
CPX-E-EP - Automate programmable industriel Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil CPX-E-EP Festo au format PDF.

| Caractéristiques techniques | Module d'E/S CPX-E-EP de Festo, conçu pour l'automatisation industrielle. |
|---|---|
| Utilisation | Intégré dans des systèmes d'automatisation pour le contrôle de processus et la gestion des données. |
| Maintenance et réparation | Vérification régulière des connexions et des mises à jour logicielles recommandées. |
| Sécurité | Conforme aux normes de sécurité industrielle, utilisation dans des environnements contrôlés. |
| Informations générales | Compatible avec divers systèmes de contrôle et protocoles de communication. |
FOIRE AUX QUESTIONS - CPX-E-EP Festo
Questions des utilisateurs sur CPX-E-EP Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automate programmable industriel au format PDF gratuitement ! Retrouvez votre notice CPX-E-EP - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil CPX-E-EP de la marque Festo.
MODE D'EMPLOI CPX-E-EP Festo
Manuel | Fonction, Paramétrage

8192627
8192627
2023-09b
[8192631]
Traduction de la notice originale
CODESYS, EtherCAT, EtherNet/IP, INTEL, IO-Link, MOTOROLA, MODBUS, PI PROFIBUS PROFINET sont des marques déposées appartenant à leurs propriétaires respectifs dans certains pays.
Table des matières
1 À propos de ce document....6
1.1 Documents applicables....6
1.2 Informations complémentaires....6
1.3 Utilisateurs....6
1.4 Version du produit....6
1.5 Étiquette produit....7
1.6 Normes indiquées....7
1.7 Certification UL.... 7
2 Fonction....8
2.1 Vue d'ensemble....8
2.1.1 Exemple de fonctionnement....9
2.1.2 Modules CPX-E....9
2.1.3 Système d'automatisation CPX-E.... 12
2.1.4 Concept d'alimentation électrique.... 14
2.2 Influer sur les états des signaux....17
2.2.1 Influer sur les signaux de sortie.... 17
2.2.2 Influer sur les signaux d'entrée.... 19
2.2.3 Forçage....19
2.2.4 État du signal en cas de perturbation (Fail safe).... 22
2.2.5 État du signal dans l'état Idle (Idle mode).... 25
2.3 Possibilités de diagnostic.... 26
2.3.1 Témoins à LED.... 27
2.3.2 Bits d'état.... 30
2.3.3 Interface de diagnostic I/O.... 31
2.3.4 Mémoire de diagnostic....35
2.3.5 Classes d'erreurs.... 38
2.3.6 Numéros d'erreur.... 38
3 Paramétrage.... 44
3.1 Paramétrage avec le logiciel de Festo.... 45
3.2 Paramétrage via la commande de niveau supérieur.... 45
3.3 Types de paramètres.... 45
3.4 Paramètres et données du système d'automatisation CPX-E.... 48
3.4.1 Vue d'ensemble....48
3.4.2 Numéros de fonction.... 48
3.5 Paramètres système.... 51
3.5.1 Surveillance....51
3.5.2 Fail safe.... 52
3.5.3 Force mode.... 53
3.5.4 Idle mode....53
3.5.5 Démarrage du système....54
3.5.6 Représentation analogique des valeurs de processus.... 55
3.6 Paramètres de module (spécifiques au module).... 55
3.6.1 Surveillance module.... 56
3.6.2 Comportement après court-circuit/surcharge.... 57
3.6.3 Temps anti-rebond à l'entrée.... 57
3.6.4 Temps de prolongation des signaux.... 58
3.6.5 Format de données valeur analogique entrées/sorties.... 58
3.7 Paramètres de module (spécifiques au canal).... 59
3.7.1 Prolongation des signaux canal x. 59
3.7.2 Fail safe canal x....59
3.7.3 Idle mode canal X.... 60
3.7.4 Forçage canal x....60
3.8 Paramètre de mémoire de diagnostic (Trace parameter)....61
3.8.1 Entrées rémanentes lors de la mise sous tension (Power On)....61
3.8.2 Filtre Run/Stop 1....61
3.8.3 Filtre Run/Stop 2....62
3.8.4 Filtre de fin d'erreur.... 63
3.8.5 Filtre de numéro d'erreur.... 63
3.8.6 Filtre de module/canal.... 64
3.8.7 Numéro de module.... 64
3.8.8 Numéro de canal....64
3.8.9 Numéro d'erreur.... 65
3.9 Données de la mémoire de diagnostic.... 65
3.9.1 Nombre d'entrées dans la mémoire de diagnostic.... 65
3.9.2 Dépassement de capacité.... 65
3.9.3 État....66
3.9.4 Mémoire de diagnostic....66
3.10 Données de diagnostic système....68
3.10.1 Bits d'état.... 68
3.10.2 Numéro de module et état de diagnostic.... 68
3.10.3 Numéro d'erreur.... 69
3.11 Données de diagnostic de module....69
3.11.1 Numéro du premier canal défectueux....69
3.11.2 Numéro d'erreur....70
3.11.3 Info 2 et 3 (réservés)....70
3.12 Données système.... 71
3.12.1 Démontage.... 71
3.12.2 Force mode.... 71
3.12.3 Démarrage du système....72
3.12.4 Fail safe.... 72
3.12.5 Idle mode....72
3.12.6 Surveillance système.... 73
3.13 Données de module.... 74
3.13.1 Code de module.... 74
3.13.2 Code de révision.... 74
3.13.3 Numéro de série.... 75
4 Caractéristiques techniques....75
4.1 Caractéristiques techniques, générales.... 75
4.2 Caractéristiques techniques électriques....77
4.3 Caractéristiques techniques, certification UL....78
1 À propos de ce document
Le présent document décrit le fonctionnement et le paramétrage de la famille de produits mentionnés dans le titre. L'utilisation ainsi que d'autres informations relatives à l'exploitation des produits sont décrites dans d'autres documents → 1.1 Documents applicables.
Tous les documents disponibles sur le produit → www.festo.com/sp.
| Document Sommaire | |
| Mode d'emploi Système d'automatisation CPX-E In | structions et remarques importantes relatives au montage, à l'installation électrique et aux étapes de maintenance d'un système d'automatisation CPX-E |
| Notices d'utilisation et manuels des modules CPX-E dans le système d'automatisation CPX-E | Informations concernant l'utilisation des modules CPX-E |
Tab. 1 : Documents applicables
1.2 Informations complémentaires
-Pour toute question d'ordre technique, contacter l'interlocuteur Festo régional. www.festo.com.
-Accessoires et pièces de rechange www.festo.com/catalogue.
i
Micrologiciel, logiciel ou fichiers de configuration → www.festo.com/sp.
| Autres informations Sommaire | |
| Fichiers de description d'appareil Définition des modules dans un système d'auto-matisation CPX-E pour intégration dans une commande de niveau supérieur | |
| Documentation de la commande de niveau supérieur et des autres participants du réseau | Informations concernant la mise en service et le paramétrage des composants |
Tab. 2 : Autres informations
1.3 Utilisateurs
Ce document s'adresse à du personnel qualifié. La compréhension de cette documentation nécessite une expérience des systèmes de commande électrique.
1.4 Version du produit
Ce document se réfère au système d'automatisation CPX-E constitué de modules CPX-E. La version du produit peut être identifiée à l'aide de l'étiquette produit ou d'un logiciel de Festo adéquat.
i
Le logiciel adéquat de détermination de la version du produit est disponible sur le portail d'assistance de Festo → www.festo.com/sp.
La fonction d'aide intégrée comporte des informations sur l'utilisation du logiciel.
1.5 Étiquette produit
Les modules CPX-E sont marqués sur le côté gauche. L'étiquette produit est décrite dans les documentations accompagnant le produit.
1.6 Normes indiquées
Numéro de version
| DIN 46228-1:1992-08 EN 60529:2013-10 | ||
| DIN 46228-4:1990-09 EN 60715:2001-09 | ||
| EN 60068-2-27:2010-02 IEC 60204-1:2014-10 |
Tab. 3 : Normes indiquées dans le document
Les informations de cette section, associées à la marque de certification UL figurant sur le produit, s'appliquent en vue du respect des conditions de certification d'Underwriters Laboratories Inc. (UL) pour les États-Unis et le Canada.
Informations de certification UL
| Code de catégorie de produit NRAQ/NRAQ7 | |
| Numéro de fichier E239998 | |
| Normes prises en compte UL 6101 | 10-1, 3rd Edition, May 11, 2012, Revised April 29, 2016CAN/CSA-C22.2 No. 61010-1-12, 3rd Edition, Revision dated April 29, 2016UL 61010-2-201, 1st Edition, Revised February 20, 2017CSA-C22.2 No. 61010-2-201:14, 1st Edition, Issue date January 01, 2014 |
| Marquage UL |  US LISTED US LISTED |
Tab. 4 : Informations de certification UL
- Pour respecter les conditions de certification d'Underwriters Laboratories Inc. (UL), les caractéristiques techniques et les conditions ambiantes peuvent présenter différentes valeurs pour les États-Unis et le Canada.
Tenir compte des écarts → Caractéristiques techniques.
- L'unité doit être alimentée par une source de courant répondant aux exigences imposées à un circuit à énergie limitée selon CEI/EN/UL/CSA 61010-1 ou à une source à puissance limitée (LPS) selon CEI/EN/UL/CSA 60950-1 ou CEI/EN/UL/CSA 62368-1 ou à un circuit de classe 2 selon NEC ou CEC.
i
Les accès non autorisés à l'appareil peuvent provoquer des dommages ou des dysfonctionnements.
En cas de connexion de l'appareil à un réseau :
protéger le réseau de tout accès non autorisé.
Exemples de mesures de protection du réseau :
- Pare-feu
• Intrusion Prevention System (IPS) - Segmentation du réseau
• LAN virtuel (VLAN)
• Virtual private Network (VPN) - Sécurité au niveau de l'accès physique (Port Security)
Autres remarques → Directives et normes relatives à la sécurité dans la technique de l'information, par ex. IEC 62443, ISO/IEC 27001.
i
Un mot de passe d'accès protège uniquement contre les modifications accidentelles.
REMARQUE
Les modules dotés d'interfaces Ethernet ne sont autorisés que dans les réseaux dans lesquels tous les composants raccordés sont alimentés au moyen de circuits TBTS ou de circuits intégrés équipés d'une protection équivalente.
2 Fonction
2.1 Vue d'ensemble
Le système d'automatisation CPX-E est un système modulaire dédié au raccordement de périphériques électriques et à l'utilisation dans un environnement protégé. Un système d'automatisation CPX-E associé à un module de bus et à une commande peut être relié à une commande de niveau supérieur via un réseau ou peut être exploité de manière autonome. Le comportement du système d'automatisation CPX-E peut être adaptée par paramétrage aux diverses exigences.
L'accès aux paramètres internes permet p. ex., de modifier ce qui suit :
- Réaction des sorties en cas d'erreurs de communication (réglages Fail-safe)
- Comportement après dépannage
-Temps anti-rebond et temps de prolongation des signaux pour signaux d'entrée numériques
-Réglages Force (forcer un état de signal)
-Mode de fonctionnement de la mémoire de diagnostic
i
Les modules CPX-E sont livrés avec des paramètres préréglés. Les paramètres spécifiques à chaque module se trouvent dans la documentation correspondante du module.
2.1.1 Exemple de fonctionnement
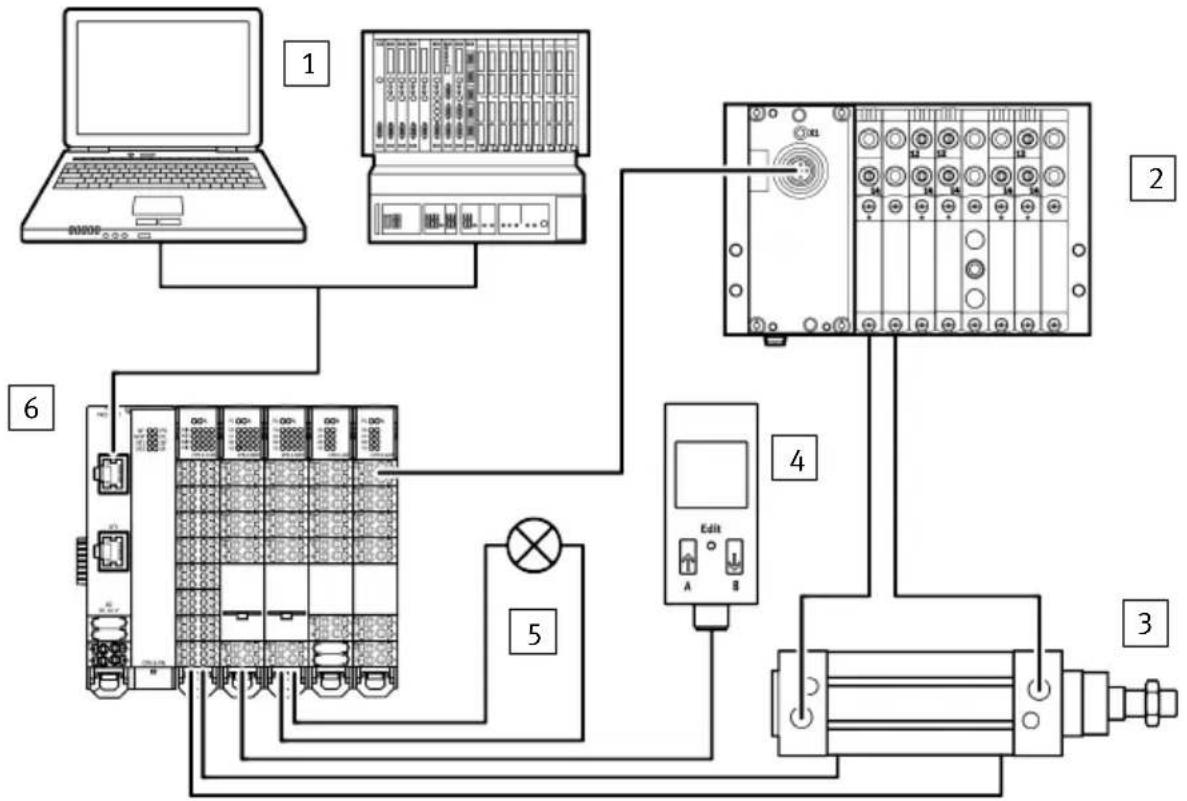
Fig. 1 : Exemple de fonctionnement
1 Commande de niveau supérieur
2 Terminal de distributeurs VTUG
3 Vérin normalisé avec capteurs de proximité dédiés à la détection de position
2.1.2 Modules CPX-E
4 Capteur de débit
5 Voyant
6 Système d'automatisation CPX-E avec module de bus et modules I/O
Cette section montre une vue d'ensemble des différents modules CPX-E à partir desquels il est possible de construire un système d'automatisation CPX-E et en décrit les fonctions.
i
Des informations détaillées sur les différents modules figurent dans les différentes documentations jointes au produit.
Fonction
Module de bus
Un module de bus est l'interface d'un système d'automatisation CPX-E avec le bus de terrain/réseau et prend alors en charge les fonctions suivantes :
- Connexion du système d'automatisation CPX-E avec le bus de terrain/réseau
- Transfert des données entre le système d'automatisation CPX-E et la commande de niveau supérieur
- Réacheminement de signaux de pilotage vers les modules raccordés
- Surveillance de la capacité de fonctionnement des modules raccordés
- Accès en lecture et en écriture aux paramètres système, aux signaux d'entrée et de sortie ainsi qu'aux données de diagnostic (en fonction du module de bus)
- Commande du système d'automatisation CPX-E
Exemples de modules de bus :
-CPX-E-PB (PROFIBUS DP)
-CPX-E-PN (PROFINET IO)
- CPX-E-EP (EtherNet/IP, Modbus TCP)
-CPX-E-EC (EtherCAT)
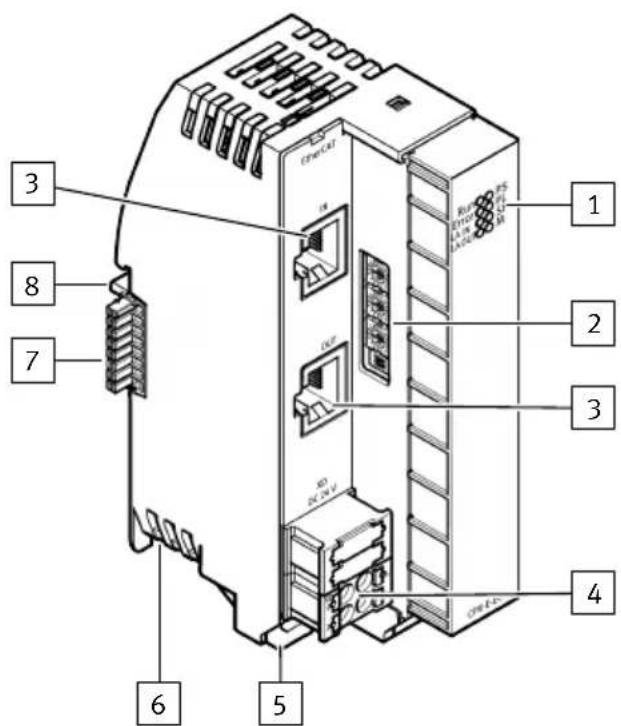
Fig. 2 : Structure produit du module de bus (à l'exemple du CPX-E-EC)
1 Témoins à LED
2 Commutateurs rotatifs et commutateurs DIL
3 Raccordement au réseau
4 Barrette de fixation (codée, extractible)
5 Verrouillage de la barrette de fixation
6 Verrouillage du module
7 Élément d'interconnexion
8 Contact de la terre fonctionnelle FE
i
Les commutateurs rotatifs et DIL ne sont pas disponibles pour chaque module de bus.
Fonction
Commande
Une commande sert un commander un système d'automatisation CPX-E :
- en tant que commande système autonome
- pour intégration dans des commandes d'installation de niveau supérieur via des interfaces de communication intégrées (p. ex. PROFINET).
i
En plus de la programmation, la mise en œuvre d'une commande permet aussi de réaliser la visualisation de process via CODESYS.
Exemples de commandes :
- CPX-E-CEC-C1
- CPX-E-CEC-M1
-CPX-E-CEC-C1-EP
-CPX-E-CEC-M1-EP - CPX-E-CEC-C1-PN
- CPX-E-CEC-M1-PN
text_image
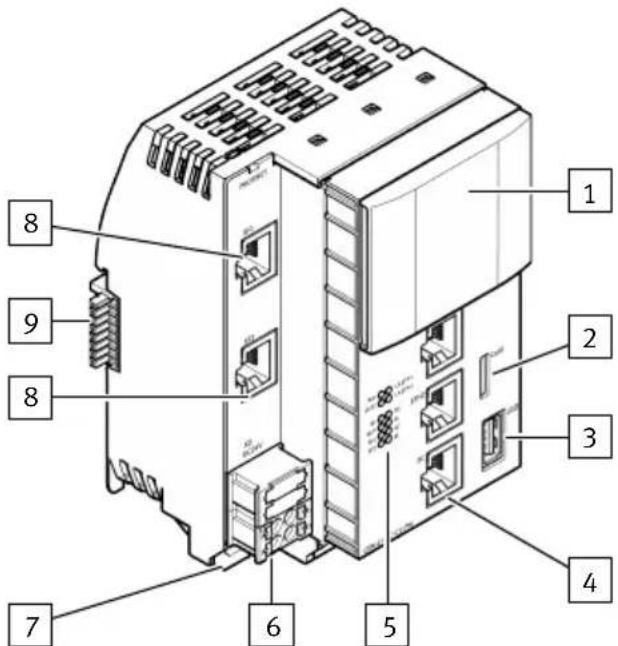
1 2 3 4 5 6 7 8 9 8Fig. 3 : Structure produit d'une commande (à l'exemple d'une CPX-E-CEC-C1-PN)
1 Obturateur (amovible)
2 Emplacement pour carte mémoire SD
3 Interface USB
4 Interface Ethernet
5 Témoins à LED
6 Barrette de fixation (codée, extractible)
7 Verrouillage de la barrette de fixation
8 Raccordement au réseau
9 Élément d'interconnexion
Modules d'I/O
En fonction du module, les modules d'entrée et de sortie permettent de traiter des signaux analogiques ou numériques.
Exemples de modules d'entrée et de sortie :
- Module d'entrée numérique CPX-E-16DI
- Module de sortie numérique CPX-E-8DO
- Module d'entrée analogique CPX-E-4AI-U-I
- Module de sortie analogique CPX-E-4AO-U-I
- Module maître IO-Link CPX-E-4IOL
-Module compteur CPX-E-1CI
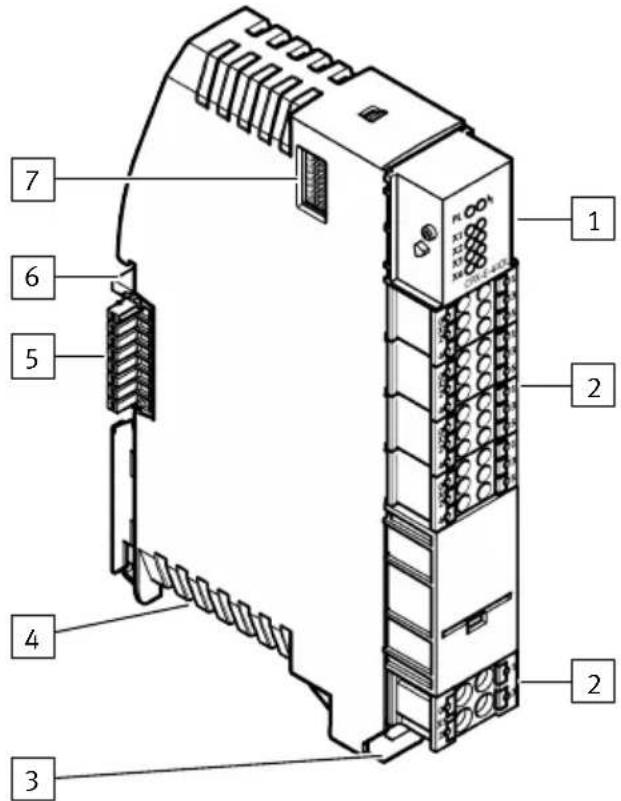
text_image
7 6 5 4 3 1 2 2 PL00A X1 X2 X3 X4 M1 M2 M3 M4 C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16 C17 C18 C19 C20 C21 C22 C23 C24 C25 C26 C27 C28 C29 C30 C31 C32 C33 C34 C35 C36 C37 C38 C39 C40 C41 C42 C43 C44 C45 C46 C47 C48 C49 C50 C51 C52 C53 C54 C55 C56 C57 C58 C59 C60 C61 C62 C63 C64 C65 C66 C67 C68 C69 C70 C71 C72 C73 C74 C75 C76 C77 C78 C79 C80 C81 C82 C83 C84 C85 C86 C87 C88 C89 C90Fig. 4 : Structure produit d'un module d'entrée/de sortie (à l'exemple du module maître IO-Link CPX-E-4IOL)
1 Témoins à LED
2 Barrette de fixation (codée, extractible)
3 Verrouillage des barrettes de fixation
4 Verrouillage du module
5 Élément d'interconnexion
6 Contact de la terre fonctionnelle FE
7 Micro-interrupteur DIL
i
Les commutateurs DIL ne sont pas disponibles sur chaque module d'entrée/de sortie.
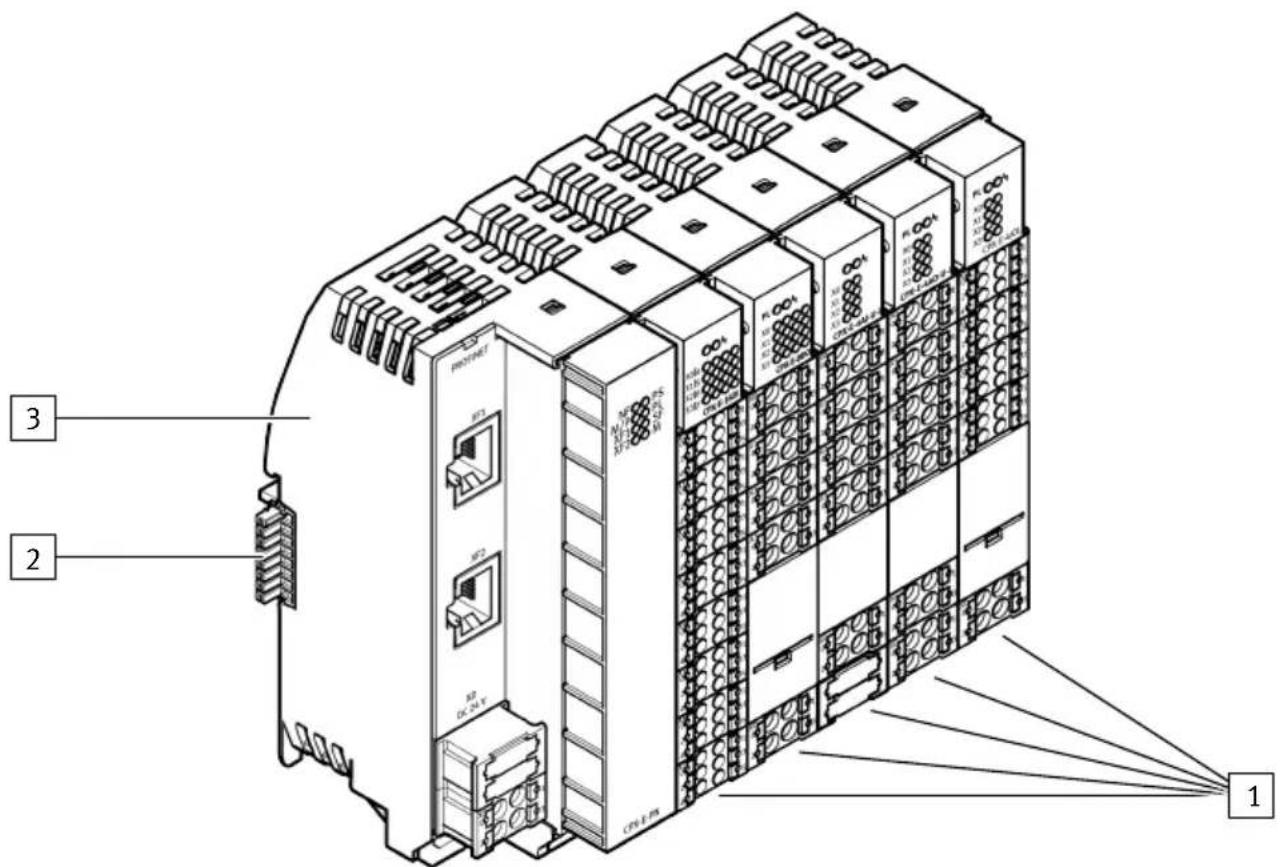
2.1.3 Système d'automatisation CPX-E
2.1.3.1 Règles de montage
Le Système d'automatisation CPX-E se compose principalement d'un module de bus ou d'une commande et d'un maximum de 10 autres modules. À l'intérieur d'un système d'automatisation CPX-E, le module de bus ou la commande est toujours placé(e) sur la gauche en tant que premier module. L'ordre des autres modules est indifférent.
Fonction
text_image
3 2 1Fig. 5 : Structure du système d'automatisation CPX-E (exemple)
1 Modules d'entrée et de sortie
3 Module de bus, ici CPX-E-PN
2 Élément d'interconnexion
Modules d'entrée et de sortie représentés sur l'image :
- Module d'entrée numérique CPX-E-16DI
- Module de sortie numérique CPX-E-8DO
-Module d'entrée analogique CPX-E-4AI-U-I
-Module de sortie analogique CPX-E-4AO-U-I - Module maître IO-Link CPX-E-4IOL
2.1.3.2 Montage sur rail DIN
Le montage des modules s'effectue sur un rail DIN 35 mm × 7,5 mm selon EN 60715.
i
Lors du choix des vis pour le montage sur rail, il faut respecter une distance de 3 mm entre le rail DIN et les éléments d'interconnexion.
L'espacement entre les vis de fixation pour le montage du rail DIN ne doit pas dépasser 50 mm.
Fonction
2.1.3.3 Distances de montage
Afin de garantir une mise sous pression suffisante des modules, lors du montage du système d'automatisation CPX-E, respecter les distances minimales suivantes.
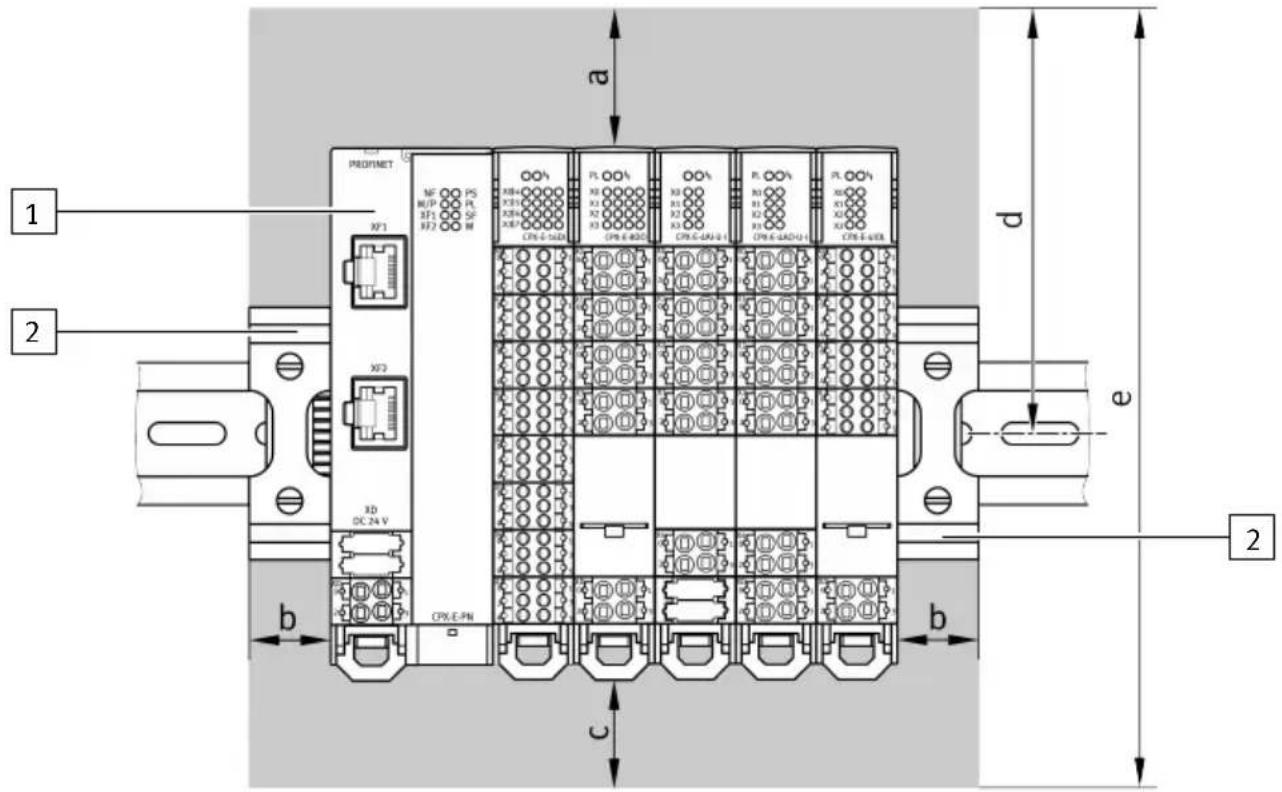
text_image
PROPHET NF PS M/P PL SF SF XF1 XF2 XF3 XP/E-PN CPX-E-PN CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ-U CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ CPX-E-RDQ a b c 1 2 d e 2Fig. 6 : Distances de montage
1 Système d'automatisation CPX-E
2 Embout
| Cote a b c d e | |||||
| Distance minimale [mm] 40 20 30 106 195 |
Tab. 5 : Distances minimales
2.1.4 Concept d'alimentation électrique
Le Système d'automatisation CPX-E utilise des tensions distinctes pour l'alimentation de l'électronique et des capteurs (U EL/SEN ) et pour l'alimentation des sorties (U OUT ). Les potentiels identiques des tensions (+24 V DC et 0 V DC) sont reliés entre eux dans les barrettes de fixation.
Ce qui permet de transmettre la tension correspondante d'un module à un autre module.
Alimentation en tension de service UEL/SEN
L'alimentation en tension de service U_EL/SEN pour l'alimentation de l'électronique et des capteurs est alimentée au niveau du module de bus ou de la commande et distribuée en interne au Système d'automatisation CPX-E complet via l'enchaînement.
Fonction
| Raccord [XD1], [XD2]1) | Signal | |
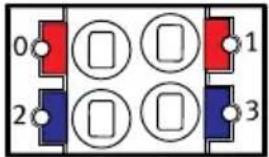 | 0 +24 V DC alimentation en tension de service U EL/SEN | |
| 1 | ||
| 2 0 V DC alimentation en tension de service U EL/SEN | ||
| 3 | ||
1) Les raccords XD.0 et XD.1 ainsi que XD.2 et XD.3 sont reliés ensemble dans la barrette de fixation.
Tab. 6 : Raccord [XD1], [XD2]
i
Pour se conformer aux conditions de certification d'Underwriters Laboratories Inc. (UL) pour les États-Unis et le Canada, dans le cadre de UL/CSA, en fonction de la consommation de courant, le raccordement en parallèle de l'alimentation en tension de service en [XD1] et [XD2] est nécessaire
→ 4.3 Caractéristiques techniques, certification UL.
Alimentation en tension de charge UOUT
Pour chaque module disposant de sorties, l'alimentation en tension de charge U_OUT d'alimentation des sorties est alimentée séparément et directement au niveau du module. Dans l'exemple suivant, via le module de sortie CPX-E-8DO, le module de sortie CPX-E-4AO-UI et le module maître IO-Link CPX-E-4IOL.
Fonction
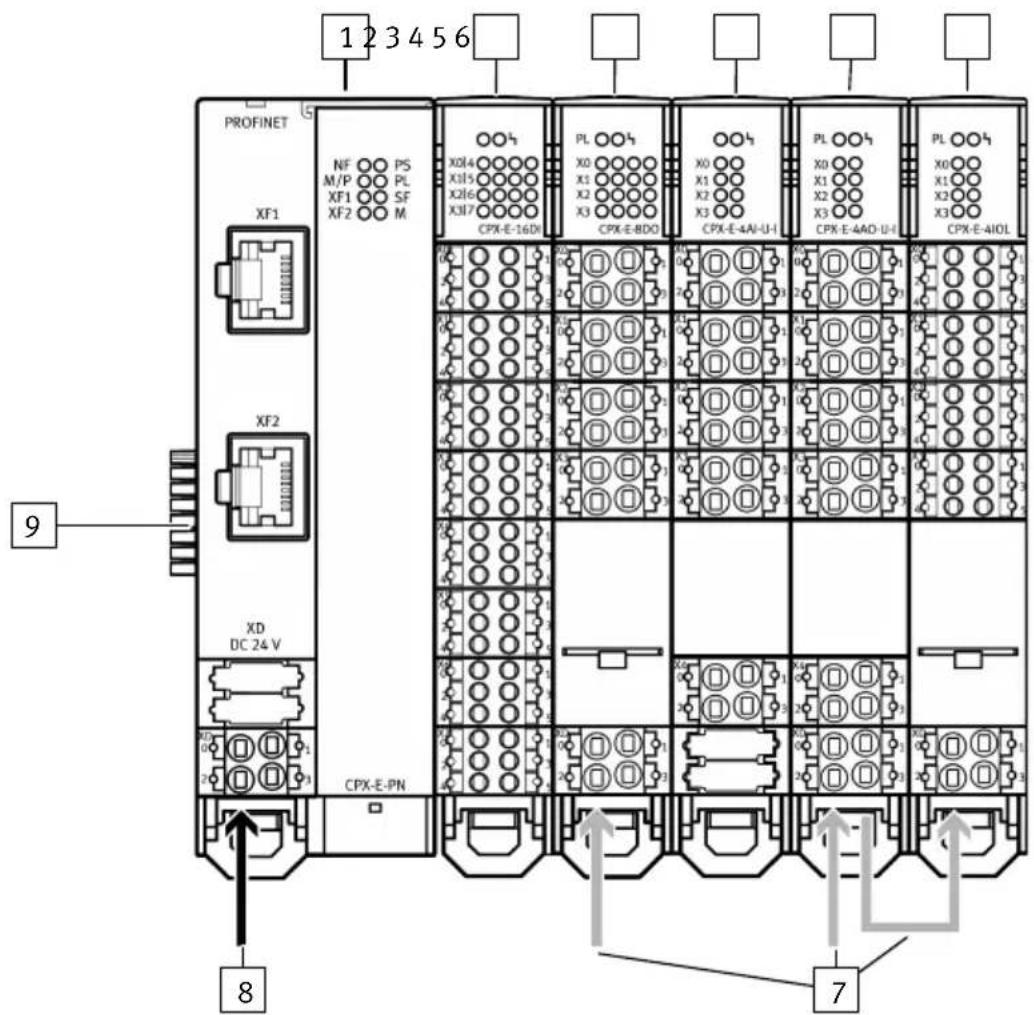
text_image
1 2 3 4 5 6 PROFINET NF PS M/P PL XF1 SF XF2 M X014 X015 X216 X317 CPX-E-16D PL X0 X1 X2 X3 CPX-E-8DD X0 X1 X2 X3 CPX-E-4A-U-I PL X0 X1 X2 X3 CPX-E-4AD-U-I PL X0 X1 X2 X3 CPX-E-4IOL 9 XF1 XF2 XD DC 24 V CPX-E-PN 8 7Fig. 7 : Concept d'alimentation électrique
1 Module de bus CPX-E-PN
2 Module d'entrée CPX-E-16DI
3 Module de sortie CPX-E-8DO
4 Module d'entrée CPX-E-4Al-U-I
5 Module de sortie CPX-E-4AO-U-I
6 Module maître IO-Link CPX-E-4IOL
7 Alimentation en tension de charge U_OUT
8 Alimentation en tension de service U_EL/SEN
9 Élément d'interconnexion
T
L'alimentation en tension de service U_EL/SEN et l'alimentation en tension sous charge U_OUT s'effectuent séparément l'une de l'autre au sein du système d'automatisation CPX-E.
Si cette séparation n'est pas requise dans le cas présent, les deux tensions peuvent également être alimentées par une source de tension commune. Dans ce cas, une alimentation en tension sous charge désactivable séparément est requise.
2.2 Influer sur les états des signaux
| Fonction Priorité 1) | Description sommaire Signaux influençables | ||
| Forçage2) | 1 Influe sur | les états des signaux indépendammentdes états de fonctionnement réels ➔ 2.2.3 For-çage. | Signaux d'entrée et de sortie |
| Fail safe 2 | Définit les états | des signaux qui seront actifsen cas d'erreurs de communication du réseau ➔ 2.2.4 État du signal en cas de perturbation(Fail safe). | Signaux de sortie |
| Idle mode3) | 3 Définit les | états des signaux qui seront actifs lorsdu passage à l'état Idle ➔ 2.2.5 État du signaldans l'état Idle (Idle mode). | Signaux de sortie |
1) Lorsque plusieurs fonctions sont actives simultanément
2) Essentiellement à des fins de test au cours de la mise en service
3) Significatif seulement pour certains protocoles réseau
Tab. 7 : Fonctions d'influence sur les états es signaux
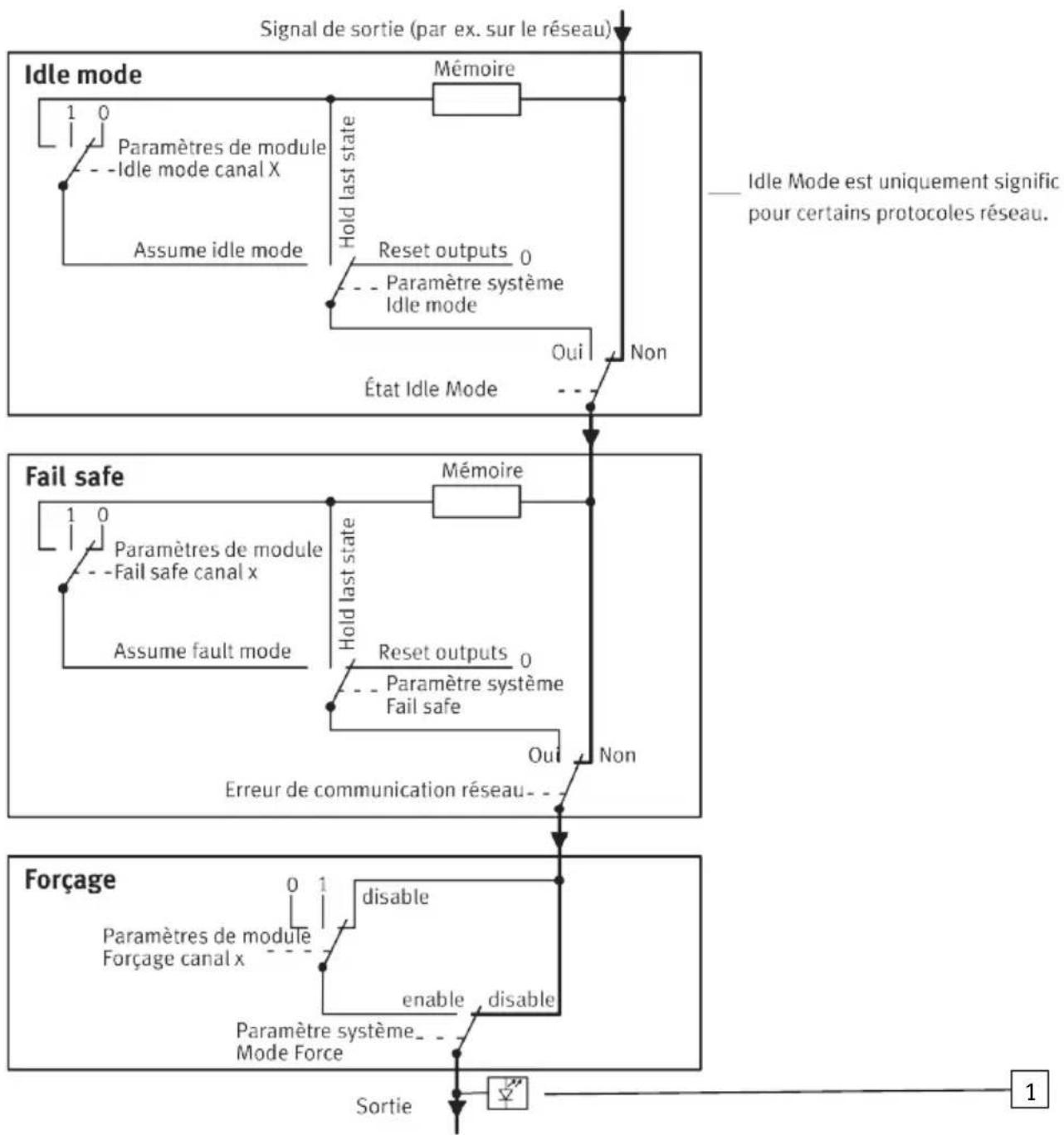
2.2.1 Influer sur les signaux de sortie
Les principaux réglages de chaque fonction sont prédéfinis par des paramètres système.
Lors du réglage correspondant du paramètre système, il est possible de définir individuellement l'état de signal souhaité pour chaque canal par l'intermédiaire de paramètres de module spécifiques au canal.
Fonction
flowchart
graph TD
A["Signal de sortie (par ex. sur le réseau)"] --> B["Idle mode"]
B --> C["Mémoire"]
C --> D["Hold last state"]
D --> E["Reset outputs 0"]
E --> F["Paramètre système Idle mode"]
F --> G["État Idle Mode"]
G --> H["Oui"]
H --> I["Non"]
I --> J["Fail safe"]
J --> K["Mémoire"]
K --> L["Hold last state"]
L --> M["Reset outputs 0"]
M --> N["Paramètre système Fail safe"]
N --> O["Oui"]
O --> P["Non"]
P --> Q["Forçage"]
Q --> R["forçage: Enable/Disable/forçage canal x"]
R --> S["Sortie"]
S --> T["1"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style J fill:#ccf,stroke:#333
style Q fill:#cfc,stroke:#333
Fig. 8 : Influer sur les signaux de sortie
1 LED d'état de la sortie correspondante
Fonction
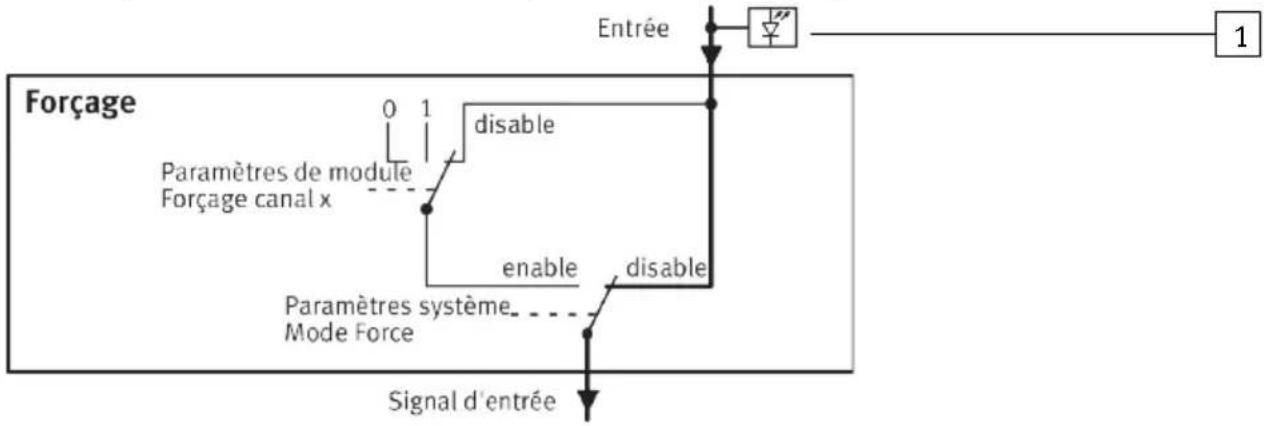
2.2.2 Influer sur les signaux d'entrée
Le forçage d'une entrée ne modifie pas le signal d'entrée proprement dit et ne peut également pas être observé au niveau de la LED d'état correspondante. L'état logique de l'entrée ne change qu'en interne et, le cas échéant s'avère efficace pour la technique du programme.
flowchart
graph TD
A["Forçage"] --> B{0 1}
B --> C["Paramètres de module Forçage canal x"]
C --> D{disable}
D --> E["enable"]
E --> F{disable}
F --> G["Signal d'entrée"]
H["Entrée"] --> I["Switch"]
I --> J["1"]
Fig. 9 : Influer sur les signaux d'entrée
1 LED d'état de l'entrée correspondante
2.2.3 Forçage
2.2.3.1 Principes de base
La fonction Forçage permet de manipuler les états d'un signal indépendamment des états de fonctionnement réels. La fonction Forçage permet d'écraser des signaux d'entrée et de sortie. Les signaux d'entrée effectivement présents ou les modifications d'état réalisées via programme sont ignorés. Ce n'est qu'après avoir désactivé la fonction Forçage que les signaux d'entrée effectivement présents et les signaux de sortie créés par le programme utilisateur sont valables.
La fonction Forçage est essentiellement utilisée à des fins de tests au cours de la phase de mise en service pour forcer certains signaux à adopter l'état souhaité, même en cas d'absence de câblage.
2.2.3.2 Paramétrage
Pour le système d'automatisation CPX-E, un paramétrage du forçage est possible pour :
- les entrées et les sorties numériques
- les bobines (uniquement en liaison avec le module CPX-E-4IOL)
-les entrées et les sorties de l'interface de diagnostic I/O et les bits d'état
-les entrées et les sorties analogiques
Le paramètre système "Force mode" permet d'approuver ou de bloquer le forçage de manière globale pour le système d'automatisation CPX-E.
| Paramètres système | Réglages Description | |
| Force mode bloqué | (réglage par défaut) Forçage bloqué | 1) |
| approuvé Forçage approuvé | 1) |
1) Le réglage s'applique au système d'automatisation CPX-E complet.
Tab. 8 : Paramètre système : "Force mode"
Fonction
Pour chaque module, il est possible de définir l'état du signal par rapport aux canaux (entrée/sortie).
| Paramètres de module | Réglages Description | |
| Force mode bloqué | (réglage par défaut) La fonction Forçage est bloqué pour le canal. | |
| approuvé Reprendre l’état de signal défini par Force state. | ||
| Force state | ||
| Signal numérique Réinitialiser le signal (réglage par défaut) | Réinitialiser le signal d’entrée/de sortie. | |
| Signal analogique Valeur analogique (0 = réglage par défaut) | Valeur du signal analogique. | |
Tab. 9 : Paramètre de module "Force mode"
Fonction
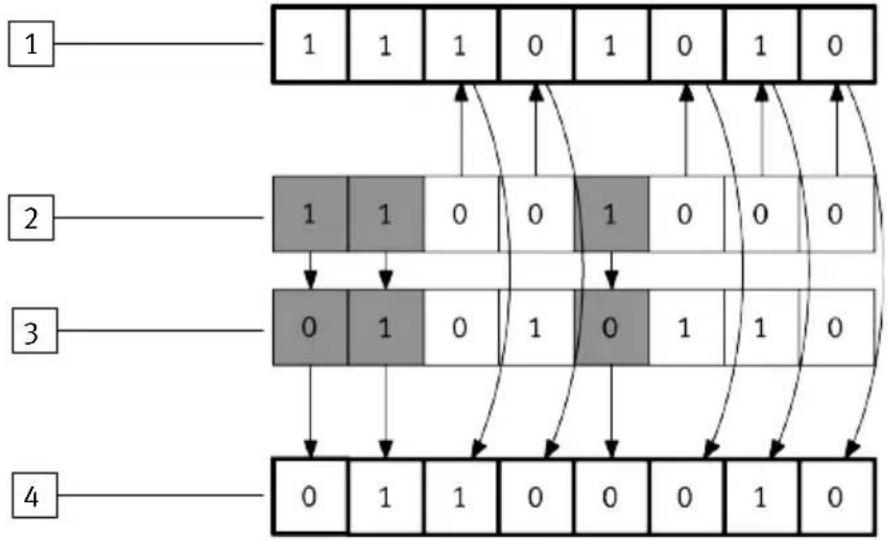
2.2.3.3 Mode de fonctionnement
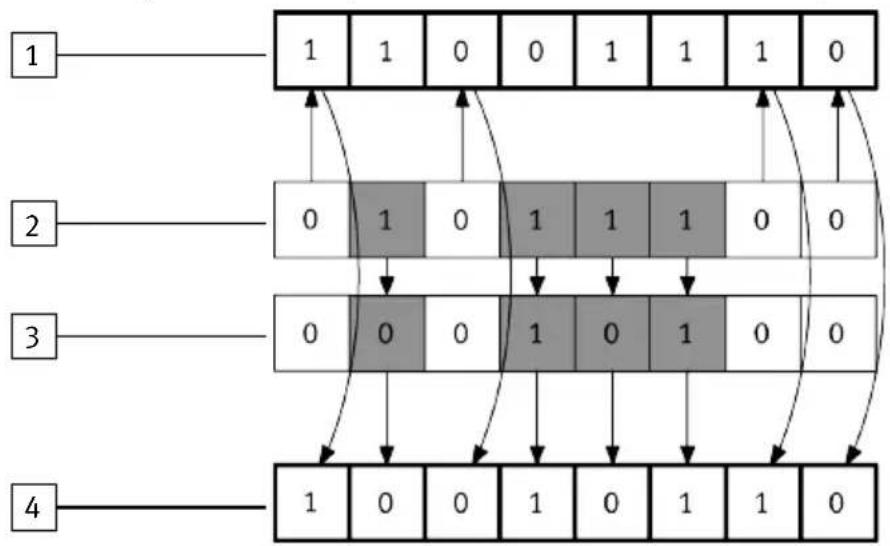
Les informations d'entrée effectivement présentes sont remplacées dans l'illustration du processus des entrées par les valeurs indiquées dans le tableau Force.
Les informations effectivement présentes dans l'illustration du processus des sorties sont remplacées par les valeurs indiquées dans le tableau Force et transmises à la sortie physique.
flowchart
graph TD
A["1"] --> B["1"]
A --> C["1"]
B --> D["0"]
C --> E["0"]
D --> F["1"]
E --> G["1"]
F --> H["0"]
G --> I["0"]
H --> J["1"]
I --> K["1"]
J --> L["0"]
K --> M["0"]
L --> N["1"]
M --> O["1"]
N --> P["0"]
O --> Q["1"]
P --> R["0"]
Q --> S["1"]
R --> T["0"]
S --> U["1"]
T --> V["0"]
U --> W["1"]
V --> X["0"]
W --> Y["1"]
X --> Z["0"]
Fig. 10 : Paramétrage Force – Exemple pour les signaux binaires
1 État du signal avant
2 Paramètre de module (relatif au canal)
Force mode
$$ 0 = \text { Forçage bloqué } $$
3 Paramètre de module (relatif au canal) Force state
$$ 0 = \text { Réinitialiser le signal } $$
4 État du signal après
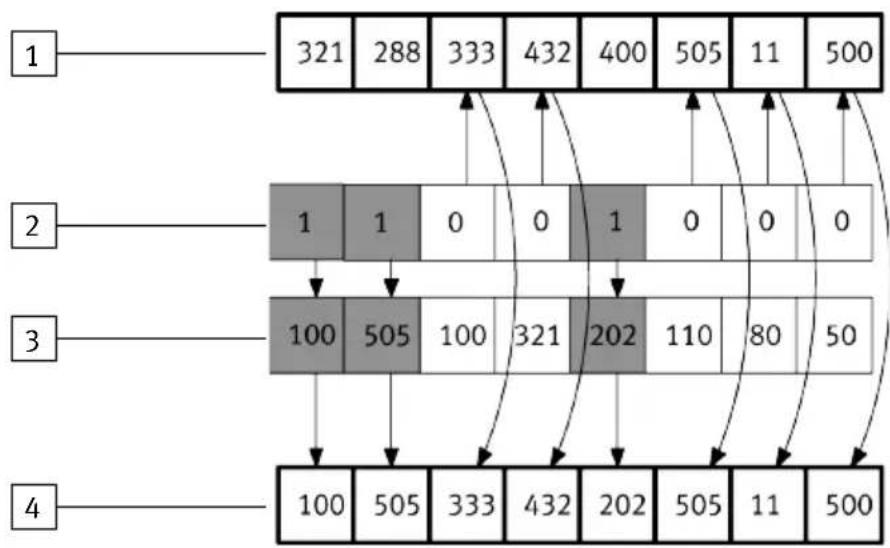
Fonction
flowchart
graph TD
A["1"] --> B["321"]
A --> C["288"]
A --> D["333"]
A --> E["432"]
A --> F["400"]
A --> G["505"]
A --> H["11"]
A --> I["500"]
J["2"] --> K["1"]
J --> L["1"]
J --> M["0"]
J --> N["0"]
J --> O["1"]
J --> P["0"]
J --> Q["0"]
R["3"] --> S["100"]
R --> T["505"]
R --> U["100"]
R --> V["321"]
R --> W["202"]
R --> X["110"]
R --> Y["80"]
R --> Z["50"]
AA["4"] --> AB["100"]
AA --> AC["505"]
AA --> AD["333"]
AA --> AE["432"]
AA --> AF["202"]
AA --> AG["505"]
AA --> AH["11"]
AA --> AI["500"]
Fig. 11 : Paramétrage Force – Exemple pour les signaux analogiques
1 Signal analogique avant
3 Paramètre de module (relatif au canal) Force state
2 Paramètre de module (relatif au canal) Force mode
4 Signal analogique après
0 = Forçage bloqué
1 = Force value
2.2.4 État du signal en cas de perturbation (Fail safe)
2.2.4.1 Principes de base
Le paramétrage Fail-safe permet de définir l'état de signal que les sorties doivent adopter en cas d'erreur de communication du réseau (état Fail-safe). De cette manière, on crée un état défini des machines/de l'installation en cas d'erreurs de communication du réseau (p. ex. défaillance de la commande de niveau supérieur).
2.2.4.2 Paramétrage
Sur le système d'automatisation CPX-E, le paramétrage de Fail-safe est possible pour :
- les sorties numériques
-les sorties analogiques
-les bobines (uniquement en liaison avec le module CPX-E-4IOL ou les sorties numériques)
Le paramètre système "Fail safe" permet de définir de manière globale quel état de signaux les sorties doivent adopter en cas d'erreurs de communication du réseau, p. ex. :
- Défaillance de communication (interruption du réseau, défaillance de la commande de niveau supérieur)
-Arrêt de la communication
Fonction
| Paramètres système | Réglages Description | |
| Fail safe Réinitialiser | les sorties (réglage par défaut) | Réinitialiser toutes les sorties. |
| Hold last state Maintenir l’état actuel des signaux pour toutes les sorties. | ||
| Accepter la valeur Fault mode Reprendre | l’état des signaux défini pour le canal en question. | |
Tab. 10 : Paramètre système "Fail safe"
i
"Réinitialiser les sorties" signifie :
- Les distributeurs monostables passent en position d'initiale
- Les distributeurs bistables restent dans la position actuelle
- Les distributeurs à position médiane vont en position médiane (selon le type de distributeur : sous pression, à l'échappement ou bloqué)
Si "Accepter la valeur Fault-mode" est activé : les états de signaux définis pour le canal en question via paramètres de module sont actifs → Tab. 11 Paramètre de module "Fail safe".
| Paramètres de module | Réglages Description | |
| Fault mode Hold last | state Maintenir l’état actuel des signaux. | |
| Fault state (réglage par défaut) Reprendre l’état d'un signal défini via Force state. | ||
| Fault state | ||
| Signal numérique Réinitialiser la sortie (préréglage) Réinitialiser le signal de sortie. | ||
| Signal analogique Valeur analogique Valeur du signal analogique | ||
Tab. 11 : Paramètre de module "Fail safe"
Fonction
2.2.4.3 Mode de fonctionnement
Le paramètre « Fault mode » permet de déterminer si l'état de signal actuel doit être maintenu ou si l'état de signal défini via le paramètre « Fault state » doit être adopté.
flowchart
graph TD
A["1"] --> B["1"]
B --> C["1"]
C --> D["0"]
D --> E["0"]
E --> F["1"]
F --> G["1"]
G --> H["1"]
H --> I["1"]
I --> J["0"]
J --> K["0"]
K --> L["0"]
L --> M["0"]
M --> N["0"]
N --> O["0"]
O --> P["0"]
P --> Q["0"]
Q --> R["0"]
R --> S["0"]
S --> T["0"]
T --> U["0"]
U --> V["0"]
V --> W["0"]
W --> X["0"]
X --> Y["0"]
Y --> Z["0"]
Z --> AA["0"]
AA --> AB["0"]
AB --> AC["0"]
AC --> AD["0"]
AD --> AE["0"]
AE --> AF["0"]
AF --> AG["0"]
AG --> AH["0"]
AH --> AI["0"]
AI --> AJ["0"]
AJ --> AK["0"]
AK --> AL["0"]
AL --> AM["0"]
AM --> AN["0"]
AN --> AO["0"]
Fig. 12 : Paramétrage Fail safe – Exemple pour les signaux binaires
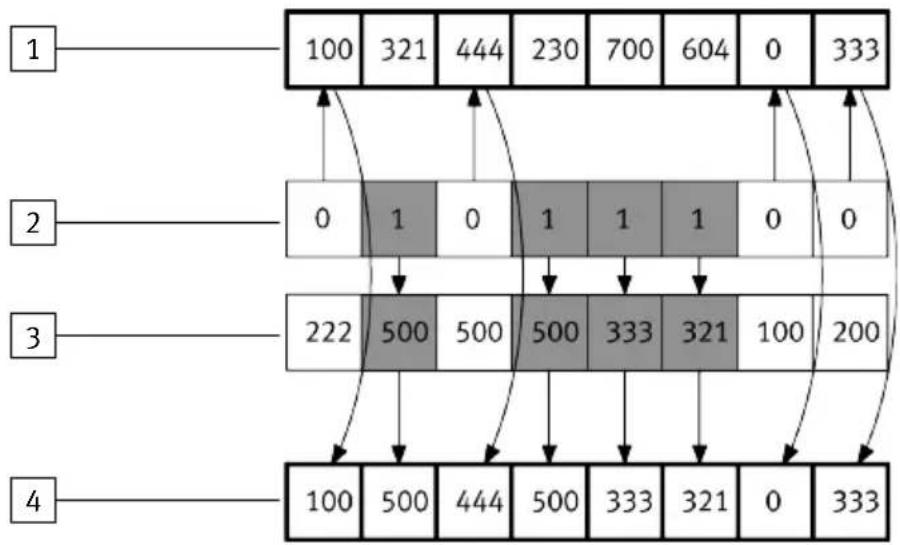
1 Etat du signal avant dysfonctionnement
2 Paramètre de module (relatif au canal)
Fault mode
3 Paramètre de module (relatif au canal) Fault state
$$ 0 = \text { réinitialiser la sortie } $$
$$ 1 = \text { activer la sortie } $$
4 État du signal après dysfonctionnement
Fonction
flowchart
graph TD
A["1"] --> B["100"]
A --> C["321"]
A --> D["444"]
A --> E["230"]
A --> F["700"]
A --> G["604"]
A --> H["0"]
A --> I["333"]
J["2"] --> K["0"]
J --> L["1"]
J --> M["0"]
J --> N["1"]
J --> O["1"]
J --> P["1"]
J --> Q["0"]
J --> R["0"]
S["3"] --> T["222"]
S --> U["500"]
S --> V["500"]
S --> W["500"]
S --> X["333"]
S --> Y["321"]
S --> Z["100"]
S --> AA["200"]
AB["4"] --> AC["100"]
AB --> AD["500"]
AB --> AE["444"]
AB --> AF["500"]
AB --> AG["333"]
AB --> AH["321"]
AB --> AI["0"]
AB --> AJ["333"]
Fig. 13 : Paramétrage Fail safe – Exemple pour les signaux analogiques
1 Etat du signal avant dysfonctionnement
2 Paramètre de module (relatif au canal)
Fault mode
3 Paramètre de module (relatif au canal)
Fault state
4 État du signal après dysfonctionnement
2.2.5 État du signal dans l'état Idle (Idle mode)
2.2.5.1 Principes de base
i
Cette fonction n'est pertinente qu'avec certains protocoles réseau → Manuel du module de bus correspondant.
Le soi-disant paramétrage Idle-mode permet à l'utilisateur de déterminer l'état de signal que les sorties doivent adopter en passant en mode Idle. Ce qui permet ainsi de créer un état défini des machines/de l'installation.
2.2.5.2 Paramétrage
Sur le système d'automatisation CPX-E, le paramétrage de Idle-mode est possible pour :
- les sorties numériques
-les sorties analogiques
-les bobines (uniquement en liaison avec le module CPX-E-4IOL ou les sorties numériques)
Le paramètre système « Idle mode » permet de définir de manière globale quel état de signal les sorties doivent adopter lors du passage à l'état Idle.
| Paramètres système | Réglages Description | |
| System Idle mode R | Réinitialiser la sortie (préréglage). Réinitialiser toutes les sorties. | |
| Hold last state Maintenir l’état actuel des signaux pour toutes les sorties. | ||
| Adopter valeur Idle mode. Reprendre l’état des signaux défini pour le canal en question. |
Tab. 12 : Paramètre système "Idle mode"
Si « Adopter la valeur Idle mode » est activé, alors les états de signaux définis pour le canal en question via paramètres de module sont actifs.
| Paramètres de module | Réglages Description | |
| Idle mode Hold last | state Maintenir l’état actuel des signaux. | |
| Idle state (réglage par défaut) Reprendre | l’état d’un signal défini via Idle state. | |
| Idle state | ||
| Signal numérique R | éinitialiser la sortie. Réinitialiser le signal | de sortie. |
| Activer la sortie. Activer le signal de sortie. | ||
| Signal analogique Valeur analogique Valeur du signal analogique | ||
Tab. 13 : Paramètre de module "Idle mode"
2.2.5.3 Mode de fonctionnement
Le mode de fonctionnement est identique au paramétrage Fail-sage → 2.2.4.3 Mode de fonctionnement.
2.3 Possibilités de diagnostic
En fonction du paramétrage et du protocole réseau utilisé, différentes possibilités sont disponibles pour le diagnostic des erreurs.
| Possibilité de diagnostic | Description | Informations détaillées |
| Éléments de signalisation LED | ||
| Spécifiques système | L'état du système et les erreurs sont signalés directement sur le module par des témoins à LED. | → 2.3.1 Témoins à LED |
| Spécifiques au module ou au réseau | L'état du module ou du réseau et les erreurs sont signalés directement sur le module par des témoins à LED. | → Documentations du module correspondant |
| Possibilité de diagnostic | Description Informations détaillées | |
| Diagnostic système interne | ||
| Bits d'état Les messages | de diagnostic collectifs (messages d'erreur globaux) sont affichés via 8 entrées internes (8 bits d'état). | → 2.3.2 Bits d'état |
| Interface de diagnostic I/O | Les informations de diagnostic du système d'automatisation CPX-E sont mises à disposition via ce qu'on appelle l'interface de diagnostic I/O.L'interface de diagnostic I/O permet un accès en lecture indépendant du bus aux informations de diagnostic, aux données et aux paramètres par l'intermédiaire de 16 entrées et sorties internes. | → 2.3.3 Interface de diagnostic I/O |
| des fonctions de diagnostic spécifiques au réseau | En fonction du réseau utilisé, des fonctions de diagnostic ou des services de communication spéciaux, tels que p. ex. DPV1 avec PROFIBUS, sont le cas échéant disponibles. | → Documentations du module correspondant |
Tab. 14 : Possibilités de diagnostic
2.3.1 Témoins à LED
Différents témoins à LED sont disponibles sur chaque module pour afficher l'état et les erreurs. Il faut alors faire la distinction entre les témoins à LED spécifiques au système et ceux spécifiques au module ou au réseau.
i
Ce document décrit les témoins LED spécifiques au système.
Les témoins LED spécifiques au module et au réseau sont décrits dans les documents de chaque module.
| Power System [PS] – alimentation en tension de service U_EL/SEN | |||
| LED (verte) Signification Solution | |||
 allumée allumée |  | Alimentation électrique présente, aucune erreur | - |
 clignote clignote |  | Alimentation électrique présente, mais en dehors de la plage de tolé-rance | Éliminer la sous-tension. |
| L'interconnexion manque au niveau du module de bus ou elle est incom-plète | Contrôler l'interconnexion. | ||
| Power System [PS] – alimentation en tension de service U_EL/SEN | |||
| LED (verte) Signification Solution | |||
 clignote clignote |  | Le fusible interne de l'alimentation électrique s'est déclenché | Éliminer le court-circuit/la sur-charge.Ensuite, en fonction du paramétrage, l'alimentation électrique est automatiquement réactivée (réglage d'usine) ou il faut désactiver et réactiver l'alimentation électrique. |
 éteinte éteinte |  | Alimentation électrique absente Contrôler le raccordement de l'alimentation électrique. | |
Tab. 15 : Power System [PS] – alimentation en tension de service
| Power Load [PL] – alimentation en tension de charge UOUT | |||
| LED (verte) Signification | Solution | ||
 allumée allumée | 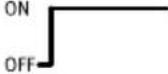 | Alimentation électrique présente,aucune erreur | – |
 clignote clignote |  | Alimentation électrique présente,mais en dehors de la plage de tolé-rance | Éliminer la sous-tension. |
 éteinte éteinte |  | Alimentation électrique absente Contrôler le raccordement de l’ali-mentation électrique. | |
Tab. 16 : Power Load [PL] – alimentation en tension de charge
| System Failure [SF] – erreur système | |||
| LED (rouge)1) | Signification Solution | ||
 |  | erreur mineure/information(classe d'erreur 1) | → 2.3.5 Classes d'erreurs |
cl  e e |  | Erreur(classe d'erreur 2) | |
System Failure [SF] – erreur système
| LED (rouge) ^1) | Signification Solution | ||
 |  | erreur grave(classe d'erreur 3) | →2.3.5 Classes d'erreurs |
| clignote | |||
 |  | Aucune erreur – | |
| éteinte | |||
1) Le témoin à LED « System Failure » [SF] clignote en fonction de la classe d'erreur survenue.
Tab. 17 : System Failure [SF] – erreur système
| Modify [M] – Paramétrage modifié ou Forçage actif | ||
| LED (jaune) Signification | ||
 allumée allumée |  | Démarrage système avec paramétrage enregistré et extension enregistrée ;les paramètres et l’extension sont enregistrés de manière rémanente ; leparamétrage externe est bloqué.1)Attention lors du remplacement de systèmes avec paramétrage enregistré.Sur ces systèmes, en cas de remplacement, le paramétrage n’est pas automatiquement créé via la commande de niveau supérieur.– Avant de procéder au remplacement, déterminer les paramètres requis etles créer le cas échéant. |
 clignote clignote |  | La fonction Forçage est activée.1) |
 éteinte éteinte |  | Démarrage système avec paramétrage par défaut (réglage d'usine) etextension actuelle configuré ; le paramétrage externe est possible (valeurpar défaut). |
1) L'affichage de la fonction Forçage (LED clignote) a priorité sur l'affichage du réglage du démarrage système avec paramétrage enregistré et extension enregistrée (LED allumée).
Tab. 18 : Modify [M] – Paramétrage modifié ou Forçage actif
2.3.2 Bits d'état
Indépendamment du module de bus utilisé, le système d'automatisation CPX-E met à disposition 8 bits d'état pour l'affichage des messages de diagnostic collectifs (messages d'erreur globaux). Les bits d'état sont configurés comme des entrées. L'occupation des adresses d'entrée par des bits d'état dépend du protocole de réseau utilisé → Manuel du module de bus correspondant.
i
Les bits d'état fournissent des informations de diagnostic codées sous forme de signaux 0 ou 1. Si tous les bits d'état fournissent le signal 0, cela signifie qu'aucune erreur n'est signalée.
- Les bits 0 ... 3 indiquent quel est le type de module pour lequel des erreurs sont survenues.
- Les bits 4 ... 7 indiquent le type d'erreur.
| Bit Informations de diagnostic avec le signal 1 Description | ||
| 0 Erreur au | niveau du distributeur Type de module sur le | quel une erreur est survenue |
| 1 Erreur au | niveau d'une sortie | |
| 2 Erreur au | niveau d'une entrée | |
| 3 Erreur sur | le module analogique, fonctionnel ou technologique | |
| 4 Sous-tension Nature de l'erreur | ||
| 5 Court-circuit/surcharge | ||
| 6 Rupture de fil | ||
| 7 autre erreur | ||
Tab. 19 : Affectation des bits des informations de diagnostic
2.3.2.1 Exemples d'informations d'état typiques
| Aucune erreur signalée | ||||||||
| Type d'erreur Type de module | ||||||||
| Autre erreur | Rupture de fil | Court-circuit | Sous-tension | Analogique, fonction | Entrée Sortie Distributeur | |||
| Bit 7 6 5 4 | 3 2 1 0 | |||||||
| État 0 0 0 0 | 0 0 0 0 | |||||||
Tab. 20 : Information d'état "Aucune erreur signalée" (exemple)
Court-circuit sur la sortie
| Type d'erreur Type de module | ||||||||
| Autre erreur | Rupture de fil | Court-circuit | Sous-tension | Analogique, fonction | Entrée Sortie Distributeur | |||
| Bit 7 6 5 4 | 3 2 1 0 | |||||||
| État 0 0 1 0 | 0 0 1 0 | |||||||
Tab. 21 : Information d'état "Court-circuit sur la sortie" (exemple)
Sous-tension de l'alimentation des capteurs
| Type d'erreur Type de module | ||||||||
| Autre erreur | Rupture de fil | Court-circuit | Sous-tension | Analogique, fonction | Entrée Sortie Distributeur | |||
| Bit 7 6 5 4 | 3 2 1 0 | |||||||
| État 0 0 0 | 1 0 1 0 0 | |||||||
Tab. 22 : Information d'état "Sous-tension alimentation des capteurs" (exemple)
i
Lorsque plusieurs erreurs apparaissent simultanément sur différents types de module, les erreurs ne peuvent pas être affectées. Pour déterminer les erreurs de manière claire, il est possible d'utiliser l'interface de diagnostic I/O → 2.3.3 Interface de diagnostic I/O.
2.3.3 Interface de diagnostic I/O
Pour les réseaux qui ne disposent pas de fonctions complètes de diagnostic, les informations de diagnostic du système d'automatisation CPX-E sont disponibles par l'intermédiaire de l'interface de diagnostic I/O. L'interface de diagnostic I/O permet un accès en lecture indépendant du réseau aux informations de diagnostic, aux données et aux paramètres par l'intermédiaire des entrées et des sorties (16 entrées/16 sorties).
2.3.3.1 Organisation des données et paramètres internes
Les données et paramètres internes des modules CPX et du système d'automatisation CPX-E sont enregistrés dans un espace mémoire commun. L'interface de diagnostic I/O permet d'accéder en lecture à chaque octet de cette plage mémoire par l'intermédiaire du numéro de fonction.
i
La modification des paramètres s'effectue, en fonction du réseau utilisé, par l'intermédiaire de fonctions spécifiques au réseau → 3 Paramétrage.
2.3.3.2 Mode de fonctionnement
L'interface de diagnostic I/O permet d'appeler des informations de diagnostic détaillées.
On peut p. ex., savoir exactement sur quel module et quel canal une erreur s'est produite.
16 bits d'entrée et 16 bits de sortie, via lesquels toutes les données de diagnostic peuvent être lues, sont utilisés pour l'appel du diagnostic système.
i
Les adresses des bits d'entrée et de sortie de l'interface de diagnostic I/O dépendent du réseau utilisé → Manuel du module de bus correspondant.
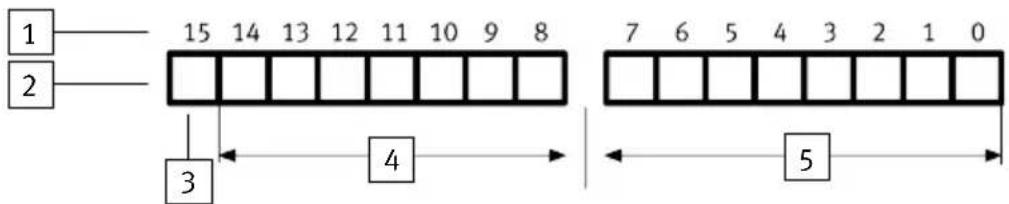
2.3.3.3 Bits de sortie
Les bits de sortie A0 ... A12 de l'interface de diagnostic I/O permettent d'indiquer le numéro de fonction des données désirées sous forme d'un code binaire. Le numéro de fonction est pris en charge lorsque le bit de commande A15 fournit un signal 1.
text_image
1 2 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 3 4 5Fig. 14 : Bits de sortie
1 Numéro de bit
2 Sorties
3 Bit de commande
4 Réservé
5 Numéro de fonction
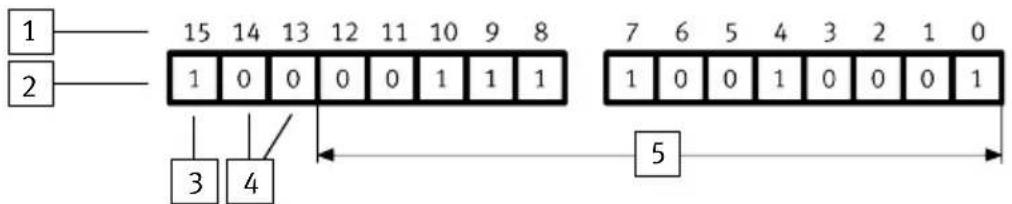
2.3.3.4 Bits d'entrée
Les données de réponse sont émises par le système d'automatisation CPX-E via les bits d'entrée E0 ... E7 lorsque le bit d'acquittement E15 fournit un signal 1.
text_image
1 2 15 14 13 12 11 10 9 8 3 4 7 6 5 4 3 2 1 0 5Fig. 15 : Bits d'entrée
1 Numéro de bit
2 Entrées
3 Bit d'acquittement
4 Réservé
5 Données de diagnostic
i
Lorsque le bit de commande A15 fournit un signal 0, le bit de validation E15 se remet automatiquement à zéro et l'octet d'état se superpose pour les bits des données de diagnostic.
Fonction
2.3.3.5 Lecture des données de diagnostic
Organigramme
Le numéro de fonction est pris en charge lorsque le bit de commande A15 a un flanc positif.
Les bits d'entrée E0 ... E7 fournissent les données de diagnostic lorsque le bit acquittement fournit un signal 1.
flowchart
graph TD
A["Démarrage du processus de lecture"] --> B["Démarrage du timeout"]
B --> C["Configuration du numéro de fonction"]
C --> D["Forcer le bit de contrôle (A15)"]
D --> E{Bit d'acquittement = 1 ?}
E -->|Non| F{Tempori sateur écoulé ?}
F -->|Oui| G["Réinitialisation du bit de contrôle"]
F -->|Non| H["Reprendre les données"]
H --> I["Réinitialiser le bit de contrôle A15"]
I --> J{Bit d'acquittement = 0 ?}
J -->|Non| K{Tempori sateur écoulé ?}
K -->|Oui| L["Timeout"]
K -->|Non| M["Reprendre les données"]
M --> N["Reprendre les données"]
N --> O["Démarrage du timeout"]
Fig. 16 : Organigramme Lire les données de diagnostic
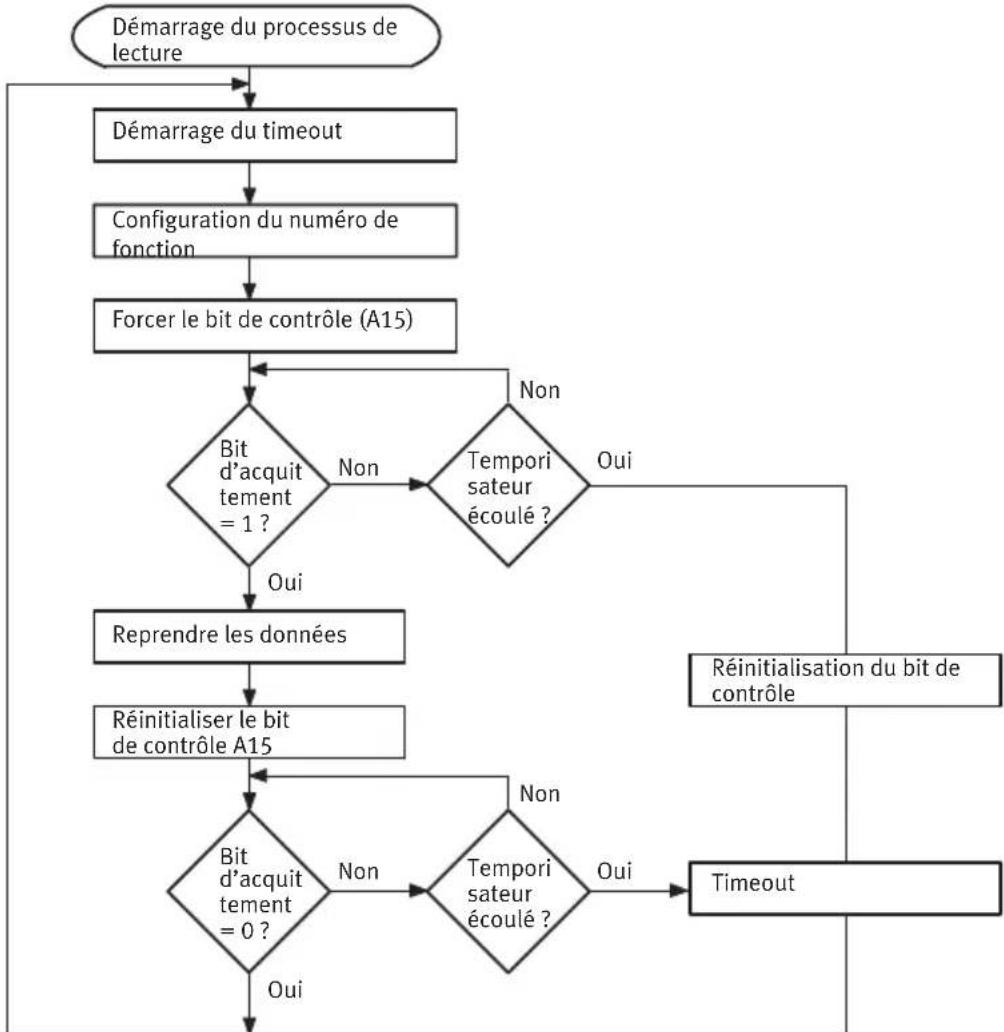
Exemple 1 : contrôle de la présence éventuelle de données de diagnostic
Le numéro de fonction 1937 indique si des données de diagnostic existent et contient le cas échéant le numéro du premier module sur lequel une erreur est survenue ➔ 3.10.2 Numéro de module et état de diagnostic.
-Numéro de fonction 1937 décimal = 11110010001 en binaire
Lecture du numéro de fonction 1937
text_image
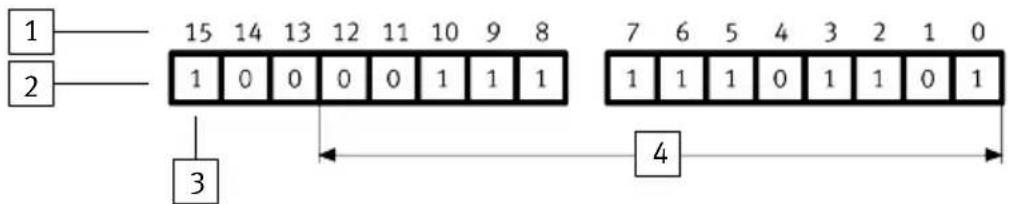
1 2 15 14 13 12 11 10 9 8 1 0 0 0 0 1 1 1 3 4 7 6 5 4 3 2 1 0 1 0 0 1 0 0 0 1 5Fig. 17 : Lecture du numéro de fonction 1937

text_image
1 Numéro de bit des sorties 2 État des signaux des sorties 3 Bit de commande 4 Réservé 5 Numéro de fonctionIl existe des données de diagnostic lorsque le bit 6 fournit un signal 1. Les bits 0 ... 5 contiennent alors le numéro de module du premier module défaillant → 3.10.2 Numéro de module et état de diagnostic.
Si par exemple, il existait une erreur sur le module 5 (5 décimal = 101 binaire), les données d'entrée suivantes seraient présentes :
Données de réponse (exemple – erreur au niveau du module 5)
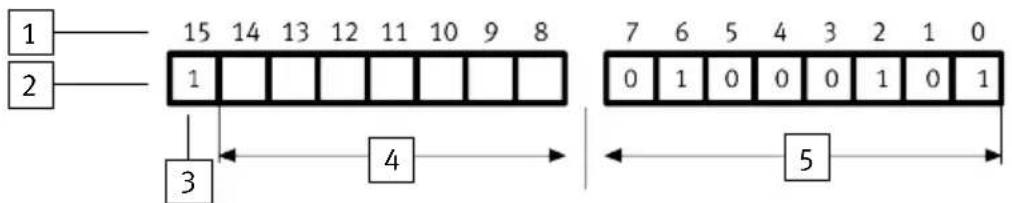
text_image
1 2 15 14 13 12 11 10 9 8 1 3 4 7 6 5 4 3 2 1 0 0 1 0 0 0 1 0 1 5Fig. 18 : Données de réponse (exemple)

text_image
1 Numéro de bit des entrées 2 État des signaux des entrées 3 Bit d'acquittement 4 Réservé 5 Données de diagnostici
Pour de plus amples informations sur les données de diagnostic de module → 3.11 Données de diagnostic de module.
Exemple 2 : lire le numéro d'erreur actuel du module 5
Le numéro du module défaillant permet de déterminer les numéros de fonction des données de diagnostic correspondantes du module → 3.11 Données de diagnostic de module.
Les données de diagnostic du module peuvent p. ex. être :
- le numéro du canal défectueux
- le numéro d'erreur du module
Le numéro de fonction suivant permet, p. ex. de déterminer le numéro d'erreur du module 5 :
-Numéro de fonction = 2008 + 4 × 5 + 1 = 2029 - 2029 décimal = 11111101101 en binaire
Fonction
Lecture des numéros d'erreur du module 5
text_image
1 2 15 14 13 12 11 10 9 8 1 0 0 0 0 1 1 1 3 7 6 5 4 3 2 1 0 1 1 1 0 1 1 0 1 4Fig. 19 : Lecture des numéros d'erreur du module 5

text_image
1 Numéro de bit 2 État des signaux des sorties 3 Bit de commande 4 Numéro de fonctionLes données de réponse pour le cas où le numéro d'erreur 4 (4 en décimal = 100 en binaire) est présent sont représentées sur l'image suivante à titre d'exemple.
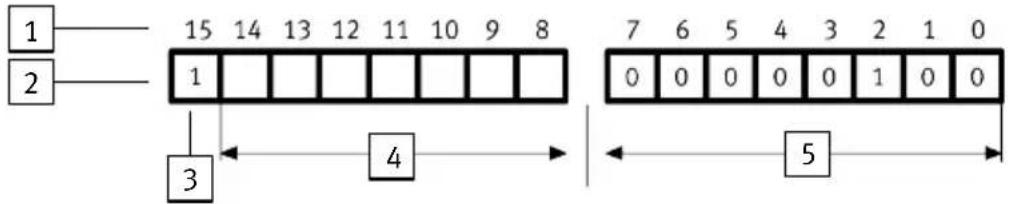
text_image
1 2 15 14 13 12 11 10 9 8 1 3 4 7 6 5 4 3 2 1 0 0 0 0 0 0 1 0 0 5Fig. 20 : Données de réponse pour le numéro d'erreur 4

text_image
1 Numéro de bit des entrées 2 État des signaux des entrées 3 Bit d'acquittement 4 Réservé 5 Données de diagnostic2.3.4 Mémoire de diagnostic
2.3.4.1 Principes de base
La mémoire de diagnostic sert à documenter l'état des erreurs. L'enregistrement du moment auquel apparaissent les erreurs et les successions d'erreurs permettent de trouver les causes d'erreurs difficiles à localiser. Les erreurs qui surviennent en cours d'exploitation sont enregistrées dans la mémoire de diagnostic. En fonction du paramétrage, les 40 premières ou dernières entrées sont enregistrées ainsi que l'heure mesurée à partir de l'activation de l'alimentation électrique.
2.3.4.2 Paramétrage
Les paramètres de la mémoire de diagnostic permettent de paramétrer différents filtres de la mémoire de diagnostic → 3.8 Paramètre de mémoire de diagnostic (Trace parameter). Ces filtres permettent de supprimer l'enregistrement de certains états du système d'automatisation et de démarrer ou d'arrêter l'enregistrement.
La figure suivante montre le mode de fonctionnement des filtres de la mémoire de diagnostic.
Fonction
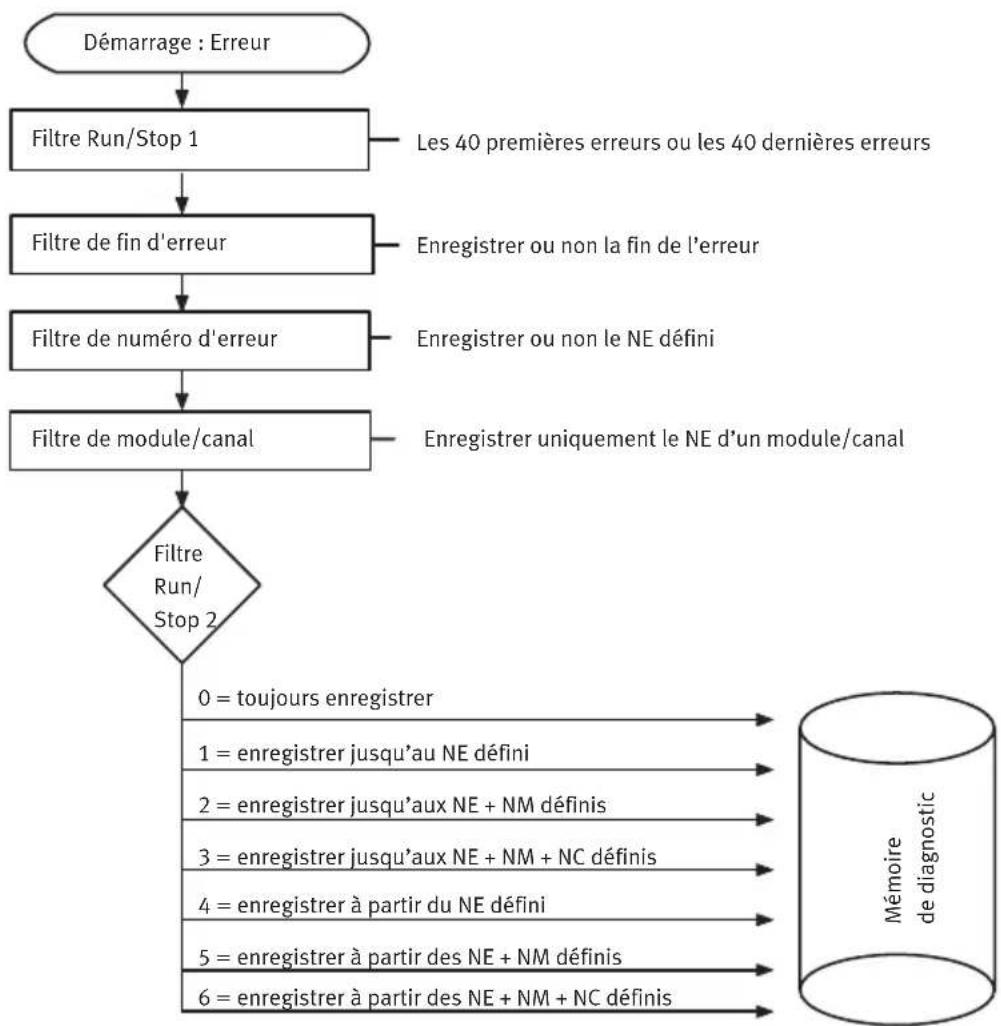
flowchart
graph TD
A["Démarrage : Erreur"] --> B["Filtre Run/Stop 1"]
B --> C["Filtre de fin d'erreur"]
C --> D["Filtre de numéro d'erreur"]
D --> E["Filtre de module/canal"]
E --> F{Filtre Run/Stop 2}
F -->|0 = toujours enregistrer| G["1 = enregistrer jusqu'au NE défini"]
F -->|2 = enregistrer jusqu'aux NE + NM définis| H["3 = enregistrer jusqu'aux NE + NM + NC définis"]
F -->|4 = enregistrer à partir du NE défini| I["5 = enregistrer à partir des NE + NM définis"]
F -->|6 = enregistrer à partir des NE + NM + NC définis| J["End"]
G --> K["Mémoire de diagnostic"]
H --> K
I --> K
J --> K
MN = Numéro de module
FN = Numéro d'erreur
KN = Numéro de canal
Fig. 21 : Mode de fonctionnement des filtres de la mémoire de diagnostic
2.3.4.3 Mode de fonctionnement
Au maximum, 40 messages de diagnostic sont enregistrés dans la mémoire de diagnostic. Un logiciel approprié de Festo ou en cas d'utilisation d'une commande CPX-E-CECE-...,CODESYS permet, entre autres, de paramétrer les messages à enregistrer et de choisir comment ils doivent être enregistrés. Et p. ex. la durée d'enregistrement ou le mode de la mémoire de diagnostic ("Entries remanent at Power ON") ou la méthode d'enregistrement (Réglage "Run/Stop").
Des explications des principaux réglages se trouvent aux sections suivantes.
i
Le logiciel approprié de paramétrage est disponible sur le Support Portal de Festo
→ www.festo.com/sp. Des informations sur l'utilisation du logiciel figurent dans la fonction d'aide intégrée.
Fonction
Durée d'enregistrement ou mode de la mémoire des défauts
« Trace parameters » > « Entries remanent at Power ON » ou « Diag.Buffer – Mode » :
- « Active » ou « de manière rémanente » :
Les messages de diagnostic restent en mémoire après la mise hors tension ou une défaillance de la tension de service U_EL/SEN .
-« Inactive » ou « non rémanent » :
Les messages de diagnostic sont perdus après la mise hors tension ou une défaillance de la tension de service U_EL/SEN .
Mode d'enregistrement
« Trace parameters » > « Run/Stop 1 » ou « Diag.Buffer – Mode » :
- « Save first 40 entries » ou « Stop after 40 records... » (Arrêt après 40 entrées...) :
Le module de bus enregistre les 40 premiers messages de diagnostic. Les messages supplémentaires suivants ne seront pas mémorisés.
- « Stop after 40 records... » ou « Record continually... » (Enregistrer en continu...) :
Enregistrement en continu des messages de diagnostic. Après le 40e message, le message le plus ancien message est écrasé.
Filtre de fin d'erreur
« Trace parameters » > « Fault end filter » ou « Diag.Buffer – Error end » :
- « Record outgoing faults » ou « Record coming/going » (Enregistrer les erreurs entrantes/sortantes) :
Lors de l'apparition et de la suppression d'une erreur, son numéro et le moment de l'événement sont enregistrés.
- « Do not record outgoing faults » ou « Record coming only » (N'enregistrer que les erreurs entrantes) :
Le numéro de l'erreur et le moment de l'événement sont enregistrés uniquement en cas d'erreur. Le moment de l'événement n'est pas enregistré si l'erreur est éliminée.
2.3.5 Classes d'erreurs
En fonction du degré de gravité de l'erreur, les erreurs possibles du système d'automatisation CPX-E sont réparties en 3 classes d'erreur (1 ... 3) ayant chacune une priorité différente. Si une erreur survient, la LED d'erreur système (SF) clignote en fonction de la classe d'erreur survenue.
| Classe d'erreur Séquence de clignotement de la LED d'erreur système (SF) | Degré de gravité de l'erreur | Priorité |
| 1 Clignote 1 fois, temps de pause léger faible | ||
| 2 Clignote 2 fois, temps de pause moyen moyen | ||
| 3 Clignote 3 fois, temps de pause élevée élevée |
Tab. 23 : Classes d'erreurs
Si plusieurs erreurs apparaissent en même temps, l'erreur ayant la priorité la plus élevée s'impose, ce qui signifie :
-que la LED d'erreur système clignote en fonction de la priorité la plus élevée.
- que dans les données de diagnostic du système, le numéro de l'erreur ayant la priorité la plus élevée est enregistré sous le numéro de fonction 1938 (numéro d'erreur).
Au sein d'une classe d'erreur, les erreurs de modules ayant un numéro plus faible ont la priorité la plus élevée. Ainsi, au sein d'une classe d'erreur, les erreurs du
- numéro de module 0 ont la priorité la plus élevée
-Le numéro de module 1 reçoit la deuxième priorité
一...
2.3.6 Numéros d'erreur
| Numéro d'erreur (classe d'erreur 2) | ||
| Numéro d'erreur | Signification Solution | |
| 0 Aucune erreur – | ||
| 1 Diagnostic général (erreurs spécifiques au module) | → Manuel du module correspondant | |
| 2 Court-circuit/surcharge alimentation des capteurs (CCSA) ou des sorties (CCSS) | Éliminer les courts-circuits / surcharges → Manuel du module correspondant. | |
| 3 Rupture de fil/Fonctionnement à vide Entrée/Sortie en courant | Contrôler les câbles et les cap-teurs/actionneurs et les remplacer le cas échéant. | |
| 4 Défaillance de l'alimentation en tension de charge U_OUT à cause d'un court-cir-uit/d'une surcharge (côté sortie) | Contrôler les actionneurs et leurs raccor-dements. | |
| 5 Sous-tension de l'alimentation en tension de service U_EL/SEN (côté entrée) | Éliminer la sous-tension. | |
| 6 ... 8 réservé | - | |
| 9 Sous-dépassement de la plage nominale Contrôler la plage du signal et la valeur limite paramétrée. | ||
| 10 Dépassement de la plage nominale | ||
| 11 Court-circuit distributeur Contrôler le distributeur et l'interface pneumatique. | ||
| 12 réservé – | ||
| 13 Rupture de fil distributeur (Open load) Contrôler le distributeur et l'interface pneumatique. | ||
| 14 Valeur limite du Condition Counter dépassée | Définir ou supprimer la valeur limite du Condition Counter par paramétrage. | |
| 15 Défaillance du module/canal Contrôler les périphériques/le module et les remplacer le cas échéant. | ||
| 16 La configuration enregistrée diffère de la configuration effective du système d'automatisation | Au niveau du système d'automatisation CPX-E :contrôler la configuration et la ré-enregistrer, le cas échéant→Tab. 39 Paramètre système – Démarrage du système.Au niveau du module de bus :Modifier le paramètre de démarrage du système pour choisir "Démarrage système avec paramétrage par défaut et extension CPX-E actuelle".Au niveau de la commande :Enregistrer la configuration réelle en tant que configuration de consigne à l'aide du logiciel CODESYS. | |
| 17 La longueur I/O du module mémorisée diffère de l'extension réelle du système d'automatisation | → Numéro d'erreur 16 | |
| 18 Nombre de points I/O dépassé Contrôler la position du micro-interrupteurDIL et l'extension du système d'automatisation → Manuel du module de bus / de la commande en question. | ||
| 19 Durée de fonctionnement à régime nominal/cycle de vie dépassé(e) | Remplacer le module ou la pièce de rechange ➔ Manuel du module correspondant. | |
| 20 Erreur lors | du paramétrage – Plage du signal | Contrôler le paramétrage et le cas échéant, le renouveler avec les paramètres corrects. |
| 21 Erreur lors | du paramétrage – Format des données | |
| 22 Erreur lors | du paramétrage – Mise à l'échelle linéaire | |
| 23 Erreur lors | du paramétrage – Lissage des valeurs de mesure | |
| 24 Erreur lors | du paramétrage – Valeur limite inférieure | |
| 25 Erreur lors | du paramétrage – Valeur limite supérieure | |
| 26 Erreur alimentation de l'actionneur Éliminer court-circuit/surcharge ou contrôler l'alimentation des actionneurs et les actionneurs. | ||
| 27 Pièce de rechange manquante ou incorrecte | Remplacer le module ou la pièce de rechange ➔ Manuel du module correspondant. | |
| 28 Valeur d'alerte atteinte Vérifier les conditions de service ➔ Manuel du module correspondant. | ||
| 29 Erreur lors | du paramétrage Contrôler le paramétrage et le cas échéant, le renouveler avec les paramètres corrects. | |
| 30 Erreur de communication interne (pas de nouvelles données de sortie) | Remplacer le module si éteindre/allumer ne résout pas le problème. | |
| 31 Connexion | du bus interrompue Établir la connexion du bus ou contrôler la configuration. | |
| 32 Accès en lecture STI défectueux Répéter l'accès en lecture STI. | ||
| 33 Paramètre | Accès en lecture erroné Répéter le paramètre | Accès en lecture. |
| 34 ... 36 réservé – | ||
Numéros d'erreur (classe d'erreur 2)
| Numéro d'erreur | Signification Solution | |
| 37 Dysfonctionnement de la fonction régulateur (p. ex. valeur de consigne impossible à atteindre) | Contrôler la pression et l'alimentation des actionneurs. | |
| 38 Aucun distributeur identifié Contrôler le distributeur (fonction / montage) et le remplacer si nécessaire. | ||
| 39 Maintenance nécessaire → Manuel du module correspondant | ||
| 40 ... 47 réservé – | ||
| 48 Erreur de calibrage (l'équilibrage à l'usine fait défaut) | Remplacer le module. | |
| 49 La boucle de courant se trouve dans la zone inférieure de chute | Contrôler l'installation / le paramétrage de l'actionneur → Manuel du module correspondant. | |
| 50 La boucle de courant se trouve dans la zone supérieure de chute | ||
| 51 Valeur limite physique d'un capteur dépassée :–Valeur de processus invalide–Endommagement matériel possible | Contrôler la structure (respect de la spécification du module), s'assurer que le module n'est pas endommagé et le remplacer si nécessaire. | |
| 52 Court-circuit à la compensation de sou-dure froide | Éliminer le court-circuit et le cas échéant, contrôler les capteurs CSF raccordés. | |
| 53 Rupture de fil à la compensation de sou-dure froide | Contrôler les câbles et les capteurs CSF raccordés et les remplacer le cas échéant. | |
| 54 Données de calibrage erronées Remplacer le module. | ||
| 55 Formation de la valeur de processus invalide en raison d'une structure erronée | Contrôler la structure (respect de la spécification du module). | |
| 56 ... 63 réservé – | ||
| 64 Le nombre de modules dans la structure actuelle du système d'automatisation ne correspond pas à la structure mémorisée | Corriger l'extension ou mémoriser la nouvelle extension. | |
| 65 ... 69 réservé – | ||
| 70 L'extension du système d'automatisation est plus importante que le nombre de stations réglé | Contrôler la position des commutateurs DIL (augmenter le nombre de stations). | |
| 71 Connexion du bus interrompue Contrôler les câbles réseau. | ||
| Numéro d'erreur (classe d'erreur 2) | ||
| Numéro d'erreur | Signification Solution | |
| 72 ... 79 réservé – | ||
| 80 Dysfonctionnement spécifique au module → Manuel du module correspondant | ||
| 81 ... 99 réservé – | ||
| 100 Erreur lors de la configuration / du paramétrage | Contrôler la configuration/le paramétrage, la corriger si nécessaire ou répéter la mise en service. | |
| 101 Erreur lors de l'exécution d'un ordre de positionnement | Contrôler la commande de déplacement et la corriger si nécessaire. | |
| 102 Erreur lors de l'exécution d'un ordre de déplacement | ||
| 103 Erreur dans la régulation ou les conditions marginales d'un ordre de positionnement | ||
| 104 Erreur dans la commande séquentielle ou la configuration du système | Contrôler la configuration du système, la commande de déplacement, les signaux I/O ou l'état du système et rectifier si nécessaire. | |
| 105 Erreur de la périphérie (alimentation électrique, pression de service, etc.) | Contrôler la périphérie, l'alimentation électrique et la pression de service. | |
| 106 Erreur au niveau du distributeur ou de la liaison d'axe | Contrôler le distributeur ou les câbles et les remplacer si nécessaire. | |
| 107 Erreur au niveau de la commande ou du régulateur d'entraînement | Contrôler la commande ou le régulateur d'entraînement et la/le remplacer si nécessaire. | |
| 108 Erreur au niveau du système de mesure ou de la liaison d'axe | Contrôler le système de mesure ou les câbles et remplacer si nécessaire. | |
| 109 Erreur au niveau du moteur ou de l'étage de puissance | Contrôler le moteur ou l'étage de puissance et remplacer si nécessaire. | |
| 110 ... 114 réservé – | ||
| 115 Un module / canal d'un système de niveau inférieur est tombé en panne | Contrôler le module de niveau inférieur (fonction / montage) et le remplacer si nécessaire. → Manuel du module correspondant. | |
| Numéros d'erreur (classe d'erreur 3) | ||
| Numéro-d'erreur | Signification Solution | |
| 128 Matériel défectueux Contrôler le matériel et le remplacer si nécessaire. | ||
| 129 Module de bus défectueux Remplacer le module de bus. | ||
| 130 Erreur système au niveau du module de bus | Remplacer le module si éteindre/allumer ne résout pas le problème. | |
| 131 Erreur de la communication interne lors du boot | Contrôler le système d'automatisation et le remplacer si nécessaire. | |
| 132 Erreur système Remplacer le module si éteindre/allumer ne résout pas le problème. | ||
| 133 ... 134 Module défectueux Remplacer le module. | ||
| 135 Erreur lors de la configuration interne, module en panne | Contrôler le système d'automatisation et le remplacer si nécessaire. | |
| 136 Erreur système Remplacer le module si éteindre/allumer ne résout pas le problème. | ||
| 137 Erreur lors de la configuration interne, module en panne | Contrôler le système d'automatisation et le remplacer si nécessaire. | |
| 138 Erreur lors de la configuration interne, p. ex. :-Module mal monté, enfiché-Module défectueux | Contrôler le montage/la disposition du module (pas de trous dans l'extension du système d'automatisation), contrôler le module et le remplacer si nécessaire. | |
| 139 Erreur lors du traitement des services cycliques (p. ex. paramètres) | Contrôler le programme de commande, contrôler le système d'automatisation et le remplacer si nécessaire. | |
| 140 Matériel défectueux Identifier le module défectueux et le remplacer. | ||
| 141 Dysfonctionnement de la communication interne, le système d'automatisation n'était pas encore en service | Contrôler l'environnement d'application, contrôler le système d'automatisation et le remplacer si nécessaire. | |
| 142 | ||
| 143 Erreur système Remplacer le module si éteindre/allumer ne résout pas le problème. | ||
| 144 Le module ne possède pas de licence valide | Acquérir la licence ou remplacer le module. | |
| 145 ... 149 réservé – | ||
Tab. 24 : Numéros d'erreur (classe d'erreur 2)
| Numéros d'erreur (classe d'erreur 3) | ||
| Numéro-d'erreur | Signification Solution | |
| 150 Erreur système Remplacer le module si éteindre/allumer ne résout pas le problème. | ||
| 151 ... 199 réservé – | ||
Tab. 25 : Numéros d'erreur (classe d'erreur 3)
| Numéros d'erreur (classe d'erreur 1) | ||
| Numéro-d'erreur | Signification Solution | |
| 200 Erreur lors du paramétrage (échec de transmission des paramètres) | Remplacer le module si éteindre/allumer ne résout pas le problème. | |
| 201 Prescription d'adresse erronée Contrôler la position du comptateur DIL et la corriger si nécessaire. | ||
| 202 Initialisation erronée de la puce de proto-cole | Remplacer le module si éteindre/allumer ne résout pas le problème. | |
| 203 réservé – | ||
| 204 Position invalide du commutateur Contrôler la position du comptateur DIL et la corriger si nécessaire. | ||
| 205 ... 253 réservé – | ||
| 254 Sous-tension de l'électronique et des cap-teurs | Éliminer la sous-tension. | |
| 255 Erreur inconnue – | ||
Tab. 26 : Numéros d'erreur (classe d'erreur 1)
3 Paramétrage
Le paramétrage permet d'adapter au cas par cas le fonctionnement du système d'automatisation CPX-E ou celui de modules et de canaux individuels. Le paramétrage peut être réalisé à l'aide d'un logiciel de Festo approprié ou via la commande de niveau supérieur. Les paramètres sont préréglés au départ de l'usine.
i
Les possibilités du paramétrage dépendent du module de bus utilisé ou de la commande utilisée
→ Manuel du module de bus correspondant / de la commande correspondante.
3.1 Paramétrage avec le logiciel de Festo
i
Le logiciel approprié de paramétrage est disponible sur le Support Portal de Festo
→ www.festo.com/sp. Des informations sur l'utilisation du logiciel figurent dans la fonction d'aide intégrée.
3.2 Paramétrage via la commande de niveau supérieur
Différentes possibilités sont disponibles pour paramétrer le système d'automatisation CPX-E via la commande de niveau supérieur.
| Possibilités de paramétrage Description/Avantages | |
| Module d'interface ou scanner/ maître | Le paramétrage peut être garanti p. ex. au cours de la phase Start Up ou après des interruptions du réseau. |
| Programme utilisateur dans la commande de niveau supérieur | Les paramètres peuvent être modifiés pour le temps d'exécution. |
| Configurateurs spécifiques au réseau | Les paramètres peuvent être modifiés lors de la phase de mise en service ou au cours de la recherche d'erreurs. |
Tab. 27 : Possibilités de paramétrage
3.3 Types de paramètres
On distingue les paramètres suivants :
| Type de paramètre Description Aperçu des | paramètres | |
| Paramètres système Influent sur le comportement du système d'auto-matisation CPX-E complet. | → Tab. 29Paramètres système | |
| Paramètres de module (spécifi-ques au module) | Influent sur le comportement d'un module donné. | → Tab. 30Paramètres du module |
| Paramètres de module (spécifi-ques au canal) | Influent sur le comportement d'un canal donné. | |
| Paramètres de la mémoire de diagnostic | Influent sur le mode de travail de la mémoire de diagnostic interne. | → Tab. 31Paramètres dela mémoire de diagnostic |
Tab. 28 : Types de paramètres
| Paramètres système Description | sommaire |
| Surveillance du diagnostic en cas de :-Court-circuit/surcharge-Sous-tension au niveau des sorties | Activation ou désactivation de la surveillance de court-circuit/surcharge et de sous-tension pour l'ensemble du système d'automatisation CPX-E. |
| État du signal en cas de panne (paramètre Fail-safe) | Définit l'état que doivent prendre les signaux de sortie numériques en cas d'erreur de communication du réseau. |
| État du signal en mode Idle^1) | Définit l'état que doivent adopter les signaux de sortie numériques en cas de passage à l'état Idle. |
| Forcer un état de signal (para-mètre Force) | Manipulation des états de signaux indépendamment des états de fonctionnement effectifs et de la commande de niveau supérieur. |
| Démarrage du système Définit le | comportement au démarrage du système d'automatisation CPX-E. |
| Représentation analogique des valeurs de processus (format des données) ^2) | Commute le format des données pour la représentation des valeurs de processus analogiques (signaux I/O). |
1) Cette fonction n'est pertinente qu'avec certains protocoles réseau → Manuel du module de bus correspondant.
2) Paramètre spécial, uniquement disponible avec certains modules de bus
1) Cette fonction n'est pertinente qu'avec certains protocoles réseau → Manuel du module de bus correspondant.
Tab. 29 : Paramètres système
| Paramètres du module Description sommaire | |
| Spécifiques aux modules | |
| Surveillance du diagnostic en cas de :-Court-circuit/surcharge-Sous-tension-Rupture de fil | Activation ou désactivation la surveillance de court-circuit/sur-charge et du manque de tension au niveau du module. |
| Comportement après :- Court-circuit/surcharge- Rupture de fil | Définit si en cas de court-circuit/surcharge ou de rupture de fil la tension correspondante reste coupée ou si elle est à nouveau activée de manière automatique. |
| Temps anti-rebond à l'entrée Permet la détection parfaite de signaux d'entrée numériques. | |
| Temps de prolongation des signaux | Permet de détecter les signaux courts. |
| Format des données Valeurs analogiques | → Manuel du module analogique correspondant |
| spécifiques au canal | |
| Prolongation des signaux Permet | de détecter les signaux courts. |
| Surveillance rupture de fil Permet | de détecter les erreurs de connexion. |
| Fault mode Définit l’état que doit | adopter le canal correspondant en cas d’erreur de communication du réseau. |
| Fault state | |
| Idle mode1) | Définit l’état que doivent adopter les signaux de sortie numériques en cas d’activation de la fonction Idle. |
| Idle state1) | |
| Force mode Les signaux effectifs | sont remplacés dans l’image du processus par les réglages Force. |
| Force state | |
Tab. 30 : Paramètres du module
| Paramètres de la mémoire de diagnostic | Description sommaire |
| Enregistrements rémanents Définit si le contenu de la mémoire de diagnostic est effacé ou non après un redémarrage. | |
| Filtre de la mémoire de diagnostic :-Filtre Run/Stop 1 + 2-Filtre de fin d'erreur-Filtre de numéro d'erreur-Filtre de module/canal | Les filtres de la mémoire diagnostic permettent de supprimer l'enregistrement de messages d'erreurs et de démarrer ou d'arrêter l'enregistrement d'erreurs. |
Tab. 31 : Paramètres de la mémoire de diagnostic
3.4 Paramètres et données du système d'automatisation CPX-E
3.4.1 Vue d'ensemble
| Paramètre Description | |
| Paramètres système Définissent des fonctions système globales pour l’ensemble du système d'automatisation, p. ex. :-Surveillance du diagnostic-Démarrage du système | |
| Paramètres de module Définissent des fonctions spécifiques au module et au canal pour le module concerné, p. ex. :-Temps de correction à l’entrée-Temps de prolongation des signaux | |
| Paramètres de la mémoire de diagnostic | Définissent la méthode de travail de la mémoire de diagnostic |
Tab. 32 : Vue d'ensemble des paramètres
| Données Description | |
| Données de diagnostic système | Informations globales sur l’état du système (p. ex. numéro d’erreur, mes-sage de diagnostic collectif) |
| Données de diagnostic de module | Informations sur la localisation des erreurs (p. ex. numéro d’erreur, numéro du premier canal défectueux) |
| Données de la mémoire de diagnostic | Entrées dans la mémoire de diagnostic (40 max.) |
| Données système Informations relatives aux réglages système globaux | |
| Données de module Numéro de série, code de révision et code de module des modules utilisés | |
Tab. 33 : Vue d'ensemble des données
3.4.2 Numéros de fonction
| Numéro de fonction1) | Description Données/paramètre Voir chapitre | ||
| 0 Démontage | Données système | → 3.12.1 | |
| Force mode | Données système | → 3.12.2 | |
| Démarrage du système | Données système | → 3.12.3 | |
| 1 Fail safe | Données système | → 3.12.4 | |
| Idle mode | Données système | → 3.12.5 | |
| 2 Surveillance | système Données système | → 3.12.6 | |
| 16 + 16m + 0 | Code de module Données de module | → 3.13.1 | |
| Numéro de fonction1) | Description Données/paramètre Voir chapitre | ||
| 16 + 16m + 13 | Code de révision Données de module | → 3.13.2 | |
| 784 + 4m + 0 ... 3 | Numéro de série Données de module | → 3.13.3 | |
| 1936 Bits d'état | Données de diagnostic système | → 3.10.1 | |
| 1937 Numéro | de module et état de diagnostic | Données de diagnostic système | → 3.10.2 |
| 1938 Numéro | d'erreur Données de diagnostic système | → 3.10.3 | |
| 2008 + 4m + 0 | Numéro du premier canal défectueux | Données de diagnostic de module | → 3.11.1 |
| 2008 + 4m + 1 | Numéro d'erreur de module Données de diagnostic de module | → 3.11.2 | |
| 2008 + 4m + 2 | Info 2 (réservé) Données de diagnostic de module | → 3.11.3 | |
| 2008 + 4m + 3 | Info 3 (réservé) Données de diagnostic de module | → 3.11.3 | |
| 3480 Entrées | rémanentes lors de la mise sous tension (Power On) | Paramètres de la mémoire de diagnostic | → 3.8.1 |
| Filtre Run/Stop 1 Paramètres de la mémoire de diagnostic | → 3.8.2 | ||
| 3482 Nombre | d'entrées dans la mémoire de diagnostic | Données de la mémoire de diagnostic | → 3.9.1 |
| 3483 Dépassement de capacité Données de la mémoire de diagnostic | → 3.9.2 | ||
| État Données de la mémoire de diagnostic | → 3.9.3 | ||
| 3484 Filtre Run/Stop 2 Paramètres de la mémoire de diagnostic | → 3.8.3 | ||
| Filtre de fin d'erreur Paramètres de la mémoire de diagnostic | → 3.8.4 | ||
| Filtre de numéro d'erreur Paramètres de la mémoire de diagnostic | → 3.8.5 | ||
| Filtre module/canal Paramètres de la mémoire de diagnostic | → 3.8.6 | ||
| 3485 Numéro | de module Paramètres de la mémoire de diagnostic | → 3.8.7 | |
| 3486 Numéro | de canal Paramètres de la mémoire de diagnostic | → 3.8.8 | |
| 3487 Numéro | d'erreur Paramètres de la mémoire de diagnostic | → 3.8.9 | |
| 3488 + 10d + 0 ... 92) | Mémoire de diagnostic | Données de la mémoire de diagnostic | → 3.9.4 |
| 4401 Surveillance | ance Paramètres système | → 3.5.1 | |
| 4402 Fail safe | Paramètres système | → 3.5.2 | |
| Force mode Paramètres système | → 3.5.3 | ||
| Idle mode Paramètres système | → 3.5.4 | ||
| Démarrage du système Paramètres système | → 3.5.5 | ||
| Représentation analogique des valeurs de processus | Paramètres système | → 3.5.6 | |
| 4828 + 64m + 0 | Surveillance module Paramètres de module (spécifiques au module) | → 3.6.1 | |
| 4828 + 64m + 1 | Comportement après court-circuit/surcharge | Paramètres de module (spécifiques au module) | → 3.6.2 |
| Temps anti-rebond à l'entrée | Paramètres de module (spécifiques au module) | → 3.6.3 | |
| Temps de prolongation des signaux | Paramètres de module (spécifiques au module) | → 3.6.4 | |
| 4828 + 64m + 3 | Format de données Valeur analogique Entrées | Paramètres de module (spécifiques au module) | → 3.6.5 |
| Format de données Valeur analogique Sorties | Paramètres de module (spécifiques au module) | ||
| 4828 + 64m + 6 | Prolongation des signaux canal x | Paramètres de module (spécifiques au canal) | → 3.7.1 |
| - 3) | Fail safe canal x Paramètres de module (spécifiques au canal) | → 3.7.2 | |
| Idle mode canal X Paramètres de module (spécifiques au canal) | → 3.7.3 | ||
| Forçage canal x Paramètres de module (spécifiques au canal) | → 3.7.4 | ||
| Numéro de fonction1) | Description Données/paramètre Voir chapitre | ||
| -4) | Nombre d'octets d'entrée (Rx size) | Données système (spécifiques au réseau) | - |
| Nombre d'octets de sortie (Tx size) | Données système (spécifiques au réseau) | - | |
1) m = numéro de module (numérotation de gauche à droite en partant de 0)
2) d = événement de diagnostic
3) L'accès s'effectue en fonction du protocole → Manuel du module de bus
4) Significatif seulement pour certains protocoles réseau→ Manuel du module de bus
Tab. 34 : Numéros de fonction
3.5 Paramètres système
3.5.1 Surveillance
Activer ou désactiver (supprimer) la surveillance de court-circuit/surcharge et de sous-tension pour le système d'automatisation complet.
Valeurs : 1 = actif (réglage par défaut) ; 0 = inactif
En cas de surveillance active, une erreur signalée par un module est :
-envoyée au maître de niveau supérieur
-est enregistrée dans la mémoire de diagnostic (en fonction des paramétrages de filtres)
- est saisie dans les données de diagnostic du module et, si nécessaire, dans les bits d'état
- indiquée sur le module par la LED rouge d'erreur générale
| Paramètre système – Surveillance Sélection par paramètres | |||||||||
| N° de f.1)4401 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Court-circuit/surcharge alimentation des capteurs (CCSA) | % | ||||||||
| Court-circuit/surcharge des sorties (CCSS) | % | ||||||||
| Sous-tension sorties (UOUT) | % | ||||||||
1) Numéro de fonction
Tab. 35 : Paramètre système – Surveillance
i
La surveillance peut également être configurée séparément pour chaque module via le paramètre de module « Surveillance module » → 3.6.1 Surveillance module. Le mode de fonctionnement de la LED d'erreur du canal reste inchangé.
3.5.2 Fail safe
Le paramètre système « Fail safe » définit quel état de signal les sorties doivent adopter en cas d'erreurs de communication du réseau, p. ex. en cas d'interruption du réseau, de défaillance de la commande de niveau supérieur, d'arrêt de la communication.
| Paramètre système – Fail safe Sélection par paramètres | |||||||||
| N° de f.1)4402 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Réinitialiser toutes les sorties (réglage par défaut) 0 0 | |||||||||
| Hold last state (maintenir l'état du signal) 0 1 | |||||||||
| Accepter Fault mode 1 0 | |||||||||
1) Numéro de fonction
Tab. 36 : Paramètre système – Fail safe
i
Lors du passage d'Adopter « Fault mode » vers « Réinitialiser toutes les sorties » ou vers « Hold last state », par mesure de sécurité, les réglages Fail-safe relatifs au canal (paramètres de module « Fault mode » et « Fault state ») sont automatiquement réinitialisés pour éviter les états de signaux indésirables. L'état Fault-mode est configuré avec les paramètres du module spécifiques au canal
→ 3.7.2 Fail safe canal x.
3.5.3 Force mode
Le paramètres système « Force mode » définit pour le système complet si la fonction Forçage est bloqué ou approuvée.
| Paramètre système – Force mode Sélection par paramètres | |||||||||
| N° de f.1)4402 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Force mode bloqué (réglage par défaut) 0 0 | |||||||||
| Force mode approuvé (maintenir l'état du signal) 0 1 | |||||||||
1) Numéro de fonction
Tab. 37 : Paramètre système – Force mode
i
En cas de modification de ce paramètre, par mesure de sécurité, les réglages Force relatifs au canal (paramètres de module « Force mode » et « Force state ») sont automatiquement réinitialisés afin d'éviter des états indésirables des signaux et ce, dans les cas suivants :
- Modification à l'aide d'un logiciel de Festo : en cas de passage de "approuvé" à "bloqué"
- Modification via le réseau : en cas de passage de "bloqué" à "approuvé"
Les signaux Force ont priorité sur les signaux Fail Safe.
3.5.4 Idle mode
Le paramètre système « Idle mode » définit l'état de signal que doivent adopter les sorties lors du passage du système à l'état Idle.
| Paramètres système – Idle mode1) | Sélection par paramètres | ||||||||
| N° de f.2)4402 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Réinitialiser toutes les sorties (réglage par défaut) 0 0 | |||||||||
| Hold last state (maintenir l'état du signal) 0 1 | |||||||||
| Accepter Idle mode 1 0 | |||||||||
1) Ce paramètre n'est pertinent qu'avec certains protocoles réseau → Manuel du module de bus correspondant.
2) Numéro de fonction
Tab. 38 : Paramètres système – Idle mode
i
Lors du passage de Accepter « Idle mode » vers « Réinitialiser toutes les sorties » ou vers « Hold last state », par mesure de sécurité, les réglages Idle-mode relatifs au canal (paramètre de module « Idle mode » et « Idle state ») sont automatiquement réinitialisés pour éviter des états de signaux indésirables.
3.5.5 Démarrage du système
Le paramètre système « Démarrage du système » définit le comportement au démarrage du système et enregistre tous les réglages des paramètres actuels ainsi que l'extension actuelle.
| Paramètre système – Démarrage du système Sélection par paramètres | ||||||||
| N° de f.1)4402 | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| Démarrage système avec paramétrage par défaut (réglage d’usine) et extension CPX actuelle ; paramétrage externe (réglage par défaut) possible | 0 | |||||||
| Démarrage système avec paramétrage enregistré et extension CPX enregistrée ; les paramètres et l’extension sont enregistrés de manière rémanente ; le paramétrage externe est bloqué ; la LED Modify (M) du module de bus est allumée | 1 | |||||||
1) Numéro de fonction
Tab. 39 : Paramètre système – Démarrage du système
i
Lorsque le bit 6 est posé sur 1, la configuration actuelle des paramètres est protégée en écriture et l'extension actuelle est enregistrée, à l'exception du bit 6 et des paramètres de module « Forçage canal X ».
Recommendation :
Démarrage du système avec paramétrage par défaut et extension CPX actuelle". Le paramétrage souhaité peut alors être établi p. ex., par le module d'interface ou le scanner/maître au cours de la phase de Start-Up ou après une interruption du bus de terrain/réseau (en fonction du réseau utilisé). Si "Démarrage du système avec paramétrage par défaut et extension CPX actuelle", après la mise hors marche et en marche, les réglages à l'usine sont valables pour tous les paramètres de module et système.
3.5.6 Représentation analogique des valeurs de processus
Le paramètre système « Représentation analogique des valeurs de processus » commute le format des données ou la séquence d'octets pour la représentation de valeurs de processus analogiques.
| Paramètres système – Représentation analogique des valeurs de processus1) | Sélection par paramètres | ||||||||
| N° de f.2)4402 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Séquence des octets Format INTEL (réglage par défaut) : Bit de poids faible à gauche, bit de poids fort à droite (LSB-MSB)3) | 0 | ||||||||
| Séquence des octets Format MOTOROLA : Bit de poids fort à gauche, bit de poids faible à droite (MSB-LSB)3) | 1 | ||||||||
1) Ce paramètre n'est pertinent qu'avec certains modules de bus → Manuel du module de bus correspondant.
2) Numéro de fonction
3) LSB = Bit le moins significatif ; MSB = Bit le plus significatif
Tab. 40 : Paramètres système – Représentation analogique des valeurs de processus
3.6 Paramètres de module (spécifiques au module)
Les paramètres de module se rapportent à des fonctions spécifiques au module ou au canal.
Pour chaque module, on dispose de 64 octets pour les paramètres.
i
Le manuel du module correspondant comporte de plus amples informations sur les paramètres de module pris en charge par le module ainsi que sur les valeurs de paramètre et leurs pré-réglages.
3.6.1 Surveillance module
Il est possible, pour chaque module, d'activer ou de désactiver (supprimer) séparément la surveillance des erreurs pouvant survenir.
Valeurs : 1 = actif (réglage par défaut) ; 0 = inactif
En cas de surveillance active, une erreur est :
- envoyée au module de bus
- indiquée par la LED d'erreur générale du module
| Paramètre de module – Surveillance du module | Sélection par paramètres | ||||||||
| N° de f.1)4828 +64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Court-circuit/surcharge alimentation des cap-teurs (CCSA) | + 0 | %1 | |||||||
| Court-circuit/surcharge des sorties (CCSS) + 0 | %1 | ||||||||
| Sous-tension sorties (UOUT) + 0 | %1 | ||||||||
| Surveillance des erreurs de paramétrage + 0 | %1 | ||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 41 : Paramètre de module – Surveillance du module
i
La surveillance se règle aussi pour le système d'automatisation complet via le paramètre système « Surveillance » → 3.5.1 Surveillance.
3.6.2 Comportement après court-circuit/surcharge
Le paramètre de module « Comportement après court-circuit/surcharge » définit si, en cas de court-circuit/surcharge de l'alimentation des capteurs ou des sorties, la tension correspondante reste coupée ou si elle est restaurée de manière automatique.
Valeurs : 1 = rétablir la tension ; 0 = la tension reste coupée
| Paramètre de module – Comportement après court-circuit/surcharge | Sélection par paramètres | ||||||||
| N° de f.1)4828 +64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Court-circuit/surcharge alimentation des cap-teurs (CCSA) | + 1 | %1 | |||||||
| Court-circuit/surcharge des sorties (CCSS) + 1 | %1 | ||||||||
| Court-circuit/surcharge du signal analogique + 1 | %1 | ||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 42 : Paramètre de module – Comportement après court-circuit/surcharge
i
Lorsqu'on sélectionne le réglage "La tension reste coupée", il faut éteindre puis rallumer le système ou réinitialiser/poser le signal correspondant pour rétablir la tension.
3.6.3 Temps anti-rebond à l'entrée
Le paramètre de module « Temps anti-rebond à l'entrée » définit quand, sur le module correspondant, un changement de front du signal capteur doit être repris comme signal d'entrée logique.
| Paramètre de module – Temps anti-rebond à l'entrée | Sélection par paramètres | ||||||||
| N° de f.1)4828 + 64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Temps anti-rebond à l'entrée 0,1 ms + 1 0 0 | |||||||||
| Temps anti-rebond à l'entrée 3 ms (réglage par défaut typique) | + 1 0 1 | ||||||||
| Temps anti-rebond à l'entrée 10 ms + 1 1 0 | |||||||||
| Temps anti-rebond à l'entrée 20 ms + 1 1 1 | |||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 43 : Paramètre de module – Temps anti-rebond à l'entrée
T
Pour de plus amples informations concernant ce paramètre → Manuel du module correspondant.
3.6.4 Temps de prolongation des signaux
Le paramètre de module définit le temps de prolongation des signaux pour les différents modules correspondants.
Les états de signaux repris en tant que signal d'entrée logique sont valables tant que le temps de prolongation des signaux (durée minimale des signaux) défini n'est pas écoulé. Les changements de fronts intervenant pendant le temps de prolongation sont ignorés.
| Paramètre de module – Temps de prolongation des signaux | Sélection par paramètres | ||||||||
| N° de f.1)4828 +64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Temps de prolongation des signaux 0,5 ms + 1 0 0 | |||||||||
| Temps de prolongation des signaux 15 ms(réglage par défaut typique) | + 1 0 1 | ||||||||
| Temps de prolongation des signaux 50 ms + 1 1 0 | |||||||||
| Temps de prolongation des signaux 100 ms + 1 1 1 | |||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 44 : Paramètre de module – Temps de prolongation des signaux
i
Le temps de prolongation des signaux peut être activé pour chaque canal → 3.7.1 Prolongation des signaux canal x.
Pour de plus amples informations concernant ce paramètre → Manuel du module correspondant.
3.6.5 Format de données valeur analogique entrées/sorties
Le paramètre de module « Format de données valeur analogique entrées / sorties » définit le format des données avec lequel les valeurs analogiques correspondantes doivent être traitées en interne (valeurs → Manuel du module correspondant).
Le choix du format de données dépend du réseau ou du maître utilisé et facilite l'évaluation de valeurs analogiques.
| Paramètre de module – Format de données valeur analogique entrées / sorties | Sélection par paramètres | ||||||||
| N° de f.1)4828 +64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Format de données Valeur analogique Entrées + | 3 | % | % | ||||||
| Format de données Valeur analogique Sorties + | 3 | % | % | ||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 45 : Paramètre de module – Format de données valeur analogique entrées / sorties
3.7 Paramètres de module (spécifiques au canal)
3.7.1 Prolongation des signaux canal x
Le paramètre de module définit si la prolongation des signaux est approuvée ou bloquée pour le canal correspondant.
Valeurs : 1 = approuvé ; 0 = bloqué
Le temps de prolongation des signaux peut être défini séparément pour chaque module → 3.6.4
Temps de prolongation des signaux.
| Paramètre de module – Prolongation des signaux canal x | Sélection par paramètres | ||||||||
| N° de f.1)4828 +64m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Prolongation des signaux canal 0 + 6 | % | ||||||||
| Prolongation des signaux canal 1 + 6 | % | ||||||||
| Prolongation des signaux canal 2 + 6 | % | ||||||||
| Prolongation des signaux canal 3 + 6 | % | ||||||||
| Prolongation des signaux canal 4 + 6 | % | ||||||||
| Prolongation des signaux canal 5 + 6 | % | ||||||||
| Prolongation des signaux canal 6 + 6 | % | ||||||||
| Prolongation des signaux canal 7 + 6 | % | ||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 46 : Paramètre de module – Prolongation des signaux canal x
3.7.2 Fail safe canal x
Le paramétrage Fail-safe permet de définir l'état de signal que les sorties doivent adopter en cas d'erreur de communication → 2.2.4 État du signal en cas de perturbation (Fail safe)
| Paramètre de module – Fail safe canal x Sélection par paramètres | ||
| Fault mode canal x Hold | last state L'accès s'effectu | e via des fonctions spécifiquesau protocole → Manuel du module de bus. |
| Fault state (réglage par défaut) | ||
| Fault state canal x Réiniti | aliser la sortie(préréglage) | |
| Activer sortie | ||
Tab. 47 : Paramètre de module – Fail safe canal x
3.7.3 Idle mode canal X
Le paramétrage Idle mode permet de définir l'état de signal que doivent adopter les sorties lors du passage à l'état Idle → 2.2.5 État du signal dans l'état Idle (Idle mode)
| Paramètre de module – Idle mode canal x^1) | Sélection par paramètres | |
| Idle mode canal x Hold last state L'accès s'effectue | via des fonctions spécifiquesau protocole → Manuel du module de bus. | |
| Idle state canal x Réinitialiser la sortie(préréglage) | ||
1) n'est pas pris en charge par tous les modules de bus
Tab. 48 : Paramètre de module – Idle mode canal x
La fonction Forcen permet de manipuler les états d'un signal indépendamment des états de fonctionnement effectifs → 2.2.3 Forçage
| Paramètre de module – Forçage canal x Sélection | par paramètres | |
| Force mode Entrées canal x | bloqué (réglage par défaut) | L'accès s'effectue via des fonctions spécifiques au protocole → Manuel du module de bus. |
| Force state | ||
| Force state Entrées canal x | Activer le signal | |
| Réinitialiser le signal (réglage par défaut) | ||
| Force mode Sorties canal x | bloqué (réglage par défaut) | |
| Force state | ||
| Force state Sorties canal x | Activer le signal | |
| Réinitialiser le signal (réglage par défaut) | ||
Tab. 49 : Paramètre de module – Forçage canal x
3.8 Paramètre de mémoire de diagnostic (Trace parameter)
Les paramètres de mémoire de diagnostic permettent d'adapter la méthode de travail de la mémoire de diagnostic aux différentes exigences. Après la mise hors circuit/en circuit de l'alimentation, les paramètres de mémoire de diagnostic conservent le dernier réglage effectué et sont enregistrées de manière non volatile.
i
Plus d'informations sur le fonctionnement de la mémoire de diagnostic → 2.3.4 Mémoire de diagnostic.
3.8.1 Entrées rémanentes lors de la mise sous tension (Power On)
Définit si le contenu de la mémoire de diagnostic est effacé ou non après un redémarrage.
Valeurs : 1 = actif (réglage par défaut) ; 0 = inactif
Lors du changement de mode, la mémoire de diagnostic est effacée.
| Paramètre de la mémoire de diagnostic –Entrées enregistrées de manière rémanente au Power ON | Sélection par paramètres | ||||||||
| N° de f.1)3480 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Entrées enregistrées de manière rémanente au redémar-rage | % | ||||||||
1) Numéro de fonction
Tab. 50 : Paramètre de la mémoire de diagnostic – Entrées enregistrées de manière rémanente au Power ON
3.8.2 Filtre Run/Stop 1
Filtre de la mémoire de diagnostic déterminant si les 40 premières ou les 40 dernières erreurs doivent être enregistrées.
Lors du changement de mode, la mémoire de diagnostic est effacée.
| Paramètre de la mémoire de diagnostic – Filtre Run/Stop 1 | Sélection par paramètres | ||||||||
| N° de f.1)3480 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Enregistrement des 40 premières entrées ; arrêt après 40 entrées | 0 | ||||||||
| Enregistrement des 40 dernières entrées ; écraser les anciennes entrées (réglage par défaut) | 1 | ||||||||
1) Numéro de fonction
Tab. 51 : Paramètre de la mémoire de diagnostic – Filtre Run/Stop 1
3.8.3 Filtre Run/Stop 2
Filtre de la mémoire diagnostic permettant de déterminer à quel moment il faut commencer ou arrêter l'enregistrement des erreurs.
| Paramètre de la mémoire de diagnostic – Filtre Run/Stop 21) | Sélection par paramètres | ||||||||
| N° de f.2)3484 | Bit | ||||||||
| 765 | 432 | 10 | |||||||
| Filtre Run/Stop 2 inactif (réglage par défaut) 0 0 0 | |||||||||
| Enregistrer jusqu’au NE défini 0 0 1 | |||||||||
| Enregistrer jusqu’aux NE + NM définis 0 1 0 | |||||||||
| Enregistrer jusqu’aux NE + NM + NC définis 0 1 1 | |||||||||
| enregistrer à partir du NE défini 1 0 0 | |||||||||
| Enregistrer à partir des NE + NM définis 1 0 1 | |||||||||
| Enregistrer à partir des NE + NM + NC définis 1 1 0 | |||||||||
| réservé 1 1 1 | |||||||||
1) NM = numéro de module ; NC = numéro de canal ; NE = numéro d'erreur
2) Numéro de fonction
Tab. 52 : Paramètre de la mémoire de diagnostic – Filtre Run/Stop 2
i
Les différents numéros sont définis par les paramètres de mémoire de diagnostic « Numéro de module » (→ 3.8.7 Numéro de module), « Numéro de canal » (→ 3.8.8 Numéro de canal) et « Numéro d'erreur » (→ 3.8.9 Numéro d'erreur).
3.8.4 Filtre de fin d'erreur
Filtre de la mémoire diagnostic permettant de déterminer si les erreurs sortantes doivent être enregistrées ou non.
| Paramètre de mémoire de diagnostic – Filtre de fin d'erreur | Sélection par paramètres | ||||||||
| N° de f.1)3484 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Enregistrer les erreurs sortantes (fin de l'erreur) ; filtre inactif (réglage par défaut) | 0 | ||||||||
| Ne pas enregistrer les erreurs sortantes (fin de l'erreur) ; filtre actif | 1 | ||||||||
1) Numéro de fonction
Tab. 53 : Paramètre de mémoire de diagnostic – Filtre de fin d'erreur
i
L'enregistrement des erreurs sortantes permet de savoir pendant combien de temps une erreur a persisté. Les erreurs entrantes et sortantes représentent respectivement une entrée. Les erreurs sortantes sont caractérisées par le numéro d'erreur "0". 40 entrées max. sont enregistrées.
3.8.5 Filtre de numéro d'erreur
Ce filtre de mémoire de diagnostic permet de supprimer l'enregistrement d'un message d'erreur précis ou d'enregistrement exclusivement un message d'erreur précis.
| Paramètre de mémoire de diagnostic – Filtre de numéro d'erreur | Sélection par paramètres | ||||||||
| N° de f.1)3484 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Filtre de numéro d'erreur désactivé (réglage par défaut) 0 0 | |||||||||
| n'enregistrer que les numéros d'erreur définis 0 1 | |||||||||
| Ne pas enregistrer de numéros d'erreur définis 1 0 | |||||||||
| réservé 1 1 | |||||||||
1) Numéro de fonction
Tab. 54 : Paramètre de mémoire de diagnostic – Filtre de numéro d'erreur
i
Les différents numéros sont définis via le paramètre de mémoire de diagnostic « Numéro d'erreur »
(→ 3.8.9 Numéro d'erreur).
3.8.6 Filtre de module/canal
Pour analyser les erreurs d'un module ou d'un canal donné, ce filtre de la mémoire de diagnostic permet de supprimer l'enregistrement des erreurs d'autres modules ou canaux.
| Paramètre de mémoire de diagnostic – Filtre module / canal | Sélection par paramètres | ||||||||
| N° de f.1)3484 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Filtre de module/canal désactivé (réglage par défaut) 0 0 | |||||||||
| N'enregistrer que le numéro d'erreur d'un module 0 1 | |||||||||
| n'enregistrer que le numéro d'erreur d'un canal 1 0 | |||||||||
| réservé 1 1 | |||||||||
1) Numéro de fonction
Tab. 55 : Paramètre de mémoire de diagnostic – Filtre module / canal
T
Les différents numéros sont définis via le paramètre de mémoire de diagnostic « Numéro de module » (→ 3.8.7 Numéro de module) et « Numéro de canal » (→ 3.8.8 Numéro de canal).
3.8.7 Numéro de module
Numéro de module pour le filtre de la mémoire de diagnostic.
N'est efficace que si un filtre de mémoire de diagnostic correspondant est activé.
| Paramètre de mémoire de diagnostic – Numéro de module | Sélection par paramètres | ||||||||
| N° de f.1)3485 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro de module 0 ... 47 (0 = préréglage) | %1 | %1 | %1 | %1 | %1 | %1 | |||
1) Numéro de fonction
Tab. 56 : Paramètre de mémoire de diagnostic – Numéro de module
3.8.8 Numéro de canal
Numéro de canal pour le filtre de la mémoire de diagnostic.
N'est efficace que si un filtre de mémoire de diagnostic correspondant est activé.
| Paramètre de mémoire de diagnostic – Numéro de canal | Sélection par paramètres | ||||||||
| N° de f.1)3486 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro de canal 0 ... 63 (0 = préréglage) | %1 | %1 | %1 | %1 | %1 | %1 | |||
1) Numéro de fonction
Tab. 57 : Paramètre de mémoire de diagnostic – Numéro de canal
3.8.9 Numéro d'erreur
Numéro d'erreur pour le filtre de la mémoire de diagnostic.
N'est efficace que si un filtre de mémoire de diagnostic correspondant est activé.
| Paramètre de mémoire de diagnostic – Numéro d'erreur | Sélection par paramètres | ||||||||
| N° de f.1)3487 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro d'erreur 0 ... 255 (0 = préréglage) | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction
Tab. 58 : Numéro d'erreur 0 ... 255 (0 = préréglage)
3.9 Données de la mémoire de diagnostic
3.9.1 Nombre d'entrées dans la mémoire de diagnostic
Indique le nombre d'entrées dans la mémoire de diagnostic. Peut être utilisé comme compteur de boucles si l'ensemble de la mémoire de diagnostic doit être lue via un programme API.
| Données de mémoire de diagnostic – Nombre d'entrées dans la mémoire de diagnostic | Sélection par paramètres | ||||||||
| N° de f.1)3482 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Nombre d'entrées dans la mémoire de diagnostic(0 ... 40) | %1 | %1 | %1 | %1 | %1 | %1 | |||
1) Numéro de fonction
Tab. 59 : Données de mémoire de diagnostic – Nombre d'entrées dans la mémoire de diagnostic
3.9.2 Dépassement de capacité
Indique si la capacité de la mémoire de diagnostic a été dépassée. Un trop-plein signifie que plus de 40 erreurs sont survenues.
Le trop-plein est indiqué aussi bien lors de l'enregistrement des 40 premières erreurs que lors de l'enregistrement des 40 dernières erreurs.
| Données de mémoire de diagnostic – Dépassement de capacité | Sélection par paramètres | ||||||||
| N° de f.1)3483 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Pas de dépassement de capacité 0 | |||||||||
| Dépassement de capacité 1 | |||||||||
1) Numéro de fonction
Tab. 60 : Données de mémoire de diagnostic – Dépassement de capacité
3.9.3 État
Indique si l'enregistrement des erreurs est activé ou désactivé. Il est possible d'arrêter ou de lancer l'enregistrement des erreurs à l'aide des filtres Run/Stop.
| Données de mémoire de diagnostic – État Sélection par paramètres | |||||||||
| N° de f.1)3483 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Enregistrement activé 0 | |||||||||
| Enregistrement non activé 1 | |||||||||
1) Numéro de fonction
Tab. 61 : Données de mémoire de diagnostic – État
3.9.4 Mémoire de diagnostic
La mémoire de diagnostic peut contenir 40 entrées de diagnostic max., sachant qu'une entrée de diagnostic fait 10 octets.
Les 5 premiers octets contiennent des informations sur le moment de déclenchement de l'erreur et les 5 derniers octets contiennent des informations sur l'erreur.
1) Numéro de fonction ; d = événement de diagnostic 0 ... 39 ; événement de diagnostic actuel = 0
2) mesuré à partir de la mise en circuit de l'alimentation électrique
Tab. 62 : Données de la mémoire de diagnostic – Mémoire de diagnostic
| Données de mémoire de diagnostic – Mémoire de diagnostic (10 octets par entrée, 40 entrées) | Sélection par paramètres | ||||||||||
| Octet | Description Valeur N° de | f.1)3488 + 10d | Bit | ||||||||
| 7 6 5 | 4 3 | 2 1 0 | |||||||||
| 1 JoursNombre de jours2) | 0 ... 255 + 0 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | ||
| 2 HeuresNombre d'heures2) | 0 ... 23 + 1 | %1 | %1 | %1 | %1 | %1 | |||||
| 3 MinutesNombre de minutes2) | 0 ... 59 + 2 | %1 | %1 | %1 | %1 | %1 | %1 | ||||
| 4 SecondesNombre de secondes2) | 0 ... 59 + 3 | %1 | %1 | %1 | %1 | %1 | %1 | ||||
| 5 MillisecondesNombre de 10 millisecondes2)Le bit 7 est également posés'il s'agit de la première entréeaçrès une remise sous tension. | 0 ... 99ou128 ... 227 | +4 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
| 6 Code de moduleCode de module du moduleayant signalé l'erreur | 0 ... 255 + 5 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | ||
| Données de mémoire de diagnostic - Mémoire de diagnostic (10 octets par entrée, 40 entrées) | Sélection par paramètres | ||||||||||
| Octet | Description Valeur N° de | f.1)3488 + 10d | Bit | ||||||||
| 7 6 5 | 4 3 | 2 1 0 | |||||||||
| 7 Position du moduleNuméro de module du module ayant signalé l'erreur ;63 = erreur non liée au module | 0 ... 47;63 | + 6 | %1 | %1 | %1 | %1 | %1 | %1 | |||
| 8 Numéro du premier canal de sortie défectueux(bits 0 ... 5 ; valeurs 0 ... 63) | 0 ... 255 + 7 | 0 0 | %1 | %1 | %1 | %1 | %1 | %1 | |||
| 1 | 0 | %1 | %1 | %1 | %1 | %1 | %1 | ||||
| 0 | 1 | %1 | %1 | %1 | %1 | %1 | %1 | ||||
| %1 | %1 | %1 | %1 | %1 | %1 | ||||||
| 9 Numéro d'erreur (messages d'erreur possibles ➔ 2.3.5Classes d'erreurs) | 0 ... 255 + 8 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | ||
| 10 Canaux consécutifsNombre de canaux consécutifs correspondants avec la même erreur | 0 ... 63 + 9 | %1 | %1 | %1 | %1 | %1 | %1 | ||||
T
Si le numéro d'erreur = 0 : le contenu de ces octets est également 0.
Si le numéro d'erreur est entre 128 ... 199 (classe d'erreur 3) : le contenu de ces octets n'est pas pertinent (cas SAV).
3.10 Données de diagnostic système
3.10.1 Bits d'état
Les 8 bits d'état indiquent des messages de diagnostic collectifs.
- Bit 0 ... 3 : source d'erreur
- Bit 4 ... 7 : type d'erreur
Valeurs : 1 = erreur présente ; 0 = aucune erreur
| Données de diagnostic système – Bits d'état Sélection par paramètres | ||||||||
| N° de f.1)1936 | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| Distributeur | % | |||||||
| Sortie | % | |||||||
| Entrée | % | |||||||
| Module analogique/technologique | % | |||||||
| Sous-tension | % | |||||||
| Court-circuit/surcharge | % | |||||||
| Rupture de fil | % | |||||||
| Autre erreur | % | |||||||
1) Numéro de fonction
Tab. 63 : Données de diagnostic système – Bits d'état
3.10.2 Numéro de module et état de diagnostic
Indique si des données de diagnostic existent et contient le cas échéant le numéro du premier module sur lequel une erreur est survenue.
Valeurs : 1 = présence de données de diagnostic ; 0 = absence de données de diagnostic
Le numéro du module défectueux permet de connaître le numéro de fonction des données de diagnostic correspondantes.
| Données de diagnostic système – Numéro de module et état de diagnostic | Sélection par paramètres | ||||||||
| N° de f.1)1937 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro de module du premier module défectueux(0 ... 47) | %1 | %1 | %1 | %1 | %1 | %1 | |||
| État de diagnostic | %1 | ||||||||
1) Numéro de fonction
Tab. 64 : Données de diagnostic système – Numéro de module et état de diagnostic
3.10.3 Numéro d'erreur
Numéro d'erreur actuel (messages d'erreur possibles → 2.3.6 Numéros d'erreur).
Le numéro de fonction 1937 indique s'il existe des données de diagnostic → 3.10.2 Numéro de module et état de diagnostic.
| Données de diagnostic système – Numéro d'erreur | Sélection par paramètres | ||||||||
| N° de f.1)1938 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro d'erreur (0 ... 255) | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction
Tab. 65 : Données de diagnostic système – Numéro d'erreur
3.11 Données de diagnostic de module
Les données de diagnostic du module sont attribuées aux numéros de fonction 2008 ... 2199. Pour chaque module, il existe 4 informations de diagnostic se trouvant dans 4 octets successifs.
Le numéro de fonction des données diagnostic du module défectueux se calcule comme suit :
- Numéro de fonction = 2008 + (4 x numéro de module) + numéro d'information
i
Il est possible de connaître le numéro du premier module défectueux à l'aide des données de diagnostic système (numéro de fonction 1937) → 3.10.2 Numéro de module et état de diagnostic.
3.11.1 Numéro du premier canal défectueux
Indique le numéro du premier canal défectueux.
| Données de diagnostic de module – Numéro du premier canal défectueux | Sélection par paramètres | ||||||||
| N° de f.1)2008 + 4m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro de canal (0 ... 63) + 0 | %1 | %1 | %1 | %1 | %1 | %1 | |||
| Numéro du premier canal de sortie défectueux + 0 0 0 | |||||||||
| Numéro du premier canal d'entrée défectueux + 0 1 0 | |||||||||
| Erreur de module + 0 0 1 | |||||||||
| réservé + 0 1 1 | |||||||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 66 : Données de diagnostic de module – Numéro du premier canal défectueux
3.11.2 Numéro d'erreur
Numéro d'erreur (messages d'erreur possibles → 2.3.5 Classes d'erreurs)
| Données de diagnostic de module – Numéro d'erreur | Sélection par paramètres | ||||||||
| N° de f.1)2008 + 4m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Numéro d'erreur (0 ... 255) + 1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 67 : Données de diagnostic de module – Numéro d'erreur
3.11.3 Info 2 et 3 (réservés)
| Données de module de diagnostic – Info 2(réservé) | Sélection par paramètres | ||||||||
| N° de f.1)2008 +4m | Bit | ||||||||
| 765 | 432 | 10 | |||||||
| réservé + 2 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 68 : Données de module de diagnostic – Info 2 (réservé)
| Données de module de diagnostic – Info 3(réservé) | Sélection par paramètres | ||||||||
| N° de f.1)2008 +4m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| réservé + 3 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 69 : Données de module de diagnostic – Info 3 (réservé)
3.12 Données système
Les données système fournissent des informations sur les réglages globaux du système et les états du système.
Les données système ne sont pas enregistrées de manière rémanente et seront perdues après la mise hors tension.
3.12.1 Démontage
Indique si l'extension actuelle du système d'automatisation est conforme à l'extension enregistrée.
Voir aussi le paramètre système « Démarrage du système »→ 3.5.5 Démarrage du système.
| Données système – Extension Sélection par paramètres | |||||||||
| N° de f.1)0 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Extension identique 0 | |||||||||
| Extension différente 1 | |||||||||
1) Numéro de fonction
Tab. 70 : Données système – Extension
3.12.2 Force mode
Indique si le forçage est bloqué ou autorisé.
Voir aussi le paramètre système « Force mode »→ 3.5.3 Force mode.
| Données système – Force mode Sélection par paramètres | |||||||||
| N° de f.1)0 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Forçage bloqué 0 | |||||||||
| Forçage autorisé 1 | |||||||||
1) Numéro de fonction
Tab. 71 : Données système – Force mode
3.12.3 Démarrage du système
Indique de quelle manière le démarrage système du système d'automatisation est effectué. Voir aussi le paramètre système « Démarrage du système » → 3.5.5 Démarrage du système.
| Données système – Démarrage du système Sélection par paramètres | ||||||||
| N° de f.1)0 | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| Démarrage du système avec paramétrage par défaut (réglage à l'usine) et extension actuelle | 0 | |||||||
| Démarrage système avec paramétrage enregistré et extension enregistrée | 1 | |||||||
1) Numéro de fonction
Tab. 72 : Données système – Démarrage du système
3.12.4 Fail safe
Indique si Fail safe est actif ou inactif.
| Données système – Fail safe Sélection par paramètres | |||||||||
| N° de f.1)1 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Réinitialiser toutes les sorties 0 0 | |||||||||
| Hold last state (maintenir l'état du signal) 0 1 | |||||||||
| Accepter Fault mode 1 1 | |||||||||
1) Numéro de fonction
Tab. 73 : Données système – Fail safe
3.12.5 Idle mode
Indique si Idle mode est actif ou inactif.
| Données système – Idle mode Sélection par paramètres | |||||||||
| N° de f.1)1 | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| Réinitialiser toutes les sorties 0 0 | |||||||||
| Hold last state (maintenir l'état du signal) 0 1 | |||||||||
| Accepter Idle mode 1 1 | |||||||||
1) Numéro de fonction
Tab. 74 : Données système – Idle mode
Paramétrage
3.12.6 Surveillance système
Indique si la surveillance de court-circuit/surcharge et de sous-tension est active ou inactive.
Voir aussi le paramètre système « Surveillance »→ 3.5.1 Surveillance.
| Données système – Surveillance système Sélection par paramètres | ||||||||
| N° de f.1)2 | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| Court-circuit/surcharge alimentation des capteurs (CCSA) | %1 | |||||||
| Court-circuit/surcharge des sorties (CCSS) | %1 | |||||||
| Sous-tension sorties (UOUT) | %1 | |||||||
1) Numéro de fonction
Tab. 75 : Données système – Surveillance système
3.13 Données de module
Les données de module contiennent des informations correspondantes sur les différents modules et servent ainsi d'identification des modules.
3.13.1 Code de module
Indique le code du module.
Les codes de module figurent dans la documentation correspondante du module.
| Données de module – Code de module Sélection par paramètres | |||||||||
| N° de f.1)16 + 16m | Bit | ||||||||
| 7 6 5 | 4 3 2 | 1 0 | |||||||
| réservé (0)Code de module (1 ... 245)réservés (246 ... 255 | + 0 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | %1 |
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 76 : Données de module – Code de module
3.13.2 Code de révision
Indique la version du module (→ Étiquette produit).
| Données de module – Code de révision Sélection par paramètres | ||||||||
| N° de f.1)16 + 16m | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| Code de révision (0 ... 255) + 13 | %1 | %1 | %1 | %1 | %1 | %1 | %1 | |
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 77 : Données de module – Code de révision
3.13.3 Numéro de série
Indique le numéro de série du module (codé en hexadécimal).
| Données de module – Numéro de série Sélection par paramètres | ||||||||
| N° de f.1)784 + 4m | Bit | |||||||
| 7 6 5 | 4 3 2 | 1 0 | ||||||
| 8er chiffre + 0 | %1 | %1 | %1 | %1 | ||||
| 7er chiffre + 0 | %1 | %1 | %1 | |||||
| 6er chiffre + 1 | %1 | %1 | %1 | %1 | ||||
| 5er chiffre + 1 | %1 | %1 | %1 | |||||
| 4er chiffre + 2 | %1 | %1 | %1 | %1 | ||||
| 3er chiffre + 2 | %1 | %1 | %1 | |||||
| 2er chiffre + 3 | %1 | %1 | %1 | %1 | ||||
| 1er chiffre + 3 | %1 | %1 | %1 | |||||
1) Numéro de fonction ; m = numéro de module (numérotation de gauche à droite, en partant de 0)
Tab. 78 : Données de module – Numéro de série
4 Caractéristiques techniques
4.1 Caractéristiques techniques, générales
| Caractéristiques techniques générales CPX-E | |
| Certificats, déclaration de conformité | → www.festo.com/sp |
| Position de montage Verticale / horizontale | |
| Température ambiante en [°C]–5 ... +60 position de montage verti-cale | |
| Température ambiante en [°C]–5 ... +50 position de montage horizon-tale | |
| Température de stockage [°C]–20 ... +70 | |
| Humidité atmosphérique [%] 0 ... 95 (sans condensation) | |
| Altitude d'installation max. [m] 2000 autorisée au-dessus du niveau de la mer | |
| Degré de protection selon EN 60529 IP20 | Le degré de protection n'est pas testé par UL. |
| Caractéristiques techniques générales CPX-E | |
| Protection contre les chocs électriques(protection contre les contacts directs etindirects selon IEC 60204-1) | Grâce à l'utilisation de circuits électriques TBTP (Pro-tected extra-low voltage) |
| Certification RCM Mark | |
| Niveau de pollution 2 | |
| Résistance aux vibrations et aux chocs selon EN 60068→Tab. 80 Accentuation du niveau de sévérité(NS) | |
| Résistance aux vibrations (partie 2-6) Rail | DIN SG1 |
| Résistance aux chocs (partie 2-27) Rail DIN | SG1 |
| Résistance aux chocs permanents (partie2-27) | Rail DIN SG1 |
| Système d'automatisation CPX-E | |
| Volume d'adressage des entrées/sorties [Octet] 64/64 (maximal) | |
| Nombre max. de modules par Système d'automatisation CPX-E, y comprismodule de bus ou commande | 11 |
Tab. 79 : Caractéristiques techniques générales
| Accentuation du niveau de sévérité (NS) | |||||
| Mise sous charge due aux vibrations | |||||
| Gamme de fréquence [Hz] Accélération [m/s 2] Débattement [mm] | |||||
| NS1 NS2 NS1 NS2 | 2 NS1 NS2 | ||||
| 2 ... 8 | 2 ... 8 | - | - | ±3,5 | ±3,5 |
| 8 ... 27 8 ... 27 | 10 10 -- | ||||
| 27 ... 58 | 27 ... 60 | - | - | ±0,15 | ±0,35 |
| 58 ... 160 | 60 ... 160 | 20 | 50 | - | - |
| 160 ... 200 | 160 ... 200 | 10 | 10 | - | - |
| Mise sous charge du aux chocs | |||||
| Accélération [m/s2] Durée [ms] | Chocs par sens de déplacement | ||||
| NS1 NS2 NS1 NS2 | 2 NS1 NS2 | ||||
| ±150 | ±300 | 11 | 11 | 5 | 5 |
Accentuation du niveau de sévérité (NS)
| Mise sous charge due aux chocs permanents | ||
| Accélération [m/s2] Durée [ms] Chocs par sens de déplacement | ||
| ±150 6 1000 | ||
Tab. 80 : Accentuation du niveau de sévérité (NS)
4.2 Caractéristiques techniques électriques
Alimentation électrique
| Alimentation en tension de service U_EL/SEN | |
| Tension de service nominale [V DC] 24 ± 25 % | |
| Seuil de réponse pour la [V DC] 17,5 détection de sous-tension | |
| Intensité maximale admis- [A] 8 sible de la barrette de fixa- tion | 1) |
| Temps de maintien [ms] en fonction du module | 2) |
| Alimentation en tension de charge U_OUT | |
| Tension de service nominale [V DC] 24 ± 25 % | 3) |
| Seuil de réponse pour la [V DC] En fonction de sous-tension | 2) |
| Intensité maximale admis- [A] 8 sible de la barrette de fixa- tion | |
1) Pour les conditions de service divergentes UL → Documentation des modules
2) → Documentation des modules
3) L'indication de tolérance diverge sur certains modules.
Tab. 81 : Alimentation électrique
1) selon DIN 46228-1
2) selon DIN 46228-4
| Données de raccordement des barrettes de fixation | à 4 pôles à 6 pôles | ||
| Section de conducteur | |||
| Massive [mm2] 0,14 | ... 1,5 | ||
| Flexible [mm2] 0,14 | ... 2,5 | 0,14 ... 1,5 | |
| Section du câble flexible avec cosse | |||
| Sans manchon en plastique [mm2] 0,14 | ... 1,5 | ||
| Avec manchon en plastique [mm2] 0,14 | ... 1,5 | 0,14 ... 1,0 | |
| Données de raccordement des barrettes de fixation | à 4 pôles à 6 pôles | ||
| Longueur de l'embout sans manchon en plastique1) | |||
| Section du conducteur [mm] 8 ... 100,14 ... 1,0 mm2 | |||
| Section du conducteur [mm] 8 ... 10 1,5 mm2 | 10 10 | ||
| Longueur de l'embout avec manchon en plastique2) | |||
| Section du conducteur [mm] 8 ... 100,14 ... 0,34 mm2 | |||
| Section du conducteur [mm] 8 ... 10 0,5 ... 1,0 mm2 | 10 10 | ||
Tab. 82 : Données de raccordement des barrettes de fixation
4.3 Caractéristiques techniques, certification UL
Caractéristiques électriques et conditions ambiantes UL
| Niveau de pollution 3 | |
| Lieu de montage Uniquement pour utilisation en intérieur | |
| Altitude d'installation maximale 2000 m | |
| Protection contre les influences mécaniques | Monter le produit dans le boîtier ou l'armoire de commande. |
Tab. 83 : Caractéristiques électriques et conditions ambiantes UL
Intensité maximale admissible de l'alimentation en tension de service U EL/SEN UL
| Alimentation via le raccord [A]≤ 4[XD1] | |
| Alimentation via les deux rac- [A] > 4 ... 8 A cords [XD1] et [XD2] |
Tab. 84 : Intensité maximale admissible UL
Copyright:
Festo SE & Co. KG
Ruiter Straße 82
73734 Esslingen
Allemagne
Phone:
+49 711 347-0
Internet:
www.festo.com




