YJKP - Actionneur pneumatique Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil YJKP Festo au format PDF.

| Caractéristique | Détails |
|---|---|
| Type de produit | Actionneur électrique |
| Applications | Utilisé dans les systèmes d'automatisation industrielle |
| Dimensions | Varie selon le modèle |
| Poids | Varie selon le modèle |
| Alimentation | 230 V AC ou 24 V DC selon le modèle |
| Interface de communication | Protocole standard pour intégration dans des systèmes de contrôle |
| Maintenance | Vérification régulière des connexions électriques et de l'état mécanique |
| Sécurité | Conforme aux normes de sécurité électrique en vigueur |
| Garantie | Durée variable selon le distributeur |
| Informations supplémentaires | Consulter la documentation technique pour des spécifications détaillées |
FOIRE AUX QUESTIONS - YJKP Festo
Questions des utilisateurs sur YJKP Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Actionneur pneumatique au format PDF gratuitement ! Retrouvez votre notice YJKP - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil YJKP de la marque Festo.
MODE D'EMPLOI YJKP Festo
Traduction de la notice originale
EtherCAT ^® , EtherNet/IP ^® , MODBUS ^® , OPC UA ^® , PI PROFIBUS PROFINET ^® sont des marques déposées appartenant à leurs propriétaires respectifs dans certains pays.
Table des matières
1 À propos de ce document....4
2.1 Instructions de sécurité générales.... 4
2.2 Usage normal.... 5
2.3 Mauvais usage prévisible.... 5
2.4 Qualification du personnel spécialisé.... 5
3 Informations complémentaires....5
4 Catalogue produits....6
5 Transport....7
6 Montage....8
6.1 Préparation....8
6.2 Assemblage....8
7 Installation.... 10
7.1 Sécurité.... 10
7.2 Installation électrique - Câbles.... 10
7.3 Installation électrique CECC-X-M1-YS.... 13
7.4 Installation électrique CMMT-AS-...-MP....20
7.5 Fonctions de sécurité.... 25
8 Mise en service....26
9 Maintenance....28
9.1 Sécurité.... 28
9.2 Travaux de maintenance.... 28
9.3 Nettoyage....28
10 Démontage.... 28
11 Caractéristiques techniques.... 30
1 À propos de ce document
Tous les documents disponibles sur le produit → www.festo.com/sp.
| Document Produit | |
| Mode d'emploi Capteur SKDA-...-AB | |
| Mode d'emploi Vérin électrique ESBF-BS/LS | |
| Instructions de montage Kit axial EAMM-A-D... | |
| Instructions de montage Kit parallèle EAMM-U-...-D... | |
| Mode d'emploi Servomoteur EMMT-AS | |
| Documentation utilisateur Contrôleur de moteur CMMT-AS-...-MP | |
| Instructions de montage Assortiment de connecteurs NEKM-C6-...-S/-D | |
| Documentation utilisateur Commande CECC-X-M1 | |
| Instructions de montage Câble de liaison NEBS-M1 | 2G5-ES-...-LE5 |
Tab. 1 : Documents applicables relatifs au kit servopresses
| Document Produit Sommaire | ||
| Aide en ligne YJKP YJKP Utilisation du logiciel du kit ser- | vopresses YJKP | |
| Application Note YJKP Exemples d'application relatifs | à la connexion et à la mise en service | |
Tab. 2 : Autres fluides relatifs au kit servopresses

Le domaine d'application et les certifications des composants individuels du kit sont décrits dans des documents distincts → www.festo.com/sp.
2 Sécurité
2.1 Instructions de sécurité générales
-N'utiliser le produit que dans un état technique parfait.
- Utiliser le produit uniquement dans son état d'origine sans y apporter de modifications non autorisées.
-Tenir compte des marquages sur le produit.
-Tenir compte des conditions ambiantes sur le lieu d'utilisation.
-Ne jamais débrancher ou raccorder le connecteur si le produit est sous tension.
- Veiller à ce que la mise à la terre pour des raisons de protection et le raccordement du blindage soient corrects.
Informations complémentaires
- Avant de travailler sur le produit : couper l'alimentation pneumatique et la protéger contre toute réactivation.
- Avant toute intervention sur le produit, couper l'alimentation électrique et la sécuriser contre toute remise en marche.
- Respecter les couples de serrage. Sans indication spéciale, la tolérance est de ± 20 %.
- Avant la mise en service, veiller à ce que les mouvements générés par les actionneurs raccordés ne présentent aucun danger pour les personnes.
-Conserver la documentation pendant tout le cycle de vie du produit.
2.2 Usage normal
Ce produit est un module pour l'exécution d'opérations d'assemblage avec surveillance du processus d'assemblage. Le module peut être utilisé au sein de machines ou d'installations de technique d'automatisation avec une commande de niveau supérieur.
Utiliser le produit exclusivement de la manière suivante :
-dans les limites définies par les caractéristiques techniques du produit
- dans le secteur industriel
-entièrement monté
2.3 Mauvais usage prévisible
Construction de presses avec approvisionnement manuel ou prélèvement manuel conformément à la directive Machines 2006/42/UE, annexe IV art. 9 sans autres mesures de protection.
Ne jamais utiliser le produit de la manière suivante :
- avec des modifications ou des transformations non autorisées du produit
-avec un dépassement des limites de charge
-dans une position de montage non autorisée
2.4 Qualification du personnel spécialisé
Travaux sur le produit uniquement par du personnel qualifié capable d'évaluer les travaux qui lui sont confiés et de détecter les dangers. Le personnel spécialisé possède des connaissances et une expérience en matière de technologie de commande électropneumatique.
3 Informations complémentaires
-Pour toute question d'ordre technique, contacter l'interlocuteur Festo régional. → www.festo.com.
- Accessoires et pièces de rechange → www.festo.com/catalogue.
4 Catalogue produits
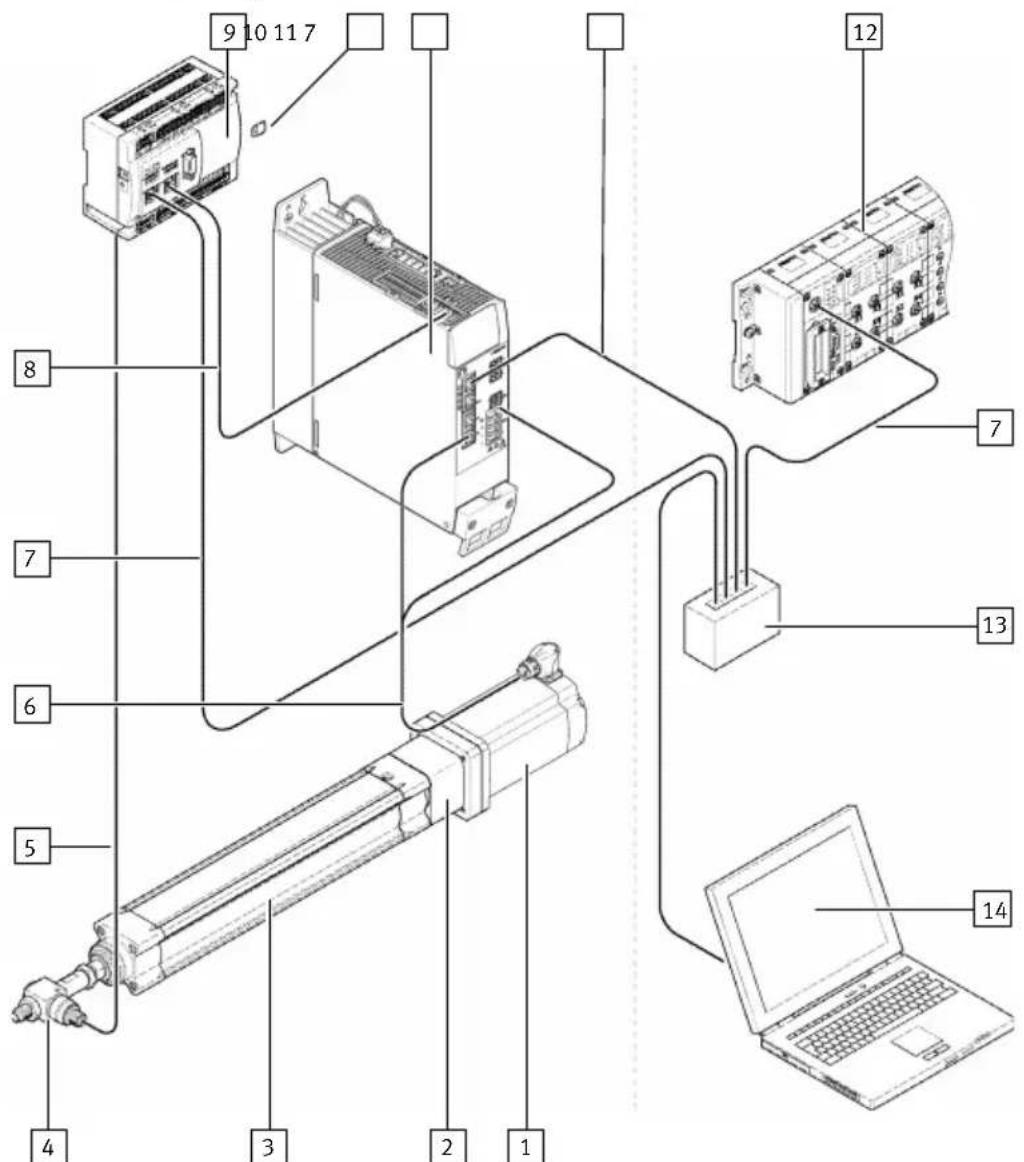
Fig. 1 : Présentation du système
1 Servomoteur EMMT-AS
2 Kit axial EAMM-A / kit parallèle EAMM-U
3 Vérin électrique ESBF-BS
4 Capteur SKDA-...-AB
5 Câble de liaison NEBS-M12G5-ES-...-LE5
6 Câble moteur NEBM-M...-EH-...-R3LEG14
7 Câble LAN (non compris dans la fourniture)
8 Câble LAN
9 Commande CECC-X-M1-YS
10 Carte mémoire
11 Contrôleur de moteur CMMT-AS
12 Commande de niveau supérieur (non comprise dans la fourniture)
13 Commutateur (non compris dans la fourni-
ture)
14 Ordinateur portable (non compris dans la fourniture)
5 Transport
Déroulement du transport et du déballage
REMARQUE
Endommagement du produit dû à un transport incorrect.
- Tenir compte des marquages et informations de transport figurant sur l'emballage.
-
Transporter le produit dans l'emballage jusqu'au site de montage/entreposage et l'installer sur un sous-sol stable et plan.
-
En cas d'entreposage : observer les conditions de stockage → 11 Caractéristiques techniques.
REMARQUE
Endommagement du produit dû à un déballage incorrect.
- Tenir compte des marquages et informations de déballage figurant sur l'emballage.
• Déballer le produit avec au moins 2 personnes. - Utiliser un outil adapté.
- Certaines parties de l'emballage sont grandes et lourdes :
- Ne pas laisser tomber ces parties sur le produit.
-
Utiliser un moyen approprié pour soulever et déposer (par ex. une grue).
-
Retirer l'emballage en suivant l'ordre imprimé.
Protection de l'emballage
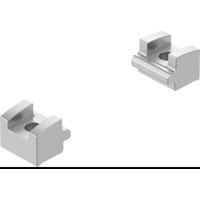
Des protections empêchent les mouvements incontrôlés du produit dans l'emballage pendant le transport et la mise en place. Le produit est doté des protections de transport marquées suivantes :

Fig. 2 : Vis de transport

Fig. 3 : Collier de serrage
6 Montage
6.1 Préparation
Encombrement
L'espace de montage du produit dépend de la taille choisie du kit servopresses et des facteurs suivants :
- course du vérin électrique → www.festo.com/catalogue
-position de montage et type de moteur
i
Une chute involontaire de la tige de piston est possible à tout moment. L'axe ne peut pas être poussé manuellement en arrière. Le cas échéant, le vérin électrique doit pouvoir être démonté.
Surface de montage
La surface de montage doit présenter les caractéristiques suivantes :
- résistant au gauchissement
- hors tension
–solidité suffisante pour supporter les forces maximales
-planéité suffisante
6.2 Assemblage

AVERTISSEMENT
Risque de blessure en raison d'une chute de la tige de piston.
- Avant toute intervention sur le produit, protéger la tige de piston de toute chute.

ATTENTION
Risque de blessure en raison de la chute du produit.
- S'assurer que la surface de montage est suffisamment solide pour supporter les forces maximales.
- Utiliser avec les éléments de fixation fournis uniquement.
• Bloquer les raccords à vis.
i
Dans le kit servopresses, les composants vérin électrique, kit axial et parallèle et servomoteur peuvent être prémontés. Pour les composants individuels, les étapes de montage suivantes sont nécessaires.
Montage du kit de montage moteur
Selon la configuration, un kit axial ou parallèle peut être monté.
Montage
Montage du kit axial EAMM-A
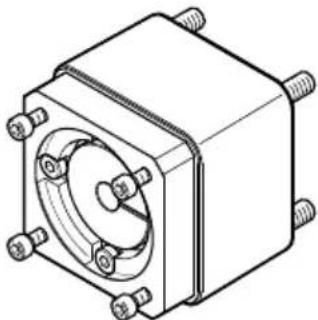
Montage du kit parallèle EAMM-U
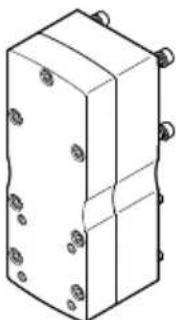
Fig. 5 : Kit parallèle EAMM-U
→ Respecter les Instructions de montage jointes du kit parallèle EAMM-U-...-D... → 1.1 Documents applicables.
• Monter le kit parallèle EAMM-U.
Fixation de l'unité d'entraînement au bâti
→ Respecter les Instructions de montage jointes du vérin électrique ESBF-BS / -LS → 1.1 Documents applicables.
- Fixer l'unité complète constituée de l'axe, du kit axial/parallèle et du moteur sans contraintes sur le bâti du client.
Montage du capteur SKDA
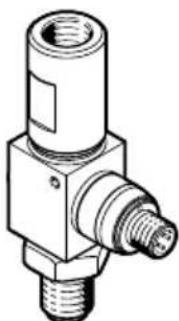
Fig. 6 : Capteur SKDA
Respecter lesMode d'emploi jointes du capteur SKDA-...-AB → 1.1 Documents applicables.
-
Ne pas visser le contre-écrou jusqu'en butée sur l'ESBF-BS.
-
Visser le capteur sur l'ESBF-BS.
- Placer le contre-écrou sur le capteur pour le bloquer.
Autres étapes
- Insérer une carte mémoire (carte microSD) dans le CECC-X-M1-YS.
- Monter la commande CECC-X-M1-YS.
Respecter la documentation de la commande CECC-X-M1-YS → 1.1 Documents applicables. - Monter le contrôleur CMMT-AS.
Respecter la documentation utilisateur du contrôleur de moteur CMMT-AS-...-EC-S1 → 1.1 Documents applicables.
i
Informations actuelles sur les accessoires → www.festo.com/catalogue.
7 Installation
7.1 Sécurité

AVERTISSEMENT
Risque de blessure en raison d'une chute de la tige de piston.
- Avant toute intervention sur le produit, protéger la tige de piston de toute chute.

AVERTISSEMENT
Risque de blessure dû au mouvement inattendu du produit.
L'énergie électrique peut entraîner un mouvement imprévu du produit.
- Avant toute intervention sur le produit, couper l'alimentation électrique, contrôler l'absence de tension et sécuriser l'alimentation contre toute remise en marche.
REMARQUE
Dommages matériels en cas d'utilisation de raccords inappropriés.
Au sens de l'usage normal, tous les raccords non cités ne doivent pas être utilisés.
i
Les détails sur la manipulation des composants individuels du kit sont décrits dans des documents distincts → www.festo.com/sp.
7.2 Installation électrique - Câbles
Câble de liaison NEBS-M12G5-ES-...-LE5
Le câble de liaison relie le capteur au vérin électrique avec l'entrée analogique [X19] de la commande CECC-X-M1-YS.
Le connecteur fourni doit être monté au niveau des extrémités de câble ouvertes.
| Capteur SKDA Câble de liaison NEBS-M12G5-ES-...-LE5 Commande | CECC-X-M1-YS | |||
| Broche Couleur du conducteur ^1) | Signal Raccord [X19] | |||
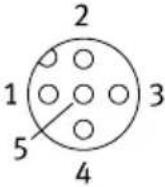 | 1 BN | 24 V DC | Alimentation électrique du capteur | X19.0.1 |
| 2 WH | non utilisée | |||
| 3 BU | Entrée 4 ... 20 mA | Évaluation du signal du capteur par le logiciel servopresses | X19.0.2 | |
| 4 BK | non utilisée | |||
| 5 GY | non utilisée | |||
| Tresse de blindage | Poser une tresse de blindage sur une grande surface à proximité immédiate de la commande et du capteur | |||
1) Code couleur selon IEC 60757:2021-06
Tab. 3 : Câble de liaison capteur - entrées analogiques [X19]
- Raccorder le câble de liaison au capteur.
- Poser les extrémités de câble ouvertes sur le connecteur fourni, conformément au tableau.
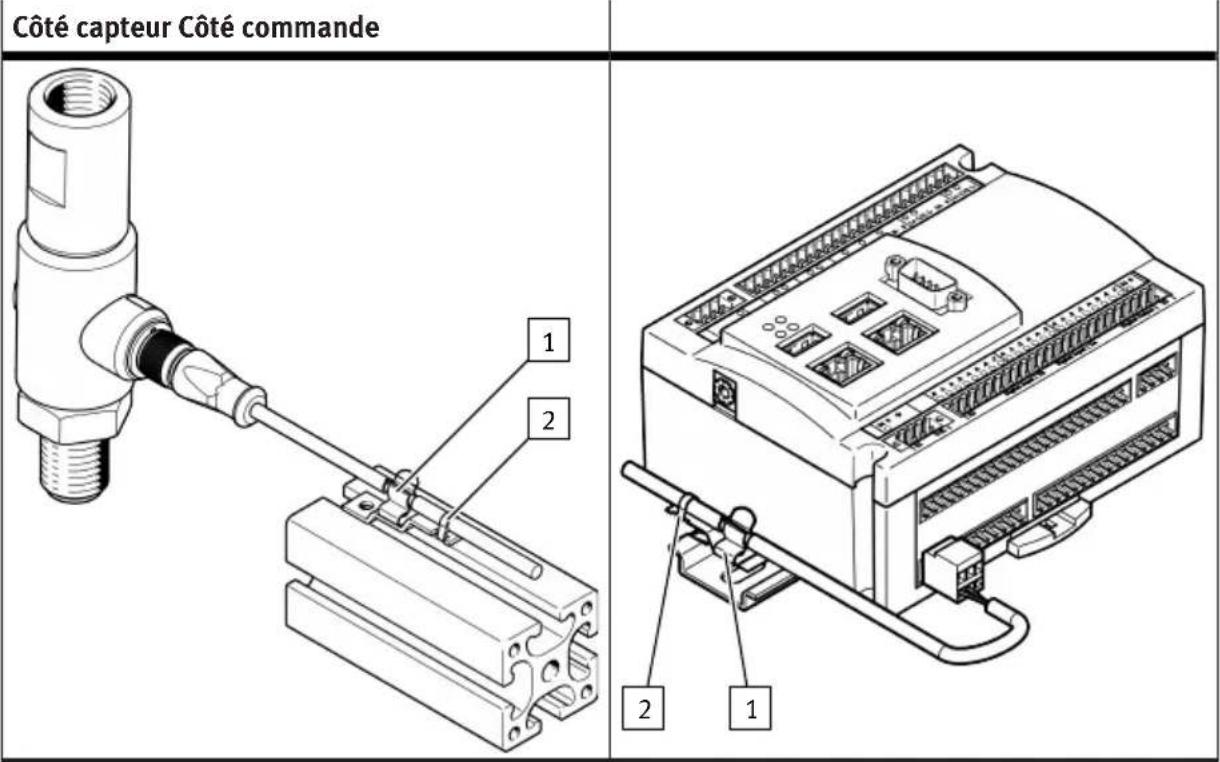
- Retirer partiellement la gaine de câble des deux côtés et poser une tresse de blindage sur une grande surface avec des clips de blindage 1. Assurer la décharge de traction du câble avec des colliers de serrage 2 via la gaine extérieure du câble.
text_image
Côté capteur Côté commande 1 2 2 1- Enficher le connecteur mâle dans le raccord [X19.0] de la commande.
Câble de liaison NEBC-R3G4-ES-1-S-R3G4-ET
Le câble de liaison relie l'interface RTE Port 1 [XF1 IN] du contrôleur de moteur et l'interface EtherCAT [X10] de la commande CECC-X-M1-YS.
Câble moteur NEBM-M...G15-EH-...-R3LEG14
| Raccord moteur Signal Description | tion Couleur | du con-duc-teur1) | Raccord du contrôleur | |||
| Broche Raccord de phase moteur [X6A] | ||||||
M23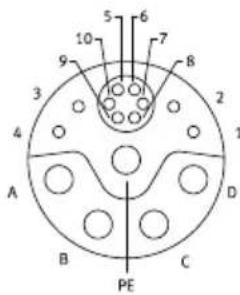 M40 M40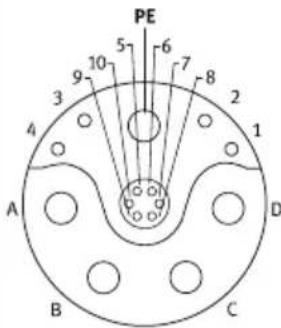 | A U Phase moteur U BU Broche 1 | |||||
| B V Phase moteur V BN Broche 2 | ||||||
| C W Phase moteur W BK Broche 3 | ||||||
| D | - | non occupée | - | - | ||
| PE | PE | Terre de protection | GNYE | Broche 4 | ||
| Frein de retenue | [X6B] | |||||
| 1 | BR- | Frein de retenue, potentiel négatif | BUWH | Broche 3 | ||
| 2 | - | non occupée | - | - | ||
| 3 | - | non occupée | - | - | ||
| 4 BR+ | Frein de retenue, potentiel positif GNW | WH Broche | 2 | |||
| Codeur absolu, monitor / multi ours | [X2] | |||||
| 5 | Us | Tension d'alimentation | Broche 7 | |||
| 6 | GND | Masse 0 V | Broche 8 | |||
| 7 | DATA+ | Ligne de données | Broche 4 | |||
| 8 | DATA- | Ligne de données | Broche 5 | |||
| 9 | CLK+ | Ligne d'horloge | Broche 1 | |||
| 10 | CLK- | Ligne d'horloge | Broche 2 | |||
1) Code couleur selon IEC 60757:2021-06
Tab. 4 : Câble moteur NEBM-M...G15-EH-...-R3LEG14
- Enficher le connecteur mâle dans le raccord du servomoteur.
- Enficher le connecteur mâle RJ 45 dans le raccord [X2] du contrôleur.
- Brancher les extrémités de câble ouvertes selon le tableau aux raccords [X6A] et [X6B] du contrôleur de moteur.
Recourir aux connecteurs de l'assortiment de connecteurs NEKM-C6-C16-S.
7.3 Installation électrique CECC-X-M1-YS
Vue d'ensemble des interfaces
text_image
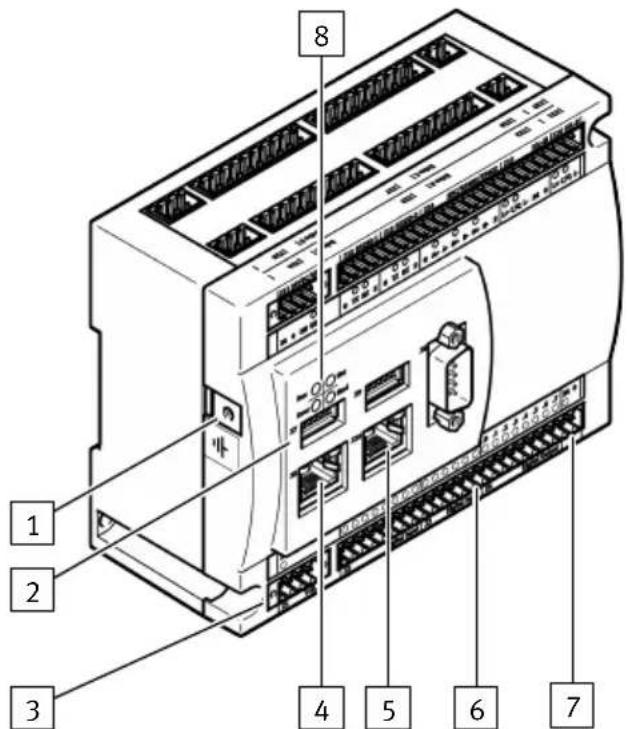
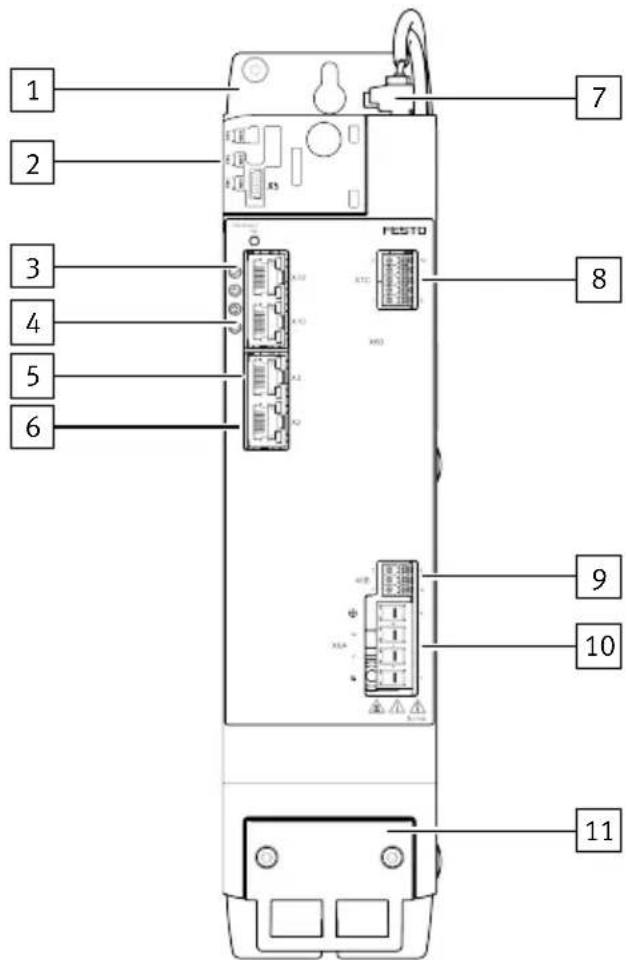
1 2 3 4 5 6 7 8Fig. 7 : CECC-X-M1-YS interfaces en face avant
1 Raccord de la terre fonctionnelle
2 [X7][X9] Interfaces USB
3 [X1] Alimentation électrique
4 [X8] Interface Ethernet
5 [X10] Interface EtherCAT
6 [X2][X3][X4] Interfaces I/O
7 [X5] Alimentation électrique des sorties numériques
8 LEDs d'état
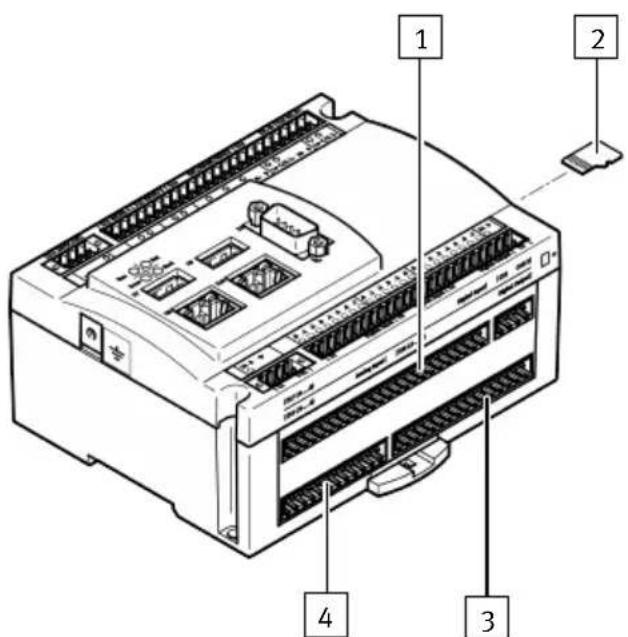
1 [X17] Entrées numériques
2 Carte mémoire
3 [X20] Sorties numériques
4 [X19] Entrées analogiques
REMARQUE
Dommages matériels en cas d'utilisation de raccords inappropriés.
Au sens de l'usage normal, tous les raccords non cités ne doivent pas être utilisés.
Les LED d'état indiquent l'état de fonctionnement de la commande.
| LED d'état Signification | |
| [Run] État de l'application | |
| [Error] Erreur | |
| [Net] Appareil détecté | |
| [Mod] réservé |
Tab. 5 : CECC-X-M1-YS LEDs d'état
Vue d'ensemble raccord et connecteur mâle/câble : CECC-X-M1-YS
| Raccord Connecteur mâle / câble Finalité | ||
| [X1] NECC-L2G4-C1 | 1) | Alimentation électrique de l'appareil |
| [X5] NECC-L2G2-C1 | 1) | Alimentation électrique pour sorties numériques |
| [X2] NECC-L2G8-C1 | 1) | Interface I/O |
| [X3] NECC-L2G6-C1 | 1) | |
| [X4] NECC-L2G4-C1 | 1) | |
| [X8] Câble de brassage LAN standard2) | Interface Ethernet | |
| [X7] [X9] Interfaces USB | ||
| [X10] Câble de brassage LAN standard | Interface EtherCAT | |
| [X17] 2x NECC-L2G6-C1 | 1) | entrées numériques |
| [X20] NECC-L2G2-C1 | 1) | sorties numériques |
1) Connecteur pour confectionnement configuré par le client
2) Non compris dans la fourniture du kit
Tab. 6 : CECC-X-M1-YS Raccord et connecteur mâle
[X1] Alimentation électrique CECC-X-M1-YS
![Festo YJKP - [X1] Alimentation électrique CECC-X-M1-YS - 1](/content/2026/04/709272/images/72c9ba328ad86d7486fbb2ff1042cd50d732ec7c688b3a353d76965f36db8650.jpg)
AVERTISSEMENT
Risque de blessure par choc électrique.
- Pour l'alimentation électrique, utiliser exclusivement des circuits électriques TBTS, qui garantissent une isolation électrique fiable du réseau.
-
Respecter la norme IEC 60204-1/EN 60204-1.
-
Alimentation électrique pour l'appareil et les entrées numériques et analogiques.
-Courant résiduel pour tous les raccords alimentés : ≤ 750 mA - Dont consommation propre : ≤ 200 mA
- Une protection externe contre les surchauffes doit être utilisée pour l'alimentation électrique de l'appareil.
| Borne Raccord Utilisation | ||
| X1.1 24 24 V DC | ||
| X1.2 0 0 V DC | ||
| X1.3 Terre fonctionnelle | ± | |
| X1.4 non occupée – |
Tab. 7 : [X1] Raccord d'alimentation électrique pour l'appareil les entrées numériques et analogiques
- Établir l'alimentation électrique avec l'appareil.
- Poser les extrémités de câble ouvertes sur le connecteur fourni, conformément au tableau.
- Enficher le connecteur mâle dans le raccord [X1] de la commande.
[X5] Alimentation électrique pour sorties numériques
- Alimentation électrique pour sorties numériques.
-Courant résiduel pour tous les raccords alimentés : ≤ 5 A
| Borne Raccord Utilisation | ||
| X5.1 24 24 V DC | ||
| X5.2 0 0 V DC |
Tab. 8 : [X5] Raccord alimentation électrique pour sorties numériques
- Établir l'alimentation électrique avec l'appareil.
- Poser les extrémités de câble ouvertes sur le connecteur fourni, conformément au tableau.
- Enficher le connecteur mâle dans le raccord [X5] de la commande.
| Borne Raccord Utilisation | ||
| X2.0 ... X2.7 8 entrées numériques Configurable en tant que condition d'évolution dans la chaîne séquentielle du processus de presse : DI1 ... DI8 ^1) | ||
| X3.0 6 entrées numériques Lancer le processus de presse ^1) Type d'utilisation manuel : enregistrer courbe de référenceMode automatique : démarrer le processus de presse | ||
| X3.1 Type d'utilisation “Manuel” | ^1) | |
| X3.2 Mode de fonctionnement “Automatique” | ^1) | |
| X3.3 Démarrer la course de mise en référence | ^1) | |
| X3.4 Acquittement des erreurs | ^1) | |
| X3.5 Annuler le processus de presse | ^1)2) | |
| X4.0 ... X4.3 4 sorties numériques configurables en tant que signaux de sortie dans la chaîne séquentielle du processus de presse : DO1 ... DO4 ^1) Sortie 24 V DC qui est activée par le logiciel dès qu'un certain événement survient (position atteinte, force atteinte). | ||
| X4.4 ... X4.7 non occupée – | ||
1) Pour plus de détails, consulter l'aide en ligne
2) Annulation du processus lors de l'entrée = FALSE.
Tab. 9 : [X2, X3, X4] raccords des interfaces I/O
[X8] Interface Ethernet
REMARQUE
L'accès non autorisé à l'appareil peut provoquer des dommages ou un dysfonctionnement.
- Lors de la connexion de l'appareil à un réseau, protéger le réseau de tout accès non autorisé. Pour les mesures de protection du réseau, se fonder sur les normes relatives à la sécurité des technologies de l'information, p. ex. IEC 62443, ISO/IEC 27001.
L'interface Ethernet [X8] est de type connecteur femelle RJ45 et prend en charge le réseau de communication Gigabit-LAN.
Les protocoles suivants sont supportés :
-EtherNet/IP (serveur)
- Modbus TCP (serveur)
- Ethernet TCP/IP
-PROFINET IO
-OPC UA (uniquement possible avec le kit d'extension logiciel en option.)
i
L'interface Ethernet vise à la configuration et au paramétrage du système via un PC ou une tablette connectés au réseau. Après l'installation mécanique et électrique, le kit servopresses peut être utilisé à l'aide d'un navigateur Web. Pendant le temps d'exécution du système, il est possible de remplacer les données de commande et de processus sur cette interface au moyen d'une commande de niveau supérieur.
L'intégration du CECC-X-M1-YS au réseau local est obligatoire.
Exigences minimales concernant un PC/une tablette
- Navigateur Web avec JavaScript et prise en charge de HTML5-Canvas, p. ex. Firefox, Chrome, Internet Explorer ≥, version 9
- Résolution d'écran 1024 x 768 pixels
L'accès s'effectue par saisie dans la ligne d'adresse : http://«adresse IP»:8080/servo_press_kit.htm
Exemple : http://192.168.4.2:8080/servo_press_kit.htm
La commande offre la possibilité de raccorder des clés USB de jusqu'à 32 GO aux interfaces USB [X7] ou [X9] et d'enregistrer les résultats de pressage.
Les interfaces USB sont compatibles avec les normes USB3.0 et USB2.0. Elles conviennent pour les connecteurs mâles USB de type A.
[X17] Entrées numériques
REMARQUE
Dommages matériels ou diminution des fonctions en raison d'un mauvais câblage I/O.
- Toutes les entrées et sorties numériques sont exécutées en tant que PNP. Utiliser uniquement un câblage correspondant.
- Les entrées numériques sont exécutées en technique de raccordement à 3 fils.
-Les entrées numériques ne sont pas séparées galvaniquement. - Le potentiel de terre de l'ensemble des entrées se rapporte à la GND de l'alimentation électrique [X1].
- Pour le raccordement d'autres capteurs avec une technique de raccordement à 3 fils : utiliser à chaque fois les 3 broches côte à côte.
| Borne Raccord Utilisation | ||
| X17.0.1 24 V DC Alimentation électrique 24 V DC pour sélection de programme bit 0^1) | ||
| X17.0.2 Entrée DI9 Sélection de programme bit 0 | ||
| X17.0.3 Logique GND Alimentation électrique GND | capteur pour sélection de programme bit 0^1) | |
| X17.1.1 24 V DC Alimentation électrique 24 V DC capteur pour sélection de programme bit 1^1) | ||
| X17.1.2 Entrée DI10 Sélection de programme bit 1 | ||
| X17.1.3 Logique GND Alimentation électrique GND | capteur pour sélection de programme bit 1^1) | |
| X17.2.1 24 V DC Alimentation électrique 24 V DC capteur pour sélection de programme bit 2^1) | ||
| X17.2.2 Entrée DI11 Sélection de programme bit 2 | ||
| X17.2.3 Logique GND Alimentation électrique GND | capteur pour sélection de programme bit 2^1) | |
| X17.3.1 24 V DC Alimentation électrique 24 V DC capteur pour sélection de programme bit 3^1) | ||
| X17.3.2 Entrée DI12 Sélection de programme bit 3 | ||
| X17.3.3 Logique GND Alimentation électrique GND | capteur pour sélection de programme bit 3^1) | |
| X17.4.1 24 V DC Alimentation électrique 24 V DC | 2) | |
| X17.4.2 Activation de la servo-presse | Validation étage de sortie contrôleur de moteur via la commande CECC-X-M1-YS | |
| X17.4.3 Logique GND Alimentation électrique GND | 2) | |
| X17.5.1 24 V DC Alimentation électrique 24 V DC | 2) | |
| X17.5.2 Activation mode pas à pas | Processus de presse en mode pas à pas | |
| X17.5.3 Logique GND Alimentation électrique GND | 2) | |
| X17.6.1 ... X17.6.3 non occupée – | ||
| X17.7.1 ... X17.7.3 non occupée – | ||
1) en option
2) Réserve
Tab. 10 : [X17] Affectation des bornes des entrées numériques
[X20] Sorties numériques
REMARQUE
Dommages matériels ou diminution des fonctions en raison d'un mauvais câblage I/O.
- Toutes les entrées et sorties numériques sont exécutées en tant que PNP. Utiliser uniquement un câblage correspondant.
-Les sorties numériques sont exécutées en technique de raccordement à 2 fils.
-Les sorties numériques sont séparées galvaniquement.
- La consommation électrique par sortie s'élève à 0,5 A.
- Le potentiel de terre de l'ensemble des sorties se rapporte à la GND de l'alimentation électrique [X5].
-Les sorties sont protégées contre les surcharges et les courts-circuits thermiques.
- Utiliser 2 broches côte à côte pour le raccordement d'un consommateur.
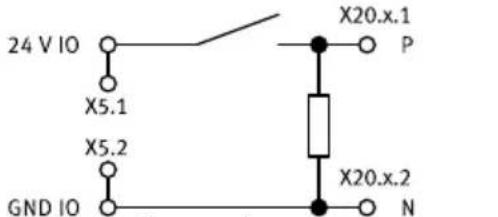
text_image
24 V IO X5.1 X5.2 GND IO X20.x.1 P X20.x.2 NFig. 9 : Technique de commutation PNP
| Borne Raccord | Affectation Commentaire | |
| X20.0.1 Signal P | Erreur 0,5 A par canal, SSR | 1)2) |
| X20.0.2 non occupée -- | ||
| X20.1.1 Signal P | Servopresses opérationnelles 0,5 A par canal, SSR | 1)2) |
| X20.1.2 non occupée -- | ||
| X20.2.1 Signal P | Demande de course de référence | 0,5 A par canal, SSR 1)2) |
| X20.2.2 non occupée -- | ||
| X20.3.1 Signal P | Résultat de presse en ordre 0,5 A par canal, SSR | 1)2) |
| X20.3.2 non occupée -- | ||
| X20.4.1 Signal P | Résultat de presse non en ordre 0,5 A par canal, SSR | 1)2) |
| X.20.4.2 | non occupée -- | |
| X20.5.1 Signal P | Servopresse activée -- | |
| X20.5.2 non occupée -- | ||
| X20.6.1 Signal P | Etape de programme terminée -- |
| Borne Raccord Affectation Commentaire | |||
| X20.6.2 non occupée -- | |||
| X20.7.1 ... X20.7.2 | non occupée -- | ||
1) SSR : Solid State Relay
2) Pour plus de détails, consulter l'aide en ligne
Tab. 11 : [X20] Affectation des bornes des sorties numériques
Emplacement de carte mémoire
- Insérer la carte mémoire sur le côté de l'appareil pour que le système puisse fonctionner.
L'enregistrement de configurations, de programmes et de résultats de processus de presses est possible.
7.4 Installation électrique CMMT-AS-...-MP
Vue d'ensemble des interfaces CMMT-AS-...-3A-MP
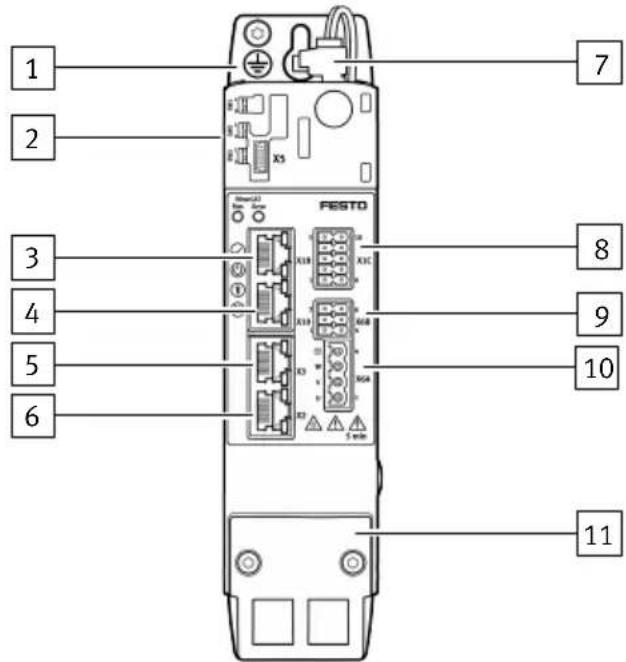
text_image
1 2 3 4 5 6 7 8 9 10 111 Raccord de la terre de protection du boîtier
2 Micro-interrupteurs DIL SW1, SW2, SW3, derrière une plaque d'obturation
3 [X18] Ethernet standard
4 [X10] Synchronisation des appareils
5 [X3] Détecteur de position 2
6 [X2] Détecteur de position 1
7 [X9B] Raccord de la résistance de freinage
8 [X1C] Entrées / sorties vers l'axe
9 [X6B] Raccord moteur auxiliaire
10 [X6A] Raccord de phase moteur
11 Borne de blindage et décharge de traction
Fig. 10 : CMMT-AS-...-3A-MP en face avant
Installation
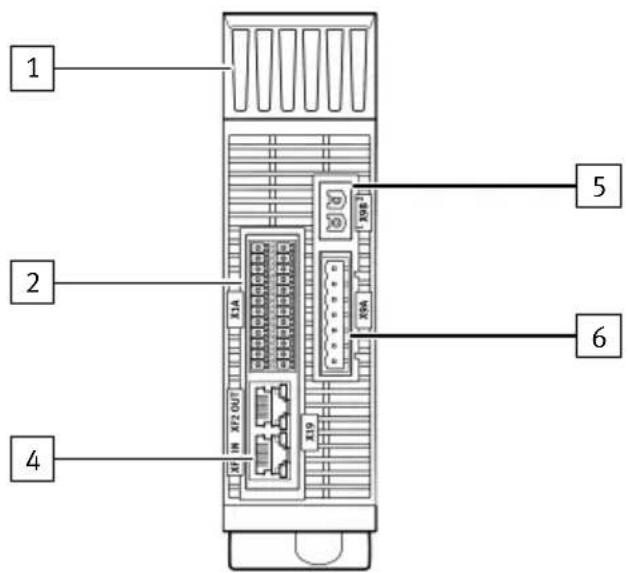
text_image
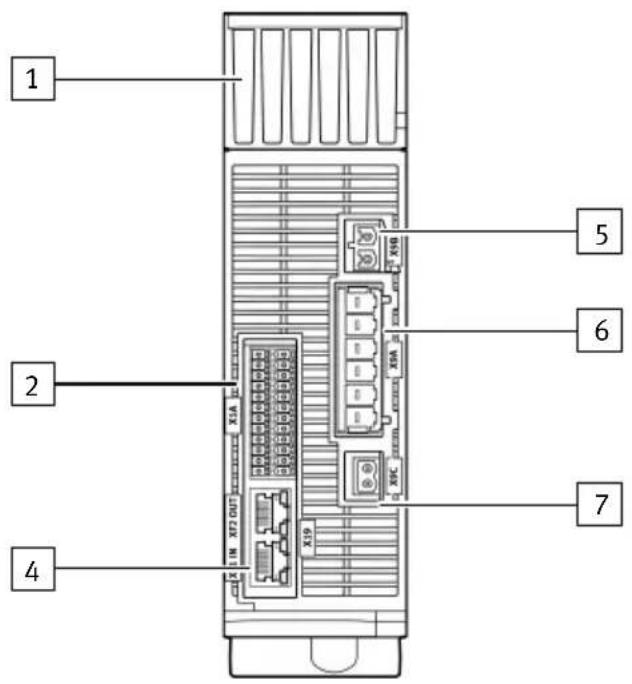
1 2 4 5 6Fig. 11 : CMMT-AS-...-3A-MP en haut
1 Dissipateur de chaleur
2 [X1A] Interface I/O
4 [XF1 IN] Interface RTE port 1
5 | [X9B] Raccord de la résistance de freinage
6 [X9A] Tension réseau, tension du circuit intermédiaire, tension logique
Vue d'ensemble des interfaces CMMT-AS-C2/C3/C5-...-11A-MP
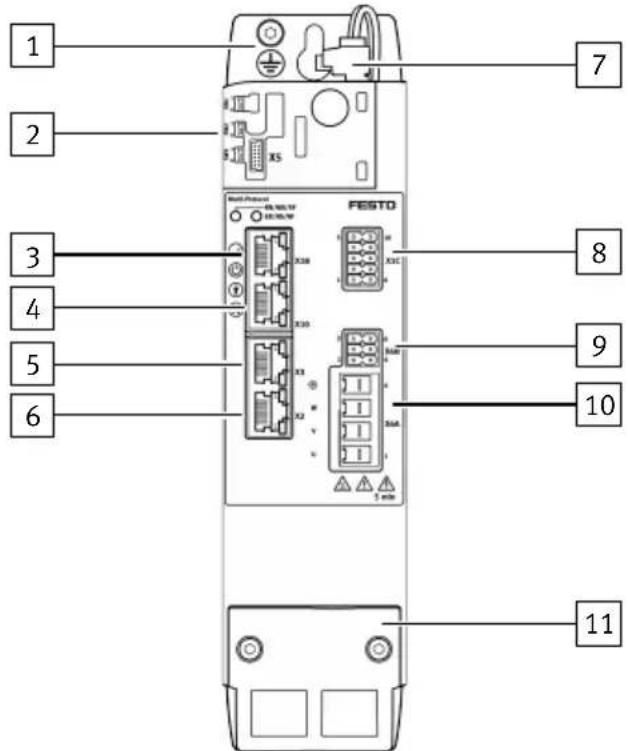
text_image
1 2 3 4 5 6 7 8 9 10 11Fig. 12 : CMMT-AS-C2/C3/C5-...-11A-MP en face avant
1 Raccord de la terre de protection du boîtier
2 Micro-interrupteurs DIL SW1, SW2, SW3, derrière une plaque d'obturation
3 [X18] Ethernet standard
4 [X10] Synchronisation des appareils
5 [X3] Détecteur de position 2
6 [X2] Détecteur de position 1
7 [X9B] Raccord de la résistance de freinage
8 [X1C] Entrées / sorties vers l'axe
9 [X6B] Raccord moteur auxiliaire
10 [X6A] Raccord de phase moteur
11 Borne de blindage et décharge de traction
Installation
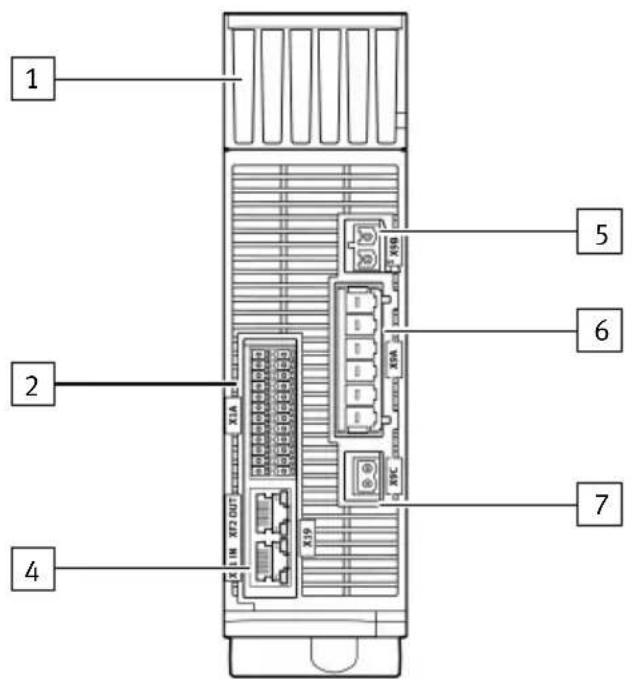
text_image
1 2 4 5 6 7 X19 X30 X31 X32 X33 X34 X35 X36 X37 X38 X39 X40 X41 X42 X43 X44 X45 X46 X47 X48 X49 X50Fig. 13 : CMMT-AS-C2/C3/C5-...-11A-MP en haut
1 Dissipateur de chaleur
2 [X1A] Interface I/O
4 [XF1 IN] Interface RTE port 1
5 [X9B] Raccord de la résistance de freinage
6 [X9A] Tension réseau, tension du circuit intermédiaire
7 [X9C] Tension logique
Vue d'ensemble des interfaces CMMT-AS-C7/C12-...-11A-MP
text_image
1 2 3 4 5 6 7 FESTO 8 9 10 11Fig. 14 : CMMT-AS-C7/C12-...-11A-MP en face avant
1 Raccord de la terre de protection du boîtier
2 Micro-interrupteurs DIL SW1, SW2, SW3, derrière une plaque d'obturation
3 [X18] Ethernet standard
4 [X10] Synchronisation des appareils
5 [X3] Détecteur de position 2
6 [X2] Détecteur de position 1
7 [X9B] Raccord de la résistance de freinage
8 | [X1C] Entrées / sorties vers l'axe
9 [X1C] Entrées / sorties vers l'axe
10 [X6A] Raccord de phase moteur
11 Borne de blindage et décharge de traction
text_image
1 2 4 5 6 7 X19 X30 X31 X32 X33 X34 X35 X36 X37 X38 X39 X40 X41 X42 X43 X44 X45 X46 X47 X48 X49 X501 Dissipateur de chaleur
2 [X1A] Interface I/O
4 [XF1 IN] Interface RTE port 1
5 [X9B] Raccord de la résistance de freinage
6 [X9A] Tension réseau, tension du circuit intermédiaire
7 [X9C] Tension logique
Fig. 15 : CMMT-AS-C7/C12-...-11A-MP en haut
REMARQUE
Dommages matériels en cas d'utilisation de raccords inappropriés.
Au sens de l'usage normal, tous les raccords non cités ne doivent pas être utilisés.
LED d'état
Les LED d'état indiquent l'état de fonctionnement du contrôleur de moteur.
| LED Désignation Description sommaire | ||
| √ | LED d'état Indique l'état général de l'appareil | |
| ∅ | LED d'alimentation Indique l'état de l'alimentation électrique | |
| † | LED de sécurité Indique l'état de la technique de sécurité | |
| (2) | LED d'état d'application Indique la séquence d'identification, réservée aux extensions ultérieures | |
Tab. 12 : LEDs d'état de l'appareil
Des descriptions détaillées de la LED d'état se trouvent dans la documentation utilisateur du contrôleur de moteur CMMT-AS-...-EC-S1 → 1.1 Documents applicables.
Vue d'ensemble des raccords et des connecteurs mâles/câbles : CMMT-AS
| Raccord Connecteur | mâle / câble Finalité | |
| [X1A] spécifique au | client Interface I/O pour fonction STO | |
| [X2] NEBM-M...G15- | EH-...-R3LEG14 | Raccord de codeur du servomoteur |
| [X6A] Connexion moteur | Connecteurs de l'assortiment de connecteurs servomoteur | |
| [X6B] Connexion avec | necteurs NEKM-C6-C16 |
| Raccord Connecteur mâle / câble Finalité | |
| [X19] Câble de liaisonNEBC-R3G4-ES-1-S-R3G4-ET | Connexion avec la commande CECC-X-M1-YS |
| [X9A] Assortiment de connecteurs NEKM-C6-C16-S ^1) | Alimentation électrique |
| [X18] Câble de brassage LAN standard ^2) | Interface Ethernet |
1) Connecteur pour confectionnement configuré par le client
2) Non compris dans la fourniture du kit
Tab. 13 : Raccord et connecteur mâle
[X9a] Alimentation électrique
• Raccorder l'alimentation électrique selon le tableau → 1.1 Documents applicables.
- Plage de force ≤1,5 kN : 100 ... 230 V AC (1 phase)
- Plage de force ≥4 kN : 230 ... 480 V AC (3 phases)
7.5 Fonctions de sécurité
Les fonctions de sécurité sont décrites dans d'autres documents → 1.1 Documents applicables
| [X40] Broche Dési- | gnation | Spécification | |
| 12X1A1 | 24 | 1 ... 8 – Réserve, ne pas raccorder | |
| 9 #SBC-B Entrée de pilotage Safe Brake Control (SBC)Canal B | |||
| 10 #SBC-A Entrée de pilotage Safe Brake Control (SBC)Canal A | |||
| 11 #STO-B Entrée de pilotage Safe Torque Off (STO)Canal B | |||
| 12 #STO-A Entrée de pilotage Safe Torque Off (STO)Canal A | |||
| 13–16 – Réservé, ne pas raccorder | |||
| 17 GND | Potentiel de référence | ||
| 18 SIN4 | Demande de desserrage du frein +24 V | ||
| 19 ... 20 | – Réservé, ne pas raccorder | ||
| 21 SBA | Sortie de diagnostic Safe Brake Control acknowledge | ||
| 22 STA | Sortie de diagnostic Safe Torque Off acknowledge | ||
| 23 RDY-C2 | Contact NO : message opérationnel (Ready) | ||
| 24 RDY-C1 | |||
Tab. 14 : X1A Interface I/O pour STO et SBC
Câblage en cas d'utilisation des fonctions de sécurité STO ou SBC
- Recourir aux connecteurs de l'assortiment de connecteurs NEKM-C6-C16-S.
- Pour le câblage, utiliser des conducteurs de section comprise entre 0,25 mm² et 0,75 mm².
- Pour un travail sûr avec la fonction de sécurité STO (Safe Torque Off) ou SBC (Safe Brake Control), respecter les instructions supplémentaires des documents applicables → 1.1 Documents applicables.
8 Mise en service

AVERTISSEMENT
Risque de blessure dû au mouvement inattendu du produit.
L'énergie électrique peut entraîner un mouvement imprévu du produit.
- Avant toute intervention sur le produit, couper l'alimentation électrique, contrôler l'absence de tension et sécuriser l'alimentation contre toute remise en marche.
Définir le protocole de bus
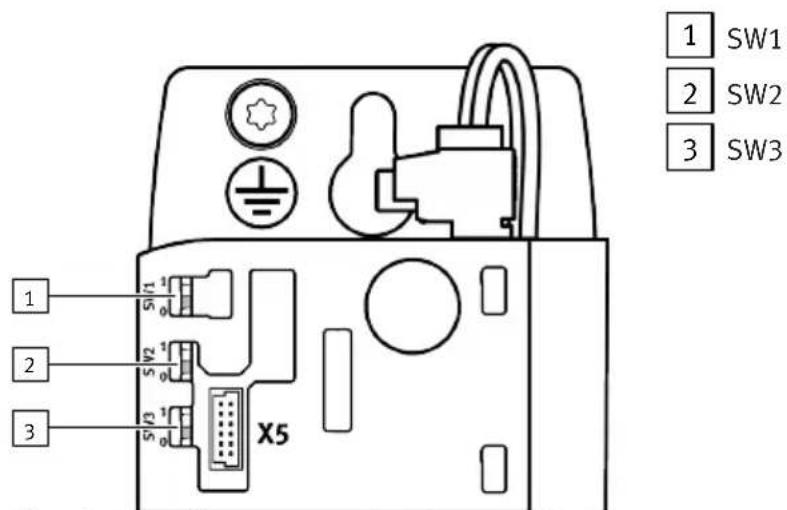
Pour la mise en service, le protocole de bus doit être réglé à l'aide d'un micro-interrupteur DIL. Les micro-interrupteurs DIL sont situés dans la partie supérieure du contrôleur sous une plaque d'obturation. La plaque d'obturation peut être enlevée à la main sans outil. Les commutateurs peuvent être réglés avec un petit tournevis à lame plate. La position du micro-interrupteur est évaluée une fois au démarrage de l'appareil. Une modification de la position du micro-interrupteur ne prend donc effet qu'après le redémarrage de l'appareil.
text_image
1 SW1 2 SW2 3 SW3 1 2 3 S1/1 S2/1 S3/1 S4/1 X5Fig. 16 : Micro-interrupteurs DIL du protocole de bus
- Retirer la plaque d'obturation.
- Réglez le micro-interrupteur DIL sur le protocole de bus EtherCAT.
- Refermer la partie supérieure du contrôleur avec la plaque d'obturation.
Les premières étapes de la mise en service du kit servopresses doivent être effectuées à l'aide du Festo Field Device Tool (FFT) → www.festo.com/sp.
Conditions préalables
- Le PC et le FFT ainsi que la commande et le contrôleur de moteur sont connectés au même réseau.
- Les participants (commande, contrôleur de moteur) sont connectés directement par un interrupteur.
- Protocole de bus réglé sur EtherCAT.
| Port Description TCP/UDP | ||
| 161 PROFINET (utilisation de SNMP) | ||
| 80, 8080 Accès HTTP au logiciel de la servopresse TCP | ||
| 20, 21 FTP TCP | ||
| 1024 - 65535 FTP LoggingEn fonction de la configuration du serveur FTP, les ports doivent être validés dans cette plage. | TCP | |
| 4444 Activation de la servopresse via TCP/IP TCP | ||
| 502 Modbus TCP | ||
| 44818 EtherNet/IP TCP | ||
| 2222 | EtherNet/IP UDP | |
| 10002 Festo Field Device Tool | UDP/TCP | |
| 445 SMB | TCP | |
| 4840, 443 | OPC UA | TCP |
Tab. 15 : Ports de commande de servopresse
Préparation avec le FFT
- Préparation avec le FTT : régler les paramètres réseau de la commande CECC-X-M1-YS.
- Régler les paramètres réseau du contrôleur de moteur CMMT-AS.
- Recommandé en option : mettre à jour le micrologiciel et le logiciel.
- Mise à jour du micrologiciel pour la commande CECC-X-M1-YS
- Mise à jour du micrologiciel pour le contrôleur de moteur CMMT-AS
- Mise à jour du logiciel pour le logiciel servopresses sur la commande CECC-X-M1-YS
i
Exemples expliqués dans les notes d'application de Festo → www.festo.com/sp.
REMARQUE
Usure importante lors de l'exploitation en raison d'une course minimum trop faible.
• Respecter la course minimum.
- En cas de dépassement inférieur, la course minimum de 12,5 mm tous les 100 cycles de déplacement doit être parcourue 10 fois.
9 Maintenance
9.1 Sécurité

AVERTISSEMENT
Risque de blessure en raison d'une chute de la tige de piston.
- Avant toute intervention sur le produit, protéger la tige de piston de toute chute.

AVERTISSEMENT
Risque de blessure dû au mouvement inattendu du produit.
L'énergie électrique peut entraîner un mouvement imprévu du produit.
- Avant toute intervention sur le produit, couper l'alimentation électrique, contrôler l'absence de tension et sécuriser l'alimentation contre toute remise en marche.
9.2 Travaux de maintenance
Les travaux de maintenance des composants individuels du kit sont décrits dans les documents applicables → 1.1 Documents applicables.
Intervalle Travail de maintenance
| au moins une fois par an, en fonction du nombre de mouvements et de la charge | Vérifier la fixation du capteur de force. |
| En cas de kit parallèle : vérifier régulièrement l'usure et la précontrainte de la courroie crantée.En cas de défaillance de la courroie crantée, l'axe peut s'affaisser de manière incontrôlée. | |
| En cas de kit axial : vérifier régulièrement la fixation (vis de serrage) de l'accouplement. |
Tab. 16 : Travaux de maintenance
9.3 Nettoyage
REMARQUE
Dommage matériel dû à un nettoyage non conforme.
- Ne pas nettoyer les éléments de guidage.
- Ne nettoyer le produit qu'avec des produits de nettoyage qui préservent l'environnement et un chiffon doux.
Le nettoyage des composants individuels du kit est décrit dans les documents applicables ➔ 1.1 Documents applicables.
10 Démontage

AVERTISSEMENT
Risque de blessure dû au mouvement inattendu du produit.
L'énergie électrique peut entraîner un mouvement imprévu du produit.
- Avant toute intervention sur le produit, couper l'alimentation électrique, contrôler l'absence de tension et sécuriser l'alimentation contre toute remise en marche.

AVERTISSEMENT
Risque de blessure dû au mouvement inattendu du produit lors du levage.
- Sécuriser les éléments mobiles contre les mouvements inattendus avec des protections de transport.
- Utiliser tous les œillets de transport.
- Tenir compte de la position du centre de gravité.
i
Les détails sur la manipulation des composants individuels du kit sont décrits dans des documents distincts → www.festo.com/sp.
11 Caractéristiques techniques
| Kit servopresses YJKP -0.8 -1.5 -4 | -7 -12 -17 | |||||
| Force de pression max. [kN] 0,8 1,5 | 4 7 12 17 | |||||
| Charge utile max. [kg] 19,5 19,5 48 | 48 95 95 | |||||
| Interface API EtherNet/IP, Modbus | TCP, Ethernet TCP/IP, PROFINET IO, OPC UA | |||||
| Facteur de marche [%] | 100^1) | |||||
| Position de montage | Indifférente | |||||
| Contrôleur | CECC-X-M1-YS | |||||
| Contrôleur de moteur CMMT-AS | -C4-3A-MP-S1 | -C5-11A-P3-MP-S1 | -C12-11A-P3-MP-S1 | |||
| Servomoteur EMMT-AS | -60-M | -60-L | -80-L | -100-S | -150-L | |
| Vérin électrique ESBF-BS-...- 5P^2) | -32 -40 -50 | -63 -80 -100 | ||||
| Pas de la vis d'entraînement [mm] | 5 | |||||
| Répétitivité [mm] | ± 0,01 | ± 0,015 | ± 0,01 | |||
| Vitesse d'avance [mm/s] | ≤ 250 | ≤ 160 | ||||
| Accélération ^3) [m/s ^2 ] | 2 | |||||
| Décélération ^4) [m/s ^2 ] | 2 | |||||
| Décélération Quick [m/s ^2 ] Stop | 5 | |||||
| Position de montage du moteur | Axiale, parallèle | |||||
| Capteur de force SKDA-...-AB | -0.8 | -1.5 | -4 | -7 | -12 | -17 |
| Surcharge max. [kN] | ± 1,5 | ± 3,75 | ± 11,25 | ± 15 | ± 30 | ± 37,5 |
| Taux d'échantillonnage [Hz] | 1 000 | |||||
| Précision de mesure [%FS] | ≤ ± 0,25 | |||||
1) Le système peut presser de manière durable à une force nominale contre un composant / une charge (avec v inférieur à 50 mm/s).
2) Course utile [mm]: 100, 200, 300, 400
3) Accélération pour procédures de positionnement
4) Temporisation si la force est atteinte
Tab. 17 : Caractéristiques techniques YJKP
Caractéristiques techniques CECC-X-M1-YS
| Commande CECC-X-M1-YS | |
| Bruit du ventilateur [dB(A)] 35,7 (à 1 m de distance)LpAeq | |
| Alimentation électrique [X1], [X5] | |
| Tension de service [V DC] 19,2 ... 30 (non protégée contre l'inversion de polarité) | |
| Intensité absorbée [mA] 200 (nominale à 24 V DC) | |
| Carte mémoire | |
| Type pris en charge microSD | |
| Capacité [Go] 32 | |
| Système de fichiers FAT32 | |
| Entrée analogique [X19] | |
| Signal d'entrée [mA] 0 ... 20 | |
| Résolution 14 bits | |
| Matériel | |
| Processeur (CPU) Dual Core, 2 x 866 MHz | |
| Mémoire vive globale [Mo] 512 | |
Tab. 18 : Caractéristiques techniques CECC-X-M1-YS
Caractéristiques techniques CMMT-AS
Caractéristiques techniques détaillées du contrôleur de moteur ➞ 1.1 Documents applicables.
Poids du produit
| Kit servopresses YJKP -0.8 -1.5 -4 | -7 -12 -17 | |||||
| Commande CECC-X-M1-YS [kg] 0,41 | ||||||
| Contrôleur de moteur [kg] 1,4 2,2 4,1 CMMT-AS | ||||||
| Servomoteur EMMT-AS -60-M -60-L | -80-L -100 | -S -150-L | ||||
| Poids de base [kg] 1,53 1,91 3,29 5,5 26 | ||||||
| Frein de poids supplémentaire [kg] 0,32 0,32 0,8 3 1,2 5,5 | ||||||
| Vérin électrique ESBF-BS-...-5P | -32 | -40 | -50 | -63 | -80 | -100 |
| Poids de base à 0 mm de [kg] course | 0,781 | 1,237 | 1,982 | 3,163 | 7,393 | 11,123 |
| Poids supplémentaire par [kg] 0,33 0,47 0,6 5 0,87 1,55 1,93 course de 100 mm | ||||||
| Capteur de force SKDA-...-AB | -0.8 | -1.5 | -4 | -7 | -12 | -17 |
| Poids de base [kg] 0,2 0,2 0,3 0,3 0,7 0,7 | ||||||
| Kit de connexion | ||||||
| Kit axial EAMM-A [kg] 0,26 0,41 1,1 4 1,17 2,92 3,46 | ||||||
| Kit parallèle EAMM-U [kg] 1,05 2,45 4,9 9 4,95 11,9 11,8 | ||||||
Tab. 19 : Poids du produit YJKP
Conditions de service et conditions de stockage
| Kit servopresses YJKP | |
| Température de stockage [°C] -10 | ... +60 |
| Emplacement de stockage Surface | sèche, stable et plane (dans l'emballage d'origine) |
| Durée de stockage max. 48 mois | |
| Température ambiante [°C] 0 ... +40 | |
| Humidité de l'air [%] 0 ... 90 (sans | condensation) |
| Classe de protection anti-corrosion | KBK0, aucun effet de corrosion |
| Altitude d'installation autorisée au-dessus du niveau de la mer | |
| En cas de puissance nomi- [m] 1 000nale | |
| En cas de puissance [m] 1 000 ... 2 000réduite ^1) | |
1) à plus de 1 000 m au-dessus du niveau de la mer, réduction de la puissance de 1 % par 100 m
Tab. 20 : Conditions de service et conditions de stockage
Copyright:
Festo SE & Co. KG
73734 Esslingen
Ruiter Straße 82
Deutschland
Phone:
+49 711 347-0
Internet: