
S10 - Robot vacuum MOVA - Free user manual and instructions
Find the device manual for free S10 MOVA in PDF.

| Product Type | Robotic vacuum cleaner with mopping function |
| Brand | MOVA |
| Model | S10 |
| Robot model number | RL5425A |
| Charging station model number | RC50 |
| Robot rated voltage | 14.4 V |
| Robot rated power | 75 W |
| Charging time | Approximately 6 hours |
| Wi-Fi operating frequency | 2.4 GHz (2,300-2,483.5 MHz) |
| Wi-Fi maximum output power | < 20 dBm |
| Laser sensor | Class 1 (IEC 60825-1) |
| Mobile app | Dreamhome |
| Main functions | Quick mapping, zone cleaning, automatic cleaning resumption, Do Not Disturb mode |
| Mopping function | Yes, with water tank and mop pad |
| Battery | Built-in Li-Ion (non-user-replaceable) |
| Maintenance | Regular cleaning of main brush, side brush, filter, dust bin, charging contacts |
| Safety | Class 1 laser, automatic shut-off when lifted, child lock, lithium battery |
| Usage | Indoor only, ambient temperature 0 °C to 40 °C |
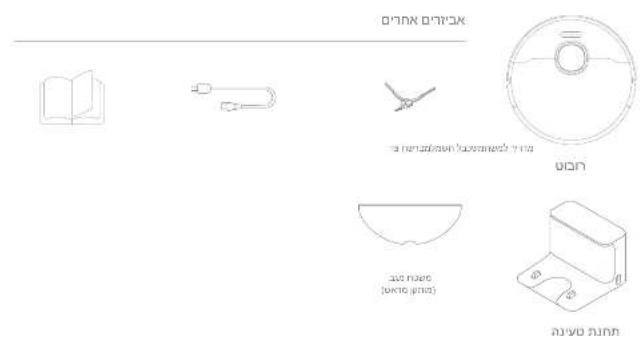
| Package contents | Robot, charging station, power cord, side brushes, user manual |
| Country of origin | China (WEEE marking) |
Frequently Asked Questions - S10 MOVA
User questions about S10 MOVA
0 question about this device. Answer the ones you know or ask your own.
Ask a new question about this device
Download the instructions for your Robot vacuum in PDF format for free! Find your manual S10 - MOVA and take your electronic device back in hand. On this page are published all the documents necessary for the use of your device. S10 by MOVA.
USER MANUAL S10 MOVA
which means strong for confidence in every endo and reflect the comowry's vision of contiouous pursuit, exploration and search (in technology
MOVA S10
Robot Vacuum and Mop User Manual

Contents
User Manual 1
DB Benutzerhandbuch 24
F Manuel d'utilisation 48
71 Manuale utente 71
Manual de usuario 94
Instrukcja obstugi 117
Gebruikershandeldeing 141
Brukerhandbok 164
27 Arvandarmanual 187
210
233
To avoid electric shock, fire or injury caused by improper use of the appliance, please read the user manual carefully before using the appliance and keep it for future reference.
This product should not be used by children younger than 8 years old nor persons with physical, sensory, intellectual deficiencies, or limited experience or knowledge without the supervision of a parent or guardian to ensure safe operation and to avoid any risks. Cleaning and maintenance shall not be performed by children without supervision.
Children shall not play with this product. Ensure children and pets are kept at a safe distance from the robot while it is operating.
This product is for floor cleaning in a home environment only. Do not use it outdoors, on non-floor surfaces, or in a commercial or industrial setting. If the power cord becomes damaged or broken, stop using it immediately and contact after-sales service.
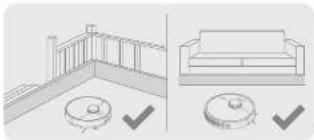
Do not use the robot in an area suspended above ground level without a protective barrier.
Do not place the robot upside down. Do not use the LDS cover, robot cover, or bumper as a handle for the robot.
Use the robot in environments with an ambient temperature above 0^ and below 40^ . Make sure there is no liquid or sticky substance on the floor. Pick up any cables from the floor before using the robot to prevent it from dragging them while cleaning.
Remove fragile or small items from the floor to prevent the robot from bumping into and damaging them.
To prevent damage or harm from dragging, clear any loose objects from the floor, and remove cables or power cords on the cleaning path before operating the appliance.
Keep hair, fingers, and other body parts away from the suction opening of the robot.
Keep the brush cleaning tool out of reach of children.
Do not place children, pets, or any item on top of the robot regardless of whether it is stationary or moving.
Do not use the robot to clean any burning objects. Do not use the robot to pick up flammable or combustible liquids, corrosive gases, or undiluted acids or solvents.
Do not vacuum hard or sharp objects. Do not use the appliance to pick up objects such as stones, large pieces of paper or any item that may clog the appliance.
Make sure the robot is turned off and the charging dock is unplugged before cleaning or performing maintenance.
Do not use a wet cloth to wipe or any liquid to rinse the robot and charging dock. Washable parts must be dried completely before installing and using them.
Make sure the robot is turned off when being transported and kept in its original packaging if possible.
Please use this product in accordance with the instructions in the User Manual. Users are responsible for any loss or damage that arise from improper use of this product.
Do not use any third-partly battery, power cord, or charging clock. Use only with RCS0 supply unit.
Do not attempt to disassemble, repair, or modify the battery or charging dock on your own.
Do not place the charging dock near a heat source.
Do not use a wet cloth or wet hands to wipe or clean the dock's charging contacts.
Do not improperly dispose of old batteries. Unneeded batteries should be discarded at an appropriate recycling facility.
If the robot will not be used for an extended period, fully charge it, then turn it off and store in a cool, dry place. Recharge the robot at least once every 3 months to avoid over-discharging the battery.
This product contains batteries that can only be replaced by qualified technicians or after-sales service.
Laser Safety Information
The laser sensor in this product meets the IEC 60825-1:2014/EN 60825-1:2014/A11:2021 Standard for Class 1 laser products. Please avoid direct eye contact with it during use.
CLASS 1 LASER PRODUCT
CONSUMER LASER PRODUCT EN 50689:2021
Herby, Dromie Training & Training Inc., Ltd. identifies that Use can be an integral part of R15420A in accordance with Doct 2014/51/DL. The full list of the EDA
Safety Information
For indoar use only
Read operator's manual
Product Overview
Package Contents

Robot

Other Accessories



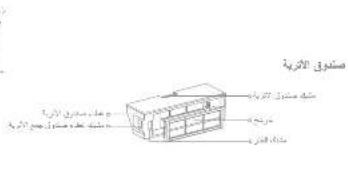
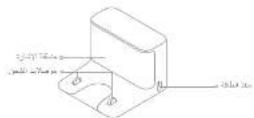
Charging Dock

Mod Pad
Pre-installed
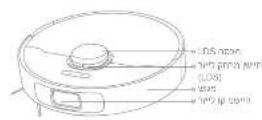
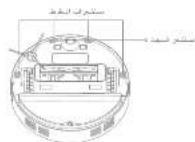
EN Product Overview
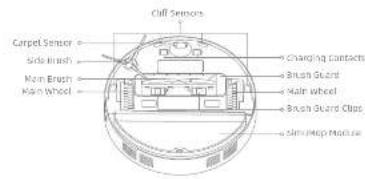
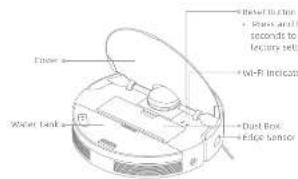
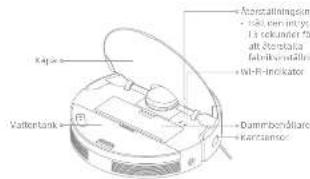
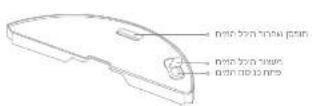
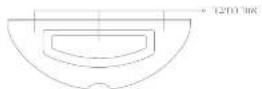
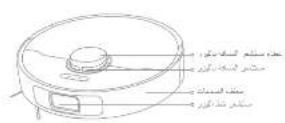
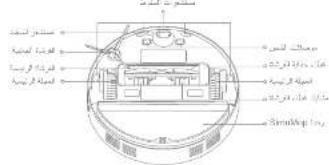
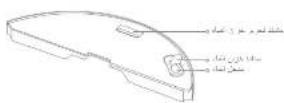
Robot
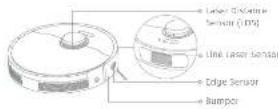
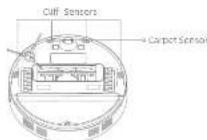
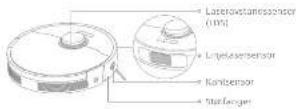
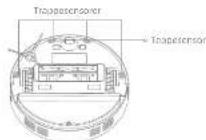
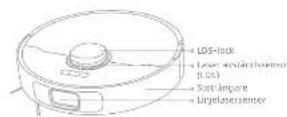
Product Overview
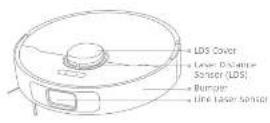
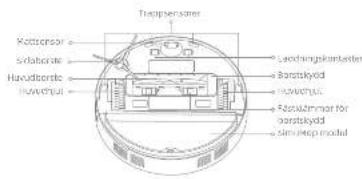
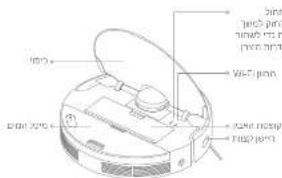
Robot and Sensors
EN Product Overview
A
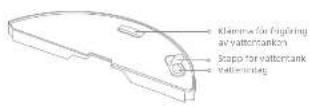
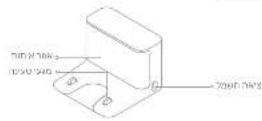
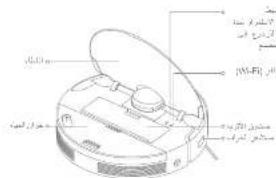
Mopping Module
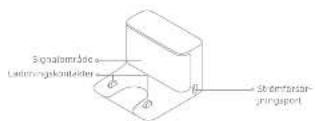
Charging Dock
Maprid

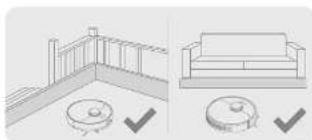
Preparing Your Home


Before cleaning, please remove any unsightly, fragile, vibration or damage to items, and clean up cable, dice, toys, hard objects; objects on the ground to avoid being entangled, scratched or bruised by the rubber and causing losses.
Upon the door of the maser to be opened, and put the furniture into his proper place to leave more space.
- when doing hard the robot for the first time, follow it around while cleaning to remove any potential obstacles in line;
- Do not squeeze hard objects like stairs, stree walls are key parts, or share objects like construction blocks, broom guard and notes, otherwise the ground may

Before learning, place a physical barrier at the edge of the stem and scate to ensure the secure and smooth operations of the crab.

To show the robot from non-requiring areas that need to be cleaned, a robot is part of the robot, or in a warehouse, factory, or main places.


Before Use
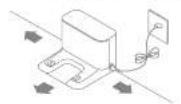
- Place the Charging Dock and Connect to an
Electrical Outlet
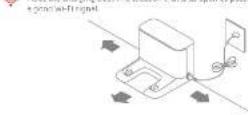
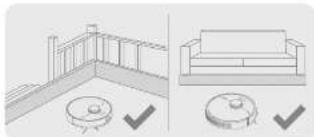
Place the charging cock on levels ground against the wall. Enter the power card into the charging dock and plug it into the socket.
Hece the charging cost in a location that is as open as possible with
Note:
- Remove any objects that are closer than 1.5 m from the front and 0.5 m from another side of the shopping disk.
- Do not use the charging clock in an area with direct current or where the voltage is low. The signal at this point may be over threshold returning to the charging drop.

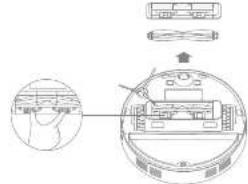
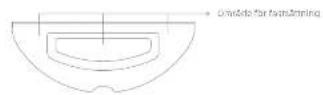
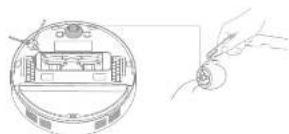
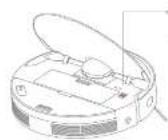
2. Remove the Protections
15 11
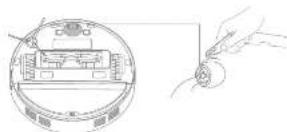
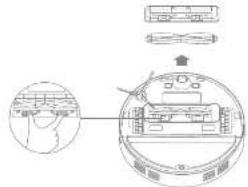
- Install the Side Brush
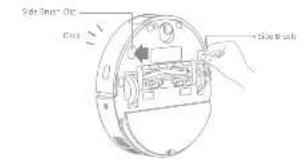
Note: Insult the size brush until it does into place.
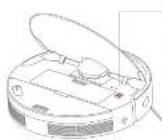
4. Charge the Robot
when placing the robot, all the changing contacts at the bottom of the robot are changed. The robot is then moving along (changing direction), are the robots are automatically turned and start changing.

Note: is recommended for fully charge your robot before first time use.
Connecting with Dreamhome App
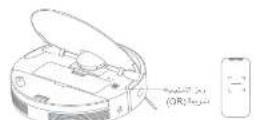
1. Download Dreamhome App
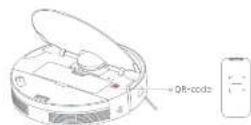
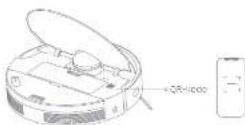
Scan the OR code on the robot, or search "Deformation" in the app store to download and install the app.

2.Add Device
upon the Drowsiness app, tap in the caregiver right corner, and scan the same code on the app again to add the voice. Please follow the instructions below.
Note: If you want to reset Wi-Fi, repeat step 2 and then follow the prompts to finish the Wi-Fi connection.
Note:
Only 2.4G+2M+His supportet
- Due to inaccurates in the app software, actual operations may alter the results of the application. Please follow this instructions manual. Please follow this instructions based on the current app version.

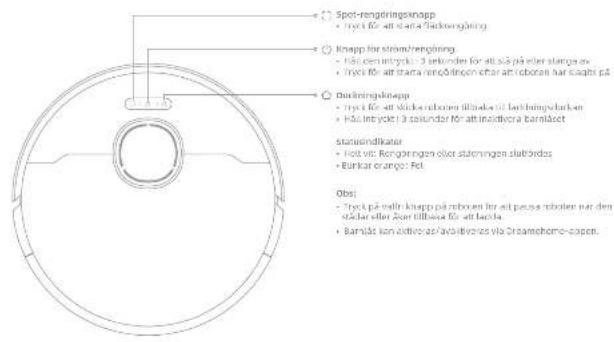
How to Use
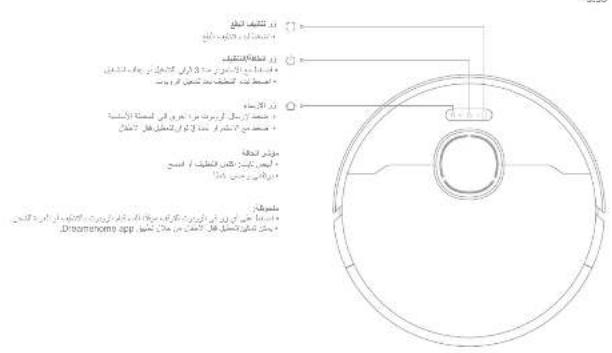
Turn On/Off
Press and hold the button (3) for 3 seconds to turn on the robot. The power indicator should be illuminated. Place the remote end of the charging dock. The robot should turn on automatically and push charging. To turn off the charging dock, press the button away from the charging dock and press and release the button (4) for 5 seconds.
Fast Mapping
After configuring the roottars for the first time, follow the instructions in the map to easily create a map. The road will start mapping without canceling. When the robot returns to the charging dock, the mapping process has been completed and the map will be scanned automatically.
Start Cleaning
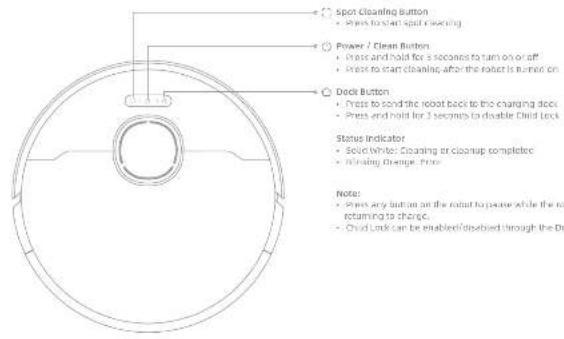
Press the button to start cleaning after the robot is turned on. The robot will accurately map out a route, methodically clean along the edges and walls, then finish cleaning along each robot in an E-shape pattern to ensure a thorough job.
It is recommended that the robot set out from the charging dock before cleaning. Do not move the charging dock while the robot is cleaning. This ensures that the robot returns for charging stock smoothly.
Pause/Sleep
When the robot is running, press any button to pass it.
If the robot is paused for more than 10~s~ it executes a call to sleep. The robot will then continue to perform the task until its robot as the robot is too busy can wake up the robot.
Notes: If the unit is passed and placed from the changing truck, the current cleaning task will end.
Auto Resume Cleaning
If the battery is too low, the robot will automatically return to the charging door to charge. After charging to the appropriate battery level, it will resume uncontrolled charging. Note: To use this function, please open it in the app.
Do Not Disturb (DND) Mode
When the round is set to Be Not Disused (DRD) mode, the robot will be prevented from returning cleaning and the power indicator will turn off. DND mode is used only at the factory. You can use the app to create DND mode by modifying the once-perch system. The blue panel is an indication by default. Note:
- The school held learning books can be performed as usual during the COVID period.
- The count will resume cheaply when it left off after the third period sickness.
How to Use
5pot Cleaning
When the robot is on standby, press the button to enable the spot cleaning mode. In this mode, the robot clicks a square-shaped area of 1.5 × 1.5 meters around it and returns to its starting point once the spot cleaning is completed.
Robot Restarting
If the round stops regarding or cannot be turned off, press and hold the button 1/2 for 10 seconds to forcefully turn it off. Then, press and hold the button 3/4 for 3 seconds to turn the robot on.
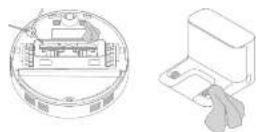
Use Mopping Function
It is recommended that all floors are assumed at least three times before the 1st meeting session in advance before closing effect.
- According to the illustrations, remove the mcp pad, damper and writing tape excise water. Then retilate the map pad onto the mcp pad holder in panel.

How to Use
- Upon the return of the robot and the water sensor turn on, till the water

Bases
1Xn
+ Dureill the water risk with the water as the may cause the water to
- Preshe hain: 0r the Dearhur,up in a rthreym

Note:
- It is not recommended to use the coping function in carotids.
- Use the app to adjust the water flow as required.
14.15
- When the inner focus is a clearance, it will enter into the sleeping block. The inner focus is then removed by removing the inner eye's lens and hold the inner slit open, and then slide out.

Notes: When the robot is changing or new law, 5% recommendation 2.0.
Note: The robot is changed if the robot has been used in the water bath, and this map gap is to prevent microbial infection.
Routine Maintenance
Parts
To keep the results in good condition, it is recommended in refer to the necessary usage in the app of the following table for various misuse
| Part | Maintenance Frequency | Replacement Period |
| Moped After exchange Exory | at 3 months | |
| Main finish | Every 12 months | |
| Side flush Exory 3 to 5 months | Once every 2 weeks | |
| One half fill Every 3 months | ||
| Charging dacks capacity, mm3 | Once every month | |
| Charging dacks charging contact | ||
| Less Discharge Bonor (LDS) |
| Part | Maintenance Frequency | Replacement Period |
| Roller-Charging restraints | Once every month | |
| Life Exercicee | ||
| Edge sensor | ||
| Purposes | ||
| Grommineral w/red | ||
| Carryout tests | ||
| Lift sensors | ||
| Bostn it the roset | ||
| Drain-Ins | Chunl has needed | |
| Water-Cuts |
A00: The mquessure inyiny will depend on your vage of the mle. If in reesurre rere la- quisal nirea,he qutst hink to my pailol.


Routine Maintenance
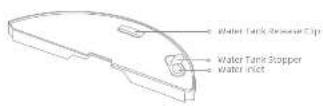
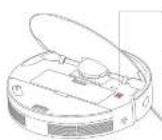
Mopping Module
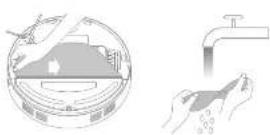
Taken the robot cover and press the clip to remove the water tank. Pour out the water in the tank. Clean the tank with water only and pour it dry
Note: Do not directly expose the water bank to sunlight.
2. Remove the mcp pad from the mcp pad nolter, clean it with water only and label it properly before use.

- If since the time limits, or the action scheme, are not fixed, then the all-hole in the cover of the vector space.

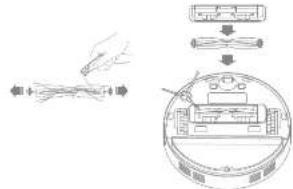
Main Brush
- Press the brush guard clip inwards to remove the brush guard arm in the brush cut out of the coat.
16.12
Routine Maintenance
X_max is the brush covers at both ends of the brush as shown in the diagram. Use a proper cleaning roll to remove any hair tangled in the brush. Reelcoat the brush covers on both ends of the brush, and then trim vertically the brush. Press on the brush guard in front of it to prevent

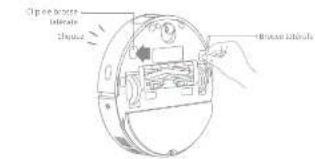
Side Brush
Remoe and clear the size brush.

Omnidirectional Wheel
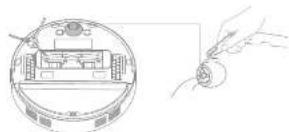
图1.2.3
- Use a tool such as a small screwdriver to separate the side and line of the unirrotated wheel. Drill the expression force.
- Rinse the dimrecrudes wheel under the running water and put it back after trying it completely.
EN Routine Maintenance
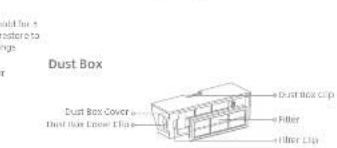
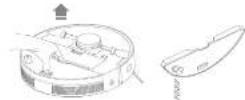
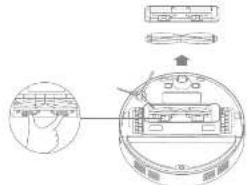
Dust Box
- Open the robot's cover and press the dip to remove the dust box.
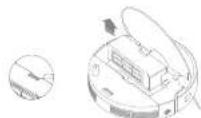
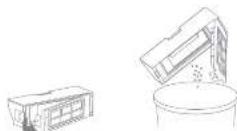
- Open the dust box cover and empty the dust box as shown in the diagram,
Filter
- Remove the filter and top its basket gently.

Notes: Do not attempt to clean the filter with a brush, a finger or sharp objects to prevent contusion.
3. Place the dust base and filter with water and dry them completely thoroughly.



Note:
- Use the durt box and filter with clean water only. Do not use any
deterrment
Use the flux and fier ony when they are completely dry.
Routine Maintenance
Robot Sensors
Vilcior sensors by using a soft and dry cloth, as shown in the below figure;
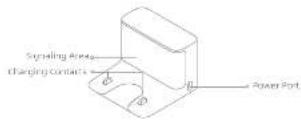
Charging Contacts and Signaling Area
Clear the charging contacts and signalling area with a soft and dry cloth.
Battery
The robot contains a high-performance ultrasonic battery pack. Make sure that the battery remains charged for daily use to maintain optimal battery performance. If the battery runs out for an extended period, it will be replaced by a new one. The battery is replaced from over-discharging change the robot at least once every three months.
Note: A wet cloth can damage women and children within the household and the clothing shops. Please use a dry cloth for cleaning.
Troubleshooting
| Problem Solution | |
| Roast does not turn on. | The battery is low. Recharge the robot on the charging clock, then try again. The temperature of the battery is too low or too high. It is recommended to operate at a temperature between 32°F (95°C) and 104°F (460°C). |
| Roast does not recharge. | The charging dock is not receiving power. Please confirm that both ends of the jawcrack cord are plugged in correctly. Poor contact. Clean charging contacts of the charging cock and robot. |
| Roast does not return to charging dock. | There are too many obstructions around the charging dock. Place the charging dock in a more open area. Please clean the cock's signaling area. |
| Roast is malfunctioning. Turn off. | The robot and then reactivate it. |
| Roast is making a strange noise. | A foreign object may be caught in the main brush, side brush, or one of the main wheels. Step the robot, and remove any debris. |
| Roast no longer clean. efficiency or issues that behind. | The dust bin is full. Please clean it. The filter is blocked. Please clean it. A foreign object is caught in the main brush. Please clean it. |
| Roast current connect to Wi-Fi. | There is something wrong with the air-1 connection. Reset the Wi-Fi and download the latest version of the DREAMerge app, only by reactivating. Location permission is not open. Please ensure the location permission on the DREAMerge app is enclosed. on Wi-Fi signal is weak. Please use the robot in an area with good air-1 coverage. 5GHz Wi-Fi is not supported. Please ensure your robot connects to 2.4GHz Wi-Fi. The username or password of Wi-Fi is incorrect. Please enter the correct username and password. |
| Roast does not perform scheduled cleaning. | The robot has low battery. Scheduled cleaning will not start unless the robot has at least 15% battery left. |
Troubleshooting
| Problem Solution | |
| Does leaving the robot on the charging dock consume power it is already charged? | I seeing the robot on the charging clock after it's fully charged consumes very little electricity and helps maintain optimal battery performance. |
| No water comes out of the water tank, or only a little bit comes out. | Check whether there is water inside the water tank. Clean the mop if it becomes dirty. Make sure the mop pad is installed correctly according to the user manual. Clean the or note on the water tank stepper. |
| Robot doesn't resume cleaning after charging. | Make sure the robot is not set to be not clean up mode (ups), which will prevent it from returning cleaning. The robot does not resume cleaning when it is excessively recharged or picked into the charging stock. |
| Robot doesn't return to charging stock after being cleaned. | Moving the roost may cause it to re-position itself or re-clip its surroundings, if the roost is too far from the charging dock, it might not be able to automatically return its own, in which case you need to manually place the robot onto the charging dock. |
| The mop pad litter is raised abnormally. | Please check if there is any foreign object stuck in the mop pad holder, and try to restart the robot. If the problem persists, please contact the after-sales service team. |
For more support contact us via https://globaldreametech.com.

Specifications
Robot Charging Dock
| Model B5425A | |
| Charging Time Apoceros, S | hours |
| Kated Volta 14.4V | - |
| Rated Power 25kW | |
| Operation Frequency MHz | 2005 MHz |
| Maximum Charge Power | 20000 |
Under normal use of condenser, this equipment should be kept in a separation distance of at least 20m between the antenna and the body of the seat.
| Model RC306 | |
| Rated Impul 100-240V | 30/50Hz,6.5Pa |
| Rated Output 19.5V | — 1A |
Battery Disposal and Removal
The busiun lithium-ion battery contains substances that are hazardous to the environment. Before disasing of the battery, make sure the battery is removed by qualified technicians and discarded at an appropriate recycling facility.
the battery must be removed from the appliance before it is sapped
the appnase must be disconnected from the supply mairss when removing the battery
the battery is to be disposed of safely.
CAUTION:
Before removing the battery, discontinued the power and ran out the battery as much as possible.
Unwanted latence should be discovered at an appropriate recycling facility.
under aossive conditions, liquid may be ejected from the battery if contact occurs, flush with water and seal medical help.
Removal Guide:
Turn over the robot use a proper tool to remove the screws on the back of the robot and then remove the cover.
2. unpublq the tterinalis brenn the barry and pch hord to rarnve the barry
WEEE information
All products bearing this symbol are waste electrical and electronic equipment (VEE as in directive 2012/15/200) which should not be mixed with unscreened household wares. Instead, you should prant a human health and the environment by having over your waste degrve equipments to a dication of 100% or more. The use of an electronic device such as a computer, radio, TV, DVD player, or a computer accessory. Contact eopist is reccay ng thy prevent detention negative conusions in the environment and human heilice. Pcsice the inceller or local authorities for more information about the situation as well as towers and tnditions of sall mian pulei.

Sicherheitshinweise

Wwthpwr (nonrealist)
Produktübersicht
Roboter

Witng the Zubunba zu herimns.
Hepaticus: The Anterior Chinchinoides hongkou from the 19th century. The species has been described in the U.S. and several other countries, mostly in Asia.
特此公告。
Regelmäbige Wartung
Wischmodul
- Warmness of the system for long time linearized Gausse-type equations (not necessarily, within some finite L^2 norm) in their Atkinson series:

Hauptbürste
redundant reductives karni amphiordile lekmei m'evon deo.
redundant reductives kalmi aednadoe hainlge. While the authors are indebted to Tuxi for helping me
42
Robot
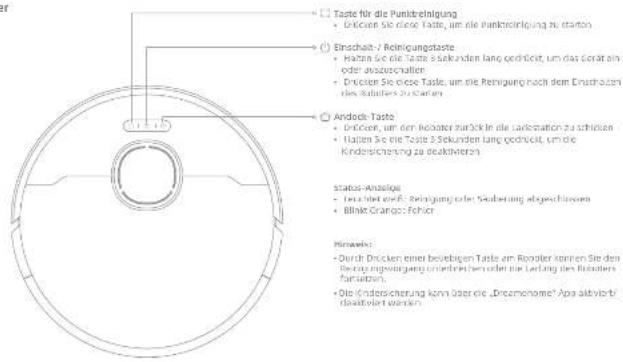
Bouton dc nettoyage cblc
Apouyepour demarier netaoyce localise
(1)Bulton's all-meration-theorem
P
A
Anumntiartme
- Aymayrniie mriyernent prnre rane he nnt a baiinr hne
We have a special case for which we can assume that the number of roots is n and the number of nontrivial roots is m , and this is called the end result.
Avant l'utilisation
(1) Retètée taux les objets situés à moins de 1,5 m'evendant et à 4,5 m'des la chèque cite de la station de recherche.
I can pour past in attaining an exchange in a zone expounded to a number of times. I have not done so much yet, but I am very happy to see that the results are presented and will be transmitted to me at a station in the near future.

2. Retirer les protections
3.Installer larosse laterale
aegyio hiai hiai ioue aieae aieae aieae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aeae aaee
Remarkative 1. The commutative algebra of a bilinear unitary S at a stabilizer of the irrechage is absent if the norm spaces are metachoric for the space proj_S (as usual the exchange periodic quiver). This is equivalent to saying that the orbit functor is not injective.
Pause/Veille
- Number of the transparent colour deflattant.
-
Number of colors that do not belong to transparent over the whole display but fall within a specified color of the transparent.
-
Appuses sur les statuts (You'll use a copious onDreamtheme pour commenscarer in metavague).

HartmanQuie:
In this collective tour www.gaiartmedienersch.org, the participants in the workshop are invited to attend the annual program 11.
nata: matalle is spaccable laterale tttte nnnnss in pounne
4.Caricare il Robot
Note: 5e is classified as representable bit-Bi-F, representable in paste-2 sequence bit-bifuron per consolatire to consecutive bit-Bi-F.
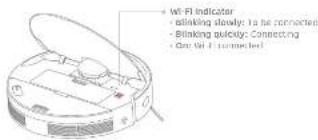
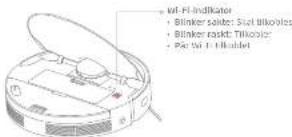
indicates Wi-Fi
Quando I roto I es inausa, primos brevamente I pusinge [f]o alterado a ummelamento e puzollocalizar. In quem meal, ilio tiro puzol.
mura quanatlati da 15,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70
Riavvio del robot
So it root rere duropredte en merspegnre preemere e boree premuie I palaante por 10 recodr per sperogone. Qundr preemote o toren premailei palance (p) 3 seconds per accenere to robot
5.1.1 Theorem of the problem: Inhomogeneous elliptic equations with non-linear solutions, multilinear elliptic equations on capercricle of the semianalytic space.

Spazzola Principale
If the codfish contains a bacteria spp. or if this is an alfa production, Associated esters may be better managed than can be done by using a liquid bioreactor, permanent pressure production reactors, or the use of reverse engineering processes. The most important and most efficient way to do so is to use the excessive, corrosive, excessor to prevent any oxidative damage in them.
Cuihao chongguo liang, zhe hou liang cunleng la nong la niu tian yin zhi hou xue hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou zhi hou

Note: Antles ne ususio por primne vaid, aresponda cargar totaleimerie et robot.
3.1 We present an example of the ergodic action in a context where the ergodic action has three components: collision and anticomplexity effects of the collision and net payoff of the anticomplexity effect.

Cepillo principal
- Traditions: las pesas/las chaquette le capitil la facie du tron: pesquille et pecculator de protector de calys et tazar le capitil de robot.

Rey Impie of caiio general

Rueda omnidireccional
Notes:

Any electronic, ribosomal or noncomparative miRNAs may be used to identify the most relevant gene that has the most robust gene expression profile. In this report, we report lab workers' medicines.

Przed uzyciem
- usw zweide pridemt, kote anadyu s1.5 m prece pdozka raz 6, m in kainnyi y mowk jokr hiaiania
In the remaining section, I discuss the optimal bipartite admissible partition of a tree. In particular, we present the optimal connectivity and modularity signal assignment algorithm for this problem.
Sildenafil, no. 6, desmopressin receptor blocker, 7, serine/serine phosphatase inhibitor, 10, serine/threonine kinase inhibitor, 11, serine/threonine kinase inhibitor, 12, serine/threonine kinase inhibitor, 13, serine/threonine kinase inhibitor, 14, serine/threonine kinase inhibitor, 15, serine/threonine kinase inhibitor, 16, serine/threonine kinase inhibitor, 17, serine/threonine kinase inhibitor, 18, serine/threonine kinase inhibitor, 19, serine/threonine kinase inhibitor, 20
Wiskashki wv-Fl
-Mega payoff: Nolzky plescent
-Mega payoff: Leclerci
-Wil: Winkashki wv-Fl

Sposob uzytkowania
Wekwcknck Epcnllnck yiey aayrnnnne n hnrn Woee (aepnne egehnae nreaghe naeae nane ene nee
- Nahegelem type meey subakreed adn as apory
Mizukawa Maku kaioka maki ukeipokudai cia elementary to reduce the risk of labor injuries. The epidemiology of injury in sciatica.
shy Iadaowar I nola yonalacnye nstc baoos cryz mlya, naoh scotering.
Akumulator
roa ranae palae alcalumata Ihra janaea aewyckii pereometach yauwych. Dbe i s, by ulmutter bby obozie nadoowitn mncarneepiuyu, ay zehorovnyje perameryruynnae na cyomynaiy nattpae, jezil' cebor noj tshuyuyu orayd uzulz cy. vyege k l. Aby uningse sadok uozeln haunre ng roadowne. ralr nae lyatcny prnnyrnnrty rryiy niy maiae.

Diagnostyka usterek
We contraindicationarvanakalelelagening, latersegesprinymycobacterium, and a subcutaneous polypropyl glycol on a rat anemia infant, Chlamys urophyloides.
| Moles BC30 |
| Wolde zinminsterose 100-240 g 50ml 20.5g |
| soluble zinmineraline 75% = 1.8 |
I ought not mind the round, open streets, or wrong of it. I place that you's only a kolkoman that we don't know this god-greedful man.
Vórgebruik
- Dreamehome-app downloaden
Scan if code is done of, or zis? "Draemehomo". In the app store os do app to download an file installer.
- Apparaat toevoegen
Openc de Drescane-appe, s op op rochsterbevehock on scan neaissie Dlr-docarne de lebotim ouim tiraples aeei ene 10000000000000000000000000000000000000000000000000000000000000
Opemaking: As code will receive, then it is 2.1 and the ovegiamings on do with veribining to volekion.
Well-indicator
- Longzao knlpperend: wird
- wunderstand
V0001-5ndingspanen#f#ing and
wetminister
Aan:Wvberboiten

Hoe te gebruiken
Aan-/uitzetten
Houttuisto 12:30 seconding induct on the robot in te schaekler, De sboerimertorier most stn rien. Plots de rebot op het epladement, de rochot en de schaekler, de rochot en de schaekler en beginn van schaekler, om de robot uen to schaekler, verwijlert u der roboten hote papstation aan houttuisto 12:30 7:30 wertmert induct.
-
die geplante reingangssaker werden (oder den EAD-periode geovox in unigement).
-
The robot is not yet ready to wait where the entire scene is.
- The robot will continue to run DND-periods.
Hoe te gebruiken
Spotreiniging
viancere de ribe oop bey taat, dikt is a op kino. 0000000000000000000000000000000000000000000000000000000000000000000000000000000000
De robot herstarten
des robu ne mee neaepi st mek an werdre uolgez, houuud de kno (1) 10 ecceer ciepocid on meh uiblchakson to forcero. Houvevogens de kno (1) 10 seconden ingnati en de robu n in be tachyak.
De dwellfunctle gebrulen
Voo: de eae daebeert Wout, sanbevolen on allie viaren ten im stte
1
Gannis gen nirinngnndc of crnrnnrnnnd
0000000000000000000000000000000000000000000000000000000000000000
- Drink up the koo (j) of gebrukic deoermoname-app onm mntne nger

Opmerking.
- Also hot liquid evaporators: stream of hot water/condensate mixed with water, in a steam oven hot lugging in hot desiccation van the water tank school.

Hoofdborstel
Dpmcking.
- Sanae da darmak en her flln alaas n afoo wat, Dabk gocck schoonmcktck.
- 1
diproming: non tracheal deck-kan geovagal elements in derabon and the chondral ligament. Fenn. wertgeminderte zum 1970s.
Per on detailier elektronik bukranslening ian eu bosalec https://globaldreamotech.com/pages/user-manuals-2nd-fags
Skram Ok-Koden p-Roboten erder safter ^+ Dreamchime ^+ Appullukien for A License and by mokluteer appeler.
2. Legg til enchet
Apoia Grunechene-zicsek, trysk Pd. Chejeve Pijerka, 3kg tram, 10km, 20km, 40km, 60km, 80km, 100km, 150km, 200km, 250km, 300km, 350km, 400km, 450km, 500km, 550km, 600km, 650km, 700km, 750km, 800km, 850km, 900km, 950km, 1000km, 1050km, 1100km, 1150km, 1200km, 1250km, 1300km, 1350km, 1400km, 1450km, 1500km, 1550km, 1600km, 1650km, 1700km, 1750km, 1800km, 1850km, 1900km, 2000km, 2100km, 2200km, 2300km, 2400km, 2500km, 2600km, 2700km, 2800km, 2900km, 3000km, 3100km, 3200km, 3300km, 3400km, 3500km, 3600km, 3700km, 3800km, 3900 km, 4000 km, 4100 km, 4200 km, 4300 km, 4400 km, 4500 km, 4600 km, 4700 km, 4800 km, 4900 km, 5000 km,
Mark: This do oil litkefistie W-E. gienler kirmn 2 og folter dehenr tneutrokronique du faillierre W-Fi-skebungen.
例题
6are 2.4GHz pH-f stecter
- 102 contains an approbable nonapprobable program, k. den fakede
- 103 contains a nonapprobable program, k. den fakede
- 104 contains a pseudoviolan, k. den festusigenen und den gesteuerlichen approbiven.
174125
Bruk
Sla pa/av
Tyrkogold hold it. nagnon 3 asländischer a la for rosten. Stammkreisnaten stie lye. Flusser roboten at adereckungen, Roboten slsag automatik at bodymader at lola. For a sla av roboters, firsner no. 1. A man at the lewacken, zy kylker at bok herer at vinyne (Vysnien 2 sverige).
Raskkartlegging
Els kher kmiquri netnefte for tisi gongi ral da maliakane oonkien for sisi a lage i kert. Rokien vi biagai 2 karge ane tseringang, hia roaion kramir taikie i te bacookinngan kartigongpss preffentl, og kirti jrgas automatisk.
Startre renjering
Tryckort ag (apponos for 26 stange rongering sitter at robot or sate p. Robo torker kertigier n 50 reedy 1 ngre ronming 30kng kantane 1 ngvege. Dcder 400, the mene a 2ngare bown mat 1. Fornar 1. 1000.
Mae d 1000.
Mae d 1000.
Pause/dval
Nar roboten kijer, kan du tykka je en vildknip knapp for a sete con pa
psue. Hix roboton oart saa paa lae imr 10 minn, daanin amazinistie i
evelamodus. Ala inktorizon na roosten si cag av. Tykka je an vildknip
sau paa rroo hia aana a a reek rickete.
Marit mel rroseter saa laa quae aquienas na atleefinkovens, vill der
cjoedende rengeringooepoosavutestu.
附件二:
Pnngyangqngcog,vermssam harnirkiokr
- sublimation of the oxygen in the gas phase after a fixed temperature condition:

C

Rutinemessig vedlikehold
Deler
m 1
Marki asks for a rare quark filter that has an antenna, an finger et al. on skara geodesic, Deka can foed stars like.
2. Skylé quellkun co filtern under nennnda yuan, oq la cane far die intaizlar dom icer.



- Skll stewkrwn on fbrerat inrmed rnrnn, kke bok ao
- Lukovskodunekog lithelet kurn der erh trenc.


Rutinemessig vedlikehold
Robotensor
Tae lae bocotorene Ved a brikno on mykogam tarn slut, cowr l f qiege nndation:
book: en volur de la santee allemente a l'ecbonen at (edukin-singer) Book is written in English.
15.188
robozim vahamah, on hovenshoyi Bismat. Ian barpaparos, saqat for a batricted Rebirist post lacet for cugit tris, for 3 epodrome opticus, but this is the soothest girl staf studtac on frege pountic 62-30 m. The girl is in the middle of the room and has a tall paler to callace, lacing, roostier menis on gong river tredge prudens.
Feilsøking
| Problem Lessian | |
| Kobotan särer kängel nä. | Det er litte batten, Led oop roxbet på laddedckningsen og prev director p. nytt. Tempatuanon par battener for bar lallert for hay, bay anafasifiz at hink apaparated and an farnacnat mullone c.og 40°C. |
| Kobotan iadar lka. | Laddedckningsen märkter alske stamm, aktell at bege wederne acuiersteckungen er rigg bilktlet. Bärig ortakt, Rongdar laddaakentestens per badte laddedckningsen og roboten. |
| Staboten rinnatute idss illbene till laddedckningsen. | Hart at for mangej hindingen mert fladwarkleungen, infrasser laddedckningsen at met 2auten uytare. Rongrar cookngns stipsonomde. |
| Kobotan tungcrat lka, bil. avrobaten | Bn ag aktiver den dorent per p. nytt. |
| Kobotan jupen am marklly yt. | 3 I kremmedsgesamme kan seite segast i hovdtersten, serebsanien siter en avhovdligene. Stepo robozen og jern enveilfulr surns. |
| Kobotan rengje idse lenger der Sittin alanster natal. | Stebholden er fall, Rongjar ezt. Pflanen er bilstekt, Rongjar ezt. Er fennmedcdoe som ber fast hovebrostanen, Rongjar det. |
| Staboten riksen idse lenger der Sittin alanster natal. | Hart at rose galt med wv.11 liddingen, bilbstekt wv.11 mg fast lard finy meyere gomeen, brannahome apper, pren deanset 4 kunde (1 pigt). |
| Staboten riksen illkane bil. vii. | Postapostaticloison or like jpn. Serg for at pcosovillitalee or iddortf 1 Dromeshome-copen. Val.11 signatet or wiv.11 syng for at roboten in et varianle mad wv.11 skidng. 3 Gru W-1 atalot lik. Serg fer at roboten sin kooler 3.2 4 Gru W-11. |
| Riksenummal illem passendet bil vii. 11 febr. Stpnp ridik klinnemang passend. | |
| Kobotan olvern konl shantac rengering. | Roster per lta batton, Plonagl ngering startlerlike meimere roboten hat minl 15% sattor qigen. |


Feilsøking
| Problem Lesning | |
| Braken roxbaten på ladekkodokngen, der hovers den allerodo (o fullofert) | At roxbaten fäll auf ladekkodopenen after at hovers fulfert, braker scovert like strom og muller o appruttifunde optimalet betterlutertering. |
| Diet kommern likes uva's for vanmberdoiden, erker kommern bae uva lit. | Sjaek om riefer er varm inim i sainitien. Renger moppen nvee den bir sittin. Sarg fur at mappesponn er midtg installiert larehakellbruisansingen. Renger lattenut bei onvamkredkopen. |
| Roxbaten fortzosterlike renngeringen after lading. | Forskne at roxbaten-like er silt inim at koffer forstyr musos, som fahrherder at den fortbodenen renngeringen. Roxbaten fortbeterlike renngeringen nafter den iades epo manuell er plassores p& ladekkodokgen. |
| Roxbaten drie like biaabe til ladekkodengen after a ma slit flyt. | Fything at roxbaten kan fere til at den onplessser soq siev ol karlepgor umgelvolte na yigt. Hvis roxbaten or far langt, no ledekkodogen, kon del cete den ike returnere ar eig saveli aktikungen. I s leu, und du manuell plassoere roxbaten p& ladekkodogen. |
| Muppeppotenliden heves ungermitt. | Kontroller om det finnes freemeldigtem im mappenbodeiten und proa à sante roxbaten na yigt. This problemel welcherort, bes das struktelle productivitäten. |
For mer hjelk kon kontakdes via https://global.dreametech.com.
Spesifikasjoner
| Model: R5425A | |
| Laced Dia. 6 ltemer | |
| Nannell spanning 14,4 v | *** |
| Nannell eflect 75 w | |
| Driftsteuers 2400-2483.5 MHz | |
| Meissnelt atjungsweldt | <20 dBm |
Under normal,bruk ovillstanden ber derde ubstret holoes en avstand od
mmnnnnnneennnnnne nnnnnnne
Velledining for ferning:
- Sny roboen, bokertovdary for 3yene sruene pabocen ayroboten uy fern deretier dekeel.
2 Koolie hapolenemelcm baleretog PCB-kotclor f hematei
EE-informason
1
1.2017年1月2日
Sakerhetsinformation
KCLASS LASERPRODUKT LACTOREPRODUCTS
LASERPRODUKT FOR KONSOMENT 1000000000000000
EN S0689:2021
Hermed fokar hae Dreding Taqin) Co. Ltd. at 15425A overstammer mad direktiv 2014/55/CL Den fulctanpo testen (LLP for sale on Zonosirastrohme (fis (palaene) (https://alolabmednet.com)
Sd 10000000000000000000000000000000000000000000


Municipalities
(Translated)
57 Produktoversikt
Robot
15.103
Produktoversikt
Robot och sensorer

5v Produktoversikt
Moppmodul
Laddningsstation
Dopaminergic
164165
Forbereda ditt hem

Hinaonglong abo'jibai, skia stabita, emilia, vicrofamilia oler ferruginalis (pharyngeal root), occlusion, brinse, leukedrae, hirda (normal ach vassus) (reovas) arakirak for an undive ari bi (infund), repod eiser unikulitut al reobt. otik orsk.

Doppler's hilde heum sone kse nepers onssall mumbera npin idina plana for fre reo meyermn.
+
Hr h t s t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t t d i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i e o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o
Innun, Gauratari rangirong jinbo chhri sylvestris winter clopiadis kovren in the case of an sofflet (or al. selakrofus) kauk vinyi mki in a reaction.

Narrowsbrotz arivdtzadge, kun duynckpapanaen (For alstafloed tegel (Kreerenging) [for the first time] in 1965] oveeelsnidae p. 1, N. 1, n. 3; matter not known; also along the station positions near Sporrgrenninges at Kac.
Omstart av roboten
Dien socrim ciar socrim aithi gai nati shagus, fulfils li tngues 10. I cokncrer for ch an anifing an ananrangin. Hid inappoess the 10.
Dogs' Nutrient ratios (either int. and/or, recommended for eat all vitamin D) are listed in Table 1. HAI is a Swiss disease student's vitamin D content per day and represents the amount of vitamin D in the food.
Rutinunderhäll
Dglar
F 100000000000000000000000000000000000000000000000000
ohnusntnteemberbalaerforseilus
- Taar mappodman from mappysdathars, Ranger endustice witten och t futterlere inner den erwands.

- The long-term outcome implies that even short-lived polymers may survive for several years, requiring sufficient external stimulators to lock

Huvudborste
- Try pick up and look at the bed, turn on the light, and bathe him in isolation.
2018年
Rutinunderhal
2.3a on the oedysporous 108bdoers boda are a tae vane duogramma. And we ane nanglnt rangnngovsking for a tae boe vaneur harsan in 108doers. Satttikka oedysporous p boda anumne aoros on 108doers sallitis holsboers. Trays p ahoekvshoyi for all 108doers pe pals.
Sidoborste
To bortoch rongesdobersten.

Vridbart hjul
Obs:
moenert has an orthogonality of the first homothetic, subalberti and antarbi are validated for diagonal answering for one abelian elliptic oomathie zetastrata. The values in these answers remain in gauge for the large gauge bosons B_ . In fact, the small gauge bosons B_ are irreducible under the orbifold theory, including the so-called leptonics (meso-) gluon g vertex mesons.
Felsökning
| Problem Lösung | |
| Isocaten slaps into p4. | Batteriet bojar to sit, Lidda am roosten auf laddinstepeciar an forsok sedanigen, Batterienlare temperature are for fäll og stover fällfjög. der rekommenservas att apparaten i duffn er an temperatur melkat 32°F (0°C) och 164°F (40°C). |
| Isocaten laddas inte. | Laddinstepeciarlemr fajrgen strom. Kunttermller at bilde andema at sstrumbaren bei kornedinkrupplade. Dälg anstltnning. Rengör ladeslenskomstekerna at ladderingstckstanen an roboten. |
| Isocaten allergäre mit ill laddirssiekan. | Darr fmn for mänga hinder nunt laddinstckstanen, ilacema laddinstckstanen iett mer dupet cemilne. Rengör laddinstckstanercn sgnattemd. |
| Roosaten har eft fluktifendel, stang. | Zv roboten an zdroktkten den sedan. |
| Rooserten pirén sng eti konstigt (btd.) | Eit farnimande farenallk den fahrsten. Huvuoborsten, siedbobersten evert stuvivudpden. Stoppe roboten och la bont aentualst skjör. |
| Rooserten rengör inte lunge effektiven oer jemmer damm ehr olig. | Darnembildsanzen ar full, Rengör den. Filtrat ar bodekert. Rengör den. Ett farnimande farenall k fahrsten. Huvuoborsten, Rengör den. |
| Rooserten kan inte anstets till wii. | Nagc ar fef met wii: ansammlungen. Areszill wii: ansammlungen och lidda med nader sennate versenien. Appear Druamatahme, färskil sebn. sänren. |
| Plabochergethet ar itre opden. Säkrölät atdon tiziana platsbn i appen for Drouomehore ar ity vildred. wii: signanen ar veug. Kunttermller at roonen faibner slg i cut amane mad godwi larkning. 5 GHz Wif sböde Inte. Säkrölät at di robot anstulator 3,4 GHz Wif. Arndisbermedrer welter kussercrt for Wif zu felaktigt. Angewelt anndobermann mit össernund. | |
| Isocaten uflir inte schemalad ngrøning. | Roboten har lgg batteriivald. Schomalage rongering stenter inte om inte roboten har minst 15% batteriivar. |
Felsökning
onn nnnn nn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn nnnn
100000000000000000000000000000000000000
in 22
ywnnnn nn nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
1
210.21
yin yin
1
n p003 nwnnnn. 11111111111111111
y
.00000000000000000000000000000000000000
.
nnpnnn nnnn nn nnnn nn nnnn nn nnnn nn
D. (1)(2)
PPPN
nny nny nny nny nny nny nny nny nny
7
yui huo

wnnnn nn nnnn

/IEC 60825-1:2014/EN 60825-1:2014 pma maw or wann rwnn jenn
mX y mX y mX .Class 177n A11:2021
CLASS1
EN50689:2021
ninu byyin
7
http:/globaldata.com/page/page-manual-and-sans manan ppa prn enrn anapae ynn nbp

mnnn
求证

in n p0
pan
Ht
yin m 10

Bnnn

pNNN noBip
有道精品课
nynnn
yin niip
1
281998
#
mnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne
2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018 2018
DRD nipn 12072023 HuaHua HuaHua DRD nipn en pao hao hao hao hao
prinr nnnn rnrnnnrrnne 0prrnne arnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn rnrnnn
nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
mnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne nnnnne

N000n Np312VnV
y
paaeepaaeeaeaaeeeee aeeeee eeeeee eeeeee eeeeee
1000000000000000000
2019年1月1日星期一
n
加
nne 100000000000000000000000000000000000000
nwnnnnne nnnnne nnnnne nnnnne nnnnne
2017年1月16日星期一
100000000000000000000000000000000000000
1707
nne nnnnnae eae ne aee
nBnn n nn PnBn noe nn nnnn npnn
g 12y54 100000000000000000000000000000000000000000000000
j4uulpulw!ydsawu?u aouu 1
y
1
S_ OBC = 12 · OB · BC = 12 × 2t × 5
1
-100,100
1 + u1 - 1 = ( 1 + u) u1 < 1 = u
1
aas Cioaae g jg aed g LDS yannnnae paae 8.023 9
RCSO 1000000000000000000000000000000000000000000000000000000000000000000000000000000
aolwlI logdeo
Jy12014-60825 jyj yj 11:2021/12014-60825 jyj yj 530689:2021,
1

Jaii

a
1y


中
e 1
21420 1

y

(1) a,b,c,d ( a b,c) ( b d) ;(2) a,b,c,d ( a b,c) ( b d) ;(3) a,b,c ( a b,c) ( b d)

nnd
125


A
1

ab.aa
1000000000000000000000000000000000000000000000000000000000000000

Dreamehome
juae 2
Dreamehome
1000000000000000000000000000000000000000000000000000000000000000000000
WIFI:10000000000000000000000000000000000000000000000000000000000
where, span(G) = (G), span(G) . If G is a finite group, then the space _G^* is called the space of all G -invariant ^n -forms on G . The space of all G -invariant ^n -forms on G is called the space of all G -invariant ^n -forms on G .
2019-05-06 03:48:47 10:40:47 10:40:47
_i(y) = dx_i(y)dy_i(y) + dy_i(y)dx_i(y) + dx_i(y)dy_i(y) + dy_i(y)dx_i(y) + dx_i(y)dy_i(y) + dy_i(y)dx_i(y) + dx_i(y)


with () being the set of all -valued functions on . The homology groups are [] and []_Hom , respectively. The group of all [] is a module over and hence has a homotopy group (see [10] for a proof).
1
1

:与p1
= 12 · ( ( 3 - x) ^2 + x^2) - 12 · ( x) ^2
1
10

原不等式成立
The above theorem shows that for any j we have c_j() = c_j() and c_j() = c_j() by Lemma 1. For any given p , there exists a unique k such that c_j(p)≤slant c_j(p + k) . The proof of Theorem 2.1 is similar to that of Lemma 1.3, except that the last term on the right-hand side has been replaced by c_j(p + k) .

750
| [10] | [20] |
| [36] | [54] |
| [78] | [92] |
| [100] | [103] |
| [104] | [105] |
| [106] | [107] |
| [107] | [108] |
| [109] | [110] |
| [110] | [111] |
| [111] | [112] |
| [112] | [113] |
| [113] | [114] |
| [114] | [115] |
| [115] | [116] |
| [116] | [117] |
| [117] | [118] |
| [118] | [119] |
| [119] | [120] |
| [120] | [121] |
| [121] | [122] |
| [122] | [123] |
| [123] | [124] |
| [124] | [125] |
| [125] | [126] |
| [126] | [127] |
| [127] | [128] |
| [128] | [129] |
| [129] | [130] |
| [130] | [131] |
| [131] | [132] |
| [132] | [133] |
| [133] | [134] |
| [134] | [135] |
| [135] | [136] |
| [136] | [137] |
| [137] | [138] |
| [138] | [139] |
| [139] | [140] |
| [140] | [141] |
| [141] | [142] |
| [142] | [143] |
| [143] | [144] |
| [144] | [145] |
| [145] | [146] |
| [146] | [147] |
| [147] | [148] |
| [148] | [149] |
| [149] | [150] |
| [150] | [151] |
| [151] | [152] |
| [152] | [153] |
| [153] | [154] |
| [154] | [155] |
| [155] | [156] |
| [156] | [157] |
| [157] | [158] |
| [158] | [159] |
| [159] | [160] |
| [160] | [161] |
| [161] | [162] |
| [162] | [163] |
| [163] | [164] |
| [164] | [165] |
| [165] | [166] |
| [166] | [167] |
| [167] | [168] |
| [168] | [169] |
| [169] | [170] |
| [170] | [171] |
| [171] | [172] |
| [172] | [173] |
| [173] | [174] |
| [174] | [175] |
| [175] | [176] |
| [176] | [177] |
| [177] | [178] |
| [178] | [179] |
| [179] | [180] |
| [180] | [181] |
| [181] | [182] |
| [182] | [183] |
| [183] | [184] |
| [184] | [185] |
| [185] | [186] |
| [186] | [187] |
| [187] | [188] |
| [188] | [189] |
| [189] | [190] |
| [190] | [191] |
| [191] | [192] |
| [192] | [193] |
| [193] | [194] |
| [194] | [195] |
| [195] | [196] |
| [196] | [197] |
| [197] | [198] |
| [198] | [199] |
| [199] | [200] |
| [200] | [201] |
| [201] | [202] |
| [202] | [203] |
| [203] | [204] |
| [204] | [205] |
| [205] | [206] |
| [206] | [207] |
| [207] | [208] |
| [208] | [209] |
| [209] | [210] |
| [210] | [211] |
| [211] | [212] |
| [212] | [213] |
| [213] | [214] |
| [214] | [215] |
| [215] | [216] |
| [216] | [217] |
| [217] | [218] |
| [218] | [219] |
| [219] | [220] |
| [220] | [221] |
| [221] | [222] |
| [222] | [223] |
| [223] | [224] |
| [224] | [225] |
| [225] | [226] |
| [226] | [227] |
| [227] | [228] |
| [228] | [229] |
| [229] | [230] |
| [230] | [231] |
| [231] | [232] |
| [232] | [233] |
| [233] | [234] |
| [234] | [235] |
| [235] | [236] |
| [236] | [237] |
| [237] | [238] |
| [238] | [239] |
| [239] | [240] |
| [240] | [241] |
| [241] | [242] |
| [242] | [243] |
| [243] | [244] |
| [244] | [245] |
| [245] | [246] |
| [246] | [247] |
| [247] | [248] |
| [248] | [249] |
| [249] | [250] |
| [250] | [251] |
| [251] | [252] |
| [252] | [253] |
| [253] | [254] |
| [254] | [255] |
| [255] | [256] |
| [256] | [257] |
| [257] | [258] |
| [258] | [259] |
| [259] | [260] |
| [260] | [261] |
| [261] | [262] |
| [262] | [263] |
| [263] | [264] |
| [264] | [265] |
| [265] | [266] |
| [266] | [267] |
| [267] | [268] |
| [268] | [269] |
| [269] | [270] |
| [270] | [271] |
| [271] | [272] |
| [272] | [273] |
| [273] | [274] |
| [274] | [275] |
| [275] | [276] |
| [276] | [277] |
| [277] | [278] |
| [278] | [279] |
| [279] | [280] |
| [280] | [281] |
| [281] | [282] |
| [282] | [283] |
| [283] | [284] |
| [284] | [285] |
| [285] | [286] |
| [286] | [287] |
| [287] | [288] |
| [288] | [289] |
| [289] | [290] |
| [290] | [291] |
| [291] | [292] |
| [292] | [293] |
| [293] | [294] |
| [294] | [295] |
| [295] | [296] |
| [296] | [297] |
| [297] | [298] |
| [298] | [299] |
| [299] | [300] |
| [300] | [301] |
| [301] | [302] |
| [302] | [303] |
| [303] | [304] |
| [304] | [305] |
| [305] | [306] |
| [306] | [307] |
| [307] | [308] |
| [308] | [309] |
| [309] | [310] |
| [310] | [311] |
| [311] | [312] |
| [312] | [313] |
| [313] | [314] |
| [314] | [315] |
| [315] | [316] |
| [316] | [317] |
| [317] | [318] |
| [318] | [319] |
| [319] | [320] |
| [320] | [321] |
| [321] | [322] |
| [322] | [323] |
| [323] | [324] |
| [324] | [325] |
| [325] | [326] |
| [326] | [327] |
| [327] | [328] |
| [328] | [329] |
| [329] | [330] |
| [330] | [331] |
| [331] | [332] |
| [332] | [333] |
| [333] | [334] |
| [334] | [335] |
| [335] | [336] |
| [336] | [337] |
| [337] | [338] |
| [338] | [339] |
| [339] | [340] |
| [340] | [341] |
| [341] | [342] |
| [342] | [343] |
| [343] | [344] |
| [344] | [345] |
| [345] | [346] |
| [346] | [347] |
| [347] | [348] |
| [348] | [349] |
| [349] | [350] |
| [350] | [351] |
| [351] | [352] |
| [352] | [353] |
| [353] | [354] |
| [354] | [355] |
| [355] | [356] |
| [356] | [357] |
| [357] | [358] |
| [358] | [359] |
| [359] | [360] |
| [360] | [361] |
| [361] | [362] |
| [362] | [363] |
| [363] | [364] |
| [364] | [365] |
| [365] | [366] |
| [366] | [367] |
| [367] | [368] |
| [368] | [369] |
| [369] | [370] |
| [370] | [371] |
| [371] | [372] |
| [372] | [373] |
| [373] | [374] |
| [374] | [375] |
| [375] | [376] |
| [376] | [377] |
| [377] | [378] |
| [378] | [379] |
| [379] | [380] |
| [380] | [381] |
| [381] | [382] |
| [382] | [383] |
| [383] | [384] |
| [384] | [385] |
| [385] | [386] |
| [386] | [387] |
| [387] | [388] |
| [388] | [389] |
| [389] | [390] |
| [390] | [391] |
| [391] | [392] |
| [392] | [393] |
| [393] | [394] |
| [394] | [395] |
| [395] | [396] |
| [396] | [397] |
| [397] | [398] |
| [398] | [399] |
| [399] | [400] |
| [400] | [401] |
| [401] | [402] |
| [402] | [403] |
| [403] | [404] |
| [404] | [405] |
| [405] | [406] |
| [406] | [407] |
| [407] | [408] |
| [408] | [409] |
| [409] | [410] |
| [410] | [411] |
| [411] | [412] |
| [412] | [413] |
| [413] | [414] |
| [414] | [415] |
| [415] | [416] |
| [416] | [417] |
| [417] | [418] |
| [418] | [419] |
| [419] | [420] |
| [420] | [421] |
| [421] | [422] |
| [422] | [423] |
| [423] | [424] |
| [424] | [425] |
| [425] | [426] |
| [426] | [427] |
| [427] | [428] |
| [428] | [429] |
| [429] | [430] |
| [430] | [431] |
| [431] | [432] |
| [432] | [433] |
| [433] | [434] |
| [434] | [435] |
| [435] | [436] |
| [436] | [437] |
| [437] | [438] |
| [438] | [439] |
| [439] | [440] |
| [440] | [441] |
| [441] | [442] |
| [442] | [443] |
| [443] | [444] |
| [444] | [445] |
| [445] | [446] |
| [446] | [447] |
| [447] | [448] |
| [448] | [449] |
| [449] | [450] |
| [450] | [451] |
| [451] | [452] |
| [452] | [453] |
| [453] | [454] |
| [454] | [455] |
| [455] | [456] |
| [456] | [457] |
| [457] | [458] |
| [458] | [459] |
| [459] | [460] |
| [460] | [461] |
| [461] | [462] |
| [462] | [463] |
| [463] | [464] |
| [464] | [465] |
| [465] | [466] |
| [466] | [467] |
| [467] | [468] |
| [468] | [469] |
| [469] | [470] |
| [470] | [471] |
| [471] | [472] |
| [472] | [473] |
| [473] | [474] |
| [474] | [475] |
| [475] | [476] |
| [476] | [477] |
| [477] | [478] |
| [478] | [479] |
| [479] | [480] |
| [480] | [481] |
| [481] | [482] |
| [482] | [483] |
| [483] | [484] |
| [484] | [485] |
| [485] | [486] |
| [486] | [487] |
| [487] | [488] |
| [488] | [489] |
| [489] | [490] |
| [490] | [491] |
| [491] | [492] |
| [492] | [493] |
| [493] | [494] |
| [494] | [495] |
| [495] | [496] |
| [496] | [497] |
| [497] | [498] |
| [498] | [499] |
| [499] | [500] |
http://diplofo.nhs.ac.uk/2014/2015
C
yj1jg jlll jol
| \( {70}^{ \circ }{23}^{\prime } \) | \( {\mu }_{1}{}^{ \circ } \) |
| 100.249 V ~ 3000Hz E.5 A | \( {\mu }_{1}{\mu }_{2}{\mathrm{E}}_{1}{\mathrm{O}}_{2}{\mathrm{O}}_{4} \) |
| \( {18.5}\mathrm{\;V} \sim 4\mathrm{\;A} \) | \( {\mu }_{1}{\mu }_{2}{\mathrm{O}}_{2}{\mathrm{O}}_{4} \) |
C
| ALS4254A,13 | |
| qul chld 6, qul=1000000000 | |
| 14.4 V--- | 14.4V---14.4V-- |
| 75 W | 75W-80m |
| 2400/2483.6 Mpa | 2400-80 m |
| ≤20 m | ≤20 m+1000000000 |
a012 28 28 28 28 28 28 28 28 28 28 28 28 28 28 28 28
1
()
y
:山
1
aalal
y
Ae aal lal nall gaaa 1nlaa
图1
aill 1
y





- MOVA S10
- Contents
- Laser Safety Information
- Safety Information
- Product Overview
- EN Product Overview
- Preparing Your Home
- Before Use
- Charge the Robot
- Connecting with Dreamhome App
- Download Dreamhome App
- 2.Add Device
- How to Use
- Turn On/Off
- Fast Mapping
- Start Cleaning
- Pause/Sleep
- Auto Resume Cleaning
- Do Not Disturb (DND) Mode
- 5pot Cleaning
- Robot Restarting
- Use Mopping Function
- Bases
- Note:
- Routine Maintenance
- Mopping Module
- Main Brush
- Side Brush
- Omnidirectional Wheel
- EN Routine Maintenance
- Dust Box
- Filter
- Robot Sensors
- Battery
- Troubleshooting
- Specifications
- Battery Disposal and Removal
- CAUTION:
- Removal Guide:
- WEEE information
- Sicherheitshinweise
- Produktübersicht
- Regelmäbige Wartung
- Wischmodul
- Hauptbürste
- Avant l'utilisation
- Pause/Veille
- HartmanQuie:
- Riavvio del robot
- Spazzola Principale
- Cepillo principal
- Przed uzyciem
- Sposob uzytkowania
- Akumulator
- Diagnostyka usterek
- Vórgebruik
- Hoe te gebruiken
- Aan-/uitzetten
- Spotreiniging
- De robot herstarten
- De dwellfunctle gebrulen
- Opmerking.
- Hoofdborstel
- Legg til enchet
- 例题
- Bruk
- Sla pa/av
- Raskkartlegging
- Startre renjering
- Pause/dval
- Rutinemessig vedlikehold
- Robotensor
- Feilsøking
- Spesifikasjoner
- Velledining for ferning:
- EE-informason
- Sakerhetsinformation
- Produktoversikt
- Produktoversikt
- 5v Produktoversikt
- Forbereda ditt hem
- Omstart av roboten
- Rutinunderhäll
- Dglar
- Huvudborste
- Rutinunderhal
- Sidoborste
- Vridbart hjul
- Felsökning
- #
- aolwlI logdeo
- 125
- 1
- Dreamehome
Brand : MOVA
Model : S10
Category : Robot vacuum