SBC-MotoDriver3 - Carte électronique Joy-It - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil SBC-MotoDriver3 Joy-It au format PDF.

| Caractéristiques Techniques | Non spécifiées |
|---|---|
| Utilisation | Conçu pour le pilotage de moteurs dans des projets de robotique et d'automatisation. |
| Maintenance et Réparation | Vérifier régulièrement les connexions et l'alimentation. Remplacer les composants défectueux si nécessaire. |
| Sécurité | Utiliser dans un environnement sec et bien ventilé. Éviter les courts-circuits. |
| Informations Générales | Compatible avec divers microcontrôleurs. Idéal pour les projets éducatifs et de loisir. |
FOIRE AUX QUESTIONS - SBC-MotoDriver3 Joy-It
Questions des utilisateurs sur SBC-MotoDriver3 Joy-It
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Carte électronique au format PDF gratuitement ! Retrouvez votre notice SBC-MotoDriver3 - Joy-It et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil SBC-MotoDriver3 de la marque Joy-It.
MODE D'EMPLOI SBC-MotoDriver3 Joy-It
Carte de commande de moteur pour moteurs DC et pas à pas
Attention, ce manuel a été traduit automatiquement, en cas de doute, consulter le manuel en anglais ou contactez le service client.
Toutes les demandes de support doivent être formulées en allemand ou en anglais.
TABLE DES MATIÈRES
- Informations générales
- Modification de l'adresse I ^2 C
- Affectation des broches
-
Utilisation avec Raspberry Pi
4.1 Connexion
4.2 Installation
4.3 Utilisation de moteurs pas à pas -
Utilisation avec Raspberry Pi Pico
5.1 Connexion
5.2 Installation
5.3 Exemple de code
5.4 Utilisation de moteurs pas à pas
- Utilisation avec ARD-ONE-C (Arduino compatible)
6.1 Connexion
6.2 Installation
6.3 Exemple de code
6.4 Utilisation de moteurs pas à pas
- Utilisation avec micro:bit
7.1 Connexion
7.2 Installation
7.3 Exemple de code
7.4 Utilisation de moteurs pas à pas
7.5 Appairage du micro:bit
-
Informations supplémentaires
-
Soutien
1. INFORMATIONS GÉNÉRALES
Cher client, Nous vous remercions d'avoir choisi notre produit. Dans ce qui suit, nous vous montrerons ce à quoi vous devez prêter attention lors de la mise en service et de l'utilisation.
Si vous rencontrez des problèmes inattendus lors de l'utilisation, n'hésitez pas à nous contacter.
Avec le MotoDriver3, vous avez la possibilité de commander et d'alimenter jusqu'à quatre moteurs DC ou deux moteurs pas à pas. La commande des moteurs connectés s'effectue via la puce PCA9634, qui met à disposition une interface I2C.
2. MODIFICATION DE L'ADRESSE I2C
Cette carte de commande de moteur peut être configurée avec 128 adresses I2C possibles. Vous pouvez les choisir librement, mais par défaut, l'adresse 0x15 est utilisée.
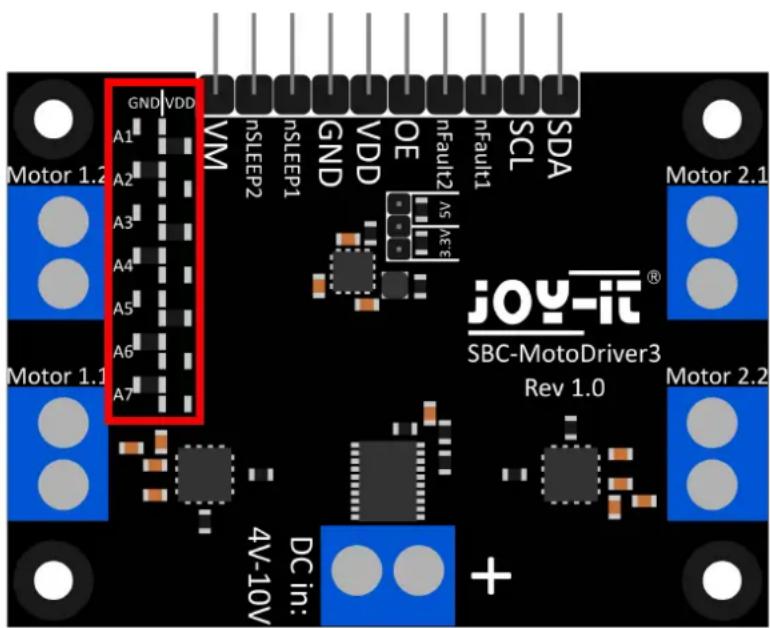
Dans l'illustration suivante, vous voyez quelles résistances peuvent être modifiées pour changer l'adresse I2C de la carte pilote du moteur. Vous pouvez souder ces résistances de A1 à A7 entre GND et VDD pour obtenir différentes adresses I2C.
Les positions des sept résistances peuvent être traduites en une valeur binaire de 7 bits. Nous prenons ici l'adresse standard de la carte de commande du moteur 0x15 qui peut être traduite en 001 0101b, c'est-à-dire :
Il convient de noter qu'il ne faut jamais modifier l'adresse 12C pendant le fonctionnement, car cela peut entraîner des problèmes imprévisibles.
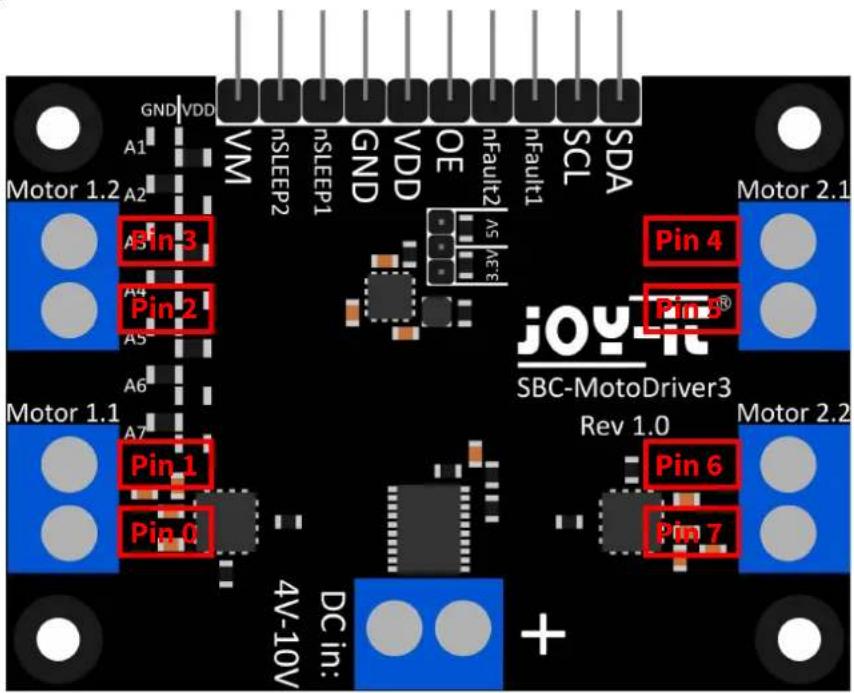
3. AFFECTATION DES BROCHES
Dans cette section, nous expliquons brièvement les fonctions de chaque broche.

- SCL et SDA : Interface I2C. Broches pour la communication avec le circuit intégré du pilote.
- nFault1 et nFault2 : Broches d'état des pilotes de moteur. Elles émettent un signal logique BAS lorsque les pilotes de moteur surchauffent ou sont soumis à une charge excessive en courant, par exemple.
- VDD : Sortie de tension du convertisseur de tension. Cette broche délivre la tension du convertisseur de tension intégré sur la carte. Vous pouvez choisir entre 2 tensions via un cavalier sur la carte. Les tensions 5V et 3.3V sont sélectionnables ici.
- GND : Connexion à la terre.
- nSLEEP1 et nSLEEP2 : Active la sortie des pilotes de moteur. Lorsque ces broches sont tirées vers un signal logique HAUT, les sorties des pilotes de moteur sont activées, et lorsque les broches sont tirées vers un signal logique BAS, les pilotes de moteur passent en mode veille à faible consommation.
- VM : Sortie de la tension du moteur. Cette broche délivre la tension en courant continu (DC) provenant de l'entrée et utilisée pour alimenter les moteurs, en tant que tension utilisable.
Cette carte de commande de moteur comporte 5 bornes à vis.
Quatre d'entre elles portent la sérigraphie "Motor 1.1 | Motor 1.2 | Motor 2.1 et Motor 2.2". Il s'agit des bornes pour les moteurs. Il est possible d'y connecter 2 moteurs pas à pas ou 4 moteurs à courant continu. La dernière borne est l'entrée de tension pour les pilotes de moteur et le transformateur de tension.
Il est important de ne pas dépasser la tension maximale admissible de la carte de commande du moteur et de sélectionner les moteurs en conséquence, sinon la carte de commande du moteur pourrait être endommagée.
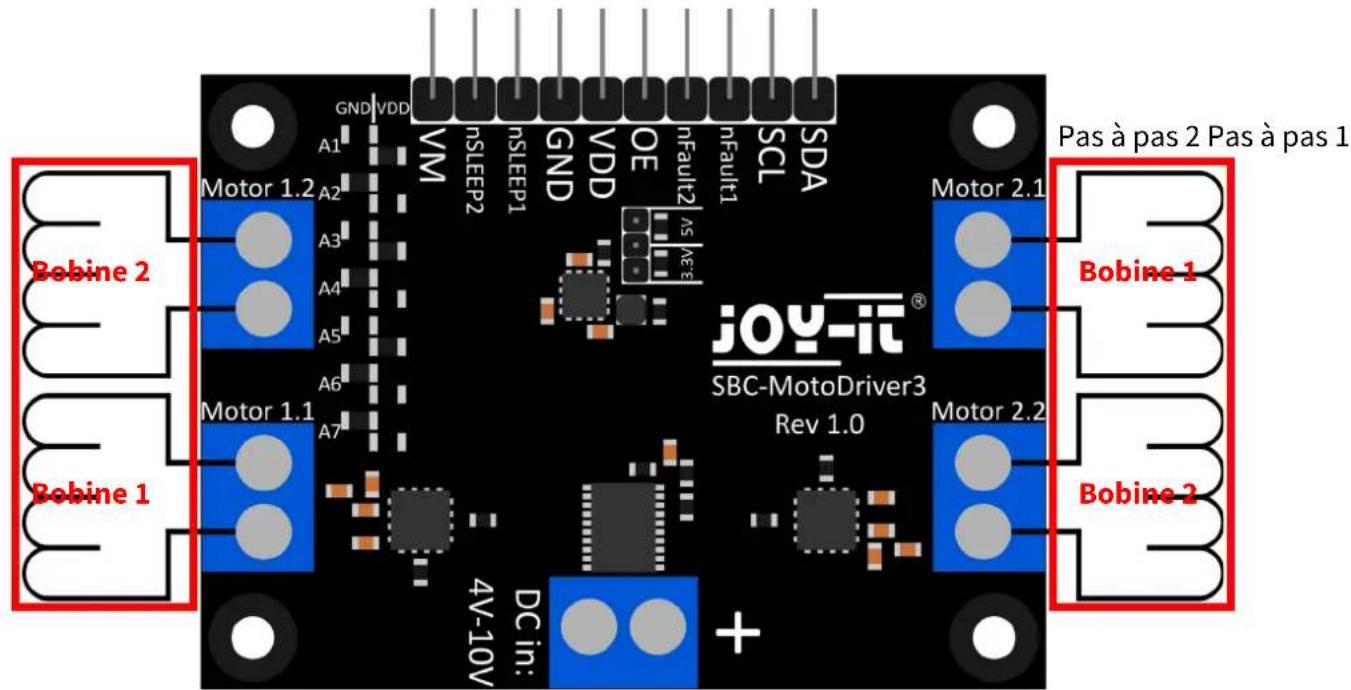
Connectez les câbles des bobines de vos moteurs pas à pas à la carte de pilotage du moteur comme indiqué ci-dessus afin de pouvoir les utiliser sans problème.
La borne "Motor 1.1" aura plus tard la broche 0 et la broche 1 dans le logiciel.
La borne "Motor 1.2" aura plus tard la broche 2 et la broche 3 dans le logiciel.
La borne "Motor 2.1" aura plus tard la broche 4 et la broche 5 dans le logiciel.
La borne "Motor 2.2" aura plus tard la broche 6 et la broche 7 dans le logiciel.
4. UTILISATION AVEC LE RASPBERRY PI
4.1. Connexion
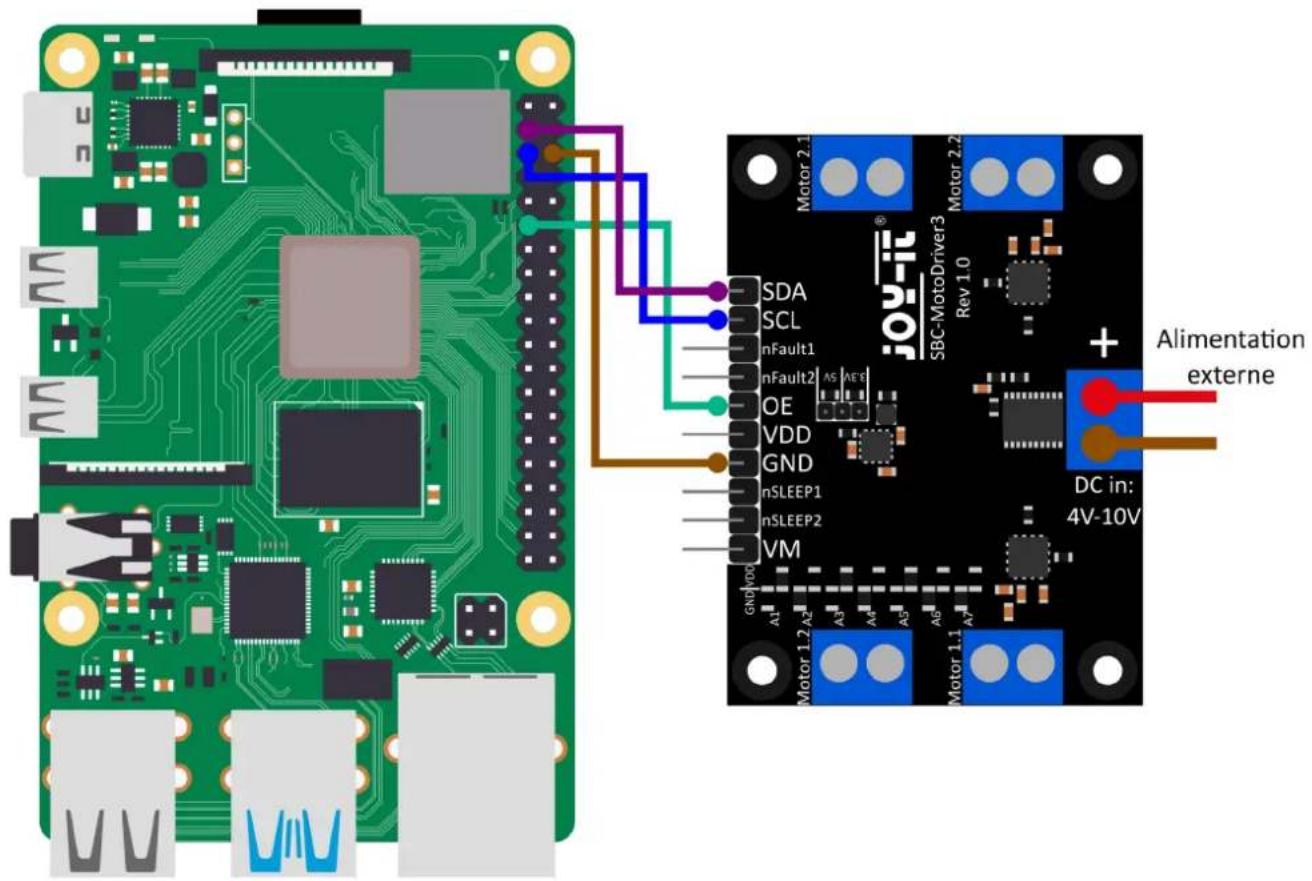
| Raspberry Pi | SBC-MotoDriver3 | Externe |
| SDA (Pin 3) SDA - | ||
| SCL (Pin 5) SCL - | ||
| - nFault1 - | ||
| - nFault2 - | ||
| GPIO 17 (Pin 11) OE - | ||
| - VDD - | ||
| GND (Pin 6) GND - | ||
| - nSLEEP1 | - | |
| - nSLEEP2 | - | |
| - | VM/DC in | La source de tension externe doit être alignée selon les spécifications des moteurs. |
Veuillez noter que vous ne pouvez pas connecter VDD à votre Raspberry Pi, car le convertisseur de tension sur la carte ne peut fournir que 1 ampère et le Raspberry Pi peut nécessiter plus de 1 ampère sous charge. Pour éviter d'endommager les circuits intégrés du convertisseur de tension et donc l'ensemble de la carte, nous vous conseillons de ne pas connecter VDD à votre Raspberry Pi.
4.2. Installation
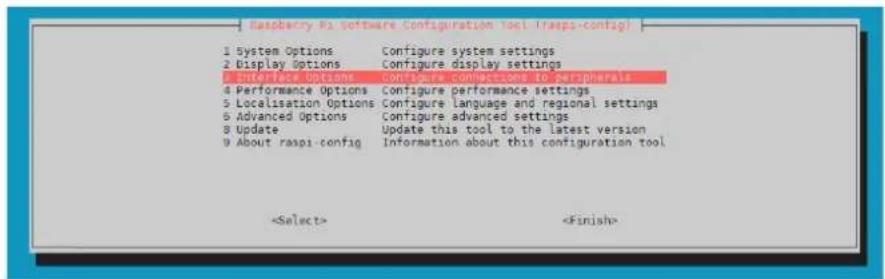
Tout d'abord, vous devez activer I2C sur votre Raspberry Pi. Pour ouvrir la configuration, saisissez la commande suivante :
sudo raspi-config
Ensuite, sélectionnez 3 Interface Options → P5 I2C.
Là, vous obtiendrez la question Would you like the ARM I2C Interface to be enabled?. Confirmez cela en sélectionnant Yes.
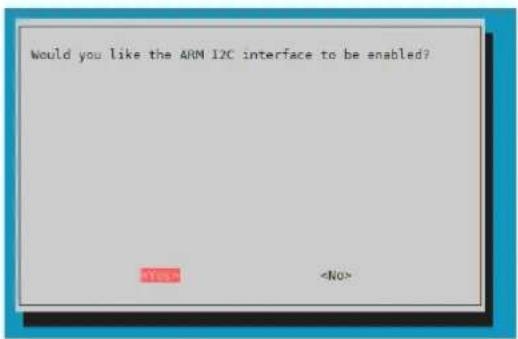
Vous avez maintenant activé avec succès I2C. La carte de commande du moteur est désormais accessible à l'adresse I2C 0x15, qui est définie par défaut pour cette carte. L'adresse I2C sera différente si vous l'avez déjà configurée avant de configurer votre Raspberry Pi.
Maintenant, pour trouver votre carte de commande du moteur, vous devez télécharger et installer i2c-tools sur votre Raspberry Pi. Vous pouvez le faire avec la commande suivante.
sudo apt-get install i2c-tools
Après avoir téléchargé et installé i2c-tools, vous pouvez maintenant démarrer le programme en utilisant la commande suivante :
i2cdetect -y 1
Pour trouver votre carte de pilote de moteur, vous devriez voir les adresses I2C 0x15 et 0x70.
Veuillez noter que 0x70 est une adresse I2C interne du PCA9634 et ne doit pas être utilisée si ce n'est pas nécessaire. En effet, cette adresse fait office de réinitialisation matérielle du PCA9634.
Ensuite, vous devez télécharger les bibliothèques supplémentaires requises. Pour cela, vous devez exécuter les commandes suivantes :
sudo apt install -y python3-dev python3-pip
pip3 install SMBus2
sudo apt install -y git
Ensuite, vous devez redémarrer votre Raspberry Pi. Pour redémarrer votre Raspberry Pi, il vous suffit d'exécuter la commande suivante.
sudo reboot now
Pour notre exemple de code, nous utilisons la bibliothèque SBC-MotoDriver3-RaspberryPi de Joy-IT, qui est publiée sous la licence GNU et contient déjà un exemple de code. Utilisez la commande suivante pour télécharger cette bibliothèque depuis GitHub. Vous pouvez également télécharger uniquement l'exemple de code ici.
git clone https://github.com/joy-it/SBC-MotoDriver3-RaspberryPi.git
Maintenant que vous avez téléchargé la bibliothèque, vous devez exécuter la commande suivante pour utiliser l'exemple de la bibliothèque de la carte de commande du moteur.
cd SBC-MotoDriver3-RaspberryPi
python3 SBC-MotoDriver3-Example.py
4.3 Utilisation de moteurs pas à pas
Veuillez noter qu'un seul moteur pas à pas peut être connecté par côté. En ce qui concerne le matériel, il est important d'utiliser les moteurs pas à pas appropriés pour la plage de tension autorisée. En outre, quelle que soit la plate-forme sur laquelle vous avez l'intention d'utiliser le produit, veillez à ne jamais connecter simultanément un moteur pas à pas et un moteur à courant continu sur le même côté. Cela peut entraîner des problèmes, voire endommager le produit.
En termes de logiciel, veillez à ne pas envoyer la fonction de moteur pas à pas au même pilote de moteur que les fonctions de moteur à courant continu, quelle que soit la plate-forme sur laquelle vous envisagez d'utiliser le produit. Ces fonctions doivent toujours être séparées les unes des autres.
5. UTILISATION AVEC LE RASPBERRY PI PICO
5.1. Connexion
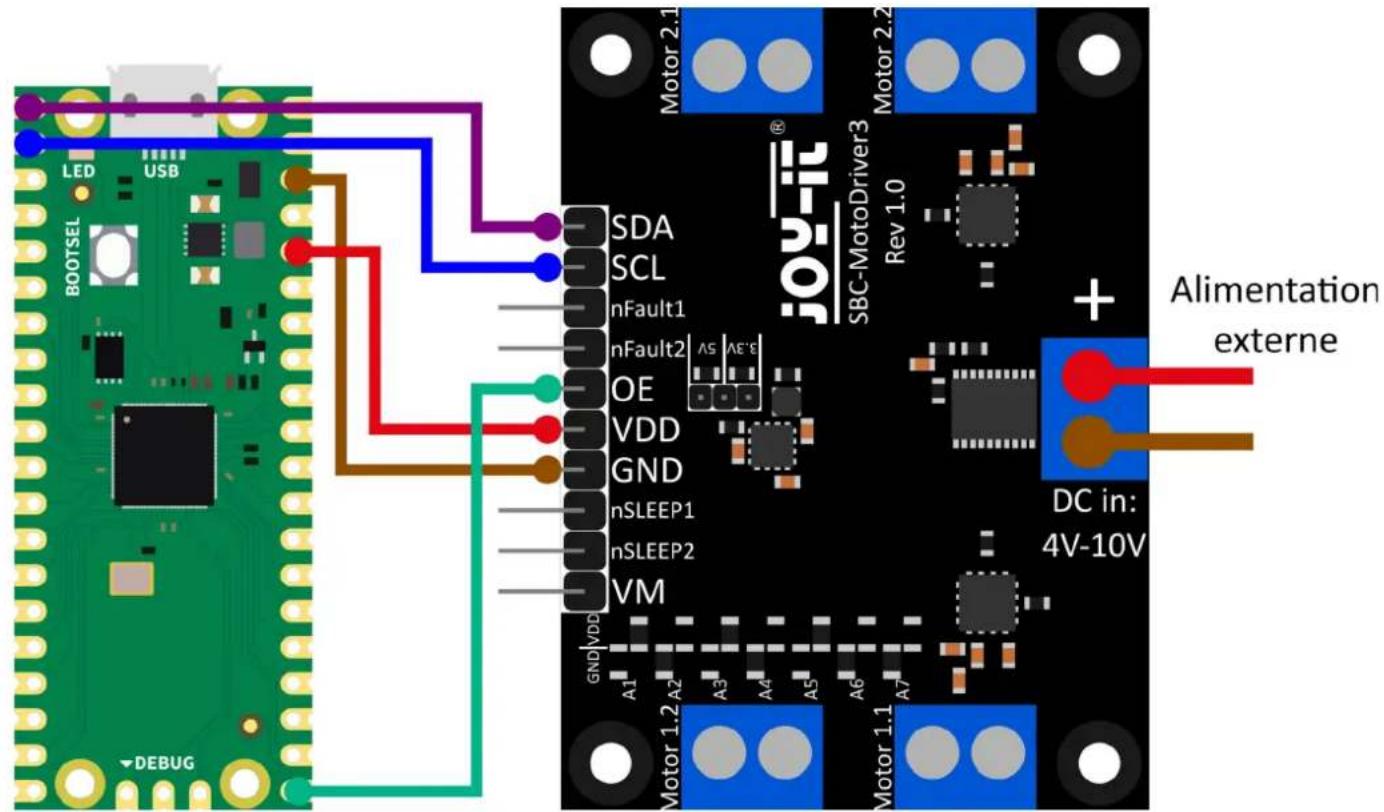
| Raspberry Pi Pico | SBC-MotoDriver3 | Externe |
| Pin 0 SDA - | ||
| Pin 1 SCL - | ||
| - nFault1 - | ||
| - nFault2 - | ||
| Pin 16 OE - | ||
| 3V3 VDD - | ||
| GND GND - | ||
| - nSLEEP1 - | ||
| - nSLEEP2 - | ||
| - | VM/DC in | La source de tension externe doit être alignée selon les spécifications des moteurs. |
Veuillez noter que lorsque vous connectez VDD à votre Raspberry Pi Pico, vous devez régler la tension de sortie du convertisseur de tension sur la carte sur 3,3V à l'aide du cavalier afin de pouvoir alimenter votre Pico via la carte de commande du moteur.
5.2. Installation
Pour utiliser cette bibliothèque sur votre Raspberry Pi Pico, nous vous recommandons de télécharger l'IDE Thonny Python.
Une fois que vous avez téléchargé l'IDE Thonny, vous pouvez maintenant télécharger la dernière version de Micropython et l'installer sur votre Pico.
Après avoir téléchargé la dernière version de Micropython, vous pouvez maintenant l'installer sur votre Pico en maintenant le bouton BOOTSEL enfoncé lorsque vous connectez votre Pico à votre PC. Vous pouvez ensuite relâcher le bouton BOOTSEL. La Pico devrait maintenant s'ouvrir dans l'Explorateur sur votre écran. Il vous suffit maintenant de glisser le fichier téléchargé et votre Pico est flashé avec la dernière version de Micropython.
5.3. Exemple de code
Ensuite, vous pouvez télécharger la bibliothèque depuis GitHub. Nous utilisons la bibliothèque SBC-MotoDriver3-RaspberryPiPico de Joy-IT pour notre exemple de code, qui est publiée sous la licence GNU.
Après avoir téléchargé le fichier *.zip, vous devez le décompresser et suivre ces étapes pour utiliser la bibliothèque sans problème.
- Ouvrez l'IDE Thonny, allez dans "Affichage" et activez "Fichiers" là-bas.
- Créez un nouveau dossier sur votre Pico que vous nommez "lib".
- Dans la fenêtre "Fichiers" qui s'ouvre maintenant, ouvrez le dossier dans lequel se trouve la bibliothèque de GitHub.
- Accédez au dossier "lib" sur votre Pico et faites un clic droit sur le fichier "SBC_MotoDriver3_Lib.py" dans la fenêtre "Fichiers" et téléchargez-le dans votre dossier "lib" sur votre Pico.
- Laissez le dossier "lib" sur votre Pico et téléchargez maintenant le fichier "SBC-MotoDriver3-Example.py" dans la fenêtre "Fichiers" en faisant un clic droit sur votre Pico.
Si vous avez suivi ces étapes, vous pouvez déjà utiliser l'exemple de code.
5.4 Utilisation de moteurs pas à pas
Veuillez noter qu'un seul moteur pas à pas peut être connecté par côté. En ce qui concerne le matériel, il est important d'utiliser les moteurs pas à pas appropriés pour la plage de tension autorisée. En outre, quelle que soit la plate-forme sur laquelle vous avez l'intention d'utiliser le produit, veillez à ne jamais connecter simultanément un moteur pas à pas et un moteur à courant continu sur le même côté. Cela peut entraîner des problèmes, voire endommager le produit.
En termes de logiciel, veillez à ne pas envoyer la fonction de moteur pas à pas au même pilote de moteur que les fonctions de moteur à courant continu, quelle que soit la plate-forme sur laquelle vous envisagez d'utiliser le produit. Ces fonctions doivent toujours être séparées les unes des autres.
6. UTILISATION AVEC ARD-ONE-C (COMPATIBLE ARDUINO)
6.1. Connexion
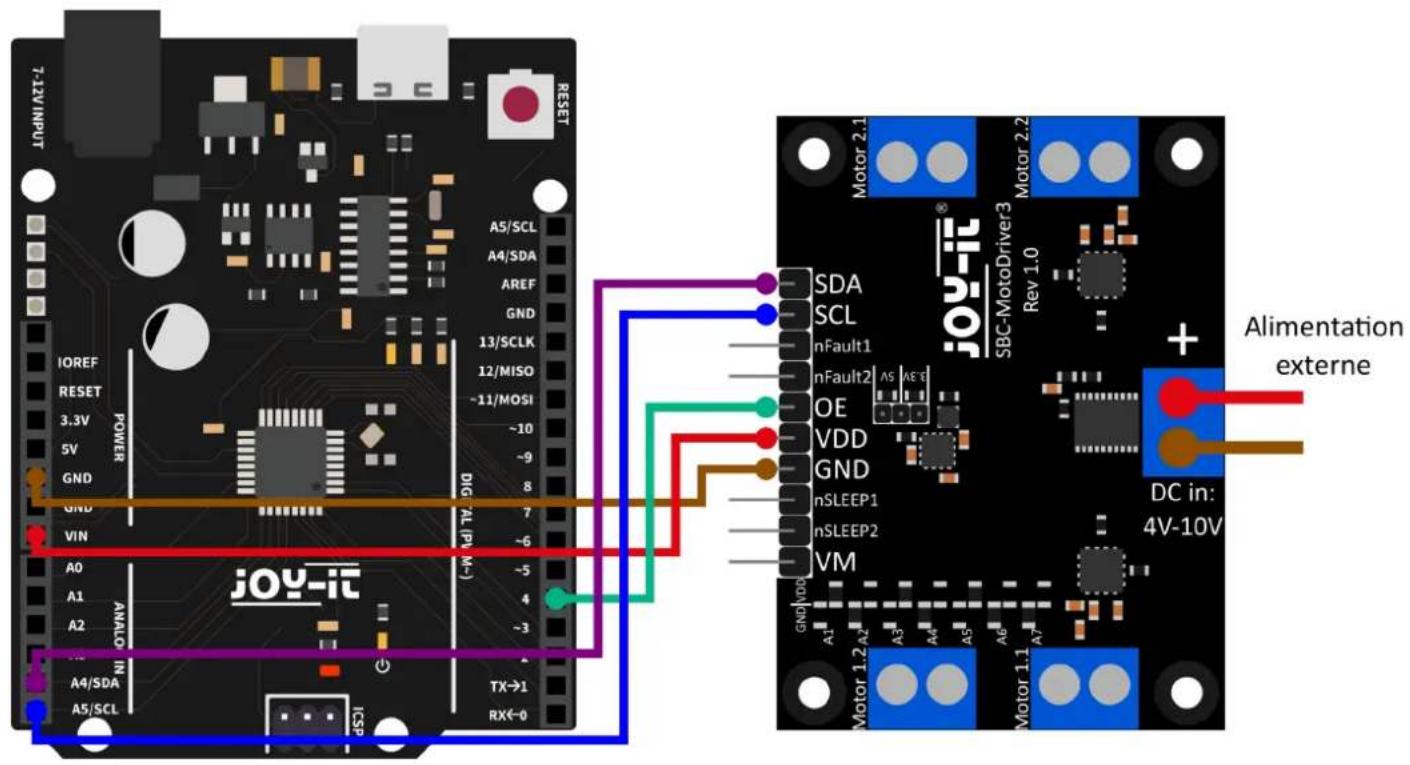
| ARD-ONE-C | SBC-MotoDriver3 | Externe |
| SDA (A4) SDA - | ||
| SCL (A5) SCL - | ||
| - nFault1 - | ||
| - nFault2 - | ||
| D4 OE - | ||
| VIN VDD - | ||
| GND GND - | ||
| - nSLEEP1 - | ||
| - nSLEEP2 - | ||
| - | VM/DC in | La source de tension externe doit être alignée selon les spécifications des moteurs. |
Veuillez noter que si vous connectez VDD à votre ARD-ONE-C, vous devez régler la tension de sortie du convertisseur de tension sur la carte avec le cavalier sur 5V afin de pouvoir alimenter votre ARD-ONE-C avec la tension via la carte de commande du moteur.
6.2. Installation
Pour notre exemple de code, nous utilisons la bibliothèque SBC-MotoDriver3-Arduino de Joy-IT, qui est publiée sous la licence GNU. Pour utiliser cette bibliothèque, vous devez la télécharger depuis GitHub. Vous pouvez l'installer en allant dans Sketch → Include Library → Add .zip Library .... Recherchez la bibliothèque que vous venez de télécharger et sélectionnez-la.
6.3. Exemple de code
Pour tester votre carte de pilote de moteur avec un exemple de code, il vous suffit d'aller dans Fichier → Exemples → SBC-MotoDriver3-Arduino dans votre IDE Arduino, puis de sélectionner SBC-MotoDriver3-Example... Cliquez sur Téléverser pour charger l'exemple de code dans votre Arduino. Vous pouvez également télécharger l'exemple de code ici.
6.4 Utilisation de moteurs pas à pas
Veuillez noter qu'un seul moteur pas à pas peut être connecté par côté. En ce qui concerne le matériel, il est important d'utiliser les moteurs pas à pas appropriés pour la plage de tension autorisée. En outre, quelle que soit la plate-forme sur laquelle vous avez l'intention d'utiliser le produit, veillez à ne jamais connecter simultanément un moteur pas à pas et un moteur à courant continu sur le même côté. Cela peut entraîner des problèmes, voire endommager le produit.
En termes de logiciel, veillez à ne pas envoyer la fonction de moteur pas à pas au même pilote de moteur que les fonctions de moteur à courant continu, quelle que soit la plate-forme sur laquelle vous envisagez d'utiliser le produit. Ces fonctions doivent toujours être séparées les unes des autres.
7. UTILISATION AVEC LE MICRO:BIT
7.1. Connexion
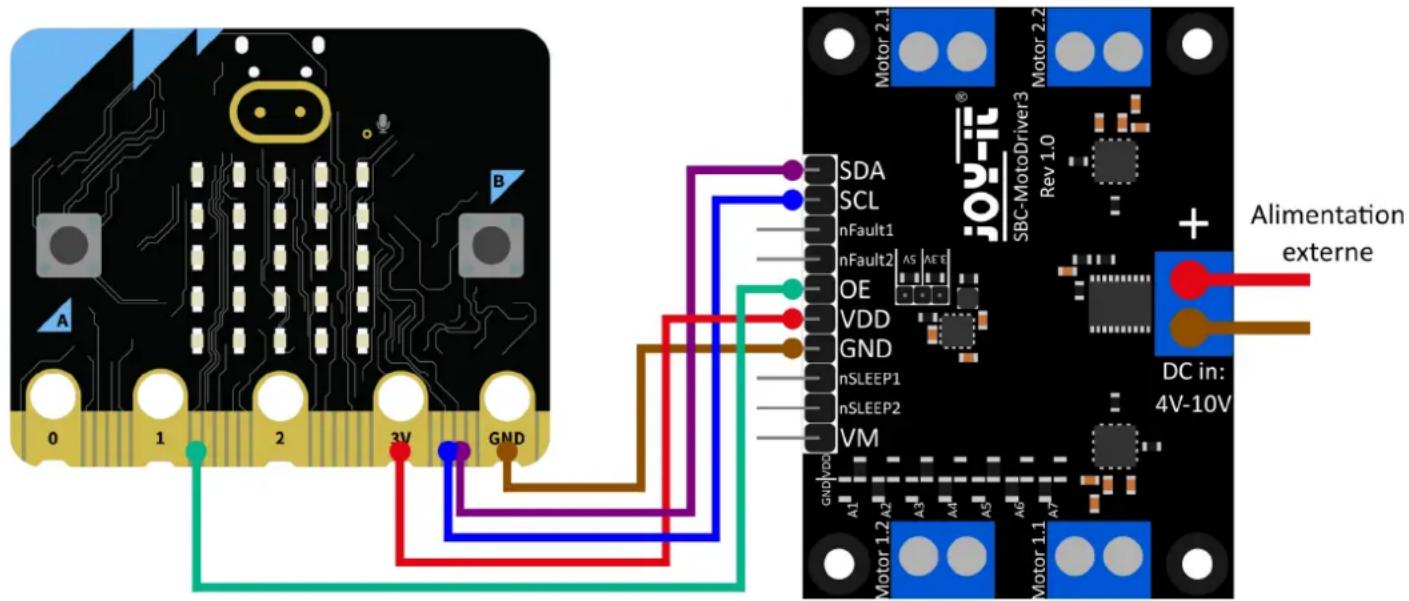
| micro:bit | SBC-MotoDriver3 | Externe |
| SDA (Pin 20) SDA - | ||
| SCL (Pin 19) SCL - | ||
| - nFault1 - | ||
| - nFault2 - | ||
| Pin 8 OE - | ||
| 3V VDD - | ||
| GND GND - | ||
| - nSLEEP1 - | ||
| - nSLEEP2 - | ||
| - | VM/DC in | La source de tension externe doit être ajustée selon les spécifications des moteurs. |
Veuillez noter que si vous connectez VDD à votre micro:bit, vous devez régler la tension de sortie du convertisseur de tension sur la carte à 3,3 V à l'aide du cavalier pour pouvoir alimenter votre micro:bit avec la tension via la carte de commande du moteur.
Vous devrez peut-être utiliser une carte de connexion pour connecter des câbles à certaines broches de votre micro:bit. Dans cet exemple, une carte de connexion est utilisée. Nous vous recommandons la carte de connexion pour micro:bit de Joy-IT.
7.2. Installation
Pour le contrôle, nous recommandons d'utiliser la bibliothèque pxt-SBC-MotoDriver3 publiée par Joy-IT sous la licence GNU.
Vous pouvez ajouter la bibliothèque en cliquant sur Extensions dans la page Makecode,
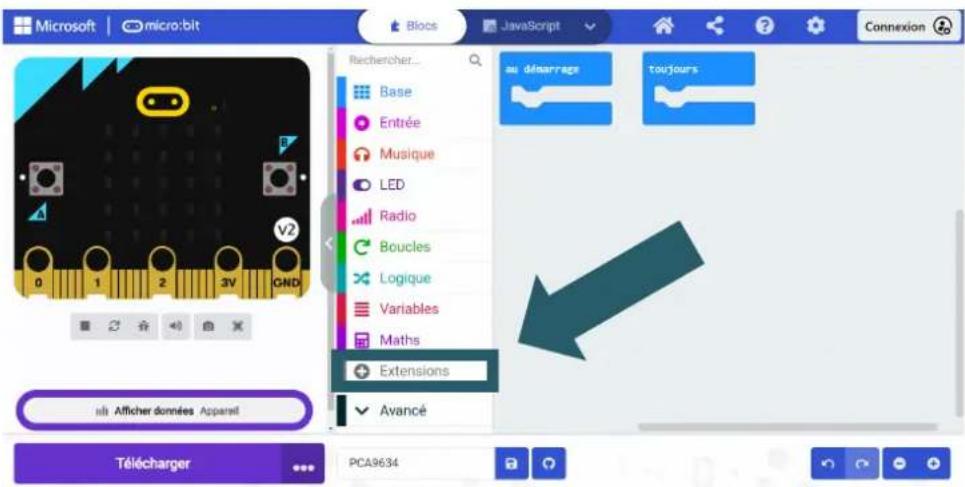
puis en tapant https://github.com/joy-it/pxt-SBC_MotoDriver3 dans la barre de recherche. Une fois que vous avez fait cela, il vous suffit de cliquer sur l'extension pour l'ajouter automatiquement à votre projet en cours.
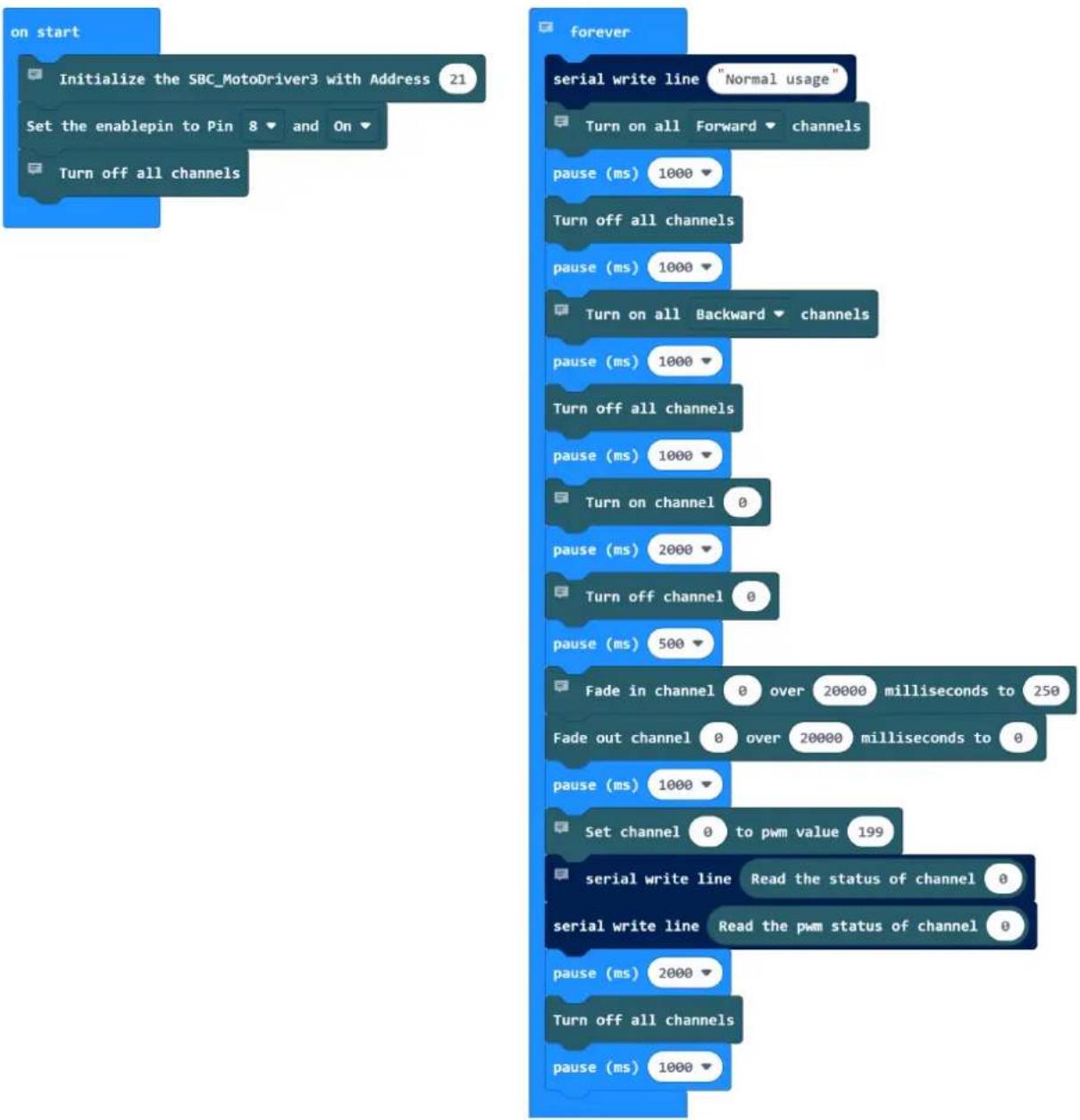
7.3. Example de code
Pour tester votre Carte de pilote de moteur, vous pouvez télécharger un exemple de code depuis notre site ici ou simplement reconstruire le code vous-même comme indiqué ci-dessous.
Si vous avez décidé de télécharger notre exemple de code, alors après avoir décompressé le fichier, vous pouvez simplement faire glisser-déposer le contenu sur la page Web de Makecode et relâcher pour importer le fichier et l'ouvrir automatiquement.
Exemple de code Micro:bit Illustration :
7.4 Utilisation de moteurs pas à pas
Veuillez noter qu'un seul moteur pas à pas peut être connecté par côté. En ce qui concerne le matériel, il est important d'utiliser les moteurs pas à pas appropriés pour la plage de tension autorisée. En outre, quelle que soit la plate-forme sur laquelle vous avez l'intention d'utiliser le produit, veillez à ne jamais connecter simultanément un moteur pas à pas et un moteur à courant continu sur le même côté. Cela peut entraîner des problèmes, voire endommager le produit.
En termes de logiciel, veillez à ne pas envoyer la fonction de moteur pas à pas au même pilote de moteur que les fonctions de moteur à courant continu, quelle que soit la plate-forme sur laquelle vous envisagez d'utiliser le produit. Ces fonctions doivent toujours être séparées les unes des autres.
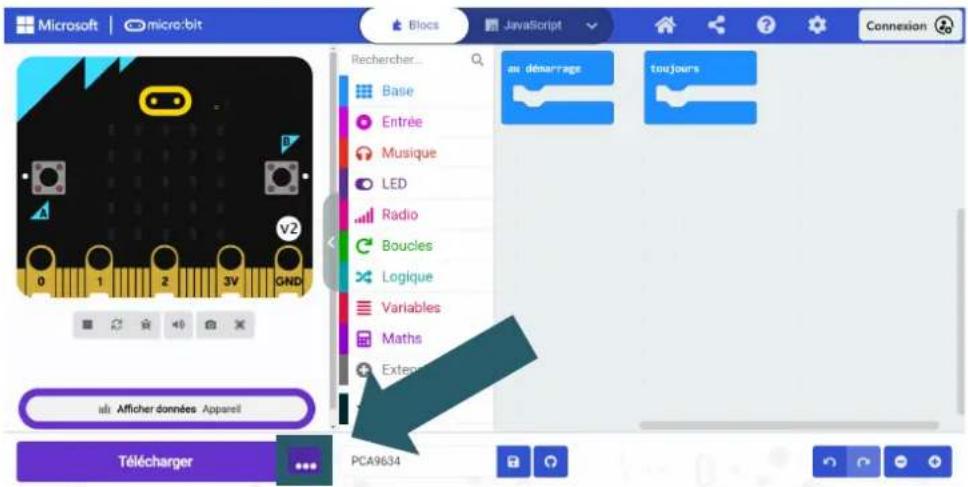
7.4. Appairage du Micro:Bit
Cliquez sur le bouton situé à droite du bouton Téléverser/Télécharger.
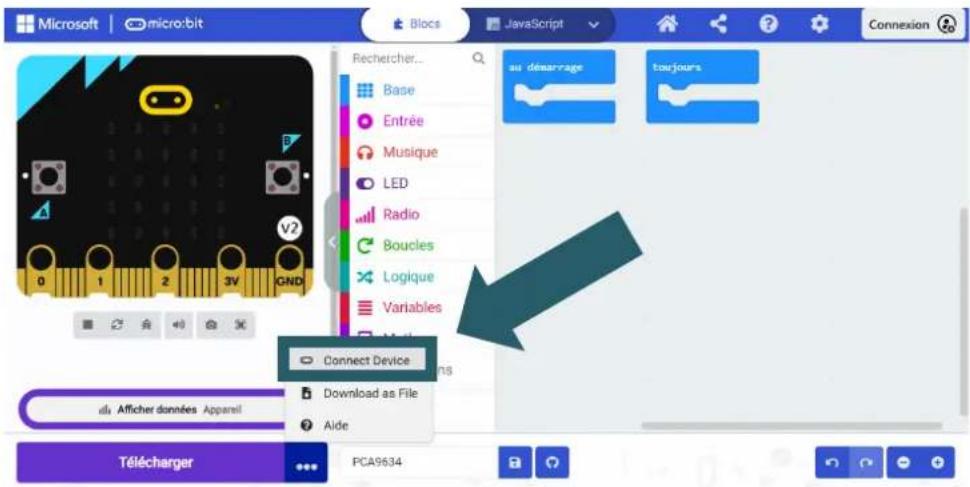
Cliquez sur Connect Device.
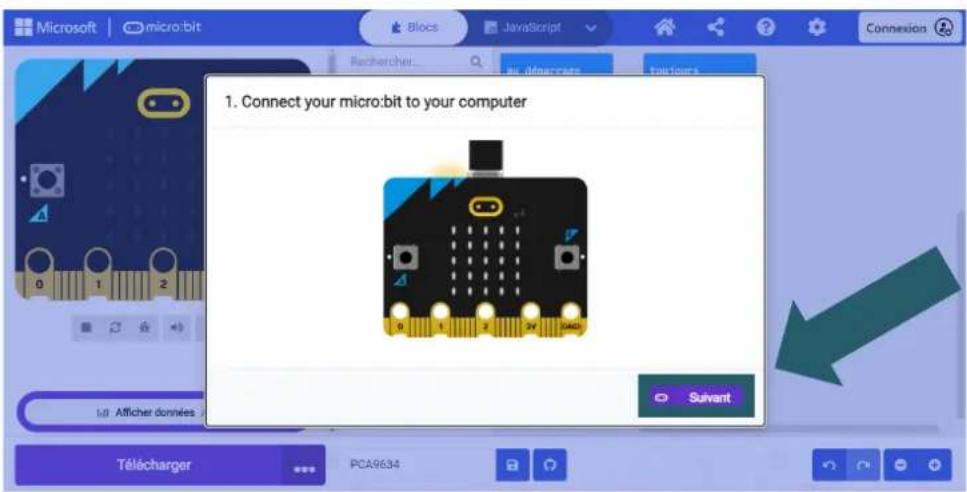
Cliquez sur Suivant.
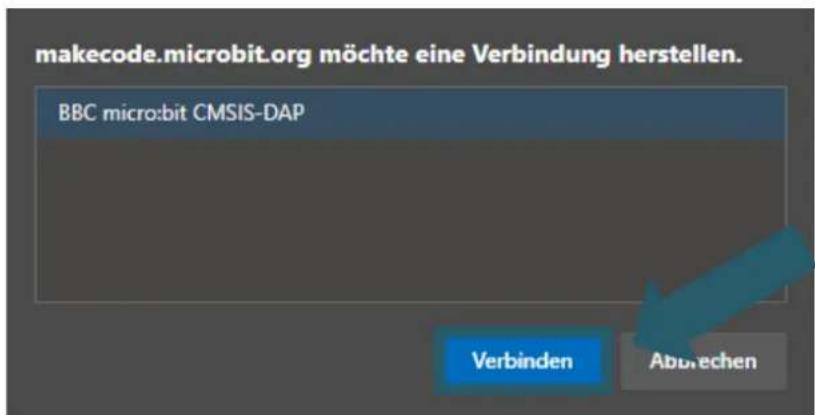
Cliquez sur Pair.
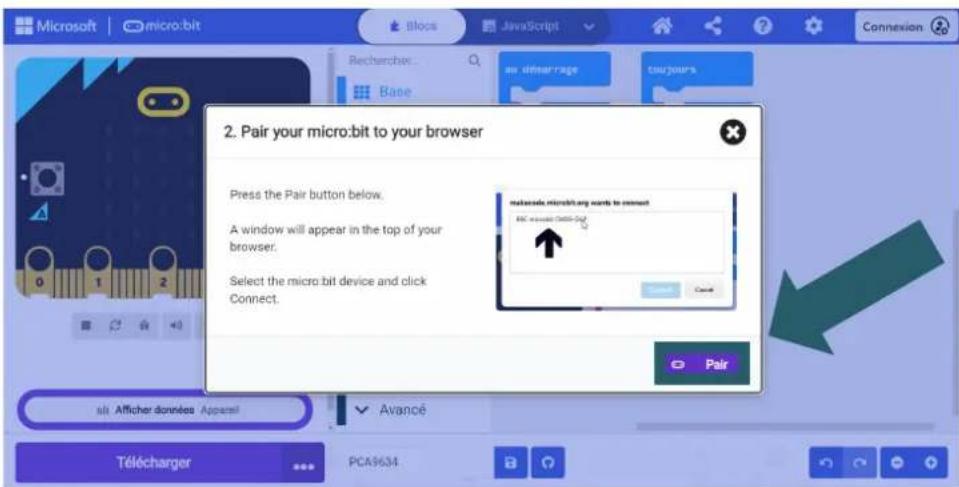
Sélectionnez votre Micro:Bit dans la fenêtre ouverte, puis cliquez sur "Connector" pour pouvoir le connecter et l'utiliser.
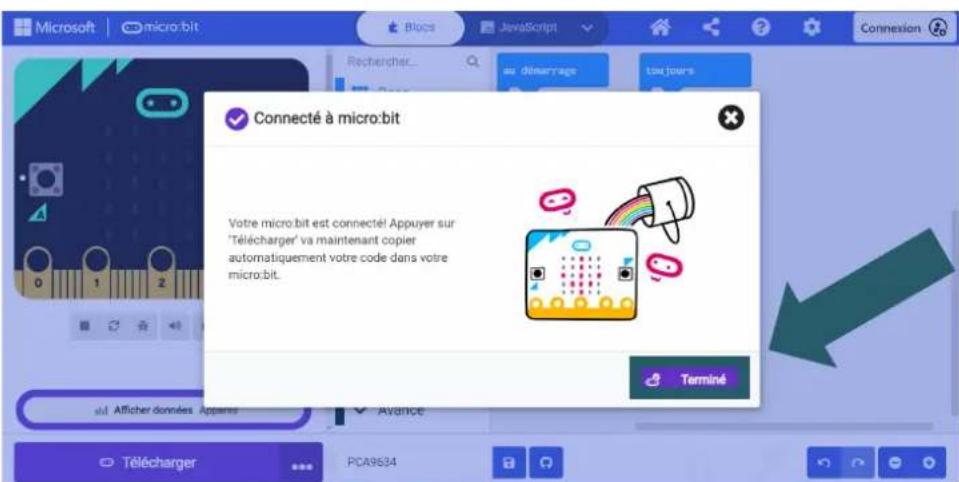
La dernière chose que vous devez faire est de cliquer sur Terminé pour pouvoir télécharger votre code. Vous pouvez télécharger votre code en cliquant sur "Télécharger".
8. INFORMATIONS SUPPLÉMENTAIRES
Nos obligations d'information et de reprise conformément à la loi sur les équipements électriques et électroniques (ElektroG)
Symbole sur les équipements électriques et électroniques :

Ce symbole de poubelle barrée signifie que les appareils électriques et électroniques ne doivent pas être jetés avec les déchets ménagers. Vous devez rapporter les anciens appareils à un point de collecte approprié.
Avant de remettre les piles et accumulateurs usagés qui ne sont pas intégrés à un équipement, ils doivent être séparés de celui-ci.
Options de retour :
En tant qu'utilisateur final, vous pouvez retourner votre ancien appareil (qui remplit essentiellement la même fonction que le nouvel appareil acheté chez nous) gratuitement pour être éliminé lorsque vous achetez un nouvel appareil.
Les petits appareils dont les dimensions extérieures ne dépassent pas 25 cm peuvent être éliminés en quantités normales pour un usage domestique, indépendamment de l'achat d'un nouvel appareil.
Possibilité de retour à notre adresse de l'entreprise pendant les heures d'ouverture :
SIMAC Electronics GmbH, Pascalstr. 8, D-47506 Neukirchen-Vluyn, Allemagne.
Possibilité de retour dans votre région :
Nous vous enverrons un timbre d'expédition avec lequel vous pourrez nous retourner l'appareil gratuitement. Veuillez nous contacter par e-mail à Service@joy-it.net ou par téléphone.
Informations sur l'emballage :
Si vous n'avez pas de matériel d'emballage approprié ou si vous ne souhaitez pas utiliser le vôtre, veuillez nous contacter et nous vous enverrons un emballage approprié.
9. SOUTIEN
Si vous avez des problèmes ou des questions après votre achat, nous vous apporterons notre soutien par e-mail, téléphone et via notre système de support par ticket.
Email: service@joy-it.net
Système de support par ticket: http://support.joy-it.net
Téléphone : +49 (0)2845 9360-50 (Lu. - Je. : 10:00 - 17:00 h, ven. : 10:00 - 14:30 h)
Pour plus d'informations, veuillez visiter notre site web :
www.joy-it.net