
UA 30 CLD - Ultraschallsensor CARLO GAVAZZI - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts UA 30 CLD CARLO GAVAZZI als PDF.
Benutzerfragen zu UA 30 CLD CARLO GAVAZZI
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Ultraschallsensor kostenlos im PDF-Format! Finden Sie Ihr Handbuch UA 30 CLD - CARLO GAVAZZI und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. UA 30 CLD von der Marke CARLO GAVAZZI.
BEDIENUNGSANLEITUNG UA 30 CLD CARLO GAVAZZI
Abstandssensor, programmierbare Ausgänge /
Login-Logout Counter
Ultraschall, Abstandssensorprogrammierbare Ausgänge. Typen UA 30 CLD .. F. M7
INHALT
Installation 15
Beschreibung der Software 16
Technische Daten 74
Erfassungsbereich 76
Schaltung 77
Abmessungen 77
Hinweise zur Installation 78
Installation
Montieren Sie den Sensor in der gewünschten Position mit Ausrichtung auf das Objekt. Kontrollieren Sie, dass der Objektabstand innerhalb der Sensorreichweite liegt.
2. Sensorversorgung
Zur Sensorversorgung ist Pin 2 an Erde (0 V DC) und Pin 1 an + (19 -30 V DC) zu verbinden.
3. Programmierung des Sensors
Die Parameter werden entsprechend der Software-Beschreibung eingegeben.
Beschreibung der Software
Das für die Windows-Plattform konzipierte Programm UDSProg.EXE erleichtert die Konfiguration des Sensors anhand selbsterklärender Menüs.
Konfiguration von COM Schnittstelle und Adresse
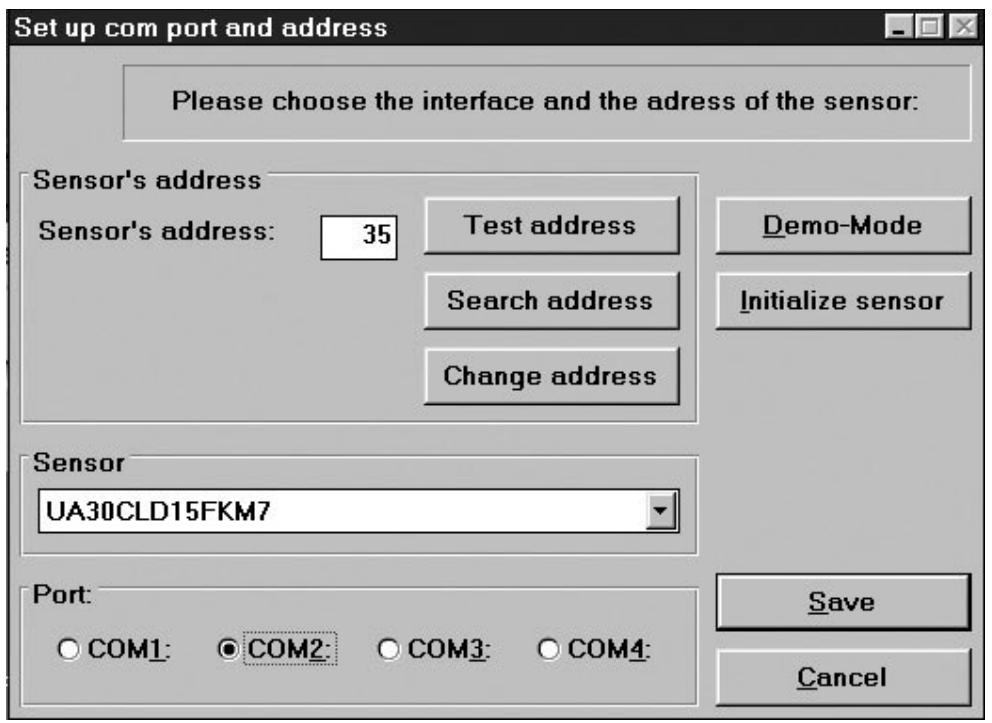
Schnittstelle (Port)
Die COM Schnittstelle für den Programmieradapter wird im ersten Fenster ausgewählt, das beim Programstart erscheint.
Sensor
Im Drop-down-Menu wird der korrekte Sensortyp ausgewählt.
Adresse (Address)
Die werkseitige Einstellung ist 97, noch{lsst sich diese Adresse in einen beliebigen Wert zwischen 0 und 99 andern.
Wird ein Sensor mit einer unbekannten Adresse angeschlossen,findet man mit der Funktion „Adresse suchen“ die korrekte Adresse.
Demo-Modus (Demo-Mode)
Der Sensor lauft auch im Demo-Modus. Eine Programmierung ist nicht möglich, esleen sich ledigious die Einstellungen überprüfen.
Initialisieren des Sensors (Initialize sensor)
Der Sensor wird auf die werkseitigen Einstellungen zurückgestellt.
OK
Die Einstellungen wurden bestätigt und das Hauptmenü erscheidt.
Hauptmenü
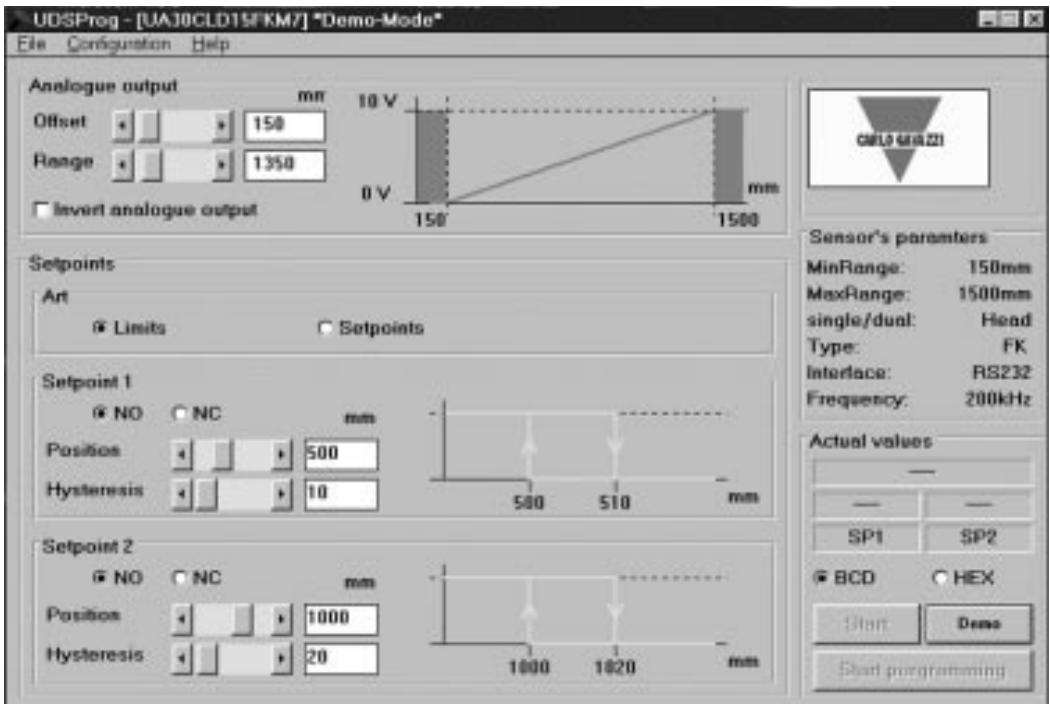
Analogausgang (Analogue output)
Für den Analogausgang werden zwei Parameter eingegeben: Offset und Messbereich. Offset bezeichnet die Entfernung von der Sensorvorderseite zum nachstgelegenen Endpunkt des Messbereichs. Der Messbereich bezeichnet die Entfernung, die den Ausgang veranlasst, von 0-10V oder 4-20 mA umzuschalten.
Offset und Messbereich werden schrittweise (in mm) gewählt - durch Scrollen der Bildlaufleiste oder Eingabe von Werten. Das Kontrollkästchen ist anzuklicken, wenn eine Umkehrung des Analogausgangs gewünscht wird. Die gewählten Ausgangseigenschaften werden gezeigt.
Sollwerte-Ausgänge (Setpoint outputs)
Sollwerte werden entweder als Grenzwerte (Limits) (im Modus „Limits“) oder als Sollwerte (Setpoint) (im Modus „Setpoints“) gewählt, wobei ein Fenster für „Position“ und „Hysterese“ vorhanden ist.
Je nach Wahl (NO oder NC), handelt es sich bei den Sollwerten in der Regel um Schließer- oder Offner-Funktionen.
NO: Wird ein Sollwert überschritten, ist die Ausgangsimpedanz hoch. Innerhalb des Messbereichs ist die Ausgangsimpedanz niedrig und es fließt Strom (<100 mA).
NC: Wird ein Sollwert überschritten, ist die Ausgangsimpedanz niedrig und es fließt Strom (< 100 mA). Innerhalb des Messbereichs ist die Ausgangsimpedanz hoch.
Hysterese (Hysteresis)
Um einen stabilen Ausgang zu gewährleisten (wenn eine gemessene Entfernung dem Sollwert entspricht), kann eine Hysterese festgelegt werden. Beispiel für einen NO-Ausgang:
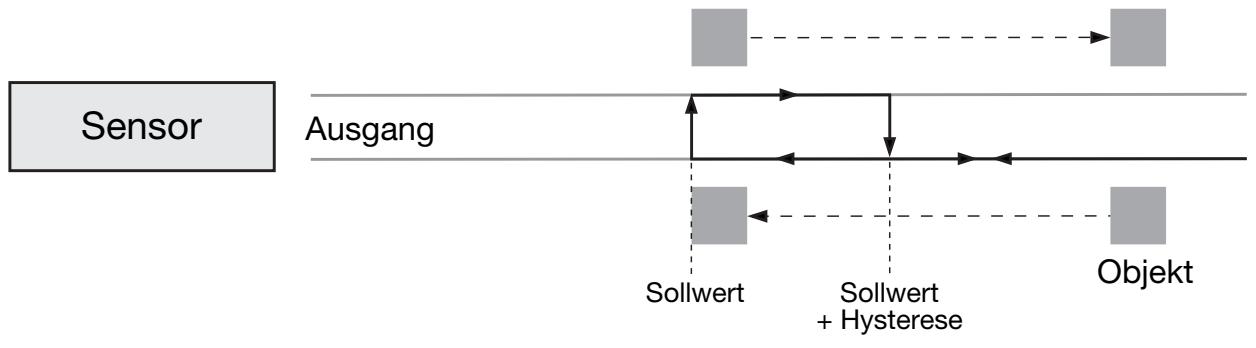
Wenn sich ein Objekt dem Sensor nähert, ändert sich der Ausgang, wenn die Entfernung dem Sollwert entspricht. Entfernt sich das Objekt von diesen Punkt, Goes der Ausgang zurück, wenn die Entfernung dem Sollwert zuzüglich der Hysterese entspricht.
Datei-MENU
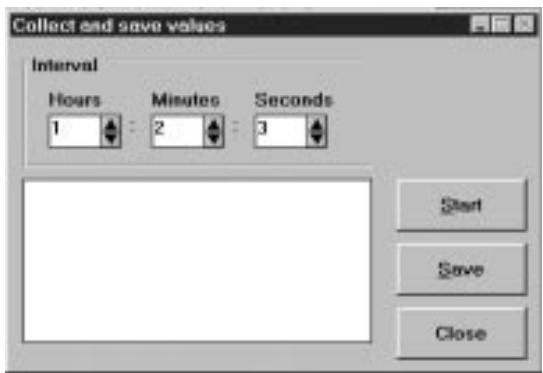
Erfassen und Speichern von Werten
Bei dieser Auswahl öffnet sich ein neues Fenster. Die Frequenz der Messungen kann gewählt werden (Sekunden, Minuten und Stunden).
"Start" startet die Erfassung.
,Speichern" speichert die Werte ab (die sich mithilfe des Programms Excel auswerten setzen).
Ablegen von Sensor-Parametern
Die Parameter der aktuell angezeigten Einstellungen werden in einer Datei auf der Festplatte abgelegt.
Laden der Sensor-Parameter
Die Parameter aus einer Datei auf der Festplatte werden in den Sensor geladen.
Konfigurations-MENU
Konfiguration vom Sensor einlesen (Read configuration from sensor)
Die aktuelle Konfiguration des Sensors wird abgerufen und angezeigt.
Übergabe von Konfigurationsdaten an den Sensor (Write configuration to sensor)
Die auf dem Bildschirm angezeigten Parameter werden an den Sensor übermittelt. Das gleiche{lssst sich auch durch Anklicken der Schaltfläche „Programmierung starten" (Hauptmenü) erreichen.
Initialisieren des Sensors (Initialize sensor)
Der Sensor wird auf die werkseitigen Einstellungen zurückgestellt.
Konfiguration von Sensor und Schnittstelle (Configure sensor and interface)
Sensor, serielle Schnittstelle und weitere Einstellungen setzen sich auswahlen.
Weitere Optionen
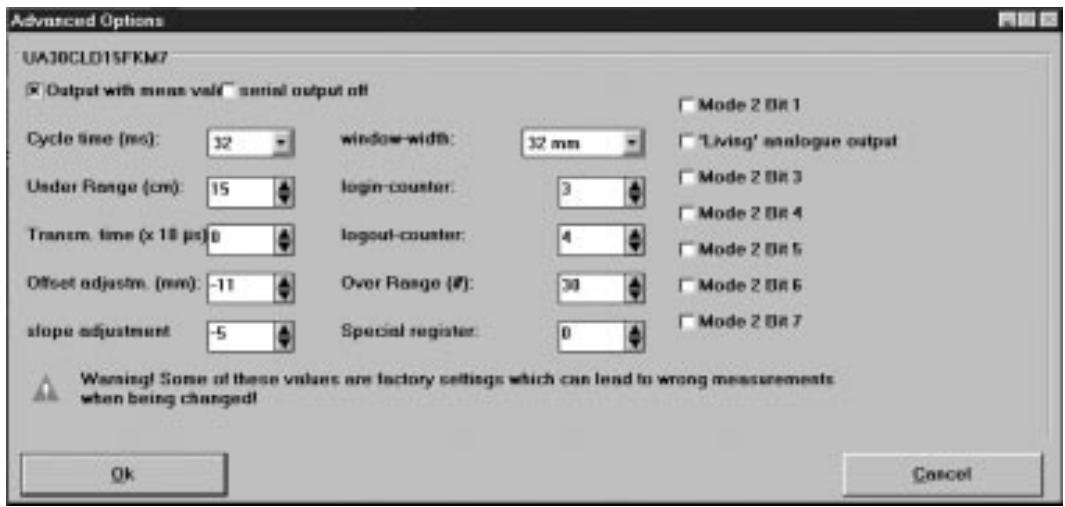
Ausgang mit Durchschnittswerten (Output with mean value)
Auswahl eines Durchschnittwert-Verfahrens.
Serielle Ausgabe ausgeschaltet (Serial output off)
Deaktiviert die serielle Datenausgabe vom Sensor. Bei zeitkritischen Anwendungen kann diese Funktion hilfreich sein.
Zykluszeit (Cycle Time)
Die Zykluszeit lasst sich stufenweise einstellen: 64, 32, 16, 8 oder 4 ms.
Das Prinzip der Enternungsmessung ist in der nachfolgenden Grafik dargestellt.
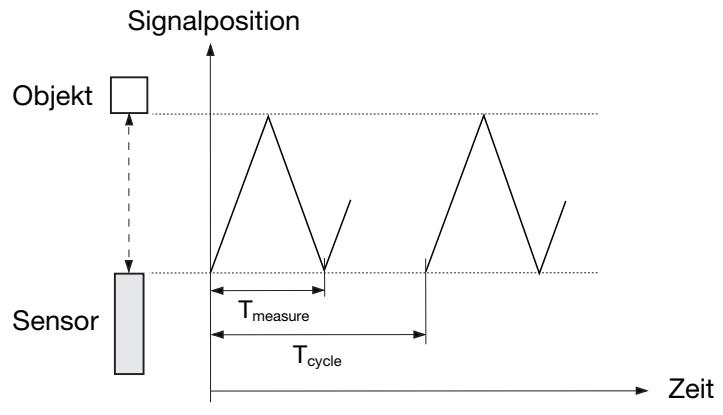
Das Schaubild zeigt die Signalposition im Verhältnis zur Zeit. Der Sensor sendet einen Ultraschallimpuls aus. Das Objekt reflektiert das Signal, und these Echo wird vom Sensor empfangen. An der Vorderseite des Sensors wird ein neuen Echo erzeugt, also ein Echo des Echos. Da es sich hierbei um ein schwaches nicht verwendbares Signal handelt - Lösst T_measure (Messzeit) nur das nutzbare Signal durch (erstes Echo). Mit T_cycle (Zykluszeit) wird festgelegt, wann der{nachste Impuls übermittelt wird.
Mit der Zykluszeit wird die Reaktionszeit des Sensors festgelegt. Nätürlich weisen Sensoren mit größer Reichweite auch längerere Reaktionszeiten auf. Bei der Eingabe der Zykluszeitlässt sich auch die Reaktionszeit des Sensors nach Einsatzbereich einstehen.
Die Zykluszeit muss länger andauern als die Zeit, die zum Empfangen des Echos nach der Aussenbung des Impulses erforderlich ist!
T_measure ist proportional der Entfernung zum Object (von der Aussenung des Impulses bis zum Empfangen des Echos). T_measure ist ein proportionaler Ausdruck für die Entfernung, weshalb die Zeit in Entfernung umgerechnet und als analoger Wert angegeben wird.
Eine Richtlinie für die maximale Reichweite innerhalb einer bestimmten Zykluszeit ist:
| Zykluszeit (ms) | Entfernung (m) |
| 4 | 0.3 |
| 8 | 0.7 |
| 16 | 2.5 |
| 32 | 4.5 |
| 64 | 10 |
Messbereichsunterschreitung (Under Range)
These lasset sich stufenweise von 0 bis 255 cm einstellen. Wahrend der Aussenbung ist der Sensor nicht empfangsbereit, weshalb die Länge
des Sende-Impulses auch für die kürzeste Entfernung zur Erfassung maßgebend ist. Diese Reichweite, die durch die Länge des Sendelampses begrenzt wird, nennt sich „Toter Bereich".
Es ist möglich, die Messbereichsunterschreitung zu kontrollieren. Indem man die Messbereichsunterschreitung auf eine bestimmte Entfernung einstellt, kann man Echos ignorantieren, die von Objekten zwischen der Sensorvorderseite und der Grenze zur Messbereichsunterschreitung liegen. Dadurch wird es ermöglicht, dicht vor dem Sensor auftretende Störobjekte zu ignorantieren.
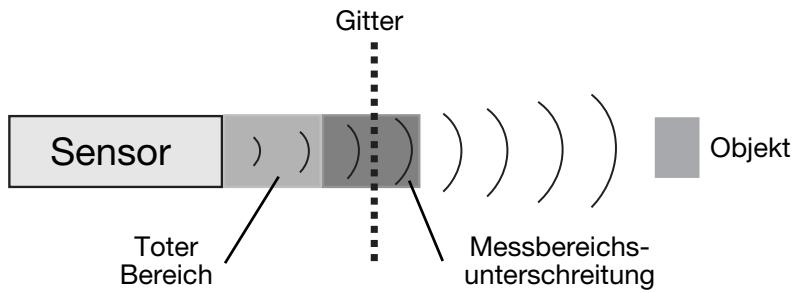
Ein Sensor kann beispiselsweise durch ein Gitter hindurch Objekte ausmachen, ohne durch Reflexionen von Ersterem gestört zu werden.
Beschränkungen (Limitations)
- Die mindestmögliche Messbereichsunterschreitung hängt vom Sender-Schwingkreis ab.
- Echos von einem massigen Object in einem toten Bereich werden unterträckt, aber Zweit- und Drittechos konnen aufgefangen werden, wenn der Zeitwert den eingegebenen Wert für den toten Bereich übersteigt. Der Ausgangswert zeigt dann eine Entfernung an, die 2 bis 3 mal länger ist.
Aussenungszeit (Transmission Time)
Aussenungszeit ist der Wert, mit dem die Länge des ausgesendeten Impulses bezeichnet wird. Er lassst sich in Schritten von 10 μs bis zum Wert von 2.55 ms festlegen. Werde der Wert 0 gewählt, verändert sich die Länge entsprechend der gesessenen Entfernung.
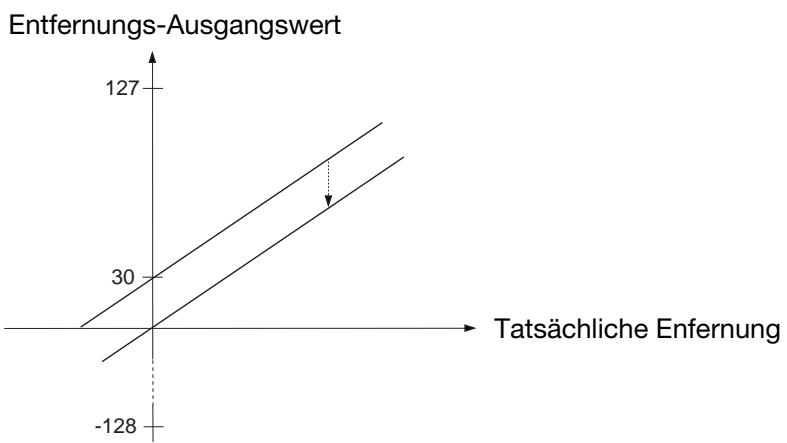
Einstellung von Offset und Neigung (Offset and Slope Adjustment)
These Einstellungen werden werkseitig vorgenommen. Lassen Sieitte Vorsicht walten und verändern Sie diese nach Möglichkeit nicht, Denn diese Parameter dienen der Feineinstellung.
Einstellung von Offset (Offset Adjustment)
Zwischen der angezeigten und wirklichen Entfernung kann ein Unterschied bestehen.
0 mm bei der Anzeige und 0 mm als physische Länge können diffe-
rieren. Die Position 0 mm lassst sich mit der Ausgleichsvorrichtung am Sensorkopf in Millimeter-Schritten im Bereich +/-128 mm verändern.
Beispiel für einen negativen Offset (s. nachfolgende Abb.):
Der Ausgang gibt eine Entfernung an, die sich 30 mm hinter dem Objekt befindet. Durch Einstellen vom Offset auf -30 mm kann die Falsch-anzeige aufgehoben werden, weil bei allen Messungen 30 mm abgezogen werden.
Einstellung der Neigung (Slope adjustment)
Damit lassst sich die Neigung des analogen Ausgangs verändern. Werden bei der Neigungseinstellung falsche Werte eingegeben, können Linearität und Temperaturausgleich beeinflusst werden.
Fensterbreite (Window Width)
Arbeitet der Sensor in der Durchschnittswert-Betriebsart wird ein Fenster um den aktuellen Messwert gelegt. Alle gemessenen Werte innerhalb these Fensters bilden die Grundlage für die Anzeige. Die Anzeige bildet dann den Mittelpunkt des Fensters für die{nachste Anzeige, weshalb sich das Fenster entsprechend der Bewegung des Objektes verschiett. Die Höchstgeschwindigkeit der Fensterver-schiebungen begrenzt auch die Geschwindigkeit des zu erfassenden Objektes. Bewegt das Objekt sich zu schnell, ignoriert der Algorithmus der Fehlimpuls-Unterprückung die Entfernungsmessung.
Die maximale Geschwindigkeit hängt von der Zykluszeit und der Grübe des verwendeten Messfensters ab. Mit dem Befehl „Cycle time adjustment" (Einstellung von Zykluszeit) besteht die Möglichkeit, das Messfenster anzupassen. Die „Normalgroße" des Messfensters liegt im Bereich ± 32 mm.

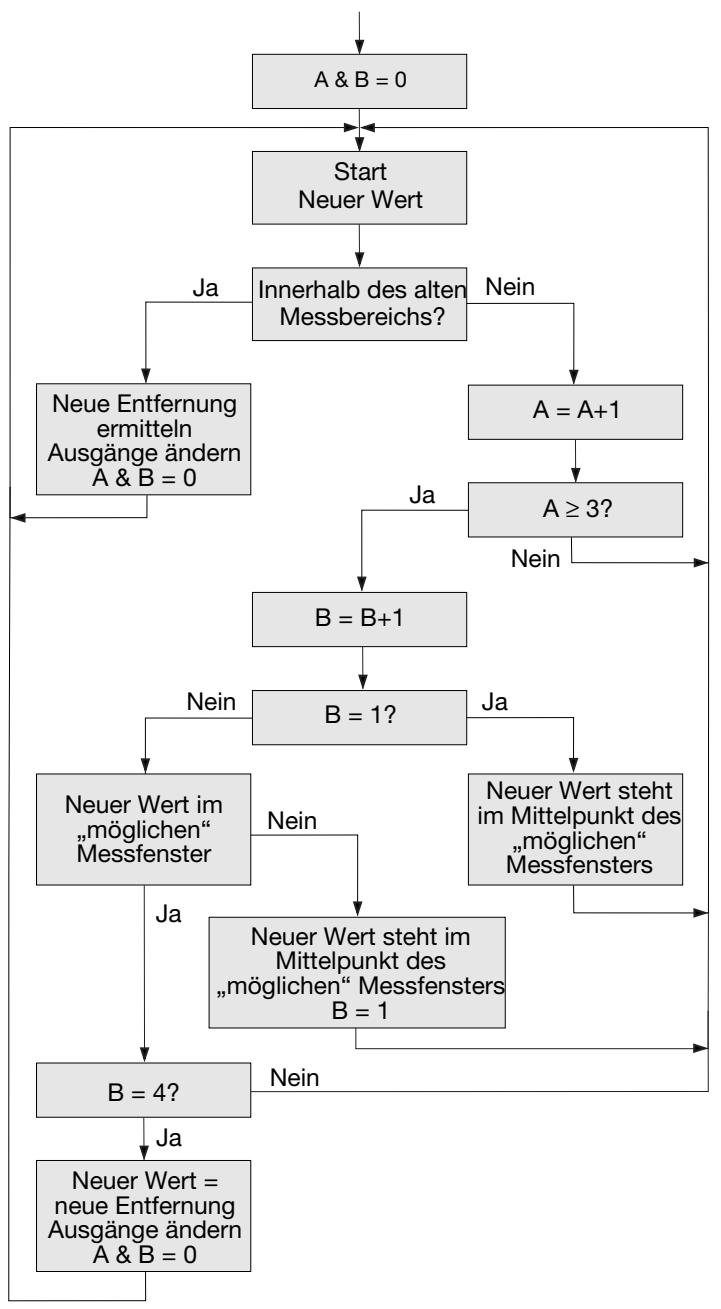
An- und Abmeldezähler (Login-Logout Counter)
Dieser Zähler ist Teil der Sensor-Software (Fehlimpuls-Unterrückung). Bei Veränderungen ist dazu Vorsicht geboten!
Die Sensorelektronik ist gegen elektromagnetische Störungen von außen bestens abgeschirmt. Außerdem ist der Mikroprozessor in der Lage, das Nutzsignal aus einem Bereich mit vielen Störsignalen herauszufiltern. Die werkseitigen Einstellungen sind so optimiert, dass sie den allermeisten Messaufgaben gewachsen sind.
Bei Auswahr des Ausgangs mit Durchschnittswert wird eine Routine aktiviert die wie folgt abläuft. Die aktuell gemessene Entfernung wird als Mittelpunkt eines Fensters (± 32) angenommen. Dieses wird Messfenster genannot (zu dessen Einstellung beachten Sieitte den Abschnitt „Messfenster").
Befindet sich die{nachste Messung bzw. der neue Wert innerhalb des Messfensters, werden sie zur erneuten Ermittlung der Entfernung herangezogen, die dann angezeigt wird. Der neue Wert bildet dann den Mittelpunkt des Messfensters.
Die beiden Zähler, A^ (Logout-Zähler) für das Auslesen der jeweiligen Entfernung und B^ (Login-Zähler) werden auf 0 zurückgesetzt. Befindet sich die{nachste Messung bzw. der neue Wert außerhalb des Fensters, wird diese Messung ignoriert und der Enttermungs-Ausgangswert bleibt unverändert. Das Zahlwerk für die Messungen außerhalb des Fensters erhöht sich jeweils um 1.
Liegt der Wert desLogout-Zählers A unter 3 (programmierbar), springt das Programm zur Startposition zurück und beginnnt mit einer neuen Messung.
Ist der Wert größter als oder gleich 3, erhöht sich der Wert im Login-Zahler B.
Ist B = 1 , wird davon ausgegangen, dass der gemessene Wert die neue Entfernung darstellt, und ein neuen Messfenster wird generiert. Das Programm springt darüber in Startposition und beginnnt mit einer neuen Messung.
Ist B > 1 , und der neue Messwert liegt außerhalb des neuen Messfensters, wird B auf den Wert 1 gesetzt, das Programm springt darüber in Startposition und beginnnt mit einer neuen Messung.
Ist B = 4 (programmierbar), wird die neue Messung als neue Entfernung angenommen. Der Ausgang verändert sich daraufhin, und die Login-
undLogout-Zähler A und B werden auf 0 zurückgesetzt. Das Programm springt darüber in Startposition und beginnnt mit einer neuen Messung.
Das folgende Ablaufdiagramm zeigt die Programmstruktur.
Messbereichsüberschreitung (Over Range)
Der Zähler lässt sich auf Werte zwischen 0 bis 255 einstellen. Wenn der Sensor die Entfernung zu einem kleinen, schwer erfassbaren Objekt messen soll, können die Ausgangswerte sehr instabil sein. Sie springen dann zwischen der tatsächlichen Entfernung und Messbereichsüberschreitung hin und her. Diese unerwänschten „Sprünge“ setzen sich mit dem ORC (Überschreitungszähler) unterträcken.
Dieser Vorgang Goes aus folgendem Ablaufdiagramm hervor:
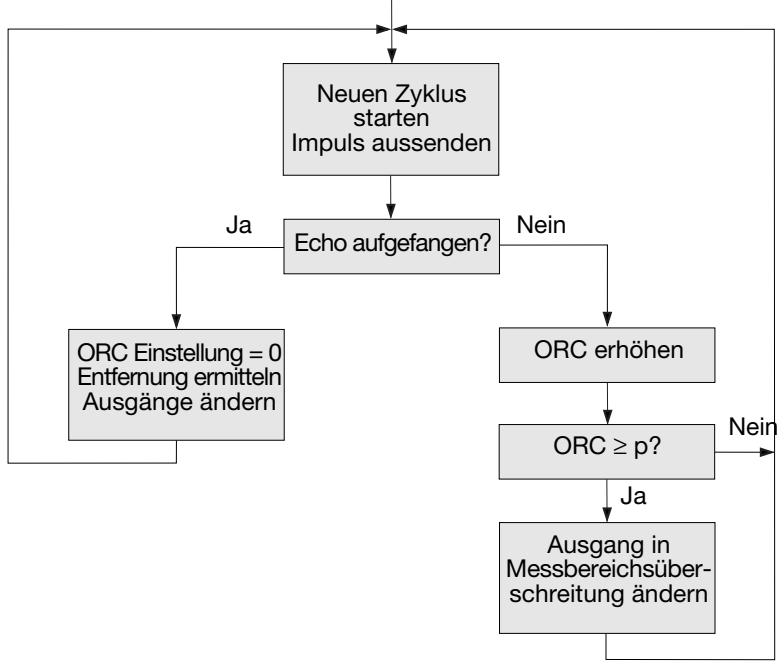
Zu Beginn des Messzyklus' sendet der Sensor einen Impuls aus.
Beim Empfangen des Echos werden der ORC (Over Range Counter) auf den Wert 0 zurückgesetzt, eine neue Entfernung ermittelt und ggf. die Ausgänge verändert. Danach erfolgt die Aussenwendung eines neuen Impulses.
Wird kein Echo empfangen, erhöht sich der Wert des ORC.
Liegt der Wert des ORC unter dem Parameter p , erfolgen keine Änderungen am Ausgang, und der Sensor sendet im nachsten Messzyklus einen Impuls aus.
Ist dieser Wert größter als oder gleich p, werden die Ausgänge auf Messbereichsüberschreitung gesetzt, und der Sensor sendet beim nächsten Messzyklus einen Impuls aus.
Beispiel: Sensor mit folgenden Einstellungen:
Zykluszeit = 64 ms
Messbereichsüberschreitung = 200
Verschwindet das Objekt plottlich, besteht der Sensor 200^*64 ms = 12.8 Sek. zum Umschalten der Ausgänge auf Messbereichsüberschreitung.
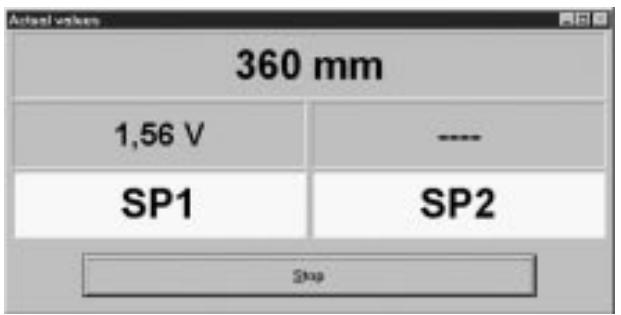
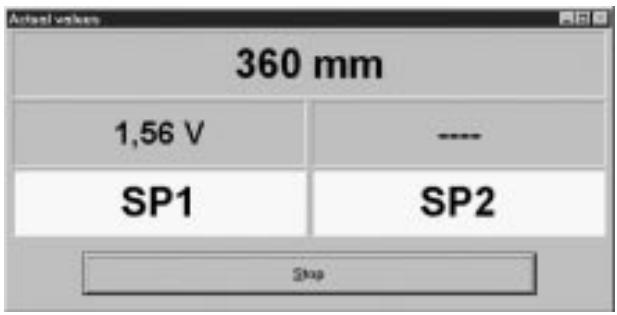
Weiteres Fenster im Test-Modus
Im Start-Modus lässt sich ein separates Fenster öffnen, in dem Entfernung und Status des Kontaktausgangs angezeigt wird.
Demo-Mode (demofunktion)
Ekstra vindue i testfunktionen
Verpolung, Kurzschluss, Transienten /
Wiring Diagram / Schaltbild / Schéma de Câblage /
Funktion / Fonction /
Función / Funzione /
Funktion
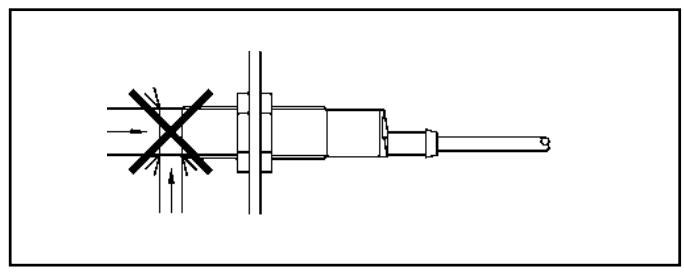
Um Störungen durch
induktive Spannings-/Stromspitzen zu
vermeiden, Kabel der
Naherungsschalter
getrennt von anderen
stromfuhrrenden
Kabeln halten
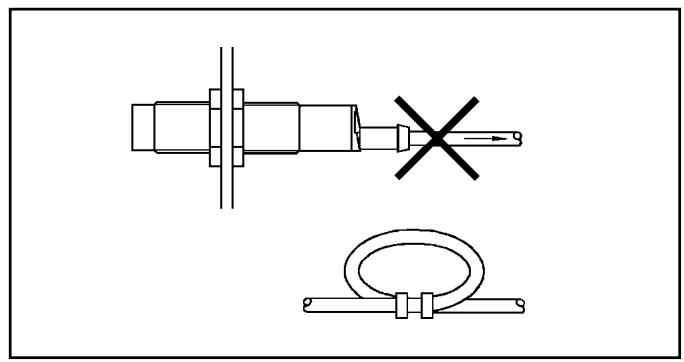
Schutz vor Überdehnung des Kabels
Nicht am Kabelziehen
Schutz der Sensorfläche des Schalters
Naherungsschalter nicht als mechanischen Anschlag verwenden
Mobiler
Naherungsschalter
Wiederholtes Biegendes Kabels vermeiden
ormas de Instalación / Consiglio per l'Installazione / Installationsråd og -vink
FRANÇAIS
ESPNOL
ITALIANO
DANSK
Gerätehersteller mit dem ISO 9001/EN 29 001 Zertifikat