VTEM - Automatisme industriel Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil VTEM Festo au format PDF.

| Caractéristiques techniques | Vanne de régulation pneumatique, technologie de contrôle de débit, compatible avec des systèmes de commande Festo. |
|---|---|
| Utilisation | Utilisée pour le contrôle de l'air comprimé dans les applications industrielles, notamment dans l'automatisation et la robotique. |
| Maintenance et réparation | Vérification régulière des joints et des filtres, nettoyage des orifices d'entrée et de sortie, remplacement des pièces usées selon les recommandations du fabricant. |
| Sécurité | Respecter les normes de sécurité en matière de pression et de température, porter des équipements de protection individuelle lors de l'installation et de la maintenance. |
| Informations générales | Produit de la marque Festo, reconnu pour sa fiabilité et sa durabilité dans des environnements industriels exigeants. |
FOIRE AUX QUESTIONS - VTEM Festo
Questions des utilisateurs sur VTEM Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automatisme industriel au format PDF gratuitement ! Retrouvez votre notice VTEM - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil VTEM de la marque Festo.
MODE D'EMPLOI VTEM Festo
CANopen, CC-LINK, Chrome, DEVICENET, ETHERNET POWERLINK, EtherCAT, EtherNet/IP, FIREFOX, INTERNET EXPLORER, MICROSOFT EDGE, MODBUS, PI PROFIBUS PROFINET, SERCOS sont des marques déposées appartenant à leurs propriétaires respectifs dans certains pays.
Table des matières
1 À propos de ce document....5
1.1 Documents applicables....5
1.2 Version du produit.... 5
1.2.1 Étiquette produit....6
2 Sécurité....8
2.1 Instructions de sécurité....8
2.2 Usage normal....8
2.3 Qualification du personnel spécialisé.... 8
2.4 Certification UL....9
2.5 Mesures relatives à la cybersécurité.... 9
3 Informations complémentaires....9
4 Fonction.... 10
4.1 Généralités.... 10
4.1.1 Structure du produit.... 10
4.1.2 Éléments d'affichage.... 15
4.1.3 Éléments de commande.... 18
4.1.4 Éléments de raccordement....18
4.1.5 Définition du sens de déplacement/de la position de l'actionneur..... 21
4.2 Versions de micrologiciel.... 22
4.3 Accès via Ethernet.... 22
4.4 Interface WebConfig.... 23
4.4.1 Commande manuelle auxiliaire.... 24
4.4.2 Commande d'accès....24
4.4.3 Exportation/importation d'un paramétrage et de réglages.... 24
4.5.1 ID Motion App.... 26
4.5.2 Licences.... 26
4.5.3 Paramètre 28
4.5.4 Valeurs de consigne et réelles.... 44
4.5.5 Temps d'attente entre les Motion Apps.... 44
4.6 Communication entre API et Motion Terminal....44
4.6.1 Représentation des chiffres.... 45
4.6.2 Structure des données de processus en cas d'exploitation d'une Motion App 45
4.6.3 Exploitation d'une Motion App.... 50
4.6.4 Mode de transfert.... 54
4.7 Motion App #01 : fonctions de distributeurs.... 82
4.7.1 Description de fonctionnement.... 82
4.7.2 Capteurs requis....82
4.7.3 Paramètres système utilisés.... 83
4.7.4 Paramètres d'application utilisés.... 84
4.7.5 Valeurs prédéfinies.... 85
4.7.6 Valeurs de retour....93
4.8 Course d'apprentissage.... 95
4.8.1 Conditions préalables au démarrage de la course d'apprentissage.....95
4.8.2 Valeurs prédéfinies.... 96
4.8.3 Valeurs de retour....97
4.8.4 Déroulement de la course d'apprentissage....98
4.8.5 Enregistrement des données d'apprentissage....98
4.8.6 Validité des données d'apprentissage après des modifications de paramètre 98
4.9 Possibilités de diagnostic.... 100
4.9.1 Éléments de signalisation LED....100
4.9.2 Interface de diagnostic....105
4.9.3 Canal de diagnostic du mode de transfert.... 105
5 Paramétrage.... 114
5.1 Activer les paramètres systèmes, d'application et de synchronisation.... 115
5.1.1 Conditions préalables....115
5.1.2 Déroulement.... 115
5.2 Lecture de paramètres systèmes, d'application et de synchronisation.... 116
5.2.1 Conditions préalables....117
5.2.2 Déroulement.... 117
5.3 Définition des paramètres de capteur.... 119
5.3.1 Conditions préalables....119
5.3.2 Déroulement.... 119
5.4 Réglage des paramètres de description d'actionneurs définis par l'utilisateur..... 121
5.4.1 Conditions préalables....121
5.4.2 Déroulement.... 121
5.5 Enregistrer le paramétrage de manière persistante....123
5.6 Changer de jeu de paramètres actif.... 123
5.6.1 Conditions préalables....123
5.6.2 Déroulement.... 123
5.6.3 Exemple.... 124
6 Caractéristiques techniques.... 126
6.1 Caractéristiques techniques, générales.... 126
6.2 Caractéristiques techniques pneumatiques.... 127
6.3 Caractéristiques techniques électriques....129
6.4 Caractéristiques techniques, modules d'entrée.... 130
6.5 Caractéristiques techniques, certification UL....130
7 Périphériques pris en charge.... 131
7.1 Nœuds de bus CPX pris en charge.... 131
7.2 Liste des actionneurs pris en charge.... 132
8 Licences....132
1 À propos de ce document
Tous les documents disponibles sur le produit → www.festo.com/sp.
| Document Produit Sommaire | ||
| Instructions de montage CPX, VTEM | Montage sur panneau, montage sur rail DIN | |
| Mode d'emploi VTEM Système, fonction, paramétrage | ||
| Manuel GAMM-A... Motion App | ||
| Manuel Terminal CPX Système | ||
| Application Note VTEM Actionneurs pris en charge | Codes de dysfonctionnement→ www.festo.com/sp → VTEM→ Connaissances d'expert | |
Tab. 1 : Documents applicables
1.2 Version du produit
Ce document se réfère aux versions de produit suivantes :
| Produit Version | |
| VTEM-... Motion Terminal | VTEM à partir de la révision 01 |
| CTMM-S1-C Contrôleur du | Motion Terminal VTEM à partir de la révision 01 |
| Micrologiciel | Micrologiciel du contrôleur CTMM à partir de la version 4.26.0 |
| VEVM-S1-27-... | Distributeur pour Motion Terminal VTEM à partir de la révision 01 |
| CTMM-S1-D-8E-M8-3 | Module d'entrée numérique pour Motion Terminal VTEM à partir de la révision 02 |
| CTMM-S1-A-8E-A-M8-4 | Module d'entrée analogique pour Motion Terminal VTEM à partir de la révision 02 |
| Navigateur^1) | – FIREFOX à partir de la version 38 (recommandé)– Chrome à partir de la version 64– INTERNET EXPLORER à partir de la version 11– MICROSOFT EDGE à partir de la version 38 |
1) Utiliser la version actuelle.
Tab. 2 : Version du produit
La version du produit peut être identifiée à l'aide de l'étiquette produit ou d'un logiciel de Festo adéquat.
i
Le logiciel approprié de détermination de la version du produit est disponible sur le site internet de Festo → www.festo.com/sp.
La fonction d'aide intégrée comporte des informations sur l'utilisation du logiciel.
i
Il se peut qu'une version mise à jour de ce document existe pour cette version ou des versions récentes du produit→ www.festo.com/sp.
1.2.1 Étiquette produit
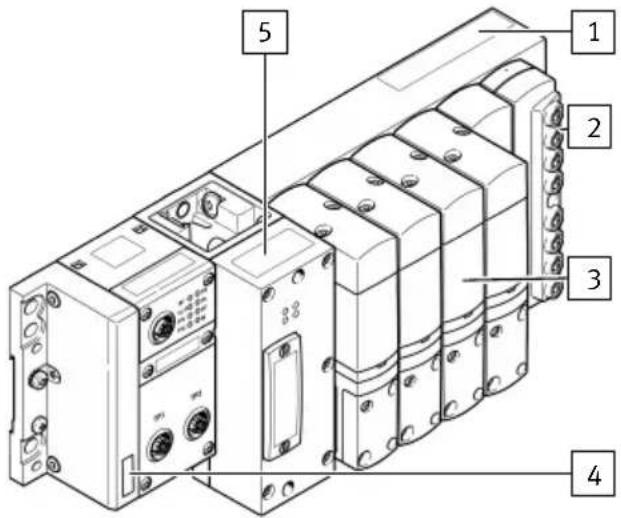
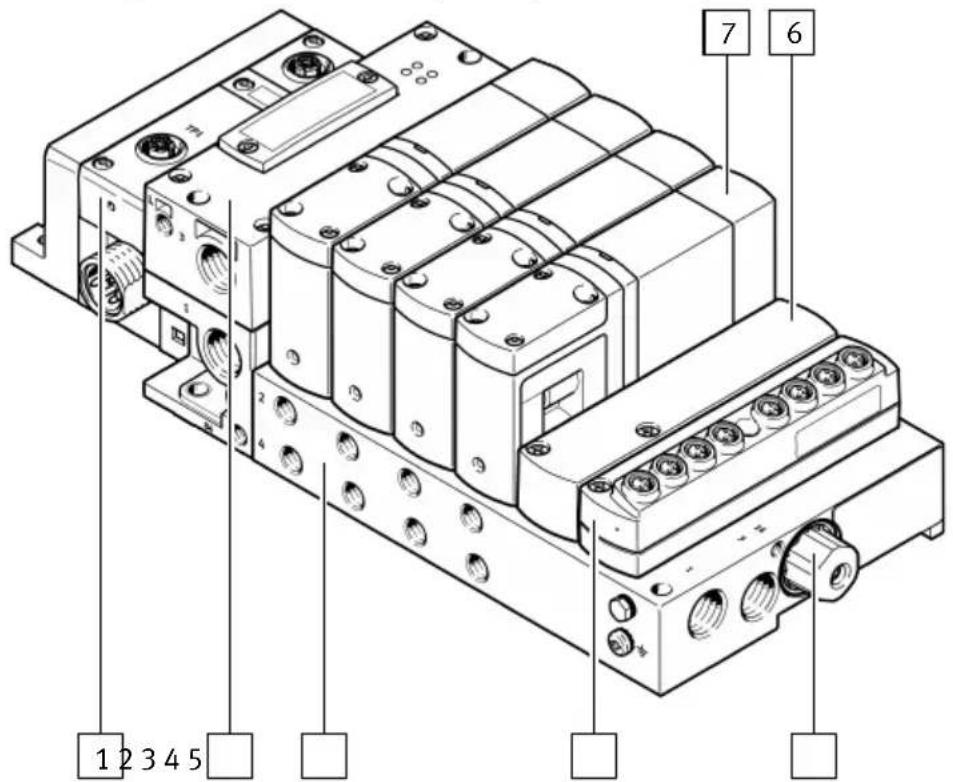
L'étiquette produit est constituée de plusieurs marquages distincts. Ces derniers sont décrits ci-après. La clé produit du Motion Terminal et le Data Matrix Code correspondant figurent sur les inscriptions du Motion Terminal (→ 1, 4). Scanner le Data Matrix Code avec un appareil approprié pour accéder aux documents correspondant au produit sur le portail d'assistance de Festo. De manière alternative, il est possible d'entrer le Product Key (code alphanumérique à 11 caractères sur l'étiquette produit) dans le champ de recherche du portail d'assistance.
text_image
1 2 3 4 5Fig. 1 : Étiquettes produit
1 Étiquetage du Motion Terminal avec Product Key (Motion Terminal)
2 Étiquetage du module d'entrée
3 Étiquetage du distributeur
4 Product Key (Motion Terminal)
5 Étiquetage du contrôleur
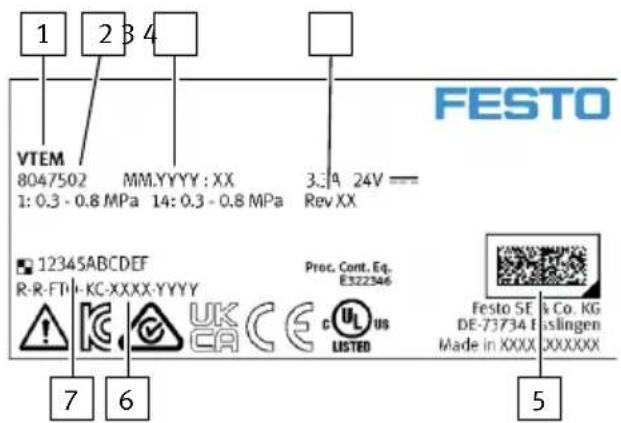
Étiquetage du Motion Terminal
text_image
1 2 3 4 VTEM 8047502 MM.YYYY : XX 3.3A 24V = 1: 0.3 - 0.8 MPa 14: 0.3 - 0.8 MPa Rev XX ■ 12345ABCDEF Proc. Cont. Eq. R-R-FTI-KC-XXXX-YYYY E322346 ⚠️ UK US LISTED 7 6 FESTO SE & Co. KG DE-73734 Fesslingen Made in XXXX XXXXXX 5Fig. 2 : Étiquetage du Motion Terminal
1 Code de commande
2 Numéro de pièce
3 Date de production et identification de l'usine
4 Revision
5 Data Matrix Code
6 Numéro d'enregistrement certification KC
7 Product Key
Étiquetage du distributeur

text_image
VEVM-S1-27-B-C-F-1T1L 8047503 Rev XX MM-YYYY : XX 12345ABCDEF C 14 84 1 3 8 7 6 5Fig. 3 : Étiquetage du distributeur
1 Code de commande
2 Numéro de pièce
3 Product Key
4 Symbole de circuit pneumatique
5 Position de base du distributeur (C = bloquée en position de base)
6 Data Matrix Code
7 Date de production et identification de l'usine
8 Revision
Autocollant supplémentaire distributeur VEVM-S1-27-... Révision 05
Rev 05

Fig. 4 : Autocollant supplémentaire distributeur VEVM-S1-27-... Révision 05
2 Sécurité
2.1 Instructions de sécurité
- Tenir compte des marquages sur le produit.
- Avant toute intervention sur le produit, couper l'alimentation en énergie et la sécuriser contre toute remise en marche.
-
À l'état hors tension (position de repos), de l'air comprimé peut être emprisonné entre les raccords d'air de travail et les actionneurs connectés. Afin d'éviter les mouvements involontaires des actionneurs connectés suite à des fuites, effectuer les étapes suivantes avant de couper la tension d'alimentation :
-
Mettre le système à l'échappement Commande Appli (app control) : « Mettre à l'échappement ».
- Débrancher l'alimentation air comprimé et, si nécessaire, l'alimentation en vide.
- Lors du déplacement rapide de masses hautes, en particulier lors des opérations de freinage, la pression dans le système pneumatique peut augmenter et endommager les composants pneumatiques.
- Concevoir l'installation pneumatique en fonction de l'application avec une réserve de charge suffisante.
- Stocker le produit dans un endroit frais, sec, à l'abri des UV et de la corrosion. Veiller à ce que les périodes de stockage restent courtes.
- Respecter les consignes de manipulation des composants sensibles aux charges électrostatiques.
-Respecter les couples de serrage. Sans indication spéciale, la tolérance est de ± 20 %.
2.2 Usage normal
Le produit est destiné à la commande d'actionneurs pneumatiques et à l'exécution de tâches de mouvement (Motion Apps).
Le produit doit exclusivement être utilisé de la manière suivante :
-Utilisation uniquement dans le domaine industriel : en dehors des environnements industriels, p. ex. dans les zones commerciales et mixtes, des mesures d'antiparasitage doivent éventuellement être prises.
- Utilisation exclusivement en liaison avec des modules et des composants autorisés pour la variante de produit correspondante et contrôlés et homologués par Festo.
- Utilisation dans l'état d'origine sans modifications arbitraires et en parfait état technique. Seules les transformations ou modifications décrites dans la présente documentation et les documents applicables sont autorisées.
2.3 Qualification du personnel spécialisé
Travaux sur le produit uniquement par du personnel qualifié capable d'évaluer les travaux qui lui sont confiés et de détecter les dangers. Le personnel spécialisé possède des connaissances et une expérience en matière de technologie de commande électropneumatique.
2.4 Certification UL
Les informations de cette section, associées à la marque de certification UL figurant sur le produit, s'appliquent en vue du respect des conditions de certification d'Underwriters Laboratories Inc. (UL) pour les États-Unis et le Canada.
Informations de certification UL
| Code de catégorie de produit QUYX, QUYX7 | |
| Numéro de fichier E322346 | |
| Normes prises en compte UL 61010-1 | CAN/CSA C22.2 No. 61010-1 |
| Marquage UL |  US LISTED US LISTED |
Tab. 3 : Informations de certification UL
Raccorder Uniquement a un circuit de NEC/CEC Classe 2.

AVERTISSEMENT
L'unité doit être alimentée par une source de courant répondant aux exigences imposées à un circuit à énergie limitée selon CEI/EN/UL/CSA 61010-1 ou à une source à puissance limitée (LPS) selon CEI/EN/UL/CSA 60950-1 ou CEI/EN/UL/CSA 62368-1 ou à un circuit de classe 2 selon NEC ou CEC.
L'armoire de commande doit présenter une stabilité et une rigidité suffisantes et répondre aux exigences des normes UL 61010-1, 61010-2-201.
2.5 Mesures relatives à la cybersécurité
Une exécution accidentelle ou inappropriée de fonctions du produit peut entraîner une défaillance ou un dysfonctionnement du produit et donc de l'ensemble de l'installation concernée. De plus, un accès non autorisé aux informations stockées sur le produit est possible. L'exploitant de l'installation doit prendre des mesures appropriées pour empêcher tout accès accidentel ou inapproprié au produit.
Informations sur la cybersécurité → www.festo.com/psirt.
Une vue d'ensemble des fonctions à sécuriser → 4.3 Accès via Ethernet.
3 Informations complémentaires
-Pour toute question d'ordre technique, contacter l'interlocuteur Festo régional. → www.festo.com.
-Accessoires et pièces de rechange → www.festo.com/catalogue.
- Informations sur la cybersécurité → www.festo.com/psirt.
4 Fonction
4.1 Généralités
Le Motion Terminal VTEM propose différentes fonctions de commande et de régulation pneumatiques qui sont réalisées sous la forme de Motion Apps (MA). Des paramètres et des valeurs de consigne peuvent être prédéfinis pour l'exploitation d'une Motion App. La Motion App convertit ces consignes en instructions de commande pour le distributeur correspondant.
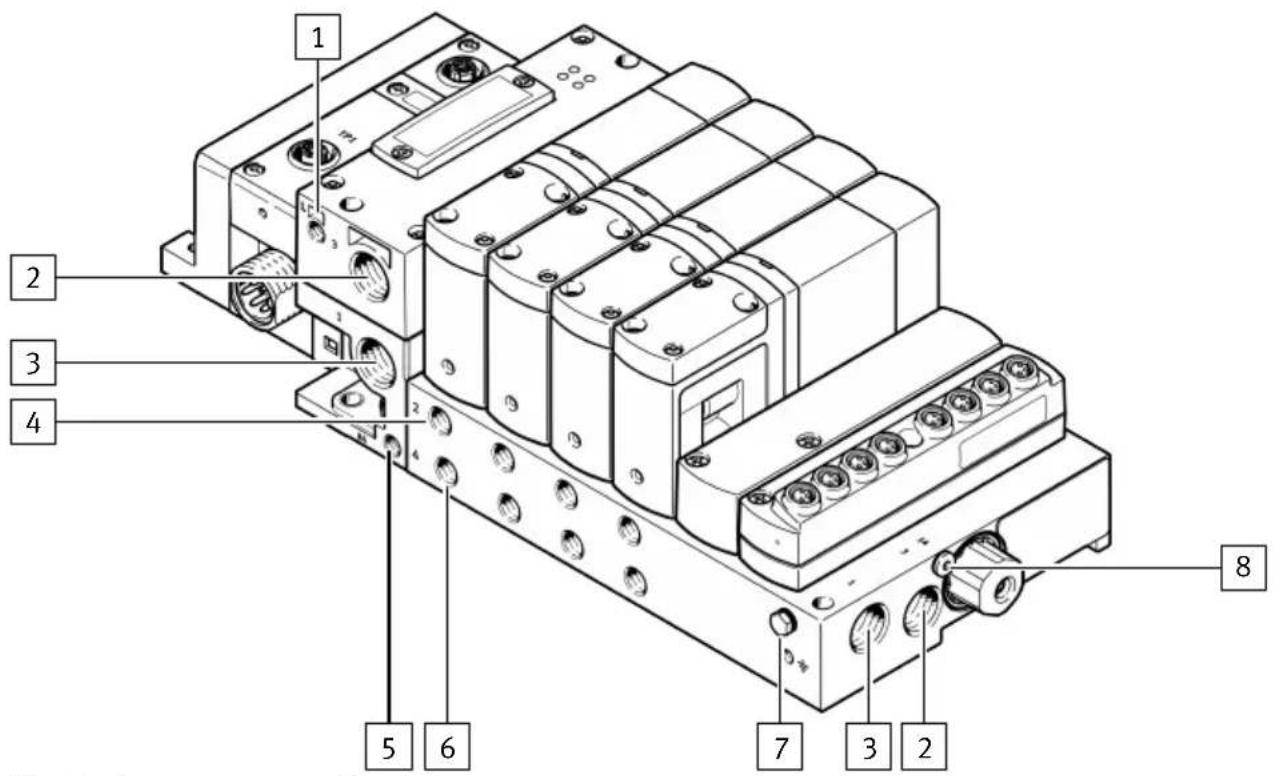
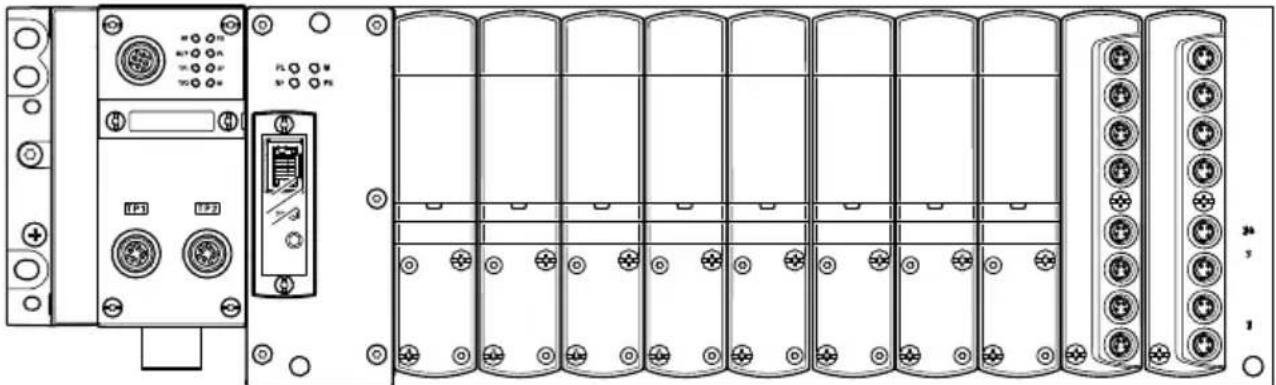
4.1.1 Structure du produit
En fonction de la configuration commandée, le produit peut être composé des modules suivants :
text_image
1 2 3 4 5 7 6Fig. 5 : Structure du produit
1 Côté électronique terminal CPX
2 Contrôleur Motion Terminal CTMM-S1-C
3 Barrette de raccordement
4 Module d'entrée CTMM-S1-A/D-... (en option)
5 Manodétendeur de la pression de pilotage
6 Plaque d'obturation VABB-P11-27-T (en option)
7 Distributeur VEVM-S1-27-...
i
Le manodétendeur est réglé et scellé à l'usine. Ce réglage ne doit pas être modifié au risque de voir la garantie s'éteindre.
i
En cas d'équipement du Motion Terminal avec au moins un distributeur de la révision 05(Rév 05) :
- Quatre emplacements de distributeurs au maximum peuvent être équipés sur la barrette de raccordement.
- Des caractéristiques techniques divergentes 6 Caractéristiques techniques s'appliquent par rapport à un équipement exclusif avec des distributeurs d'autres niveaux de révision.
4.1.1.1 Côté électronique terminal CPX
Le Terminal CPX établit la connexion avec une commande de niveau supérieur via une commande interne (CPX-CEC-...-V3) ou un nœud de bus (→ 7.1 Nœuds de bus CPX pris en charge).
4.1.1.2 Contrôleur Motion Terminal CTMM-S1-C
Le contrôleur du Motion Terminal sert d'interface entre le Terminal CPX et les composants du Motion Terminal.
Le contrôleur possède une interface Ethernet pour accéder à l'interface WebConfig du Motion Terminal. L'air comprimé (1) et l'échappement collecté ou le vide (3) ainsi que l'échappement de l'air de pilotage (84) et une compensation de la pression (L) peuvent être raccordés au boîtier du contrôleur. Pour le terminal CPX, le Motion Terminal est un composant unique et il est représenté dans les données de processus du Terminal CPX par une certaine quantité de données d'entrée et de sortie
→ 4.6 Communication entre API et Motion Terminal.
Le terminal CPX et le module CPX CTMM-S1-C peuvent être paramétrés à l'aide du terminal de dialogue (CPX-MMI), du logiciel Festo Maintenance Tool (CPX-FMT) ou du système de niveau supérieur.

D'autres informations concernant le paramétrage du système CPX et de ses modules figurent dans le manuel du terminal CPX → 1.1 Documents applicables.
Les tableaux suivants montrent une vue d'ensemble et une description des paramètres de module CPX contenus dans le CTMM-S1-C.
| Numéro de fonction1) | Bit Paramètres Préréglage | |
| 4828 + m × 64 + 0 0 Sur | veillance court-circuit/surcharge alimentation capteurs (CCSA) | actif |
| 2 Surveillance sous-tension sorties/distribu- teurs U_OUT/U_VAL | actif | |
| 4828 + m × 64 + 6 0 Sur | veillance dépression actif |
1) m = numéro de module (numérotation de gauche à droite en partant de 0)
Tab. 4 : Vue d'ensemble des paramètres de module CPX
Description des modules de paramètre CPX
| Surveillance court-circuit/surcharge, surveillance sous-tension U_OUT/U_VAL | ||
| Numéro de fonction 48 | 28 + m × 64 + 0m = numéro de module (0 ... 47) | |
| Description Surveillance du Motion Terminal quant aux erreurs suivantes :- Court-circuit ou surcharge de l'alimentation des capteurs- Sous-tension au niveau des distributeurs U_VAL La surveillance des erreurs peut être activée ou désactivée séparément.Effet de la surveillance active :- message d'erreur au niveau des nœuds de bus CPX- message de défaut dans la mémoire de diagnostic VTEMLes deux surveillances peuvent chacune être activées pour le terminal CPXcomplet. Pour de plus amples détails, voir le manuel du terminal CPX ➔ 1.1Documents applicables. | ||
| Affectation Bit 0 Surveillance court-circuit ou surcharge de l'alimentation des capteurs | ||
| Valeurs Bit 0, 2 0 = inactif | ||
| Surveillance dépression | ||
| Numéro de fonction 48 | 28 + m × 64 + 6m = numéro de module (0 ... 47) | |
| Description Surveillance du Motion Terminal quant à l'erreur suivante :- Pression d'alimentation au niveau du raccord (1) trop faible (< 3 bar)La surveillance de l'erreur peut être activée ou désactivée. La surveillance doit être désactivée pour une pression au niveau du raccord (1) inférieure à 3 bar. Effet de la surveillance active :-message d'erreur au niveau des nœuds de bus CPX- message de défaut dans la mémoire de diagnostic VTEM | ||
| Affectation Bit 0 Surveillance dépression | ||
| Valeurs Bit 0 0 = inactif | ||
Tab. 5 : Description des modules de paramètre CPX
4.1.1.3 Barrette de raccordement
La barrette de raccordement fournit les raccords d'air de travail (2) et (4) pour chacun des distributeurs ainsi que les raccords d'alimentation pneumatique (1) et d'échappement collecté (3). En outre, une alimentation externe en air de pilotage (14) peut être raccordée à la barrette de raccordement. La commutation entre air de pilotage interne et air extérieur est assurée par l'utilisation d'un bouchon d'obturation ou d'un sélecteur sur la barrette de raccordement (→ 1.1 Documents applicables Instructions d'utilisation Motion Terminal VTEM).
4.1.1.4 Manodétendeur de la pression de pilotage
Le manodétendeur garantit une pression de pilotage constante pour les distributeurs.
i
Le manodétendeur est réglé et scellé au départ de l'usine. Le réglage ne doit pas être modifié au risque de voir la garantie s'éteindre.
4.1.1.5 Module d'entrée CTMM-S1-A/D-... (en option)
Certaines Motion Apps comprennent l'évaluation des signaux de capteurs numériques ou analogiques. Les capteurs nécessaires sont connectés aux modules d'entrée CTMM. L'affectation des entrées à un distributeur et, par conséquent, à une Motion App s'effectue via les paramètres système
→ 4.5.3.1 Paramètres système.
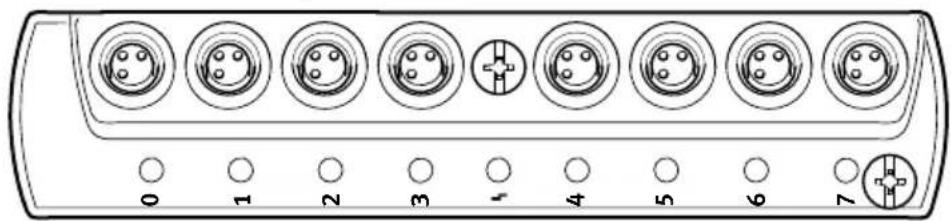
Fig. 6 : Module d'entrée CTMM-S1-D
i
Les entrées sont uniquement évaluées par le contrôleur du Motion Terminal. Les états des entrées ne peuvent pas être interrogés directement par la commande de niveau supérieur. Mais, différentes Motion Apps fournissent des informations sur les états ou les valeurs des capteurs.
Les propriétés des périphériques qui sont raccordés aux entrées du module d'entrée doivent être communiquées au système (configuration du module d'entrée).
Indications nécessaires → 4.5.3.4 Paramètres de capteur:
- Type de capteur
- Orientation du capteur (pour les capteurs de position sur le module d'entrée analogique CTMM-S1-A...)
4.1.1.6 Plaque d'obturation VABB-P11-27-T
Les emplacements de distributeur ou de module libres doivent être fermés avec une plaque d'obturation.
Fonction
4.1.1.7 Distributeurs
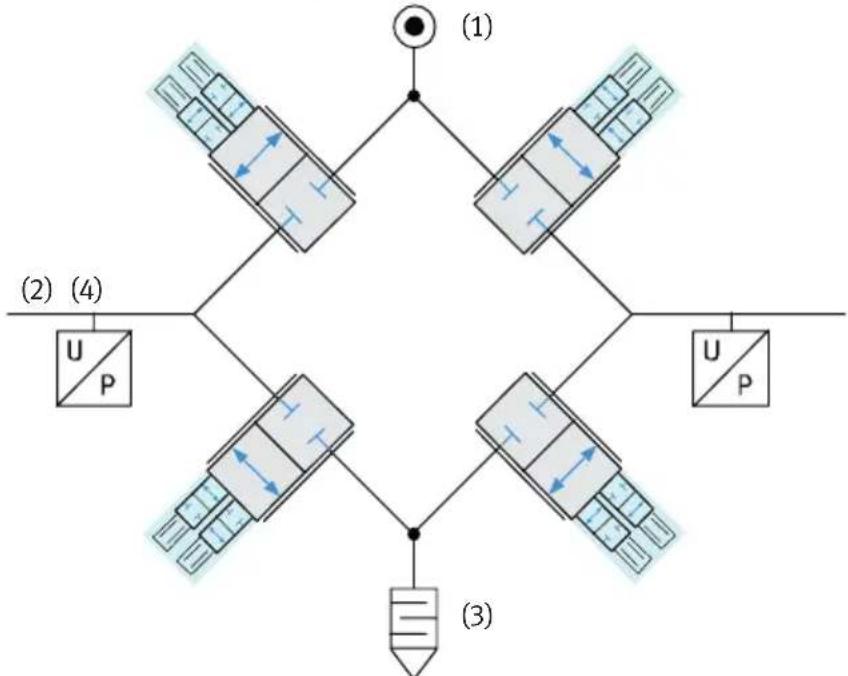
Associés au contrôleur, les distributeurs constituent l'élément central du Motion Terminal. Un distributeur VEVM-S1-27-... contient un pont intégral constitué de 4 distributeurs à commande proportionnelle 2/2 commutés collectivement avec distributeurs pilote à piézo. De plus, chaque distributeur est équipé de capteurs chargés d'enregistrer et de régler l'état effectif du distributeur.
flowchart
graph TD
A["Node (1)"] --> B["Node (2)"]
A --> C["Node (3)"]
A --> D["Node (4)"]
B --> E["U/P"]
C --> F["U/P"]
D --> G["U/P"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#ccf,stroke:#333
style D fill:#ccf,stroke:#333
style E fill:#dfd,stroke:#333
style F fill:#dfd,stroke:#333
style G fill:#dfd,stroke:#333
Fig. 7 : Circuit du pont intégral d'un distributeur VEVM-S1-27-...
Indépendamment des autres distributeurs, une des Motion Apps sous licence peut être exploitée sur chaque distributeur.
Numérotation des distributeurs
Les emplacements des distributeurs sont numérotés de gauche à droite de manière croissante, en commençant par le contrôleur avec l'emplacement 0. Le numéro (l'adresse) d'un distributeur résulte de l'emplacement sur lequel il est monté.
4.1.2 Éléments d'affichage
Pour la réaction des éléments d'affichage et les possibilités de diagnostic, voir ➞ 4.9.1 Éléments de signalisation LED.
4.1.2.1 Contrôleur
text_image
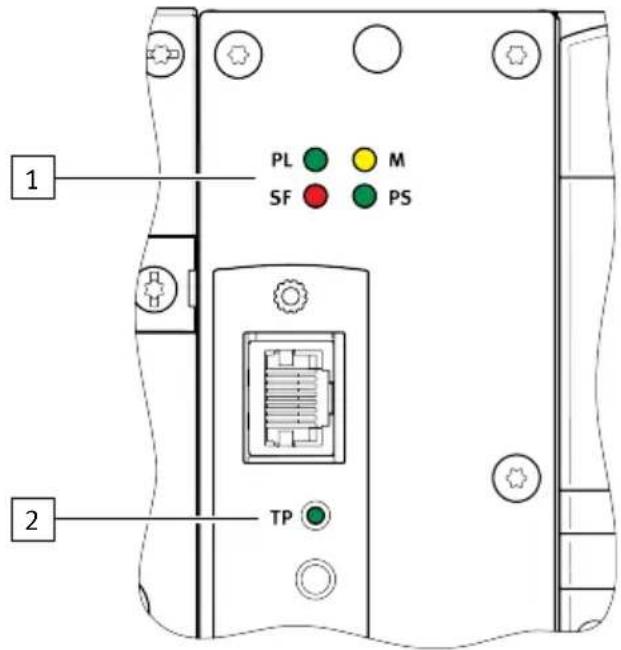
1 PL SF M PS 2 TP1 LED spécifiques au CPX
2 LED spécifique à Ethernet
Fig. 8 : Témoins à LED sur le contrôleur
| LED Signification | |||
| LED spécifiques au CPX | |||
 | PL (verte) | Power Load Surveillance de l'alimentation en tension de charge U | VAL |
 | M (jaune) | Modify Mode de paramétrage (via nœud de bus CPX ou interface Web-Config) | |
 | SF (rouge) | System Failure Erreur de communication | |
 | PS (verte) | Power System Surveillance de l'alimentation en tension de service U | EL/SEN |
| LED spécifique à Ethernet | |||
 | TP (verte) | Ethernet Link/Traffic | Connexion Ethernet/transmission des données |
Tab. 6 : Témoins à LED sur le contrôleur
4.1.2.2 Distributeur
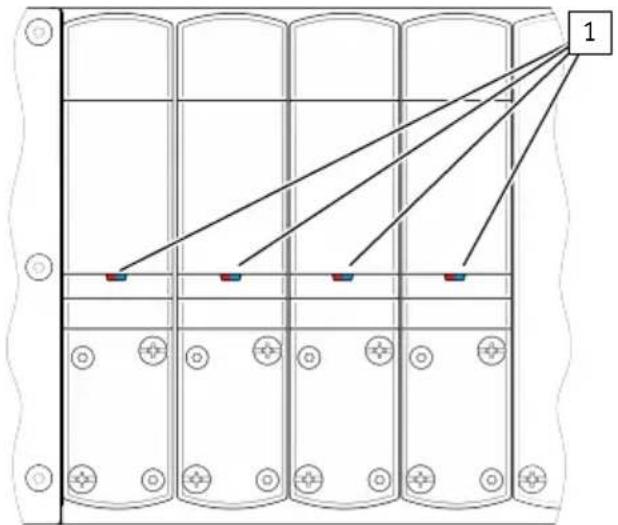
1 Témoin à LED distributeur (rouge/bleu)
Fig. 9 : Témoin à LED sur le distributeur
| LED Signification | ||
 | (rouge) | Erreur du distributeur |
 | (bleu) | Fonctionnement/Mise à jour |
Tab. 7 : Témoin à LED sur le distributeur
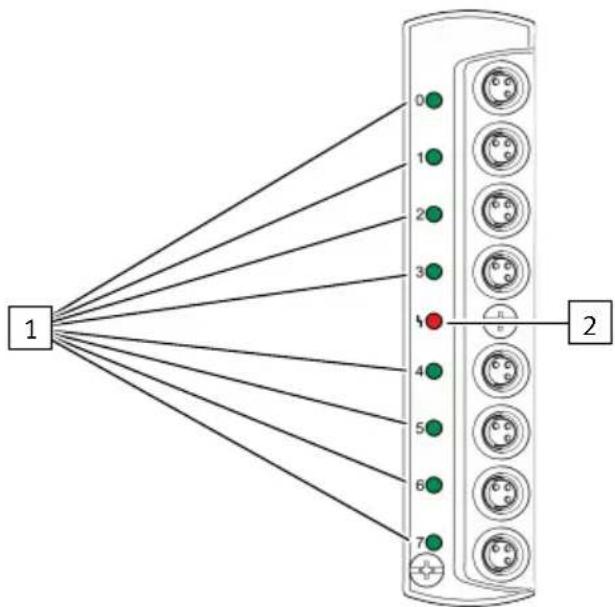
4.1.2.3 Modules d'entrée
flowchart
graph TD
A["1"] --> B["0"]
A --> C["1"]
A --> D["2"]
A --> E["3"]
A --> F["4"]
A --> G["5"]
A --> H["6"]
A --> I["7"]
B --> J["1"]
C --> K["2"]
D --> L["3"]
E --> M["4"]
F --> N["5"]
G --> O["6"]
H --> P["7"]
I --> Q["8"]
1 Témoin à LED, état d'entrée (vert, modules d'entrées numériques CTMM-S1-D-... seulement)
2 Témoin à LED, erreur de module (rouge)
Fig. 10 : Témoins à LED, modules d'entrée
| LED Signification | |
 | (verte) État d'entrée (modules d'entrée numériques CTMM-S1-D-... seulement) |
 | (rouge) Court-circuit/Surcharge |
Tab. 8 : Témoins à LED, modules d'entrée
4.1.3 Éléments de commande
Le produit ne possède pas d'éléments de commande mécaniques. Le réglage de paramètres et de valeurs de consigne s'effectue exclusivement via l'interface WebConfig ou par la commande de niveau supérieur (API). Si une connexion Ethernet est établie avec le contrôleur du Motion Terminal, l'interface WebConfig peut être ouverte dans un navigateur Web. (→ 4.4 Interface WebConfig).
4.1.4 Éléments de raccordement
4.1.4.1 Électrique
Raccord de la terre fonctionnelle
i
Le raccord droit de la terre fonctionnelle doit être directement relié au raccord de la terre fonctionnelle sur la plaque d'extrémité gauche du terminal CPX avec un câble de faible impédance. Le raccord de la terre fonctionnelle sur la plaque d'extrémité gauche du terminal CPX doit être connectée au potentiel de terre avec un câble defaible impédance.
Les détails sur la mise à la terre figurent dans le manuel du terminal CPX → 1.1 Documents applicables.
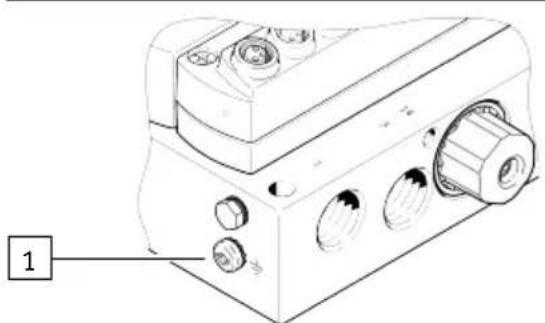
Fig. 11 : Raccord de la terre fonctionnelle, côté droit
1 Raccord de la terre fonctionnelle
Fonction
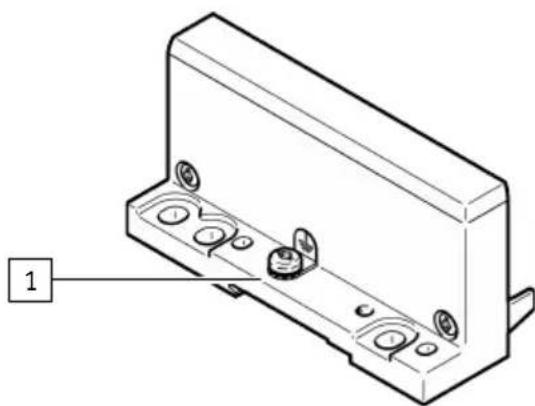
Fig. 12 : Raccord de la terre fonctionnelle, côté gauche
1 Raccord de la terre fonctionnelle (terminal CPX, plaque d'extrémité gauche)
Interface Ethernet
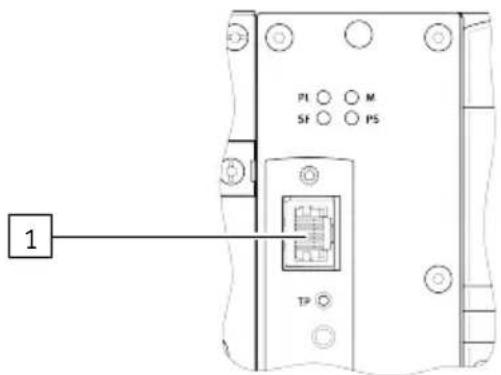
L'interface Ethernet se trouve sur le contrôleur derrière un obturateur transparent. L'interface Ethernet sert exclusivement à l'accès à l'interface WebConfig du contrôleur.
i
L'interface Ethernet sert uniquement à l'ajustage et à la maintenance et ne doit pas être utilisée en cours de service.
i
Les accès non autorisés à l'appareil peuvent provoquer des dommages ou des dysfonctionnements.
En cas de connexion de l'appareil à un réseau :
protéger le réseau de tout accès non autorisé.
Exemples de mesures de protection du réseau :
- Pare-feu
• Intrusion Prevention System (IPS)
• Segmentation du réseau
• LAN virtuel (VLAN)
• Virtual private Network (VPN) - Sécurité au niveau de l'accès physique (Port Security)
Autres remarques → Directives et normes relatives à la sécurité dans la technique de l'information, par ex. IEC 62443, ISO/IEC 27001.
Modules d'entrée
| CTMM-...-D-... CTMM-...-A-... | |||||
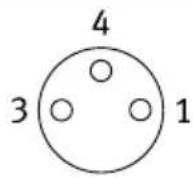 | 1 +24 VU SEN | 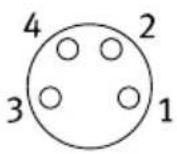 | 1 +24 VU SEN | ||
| 30 VU SEN | 2 Entrée | ||||
| 4 Entrée 30 V U | SEN | ||||
| 4 n. | c. | ||||
Tab. 9 : Modules d'entrée
4.1.4.2 Pneumatique
Des raccords pour l'alimentation pneumatique (1) et l'échappement collecté (3) sont présents aussi bien sur le contrôleur que sur le côté droit de la barrette de raccordement. Les raccords sont connectés en interne et peuvent être utilisés en alternance ou en parallèle.
Pour les applications intensives en termes de débit, il faut sélectionner les raccords (1) et (3) sur la barrette de raccordement. Pour une amélioration supplémentaire, il faut sélectionner une commutation en parallèle, indépendante des deux raccords d'alimentation et d'échappement. Des informations plus détaillées sont disponibles sous Connaissances d'expert → www.festo.com/sp.
Le produit peut être utilisé avec de l'air de pilotage intérieur ou de l'air extérieur.
- Pour l'alimentation en air de pilotage intérieur, la pression au niveau du raccord (1) doit être > 3 bar.
- Pour l'alimentation en air extérieur, la pression au niveau du raccord (14) doit être > 3 bar. Pour le raccordement de l'alimentation pneumatique (1), la pression est surveillée par le Motion Terminal. Si la pression au niveau du raccord (1) est inférieure à 3 bar, il faut prévoir une alimentation en air de pilotage externe d'au moins 3 bar, la surveillance de la dépression en (1) doit être désactivée via le paramètre de module CPX correspondant → Tab. 4 Vue d'ensemble des paramètres de module CPX. L'appareil n'effectue pas de surveillance de la pression pour le raccord (14).
Dans le cas d'une alimentation en air extérieur, celle-ci doit être maintenue pendant toute la durée du fonctionnement. Après une perte de pression, une poursuite sans erreurs du fonctionnement nécessite une réinitialisation de la tension de service avant la reprise du fonctionnement.
Fonction
text_image
1 2 3 4 5 6 7 3 2 8Fig. 14 : Raccords pneumatiques
1 Raccord M7 de compensation de pression (L)
2 Raccord G3/8 d'échappement collecté/de vide (3)
3 Raccord G3/8 d'alimentation pneumatique (1)
4 Raccords G1/8 d'air de travail (2)
5 Raccord M7 d'échappement (84)
6 Raccords G1/8 d'air de travail (4)
7 Sélecteur pour l'air extérieur ou bouchon d'obturation pour l'air intérieur M5
8 Raccord M5 de l'air extérieur (14) ou bouchon d'obturation pour l'air intérieur
4.1.5 Définition du sens de déplacement/de la position de l'actionneur
i
De manière générale, dans ce document et sur l'interface WebConfig, le sens de déplacement ou la position d'actionneurs commandés via le Motion Terminal est décrit(e) avec les termes « sortir » ou « sorti » et « rentrer » ou « rentré » qui se réfèrent à des vérins à tige de piston simple. La fonction pneumatique permet de transférer la signification des termes vers d'autres actionneurs.
| Terme Raccord (4) Raccord (2) Position de commutation | du distributeur | |||
| Sortir/sorti sous pression À l'échappement 14 |  | |||
| Rentrer/rentré À l'échappement sous pression 12 | 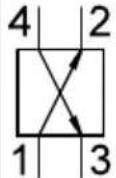 | |||
Tab. 10 : Définition du sens de déplacement
4.2 Versions de micrologiciel
Les modifications d'une version de micrologiciel par rapport à la précédente peuvent être consultées dans les notes de version jointes aux fichiers d'installation du micrologiciel et se trouvant dans le portail d'assistance → www.festo.com/sp. La version actuelle du manuel fait référence à la version de micrologiciel suivante : → Tab. 2 Version du produit.
Une mise à jour de l'appareil pour l'amener à une nouvelle version du micrologiciel s'effectue à l'aide du Festo Field Device Tools (FFT) (voir la Prise en main rapide Motion Terminal VTEM ➔ 1.1 Documents applicables). Ensuite, l'appareil se comporte conformément aux réglages d'usine. Au besoin, les données de paramétrage et les réglages déjà existants peuvent être exportés dans un fichier de configuration avant de procéder à une mise à jour du micrologiciel et être ré-importés une fois la mise à jour terminée (→ 4.4.3 Exportation/importation d'un paramétrage et de réglages).
4.3 Accès via Ethernet
Les fonctions du produit peuvent également être exécutées à distance avec une connexion Ethernet existante, p. ex. via un protocole de communication utilisé par le Festo Field Device Tool FFT. L'accès est possible sans authentification ni autorisation.
- Ne pas exécuter les fonctions Recherche, Réseau, Micrologiciel, Réparation et Reboot en cours de service.
- Empêcher l'exécution accidentelle ou abusive de fonctions sur le produit en prenant des mesures appropriées, p. ex. en bloquant les ports correspondants à l'aide d'un pare-feu → Tab. 11 Fonctions accessibles via Ethernet.
| Fonction Description | Port Fonctionnement | ||
| Recherche L'appareil | peut être trouvé sur le réseau à l'aide d'un protocole de recherche. | 10002 (Multicast) | |
| Réseau L'appareil p | rend en charge l'affichage et le réglage des paramètres réseau. Après le réglage, le cas échéant, l'appa-reil est redémarré. | 10002 (Multicast) | |
| Micrologiciel L'appareil | prend en charge le transfert d'une nouvelle version du micrologiciel. | 10002 (Multicast) | |
| Page d'accueil L'appareil | fournit une page d'informa-tions pour les navigateurs Internet. L'appareil met à disposition un serveur web (Web-Config). | 80, 8080 | |
| Diagnostic L'appareil | prend en charge l'émission d'informations de diagnostic. | 10002 (Multicast) | |
| Identification L'appareil | prend en charge la demande d'identification (p. ex. LED clignotante). | 10002 (Multicast) | |
| Versions L'appareil | prend en charge l'émission d'informations de version détaillées. | 10002 (Multicast) | |
| Réparation L'appareil | peut être réparé après une mise à jour du micrologiciel annulée ou incorrecte. | 10002 (Multicast) | |
| Reboot L'appareil peut être redémarré. | 10002 (Multicast) | ||
| Ne pas exécuter la fonction en cours de service pour éviter des dommages potentiels à l'installa-tion. La fonction peut être exécutée en cours de service. | |||
Tab. 11 : Fonctions accessibles via Ethernet
4.4 Interface WebConfig
Le Motion Terminal est doté d'une interface WebConfig dédiée à la mise en service et au test des fonctions.
Cette dernière peut être appelée via un navigateur sur un appareil connecté au contrôleur du Motion Terminal. L'interface Ethernet d'un nœud de bus dans le terminal CPX ne permet pas d'accéder à l'interface WebConfig du contrôleur.
Sans saisie du mot de passe, il est uniquement possible de consulter les réglages, les configurations et les valeurs réelles du Motion Terminal, mais pas de les adapter. Le mot de passe doit être saisi via la barre de menu de l'interface WebConfig et peut également être adapté une fois l'authentication réussie. La réinitialisation d'un mot de passe oublié est uniquement possible via l'exécution d'une mise à jour de micrologiciel.
i
Réglage d'usine du contrôleur :
- Adresse IP : 192.168.4.2,
- Adresse de sous-réseau : 255.255.0.0
- Mot de passe d'activation du mode d'édition : vtem
Le mot de passe peut être adapté via l'interface WebConfig.
L'utilisation de l'interface WebConfig est décrite dans le QuickGuide « Motion Terminal VTEM, interface WebConfig » → www.festo.com/sp.
4.4.1 Commande manuelle auxiliaire
Afin de pouvoir tester la fonctionnalité d'un actionneur raccordé, via ladite commande manuelle auxiliaire, l'interface WebConfig permet d'utiliser la fonction de base des distributeurs sans recourir à une Motion App.
La commande manuelle auxiliaire permet aussi de contrôler la tuyauterie ainsi que les sens de déplacement de l'actionneur → 4.1.5 Définition du sens de déplacement/de la position de l'actionneur.
4.4.2 Commande d'accès
L'accès en écriture à un distributeur est possible à un moment défini, soit via l'interface WebConfig ou via la commande de niveau supérieur (API). Par défaut, l'API possède les droits en écriture mais ils peuvent toutefois être repris de manière active de l'interface WebConfig.
La reprise des droits en écriture via l'interface WebConfig n'est possible que si le distributeur est inactif (ValveMode = 61)→ Tab. 47 État du distributeur. Ce qui signifie qu'il faut d'abord fermer toute Motion App en cours ou interrompre le mode transfert avant que l'interface WebConfig ne puisse accéder en écriture au distributeur.
4.4.3 Exportation/importation d'un paramétrage et de réglages
Les paramètres et les réglages archivés sur le contrôleur peuvent être exportés de manière compacte de l'appareil sous la forme d'un fichier unique et peuvent également être importés dans l'appareil.
Ce fichier contient les données pertinentes de tous les composants de l'appareil (contrôleur, distributeurs, modules d'entrée).
Cas d'application possibles :
- exportation préalable à une mise à jour de micrologiciel, puis ré-importation afin de pouvoir continuer à utiliser les paramètres et les réglages, même après la mise à jour (« Backup and Restore »)
- exportation des fichiers d'un appareil et importation sur un autre (« Clonage » du terminal de distributeurs)
L'exportation et l'importation de ce fichier s'effectue via l'interface WebConfig sous l'onglet « Maintenance ». Tant l'exportation que l'importation ne sont possibles que si, à ce moment précis, aucun des distributeurs n'est en service ou n'échange des données de manière active avec la commande de niveau supérieur.
Fonction
Ce qui signifie :
- L'état du distributeur (valve state) doit être différent de Running pour tous les distributeurs (→ 4.6.2.2 Structure des données d'entrée (PDI)).
- Le mode de transfert ne doit pas être actif sur aucun des distributeurs (→ 4.6.4 Mode de transfert). Pendant l'accès à la configuration par le biais de la fonctionnalité d'exportation (en lecture) ou par le biais de la fonctionnalité d'importation (en écriture), aucune autre action n'est possible via l'interface WebConfig. Même une activation via les données de sortie de la commande de niveau supérieur est bloquée jusqu'à la fin de l'accès.
Un fichier de configuration exporté porte le nom de fichier « VTEM_config_
4.4.3.1 Réaction lors de l'exportation
Réaction lors de l'exportation :
–Les paramètres exportés sont ceux de tous les emplacements de distributeur, même de ceux auxquels aucun distributeur n'était connecté à ce moment-là.
- Les paramètres exportés sont ceux de l'ensemble des cinq jeux de paramètres (avec les données du système, de l'application, des paramètres de synchronisation et les données d'apprentissage correspondantes) (→ 4.5.3.9 Jeux de paramètres).
- Tous les paramètres de capteur sont exportés (→ 4.5.3.4 Paramètres de capteur), dans la mesure où le module d'entrée correspondant est effectivement présent.
- Tous les paramètres de description de périphériques définis par l'utilisateur sont exportés, dans la mesure où ils sont disponibles → 4.5.3.5 Paramètres de description de capteurs de position définis par l'utilisateur, → 4.5.3.6 Paramètres de description de capteurs de débit définis par l'utilisateur, → 4.5.3.7 Paramètres de description d'actionneurs définis par l'utilisateur.
4.4.3.2 Réaction lors de l'importation
Réaction lors de l'importation :
- Lors de l'importation, les paramètres et les réglages pour lesquels aucune valeur n'a été exportée conservent leur ancienne valeur.
- Lors de la lecture des données de paramétrage, un contrôle des plages de valeurs autorisées des valeurs est effectué. Si les limites sont violées, le paramètre est posé sur la valeur limite la plus proche.
De plus, lors du transfert d'un fichier de configuration sur un appareil de construction différente, il faut tenir compte de ce qui suit :
- Les données de paramétrage pour distributeurs sont affectées en fonction de leur emplacement.
- lors du transfert d'une variante d'appareil plus longue vers une variante plus courte, les données des emplacements de distributeurs « excédentaires » sont ignorées.
- lors du transfert d'une variante d'appareil plus courte vers une plus longue, aucune donnée ne peut être écrite pour les emplacements de distributeur supplémentaires (avec un nombre plus élevé d'emplacements).
Fonction
- Les données de paramétrage pour modules d'entrée sont affectées en fonction de la position du module d'entrée (1 ou 2).
- Comme les données pour modules d'entrée analogiques et numériques ne sont pas compatibles, les paramètres de capteur ne peuvent être importés que si le type du module d'entrée monté à cette position coïncide entre l'appareil d'origine et l'appareil cible.
- Le transfert des données de paramétrage du module d'entrée entre des variantes d'appareil de différentes longueurs (p. ex. de 4+2 vers 8+2, de 8+2 vers 4+2, de 4+2 vers 2+1, etc.) est possible.
| Appareil d'origine Appareil cible Les paramètres de cap- | teur sont repris pour le module | |||
| Position 1 Position | 2 Position 1 Position | 2 | ||
| analogique numérique | analogique analogique | numérique Position | 1 et 2 | |
| analogique numérique | analogique analogique | analogique Position | 1 | |
| analogique numérique | analogique numérique | numérique Position | 2 | |
| analogique numérique | analogique numérique | analogique – | ||
| numérique numérique – | numérique | Position 2 | ||
| – analogique analogique analogique | analogique analogique | Position 2 | ||
Tab. 12 : Exemples pour des appareils disposant chacun de deux emplacements de module d'entrée
4.5 Motion Apps
Les fonctions du Motion Terminal sont exécutées via ce qu'on appelle des Motion Apps. En règle générale, une Motion App réalise une tâche pneumatique telle que le réglage de la pression, l'étranglement du débit ou l'accélération et le freinage contrôlés d'un mouvement.
La Motion App #01 « Fonctions de distributeur » faisant partie de l'équipement de base du Motion Terminal est décrite dans ce document :→ 4.7 Motion App #01 : fonctions de distributeurs.
i
D'autres Motion Apps sont décrites dans des documentations spécifiques → www.festo.com/sp.
4.5.1 ID Motion App
Chaque Motion App possède un ID claire. Cette dernière est aussi bien requise pour la sélection que pour le paramétrage de la Motion App. L'ID correspondante figure dans la documentation des Motion Apps.
4.5.2 Licences
Afin de pouvoir utiliser une Motion App, une licence correspondante doit être archivée sur le contrôleur du Motion Terminal. Le nombre de licences requises par Motion App dépend du nombre souhaité de distributeurs sur lesquels la Motion App correspondante est censée être simultanément exploitée. Par défaut, la Motion App #01 « Fonctions de distributeur » peut être utilisée sous licence pour tous les distributeurs du Motion Terminal. Il est ainsi possible d'exploiter une autre fonction de distributeur sur chacun des 8 distributeurs max. d'un Motion Terminal.
Si p. ex., la Motion App #3 « Régulation de pression proportionnelle » est censée être exploitée simultanément sur 03 distributeurs, 3 licences doivent être archivées pour cette Motion App.
i
Le nombre de licences archivées sur le Motion Terminal ainsi que celui des licences encore libres (non utilisées par une Motion App active) peut être consulté sur l'interface WebConfig ou via le canal d'information du mode de transfert → Tab. 66 Informations sur les licences.
Les licences ne sont affectées à aucun emplacement de distributeur spécifique. Chaque Motion App sous licence peut être exploitée sur chaque distributeur. Des limitations dues au nombre de licences n'existent qu'en matière d'exploitation simultanée d'une Motion App sur plusieurs distributeurs.
Si vous essayez de démarrer une Motion App pour laquelle toutes les licences disponibles sur l'appareil sont déjà attribuées à d'autres distributeurs, celles-ci sont automatiquement retirées de tous les distributeurs sur lesquels la Motion App correspondante n'est pas activement utilisée à ce moment (statut du distributeur « Configurable »), afin qu'il puisse être utilisé sur le distributeur souhaité.
i
Des informations sur l'extension des licences existantes figure dans le catalogue de Festo
→ www.festo.com/sp.
4.5.2.1 Licences de démonstration
La période de démonstration correspond aux 720 premières heures de fonctionnement du Motion Terminal. Pendant cette période, une activation temporaire de Motion Apps sous licence non réglementaire est possible.
La durée restante de la période de démonstration s'affiche dans le coin supérieur droit de l'interface WebConfig et peut être consultée via le canal d'informations du mode de transfert → Tab. 66 Informations sur les licences.
Pendant la période de démonstration, l'option « Utilisation des licences de démonstration » peut être activée et désactivée aussi souvent que nécessaire. Ceci est possible via l'affichage dans le coin supérieur droit de l'interface WebConfig ou via le canal « Paramètres du terminal » du mode de transfert → Tab. 60 Signification de l'indice par addressed target et par canal.
Au moment de la commutation, aucune Motion App ne peut être utilisée sur aucun des distributeurs (valve state ≠ "2" (running)). Après avoir activé l'option « Utilisation de licences de démonstration », le nombre des licences Motion App disponibles augmente en conséquence et celles-ci peuvent être attribuées et utilisées comme d'habitude.
Après l'expiration de la période de démonstration, l'option « Utilisation de licences de démonstration » peut, le cas échéant, être automatiquement désactivée. Si des Motion Apps qui ne sont pas sous licence réglementaires sont utilisées à ce moment, toutes les Motion Apps seront arrêtées.
Un avertissement correspondant est inscrit dans les listes de défauts de tous les emplacements de distributeur dix heures avant l'expiration de la période de démonstration.
Tant que l'option « Utilisation de licences de démonstration » est active, la LED jaune du contrôleur
→ Tab. 105 Témoin LED M (Modify) clignote.
4.5.3 Paramètre
Les conditions-cadres pour l'exploitation d'une Motion App sont configurées via des paramètres système et spécifiques à une application. Il faut faire la distinction entre 4 types de paramètres :
- Les paramètres système décrivent les composants qui sont raccordés au Motion Terminal (tuyaux, actionneur, position de montage, etc.). Les paramètres système s'appliquent à un emplacement de distributeur et, par conséquent, à toutes les Motion Apps exploitées simultanément sur cet emplacement de distributeur.
- Les paramètres d'application décrivent le cas d'application de la Motion App (masse déplacée, temps de déplacement, force minimale, etc.). Les paramètres d'application peuvent être archivés de manière individuelle sur chaque distributeur pour chaque Motion App.
- Les paramètres de synchronisation permettent de régler avec précision la réaction d'une Motion App au-delà des paramètres d'application. Ce qui permet d'optimiser la réaction du système pour des cas d'application spéciaux. Les paramètres de synchronisation peuvent être archivés de manière individuelle sur chaque distributeur pour chaque Motion App.
- Les paramètres de capteur décrivent les capteurs raccordés aux entrées d'un module d'entrée. Les paramètres de capteur peuvent être écrits et lus depuis chaque distributeur. Ils ne font pas partie intégrante du jeu de paramètres (→ 4.5.3.9 Jeux de paramètres) et peuvent être utilisés indifféremment par tous les distributeurs.
i
Les paragraphes suivants se réfèrent au transfert des paramètres par la commande de niveau supérieur (API). Comme la communication n'autorise que les valeurs entières, les valeurs basées sur une unité sont augmentées à des valeurs entières avec un facteur.
Exemple :
un paramètre peut être défini dans une plage de 0 ... 100 mm par incréments de 0,01 mm. Pour ce faire, une valeur dans la plage 0 ... 10000 est transférée. Un incrément (digit) correspond donc à 0,01 mm.
4.5.3.1 Paramètres système
Les paramètres système décrivent les périphériques raccordés à un distributeur avec des attributs tels que longueur de tuyau, type de vérin et position de montage. Les paramètres système d'un jeu de paramètres s'appliquent de manière conjointe à toutes les Motion Apps exploitées sur un distributeur, mais ne sont pas utilisés par toutes les Motion App.
i
Les paramètres nécessaires à l'exploitation d'une Motion App doivent être transférés avant le démarrage de la Motion App.
Vue d'ensemble des paramètres système
| ID Paramètres système | |
| 12 Longueur de tuyau en (2) | |
| 13 Longueur de tuyau en (4) | |
| 14 Diamètre intérieur de tuyau en (2) | |
| 15 Diamètre intérieur de tuyau en (4) | |
| 20 Type d'actionneur | |
| 21 Course de l'actionneur | |
| 40 Volume en (2) | |
| 41 Volume en (4) | |
| 42 Fluide de service | |
| 60 Position de montage de l'actionneur | |
| 61 Décalage du point d'origine de l'axe | |
| 70 Entrée de capteur pour détection de fin de course Rentré | |
| 71 Entrée de capteur pour détection de fin de course Sorti | |
| 75 Entrée de capteur pour mesure de course partielle Rentré | |
| 76 Entrée de capteur pour mesure de course partielle Sorti | |
| 80 Entrée de capteur pour mesure de pleine course | |
| 81 Entrée de capteur pour la mesure du débit en (2) | |
| 82 Entrée de capteur pour la mesure du débit en (4) |
Tab. 13 : Vue d'ensemble des paramètres système
Longueur de tuyau en (2)
| ID Plage de valeurs Valeur en chiffres Plage en chiffres | |
| 12 0 ... 20 000 mm 1 mm 0 ... 20 000 × 1 mm |
Tab. 14 : Longueur de tuyau en (2)
Longueur de tuyau en (4)
| ID Plage de valeurs Valeur en chiffres Plage en chiffres | |
| 13 0 ... 20 000 mm 1 mm 0 ... 20 000 × 1 mm |
Tab. 15 : Longueur de tuyau en (4)
Fonction
Diamètre intérieur de tuyau en (2)
| ID Plage de valeurs Valeur en chiffres Plage en chiffres | |
| 14 2 ... 11 mm 1 mm 200 ... 1 100 × 0,01 mm |
Tab. 16 : Diamètre intérieur de tuyau en (2)
Diamètre intérieur de tuyau en (4)
| ID Plage de valeurs Valeur en chiffres Plage en chiffres | |
| 15 2 ... 11 mm 1 mm 200 ... 1 100 × 0,01 mm |
Tab. 17 : Diamètre intérieur de tuyau en (4)
Diamètre intérieur [mm] pour tuyaux de Festo
| Diamètre extérieur [mm] 4 6 8 10 | ||||
| PUN 2,6 4,0 5,7 7,0 | ||||
| PUN-CM 2,5 4,0 5,5 7,0 | ||||
| PUN-H 2,6 4,0 5,7 7,0 | ||||
| PUN-V0 | - | 4,0 5,7 7,0 | ||
| PUN-V0-C | 2,0 2,0 4,0 6,0 | |||
| PLN | 2,9 4,0 5,9 7,0 | |||
| PEN | 2,7 4,0 5,7 7,0 | |||
| PAN | 2,9 4,0 5,9 7,0 | |||
| PAN-MF | 2,5 4,0 6,0 7,5 | |||
| PAN-R | 2,5 3,8 5,0 6,2 | |||
| PFAN | 2,9 4,0 5,9 7,0 |
Tab. 18 : Diamètre intérieur pour tuyaux de Festo
Fonction
Type d'actionneur
Les actionneurs de Festo pris en charge par le Motion Terminal figurent sur une liste. Pour chaque actionneur, la liste contient une valeur pour le paramètre « Type d'actionneur ». Avant toute utilisation d'une Motion App correspondante, la valeur par défaut doit être remplacée par la valeur répertoriée sur la liste du type d'actionneur raccordé.
| ID Plage de valeurs | |
| 20 | → 7.2 Liste des actionneurs pris en charge |
Tab. 19 : Type d'actionneur
Pour prendre en charge des applications spéciales avec des combinaisons d'actionneurs ou des actionneurs ne figurant pas sur la liste, il est possible de stocker les propriétés physiques d'un ou de plusieurs actionneurs sur l'appareil (→ 5.4 Réglage des paramètres de description d'actionneurs définis par l'utilisateur). Celles-ci peuvent ensuite être sélectionnées pour l'utilisation via le paramètre système « Type d'actionneur ».
Course de l'actionneur
La course de l'actionneur décrit la course maximale de l'actionneur sans tenir compte des butées mécaniques dans la course totale.
| ID Plage | de valeurs Valeur en chiffres | Plage en chiffres | |
| 21^1) | 10 ... 5 000 mm 1 mm 10 ... 5 | 000 × 1 mm |
1) En cas de sélection d'un vérin oscillant en tant que type d'actionneur, ce n'est pas la peine de définir le paramètre « Course de l'actionneur ». La valeur de l'angle d'oscillation résulte du code de commande du vérin oscillant.
Tab. 20 : Course de l'actionneur
Volume en (2)
| ID Plage | de valeurs Valeur en chiffres | Plage en chiffres | |
| 40 0 ... 32 | mm 0,001 l 0 ... 32 000 × 0,001 l |
Tab. 21 : Volume en (2)
Volume en (4)
| ID Plage | de valeurs Valeur en chiffres | Plage en chiffres | |
| 41 0 ... 32 | mm 0,001 l 0 ... 32 000 × 0,001 l |
Tab. 22 : Volume en (4)
Fluide de service
| ID Plage | de valeurs Valeur en chiffres | Plage en chiffres | |
| 42 1 ... 32 | 767 1 1 ... 32767 × 1 |
Tab. 23 : Fluide de service
Position de montage de l'actionneur
| ID Plage | de valeurs Position | de montage Valeur en chiffres | Plage en chiffres |
| 60 -180° | ... +180° | 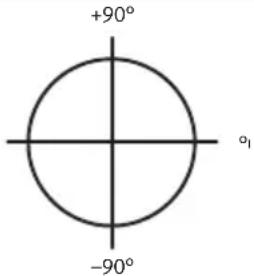 | 0,01° -18 000 ... 18 000 × 0,01° |
Tab. 24 : Position de montage de l'actionneur

Une valeur positive signifie que, lors de la sortie, la masse est déplacée vers le haut (en s'éloignant du sol) (raccord (4) sous pression, raccord (2) à l'échappement ; position de commutation 14).
La valeur indiquée pour la position de montage se réfère à la position du plan sur lequel masse de la charge est déplacée et varie donc en fonction de l'actionneur sélectionné → Tab. 19 Type d'actionneur.
| Mode d'entraînement | -135° -45° 0° 45° 135° | ||||
| Vérin à tige |  |  | 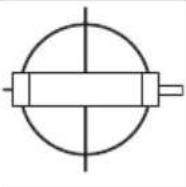 |  |  |
| Vérin linéaire(12 = « rentrer »)(14 = « sortir ») | 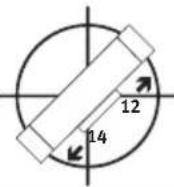 | 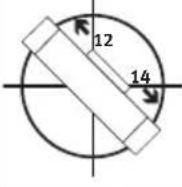 | 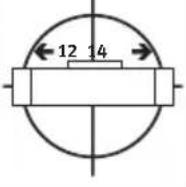 | 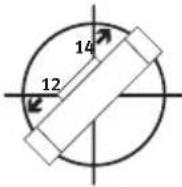 | 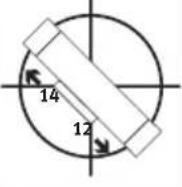 |
| Vérin oscillant Les vérins oscillants ne peuvent être utilisés que dans les situations de montage suivantes où, en raison de la position de montage, la gravité n'influe aucunement sur le comportement de déplacement du vérin oscillant.-Centre de gravité de la masse dans l'axe de rotation : position de montage indifférente autorisée.- Centre de gravité en dehors de l'axe de rotation (non recommandé) : Seule la position de montage verticale est autorisée, axe orienté à la verticale vers le haut ou vers le bas.Dans ces cas, le paramètre « Position de montage actionneur » ne doit pas être paramétré. Toute utilisation autre que dans les situations de montage décrites ci-dessus peut entraîner un comportement de déplacement imprévisible du vérin oscillant et n'est donc pas autorisée. | |||||
Tab. 25 : Importance de la position de montage avec différents types d'actionneur
Décalage du point d'origine de l'axe
| ID Plage | de valeurs Valeur en chiffres | Plage en chiffres | |
| 61 0 ... 5 | 000 mm 1 mm | 0 ... 5 000 × 1 mm |
Tab. 26 : Décalage du point d'origine de l'axe
Entrée de capteur pour détection de fin de course Rentré
| ID Valeur | en chiffres Plage de valeurs | 1) |
| 70 1 | [20 ... 27] ou [40 ... 47] et [50 ... 57] ou [80 ... 87] et [90 ... 97] | |
1) en fonction du distributeur et de l'enchaînement
Tab. 27 : Entrée de capteur pour détection de fin de course Rentrée
Entrée de capteur pour détection de fin de course Sorti
| ID Valeur | en chiffres Plage de valeurs | 1) |
| 71 1 | [20 ... 27] ou [40 ... 47] et [50 ... 57] ou [80 ... 87] et [90 ... 97] | |
1) en fonction du distributeur et de l'enchaînement
Tab. 28 : Entrée de capteur pour détection de fin de course Sorti
Entrée de capteur pour mesure de course partielle Rentré
| ID Valeur | en chiffres Plage de valeurs | 1)2) |
| 75 1 [20 ... 27] ou [40 ... 47] et | [50 ... 57] ou [80 ... 87] et [90 ... 97] | |
1) en fonction du distributeur et de l'enchaînement
2) Valeur = - 1, si la mesure de course partielle n'est pas utilisée
Tab. 29 : Entrée de capteur pour mesure de course partielle Rentré
Entrée de capteur pour mesure de course partielle Sorti
| ID Valeur | en chiffres Plage de valeurs | 1)2) |
| 76 1 [20 ... 27] ou [40 ... 47] et | [50 ... 57] ou [80 ... 87] et [90 ... 97] | |
1) en fonction du distributeur et de l'enchaînement
2) Valeur = -1, si la mesure de course partielle n'est pas utilisée
Tab. 30 : Entrée de capteur pour mesure de course partielle Sorti
Entrée de capteur pour mesure de pleine course
| ID Valeur | en chiffres Plage de | valeurs | 1)2) |
| 80 1 [20 ... 27] ou [40 ... 47] et | [50 ... 57] ou [80 ... 87] et [90 ... 97] | ||
1) en fonction du distributeur et de l'enchaînement
2) Valeur = - 1, si la mesure de course complète n'est pas utilisée
Tab. 31 : Entrée de capteur pour mesure course partielle mesure course totale
Entrée de capteur pour la mesure du débit en (2)
| ID Valeur | en chiffres Plage de | valeurs | 1)2) |
| 81 1 [20 ... 27] ou [40 ... 47] et | [50 ... 57] ou [80 ... 87] et [90 ... 97] | ||
1) en fonction du distributeur et de l'enchaînement
2) Valeur = - 1, si la mesure de débit n'est pas utilisée
Tab. 32 : Entrée de capteur pour la mesure du débit en (2)
Entrée de capteur pour la mesure du débit en (4)
| ID Valeur | en chiffres Plage de | valeurs | 1)2) |
| 82 1 [20 ... 27] ou [40 ... 47] et | [50 ... 57] ou [80 ... 87] et [90 ... 97] | ||
1) en fonction du distributeur et de l'enchaînement
2) Valeur = - 1, si la mesure de débit n'est pas utilisée
Tab. 33 : Entrée de capteur pour la mesure du débit en (4)
4.5.3.2 Paramètres d'application
Les paramètres d'application décrivent les conditions-cadre dans lesquelles une Motion App est censée être exécutée, avec des attributs tels que la masse lors de la rentrée ou la sortie, le temps de déplacement et l'accélération. Sachant que les paramètres d'application d'un jeu de paramètres peuvent être adaptés de manière individuelle pour chaque Motion App (→ 4.5.3.9 Jeux de paramètres). Ce qui signifie que pour un distributeur, p. ex., la « masse lors de la rentrée » peut être définie différemment pour différentes Motion Apps.
Toutes les Motion Apps n'utilisent pas des paramètres d'application.

Les paramètres nécessaires à l'exploitation d'une Motion App doivent être transférés avant le démarrage de la Motion App.
Vue d'ensemble des paramètres d'application
| ID Paramètres d'application | |
| 100 Rentrer masse 1) | |
| 101 Sortir masse 2) | |
| 102 Moment d'inertie de masse lors de la rentrée 1) | |
| 103 Moment d'inertie de masse lors de la sortie 2) | |
| 120 Temps de déplacement lors de la rentrée 1) | |
| 121 Temps de déplacement lors de la sortie 2) | |
| 124 Temps de repos jusqu'à « position cible atteinte » | |
| 126 Durée du dépassement de la valeur de seuil pour les erreurs de poursuite | |
| 141 Tolérance pour « position cible atteinte » | |
| 142 Vitesse maximale | |
| 144 Accélération maximale | |
| 146 Décélération de freinage maximale | |
| 148 À-coup maximal | |
| 150 Décalage du point zéro du projet | |
| 151 Décalage de la fin de course logicielle négative (Rentrée) 1) | |
| 152 Décalage de la fin de course logicielle positive (Sorti) 2) | |
| 153 Distance jusqu'à la position cible à vitesse finale constante dans le sens du retour 1) | |
| 154 Distance jusqu'à la position cible à vitesse finale constante dans le sens de l'avance 2) | |
| 155 Vitesse finale en cas de contact dans le sens du retour 1) | |
| 156 Vitesse finale en cas de contact dans le sens de l'avance 2) | |
| 182 Montée de pression maximale en (2) |
ID Paramètres d'application
| 183 Montée de pression maximale en (4) | |
| 184 Niveau de pression moyen | |
| 200 Fuite | maximale pour l'état « bon » |
| 201 Fuite | maximale pour l'état « avertissement » |
| 202 Fuite | maximale pour l'état « critique » |
| 204 Valeur de seuil, erreur de poursuite de position | |
| 205 Valeur de seuil, erreur de poursuite de vitesse | |
| 220 Caractéristique (2) | |
| 221 Caractéristique (4) | |
| 222 Fonction de mise en pression | |
| 223 Mode de fonctionnement | |
| 224 Surveillance des fins de course | |
| 225 Possibilité de montée en pression dans la fin de course mécanique | |
| 255 Motion App à apprendre | |
1) (2) sous pression, (4) à l'échappement ; position de commutation 12
2) (4) sous pression, (2) à l'échappement ; position de commutation 14
Tab. 34 : Vue d'ensemble des paramètres d'application
4.5.3.3 Paramètres de synchronisation
Dans certains cas d'application, il peut arriver que les paramètres système et les paramètres d'application ne permettent pas d'obtenir une qualité suffisante du comportement du système. Dans ces cas, pour certaines Motion Apps, les paramètres de synchronisation offrent la possibilité d'influer plus intensément sur le comportement du système.
i
L'utilisation des paramètres de synchronisation est facultative. En règle générale, les Motion Apps peuvent être utilisées sans activer les paramètres de synchronisation (avec la valeur par défaut 0).
Les ID des paramètres de synchronisation se situent dans la plage de 230 ... 249. L'affectation de ces ID est définie de manière spécifique par les Motion Apps. Cette définition figure dans le manuel de la Motion App correspondante.
4.5.3.4 Paramètres de capteur
Les propriétés des capteurs qui sont raccordés aux entrées des modules d'entrée sont définis à l'aide des paramètres suivants. La lecture et l'écriture des paramètres de capteur s'effectuent via un canal dédié et en mode de transfert et peuvent être exécutées via les données de processus d'un distributeur quelconque (→ 5.3 Définition des paramètres de capteur).
L'ID des paramètres des différentes entrées se calcule à partir du numéro de l'entrée (0 ... 7), multiplié par le facteur 30 et ajouté au numéro du type de paramètre.
| ID Paramètres Valeurs Signification | |||
| N° d'entrée × 30 + 11) | Type de capteur 1001 | SMT-8M-A-PS-24V-... | |
| 2001 SDAP-MHS-M50-... | |||
| 2002 SDAP-MHS-M100-... | |||
| 2003 SDAP-MHS-M160-... | |||
| 2901 capteur de position 1 défini par l'utilisateur | |||
| 2902 capteur de position 2 défini par l'utilisateur | |||
| 2903 capteur de position 3 défini par l'utilisateur | |||
| 3001 SFAB-50U-...-2SA-... | |||
| 3002 SFAB-200U-...-2SA-... | |||
| 3003 SFAB-600U-...-2SA-... | |||
| 3004 SFAB-1000U-...-2SA-... | |||
| 3101 SFAH-50U-...-PNVBA-... | |||
| 3102 SFAH-100U-...-PNVBA-... | |||
| 3103 SFAH-200U-...-PNVBA-... | |||
| 3901 capteur de débit 1 défini par l'utilisateur | |||
| 3902 capteur de débit 2 défini par l'utilisateur | |||
| 3903 capteur de débit 3 défini par l'utilisateur | |||
| N° d'entrée × 30 + 21) | Orientation du cap-teur pour les cap-teurs de position2) | 0 Signal de sortie montant dans le sens de la sortie | |
| 1 Signal de sortie descendant dans le sens de la sortie | |||
| Orientation du cap-teur pour les cap-teurs de débit2) | 0 valeurs de débit positives | ||
| 1 valeurs de débit négatives | |||
1) Exemples : le type de capteur pour l'entrée 0 est adressé avec l'ID 1 (0 × 30 + 1). L'orientation du capteur pour l'entrée 4 est adressée avec l'ID 122 (4 × 30 + 2).
2) Uniquement pour les capteurs analogiques, p. ex. SDAP-...
Tab. 35 : Paramètres de capteur
i
Les paramètres de capteur ne font pas partie intégrante des jeux de paramètres car ils sont indépendants des distributeurs.
Dans le cas de capteurs définis par l'utilisateur, l'interprétation du signal du capteur s'effectue conformément aux propriétés configurées → 4.5.3.5 Paramètres de description de capteurs de position définis par l'utilisateur, → 4.5.3.6 Paramètres de description de capteurs de débit définis par l'utilisateur.
4.5.3.5 Paramètres de description de capteurs de position définis par l'utilisateur
i
L'archivage de capteurs de position définis par l'utilisateur est facultatif. En règle générale, les capteurs de la liste des capteurs de position pris en charge doivent être utilisés. Pour ces derniers, aucune autre description n'est requise par l'utilisateur.
Pour prendre en charge des applications spéciales avec des systèmes de mesure et des capteurs qui ne figurent pas sur la liste des capteurs de position pris en charge, il est possible d'archiver jusqu'à trois capteurs de position définis par l'utilisateur sur l'appareil. Ces derniers peuvent ensuite être sélectionnés via le paramètre système « Type de capteur » pour l'utilisation sur un module d'entrée analogique.
Pour la description des capteurs de position définis par l'utilisateur, l'option « Accès à la liste étendue des capteurs » doit être activée dans les réglages du Motion Terminal. Le réglage s'effectue alors via le menu de l'interface WebConfig ou via le mode de transfert dans le canal 14 → Tab. 60 Signification de l'indice par addressed target et par canal.
Les propriétés d'un capteur de position défini par l'utilisateur qui sont nécessaires à l'interprétation correcte de ses signaux de mesure sont définies à l'aide des paramètres suivants. La lecture et l'écriture des paramètres de description de capteurs de position définis par l'utilisateur s'effectuent via le canal 17 (user-defined peripherals) du mode de transfert et peuvent être exécutés via les données de processus d'un distributeur quelconque → 4.6.4 Mode de transfert. Un type de capteur de position défini de cette manière est disponible pour tous les ports de module d'entrée analogique du Motion Terminal.
| ID | Paramètre Plage de valeurs | Valeur en chif- | fres | Plage en chiffres |
| 1 | Plage de détection (valeur maximale) | 0 ... 10 000 mm 1 mm | 0 ... 10 000 × 1 mm | |
| Interprétation du signal mesuré : 4 mA ≧ 0 mm | 20 mA ≧ valeur maximale de la plage de détec-tion | |||
Tab. 36 : Paramètres de description de capteurs de position définis par l'utilisateur
i
Les paramètres de description de capteurs de position définis par l'utilisateur ne font pas partie des jeux de paramètres, car ils sont indépendants des distributeurs.
4.5.3.6 Paramètres de description de capteurs de débit définis par l'utilisateur
i
Le stockage de capteurs de débit définis par l'utilisateur est facultatif. En règle générale, les capteurs de la liste des capteurs de débit pris en charge devraient être utilisés. Pour ces derniers, aucune autre description n'est requise par l'utilisateur.
Pour prendre en charge des applications spéciales avec des systèmes de mesure et des capteurs qui ne sont pas inclus dans la liste des capteurs de débit pris en charge, il est possible de stocker jusqu'à trois capteurs de débit définis par l'utilisateur sur l'appareil. Ces derniers peuvent ensuite être sélectionnés via le paramètre système « Type de capteur » pour l'utilisation sur un module d'entrée analogique.
Pour la description des capteurs de débit définis par l'utilisateur, l'option « Accès à la liste étendue des capteurs » doit être activée dans les réglages du Motion Terminal. Le réglage s'effectue alors via le menu de l'interface WebConfig ou via le mode de transfert dans le canal 14→ Tab. 60 Signification de l'indice par addressed target et par canal.
Les propriétés d'un capteur de débit défini par l'utilisateur qui sont nécessaires pour l'interprétation correcte de ses signaux de mesure sont définies à l'aide des paramètres suivants. La lecture et l'écriture des paramètres de description de capteurs de débit définis par l'utilisateur s'effectuent via le canal 17 (user-defined peripherals) du mode de transfert et peuvent être exécutés via les données de processus d'un distributeur quelconque → 4.6.4 Mode de transfert. Un type de capteur de débit défini de cette manière est disponible pour tous les ports de module d'entrée analogique du Motion Terminal.
| ID | Paramètre Plage de valeurs | Valeur en chif- | fres | Plage en chiffres |
| 1 | Plage de détection (valeur maximale)1) | 1 ... 3 000 l/min 1 l/min | 1 ... 3 000 × 1 l/min | l/min |
| 2 | Limite inférieure des valeurs mesurées et supposées fiables2) | 0,1 ... 10 % 0,1 % 1 ... | 100 × 0,1 % | |
| Interprétation du signal mesuré : 4 mA ≧ 0 l/min | 20 mA ≧ valeur maximale de la plage de détection | |||
1) Valeur maximale du débit interprété quant au fluide de service à utiliser à 0 °C. En cas de norme de référence différente du capteur, la valeur de débit maximale indiquée dans sa fiche technique doit être convertie en conséquence.
2) par rapport à la valeur maximale de la plage de détection
Tab. 37 : Paramètres de description de capteurs de débit définis par l'utilisateur
i
La valeur maximale indiquée du débit interprété se réfère au fluide de service utilisé à 0 °C. En cas de norme de référence différente du capteur, la valeur de débit maximale indiquée dans sa fiche technique doit être convertie en conséquence.
Les paramètres de description de capteurs de débit définis par l'utilisateur ne font pas partie des jeux de paramètres, car ils sont indépendants des distributeurs.
4.5.3.7 Paramètres de description d'actionneurs définis par l'utilisateur
i
L'archivage d'actionneurs définis par l'utilisateur est facultatif. En règle générale, les actionneurs de la liste des actionneurs pris en charge peuvent être utilisés. Pour ces derniers, aucune autre description n'est requise par l'utilisateur. → 7.2 Liste des actionneurs pris en charge
Pour prendre en charge des applications spéciales avec des combinaisons d'actionneurs ou des actionneurs qui ne figurent pas sur la liste des actionneurs pris en charge, il est possible d'archiver jusqu'à huit actionneurs définis définis par l'utilisateur sur l'appareil. Ces derniers peuvent ensuite être sélectionnés via le paramètre système « Type d'actionneur » pour l'utilisation sur un distributeur. Pour la description des entraînements définis par l'utilisateur, l'option « Accès à la liste étendue des entraînements » doit être activée dans les réglages du Motion Terminal. Le réglage s'effectue alors via le menu de l'interface WebConfig ou via le mode de transfert dans le canal 14 → Tab. 60 Signification de l'indice par addressed target et par canal.
Les propriétés physiques d'un actionneur défini par l'utilisateur sont définies par les paramètres suivants. La lecture et l'écriture des paramètres de description d'actionneurs définis par l'utilisateur s'effectuent via le canal 17 (user-defined peripherals) du mode de transfert et peuvent être exécutés via les données de processus d'un distributeur quelconque → 5.4 Réglage des paramètres de description d'actionneurs définis par l'utilisateur. Un actionneur défini de la sorte est disponible pour tous les distributeurs du Motion Terminal.
Toutes les propriétés physiques d'un actionneur ne sont pas toujours connues. Des instructions concernant les paramètres qui sont particulièrement pertinents pour la description d'un actionneur défini par l'utilisateur pour le fonctionnement avec une certaine Motion App et des indications pour d'éventuelles indications approximatives figurant dans la liste des actionneurs pris en charge → 7.2 Liste des actionneurs pris en charge.
| ID | Paramètre Plage de valeurs | Valeur en chif- | fres | Plage en chiffres |
| 1 | Modèle 1 = vérin à tige à simple effet | |||
| 2 | Diamètre du piston (dia-mètre intérieur du vérin) | 5 ... 3 276,7 mm 0,1 | mm 50 ... 3 2767 × | 0,1 mm |
| 3 | Diamètre de la tige de piston^1) | 0 ... 3 276,7 mm 0,1 | mm 0 ... 32 767 × | 0,1 mm |
| 4 | Masse du piston 0,01 ... 327 | 67 kg 0,01 kg 1 ... 32 | 767 × 0,01 kg | |
| 5 | Masse de la tige de piston par mètre linéaire^1) | 0 ... 327,67 kg/m 0,0 | 1 kg/m 0 ... 32 767 | × 0,01 kg/m |
| 6 | Volume mort à l'extré-mité rentrée de l'action-neur | 0 ... 3 276,7 cm^3 | 0,1 cm^3 | 0 ... 32 767 × 0,1 cm^3 |
| 7 | Volume mort à l'extré-mité sortie de l'action-neur | 0 ... 3 276,7 cm^3 | 0,1 cm^3 | 0 ... 32 767 × 0,1 cm^3 |
| 8 | Conductance pneuma-tique du raccord au niveau de la chambre mise sous pression pour la sortie | 0 ... 327,67 l/(s*bar) | 0,01 l/(s*bar) 0 ... | 32 767 × 0,01 l/(s*bar) |
| 9 | Conductance pneuma-tique du raccord au niveau de la chambre mise sous pression pour la rentrée | 0 ... 327,67 l/(s*bar) | 0,01 l/(s*bar) 0 ... | 32 767 × 0,01 l/(s*bar) |
| 10 | Force de frottement cou-lombienne | 0 ... 3 276,7 N 0,1 N | 0 ... 32 | 767 × 0,1 N |
| 11 | Coefficient de frottement visqueux | 0,1 ... 3 276,7 N*s/m | 0,1 N*s/m 1 ... 32 | 767 × 0,1 N*s/m |
| 12 | énergie d'impact maxi-male au niveau de l'ex-trémité rentrée de l'ac-tionneur | 0,01 ... 32,767 J | 0,001 J | 10 ... 32 767 × 0,001 J |
| 13 énergie d'impact maxi-male au niveau de l'ex-trémité sortie de l'ac-tionneur | 0,01 ... 32,767 J 0,001 | J 10 ... 32 767 × 0,001 J | ||
| 14 Zone d'action de l'amor-tissement de fin de course à l'extrémité ren-trée de l'actionneur | 0 ... 3 276,7 mm 0,1 | mm 0 ... 32 767 × 0,1 mm | ||
| 15 Zone d'action de l'amor-tissement de fin de course à l'extrémité sortie de l'actionneur | 0 ... 3 276,7 mm 0,1 | mm 0 ... 32 767 × 0,1 mm | ||
1) Uniquement nécessaire pour les vérins à tige de piston
Tab. 38 : Paramètres de description d'actionneurs définis par l'utilisateur
i
Les paramètres de description d'actionneurs définis par l'utilisateur ne font pas partie des jeux de paramètres, car ils sont indépendants des distributeurs.
4.5.3.8 Données d'apprentissage
Certaines Motion Apps nécessitent une procédure d'apprentissage afin de déterminer les caractéristiques des périphériques raccordés et d'atteindre le résultat souhaité pendant le fonctionnement normal (→ 4.8 Course d'apprentissage). Les données de cette procédure d'apprentissage sont archivées dans les jeux de paramètres pour chaque Motion App (→ 4.5.3.9 Jeux de paramètres). Lors de l'exploitation d'une Motion App correspondante, ces données sont continuellement actualisées et enregistrées de manière persistante sur le Motion Terminal.
i
Les données d'apprentissage sont archivées dans le jeu de paramètres actuellement actif et automatiquement enregistrées de manière persistante (→ 4.8.5 Enregistrement des données d'apprentissage).
Les données d'apprentissage peuvent être lues et, si nécessaire, écrasées. Ce qui permet, par exemple, de générer une sauvegarde des données d'apprentissage ou de transférer les données d'apprentissage sur des installations de construction identique. La lecture et l'écriture des données d'apprentissage s'effectuent vie les canaux 1 ... 5 en mode de transfert (→ 4.6.4.1 Structure des données de processus en mode de transfert). Pour l'adressage, il faut se référer à la Motion App correspondante (addressed target) ainsi qu'indiquer l'ID de la donnée d'apprentissage (index) (→ Tab. 59 Signification des addressed targets par canal). Les données d'apprentissage spécifiques à la Motion App figurent dans le manuel de la Motion App correspondante.
Fonction
Une autre possibilité de transférer des données d'apprentissage et les paramètres associés vers un autre Motion Terminal consiste à exporter ces données dans un fichier de configuration (→ 4.4.3 Exportation/importation d'un paramétrage et de réglages).
4.5.3.9 Jeux de paramètres
Pour chaque distributeur, le Motion Terminal peut gérer 5 différents jeux de paramètres constitués de paramètres système, de paramètres d'application, de paramètres de synchronisation et de données d'apprentissage (→ 4.8 Course d'apprentissage). En cas de remplacement des périphériques raccordés, le paramétrage du distributeur peut ainsi être aisément modifié en activant un autre jeu de paramètres.
i
Lors du démarrage du Motion Terminal, le jeu de paramètres 1 est automatiquement sélectionné. Le changement des jeux de paramètres est décrit au paragraphe → 5.6 Changer de jeu de paramètres actif.
Structure d'un jeu de paramètres
L'exemple suivant est censé illustrer la structure d'un jeu de paramètres.
Distributeur à l'emplacement 1
| Jeu de paramè- tres 3 | Motion App A M | Motion App B Moti | on App C Motion | App D Motion App | ... |
| Paramètre sys- tème | Sys.-Par. a | ||||
| Sys.-Par. b | |||||
| Sys.-Par. c | |||||
| Sys.-Par. ... | |||||
| Paramètres d'application | App.-Par. m App. | -Par. m App.-Par. | m App.-Par. m App. | -Par. m | |
| App.-Par. n App. | -Par. n App.-Par. | n App.-Par. n App. | -Par. n | ||
| App.-Par. o App. | -Par. o App.-Par. | o App.-Par. o App. | -Par. o | ||
| App.-Par. ... App. | -Par. ... App.-Par. | ... App.-Par. ... App. | -Par. ... | ||
| Paramètres de synchronisa- tion | Tun.-Par. x Tun.- | -Par. x Tun.-Par. x | Tun.-Par. x Tun.- | Par. x | |
| Tun.-Par. y Tun.- | -Par. y Tun.-Par. y | Tun.-Par. y Tun.- | Par. y | ||
| Tun.-Par. ... Tun. | -Par. ... Tun.-Par. | .. Tun.-Par. ... Tun. | -Par. ... | ||
| Données d'ap- prentissage | Enregistrement 1 | Enregistrement 2 | Enregistrement 3 | Enregistrement 4 | Enregistrement 5 |
Tab. 39 : Exemple de structure du jeu de paramètres 3
4.5.4 Valeurs de consigne et réelles
Les données de processus permettent d'écrire ou de lire les valeurs de consigne et réelles.
| Valeurs de consigne et réelles | |
| Écrire des valeurs de consigne Données de sortie (PDO, Process Data Output) | |
| Lire les valeurs réelles Données d'entrée (PDI, Process Data Input) |
Tab. 40 : Valeurs de consigne et réelles
Les valeurs de consigne et réelles sont spécifiques aux différentes Motion Apps. La structure des données de processus est décrite au paragraphe (→ 4.6 Communication entre API et Motion Terminal).
4.5.5 Temps d'attente entre les Motion Apps
Dans les cas suivants, avant l'exécution d'une Motion App démarré, un calibrage du distributeur correspondant est exécuté :
–Après un redémarrage du Motion Terminal, une Motion App est démarrée pour la première fois. Exception : Motion App #01 en mode de marche « commandé »
- Après l'exploitation de la Motion App #01 dans le mode de marche « commandé », la Motion App #01 est démarrée pour la première fois dans le mode de marche « régulé » ou une autre Motion App est démarrée.
Ce calibrage peut durer jusqu'à 60 secondes et sera automatiquement effectué avant l'exécution de la Motion App. L'état du calibrage est visible sous forme de valeur de retour dans les données de processus → Tab. 52 Notes relatives aux données de sortie invalides.
4.6 Communication entre API et Motion Terminal
La communication entre la commande de niveau supérieur (API) et le contrôleur du Motion Terminal se base sur 8 fois 6 octets de données d'entrée et de sortie du Terminal CPX. Chacun des 8 distributeurs max. d'un Motion terminal est affecté de 6 octets de données d'entrée (PDI) et de 6 octets de sortie (PDO) indépendamment du nombre de distributeurs effectivement présents.
En fonction du mode de fonctionnement actuel d'un distributeur, les données de processus permettent de transférer les tâches et les contenus suivants :
- Démarrage/exploitation/fermeture d'une Motion App → 4.6.3 Exploitation d'une Motion App.
-Paramétrage des modules d'entrée par l'API → 5.3 Définition des paramètres de capteur.
Fonction
- Paramétrage des Motion Apps par l'API (téléchargement des paramètres) 5.1 Activer les paramètres systèmes, d'application et de synchronisation.
- Lecture des Motion Apps configurées (chargement des paramètres) 5.2 Lecture de paramètres systèmes, d'application et de synchronisation.
- Lecture des données système et des valeurs mesurées 4.6.4.2 Informations relatives à l'état du Motion Terminal (canal d'info).
- Lecture des informations de diagnostic et acquittement des erreurs 4.9.3 Canal de diagnostic du mode de transfert.
i
Les données de processus actuelles (PDO et PDI) de tous les emplacements sont affichées dans la vue « Surveillance » de l'interface utilisateur WebConfig.
Toutes les tâches ne sont pas possibles via la zone de données de processus des emplacements absents ou inutilisés. Seules des tâches non liées au distributeur peuvent être exécutées, telles que le paramétrage des modules d'entrée, la lecture des données système et des valeurs mesurées ainsi que les informations de diagnostic.
4.6.1 Représentation des chiffres
i
Les valeurs de consigne et les valeurs réelles ainsi que les paramètres sont représentées à l'intérieur des données de processus au format « Nombre entier signé 16 bits » (signed int16) en tant que complément double.
4.6.2 Structure des données de processus en cas d'exploitation d'une Motion App
i
Description des données de processus lors de l'exploitation d'une Motion App (→ 4.6.3 Exploitation d'une Motion App).
4.6.2.1 Structure des données de sortie (PDO)
Lors de l'exploitation d'une Motion App, les 6 octets de données de sortie (PDO) sont répartis en 3 zones pour chaque emplacement de distributeur :
- Commande (→ Tab. 42 Vue détaillée de la zone « Commande » des données de sortie (PDO))
- Valeur de consigne 1
- Valeur de consigne 2
Distributeur sur l'un des emplacements 0 ... 7
| Octet 5 Octet 4 Octet 3 Octet 2 Octet 1 Octet 0 | |||||
| Valeur de consigne 2 Valeur de consigne 1 Commande | |||||
Tab. 41 : Structure des données de sortie (PDO) par distributeur
Le tableau suivant est une vue détaillée de la zone « Commande ».
| Vue détaillée de la zone Commande | |||||||||||||||
| Octet PDO 1 Octet PDO 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| app option app control valve mode | |||||||||||||||
Tab. 42 : Vue détaillée de la zone « Commande » des données de sortie (PDO)
Mode de fonctionnement du distributeur (valve mode)
Le mode de fonctionnement du distributeur (valve mode) est prédéfini avec les bits 5 ... 0 de l'octet 0 (PDO).
i
Dans chaque mode de fonctionnement, cette zone est occupée par la même fonction et revêt une importance centrale pour la commande du Motion Terminal. L'occupation des autres zones dépend du mode de fonctionnement actuel du distributeur.
| Valeur déc. Mode de fonctionnement du distributeur | Description |
| 0 réservé Aucune valeur valide | |
| 1 ... 59 Exploiter une Motion App (la valeur correspond à l'ID de la Motion App) | Sélection de la Motion App à exploiter à l'aide de son ID. Les valeurs de consigne nécessaires à l'exploitation de la Motion App sont transmises dans les octets 5 ... 2 (PDO). |
| 60 Course d'apprentissage Apprentissage des propriétés pertinentes du système raccordé pour l'exécution de Motion Apps définies. | |
| 61 Fermer Motion App Fermeture de la Motion App actuellement exploitée sur le distributeur. | |
| 62 Acquittement des erreurs Vider la liste des dysfonctionnements | Les erreurs inactives doivent être acquittées pour faire passer l'état du distributeur de « pas prêt » à « prêt ». |
| 63 Mode de transfert Transfert de paramètres, d'informations de diagnostic et des réglages du distributeur (→ 4.6.4 Mode de transfert). | |
Tab. 43 : Mode de fonctionnement du distributeur
Commande de la Motion App (app control)
Les informations de commande des Motion Apps sont prédéfinis via les bits 7 ... 6 de l'octet 0 (PDO). Le fonctionnement concret est spécifique à la Motion App et figure dans le manuel de la Motion App.
Réglage de la Motion App (app option)
Le réglage d'une Motion App est prédéfini via l'octet 1 (PDO).
Le fonctionnement concret est spécifique à la Motion App et figure dans le manuel de la Motion App.
Zones « Valeur de consigne 1 » et « Valeur de consigne 2 » (setpoint1, setpoint2)
Les valeurs de consigne pour l'exécution d'une Motion App sont prédéfinies via les octets 5 ... 4 (PDO) (valeur de consigne 2) et 3 ... 2 (PDO) (valeur de consigne 1).
Le fonctionnement concret est spécifique à la Motion App et figure dans le manuel de la Motion App.
4.6.2.2 Structure des données d'entrée (PDI)
Lors de l'exploitation d'une Motion App, les 6 octets de données d'entrée (PDI) sont répartis en 3 zones pour chaque emplacement de distributeur :
- État (→ Tab. 45 Vue détaillée de la zone « État » des données d'entrée(PDI))
- Valeur réelle 1
- Valeur réelle 2
Distributeur sur l'un des emplacements 0 ... 7
| Octet 5 Octet 4 Octet 3 Octet 2 Octet 1 Octet 0 | |||||
| Valeur réelle 2 Valeur réelle 1 État | |||||
Tab. 44 : Structure des données d'entrée (PDI) par distributeur
Le tableau suivant est une vue détaillée de la zone « État ».
| Vue détaillée de la zone « État » | |||||||||||||||||
| Octet PDI 1 Octet PDI 0 | |||||||||||||||||
| État | |||||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | ||
| app state valve state valve mode | |||||||||||||||||
Tab. 45 : Vue détaillée de la zone « État » des données d'entrée(PDI)
Mode de fonctionnement du distributeur (valve mode)
Le mode de fonctionnement actuellement actif du distributeur est retourné via les bits 5 ... 0 de l'octet 0 (PDI).
| Valeur déc. Mode de fonctionnement du distributeur | Description |
| 1 ... 59 Motion App exploitée Affichage de la Motion App actuellement exploitée à l'aide de son ID. | |
| 60 Course d'apprentissage | → 4.8 Course d'apprentissage |
| 61 Distributeur inactif (en position de repos) | Actuellement, aucune Motion App n'est exécutée ou la Motion App dernièrement exécutée a été arrêtée.Si le distributeur est inactif en raison de données de sortie erronées, la cause s'affiche dans la zone « app state » → 4.6.3.5 Signal de retour en cas de données de sortie invalides. |
| 62 Distributeur inactif (en position de repos) | Non utilisé. Le signal en retour à la commande « 62 »(Acquitter erreur) est « 61 » (distributeur inactif). |
| 63 Mode de transfert actif | → 4.6.4 Mode de transfert |
Tab. 46 : Mode de fonctionnement du distributeur
Exemple
Pour démarrer la Motion App #05, la valeur « 5 » est transférée dans la zone PDO « valve mode ». C'est uniquement lorsque la valeur « 5 » apparaît dans la zone « valve mode » (et dans la zone « valve state » la valeur « 2 ») que la Motion App est effectivement démarrée.
État du distributeur (valve state)
L'état actuel du distributeur (valve state) est représenté via les bits 7 ... 6 dans l'octet 0 (PDI).
| État du distributeur Signification | Bit 7 Bit 6 Déc. | |||
| pas prêt (not ready) La procédure de démarrage du Motion Terminal n'est pas terminée ou une erreur déjà détectée et déjà éliminée doit encore être acquittée. | 0 0 0 | |||
| prêt (configurable) Le distributeur est inactif. Une Motion App peut être exploité ou passée en mode de transfert. | 0 1 1 | |||
| en service (running) Une Motion App est en cours d'exécution. 1 0 2 | ||||
| Erreur (failure) Une erreur a été détectée mais n'a pas encore été éliminée. La Motion App a été arrêtée. | 1 1 3 | |||
Tab. 47 : État du distributeur
État de la Motion App (app state)
L'état actuel de la Motion App (app state) est représenté par différentes informations via les bits 7 ... 0 de l'octet 1 (PDI).
i
Les informations décrites ici s'appliquent en cas d'exploitation de toutes les Motion Apps. Les informations supplémentaires spécifiques à la Motion App qui sont transférées dans l'état de la Motion App (app state) sont décrites dans les manuels correspondants des Motion Apps.
Signalisation d'avertissements
La présence d'avertissements dans la mémoire de diagnostic du Motion Terminal est représentée par le bit 7 de l'octet 1 (PDI).
| Valeur Description | |
| 0 Il n'existe aucun avertissement émanant de la Motion App active. | |
| 1 La Motion App active signale un avertissement présent dans la mémoire de diagnostic du Motion Terminal. |
Tab. 48 : Signalisation d'avertissements
i
À propos de la gestion des avertissements et des erreurs (→ 4.9 Possibilités de diagnostic).
4.6.3 Exploitation d'une Motion App
i
En fonction de la Motion App à exploiter, avant de l'exploiter, il faut procéder à la définition des paramètres système et d'application (→ 4.5.3 Paramètre). La Motion App utilise les valeurs de paramètres définies par l'utilisateur et, le cas échéant, les données d'apprentissage en résultant et issues du jeu de paramètres actif (→ 5.6 Changer de jeu de paramètres actif). C'est le manuel de la Motion App correspondante qui détermine les paramètres système et/ou d'application qui seront utilisés par une Motion App.
4.6.3.1 Conditions préalables
-La procédure Boot du Motion Terminal est terminée.
–Les paramètres système et d'application requis par la Motion App ont été transférés ( 5.1 Activer les paramètres systèmes, d'application et de synchronisation).
- Si la Motion App est censée accéder à des données de capteur, les paramètres de capteur requis ont été transférés pour toutes les entrées de capteur affectées (→ 5.3 Définition des paramètres de capteur).
- Si nécessaire, une course d'apprentissage a été effectuée pour la Motion App (→ 4.8 Course d'apprentissage).
- L'état du distributeur sur lequel la Motion App est censée être exploitée est « prêt » (« configurable ») (→ 4.6.2.2 Structure des données d'entrée (PDI)).
- Il n'existe aucune erreur active ou inactive sur le distributeur sur lequel la Motion App est censée être exploitée (→ 4.9.3.6 Lecture d'une liste de dysfonctionnements ;→ 4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements).
4.6.3.2 Démarrage d'une Motion App
Pour démarrer une Motion App, les valeurs de consigne 1 et 2 ainsi que la commande (comprenant « valve mode », « app control » et « app option ») doivent être transférées dans les 6 octets PDO du distributeur correspondant.
Exemple
La Motion App #02 « Distributeur proportionnel » (octet PDO 0 bits 5 ... 0 => 2_10 ) est censée être démarrée avec les consignes suivantes :
- État de commutation des raccords d'air de travail (app control) :
(2) actif, (4) actif (octet PDO 0, bit 7 => 1, octet PDO 0, bit 6 => 1)
-Type de distributeur (app option): 2 x 3/3 (octet PDO 1 => 15 10)
-Degré d'ouverture (2) (setpoint value 1) : +50 % (octet PDO 2+3 => 5000 _10 )
-Degré d'ouverture (4) (setpoint value 2) : +40 % (octet PDO 4+5 => 4000 _10 )
| Octet PDO 5 4 | 3 2 1 0 | |||||||||||||||||||
| Secteur Valeur de consigne 2 | Valeur de consigne 1 | Commande | ||||||||||||||||||
| Bits 15 ... 0 15 | ... 0 7 6 5 4 3 | 2 1 0 7 6 5 4 3 | 2 1 0 | 0 | ||||||||||||||||
| Fonction setpoint value 2 | setpoint value 1 | app option app | con- trol | valve mode | ||||||||||||||||
| Valeur 4000 5 | 000 0 0 0 0 1 1 | 1 1 1 1 0 0 0 0 | 1 0 | |||||||||||||||||
Tab. 49 : Affectation des données de sortie (PDO) pour un exemple d'exploitation de la Motion App #02
Les données d'entrée retournent l'état actuel du distributeur et de la Motion App :
- Mode de fonctionnement du distributeur (valve mode) : Motion App #02 (octet PDI 0, bits 5 ... 0 => 000010₂)
-État du distributeur (valve state) : en service (running) (octet PDI 0, bits 7 ... 6 => 10 2)
-État de la Motion App (app state) :
- Détection des fins de course :
p. ex., le capteur pour la fin de course « sorti » retourne « 1 » (octet PDI 1, bit 2 => 1)
p. ex., le capteur pour la fin de course « rentré » retourne « 0 » (octet PDI 1, bit 0 => 0)
- Avertissement : il n'existe aucun avertissement (octet PDI 1, bit 7 => 0)
- Valeur réelle 1 (actual value 1) : degré d'ouverture : p. ex. +50,02% (octet PDI 3 ... 2 => 5002 _10 )
- Valeur réelle 2 (actual value 2) : degré d'ouverture : p. ex. +39,99% (octet PDI 5 ... 4 => 3999 _10 )
| Octet PDI 5 4 | 3 2 1 0 | |||||||||||||||||||
| Secteur Valeur réelle2 | Valeur réelle1 | État | ||||||||||||||||||
| Bits 15 ... 0 15 ... 0 7 6 5 4 3 | 2 1 0 7 6 5 4 3 | 2 1 0 | ||||||||||||||||||
| Fonction actual value2 | actual value1 | app state | valve state | valve mode | ||||||||||||||||
| Valeur 3999 5 | 002 0 0 0 0 0 1 | 0 0 1 0 0 0 0 0 | 1 0 | |||||||||||||||||
Tab. 50 : Exemple de signal en retour dans les données d'entrée (PDI) en cas d'exploitation de la Motion App #02
4.6.3.3 Pilotage d'une Motion App
En cours d'exploitation, il est possible de piloter la réaction d'une Motion App en adaptant les valeurs de « app control », « app option », « setpoint value 1 » et « setpoint value 2 ».
4.6.3.4 Fermeture d'une Motion App
Pour fermer une Motion App, il faut régler le mode de fonctionnement du distributeur (valve mode) sur la valeur « 61 ». Ce qui a pour effet de fermer la Motion App. La valeur dans la zone « valve state » des données d'entrée (PDI) passe à « 01₂ » (configurable).
Une autre Motion App peut désormais être démarrée ou il est possible de passer au mode de transfert (→ 4.6.4 Mode de transfert).
4.6.3.5 Signal de retour en cas de données de sortie invalides
Si, lors du démarrage d'une Motion App, des données de sortie erronées ou, dans l'état existant, invalides sont transférées au contrôleur du Motion Terminal par la commande de niveau supérieur, le démarrage de la Motion App est empêché. En présence de données de sortie invalides pendant l'exploitation d'une Motion App, celle-ci est arrêtée. Dans les deux cas, un signal de retour correspondant est émis via l'état de la Motion App (app state) dans les données d'entrée :
- Mode de fonctionnement du distributeur (valve mode) : 61 (Motion App arrêtée) (octet PDI 0, bits 5 ... 0 => 111101₂)
- État du distributeur (valve state) : prêt (configurable) (octet PDI 0, bits 7 ... 6 => 012)
- État de la Motion App (app state) : → Tab. 52 Notes relatives aux données de sortie invalides
- Valeur réelle 1 (actual value 1) : (octet PDI 3 ... 2 => pression actuelle [mbar] au niveau du raccord (2))
- Valeur réelle 2 (actual value 2) : (octet PDI 5 ... 4 => pression actuelle [mbar] au niveau du raccord (4))
| PDI Byte 5 4 3 | 2 1 0 | ||||||||||||||||||
| Secteur Valeur réelle2 | Valeur réelle1 | État | |||||||||||||||||
| Bits 15 ... 0 15 | ... 0 7 6 5 4 3 | 2 1 0 7 6 5 4 3 | 2 1 0 | 0 | |||||||||||||||
| Fonction actual value2 | actual value1 | app state valve | state | valve mode | |||||||||||||||
| Valeur pressionactuelle | pressionactuelle | →Tab. 52 Notes relativesaux données de sortie invalides | 0 1 | 1 1 | 1 1 | 0 1 | |||||||||||||
Tab. 51 : Signal de retour en cas de données de sortie invalides
Signification PDI octet 1
| Valeur déc. | app state Signification | |
| 1 valve mode | invalid Valeur invalide dans la zone « | valve mode » |
| 2 app control | invalid Valeur invalide dans la zone « | app control » |
| 3 app option | invalid Valeur invalide dans la zone « | app option » |
| 4 setpoint1 | invalid Valeur invalide dans la zone « | Valeur de consigne 1 » |
| 5 setpoint2 | invalid Valeur invalide dans la zone « | Valeur de consigne 2 » |
| 6 parameters | invalid Paramétrage incorrect | (informations plus détaillées ➔ 4.9.3 Canal de diagnostic du mode de transfert) |
| 10 access denied (WebConfig access) Accès refusé | par l'API à cause d'un accès actif via l'interface WebConfig. | |
| 11 blocked | due to saving Accès bloqué à cause d'u | ne procédure de sauve-garde en cours. |
| 12 no license | for this app Aucune licence existante | pour la Motion App demandée. |
| 13 all licences | in use Aucune licence libre existante | pour la Motion App demandée. |
| 14 licence file | invalid Le fichier de licence est invali | de. |
| 15 no valve | detected Aucun distributeur n'a été détecté à l'emplace-ment de distributeur adressé. | |
| 16 valve self | calibration running Auto-calibrage du | distributeur en cours. |
Tab. 52 : Notes relatives aux données de sortie invalides
4.6.3.6 Mode veille d'une Motion App après déclenchement d'une erreur
Si une erreur se produit pendant l'exécution d'une Motion App, l'état du distributeur (valve state) passe à la valeur « 3 » (failure). Le fonctionnement actif de la Motion App en cours d'exécution est arrêté et le distributeur est réglé sur l'état sûr. Dès que la cause de l'erreur est éliminée et que l'erreur n'est plus active, le distributeur passe automatiquement à l'état « 0 » (not ready). En cas d'erreurs causées par l'exécution de la Motion App elle-même, la cause est déjà éliminée par l'arrêt implicite. Tant que la commande de niveau supérieur continue de transmettre l'ID de la Motion App précédemment exécutée en tant que mode de fonctionnement du distributeur (valve mode), l'application Motion se trouve en mode veille. Aucun autre signal de commande n'est alors généré pour le distributeur. Les sorties du distributeur restent fermées. Cependant, des valeurs réelles définies pour cette Motion App continuent d'être déterminées et émises dans les données de process. Le mode veille peut être quitté via le mode de fonctionnement (valve mode) 61→ 4.6.3.4 Fermeture d'une Motion App.
Fonction
Dans les deux états « 3 » (failure) et « 0 » (not ready), il est possible de passer en mode de transfert, par exemple pour lire la liste des dysfonctionnements ➔ 4.6.4 Mode de transfert. Après avoir quitté le mode de transfert, aucune autre exécution de le Motion App n'est possible en mode veille.
L'état du distributeur « 0 » (not ready) peut être acquitté comme d'habitude via le mode de fonctionnement (valve mode) 62 → 4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements. Le distributeur repasse en mode de fonctionnement (valve mode) 61 avec l'état de distributeur « 1 » (configurable). Le cas échéant, cela met fin au mode veille. Le distributeur est de nouveau opérationnel pour une Motion App.
4.6.4 Mode de transfert
Le mode de transfert (mode du distributeur (valve mode) = « 63 ») offre, via différents canaux, la possibilité d'échanger des informations telles que des paramètres (→ 5 Paramétrage), des valeurs d'état ou des informations de diagnostic (→ 4.9.3 Canal de diagnostic du mode de transfert) entre le Motion Terminal et la commande de niveau supérieur. L'utilisation du mode de transfert nécessite des données de processus (6 octets de données de sortie (PDO) et 6 octets de données d'entrée (PDI) par distributeur).
4.6.4.1 Structure des données de processus en mode de transfert
Structure des données de sortie (PDO)
Lors de l'exploitation du mode de transfert, les 6 octets de données de sortie (PDO) sont répartis en 3 zones pour chaque emplacement de distributeur :
-Commande → Tab. 42 Vue détaillée de la zone « Commande » des données de sortie (PDO)
- Paramètre Tab. 58 Vue détaillée de la zone « Paramètres » des données de sortie (PDO)
- Valeur Tab. 60 Signification de l'indice par addressed target et par canal
Distributeur aux emplacements 0 ... 7
| Octet 5 Octet 4 Octet 3 Octet 2 Octet 1 Octet 0 | ||||
| Valeur Paramètre Commande | ||||
Tab. 53 : Structure des données de sortie (PDO) par distributeur
Le tableau suivant est une vue détaillée de la zone « Commande ».
Vue détaillée de la zone « Commande »
| Octet PDO 1 Octet PDO 0 | |||||||||||||||
| État | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| transfer control channel – valve mode = 63 | |||||||||||||||
Tab. 54 : Vue détaillée de la zone « Commande » des données de sortie (PDO)
Octet 0
Le mode de fonctionnement du distributeur (valve mode, octet PDO 0, bits 5... 0) permet de faire passer le distributeur en mode de transfert avec la valeur « 63 ».
Les bits 7 ... 6 de l'octet 0 (PDO) sont ignorés en mode de transfert.
Canal (channel)
Les bits 4 ... 0 de l'octet 1 (PDO) permettent de sélectionner le canal sur lequel les informations sont censées être transférées. Les valeurs non indiquées sont réservées et ne peuvent pas être utilisées.
| Valeur déc.1) | Canal Signification Accès | ||
| 1 parameter set 1 Paramétrage dans | le jeu de paramè- tres 1 | lecture/écriture | |
| 2 parameter set 2 Paramétrage dans | le jeu de paramè- tres 2 | lecture/écriture | |
| 3 parameter set 3 Paramétrage dans | le jeu de paramè- tres 3 | lecture/écriture | |
| 4 parameter set 4 Paramétrage dans | le jeu de paramè- tres 4 | lecture/écriture | |
| 5 parameter set 5 Paramétrage dans | le jeu de paramè- tres 5 | lecture/écriture | |
| 14 terminal settings Réglages du Mo | tion Terminal com- plet | lecture/écriture | |
| 15 valve settings Réglages du distrib | uteur lecture/écriture | ||
| 16 input module settings Paramétrage des modules d'entrée lecture/écriture | |||
| 17 user-defined peripherals Paramétrage de périphériques définis par l'utilisateur | lecture/écriture | ||
| 25 information Informations sur l'état du terminal (→ Tab. 60 Signification de l'indice par addressed target et par canal) | lecture | ||
| 31 malfunctions Accès à la mémoire de diagnostic (→ Tab. 60 Signification de l'indice par addressed target et par canal) | lecture | ||
1) Les valeurs non indiquées sont réservées et ne peuvent pas être utilisées.
Tab. 55 : Canaux disponibles

Pour de plus amples infos sur les jeux de paramètres → 4.5.3.9 Jeux de paramètres.
Commande de transfert (transfer control)
Les bits 7 ... 5 de l'octet 1 (PDO) permettent de commander la transmission du mode de transfert.
| Valeur déc.1) | Transmission Signification | |
| 1 download | Transfert de l'API vers le Motion Terminal | |
| 2 upload | Transfert du Motion Terminal vers l'API | |
| 3 Quitter le | mode de transfert | Le mode de transfert est quitté, le mode du distributeur passe au mode 61 (distributeur en position de repos), l'état du distributeur passe à la valeur 1 (configurable). |
| 4 Enregistrer | le paramétrage de manière persistante | Les données sont enregistrées de manière persistante sur le Motion Terminal pour le distributeur à paramétrer actuellement. |
1) Les valeurs non indiquées sont réservées et ne peuvent pas être utilisées.
Tab. 56 : Affectation possible de la commande de transfert
| Distributeur aux emplacements 0 ... 7 | |||||
| Octet 5 Octet 4 Octet 3 Octet 2 Octet 1 Octet 0 | |||||
| Valeur Paramètre Commande | |||||
Tab. 57 : Structure des données de sortie (PDO)
Le tableau suivant présente une vue détaillée de la zone « Paramètres ».
| Vue détaillée de la zone Paramètres | |||||||||||||||
| Octet PDO 3 Octet PDO 2 | |||||||||||||||
| Paramètre | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| index addressed target | |||||||||||||||
Tab. 58 : Vue détaillée de la zone « Paramètres » des données de sortie (PDO)
Adressage de la transmission de données (addressed target)
Adresse spécifique au canal de la destination sur laquelle la transmission est censée être écrite ou à partir de la laquelle elle est censée être lue.
| Canal addressed target Signification Valeur | en chiffres | ||
| 1 ... 5 1 | ... 59 ID de la Motion | App pour laquelle des paramètres ont censésêtre transmis. Pour les paramètres système, l'indication sert au contrôle de validité spécifique à la Motion App de la valeur indiquée. | 1 |
| 60 Transmettre les paramètres pour la course d'apprentissage 1 | |||
| 101 ... 159 100 + | D de la Motion App pour laquelle des données d'apprentissage sont censées être transmises | 1 | |
| 14 0 Réglages du Motion Terminal complet 1 | |||
| 15 0 Réglages du distributeur 1 | |||
| 16 1 Transmettre des informations sur les périphériques au premier module d'entrée en partant de la gauche | 1 | ||
| 2 Transmettre des informations sur les périphériques au deuxième module d'entrée en partant de la gauche | 1 | ||
| 17 1 ... 3 Numéro du capteur de position défini par l'utilisateur pour lequel des paramètres sont censés être transférés | 1 | ||
| 11 ... 13 10 + Numéro du capteur de débit défini par l'utilisateur pour lequel des paramètres sont censés être transférés | 1 | ||
| 101 ... 108 100 + numéro de l'actionneur défini par l'utilisateur pour lequel des paramètres sont censés être transférés | 1 | ||
| 25 1 Informations matérielles 1 | |||
| Canal addressed target Signification Valeur | en chiffres | ||
| 25 23 Débits (débit volumétrique) (via des capteurs analogiques sur le module d'entrée) | 1 | ||
| 31 – addressed target n'est pas utilisé dans ce canal – | |||
Tab. 59 : Signification des addressed targets par canal
Index (index)
En fonction du canal sélectionné, l'octet 3 (PDO) permet d'identifier plus précisément l'information à transmettre.
| Canal addressed target | Index Signification Valeur | en chif-fres | ||
| 1 ... 5 1 | ... 60 0 ... 25 | 5 ID du para mètre système, d'application ou de synchronisation censé être transmis → 4.5.3 Paramètre | 1 | |
| 101 ... 159 0 | ... 255 ID de la valeur d'apprentissage censée être transmise → Manuel de la Motion App correspondante | 1 | ||
| 14 | 0 | 51 | Conservation des données d'apprentissage existantes en cas de modifications de paramètres | 1 |
| 52 | Accès à la liste étendue des capteurs | 1 | ||
| 53 | Accès à la liste étendue des actionneurs | 1 | ||
| 54 | Utilisation de licences de démonstration pendant la période de démonstration | 1 | ||
| 15 | 0 | 1 | Numéro du jeu de paramètres actif | 1 |
| 2 | ID de la Motion App affectée | 1 | ||
| 16 | 1 ... 2 0 ... 2 | 55 ID du para mètre de capteur → Tab. 35 Paramètres de capteur | 1 | |
| 17 | 1 ... 3 | 1 | ID du paramètre de description d'un capteur de position défini par l'utilisateur → Tab. 36 Paramètres de descrip-tion de capteurs de position définis par l'utilisateur | 1 |
| 11 ... 13 1 ... | 2 ID du para mètre de description d'un capteur de débit défini par l'utilisateur → Tab. 37 Paramètres de descrip-tion de capteurs de débit définis par l'utilisateur | 1 | ||
| 101 ... 108 1 | ... 15 ID du para mètre de description d'un actionneur défini par l'utilisateur → Tab. 38 Paramètres de description d'action-neurs définis par l'utilisateur | 1 | ||
Fonction
| Canal addressed target | Index Signification Valeur | en chif-fres | |
| 25 10 .. 255 ID de l'info matérielle → Tab. 64 Informations matérielles 1 | |||
| 2 0 ... 255 ID de l'info logicielle → Tab. 65 Informations logicielles 1 | |||
| 3 0 ... 255 ID des informations de licence les licences → Tab. 66 Informations sur 1 | |||
| 11 0 ... 255 D de la valeur de pression → Tab. 68 Valeurs de pression 1 | |||
| 12 0 ... 255 D de la valeur de température → Tab. 69 Températures 1 | |||
| 13 0 ... 255 D de la valeur de la course du vérin auxiliaire → Tab. 70 Courses du booster | |||
| 14 0 ... 255 D de la valeur de débit au niveau du distributeur → Tab. 71 Débits au niveau du distributeur | |||
| 21 0 ... 255 D de la valeur du signal de proximité → Tab. 72 Signaux de proximité | |||
| 22 0 ... 255 D de la valeur de position → Tab. 73 Positions 1 | |||
| 23 0 ... 255 D de la valeur de débit au niveau du capteur externe → Tab. 74 Débits au niveau du capteur externe | |||
| 31 – 1 .. 40 Numéro de la position dans la mémoire de diagnostic dont le contenu est censé être lu | |||
| 253 Position du message de diagnostic le plus récent de type « Erreur » | |||
| 254 Position du message de diagnostic le plus ancien de type « Erreur » | |||
| 255 Nombre de messages de diagnostic dans la mémoire de diagnostic | |||
Tab. 60 : Signification de l'indice par addressed target et par canal
Zone « Valeur » (value)
La zone est utilisée pour transmettre des valeurs numériques. La signification et la fonction des valeurs numériques sont définies par les zones précédemment décrites.
Structure des données d'entrée (PDI)
Les données d'entrée (PDI) du mode de transfert servent à la confirmation du transfert effectué ou à l'édition de la valeur demandée. Pour ce faire, les informations ayant été transférées dans les données de sortie via « valve mode », « channel », « transfer control », « addressed target » et« index » sont retournées aux emplacements correspondants dans les données d'entrée.
i
La zone « valve state » représente les informations décrites au paragraphe (→ 4.6.2.2 Structure des données d'entrée (PDI)).
| Distributeur aux emplacements 0 ... 7 | |||||
| Octet 5 Octet 4 Octet 3 Octet 2 Octet 1 Octet 0 | |||||
| Valeur Paramètre État | |||||
Tab. 61 : Structure des données d'entrée (PDI)
Le tableau suivant est une vue détaillée de la zone « État ».
| Vue détaillée de la zone « État » | |||||||||||||||
| PDI Byte 1 PDI Byte 0 | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| transfer control channel valve state valve mode = 63 | |||||||||||||||
Tab. 62 : Vue détaillée de la zone « État » des données d'entrée(PDI)
Le tableau suivant présente une vue détaillée de la zone « Paramètres ».
| Vue détaillée de la zone « Paramètres » | |||||||||||||||
| PDI Byte 3 PDI Byte 2 | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| index addressed target | |||||||||||||||
Tab. 63 : Vue détaillée de la zone « Paramètres » des données d'entrée (PDI)
4.6.4.2 Informations relatives à l'état du Motion Terminal (canal d'info)
Le canal 25 permet la lecture de diverses informations reproduisant l'état du Motion Terminal.
| Informations matériellesCanal 25, addressed target 1 | ||
| Index Signification Valeur en chif- | fres | |
| 1 ID matériel du contrôleur CTMM-S1-C 1 | ||
| 2 ID matériel de la carte d'interconnexion 1 | ||
| 21 Révision matérielle du distributeur 0 1 | ||
| 41 Révision matérielle du distributeur 1 1 | ||
| 61 Révision matérielle du distributeur 2 1 | ||
| 81 Révision matérielle du distributeur 3 1 | ||
| 101 Révision matérielle du distributeur 4 1 | ||
| 121 Révision matérielle du distributeur 5 1 | ||
| 141 Révision matérielle du distributeur 6 1 | ||
| 161 Révision matérielle du distributeur 7 1 | ||
| 181 Révision matérielle du module d'entrée 1 1 | ||
| 201 Révision matérielle du module d'entrée 2 1 | ||
| Informations logiciellesCanal 25, addressed target 2 | ||
| Index Signification Valeur en chif- | fres | |
| 1 Version | du micrologiciel du contrôleur, numéro majeur 1 | |
| 2 Version | du micrologiciel du contrôleur, numéro mineur 1 | |
| 3 Version | du micrologiciel du contrôleur, numéro de correctif 1 | |
| 5 Version | du Bootloader du contrôleur, numéro majeur 1 | |
| 6 Version | du Bootloader du contrôleur, numéro mineur 1 | |
| 7 Version | du Bootloader du contrôleur, numéro de correctif 1 | |
| 21 Version | du micrologiciel du distributeur 0, numéro majeur 1 | |
| 22 Version | du micrologiciel du distributeur 0, numéro mineur 1 | |
| 23 Version | du micrologiciel du distributeur 0, Patch Number 1 | |
| 25 Version | du Bootloader du distributeur 0, numéro majeur 1 | |
| 26 Version | du Bootloader du distributeur 0, numéro mineur 1 | |
| 27 Version | du Bootloader du distributeur 0, version de correctif 1 | |
| 41 Version | du micrologiciel du distributeur 1, numéro majeur 1 | |
| 42 Version | du micrologiciel du distributeur 1, numéro mineur 1 | |
| 43 Version | du micrologiciel du distributeur 1, Patch Number 1 | |
| 45 Version | du Bootloader du distributeur 1, numéro majeur 1 | |
| 46 Version | du Bootloader du distributeur 1, numéro mineur 1 | |
| 47 Version | du Bootloader du distributeur 1, numéro de correctif 1 | |
| 61 Version | du micrologiciel du distributeur 2, numéro majeur 1 | |
| 62 Version | du micrologiciel du distributeur 2, numéro mineur 1 | |
| 63 Version | du micrologiciel du distributeur 2, Patch Number 1 | |
| 65 Version | du Bootloader du distributeur 2, numéro majeur 1 | |
| 66 Version | du Bootloader du distributeur 2, numéro mineur 1 | |
| 67 Version | du Bootloader du distributeur 2, numéro de correctif 1 | |
| 81 Version | du micrologiciel du distributeur 3, numéro majeur 1 | |
| 82 Version | du micrologiciel du distributeur 3, numéro mineur 1 | |
| 83 Version | du micrologiciel du distributeur 3, Patch Number 1 | |
| 85 Version | du Bootloader du distributeur 3, numéro majeur 1 | |
| 86 Version | du Bootloader du distributeur 3, numéro mineur 1 | |
Tab. 64 : Informations matérielles
Informations logicielles Canal 25, addressed target 2
| Index Signification Valeur en chif- | fres | |
| 87 Version du Bootloader du distributeur 3, numéro de correctif 1 | ||
| 101 Version du micrologiciel du distributeur 4, numéro majeur 1 | ||
| 102 Version du micrologiciel du distributeur 4, numéro mineur 1 | ||
| 103 Version du micrologiciel du distributeur 4, Patch Number 1 | ||
| 105 Version du Bootloader du distributeur 4, numéro majeur 1 | ||
| 106 Version du Bootloader du distributeur 4, numéro mineur 1 | ||
| 107 Version du Bootloader du distributeur 4, numéro de correctif 1 | ||
| 121 Version du micrologiciel du distributeur 5, numéro majeur 1 | ||
| 122 Version du micrologiciel du distributeur 5, numéro mineur 1 | ||
| 123 Version du micrologiciel du distributeur 5, Patch Number 1 | ||
| 125 Version du Bootloader du distributeur 5, numéro majeur 1 | ||
| 126 Version du Bootloader du distributeur 5, numéro mineur 1 | ||
| 127 Version du Bootloader du distributeur 5, numéro de correctif 1 | ||
| 141 Version du micrologiciel du distributeur 6, numéro majeur 1 | ||
| 142 Version du micrologiciel du distributeur 6, numéro mineur 1 | ||
| 143 Version du micrologiciel du distributeur 6, Patch Number 1 | ||
| 145 Version du Bootloader du distributeur 6, numéro majeur 1 | ||
| 146 Version du Bootloader du distributeur 6, numéro mineur 1 | ||
| 147 Version du Bootloader du distributeur 6, numéro de correctif 1 | ||
| 161 Version du micrologiciel du distributeur 7, numéro majeur 1 | ||
| 162 Version du micrologiciel du distributeur 7, numéro mineur 1 | ||
| 163 Version du micrologiciel du distributeur 7, numéro de correctif 1 | ||
| 165 Version du Bootloader du distributeur 7, numéro majeur 1 | ||
| 166 Version du Bootloader du distributeur 7, numéro mineur 1 | ||
| 167 Version du Bootloader du distributeur 7, numéro de correctif 1 | ||
| 181 Version du micrologiciel du module d'entrée 1, numéro majeur 1 | ||
| 182 Version du micrologiciel du module d'entrée 1, numéro mineur 1 | ||
| 183 Version du micrologiciel du module d'entrée 1, Patch Number 1 | ||
| 185 Version du Bootloader du module d'entrée 1, numéro majeur 1 | ||
| Informations logiciellesCanal 25, addressed target 2 | ||
| Index Signification Valeur en chif- | fres | |
| 186 Version du Bootloader du module d'entrée 1, numéro mineur 1 | ||
| 187 Version du Bootloader du module d'entrée 1, Patch Number 1 | ||
| 201 Version du micrologiciel du module d'entrée 2, numéro majeur 1 | ||
| 202 Version du micrologiciel du module d'entrée 2, numéro mineur 1 | ||
| 203 Version du micrologiciel du module d'entrée 2, Patch Number 1 | ||
| 205 Version du Bootloader du module d'entrée 2, numéro majeur 1 | ||
| 206 Version du Bootloader du module d'entrée 2, numéro mineur 1 | ||
| 207 Version du Bootloader du module d'entrée 2, Patch Number 1 | ||
Tab. 65 : Informations logicielles
| Informations sur les licencesCanal 25, addressed target 3 | ||
| Index Signification Valeur | en chif-fres | |
| 1 ... 59 Nombre de licences pour Motion App #01 ... #59 (conformément au fichier de licence chargé) | 1 | |
| 101 ... 159 Nombre de licences libres pour Motion App #01... #59 (en fonction de l'utilisation actuelle) | 1 | |
| 253 Durée restante de la période de démonstration, nombre d'heures hh (concernant le format horaire hh:mm) | 1 | |
| 254 Durée restante de la période de démonstration, nombre de minutes mm (concernant le format horaire hh:mm) | 1 | |
Tab. 66 : Informations sur les licences
| Product KeyCanal 25, addressed target 4 | |||
| Index Signif | cation Valeur | ||
| 1 Product Key | Controller 1er caractère(octet de poids fort, non signé) | (octet de poids fort, non signé) | Caractère ASCII |
| 2e caractère (octet de poids faible, non signé) | Caractère ASCII | ||
| 2 3e caractère | signé) | Caractère ASCII | |
| 4e caractère (octet de poids faible, non signé) | Caractère ASCII | ||
| 3 5e caractère | (octet de poids fort, non signé) | signé) | Caractère ASCII |
| 6e caractère (octet de poids faible, non signé) | Caractère ASCII | ||
| 4 7e caractère | (octet de poids fort, non signé) | signé) | Caractère ASCII |
| 8e caractère (octet de poids faible, non signé) | Caractère ASCII | ||
| 5 9e caractère | (octet de poids fort, non signé) | signé) | Caractère ASCII |
| 10. caractère (octet de poids faible, non signé) | Caractère ASCII | ||
| 6 11. caractère | (octet de poids fort, non signé) | non signé) | Caractère ASCII |
| 12. caractère (octet de poids faible, non signé) | Caractère ASCII | ||
Tab. 67 : Product Key
| Valeurs de pressionCanal 25,adressed target 11 | ||
| Index Signification Valeur en chif- | fres | |
| 1 Pression d'alimentation au niveau du raccord (1) (absolue) 0,001 bar | ||
| 2 Pression d'alimentation au niveau du raccord (1) (relative) 0,001 bar | ||
| 3 Pression d'échappement au niveau du raccord (3) (absolue) 0,001 bar | ||
| 4 Pression d'échappement au niveau du raccord (3) (relative) 0,001 bar | ||
| 5 Pression ambiante (absolue) 0,001 bar | ||
| 21 Pression au niveau du distributeur 0, raccord d'air de travail (2)(absolue) | 0,001 bar | |
| 22 Pression au niveau du distributeur 0, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 23 Pression au niveau du distributeur 0, raccord d'air de travail (4)(absolue) | 0,001 bar | |
| 24 Pression au niveau du distributeur 0, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 41 Pression au niveau du distributeur 1, raccord d'air de travail (2)(absolue) | 0,001 bar | |
| 42 Pression au niveau du distributeur 1, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 43 Pression au niveau du distributeur 1, raccord d'air de travail (4)(absolue) | 0,001 bar | |
| 44 Pression au niveau du distributeur 1, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 61 Pression au niveau du distributeur 2, raccord d'air de travail (2)(absolue) | 0,001 bar | |
| 62 Pression au niveau du distributeur 2, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 63 Pression au niveau du distributeur 2, raccord d'air de travail (4)(absolue) | 0,001 bar | |
| 64 Pression au niveau du distributeur 2, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 81 Pression au niveau du distributeur 3, raccord d'air de travail (2)(absolue) | 0,001 bar | |
Valeurs de pression Canal 25, adressed target 11
| Index Signification Valeur en chif- | fres | |
| 82 Pression au niveau du distributeur 3, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 83 Pression au niveau du distributeur 3, raccord d'air de travail (4) (absolue) | 0,001 bar | |
| 84 Pression au niveau du distributeur 3, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 101 Pression au niveau du distributeur 4, raccord d'air de travail (2) (absolue) | 0,001 bar | |
| 102 Pression au niveau du distributeur 4, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 103 Pression au niveau du distributeur 4, raccord d'air de travail (4) (absolue) | 0,001 bar | |
| 104 Pression au niveau du distributeur 4, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 121 Pression au niveau du distributeur 5, raccord d'air de travail (2) (absolue) | 0,001 bar | |
| 122 Pression au niveau du distributeur 5, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 123 Pression au niveau du distributeur 5, raccord d'air de travail (4) (absolue) | 0,001 bar | |
| 124 Pression au niveau du distributeur 5, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 141 Pression au niveau du distributeur 6, raccord d'air de travail (2) (absolue) | 0,001 bar | |
| 142 Pression au niveau du distributeur 6, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 143 Pression au niveau du distributeur 6, raccord d'air de travail (4) (absolue) | 0,001 bar | |
| 144 Pression au niveau du distributeur 6, raccord d'air de travail (4) (relative) | 0,001 bar | |
| 161 Pression au niveau du distributeur 7, raccord d'air de travail (2) (absolue) | 0,001 bar | |
| Valeurs de pressionCanal 25, adressed target 11 | ||
| Index Signification Valeur en chif- | fres | |
| 162 Pression au niveau du distributeur 7, raccord d'air de travail (2) (relative) | 0,001 bar | |
| 163 Pression au niveau du distributeur 7, raccord d'air de travail (4) (absolue) | 0,001 bar | |
| 164 Pression au niveau du distributeur 7, raccord d'air de travail (4) (relative) | 0,001 bar | |
Tab. 68 : Valeurs de pression
| TempératuresCanal 25, addressed target 12 | ||
| Index Signification Valeur en chif- | fres | |
| 1 Température au niveau du capteur de pression d'alimentation au niveau du raccord (1) | 0,1 °C | |
| 3 Température au niveau du capteur de pression d'échappement au niveau du raccord (3) | 0,1 °C | |
| 5 Température au niveau du capteur de pression ambiante 0,1 °C | ||
| 21 Température au niveau du distributeur 0, raccord d'air de travail (2) 0,1 °C | ||
| 23 Température au niveau du distributeur 0, raccord d'air de travail (4) 0,1 °C | ||
| 41 Température au niveau du distributeur 1, raccord d'air de travail (2) 0,1 °C | ||
| 43 Température au niveau du distributeur 1, raccord d'air de travail (4) 0,1 °C | ||
| 61 Température au niveau du distributeur 2, raccord d'air de travail (2) 0,1 °C | ||
| 63 Température au niveau du distributeur 2, raccord d'air de travail (4) 0,1 °C | ||
| 81 Température au niveau du distributeur 3, raccord d'air de travail (2) 0,1 °C | ||
| 83 Température au niveau du distributeur 3, raccord d'air de travail (4) 0,1 °C | ||
| 101 Température au niveau du distributeur 4, raccord d'air de travail (2) 0,1 °C | ||
| 103 Température au niveau du distributeur 4, raccord d'air de travail (4) 0,1 °C | ||
| 121 Température au niveau du distributeur 5, raccord d'air de travail (2) 0,1 °C | ||
| 123 Température au niveau du distributeur 5, raccord d'air de travail (4) 0,1 °C | ||
| 141 Température au niveau du distributeur 6, raccord d'air de travail (2) 0,1 °C | ||
| 143 Température au niveau du distributeur 6, raccord d'air de travail (4) 0,1 °C | ||
| TempératuresCanal 25, addressed target 12 | ||
| Index Signification Valeur en chif- | fres | |
| 161 Température au niveau du distributeur 7, raccord d'air de travail (2) 0,1 °C | ||
| 163 Température au niveau du distributeur 7, raccord d'air de travail (4) 0,1 °C | ||
Tab. 69 : Températures
| Courses du vérin auxiliaire (degré d'ouverture)Canal 25, addressed target 13 | ||||
| Index Sig | nification Valeur en chif- | fres | ||
| Distributeur Raccord d'alimentationen air de travail | Vérin auxiliaire | |||
| 21 0 2 Mise sous pression 0,01 % | ||||
| 22 Mise à l'échappement 0,01 % | ||||
| 23 4 Mise sous pression 0,01 % | ||||
| 24 Mise à l'échappement 0,01 % | ||||
| 41 1 2 Mise sous pression 0,01 % | ||||
| 42 Mise à l'échappement 0,01 % | ||||
| 43 4 Mise sous pression 0,01 % | ||||
| 44 Mise à l'échappement 0,01 % | ||||
| 61 2 2 Mise sous pression 0,01 % | ||||
| 62 Mise à l'échappement 0,01 % | ||||
| 63 4 Mise sous pression 0,01 % | ||||
| 64 Mise à l'échappement 0,01 % | ||||
| 81 3 2 Mise sous pression 0,01 % | ||||
| 82 Mise à l'échappement 0,01 % | ||||
| 83 4 Mise sous pression 0,01 % | ||||
| 84 Mise à l'échappement 0,01 % | ||||
| 101 4 2 Mise sous pression 0,01 % | ||||
| 102 | Mise à l'échappement 0,01 % | |||
| 103 | 4 Mise sous pression 0,01 % | |||
| 104 | Mise à l'échappement 0,01 % | |||
| Courses du vérin auxiliaire (degré d'ouverture)Canal 25, addressed target 13 | ||||
| Index Signification Valeur en chif- | fres | |||
| 121 5 2 Mise sous pression à l'échappement | 0,01 % | |||
| 122 Mise | ||||
| 123 4 Mise sous pression à l'échappement | 0,01 % | |||
| 124 Mise | ||||
| 141 6 2 Mise sous pression à l'échappement | 0,01 % | |||
| 142 Mise | ||||
| 143 4 Mise sous pression à l'échappement | 0,01 % | |||
| 144 Mise | ||||
| 161 7 2 Mise sous pression à l'échappement | 0,01 % | |||
| 162 Mise | ||||
| 163 4 Mise sous pression à l'échappement | 0,01 % | |||
| 164 Mise | ||||
Tab. 70 : Courses du booster
| Débits au niveau du distributeur (débit volumétrique) ^1) Canal 25, addressed target 14 | |||
| Index Signification Valeur en chif- | fres | ||
| 22 0 | 2 | 0,1 l/min | |
| 24 | 4 | 0,1 l/min | |
| 26 | 2 (Low Byte, signed) | 10 l/min | |
| 4 (High Byte, signed) | 10 l/min | ||
| 42 1 | 2 | 0,1 l/min | |
| 44 | 4 | 0,1 l/min | |
| 46 | 2 (Low Byte, signed) | 10 l/min | |
| 4 (High Byte, signed) | 10 l/min | ||
| 62 2 | 2 | 0,1 l/min | |
| 64 | 4 | 0,1 l/min | |
Débits au niveau du distributeur (débit volumétrique) ^1) Canal 25, addressed target 14
| Index Signification Valeur en chif- | fres | ||
| 66 2 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
| 82 3 2 0,1 l/min | |||
| 84 4 0,1 l/min | |||
| 86 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
| 102 4 2 0,1 l/min | |||
| 104 4 0,1 l/min | |||
| 106 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
| 122 5 2 0,1 l/min | |||
| 124 4 0,1 l/min | |||
| 126 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
| 142 6 2 0,1 l/min | |||
| 144 4 0,1 l/min | |||
| 146 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
| 162 7 2 0,1 l/min | |||
| 164 4 0,1 l/min | |||
| 166 2 (Low Byte, signed) 10 l/min | |||
| 4 (High Byte, signed) 10 l/min | |||
1) Débit volumétrique en supposant une densité d'air dans des conditions normales selon ISO 8778/DIN 1945-1 (densité 1,1850 kg/m³ d'air sec à 20 °C) calculé en fonction des levées de soupape et des pressions actuelles en (1), (2) ou (4) et (3). Les signaux de pression sont utilisés non filtrés, les valeurs de retour varieront donc dans les mêmes conditions en fonction du bruit des capteurs de pression.
Tab. 71 : Débits au niveau du distributeur
| Signaux de proximitéCanal 25, addressed target 21 | ||
| Index Signification Valeur en chif- | fres | |
| 181 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 0 | 1 | |
| 182 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 0 | 1 | |
| 183 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 1 | 1 | |
| 184 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 1 | 1 | |
| 185 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 2 | 1 | |
| 186 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 2 | 1 | |
| 187 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 3 | 1 | |
| 188 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 3 | 1 | |
| 189 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 4 | 1 | |
| 190 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 4 | 1 | |
| 191 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 5 | 1 | |
| 192 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 5 | 1 | |
| 193 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 6 | 1 | |
| 194 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 6 | 1 | |
| 195 Valeur brute provenant du capteur de proximité sur le module d'entrée 1, raccord 7 | 1 | |
| 196 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 1, raccord 7 | 1 | |
Signaux de proximité Canal 25, addressed target 21
| Index Signification Valeur en chif- | fres | |
| 201 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 0 | 1 | |
| 202 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 0 | 1 | |
| 203 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 1 | 1 | |
| 204 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 1 | 1 | |
| 205 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 2 | 1 | |
| 206 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 2 | 1 | |
| 207 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 3 | 1 | |
| 208 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 3 | 1 | |
| 209 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 4 | 1 | |
| 210 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 4 | 1 | |
| 211 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 5 | 1 | |
| 212 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 5 | 1 | |
| 213 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 6 | 1 | |
| 214 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 6 | 1 | |
| Signaux de proximitéCanal 25, addressed target 21 | ||
| Index Signification Valeur en chif- | fres | |
| 215 Valeur brute provenant du capteur de proximité sur le module d'entrée 2, raccord 7 | 1 | |
| 216 Valeur interprétée provenant du capteur de proximité sur le module d'entrée 2, raccord 7 | 1 | |
Tab. 72 : Signaux de proximité
| PositionsCanal 25, addressed target 22 | ||
| Index Signification Valeur en chif- | fres | |
| 181 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 0 | 0,001 mA | |
| 182 Valeur interprétée provenant du capteur de position sur le module d'en-trée 1, raccord 0 | 0,1 mm | |
| 183 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 1 | 0,001 mA | |
| 184 Valeur interprétée provenant du capteur de position sur le module d'en-trée 1, raccord 1 | 0,1 mm | |
| 185 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 2 | 0,001 mA | |
| 186 Valeur interprétée provenant du capteur de position sur le module d'en-trée 1, raccord 2 | 0,1 mm | |
| 187 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 3 | 0,001 mA | |
| 188 Valeur interprétée provenant du capteur de position sur le module d'en-trée 1, raccord 3 | 0,1 mm | |
| 189 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 4 | 0,001 mA | |
| 190 Valeur interprétée provenant du capteur de position sur le module d'en-trée 1, raccord 4 | 0,1 mm | |
| 191 Valeur brute provenant du capteur de position sur le module d'entrée 1,raccord 5 | 0,001 mA | |
| Index Signification Valeur en chif- | fres | |
| 192 Valeur interprétée provenant du capteur de position sur le module d'entrée 1, raccord 5 | 0,1 mm | |
| 193 Valeur brute provenant du capteur de position sur le module d'entrée 1, raccord 6 | 0,001 mA | |
| 194 Valeur interprétée provenant du capteur de position sur le module d'entrée 1, raccord 6 | 0,1 mm | |
| 195 Valeur brute provenant du capteur de position sur le module d'entrée 1, raccord 7 | 0,001 mA | |
| 196 Valeur interprétée provenant du capteur de position sur le module d'entrée 1, raccord 7 | 0,1 mm | |
| 201 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 0 | 0,001 mA | |
| 202 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 0 | 0,1 mm | |
| 203 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 1 | 0,001 mA | |
| 204 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 1 | 0,1 mm | |
| 205 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 2 | 0,001 mA | |
| 206 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 2 | 0,1 mm | |
| 207 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 3 | 0,001 mA | |
| 208 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 3 | 0,1 mm | |
| 209 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 4 | 0,001 mA | |
| 210 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 4 | 0,1 mm | |
| 211 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 5 | 0,001 mA | |
| PositionsCanal 25, addressed target 22 | ||
| Index Signification Valeur en chif- | fres | |
| 212 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 5 | 0,1 mm | |
| 213 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 6 | 0,001 mA | |
| 214 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 6 | 0,1 mm | |
| 215 Valeur brute provenant du capteur de position sur le module d'entrée 2, raccord 7 | 0,001 mA | |
| 216 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 7 | 0,1 mm | |
Tab. 73 : Positions
| Débits au niveau du capteur externeCanal 25, addressed target 23 | ||
| Index Signification Valeur en chif- | fres | |
| 181 Valeur brute du capteur de débit sur le module d'entrée 1, port 0 0,001 mA | ||
| 182 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 0 0,1 l/min | ||
| 183 Valeur brute du capteur de débit sur le module d'entrée 1, port 1 0,001 mA | ||
| 184 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 1 0,1 l/min | ||
| 185 Valeur brute du capteur de débit sur le module d'entrée 1, port 2 0,001 mA | ||
| 186 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 2 0,1 l/min | ||
| 187 Valeur brute du capteur de débit sur le module d'entrée 1, port 3 0,001 mA | ||
| 188 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 3 0,1 l/min | ||
| 189 Valeur brute du capteur de débit sur le module d'entrée 1, port 4 0,001 mA | ||
| 190 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 4 0,1 l/min | ||
| 191 Valeur brute du capteur de débit sur le module d'entrée 1, port 5 0,001 mA | ||
| 192 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 5 0,1 l/min | ||
| 193 Valeur brute du capteur de débit sur le module d'entrée 1, port 6 0,001 mA | ||
| 194 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 6 0,1 l/min | ||
| 195 Valeur brute du capteur de débit sur le module d'entrée 1, port 7 0,001 mA | ||
| Débits au niveau du capteur externeCanal 25, addressed target 23 | ||
| Index Signification Valeur en chif- | fres | |
| 196 Valeur interprétée du capteur de débit sur le module d'entrée 1, port 7 0,1 l/min | ||
| 201 Valeur brute du capteur de débit sur le module d'entrée 2, port 0 0,001 mA | ||
| 202 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 0 0,1 l/min | ||
| 203 Valeur brute du capteur de débit sur le module d'entrée 2, port 1 0,001 mA | ||
| 204 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 1 0,1 l/min | ||
| 205 Valeur brute du capteur de débit sur le module d'entrée 2, port 2 0,001 mA | ||
| 206 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 2 0,1 l/min | ||
| 207 Valeur brute du capteur de débit sur le module d'entrée 2, port 3 0,001 mA | ||
| 208 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 3 0,1 l/min | ||
| 209 Valeur brute du capteur de débit sur le module d'entrée 2, port 4 0,001 mA | ||
| 210 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 4 0,1 l/min | ||
| 211 Valeur brute du capteur de débit sur le module d'entrée 2, port 5 0,001 mA | ||
| 212 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 5 0,1 l/min | ||
| 213 Valeur brute du capteur de débit sur le module d'entrée 2, port 6 0,001 mA | ||
| 214 Valeur interprétée du capteur de débit sur le module d'entrée 2, port 6 0,1 l/min | ||
| 215 Valeur brute du capteur de débit sur le module d'entrée 2, port 7 0,001 mA | ||
| 216 Valeur interprétée provenant du capteur de position sur le module d'entrée 2, raccord 7 | 0,1 l/min | |
Tab. 74 : Débits au niveau du capteur externe
4.6.4.3 Signal de retour en cas de données de sortie invalides
Si, à l'intérieur des données de sortie, une information invalide a été transmise, un signal de retour correspondant est émis via les données d'entrée du mode de transfert :
- Mode de fonctionnement du distributeur (valve mode) : 63 (mode de transfert actif) (octet PDI 0, bits 5 ... 0 => 111111₂)
-État du distributeur : valve state → 4.6.2.2 Structure des données d'entrée (PDI).
-Canal (channel) : non affecté (octet PDI 1, bits 4 ... 0 => 0)
- Commande de transfert (transfer control) : non affectée (octet PDI 1, bits 7... 5 => 0)
- Adressage de la transmission de données (addressed target) : non affecté (octet PDI 2 => 0)
-Index (index) : non affecté (octet PDI 3 => 0)
-Valeur (value) : (octet PDI 5 ... 4) → Tab. 75 Affectation de l'information invalide
Affectation de l'information invalide
La zone « Valeur » (value) représente la partie des données de sortie contenant des informations invalides.
| Valeur invalid command Signification | ||
| 1 invalid channel Valeur invalide dans la zone « channel » | ||
| 2 invalid transfer control Valeur invalide dans la zone « transfer control » | ||
| 3 invalid addressed target Valeur invalide dans la zone « addressed target » | ||
| 4 invalid index Valeur invalide dans la zone « index » | ||
| 5 invalid value Valeur invalide dans la zone « value » | ||
| 6 invalid combination Combinaison invalide de valeurs dans différentes zones | ||
| 7 access denied, data in use Les données sont actuellement utilisées par un autre distributeur | ||
| 8 no data, slot is empty Les données adressées ne sont pas disponibles car aucun distributeur n'est installé à l'emplacement dont la zone de données de processus est utilisée pour la communication. | ||
Tab. 75 : Affectation de l'information invalide
Exemple de données d'entrée en cas de valeur incorrecte dans la zone « index »
| Octet PDI 1 Octet PDI 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 0 0 | 0 0 0 0 | 0 ... ... | 1 1 1 | 1 1 1 | |||||||||||
| transfer control = 0 | channel = 0 valve state valve mode = 63 (mode de transfert) | ||||||||||||||
| Octet PDI 3 Octet PDI 2 | |||||||||||||||
| Paramètres | |||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 0 0 | 0 0 0 0 | 0 0 0 | 0 0 0 0 | 0 0 | |||||||||||
| index = 0 addressed target = 0 | |||||||||||||||
| Octet PDI 5 Octet PDI 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | ||
| 0 0 0 | 0 0 0 0 | 0 0 0 | 0 0 0 1 | 0 0 | |||||||||||
| value = 4 | |||||||||||||||
Tab. 76 : Exemple de données d'entrée en cas de valeur incorrecte dans la zone « index »
4.6.4.4 Enregistrement persistant des réglages
Pour enregistrer les valeurs actuelles d'un distributeur de manière persistante sur le Motion Terminal, on utilise la méthode de commande de transfert « save persistent » (transfer control = 4). Ici, aucun canal spécial n'est requis, la valeur de la zone « channel » ne sera pas analysée.
i
Après l'exécution de la course d'apprentissage, il faut dans tous les cas exécuter la fonction « Enregistrer de manière persistante ». Les paramètres adaptés relatifs aux données obtenues lors de la course d'apprentissage seront enregistrées de manière durable sur le contrôleur du Motion Terminal.
Sinon, après un redémarrage du Motion Terminal, il faudra de nouveau exécuter la course d'apprentissage (→ 4.8.6 Validité des données d'apprentissage après des modifications de paramètre).
État de la procédure d'enregistrement
L'état de la procédure d'enregistrement est représenté dans la zone « Valeur » (value) des données d'entrée (PDI).
| Valeur saving progress Signification/Remède | ||
| 1 saving in progress La procédure d'enregistrement est en cours. | ||
| 2 saving successful La procédure d'enregistrement est terminée. | ||
| 3 saving not possible La procédure d'enregistrement ne peut pas être exécutée.-Répéter la procédure.-En cas de nouvelle apparition, contacter l'assistance technique de Festo. | ||
| 4 saving failed La procédure d'enregistrement a échoué. | - Répéter la procédure.- En cas de nouvelle apparition, contacter l'assistance technique de Festo. | |
Tab. 77 : État de la procédure d'enregistrement
| Contenu des données de sortie pour l'enregistrement persistant | ||||||||||||||||
| PDO octet 1 PDO octet 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 1 0 0 | ... ... ... | ... ... ... | ... ... 1 | 1 1 1 1 | 1 | |||||||||||
| transfer control = 4 (save persistent) | channel = ... (est ignoré) - | valve | mode = 63 (mode de transfert) | |||||||||||||
| PDO octet 3 PDO octet 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | ||||
| ... ... | ... ... ... | ... ... ... | ... ... ... | ... ... ... | ... ... ... | |||||||||||
| index = ... (est ignoré) | addressed target ... (est ignoré) | |||||||||||||||
Contenu des données de sortie pour l'enregistrement persistant
| PDO octet 5 PDO octet 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit15 | Bit14 | Bit13 | Bit12 | Bit11 | Bit10 | Bit 9 | Bit 8 Bit | Bit 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | Bit 2 Bit | 1 Bit 0 | ||
| ... ... | ... ... | ... ... | ... ... | ... ... | ... ... | ... ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| value ... (est ignoré) | |||||||||||||||
Tab. 78 : Contenu des données de sortie pour l'enregistrement persistant
| Contenu des données d'entrée en cas de procédure d'enregistrement réussie | ||||||||||||||||
| PDI octet 1 PDI octet 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 1 0 0 | ... ... ... | ... ... ... | ... ... 1 | 1 1 1 1 | 1 | |||||||||||
| transfer control = 4 (save persistent) | channel = ... valve state valve mode = 63 (mode de transfert) | |||||||||||||||
| PDI octet 3 PDI octet 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 0 0 | 0 0 0 0 | 0 0 0 0 | 0 0 0 0 | 0 0 | ||||||||||||
| index = 0 addressed target = 0 | ||||||||||||||||
| PDI octet 5 PDI octet 4 | ||||||||||||||||
| Valeur | ||||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | |||
| 0 0 0 | 0 0 0 0 | 0 0 0 0 | 0 0 0 0 | 1 0 | ||||||||||||
| value = 2 (saving successful) | ||||||||||||||||
Tab. 79 : Contenu des données d'entrée en cas de procédure d'enregistrement réussie
4.7 Motion App #01 : fonctions de distributeurs
| ID de la Motion App Désignation | de la Motion App Pictogramme de la Motion App |
| 01 Fonctions de distributeurs |
Tab. 80 : Motion App #01 : fonctions de distributeurs

L'ID de la Motion App doit être transférée via la zone « Mode de fonctionnement du distributeur (valve mode) » des données de process (bits 5 ... 0 de l'octet 0 (PDO)) afin de pouvoir exploiter la Motion App sur un distributeur (→ 4.6.3 Exploitation d'une Motion App).
4.7.1 Description de fonctionnement
La Motion App propose 9 fonctions de distributeur susceptibles d'être exécutées par le distributeur correspondant. La fonction de distributeur permet d'affecter à un distributeur du Motion Terminal les propriétés d'un distributeur conventionnel. Les capteurs intégrés permettent de surveiller la position de commutation ainsi que la pression au niveau des raccords d'air de travail. En cas d'interruption de l'alimentation en pression de pilotage ou de l'alimentation électrique, le distributeur repasse en position de repos mécanique (tous les canaux sont bloqués).
Les types de distributeur répertoriés peuvent être affectés de manière cyclique à un distributeur via les données de processus du terminal CPX (→ Tab. 85 Type de distributeur). De plus, l'état de commutation du type de distributeur correspondant peut être prédéfini de manière cyclique via les données de processus du terminal CPX.
4.7.2 Capteurs requis
La Motion App ne nécessite aucun capteur externe. En option, l'utilisation de capteurs de vérin est possible. Si ces derniers sont censés être utilisés dans les valeurs retournées de la Motion App
(→ 4.7.6.1 État de la Motion App (app state)), l'affectation des entrées de capteur à la Motion App (au distributeur) doit s'effectuer via l'interface WebConfig ou par la commande de niveau supérieur
(→ 4.7.3 Paramètres système utilisés).
4.7.3 Paramètres système utilisés
| ID Paramètres système Plage de valeurs | |
| 70 Entrée de capteur pour détection de fin de course Rentré ^1) (en option) | 20 ... 27 ou 40 ... 47 et 50 ... 57 ou 80 ... 87 et 90 ... 97 ^2) |
| 71 Entrée de capteur pour détection de fin de course Sorti ^3) (en option) | 20 ... 27 ou 40 ... 47 et 50 ... 57 ou 80 ... 87 et 90 ... 97 ^2) |
1) (2) sous pression, (4) à l'échappement
2) en fonction de la version d'appareil (position des modules d'entrée)
3) (4) sous pression, (2) à l'échappement
Tab. 81 : Paramètres système
4.7.3.1 Entrée de capteur pour la détection de fin de course Rentré ((2) sous pression, (4) à l'échappement)
Ce paramètre ne doit être activé qu'en cas d'utilisation de capteurs de vérin et s'ils sont censés être analysés dans la valeur de retour (en option). La valeur du paramètre se calcule à partir de la position du module d'entrée (emplacement), multipliée par le facteur 10, ajoutée au numéro de l'entrée sur ce module d'entrée (0 ... 7).
| ID Plage de valeurs Composition de la valeur (calcul des digits) | ||
| 70 20 ... 27(Motion Terminal avec 2 emplacements de distributeurs et un emplacement pour modules d'entrée) | [Emplacement module d'entrée] ×10 + [Numéro entrée de capteur] × 1 | |
Tab. 82 : Entrée de capteur pour détection de fin de course Rentrée
4.7.3.2 Entrée de capteur pour la détection de fin de course Sorti ((4) sous pression, (2) à l'échappement)
Ce paramètre ne doit être activé qu'en cas d'utilisation de capteurs de vérin et s'ils sont censés être analysés dans la valeur de retour (en option). La valeur du paramètre se calcule à partir de la position du module d'entrée (emplacement), multipliée par le facteur 10, ajoutée au numéro de l'entrée sur ce module d'entrée (0 ... 7).
| ID Plage de valeurs Composition de la valeur | (calcul des digits) |
| 71 20 ... 27(Motion Terminal avec 2 emplacements de distributeurs et un emplacement pour modules d'entrée) | [Emplacement module d'entrée] ×10 + [Numéro entrée de capteur] × 1 |
| 40 ... 47 et 50 ... 57(Motion Terminal avec 4 emplacements de distributeurs et 2 emplacements pour modules d'entrée) | |
| 80 ... 87 et 90 ... 97(Motion Terminal avec 8 emplacements de distributeurs et 2 emplacements pour modules d'entrée) |
Tab. 83 : Entrée de capteur pour détection de fin de course Sorti
4.7.4 Paramètres d'application utilisés
le mode de fonctionnement
Le paramètre permet de définir la réaction du distributeur pour ce qui est de la consommation propre en air comprimé et de la compatibilité au changement rapide entre deux Motion Apps.
Modes de fonctionnement possibles :
- piloté :
fonctionnement en tant que distributeur classique avec une faible consommation propre en air comprimé, des temps de commutation brefs, une ouverture/fermeture sûre. Lors du passage à une autre Motion App ou à la Motion App #01 en mode de fonctionnement « régulé », un nouveau calibrage du distributeur s'avère nécessaire (→ 4.5.5 Temps d'attente entre les Motion Apps).
- régulé :
fonctionnement en mode de compatibilité au changement rapide entre deux Motion Apps. Consommation propre en air comprimé plus élevée mais pas de temps d'attente lors du passage à d'autres Motion Apps.
| ID mode de fonctionnement sélectionné Valeur du paramètre | ||
| 223 piloté 0 (réglage standard) | ||
Tab. 84 : le mode de fonctionnement
4.7.5 Valeurs prédéfinies

Description générale de la structure des données de processus lors de l'exploitation d'une Motion
App : (→ 4.6.2 Structure des données de processus en cas d'exploitation d'une Motion App).
4.7.5.1 Réglage de la Motion App (app option)
Type de distributeur
Le type du distributeur est défini avec l'octet 1 (PDO).
| Type de distributeur Valeur déc. | |
| 4/3 G (fermé au repos) 1 | |
| 4/3 B (ouvert au repos) 2 | |
| 4/3 E (ouvert au repos) 3 | |
| 2 × 3/2 O (ouvert au repos) 4 | |
| 2 × 3/2 G (fermé au repos) 5 | |
| 3/2 O + 3/2 G 6 | |
| 4/2 bistable 7 | |
| 2 × 2/2 G (fermé au repos) 8 | |
| 4/2 monostable 9 |
Tab. 85 : Type de distributeur
4.7.5.2 Commande de la Motion App (app control)
État de commutation du distributeur
L'état de commutation au niveau des raccords d'air de travail (2) et (4) du distributeur est commandé avec les bits 7 ... 6 de l'octet 0 (PDO) et dépend du type de distributeur défini.
États de commutation possibles :
-fermé (G)
- sous pression (B)
- à l'échappement (E)
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 4/3 G (4) (2) Bit 7 Bit 6 | 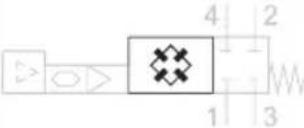 | |||||
| Position de repos : fermé G G 0 0 0 | ||||||
| E B 0 1 1 | 4 1 21 3 | |||||
| B E 1 0 2 | 4 1 21 3 | |||||
| G G 1 1 3 | 4 1 21 3 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 86 : Type de distributeur 4/3 G
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 4/3 B (4) (2) Bit 7 Bit 6 |  | |||||
Position de repos : sous pression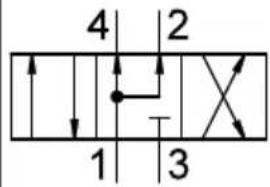 | B B 0 0 0 | 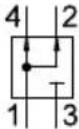 | ||||
| E B 0 1 1 |  | |||||
| B E 1 0 2 | 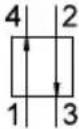 | |||||
| B B 1 1 3 | 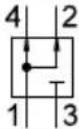 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 87 : Type de distributeur 4/3 B
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 4/3 E (4) (2) Bit 7 Bit 6 |  | |||||
Position de repos : à l'échappement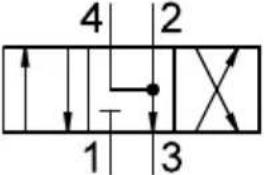 | E E 0 0 0 |  | ||||
| E B 0 1 1 |  | |||||
| B E 1 0 2 | 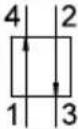 | |||||
| E E 1 1 3 | 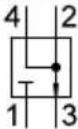 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 88 : Type de distributeur 4/3 E
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 2 × 3/2 O (4) (2) Bit 7 Bit 6 | 4 | 2 | |||||
Position de repos : ouvert B B 0 0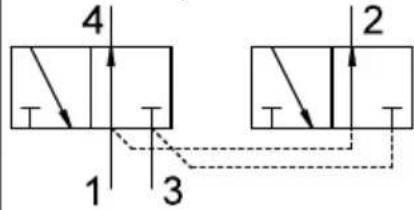 | 0 | 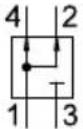 | ||||
| E B 0 1 1 |  | |||||
| B E 1 0 2 | 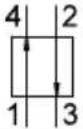 | |||||
| E E 1 1 3 | 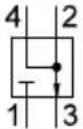 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 89 : Type de distributeur 2 × 3/2 0
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 2 × 3/2 G (4) (2) Bit 7 Bit 6 | | |||||
Position de repos : fermé E E 0 0 0 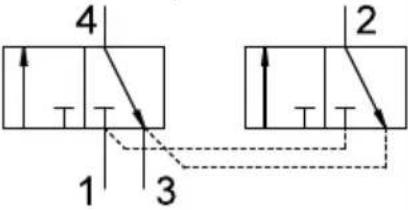 |  | |||||
| B E 0 1 1 | 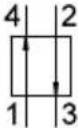 | |||||
| E B 1 0 2 | 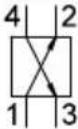 | |||||
| B B 1 1 3 | 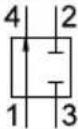 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 90 : Type de distributeur 2 × 3/2 G
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 3/2 O + 3/2 G (4) (2) Bit 7 Bit 6 |  | |||||
Position de repos : rentrer ((2) sous pression, (4) à l'échappement)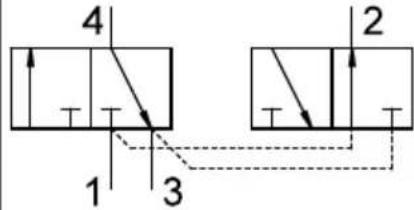 | E B 0 0 0 | 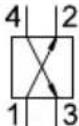 | ||||
| B B 0 1 1 | 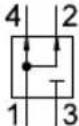 | |||||
| E E 1 0 2 | 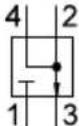 | |||||
| B E 1 1 3 | 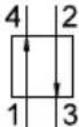 | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 91 : Type de distributeur 3/2 O + 3/2 G
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 4/2 bistable (4) (2) Bit 7 Bit 6 |  | |||||
Position de repos : lors du premier appel du type de distributeur, (2) et (4) sont bloqués. En cas de passage d'un autre type de distributeur à 4/2 bistable, sa dernière position de commutation reste active.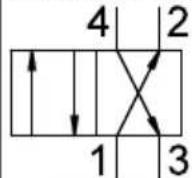 | Maintenir l'état 0 0 0 | |||||
| E B 0 1 1 |  | |||||
| B E 1 0 2 | 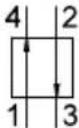 | |||||
| Maintenir l'état 1 1 3 | ||||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 92 : Type de distributeur 4/2 bistable
Fonction
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | |||
| 2 × 2/2 G (4) (2) Bit 7 Bit 6 |  | |||||
Position de repos : fermé G G 0 0 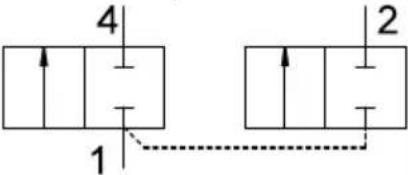 |  | |||||
| B G 0 1 1 |  | |||||
| G B 1 0 2 |  | |||||
| B B 1 1 3 |  | |||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
Tab. 93 : Type de distributeur 2 × 2/2 G
| Type de distributeur conventionnel | État de commutation | Symbole de rechange1) | Octet 0 Déc. | ||||
| 4/2 monostable (4) (2) Bit 7 |  | 2) | Bit 6 | ||||
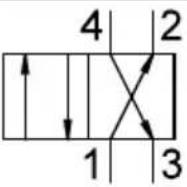 | EB-00 |  | |||||
| BE-11 | 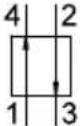 | ||||||
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM-S1-27-... et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonnes de droite).
2) Ce bit est ignoré
Tab. 94 : Type de distributeur 4/2 monostable
4.7.5.3 Valeur de consigne 1 et 2 (setpoint value 1, setpoint value 2)
La Motion App ne recourt à aucune prescription de valeur de consigne.
4.7.6 Valeurs de retour
4.7.6.1 État de la Motion App (app state)
État des entrées numériques (détection de la position finale)
L'état des entrées du module d'entrée numérique CTMM-...-D-... affectées au distributeur actuellement utilisé est représenté via les bits 2 et 0 de l'octet 1 (PDI).
L'affectation des entrées s'effectue dans les paramètres système (→ 4.7.3 Paramètres système utilisés).
| Position Bit 2 Bit 1 Bit 0 | |||
| Fin de course sorti atteinte ^1) | 0/1 -- | ||
| Fin de course rentré atteinte ^2) | -- 0/1 |
1) (4) sous pression, (2) à l'échappement ; position de commutation 14
2) (2) sous pression, (4) à l'échappement ; position de commutation 12
Tab. 95 : État des entrées numériques
Position de commutation au niveau des raccords d'air de travail (2) et (4)
La position de commutation au niveau des raccords de travail (2) et (4) du distributeur est représentée via les bits 6 ... 5 (4) et les bits 4 ... 3 (2) de l'octet 1 (PDI).
| Position de commutation Bit 6 Bit 5 Bit 4 Bit 3 | |||||
| (4) (2) | |||||
| Fermé - 0 0 -- | |||||
| Sous pression - 0 1 -- | |||||
| À l'échappement - 1 0 -- | |||||
| Erreur^1) | - 1 1 -- | ||||
| - Fermé -- 0 0 | |||||
| - Sous pression -- 0 1 | |||||
| - À l'échappement -- 1 0 | |||||
| - Erreur | 1) | -- 1 1 | |||
1) En cas de nouvelle apparition, contacter l'assistance technique de Festo.
Tab. 96 : Position de commutation au niveau des raccords d'air de travail
Avertissements
La présence d'avertissements dans la mémoire de diagnostic du Motion Terminal du distributeur est représentée par le bit 7 de l'octet 1 (PDO).
| Valeur Description |
| 0 Il n'existe aucun avertissement émanant de la Motion App active. |
| 1 Un avertissement est présent dans la mémoire de diagnostic du Motion Terminal. |
Tab. 97 : Avertissement

Traitement des avertissements et des erreurs :→ 4.9 Possibilités de diagnostic.
4.7.6.2 Valeur réelle 1 et 2 (actual value 1, actual value 2)
Pression mesurée au niveau des raccords d'air de travail (2) et (4)
La pression mesurée au niveau des raccords d'air de travail (2) et (4) est représentée en tant que nombre entier signé via les octets 5 ... 4 (PDI) (4) et 3 ... 2 (PDI) (2).
| Raccord | Plage de valeurs Valeur | digit | Zone en chiffres Type de données Octet | (PDI) |
| (4) -1000 | ... +32767 mbar 1 mbar | -1000 ... +32767× 1 mbar | signed int16 5 ... 4 | |
| (2) -1000 | ... +32767 mbar 1 mbar | -1000 ... +32767× 1 mbar | signed int16 3 ... 2 |
Tab. 98 : Pression mesurée au niveau des raccords d'air de travail
4.8 Course d'apprentissage
Pour fonctionner, différentes Motion Apps nécessitent des informations sur la réaction physique des périphériques raccordés. Le Motion Terminal détermine ces informations lors du processus désigné par le terme de « course d'apprentissage ». Les informations sont enregistrées en tant que « données d'apprentissage » au sein d'un jeu de paramètres sur le contrôleur du Motion Terminal (4.5.3.8 Données d'apprentissage).
Une course d'apprentissage peut être exécutée dans 2 modes différents :
- Automatique
Un programme automatique est exécuté pour déterminer et enregistrer les données d'apprentissage. Ce mode est suffisant pour la plupart des applications.
- Manuel
Le distributeur est en mode d'apprentissage. Les mouvements de l'actionneur sont commandés manuellement (via l'interface WebConfig ou par la commande de niveau supérieur).
Des mouvements individuels peuvent être exécutés et analysés par la routine d'apprentissage.
i
Le type de course d'apprentissage susceptible d'être utilisé dépend de la Motion App pour laquelle les données d'apprentissage sont censées être déterminées. Les deux types de course d'apprentissage ne sont pas disponibles pour toutes les Motion Apps. Quelques Motion Apps peuvent être exploitées complètement sans course d'apprentissage préalable.
Les étapes effectuées automatiquement lors d'une course d'apprentissage dépendent de la Motion App concernée par l'apprentissage et, si nécessaire, et sont documentées dans la description de la Motion App correspondante.
4.8.1 Conditions préalables au démarrage de la course d'apprentissage
Avant de lancer une course d'apprentissage pour une Motion App donnée, les paramètres système et d'application utilisés par cette Motion App doivent avoir été paramétrés.
De plus, le paramètre d'application « Motion App à apprendre » (255) doit être paramétré sur l'ID de la Motion App pour laquelle la course d'apprentissage est censée être exécutée (→ 4.5.3.2 Paramètres d'application).
i
Les paramètres d'application peuvent être définis de manière individuelle pour chaque Motion App d'un distributeur (→ 4.5.3.2 Paramètres d'application).
Pour la course d'apprentissage, il faut définir le paramètre d'application « Motion App à apprendre » (255) pour le mode de fonctionnement « Course d'apprentissage » (60). Dans ce cas, la course d'apprentissage est traitée comme une Motion App. C'est l'ID de la Motion App pour laquelle une course d'apprentissage est censée être exécutée qui doit être affecté en tant que valeur au paramètre d'application.
Exemple
Une course d'apprentissage est censée être exécutée pour la Motion App #07 « Préréglage du temps de mouvement ». Pour ce faire, il faut affecter la valeur « 7 » au paramètre d'application « Motion App à apprendre » (255) pour le mode de fonctionnement « Course d'apprentissage » (60).
Fonction
Après la définition du paramètre d'application 255, il faut quitter le mode de transfert. Le distributeur peut désormais être commuté dans le mode de fonctionnement « Course d'apprentissage » (60).
4.8.2 Valeurs prédéfinies
4.8.2.1 Sélection du mode de course d'apprentissage
Le mode de la course d'apprentissage (automatique/manuel) est prédéfini par les bits 7 ... 6 de l'octet 0 (PDO).
| Mode la course d'apprentissage Bit 7 Bit 6 Déc. | |||
| Stopper la course d'apprentissage 0 0 0 | |||
| Exécuter une course d'apprentissage automatique 0 1 1 | |||
| Exécuter une course d'apprentissage manuelle ^1) | 1 0 2 | ||
| Ce mode n'est pas affecté 1 1 3 |
1) Ce mode n'est pas nécessaire pour l'apprentissage de la plupart des Motion Apps et n'est donc pas disponible. Tab. 99 : Mode course d'apprentissage
4.8.2.2 Commande de la course d'apprentissage manuelle
Le mouvement de l'actionneur pour la détermination manuelle des données d'apprentissage est commandé via les octets 3 ... 2 (PDO).
| Fonction État de commu- | tation | Symbole de rechange1)  | Valeur déc. | |
| (4) (2) | ||||
| Bloqué G G 0 | 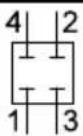 | |||
| Sortir | B E | 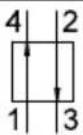 | 1 | |
| Rentrer | E | B 2 | 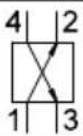 | |
| Mise à l'échappement | E | E | 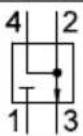 | 3 |
1) Le symbole dans cette colonne remplace le pont intégral sur le plan de montage du distributeur VEVM et représente ainsi la fonction à l'état commuté du distributeur avec valeur de consigne correspondante (colonne de droite).
Tab. 100 : Commande de la course d'apprentissage manuelle
4.8.3 Valeurs de retour
4.8.3.1 Détection des fins de course
Dans la mesure où la Motion App à apprendre exige des capteurs, les informations sur les positions de fin de course atteintes sont représentées par les bits 2 et 0 dans l'octet 1 (PDI).
L'affectation des entrées correspond à la sélection de la consigne via les paramètres système
(→ 4.5.3.1 Paramètres système).
| Position Bit 2 Bit 1 Bit 0 | |||
| Fin de course sorti atteinte ^1) | 0/1 -- | ||
| Fin de course rentré atteinte ^2) | -- 0/1 |
1) (4) sous pression, (2) à l'échappement ; position de commutation 14
2) (2) sous pression, (4) à l'échappement ; position de commutation 12
Tab. 101 : Détection des fins de course
4.8.3.2 État de la course d'apprentissage
L'état actuel de la course d'apprentissage est représenté via les bits 6 ... 3 de l'octet 1 (PDI).
État Bit 6 Bit 5 Bit 4 Bit 3 Déc.
| pas encore démarrée (not started yet) 0 0 0 0 0 | |||||
| non apprise (unlearned) 0 0 0 1 1 | |||||
| Contrôle des tuyaux et des capteurs (check tubes and sensors) | 0 0 1 0 2 | ||||
| Sélection de la stratégie de régulation (choose control) 0 0 | 1 1 3 | ||||
| Adaptation des paramètres de trajectoire (tune trajectory) | 0 1 0 0 4 | ||||
| Déterminer valeur de référence (determine reference value) | 0 1 0 1 5 | ||||
| Identification (identification) 0 1 1 0 6 | |||||
| déjà exploitable, l'identification est toujours en cours (already operable, further identification ongoing) | 1 0 1 0 10 | ||||
| terminée avec des restrictions (completed with limitations, reduced performance) | 1 0 1 1 11 | ||||
| Partiellement terminée ((2) valide)(partitially completed ((2) valide)) | 1 1 0 0 12 | ||||
| Partiellement terminée ((4) valide)(partitially completed ((4) valide)) | 1 1 0 1 13 | ||||
| terminée (completed) 1 1 1 0 14 | |||||
| interrompue avec erreur (aborted with error) | 1 1 1 1 15 |
Tab. 102 : État de la course d'apprentissage
4.8.4 Déroulement de la course d'apprentissage
4.8.4.1 Course d'apprentissage automatique
Après avoir réglé le mode de la course d'apprentissage (→ 4.8.2.1 Sélection du mode de course d'apprentissage ) sur « Exécuter course d'apprentissage automatique », la course d'apprentissage démarre. En fonction de la Motion App pour laquelle la course d'apprentissage est effectuée, les sorties (2) et (4) sont mises sous pression. Un actionneur raccord est alors déplacé.
Ensuite, l'état de la course d'apprentissage passe à la valeur « 14 » (completed) (→ 4.8.3.2 État de la course d'apprentissage).
4.8.4.2 Course d'apprentissage manuelle
La course d'apprentissage manuelle doit être comprise comme une alternative à la course d'apprentissage automatique → 4.8.4.1 Course d'apprentissage automatique. Elle n'est pas disponible pour chaque Motion App.
Après avoir réglé le mode de la course d'apprentissage (→ 4.8.2.1 Sélection du mode de course d'apprentissage) sur « Exécuter course d'apprentissage manuelle », l'actionneur peut être déplacé entre les fins de course via la commande de la course d'apprentissage manuelle (→ 4.8.2.2 Commande de la course d'apprentissage manuelle).
L'état de la course d'apprentissage (→ 4.8.3.2 État de la course d'apprentissage) permet d'observer la procédure.
La course d'apprentissage est terminée lorsque l'état de la course d'apprentissage passe à la valeur « 14 » (completed).
4.8.5 Enregistrement des données d'apprentissage
Les données d'apprentissage et les valeurs de référence déterminées lors de la course d'apprentissage sont automatiquement enregistrées de manière persistante dans le jeu de paramètres actif sur le contrôleur du Motion Terminal.
Pendant l'exploitation de la Motion App, les données d'apprentissage sont contrôlées en continu et adaptées si nécessaire. Ces adaptations aussi sont enregistrées de manière directe et persistante.
4.8.6 Validité des données d'apprentissage après des modifications de paramètre
En cas de modification des paramètres système d'application et/ou de synchronisation, les données d'apprentissage sont rejetées parce que, dans ce cas, il faut partir du principe qu'elles ne sont plus compatibles avec la configuration modifiée.
Par conséquent, après la modification des paramètres système, d'application et/ou de synchronisation dans un jeu de paramètres, il faut de nouveau procéder à une course d'apprentissage pour la Motion App concernée par les modifications.
Pour les Motion Apps #12 « Diagnostic de fuite » et #33 « Positionnement », il n'y a pas de rejet automatique des données d'apprentissage.
i
Les données d'apprentissage sont également réinitialisées lorsque les paramètres système, d'application et/ou de synchronisation toujours identiques sont transférées au démarrage du système par la commande de niveau supérieur sans toutefois ne jamais avoir été enregistrées de manière persistante sur le contrôleur du Motion Terminal. Dans ce cas, le Motion Terminal démarre avec les valeurs par défaut des paramètres. Dès que ces dernières sont écrasées par la commande de niveau supérieur, cette modification des paramètres entraîne un rejet des données d'apprentissage.
Pour éviter ce comportement, les paramètres système, d'application et/ou de synchronisation doivent être enregistrés une bonne fois pour toutes de manière persistante sur le contrôleur du Motion Terminal de sorte que lors du transfert des paramètres toujours identiques par la commande de niveau supérieur, aucune modification entre les valeurs enregistrées et transférées ne puisse être détectée.
Pour des exigences spéciales, il peut être souhaitable de conserver les données d'apprentissage déterminées, même après la modification de paramètres système, d'application ou de synchronisation. À cet effet, il est possible d'activer l'option « Conservation des données d'apprentissage existantes en cas de modifications de paramètres » dans les réglages du Motion Terminal. Le réglage s'effectue alors via le menu de l'interface WebConfig ou via le mode de transfert dans le canal 14 (→ Tab. 60 Signification de l'indice par addressed target et par canal). En cas de modification de paramètres, les données d'apprentissage ne sont ensuite plus automatiquement réinitialisées, au lieu de cela, un message unique est inscrit dans la liste des défauts. Lors de l'activation de cette option, l'utilisateur doit impérativement s'assurer que la combinaison des modifications de paramètres apportées et des données d'apprentissage ne peut pas entraîner une réaction indésirable de l'actionneur.
4.9 Possibilités de diagnostic
Il existe différentes manières de diagnostiquer les dysfonctionnements.
| Possibilité de diagnostic Description | tion Informations détail- | lées |
| Éléments de signalisation LED L'état | tat système général du Motion Terminal est représenté par les éléments de signa-lisation LED sur le contrôleur, les distribu-teurs et les modules d'entrée. | → 4.9.1 Éléments de signalisation LED |
| Diagnostic système CPX Avec les numéros d'erreur CPX, le diag-nostic système CPX fournit des informations sur le type de dysfonctionnement à l'inté-rieur du terminal CPX (Motion terminal compris). | → 4.9.2 Interface de diagnostic→ Manuel du ter-minal CPX | |
| Canal de diagnostic du mode de transfert (Motion Terminal) | Par le biais des informations du diagnostic CPX, le Motion Terminal fournit des informa-tions sur les erreurs et les avertissements. Ces informations peuvent être appelées via le canal de diagnostic du mode de transfert. | → 4.9.3 Canal de diagnostic du mode de transfert |
Tab. 103 : Possibilités de diagnostic
4.9.1 Éléments de signalisation LED
4.9.1.1 Contrôleur
| LED PL (verte) Signification Mesure | |||
 | ONOFF |  | La tension est appliquée. Pas d'erreur. |
 éteinte éteinte |  | La tension n'est pas appliquée. Contrôler le raccordement de l'alimentation électrique. | |
Tab. 104 : Témoin LED PL (Power Load)
| LED M (jaune) Signification | ion Mesure | ||
 allumée allumée |  | Configuration active : l'interface WebConfig possède des droits en écriture ou l'API effectue des accès en écriture sur le paramétrage du contrôleur. | - |
 clignote clignote |  | Option d'utilisation de licences de démonstration active. | Tenir compte de la durée restante de la période de démonstration |
 éteinte éteinte |  | Configuration inactive : pas d'accès via l'interface WebConfig. | - |
Tab. 105 : Témoin LED M (Modify)
| LED PS (verte) Signification Mesure | |||
 allumée allumée |  | La tension est appliquée. Pas d'erreur. | - |
 clignote clignote |  | La tension est appliquée, mais en dehors de la plage de tolérance. | Éliminer le court-circuit/la surcharge. |
 éteinte éteinte |  | La tension n'est pas appliquée. Contrôler le raccordement de l'alimentation électrique. | |
Tab. 106 : Témoin LED PS (Power System)
| LED SF (rouge) Signification Mesure | |||
 éteinte éteinte | ON· OFF OFF | Pas d'erreur – | |
 allumée allumée | ON  OFF OFF | Tension de l'alimentation en tension de charge UVALen dehors de la plage de tolérance. | Éliminer le court-circuit/la surcharge. |
| Accès à l'interface WebConfig impossible ou seulement en partie possible. | Lire et éliminer l'erreur via l'API, CPX-FMT ou FFT.Couper et rétablir l'alimentation en tension de service UEL/SEN. | ||
Tab. 107 : Témoin LED SF (System Failure)
| LED TP (verte) Signification | ion Mesure | |||
 allumée allumée | ONOFF• |  | La connexion réseau est OK (Link) – | |
 clignote clignote | ONOFF• |  | Trafic de données (Traffic) La fré-quence de clignotement dépend du trafic de données. | – |
 éteinte éteinte | ON•OFF• |  | Aucune connexion réseau/Le câble réseau n'est pas raccordé. | Si un accès à l'interface WebConfig est souhaité : vérifier la connexion réseau |
Tab. 108 : Témoin LED TP (Ethernet Link/Traffic)
4.9.1.2 Distributeur
| LED distributeur(bleue/rouge) | Signification Mesure | ||
 |  | Erreur du distributeur Contrôler le journal des erreurs 4.9.3 Canal de diagnostic du mode de transfert. | |
| allumée en rouge | L'alimentation en tension de charge U_VAL n'est pas appliquée. | Contrôler le raccordement de l'ali-mentation électrique U_VAL . | |
 |  | Fonctionnement sans erreurs – | |
| allumée en bleu | |||
 |  | Mise à jour du micrologiciel en cours – | |
| Le distributeur démarre – | |||
| clignote en bleu | Le distributeur est en cours de cali-bration 4.5.5 Temps d'attente entre les Motion Apps. | – | |
 éteinte éteinte |  | Pas d'alimentation électrique du dis-tributeur. | Si l'alimentation électrique du ter-minal est activée, couper l'alimenta-tion électrique et vérifier si le distrib-uteur est correctement fixé. |
Tab. 109 : Témoin LED État du distributeur
4.9.1.3 Module d'entrée analogique
| LED ↓ (rouge) | Signification Mesure | ||
 éteinte éteinte |  | Pas d'erreur – | |
 allumée allumée |  | Court-circuit/Surcharge dans l'ali-mentation des capteurs. | Éliminer le court-circuit/la surcharge. |
| Erreur du module Couper et rétablir l'alimentation en tension de service U_EL/U_SEN . | |||
Tab. 110 : Témoin LED erreur de module analogique
4.9.1.4 Module d'entrée numérique
| LED ↓ (rouge) | Signification Mesure | ||
 éteinte éteinte |  | Pas d'erreur – | |
 allumée allumée |  | Court-circuit/Surcharge dans l'ali-mentation des capteurs. | Éliminer le court-circuit/la surcharge. |
| Erreur du module Couper et rétablir l'alimentation en tension de service U_EL/U_SEN . | |||
Tab. 111 : Témoin LED erreur de module numérique
| LED (verte) Signification | Mesure | ||
| allumée | ONOFF | Signal 1 (signal appliqué). – | |
| éteinte | ONOFF | Signal 0 (signal non appliqué). – | |
Tab. 112 : Témoin à LED état de l'entrée numérique
4.9.2 Interface de diagnostic
L'interface de diagnostic du terminal CPX permet de limiter un dysfonctionnement à un composant concret du terminal CPX ou du Motion Terminal. Pour de plus amples détails, voir le manuel du terminal CPX → 1.1 Documents applicables.
L'information de canal permet d'identifier la source du dysfonctionnement à l'intérieur du Motion terminal.
Affectation des numéros de canal (sans modules CPX supplémentaires)
| Contrôleur | Emplacement de distributeur Module d'en- | trée | |||||||||
| 0 1 2 3 4 5 6 7 1 2 | |||||||||||
| Canal d'entrée E0 | E1, | E2 ... E9 | E10, E11 ... E18 | ||||||||
| Canal de sortie A0 | A1 A2 A3 A4 | A5 A6 | A7 A8 | -- | |||||||
Tab. 113 : Affectation des numéros de canal (sans modules CPX supplémentaires)
Les canaux E2 ... E9 et E11 ... E18 correspondent aux différentes entrées (0 ... 7) du module d'entrée concerné.

En fonction de la conception du terminal CPX, le numéro de canal représenté en haut doit être ajouté au numéro des canaux I/O susceptibles d'être occupés par d'autres modules dans le terminal CPX.
Exemple
Si encore un module d'entrée numérique avec 8 canaux d'entrée (0 ... 7) est monté entre le nœud de bus et le contrôleur du Motion Terminal, le contrôleur du Motion Terminal utilise alors les canaux E8 et A0.
4.9.3 Canal de diagnostic du mode de transfert
Via le mode de transfert, le Motion Terminal fournit des informations qui, indépendamment du numéro d'erreur CPX, permettent une analyse plus précise de la cause du dysfonctionnement. De plus, des informations sont disponibles sur le moment de leur apparition.
4.9.3.1 Erreurs et avertissements
Le Motion Terminal fait la distinction entre 2 classes de dysfonctionnements :
- Erreur
- Avertissement
Erreur
Un dysfonctionnement classé comme erreur est tellement grave que la Motion App actuellement exploitée s'arrête automatiquement ou que le démarrage d'une Motion App est empêché. Après l'élimination de la cause de l'erreur, il faut acquitter l'erreur avant que le démarrage d'une Motion App ne soit possible (→ 4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements). Les erreurs sont journalisées dans la mémoire de diagnostic du Motion Terminal.
En présence d'une erreur, l'état du distributeur (valve state) passe à la valeur « 3 » (failure)
(→ 4.6.2.2 Structure des données d'entrée (PDI)).
Après élimination de l'erreur, la valeur passe à « 0 » (not ready). Ce n'est qu'après acquittement de l'erreur que l'état du distributeur repasse à « 1 » (configurable).
Avertissement
Un dysfonctionnement classé comme avertissement représente un état indésirable n'empêchant pas le fonctionnement fondamental de la Motion App exploitée, mais limitant, le cas échéant, la performance de la Motion App. C'est pourquoi les avertissements sont affichés (zone « app state »,
→ 4.6.2.1 Structure des données de sortie (PDO)) et journalisées dans la mémoire de diagnostic du Motion Terminal. Toutefois, les avertissements n'ont pas d'impact direct sur l'exploitation des Motion Apps.
4.9.3.2 Structure du message de dysfonctionnement
Les informations dans la mémoire de diagnostic du Motion Terminal sont composées de trois parties : -Code de dysfonctionnement
- Code secondaire de dysfonctionnement
- Classification du dysfonctionnement
La valeur transférée lors de la lecture de la mémoire de diagnostic est représentée dans les octets 5 ... 4 (PDI) du mode de transfert et elle est constituée comme suit :
| PDI octet 5 PDI octet 4 | ||||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| Classifica-tion | Code secondaire de dysfonctionne-ment | Code de dysfonctionnement | ||||||||||||||
Tab. 114 : Structure du message de dysfonctionnement
Code de dysfonctionnement et code secondaire de dysfonctionnement
Dans la plupart des cas, le code de dysfonctionnement suffit à la limitation côté client de la cause du dysfonctionnement. Le cas échéant, le code secondaire de dysfonctionnement permet une analyse plus détaillée du dysfonctionnement et devrait donc, en cas d'une prise de contact avec l'assistance de Festo, toujours être indiqué.

Une liste des codes de dysfonctionnement et des codes secondaires de dysfonctionnement avec description de la cause possible et des remèdes correspondants figure dans la note d'application « Codes de dysfonctionnement VTEM » (→ 1.1 Documents applicables).
Les codes secondaires de dysfonctionnement susceptibles d'être utilisés par l'utilisateur pour éliminer les erreurs y sont également indiqués.
Classification du dysfonctionnement
Les dysfonctionnements dans la mémoire de diagnostic du Motion Terminal sont affectés à l'une des classifications suivantes. La classification du dysfonctionnement est représentée via les bits 7 ... 6 de l'octet 5 (PDI).
| Classification Signification | Bit 7 Bit 6 Déc. | |||
| réservé – 0 0 0 | ||||
| erreur active Le dysfonctionnement est classifié comme erreur. La cause de l'erreur persiste. | 0 1 1 | |||
| erreur inactive Le dysfonctionnement est classifié comme erreur. La cause de l'erreur n'existe plus, mais l'erreur n'a pas encore été acquittée (→ 4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements) | 1 0 2 | |||
| Avertissement Le dysfonctionnement est classifié comme avertissement. | 1 1 3 | |||
Tab. 115 : Classification du dysfonctionnement
4.9.3.3 Structure de l'horodatage
Chaque entrée dans la liste des défauts est fournie avec un horodatage qui documente l'heure de l'occurrence. La valeur de référence pour les informations de temps est le temps de fonctionnement de l'appareil depuis sa mise sous tension (Uptime). L'horodatage est créé au format [heures] : [minutes] : [secondes]. [Millisecondes]. Les informations d'horodatage pouvant être transmises lors de la lecture de la mémoire de diagnostic se composent de trois parties et sont stockées dans les octets 5... 4 (PDI) du mode de transfert illustré.
| Octet PDI 5 Octet PDI 4 | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| Heures | |||||||||||||||
Tab. 116 : Structure de l'horodatage partie 1 : heures
| Octet PDI 5 Octet PDI 4 | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| Minutes Secondes | |||||||||||||||
Tab. 117 : Structure de l'horodatage partie 2 : minutes et secondes
| Octet PDI 5 Octet PDI 4 | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| Millisecondes | |||||||||||||||
Tab. 118 : Structure de l'horodatage partie 3 : millisecondes
4.9.3.4 Structure de la mémoire de diagnostic VTEM
La mémoire de diagnostic du Motion Terminal se compose de plusieurs listes de défauts, dont chacune se rapporte à un emplacement de distributeur. Chacune de ces listes est affichée dans la vue « Surveillance » de l'interface WebConfig et peut être consultée à l'aide du mode de transfert → 4.9.3.6 Lecture d'une liste de dysfonctionnements.
Les dysfonctionnements ne concernant que l'un des distributeurs sont inscrits dans sa liste des dysfonctionnements ; par contre, les dysfonctionnements du contrôleur ou des modules d'entrée affectent tous les distributeurs et sont donc enregistrés dans les listes de dysfonctionnements de tous les emplacements de distributeur.
Chacune des listes de dysfonctionnements peut accueillir jusqu'à 40 messages de dysfonctionnement et se remplit de manière chronologique. Comme un nouveau message de dysfonctionnement occupe toujours la position 1, les messages déjà présents sont alors « reculés » d'une position (numéro de position précédent + 1).
Les informations d'horodatage des messages d'erreur existants peuvent être lues via les positions 51 ... 190.
L'instant de référence des positions 250 ... 252 se réfère à la copie de la liste des défauts qui est créée lors de l'appel de la voie 31 en mode transfert et assure la cohérence des données sur la durée de plusieurs lectures dans cette voie. ➔ 4.9.3.6 Lecture d'une liste de dysfonctionnements Les positions 253 ... 255 contiennent des informations sur le contenu de la liste de dysfonctionnements :
| Position Sommaire | |
| 1 ... 40 Messages de dysfonctionnement ( → 4.9.3.2 Structure du message de dysfonctionnement) dans l'ordre inverse de leur apparition | |
| 51 ... 90 1ère partie de l'horodatage de l'entrée X + 50Octet 5 ... 4 : 16 bits unsigned = heures | |
| 101 ... 141 2ème partie de l'horodatage de l'entrée X + 100Octet 5 : 8 bits unsigned = minutesOctet 4 : 8 bits unsigned = secondes | |
| 151 ... 190 3ème partie de l'horodatage de l'entrée X + 150Octet 5 ... 4 : 16 bits unsigned = millisecondes | |
| 250 1. Partie du temps de référence de l'instantané de la liste des défauts lors de l'appel du canal 31Octet 5 ... 4 : 16 bits unsigned = heures | |
| 251 2. Partie du temps de référence de l'instantané de la liste des défauts à l'appel du canal 31Octet 5 : 8 bits unsigned = minutesOctet 4 : 8 bits unsigned = secondes | |
| 252 3. Partie du temps de référence de l'instantané de la liste des défauts à l'appel du canal 31Octet 5 ... 4 : 16 bits unsigned = millisecondes | |
| 253 Position du message de diagnostic de type « Erreur » le plus récent | |
| 254 Position du message de diagnostic de type « Erreur » le plus ancien | |
| 255 Nombre de messages de diagnostic dans la liste de dysfonctionnements |
Tab. 119 : Structure des listes de dysfonctionnement
Saturation d'une liste de dysfonctionnements
Chacune des listes de dysfonctionnements comporte jusqu'à 40 entrées. En présence de plus d'entrées, la distinction se fait selon le type d'entrée.
Si l'entrée la plus ancienne est un avertissement, cette entrée est expulsée de la liste.
A contrario, si l'entrée la plus ancienne est une erreur, la liste est figée. Si plusieurs erreurs ou erreurs consécutives surviennent successivement, il est ainsi garanti que la première erreur (et le cas échéant, causale) ne puisse pas être sortie de la liste.
Exemple de liste de dysfonctionnements
Le tableau suivant présente un contenu possible d'une liste de dysfonctionnements. Cette dernière contient 3 messages de dysfonctionnement. Le message de dysfonctionnement le plus récent en position 1 est classifié comme erreur.
| Position Sommaire Valeur déc. Signification | |||
| 1 01|000000|0 | 0001010 1 | 0 | 10 erreur active | Code secon | daire de dys-fonctionnement 0 | court-circuit dans un des capteurs raccordés sur le module d'entrée 1 | |
| 2 11|000100|0 | 1001110 3 | 4 | 78 Avertissement | code secondaire de dys-fonctionnement 4 | instruction API invalide | ||
| 3 11|000101|0 | 1001110 3 | 5 | 78 Avertissement | code secondaire de dys-fonctionnement 5 | instruction API invalide | ||
| ... 00|000000|0 | 00000000 0 | 0 | 0 Aucun messaage de dysfoncitionnement | ||
| 40 00|000000 | 00000000 0 | 0 | 0 Aucun messaage de dysfoncitionnement | ||
| 51 00000000 | 00111100 60 Horodatage du dysfonctionnement en position 1 : 60 h, 24 min, 7 s et 52 ms | ||
| 101 00011000 | |00000111 24 | 7 | ||
| 151 00000000 | 00110100 52 | ||
| 52 00000000 | 00101010 42 Horodatage du dysfonctionnement en position 2 : 42 h, 47 min, 11 s et 112 ms | ||
| 102 00101111 | |00001011 47 | 11 | ||
| 152 00000000 | 01110000 112 | ||
| 53 00000000 | 00000000 0 Horodatage du dysfonctionnement en position 3 : 0 h, 8 min, 15 s et 753 ms | ||
| 103 00001000 | 00001111 8 | 15 | ||
| 153 00000010 | 11110001 753 | ||
| 250 00000000 | 00111100 60 L'information lue correspond | à l'état à l'instant : 60 h, 24 min, 7 s et 365 ms | |
| 251 00011000 | |00000111 24 | 7 | ||
| 252 00000001 | 01101101 365 | ||
| 253 00 00000 | 00000001 1 Le message d'erreur le plus récent se trouve en position 1^1) | ||
| 254 00 00000 | 00000001 1 Le message d'erreur le plus ancien se trouve en position 1^1) | ||
| 255 00 00000 | 00000011 3 La liste de dysfonctionnements comporte 3 messages de dysfonctionnement | ||
1) Les messages d'erreur les plus récents et les plus anciens sont identiques dans cet exemple ; il n'y a qu'un seul message d'erreur dans la liste des défauts.
Tab. 120 : Exemple de liste de dysfonctionnements
4.9.3.5 Réaction en cas d'apparition d'une erreur
Lors de l'apparition d'une erreur, le distributeur est arrêté (état du distributeur (valve state) = 3 (failure)).
Si la cause de l'erreur n'existe plus, l'état du distributeur passé à « pas prêt » (valve state = 0 (not ready)).
Après acquittement de l'erreur, l'état du distributeur passe à « prêt » (valve state = 1 (configurable))
(→ 4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements).
4.9.3.6 Lecture d'une liste de dysfonctionnements
La lecture d'une liste de dysfonctionnements s'effectue via le mode de transfert (valve mode = 63).
Les zones des données de processus sont alors utilisées comme suit :
- Mode de fonctionnement du distributeur (valve mode) : 63 (mode de transfert actif) (octet PDO 0, bits 5 ... 0 => 1111112)
-Canal (channel) : 31 (malfunctions) (octet PDO 1, bits 4 ... 0 => 111112)
-Commande de transfert (transfer control) : 2 (upload) (octet PDO 1, bits 7 ... 5 => 010 _2) - Adressage du transfert de données (addressed target) : emplacement de distributeur dont la liste de dysfonctionnements est censée être lue Tab. 121 Sélection de la liste de dysfonctionnements (octet PDO 2 0, 100 107 ).
- Index (index) : position de la liste de dysfonctionnements dont la valeur est censée être lue
→ Exemple de liste de dysfonctionnements (octet PDO 3 => 1 ... 40, 253 ... 255).
i
Au moment où le canal 31 est appelé, une image de la liste de dysfonctionnements réelle est générée. Tant que le canal 31 n'est pas quitté, cette image ne change plus. Cela empêche tout changement de contenu entre les différentes requêtes (nombre d'entrées, chargement des différentes entrées) et que les valeurs réceptionnées deviennent alors incohérentes.
Si des erreurs inactives sont acquittées via l'interface WebConfig tandis que, du côté API, le canal du mode de transfert 31 est actif, l'affichage sur l'interface WebConfig diffère alors des données qui sont réceptionnées par l'API.
| addressed target Signification | |
| 0 Liste de dysfonctionnements de l'emplacement de distributeur, via la zone de données de process duquel la communication s'établit | |
| 100 Liste de dysfonctionnements de l'emplacement de distributeur 0 | |
| 101 Liste de dysfonctionnements de l'emplacement de distributeur 1 | |
| 102 Liste de dysfonctionnements de l'emplacement de distributeur 2 | |
| 103 Liste de dysfonctionnements de l'emplacement de distributeur 3 | |
| 104 Liste de dysfonctionnements de l'emplacement de distributeur 4 | |
| 105 Liste de dysfonctionnements de l'emplacement de distributeur 5 | |
| 106 Liste de dysfonctionnements de l'emplacement de distributeur 6 | |
| 107 Liste de dysfonctionnements de l'emplacement de distributeur 7 |
Tab. 121 : Sélection de la liste de dysfonctionnements
Exemples de données de sortie pour lire l'entrée la plus récente d'une liste de dysfonctionnements Base de départ pour l'exemple de contenu d'une liste de dysfonctionnements → Tab. 120 Exemple de liste de dysfonctionnements.
| Exemples de données de sortie pour lire l'entrée la plus récente d'une liste de dysfonctionnements | ||||||||||||||||
| Octet PDO 1 Octet PDO 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 B | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 B | it 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 1 0 | 1 1 1 1 | 1 ... ... | 1 1 1 | 1 1 1 | ||||||||||||
| transfer control = 2 | channel = 31 - valve mode = 63 (mode de transfert) | |||||||||||||||
| Octet PDO 3 Octet PDO 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 B | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 B | it 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 0 0 | 0 0 0 0 | 1 0 0 | 0 0 0 0 | 0 0 | ||||||||||||
| index = 1 addressed target = 0 (liste de dysfonctionnements de l'emplacement de distributeur, via la zone de données de process duquel la communication s'établit) | ||||||||||||||||
Exemples de données de sortie pour lire l'entrée la plus récente d'une liste de dysfonctionnements
Tab. 122 : Exemples de données de sortie pour lire l'entrée la plus récente d'une liste de dysfonctionnements
Exemple de données d'entrée avec le contenu de l'entrée la plus récente d'une liste de dysfonctionnements
Base de départ pour l'exemple de contenu d'une liste de dysfonctionnements → Tab. 120 Exemple de liste de dysfonctionnements.
Exemple de données d'entrée avec le contenu de l'entrée la plus récente d'une liste de dysfonctionnements
| Octet PDI 1 Octet PDI 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 1 0 | 1 1 1 1 | 1 1 1 | 1 1 1 1 | 1 1 | |||||||||||
| transfer control = 2 | channel = 31 valve state | = 3 (fai-lure) | valve mode = 63 (mode de transfert) | ||||||||||||
| Octet PDI 3 Octet PDI 2 | |||||||||||||||
| Paramètre | |||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 0 0 | 0 0 0 0 | 1 0 0 | 0 0 0 0 | 0 0 | |||||||||||
| index = 1 addressed target = 0 | |||||||||||||||
| Octet PDO 5 Octet PDO 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | ||
| Exemple de données d'entrée avec le contenu de l'entrée la plus récente d'une liste de dysfonctionnements | ||||||||||||||
| 0 1 0 | 0 0 0 0 | 0 0 0 | 0 0 1 0 | 1 0 | ||||||||||
| 1 (erreur active) | 0 (aucun code secondaire de dysfonctionnement) | 10 (court-circuit dans un des capteurs raccordés sur le module d'entrée 2) | ||||||||||||
Tab. 123 : Exemple de données d'entrée avec le contenu de l'entrée la plus récente d'une liste de dysfonctionnements
4.9.3.7 Acquittement d'erreurs et vidage de la liste de dysfonctionnements
Pour modifier l'état du distributeur (valve state) de « 0 » (not ready) à « 1 » (configurable), il faut acquitter l'erreur après que la cause de l'erreur a été éliminée.
- Quitter le mode de transfert en réglant la commande de transfert (octet PDO 1 bits 7 ... 5) sur la valeur « 3 ». Le distributeur passe dans le mode (valve mode) 61, l'état du distributeur (valve state) est « Erreur » (valeur 3).
- Éliminer la cause de l'erreur. L'état du distributeur passe à « pas prêt » (valeur 0).
- Régler le mode de fonctionnement du distributeur (valve mode, PDO octet 0, bits 5 ... 0) sur la valeur « 62 » (« Acquitter l'erreur »). L'état du distributeur passe à « prêt » (valeur 1).

Suite à l'acquittement, toutes les entrées de la liste de dysfonctionnements sont effacées pour cet emplacement de distributeur.
Si la liste de dysfonctionnements d'un emplacement de distributeur contient des entrées cumulées de type « Avertissement», mais aucune erreur active ou inactive, la liste de dysfonctionnements peut alors également être réinitialisée dans l'état (valve state) « 1 » (configurable) en réglant le mode de fonctionnement sur « 62 ».
Acquittement de défauts sans lecture préalable de la liste de dysfonctionnements
Si l'erreur peut être éliminée sans lecture de la liste de dysfonctionnements (et donc sans utilisation du mode de transfert), cela donne le déroulement simplifié suivant :
- Il existe une erreur : PDI octet 0, bit 7 = 1 et bit 6 = 1.
valve state = failure - La cause de l'erreur a été éliminée : PDI octet 0, bit 7 = 0 et bit 6 = 0.
valve state = not ready - L'erreur est acquittée : régler le PDO octet 0, bit 5 ... 0 « valve mode » sur la valeur 111110_2 = 62_10 .
-
Le distributeur est de nouveau prêt : PDI octet 0, bit 7 = 0 et bit 6 = 1
valve state = configurable -
Après l'acquittement de l'erreur, une Motion App ou le mode de transfert peut être démarré(e).
5 Paramétrage
Dans ce chapitre, le paramétrage est synonyme de transfert de paramètres système, d'application et de synchronisation par la commande de niveau supérieur (API) vers le Motion Terminal VTEM.
Le transfert des valeurs de paramètre s'effectue dans le mode transfert du Motion Terminal (4.6.4 Mode de transfert).
i
En plus de la procédure décrite ici, il est possible de configurer les paramètres du Motion Terminal via l'interface WebConfig ou de les lire à partir d'un fichier de configuration exporté antérieurement. (→ 4.4.3 Exportation/importation d'un paramétrage et de réglages).
Un paramétrage créé via l'interface WebConfig et archivé sur le contrôleur du Motion Terminal peut être transféré vers la commande de niveau supérieur par lecture via le mode transfert.
5.1 Activer les paramètres systèmes, d'application et de synchronisation
La définition de paramètres systèmes, d'application et de synchronisation s'effectue à l'aide du mode de transfert ( 4.6.4 Mode de transfert).
5.1.1 Conditions préalables
-La procédure Boot du Motion Terminal est terminée.
- Aucune Motion App n'est actuellement exploitée sur le distributeur correspondant (valve state ≠ « 2 » (running)).
5.1.2 Déroulement
Pour transférer des paramètres système, d'application et de synchronisation, dans le mode transfert, il faut sélectionner les réglages suivants :
- Mode d'exploitation du distributeur (valve mode) : 63 (mode de transfert actif) (octet PDO 0, bits 5 ... 0 => 111111 _2 )
- Canal (channel) : 1 ... 5 (ID du jeu de paramètres pour lequel le paramètre est censé être défini) (octet PDO 1, bits 4 ... 0 => 00001₂ ... 00101₂)
- Commande de transfert (transfer control) : 1 (download) (octet PDO 1, bits 7 ... 5 => 001 _2 )
-Adressage de la transmission de données (addressed target) : 0 ... 60 (octet PDO 2 => 0 10 ... 6010)
-0 pour la définition de paramètres système indépendamment de la Motion App. Dans ce cas, le respect de la plage de valeurs spécifique à la Motion App n'est pas contrôlé. - 1 ... 59 pour la définition de paramètres systèmes, d'application ou de synchronisation pour ma Motion App correspondante
-60 pour la définition de paramètres pour la course d'apprentissage → 4.8.1 Conditions préalables au démarrage de la course d'apprentissage - Index (index) : ID du paramètre censé être réglé (octet PDO 3 => 12 10 ... 255 10 )
- Valeur (value) : valeur censée être écrite dans le paramètre (octets PDO 5 ... 4) → 4.5.3 Paramètre.
i
Par rapport à la représentation au paragraphe (→ 4.5.3 Paramètre), les plages de valeur des paramètres peuvent être limitées par la Motion App utilisée. Les plages de valeur concrètes pour les différentes Motion Apps sont décrites dans les manuels des Motion Apps.
Si un paramètre système se trouve en dehors de la plage de valeurs valide d'une Motion App à démarrer parce qu'il a été configuré pour une autre Motion App ou avec addressed target = 0, une erreur est émise lors de la tentative de démarrage de la Motion App.
Exemple
Le paramètre système « Diamètre intérieur du tuyau en (2) » (ID 14) est censé être paramétré dans le jeu de paramètres 2 pour un diamètre intérieur du tuyau de 5,7 mm afin de pouvoir être utilisé par la Motion App 04.
| Exemple de définition du paramètre système « Diamètre intérieur de tuyau en (2) » | ||||||||||||||||
| Octet PDO 1 Octet PDO 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 B | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 B | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 0 1 | 0 0 0 1 | 0 .... ... | 1 1 1 | 1 1 1 | ||||||||||||
| transfer control = 1 (download) | channel = 2 (Parameter-Set 2) - valve mode = 63 (mode de transfert) | |||||||||||||||
| Octet PDO 3 Octet PDO 2 | ||||||||||||||||
| Paramètres | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 B | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 B | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 0 0 | 0 1 1 1 | 0 0 0 | 0 0 0 1 | 0 0 | ||||||||||||
| index = 14 (ID de paramètre 14) adressed target = 4(paramètre système respectant la plage de valeurs pour la Motion App #04) | ||||||||||||||||
| Octet PDO 5 Octet PDO 4 | ||||||||||||||||
| Valeur | ||||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 B | Bit 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 B | Bit 2 Bit | 1 Bit 0 | |||
| 0 0 0 | 0 0 0 1 | 0 0 0 | 1 1 1 0 | 1 0 | ||||||||||||
| value = 570 (570 × 0,01 mm = 5,7 mm) | ||||||||||||||||
Tab. 124 : Exemple de définition du paramètre système « Diamètre intérieur de tuyau en (2) »
Pour confirmation les valeurs sont représentées dans les plages correspondantes des données d'entrée (PDI) (→ Tab. 61 Structure des données d'entrée (PDI)).
5.2 Lecture de paramètres systèmes, d'application et de synchronisation
La lecture des valeurs des paramètres système, d'application et de synchronisation s'effectue à l'aide mode transfert (→ 4.6.4 Mode de transfert).
Paramétrage
5.2.1 Conditions préalables
- La procédure Boot du Motion Terminal est terminée.
- Aucune Motion App n'est actuellement exploitée sur le distributeur correspondant (valve state ≠ « 2 » (running)).
5.2.2 Déroulement
Pour lire les valeurs de paramètres système, d'application et de synchronisation, dans le mode transfert, il faut sélectionner les réglages suivants :
- Mode de fonctionnement du distributeur (valve mode) : 63 (mode de transfert actif) (PDO octet 0, bits 5 ... 0 => 1111112)
- Canal (channel) : 1 ... 5 (ID du jeu de paramètres dans lequel une valeur de paramètre est censée être lue) (PDO octet 1, bits 4 ... 0 => 00001 2 ... 00101 2 )
- Commande de transfert (transfer control) : 2 (upload) (PDO octet 1, bits 7 ... 5 => 010 _2 )
-Adressage de la transmission de données (addressed target) : 0 ... 60 (PDO octet 2 => 0 10 ... 60 10)
-0 pour la lecture de paramètres système (indépendamment de la Motion App)
- 1 ... 59 pour la lecture de paramètres systèmes, d'application ou de synchronisation pour la Motion App correspondante
-60 pour la lecture de paramètres pour la course d'apprentissage ( 4.8.1 Conditions préalables au démarrage de la course d'apprentissage)
-Index (index) : ID du paramètre dont la valeur est censée être lue (PDO octet 3 => 12 10 ... 255 10 ) La zone « Valeur » est ignorée.
Exemple
La valeur du paramètre d'application « Temps de déplacement sortie » (ID 121) pour la Motion App #07 dans le jeu de paramètres 4 est censée être lue.
| Exemple de lecture du paramètre d'application « Temps de déplacement sortie » | ||||||||||||||||
| PDO octet 1 PDO octet 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 1 0 | 0 0 1 0 | 0 ... ... | 1 1 1 | 1 1 1 | ||||||||||||
| transfer control = 2 (upload) | channel = 4 (jeu de paramè- tres 4) | – valve mode | = 63 (mode de transfert) | |||||||||||||
| PDO octet 3 PDO octet 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 1 1 | 1 1 0 0 | 1 0 0 | 0 0 0 1 | 1 1 | ||||||||||||
| index = 121 (Parameter-ID 121) adressed target = | 7 (Motion App #07) | |||||||||||||||
| PDO octet 5 PDO octet 4 | ||||||||||||||||
| Valeur | ||||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | t 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | t 2 Bit | 1 Bit 0 | |||
| ... ... ... | ... ... ... | ... ... ... | ... ... ... | ... ... ... | ... ... ... | |||||||||||
| value = ... (est ignoré) | ||||||||||||||||
Tab. 125 : Exemple de lecture du paramètre d'application « Temps de déplacement sortie »
La valeur du paramètre d'application est représentée via les données d'entrée de l'octet 5 ... 4 (PDI).
| Représentation via les données d'entrée du paramètre d'application lu | |||||||||||||||
| PDI octet 1 PDI octet 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 1 0 | 0 0 1 0 | 0 ... ... | 1 1 1 | 1 1 | |||||||||||
| transfer control = 2 (upload) | channel = 4 (jeu de paramè- tres 4) | valve state valve mode = 63 (mode de transfert) | |||||||||||||
| PDI octet 3 PDI octet 2 | |||||||||||||||
| Paramètre | |||||||||||||||
| Bit 7 | Bit 6 Bit | it 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | it 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | it 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 1 1 | 1 1 0 0 | 1 0 0 | 0 0 0 1 | 1 1 | |||||||||||
| index = 121 (Parameter-ID 121) adressed target = 7 (Motion App #07) | |||||||||||||||
| PDI octet 5 PDI octet 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | ||
| 0 0 0 | 0 0 0 0 | 0 0 1 | 1 0 0 1 | 0 0 | |||||||||||
| value = 100 (100× 0,01 s = 1 s) | |||||||||||||||
Tab. 126 : Représentation via les données d'entrée du paramètre d'application lu
5.3 Définition des paramètres de capteur
La définition des paramètres système et d'application s'effectue à l'aide du mode de transfert
(→ 4.6.4 Mode de transfert).
5.3.1 Conditions préalables
-La procédure Boot du Motion Terminal est terminée.
- Aucune Motion App n'est actuellement exploitée sur un distributeur (valve state ≠ « 2 » (running)).
- Il n'y a pas d'accès simultané aux paramètres de capteur du même module d'entrée via le mode de transfert d'un autre distributeur ou via l'interface WebConfig.
5.3.2 Déroulement
Pour transférer des paramètres système, dans le mode transfert, il faut sélectionner les réglages suivants :
Paramétrage
- Mode de fonctionnement du distributeur (valve mode) : 63 (mode de transfert actif) (octet PDO 0, bits 5 ... 0 => 111111,)
- Canal (channel) : 16 (paramétrage des modules d'entrée) (octet PDO 1, bits 4 ... 0 => 10000 _2 )
- Commande de transfert (transfer control) : 1 (download) (octet PDO 1, bits 7 ... 5 => 001 _2 )
- Adressage de la transmission de données (addressed target) : 1 ... 2 (numéro du module d'entrée) (octet PDO 2 => 1 10 ... 2 10 )
- Index (index) : ID du paramètre de capteur censé être défini (octet PDO 3 => 1 10 ... 212 10 )
- Valeur (value) : valeur censée être écrite dans le paramètre (octets PDO 5 ... 4) (→ Tab. 35 Paramètres de capteur).
Exemple
Un capteur de type SDAP-MHS-M160 a été raccordé à la dernière des huit entrées d'un module d'entrée analogique monté sur le deuxième emplacement prévu pour les modules d'entrée. Il s'agit maintenant de paramétrer le paramètre de capteur « Type de capteur » de sorte que les valeurs analogiques mesurées puissent être interprétés en conséquence et être utilisées par des Motion Apps.
| Exemple de définition du paramètre de capteur « Type de capteur » | ||||||||||||||||
| Octet PDO 1 Octet PDO 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 0 0 1 | 1 0 0 0 | 0 ... ... | 1 1 1 | 1 1 1 | ||||||||||||
| transfer control = 1 (download) | channel = 16 (input module settings) | - valve mode | = 63 (mode de transfert) | |||||||||||||
| Octet PDO 3 Octet PDO 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | t 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | t 3 Bit | 2 Bit 1 | Bit 0 | ||||
| 1 1 0 | 1 0 0 1 | 1 0 0 | 0 0 0 0 | 1 0 | ||||||||||||
| index = 211 (7 x 30 + 1) addressed target = 2 | (module d'entrée sur le deuxième emplacement prévu à cet effet) | |||||||||||||||
| Octet PDO 5 Octet PDO 4 | ||||||||||||||||
| Valeur | ||||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | |||
Exemple de définition du paramètre de capteur « Type de capteur »
| 0 0 0 | 0 0 1 1 | 1 1 1 | 0 1 0 0 | 1 1 | ||||||||||
| value = 2003 (SDAP-MHS-M160-...) | ||||||||||||||
Tab. 127 : Exemple de définition du paramètre de capteur « Type de capteur »
Pour confirmation les valeurs sont représentées dans les plages correspondantes des données d'entrée (PDI) (→ Tab. 61 Structure des données d'entrée (PDI)).
5.4 Réglage des paramètres de description d'actionneurs définis par l'utilisateur
5.4.1 Conditions préalables
- La procédure Boot du Motion Terminal est terminée.
- Aucune Motion App n'est actuellement exploitée sur un distributeur (valve state ≠ « 2 » (running)).
- L'option « Accès à la liste étendue des actionneurs » dans les réglages du Motion Terminal est réglée. Le réglage s'effectue alors via le menu de l'interface WebConfig ou via le mode de transfert dans le canal 14 (→ Tab. 60 Signification de l'indice par addressed target et par canal)
- Il n'y a pas d'accès simultané aux paramètres du même actionneur défini par l'utilisateur via le mode de transfert d'un autre distributeur ou via l'interface WebConfig.
i
Après avoir activé l'option « Accès à la liste étendue des actionneurs », il est possible pour toutes les Motion Apps de sélectionner et d'utiliser des actionneurs qui n'ont pas été vérifiés ou approuvés par Festo pour le Motion Terminal ou une Motion App spécifique. L'exploitation de Motion Apps en recourant à cette option s'effectue par conséquent expressément en dehors de la spécification.
5.4.2 Déroulement
Les réglages suivants doivent être sélectionnés en mode de transfert pour transférer les paramètres de description d'actionneurs définis par l'utilisateur :
- Mode d'exploitation du distributeur (valve mode) : 63 (mode de transfert actif) (octet PDO 0, bits 5 ... 0 => 111111 _2 )
- Canal (channel) : 17 (paramétrage de périphériques définis par l'utilisateur) (octet PDO 1, bits 4 ...0 => 10001₂)
-Commande de transfert (transfer control) : 1 (download) (octet PDO 1, bits 7 ... 5 => 001 2) - Adressage de la transmission des données (addressed target) : 101 ... 108 (100 + numéro de l'actionneur défini par l'utilisateur) (octet PDO 2 => 101 10 ... 108 10 )
- Index (index) : ID du paramètre de description de l'actionneur défini par l'utilisateur censé être réglé (octet PDO 3 => 1_10 ... 13_10 )
-Valeur (value) : valeur censée être écrite dans le paramètre (octets PDO 5 ... 4) ( → Tab. 38 Paramètres de description d'actionneurs définis par l'utilisateur)
Exemple
Un diamètre de piston de 25 mm est censé être archivé pour le premier des huit actionneurs définis par l'utilisateur possibles.
| Exemple Réglage du paramètre de description d'actionneurs définis par l'utilisateur « Diamètre de piston » | ||||||||||||||||
| Octet PDO 1 Octet PDO 0 | ||||||||||||||||
| Commande | ||||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| 0 0 1 | 1 0 0 0 | 1 ... | ... 1 1 | 1 1 1 | 1 | |||||||||||
| transfer control = 1 (download) | channel = 17 (user-defined peripherals) | - valve mode | = 63 (mode de transfert) | |||||||||||||
| Octet PDO 3 Octet PDO 2 | ||||||||||||||||
| Paramètre | ||||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| 0 0 0 | 0 0 0 1 | 0 0 1 | 1 0 0 1 | 0 1 | ||||||||||||
| index = 2 (diamètre du piston) addressed target = 101 (actionneur défini par l'utilisateur 1) | ||||||||||||||||
| Octet PDO 5 Octet PDO 4 | ||||||||||||||||
| Valeur | ||||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| 0 0 0 | 0 0 0 0 | 0 1 1 | 1 1 1 0 | 1 0 | ||||||||||||
| value = 250 (250 × 0,1 mm = 25 mm) | ||||||||||||||||
Tab. 128 : Exemple Réglage du paramètre de description d'actionneurs définis par l'utilisateur « Diamètre de piston »
Pour confirmation les valeurs sont représentées dans les plages correspondantes des données d'entrée (PDI) (→ Tab. 61 Structure des données d'entrée (PDI)).
i
Lors de la description et de l'utilisation d'un actionneur défini par l'utilisateur, l'utilisateur doit impérativement s'assurer que les paramètres définis sont complets et qu'ils décrivent correctement l'actionneur réel.
5.5 Enregistrer le paramétrage de manière persistante
i
Enregistrement persistant du paramétrage sur le contrôleur du Motion Terminal : ➞ 4.6.4.4 Enregistrement persistant des réglages).
i
Même dans le cas où le paramétrage est transféré lors de chaque démarrage du système par la commande de niveau supérieur sur le contrôleur du Motion Terminal, ce paramétrage est aussi censé être enregistré une fois pour toutes de manière persistante sur le contrôleur du Motion Terminal. Sinon, les données d'apprentissage déterminées par une course d'apprentissage pour une Motion App seront éventuellement rejetées (→ 4.8.6 Validité des données d'apprentissage après des modifications de paramètre).
5.6 Changer de jeu de paramètres actif
Le changement du jeu de paramètres actif est piloté via le canal « valve settings » (channel = 15) (→ 4.6.4.1 Structure des données de processus en mode de transfert). La zone « Valeur » contient alors le numéro du jeu de paramètres à activer.
5.6.1 Conditions préalables
-La procédure Boot du Motion Terminal est terminée.
- Aucune Motion App n'est actuellement exploitée sur le distributeur correspondant (valve state ≠ « 2 » (running)).
5.6.2 Déroulement
Pour définit le jeu de paramètres actif, dans le mode transfert, il faut sélectionner les réglages suivants :
- Mode de fonctionnement du distributeur (valve mode) : 63 (mode transfert actif) (PDO octet 0, bits 5 ... 0 => 111111₂)
-Canal (channel) : 15 (réglages du distributeur) (PDO octet 1, bits 4 ... 0 => 01111 2)
-Commande de transfert (transfer control) : 1 (download) (PDO octet 1, bits 7 ... 5 => 001 _2)
-Adressage de la transmission de données (addressed target) : 0 (PDO octet 2 => 0) - Index (index) : 1 (PDO octet 3 => 1) -
- Valeur (value) : numéro du jeu de paramètres censé être activé (PDO octets 5 ... 4)
5.6.3 Exemple
Le jeu de paramètres 4 est censé être sélectionné comme jeu de paramètres actif.
| Exemple de données de sortie pour le changement du jeu de paramètres actif | |||||||||||||||
| PDO octet 1 PDO octet 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| 0 0 1 | 0 1 1 | 1 ... ... | 1 1 1 | 1 1 1 | |||||||||||
| transfer control = 1 (download) | channel = 15 (valve settings) - valve mode = 63 (mode de transfert) | ||||||||||||||
| PDO octet 3 PDO octet 2 | |||||||||||||||
| Paramètre | |||||||||||||||
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| 0 0 0 | 0 0 0 | 1 0 0 | 0 0 0 | 0 0 | |||||||||||
| index = 1 (jeu de paramètres actif) adressed target = 0 | |||||||||||||||
| PDO octet 5 PDO octet 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| 0 0 0 | 0 0 0 | 0 0 0 | 0 0 0 | 0 0 | |||||||||||
| value = 4 | |||||||||||||||
Tab. 129 : Exemple de données de sortie pour le changement du jeu de paramètres actif
Le transfert est confirmé dans les données d'entrée.
Exemple de données d'entrée avec le jeu de paramètres sélectionné
| PDI octet 1 PDI octet 0 | |||||||||||||||
| Commande | |||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 0 1 | 0 1 1 1 | 1 ... ... | 1 1 1 | 1 1 1 | |||||||||||
| transfer control = 1 (download) | channel = 15 (valve settings) valve state valve mode = 63 (mode de transfert) | ||||||||||||||
| PDI octet 3 PDI octet 2 | |||||||||||||||
| Paramètre | |||||||||||||||
| Bit 7 | Bit 6 Bit | 5 Bit | 4 Bit 3 | Bit 2 | Bit 1 Bit | 0 Bit | 7 Bit 6 | Bit 5 | Bit 4 Bit | 3 Bit | 2 Bit 1 | Bit 0 | |||
| 0 0 0 | 0 0 0 0 | 1 0 0 | 0 0 0 0 | 0 0 | |||||||||||
| index = 1 (jeu de paramètres actif) adressed target = 0 | |||||||||||||||
| PDI octet 5 PDI octet 4 | |||||||||||||||
| Valeur | |||||||||||||||
| Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 Bit | 7 Bit | 6 Bit 5 | Bit 4 | Bit 3 Bit | 2 Bit | 1 Bit 0 | ||
| 0 0 0 | 0 0 0 0 | 0 0 0 | 0 0 0 1 | 0 0 | |||||||||||
| value = 4 | |||||||||||||||
Tab. 130 : Exemple de données d'entrée avec le jeu de paramètres sélectionné
Une fois le changement de jeu de paramètres actif effectué, les données de paramétrage et d'apprentissage y figurant sont prises en compte pour chaque Motion App démarrée ultérieurement.
6 Caractéristiques techniques
6.1 Caractéristiques techniques, générales
| VTEM | |
| Certificats, déclaration de conformité | → www.festo.com/sp |
| Plages de température admissibles | |
| Stockage [°C]–20 ... +40 | |
| – en cas d'équipement exclusif avec des distributeurs des révisions ≠ Révision 05 (Rev 05) | |
| Environnement [°C] 5 ... 50 | |
| Fluide [°C] 5 ... 50 | |
| – en cas d'équipement avec au moins un distributeur de la révision 05 (Rev 05) | |
| Environnement [°C] 5 ... 45 | |
| Fluide [°C] 5 ... 45 | |
| Conditions ambiantes | |
| Degré de protection IP65 | – Entièrement monté et raccords inutilisés obturés.– En cas d'utilisation du raccord Ethernet, le degré de protection IP65 n'est pas garanti. |
| Humidité relative de l'air [%] 0 ... 90 | |
| Résistance aux vibrations et aux chocs | → Instructions de montage CPX-VTEM |
Tab. 131 : Caractéristiques techniques, générales
6.2 Caractéristiques techniques pneumatiques
| Valeurs caractéristiques du distributeur | |
| Temps de commutation [ms] 8,5 Marche | |
| Temps de commutation Arrêt [ms] 8,5 | |
| Valeur C [l/s*bar] 2 | |
| Débit nominal normal Mise [l/min] 450 sous pression à 0,6 MPa contre 0,5 MPa (6 bar contre 5 bar) | |
| Débit nominal normal Mise à [l/min] 480 l'échappement à 0,6 MPa contre 0,5 MPa (6 bar contre 5 bar) | |
| Sens d'écoulement Non réversible |
Tab. 132 : Valeurs caractéristiques du distributeur
| Valeurs caractéristiques de pression et des fluides | |
| Fluide de service, fluide de commande | Air comprimé selon ISO 8573-1:2010 [7:4:4] |
| Gaz inertes | |
| Remarques relatives au fluide de service/commande | Exploitation lubrifiée impossible |
| Fonctionnement sous vide Uniquement au | niveau des raccords d'échappement (3) |
| Fuite totale Motion Terminal [l/h] 15 plus fuite | fuite des emplacements de distributeur |
| Fuite par logement de distribu- [l/h] 3 (avec buteur) | distributeur) |
| 1 (avec plaque d'obturation) | |
Valeurs caractéristiques de pression et des fluides
| [MPa][bar] | ||
| Pression de service nomi-nale / Pression de pilotage nominale | 0,6 6 | |
| Pression de service, pression de pilotage avec air intérieur via le rac-cord (1) | 0,3 ... 0,8 3 ... 8 | |
| Pression de service, pression de pilotage avec air extérieur via le rac-cord (14) | 0 ... 0,8 0 ... 8 |
Tab. 133 : Valeurs caractéristiques de pression et des fluides
Interfaces pneumatiques
| Raccords d'air de travail (2) et (4) | G 1/8 |
| Pilotage séparé (14) M5 | |
| Raccord de distributeur (1) et (3) | G 3/8 |
| Échappement pilote (84) M7 | |
| Compensation de pression (L) | M7 |
Tab. 134 : Interfaces pneumatiques
6.3 Caractéristiques techniques électriques
Tension de service VTEM (via terminal CPX)
| Séparation de potentiel U_EL/SEN et U_VAL | Oui, avec alimentation séparée au niveau du terminal CPX |
| Terre fonctionnelle (FE) Via le raccord de terre fonctionnelle du terminal CPX et le raccord de terre fonctionnelle sur la barrette de raccorde-ment VTEM | |
| – en cas d'équipement exclusif avec des distributeurs des révisions ≠ Révision 05 (Rev 05) | |
| Tension de service [V DC] 24 ± 25 % | |
| – en cas d'équipement avec au moins un distributeur de la révision 05 (Rev 05) | |
| Tension de service [V DC] 24 ± 15 % | |
Tab. 135 : Tension de service
Consommation interne en 24 V DC, type
| via U_EL/SEN | via U_VAL | ||
| Contrôleur + module d'inter- [mA] 115 85 connexion | |||
| Module d'entrée analogique [mA] 12 0 (plus la consommation propre des capteurs) | |||
| Module d'entrée numérique [mA] 12 0 (plus la consommation propre des capteurs) | |||
| Par distributeur [mA] 37 Révision du distributeur | ≠ Rév 05 | 60 Rév 05 | 24 |
Tab. 136 : Intensité absorbée

En cas d'équipement avec au moins un distributeur VEVM-S1-27-... de la révision 05 (Rev 05) :
En cas de décharges d'électricité statique selon EN 61000-4-2, la qualité de fonctionnement peut être limitée. Le produit devrait être utilisé dans un environnement protégé contre les décharges électrostatiques.
6.4 Caractéristiques techniques, modules d'entrée
CTMM-...
| Longueur maximale des [m] 30 câbles raccordés | |
| Protection par fusible Fusible électronique | interne par module |
| Séparation galvanique entre les entrées | Aucune |
Tab. 137 : Modules d'entrée, généralités
CTMM-...-D-...
| Interface M8, à 3 pôles | |
| Réaction Entrée en tension 24 V DC | |
| Courbe caractéristique d'entrée | Selon IEC 61131-2, type 3 |
| Logique de commutation PNP, NO (contact NO) | |
| Niveau de commutation | |
| Signal 0 [V DC] ≤ 5 | |
| Signal 1 [V DC] ≥ 11 | |
Tab. 138 : Module d'entrée numérique
CTMM-...-A-...
| Interface M8, à 4 pôles | |
| Réaction Entrée en courant 4 ... 20 mA | |
| Capteurs optionnels compatibles SDAP-MHS-M...-1L-A-E-0.3-M8 | |
Tab. 139 : Modules d'entrée analogiques
6.5 Caractéristiques techniques, certification UL

Afin de respecter les conditions de certification de Underwriters Laboratories Inc. (UL) pour les États-Unis et le Canada, il faut respecter les données électriques et les conditions ambiantes suivantes dans le cadre du domaine d'application de UL/CSA.
Caractéristiques électriques et conditions ambiantes UL
| Tension nominale 24 V | |
| Courant d'entrée 3,3 A max. | |
| la puissance 100 W max. |
Caractéristiques électriques et conditions ambiantes UL
| Pression différentielle 0,8 MPa max. | |
| Niveau de pollution 2 | |
| Plage d'humidité 0 ... 90 % | |
| Lieu de montage Uniquement pour utilisation en intérieur | |
| Altitude d'installation maximale 2000 m | |
| Degré de protection Le degré de protection IP65 n'est pas testé par UL. | |
Tab. 140 : Caractéristiques électriques et conditions ambiantes UL
7 Périphériques pris en charge
7.1 Nœuds de bus CPX pris en charge
Le terminal CPX peut établir la connexion avec une commande de niveau supérieur via l'un des nœuds de bus suivants :
| Code de type Désignation Protocole | ||
| CPX-FB11 Nœud de | bus DEVICENET | |
| CPX-FB13 Nœud de | bus PROFIBUS | |
| CPX-FB14 Nœud de | bus CANopen | |
| CPX-FB23-24 Nœud | de bus CC-LINK | |
| CPX-FB33 Nœud de | bus PROFINET | |
| CPX-FB36 Nœud de | bus EtherNet/IP, Modbus TCP | |
| CPX-FB37 Nœud de | bus EtherCAT | |
| CPX-FB38 Nœud de | bus EtherCAT | |
| CPX-FB39 Nœud de | bus SERCOS | |
| CPX-FB40 Nœud de | bus ETHERNET POWERLINK | 1) |
| CPX-FB45 Nœud de | bus PROFINET | |
| T32 | CoDeSys embedded Controller | RS232 (S1) |
| T33 | CoDeSys embedded Controller | CANopen |
| T34 | CoDeSys embedded Controller | Softmotion |
1) Aucun module disponible, configuration individuelle via CPX-FMT.
Tab. 141 : Nœuds de bus CPX pris en charge
7.2 Liste des actionneurs pris en charge

→ www.festo.com/sp → VTEM → Connaissances d'expert
Cette liste comporte tous les actionneurs de Festo validés pour le Motion Terminal ainsi que la valeur correspondante devant être inscrite dans le paramètre système « Type d'actionneur » (ID 20) afin de pouvoir exploiter l'actionneur concerné avec une Motion App.
8 Licences
Ce produit utilise des logiciels open source. Le tableau suivant répertorie les progiciels correspondants ainsi que les licences auxquelles les logiciels sont soumis.
| Logiciel Licence | Version Détermination de la licence | ||
| Unity MIT - https: | //opensource.org | /licenses/MIT | |
| bbenv GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | |||
| bootgen Xilinx - | |||
| bootloader GPL 2.0+ | https://www.gnu.org/licenses | ||
| busybox | GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | ||
| e2fsprogs | GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | ||
| gcovr | BSD | 3 | https://opensource.org/licenses/BSD-3-Clause |
| haserl GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | |||
| libb64 | Public Domain Certification | - | - |
| libev | BSD | 2 | https://opensource.org/licenses/BSD-2-Clause |
| libiniparser | MIT - https://opensource.org/licenses/MIT | ||
| libnl | LGPL | 2.1 https://www.gnu.org/licenses/lgpl-2.1 | |
| libtool | BSD | 3 | https://opensource.org/licenses/BSD-3-Clause |
| linux | GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | ||
| lua | MIT - https://opensource.org/licenses/MIT | ||
| luafilesystem | MIT - https://opensource.org/licenses/MIT | ||
| lzo | GPL 2.0 https://www.gnu.org/licenses/gpl-2.0 | ||
| mkimage GPL 2.0+ | https://www.gnu.org/licenses | ||
| mtdutils GPL 2.0 | https://www.gnu.org/licenses/gpl-2.0 | ||
| Logiciel Licence | Version Détermination de la licence | ||
| sysroot LGPL 2.1 | https://www.gnu.org/licenses/lgpl-2.1 | ||
| zlib Zlib – https://zlib.net/zlib_license.html | |||
Tab. 142 : Licences
Copyright:
Festo SE & Co. KG
Ruiter Straße 82
73734 Esslingen
Allemagne
Phone:
+49 711 347-0
Internet:
www.festo.com