que JP1 y JP12 no estén activados.Compruebe la velocidad de transmisión, los bits de parada y los bits de datos.Compruebe losindicadoresde transmisión/recepción D29y D30, los cuales parpadean cuando hay actividad en el bus.Compruebe que el pitón A y el pitón B estén bien conectados.Compruebe si el problema se resuelve al añadir un resistor terminal (JP2), un resistor a masa de pitón A (JP3), o un resistor de polarización de pitón B (JP4).Compruebe la dirección esclava (active el puente JP13 y use los indicadores D2–D3, D17–D22 para leer la dirección actual). |
| La comunicación con la pasarela I/O no funciona. | Compruebe que JP1 y JP12 no estén activados.Compruebe la configuración de red de la pasarelaCompruebe la fuente de alimentación de 24 V (CC).Compruebe que el cable adaptador Modbus RTU esté conectado correctamente. |
| La interfazdel controladorde velocidad digital no funciona. | Compruebe que JP1 no esté activado.Compruebe que JP12 esté activado.Compruebe la tensión en una entrada alta; deberá estar entre 15 y 33 V (CC).Compruebe la tensión en una entrada baja; deberá estar cerca de cero voltios.Compruebe la conexión GND. |
| El indicador D36 está rojo, o la velocidad de la herramienta es demasiado rápida/lenta. | Compruebe el cableado C+/C-/P+/P- en J3. |
Información sobre gestión de residuos
PELIGRO

Para inutilizar una herramienta de potencia obsoleta, quite el cable de alimentación.
Cumpla con las normativas específicas aplicables en su país sobre el desguace y el reciclado de máquinas, embalajes y accesorios en desuso.
Solo para la UE: No realice el desguace de herramientas eléctricas junto con los residuos domésticos. En cumplimiento de las directivas europeas sobre residuos de aparatos eléctricos y electrónicos y su aplicación de acuerdo con la legislación nacional, las herramientas eléctricas que han llegado al final de su vida deben ser recogidas por separado y llevadas a una planta de reciclaje compatible con el medio ambiente.
Para más información sobre REACH, RoHS y nuestra responsabilidad social corporativa, visite www.mirka.com





- Declaración de conformidad
- Mirka Ltd, 66850 Jepua, Finlandia
- Fabricante / Proveedor
- Garantía
- Términos y condiciones
- Componentes que cubre la garantía:
- La garantía no cubre:
- Símbolos
- Tabla de información de la instalación
- General
- Interfaz Modbus RTU
- Pasarela I/O a interfaz Modbus RTU
- Interfaz de control digital
- Interfaz de relé
- Datos técnicos para el accionamiento del motor
- Instrucciones de seguridad
- Advertencias
- Antes de poner en marcha la herramienta
- Tabla de información del compartimento de accionamiento del motor
- Conexiones de bloque de terminales (firmware v. 3.05 y posteriores)
- Estado Enable:
- Módulo AutoStart de extracción:
- Modbus RTU
- Registros de entrada (F4)
- Pasarela Profinet I/O o EtherNet/IP (Hilscher NT 50-RS-ES)
- Configuración
- Ejemplo de asignación de pasarela Siemens TIA Portal V14 3.04 o posterior
- Funcionamiento básico del Modbus RTU
- Interfaz digital
- Operaciones de interfaz digital
- Función de autoprueba
- Función de reseteado
- Función de reseteado de fábrica
- Escribir protección
- Parada de seguridad / E-Stop
- Función de cambio de herramienta sobre la marcha
- Información sobre gestión de residuos
- PELIGRO
Marca : Mirka
Modelo : AIROS 550S
Categoría : Armario eléctrico