
iMow MI 632 P - Rasenmäher VIKING - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts iMow MI 632 P VIKING als PDF.

| Produkttyp | Rasenmähroboter |
| Marke | Viking |
| Modell | iMow MI 632 P |
| Schnitthöhe | 20 mm bis 60 mm, einstellbar auf 8 Stufen |
| Maximale Mähfläche | 632 m² |
| Mitgelieferter Begrenzungsdraht | 2 Rollen à 150 m (insgesamt 300 m) |
| Akku | Lithium-Ionen, integriert |
| Stromversorgung | Netzteil (100-240 V AC, Ausgang 30 V DC) |
| Hauptfunktionen | Automatisches Mähen, manuelles Mähen, Mulchen, Regensensor (5 Stufen), Randmähen, Wochenprogrammierung, manuelle Fernsteuerung |
| Sicherheit | STOP-Taste, Geräteverriegelung, Schutzabdeckungen, Hindernissensor, Aufhebeschutz, Neigungssensor (max. 19,3°), Diebstahlsicherung mit PIN-Code |
| Wartung und Reinigung | Regelmäßige Reinigung des Mähdecks und der Räder, Überprüfung und Austausch des Messers (alle 200 Betriebsstunden), jährliche Wartung durch autorisierten Händler |
| Ersatzteile und Reparierbarkeit | Messer, Akku, Ladekontakte, Räder, Heringe, Drahtverbinder erhältlich bei VIKING-Fachhändlern |
| Allgemeine Informationen | Verlegung des Begrenzungsdrahts erforderlich; Installation mit Assistent; automatischer oder manueller Betrieb; grafisches Display und abnehmbare Bedienkonsole |
Häufig gestellte Fragen - iMow MI 632 P VIKING
Benutzerfragen zu iMow MI 632 P VIKING
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Rasenmäher kostenlos im PDF-Format! Finden Sie Ihr Handbuch iMow MI 632 P - VIKING und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. iMow MI 632 P von der Marke VIKING.
BEDIENUNGSANLEITUNG iMow MI 632 P VIKING
Verehrte Kundin, lieber Kunde,
vielen Dank, dass Sie sich für ein Qualitätserzeugnis der Firma VKING entschieden haben.
Dieses Produkt wurde nach modernsten Fertigungsverfahren und umfangreichen Qualitätssicherungsmaßnahmen hergestellt, Denn erst dann, wenn Sie mit ihrem Gerät zufrieden sind, ist unser Ziel erreicht.
Wenn Sie Fragen zu Ihr Gemar haben,
wenden Sie sichitte an ihren Handler
oder direkt an unsere
Vertriebsgesellschaft.
Viel Freude mit Ihrem VKING Gerät wünscht Ohnen

Dr. Peter Pretzsch
Geschäftsführung
1. Inhaltsverzeichnis
Zu dieser Gebrauchsanleitung 4
Allgemein 4
Ländervarianten 4
Anleitung zum Lesen der
Gebrauchsanleitung 5
Gerätebeschreibung 6
Robotermaher 6
Dockingstation 7
Steuerkonsole 8
Wie der Robotermaher arbeitet 9
Funktionsprinzip 9
Manuelles Mahlen 10
Sicherheitseinrichtungen 10
STOP-Taste 10
Gerätesperre 10
Schutzabdeckungen 11
Zweihandbedienung 11
Stoßsensor 11
Anhebeschutz 11
Neigungssensor 11
Displaybeleuchtung 11
Diebstahlschutz 11
Zu Ihrer Sicherheit 11
Allgemein 11
Bekleidung und Ausrüstung 12
Warning - Gefahren durch elektrischen Strom 13
Akku 13
Transport des Gerats 14
Vor der Inbetriebnahme 14
Programmierung 15
Während des Betriebs 15
Wartung und Reparaturen 17
Lagerung bei längeren
Betriebspausen
Entsorgung 18
Symbolsbeschreibung 18
Lieferumfang 19
Erstinstallation 20
Hinweise zur ersten Installation 20
Akku einbauen 20
Schnitthöhe einstellen 21
Sprache, Datum, Uhrzeit einstellen 21
Dockingstation installieren 21
Begrenzungsdraht verlegen 24
Begrenzungsdraht anschlieben 25
Robotermaher und Dockingstation koppeln 28
Installation prufen 28
Robotermaher programmieren 29
Erstinstallation abschreiben 30
Menu 31
Bedienhinweise 31
Statusanzeige 32
Hauptmenü 33
Befehle 33
Mahplan 34
Tagesplan 34
Wochenplan 35
Information 35
Einstellungen 36 iMow - Geräteinstellungen 36
Regensensor einstellen 37
Statusanzeige einstellen 37
Installation 37
Startpunkte einstellen 38
Sicherheit 38
Service 39
Begrenzungsdraht 40
Verlegung des Begrenzungsdrahts planen 40
Skizze der Mahlfläche anfertigen 40
iRuler 41
Engstellen 42
Begrenzungsdraht verlegen 42
Begrenzungsdraht anschließen 42
Verbindungsstrecken installieren 42
Sperrflächen installieren 43
Nebenflächen 43
Gassen 44
Drahtreserven installieren 45
Drahtverbinder verwenden 45
Dockingstation 46
Bedienelemente der Dockingstation 46
Hinweise zum Mahlen 46
Allgemein 46
Mulchen 46
Aktivzeiten 47
Mähdauer 47
Manuelles Mahlen 47
Gerat in Betriebnehmen 47
Vorbereitung 47
Steuerkonsole entnehmen und einsetzen 47
Programmierung anpassen 48
Mahren mit Automatik 49
Mahren unabhängig von Aktivzeiten 49
Manuelles Mahen 49
Robotermahereindocken 50
Akku aufladen 50
Wartung 51
Wartungsplan 51
Gerat reinigen 51
Verschleibgrenzen des
Mahmessers prufen 52
Mahmesser aus- und einbauen 52
Mahmesser schärfen 53
Drahtbruchsuchen 53
Netzteilstecker 54
Aufbewahrung und Winterpause 55
Übliche Ersatzteile 55
Zubehör 56
Verschleib minimieren und Schaden vermeiden
Umweltschutz 56
Akku ausbauen 57
Transport 57
Gerat anheben oder tragen 57
Gerat verzurren 58
CE-Konformitätserklung des
Herstellers 58
Technische Daten 58
Meldungen 59
Fehlersuche 64
Serviceplan 66
Übergabebestätigung 66
Servicebestätigung 66
Installationsbeispiele 67
2. Zu dieser Gebrauchsanleitung
2.1 Allgemein
These Gebrauchsanleitung ist eine Originalbetriebsanleitung des Herstellers im Sinne der EG-Richtlinie 2006/42/EC.
VIKING arbeitet ständig an der Weiterentwicklung seiner Produktpalette; Änderungen des Lieferumfanges in Form, Technik und Ausstattung müssen wir uns deshalb vorbehalten.
Aus den Angaben und Abbildungen theses Heftes konnen aus thisem Grund keine Ansprüche abgeleitet werden.
These Gebrauchsanleitung ist urheberrechtlich geschützt. Alle Rechte bleiben vorbehalten, besonders das Recht der Vervielfaltigung, Übersetzung und der Verarbeitung mit elektronischen Systemen.
2.2 Ländervarianten
VIKING liefert abhängig vom Auslieferungsland Geräte mit entsprechenden Steckern und Schaltern aus.
In den Abbildungen sind Geräte mit Eurosteckern dargestellt, der Netzanschluss von Geräten mit anderen Steckerausführungen erfolgt auf gleichartige Weise.
2.3 Anleitung zum Lesen der Gebrauchsanleitung
Bilder und Texte beschreiben bestimmte Handhabungsschritte.
Samtliche Bildsymbole, die auf dem Gerät angebracht sind, werden in dieser Gebrauchsanleitung erklär.
Blickrichtung:
Blickrichtung bei Verwendung „links" und „rechts" in der Gebrauchsanleitung: Der Benutzer stehen hinter dem Gerät undblick in Fahrrichtung vorwärts.
Kapitelverweis:
Auf entsprechende Kapitel und Unterkapitel für weitere Erklärungen wird mit einem Pfeil verwiesen. Das folgende Beispiel zeigt einen Verweis auf ein Kapitel: (2.1)
Kennzeichnung von Textabschnitten:
Die beschriebenen Anweisungen konnen wie in den folgenden Beispielen gekennzeichnet sein.
Handhabungsschritte, die das Eingreifen des Benutzers erfordern:
- Schraube (1) mit einem Schraubenzieher lösen, Hebel (2) betätigten ...
Generelle Aufzahlungen:
-Einsatz des Produkts bei Sport- oder Wettbewerbsveranstaltungen
Textemitzusatzlicher Bedeutung:
Textabschnitt mit zusätzlicher Bedeutung werden mit einem der nachfolgenden beschieden Symbole gekennzeichnet, um diese in der Gebrauchsanleitung zusammen hervorzuheiten.
Gef
Unfall- und schwere Verletzungsgefahr für Personen. Ein bestimmtes Verhalten ist notwendig oder zu unterlassen.
#
Warning! Verletzungsgefahr für Personen. Ein bestimmtes Verhalten verhindert mögliche oder wahrscheinliche Verletzungen.
!
Vorsicht! Leichte Verletzungen bzw. Sachschäden können durch ein bestimmtes Verhalten verhindert werden.
i
Hinweis Information fur eine bessereutzung des Gerates und ummogliche Fehlbedienungen zuvermeiden.
TextemitBildbezug:
Eine Abbildungen, die für den Gebrauch des Gerats notwendig sind,finden Sie ganz am Anfang der Gebrauchsanleitung.
Das Kamerasymbol dient zur Verknüpfung der Bilder auf den Bildseiten mit dem entsprechenden Textteil in der Gebrauchsanleitung.

Bilder mit Textabschnitten:
Handhabungsschritte mit direktem Bezug auf das Bild finden Sie unmittelbar nach der Abbildung mit entsprechenden Positionsziffern.
Beispiel:
3. Gerätebeschreibung
3.1 Robotermaher
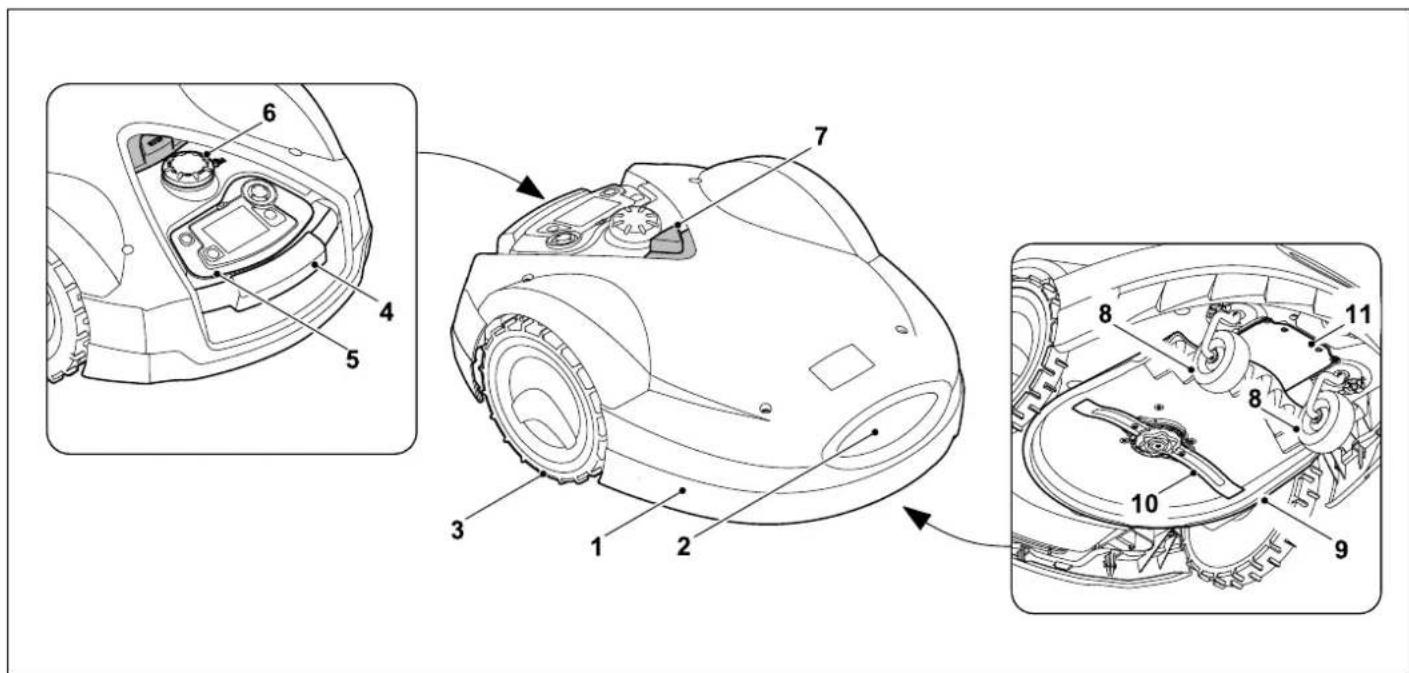
1 Beweglich gelagerte Haube ( 5.5) (5.6)
2 Ladekontakte: Anschlusskontakte zur Dockingstation
3 Hinterrad
4 Tragegriff (20.1)
5 Entnehmbare Steuerkonsole ( 3.3),( 14.2)
6 Drehgriff Schnitthöhenverstellung (9.3)
7 STOP-Taste (⇒ 5.1)
8 Vorderrad
9 Mahwerk
10 Beidseitig geschliffenes Mahmesser ( 15.4)
11 Akkufach
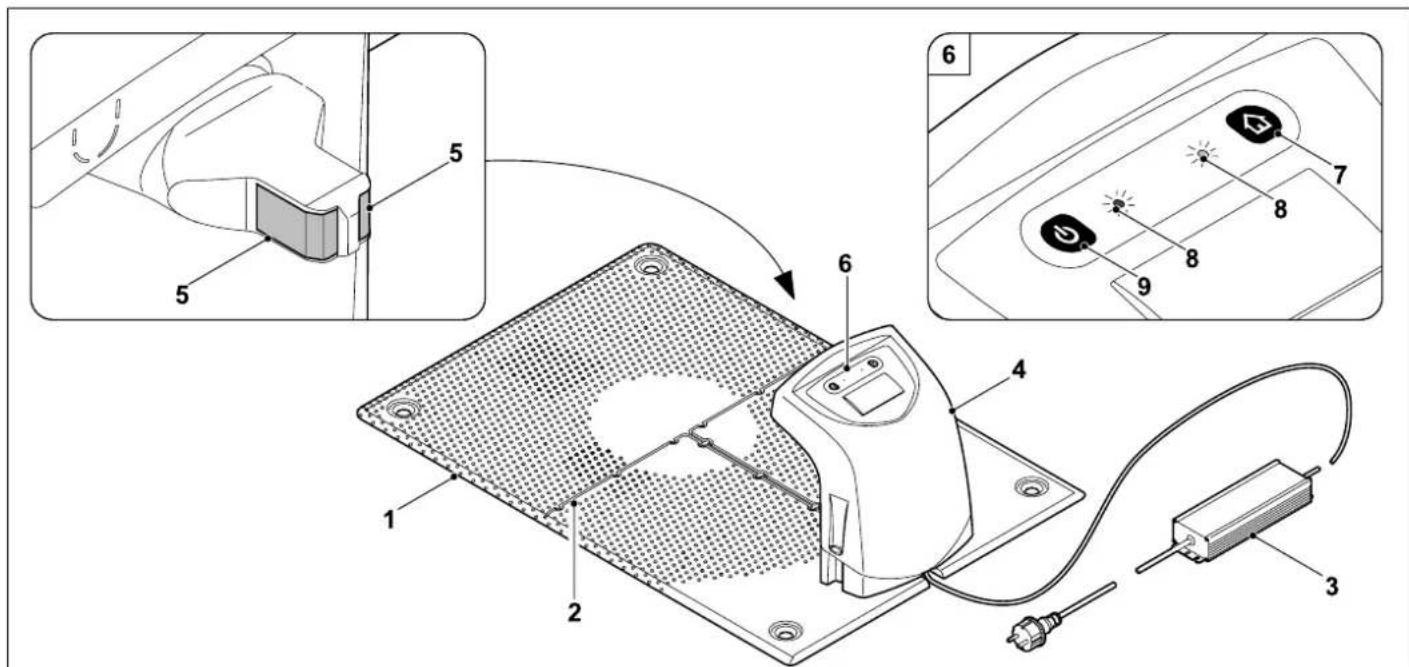
3.2 Dockingstation

1 Bodenplatte
2 Kabelführungen zum Einlagen des Begrenzungsdrahts ( 9.7)
3Netzeil
4 Abnehmbare Abdeckung (9.5)
5 Ladekontakte: Anschlusskontakte zum Robotermaher
6 Bedienpanel mit 2 Tasten und 2 LED ( 12.1)
7 Home-Taste
8 LED-Anzeige
9 Ein-Aus-Taste
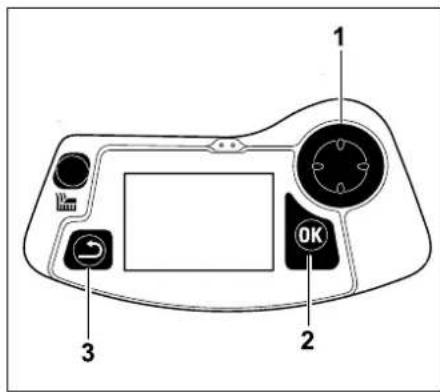
3.3 Steuerkonsole
1 Steuerkreuz: Lenken des Robotermahers (4.2) Navigieren in Menus (10.1)
2 OK-Taste: Manuell Mahlen ( 4.2) Navigieren in Menus ( 10.1)
3 Zurück-Taste: Navigieren in Menus (⇒ 10.1)
4 Mah-Taste: Manuell Mahen (4.2) Mahen unabhängig von Aktivzeiten (14.5)
5 Regensensor ( 10.11) 6 Grafikfahiges Display
4. Wie der Robotermaher(PC) erarbeitet
4.1 Funktionsprinzip
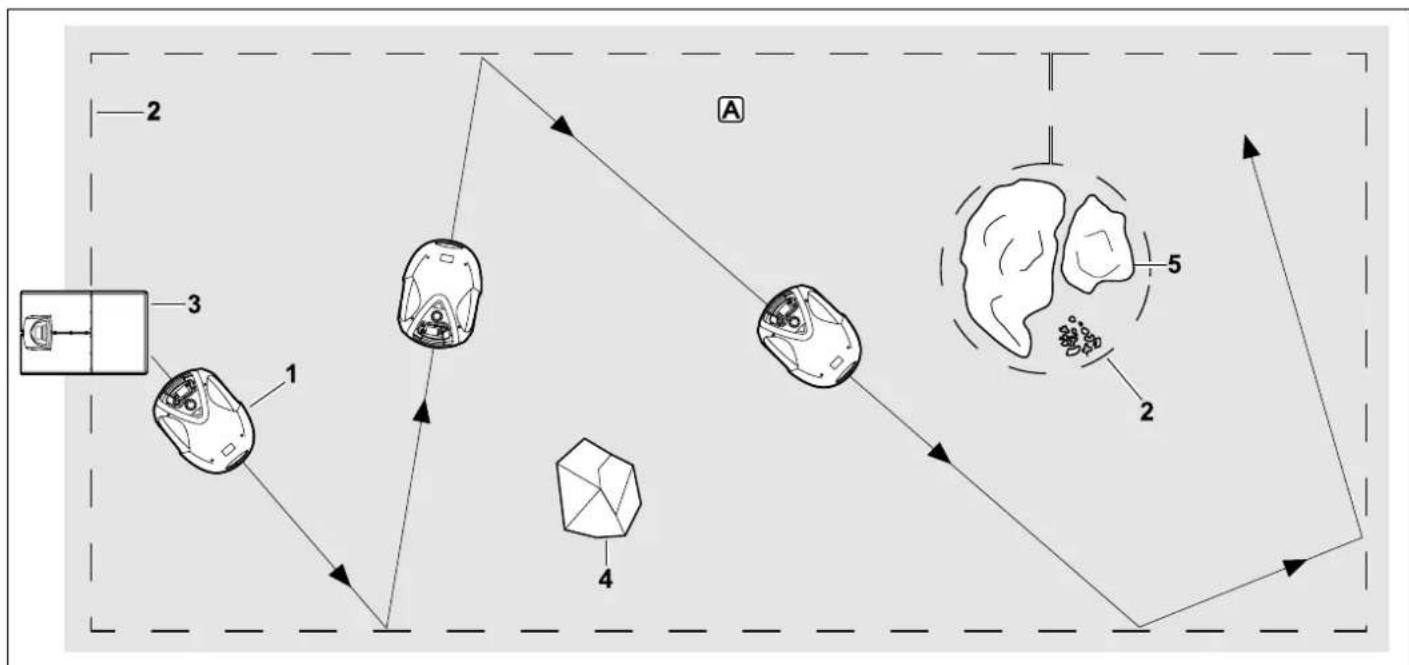
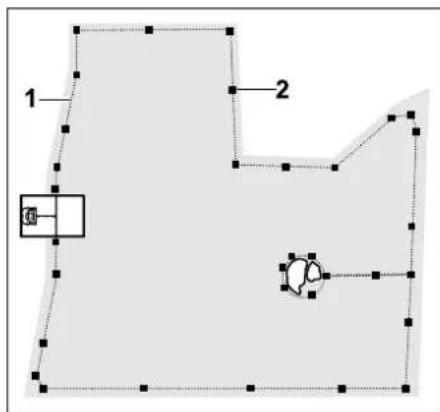
Der Robotermaher (1) ist für die automatische Bearbeitung von Rasenflächen konzipiert. Er mächt den Rasen in zufällig gewährten Bahnen.
Damit der Robotermaher die Grenzen der Mahfläche A erkennt, muss ein Begrenzungsdraht (2) um diese Fläche verlegt werden. Diesen durchfließt ein Drahtsignal, das von der Dockingstation (3) erzeugt wird.
Feste Hindernisse (4) in der Mahlfache werden vom Robotermaher mit Hilfe eines Stoßsensors sicher erkannt. Bereiche (5), die der Robotermaher nicht befahren darf, und Hindernisse, an die er nicht anstoßen soll, müssen mit Hilfe des Begrenzungsdrahts von der restlichen Mahlfache abgegrenzt werden.
Bei eingeschalteter Automatik verlässt der Robotermaher während der Aktivzeiten ( 13.3) die Dockingstation selbstig und maht den Rasen. Zum
Aufladen des Akkus fahrtder Robotermaher selbständig in die Dockingstation. Anzahl und Dauer der Mah- und Ladevorgänge innerhalb der Aktivzeiten werden darauf vollautomatisch angepasst. So ist garantiert, dass stets die notige wochentliche Mahdauer erreicht wird.
Bei ausgeschalteter Automatik und für Mahvorgänge unabhängig von Aktivzeiten kann ein Mahvorgang mit der
Mäh-Taste bzw. mit dem Befehl "Mähen starten" bzw. "Mähen zeitverzögt starten" aktiviert werden. (⇒ 10.4)
4.2 Manuelles Mahlen
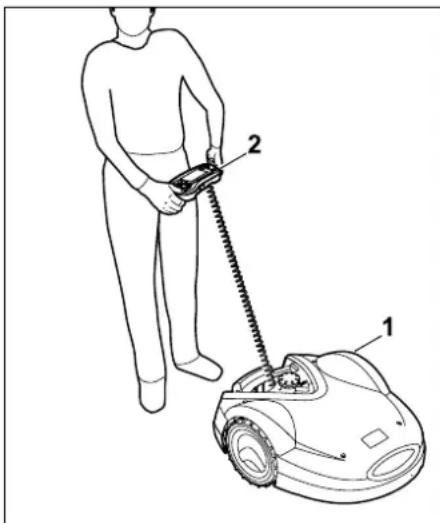
Mit dem Robotermaher (1) kann der Rasen auch manuell wie mit einem handgebungfrten Rasenmaher gemaht werden. Dazu Steuerkonsole (2) entnahmen, im Menu "Befehle" die Option "Handsteuerung" wahlen, Mahmesser sowie Fahrnantrieb aktivieren und hinter dem Robotermaher nachgeben. ( 14.6)
Der Stoßsensor und die Randbegrenzung sind während des manuellen Mahens inaktiv.
5. Sicherheitseinrichtungen
Das Gerät ist für die sichere Bedienung und zum Schutz vor unsachgemäß Benutzung mit mehreren Sicherheitseinrichtungen ausgestattet.

Verletzungsgefahr!
Wird bei einer der Sicherheitseinrichtungen ein Defekt festgestellt, daß das Gerät nicht in Betrieb genommen werden. Wenden Sie sich an einen Fachhandler, VIKING empfeht den VIKING Fachhandler.
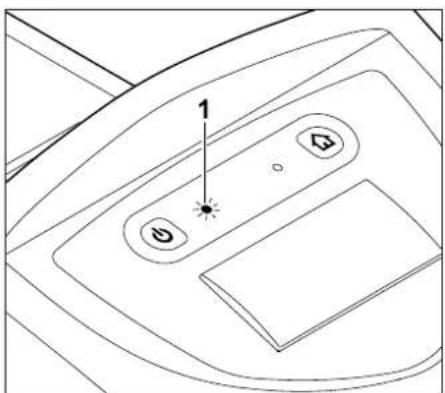
5.1 STOP-Taste
Durch Drücken der roten STOP-Taste auf der Oberseite des Robotermahers wird der Betrieb des Gerats sofort gestopt. Das Mahmesser kommt innerhalb von wichtigen Sekunden zum Stillstand und im Display erscheint die Meldung "STOP-Taste betätig". Solange die Meldung aktiv ist, kann der Robotermaher nicht in Betrieb genommen werden und ist in einem sicheren Zustand. ( 23.)
Bei eingeschalteter Automatik erfolgt nach Bestätigung der Meldung mit OK eine Abfrage, ob der automatische Betrieb fortgesetzt werden soll. Bei Ja bearerbeitet der Robotermä die Mahlfache nach Mahplan.

Bei Nein bleibt der Robotermaher in der Mahfläche stehen, die Automatik wird ausgeschelt. (⇒ 10.4)

Langes Drucken der STOP-Taste aktiviert zusätzlich die Gerätesperre. (⇒ 5.2)
5.2 Gerätesperre
Der Robotermaher muss vor allen Wartungs- und Reinigungsrarbeiten, vor dem Transport sowie vor der Überprüfung gespeit wird. Bei aktivierter Gerätesperre k Robotermaher nicht in Betrieb werden.

Aktivieren der Gerätesperre:
- STOP-Taste lang drucken,
- im Menu Befehle,
- im Menü Sicherheit.
Gerätesperre via Menu Befehle aktivieren:
- Im Menu "Befehle" den Eintrag "iMow sperren" ausgehalten und mit OK-Taste bestätigten. (⇒ 10.4)
Gerätesperre via Menu Sicherheit aktivieren:
- Im Menu "Einstellungen" das Untermenü "Sicherheit" öffnen. (⇒ 10.15)
- Eintrag "iMow sperren" wahlen und mit OK-Taste bestätigten.
Gerätesperre aufheben:
- Bei Bedarf Gerät mit einem beliebigen Tastendruck aufwecken.
- Robotermaher mit abgebildeter Tastenkombination entsperren. Dazu sind die Mah-Taste und die OK-Taste in der abgebildeten Reihenfolge zu drucken.

5.3 Schutzabdeckungen
Der Robotermaher ist mit Schutzabdeckungen ausgestattet, die einen unbeabsichtigten Kontakt mit dem Mahmesser und mit Schnittgut verhindern. Dazu zahlt insbesondere die Haube.
5.4 Zweihandbedienung
Das Mahmesser kann beim manuellen Mahen nur eingeschaltet werden, wenn die OK-Taste mit dem rechten Daumen betätig und gehalten und anschließend die Mahtaste mit dem linken Daumen gedrückt wird. Einmal aktiviert, muss mehr die Mahtaste gedrückt bleiben, weiterzumahlen.

5.5 Stoßsensor
Der Robotermaher bleibt sofort stehen, wenn er im automatischen Betrieb auf ein festes Hindernis trifft, das hoher als 10 cm und fest mit dem Untergrund verbunden ist. Anschließlich ändert er die Fahrrichtung und setzen den Mähvorgang fort. Wir der Stoßsensor zu oft ausgelöst, wird zusammen das Mahmesser gestoppt.

Der Stoß gegen ein Hindernis erfolgt mit einer gewissen Kraft. Empfindliche Hindernisse bzw. leichte Gegenstände wie Kleinere Blumentöffe können deshalb umgeworfen bzw. beschädigt werden.
VIKING empfeihlt, Hindernisse zu entfernen bzw. mit Sperrflächen auszugrenzen. (11.8)
5.6 Anhebeschutz
Wenn der Robotermaher an der Haube oder am Tragegriff angehoben wird, unterbricht er sofort den Mahvorgang. Das Mahmesser kommt innerhalb von wichtigen Sekunden zum Stillstand.
5.7 Neigungssensor
Wenn während des Betriebs die erlaubte Hangneigung übersritten wird,ändert der Robotermaher sofort die Fahrrichtung. Bei einem Überschlag werden der Fahrantrieb und der Mahmotor abgeschaltet.
5.8 Displaybeleuchting
Während des Betriebs wird die Displaybeleuchtung aktiviert. Durch das Licht ist der Robotermaher auch bei Dunkelheit gut zu erkennen.
5.9 Diebstahlschutz
Bei aktiviertem Diebstahlschutz ertont nach dem Anheben des Robotermahers ein Alarmsignal, wenn der PIN-Code nicht innerhalb von einer Minute eingebehen wird. ( 10.15)
Der Robotermaher kann ausschließlich zusammen mit der mitgelieferten Dockingstation betrieben werden. Eine weitere Dockingstation muss mit dem Robotermaher gekoppelt werden. ( 10.15)

VIKING empfeihlt, eine der Sicherheitsstufen "Niedrig", "Mittel" oder "Hoch" einzustellen. So ist garantiert, dass Unbefugte den Robotermaher nicht mit anderen Dockingstationen in Betriebnehmen konnen bzw. Einstellungen oder die Programmierung verändern.

6. Zu Ihrer Sicherheit
6.1 Allgemein

Bei der Arbeit mit dem Gerät sind diese Unfall-Verhütungsvorschriften unbedingt zu befolgen.

Vor der ersten Inbetriebnahme muss die gesamte Gebrauchsanleitung aufmerksam durchgelesen
werden. Bewahren Sie die Gebrauchsanleitung für späteren Gebrauch sorgfältig auf.
These Vorsichtsmaßnahmen sind für ihre Sicherheit unerlässlich, die Auflistung ist noch nicht abschließlich. Benutzen Sie das Gerät stets mit Vernunft und Verantwortungsbewusstsein und denken Sie daran, dass der Benutzer für Unfälle mit anderen Personen oder deren Eigentum verantwortlich ist.
Der Begriff "Benutzen" umfasst alle Arbeiten am Robotermaher, an der Dockingstation und am Begrenzungsdraht.
Demgemäß ist ein "Benutzer" eine Person, die z. B. Arbeitsen am Robotermaher durchfuhrt, die das Gerät in
Betrieb nimmt oder aktiviert, die den Begrenzungsdraht bzw. die Dockingstation installiert.
Benutzen Sie das Gerät nur ausgeruht und beiGreater körperlicher sowie geistiger Verfassung.Wenn Sie gesundheitlich beeinträchtigt sind, sollen den Sie ihren Arzt fragen,ob die Arbeit mit dem Gerät möglich ist.Nach der Einnahme von Alkohol, Drogen oder Medikamenten, die das Reaktionsvermögen beeinträchtigen, darf nicht mit dem Gerät gearbeitet werden.
Machen Sie sich mit den Bedienteilen und dem Gebrauch des Geräts vertraut.
Das Gerätarf nur von Personen benutzt werden, die die Gebrauchsanleitung gelesen haben und die mit der Handhabung des Geräts vertraut sind. Vorder erstmaligen Inbetriebnahme muss sich der Benutzer um eine fachkundige und praktische Unterweisung bemühen. Dem Benutzer muss vom Verkafer oder von einem anderen Fachkundigen erklär werden, wie das Gerät safer zu verwenden ist.
Bei dieser Unterweisung sollte dem Benutzer insbesondere bewusst gemacht werden, dass für die Arbeit mit dem Gerät außerste Sorgfalt und Konzentration notwendig sind.

Lebensgefahr durch Erstickung!
Erstickungsgefahr für Kinder beim Spielern mit Verpackungsmaterial. Verpackungsmaterial unbedingt von Kindern fernhalten.
Das Gerätarf nur an Personen
weitergegeben bzw. verliehen werden, die mit thisem Modell und seiner
Handhabung grundsätzlich vertraut sind.
Die Gebrauchsanleitung ist Teil des Gerats und muss stets mitgegeben werden.
Kindern, Personen mit eingeschränkten körperlichen, sensorialen oder geistigen Fähigkeiten oder unzureichender Erfahrung und Wissen oder Personen, welche mit den Anweisungen nicht vertraut sind, darf die Verwendung des Gerätes nie gestattet werden.
Erlauben Sie niemals Kindern oder Jugendlichen unter 16 Jahren das Gerät zu benutzen. Örtliche Bestimmungen konnen das Mindestalter des Benutzers festlegen.
Aus Sicherheitsgründen ist jeder Veränderung am Gerät, ausgenommen der fachgerechte Anbau von Zubehör und Anbaugeräten, welche von VIKING zugelassen sind, untersagt, außer dem führt dies zur Aufhebung des Garantieanspruchs. Auskunft über zugelassenes Zubehör und Anbaugeräte erhalten Sie bei ihrem VIKING Fachhandler.
Insbesondere ist jeder Manipulation am Gerät untersagt, welche die Leistung bzw. die Drehzahl der Elektromotoren verändert.
Es durren keine Änderungen am Gerat vorgenommen werden, welche zu einer Erhöhung der Gerauschemission führen.
Die Gerätesoftwarearfaus Sicherheitsgründen niemals verändert oder manipuliert werden.
Beim Einsatz in öffentlichen Anlagen, Parks, Sportstätten, an Straβen und in land- und forstwirtschaftlichen Betrieben ist besondere Vorsicht erforderlich.
Mit dem Gerät dürfen keine Gegenstände,
Tiere oder Personen, insbesondere
Kinder, transportiert werden.
Erlauben Sie niemals Personen, insbesondere Kindern, auf dem Robotermaher mitzufahren oder auf ihm zu sitzen.
Achtung – Unfallgefahr!
Der Robotermaher ist zur automatischen Rasenpflege und zum manuellen Rasenmahlen bestimmt. Eine andere Verwendung ist nicht gestattet und kann gefährlich sein oder zu Schaden am Gerät führen.
Wegen körperlicher Gefährung des Benutzers darf das Gerät für folgende Arbeiten nicht eingesetzt werden (unvollständige Aufzahlung):
- zum Trimmen von Buschen, Hecken und Strauchern,
- zum Schneiden von Rankgewächsen,
- zur Rasenpflege auf Dachbepflanzungen und in Balkonkästen,
zum Häckseln und Zerkleinern von Baum- und Heckenschmitt, - zum Reinigen von Gehwegen (Absaugen, Fortblasen),
-zum Einebnen von Bodenerhebungen. wie z.B.Maulwurfshugeln.
6.2 Bekleidung und Ausrüstung

Tragen Sie festes Schuhwerk mit griffiger Sohle und arbeiten Sie niemals barfuß oder
beispelsweise in Sandalen,
- wenn der Robotermaher mit Hilfe der Steuerkonsole von Ort zu Ort gefahren wird,
- wenn Sie sich dem Robotermaher während des Betriebs nahern,
- wenn der Rasen manuell gemaht wird. ( 4.2)

Bei der Installation, bei Wartungsarbeiten und allen sonstigen Arbeiten am Gerät und an der Dockingstation
geeignete Arbeitskleidung anziehen.
Niemals lose Kleidung tragen, die an beweglichen Teilen hangen bleiben kann - auch keinen Schmuck, keine Krawatten und keine Schals.
Tragen Sie insbesondere eine lange Hose,
- wenn Sie sich dem Robotermaher während des Betriebs nähern,
- wenn Sie den Rasen manuell mahren.

Bei Wartungs- und Reinigungsrarbeiten, bei Drahtverlegarbeiten sowie bei der Fixierung der
Dockingstation stets feste Handschuhe tragien.
Hände insbesondere bei allen Arbeiten am Mahmesser und beim Einschlagen der Fixiernagel sowie der Heringe der Dockingstation schützen.
Lange Haare bei allen Arbeiten am Gerät zusammenbinden und sichern (Kopftuch, Mütze etc.).

Beim Einschlagen der Fixiernägel und der Heringe der Dockingstation ist eine geeignete Schutzbrille zu
tragen.
6.3 Warning - Gefahren durch elektrischen Strom

Achtung! Stromschlaggefahr!
Besonderss wichtig für die elektrische Sicherheit sind ein intaktes
Netzkabel und ein
intakter Netzstecker am Netzteil.
Beschädigte Kabel, Kupplungen und Stecker oder den Vorschriften nicht entsprechende
Anschlussleitungen dürfen nicht verwendet werden, um sich nicht der Gefahr eines elektrischen Schlages auszusetzen.
Daher Anschlussleitung regelmäßig auf Anzeichen einer Beschädigung oder Alterung (Brüchigkeit) überprüfen.
Nur Original-Netzteil verwenden.
Das Netzeilarfnichtbenutzwerden
-
wenn es beschädigt oder abgenutzt ist,
-
wenn Leitungen beschädigt oder abgenutzt sind. Insbesondere ist die Netzanschlussanleitung auf Beschädigung und Alterung zu prufen.
Wartungs- und Reparaturarbeiten an Netzleitungen und am Netzteil dürfen nur von speziell ausgebildeten Fachleuten durchgeführt werden.
Stromschlaggefahr!
Eine beschädigte Leitung nicht ans Stromnetz anschließen und eine beschädigte Leitung erst berühren, wenn sie vom Stromnetz getrennt ist.
Die Anschlussleitungen am Netzteil dürfen nicht verändert (z. B. gekürzt) werden. Das Kabel zwischen Netzteil und Dockingstationarf nicht verlangert werden.
Stromschlaggefahr!
Beschädigte Kabel, Kupplungen und Stecker oder den Vorschriften nicht entsprechende Anschlussleitungen dürfen nicht verwendet werden.
Achten Sie immer darauf, dass die verwendeten Netzleitungen ausreichend abgesichert sind.
Anschlussleitung an Stecker und Steckbuchse trennen und nicht an den Anschlussleitungenziehen.
Das Gerät nur an eine Stromversorgung anschließen, die durch eine Fehlerstrom-Schutzeinrichtung mit einem Auslösestrom von hochstens 30 mA geschützt ist. Nahere Auskünfte gibt der Elektroinstallatur.
Wird das Netzteil an eine
Stromversorgung außerhalb eines
Gebäudes angeschlossen, muss diese
Steckdose für den Betrieb im
Außenbereich zugelassen sein. Nähere
Auskünfte zu den länderspezifischen
Vorschriften gibt der Elektroinstallateur.
Wird das Gerät an ein Stromaggregat angeschlossen, ist darauf zuchten, dass es durch Stromschwankungen beschädigt werden kann.
6.4 Akku
Nur Original-Akku verwenden.
Der Akku ist ausschließlich damit bestimmt, in einem VIKING Robotermaher fix eingebaut zu werden. Er ist Dort optimal geschützt und wird aufgeladen, wenn der

Robotermaher in der Dockingstation steht. Es darkein anderes Ladegerat verwendet werden.Die Verwendung eines nicht geeigneten Ladegerats kann zu Stromschlaggefahr, Überhitzung oder Austreten von atzender Akkuflussigkeit fuhren.
Akku niemals offen.
Akku nicht fallen setzen.
Keinen defekten oder deformierten Akku verwenden.
Akku außerhalb der Reichweite von Kindern lagern.

Explosionsgefahr! Akku vor direkter
Sonneneinstrahlung, Hitze und Feuerschützen - niemals in werfen.

Akku nur in einem
Temperaturbereich von -10^ bis max. +50^ einsetzen und lagern.

Akku vor Regen und Feuchtigkeit schützen - nicht in Flüssigkeiten tauchen.

Akku nicht Mikrowellen oder hohem Druck aussetzen.
Akkukontakte niemals mit metallischen Gegenständen verbinden (kurzschlieben). Akku kann durch Kurzschluss beschädigt werden.
Nicht benutzten Akku fern von Metallgegenständen (z. B. Nagel, Munzen, Schmuck) halten. Keine metallischen Transportbehälter verwenden - Explosions- und Brandgefahr!
Bei falscher Anwendung kann Flüssigkeit aus dem Akku austreten - Kontakt vermeiden! Bei zufälligem Kontakt mit Wasser absprüten. Wenn die Flüssigkeit in die Augen kommt, zusammen arztliche Hilfe in Anspruchnehmen. Austretende Akkuflüssigkeit kann zu Hautreizungen, Verbrennungen und Veratzungen führen.
Keine Gegenstände in die Luftungsschlitze des Akkus stecken.
Weiterführunge Sicherheitschinweise siehe www.viking-garden.com/safety-datasheets
6.5 Transport des Geräts
Vor jedem Transport, insbesondere vom dem Anheiten des Robotermahers, Gerätesperre aktivieren. (⇒ 5.2)
Das Gerät vor dem Transport auskühlen halten.
Beim Anheiten und Tragen Kontakt mit dem Mahmesser vermeiden. Der Robotermaheroridaur amTragegriff angehoben werden, niemals unter das Gerat greifen.
Beachten Sie das Gewicht des Geräts und benutzen Sie bei Bedarf geeignete Verladehilfen (Hebevorrichtungen).
Gerat und mittransportierte Geräteile (z. B. Dockingstation) auf der Ladeflache mit ausreichend dimensionierten Befestigungsmitteln (Gurte, Seile usw.) an den in dieser Gebrauchsanleitung beschrieben Befestigungspunkten sichern. ( 20)
Beachten Sie beim Transport des Geräts regionale gesetzliche Vorschriften, insbesondere was die Ladungssicherheit und den Transport von Gegenständen auf Ladeflächen betrifrft.
Akku nicht im Auto liegen给你们 und niemals direkter Sonneneinstrahlung aussetzen.
Lithium-lonen-Akkus mussen beim Transport besonder sorgfältig gehendt werden, insbesondere ist auf Kurzschlussicherheit zu achten. Akku entweder in der unbeschädigten Original-Verpackung oder im Robotermaher transportieren.
6.6 Vor der Inbetriebnahme
Esistsicherzustellen,dassedePerson, die das Gerat benutzt, die Gebrauchsanleitung kennt.
Befolgen Sie die Anweisungen zur Installation von Dockingstation ( 12.) und Begrenzungsdraht ( 11.)
Der Begrenzungsdraht und das Netzkabel mussen gut auf dem Boden befestigt werden, damit sie keine Stolperfallen darstellen. Eine Verlegung über Kanten (z. B. Gehsteige, Pflastersteinkante) ist zu vermeiden. Bei Verlegung auf Boden, in die die mitgelieferten Fixiemagel nicht eingeschlagen werden konnen (z. B. Pflastersteine, Gehsteige), ist ein Kabelkanal zu verwenden.
Die ordnungsgemäß Verlegung des Begrenzungsdrahts und des Netzkabels ist regelmäß zu kontrollieren.
Fixiernagel immer vollständig einschlagen, um eine Stolpergefahr zu vermeiden.
Die Dockingstation nicht an einer unübersichtlichen Stelle installieren, an der sie zu einer Stolperfalle werden kann (z. B. hinter Hausecken).
Dockingstation möglichst außerhalb der Reichweite von Kriechtieren wie Ameisen oder Schnecken installieren - insbesondere den Bereich um Ameisennester und Kompostieranlagen meiden.
Bereiche, die der Robotermaher nicht befahren soll, die nicht gefahrlos befahren werden konnen (z. B. wegen Absturzgefahr) oder die nicht mit Gras bewachsen sind (z. B. Kieswege) sind durch eine entsprechende Verlegung des Begrenzungsdrahts zu sperren.
Der Robotermaher erkennt keine Abstruzstellen wie Kanten, Absätze, Swimmingpools oder Teiche. Wird der Begrenzungsdraht entlang von potentiellen Abstruzstellen verlegt, ist aus Sicherheitsgründen zwischen dem Begrenzungsdraht und der Gefahrenstelle ein Abstand von mehr als 1 m einzuhalten.
Überprüfen Sie regelmäßig das Gelände, auf dem das Gerät eingesetzt wird, und entfernen Sie alle Steine, Stöcke, Drahte, Knochen und alle sonstigen Fremdkörper, die von dem Gerät hochgeschleudert werden können.
Nach der Installation des
Begrenzungsdrahts insbesondere alle
Werkzeuge von der Mahlfläche entfern.
Abgebrochene oder beschädigte
Fixiernagel müssen aus der Grasnarbe
herausbezogen und entsorgt werden.
Überprüfen Sie regelmäßig die zu mahende Flüche auf Unebenheiten und entfern den Sie diese.
Benutzen Sie das Gerät niemals, wenn Schutzeinrichtungen beschädigt oder nicht angebaut sind.
Die am Gerat installierten Schalt- und Sicherheitseinrichtungen dürfen nicht entfernt oder überbrücken werden.
Vor dem Gebrauch des Geräts sind alle abgenutzten und beschädigten Teile zu ersetzen. Unleserliche oder beschädigte Gefahren- und Warnhinweise am Gerät sind zu erneuern. Ihr VKING Fachhändler hält Ersatzklebeschider und alle weiteren Ersatzteile bereit.
Vor der Inbetriebnahme ist zu prufen,
- ob das Gerät im betriebssicheren Zustand ist. Das bedeutet, dass sich die Abdeckungen und Schutzvorrichtungen an ihrem Platz befinden und in einwandfreiem Zustand sind.
- ob der elektrische Anschluss des Netzteils an einer vorschrifsmäßig installierten Steckdose erfolgt.
- ob am Netzteil die Isolierung der Anschlussleitung und des Netzsteckers in einwandfreiem Zustand ist.
- ob das gesamte Gerät (Gehäuse, Haube, Befestigungselemente, Mähmesser, Messerwelle etc.) weder abgenutzt noch beschädigt ist.
- ob das Mahmesser und die Messerbefestigung in ordnungsgemäßem Zustand sind (sicherer Sitz, Beschädigungen, Verschleib). ( 15.3)
- ob alle Schrauben, Muttern und andere Befestigungselementevorhanden bzw. festgezogen sind. Lockere Schrauben und Muttern vor der Inbetriebnahme festziehen (Anziehmamente beachten).
Bei Bedarf alle notigen Arbeiten durchfuhren bzw. einen Fachhändler aufsuchen. VKING empfeht den VKING Fachhändler.
6.7 Programmierung
Beachten Sie die communalen Vorschriften für die Betriebszeiten von Gartengeräten mit Elektromotor und programmieren Sie die Aktivzeiten dementsprechend. (13.3)
Insbesondere ist die Programmierung auch so anzupassen, dass sich während des Mahbetriebs keine Kinder, Zuschauer oder Tiere auf der zu mahenden Fläche befinden.
Der Robotermaherarfndichtzeitgleichmit einerBewasserungsanlagebetrieben werden, dieProgrammierungist dementsprechendanzupassen.
Stellen Sie sicher, dass am Robotermaher das richtige Datum und die richtige Uhrzeit eingestellt sind. Korrigieren Sie gegebenenfalls die Einstellungen. Falsche Werte konnen zu unbeabsichtigtem Abfahren des Robotermahers führen.
6.8 Wahrend des Betriebs
Dritte, insbesondere Kinder und Tiere, aus dem Gefahrenbereich fernhalten.
Erlauben Sie Kindern niemals, sich dem Robotermaher während des Betriebs zuannah oder mit ihm zu spielten.
Lassen Sie den Robotermaher niemals ohne Aufsicht arbeiten, wenn Sie wissen, dass sich Tiere oder Personen – insbesondere Kinder – in der Nähe aufhalten.

Achtung - Verletzungsgefahr!
Fuhren Sie niemals Höhe oder
Fuße an oder unter sich drehende Teile. Berühren Sie niemals das umlaufende Messer.
Vor Gewittern bzw. bei Blitzschlaggefahren, Netzteil vom Stromnetz trennen. Der Robotermaher darf dann nicht in Betrieb genommen werden.
Der Robotermaher darit mit laufendem Elektromotor niemals gekippt und hochgehoben werden.
Versuchen Sie niemals, Einstellungen am Gerät vorzunehmen, solange einer der Elektromotoren lauft.
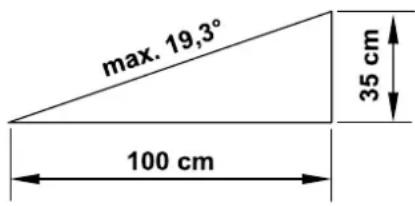
Aus Sicherheitsgründen darf das Gerät nicht an Hangen mit einer Steigung über 19,3^ (35%) eingesetzt werden.
Verletzungsgefahr! 19,3° Hangneigung entsprechen einem vertikalen Anstieg von 35 cm bei 100 cm horizontaler Länge.

Achten Sie auf den Nachlauf des Schneidwerkzeuges, der bis zum Stillstand eine Sekunden beträgt.
Drucken Sie während des laufenden Betriebs die STOP-Taste ( 5.1)
- bevor Sie Einstellungen im Menuändern bzw. vornehmen,
-
bevor Sie die Programmierung anpassen,
-
bevor Sie die Steuerkonsole entnahmen.
Aktivieren Sie die Gerätesperre (⇒ 5.2), - bevor Sie das Gerät anheben und tragen,
- bevor Sie das Gerät transportieren,
- bevor Sie Blockierungen offen oder Verstopfungen beseitigen,
- bevor Arbeiten am Mahmesser durchgeführt werden,
- bevor das Gerät überprüft oder gereinigt wird,
- wenn ein Fremdkörper getroffen wurde oder falls der Robotermaher abnormal stark vibriert. Überprüfen Sie in diesen Fällen das Gerät, insbesondere die Schneideinheit (Messer, Messerwelle, Messerbefestigung), auf Beschädigungen und führen Sie die erforderlichen Reparaturen durch, bevor Sie das Gerät erneut starten und mit ihm arbeiten.
Verletzungsgefahr! Starkes Vibrieren ist
Starkes Vibrierten ist in der Regel ein Hinweis auf eine Störung. Der Robotermaher dar insbesondere mit beschädigter oder verbogener Messerwelle oder mit einem beschädigten bzw. verbogenen Mahmesser nicht in Betrieb genommen werden. Lassen Sie die erforderlichen Reparaturen von einem Fachmann -VIKING empfehl't den VIKING Fachhändler - durchfahren, falls Ihnen die notigen Kenntnisse fehlen.
Vor dem Verlassen des Geräts sind die Sicherheitsinstellungen des Robotermahers so anzupassen, dass er von unbefugten Personen nicht in Betrieb genommen werden kann. (10.15)
Manuelles Mahen:
Starten Sie das Gerät mit Vorsicht, entsprechend den Hinweisen in Kapitel "Manuelles Mahen". (⇒ 14.6)
Arbeiten Sie nur bei Tageslicht oder beiguter künstlicher Beleuchtung.
Niemals Tasten am Gerät - insbesondere Mäh-Taste - mechanisch fixieren.
Der Benutzer muss sich immer hinter dem Gerät aufhalten. Stets auf ausreichenden Abstand der Fußzum Messer achten.
Beim Rasenmahen niemals laufen, um eine Verletzungsgefahr durch Ausrutschen, Stolpern usw. zu verhindern.
Seien Sie besonderss vorsichtig, wenn Sie den Robotermaher umkehren oder rückwärts zu sich heranbewegen.
Bei feuchtem Untergrund besteht wegen verminderter Standhaftung erhöhte Unfallgefahr.
Esistbesonderssvorsichtigzuarbeiten, umeinAusrutschen zuverhindern.Wennmoglich,manuellesMahrenbei feuchtem Untergrund vermeiden.
Achten Sie immer auf einen gute Stand an Hängen und vermeiden Sie das Mahen an übermöig steilen Hängen.
Mahren Sie quer zum Hang, niemals aufoder abwarts, und achten Sie daraufuf, stets über dem Robotermaher zu stehen, um bei eventuellem Verlust der Kontrolle uber das Gerat nicht zusätzlich überrollt zu werden.
In der Grasnarbe verborgene Objekte (Rasensprenganlagen, Pfahle, Wasserventile, Fundamente, elektrische Leitungen etc.) müssen umfahren werden. Überfahren Sie niemals solche Fremdobjekte.
Fahren Sie niemals absichtlich gegen Hindernisse. Der Stöbsensor ist während des manuellen Mahens inaktiv.
6.9 Wartung und Reparaturen
Vor dem Beginn von Reinigung-, Reparatur- und Wartungsarbeiten Gerätesperre aktivieren und Robotermaher auf festem, ebenem Untergrund abstellen. STOP
Vor allen Arbeitsen an der Dockingstation und am Begrenzungsdraht Netzstecker des Netzteils abziehen.

Robotermaher vor allen Wartungsarbeiten ca. 5 Minuten abkühlen halten.
Die Netzanschlussleitung darfschließlich von autorisierten Elektro-Fachkräften instandgesetzt bzw. erneuert werden.
Nach allen Arbeiten am Gerät ist vor der erneuten Inbetriebnahme die Programmierung des Robotermahers zu überprüfen und bei Bedarf zu korrigieren. Insbesondere müssen Datum und Uhrzeit eingestellt werden.
Reinigung:
Das gesamte Gerät muss in regelmäßigen Abständen sorgfältig gereinigt werden. (⇒ 15.2)
Niemals Strahlwasser (insbesondere Hochdruckreiniger) auf

Motorteile, Dichtungen, elektrische
Bauteile und Lagerstellen richten.
Beschädigungen bzw. teure Reparaturen können hier die Folge sein.
Das Gerät nicht unter fließen dem Wasser (z. B. mit einem Gartenschlauch) reinigen.
Benutzen Sie keine aggressiven Reinigungsmittel. Diese können Kunststoffe und Metalle beschädigen, was den sicheren Betrieb Ihr's VRING Geräts beeinträchtigen kann.
Wartungsarbeiten:
Es durren nur Wartungsarbeitendurchgefuhrt werden, die in dieserGebrauchsanleitung beschreiben sind,alle anderen Arbeiten von einemFachhandler ausfuhren halten. Sollten Ihnen notwendige Kenntnisse undHilfsmittel fehlen, wenden Sie sich immer an einen Fachhandler.VIKING empfeihlt Wartungsarbeiten und Reparaturen nur vom VIKING Fachhandler durchfuhren zu halten.VIKING Fachhandlern werden regelmäßigSchulungen angeboten und technischeInformationen zur Verfung gestellt.
Verwenden Sie nur Werkzeuge, Zubehore oder Anbaugeräte, welche von VIKING für diesen Gerät zugelassen sind oder technisch gleichartige Teile, sonst kann die Gefahr von Unfällen mit Personenschäden oder Schäden am Gerät bestehen. Bei Fragen sollenn Sie sich an einen Fachhandler wenden.
VIKING Original-Werkzeuge, -Zubehör und -Ersatzteile sind in ihren Eigenschaften optimal auf das Gerät und die Anforderungen des Benutzers abgestimmt. VKING Original-Ersatzteile erkennt man an der VKING-Ersatzteilnummer, am Schriftzug VKING
und gegebenenfalls am VIKING
Ersatzteilkennzeichen. Auf kleinen Teilen kann das Zeichen auch allein stehen.
Halten Sie Warn- und Hinweisaufkleber stets sauber und lesbar. Beschädigte oder verloren gegangene Aufkleber sind durch neue Originalschilder von Ihr dem VKING Fachhändler zu ersetzen. Falls ein Bauteil durch ein Neuteil ersetzt wird, achten Sie daraufuf, dass das Neuteil dieselben Aufkleber erhalten.
Arbeiten an der Schneideinheit nur mit dicken Arbeitshandschuhen und unter außerster Vorsicht vornehmen.
Halten Sie alle Schrauben und Muttern, besonders alle Schrauben und Befestigungselemente der Schneideinheit, fest angezogen, damit sich das Gerät in einem sicheren Betriebszustand befindet.
Prufen Sie das gesamte Gerät regelmäßig, insbesondere vor der Einlagerung (z. B. vor der Winterpause), auf Verschleiß und Beschädigungen. Abgenutzte oder beschädigte Teile sind aus Sicherheitsgründen sofort auszutauschen, damit sich das Gerät immer in einem sicheren Betriebszustand befindet.
Falls fur Wartungsarbeiten Bauteile oder Schutzeinrichtungen entfernt wurden, sind diese umgehend und vorschriftsmäßig wieder anzubRING.
6.10 Lagerung bei längeren Betriebspausen
Vor dem Einlagern hochste Sicherheitsstufe einstellen. ( 10.15) Zusätzlich Gerätesperre aktivieren.

Stellen Sie sicher, dass das Gerät vor unbefugter Benutzung (z. B. durch Kinder) geschützt ist.
Das Gerät im betriebssicheren Zustand lagern.
Gerat vor der Lagerung (z. B. Winterpause) grundlich reinigen.
Lassen Sie das Gerät ca. 5 Minuten abkühlen, bevor Sie es in einem geschlossenen Raum abstellen.
Der Lagerraum muss trocken, frostsicher und abschließbar sein.
Das Gerät niemals in der Näre von offenem Feuer bzw. starken Hitzequellen (z. B. Ofen) lagern.
Bei längeren Betriebspausen (z. B. Winterpause) Dockingstation abbauen und zusammen mit dem Robotermaher sicher lagern. ( 15.8)
6.11 Entsorgung
Abfallprodukte konnen den Menschen, Tieren und der Umwelt schaden und müssen deshalb fachgerecht entsorgt werden.
Wenden Sie sich an Ihr Recycling-Center oder ihren Fachhändler, um zu erfahren, wie Abfallprodukte fachgerecht zu entsorgen sind. VIKING empfeht den VIKING Fachhändler.
Stellen Sie sicher, dass ein ausgedientes Gerät einer fachgerechten Entsorgung zugeführ wird. Machen Sie das Gerät vor der Entsorgung unbrauchbar. Um Unfallen vorzubeugen, insbesondere Netzkabel des Netzteils, Akku und Steuerkonsole des Robotermahers entfern.
Verletzungsgefahr durch das Mähmesser!
Lassen Sie auch einen ausgedienten Rasenmacher niemals unbeaufsichtigt. Stellen Sie sicher, dass das Gerät und insbesondere das Mährmesser außerhalb der Reichweite von Kindern aufbewahrt werden.
Der Akku muss getrennt vom Gerät entsorgt werden. Es ist sicherzustellen, dass Akkus safer und umweltgerecht entsorgt werden.
7. Symbolbeschreibung
Warning!
Vor Inbetriebnahme Gebrauchsanleitung lessen.

Warning!
Während des Betriebs sicheren Abstand vom Gerät halten.
Dritte aus dem Gefahrenbereich fernhalten.

Warning!
Gerät sperren, bevör es angehoben wird bzw. bevör Arbeiten an ihm durchgeführt werden.


Warning!
Nicht auf das Gerät setzen oder steigen.

Warning!
Niemals das umlaufende Messer berühren.
8. Lieferumfang
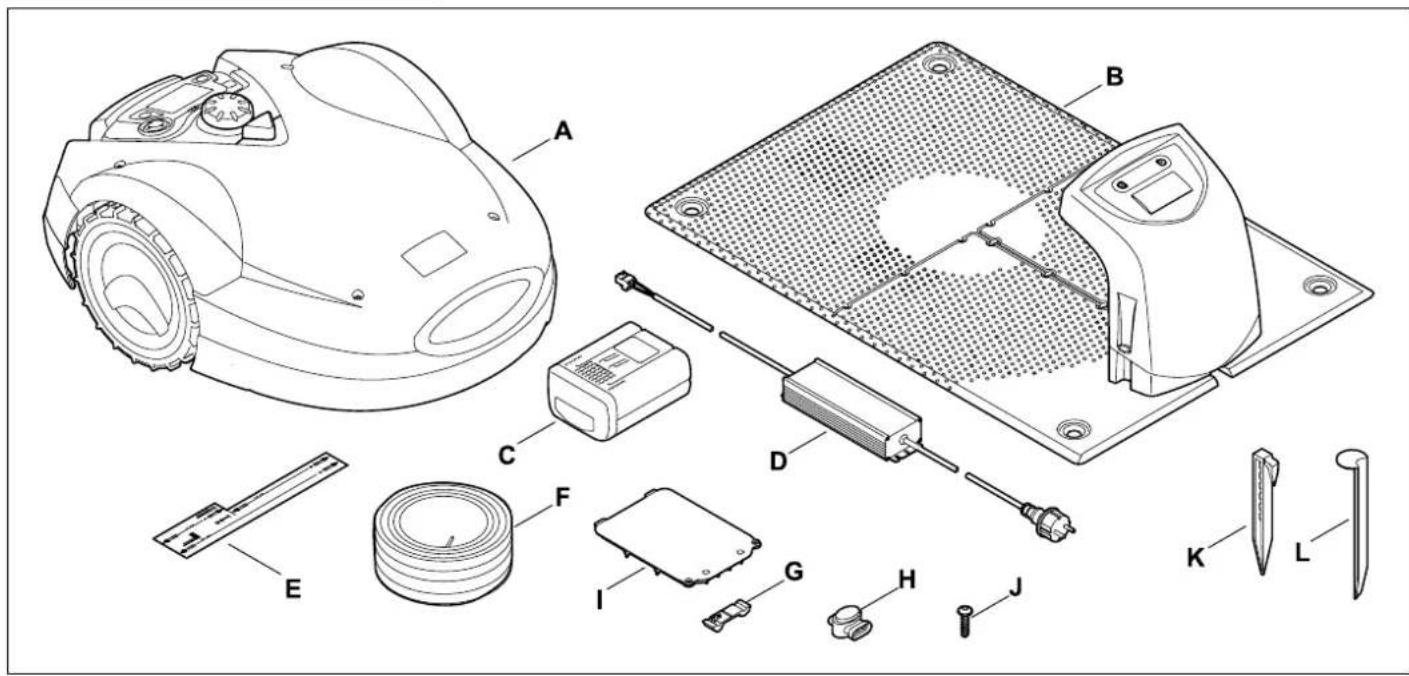
Pos. Bezeichnung Stk.
A Robotermaher 1
B Dockingstation 1
C Akku 1
DNetzteil 1
E iRuler 2
F Begrenzungsdraht auf Rolle (150 m):
MI 6321
MI 632 P 2
G Klemmstecker fur 2
Begrenzungsdraht
H Drahtverbinder 3
I Akkufachabdeckung 1
Pos. Bezeichnung Stk.
J Schraube 2
K Fixiernagel für Begrenzungsdraht:
MI 632 200
MI 632 P 300
L Hering fur 4
Dockingstation Gebrauchsanleitung 1
9. Erstinflation
9.1 Hinweise zur ersten Installation
Zur Installation des Robotermahers steht ein Installationsassistant zur Verfugung. Dieses Programm fuhrt Sie durch den gesamtten Prozess der ersten Installation:
- Sprache, Datum, Uhrzeit einstehen
- Dockingstation installieren
- Begrenzungsdraht verlegen
- Begrenzungsdraht anschließen
- Robotermaher und Dockingstation koppeln
Installation prufen - Robotermaher programmieren
Erstinstallation abschreiben
Der Installationsassistent muss vollständig abgearbeitet werden, erst danach ist der Robotermaher einsatzbereit.
Auf der Homepage www.viking-garden.com ist ein Installationsvideo abrufbar. Weitere Hinweise zur Installation des Robotermahers halt der VIKING Fachhändler bereit.
Der Installationsassistent wird nach einem Reset (Rücksetzen auf Werkseinstellungen) erneut aktiviert. ( 10.16)
Vorbereitende Maßnahmen:
-
Rasen vor der ersten Installation mit einem herkömmlichen Rasenmaher mahren (optimale Grashöhe 3 bis 4 cm).
-
Bei hartem und trockenem Untergrund die Mahlfacheichtbewassern, um das Einschlagen der Fixiernagel zu erleichtern.
Bei der Bedienung der Menüs die Anleitung im Kapitel "Bedienhinweise" beachten. ( 10.1)
Mit dem Steuerkreuz werden Optionen, Menüpunkte bzw. Schaltflächen ausgewählt.
Mit der OK-Taste wird ein Untermenü geöffnet bzw. eine Auswahl bestätigt.

Mit der Zurück-Taste
verlässt man das aktive
Menu bzw. springt im
Installationsassistenten einen
Schritt zurück.
Treten während der ersten Installation Fehler oder Störungen auf, erscheint eine entsprechende Meldung im Display. (23.)
9.2 Akku einbauen
Lithium-lonen-Akkus sind mit besonderer Vorsicht zu behandeln. VIKING empfeihlt, den Akku von einem VIKING Fachhändler einbauen zu halten. Ein defekter Akkuarf ausschließlich von einem VIKING Fachhändler getauscht werden.
Der Akku bleibt im Robotermaher fix eingebau, ein Ausbau ist nur vor der Entsorgung des Gerats erforderlich. ( 19.1)
Kleinste Schnitthöhe (Stufe 1)
einstellen. ( 9.3)
- Robotermaher auf einer geeigneten Unterlage auf dem Rücken ablegen.
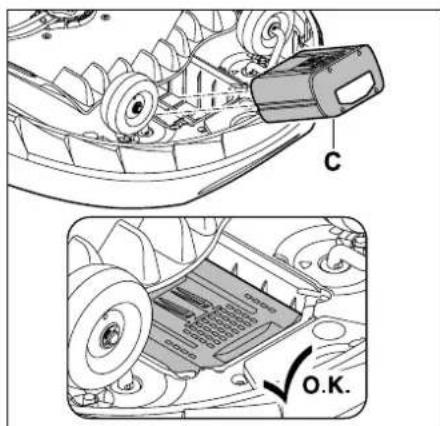
Akku (C) wie abgebildet einsetzen und einrasten halten.
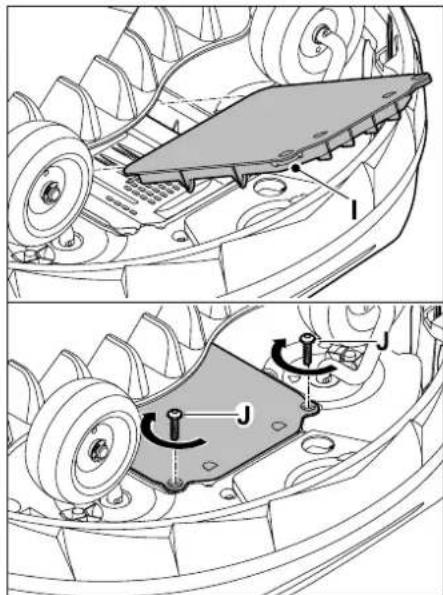
Abdeckung (I) einsetzen und Schrauben (J) festziehen. Ein maximales Drehmoment von 1 - 2 Nm beachten.
- Robotermaher auf die Räder stellen.
9.3 Schnitthöhe einstellen
Es konnen Schnitthohen zwischen 20 mm und 60 mm eingestellt werden.
Stufe 1 kleinste Schnittthoe Stufe 8 groBe Schnittthoe
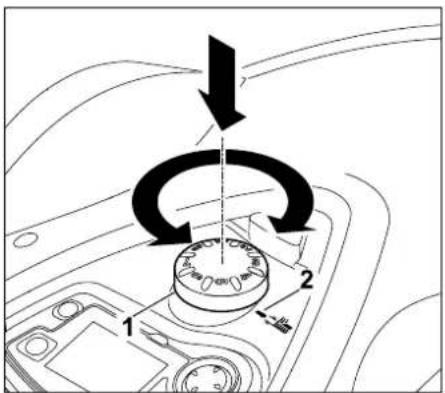
Drehknopf (1) drucken und verdren. Er rastet wieder ein, wenn er losgelassen wird. Die Markierung (2) zeigt auf die eingestellte Schnittthöhe.
i Der Drehknopf kann nach oben vom Verstellelement abgezogen werden. These Konstruktion dient der Sicherheit: So ist garantiert, dass das Gerät nicht am Drehknopf angehoben und getragen wird.
9.4 Sprache, Datum, Uhrzeit einstellen
- Drücken einer beliebigen Taste der Steuerkonsole aktiviert das Gerät und damit den Installationsassistenten.

Gewünschte Displaysprache wahlen und mit OK-Taste bestätigten.
OK
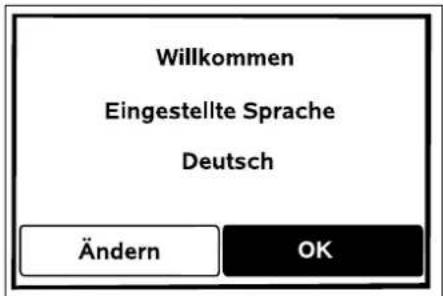
Sprachauswahl mit der OK-Taste bestätigen bzw. "Ändern" auswahlen und Sprachauswahl wiederholen.
OK
- Falls erforderlich, die 9-stellige Serialnummer des Robotermahers eingeben. Diese Nummer ist auf dem Typenschild abgedruckt (Aufkreber im Fach unter der Steuerkonsole).
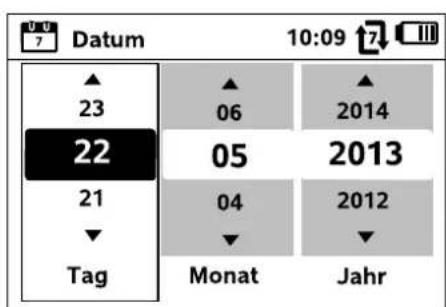

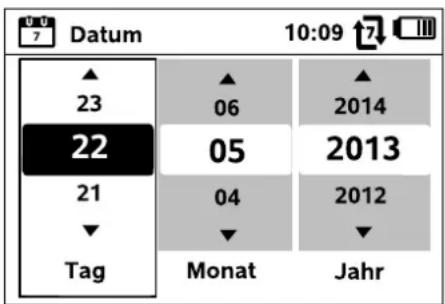
Aktuelles Datum mit Hilfe des Steuerkreuzes einstellen und mit der OK-Taste bestätigen.
OK
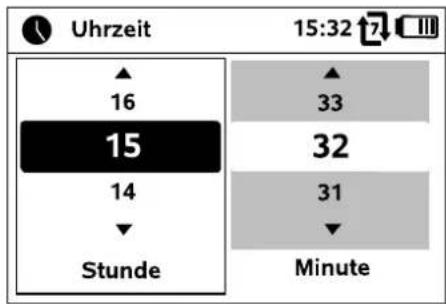
Aktuelle Uhrzeit mit Hilfe des Steuerkreuzes einstellen und mit der OK-Taste bestätigen.
OK
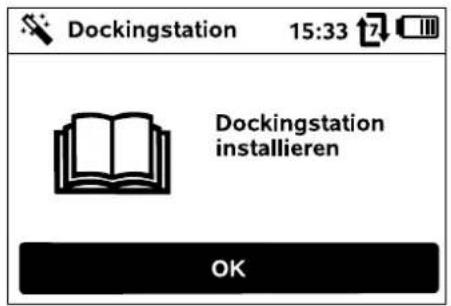
9.5 Dockingstation installieren
Installationsbeispiele in dieser Gebrauchsanleitung beachten. ( 26.)
Auf der Dockingstation kann ein als Zubehör erhältliches Sonnendach montiert werden. Damit ist der Robotermaher better vor Witterungseinfüssen geschützt.
Die Dockingstation an einem geschützten, schattigen Platz installieren. Direkte Sonneneinstrahlung kann zu erhöhten Temperatren im Gerät und längerem Akku-Ladezeiten führen.
Die Dockingstation sollte am gewünschten Standort gut zu erkennen sein, damit sie nicht zur Stolperfalle wird.
Zum Betrieb der Dockingstation ist ein Netzanschluss erforderlich, der max. 15 m entfernt sein damit.
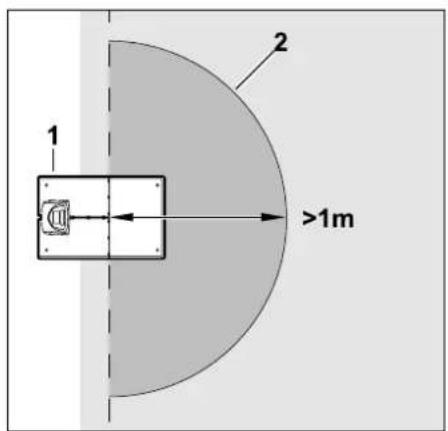
Vor der Dockingstation (1) muss sich eine ebene Freifläche (2) mit mindestens 1 m Radius befinden. Hügel oder Vertiefungen beseitigen.
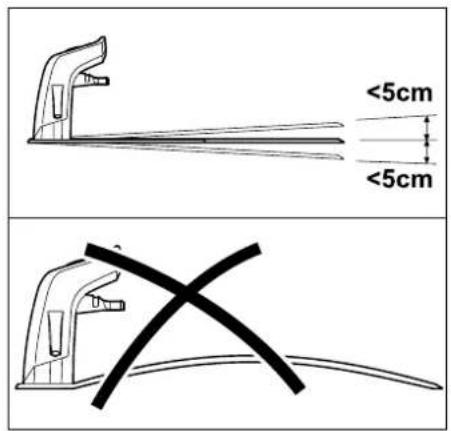
Der Boden am gewünschten Standort sollte waagrecht sein, ein maximer Hohenunterschied von 5 cm muss eingehalten werden. Bodenplatte niemals durchbügen. Unebenheiten unter der Bodenplatte sind zu beseitigen, damit sie vollständig aufliegen kann.
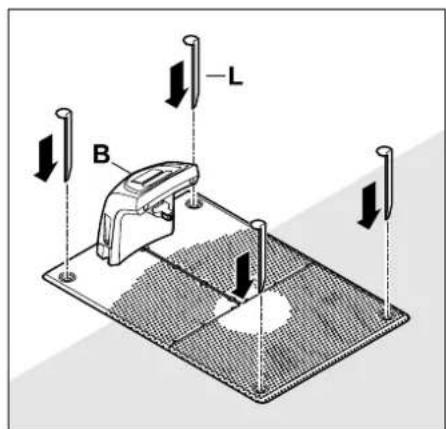
Dockingstation (B) am gewünschten Standort mit vier Heringen (L) fixieren.
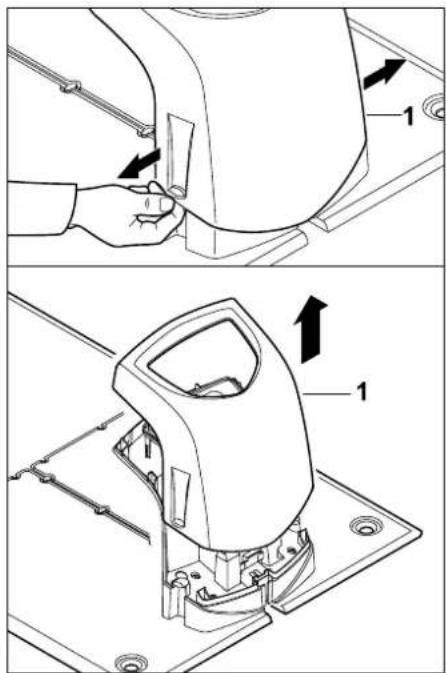
Abdeckung (1) wie abgebildet links und rechts kein. auseinanderziehen und nach offen abnehmer.
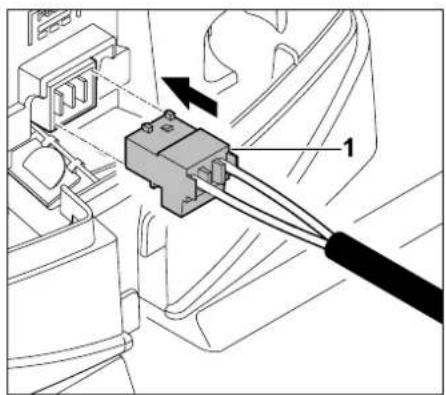
Stecker des Netzeils (1) an Platine der Dockingstation anstecken.

i Der Stecker kann bei Bedarf abgeschraubt werden (z. B. wenn das Stromkabel durch eine Mauerbohrung gefuhr wird). Beim Befestigen des Steckers am Stromkabel auf richtige Polung achten. ( 15.7)
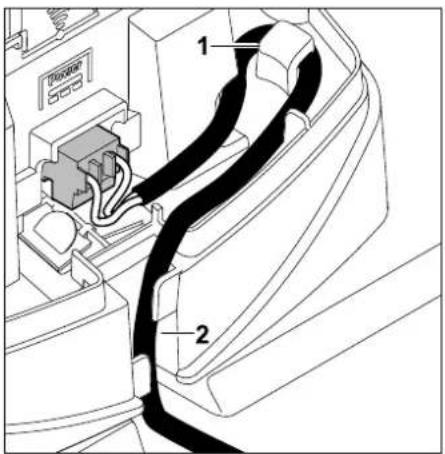
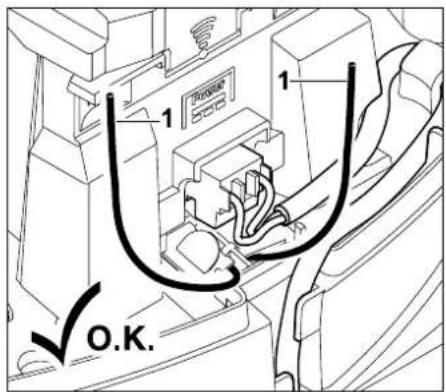
Stromkabel wie abgebildet durch die Zugentlastung (1), durch den Kabelkanal (2) und weiter zum Netzteil führen.
Das Netzteil außerhalb der Mahlfläche, geschützt vor direkter Sonneneinstrahlung, Feuchtigkeit und Nasse installieren - bei Bedarf an einer Wand befestigen.
- Alle Stromkabel außerhalb der Mahlfläche, insbesondere auch außerhalb der Reichweite des Mahmesser, verlegen und am Boden fixieren oder in einem Kabelkanal verstauen.
Stromkabel im Nahbereich der Dockingstation ausrollen, um Störungen des Drahtsignals zu vermeiden.
Eine ordnungsgemäße Funktion des Netzteils ist nur bei einer Betriebstempoatur zwischen 0^ C und 60^ C gegeben.
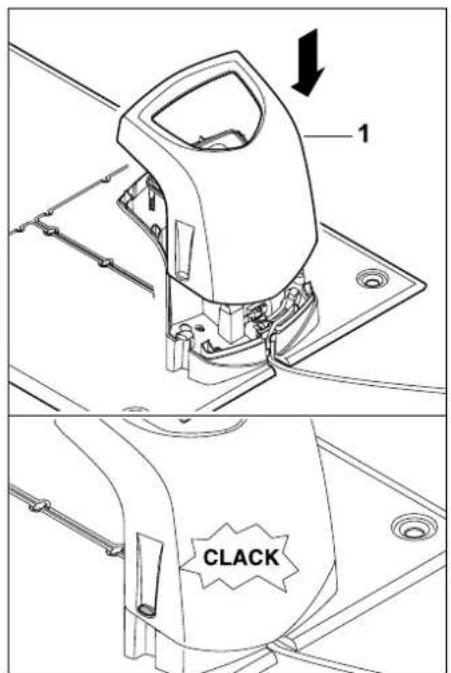
Abdeckung (1) auf Dockingstation aufsetzen und einrasten halten - keine Kabel einklemmen. Danach Netzstecker anstecken.
Auf der Dockingstation blinkt die rote LED, solange kein Begrenzungsdraht angeschlossen ist. ( 12.1)
- Nach Abschluss der Arbeiten OK-Taste auf der Steuerkonsole drucken.
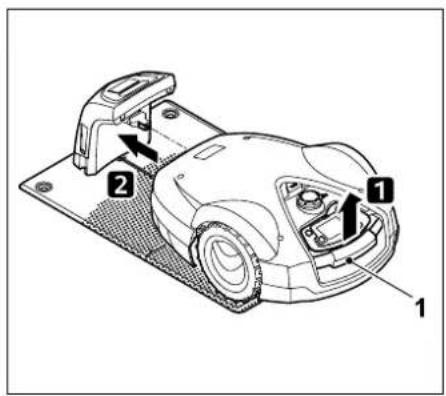
Robotermaher am Tragegriff (1) etwas anheben und Antriebsrader entlasten. Gerat auf die Vorderrader aufgestutzt in die Dockingstation schieren.
Nach dem Eindocken darauf an der Dockingstation keine LED leuchten. ( 12.1)
Danach OK-Taste auf der Steuerkonsole drucken.


Falls der Akku entladen ist,
erscheint nach dem Eindocken im rechten oberen Eck des Displaysstatt dem Akkusymbol ein NetzsteckerSymbol. ( 14.8) Der Akku wird bei Bedarf automatisch geladen.
9.6 Begrenzungsdraht verlegen
Vor der Drahtverlegung das gesamte Kapitel "Begrenzungsdraht" lessen und beachten. ( 11.)
Insbesondere Verlegung planen, Drahtabände beachten, Sperrflächen, Drahtreserven, Verbindungsstrecken, Nebenflächen und Gassen im Zuge der Verlegung mit installmenten.
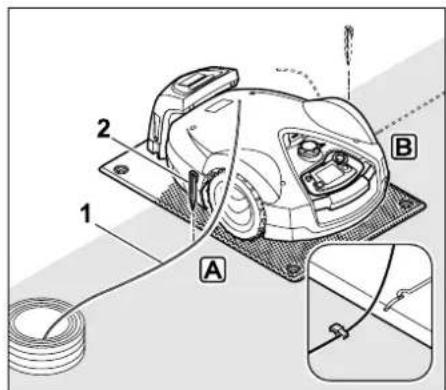
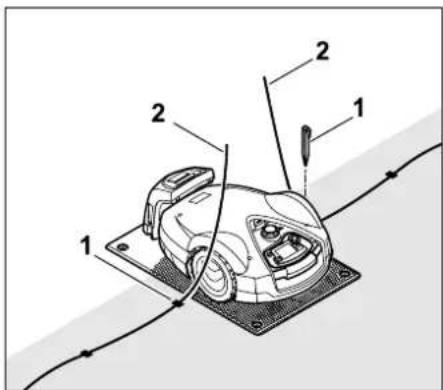
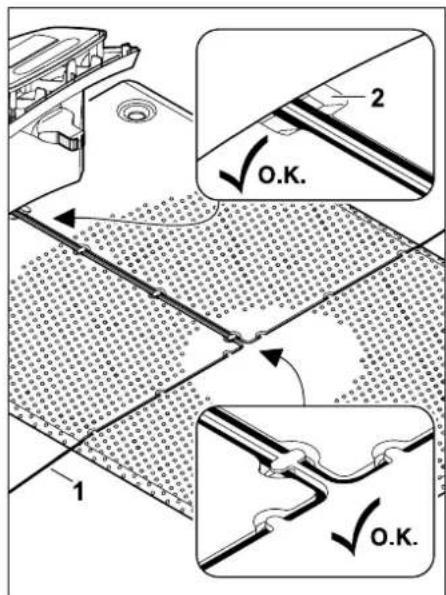
Begrenzungsdraht (1) links A oder rechts B geben der Bodenplatte, direkt geben einem Drahtauslass mit einem Fixiernagel (2) am Boden befestigen.
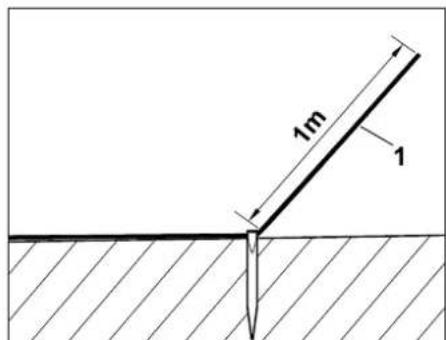
Ein freies Drahtende (1) von ca. 1 m
Länge vorsehen.
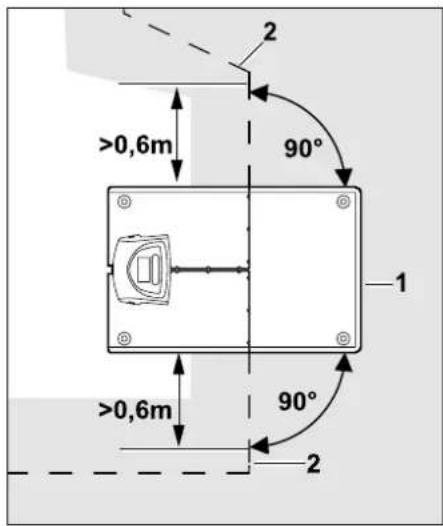
Vor und nach der Dockingstation (1) den Begrenzungsdraht (2) 0,6 m geradeaus und im rechten Winkel zur Bodenplatte verlegen. Danach mit dem Begrenzungsdraht dem Rand der Mahfläche folgen.
Begrenzungsdraht (1) um die Mahlfläche und um eventuell vorhandene Hindernisse ( 11.8) verlegen und mit Fixiernägeln (2) am Boden festmachen. Abstände mit Hilfe des iRulers kontrollieren. ( 11.3)
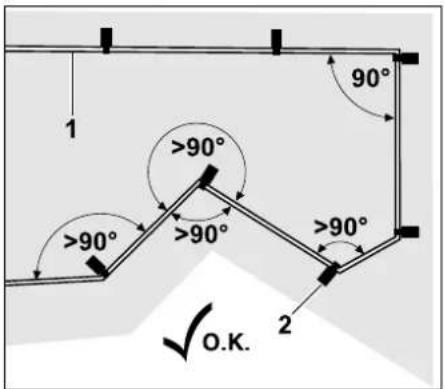
Die Verlegung in spitzen Winkeln (kleiner als 90^ ) ist zu vermeiden. In spitz zulaufenden Rasenecken Begrenzungsdraht (1) wie abgebildet mit Fixiernageln (2) am Boden befestigen.
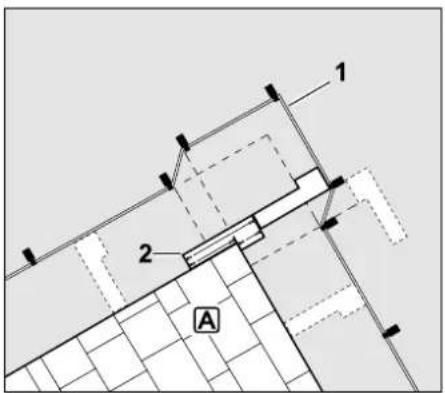
Bei der Verlegung um hohe Hindernisse wie Mauerecken oder Hochbeete A muss in den Ecken ein großerer Drahtabstand eingehalten werden, damit der
Robotermaher nicht am Hindernis streift. Begrenzungsdraht (1) mit Hilfe des iRulers (2) wie abgebildet verlegen.
- Begrenzungsdraht bei Bedarf mit den mitgelieferten Drahtverbindern verlangern. (⇒ 11.12)
- Bei mehreren zusammenhängenden Mahflächen Nebenflächen installieren (⇒ 11.9) bzw. Mahflächen mit Gassen verbinden. (⇒ 11.10)
Den letzten Fixiernagel (1) wieder links bzw. rechts besoin der Bodenplatte, direkt besoin dem Drahtauslass einschlagen. Begrenzungsdraht (2) abschreiben, frei Drahtenden von ca. 1 m Lange vorsehen.
Fixierung des Begrenzungsdrahts am Boden kontrollieren, als Richtwert genugt ein Fixiernagel pro Meter. Der Begrenzungsdraht muss immer auf der Rasenfläche aufliegen. Fixiernagel ganz einschlagen.
- Nach Abschluss der Arbeiten OK-Taste auf der Steuerkonsole drucken.
Falls der Akku zum Abarbeiten der restlichen Schritte des Installationsassistenten zu weniger geladen ist, wird eine
entspruchende Meldung angezeigt. In thisem Fall Robotermaher in der Dockingstation stehen setzen und den Akku weiter aufladen.
Der Sprung in den nachsten Schritt des Installationsassistenten mit der OK-Taste ist erst möglich, wenn die notige Akkuspannung erreicht ist.
9.7 Begrenzungsdraht anschließen

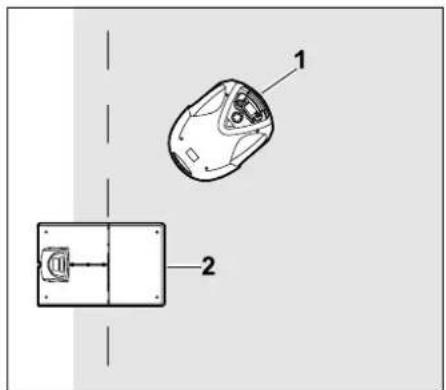
Robotermaher (1) wie abgebildet hinter der Dockingstation (2) innerhalb der Mahlflache abstellen, anschließend OK-Taste drucken.


Stcker des Netzteils vom Stromnetz trennen, anschließend OK-Taste drucken.

Abdeckung wie im Abschnitt "Dockingstation installmenten" beschrieben abnehmer. ( 9.5)
Danach OK-Taste auf der Steuerkonsole drucken.
Begrenzungsdraht (1) in Kabelführungen der Bodenplatte einlagen und durch Sockel (2) fadeln.
Begrenzungsdrahtenden (1) auf etwa 10 cm frei Lange kürzen.

Freie Länge genau beachten und überstehende Drahtenden nicht aufrolten. Zu lange frei Enden konnen die ordnungsgemäße Funktion des Robotermahers stären.
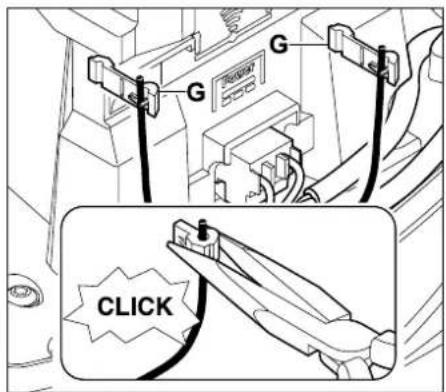
Klemmstecker (G) mit einer geeigneten Zange auf die Kabelenden aufdrücken auf korrektes Einrasten achtien.

Die Klemmstecker sind fur den einmaligen Gebrauch bestimmt und dürfen nach einer Demontage nicht wiederverwendet werden. Zusätzliche Klemmstecker sind beim VKING Fachhändler erhältlich. (⇒ 16.)
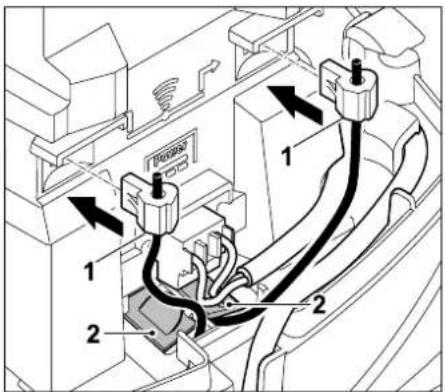
Stecker (1) wie abgebildet anstecken. Auf korrekten Anschluss von linkem und rechten Begrenzungsdrahtende achten - Drahtenden nicht vertauschen. Abdeckungen des Kabelkanals (2) schreiben.
- Nach Abschluss der Arbeiten OK-Taste auf der Steuerkonsole drucken.
Abdeckung wie im Abschnitt "Dockingstation installmenten" beschrieben montieren. ( 9.5)
Danach OK-Taste auf der Steuerkonsole drucken.


Stecker des Netzeils an Stromnetz anschließen, anschließend OK-Taste drucken.

Wenn der Begrenzungsdraht korrekt installiert und die Dockingstation an das Stromnetz angeschlossen ist, leuchtet die rote LED (1).

Das Kapitel "Bedienelemente der Dockingstation" beachten, insbesondere wenn die LED nicht wie beschrieben leuchtet. (12.1)
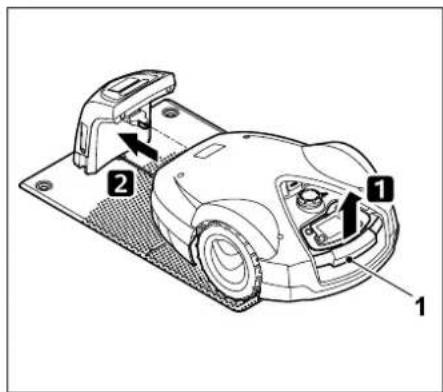
Robotermaher am Tragegriff (1) etwas anheben und Antriebsräder entlasten. Gerät auf die Vorderräder aufgestützt in die Dockingstation schieren.
Nach dem Eindocken darauf an der Dockingstation keine LED leuchten. ( 12.1)
Danach OK-Taste auf der Steuerkonsole drucken.

9.8 Robotermaher und Dockingstation koppeln

Der Robotermaher kann erst in Betrieb genommen werden, wenn das von der Dockingstation ausgesandte Drahtsignal ordnungsgemäß empfangt. ( 10.15)
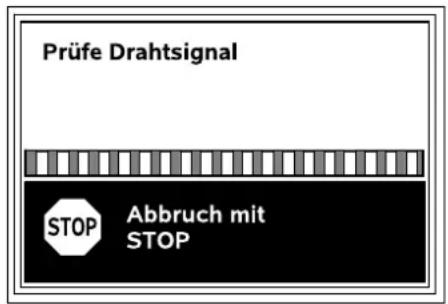
Das Prufen des Drahtsignals kann mehrere Minuten dauern. Mit der roten STOP-Taste auf der Geräte Oberseite wird das Koppeln abgebrochen, der vorge Schritt des Installationsassistenten wird aufgerufen.
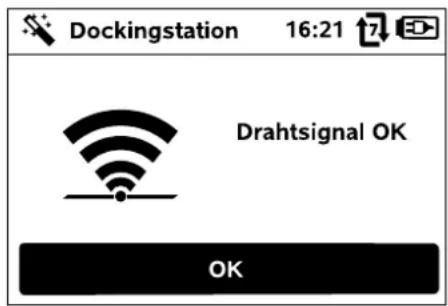
Drahtsignal OK:
Im Display wird der Text "Drahtsignal OK" angezeigt.

Der Robotermaher und die Dockingstation sind ordnungsgemäß gekoppelt.
Erstinstallation durch Drucken der OK-Taste fortsetzen.
Kein Drahtsignal:
Im Display wird der Text "Kein Drahtsignal" angezeigt. Der Robotermaher empfangt kein Drahtsignal.
Dockingstation an das Stromnetz anschlieben bzw. Begrenzungsdraht an Dockingstation anstecken und LED-Anzeige an der Dockingstation prufen. ( 12.1)
Nach Drucken der OK-Taste wird das Koppeln wiederholt.
Drahtsignal verpolt:
Im Display wird der Text "Anschlusse vertauscht oder iMow außerhalb" angezeigt. Der Robotermaher empfangt ein verpoltes Drahtsignal. Robotermaher in die Dockingstation stellen bzw. Enden des Begrenzungsdrahts richtig an Dockingstation anschließen.
Nach Drucken der OK-Taste wird das Koppeln wiederholt.
Drahtsignal prufen:
Im Display wird der Text "Drahtsignal prufen" angezeigt. Der Robotermaher empfängt ein gestörtes Drahtsignal. Mögliche Ursachen sind stromfuhrende Erdkabel, Stahlbeton oder storende Metalle im Boden unter der Dockingstation. Auch ein aufgewickeltes Netzkabel im Nahbereich der Dockingstation oder Fremdsignale (z. B. Signal einer weiteren Dockingstation) konnen das Drahtsignal stären.
Falls möglich, Störquelle beseitigen, sonst Dockingstation an einer anderen Position installmenten.
Nach Drucken der OK-Taste wird das Koppeln wiederholt.


Falls das Drahtsignal nicht ordnungsgemäß empfangen werden kann und die beschreibenben Maßnahmen Abhilfe bieten, VKING Fachh kontaktieren.
9.9 Installation prüfen

Begrenzung



Rand abfahren
Start
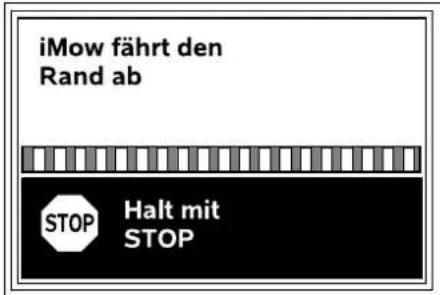
Testlauf zur Überprüfung der korrekten Drahtverlegung durch Drucken der OK-Taste starten.

Während des Randabfahrens hinter dem Robotermaher hergehen und darauf auf achten,
- dass der Robotermaher den Rand der Mahlfache wie geplant befahr,
-dass die Abstände zu Hindernissen und zu den Grenzen der Mahlflache stimmen, - dass das Aus- und Eindocken korrekt Funktioniert.

Während des Testlaufs wird das Mahmesser nicht aktiviert.
Der Testlauf kann bei Bedarf nach der Erstinstallation erneut durchgefuhrt werden. ( 10.13)
Das Randabfahren wird automatisch durch Hindernisse oder durch Befahren von Hangen mit zu großer Neigung bzw. manuell durch Drucken der roten STOP-Taste auf der Geräte Oberseite unterbrochen.
- Falls der Testlauf automatisch unterbrochen wurde, Position des Begrenzungsdrahts korrigieren bzw. Hindernisse entfern.
- Vor der Fortsetzung des Randabfahrens Position des Robotermahers kontrollieren. Das Gerät muss entweder auf dem Begrenzungsdraht oder innerhalb der Mahlfache mit der Vorderseite Richtung Begrenzungsdraht stehen.
Fortsetzung nach Unterbrechung:
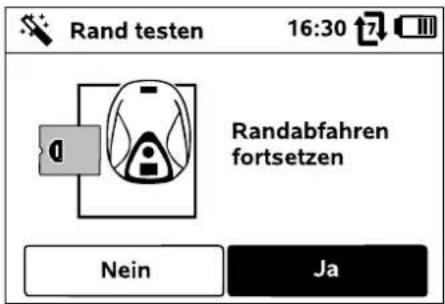
Nach einer Unterbrechung Randabfahren mit Ja fortsetzen.
Bei Nein wird das Abfahren des Begrenzungsdrahts beendet, der{nachste Schritt des Installationsassistenten wird aufgerufen.

Bei einem Abbruch des Testlaufskonnen mögliche Probleme beim Befahren des Rands der Mahlfläche nicht erkannt werden.
Abschluss des Testlaufs:
Mit dem Eindhoven nach einer vollständigen Runde wird der nachste Schritt des Installationsassistenten aufgerufen.
9.10 Robotermaher programmieren
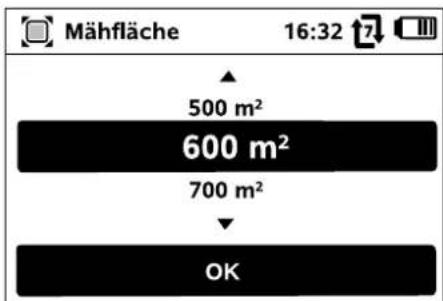
GröBe der Rasenfläche eingeben und mit OK bestätigten.

Installierte Sperrflächen bzw. Nebenflächen sind bei der Grüse der Mahfläche nicht mitzurechnen.
OK

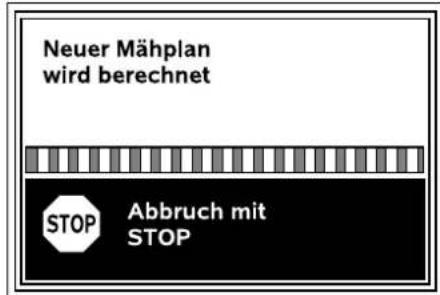
Ein neuer Mahplan wird berechnet. Mit der roten STOP-Taste auf der Geräte Oberseite kann der Vorgang abgebrochen werden.
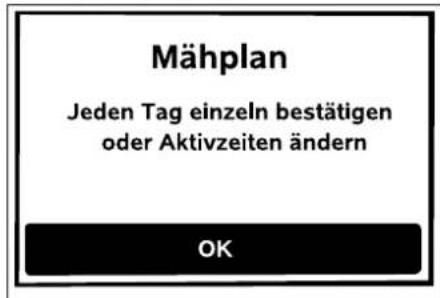
Hinweis "Jeden Tag einzeln bestätigkeiten oder Aktivzeiten ändern" durch Drücken der OK-Taste bestätigten.
OK

Der Montag-Tagesplan wird angezeigt und der Menüpunkt Tagesplan bestätig ist aktiviert.
Mit OK werden alle Aktivzeiten des angezeigten Tages bestätigt, der{nachste Tagesplan wird angezeigt.
Bei klaen Mahrflächen werden nicht alle Wochentage zum Mahen genutzt. In thisem Fall werden keine Aktivzeiten angezeigt, der Menupunkt "Tagesplan loschen" entfällt. Tagespläne ohne Aktivzeiten sind ebenfalls mit OK zu bestätigten.
Die angezeigten Aktivzeiten konnen geändert werden. Dazu gewünschtes Zeitintervalt mit dem Steuerkreuz auswahlen und mit OK öffnen. (10.6)
Falls zusätzliche Aktivzeiten gewünscht sind, Menupunkt Neue Aktivzeit wahlen und mit OK offen. Im Auswahlfenster Beginnzeit und Endzeitpunkt der neuen Aktivzeit festlegen und mit OK bestätigten. Bis zu drei Aktivzeiten pro Tag sind möglich.
Falls alle angezeigten Aktivzeiten gelöscht werden sollen, Menupunkt Tagesplan loschen wahlen und mit OK bestätigten.

Nach der Bestätigung des Sonntag-Tagesplans wird der Mahplan angezeigt.
Mit OK wird der angezeigte Mahplan bestätigt und der abschließlich Schritt des Installationsassistenten wird aufgerufen.
Falls Änderungen notwendig sind, Ändern auswahlen und Aktivzeiten individuell anpassen.
Während der Aktivzeiten mussen sich Dritte vom Gefahrenbereich fernhalten. Die Aktivzeiten sind entsprechend anzupassen. Beachten Sie außer dem die communalen Bestimmungen zum Einsatz von Robotermahern sowie die Hinweise im Kapitel "Zu ihrer Sicherheit" ( 6.) und verändern Sie die Aktivzeitensofar oder nach Abschluss der Erstinflation bei Bedarf im Menu "Mahplan". ( 10.5) Insbesondere sollen Sie bei der zuständigen Behörde nachfragen, zu welchen Tages- und Nachtzeiten das Geräteingesetzt werden darf.
9.11 Erstinstallation abschreiben

Alle Fremdkörper (z. B.
Spielsachen, Werkzeug) von der
Mähfläche entfernen.
Erstinstallation mit Drucken der OK-Taste abschreiben. Der

Robotermaher ist nun bereit. Falls der Abschluss der Erstinstallation in eine Aktivzeit fällt, beginnt der Robotermaher sofort mit dem Bearbeiten der Mahlfläche.
Falls der Abschluss der Erstinflation außerhalb der Aktivzeit erfolgt, kann durch Drucken der OK-Taste ein Mähvorgang gestartet werden. Falls der Robotermaher nicht mAHen soll, "Nein" auswahlen.
Nach der Erstinstallation ist die Sicherheitsstufe "Keine" aktiviert. VIKING empfeht, eine der Sicherheitsstufen "Niedrig", "Mittel" oder "Hoch" zu wahlen. So ist garantiert, dass Unbefugte keine Einstellungen verändern und der Robotermaher nicht mit weiteren Dockingstationen betrieben werden kann. (10.15)
10. Menu
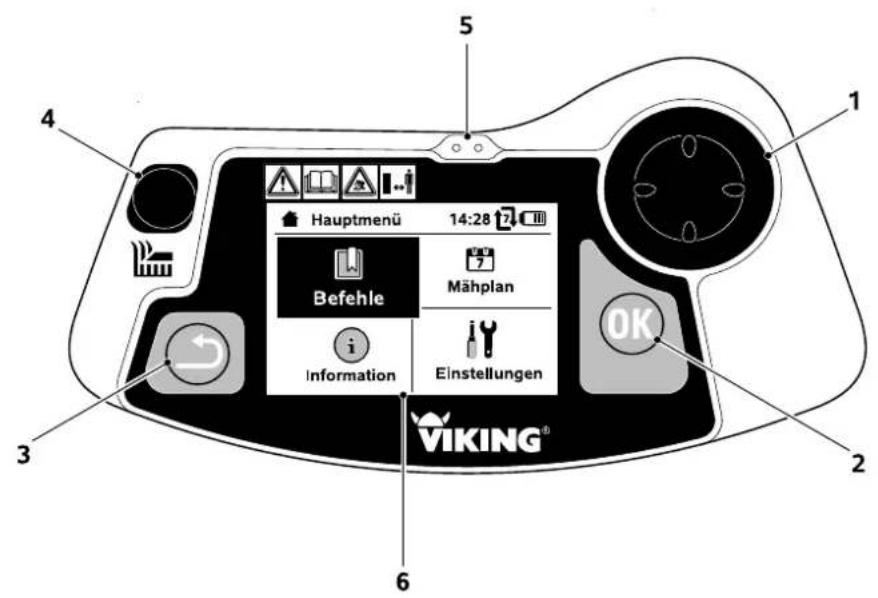
10.1 Bedienhinweise
- Steuerkonsole bei Bedarf entnahmen.
(⇒ 14.2)
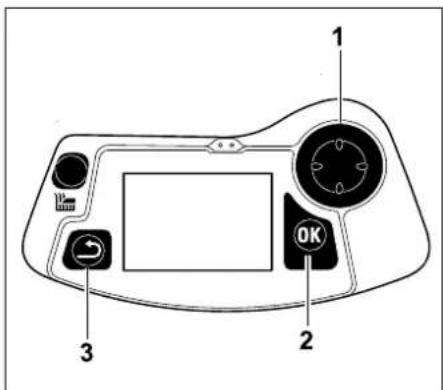
Das Steuerkreuz (1) dient zur Navigation in den Menus, mit der OK-Taste (2) werden Einstellungen bestätigt und Menus geöffnet. Mit der Zurück-Taste (3) konnen Menus wieder verlassen werden.
Das Hauptmenu besteht aus 4 Untermenus, dargestellt als Schaltflächen. Das ausgewählte Untermenu ist schwarz hinterlegt und wird mit der OK-Taste geöffnet.


In der zweiten Menüebene werden die jeweiligen Untermenüs mit Registerkarten dargestellt.
Registerkarten werden durch Drucken des Steuerkreuzes nach links bzw. rechts ausgewählt, Untermenus durch Drucken des Steuerkreuzes nach unten bzw. oben. Aktive Registerkarten bzw. Menueinträge sind schwarz hinterlegt.
Der Scrollbalken am rechten Displayrand weist daraufhin, dass durch Drucken des Steuerkreuzes nach unten bzw. oben noch weitere Einträge angezeigt werden konnen.
Untermenus werden Drucken der OK-Taste geöffnet.

In Untermenüs werden Optionen aufgelistet. Aktive Listeneinträge sind schwarz hinterlegt. Drucken der OK-Taste öffnet ein Auswahlfenster oder ein Dialogfenster.
Auswahlfenster:
Einstellwerte konnen durch Drucken des Steuerkreuzes verändert werden. Der aktuelle Wert ist schwarz hervorgoben. Mit der OK-Taste erfolgt die Bestätigung aller Werte.
Dialogfenster:
Falls Änderungen gespeichert oder Meldungen bestätigt werden müssen, erscheint im Display ein Dialogfenster. Die aktive Schaltfläche ist schwarz hinterlegt.
Bei einer Wahlmöglichkeit kann durch Drücken des Steuerkreuzes nach links bzw. rechts die jeweilige Schaltfläche aktiviert werden.
Mit der OK-Taste wird die gewähte Option bestätigt und das übergeordnete Menu aufgerufen.
10.2 Statusanzeige
Die Statusanzeige erscheint,
- wenn der Standby-Betrieb des Robotermahers durch Drucken einer Taste beendet wird,
- wenn im Hauptmenü die Zurück-Taste gedrückt wird,
- während des laufenden Betriebs.

Im oberen Bereich der Anzeige sind zwei konfigurierbare Felder zu finden, hier konden diverse Informationen zum Robotermaher bzw. zu den Mahvorgangen angezeigt werden. ( 10.12)
Keine laufende Aktivität:
Im unteren Bereich der Anzeige werden Meldungen und der Automatik-Status angezeigt. ( 10.4)
iMow betriebsbereit:
Sind Empfehlungen aktiv,
erscheinen diese abwechselnd mit dem Text "iMow betriebsbereit".
Aktive Störungen bzw. Fehler:
Die entsprechende Meldung wird zusammen mit dem Meldungsfcode angezeigt. Wenn mehrere Meldungen aktiv sind, erschinen sie abwechselnd.
Während laufender Aktivitäten:
Im unteren Bereich der Statusanzeige wird über den derzeit aktiven Vorgang mit einem Symbol und einem entsprechenden Text informiert.
Start des Mahvorgangs:
Der Text "Achtung - iMow startet", eine blinkende Displaybeleuchtung und ein Signaton weisen auf den bevorstehenden Start des Mahmotors hin. Erst eineugekunden, nach dem sich der Robotermaher in Bewegung gesetzt hat, wird das Mahmesser automatisch zugeschaltet.
Laufender Mahvorgang:
Der Text "iMow mahr den Rasen" wird angezeigt.
Randmähen:
Während der Robotermaher den Rand der Mahlfache beareritet, wird der Text "Rand wird gemaht" angezeigt.
Zur Dockingstation fahren:
Wenn der Robotermaher zurück zur Dockingstation fahr, wird im Display der jeweilige Grund (z. B. Akku entladen, Mahen beendet) angezeigt.
Laden des Akkus:
Beim Aufladen des Akkus erscheint der Text "Akku wird aufgeladen".

10.3 Hauptmenu
Das Hauptmenu wird angezeigt,
- wenn die Statusanzeige (⇒ 10.2) durch Drucken der OK-Taste verlassen wird,
- wenn in der zweiten Menüebene die Zurück-Taste gedrückt wird.
Im Hauptmenu können 4
Untermenus ausgewählt werden.
- Befehle (⇒ 10.4)
iMow sperren
Automatik ein- und ausschalten
Zur Dockingstation fahren
Handsteuerung
Mahren starten
Mähen zeitverzöget starten
Nächste Aktivzeit auslassen
Randmähen
- Mahplan (⇒ 10.5)
Tagesplan
Wochenplan
- Information ( 10.8)
Meldungen
Ereignisse
Status iMow
StatusRasen
- Einstellungen (10.9)
iMow
Installation





Sicherheit
Service
Handlerbereich
10.4 Befehle
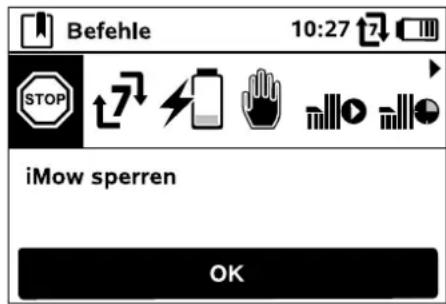
Gewündschen Befehl mit dem Steuerkreuz auswahlen und mit OK ausführren.
- iMow sperren
- Automatik einschalten/ausschalten
- Zur Dockingstation fahren
- Handsteuerung
- Mahlen starten
- Mahen zeitverzögt starten
- Nachste Aktivzeit auslassen
-
Randmähen
-
iMow sperren:
Gerätesperre aktivieren.
Zum Entsperren angezeigte
Tastenkombination drucken.
(⇒ 5.2)
- Automatik einschalten/ ausschalten:
Bei eingeschalteter Automatik
erscheint in der Statusanzeige
der Text "Automaticeingeschaltet", befindem Akku-Symbol wird in den Menus das


Automatiksysymbol angezeigt. Der Robotermaher darbeiter die Mähfläche vollautomatisch.
Bei ausgeschalteter Automatik entscheidet in der Statusanzeige der Text "Automatik ausgeschaltet", die Aktivzeiten im Mahplan werden inaktiv (grau) dargestellt. Die Mahfläche wird nicht automatisch bearbeitet. Mahvorgänge konnen über die Befehle "Mahren starten", "Mahren zeitverzögt starten" eingeleitet werden.
- Zur Dockingstation fahren:
Der Robotermaher fahrzurück zur Dockingstation und ladt den Akku auf. Bei eingeschalteter
AutomatikbearbeitetderRobotermaherind der nachstmöglichenAktivzeitwieder dieMahflache.
- Handsteuerung:
Rasen manuell mAHen.
Aus Sicherheitsgründen kann das Mahmesser nur
eingeschaltet werden, wenn die OK-Taste betätig und gehalten sowie anschließend die Mahtaste gedrückt wird. Das Lenken erfolgt mit dem Steuerkreuz. (⇒ 14.6)
- Mahren starten:
Nach Aktivierung startet der Robotermaher automatisch den Mahvorgang. Es ist das Ende des Mahvorgangs festzulegen.
Die Standardeinstellung für die Dauer des Mahvorgangs kann in den
Geräteinstellungen unter "Mähzeit"
geändert werden. (⇒ 10.10)

Im Hauptmenu ( 10.3) kann
der Befehl "Mahlen starten"
auch durch Drucken der
Mähtaste aktiviert werden.


6. Mühen zeitverzögert starten:
Nach Aktivierung startet der Robotermaher automatisch, aber zeitverzogert den Mahvorgang. Es sind Startzeit und Ende des Mahvorgangs festzulegen.
Die Standardeinstellungen für die Dauer des Mahvorgangs bzw. die Verzögerung können in den Geräteinstellungen unter "Mähzeit" bzw. "Verzögerung" geändert werden. ( 10.10)
7. Nächste Aktivzeit auslassen:
Der Befehl kann genutzt werden,
wenn der Robotermaher
während der nachsten Aktivzeit nicht
arbeiten soll (z. B. bei einer Gartenparty).
Nach Bestätigung wird während der
nachsten Aktivzeit nicht gemäht. Eine
derart gesperte Aktivzeit wird im Mahplan
grau dargestellt. Sie kann im Menu
"Tagesplan" wieder für das Mahen
freigegeben werden. ( 10.6) Wird der Befehl mehrmals hintereinander
ausgenuft, so wird immer die
nachstfolgende Aktivzeit ausgelassen. Ist
in der laufenden Woche keine weitere
Aktivzeit übrig, erscheidt die Meldung
"Nächste Woche wird nicht gemäht".
8. Randmähen:
Nach Aktivierung maht der Robotermaher den Rand der Mahfläche. Nach einer Runde fahr her zurück zur Dockingstation und ladt den Akku auf.

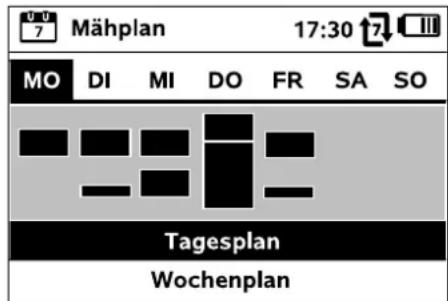
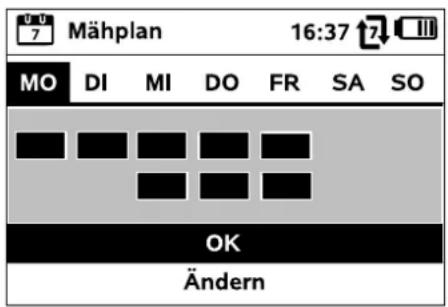
10.5 Miahplan
Der gespeicherte Mahplan wird über das Menu "Mahplan" im Hauptmenu aufgerufen. Die rechtekigen Flächen unter dem jeweiligen Tag stehen für die gespeicherten Aktivzeiten. In schwarz markierten Aktivzeiten wird gemäß, graue Flächen stehen für Aktivzeiten ohne Mahvorgänge - z. B. bei einer ausgeschalteten Aktivzeit oder nach dem Befehl "Aktivzeit auslassen". (⇒ 10.4)
Bei ausgeschalteter Automatik ist der gesamte Mahplan inaktiv, alle Aktivzeiten werden grau dargestellt.
Wird das Steuerkreuz nach oben oder unter den gedrückt, können die Untermenus Tagesplan ( 10.6) oder Wochenplan ( 10.8) ausgewählt und mit der OK-Taste geöffnet werden.
Sollen die Aktivzeiten eines einzeln Tagesbearbeitert werden,dann muss der Tag mit dem Steuerkreuz (nach links oder rechts drucken)aktiviert und das Untermenü Tagesplan geöffnet werden.

10.6 Tagesplan
In Aktivzeiten mit Håkchen ist
Mahren erlaubt, sie werden im
Mahplan schwarz markiert.

In Aktivzeiten ohne Håkchen ist Mähen nicht erlaubt, sie werden im Mahplan grau markiert.

Hinweise im Kapitel "Aktivzeiten" beachten. ( 13.3) Insbesondere müssen sich Dritte während der Aktivzeiten vom Gefahrenbereich fernhalten.
Die gespeicherten Aktivzeiten können einzeln ausgewählt und bearbeitet werden.
Der Menupunkt Neue Aktivzeit kann gewählt werden, solange weniger als 3 Aktivzeiten pro Tag gespeichert sind. Eine zusätzliche Aktivzeitarf sich nicht mit anderen Aktivzeiten überschneiden.

Falls der Robotermaher am gewählten Tag nicht mahen soll, dann ist der Menupunkt Tagesplan loschen zu wahlen.
Aktivzeitbearbeiten:
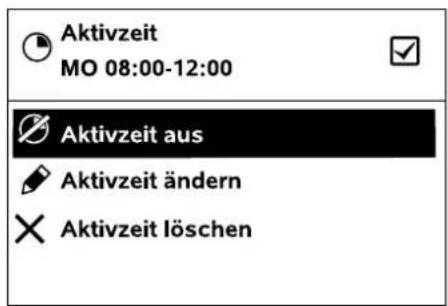
Mit Aktivzeit aus bzw. Aktivzeit ein wird die gewählte Aktivzeit für das automatische Mähen gesetzt bzw. freigegeben.
Mit Aktivzeit ändern kann das Zeitfenster geändert werden.
Falls die gewählte Aktivzeit nicht mehr bestehtigt wird, dann ist der Menupunkt Aktivzeit loschen zu wahlen.
Reichen die Zeitfenster fur die nötigen Maheinsätze und Ladevorgänge nicht aus, sind Aktivzeiten zu verlangern oder zu ergänzen bzw. ist die Mahdauer zu verringn. Eine entsprechende Displaymeldung wird angezeigt.
10.7 Wichenplan
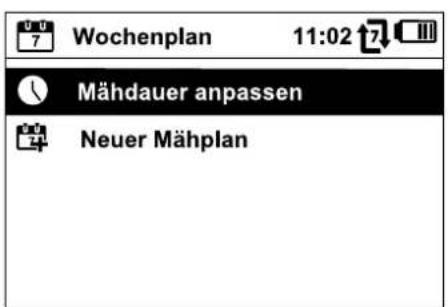
Die wochentliche Mahzeit kann unter Mahdauer anpassen
eingestellt werden. Der eingestellte Wert ist auf die Höhe der Mahfläche abgestimmt. (⇒ 13.4)
Hinweise im Kapitel "Programmierung anpassen" beachten. (⇒ 14.3)
Der Befehl Neuer Mahplan löscht alle gespeicherten Aktivzeiten. Der Schritt "Robotermaher programmieren" des Installationsassistenten wird aufgerufen. ( 9.10)
Falls der Abschluss der Neuprogrammierung in eine Aktivzeit fällt, startet der Robotermaher nach der Bestätigung der einzelnen Tagespläne einen automatischen Mähvorgang.
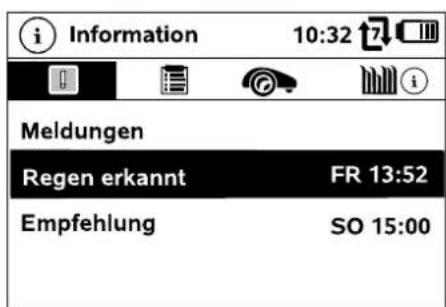
10.8 Information
-
Meldungen: Im Menu Meldungen sind alle aktiven Fehler, Störungen und Empfehlungen zusammen mit dem Zeitpunkt des Aufretens aufgelistet. Bei störungsfreiem Betrieb erscheidt der Text "Keine Meldungen". Meldungsdetails werden nach Drucken der OK-Taste angezeigt. ( 23.)
-
Ereignisse: Im Menu Ereignisse werden die letzten Aktivitäten des Robotermahers aufgelistet. Ereignisdetails (Zusatztext, Zeitpunkt und Code) werden nach Drucken der OK-Taste angezeigt.
Wenn manche Aktivitäten ungewöhnlich oft aufreten, halt der VKING Fachhändler weitere Details bereit. Fehler im Normalbetrieb werden in den Meldungen dokumentiert.
3.Status iMow: Im Menu Status iMow sind Details zum Robotermaher zu!.
Ladezustand: Akkuladung in Prozent

- Restzeit: Verbleibende Mahdauer in der laufendenWoche in Stunden und Minuten
- Datum und Uhrzeit
- Startzeit:
Start des nachsten geplanten
Mehrvorgangs - Anzahl aller abgeschlossenen Mahvorgänge
Mähstunden: Dauer aller abgeschlossenen Mahvorgänge in Stunden
Wegstrecke: Gesamte zurückgelegte Fahrstrecke in Metern - Ser.-No.: Serialnummer des Robotermahers, auch abzulesen am Typenschild im Fach unter der Steuerkonsole.
-Akku: Serialnummer des Akkus - Software: Installierte Gerätesoftware
4.StatusRasen: Im Menu Status Rasen werden Details zur Rasaenflache aufgelistet. - Mahfläche in Quadratmetern: Wert wird bei der Erstinstallation bzw. bei einer Neuinstallation eingegeben. ( 9.4)
Rundenzeit: Dauer einer Runde um die Mahlfache in Minuten und Sekunden - Startpunkte 1 - 4: Entfernung des jeweiligen Startpunkts von der Dockingstation in Metern, gemessen im Uhrzeigersinn. (⇒ 10.13)
-Umfang: Umfang der Mahlfache in Metern
- Randmahlen: Häufigkeit des Randmahens pro Woch (10.13)
10.9 Einstellungen

- iMow: Anpassen von Geräteinstellungen (⇒ 10.10)
- Installation: Anpassen und Testen der Installation ( 10.13)
- Sicherheit: Anpassen der Sicherheitseinstellungen ( 10.15)
-
Service: Wartung und Service ( 10.16)
-
Handlerbereich:
Menu ist durch den
Händlercode geschützt. Der
VIKING Fachhändler führt mit Hilfe dieseres
Menü diverse Wartungs- und
Servicetätigkeiten durch.
10.10 iMow - Geräteinstellungen
- Regensensor: Der Regensensor kann so eingestellt werden, dass das Mähen bei Regen unterbrochen bzw. nicht gestartet wird.
Regensensor einstellen ( 10.11)
- Mahzeit:
Einstellen des Standards für die Dauer eines Mahvorgangs nach Aktivieren des Befehls "Mahren starten". (⇒ 10.4) - Verzogerung:
Einstellen des Standards für die Verzogierung nach Aktivieren des Befehls "Mahren zeitverzögert starten". (⇒ 10.4)
4.Statusanzeige: Auswahlen der Informationen, die in der Statusanzeige erschinen sollen. ( 10.2) - Statusanzeige einstellen ( 10.12)
5.Uhrzeit: Einstellen der aktuellen Uhrzeit. Die eingestellte Uhrzeit muss mit der tatsächlichen Uhrzeit übereinstimmen, um ein ungewoltes Mahen des Robotermahers zu verhindern.
6. Datum: Einstellen des aktuellen Datum. Das eingestellte Datum muss mit dem tatsächlichen Kalenderdatum übereinstimmen, um ein ungewoltes Mühen des Robotermahers zu verhindern.
7. Datumsformat:
Einstellen des gewünschten
Datumsformats.
8. Spurversatz:
Der Robotermaher fahrstdammiig mit 6 cm Versatz nach innen entlang dem
Begrenzungsdraht. Mit thisem Wert ist ein optimales Eindhoven garantiert. Der iRuler ist ebenso auf einen Spurversatz von 6 cm ausgelegt.

VIKING empfehl't, die Standardeinstellung von 6 cm nicht zu verändern.
- Nur bei Bedarf Auswahlfenster mit OK öffnen und gewündten Wert (3 cm bis 9 cm) einstehen.
9. Sprache:
Gewünschte Displaysprache einstehen. Standardmäßig ist jene Sprache eingestellt, die bei der Erstinstallation gewählt wurde.
10. Kontrast:
Bei Bedarf kann der Displaykontrast eingestellt werden.

10.11 Regensensor einstellen
Zum Einstellen des 5-stufigen Sensors Steuerkreuz nach links oder rechts drucken. Der aktuelle Wert wird im Menu
"Einstellungen" mit einer Strichgrafik dargestellt.
Die Empfindlichkeit des Regensensors ist an die lokalen Verhältnisse und Wünsche anpassbar. Insbesondere kann so auch eingestellt werden, wie lange der Robotermaher nach einem Regen das Abtrocknen der Mahlfläche abwartet.
Bei mittlerer
Empfindlichkeit ist der
Robotermaher fur den
Einsatz unter normalen
äußeren Bedingungen bereit.

Den Balken weiter nach links schieben fur Mahlen bei hoherer Feuchtigkeit. Ganz links mahr der Robotermaher auch bei nassen außeren
Bedingungen und unterbricht den Mähvorgang nicht, wenn Regentropfen auf den Sensor treffen.
Den Balken weiter nach rechts schieren für Mahren bei geringerer Feuchtigkeit.
Ganz rechts maht der Robotermaher nur, wenn der Regensensor vollkommen tro

10.12 Statusanzeige einstellen
Zum Konfigurieren der Statusanzeige linke bzw. rechte Anzeige mit dem Steuerkreuz auswahlen und mit OK bestätigten.
Ladezustand:
Anzeige des Akkusymbols zusammen mit dem Ladezustand in Prozent
Restzeit:
Verbleibende Mahdauer in der laufendenWoche in Stunden und Minuten
Uhrzeit und Datum:
Aktuelles Datum und aktuelle Uhrzeit
Startzeit:
Start des nachsten geplanten Mähvorgangs
Mähvorgänge:
Anzahl aller bisher geleisteten Mähvorgänge
Mähstunden:
Dauer aller bisher geleisteten Mähvorgänge






Wegstrecke:
Gesamte zurückgelegte
Wegstrecke



10.13 Installation
1. Neuinstallation:
Mit einer Neuinstallation wird der Installationsassistent erneut gestartet, der bestehende Mahplan wird gelöscht. ( 9.4)


2. Startpunkte:
Der Robotermaher beginnt die Mahrvorgänge stets bei der Dockingstation bzw. bei einem der definierten Startpunkte. Werden bestimmte Teilflächen unzureichend bearerbeitet, können diese somit gezielt angefahren den werden. In Bereichen, die der Robotermaher über eine Gasse erreicht, muss zumindest ein Startpunkt festgelegt werden.
- Startpunkte einstellen ( 10.14)
3. Rand testen:
Der Robotermaher startet nach Aktivierung einen Testlauf zur Überprüfung der korrekten Drahtverlegung.
Der Schritt "Installation prufen" des Installationsassistenten wird gestartet. ( 9.9)


Zur Überprüfung der korrekten Drahtverlegung um Sperrflächen Robotermaher mit der Vorderseite Richtung Sperrfläche in der Mahfläche positionieren und Testlauf starten.
4. Randmähen:
Im Menu Randmahen kann festgelegt werden, wie oft der Robotermaher den Rand der Mahlflächen mahen soll:
Nie - Standardeinstellung
Einmal - Der Rand wird einmal pro Woche gemäht.
Zweimal - Der Rand wird zweimal pro Woche gemaht.
10.14 Startpunkte einstellen
Zum Einstellen entweder
- Startpunkte einlernen
oder - gewünschten Startpunkt auswahlen und manuell definieren.
Startpunkte einlernen:
Alle bestehenden Startpunkte werden gelöscht und der Robotermaher fahr eine Runde um die Mahlfläche entlang des Begrenzungsdrahts.
Während der Fahrt konnen durch Drucken der OK-Taste bis zu 4 Startpunkte festgelegt werden, danach dockt der Robotermaher wieder in der Dockingstation ein. Bei Bedarf kann der Einlernvorgang mit der STOP-Taste abgebrochen werden. Bei Hindernissen am Rand der Mahfläche wird die Fahrt ebenfalls abgebrochen.
Nach dem Eindhoven bzw. nach dem Abbruch werden nach Bestätigung mit OK die neuen Startpunkte gespeichert. Den gespeicherten Punkten wird eine Starthaufigkeit von 15% zugewiesen.
- Bei Bedarf nach dem Einlernen Starthaufigkeit verändern.
- Falls der Einlernvorgang vorzeitig beendet wurde, Robotermaher per Befehl zur Dockingstation schicken. (10.4)
Startpunkt 1 bis 4 manuell einstellen:
Entfernung des Startpunkts von der Dockingstation festlegen und Starthaufigkeit definierten.
Die Entfernung entspricht der Fahrstrecke von der Dockingstation zum Startpunkt in Metern, gemessen im Uhrzeigersinn.
Die Starthaufigkeit kann zwischen 0% und 25% liegen und definiert, wie oft ein Mahvorgang bei diesen Startpunkt begonnen werden soll.

Die Dockingstation ist als Startpunkt 0 definiert, standardmäßig werden
Mähvorgänge von Dort gestartet. Die Starthaufigkeit entspricht dem errechneten Restwert auf 100%.
10.15 Sicherheit
- Gerätesperre
- Stufe
- PIN-Codeändern
- Warntone
- Menutone
- Tastensperre
- iMow + Dock koppeln
1. Gerätesperre:
Mit OK wird die Gerätesperre aktiviert, der Robotermaher kann nicht mehr in Betrieb genommen werden. Der Robotermaher muss vor allen Wartungs- und Reinigungserbeiten, vor dem Transport sowie vor der Überprüfung gespeit werden. (→ 5.2)



Zum Aufheben der Gerätesperre abgebildete Tastenkombination (Mäh-Taste und OK-Taste) drucken.

2. Stufe:
Es konnen 4 Sicherheitsstufen eingestellt werden, je nach Stufe werden bestimmte Sperren und Schutzeinrichtungen aktiv.
Keine:
Der Robotermaher ist ungeschützt.
Niedrig:
PIN-Code-Eingabe für das Koppeln von Robotermaher und Dockingstation sowie für das Rücksetzen des Geräts auf Werkseinstellung; Zeitsperre ist aktiv.
Mittel:
Wie "Niedrig", zusätzlich konnen Einstellungen erst nach PIN-Code-Eingabe verändert werden.
Hoch:
Wie "Mittel", zusätzlich zur PIN-CodeAbfrage ist ein Diebstahlschutz aktiv.

VIKING empfeihlt, eine der Sicherheitsstufen "Niedrig", "Mittel" oder "Hoch" einzustellen.
Gewünschte Stufe auswahlen und mit OK bestätigten, bei Bedarf 4-stelligen PIN-Code eingeben.
Resetspere:
PIN-Code-Abfrage vor dem Zurücksetzenden Geräts auf Werkseinstellungen.
Koppelsperre:
PIN-Code-Abfrage vor dem Koppeln von Robotermaher und Dockingstation.
Zeitsperre:
PIN-Code-Abfrage für das Ändern einer Einstellung, wenn länger als 1 Monat kein PIN-Code mehr eingegeben wurde.
Einstellschutz:
PIN-Code-Abfrage, wenn Einstellungen geändert werden.
Diebstahlschutz:
Wird der Maher länger als 10 Sekunden am Griff hochgehoben, dann erscheint eine PIN-Abfrage. Wird der PIN-Code nicht binnen 1 Minute eingebehen, startet ein Alarmton, außerdem wird die Automatik ausgeschaltet.
3. PIN-Codeändern:
Der 4-stellige PIN-Code kann bei Bedarf geändert werden.


Der Menupunkt "PIN-Code ändern" wird nur bei den Sicherheitsstufen "Niedrig", "Mittel" oder "Hoch" angezeigt.
- Zuerst alten PIN-Code eingeben und mit OK bestätigten.
- Neuen 4-stelligen PIN-Code einstellen und mit OK bestätigten.

VIKING empfehl't, den geänderten PIN-Code zu notieren.
Falls der PIN-Code 5-mal falschingegeben wurde, ist ein 4-stelliger Master-Code notwendig, außer dem wird die Automatik ausgeschaltet.
Für die Erstellung des Master-Codes sind dem VIKING
Fachhändler die 9-stellige Serialnummer und das 4-stellige Datum, die im Auswahlfenster angezeigt werden, zu übermitteln.
4. Warntöne:
Ein- bzw. Ausschalten des akustischen Signals, das ertont, wenn der Robotermaher gegen ein Hindernis stöhrt.
5. Menütone:
Ein- bzw. Ausschalten des akustischen Klick-Signals, das ertont, wenn ein Menu geöffnet bzw. eine Auswahl mit OK bestätigt wird.
6. Tastensperre:
Ist die Tastensperre
eingeschaltet, können die Tasten
der Steuerkonsole nur bedient
werden, wenn zuerst die Taste
Zurück gedrück und gehalten un
anschließlich das Steuerkreuz na
vorne gedrück wird.
Die Tastensperre wird 2 Minuten
letzten Tastenbetätigung aktiv.
7. iMow + Dock koppeln:
Der Robotermaher Funktioniert nach der Erstinbetriebnahme ausschließlich mit der mitgelieferten Dockingstation. Nach einem Tausch der Dockingstation bzw. von elektronischen Bauteilen im Robotermaher oder zur Inbetriebnahme des Robotermahers auf einer weiteren Mahlfläche mit einer anderen Dockingstation müssen der Robotermaher und Dockingstation gekoppelt werden.
- Dockingstation installieren und Begrenzungsdraht anschließen. ( 9.5) , ( 9.7)
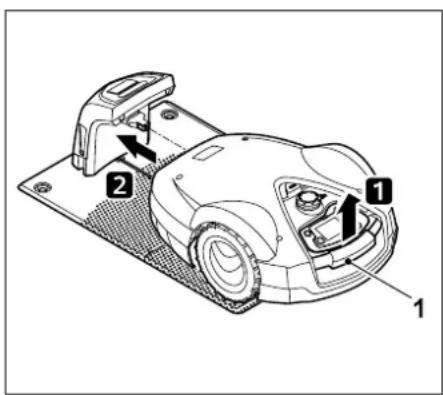

Robotermaher am Tragegriff (1) etwas anheben und Antriebsräder entlasten. Gerät auf die Vorderräder aufgestützt in die Dockingstation schiben.
- Nach Drucken der OK-Taste PIN-Code eingeben, danach sicht der Robotermaher nach dem Drahtsignal und speichert es automatisch. Der Vorgang dauert mehrere Minuten. (⇒ 9.8)


Der PIN-Code ist bei Sicherheitsstufe "Keine" nicht erforderlich.
10.16 Service
1. Messerwechsel:
Mit OK wird der Einbau eines neuen Mahmessers bestätigt.

Falls das Messer länger als 200
Stunden in Gebrauch war, entscheid
die Meldung "Mahmesser
tauschen". (→ 15.4)
2.Drahtbruchsche:
Falls an der Dockingstation die rote LED blinkt, ist der Begrenzungsdraht unterbrochen. ( 12.1) Mit OK wird ein Assistant zum Finden der Bruchstelle aktiviert.
Drahtbruchsuchen ( 15.6)
3. Reset Einstellungen:
Mit OK wird der Robotermaher auf Werkseinstellungen zurückgesetzt, der Installationsassistent wird erneut gestartet. ( 9.4)
- Nach Drucken der OK-Taste PIN-Code eingeben.


Der PIN-Code ist bei Sicherheitsstufe "Keine" nicht erforderlich.
11. Begrenzungsdraht

Vor dem Verlegen des
Begrenzungsdrahts,
insbesondere vor der
ersten Installation, das
gesamte Kapitel lessen und die Drahtverlegung genau planen.

Erste Installation mit dem
Installationsassistenten
durchfuhren. ( 9.)
Sollten Sie Unterstützung
benötigen, hilft Ihnen der VIKING
FachhändlerGREne bei der
Vorbereitung der Mahlfache und
der Installation des
Begrenzungsdrahts.
Vor der endgültigen Fixierung des
Begrenzungsdrahts Installation prüfen.
(⇒ 9.9) Anpassungen der Drahtverlegung
sind in der Regel im Bereich von Gassen,
Engstellen oder Sperrflächen notwendig.
Abweichungen konnen vorkommen,
- wenn die technischen Molligkeiten
des Robotermahers ausgereizt werden,
etwa mit sehr langen Gassen oder bei
Verlegung im Bereich von metallischen
Gegenständen bzw. über Metall unter
derRasenfläche,
- wenn die Mahlfache speziell fur den
Einsatz des Robotermahers baulich
verändert wird.
11.1 Verlegung des Begrenzungsdrahts planen

Installationsbeispiele am Ende
der Gebrauchsanleitung
beachten. ( 26.)
Sperrflächen, Gassen,
Nebenflächen und Drahtreserven
im Zuge der Verlegung des
Begrenzungsdrahts mit installieren,
um spatere Korrekturen zu
vermeiden.
- Standort der Dockingstation
festlegen ( 9.5)
- Hindernisse in der Mahlfache
entweder entfernen oder Sperrflächen vorsehen. ( 11.8)
- Der Begrenzungsdraht muss in einer
durchgehenden Schleife um die
gesamte Mahlfache verlegt werden -
maximale Lange 500 m.
Gassen und Nebenflächen:
Zum Mahen mit Automatik alle
Bereiche der Mahlfache mit Gassen
verbinden. ( 11.10)
Reicht dazu der Platz nicht aus, sind
Nebenflächen einzurichten. (⇒ 11.9)
- Beim Verlegendes Begrenzungsdrahts
Abstände beachten ( 11.3)
9cm bei befahrbaren Hindernissen
(z. B. Gehwege)
18 cm bei Gassen
27 cm bei hohen Hindernissen (z. B.
Mauern, Bäume)
54 cm Mindestdrahtabstand in
Engstellen
100 cm bei Wasserflächen und
potenziellen Absturzstellen (Kanten,
Absätze)
Ecken:
Verlegung in spitzen Winkeln (kleiner
Damit die Verlegung des
Begrenzungsdrahts nachträglich
leichter geändert werden kann, sollenen
mehrere Drahtreserven installiert
werden. ( 11.11)
11.2 Skizze der Mahlfläche
anfertigen

Beider Installationdes
Robotermahers und der Dockingstation ist
es empfehlenswert, eine Skizze der
Mähfläche anzufertigen. Am Anfang
desier Gebrauchsanleitung ist davon eine
Seite vorgesehen.
These Skizze ist bei späteren Änderungen
zuactualisieren.
Inhalt der Skizze:
- Kontur der Mähfläche mit wichtigen
Hindernissen, Grenzen und allfälligen
Sperrflächen, in denen der
Robotermaher nicht arbeiten darf.
( 26.)
Position der Dockingstation ( 9.5)
Lage des Begrenzungsdrahts
Der Begrenzungsdraht wachst nach
kurzer Zeit in den Boden ein und ist
nicht mehr zu sehen. Insbesondere die
Verlegung des Drahts um Hindernisse
vermerken. ()
Lage der Drahtverbinder
Die verwendeten Drahtverbinder sind
nach kurzer Zeit nicht mehr zu sehen.
Ohre Position ist zu notieren, um sie bei
Bedarf tauschen zu konnen. ( 11.12)
11.3 iRuler
Abstand messen:
Damit der Begrenzungsdraht im wichtigen Abstand zum Rand der Rasenfläche und zu Hindernissen verlegt wird, sollte der iRuler zur Abstandsmessung verwendet werden.
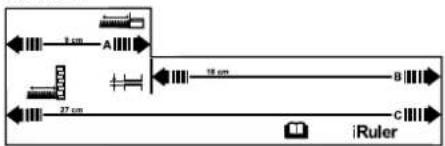
A-9cm
Abstand zwischen dem Rand der Mährfläche und dem Begrenzungsdraht.

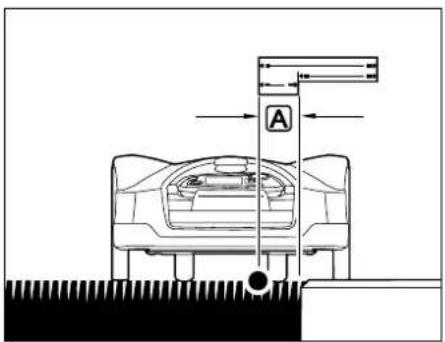
B-18cm
Der Robotermaher darf mit einem Hinterrad außerhalb der Mahlfache fahren, der Rasen wird bis zur Rasenkante gemaht.
Drahtabstand in Gassen.

(11.10)
Eine Gasse dient zum Verbinden von mehreren Mahlflächen bzw. zum Überbrücken von Engstellen. Mindestbreite von befahrbaren Randsteinen.
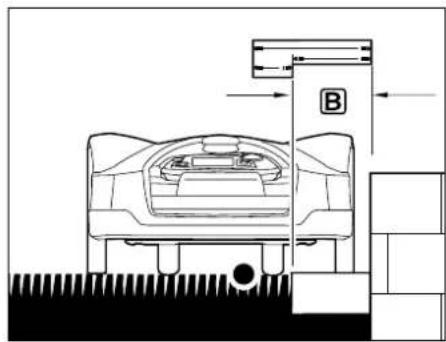
Befahrbare Randsteine müssen mindestens 18 cm breit sein.

C-27cm
Begrenzungsdraht um Außenecken mit größem Abstand zu den Randsteinen verlegen. (⇒ 9.6) Bei Bedarf breitere Randsteine verwenden.
Abstand zwischen einem Hindernis und dem Begrenzungsdraht.

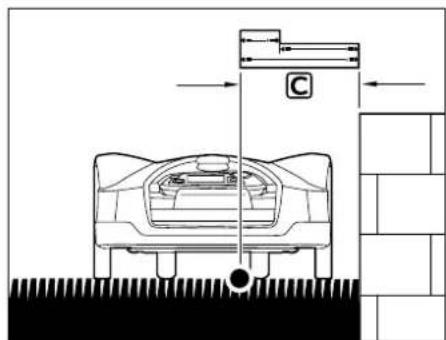
Der Robotermaher muss vollständig innerhalb der Mahlfache fahren undarf das Hindernis nicht berühren.
Der zweifache Abstand (54 cm, das entspricht 2 iRuler-Langen bzw. der Gerätebreite) ist der minimale Drahtabstand in Engstellen. ( 11.4)
Höhe von Hindernissen messen:
Der Robotermaher kann Hindernisse wie Wege befahren, wenn die zu überwindende Geländestufe kleiner als 3 cm ist. Die Stufe im iRuler entspricht genau dieser Hohe.
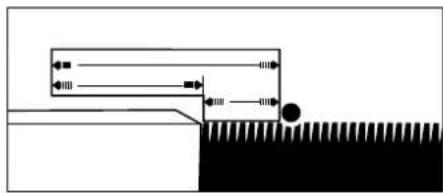
Hindernis ist niedriger als 3 cm: Begrenzungsdraht mit Abstand A (9 cm) verlegen.
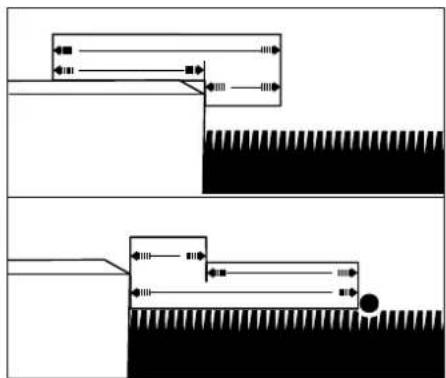
Hindernis ist hoher als 3 cm: Begrenzungsdraht mit Abstand (27cm) verlegen.
Bei Bedarf Schnitthöhe so
einstellen, dass der Robotermaher
mit dem Mahwerk nicht an
Hindernisse stöh.
Wird die kleiste Schnitthöhe
eingestellt, kann der Robotermaher
deshalb weniger als 3 cm
überwinden.
11.4 Engstellen
Der Robotermaher befindrt alle Engstellen automatisch, solange der minimale Drahtabstand eingehalten wird. Schmalere Bereiche der Mahlfache sind durch entsprechende Verlegung des Begrenzungsdrahts auszugrenzen.
Sind zwei Mahflächen über einen befahrbaren schmalen Korridor miteinander verbunden, kann eine Gasse installiert werden. (11.10)
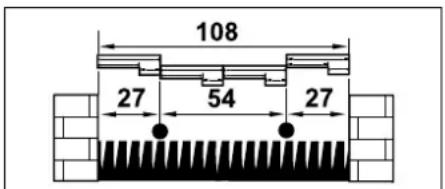
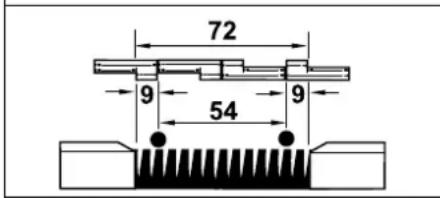
Der minimale Drahtabstand beträgt 54 cm, das entspricht 2 iRuler-Langen bzw. der Gerätebreite.
Darus ergibt sich in Engstellen folgender Platzbedarf:
- zwischen hohen Hindernissen über 3 cm Höhe wie Mauern 108 cm,
- zwischen befahrbaren Hindernissen unter 3 cm Höhe wie Wegen 72 cm.
11.5 Begrenzungsdraht verlegen
Nur Original-Fixiernagel und Original-Begrenzungsdraht verwenden.
Die Verlegerichtigung (mit oder gegen den Uhrzeigersinn) kann je nach Bedarf gewählt werden.
Fixiernägel niemals mit Hilfe des Begrenzungsdrahts Herausziehen - immer ein geeignetes Werkzeug (z. B. Kombizange) verwenden.
Verlauf des Begrenzungsdrahts in einer Skizze festhalten. ( 11.2)
Der Begrenzungsdraht kann auch in einem Kabelschlitz bis zu 10 cm tief vergraben werden.
- Dockingstation installieren. ( 9.5)
- Begrenzungsdraht ausgehend von der Dockingstation um die Mahlfache und um eventuell vorhandene Hindernisse ( 11.8) verlegen und mit Fixiernageln am Boden festmachen. Abstände mit Hilfe des iRulers kontrollieren. ( 11.3) Hinweise in Kapitel "Erstinstallation" beachten. ( 9.6)
- Begrenzungsdraht anschließen.
(⇒ 11.6)
11.6 Begrenzungsdraht anschließen
- Netzstecker abziehen und danach Abdeckung der Dockingstation abnehmer.

- Begrenzungsdraht in Kabelführungen der Bodenplatte einlagen, durch Sockel fadeln, Stecker anbringen und an Dockingstation anstecken. Hinweise in Kapitel "Erstinstallation" beachten. (⇒ 9.7)
Abdeckung der Dockingstation montieren und danach Netzstecker anstecken.
Drahtsignal prufen. ( 12.1)
Eindocken prufen. ( 14.7) Bei Bedarf Position des Begrenzungsdrahts im Bereich der Dockingstation korrigieren.
11.7 Verbindungsstrecken installieren
Der Robotermaher ignoriert das Begrenzungsdrahtsignal, wenn die Drahte eng beieinander, parallel verlegt werden. Verbindungsstrecken müssen installiert werden,
- wenn Nebenflächen installiert werden sollen. ( 11.9)
- wenn Sperrflächen notwendig sind.
(⇒ 11.8)
VIKING empfeht,
Verbindungsstrecken zusammen
mit den entsprechenden
Sperrflächen bzw. Nebenflächen im
Zuge der Drahtverlegung mit zu
verlagen.
Bei nachträglicher Installation ist die Drahtschleife zu durchtrennen, Verbindungsstrecken müssen dann mittels der mitgelieferten Drahtverbinder eingebunden werden. (→ 11.12)
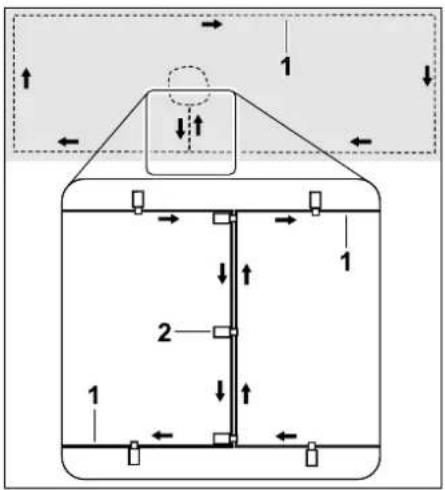
In Verbindungsstrecken wird der Begrenzungsdraht (1) parallel verlegt, die Drahte dürfen sich nicht überkreuzen und müssen eng beieinander liegen. Die Verbindungsstrecke mit einer ausreichenden Anzahl an Fixiernägeln (2) am Boden festmachen.
11.8 Sperrflächen installieren
Um Hindernisse, die der Robotermaher nicht berühren darf, die niedriger als 10 cm sind oder die nicht stabil genug sind, um dagegenzustoßen, sind Sperrflächen zu installmenten.
VIKING empfeihlt,
- Hindernisse entweder mit Sperrflächen auszugrenzen oder zu entfernen.
Sperrflächen nach der Erstin installation bzw. nach Veränderungen der Drahtinstallation mit Hilfe des Befehls "Rand testen" zu überprüfen. ( 10.13)
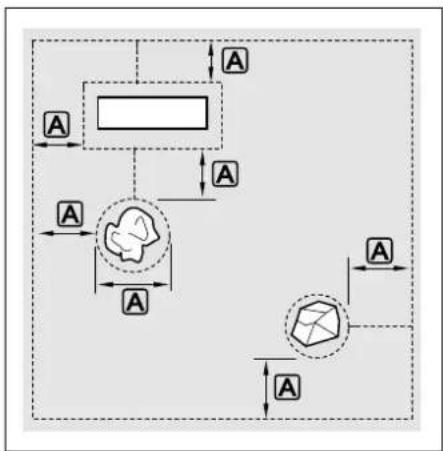
Sperrflächen müssen einen Mindestdurchmesser von 54 cm haben der Abstand zur Randschleife A muss ebenfalls größer als 54 cm sein. 54 cm entsprechen 2 iRuler-Längen.
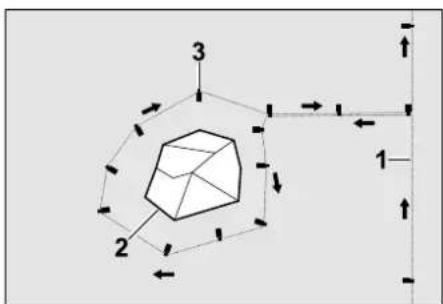
Begrenzungsdraht (1) von der Umrandung zum Hindernis führen, im wichtigen Abstand (iRuler verwenden) um das Hindernis (2) verlegen und mit einer ausreichenden Zahl von Fixiernägeln (3) am Boden festmachen. Anschließ Begrenzungsdraht darüber zur Umrandung verlegen.
Zwischen Hindernis und Umrandung ist der Begrenzungsdraht parallel und ohne zu überkreuzen in einer Verbindungsstrecke zu verlegen. ( 11.7)
11.9 Nebenflächen
Nebenflächen sind Bereiche der Mahfläche, die vom Robotermaher nicht vollautomatisch bearbeitet werden können, weil die Zufahr nicht möglich ist. Auf diese Art können mehrere getrennte Mahflächen mit einem einzigen Begrenzungsdraht umrandet werden. Der Robotermaher muss manuell von einer zur anderen Mahfläche gebracht werden. Der Mahvorgang wird über den Befehl "Mahren starten" (⇒ 10.4) bzw. "Mahren zeitverzögt starten" (⇒ 10.4) ausgelost.
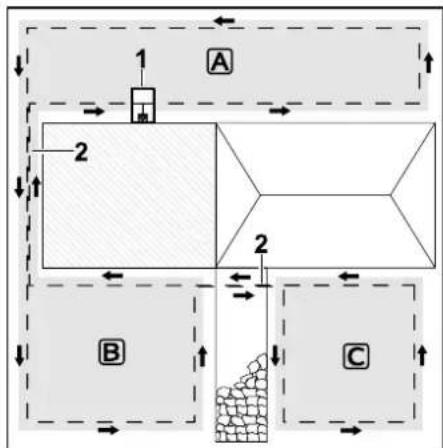
Die Dockingstation (1) wird in der Mahfläche A installiert, diese wird nach Mahplan vollautomatisch beareritet. Die Nebenflächen B und C sind mit Verbindungsstrecken (2) mit der Mahfläche A verbunden. In allen Flächen muss der Begrenzungsdraht in derselben
Richtung verlegt werden - Begrenzungsdraht in den Verbindungsstrecken nicht überkreuzen.
11.10 Gassen
Sind mehrere Mahflächen zu mahren (z. B. Mahflächen vor und hinter dem Haus), kann eine Gasse zum Verbinden installiert werden. So ist es möglich, alle Mahflächen automatisch zu bearbeiten.
In Gassen wird der Rasen nur beim Abfahren des Begrenzungsdrahts gemaht. Bei Bedarf automatisches Randmahen aktivieren oder den Bereich der Gasse regelmäßigen manuell mAHen. ( 10.4) ( 10.13)
Voraussetzungen:
- Mindestbreite zwischen festen Hindernissen im Bereich der Gasse 72 cm, zwischen befahrbaren Wegen 36 cm.
Gasseistfreibefahrbar. - Im Bereich der zweiten Mahlfache wird zumindest 1 Startpunkt definiert. (→ 10.14)
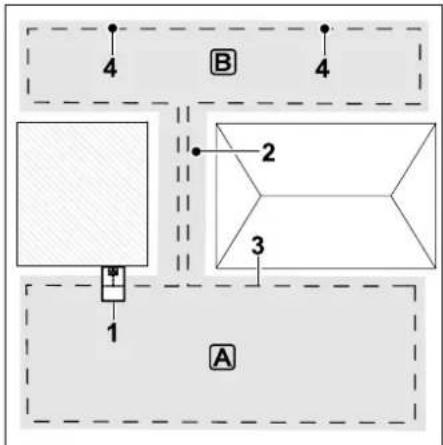
Die Dockingstation (1) wird in der
Mähfläche A installiert. Die Mahfläche B ist mit einer Gasse (2) mit der
Mähfläche A verbunden. Der
Begrenzungsdraht (3) kann vom
Robotermaher durchgangig befahren
werden. Zum Bearbeiten der
Mähfläche B sind Startpunkte (4) zu
definieren. ( 10.14) Einzelne Mahvorgänge werden dann je
nach Einstellung (Starthaufigkeit) bei den
Startpunkten begonnen.
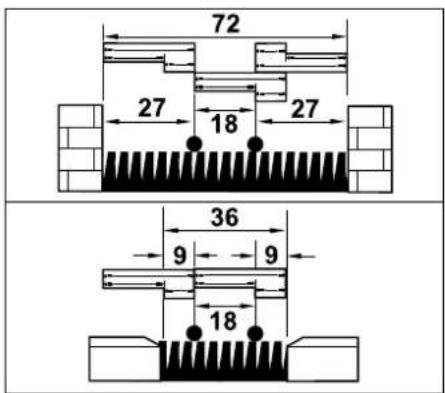
Der Drahtabstand beträgt in Gassen stets 18 cm.
Daraus ergibt sich folgender Platzbedarf:
- zwischen hohen Hindernissen über 3 cm Höhe wie Mauern 72 cm,
- zwischen Gehwegen bzw. befahrbaren Hindernissen unter 3 cm Höhe wie Wegen 36 cm.
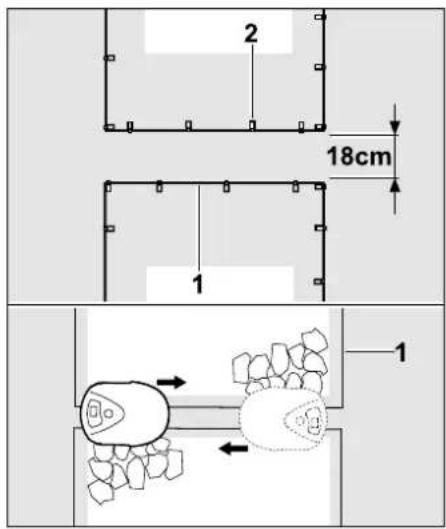
In Gassen wird der Begrenzungsdraht (1) parallel mit 18 cm Abstand verlegt und mit einer ausreichenden Anzahl an Fixiernägeln (2) am Boden festgemacht.
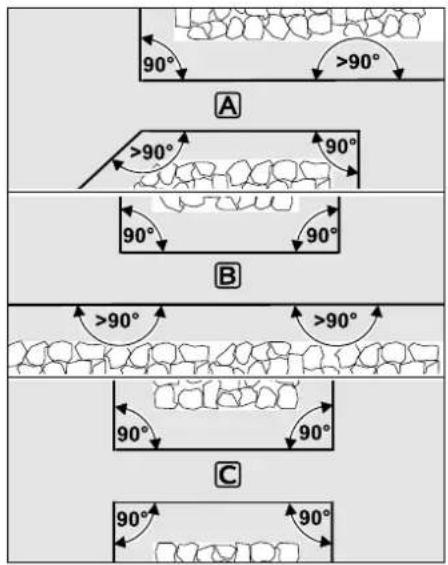
A, B, C - Beispiele für Gassen.
Begrenzungsdraht nicht in spitzen Winkeln (kleiner als 90^ ) verlegen.
11.11 Drahtreserven installmenten
In regelmäßigem Abstand installierte Drahtreserven erleichtern notwendige Korrekturen, etwa um die Position der Dockingstation oder den Verlauf des Begrenzungsdrahts nachträglich zu verändern.
Drahtreserven sollen insbesondere in der Näre von schwierigen Passagen installiert werden.
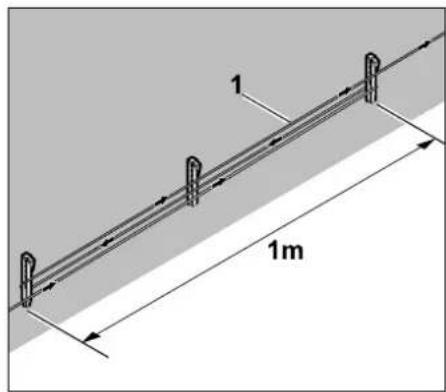
Begrenzungsdraht (1) über eine Länge von ca. 1 m zwischen 2 Fixiernageln wie abgebildet verlegen. Drahtreserve in der Mitte mit einem weiteren Fixiernagel am Boden festmachen.
11.12 Drahtverbinder verwenden
Zur Veränderung des Begrenzungsdrahts oder zum Verbinden von losen Drahtenden dürfen ausschließlich die mitgelieferten gelgefüllten Drahtverbinder verwendet werden. Sie verhindern frühereitigen Verschleib (z. B. Korrosion an den Drahtenden) und garantieren eine optimale Verbindung.
Position der Drahtverbinder in der Skizde der Mahflache vermerken. ( 11.2)
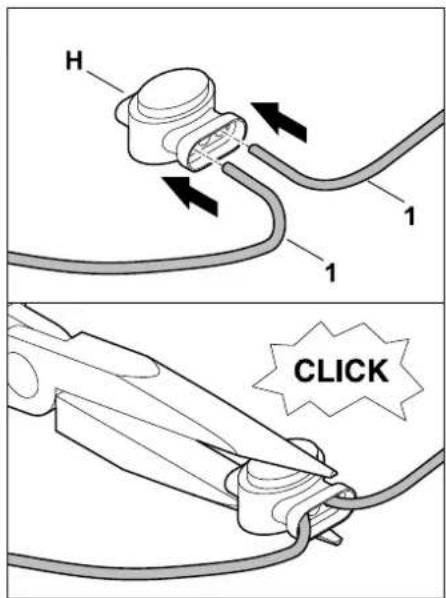
Lose Drahtenden (1) bis zum Anschlag in Drahtverbinder (H) stecken.
Drahtverbinder mit einer geeigneten Zange zusammen – auf korrektes Einrasten achten.

12. Dockingstation
12.1 Bedienelemente der Dockingstation
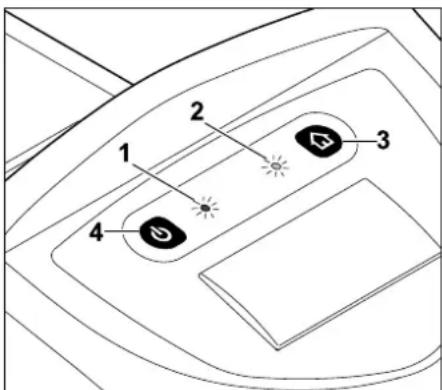
Eine rote LED (1) und eine grüne LED (2) informieren über den Status der Dockingstation und des Drahtsignals. Mit der Home-Taste (3) kann der Robotermaher während eines Mahvorgangs zur Dockingstation zurückgeholt werden. Mit der Ein-Aus-Taste (4)leen sich die Dockingstation und mit ihr das Drahtsignal ein- und ausschalten.

Rote LED leuchtet

Rote LED blinkt

Grüne LED leuchtet

Grüne LED blinkt

LEDistausgeschaltet
Aktivität Rot Grün
Standby


Drahtsignal OK


Laden


Heimruf


Drahtbruch


Drahtbruchsuche


Fehler


Home-Taste:
Während eines Mähvorgangs aktiviert das Drucken der Home-Taste den Heimruf.

Der Robotermaher beendet den laufenden Maheinsatz, sicht den Begrenzungsdraht und kehrt zur Dockingstation zurück, um den Akku zu laden. In der laufenden Aktivzeit erfolgt kein weiterer Mahvorgang.

Der Heimruf bleibt aktiv, bis der Robotermaher eingedockt ist oder bis die Home-Taste erneut gedrück wird.
Ein-Aus-Taste:
Fur das automatische Bearbeitenden Mahlfache ist das Betätigder Ein-Aus-Taste nicht nitig. Das Ein-bzw-Ausschalten des Drahtsignals erfolgt vollautomatisch.
Wenn der Robotermaher nicht eingedockt ist, aktiviert das Drucken der Ein-Aus-Taste die Dockingstation. Das Drahtsignal bleibt 48 Stunden aktiv, sofern der Robotermaher nicht vorher eindockt.
Bei laufendem Betrieb wird durch 3 Sekunden langes Drucken der Taste das Drahtsignal abgeschaltet und der
Robotermaher bleibt in der Mahlflache stehen. Im Display des Robotermahers erscheint eine entsprechende Meldung.
13. Hinweise zum Mähen
13.1 Allgemein
Der Robotermaher ist für die automatische Bearbeitung von Rasenflächen konzipiert. Das Gras wird bzw durch kontinuierliche Bearbeitung kurz gehalten. Das Ergebnis ist ein früherer und dichter Rasen.
Rasenflächen, die nicht zuvor mit einem herkömmlichen Rasenmäher gemaht wurden, sind erst nach mehreren Mähvorgängen sauber bearbeitet. Vor allem bei etwas higherem Gras entstehen somit erst nach ein paar Mähvorgängen ein sauberes Schnittbild.
Bei freiem und trockenem Klima sollte der Rasen nicht zu kurz gehalten werden, da er sonst von der Sonne verbrannt und unansehnlich wird.
Mit einem scharfen Messer ist das Schnittbild schoner als mit einem stumpfen, daß sollte es regelmäßig getauscht werden.
13.2 Mulchen
Der Robotermaher ist ein Mulchmahr.
Beim Mulchen werden die Grashalme nach dem Abschneiden im Mahwerksgehause weiter zerkleinert. Sie fallen anschließend in die Grasnarbe zurück, wo sie liegen bleiben und verrotten.
Das fein zerkleinerte Schnittgut gibt dem Rasen organische Nährstoffe zurück und dient dadurch als natürlicher Dünger. Der Düngerbedarf wird deutlich reduziert.
13.3 Aktivzeiten
Während der Aktivzeiten ist es dem Robotermaher erlaubt, jederzeit die Dockingstation zu verlassen und den Rasen zu mAHen. Während dieser Zeiten finden deshalb Mahrvorgänge,
Ladevorgänge und Ruhephasen stall. Der Robotermaher verteil die nötigen Mah- und Ladevorgänge automatisch auf die zur Verfugung stehenden Zeitfenster.
Bei der Installation werden Aktivzeiten automatisch über die gesamte Woche verteilt. Zeitreserven werden mit berücksichtigt - so ist eine optimale Rasenpflege garantiert, auch wenn vereinzt Mahvorgänge nicht staatfinden konnen (z. B. aufgrund von Regen).

Während der Aktivzeiten,müssen sich Dritte vom Gefahrenbereich fernhalten. Die Aktivzeiten sind entsprechend anzupassen.
Beachten Sie außerdem die
kommunalen Bestimmungen zum
Einsatz von Robotermahern sowie die Hinweise im Kapitel "Zu ihrer Sicherheit" ( 6.) und verändern
Sie die Aktivzeiten im Menu "Mahplan". ( 10.6) Insbesondere sollen Sie bei der
zuständigen Behörde nachfragen, zu welchen Tages- und Nachtzeiten das Gerät eingesetzt werden darf.
13.4 Mähduer
Die Mahdauer gibt an, wie weitere Stunden proWoche der Rasen gemaht werden soll. Sie kann in den Wocheneinstellungen ( 10.7) verlangert oder versturzt werden.
Die Mahdauer entspricht der Zeit, während der der Robotermaher den Rasen maht. Zeiten, in denen der Akku geladen wird zahlen nicht zur Mahdauer.
Bei der Erstinstallation berechnet der Robotermaher die Mahdauer automatisch aus der angegebenen Höhe der Mahlfläche. Diese Richtwert ist auf normalen Rasen bei trockenen Verhältnissen abgestimmt.

Flächenleistung:
MI 632: 60 Minuten für 100m^2 MI 632 P: 45 Minuten für 100m^2
13.5 Manuelles Mahren
Das Mahmesser nicht in hohem Gras bzw. nicht in niedrigster Schnitthöhe einschalten!
Der Robotermaherarf nur so stark beansprucht werden,dass die Drehzahl des Mahmotorsthereiicht wesentlich absinkt.Wenn die Drehzahl absinkt oder wenn der Robotermaher langsamer fahrht, hochere Schnitthohen-Einstellung wahlen.
14. Gerät in Betriebnehmen
14.1 Vorbereitung

Zur Erstinstallation steht ein
Installationsassistant zur Verfugung. ( 9.)
- Dockingstation installieren (⇒ 9.5)
- Begrenzungsdraht verlegen ( 9.6) und anschließen ( 9.7)
Fremdkörper (z. B. Spielsachen, Werkzeug) von der Mahlfläche entfernen - Akku auflagen (⇒ 14.8)
Uhrzeit und Datum einstellen ( 10.10) - Mahplan prüfen und bei Bedarf anpassen - insbesondere ist sicherzustellen, dass sich Dritte während der Aktivzeiten vom Gefahrenbereich fernhalten. (⇒ 10.5)

Sehr hohen Rasen vor Gebrauch des Robotermahers mit einem herkömmlichen Rasenmaher kurz mahlen (z. B. nach einer längeren Unterbrechung).
14.2 Steuerkonsole entnehmer und einsetzen
Die Steuerkonsole kann bei Bedarf aus dem Robotermaher entnommen werden, um manuell zu mAHen oder z. B. die Programmierung zu ändern.
Der automatische Betrieb des Robotermahers ist ausschließlich mit eingesetzter Steuerkonsole möglich.
Steuerkonsole entnehmen:
- Im laufenden Betrieb vor dem Entnehmen der Steuerkonsole STOP-Taste drucken.

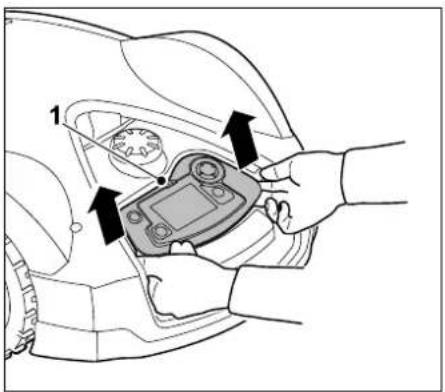
Steuerkonsole (1) im hinteren Bereich mit einem leichten Ruck anheiten und aus dem Robotermaher entnehmen. Sie bleibt per Spiralkabel mit dem Gerät verbunden.
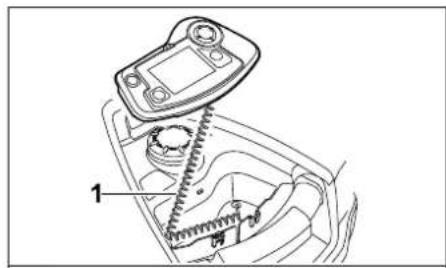
Steuerkonsole einsetzen:
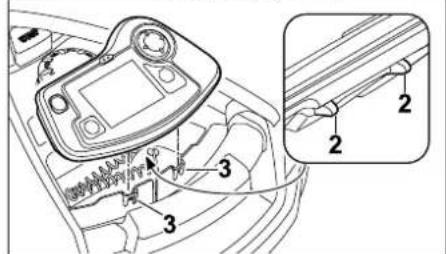
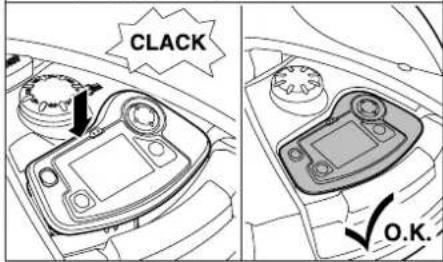
Spiralkabel (1) im Gehäusefach verstauen. Steuerkonsole liegt nach hinten kippen, Haltenasen (2) in die Gehäuseausnehmungen (3) einfädeln, anschließend Steuerkonsole vorne niederrücken und einrasten halten.
14.3 Programmierung anpassen
Die aktuelle Programmierung kann im Mahplan angesehen werden. ( 10.5) Der Mahplan wird bei der Installation bzw. beim Erstellen eines neuen Mahplans aus der GroBe der Mahflache errechnet.
Die Aktivzeiten und die Mahdauer konnen individuell verändert werden, die erforderlichen Mahvorgänge selbst werden automatisch auf die möglichen Aktivzeiten verteil. Bei Bedarf laufen während einer Aktivzeit auch mehrere Mah- und Ladevorgänge ab. Falls gewünscht wird der Rand der Mahfläche automatisch in regelmäßigen Abständenge im Jahr 1907.
Bis zu drei entsprechiche Aktivzeiten pro Tag sind möglich. ( 10.5)
Wenn der Robotermaher bestimme Bereiche in der Mahlflache gezielt anfahren soll, sind spezifische Startpunkte zu definieren. ( 10.14)

Unter Umständen (z. B. Schonwetter oder großzugige Zeitfenster) werden für eine optimale Rasenpflege nicht alle Aktivzeiten genutzt.
Ändern der Aktivzeiten: (⇒ 10.6)
- Zusätzliche Aktivzeiten für weitere Mahvorgänge
- Anpassen der Zeitfenster, um z. B. ein Mähen am Morgen oder während der Nacht zu vermeiden.
Auslassen einzelnr Aktivzeiten, weil die Mahlfache z. B. fur eine Party genutzt wird.
Verlangern der Mahdauer: ( 10.7) - Es gibt Bereiche, die nicht ausreichend gemaht werden, z. B. weil die Mahlfache sehr verwinkelt ist.
- Intensives Graswachstum in der Wachstumsperiode
- Besonderss dichter Rasen
Verringer der Mahdauer: ( 10.7)
Verringertes Graswachstum aufgrund von Hitze, Kälte oder Trockenheit
Erstellen eines neuen Miahplans: ( 10.7)
Die Grosse der Mahlfache wurde verändert.
Neuinstallation: ( 10.13)
- Neuer Standort der Dockingstation
Erstinbetriebnahme auf einer neuen Mahlfache
14.4 Mähen mit Automatik
- Automatik einschalten: Bei eingeschalteter Automatik wird im Display gegenüber dem Akku-Symbol das Automatik-Symbol angezeigt. (⇒ 10.4)

- Mähvorgänge starten: Die Mähvorgänge werden automatisch auf die zur Verfügung stehenden Aktivzeiten verteil. (⇒ 13.3)
- Mähvorgänge beenden:
- Wenn der Akku entladen ist, fahrth der Robotermaher automatisch zur Dockingstation. (→ 14.7)
- Mit der STOP-Taste kann der laufende Mähvorgang jederzeit manuell beendet werden. (→ 5.1)
- Mit der Home-Taste an der Dockingstation wird der laufende Mähvorgang bereits falls sofort beendet. (→ 12.1)
Mähflächen, die der Robotermaher über eine Gasse erreicht, werden nur bearbeitet, wenn Startpunkte in dieser Fläche definiert sind.
14.5 Mähen unabhängig von Aktivzeiten
Mähflächen mit Dockingstation:
Um einen Bereich der Mahlfläche zu bearbeiten, der nur über eine Gasse zu erreichen ist, Robotermaher dorthin tragen bzw. fahren.
- Sofort mahren: Befehl Mähen starten aufrufen (⇒ 10.4) bzw. Mäh-Taste drücken. Der Mähvorgang startet sofort und nauert bis zur gewährten Uhrzeit.
- Zeitverzogert mAHen: Befehl MAHen zeitverzogert starten aufrufen. ( 10.4) Der Mahvorgang startet bei der gewährten Startzeit und dauert bis zum gewährten Endzeitpunkt.
- Mähen manuell beenden:
Mit der STOP-Taste kann der laufende Mahvorgang jederzeit beendet werden.
(⇒ 5.1)
Mit der Home-Taste an der Dockingstation wird der laufende Mahvorgang ebenfalls(sofort beendet.
(⇒ 12.1)
Bei Bedarf ladt der Robotermaher zwischenheitlich den Akku und setzen danach den Mahvorgang bis zum gewährten Endzeitpunkt fort.
Nebenflächen:
- Robotermaher in die Nebenfläche tragen oder fahren.
-
Sofort mahren: Befehl Mähen starten aufrufen (⇒ 10.4) bzw. Mäh-Taste drücken. Der Mähvorgang startet sofort und nauert bis zur gewährten Uhrzeit.
-
Zeitverzogert mAHen: Befehl MAHen zeitverzogert starten aufrufen. ( 10.4) Der Mahvorgang startet bei der gewählten Startzeit und dauert bis zum gewählten Endzeitpunkt.
- Mähen beenden:
- Wenn der gewährte Endzeitpunkt erreicht ist, bleibt der Robotermaher in der Nebenfläche mit einer entsprechenden Meldung stehen.
- Gerät zum Auflagen des Akkus in die Dockingstation bringen und angezeigte Meldung bestätigten. (23.)
- Mit der STOP-Taste kann der laufende Mahvorgang jederzeit manuell beendet werden. (5.1)
Wenn der Akku vor dem gewählten Endzeitpunkt entladen ist, wird der Mahvorgang entsprechend verkürzt.
14.6 Manuelles Mahren
i Der Stoßsensor und die Randbegrenzung sind während des manuellen Mahens inaktiv.
- Bei Bedarf Akku aufladen (⇒ 14.8)
- Steuerkonsole entnehmer (⇒ 14.2)
- Befehl Handsteuerung aktivieren (10.4)
- Robotermaher mit dem Steuerkreuz bewegen und lenken.

Vorwärts stehen 2
Geschwindigkeiten zur Verfügung: langsam mit leichtem Tastendruck, schnell mit festem Tastendruck.
Vor dem Einsatz den Mahmessers auf ausreichenden Abstand der Fußzum Mahwerk achten - stets hinter dem Robotermaher nachgeben. ( 4.2)
Zum Einschalten des Mahmessers mit dem rechten Daumen OK-Taste betätigen und halten, anschließend mit dem linken Daumen Mahtaste drucken. Solange die Mahtaste gedruckt bleibt, dreht sich das Mahmesser.
Während des manuellen Mähens mit dem linken Daumen die Mahtaste gedrück halten und mit der rechten Hand das Steuerkreuz betätigten.
Zum Ausschalten des Mahmessers Mahtaste loslassen.
Nach dem manuellen Mahren Akku auflagen. (14.8)
14.7 Robotermaher eindhoven
Eindocken im Automatik-Betrieb:
Der Robotermaher fahrth automatisch in die Dockingstation, wenn die Aktivzeit zu Ende ist bzw. wenn der Akku entladen ist.
Eindocken erzwingen:
Bei Bedarf Steuerkonsole einlagen ( 14.2)
Bei Bedarf Dockingstation einschalten ( 12.1)
- Befehl Zur Dockingstation fahren aktivieren. (10.4) Wahrend eines Mahvorgangs kann alternatively die Home-Taste an der Dockingstation gedrück werden.
An der Dockingstationarf nach dem Eindocken keine LED leuchten. ( 12.1)
In der laufenden Aktivzeit erfolgt nach dem Eindocken kein weiterer Mahvorgang.
Manuelles Eindhoven:
- Robotermaher mit der Steuerkonsole in die Dockingstation fahren - dazu Steuerkonsole entnahmen ( 14.2) und Befehl Handsteuerung ( 10.4) aktivieren.
oder
- Robotermaher manuell in die Dockingstation schieren.
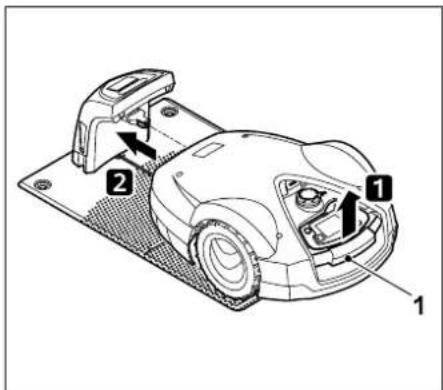
Robotermaher am Tragegriff (1) etwas anheben und Antriebsrader entlasten. Gerat auf die Vorderrader aufgestützt in die Dockingstation schieren.
Steuerkonsole einlagen (14.2)
An der Dockingstationarf nach dem Eindocken keine LED leuchten. ( 12.1)
14.8 Akku aufladen

Akku ausschließlich via Dockingstation laden. Akku niemals ausbauen und mit einem externen Ladegerät aufladen.
Automatisches Laden:
Beim Mähen erfolgt das Laden automatisch jeweils am Ende des Mähvorgangs, wenn der Robotermaher in der Dockingstation eindockt.

Nach dem Eindocken darauf der Dockingstation keine LED leuchten. ( 12.1)
Ladevorgang manuell starten:
- Nach einem Einsatz in Nebenflächen Robotermaher in die Mahlfläche bringen und eindocken. (⇒ 14.7)
Nach dem Abbruch eines Mähvorgangs Robotermaher eindocken. (14.7) - Bei Bedarf Standby des Robotermahers durch Drucken einer Taste beenden. Der Ladevorgang startet automatisch.
Ladevorgang:
Während des Ladevorgangs wird in der Statusanzeige der Text "Akku wird aufgeladen" angezeigt.

In allen übrigen Menüs erscheint im rechten oberen Eck des Displays ein Netzstecker-Symbolstatt dem Akkusymbol.

Der Ladevorgang pauert entsprechlich lang und wird automatisch auf den nachsten Einsatz abgestimmt.
Bei Ladeproblemen erscheidine eine entsprchende Meldung im Display. ( 10.8)
Der Akku wird erst nach dem Unterschieden einer bestimmten Spannung geladen.
Ladezustand:
In der Statusanzeige kann der momentane Ladezustand direkt abgelesen werden, wenn die entsprachende Anzeige ausgewählt ist. ( 10.12)
In allen übrigen Menüds dient das Akkusymbol im rechten oberen Eck des Displays zur Anzeige des Ladezustands.
kein Balken-Akku entladen 1 bis 5 Balken-Akku teilentladen 6 Balken-Akku voll geladen


15. Wartung

Verletzungsgefahr! Vor allen Wartungs-
Reinigungsrarbeiten am Gerat das Kapitel "Zu Ihrer Sicherheit" ( 6.) insbesondere das Unterkapitel "Wartung und Reparaturen" ( 6.9) sorgfaltig lessen und alle Sicherheitshinweise GENAU beachesten.
Vor allen Wartungs- oder Reinigungsrarbeiten Gerätesperre aktivieren. ( 5.2)
Vor dem Beginn von Wartungsarbeiten an der Dockingstation den Netzstecker abziehen.
Bei allen
Wartungsarbeiten
Handschuhe tragen,
insbesondere bei
Arbeiten am Mahmesser.



15.1 Wartungsplan
Die Wartungsintervalle richten sich unter anderem nach den Betriebsstunden. Der entsprchende Zähler "Mähstunden" kann im Menu "Information" aufgerufen werden. (⇒ 10.8)
Die angegeben Wartungsintervalle sind genau einzuhalten.
Wartungsarbeiten an Tagen mit Aktivzeiten:
-
Allgemeinzustand des Geräts und der Dockingstation durch Sichtkontrolle prufen.
-
Displayanzeige kontrollieren - aktuelle Uhrzeit und Start des nachsten Maheinsatzes prufen.
- Mährfläche kontrollieren und bei Bedarf Fremdkörper etc. entfern.
Prufen, ob der Akku geladen wird. ( 14.8)
Wochentliche Wartungsarbeiten:
Gerat reinigen. ( 15.2)
- Mähmesser, Messerbefestigung und Mahwerk durch Sichtkontrolle auf Beschädigungen (Kerben, Risse, Bruchstellen usw.) und Verschleißen prüfen. ( 15.3)
Alle 200 Stunden:
- Mähmesser ersetzen. Im Display erscheint eine entsprechende Erinnerung. (⇒ 15.4)
Jährliche Wartungsarbeiten:
VIKING empfeihlt eine jährliche Inspektion in den Wintermonaten durch den VIKING Fachhändler. Dabei werden insbesondere der Akku, die Elektronik und die Software gewartet.

Damit der Fachhändler alle Wartungsarbeiten ordnungsgemäß durchführten kann, Sicherheitsstufe auf "Keine"ändern oder Fachhändler den verwendeten PIN-Code mitteilen.
15.2 Gerat reinigen
Eine sorgsame Behandlung schützt das Gerät vor Schäden und verlangert die Nutzungsdauer.
Reinigungs- und Wartungsposition:
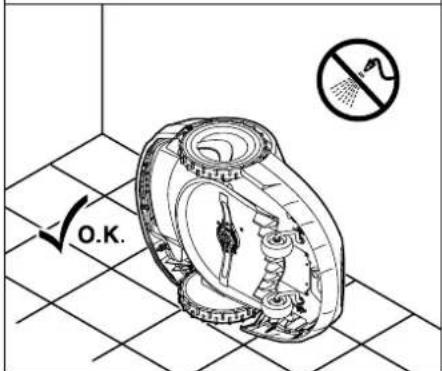
Zum Reinigen der Geräteoberseite (Haube, Fernsteuerung) Gerät auf einem abenen, festen und waagrechten Untergrund abstellen. Zum Reinigen der Geräteunterseite (Mähmesser, Mahwerk) Robotermaher wie abgebildet auf die linke Geräteseite aufkippen und gegen eine Wand lehen.
- Verschmutzungen mit einer Bürste oder mit einem Tuch entfern.
Insbesondere auch das Mahmesser und die Dockingstation reinigen. - Angesetzte Grasrückstände im Gehäuse und im Mahwerk vorab mit einem Holzstablös.
- Bei Bedarf einen Spezialreiniger (z. B. STIHL Spezialreiniger) verwenden.
15.3 Verschleibgrenzen des Mahmessers prufen
A
Verletzungsgefahr!
Ein verschlissenes Mahmesser kann abbrechen und schwere Verletzungen verursachen. Die Anweisungen zur Messerwartung sind deshalb einzuhalten.
Mähmesser werden je nach Einsatzort und Einsatzdauer unterschiedlich stark abgenutzt. Wenn Sie das Gerät auf sandigem Untergrund bzw. Häufig unter trockenen Bedingungen einsetzen, werden die Mähmesser stärker beansprucht und verschreiben überdurchschnittlich schnell.
Das Mahmesser muss zumindest alle 200 Betriebsstunden getauscht werden, das Nachscharfen ist dem VKING Fachhändler zu überlassen. ( 15.5)
- Gerätesperre aktivieren. (⇒ 5.2)
- Robotermaher seitlich aufkippen und sichere gegen eine stabile Wand lehnen. Mahwerk sowie Mahmesser sorgfältig reinigen. (15.2)
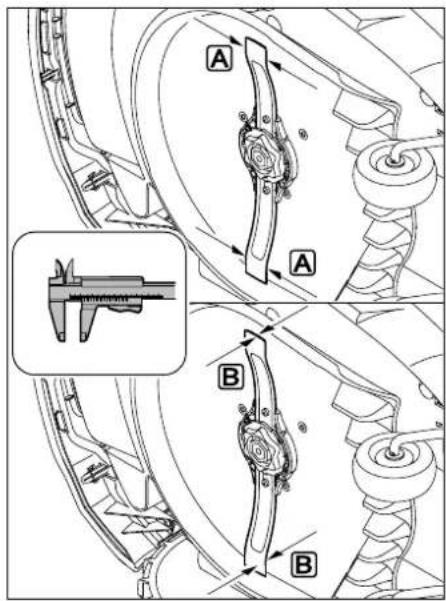
Messerbreite A und Messerstrakte B mit einem Messschieber prufen.
Ist das Mahmesser an einer Stelle schmäler als 25 mm oder dūnner als
1,3 mm, musse ersetzt werden.
15.4 Mähmesser aus- und einbauen

Das Mahmesser ist für eine Lebensdauer von 200 Stunden ausgelegt. Nach dieser Zeit erscheidt im Display eine entsprechende Meldung.
Geratesperre activieren ( 5.2) und Handschuhe anziehen.

- Robotermaher seitlich aufkippen und sichere gegen eine stabile Wand lehnen. Mahwerk sowie Mahmesser sorgfaltig reinigen. ( 15.2)
Mähmesser ausbauen:
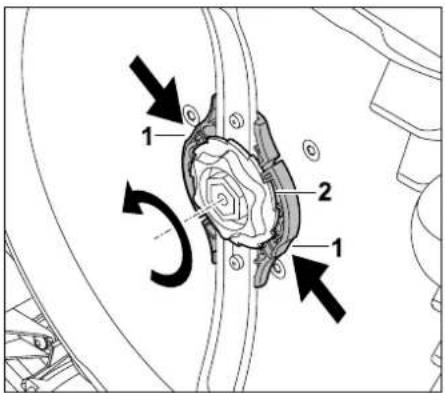
Beide Laschen (1) am Messerhalter mit einer Hand eindrücken und halten. Fixiermutter (2) mit der anderen Hand ausdrehen. Mahmesser zusammen mit Fixiermutter entnehmer.
Mahmesser einbauen:

Verletzungsgefahr!
Messer vor dem Einbau auf Beschädigungen kontrollieren. Das Messer muss erneuert werden, wenn Kerben oder Risse erkennbar sind bzw. wenn es an einer Stelle schmäl er als 25 mm oder)dünner als 1,3 mm ist. ( 15.3)
Der Messerhalter und die Fixiermutter müssen ebenfalls erneuert werden, wenn sie beschädigt sind (z. B. gebrochen, verschlissen). Insbesondere muss die Fixiermutter sauber im Messerhalter einrasten.
- Messer, Messerhalter und Fixiermutter vor der Montage reinigen.
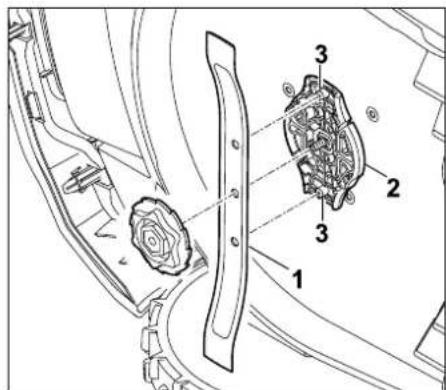
Mähmesser (1) wie abgebildet auf Messerhalter (2) aufsetzen. Auf richtige Lage der Haltenasen (3) im Mähmesser achten.
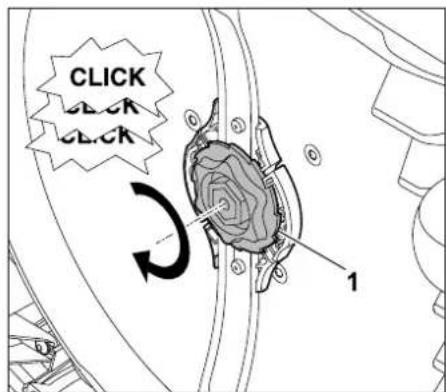
Fixiermutter (1) bis zum Anschlag aufschrauben. Wahrend des Festziehens sind mehrere Click-Gerausche hörbar. Den sicheren Sitz des Mahmessers durch vorsichtiges Rütteln kontrollieren.
Nach dem Einbau eines neuen Mahmessers Messerwechsel im Menu "Service" bestätig. ( 10.16)
15.5 Mahmesser schäfen
VIKING empfeihlt, ein stumpfes
Mahmesser gegen ein neues zu tauschen.
Das Nachscharfen eines stumpfen
Mahmesser ist einem VKING
Fachhandlor zu überlassen, er verfügt
über die notwendigen Fachkenntnisse und Spezialwerkzeuge.

Eine ordnungsgemäße Funktion des Gerats ist insbesondere nur mit einem sehr genau ausbalancierten Mahmesser gegeben.
Ein falsch geschliffenes Messer (z. B. Unwucht, falscher Scharfwinkel) erhöht die Gerauschemissionen und kann zu Schaden am Gerät führen.
15.6 Drahtbruchuchen

Bei einem Drahtbruch blinkt die rote LED an der Dockingstation. ( 12.1) Im Display des Robotermahers wird eine entsprechende Meldung angezeigt.
Die Drahtbruchsche kann mit entnommener oder eingelegter Steuerkonsole durchgefuhrt werden. Für die Feinsuche sollte die Steuerkonsole eingelegt werden.
Falls ein Drahtbruch nicht wie beschreibenben gefunden werden kann, VIKING Fachhändler kontaktieren.
Auf der Dockingstation HomeTaste drucken und halten, gleichzeitig Ein-Aus-Tastezweimal drucken. Es leuchtet diegrune LED und blinktie die roteLED. ( 12.1)
- Bei Bedarf Steuerkonsole entnahmen.
(⇒ 14.2)
- Im Menu "Service" Eintrag
"Drahtbruchsche" auswahlen und mit OK bestätig. (⇒ 10.16)
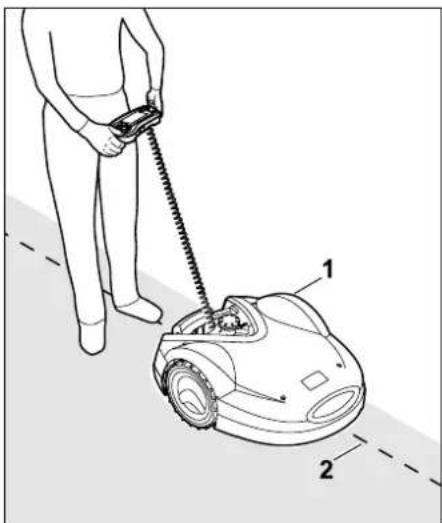
Suche mit entnommener Steuerkonsole:
Mit dem Robotermaher (1) ausgehend von der Dockingstation dem Rand der Mahlfläche im Uhrzeigersinn folgen. Dazu Gerät mit dem Steuerkreuz lenken und darauf auf achten, dass der Begrenzungsdraht (2) unter den Drahtsensoren verläuft. Die Drahtsensoren sind geschützt links und rechts im vorderen Bereich des Robotermahers montiert.
Im Display wird bei der Drahtbruchsuche die Signalstarke angezeigt, die Drahtsensoren sind optimal über dem Begrenzungsdraht positioniert, wenn der Wert am hochsten ist.
Während die Drahtsensoren das Drahtsignal korrekt empfangen, erscheint im Display das Symbol Drahtsignal OK.
Im Bereich des Drahtbruchs sindt die Signalstarke und im Display wird das Symbol für Drahtsignal prufen angezeigt.


- Bruchstelle mit Hilfe eines Drahtverbinders überbrücken ( 11.12) , bei Bedarf Begrenzungsdraht im Bereich der Bruchstelle neu verlegen.
- Ein-Aus-Taste der Dockingstation drucken. Werde der Drahtbruch ordnungsgemäß behoben, leuchtet nun die die rote LED. ( 12.1)
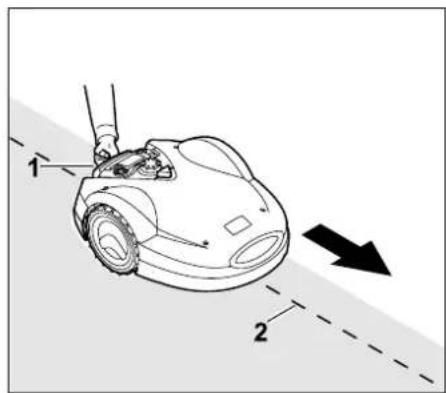
Feinsuche mit eingelegter Steuerkonsole:
Robotermaher am Tragegriff (1) etwas anheben und Antriebsrader entlasten. Mit dem Gerat auf die Vorderrader aufgestützt dem Begrenzungsdraht (2) folgen. Die weitere Vorgehensweise entspricht der Suche mit entnommener Steuerkonsole.
15.7 Netzeilstecker
Das Netzteil ist mit einem abschraubbaren Stecker ausgestattet.
Dieser Stecker kann demontiert werden, wenn das Netzteil im Gebäudeinneren installiert wird und deshalb das Stromkabel durch eine Mauerbohrung geführt werden muss.

Verletzungsgefahr!
Vor allen Arbeitsen am Netzteil Netzsteckerziehen und Netzteil an der Dockingstation abstecken. Sicherheitshinweise in Kapitel "Warning - Gefahren durch elektrischen Strom" beachten. ( 6.3)
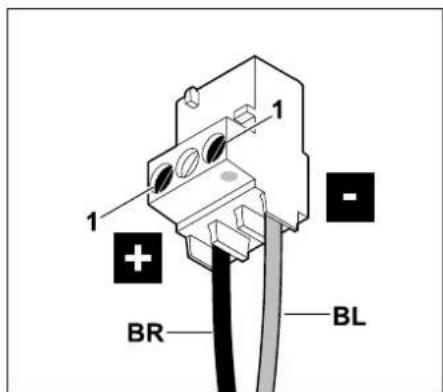
Das blaue Kabel (BL) und das braune Kabel (BR) am Stecker wie abgebildet montieren. Schrauben (1) festziehen.
15.8 Aufbewährung und Winterpause
Bei längerer Stillegung des Robotermahers (z. B. Winterpause) die nachfolgenden Punkte beachten:
- Akku aufladen (14.8)
- Automatik ausschalten (⇒ 10.4)
Hochste Sicherheitsstufe aktivieren (Diebstahlschutz) ( 10.15)
Geratesperre aktivieren ( 5.2) - Stecker des Netzeils vom Stromnetz trennen
Abdeckung der Dockingstation abnehmer ( 9.5)
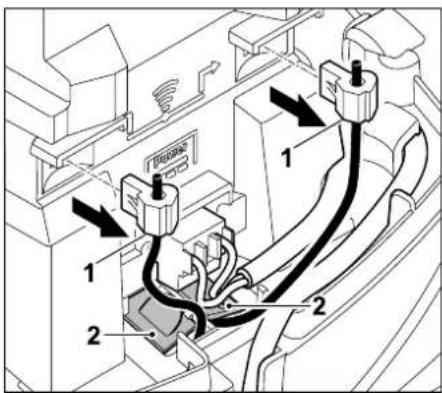
Begrenzungsdraht (1) abstecken. Abdeckungen des Kabelkanals (2) öffnen und Begrenzungsdraht mitsamt den Klemmsteckern aus dem Sockel der Dockingstation ausfaden.
Klemmstecker nicht vom Begrenzungsdraht abmontieren, sie sind fur den einmaligen
Gebrauch bestimmt. Zusätzliche Klemmstecker sind beim VKING Fachhandler erhalten. ( 16.)
Begrenzungsdraht nicht aus der Mahlfache entfern.
Stromkabel an der Dockingstation abstecken
Abdeckung der Dockingstation montieren ( 9.5)
- Dockingstation abmontieren
Freie Enden (Stecker) des Begrenzungsdrahts gegen Umwelteinflüsse schützen - z. B. mit einem geeigneten Isolierband abkleben.
Alle außeren Teile des Robotermahers und der Dockingstation sorgfältig reinigen
- Robotermaher zusammen mit der Dockingstation und dem Netzteil in einem trockenen, verschlossenen und staubarmen Raum in Normallage aufbewahren. Robotermaher in die Dockingstation eindhoven. Stellen Sie sicher, dass das Gerät außerhalb der Reichweite von Kindern ist.
- Robotermaher nur in betriebssicherem Zustand einlagern
- Halten Sie alle Schrauben fest angezogen, erneuern Sie unleserlich gewordene Gefahren- und Warnhinweise am Gerat, prufen Sie die gesamte Maschine auf Verschleib oder Beschädigungen. Ersetzen Sie abgenutzte oder beschädigte Teile.
Eventuelle Störungen am Gerät sind grundsätzlich vor der Einlagerung zu beheben.
Niemals Gegenstände auf dem Robotermaher oder der Dockingstation ablegen bzw. lagern.
Wiederinbetriebnahme des Robotermahers nach einer längeren Stillegung:
- MährflächeVBORBITEENFremdkörper entfern und sehr hohen Rasen mit einem herkommlichen Rasenmaher kurz mAHen.
- Dockingstation installieren ( 9.5) und Begrenzungsdraht anschließen. ( 9.7)
- Akku auflagen (⇒ 14.8)
- Uhrzeit und Datum kontrollieren und bei Bedarf einstellen (⇒ 10.10)
- Mahplan kontrollieren und bei Bedarfändern. (⇒ 10.5)
- Automatik einschalten (⇒ 10.4)
16. Übliche Ersatzteile
Begrenzungsdraht ARB 150: 0000 400 8610
Drahtverbinder ADV 010:
6909 007 1090
Klemmstecker AKS 010:
6909 007 1095
17. Zubehor
Für das Gerät ist weiteres Zubehör erhältlich.
Nahere Informationen erhalten Sie bei Ihrem VKING Fachhändler, im Internet (www.viking-garden.com) oder im VKING Katalog.

Aus Sicherheitsgründen darf mit dem Gerät nur von VIKING freigegebenes Zubehör verwendet werden.
18. Verschleib minimieren und Schaden vermeiden
Wichtige Hinweise zur Wartung und Pflege der Produktgruppe
Robotermaher, alkubetrieben
Für Sach- und Personenschäden, die durch Nichtbeachtung der Hinweise in der Bedienungsanleitung, insbesondere hinsichtlich Sicherheit, Bedienung und Wartung, verursacht werden, oder die durch Verwendung nicht zugelassener Anbau- oder Ersatzteile auftreten, schließt die Fa. VKING jeder Haftung aus.
Bitte beachten Sie unbedingt folgende wichtige Hinweise zur Vermeidung von Schäden oder übermäßig dem Verschleib an Ihr hem VKING Gerät:
1. Verschleißteile
Manche Teile des VIKING Gerätes unterliegen auch bei bestimmungsgemäßem Gebrauch einem
normalen VerschleB und müssen je nach Art und Dauer der Nutzung rechtzeitig ersetzt werden.
Dazu gehoreu.a.:
- Mahmesser
-Akku
2. Einhaltung der Vorgaben dieser Gebrauchsanleitung
Benutzung, Wartung und Lagerung des VKING Gerates mussen so sorgfaltig erfolgen, wie in dieser Gebrauchsanleitung beschreiben. Alle Schaden, die durch Nichtbeachten der Sicherheits-, Bedienungs- und Wartungshinweise verursacht werden, hat der Benutzer selbst zu verantworten.
Dies gilt insbesondere für:
-falsche Handhabung des Akkus (Aufladen, Lagerung),
-falschen elektrischen Anschluss (Spannung),
- nicht von VKING freigegebene Veränderungen am Produkt,
- die Verwendung von Werkzeugen oder Zubehören, die nicht für das Gerät zulässig, geeignet oder qualitativer minderwertig sind,
- nicht bestimmungsgemäß Verwendung des Produktes,
den Einsatz des Produktes bei Sportoder Wettbewerbsveranstaltungen,
- Folgeschäden durch die Weiterbenutzung des Produktes mit defekten Bauteilen.
3. Wartungsarbeiten
Alle im Abschnitt "Wartung" aufgeführten Arbeiten müssen regelmäßig durchgeführt werden.
Soweit these Wartungsarbeiten nicht vom Benutzer selbst ausgeführrt werden können, ist damit ein Fachhändler zu beauftragen.
VIKING empfeihlt Wartungsarbeiten und Reparaturen nur beim VIKING Fachhändler durchführren zu halten.
VIKING Fachhandlern werden regelmäßig Schulungen angeboten und technische Informationen zur Verfugung gestellt.
Werden diese Arbeiten versäumt, konnen Schäden auftreten, die der Benutzer zu verantworten hat.
Dazu zahlen unter anderem:
- Schaden am Gerät infolge unzureichender oder falscher Reinigung,
- Korrosions- und andere Folgeschäden durch unsachgemäße Lagerung,
- Schäden am Gerät durch die Verwendung von qualitativer minderwertigen Ersatzteilen,
- Schaden infolge nicht rechtzeitig oder unzureichend durchgeführter Wartung bzw. Schaden durch Wartungs- oder Reparaturarbeiten, die nicht in Werkstätten von Fachhandlern durchgeführt wurden.
19. Umweltschutz
Verpackungen, Gerät und Zubehöre sind aus recyclingfähigen Materialien hergestellt und entsprechend zu entsorgen.
Die getrennte, umweltgerechte
Entsorgung von Materialresten fordert die
Wiederverwendbarkeit von Wertstoffen.
Aus thisem Grund ist nach Ablauf der
gewöhnlichen Gebrauchsdauer das Gerät der Wertstoffsmäßung zuzuführen. Beachten Sie bei der Entsorgung die Angaben im Kapitel "Entsorgung". (⇒ 6.11)

Abfallprodukte wie Akkus immer fachgerecht entsorgen. Beachten Sie die ortlichen Vorschriften.

Lithium-Ionen-Akkus nicht über den Hausmull entsorgen, sondern beim Fachhändler oder bei der Problemstoffsammelstelle
abgeben.
19.1 Akku ausbauen
- Gerätesperre aktivieren. ( 5.2)
Kleinste Schnitthöhe einstellen. ( 9.3) - Robotermaher auf den Rücken legen.
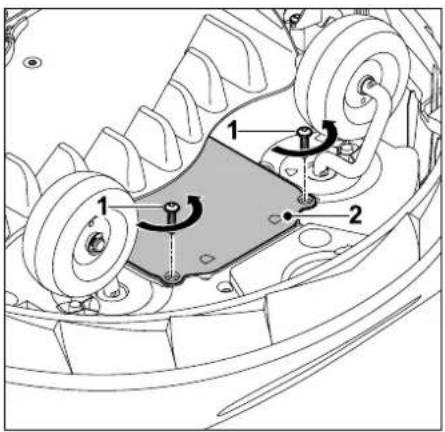
Schrauben (1) ausdrehen und Abdeckung (2) entnehmer.
- Akku aus dem Akkufach entnehmer ( 9.2) , Abdeckung wieder einsetzen und Schrauben eindrehen.

Verletzungsgefahr! Beschädigung des Akkus vermeiden.
20. Transport

Verletzungsgefahr!
Vor dem Transport das Kapitel "Zu Ihrer Sicherheit" ( 6.) insbesondere das Unterkapitel "Transport des Geräts" ( 6.5) , sorgfältig lessen und alle Sicherheitshinweise einzel beachten - immer Gerätesperre aktivieren. ( 5.2)
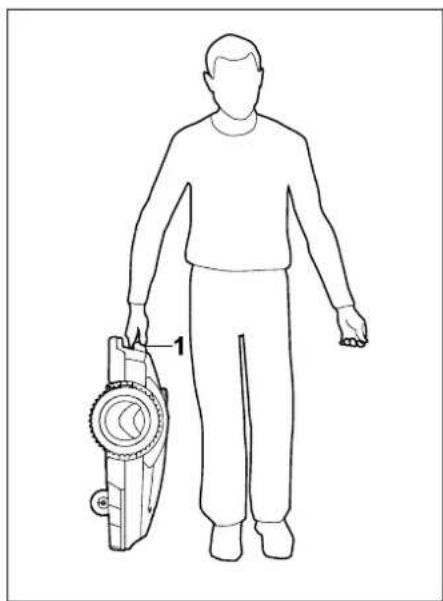
20.1 Gerat anheben oder tragen
Rasenmacher am Tragegriff (1) anheben und tragen. Immer auf ausreichend Abstand des Mahmessers vom Körper, insbesondere von Füßen und Beinen, achten.
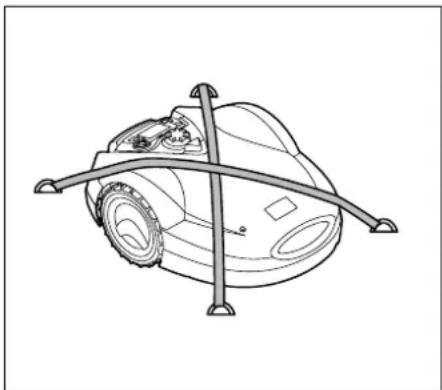
20.2 Gerat verzurren
Rasenmacher auf der Ladefläche sichern. Dazu Gerät wie abgebildet mit geeigneten Befestigungsmitteln (Gurte, Seile) fixieren.
Mittransportierte Geräteiele (z. B. Dockingstation, Kleinteile) ebenfals gegen Verrutschen sichern.
21. CE-Konformitätserklung des Herstellers
Wir.
VIKING GmbH
Hans Peter Stihl-Straße 5
A-6336 Langkampfen/Kufstein
erklaren, dass die Maschine
Rasenmacher,automatisch und akkubetrieben (MI)
Fabrikmarke:VIKING
Typ:MI 632.0
MI 632.0 P
Serienidentfierung 6309
mit der
Dockingstation
Fabrikmarke:VIKING
Typ: ADO 600
Serienidentfierung 6309
mit folgenden EG-Richtlinien
übereinstimmt:
Die Erzeugnisse sind in Übereinstimmung mit folgenden Normen entwickelt worden: EN 60335-1, EN 50636-2-107
Zusammenstellung und Aufbewährung der Technischen Unterlagen:
Sven Zimmermann
VIKING GmbH
Das Baujahr und die Serialnummer sind auf dem Typenschild des Geräts angegeben.
Langkampfen.
2015-01-02 (JJJJ-MM-TT)
VIKING GmbH

Sven Zimmermann
Abteilungsleiter Konstruktion
22. Technische Daten
MI 632.0 / MI 632.0 P:
Serienidentfizierung 6309
Mahsystem Mulchmahwerk
Schneidvorrichtung Messerbalken
Schnittbreite 30~cm
Drehzahl der
Schneidvorrichtung 3150 U/min
Akku-Typ Lithium-lon
Akku-Spannung UDC 29 V
Schnitthöhe 20 - 60 mm
Schutzklasse III
Schutzart IPX1
Gemäß Richtlinie 2006/42/EC
und Norm EN 50636-2-107:
Gemessener Schall
leistungspegel LwA 61,0 dB(A)
Unsicherheit K_WA 2,0 dB(A)
Unsicherheit K_pA 2 dB(A)
L/B/H 73/54/27 cm
Gewicht (ohne Akku) 12 kg
MI 632.0:
geeignet fur Flachen bis 3000m^2
Leistung 120 W
Netzteil HLG-120H
2,9 A
Akku-Bezeichnung AAI 130
Akku-Energie 130 Wh
Akku-Kapazitat 4,5 Ah
Gewicht Akku 1,10 kg
MI 632.0 P:
geeignet fur Flachen bis 4000m^2
MI 632.0 P:
Leistung 185 W
Netzteil HLG-185H
4.4A
Akku-Bezeichnung AAl 200
Akku-Energie 194 Wh
Akku-Kapazität 6,8 Ah
Gewicht Akku 1,40 kg
Dockingstation ADO 600:
Spannung UDC 42V
Schutzklasse III
Schutzart IPX1
Gewicht 3 kg
Netzteil:
Spannung UAC 100-240V
Frequenz 50/60 Hz
Spannung UDC 42V
Schutzklasse II
Schutzart IP67
Transport von VIKING Akkus:
VIKING Akkus erfüllen die nach UN-Handbuch ST/SG/AC.10/11/Rev.5 Teil III, Unterabschnitt 38.3 genommen Voraussetzungen.
Der Benutzer kann VKING Akkus beim Straßentransport ohne weitere Auflagen zum Einsatzort des Geräts mitführren.
Beim Luft- oder Seetransport sind die länderspezifischen Vorschriften zu beachten.
Weiterfuhrende Transporthinweise siehe www.viking-garden.com/safety-datasheets
REACH:
REACH bezeichnet eine EG-Verordnung zur Registrierung, Bewertung und Zulassung von Chemikalien. Informationen zur Erfüllung der REACH-Verordnung (EG) Nr. 1907/2006 siehe www.stihl.com/reach
23. Meldungen
Meldungen informieren über aktive Fehler, Störungen und Empfehlungen. Sie werden in einem Dialogfenster angezeigt und können nach Drucken der OK-Taste im Menu "Meldungen" aufgerufen werden. ( 10.8)
Empfehlungen und aktive Meldungen erschieren auch in der Statusanzeige. ( 10.2)
In den Meldungsdetails konnen der Meldungcode, der Zeitpunkt des Aufretens, die Prioritat und die Aufretenshafugkeit abgerufen werden.
- Empfehlungen haben die Priorität
"Niedrig" oder "Info", sie erscheinen in der Statusanzeige abwechselnd mit dem Text "iMow betriebsbereit".
Der Robotermaher kann weiterhin in Betrieb genommen werden, der automatische Betrieb lauft weiter.
- Störungen haben die Priorität
"Mittel" und erfordern eine Aktion des Benutzers.
Der Robotermaher kann erst nach der Beseitigung der Störung wieder in Betrieb genommen werden.
- Bei Fehlern mit der Priorität "Hoch" erscheint im Display der Text "Fachhändler kontaktieren". Der Robotermaher kann erst nach der Fehlerbehung durch den VKING Fachhändler wieder in Betrieb genommen werden.

Bleibt eine Meldung trotz der vorgeschlagenen Abhilfe aktiv, ist der VKING Fachhändler zu kontaktieren.
Fehler, die ausschließlich von einem VIKING Fachhändler behoben werden können, sind im Folgenden nicht aufgelistet. Sollte ein solcher Fehler auftreten, sind der 4-stellige Fehlercode und der Fehlertext an den Fachhändler zu übermitteln.
Meldung:
0001 - Datenverlust
Zum Freigeben OK drucken
Mögliche Ursache:
- Update der Gerätesoftware wurde durchgeführt
- Spannungsverlust
- Software-bzw. Hardwarefehler
Abhilfe:
- Nach Drucken der OK-Taste arbeitet der Robotermaher mit voreingestelltener Einstellungen -Einstellungen (Datum Uhrzeit, Mahplan) prufen und korrigieren
Meldung:
0100-Akku entladen
Akku aufladen
Mögliche Ursache:
- Spannung des Akkus zu gering
Abhilfe:
- Robotermaher zum Aufladen des Akkus in die Dockingstation stellen (14.8)
Meldung:
0180 - Temperatur niedrig
Temperaturbereich untersritten
Mögliche Ursache:
- Temperatur im Inneren des Robotermahers zu niedrig
Abhilfe:
- Robotermaher aufwärmen
Meldung:
0181 - Temperatur hoch
Temperaturbereich überschritten
Mögliche Ursache:
- Temperatur im Inneren des Robotermahers zu hoch
Abhilfe:
- Robotermaher abkühlen lessen
Meldung:
0183 - Temperatur hoch
siehe Meldung 0181
Meldung:
0185-Temperatur hoch
siehe Meldung 0181
Meldung:
0186 - Temperatur niedrig
siehe Meldung 0180
Meldung:
0187 - Temperatur hoch
siehe Meldung 0181
Meldung:
0302 - Fehler Antriebsmotor
Temperaturbereich übersritten
Mögliche Ursache:
- Temperatur im linken Antriebsmotor zu hoch
Abhilfe:
- Robotermaher abkühlen halten
Meldung:
0305 - Fehler Antriebsmotor
Linkes Rad steckt fest
Mögliche Ursache:
- Überlast am linken Antriebsrad
Abhilfe:
- Robotermaher reinigen (⇒ 15.2)
-Unebenheiten (Locher, Vertiefungen) in der Mahlfache beseitigen
Meldung:
0402 - Fehler Antriebsmotor
Temperaturbereich überschritten
Mögliche Ursache:
- Temperatur im rechten Antriebsmotor zu hoch
Abhilfe:
- Robotermaher abkühlen lessen
Meldung:
0405 - Fehler Antriebsmotor
Rechtes Rad steckt fest
Mögliche Ursache:
- Überlast am rechten Antriebsrad
Abhilfe:
- Robotermaher reinigen (15.2)
-Unebenheiten (Löcher, Vertiefungen) in der Mährfläche beseitigen
Meldung:
0502 - Fehler Mahmotor
Temperaturbereich überschritten
Mögliche Ursache:
- Temperatur im Mahmotor zu hoch
Abhilfe:
- Robotermaher abkühlen halten
Meldung:
0505 - Fehler Mahmotor
Mahmesser steckt fest
Mögliche Ursache:
-
Mahmotor kann nicht eingeschaltet werden
-
Überlast am Mahmotor
Abhilfe:
- Mahmesser und Mähwerk reinigen (15.2)
-Gröbere Schnitthöhe einstellen (⇒ 9.3)
—Unebenheiten (Löcher, Vertiefungen) in der Mährfläche beseitigen
Meldung:
0701 - Akkufehler
Temperaturbereich verlassen
Mögliche Ursache:
- Temperatur im Akku zu niedrig bzw. zu hoch
Abhilfe:
- Robotermaher aufwärmen halten bzw. abkühlen - zulässigen Temperaturbereich des Akkus beachten (⇒ 6.4)
Meldung:
0703-Akku entladen
siehe Meldung 0100
Meldung:
0704-Akku entladen
siehe Meldung 0100
Meldung:
1000- Überschlag
Zulässige Neigung überschritten
Mögliche Ursache:
- Neigungssensor hat einen Überschlag festgestellt
Abhilfe:
- Robotermaher auf die Räder stellen, auf Beschädigungen prüfen und Meldung mit OK bestätigen
Meldung:
1010 - iMow angehoben
Zum Freigeben OK drucken
Mögliche Ursache:
- Robotermaher wurde an der Haube angehoben
Abhilfe:
-Beweglichkeit der Haube prufen und Meldung mit OK bestätigten
Meldung:
1020- STOP-Taste betätigt
Zum Freigeben OK drucken
Mögliche Ursache:
- STOP-Taste wurde gedrückt
Abhilfe:
- Meldung mit OK bestätigten
Meldung:
1030-Haubenfehler
Haube prufen
Danach OK drucken
Mögliche Ursache:
- Keine Haube erkannt
Abhilfe:
-Haube prufen (Beweglichkeit, festen Sitz) und Meldung mit OK bestätigten
Meldung:
1100 - Steuerkonsole
Steuerkonsole während der Fahrt entnommen
Mögliche Ursache:
- Steuerkonsole wurde während des automatischen Betriebs entnommen
Abhilfe:
- Meldung mit OK bestätigten - nach Einlagen der Steuerkonsole wird der automatische Betrieb wieder aufgenommen
Meldung:
1120-Haube blockiert
Haube prufen
Danach OK drucken
Mögliche Ursache:
- Permanente Kollision erkannt
Abhilfe:
- Robotermaher befreien, bei Bedarf Hindernis entfernen bzw. Verlauf des Begrenzungsdrahtsändern-danach Meldung mit OK bestätigen
-Beweglichkeit der Haube prufen und Meldung mit OK bestätigten
Meldung:
1125-Hindernis beseitigen
Drahtverlegung prufen
Mögliche Ursache:
-Begrenzungsdraht ungenau verlegt
Abhilfe:
- Verlegung des Begrenzungsdrahts prufen, Abstände mit dem iRuler kontrollieren ( 11.3)
Meldung:
1130 - Steckt fest
iMowbefreien
Danach OK drucken
Mögliche Ursache:
- Robotermaher steckt fest
- Antriebsräder drehen durch
Abhilfe:
- Robotermaher befreien, Unebenheiten in der Mahlflache entfernen bzw. Verlauf des Begrenzungsdrahts andern - danach Meldung mit OK bestätigten
- Antriebsräder reinigen, bei Bedarf Betrieb bei Regen verhinder - danach Meldung mit OK bestätigten ( 10.11)
Meldung:
1135-AuBerhalb
iMow in Mahflache stellen
Mögliche Ursache:
- Der Robotermaher ist außerhalb der Mahlfache
Abhilfe:
- Robotermaher in die Mahlfläche bringen
Meldung:
1140-Zu steil
Drahtverlegung prufen
Mögliche Ursache:
- Neigungssensor hat mehr als 19^ Hangneigung festgestellt
Abhilfe:
-Verlauf des Begrenzungsdrahts
ändern, Rasenflächen mit mehr als 19^ Hangneigung ausgrenzen
Meldung:
1160 - Griff betätigt
Zum Freigeben OK drucken
Mögliche Ursache:
- Der Robotermaher wurde am Tragegriff angehoben
Abhilfe:
- Meldung mit OK bestätigten
Meldung:
1170 - Kein Signal
Drahtsignal prufen
Mögliche Ursache:
Drahtsignal wird während des Betriebs nicht mehr empfangen
- Der Robotermaher ist außerhalb der Mahlfache
Dockingstation bzw. elektronische Bauteile wurden getauscht
Abhilfe:
- Stromversorgung der Dockingstation prufen
-
LED an der Dockingstation prufen - die rote LED muss während des Betriebs permanent leuchten (⇒ 12.1)
-
Robotermaher in die Mahfläche bringen
-
Robotermaher und Dockingstation koppeln (⇒ 10.15)
Meldung:
1180 - iMow eindhoven
Automatisches Eindhoven nicht möglich
Mögliche Ursache:
- Robotermaher hat in einer Nebenflächenach der Dockingstation gesucht
- Dockingstation wurde nicht gefunden
Abhilfe:
- Robotermaher in die Mahlfache bringen und eindhoven (⇒ 14.7)
-LED an der Dockingstation prufen, Dockingstation bei Bedarf einschalten ( 12.1)
-Eindocken prufen (14.7)
Meldung:
1190 - Dockingfehler
Dockingstation belegt
Mögliche Ursache:
- Dockingstation durch einen zweiten Robotermaher belegt
Abhilfe:
- Robotermaher eindhoven, wenn die Dockingstation wieder frei ist
Meldung:
1200 - Fehler Mahmotorsiehe Meldung 0505
Meldung:
1210 - Fehler Antriebsmotor Rad steckt fest
Mögliche Ursache:
- Uberlast an einem Antriebsrad
Abhilfe:
- Robotermaher reinigen (⇒ 15.2)
-Unebenheiten (Locher, Vertiefungen) in der Mährfläche beseitigen
Meldung:
1220 - Regen erkannt
Mähen abgebrochen
Mögliche Ursache:
- Mähvorgang wurde wegen Regen abgebrochen bzw. nicht begonnen
Abhilfe:
-Keine Aktion nötig,bei Bedarf Regensensor einstellen ( 10.11)
Meldung:
2000 - Signalproblem
iMow eindhoven
Mögliche Ursache:
-Drahtsignal fehlerhaft, Feinabstimmung notig
Abhilfe:
- Robotermaher in die Dockingstation stellen - danach OK drucken
Meldung:
2010 - Mahmesser tauschen
Zulässige Lebensdauer erreicht
Mögliche Ursache:
-Mahmesser ist seit mehr als 200 Stunden in Gebrauch, Tausch notig
Abhilfe:
-Mahmesser tauschen, danach Messerwechsel im Menu "Service" bestätigen ( 15.4)
Meldung:
2020 - Empfehlung
Jahresservice durch Fachhändler
Mögliche Ursache:
Gerateserviceempfohlen
Abhilfe:
Jahresservice beim VKING Fachhandler durchführung lessen
Meldung:
2030-Akku
Zulässige Lebensdauer erreicht
Mögliche Ursache:
-Akkutausch nötig
Abhilfe:
- Akku vom VIKING Fachhandlertauschen lassen
Meldung:
2032 - Akkufehler bei Ladevorgang siehe Meldung 0701
Meldung:
2040 - Akkufehler bei Start Mühbetrieb siehe Meldung 0701
Meldung:
2050 - Mahplan anpassen Aktivzeiten verlangern
Mögliche Ursache:
Aktivzeiten wurden verkurzt/gelöscht bzw. Mahdauer wurde verlangert gespeicherte Aktivzeiten reichen nicht für die notigen Mahvorgänge
Abhilfe:
-Aktivzeiten verlangern () 10.6) bzw. Mahdauer verringern () 10.7
Meldung:
4001 - Interner Fehler Temperaturbereich verlassen
Mögliche Ursache:
- Temperatur im Akku bzw. im Inneren des Geräts zu niedrig bzw. zu hoch
Abhilfe:
- Robotermaher aufwärmen halten bzw. abkühlen - zulässigen Temperaturbereich des Akkus beachten ( 6.4)
Meldung:
4002 - Überschlag
siehe Meldung 1000
Meldung:
4003-Haube angehoben
Haube prufen
Danach OK drucken
Mögliche Ursache:
-Haube wurdene angehoben.
Abhilfe:
-Haube prufen und Meldung mit OK bestätigen.
Meldung:
4004 - Internet Fehler
Zum Freigeben OK drucken
Mögliche Ursache:
-
Fehler im Programmablauf
-
Stromausfall während des automatischen Betriebs
-
Robotermaher befindet sich außerhalb der Mahlfache
Abhilfe:
- Meldung mit OK bestätigten
Stromversorgung der Dockingstation prufen - die rote LED muss während des Betriebs permanent leuchten, danach OK-Taste drucken (12.1)
- Robotermaher in die Mahfläche bringen, danach OK-Taste drücken
Meldung:
4005 - Internet Fehler
siehe Meldung 4004
Meldung:
4006 - Internet Fehler
siehe Meldung 4004
Meldung:
4008 - Internet Fehler
siehe Meldung 4004

24. Fehlersuche
eventuell einen Fachhändler aufsuchen, VIKING empfeht den VIKING Fachhändler.
Störung:
Der Robotermaher arbeitet zur falschen Zeit
Mögliche Ursache:
-Uhrzeit und Datum falsch eingestellt
-Aktivzeiten falsch eingestellt
Gerat wurdewon Unbefugten in Betrieb genommen
Abhilfe:
-Uhrzeit und Datum einstellen ( 10.10)
-Aktivzeiten einstellen ( 10.5)
- Sicherheitsstufe "Mittel" oder "Hoch" einstehen (⇒ 10.15)
Störung:
Der Robotermaher arbeitet während einer Aktivzeit nicht
Mögliche Ursache:
-Akku wird geladen
- Automatik ausgeschaltet
-Aktivzeit ausgeschaltet
- Regen erkannt
- Wöchentliche Mahdauer ist erreicht, kein weiterer Mahvorgang in dieserWoche notig
- Meldung ist aktiv
- Steuerkonsole nicht korrekt eingelegt
Dockingstation nicht ans Stromnetz angeschlossen
Abhilfe:
-Akku fertig laden lassen ( 14.8)
- Automatik einschalten (⇒ 10.4)
-Aktivzeit freigeben ( 10.6)
- Regensensor einstellen ( 10.11)
-Keine weitere Aktion nötig, Mähvorgänge werden automatisch auf dieWoche verteil-bei Bedarf Mähvorgang mit dem Befehl "Mahren" starten ( 10.4)
- Angezeigte Störung beseitigen und Meldung mit OK bestätigten (⇒ 10.8)
- Steuerkonsole einlagen (⇒ 14.2)
- Stromversorgung der Dockingstation prufen ( 9.5)
Störung:
Der Robotermaher mahr nicht nach Aufruferen der Befehle "Mahren starten" bzw. "Mahren zeitverzogert starten"
Mögliche Ursache:
-Akkuladung unzureichend
-Regen erkannt
- Steuerkonsole nicht korrekt eingelegt
- Meldung ist aktiv
- Home-Taste an der Dockingstation wurde gedrückt - Heimruf aktiv
Abhilfe:
-Akku auflagen ( 14.8)
- Regensensor einstellen (⇒ 10.11)
- Steuerkonsole einlagen (14.2)
- Angezeigte Störung beseitigen und Meldung mit OK bestätigten (⇒ 10.8)
- Home-Taste zum Ausschalten des Heimrufs drucken bzw. Befehn nach dem Eindhoven erneut ausführten
Störung:
Der Robotermaher arbeitet nicht und im Display wird nicht angezeigt
Mögliche Ursache:
Gerat ist im Standby
-Akkudefekt
Abhilfe:
-Beliebige Tastesum Aufwecken des Robotermahers drucken - Statusanzeige erscheint ( 10.2)
-Akku tauschen (x)
Störung:
Der Robotermaher ist laut und vibriert
Mögliche Ursache:
- Mähmesser ist beschädigt
- Mahwerk ist stark verschmutzt
Abhilfe:
-Mahmesser tauschen-Hindernisse auf der Rasaflache entfernen ( 15.4) (x)
-Mahwerk reinigen ( 15.2)
Störung:
Schleches Mulch-bzw. Mahergebnis
Mögliche Ursache:
-Rasenhöhe ist im Verhältnis zur Schnitthöhe zu hoch
Rasen ist sehr nass
- Mähmesser ist stumpf oder verschlissen
-Aktivzeiten unzureichend, Mahdauer zu kurz
- Größe der Mahlfache falsch eingestellt
- Mahfläche mit sehr hohem Rasen
Lange Regenphasen
Abhilfe:
-Schnitthöhe einstellen ( 9.3)
- Regensensor einstellen (⇒ 10.11) Aktivzeiten verschieben (⇒ 10.6)
- Mahmesser tauschen ( 15.4)
-Aktivzeiten verlangern bzw. ergänzen ( 10.6) Mahdauer verlangern ( 10.7)
-Neuen Mahplan erstellen ( 10.7)
-Fur ein sauberes Mathergebnis benotigt der Robotermaher je nach GroBe der Mahflache bis zu 2 Wochen
- Mähen bei Regen erlauben (⇒ 10.11) Aktivzeiten verlangern (⇒ 10.6)
Störung:
Displayanzeige in fremder Sprache
Mögliche Ursache:
- Spracheinstellung wurde geändert
Abhilfe:
- Sprache einstellen ( 10.10)
Störung:
In der Mahlfache entstehen braune (erdige) Stellen
Mögliche Ursache:
- Mahdauer ist im Verhältnis zur Mahlfache zu lang
-Begrenzungsdraht wurde in zu engen Radien verlegt - Größe der Mahlfache falsch eingestellt
Abhilfe:
-Mahdauer verringern ( 10.7)
-Verlauf des Begrenzungsdrahtskorrigieren ( 9.6)
-Neuen Mahplan erstellen ( 10.7)
Störung:
Mähvorgänge sind deutlich kürzer als gewöhnlich
Mögliche Ursache:
- Gras ist sehr hoch oder zu nass
Gerat (Mahwerk, Antriebsräder) ist stark verschmutzt - Akku ist am Ende seiner Lebensdauer
Abhilfe:
-Schnitthöhe einstellen ( 9.3)
Regensensor einstellen ( 10.11) Aktivzeiten versuschieben ( 10.6)
Gerat reinigen (15.2)
-Akku tauschen -eine entsprchende Empfehlung im Display beachten (空) 10.8
Störung:
Der Robotermaher ist eingedockt, der Akku wird nicht geladen
Mögliche Ursache:
- Aufladen des Akkus nicht nötig
- Dockingstation nicht ans Stromnetz angeschlossen
Eindocken fehlerhaft
Ladekontakte korrodiert
Abhilfe:
- Keine Aktion notig - Aufladen des Akkus erfolgt automatisch nach entsprechieren einer bestimmen Spannung
- Stromversorgung der Dockingstation prufen ( 9.5)
- Robotermaher in der Mahfliche abstellen und zurück zur Dockingstation ( 10.4) schicken, bzw das ordnungsgemäß Eindocken prufen - bei Bedarf Position der Dockingstation korrigieren ( 9.5)
Ladekontakte tauschen (x)
Störung:
Eindocken Funktioniert nicht
Mögliche Ursache:
-Unebenheiten im Einfahrtsbereich der Dockingstation
-Verschmutzte Antriebsräder bzw.
verschmutzte Bodenplatte
-Begrenzungsdraht im Bereich der Dockingstation falsch verlegt
- Enden des Begrenzungsdrahts nicht gekürzt
Abhilfe:
-Unebenheiten im Einfahrtsbereich beseitigen ( 9.5)
Antriebsrader und Bodenplatte der Dockingstation reinigen (15.2)
-Begrenzungsdraht neu verlegen -auf korrekten Verlauf im Bereich der Dockingstation achten ( 9.6)
-Begrenzungsdraht wie beschreiben kürzen und ohne Drahtreserven verlegen - überstehende Enden nicht aufrolten ( 9.7)
Störung:
Der Robotermaher hat den Begrenzungsdraht überfahren
Mögliche Ursache:
-Begrenzungsdraht ist falsch verlegt, Abstände stimmen nicht
- Mährfläche hat eine zu große Neigung
- Störfelder beeinflussen den Robotermaher
Abhilfe:
- Verlegung des Begrenzungsdrahts prufen (10.13), Abstände mit dem iRuler kontrollieren (11.3)
- Verlegung des Begrenzungsdrahts prufen, Zonen mit zu großer Hangneigung sperren (10.13)
- VIKING Fachhändler kontaktieren (X)
Störung:
Der Robotermaher steckt oft fest
Mögliche Ursache:
-Schnitthöhe zu niedrig
- Antriebsräder verschmutzt
- Vertiefungen, Hindernisse in der Mährfläche
Abhilfe:
-Schnitthöhevergroßern( 9.3)
-Antriebsraderinigen ( 15.2)
- LÖcher in der Mahlfache aufflüssen, Sperrflächen um Hindernisse wie freiliegende Wurzeln installieren, Hindernisse entfern (⇒ 9.6)
Störung:
Der Stößsensor wird nicht aktiviert, wenn der Robotermaher auf ein Hindernis trifft
Mögliche Ursache:
-Niedriges Hindernis (weniger als 10 cm hoch)
- Das Hindernis ist nicht fest mit dem Untergrund verbunden - z. B. Fallobst oder ein Tennisball
Abhilfe:
-Hindernis entfernen oder mit einer Sperrfläche ausgrenzen ( 11.8)
-Hindernis entfernen
Störung:
Fahrspuren am Rand der Mährfläche
Mögliche Ursache:
-Zu haufiges Randmahen
- Startpunkte in Verwendung
- Akku wird gegen Ende seiner Lebensdauer sehr oft aufgeladen
Abhilfe:
-Randmähen ausschalten oder auf einmal pro Woch e verringern ( 10.13)
-In geeigneten Mahflächen alle Mähvorgänge bei der Dockingstation starten ( 10.14)
-Akku tauschen -eine entsprchende Empfehlung im Display beachten (长) 1 23.)
Störung:
Ungemähtes Gras am Rand der Mahfläche
Mögliche Ursache:
-
Randmähen ausgeschaltet
-Begrenzungsdraht ungenau verlegt -
Gras ist außerhalb der Reichweite des Mahm Messers
Abhilfe:
-Einmal bzw. zweimal proWoche Rand mAHen ( 10.13)
- Verlegung des Begrenzungsdrahts prufen (10.13), Abstände mit dem iRuler kontrollieren (11.3)
- Ungemäßte Bereiche regelmäßig mit einem geeigneten Rasentrimmer bearbeiten
Störung:
Kein Drahtssignal
Mögliche Ursache:
- Dockingstation ausgeschaltet - keine LED leuchtet
- Dockingstation nicht ans Stromnetz angeschlossen - keine LED leuchtet
-Begrenzungsdraht nicht an die Dockingstation angeschlossen - rote LED blinkt
-Begrenzungsdraht unterbrochen - rote LED blinkt - Robotermaher und Dockingstation sind nicht gekoppelt
- Defekt in der Elektronik
Abhilfe:
- Dockingstation einschalten (⇒ 12.1)
- Stromversorgung der Dockingstation prufen ( 9.5)
-Begrenzungsdraht an Dockingstation anschließen ( 9.7)
Drahtbruchuchen ( 15.6) ),anschließlich Begrenzungsdraht mitDrahtverbindern reparieren ( 11.12) - Robotermaher und Dockingstation koppelIn ( 10.15)
- VIKING Fachhändler kontaktieren (x)
25. Serviceplan
25.1 Übergabebestätigung
Nächster Service
Datum:
25.2 Servicebestätigung

Geben Sie diese
Gebrauchsanleitung bei
Wartungsarbeiten Ihrem VKING
Fachhändler.
Er bestätigt auf den vorgedruckten Feldern die Durchführung der Servicearbeiten.

Service ausgeführ am

Datum)nachsterService
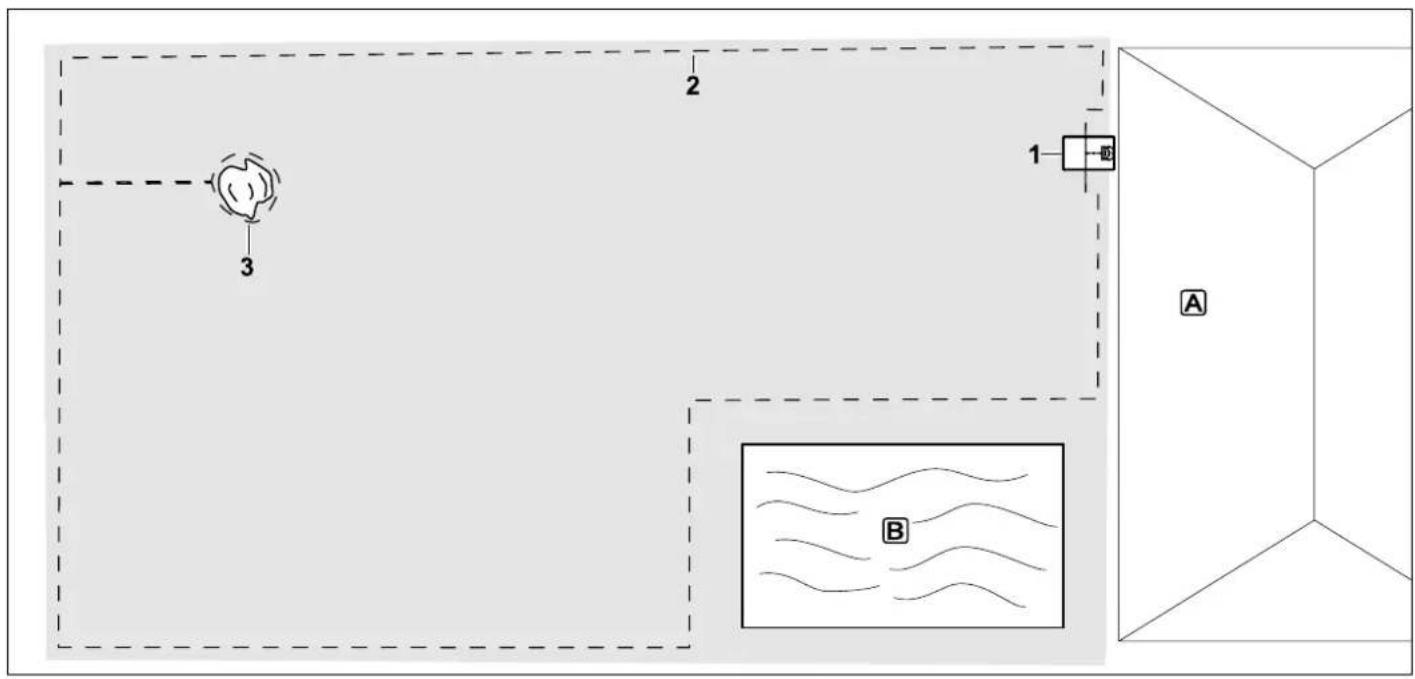
26. Installationsbeispiele
Rechteckige Mahlfache mit einzelnem Baum und Schwimmbecken
Dockingstation:
Standort (1) direkt am Haus A
Sperrfläche:
Installation um den freistehenden Baum (3), ausgehend von einer im rechten Winkel zum Rand installierten Verbindungsstrecke.
Schwimmbecken:
Aus Sicherheitsgrunden (vorgeschriebener Drahtabstand) wird der Begrenzungsdraht (2) um das Becken herum verlegt.
Drahtabände: (1) 11.3)
27 cm bzw. 9 cm Abstand zum Rand
27 cm um den Baum
100 cm Abstand zur Wasserfläche
Programmierung:
Nach Festlegen dergroBe der Mahrflache sind keine weiteren Anpassungen nOtig.
Besonderheiten:
Ungemähte Bereiche rund um das Schwimbecken regelmäßig manuell mahren bzw. mit einem geeigneten Rasentrimmer bearbeiten.

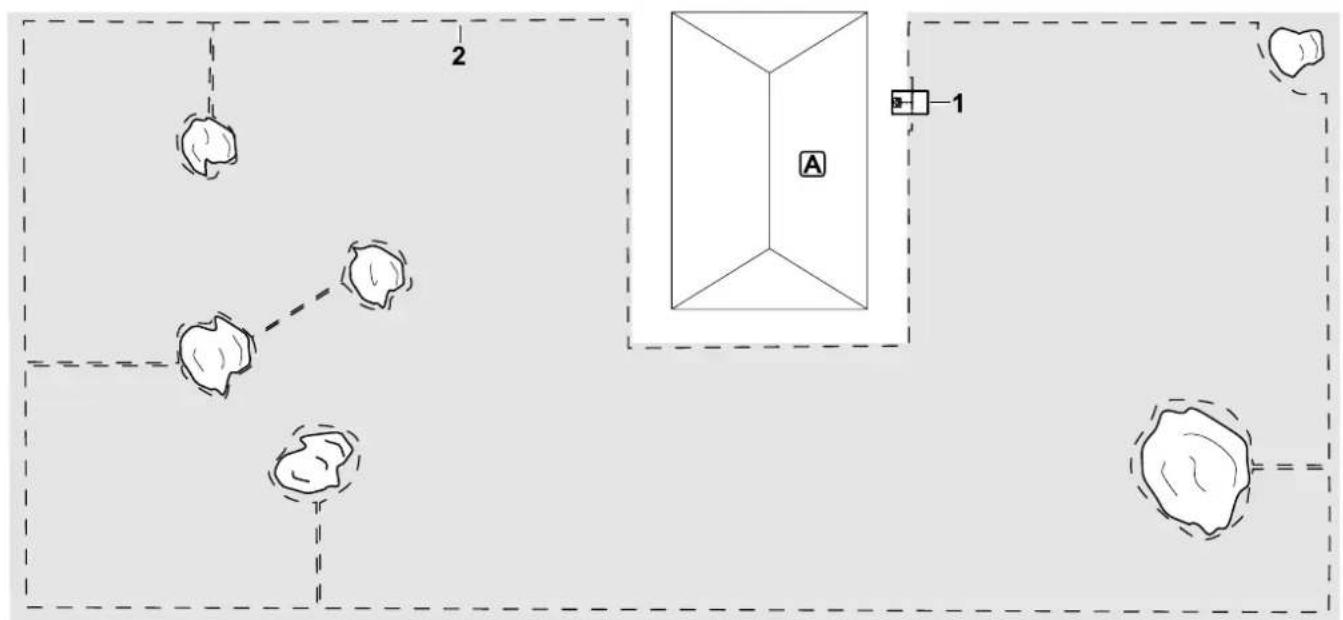
U-förmige Mähfläche mit mehreren freistehenden Bäumen
Dockingstation:
Standort (1) direkt am Haus A
Sperrflächen:
Installation um die freistehenden Bäume, jeweils ausgehend von im rechten Winkel zum Rand (2) installierten
Verbindungsstrecken, 2 Sperrflächen sind mit einer Verbindungsstrecke verbunden.
Drahtabstände: ( 11.3)
27 cm bzw. 9 cm Abstand zum Rand
27 cm um die Bäume
Programmierung:
Nach Festlegen der Gröbe der Mährfläche sind keine weiteren Anpassungen nötig.
Besonderheiten:
Baum in der Ecke der Mahlfache-Bereich hinter dem ausgewgrenzten Baum regelmäßig mit einem geeigneten Rasentrimmer bearbeiten oder als Hochgraswiese stehen halten.
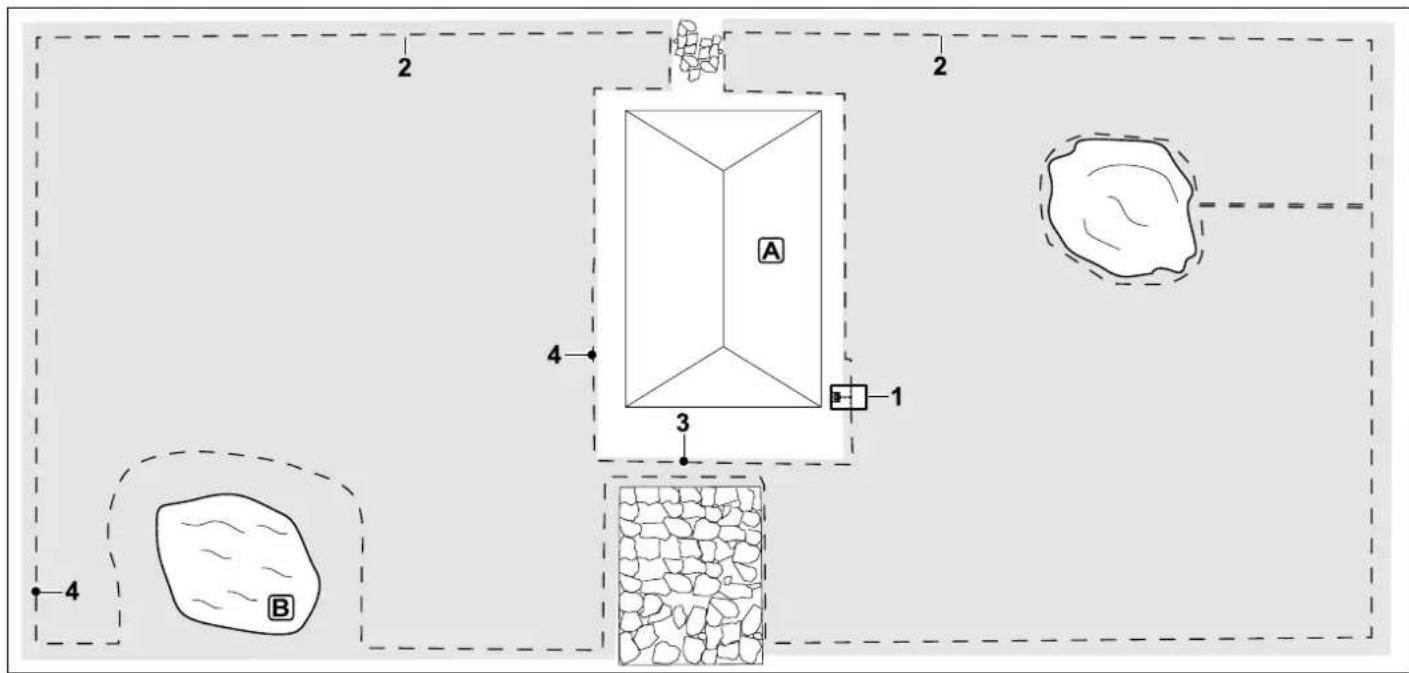
Zweigeteilte Mahlfläche mit Teich und freistehendem Baum
Dockingstation:
Standort (1) direkt am Haus A
Sperrfläche:
Installation um den freistehenden Baum, ausgehend von einer im rechten Winkel zum Rand installierten Verbindungsstrecke.
Teich:
Aus Sicherheitsgrunden (vorgeschriebener Drahtabstand) wird der Begrenzungsdraht (2) um den Teich herum verlegt.
Drahtabände: (1) 11.3)
27 cm bzw. 9 cm Abstand zum Rand bzw. zu Terrassen
27 cm um den Baum
100 cm Abstand zur Wasserfläche
Engstelle:
Installation einer Gasse (3) mit 18 cm
Drahtabstand ( 11.10)
Programmierung:
Gesamtgroße der Mahlfache festlegen, 2
Startpunkte (4) programmieren (in der
Nähe der Dockingstation und im
verwinkelten Eck beim Teich) -
Starthaufigkeit jeweils 20% bis 25% (10.14)
Besonderheiten:
Ungemähte Bereiche, z. B. rund um den Teich, regelmäßig manuell mahen bzw. mit einem geeigneten Rasentrimmer bearbeiten.
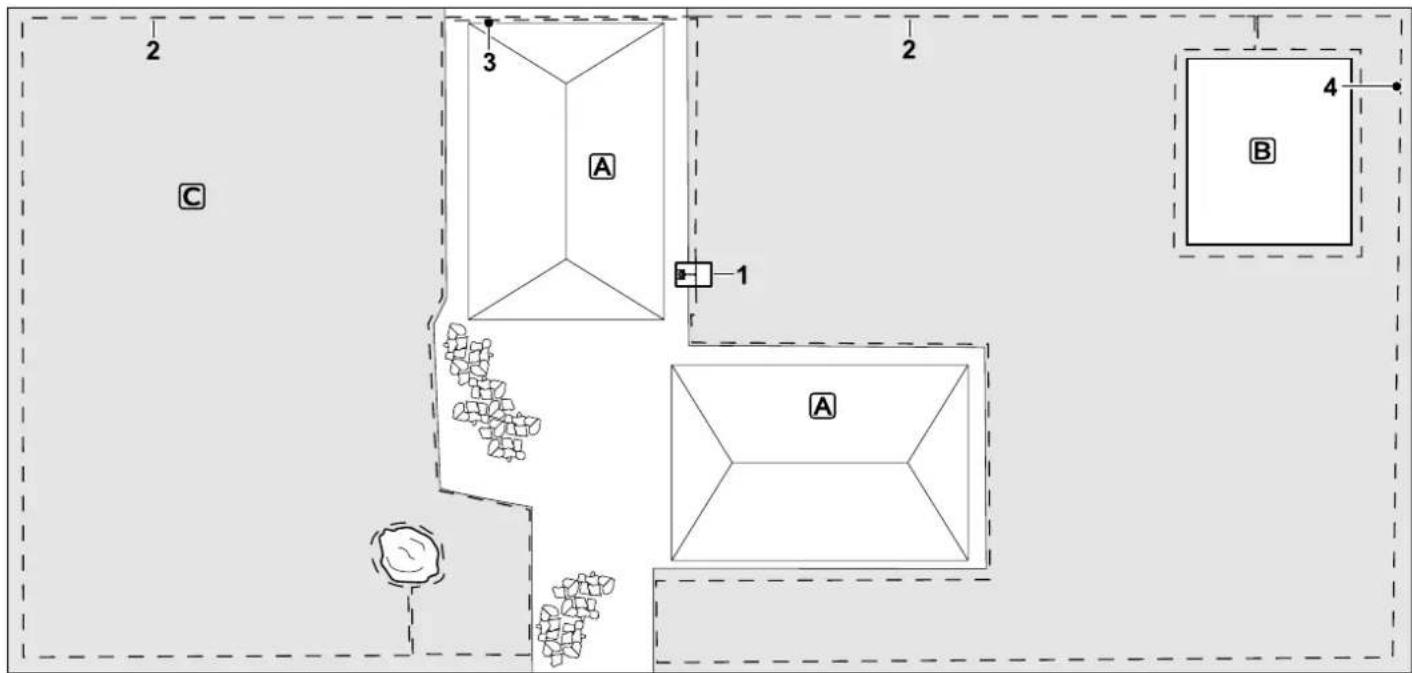
Zweigeteilte Mahlfache - Robotermaher kann nicht selbständig von einer zur anderen Mahlfache fahren.
Dockingstation:
Standort (1) direkt besoin den Häusern A
Sperrflächen:
Installation um den freistehenden Baum und um den Gemüsegarten [B], ausgehend von einer im rechten Winkel zum Rand installierten Verbindungsstrecke.
Drahtabstände: (1) 11.3)
27 cm bzw. 9 cm Abstand zum Rand (2) bzw. zu Terrassen
27 cm um den Baum und um den Gemüsegarten
54 cm minimalen Drahtabstand in den Engstellen hinter dem Gemüsegarten beachten.
Nebenfläche:
Installation einer Nebenfläche C, Verbindungsstrecke (3) auf der Hausterrasse in einem Kabelkanal verstauen.
Programmierung:
Grosse der Mahlfläche (ohne Nebenfläche) festlegen, 1 Startpunkt (4) in der Engstelle programmieren - Starthaufigkeit 20% bis 25% ( 10.14)
Besonderheiten:
Robotermaher mehrmals proWoche in die Nebenflache bringen und den Befehl "Mahren starten"aktivieren. ( 14.5)
Flächenleistung beachten. (⇒ 13.4) Bei Bedarf zwei getrennte Mahflächen mit 2 Dockingstationen installieren.
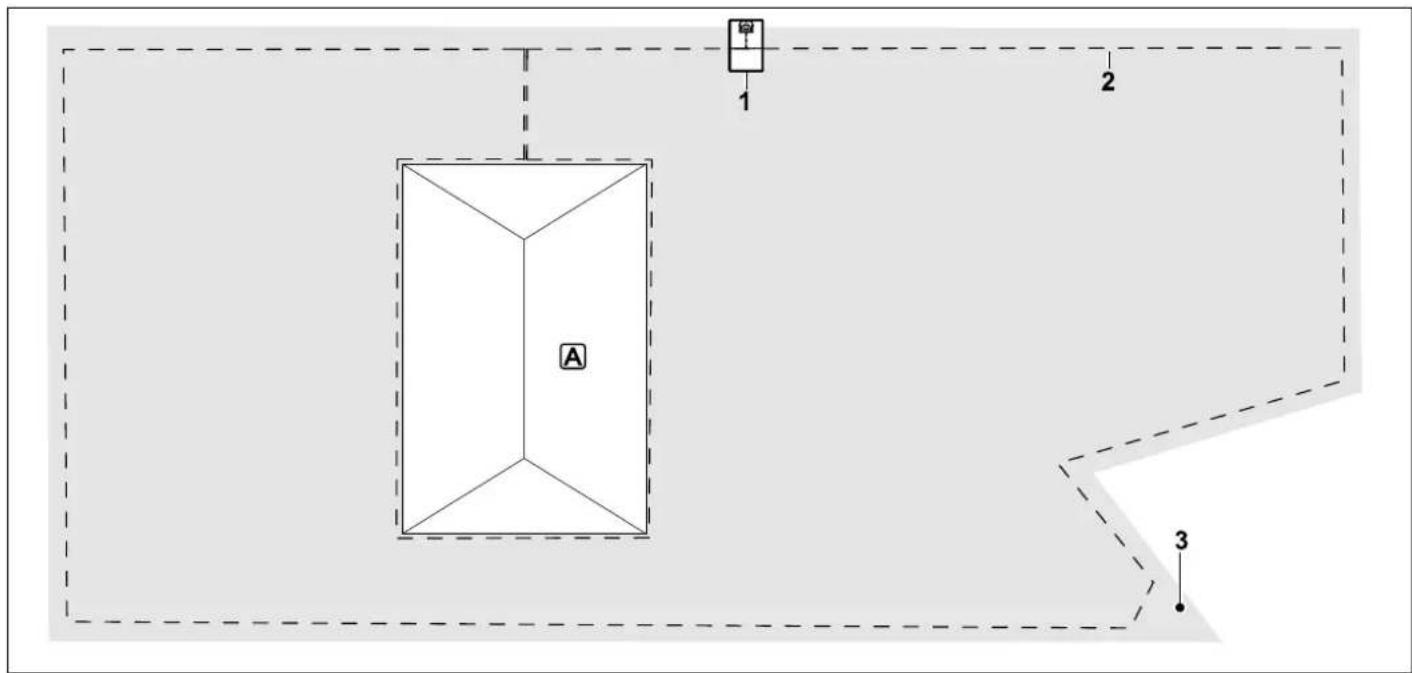
Mähfläche um ein freistehendes Gebäude.
Dockingstation:
Standort (1) am Rand der Mahfläche. Das Haus A ist mit einer Sperrfläche ausgewgrenzt, die Dockingstation kann deshalb nicht in unmittelbarer Höhe des Hauses aufgebaut werden.
Netzkabel vom Haus zur Dockingstation in einem geeigneten Kabelkanal verlegen.
Sperrfläche:
Installation um das Haus, ausgehend von einer im rechten Winkel zum Rand installierten Verbindungsstrecke.
Drahtabände: (1) 11.3)
27 cm bzw. 9 cm Abstand zum Rand (2)
Programmierung:
Nach Festlegen der Gröbe der Mähfläche sind keine weiteren Anpassungen nötig.
Besonderheiten:
Im Bereich des spitz zulaufenden Rasenecks (3) Begrenzungsdraht wie abgebildet verlegen -kleinere Winkel als 90^ vermeiden. ( 9.6) Bereich im Raseneck regelmäßig mit einem geeigneten Rasentrimmer bearbeiten.
Dear Customer,
A 6336 Langkampfen/Kufstein
Sven Zimmermann
VIKING GmbH
Hans Peter Stihl-Straße 5
A 6336 Langkampfen/Kufstein (Autriche)
déclarons que les
24. Recherche des pannes
Displayverlichting 221
Diefstalbeveiliging 221
Technische gegevens 268
Meldingen 269
Defectosporing 273
- startpunten instellen
of - gewenst startpunkt selecteren en handmatig definierten.
Startpunterstellen:
de robotmaier is nicht beveiligd.
Laag:
3. Resetinstallingen:
19. Milieubescherming
Hans Peter Stihl-Straße 5
A 6336 Langkampfen/Kufstein
verklaren, dat de
22. Technische gegevens
MI 632.0 / MI 632.0 P:
Serienummer 6309
Maaisystem mulchmaaiwerk
Snijsysteme meskalk
Snijbrendte 30 cm
Gewicht accu 1,10 kg
MI 632.0 P:
Gewicht accu 1,40 kg
Dockingstation ADO 600:
Spanning Ubc 42V
Beschemklasse III
Beschermotype IPX1
Gewicht 3 kg
Voeding:
Spanning U_AC 100-240V
Frequentie 50/60 Hz
Spanning UDC 42V
Beschemklasse II
Beschermotype IP67
- Dockingstation is nicht gezonden
Oplossing:
- maaien is wegens regen aufgeb broken of Niet begonnen
Oplossing:
Hans Peter Stihl-Straße 5
A 6336 Langkampfen/Kufstein


- Inhaltsverzeichnis
- Zu dieser Gebrauchsanleitung 4
- Gerätebeschreibung 6
- Wie der Robotermaher arbeitet 9
- Sicherheitseinrichtungen 10
- Zu Ihrer Sicherheit 11
- Symbolsbeschreibung 18
- Lieferumfang 19
- Erstinstallation 20
- Menu 31
- Begrenzungsdraht 40
- Zu dieser Gebrauchsanleitung
- Allgemein
- Ländervarianten
- Anleitung zum Lesen der Gebrauchsanleitung
- Blickrichtung:
- Kapitelverweis:
- Kennzeichnung von Textabschnitten:
- Textemitzusatzlicher Bedeutung:
- Gef
- #
- !
- i
- TextemitBildbezug:
- Bilder mit Textabschnitten:
- Gerätebeschreibung
- Robotermaher
- Steuerkonsole
- Wie der Robotermaher(PC) erarbeitet
- Funktionsprinzip
- Manuelles Mahlen
- Sicherheitseinrichtungen
- Verletzungsgefahr!
- STOP-Taste
- Gerätesperre
- Gerätesperre via Menu Befehle aktivieren:
- Gerätesperre via Menu Sicherheit aktivieren:
- Gerätesperre aufheben:
- Schutzabdeckungen
- Zweihandbedienung
- Stoßsensor
- Anhebeschutz
- Neigungssensor
- Displaybeleuchting
- Diebstahlschutz
- Zu Ihrer Sicherheit
- Allgemein
- Lebensgefahr durch Erstickung!
- Achtung – Unfallgefahr!
- Bekleidung und Ausrüstung
- Warning - Gefahren durch elektrischen Strom
- Achtung! Stromschlaggefahr!
- Stromschlaggefahr!
- Akku
- Explosionsgefahr! Akku vor direkter
- Transport des Geräts
- Vor der Inbetriebnahme
- Programmierung
- Wahrend des Betriebs
- Verletzungsgefahr! Starkes Vibrieren ist
- Manuelles Mahen:
- Wartung und Reparaturen
- Reinigung:
- Wartungsarbeiten:
- Lagerung bei längeren Betriebspausen
- Entsorgung
- Verletzungsgefahr durch das Mähmesser!
- Symbolbeschreibung
- Warning!
- Lieferumfang
- Pos. Bezeichnung Stk.
- Erstinflation
- Hinweise zur ersten Installation
- Vorbereitende Maßnahmen:
- Akku einbauen
- Schnitthöhe einstellen
- Sprache, Datum, Uhrzeit einstellen
- Dockingstation installieren
- Begrenzungsdraht verlegen
- Begrenzungsdraht anschließen
- Robotermaher und Dockingstation koppeln
- Drahtsignal OK:
- Kein Drahtsignal:
- Drahtsignal verpolt:
- Drahtsignal prufen:
- Installation prüfen
- Start
- Fortsetzung nach Unterbrechung:
- Abschluss des Testlaufs:
- Robotermaher programmieren
- Erstinstallation abschreiben
- Menu
- Bedienhinweise
- Statusanzeige
- Keine laufende Aktivität:
- iMow betriebsbereit:
- Aktive Störungen bzw. Fehler:
- Während laufender Aktivitäten:
- Start des Mahvorgangs:
- Laufender Mahvorgang:
- Randmähen:
- Zur Dockingstation fahren:
- Laden des Akkus:
- Hauptmenu
- Befehle
- Mühen zeitverzögert starten:
- Nächste Aktivzeit auslassen:
- Randmähen:
- Aktivzeitbearbeiten:
- Wichenplan
- Information
- Einstellungen
- iMow - Geräteinstellungen
- Spurversatz:
- Sprache:
- Kontrast:
- Regensensor einstellen
- Bei mittlerer
- Statusanzeige einstellen
- Ladezustand:
- Restzeit:
- Uhrzeit und Datum:
- Startzeit:
- Mähvorgänge:
- Mähstunden:
- Wegstrecke:
- Installation
- Neuinstallation:
- Startpunkte:
- Rand testen:
- Randmähen:
- Startpunkte einstellen
- Startpunkte einlernen:
- Startpunkt 1 bis 4 manuell einstellen:
- Die Dockingstation ist als Startpunkt 0 definiert, standardmäßig werden
- Sicherheit
- Gerätesperre:
- Stufe:
- Keine:
- Niedrig:
- Mittel:
- Hoch:
- Resetspere:
- Koppelsperre:
- Zeitsperre:
- Einstellschutz:
- Diebstahlschutz:
- PIN-Codeändern:
- Warntöne:
- Menütone:
- Tastensperre:
- iMow + Dock koppeln:
- Service
- Messerwechsel:
- 2.Drahtbruchsche:
- Reset Einstellungen:
- Begrenzungsdraht
- Vor dem Verlegen des
- Verlegung des Begrenzungsdrahts planen
- Installationsbeispiele am Ende
- - Standort der Dockingstation
- Gassen und Nebenflächen:
- Skizze der Mahlfläche
- anfertigen
- Lage des Begrenzungsdrahts
- Lage der Drahtverbinder
- iRuler
- Abstand messen:
- Höhe von Hindernissen messen:
- Engstellen
- Begrenzungsdraht verlegen
- Begrenzungsdraht anschließen
- Verbindungsstrecken installieren
- Sperrflächen installieren
- Nebenflächen
- Gassen
- Voraussetzungen:
- Drahtreserven installmenten
- Drahtverbinder verwenden
- Dockingstation
- Bedienelemente der Dockingstation
- Aktivität Rot Grün
- Home-Taste:
- Ein-Aus-Taste:
- Hinweise zum Mähen
- Allgemein
- Mulchen
- Aktivzeiten
- Mähduer
- Flächenleistung:
- Manuelles Mahren
- Gerät in Betriebnehmen
- Vorbereitung
- Zur Erstinstallation steht ein
- Steuerkonsole entnehmer und einsetzen
- Steuerkonsole entnehmen:
- Programmierung anpassen
- Mähen mit Automatik
- Mähen unabhängig von Aktivzeiten
- Mähflächen mit Dockingstation:
- Nebenflächen:
- Manuelles Mahren
- Robotermaher eindhoven
- Eindocken im Automatik-Betrieb:
- Eindocken erzwingen:
- Manuelles Eindhoven:
- oder
- Akku aufladen
- Automatisches Laden:
- Ladevorgang manuell starten:
- Ladevorgang:
- Wartung
- Verletzungsgefahr! Vor allen Wartungs-
- Wartungsplan
- Wartungsarbeiten an Tagen mit Aktivzeiten:
- Wochentliche Wartungsarbeiten:
- Alle 200 Stunden:
- Jährliche Wartungsarbeiten:
- Gerat reinigen
- Reinigungs- und Wartungsposition:
- Verschleibgrenzen des Mahmessers prufen
- A
- Messerbreite A und Messerstrakte B mit einem Messschieber prufen.
- Mähmesser aus- und einbauen
- Mähmesser ausbauen:
- Mahmesser einbauen:
- Mahmesser schäfen
- Drahtbruchuchen
- Netzeilstecker
- Aufbewährung und Winterpause
- Übliche Ersatzteile
- Zubehor
- Verschleib minimieren und Schaden vermeiden
- Wichtige Hinweise zur Wartung und Pflege der Produktgruppe
- Robotermaher, alkubetrieben
- Verschleißteile
- Einhaltung der Vorgaben dieser Gebrauchsanleitung
- Wartungsarbeiten
- Umweltschutz
- Akku ausbauen
- Transport
- CE-Konformitätserklung des Herstellers
- Fabrikmarke:VIKING
- Technische Daten
- MI 632.0 / MI 632.0 P:
- MI 632.0:
- MI 632.0 P:
- Dockingstation ADO 600:
- Netzteil:
- Transport von VIKING Akkus:
- REACH:
- Meldungen
- Meldung:
- Mögliche Ursache:
- Abhilfe:
- Fehlersuche
- Störung:
- Serviceplan
- Übergabebestätigung
- Servicebestätigung
- Dockingstation:
- Sperrfläche:
- Schwimmbecken:
- Programmierung:
- Besonderheiten:
- Sperrflächen:
- Teich:
- Engstelle:
- Drahtabstände: (1) 11.3)
- Nebenfläche:
- Dear Customer,
- Recherche des pannes
- Startpunterstellen:
- Laag:
- Resetinstallingen:
- Milieubescherming
- Technische gegevens
- Oplossing:
Marke : VIKING
Modell : iMow MI 632 P
Kategorie : Rasenmäher