
EXPLORIST - GPS et systèmes de navigation NAVICOM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil EXPLORIST NAVICOM au format PDF.

| Intitulé | Description |
|---|---|
| Type de produit | GPS de randonnée et de navigation marine |
| Caractéristiques techniques principales | Écran couleur, cartographie intégrée, étanchéité IPX7 |
| Alimentation électrique | Batterie rechargeable lithium-ion |
| Dimensions approximatives | 15 cm x 7 cm x 3 cm |
| Poids | 250 g |
| Compatibilités | Compatible avec les cartes marines et terrestres Navionics |
| Type de batterie | Batterie lithium-ion rechargeable |
| Tension | 3.7 V |
| Puissance | Non spécifiée |
| Fonctions principales | Navigation GPS, suivi d'itinéraires, points d'intérêt, boussole numérique |
| Entretien et nettoyage | Nettoyer avec un chiffon doux, éviter les produits chimiques agressifs |
| Pièces détachées et réparabilité | Disponibilité des pièces détachées limitée, consulter le service après-vente |
| Sécurité | Utiliser dans des conditions climatiques appropriées, éviter les chocs violents |
| Informations générales utiles | Vérifier la compatibilité des cartes avant l'achat, mise à jour régulière du firmware recommandée |
FOIRE AUX QUESTIONS - EXPLORIST NAVICOM
Questions des utilisateurs sur EXPLORIST NAVICOM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre GPS et systèmes de navigation au format PDF gratuitement ! Retrouvez votre notice EXPLORIST - NAVICOM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil EXPLORIST de la marque NAVICOM.
MODE D'EMPLOI EXPLORIST NAVICOM
Principe de fonctionnement du GPS / Conseils d'installations MAGELLAN - 7 - LORENZ - 20 -
PARTIE sondeur :
Principe de fonctionnement d'un sondeur -27- HUMMINBIRD
Principe de fonctionnement de la VHF - 38 - VHF NAVICOM
PARTIE RADAR :
Principe de fonctionnement d'un radar - 44 - O JRC
DIVERS:
Tableaux de connexions NMEA - 49 -
GPS (système de positionnement global):
Le GPS est le système de positionnement global par satellites opéré et financé par les États-Unis. Un réseau de 24 satellites transmet en permanence des signaux radio haute fréquences, contenant des données relatives au temps et à la distance, pouvant être captés par n'importe quels récepteurs GPS afin de permettre à son utilisateur sa position en tout point sur la terre.
En l'an 2000, le code SA (Selective Availability) a été désactivé par les Etats-Unis, donnant à tous les récepteurs GPS une précision potentielle de 15 mètres sans correction de signal. Les signaux sont disponibles 24h/24, quelles que soient les conditions météorologiques, n'importe où dans le monde. En utilisant des récepteurs compatibles Waas ou Egnos, la précision est portée à 3 mètres.
Comment fonctionne le positionnement par satellites :
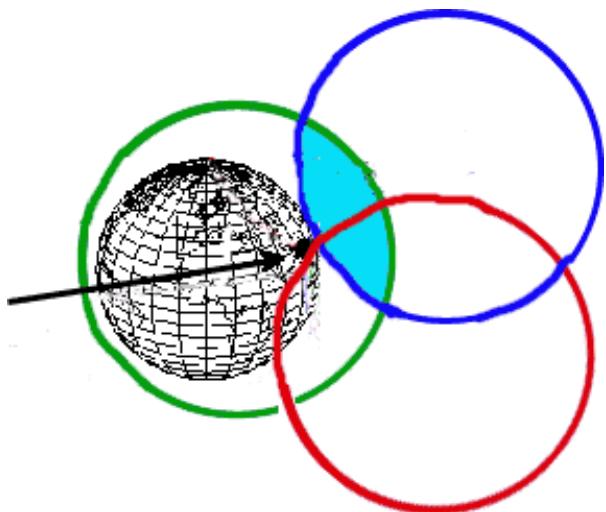
Les récepteurs GPS se servent des données satellites pour calculer un positionnement par triangulation. Cela signifie qu'au moins trois satellites doivent être « visibles » par le récepteur pour que ce dernier puisse effectuer des mesures de longitude et latitude. Un quatrième satellite doit être en visibilité directe pour pouvoir calculer l'altitude. En moyenne, huit satellites sont constamment en visibilité directe de n'importe quel point sur la terre, la précision du positionnement étant fonction du nombre de satellites observés.
En comparant l'instant d'émission des signaux depuis les satellites à l'instant de leur arrivée sur le récepteur, ce dernier calcule la distance qui le sépare de chaque satellite. La distance qui sépare le récepteur de trois satellites ou plus permet alors de déterminer sa position sur la surface du globe. À partir de ces mesures de distance, le récepteur peut aussi calculer la vitesse, la direction, le temps de trajet, la distance jusqu'à la destination prévue, l'altitude, le cap, etc....
En moyenne, la précision d'un récepteur GPS est inférieure à 15 mètres. Des systèmes d'augmentation de la précision des satellites existent, grâce à un réseau de stations terrestres et de satellites géostationnaires. La précision de la position peut approcher les 3 à 5 mètres :
- Aux États-Unis, c'est le système WAAS. En Europe, le système EGNOS et en Asie, le système MSAS.
Le développement du Système de Positionnement Global par Satellite (GNSS) européen GALILEO a été initié en 1999. Un réseau de 30 satellites émettra en permanence des signaux de radionavigation haute fréquences contenant des données de temps et de distance qui pourraient être captées par n'importe quel récepteur GALILEO et qui permettront aux utilisateurs de connaître leur position n'importe où dans le monde.
GALILEO est conçu pour satisfaire les besoins d'un large éventail d'applications liées au positionnement et à la navigation avec une précision sans précédent et une garantie de continuité, et de fiabilité du signal, même dans les latitudes les plus extrêmes. La mise en place de GALILEO est prévue pour 2008.
La détermination de la position :
Le principe du positionnement GPS est très proche du principe de triangulation. On mesure la distance entre l'utilisateur et un certain nombre de satellites de positions connues. On définit ainsi des sphères centrées sur des satellites et dont l'intersection donne la position. Le récepteur GPS est capable d'identifier le satellite qu'il utilise à l'aide du signal pseudo aléatoire émis par chaque satellite. Il charge, à l'aide de ce signal, les informations sur l'orbite et la position du satellite. Pour mesurer la distance qui sépare le satellite du GPS, on mesure le temps T mis par le signal pour aller de l'un vers l'autre.
Premier satellite :
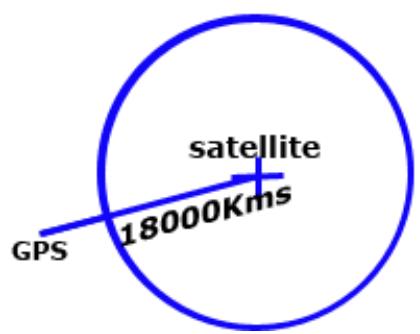
Vitesse de la lumière X temps = Distance - 300000X0,06 = 18000Kms
Deuxième satellite :
Signal satellite

Récepteur GPS
10 5 10 15 20 25 30 10,07 seconde.1 centième de seconde
Vitesse de la lumière X temps = Distance - 300000X0,07 = 21000Kms
Vous êtes que que part par la
Troisième satellite :
Vous estes ici
Vitesse de la lumière X temps = Distance - 300000X0,05 = 15000Kms
Le système GPS permet également de mesurer la vitesse à laquelle se déplace l'utilisateur. Cette évaluation se fait par mesure de Doppler sur le signal provenant d'un satellite GPS. En effet, le signal reçu par le récepteur GPS n'a pas exactement la même fréquence que lorsqu'il est généré par le satellite. Suivant le principe Doppler, le rapport des fréquences est fonction des positions et des vitesses relatives du satellite et de l'utilisateur.
Les signaux émis par les satellites GPS
Chaque satellite émet simultanément sur deux fréquences porteuses, l'une à 1575.42 MHz, l'autre à 1227.6 MHz. Le signal est modulé en modulation de phase.
Chaque satellite GPS émet un message de navigation, qui contient toutes les données nécessaires au récepteur pour effectuer tous les calculs de navigation.
Ces données comprennent :
- une information de l'état de santé du satellite
- les informations nécessaires à l'acquisition du code du message
- les informations de précision du satellite
- une information concernant le retard de propagation dû à l'ionosphère
Sommaire
Spécifications Versions firmware et Basemap Combinaisons de touches / Fonctions cachées
Versions Programme ○ Fonctions cachées
Versions Programme ○ Fonctions cachées ○ Améliorations cartographiques

SPECIFICATIONS
| eXplorist | 100 | 200 | 210 | 300 | 400 | 500 | 600 | XL |
| MEMOIRE | ||||||||
| Basemap | Non | 8Mb | 8Mb | 8Mb | 8Mb | 8Mb | 8Mb | 8Mb |
| Mémoire disponible | Non | Non | 22Mo | Non | 6Mo + 2Go max. sur SD | 6Mo + 2Go max. sur SD | 6Mo + 2Go max. sur SD | 6Mo + 2Go max. sur SD |
| Nb wpts / Nb routes | 500 / 20 | 500 / 20 | 500 / 20 | 500 / 20 | Illimité sur SD | Illimité sur SD | Illimité sur SD | Illimité sur SD |
| Nb de wpts / route | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 |
| Nb de trace | 3 | 5 | 150 | 5 | Illimité sur SD | Illimité sur SD | Illimité sur SD | Illimité sur SD |
| Nb de wpt / trace | 2000 | 2000 | 2000 | 2000 | 2000 | 2000 | 2000 | 2000 |
| CHARACTERISTIQUES | ||||||||
| Ecran | 2,3" (5,84cm)4 niveaux de gris | 2,3" (5,84cm)4 niveaux de gris | 2,3" (5,84cm)4 niveaux de gris | 2,3" (5,84cm)4 niveaux de gris | 2,3" (5,84cm)4 niveaux de gris | 2,2" (5,58cm)TFTTransflectifcouleur | 2,2" (5,58cm)TFTTransflectifcouleur | 3,5" (8,89cm)TFTTransflectifcouleur |
| Type de batterie | 2AA | 2AA | 2AA | 2AA | Li-ion Pack | Li-ion Pack | Li-ion Pack | 4AA |
| Durée des batteries | 14H à 18H | 14H à 18H | 14H à 18H | 14H à 18H | 12H à 18H | 12H à 18H | 12H à 18H | 8H à 14H |
| AUTRES FONCTIONS | ||||||||
| Connexion externe | Non | Non | 12V Power+ USB | Non | 12V Power+ USB | 12V Power+ USB | 12V Power+ USB | 12V Power+ USB |
| Altimètre / Baromètre | Non | Non | Non | Oui | Non | Non | Oui | Non |
| Compas | Non | Non | Non | 2 axes | Non | Non | 3 axes | Non |
Versions de firmware et basemap
| GPS | REFERENCE | FIRMWARE | BASEMAP |
| Explorist 100 | 980771-08 | MarsI_1_15.HEX | |
| Explorist 200 | 980771-09 | MarsII_III_1_25.hex | EU_105.MGI |
| Explorist 210 | 980771-30 | Mars210_1_75.hex | EU_106.MGI |
| Explorist 300 | 980771-10 | MarsII_III_1_25.hex | EU_105.MGI |
| Explorist 400 | 980771-11 | V2.02 | EU_M_105.MGI |
| Explorist 500 | 980771-12 | V2.03 | EU_M_105.MGI |
| Explorist 600 | 980771-13 | V2.03 | EU_M_105.MGI |
| Explorist XL | 980812-03 | V1.05 | EU_200.MGI |
Versions valables à partir du 01/02/2006.
Combinaisons de touches
ZOOM OUT / GOTO / POWER: Efface toute la mémoire.
NAV / MENU / POWER: Éteint le GPS.
Fonctions cachees
Allumer le GPS, faire apparaitre le MENU puis avec le joystick Droite / Gauche / Droite / Gauche : Accès aux fonctions cachées.
00 - Affiche les informations de version de firmware. 03 - État et gestion de WAAS / EGNOS. 10 - Éteint le GPS. 30 - Menu d'effacement de la mémoire. 38 - Sélection de la langue. 87 - Test de la SD CARD.
Roadmate 300
La version programme est la même pour les US et l'Europe.
V1.58: Première version programme. V1.65: Calcul d'itinéraire plus rapide. V1.81: Améliore la réception satellite.
Écran USER: - et + (entrée test montage final)
MFG Sequential Tests: Test d'usine
Réconfigurer Nand Flash: NE PAS UTILISER (Peut endommager le GPS)
Test écran tactile.
Test du casque (Un casque est nécessaire).
SD: TESTD'USINE
SNR-XO Offset Test Internal: NE PAS UTILISER (Peut endommager le GPS)
USB: TEST D'USINE
Réinitialise les données utilisées comme un appareil neuf.
Écran OPTION: ++/--/+/- (menu masqué)
Playback Vehicle Position: TEST D'USINE
Record Vehicle Position: TEST D'USINE
Les versions programme Europe sont impaires et les versions programme US sont paires.
| 1ère version programme: Rev A (V3.XX) | |||
| EUROPE | US | ||
| V3.31 | V3.32 | ||
| V3.55 | V3.31 + Norvégien | ||
| 2ème version programme: Rev B (V4.XX) Commercialisée depuis le 02/11/2004 | |||
| EUROPE | US | ||
| V4.11 | V4.12 | ||
| V4.25 | Résout le problème de la langue allemande. | V4.26 | |
| V4.29 | V4.25 + Norvégien | ||
| V4.31 | Résout les blocages soft (ex: bloqué sur écran Magellan). Mise à jour faite uniquement dans nos ateliers car elle nécessite une modification hard. | V4.32 | |
| 3ème version programme: Rev C (V5.XX) | |||
| V5.15 | V5.16 | ||
Versions valides à partir du 01/02/2006.
Fonctions cachees
Éteindre le GPS : Appuyer simultanément sur ENTER / CANCEL / POWER.
Reset Data Saver GPS: Réinitialisation de la carte GPS (Uniquement disponible sur V4 XX).
Reset Data Saver: Réinitialisation des données utilisateurs.
Nand Flash Format: Permet de débloquer l'appareil en cas de plantage programme.
HDD Format: Formate le Disque Dur (ATTENTION).
Écran OPTION: ++/--/+/-
Set Vehicle Position: Permet de rentrer une adresse.
Effacer la mémoire A12: Réinitialisation de la carte GPS.
Dump File System Info: Permet de sortir les infos système et numéro de série par port série.
MFG GPS Status: Statut des satellites.
Choix du continent : Choix entre la cartographie US et Europe (Uniquement disponible sur V4. XX).



Les ameliorations cartographques et logicielles de la REV b (V4. XX):
- Nouvelle cartographie Navteq de Q.1.04 : Couverture plus importante :
Nord Amérique : couverture complète du Canada
Europe : Meilleure couverture de la France, Italie, Finlande, Portugal, Espagne et Irlande. Ajout de la Grèce, Île de Man et les Îles anglo-normandes.
- Les cartographies Europe et Nord Amérique seront pré-chargées dans le disque dur. Une seule région est débloquée et le client a la possibilité d'acheter et de débloquer l'autre région quand il le souhaite.
- Fonction IRDA compatible avec les PDA
- Fonction Maison (Home) en accès rapide
- Affichage de l'icône recherche des satellites
- Fonction automatique Power Off (Après 20 min de non utilisation)
- Mémorisation de 50 destinations précédentes au lieu de 10
- Information de l'altitude dans la fonction « locate »
- Fonction simulator, besoin du coefficient de vitesse (1,1.5,2)
Les ameliorations cartographiques et logicielles de la REV c (V5. XX):
- Nouvelle cartographie Navteq de Q.2.04 : Couverture plus importante :
Europe : Ajout de la Slovaquie et de la République Tchèque
- Text-to-Speech : Annonce le nom des rues
- Calcul d'itinéraire à plusieurs destinations
- Personnalisable avec les propres points d'intérêts du client : il est possible de charger jusqu'à 1 millions de points d'intérêts
- Mode de nuit automatique : La carte passe automatiquement de l'écran jour à l'écran nuit
- Contrôle automatique du volume : Le son augmente lorsque le véhicule roule à plus de 45MPH
- Sauvegarde de la position actuelle : L'adresse est sauvegardée dans le réseau
- Mot de passe pour chaque utilisateur
One Touch To Choose Your World
Cablages standard :
Câblage de l'antenne GPS active Ref : ANT WAAS/EGNOOS Câblage d'un LOPDC Câblage d'une Ant WAAS/EGNOOS avec un LOPDC Câblage C-Link Câblage entre une Black Box et un Traceur Lorenz
Je ne peux pas créer de Mark / Événement / Waypoint sur mon traceur de carte LORENZ : Comment remplacer une antenne passive par une antenne active : Je n'ai pas de position GPS sur mon traceur de type Compact : Mon appareil est-il compatible avec la cartographie MAX ?
Cablages standard
Câblage de l'antenne GPS active Ref : ANT WAAS/EGNOS :
| Couleur de Fil | Fonction | Connecteur 8 Pins |
| Rouge | +10-35 V | 7 |
| Marron | GPS Tx | 2 |
| Noir | GND/Commun | 3,6 |
Câblage d'un LOPDC :
Ce câblage est valable pour les appareils de type : Compact / Excalibur / Panoramic
Câblage c-link :
Principe : Permet de relier deux traceurs LORENZ pour envoyer / recevoir les informations de position, de navigation (Une seule antenne est nécessaire pour faire fonctionner les deux appareils. Il faut une station primaire (ou maître) et une station secondaire (ou esclave), ainsi quand une action est réalisée sur la station primaire elle est automatiquement retransmise à la station secondaire.
Il faut acheter une carte C-Map Max pour la station primaire comme d'habitude, par contre pour la station secondaire, il faut une carte miroir qui sera facturée 75 prix public quel que soit la zone de la carte principale, ainsi il y aura une cartographie détaillée sur les deux appareils.
Il faut ensuite sélectionner la station primaire et secondaire sur chaque appareil : MENU > Réglage de base > Entrée / Sortie > C-Link > Station Primaire/Secondaire
| Station Primaire | Station Secondaire |
| Rx >> | >> Tx |
| Tx << | << Rx |
| GND | GND |
-Black Box avec un traceur de type Compact / Sky X7 / Excalibur / Panoramic : Pour activer la Black Box : MENU > Réglage de Base > Entrée Port 2 > BBFF50/200
-Black Box avec un traceur de type World Map et Starlight : Pour activer la Black Box : MENU > Réglage de Base > Entrée Port 3 > BBFF50/200
Procedure de RESET
. Cette procédure est valable pour les traceurs de carte type LORENZ / STANDARD HORIZON :
Appareil éteint, appui sur PAGE et tout en restant appuyé, mise en route de l'appareil. Apparait alors le MENU SYSTEM Test > RAM MENU > RAM Clear → ENTER
Questions les plus frequentes
Je ne peux pas créer de Mark / Événement / Waypoint sur mon traceur de carte LORENZ :
Il faut aller activer l'onglet fonctions spéciales :
MENU > Réglage de base > Fonctions spéciales > ON
Une fois cela effectué, on appuie sur [ENTER] et on a le choix de créer une Mark, un événement ou un Waypoint.
Comment remplacer une antenne Passive par une antenne active :
Les anciens traceurs de cartes Lorenz avec antenne déportée étaient équipées d'antenne Passive (Excalibur - World Map). Au besoin on peut les remplacer par des antennes actives pour cela :
Il faut désactiver le GPS interne : MENU > Réglage de Base > Entrée / Sortie > GPS Interne > OFF
Ensuite, il reste à câbler la nouvelle antenne (ex : GAA-2) sur l'entrée NMEA N°1 (Fil Blanc : NMEA IN +; Fil Vert : NMEA IN -).
Je n'ai pas de position GPS sur mon traceur de type Compact :
Vérifier que le récepteur GPS n'est pas masqué par un obstacle ou qu'il n'est pas monté à l'intérieur d'une cabine (un appareil avec antenne externe est alors préconisé)
S'il est correctement monté mais qu'il ne reçoit toujours pas, faire un RESET de l'appareil.
Sinon retour de l'appareil en atelier.
Mon appareil est-il compatible avec la cartographie MAX ?
Note : si le modèle (inscrit derrière l'appareil au-dessus du numéro de série) de votre appareil figure dans le tableau ci-dessous, il est alors compatible avec les cartes C-Map MAX, la fonction C-Link et l'option sondeur.
| Type d'appareils | Model |
| Compact 7 B/W | P1LS850ALZ / P1LS860ALZ |
| Compact 7 Sun | P1MS860ALZ |
| Compact X7 | P2MS800ALZ |
| Compact 8 Sun | P1MW100ALZ / P1MW130ALZ |
| Excalibur 7 Speed | P1LSB50ELZ / P1LSB500LZ |
| Excalibur 7 Speed Sun Color | P1MSB60ELZ / P1MSB600LZ |
| Sky X7 | P1MSB00ELZ / P2MSB000LZ |
| Panoramic 8 Sun | P1MW1100LZ / P1MW130ELZ / P1MW1000LZ / P1MW1300LZ |
| Starlight Plus | P1DC4100LZ / P2DC4000LZ |
| Starlight Pro | P1DC4110LZ / P1DC4010LZ |
| World Map 11 B/W | P1LD910GLZ |
| World Map 11 color | P1MF9100LZ / P1MF9200LZ / P1MF9300LZ |
| World Map 11 Sun color | P1MF9110LZ / P1MF9210LZ / P1MF9310LZ / P1MF931ELZ |

Sommaire
- PRINCIPLE DE FONCTIONNEMENT DU SONDEUR
- INSTALLATION DE LA SONDE SUR LE TABLEAU ARRRIERE - 31 -
- INSTALLATION DE LA SONDE A L'INTERIEUR DE LA COQUE
- INSTALLATION D'UNE SONDE TRAVERSANTE - 33 -
- ACCESSOIRESHUMMINBIRD -34-
- FAQ -36-
Passage démisse en route Le mode simulator reste actif malgré que le transducer soit branché au display L'écran s'éteint lorsque le bateau se déplace à grande vitesse Lorsque le bateau se déplace à grande vitesse, le fond disparaît de l'écran; l'image s'évanouit ou est interrompue L'appareil ne détecte aucun poisson Détermination des causes possibles d'interférence
Principhe de fonctionnement du sondeur
Le sondeur permet de sonder les fonds, mesurer la profondeur et détecter la présence d'obstacles ou de poissons à la verticale du bateau. Toutes ces informations sont dans la majorité des cas retranscrites sur un écran. Le principe de fonctionnement d'un sondeur est le suivant : une impulsion électrique est émise par le sondeur à la sonde qui vibre sous l'effet de cette impulsion. Une vague d'ultrasons est alors dirigée vers le bas, à une vitesse de l'ordre de 1500 mètres par seconde. L'onde est réfléchie et renvoyée vers la source lors d'une rencontre avec le fond ou avec un obstacle (banc de poissons, épaves, etc...). En calculant la différence de temps entre l'émission et la réception, le sondeur détermine la profondeur de l'objet, ou plus exactement sa distance par rapport à la sonde (ce n'est pas exactement la même chose). Un sondeur peut mesurer des intervalles de temps inférieurs à un millième de seconde.
Les échos retournés sont analysés et affichés sur l'écran du sondeur. Cette "image" instantanée se décale d'un cran (un pixel) à chaque nouvelle impulsion, si bien qu'après plusieurs impulsions on obtient à l'écran une ASF de représentation en deux dimensions du relief du fond, et des objets qui se trouvent entre le fond et la surface.
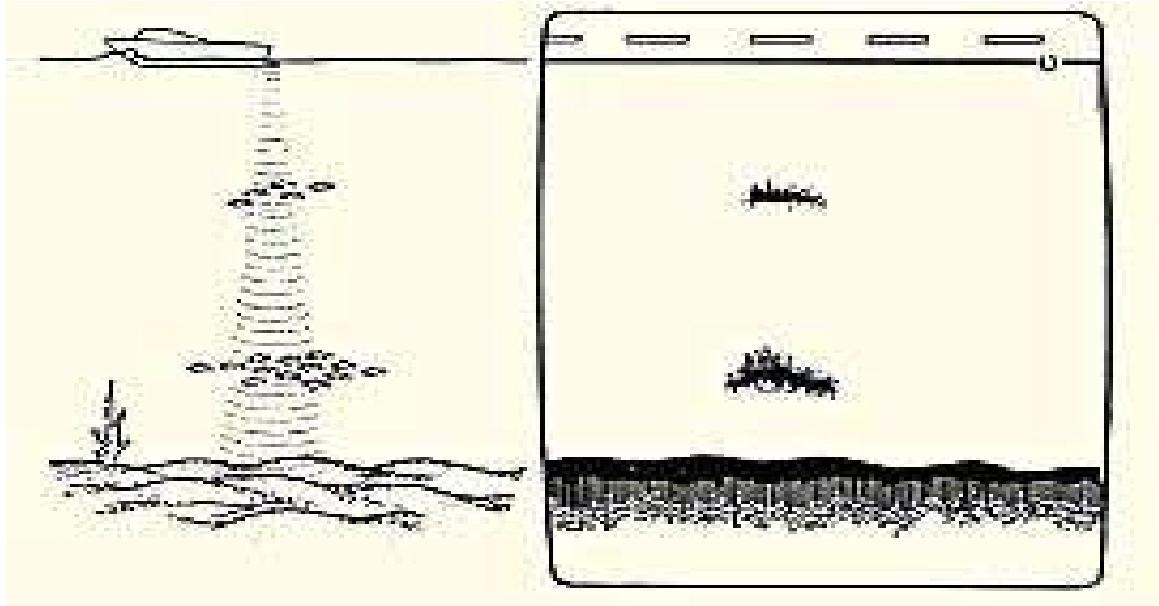
La sonde joue le rôle d'émetteur / récepteur et retransmet les informations au sondeur. Il faut néanmoins être vigilant à l'interprétation de l'écran car le sondeur retranscrit une image sonore en 3 dimensions en une image graphique en 2 dimensions. L'utilisateur doit donc jouer avec les différentes fonctions de l'appareil pour régler et interpréter de la meilleure façon les images retranscrites. Ces informations sont généralement transmises sous la forme d'une image défilant sur un écran.
Le principal paramètre qui influence la qualité de la détection est la fréquence. Exprimée en kHz, elle détermine la longueur d'onde émise par la sonde. C'est-à-dire, selon les fonds sondés, il faut utiliser des fréquences différentes, plus ou moins importantes. Par exemple, une fréquence de 200kHz détecte mieux les petits objets et donne une image plus précise, mais son utilisation reste limitée pour les grandes profondeurs.
Influence de l'angle du cône sur la lecture
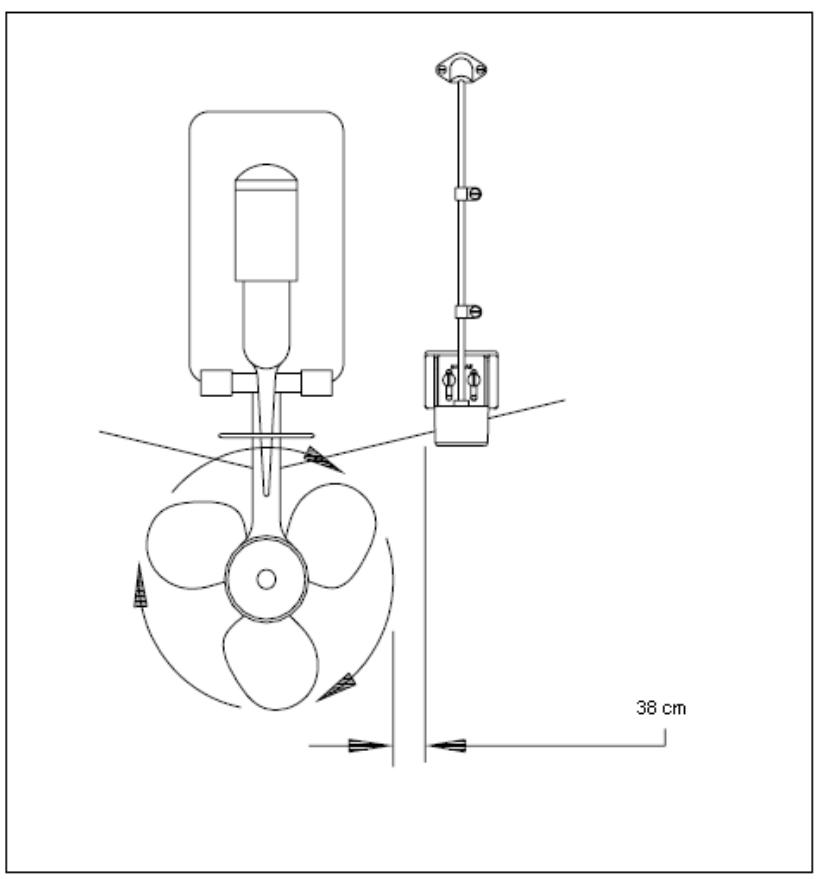
Installation de la SONDE sur le tableau arriere
- Déterminer le meilleur emplacement pour l'installation de la sonde :
Il est très important d'installer la sonde à un endroit relativement libre de turbulences. La meilleure façon de localiser un emplacement libre de turbulences est de regarder le tableau arrière lorsque le bateau se déplace. Cette trainée se limite normalement aux aires situées directement à l'arrière des membrures, virures ou rangées de rivets sous le bateau et dans la zone immédiate de l'hélice. Sur les bateaux munis d'un moteur hors-bord ou semi hors-bord, il vaut mieux placer le transducer à une distance d'au moins 38cm à côté de l'hélice (Voir schéma).
Installation de la SONDE a l'interieur de la COQUE
- L'installation à l'intérieur de la coque donne généralement de bons résultats dans les bateaux à coque de fibre de verre à une seule épaissieur. Humminbird ne peut garantir le rendement en profondeur lorsque l'appareil émet et reçoit à travers la coque d'un bateau, car une perte de signal se produit. Le niveau de la perte dépend de la construction, de l'épaissieur de la coque et de l'endroit où la sonde est installée. Cette installation nécessite l'utilisation d'un adhésif époxyde en deux parties à durcissement lent. N'utilise pas de silicone, un adhésif mou ou un adhésif époxyde rapide à durcissement rapide.
- En règle générale, plus votre bateau est rapide, plus vous devez placer le transducer vers l'arrière et près de la ligne d'axe centrale.
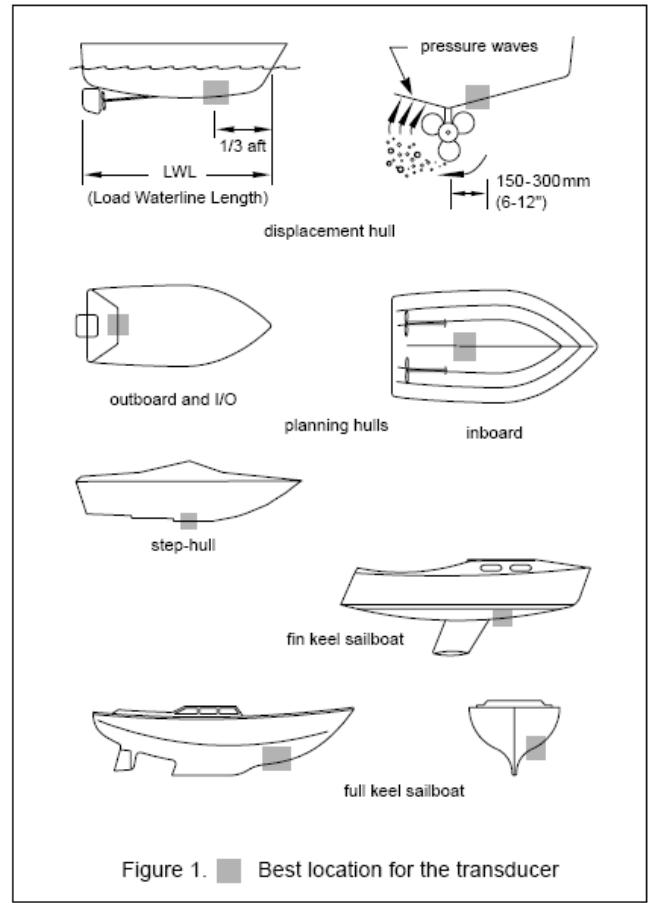
Installation d'une SONDE traversante
Avant de procéder au montage,
Vérifier d'abord si la sonde n'a subi aucun dommage durant le transport, puis après avoir connecté la sonde au sondeur, la maintenir immergée quelques temps sur le côté du bateau pour confirmer son bon fonctionnement. Le meilleur emplacement se situe vers le milieu du bateau, le plus près possible de la ligne médiane. Elle doit être installée au-devant des hélices sur les bateaux inboard. À l'intérieur du bateau, choisir un lieu facile d'accès pour l'installation et le passage des câbles.

Tableau des differents accessoires des sondeurs humminbird avec leurs
| Sonde 1A | Sonde 1B | Sonde 1C | Sonde 1D | Sonde 1E | Sonde 1F | Sonde 1G | Sonde 1H | Sonde 1I | Sonde 1J | |||||||||||
| Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | Tunismid | |
| Piranha Max10x a 20x | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | |||||||||||
| FF 141cx/323x/343cx/363x/383cx | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| FF 515x/525x/535x/565x | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| FF 585cx | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| FF 595cx | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| FF 727x/767x/777c2x/787c2x | 1 | XHS 9 20 T* | SH-A03T* | MHS SHS2 | SW-TS098 | XTH 9 20 P * | SH-B03!* | XTH 9 20* | SH-C03* | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||
| FF 737x | 2 | KT 6 TB 90 T | SH-A32T | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||
| Matrix 10x/15x/20x/25x/55x/65x | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| Matrix 12x/17x/27x/77x | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| Matrix 35x/37x | 2 | KT 6 TB 90 T | SH-A32T | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||
| Matrix 47 3D | 3 | SHS 7W | SH-A52 | MHS HS | SW-TS101 | STH 7W | SH-C52 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||||
| Matrix 67x/87x | 1 | XHS 9 20 T* | SH-A03T* | MHS SHS2 | SW-TS098 | XTH 9 20 P * | SH-B03!* | XTH 9 20* | SH-C03* | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| Matrix 97x | 1 | XHS 9 20 T* | SH-A03T* | MHS SHS2 | SW-TS098 | XTH 9 20 P * | SH-B03!* | XTH 9 20* | SH-C03* | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG G W SW | ||||||
| Panorama 931cx | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W / SW | ||||||||
| Panorama 931cx DF | 2 | XHS 9 DB 74T | SH-A04T | MHS HS | SW-TS101 | XTH 9 DB 74 P | SH-B04 | XTH 9 DB 74 | SH-C04 | XTD 9 DB 74 | SH-U04 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| Panorama 931cx DF | 2 | KT 9 DB 74 T | SH-A04TPM | MHX XT | SW-TS099 | XTH 9 DB 35KW | SH-C90DF | XTD 9 DB 74 | SH-U04 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||
| Panorama 937c2x DF | 2 | KT 9 DB 74 T | SH-A04TPM | MHX XT | SW-TS099 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||||||
| Panorama 937cx | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||
| Panorama 937cx DF | 2 | XHS 9 DB 74T | SH-A04T | MHS HS | SW-TS101 | XTH 9 DB 74 P | SH-B04 | XTH 9 DB 74 | SH-C04 | XTD 9 DB 74 | SH-U04 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| Panorama 937cx DF | 2 | KT 9 DB 74 T | SH-A04TPM | MHX XT | SW-TS099 | XTH 9 DB 35KW | SH-C90DF | XTD 9 DB 74 | SH-U04 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||
| Panorama 947cx 3D | 3 | SHS 7W | SH-A52 | MHS HS | SW-TS101 | STH 7W | SH-C52 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||||
| Panorama 981cx SI | 2 | XHS 9 SI 160 T | SH-A05T | MHS HS | SW-TS101 | XTH 9 SI 160 P | SH-B05 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||||
| Panorama 987cx SI | 2 | XHS 9 SI 160 T | SH-A05T | MHS HS | SW-TS101 | XTH 9 SI 160 P | SH-B05 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||||||
| SONDEUR ANCIENNE GENERATION | ||||||||||||||||||||
| Panorama 1x a 5x | 1 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | |||||||||||
| 100 SX / 150 SX | 4 | XHS 6 24 | SH-A12 | MHS SHS | SW-TS098 | XTH 6 16P | SH-B12 | XTH 6 16 | SH-C12 | |||||||||||
| 200 DX / 250 DX | 4 | KT 6 20 | SH-A22 | MHX XT | SW-TS099 | XTH 6 20 P | SH-B22 | XTH 6 20 | SH-C22 | |||||||||||
| 300 TX / 350 TX | 2 | KT 6 TB 90 P | SH-A32 | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| 400 TX / 450 TX | 2 | KT 6 TB 90 P | SH-A32 | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| HDR 600 | 4 | XHS 6 16 | SH-A12 AG | MHS HS | SW-TS101 | XTH 6 20 P | SH-B22 | XTH 6 20 | SH-C22 | |||||||||||
| HDR 610 | 4 | XHS 9 20 T | SH-A03T | MHS SHS2 | SW-TS098 | XTH 9 20 P I | SH-B03! | XTH 9 20 | SH-C03 | |||||||||||
| LCR-W | 4 | XHS 6 16 T | SH-A12 AG | MHS HS | SW-TS101 | XTH 6 20 P | SH-B22 | XTH 6 20 | SH-C22 | |||||||||||
| Legend 1000 / 2000 | 4 | KT 6 20 | SH-A22 | MHX XT | SW-TS099 | XTH 6 20 P | SH-B22 | XTH 6 20 | SH-C22 | |||||||||||
| Legend 3005 | 5 | KT 9 CB 24 | SH-A72 | MHS HS | SW-TS101 | XTH 9 CB 24 P | SH-B72 | XTH 9 CB 24 | SH-C72 | |||||||||||
| Legend 1005/2005/3005 Deep | 4 | KT 6 DB 74 | SH-A42 | MHX XT | SW-TS099 | XTH 6 DB 74 P | SH-B42 | XTH 6 DB 74 | SH-C42 | |||||||||||
| NS 25 | 4 | KT 6 20 | SH-A22 | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B22 | XTH 6 TB 90 | SH-C22 | |||||||||||
| Wide 100 | 4 | XHS 6 24 | SH-A12 | MHS SHS | SW-TS098 | XTH 6 TB 90 P | SH-B22 | XTH 6 TB 90 | SH-C22 | |||||||||||
| Wide 128 | 4 | XHS 6 24 | SH-A12 | MHS SHS | SW-TS098 | XTH 6 TB 90 P | SH-B22 | XTH 6 TB 90 | SH-C22 | |||||||||||
| Wide 3D Paramount/vision/vista | 3 | SHS 7W | SH-A52 | MHS HS | SW-TS101 | STH 7W | SH-C52 | |||||||||||||
| Wide paramount/panorama | 2 | KT 6 TB 90 P | SH-A32 | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | ||||||
| SH-A32 | MHX XT | SW-TS099 | XTH 6 TB 90 P | SH-B32 | XTH 6 TB 90 | SH-C32 | XTD 6 TB 90 | SH-U32 | TS WFM / TS W | SA-VTTR/SA-VTTA | TG W/ SW | |||||||||
| TA STA SA VTA TA STA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SA VTA SAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAAVAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA LAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA JAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA SAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAAA/VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA/VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAAA / AA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vae Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa Vaa VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VBAVAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA VAA Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/vaa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/Vaa/Faa/Faa/vaa/va/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vaa/Vla/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/VAN/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Van/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/VAC/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Vb/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Va/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vac/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vob/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vab/Vbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Bbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/ Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/CBB/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/CBB/ Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/ CBB/ Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/CBB/ CBB/ Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/CBB/ Cbb/CBB/ Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/Cbb/CBB/ cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/ cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB /cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ c BB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB- cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ CBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cbb/cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA /cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA/ CBA /cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBB/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBB/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA/ cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBA /cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB/ cBB /cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA /cBB/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBA/ cBB' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBB' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /CBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /CBB' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' / cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' / cBB' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA'//cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' /cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' //cBA' /cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' /cBA' /cBA' /cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBA' /cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBB' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBB' //cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBA' /cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBB' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' /cBB' //cBA' //cBA' //cBA' /cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' /cBB' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBA' //cBB' //cBA' //cBA' //cBA' /cAB ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' | ||||||||||||||||||||
| Sonde optionnelle quadrifasciées | |||
| Sonde TA | XT 6 TB 90 T | SH-A32T | |
| Sonde TP | XTH 6 TB 90 P | SH-B32 | |
| Sonde TB | XTH 6 TB 90 | SH-C32 | |
| I Exist en sonde flash mont | |||
| Sonde TPFM | XFM 9-20 | SH-B03FM | |

| Rd. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr. Rbm. | Tie Nomencl | Dr.Rbm. | |
| Rallonge de sonde | Rallonge V/T | Support ventouse | Support moleur écl. | Etrier de fixation | Kit d'encastrement | Kit portable | II. de protection | Valise de transp. | Cache fast lock | SONDEUR GAMME 2006 | |||||||||||
| EC W10W3 | SW-021/023 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MPS/MK/HM | SW-M05/M05 | IM04 | PTC P | SW-P04 | UC P | SW-R06 | Piranha Max10x a 20x | ||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK300 | SW-T300 | PTC W2 | SW-P01 | UC 4 | SW-R300 | MC W | SW-R01 | FF 141cx/323x/343cx/363x/383cx | |||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-P03 | MC W | SW-R01 | FF 515x/525x/535x/565x | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-P03 | MC W | SW-R01 | FF 585cx | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-P01 | MC W | SW-R01 | FF 595cx | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK700 | SW-T700 | PTC W2 | SW-P01 | UC 3 | SW-R700 | MC W | SW-R01 | FF 727x/767x/777c2x787c2x | |||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS200 | MS M | SW-M04 | IDMK700 | SW-T700 | PTC W2 | SW-P01 | UC 3 | SW-R700 | MC W | SW-R01 | FF 737x | |||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-P01 | MC W | SW-R01 | Matrix 10x/15x/20x/25x/55x/65x | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-PO3 | MC W | SW-R01 | Matrix 12x/17x/27x/77x | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SW-O04 | AD STM | SW-TS200 | MS M | SW-M04 | IDMK M | SW-T03 | PTC W2 | SW-P01 | UC M | SW-R07 | CC W | SW-PO3 | MC W | SW-R01 | Matrix 35x/37x | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT | SW-O05 | AD STM | SW-TS200 | MS M | SW-M04 | IDMK M | SW-T03 | PTC V2 | SW-P01 | UC M | SW-R07 | CC W | SW-PO3 | MC W | SW-R01 | Matrix 47 3D | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | MS M | SW-M04 | IDMK M | SW-T03 | PTC V2 | SW-P01 | UC M | SW-R07 | CC W | SW-PO3 | MC W | SW-R01 | Matrix 67x/87x | |
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | GM 1/MKH L | SW-M97/SW-M98 | Matrix 97 x | |||||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SW-O03 | AD STM | SW-TS201 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 931cx | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT | SW-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 931cx DF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SW-O04 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 931cx DF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O04 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 937cxDF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX SPT | SM-O03 | AD STM | SW-TS201 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 937cx | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O04 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 97cx | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 937cx DF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 97cx DF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | Panoramic 937cx DF | |||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | ||||||||||
| EC W10W3 | SW-021/023 | EC TS10/TS | SW-031/033 | MHX PT2 | SM-O05 | AD STM | SW-TS200 | GM 2/MKH 2 | SW-M900/SW-M901 | UC 2 | SW-R99 | ||||||||||
| EC W86/20 | SW-041/040 | MHX SPT | SW-O03 | AD STM | SW-TS201 | ||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX SPT | SW-O03 | AD STM | SW-TS201 | ||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O04 | AD STM | SW-TS200 | ||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O04 | ||||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | ||||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | ||||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | SW-TS200 | |||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | ||||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | PC W2 | SW-P01 | UC WL | SW-R03 | CC W | SW-P03 | MC W | |||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | ||||||||||||||||||
| EC 6/6/20 | SW-041/040 | MHX PT2 | SW-O05 | ||||||||||||||||||
Questions les plus frequentes
- Pas de mise en route :
Vérifiez que le câble d'alimentation est bien branché à l'alimentation du bord et au display du sondeur
Vérifiez que le fusible est en bon état
Vérifiez que la tension de batterie soit au moins de 10V
Enlevez toutes traces d'oxydations aussi bien sur le câble d'alimentation que sur la batterie
Sinon, retour de l'appareil en atelier
- Le mode simulateur reste actif malgré que le transducer soit branché au display :
Vérifiez que la sonde est correctement branchée à l'écran en vous reportant au manuel d'utilisation
Vérifiez qu'il n'y a pas un problème sur le câble de la sonde.
Remplacez-la si possible par une autre sonde.
Sinon, retour de l'appareil en atelier
- L'écran s'éteint lorsque le bateau se déplace à grande vitesse :
Si la puissance de sortie du bateau n'est pas régulée, il se peut que la tête de commande se protège grâce à un dispositif de protection contre les surtensions. Assurez-vous que la tension d'entrée ne dépasse pas 20V.
- Lorsque le bateau se déplace à grande vitesse, le fond disparaît de l'écran ; l'image s'évanouit ou est interrompue :
La position de la sonde doit probablement être readjustée. Un mélange d'air et d'eau s'écoulant autour de la sonde pourrait nuire à l'interprétation des données du sondeur.
- L'appareil ne détecte aucun poisson, même si vous savez qu'il y en a sous le bateau et les lectures du fond semblent faibles ou fausses :
Le signal de transmission peut être affecté par une batterie faible
Le bruit électrique provenant du moteur du bateau pourrait nuire à la réception du sondeur. Voir la section détermination des causes d'interférences pour obtenir de plus amples informations.
La cause peut aussi être provoquée par un mauvais positionnement de la sonde (par exemple, montée en angle plutôt que pointée directement vers le bas), par le fait qu'elle soit collée à l'intérieur de la coque et que le lien entre la sonde et la coque n'est pas totalement hermétique, ou encore si la sonde est sale, le détecteur pourrait avoir des difficultés à TRAITER les retours des échos.
Sources possibles d'interférence :
- Autres appareils électroniques : Fermez tous les dispositifs environnants pour voir si cela résout le problème, puis allumez-les de nouveau, un après l'autre pour voir si le problème survient de nouveau.
- Le moteur du bateau : Pour déterminer si le moteur du bateau est la source du bruit, faites augmenter le régime moteur en restant au point mort et en position stationnaire pour voir si le bruit augmente parallèlement avec les régimes moteurs. Si tel est le cas, le problème peut provenir des bougies d'allumage, de l'alternateur ou du câblage du tachymètre. Remplacez les bougies d'allumage par des bougies à résistance, installez un filtre pour l'alternateur, ou acheminez les cables du transducer et d'alimentation de l'écran à l'écart du câblage du moteur.
- Cavitation causée par l'hélice du bateau : La turbulence créée par l'hélice peut être cause du bruit. Assurez-vous que la sonde est montée au moins 38 cm à l'écart de l'hélice et que l'eau s'écoule avec aisance sur la sonde.
Sommaire
- PRINCIPHE DE FONCTIONNEMENT DE LA VHF - 40 -
- AFFECTATION DES CANAUX VHF - 41 -
- FAQ : -42 -
Pour les VHF portables (Type RT211/212/250/311/350) :
Procédure de RESET :
L'appareil ne se met pas en marche :
Impossibilité de changer de canal ou d'obtenir certains numéros de canaux :
Pas d'émission du tout OU Émission sur 1 W mais pas sur 5 W :
Pas de mise en route de l'appareil :
L'émission est impossible ou la haute puissance ne peut être sélectionnée :
Faible sensibilité du récepteur :
Couleurs de fils pour l'entrée NMEA de la RT-450DSC :
Mauvais numéro MMSI programmé dans la VHF :
Utilisation des VHF :
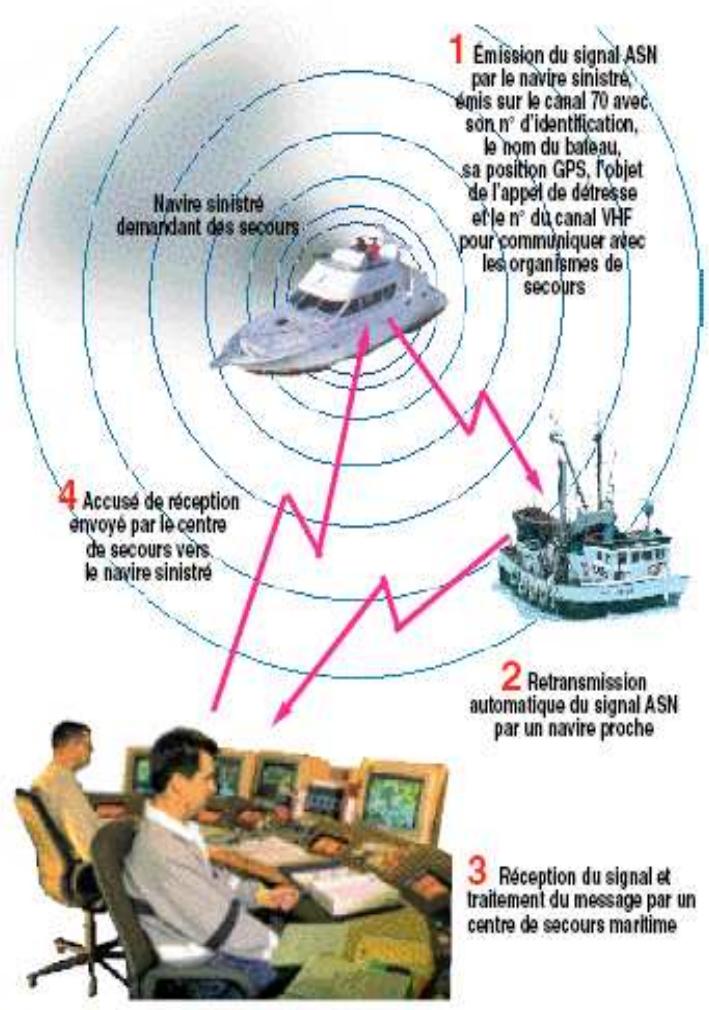
Légères, peu encourageantes et économiques en énergie électrique, les VHF permettent une liaison instantanée pour la communication avec d'autres stations VHF, l'obtention de bulletins météo, les avis urgents.... En raison de la portée trop limitée des téléphones GSM (2 MN), elles représentent un élément essentiel de sécurité, surtout si le bateau s'éloigne des côtes.
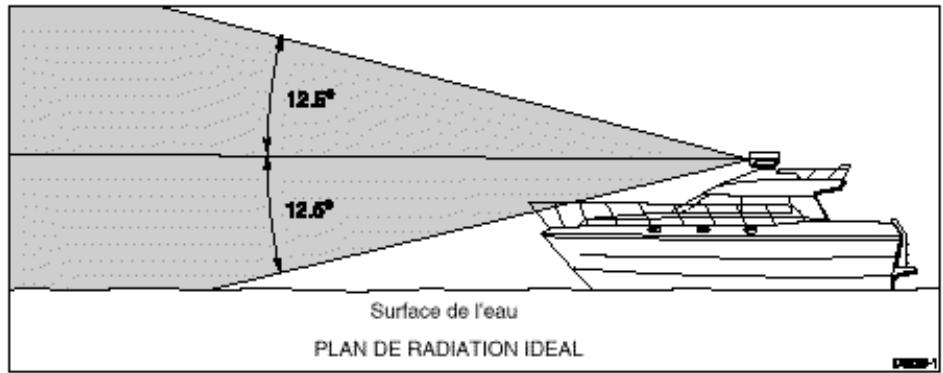
Portée d'émission : Contrairement aux signaux à plus BASSE fréquence, les ondes VHF se propagent en lignes droites et ne sont pas réfléchies par la ionosphere, leur portée est donc limitée « à vue » distance au-delà de laquelle les autres bateaux sont au-delà de l'horizon terrestre. La portée des émetteurs VHF est donc proportionnelle à l'altitude de l'antenne par rapport au niveau de la mer.
Les VHF équipées ASN : Lors de sa mise en service, chaque appareil équipé ASN (Appel Sélectif Numérique) est codé avec un numéro MMSI qui assure l'identification du bateau par les services de secours. Il est possible de contacter directement un bateau en composant sur la VHF son numéro MMSI.
Appels de détresse : Le système ASN permet d'émettre un message numérique de détresse sur et simplifié sur le canal 70. Les appels de détresse ASN incluent les informations nécessaires au déclenchement des opérations de secours : le numéro MMSI du bateau, sa position et l'heure de l'appel. Après avoir sélectionné le type de détresse, il suffit d'appuyer sur la touche Détresse de la VHF pour activer le processus.
| €0402 - €3481 - €548 | 62 | Bueo | Bueo |
| €3481 - €3481 - €548 | 62 | Bueo | Bueo |
| €5481 - €5481 - €548 | 62 | Bueo | Bueo |
| €0402 - €0481 - €048 | 62 | Bueo | Bueo |
| €0481 - €0481 - €048 | 62 | Bueo | Bueo |
| €0481 - €0481 - €048 | 62 | Bueo | Bueo |
| €0481 - €0481 - €048 | 62 | Bueo | Bueo |
| €0481 - €0481 - €054 | 62 | Bueo | Bueo |
| €0481 - €0481 - €054 | 62 | Bueo | Bueo |
| €0481 - €0481 - €054 | 62 | Bueo | Bueo |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €04B1 - €048 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
| €0481 - €0481 - €054 | 62 | Bueo | BUE |
1 + u7 = 7031 + u
Questions les plus frequentes
- Pour les VHF portables (Type RT211/212/250/311/350) :
Procédure de RESET :
Restez appuyé sur la touche [LIGHT] pendant la mise en route
L'appareil ne se met pas en marche :
Raison : Batterie non chargée
ou : Mauvaise fixation de la batterie
Impossibilité de changer de canal ou d'obtenir certains numéros de canaux :
Raison : Suivant le pays d'achat, certains canaux peuvent être à accès restreint ou déprogrammés
ou : fonction balayage ou double / triple veille activée
Pas d'émission du tout OU Émission sur 1 W mais pas sur 5W :
Raison : Tension faible lors de l'émission à pleine puissance (Rechargez la batterie)
ou : Puissance d'émission limitée sur certains canaux
ou : Antenne endommagée
Pas de mise en route de l'appareil :
Raison : Mise en route avec le bouton Volume
Ou : Vérifier les connexions de base de l'appareil
Aucun son ne provient du haut-parleur :
Raison: Reglez le bouton volume jusqu'à un niveau ajusté
ou : Réglez le Squelch jusqu'à son niveau de seuil
L'émission est impossible ou la haute puissance ne peut être sélectionnée :
Raison : Assurez-vous que la touche [PTT] ne soit pas défectueuse ou : Assurez-vous que le micro ou la prise micro ne soit pas défectueux ou : Certains canaux sont exclusivement destinés à la haute puissance ou à la réception ou : Appuyez sur la touche [HI/LO] pour sélectionner le mode haute puissance
Faible sensibilité du récepteur :
Raison : Vérifiez que la connexion de l'antenne soit correcte
ou : Vérifiez le câble coaxial et la connexion de celui-ci avec la prise d'antenne type PL/259
Couleurs de fils pour l'entrée NMEA de la rt-450dsc :
Fil Jaune : NMEA IN +
Fil Vert : NMEA IN -
Mauvais numéro MMSI programme dans la VHF :
Retour obligatoire en atelier pour reprogrammation
N'a si malgré ces conseils d'utilisation voe VHF ne fonctionne toujours pas correctement, un retour en atelier sera nécessaire.

Sommaire
- PRINCIPLE DE FONCTIONNEMENT D'UN RADAR - 46 -
- LES AIDES ET LES FONCTIONS - 47 -
- REGLAGES OBLIGATOIRES APRES INSTALLATIONS
- FAQ -48-
Pas de mise en route : Problèmes de fonctionnement du display (Bugs, fonctionnement aléatoire):
Principhe de fonctionnement d'un RADAR
Le mot radar est une abréviation de l'expression anglaise Radio Detecting And Ranging et qui signifie « Détection et télémetrie par radio ». D'une aide déjà sérieuse à la navigation par temps clair, le RADAR est indispensable par visibilité réduite. Tous les obstacles fixes ou mobiles, qu'on ne désigne plus autour du bateau, apparaisent sur l'écran. Il permet de continuer de faire route en toute sécurité, de manœuvrer pour éviter un autre bateau et même de rentrer au port.
Le fonctionnement du radar s'apparente à celui d'un sondeur. Le RADAR propage des pulsations électromagnétiques dans l'air à la vitesse de la lumière (300000 Km/s). La pulsation est réfléchie par un objet et revient sous forme d'écho. Il détermine ainsi l'éloignement de la cible en mesurant le temps écoulé entre l'émission de la pulsation et le retour de l'écho. Le relèvement de la cible détectée est déterminé par la direction vers laquelle pointe l'antenne du radar lorsqu'elle émet l'impulsion.
Hauteur de l'aérien :
Il n'est pas utile de trop monter l'aérien, les mouvements du bateau dégradent l'avantage de la hauteur. L'idéal serait de 3 à 4 mètres. Autrefois le radar servait à repérer la côte par mauvaise visibilité à grande distance. Aujourd'hui, GPS et carte font bien moins pour les obstructions fixes. Le radar servira surtout à repérer les autres bateaux. Un autre effet pervers des aériens trop hauts est que les échos proches disparaissent, à cause de la faible ouverture du lobe sur le plan vertical. Un gros navire ne peut pas vous voir, par très beau temps si vous êtes à moins d'un mille, vous êtes sous le faisceau; par mauvais temps c'est pire.
Les aides et fonctions
Les derniers modèles disposent d'une puissante carte informatique :
Tous les radars possèdent évidemment un marqueur mobile donnant distance et relèvement. Le radar est toujours couplé au GPS et la position vraie est lue sur le curseur.
La zone de sécurité est la fonction la plus ancienne et la plus simple. Un cercle dont le rayon est réglable détermine une surface centrée sur le bateau. Tout écho entrant dans la zone déclenche une alarme.
Une fonction très simple d'économie d'énergie consiste à ne faire tourner l'antenne et l'émission qu'un bref moment (Par exemple 5 tours d'antenne par minute) ce qui permet de réactualiser l'image et de baisser la consommation en énergie du système. Les radars modernes permettent de définir des zones plus complexes.
La reconnaissance de cibles a été une amélioration notable, cette fonction s'applique à MARPA. Les échos sont marqués par l'utilisateur et la cible est accrochée. Pour chaque cible, le vecteur vitesse est calculé (cap et vitesse), le risque de collision est analysé et une alarme peut être générée.
Les hauts de gamme ont aussi le lecteur de cartes. Soit l'écran est divisé avec l'image du traceur GPS et l'image du radar séparé, soit les deux images sont fusionnées en couleurs différentes. Il est aussi possible d'intégrer d'autres sources, vidéo, sondeur....

Reglages obligatoires apres installation
- Réglage de la ligne de foi :
Ce réglage est très important, il permet de dire avec précision la position des cibles. Il doit être réalisé une fois l'antenne fixée.
- Réglage du zéro (ligne de retard) :
Il permet d'augmenter la précision des distances du bateau par rapport à une cible pointée.
- Réglage de l'accord (TUNE):
Il permet de régler la fréquence de l'oscillateur.
Questions les plus frequentes
Pas de mise en route :
Vérifier le câblage/alimentation du radar
Vérifier que le radôme est connecté au display (sinon pas de mise en route).
Sinon, retour de l'appareil en atelier
Problèmes de fonctionnement du display (Bugs, fonctionnement aléatoire) :
Faire un RESET du système :
Appareil éteint : Appui sur [EBL/VRM] + mise en route
Sinon, retour de l'appareil en atelier
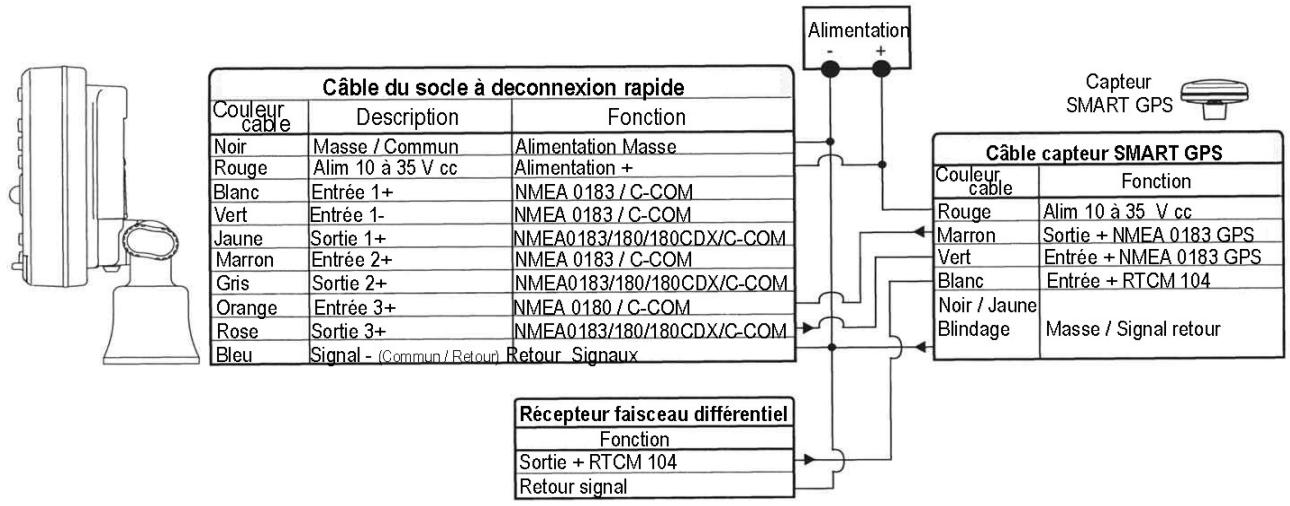
Connexions NMEA pour les appareils les plus courants
| APPAREILS | Couleur de fil NMEA+ | Couleur de fil NMEA- |
| SP12X | Jaune | Bleu/Rose |
| SP24 ou SP24XC | Orange | Bleu |
| FX112 | Jaune | Orange |
| FX312 | Jaune | Orange |
| FX412 | Jaune | Orange |
| FX324 | Jaune | Orange |
| GPS310 | Orange | Noir |
| GPS315 | Orange | Noir |
| GPS320 | Orange | Noir |
| MAP330 | Orange | Noir |
| MERIDIAN | Orange | Noir |
| SPORTTRACK | Orange | Noir |
| Valsat 03 | Pin 7 | Pin14 |
| Valsat SP | Jaune | Bleu/Rose |
| Entrée Sondeur Matrix | Vert | Noir |
| RT 450DSC | Jaune | Vert |
| APPAREILS | Couleur de fil NMEA+ | Couleur de fil NMEA- |
| Antenne GA 24X (MLR) | Blanc | Jaune |
| Antenne GAA-2 | Marron | Noir |
| Antenne AS-GR16 | Blanc | Noir |
| Antenne JRC | Vert | Blanc |
| Antenne LORENZ | Marron | Noir |
| Appareil LORENZ | Gris | Noir |
| GPS Garmin type Etrex | Blanc | Noir |
| RT 450DSC | Jaune | Vert |