
DTM434 - Lecteur de mémoire IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil DTM434 IFM au format PDF.

| Marque | IFM |
| Modèle | DTM434 |
| Type de produit | Tête de lecture/écriture RFID sans contact |
| Dimensions | M30 (encastrable), diamètre 30 mm, longueur approx. 70 mm |
| Alimentation | Via bus CAN (24 V CC, TBTS/TBTP, selon IEC 61010-1) |
| Interface | CANopen (CiA DS-301), connecteur M12 5 pôles |
| Fréquence de travail | 13,56 MHz |
| Normes supportées | ISO 15693, ISO 14443 type A, NFC Forum type 4 |
| Types de tags supportés | I-Code SLI/SLIX2, F-MEM, TI, ST, EM4233SLI, NXP Mifare/Ultralight/NTAG |
| Fonctions principales | Lecture/écriture UID et données, transfert PDO/SDO, comparaison de données, filtre UID, protection par mot de passe et verrouillage |
| Indicateurs LED | Verte/jaune/rouge : état opérationnel et détection de tag |
| Portée de lecture/écriture | Variable selon tag et environnement (consulter la fiche technique) |
| Distance de montage entre appareils (latérale) | ≥ 60 mm (lecture/écriture) |
| Distance de montage entre appareils (frontale) | ≥ 120 mm (lecture/écriture) |
| Classe de protection | III (TBTS/TBTP) |
| Température d'utilisation | Non spécifiée explicitement, mais altitude ≤ 2000 m, humidité ≤ 80 % sans condensation |
| Cybersécurité | Conforme CEI 62443-1-1, utilisation derrière un pare-feu |
| Entretien et nettoyage | Sans maintenance ; nettoyer avec un chiffon sec |
| Réparabilité | Ne pas ouvrir ; réparation uniquement par le fabricant |
| Accessoires | Disponibles sur le site ifm.com (câbles, connecteurs, tags) |
| Contenu de la livraison | Tête de lecture/écriture uniquement (sans accessoires de montage ni de raccordement) |
| Notice d'utilisation | 44 pages en français, téléchargeable sur notice-facile.com |
FOIRE AUX QUESTIONS - DTM434 IFM
Questions des utilisateurs sur DTM434 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Lecteur de mémoire au format PDF gratuitement ! Retrouvez votre notice DTM434 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil DTM434 de la marque IFM.
MODE D'EMPLOI DTM434 IFM
Notice d'utilisation
Interface CANopen
Système d'identification RFID
DTM434
DTM435
Tête de lecture / écriture
Contenu
1 Remarques préliminaires 4
1.1 Symboles utilisés 4
1.2 Avertissements 4
1.3 Notes légales 4
1.4 Information Open Source 4
2 Consignes de sécurité. 5
2.1 Symboles de sécurité sur l'appareil.... 5
2.2 Consigne de sécurité sur les rayonnements électromagnétiques à haute fréquence .... 5
2.3 Cybersécurité 6
3 Usage prévu 7
3.1 Application 7
4 Fourniture 8
5 Fonctions 9
5.1 TAG 9
5.2 Aperçu des appareils 9
6 Montage 10
6.1 Remarques sur le montage de l'appareil.... 10
6.2 Eliminer des perturbations.... 10
6.3 Conception mécanique 10
6.4 Installer l'appareil 11
6.5 Distances de montage 11
6.6 Positionner les TAGs 12
7 Raccordement électrique 14
7.1 Schéma de branchement 14
8 Eléments de service et d'indication 15
9 Fonctionnement 16
9.1 Interface CANopen 16
9.1.1 Fonctions CANopen 16
9.1.2 Modification du Node ID et du Bitrate 16
9.1.3 Mise en service.... 17
9.1.4 Utilisation des types de données 32 bits 18
9.1.5 Modes de communication de l'objet de données process (PDO) 18
9.1.6 Répertoire d'objets (RO) 18
9.1.7 Messages d'erreur 25
9.1.8 Surveillance d'activité avec Heartbeat.... 27
9.1.9 Modification d'objets 27
9.1.10 Objets de données process.... 27
9.1.11 Etat de l'appareil 28
9.1.12 Désactiver l'antenne 30
9.1.13 Sélectionner le type de TAG 30
9.1.14 Lecture des informations d'un TAG.... 31
9.1.15 Valeur RSSI 31
9.1.16 Filtre de détection TAG 31
9.2 Transmission de données avec un TAG 33
9.2.1 Lecture de l'UID du TAG 33
9.2.2 Lecture des données du TAG via transfert PDO 33
9.2.2.1 Exemple 1.... 33
9.2.2.2 Exemple 2.... 34
9.2.3 Ecriture de données sur le TAG via transfert PDO 34
9.2.3.1 Exemple 1.... 35
9.2.3.2 Exemple 2.... 36
9.2.4 Traitement d'erreurs en cas de transfert PDO 36
9.2.5 Lecture des données du TAG via transfert SDO 36
9.2.5.1 Exemple 36
9.2.6 Ecriture de données sur le TAG via transfert SDO 37
9.2.6.1 Exemple 37
9.2.7 Verrouillage de la zone de données sur le TAG via transfert SDO 37
9.2.7.1 Exemple 38
9.2.8 Codes d'erreur pendant le transfert SDO 38
9.3 Fichier EDS.... 39
10 Maintenance, réparation et élimination 40
11 Homologations / Normes.... 41
Glossaire....42
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
1.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
1.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :

AVERTISSEMENT
Avertissement de dommages corporels graves
▷ Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.

ATTENTION
Avertissement de dommages corporels légers à modérés
▷ Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE
Avertissement sur les dommages matériels
▷ Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
1.3 Notes légales
© Tous droits réservés par ifm electronic gmbh. Cette notice ne peut être reproduite ou exploitée, même par extraits, sans l'accord d'ifm electronic gmbh.
Tous les noms de produits, les images, sociétés ou autres marques sont la propriété de leurs titulaires.
1.4 Information Open Source

▶ Pour plus d'informations sur l'Information Open Source, voir documentation.ifm.com.
2 Consignes de sécurité
• L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
• Assurer une protection efficace des appareils et des câbles contre l'endommagement.
• Stocker le produit dans son emballage d'origine.
2.1 Symboles de sécurité sur l'appareil
Les symboles suivants sont utilisés sur l'appareil. Respecter les indications afin d'éviter des dangers :


- L'alimentation électrique doit être conforme à CEI 61010-1, chap. 9.4 - Circuit à énergie limitée.
- Appareil de la classe de protection III. Fonctionnement uniquement avec des circuits électriques TBTS/TBTP.
2.2 Consigne de sécurité sur les rayonnements électromagnétiques à haute fréquence
Dans des conditions d'application spécifiques, le risque pour l'utilisateur peut varier en fonction de l'installation et des réglages de l'appareil.
L'installateur/l'exploitant du système est tenu de procéder à une analyse des risques et de prendre les mesures appropriées pour protéger les personnes. En particulier, les règlements nationaux doivent également être respectées. Les mesures de protection possibles peuvent inclure des distances minimales garanties d'un utilisateur, des contrôles d'accès et la formation des utilisateurs.

AVERTISSEMENT
L'opération de cet appareil peut causer des perturbations radioélectriques dans les lieux de résidence.
▷ L'appareil émet des ondes électromagnétiques à haute fréquence qui peuvent interférer avec le fonctionnement des appareils électroniques situés à proximité, notamment les stimulateurs cardiaques, les appareils auditifs et les défibrillateurs.
▶ En raison des règlements relatifs à l'exposition humaine, une distance minimale de 20 cm doit être maintenue entre l'appareil et les personnes.
▶ Si vous avez un stimulateur cardiaque ou un autre dispositif médical implanté, n'utilisez pas l'appareil sans avoir consulté au préalable votre médecin ou le fabricant de votre dispositif médical. Gardez une distance de sécurité entre l'appareil et vos dispositifs médicaux et évitez de continuer à utiliser l'appareil si vous constatez une déficience permanente de votre dispositif médical.
2.3 Cybersécurité
Installation
L'appareil est conçu pour fonctionner dans un environnement sûr selon CEI 62443-1-1.
L'appareil est prévu pour l'utilisation derrière un pare-feu.
▶ Effectuer une évaluation des risques de l'installation selon CEI 62443-1-1.
▶ Prendre des mesures pour assurer la sécurité physique.
Fonctionnement
▶ Respecter les fonctions de sécurité décrites dans la documentation de l'appareil et les recommandations pour leur utilisation.
Maintenance
▶ Vérifier régulièrement si des mises à jour du logiciel sont disponibles pour l'appareil.
▶ Sauvegarder la configuration et les données du système conformément aux processus de gestion du changement de votre entreprise.
Mise hors service
▶ Veiller à ce qu'aucune information sensible ne tombe entre les mains de personnes non autorisées.
▶ Avant de mettre l'appareil hors service, toujours réinitialiser les réglages du système sur les réglages d'usine.
3 Usage prévu
La tête de lecture / écriture lit et écrit des TAGs sans contact.
Les données sont mises à disposition comme données process via l'interface bus CAN.
3.1 Application
La sécurité de l'appareil est conçue pour l'emploi dans les conditions environnantes suivantes :
- Classe de protection 3 (TBTS / TBTP) et alimentation de l'appareil selon « limited energy » conformément à CEI 61010-1, chapitre 9.4. Isoler les circuits externes selon la figure 102 de CEI 61010-2-201.
• Utilisation à l'intérieur et à l'extérieur.
• Altitudes jusqu'à 2000 m. - Humidité relative de l'air jusqu'à 80 % au maximum, sans condensation.
• Degré de pollution 2.
4 Fourniture
• Tête de lecture / écriture

L'appareil est livré sans accessoires de montage ni de raccordement.
Accessoires disponibles : www.ifm.com.
Le bon fonctionnement n'est pas assuré en cas d'utilisation d'accessoires d'autres fabricants.
5 Fonctions
5.1 TAG
Les TAGs sont passifs, c'est-à-dire qu'ils fonctionnent sans pile. L'énergie nécessaire à leur fonctionnement étant fournie par la tête de lecture / écriture.
L'énergie est fournie par un couplage inductif. La bobine de l'antenne intégrée dans la tête de lecture / écriture génère un champ magnétique qui pénètre en partie la bobine de l'antenne du TAG. Une tension est générée par induction qui alimente le support de données en énergie.
L'appareil supporte des TAGs selon ISO 15693.
5.2 Aperçu des appareils
DTM434
 | Référence : | DTM434 |
| Fonction : | Tête de lecture / écriture | |
| Désignation : | DTMHF IBRWCOUS03 | |
| Type : | M30, encastrable |
DTM435
 | Référence : | DTM435 |
| Fonction : | Tête de lecture / écriture | |
| Désignation : | DTMHF INRWCOUS03 | |
| Type : | M30, non encastrable |
6 Montage
6.1 Remarques sur le montage de l'appareil
En cas de montage de plusieurs systèmes, respecter les distances minimales entre les appareils.
Le montage encastré de l'appareil dans le métal réduit la distance de lecture/écriture.
La proximité immédiate de sources d'émissions HF, telles que des transformateurs de soudure ou des convertisseurs, peut nuire au fonctionnement de l'appareil.
6.2 Eliminer des perturbations
L'appareil génère un champ électrique modulé d'une fréquence de 13,56 MHz.
Eviter les perturbations dans la communication de données :
▶ Ne pas faire fonctionner d'autres appareils à proximité qui utilisent la même bande de fréquence (par exemple les convertisseurs de fréquence, les alimentations à découpage etc.).
S'il y a d'autres appareils à proximité qui utilisent la même bande de fréquence :
▶ Les distances de montage entre les appareils doivent être aussi grandes que possible.
▶ Faire fonctionner les appareils en alternance.
▶ Activer/désactiver le champ HF de l'appareil.
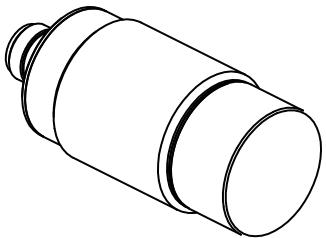
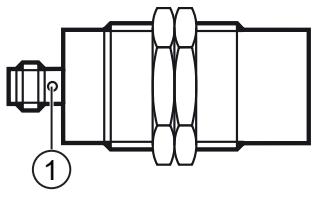
6.3 Conception mécanique
DTM434
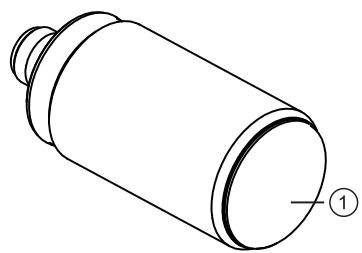
Fig. 1: DTM434
1 Face active
DTM435
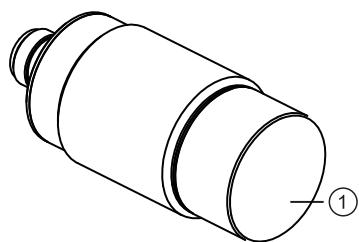
Fig. 2: DTM435
1 Face active
6.4 Installer l'appareil
▶ Fixer l'appareil avec les écrous (M30) fournis.
DTM434

Fig. 3: Montage encastré
DTM435
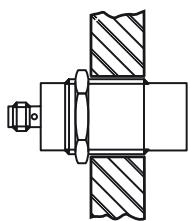
Fig. 4: Montage non encastré
6.5 Distances de montage
DTM434
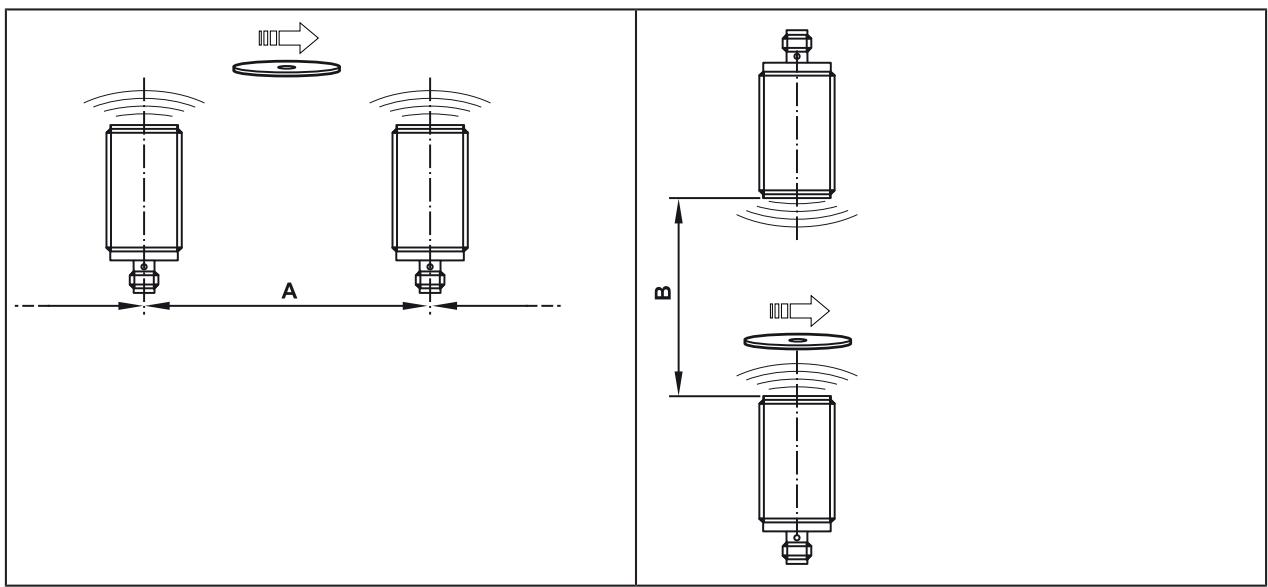
| Mode de fonctionnement | Distance latérale (A) | Distance frontale (B) |
| Lecture et écriture | ≥ 60 mm | ≥ 120 mm |
DTM435

| Mode de fonctionnement | Distance latérale (A) | Distance frontale (B) |
| Lecture et écriture | ≥ 100 mm | ≥ 200 mm |
6.6 Positionner les TAGs
La face active marque le centre de la bobine de l'antenne intégrée de la tête de lecture / écriture.
▶ S'assurer que l'orientation de la face active de la tête de lecture / écriture correspond à l'axe du TAG.
Pour le montage en ou sur métal, utiliser des TAGs prévus spécialement à cet effet.
Positionner le TAG dans la zone de la face active. Prendre en compte l'angle d'ouverture et la portée de travail (→ Fiche technique de l'appareil).
DTM434

Fig. 5: Positionner le TAG
▶ Orienter le TAG face à l'antenne de l'appareil dans l'axe.
▷ La distance « D » est indiquée dans la fiche technique.
DTM435
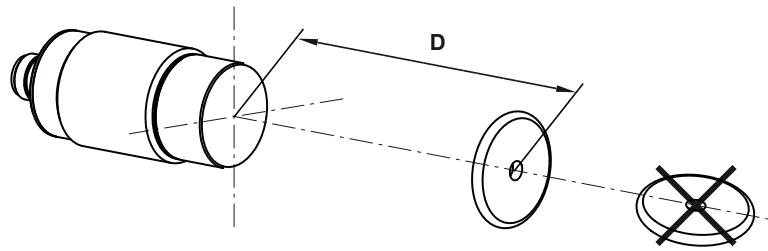
Fig. 6: Positionner le TAG
▶ Orienter le TAG face à l'antenne de l'appareil dans l'axe.
▷ La distance « D » est indiquée dans la fiche technique.
7 Raccordement électrique

L'appareil doit être raccordé par un électricien qualifié.
Appareil de la classe de protection III (CP III).
L'alimentation électrique ne doit s'effectuer que via des circuits TBTP/TBTS.
▶ Avant le raccordement électrique mettre l'installation hors tension.
7.1 Schéma de branchement
▶ Raccorder l'appareil au bus CAN via le connecteur M12.
▷ L'alimentation en tension est assurée par le bus CAN.
| Raccordement des broches | Schéma de branchement |
| Connecteur M12, codage A, 5 pôles | |
 | 1 : Blindage2 : U+3 : GND4 : CAN high5 : CAN low |

La connexion bus CAN est pratiquement exempte de perturbations si les points suivants sont pris en compte :
▶ Utiliser des câbles autorisés pour le bus CAN.
▶ Terminer les câbes avec des résistances de terminaison de 120 Ω.

Informations sur les connecteurs femelles disponibles sur : www.ifm.com.
8 Eléments de service et d'indication
| DTM434 | DTM435 |
 |  |
1 LED verte / jaune / rouge
| LED | Etat | Description |
| vert | allumé | État opérationnel Pre-Operational |
| Clignote toutes les 1,6 s en alternance avec la LED jaune | État opérationnel Pre-Operational et TAG détecté | |
| Clignote toutes les 0,4 s | État de fonctionnement Operational | |
| jaune | allumé | État opérationnel Operational et TAG détecté |
| Clignote toutes les 1,6 s en alternance avec la LED verte | État opérationnel Pre-Operational et TAG détecté | |
| Clignote | Défaut de matériel d'appareil | |
| rouge | Clignote toutes les 0,4 s en alternance avec d'autres couleurs de LED | Erreur de configuration |
| Clignote toutes les 1,2 s en alternance avec d'autres couleurs de LED | Erreur dans le réseau bus CAN | |
| allumé | Bus CAN inaccessible | |
| Clignote | LSS Service actif |
9 Fonctionnement
9.1 Interface CANopen
La tête de lecture/écriture dispose d'une interface CANopen standardisée selon CiA DS-301. Toutes les valeurs mesurées et tous les paramètres sont accessibles via le répertoire d'objets (RO). La configuration individuelle peut être sauvegardée dans la mémoire permanente interne.
L'appareil est fourni avec le Node ID à 32 et un Bitrate de 125 kbit/s.

▶ Utiliser uniquement des câbles autorisés pour CANopen.
▶ Terminer les câble avec des résistances de terminaison (120 Ω).
▷ Le câble ifm EVC492 dispose des résistances de terminaison intégrées.
9.1.1 Fonctions CANopen
Les fonctions CANopen suivantes sont disponibles :
- 64 objets de données process émetteurs et récepteurs (TPDO1.. 64, RPDO1.. 64) en deux modes de fonctionnement possibles :
- interrogation individuelle via un télégramme Remote-Transmission-Request (RTR)
– transmission événementielle
- Messages d'erreur par objet Emergency (EMCY) avec support :
– du registre d'erreurs général
– du registre d'état spécifique au fabricant
– de la liste d'erreurs
• Mécanisme de surveillance Heartbeat
• Indication d'états et d'erreurs par LED
- Outre la fonctionnalité CiA DS-301, d'autres caractéristiques spécifiques aux fabricants et aux profils existent :
- réglage du Node ID et du Bitrate par une saisie dans le répertoire d'objets (SDO)
- configuration et lecture/écriture de données de fonctionnement via objets de données service (SDO)
• Support de Layer Setting Service (LSS)
• Support de la transmission de données process synchronisée (SYNC)
9.1.2 Modification du Node ID et du Bitrate
L'appareil offre plusieurs possibilités de modification du Node ID et du Bitrate. L'appareil est fourni avec le Node ID à 32 et un Bitrate de 125 kbit/s.

Chaque Node ID doit être attribué une seule fois dans le réseau CANopen. Si un Node ID est attribué plusieurs fois, des dysfonctionnements peuvent se produire dans le réseau CANopen.
Modification du Node ID et du Bitrate dans le répertoire d'objets
Le Node ID est saisi dans le répertoire d'objets dans les objets 0x20F0 et 0x20F1. Si les deux valeurs se correspondent, le réglage est mémorisé et devient actif après réinitialisation du logiciel de l'appareil. Des valeurs entre 1 et 127 peuvent être utilisées comme Node ID.
Le Bitrate est saisi dans les objets 0x20F2 et 0x20F3. Si les deux valeurs se correspondent, le réglage est mémorisé et devient actif après réinitialisation du logiciel de l'appareil. Les valeurs suivantes peuvent être utilisées comme Bitrate :
| Valeur | Bitrate |
| 0 | 1 000 kbits/s |
| 1 | 800 kbits/s |
| 2 | 500 kbits/s |
| 3 | 250 kbits/s |
| 4 | 125 kbits/s |
| 5 | 100 kbits/s |
| 6 | 50 kbits/s |
| 7 | 20 kbits/s |
Si un maître est utilisé dans le réseau CANopen pour la sauvegarde centralisée de paramètres, les valeurs modifiées pour Node ID (0x20F0 et 0x20F1) et Bitrate (0x20F2 et 0x20F3) doivent également être saisies dans le maître.
Sinon, les valeurs seront remises à chaque démarrage du réseau CANopen.
Modification du Node ID et du Bitrate par LSS
A l'aide de Layer Setting Service (LSS), un maître LSS peut modifier le Node ID et le Bitrate de l'appareil (esclave LSS) via le bus CAN. Pour ce faire, le maître LSS met tous les esclaves LSS en mode de configuration. Chaque esclave LSS peut être identifié sans équivoque via les données d'appareil (ID fournisseur, code produit, numéro de révision et numéro de série).
Pour changer le Bitrate, le maître LSS transmet le nouveau Bitrate en mode de configuration avec le service « Configure Timing Bit ». L'esclave LSS signale au maître LSS si le nouveau Bitrate est supporté. Ensuite, le maître LSS transmet via le service « Activate Bit Timing » le temps « switch_delay » après lequel le nouveau Bitrate doit être activé. Après l'activation, le maître LSS remet l'esclave LSS en mode opérationnel.
Pour modifier le Node ID, le maître LSS transmet le nouveau Node ID en mode de configuration. L'esclave LSS signale au maître LSS si le nouveau Node ID est valable. Après la modification du Node ID le maître LSS remet l'esclave LSS en mode opérationnel.
Le nouveau Bitrate et le nouveau Node ID deviennent actifs après la réinitialisation du logiciel de l'esclave LSS.
9.1.3 Mise en service
La norme CANopen CiA301 définit trois états de fonctionnement possibles pour les nœuds capteurs :
Pre-Operational
A l'état « Pre-Operational », aucun message PDO (données process) peut être transmis. L'état « Pre-Operational » s'utilise pour le paramétrage du capteur ou comme mode de veille.
Lors du démarrage, l'appareil répond en mode « Pre-Operational » sur le bus CAN avec le message boot up « 0x700+Node ID ».
Operational
A l'état « Operational » tous les services de communication sont effectués. L'état « Operational » s'utilise pour l'échange des données process pendant le fonctionnement.
Stopped
A l'état « Stopped » seulement des messages NMT (gestion du réseau) sont possibles. Ainsi, des capteurs redondants ou défectueux peuvent être séparés presque complètement du bus.
Le maître ou le gestionnaire du réseau peut demander au capteur de changer d'état via des messages NMT.
9.1.4 Utilisation des types de données 32 bits
CANopen définit les types de données jusqu'à une taille maximale de 64 bits (8 octets). Avec le type de données, les données utilisables des TAGs sont transmises efficacement via l'interface CANopen. Le type de données est aussi utilisé pour le réglage par défaut de l'appareil et le fichier EDS.
Il existe toutefois des systèmes de contrôle-commande qui ne peuvent traiter que des types de données jusqu'à une largeur de type de données de 32 bits (4 octets). Pour soutenir tous les systèmes de contrôle-commande, l'appareil propose des objets de données alternatifs dont les types de données sont limité à un maximum de 32 bits. Les objets de données sont complétés de la précision « 32 bits » dans la présente notice. En outre, un fichier EDS est fourni pour l'utilisation des types de données, qui est lu par le logiciel du système de contrôle-commande.
Dans le réglage usine, l'appareil utilise des types de données 64 bits (par ex. avec les PDO pré- configurés). Le réglage doit être adapté pour l'utilisation des types de données 32 bits. L'adaptation peut être réalisée au moyen du logiciel du système de contrôle-commande, en lisant le ficher EDS correspondant.
9.1.5 Modes de communication de l'objet de données process (PDO)
Le TPDO peut être vérifié à tout moment par transmission d'un télégramme Remote Transmission Request (RTR). Sinon, les TPDO seront transmis automatiquement dès que leur valeur est changée (événementiellement).
En option, le service CANopen "SYNC" peut être utilisé (voir CiA 301, 7.2.5 Synchronization object (SYNC)). Pour la transmission synchronisée, CANopen met à disposition l'objet SYNC avec lequel les TPDO sont envoyés après chaque « Nième » réception d'un télégramme SYNC.
En total, 64 TPDO et 64 RPDO sont disponibles ; à la livraison seulement les 4 premiers sont actifs. Si la configuration du réseau CAN le permet, les objets de données process restants peuvent également être activés.
Les données process sont attribuées à la plage d'adressage linéaire du TAG dans les réglages de défaut. Le TPDO1 par exemple transmet les 8 premiers octets de la mémoire de données utilisables du TAG.
La lecture de la mémoire et la transmission des données via TPDO se font automatiquement dès qu'un nouveau TAG est détecté.
L'écriture des données sur les TAG se fait de la même façon par un accès en écriture sur le RPDO correspondant.
La transmission de données par objets de données process n'est possible qu'en état de fonctionnement « Operational ».
Les TPDO et RPDO préréglés sont utilisés avec des objets de données 64 bits. Pour l'utilisation de systèmes de contrôle-commande 32 bits, les réglages des PDO doivent être adaptés.
9.1.6 Répertoire d'objets (RO)
Communication CANopen (CiA 301)
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x1000 | 0x00 | Type d'appareil | u32 | ro | 0x00000000 | - | - |
| 0x1001 | 0x00 | Registre d'erreurs | u8 | ro | 0x00 | - | - |
| 0x1003 | 0x010x02 | Champ d'erreurs prédéfini | u32 | ro | 0x00000000 | - | - |
| 0x1005 | 0x00 | COB-ID SYNC | u32 | rw | 0x00000000 | - | Oui |
| 0x1008 | 0x00 | Nom de l'appareil fabricant | vSTR | ro | Référence de l'appareil | - | - |
| 0x1009 | 0x00 | Version du matériel fabricant | vSTR | ro | Version du matériel actuelle | - | - |
| 0x100A | 0x00 | Version du logiciel fabricant | vSTR | ro | Version du logiciel actuelle | - | - |
| 0x1010 | 0x01 | Sauvegarder les paramètres (sauvegarder les paramètres appareil dans la mémoire non volatile) | u32 | rw | 0x00000000 | - | - |
| 0x1011 | 0x01 | Charger les paramètres de communication par défaut | u32 | rw | 0x00000000 | - | - |
| 0x1014 | 0x00 | COB-ID EMCY (message d'urgence COB-ID) | u32 | rw | Node ID + 0x80 | - | - |
| 0x1015 | 0x00 | Temps d'inhibition EMCY (temps d'inhibition entre des messages EMCY) | u16 | rw | 0x0000 | - | Oui |
| 0x1017 | 0x00 | Producteur temps Heartbeat (différence temporelle entre des messages Heartbeat transmis en ms) | u16 | rw | 0x0000 | - | Oui |
| 0x1018 | 0x01 | ID du fournisseur | u32 | ro | 0x0069666D | - | - |
| 0x02 | Code produit | u32 | ro | Code produit de la version appareil | - | - | |
| 0x03 | Numéro de révision | u32 | ro | Révision principale et version logiciel actuelle | - | - | |
| 0x04 | Numéro de série | u32 | ro | Numéro de série de l'appareil | - | - | |
| 0x1200 | 0x01 | COB-ID client au serveur | u32 | ro | Node ID + 0x600 | - | - |
| 0x02 | COB-ID client au serveur | u32 | ro | Node ID+ 0x580 | - | - | |
| 0x1400 0x143F | 0x01 | Paramètre RPDO : COB-ID | u32 | rw | Objets de données process récepteurs (RPDO) (→ Objets de données process ☐ 27) | - | Oui |
| 0x02 | Paramètre RPDO : Type de transmission | u8 | ro | 0xFF | - | Oui | |
| 0x1600 0x163F | 0x01-0x08 | Mapping RPDO | u32 | rw | Objets de données process récepteurs (RPDO) (→ Objets de données process ☐ 27) | - | Oui |
| 0x18000x183F | 0x01 | Paramètre TPDO : COB-ID | u32 | rw | Objets de données process récepteurs (RPDO)(→ Objets de données process ☐ 27) | - | Oui |
| 0x02 | Paramètre TPDO : Type de transmission | u8 | rw | 0xFF | - | Oui | |
| 0x03 | Paramètre TPDO : Temps d'inhibition | u16 | rw | 0x00 | - | Oui | |
| 0x1A000x1A3F | 0x01-0x08 | Mapping TPDO | u32 | rw | Objets de données process récepteurs (RPDO)(→ Objets de données process ☐ 27) | - | Oui |
Configuration bus
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegardée la valeur de l'objet |
| 0x20F0 | 0x00 | Node ID réglage A (Node ID pour la communication CANopen) | u8 | rw | 32 | - | Sauvegardée automatiquement |
| 0x20F1 | 0x00 | Node ID réglage B (Node ID pour la communication CANopen) | u8 | rw | 32 | - | Sauvegardée automatiquement |
| 0x20F2 | 0x00 | Bitrate réglage A (Bitrate bus CAN) | u8 | rw | 4 | - | Sauvegardée automatiquement |
| 0x20F3 | 0x00 | Bitrate réglage B (Bitrate bus CAN) | u8 | rw | 4 | - | Sauvegardée automatiquement |
Etat et commande appareil lecture
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2150 | 0x00 | Etat d'appa-reil (bit état d'appareil) | u32 | ro | Oui | - | |
| 0x2151 | 0x00 | Antenne active (activer le frontend HF de l'appareil) | bool | rw | 1 | - | Oui |
| 0x2160 | 0x01-0xFE | Définition du type de TAG (nom des TAG supportés) | dom | ro | Sélectionner le type de TAG ( → ☐ 30) | - | - |
| 0x2161 | 0x00 | Sélection du type de TAG (valeur sélectionne le type du TAG qui est défini dans 0x2160) | u8 | rw | 2 | - | Oui |
| 0x2162 | 0x00 | RSSI | u8 | ro | - | Oui | - |
Information TAG
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2180 | 0x00 | UID actuel (UID du TAG dans la plage de lecture, PDO map-pable) | u64 | ro | 0x000000000 0000000 | Oui | |
| 0x2181 | 0x00 | DSFID actuel (DSFID du TAG dans la plage de lec-ture, PDO mappable) | u8 | ro | 0x00 | Oui | |
| 0x2182 | 0x01 | Information TAG : UID | u64 | ro | 0x000000000 0000000 | - | |
| 0x02 | Information TAG : DSFID | u8 | ro | 0x00 | - | ||
| 0x03 | Information TAG : AFI | u8 | ro | 0x00 | - | ||
| 0x04 | Information TAG : taille mémoire | u32 | ro | 0x00000000 | - | ||
| 0x05 | Information TAG : référence IC | u8 | ro | 0x00 | - | ||
| 0x06 | Information TAG : type de TAG (type du TAG identifié, défini dans 0x2160) | u8 | ro | 0x00 | - | ||
| 0x2190 | 0x00 | 4 octets supé-rieurs de l'UID actuel (32 bits) (UID du TAG dans la plage de lecture, PDO mappable) | u32 | ro | 0x000000000 0000000 | Oui | |
| 0x2191 | 0x00 | 4 octets inférieurs de l'UID actuel (32 bits) (UID du TAG dans la plage de lecture, PDO mappable) | u32 | ro | 0x000000000 0000000 | Oui |
Lecture des données mappables
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2200 | 0x01-0x40 | Lecture de l'adresse de départ dans la mémoire User (début de la zone d'adresses sur le TAG qui doit être lue) | u16 | rw | Objets de données process récepteurs (RPDO) ( → Objets de données process 27) | - | Oui |
| 0x2201 | 0x01-0x40 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | u8 | rw | Objets de données process récepteurs (RPDO) ( → Objets de données process 27) | - | Oui |
| 0x220A | 0x01-0x40 | Données du TAG (8 octets de données du TAG, actualisés quand un nouveau TAG entre dans la plage de lecture) | u64 | ro | Oui | - | |
| 0x220B | 0x01-0x40 | Données du TAG (32 bits) (4 octets de données du TAG, actualisés quand un nouveau TAG entre dans la plage de lecture) | u32 | ro | Oui | - |
Lecture de la zone de données
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2280 | 0x00 | Début lecture de l'adresse (début de la zone d'adresses sur le TAG qui doit être lue) | u16 | rw | 0x0000 | - | Oui |
| 0x2281 | 0x00 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue) | u16 | rw | 0x0000 | - | Oui |
| 0x2282 | 0x00 | Données du TAG (données du TAG souhaitées, comme configuré dans les objets 0x2280 et 0x2281) | dom | ro | - | - |
Ecriture des données mappables
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2300 | 0x01-0x40 | Ecriture de l'adresse de démarrage (début de la zone d'adresses sur le TAG qui doit être écrite) | u16 | rw | Objets de données process récepteurs (RPDO) ( → Objets de données process 27) | - | Oui |
| 0x2301 | 0x01-0x40 | Ecriture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être écrite ; max. 8 octets) | u8 | rw | Objets de données process récepteurs (RPDO) ( → Objets de données process 27) | - | Oui |
| 0x2302 | 0x01-0x40 | Ecriture auto (activer l'accès en écriture automatique si un nouveau TAG est détecté) | bool | rw | 0 | - | Oui |
| 0x230A | 0x01-0x40 | Données du TAG (8 octets de données du TAG) | u64 | rw | Oui | - | |
| 0x230B | 0x01-0x40 | Données du TAG (32 bits) (4 octets de données du TAG) | u32 | rw | Oui | - | |
| 0x231E | 0x00 | Trigger écriture (32 bits)PDO supérieurs | u32 | rw | 0x0000000000000000 | Oui | - |
| 0x231F | 0x00 | Trigger écriture (32 bits)PDO inférieurs | u32 | rw | 0x0000000000000000 | Oui | - |
Ecriture de la zone de données
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2380 | 0x00 | Ecriture de l'adresse de démarrage (début de la zone d'adresses sur le TAG qui doit être écrite) | u16 | rw | 0x0000 | - | Oui |
| 0x2381 | 0x00 | Ecriture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être écrite) | u16 | rw | 0x0000 | - | Oui |
| 0x2382 | 0x00 | Données du TAG (données à écrire sur le TAG, comme configuré dans les objets 0x2380 et 0x2381) | dom | wo | - | - |
Verrouillage de la zone de données
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x2480 | 0x00 | Verrouillage de l'adresse de démarrage (début de la zone d'adresse sur le TAG qui doit être ver-rouillée. Doit être aligné sur les zones TAG) | u16 | rw | 0x0000 | - | Oui |
| 0x2481 | 0x00 | Verrouillage de la longueur (longueur de la zone de mémoire sur le TAG qui doit être verrouillée. Doit être alignée sur les zones TAG) | u16 | rw | 0x0000 | - | Oui |
| 0x2481 | 0x00 | Trigger ver-rouillage (trigger pour ver-rouiller des données sur le TAG comme configuré dans les objets 0x2480 et 0x2481) | bool | wo | - | - |
Filtre UID
| Index | Sous-index | Nom (objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x4603 | 0x00 | Profondeur filtre UID | s8 | rw | 0x00 | - | Oui |
| 0x4605 | 0x00 | Profondeur filtre ID zéro | s8 | rw | 0x02 | - | Oui |
9.1.7 Messages d'erreur
L'appareil supporte une série de messages d'erreur, transmis en cas d'un défaut de communication, de matériel ou RFID. Si une de ces erreurs se produit, le registre d'erreurs (index RO 0x1001) et le champ d'erreurs (index RO 0x1003) sont mis à jour.
Le COB-ID des messages Emergency peut être modifié dans l'objet "COB-ID EMCY" (index RO 0x1014). Par l'activation du bit 31 dans cet objet, les messages Emergency sont désactivés.
La durée de désactivation entre deux messages Emergency peut être réglée via l'objet 0x1015. L'indication se fait en étapes de 100 µs.

Le COB-ID des messages Emergency est préréglé à 0x80 + Node ID.
| Message d'erreur | Registre d'erreurs (0x1001) | Code d'erreur fabricant | Nom d'erreur fabricant | Description |
| 0x8210 | 0x11 | protocole : PDO n'est pas traité en raison d'une erreur de longueur. | ||
| 0x8130 | 0x01 | Surveillance : erreur Node Guarding ou Heartbeat | ||
| 0x8100 | 0x11 | Surveillance : erreur de communication générale lors de l'envoi de « Bus off » | ||
| 0x5000 | 0x81 | 0x01 | Erreur matériel appareil (erreur d'antenne) | |
| 0x4200 | 0x09 | 0x02 | Température de l'appareil trop élevée | |
| 0xFF00 | 0x81 | 0x01 | RX : ISO_COMMAND_ERROR_NO_RESPONSE | Le TAG n'a pas répon-du ; Il est possible que le TAG ne soit plus dans le champ. |
| 0xFF00 | 0x81 | 0x02 | RX : ISO_COMMAND_ERROR_RX_ERROR | Erreur lors de la réception de la réponse du TAG (erreur CRC, erreur framing, collision, etc.). |
| 0xFF01 | 0x81 | 0x01 | TX : ISO_COMMAND_ERROR_NO_RESPONSE | Le TAG n'a pas répon-du ; Il est possible que le TAG ne soit plus dans le champ. |
| 0xFF01 | 0x81 | 0x02 | TX : ISO_COMMAND_ERROR_RX_ERROR | Erreur lors de l'envoi de la réponse du TAG (erreur CRC, erreur framing, collision, etc.). |
| 0xFF02 | 0x81 | 0x01 | ISO_TAG_ERROR_COMMAND_NOT_SPECIFIED | La commande n'est pas supportée. Raison possible : commande défectueuse. |
| 0xFF02 | 0x81 | 0x02 | ISO_TAG_ERROR_COMMAND_SYNTAX | La commande n'est pas reconnue. Raison possible : Nombre de zones trop élevé. erreur de format. |
| 0xFF02 | 0x81 | 0x03 | ISO_TAG_ERROR_OPTION_NOT_SUPPORTED | Les options indiquées ne sont pas supportées. |
| 0xFF02 | 0x81 | 0x0F | ISO_TAG_ERROR_OTHER | Autres erreurs. |
| 0xFF02 | 0x81 | 0x10 | ISO_TAG_ERROR_BLOCK_NOT_USABLE | La zone indiquée ne peut pas être utilisée (ou n'a pas été pas trouvée). |
| 0xFF02 | 0x81 | 0x11 | ISO_TAG_ERROR_BLOCK_ALREADY_BLOCKED | La zone indiquée est bloquée et ne peut pas être bloquée une nouvelle fois. |
| 0xFF02 | 0x81 | 0x12 | ISO_TAG_ERROR_BLOCK_NOT_UPDATEABLE | La zone indiquée est déjà bloquée et son contenu ne peut pas être actualisé |
| 0xFF02 | 0x81 | 0x13 | ISO_TAG_ERROR_BLOCK_WRITE_VERIFY | La zone indiquée n'a pas pu être programmée normalement (erreur vérification d'écriture). |
| 0xFF02 | 0x81 | 0x14 | ISO_TAG_ERROR_BLOCK_LOCK_VERIFY | La zone indiquée n'a pas pu être bloquée normalement (erreur vérification de verrouillage). |
| 0xFF03 | 0x81 | 0x00 | STATUS_BUFFER_OVERFL | Débordement du tam-pon interne. |
9.1.8 Surveillance d'activité avec Heartbeat
Grâce à la fonctionnalité Heartbeat, l'activité d'un appareil dans le réseau CANopen peut être surveillée par le maître. L'appareil transmet, à intervalles réguliers, un message Heartbeat qui contient l'état de l'appareil.
La fonction Heartbeat est activée par la saisie d'une valeur supérieure à « 0 » dans l'objet intervalle de temps du Heartbeat (index RO 0x1017). Cette valeur spécifie le temps entre deux signaux Heartbeat en millisecondes. La valeur « 0 » désactive la fonction Heartbeat.
9.1.9 Modification d'objets
Des modifications aux objets dans le répertoire d'objets sont validées immédiatement. Lors d'un reset toutes les modifications sont perdues. Pour éviter cela, les objets doivent être sauvegardés dans la mémoire rémanente interne (flash). Tous les objets marqués « Sauvegarder valeur de l'objet : oui » dans le répertoire d'objets sont mémorisés en permanence dans le flash de l'appareil. Grâce à l'écriture de la signature « save » (65766173h) pour sauvegarder les objets (index RO 1010h/01h), tous les objets actuels du répertoire d'objets sont transmis dans la mémoire flash.
Les objets peuvent être remis aux réglages usine par l'écriture de la signature « load » (64616F6Ch) dans l'index RO 1011h/01h. Les modifications seront validées après un reset.
Selon l'architecture du réseau CANopen, les objets peuvent également être mémorisés de façon centralisée dans un maître CANopen. Dans ce cas, les objets seront transmis à l'appareil lors du démarrage du système et les valeurs sauvegardées localement seront remplacées.
Particularités des objets Node ID (index RO 0x20F0 et 0x20F1) et Bitrate (index RO 0x20F2 et 0x20F3):
▶ Une modification de ces objets ne sera validée qu'après un reset.
▶ Les objets ne peuvent pas être transférés en flash via l'index RO 1010h/01h.
▶ Les objets ne peuvent pas être remis aux réglages usine via l'index RO 1011h/01h.
9.1.10 Objets de données process
64 objets de données process émetteurs et récepteurs sont disponibles. A la livraison, 4 objets de données process sont actifs.
Objets de données process émetteurs (TPDO)
Le tableau suivant contient les objets de données process émetteurs (TPDO) à la livraison.
| TPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet mappé | Répertoire d'objets : Sous-index objet mappé | Répertoire d'objets : Longueur d'objet mappée | Mémoire TAG : Lecture adresse de départ | Mémoire TAG : Lecture longueur |
| 1 | Node ID + 0x0180 | 0x2150 | 0x00 | 0x20 | Etat de l'appareil | |
| 2 | Node ID + 0x0280 | 0x220A | 0x01 | 0x40 | 0x00000000 | 0x08 |
| 3 | Node ID + 0x0380 | 0x220A | 0x02 | 0x40 | 0x00000008 | 0x08 |
| 4 | Node ID + 0x0480 | 0x220A | 0x03 | 0x40 | 0x00000010 | 0x08 |
| 5 | 0 (désactivé) | 0x220A | 0x04 | 0x40 | 0x00000018 | 0x08 |
| 64 | 0 (désactivé) | 0x220A | 0x3F | 0x04 | 0x000001F0 | 0x08 |

Les TPDO et RPDO préréglés sont utilisés avec des objets de données 64 bits. Pour l'utilisation de systèmes de contrôle-commande 32 bits, les réglages des TPDO et RPDO doivent être adaptés.
Objets de données process récepteurs (RPDO)
Le tableau suivant contient les objets de données process récepteurs (RPDO) à la livraison.
| RPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet mappé | Répertoire d'objets : Sous-index objet mappé | Répertoire d'objets : Longueur d'objet mappée | Mémoire TAG : Ecriture de l'adresse de départ | Mémoire TAG : Ecriture de la longueur |
| 1 | Node ID + 0x0200 | 0x230F | 0x00 | 0x40 | Ecriture trigger | |
| 2 | Node ID + 0x0300 | 0x230A | 0x01 | 0x40 | 0x00000000 | 0x08 |
| 3 | Node ID + 0x0400 | 0x230A | 0x02 | 0x40 | 0x00000008 | 0x08 |
| 4 | Node ID + 0x0500 | 0x230A | 0x03 | 0x40 | 0x00000010 | 0x08 |
| 5 | 0 (désactivé) | 0x230A | 0x04 | 0x40 | 0x00000018 | 0x08 |
| 64 | 0 (désactivé) | 0x230A | 0x3F | 0x04 | 0x000001F8 | 0x08 |

Les TPDO et RPDO préréglés sont utilisés avec des objets de données 64 bits. Pour l'utilisation de systèmes de contrôle-commande 32 bits, les réglages des TPDO et RPDO doivent être adaptés.
9.1.11 Etat de l'appareil
L'état actuel de l'appareil est indiqué dans l'objet « Etat d'appareil » (index RO 0x2150, sub-index 0x00). A la livraison, l'objet TPDO1 est attribué.
| Bit | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 |
| État | tag_err | |||||||
| Valeur par défaut | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Bit | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
| État | write_err | |||||||
| Valeur par défaut | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 |
| État | read_err | |||||||
| Valeur par défaut | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| État | r | r | buf_ovfl | fr_err | busy | present | ant | pow |
| Valeur par défaut | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |
| État | Valeur | Description | Message EMCY |
| pow | 1 | Opérationnel (toujours 1) | |
| ant | 0 | Antenne désactivée | |
| 1 | Antenne activée | ||
| present | 0 | Aucun TAG disponible | |
| 1 | TAG disponible | ||
| busy | 0 | Etat de repos | |
| 1 | Accès en lecture ou écriture actif | ||
| fr_err | 0 | Frontend OK | |
| 1 | Erreur frontend détectée (pro-blème matériel) | oui | |
| buf_ovfl | 0 | Tampon OK | |
| 1 | Débordement du tampon détecté | oui | |
| read_err | Erreur de la dernière opéra-tion de lecture | oui | |
| write_err | Erreur de la dernière opéra-tion d'écriture | oui | |
| tag_err | Message d'erreur TAG pour la dernière opération | oui |
| Lecture des codes d'erreur (actualisés après chaque accès en lecture du TAG) | ||
| 0x00 | ISO_COMMAND_ERROR_NO_ERROR | Aucune erreur, commande réussie |
| 0x01 | SO_COMMAND_ERROR_NO_RESPONSE | Le TAG n'a pas répondu, peut-être que le TAG n'est plus dans le champ ? |
| 0x02 | ISO_COMMAND_ERROR_RX_ERROR | Erreur lors de la réception de la réponse du TAG (erreur CRC, erreur framing, collision, etc.). |
| Ecriture des codes d'erreurs (actualisés après chaque accès en écriture du TAG) | ||
| 0x00 | ISO_COMMAND_ERROR_NO_ERROR | Aucune erreur, commande réussie. |
| 0x01 | SO_COMMAND_ERROR_NO_RESPONSE | Le TAG n'a pas répondu, peut-être que le TAG n'est plus dans le champ ? |
| 0x02 | ISO_COMMAND_ERROR_RX_ERROR | Erreur lors de la réception de la réponse du TAG (erreur CRC, erreur framing, collision, etc.). |
| Codes d'erreur TAG (actualisés après accès en lecture / écriture du TAG) | ||
| 0x00 | ISO_TAG_ERROR_NO_ERROR | Le TAG ne cause pas d'erreur. |
| 0x01 | ISO_TAG_ERROR_COMMAND_NOT_SPECIFIED | La commande indiquée n'est pas supportée. Exemple : commande erreur de code. |
| 0x02 | ISO_TAG_ERROR_COMMAND_SYN-TAX | La commande n'est pas reconnue. Nombre de zones trop élevé. Exemple : erreur de format. |
| 0x03 | ISO_TAG_ERROR_OPTION_NOT_SUPPORTED | Les options indiquées ne sont pas supportées. |
| 0x0F | ISO_TAG_ERROR_OTHER | Autre erreur |
| 0x10 | ISO_TAG_ERROR_BLOCK_NOT_USABLE | La zone indiquée ne peut pas être utilisée (ou n'a pas été pas trouvée). |
| 0x11 | ISO_TAG_ERROR_BLOCK_ALREADY_BLOCKED | La zone indiquée est bloquée et ne peut pas être bloquée une nouvelle fois. |
| 0x12 | ISO_TAG_ERROR_BLOCK_NOT_UPDATEABLE | La zone indiquée est déjà bloquée et son contenu ne peut pas être actualisé |
| 0x13 | ISO_TAG_ERROR_BLOCK_WRITE_VERIFY | La zone indiquée n'a pas pu être programmée normalement (erreur vérification d'écriture) |
| 0x14 | ISO_TAG_ERROR_BLOCK_LOCK_VERIFY | La zone indiquée n'a pas pu être bloquée normalement (erreur vérification de verrouillage). |
9.1.12 Désactiver l'antenne
L'antenne de l'appareil peut être désactivée si l'objet « Antenna active » (index RO 0x2151) est réglé à la valeur 0. Dans ce cas, plus aucun TAG n'est détecté, puisque le champ magnétique de l'appareil n'est plus actif.
L'antenne est réactivée avec la valeur 1. Avec l'objet « Antenna active », des interférences entre des appareils positionnés l'un à côté de l'autre peuvent être évitées en désactivant les antennes des deux appareils en alternance.
9.1.13 Sélectionner le type de TAG
L'appareil est compatible avec plusieurs types de TAG. Selon la taille de la mémoire de données utilisables et le fabricant, les TAG diffèrent en ce qui concerne l'accès aux données. C'est pourquoi l'appareil doit connaître le type de TAG utilisé dans le système.
Dans l'objet 0x2161, le type de TAG utilisé dans le système RFID peut être sélectionné. Les types de TAG disponibles peuvent être lus dans l'objet 0x2180, sub-index 0x01-0xFE.
| Type de TAG | Nom | Taille des blocs [octets] | Nombre de blocs |
| 1 | définies par l'utilisateur | ? | ? |
| 2 | I-Code SLI | 4 | 28 |
| 3 | I-Code SLI-S | 4 | 40 |
| 4 | I-Code SLI-L | 4 | 8 |
| 5 | F-MEM 2k | 8 | 250 |
| 6 | F-MEM 232b | 4 | 58 |
| 7 | F-MEM 8k | 32 | 256 |
| 8 | TI_32b | 4 | 8 |
| 9 | TI_256b | 4 | 64 |
| 10 | ST_128b | 4 | 32 |
| 11 | ST_256b | 4 | 64 |
| 12 | ST_8k | 4 | 2048 |
| 13 | I-Code SLIX2 | 4 | 79 |
Via l'objet 0x2182 0x06, le type de TAG détecté par l'appareil peut être vérifié. Pour ce faire, le type de TAG détecté doit être lu dans l'objet 0x2182 sub-index 0x06 et cette valeur doit ensuite être saisie dans l'objet 0x2161.

Le type de TAG 2 est préréglé.

La détection du type de TAG n'est pas supportée par tous les TAG.

Le type de TAG réglé est sauvegardé en permanence dans l'appareil avec l'objet « Save Parameter ».
9.1.14 Lecture des informations d'un TAG
Via les objets 0x2180 à 0x2182, les informations d'un TAG peuvent être lues. Pour ce faire, le TAG doit se trouver dans la zone de détection de l'appareil.
Les objets 0x2180 et 0x2182 ne sont valables que tant que le TAG est détecté. Si aucun TAG n'est à portée, les valeurs des objets seront remises à 0.
La valeur de l'objet 0x2182 peut être lue par le TAG sur demande.

La lecture d'informations n'est pas supportée par tous les types de TAG.
9.1.15 Valeur RSSI
La valeur RSSI (Received Signal Strength, index RO 0x2162) indique l'intensité du signal reçu qui est émis par le TAG devant l'appareil :
« 0 » : aucun TAG détecté
« 1 » : intensité de réception min.
« 8 » : intensité de réception max.

L'intensité de réception max. n'est atteinte que par quelques combinaisons appareil / TAG.

L'intensité de réception dépend de la distance entre le TAG et la face active de l'appareil.

Des changements de positions dans l'environnement, par exemple d'objets métalliques, peuvent influencer l'intensité de réception.
9.1.16 Filtre de détection TAG
Les situations suivantes causent une détection et lecture multiple du TAG non souhaitées :
• Le TAG se trouve dans les limites de la portée.
- Les conditions de montage ont un effet défavorable sur le champ électromagnétique de l'appareil.
Par conséquent le TAG n'est pas détecté sans équivoque ce qui entraîne des messages d'erreur lors de la lecture et de l'écriture par PDO. Avec les objets "Profondeur filtre UID" et "Profondeur filtre ID zéro" les messages d'erreur peuvent être filtrés.

Les valeurs suivantes ont fait leurs preuves :
▶ « 0 » à « 5 » pour les applications dynamiques (TAG à passage rapide)
▶ « >5 » pour les applications statiques
| Temps (ms) | 0 | 7 | 14 | 21 | 28 | 35 | 42 | 49 | 56 | 63 | 70 | 77 | 84 | 91 | 98 | 105 | 112 | 119 | 126 | 133 |
| TAGdans le champ | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||||||||||
| Le TAGn'est pasdans le champ | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| Profondeur filtre UID : 0, profondeur filtre ID zéro : 0 | |||||||||||||||||||
| TAG dé- tecté | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | |||||||||
| TAG non détecté | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||||||||||
| Profondeur filtre UID : 5, profondeur filtre ID zéro : 0 | |||||||||||||||||||
| TAG dé- tecté | ● | ● | |||||||||||||||||
| TAG non détecté | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||
| Profondeur filtre UID : 0, profondeur filtre ID zéro : 5 | |||||||||||||||||||
| TAG dé- tecté | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||
| TAG non détecté | ● | ● | |||||||||||||||||
| Profondeur filtre UID : 5, profondeur filtre ID zéro : 5 | |||||||||||||||||||
| TAG dé- tecté | ● | ● | ● | ● | ● | ● | |||||||||||||
| TAG non détecté | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||||||
Objet profondeur filtre UID
Avec l'objet "profondeur filtre UID" (0x4603/0x00) le nombre de bonnes détections TAG que l'appareil doit exécuter est réglé. Quand le nombre réglé est atteint, le TAG sur le bus CAN est considéré comme détecté (TAG présent).
La valeur « 0 » désactive le filtre. Les valeurs ">0" retardent le bit "Tag présent" de 7 ms respectivement. Ainsi une temporisation à l'enclenchement de la valeur TAG est réalisée. La détection dans les limites de la portée se stabilise parce qu'une valeur n'est fournie que si le TAG est détecté de façon stable.
Objet profondeur filtre ID zéro
Avec l'objet "Profondeur filtre ID zéro" (0x4605/0x00) le nombre des détections TAG non réussies que l'appareil doit exécuter se termine. Quand le nombre réglé est atteint, le TAG sur le bus CAN est considéré comme n'étant plus présent (TAG présent).
La valeur « 0 » désactive le filtre. Les valeurs ">0" retardent la remise du bit "Tag présent" de 7 ms respectivement. Ainsi une temporisation au déclenchement de la valeur TAG est réalisée. La détection dans les limites de la portée se stabilise parce qu'une valeur n'est fournie que si le TAG reste non-détecté de façon stable.
9.2 Transmission de données avec un TAG
9.2.1 Lecture de l'UID du TAG
L'UID (Unique Identification Number) du TAG est disponible dans l'objet 0x2180 dès qu'un TAG se trouve dans la portée de lecture de l'appareil. Si aucun TAG n'est disponible, la valeur 0x0000000000000000 est retournée.
Si l'objet est mappé sur un TPDO, la transmission se fait de façon événementielle dès qu'un TAG entre dans la portée de lecture ou est enlevé du champ de lecture.

Pour les systèmes de contrôle-commande 32 bits, les objets suivants sont utilisés au lieu de l'objet 0x2180 : 0x2190 et 0x2191.
9.2.2 Lecture des données du TAG via transfert PDO
La transmission de données PDO du TAG se fait de façon événementielle. Cela signifie que les TPDO configurés seront transmis automatiquement par l'appareil quand les données sont changées. Cela est par exemple le cas lorsqu'un nouveau TAG entre dans la zone de détection de l'appareil. Les données sont lues indépendamment par le TAG et transmises via le bus CAN à l'aide des TPDO.
Les données lues par le TAG, qui peuvent être attribuées à un TPDO, se trouvent dans l'objet 0x220A, sub-index 0x01-0x40.

Seulement les données du TAG qui sont attribuées à un TPDO sont lues. Des objets de données non attribués ne sont pas mis à jour automatiquement.
Pour chaque objet de données il y a deux objets qui servent pour la configuration :
• 0x2200 (Lecture adresse de départ),
- 0x2201 (Lecture longueur) avec les sub-index appropriés pour l'objet de données.
Dans les objets, l'adresse de départ dans la zone de données utiles du TAG et la longueur des données à lire sont réglées.

Pour les systèmes de contrôle-commande 32 bits, l'objet 0x220B est utilisé au lieu de l'objet 0x220A. La longueur de données maximale est limitée à des données de 32 bits (4 octets).

Si la longueur de données configurée est inférieure à la longueur de données de l'objet utilisé (64 bits ou 32 bits), les bits restants sont remplis avec 0.

Dans un TPDO, un maximum de 64 bits ou 32 bits peut être envoyé. Pour la transmission d'un plus grand nombre de données, des TPDO supplémentaires sont attribués et les objets de données correspondants sont configurés.
9.2.2.1 Exemple 1
La zone de données 0x10 à 0x18 (8 octets) doit être transmise avec le deuxième TPDO.
| TPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet | Répertoire d'objets : Sous-index objet | Répertoire d'objets : Longueur de l'objet |
| 2 | Node ID + 0x0280 | 0x220A | 0x01 | 0x40 |
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2200 | 0x01 | Début lecture de l’adresse (début de la zone d’adresses sur le TAG qui doit être lue) | 0x10 |
| 0x2201 | 0x01 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | 0x08 |
9.2.2.2 Exemple 2
La zone de données 0x44 à 0x48 (4 octets) doit être transmise avec le sixième TPDO.
| TPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet | Répertoire d'objets : Sous-index objet | Répertoire d'objets : Longueur de l'objet |
| 6 | Node ID + 0x0680 | 0x220A | 0x05 | 0x40 |
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2200 | 0x05 | Début lecture de l’adresse (début de la zone d’adresses sur le TAG qui doit être lue) | 0x44 |
| 0x2201 | 0x05 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | 0x04 |
9.2.3 Ecriture de données sur le TAG via transfert PDO
Afin d'écrire des données sur un TAG via transfert PDO, un RPDO doit être attribué à l'objet 0x230A avec un sub-index dans la zone de 0x01 à 0x40. L'adresse de la zone de données utiles du TAG sur laquelle les données sont à écrire est déterminée dans l'objet 0x2300. Les sub-index de ces objets doivent être compatibles.
L'écriture sur le TAG se fait après l'écriture des données sur le RPDO et la modification du bit correspondant dans l'objet « Ecriture trigger » (index RO 0x230F, sub-index 0x00).
| MSB | LSB | ||||||||
| Bit | 63 | 62 | 61 | .. | .. | .. | 2 | 1 | 0 |
| Trigger | tr64 | tr63 | tr62 | .. | .. | .. | tr3 | tr2 | tr1 |
| Valeur par défaut | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Trigger | Description |
| tr64 | Trigger pour données TAG 64 (0x230A/0x40) |
| tr63 | Trigger pour données TAG 63 (0x230A/0x3F) |
| tr62 | Trigger pour données TAG 62 (0x230A/0x3E) |
| tr61 | Trigger pour données TAG 61 (0x230A/0x3D) |
| tr60 | Trigger pour données TAG 60 (0x230A/0x3C) |
| tr59 | Trigger pour données TAG 59 (0x230A/0x3B) |
| tr58... | Trigger pour données TAG 58 (0x230A/0x3A)... |
| tr6 | Trigger pour données TAG 6 (0x230A/0x6) |
| tr5 | Trigger pour données TAG 5 (0x230A/0x5) |
| tr4 | Trigger pour données TAG 4 (0x230A/0x4) |
| tr3 | Trigger pour données TAG 3 (0x230A/0x3) |
| tr2 | Trigger pour données TAG 2 (0x230A/0x2) |
| tr1 | Trigger pour données TAG 1 (0x230A/0x1) |
L'opération d'écriture se fait toujours lors du changement de bit du bit correspondant (0->1 ou 1->0). Idéalement, l'objet « Ecriture trigger » (index RO 0x230F, sub-index 0x00) est attribué à un RPDO. A la livraison, l'objet « Ecriture trigger » est attribué au premier RPDO.
Avec l'objet « Auto Write » (index RO 0x2302), l'écriture automatique de données peut être activée. Dès qu'un TAG se trouve dans la zone de détection, les dernières données seront écrites sur le TAG.

Seulement des données jusqu'à la longueur de données configurée seront écrites sur le TAG. Les données suivantes seront ignorées. Pour l'écriture de plus de 8 octets (4 octets pour les objets de données 32 bits), des RPDO supplémentaires sont attribués et les objets de données correspondants sont configurés.

Pour les systèmes de contrôle-commande 32 bits, il faut utiliser l'objet 0x230B au lieu de l'objet 0x230A. La longueur de données maximale est limitée à 32 bits (4 octets).
Le trigger est réparti sur les objets 0x231E et 0x231F. L'objet 0x231E contient les triggers pour les données ID 33 à 64. L'objet 0x231F contient les triggers pour les données ID 1 à 32.
9.2.3.1 Exemple 1
La zone de données 0x10 à 0x18 (8 octets) doit être transmise avec le deuxième RPDO.
| RPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet | Répertoire d'objets : Sous-index objet | Répertoire d'objets : Longueur de l'objet |
| 2 | Node ID + 0x0200 | 0x230A | 0x01 | 0x40 |
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2300 | 0x01 | Début lecture de l'adresse (début de la zone d'adresses sur le TAG qui doit être lue) | 0x10 |
| 0x2301 | 0x01 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | 0x08 |
| 0x2302 | 0x01 | Ecriture auto | 0x00 |
Transmission de données via RPDO :
| Transmission PDO | PDO | Données |
| A l’appareil | RPDO 2 | 0x12345678 |
Démarrage de l'accès en écriture :
| Transmission PDO | PDO | Données |
| A l’appareil | RPDO 1 | Commutation de bit 0 |
9.2.3.2 Exemple 2
La zone de données 0x44 à 0x48 (4 octets) doit être transmise avec le sixième RPDO. De plus, les données doivent être écrites sur un TAG chaque fois que le TAG entre dans la zone de détection de l'appareil.
| RPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet | Répertoire d'objets : Sous-index objet | Répertoire d'objets : Longueur de l'objet |
| 6 | Node ID + 0x0600 | 0x230A | 0x05 | 0x40 |
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2300 | 0x05 | Début lecture de l'adresse (début de la zone d'adresses sur le TAG qui doit être lue) | 0x44 |
| 0x2301 | 0x05 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | 0x04 |
| 0x2302 | 0x05 | Ecriture auto | 0x01 |
Transmission de données via RPDO :
| Transmission PDO | PDO | Données |
| A l’appareil | RPDO 6 | 0x12340000 |
Les données sont écrites sur le TAG lorsque ce dernier entre dans la zone de détection.

Il faut toujours envoyer les données 64 bits (8 octets) / données 32 bits (4 octets) à un RPDO. Si la longueur de données est inférieure à 64 bits / 32 bits, les bits restants seront ignorés.
9.2.4 Traitement d'erreurs en cas de transfert PDO
Si un accès en lecture/écriture sur un TAG n'est pas possible, l'appareil génère un message Emergency sur le bus CAN.
Le code d'erreur peut être lu du registre d'erreurs (index RO 0x1001, sub-index 0x00) et du champ d'erreurs prédéfini (index RO 0x1003, sub-index 0x01-0x02).
9.2.5 Lecture des données du TAG via transfert SDO
Afin de lire les données d'un TAG via un transfert SDO, l'adresse et la longueur des données sur le TAG doivent être définies. L'adresse doit être indiquée dans l'objet 0x2280 et la longueur des données dans l'objet 0x2281.
Ensuite, l'accès en lecture du TAG peut être démarré par un transfert de données vers l'objet 0x2282.
9.2.5.1 Exemple
La zone de données 0x50 à 0x70 doit être lue par le TAG.
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2280 | 0x00 | Début lecture de l’adresse (début de la zone d’adresses sur le TAG qui doit être lue) | 0x50 |
| 0x2281 | 0x00 | Lecture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être lue ; max. 8 octets) | 0x20 |
Le transfert est démarré par la lecture de l'objet 0x2282, sub-index 0x00.

Les données sont transmises en une seule pièce en tant que type de données Domain. Jusqu'à une longueur de données de 4 octets, le transfert se fait en tant que « expedited », au-dessus en tant que « segmented ».

Le récepteur doit être prêt pour la mémorisation temporaire et le traitement des données.
9.2.6 Ecriture de données sur le TAG via transfert SDO
Afin d'écrire les données sur un TAG via un transfert SDO, l'adresse et la longueur des données sur le TAG doivent être définies.
L'adresse doit être indiquée dans l'objet 0x2380 et la longueur des données dans l'objet 0x2381. Ensuite, l'accès en écriture sur le TAG peut être démarré par un transfert de données vers l'objet 0x2382.
9.2.6.1 Exemple
La zone de données 0x34 à 0x38 doit être transférée sur le TAG.
Répertoire objets
| Index | Sous-index | Nom (objet) | Valeur |
| 0x2380 | 0x00 | Début écriture adresse (début de la zone d'adresses sur le TAG qui doit être écrite) | 0x34 |
| 0x2381 | 0x00 | Ecriture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être écrite) | 0x03 |
| 0x2382 | 0x00 | Données du TAG (données qui doivent être écrites sur le TAG) | 0x01020304 |

Les données sont transmises en une seule pièce en tant que type de données Domain. Jusqu'à une longueur de données de 4 octets, le transfert se fait en tant que « expedited », au-dessus en tant que « segmented ».

L'émetteur doit pouvoir fournir la quantité de données indiquée.
9.2.7 Verrouillage de la zone de données sur le TAG via transfert SDO
Les zones de données du TAG peuvent être équipées d'une protection en écriture.

La protection en écriture d'une zone de données ne peut pas être enlevée.
Dans l'objet "Verrouiller le début de l'adresse" (index RO 0x2480), l'adresse de départ de la zone de données à protéger est mémorisée. En plus, la longueur de la zone de données est mémorisée dans l'objet "Ecriture longueur" (index RO 0x2481).
Pour activer la protection en écriture, le trigger (index RO 0x2482) est réglé à 1.

L'adresse de départ doit correspondre à l'adresse de départ d'un bloc de mémoire sur le TAG. La longueur doit être un multiple de la longueur d'un bloc de mémoire sur le TAG.
9.2.7.1 Exemple
La zone de données 0x04 à 0x0C doit être protégée en écriture dans un TAG avec la taille des blocs 4 (2 blocs ou 8 octets).
Répertoire objets
| Indice | Sous-index | Nom (objet) | Valeur |
| 0x2480 | 0x00 | Verrouiller le début de l'adresse (début de la zone d'adresses sur le TAG qui doit être verrouillé) | 0x04 |
| 0x2481 | 0x00 | Ecriture de la longueur (longueur de la zone de mémoire sur le TAG qui doit être verrouillé) | 0x08 |
| 0x2482 | 0x00 | Tag trigger verrouillage | 0x01 |
9.2.8 Codes d'erreur pendant le transfert SDO
Les transferts SDO sont des transferts validés. Lorsqu'un défaut se produit pendant le transfert ou les actions déclenchées par le transfert, un défaut est signalé après le transfert SDO.
| Code d’erreur SDO | Description | Cause possible |
| 0x05030000 | Bit toggle inchangé. | |
| 0x05040000 | Protocole SDO expiré. | |
| 0x05040001 | Spécification commande client/serveur non valable ou inconnue. | |
| 0x05040002 | Largeur de la zone non valable (unique-ment mode bloc). | |
| 0x05040003 | Numéro séquence non valable (unique-ment mode bloc). | |
| 0x05040004 | Erreur CRC (uniquement mode bloc). | |
| 0x05040005 | Aucun emplacement de mémoire libre. | |
| 0x06010000 | Accès non supporté sur un objet. | |
| 0x06010001 | Essai de lire un objet seulement écriture. | |
| 0x06010002 | Essai d’écrire un objet seulement lec-ture. | |
| 0x06020000 | Objet n’existe pas dans le dictionnaire objet. | |
| 0x06040041 | Objet ne peut pas être mappé sur PDO. | |
| 0x06040042 | Le nombre et la longueur des objets mappés dépassent la longueur PDO. | |
| 0x06040043 | Raison incompatibilité générale para-mètres. | |
| 0x06040047 | Incompatibilité générale paramètres dans l’appareil. | |
| 0x06060000 | Accès non réussi à cause d’un défaut du matériel. | |
| 0x06070010 | Type de données n’est pas identique ; la longueur du paramètre de service n’est pas identique. | |
| 0x06070012 | Type de données n’est pas identique ; paramètre de service trop long. | |
| 0x06070013 | Type de données n’est pas identique ; paramètre de service trop court. | |
| 0x06090011 | Sous-index n’existe pas. | |
| 0x06090030 | Valeur non valide pour paramètre (uniquement téléchargement). | |
| 0x06090031 | Valeur du paramètre écrit trop haute (uniquement téléchargement). | |
| 0x06090032 | Valeur du paramètre écrit trop basse (uniquement téléchargement). | |
| 0x06090036 | Valeur maximale est plus basse que la valeur minimum. | |
| 0x060A0023 | Ressource non disponible : connexion SDO. | |
| 0x08000000 | Erreur générale. | |
| 0x08000020 | Les données ne peuvent pas être trans-mises à l’application ou sauvegardées. | Erreur accès en lecture ou écriture du TAG. Informations détaillées dans l’objet état appareil (0x2150). |
| 0x08000021 | Les données ne peuvent pas être trans-mises à l’application ou sauvegardées à cause d’une commande locale. | |
| 0x08000022 | Les données ne peuvent pas être trans-mises à l’application ou sauvegardées à cause de l’état actuel de l’appareil. | |
| 0x08000023 | Génération dynamique du répertoire objets non réussie ou répertoire objets ne pas présent (par ex. répertoire objets est généré du fichier et la génération échoue à cause d’une erreur fichier). | |
| 0x08000024 | Aucune donnée disponible. | Longueur de données = 0 |
9.3 Fichier EDS
Le fichier EDS sert de modèle pour les différentes configurations d'un type d'appareil. Un fichier DCF est généré du fichier EDS, qui contient la configuration de l'appareil, les valeurs de l'objet, le Node ID et le Bitrate.
Pour la configuration du réseau CANopen et des appareils, des outils de configuration CANopen sont disponibles.
Les fichiers EDS sont disponibles sur le site web d'ifm : www.ifm.com
Contenu du fichier EDS :
- Fonctions de communication et objets (selon le profil CANopen DS-301)
- Objets spécifiques au fabricant

L'installation du fichier EDS dépend de l'outil de configuration.
Pour plus d'informations, contacter le fabricant du système de contrôle-commande.

▷ Les fichiers EDS sont fournis avec des types de données 64 bits ou 32 bits. Le système de contrôle-commande définit s'il traite des types de données 64 bits ou 32 bits.
▶ Sélectionner le fichier EDS convenant au système de contrôle-commande.
10 Maintenance, réparation et élimination
L'appareil est sans maintenance.
▶ En cas de mauvais fonctionnement de l'appareil prendre contact avec ifm.
▶ Ne pas ouvrir l'appareil. Aucune opération de maintenance ne peut être effectuée par l'utilisateur. L'appareil ne doit être réparé que par le fabricant.
▶ Le nettoyage de l'appareil se fait au moyen d'un chiffon sec.
▶ Respecter la réglementation nationale en vigueur pour la destruction écologique de l'appareil.
11 Homologations / Normes
Pour les homologations et les normes, les informations suivantes sont disponibles :
- Normes d'essai et réglementations : documentation.ifm.com
- Déclaration de conformité UE et homologations : documentation.ifm.com
- Notes relatives aux homologations : Notice d'emballage de l'appareil et documentation.ifm.com
Glossaire
CAN
Controller Area Network, système bus pour les engins mobiles.
CANopen
Protocole réseau basé sur CAN sur le niveau application avec une interface de communication ouverte (répertoire objets).
CiA
CAN in Automation e. V., organisation regroupant des fabricants et utilisateurs en Allemagne/Erlangen, organe de définition et contrôle pour CAN et des protocoles réseaux basés sur CAN.
COB
Objet de communication CANopen (PDO, SDO, EMCY, ...)
EDS
Fiche technique électronique
EMCY
L'objet d'urgence contient un message d'alarme avec lequel l'appareil signale une erreur.
Heartbeat
Surveillance cyclique paramétrable parmi les participants réseau. Contrairement au « Node Guarding » le maître NMT supérieur n'est pas nécessaire.
LSS
Procédure de réglage de paramètres fondamentaux d'appareils
Mapping PDO
Décrit les données applications qui sont transférées avec un PDO.
NMT
Gestion du réseau
Node ID
Numéro unique d'un participant dans le réseau CANopen.
Objet
Terme générique pour les données/messages interchangeables à l'intérieur du réseau CANopen.
PDO
Le Process Data Object transmet des données process en temps réel dans le réseau CANopen, par ex. la vitesse de rotation d'un moteur. Les PDO ont un niveau de priorité plus haut que les SDO ; contrairement aux SDO ils sont transférés sans confirmation. Les PDO consistent en un message CAN avec identifiant et des données utiles jusqu'à 8 octets.
Référence IC
La référence IC désigne le type de puce du TAG. Elle est attribuée par le fabricant du TAG.
RPDO
Objet de données process reçu par l'appareil.
RSSI
Receives Signal Strength Indicaton (indication de l'intensité du signal reçu) est l'intensité du champ du signal reçu.
SDO
Le SDO atteint de façon ciblée le répertoire objets d'un participant réseau (lire/écrire). Un SDO peut consister en plusieurs messages CAN. La transmission de messages individuels est confirmée par le participant adressé. Utilisant les SDO, les appareils peuvent être configurés et paramétrés.
SYNC
Le télégramme SYNC déclenche la transmission de données process synchronisée.
TAG
An ID tag is used to identify objects. A read/write device is used to read the ID tag via a high-frequency radio signal. An ID tag consists of an antenna, an analogue circuit for receiving and transmitting (transceiver), a digital circuit and a non-volatile memory.
TPDO
Objet de données process transmis par l'appareil.





- 1 REMARQUES PRÉLIMINAIRES
- 1.1 SYMBOLES UTILISÉS
- 1.2 AVERTISSEMENTS
- 1.3 NOTES LÉGALES
- 1.4 INFORMATION OPEN SOURCE
- 2 CONSIGNES DE SÉCURITÉ
- 2.1 SYMBOLES DE SÉCURITÉ SUR L'APPAREIL
- 2.2 CONSIGNE DE SÉCURITÉ SUR LES RAYONNEMENTS ÉLECTROMAGNÉTIQUES À HAUTE FRÉQUENCE
- 2.3 CYBERSÉCURITÉ
- 3 USAGE PRÉVU
- 3.1 APPLICATION
- 4 FOURNITURE
- 5 FONCTIONS
- 5.1 TAG
- 5.2 APERÇU DES APPAREILS
- 6 MONTAGE
- 6.1 REMARQUES SUR LE MONTAGE DE L'APPAREIL
- 6.2 ELIMINER DES PERTURBATIONS
- 6.3 CONCEPTION MÉCANIQUE
- 6.4 INSTALLER L'APPAREIL
- 6.5 DISTANCES DE MONTAGE
- 6.6 POSITIONNER LES TAGS
- 7 RACCORDEMENT ÉLECTRIQUE
- 7.1 SCHÉMA DE BRANCHEMENT
- 8 ELÉMENTS DE SERVICE ET D'INDICATION
- 9 FONCTIONNEMENT
- 9.1 INTERFACE CANOPEN
- 9.1.1 FONCTIONS CANOPEN
- 9.1.2 MODIFICATION DU NODE ID ET DU BITRATE
- 9.1.3 MISE EN SERVICE
- 9.1.4 UTILISATION DES TYPES DE DONNÉES 32 BITS
- 9.1.5 MODES DE COMMUNICATION DE L'OBJET DE DONNÉES PROCESS (PDO)
- 9.1.6 RÉPERTOIRE D'OBJETS (RO)
- 9.1.7 MESSAGES D'ERREUR
- 9.1.8 SURVEILLANCE D'ACTIVITÉ AVEC HEARTBEAT
- 9.1.9 MODIFICATION D'OBJETS
- 9.1.10 OBJETS DE DONNÉES PROCESS
- 9.1.11 ETAT DE L'APPAREIL
- 9.1.12 DÉSACTIVER L'ANTENNE
- 9.1.13 SÉLECTIONNER LE TYPE DE TAG
- 9.1.14 LECTURE DES INFORMATIONS D'UN TAG
- 9.1.15 VALEUR RSSI
- 9.1.16 FILTRE DE DÉTECTION TAG
- 9.2 TRANSMISSION DE DONNÉES AVEC UN TAG
- 9.2.1 LECTURE DE L'UID DU TAG
- 9.2.2 LECTURE DES DONNÉES DU TAG VIA TRANSFERT PDO
- 9.2.2.1 EXEMPLE 1
- 9.2.2.2 EXEMPLE 2
- 9.2.3 ECRITURE DE DONNÉES SUR LE TAG VIA TRANSFERT PDO
- 9.2.3.1 EXEMPLE 1
- 9.2.3.2 EXEMPLE 2
- 9.2.4 TRAITEMENT D'ERREURS EN CAS DE TRANSFERT PDO
- 9.2.5 LECTURE DES DONNÉES DU TAG VIA TRANSFERT SDO
- 9.2.5.1 EXEMPLE
- 9.2.6 ECRITURE DE DONNÉES SUR LE TAG VIA TRANSFERT SDO
- 9.2.6.1 EXEMPLE
- 9.2.7 VERROUILLAGE DE LA ZONE DE DONNÉES SUR LE TAG VIA TRANSFERT SDO
- 9.2.7.1 EXEMPLE
- 9.2.8 CODES D'ERREUR PENDANT LE TRANSFERT SDO
- 9.3 FICHIER EDS
- 10 MAINTENANCE, RÉPARATION ET ÉLIMINATION
- 11 HOMOLOGATIONS / NORMES
Marque : IFM
Modèle : DTM434
Catégorie : Lecteur de mémoire