P.BE-CMMP-FHPP-DN-SW-DE - Automatisme industriel Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil P.BE-CMMP-FHPP-DN-SW-DE Festo au format PDF.

| Caractéristiques | Détails |
|---|---|
| Type de produit | Non catégorisé |
| Utilisation | Applications industrielles diverses |
| Maintenance | Vérification régulière des connexions et de l'état général |
| Sécurité | Respecter les normes de sécurité en vigueur lors de l'utilisation |
| Informations générales | Consulter la documentation technique pour des spécifications détaillées |
FOIRE AUX QUESTIONS - P.BE-CMMP-FHPP-DN-SW-DE Festo
Questions des utilisateurs sur P.BE-CMMP-FHPP-DN-SW-DE Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automatisme industriel au format PDF gratuitement ! Retrouvez votre notice P.BE-CMMP-FHPP-DN-SW-DE - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil P.BE-CMMP-FHPP-DN-SW-DE de la marque Festo.
MODE D'EMPLOI P.BE-CMMP-FHPP-DN-SW-DE Festo
DeviceNet pour contrôleur de moteur CMMP...
FESTO
Description
DeviceNet
CMMP...

Édition ____ fr 0708NH
Désignation ____ P.BE-CMMP-FHPP-DN-SW-FR
Référence 557 352
Toute transmission ou reproduction de ce document, ainsi que toute exploitation ou communication de son contenu sont interdites, sauf autorisation expresse. Tout non-respect de cette règle est illicite et expose son auteur au versement de dommages et intérêts.
Tous droits réservés, notamment en termes de demande de brevet, de modèle déposé et de protection par dessin ou modèle.
Liste des révisions
| Auteur : | ||||
| Nom du manuel : | P.BE-CMMP-FHPP-DN-SW-FR | |||
| Nom du fichier : | P_BE-CMMP-FHPP-DN-SW-FR.doc | |||
| Emplacement d'archivage du fichier : | ||||
| N° d'ordre | Description | Index de révision | Date de la modification | |
| 001 | Création | 0708NH | 25.02.2008 | |
Marques déposées
DeviceNet™ est une marque déposée de l'association ODVA.
TABLE DES MATIÈRES
1. Généralités....7
1.1 Documentation....7
1.2 Profil Festo de manipulation et de positionnement (FHPP)....7
1.3 Échange de données dans DeviceNet....8
2. Consignes de sécurité pour les entraînements et les commandes électriques..... 9
2.1 Symboles utilisés 9
2.2 Consignes générales .... 10
2.3 Risques dus à une utilisation incorrecte.... 12
2.4 Consignes de sécurité 12
2.4.1 Consignes générales de sécurité 12
2.4.2 Consignes de sécurité liées au montage et à l'entretien.... 14
2.4.3 Protection contre le contact avec les pièces électriques.... 17
2.4.4 Protection par très basse tension de sécurité (TBTS) contre les chocs électriques....19
2.4.5 Protection contre les mouvements dangereux.... 19
2.4.6 Protection contre le contact avec les pièces chaudes ...... 20
2.4.7 Protection lors de la manipulation et du montage 21
3. Montage et installation 22
3.1 Montage 22
3.2 Installation 23
4. Activation et configuration de DeviceNet.... 24
4.1 Configuration de la MAC-ID 24
4.2 Réglage de la vitesse de transmission.... 24
5. Aperçu 25
5.1 Aperçu de DeviceNet 25
5.2 Connexion E/S.... 26
5.3 Explicit Messaging....26
5.4 Fiche technique électronique (EDS)....26
6. Configuration dans un réseau DeviceNet....27
7. Paramètres....28
7.1 Objet "Device Data Object" 28
7.2 Objet "Process Data Object" 29
7.3 Objet "Project Data Object" 29
TABLE DES MATIÉRES
7.4 Objet "Jog Mode Object" 30
7.5 Objet "Direct Mode Position Object" 30
7.6 Objet "Direct Mode Torque Object" 30
7.7 Objet "Direct Mode Speed Object" 31
7.8 Objet "Axis Parameter Object" 31
7.9 Objet "Homing Object" 32
7.10 Objet "Controller Parameters Object" 32
7.11 Objet "Electronical Identification Plate Object" 33
7.12 Objet "Stand Still Object" 33
7.13 Objet "Fault Buffer Administration Parameters Object" 33
7.14 Objet "Error Record List Object" 34
7.15 Objet "Warning Record List Object" 34
7.16 Objet "Recordlist Object" 35
8. LED d'état de module/réseau 36
9. Codes d'erreur DeviceNet 37
1. Généralités
1. Généralités
1.1 Documentation
Le présent document décrit la liaison bus de terrain du contrôleur de moteur CMMP dans un réseau DeviceNet. Il explique l'activation de l'interface DeviceNet et illustre le protocole d'application FHPP de DeviceNet. Pour un descriptif détaillé des paramètres FHPP, reportez-vous à la documentation relative à FHPP.
Le présent document s'adresse aux personnes déjà familiarisées avec la gamme de contrôleurs de moteur et le protocole DeviceNet. Il contient des consignes de sécurité à respecter impérativement.
1.2 Profil Festo de manipulation et de positionnement (FHPP)
Pour toutes les tâches de manipulation et de positionnement, Festo a développé un profil de données optimisé, le "Festo Handling and Positioning Profile" (FHPP).
Le FHPP permet une commande et programmation unique pour les différents systèmes de bus de terrain et contrôleurs de Festo.
Il définit pour l'utilisateur d'une manière homogène
• les modes de fonctionnement,
• la structure des données E/S,
• les objets de paramètres et
• la commande séquentielle.
Communication avec le bus de terrain
Sélection
d'enregistrement
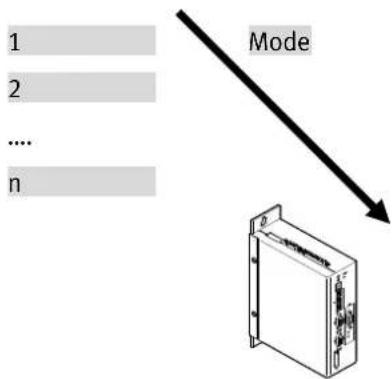
flowchart
graph TD
A["1"] --> D["Device"]
B["2"] --> D
C["..."] --> D
E["n"] --> D
F["Mode"] --> D
Fonctionnement direct
Canal de paramètres
Accès libre à l'ensemble
des paramètres
En lecture et en écriture
Tab. 1.1 : Principe FHPP
1.3 Échange de données dans DeviceNet
DeviceNet a été développé par Rockwell Automation et l'ODVA (Open DeviceNet Vendor Association) comme standard de bus de terrain ouvert, sur la base du protocole CAN. DeviceNet fait partie des réseaux basés sur CIP. CIP (Common Industrial Protocol) forme la couche d'application de DeviceNet et définit l'échange de :
- messages explicites avec priorité basse, p. ex. pour la configuration ou le diagnostic,
- messages E/S, p. ex. données de processus urgentes.

Nota
L'Open DeviceNet Vendor Association (ODVA) est l'organisation d'utilisateurs de DeviceNet. Vous trouverez les spécifications DeviceNet/CIP aux adresses Internet suivantes :
- ODVA (Open DeviceNet Vendor Association) http://www.odva.org
• CI (ControlNet International) http://www.controlnet.org.
2. Consignes de sécurité pour les entraînements et les commandes électriques
2.1 Symboles utilisés

Informations
Informations importantes

Nota
Remarques importantes.

Attention
Le non-respect peut entraîner des dommages matériels graves.

Avertissement
Le non-respect peut entraîner des dommages matériels ou des blessures corporelles.

Avertissement
DANGER!
Le non-respect peut entraîner des dommages matériels ou des blessures corporelles graves.

Avertissement
Tension mortelle !
La consigne de sécurité signale un risque de tension mortelle.
Accessoires

Environnement
2.2 Consignes générales
En cas de dommages dus au non-respect des avertissements figurant dans ces instructions de service, Festo SE & Co. KG se dégage de toute responsabilité.

Nota
- Avant la mise en service, il convient de lire les Consignes de sécurité pour les entraînements et les commandes électriques à partir de la page 9 de même que le chapitre 2. Consignes de sécurité pour les entraînements et les commandes électriques.
Si la documentation n'est pas comprise de manière claire dans la présente langue, veuillez contacter le fournisseur et l'en informer.
Le fonctionnement correct et sûr du régulateur de servopositionnement est tributaire d'un transport adéquat et correct, du stockage, du montage, de la planification, en tenant compte des risques et conformément aux mesures de protection et d'urgence, et de l'installation ainsi que de la commande minutieuse et de l'entretien.
Nota
Seul du personnel dûment formé et compétent doit être amené à travailler sur les installations électriques :
Personnel dûment formé et compétent
Au sens du présent manuel produit ou des consignes d'avertissement figurant sur le produit lui-même, ce sont des personnes suffisamment familiarisées avec la planification, l'installation, le montage, la mise en service et l'exploitation du produit ainsi qu'avec l'ensemble des avertissements et mesures de précaution conformément aux présentes instructions de service figurant dans ce manuel et disposant des compétences nécessaires à leur activité :
- formation, instruction ou autorisation quant à l'activation/la désactivation d'appareils/de systèmes conformément aux normes techniques de sécurité, à la mise à la terre et à l'identification appropriée conformément aux exigences du travail.
- formation ou instruction conforme aux normes techniques de sécurité en matière d'entretien et d'utilisation de l'équipement de sécurité approprié.
- formation aux premiers secours.
Lire impérativement les consignes suivantes avant la première mise en service de l'installation pour éviter les blessures corporelles et/ou les dommages matériels :

- Observer à tout moment ces consignes de sécurité.
2. Consignes de sécurité pour les entraînements et les commandes électriques

- N'essayez pas d'installer ni de mettre en service le régulateur de servopositionnement avant d'avoir soigneusement lu l'intégralité des consignes de sécurité relatives aux entraînements et aux commandes électriques figurant dans ce document. Lire impérativement ces instructions de sécurité ainsi que toutes les autres indications destinées à l'utilisateur avant de travailler avec le régulateur de servopositionnement.

Si vous ne disposez pas d'instructions d'utilisation pour le régulateur de servopositionnement, veuillez vous adresser à votre distributeur.
- Exigez l'envoi immédiat de ces documents au(x) responsable(s) du fonctionnement correct du régulateur de servopositionnement. - En cas de vente, de prêt et/ou d'autre transfert du régulateur de servopositionnement, ces consignes de sécurité doivent impérativement être remises.

Pour des raisons de sécurité et de garantie, toute ouverture du régulateur de servopositionnement par l'exploitant est interdite.

La condition primordiale d'un fonctionnement parfait du régulateur de servopositionnement est une planification appropriée !


Avertissement
DANGER!
Toute utilisation non appropriée du régulateur de servopositionnement et tout non-respect des consignes d'avertissement données ici ainsi que toute intervention incorrecte sur le dispositif de sécurité peuvent occasionner des dommages matériels, des blessures corporelles, un choc électrique, voire entraîner la mort.
2.3 Risques dus à une utilisation incorrecte

Avertissement
DANGER!
Haute tension électrique et courant de travail de haute intensité !
Danger de mort ou de graves blessures par choc électrique !

Avertissement
DANGER!
Haute tension électrique due à un raccordement erroné !
Danger de mort ou de graves blessures par choc électrique !

Avertissement
DANGER!
Surfaces chaudes possibles sur le boîtier de l'appareil !
Risque de blessure ! Risque de brûlures !

Avertissement
DANGER!
Mouvements potentiellement dangereux !
Danger de mort; de graves blessures ou de dommages matériels suite à des mouvements inopinés des moteurs !
2.4 Consignes de sécurité
2.4.1 Consignes générales de sécurité

Avertissement
Le régulateur de servopositionnement est conforme à la classe de protection IP20, ainsi qu'à la classe d'encrassement 1.
- Il convient de veiller à ce que l'environnement corresponde à cette classe de protection ou d'encrassement.

Avertissement
- N'utiliser que des accessoires et des pièces de rechange agréés par le fabricant.

Avertissement
- Les contrôleurs de servomoteur doivent être raccordés au réseau conformément aux normes EN et aux prescriptions VDE, de manière à pouvoir être débranchés du réseau à l'aide d'appareils de déconnexion appropriés (p. ex. interrupteur principal, contacteur-disjoncteur, sectionneur de puissance).

Le régulateur de servopositionnement peut être protégé par un interrupteur de protection contre les courants de court-circuit (RCD = Residual Current protective Device) de 300 mA.

Avertissement
- Utiliser des contacts dorés ou des contacts à forte pression de contact pour la commutation des contacts de commande.

- Des mesures d'antiparasitage préventives doivent être prises pour les installations de commutation, comme les contacteurs-disjoncteurs et les relais à circuit RC ou des diodes.

- Observer les consignes et les directives de sécurité du pays dans lequel l'appareil va être utilisé.

Avertissement
- Respecter les conditions ambiantes indiquées dans la documentation du produit. Les applications critiques en termes de sécurité sont interdites à moins qu'elles ne soient expressément autorisées par le fabricant.

Avertissement
- Les caractéristiques techniques, les conditions de raccordement et d'installation du régulateur de servopositionnement figurent dans ce manuel produit et doivent impérativement être respectées.

Avertissement
DANGER!
- Il convient de respecter les directives générales d'installation et de sécurité relatives au travail sur les installations à courant fort (p. ex. DIN, VDE, EN, CEI ou autres prescriptions nationales et internationales).
Tout non-respect peut entraîner la mort, des blessures corporelles ou de graves dommages matériels.

Les directives suivantes en particulier s'appliquent, sans être exhaustives :
| VDE 0100 | Prescription pour le montage d'installation à courant fort jusqu'à 1000 volts |
| EN 60204-1 | Équipement électrique des machines |
| EN 50178 | Équipement d'installations à courant fort avec éléments électroniques |
| EN ISO 12100 | Sécurité des machines – concepts de base, principes généraux de conception |
| EN 1050 | Sécurité des machines – principes d'évaluation des risques |
| EN 1037 | Sécurité des machines – prévenir les mises en marche intempestives |
| EN 954-1 | Pièces des commandes importantes pour la sécurité |
2.4.2 Consignes de sécurité liées au montage et à l'entretien
Le montage et l'entretien de l'installation sont dans tous les cas soumis aux directives DIN, VDE, EN et CEI en vigueur, ainsi qu'à toutes les directives nationales et locales en matière de sécurité et de prévention des accidents. Le constructeur ou l'exploitant de l'installation est tenu de veiller au respect de ces consignes :

Avertissement
La commande, l'entretien et/ou la réparation du régulateur de servopositionnement doivent uniquement être effectués par du personnel compétent et dûment formé au travail sur ou avec les appareils électriques.
Éviter les accidents, les blessures corporelles et/ou les dommages matériels :

Avertissement
- Protéger les axes verticaux de toute chute ou de tout affaissement possible après mise hors circuit du moteur, par exemple par :
- verrouillage mécanique des axes verticaux,
- dispositif de freinage, de sûreté ou de blocage ou
- équilibrage de poids suffisant de l'axe.

Avertissement
Le frein d'arrêt du moteur livré de série ou tout autre frein d'arrêt du moteur externe commandé par un régulateur d'entraînement seul n'est pas prévu pour la protection des personnes !

Avertissement
Mettre l'équipement électrique hors tension en actionnant l'interrupteur principal et le protéger contre toute remise en marche, attendre jusqu'à ce que le circuit intermédiaire soit déchargé pour :
- les travaux d'entretien et de réparation
- les travaux de nettoyage
- les longues interruptions de fonctionnement.

Avertissement
Avant d'effectuer les travaux d'entretien, il convient de s'assurer que l'alimentation électrique est coupée, verrouillée et que le circuit intermédiaire est déchargé.

Avertissement
En cours de fonctionnement, la résistance de freinage externe ou interne entraîne et peut entraîner jusqu'à 5 minutes après mise hors circuit du régulateur de servopositionnement une dangereuse tension de circuit intermédiaire susceptible, en cas de contact, d'entraîner la mort ou de graves blessures corporelles.

Avertissement
- Procéder au montage avec précaution. Il faut s'assurer, tant pour le montage que pendant le fonctionnement ultérieur de l'entraînement que ni copeaux de forage, poussière métallique ni pièces de montage (vis, écrous, bouts de câble) ne tombent dans le régulateur de servopositionnement.
2. Consignes de sécurité pour les entraînements et les commandes électriques

- Il convient également de s'assurer que l'alimentation électrique externe du régulateur (24 V) soit coupée.

Une mise hors circuit du circuit intermédiaire ou de la tension d'alimentation doit toujours être effectué avant la coupure de l'alimentation du régulateur 24 V.

Avertissement
- Toujours effectuer les travaux dans la zone de la machine après avoir coupé et verrouillé l'alimentation en courant alternatif ou continu. Les étages de sortie mis hors circuit ou la libération du régulateur désactivée ne constituent pas des verrouillages appropriés. En cas de défaillance, un déplacement inopiné de l'entraînement peut tout à fait se produire.
Les entraînements dotés de la fonction de sécurité "Arrêt sécurisé", conformément à la norme EN 954-1 CAT 3, font exception.

Avertissement
- Procéder à la mise en service en faisant tourner les moteurs à vide pour éviter tout dommage mécanique, dû, p. ex. à un sens de rotation incorrect.

Avertissement
Par principe, les appareils électroniques n'ont pas de sûreté intégrée.
- En cas de défaillance de l'appareil électrique, l'utilisateur est tenu de préserver l'état sûr de son installation.

Avertissement
DANGER!
Le régulateur de servopositionnement et la résistance de freinage en particulier, externe ou interne, peuvent absorber des températures élevées susceptibles, en cas de contact, de provoquer de graves brûlures corporelles.
2.4.3 Protection contre le contact avec les pièces électriques
Ce chapitre ne concerne que les appareils et les composants d'entraînement fonctionnant à des tensions supérieures à 50 Volts. En cas de contact avec des pièces parcourues de tensions supérieures à 50 Volts, elles peuvent s'avérer dangereuses pour les personnes et entraîner un choc électrique. Lors du fonctionnement des appareils électriques, certaines pièces de ces appareils se trouvent inévitablement sous une tension dangereuse.

Avertissement
Tension électrique de grande intensité !
Danger de mort ou de graves blessures par choc électrique ou danger de graves blessures corporelles !
Le fonctionnement est dans tous les cas soumis aux normes DIN, VDE, EN et CEI en vigueur, ainsi qu'à toutes les directives nationales et internationales en matière de sécurité et de prévention des accidents. Le constructeur ou l'exploitant de l'installation est tenu de veiller au respect de ces consignes :

Avertissement
- Avant toute mise en marche, monter les capotages et les dispositifs prévus de protection contre les contacts sur les appareils. Pour les appareils à monter, la protection contre tout contact direct avec les pièces électriques doit être assurée par un carter externe, comme p. ex. une armoire électrique.
Observer les directives BGVA3!

Avertissement
- Toujours raccorder le conducteur de protection de l'équipement électrique et des appareils au réseau d'alimentation. En raison du filtre réseau intégré, le courant de fuite est supérieur à 3,5 mA !

Avertissement
- Observer la section de cuivre minimale préconisée conformément à la norme EN 60617 sur toute la longueur de la liaison du conducteur de protection !

Avertissement
- Avant toute mise en service, même pour des besoins temporaires de mesure et d'essai, toujours raccorder le conducteur de protection à l'ensemble des appareils électriques conformément au schéma de câblage ou le relier au conducteur de terre. Sinon, de fortes tensions peuvent survenir sur le carter et provoquer un choc électrique.
2. Consignes de sécurité pour les entraînements et les commandes électriques

Avertissement
- Ne pas toucher les points de raccordement électrique des composants à l'état sous tension.

Avertissement
- Avant d'accéder aux pièces électriques soumises à des tensions supérieures à 50 Volts, débrancher l'appareil du secteur ou de la source d'alimentation.
- Le protéger contre toute remise en marche.

Avertissement
- Lors de l'installation et surtout en matière d'isolement et de mesures de protection, il convient de tenir compte de la tension de circuit intermédiaire. Il faut prévoir une mise à la terre et un dimensionnement des conducteurs appropriés ainsi qu'une protection contre les courts-circuits correspondante.

Avertissement
L'appareil est doté d'un circuit de décharge rapide de circuit intermédiaire conforme à la norme EN 60204-1, article 6.2.4. Dans certaines configurations d'appareil, surtout lors de la commutation parallèle de plusieurs contrôleurs de servomoteur dans le circuit intermédiaire ou en cas d'une résistance de freinage non raccordée, le dispositif de décharge rapide peut s'avérer sans effet. Jusqu'à une minute après la mise hors circuit, les contrôleurs de servomoteur peuvent alors être parcourus d'une tension dangereuse (charge résiduelle de condensateur).
2.4.4 Protection par très basse tension de sécurité (TBTS) contre les chocs électriques
L'intégralité des raccordements et des bornes du régulateur de servopositionnement soumises à des tensions comprises entre 5 et 50 Volts sont de très basses tensions de sécurité protégées contre les contacts accidentels conformément aux normes suivantes :
Normes
- au niveau international : CEI 60364-4-41
- dans les pays européens membres de l'UE : EN 50178/1998, article 5.2.8.1.

Avertissement
DANGER!
Haute tension électrique due à un raccordement erroné !
Danger de mort ou de blessures par choc électrique !
Seuls des appareils, des composants et des câbles électriques présentant une très basse tension de sécurité (TBTS / PELV = Protective Extra Low Voltage) peuvent être raccordés aux raccordements et aux bornes soumises à des tensions comprises entre 0 et 50 Volts.
Ne raccorder que des tensions et des circuits électriques séparés avec sûreté des tensions dangereuses. Une séparation sûre est par exemple obtenue par le raccordement de transformateurs de séparation, d'optocoupleurs à sécurité intrinsèque ou par un fonctionnement sur pile.
2.4.5 Protection contre les mouvements dangereux
Les mouvements dangereux peuvent être occasionnés par une commande erronée des moteurs raccordés. Les causes peuvent être des plus diverses :
Causes
- câblage mal effectué ou erroné
- erreur lors de la commande des composants
- erreurs des transducteurs et des générateurs de signaux
- composants défectueux ou non conformes CEM
- erreur logicielle du système de commande de niveau supérieur.
Ces erreurs peuvent survenir immédiatement après la mise en marche ou après une période indéterminée en cours de service.
Les surveillances intégrées aux composants d'entraînement excluent quasiment tout dysfonctionnement des entraînements raccordés. En matière de protection des personnes et tout particulièrement de risque de blessures corporelles et/ou de dommages matériels, il convient de se fier uniquement à ces faits. Jusqu'à l'activation des surveillances intégrées, il faut dans tous les cas s'attendre à un mouvement d'entraînement erroné dont l'ampleur dépend du type de commande et de l'état de fonctionnement.

Avertissement
DANGER!
Mouvements potentiellement dangereux !
Danger de mort, risque de blessures, de graves blessures corporelles ou de dommages matériels !
Pour les raisons indiquées ci-dessus, la protection des personnes doit être assurée par des surveillances ou des mesures de niveau supérieur et applicables à toute l'installation. Le fabricant de l'installation doit les prévoir en fonction des caractéristiques spécifiques de l'installation après voir procédé à une analyse des dangers et des erreurs. Sans oublier d'intégrer les directives de sécurité valables pour l'installation. La désactivation, le pontage ou l'activation erronée des dispositifs de protection peut provoquer des mouvements arbitraires de la machine ou d'autres dysfonctionnements.
2.4.6 Protection contre le contact avec les pièces chaudes

Avertissement
DANGER!
Surfaces chaudes possibles sur le boîtier de l'appareil !
Risque de blessure ! Risque de brûlures !

Avertissement
Risque de brûlures !
- Ne pas toucher la surface du carter à proximité de sources de chaleur !
- Avant toute intervention, laisser d'abord les appareils refroidir 10 minutes après la mise hors circuit.
Tout contact avec des parties chaudes de l'équipement, comme le carter de l'appareil, contenant des dissipateurs de chaleur et des résistances, risque de provoquer des brûlures !
2.4.7 Protection lors de la manipulation et du montage
La manipulation et le montage de certains composants et pièces de manière inappropriée peut, dans des conditions défavorables, entraîner des blessures.

Avertissement
DANGER!
Risque de blessure dû à une manipulation incorrecte !
Blessures corporelles par écrasement, cisaillement, coupure, chocs !
Consignes générales de sécurité applicables :

Avertissement
- Observer les consignes d'installation et de sécurité en matière de manipulation et de montage.
- Utiliser des dispositifs de montage et de transport appropriés.
- Empêcher tout blocage et tout écrasement en prenant des mesures préventives appropriées.
- N'utiliser que des outils adéquats. Dans la mesure où cela est préconisé, utiliser des outils spéciaux.
- Mettre en œuvre les dispositifs de levage et les outils de manière adéquate.
- Si nécessaire, utiliser les équipements de protection appropriés (par exemple, lunettes de protection, chaussures de sécurité, gants de protection).
- Ne pas stationner en dessous de charges suspendues.
- Essuyer immédiatement les fuites de liquides sur le sol pour éviter de glisser.
3. Montage et installation
3.1 Montage

Attention
Le contrôleur de moteur doit être isolé de tout câble sous tension avant le montage d'un module auxiliaire. Après la coupure de la tension de service, il convient de respecter un délai d'une minute pour une décharge complète dans le contrôleur de moteur.

Attention
Lors de la manipulation du module auxiliaire, il convient de veiller au respect des consignes de protection contre les décharges électrostatiques.
À l'aide d'un tournevis approprié, dévissez l'armature avant par le biais du compartiment du module Ext1 ou Ext2 du contrôleur de moteur. Introduisez maintenant le module auxiliaire dans le compartiment de module ouvert de manière à faire glisser la carte dans les guides latéraux du compartiment de module. Elle doit être enfoncée jusqu'à la butée. Pour terminer, vissez la plaque avant du module auxiliaire sur le carter du contrôleur de moteur à l'aide de la vis cruciforme. Il convient de veiller à ce que la plaque avant affleure par rapport à la face avant afin de permettre la conduction du courant vers le carter.
3.2 Installation
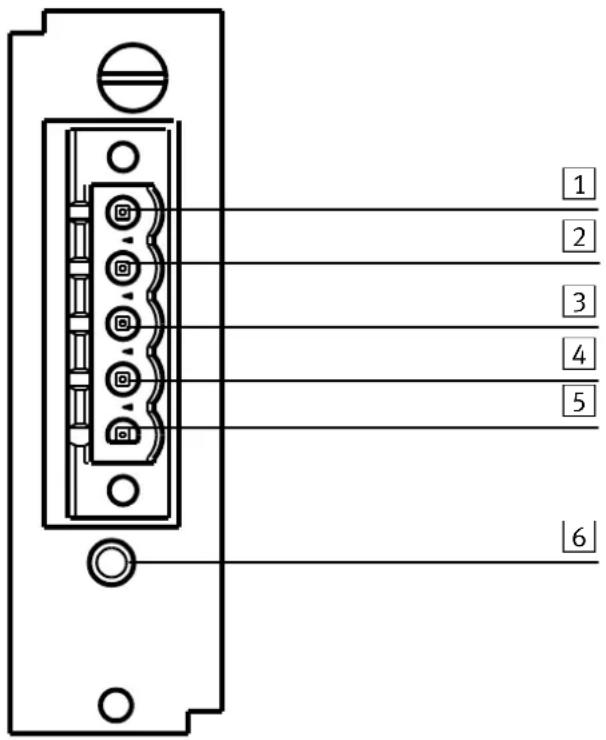
1 Broche 5 : V+
2 Broche 4 : CAN_H
3 Broche 3 : Drain / Shield
4 Broche 2 : CAN_L
5 Broche 1 : V-
6 MNS LED
text_image
1 2 3 4 5 6Fig. 3.1 : Module DeviceNet – Affectation des broches
Pour ce qui concerne les contrôleurs de moteur CMMP-AS, l'interface DeviceNet se présente sous la forme d'un module auxiliaire en option. Conformément aux spécifications DeviceNet, un connecteur ouvert à 5 pôles est accessible au niveau de la plaque avant. Une LED bicolore fournit des informations sur l'appareil et l'état de communication. Elle est conçue comme une LED (MSN) d'état de module/réseau.
À côté des contacts CAN_L et CAN_H destinés à la connexion réseau, l'alimentation 24 VCC doit être reliée à la borne V+ et l'alimentation 0 VCC à la borne V- afin d'alimenter l'émetteur-récepteur CAN.
Raccordez le blindage câble au contact Drain/Shield.
Pour relier correctement l'interface DeviceNet à votre réseau, consultez le "Manuel de planification et d'installation" ("Planning and Installation Manual") sur le site ODVA :
http://www.odva.org
Les différents types d'alimentation du réseau y sont représentés de façon très détaillée.
Pour obtenir des résultats optimaux, nous vous recommandons l'utilisation de composants préfabriqués.
4. Activation et configuration de DeviceNet
Le module DeviceNet enfiché est détecté automatiquement suite à la mise en marche du contrôleur de moteur.
Une MAC-ID claire est attribuée à chaque appareil du réseau.
4.1 Configuration de la MAC-ID
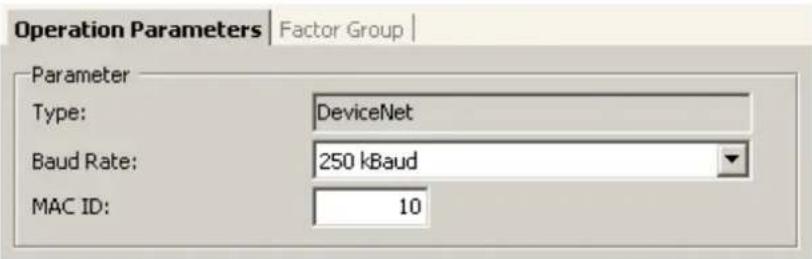
La configuration de la MAC-ID doit être réalisée dans la fenêtre "Operation Parameters" (Paramètres d'exploitation) du programme FCT :
text_image
Operation Parameters | Factor Group | Parameter Type: DeviceNet Baud Rate: 250 kBaud MAC ID: 10Le paramétrage de la vitesse de transmission et de la MAC-ID s'effectue dans cette fenêtre.

Nota
Si une MAC-ID reçoit une valeur supérieure à 63, la MAC-ID 63 est définie automatiquement.
4.2 Réglage de la vitesse de transmission
La configuration de la vitesse de transmission s'effectue également dans la fenêtre "Operation Parameters" (Paramètres d'exploitation) du programme FCT.
La vitesse de transmission possible dépend du câble utilisé, de la longueur de câble et des capacités de la commande de niveau supérieur. Lorsque le DeviceNet est encore actif, la vitesse de transmission sélectionnée peut différer de la vitesse de transmission réellement appliquée. Pour cette raison, la vitesse de transmission réelle est affichée dans l'outil de mise en service.
La communication du DeviceNet est activée suite au paramétrage de la MAC-ID et de la vitesse de transmission. Souvenez-vous que les paramètres mentionnés plus haut ne peuvent être modifiés que lorsque le protocole est désactivé. Tous les paramètres s'appliquent seulement après que la communication DeviceNet a été désactivée, puis activée à nouveau.
Sachez que l'activation de la communication DeviceNet est disponible seulement une fois que le jeu de paramètres a été enregistré et qu'une réinitialisation a été exécutée.
5. Aperçu
5.1 Aperçu de DeviceNet
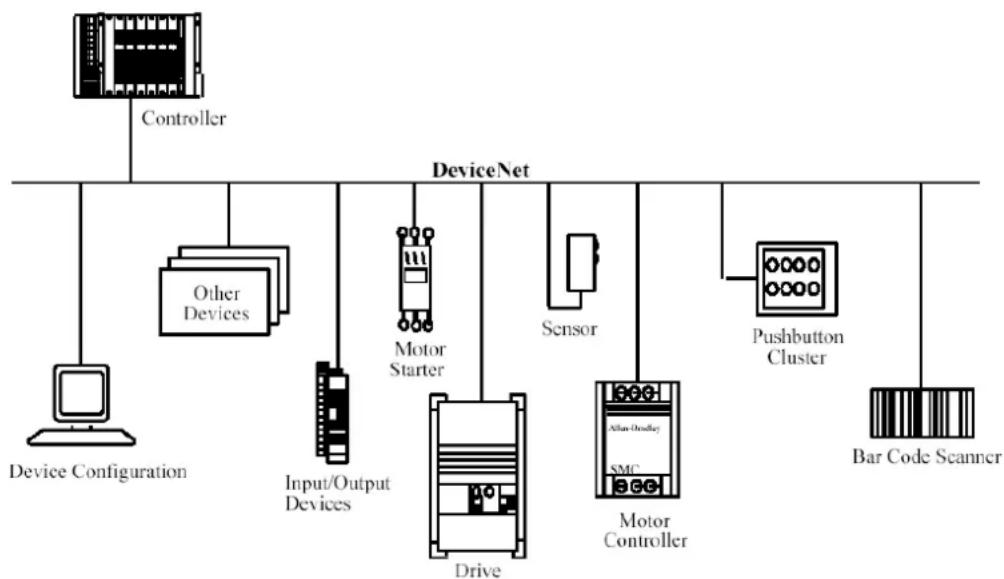
DeviceNet est un réseau orienté machine, lequel assure les liaisons entre des appareils industriels simples (capteurs, actionneurs) et des appareils de niveau supérieur (régulateurs). DeviceNet s'appuie sur le protocole CIP (Common Industrial Protocol) et applique des adaptations à tous les aspects communs du CIP afin d'ajuster la taille de trame pour les messages à celle du DeviceNet. La Fig. 5.1 illustre un réseau DeviceNet classique.
flowchart
graph TD
A["Controller"] --> B["DeviceNet"]
B --> C["Device Configuration"]
B --> D["Other Devices"]
B --> E["Input/Output Devices"]
B --> F["Motor Starter"]
B --> G["Drive"]
B --> H["Sensor"]
B --> I["Bar Code Scanner"]
B --> J["Pushbutton Cluster"]
Fig. 5.1 : Réseau DeviceNet
Avantages de DeviceNet :
- Une solution économique pour les réseaux au niveau des appareils.
- L'accès aux informations stockées dans les appareils au niveau inférieur.
- Les possibilités de configuration maître/esclave et poste à poste.
Le DeviceNet poursuit deux objectifs essentiels :
- Le transport d'informations orientées commande, lesquelles sont en rapport avec les appareils de niveau inférieur (connexion E/S).
- Le transport d'informations complémentaires, indirectement associées au système régulé, comme les paramètres de configuration (Explicit Messaging Connection).
5.2 Connexion E/S
Plusieurs types de connexion E/S sont définis par le DeviceNet™. Actuellement, seule la prise en charge est assurée pour la commande Poll/le message de réponse avec 16 octets de données d'entrée et 16 octets de données de sortie. Cela signifie que le maître envoie périodiquement 16 octets de données à l'esclave et l'esclave répond également avec 16 octets de données.
La signification des données est définie au moyen du protocole d'application FHPP. Consultez le manuel d'utilisation FHPP pour de plus amples informations.
5.3 Explicit Messaging
Le protocole Explicit Messaging est utilisé pour transporter les données de configuration et configurer un système. Explicit Messaging est également utilisé pour établir une connexion E/S. Les connexions Explicit Messaging sont toujours des liaisons point à point. Une extrémité envoie une demande et l'autre extrémité envoie une réponse. Il peut alors s'agir d'un message de réussite ou d'un message d'erreur.
Explicit Messaging met à disposition différents services. Les services les plus courants sont les suivants :
- Ouvrir la connexion Explicit Messaging
• Fermer la connexion Explicit Messaging - Get Single Attribute (lire le paramètre)
- Set Single Attribute (enregistrer le paramètre).
5.4 Fiche technique électronique (EDS)
Pour permettre une mise en service simple et rapide, les capacités de l'interface DeviceNet du contrôleur de moteur sont décrites dans un fichier EDS. À l'aide d'un outil de configuration approprié, il est possible de paramétrer un appareil au sein d'un réseau. La fiche EDS relative au DeviceNet est stockée sur le CD accompagnant le produit. Vous pouvez télécharger la toute dernière version sur notre site (www.festo.com/download).
- Configuration dans un réseau DeviceNet
6. Configuration dans un réseau DeviceNet
Le mode de configuration de votre réseau dépend du logiciel de configuration utilisé. Suivez les instructions du constructeur des commandes pour enregistrer le fichier EDS du contrôleur de moteur.
7. Paramètres
7. Paramètres
Ce chapitre décrit uniquement le modèle d'objet DeviceNet mis en œuvre, c'est-à-dire la façon dont il est possible d'accéder aux paramètres FHPP par l'intermédiaire du DeviceNet. Pour un descriptif détaillé des paramètres correspondants, reportez-vous à la documentation relative à FHPP.
Conformément aux spécifications du DeviceNet, les types de données utilisés sont les suivants :
| Type | Signé | Non signé |
| 8 bits | SINT | USINT |
| 16 bits | INT | UINT |
| 32 bits | DINT | UDINT |
Tab. 7.1 : Types de données
7.1 Objet "Device Data Object"
Cet objet fournit des informations en vue de l'identification d'un appareil.
| Nom | Attribut | FHPP-PNU | Type | |
| Version | Manufacturer hardware version | 1 | 100,1 | UINT |
| Firmware version | 2 | 101,1 | UINT | |
| Version FHPP | 3 | 102,1 | UINT | |
| Identification | Project identifier | 7 | 113,1 | UDINT |
| Serial number controller | 8 | 114,1 | UDINT | |
| Manufacturer device name | 9 | 120,1 | SHORT_STRING | |
| User device name | 10 | 121,1 | SHORT_STRING | |
| Drive manufacturer | 11 | 122,1 | SHORT_STRING | |
| http address manufacturer | 12 | 123,1 | SHORT_STRING | |
| Festo order number | 13 | 124,1 | SHORT_STRING | |
| I/O Control + FCT Control | 14 | 125,1 | USINT |
Tab. 7.2 : Objet "Device Data Object"
7.2 Objet "Process Data Object"
Cet objet fournit les exigences et valeurs réelles pour la position, la vitesse et le couple. Les entrées et sorties TOR peuvent être également contrôlées.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Position | Position : Actual value | 1 | 300,1 | DINT |
| Position : Setpoint | 2 | 300,2 | DINT | |
| Position : Actual deviation | 3 | 300,3 | DINT | |
| Couple | Torque : Actual value | 4 | 301,1 | DINT |
| Torque : Setpoint | 5 | 301,2 | DINT | |
| Torque : Actual deviation | 6 | 301,3 | DINT | |
| Entrées/sorties TOR | Dig. Inputs : DIN0 ... 7 | 10 | 303,1 | USINT |
| Dig. Inputs : DIN8 ... 11 | 11 | 303,2 | USINT | |
| Dig. Outputs : DOUT0 ... 3 | 14 | 304,1 | USINT | |
| Vitesse | Velocity : Actual value | 24 | 310,1 | DINT |
| Velocity : Demand value | 25 | 310,2 | DINT | |
| Velocity : Actual deviation | 26 | 310,3 | DINT | |
| Commande d'enregistrement | Demand record number | 32 | 400,1 | USINT |
| Actual record number | 33 | 400,2 | USINT | |
| Record status byte | 34 | 400,3 | USINT | |
| Compteur du nombre d'heures de fonctionnement | Operating hour meter | 35 | 305,3 | UDINT |
Tab. 7.3 : Objet "Process Data Object"
7.3 Objet "Project Data Object"
Cet objet fournit des informations relatives au projet, à savoir les paramètres communs à tous les appareils d'une machine.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Divers | Project zero point | 1 | 500,1 | DINT |
| Negative position limit | 2 | 501,1 | DINT | |
| Positive position limit | 3 | 501,2 | DINT | |
| Max. speed | 4 | 502,1 | UDINT | |
| Max. acceleration | 5 | 503,1 | UDINT | |
| Max. jerk-free filter time | 7 | 505,1 | UDINT | |
| Teach target | 20 | 520,1 | USINT |
Tab. 7.4 : Objet "Project Data Object"
7.4 Objet "Jog Mode Object"
Cet objet fournit des informations relatives au mode test pas à pas.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Jog mode | Jog mode : Speed slow | 30 | 530,1 | DINT |
| Jog mode : Speed fast | 31 | 531,1 | DINT | |
| Jog mode : Acceleration | 32 | 532,1 | UDINT | |
| Jog mode : Deceleration | 33 | 533,1 | UDINT | |
| Jog mode : Time for phase 1 | 33 | 534,1 | UDINT |
Tab. 7.5 : Objet "Jog Mode Object"
7.5 Objet "Direct Mode Position Object"
Cet objet fournit des informations projet relatives au mode direct Régulation de position.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Direct mode position | Direct mode pos : Base speed | 40 | 540,1 | DINT |
| Direct mode pos : Acceleration | 41 | 541,1 | UDINT | |
| Direct mode pos : Deceleration | 42 | 542,1 | UDINT | |
| Direct mode pos : Jerkfree filtertime | 46 | 546,1 | UDINT |
Tab. 7.6 : Objet "Direct Mode Position Object"
7.6 Objet "Direct Mode Torque Object"
Cet objet fournit des informations projet relatives au mode direct Couple de rotation.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Direct mode torque | Direct mode torque : Base torque ramp | 32 | 550,1 | UDINT |
| Direct mode torque : Force target window | 34 | 552,1 | UINT | |
| Direct mode torque : Time window | 35 | 553,1 | UINT | |
| Direct mode torque : Speed limit | 36 | 554,1 | UDINT |
Tab. 7.7 : Objet "Direct Mode Torque Object"
7.7 Objet "Direct Mode Speed Object"
Cet objet fournit des informations projet relatives au mode direct Vitesse de rotation.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Direct mode speed | Direct mode speed : Base speed ramp | 60 | 560,1 | UDINT |
| Direct mode speed : Velocity window | 61 | 561,1 | UINT | |
| Direct mode speed : Velocity window time | 62 | 562,1 | UINT | |
| Direct mode speed : Velocity threshold | 63 | 563,1 | UINT | |
| Direct mode speed : Velocity threshold time | 64 | 564,1 | UINT | |
| Direct mode speed : Torque limit | 65 | 565,1 | UDINT |
Tab. 7.8 : Objet "Direct Mode Speed Object"
7.8 Objet "Axis Parameter Object"
Cet objet fournit des informations relatives aux axes, à savoir les paramètres associés à un appareil particulier d'une machine.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Mécanique | Polarity | 1 | 1000,1 | USINT |
| Encoder resolution : Increments | 2 | 1001,1 | UDINT | |
| Encoder resolution : Motor revolutions | 3 | 1001,2 | UDINT | |
| Gear ratio : Motor revolutions | 4 | 1002,1 | UDINT | |
| Gear ratio : Shaft revolutions | 5 | 1002,2 | UDINT | |
| Feed constant : Feed | 6 | 1003,1 | UDINT | |
| Feed constant : Shaft revolutions | 7 | 1003,2 | UDINT | |
| Position factor : Numerator | 8 | 1004,1 | UDINT | |
| Position factor : Divisor | 9 | 1004,2 | UDINT | |
| Axis parameter : X2A gear numerator | 11 | 1005,2 | DINT | |
| Axis parameter : X2A gear divisor | 12 | 1005,3 | DINT | |
| Velocity encoder factor : Numerator | 15 | 1006,1 | UDINT | |
| Velocity encoder factor : Divisor | 16 | 1006,2 | UDINT | |
| Acceleration factor : Numerator | 17 | 1007,1 | UDINT | |
| Acceleration factor : Divisor | 18 | 1007,2 | UDINT |
Tab. 7.9 : Objet "Axis Parameter Object"
7.9 Objet "Homing Object"
Cet objet fournit des informations projet relatives au déplacement de référence.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Homing | Offset axis zero point | 20 | 1010,1 | DINT |
| Homing method | 21 | 1011,1 | SINT | |
| Homing : Speed (Search for switch) | 22 | 1012,1 | UDINT | |
| Homing : Speed (Search for zero) | 23 | 1012,2 | UDINT | |
| Homing : Acceleration | 24 | 1013,1 | UDINT | |
| Homing required | 25 | 1014,1 | USINT | |
| Homing max. torque | 26 | 1015,1 | USINT |
Tab. 7.10 : Objet "Homing Object"
7.10 Objet "Controller Parameters Object"
Cet objet fournit des informations projet relatives au contrôleur.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Paramètres du régulateur | Halt option code | 30 | 1020,1 | UINT |
| Position window | 32 | 1022,1 | UDINT | |
| Position window time | 33 | 1023,1 | UINT | |
| Gain position controller | 34 | 1024,18 | UINT | |
| Gain speed controller | 35 | 1024,19 | UINT | |
| Time speed controller | 36 | 1024,20 | UINT | |
| Gain current controller | 37 | 1024,21 | UINT | |
| Time current controller "μs" | 38 | 1024,22 | UINT | |
| Save position | 39 | 1024,32 | UINT | |
| Festo serial number + motor's serial number | 44 | 1025,1 | UDINT | |
| I2t time motor | 45 | 1025,3 | UINT | |
| Power stage temperature | 49 | 1026,1 | UDINT | |
| Max. power stage temperature | 50 | 1026,2 | UDINT | |
| Nominal motor current | 51 | 1026,3 | UDINT | |
| Current limit (per mille nominal motor current) | 52 | 1026,4 | UDINT | |
| Controller serial number | 55 | 1026,7 | UDINT |
Tab. 7.11 : Objet "Controller Parameters Object"
7.11 Objet "Electronical Identification Plate Object"
Cet objet fournit des informations projet relatives à la plaque signalétique électronique.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Données de la pla-que signalétique | Max. current | 64 | 1034,1 | UINT |
| Motor rated current | 65 | 1035,1 | UDINT | |
| Motor rated torque | 66 | 1036,1 | UDINT | |
| Torque constant | 67 | 1037,1 | UDINT |
Tab. 7.12 : Objet "Electronical Identification Plate Object"
7.12 Objet "Stand Still Object"
Cet objet fournit des informations projet relatives à la surveillance d'arrêt.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Surveillance d'arrêt | Position demand value | 68 | 1040,1 | DINT |
| Position actual value | 69 | 1041,1 | DINT | |
| Following error window | 70 | 1042,1 | UDINT | |
| Following error timeout | 71 | 1043,1 | UINT |
Tab. 7.13 : Objet "Stand Still Object"
7.13 Objet "Fault Buffer Administration Parameters Object"
Cet objet fournit des informations projet relatives à la mémoire de diagnostic.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Erreur | Error buffer : Incoming/outgoing error | 1 | 204,1 | USINT |
| Error buffer : Resolution time stamp | 2 | 204,2 | USINT | |
| Error buffer : Number of entries | 4 | 204,4 | USINT | |
| Avertissements | Warning buffer : Incoming/outgoing warning | 5 | 214,1 | USINT |
| Warning buffer : Resolution time stamp | 6 | 214,2 | USINT | |
| Warning buffer : Number of entries | 8 | 214,4 | USINT |
Tab. 7.14 : Objet "Fault Buffer Administration Parameters Object"
7.14 Objet "Error Record List Object"
Cet objet représente la mémoire de stockage des erreurs. Un groupe d'objets est disponible pour chaque sous-index (x) de 1 à 32.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Mémoire de diagnostic | Diagnosis | 1 | 200 x | USINT |
| Error number | 2 | 201 x | UINT | |
| Time stamp "s" | 3 | 202 x | UDINT | |
| Additional Information | 4 | 203 x | UDINT |
Tab. 7.15 : Objet "Error Record List Object"
7.15 Objet "Warning Record List Object"
Cet objet représente la mémoire de stockage des avertissements. Un groupe d'objets est disponible pour chaque sous-index (x) de 1 à 32.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Mémoire de stockage des avertissements | Diagnosis | 1 | 210 x | USINT |
| Warning number | 2 | 211 x | UINT | |
| Time stamp "s" | 3 | 212 x | UDINT | |
| Additional Information | 4 | 213 x | UDINT |
Tab. 7.16 : Objet "Warning Record List Object"
7. Paramètres
7.16 Objet "Recordlist Object"
Cet objet représente la liste des jeux de données. Les jeux de données peuvent être automatiquement exécutés et également reliés les uns aux autres. Un groupe d'objets est disponible pour chaque sous-index (x) de 1 à 250.
| Affectation | Nom | Attribut | FHPP-PNU | Type |
| Données d'enregistrement | Record Control Byte1 | 1 | 401 x | USINT |
| Record Control Byte2 | 2 | 402 x | USINT | |
| Setpoint | 4 | 404 x | DINT | |
| Preselection value | 5 | 405 x | DINT | |
| Velocity | 6 | 406 x | UDINT | |
| Acceleration | 7 | 407 x | UDINT | |
| Deceleration | 8 | 408 x | UDINT | |
| Speed limit (in torque control) | 12 | 412 x | UDINT | |
| Jerkfree filtertime | 13 | 413 x | UDINT | |
| Tolerance time | 15 | 415 x | UDINT | |
| Following Position "ms" | 16 | 416 x | USINT |
Tab. 7.17 : Objet "Recordlist Object"
8. LED d'état de module/réseau
La LED combinée d'état de module/réseau fournit des informations limitées relatives à l'appareil et à l'état de la communication.
| LED | État | Signification |
| Éteinte | L'appareil n'est pas en ligne | L'appareil n'a pas encore terminé son initialisation ou n'est pas alimenté. |
| Clignote en vert | Opérationnel et en ligne, non connectéouen ligne et demande la mise en service | L'appareil fonctionne en mode normal et il est en ligne. La connexion n'est pas établie. |
| Vert | Opérationnel et en ligne, connecté | L'appareil fonctionne en mode normal et il est en ligne. Les connexions sont établies. |
| Clignote rouge-vert | Échec de la communication et réception d'une "Identify Comm Fault Request" | L'appareil a détecté une erreur d'accès réseau et se trouve dans l'état "Communication Faulted".En conséquence, l'appareil a reçu une "Identify Communication Faulted Request" et l'a acceptée.Comportement normal pendant la mise en service. |
| Clignote en rouge | Erreur insignifianteouinterruption de la connexion(Time-out) | Erreur corrigible et/ou au moins une connexion E/S se trouve dans l'état Time-out. |
| Rouge | Erreur sérieuseouerreur de connexion sérieuse | L'appareil présente une erreur non corrigible.L'appareil a détecté une erreur qui rend la communication dans le réseau impossible(par exemple, bus désactivé, MAC-ID en double). |
Tab. 8.1 : LED d'état
9. Codes d'erreur DeviceNet
Les erreurs suivantes peuvent survenir lors de l'utilisation du module DeviceNet.
| Code | Nom | Description | Action |
| 64-0 | DeviceNet :Duplicate MAC-ID | Le contrôle "Duplicate MAC-ID Check" a trouvé deux nœuds dotés de la même MAC-ID. | Définissez la MAC-ID d'un nœud sur une valeur non utilisée. |
| 64-1 | DeviceNet :Bus power lost | Le module DeviceNet n'est pas alimenté en 24 VCC. | En plus de son raccordement au contrôleur de moteur, le module DeviceNet doit être connecté à une alimentation 24 VCC. |
| 64-2 | DeviceNet :RX queue overrun | Réception d'un trop grand nombre de messages dans un délai bref. | Diminuez la vitesse de balayage. |
| 64-3 | DeviceNet :TX queue overrun | L'espace disponible sur le bus CAN n'est pas suffisant pour envoyer les messages. | Augmentez la vitesse de transmis-sion, réduisez le nombre de nœuds ou diminuez la vitesse de balayage. |
| 64-4 | DeviceNet :IO send error | Erreur lors de l'envoi de données E/S | Vérifiez si les connexions réseau sont correctes et si le réseau n'est pas perturbé. |
| 64-5 | DeviceNet :Bus Off | Le régulateur CAN est défini sur BUS OFF | Vérifiez si les connexions réseau sont correctes et si le réseau n'est pas perturbé. |
| 64-6 | DeviceNet :CAN controller overrun | Le régulateur CAN connaît une surcharge. | Augmentez la vitesse de transmis-sion, réduisez le nombre de nœuds ou diminuez la vitesse de balayage. |
| 65-0 | DeviceNet active,but no module | La communication de DeviceNet est activée dans le jeu de paramètres du contrôleur de moteur, mais au-cun module n'est disponible. | Désactivez la communication de DeviceNet ou raccordez un module. |
| 65-1 | DeviceNet :Timeout I/0 connection | Interruption d'une connexion E/S | Aucun message E/S n'a été reçu pendant la période escomptée. |
Tab. 9.1 : Codes d'erreur – DeviceNet
9. Codes d'erreur DeviceNet
Les erreurs suivantes concernent le protocole FHPP. Elles peuvent néanmoins survenir lors de l'utilisation du module DeviceNet. Pour de plus amples détails, reportez-vous à la documentation relative à FHPP.
| Code | Nom | Description | Action |
| 70-1 | FHPP :Math error | Surcharge/sous-charge ou division par zéro pendant le calcul des données cycliques. | Vérifiez les données cycliques et/ou contrôlez le groupe de facteurs. |
| 70-2 | FHPP :Factor Group invalid | Le calcul du groupe de facteurs produit des valeurs internes incorrectes. | Vérifiez le groupe de facteurs. |
| 70-3 | FHPP :Operation mode change failure | Le changement du mode actuel au mode d'exploitation souhaité n'est pas autorisé. | Vérifiez votre application. Il se peut que les changements ne soient pas tous autorisés. |
Tab. 9.2 : Codes d'erreur - FHPP