
P.BE-CMMP-SC-SW-IT - Automate industriel Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil P.BE-CMMP-SC-SW-IT Festo au format PDF.

| Type de produit | Module interface SERCOS pour servorégulateur CMMP-AS (Automate industriel) |
| Marque | Festo |
| Modèle | P.BE-CMMP-SC-SW-IT |
| Catégorie | Automate industriel |
| Technologie de communication | SERCOS (fibre optique, 2/4/8/16 Mbit/s) |
| Modes de fonctionnement | Régulation de couple, régulation de vitesse, asservissement de position, interpolation interne à l'entraînement |
| Nombre d'axes par anneau | Jusqu'à 6 axes |
| Temps de cycle SERCOS | 125 µs (régulateur de courant), 250 µs (vitesse), 500 µs (position), 1000 µs (interpolation) |
| Alimentation | Via le bus du contrôleur CMMP-AS (24 V DC logique, alimentation principale) |
| Indice de protection | IP20 |
| Température de fonctionnement | 0 °C à 50 °C (estimation) |
| Dimensions | Module enfichable pour slot Ext2 |
| Poids | Environ 200 g (estimation) |
| Sécurité | Protection contre tensions mortelles (>50 V), très basse tension de sécurité (TBTS), arrêt rapide, surveillance des défauts |
| Entretien et nettoyage | Aucun entretien spécifique ; nettoyer avec un chiffon sec si nécessaire |
| Fonctions spéciales | Prise de référence guidée, positionnement de broche, détection (mesure), identification automatique du moteur |
| Paramètres configurables | Pondération des données (position, vitesse, accélération), télégrammes standard ou personnalisés |
| Diagnostic | Classes de diagnostic 1, 2, 3 et fabricant ; messages d'erreur détaillés |
| Connectique | Émetteur (HFE 7000-210) et récepteur (HFD 7000-402) fibre optique |
| Compatibilité | Contrôleurs Festo CMMP-AS, interface SERCOS selon CEI 61491 |
| Manuel de référence | P.BE-CMMP-AS-SC-SW-FR (réf. 557 364) |
FOIRE AUX QUESTIONS - P.BE-CMMP-SC-SW-IT Festo
Questions des utilisateurs sur P.BE-CMMP-SC-SW-IT Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automate industriel au format PDF gratuitement ! Retrouvez votre notice P.BE-CMMP-SC-SW-IT - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil P.BE-CMMP-SC-SW-IT de la marque Festo.
MODE D'EMPLOI P.BE-CMMP-SC-SW-IT Festo
SERCOS pour contrôleur de moteur CMMP...
FESTO
Manuel
SERCOS
CMMP...

Édition ____ fr 0708NH
Désignation P.BE-CMMP-AS-SC-SW-FR
Référence 557 364
©(Festo SE & Co. KG, D-73726 Esslingen, 2008)
Internet : http://www.festo.com
E-mail : service_international@festo.com
Sauf autorisation expresse, la transmission ou la reproduction de ce document, ainsi que toute exploitation ou communication de son contenu sont interdites. Tout non-respect de cette règle est illicite et expose son auteur au versement de dommages et intérêts. Tous droits réservés, notamment en termes de demande de brevet, de modèle déposé et de protection par dessin ou modèle.
Rapport de modification
| Auteurs | Festo SE & Co. KG | |||
| Nom du manuel : | P.BE-CMMP-AS-SC-SW-FR | |||
| Nom du fichier : | ||||
| Emplacement d'archivage du fichier | ||||
| N° d'ordre | Validation pour transmission | Index de version | Date de la modification | |
| 1 | Création | 0708NH | 11.03.2008 | |
Marques déposées
Microsoft et Windows sont des marques déposées ou des marques de fabrique de la Microsoft Corporation aux États-Unis et/ou dans d'autres pays.
Droits d'auteur
© Festo SE & Co. KG Tous droits réservés.
Les informations et les données de ce document ont été rassemblées selon l'état actuel de nos connaissances. Toutefois, des différences entre ce document et le produit ne sont pas complètement exclues. Pour les appareils et le logiciel correspondant dans la version remise au client, Festo garantit l'utilisation conforme aux dispositions contractuelles en accord avec la notice d'utilisation. En cas d'écarts importants par rapport à la notice d'utilisation, Festo est habilité et s'engage à procéder à des corrections, sous réserve de ne pas entraîner de frais inappropriés. Toute responsabilité éventuelle ne se réfère pas aux vices dus à des divergences entre les conditions d'exploitation prévues et décrites pour l'appareil dans la notice d'utilisation.
Festo ne garantit pas que les produits sont conformes aux exigences et aux objectifs de l'acheteur ni qu'ils sont compatibles pour fonctionner avec d'autres produits sélectionnés par l'acheteur. Festo SE dégage de toute responsabilité en cas de dommages résultant de l'exploitation commune de ses produits avec d'autres produits ou engendrés par une utilisation non conforme des appareils ou des systèmes.
Festo SE & Co. KG se réserve le droit de modifier, de compléter ou d'améliorer le document ou le produit sans préavis.
Sans autorisation expresse de son auteur, ce document ne doit pas, en totalité ou sous forme d'extraits, être reproduit, traduit dans une autre langue naturelle ou lisible par une machine et ne doit pas être transféré sur un support de données électronique, mécanique, optique ou de toute autre forme.
Marques déposées
Les noms de produit figurant dans ce document peuvent être des marques déposées. Dans ce document, les marques déposées ont pour seul objet d'identifier les produits correspondants.
SERCOS interface® est une marque déposée du groupement d'intérêt SERCOS interface e.V.
Table des matières
1. Généralités....9
1.1 Documentation....9
1.2 Système de communication série en temps réel
(SErial Realtime COmmunication System) 10
2. Consignes de sécurité pour les entraînements et les commandes électriques.... 11
2.1 Symboles utilisés .... 11
2.1.1 Autres symboles 11
2.2 Consignes générales 12
2.2.1 Personnel dûment formé et compétent.... 12
2.3 Dangers liés à une utilisation incorrecte.... 13
2.4 Consignes de sécurité 14
2.4.1 Consignes générales de sécurité 14
2.4.2 Consignes de sécurité relatives au montage et à l'entretien....16
2.4.3 Protection contre les contacts accidentels avec les pièces électriques....17
2.4.4 Protection contre les chocs électriques par très basse tension de sécurité (TBTS)....19
2.4.5 Protection contre les contacts avec des pièces chaudes.... 20
2.4.6 Protection lors de la manipulation et du montage 21
3. Câblage et affectation des broches 22
4. Activation de SERCOS 24
4.1 Aperçu 24
5. Aperçu 26
5.1 Aperçu communication....26
5.2 Télégramme d'entraînement (AT) 27
5.3 Télégramme de données maître (MDT).... 28
5.4 Canal de service (SC) 29
5.5 Types de télégrammes 30
5.5.1 Télégrammes standard 30
5.5.2 Télégramme d'application 31
5.6 Initialisation (changement de phase) 32
5.6.1 Phase de communication 0 : Fermeture de l'anneau .... 32
5.6.2 Phase de communication 1 : Identification des entraînements...... 32
Table des matières
5.6.3 Phase de communication 2 : Chargement des paramètres de communication .... 32
5.6.4 Phase de communication 3 : Chargement des paramètres d'application....33
5.6.5 Phase de communication 4 : Mode cyclique .... 33
6. Temps de cycle SERCOS 34
7. Modes de fonctionnement .... 35
7.1 Régulation de couple....36
7.2 Régulation de vitesse 36
7.3 Asservissement de position.... 36
7.4 Interpolation interne à l'entraînement.... 37
8. Pondération des données 38
8.1 Données de position.... 38
8.1.1 Aperçu 38
8.1.2 Non pondéré....39
8.1.3 Pondération translationnelle 39
8.1.4 Pondération rotationnelle....39
8.2 Données de vitesse 40
8.2.1 Aperçu 40
8.2.2 Non pondéré....41
8.2.3 Pondération translationnelle 41
8.2.4 Pondération rotationnelle 41
8.3 Données d'accélération....42
8.3.1 Aperçu 42
8.3.2 Non pondéré....43
8.3.3 Pondération translationnelle 43
8.3.4 Pondération rotationnelle....43
8.4 Données de couple.... 43
8.5 Données de température....43
9. Mot de commande/Mot d'état....44
- Gestion des erreurs....47
- Fonctions d'E/S....48
- Commandes spéciales .... 49
12.1 Prise de référence guidée par l'entraînement.... 49
12.2 Positionnement de la broche....52
Table des matières
12.3 Détection (mesure)....53
12.4 Identification automatique du moteur....53
13. Paramètres....55
13.1 Aperçu 55
13.1.1 Paramètres de communication 55
13.2 Configuration d'un télégramme....61
13.3 Listes d'IDN/Commandes de changement de phase 64
13.4 Modes de fonctionnement....68
13.5 Paramètres de pondération....70
13.6 Valeurs de consigne/valeurs réelles....76
13.7 Limitation / Surveillance 79
13.8 Mot d'état de signal/bits en temps réel.... 84
13.9 Bits d'état....89
13.10 Identification automatique....95
13.11 Gestion des erreurs 96
13.12 Fonctions E/S 97
13.13 Prise de référence guidée par l'entraînement.... 101
13.14 Interpolation interne à l'entraînement.... 104
13.15 Touches de mesure 105
13.16 Positionnement de la broche.... 108
13.17 Divers 110
13.18 Informations.... 113
13.19 Classes de diagnostic.... 117
13.19.1 Classe de diagnostic 1 (classe d'état 1)....117
13.19.2 Classe de diagnostic fabricant 1 .... 118
13.19.3 IDN S-0-0095 : Message de diagnostic 119
13.19.4 Classe de diagnostic 2 (classe d'état 2)....119
13.19.5 Classe de diagnostic 3 (classe d'état 3)....120
13.19.6 Classe de diagnostic fabricant 3 (classe d'état 3)....121
13.19.7 IDN S-0-0014 : "État de l'interface" 122
13.19.8 Masques de diagnostic.... 123
14. Codes d'erreur SERCOS 125
A. Annexe 127
B. Index 128
1. Généralités
1. Généralités
1.1 Documentation
Ce manuel SERCOS décrit le raccordement au bus de terrain de contrôleurs de servomoteurs CMMP-AS sous SERCOS. Il décrit brièvement le protocole proprement dit, l'activation de la communication SERCOS et les paramètres disponibles sous SERCOS.
Il s'adresse à des personnes déjà familiarisées avec la gamme des contrôleurs de servomoteurs et le protocole SERCOS.
Il comporte des consignes de sécurité à respecter impérativement.
Pour de plus amples informations, veuillez consulter les manuels suivants des produits de la gamme CMMP-AS :
- Manuel produit "Contrôleur de servomoteur P.BE-CMMP-AS" :
Description des spécifications techniques et du mode de fonctionnement de l'appareil et conseils d'installation et d'utilisation du contrôleur de servomoteur P.BE-CMMP-AS-...-3 A pour contrôleurs de servomoteur monophasé.
- Manuel produit "Contrôleur de servomoteur P.BE-CMMP-AS" :
Description des caractéristiques techniques et du mode de fonctionnement de l'appareil et conseils d'installation et d'utilisation du P.BE-CMMP-AS-...-11 A pour contrôleurs de servomoteur triphasé.
- Manuel CANopen "Contrôleur de servomoteur CMMP-AS" :
Description du protocole CANopen à mettre en œuvre selon DSP402 : P.BE-CMMP-CO-SW
- Manuel PROFIBUS "Contrôleur de servomoteur CMMP-AS" :
Description du protocole PROFIBUS à mettre en œuvre : P.BE-CMMP-FHPP-PB-SW
- Manuel produit "Module de technologie Ethernet" :
Description des caractéristiques techniques et de la fonctionnalité de l'appareil avec des conseils d'installation et de commande du module de technologie Ethernet : P.BE-CMMP-ET-SW
1. Généralités
1.2 Système de communication série en temps réel (SErial Realtime COmmunication System)
Interface SERCOS, l'interface numérique unique en son genre, mondialement harmonisée (CEI 61491 et EN 61491) dédiée à la communication entre des systèmes de commande et des entraînements. Il s'agit du premier système à bus de terrain permettant la réalisation numérique d'applications synchronisées à grand rendement dans le secteur de la construction de machines-outils.
On utilise un anneau de fibre optique comme support de transmission. La vitesse de transmission est de 2, 4, 8 ou 16 Mbit/s.
Cette interface permet essentiellement de réaliser trois types de communication entre la CN et les organes de commande d'entraînement numériques :
- transmission de la valeur de consigne de position
• transmission de la vitesse de consigne - transmission du couple de rotation de consigne.
La transmission de la valeur de consigne de position s'est avérée être la meilleure solution pour les applications rapides et ultra-précises. Au sein d'un anneau en fibre optique, jusqu'à six axes peuvent être alimentés toutes les 0,5 ms, de manière cyclique et parallèle, en nouvelles valeurs de consignes de position (positions de consigne).
L'interface SERCOS permet d'afficher l'ensemble des données, des paramètres et des informations de diagnostic internes à l'entraînement et de les entrer à l'aide d'une CN compatible SERCOS.
- Consignes de sécurité pour les entraînements et les commandes électriques
2. Consignes de sécurité pour les entraînements et les commandes électriques
2.1 Symboles utilisés

Information
Informations et recommandations importantes

Attention!
Tout non respect peut entraîner de graves dommages matériels.

DANGER!
Tout non respect peut entraîner des dommages corporels et matériels.

Attention ! Tension mortelle.
Le symbole de sécurité signale la présence éventuelle d'une tension mortelle.
Accessoires

Environnement
2.1.1 Autres symboles

Symbole de disquette
Toutes les étapes suivantes concernent les réglages au sein du programme de paramétrage Festo ServoCommander™.

Symbole de connecteur
Toutes les étapes suivantes concernent le matériel, c'est-à-dire le contrôleur de servomoteur CMMP-AS.
- Consignes de sécurité pour les entraînements et les commandes électriques
2.2 Consignes générales
En cas de dommages suite au non respect des consignes de sécurité énoncées dans ce manuel, Festo SE dégage de toute responsabilité.

Avant toute mise en service, il convient de lire les chapitres "Consignes de sécurité pour les entraînements et les commandes électriques" à partir de la page 11.
Si la documentation n'est pas comprise avec précision dans la présente langue, veuillez vous adresser à votre fournisseur et l'en informer.
Le fonctionnement sans erreurs et sûr du contrôleur de servomoteur exige un transport correct, effectué dans les règles, un stockage, un montage et une installation conformes et correctes, ainsi qu'une utilisation et un entretien conformes. Seul un personnel dûment formé et compétent est habilité à travailler sur les appareillages électriques.
2.2.1 Personnel dûment formé et compétent
Au sens du présent manuel ou des consignes de sécurité figurant sur le produit lui-même, il s'agit de personnes suffisamment familiarisées avec l'installation, le montage, la mise en service et l'exploitation du produit, ainsi qu'avec l'ensemble des avertissements et des mesures de précaution conformément aux instructions figurant dans ce manuel et suffisamment qualifiées dans leur domaine de spécialité.
- formation, instruction ou autorisation quant à l'activation/la désactivation d'appareils/de systèmes conformément aux normes techniques de sécurité, à la mise à la terre et à l'identification appropriée conformément aux nécessités du travail.
- formation et instruction conformément aux normes techniques de sécurité en matière d'entretien et d'utilisation de l'équipement de sécurité correspondant.
• formation aux premiers secours.
Les consignes suivantes doivent être lues avant la première mise en service du système afin d'éviter tout dommage corporel et/ou matériel.

Observer à tout moment les consignes de sécurité.

Ne pas essayer d'installer ni de mettre en service le contrôleur de servomoteur avant d'avoir soigneusement lu l'ensemble des consignes de sécurité relatives aux entraînements et aux régulateurs électriques figurant dans ce document. Lire impérativement ces consignes de sécurité ainsi que toutes les autres indications destinées à l'utilisateur avant de travailler avec le contrôleur de servomoteur.
2. Consignes de sécurité pour les entraînements et les commandes électriques

Si vous ne disposez pas d'instructions d'utilisation pour le contrôleur de servomoteur, veuillez vous adresser à votre distributeur. Exigez que ces documents soient envoyés sans délai à la personne responsable du fonctionnement sûr du contrôleur de servomoteur.

Lors de la revente de l'appareil, de sa location ou de toute autre mise à la disposition de tierces personnes, les présentes consignes de sécurité doivent également être jointes.

Pour des raisons de sécurité et de garantie, il est interdit à l'utilisateur d'ouvrir le contrôleur de servomoteur.

Une étude et une conception conformes du processus de régulation constituent des conditions requises pour le fonctionnement correct du contrôleur de servomoteur !

DANGER!
Toute utilisation non appropriée du contrôleur de servomoteur et tout non-respect des consignes d'avertissement ainsi que toute intervention incorrecte sur le dispositif de sécurité peuvent occasionner des dommages matériels, des dommages corporels, un choc électrique, voire, dans le pire des cas, entraîner la mort.
2.3 Dangers liés à une utilisation incorrecte

DANGER!
Haute tension électrique et courant de charge de haute intensité !
Danger de mort ou de graves blessures corporelles par choc électrique !

DANGER!
Haute tension électrique due à des raccordements erronés !
Danger de mort ou de graves blessures corporelles par choc électrique !
- Consignes de sécurité pour les entraînements et les commandes électriques

DANGER!
La surface du boîtier de l'appareil peut être chaude !

DANGER!
Mouvements dangereux !
Danger de mort, risques de graves blessures corporelles ou dommages matériels dus à des mouvements incontrôlés du moteur !
2.4 Consignes de sécurité
2.4.1 Consignes générales de sécurité

Le contrôleur de servomoteur est conforme à la classe de protection IP20 et au degré d'encrassement 1. S'assurer que l'environnement est conforme à cette classe de protection et à ce degré d'encrassement.

N'utiliser que les pièces de rechange et les accessoires autorisés par le fabricant.

Les appareils doivent être raccordés au réseau conformément aux normes EN de manière à pouvoir être débranchés du réseau à l'aide d'appareils de déconnexion correspondants (p. ex. interrupteur principal, contacteur-disjoncteur, sectionneur de puissance).

Le contrôleur de servomoteur peut être protégé par un interrupteur de protection contre les courants de court-circuit (RCD = dispositif de protection contre les courants de fuite) de 300 mA.

Utiliser des contacts dorés ou des contacts à forte pression de contact pour la commutation des contacts de commande.
2. Consignes de sécurité pour les entraînements et les commandes électriques

Prendre des mesures préventives de déparasitage pour les tableaux de distribution, comme p. ex. la commutation de contacteurs-disjoncteurs et de relais avec des éléments RC ou des diodes.

Respecter les consignes et les dispositions de sécurité du pays dans lequel l'appareil est utilisé.

Respecter les conditions ambiantes indiquées dans la documentation du produit. Les applications critiques en termes de sécurité sont interdites à moins qu'elles n'aient été expressément autorisées par le fabricant.

Les indications relatives à une installation conforme aux normes CEM figurent dans le manuel des produits de la famille CMMS-AS. Le fabricant de l'installation ou de la machine est tenu de respecter les valeurs limites préconisées par les directives nationales en vigueur.

Les caractéristiques techniques ainsi que les conditions de raccordement et d'installation du contrôleur de servomoteur figurent dans ce manuel produit et doivent être respectées.

DANGER!
Respecter les directives générales d'installation et de sécurité relatives au travail sur les installations à courant fort (p. ex. DIN, VDE, EN, CEI ou autres prescriptions nationales et internationales).
Tout non-respect peut entraîner la mort, des blessures corporelles ou de graves dommages matériels.

Les directives suivantes en particulier s'appliquent, sans toutefois être exhaustives :
Dispositions VDE 0100 relatives à l'installation d'appareils à courant fort (jusqu'à 1 000 V),
EN 60204 Équipement électrique des machines,
EN 50178 Équipement électrique utilisé dans les installations de puissance.
- Consignes de sécurité pour les entraînements et les commandes électriques
2.4.2 Consignes de sécurité relatives au montage et à l'entretien
Pour le montage et l'entretien du système, ce sont les prescriptions DIN, VDE, EN et CEI qui s'appliquent, ainsi que l'ensemble des prescriptions nationales et locales en matière de sécurité et de prévention des accidents. L'ingénieur d'exploitation ou l'exploitant est tenu de respecter ces prescriptions.

La commande, l'entretien et/ou la réparation du contrôleur de servomoteur ne doivent être assurés que par du personnel dûment formé et qualifié pour intervenir sur ou avec des appareils électriques.
Éviter les accidents, les blessures et/ou les dommages :

Le frein d'arrêt du moteur livré de série ou tout autre frein d'arrêt du moteur externe commandé par un régulateur d'entraînement seul n'est pas approprié à la protection des personnes.
- Bloquer les axes verticaux contre les risques de chute ou d'affaissement une fois que le moteur a été désactivé, p. ex. par :
• verrouillage mécanique de l'axe vertical, - l'utilisation de dispositifs de freinage, de retenue ou de blocage ou
• par un équilibrage suffisant de l'axe.

En cours de service du contrôleur de servomoteur et jusqu'à 5 minutes après sa désactivation, la résistance de freinage externe ou interne est parcourue par de dangereuses tensions continues. Tout contact peut s'avérer mortel ou entraîner de graves blessures corporelles.
Mettre l'équipement électrique hors tension à l'aide de l'interrupteur principal et le protéger contre toute remise en marche jusqu'à ce que le circuit de courant continu soit déchargé dans les cas de :
- travaux d'entretien et de réparation,
- travaux de nettoyage,
- longues périodes d'immobilisation.

Avant d'exécuter le moindre travail d'entretien, s'assurer que la tension d'alimentation a été coupée et verrouillée et que le circuit de courant continu est déchargé.
2. Consignes de sécurité pour les entraînements et les commandes électriques

Faire preuve d'une vigilance particulière lors du montage. S'assurer, tant pendant le montage qu'ultérieurement pendant l'exploitation de l'entraînement, qu'aucun copeau de forage, qu'aucune poussière métallique ni aucune pièce de montage (vis, écrous, tronçons de câble) ne tombe dans l'appareil.

S'assurer également que l'alimentation électrique externe du régulateur (24 V) est désactivée.

Le circuit de courant continu ou l'alimentation réseau doit toujours être coupé avant de couper l'alimentation du régulateur 24 V.

N'effectuer les travaux dans le secteur de la machine qu'après avoir désactivé l'alimentation en courant alternatif et/ou continu. Les étages de sortie ou les déblocages de contrôleur désactivés ne sont pas considérés comme des moyens de verrouillage appropriés. En cas de dysfonctionnement, l'entraînement peut être accidentellement activé.

Effectuer la première mise en service avec des moteurs fonctionnant au ralenti pour éviter toute détérioration mécanique, p. ex. suite à un sens de rotation erroné.

Les appareils électroniques ne sont jamais totalement à l'abri d'éventuelles défaillances. L'utilisateur est tenu de s'assurer que le système est placé dans un état sûr dans l'éventualité d'un défaut d'un appareil électrique.

Le contrôleur de servomoteur et plus particulièrement la résistance de freinage, externe ou interne, peuvent atteindre des températures élevées susceptibles de provoquer de graves brûlures.
2.4.3 Protection contre les contacts accidentels avec les pièces électriques
Cette section ne concerne que les appareils et les composants d'entraînement parcourus par des tensions supérieures à 50 V. Tout contact avec des pièces parcourues par des tensions supérieures à 50 V peut s'avérer dangereux pour l'homme et déclencher une décharge électrique. Pendant le fonctionnement des appareils électriques, certaines pièces de ces appareils sont forcément parcourues par des tensions dangereuses.
2. Consignes de sécurité pour les entraînements et les commandes électriques

DANGER!
Tension électrique de grande intensité !
Danger de mort, risque de décharge électrique ou de graves blessures !
Pour le montage et l'entretien du système, ce sont les prescriptions DIN, VDE, EN et CEI qui s'appliquent ainsi que l'ensemble des prescriptions nationales et locales en matière de sécurité et de prévention des accidents. L'ingénieur d'exploitation ou l'exploitant est tenu de respecter ces prescriptions :

Avant de mettre l'appareil en marche, installer les différents capots et autres dispositifs de protection contre les contacts accidentels. Les appareils à monter doivent être protégés par un boîtier, comme p. ex. une armoire de commande, contre les contacts accidentels. Observer la prescription VBG4 !

Respecter la section de cuivre minimale sur toute sa longueur pour le conducteur de mise à la terre conformément à la norme EN 60617 !

Raccorder le conducteur de protection de tous les appareils électriques avant la première mise en service, même pour de brèves raisons de mesure ou de contrôle et ce, toujours conformément au schéma des connexions ou le raccorder au conducteur de terre. Sinon, le boîtier peut être parcouru par des tensions de forte intensité susceptibles de provoquer un choc électrique.

Ne pas toucher les branchements électriques des composants quand ils sont activés.

- Avant toute intervention sur des pièces parcourues par des tensions supérieures à 50 V, débrancher l'appareil du réseau ou de l'alimentation électrique.
• Le protéger contre toute remise en marche.

Pour l'installation, il faut tenir compte de l'intensité de la tension continue et plus particulièrement en termes d'isolement et de mesures de protection. Veiller à la mise à la terre et au dimensionnement correct des conducteurs ainsi qu'à la protection appropriée contre les courts-circuits.

DANGER!
L'appareil est doté d'un circuit de décharge rapide pour le circuit de courant continu conforme à la norme EN 60204, article 6.2.4. Dans certaines configurations d'appareil, surtout lors de la commutation parallèle de plusieurs contrôleurs de servomoteur dans le circuit de courant continu ou en cas d'une résistance de freinage non raccordée, le dispositif de décharge rapide peut s'avérer sans effet. Après la désactivation, les contrôleurs de servomoteur peuvent rester jusqu'à 5 minutes sous tension (charge résiduelle du condensateur).
2.4.4 Protection contre les chocs électriques par très basse tension de sécurité (TBTS)
Toutes les connexions et les bornes avec des tensions entre 5 et 50 V du contrôleur de servomoteur sont de très basses tensions de sécurité protégées contre les contacts accidentels conformément aux normes suivantes :
- Sur le plan international : CEI 60364-4-41
- dans les pays européens membres de l'UE : EN 50178/1998, article 5.2.8.1

DANGER!
Haute tension électrique due à des raccordements incorrects! Danger de mort ou de blessures par choc électrique!
Ne raccorder aux connexions et bornes parcourues par des tensions entre 0 et 50 V que des appareils, des composants électriques et des câbles à très basse tension de sécurité (TBTS) (PELV = Protective Extra Low Voltage).
Ne brancher que des tensions et des circuits électriques protégés contre les tensions dangereuses. Cette protection peut être assurée par des transformateurs de séparation, des optocoupleurs fiables ou en mode sur batterie.
Protection contre les mouvements dangereux
Les mouvements dangereux peuvent être occasionnés par la commande erronée de moteurs raccordés, ce qui peut être dû à diverses raisons :
- acheminement de ligne ou câblage incorrects ou défectueux,
- erreur lors de la commande des composants,
- défaut des capteurs ou convertisseurs de mesure,
- composants défectueux ou non conformes à la norme CEM,
- erreur logicielle du système de commande de niveau supérieur.
Ces défauts peuvent survenir directement après l'activation de l'appareil ou après une durée indéfinie de fonctionnement.
2. Consignes de sécurité pour les entraînements et les commandes électriques
Les appareils de surveillance des composants d'entraînement excluent en grande partie tout dysfonctionnement des entraînements raccordés. Eu égard à la protection des personnes, et en particulier aux blessures et/ou aux dommages matériels, il convient de ne pas se fier exclusivement à eux. Jusqu'à ce que les appareils de surveillance installés soient efficaces, il faut s'attendre à des mouvements d'entraînement erronés dont l'ampleur dépend du type de commande et de l'état de fonctionnement.

DANGER!
Mouvements dangereux !
Danger de mort, risque de blessures, de graves blessures corporelles ou dommages matériels !
Pour les raisons énoncées ci-dessus, la protection des personnes doit être assurée par l'intermédiaire de mesures de surveillance ou de niveau supérieur pour l'appareil. Ces dernières sont mises en place en accord avec les données spécifiques du système et d'une analyse des risques et des défauts effectuée par le fabricant. Les prescriptions de sécurité applicables au système sont également prises en compte. Les mouvements aléatoires ou les autres dysfonctionnements peuvent être occasionnés par la désactivation de dispositifs de sécurité, leur contournement ou leur non-activation.
2.4.5 Protection contre les contacts avec des pièces chaudes

DANGER!
Les surfaces du boîtier peuvent être chaudes !
Risque de blessure ! Risque de brûlures !

Risque de brûlures !
- Ne pas toucher les surfaces de l'appareil à proximité de sources de chaleur ! Risque de brûlures !
- Avant tout contact, laisser refroidir les appareils pendant 10 minutes après leur désactivation.
-
Le contact avec des pièces d'équipement chaudes, comme p. ex. le boîtier, contenant des radiateurs et des résistances, peut entraîner des brûlures !
-
Consignes de sécurité pour les entraînements et les commandes électriques
2.4.6 Protection lors de la manipulation et du montage
La manipulation et le montage incorrects de certains composants et pièces peuvent, dans des conditions défavorables, entraîner des blessures.

DANGER!
Risque de brûlure suite à une manipulation non conforme !
Blessures corporelles par écrasement, cisaillement, coupure, chocs !
Les consignes générales de sécurité suivantes s'appliquent :

- Observer les consignes d'installation et de sécurité en matière de manipulation et de montage.
- Utiliser des dispositifs de montage et de transport appropriés.
- Prévenir tout pincement et écrasement en prenant des mesures de protection adaptées.
- Utiliser exclusivement des outils compatibles. Si indiqué, utiliser des outils spéciaux.
- Utiliser les engins de levage et les outils de manière conforme.
- Si nécessaire, porter un équipement de protection approprié (p. ex. lunettes de protection, chaussures de sécurité, gants de protection).
- Ne pas se tenir sous des charges suspendues.
-
Essuyer immédiatement tout liquide répandu sur le sol afin d'éviter toute glissade.
-
Câblage et affectation des broches
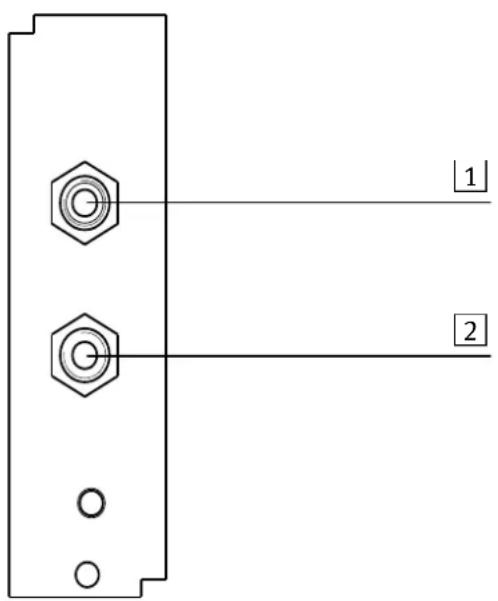
3. Câblage et affectation des broches
1 Récepteur
2 Émetteur
text_image
1 2Fig. 3.1: Affectation des broches
Pour la gamme de produits CMMP-AS, l'interface SERCOS a été réalisée sous la forme d'un module enfichable en option. En vertu d'exigences matérielles spéciales, il ne peut qu'être utilisé sur le slot Ext2.
En harmonie avec la spécification SERCOS, l'émetteur HFE 7000-210 (boîtier en plastique) et le récepteur HFD 7000-402 (boîtier métallique) sont accessibles sur la face avant.
3. Câblage et affectation des broches
1 CMMP-AS
2 CAMC-SC
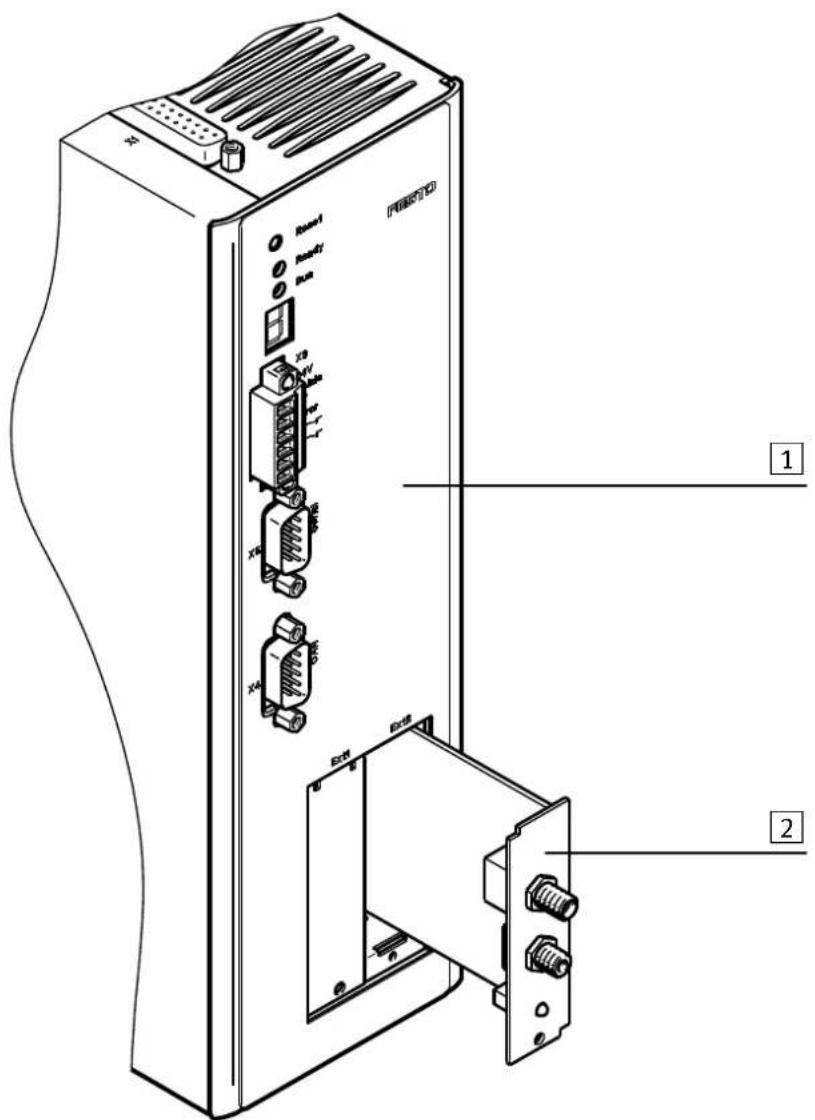
Fig. 3.2: Position d'enfichage pour CMMP-AS

Pour réaliser un réseau SERCOS, veuillez vous en tenir aux recommandations de la société d'intérêt SERCOS interface.
4. Activation de SERCOS
4. Activation de SERCOS
4.1 Aperçu
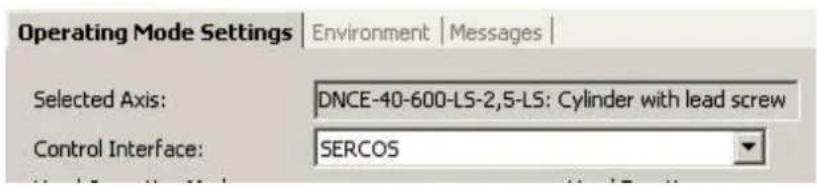
L'activation de SERCOS s'effectue une seule fois par l'intermédiaire de l'interface série (RS232) du servorégulateur. Pour activer le protocole SERCOS, il faut procéder à plusieurs réglages dans le programme de mise en service.
- Dans la fenêtre "Configuration"
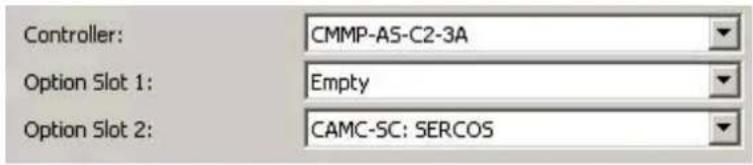
text_image
Controller: CMMP-A5-C2-3A Option Slot 1: Empty Option Slot 2: CAMC-SC: SERCOS- Dans la fenêtre "Application data"
- Dans la fenêtre "Fieldbus"
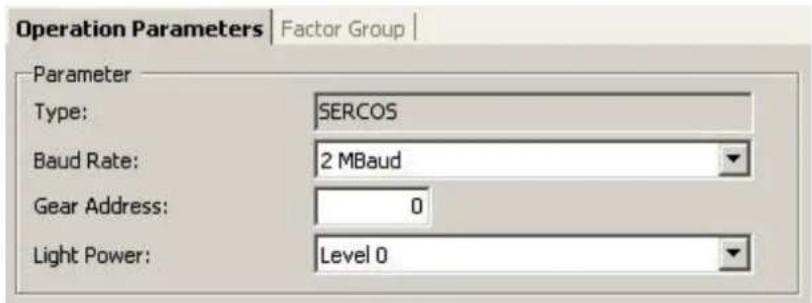
Avant de pouvoir activer la communication SERCOS, il faut définir trois paramètres différents :
Adresse d'entraînement
Pour garantir une identification explicite, chaque esclave sur le réseau doit posséder une adresse esclave explicite. Comme pour tous les appareils de la gamme CMMP-AS, il ne faut affecter qu'un entraînement par esclave, l'adresse d'entraînement est identique à l'adresse de l'esclave.
Vitesse de transmission
Ce paramètre détermine la vitesse de transmission en mBauds. La vitesse de transmission possible dépend du câble à fibre optique utilisé et de la puissance de la commande numérique utilisée. Quand SERCOS est encore actif, la vitesse de transmission sélectionnée peut diverger de la vitesse de transmission effectivement utilisée. C'est la raison pour laquelle la "vitesse de transmission momentanée" est également indiquée.
4. Activation de SERCOS
Rendement lumineux
En fonction du câble à fibre optique utilisé et de la longueur du câble, il peut s'avérer nécessaire d'adapter la puissance des diodes d'émission pour éviter tout forçage. Pour de plus amples informations sur ce paramètre, veuillez consulter le chapitre 14.
La communication SERCOS peut enfin être activée. Veuillez ne pas oublier que les paramètres mentionnés ci-dessus ne peuvent être modifiés qu'une fois le protocole désactivé. Tous les paramètres ne deviennent valides qu'après désactivation puis réactivation de la communication SERCOS.

Il faut savoir que l'activation de la communication SERCOS après une réinitialisation n'est disponible que si le jeu de paramètres a été enregistré.
Vitesses de transmission disponibles
Les vitesses de transmission suivantes sont disponibles :
2 Mbauds
4 Mbauds
8 Mbauds
16 Mbauds
5. Aperçu
5. Aperçu
5.1 Aperçu de communication
SERCOS est un système de bus de terrain Maître-Esclave composé d'un maître et de plusieurs esclaves connectés en série. La communication s'effectue de manière cyclique et commence avec le télégramme de synchronisation maître (MST). Le temps entre deux MST porte le nom de temps de cycle SERCOS (tSCYC).
Le MST est suivi du télégramme d'entraînement (AT) de chaque entraînement. L'AT contient les informations de réponse de l'entraînement, p. ex. les informations relatives à sa position (valeur réelle de position).
Les AT sont suivis du télégramme de données maître (MDT). Le MDT contient un enregistrement de données de chaque esclave avec les données d'exploitation pour les entraînements, p. ex. positions de consigne (valeurs de consigne de position).
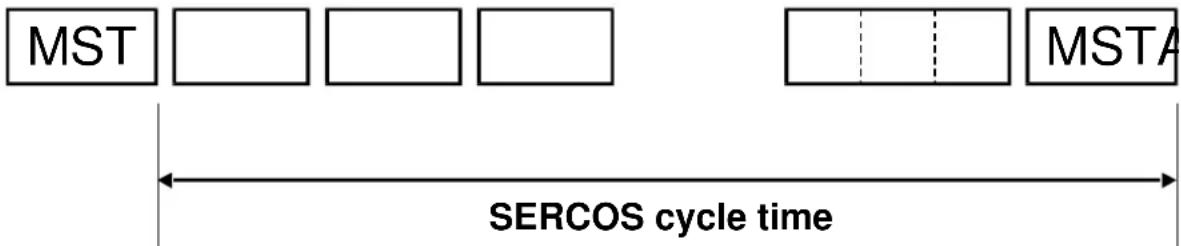
Fig. 5.1: Transmission cyclique de données
Le MDT et l'AT sont configurables, c'est-à-dire que le nombre et la nature des paramètres échangés de manière cyclique peuvent être déterminés par l'utilisateur.
Par ailleurs, l'utilisation du canal de service permet d'échanger les données non critiques en termes de temps. Un conteneur de données distinct est réservé à cet effet à l'intérieur du MDT et de l'AT. La transmission sur le canal de service s'effectue de manière segmentée.
Le canal de service est également utilisé pour le traitement de commandes de procédure telles que la "Prise de référence guidée par l'entraînement".
Pour mettre correctement en place un réseau SERCOS, il est nécessaire de configurer le timing de chaque esclave et de définir le moment d'envoi du MDT et des AT. Pour ce faire, l'initialisation de la communication est divisée en cinq phases de communication principales (CP).
| Phase de communication | Objectif | Tâche |
| 0 | Fermeture de l'anneau | Le maître teste si tous les esclaves répètent le signal du maître. |
| 1 | Identification des axes | Le maître identifie les esclaves à partir de leur adresse d'entraînement. |
5. Aperçu
| Phase de communication | Objectif | Tâche |
| 2 | Chargement des paramètres de communication | Le maître interroge les capacités de timing de chaque entraînement et règle le timing de l'anneau en fonction des paramètres de timing des entraînements. |
| 3 | Chargement des paramètres d'application | Transmission de tous les paramètres pour la communication cyclique, p. ex. la pondération des valeurs de position |
| 4 | Mode cyclique | Les esclaves opèrent de manière cyclique. |
Tab. 5.1: Phases de communication
SERCOS définit un grand nombre de paramètres aussi bien pour les besoins de la communication que de l'application. Pour identifier un paramètre, un numéro d'identification explicite (IDN) lui est attribué. En plus des données d'exploitation, il est également possible de lire les noms, l'attribut, l'unité, la valeur minimale et maximale pour chaque IDN implémenté.
Les paramètres définis par la spécification SERCOS sont identifiés par un "S", comme dans S-0-0001. Les paramètres spécifiques au constructeur commencent par un "P".
Le chapitre suivant décrit la structure des télégrammes SERCOS comme AT et MDT.
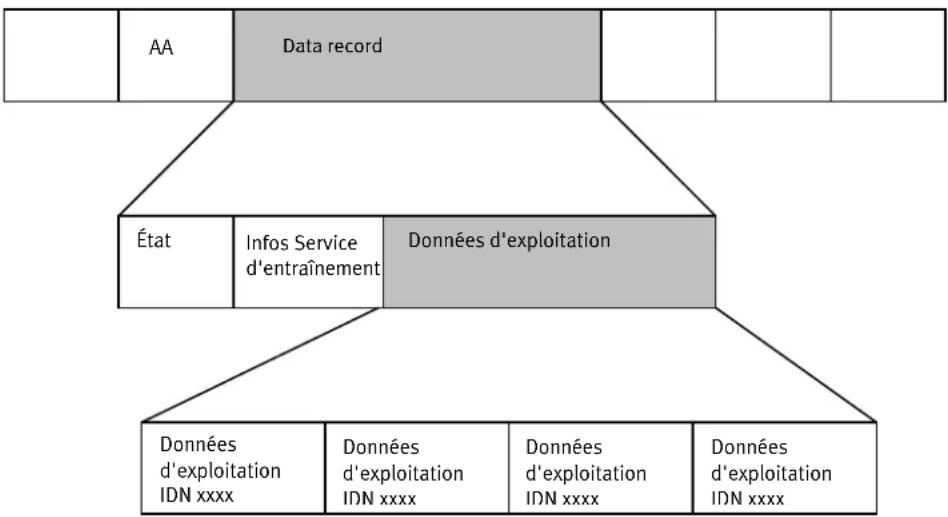
5.2 Télégramme d'entraînement (AT)
Le télégramme d'entraînement contient les données d'exploitation de l'entraînement. Chaque esclave envoie sont propre AT avec son adresse d'entraînement spécifique dans le champ Adr. Les données d'exploitation peuvent être configurées par l'utilisateur en fonction de l'application spécifique, p. ex. la valeur réelle de position et la valeur réelle de vitesse peuvent être insérées en commun.
flowchart
graph TD
A["Data record"] --> B["État"]
B --> C["Données d'exploitation"]
C --> D["Données d'exploitation IDN xxxx"]
C --> E["Données d'exploitation IDN xxxx"]
C --> F["Données d'exploitation IDN xxxx"]
Fig. 5.2: Télégramme d'entraînement (AT)
5. Aperçu
Un paramètre spécial (IDN list of all configurable data in the AT) permet de trouver quels IDN peuvent être enregistrés dans l'AT.
En plus des données d'exploitation, l'AT contient des données du canal de service (Info Service d'entraînement) et le mot d'état avec les informations d'état de l'entraînement.
Pour des informations détaillées sur la configuration du MDT, veuillez consulter le manuel de votre CN.
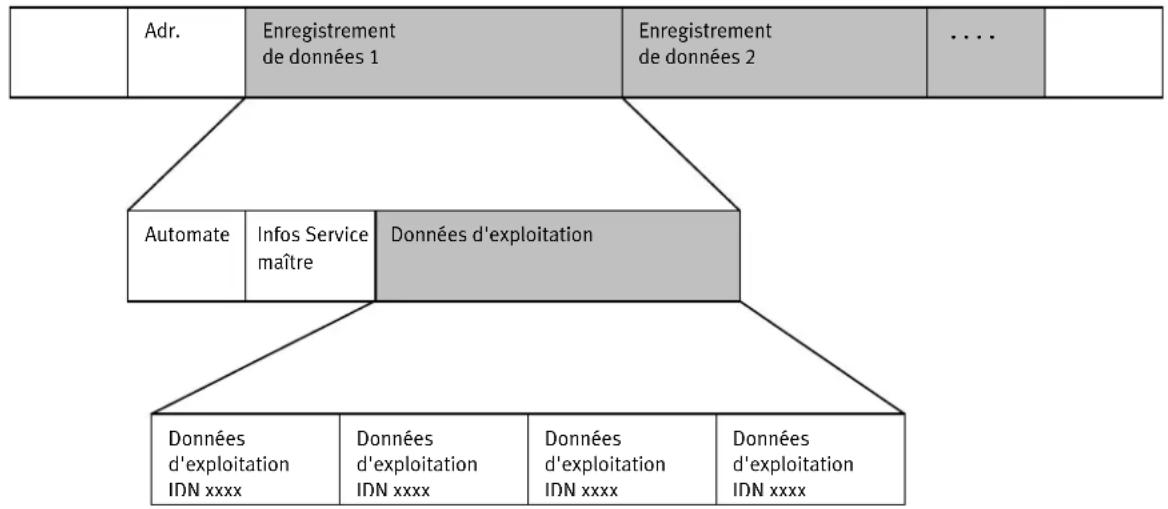
5.3 Télégramme de données maître (MDT)
Le télégramme de données maître contient les valeurs de consigne des entraînements. Le maître envoie seulement un télégramme de données maître avec des enregistrements de données spécifiques pour chaque entraînement. Les données d'exploitation pour les entraînements peuvent être configurées, p. ex. la valeur de consigne de position et la valeur limite de couple de rotation peuvent être insérées en commun.
Un paramètre spécial (IDN list of all configurable data in the MDT) permet de trouver quels IDN peuvent être enregistrés dans le MDT.
flowchart
graph TD
A["Adr."] --> B["Enregistrement de données 1"]
B --> C["Enregistrement de données 2"]
C --> D["..."]
E["Automate"] --> F["Infos Service maître"]
F --> G["Données d'exploitation"]
G --> H["Données d'exploitation IDN xxxx"]
G --> I["Données d'exploitation IDN xxxx"]
G --> J["Données d'exploitation IDN xxxx"]
H --> K["Données d'exploitation IDN xxxx"]
I --> L["Données d'exploitation IDN xxxx"]
J --> M["Données d'exploitation IDN xxxx"]
Fig. 5.3: Télégramme de données maître (MDT)
À l'image de la structure de l'AT, le MDT contient des données du canal de service (Infos Service maître) ainsi que le mot de commande pour commander l'entraînement.
Pour des informations détaillées sur la configuration du MDT, veuillez consulter le manuel de votre CN.
5. Aperçu
5.4 Canal de service (SC)
En plus de l'échange de données cyclique, il est possible d'échanger des données non critiques en termes de temps sur le canal de service. Comme dans l'AT et le MDT, seuls 2 octets sont réservés au canal de service, les données doivent être transmises de manière segmentée. Pour transmettre les données, un mécanisme de handshake spécial est mis en œuvre. Pour de plus amples informations relatives au mécanisme de handshake, veuillez consulter les spécifications SERCOS.
Le canal de service est souvent utilisé par les CN pour afficher tous les paramètres disponibles (nom, valeur, etc.) et autoriser l'utilisateur à les modifier. C'est votre CN qui détermine la fonctionnalité du canal de service. Pour plus d'informations à ce sujet, veuillez consulter le manuel de votre CN.
Le canal de service est aussi utilisé pour régler l'entraînement pendant l'initialisation (commutation de phase), pour envoyer des paramètres de timing à l'entraînement et déclencher le passage à la phase suivante par l'envoi d'une commande de procédure. Par commande de procédure, l'on désigne un type spécial de données non cycliques qui, envoyées par l'intermédiaire du canal de service, appellent des processus fonctionnels définis, comme p. ex. le démarrage du processus de prise de référence. Ces processus peuvent nécessiter un certain temps. Toutefois, le canal de service est immédiatement à nouveau disponible pour la transmission de données non cycliques car la commande de procédure ne déclenche que le début d'un processus fonctionnel. L'état de la commande est transmis par le canal de service permettant ainsi au maître de vérifier si la commande lancée a été correctement exécutée ou si elle est encore en cours d'exécution. En tant que paramètre, un IDN explicite est attribué à chaque commande de procédure.
5. Aperçu
5.5 Types de télégrammes
Le contenu des télégrammes des enregistrements de données configurables est déterminé par le paramètre "Telegram type" (S-0-0015). Il est possible de sélectionner un télégramme standard prédéfini ou d'utiliser un télégramme spécifique à l'utilisateur. Le type de télégramme doit être configuré en phase 2.
5.5.1 Télégrammes standard
Télégramme standard 0
Aucune donnée cyclique n'est transmise. Les données ne peuvent être transmises que sur le canal de service.
Télégramme standard
Le télégramme standard 1 peut être utilisé pour le mode de fonctionnement Régulation du couple de rotation :
Enregistrement de données dans le MDT
Enregistrement de données dans l'AT
Champ de données 0
Champ de
données 1
Valeur de consigne de couple de rotation (S-0-0080) 2 octets
Aucune donnée
0 octet
Télégramme standard 3
Le télégramme standard 3 peut être utilisé pour le mode de fonctionnement Régulation de la vitesse :
Enregistrement de données dans le MDT
Enregistrement de données dans l'AT
Champ de données 0
Champ de
données 1
Champ de
Champ de
données 0
données 1
Valeur de consigne de vitesse (S-0-0036) 4 octets
Valeur réelle de
position
(S-0-0041) 4 octets


5. Aperçu
Télégramme standard 4
Le télégramme standard 4 peut être utilisé pour le mode de fonctionnement
"Asservissement de position":
Enregistrement de données dans le MDT
Champ de données 0
Champ de données 1
Valeur de consigne de position
(S-0-0047) 4 octets
Enregistrement de données dans l'AT
Champ de données 0
Champ de données 1
Valeur réelle de position
(S-0-0041) 4 octets
5.5.2 Télégramme d'application
En plus des télégrammes standard, il est possible d'utiliser des télégrammes personnels, librement configurables. Le MDT et l'AT peuvent être configurés indépendamment l'un de l'autre.
Les IDN utilisés dans le MDT doivent être paramétrés dans S-0-0024 (Configuration list MDT). Les paramètres disponibles peuvent être relevés dans l'IDN S-0-0188 (IDN list of all configurable data in the MDT). La longueur maximale admissible en octets peut être donnée par S-0-0186 (Length of the configurable data record in the MDT).
Pour la configuration de l'AT, les IDN suivants peuvent être utilisés :
S-0-0016 (Configuration list AT)
Il faut tenir compte du fait que seul un nombre limité de données peut être échangé de manière cyclique en cas d'utilisation de petits temps de cycle SERCOS. Le nombre maximal d'IDN transmis de manière cyclique est limité à 4.
Pour des informations détaillées sur la configuration des télégrammes d'application, veuillez consulter le manuel de votre CN.
Les valeurs suivantes pour S-0-0015 (Telegram type) sont admissibles :
| Bit | Description | Valeur |
| 0 ... 2 | Télégrammes standard | 000_b : Non autorisée |
| 001_b : Télégramme standard 1 | ||
| 010_b : Non autorisée | ||
| 011_b : Télégramme standard 3 | ||
| 100_b : Télégramme standard 4 | ||
| 101_b : Non autorisée | ||
| 110_b : Non autorisée | ||
| 111_b : Télégramme d'application |
Tab. 5.2: Valeurs pour S-0-0015
5. Aperçu
5.6 Initialisation (changement de phase)
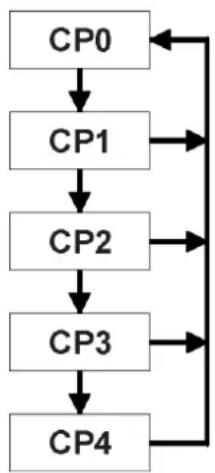
Pour mettre en place un réseau SERCOS, il est indispensable de connaître les capacités de timing spécifiques des entraînements raccordés afin de déterminer les moments d'émission et de réception. En outre, le maître doit synchroniser tous les esclaves avant que la communication cyclique ne puisse commencer. Pour ce faire, cinq phases sont définies.
Le diagramme d'état de SERCOS est représenté à droite. Normalement la phase suivante ne peut être atteinte que par la phase précédente. Seule la phase 0 peut être atteinte à partir de toutes les autres phases afin de lancer une nouvelle initialisation.
Le maître détermine la phase correspondante dans le télégramme de synchronisation maître (MST). Pour atteindre la phase 3 et la phase 4, l'exécution d'une commande de procédure est également nécessaire (voir aussi chapitre 13.3).
flowchart
graph TD
CP0 --> CP1
CP1 --> CP2
CP2 --> CP3
CP3 --> CP4
CP0 <--> CP1
CP1 <--> CP2
CP2 <--> CP3
CP3 <--> CP4
Fig. 5.4: Changement de phase
5.6.1 Phase de communication 0 : Fermeture de l'anneau
Au cours de la phase 0, le maître essaie de réceptionner son propre signal afin de détecter si l'anneau SERCOS est fermé. Tous les esclaves SERCOS se contentent de répéter le signal du maître, ce qui permet au maître de reconnaître que l'anneau est fermé. En cas de défaut de communication, l'esclave peut retomber de lui-même en phase 0.
5.6.2 Phase de communication 1 : Identification des entraînements
La phase de communication 1 est utilisée pour détecter les entraînements connectés à l'anneau. Pour ce faire, le maître communique en particulier avec chaque entraînement à l'aide de son adresse d'entraînement pour confirmer que tous sont présents.
5.6.3 Phase de communication 2 : Chargement des paramètres de communication
Au cours de la phase de communication 2, toute la fonctionnalité du canal de service est disponible et les données non cycliques peuvent être échangées.
Les paramètres suivants au moins doivent être transmis :
- moments d'émission et intervalles de temps
- paramètres de définition du contenu et de la longueur de l'AT
- paramètres de définition du contenu et de la longueur du MDT.
5. Aperçu
Avant que le maître ne puisse changer de phase dans le MST pour passer à la phase de communication 3, il est nécessaire que l'entraînement contrôle les paramètres de timing envoyés par le maître. Pour ce faire, une commande de procédure doit être exécutée pour le maître avant qu'il ne soit autorisé à passer à la phase 3. Cette commande de procédure est désignée par le terme de "CP3 Transition check" (S-0-0127). Elle est décrite au chapitre 13.3. Au moins les paramètres de la "IDN list of operation data for CP2" (S-0-0018) doivent avoir été transmis sans erreur lors de la phase de communication 2.
Pour vérifier la validité des paramètres, l'esclave ne peut se référer qu'à des critères d'ordre général (p. ex. minimum, maximum). L'esclave ne peut pas déceler si tous les paramètres envoyés par le maître sont corrects en termes de données de commande et d'installation globale. Ce qui signifie que même si l'entraînement confirme de manière positive "CP3 transition check", des paramètres de communication incorrects en termes d'installation globale peuvent être présents, ce qui peut entraîner une interruption de la communication cyclique.
Au passage à la phase de communication 3, la synchronisation de l'entraînement avec le cycle MST est lancée.
5.6.4 Phase de communication 3 : Chargement des paramètres d'application
Au cours de la phase de communication 3, l'échange des données s'effectue par l'intermédiaire de télégrammes définis pour le mode cyclique. On utilise également les intervalles de temps pour le mode cyclique. Les données du mode cyclique ne sont pas importantes, c'est-à-dire qu'elles ne sont pas utilisées par l'entraînement, il est toutefois nécessaire que la structure du télégramme coïncide déjà avec celle de la phase de communication 4. Au cours de cette phase, il est possible d'adapter l'entraînement à l'application spécifique, p. ex. en modifiant les paramètres de pondération pour la position, la vitesse et l'accélération.
Pour passer à la phase de communication 4, l'entraînement doit vérifier la validité des paramètres transmis et également vérifier s'il est synchronisé. Pour ce faire, une commande de procédure doit être exécutée pour le maître avant qu'il ne soit autorisé à passer à la phase 4. Cette commande de procédure est désignée par le terme de "CP4 transition check" (S-0-0128). Elle est décrite au chapitre13.3.
Au moins les paramètres de la "IDN list of operation data for CP3" (S-0-0019) doivent avoir été transmis sans erreur lors de la phase de communication 3.
5.6.5 Phase de communication 4 : Mode cyclique
Au cours de cette phase, l'initialisation prend fin et les données cycliques sont échangées. Désormais, la mise sous tension de l'entraînement est possible par l'intermédiaire du mot de commande intégré au MDT. L'état de l'entraînement est signalé par le mot d'état intégré à l'AT.
6. Temps de cycle SERCOS
6. Temps de cycle SERCOS
Normalement, le temps de cycle SERCOS peut être déterminé par le paramètre IDN S-0-0002. Afin d'obtenir le meilleur comportement possible, il faut que tous les régulateurs au sein du CMMP-AS-SC (régulateur de courant, régulateur de vitesse et asservissement de position) soient synchronisés avec le MST.
| Nom | Facteur | Temps de cycle |
| t_i (régulateur de courant) | 2 | 125 μs |
| t_n (régulateur de vitesse) | 2 | 250 μs |
| t_x (asservissement de position) | 2 | 500 μs |
| t_p (calcul d'interpolation – IPO) | 2 | 1000 μs |
Tab. 6.1: Temps de cycle SERCOS
7. Modes de fonctionnement
7. Modes de fonctionnement
Le mode de fonctionnement de l'entraînement est déterminé par le mot de commande du MDT (voir chapitre 9). Vous avez le choix entre un mode de fonctionnement principal et trois modes de fonctionnement auxiliaires. Le mot d'état permet de connaître le mode de fonctionnement activé.
La signification des modes de fonctionnement principal et auxiliaires doit être définie par le maître lors de la phase de communication 3. Pour ce faire, les IDN suivants doivent être utilisés :
S-0-0035 Secondary opération mode 3
Les valeurs suivantes sont admissibles :
| Valeurs | Description |
| 0x0000 | Mode de fonctionnement non défini |
| 0x0001 | Régulation de couple |
| 0x0002 | Régulation de vitesse |
| 0x000B | Asservissement de position avec utilisation du "capteur de commutation", sans poursuite, interpolation |
| 0x000C | Asservissement de position avec utilisation du "capteur de position réelle", sans poursuite, interpolation |
| 0x002B | Interpolation guidée par l'entraînement avec utilisation du "capteur de commutation" |
Tab. 7.1: Valeurs
Afin de sélectionner les modes de fonctionnement, il faut disposer dans le MDT des valeurs de consigne pour chaque mode de fonctionnement utilisé.

Le maître doit s'assurer que toutes les valeurs de consigne de chaque mode de fonctionnement utilisé sont disponibles dans le MDT. Sinon, lors du passage à un autre mode de communication, la valeur de consigne peut être indéfinie, ce qui peut entraîner un comportement incontrôlé de l'entraînement.
Comme indiqué plus haut, le changement de mode de fonctionnement est déclenché par écriture dans le mot de commande. Comme le changement de mode de fonctionnement nécessite un certain temps, le mode de fonctionnement actuel peut être consulté à l'aide du mot d'état. Pendant le passage au nouveau mode de fonctionnement, les valeurs de consigne des deux modes de fonctionnement doivent être valides.
7. Modes de fonctionnement
Quand l'entraînement signale le nouveau mode de fonctionnement dans le mot d'état, les valeurs de consigne de l'ancien mode de fonctionnement n'ont plus besoin d'être valides.
La commutation dans un mode de fonctionnement non initié entraîne une erreur (37-5) signalée dans "Interface status" (S-0-0014). Voir le chapitre 1.1.1.
7.1 Régulation de couple
En mode "Régulation de couple", une nouvelle valeur de consigne (Torque commande value, S-0-0080) doit être disponible dans la base de temps du temps de cycle SERCOS. Cette valeur est la valeur d'entrée pour le régulateur de couple. Le couple effectif peut être consulté à l'aide de "Torque feedback value" (S-0-0084). Il est du ressort de l'utilisateur de s'assurer que la valeur de consigne de couple est intégrée dans le MDT avant de basculer dans ce mode de fonctionnement.
7.2 Régulation de vitesse
En mode "Régulation de vitesse", une nouvelle valeur de consigne (Velocity command value, S-0-0036) doit être disponible dans la base de temps du temps de cycle SERCOS. Cette valeur est la valeur de départ pour le régulateur de vitesse qui génère la valeur de consigne pour le régulateur de couple. La vitesse effective peut être consultée à l'aide de "Velocity feedback value 1" (S-0-0040). Il est du ressort de l'utilisateur de s'assurer que la valeur de consigne de vitesse est intégrée dans le MDT avant de basculer dans ce mode de fonctionnement.
7.3 Asservissement de position
En mode "Asservissement de position", une nouvelle valeur de consigne (Position command value, S-0-0047) doit être disponible dans la base de temps du temps de cycle SERCOS. Cette valeur est la valeur d'entrée pour l'interpolateur interne. L'interpolateur génère des valeurs de consigne de position dans la base de temps du régulateur de vitesse (par exemple quatre fois plus rapidement que le temps de cycle SERCOS) ainsi que des valeurs de vitesse d'avance. L'asservissement de position et le régulateur de vitesse reçoivent de nouvelles valeurs de consigne selon un temps de cycle plus élevé que le temps de cycle SERCOS. Ce qui explique que l'entraînement suive sans poursuite (sans erreur de poursuite) les valeurs de consigne de position SERCOS (valeurs de consigne). La position effective peut être consultée soit par l'intermédiaire de "Position feedback value 1" (S-0-0051) ou de "Position feedback value 2" (S-0-0053). La première donne la valeur réelle de position du codeur du moteur, la deuxième la valeur réelle d'un capteur externe supplémentaire. Elles sont valides en alternance lorsque le mode de fonctionnement concerné est activé. Sinon, la valeur réelle donne 0. Il est interdit de basculer en ligne entre la valeur réelle interne et la valeur réelle externe. Si un IDN de mode de fonctionnement (S-0-0032, S-0-0033, S-0-0034, S-0-0035) a été réglé sur 0x000B, il n'est pas autorisé d'en activer un autre sur 0x000C et inversement. Il est du ressort de l'utilisateur de s'assurer que la valeur de consigne de position est intégrée dans le MDT avant de basculer dans ce mode de fonctionnement.
7. Modes de fonctionnement
7.4 Interpolation interne à l'entraînement
Dans ce mode de fonctionnement, l'entraînement reçoit une nouvelle position cible en provenance du maître et se déplace de lui-même vers cette position en respectant la vitesse de positionnement (S-0-0259), l'accéléraison de positionnement (S-0-0260) et la décélération de positionnement (S-0-0359) prédéfinies. Il n'est pas indispensable que la position cible soit donnée de manière cyclique, elle peut également être envoyée sur le canal de service. Une nouvelle course de positionnement commence à chaque fois qu'une nouvelle position cible (S-0-0258) est écrite.
8. Pondération des données
8. Pondération des données
Les données d'exploitation peuvent posséder différentes pondérations pour adapter les entraînements à l'application. SERCOS fait la distinction entre les données d'exploitation non pondérées et les données pondérées, spécifiques à l'application.
Lors de la pondération spécifique à l'application, il est fait référence aux données en fonction des mouvements en charge rotationnels et translationnels.
Plusieurs pondérations prédéfinies sont disponibles pour les données de position, de vitesse, de couple et d'accélération.
8.1 Données de position
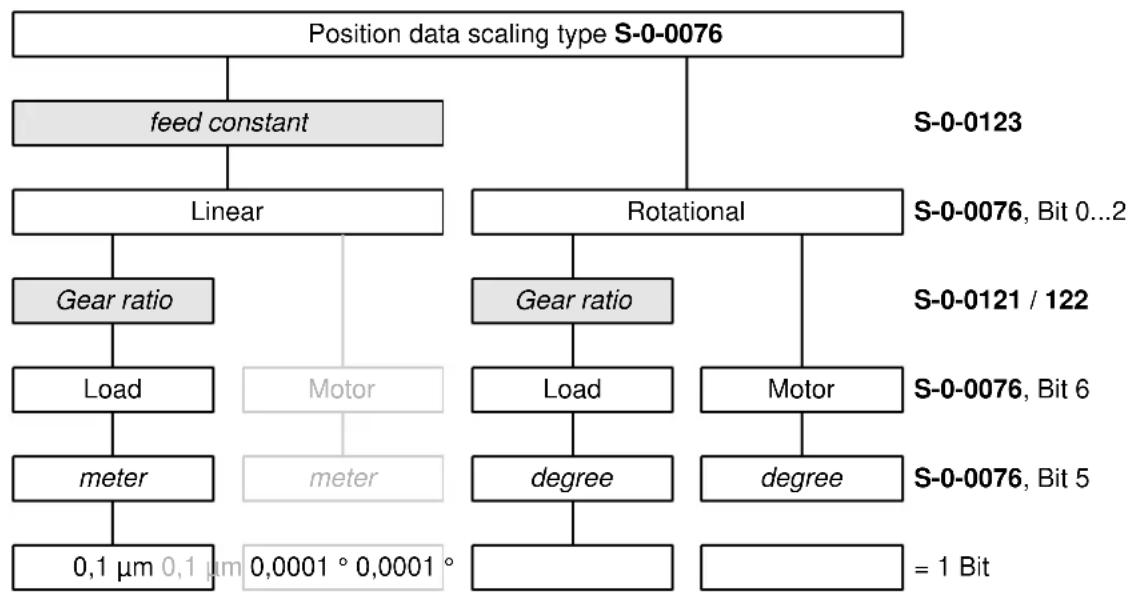
8.1.1 Aperçu
La pondération peut être définie bit par bit dans IDN S-0-0076. Le diagramme suivant donne un aperçu des pondérations disponibles (à ce jour, la pondération translationnelle sur l'arbre moteur n'est pas disponible).
flowchart
graph TD
A["Position data scaling type S-0-0076"] --> B["feed constant"]
A --> C["Linear"]
A --> D["Rotational"]
B --> E["Gear ratio"]
E --> F["Load"]
F --> G["meter"]
G --> H["0.1 μm 0.1 μm 0,0001 ° 0,0001 °"]
C --> I["Gear ratio"]
I --> J["Load"]
J --> K["meter"]
K --> L["0,0001 ° 0,0001 °"]
D --> M["Gear ratio"]
M --> N["Load"]
N --> O["meter"]
O --> P["0,0001 ° 0,0001 °"]
style A fill:#f9f,stroke:#333
style B fill:#ccc,stroke:#333
style C fill:#ccc,stroke:#333
style D fill:#ccc,stroke:#333
style E fill:#ccc,stroke:#333
style F fill:#ccc,stroke:#333
style G fill:#ccc,stroke:#333
style H fill:#ccc,stroke:#333
style I fill:#ccc,stroke:#333
style J fill:#ccc,stroke:#333
style K fill:#ccc,stroke:#333
style L fill:#ccc,stroke:#333
style M fill:#ccc,stroke:#333
style N fill:#ccc,stroke:#333
style O fill:#ccc,stroke:#333
style P fill:#ccc,stroke:#333
Fig. 8.1: Pondération des données de position
Les valeurs suivantes s'appliquent pour IDN S-0-0076 :
| BIT | Description | Valeur |
| 0 ... 2 | Type de pondération | 00_b : Non pondéré (incrémentiel) 01_b : Pondération translationnelle 10_b : Pondération rotationnelle |
| 3 | Pondération favorite | 0_b : Pondération favorite 1_b : Non autorisée |
8. Pondération des données
| BIT | Description | Valeur |
| 4 | Unité de la pondération translationnelle/rotationnelle | 0_b : Mètre/degré angulaire 1_b : Non autorisée |
| 5 | Réservé | |
| 6 | Référence des données | 0_b : Sur l'arbre moteur 1_b : Sur la charge |
| 7 | Format de traitement | 0_b : Format absolu 1_b : Format modulo (voir IDN S-0-0103) |
| 8 ... 15 | Réservé |
Tab. 8.1: Les valeurs s'appliquent pour IDN S-0-0076
8.1.2 Non pondéré
Si aucune pondération n'est sélectionnée, toutes les données de position sont envoyées avec la pondération interne des données de position (232 pas = 1 rotation). Comme les valeurs de position définies par SERCOS sont des valeurs à 4 octets, cette pondération ne s'avère généralement pas judicieuse pour les applications, ce qui explique que l'on ne puisse pas sélectionner "non pondéré".
8.1.3 Pondération translationnelle
En cas d'utilisation d'un moteur linéaire ou d'un entraînement linéaire, l'utilisation de valeurs de position linéaires s'avère pratique. Ici, la pondération est définie par le facteur de pondération des données de position translationnelles (S-0-0077) et par l'exposant de pondération des données de position translationnelles (S-0-0078) en appliquant la formule suivante :
$$ \mathrm{LSB} = \mathrm{S} - 0 - 0 0 7 7 * 1 0 ^ {\mathrm{S} - 0 - 0 0 7 8} $$
Avec 1 comme facteur et -7 comme exposant, cela donne une résolution de 0,1 μm par bit.
Le rapport entre les rotations du moteur et le mouvement translationnel est déterminé par la constante d'avance (S-0-0123). Si, de plus, la pondération translationnelle se réfère à la charge, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8.1.4 Pondération rotationnelle
En cas de sélection de rotationnel, la résolution de position rotationnelle est indiquée par le paramètre S-0-0079 qui définit les pas par nombre de rotations.
Une résolution rotationnelle de position de 3 600 000 entraîne une pondération de 0,0001° par bit.
Si, de plus, la pondération rotationnelle se réfère à la charge, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8. Pondération des données
8.2 Données de vitesse
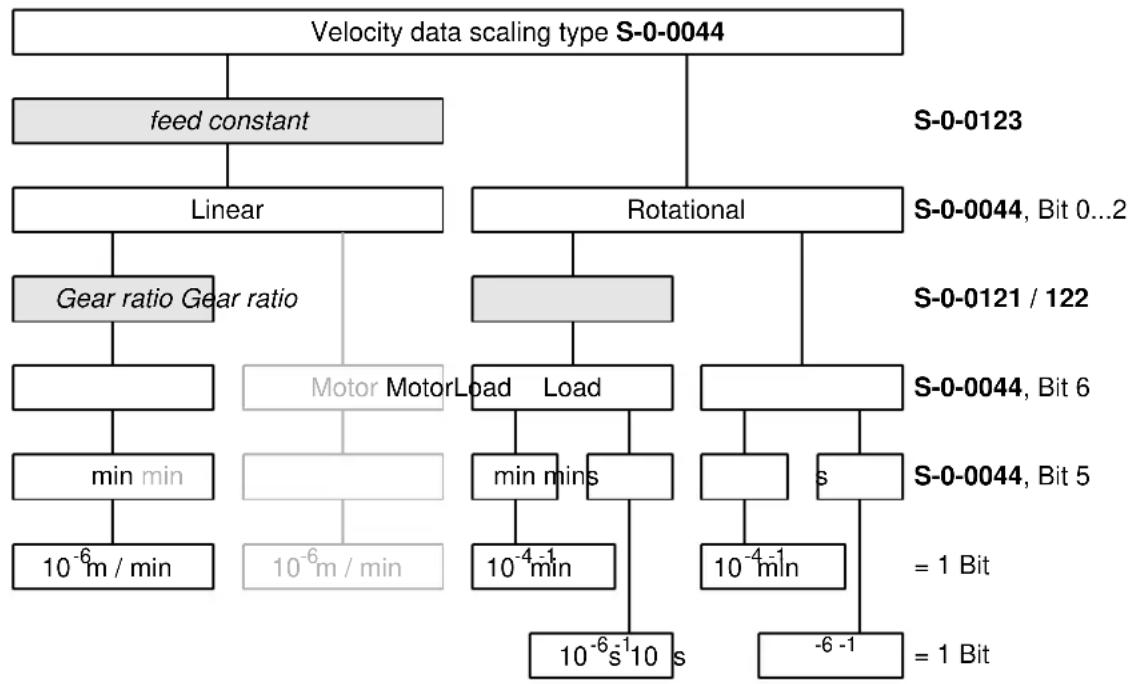
8.2.1 Aperçu
La pondération peut être définie bit par bit dans l'IDN S-0-0044. Le diagramme suivant donne un aperçu des pondérations disponibles (à ce jour, la pondération translationnelle sur l'arbre moteur n'est pas disponible) :
flowchart
graph TD
A["Velocity data scaling type S-0-0044"] --> B["feed constant"]
A --> C["Linear"]
A --> D["Rotational"]
B --> E["Gear ratio Gear ratio"]
E --> F["min min"]
F --> G["10⁻⁶ m / min"]
C --> H["Motor MotorLoad"]
H --> I["10⁻⁶ m / min"]
D --> J["Load"]
J --> K["min mins"]
J --> L["s"]
D --> M["10⁻⁴ min"]
M --> N["10⁻⁶ s⁻¹ 10 s"]
D --> O["-6 -1"]
O --> P["10⁻⁴ min"]
P --> Q["S-0-0044, Bit 5 = 1 Bit"]
D --> R["S-0-0121 / 122"]
R --> S["S-0-0044, Bit 6 = 1 Bit"]
R --> T["S-0-0123"]
Fig. 8.2: Velocity data scaling type
Les valeurs suivantes s'appliquent pour IDN S-0-0044 :
| Bit | Description | Valeur |
| 0 ... 2 | Type de pondération | 00_b : Non pondéré (incrémentiel) 01_b : Pondération translationnelle 10_b : Pondération rotationnelle |
| 3 | Pondération favorite | 0_b : Pondération favorite 1_b : Non autorisée |
| 4 | Unité de la pondérationtranslationnelle/rotationnelle | 0_b : Mètre/rotations 1_b : Non autorisée |
| 5 | Unités de temps | 0_b : Minutes 1_b : Secondes |
| 6 | Référence des données | 0_b : Sur l'arbre moteur 1_b : Sur la charge |
| 7 ... 15 | Réservé |
Tab. 8.2: Les valeurs s'appliquent pour l'IDN S-0-0044
8. Pondération des données
8.2.2 Non pondéré
À ce jour, "Non pondéré" ne peut pas être sélectionné.
8.2.3 Pondération translationnelle
Pour la pondération translationnelle des données de vitesse, la pondération est définie par le facteur de pondération pour les données de vitesse (S-0-0045) et l'exposant de pondération pour les données de vitesse (S-0-0046) en utilisant la formule suivante :
$$ \mathrm{LSB} = \mathrm{S-0-0045} * 1 0 ^ {\mathrm{S-0-0046}} $$
Avec 1 comme facteur et -6 comme exposant, cela donne une résolution de 0,001 mm/min. par bit.
Le rapport entre les rotations de l'arbre du moteur et le mouvement translationnel est déterminé par la constante d'avance (S-0-0123). Comme seule la pondération avec référence à la charge peut être sélectionnée, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8.2.4 Pondération rotationnelle
Pour la pondération rotationnelle des données de vitesse, la pondération est également définie par le facteur de pondération pour les données de vitesse (S-0-0045) et l'exposant de pondération pour les données de vitesse (S-0-0046) en utilisant la formule suivante :
$$ \mathrm{LSB} = \mathrm{S-0-0045} * 1 0 ^ {\mathrm{S-0-0046}} $$
Pour la pondération rotationnelle, il est aussi possible de choisir l'unité de temps (min/s). Pour les minutes, l'exposant de pondération est -4, pour les secondes -6. Avec 1 comme facteur, cela donne une résolution de 0,0001 min-1 par bit ou 0,000 001 s-1 par bit.
Si, de plus, la pondération se réfère à la charge, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8. Pondération des données
8.3 Données d'accélération
8.3.1 Aperçu
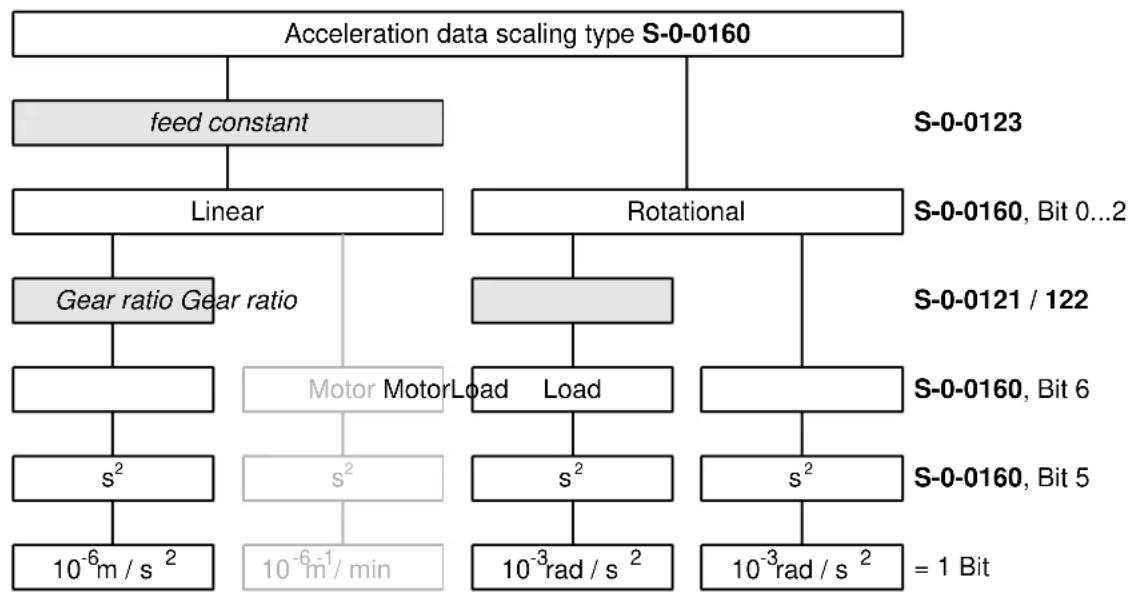
La pondération peut être définie bit par bit dans l'IDN S-0-0160. Le diagramme suivant donne un aperçu des pondérations disponibles (à ce jour, la pondération translationnelle sur l'arbre moteur n'est pas disponible) :
flowchart
graph TD
A["Acceleration data scaling type S-0-0160"] --> B["feed constant"]
A --> C["Linear"]
A --> D["Rotational"]
B --> E["Gear ratio Gear ratio"]
C --> F["Motor MotorLoad"]
D --> G["Load Load"]
E --> H["s²"]
F --> I["s²"]
G --> J["s²"]
H --> K["10⁻⁶ m/s²"]
I --> L["10⁻⁶ m⁻¹/min"]
J --> M["10⁻³ rad/s²"]
N["S-0-0123"] --> A
O["S-0-0160, Bit 0...2"] --> A
P["S-0-0121 / 122"] --> D
Q["S-0-0160, Bit 6"] --> D
R["S-0-0160, Bit 5"] --> D
S["= 1 Bit"] --> M
Fig. 8.3: Pondération des données d'accélération
Les valeurs suivantes s'appliquent pour l'IDN S-0-0160 :
| Bit | Description | Valeur |
| 0 ... 2 | Type de pondération | 00_b : Non pondéré (incrémentiel) 01_b : Pondération translationnelle 10_b : Pondération rotationnelle |
| 3 | Pondération favorite | 0_b : Pondération favorite 1_b : Non autorisée |
| 4 | Unité de la pondération translationnelle/rotationnelle | 0_b : Mètre/radian 1_b : Non autorisée |
| 5 | Unités de temps | 0_b : Minutes 1_b : Réservé |
| 6 | Référence des données | 0_b : Sur l'arbre moteur 1_b : Sur la charge |
| 7 ... 15 | Réservé |
Tab. 8.3: Les valeurs s'appliquent pour l'IDN S-0-0160
8. Pondération des données
8.3.2 Non pondéré
À ce jour, "Non pondéré" ne peut pas être sélectionné.
8.3.3 Pondération translationnelle
Pour la pondération translationnelle des données d'accélération, la pondération est définie par le facteur de pondération pour les données d'accélération (S-0-0161) et l'exposant de pondération pour les données d'accélération (S-0-0162) en utilisant la formule suivante :
$$ \mathrm{LSB} = \mathrm{S-0-0161} * 1 0 ^ {\mathrm{S-0-0162}} $$
Avec 1 comme facteur et -6 comme exposant, cela donne une résolution de 0,000 001 m/s² par bit. Le rapport entre les rotations du moteur et le mouvement translationnel est déterminé par la constante d'avance (S-0-0123). Comme seule la pondération avec référence à la charge peut être sélectionnée, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8.3.4 Pondération rotationnelle
Pour la pondération rotationnelle des données d'accélération, la pondération est également définie par le facteur de pondération pour les données d'accélération (S-0-0161) et l'exposant de pondération pour les données d'accélération (S-0-0162) en utilisant la formule suivante :
$$ \mathrm{LSB} = \mathrm{S-0-0161} * 1 0 ^ {\mathrm{S-0-0162}} $$
Avec 1 comme facteur et -3 comme exposant, cela donne une résolution de 0,001 rad/s ^2 par bit. Si, de plus, la pondération se réfère à la charge, le rapport de transmission (S-0-0121/S-0-0122) doit être réglé en conséquence.
8.4 Données de couple
Les données de couple sont toujours indiquées en NM et en référence au moteur. Comme les données de couple sont pondérées en NM, il faut définir la constante de couple (P-0-0100) en conséquence.
8.5 Données de température
Les données de température peuvent être sélectionnées par le type de pondération pour les données de température (S-0-0208) en °C et en F. Les valeurs suivantes s'appliquent donc à l'IDN S-0-0208 :
| Bit | Description | Valeur |
| 0 | Unité de température | 00_b : 0,1 ^ 01_b : 0,1 F |
| 1 ... 15 | Réservé |
Tab. 8.4: Données de température
9. Mot de commande/Mot d'état
Le mot de commande (envoyé dans le MDT) permet de commander l'entraînement et le mot d'état (envoyé dans l'AT) permet de consulter l'état de l'entraînement.
Par ailleurs, quelques bits de handshake sont intégrés pour la communication sur le canal de service, le mode de fonctionnement peut être sélectionné (bit 8 ... 9) et l'entraînement peut être activé/désactivé par le mot de commande (bit 13 ... 15). Deux bits configurables (bits en temps réel) peuvent commander des processus à l'intérieur du servomoteur (voir chapitre 13.8). Pour les besoins du débogage, le mot de commande et le mot d'état peuvent être lus dans des IDN "normaux" : S-0-0134 et S-0-0135.
| Bit | Description | Valeur |
| 0 ... 2 | Canal de service | Handshake de transport du canal de service |
| 3 ... 5 | Élément de bloc de données | 000_b : Canal de service non activé 001_b : IDN 010_b : Nom 011_b : Attribut 100_b : Unité 101_b : Minimum 110_b : Maximum 111_b : Données d'exploitation |
| 6 | Realtime control bit 1 | |
| 7 | Realtime control bit 2 | |
| 8 ... 9 | Mode de fonctionnement | 00_b : Mode de fonctionnement principal 01_b : Mode de fonctionnement auxiliaire 1 10_b : Mode de fonctionnement auxiliaire 2 11_b : Secondary operation mode 3 |
| 10 ... 12 | Réservé | 1 -> 0: Quand l'entraînement effectue une prise de référence guidée par l'entraînement, ce dernier est arrêté en position de référence avec l'accélération d'avance. La prise de référence n'est pas interrompue. Elle peut être reprise par une nouvelle activation du bit d'arrêt.Dans d'autres cas, le bit d'arrêt n'a aucune fonction !0 -> 1 : Reprise de l'opération de prise de référence interrompue. |
| 13 | Pause/redémarrage | 1 -> 0: L'étage de puissance est immédiatement coupé, le moteur tourne librement (en l'absence d'un frein moteur).1: L'étage de puissance est activé. Le régulateur peut être activé par l'activation du bit 15. |
9. Mot de commande/Mot d'état
| Bit | Description | Valeur |
| 14 | Activer l'entraînement (étage de puissance) | 1 -> 0 : Le moteur est freiné conformément à la "Décélération arrêt rapide" (ServoCommanderTM : Paramètres / Paramètres de sécurité / Décélérations - Arrêt rapide).Après le freinage, l'étage de puissance est désactivé.0 -> 1 : Si le bit 14 est activé, l'étage de puissance est activé, le moteur est commandé en fonction du mode de fonctionnement momentané. |
| 15 | Entraînement marche |
Tab. 9.1: Mot de commande/mot d'état

Étage de puissance désactivé
Cela signifie que les transistors ne sont plus amorcés. Quand cet état survient sur un moteur en rotation, ce dernier tourne à vide sans être freiné si aucun frein mécanique n'est installé. Un frein moteur est immédiatement verrouillé.
Attention : Cela n'est pas une garantie que le moteur soit hors tension.

Étage de puissance activé
Cela signifie que le moteur est commandé en fonction du mode de fonctionnement sélectionné. En présence d'un frein moteur, ce dernier est déclenché. Un réglage incorrect des paramètres ou un défaut peuvent entraîner un comportement incontrôlé du moteur.

Avant de mettre l'étage de puissance en marche pour la première fois, s'assurer que le servorégulateur contient les paramètres conformes à l'application souhaitée (mode de fonctionnement, type de télégramme, courant moteur, etc.).
Un réglage incorrect des paramètres peut entraîner un comportement incontrôlé de l'entraînement et provoquer des blessures corporelles et des dommages matériels.

Vérifier S-0-0092 (Bipolar torque limit value) avant d'activer l'entraînement.
Si S-0-0092 n'est pas réglé sur une valeur appropriée lors de la phase de communication 2, aucun couple n'est exercé sur le moteur. Le moteur ne va donc pas tourner.
9. Mot de commande/Mot d'état
Les bits suivants du mot d'état peuvent être consultés. À l'image du bit de commande en temps réel, deux bits d'état (bit 6 et 7) peuvent être configurés en fonction de l'application.
| Bit | Description | Valeur |
| 0 ... 5 | Canal de service | Handshake de transport du canal de service |
| 6 | Realtime status bit 1 | |
| 7 | Realtime status bit 2 | |
| 8 ... 9 | Mode de fonctionnement momentané | 00_b : Mode de fonctionnement principal 01_b : Mode de fonctionnement auxiliaire 1 10_b : Mode de fonctionnement auxiliaire 2 11_b : Secondary operation mode 3 |
| 11 | Bit de modification C3D | 0_b : Non modifié 1_b : Modifié |
| 12 | Bit de modification C2D | 0_b : Non modifié 1_b : Modifié |
| 13 | Bit de modification classe d'état 1 | 0_b : Pas de coupure 1_b : Coupure suite à une erreur dans la classe d'état 1 |
| 14 ... 15 | Opérationnel | 00_b : Entraînement non prêt pour l'activation 01_b : Entraînement prêt pour l'activation de l'alimentation électrique 10_b : Entraînement prêt et alimentation électrique activée 11_b : Entraînement opérationnel, étage de puissance activé |
Tab. 9.2: Statusword
Normalement, les axes linéaires doivent identifier leur position de départ à chaque fois que l'entraînement est activé pour la première fois. Le processus d'identification commence par un flanc ascendant du bit 15 du mot de commande et peut prendre un certain temps. C'est uniquement lorsque le processus d'identification s'est soldé par un succès que les bits 14 et 15 du mot d'état sont réglés sur 11 _b . Pour éviter des dépassements de temps dans le maître, il est possible de contrôler la nécessité de cette procédure d'identification en lisant S-0-0182.
10. Gestion des erreurs
10. Gestion des erreurs
Les servorégulateurs de la série CMMP-AS offrent la possibilité de modifier la réaction d'erreur de certains événements, p. ex. l'apparition d'une erreur de poursuite. Ainsi, le régulateur réagit différemment quand un événement donné survient. En fonction des réglages de la gestion_des erreurs : Réaction_d'erreur (P-0-0041), l'entraînement peut être freiné, l'étage de puissance est immédiatement désactivé ou un message d'avertissement s'affiche sur l'écran.
Pour chaque événement, une réaction d'erreur minimale spécifique au fabricant est définie et il est impossible de la sous-dépasser. De cette manière, des erreurs "critiques" comme 06 0 Court-circuit, ne peuvent pas être paramétrées, car une désactivation immédiate est nécessaire pour protéger le servorégulateur de toute détérioration.
Quand une réaction d'erreur est réglée sur une réaction située sous la réaction minimale admissible pour cette erreur, celle-ci est automatiquement réglée sur la réaction d'erreur minimale admissible.
Pour modifier la réaction d'erreur, il faut régler le paramètre Gestion_des erreurs : Numéro_d'erreur (P-0-0040). Vous trouverez une liste de tous les codes d'erreur dans le manuel "Contrôleurs de servomoteur CMMP-AS".
Les paramètres suivants sont possibles pour P-0-0041 :
| Valeur | Signification |
| 0 | Pas d'action |
| 1 | Entrée dans la mémoire tampon |
| 3 | Avertissement sur l'écran à 7 segments |
| 5 | Désactiver le régulateur |
| 7 | Freiner avec le maximum de courant |
| 8 | Désactiver l'étage de puissance |
Tab. 10.1: P-0-0041
11. Fonctions d'E/S
11. Fonctions d'E/S
Le servorégulateur CMMP-AS permet à son utilisateur d'accéder à toutes les entrées numériques (DIN) par l'intermédiaire d'un IDN de l'interface SERCOS. Ceci permet de consulter l'état des DIN dans P-0-0125, tandis que la polarité des DIN peut être modifiée avec P-0-0126.
Comme certaines DIN sont des entrées logiques affichées par des bits d'état dans le CMMP-AS, elles peuvent être affectées à des DIN matérielles variables. Par exemple, l'entrée matérielle DIN8 du "palpeur de mesure" (état logique) peut être affectée à la DIN9. Toutes les autres DIN, hormis le "palpeur de mesure", le "démarrage", le "commutateur de référence" et les "commutateurs limites" sont des DIN matérielles indiquant directement le niveau de tension sur la broche correspondante.
Pour cette raison, seule la polarité du "commutateur de référence" et des "commutateurs limites" peut être modifiée dans P-0-0126.
Par ailleurs, les sorties numériques peuvent être modifiées par écriture dans P-0-0110, sachant qu'il est possible d'affecter plusieurs bits d'état à une sortie numérique, ainsi, quand le bit d'état est activé, la sortie est également réglée. L'affectation peut se faire dans P-0-0113 pour DOUT1, P-0-0114 pour DOUT2 et P-0-0115 pour DOUT3.
Les bits d'état suivants sont disponibles :
| Valeur | Description | Valeur | Description |
| 0 | Modifier directement DOUTx par P-0-0110 | 9 | Tension insuffisante du circuit intermédiaire |
| 1 | Position XSET = XDEST | 10 | Frein débloqué |
| 2 | Position XACT = XDEST | 11 | Étage de puissance débloqué |
| 3 | Réservé | 12 | Pas de fonction (ON) |
| 4 | Déclencheur distance restante | 13 | Réservé |
| 5 | Opération de prise de référence active | 14 | Réservé |
| 6 | Vitesse cible atteinte | 15 | Moteur linéaire identifié |
| 7 | Limite I2t active | 16 | Position de référence valide |
| 8 | Erreur de poursuite |
Tab. 11.1: Bits d'état
12. Commandes spéciales
12. Commandes spéciales
12.1 Prise de référence guidée par l'entraînement
Quand le maître force et active la commande de procédure "Prise de référence guidée par l'entraînement" (S-0-0148), l'entraînement active automatiquement l'asservissement de position interne à l'entraînement et accélère la vitesse de prise de référence (S-0-0041) en tenant compte du paramètre de prise de référence (S-0-0147) et de l'accélération de prise de référence (IDN S-0-0042). En outre, l'entraînement réactive le bit d'état "Position value feedback status" (S-0-0403). Toutes les modifications des valeurs de commande cycliques sont ignorées tant que la commande de procédure est activée. Après avoir détecté l'impulsion de référence, l'entraînement freine jusqu'à l'arrêt en tenant compte de l'accélération de prise de référence. La commande de procédure Prise de référence guidée par l'entraînement est terminée avec succès une fois que l'entraînement s'est arrêté et que la valeur de consigne de position (S-0-0407) est réglée sur le point de référence de la machine. L'entraînement le signale en forçant le bit d'état "Position value feedback status" (S-0-0403). Ensuite, le régulateur doit lire la valeur de consigne de position de l'entraînement sur le canal de service et attribuer cette valeur de consigne de position à son système de valeur de consigne. Une fois que la commande de procédure a été réinitialisée par le régulateur, l'entraînement suit à nouveau les valeurs de consigne du régulateur.
Si cette commande de procédure devait être interrompue, la valeur réelle de position ne sera pas référencée jusqu'au repère de référence. Le bit d'état de la valeur réelle de position ne sera pas activé non plus.
Si une erreur de classe d'état 1 survient, la commande de procédure est interrompue avec une erreur.
Pour le calcul du point de référence, deux paramètres sont pris en compte :
Reference 1 (S-0-0052) et Reference offset 1 (S-0-0150). Reference offset 1 détermine la distance entre le repère de référence (p. ex. le flanc descendant du commutateur de référence) et le point de référence. Reference1 détermine la position (dans le système de coordonnées après l'opération de prise de référence) au niveau de ce point. Elle est normalement de 0.
L'illustration suivante donne un aperçu du point de référence.
12. Commandes spéciales
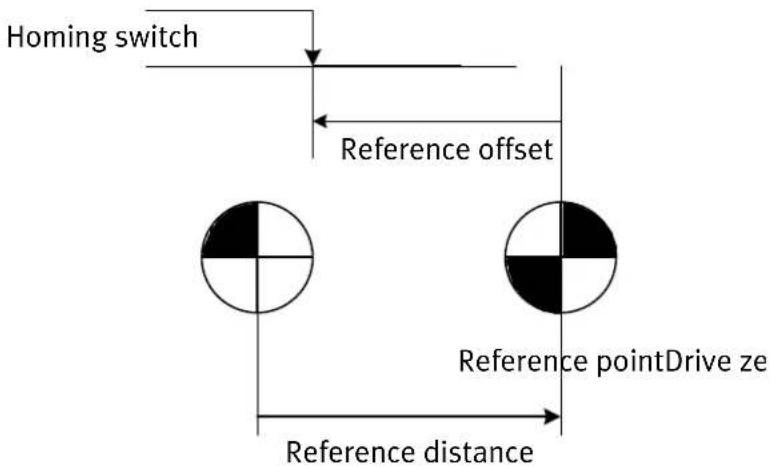
text_image
Homing switch Reference offset Reference pointDrive ze Reference distanceFig. 12.1: Point de référence
Pour plus de détails sur l'opération de prise de référence, veuillez consulter le manuel du logiciel "Contrôleurs de servomoteur CMMP-AS".
Les options suivantes sont possibles pour le paramètre de prise de référence (S-0-0147) :
| Bit | Description | Valeur |
| 0 | Sens de la prise de référence | 0_b : Sens positif 1_b : Sens négatif |
| 1 | Réservé | |
| 2 | Commutateur de référence | 0_b : Non autorisé/disponible 1_b : Raccordé à l'entraînement |
| 3 | Signal de retour | 0_b : Utilisation du signal de retour du moteur 1_b : Utilisation du signal de retour externe |
| 4 | Réservé | |
| 5 | Évaluation du commutateur de référence | 0_b : Le commutateur de référence est évalué 1_b : Non autorisé/disponible |
| 6 | Évaluation impulsion du repère de position réelle | 0_b : Non autorisé/disponible 1_b : L'impulsion du repère n'est pas évaluée |
| 7 | Position après la prise de référence guidée par l'entraînement | 0_b : L'entraînement se trouve dans une position indéfinie 1_b : Non autorisé/disponible |
| 8 | Prise de référence guidée par l'entraînement avec distance de prise de référence | 0_b : Non autorisé/disponible 1_b : Distance de prise de référence non sélectionnée |
| 9 ... 15 | Réservé |
Tab. 12.1: Options
12. Commandes spéciales
À la différence de la spécification SERCOS, il n'existe pas de décalage de cote de référence pour les valeurs réelles externes. L'IDN S-0-0150 (Reference offset 1) est utilisé dans les deux cas (évaluation de position réelle interne et externe) pour définir le décalage de la cote de référence pour la commande de procédure Prise de référence guidée par l'entraînement.

L'opération Prise de référence guidée par l'entraînement peut être exécutée dans un mode d'asservissement de position.
Afin d'assurer la compatibilité avec la norme SERCOS, toutes les méthodes de prise de référence possibles ne peuvent pas être réglées par l'intermédiaire du paramètre de prise de référence (S-0-0147). C'est pourquoi il faut implémenter un IDN spécifique au fabricant : Homing method (P-0-0045). Les deux paramètres ne sont pas indépendants l'un de l'autre de sorte que c'est l'IDN écrit en dernier qui détermine le comportement de prise de référence.
Les options possibles sont disponibles pour la méthode de prise de référence (P-0-0047) :
| Valeur | Direction | Objectif | Point de référence pour le point zéro |
| -18 | Positif | Arrêt en fin de course | Arrêt en fin de course |
| -17 | Négatif | Arrêt en fin de course | Arrêt en fin de course |
| -2 | Positif | Arrêt en fin de course | Impulsion nulle |
| -1 | Négatif | Arrêt en fin de course | Impulsion nulle |
| 1 | Négatif | Capteur de fin de course | Impulsion nulle |
| 2 | Positif | Capteur de fin de course | Impulsion nulle |
| 7 | Positif | Commutateur de référence | Impulsion nulle |
| 11 | Négatif | Commutateur de référence | Impulsion nulle |
| 17 | Négatif | Capteur de fin de course | Capteur de fin de course |
| 18 | Positif | Capteur de fin de course | Capteur de fin de course |
| 23 | Positif | Commutateur de référence | Commutateur de référence |
| 27 | Négatif | Commutateur de référence | Commutateur de référence |
| 33 | Négatif | Impulsion nulle | Impulsion nulle |
| 34 | Positif | Impulsion nulle | Impulsion nulle |
| 35 | - | Position réelle |
Tab. 12.2: Options
12. Commandes spéciales
12.2 Positionnement de la broche
La commande de procédure "Position spindle" (S-0-0152) est utilisée pour positionner un moteur sur une position angulaire absolue ou le faire tourner par rapport à un décalage relatif.
Lors du forçage et de l'activation de la commande, l'entraînement commence à se déplacer jusqu'à la position souhaitée prédéfinie par la position angulaire de la broche (S-0-0153) ou par le décalage relatif (S-0-0180).
L'IDN S-0-0154 (Spindle positioning parameter) détermine la direction et la valeur de consigne du positionnement.
Jusqu'à ce que la commande soit activée, chaque valeur de consigne écrite dans S-0-0153 ou S-0-0180 déclenche une nouvelle opération de positionnement de l'entraînement. Pour le positionnement, le programme utilise la vitesse de positionnement de broche maximale (S-0-0222).
Quand l'interpolateur de l'entraînement atteint la valeur de consigne sélectionnée, l'entraînement active l'état "In Position" (S-0-0336).
Si la centrale de commande interrompt cette commande, l'entraînement active alors le mode de fonctionnement activé dans le mot d'état. Il est du ressort de l'utilisateur de s'assurer que les valeurs de consigne sont correctes à ce moment précis.
Les valeurs suivantes peuvent être utilisées pour l'IDN S-0-0154 (Spindle positioning parameter) :
| Bit | Description | Valeur |
| 0 ... 1 | Direction | 00_b : Sens positif 01_b : Sens négatif 10_b : Réservé 11_b : Réservé |
| 2 | Type de positionnement | 0_b : absolu via position angulaire de broche (IDN S-0-0153) 1_b : relatif via décalage relatif (IDN S-0-0180) |
| 3 ... 15 | Réservé |
Tab. 12.3: IDN S-0-0154
Toutes les modifications de cet IDN prennent effet dès le démarrage d'un nouveau positionnement. Un positionnement déjà actif n'est pas affecté.
12. Commandes spéciales
12.3 Détection (mesure)
Le forçage et l'activation de la commande "Probing cycle" (S-0-0170) permet de détecter les valeurs réelles de position. Les paramètres de commande du palpeur de mesure (S-0-0169) permettent de sélectionner s'il faut utiliser le flanc ascendant ou descendant. La détection est activée par "Probe 1 enable" (S-0-0405).
Dès l'apparition du flanc sélectionné au niveau de l'entrée numérique, l'entraînement archive la valeur réelle de position dans les paramètres S-0-0130 à S-0-0133 et force le bit correspondant dans "Probe status" (S-0-0179) et dans "Probe 1 positive latched" (S-0-0409) ou "Probe 1 negative latched" (S-0-0410).
Dès l'apparition d'un flanc actif, l'opération est désactivée jusqu'à ce que "Probe x enable" soit réinitialisé. Le réglage suivant réactive la mesure. Voir aussi les chapitres 0 et 13.9.
Les valeurs suivantes peuvent être utilisées pour l'IDN S-0-0169 (Probe control parameter) :
| Bit | Description | Valeur |
| 0 | Probe 1 positive edge | O_b : Flanc positif non actif 1_b : Flanc positif actif |
| 1 | Probe 1 negative edge | O_b : Flanc positif non actif 1_b : Flanc positif actif |
Tab. 12.4: S-0-0169
12.4 Identification automatique du moteur
Cette fonction du servorégulateur CMMP-AS permet à l'utilisateur d'identifier automatiquement les réglages corrects pour un moteur inconnu, comme p. ex. le "nombre de pôles", l" angle de décalage du codeur" et les réglages actuels du régulateur. Il existe donc deux commandes de procédure pour lancer l'identification automatique du moteur (P-0-0101 et P-0-0102). Le succès de l'identification automatique du moteur peut être lu par P-0-0103.
L'identification automatique du moteur est lancée par l'exécution de la commande correspondante. Si l'identification se solde par un succès, la commande est terminée normalement sinon la commande se termine par une erreur. Dans ce cas, la lecture de P-0-0103 donne des informations sur le problème. Il est divisé en deux parties : Les bits 0 ... 15 émettent une erreur pendant l'exécution de P-0-0101 et les bits 16 ... 31 émettent une erreur pendant l'exécution de P-0-0102. Les bits 0 ou 16 sont toujours activés si une erreur est survenue.
12. Commandes spéciales
Bits d'erreur pour P-0-0101 (0 ... 15)
| Bit | Description |
| 0 | Erreur dans P-0-0101 |
| 1 | Régulateur activé au démarrage |
| 2 | Étage de puissance désactivé pendant l'exécution |
| 3 | Niveau de tension insuffisant sur le bus CC |
| 4 | Temps de montée d'impulsion non valide |
| 5 | Réservé |
| 6 | Réservé |
| 7 | Réservé |
| 8 | Réservé |
| 9 | Réservé |
| 10 | Réservé |
| 11 | Réservé |
| 12 | Réservé |
| 13 | Réservé |
| 14 | Réservé |
| 15 | Les paramètres constatés sont limités |
Bits d'erreur pour P-0-0102 (16 ... 31)
| Bit | Description |
| 16 | Erreur dans P-0-0102 |
| 17 | Régulateur activé au démarrage |
| 18 | Étage de puissance désactivé pendant l'exécution |
| 19 | Codeur angulaire inconnu |
| 20 | Impulsion d'indexage introuvable |
| 21 | Signaux invalides du capteur à effet Hall |
| 22 | Commutation impossible sur le capteur à effet Hall |
| 23 | Pas de changement de segment après 90° |
| 24 | Distance de segment non valide |
| 25 | Le moteur n'a pas pu tourner |
| 26 | Détection d'un nombre de pôles invalide |
| 27 | Réservé |
| 28 | Réservé |
| 29 | Réservé |
| 30 | Réservé |
| 31 | Réservé |
Tab. 12.5: Bits d'erreur
En cas de défaillance de la fonction d'identification automatique, veuillez contrôler la tension du bus CC, la connexion du capteur et l'état de DIN4 : elle doit être paramétrée pendant la fonction d'identification.

DIN4 doit être paramétrée pour activer l'étage de puissance d'exécution des fonctions d'identification.

Dès le démarrage des fonctions d'identification automatique, le moteur commence à se déplacer de lui-même ! C'est pourquoi le moteur doit pouvoir tourner librement !
13. Paramètres
13. Paramètres
13.1 Aperçu
Pour la lecture et l'écriture des informations, un IDN propre est attribué à toutes les données. Le type de donnée peut être lu par l'intermédiaire de l'"attribut" disponible pour chaque IDN. En plus des types de données "normales" signées et non signées, il existe aussi "texte" et "liste d'IDN". Pour des informations détaillées sur les types de données, veuillez consulter la spécification SERCOS.
Ce chapitre décrit brièvement tous les paramètres qui sont implémentés dans la gamme CMMP-AS.
13.1.1 Paramètres de communication
Tab. 13.1: Paramètres de communication
13. Paramètres
| IDN | S-0-0001 |
| Nom | NC Cycletime CN (tNcyc) |
| Description | Le temps de cycle CN détermine les intervalles de temps cycliques pendant lesquels la commande numérique met de nouvelles valeurs de consigne à disposition. Le temps de cycle doit être transmis du maître à l'esclave pendant la phase de communication 2 et il est activé dans la phase de comm. 3. Le temps de cycle CN doit coïncider avec le temps de cycle SERCOS. tNcyc = tScyc |
| Octets | 2 |
| Min. | S-0-0002 |
| Max. | S-0-0002 |
| Unité | 1 μs |
| IDN | S-0-0002 |
| Nom | SERCOS Cycletime (tScyc) |
| Description | Le temps de cycle de communication de l'interface détermine selon quels intervalles de temps les données cycliques sont transmises. Le temps de cycle SERCOS est fixé à 500 μs, 1 ms et jusqu'à 10 ms par pas de 1 ms. Le temps de cycle SERCOS doit être transmis du maître à l'esclave pendant la phase de communication 2 et il est activé dans la phase de comm. 3 tant dans le maître que dans l'esclave. Voir aussi le chap. 6 ! |
| Octets | 2 |
| Min. | 500 (voir aussi le chapitre 6) |
| Max. | 10 000 (voir aussi le chapitre 6) |
| Unité | 1 μs |
| IDN | S-0-0003 |
| Nom | Shortest AT transm. Starting time (t1min) |
| Description | Indique le temps nécessaire à l'esclave entre la fin du télégramme de synchronisation du maître réceptionné et le début d'émission du télégramme d'entraînement. Cet intervalle de temps exigé par l'esclave dépend du type de télégramme sélectionné. Le temps t1min est lu par le maître dans la phase de communication 2 pour calculer le moment d'émission de l'AT t1 (IDN S-0-0006). |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | 1 μs |
13. Paramètres
| IDN | S-0-0004 |
| Nom | Transmit/receive trans. Time (tATMT) |
| Description | C'est le temps nécessaire à l'esclave pour passer à la réception du télégramme de données maître après l'envoi du télégramme d'entraînement. Le temps de commutation Émission-Réception est lu par le maître dans la phase de comm. 2 pour calculer correctement le moment d'envoi du télégramme de données maître t2 (IDN S-0-0089). |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | 1 μs |
| IDN | S-0-0005 |
| Nom | Minimum feedback processing time (t5) |
| Description | C'est le temps nécessaire à un entraînement entre le début de l'acquisition d'une valeur réelle et la fin du télégramme de synchronisation maître suivant. Cette valeur est indiquée par l'entraînement de manière à ce que la valeur réelle soit transmise à la commande numérique dans le télégramme d'entraînement suivant. Le maître lit cette valeur dans la phase de communication 2 pour synchroniser en conséquence le moment de mesure des valeurs de mesure t4 (S-0-0007) pour tous les entraînements. |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | 1 μs |
| IDN | S-0-0006 |
| Nom | AT transm. Starting time (t1) |
| Description | Le moment d'émission du télégramme d'entraînement détermine quand l'esclave, après la fin du télégramme de synchronisation maître, envoie son télégramme d'entraînement lors de la phase de communication 3 et 4. Ce paramètre est transmis lors de la phase de communication 2 du maître à l'esclave. Le moment d'émission du télégramme d'entraînement doit être supérieur ou égal au temps de réaction d'émission AT (IDN S-0-0003) t1 = t1min. |
| Octets | 2 |
| Min. | t1min (S-0-0003) |
| Max. | tScyc (S-0-0002) |
| Unité | 1 μs |
13. Paramètres
| IDN | S-0-0007 |
| Nom | Feedback aquisition time (t4) |
| Description | Le moment de mesure des valeurs réelles est déterminé par le maître après la fin du télégramme de synchronisation maître. Ainsi, le maître donne un moment de mesure prédéfini des valeurs réelles pour tous les entraînements qui travaillent en coordination. Ce qui garantit la synchronisation de l'acquisition des valeurs réelles.Le moment de mesure des valeurs réelles ne peut pas être adapté dans CMMP-AS-SC.Il est implicitement prédéfini par t3. |
| Octets | 2 |
| Min. | 0 |
| Max. | tScyc (S-0-0002) |
| Unité | 1 μs |
| IDN | S-0-0008 |
| Nom | Command value val. Time (T3) |
| Description | T3 détermine à quel moment l'entraînement peut accéder aux nouvelles valeurs de consigne après la fin d'un télégramme de synchronisation maître. Le maître prédéfinit ainsi pour tous les entraînements qui travaillent en coordination le même "Command value val. Time". L'entraînement active le "Command value val. Time" lors de la phase de communication 3. |
| Octets | 2 |
| Min. | 0 |
| Max. | tScyc (S-0-0002) |
| Unité | 1 μs |
| IDN | S-0-0009 |
| Nom | Position of data record in MDT |
| Description | La position d'un enregistrement de données de l'entraînement dans un télégramme de données maître, exprimée en position d'octet. Elle commence par 1 pour le premier octet de données après le champ d'adresse dans MDT. L'adresse de départ de l'enregistrement des données d'entraînement dans le MDT est communiquée par le maître à chaque entraînement lors de la phase de communication 2. La position d'un enregistrement de données en longueur du MDT, exprimée en octets, contient les enregistrements de données de tous les entraînements. Lors de la phase de communication 2, chaque entraînement est informé de la longueur du MDT par le maître. Elle est activée lors de la phase de communication 3 dans le maître et dans l'esclave. |
| Octets | 2 |
13. Paramètres
| Min. | 1 |
| Max. | 65531 |
| Unité | -- |
| IDN | S-0-0010 |
| Nom | Length of MDT |
| Description | La longueur du télégramme de données maître, exprimée en octets, contient les enregistrements de données de tous les entraînements. Lors de la phase de communication 2, chaque entraînement est informé de la longueur du MDT par le maître.Elle est activée lors de la phase de communication 3 dans le maître et dans l'esclave. |
| Octets | 2 |
| Min. | 4 (un entraînement) |
| Max. | 65534 |
| Unité | -- |
| IDN | S-0-0087 |
| Nom | Trans. to trans. recovery time(tATAT) |
| Description | Le temps nécessaire entre deux télégrammes d'entraînement quand ces derniers sont envoyés par le même esclave. Ce paramètre n'est pas utilisé pour les esclaves ne possédant qu'un seul entraînement. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | 1 μs |
| IDN | S-0-0088 |
| Nom | Rec. to rec. recovery time (tMTSY) |
| Description | Temps de repos de l'esclave après la réception d'un télégramme de données maître pour basculer vers la réception du télégramme de synchronisation maître suivant.Le maître lit ce temps lors de la phase de communication 2 afin de s'assurer que l'intervalle entre la fin du télégramme de données maître et le début du télégramme de synchronisation maître est suffisant. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | 1 μs |
13. Paramètres
| IDN | S-0-0089 |
| Nom | MDT trans. starting time (t2) |
| Description | Le moment d'émission du télégramme de données maître détermine quand le maître, après le télégramme de synchronisation maître, envoie son télégramme de données maître lors de la phase de communication 3 et 4. Ce paramètre est transmis par le maître à l'esclave lors de la phase de communication 2 et il est activé lors de la phase de communication 3. |
| Octets | 2 |
| Min. | 0 |
| Max. | tSCYC (IDN S-0-0002) |
| Unité | 1 μs |
| IDN | S-0-0090 |
| Nom | Command value proceeding time (tMTSG) |
| Description | Le temps nécessaire à l'esclave pour mettre à disposition les valeurs de consigne pour un entraînement après réception du télégramme de données maître. Ce temps est lu par le maître lors de la phase de comm. 2 pour calculer correctement "Command value val. Time" t3 (S-0-0008). Le temps de copie valeurs de consigne dépend du type de télégramme. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | 1 μs |
| IDN | S-0-0028 |
| Nom | MST error counter |
| Description | Le compteur d'erreurs MST compte tous les télégrammes de synchronisation maître non valides dans les phases de communication 3 et 4. Si plus de deux MST successifs sont invalides, les autres MST non valides ne sont plus comptés.Le compteur d'erreurs MST compte jusqu'à un maximum de 2^16 - 1. Ce qui signifie que, si une valeur de 65535 est activée dans le compteur, c'est qu'une transmission fortement perturbée a dû être présente pendant une longue période. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
| IDN | S-0-0029 |
| Nom | MDT error counter |
| Description | Le compteur d'erreurs MDT compte tous les télégrammes de données maître non valides dans les phases de communication 3 et 4. Si plus de deux MDT successifs sont invalides, les autres MDT non valides ne sont plus comptés.Le compteur d'erreurs MDT compte jusqu'à un maximum de 2^16 - 1. Ce qui signifie que, si une valeur de 65535 est activée dans le compteur, c'est qu'une transmission fortement perturbée a dû être présente pendant une longue période. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13.2 Configuration d'un télégramme
Tab. 13.2: Configuration d'un télégramme
| IDN | S-0-0015 |
| Nom | Telegram type |
| Description | Le paramètre "Telegram type" permet de choisir entre les télégrammes standard et les télégrammes d'application (bits 0 ... 2). Voir aussi le chapitre 5.5. |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000111b |
| Unité | -- |
13. Paramètres
| IDN | S-0-0016 |
| Nom | Configuration list AT |
| Description | La liste d'IDN contient les IDN dont les données d'exploitation cycliques du télégramme d'entraînement sont transmises dans un télégramme d'application.Seules les données figurant dans "IDN list of all configurable data in the AT"(IDN S-0-0187) sont considérées comme cycliques. Voir aussi le chapitre 5.5.2. |
| Octets | Liste d'IDN |
| Min. | 0 IDN |
| Max. | 4 IDN |
| Unité | Liste d'IDN |
| IDN | S-0-0024 |
| Nom | Configuration list MDT |
| Description | La liste d'IDN contient les IDN dont les données d'exploitation cycliques du télégramme de données maître sont transmises dans un télégramme d'application.Seules les données figurant dans "IDN list of all configurable data in the MDT"(IDN S-0-0188) sont considérées comme cycliques. Voir aussi le chapitre 5.5.2. |
| Octets | Liste d'IDN |
| Min. | 0 IDN |
| Max. | 4 IDN |
| Unité | Liste d'IDN |
| IDN | S-0-0185 |
| Nom | Length of configurable data record in the AT |
| Description | Dans les données d'exploitation de cet IDN, l'entraînement indique la longueur maximale en octets qu'il peut traiter dans l'enregistrement de données configurable du télégramme d'entraînement.Eu égard aux performances, une longueur maximale de 64 octets (4 * variables à 32 bits) peut être transmise par l'intermédiaire du télégramme d'entraînement, mais seuls 4 IDN max. peuvent être configurés sur la liste de configuration du télégramme d'entraînement (S-0-0016). |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | 1 |
13. Paramètres
| IDN | S-0-0186 |
| Nom | Length of configurable data record in the MDT |
| Description | Dans les données d'exploitation de cet IDN, l'entraînement indique la longueur maximale en octets qu'il peut traiter dans l'enregistrement de données configurable du télégramme de données maître.Eu égard aux performances, une longueur maximale de 64 octets (4 * variables à 32 bits) peut être transmise par l'intermédiaire du télégramme de données maître, mais seuls 4 IDN max. peuvent être configurés sur la liste de configuration du télégramme de données maître (S-0-0024). |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | 1 |
| IDN | S-0-0187 |
| Nom | IDN list of all configurable data in the AT |
| Description | Cette liste contient tous les IDN des données d'exploitation susceptibles d'être traitées de manière cyclique comme valeurs réelles dans le télégramme d'entraînement.L'utilisateur ne devrait configurer que des IDN de cette liste comme données cycliques pour le télégramme d'entraînement dans "IDN list of all configurable data in the AT"(S-0-0016). |
| Octets | Liste d'IDN |
| Min. | - |
| Max. | - |
| Unité | Liste d'IDN |
| IDN | S-0-0188 |
| Nom | IDN list of all configurable data in the MDT |
| Description | Cette liste contient tous les IDN des données d'exploitation susceptibles d'être traitées de manière cyclique comme valeurs de consigne dans le télégramme de données maître.L'utilisateur ne devrait configurer que des IDN de cette liste comme données cycliques pour le télégramme de données maître dans "IDN list of all config. data in the MDT" (S-0-0024). |
| Octets | Liste d'IDN |
| Min. | - |
| Max. | - |
| Unité | Liste d'IDN |
13. Paramètres
13.3 Listes d'IDN/Commandes de changement de phase
| IDN | S-0-0017 |
| Nom | IDN list of all operation data |
| Description | Tous les IDN de toutes les données d'exploitation peuvent être lus sur cette liste d'IDN. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
| IDN | S-0-0018 |
| Nom | IDN list of operation data for CP2 |
| Description | Cette liste d'IDN contient les IDN de toutes les données d'exploitation nécessaires pour la phase de communication 2 et devant être transmises pendant la phase de communication 2. L'écriture sans erreurs de tous ces IDN est nécessaire avant de pouvoir passer à la phase de communication 3. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
13. Paramètres
| IDN | S-0-0019 |
| Nom | IDN list of operation data for CP3 |
| Description | Cette liste d'IDN contient les IDN de toutes les données d'exploitation nécessaires pour la phase de communication 3 et devant être transmises pendant la phase de communication 3. L'écriture sans erreurs de tous ces IDN est nécessaire avant de pouvoir passer à la phase de communication 4. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
| IDN | S-0-0020 |
| Nom | IDN list of operation data for CP4 |
| Description | Cette liste d'IDN contient toutes les données d'exploitation pouvant être modifiées lors de la phase de communication 4. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
| IDN | S-0-0021 |
| Nom | IDN list of invalid operation data for CP2 |
| Description | Cette liste d'IDN contient les IDN qui se trouvent sur la liste "IDN list of operation data for CP2" (IDN S-0-0018) et qui sont considérés comme non valides par l'entraînement avant de passer de la phase de communication 2 à la phase de communication 3 (voir IDN S-0-0127).Cas de figure 1 : la commande IDN S-0-0127 est correctement exécutée ; la listed'IDN (IDN S-0-0021) ne contient pas d'IDN.Cas de figure 2 : la commande IDN S-0-0127 entraîne une erreur ; la liste d'IDN (IDN S-0-0021) contient tous les IDN des données d'exploitation invalides. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
13. Paramètres
| IDN | S-0-0022 |
| Nom | IDN list of invalid operation data for CP3 |
| Description | Cette liste d'IDN contient les IDN qui se trouvent sur la liste "IDN list of operation data for CP3" (IDN S-0-0019) et qui sont considérés comme non valides par l'entraînement avant de passer de la phase de communication 3 à la phase de communication 4 (voir IDN S-0-0128).Cas de figure 1 : la commande IDN S-0-0128 est correctement exécutée ; la listed'IDN (IDN-0-0021) ne contient pas d'IDN.Cas de figure 2 : la commande IDN S-0-0128 entraîne une erreur ; la liste d'IDN (IDN S-0-0021) contient tous les IDN des données d'exploitation invalides. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
| IDN | S-0-0023 |
| Nom | IDN list of invalid operation data for CP4 |
| Description | Cette liste d'IDN contient les IDN de toutes les données d'entraînement considérées comme non valides par l'entraînement après le passage à la phase de communication 4. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
| IDN | S-0-0025 |
| Nom | IDN list of all procedure commands |
| Description | Cette liste d'IDN contient les IDN de toutes les commandes de procédure prises en charge par l'entraînement. |
| Octets | Liste d'IDN |
| Min. | -- |
| Max. | -- |
| Unité | Liste d'IDN |
13. Paramètres
| IDN | S-0-0127 |
| Nom | CP3 transition check (procedure command) |
| Description | Par cette commande, le maître invite l'esclave à vérifier que tous les paramètres nécessaires pour la phase de communication 3 ont bien été transmis. Sinon, cette commande entraîne une erreur (voir IDN S-0-0021).Après l'exécution correcte de la commande, le régulateur doit interrompre la commande. Le régulateur peut alors activer la phase de communication 3 dans le télégramme de synchronisation maître 3. |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | - |
| IDN | S-0-0128 |
| Nom | CP4 transition check (procedure command) |
| Description | Par cette commande, le maître invite l'esclave à vérifier que tous les paramètres nécessaires pour la phase de communication 4 ont bien été transmis. Sinon, cette commande entraîne une erreur. (voir IDN S-0-0022).Après l'exécution correcte de la commande, le régulateur doit interrompre la commande. Le régulateur peut alors activer la phase de communication 4 dans le télégramme de synchronisation maître 3. |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | - |
13. Paramètres
13.4 Modes de fonctionnement
Tab. 13.4: Modes de fonctionnement
| IDN | S-0-0032 |
| Nom | Primary operation mode |
| Description | Cet IDN défini le mode de fonctionnement principal. Le mode de fonctionnement peut être commuté par le maître par l'activation de bits dans le mot de commande.Voir aussi les chapitres 7 et 9. |
| Octets | |
| Min. | |
| Max. | |
| Unité |
| IDN | S-0-0033 |
| Nom | Secondary operation mode 1 |
| Description | Cet IDN défini le mode de fonctionnement auxiliaire 1. Le mode de fonctionnement peut être commuté par le maître par l'activation de bits dans le mot de commande.Voir aussi les chapitres 7 et 9. |
| Octets | |
| Min. | |
| Max. | |
| Unité |
13. Paramètres
| IDN | S-0-0034 |
| Nom | Secondary operation mode 2 |
| Description | Cet IDN défini le mode de fonctionnement auxiliaire 2. Le mode de fonctionnement peut être commuté par le maître par l'activation de bits dans le mot de commande.Voir aussi les chapitres 7 et 9. |
| Octets | |
| Min. | |
| Max. | |
| Unité |
| IDN | S-0-0035 |
| Nom | Secondary operation mode 3 |
| Description | Cet IDN défini le mode de fonctionnement auxiliaire 3. Le mode de fonctionnement peut être commuté par le maître par l'activation de bits dans le mot de commande.Voir aussi les chapitres 7 et 9. |
| Octets | |
| Min. | |
| Max. | |
| Unité |
13. Paramètres
13.5 Paramètres de pondération
| IDN | Description |
| S-0-0086 | Torque scaling type |
| S-0-0093 | Torque scaling factor |
| S-0-0094 | Torque scaling exponent |
| S-0-0044 | Velocity data scaling type |
| S-0-0045 | Velocity data scaling factor |
| S-0-0046 | Velocity data scaling exponent |
| S-0-0076 | Position data scaling type |
| S-0-0077 | Position data scaling factor |
| S-0-0078 | Position data scaling exponent |
| S-0-0079 | Rotational position resolution |
| S-0-0103 | Modulo value |
| S-0-0160 | Acceleration data scaling type |
| S-0-0161 | Acceleration data scaling factor |
| S-0-0162 | Acceleration data scaling exponent |
| S-0-0208 | Temperature data scaling type |
| S-0-0121 | Input revolutions of load gear |
| S-0-0122 | Output revolutions of load gear |
| S-0-0123 | Feed constant |
Tab. 13.5: Paramètres de pondération
| IDN | S-0-0086 |
| Nom | Torque data scaling type |
| Description | À ce stade de l'implémentation SERCOS, pour les données de couple, seule la pondération rotationnelle en Nm par rapport à l'arbre moteur est admissible. Voir aussi le chapitre 8.4. |
| Octets | 2 |
| Min. | 00000000 00000010b |
| Max. | 00000000 00000010b |
| Unité | -- |
13. Paramètres
| IDN | S-0-0093 |
| Nom | Torque data scaling factor |
| Description | Ce paramètre détermine le facteur de pondération pour toutes les données de couple / de force de l'entraînement. Il est en lecture seule. Voir aussi le chapitre 8.4. |
| Octets | 2 |
| Min. | 1 |
| Max. | +2^16 - 1 |
| Unité | 1 |
| IDN | S-0-0094 |
| Nom | Torque data scaling exponent |
| Description | Ce paramètre détermine l'exposant de pondération pour toutes les données de couple / de force de l'entraînement. Il est en lecture seule. Voir aussi le chapitre 8.4. |
| Octets | 2 |
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | 1 |
| IDN | S-0-0044 |
| Nom | Velocity data scaling type |
| Description | Les paramètres de pondération permettent de sélectionner différents modes de pondération. Voir aussi le chapitre 8.2. |
| Octets | 4 |
| Min. | 00000000 00000000b |
| Max. | 00000000 01110011b |
| Unité | -- |
13. Paramètres
| IDN | S-0-0045 |
| Nom | Velocity data scaling factor |
| Description | Ce paramètre détermine le facteur de pondération pour toutes les données de vitesse. Il est en lecture seule. Voir aussi le chapitre 8.2. |
| Octets | 2 |
| Min. | 1 |
| Max. | +2^16 - 1 |
| Unité | -- |
| IDN | S-0-0046 |
| Nom | Velocity data scaling exponent |
| Description | Ce paramètre détermine l'exposant de pondération pour toutes les données de vitesse. Il est en lecture seule. Voir aussi le chapitre 8.2. |
| Octets | 2 |
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | -- |
| IDN | S-0-0076 |
| Nom | Position data scaling type |
| Description | Ce paramètre de pondération permet de sélectionner différents modes de pondération pour les données de position. Voir aussi le chapitre 8.1. |
| Octets | 2 |
| Min. | Voir le chapitre 8.1. |
| Max. | Voir le chapitre 8.1. |
| Unité | -- |
13. Paramètres
| IDN | S-0-0077 |
| Nom | Translational position data scaling factor |
| Description | Ce paramètre détermine le facteur de pondération pour toutes les données de position dans un entraînement. Il est en lecture seule. Voir aussi le chapitre 8.1. |
| Octets | 2 |
| Min. | 1 |
| Max. | +2^16 - 1 |
| Unité | -- |
| IDN | S-0-0078 |
| Nom | Translational position data scaling exponent |
| Description | Ce paramètre détermine l'exposant de pondération pour toutes les données de position dans un entraînement. Il est en lecture seule. Voir aussi le chapitre 8.1. |
| Octets | 2 |
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | -- |
| IDN | S-0-0079 |
| Nom | Rotational position resolution |
| Description | Ce paramètre détermine la résolution de position de rotation pour toutes les données de position dans un entraînement. Il est en lecture seule. Voir aussi le chapitre 8.1. |
| Octets | 4 |
| Min. | 1 |
| Max. | +2^32 - 1 |
| Unité | -- |
13. Paramètres
| IDN | S-0-0103 |
| Nom | Modulo value |
| Description | Si le bit 7 (format Modulo) est activé dans IDN S-0-0076, les données de position sont indiquées dans la plage 0...S-0-0103. La différence maximale entre deux valeurs de position successives ne doit pas dépasser IDN S-0-0103/2 ! Voir aussi le chapitre 8.1. |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0160 |
| Nom | Acceleration data scaling type |
| Description | Le paramètre de pondération pour les données d'accélération permet de sélectionner différents modes de pondération. Voir le chapitre 8.1. |
| Octets | 2 |
| Min. | Voir le chapitre 8.3. |
| Max. | Voir le chapitre 8.3. |
| Unité | -- |
| IDN | S-0-0161 |
| Nom | Acceleration data scaling factor |
| Description | Ce paramètre détermine le facteur de pondération pour toutes les données d'accélération dans un entraînement. Il est en lecture seule. Voir le chapitre 8.3. |
| Octets | 2 |
| Min. | 1 |
| Max. | +2^16 - 1 |
| Unité | 1 |
| IDN | S-0-0162 |
| Nom | Acceleration data scaling exponent |
| Description | Ce paramètre détermine l'exposant de pondération pour toutes les données d'accélération dans un entraînement. Il est en lecture seule. Voir le chapitre 8.3. |
| Octets | 2 |
13. Paramètres
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | 1 |
| IDN | S-0-0208 |
| Nom | Temperature data scaling type |
| Description | Ce paramètre de mode de pondération détermine si le degré Celsius [°C] ou Fahrenheit [F] est utilisé comme unité pour toutes les données de température de l'entraînement. La longueur de données de toutes les données de température est fixée à deux octets. Voir le chapitre 8.5. |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000001b |
| Unité | -- |
| IDN | S-0-0121 |
| Nom | Input revolutions of load gear |
| Description | Si un mode de pondération est sélectionné en référence à la charge, le format de sortie de la transmission est calculé avec les facteurs de conversion. Les rotations d'entrée doivent être saisies dans cet IDN sous la forme de valeurs en nombres entiers. |
| Octets | 4 |
| Min. | 1 |
| Max. | +2^32 - 1 |
| Unité | 1 |
| IDN | S-0-0122 |
| Nom | Output revolutions of load gear |
| Description | Si un mode de pondération est sélectionné en référence à la charge, le format de sortie de la transmission est calculé avec les facteurs de conversion. Les rotations de sortie doivent être saisies dans cet IDN sous la forme de valeurs en nombres entiers. |
| Octets | 4 |
| Min. | 1 |
| Max. | +2^32 - 1 |
| Unité | 1 |
13. Paramètres
| IDN | S-0-0123 |
| Nom | Feed constant |
| Description | La constante d'avance décrit l'élément de la machine qui transforme un mouvement rotationnel en mouvement translationnel. La constante d'avance décrit le trajet linéaire effectué pendant la rotation de la broche d'avance. Elle est utilisée pour toutes les données de pondération rotationnelles. |
| Octets | 4 |
| Min. | 1 |
| Max. | +2^32 - 1 |
| Unité | 1 μm/rotation |
13.6 Valeurs de consigne/valeurs réelles
| IDN | Description |
| S-0-0047 | Position command value |
| S-0-0051 | Torque feedback value 1 |
| S-0-0053 | Torque feedback value 2 |
| S-0-0036 | Velocity command value |
| S-0-0040 | Velocity feedback value 1 |
| S-0-0080 | Torque command value |
| S-0-0083 | Torque feedback value 1 |
Tab. 13.6: Valeurs de consigne / valeurs réelles
| IDN | S-0-0047 |
| Nom | Position command value |
| Description | Dans le mode de fonctionnement Asservissement de position, les valeurs de consigne de position sont transmises à l'entraînement par la commande numérique selon la base de temps du cycle CN. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
13. Paramètres
| IDN | S-0-0051 |
| Nom | Position feedback value 1 (motor feedback value) |
| Description | La valeur réelle de position 1 est transmise par l'entraînement au régulateur pour lui permettre de surveiller et d'afficher les informations de position. La valeur réelle de position 1 se réfère au codeur moteur(ServoCommanderTM: Mode de fonctionnement/Sélection du capteur/Capteur de commutation).Important : en cas de sélection du capteur de valeur réelle de position 2(capteur externe), la valeur de cet IDN est 0. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0053 |
| Nom | Position feedback value 2 (external encoder) |
| Description | La valeur réelle de position 2 contient la valeur réelle de position d'un capteur externe en option.Important: quand l'asservissement de position de la valeur réelle de position 1 (capteur moteur) est choisi comme mode de fonctionnement, la valeur de cet IDN est 0. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0036 |
| Nom | Velocity command value |
| Description | En mode de fonctionnement Régulation de vitesse de l'entraînement, le régulateur transmet les valeurs de consigne de vitesse à l'entraînement selon la base de temps du temps de cycle CN. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | En fonction du mode de pondération pour les données de vitesse (S-0-0044) |
13. Paramètres
| IDN | S-0-0040 |
| Nom | Velocity feedback value 1 |
| Description | La valeur réelle de vitesse 1 est transmise par l'entraînement au régulateur pour lui permettre d'afficher la vitesse de manière périodique. La valeur réelle de vitesse 1 se réfère toujours au codeur moteur(ServoCommanderTM: Mode de fonctionnement/Sélection du capteur/Capteur de commutation) |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | En fonction du mode de pondération pour les données de vitesse (S-0-0044) |
| IDN | S-0-0080 |
| Nom | Torque command value |
| Description | En mode de fonctionnement Régulation de couple de l'entraînement, les valeurs de consigne de couple sont transmises par le régulateur à l'entraînement. |
| Octets | 2 |
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | Selon le mode de pondération pour les données de couple (IDN S-0-0086) |
| IDN | S-0-0084 |
| Nom | Torque feedback value |
| Description | La valeur réelle de couple est transmise dans le mode Régulation de couple par l'entraînement au régulateur. |
| Octets | 2 |
| Min. | -2^15 |
| Max. | +2^15 - 1 |
| Unité | Selon le mode de pondération pour les données de couple (IDN S-0-0086) |
13. Paramètres
13.7 Limitation / Surveillance
| IDN | Description |
| S-0-0091 | Bipolar velocity limit value |
| S-0-0092 | Bipolar torque limit value |
| S-0-0049 | Positive position limit value |
| S-0-0050 | Negative position limit value |
| S-0-0114 | Load limit of motor |
| S-0-0057 | Position window |
| S-0-0125 | Velocity threshold (nx) |
| S-0-0157 | Velocity window |
| S-0-0124 | Standstill window |
| S-0-0159 | Monitoring window |
| S-0-0189 | Following distance |
| S-0-0200 | Amplifier warning temperature |
| S-0-0201 | Motor warning temperature |
| S-0-0206 | Drive on relay |
| S-0-0207 | Drive off relay |
Tab. 13.7: Limitation / Surveillance
| IDN | S-0-0091 |
| Nom | Bipolar velocity limit value |
| Description | Quand la valeur limite de vitesse est bipolairement dépassée, l'entraînement réagit en forçant l'état dans la classe d'état 3 sur "ncommand > nlimit" (voir IDN S-0-0013). |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (IDN S-0-0044) |
13. Paramètres
| IDN | S-0-0092 |
| Nom | Bipolar torque limit value |
| Description | La valeur de consigne de couple est limitée à cette valeur dans tous les modes de fonctionnement hormis pour la régulation de couple.Important: le bit d'état "(Torque/couple) > Tlimit" de la classe d'état 3 (IDN S-0-0013)n'est pas encore pris en charge. |
| Octets | 2 |
| Min. | 0 |
| Max. | +2^15 - 1 |
| Unité | Selon le mode de pondération pour les données de couple (S-0-0086) |
| IDN | S-0-0049 |
| Nom | Positive position limit value |
| Description | La valeur limite de position positive décrit le trajet maximal admissible dans le sens positif. La valeur limite de position positive n'est activée que si toutes les données de position se réfèrent au point zéro de la machine. Si la valeur limite de position positive est dépassée, l'entraînement force un bit d'erreur dans la classe d'état 1 (IDN S-0-0011). Important : la valeur limite de position positive n'est active que dans le mode de fonctionnement "Interpolation interne à l'entraînement". |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0050 |
| Nom | Negative position limit value |
| Description | La valeur limite de position négative décrit le trajet maximal admissible dans le sens négatif. La valeur limite de position négative n'est activée que si toutes les données de position se réfèrent au point zéro de la machine.Important : la valeur limite de position négative n'est active que dans le mode de fonctionnement "Interpolation interne à l'entraînement". |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
13. Paramètres
| IDN | S-0-0114 |
| Nom | Load limit of motor |
| Description | Le moteur peut être surchargé pendant un laps de temps donné. Cet IDN indique combien de temps le moteur peut absorber le courant maximal. Après ce laps de temps, le courant est automatiquement ramené au courant nominal pour protéger le moteur.Dans ce cas, l'entraînement force le bit d'avertissement de surcharge en classe d'état 2 (voir IDN S-0-0310). |
| Octets | 2 |
| Min. | 10 |
| Max. | 2000 |
| Unité | ms |
| IDN | S-0-0057 |
| Nom | Position window |
| Description | Quand la différence entre la valeur de consigne de position cumulée et la valeur de position réelle se trouve à l'intérieur de la plage de la fenêtre de positionnement, l'entraînement force l'état sur "In Position" (IDN -0-0336).L'état "In Position" peut être affecté à un bit d'état en temps réel (mot d'état) (voir IDN S-0-0305). |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0125 |
| Nom | Velocity threshold (nx) |
| Description | Quand la valeur réelle de vitesse chute en dessous du seuil de vitesse nx, l'entraînement force l'état : "nfeedback < nx" (IDN S-0-0332) en classe d'état 3. |
| Octets | 4 |
| Min. | -2^31 - 1 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (IDN S-0-0044) |
13. Paramètres
| IDN | S-0-0157 |
| Nom | Velocity window |
| Description | La fenêtre de vitesse affecte la vitesse actuelle à la valeur de consigne de vitesse (IDN S-0-0036). Quand la valeur réelle de vitesse actuelle se trouve dans le secteur de la valeur de consigne de vitesse plus ou moins la fenêtre de vitesse, l'entraînement force l'état sur : "nfeedback = ncommand" (IDN S-0-0330). |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (IDN S-0-0044) |
| IDN | S-0-0124 |
| Nom | Standstill window |
| Description | La fenêtre d'immobilisation décrit l'ampleur de l'écart de la vitesse par rapport à 0.Quand la valeur réelle de vitesse se trouve à l'intérieur de la fenêtre d'immobilisation,l'entraînement force l'état sur :"nfeedback = 0" (IDN S-0-0331) en classe d'état 3. |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (IDN S-0-0044) |
| IDN | S-0-0159 |
| Nom | Monitoring window |
| Description | La fenêtre de surveillance permet de définir le décalage de position maximal pour la valeur réelle de position en référence à la valeur réelle de position active. Quand la valeur de l'erreur de position (erreur de poursuite)dépasse la valeur maximale de la fenêtre de surveillance, l'entraînement force une erreur pour décalage de position excessif en classe d'état 1 (IDN S-0-0011). |
| Octets | 4 |
| Min. | 0 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
13. Paramètres
| IDN | S-0-0189 |
| Nom | Following distance |
| Description | L'entraînement utilise les données d'exploitation de cet IDN pour archiver l'écart entre la valeur de consigne de position et la valeur réelle de position correspondante (1 ou 2). Following distance = Position command value - position feedback value (1 ou 2) S-0-0189 = S-0-0047 - S-0-0051 ou S-0-0053 |
| Octets | 4 |
| Min. | -2^31 - 1 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (S-0-0076) |
| IDN | S-0-0200 |
| Nom | Amplifier warning temperature |
| Description | Quand la température de l'amplificateur dépasse la valeur de la température d'avertissement de l'amplificateur, l'entraînement se désactive avec une erreur (classe d'état 1). Cet IDN est en lecture seule. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Selon le mode de pondération pour les données de position (S-0-0208) |
| IDN | S-0-0201 |
| Nom | Motor warning temperature |
| Description | Quand la température du moteur dépasse la valeur de la température d'avertissement du moteur, l'entraînement se désactive avec une erreur (classe d'état 1). |
| Octets | 2 |
| Min. | 20 °C |
| Max. | 300 °C |
| Unité | Selon le mode de pondération pour les données de position (S-0-0208) |
13. Paramètres
| IDN | S-0-0206 |
| Nom | Drive on relay |
| Description | Cet IDN décrit la temporisation entre l'activation du couple par l'intermédiaire des bits "Drive on" et "Drive enable" (bits 14 et 15) dans le mot de commande maître (S-0-0134) et le début effectif du mouvement. Cette temporisation est nécessaire si le moteur raccordé utilise un frein d'arrêt afin de desserrer le frein avant le début du mouvement. |
| Octets | 2 |
| Min. | 0 |
| Max. | 5785,6 |
| Unité | ms |
| IDN | S-0-0207 |
| Nom | Drive off relay |
| Description | Lorsque le maître réinitialise le bit "Drive off" (bit 15) du mode de commande maître (S-0-0134), l'entraînement freine à nmin. Ensuite, le verrouillage du frein d'arrêt est déclenché. Le couple reste activé dans l'entraînement jusqu'à ce que "Drive off relay" ait expiré. |
| Octets | 2 |
| Min. | 0 |
| Max. | 5785,6 |
| Unité | ms |
13.8 Mot d'état de signal/bits en temps réel
Tab. 13.8: Mot d'état de signal/bits en temps réel
13. Paramètres
| IDN | S-0-0144 |
| Nom | Signal statusword |
| Description | Le mot d'état permet aux entraînements de transmettre les signaux en temps réel au régulateur. À cet effet, le mot d'état doit être intégré en tant que donnée cyclique dans le télégramme d'entraînement. Les bits du mot d'état de signal sont définis à l'aide de "Configuration list for signal statusword" (voir IDN S-0-0026).Important :seuls les bits d'état comme IDN S-0-0401 (Probe 1) peuvent être transmis à l'aide du mot d'état de signal. La configuration du mot d'état de signal avec certains bits d'IDN complexes n'est pas admissible. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| IDN | S-0-0026 |
| Nom | Configuration list for signal statusword |
| Description | Il s'agit ici de la liste de configuration pour tous les bits d'état indiqués dans le mot d'état de signal (S-0-0144).L'ordre des IDN sur la liste de configuration détermine le système de numérotation de bit dans l'IDN S-0-0144, en commençant par le LSB dans le mot d'état de signal.Le premier IDN de la liste de configuration définit le bit 0.Le dernier IDN de la liste de configuration définit le bit 15 du mot d'état de signal.Important : tous les IDN ne peuvent pas être transmis via le mot d'état de signal.Les IDN configurés doivent être des bits d'état (p. ex. IDN S-0-0401 – "Probe 1").La configuration de la liste d'IDN S-0-0026 est vérifiée sur le canal de service à chaque fois qu'elle est écrite. Les IDN non valides sont effacés de la liste. |
| Octets | Liste d'IDN |
| Min. | 0 IDN |
| Max. | 16 IDN |
| Unité | Liste d'IDN |
13. Paramètres
| IDN | S-0-0300 |
| Nom | Realtime control bit 1 |
| Description | Cet IDN permet d'accéder à la valeur du "Realtime control bit 1" qui est également transmis via le bit 6 du "Master controlword" (S-0-0134). |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000001b |
| Unité | -- |
| IDN | S-0-0302 |
| Nom | Realtime control bit 2 |
| Description | Cet IDN permet d'accéder à la valeur du "Realtime control bit 2" qui est également transmis via le bit 7 du "Master controlword" (S-0-0134). |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000001b |
| Unité | -- |
| IDN | S-0-0301 |
| Nom | Allocation of realtime control bit 1 |
| Description | Afin d'affecter un signal au "Realtime control bit 1" (S-0-0300) et au bit 6 du "Master controlword" (S-0-0134), l'IDN du signal est écrit dans les données d'exploitation de S-0-0301. Seul l'IDN S-0-0405 (Probe 1 enable) peut être configuré dans S-0-0301 en tant que bit de commande en temps réel. Si le "Realtime control bit" n'est pas utilisé, il faut forcer la valeur de l'IDN S-0-0301 sur "S-0-0000". Dans ce cas, le "Realtime control bit 1" n'a pas de fonction. |
| Octets | 2 |
| Min. | S-0-0000 (aucun signal défini) |
| Max. | S-0-0405 |
| Unité | -- |
13. Paramètres
| IDN | S-0-0303 |
| Nom | Allocation of realtime control bit 2 |
| Description | Afin d'affecter un signal au "Realtime control bit 2" (S-0-0302) et au bit 7 du "Master controlword" (S-0-0134), l'IDN du signal est écrit dans les données d'exploitation de S-0-0303. Seul l'IDN S-0-0405 (Probe 1 enable) peut être configuré dans S-0-0303 en tant que bit de commande en temps réel. Si le "Realtime control bit 2" n'est pas utilisé, il faut forcer la valeur de l'IDN S-0-0303 sur "S-0-0000". Dans ce cas, le "Realtime control bit 2" n'a pas de fonction. |
| Octets | 2 |
| Min. | S-0-0000 (aucun signal défini) |
| Max. | S-0-0405 |
| Unité | -- |
| IDN | S-0-0304 |
| Nom | Realtime status bit 1 |
| Description | Cet IDN permet de consulter la valeur du "Realtime status bit 1" qui est également transmis via le bit 6 du "Drive statusword" (S-0-0135). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| IDN | S-0-0306 |
| Nom | Realtime status bit 2 |
| Description | Cet IDN permet de consulter la valeur du "Realtime status bit 2" qui est également transmis via le bit 7 du "Drive statusword" (S-0-0135). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
| IDN | S-0-0305 |
| Nom | Allocation of realtime status bit 1 |
| Description | Afin d'affecter un signal au "Realtime status bit 1" (S-0-0304) et au bit 6 du "Drive statusword" (S-0-0135), l'IDN du signal est écrit dans les données d'exploitation de S-0-0305. Tous les IDN ne peuvent pas être transmis en tant que "Realtime status bit". Vous trouverez ci-après une liste de tous les IDN configurables. |
| Octets | 2 |
| Min. | S-0-0000 (aucun signal défini) |
| Max. | S-x-xxxx (voir liste) |
| Unité | -- |
| IDN | S-0-0307 |
| Nom | Allocation of realtime status bit 2 |
| Description | Afin d'affecter un signal au "Realtime status bit 2" (S-0-0306) et au bit 7 du "Drive statusword" (S-0-0135), l'IDN du signal est écrit dans les données d'exploitation de S-0-0307. Tous les IDN ne peuvent pas être transmis en tant que "Realtime status bit". Vous trouverez ci-après une liste de tous les IDN configurables : |
| Octets | 2 |
| Min. | S-0-0000 (aucun signal défini) |
| Max. | S-x-xxxx (voir liste) |
| Unité | -- |
| IDN | Description |
| S-0-0310 | Message d'avertissement "Surcharge" |
| S-0-0311 | Avertissement température excessive amplificateur |
| S-0-0312 | Avertissement température excessive moteur |
| S-0-0330 | Status “nfeedback = ncommand” |
| S-0-0331 | Status “nfeedback = 0” |
| S-0-0332 | Status “nfeedback < nx” |
| IDN | Description |
| S-0-0336 | Status "In position" |
| S-0-0400 | Commutateur de référence |
| S-0-0401 | Probe 1 |
| S-0-0403 | Position feedback value status |
| S-0-0409 | Probe 1 positive latched |
| S-0-0410 | Probe 1 negative latched |
13. Paramètres
13.9 Bits d'état
| IDN | Description |
| S-0-0310 | Signal statusword |
| S-0-0311 | Amplifier overtemperature warning (Status) |
| S-0-0312 | Motor overtemperature warning (Status) |
| S-0-0330 | Status “nfeedback = ncommand” |
| S-0-0331 | Status “nfeedback = 0” |
| S-0-0332 | Status “nfeedback < nx” |
| S-0-0336 | Status "In position" |
| S-0-0400 | Home switch (Status) |
| S-0-0401 | Probe 1 |
| S-0-0403 | Position feedback value status |
| S-0-0405 | Probe 1 enable |
| S-0-0409 | Probe 1 positive latched |
| S-0-0410 | Probe 1 negative latched |
Tab. 13.9: Bits d'état
| IDN | S-0-0310 |
| Nom | Overload warning (Status) |
| Description | Ce paramètre est utilisé pour définir un IDN pour "Amplifier overtemperature warning". Cela permet, par exemple d'affecter "Overload warning" à un bit d'état en temps réel (voir IDN S-0-0305). "Overload warning" est également défini comme bit de classe d'état 2 (IDN S-0-0012) et il est réglé en fonction de "Overload limit value" (voir IDN S-0-0114). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
13. Paramètres
| IDN | S-0-0311 |
| Nom | Amplifier overtemperature warning (Status) |
| Description | Ce paramètre est utilisé pour définir un IDN pour "Amplifier overtemperature warning". Cela permet, par exemple d'affecter "Amplifier overtemperature warning" à un bit d'état en temps réel (voir IDN S-00305). "Amplifier overtemperature warning" est également défini comme bit de classe d'état 2 (IDN S-0-0012) et il est réglé en fonction de "Amplifier warning temperature" (voir IDN S-00200). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0312 |
| Nom | Motor overtemperature warning (Status) |
| Description | Ce paramètre est utilisé pour définir un IDN pour "Motor overtemperature warning". Cela permet, par exemple d'affecter "Motor overtemperature warning" à un bit d'état en temps réel (voir IDN S-00305). "Motor overtemperature warning" est également défini comme bit de classe d'état 2 (IDN S-0-0012) et il est réglé en fonction de la "Motor warning temperature" (voir IDN S-00201). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0330 |
| Nom | Status “nfeedback = ncommand” |
| Description | Ce paramètre est utilisé pour définir un IDN pour l'état "nfeedback = ncommand".Cela permet, par exemple d'affecter l'état "nfeedback = ncommand" à un bit d'état en temps réel (voir IDN S-00305). L'état "nfeedback = ncommand" est également défini comme bit de classe d'état 3 (IDN S-0-0013) et il est forcé quand la valeur réelle de vitesse (IDN S-0-0040) se trouve à l'intérieur de la fenêtre de vitesse programmée (IDN S-0-0157). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
13. Paramètres
| IDN | S-0-0331 |
| Nom | Status “nfeedback = 0” |
| Description | Ce paramètre est utilisé pour définir un IDN pour l'état "nfeedback = 0".Cela permet, par exemple d'affecter l'état "nfeedback = 0" à un bit d'état en temps réel (voir IDN S-00305). L'état "nfeedback = 0" est également défini comme bit de classe d'état 3 (IDN S-00013) et il est forcé quand la valeur réelle de vitesse (IDN S-0-0040) se trouve à l'intérieur de la fenêtre d'immobilisation programmée (IDN S-0-0124). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0332 |
| Nom | Status “nfeedback < nx” |
| Description | Ce paramètre est utilisé pour définir un IDN pour l'état "nfeedback < nx".Cela permet, par exemple d'affecter l'état "nfeedback < nx" à un bit d'état en temps réel (voir IDN S-0-0305). L'état "nfeedback < nx" est également défini comme bit de classe d'état 3 (IDN S-0-0013) et il est forcé quand la valeur réelle de vitesse (IDN S-0-0040) est inférieure au seul de vitesse (IDN S-0-0125). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0336 |
| Nom | Status "In position" |
| Description | Ce paramètre est utilisé pour définir un IDN pour l'état "In position" afin de l'affecter à un bit d'état en temps réel (voir IDN S-0-0305).L'état "In position" est défini comme bit de classe d'état 3 (IDN S-0-0013) et il est forcé quand la valeur réelle de position se trouve à l'intérieur de la fenêtre de positionnement (voir IDN S-0-0057) par rapport à la valeur de consigne de position.Important: ce bit est uniquement évalué dans l'entraînement dans des modes d'exploitation guidés par l'entraînement comme "Interpolation interne à l'entraînement" ou dans la commande de procédure "Position spindle" (S-0-0152). Dans les modes d'exploitation normales d'asservissement de position, il n'a aucune fonction. |
13. Paramètres
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0400 |
| Nom | Home switch (Status) |
| Description | Ce paramètre est utilisé pour affecter un IDN au commutateur de référence (signal externe). Ce qui permet ainsi d'affecter le commutateur de référence à un bit d'état en temps réel (voir IDN S-0-0305). Le commutateur de référence est un signal actif haut. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0401 |
| Nom | Probe 1 |
| Description | Ce paramètre est utilisé pour affecter un IDN au palpeur de mesure 1 (signal externe).Ceci permet ainsi d'affecter le palpeur de mesure 1 à un bit d'état en temps réel (voir IDN S-0-0305). Le palpeur de mesure 1 est un signal actif haut.Cet IDN indique toujours la valeur effective du palpeur de mesure, même quand la commande de procédure "Probing cycle" n'est pas active. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
13. Paramètres
| IDN | S-0-0403 |
| Nom | Position feedback value status |
| Description | Si l'entraînement est mis en référence sur les coordonnées en référence au point zéro de la machine, l'entraînement force le bit 0 de ce paramètre pour informer le régulateur que toutes les valeurs réelles de position se réfèrent au point zéro de la machine.Le bit 0 est réinitialisé si les commandes de procédure "Drive controlled homing" (IDN S-0-0148) ou "Cancel reference point" (IDN S-0-0191) sont lancées ou encore si l'entraînement perd sa référence par rapport au point zéro de la machine, p. ex. suite à une erreur système au niveau des valeurs réelles.L'état de valeur réelle de position peut être affecté à un bit d'état en temps réel et donc signalé de manière permanente au régulateur dans le mot d'état entraînement (voir IDN S-0-0305). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0405 |
| Nom | Probe 1 enable |
| Description | Ce paramètre est utilisé pour affecter un IDN à "Probe 1 enable". Ainsi, le bit "Probe 1 enable" peut être affecté à un bit de commande en temps réel (voir IDN S-0-0301). "Probe 1 enable" est vérifié par l'entraînement tant que la commande de procédure "Probing cycle" (IDN S-0-0170) est active. Pour un nouveau cycle de palpeur de mesure avec le même flanc du palpeur de mesure 1, le régulateur doit réinitialiser "Probe 1 enable" et le forcer de nouveau sur "1". Voir aussi les chapitres 12.3 et 13.8. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit de commande (bit 0) |
13. Paramètres
| IDN | S-0-0409 |
| Nom | Probe 1 positive latched |
| Description | Ce paramètre est utilisé pour affecter un IDN à "Probe 1 positive latched". Cela permet, par exemple, d'affecter l'état "Probe 1 positive latched" à un bit d'état en temps réel (voir IDN S-0-0305).Le bit 0 de ce paramètre n'est forcé par l'entraînement que si la commande de procédure "Probing cycle" (IDN S-0-0170) est active, le signal "Probe 1 enable" (IDN S-0-0405) forcé sur 1 et le flanc positif de "Probe 1" (IDN S-0-0401) enregistré.Parallèlement, l'entraînement archive la valeur réelle de position dans "Probe value 1 positive edge" (IDN S-0-0130).Cet IDN n'est pas forcé sur 0 par l'entraînement quand la commande de procédure "Probing cycle" n'est pas active, mais affiche la dernière valeur qu'il possédait quand la commande de procédure était encore active. Voir aussi le chapitre 12.3 |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
| IDN | S-0-0410 |
| Nom | Probe 1 negative latched |
| Description | Ce paramètre est utilisé pour affecter un IDN à "Probe 1 negative latched". Cela permet, par exemple d'affecter l'état "Probe 1 negative latched" à un bit d'état en temps réel (voir IDN S-0-0305).Le bit 0 de ce paramètre n'est forcé par l'entraînement que si la commande de procédure "Probing cycle" (IDN S-0-0170) est active, le signal "Probe 1 enable" (IDN S-0-0405) forcé sur 1 et le flanc négatif de "Probe 1" (IDN 00401) est enregistré.Parallèlement, l'entraînement archive la valeur réelle de position dans "Probe value 1 negative edge" (IDN S-0-0131).Cet IDN n'est pas forcé sur 0 par l'entraînement quand la commande de procédure "Probing cycle" n'est pas active, mais affiche la dernière valeur qu'il possédait quand la commande de procédure était encore active. Voir aussi le chapitre 12.3. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | Bit d'état (bit 0) |
13. Paramètres
13.10 Identification automatique
| IDN | Description |
| P-0-0101 | Motoridentification current controller |
| P-0-0102 | Motoridentification angle encoder |
| P-0-0103 | Motoridentification status |
Tab. 13.10: Identification automatique
| IDN | P-0-0101 |
| Nom | Motoridentification current controller |
| Description | Cette commande de procédure permet de définir automatiquement tous les réglages du régulateur de courant. Les réglages automatiquement reconnus sont :Amplification du régulateur de courantConstante de temps du régulateur de courantPendant le traitement de P-0-0101, des informations supplémentaires peuvent être lues dans P-0-0103.Attention, l'étage de puissance doit être activé (DIN4) mais le régulateur d'exécution réglementaire de P-0-0101 doit cependant être désactivé (DIN5). En outre, aucune erreur ne doit exister dans la classe d'état 1 et le moteur doit pouvoir tourner sans la moindre sollicitation. |
| Octets | 2 |
| Min. | 0 |
| Max. | |
| Unité | -- |
| IDN | P-0-0102 |
| Nom | Motoridentification angle encoder |
| Description | Cette commande de procédure permet de définir automatiquement tous les réglages du codeur angulaire. Les réglages automatiquement reconnus sont :Nombre de pôlesAngle de décalage du codeurSéquence des phasesPendant le traitement de P-0-0102, des informations supplémentaires peuvent être lues dans P-0-0103.Attention, l'étage de puissance doit être activé (DIN4) mais le régulateur d'exécution réglementaire de P-0-0102 doit cependant être désactivé (DIN5). En outre, aucune erreur ne doit exister dans la classe d'état 1 et le moteur doit pouvoir tourner sans la moindre sollicitation. |
13. Paramètres
| Octets | 2 |
| Min. | 0 |
| Max. | |
| Unité | -- |
| IDN | P-0-0103 |
| Nom | Motoridentification status |
| Description | Cet IDN permet d'afficher des informations supplémentaires de l'identification automatique du moteur. Elles devraient être lues par l'utilisateur si un problème survient pendant le traitement des commandes de procédure P-0-0101 et P-0-0102.Attention, même dans le cas d'une exécution correcte de P-0-0101, des paramètres définis pourraient être limités ou non valides. C'est pourquoi l'utilisateur devrait évaluer P-0-0103 à chaque fois que P-0-0101 est exécuté.Pour de plus amples détails, voir chapitre 12.4. |
| Octets | 4 |
| Min. | 0 |
| Max. | |
| Unité | -- |
13.11 Gestion des erreurs
| IDN | P-0-0040 |
| Nom | Error_Management: error_number |
| Description | L'IDN error_number contient le code d'erreur principal, dont la réaction doit être modifiée. Le code d'erreur principal est normalement indiqué avant le trait d'union, p. ex. erreur 08-2, code d'erreur principal 8. |
| Octets | 4 |
| Min. | 0 |
| Max. | 96 |
| Unité |
13. Paramètres
| IDN | P-0-0041 |
| Nom | Error_Management: error_reaction |
| Description | Cet IDN permet de modifier la réaction à l'erreur. Si la réaction minimale du fabricant est inférieure à cette réaction, elle se limite à la réaction minimale. La réaction actuellement définie peut être consultée par la lecture de l'IDN. |
| Octets | 4 |
| Min. | 0 |
| Max. | 8 |
| Unité |
| Valeur | Signification |
| 0 | Pas d'action |
| 1 | Entrée dans la mémoire tampon |
| 3 | Avertissement sur l'écran à 7 segments |
| 5 | Désactiver le régulateur |
| 7 | Freiner avec le maximum de courant |
| 8 | Désactiver l'étage de puissance |
13.12 Fonctions E/S
| IDN | Description |
| P-0-0110 | Digital outputs |
| P-0-0113 | Function DOUT1 |
| P-0-0114 | Function DOUT2 |
| P-0-0115 | Function DOUT3 |
| P-0-0125 | Digital inputs |
| P-0-0126 | Polarity of digital inputs |
Tab. 13.11: Fonctions d'E/S
13. Paramètres
| IDN | P-0-0110 |
| Nom | Digital outputs |
| Description | Réglez les sorties numériques et consultez l'état des sorties. Pour permettre l'écriture d'une sortie, la fonction de la sortie correspondante doit être forcée sur 0. |
| Octets | 4 |
| Min. | 0 |
| Max. | |
| Unité | -- |
| Bit | Description | Valeur |
| 0 | DOUT0 | Entraînement prêt |
| 1 | DOUT1 | 0_b : Arrêt, 1 b : Marche |
| 2 | DOUT2 | 0_b : Arrêt, 1 b : Marche |
| 3 | DOUT3 | 0_b : Arrêt, 1 b : Marche |
| 4 ... 31 | Réservé |
| IDN | P-0-0113 |
| Nom | Function DOUT1 |
| Description | Affectez un état à la sortie numérique ou autorisez la modification avec l'IDN P-0-0110. |
| Octets | 2 |
| Min. | 0 |
| Max. | 16 |
| Unité | voir tableau |
| IDN | P-0-0114 |
| Nom | Function DOUT2 |
| Description | Affectez un état à la sortie numérique ou autorisez la modification avec l'IDN P-0-0110. |
| Octets | 2 |
| Min. | 0 |
| Max. | 16 |
| Unité | voir tableau |
13. Paramètres
| IDN | P-0-0115 |
| Nom | Function DOUT3 |
| Description | Affectez un état à la sortie numérique ou autorisez la modification avec l'IDN P-0-0110. |
| Octets | 2 |
| Min. | 0 |
| Max. | 16 |
| Unité | voir tableau |
| Valeur | Description |
| 0 | Modifier directement DOUT3 par P-0-0110 |
| 1 | Position XSET = XDEST |
| 2 | Position XACT = XDEST |
| 3 | Réservé |
| 4 | Déclencheur distance restante |
| 5 | Opération de prise de référence active |
| 6 | Vitesse cible atteinte |
| 7 | Limite I2t active |
| 8 | Erreur de poursuite |
| Valeur | Description |
| 9 | Tension insuffisante du circuit intermédiaire |
| 10 | Frein débloqué |
| 11 | Étage de puissance débloqué |
| 12 | Pas de fonction (ON) |
| 13 | Réservé |
| 14 | Réservé |
| 15 | Moteur linéaire identifié |
| 16 | Position de référence valide |
| IDN | P-0-0125 |
| Nom | Digital inputs |
| Description | Cet IDN permet de consulter l'état de toutes les entrées numériques. Comme la polarité de la plupart d'entre elles ne peut pas être modifiée, l'état de la DIN se réfère directement au niveau de tension à la DIN correspondante. |
| Octets | 4 |
| Min. | 0 |
| Max. | |
| Unité | -- |
- Paramètres
| Bit | Nom | Description |
| 0 | DINO | Forcée par défaut sur le "bit 0 du sélecteur de position" |
| 1 | DIN1 | Forcée par défaut sur le "bit 1 du sélecteur de position" |
| 2 | DIN2 | Forcée par défaut sur le "bit 2 du sélecteur de position" |
| 3 | DIN3 | Forcée par défaut sur le "bit 3 du sélecteur de position" |
| 4 | DIN4 | Débloquer l'étage de puissance |
| 5 | DIN5 | Activer le régulateur |
| 6 | DIN6 | Interrupteur de fin de course gauche (état logique) |
| 7 | DIN7 | Interrupteur de fin de course droit (état logique) |
| 8 | DIN8 | Forcée par défaut sur "Start" (niveau de tension en DIN8) |
| 9 | DIN9 | Forcée par défaut sur "Probe" (niveau de tension en DIN9) |
| 10 | DIN10 | Double affectation avec DOUT2 |
| 11 | DIN11 | Double affectation avec DOUT3 |
| 12 | DIN/AIN1 | Double affectation avec AIN1 |
| 13 | DIN/AIN2 | Double affectation avec AIN2 |
| 14 | Réservé | Réservé |
| 15 | Réservé | Réservé |
| 16 | Réservé | Réservé |
| 17 | Réservé | Réservé |
| 18 | Réservé | Réservé |
| 19 | Réservé | Réservé |
| 20 | Réservé | Réservé |
| 21 | Réservé | Réservé |
| 22 | Réservé | Réservé |
| 23 | Réservé | Réservé |
| 24 | Commutateur de référence | État logique en fonction de l'affectation de la DIN et polarité |
| 25 | Probe (Palpeur de mesure) | État logique en fonction de l'affectation de la DIN et polarité |
| 26 | Start (Lancement) | État logique en fonction de l'affectation de la DIN et polarité |
| 27 ... 31 | Réservé | Réservé |
13. Paramètres
| IDN | P-0-0126 |
| Nom | Polarity of digital inputs |
| Description | Cet IDN permet de consulter la polarité de toutes les entrées numériques. Comme seuls les interrupteurs de fin de course et le palpeur de mesure peuvent posséder un état logique différent du niveau de tension de la DIN affectée, seule la polarité de ces DIN peut être modifiée.L'affectation des bits est la même que pour l'IDN P-0-0125. |
| Octets | 4 |
| Min. | 0 |
| Max. | |
| Unité | -- |
13.13 Prise de référence guidée par l'entraînement
| IDN | Description |
| S-0-0041 | Homing velocity |
| S-0-0042 | Homing acceleration |
| S-0-0147 | Homing parameter |
| S-0-0148 | Drive controlled homing (procedure command) |
| S-0-0150 | Reference offset 1 |
| S-0-0191 | Cancel reference point (procedure command) |
| P-0-0047 | Homing method |
Tab. 13.12: Prise de référence guidée par l'entraînement
| IDN | S-0-0041 |
| Nom | Homing velocity |
| Description | La vitesse de prise de référence est utilisée pendant la commande de procédure "Drive controlled homing" (IDN S-0-0148). |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | En fonction du mode de pondération pour les données de vitesse (S-0-0044) |
13. Paramètres
| IDN | S-0-0042 |
| Nom | Homing acceleration |
| Description | L'accélération de prise de référence est nécessaire à l'entraînement quand la commande de procédure "Drive controlled homing" (IDN S-0-0148) est activée. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | En fonction du mode de pondération pour les données d'accélération (S-0-0160) |
| IDN | S-0-0147 |
| Nom | Homing parameter |
| Description | Ce paramètre permet de régler plusieurs options de prise de référence guidée par l'entraînement. Voir aussi le chapitre 12.1. |
| Octets | 2 |
| Min. | 00000001 0001x100b |
| Max. | 00000001 0001x10xb |
| Unité | -- |
| IDN | S-0-0148 |
| Nom | Drive controlled homing (procedure command) |
| Description | Cette commande de procédure déclenche une prise de référence guidée par l'entraînement. Voir aussi le chapitre 12.1. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
| IDN | S-0-0150 |
| Nom | Reference offset 1 |
| Description | Ce paramètre décrit l'écart entre l'impulsion du repère de référence des valeurs réelles de position et le point de référence.À la différence de la spécification SERCOS, il n'existe pas de décalage de cote de référence pour les valeurs réelles externes. Cet IDN est utilisé dans les deux cas (évaluation de position réelle interne et externe) pour définir le décalage de la cote de référence pour la commande de procédure Prise de référence guidée par l'entraînement. Voir aussi le chapitre 12.1. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0191 |
| Nom | Cancel reference point (procedure command) |
| Description | Quand le maître force et active la commande de procédure "Cancel reference point", l'entraînement réinitialise le bit "Position feedback value status" (IDN S-0-0403).La commande de procédure est exécutée avec succès par l'entraînement dès que le bit "Position feedback value status" est remis à 0. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| IDN | P-0-0045 |
| Nom | Homing method |
| Description | IDN spécifique au fabricant pour la détermination des méthodes de prise de référence.Voir le chapitre 12.1. |
| Octets | 2 |
| Min. | |
| Max. | |
| Unité | -- |
13. Paramètres
13.14 Interpolation interne à l'entraînement
| IDN | Description |
| S-0-0258 | Target position |
| S-0-0259 | Positioning speed |
| S-0-0260 | Positioning acceleration |
| S-0-0359 | Positioning deceleration |
Tab. 13.13: Interpolation interne à l'entraînement
| IDN | S-0-0258 |
| Nom | Target position |
| Description | Quand "Interpolation interne à l'entraînement" est choisi comme mode de fonctionnement, cet IDN est utilisé par le maître pour transmettre la position cible absolue. L'entraînement se déplace vers la position cible en tenant compte de la "Positioning speed" (IDN S-0-0259), de la "Positioning acceleration" (IDN S-0-0260) et de la "Positioning deceleration" (IDN S-0-0359). |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0259 |
| Nom | Positioning speed |
| Description | La "Positioning speed" est utilisée dans le mode de fonctionnement "Interpolation interne à l'entraînement" en tant que vitesse pour le déplacement vers la "Target position" (IDN S-0-0258). Quand l'accélération (S-0-0260) ou la décélération de positionnement (S-0-0359) est réglée sur une valeur faible ou que l'écart de valeur réelle de position (S-0-0051 ou S-0-0053) par rapport à la position cible (S-0-0258) est trop court, il se peut que la vitesse de positionnement ne soit pas atteinte. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (IDN S-0-0044) |
13. Paramètres
| IDN | S-0-0260 |
| Nom | Positioning acceleration |
| Description | La "Positioning acceleration" est utilisée dans le mode de fonctionnement "Interpolation interne à l'entraînement" en tant qu'accélération pour tous les mouvements de l'entraînement. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données d'accélération (IDN S-0-0160) |
| IDN | S-0-0359 |
| Nom | Positioning deceleration |
| Description | La "Positioning deceleration" est utilisée dans le mode de fonctionnement "Interpolation interne à l'entraînement" en tant que décélération pour tous les mouvements de l'entraînement. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données d'accélération (IDN S-0-0160) |
13.15 Touches de mesure
| DIN | Description |
| S-0-0130 | Probe value 1 positive edge |
| S-0-0131 | Probe value 1 negative value |
| S-0-0169 | Probe control parameter |
| S-0-0170 | Probing cycle (procedure command) |
| S-0-0179 | Probe status |
Tab. 13.14: Touches de mesure
13. Paramètres
| IDN | S-0-0130 |
| Nom | Probe value 1 positive edge |
| Description | Dans le cas d'un flanc positif du palpeur de mesure 1 (IDN S-0-0401), la valeur réelle de position momentanée est archivée dans cet IDN.Quand l'asservissement de position s'effectue en tant que mode de fonctionnement à l'aide de la valeur réelle de position 1, la valeur réelle de position 1 momentanée est archivée dans cet IDN.Quand l'asservissement de position s'effectue en tant que mode de fonctionnement à l'aide de la valeur réelle de position 2, la valeur réelle de position 2 momentanée est archivée dans cet IDN.Cet IDN est uniquement pris en charge quand l'entraînement est utilisé dans un mode d'asservissement de position. Voir aussi le chapitre 12.3. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0131 |
| Nom | Probe value 1 negative value |
| Description | Dans le cas d'un flanc positif du palpeur de mesure 1 (IDN S-0-0402), la valeur réelle de position momentanée est archivée dans cet IDN.Quand l'asservissement de position s'effectue en tant que mode de fonctionnement à l'aide de la valeur réelle de position 1, la valeur réelle de position 1 momentanée est archivée dans cet IDN.Quand l'asservissement de position s'effectue en tant que mode de fonctionnement à l'aide de la valeur réelle de position 2, la valeur réelle de position 2 momentanée est archivée dans cet IDN.Cet IDN est uniquement pris en charge quand l'entraînement est utilisé dans un mode d'asservissement de position. Voir aussi le chapitre12.3. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
13. Paramètres
| IDN | S-0-0169 |
| Nom | Probe control parameter |
| Description | Ce paramètre détermine quel palpeur de mesure et quels flancs sont activés pour la commande de procédure "Probing cycle". Voir aussi le chapitre 12.3. |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 000000xxb |
| Unité | -- |
| IDN | S-0-0170 |
| Nom | Probing cycle (procedure command) |
| Description | Quand le maître force et active la commande de procédure "Probing cycle", l'entraînement réagit aux paramètres suivants :"Probe 1 enable" (IDN S-0-0405) et "Probe 1" (IDN S-0-0401) comme programmé dans "Probe control parameter" (IDN S-0-0169).Pendant que la commande de procédure est activée, le régulateur peut déclencher plusieurs mesures. Quand le régulateur ne souhaite plus d'autres mesures, le régulateur interrompt la commande de procédure. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| IDN | S-0-0179 |
| Nom | Probe status |
| Description | Quand l'entraînement archive une ou plusieurs valeurs de mesure pendant que la commande de procédure "Probing cycle" (IDN S-0-0170) est activée, il force parallèlement le bit affecté dans l'état de valeur de mesure.Si "Probe 1 enable" (IDN S-0-0405) est réinitialisé par le régulateur, l'entraînement réinitialise le bit 0 et le bit 1 de "Probe status".Si "Probe 2 enable" (IDN S-0-0406) est réinitialisé par le régulateur, l'entraînement réinitialise le bit 2 et le bit 3 de "Probe status".Important : À la différence de la spécification SERCOS, les bits de "Probe status" ne sont pas réinitialisés quand les flancs de l'IDN S-0-0169 ne sont pas activés et que des résultats de mesure ont déjà eu lieu. |
| Octets | 2 |
13. Paramètres
| Min. | -- |
| Max. | -- |
| Unité | -- |
13.16 Positionnement de la broche
| IDN | Description |
| S-0-0153 | Spindel angle position |
| S-0-0180 | Spindel relative offset |
| S-0-0154 | Spindel positioning parameter |
| S-0-0222 | Spindel positioning speed |
| S-0-0152 | Position spindel (Procedure command) |
Tab. 13.15: Positionnement de la broche
| IDN | S-0-0153 |
| Nom | Spindel angle position |
| Description | Ce paramètre décrit la position angulaire absolue de la broche par rapport au point de référence. Le paramètre est uniquement activé en liaison avec la commande de procédure "Position spindel" (voir IDN S-0-0152). |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
| IDN | S-0-0180 |
| Nom | Spindel relative offset |
| Description | Le paramètre est uniquement activé en liaison avec la commande de procédure "Position spindel" (voir IDN S-0-0152).Le décalage relatif de la broche est ajouté à la valeur de position absolue en cours de traitement.Le paramètre est utilisé pour actionner la broche pour un certain nombre de rotations. |
| Octets | 4 |
| Min. | -2^31 |
| Max. | +2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de position (IDN S-0-0076) |
13. Paramètres
| IDN | S-0-0154 |
| Nom | Spindel positioning parameter |
| Description | Cet IDN détermine le type de positionnement par l'intermédiaire de la commande de procédure "Position spindel". Il est possible de faire la distinction entre un positionnement absolu et relatif. En outre, il est possible de changer le sens de rotation de positif à négatif. Voir aussi le chapitre 12.3. |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000x0xb |
| Unité | -- |
| IDN | S-0-0222 |
| Nom | Spindel positioning speed |
| Description | Quand la commande de procédure "Position spindel" (voir IDN S-0-0152) est activée dans l'entraînement, ce dernier accélère ou décélère en fonction de la vitesse momentanée jusqu'à la vitesse de positionnement de la broche et positionne l'entraînement dans la position angulaire de broche absolue (S-0-0153) ou relative à la position momentanée (S-0-0180) en fonction du paramètre de positionnement de la broche (S-0-0154).Toute l'opération de positionnement via la commande de procédure S-0-0152 est effectuée avec la vitesse de positionnement de la broche (S-0-0222). En cas d'interruption de la commande de procédure S-0-0152, cet IDN n'a aucune fonction.Important : La modification de la vitesse de positionnement de la broche n'agit pas sur une opération de positionnement momentanée. La vitesse modifiée n'est utilisée que lors de l'opération de positionnement suivante. |
| Octets | 4 |
| Min. | 0 |
| Max. | 2^31 - 1 |
| Unité | Selon le mode de pondération pour les données de vitesse (S-0-0044) |
13. Paramètres
| IDN | S-0-0152 |
| Nom | Position spindel (Procedure command) |
| Description | Cette commande de procédure commute automatiquement l'entraînement dans la boucle de régulation de position en dessous de la vitesse de positionnement de la broche (IDN S-0-0222).Tant que cette commande est active, toutes les modifications des valeurs de commande cycliques sont ignorées.Par ailleurs, l'entraînement positionne la broche en fonction du "Spindel positioning parameter" (IDN S-0-0154) de manière absolue par rapport à la position angulaire programmée (IDN S-0-0153) ou tourne la broche de manière relative (pas à pas) (IDN S-0-0180).Quand l'interpolateur de l'entraînement atteint la valeur de consigne sélectionnée, l'entraînement force l'état‘Target position reached’ (IDN S-0-0342).Tant que cette commande de procédure est activée, l'entraînement procède à l'asservissement de position et s'adapte à chaque nouvelle valeur de consigne (IDN S-0-0153 ou S-0-0180) transmise sur le canal de service. Si la centrale de commande interrompt cette commande, l'entraînement active alors le mode de fonctionnement activé dans le mot d'état. Voir aussi le chapitre 12.2. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13.17 Divers
| IDN | Description |
| S-0-0104 | Position loop Kv factor |
| S-0-0108 | Feedrate Override |
| S-0-0265 | Language designation |
Tab. 13.16: Divers
| IDN | S-0-0104 |
| Nom | Position loop Kv factor |
| Description | Cet IDN permet de régler l'amplification de la boucle d'asservissement de position. |
| Octets | 2 |
| Min. | 0 |
| Max. | 15 |
| Unité | 0,001 (mètre/min)/millimètre |
13. Paramètres
| IDN | S-0-0108 |
| Nom | Feedrate Override |
| Description | Le "Feedrate Override" est uniquement activé en cas de commandes de procédure guidées par l'entraînement. Dans un tel cas, la valeur de consigne de vitesse est calculée en interne par l'entraînement. Le "Feedrate Override" a un effet multiplicateur sur la valeur de consigne de vitesse. |
| Octets | 2 |
| Min. | 0 |
| Max. | 200 |
| Unité | 0,001 % |
| IDN | P-0-0100 |
| Nom | Torque constant |
| Description | La constante de couple est nécessaire pour calculer toutes les données de couple qui sont transmises en Nm via le bus SERCOS en valeurs en Ampère internes à l'entraînement. C'est pourquoi le facteur de conversion en Nm/A peut être inscrit dans cet IDN. |
| Octets | 2 |
| Min. | 0,01 |
| Max. | 100,00 |
| Unité | Nm/A |
| IDN | S-0-0265 |
| Nom | Language designation |
| Description | Cet IDN permet de choisir la langue dans laquelle toutes les chaînes ASCII sont envoyées au maître. Deux langues peuvent être sélectionnées.0: German1: English |
| Octets | 2 |
| Min. | 0 |
| Max. | 1 |
| Unité | -- |
13. Paramètres
| IDN | P-0-0020 |
| Nom | Drive status enable |
| Description | Pour vérifier si le servorégulateur peut être activé par le mot de commande, il est possible de consulter l'état de libération CMMP-AS avant d'activer l'entraînement.Quand tous les bits de cet IDN sont sur 0, l'entraînement est prêt pour l'activation.Sinon, l'utilisateur est en mesure de voir pourquoi le CMMP-AS ne peut pas être activé. |
| Octets | 4 |
| Min. | 0 |
| Max. | |
| Unité | -- |
| Bit | Description |
| 0 | Précharge bus CC non terminée |
| 1 | Codeur non prêt |
| 2 | L'auto-identification du codeur est encore en cours |
| 3 | L'auto-identification du régulateur de courant est encore en cours |
| 4 ... 15 | Réservé |
| 16 | Logique de libération du régulateur <> "DIN5 et SERCOS" |
| 17 | Libération étage de puissance logique manque (selon logique de libération : DIN4 + X) |
| 18 | Libération régulateur logique manque (selon logique de libération : DIN5 + X) |
| 19 | Réservé |
| 20 | Une erreur est survenue |
| 21 | DIN4 manque |
| 22 | DIN5 manque |
| 23 ... 31 | Réservé |
13. Paramètres
13.18 Informations
| IDN | Description |
| S-0-0030 | Manufacturer version |
| S-0-0109 | Motor peak current |
| S-0-0110 | Amplifier peak current |
| S-0-0111 | Motor continuous current |
| S-0-0112 | Amplifier rated current |
| S-0-0140 | Spindel relative offset |
| S-0-0141 | Spindel positioning parameter |
| S-0-0142 | Application type |
| S-0-0143 | SERCOS interface version |
| S-0-0096 | Slave arrangement |
| S-0-0134 | Master controlword |
| S-0-0135 | Drive statusword |
Tab. 13.17: Informations
| IDN | S-0-0030 |
| Nom | Manufacturer version |
| Description | Cet IDN permet de consulter la version de l'implémentation SERCOS. |
| Octets | -- |
| Min. | 01.00 |
| Max. | 01.00 |
| Unité | Texte |
| IDN | S-0-0109 |
| Nom | Motor peak current |
| Description | Le courant maximal du moteur doit être écrit dans cet IDN. Le courant du servomoteur est limité à cette valeur. S-0-0114 permet de déterminer combien de temps cette valeur peut être appliquée. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | mA |
13. Paramètres
| IDN | S-0-0110 |
| Nom | Amplifier peak current |
| Description | Cet IDN permet de consulter le courant maximal disponible du servomoteur. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | mA |
| IDN | S-0-0111 |
| Nom | Motor continuous current |
| Description | Le courant nominal du moteur doit être écrit dans cet IDN. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | mA |
| IDN | S-0-0112 |
| Nom | Amplifier rated current |
| Description | Cet IDN permet de consulter le courant nominal du servomoteur. |
| Octets | 4 |
| Min. | -- |
| Max. | -- |
| Unité | mA |
| IDN | S-0-0140 |
| Nom | Type de régulateur |
| Description | Les données d'exploitation du type de régulateur contiennent le nom de l'entreprise et le type de modèle du fabricant. |
| Octets | 1 octet variable (ASCII) |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
| IDN | S-0-0141 |
| Nom | Type de moteur |
| Description | Cet IDN peut contenir le nom de l'entreprise et le fabricant du moteur. Jusqu'ici, cet IDN n'est pas stocké de manière permanente dans le CMMP-AS-SC. Lors de la désactivation, il est à chaque fois réinitialisé en chaîne vide. |
| Octets | 1 octet variable (ASCII) |
| Min. | 0 signes ASCII |
| Max. | 16 signes ASCII |
| Unité | -- |
| IDN | S-0-0142 |
| Nom | Application type |
| Description | Cet IDN peut contenir le type d'application. Jusqu'ici, cet IDN n'est pas stocké de manière permanente dans le CMMP-AS-SC. Lors de la désactivation, il est à chaque fois réinitialisé en chaîne vide. |
| Octets | 1 octet variable (ASCII) |
| Min. | 0 signes ASCII |
| Max. | 16 signes ASCII |
| Unité | -- |
| IDN | S-0-0143 |
| Nom | SERCOS interface version |
| Description | Cet IDN montre le numéro de version de l'interface SERCOS actuelle conformément à la spécification SERCOS V2.2 (novembre 2001). |
| Octets | 1 octet variable (ASCII) |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
| IDN | S-0-0096 |
| Nom | Slave arrangement |
| Description | Pendant l'initialisation, le maître doit détecter les esclaves physiques présents avec leurs entraînements raccordés pour optimiser le calcul automatique des intervalles de temps. Le maître peut demander ces informations aux entraînements dans la phase de communication 2. Cette entrée permet au maître de reconnaître d'autres entraînements appartenant au même esclave physique. Comme les appareils CMMP-AS-SC sont des esclaves dotés d'un entraînement, l'identification de l'esclave renvoie l'adresse de l'entraînement en bit de poids fort et de poids faible. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | 1 |
| IDN | S-0-0134 |
| Nom | Master controlword |
| Description | Permet d'afficher le mot de commande maître sur l'écran du régulateur par le biais du canal de service (cela peut s'avérer utile pendant le démarrage et pour l'élimination des défauts). Voir aussi le chapitre 9. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| IDN | S-0-0135 |
| Nom | Drive statusword |
| Description | Permet d'afficher le mot d'état de l'entraînement sur l'écran du régulateur par le biais du canal de service (cela peut s'avérer utile pendant le démarrage et pour l'élimination des défauts). Voir aussi le chapitre 9. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13. Paramètres
13.19 Classes de diagnostic
13.19.1 Classe de diagnostic 1 (classe d'état 1)
| IDN | S-0-0011 |
| Nom | Classe de diagnostic 1 |
| Description | Il s'agit ici de la classe de diagnostic pour tous les défauts d'entraînement. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
Si une situation de défaut survient dans la classe d'état 1, le moteur est freiné avec la décélération d'arrêt rapide. Après le freinage, l'étage de puissance est désactivé. Le bit 13 du mot d'état d'entraînement est forcé pour afficher la situation de défaut.
Les bits de la classe d'état 1 ne peuvent être réinitialisés qu'à l'aide de la commande "Reset diagnosis class 1" (S-0-0099) quand la cause du défaut n'existe plus.
| Bit | Description | Numéro de défaut CMMP-AS | Voir aussi |
| 0 | Surcharge | 31 | S-0-0114 |
| 1 | Température excessive de l'amplificateur | 4 | S-0-0203 |
| 2 | Température excessive du moteur | 3 | S-0-0204 |
| 3 | -- | - | S-0-0205 |
| 4 | Tension erronée du régulateur | 5 | |
| 5 | Erreur de réponse | 8 | |
| 6 | -- | - | |
| 7 | Surintensité de courant | 6 | |
| 8 | Surtension | 7 | |
| 9 | Tension basse | 2 | |
| 10 | -- | - | |
| 11 | Écart de position excessif | 17 | S-0-0159 |
| 12 | Erreur de communication | - | S-0-0014 |
| 13 | Valeur limite de position dépassée | 40 | S-0-0049 |
| 14 | -- | ||
| 15 | Erreur spécifique au fabricant | - | S-0-0129 |
13. Paramètres
Toutes les erreurs susceptibles de survenir dans le CMMP-AS sans qu'un bit spécifique de classe d'état 1 ne soit forcé sont activées dans S-0-0129 et forcent donc automatiquement le bit 15.
13.19.2 Classe de diagnostic fabricant 1
| IDN | S-0-0129 |
| Nom | Classe de diagnostic fabricant 1 |
| Description | Si une erreur est activée dans la classe de diagnostic fabricant 1, le bit d'erreur spécifique au fabricant est également activé dans la classe de diagnostic 1 (voir IDN S-0-0011).L'entraînement n'annule l'erreur spécifique au fabricant et ne réinitialise à "0" que si l'erreur dans la classe de diagnostic fabricant 1 a été éliminée après la réception de la commande "Reset diagnosis class 1" (voir IDN S-0-0099) par l'intermédiaire du canal de service.Structure de S-0-0129 :Bit 0 : erreur dans CMMP-AS-SC0 : aucune erreur1 : une erreur est survenue (voir IDN S-0-0095 pour le numéro d'erreur Festo)Les bits 15 ... 1 sont réservés |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 00000000 00000001b |
| Unité | - |
La classe de diagnostic fabricant 1 peut également être réinitialisée à l'aide de la commande "Reset diagnosis class 1" (S-00099) quand la cause du défaut n'existe plus.
| Bit | Description | Numéro de défaut CMMP-AS |
| 0 | Erreur générale | voir S-0-0095 |
| 1 ... 15 | Réservé |
13. Paramètres
13.19.3 IDN S-0-0095 : Message de diagnostic
| IDN | S-0-0095 |
| Nom | Diagnosis message |
| Description | L'état d'exploitation momentané est surveillé à l'aide de messages de diagnostic. Les messages de diagnostic sont générés sous forme de texte par l'entraînement et archivés dans les données d'exploitation de cet IDN. Si un défaut survient dans l'entraînement, le numéro d'erreur Festo actuel est envoyé par cet IDN au maître. Pour les codes d'erreur, veuillez consulter le manuel du logiciel "Contrôleurs de servomoteur CMMP-AS". |
| Octets | 1 octet variable (ASCII) |
| Min. | -- |
| Max. | -- |
| Unité | -- |
13.19.4 Classe de diagnostic 2 (classe d'état 2)
| IDN | S-0-0012 |
| Nom | Classe de diagnostic 2 |
| Description | Il s'agit ici de la classe de diagnostic pour tous les préavis de coupure (avertissement). |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
À la différence de la classe d'état 1, la classe de diagnostic 2 émet des avertissements. Les bits de la classe d'état 2 sont forcés quand la cause spéciale survient et sont réinitialisés à la lecture de l'IDN.
| N° de bit | Description | Voir aussi |
| 0 | Message d'avertissement "Surcharge" | S-0-0310 |
| 1 | Avertissement température excessive amplificateur | S-0-0311 |
| 2 | Avertissement température excessive moteur | S-0-0312 |
| 3 | -- | |
| 4 | -- | |
| 5 | -- | |
| 6 | -- | |
| 7 | -- |
13. Paramètres
| N° de bit | Description | Voir aussi |
| 8 | -- | |
| 9 | -- | |
| 10 | -- | |
| 11 | -- | |
| 12 | -- | |
| 13 | Position cible en dehors de la plage de déplacement *) | |
| 14 | -- | |
| 15 | -- | |
| *) Uniquement en mode de fonctionnement "Interpolation interne à l'entraînement" | ||
13.19.5 Classe de diagnostic 3 (classe d'état 3)
| IDN | S-0-0013 |
| Nom | Classe de diagnostic 3 |
| Description | Il s'agit ici de la classe de diagnostic pour tous les états de fonctionnement de l'entraînement. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
La classe de diagnostic 3 se compose de signes d'état. Les bits de la classe d'état 2 sont forcés quand la cause spéciale survient et sont réinitialisés après la disparition de la cause.
| N° de bit | Description | Voir aussi |
| 0 | nfeedback = ncommand | S-0-0330 |
| 1 | nfeedback = 0 | S-0-0331 |
| 2 | nfeedback < nx | S-0-0332 |
| 3 | -- | |
| 4 | -- | |
| 5 | ncommand > nlimit | S-0-0335 |
| 6 | In Position | S-0-0336 |
| 7 | -- | |
| 8 | -- |
13. Paramètres
| N° de bit | Description | Voir aussi |
| 9 | -- | |
| 10 | -- | |
| 11 | -- | |
| 12 | -- | |
| 13 | -- | |
| 14 | -- | |
| 15 | État spécifique fabricant | S-0-0182 |
13.19.6 Classe de diagnostic fabricant 3 (classe d'état 3)
Si un bit d'état est activé dans la classe de diagnostic fabricant 3, le bit d'état spécifique au fabricant est également activé dans la classe de diagnostic 3 (voir IDN S-0-0013).
| IDN | S-0-0182 |
| Nom | Classe de diagnostic fabricant 3 |
| Description | |
| Octets | 2 |
| Min. | |
| Max. | |
| Unité | -- |
| Bit | Description |
| 0 | Une identification interne automatique de la position de commutation est nécessaire. |
| 1 ... 15 | Réservé |
13. Paramètres
13.19.7 IDN S-0-0014 : "État de l'interface"
| IDN | S-0-0014 |
| Nom | Interface status |
| Description | Il s'agit ici de la classe de diagnostic pour toutes les erreurs de communication. Une erreur de communication dans S-0-0014 entraîne les actions suivantes :a) Une erreur de communication est activée dans la classe d'état 1 (voir IDN S-0-0011) si l'état de l'interface est forcé par une erreur.b) Quand une erreur de communication est survenue, l'erreur et la phase de communication au moment de l'erreur sont archivées.L'entraînement n'annule une erreur de communication et ne réinitialise "0" que si l'erreur au niveau de l'interface a été éliminée après la réception de la commande "Reset diagnosis class 1" (voir IDN S-0-0099) par l'intermédiaire du canal de service.L'activation des bits 2 ... 0 n'indique aucune erreur. Si aucune erreur de communication n'est présente, la phase de communication momentanée dans l'état d'interface est contenue sur ces bits. |
| Octets | 2 |
| Min. | -- |
| Max. | -- |
| Unité | -- |
| N° de bit | Nom | Description | Numéro de défaut CMMP-AS |
| 0 ... 2 | Phase de communication | Phase momentanée | - |
| 3 | Erreur MST | Il manquait deux télégrammes de synchronisation maître successifs. Dans la phase de communication 3 ou 4, le CMMP-AS retombe en phase 0. Une erreur survient, l'entraînement est arrêté. | 37-2 |
| 4 | Erreur MDT | Il manquait deux télégrammes de données maître successifs. Dans la phase de communication 4, le CMMP-AS retombe en phase 0. Une erreur survient, l'entraînement est arrêté. | 37-4 |
| 5 | Phase non valide | Phase non valide par le maître (phase de communication > 4) Le CMMP-AS retombe en phase 0. Une erreur survient, l'entraînement est arrêté. | 37-3 |
13. Paramètres
| N° de bit | Nom | Description | Numéro de défaut CMMP-AS |
| 6 | Erreur pendant le passage à la phase supérieure | Séquence de phase invalide par le maître.Le CMMP-AS retombe en phase 0. Une erreur survient,l'entraînement est arrêté. | 37-3 |
| 7 | Erreur pendant le passage à une phase inférieure. | Valeur invalide pour le passage en phase inférieure (pas en phase 0).Le CMMP-AS retombe en phase 0. Une erreur survient,l'entraînement est arrêté. | 37-3 |
| 8 | Changement de phase sans confirmation de disponibilité | Le maître tente de passer à la phase de communication 3 ou 4 bien que S-0-0127 ou S-0-0128 n'ait pas été correctement confirmé. | 37-3 |
| 9 | Passage dans un mode de fonctionnement non initialisé | Un mode de fonctionnement invalide on non initialisé doit être activé. Une erreur survient, l'entraînement est arrêté. | 37-5 |
| 10 ... 15 | Réservé |
13.19.8 Masques de diagnostic
| IDN | S-0-0097 |
| Nom | Masque classe de diagnostic 2 |
| Description | Ce masque permet de convertir les avertissements de la classe de diagnostic 2 en référence à leur effet sur le bit de modification dans l'état d'entraînement. Lors de la modification des avertissements convertis, le bit de modification de la classe de diagnostic 2 n'est pas forcé dans l'état d'entraînement. Le masque n'agit pas sur les données d'exploitation de la classe de diagnostic 2 (voir IDN S-0-0012). |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 11111111 11111111b |
| Unité | - |
13. Paramètres
| IDN | S-0-0098 |
| Nom | Masque classe de diagnostic 3 |
| Description | Ce masque permet de convertir les signes d'état de la classe de diagnostic 3 en référence à leur effet sur le bit de modification dans l'état d'entraînement. Lors de la modification des signes d'état convertis, le bit de modification de la classe de diagnostic 3 n'est pas forcé dans l'état d'entraînement. Le masque n'agit pas sur les données d'exploitation de la classe de diagnostic 3 (voir IDN S-0-0013). |
| Octets | 2 |
| Min. | 00000000 00000000b |
| Max. | 11111111 11111111b |
| Unité | - |
| IDN | S-0-0099 |
| Nom | Reset diagnosis class 1 (procedure command) |
| Description | Quand cette commande de procédure est reçue par l'entraînement via le canal de service et qu'aucune erreur n'est activée, la classe d'état 1, l'état d'interface, la classe d'état fabricant 1, l'erreur de coupure d'entraînement (bit d'état entraînement 13) ainsi que le mécanisme de coupure de l'entraînement sont tous réinitialisés (voir l'IDN S-0-0011, l'IDN S-0-0014 et l'IDN S-0-0129). Voir aussi le chapitre 13.19. |
| Octets | 2 |
| Min. | - |
| Max. | - |
| Unité | - |
14. Codes d'erreur SERCOS
14. Codes d'erreur SERCOS
Les erreurs suivantes peuvent survenir lors de l'utilisation du module enfichable SERCOS.
| Code | Nom | Description | Mesure |
| 37-0 | Distorsion des données de réception | Les données réceptionnées se situent au-delà de la limite de distorsion (INT_RDIST) | Vérifier si le câble à fibres optiques est correctement raccordé.Vérifier la vitesse de transmission. |
| 37-1 | Anneau non fermé | Le réseau annulaire de fibres optiques semble ne pas être fermé. (INT_FIBBR) | Vérifier si le câble à fibres optiques est correctement raccordé. Vérifier si le câble à fibres optiques n'est pas endommagé.Vérifier la vitesse de transmission. |
| 37-2 | MST manque deux fois | Deux télégrammes de synchronisation maître successifs manquaient ou ont été reçus trop tard. Dans la phase de communication 4, le CMMP-AS retombe en phase 0. | Vérifier la vitesse de transmission.Contrôler avec une vitesse de transmission plus rapide.Contrôler avec un temps de cycle plus élevé. |
| 37-3 | Changement de phase non valide | La phase indiquée dans le télégramme de synchronisation maître n'est pas autorisée. | Voir le chapitre 1.1.1. |
| 37-4 | MDT manque deux fois | Il manquait deux télégrammes de données maître successifs. Dans la phase de communication 4, le CMMP-AS retombe en phase 0. | Vérifier si le câble à fibres optiques est correctement raccordé.Vérifier la vitesse de transmission. |
| 37-5 | Mode de fonctionnement non valide | Le mode de fonctionnement sélectionné est invalide ou non autorisé. | Vérifier S-0-0032, S-0-0033, S-0-0034 et S-0-0035. Voir aussi le chapitre 7. |
- Codes d'erreur SERCOS
| Code | Nom | Description | Mesure |
| 38-0 | Erreur d'initialisation | Initialisation invalide de SERCON | Erreur interne |
| 38-1 | SERCOS activé sans module enfichable | La communication SERCOS est activée, mais aucun module enfichable n'est disponible. | Installer le module enfichable ou désactiver SERCOS. |
| 38-2 | Panne du module | L'auto-test du module s'est soldé par un échec. | Remplacer le module enfichable. |
| 38-3 | Échec de S-0-0127 | Pendant l'exécution de la commande de procédure S-0-0127, tous les paramètres de S-0-0018 n'ont pas été correctement transmis. | Vérifier la liste IDN S-0-0021 et relancer la commande de procédure. |
| 38-4 | S-0-0127 : échec de la création du MDT ou de l'AT | Les données cycliques du télégramme de données maître ou du télégramme d'entraînement n'ont pas pu être créées. | Vérifier S-0-0016 pour le télégramme d'entraînement et S-0-0024 pour le télégramme de données maître. Vérifier également S-0-0015. |
| 38-5 | Échec de S-0-0128 | Pendant l'exécution de la commande de procédure S-0-0128, tous les paramètres de S-0-0019 n'ont pas été correctement transmis. | Vérifier la liste IDN S-0-0022 et relancer la commande de procédure. |
| 38-6 | S-0-0128 : Pondération non valide | Erreur pendant le calcul de la pondération souhaitée | Vérifier la pondération et exécuter de nouveau S-0-0128. |
| 38-7 | Liste IDN S-0-0026 ou liste IDN S-0-0027 non valide | La liste IDN S-0-0026 ou la liste IDN S-0-0027 contient un IDN non valide (interdit). | Vérifier S-0-0026 et S-0-0027. |
| 38-9 | Module enfichable non valide | SERCON 816 en mode de compatibilité SERCON 410b | Erreur interne |
A. Annexe
Afin d'adapter le rendement lumineux des diodes d'émission, différentes sorties peuvent être activées ensemble. Le tableau suivant donne un aperçu des paliers disponibles et des sorties correspondantes. La luminosité augmente avec des numéros de palier supérieurs.
| Palier | TXD1 | TXD3 | TXD4 | TXD6 |
| 0 | -- | -- | -- | -- |
| 1 | ALLUMEE | -- | -- | -- |
| 2 | -- | -- | -- | ALLUMEE |
| 3 | ALLUMEE | -- | -- | ALLUMEE |
| 4 | -- | ALLUMEE | -- | -- |
| 5 | ALLUMEE | ALLUMEE | -- | -- |
| 6 | -- | ALLUMEE | ALLUMEE | -- |
| 7 | -- | ALLUMEE | -- | ALLUMEE |
| 8 | ALLUMEE | ALLUMEE | -- | ALLUMEE |
| 9 | ALLUMEE | ALLUMEE | ALLUMEE | -- |
| 10 | -- | ALLUMEE | ALLUMEE | ALLUMEE |
| 11 | ALLUMEE | ALLUMEE | ALLUMEE | ALLUMEE |
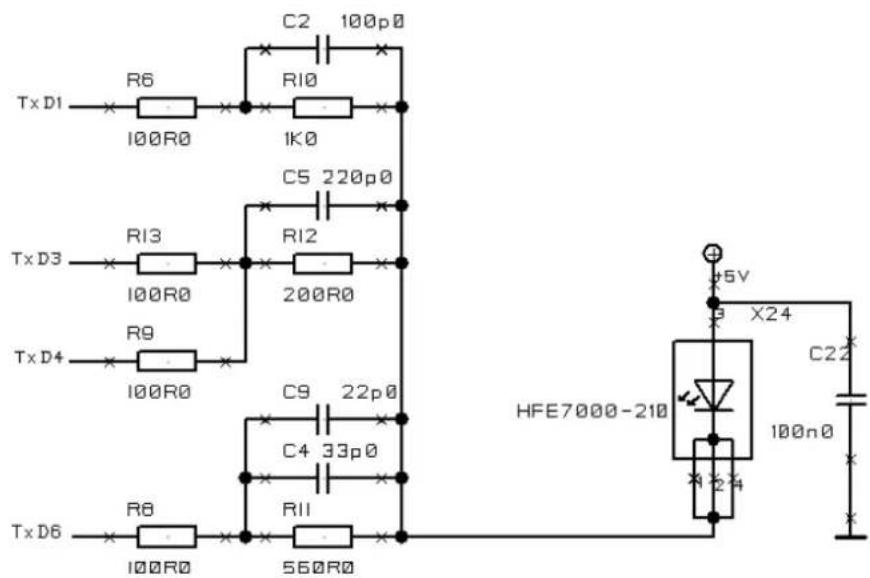
text_image
Tx D1 R6 100R0 C2 100p0 RI0 IK0 C5 220p0 Tx D3 RI3 100R0 RI2 200R0 Tx D4 R9 100R0 C9 22p0 C4 33p0 R11 Tx D6 R8 100R0 560R0 HFE7000-210 +5V X24 C22 100n0Fig. A.1: Raccordement de la diode d'émission
B. Index
-A-
Acceleration data scaling exponent 43,74
Acceleration data scaling factor ..... 43, 74
Acceleration data scaling type 74
Activation 24
Adresse d'entraînement ...... 24
Commande de procédure identification automatique du moteur .... 53
Commande de procédure Prise de référence guidée par l'entraînement .... 49
Commande Probing cycle 53
Configuration list AT 62
Télégramme de données maître .... 26, 28
Télégramme de synchronisation maître 26
Télégramme d'entraînement ...... 27
Télégramme standard 31
Temperature data scaling type ..... 43, 75
Temps de cycle SERCOS 26
Torque command value 36,78
Type de régulateur ...... 114
-V-
Velocity command value ...... 36, 77
Velocity data scaling exponent ..... 41, 72
Velocity data scaling factor ...... 41, 72
Velocity data scaling type 71
Velocity feedback value 1 .... 78
Velocity threshold (nx) 81
Velocity window.... 82
Vitesse de transmission 24




