KSR6 - Jouets VELLEMAN - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil KSR6 VELLEMAN au format PDF.
| Type de produit | Robot kit éducatif à monter |
| Alimentation | 4 piles LR3 (AAA) 1.5V (non incluses) |
| Fonctions principales | Détection d'obstacles par infrarouge, rotation automatique à gauche, marche avant |
| Composants inclus | Résistances, condensateurs, transistors, diodes, CI LM324, moteurs, engrenages, câbles, vis, antennes, boîtier |
| Instructions de montage | Nécessite soudure des composants électroniques et assemblage mécanique |
| Réglage | Résistance variable pour ajuster la sensibilité de détection |
| Entretien | Lubrification des axes des pignons avec de l'huile fine si le robot ne roule pas aisément |
| Sécurité | Nécessite une surveillance adulte lors du montage en raison de l'utilisation d'outils (fer à souder, pince) |
| Piles | Piles non incluses ; utiliser uniquement des piles LR3 (AAA) 1.5V |
| Marque | Velleman |
| Modèle | KSR6 |
| Catégorie | Jouets |
FOIRE AUX QUESTIONS - KSR6 VELLEMAN
Questions des utilisateurs sur KSR6 VELLEMAN
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Jouets au format PDF gratuitement ! Retrouvez votre notice KSR6 - VELLEMAN et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil KSR6 de la marque VELLEMAN.
MODE D'EMPLOI KSR6 VELLEMAN
1. Introduction & caractéristiques
Nous you remercions de vore achat! Lisez la notice presente attentivement avant la mise en service de l'appareil.
Le KSR6 a des 'yeux' diodes IR lui permettant de contourer des obstacles dans sa route. Le Ladybug tourne automatiquement à gauche quand il détecte un objet. Il continue en avant tant qu'il n'y a pas de détention.
Le Kit est livre avec 2 jours de pattes bougeant d'une façon unique. LeCLSIR est garant! Notre KSR6 marche sur 4 piles LR3 de 1.5V (non incl.).
Sauf ils piles vous aurez également besoin d'une pince plate, une pince coupante, un tournevis, un fer à souder et du fil d'apport.
2. List des pieces électroniques (voir fig. 1 à la p. 1)
- résistance : 1x 10Ω (brun/noir/noir/dore)
2x 15Ω (brun/vert/noir/dore)
2x 100Ω (brun/noir/brun/dore)
1x 1K (brun/noir/rouge/dore)
4x 4K7 (jaune/pourpre/rouge/dore)
3x 10K (brun/noir/orange/dore)
3x 120K (brun/rouge/jaune/dore)
1x 1.8M (brun/gris/vert/dore)
- condensateur ceramique 1x type 331, 4x type 104
- condensateur electrolytique 1x 4.7 f 2x 100 f
- diode IR 5mm, claire (1x)
- phototransistor, noir (1x)
- tube noir (1x)
- diode 1N4148 (1x)
- barrette à 4 broches (1x)
- barrette femelle à 4 broches (1x)
- transistor: 3x C945, 1x A733, 2x 8050, 2x 8550,
- support de LED (3x)
- CI: 1 x type 78P156
- support de CI (1x)
- connecteur d'alimentation (1x)
15.broche (4x) - résistance variable 50K (1x)
17.glissiere(1x) - connecteur avec fil : 1 x jaune, 1 x vert, 1 x orange, 1 x bleu
19.orte-piles(1x) - CI (1x)
3. List des pieces mécaniques (voir fig. 2 à la p. 1)
- 2x vis 3 × 6mm (P13)
- 9x vis 3 x 6mm (P14)
- 3x écrou M3 (P15)
- 4x entretoise hexagonale 10mm (P16)
- 1x boitier (P17)
- 2x antenne (P18)
4. Montage
a) Montage du CI
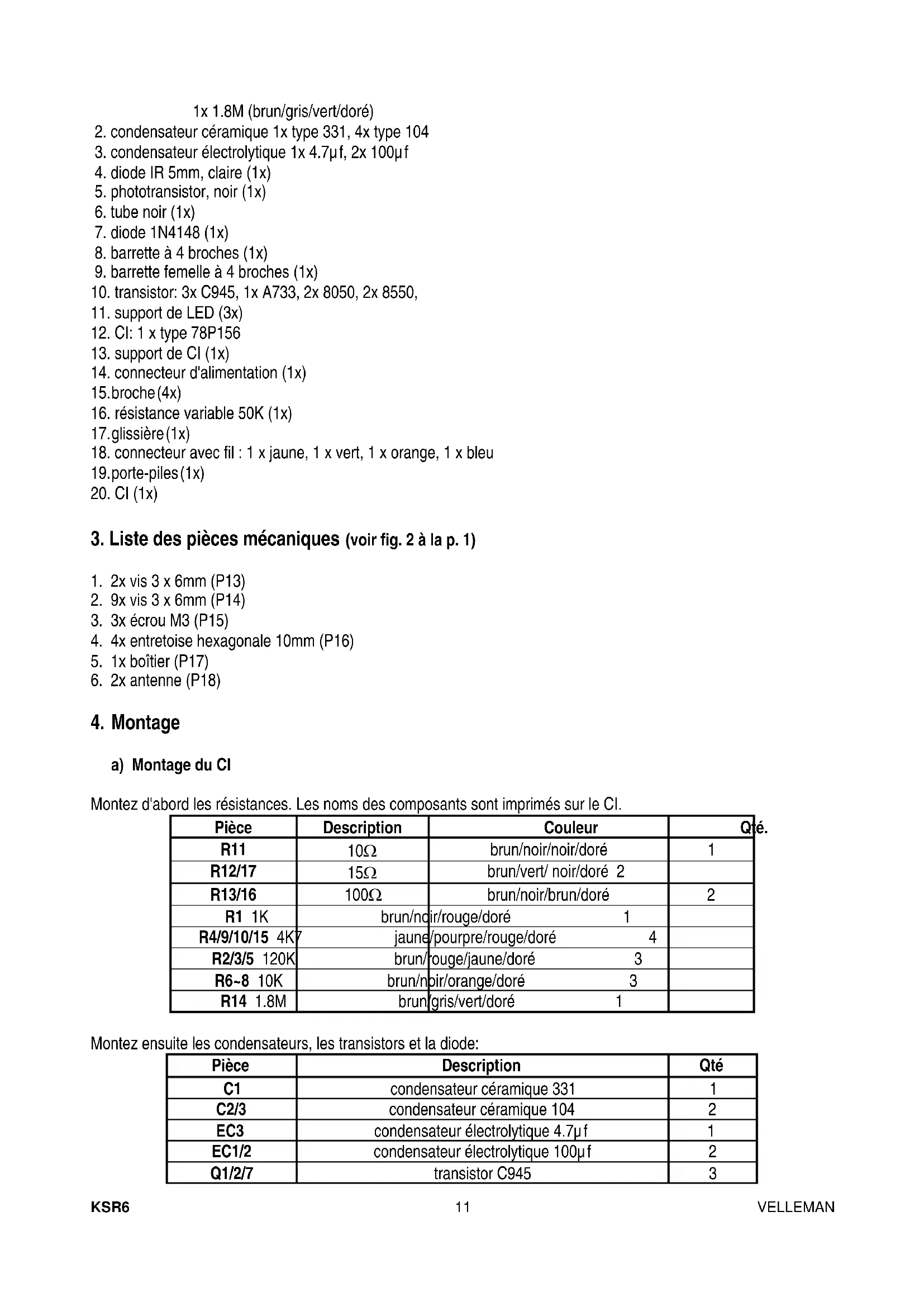
Montez d'abord les résistances. Les noms des composants sont imprimés sur le CI.
| Pierre | Description | Couleur | Qé |
| R11 | 10Ω | brun/noir/noir/doré | 1 |
| R12/17 | 15Ω | brun/vert/ noir/doré 2 | |
| R13/16 | 100Ω | brun/noir/brun/doré | 2 |
| R1 1K | brun/noir/rouge/doré 1 | ||
| R4/9/10/15 4K7 | jaune/pourpre/rouge/doré 4 | ||
| R2/3/5 120K | brun/rouge/jaune/doré 3 | ||
| R6~8 10K | brun/noir/orange/doré 3 | ||
| R14 1.8M | brun/gris/vert/doré 1 |
Montez ensuite les condensateurs, les transistors et la diode:
| Pierre | Description | Qtré |
| C1 | condensateur céramique 331 | 1 |
| C2/3 | condensateur céramique 104 | 2 |
| EC3 | condensateur electrolytique 4.7μf | 1 |
| EC1/2 | condensateur electrolytique 100μf | 2 |
| Q1/2/7 | transistor C945 | 3 |
| Q8 transistor A733 1 | |
| Q4/5 transistor 8050 2 | |
| Q3/6 transistor 8550 2 | |
| D1 diode 1 N4148 1 |
Montez les support de CI, connecteur d'alimentation, glissiere, resistance variable, broches, CI et barrette.
| Pièce | Description | Qté | ||
| IC1 support de CI (fig.1 #13) 1 | ||||
| BAT. connecteur d'alimentation (fig.1 #14) 1 | ||||
| SW. glissée (fig.1 #17) 1 | ||||
| VR1 résistance variable (fig.1 #16) 1 | ||||
| M1 (+/-) | broches (fig.1 #15) 4 | |||
| M2 (+/-) | ||||
| IC1 | type LM324 | ID Socket ID | 1 | |
| To IR_PCB | barrette (fig. 1 #8) | 1 | ||
Montez la diode IR, le phototransistor et la barrette femelle: (voir figures 3a et 3b à la page 2)
| Pèce | Description | Qté |
| TX_IR | diode IR (fig.1 #4) | 1 |
| RX_IR | phototransistor (fig.1 #5) | 1 |
| From Main_Board | barrette femelle (fig.1 #9) | 1 |
b) Montage de la boite d'engrenages
Parties (voir fig. 4 à la p. 3)
P1: moteur x 2
P7: pignon (44T + 0) avec axe (vert) x 2
P2: support de moteur x 2
P8: pignon (44T + 0) avec axe (orange) x 4
P3:écrou (2× 10mm) x4
P9: satellite 8T (blanc) x 2
P4: boulon (M2) x 4
P10: pignon 48/18T (blanc) x 2
P5: vis (3x7mm) x 34
P11: pignon 44/18T (bleu) x 4
P6: oeillet x 6
P12: tube claire x 2
(voir fig. 5 à la p.3)
A: plaques de protection pour pignons (2)
B: plaques de protection pour moteur (2)
C: plaques de protection (4) pour les pignons des roues/pattes sur les coins
D: plaques de montage (2) pour les pignons des roues/pattes sur les coins
E: plaques de montage (2) pour les pignons des roues/pattes sur les coins
F: plaque de montage pour moteurs (1)
G: plaque supérieure (1)
H: roues (6)
I: pattes (6)
J: pied en caoutchouc pour pattes (6)
Montage: voir les figures dans le tableau sur la page 4.
c) Montage mécanique
- Montez les fils et les condensateurs céramiques type 104 sur les moteurs (voir fig. 6 à la p. 5) et les antennes sur le petit CI (voir fig. 7 à la p. 5). Le code de couleur des fils est: 1=vert, 2=jaune, 3=orange, 4=bleu
- Fixez le portepiles et le petit Cl sur le Cl principal (voir fig. 8 à la p. 5). Connectez le portepiles au connecteur d'alimentation (BAT, voir "4.a) Montage du Cl").
- Montez le Cl sur la boite d'engrenages et guidez les fils a travers les trou s la droite du robot (voir fig. 9 a la p. 5)
- Reliez les fils aux broches des connexions M (voir fig. 10 à la p. 6).
- Assemblez le boitier (voir fig.11 à la p. 6).
5. Câblage (voir fig.12 à la p. 6)
6. Opération
- Mettez l'interrupteur dans la position "ON".
- Mettez le KSR6 sur le sol ; il commencerà à bouger en avant.
- Quand il detecte un obstacle, il tourne automatiquement a gauche. S'il n'y a pas d'obstacle, il continue tout droit.
- Reglez la résistance variable pour modifier la distance de détction (vers la gauche: plus sensible, vers la droite: moins sensible).
7. Problèmes et solutions
- Vérifiez si chaque composant du CI a été monté au bon endroit. Contrôlez la polarité de la diode IR et le phototransistor.
- Veillez à ce que tout câblage soit correctement connecté.
- La sensibilité peut diminuer quand les piles deviennent faibles. Augmentez la portée avec la résistance variable.
- Lubrifiez les axes des pignons avec un peu d'huile de graissage fine si vous KSR6 ne rouge pas aisement.
Les specifications et le contenu de la notice peuvent être modifiées sans notification préalable.