
EKR-KB1 - Télécommande de contrôle industriel ENEO - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil EKR-KB1 ENEO au format PDF.

| Type d'appareil | Télécommande professionnelle |
| Écran | Écran LCD intégré |
| Nombre de boutons | Plus de 40 boutons |
| Joystick | Oui, joystick multidirectionnel |
| Alimentation | Alimentation externe ou piles |
| Connectivité | Non précisé |
| Dimensions | Compacte, format bureau |
| Poids | Léger |
| Usage principal | Contrôle de systèmes complexes |
| Matériau | Plastique robuste |
| Langues supportées | Multilingue |
| Interface utilisateur | Écran et boutons |
| Compatibilité | Non précisé |
| Fonctions spéciales | Programmable |
| Garantie | Non précisé |
FOIRE AUX QUESTIONS - EKR-KB1 ENEO
Questions des utilisateurs sur EKR-KB1 ENEO
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Télécommande de contrôle industriel au format PDF gratuitement ! Retrouvez votre notice EKR-KB1 - ENEO et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil EKR-KB1 de la marque ENEO.
MODE D'EMPLOI EKR-KB1 ENEO
1.1 Contenu de l'emballage 6 1.2 Ouverture de l'emballage 6 1.3 Contrôle du marquage 6 1.4 Marquage 6
2.1 Caractéristiques 7
2.1.1 Pupitre 7 2.1.2 Configuration 7 2.1.3 Sécurité 7
2.2 Appareils pouvant être connectés au pupitre EKR-KB1 7
2.2.1 Matrices vidéo 7 2.2.2 Multiplexeur vidéo 7 2.2.3 DVR 8 2.2.4 Récepteurs de télématie et domes motorisés 8
2.3 Fonction des touches et des connecteurs 8 2.4 Touches double action 9 2.5 Dip-switch 9
3 LIGNES de communication et connexions 10
3.1 Ligne vidéo et lignes télémétriques 10 3.2 RS485 avec exemples de câblage 10 3.3 Raccordement standard 11 3.4 Un ponton par ligne 12 3.5 Plusieurs appareils sur la même ligne 12
4.1 Touches 13 4.2 Choix et entrée des données 13 4.3 Description des menus de configuration 13 4.4 Attribution des lignes de téLémetrie 15 4.5 Validation des caméras et assignation des récepteurs 15
4.5.1 Configuration par défaut 16 4.5.2 Menu de validation caméras 16 4.5.3 Menu d'assignation récepteurs 16 4.5.4 Modification de la liste 16 4.5.5 Remarque sur l'assignation des récepteurs 18 4.5.6 Message d'avertissement 18
4.6 Validation des moniteurs 18
4.6.1 Configuration par défaut 18 4.6.2 Modification de la liste 18
4.7 Validation des multiplexeurs 19
4.7.1 Configuration par défaut 19 4.7.2 Modification de la liste 19
4.8 Validation demande de fonctions 19 4.9 Calibrage et test du Joystick 20 4.10 Avertisseur sonore (buzzer) 21
4.11 Mot de passe 21 4.12 Messages d'avertissement et d'erreur 21 4.13 Test automatique des canaux sériels 22
4.13.1 Opérations de test automatique 22
4.14 Protocole Macro: fonctions spécifiques 23 4.14.1 Description 23 4.14.2 Fonctions spécifiques liées au protocole Macro 23
5 Gestion VIDEO 24
5.1 Description de l'afficheur 24 5.2 Vidéo: concepts fondamentaux 24
5.2.1 Sélection directe d'une caméra 24 5.2.2 Sélection de la caméra précédente / suivante 25 5.2.3 Contrôle des magnétoscopes numériques Everfocus 25 5.2.4 "Vues" 26 5.2.5 Récepteurs associés aux caméras 27
5.3 Matrice vidéo SM328A 28
5.3.1 Description 28 5.3.2 Connexion 28 5.3.3 Configuration du dispositif vidéo 28
5.4 Matrices vidéo Eneo EKR-32/8 29
5.4.1 Description 29 5.4.2 Connexion 29 5.4.3 Configuration du dispositif vidéo 29
5.5 Matrices SM42A et SM82A 30
5.5.1 Description 30 5.5.2 Connexion 30 5.5.3 Configuration du dispositif vidéo 30
5.6 Matrices vidéo Eneo EKR-8/4 et EKR-16/4 31
5.6.1 Description 31 5.6.2 Connexion 31 5.6.3 Programmation de la matrice 32
5.7 Matrices LXRPS42A et LXRPS82A Linxs 33
5.7.1 Description 33 5.7.2 Connexion 33 5.7.3 Programmation de la matrice 34
5.8 Matrice vidéo SW328 35
5.8.1 Description 35 5.8.2 Connexion 35 5.8.3 Configuration de la matrice 35
5.9 Matrice vidéo SW164OSM 36
5.9.1 Description 36 5.9.2 Connexion 36 5.9.3 Programmation de la matrice 38
5.10 Multiplexeur vidéo Eneo 39
5.10.1 Description 39 5.10.2 Connexion directe 39 5.10.3 Fonctions spécifiques 40
5.11 Multiplexeur vidéo SP16C 41
5.11.1 Description 41 5.11.2 Connexion directe 41 5.11.3 Fonctions spécifiques 42
5.12 Contrôle du multiplexeur à travers un dispositif vidéo 43
5.12.1 Sélection d'un moniteur connecté à la matrice vidéo 43 5.12.2 Sélection d'un moniteur connecté au multiplexeur 43
5.13 Multiplexer vidéo Sony 44
5.13.1 Description 44 5.13.2 Matériel et documents de référence 44 5.13.3 Branchement direct 44 5.13.4 Configuration 45 5.13.5 Fonctions consacrées 45
5.14 DVR Sony 47
5.14.1 Description 47 5.14.2 Matériel et documents de référence 47 5.14.3 Branchement direct 47 5.14.4 Configuration 48 5.14.5 Menu spécial SEARCH 48 5.14.6 Menu spécial COPY 48 5.14.7 Fonctions consacrées 48
5.15 Multiplexeur Ademco 50
5.15.1 Description 50 5.15.2 Connexion directe 50 5.15.3 Fonctions spécifiques 51
5.16 Multiplexer Sanyo 52
5.16.2 Matériel et documents de référence 52 5.16.3 Branchement direct 52 5.16.4 Configuration 53 5.16.5 Fonctions consacrées 53 5.16.6 Choix du protocole 54 5.16.7 Indications sur l'écran 54
5.17 DVR Everfocus 55
5.17.1 Description 55 5.17.2 Connexion 55 5.17.3 Configuration du DVR 55
6 CONTROLLE DE LA TELÉMÉTRIE 55
6.1 Contrôle en direct ou par le coaxial du système vidéo 56
6.2 Opérations de base des commandes de télématie 57
6.2.1 Changement d'un récepteur à un autre 57
6.3 Résolution de problèmes de communication pupitre - récepteur 57
6.4 Remarques concernant le contrôle de la télématie 58
6.4.1 Codes spécifiques 58 6.4.2 Conventions de typographie 58
6.5 Dome Elbex 59
6.5.1 Matériel et documents de referencia 59 6.5.2 Remarque importante concernant les protocoles 59 6.5.3 Connexion 59 6.5.4 Configuration du dôme 59 6.5.5 Contrôle du dôme 59 6.5.6 Mouvement du dôme 60 6.5.7 Autopan 60 6.5.8 Limits movement 60 6.5.9 Preset, balayage, home 60 6.5.10 Contrôle auto scan 61 6.5.11 Fonctions de timer 61 6.5.12 Systeme optique 62 6.5.13 Relais auxiliaires 64 6.5.14Autres fonctions 64
6.6 Domelmo 65
6.6.1 Matériel et documents de référence 65 6.6.2 Connexion 65 6.6.3 Programmation 65 6.6.4 Auto-pan 66 6.6.5 Présent (préposition), scan (balayage), home 67 6.6.6 Séquences et Cruise (patrouille) 67 6.6.7 Autres fonctions 67
6.7 Tourelle Eneo 68
6.7.1 Matériel et documents de référence 68 6.7.2 Connexion 68 6.7.3 Configuration tourelle 68 6.7.4 Autopan 69 6.7.5 Prédefinition, balayage, home 69 6.7.6 Patrouille 69 6.7.7 Relais auxiliaires 70 6.7.8 Limites de positionnement 70 6.7.9 Autres fonctions 70
6.8 Dome Ernitec Saturn 71
6.8.1 Matériel et documents de référence 71 6.8.2 Connexion 71 6.8.3 Configuration 71 6.8.4 Auto-pan 72 6.8.5 Présent (préposition), scan (balayage), patrol (patrouille) et home 72 6.8.6 Relais auxiliaires: 73
6.8.7 Objectifs : 73 6.8.8 Position de retour : 73 6.8.9 Autres codes spécifiques 73
6.9 Dôme Eneo Fastrax II 74
6.9.1 Matériel et documentation de référence 74 6.9.2 Connexion 74 6.9.3 Configuration 74 6.9.4 Présentation, balayage, home 75 6.9.5 Balayage automatique, Patrouille et Modèle 75
6.10 Dome JVC TK-C675 76
6.10.1 Matériel et documents de référence 76 6.10.2 Connexion 76 6.10.3 Configuration 76 6.10.4 Auto-pan 77 6.10.5 Présent (préposition), home, scan (balayage) 77 6.10.6 Patrol (patrouille). 78 6.10.7 Autres commandes et codes spécifiques 78
6.11 Dome JVC TK-C676 79
6.11.1 Matériel et documents de référence 79 6.11.2 Connexion hardware du dome 79 6.11.3 Programmation du dome 79 6.11.4 Configuration 79 6.11.5 Fonctions ajoutées par rapport au modèle TK-C675 79 6.11.6 Présent, home, scan 79 6.11.7 Contacts auxiliaires 79 6.11.8 Autres fonctions 80 6.11.9 Zoom et focus 80
6.12 Dôme Panasonic 81
6.12.1 Matériel et documents de référence 81 6.12.2 Remarque importante concernant les protocoles 81 6.12.3 Connexion 81 6.12.4 Programmation 82 6.12.5 Auto-pan 82 6.12.6 Fonctions Auto-pan pour le modèle WV-CS850 82 6.12.7 Limitation du mouvement pour le modèle WV-CS850 83 6.12.8 Présent (préposition), scan (balayage), home 83 6.12.9 Configuration Patrol (patrouille) pour le modèle WV-CS850 83 6.12.10 Configuration Patrol (patrouille) pour modèle WV-CS600 83 6.12.11 Configuration shutter (obturateur) et sensibilité électronique 83 6.12.12 Autoflip (rotation automatique). 84 6.12.13 Optique et flip (rotation) 84 6.12.14 Relais (uniquement modèle WV-CS850) 84 6.12.15 Autres fonctions (uniquement modèle WV-CS850). 85
6.13 Dome Pelco 86
1.1.1 Matériel et documents de référence 86 6.13.2 Connexion 86 6.13.3 Configuration 86 6.13.4 Présent (préposition), scan (balayage), home 86 6.13.5 Pattern (patrouille) 87 6.13.6 Zone 87 6.13.7 Optique 87 6.13.8 Relais et alarmes 87 6.13.9 Autres fonctions 88 6.13.10 Courbe de vitesse 88
6.14 Dome Samsung 89
1.1.1 Matériel et documents de référence 89 6.14.2 Connexion 89 6.14.3 Configuration 89 6.14.4 Auto-pan 90 6.14.5 Présent (préposition), scan (balayage), home, patrol (patrouille) 90 6.14.6 Pattern (patrouille) 91 6.14.7 Autres fonctions 91
6.15 Dome Santec 92 6.15.1 Connexion 92
6.15.2 Configuration 92 6.15.3 Présentation, balayage, home 93 6.15.4 Balayage automatique, Patrouille et Modèle 93
6.16.1 Matériel et documents de référence 94 6.16.2 Connexion 94 6.16.3 Configuration 94 6.16.4 Présélection (préposition), scan (balayage), home 95 6.16.5 Modèle et "apple peel" (patrouille) 95 6.16.6 Relais 95 6.16.7 Autres fonctions 96
6.17 Dome star 97
6.17.1 Matériel et documents de référence 97 6.17.2 Connexion 97 6.17.3 Prését (préposition), scan (balayage), home 97 6.17.4 Autopan, patrol (patrouille), tour (ronde) 97 6.17.5 Configuration 100 6.17.6 Autres fonctions 100
6.18 Dome VCL 101
6.18.1 Matériel et documents de référence 101 6.18.2 Connexion 101 6.18.3 Configuration 101 6.18.4 Présent (préposition), scan (balayage), home 101 6.18.5 Auto-pan et tour 102 6.18.6 Configuration de la caméra 102 6.18.7 Objectif 103 6.18.8 Autres fonctions 103
6.20 Récepteurs videotec et linxs avec protocole videotec 105
6.20.1 Matériel de référence 105
6.20.2 Configuration des récepteurs 105
6.20.3 Connexion 105
6.20.4 Présent (préposition), scan (balayage), home 105
6.20.5 Auto-pan 105
6.20.6 Patrol (patrouille) 106
6.20.7 Relais 106
6.20.8 Autres fonctions 106
6.21 Récepteurs videotec avec protocole macro 107
6.21.1 Remarque 107
6.21.2 Matériel de référence 107
6.21.3 Connexion 107
6.21.4 Configuration 107
6.21.5 Auto-pan 107
6.21.6 Présent (préposition), scan (balayage), home 108
6.21.7 Patrol (patrouille) 108
6.21.8 Relais 109
6.21.9 Optique 109
6.21.10 Autres fonctions 109
8 Characteristiques techniques 110
Le fabricant décline toute responsabilité en cas de dommages dus à une utilisation incorrecte des appareils décrits dans ce manuel; il se réserve le droit d'en modifier le contenu sans préavis. La documentation de ce manuel a été étudiée et vérifiée avec le plus grand soin; cependant le constructeur décline toute responsabilité sur son utilisation. La même chose vaut pour chaque personne ou sociétés impliquées dans la création et la production de ce manuel.
1 Ouverture de l'emballage et contrôle du contenu

Sauf indication contraire, les opérations suivantes doivent être effectuées avec l'alimentation coupée.
L'installation de ce produit doit être effectuée par un technicien qualifié.
1.1 Contenu de l'emballage
À la livraison du produit, contrôle que l'emballage est intact et ne porte aucun signe de chute ou d'éraflure. Si l'emballage est endommagé, contacter immédiatement le fournisseur.
1 pupitre EKR-KB1 1 alimentation externe - 6 câbles téléphoniques 6/6 droits, longueur 150 cm environ - 6 boîtes de dérivation RJ jack - Manuel d'utilisation.
Contrôler que le contenu correspond à cette liste.
1.2 Ouverture de l'emballage
Si l'emballage ne présente aucune signe apparent de chute ou d'égratignure, contrôler que le matériel contenu est conforme à la liste du chapitre précédent.
L'installateur doit éliminer les produits d'emballage selon les modalités en vigueur dans le pays concerné.
1.3 Contrôle du marquage

Avant de procéder à l'installation, vérifier que le matériel fourni correspond à la commande et examiner les marquages selon les indications du chapitre suivant. N'effectuer sous aucun prétexte des raccordements ou des relations non prévus dans ce manuel : l'utilisation d'appareils inadaptés peut engendrer des risques sérieux pour la sécurité du personnel et de l'installation.
1.4 Marquage

Une étiquette conforme au marquage CE, indiquant le code d'identification (code barres EXT3/9) et le code de série (code barres EXT3/9) est collée à l'arrête du pupitre. L'alimentation fournie compte une fois indiquant les caractéristiques d'alimentation du pupitre.
Lors de l'installation, vérifier que les caractéristiques d'alimentation du pupitre sont conformes au besoin. Toute utilisation d'appareils non adéquats peut entraîner des risques sérieux pour la sécurité du personnel et de l'installation.
2.1 Caractéristiques

Le pupitre EKR-KB1 est un produit professionnel destiné au secteur de la sécurité et de la surveillance.
Le pupitre EKR-KB1 permet le contrôle de la commutation vidéo, de la gestion des alarmes, ainsi que la commande à distance des récepteurs de télémétrie.
2.1.1 Pupitre
Année, 2005.
Configuration ergonomique des touches
Facilité d'utilisation : les opérations les plus courantes s'effectuent au moyen d'une seule touche
Contrôle de la télémétrie au moyen d'un joystick.
2.1.2 Configuration
Configuration complète du pupitre par setup sur afficheur.
Sélection de la langue utilisée;
Contrôle d'une large gamme de récepteurs et de dômes à vitesse rapide;
Validation / invalidation des entrées et sorties pouvant être contrôlées sur chaque page;
Validation / invalidation de groupes de touches;
Test automatique des voies de communication;
Lignes de communication RS485.
2.1.3 Sécurité
Avertisseur sonore (buzzer) en cas d'alarme ou d'interruption des communications;
3 mots de passe peuvent être configurés indépendamment sur chaque poutine:
- mot de passe de connexion: demandé à la mise en service afin d'éviter toute utilisation non autorisée;
- mot de passe de reset alarmes: demandé lors du reset de la condition d'alarme;
- mot de passe de setup: demandé en cas de requête de setup (sur poutine ou matrice) Chaque mot de passe est composé de 5 chiffres et il peut être invalidé en le programmant à 00000.
2.2.1 Matrices vidéo
Eneo EKR-32/8A, EKR-8/4, EKR-16/4
Videotec SM328A
Videotec SM42A, SM82A
Videotec SM84A, SM164A
Videotec SW328
Videotec SW164OSM (avec adaptateur de ligne RS232 - RS485)
LXRPS42A, LXRPS42TA
LXRPS82A, LXRPS82TA
LXRPS84A, LXRPS164A
2.2.2 Multiplexeur vidéo
Eneo couleur et modèle N/B VCMT-8009/80016 / VBMT-8009/80016
Videotec SP16C
Javelin modèle couleur et noir & blanc JPMCD16X / JPMMD16X
Multiplexeur Sony YS-DX516P
Multiplexeur Ademco DVR AHDR4 / DVR AHDR9 / AHDR16
Multiplexeur Sanyo MPX-CD93P / MPX-CD163P
2.2.3 DVR
Sony HSR-X216P
Everfocus EDSR et EDSR/H
2.2.4 Récepteurs de télémétrie et de dômes motorisés
DTRX1, DTRX3
DTMRX1
DTRXDC
MICRODEC485
Dôme Elbex EX/EXC 8000 Instant Dome
Dôme Elmo D7720B
Dôme Ernitec Saturn
P/T Eneo VPT-42/RS1
Dôme Eneo Fastrax II
Dome JVC TK-C675, TK-C676
Dôme Panasonic 600 et Panasonic 850
Dôme Pelco Spectra et Spectra Lite
Dôme Samsung SCC64-1P - SCC643P
Dôme Santec
Dôme Sensormatic DeltaDome
Dome Star
Dôme VC5S-ORBM
2.3 Fonction des touches et des connecteurs
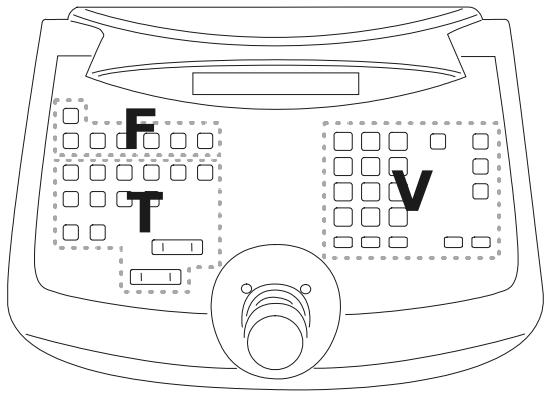
Les touches sont regroupées par fonction:
- touches gestion vidéo V
- touches fonction F
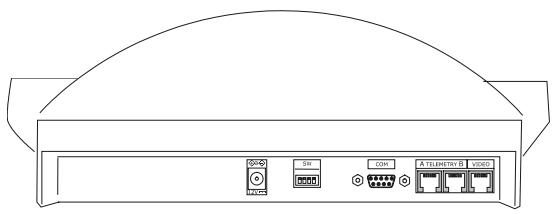
Le pupitre comprend trois connecteurs RJ11 placés à l'arrière de l'appareil : un connecteur d'alimentation, un Dip-switch de configuration et un connecteur DB9 pour la mise à jour du microprogramme vidéotec.



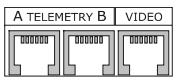
La ligne VIDÉO contrôle la matrice ou le multiplexeur. Les lignes A et B contrôlent respectivement la première et la seconde voie de télémétrie. Le Dip-switch permet d'insérer ou de retirer la charge de 120 ohms pour chaque ligne RS485 (voir § 3.2 - RS485 avec exemples de câblage, page 10)
2.4 Touches double action
En pressant simultanément plusieurs touches (SHIFT, SET, END) il est possible d'activer diverses fonctions. Par exemple, SHIFT MENU indique la pression maintenue sur la touche SHIFT, suivie de la pression fugitive de MENU. Le relâchement des deux touches peut être effectué dans n'importe quel ordre.
2.5 Dip-switch
Le Dip-switch à l'arrière du pupitre permet d'insérer ou de désactiver la charge des lignes RS485 ainsi que de bloquer la programmation du pupitre sur le PC. Pour tout renseignement complémentaire sur l'introduction des charges de lignes se reporter au 3.1 - Ligne vidéo et lignes télemétrie, page 9.
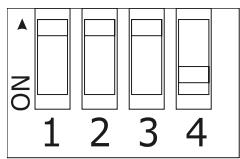
| DIP4: charge sur ligne Video | ON: charge introduite OFF: charge retiree |
| DIP3: charge sur ligne Télémétrie B | ON: charge introduite OFF: charge retiree |
| DIP2: charge sur ligne Télémétrie A | ON: charge introduite OFF: charge retiree |
| DIP1: mise à jour du firmware par PC | ON: mise à jour autorisée OFF: mise à jour non autorisée |
3.1 Ligne vidéo et lignes télemétrie
Le pupitre EKR-KB1 permet de contrôler une vaste gamme d'appareils, aussi bien en vidéo (matrices et multiplexeur) qu'en télémetrie (récepteurs ou dômes). Une programmation précise des touches est indispensable afin d'assurer une communication correcte entre les produits raccordés.
Le terme ligne vidéo désigne la voie de communication destinée au contrôle du dispositif vidéo ; le terme lignes télemétriques désigne les deux voies disponibles pour le contrôle de la télemétrie.
Il est conseillé de procéder d'abord à la configuration de la ligne vidéo avant de passer à la télémetrie.
3.2 RS485 avec exemples de câblage
Les voies de communication RS485 sont des lignes à 2 fils dont la longueur maximale est de 1200m.
La terminaison par une charge ohmique des lignes RS485 empêche tout écho du signal le long du câble ; il est indispensable de la programmer à chaque début et fin de ligne.
Les modes de terminaison des lignes varieront en fonction des types d'installation. Dans les schémas ci-dessous, les dispositifs devant être terminés sont indiqués par le symbole #.
| Configuration | Description | Example | |
| Étoile Lignes simples | / Chacune des deux liaisons est constituée par une ligne de 1200 mètres maximum. Chaque apparéil étant connecté à une extrémité de la ligne, la résistance de charge doit être insérée. | #RX1 #RX2 line 1 #TX K1 #TX K2 | |
| Backbone (Ligne Bus) | Les transmetteurs peuvent être placés à n'importequel point de la ligne bus. Les deux extrémités de ligne (sur l'ex., le pupitre K et le récepteur R3) sont terminées ; les autres apparéils (R1 et R2) ne sont pas terminés. La longueur maximale de la ligne est de 1200m. Selon le standard RS485, il est possible de connecter 32 dispositifs maximum sur la même ligne. | R1 RX R2 RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #BX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX # RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX # Un certain nombre de stub peut être mis en collatèle permettant le branchement d'articels supplémentaires. Les stub ne représentent pas les extrémités de la ligne et ne doivent donc pas être terminés, et leur longueur doit être extrémentement réduite (environ deux mètres). Selon le standard RS485, il est possible de connecter un maximum de 32 dispositifs sur la même ligne. | #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX #RX # |
| Configuration | Description | Example | ||
| Dispositifs chaîne | Les-appareils sont raccordés entre euxs par un cable 2 paires terminé à chaque extrémité. Ce câblage n'est réalisable qu'avac des appareils équipés d'une entrefee RX (réception) et d'une sortie TX (transmission), comme les récepteurs Videotec DTRX1 et DTRX3. Le signal reçu dans le récepteur en RX est amplifié et remis en forme puis transmis par TX au récepteur suivant. En cas d'accident sur un apparéil, la liaison vers les récepteurs suivants est interrompue. La longueur maximum entre chaque apparéil est de 1200 mètres. | R1 #RX #TX line 2 #RX #TX line 3 #TX K | ||
| Configuration mixte | Des configurations mixtes peuvent être réalisées, mais toujours en tenant compte des impératifs indiqués ci- dessus Longueur maximale de chaque ligne: 1200m Chaque ligne doit être terminée aux extrémités Les adaptateurs doivent être très courts (max. 2m) | R1 #RX #TX R2 #RX #TX stub line 2 #TX K2 #TX K1 | ||
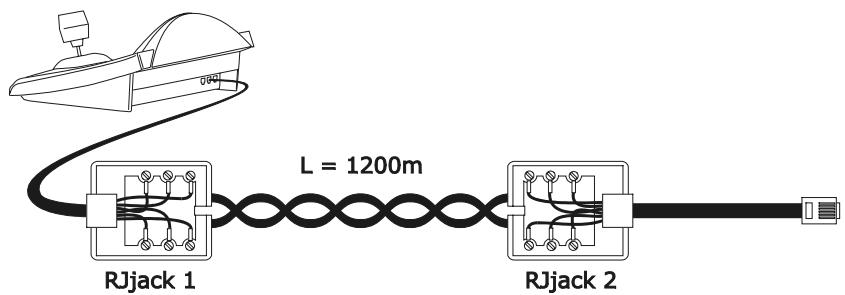
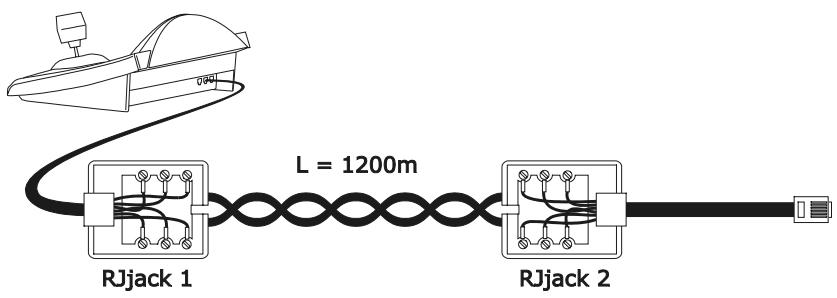
La liaison entre le pupitre EKR-KB1 et les différents appareils à contrôler s'effectue exclusivement en RS485. Si certains appareils ne sont pas équipés en RS485, il sera nécessaire de prévoir un convertisseur de signal (par ex. RS485-RS232 ou RS485-Current Loop). Le raccordement avec les produits Videotec (cyclopes vidéo SM42A, SM82A, matrices vidéo SW328, SM84A, SM164A, etc.) EKR-8/4, EKR-16/2 peut s'effectuer avec le câble téléphonique de 1,50m fourni avec l'appareil. Deux câbles téléphoniques et deux boîtes de dérivation RJ jack permettent de réaliser des distances de 1200m en utilisant le schéma ci-dessous:
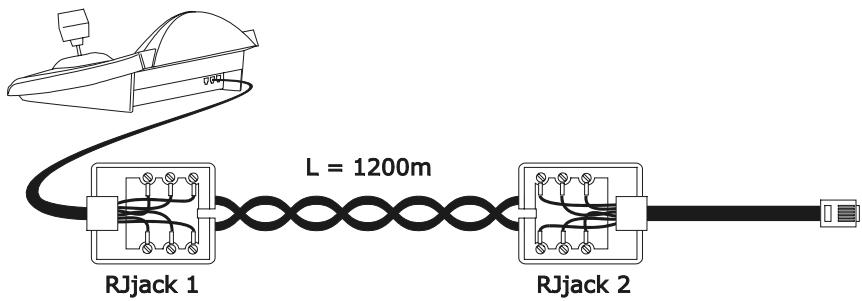
| EKR-KB1 | RJjack 1 | RJjack 2 | Dispositif |
| RS485A | blanc | bleu | RS485A |
| RS485B | jaune | noir | RS485B |
3.4 Un pont par ligne
Le raccordement s'effectue au moyen du câble de connexion standard décrit au chapitre précédent.
3.5 Plusieurs appareils sur la même ligne
La présence de plusieurs appareils sur la même ligne de communication implique l'utilisation de boîtes de dérivations RJ-jack. Comme indiqué au § 3.2 - RS485 avec exemples de câblage, page 10, il est nécessaire d'identifier les deux appareils représentant les extrémités de la ligne et de les terminer (pour la terminaison du pupitre EKR-KB1, voir § 2.5 - Dip-switch, page 9). La longueur des stub (dérivations) ne doit pas dépasser 2 mètres.
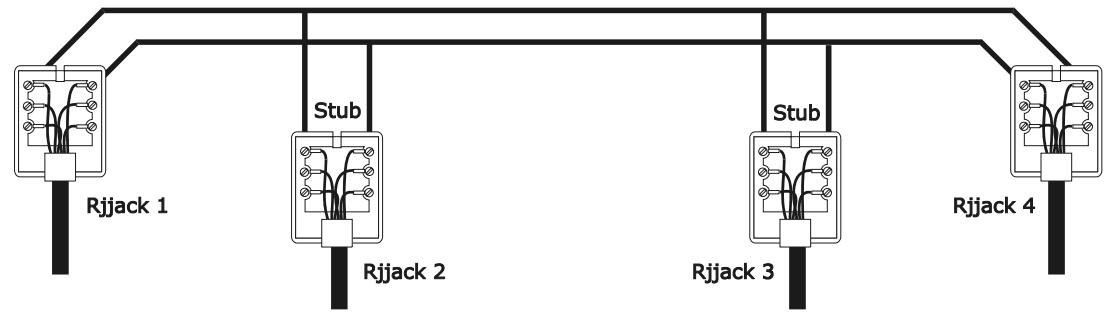
| Dispositifs transmission (pupitres) | Dispositifs réception (matrices video, récept. de télémétrie) | |
| Blanc | RS485A | Bleu |
| Jaune | RS485B | Noir |
4 Configuration du pupitre
La programmation est contrôlée sur l'afficheur du pupitre. Les opérations de programmation, ainsi que les différents points du menu, sont décrites ci-dessous:
4.1 Touches
Entrer dans la programmation : SET MENU
Déplacement du curseur dans les menus:
sélection de la ligne au moyen du Joystick.
← modification des données au moyen du Joystick.
ENTER entrée dans le sous-menu montré par le curseur
Retour au menu précédent
Sortie de la configuration : appuyer à plusieurs reprises ESC
4.2 Choix et entrée des données
Si le menu propose plusieurs choses, celle sélectionnée est indiquée par le symbole.
Pour confirmer l'introduction d'une nouvelle donnée, confirmer avec la touche ENTER.
CLEAR permet d'effacer la dernière donnée, et ESC de sortir sans mémoriser. Si la donnée numérique est incorrecte, un signal acoustique avertit l'opérateur de son erreur. Certains points du menu ne sont plus affichés si les effectués le rendent superflu.
4.3 Description des menus de configuration
| Indication sur l'écran | Sous-menu | Description |
| MENU PRINCIPAL | ||
| Langue | LANGUE Italiano English Francais Deutsch | Sélectionne la langue des menus et des messages. La langue sélectionnée est indiquée par le symbole *. |
| Communications | COMMUNICATIONS Video Ligne A télémetrie Ligne B télémetrie | Définition des apparciels connectés aux pupitres; voir § 2.2 - Appareils pouvant être connectés au pupitre EKR-KB1, page 7. |
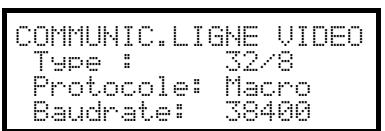
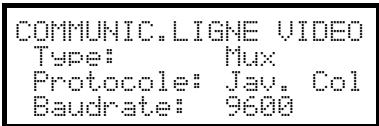
| COMMUNIC.LIGNE VIDEO Type:XXX Protocole:XXX Baudrate:XXX | Paramètres de la ligne video; voir § 5 - Gestion video, page 22. | |
| COMM.LIGNE A TELE Protocole:XXX Connect:XXX Baudrate:XXX | Paramètres de la ligne A télémetrie;voir § 6 - Contrôle de la télémetrie, page 44. | |
| COMM.LIGNE B TELE Protocole:XXX Connect:XXX Baudrate:XXX | Paramètres de la ligne B télémetrie;voir § 6 - Contrôle de la télémetrie, page 44. | |
| Mise en service | MISE EN SERVICE Cameras/Recepteurs Moniteurs Fonctions Multiplexeur | Mise en service des cameras/recepteurs, moniteurs, fonctions et multiplexeurs. La mise en service permet de réduire les manipulations sans devoir utiliser de nouveaux mots de passer. |
| CAMERAS-RECEPTEURS Configurer cameras Config. recepteurs Modifier liste | Mise en service de chaqueamera et assignation des récepteurs aux cameras; voir § 4.5 - Validation des cameras, page 15 | |
| MISE EN SERU.MONIT. Config. par default Modif. de la liste | Mise en service de chaque monitaur; voir § 4.6 - Validation des moniteurs, page 18. | |
| MISE EN SERU.FONCT. preced./suiu: xx Changem.mon.: xx Config. video: xx Alarme reset: xx Config. rec: xx Joystick: xx Optiques: xx Autopan/scan: xx Changem-rec: xx Relais: xx Essieu/Lave: xx | Mise en service des fonctions; voir § 4.8 - Validation demande de fonction, page 19 | |
| MISE EN SERU.MUX Config. défaut Modif. de la liste | Mise en service de chaque multiplexeur; voir § 4.7 - Validation des multiplexeurs, page 19. | |
| Numero pujitre | NUM.D'ID.PUPITRE Numero: _ (1/xx) | Numéro d'identification du pujitre. Chaque pujitre doit avoir un numéro différent: des pujtres ayant le même numéro créeraient des problèmes de communication. |
| Calibrage joystick | CALIBR.DU JOYSTICK 1 Relacher le joy et appuyer Enter Pour continuer... | Calibrage et test Joystick; voir § 4.9 - Calibrage et test du Joystick, page 19. |
| SONNERIE | SONNERIE Mise en service Appuyer la touche | Validation avertisseur sonore; voir § 0 - Avertisseur sonore, page 20. |
| BUZZER Pas utiliser Sur alarme Sur com fault Sur alarme/com f. | ||
| CLICK SUR LA TOUCHE Pas utiliser Bref Long | ||
| Mot de passage | CHANGEM.MOT DE PASSE Allumage Alarmes Configuration | Définition des mots de passepupitre; voir § 4.11 - Mot de passage, page 20. |
| MOT DE PASSE ALLUM. Inserer mot de passée [ ] | Introduction du mot de passage | |
| MOT DE PASSE CONFIG. Inserer mot de passée [ ] | Confirmation du mot de passage | |
| Autres parametres | AUTRES PARAHETRES Economie d'énergie Messes d'erreur Ligne Autotest Test joystick Test memoire Contraste moniter Reset configurat. | |
| ECONOMIE D'ENERGIE Pas utilisee' Activee' | Règile le pujitre en mode économique d'énergie après une minute d'inactivité | |
| MESSAGE D'ERREUR Pas montres Auto.sans buzzer Auto.avec buzzer Avec confirmation | Gestion des messages d'advertissement et d'erreur; voir § 4.12 - Messages d'advertissement et d'erreur, page 21 | |
| TEST CANAUX SERIES ? ----- ?? U:?? B:?? A:?? ESC pour terminer | Test automatique des canaux sériels; voir § 4.13 - Test automatique des canaux sériels, page 21. | |
| TEST JOYSTICK X:0 min:0 max:0 Y:0 min:0 max:0 Z:0 min:0 max:0 | Test de fonctionnement du Joystick; voir § 4.9 - Calibrage et test du Joystick, page 19. | |
| TEST MÉmoire Page: xxx/511 ESC pour terminer | Test mémoire interne, utile en cas de dysfonctionnement et d'assistance téléphonique. | |
| CONTRASTE NONIT.155 INC/DEC. Change 1. Default 0. Preced. ESC.Fin | Modification du contraste de l'afficheur; presser INC et DEC pour modifier le contraste. 0 return au contraste précédent et 1 celui par défaut. | |
| RESET PUPITRE Mettre a zero la configuration? [oui] [NON] | Rétablissement des valeurs par défaut configurées en usine. L'opération de reset doit être confirmée par l'opérateur. | |
Sauve et sortie
Mémorisation des nouvelles configurations et sortie des menus.
4.4 Attribution des lignes de télémétrie
L'assignation des lignes de télemétrie a été insérée dans le menu de validation des caméras. Se reporter au paragraphe suivant.
4.5 Validation des caméras et assignation des récepteurs
Permet de limiter l'utilisation des pupitres aux seules entrées vidéo validées, en évitant l'utilisation de nouveaux mots de passe. Il est conseillé de ne valider le groupe d'entrées vidéo pour chaque pupitre qu'après avoir défini la configuration de l'installation.
Pour chaque caméra, il est nécessaire de définir dans ce menu:
validation de la caméra à la communication pupitre;
numéro du récepteur/dôme auquel est éventuellement connectée la caméra;
ligne de télemétrie (A ou B) à laquelle est connecté le récepteur/dôme correspondant.
4.5.1 Configuration par défaut
Permet le contrôle de toutes les caméras et efface la configuration précédente.
À chaque caméra est assigné un récepteur identifié par le même numéro (caméra 1, récepteur 1; caméra 2, récepteur 2, etc.) et tous les récepteurs sont contrôlés par la ligne A.
4.5.2 Menu de validation caméras
Le menu de validation des caméras permet d'établir quelles sont les caméras pouvant être rappelées par le pupitre.
Sélectionner Configurer caméras pour accéder au sous-menu.
Les quatre rubriques disponibles sont les suivantes :
Valider : toutes les caméras de 1 à 9999 sont validées.
Invalider toutes : toutes les caméras sont invalidées.
Valider de : un groupe de caméras est validé, le premier numéro devant être inférieur au second.
Invalider deva : un groupe de cameras est invalidé, le premier numéro devant être inférieur au second.
4.5.3 Menu d'assignation récepteurs
Le menu de validation des récepteurs permet d'établir quelles sont les caméras équipées d'un récepteur/dôme.
Sélectionner Configurer récepteurs pour accéder au sous-menu.
Les cinq rubriques disponibles sont les suivantes :
Valider toutes : à chaque caméra est assigné un récepteur.
Invalider toutes : toutes les caméras sont configurées comme «sans tourelle».
Valider si cam. validée : les récepteurs sont assignés uniquement si la caméra correspondante est validée ; tous les récepteurs dont la caméra est invalidée sont éliminés.
Valider de: un groupe de récepteurs est assigné. Le premier numéroámara inséré doit être inférieur au second.
Invalider de : un groupe de récepteurs est invalidé. Le premier numéro inséré doit être inférieur au second.
Remarque:
Le numéro du récepteur assigné correspond à celui de la caméra correspondante, sans les milliers. - En cas de possibilité de sélection entre deux lignes de télémétrie différentes, la ligne sur laquelle sont connectés les récepteurs est demandée. Tous les récepteurs compris dans un intervalle sont assignés à la même ligne de télémétrie.
4.5.4 Modification de la liste
Après la définition générale effectuée avec les deux menus précédents, il est possible de modifier chaque rubrique pour une définition plus précise de la liste de caméras pouvant être demandées par le pupitre et des récepteurs assignés à ces dernières.
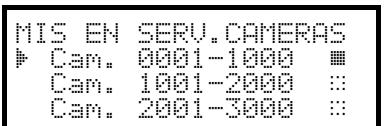
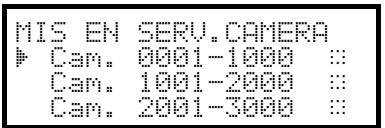
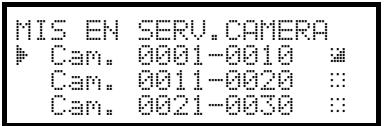
Le menu de modification de la liste affiche les ensembles de caméras devant être configurées :
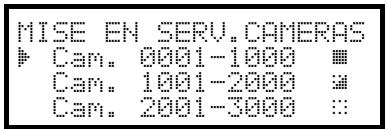
Les trois symboles à droite de l'afficheur :
indique qu'aucune des caméras de l'ensemble correspondant n'est validée indique que certaines des caméras de l'ensemble sont validées et d'autres non indique que toutes les caméras de l'ensemble sont validées.
Il est possible de programmer jusqu'à 9999 caméras: bien qu'un nombre inférieur soit utilisé, cette possibilité est utile en cas de programme de vidéo importante prévoyant le concept de “zone”.
La page-écran de l'exemple propose trois ensembles de caméras : le premier du numéro 1 au numéro 1000 ; le second du numéro 1001 au 2000 ; le troisième du 2001 au 3000.
Les autres groupes de caméras peuvent être sélectionnés au moyen du joystick
Le curseur indique l'ensemble de caméras en cours de configuration:
- pour valider la demande de toutes les caméras de l'ensemble, presser 1.
- Pour invalider toutes les caméras de l'ensemble, presser 0
- si certaines caméras de l'ensemble doivent être validées et d'autres non, presser ENTER pour subdiriser l'ensemble indiqué en ensembles plus petits
- Presser ESC pour revenir aux pages - écran précédent.
L'exemple suivant indique comment valider les caméras de 1 à 7 en invalidant l'accès à toutes les autres. À la caméra 3 est assigné le récepteur 12 connecté à la ligne de télémetrie B:
Toutes les caméras de l'ensemble 1-1000 sont validées, tandis que celles de 1001 à 3000 ne le sont pas.
Sélectionner l'ensemble 1-1000 au moyen du joystick et presser pour invalider complètement toutes les caméras.
Les icônes sur la droite de l'afficheur indiquent qu'aucune des caméras des ensembles de 1 à 3000 n'est disponible.
Sélectionner l'ensemble 1-1000 au moyen du joystick et presser ENTER pour affiner le choix.
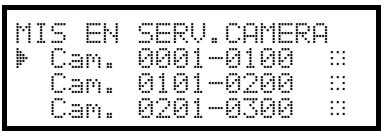
Les ensembles affichés sur l'écran sont maintenant de 100 caméras chacun. Aucune caméra des ensembles n'est validée.
Sélectionner l'ensemble 1-100 avec et presser ENTER pour affiner encore le choix.
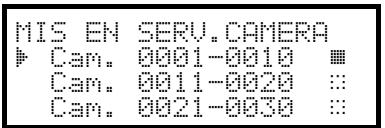
Sélectionner l'ensemble 1-10, et presser 1 pour valider toutes les caméras de l'ensemble de 1 à 10.
Presser ENTER pour définir la validation individuelle des caméras.
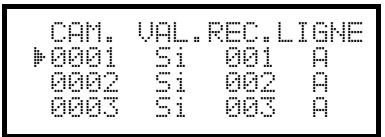
Le menu change pour permettre la définition détaillée de chaque caméra.
Étant donné que toutes les caméras de 1 à 10 sont désormais validées, il est nécessaire de faire défiler la liste au moyen du manche à balai pour invalider les caméras 8, 9 et 10, comme prévu par les demandes de l'exemple.
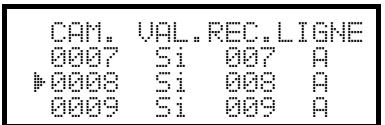
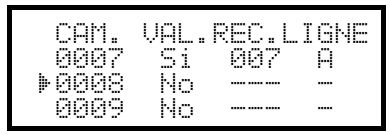
Faire défiler la liste avec ♦ jusqu'à la caméra 8.
La légende proposée sur la première ligne indique :
VAL : la sélection de la caméra est possible ou non sur le p
REC : numéro de récepteur/dôme assigné à la caméra
LIGNE : ligne de contrôle (A ou B) du récepteur/dôme
Presser 0 pour invalider la caméra 8. L'invalidation de la caméra élimine automatiquement le numéro récepteur et la ligne de télemétrie correspondants. Procéder de même pour invalider les caméras 9 et 10.
Pour chaque caméra sur tourelle correspond généralement un numéro récepteur/dôme correspondant à celui de la caméra (caméra 1, récepteur 1, caméra 2, récepteur 2, etc.)
Dans certains cas (par ex., durant l'installation d'équipements composites), il peut être nécessaire de faire correspondre un numéro de récepteur différent à une caméra.
Sur l'exemple proposé, il est nécessaire d'assigner à laámara 3 le récepteur 12, et ce dernier doit être contrôlé sur la ligne de téiémetrie B.
Faire défiler la liste jusqu'à trouver laamera à configurer et presser ENTER pour procéder à la modification.
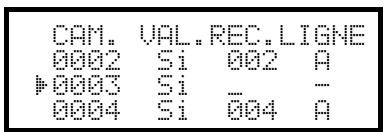
Dans la colonne REC apparaît un curseur : l'insertion du numéro récepteur/dôme assigné à laamera est demandée. Presser
1 2 ENTER pour assigner le récepteur 12.
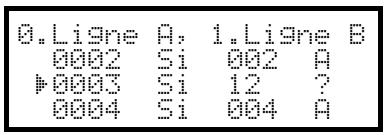
Après l'insertion du numéro récepteur, si le pupitre est configuré pour contrôle deux protocoles différents de télémétrie, la ligne de connexion du récepteur est demandée (A ou B).
Presser 0 pour assigner la ligne A, 1 pour la ligne B.
Une fois les modifications terminées, presser à plusieurs reprises ESC pour revenir au menu précédent ou au menu principal.
L'icône de l'ensemble 1-10 est désormais devenue indiquant que seules certaines caméras du groupe sont validées.
4.5.5 Remarque sur l'assignation des récepteurs
Après l'assignation des récepteurs dans le menu, la touche RECEIV est automatiquement invalidée (pour revalider si nécessaire, se reporter au § 4.5 - Validation des caméras, page 15)
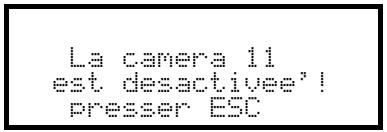
4.5.6 Message d'advertisement
En cas de demande d'une caméra non validée, un message prévient que la demande n'est pas autorisée:
4.6 Validation des moniteurs
La validation des moniteurs permet d’éviter toute intervention de la part d’opérateurs non autorisés.
4.6.1 Configuration par défaut
La configuration par défaut permet le contrôle de tous les moniteurs et efface toute configuration précédente.
4.6.2 Modification de la liste
Les opérations pour la validation et l'invalidation des moniteurs sont identiques à celles pour les caméras (voir § 4.5 - Validation des caméras, page 15). Les moniteurs sélectionnables sur le pupitre sont au nombre de 99.
4.7 Validation des multiplexeurs
La validation des multiplexeurs évite toute intervention de la part d'opérateurs non autorisés.
4.7.1 Configuration par défaut
Cette configuration permet le contrôle de tous les multiplexeurs et efface toute configuration précédente.
4.7.2 Modification de la liste
Les opérations pour la validation et l'invalidation des multiplexeurs sont identiques à celles précitées plus haut pour les caméras (voir § 4.5 - Validation des caméras, page 15). Les multiplexeurs sélectionnables sur le pupitre sont au nombre de 39 au maximum.
4.8 Validation demande de fonctions
Les opérateurs peuvent être autorisés ou non à effectuer certaines opérations à partir du pupitre.
Ces opérations sont divisées en groupes de fonctions :
Précéd/suiv.: validation de la sélection au moyen des touches DEC et INC; ces touches peuvent interrompre la série du cycle, il est donc nécessaire de les invalider si l'on peut éviter cette fonction.
Changement: validation changement moniteur; il est possible de limiter un seul moniteur à un opérateur
Config video: validation de la configuration vidéo (cyclique ou matrice); peut être assujetti à un mot de passe.
Config. rec.: validation de la configuration de télémétrie ou dômes; peut être assujettie à un mot de passe.
Alarme Reset: validation au reset des alarmes du dispositif vidéo; peut être assujettie à un mot de passe
Joystick: validation utilisation du joystick
Optiques: validation au contrôle des fonctions optiques des récepteurs de télémétrie
Autopan/scan: validation variation du mouvement de tourelle / dôme avec commandes de l'auto-pan et scan
Changement rec. : validation changement numéro d'un récepteur associé à une caméra
Relais: validation au contrôle du relais
Wiper/Wash: validation au contrôle de l'essuie-glace
4.9 Calibrage et test du joystick
Bien que le calibrage soit effectué en usine, il est utile de le vérifier. En cas de dysfonctionnement (par ex. si une fonction pan ou tilt reste activée lorsque le Joystick est au repos), il faudra reprogrammer le joystick.
CALIBRAGE DU JOYSTICK 1 Relacher le joystick et appuyer sur Enter pour continuer...
Le Joystick au repos (relâché), presser ENTER. Cette opération permet de définir le point de repos. ESC permet de passer au test suivant sans effectuer d'étalonnage.
CALIBER DU JOYSTICK 2 Remuer le joy dans les angles
Après avoir pressé ENTER, déplacer le joystick en un mouvement aléatoire en le poussant au maximum : haut, bas, droite, gauche.
CALIBR. DU JOYSTICK 2 X-0451 X0540 X+0544 Y-0540 Y0546 Y+0546 Enter pour terminer
Pendant le mouvement, les paramètres sur l'afficheur ne sont à prendre en compte qu'en cas de dysfonctionnement ou d'assistance téléphonique. Déplacer le joystick jusqu'à ce que les valeurs : x + et y + (points limites à gauche, à droite, en bas et en haut) ne varient plus avec le mouvement. Les autres valeurs reportées au centre de l'afficheur changent continuellement avec les mouvements du joystick.
CALIER. JOYSTICK 3 Tourner le joystick
ENTER permit de passer à la phase de configuration suivante.
ESC permet de passer au test sans terminer l'étalonnage.
Durant le fonctionnement normal, la rotation du joystick entraîne l'activation du zoom.
CALIBRATION DU JOYSTICK 3 Z-6381 Z9533 Z+8533 Enter pour terminer
Mouvement le joystick jusqu'à atteindre plusieurs fois les deux points extrêmes et jusqu'à les valeurs indiquées par ^- et ^+ (points limites dans le sens des aiguilles d'une montre et dans le sens inverse des aiguilles d'une montre) ne varient plus.
TEST DU JOYSTICK X: 0 min: OK max: OK Y: 0 min: OK max: OK Z: 0 min: OK max: OK
ENTER permit de terminer la configuration et de passer au test, permit de passer au test sans terminer l'étalonnage.
Test de contrôle si le calibrage est correct : le Joystick au repos, les valeurs individuelles par ^#, ^# et ^# doivent être égales à 0. Tourner le joystick au maximum de sa course dans le sens des aiguilles d'une montre et dans le sens contraire. Ceci fait, si les trois paramètres min et max indiquent OK, le calibrage est correct. Dans le cas contraire, recommencer l'étalonnage, une mauvaise configuration compromettant le bon fonctionnement.
4.10 Avertisseur sonore (buzzer)
Le pupitre est équipé d'un avertisseur sonore se déclenchant en cas d'anomalie. L'avertisseur sonore peut être validé pour les fonctions suivantes:
- reconnaissance de la condition d'alarme du dispositif video (cyclique ou matrice)
- reconnaissance de la condition d'interruption des communications avec le dispositif video
- émission d'un petit signal d'avertissement lors de la pression d'une touche.
Il convient de remarquer que les conditions d'alarme et d'interruption des communications ne sont disponibles que sur certains produits : Eneo EKR-8/4, EKR-16/4, EKR-32-8, SM42A, SM82A, SM84A, SM164A, SW164OSM, SW328.
4.11 Mot de passe
La sécurité des puJtres est gérée par trois niveaux de mot de passe:
- mot de passe de mise en marche, évitant toute utilisation indésirable
- mot de passe de programmation : demandé à chaque nouvelle entrée en programmation. Il n'est pas nécessaire pour les cycliques Eneo EKR-8/4, EKR-16/4, EKR-32-8, SM42A / SM82A et matrices SM84A / SM164A, car il est géré au niveau du dispositif vidéo : il est dans ce cas nécessaire de procéder à l'introduction conformément aux indications du manuel du dispositif intéressé
- mot de passe de reset alarmes: demandé en cas de reset d'une condition d'alarme.
Des mots de passe indépendants sont attribués à chaque pupitre. Ils peuvent être invalidés (situation par défaut en sortie d'usine) si définis à 00000.

Important : en cas d'oubli du mot de passe de programmation, il est impossible de le retrouver.
4.12 Messages d'avertissement et d'erreur
Un message sur écran, configuré de 4 façons différentes, indique la non-exécution d'une opération demandée:
- messages non montrés
- message automatique sans bip d'alerte: le message est affiché durant environ 3 secondes et disparaît automatiquement sans signal acoustique; il peut être effacé plus tôt en pressant ESC.
- message automatique avec bip d'advertisement: le message est affiché durant environ 3 secondes et s'accompagne d'un signal acoustique; sa disparition est automatique et peut être avancée en pressant ESC.
- message avec confirmation: le message s'accompagne d'un bip d'advertisement et ne disparaît que si l'opérateur presse ESC.
4.13 Test automatique des canaux sériels
En cas de dysfonctionnement, ou afin de contrôler le pupitre, un test très simple permet de vérifier que les voies de communication vers le dispositif vidéo et la télematie fonctionnent parfaitement.
Déconnecter, si nécessaire, les dispositifs connectés aux lignes V, A et B, et réaliser le câble de test suivant au moyen des deux câbles téléphoniques et des deux boîtes RJ-jack fournies avec l'équipement:

| Câble téléphonique | RJjack 1 | RJjack 2 | Câble téléphonique |
| RS485A | blanc | blanc | RS485A |
| c | c | ||
| RS485B | jaun | jaun | RS485B |
| e | e |

Ce câble est différent du câble de connexion décrit au § 3.3 - Raccordement standard, page 11.
4.13.1 Opérations de test automatique
- Connecter le câble de test aux connecteurs A et B
- Connecter le cable de test aux connecteurs A et V
- Connecter le câble de test aux connecteurs B et V.
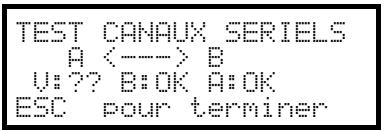
Sur l'écran s'affiche l'indication < - E, ce qui signifie que les communications en entrée et en sortie des deux lignes fonctionnent.
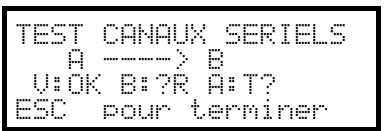
Ces indications signifient que le câble est défectueux, ou que les lignes en cours de test ne fonctionnent pas. Sur l'exemple, la voie A transmet et la voie B reçoit correctement, mais la communication ne s'effectue que dans une seule direction.
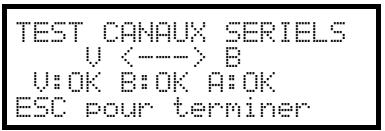
La troisième ligne présente les résultats du test : U, E et indiquent respectivement les trois lignes : Vidéo, Télémétrie B et Télémétrie A.
Pour chaque ligne A, B et V, le résultat du test est donné par l'une des quatre indications suivantes :
: la ligne ne fonctionne pas et n'est pas en mesure de transmettre ni de recevoir les données T---: la ligne est en mesure de transmettre mais non de recevoir F: la ligne reçoit mais n'est pas en mesure de transmettre OK: la ligne transmet et reçoit correctement.
4.14.1 Description
Le protocole Macro de la ligne Vidéo peut être configuré pour une utilisation spécifique adaptée à une installation particulière. Avant d'avoir sélectionné le protocole Macro, avec le curseur sur la ligne Protocole, presser ENTER pour accéder au sous-menu de configuration.
En cas d'activation d'une fonction spécifique, l'indication Macro est suivie d'une
4.14.2.1 Polling
Défaut: OUI
Toute connexion avec une matrice prévoit généralement le polling.
Si le pupitre est connecté à un PC ou à un dispositif OEM, le polling peut être suspendu pour simplifier l'implémentation du protocole Macro et ne pas devoir observer des délais difficiles à respecter dans des systèmes non spécifiques.
4.14.2.2 Mux sanyo
Défaut: NON.
Définir OUI si le multiplexeur SANYO est connecté à une ligne Aux de la matrice. Plusieurs pages-écran spécifiques non montrées par le pupitre en temps normal sont ainsi activées, ce qui permet un contrôle complet du multiplexeur.
Si le multiplexeur est directement contrôlé par le pupitre, définir NON.
Défaut: NON.
Définir OUI si les exigences de l'installation (plusieurs matrices contrôlées par le même pupitre) permettent d'utiliser 9999 caméras.
4.14.2.4 Décodification des récepteurs
Défaut: OUI
Généralement, à une entrée vidéo correspond un récepteur de télématique identifié par le même numéro (entrée 1/récepteur 1, entrée 2/récepteur 2, etc.)
Si les exigences de l'installation rendent nécessaire la configuration de numéros différents, l'association entrée/récepteur doit être calculée. Cette décodification peut être effectuée sur le pupitre (condition normale) ou à partir de la matrice. Cette dernière possibilité n'est pas prévue sur tous les modèles de matrices.
Si la décodification à partir de la matrice est activée, il n'est pas possible de sélectionner le numéro récepteur. Ce dernier n'était pas dans ce cas affiché sur l'écran.
5 Gestion vidéo
L'arrière du pupitre est équipé d'un connecteur VIDÉO pour le contrôle des dispositifs vidéo. Il est nécessaire de configurer tant le pupitre que le dispositif contrôlé, le protocole de communication choisi devant être identique à la vitesse de communication (vitesse de transmission en bauds).
Si ces paramètres ne sont pas configurés correctement, toute communication entre les dispositifs est impossible.
5.1 Description de l'afficheur
En cas de contrôle d'un DVR Everfocus par le pupitre, se reporter au § 5.2.3 - Contrôle des magnétoscopes numériques Everfocus page 25.
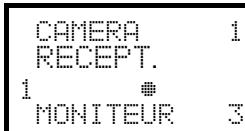
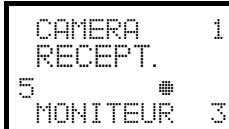
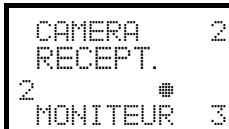
L'afficheur du EKR-KB1 donne à l'opérateur toutes les informations nécessaires comme indiqué ci-dessous
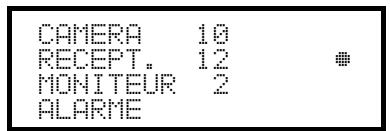
Les quatre lignes représentent respectivement :
CAMERA: Dernière caméra sélectionnée par l'opérateur.
Si une icône apparait au lieu d'un numéro, cela signifie que des fonctions spéciales sont demandées, comme par exemple :
- icône : caméra suivante prévue par la série
- icone : caméra précédente prévue par la série
- icône cycle automatique
RECEPT : récepteur de télémétrie associé à la caméra; les commandes de télémétrie lui sont adressées
MONITEUR: moniteur actif; toutes les opérations vidéo sont adressées à ce moniteur
Ligne des messages (sur l'exemple : ALARME) : les messages d'alarme et l'indication des touches pressées sont affichés sur cette ligne.
Le symbole représente la position du Joystick et se modifie durant les mouvements de ce dernier.
5.2 Vidéo : concepts fondamentaux
Le pupitre EKR-KB1 permet deux types d'opérations fondamentales pour le contrôle du signal vidéo:
- sélection d'une caméra sur le moniteur actif
- début d'une série de cycles prédéfinis sur le moniteur sélectionné
Toutes les opérations effectuées sur le pupitre sont attribuées au moniteur sélectionné, indiqué sur l'écran.
La sélection de la caméra dépend de la configuration des caméras validées. Si une caméra n'est pas validée, la tentative de sélection sera accompagnée d'un message d'erreur; voir § 4.5.6 - Message d'avertissement, page 18.
On remarque que toutes les commandes ne sont pas acceptées par les appareils (cycliques et matrices). En cas de demande d'une fonction non acceptée, un message d'erreur avertit l'opérateur de l'impossibilité d'effectuer la commande.
5.2.1 Sélection directe d'une caméra
Presser CAM suivi du numéro de la caméra, et confirmer avec ENTER.
Par exemple: CAM 1 2 ENTER sélectionne la caméra 12 sur le moniteur actif.
Lorsque c'est possible, la sélection se fait automatiquement sans besoin d'appuyer sur la touche ENTER.
5.2.2 Sélection de la caméra précédente / suivante
Les touches DEC et INC sélectionnent respectivement laamera précédente et suivante prévue dans la série de cycle programmée.
Si la séquence de cycle est en cours, une simple pression des touches DEC et INC l'interrompt.
Les touches DEC et INC peuvent être invalidées et sont acceptées par les cycliques Eneo EKR-8/4, -16/4, -32/8,
SM42A et SM82A et les matrices SM84A et SM164A. Sur les autres appareils, la pression des touches n'est pas utilisée.
5.2.3.1 Mode DVR
Si le pupitre est configuré pour contrôler un DVR Everfocus, une page-écran personnalisée s'affiche lors de sa mise en service:
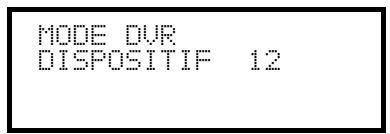
DISPOSITIF indique le numéro du DVR activé.
En mode DVR, les touches activent les fonctions secondaires (indiquées en clair à côté ou au-dessus de chaque touche) : pour connaître la signification de chaque touche, se reporter au manuel d'utilisation du DVR. Le mode DVR permet un contrôle complet du DVR mais ne permet pas de contrôler la télémetrie.
Pour passer du mode DVR au mode télémetrie et vice-versa, enforcer la touche [ ESC ] DVR MODE.
Opérations en mode DVR
Sélection du DVR active :
- enfoncer la touche [MON DEVICE]
- entrez le numéro du DVR (de 0 à 16382)
- confirmer avec [ENTER MODE].
Demande d'une voie vidéo:
- presser [CAM] CH
- entrez le numéro de la voie vidéo désirée
- confirmer si nécessaire avec [ENTER MODE].
Jog et shuttle
Jog et shuttle correspondant à la manette présente sur le DVR.
Le contrôle du jog s'effectue au moyen des touches [DEC JOG<] et [INC JOG>]: chaque pression des touches correspond à un pas de la manette de jog.
Le contrôle du shuttle s'effectue au moyen du manche à balai.
Le manche à balai permet de se déplacer dans les menus de configuration du DVR, mais permet également la sélection rapide des quatre premières entrées (si prévues sur le modèle de DVR):
- Manche à balai à gauche : voie 1
- manche à balai à droite : voie 2
- Manche à balai vers le haut : voie 3
- manche à balai vers le bas: voie 4.
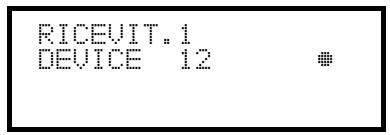
5.2.3.2 Mode télémétrie
Le mode télémétrie permet de contrôler la télémétrie connectée au pupitre. Le mode télémétrie permet uniquement de changer le numéro de DVR activé et de demander une entrée vidéo. Toutes les touches numériques sont utilisées pour la demande des vues (décrites au paragraphe suivant), tandis que le manche à balai est utilisé pour le mouvement des tourelles ou dômes connectés.
Le mode télémétrie est indiqué par la page-écran:
5.2.4 "Vues
Une vue est un groupe d'actions
La "vue" permet d'effectuer une série de quatre opérations au moyen d'une touche unique:
- sélection d'un nouveau moniteur
- sélection d'une caméra sur le nouveau moniteur choisi
- sélection du récepteur associé à la caméra
- opérations de scan sur une position de tourelle précédemment mémorisée sur le récepteur.
La configuration correcte des vues permet d'accélérer les opérations en prévoyant 10 combinaisons de caméra / moniteur / récepteur / scan pouvant être prédéfinies par l'opérateur.
L'utilisation des vues est particulièrement utile en cas d'alarme : si à la touche 1 sont associés la caméra 12 (à laquelle correspond généralement le récepteur 12), le moniteur 3 et le scan 5, une simple pression de la touche 1 entraîne le remplacement de la série.
MON 3 ENTER CAM 1 2 ENTER RECEIV 1 2 ENTER SCAN 5 ENTER.
Sur pression de la touche, l'opérateur peut donc appeler rapidement une position prédéfinie sur un moniteur.
5.2.4.1 Programmation des vues
La programmation de la vue s'effectue en pressant simultanément les touches de SHIFT SET 0 a
SHIFT SET 9, à condition que l'opérateur soit autorisé à effectuer la configuration des vues.
La configuration actuelle est affichée pendant environ une seconde, puis demande les nouveaux paramètres:
L'exemple ci-contre indique qu'une pression de la touche 1 appelle la caméra 1 sur le moniteur actif (le symbole - signifie qu'aucun moniteur n'est sélectionné) et qu'aucune opération de scan n'est demandée pour la tourelle associée à la caméra (symbole - à côté de la légende Scan).
Sélection de la caméra.
Introduire un numero et presser ENTER pour confirmer.
Sélection du moniteur.
Introduire un numéro et presser ENTER pour confirmer.
L'introduction du numéro 0 permet de ne pas modifier le moniteur actif lorsque la vue est appelée.
Sélection de la position de scan.
Introduire un numéro et presser ENTER pour confirmer.
L'introduction du nombre 0 permet de ne demander aucune opération de scan lorsque la vue est appelée.
5.2.4.2 Rappel des vues
Presser les touches de 0 à 9 pour rappeler la vue correspondante.
5.2.4.3 Élimination de la personnalisation des vues
Presser simultanément les touches SHIFT SET CLEAR
La configuration par défaut des vues permet de rappeler directement les caméras de 1 à 9 sans modification du moniteur actif et sans opération de scan. La touche 0 rappelle la caméra 10.
5.2.5 Récepteurs associés aux caméras
Il est possible d'associer un récepteur de télémétrie (et un seul) à chaque caméra.
Il faut éviter de modifier le couple caméra - récepteur, sauf en cas de modification de l'installation elle-même.
Généralement le même numéro est attribué à laamera et au récepteur (par exemple, laamera 10 est contrôlée par le récepteur 10), mais cette programmation peut être modifiée.
Chaque fois qu'une caméra est appelée, son récepteur programme est sollicité. Il est possible de changer le nr. du récepteur avec le menu de configuration MISE EN SERVICE/FONCTIONS/NUM. RECEPT.
Par example:

La caméra 1 est demandée. L'écran indique que le récepteur actuellement associé à cette caméra est le numéro 1.

Si l'opérateur est autorisé, il peut attribuer un autre numéro de récepteur à laamera ; dans le cas contraire, un message d'erreur s'affiche.

Laamera 2 est demandée, avec le récepteur 2.


À la nouvelle demande de laamera 1, le récepteur 5 est sélectionné.
5.3.1 Description
La matrice EKR-32/8 est un produit professionnel destiné à la gestion vidéo dans le domaine de la surveillance. Elle permet le contrôle de 32 entrées sur 8 sorties vidéo dont une pouvant être gérée par un DVR.
La matrice SM328A offre les fonctions de commutation, de gestion des alarmes, de programmation du menu sur l'écran et elle est équipée d'une ligne auxiliaire pouvant être utilisée pour le contrôle de la télémetrie ou d'un multiplexeur. Se reporter au manuel de la matrice pour toute information complémentaire.
5.3.2.1 Câble
Le câble de communication de type standard est décrit au 3.3 - Raccordement standard, page 11.
5.3.2.2 Configuration de la matrice
La nouvelle génération de matrice Eneo EKR-32/8 peut être contrôlée par différents types de pupitres compatibles avec les différents protocoles correspondants : pour le contrôle avec le pupitre EKR-KB1, utiliser le protocole MACRO avec une vitesse de transmission en bauds 38400.
Configurer correctement le Dip-switch interne de la matrice (par défaut tous les DIP sont à OFF : Protocole MACRO, vitesse de transmission en bauds 38400, programmation excluse).
5.3.2.3 Configuration du port
Pour programmer le pupitre, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré suivant :
Contrôle d'une matrice EKR-32/8
La possibilité de connecter plusieurs pupitres oblige à définir des numéros distincts d'identification (de 1 à 4).
5.3.2.4 Test de fonctionnement
En cablant directement le pupitre à la matrice avec le câble RJ fourni, on peut commuter les entrées vidéo:
Presser MON 1 ENTER pour la sélection du moniteur 1
presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
Attention! La matrice SM328A peut être configurée de façon à exclure le contrôle d'un pupitre pendant certaines périodes de la journée ou en cas de circonstances particulières. Dans de tels cas, le fonctionnement du pupitre est inhibé. Se reporter au manuel.
5.3.3 Configuration du dispositif vidéo
Pour accéder au menu de programmation sur écran, se conformer aux indications du manuel du dispositif video.
Presser SET MON pour entrer en programmation et introduire le mot de passe de configuration si nécessaire.
5.4.1 Description
Les matrices SM84A / SM164A sont des produits professionnels destinés à la gestion vidéo dans le domaine de la surveillance. Les 2 modèles se différencient uniquement par le nombre d'entrées vidéo, soit respectivement 8 et 16 pour 4 sorties vidéo dont une pouvant être directement gérée par un magnétoscope.
Outre les fonctions de commutation, de gestion des alarmes et de programmation du menu sur l’écran, ces matrices sont équipées d’une ligne auxiliaire pouvant être utilisée pour le contrôle de la télémétrie ou d’un multiplexeur. Se reporter au manuel de la matrice pour toute information complémentaire.
5.4.2.1 Câble
Le câble de communication standard est décrit au 3.3 - Raccordement standard, page 11.
5.4.2.2 Configuration de la matrice
La nouvelle génération de matrice SM84A / SM164A pouvant être contrôlée par différents types de pupitres est compatible avec les différents protocoles correspondants, ainsi au moyen du pupitre DCJ, utiliser le protocole MACRO avec une vitesse de transmission en bauds 38400.
Configurer correctement le Dip-switch interne de la matrice (par défaut tous les DIP sont à OFF : Protocole Macro, vitesse de transmission en bauds 38400).
5.4.2.3 Configuration du port
Durant la configuration du pupitre, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré comme suit:
Contrôle d'une matrice SM84A
Contrôle d'une matrice SM164A
La possibilité de raccorder 4 pupitres sur une seule matrice entraîne l'obligation de donner un numéro d'identification différent pour chaque pupitre (de 1 à 4).
5.4.2.4 Test de fonctionnement
En connectant directement le pupitre avec le cyclique ainsi configuré au moyen du câble téléphonique fourni, il doit être possible de commuter immédiatement les entrées vidéo:
- Presser MON 1 ENTER pour la sélection du moniteur 1
- presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
5.4.3 Configuration du dispositif vidéo
Pour accéder au menu de programmation sur écran, se conformer aux indications du manuel de la matrice. Presser SET MON pour entrer en programmation et introduire le mot de passe de configuration si nécessaire.
5.5.1 Description
Les matrices EKR-/4 et EKR-16/4 sont des produits dédiés à la gestion vidéo surveillance. Les modèles EKR-8/4 et EKR-16/4 se différencient par le nombre d'entrées vidéo (respectivement 8 et 16) ; les sorties vidéo sont au nombre de quatre, et l'une d'entre elles peut être directement gérée par un magnétoscope.
Elles permettent les fonctions de commutation, de gestion des alarmes et de programmation du menu sur écran
Se reporter au manuel de la matrice pour toute information complémentaire.
5.5.2.1 Câble
Le câble de communication de type standard est décrit au 3.3 - Raccordement standard, page 11.
5.5.2.2 Configuration de la matrice
La vitesse de transmission en bauds de la matrice peut être sélectionnée au moyen du Dip-switch SW1 à l'intérieur:
- ip 6 off: 9600 bauds (condition par défaut).
- IP 6 ON 1200 BAUDS
Les opérations de modification de la vitesse de transmission en bauds doivent être effectuées après avoir coupé l'alimentation de la matrice. Se reporter au manuel correspondant.
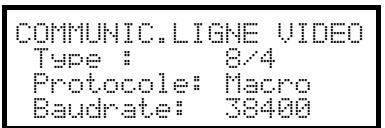
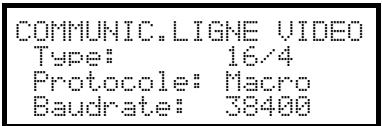
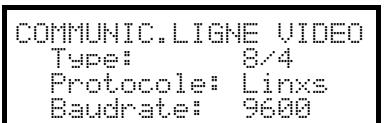
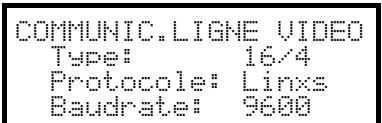
5.5.2.3 Programmation du pupitre
Le sous-menu COMMUNICATIONS / VIDEO doit être programmé comme suit :
Contrôle d'un cyclique EKR-8/4
Contrôle d'un cyclique EKR-16/4
La présence de deux pupitres connectés au cyclique implique l'obligation de définir deux numéros d'identification différents (de 1 à 4).
5.5.2.4 Test de fonctionnement
En connectant directement le pupitre au cyclique au moyen du câble téléphonique fourni, il doit être possible de commuter immédiatement les entrées vidéo:
- Presser MON 1 ENTER pour la sélection du moniteur 1
- presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
5.5.3 Configuration du dispositif vidéo
Pour accéder au menu de configuration sur écran, se conformer aux indications du manuel du dispositif video.
Presser SET MON pour entrer en programmation et si nécessaire entrer le mot de passe de programmation.
5.6.1 Description
Les matrices LXRPS84A et LXRPS164A sont des produits dédiés à la gestion vidéo surveillance. Les modèles LXRPS84A et LXRPS164A se différencient par le nombre d'entrées vidéo (respectivement 8 et 16) ; les sorties vidéo sont au nombre de quatre, et l'une d'entre elles peut être directement gérée par un magnétoscope. Elles permettent les fonctions de commutation, de gestion des alarmes et de programmation du menu sur écran. Se reporter au manuel de la matrice pour toute information complémentaire.
5.6.2.1 Câble
Le câble de communication de type standard est décrit au 3.3 - Raccordement standard, page 11.
5.6.2.2 Configuration de la matrice
La vitesse de transmission en Bauds de la matrice peut être sélectionnée au moyen du Dip-switch SW1 à l'intérieur:
dip 6 off: 9600 bauds (condition par défaut)
dip 6 on: 1200 bauds
Les opérations de modification de la vitesse de transmission en bauds doivent être effectuées après avoir coupé l'alimentation de la matrice. Se reporter au manuel correspondant.
Durant la configuration du p, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré comme suit:
Contrôle d'une matrice LXRPS84A
vitesse de transmission en bauds de 9600 bauds
Contrôle d'une matrice LXRPS164A
vitesse de transmission en bauds de 9600 bauds
Même en cas de plusieurs pupitres connectés à la matrice, le numéro d'identification de chaque pupitre est sans importance.
5.6.2.4 Test de fonctionnement
En connectant directement le pupitre avec la matrice au moyen du câble téléphonique fourni, il doit être possible de commuter immédiatement les entrées vidéo:
- Presser MON 1 ENTER pour la sélection du moniteur 1
- presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
5.6.3 Programmation de la matrice
Connecter une caméra à l'entrée 1 et un moniteur à la sortie 1, comme décrit dans le manuel de la matrice.
SET MON début de la configuration ; introduire le mot de passe de configuration si prévu.
Le pupitre indique sur l'écran le changement de mode:
CONFIGURATION MATRICE LINX5
ESC pour sortir
Touche ESC: fin de la configuration
Joystick: sélection ligne
Joystick: entrée dans les sous-menus et modification de la programmation
Touches eq: confirmation de la sélection
Touches numériques 1... 8 : introduction directe d'une valeur (ex. modification du mot de passe).
5.7.1 Description
Les matrices LXRPS84A et LXRPS164A sont des produits dédiés à la gestion de vidéo surveillance, se différenciant par le nombre d'entrées vidéo (respectivement 4 et 8). Les sorties vidéo sont au nombre de deux, et l'une d'entre elles peut être générée par un magnétoscope. Ces matrices permettent les fonctions de commutation vidéo, de gestion des alarmes et de programmation du menu sur écran. Se reporter au manuel de la matrice pour toute information complémentaire.
5.7.2.1 Câble
Le câble de communication de type standard est décrit au 3.3 - Raccordement standard, page 11.
5.7.2.2 Programmation de la matrice
La vitesse de transmission peut être sélectionnée au moyen du jumper JP1 placé à l'intérieur:
jumper ouvert: 9600 bauds (par défaut)
jumper en court-circuit: 1200 bauds
Le changement de la vitesse de transmission doit être effectué avec l'alimentation coupée (voir le manuel).
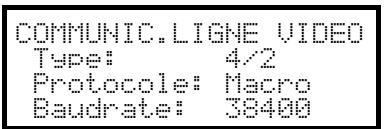
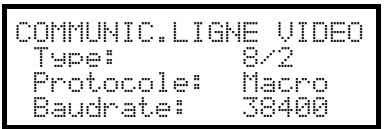
5.7.2.3 Programmation du pupitre
Durant la programmation du pupitre, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré comme suit :
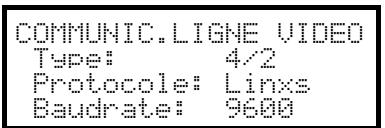
Contrôle d'une matrice LXRPS42A
La vitesse de transmission est de 9600 bauds
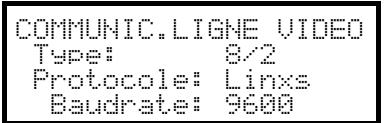
Contrôle d'une matrice LXRPS82A
La vitesse de transmission est de 9600 bauds.
Même en cas de plusieurs pupils connectés sur le cyclique, le numéro d'identification de chaque pupilre est sans importance.
5.7.2.4 Test de fonctionnement
En connectant directement le périphérique au cyclique au moyen du câble téléphonique fourni, il doit être possible de commuter immédiatement les entrées vidéo:
- Presser MON 1 ENTER pour la sélection du moniteur 1
- presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
5.7.3 Programmation de la matrice
Connecter une caméra à l'entrée 1 et un moniteur à la sortie 1 comme décrit dans le manuel de la matrice.

début de la programmation ; introduire éventuellement le mot de passe de programmation.
Le pupitre indique sur l'écran le changement de mode:
Configuration Matrice Links
ESC pour terminer
Touche ESC: fin de la configuration
Joystick: sélection ligne
Joystick: entrée dans les sous-menus et modification de la programmation
Touches eq: confirmation de la sélection
Touches numériques 1.. 8 : introduction directe d'une valeur (ex. durant la modification du mot de passe)
5.8.1 Description
La matrice SW328 est un produit professionnel dédié à la gestion de vidéo surveillance, prévue pour le contrôle de 32 entrées sur 8 sorties vidéo dont une pouvant être générée par un magnétoscope. Elle permet le contrôle des fonctions habituelles de commutation et de gestion des alarmes. (voir le manuel technique de SW328).
5.8.2.1 Câble
Le câble de communication de type standard est décrit au 3.3 - Raccordement standard, page 11.
5.8.2.2 Configuration de la matrice
Aucune configuration de la matrice n'est nécessaire.
5.8.2.3 Configuration du port
Pour programmer le pupitre, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré suivant :
Contrôle d'une matrice SW328
La vitesse de transmission est fixée à 9600 bauds
La possibilité de connecter plusieurs pupitres oblige à définir des numéros distincts d'identification (de 1 à 8).
5.8.2.4 Test de fonctionnement
En cablant directement le pupitre à la matrice avec le câble RJ fourni, on peut commuter les entrées vidéo:
Presser MON 1 ENTER pour la sélection du moniteur 1
presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
Attention! La matrice SW328 peut être configurée de façon à exclure le contrôle d'un pupitre durant certaines périodes de la journée ou en cas de circonstances particulières. Dans de tels cas, le fonctionnement du pupitre est inhibé. Se reporter au manuel de la SW328.
5.8.3 Configuration de la matrice
La matrice SW328 permet uniquement d'effectuer le changement de date et d'heures sur le pupitre.
Pour demander la modification, presser SET MON
Touche ENTER: passage au point suivant
Touche CLEAR: passage au point précédent
Touches INC / DEC : augmentation / diminution de la valeur.
5.9.1 Description
La matrice SW164OSM est un produit professionnel dédié à la gestion de vidéo surveillance. Elle permet le contrôle de 16 entrées sur 4 sorties vidéo dont une pouvant être gérée par un magnétoscope. Elle permet le contrôle de la commutation vidéo et de la gestion des alarmes. (voir le manuel de la matrice)
5.9.2.1 Câble
La connexion entre matrice et pupitre s'effectue au moyen d'une liaison RS232 (longueur max: 15 mètres). Utiliser un câble entre le DB9 à l'arrière du pupitre et l'un des connecteurs RJ11 à l'arrière de la matrice:
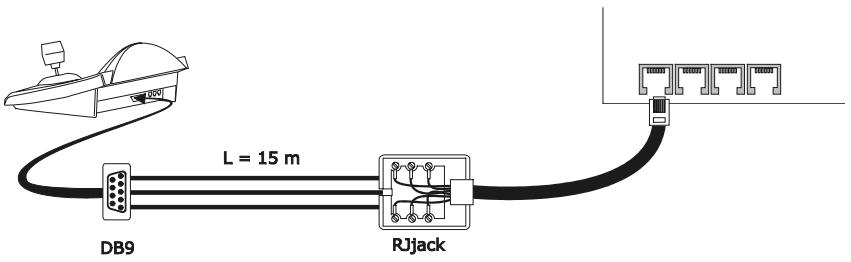
| EKR-KB1 | DB9 | RJack | SW164OSM |
| RX | 2 | jaune | TX |
| TX | 3 | blanc | RX |
| GND | 5 | rouge | GND |
Afin d'augmenter la longueur de la liaison, il est possible d'utiliser des interfaces RS485-RS232 permettant des longueurs de câble de 1200 mètres, comme indiqué ci-dessous:
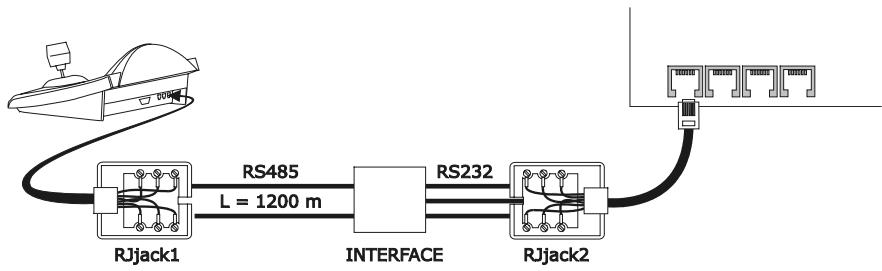
| EKR-KB1 | RJack 1 | Interface | RJjack2 | SW164OSM | |
| IN | OUT | ||||
| RS485A | blanc | A | RX | jaune | TX |
| TX | blanc | RX | |||
| RS485B | jaune | B | GND | rouge | GND |
5.9.2.2 Configuration de la matrice
À l'intérieur de la matrice, les deux cavaliers JP1 et JP2 doivent être configurés en type RS232, suivant l'inscription de la schéma.
Le Dip-switch SW1 permet la sélection de la vitesse de transmission en bauds:
| Vitesse | Dip 3 | dip 4 |
| 9600 bauds | ON | ON |
| 1200 bauds | OFF | ON |
Consulter le manuel technique de la matrice pour plus de renseignements.
5.9.2.3 Programmation du pupitre
Le sous-menu COMMUNICATIONS/LIGNEVIDEO doit être configuré comme suit:
| COMMUNIC. LIGNE VIDEO | |
| Type: | 16/4 |
| Protocol: | VideoOSM |
| Baudrate: | 9600 |
Contrôle d'une matrice SW164OSM.
Même en cas de plusieurs pupitres connectés au cyclique, l'identification de chaque pupitre est inutile.
5.9.2.4 Test de fonctionnement
En raccordant le pupitre avec la matrice comme ci-dessus, il est possible de commuter les entrées vidéo:
- Presser MON 1 ENTER pour la sélection du moniteur 1
- presser CAM 1 ENTER, CAM 2 ENTER pour la sélection des caméras.
5.9.3 Programmation de la matrice
Connecter une caméra à l'entrée 1 et un moniteur à la sortie 1, comme décrit dans le manuel de la matrice.
SET MON début de la programmation; introduire si nécessaire le mot de passer de programmation.
Le pupitre indique sur l'afficheur le changement de mode :
Configuration Matrice
ESC pour terminer
Touches : fin de la programmation
Pour assurer la compatibilité avec les précédents modèles de pupitre, l'utilisation de certaines touches a été modifiée sur le pupitre EKR-KB1.
Le tableau suivant compare les touches des pupitres DCS2 et KEYPLUS aux touches correspondantes utilisées sur le nouveau pupitre EKR-KB1:
| Menu sur écran | Signification | DCS2 KEYPLUS | DCJ |
| 1..9 | sélectionCAMÉRAS 1..9 | 1.9 | 1...9 |
| 0 | sélectionCAMÉRAS 10 | 0 | 0 |
| 11..16 | sélectionCAMÉRAS 11..16 | -/- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - | SET 0...SET 6 |
| 4 (menu Textes seul) | curseur en haut | 4 | Joystick haut ou 4 |
| 9 (menu Textes seul) | curseur en bas | 9 | Joystick bas ou 9 |
| 8 (menu Textes seul) | curseur à gauche | 8 | Joystick gauche ou 8 |
| 0 (menu Textes seul) | curseur à droite | 0 | Joystick droite ou 0 |
| PROG | touche PROG | PROG | MENU |
| ENT | touche ENTER | ENTER | ENTER |
| CLR | touche CLEAR | CLEAR | CLEAR |
| M/A | sesquence automatique | M/A | SEQ |
| ↑ (flèche haut) | Précédent/ augmentation | ▲ | INC |
| ↓ (flèche bas) | Suivant / diminution | ▼ | DEC |
5.10.1 Description
Le multiplexeur Eneo permet le raccordement de 16 entrées vidéo visualisées sous la forme d'une image composite. Un moniteur spot de service permet l'affichage de l'une des entrées.
La communication entre pupitre et multiplexeur est unidirectionnelle. Il est nécessaire de définir si le multiplexeur connecté est en noir et blanc ou couleur, puisqu'ils ont des protocoles et des caractéristiques différents.
Il est possible de contrôler le multiplexeur de façon indirecte au moyen d'une matrice EKR-8/4, EKR-16/4, comme décrit au § 5.11 - Contrôle du multiplexeur, page 37.
5.10.2.1 Câble
| EKR-KB1 | RJjack 1 | RJjack 2 | JAVELIN |
| RS485A | blanc | noir | RS485A |
| RS485B | jaune | vert | RS485B |
La connexion RS485 (unidirectionnelle) permet une distance pupitre - multiplexeur de 1200 mètres.
5.10.2.2 Programmation du multiplexeur
Le multiplexeur Eneo est disponible en deux versions se différenciant par leur protocole de contrôle. La configuration ne peut être effectuée qu'au moyen du pupitre du multiplexeur. Régler la modalité de communication RS485, la vitesse de transmission en baud et le protocole A. Se reporter au manuel Javelin correspondant.
5.10.2.3 Programmation du pupitre
Le sous-menu COMMUNICATIONS/LIGNEVIDEO, doit'être configuré comme suit:
Contrôle d'un multiplexeur Eneo
Il est nécessaire de préciser si le multiplexeur est couleurs (Eneo Coul) ou noir et blanc (Eneo N/B). Quatre valeurs de vitesse de transmission en bauds sont possibles. (Protocole: Eneo)
Il n'est possible de connecter qu'un seul pupitre à chaque multiplexeur Eneo, et le numéro d'identification des pupitres est donc sans importance. Plusieurs multiplexeurs peuvent être contrôlés par le même pupitre, à condition que ces derniers soient identifiés par des numéros d'unité différents.
5.10.2.4 Test de fonctionnement
En connectant directement le pupitre avec le multiplexeur ainsi configuré au moyen du câble indiqué plus haut, il est possible de commuter immédiatement les entrées vidéo:
Presser MON 1 ENTER pour la sélection de l'unité multiplexeur 1
presser CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande transmise par le pupitre correspond la mise en fonction d'un DEL sur le pupitre local du multiplexeur.
Attention! Si le nombre du multiplexeur ne correspond pas, les commandes transmises par le pupitre ne seront pas exécutées.
5.10.3 Fonctions spécifiques
Outre la sélection des entrées vidéo, le multiplexeur Eneo possède de nombreuses autres possibilités, activées par la pression de combinaisons de touches.
La touche MON permet de changer le numéro de l'unité répondant à la commande.
Seules certaines des fonctions indiquées plus bas sont disponibles pour les deux modèles de multiplexeur. Se reporter au manuel du multiplexeur pour davantage de détails.
SHIFT CAM enregistrement en direct, SET CAM enregistreur vidéo,
END CAM moniteur spot, END MON sortie moniteur spot
Le multiplexeur SP16C permet le raccordement et la numérisation de 16 entrées vidéo, qui seront visualisées sous la forme d’une compression de 16 images. Un moniteur spot permet d’afficher l’une des entrées en plein écran.
La communication entre pupitre et multiplexeur est unidirectionnelle.
Il est également possible de le contrôler au moyen d'une matrice vidéo SM42A, SM82A, SM84A, SM164A. Ce
Type de contrôle est décrit au § 5.11 - Contrôle du multiplexer, page 37.
5.11.2.1 Câble
| EKR-KB1 | RJjack 1 | RJjack 2 | SP16C |
| RS485A | blanc | Noir | RS485A |
| RS485B | jaune | Jaune | RS485B |
La connexion RS485 (unidirectionnelle) permet une distance max. de 1200 metres.
5.11.2.2 Programmation du multiplexeur
La programmation ne peut être effectuée qu'au moyen du pupitre du multiplexeur.
Régler la vitesse de transmission en Baud et le nombre d'identification du multiplexeur.
Se reporter au manuel correspondant.
5.11.2.3 Programmation du pupitre
Le sous-menu COMMUNICATIONS/LIGNEVIDEO, doit'être configuré comme suit:
| COMMUNIC.LIGNE VIDEO | |
| Type: | Nux |
| Protocol: | Videotec |
| Baudrate: | 9600 |
Contrôle d'un multiplexeur SP16C
Quatre valeurs de vitesse de transmission en bauds sont possibles.
5.11.2.4 Test de fonctionnement
En connectant directement le pupitre avec le multiplexeur ainsi configuré au moyen du câble indiqué plus haut, il est possible de commuter immédiatement les entrées vidéo:
- Presser MON 1 ENTER pour la sélection de l'unité multiplexeur 1
- presser CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande transmise par le pupitre correspond la mise en fonction d'un led sur le pupitre local du multiplexeur.
Attention! Si le numéro du multiplexeur ne correspond pas, les commandes transmises par le p ne seront pas exécutées.
5.11.3 Fonctions spécifiques
En plus de la sélection des entrées vidéo, le multiplexeur SP16C possède de nombreuses autres fonctions, pouvant être activées par la pression de combinaisons de touches du pupitre.
SHIFT CAM live, SET CAM VCR SHIFT 2 fonction 1+12 / haut SHIFT 4 fonction 3x3 / gauche SHIFT 6 fonction 4x4 / droite SHIFT 8 fonction 2x2 / bas SETSEQ full/zoom ENTER sel SEQ auto
5.12 Contrôle du multiplexeur à travers un dispositif vidéo
Le multiplexeur peut être contrôlé au travers d'un dispositif vidéo de la série Eneo EKR-8/4, EKR-16/4.
Pour pouvoir contrôler un multiplexeur de cette façon, il est nécessaire d'utiliser le protocole MACRO.
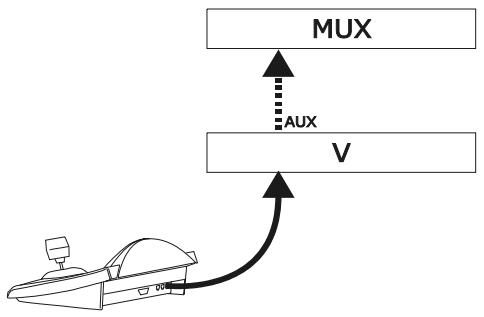
Dans ce cas, les commandes peuvent concerner la matrice vidéo ou le multiplexeur suivant la sortie moniteur sélectionnée.
5.12.1 Sélection d'un moniteur connecté à la matrice vidéo
Presser MON suivi du numéro du moniteur, et confirmer si nécessaire avec ENTER. Le message MONITEUR, suivi du numéro du moniteur, apparait sur l'afficheur.
Seuls les sorties moniteurs ayant été définies comme "validées" dans le menu MISE EN SERVICE / MONITEUR peuvent être rappelées.
5.12.2 Sélection d'un moniteur connecté au multiplexeur
À chaque multiplexeur correspond un seul moniteur principal. Pour l'utilisation du moniteur spot en option, se reporter au manuel d'utilisation correspondant.
Si le multiplexeur est identifié par une adresse (par ex. multiplexeur Javelin/Hitron), presser SHIFT MON, suivi de l'adresse du multiplexeur, et confirmer si nécessaire avec ENTER.
Si le multiplexeur n'est pas identifié par une adresse (par ex. multiplexeur SP16C), presser SHIFT MON 1 et confirmer si nécessaire avec ENTER.
Après la sélection d'un multiplexeur, le message UNITE apparait sur l'écran, suivi du numéro du multiplexeur. Seuls les multiplexeurs ayant été définis comme “validés” dans le menu MISE EN SERVICE / MULTIPLEXEUR peuvent être rappelés.
5.13.1 Description
Le multiplexer Sony YS-DX516P permet de brancher 16 entrées vidéo qui sont digitalisées et montrées sur une image composée en sortie.
5.13.2 Matériel et documents de référence
Multiplexer Sony YS-DX516P
Manuel du multiplexer
Le branchement est en RS485. La distance maximale entre pupitre et multiplexer est de 1200m.
5.13.3.2 Programmation du multiplexer
Configurer comme il convient l'adresse de l'unité et la modalité de communication RS485. Voir les modes d'emploi respectifs.
5.13.3.3 Programmation du pupitre
Durant la configuration du pupitre, le sous-menu CONUNICAZIONI LINEA VIDEO, doit etre programme ainsi:
| COMUNIC.LIGNE VIDEO | |
| Type: | Mux |
| Protocol: | Song |
| Baudrate: | 19200 |
Contrôle d'un multiplexer Sony
Quatre valeurs de bauds sont possibles.
5.13.3.4 Test de fonctionnalité
En branchant directement le pupitre au multiplexer ainsi programmé, à l'aide du câble indiqué ci-dessus, il doit être tout de suite possible de commuter les entrées vidéo:
Appuyer sur MON 1 ENTER pour la sélection de l'unité multiplexer 1
appuyer sur CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande envoyée à partir du pupitre correspond l'allumage d'un DEL sur le pupitre local du multiplexer.
Attention ! Si le numéro de l'unité multiplexer ne coincide pas, les commandes envoyées à partir du pupitre sont négligées.
5.13.4 Configuration
La configuration du multiplexer s'effectue à l'aide d'un On Screen Menu et d'un dip-switch de configuration placé sur l'arrière de l'unité. Consulter le manuel respectif pour l'explication des différentes rubriques de configuration.
Il est nécessaire de configurer le multiplexer pour la communication de type RS485, avec adresse d'identification et baudsopporturs.
5.13.4.1 Configuration OSM
Brancher directement le multiplexer au pupitre et un moniteur à la sortie MONITEUR 1.
SET MON début de la configuration du multiplexer.
Le multiplexer montre le menu sur la vidéo ; le changement de modalité est indiqué sur l'afficheur du pupitre :

INC / DEC: incrément et décrément de la valeur sélectionnée
MENU entrée dans le menu successif
ENTER émulation de la touche NEXT
ESC fin de la configuration
Joystick : mouvement dans les menus.
5.13.5 Fonctions consacrées
En plus de la procédure de sélection normale des entrées vidéo, le multiplexer Sony est équipé de beaucoup d'autres fonctions qui sont activées en appuyant sur des combinaisons de touches, qui correspondent aux touches générées sur son petit pupitre local.
La touche MON permet de changer le numéro de l'unité qui répond à la commande.
5.13.5.2 Autres fonctions
SEQ séquence CLEAR neutralisation des alarmes ENTER moniteur 2 SET ENTER "security lock" activé SET CLEAR "security lock" désactivé SHIFT ENTER montre la liste des alarmes SHIFT CLEAR fait disparaître la liste des alarmes
5.14.1 Description
Le DVR Sony HSR-X216P permet de brancher 16 entrées vidéo qui sont digitalisées et enregistrées sous forme digitale.
5.14.2 Matériel et documents de référence
DVR Sony HSR-X216P
Manuel du DVR
Le branchement est de type RS485. La distance maximale entre pupitre et DVR est de 1200 mètres.
5.14.3.2 Programmation du DVR
Configurer comme il convient l'adresse de l'unité et la modalité de communication RS485. Voir le mode d'emploi respectif.
5.14.3.3 Programmation du programmeur
Durant la configuration du pupitre, le sous-menu COMUNICAZIONI LINEAVIDEO, doit etre programme ainsi:
| COMUNIC. LIGNE | VIDEO |
| Type: | Dur |
| Protocol: | Sony |
| Baudrate: | 19200 |
Contrôle d'un DVR Sony
Quatre valeurs de bauds sont possibles.
5.14.3.4 Test de fonctionnalité
En branchant directement le pupitre au multiplexer configuré ainsi, à l'aide du câble indiqué ci-dessus, il doit être tout de suite possible de commuter les entrées vidéo:
Appuyer sur MON 1 ENTER pour la sélection de l'unité multiplexer 1
appuyer sur CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande envoyée à partir du pupitre correspond l'allumage d'un DEL sur le pupitre local du multiplexer.
Attention ! Si le numéro de l'unité multiplexer ne coincide pas, les commandes envoyées à partir du pupitre sont négligées.
5.14.4 Configuration
La configuration du DVR s'effectue à l'aide d'un On Screen Menu. Consulter le manuel respectif pour l'explication des différentes rubriques de configuration.
Il est nécessaire de configurer le DVR pour la communication de type RS485, avec adresse d'identification et baudsopporturs.
5.14.4.1 Configuration OSM
Brancher directement le DVR au pupitre et un moniteur à la sortie MONITEUR 1.
SET MON début de la configuration du DVR.
Le DVR montre le menu sur la vidéo ; le changement de modalité est indiqué sur l'afficheur du pupitre :
MENU entrée dans le sous-menu sélectionné
ESC fin de la configuration
Joystick : mouvement dans les menus et changement des valeurs.
5.14.5 Menu spécial SEARCH
SET CAM entrée dans le menu spécial SEARCH
ESC sortie du menu
Joystick : mouvement dans les menus et changement des valeurs.
Attention: si le DVR reste en mode SEARCH après la sortie du menu, appuyer sur STOP (SHIFT 3) pour revenir à la modalité normale.
5.14.6 Menu spécifique COPY
SET 0 entrée dans le menu spécial COPY
CLEAR annule l'opération de copie et efface les événements messages sur la vente
ESC sortie du menu
Attention: l'opération de copie ou l'éventuelle annulation de celle-ci, en appuyant sur CLEAR, doit être complétée avant de sortir du menu
Joystick : mouvement dans les menus et changement des valeurs.
5.14.7 Fonctions consacrées
En plus de la procédure de sélection normale des entrées vidéo, le DVR SONY est équipé de beaucoup d'autres fonctions qui sont activées en appuyant sur des combinaisons de touches, qui correspondent aux touches générées sur son petit pupitre local.
La touche MON permet de changer le numéro de l'unité qui répond à la commande.
5.14.7.1 Fonctions du magnétoscope
SHIFT 1 play SHIFT 2 pause SHIFT 3 stop SHIFT 4 enregistrement SHIFT 5 diminue la vitesse play SHIFT 6 incrémente la vitesse play SHIFT 7 fin de l'enregistrement SHIFT 8 recherche l'alarme précédente SHIFT 9 recherche l'alarme successive SHIFT 0 zoom SET 6 timer on/off
5.14.7.3 Autres fonctions
SEQ séquence CLEAR neutralisation des alarmes ENTER moniteur 2
5.15.1 Description
Le multiplexeur numérique Ademco AXMD16E / AXCD16EX permet la connexion de 16 entrées vidéo, lesquelles sont numérotées et montrées sous la forme d'une image composée en sortie.
5.15.2.1 Câble
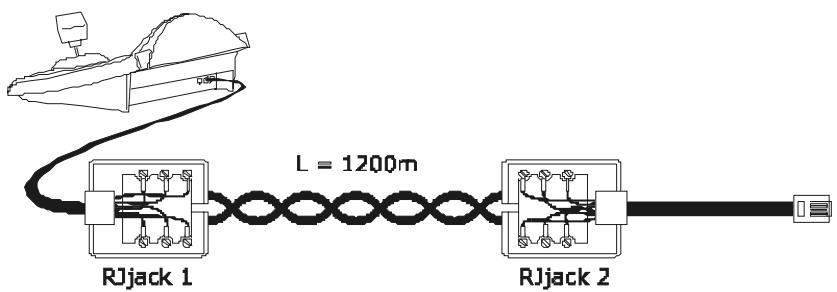
| EKR-KB1 | RJjack 1 | RJjack 2 | JAVELIN |
| RS485A | blanc | noir | RS485A |
| RS485B | jaune | vert | RS485B |
La connexion est de type RS485 (unidirectionnelle), et la distance max. entre pupitre et multiplexeur est de 1200m.
5.15.2.2 Configuration du multiplexeur
La configuration peut être effectuée uniquement au moyen du pupitre local du multiplexeur et de la souris. Définir le mode de communication RS485, la vitesse de transmission en bauds correcte et le protocole type A. Se reporter au manuel correspondant.
Durant la configuration du p, le sous-menu COMMUNICATIONS / LIGNE VIDEO doit être configuré comme suit:
COMMUNIC. LIGNEVIDEO Type: Mux Protocole: Adenco Uit. transm.: 1200
Contrôle d'un multiplexeur Ademco.
Quatre vitesses de transmission en bauds sont possibles.
5.15.2.4 Essai de fonctionnement
En connectant directement le pupitre avec le multiplexeur ainsi configuré au moyen du câble indiqué plus haut, il doit être possible de commuter immédiatement les entrées vidéo:
Presser MON 1 ENTER pour la sélection de l'unité multiplexeur 1
presser CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande transmise par le pupitre correspond la mise en fonction d'une DEL sur le pupitre local du multiplexeur.
Attention ! Si le numéro de l'unité multiplexeur ne correspond pas, les commandes transmises par le pupitre ne sont pas exécutées.
5.15.3 Fonctions spécifiques
Outre la procédure normale de sélection des entrées vidéo, le multiplexeur Ademco est équipé de nombreuses autres fonctions activées au moyen de la pression de combinaisons de touches, et correspondant aux touches présentes sur le pupitre local. Se reporter au manuel du multiplexeur pour davantage de détails.
La touche MON permet de changer le numéro de l'unité répondant à la commande.
Le tableau des correspondances entre les touches est représenté ci-dessous. La touche Zoom n'est pas implémentée.
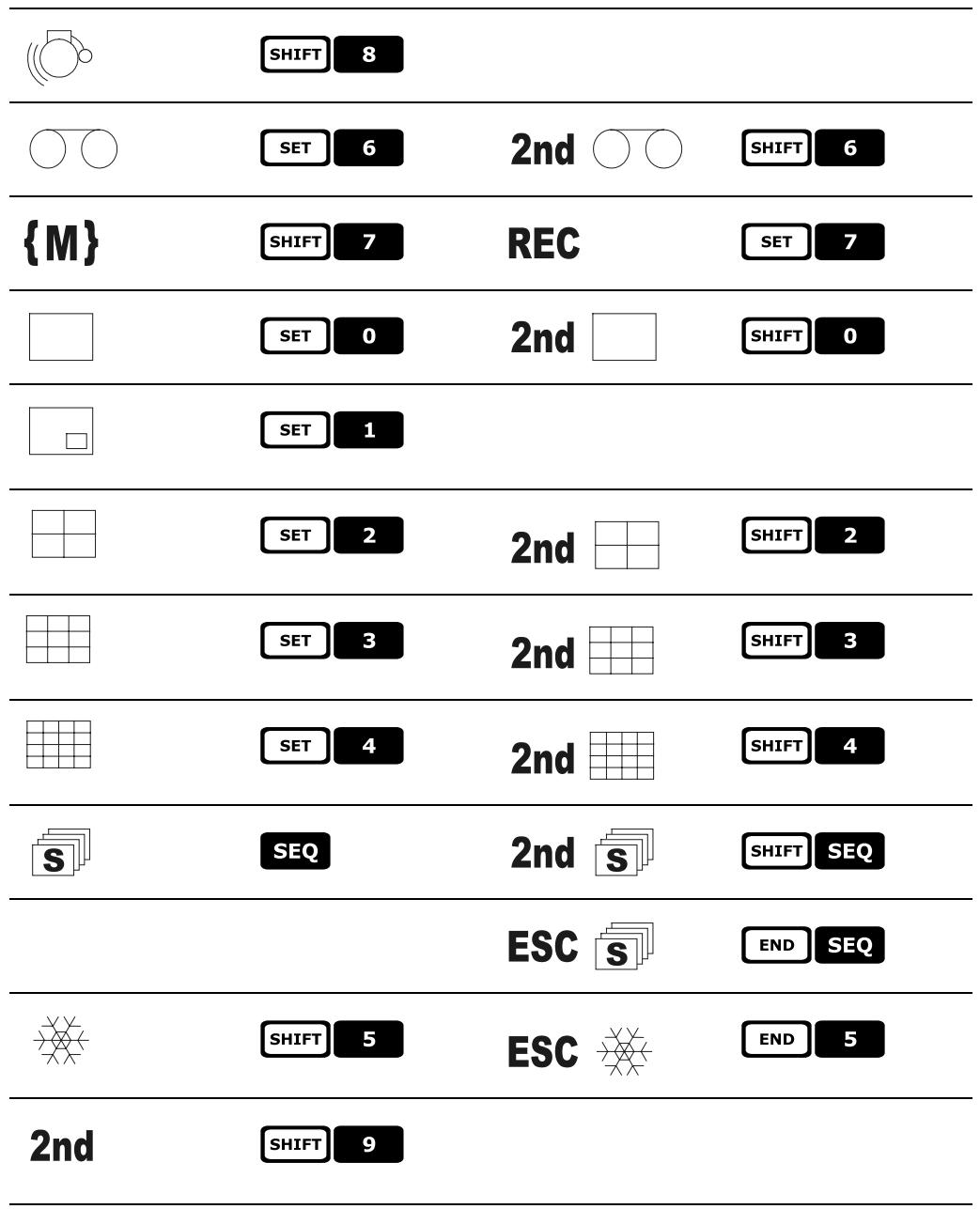
Le multiplexer SANYO MPX-CD163 permet de brancher 16 entrées vidéo qui sont digitalisées et montrées sur une image composée en sortie.
5.16.2 Matériel et documents de référence
Manuel du multiplexeur
5.16.3.1 Câble

| EKR-KB1 | RJjack 1 | RJjack 2 | Mux |
| RS485A | blanc | rouge | RS485A |
| RS485B | jaune | vert | RS485B |
Le branchement est en RS485. La distance max. entre pupitre et multiplexer est de 1200 m.
5.16.3.2 Programmation du multiplexer
Configurer comme il convient l'adresse de l'unité et la modalité de communication RS485. Voir les modes d'emploi respectifs.
5.16.3.3 Programmation du pupitre
Durant la configuration du p, le sous-menu COMUNICATION \ LIGNE VIDEO doit être programmé ainsi:
| COMUNIC. LIGNE VIDEO | |
| TiPo: | Mux |
| Protocol: | Sanyo |
| Baudrate: | 19200 |
Contrôle d'un multiplexer Sanyo
Quatre valeurs de bauds sont possibles.
5.16.3.4 Test de fonctionnalité
En branchant directement le pupitre au multiplexer ainsi programmé, à l'aide du câble indiqué ci-dessus, il doit être tout de suite possible de commuter les entrées vidéo:
Appuyer sur MON 1 ENTER pour la sélection de l'unité multiplexer 1
appuyer sur CAM 1 ENTER, CAM 2 ENTER, pour la sélection des entrées vidéo.
À chaque commande envoyée à partir du pupitre correspond l'allumage d'un DEL sur le pupitre local du multiplexer.
Attention ! Si le numéro de l'unité multiplexer ne coincide pas, les commandes envoyées à partir du pupitre sont négligées.
5.16.4 Configuration
La configuration du multiplexer s'effectue à l'aide d'un On Screen Menu. Consulter le manuel respectif pour l'explication des différentes rubriques de configuration.
Il est nécessaire de configurer le multiplexer pour la communication de type RS485, avec adresse d'identification et bauds opportuns.
5.16.4.1 Configuration OSM
Brancher directement le multiplexer au pupitre et un moniteur à la sortie MONITEUR 1.

MON
Début de la configuration du multiplexer.
Le multiplexer montre le menu sur la vidéo ; le changement de modalité est indiqué sur l'afficheur du pupitre :
INC / DEC: incrément et décrément de la valeur sélectionnée
MENU entrée et sortie de la programmation
ENTER émulation de la touche NEXT
CLEAR émulation de la touche BACK
ESC sortie de la fonction de configuration
Joystick : mouvement dans les menus.
5.16.5 Fonctions consacrées
En plus de la procédure de sélection normale des entrées vidéo, le multiplexer SANYO est équipé de beaucoup d'autres fonctions qui sont activées en appuyant sur des combinaisons de touches, qui correspondent aux touches générées sur son petit pupitre local.
La touche MON permet de changer le numéro de l'unité qui répond à la commande.
ENTER ENTER contrôle du monitor master
ENTER 1, ENTER 2, ENTER 3, ENTER 4 contrôle d'un monitor spot
5.16.5.1 Fonctions du multiplexer
SET 1 multi
SET 2 quad
SET 3 plus
SET 4 still
SET 5 live
SET 6 VCR
5.16.5.2 Autres fonctions
SEQ séquence
CLEAR neutralisation des alarmes
5.16.6 Choix du protocole
Le protocole Sanyo prévoit deux commandes différentes de sélection du moniteur principal/spot et de commutation. Avec la sélection du Mux Sanyo est proposé le protocole le plus récent, lequel risque cependant d'être incompatible avec les modèles les plus anciens de multiplexeurs.
Il est possible de sélectionner l'un des deux protocoles si le protocole défini ne permet aucune commutation. Le type de protocole est mémorisé et maintenu même après la remise en service du puJitre.
F4 : Choix du protocole le plus récent (par défaut)
SHIFT F4 : Choix du protocole classique.
5.16.7 Indications sur l'écran
L'indication du moniteur contrôle est affichée à la suite du numéro de l'unité :
+ Indique le moniteur principal
(1), (2), (3), (4) indiquent les moniteurs spot.
5.17.1 Description
Les magnétoscopes numériques Everfocus (EDSR400, EDSR100, EDSR900, EDSR1600 et versions H correspondantes) sont des dispositifs utilisés pour l'enregistrement numérique des signaux vidéo. Le videoloop de chaque entrée vidéo et deux sorties vidéo, main et call, sont disponibles.
La communication entre le pupitre et le DVR est de type unidirectionnel.
5.17.2.1 Câble
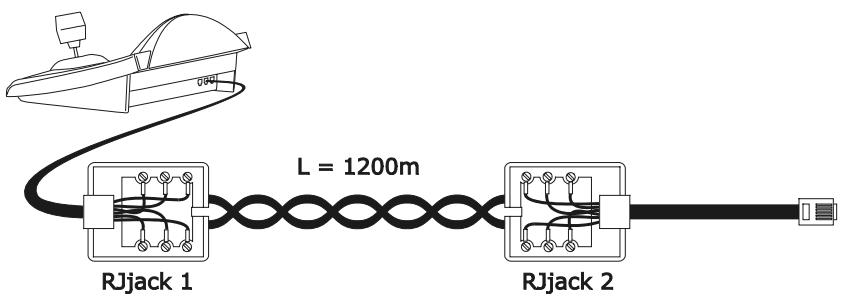
| EKR-KB1 | RJjack 1 | RJjack 2 | DVR |
| RS485A | blanc | jaune | RS485A |
| RS485B | jaune | noir | RS485B |
5.17.2.2 Configuration du DVR
Au moyen du panneau local du DVR, définir la vitesse de transmission en bauds nécessaire et le numéro unité dans le menu RS232/RS485 SETTING MENU. Tenir uniquement compte des paramètres des communications RS485. Définir STOP BIT 1, parité NULLE, bit données 8.
5.17.2.3 Configuration du port
Durant la configuration du pupitre, le sous-menu COMMUNICATIONS \ LIGNE VIDEO doit être défini comme suit:
Sélectionner le modèle de DVR et la vitesse de transmission en bauds adéquats.
5.17.2.4 Essai de fonctionnement
Après connexion directe du pupitre avec le DVR configuré comme expliqué ci-dessus au moyen du câble téléphonique indiqué, il doit être possible de commuter immédiatement les entrées vidéo:
presser [MENUDEVICE]
presser [CAM CH] 1, [CAM CH] 2 pour la sélection de la voie vidéo (confirmer avec ENTER si requis)
5.17.3 Configuration du DVR
Pour accéder au menu de configuration sur écran, se reporter aux indications du manuel du dispositif vidéo.
La configuration du pupitre à distance est uniquement possible en mode DVR, en pressant [MENUMENU].
6.1 Contrôle en direct ou par le coaxial du système vidéo
La série de cycliques et matrices (Eneo EKR-8/4 et EKR-16/4) permet de contrôler une ligne de télémetrie directement à partir du dispositif vidéo, ce qui permet d'économiser un cable de télémetrie en sortie des pupitres.
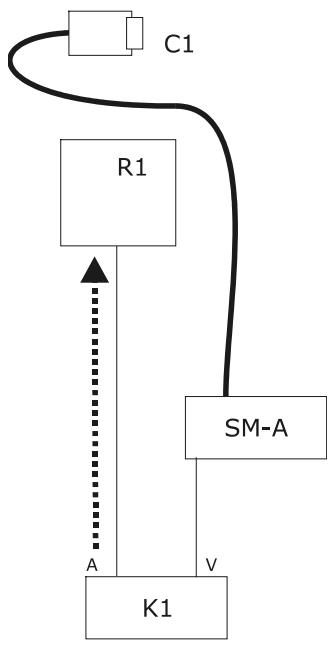
Le contrôle est de type traditionnel avec le pupitre qui contrôle deux voies de communication différentes : le récepteur R1 par la ligne A du pupitre, la matrice SM par la ligne VIDÉO.
Deux câbles sont prévus en sortie du pupitre.
Le câble vidéo de la caméra C1 peut passer à travers des dispositifs de gestion du signal vidéo tels que multiplexeurs, distributeurs, transmetteurs sur câble 2 paires, etc.
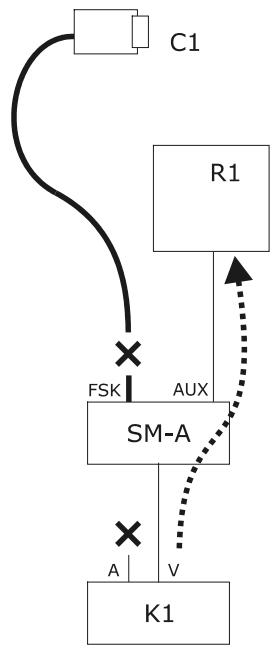
Le contrôle de la télématétrie est assuré par la sortie AUX de la matrice vidéo.
Un seul câble est prévu en sortie du p.
La matrice SM doit être configurée pour transmettre les messages de télématrie en protocole MACRO. Le récepteur R1 doit reconnaître le protocole transmis (MACRO).
La communication entre pupitre et matrice ne peut s'effectuer qu'en protocole MACRO.
Le câble vidéo de la caméra C1 peut passer à travers des dispositifs de gestion du signal vidéo tels que multiplexeurs, distributeurs, transmetteurs sur câble 2 paires, etc.
La ligne de télémetrie A (ou B) est configurée pour transmettre des messages sur le câble vidéo et le connecteur A (ou B), placé à l'arrière du pupitre, ne peut donc être utilisé pour adresser d'autres dispositifs de télémetrie mais doit être déconnecté.
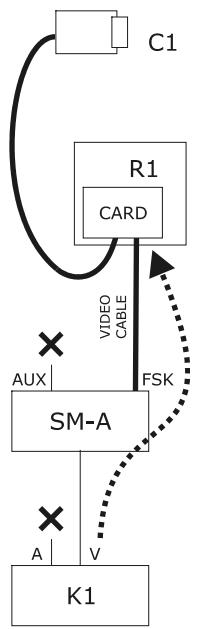
Le contrôle de la télémetrie s'effectue au moyen des signaux en sortie de la matrice vidéo sur le cable coaxial du signal video. Un seul cable est présent en sortie du pupitre.
La matrice SM doit être configurée pour transmettre les messages de télémétrie en protocole FSK sur les câbles vidéo en entrée. Le récepteur R1 doit être équipé de la carte de codage DTCOAX.
La communication entre pupitre et matrice ne peut s'effectuer qu'en protocole MACRO.
Les câbles vidéo entre récepteurs et matrice ne peuvent traverser aucun autre dispositif (ex. distributeurs vidéo) mais doivent être en liaison directe.
Les lignes de télémétrie A et B doivent être déconnectées.
6.2 Opérations de base des commandes de télémétrie
Les opérations de télémétrie se divisent en différentes catégories:
opérations de programmation (configuration du récepteur / dôme, préposition, etc.)
opérations de commande manuelle de la tourelle (pan et tilt)
opérations de commande automatique de la tourelle (autopan, scan, patrol, etc.)
opérations de commande de l'objectif
opérations de commande des relais et contacts auxiliaires.
Le pupitre peut être validé ou non à la demande de chaque groupe d'opérations. Si une opération appartenant à un groupe non validé est demandée, un message d'erreur est affiché.
Par la suite, le terme "récepteur" désignera tout appareil destiné à recevoir des commandes de télémétrie.
6.2.1 Changement d'un récepteur à un autre
Les commandes de télémétrie s'adressent toujours au récepteur indiqué sur l'afficheur
Si le pupitre est validé au changement, presser RECEIV et introduire le nouveau numéro du récepteur actif.
6.3 Résolution de problèmes de communication pupitre - récepteur
Si un récepteur ne répond pas aux commandes, il est nécessaire de contrôler les points suivants:
le modèle de récepteur connecté à la ligne de télémétrie (A ou B) utilise-t-il le protocole configuré pour la ligne de télémétrie?
le numéro du récepteur correspond-il à celui indiqué sur l'écran?
la vitesse de transmission en bauds du récepteur correspond-elle à celle définie pour la ligne de télémetrie?
la ligne de télémetrie sort-elle sur câble vidéo ou sur connecteur spécifique?
la connexion entre pupitre et récepteur est-elle correctement câblée ?
En cas d'utilisation d'une matrice SM, la matrice est-elle correctement programmée?
6.4.1 Codes spécifiques
Le pupitre EKR-KB1 permet de contrôler un grand nombre de fonctions de télémétrie et, pour le rappel de certaines d'entre elles, aucune combinaison de touches n'est prévue.
Leur activation s'effectue donc comme suit :
presser la touche CODE
introduire le code numérique correspondant à la fonction demandée et confirmer avec
ENTER.
La touche ESC annule l'opération d'introduction du code.
6.4.2 Conventions de typographie
L'indication code X X X X (min ÷ max) signifie qu'il est possible d'introduire des codes numériques
Dans les limites min et max spécifiées : par ex. CODE 2 0 X X (0÷19) indique qu'il est possible
d'introduire des codes spécifiques de 2000 à 2019. Pour chaque symbole x est prévue l'introduction d'un
nombre numérique.
Les termes "Programmation sur écran", "On Screen Menu" (Menu sur écran) et "OSM" ont la même signification : dans les manuels d'utilisation des dômes, ces dénominations sont utilisées indifféremment.
Le terme en anglais "toggle" signifie changement d'état : si un paramètre est activé, après un "toggle" il est désactivé.
6.5.1 Matériel et documents de référence
Dôme Elbex EX8389
EMB Camera (R0.70), Camera ID Code Manuel pour le Contrôle de la Caméra Numérique
6.5.2 Remarque importante concernant les protocoles
Le protocole Elbex permet le contrôle d'une gamme de dômes aux caractéristiques relativement variées.
Il est donc possible que les commandes décrites ci-dessous puissent être utilisées pour la totalité de la gamme ou ne se réfèrent qu'à un seul modèle. Se reporter au manuel du dôme pour la liste des fonctions disponibles.
Niveau d'accès 3 (contrôle complet).
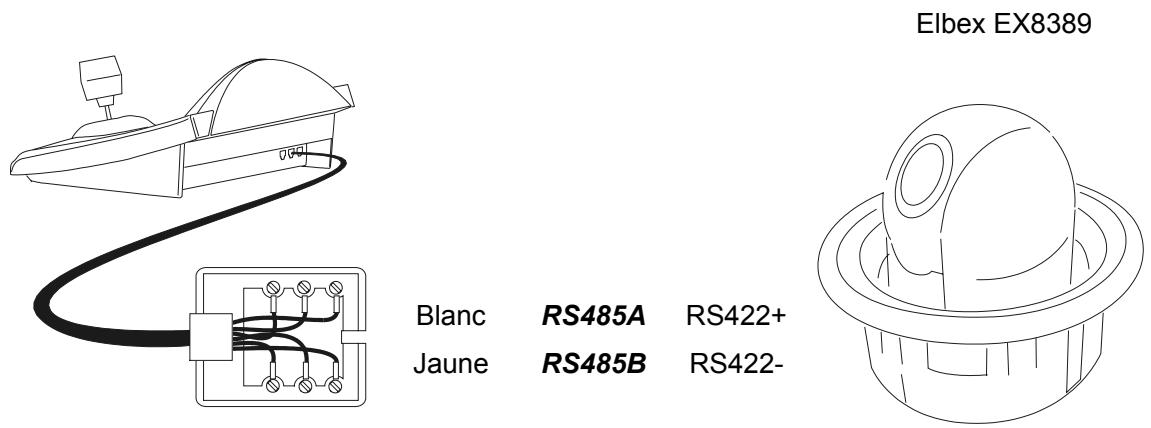
6.5.3.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré. Le numéro du dôme ne peut être changé à distance. Se reporter au manuel correspondant.
Durant la configuration du p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défini comme suit:
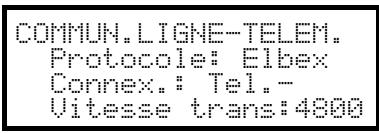
La vitesse de transmission en bauds est fixe.
6.5.4 Configuration du dôme
Tous les paramètres de configuration du dôme sont définis par la pression d'une combinaison de touches ou avec l'introduction d'un code spécifique.
Pour toutes les opérations de setup du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG TELEM).
6.5.5 Contrôle du dôme
Du fait du protocole particulier utilisé par le dôme Elbex, plusieurs dômes ne peuvent être contrôlés simultanément sur la même ligne. Utiliser un seul pupitre de contrôle par ligne représentait une solution optimale.
6.5.6 Mouvement du dôme
Le pupitre peut contrôler le dôme avec une vitesse fixe (émulation du pupitre Elbex EKB100J) ou variable.
6.5.6.1 Vitesse fixe
Le dôme se déplace dans les quatre directions à vitesse fixe. Un léger mouvement du joystick entraîne le mouvement bref du dôme pour un réglage fin de la position. Une course plus ample du joystick entraîne le mouvement du dôme à la dernière vitesse fixe définie.
Pour définir le mode à vitesse fixe, presser CODE 1
La vitesse est définie au moyen de code 1 X (1 vitesse basse ÷ 8 vitesse élevée).
6.5.6.2 Vitesse variable
La vitesse de mouvement dans les quatre directions dépend du type de mouvement du joystick. Les valeurs de vitesse précédemment définies ne sont pas prises en compte.
Commander le mode à vitesse variable en pressant CODE 0
6.5.7 Autopan
A. PAN : activation autopan END A. PAN : interruption autopan SET A. PAN : activation autopan vers la gauche SHIFT A. PAN : activation autopan vers la droite
Limite gauche


Liminete droite


définir
effacer
PRESET X X (1÷99): mémorisation de la position actuelle comme position de preset numéro X PRESET 1 0 0 : mémorisation de la position d'alarme locale PRESET 1 X X (1÷99): mémorisation de la position actuelle comme position d'alarme SCAN X X (1÷99): mouvement vers la position de preset X précédemment mémorisée SCAN 1 0 0 : mouvement vers la position d'alarme locale SCAN 1 X X (1÷99): mouvement vers la position d'alarme X précédemment mémorisée HOME: mouvement vers la position de Home (position 1). F1: mouvement vers la dernière position définie F2 : mouvement vers la position de retour d'alarme
6.5.10.1 Activation
Normale

début
arrêt
Alarme

début
arrêt


6.5.10.2 Sur les positions de préréglage
CODE 1 0 0 0 : ajout de toutes les positions de preset CODE 1 0 X X (1÷99) : ajout d'une position de preset CODE 1 1 0 0 : retrait de toutes les positions de preset CODE 1 1 X X (1÷99) : retrait d'une position de preset CODE 1 2 X X (1÷99) : temps de pause après chaque position en secondes CODE 1 3 0 0 : mouvement à vitesse maximale CODE 1 3 0 X (1÷8) : vitesse du mouvement réduite
6.5.10.3 Sur les positions d'alarme
CODE 2 0 0 0 : ajout de toutes les positions d'alarme CODE 2 0 X X (1÷99) : ajout d'une position d'alarme CODE 2 1 0 0 : retrait de toutes les positions d'alarme CODE 2 1 X X (1÷99) : retrait d'une position d'alarme CODE 2 2 X X (1÷99) : temps de pause après chaque position en secondes CODE 2 3 0 0 : mouvement à vitesse maximale CODE 2 3 0 X (1÷8) : vitesse de mouvement réduite
6.5.11 Fonctions de timer
CODE 4 0 X X (00÷56): arrêt autopan 00: continu; 01÷23: de 5 à 115 minutes (pas 5 minutes); 24÷44: de 2 à 12 heures (pas 30 minutes); 45÷56: de 13 à 24 heures (pas 1 heures) CODE 4 X X X (1÷8,00÷28): reset contacts aux. Le premier chiffre X indique le numéro contact 1 ÷ 8, et les deux suivants le temps: 00: continu; 01÷05: de 1 à 5 minutes (pas 1 minute); 06÷15: de 10 à 55 minutes (pas 5 minutes); 16÷27: de 1 à 12 heures (pas 1 heures); 28: 24 heures CODE 4 9 X X (00÷28): arrêt essuie-glace CODE 5 0 X X (00÷28): arrêt pompe CODE 5 1 X X (00÷28): arrêt illumination CODE 5 2 X X (00÷28): arrêt chauffage CODE 5 3 X X (00÷28): arrêt ventilateur*
*) 00: continu; 01÷04: de 5 à 20 secondes (pas 5 secondes); 05: 30 secondes; 06: 45 secondes; 07÷11: de 1 à 5 minutes (pas 1 minute); 12: 10 minutes; 13: 15 minutes; 14: 30 minutes; 15: 45 minutes; 16÷27: de 1 à 12 heures (pas 1 heures)
CODE 6 0 X X (00÷37): retour à la position de home (preset numéro 1)
00: fonction désactivée; 01÷06: de 5 à 30 secondes (pas 5 secondes); 07: 45 secondes; 08÷16: de 1 à 9 minutes (pas 1 minute); 17÷26: de 10 à 55 minutes (pas 5 minutes); 27÷32: de 60 à 110 minutes (pas 10 minutes); 33÷37: de 2 heures à 4 heures (pas 30 minutes).
6.5.12.1 Fonctions
A. IRIS: activation de l'autorisation END A. IRIS: désactivation de l'autorisation A. FOCUS: activation de l'autofocus END A. FOCUS: déactivation de l'autofocus
6.5.12.2 Vitesse
CODE 2 X (1 vit. basse ÷ 8 vit. élevée): vitesse du zoom CODE 3 X (1 vit. basse ÷ 8 vit. élevée): vitesse du focus
6.5.12.3 Zoom numérique
Zoom numérique:
CODE 9 1 : activation CODE 9 0 : désactivation
CODE 9 2: 4x, CODE 9 3: 16x
6.5.12.4 Obturateur
Obturateur: 2 0 1 activé 2 0 0 désactivé 2 0 2 automatique
Vitesse High: (PAL: 1/120 sec, NTSC: 1/100 sec)
CODE 2 1 2 1/125 sec CODE 2 1 3 1/250 sec
CODE 2 1 4 1/500 sec CODE 2 1 5 1/1000 sec
CODE 2 1 6 1/2000 sec CODE 2 1 7 1/4000 sec
CODE 2 1 8 1/10000 sec
Vitesse Slow:
CODE 2 2 1 PAL: 1/25 NTSC: 1/30 sec
CODE 2 2 2 PAL: 1/12.5 NTSC: 1/15 sec
CODE 2 2 3 1/8 sec CODE 2 2 4 1/4 sec
CODE 2 2 5 1/2 sec CODE 2 2 6 1 sec
CODE 2 2 7 2 sec
CODE 2 2 8 PAL: 5 sec
NTSC: 4 sec
CODE 2 2 9 PAL: 10 sec
NTSC: 8 sec
| Auto obturateur | slow | CODE | 2 | 3 | 0 | standard | CODE | 2 | 3 | 1 | priorité BLC |
| CODE | 2 | 3 | 2 | slow | CODE | 2 | 3 | 3 | high speed | ||
| Sensibilité | CODE | 2 | 4 | 1 | maximale | CODE | 2 | 4 | 2 | haute | |
| CODE | 2 | 4 | 3 | standard | CODE | 2 | 4 | 4 | minimale | ||
| Vitesse minimale | CODE | 2 | 5 | 1 | 1 sec | CODE | 2 | 5 | 2 | 2 sec | |
| CODE | 2 | 5 | 3 | 4 sec | CODE | 2 | 5 | 4 | 8 sec | ||
| Gain AGC | CODE | 2 | 6 | 1 | 20dB | CODE | 2 | 6 | 2 | 25dB | |
| CODE | 2 | 6 | 3 | 30dB | CODE | 2 | 6 | 4 | 35dB |
6.5.12.6 PIP
| Control: | CODE | 1 | 0 | 1 | activation, | CODE | 1 | 1 | 1 | désactivation |
| Master/slave: | CODE | 1 | 0 | 2 | activation, | CODE | 1 | 1 | 2 | désactivation |
| Frame Control: | CODE | 1 | 0 | 3 | activation, | CODE | 1 | 1 | 3 | désactivation |
| Home position: | CODE | 1 | 0 | 4 | définir, | CODE | 1 | 1 | 4 | rappeler |
| Freeze: | CODE | 1 | 0 | 5 | activation, | CODE | 1 | 1 | 5 | désactivation |
| Cross Control: | CODE | 1 | 0 | 6 | activation, | CODE | 1 | 1 | 6 | désactivation |
| Swithover | CODE | 4 | 3 | automatique | CODE | 4 | 4 | manuel | |
| Sensibilité de couleurs à n/b | CODE | 2 | 7 | 1 | maximale | CODE | 2 | 7 | 2 |
| CODE | 2 | 7 | 3 | standard | CODE | 2 | 7 | 4 | |
| Durée de couleurs à n/b | CODE | 2 | 7 | 5 | 2 minutes | CODE | 2 | 7 | 6 |
| CODE | 2 | 7 | 7 | 10 minutes | CODE | 2 | 7 | 8 |
Sensibilité de n/b à couleurs
| CODE | 2 | 8 | 1 | maximale | CODE | 2 | 8 | 2 | haute |
| CODE | 2 | 8 | 3 | standard | CODE | 2 | 8 | 4 | minimale |
| CODE | 2 | 8 | 5 | 2 minutes | CODE | 2 | 8 | 6 | 5 minutes |
| CODE | 2 | 8 | 7 | 10 minutes | CODE | 2 | 8 | 8 | 20 minutes |
6.5.12.8 Compensation backlight
| BLC | CODE | 3 | 0 | 2 | automatique | CODE | 3 | 0 | 1 | manuel |
| CODE | 3 | 0 | 0 | désactivé | ||||||
| Histogramme | CODE | 3 | 3 | 1 | activé | CODE | 3 | 3 | 0 | désactivé |
| CODE | 4 | X | X | (00÷13) | niveau |
6.5.12.9 Autres fonctions système optique
White balance: CODE 4 1 automatique CODE 4 2 manuel
6.5.13 Relais auxiliaires
SET AUX X (1÷8) : activation du relais END AUX X (1÷8) : désactivation du relais
6.5.14 Autres fonctions
WASHER: Activation de la pompe WIPER: Activation de l'essuie-glace
Signal video:
CODE 2 à couleurs CODE 3 noir et blanc
Chauffage:
CODE 7 allumé CODE 8 éteint
Ventilateur:
CODE 7 allumé CODE 8 eteint
Audio muting:
CODE 7 3 audio mute CODE 8 3 normal
Lumière:
CODE 7 allumée CODE 8 éteinte
Filtre IR:
6.6.1 Matériel et documents de référence
Dôme D7720B-J1P
Surveillance Control Protocol (DSCP), ver2.4, 2001.05.25
6.6.2.1 Câble
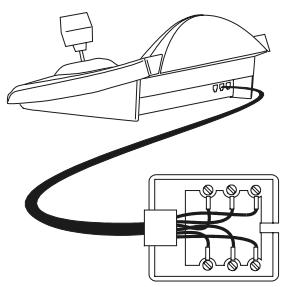
Blanc
RS485A
Rouge
Jaune
RS485B
Noir
Rouge
GND
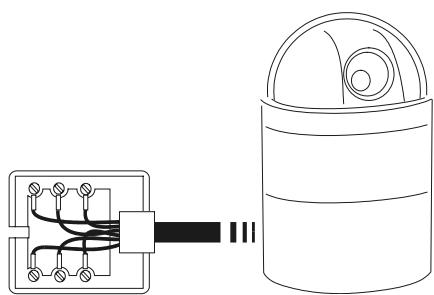

Attention!
Les deux câbles téléphoniques (le premier connecté au pupitre et le second au dôme) sont fournis comme accessoires avec le pupitre EKR-KB1.
NE PAS UTILISER le câble téléphonique gris fourni avec le dôme Elmo, l'utilisation de ce câble risque d'endommager le pupitre.
6.6.2.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré. Se reporter au manuel ELMO.
6.6.2.3 Programmation du pupitre
Le sous-menu COMMUNICATIONS ↓ LIGNE-TELEMETRIE, doit être défini comme suit:
La vitesse de transmission est fixée à 9600 bauds.
6.6.3 Programmation
La programmation du dôme est en grande partie réalisée par menu sur écran.
Certains paramètres peuvent être configurés grâce à la pression simultanée de touches combinées ou en introduisant un code spécifique.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG REÇ.)
6.6.3.1 Configuration OSM
Connecter directement le dôme au pupitre et brancher un moniteur à la sortie vidéo du dôme.
SET RECEIV début de la configuration du dôme.
Le dôme montre le menu sur l'écran ; le pupitre indique sur l'afficheur le changement de mode :
ESC fin de la configuration
ENTER entrée dans le sous-menu Joystick : déplacement du curseur dans les menus
Joystick : changement de la valeur indiquée par le curseur. Pour actionner le dôme en mode OSM, appuyer sur la touche SHIFT pendant la manipulation du Joystick.
La commande Zoom Télé-objectif et Zoom Grand-angle est obtenue en tournant la bague du Joystick
6.6.3.2 Configuration directe
Certains paramètres peuvent être configurés par pression sur certaines touches ou par un code spécial Phase du line lock (verrouillage de ligne): F1 augmentation F2 diminution
Autoflip (rotation automatique) : CODE 5 0 0 validation, CODE 5 0 1 invalidation
Vitesse zoom: CODE 6 0 X (1÷4); zoom lent (X = 1), zoom rapide (X = 4)
Vitesse pan proportionnelle au zoom: CODE 2 1 1 validée, CODE 2 1 0 invalidée
Zoom numérique: CODE 6 1 0 invalidée, CODE 6 1 X (2÷8) validé 2x÷8x
Vitesse du focus: 6 2 X (1÷4); mise au point lente (X = 1), mise au point rapide (X = 4)
A. PAN: démarrage de l'auto-pan
END A. PAN: arrêt de l'auto-pan après avoir actionné le contact de fin de course.
CODE 4 0 0 : mémorisation de cette position comme premier contact fin de course.
CODE 4 0 1 : mémorisation de cette position comme second fin de course.
CODE 4 0 2 : le mouvement s'effectue vers la droite.
CODE 4 0 3 : le mouvement s'effectue vers la gauche.
CODE 4 1 X (1÷4): vitesse de l'auto-pan de lente (X = 1) à rapide (X = 4); ce réglage sera validé au prochain démarrage de l'auto-pan.
6.6.5 Preset (préposition), scan (balayage), home
PRESET X X X (1÷128): mémorisation de la position actuelle comme préposition numéro X.
SCAN X X X (1÷128): mouvement vers la préposition X mémorisée précédemment.
END PRESET X X X (1÷128): effacement de la préposition X mémorisée précédemment.
CODE X X X (1÷128): scan lent vers la position de préposition X
Déplacement vers la position de Home
CODE 1 X X X (1÷128) : sélection de la position de Home de 1 à 128.
6.6.6 Séquences et cruise (patrouille)
Les séquences de la fonction patrol (patrouille) et la fonction "cruise" définies sur l'OSM sont activées par des codes spéciaux:
CODE 2 0 X (1÷4): démarrage de la série numéro X
CODE 3 0 0 : mise en service de la fonction "cruise".
6.6.7 Autres fonctions
Texte d'identification: CODE 3 5 1 visible, CODE 3 5 0 non visible
Titre: CODE 3 6 1 visible, CODE 3 6 0 non visible
CODE 9 9 9 9 : réinitialisation du dôme.
6.7.1 Matériel et documents de référence
Tourelle Eneo VPT-42/RS1.
Documents de protocole PC COMMAND-v3.0VT et VT-ASCII.
6.7.2.1 Câble
Blanc RS485A Jaune RS485B
RS485 RX+/
TTY 20 mA
RS485 RX-/
TTY 20 mA
Eneo VPT-42/RS1
6.7.2.2 Configuration tourelle
Configurer correctement le numéro tourelle. Se reporter au manuel correspondant.
6.7.2.3 Configuration du paramètre
Durant la configuration du pupitre, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE doit etre défini comme suit:
La vitesse de transmission en bauds doit correspondre à cette chose pour la tourelle.
6.7.3 Configuration tourelle
Tous les paramètres de configuration tourelle sont configurés au moyen de la pression d'une combinaison de touches ou en insérant un code spécifique.
Pour toutes les opérations de prédéfinition tourelle, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG TELEM).
Un menu de configuration tourelle peut être activé avec SET RECEIV:
Les rubriques du menu de prédéfinition sont décrites ci-dessous.
Chaque configuration peut être rappelée avec la combinaison de touches spécifiques :

configuration
I'autopan

configuration
patrouille
standard

configuration
patrouille
random

configuration
position
home

configuration vitesse prédéfinie.
6.7.4 Autopan
A. PAN: activation de l'autopan END A. PAN: interruption de l'autopan SET A. PAN: configuration de l'autopan avec entrée dans menu spécifique:
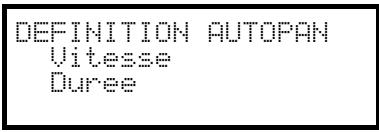
Sélectionner la vitesse et la pause autopan et insérer une valeur dans les limites autorisées.
La vitesse varie de 1 (min.) à 255 (max.)
La durée est exprimée en minutes. La valeur 255 permet à l'autopan de rester actif sans limites de temps.
Remarque : les positions de prédéfinition 63 et 64 représentent les limites de l'autopan.
6.7.5 Pré-définition, balayage, home
PRESET X X (1÷64): mémorisation de la position actuelle comme position de prédéfinition nombre X SCAN X X (1÷64): mouvement vers la position de prédéfinition X mémorisée précédemment SET PRESET: configuration de la prédéfinition avec entrée dans un menu spécifique:
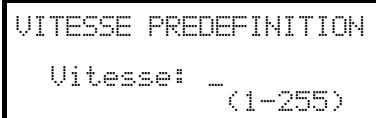
Insérer une valeur dans l'espace prévu.
La vitesse varie de 1 (min.) à 255 (max.)
HOME : mouvement vers la position de Home (position 1). SET HOME : configuration du temps de stationnement avec entrée dans un menu spécifique :
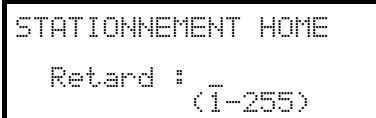
Insérer une valeur dans l'espace prévu.
Le temps est exprimé en minutes.
6.7.6 Patrouille
La tourelle Eneo permet deux types de patrouilles : patrouille standard et patrouille random.
6.7.6.1 Patrouille standard
PATROL: début patrouille standard END PATROL: fin patrouille standard SET PATROL: configuration de la patrouille standard avec entrée dans un menu spécifique:
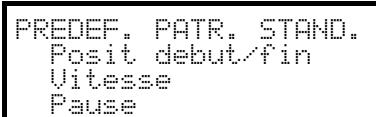
Sélectionner les différentes rubriques et insérer les valeurs dans l'espace prévu.
Position début/fin indique la série de positions consécutives sur lesquelles effectuer la patrouille
Vitesse : vitesse du mouvement de 1 (min.) à 255 (max.)
Pause : pause à l'atteinte d'une position
6.7.6.2 Patrouille random
SHIFT PATROL: début patrouille random END SHIFT PATROL: fin patrouille random SET SHIFT PATROL: configuration de la patrouille random avec entrée dans un menu spécifique:

Sélectionner les différentes rubriques et insérer les valeurs dans l'espace prévu.
Vitesse : vitesse du mouvement de 1 (min.) à 255 (max.)
Pause : pause à l'atteinte d'une position
Pour chaque paramètre, insérer une valeur min. et une valeur max.
6.7.7 Relais auxiliaires
SET AUX X (1÷3) : activation du relais END AUX X (1÷3) : désactivation du relais
CODE 2 0 : définit la limite droite dans le positionnement horizontal CODE 2 1 : définit la limite gauche dans le positionnement horizontal CODE 2 2 : définit la limite supérieure dans le positionnement vertical CODE 2 3 : définit la limite inférieure dans le positionnement vertical CODE 2 4 : valide les limites de positionnement CODE 2 5 : invalidate les limites de positionnement
6.7.9 Autres fonctions
CODE 1 1 ÷ 1 4 : sélection de la courbe de vitesse. Si le mouvement de tourelle n'est pas régulier (trop rapide et trop lent à réagir aux mouvements du manche à balai), il est conseillé de sélectionner les quatre courbes de vitesse et de contrôler laquelle est la plus adaptée. CODE 3 0 / CODE 3 1 : active/désactive la fonction de rappel de la fonction de home. CODE 9 9 9 9 : réinitialisation à distance du récepteur
6.8.1 Matériel et documents de référence
Dôme Ernitec Saturn
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
La vitesse de transmission peut être sélectionnée : 1200, 2400 (par défaut), 4800, 9600, 19200 bauds.
6.8.2.3 Configuration du paramètre
Pour programmer le p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre configuré comme suit:
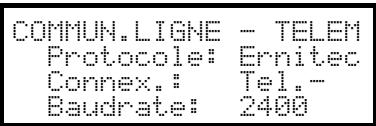
La vitesse de transmission doit correspondre à celle du dôme.
6.8.3 Configuration
La configuration du dôme est en grande partie réalisée au moyen du menu sur écran.
Certains paramètres sont configurés par la pression de combinaison de touches ou par un code spécifique.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA
TELEMETRIE (menu MISE EN SERVICE FONCTIONS CONFIG. REC).
6.8.3.1 Configuration OSM
Connecter directement le dôme au pupitre et un moniteur à la sortie vidéo du dôme.
SET RECEIV début de la configuration du dôme (correspond à la commande Preset 128 indiquée dans le manuel du dôme).
Le dôme montre le menu sur l'écran ; le pupitre indique sur l'afficheur le changement de mode :
ESC fin de la configuration
ENTER ou IRIS O: entrée dans les sous-menus et confirmation des valeurs; correspond à la touche Iris Open
Joystick , touches INC et DEC: déplacement du curseur dans les menus, modification des valeurs
FOCUS N et FOCUS F: correspondent aux touches Précédent et Suivant.
6.8.4 Auto-pan
AUTO-PAN: démarrage de l'auto-pan.
CODE X X X (0÷255): vitesse de l'auto-pan de 0 lente à 255 rapide (non disponible sur le modèle Saturn)
CODE 3 0 1 : mémorisation de la première position de fin de course
CODE 3 0 2 : mémorisation de la seconde position de fin de course.
6.8.5 Présélection (préposition), balayage (scan), patrouille (patrol) et hom
PATROL: démarrage de la séquence de patrol
HOME : Mouvement vers la position de Home correspondant à la position de preset 1
PRESET X X X (1÷128) mémorisation de la position actuelle comme position de preset numéro X
SCAN X X X (1÷128) : mouvement vers la position de preset X mémorisée précédemment.
6.8.5.1 Configuration patrol (patrouille)
La configuration de la série de patrol s'effectue au moyen de codes spécifiques:
CODE 1 0 0 0 : effacement de la séquence de patrol
code 1 X X X (1÷128): introduction de la position de preset X dans la série de patrol
CODE 2 0 0 0 montre la séquence de patrol
code 2 X X X (1÷128): élimination de la position de preset X de la série de patrol
CODE 3 X X X (0÷255): assignation du temps de pause en secondes lorsque la position est atteinte (dwell time).
Exemple de configuration et utilisation de la séquence de patrol:
CODE 1 0 0 0, effacement de la séquence définie précédemment
CODE 1 0 0 1, introduction en sequence de la position de preset 1
CODE 1 0 0 5, introduction en séquence de la position 5
CODE 1 0 0 6, introduction en séquence de la position 6
CODE 2 0 0 5, élimination de la position 5
CODE 3 0 0 5, pause de 5 secondes entre une position et la suivante PATROL, début de la séquence de patrol.
6.8.6 Relais auxiliaires:
SET AUX X (1÷8): activation du relais X
END AUX X (1÷8): désactivation du relais X.
6.8.7 Objectifs:
A. FOCUS: activation de l'autofocus
A. IRIS: activation de l'auto-iris.
6.8.8 Position de retard:
Programmation du dôme pour une "position de retour automatique" après un délai d'inactivité déterminé.
CODE 4 X X X
ou X X X composé comme suit :
les deux premiers chiffres indiquent la position de return à considérer (seules les positions de 1 à 99 sont acceptées; les positions de 100 à 128 ne peuvent être sélectionnées)
le troisième chiffre indique le temps de retard :
Par ex. CODE 4 2 1 6 programme le dôme pour un retour à la position 21 (2 1) après 5 mn
6) d'inactivité.
CODE 4 0 0 0 : la position de return est invalidée.
6.8.9 Autres codes spécifiques
CODE 4 0 0 : texte montré/caché (toggle) CODE 5 0 0 : activation/désactivation (toggle) de la compensation backlight (lumière arrêtée) CODE 9 9 9 9 : remise à zéro mémoire interne du dôme.
6.9.1 Matériel et documentation de référence
Tourelle Eneo VPT-42/RS1
Documents de protocole PC COMMAND-v3.0 VT et VT-ASCII.
6.9.2.1 Câble
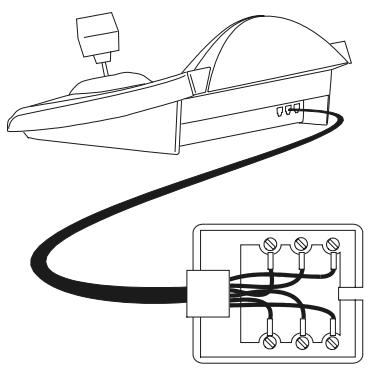
Blanc
RS485A
TX +
Jaune
RS485B
TX -
6.9.2.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré.
Définition du protocole : FASTRAX II.
La vitesse de transmission en bauds peut être sélectionnée en 2400 (défaut), 4800 et 9600.
Se reporter au manuel du dôme.
Durant la configuration du poutine, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défini comme suit:
La vitesse de transmission en bauds doit correspondre à cette pour le dôme. (Protocole: Eneo FII)
6.9.3 Configuration
La configuration du dôme est en grande partie réalisée au moyen du Menu sur écran.
Pour toutes les opérations de prédéfinition du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG TELEM).
6.9.3.1 Configuration OSM
Connecter directement le dôme au pupitre conformément au schéma indiqué, et connecter un moniteur à la sortie vidéo du dôme.

RECEIV
début de la configuration du dôme.
Le dôme montre le menu sur écran ; le pupitre affiche le changement de mode :
ESC fin de la configuration.
La touche ESC prévue par les procédures de configuration du dôme est remplacée par la touche CLEAR. ATTENTION! À la fin de la configuration du dôme, presser ESC pour rétablir le fonctionnement normal du pupitre.
Manche à balai : mouvement du curseur dans les menus.
SHIFT: remplace la touche CTRL.
CLEAR: remplace la touche ESC.
PATROL: correspond à la touche TOURE.
F1: correspond à la touche PATTERN.
HOME: correspond à la touche HOME.
MENU: correspond à la touche MENU.
ENTER: accepte et termine la modification d'un texte d'identification.
: changement des textes d'identification.
Le mouvement de tourelle est fréquemment requis à l'intérieur des menus.
Dans ce cas, maintenir SHIFT enfoncée et ne la relâcher que lorsque le mouvement est terminé:
SHIFT: contrôle Pan et Tilt.
SHIFT: contrôle zoom.
SHIFT FOCUS N, SHIFT FOCUS F: contrôle focus.
SHIFT IRIS 0, SHIFT IRISC: contrôle iris.
Certains raccourcis pour la configuration du dôme (par ex., l'entrée directe dans le menu PREPOSITION sur pression de la touche PRESET) ne sont pas validés si la même fonction peut être rappelée du menu principal.
PRESET X (1÷240): mémorisation de la position actuelle comme position de préposition nr. X
END PRESET X (1÷240): effacement de la position de préposition X
SCAN X (1÷240): mouvement vers la position de préposition X mémorisée précédemment
HOME: mouvement vers la position Home
6.9.5 Balayage automatique, patrouille et modèle
Le dôme dispose de 8 traces de balayage automatique, 8 rondes et 4 modèles, configurés sur le Menu à l'écran.
A. PAN(1÷8): démarrage balayage automatique X
PATROL(1÷8): démarrage ronde X
F1 (1÷ 4) : démarrage modèleX
6.10.1 Matériel et documents de référence
Dôme JVC TK-C675
TK-C675 Programmes manual, version 1.00/feb.1998
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
Le protocole doit être défini comme suit: Multidrop/Simplex.
6.10.2.3 Configuration du port
Pour configurer le poutine, le sous-menu COMMUNICATIONS \ LIGNE - TELEMETRIE, doit etre fait comme suit:
La vitesse de transmission est fixe (9600 baud).
6.10.3 Configuration
La configuration du dôme est en grande partie réalisée au moyen du menu sur écran.
Certains paramètres sont configurés par la pression d'une combinaison de touches ou par un code spécifique.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA
TELEMETRIE (menu CONFIGUARATION FUNCTIONS CONFIG REC.).
6.10.3.1 Configuration OSM
Connecter directement le dôme au pupitre et raccorder un moniteur à la sortie vidéo du dôme.

RECEIV
début de la programmation du dôme.
Le dôme affiche le menu sur l'écran ; le pupitre indique sur l'afficheur le changement de mode :
ESC
fin de la configuration
ENTER
correspond à la touche Set indiquée dans le manuel du dôme, pour l'entrée dans les sous-menus
MENU permet d'accéder aux sous-menus
Joystick : déplacement du curseur dans les menus et mouvement du dôme
Commandes spécifiques valides dans certains sous-menus, comme indiqué dans le manuel du dôme :
Joystick: Zoom Télé-objectif et Zoom Grand-angle
FOCUS N et FOCUS F: focus rapproché et focus à distance
HOME: touche Home
PRESET X X ENTER (1÷63): correspond aux touches Pos1-Pos63, si une position est prévue; ESC annule l'introduction.
6.10.4 Auto-pan
A. PAN: démarrage de l'auto-pan END A. PAN: interruption de l'autopan; si la fonction autopan est active, le dôme ne répond plus aux nouvelles commandes jusqu'à interruption de cette dernière CODE 1 : mémorisation de la première fin de course CODE 3: position de la première fin de course CODE 2 : mémorisation de la seconde fin de course CODE 4: position de la seconde fin de course.
6.10.5 Preset (préposition), home, scan (balayage)
PRESET X X (1÷63): mémorisation de la position actuelle comme position de preset X END PRESET X X (1÷63): annulation du preset numéro X mémorisée précédemment END SET PRESET: efface toutes les positions de preset et de home mémorisées précédemment HOME: mouvement vers la position de Home SET HOME: mémorisation de la position sélectionnée comme position de Home END HOME: effacement de la position de Home mémorisée précédemment SCAN X X (1÷63): mouvement vers la position de preset X.
6.10.6 Patrol (patrouille)
Les trois séquences de patrol sont définies durant la configuration OSM.
CODE 2 X (1÷3) : sélection et lancement de la séquence de patrol sans pression sur la touche PATROL.
Attention! Si la fonction patrol est en fonctionnement, toutes les commandes sont désactivées jusqu'à son arrêt avec END PATROL.
CODE 3 X (1÷ 3) : sélection d'une série patrol sélectionnée ; presser la touche PATROL pour activer la série.
PATROL : démarrage de la série de patrol sélectionnée.
Attention! Si la fonction patrol est en fonctionnement, toutes les commandes sont désactivées jusqu'à son arrêt avec END PATROL.
PATROL : interruption du patrol.
6.10.7 Autres commandes et codes spécifiques
A. FLIP rotation horizontale à 180 degrés (autoflip) (rotation automatique)
Validation de l'autoflip: CODE 5 validation; CODE 6 invalidation
Informations sur écran: CODE 9 informations camera, CODE 1 0 informations de service,
CODE 1 aucune information sur écran
"Titre zone": CODE 7 montré, CODE 8 caché
"Mode affichage événement": CODE 1 2 validated, CODE 1 3 invalidated
Les commandes pour le modele TK-C675 et celles pour le TK-C676 sont en peu differents: il est reccommandé deCHOISIR LA VERSION APPROPRIEE dans le menu: COMMUNICATIONS / Ligne _ telenetrie / Protocole.
Toutes les fonctions mises en œuvre pour le modèle TK-C675 fonctionnent aussi pour le modèle TK-C676.
6.11.1 Matériel et documents de référence
Dôme JVC TK-C676
TK-C675 Programmes manual, version 1.00/feb.1998
6.11.2 Connexion hardware du dôme
Comme pour le modèle TK-C675.
6.11.3 Programmation du dôme
Protocole Multidrop, Simplex
6.11.4 Configuration
Voir le modèle TK-C675.
6.11.5.1 Autopan
CODE 4 0 : vitesse autopan normale
CODE 4 1 : vitesse autopan haute
CODE 4 2 : vitesse autopanasse
Les positions du prérélection) sont 99.
6.11.7 Contacts auxiliaires
SET AUX (1÷ 3) : fermeture du contact auxiliaire 1÷ 3
END AUX (1÷3): ouverture du contact auxiliaire 1÷3
6.11.8.1 Modalités black & white












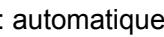



: commuté par le signal d'alarme 1..4.
6.11.9 Zoom et focus


(1 ÷ 4) : vitesse du zoom (1 lente.. 4 vite)



): vitesse du focus (1 lente.. 4 vite)
6.12.1 Matériel et documents de référence
Dôme Panasonic WV-CS600 et Panasonic WV-CS850
Protocol Information WV-CS850 ver 2.2, Nov.28, 2001
Protocol Information WV-CSR600, WV-CSR400, WV-BSR300 ver 5.3, Nov.27, 1997
6.12.2 Remarque importante concernant les protocoles
Les protocoles Panasonic permettent de contrôler une gamme de dômes aux caractéristiques différentes.
Les commandes décrites ci-après sont compatibles avec le WV-CS600, le WV-CS850 ou les deux (pour certaines fonctions) lorsque cela a été possible ; cette distinction est indiquée aux chapitres suivants. Se reporter au manuel du dôme pour la liste des fonctions disponibles.
6.12.3.2 Configuration du dôme

Attention ! Même si les deux protocoles de contrôle des dômes Panasonic (Panas600 et Panas850) sont relativement compatibles, il est conseillé d'avoir le plus ajusté pour un contrôle optimal des dômes.
Definir:
"Protocole conventionnel", LOCAL (non À DISTANCE)
8 bits de données, aucune parité, 1 bit de stop, Full Duplex
Délai d'attente = 0
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
La vitesse de transmission peut être sélectionnée à : 2400, 4800, 9600, 19200 (par défaut) bauds.
Pour programmer le p, le sous-menu COMMUNICATIONS LIGNE -TELEMETRIE, doit etre defini comme suit:
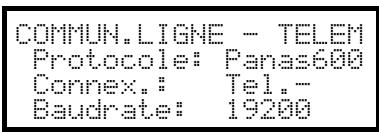
Dôme Panasonic 600
La vitesse de transmission en bauds doit correspondre à celle pour le dôme.
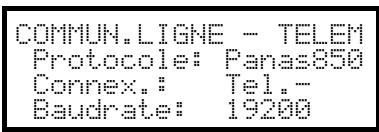
Dôme Panasonic 850
La vitesse de transmission en bauds doit correspondre à celle pour le dôme.
6.12.4 Programmation
La programmation du dôme est en grande partie réalisée par menu sur écran.
Certains paramètres peuvent être configurés par la pression de combinaison de touches ou avec un code spécifique.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu MISE EN FONCTION / FONCTIONS / CONFIG REC.).
6.12.4.1 Configuration OSM
Connecter le dôme au pupitre suivant le schéma, et raccorder un moniteur à la sortie vidéo du dôme.
SET RECEIV début de la configuration du dôme.
Le dôme montre le menu sur l'écran ; le pupitre indique sur l'afficheur le changement de mode :
ESC fin de la configuration
Joystick : mouvement dans les menus
ENTER:"set"
CLEAR : "esc"
MENU: entrée dans le menu
F2: remise à l'état initial
Focus FOCUS N / FOCUS F, Zoom si prévu.
6.12.5 Auto-pan
Les modifications de la configuration auto-pan ne sont validées qu'au redémarrage de cette fonction.
A. PAN (équivalent à CODE 6 5): activation de l'auto-pan
Attention! La fonction auto-pan se comporte différemment en fonction de la configuration sur le menu de "auto-pan key"
END A. PAN (ou CODE 6 6): interruption de l'auto-pan
6.12.6 Fonctions auto-pan pour le modèle wv-cs850
Vitesse de l'auto-pan : CODE 6 7 augmentation, CODE 6 8 diminution
CODE 6 9: mémorisation de la position sélectionnée comme premier fin de course
CODE 7 0 : mémorisation de la position sélectionnée comme second fin de course
CODE 7 4 : inversion de la direction de l'auto-pan
6.12.7 Limitation du mouvement pour le modèle wv-cs850
CODE 1 0 0 9 : activation des limites
CODE 1 0 1 0 : désactivation des limites
6.12.8 Preset (préposition), scan (balayage), home
PRESET X X (1÷64): mémorisation de la position sélectionnée comme position de preset numéro X
SCAN X X (ou CODE X X): mouvement vers la position de preset X (1÷64) mémorisée
précedement
HOME (ou CODE 8 9): mouvement vers la position de Home
6.12.9.1 Patrol (modèle)
PATROL (ou CODE 1 6 5): démarrage patrol
END PATROL (ou CODE 1 6 6): interruption patrol.
SET PATROL (OU CODE 1 6 7): mémorisation modèle
PATROL: finalisation modèle
6.12.10.1 Patrol (sequence auto)
PATROL (ou CODE 7 2): séquence automatique activée
PATROL (ou CODE 7 1): séquence automatique désactivée
6.12.11 Configuration shutter (obturateur) et sensibilitélectronique
CODE 1 7 1 : activé
CODE 1 7 2 : désactivation
CODE 1 7 3 : augmenter
CODE 1 7 4 : diminuera
6.12.11.2 Sensibilité électronique manuelle
CODE 1 7 7 : activée
CODE 1 7 8 : désactivée
CODE 1 7 9 : augmenter
CODE 1 8 0 : diminuera
6.12.11.3 Sensibilité électronique automatique
CODE 1 8 1 : activée CODE 1 8 2 : désactivée CODE 1 8 3 : augmenter CODE 1 8 4 : diminuera
6.12.12 Autoflip (rotation automatique)
A. FLIP (OU CODE 1 8 7): autoflip SET A. FLIP (ou CODE 7 8): validation de l'autoflip numérique END A. FLIP (ou CODE 7 9): invalidation de l'autoflip numérique
6.12.13 Optique et flip (rotation)
A. FOCUS (ou CODE 8 8): activation de l'autofocus
Arrêt de l'autofocus: CODE 8 6 activé, CODE 8 7 désactivé
SET IRIS O ou SET IRISC: remise à l'état initial de l'iris de la caméra
Super-D: CODE 8 4 activé, CODE 8 5 désactivé
BW: CODE 9 0 activé, CODE 9 1 désactivé, CODE 9 2 automatique
AGC: CODE 1 7 5 activé, CODE 1 7 6 désactivement
Sync. lock de ligne: CODE 1 8 5 incrément, CODE 1 8 6 déprétrement
ALC: CODE 1 0 0 0 activé
ELC: CODE 1 0 0 1 activé
AWC: CODE 1 0 0 2 activé
ATW: CODE 1 0 0 3 ACTIVÉ
6.12.14 Relais (uniquement modèle wv-cs850)
SET AUX X (1÷2) : activation du relais numéro X END AUX X (1÷2) : désactivation du relais numéro X
6.12.15 Autres fonctions (uniquement modèle wv-cs850)
Zoom électronique: CODE 9 8 activé, CODE 9 9 désactivé
Vitesse pan / tilt proportionnelle au facteur de zoom: CODE 8 0 validée, CODE 8 1 invalidée
Camera ID: CODE 9 3 validée, CODE 9 4 invalidée
Titre de zone: code 9 5 type Nord/Sud/Est/Ouest, code 9 6 type défini par l'usage,
CODE 9 7 désactivé
Nettoyage: CODE 1 8 8 activé, CODE 1 8 9 désactivé
Détection mouvement: CODE 1 0 0 4 activé, CODE 1 0 0 5 désactivé
Zone privée: CODE 1 0 0 6 activée, CODE 1 0 0 7 désactivée
Régénération : code 1 0 1 1
Remise à l'objet initial : CODE 9 9 9 8
Remise à l'objet initial intégral : CODE 9 9 9 9
6.13.1 Matériel et documents de référence
Dome Spectra II 3.31
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
Le dôme doit être configuré pour utiliser le protocole de type "D".
6.13.2.3 Configuration du paramètre
Pour configurer le p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre defini suivant:
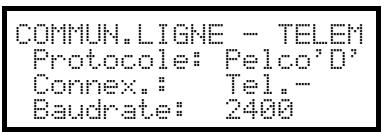
La vitesse de transmission est fixe (2400 bauds).
6.13.3 Configuration
Le dôme peut être configuré en appuyant sur une combinaison de touches ou en introduisant un code.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG REC.).
6.13.4 Preset (préposition), scan (balayage), home
PRESET X X (1÷32): mémorisation de la position sélectionnée comme position de preset numéro X
ANNULATION PRESET X X (1÷32): annulation de la position de preset X mémorisée précédendum.
SCAN X X (1÷32): mouvement vers la position X mémorisée précédendum
HOME : Mouvement vers la position de Home, correspondant à la position du preset 1
CODE 0 : Mouvement vers la position de pan 0
6.13.5 Pattern (patrouille)
PATROL : démarrage pattern SET PATROL : début configuration pattern END PATROL : fin configuration pattern
6.13.6 Zone
CODE 2 0 : démarrage scan de la zone CODE 2 1 : interruption scan de la zone CODE 1 0 X (1÷8): mémorisation début de la zone numéro X CODE 2 0 X (1÷8): mémorisation fin de la zone numéro X
6.13.7.1 Autofocus
A. FOCUS (ou CODE 4 2) : activation automatique de l'autofocus CODE 4 0 : activation de l'autofocus CODE 4 1 : déactivation de l'autofocus
6.13.7.2 Auto-iris
A. IRIS (ou CODE 5 2): activation de l'auto-iris automatique CODE 5 0 : activation de l'auto-iris CODE 5 1 : désactivation de l'auto-iris
6.13.7.3 Contrôle automatique du gain
CODE 6 0 : AGC activé CODE 6 1 : AGC désactivé CODE 6 2 : AGC automatique
6.13.8 Relais et alarmes
SET AUX X (1÷8): activation du relais numéro X END AUX X (1÷8): désactivation du relais numéro X CODE X (1÷8): reconnaissance de l'alarme numéro X
6.13.9 Autres fonctions
A. FLIP: autoplip (rotation automatique)
CODE 9 9 : nettoyage écran
CODE 9 9 9 : remise à l'état initial, à distance, de la camera (pan/tilt)
CODE 9 9 9 9 : remise à l'état initial, à distance, de la caméra (valeurs par défaut)
Balance de blanc : CODE 8 0 activation, CODE 8 1 désactivation
Compensation backlight (lumière arrêtée) : CODE 7 0 activation, CODE 7 1 désactivation
CODE 9 0 : validation du "mode de retard de phase du device"
CODE 3 X (0÷ 3) : configuration de la vitesse du zoom
CODE 1 3 X (0÷ 3) : configuration de la vitesse du focus
CODE 1 0 0 0 : vitesse shutter *
CODE 1 0 0 1 : niveau lock de ligne *
CODE 1 0 0 2 : réglage balance blanc R-B *
CODE 1 0 0 3 : réglage balance blanc M-G *
CODE 1 0 0 4 : gain*
CODE 1 0 0 5 : niveau auto-iris
CODE 1 0 0 6 : auto-iris peak *
*) Après l'introduction du code, est demandée l'introduction d'une valeur de 0 à 40000. La signification de cette valeur est décrite dans le manuel d'utilisation du dôme.
6.13.10 Courbe de vitesse
Les domes et les récepteurs qui acceptent le protocole Pelco D peuvent répondre d'une façon différente aux commandes Pan et Tilt, avec des mouvements non suffisamment fluides ou une vitesse trop élevée en cas de zoom poussé au maximum.
Pour permettre une meilleure utilisation de ces domes, il est conseillé d'essayer les quatre courbes de vitesse disponibles, en choisissant celle qui permet une belle réponse.
CODE 1 1 : première courbe de vitesse
CODE 1 2 : deuxième courbe de vitesse
CODE 1 3 : troisième courbe de vitesse
CODE 1 4 : quatrième courbe de vitesse
6.14.1 Matériel et documents de référence
Dôme Samsung SCC-641
Dôme Samsung SCC-643P
Samsung Protocol
6.14.2.1 Câble
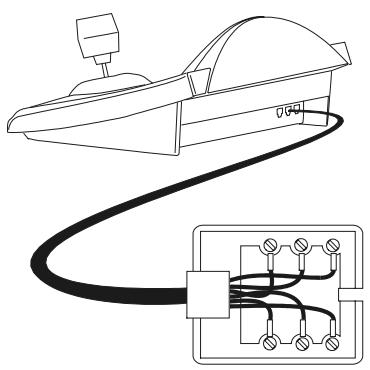
Blanc
Jaune
SCC-641
RS485A
RS485B
Txd +
Txd -
SCC-643
Blanc
Jaune
RS485A
RS485B
Rxd +
Rxd -
6.14.2.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
La vitesse de transmission peut être sélectionnée : 4800, 9600 (par défaut), 19200, 38400 baud.
Pour la Dome SCC-643 configurer la modalité FULL DUPLEX. Selon les exigences de l'installation on peut configurer la modalité HALF DUPLEX : dans ce cas la connexion est identique de la Dome SCC-641, sur les pôles Txd+ et Txd-.
6.14.2.3 Configuration du port
Pour configurer le p, le sous-menu COMMUNICATIONS LIGNE -TELEMETRIE doit être défini suivant:
COMMUN. LIGNE - TELEM.
Protocole: Samsung
Connex. Tel.
Baudrate: 9600
La vitesse de transmission doit correspondre à celle du dôme.
6.14.3 Configuration
La configuration du dôme est en grande partie réalisée par menu sur écran.
Certains paramètres peuvent être configurés par la pression de combinaison de touches ou par un code.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA
TELEMETRIE (menu VALIDATION × FUNCTIONS × CONFIG REC.).
6.14.3.1 Configuration OSM
Connecter directement le dôme au pupitre et raccorder un moniteur à la sortie vidéo du dôme.
Le pupitre DCJ entre en mode spécifique durant la configuration du dôme.
SET RECEIV début de la configuration du dôme.
Le dôme montre le menu sur l'écran ; le pupitre indique sur l'afficheur le changement de mode :
SAMSUNG MENU SUR ECRAN
Esc pour terminer
ESC fin de la configuration
Joystick : mouvement dans les menus
Zoom, Focus FOCUS N / FOCUS F, Iris IRIS O / IRIS C si prévu
ENTER: entrée dans les sous-menus
5 : touche '5' si nécessaire, suivant l'indication dans le manuel du dôme
6.14.4 Auto-pan
A. PAN: démarrage de l'auto-pan
END A. PAN: interruption de l'auto-pan
6.14.5 Preset (préposition), scan (balayage), home, patrol (patrouille)

Attention! Les indications 'Scan' et 'Patrol' figurant dans le manuel du dôme n'ont pas exactement la même signification que dans ce manuel: pour des raisons pratiques, les fonctions assument une signification 'standard' et non celle proposée dans le manuel du dôme.
'preset' (associé à la touche PRESET) indique l'action de mémoriser la position choisie
'scan' (associé à la touche SCAN) indique le mouvement de tourelle vers une position mémorisée précédemment; (dans le manuel du dôme, cette fonction est nommée preset)
'patrol' (associé à la touche patROL) indique une série de 'scan', où les positions mémorisées précédemment sont montrées en sequence les uns après les autres; (dans le manuel du dôme, cette fonction est nommée 'scan') La mémorisation des positions de preset est différente par rapport au modèle du dôme:
SCC-641P: sous-section par On Screen Menu
SCC-643P: par On Screen Menu ou par le clavier avec les commandes directes
SCAN X X X (0÷127): mouvement vers la position de preset X mémorisée précédemment
PRESET X X X (0÷127): mémorisation de la position de preset X (seulément pour le modele SCC-643P)
HOME : Mouvement vers la position de Home, correspondant à la position du preset 1
PATROL: démarrage patrol
PATROL: interruption patrol
Les 3 patterns sont définis durant la programmation OSM.
F1 démarrage pattern numéro 1 END F1 fin pattern numéro 1 F2 démarrage pattern numéro 2 END F2 fin pattern numéro 2 F3 démarrage pattern numéro 3 END F3 fin pattern numéro 3
6.14.7 Autres fonctions
Activation de l'autofocus
AUX X (1-4): activation / désactivation (toggle) du relais X.
6.15.1 Connexion
6.15.1.1 Câble
Blanc
RS485A
TX +
Jaune
RS485B
TX -
6.15.1.2 Configuration du dôme
Le numéro et le protocole du dôme doivent être correctement configurés.
La vitesse de transmission en bauds peut être sélectionnée en 2400 (défaut), 4800 et 9600.
Se reporter au manuel du domo.
Configuration du paramètre
Durant la configuration du p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défini comme suit:
COMMUN. LIGNE - TELE1. Protocol: Santec Connex.: Tel. Uit. trans.: 2400
La vitesse de transmission en bauds doit correspondre à cette pour le dôme.
6.15.2 Configuration
La configuration du dôme est en grande partie réalisée au moyen du Menu sur écran.
Pour toutes les opérations de prédéfinition du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu VALIDATION / FONCTIONS / CONFIG TELEM).
6.15.2.1 Configuration OSM
Connecter directement le dôme au pupitre conformément au schéma indiqué, et connecter un moniteur à la sortie vidéo du dôme.
SET RECEIV début de la configuration du dôme.
Le dôme montre le menu sur écran ; le pupitre affiche le changement de mode :
SANTEC MENU SUR ECRAN Esc pour terminer
ESC fin de la configuration.
La touche ESC prévue par les procédures de configuration du dôme est remplacée par la touche CLEAR
Attention! À la fin de la configuration du dôme, presser ESC pour rétablir le fonctionnement normal du pupitre.
Manche à balai : mouvement du curseur dans les menus.
SHIFT: remplace la touche CTRL.
CLEAR: remplace la touche ESC.
PATROL: correspond à la touche TOURE.
F1: correspond à la touche PATTERN.
HOME: correspond à la touche HOME.
MENU: correspond à la touche MENU.
ENTER: accepte et termine la modification d'un texte d'identification.
: changement des textes d'identification.
Le mouvement de tourelle est fréquemment requis à l'intérieur des menus.
Dans ce cas, maintenir SHIFT enfoncée et ne la relâcher que lorsque le mouvement est terminé:
SHIFT: contrôle Pan et Tilt. SHIFT: contrôle zoom. SHIFT FOCUS N, SHIFT FOCUS F: contrôle focus. SHIFT IRIS 0, SHIFT IRISC: contrôle iris.
Certsains raccourcis pour la configuration du dôme (par ex., l'entrée directe dans le menu PREPOSITION sur pression de la touche PRESET) ne sont pas validés si la même fonction peut etre rappelée du menu principal.
PRESET X (1÷240): mémorisation de la position actuelle comme position de préposition nr. X END PRESET X (1÷240): effacement de la position de préposition X SCAN X (1÷240): mouvement vers la position de préposition X mémorisée précédemment HOME: mouvement vers la position Home
6.15.4 Balayage automatique, patrouille et modèle
Le dôme dispose de 8 tracés de balayage automatique, 8 rondes et 4 modèles, configurés sur le Menu à l'écran.
A. PAN(1÷8) : démarrage balayage automatique X PATROL(1÷8) : démarrage ronde X F1 (1÷4) : démarrage modèle X
6.16.1 Matériel et documents de référence
Dôme Sensormatic DeltaDome II
RS-422/RS-485 Communication Protocols, 8000-2694-01, Rev. A
6.16.2.1 Câble
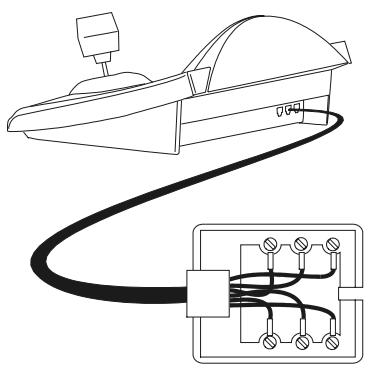
Blanc
RS485A
RX +
Jaune
RS485B
RX -
6.16.2.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant.
6.16.2.3 Configuration du paramètre
Durant la configuration du p, le sous-menu COMMUNICATIONS / LIGNE - TELEMETRIE, doit etre défini comme suit:
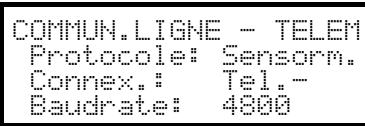
La vitesse de transmission en bauds est fixe (4800 bauds).
La configuration du dôme est en grande partie réalisée sur menu écran (OSM).
Certains paramètres sont configurés en agissant sur une combinaison de touches ou avec code spécifique.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA
TELEMETRIE (menu MISE EN SERVICE FONCTIONS CONFIG. REC.).
6.16.3.1 Configuration OSM
Connecter le dôme au p according au schéma indiqué, et connecter un moniteur à la sortie vidéo du dôme.
SET RECEIV début de la configuration du dôme.
Le dôme montre le menu sur l'écran; le pupitre indique sur l'afficheur le changement de mode:
SENSORMATRIC MENUSURECRAN
Esc pour terminer
ESC fin de la configuration
Joystick: mouvement du curseur dans les menus
ENTER ou FOCUS N / FOCUS F: sélection d'un sous-menu
INC ou augmentation d'une valeur ; curseur à droite dans la définition des textes DEC ou diminution d'une valeur ; curseur à gauche dans la définition des textes
6.16.4 Preset (préposition), scan (balayage), home
PRESET X (1÷7): mémorisation de la position actuelle comme position de preset numéro X SCAN X (1÷7): déplacement vers la position X mémorisée précédemment HOME: mouvement vers la position de Home, correspondant à la position de preset 1
6.16.5 Modèle et "apple peel" (patrouille)
F1, F2, F3 démarrage modèle 1, 2, 3 (mode "répéter")
SET F1, SET F2, SET F3 démarrage modèles 1, 2, 3
le p affiche la page-écran de définition modèle:
Déplacer le joystick et presser les touches contrôle zoom et focus pour la définition du modèle; une fois la définition terminée, appuyer ESC pour memoriser.
END F1, END F2, END F3 effacement modèle 1, 2, 3. SHIFT F2 démarrage "apple peel"
6.16.6 Relais
Les quatre relais sont contrôlés individuellement par un code. Le code indique les relais devant être actifs ; ceux non indiqués dans le code sont considérés comme désactivés. L'ordre dans lequel les numéros des relais sont introduits dans le code est sans importance.
Par ex...
CODE 1 3 (ou CODE 3 1) active les relais 1 et 3; les relais 2 et 4 sont désactivés. CODE 1 3 4 (ou CODE 3 4 1, CODE 4 1 3, etc.) active les relais 1, 3 et 4; le relais 2 est désactivé. CODE 0 désactivation de tous les relais.
6.16.7 Autres fonctions
A. FLIP autopivot (rotation automatique)
A-Focus autofocus
code 9 9 9 9 remise à l'état initial distance du dome
6.16.7.1 Retard vphase
SHIFT IRIS O l'augmentation du retard VPhase est continue jusqu'au relachement de la touche IRIS O IRIS C la diminution du retard VPhase; est continue jusqu'au relachemement de la touche IRISC
6.17.1 Matériel et documents de référence
Dôme Star SMD
Le numéro du dôme doit être correctement configuré. Se reporter au manuel du dôme.
Configuration du paramètre
Durant la configuration du pupitre, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défini comme suit:
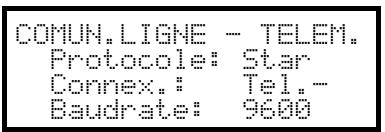
La vitesse de transmission en bauds est fixe (9600 bauds).
6.17.3 Preset (préposition), scan (balayage), home
PRESET X X (0÷63): mémorisation de la position actuelle comme position de preset numéro X
END PRESET X X (0÷63): annulation de la position de preset numéro X
SCAN X X (0÷63): mouvement vers la position de preset numéro X mémorisée précédemment
HOME: mouvement vers la position de Home, correspondant à la position de preset 1.
6.17.4 Autopan, patrol (patrouille), tour (ronde)
Dans les dômes Star, les fonctions Autopan et Patrol sont respectivement appelées Swing et Groupe. En outre, l'autopan peut être de type horizontal (Pan Swing) ou vertical (Tilt Swing).
Le swing est un mouvement à l'intérieur des limites frontales ou verticales de deux positions définies de preset.
Le groupe est un mouvement continu entre une série de positions de preset.
Le tour permet d'unir différents groupes en une série unique de positions.
A. PAN démarrage du swing
À la pression de la touche, est demandé le type de swing devant être démarré, Pan ou Tilt:
SWING
Sélectionner au moyen du Joystick et confirmer avec ENTER END A. PAN Désactivation du swing
SET a. PAN configuration du swing
À la pression des touches, est demandé le type de swing devant être démarré, Pan ou Tilt:
CONFIGURATION SWING
Type swing: [PAN][TILT]
Sélectionner au moyen du joystick et confirmer avec
ENTER.
SWING PAN Limits (preset) Durée du stop Utessе
Sélectionner les différentes options au moyen du Joystick et confirmer avec ENTER.
LIMITES SWING Pos. début: Pos. fin (0-63)
Introduire les nombres des positions de préréchoisis comme limites du swing.
DUREE STOP SWING Seconds: (0-127)
Introduire le temps de pause lorsque la position est atteinte.
VITESSE DU SWING : (1-64)
Introduire la vitesse de swing, de 1 (lente) à 64 (rapide).
6.17.4.2 Groupes
PATROL démarrage d'une série de groupe.
À la pression de la touche, est demandé le mode d'activation:
CONFIGURATION GROUPE GROUPE num. : (0-5)
Introduire le numéro du groupe (de 0 à 5).
CONFIGURATION GROUPE GROUPE num: 2 (0-5) [ORDONNE'] [CASUEL]
Sélectionner au moyen du joystick si les positions doivent être demandées selon l'ordre de configuration ou en séquence casuelle et confirmer.
PATROL interruption d'une sequence de groupe.
SET PATROL configuration des séquences de groupe.
Suite à la pression de la touche, le numéro du groupe devant être modifié est demandé :
CONFIGURATION GROUPE GROUPE NUM (0-5)
Introduire le numéro du groupe devant être modifié (de 0 à 5)
CONFIG. GROUPE 2 Modification Gr. Déplacement groupe
Sélectionner au moyen du Joystick pour modifier ou éliminer le groupe. Confirmer avec ENTER.
MODIFICATION GROUPE 2 Add position Sauve et sort
Lors de l'entrée dans ce menu, le groupe a été effacé. Choisir plusieurs fois la ligne "Add position" pour redéfinir la séquence de positions du groupe. Lorsque la séquence est complète, sélectionner "Sauve et sort"
ADD POSITION Numéro - (0-63) Utile 64 (1-64) Pause 001 (0-127)
Introduire la position désirée, la vitesse de scan et la pause en secondes une fois la position atteinte. Pour "Vitesse" et "Pause" sont proposées des valeurs par défaut pouvant être modifiées.
6.17.4.3 Tour
Un tour, défini comme l'assemblage d'une série de groupes, est disponible. Consulter le manuel du dôme pour tout détail supplémentaire.
F1 début tour
END F1 fin tour
Sur pression de la touche, est demandé le type de modification devant être apportée au tour:
Configuration tour Modification tour Déplacement tour
Sélectionner au moyen du joystick pour modifier ou supprimer le tour. Confirmer avec ENTER.
Modification tour Add groupe Sauve et sort.
Lors de l'entrée dans ce menu, le tour a été effacé. Sélectionner plusieurs fois la ligne "Add groupe" pour rédéfinir la séquence de groupes du tour. Quand la séquence est complète, sélectionner "Sauve et sort"
ADD GROUPE Groupe num. (0-5)
Introduire le groupe à ajouter à la série du tour.
Le dôme peut être configuré en pressant une combinaison de touches ou en introduisant un code spécifique. Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu MISE EN SERVICE / FONCTIONS / CONFIG. REC.).
6.17.5.1 Contrôle exposition
CODE 1 mode AE
CODE 2 priorité
CODE 2 1 shutter flickerless (sans scintillage)
CODE 2 2 augmentation de la valeur shutter
CODE 2 3 diminution de la valeur shutter
CODE 2 4 augmentation iris ouvert, CODE 1 2 4 iris ouvert
CODE 2 5 augmentation iris fermé, CODE 1 2 5 iris fermé
CODE 3 manuel
CODE 3 1 augmentation de la valeur shutter
CODE 3 2 diminution de la valeur shutter
CODE 3 3 augmentation iris ouvert, CODE 1 3 3 iris ouvert
CODE 3 4 augmentation iris fermé, CODE 1 3 4 iris fermé
CODE 3 5 augmentation du gain
code 3 6 diminution du gain
CODE 3 7 gain positif maximal
CODE 3 8 gain négatif maximal
6.17.5.2 Autres configurations
Autofocus: code 4 activation, code 5 déactivation, code 6 un shot (un déclenchement)
Balance de blanc: CODE 1 0 auto, CODE 1 1 un shot (un déclenchement)
Exposition: CODE 4 0 plus claire, CODE 4 1 plus nombre, CODE 4 2 par défaut
Mode autopower: CODE 7 validation, CODE 8 invalidation
Zoom numérique: CODE 5 0 activation, CODE 5 1 désactivation
CODE 1 9 9 9 synchronisme vidéo interne
CODE 1 X X X (0÷359) : synchronisme vidéo externe (X phases en degrés)
6.17.6 Autres fonctions
A. FLIP autoplip
A. FOCUS activation autoplip
code 9 9 9 9 remise à l'état initial du dôme
6.18.2.2 Configuration du dôme
Le numéro du dôme doit être correctement configuré. Se reporter au manuel correspondant. Le masquage n'est pas possible au départ du DCJ, cette fonction ne peut être réalisée qu'à travers la matrice VCL.
6.18.2.3 Configuration du paramètre
Durant la configuration du p, le sous-menu COMMUNICATIONS → LIGNE-TELEMETRIE doit être défini comme suit:
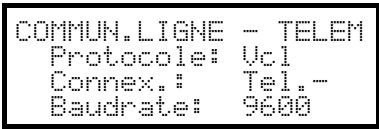
La vitesse de transmission en bauds est fixe (9600 bauds).
6.18.3 Configuration
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu MISE EN SERVICE / FONCTIONS / CONFIG. REC.).
6.18.4 Preset (préposition), scan (balayage), home
Preset X X X (0÷127): mémorisation de la position désignée comme position de preset numéro X
SCAN X X X (0÷127): mouvement vers la position X mémorisée précédemment
HOME : Mouvement vers la position de Home, correspondant à la position du preset 1
6.18.5 Auto-pan et tour
L'auto-pan est réglé entre les positions de preset 1 et 2, en modifiant le tour 4. La précédente configuration du tour 4 est perdue.
6.18.5.1 Autopan
A. PAN démarrage de l'auto-pan
END A. PAN interruption de l'auto-pan
6.18.5.2 Tour
Le tour correspond au patrol. 4 séquences de tour sont disponibles.
PATROL démarrage du tour
Sur pression de la touche, est demandé le numéro de tour devant être activé:
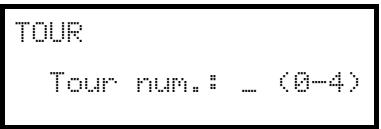
Introduire le numéro de tour (1-4), ou 0 pour indiquer le dernier tour interrompu.
PATROL interruption du tour SET PATROL configuration des rondes
Suite à la pression des touches, le numéro du tour devant être modifié est demandé:
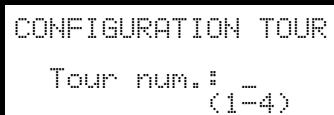
Introduire le numéro du tour (1-4).
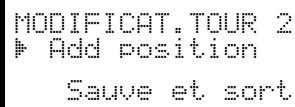
Lors de l'entrée dans ce menu, le tour a été effacé. Sélectionner plusieurs fois la ligne Add position pour redéfinir la série de positions du tour. Quand la série est complète, sélectionner Sauve et sortir.
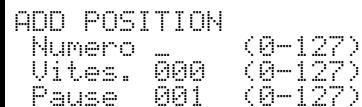
Introduire la position désirée, la vitesse de scan et le temps de pause en secondes. Pour "Vitesse" et "Pause" les valeurs proposées par défaut sont modifiables.
6.18.6 Configuration de la caméra
Les paramètres du mode IR et de la rotation automatique sont configurés simultanément. Seuls quelques VCL permettent le changement mono/couleur. En cas d'éclairage infrarouge, il est conseillé d'activer le mode IR. La rotation automatique est faite une fois atteinte la limite max. du mouvement vers le bas.
CODE 1: mode IR désactivé, autoflip désactivée CODE 2: mode IR activé, autoflip désactivée CODE 3 : mode IR désactivé, autoflip activée CODE 4 : mode IR activé, autoflip activée.
6.18.7 Objectif
Autoflip: FOCUS activation, END FOCUS désactivation
Changement mono/couleur : F1 activer/désactiver (toggle), SHIFT F1 automatique
6.18.8 Autres fonctions
A. Flip auto-plip
Mode alarmé: F2 activé, END F2 désactivé
Relais: SET AUX activé, END AUX désactivé
WASHER activation du washer
WIPER activation du wiper
6.19 Récepteurs videotec/linxs
Le fonctionnement des récepteurs de télémétrie Videotec et Linxs dépend du modèle choisi. Le tableau ci-dessous montre des différents modèles:
| DTRX3 | DTRX1 avec DTRP | DTRX1 sans DTRP | DTRXDC | DTMRX | MICRODEC | |
| Protocole Videotec | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Protocole Macro | ✓ | - | - | - | - | - |
| Fonctions de base | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Vitesse variable | - | - | - | ✓ | - | - |
| Auto-pan toggle | ✓ | ✓ | ✓ | ✓ | ✓ | - |
| Auto-pan début/fin | ✓1 | - | - | - | - | - |
| Nombre de relais | 4 | 4 | 4 | 4 | 1 | - |
| Relais toggle | ✓ | ✓ | ✓ | ✓ | ✓ | - |
| Relais activ./désact. | ✓1 | - | - | - | - | - |
| Patrol standard (14 pos.) | ✓ | ✓ | - | ✓ | - | - |
| Patrol étendue (90 pos.) | ✓1,2 | - | - | - | - | - |
1) uniquement avec protocole Macro 2) 40 positions
6.20.1 Matériel de référence
Récepteurs de télémétrie Videotec et Linxs: DTRX1, DTRX3 (avec protocole Videotec), DTRXDC, DTMRX, MICRODEC
6.20.2 Configuration des récepteurs
La nouvelle génération de récepteurs Videotec offre le choix entre deux types de protocole (Videotec et Macro). Ce chapitre fait uniquement référence au protocole Videotec. Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu MISE EN SERVICE / FONCTIONS / CONFIG. REC.). Le numéro du récepteur doit être correctement configuré. Se reporter au manuel correspondant. La vitesse de transmission en bauds peut être sélectionnée: 1200, 9600 (par défaut).
Durant la configuration du p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défini comme suit:

Récepteurs Videotec
La vitesse de transmission en bauds doit correspondre à cette chose pour le récepteur.
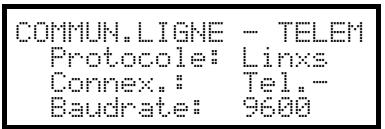
Récepteurs Linxs
La vitesse de transmission en bauds doit correspondre à celle pour le récepteur.
6.20.3.1 Câble
Les récepteurs Videotec et Linxs peuvent être directement connectés aux pupitres au moyen du câble téléphonique fourni (pour essais et contrôle), ou sur des distances max. de 1200m au moyen du câble de connexion standard décrit au 3.3 - Raccordement standard, page 11.
6.20.4 Preset (préposition), scan (balayage), home
PRESET X X (1÷14): mémorisation de la position actuelle comme position de preset numéro X
SCAN X X (1÷14): mouvement vers la position X mémorisée précédemment
HOME : Mouvement vers la position de Home, correspondant à la position du preset 1
6.20.5 Auto-pan
Activation / désactivation auto-pan (toggle)
6.20.6 Patrol (patrouille)
La série patrol est un cycle de positions de preset programme avec un temps fixe de pause pour chaque preset. Le patrol standard prévoit un maximum de 14 positions.
PATROL démarrage patrol
SET PATROL configuration patrol
Sur pression des touches, est proposé un menu de modification patrol.
La modification du patrol n'est validée qu'au moment de la transmission de la configuration au récepteur :
Sélectionner "Positions" pour définir la série de patrol.
Au moyen du Joystick, Sélectionner chaque preset et le valider (Joystick à droite) ou non (Joystick à gauche). ESC pour terminer.
Sélectionner Pause pour déterminer le temps de pause pour chaque preset. Le temps est le même pour toutes les positions.
Introduire un temps de 1 à 60 secondes.
Sélectionner Transmission pour transmettre la configuration du patrol au récepteur.
6.20.7 Relais
Quand une activation / désactivation relais est demandée, sur l'afficheur apparaît toujours l'indication "4 relais disponibles". Le nombre des relais peut en fait varier en fonction du modèle de récepteur connecté, comme décrit au tableau "Fonctions disponibles pour chaque catégorie de récepteur".
Activation / déactivation relais (toggle) ; sur pression de la touche est demandé le numéro du relais.
6.20.8 Autres fonctions
WASHER activation du washer
WIPER activation du wiper
6.21.1 Remarque
Le protocole Macro s'applique à une gamme de produits prévoyant des fonctions extrêmement différenciées.
Consulter le manuel du récepteur pour connaître les fonctions disponibles.
6.21.2 Matériel de référence
Récepteur de télémétrie Videotec DTRX3.
6.21.3.1 Câble
Les récepteurs Videotec et Linxs peuvent être directement connectés au pupitre au moyen du câble téléphonique fourni (pour essais et contrôle), ou sur des distances arrivant à 1200 m au moyen du câble de connexion standard décrit au § 3.3 - Raccordement standard, page 11.
6.21.3.2 Configuration du récepteur
La nouvelle génération de récepteurs Videotec offre le choix entre 2 types de protocole (Videotec et Macro).
Ce chapitre fait uniquement référence au protocole Macro. Configurer les récepteurs avec attention conformément aux indications du manuel correspondant.
Pour toutes les opérations de configuration du dôme, le pupitre doit être validé à la CONFIGURATION DE LA TÉLÉMÉTRIE (menu MISE EN SERVICE / FONCTIONS / CONFIG. REC.).
Le numéro du récepteur doit être configuré correctement. Se reporter au manuel correspondant.
La vitesse de transmission en bauds peut être sélectionnée : 1200, 9600 (par défaut), 19200, 38400 bauds.
6.21.3.3 Configuration du paramètre
Durant la configuration du p, le sous-menu COMMUNICATIONS LIGNE - TELEMETRIE, doit etre défi ni comme suit:
La vitesse de transmission en bauds doit correspondre à celle pour le récepteur
6.21.4 Configuration



fin de la configuration


fin de la configuration et remise à l'état initial du récepteur
6.21.5 Auto-pan

activation / désactivation auto-pan (toggle)


activation de l'auto-pan


déactivation de l'auto-pan
6.21.6 Preset (préposition), scan (balayage), home
Preset X X (1÷99): mémorisation de la position désignée comme position de preset numéro X
END PRESET X X (1÷99): annulation de la position de preset numéro X
SET END PRESET: effacement de toutes les positions de preset
SCAN X X (1÷99): mouvement vers la position de preset X mémorisée précédemment
HOME: mouvement vers la position de Home
SET HOME: émémoration de la position choisie comme "position de home"
END HOME: annulation de la position de home.
6.21.7 Patrol (patrouille)
La séquence patrol est un cycle de positions de préréglages programme avec un temps fixe de pause pour chaque préréglage. Le protocole Macro prévoit la gestion de deux types : patrol standard et patrol étendu.
6.21.7.1 Patrol (patrouille) standard
Le patrol standard correspond à celle déjà décrite au § 6.20.6 - Patrol (patrouille), page 82.
PATROL activation / déactivation patrol standard (bascule) SET PATROL configuration patrol standard SHIFT PATROL activation patrol standard END PATROL désactivation patrol standard
6.21.7.2 Patrol (patrouille) étendue
Le patrol étendu permet de gérer 99 positions de preset avec des temps de pause différenciés. Elle n'est disponible que sur certains modèles de récepteurs prévoyant le protocole Macro et équipés de preset.
F1 activation/désactivation patrol étendu (toggle) SHIFT F1 activation patrol étendu END F1 désactivation patrol étendu SET F1 configuration patrol étendu
Sur pression des touches, est proposé un menu de modification patrol étendu:
Sélectionner Positions de la pour définir la séquence de patrol.
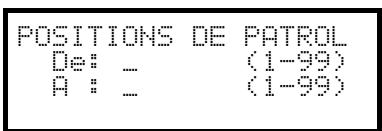
Introduire la première et la dernière position de la séquence de patrol : la séquence de patrol comprend toutes les positions comprises entre ces deux extrêmes, rappelées l'une après l'autre.
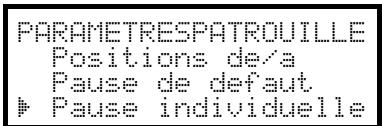
Sélectionner "Pause par défaut" si l'on désire configurer un temps de pause identique pour toutes les positions : les pauses individuelles définies précédemment sont effacées.
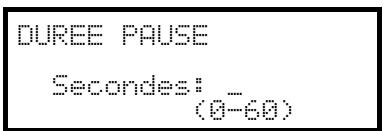
Introduire la valeur de la pause par défaut, de 0 à 60 secondes.
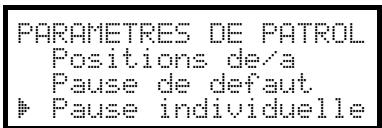
Sélectionner Pause pose. partic. si l'on désire un temps de pause spécial pour un preset.
Introduire le numéro de la position et le temps de pause, de 0 à 60 secondes.
6.21.8 Relais
Quand une activation / désactivation relais est demandée, sur l'afficheur apparaît toujours l'indication "4 relais disponibles". Le nombre des relais peut en fait varier en fonction du modèle de récepteur connecté, comme décrit au tableau "fonctions disponibles pour chaque catégorie de récepteur".
AUX activation/désactivation du relais (bascule) ; le numéro du relais est demandé, de 1 à 4.
SET AUX activation du relais; le numéro du relais est demandé END AUX déactivation du relais; le numéro du relais est demandé
6.21.10 Autres fonctions
WASHER activation du washer WIPER activation du wiper A. FLIP auto flip (inversion de l'image) SET A. FLIP activation "digital flip" END A. FLIP déactivation "digital flip"
7 Entretien

Le pupitre DCJ n'exige aucun entretien particulier.
Il est conseillé d'installer le pupitre sur une surface stable et de disposer les câbles d'alimentation et de position de façon à ne pas gêner l'activité de l'opérateur.

Les opérations de nettoyage doivent toujours être effectuées avec l'appareil hors fonction. Nettoyer le pupitre au moyen d'un chiffon sec en coton; n'utiliser ni détergent ni chiffon mouillé.
8 Caractéristiques techniques
Alimentation:
Consommation:
Dimensions:
Poids net (sans l'alimentation) :
Température de fonctionnement:
RS485
RS232
Conformité:
RS485
RS232
Conformité:
100 - 240 V~ 47/63 Hz
15W
298 x 107 x 210 mm
810g
0 - 45°C
3 lignes configurables selon les appareils connectés
1 ligne EIARS232C
EN50130-4 - EN50081-1 - EN60950
EN55022 Classe B - FCC Part. 15 Class B – 45°C
3 lignes configurables selon les appareils connectés
1 ligne EIARS232C
EN50130-4 - EN50081-1 - EN60950
EN55022 Classe B - FCC Part. 15 Class B