
Ecomat 200 DX340 - Moniteur IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil Ecomat 200 DX340 IFM au format PDF.

| Type de produit | Moniteur universel pour grandeurs physiques dérivées d'impulsions |
| Marque | IFM |
| Modèle | Ecomat 200 DX340 |
| Dimensions (découpe) | 91 x 43 mm |
| Alimentation électrique | AC : 115/230 V, DC : 24 V |
| Nombre d'entrées impulsions | 3 entrées (A, B, C) |
| Types de capteurs supportés | 3 fils DC PNP/NPN, 2 fils DC, NAMUR |
| Niveaux d'entrée | HTL (LOW 0-10V, HIGH 15-30V) / TTL (LOW 0-1V, HIGH 2.6-5.5V) |
| Fonctions principales | Affichage de vitesse de rotation, comptage, chronométrage, rapport de vitesses, différence en pourcentage, comptage avec inhibition, somme/différence |
| Gammes de fréquences | 0.03 Hz à 10 kHz selon mode |
| Programmation | Par interrupteurs DIP (SW1-SW7) et roues codeuses (SW3-SW6) |
| Affichage | 6 chiffres (LED ou LCD non spécifié) |
| Montage | Dans armoire électrique, fixation par brides |
| Raccordement | Bornier à vis, sections non spécifiées |
| Entretien | Aucun entretien particulier, nettoyage avec chiffon sec |
| Sécurité | Mettre hors tension avant raccordement ; séparation galvanique entrées/alimentation |
| Poids | Environ 200 g (estimation) |
| Température de fonctionnement | Non spécifiée, usage en intérieur |
| Nombre de pages de la notice | 12 pages |
| Langue de la notice | Français (traductions disponibles) |
FOIRE AUX QUESTIONS - Ecomat 200 DX340 IFM
Questions des utilisateurs sur Ecomat 200 DX340 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Moniteur au format PDF gratuitement ! Retrouvez votre notice Ecomat 200 DX340 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil Ecomat 200 DX340 de la marque IFM.
MODE D'EMPLOI Ecomat 200 DX340 IFM
L'afficheur est un appareil universel pour des grandeurs physiques qui peuvent être dérivées d'impulsions. Entre autres, il traite les impulsions pour
• afficher des vitesses de rotation, • afficher des vitesses, • afficher le comptage d'événements (cycles par unité de temps, quantité par unité de temps, etc.).
Montage
Montez l'appareil à l'aide des deux brides de fixation dans l'armoire électrique, découpe : 91 x 43 mm.
Raccordement électrique

Mettez l'installation hors tension et raccordez l'appareil.
Schéma de branchement:
Alimentation AC alimentation DC
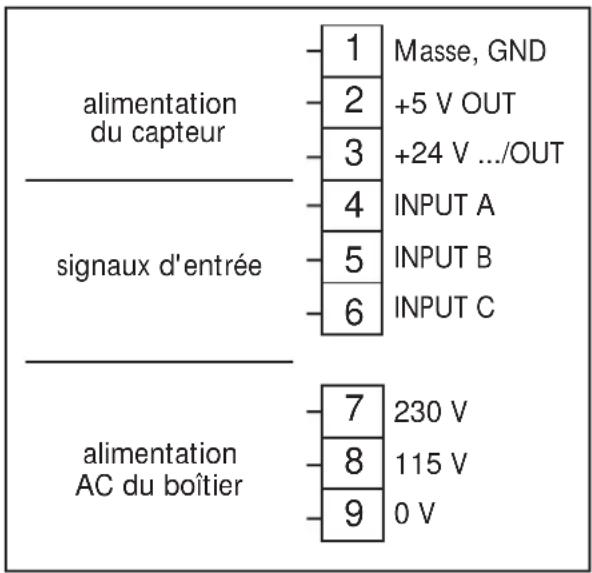
Les broches 1 à 6 sont séparées électriquement de l'alimentation secteur. En cas d'alimentation externe du capteur (par ex. codeur) raccordez la borne 1 au 0V externe.
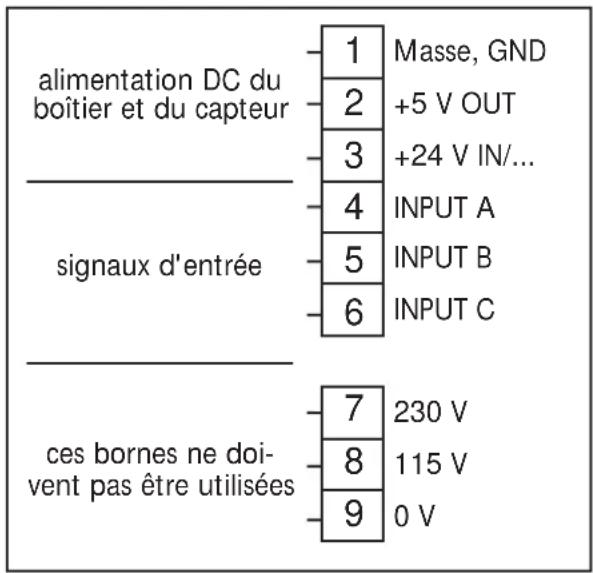
Le capteur est alimenté directement par la tension d'alimentation.
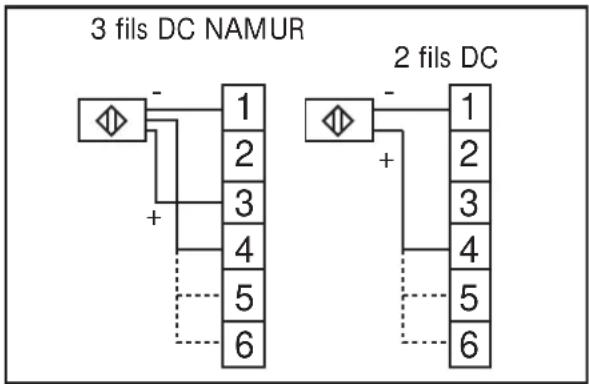
Raccordement des générateurs d'impulsions
flowchart
graph TD
A["3 fils DC NAMUR"] --> B["1"]
A --> C["2"]
A --> D["3"]
A --> E["4"]
A --> F["5"]
A --> G["6"]
H["2 fils DC"] --> I["1"]
H --> J["2"]
H --> K["3"]
H --> L["4"]
H --> M["5"]
H --> N["6"]
Niveau d'entrée:
HTL
$$ \mathrm{LOW} = 0 \dots 1 0 \mathrm{VHIGH} = 1 5 \dots 3 0 \mathrm{V} $$
TTL
$$ \mathrm{LOW} = 0 \dots 1 \mathrm{V} \text {HIGH} = 2, 6 \dots 5, 5 \mathrm{V} $$
Si des générateurs d'impulsions NAMUR sont utilisés dans des zones EX, un amplificateur de séparation adéquat doit être connecté entre le générateur d'impulsions NAMUR et le DX 340.
Configuration des entrées des générateurs d'impulsions
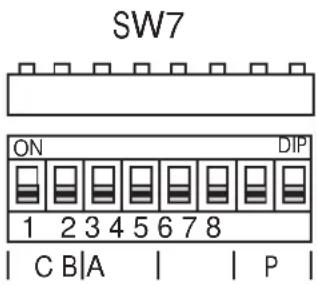 | interrupteurs 1 et 2 (entrée C)interrupteurs 3 et 4 (entrée B)interrupteurs 5 et 6 (entrée A):= 3 fils DC PNP, 2 fils DC PNP= 3 fils DC NPN, 2 fils DC NPNNAMURAucun capteur raccordé |
| interrupteur 7 et 8 (type du signal):= signal HTL sur les 3 entrées= signal TTL sur les 3 entrées |

Les deux interrupteurs d'une entrée ne doivent jamais être positionnés sur ON simultanément!
Différents générateurs d'impulsions (NPN, PNP,...) peuvent être raccordés simultanément.
Les entrées non utilisées doivent être mises à

Programmation de la fonction
Sélection du mode à l'aide de SW1 et SW2 ; sélection de l'opérande à l'aide de SW3... SW6.

sélection du mode de fonctionnement
sélection de l'opérande déterminant le type d'affichage et de la valeur affichée
En cas de besoin de valeurs décimales :
- Déterminez la valeur de l'opérande (sans tenir compte des valeurs décimales).
- Régler les roues codéuses SW3... SW6.
- Augmentez SW1 d'autant d'unités que vous avez besoin de valeurs décimales.
Attention:
Si le mode de fonctionnement (MODE) ou la configuration du SW7 a été modifiée, la remise à zéro doit être activée ou l'alimentation doit être coupée durant un court temps afin de valider la nouvelle sélection.
Vitesse de rotation, cycle par unité de temps, quantité par unité de temps
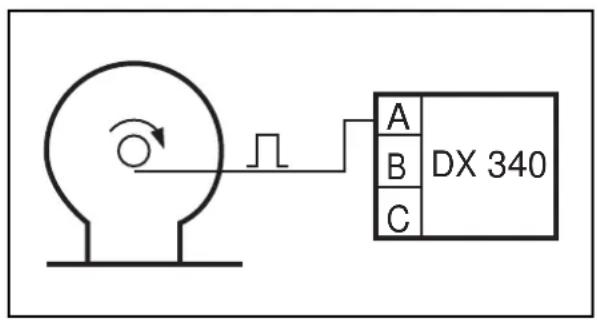
flowchart
graph LR
A[" rotating Component"] --> B["Block DX 340"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
- Calculez la fréquence d'impulsions maximale (f_) et minimale (f_).
$$ f _ {\max} = \operatorname{tr} _ {\max} x \mid f _ {\min} = \operatorname{tr} _ {\min} x \mid $$
tr = tours en min^-1 (cycles ou quantité en Hz [imp/s] ou en imp/min);
I = impulsions par tour (cycles ou quantité).
- Sélectionnez une gamme d'impulsions dans le tableau suivant.
| gamme1 | gamme2 | gamme3 | gamme4 | |||||
| mode | mode | mode | mode | |||||
| f[Hz] | 0,03 ... 10 | 07 | 0,3 ... 100 | 47 | 3 ... 1 000 | 87 | 30 ... 10 000 | C7 |
| 0,1 ... 10 06 | 1 ... 100 46 | 10 ... 1 000 86 | 100 ... 10 000 | C6 | ||||
| 0,3 ... 10 05 | 3 ... 100 45 | 30 ... 1 000 85 | 300 ... 10 000 | C5 | ||||
| 1 ... 10 04 | 10 ... 100 44 | 100 ... 1 000 84 | 1 000 ... 10 000 | C4 | ||||
| fréquence de référence f_réf | 1 Hz(60 imp / mn) | 10 Hz(600 imp / mn) | 100 Hz(6 000 imp / mn) | 1 000Hz(60 000 imp / mn) | ||||
Sélectionnez la gamme de façon à ne pas tomber en-dessous de la fréquence limite minimale, sinon 0" est affiché. La fréquence limite maximale peut être dépassée du facteur 10. L'affichage est raffraîchi de plus en plus lentement de la gamme 1 à la gamme 4. À l'intérieur des gammes, le zéro est affiché de plus en plus vite quand la fréquence limite minimale est plus haute.
- Positionnez SW1 et SW2 selon la gamme sélectionnée.
- Calculez l'opérande. (O).
$$ \boxed {O = A \frac {f _ {\text {réf}}}{f _ {E}}} $$
A = valeur affichée souhaitée
(Quelle valeur doit être affichée, combien d'impulsions, de pièces, mètres par unité de temps? La sélection de l'unité de mesure doit être telle qu'il en résulte des valeurs en nombre entier, par exemple 65,3m → 653dm).
f_{réf} = \text{fréquence de référence}
(selon la gamme sélectionnée, voir le tableau en haut)
f_E = fréquence d'entrée disponible pour la vitesse sélectionnée (f_E = tr/mn x imp/mn).
L'unité de temps pour A, fréf et fE doit être identique.
Plus le nombre des positions avant la virgule de l'opérande est grand, c'est-à-dire plus la gamme de fréquences est grande, plus l'affichage est précis.
- Transférez les chiffres de la valeur calculée (uniquement les positions avant la virgule) aux roues codeuses SW3... SW6, par exemple valeur 60: SW3 = 0, SW4 = 0, SW5 = 6, SW6 = 0.
- En cas de besoin, sélectionnez maintenant les positions décimales.
Exemple 1: affichage de la vitesse de la bande transporteuse en m/s
Si le rouleau entraîneur tourne avec 184 tr/mn, la bande se déplace avec 65,3 m/s. 4 cames servent à détecter le rouleau.
A = 65,3 [m] = 653 [dm] (pour 184 tr/mn “65,3” doit être affiché), \( f_{réf} = 600 \) [imp/mn] (en cas de sélection de la gamme de fréquence 2, \( f_{E} = 184 \) [tr/mn] x 4 = 736 [imp/mn]).
$$ \mathrm{O} = 6 5 3 \times \frac {6 0 0}{7 3 6} = 5 3 2, 3 3 $$
Après la sélection de l'opérande 0532 et des positions décimales, l'appareil affiche la vitesse de la bande en m/s.
Exemple 2: affichage de la vitesse de rotation en tr/mn
Le mécanisme d'entraînement tourne entre 0,3 et 10 Hz (18... 600 tr/mn). La détection se fait avec 8 cames.
f_ = 0,3 × 8 = 2,4Hz; f_ = 10 × 8 = 80Hz; (gamme de fréquence 2 doit être sélectionné).
A = 60 [tr/mn] (pour 60 tr/mn "60" doit être affiché)
f_réf = 600 [imp/mn] (en cas de sélection de la gamme de fréquence 2)
f_E=60 [tr/min]×8=480 [imp/min].
$$ \mathrm{O} = 6 0 \times \frac {6 0 0}{4 8 0} = 7 5 $$
Après sélection de l'opérande 0075, l'appareil affiche la vitesse de rotation en tr/min.
Temps de passage (affichage antiproportionnel)
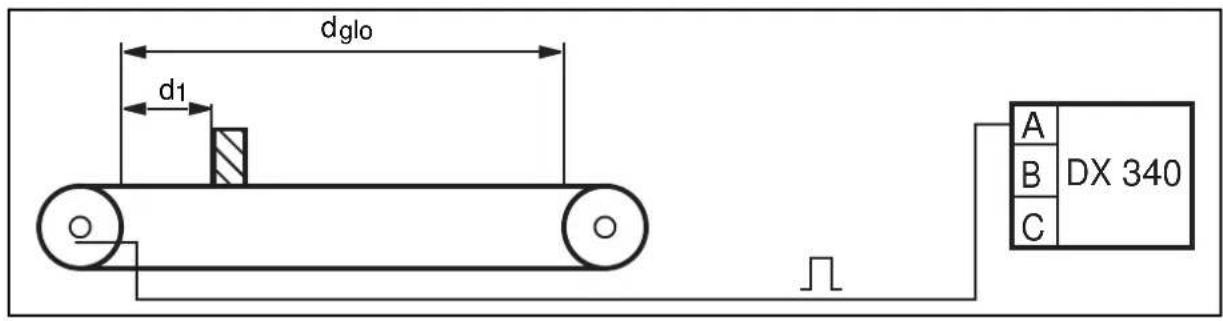
- Calculez la fréquence d'impulsions maximale (f _) et minimale (f _).
$$ \boxed {f _ {\max} [ \mathrm{Hz} ] = \frac {l _ {\mathrm{glo}}}{t _ {1}} \quad f _ {\min} [ \mathrm{Hz} ] = \frac {l _ {\mathrm{glo}}}{t _ {2}}} $$
t_1 = temps de passage le plus bref en s t_2 = temps de passage le plus long en s l_glo = nombre des impulsions pour la distance globale
$$ \boxed {I _ {\mathrm{glo}} = \frac {d _ {\mathrm{glo}}}{d _ {1}}} $$
d_glo = distance globale ; d_1 = distance parcourue entre deux impulsions. Pour d_ges et d_1 il faut utiliser la même unité de mesure.
- Sélectionnez une gamme d'impulsions dans le tableau suivant.
| gamme1 | gamme2 | gamme3 | gamme4 | |||||
| mode | mode | mode | mode | |||||
| f[Hz] | 0,03 ... 10 | 0B | 0,3 ... 100 | 4B | 3 ... 1 000 | 8B | 30 ... 10 000 | CB |
| 0,1 ... 10 0A | 1 ... 100 | 4A | 10 ... 1 000 8A | 100 ... 10 000 | CA | |||
| 0,3 ... 10 09 | 3 ... 100 49 | 30 ... 1 000 89 | 300 ... 10 000 | C9 | ||||
| 1 ... 10 08 | 10 ... 100 48 | 100 ... 1 000 88 | 1 000 ... 10 000 | C8 | ||||
| fréquence de référence frét | 1 Hz(60 imp / mn) | 10 Hz(600 imp / mn) | 100 Hz(6 000 imp / mn) | 1 000Hz(60 000 imp / mn) | ||||
Sélectionnez la gamme de façon à ne pas tomber en-dessous de la fréquence limite minimale, sinon 0" est affiché. La fréquence limite maximale peut être dépassée du facteur 10. L'affichage est raffraîchi de plus en plus lentement de la gamme 1 à la gamme 4. À l'intérieur de la gamme, le zéro est affiché de plus en plus vite quand la fréquence limite minimale est plus haute.
- Positionnez SW1 et SW2 selon la gamme sélectionnée.
- Calculez l'opérande (O).
$$ \boxed {O = \frac {l _ {\mathrm{glo}}}{f _ {\mathrm{réf}}}} $$
Iglo = nombre d'impulsions pour la distance globale
fréq = fréquence de référence
(selon la gamme sélectionnée, voir le tableau en haut)
Iglo = divisé par fréquence en Hz donne l'affichage en secondes; Iglo divisé par fréquence en imp/mn donne l'affichage en minutes.
- Transférez les chiffres de la valeur calculée aux roues codeuses SW3... SW6, par exemple: valeur 2,2 : SW3 = 0, SW4 = 0, SW5 = 2, SW6 = 2.
- En cas de besoin, sélectionnez maintenant les positions décimales.
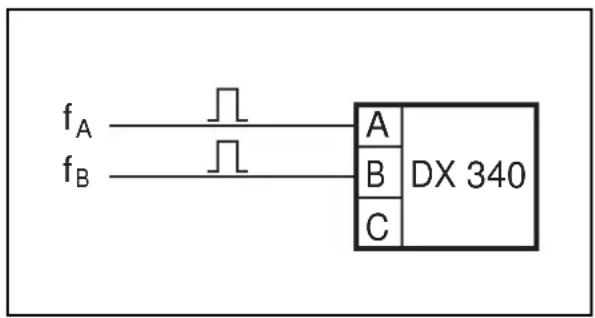
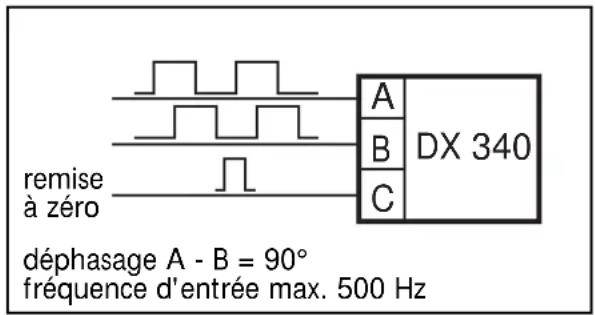
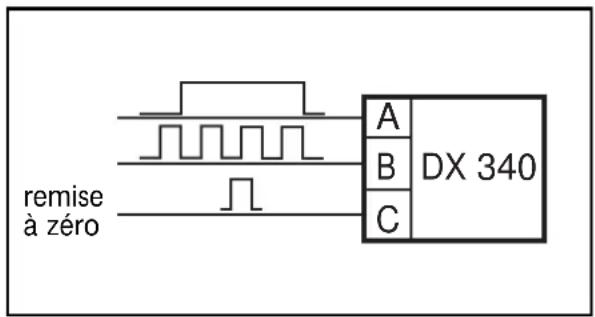
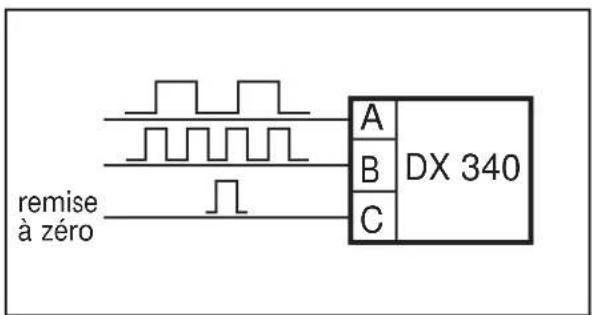
Rapport entre deux vitesses de rotation / différence en pourcentage entre 2 vitesses de rotation
- Positionnez SW1 sur 0 et SW2 sur 2.
- Calculez l'opérande.
"1000" sert de base pour l'affichage du synchronisme, c'est-à-dire :
$$ \boxed {O = 1 0 0 0 \times \frac {f _ {A}}{f _ {B}}} $$
(En cas de tours, vous obtenez les valeurs pour f_A et f_B avec: f = tr × 1).
- Transférez les chiffres de la valeur calculée aux roues codeuses SW3... SW6, par exemple valeur 480: SW3 = 0, SW4 = 4, SW5 = 8, SW6 = 0. Maintenant, le rapport entre les vitesses de rotation est affiché:
| affichage < 1000affichage = 1000affichage > 1000 | vitesse de rotation A < vitesse de rotation Bvitesse de rotation A = vitesse de rotation Bvitesse de rotation A > vitesse de rotation B |
Le temps de raffraîchissement de l'affichage (t) dépend de f_A : t = opérande / f_A.
Différence en pourcentage entre 2 vitesses de rotation
- Positionnez SW1 sur 5 et SW2 sur 2.
- Calculez l'opérande comme en haut et transférez la valeur aux roues codeuses SW3... SW6.
Vous obtenez l'affichage de la différence des vitesses de rotation entre -99,9% et +99,9% (la vitesse de rotation B représentant la référence):
| -XX,X100+XX,X | vitesse de rotation A est XX,X% de la vitesse de rotation B vitesses de rotation A et B sont identiquesvitesse de rotation B est XX,X% de la vitesse de rotation A |
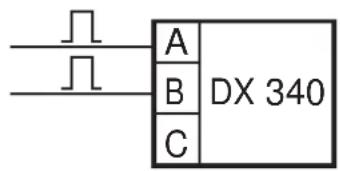
Chronométrage
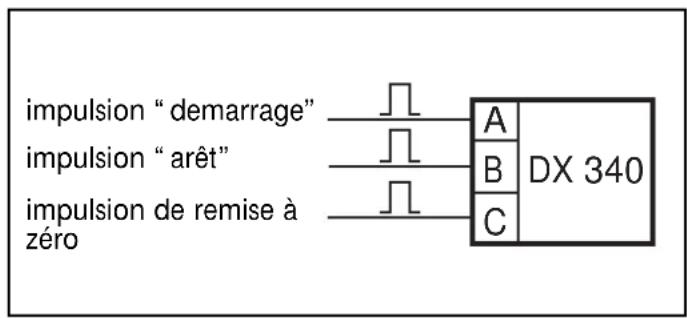
flowchart
graph LR
A["impulsion "demarrage""] --> B["A"]
C["impulsion "arêt""] --> D["B"]
E["impulsion de remise à zéro"] --> F["C"]
B --> G["DX 340"]
D --> G
F --> G
- Positionnez SW1 sur 0 et SW2 sur D.
- SW3 à SW6 permettent de sélectionner les différentes résolutions du temps et le mode d'affichage.
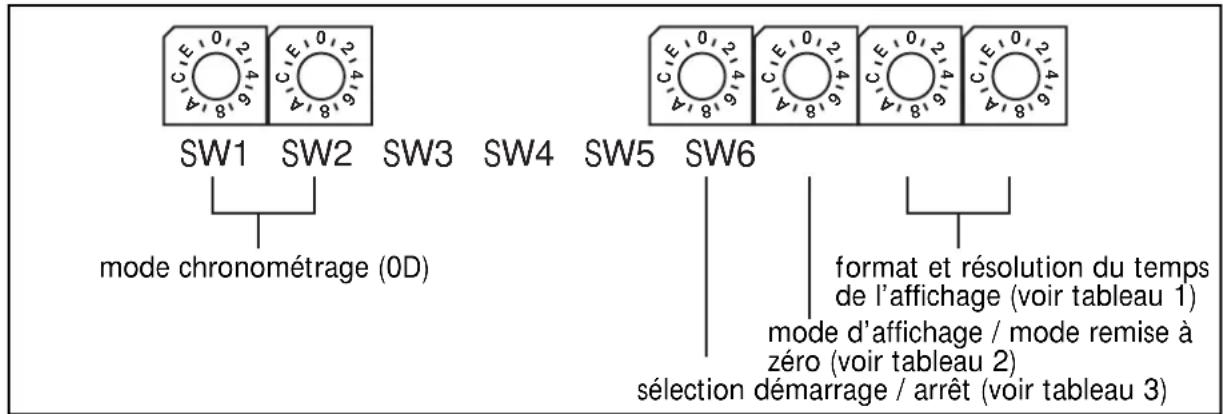
Tableau 1
| format résolution | SW5 SW6 | ||
| XXX.XXX (s) | 1 ms 0 0 | ||
| XXXX.XX (s) | 10 ms 0 1 | ||
| XXXXX.X (s) | 100 ms 0 2 | ||
| XXXXXX (s) | 1 s 0 3 | ||
| XXX.XXX (mn) | 0,001 mn 0 4 | ||
| XXXX.XX (mn) | 0,01 mn 0 5 | ||
| XXXXX.X (mn) | 0,1 mn 0 6 | ||
| XXXXXX (mn) | 1 mn 0 7 | ||
| XXXX.XX (h) | 0,01 h 0 8 | ||
| 99.59.99 (h : mn : s) | 1 s 0 9 | ||
| 99.59.99 (mn : s : 1/100s) | 0,01 s 1 0 | ||
| 9999.99 (mn : s) | 1 s 1 1 | ||
| 9999.99 (h : mn) | 1 mn 1 2 |
Tableau 2
| affichage remise à zéro SW4 | ||
| réel(le comptage en cours est affiché) | externe | 0 |
| mémoire(seul le résultat final est affiché, il reste affiché jusqu'au prochaine résultat final ou jusqu'à l'impulsion de remise à zéro) | 1 | |
| réel(le comptage en cours est affiché) | AUTOà chaque nouveau signal de démarrage le compteur commence à 0) | 2 |
| mémoire(seul le résultat final est affiché, il reste affiché jusqu'au prochaine résultat final) | 3 | |
Tableau 3
| SW3 | ||
| le temps est chronométré tant que INPUT A est au niveau bas | INPUT A  START STOP START STOP | 0 |
| le temps est chronométré tant que INPUT A est au niveau haut | INPUT A  START STOP START STOP | 1 |
| le temps est chronométré entre le front descendant de A et le front descendant B | INPUT A  START STOP START STOP | 2 |
| démarrage et arrête alternativement sur chaque front descendant A | INPUT A  START STOP START STOP START STOP START STOP | 3 |
| le temps est chronométré entre deux fronts descendants A | INPUT A 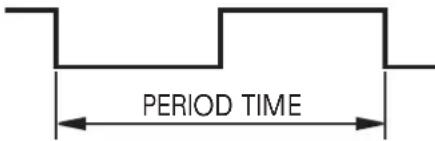 | 4 |
Remise à zéro globale : impulsion sur input C. START = démarrage STOP = arrêt TIME = temps PERIOD TIME = durée de la période
Affichage de la vitesse à partir du chronométrage du temps écoulé
impulsion
“démarrage”
impulsion "arrêt"
démarrage arrêt
- Sélectionnez une base de temps à partir du tableau suivant et transférez les chiffres aux roues codiques SW1 et SW2.
| SW1 SW2 | ||
| 10 ms | 0 | 3 |
| 100 ms | 4 | 3 |
| 1 s | 8 | 3 |
| 10 s | C | 3 |
- Calculez l'opérande pour déterminer l'affichage.
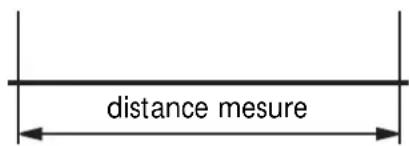
d = distance mesurée (en m, km selon l'affichage souhaité)
t = temps écoulé sélectionné (en s, mn, h selon l'affichage souhaité)
- Transférez les chiffres de la valeur calculée aux roues codantes SW3 à SW6, par exemple 360: SW3 = 0, SW4 = 3, SW5 = 6, SW6 = 0

La distance pouvant être parcourue par l'objet durant la base de temps doit être considérablement plus courte que la distance mesurée. De ce fait, la sélection de la distance mesurée doit être assez grande ou celle de la base de temps assez courte.
Exemples
| distance mesure base de temps affichage souhaité | opérande | ||
| 10m | 1 s | m/s | O = 10m1s = 10 |
| 10m | 10 ms | km/h | O = 10m1skm13600h = 360 |
Comptage / décomptage
- Positionnez SW1 et SW2 sur 0.
- Sélectionnez le facteur de multiplication souhaité à l'aide de SW3... SW6 (entre 0,001 et 9,999) :
| SW3 SW4 | SW5 SW6 facteur | |||
| 0 | 0 | 0 | 1 | 0,001 |
| 1 | 0 | 0 | 0 | 1 |
| 9 | 9 | 9 | 9 | 9,999 |
Comptage d'événements avec inhibition
- Sélectionnez le mode de fonctionnement High-Mode ou Low-Mode à l'aide de SW1 et SW2.
| SW1 SW2 | mode de fonctionnement | |
| 4 | 0 | compte les impulsions sur entrée Btant que le signal High est présent sur l'entrée A |
| 8 | 0 | compte les impulsions sur entrée Btant que le signal Low est présent sur l'entrée A |
- Sélectionnez le facteur de multiplication souhaité à l'aide de SW3... SW6 (entre 0,001 et 9,999) :
| SW3 SW4 | SW5 SW6 facteur | |||
| 0 | 0 | 0 | 1 | 0,001 |
| 1 | 0 | 0 | 0 | 1 |
| 9 | 9 | 9 | 9 | 9,999 |
Comptage de sommes/différences
Les impulsions sur l'entrée A ou l'entrée B sont multipliées par un facteur sélectionné; puis les résultats/impulsions des entrées A et B sont additionnés ou soustraits.
- Sélectionnez le mode de fonctionnement à l'aide de SW1 et SW2:
| SW1 SW2 | mode de fonctionnement | |
| 0 | 1 | addition: (A x facteur) + B |
| 4 | 1 | addition: A + (B x facteur) |
| 8 | 1 | soustraction: (A x facteur) - B |
| C 1 soustraction: A - (B x facteur) | ||
- Sélectionnez le facteur de multiplication souhaité à l'aide de SW3... SW6 (entre 0,001 et 9,999):
| SW3 SW4 | SW5 SW6 facteur | |||
| 0 | 0 | 0 | 1 | 0,001 |
| 1 | 0 | 0 | 0 | 1 |
| 9 | 9 | 9 | 9 | 9,999 |




