
AL2305 - Module électronique industriel IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil AL2305 IFM au format PDF.

| Caractéristiques techniques | Non spécifiées |
|---|---|
| Utilisation | Non spécifiée |
| Maintenance et réparation | Non spécifiée |
| Sécurité | Non spécifiée |
| Informations générales | Non spécifiées |
FOIRE AUX QUESTIONS - AL2305 IFM
Questions des utilisateurs sur AL2305 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Module électronique industriel au format PDF gratuitement ! Retrouvez votre notice AL2305 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil AL2305 de la marque IFM.
MODE D'EMPLOI AL2305 IFM
Notice d'utilisation
Module d'entrée/sortie IO-Link ;
AL2305
Contenu
1 Remarques préliminaires 3
1.1 Symboles utilisés 3
1.2 Avertissements 3
2 Consignes de sécurité.... 4
3 Usage prévu 5
4 Fonction 6
4.1 Modes de fonctionnement.... 6
4.2 IO-Link 6
4.2.1 Comportement en cas de coupure de la communication IO-Link 6
4.3 Séparation galvanique de l'alimentation en tension.... 7
4.4 Paramétrage 7
4.5 Entrées/sorties 7
4.6 Alimentation en tension.... 8
4.6.1 Tension d'alimentation US 8
4.6.2 Tension d'alimentation UA 8
4.6.3 Alimentation des capteurs UAi 8
4.6.4 Comportement en cas de sous-tension.... 8
4.6.5 Seuils, protection contre la surcharge en courant 8
4.7 Filtres d'entrée numériques....9
4.7.1 Anti-rebond du signal TOR 9
4.7.2 Temporisation du signal TOR 10
4.7.3 Inversion 11
4.7.4 Combinaison de différents filtres d'entrées 12
4.7.5 Signaux d'entrée analogiques.... 12
4.8 Mesure de la consommation de courant 13
4.8.1 Configuration.... 13
4.9 Mesure des valeurs de tension 14
4.10 Entrée de fréquence 14
4.10.1 Configuration du prédiviseur 14
4.11 Sortie PWM.... 15
4.11.1 Configuration.... 15
4.12 Sortie PWM-I. 16
4.12.1 Configuration.... 17
4.12.2 Exemple de configuration 17
4.13 Fonctionnalité SSC 17
4.13.1 Configuration.... 18
4.13.2 Diagrammes fonctionnels 18
5 Montage 21
6 Raccordement électrique 22
6.1 Raccorder l'appareil 22
6.1.1 Raccordement IO-Link 22
6.1.2 Monter les connecteurs.... 22
6.1.2.1 Longueur de câble maximale 23
7 Eléments de service et d'indication.... 24
7.1 LED....24
8 Maintenance, réparation et élimination 26
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
1.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
1.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :

AVERTISSEMENT
Avertissement de dommages corporels graves
Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.

ATTENTION
Avertissement de dommages corporels légers à modérés
Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE
Avertissement sur les dommages matériels
Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
2 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- Stocker le produit dans son emballage d'origine.
3 Usage prévu
L'appareil dispose de 8 ports qui peuvent être utilisés comme suit :
- Entrée TOR
- Entrée analogique
-4 à 20 mA
-0 à 10 V
- Sortie TOR
Les modes de port suivants sont également disponibles en mode de fonctionnement [Acyclic Enhanced] :
- Entrée analogique
-0 à 20 mA
-0 à 5 V
- Entrée de fréquence 0 à 3 kHz
- Sortie PWM-I 0 à 1 800 mA
- Sortie PWM 0 à 1 000 ‰

Mode [Acyclic Enhanced] uniquement pour version appareil BA ou supérieur
L'appareil ne doit pas être utilisé dans l'agroalimentaire et l'industrie des boissons (utilisation de produits de nettoyage sous haute pression et à des températures élevées).
4 Fonction
4.1 Modes de fonctionnement
Les modes de fonctionnement suivants sont disponibles :
| Mode de fonctionnement ID de l'appareil Description Application | |||
| Cyclique (par défaut) 1315 d / 00 05 23 h Réglage des modes de port à l'aide de données process cy-cliques | Réglage des modes de port via le système de contrôle-commande | ||
| Acyclique 1316 d / 00 05 24 h Réglage des modes de port | Réglage des modes de port et paramétrage via le logiciel IO-Link | ||
| Acyclic_Enhanced 1448 d / 00 05 A8 h Réglage des modes de port | Réglage des modes de port et paramétrage via le logiciel IO-Link | ||
Le mode de fonctionnement peut être modifié en chargeant l'IODD correspondant.
4.2 IO-Link
Cet appareil dispose d'une interface de communication IO-Link permettant l'accès direct aux données process et de diagnostic. De plus, le paramétrage de l'appareil est possible pendant le fonctionnement. L'utilisation de l'appareil via l'interface IO-Link nécessite un maître IO-Link.
Pour une communication hors fonctionnement, il vous suffit d'un PC, d'un logiciel de paramétrage IO-Link adapté et d'un câble adaptateur IO-Link.
Les IODD nécessaires pour la configuration de l'appareil, les informations détaillées concernant la structure des données process, les informations de diagnostic et les adresses des paramètres ainsi que toutes les informations nécessaires concernant le matériel et le logiciel IO-Link sont disponibles sur www.ifm.com.
4.2.1 Comportement en cas de coupure de la communication IO-Link
Le paramètre [Output state COM lost / PD invalid] (index 15000) permet de déterminer le comportement des sorties en cas de coupure de la communication IO-Link. Pour chaque sortie, il est possible de déterminer individuellement si elle doit :
• 0 : [OFF] être désactivé
• 1 : [ON] être activée
• 2 : [KEEP LAST] garder l'état précédent
| Paramètre Index Sous-index Valeur Etapes Réglage usine | ||||
| Output COM lost / PD Invalid X1.0 - 1 15000 1 | 0 [OFF], | 1 [ON],2 [KEEP LAST] | 0 | |
| Output COM lost / PD Invalid X1.0 - 2 | 2 | |||
| Output COM lost / PD Invalid X1.1 - 1 | 3 | |||
| Output COM lost / PD Invalid X1.1 - 2 | 4 | |||
| Output COM lost / PD Invalid X1.2 - 1 | 5 | |||
| Output COM lost / PD Invalid X1.2 – 2 | 6 | |||
| Output COM lost / PD Invalid X1.3 - 1 | 7 | |||
| Output COM lost / PD Invalid X1.3 - 2 | 8 | |||
| Output COM lost / PD Invalid X1.4 – 1 | 9 | |||
| Output COM lost / PD Invalid X1.4 - 2 15000 | 10 0 [OFF], | 1 [ON],2 [KEEP LAST] | 1 | 0 |
| Output COM lost / PD Invalid X1.5 - 1 11 | ||||
| Output COM lost / PD Invalid X1.5 - 2 12 | ||||
| Output COM lost / PD Invalid X1.6 - 1 13 | ||||
| Output COM lost / PD Invalid X1.6 - 2 14 | ||||
| Output COM lost / PD Invalid X1.7 - 1 15 | ||||
| Output COM lost / PD Invalid X1.7 - 2 16 | ||||
Subindex access: true
En mode de fonctionnement [Acyclic Enhanced], les options suivantes sont également possibles pour chaque sortie :
- Pour la sortie PWM :
- Pour la sortie PWM-I :
- [OFF] = 0 mA (0% rapport cyclique)
- [ON] = I max (commandé par PID)
- [KEEP LAST] = dernier courant demandé valable (commandé par PID)
4.3 Séparation galvanique de l'alimentation en tension
L'alimentation en tension des ports (UA et UAi) est séparée galvaniquement de l'alimentation en tension du maître IO-Link (US).

Une connexion électrique entre US et UA/UAi désactive la séparation galvanique. Cela peut mener à des dysfonctionnements accrus de la communication IO-Link.
4.4 Paramétrage

IO Device Description (IODD) avec tous les paramètres et les données process de l'appareil sur documentation.ifm.com.
4.5 Entrées/sorties
L'appareil dispose de 8 ports (X1.0 à X1.7).
Chaque port a 2 entrées/sorties pouvant fonctionner dans les 9 modes suivants :
| Mode de port Broche 2 Broche 4 | ||
| 0 (par défaut) Entrée TOR Entrée TOR | ||
| 1 | Entrée/sortie TOR | Entrée/sortie TOR |
| 2 | Entrée analogique (4 à 20 mA) | Entrée/sortie TOR |
| 3* | Entrée analogique (0 à 20 mA) | Entrée/sortie TOR |
| 4 | Entrée analogique (0 à 10 V) | Entrée/sortie TOR |
| 5* | Entrée analogique (0 à 5 V) | Entrée/sortie TOR |
| 6* (uniquement pour les ports X1.2 et X1.3) | Entrée TOR Entrée de fréquence 0 à 3 kHz | |
| Mode de port Broche 2 Broche 4 | ||
| 7* (uniquement pour les ports X1.0 et X1.1) E | Entrée TOR Sortie PWM-I 0 à 1 800 mA | |
| 8* Entrée TOR Sortie PWM 0 à 1 000 ‰ |
* disponible uniquement en mode de fonctionnement [Acyclic Enhanced]
| Paramètre Index Sous-index Valeur Etapes R églage usine | ||||
| Port Mode X1.0 15105 1 0 - 5, 7, 8 1 0 | ||||
| Port Mode X1.1 | 3 0 - 5, 7, 8 | |||
| Port Mode X1.2 | 5 0 – 6, 8 | |||
| Port Mode X1.3 | 7 0 – 6, 8 | |||
| Port Mode X1.4 | 9 0 – 5, 8 | |||
| Port Mode X1.5 | 11 | 0 – 5, 8 | ||
| Port Mode X1.6 | 13 | 0 – 5, 8 | ||
| Port Mode X1.7 | 15 | 0 – 5, 8 | ||
4.6 Alimentation en tension
4.6.1 Tension d'alimentation US
La tension d'alimentation US alimente l'appareil et IO-Link.
4.6.2 Tension d'alimentation UA
La tension UA alimente les sorties des ports X1.0 à X1.7.
UA peut également servir d'alimentation des ports par les capteurs lorsque UAi n'est pas connecté. Dans ce cas, la désactivation d'UA mène également à une coupure de l'alimentation en tension des capteurs. Si les capteurs doivent continuer à être alimentés en tension malgré la désactivation d'UA, l'UAi doit être connecté à une alimentation séparée.
4.6.3 Alimentation des capteurs UAi
Toutes les alimentations des capteurs ont une surveillance commune de courts-circuits. Si un court-circuit est détecté, l'alimentation capteurs est commutée en mode de protection active contre les courts-circuits [Hiccup]. La tension de sortie de l'alimentation capteurs est proportionnelle à la tension d'alimentation (18 à 30 V DC).
4.6.4 Comportement en cas de sous-tension
En cas d'une baisse de la tension d'alimentation des sorties (UA) en-dessous de 16 V, toutes les sorties sont désactivées.
4.6.5 Seuils, protection contre la surcharge en courant
| AL2305 | |
| Courant total | 4 A |
| Alimentation capteur (broche1) | 400 mA |
| Courant total max. par groupe de ports | 1,8 A |
| Courant max. par port | 1,8 A |
Il n'y a pas de limitation supplémentaire du courant aux ports individuels ; ceux-ci peuvent donc être chargés de façon variable. Si le courant total d'un groupe de ports est trop élevé, l'appareil désactive le groupe de ports surchargé jusqu'à ce que le courant soit de nouveau dans la plage permissible.
4.7 Filtres d'entrée numériques
Les signaux d'entrée peuvent être modifiés par des filtres différents avant d'être transmis via IO-Link. Les filtres suivants sont disponibles, ils sont appliqués sur le signal d'entrée dans l'ordre suivant :
- Anti-rebond du signal TOR
- Temporisation du signal TOR
- Inversion du signal TOR

flowchart
graph LR
A["Entrée TOR"] --> B["Anti-rebond du signal TOR"]
B --> C["Temporisation du signal TOR"]
C --> D["Inversion"]
D --> E["Données process IO-Link"]
Chaque filtre peut être configuré séparément via IO-Link. Pour plus d'informations voir l'IODD sur documentation.ifm.com.
L'appareil détecte des signaux qui durent au moins 2 ms. Des signaux plus courts ne sont pas détectés.

Des signaux périodiques ne sont détectés de manière fiable que si la période du signal est au moins deux fois plus longue que le temps de cycle.

Les filtres d'entrée TOR ont une précision de ± 1 ms.
4.7.1 Anti-rebond du signal TOR
Le filtre d'entrée anti-rebond supprime des signaux parasites causés par des détecteurs mécaniques, des contacts ou des relais. Le filtre transmet les signaux d'entrées temporisés (temporisation anti-rebond) sur la sortie du filtre. Le filtre ignore tous les signaux qui sont plus courts que la temporisation anti-rebond réglée.
Diagramme temporel filtre anti-rebond :
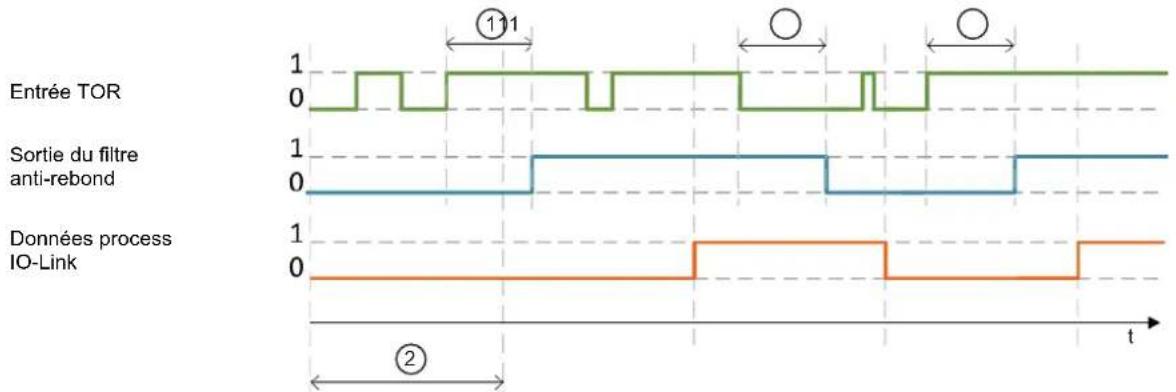
1 : temporisation anti-rebond
2 : temps de cycle
Subindex access : true
| Paramètre Index Sous-index Valeur (m/s) Etapes Réglage usine | ||||
| Input Debounce time X1.0 - 1 15100 1 0 | - 50 1 0 | |||
| Input Debounce time X1.0 - 2 2 | ||||
| Input Debounce time X1.1 - 1 3 | ||||
| Input Debounce time X1.1 - 2 15100 4 0 | - 50 1 0 | |||
| Input Debounce time X1.2 - 1 5 | ||||
| Input Debounce time X1.2 - 2 6 | ||||
| Input Debounce time X1.3 - 1 7 | ||||
| Input Debounce time X1.3 - 2 8 | ||||
| Input Debounce time X1.4 - 1 9 | ||||
| Input Debounce time X1.4 - 2 10 | ||||
| Input Debounce time X1.5 - 1 11 | ||||
| Input Debounce time X1.5 - 2 12 | ||||
| Input Debounce time X1.6 - 1 13 | ||||
| Input Debounce time X1.6 - 2 14 | ||||
| Input Debounce time X1.7 - 1 15 | ||||
| Input Debounce time X1.7 - 2 16 | ||||
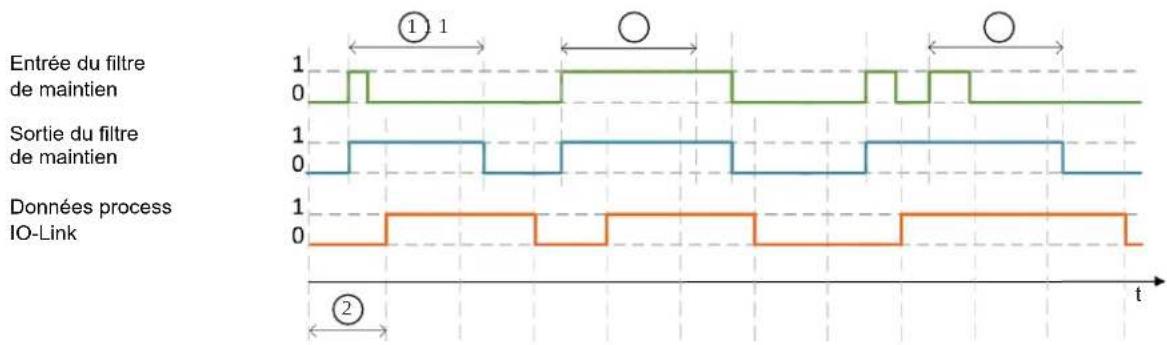
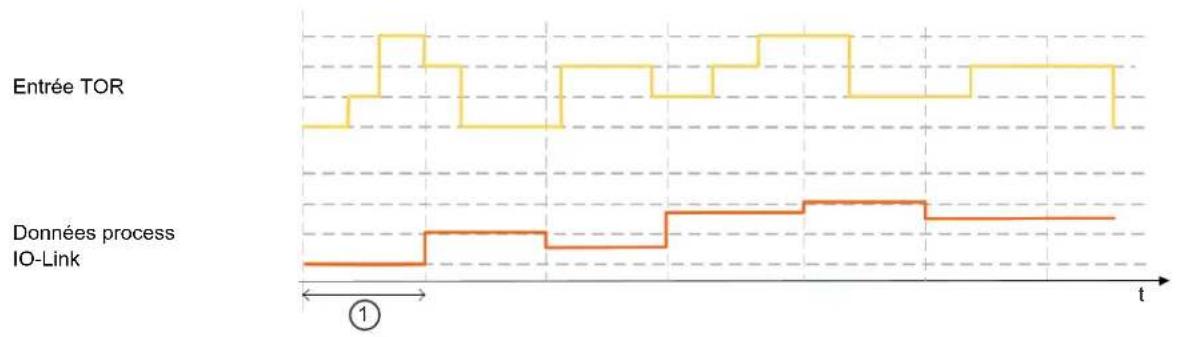
4.7.2 Temporisation du signal TOR
Ce filtre prolonge des impulsions d'entrée courtes. Le filtre est configuré via les paramètres suivants :
- Temps de maintien : durée d'impulsion à laquelle les impulsions courtes doivent être prolongées. Des impulsions qui sont plus longues que le temps de maintien ne sont pas prolongées.
- Etat de maintien : niveau d'entrée qui doit être prolongé (HIGH ou LOW)
Diagramme temporel filtre de maintien avec l'état de maintien HIGH :
line
| Signal Type | Time Segment | Value | | ---------------------------- | ------------ | ----- | | Entrée du filtre de maintien | 1 | 1 | | Sortie du filtre de maintien | 1 | 0 | | Données process IO-Link | 1 | 1 | | Données process IO-Link | 2 | 0 |1 : temps de maintien
2 : temps de cycle
Diagramme temporel filtre de maintien avec l'état de maintien LOW :
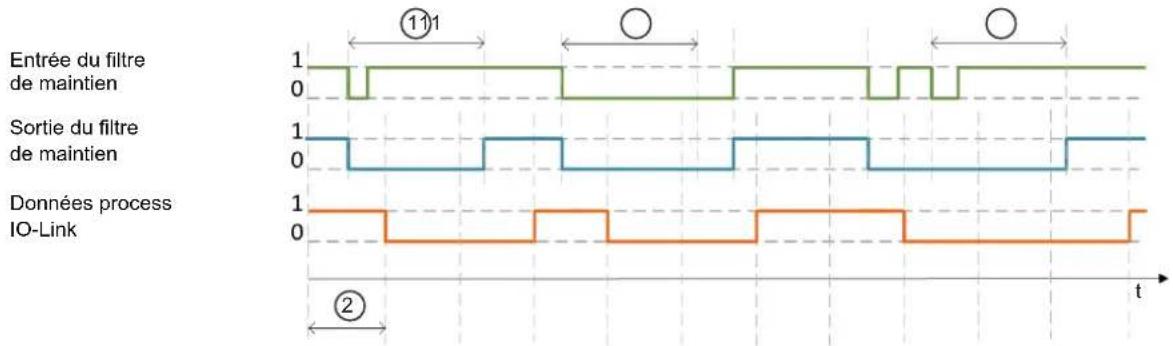
line
| Signal | Time Segment | Value | |--------|--------------|-------| | Entrée du filtre de maintien | 1 | 1 | | Sortie du filtre de maintien | 1 | 1 | | Données process IO-Link | 1 | 1 | | Données process IO-Link | 2 | 1 |1 : temps de maintien
2 : temps de cycle

Les signaux d'entrées qui sont plus courts que le temps de cycle ne sont pas transmis de manière fiable. Afin d'assurer une transmission de signal correcte via IO-Link, le filtre de maintien doit être utilisé.
| Paramètre Index Sous-index Valeur (ms) Etapes | Réglage usine | |||
| Input hold time X1.0 - 1 15101 1 0 – 100 1 0 | ||||
| Input hold time X1.0 - 2 2 | ||||
| Input hold time X1.1 - 1 3 | ||||
| Input hold time X1.1 - 2 4 | ||||
| Input hold time X1.2 - 1 5 | ||||
| Input hold time X1.2 – 2 6 | ||||
| Input hold time X1.3 - 1 7 | ||||
| Input hold time X1.3 - 2 8 | ||||
| Input hold time X1.4 – 1 9 | ||||
| Input hold time X1.4 - 2 10 | ||||
| Input hold time X1.5 - 1 11 | ||||
| Input hold time X1.5 - 2 12 | ||||
| Input hold time X1.6 - 1 13 | ||||
| Input hold time X1.6 - 2 14 | ||||
| Input hold time X1.7 - 1 15 | ||||
| Input hold time X1.7 - 2 16 |
Subindex access : true
| Paramètre Index Sous-index Valeur | Etapes Réglage usine | ||||
| Input hold state X1.0 - 1 15102 | 1 0 [LOW], | 1 [HIGH] | - | 1 | |
| Input hold state X1.0 - 2 | 2 | ||||
| Input hold state X1.1 - 1 | 3 | ||||
| Input hold state X1.1 - 2 | 4 | ||||
| Input hold state X1.2 - 1 | 5 | ||||
| Input hold state X1.2 - 2 | 6 | ||||
| Input hold state X1.3 - 1 | 7 | ||||
| Input hold state X1.3 - 2 | 8 | ||||
| Input hold state X1.4 - 1 | 9 | ||||
| Input hold state X1.4 - 2 | 10 | ||||
| Input hold state X1.5 - 1 | 11 | ||||
| Input hold state X1.5 - 2 | 12 | ||||
| Input hold state X1.6 - 1 | 13 | ||||
| Input hold state X1.6 - 2 | 14 | ||||
| Input hold state X1.7 - 1 | 15 | ||||
| Input hold state X1.7 - 2 | 16 |
Subindex access : true
4.7.3 Inversion
Ce filtre inverse les signaux d'entrées présents.
| Paramètre Index Sous-index Valeur Etapes Réglage usine | ||||
| Input invert X1.0 - 1 15103 1 0 [NO], | 1 [YES] | - | 0 | |
| Input invert X1.0 - 2 2 | ||||
| Input invert X1.1 - 1 3 | ||||
| Input invert X1.1 - 2 4 | ||||
| Input invert X1.2 - 1 5 | ||||
| Input invert X1.2 - 2 6 | ||||
| Input invert X1.3 - 1 7 | ||||
| Input invert X1.3 - 2 8 | ||||
| Input invert X1.4 - 1 9 | ||||
| Input invert X1.4 - 2 10 | ||||
| Input invert X1.5 - 1 11 | ||||
| Input invert X1.5 - 2 12 | ||||
| Input invert X1.6 - 1 13 | ||||
| Input invert X1.6 - 2 14 | ||||
| Input invert X1.7 - 1 15 | ||||
| Input invert X1.7 - 2 16 | ||||
Subindex access : true
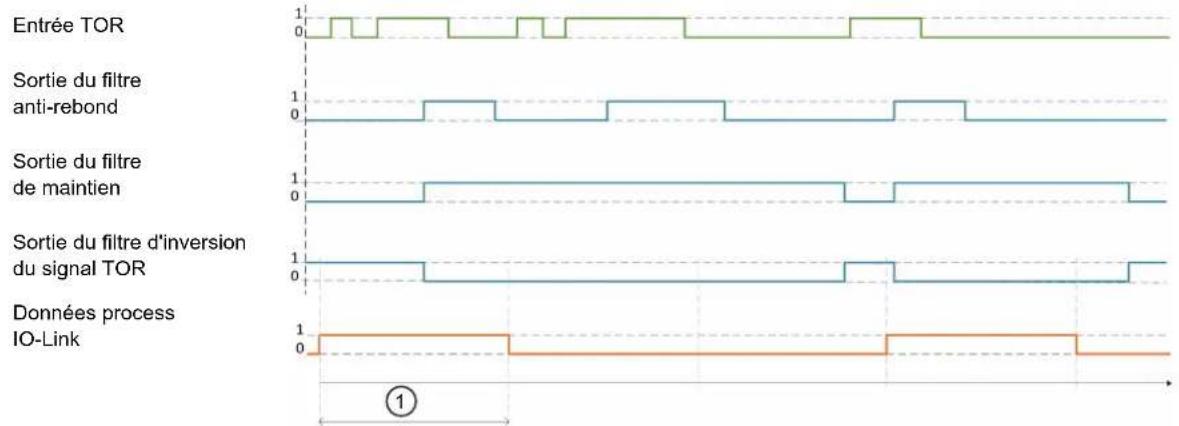
4.7.4 Combinaison de différents filtres d'entrées
Les différents filtres d'entrées peuvent être combinés.
Dans l'exemple suivant, tous les filtres sont utilisés :
line
| Signal Type | Description | | --- | --- | | Entrée TOR | High frequency (green) | | Sortie du filtre anti-rebond | Low frequency (teal) | | Sortie du filtre de maintien | Low frequency (teal) | | Sortie du filtre d'inversion du signal TOR | Low frequency (teal) | | Données process IO-Link | Low frequency (orange) |1 : temps de cycle
4.7.5 Signaux d'entrée analogiques
Si l'entrée analogique est activée, une valeur moyenne est calculée sur la durée saisie dans le paramètre.
1 : durée pour la valeur moyennée
| Paramètre Index Sous-index Valeur (ms) Etapes Réglage usine | ||||
| Analog Input filter X1.0 15104 1 1 – 100 1 10 | ||||
| Analog Input filter X1.1 3 | ||||
| Analog Input filter X1.2 5 | ||||
| Analog Input filter X1.3 7 | ||||
| Analog Input filter X1.4 9 | ||||
| Analog Input filter X1.5 11 | ||||
| Analog Input filter X1.6 13 | ||||
| Analog Input filter X1.7 15 |
Subindex access : true
4.8 Mesure de la consommation de courant
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced].
La mesure de la consommation de courant (mA) est active dès le démarrage de l'appareil et est envoyée via le paramètre IO-Link [Current] (index 15106). Cette fonction est disponible pour tous les modes de port.
L'appareil détermine les valeurs mesurées suivantes :
- Courant d'entrée de toutes les alimentations des capteurs (courant cumulé sur la broche 1 des ports X1.0 à X1.7)
- Courants de sortie des différents groupes de ports X1.0 à X1.3 et X1.4 à X1.7 (respectivement le courant cumulé sur la broche 2 et la broche 4 du port)
| Paramètre Index Sous-index Valeur (mA) | Etapes Réglage usine | ||||
| Input current X1.0...X1.7 | 15106 | 1 | 0 – 400 | - | - |
| Output current X1.0...X1.3 | 2 | 0 – 1800 | |||
| Output current X1.4...X1.7 | 3 | 0 – 1800 | |||
Tab. 1: Paramètre [Current]
4.8.1 Configuration
Pour déterminer la consommation de courant, il est possible de régler séparément le temps de calcul de la moyenne pour chaque courant. Cela se fait via le sous-index correspondant du paramètre [Current avg time] (index 15107).
Le courant mesuré peut être moyenné sur une valeur quelconque de 100 à 1 000 ms.
| Paramètre | Index | Sous-index | Valeur (ms) | Etapes | Réglage usine |
| Time X1.0 à X1.7 | 15107 | 1 | 100 – 1000 | 1 | 100 |
| Paramètre Index Sous-index Valeur (ms) Etapes Réglage usine | ||||
| Time X1.0 à X1.3 15107 2 100 – 1000 1 100 | ||||
| Time X1.4 à X1.7 3 | ||||
Tab. 2: Paramètre [Current avg Time]
4.9 Mesure des valeurs de tension
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced] .
L'appareil mesure les valeurs de tension (mV) des différentes tensions d'alimentation et les envoie via le paramètre IO-Link [Power supply voltage] (index 15108). Cette fonction est active dès le démarrage de l'appareil et est disponible pour tous les modes de port.
L'appareil détermine les valeurs mesurées suivantes :
| Paramètre Index Sous-i | Index Valeur (m) | V) Etapes Réglage usine | |||
| US | 15108 | 1 | 0 – 32000 | - | - |
| UA | 2 | ||||
| UAi | 3 | ||||
Tab. 3: Paramètre Power supply voltage
4.10 Entrée de fréquence
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced].
L'appareil dispose d'entrées TOR de type 3. Les appareils raccordés doivent être conçus pour ces entrées.

Le rapport cyclique de la fréquence d'entrée doit être compris entre 10 % et 90 %.
La durée de l'impulsion doit être de 21μs au minimum.
Pour activer l'entrée de fréquence, il faut régler le mode de port 06. Dans ce mode, la broche 4 des ports X1.2 et X1.3 fonctionne comme entrée de fréquence : → Entrées/sorties

Les paramètres de l'entrée TOR ne s'appliquent pas à l'entrée de fréquence.
L'entrée de fréquence fonctionne avec la fonctionnalité SSC conformément aux paramètres SSC.
L'entrée de fréquence a une étendue de mesure de 0 à 3 kHz avec une résolution de 0,1 Hz et une précision de 0,2 % sur toute l'étendue.
Si aucun signal d'entrée n'est détecté pendant 10 s, l'appareil met la valeur des données process correspondantes à 0.
4.10.1 Configuration du prédiviseur
La fréquence mesurée peut être divisée par une valeur comprise entre 1 et 99. Cette valeur est réglée avec le paramètre [PrSC X1.2] pour le port X1.2 et avec le paramètre [PrSC X1.3] pour le port X1.3. La valeur peut être modifiée par incréments de 1 (par défaut : 1).
Si la valeur d'entrée ne doit pas être modifiée, le prédiviseur doit avoir la valeur 1.

En cas d'utilisation de la fonctionnalité SSC, il convient de noter que la fréquence mesurée est d'abord mise à l'échelle via le prédiviseur, puis traitée avec la logique SSC.
Calcul :
La valeur affichée dans les données process n'est pas encore calculée avec l'exposant. Pour obtenir la valeur de fréquence correspondante en Hz, il faut multiplier cette valeur par 10^-1 :
FI = données process en · exposant [Hz]
Exemple :
La valeur mesurée sur les deux entrées de fréquence est de 100 Hz. Les valeurs de fréquence sont calculées comme suit :
- PrSC X1.2 = 20
- PrSC X1.3 = 1 (pas de prédiviseur)
FI X1.2 = Valeur mesurée [X1.2] / PrSC X1.2 · Exposant X1.2
$$ \begin{array}{l} = 1 0 0 0 / 2 0 \cdot 1 0 ^ {- 1} \ = 5 0 \cdot 1 0 ^ {- 1} \ = 5 [ H z ] \ \end{array} $$
FI X1.3 = Valeur mesurée [X1.3] / PrSC X1.3 · Exposant X1.3
$$ \begin{array}{l} = 1 0 0 0 / 1 \cdot 1 0 ^ {- 1} \ = 1 0 0 0 \cdot 1 0 ^ {- 1} \ = 1 0 0 [ \mathrm{Hz} ] \ \end{array} $$
| Paramètre Index Sous-index Valeur Etapes Réglage usine | |||||
| PrSC X1.2 4007 0 1 | - 99 1 1 | ||||
| PrSC X1.3 4017 0 | |||||
Tab. 4: Paramètres PrSC X1.2 et PrSC X1.3
4.11 Sortie PWM
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced].
La sortie PWM est disponible sur la broche 4 de tous les ports. La sortie PWM est activée de la manière suivante :
- Mode port = 08 dans le paramètre IO-Link 15105
- PDOut [X1.x] (PWM Duty Cycle) > 0 dans PDOut PLC-Out Word 6...20
- DO [X1.x-1] (broche 4) = 1 dans PDOut PLC-Out Word 2 (1 active la sortie PWM)
Entrées/sorties (→ 7)
4.11.1 Configuration
Les réglages suivants sont possibles pour la sortie PWM :
- Rapport cyclique (réglage via les données process)
Il est possible de régler un rapport cyclique séparé pour chaque port. La valeur est écrite via [Process data out] (→ IODD).
- Fréquence (réglage via paramètre IO-Link)
Les ports sont divisés en deux groupes, chacun ayant une valeur de fréquence commune :
– Groupe 1 pour les ports X1.0 - X1.3
– Groupe 2 pour les ports X1.4 - X1.7
| Paramètre Index Sous-index Valeur (Hz) | Etapes | Réglage usine | |||
| PWM freq X1.0 à X1.3 | 15010 | 0 | 20 – 1000 | 1 | 100 |
| PWM freq X1.4 à X1.7 | 15014 | 0 | |||
- En option : Dithering (réglage via paramètre IO-Link)
Le dithering est le cycle de travail PWM qui se modifie au fil du temps. La modification du taux d'impulsion peut se faire à une certaine fréquence, qui est liée à la fréquence PWM comme suit :
- Fréquence Dither = Fréquence de sortie PWM / (2 · [Count])
- [Count] est le nombre d'impulsions PWM avec un taux d'impulsion réduit et ensuite le même nombre d'impulsions PWM avec un taux d'impulsion augmenté dans une seule période Dither. Comme [Count] est un nombre entier, il y a un nombre entier de périodes PWM dans une période Dither. Il est également possible de définir dans la partie [Level] du paramètre Dither dans quelle mesure le taux d'impulsion doit varier.
Exemple de PWM avec Dithering représenté avec les réglages PWM suivants :
| Paramètre Index Sous-index Valeur Etapes Réglage usine | ||||
| Niveau 15020 pour X1.0 | 15021 pour X1.115022 pour X1.215023 pour X1.315024 pour X1.415025 pour X1.515026 pour X1.615027 pour X1.7 | 10 - 250 (‰) 0,10 | ||
| Count 15020 pour X1.0 | 15021 pour X1.115022 pour X1.215023 pour X1.315024 pour X1.415025 pour X1.515026 pour X1.615027 pour X1.7 | 20 - 201 | ||
Tab. 5: Paramètre PWM dither X1.x

[Level] = 0 désactive le Dithering et/ou [Count] = 0 désactive le Dithering.
4.12 Sortie PWM-I
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced].
La sortie PWM-I est disponible sur la broche 4 des ports X1.0 et X1.1. La sortie PWM-I est activée de la manière suivante :
- Mode port = 07 dans le paramètre IO-Link 15105
- PDOut [X1.x] (courant PWM-I demandé) > 0 dans PDOut PLC-Out Word 6/8
• DO [X1.x-1] (broche 4) = 1 dans PDOut PLC-Out Word 2 (1 active la sortie PWM-I) - PID [X1.x] correspondant à la charge connectée : Exemple de configuration (→ 17)
Entrées/sorties (→ 7)
4.12.1 Configuration
Les réglages suivants sont possibles pour la sortie PWM-I :
- Courant (réglage via les données process) Le courant de sortie peut être réglé séparément pour les deux ports. La valeur est écrite via [Process data out] ( IODD).
- Fréquence (réglage via paramètre IO-Link) Une valeur de fréquence commune peut être configurée pour les deux ports :
| Paramètre Index Sous-index Valeur (Hz) Etapes Réglage usine | ||||
| PWM freq X1.0 à X1.3 15010 0 20 | - 1000 1 100 | |||
• Régulateur PID
La fonctionnalité PWM-I génère du courant en réglant le rapport cyclique correspondant du signal PWM. Ainsi, à fréquence constante, la sortie PWM-I fournit d'autant plus de courant que le rapport cyclique augmente. La production du courant correspondant est assurée par un régulateur PID. Le facteur d'amplification pour la partie proportionnelle du régulateur PID peut être configuré séparément pour les deux ports à l'aide des paramètres suivants :
| Paramètre Index Sous-index Valeur Etapes | Réglage usine | ||||
| Kp | 15030 pour X1.015031 pour X1.1 | 1 | 0 à 2000000000 | 1 | 0 |
| Ki | 15030 pour X1.015031 pour X1.1 | 2 | |||
| Kd | 15030 pour X1.015031 pour X1.1 | 3 | |||
Tab. 6: Paramètre PWM-I PID pour X1.x

L'appareil peut mesurer le courant généré. La valeur est lue via [Process data in] (→ IODD).
4.12.2 Exemple de configuration
Le tableau suivant contient des exemples de réglages qui peuvent être utilisés comme point de départ pour l'optimisation du régulateur PID (pour une fréquence PWM-I de 1000 Hz) :
| Charge connectée | Kp | Ki | Kd |
| Résistance 24Ω 1 | 10000 | 0 | |
| Résistance 240Ω | 1 | 100000 | 0 |
| Moteur DC 10W | 1 | 500 | 0 |

Des valeurs en dehors de la configuration peuvent entraîner une indication de court-circuit erronée.
4.13 Fonctionnalité SSC
Cette fonction n'est disponible qu'en mode [Acyclic Enhanced].
La fonctionnalité SSC est applicable dans les modes de port suivants et sur les broches suivantes :
- Mode de port 02 ; Broche 2 de tous les ports (entrée analogique 4 à 20 mA)
- Mode de port 03 ; Broche 2 de tous les ports (entrée analogique 0 à 20 mA)
- Mode de port 04 ; Broche 2 de tous les ports (entrée analogique 0 à 10 V)
- Mode de port 05 ; Broche 2 de tous les ports (entrée analogique 0 à 5 V)
- Mode de port 06 ; Broche 4 des ports X1.2 et X1.3 (entrée de fréquence 0 à 3 kHz)
4.13.1 Configuration
Les paramètres IO-Link suivants peuvent être configurés séparément pour les 8 ports :
| Paramètre Index | Sous-index Valeur Etapes Réglage usine | |||
| SP1 SSC X1.0 P | Param (60)SSC X1.1 Param (62)SSC X1.2 Param (16384)SSC X1.3 Param (16386)SSC X1.4 Param (16388)SSC X1.5 Param (16390)SSC X1.6 Param (16392)SSC X1.7 Param (16394) | 1 -32000 à 32000 1 5000 | ||
| SP2 2 -32000 à 32000 | 14000 | |||
| Logic SSC X1.0 | Config (61)SSC X1.1 Config (63)SSC X1.2 Config (16385)SSC X1.3 Config (16387)SSC X1.4 Config (16389)SSC X1.5 Config (16391)SSC X1.6 Config (16393)SSC X1.7 Config (16395) | 1 0 [High active]1 [Low active] | - [High active] | |
| Mode 2 0 [Deactivated] | - [Two point] | |||
| Hyst 3 0 - 3000 | 100 | |||
Tab. 7: SSC X1.x Param et SSC X1.x Config
4.13.2 Diagrammes fonctionnels
L'appareil met à disposition des signaux de commutation numériques via des canaux de commutation (SSC = Switching Signal Channel).
L'appareil dispose de 8 canaux de commutation TOR SSC1.0 à SSC1.7, par lesquels la valeur process peut être émise.

Explication de la numérotation des canaux de commutation SSCx.y :
x = valeur process ; y = canal de commutation
Les canaux de commutation ne peuvent être évalués que via l'interface IO-Link.
Chaque canal de commutation peut être paramétré individuellement.
Lors du paramétrage des canaux de commutation, le mode seuil de commutation, les seuils de commutation et la logique des seuils de commutation sont réglés.
Mode seuil de commutation
Il est possible de choisir entre les modes de seuil de commutation suivants :
Le canal de commutation passe à l'état actif en fonction de la valeur de données process (PDV).
L'état actif se situe au-dessus du point de commutation dans [Single Point Mode] et [Two Point Mode] et dans la fenêtre dans [Window Mode].
Logique du seuil de commutation
En réglant la logique du seuil de commutation [High active] ou [Low active], on peut spécifier quelle valeur le canal de commutation a à l'état actif :
• [High active] : Le canal de commutation est « high » à l'état actif (= ON = normalement ouvert = 1)
- [Low active] : Le canal de commutation est « low » à l'état actif (= OFF = normalement fermé = 0)
Les figures suivantes montrent l'état des canaux de commutation en fonction du mode seuil de commutation, de la logique du seuil de commutation et de la valeur des données process (PDV).
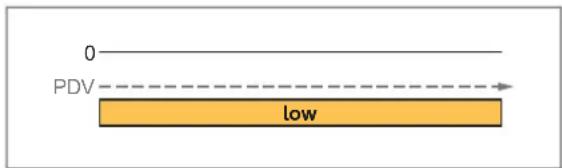
Deactivated
Si le mode seuil de commutation [Deactivated] est réglé pour un canal de commutation, le canal de commutation a en permanence la valeur suivante, indépendamment de la valeur process :
- En cas de logique du seuil de commutation [High active] : « low » en permanence.
- En cas de logique du seuil de commutation [Low active] : « high » en permanence.
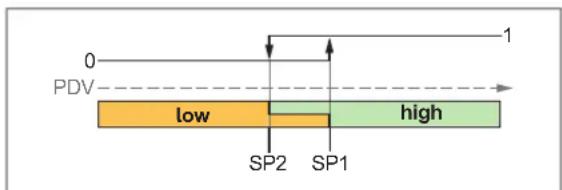
Un seul seuil d'enclenchement (SP1) est réglé manuellement.
Le seuil de déclenchement (SP1-H) se base sur le seuil d'enclenchement et l'hystérésis configurée.
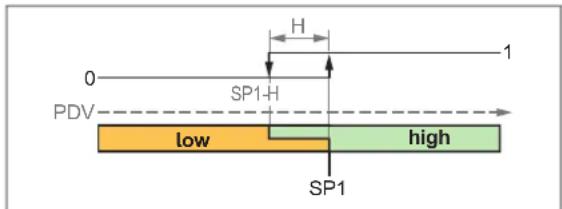
H : Hystérésis
SP1 : Seuil d'enclenchement
SP1-H Seuil de déclenchement
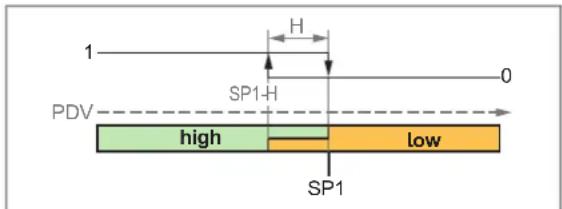
H : Hystérésis
SP1 : Seuil d'enclenchement
SP1-H Seuil de déclenchement
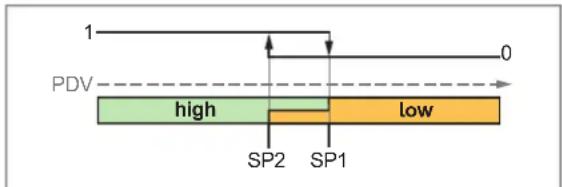
Two Point Mode
Un seuil de commutation SP1 et un seuil de commutation SP2 sont réglés manuellement.
SP1 doit être supérieur à SP2. Ainsi, le seuil de commutation 2 est toujours le seuil de déclenchement.
L'hystérésis est ignorée en mode Two Point.
SP1 : Seuil de commutation 1
SP2 : Seuil de commutation 2
SP1 : Seuil de commutation 1
SP2 : Seuil de commutation 2
Window Mode
Deux seuils de commutation (SP1) et (SP2) sont réglés manuellement.
Les deux seuils de commutation délimitent une fenêtre.
SP1 doit être supérieur à SP2. Ainsi, le seuil de commutation 2 est toujours le seuil de déclenchement.
Lorsque la valeur des données process entre dans la fenêtre, l'état du canal de commutation change immédiatement en cas de dépassement vers le bas ou vers le haut des points de commutation.
Lorsque la valeur des données process quitte la fenêtre, l'état du canal de commutation change en cas de dépassement par le haut/par le bas du seuil de commutation plus l'hystérésis (SP1+H ou SP2-H).
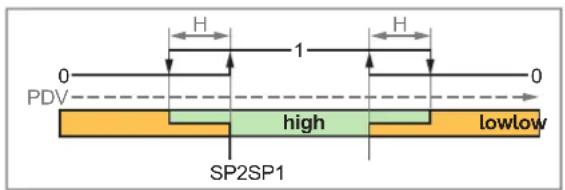
SP1 : Seuil de commutation 1
SP2 : Seuil de commutation 2
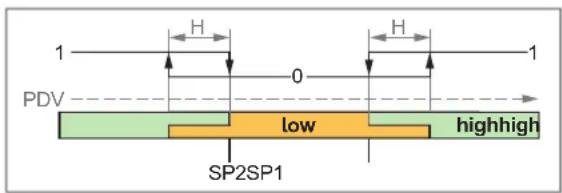
SP1 : Seuil de commutation 1
SP2 : Seuil de commutation 2
5 Montage

▶ Mettre l'installation hors tension avant le montage.

Pour le montage, choisir une surface de montage plane.
▶ Fixer le module sur la surface de montage avec des vis de montage et des rondelles M5. Couple de serrage 1,8 Nm.
6 Raccordement électrique

L'appareil doit être raccordé par un électricien qualifié.
Respecter les réglementations nationales et internationales relatives à l'installation de matériel électrique.
Alimentation en tension selon TBTS, TBTP.

Ne pas raccorder de tension externe aux sorties.
L'appareil dispose d'entrées TOR de type 3. Les appareils raccordés doivent être conçus pour ces entrées.
Protéger l'alimentation en tension UA en fonction de la charge maximale et de la température ambiante (4 A maximum).
La caractéristique de la protection doit correspondre à l'application.
Utiliser uniquement des câbles certifiés par UL (CYJV ou PVVA) avec des données appropriées pour raccorder l'appareil.
6.1 Raccorder l'appareil
▶ Mettre l'installation hors tension.
▶ Raccorder l'appareil comme suit :
Connecteur M12, codage A, IO-Link (X1)

1 : L+ (US)
2 : non utilisé
3 : L- (US)
4 : IO-Link
Connecteur M12, codage A, alimentation en tension U_AUX (X31)

1 : L+ (UAi)
2 : L- (UA et UAi)
3 : non utilisé
4 : L+ (UA)
Prise M12, codage A, ports (X1.0 à X1.7)

1 : L+ (UA et UAi)
2 : Port multifonctions DI2, DO2, AI2
3 : L- (UA et UAi)
4 : Port multifonctions DI1, DO1, FI*, PWM*, PWM-I*
5 : non utilisé
* disponible uniquement en mode de fonctionnement [Acyclic Enhanced]
6.1.1 Raccordement IO-Link
Le port IO-Link doit être raccordé selon la spécification IO-Link.
6.1.2 Monter les connecteurs
Les filetages dans l'appareil correspondent au standard M12. Afin de garantir l'indice de protection spécifié, seuls des câbles qui correspondent à ce standard doivent être utilisés. Pour les câbles coupés par l'utilisateur, le fabricant du système est responsable du type de protection.
▶ Utiliser des connecteurs avec contacts dorés.
Placer verticalement les connecteurs lors du montage afin que l'écrou moleté n'endommage pas le filetage.
▶ Respecter le codage des connecteurs lors du montage.
Si connecteur dans l'appareil :
▶ Effectuer le vissage des prises femelles selon les indications du couple de serrage du fabricant du câble. Couple de serrage maximal autorisé : 0,8 Nm
Si les prises sont dans l'appareil :
▶ Visser le connecteur mâle à 1,0 ± 0,1 Nm.
▶ Fermer des connexions non utilisées avec des bouchons. Couple de serrage : 0,6 à 0,8 Nm
▶ Equiper tous les câbles sortants à partir de 200 mm maximum d'une décharge de traction appropriée. Respecter le rayon de courbure minimal des câbles (→ indications du fabricant de câbles).
6.1.2.1 Longueur de câble maximale
- Sans communication IO-Link : chaque côté 30 m
- Avec la communication IO-Link : du côté du maître 20 m
7 Eléments de service et d'indication
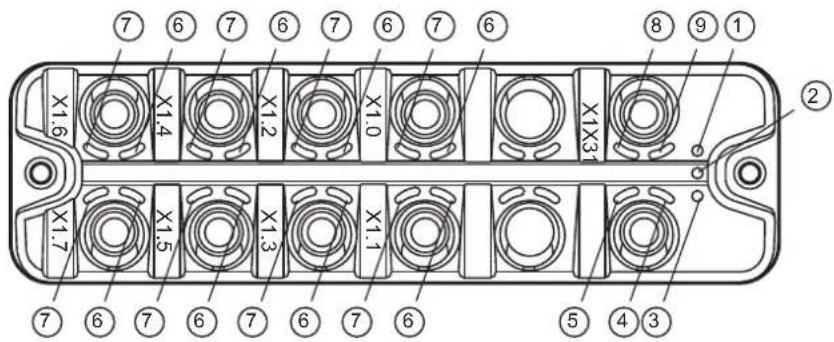
1 : LED INT Erreur interne
2 : LED 1 Erreur groupe de ports 1
3 : LED 2 Erreur groupe de ports 2
4 : LED UA Tension d'alimentation ports
5 : LED UAi Tension d'alimentation capteurs
6 : LED I/O2 État entrée/sortie I/O2
7 : LED I/O1 État entrée/sortie I/O1
8: LED Communication IO-Link
9: LED US Tension d'alimentation
7.1 LED
* disponible uniquement en mode de fonctionnement [Acyclic Enhanced]
| LED Couleur | Fonction entrée/ sortie | Etat Description | ||||
| INT rouge allumée | erreur interne | |||||
| éteinte pas d'erreur | internel'appareil est en mode de fonctionnement | |||||
| 1 rouge allumée | court-circuit dans le groupe de ports | 1 ou sous- | tension UA | |||
| éteinte pas d'erreur | dans le groupe de ports 1l'appareil est en mode de fonctionnement | |||||
| 2 rouge allumée | court-circuit dans le groupe de ports | 2 ou sous- | tension UA | |||
| éteinte pas d'erreur | dans le groupe de ports 2l'appareil est en mode de fonctionnement | |||||
| US verte allumée | tension d'alimentation ≥ 18 V | |||||
| éteinte tension d'alimentation < 16 V | ||||||
| UA verte allumée | tension d'alimentation ≥ 18 V | |||||
| éteinte tension d'alimentation < 16 V | ||||||
| UAi verte allumée | tension d'alimentation ≥ 18 V | |||||
| éteinte tension d'alimentation < 16 V | ||||||
| verte allumée | communication IO-Link active | |||||
| Io-Link non active | ||||||
| I/O1, I/O2 jaune | entrée | TOR allumée signal d'entrée High | ||||
| éteinte signal d'entrée Low | ||||||
| clignotante court-circuit | ||||||
| sortie TOR | allumée signal de sortie High | |||||
| éteinte signal de sortie Low | ||||||
| I/O1, I/O2 jaune | sortie TOR clignote | notante court-circuit | ||||
| entrée analogique allumée signal dans l'étendue de mesure | ||||||
| éteinte signal hors de l'étendue de mesure | ||||||
| clignotante court-circuit | ||||||
| entrée de fréquence* | allumée signal dans l'étendue de mesure | |||||
| éteinte signal hors de l'étendue de mesure | ||||||
| clignotante court-circuit | ||||||
| sortie PWM* allumée | signal PWM présent | |||||
| éteinte pas de signal PWM disponible | ||||||
| clignotante court-circuit | ||||||
| sortie PWM-I* allumée | signal PWM-I présent | |||||
| éteinte pas de signal PWM-I disponible | ||||||
| clignotante court-circuit | ||||||
8 Maintenance, réparation et élimination
L'appareil est sans entretien.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
Nettoyage :
▶ Mettre l'appareil hors tension.
Enlever les salissures avec un chiffon en microfibre doux, sec et non traité chimiquement.




