
SRD991 - Actionneur industriel SCHNEIDER - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil SRD991 SCHNEIDER au format PDF.

| Type de produit | Actionneur industriel (positionneur intelligent) |
| Marque | Schneider |
| Modèle | SRD991 |
| Alimentation électrique | 9 à 32 V DC |
| Signal d'entrée | 4-20 mA (bus selon IEC 1158-2) |
| Pression d'alimentation air | 1,4 à 6 bar |
| Plage de travail angulaire | ±45° autour de la position centrale |
| Types de montage | Linéaire gauche/droite, rotatif horaire/anti-horaire, direct |
| Raccordements pneumatiques | G1/4 ou NPT (selon gravure) |
| Sorties pneumatiques | y1 (simple effet) / y1, y2 (double effet) |
| Fins de course | Capteurs inductifs deux fils (DIN 19234/NAMUR) ou contacts secs |
| Options de carte | Sorties binaires, entrées binaires, recopie 4-20 mA + alarme, entrées/sorties binaires |
| Affichage | Écran LCD |
| Configuration | Boutons poussoirs locaux |
| Fonction Autostart | Butée mécanique, Standard, Optimisé, Amorti, Agressif |
| Communication | Profibus PA, Foundation Fieldbus H1 (selon variante) |
| Protection | Ne pas dépasser la pression max ; mise à la terre obligatoire |
| Entretien | Vérifier les raccordements pneumatiques et électriques ; calibrations périodiques |
| Sécurité | Ne jamais toucher les pièces en mouvement ; utiliser des pièces d'origine |
| Réparabilité | Pièces détachées disponibles (options, IP, amplificateur) |
FOIRE AUX QUESTIONS - SRD991 SCHNEIDER
Questions des utilisateurs sur SRD991 SCHNEIDER
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Actionneur industriel au format PDF gratuitement ! Retrouvez votre notice SRD991 - SCHNEIDER et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil SRD991 de la marque SCHNEIDER.
MODE D'EMPLOI SRD991 SCHNEIDER
Guide rapide d'utilisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (Français)
Guida rapida ..... (Italiano)
Trouble shooting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . (English)
SRD991 Intelligent Positioner
SRD991 Positionneur intelligent
Ces instructions sont une aide pour une mise en service rapide. Pour plus d'information sur le produit veuillez-vous reporter aux documents standards «fiche technique» et «Instructions de montage et de service» disponible sur internet.
1. MONTAGE SUR SERVOMOTEUR
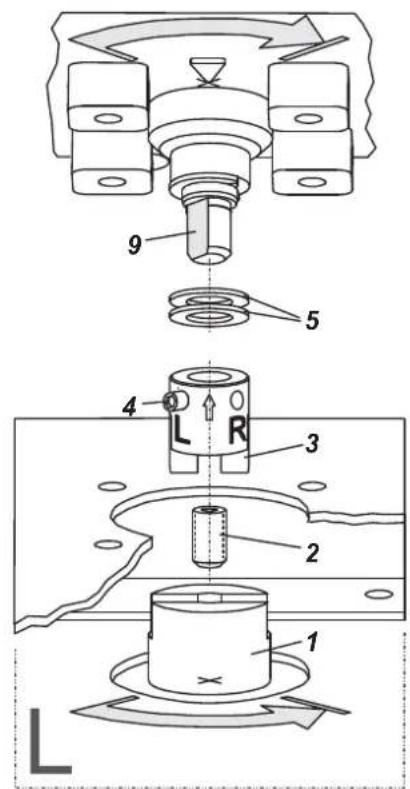
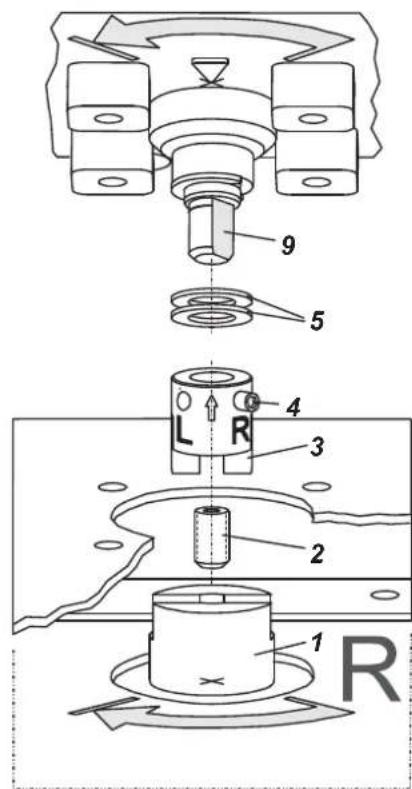
En fonctionnement la flèche 26 doit toujours pointer le méplat de l'axe de traversée 9. La zone de travail est de ± 45° autour de la position centrale.
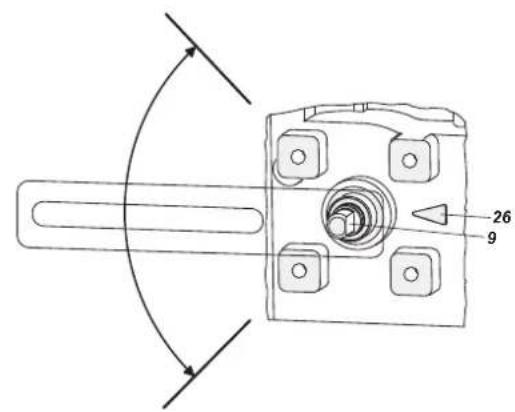
Les jeux mécanique dans le montage sont sources de mauvais contrôle, d'oscillation et d'instabilité ainsi que d'un long temps nécessaire pour l'autostart. Le montage du positionneur doit être fait selon les règles de l'art et utiliser uniquement des pièces d'origines.
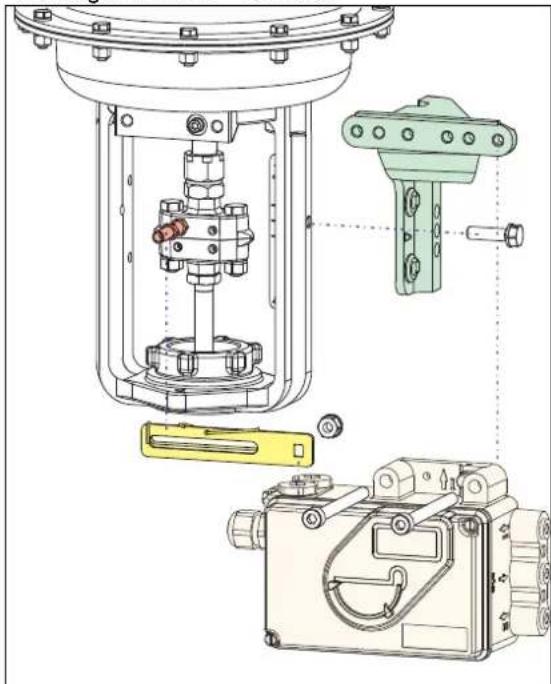
MONTAGE SUR SERVOMOTEURS LINÉAIRES
Montage NAMUR – à gauche -
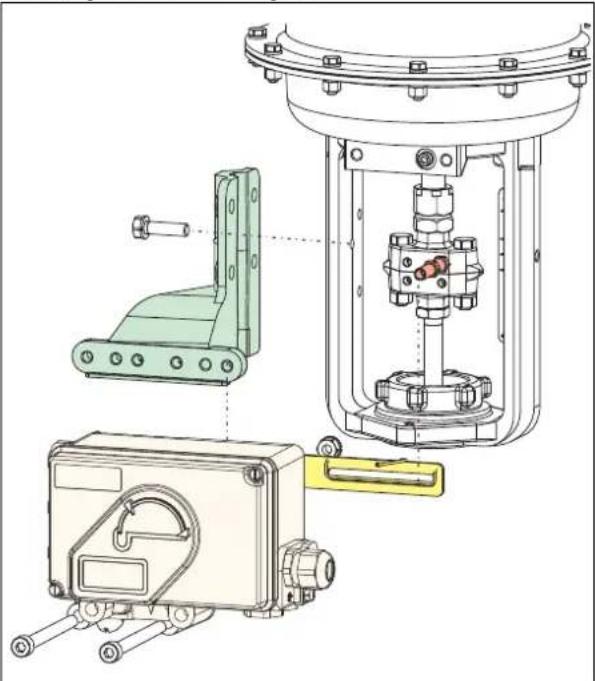
Montage NAMUR – à droite -
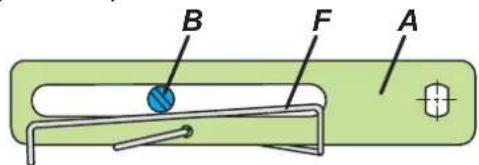
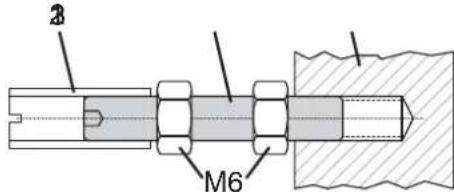
Levier d'accouplement pour servomoteurs linéaires:
Le doigt d'accouplement B doit se trouver dans la lumière du levier d'accouplement A et le ressort de compensation F doit être en contact avec le doigt d'accouplement.
doigt d'entrainement B::
1 douille filetée 2 tige 3 pièce d'accouplement
Montage direct
- Ne pas visser la vis 4 contre le filetage de l'axe de traversée 9, mais sur le méplat!
- En fonctionnement le méplat de l'axe de traversée 9 doit tourner devant la flèche 26.
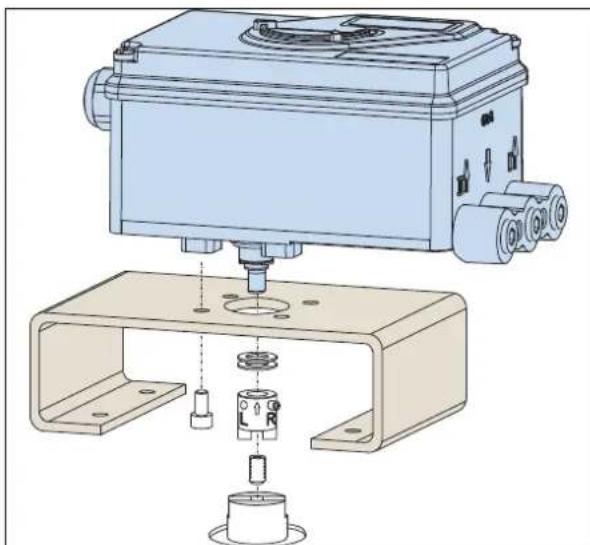
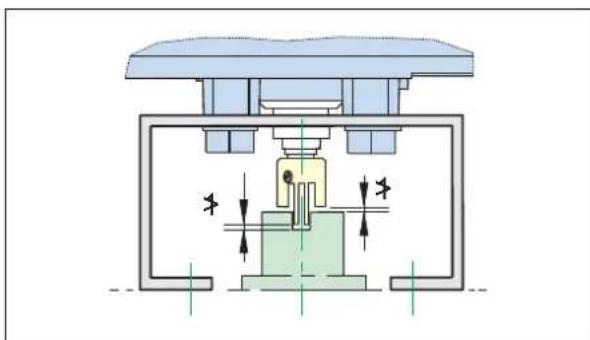
• L'axe du servomoteur 1 s'allonge sous l'effet de la chaleur produite lors du fonctionnement du servomoteur. C'est pourquoi l'adaptateur 3 doit être monter de façon à ce qu'il y ait, entre lui et l'axe de transmission 1, un jeu d'environ 1 mm. Ce jeu peut être obtenu en ajoutant un nombre approprié de rondelles 5 sur l'axe de traversée 9.
Servomoteur, sens de rotation anti-horaire
Servomoteur, sens de rotation horaire
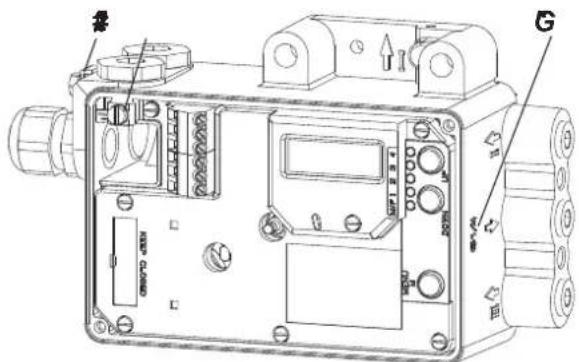
Avant le montage des raccords pneumatiques vérifier le type de filetage du positionneur. Si une lettre "G" est gravée sur le boîtier cela veut dire que le filetage est G1/4 (au lieu de NPT).
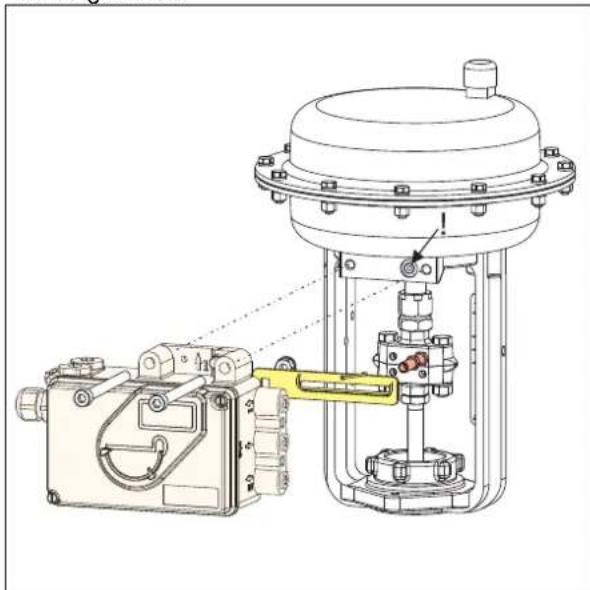
Mise à la terre
Le raccordement à la terre peut se faire avec la vis #1 ou avec la vis #2 (à l'intérieur du compartiment raccords électriques).
Pour éviter tout risque de blessure résultant d'éjection de pièces, ne pas dépasser la pression d'alimentation maximum du positionneur et du servomoteur. Pour éviter tout risque de blessure et dégâts dû à des mouvement brusque à la mise sous pression: En aucun moment ne jamais mettre vos doigts ou tout autre objet dans la vanne ou dans le pièces en mouvement du servomoteur et du mécanisme de transmission de la position. Ne jamais toucher la partie postérieur du positionneur. Raccorder l'air d'alimentation uniquement quand les sorties pneumatique y1 (et y2 en cas de double effet) sont elles-même raccordées.
Air d'alimentation (s) : 1,4 à 6 bar (en respectant la pression de travail maximum du servomoteur) air propre, déshuilé, sans poussière et eau!
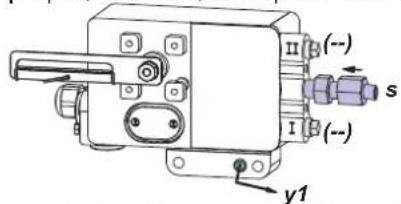
Simple effet, montage direct Simple effet Double effet s air d'alimentation y1, y2 sorties pneumatiques (--) fermé
3. RACCORDEMENTS ÉLECTRIQUES
Les recommandations de sécurité du document EX EVE0001 ainsi que les recommandations de la PSS EVE0105 et de la MI EVE0105 doivent être observées !
3.1 Signal d'entrée Bornier A
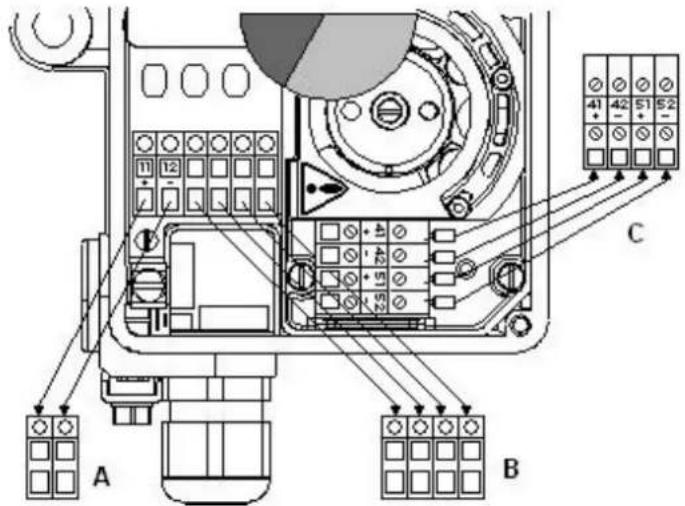
3.2 Fins de course Bornier C
3.2.1 SRD991-xxxT ou U
Capteurs inductifs technique deux fils, selon DIN 19234 ou NAMUR
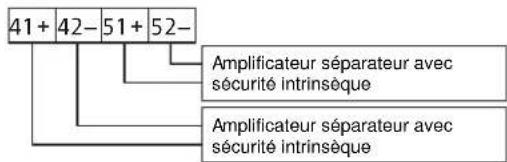
flowchart
graph TD
A["41 + 42 - 51 + 52 -"] --> B["Amplificateur séparateur avec sécurité intrinsèque"]
A --> C["Amplificateur séparateur avec sécurité intrinsèque"]
3.2.2 SRD991-xxxR
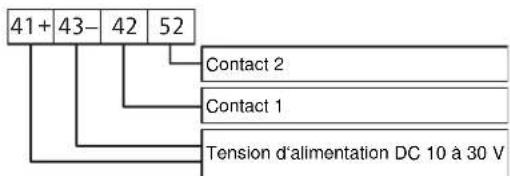
flowchart
graph TD
A["41+ 43- 42 52"] --> B["Contact 2"]
A --> C["Contact 1"]
A --> D["Tension d'alimentation DC 10 à 30 V"]
3.2.3 SRD991-xxxV
Attention : Pour le raccordement des micro-contacts respecter les recommandations de la MI (instructions de mise en service) et du document EX EVE0001.
3.3 Option Board Bornier B
3.3.1 Deux sorties binaires (SRD991-xxP)
Technique deux fils. Configuration selon DIN 19234 ou configuration "tout ou rien".
3.3.2 Deux entrées binaires (SRD991-xxB)
Entrées binaires avec alimentation interne pour raccordement sur capteurs ou contact (contacts fermés pour un fonctionnement normal!)
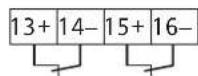
3.3.3 Recopie de position 4-20 mA + alarme (SRD991-xxQ ou SRD991-xxF)
Sortie analogique 4 à 20 mA et sortie binaire technique 2 fils. Configuration selon DIN 19234 ou configuration "tout ou rien".
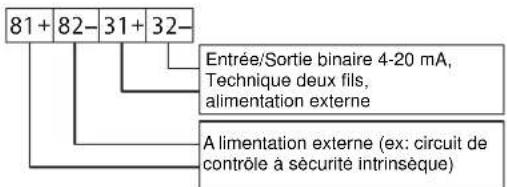
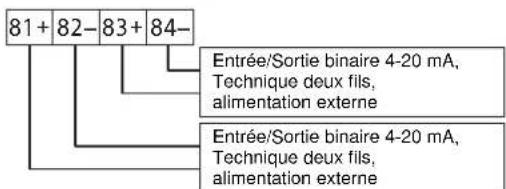
3.3.4 Deux entrées/sorties binaires (SRD991-xxE)
Technique deux fils. Configuration selon DIN 19234 ou configuration "tout ou rien".
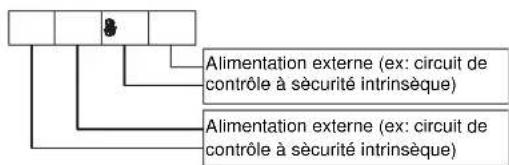
flowchart
graph TD
A[" "] --> B["Alimentation externe (ex: circuit de contrôle à sécurité intrinsèque)"]
C[" "] --> D["Alimentation externe (ex: circuit de contrôle à sécurité intrinsèque)"]
flowchart
graph TD
A["81+ 82- 83+ 84-"] --> B["Entrée/Sortie binaire 4-20 mA, Technique deux fils, alimentation externe"]
A --> C["Entrée/Sortie binaire 4-20 mA, Technique deux fils, alimentation externe"]
* Pour les installations dans des zones à sécurité intrinsèque se reporter aux certificats et aux labels pour les tensions maxima d'utilisation.
4. MISE EN SERVICE (au moyen des boutons poussoirs et de l'écran LCD ou des LED)
Après le montage sur le servomoteur, les raccordements pneumatiques et électriques faits, procéder comme ci dessous. Toute la configuration peut être réalisée au travers des touches locales et de l'écran LCD.
ATTENTION
Pour éviter tout risque de blessure et dégâts dû à des mouvement brusque durant la mise en service: En aucun moment ne jamais mettre vos doigts ou tout autre objet dans la vanne ou dans le pièces en mouvement du servomoteur et du mécanisme de transmission de la position. Ne jamais toucher la partie postérieur du positionneur.
EN SERVICE:
En fonctionnement (déjà configuré) l'écran indique par exemple ceci:
87.5%
Position vanne
Variable du process
Pour entrer dans la configuration appuyer sur (M) et le menu principal apparaît.
CONFIGURATION avec les boutons poussoirs et l'écran LCD
Quand le SRD n'a pas été configuré préalablement, apparaît automatiquement le menu principal à la mise sous tension:*
| Menu principal | |
| 1 | Montage |
| 2 | Autostart |
| 3 | Sens d'action |
(En mode configuration le menu choisi apparaît en inverse vidéo.)
Dans le menu 1 doit être sélectionné le type de montage: Après avoir appuyé sur (UP+DOWN), l'écran du SRD affiche ceci.
Boutons poussoirs
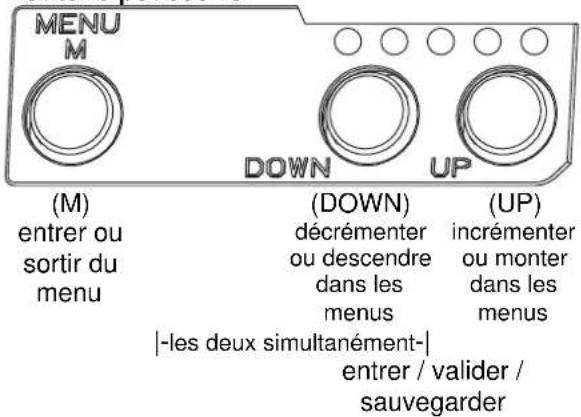
Choisissez le type de montage avec les touches (UP) ou (DOWN).
| 1 Montage |
| 1.1 Liné. gauche |
| 1.2 Liné. droite |
| 1.3 Rot anti-hor |
Appuyé sur (UP+DOWN) simultanément pour sauvegarder. Le SRD revient au niveau de la sélection des menus:
| Menu principal | |
| 1 | Montage |
| 2 | Autostart |
| 3 | Sens d'action |
Pour le menu suivant (= menu 2, AUTOSTART) appuyer 1 fois sur (UP).
| Menu principal | |
| 1 | Montage |
| 2 | Autostart |
| 3 | Sens d'action |
Appuyé sur (UP+DOWN) simultanément pour entrer le menu pour choisissez l'Autostart:
(Suite sur la page suivante...)
Plusieurs Autostart sont disponibles. Choisissez avec les touches (UP) ou (DOWN).
2 Autostart
2.1 Butée méca.
2.2 Standard
2.3 Optimisé
2.4 Amortis
2.5 Agressif
--> Uniquement les butées mécaniques sont déterminées
--> Autostart standard recommandé pour les applications standards.
--> Comportement rapide (petit overshoot possible).
--> Comportement légèrement amortis pour éviter tout overshoot.
--> Comportement très rapide avec petit overshoot.
Appuyé sur (UP+DOWN) simultanément pour confirmer et lancer l'Autostart désiré. La fonction Autostart est composée de étapes successives qui sont visualisées à chaque fois sur l'écran LCD.
Autostart terminé, le SRD est automatiquement EN SERVICE:
87.5 %
Position vanne
Variable du process
87.5 %
Position vanne
Ctrl diff erreur
Messages d'erreur
voir ci dessous.
5 DÉPANNAGE (pour plus d'information voir MI EVE0105 E)
| Autostart err 1 | |
| Description du message Solution | |
| Alimentation d'air trop faible Vérifier l'alimentation d'air | |
| Le levier (servomoteur linéaire) est monté dans le mauvais sens. Le potentiomètre est en dehors de sa plage de lecture de ± 47^ | Vérifier le montage du levier ; le méplat doit être en face de la flèche du positionneur |
| L'adaptateur (servomoteur rotatif) est monté dans le mauvais sens (R et L ont été inversés) | Vérifier le montage |
| Les sorties pneumatiques vers le servomoteur sont bouchées ou ne sont pas étanches, en cas de montage direct le bouchon au dos du positionneur n'est pas retiré. | Vérifier les connexions pneumatiques, |
| Les butées mécaniques sont indéterminables | Vérifier le montage / la pression d'air d'alimentation soit suffisante / la gamme de ressort du servomoteur |
| En cas d'utilisation d'un booster ou spool valve, Paramètre de régulation indéterminable car le débit d'air est trop important | Retirer le booster. Changer de version pour un positionneur sans spool valve |
| Paramètre de régulation indéterminable car la capacité d'air est trop grande | Utiliser un booster. |
| Installation de mauvais paramètres de régulation Reset de la configuration avec Menu 9.1 | |
Optionboard err
| Description du message Solution | |
| La configuration de l’option board est mauvaise (par exemple option board ajoutée a posteriori) | Vérifier la fixation de l’option boardConfirmer l’ajout ou la substitution de l’option board en appuyant contemporainement (UP)+(DOWN) |
| Mauvaise connexion Les connexions aux bornes ont été inverséesVérifier les raccordementsVérifier la fixation de l’option board | |
| option board défectueuse Changer l’option board |
Ctrl diff error
| Description du message Solution | |
| Problèmes liés au servomoteur comme par ex. les frottements | Vérifier le servomoteur et la vanne |
| L'alimentation d'air est insuffisante Vérifier l'alimentation d'air/le filtre détendeur | |
| Paramètres de régulation erronés, par ex. un gain trop faible | Vérifier les paramètres de régulation et les composants pneumatiques |
| Module IP ou amplificateur défectueux Vérifier et changer la pièce si nécessaire | |
6 ARBORESCENCE DES MENUS POUR LE SRD991 / SRD960
Menu principal
1 Montage d'usine
| 1.1 Liné. gauche | |
| 1.2 Liné. droite | |
| 1.3 Rot anti-hor | |
| 1.4 Rot horaire | |
| 1.5 Lineaire |
2 Autostart
| 2.1 Butée méca. | |
| 2.2 Standard | |
| 2.3 Optimisé | |
| 2.4 Amortis | |
| 2.5 Agressif |
3 Sens d'action
| 3.1 SRD |
| 3.1.1 Direct |
| 3.1.2 Inverse |
| 3.2 Recopie |
| 3.2.1 Direct |
| 3.2.2 Inverse |
4 Courbe carac.
| 4.1 Linéaire | |
| 4.2 Egal % | |
| 4.3 Inv. égal % | |
| 4.4 Spécifique |
5 Limite/alarme
| 5.1 | Limite basse 0 % |
| 5.2 | Cutoff 0% 1 % |
| 5.3 | Cutoff 100% 100 % |
| 5.4 | Limite haute 100 % |
| 5.5 | Split r.0% 4 mA |
| 5.6 | Split r.100% 20 mA |
| 5.7 | Alarme basse -10 % |
| 5.8 | Alarme haute 110 % |
| 5.9 | Nouveau 0% 4 mA |
| 5.10 | Nouveau100% 20 mA |
| 5.11 | Course x° / 20mm |
| 5.12 | Unités SI |
6 Paramètres
| 6.1 P Gain ferme | |
| 6.2 P Gain ouvre 2 | |
| 6.3 I fermeture 7.5 | |
| 6.4 I ouverture | |
| 6.5 Retard ferme | |
| 6.6 Retard ouvre 0.35 | |
| 6.7 Bande morte |
7 Sortie pneu.
| 8 Consigne manu | |
| 8.2 Pas de 12,5% | |
| 8.2 Pas de 1% | |
| 8.3 Lancer PST | |
Config sortie Description
Montage direct ou à gauche de l'arcade sur un servomoteur linéaire Montage à droite de l'arcade sur un servomoteur linéaire Montage sur servomoteur rotatif qui tourne dans le sens anti-horaire Montage sur servomoteur rotatif qui tourne dans le sens horaire Pour la version Top Mounting (seulement pour SRD991)
Uniquement butée mécanique Autostart standard recommandé pour les applications standards Autostart avec réponse optimisée. Comportement rapide (petit overshoot possible) Autostart avec réponse optimisée. Comportement légèrement amortis pour éviter tout overshoot Autostart avec réponse optimisée. Comportement très rapide avec petit overshoot
√ La vanne s'ouvre avec le signal qui va de 0 à 100% La vanne se ferme avec le signal qui va de 0 à 100%
√ Augmentation du courant lors de l'ouverture de la vanne Diminution du courant lors de l'ouverture de la vanne
√ Courbe caractéristique linéaire Courbe caractéristique égal poucentage 1:50 Courbe carac. inverse égal pourcentage 1:50 (ouverture rapide) Courbe caractéristique spécifique définie via communication
Menu non disponible localement pour les versions LED des variantes FF, ProfibusPA, Limite de fermeture (la vanne n'ira pas en dessous de cette valeur) Etanchéité à la fermeture (sous cette valeur la vanne se ferme) Etanchéité à l'ouverture (au dessus de cette valeur la vanne s'ouvre) Limite d'ouverture (la vanne n'ira pas au dessus de cette valeur) Valeur de courant pour le 0% Valeur de courant pour le 100% Valeur en dessous de laquelle une alarme sera donnée Valeur au dessus de laquelle une alarme sera donnée Nouvelle valeur de course pour le point 0% Nouvelle valeur de course pour le point 100% Valeur de course en mm ou en degrés Configuration des unités de température et de pression en SI (Système internationale) ou unités Anglosaxone US
15 Paramètre de gain à la fermeture
Paramètre de gain à l'ouverture
ramètres d'amortissement à l'ouverture
2.4 Paramètre d'amortissement à la fermeture
0.35 Paramètre de retard à la fermeture
Paramètre de retard à l'ouverture
0.1 Paramètre de bande morte
Pilotage direct du convertisseur IP (de 0 à 100% de la pression d'air)
Consigne manuelle local (pour forcer une valeur d'ouverture) Saut de 12,5% à chaque pression sur Up ou Down Saut de 1% à chaque pression sur Up ou Down Démarrage Partial Stroke Test
9 Reset calibr.
9.1 Reset Config Reset de l'appareil et retour à la configuration sortie d'usine
9.2 Calib. 4 mA Calibrage de la lecture de 4 mA
9.3 Calib. 20 mA Calibrage de la lecture de 20 mA
9.4 Calib. -45° Calibrage de la lecture de la position -45°
9.5 Calib. +45° Calibrage de la lecture de la position +45°
9.6 Reset+1effet Reset de l'appareil et forcage de l'appareil en simple effet 9.7 Reset+2effet Reset de l'appareil et forcage de l'appareil en double effet
9.8 Forc. Online Forçage en mode Online
9.9 Choix Langue Langue sur l'écran LCD
9.9.1 English
√ Standard English
9.9.2 Deutsch Standard Deutsch
9.9.3 Français Langue sélectionnée à la commande ou téléchargée ultérieurement
9.10 Sens écr.LCD
9.10.1 Normal
√ Sens d'écriture normal sur l'écran
9.10.2 Tête-bêche Ecran retourné (tête-bêche)
9.11 Cal. Recopi Calibrage de la sortie en courant de la recopie de position
9.11.1 Cal. 4 mA Ajustement de la valeur de 0% à 4 mA
9.11.2 Cal. 20mA Ajustement de la valeur de 100% à 20 mA
10 Adresse bus - Profibus PA Seulement Profibus.
10.1 Adresse LSB
10.2 Adresse MSB
10.3 Adresse
126
Champ de Dec. 0 / Hex 00 jusqu'à Dec. 15 / Hex 0F
Champ de Dec. 0 / Hex 00 jusqu'à Dec. 112 / Hex 70
Visualisation de l'adresse de Dec. 1...127 (Hex 00...7F)
10 FOUNDATION Fieldbus H1
10.1 Simulation
Verouillé
Possible
10.2 Profile
Link Master
Basic Device
Seulement FF.
√
Simulation impossible
Simulation possible
√
Link Master activé
Link Master désactivé