
FI-5500 - Frequenzumrichter MSW - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts FI-5500 MSW als PDF.

| Produkttyp | Frequenzumrichter |
| Marke | MSW |
| Modell | FI-5500 |
| Versorgungsspannung | Einphasig 220V / Dreiphasig 220V / Dreiphasig 380V (je nach Modell) |
| Nennleistung | 0,75 kW bis 15 kW (für 380V) |
| Steuerungsmodus | Sensorloser Vektorregelung (SVC), mit Sensor (FVC), U/f |
| Maximale Ausgangsfrequenz | 300 Hz (Vektor), 3200 Hz (U/f) |
| Anlaufdrehmoment | 150% bei 0,5 Hz (SVC), 180% bei 0 Hz (FVC) |
| Integrierte Schutzfunktionen | Überlast, Überstrom, Überspannung, Unterspannung, Übertemperatur, Kurzschluss |
| Digitale Eingänge | 5 (davon 1 Hochgeschwindigkeit, 100 kHz) |
| Analoge Eingänge | 2 (AI1: 0-10V, AI2: 0-10V/4-20mA) |
| Analoger Ausgang | 1 (AO1: 0-10V/0-20mA) |
| Kommunikationsschnittstelle | Modbus RTU, CANlink |
| Anzeige | 5-stellige LED |
| Betriebstemperatur | -10°C bis +40°C (Leistungsreduzierung bis 50°C) |
| Relative Luftfeuchtigkeit | <95% rF, ohne Kondensation |
| Maximale Höhe | 1000 m (Leistungsreduzierung darüber) |
| Abmessungen (H x B x T) | 186 x 125 x 159 mm (Modell 0,75kW) |
| Gewicht | 1,7 kg (Modell 0,75kW) |
| Gehäusematerial | Kunststoff oder Metall je nach Leistung |
| Wartung | Lüfter prüfen, Luftkanäle reinigen, Schrauben festziehen |
| Optionales Zubehör | Bremswiderstand, PG-Karten, I/O-Karte, Bremseinheit |
Häufig gestellte Fragen - FI-5500 MSW
Benutzerfragen zu FI-5500 MSW
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Frequenzumrichter kostenlos im PDF-Format! Finden Sie Ihr Handbuch FI-5500 - MSW und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. FI-5500 von der Marke MSW.
BEDIENUNGSANLEITUNG FI-5500 MSW
Allgemeine Funktionen und Beschreibung des Frequenzumrichters:
1) Spannungsklassen: Das Gerät unterstützt drei Spannungsklassen: einphasig 220 V, dreiphasig 220 V und dreiphasig 380 V.
2) Umfangreicher Regelungsmodus: neben der Vektorregelung mit Drehzahlsensor, sensorloser Vektorregelung und skalarer U/f-Regelung, U/f-Trennungssteuerung.
3) Umfangreicher Feldbus: Unterstützung von Modbus RTU und CANlink.
4) Zahlreiche Encoder-Typen: Unterstützung von Differential-Encodern, Open-Collector-Encodern, Drehtransformatoren, etc.
5) Brandneuer sensorloser Vektorregelungsalgorithmus.
Der brandneue SVC (Sensorless Vector Control, sensorlose Vektorregelung) bietet eine bessere Stabilität bei niedriger Drehzahl, eine höhere Belastbarkeit bei niedriger Frequenz und unterstützt die SVC-Drehmomentregelung.
6) Leistungsstarke Hintergrundsoftware: Hochladen, Herunterladen von Parametern, Echtzeit-Oszilloskop kann auf der Software im Hintergrund realisiert werden.
| Funktion Beschreibung | |
| Schutz des Motors vor Überhitzung | Wenn die PC1-Erweiterungskarte ausgewählt ist, kann AI3 das Eingangssignal des Motortemperatursensors (PT100, PT1000) empfangen, um einen Überhitzungsschutz zu ermöglichen. |
| Schnelle Strombegrenzung | Vermeiden eines Überstromfehlers im Frequenzumrichter |
| Zweistufen-Motorschalter | Zwei Sätze von Motorparametern ermöglichen die Implementierung eines Zweistufen-Motorschalters. |
| Wiederherstellen von Benutzerparametern | Benutzer können ihre eigenen Parametereinstellungen speichern oder wiederherstellen. |
| Analog-E/A-Genauigkeit | Nach der Werkskalibrierung (oder Punktkalibrierung) kann die E/A-Genauigkeit < 20 mv betragen |
| Anzeigen von benutzerdefinierten Parameter | Benutzer können entscheiden, welche Funktionsparameter angezeigt werden sollen. |
| Anzeigen geänderter Parameter | Benutzer können Funktionsparameter nach der Änderung anzeigen. |
| Optionale Fehlerbehandlung | Benutzer können die Betriebsarten des Wechselrichters nach Bestätigung bestimmter Fehler auswählen: Freilaufstopp, Bremsstopp, Dauerbetrieb. Benutzer können auch die Frequenz des Dauerbetriebs auswählen. |
| PID-Parameterschalter | Zwei Sätze von PID-Parametern können per Klemme oder Abweichung umgeschaltet werden. |
| Erkennung von PID-Rückkopplungsverlust | Der PID-Istwertverlust-Erkennungswert bietet Schutz während des PID-Betriebs. |
| DIDO positive/negative Logik | Der Benutzer kann die positive / negative Logik von DIDO einstellen. |
| DIDO-Antwortverzögerung | Der Benutzer kann die Verzögerungszeit für die DIDO-Antwort einstellen. |
| Betrieb bei kurzer Stromunterbrechung | Bei einer kurzzeitigen Netzunterbrechung oder einem Spannungsabfall arbeitet der Wechselrichter für kurze Zeit weiter. |
| Countdown-Zeit | Countdown-Timer-Betrieb, maximal 6500 Minuten. |
Öffnen Sie den Karton zur Kontrolle.
Prüfen Sie beim Öffnen des Kartons sorgfältig, ob das auf dem Typenschild angegebene Modell und die Leistung des Frequenzumrichters mit der Bestellung übereinstimmen. Die Verpackung enthält das bestellte Gerät, das Qualifikationszertifikat, die Betriebsanleitung und die Garantiekarte.
Bei Transportschäden oder Fehlmengen wenden Sie sich bitte an unsere Firma oder den Lieferanten.
Kapitel 1 Sicherheitshinweise und Vorsichtsmaßnahmen
Die Vorsichtsmaßnahmen sind in dieser Anleitung in zwei Kategorien unterteilt:

Gefahr - Bei nicht bestimmungsgemäßem Betrieb können schwere Verletzungen und sogar der d eintreten;

Achtung: Bei nicht bestimmungsgemäßem Betrieb können leichte bis mittelschwere Verletzungen und Geräteschäden auftreten.
Lesen Sie diesen Abschnitt vor der Installation, Fehlersuche und Systemwartung sorgfältig durch und befolgen Sie die Vorsichtsmaßnahmen. Das Unternehmen übernimmt keine Verantwortung für Verletzungen oder Schäden, die durch einen nicht bestimmungsgemäßen Betrieb entstehen.
1.1 Sicherheitsfragen
1.1.1 Vor der Installation:
!
Gefahr
- Wenn nach dem Öffnen der Verpackung Wasser in das Gerät eingedrungen ist, ein Bauteil fehlt oder beschädigt ist, darf das Gerät nicht installiert werden!
- Bei Unstimmigkeiten zwischen Lieferschein und Gerät darf nicht installiert werden!
!
Gefahr
- Bewegen Sie das Gerät vorsichtig, da es sonst beschädigt werden kann!
- Wenn der Wechselrichter / Frequenzumrichter beschädigt ist oder Teile fehlen, darf er nicht verwendet werden! Es besteht Verletzungsgefahr!
- Berühren Sie Komponenten des Steuerungssystems nicht mit den Händen, es besteht die Gefahr einer elektrostatischen Entladung!
1.1.2. Während der Installation:
!
Gefahr
- Installieren Sie das Gerät auf einem schwer entflammbaren Untergrund, z. B. Metall, und halten Sie es von brennbaren Materialien fern, da es sonst zu einem Brand kommen kann.
• Schrauben Sie die Befestigungsschrauben der Komponenten nicht unbedacht ein, insbesondere nicht die rot markierten!
!
Vorsicht
- Führen Sie kein Kabelende oder Schrauben in den Wechselrichter ein, da dies den Wechselrichter beschädigen kann! Installieren Sie den Wechselrichter an einem vibrationsarmen Ort und schützen Sie ihn vor Sonneneinstrahlung.
- Wenn mehr als zwei Frequenzumrichter in einem Schrank installiert werden, achten Sie auf deren Anordnung, um die Wärmeabfuhr zu gewährleisten.
1.1.3 Beim Anschluss von Kabeln
!
Gefahr
- Beachten Sie die Betriebsanleitung und setzen Sie Elektrofachkräfte ein, andernfalls besteht Gefahr!
• Der Frequenzumrichter sollte durch einen Schalter von der Stromversorgung getrennt sein, da sonst ein Brand entstehen kann! - Vergewissern Sie sich vor dem Anschließen, dass der Spannungsstatus Null ist, da es sonst zu einem elektrischer Schlag kommen kann!
- Stellen Sie sicher, dass der Frequenzumrichter ordnungsgemäß und normgerecht geerdet ist, da sonst ein elektrischer Schlag die Folge sein kann!
!
Gefahr
- Schließen Sie die Eingangsleistung nicht an die Ausgangsklemmen (U, V, W) des Frequenzumrichters an. Achten Sie auf die Markierungen an den Kabelklemmen und nehmen Sie keine falschen Anschlüsse vor, um eine Beschädigung des Wechselrichters zu vermeiden.
- Stellen Sie sicher, dass alle Kabel den EMV-Anforderungen (Elektromagnetische Verträglichkeit) und den örtlichen Sicherheitsstandards entsprechen. Die Querschnitte aller Kabel sollten den Angaben in der Betriebsanleitung entsprechen, da es sonst zu einem Unfall kommen kann!
• Schließen Sie den Bremswiderstand nicht direkt zwischen den DC (+) (-) Klemmen an, da sonst ein Brand entstehen kann! - Verwenden Sie ein einzelnes abgeschirmtes Kabel für den Encoder und achten Sie auf eine sichere Erdung der Abschirmklemme!
1.1.4 Vor dem Einschalten der Stromversorgung

Achtung!
- Prüfen Sie die Kompatibilität zwischen der Klasse der Eingangsversorgungsspannung und der Nennspannungsklasse des Frequenzumrichters, die Korrektheit der Anschlüsse der Netzeingangsklemmen (R, S, T) und der Ausgangsklemmen (U, V, W). Stellen Sie sicher, dass kein Kurzschluss in dem an den Wechselrichter angeschlossenen Peripheriekreis vorliegt und dass die Kabel fest angezogen sind, sonst kann der Wechselrichter beschädigt werden!
- Kein Teil des Frequenzumrichters benötigt eine Spannungsprüfung, da das Produkt bereits geprüft wurde!

Gefahr
- Schließen Sie den Frequenzumrichter nach der Montage der Abdeckung an die Stromversorgung an, da sonst ein elektrischer Schlag auftreten kann!
- Die Verkabelung des gesamten Peripheriezubehörs sollte in Übereinstimmung mit der Betriebsanleitung erfolgen und die Kabel müssen ordnungsgemäß gemäß der in der Betriebsanleitung angegebenen Schaltungsanschlussmethode angeschlossen werden, da sonst ein Unfall auftreten kann!
1.1.5 Nach dem Einschalten der Stromversorgung

Gefahr
- Öffnen Sie die Abdeckung nach dem Einschalten des Geräts nicht, da sonst die Gefahr eines Stromschlags besteht!
- Berühren Sie den Wechselrichter bzw. den Peripheriekreis nicht mit nassen Händen, da dies zu einem elektrischen Schlag führen kann!
- Berühren Sie nicht die Eingangs- oder Ausgangsklemmen des Frequenzumrichters, da sonst die Gefahr eines Stromschlags besteht!
- Beim ersten Einschalten führt der Frequenzumrichter eine sichere Erkennung der externen Stromschleife durch - berühren Sie nicht die U-, V-, W-Klemmen des Wechselrichters oder die Motorkabelklemmen, da sonst die Gefahr eines Stromschlags besteht!
1.1.6 Beim Gerätebetrieb

Achtung!
- Berühren Sie nicht den Lüfter oder die Auslassöffnungen, um die Temperatur zu prüfen, da sonst Verbrennungsgefahr besteht!
- Eine nicht fachkundige Person darf das Signal nicht erkennen, da dies zu Verletzungen oder Schäden am Gerät führen kann.

Gefahr
- Vermeiden Sie, dass Gegenstände in das Gerät fallen, wenn der Frequenzumrichter in Betrieb ist, da sonst das Gerät beschädigt werden kann!
• Steuern Sie den Wechselrichter nicht durch Ein- und Aussehalten des Schützes, da sonst das Gerät beschädigt werden kann!
1.1.7 Wartungsarbeiten

Gefahr
• Reparieren oder warten Sie das Gerät nicht, wenn es eingeschaltet ist, da sonst die Gefahr eines Stromschlags besteht!
- Warten oder reparieren Sie den Wechselrichter nur, wenn die Wechselrichterspannung zwei Minuten nach einem Netzausfall <DC36V ist, da sonst elektrische Restladung am Kondensator zu Verletzungen führen kann!
- Personen ohne fachliche Ausbildung dürfen den Frequenzumrichter nicht reparieren oder warten, da dies zu Verletzungen oder Schäden am Gerät führen kann.
- Nach dem Austausch des Frequenzumrichters müssen die Parameter eingestellt werden. Stecken Sie alle Stecker ein, bevor Sie das Gerät wieder in Betrieb nehmen.
1.2. Vorsichtsmaßnahmen
1.2.1. Inspektion der Motorisolierung
Bei erstmaliger Verwendung des Motors, bei erneuter Verwendung des Motors nach längerem Stillstand und bei regelmäßiger Überprüfung des Motors ist eine Isolationsprüfung erforderlich, um Schäden am Frequenzumrichter aufgrund einer falschen Isolierung der Motorwicklungen zu vermeiden. Trennen Sie bei der Überprüfung der Isolierung das Motorkabel vom Frequenzumrichter. Wir empfehlen einen Spannungsmesser von 500 V, der gemessene Isolationswiderstand sollte ≥ 5 MΩ sein.
1.2.2. Thermischer Schutz des Motors
Entspricht der gewählte Motor nicht der Nennleistung des Frequenzumrichters, insbesondere wenn die Nennleistung höher als der Frequenzumrichter ist, müssen die Motorschutzwerte angepasst werden oder es muss ein Thermorelais zum Schutz vor dem Motor installiert werden.
1.2.3 Betrieb über der Netzfrequenz
Der Frequenzumrichter liefert eine Ausgangsfrequenz von 0 Hz \~ 3200 Hz. Wenn Benutzer mit einer Frequenz über 50 Hz arbeiten müssen, berücksichtigen Sie die Toleranz des mechanischen Geräts.
1.2.4. Schwingungen des mechanischen Geräts
Bei einer bestimmten Ausgangsfrequenz des Frequenzumrichters kann es zu einem Punkt mechanischer Resonanz des Lastgeräts kommen. Der Sprungfrequenzparameter kann eingestellt werden, um dies zu vermeiden.
Informationen über Warmlaufen und Motorgeräusche
Die Ausgangsspannung des Frequenzumrichters ist eine PWM-Welle, die bestimmte Oberschwingungen enthält, so dass die Temperatur, das Geräusch und die Vibration des Motors im Vergleich zum Betrieb mit der Netzfrequenz leicht ansteigen werden.
1.2.6 Positionierung spannungsempfindlicher Komponenten oder eines Kondensator zur Verbesserung des Leistungsfaktors auf der Ausgangsseite
Der Ausgang des Frequenzumrichters ist eine PMB-Welle. Wenn auf der Ausgangsseite ein Kondensator zur Verbesserung des Leistungsfaktors oder ein spannungsabhängiger Widerstand zum Schutz vor Blitzeinschlägen installiert ist, kann es leicht zu einer vorübergehenden Überlastung oder sogar zur Beschädigung des Frequenzumrichters kommen. Bitte nicht verwenden.
1.2.7. Schaltgeräte wie z. B. ein Schütz für die Eingangs- und Ausgangsklemmen des Frequenzumrichters
Wenn ein Schütz zwischen der Spannungsversorgung und der Eingangsklemme des Frequenzumrichters installiert ist, sollte dieses Schütz das Starten und Stoppen des Frequenzumrichters nicht steuern. Wenn dieses Schütz das Starten und Stoppen des Frequenzumrichters steuern muss, sollte das Zeitintervall nicht weniger als eine Stunde betragen. Häufiges Laden und Entladen verkürzt leicht die Lebensdauer des Kondensators im Frequenzumrichter. Wenn zwischen der Ausgangsklemme und dem Motor Schaltgeräte wie z. B. ein Schütz installiert sind, stellen Sie sicher, dass der Frequenzumrichter ohne Ausgang betrieben wird, da sonst das Modul leicht beschädigt werden kann.
1.2.8. Einsatz außerhalb der Nennspannung
Verwenden Sie den Frequenzumrichter dieser Serie nicht außerhalb des in der Betriebsanleitung zugelassenen Betriebsspannungsbereichs, da sonst das Gerät beschädigt werden kann. Verwenden Sie ggf. geeignete Spannungserhöhungs- oder -reduziergeräte, um die Spannung zu transformieren.
1.2.9. Umschalten von dreiphasigem auf zweiphasigen Eingang
Tauschen Sie einen dreiphasigen Frequenzumrichter nicht gegen einen zweiphasigen Frequenzumrichter aus, da sonst ein Fehler oder Schaden auftreten kann.
1.2.10 Schutz gegen Blitzschlag
Der Frequenzumrichter verfügt über einen Überspannungsschutz, der durch Blitzschlag ausgelöst wird, so dass er über einen gewissen Selbstschutz gegen induktive Entladung verfügt. Bei häufigen Blitzeinschlägen am Standort des Kunden ist eine zusätzliche Schutzeinrichtung vor dem Frequenzumrichter erforderlich.
1.2.11 Höhenlage und Leistungsreduzierung
In Regionen mit Höhenlagen über 1000 m wird die Wärmeableitungswirkung des Frequenzumrichters aufgrund der Luftverdünnung geschwächt, so dass eine Herabstufung vor dem Einsatz erforderlich ist. Bitte kontaktieren Sie unser Unternehmen für eine Beratung.
1.2.12. Adaptiver Motor
1) Der Standard-Adaptermotor ist ein vierpoliger asynchroner Induktionsmotor mit Käfigläufer. Wählen Sie den Frequenzumrichter entsprechend dem Motornennstrom aus.
2) Der Lüfter und die Motorrotorspindel mit konstanter Frequenz sind koaxial verbunden. Wenn die Drehzahl abnimmt, nimmt die Kühlwirkung des Lüfters ab. Installieren Sie daher bei Überhitzung des Motors einen starken Abluftventilator oder tauschen Sie den Motor gegen einen Motor mit variabler Frequenz aus.
3) Standardparameter des adaptiven Motors sind in den Frequenzumrichter eingebaut. Es ist notwendig, die Motorparameter zu identifizieren oder den Standardwert basierend auf der tatsächlichen Situation zu ändern, um ihn so weit wie möglich an den tatsächlichen Wert anzupassen, da sonst der Betrieb und die Schutzfunktion beeinträchtigt werden können.
4) Ein Kurzschluss im Kabel oder Motor kann zu einem Alarm oder sogar zur Explosion des Frequenzumrichters führen. Führen Sie bei erstmalig installiertem Motor und Verkabelung zunächst einen Isolationstest auf Kurzschluss durch. Dies ist auch für die tägliche Wartung notwendig. Während der Prüfung muss der Frequenzumrichter vollständig vom zu prüfenden Teil getrennt sein.
Kapitel 2. Produktinformationen
2.1 Namensprinzip
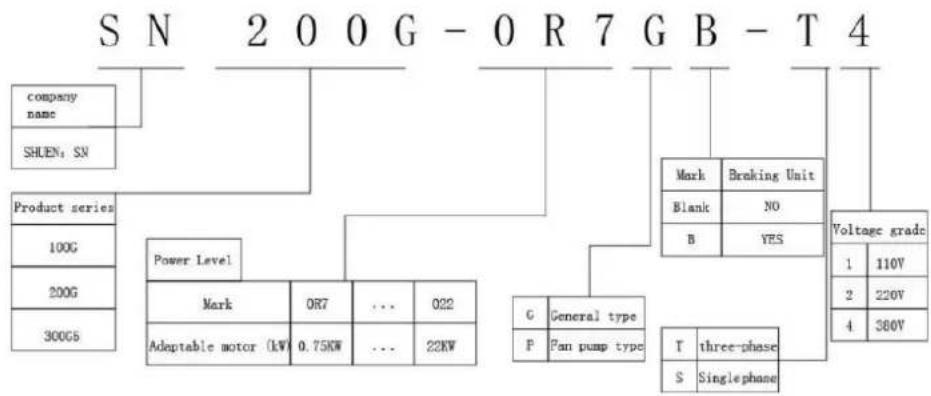
flowchart
graph TD
A["Company Name"] --> B["Product Series"]
C["SHUEN: SN"] --> B
D["Power Level"] --> E["Mark"]
D --> F["Adeptable motor (kW)"]
D --> G["OR7"]
D --> H["..."]
D --> I["022"]
D --> J["0.75KW"]
D --> K["..."]
D --> L["22KW"]
M["Mark"] --> N["Braking Unit"]
O["Blank"] --> P["NO"]
Q["B"] --> R["YES"]
S["G"] --> S1["General type"]
T["P"] --> T1["Fan pump type"]
U["T"] --> V["three-phase"]
W["S"] --> X["Single-phase"]
Y["Voltage grade"] --> Z["1 110V"]
Y --> AA["2 220V"]
Y --> AB["4 380V"]
Kapitel 2 Produktinformationen
2.2. Typenschild
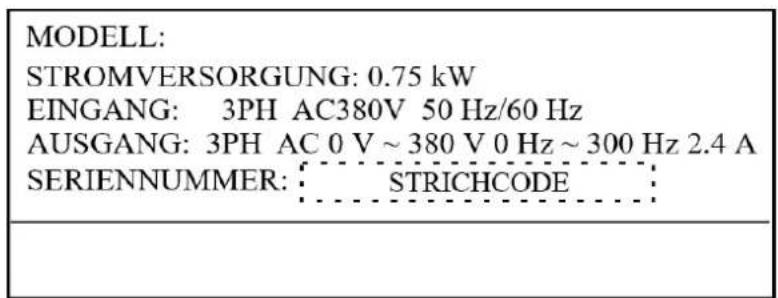
Abb. 2 - 2 Typenschild
2.3 Frequenzumrichter
Abbildung 2 - 1 Modell und technische Daten des Frequenzumrichters
| Frequenzumrichtermodell | Nennleistung (kVA) | Eingangsstrom (A) | Ausgangsstrom (A) | Adaptermotor | |
| kW | KM | ||||
| Dreiphasige Stromversorgung: 380 V, 50/60 Hz | |||||
| 10061537 | 1.5 | 3.4 | 2.1 | 0.75 | 1 |
| 10061534 | 3.0 | 5.0 | 3.8 | 1.5 | 2 |
| 10061533 | 4.0 | 5.8 | 5.1 | 2.2 | 3 |
| 10061532 | 5.9 | 10.5 | 9.0 | 3.7 | 5 |
| 10061531 | 8.9 | 14.6 | 13.0 | 5.5 | 7.5 |
| 10061530 | 11.0 | 20.5 | 17.0 | 7.5 | 10 |
| 10061536 | 17.0 | 26.0 | 25.0 | 11.0 | 15 |
| 10061535 | 21.0 | 35.0 | 32.0 | 15.0 | 20 |
2.4. Technische Daten
Tabelle 2 - 2 Technische Daten des Frequenzumrichters
| Pos. | Werte | |
| Wesentliche Funktionen | Höchste Frequenz | Vektorregelung: 0 ~ 300 HzU/f-Steuerung: 0 ~ 3200Hz |
| Trägerfrequenz | 0.5 kHz ~ 16 kHzAutomatische Trägerfrequenzanpassung basierend auf der Lastcharakteristik | |
| Eingangsfrequenzauflösung | Werteinstellungen: 0.01 HzSimulationseinstellungen: höchste Frequenz ×0,025 % | |
| Regelungsart | SVCFVCU/f-Steuerung | |
| Anlaufmoment | Maschinentyp G: 0.5 Hz/150 % (SVC); 0 Hz/180 % (FVC)Maschinentyp P: 0.5 Hz/100 % | |
| Drehzahlregelbereich | 1: 100 (SVC) 1: 1000 (FVC) | |
| Genauigkeit der Drehzahlstabilisierung | ± 0.5 % (SVC) ± 0.02 % (FVC) | |
| Genauigkeit der Drehmomentsteuerung | ± 5 % (FVC) | |
| Überlastfähigkeit | Maschinentyp G: 150 % des Nennstroms bei 60 s; 180 % des Nennstroms bei 3 sMaschinentyp P: 120 % des Nennstroms bei 60 s; 150 % des Nennstroms bei 3 s | |
| Drehmomentförderung | Automatische Drehmomentförderung; manuelle Drehmomenterhöhung um 0,1 % ~ 30,0 % | |
| U/f-Kurve | Drei Möglichkeiten: linearer Typ; Mehrpunktyp; U/f-Kurve des N-ten Leistungstyps (Leistung 1,2, Leistung 1,4, Leistung 1,6, Leistung 1,8, Leistung 2) | |
| U/f-Trennung 2 Möglichkeiten: Volltrennung, Halbtrennung | ||
| Beschleunigungs-/Verzögerungskurven | Beschleunigungs-/Verzögerungsmethode linear oder S-Kurve. VierArten von Beschleunigungs-/Verzögerungszeit. Bereich der Beschleunigungs-/Verzögerungszeit: 0,0 ~ 6500,0 s | |
| Gleichstrombremsung | Gleichstrombremsfrequenz: 0.00 Hz ~ Maximalfrequenz; Bremszeit: 0,0 s ~ 36,0 s Bremswirkung; Stromgröße: 0.0 % ~ 100.0 % | |
| Schrittkontrolle | Schrittfrequenzbereich: 0,00 Hz ~ 50,00 Hz; Schrittbeschleunigungs-/verzögerungszeit 0,0 s ~ 6500,0 s | |
| Einfacher SPS-Treiber, mehrstufige Geschwindigkeit | Führt 16 Schrittgeschwindigkeiten über den eingebauten SPS-Treiber oder das Bedienterminal aus. | |
| Eingebauter PID | Einfach zu realisierende Prozesssteuerung, geschlossener Regelkreis | |
| Automatische Spannungsregelung | Hält die Ausgangsspannung automatisch konstant bei jeder Änderung der Netzspannung | |
| Überspannung, Überstrom, Motorstillstandskontrolle | Automatische Strom-/Spannungsbegrenzung im Betrieb, um häufiges Abschalten durch Überstrom und Überspannung zu verhindern | |
| Schnelle Strombegrenzungsfunktion | Reduziert Überstromfehler, schützt den normalen Betrieb des Frequenzumrichters | |
| Drehmomentbegrenzung und -regelung | Das „Nawy“-Zeichen reduziert das Drehmoment während des Betriebs, verhindert häufige Überstromauslösungen. Der Vektormodus mit geschlossenem Regelkreis kann eine Drehmomentsteuerung implementieren. | |
| Pos. Werte | ||
| Kundenspezifische Funktionen | Ausgezeichnete Leistung | Implementierung der Motorsteuerung dank leistungsstarker Stromvektorregelung |
| Arbeitet bei einem kurzen Stromausfall | Die Spannungsreduzierung wird im Falle eines vorübergehenden Stromausfalls durch die Lastrückkopplungsenergie kompensiert, so dass ein kontinuierlicher Betrieb des Frequenzumrichters für kurze Zeit aufrechterhalten wird. | |
| Schnelle Strombegrenzung | Vermeiden von häufigen Überstromfehlern bei Wechselrichtern. | |
| Zeitstcucrung | Zeitsteuerungsfunktion: Zeiteinstellung im Bereich von 0,0 min ~ 6500,0 min | |
| Mehrmotoriges Schalten | Zwei Motorparametersätze ermöglichen die Schaltsteuerung von zwei Motoren | |
| Mehrfädiger Bus | Unterstützt zwei Arten von Spot-Feldbus: R S -4 8 5, C A N li n k | |
| Überhitzungsschutz | Optionale Multifunktionskarte, Analogeingang A13 kann Motortemperatur-Sensorsignal (PT100, PT1000) empfangen | |
| Multi-Encoder | Unterstützt verschiedene Encoder wie Differential, Open Collector und Drehtransformator | |
| Benutzerprogrammierbar | Optionale benutzerprogrammierbare Karte ermöglicht Sekundärverarbeitung. | |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| LeistungsstarkeHintergrundsoftware | Unterstützung für Betriebsparameter und virtuelles Oszilloskop. Implementierung einer grafischen Überwachung des internen Status des Frequenzumrichters über ein virtuelles Oszilloskop. | |
| Klammen | Befehlsquelle | Gegebenes Bedienfeld, gegebenes Bedienterminal, gegebener serieller Kommunikationsanschluss. Umschaltung auf verschiedene Arten. |
| Frequenzquelle | 10 Frequenzquellen: gegebene Ziffer, gegebene Analogspannung, gegebener Analogstrom, gegebener Impuls, gegebene serielle Schnittstelle. Umschaltung auf verschiedene Arten. | |
| Hilfsfrequenzquelle | 10 Hilfsfrequenzquellen. Flexible Implementierung von Hilfsfrequenzabstimmung und Frequenzsynthese | |
| Eingangsklemmen | Standard:5 digitale Eingangsklemmen, davon unterstützt eine Klemme einen schnellen 100-Hz-Impulseingang,2 analoge Eingangsklemmen, davon unterstützt eine Klcmme einen Spannungseingang von 0 ~ 10 V bzw. einen Stromeingang von 4 ~ 20 mAErweiterbar durch:5 digitale Eingangsklemmen1 analoge Eingangsklemme, die eine Spannung von 0 ~ 10 V unterstützt. | |
| Ausgangsklemmen | Standard:1 schnelle Impulsausgangsklemme (offener Kollektor ist optional), unterstützt quadratisches Ausgangssignal 0 ~ 100 kHz1 digitale Ausgangsklemme1 Relaisausgangsklemme1 analoge Ausgangsklemme unterstützt den Stromeingang 0 ÷ 20 mA bzw. die Spannung 0 ÷ 10 V. Erweiterbar durch:1 digitale Ausgangsklemme1 Relaisausgangsklemme1 analoge Ausgangsklemme unterstützt den Stromeingang 0 ÷ 20 mA bzw. die Spannung 0 ~ 10 V. |
| Pos. Werte | ||
| Display- und Tastaturunterstützung | LED-Display | Parameter anzeigen |
| Tastensperre und Funktionsauswahl | Teilweise oder vollständige Tastensperre, Festlegung des Funktionsbereichs bestimmter Tasten, um Fehlbedienung zu verhindern. | |
| Schutzfunktion | Motorkurzschlusserkennung nach dem Einschalten, Standard-Eingangs-/Ausgangsphasenschutz, Überstromschutz, Überspannungsschutz, Unterspannungsschutz, Überhitzungsschutz, Überlastschutz. | |
| Optionales Zubehör | LCD-Bedienfeld, Bremseinheit, Multifunktions-Erweiterungskarte, E/A (E/A)-Erweiterungskarte, RS485-Kommunikationskarte, CANlink-Kommunikationskarte, PG-Karte mit Differenzeingang, PG-Karte für Drehtransformator, PG-Karte mit OC-Eingang. | |
| Betriebsumgebung | Verwendungsort | In Innenräumen ohne direkte Sonneneinstrahlung, Staub, korrosive Gase, brennbare Gase, Ölnebel, Wasserdampf, Tropfwasser oder Salzgehalt. |
| Höhe | < 1,000 m | |
| Umgebungstemperatur | - 10 °C ~ + 40 °C (bei einer Umgebungstemperatur von 40 °C ~ 50 °C, muss abgesenkt werden, um das Gerät verwenden zu können) | |
| Luftfeuchtigkeit | < 95 % RH, keine Kondensation | |
| Vibrationen | < 5.9 m/s (0.6 g) | |
| Lagertemperatur | - 20 °C ~ + 60 °C | |
Technische Parameter eines Hochleistungs-Frequenzumrichters
2.5 Äußere Zeichnung, Abmessungen der Montageöffnungen
2.5.1 Äußere Zeichnung
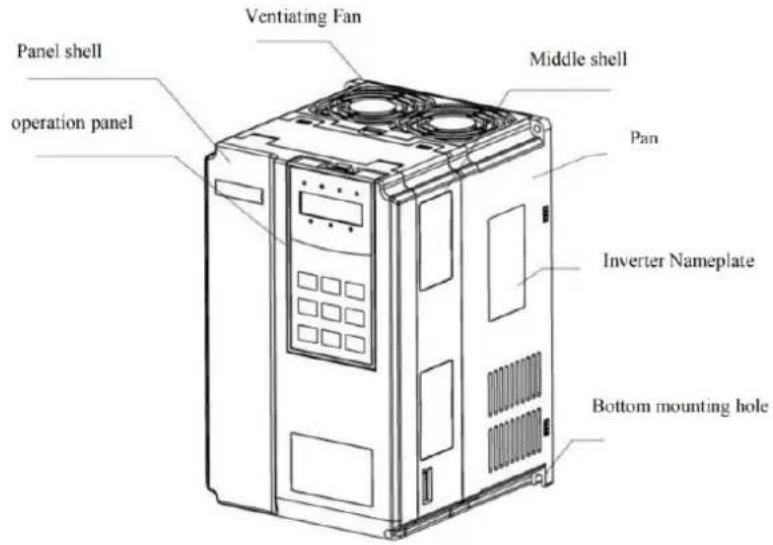
Abbildung 2 - 3 Außenansicht VFD


Abbildung 2 - 4 Schematische Darstellung der Außen- und Befestigungsmaße von Kunststoffkomponenten
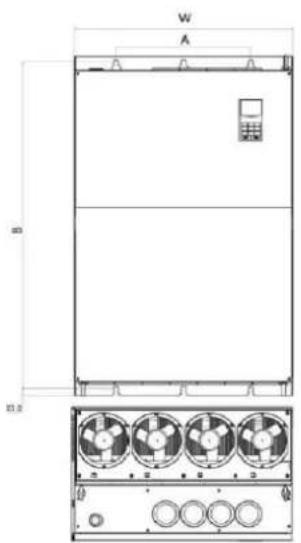
Abbildung 2 - 5 Schematische Darstellung der Außen- und Befestigungsmaße von Metallkomponenten
Technische Parameter eines Hochleistungs-Frequenzumrichters
Die Modellgehäuse sind wie folgt:
| Model1 | Gehäusetyp |
| Einphasig 220 V | |
| 0.4 kW ~ 2.2 kW | Kunststoffgehäuse |
| Dreiphasig 220 V | |
| 0.4 kW ~ 7.5 kW | Kunststoffgehäuse |
| 11 kW ~ 75 kW | Metallgehäuse |
| Dreiphasig 380 V | |
| 0.75 kW ~ 15 kW | Kunststoffgehäuse |
| 18.5 kW ~ 400 kW | Metallgehäuse |
2.5.2 Zu Abbildung 2 - 3 Abmessungen der Montageöffnungen (mm) des Frequenzumrichters
| Frequenzum-richtermodell | Montageöffnung (mm) | Außenmaß (mm) | Öffnungs-durchmesser | Masse (kg) | |||
| A | B | H | W | D | |||
| 10061537 | 114 172 | 186 125 159 | 5.0 | 1.7 | |||
| 10061534 | |||||||
| 10061533 | |||||||
| 10061532 | 149 237 | 218 160 174 | 5.0 | 3.2 | |||
| 10061531 | |||||||
| 10061530 | |||||||
| 10061536 | 190 305 | 322 208 192 | 6.0 | 6.5 | |||
| 10061535 | |||||||
2.5.3 Außenabmessungen des Anzeigefeldes
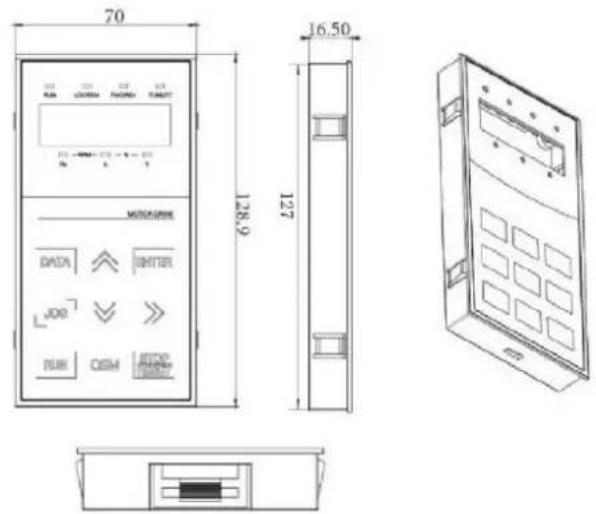
Abbildung 2 - 6 Außenabmessungen des Anzeigefeldes
Größe der Öffnungen im Anzeigefeld:
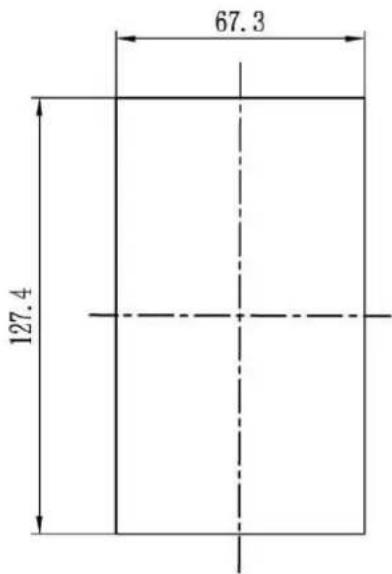
Abbildung 2 - 7 Größe der Öffnungen im Anzeigefeld
2.5.4 Maßzeichnung der externen Gleichstromdrossel
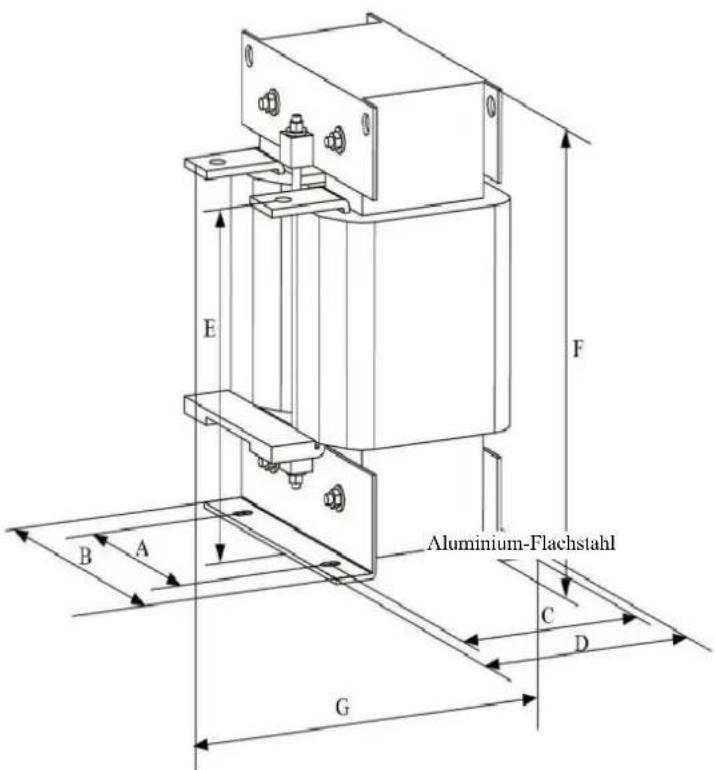
Abbildung 2 - 8 Maßzeichnung der externen Gleichstromdrossel
Hinweis: Bei besonderen Anforderungen können kundenspezifische Komponenten eingebaut werden.
Installationsmethode der externen Gleichstromdrossel: Bei der Installation des Frequenzumrichters muss der Benutzer der Jumper-Kupfer-Bus zwischen der Verkabelungssklemme von P1 und (+) der Hauptschleife entfernen und die Gleichstromdrossel zwischen P1 und (+) anschließen. Beachten Sie die Polarität der Kabel zwischen der Drosselklemme und der P1-Klemme des Frequenzumrichters, (+). Nach der Installation der Gleichstromdrossel ist der Kupfer-Bus zwischen P1 und (+) nicht mehr erforderlich.
2.6 Optionales Zubehör
Tabelle 2 - 6 Zubehör des Frequenzumrichters
| Bezeichnung | Modell | Funktion | Hinweise |
| Externe Bremseinheit | SNBU | 18,5 kW und mehr über der externen Bremseinheit | Ab 75 kW erfolgt eine Multiparallelschaltung |
| Multifunktionale Erweiterungskarte | IO-MINI-V03 | Fügt einen fünfstelligen Eingang und einen analogenSpannungseingang hinzu. AI3 ist eine isolierte analoge Größe, die an PT100 und PT1000 angeschlossen werden kann; ein Relaisausgang, ein digitaler Ausgang und ein analoger Spannungsausgang mit RS485 / CAN | Geeignet für Modelle mit einer Leistung von 3,7 kW und mehr |
| E/A-Erweiterungskarte (E/A) | IO1 | Fügt einen dreistelligen Eingang hinzu | Geeignet für die gesamte Serie |
| MODBUS-Kommunikationskarte | RS485 | Mit isolierender Kommunikationskarte | RS-485- Geeignet für die gesamte Serie |
| CANlink-Kommunikationserweit erungskarte | CANLINK-V03 | CANlink-Kommunikationsadapterkarte | Geeignet für die gesamte Serie |
| Differential-Encoder-Schnittstellenkarte | PG1 | Differential-Drehtransformator-Interfacekarte, geeignet für 5V-Spannungsquelle | Geeignet für die gesamte Serie |
| Drehtransformator-Interfacekarte | PG2 | Geeignet für Drehtransformator, 10 kHz Antriebsfrequenz, DB9-Schnittstelle | Geeignet für die gesamte Serie |
| Encoder-Interfacekarte mit offenem Kollektor | PG3 | Encoder-Interfacekarte mit offenem Kollektormit Ausgangsfrequenzteilung 1: 1, Adaptiv für 15 V Stromversorgung. | Geeignet für die gesamte Serie |
| LED-Bedienfeld | SNKE | LED-Display und Bedientastatur | Geeignet für die gesamte SN-Serie |
| Verlängerungskabel | SNCAB | Verlängerungskabel | In der Standardkonfiguration hat es eine Länge von drei Metern |
2.7 Routinemäßige Wartung des Frequenzumrichters
2.7.1. Routinemäßige Wartung
Der Einfluss von Umgebungstemperatur, Feuchtigkeit, Staub und Vibration führt zur Alterung der internen Komponenten und möglichen Fehlfunktionen und verkürzt die Lebensdauer des Frequenzumrichters, daher ist eine routinemäßige und regelmäßige Wartung erforderlich.
Elemente der Routineinspektion:
1) bei abnormaler Geräuschänderung während des Motorbetriebs;
2) bei Vibrationen während des Motorbetriebs
3) bei Änderung der Installationsumgebung des Frequenzumrichters
4) bei abnormalem Betrieb des Lüfters des Frequenzumrichters
5) im Falle einer Überhitzung des Frequenzumrichters
2.7.2 Regelmäßige Inspektionen:
1) Prüfen und reinigen Sie den Luftkanal regelmäßig.
2) Prüfen Sie auf lose Schrauben.
3) Prüfen Sie auf Spuren von Lichtbögen an den Kabelanschlüssen.
2.7.3 Lagerung des Frequenzumrichters
Nach dem Kauf des Frequenzumrichters sollte der Benutzer bei vorübergehender und langfristiger Lagerung wie folgt umgehen:
- Platzieren Sie das Gerät in die Originalverpackung.
- Eine Langzeitlagerung führt zu einer Verschlechterung des Elektrolytkondensators. Stellen Sie sicher, dass das Gerät innerhalb von zwei Jahren mindestens fünf Stunden lang eingeschaltet ist und verwenden Sie einen Spannungsregler, um die Eingangsspannung schrittweise auf den Nennwert zu erhöhen.
Die kostenlose Wartung gilt nur für den Frequenzumrichter. Im Falle eines Defekts oder einer Beschädigung während des normalen Gebrauchs ist unser Unternehmen 18 Monate lang für die Reparatur verantwortlich (ab dem Datum, an dem das Produkt das Werk verlässt und dem Datum des Barcodes auf dem Gerät). Nach 18 Monaten wird eine Reparaturgebühr berechnet. Bereits in den ersten 18 Monaten wird eine Gebühr erhoben für: Schäden am Gerät, die durch Verstöße der Anweisungen verursacht wurden, Schäden, die durch Feuer, Überschwemmung, anormale Spannung usw. verursacht wurden, Schäden, die durch die Verwendung des Frequenzumrichters für anormale Anwendungen entstanden sind. Die entsprechende Servicegebühr wird gemäß der Einheitspreisliste des Herstellers berechnet. Wenn etwas anderes vereinbart ist, hat diese Vereinbarung Vorrang.
2.9 Leitfaden für die Auswahl eines Bremskomponentenmodells
Tabelle 2-7 präsentiert die Richtlinien. Der Benutzer kann verschiedene Widerstandswerte und Leistungen entsprechend der tatsächlichen Situation wählen (der Widerstandswert sollte jedoch nicht niedriger als der empfohlene Wert in der Tabelle sein, die Leistung kann hoch sein). Die Wahl des Bremswiderstandes hängt von der Motorleistung im tatsächlich verwendeten System ab und steht im Zusammenhang mit der Systemträgheit, der Stoppzeit und der potenziellen Energiebelastung, so dass der Benutzer die Wahl anhand der vorhandenen Situation treffen sollte. Je höher das Trägheitsmoment des Systems ist, desto kürzer ist die Bremszeit und -frequenz, daher sollte der Bremswiderstand eine hohe Leistung und einen niedrigen Widerstandswert haben.
2.9.1 Auswahl des Widerstandswerts
Beim Bremsen wird die vom Motor zurückgewonnene Energie fast vollständig im Bremswiderstand verbraucht. Hier ist die Formel: U * U / R = Pb
U - stabile Bremsspannung (variiert je nach System, normalerweise 700 V)
Pb - Bremskraft
2.9.2 Auswahl der Bremswiderstandsleistung
Theoretisch entspricht die Leistung des Bremswiderstands der Bremskraft.
Es kann eine Reduzierung von bis zu 70 % vorgenommen werden.
Formel: 0,7 * Pr = Pb * D wo
Pr - Widerstandsleistung; D - Bremsfrequenz (Beteiligung am gesamten Prozess während der Erholung)
Aufzug - 20 % \~ 30 %,
Abwickler / Aufwickler - 20 \~ 30 %,
Zentrifuge - 50 % \~ 60 %
zufällige Bremslast - 5 %
Insgesamt 10 %
Abbildung 2 - 7 Auswahl der Bremselemente je nach Modell
| Frequenzum-richtermodell | Empfohlene Leistung | Empfohlener Widerstandswert | Bremseinheit | Hinweise |
| 10061537 | 150 W | ≥ 300 | Standardmäßig eingebaut | Keine spezifischen Anweisungen |
| 10061534 | 150 W | ≥ 220 | ||
| 10061533 | 250 W | ≥ 200 | ||
| 10061532 | 300 W | ≥ 130 | ||
| 10061531 | 400 W | ≥ 90 | ||
| 10061530 | 500 W | ≥ 65 | ||
| 10061536 | 800 W | ≥ 43 | ||
| 10061535 | 1000 W | 32 |
Kapitel 3 Mechanische und elektrische Installation
3.1 Mechanische Installation
3.1.1 Installationsumgebung:
1) Umgebungstemperatur: Die Umgebungstemperatur hat einen großen Einfluss auf die Lebensdauer des Frequenzumrichters, daher darf die Umgebungstemperatur während des Betriebs des Frequenzumrichters den Bereich (- 10 °C \~ 50 °C) nicht überschreiten.
2) Stellen Sie den Frequenzumrichter auf eine schwer entflammbare Oberfläche und lassen Sie ringsherum genügend Platz für die Wärmeabfuhr. Beim Betrieb des Frequenzumrichters wird viel Wärme erzeugt. Mit einer Schraube senkrecht an der Montagehalterung anbringen.
3) Installieren Sie an einem Ort mit schwachen Vibrationen < 0,6 G. Setzen Sie das Gerät keinen Stößen aus.
4) Vermeiden Sie die Installation an einem Ort, der direktem Sonnenlicht, Feuchtigkeit, Tropfwasser usw. ausgesetzt ist.
5) Vermeiden Sie die Installation an Orten, an denen korrosive, brennbare und explosive Gase in der Luft vorhanden sind.
6) Vermeiden Sie die Installation an einem Ort, an dem Ölflecken, Staub und Metallstaub vorhanden sind.
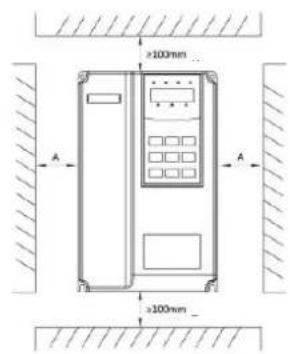
Montage oben und unten
Abbildung 3 - 1 Installationsschema des Frequenzumrichters
Gehäusemontage: Dieses Maß muss nicht berücksichtigt werden, wenn die Antriebsleistung ≤ 22 kW ist. Stattdessen sollte sie > 50 mm sein, wenn die Frequenzumrichterleistung > 22 kW beträgt.
Montage von oben und unten: Montieren Sie die Wärmedämmplatte wie in der Zeichnung dargestellt.
| Leistung | Installationsmaß | |
| B | A | |
| ≤ 15 kW | ≥ 100 mm | KeineAnforderungen |
| 18.5 kW - 30 kW | ≥ 200mm | ≥ 50mm |
| ≤ 37 kW | ≥ 300mm | ≥ 50mm |
3.1.2 Bei der mechanischen Installation ist die Wärmeableitung zu berücksichtigen. Berücksichtigen Sie den Balg:
1) Montieren Sie den Frequenzumrichter senkrecht, damit die Wärme nach oben abgeführt werden kann, Umkehrung verboten. Wenn sich mehrere Frequenzumrichter im Schrank befinden, wird empfohlen, sie nebeneinander zu installieren. In Fällen, die eine Montage von oben und unten erfordern, installieren Sie die Wärmedämmplatte wie in Abbildung 3-1 gezeigt.
2) Der Einbauraum ist in Abbildung 3-1 dargestellt, wobei der Platz für die Wärmeabfuhr des Frequenzumrichters zu berücksichtigen ist. Die Wärmeableitung anderer Komponenten im Schrank sollte berücksichtigt werden.
3) Die Montagehalterung sollte aus einem schwer entflammbaren Material bestehen.
4) Wenn Metallstaub vorhanden ist, empfehlen wir, die Heizung außerhalb des Schranks zu installieren. Der Raum in einem vollständig abgedichteten Schrank sollte so groß wie möglich sein.
3.1.3 Demontage und Montage der unteren Abdeckung
Ein Frequenzumrichter < 18,5 kW hat ein Kunststoffgehäuse. Das Entfernen der unteren Abdeckung des Kunststoffgehäuses ist in Abbildung 3 - 2, 3 - 3 dargestellt. Drücken Sie den Haken der unteren Abdeckplatte mit einem Werkzeug von innen heraus.
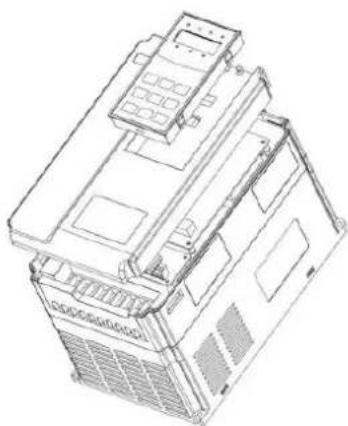
Abbildung 3 - 2 Demontagezeichnung der unteren Abdeckung des Kunststoffgehäuses
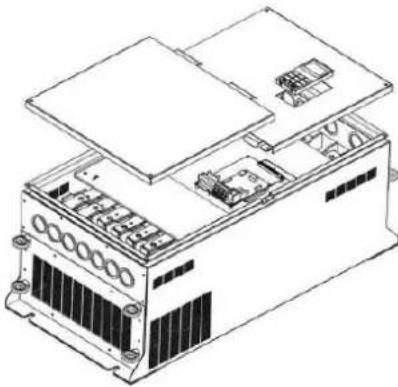
Abbildung 3 - 3 Demontagezeichnung der unteren Abdeckung eines Blechgehäuses
Ein Frequenzumrichter > 18,5 kW hat ein Blechgehäuse. Das Entfernen der unteren Blechabdeckung ist in Abbildung 3 - 3 dargestellt. Lösen Sie die Schraube der unteren Abdeckung mit einem Werkzeug.
| Gefahr | |
| Achten Sie beim Entfernen der unteren Abdeckplatte darauf, dass diese nicht herunterfällt und zu Verletzungen oder Schäden am Gerät führt. |
3.2 Elektrische Installation
3.2.1 Tipps zur Auswahl des Modells der elektrischen Peripheriekomponenten.
Tabelle 3 - 1 Tipps zur Auswahl des Modells der elektrischen Peripheriekomponenten für den Frequenzumrichter
| Frequenzumrichtermodell | (MCCB) A | Empfohlenes Schütz A | Hauptstromkreisleite auf der Eingangsseite, mm^2 | Hauptstromkreisleite auf der Ausgangsseite, mm^2 | Empfohlene Steuerstromkreisleiter, mm^2 |
| Dreiphasig 380 V | |||||
| 10061537 | 10 | 10 | 2.5 | 2.5 | 1.0 |
| 10061534 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061533 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061532 | 25 | 16 | 4.0 | 4.0 | 1.0 |
| 10061531 | 32 | 25 | 4.0 | 4.0 | 1.0 |
| 10061530 | 40 | 32 | 4.0 | 4.0 | 1.0 |
| 10061536 | 63 | 40 | 4.0 | 4.0 | 1.0 |
| 10061535 | 63 | 40 | 6.0 | 6.0 | 1.0 |
3.2.2 Tipps zu elektrischen Peripheriekomponenten
Tabelle 3 - 2 Tipps zu elektrischen Peripheriekomponenten für den Frequenzumrichter
| Bezeichnung der Teile | Installationsort Funktion | |
| Luftschalter | Vor dem Eingangsstromkreis | Unterbricht die Stromzufuhr, wenn Überstrom in nachgeschalteten Geräten auftritt. |
| Schütz | Auf der Eingangsseite des Luftschalters und des Frequenzumrichters | Ein- und Ausschalten der Stromversorgung des Frequenzumrichters. Vermeiden Sie häufiges Ein-/Ausschalten des Frequenzumrichters durch das Schütz (< zweimal pro Minute) oder direktes Starten. |
| Wechselstrom-Eingangsdrossel | Auf der Eingangsseite des Frequenzumrichters | Förderung des Leistungsfaktors auf der Eingangsseite; Eliminieren von Oberwellen auf der Eingangsseite und Verhindern von Schäden am Gerät aufgrund von Spannungswellenformverzerrungen; Beseitigung von unsymmetrischem Eingangsstrom durch Asymmetrie zwischen Versorgungsphasen. |
| EMV-Eingangsfilter | Auf der EingangsseitedesFrequenzumrichters | Reduzierung der externen Leitfähigkeit und der Störungen des Frequenzumrichters; Reduzieren der Leitfähigkeitsstörung von der Stromversorgung zum Laufwerk, Förderung der Anti-Interferenz-Fähigkeit des Frequenzumrichters. |
| Gleichstromdrossel | Auf der Gleichstrom-Bus-Seite desFrequenzumrichters | Förderung des Leistungsfaktors auf der Eingangsseite; Erhöhung des Wirkungsgrads und der thermischen Stabilität des Frequenzumrichters. Beseitigung des Einflusses von Oberwellen auf der Eingangsseite des Frequenzumrichters, wodurch die externe Leitfähigkeit und Störungen reduziert werden. |
| Wechselstrom-Ausgangsdrossel | ZwischenFrequenzumrichterausgang und Motor. In der Nähe desFrequenzumrichters installieren | Die Ausgangsseite des Frequenzumrichters enthält deutliche Oberwellen. Wenn der Motor weit vom Frequenzumrichter entfernt ist, befindet sich viel Streukapazität in der Schaltung. Einige Oberwellen können eine Resonanz im Stromkreis verursachen, die die Isolationseigenschaften des Motors und sogar den Motor beschädigt, einen großen Leckstrom erzeugt und einen häufigen Schutz des Frequenzumrichters verursacht. Wenn die Entfernung zwischen dem Frequenzumrichter und dem Motor in der Regel mehr als 50 m beträgt, wird die Installation einer Wechselstrom-Ausgangsdrossel empfohlen. |
3.2.3 Verkabelungsmethode
Schaltplan des Frequenzumrichters:
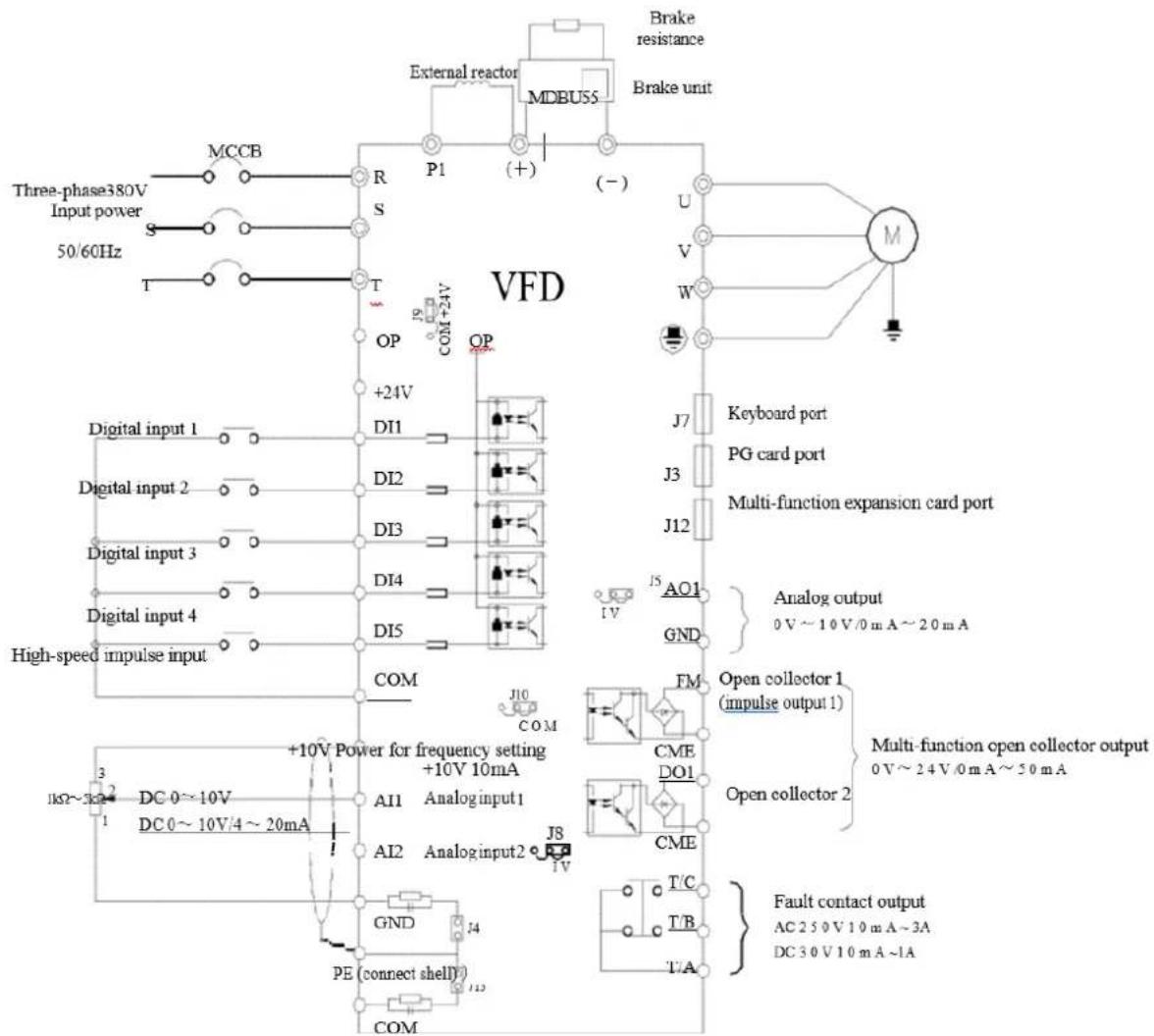
Abb. 3 - 4 Schaltplan des Frequenzumrichters
Achtung!
1) © gilt für die Hauptstromkreisklemme, ○ gilt für die Regelkreisklemme.
2) Der Bremswiderstand sollte entsprechend den Anforderungen des Benutzers ausgewählt werden, weitere Details finden Sie in den Richtlinien zur Auswahl des Bremswiderstandsmodells.
3.2.4 Hauptstromkreisklemmen und Verkabelung
1) Beschreibung der Hauptstromkreisklemmen des einphasigen Frequenzumrichters
| Klemmenbezeichnung | Bezeichnung | Beschreibung |
| L1, L2 | Einphasige Leistungscingangsklemme | Einphasiger 220 V Wechselstrom-Einspeisestelle |
| (+), (-) | Plus- / Minusklemmen des Gleichstrom-Bus | Gleichstrom-Bus-Eingangspunkt |
| (+), PB | Anschlussklemme des Bremswiderstandes | Anschluss des Bremswiderstandes |
| U, V, W | Ausgangsklemme des Frequenzumrichters | Anschließen eines dreiphasigen Motors |
| PE\ | Erdungsklemme | Erdungsklemme |
2) Beschreibung der Hauptstromkreisklemmen des dreiphasigen Frequenzumrichters
| Klemmenbezeichnung | Bezeichnung | Beschreibung |
| R、S、T | Dreiphasige Leistungscingangsklemme | Anschlusspunkt für dreiphasige Wechselstrom-Eingangsleistung |
| (+), (-) | Plus- / Minusklemmen des Gleichstrom-Bus | Eingangspunkt für Gleichstrom-Bus und Bremseinheit |
| (+), PB | Anschlussklemme des Bremswiderstandes | Anschluss des Bremswiderstandes |
| P1, (+) | Anschlussklemme für externe Gleichstrom-Drossel | Anschlusspunkt der externen Gleichstrom-Drossel |
| U, V, W | Ausgangsklemme des Frequenzumrichters | Anschließen eines dreiphasigen Motors |
| PE | Erdungsklemme | Erdungsklemme |
Warnhinweise zur Verkabelung:
a) Eingangsleistung L1, L2 oder R, S, T:
b) Die Verkabelung auf der Eingangsseite des Frequenzumrichters erfordert keine Phasenfolge. Vorsichtsmaßnahmen bei der Verkabelung:
1: (+) (-) Gleichstrom-Bus-Klemmen: Unmittelbar nach dem Abschalten liegt eine Restspannung am Gleichstrom-Bus (+) (-) an. Warten Sie, bis die CHARGE-Lampe erlischt, und vergewissern Sie sich, dass die Spannung <36 V beträgt, da sonst die Gefahr eines Stromschlags besteht.
2: Vermeiden Sie bei der Auswahl eines externen Bremselements die Polaritätsumkehr (+) (-), da dies sonst zu einer Beschädigung des Frequenzumrichters oder sogar zu einem Brand führt.
3: Die Kabellänge der Bremseinheit sollte 10 m nicht überschreiten. Für die Parallelschaltung sollte Litzen oder ein abgedichtetes Doppelkabel verwendet werden. Schließen Sie den Bremswiderstand nicht direkt an den Gleichstrom-Bus an, da es sonst zu einer Beschädigung des Frequenzumrichters oder sogar zu einem Brand kommen kann.
c) Anschlussklemme (+), PB des Bremswiderstandes:
Überprüfen Sie das Modell des eingebauten Bremsgeräts und die Anschlussklemme des Bremswiderstands. Die Auswahl des Modells des Bremswiderstands sollte dem empfohlenen Wert entsprechen und der Abstand zwischen den Kabeln sollte < 5 m betragen, da sonst der Frequenzumrichter beschädigt werden kann.
d) Anschlussklemme P1, (+) externe Gleichstrom-Drossel
Bei Frequenzumrichtern über 220V37KW und 380V75kW sollte die Verbindungsleiste zwischen den Klemmen P1 und (+) entfernt werden, wenn eine externe Gleichstrom-Drossel installiert wird, und die Gleichstrom-Drossel zwischen den beiden Klemmen angeschlossen werden.
e) U, V, W auf der Ausgangsseite des Frequenzumrichters: Schließen Sie keinen Kondensator oder Überspannungsschutz auf der Ausgangsseite des Frequenzumrichters an, da dies sonst zu einem häufigen Schutz und sogar zur Beschädigung des Frequenzumrichters führt. Aufgrund des Einflusses der Streukapazität kommt es bei einem zu langen Motorkabel leicht zu einer elektrischen Resonanz, die die Motorisolierung beschädigt oder einen großen Leckstrom erzeugt und einen häufigen Schutz des Frequenzumrichters verursacht. Wenn die Motorleitung > 100 m ist, muss eine Wechselstrom-Eingangsdrossel installiert werden.
(f) PE-Erdungsklemme

Je nach Modell kann die Markierung der Erdungsklemme unterschiedlich sein, die Bedeutung ist jedoch gleich. In den obigen Beschreibungen bedeutet dies, ⏻ dass die Erdungsmarkierung PE oder ist ⏻.
Eine zuverlässige Erdung der Erdungsklemme muss aufrechterhalten werden, und der Widerstand des Erdungskabels sollte < 0,1 Ω sein, da dies sonst zu Fehlfunktionen oder sogar zur Beschädigung des Geräts führen kann. Verwenden Sie PE- bzw. ⏻ und N-Erdungsklemme nicht zusammen auf demselben Erdungskabel.
3.2.5 Steuerklemme und Verkabelung
1) Der Klemmenplan des Steuerkreises sieht wie folgt aus:
Technische Parameter eines Hochleistungs-Frequenzumrichters
(Hinweis: Es gibt keine Kurzschlussleiste zwischen CME und COM, OP und +24V des Frequenzumrichters. Benutzer wählen die CME- und OP-Verkabelung über J10 bzw. J9.

Abb. 3 - 5 Klemmenplan des Steuerkreises
2) Funktionsbeschreibung der Steuerklemmen
Tabelle 3 - 3 Funktionsbeschreibung der Steuerklemmen des Frequenzumrichters.
| Typ Symbol | der Klemme | Klemmenbezeichnung | Funktion |
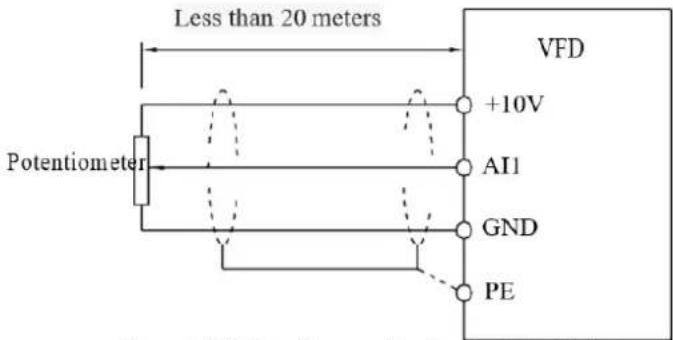
| Stromversorgung | + 10 V - GND | Anschluss einer externen Spannungsversorgung + 10 V | Ermöglicht externe Spannungsversorgung + 10 V, max: 10 mA Wird üblicherweise als Betriebsstromversorgung eines externen Potentiometers verwendet, Bereich der Potentiometer-Widerstandswerte: 1 kΩ ~ 5 kΩ. |
| + 24 V - COM | Anschluss einer externen Spannungsversorgung + 24V | Ermöglicht die externe + 24-V-Spannungsversorgung, die als Betriebsstromversorgung für die digitale Ein-/Ausgangsklemme und die externe Sensorversorgung verwendet wird. Max. Ausgangsstrom: 200 mA | |
| OP | Externe Stromeingangsklemme | Schließen Sie + 24 V oder COM über den Jumper J9 auf dem Bedienfeld an. Wenn ein externes Signal zur Ansteuerung von DI1 ~ DI5 verwendet wird, muss OP an die externe Stromversorgung angeschlossen und der Jumper J9 entfernt werden. | |
| Analoger Eingang | AI1-GND | Analogeingangsklemme 1 | 1. Eingangsspannungsbereich: DC 0 V ~ 10 V.2. Eingangsimpedanz: 22 kΩ |
| AI2-GND | Analogeingangsklemme 2 | 1. Eingangsbereich: DC 0 V ~ 10 V / 4 mA ~ 20 mA, abhängig von Jumper J8 auf dem Bedienfeld2. Eingangsimpedanz: 22 kΩ für Spannungseingang, 500 Ω für Stromeingang. |
| Typ | Symbol der Klemme | Klemmenbezeichnung | Funktion |
| Digitaler Eingang | DI1- OP | Digitaler Eingang 1 | Isolierte optische Kopplung, kompatibel mit bipolarem EingangEingangsimpedanz: 2,4 kΩSpannungsbereich für den Pegeleingang: 9 V ~ 30 V. |
| DI2- OP | Digitaler Eingang 2 | ||
| DI3- OP | Digitaler Eingang 3 | ||
| DI4- OP | Digitaler Eingang 4 | ||
| DI5- OP | Schneller Impulseingang | Zusätzlich zur Funktion von DI1 ~ DI4 kann es sich um einen Hochgeschwindigkeitsimpulseingangskanal handeln. Maximale Eingangsfrequenz: 100 kHz | |
| Analogausgang | AO1 -GND | Analogausgang 1 | Der Jumper J5 auf dem Bedienfeld bestimmt den Spannungs- oder Stromausgang.Ausgangsspannungsbereich: 0 V ~ 10 VAusgangsstrombereich: 0 mA ~ 20 mA |
| Digitaler Ausgang | DO1 -CME | Digitaler Ausgang 1 | Isolierte optische Kopplung, bipolarer Open-Collector-AusgangAusgangsspannungsbereich: 0 V ~ 24 V; Ausgangsstrombereich: 0 mA ~ 50 mA Hinweis: Der CME-Digitalausgang und der COM-Digitalcingang sind intern isoliert, der CME- und COM-Kurzschluss erfolgt jedoch über den J10-Jumper auf dem Bedienfeld (DO1 ist standardmäßig ein + 24-V-Antrieb). Wenn DO1 eine externe Stromversorgung benötigt, entfernen Sie den Jumper J10. |
| FM- CME | Schneller Impulsausgang | Wird durch den Funktionscode F5-00 „Auswahl der FM-Klemmenausgangsmethode“ begrenzt.Als schneller Impulsausgang beträgt die maximale Frequenz 100 kHz.Als Open-Collector-Ausgang entspricht es der DO1-Spezifikation. | |
| Relaisausgang | T/A-T/B | Normalerweise geschlossene Klemme: | KontaktfähigkeitAC 250 V, 3 A, COSr = 0,4 DC 30 V, 1 A |
| T/A-T/C | Normalerweise offene Klemme |
3) Funktionsbeschreibung der Steckbrücken und Hilfsklemmen
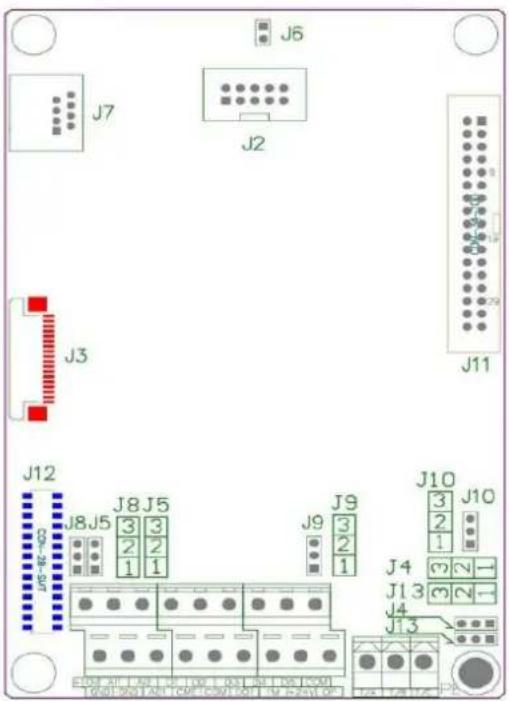
Abbildung 3 - 6 Anordnungsplan für Steckbrücken und Hilfsklemmen
Tabelle 3 - 4 Funktionsbeschreibung der Steckbrücken und Hilfsklemmen für den Frequenzumrichter
| Kennzeichnung von Jumpern | Bezeichnung | Beschreibung | |
| Hilfs-klemme | J12 | Multifunktionaler Erweiterungskartenanschluss | 28-adriger Anschluss für Optionskarten (E/A-Erweiterungskarte, SPS-Karte, verschiedene Buskarten usw.) |
| J3 | PG-Kartenanschluss | Optionen: OC, Differenz-Drehtransformator, etc. | |
| J7 | Externer Tastaturanschluss | Externe Tastatur | |
| Jumper | J4 | Auswahl des Jumpers zum Verbinden von PE und GND | Wählen Sie, wenn PE mit GND verbunden ist. Verbinden Sie bei Störungen PE mit GND, um die Entstörung zu verbessern. Standardverbindung. (Wie in Abbildung 3-6 dargestellt, ist Kurzschluss 1-2 die Verbindung zwischen PE und GND, Kurzschluss 2-3 ist keine Verbindung zwischen PE und GND) |
| J13 | Auswahl des Jumpers zum Verbinden von PE und COM | Wählen Sie, wenn PE mit COM verbunden ist. Verbinden Sie bei Störungen, PE mit COM, um die Entstörung zu verbessern. Standard-verbindung. (Wie in Abbildung 3-6 dargestellt, ist Kurzschluss 1-2 die Verbindung zwischen PE und COM, Kurzschluss 2-3 ist keine Verbindung zwischen PE und COM) | |
| J10 | Auswahl des Jumpers zum Verbinden von CME und COM | Wählen Sie, wenn CME mit COM verbunden ist. Standardmäßig keine Verbindung. (Wie in Abbildung 3-6 dargestellt, ist Kurzschluss 1-2 die Verbindung zwischen CME und COM, Kurzschluss 2-3 ist keine Verbindung zwischen CME und COM). | |
| J5 | Auswahl des Analogeingangs AI2 | Entscheiden Sie, ob die analoge Ausgangsklemme AO1 ein Spannungs- oder Stromausgang sein soll. Die Voreinstellung ist der Spannungsausgang. (Wie in Abbildung 3-6 dargestellt, ist der Kurzschluss 1-2 der Spannungsausgang, der Kurzschluss 2-3 der Stromausgang).Ausgangsspannungsbereich: 0 V-10 V.Ausgangsstrombereich: 0 mA - 20 mA | |
| J8J9 | Auswahl des Analogeingangs AI2Auswahl der OP-Terminalverbindung | Entscheiden Sie, ob die analoge Ausgangsklemme AO1 ein Spannungs- oder Stromausgang sein soll. Die Voreinstellung ist der Spannungsausgang. (Wie in Abbildung 3-6 dargestellt, ist der Kurzschluss 1-2 der Spannungsausgang, der Kurzschluss 2-3 der Stromausgang)Ausgangsspannungsbereich: 0 V-10 V.Ausgangsstrombereich: 0 mA - 20 mADie OP-Klemme wird über den Jumper J9 mit + 24 V oder COM verbunden. Die Verbindung + 24 V ist vorcingestellt. (Wie in Abbildung 3 - 6 dargestellt, ist Jumper 1-2 die Verbindung von OP und + 24 V, Jumper 2-3 ist die Verbindung von OP und COM).Wenn ein externes Signal zur Ansteuerung von DI1 ~ DI5 verwendet wird, sollte OP an die externe Spannungsversorgung angeschlossen und der Jumper J9 entfernt werden. | |
4) Beschreibung der Steuerklemmenanschlüsse
a) Analogeingangsklemme:
Ein schwaches analoges Spannungssignal wird leicht durch externe Störungen beeinflusst. Es ist üblich, abgeschirmte Kabel zu verwenden, und die Kabellänge ist so kurz wie möglich und sollte 20 m nicht überschreiten, wie in Abbildung 3 - 7 gezeigt. Wenn ein Analogsignal stark gestört ist, sollte ein Filterkondensator oder Ferritkern auf der Quellenseite des Analogsignals installiert werden, wie in Abbildung 3 - 7 gezeigt.
b) Digitaleingangsklemme: DI-Klemmenanschlussmethode
Es ist üblich, ein abgeschirmtes Kabel zu verwenden, das so kurz wie möglich ist und nicht länger als 20 m sein sollte. Wenn ein aktiver Antrieb verwendet wird, sollten die notwendigen Kompensationsmaßnahmen im Falle eines Leistungsübersprechens angewendet werden. Eine Schützsteuerung wird vorgeschlagen.
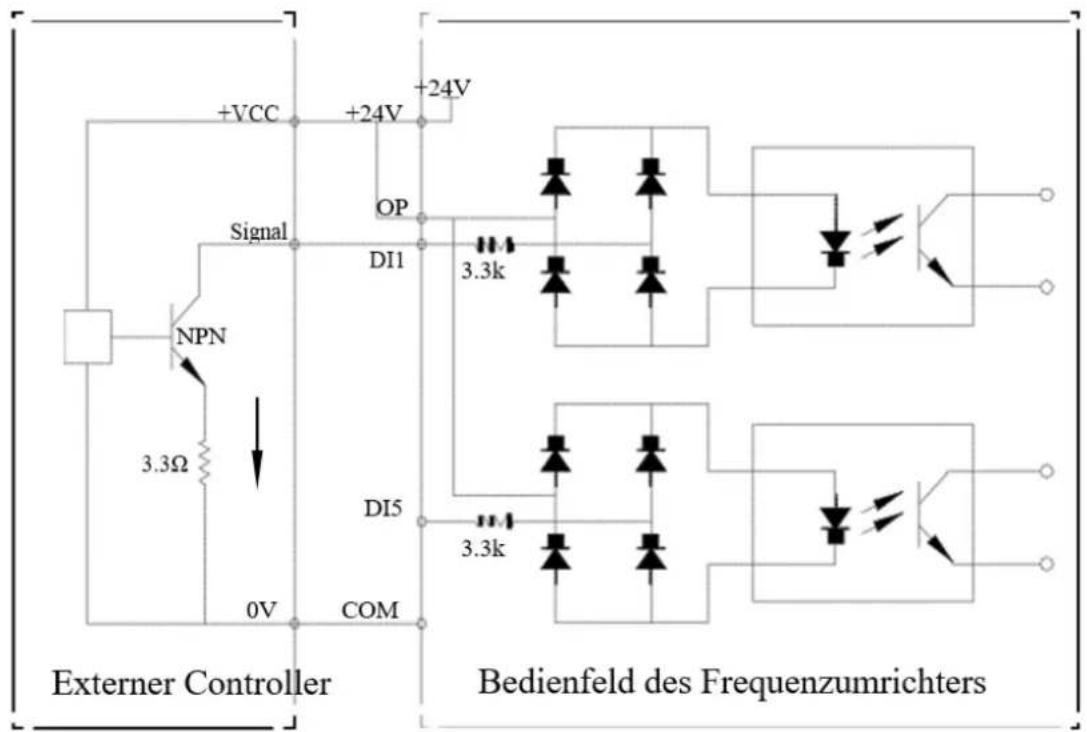
Abbildung 3 - 9 Verkabelung
Dies ist die häufigste Verkabelungsmethode. Wenn Sie eine externe Stromversorgung verwenden, entfernen Sie den Jumper J9 zwischen +24 V und OP, schließen Sie den Pluspol der externen Stromversorgung an OP und den Minuspol der externen Stromversorgung an CME an.
Verkabelung vom Quelltyp
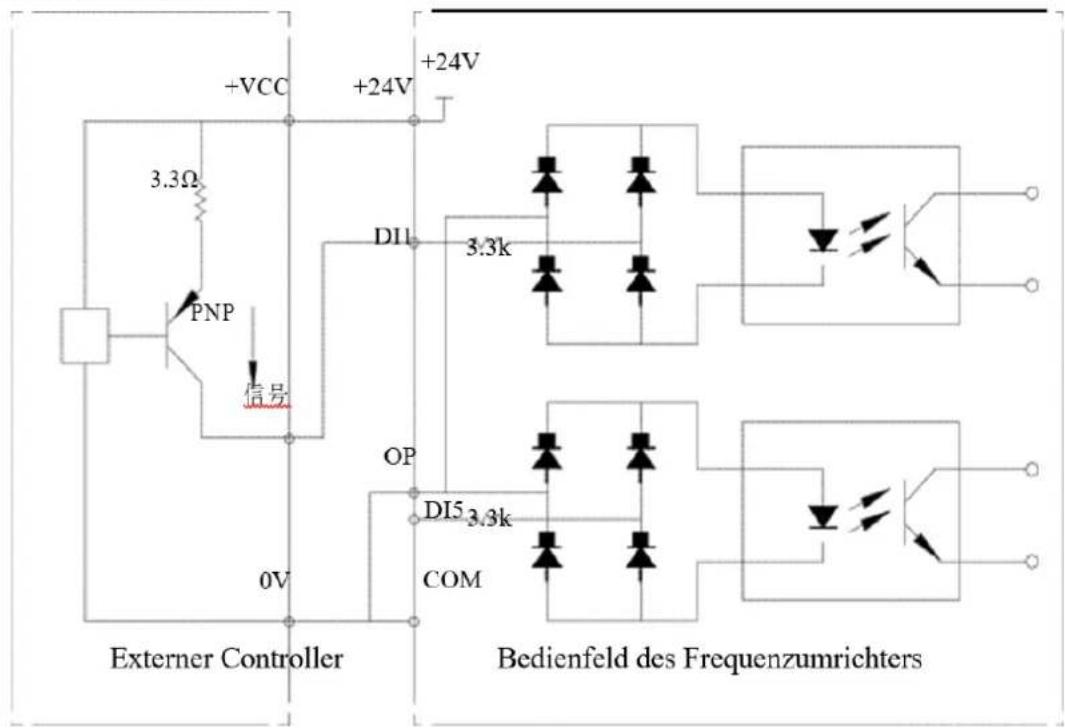
Abb. 3 - 10 Verkabelung vom Quelltyp
Bei dieser Art der Verkabelung muss das OP mit dem Jumper J9 auf COM kurzgeschlossen und +24 V mit dem gemeinsamen Anschluss des externen Controllers verbunden werden. Wenn eine externe Stromversorgung verwendet wird, schließen Sie den Minuspol der externen Stromversorgung an OP an.
Technische Parameter eines Hochleistungs-Frequenzumrichters
c) Digitale Ausgangsklemme „DO“: Wenn die digitale Ausgangsklemme eine Relaissteuerung erfordert, sollte die Absorberdiode auf beiden Seiten der Relaisspule installiert werden, da sonst die DC 24 V-Versorgung beschädigt werden kann.
Beachten Sie, dass die Polarität der Absorberdiode korrekt installiert werden muss, wie in Abbildung 3 - 11 gezeigt. Andernfalls führt jedes Signal von der digitalen Ausgangsklemme sofort zu einer Beschädigung der DC-24 V-Spannungsversorgung.
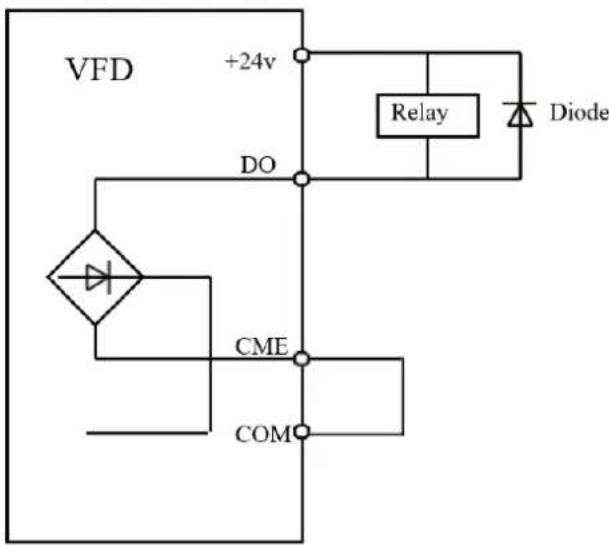
Abbildung 3 - 11 Anschlussplan der digitalen Ausgangsklemmen
Kapitel 4. Bedienung und Anzeige
4.1 Einführung in die Bedien- und Anzeigeoberfläche
Über das Bedienfeld können Sie die Betriebsparameter des Frequenzumrichters ändern, seinen Betriebsstatus überwachen und seinen Betrieb (Start, Stopp) usw. steuern. Das äußere Erscheinungsbild und das Funktionsfeld sind nachstehend aufgeführt:
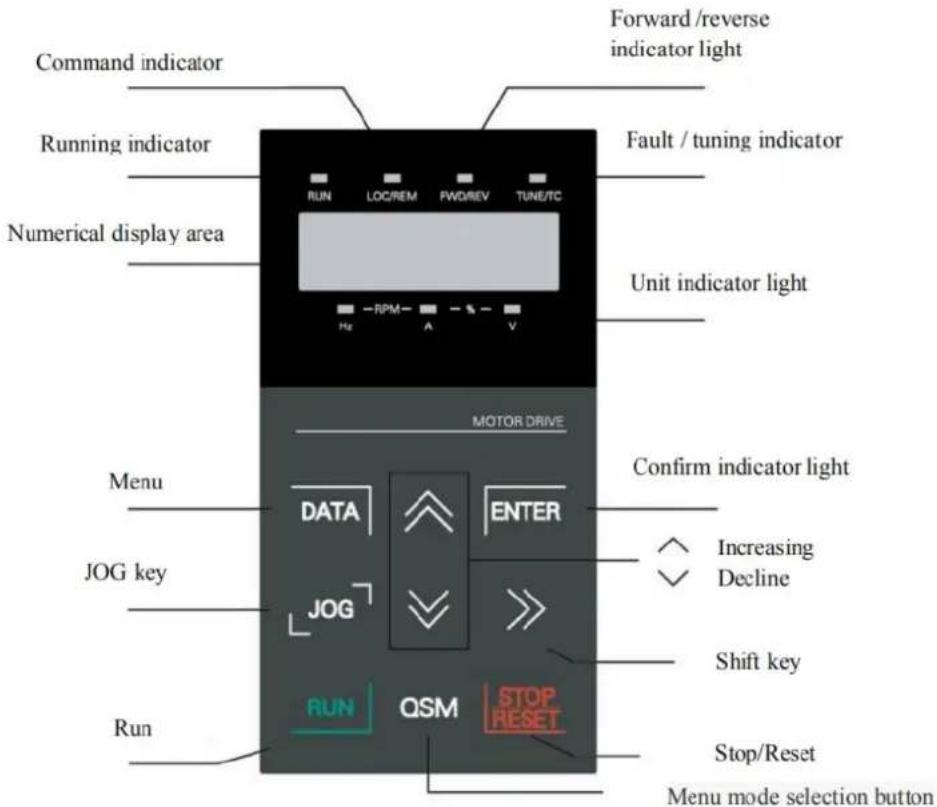
Abbildung 4 - 1 Schematische Darstellung des Bedienfelds
1) Anweisungen für die Betriebsanzeige:
RUN: Licht aus zeigt an, dass der Frequenzumrichter gestoppt ist. Ein Dauerlicht zeigt an, dass sich der Frequenzumrichter im Betriebszustand befindet.
LOCAL / REMOTE: Zeigt den Tastaturbetrieb, die Klemmensteuerung und den Fernbetrieb (Kommunikationssteuerung) an. Das Licht aus zeigt den Tastatursteuerungsstatus an. Dauerlicht zeigt die Klemmensteuerung an. Wenn das Licht blinkt, bedeutet dies, dass es sich im Fernbedienungsstatus befindet.
FWD / REV: Kontrollleuchte zum Umkehren der Motorbetriebsrichtung, Kontrollleuchte leuchtet für normalen Betriebszustand.
TUNE / TC: Abstimmung / Torque Control / Fehlerleuchte. Ein Dauerlicht zeigt an, dass es sich im Modus Selbstregelung befindet. Langsames Blinken bedeutet, dass das Gerät eingestellt ist. Schnelles Blinken bedeutet, dass es sich im Fehlerzustand befindet.
2) Kontrollleuchte der Einheit: IIz: Frequenzeinheit, A: Stromeinheit, V: Spannungseinheit, RMP (IIz + A) Geschwindigkeitseinheit % (A + V).
3) Digitaler Display:
LED 5-stelliges Display zeigt Frequenzeinstellung, Ausgangsfrequenz, überwachte Datentypen, Warncodes usw.
4) Tasten des Tastenfelds:
| Taste | Bezeichnung | Funktion |
| DATA | Programmicrtaste | Öffnet oder verlässt das Menü der ersten Ebene. |
| ENTER | Taste „Enter“ | Schritt für Schritt das Menü aufrufen, Parameter einstellen und bestätigen. |
| Taste zur Erhöhung des Werts | Erhöhen von Daten oder Einstellen eines Funktionscodes. | |
| Taste zum Verringern des Werts | Verringern von Daten oder Einstellen eines Funktionscodes | |
| Taste „Shift“ | Auf dem Display können im Stopp- oder Betriebsmodus Parameter durchlaufen werden. Durch Drücken dieser Taste kann der Parameter geändert werden. | |
| RUN | Ausführtaste | Starten von Vorgängen im Tastatursteuerungsmodus. |
| STOP/REST | Stopp / Reset | Im Betriebsmodus können Sie diese Taste verwenden, um den Betrieb zu stoppen. Im Falle eines Fehleralarms können Sie damit den Wechselrichter ohne die Einschränkungen des Codes P7-02 zurücksetzen. |
| QSM | Moduswahltaste | Funktionsschalter basierend auf PP-03 |
| JOG | Taste „Jog" (Probelauf) | P7-01-basierter Funktionsschalter, Befehlsquelle oder schnelle Richtungsumschaltung. |
4.2 Methoden zum Anzeigen und Ändern des Funktionscodes
Das Bedienfeld - Frequenzumrichter verfügt über eine dreistufige Menüstruktur zur Einstellung von Parametern und anderen Aktivitäten. Das dreistufige Menü besteht aus: Funktionsparametergruppe (erste Ebene) → Funktionscode (zweite Ebene) → Funktionscodeeinstellung (zweite Ebene). Der Betriebsablauf ist in Abbildung 4 - 2 dargestellt.
Ändern von Parameterwerten. Auswählen von Funktionsparametern Ändern von Funktionsparameterwerten

flowchart
graph LR
A["50.00"] -->|DATA| B["P0"]
B -->|ENTER| C["P0-08"]
C -->|ENTER| D["050.00"]
A -->|DATA| B
B -->|DATA| C
C -->|ENTER| D
Abbildung 4 - 2 Blockdiagramm des dreistufigen Menüs
Hinweise: Um das Menü der zweiten Ebene zu bedienen, drücken Sie die DATA-Taste oder die ENTER-Taste, um das Menü der zweiten Ebene aufzurufen. Drücken Sie ENTER, um den eingestellten Parameter zu speichern und zum Menü der zweiten Ebene zurückzukehren, und gehen Sie dann automatisch zum nächsten Funktionscode; durch Drücken von SET kehren Sie direkt zum Menü der zweiten Ebene zurück, ohne Parameter zu speichern, und kehren zum vorherigen Funktionscode zurück.
Beispiel: Funktionscode P3-02 wird von 10,00 Hz auf 15,00 Hz geändert. (Fettgedruckter Text zeigt eine blinkende Ziffer an.)

flowchart
graph TD
A["50.00"] -->|DAT| B["P0"]
B -->|Δ| C["P3"]
C -->|ENTER| D["P3-00"]
D -->|Δ| E["P3-02"]
E -->|ENTER| F["010.00"]
F -->|Δ| G["015.00"]
G -->|DATA| H["P3"]
H -->|DATA| I["P3-03"]
I -->|ENTER| J["010.00"]
DATA = DATEN
Im Menüzustand der zweiten Ebene kann der Funktionscode nicht geändert werden, wenn die Parameterziffer in der Anzeige nicht blinkt. Mögliche Gründe:
1) Dieser Funktionscode ist ein Parameter, der nicht geändert werden kann, wie z. B. ein tatsächlich erkannter Parameter, ein Betriebsatzparameter usw.
2) Der Funktionscode kann im Betriebszustand des Geräts nicht geändert werden und kann nur nach dem Stoppen geändert werden.
4.3 Parameteranzeigemodus
Der Parameteranzeigemodus wird verwendet, damit Benutzer die Betriebsparameter mit verschiedenen Bereichen entsprechend dem tatsächlichen Bedarf anzeigen können. Es stehen drei Parameteranzeigemodi zur Verfügung.
| Bezeichnung | Beschreibung |
| Betriebsparametermodus | Anzeige der Betriebsparameter des Frequenzumrichters in Reihenfolge, einschließlich der Betriebsparameter P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Benutzerdefinierter Parametermodus | Benutzerdefinierte Betriebsparameter (maximal 32 Parameter), Benutzer können die anzuzeigenden Betriebsparameter nach PE-Gruppe freigeben. |
| Parameteränderungsmodus | Die Betriebsparameter entsprechen nicht den Werkseinstellungen. |
Die zugehörigen Betriebsparameter sind PP-02 und PP-03 wie folgt:
| PP-02 | Eigenschaften des Funktionsparameter-Anzigemodus | Werks-einstellung | 11 | |
| Einstellbereich | Einheitsziffer | Auswahl der Anzeige von Gruppe U | ||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
| Dezimalstellc | Auswahl der Anzeige von Gruppe A | |||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
| PP-03 | Auswahl des Anzeigemodusdes definierten Parameters | Werks-einstellung | 00 | |
| Einstellbereich | Einheitsziffer | Auswahl der Anzeige von benutzerdefinierten Parametern | ||
| 0 | Keine Anzeige | |||
| 1 | Dezimale | |||
| Dezimalstelle | Auswahl der Anzeige von benutzerdefinierten Parametern | |||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
Wenn der gewählte Parameteranzeigemodus (PP-03) einfach ist, kann die Anzeige der einzelnen Parameter mit der Taste QSM umgeschaltet werden.
Der Code für den Anzeigemodus der einzelnen Parameter lautet wie folgt:
| Parameteranzeigemodus Display | |
| Betriebsparametermodus | -bASE |
| Benutzerdefinierter Parametermodus | -115Fr |
| Vom Benutzer geänderter Parametermodus | --[--- |
Der Schaltmodus ist wie folgt:
Aktuelle Betriebsparameter: Umschalten auf benutzerdefinierte Parameter.
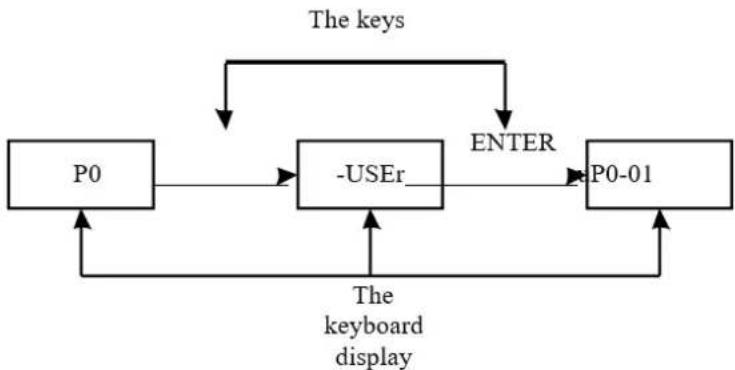
flowchart
graph TD
A["P0"] --> B["-USER"]
B --> C["P0-01"]
C --> B
B --> D["ENTER"]
D --> A
E["The keyboard display"] --> B
F["The keys"] --> D
4.4 Benutzerdefinierte Parameter
Die Erstellung eines benutzerdefinierten Benutzermenüs dient hauptsächlich dazu, dem Benutzer das Anzeigen und Ändern häufig verwendeter Parameter zu erleichtern. Die Parameter des benutzerdefinierten Menüs werden als „uP3-02“ angezeigt. Die Funktion des Parameters P3-02 im benutzerdefinierten Menü besteht darin, die Parameter und Ergebnisse der zugehörigen Programmierung der allgemeinen Bedingungen zu ändern.
Zum Beispiel auf 30 gesetzt; wenn das Menü „NULL“ anzeigt, bedeutet dies, dass der Benutzer das Menü anpasst. Es erscheint ein benutzerdefiniertes Menü für die häufig verwendeten 16 Parameter, um dem Benutzer die folgenden Einstellungen zu erleichtern:
| P0-01: Regelungsart | P0-02: Auswahl der Befehlsquelle |
| P0-03: Auswahl der dominanten Frequenzquelle | P0-07: Auswahl der Frequenzquelle |
| P0-08: Sollfrequenz | P0-17: Beschleunigungszeit |
| P0-18: Stoppzeit | P3-00: Einstellung der U/f-Kurve |
| P3-01: Drehmomenterhöhung | P4-00: Auswahl der DI1-Klemmenfunktion |
| P4-01: Auswahl der DI2-Klemmenfunktion | P4-02: Auswahl der DI3-Klemmenfunktion |
| P5-04: DO1-Ausgangsauswahl | P5-07: AO1-Ausgangsauswahl |
| P6-00: Startmodus | P6-10: Stoppmodus |
Benutzer können die Parameter anpassen und bearbeiten.
4.5 Methode zur Anzeige der Statusparameter
Im ausgeschalteten oder laufenden Zustand können verschiedene Statusparameter durch Drücken der Taste Shift „ ^D ” angezeigt werden. Funktionscode P7-03 (Betriebsparameter 1), P7-04 (Betriebsparameter 2), P7-05 (Parameter)Deaktiviert die Anzeige von Parametern. Mit einer Binärziffer wird ausgewählt, ob die Parameter angezeigt werden sollen oder nicht.
Im Stoppzustand können insgesamt 16 Parameter ausgewählt werden, ob der Stoppzustand, die eingestellte Frequenz, die Busspannung, den DI-Eingangsstatus, den DO-Ausgangsstatus, die analoge Eingangsspannung AI1, die analoge Eingangsspannung AI2, die analoge Eingangsspannung AI3, der aktuelle Zählerwert, der aktuelle Längenwert, der SPS-Betriebsschritt, die Lastgeschwindigkeitsanzeige, die PID-Einstellung, die PULSE-Eingangsimpulsfrequenz und drei Reserveparameter angezeigt werden sollen. Sukzessives Umschalten der Sequenz zeigt die gewählten Parameter an
Im Startzustand wird standardmäßig der Status von fünf Parametern angezeigt: Betriebsfrequenz, Sollfrequenz, Busspannung, Ausgangsspannung, Ausgangsstrom; weitere angezeigte Parameter sind: Ausgangsleistung, Ausgangsdrehmoment, DI-Eingangsstatus, DO-Ausgangsstatus, analoge Eingangsspannung AI1, analoge Eingangsspannung AI2, analoge Eingangsspannung AI3, aktueller Zählerwert, aktueller Längenwert, lineare Geschwindigkeit, PID; die PID-Rückführung wird durch den Funktionscode P7-03, P7-04 bitweise angezeigt (binär konvertiert). Durch aufeinanderfolgendes Umschalten der Sequenz werden die ausgewählten Parameter angezeigt.
4.6 Kennworteinstellungen
Der Frequenzumrichter verfügt über eine Benutzerpasswortschutzfunktion, PP - 00 ist auf Null eingestellt, dies ist das Benutzerpasswort. Drücken Sie erneut DATE, „- - - - , wird angezeigt. Das eingegebene Benutzerpasswort muss korrekt sein, es muss im normalen Menü eingegeben werden, sonst kann es nicht eingegeben werden.
Wenn Sie den Passwortschutz aufheben wollen, geben Sie einfach das Passwort ein und ersetzen PP - 00 durch 0.
4.7 Automatische Abstimmung der Motorparameter
Wählen Sie vor dem Betrieb des Frequenzumrichters die Vektorregelungsart. Beachten Sie die genauen Eingangsparameter vom Typenschild des Motors. Dieser Frequenzumrichter muss mit den Standardparametern auf dem Typenschild des Motors übereinstimmen. Es besteht eine starke Beziehung zwischen der Vektorregelungsart und den Motorparametern. Eine gute Regelungsleistung hängt von der genauen Abstimmung der Maschinenparameter ab.
Die Schritte für die automatische Motorparametereinstellung sind wie folgt:
Zuerst wählen wir die Befehlsquelle (P0-02) für den Befehlskanal des Bedienfelds aus. Geben Sie dann die Motorparameter in die entsprechenden Parametereingänge ein (entsprechend der aktuellen Motorauswahl):
| Motorauswahl | Parameter |
| Motor Nr. 1 | P1-00: Auswahl des Motortyps, P1-01: Motornennleistung, P1-02: Motornennspannung, P1-03: Motornennstrom, P1-04: Motornennfrequenz, P1-05: Motornenngeschwindigkeit. |
| Motor Nr. 2 | A2-00: Wählbarer Motortyp A2-01: Motornennleistung A2-02: Motornennspannung A2-03: Motornennstrom A2-04: A2-05: Motornennfrequenz, Motornenndrehzahl. |
Wählen Sie bei vollständig entlastetem Motor P1-37 (Motor 2 A2 ▼ bis 37) und wählen Sie 2 (Asynchronmotor beendet die Abstimmung), drücken Sie dann die Taste RUN auf dem Bedienfeld, der Wechselrichter berechnet automatisch die folgenden Parameter:
| Motorauswahl | Parameter |
| Motor Nr. 1 | P1-06: Statorwiderstand der Synchronmaschine, P1-07: D-Achsen-Induktivität der Synchronmaschine, P1-08: Induktivität der synchronen Q-Achse, P1-09: Gegeninduktivität des Asynchronmotors, P1-10: Leerlaufstrom des Asynchronmotors. |
| Motor Nr. 2 | A2-06: Statorwiderstand der Synchronmaschine, A2-07: D-Achsen-Induktivität der Synchronmaschine, A2-08: Induktivität der synchronen Q-Achse, A1-09: Gegeninduktivität des Asynchronmotors, A1-10: Leerlaufstrom des Asynchronmotors. |
Die Motorparameter werden automatisch eingestellt.
Wenn Motor und Last nicht vollständig abgeschaltet werden können, wählen Sie 1 (Asynchronmaschine, statische Abstimmung) auf P1-37 (Motor 2 A2-37), und drücken Sie dann die RUN-Taste auf dem Bedienfeld.
Kapitel 5 Leistungstabelle
PP-00 ist auf einen Wert ungleich Null gesetzt, d. h. das Parameterschutz-Passwort ist gesetzt. Im Betriebsparameter- und benutzerdefinierten Parametermodus kann auf das Parametermenü nur durch Eingabe des richtigen Passworts zugegriffen werden. Um das Passwort zu löschen, muss PP-00 auf 0 gesetzt werden. Dann ist das Parametermenü im vom Benutzer veränderbaren Modus nicht passwortgeschützt. Gruppe P und Gruppe A sind grundlegende Betriebsparameter, Gruppe U sind Überwachungsparameter. Die Symbole in der Funktionstabelle lauten wie folgt:
„*“: zeigt an, dass der Parameter eine „Werkseinstellung“ ist und nur vom Hersteller eingestellt werden kann und es dem Benutzer untersagt ist, hier Einstellungen vorzunehmen.
Tabelle der grundlegenden Betriebsparameter:
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| Primäre Funktionsgruppe P0 | ||||
| P0-00 | Anzeigetyp G / P | 1: Typ G (Modell mit konstantem Drehmoment)2: Typ P (Modell mit Lüfter und Pumpenlast) | Abhängig vom Maschinentyp | ● |
| P0-01 | Motorregelungsart 1 | 0: Keine Drehzahlsensor-Vektorregelung (SVC)1: Drehzahlsensor-Vektorsteuerung (FVC)2: U/f-Steuerung | 0 | ★ |
| P0-02 | Auswahl einer Befehlsquelle | 0: Bedienfeld CMD-Kanal (LED aus)1: Klemme CMD-Kanal (LED an)2: CMD-Kanal (LED blinkt) | 0 | ☆ |
| P0-03 | Auswahl der Hauptfrequenzquelle X. | 0: digitale Einstellung (Frequenzsollwert P0-08, auf / ab veränderbar, es gibt einen Speicher nach Stromausfall)1: digitale Einstellung (Frequenzsollwert P0-08, auf / ab veränderbar, kein Speicher nach Stromausfall)2: AI13: AI24: AI35: Einstellung des Impulses (DI5)6: Multi-Zustandsbefehl7: Einfache SPS8: PID9: Kommunikationseinstellungen | 0 | ★ |
| P0-04 Auswahl der Hilfsfrequenzquelle Y. | Als P0-03 (als Auswahl der Hauptfrequenzquelle X) 0 | ★ | ||
| P0-05 | Auswahl des Hilfsbereichs der überlagerten Frequenzquelle Y | 0: Mit Bezug auf die maximale Frequenz1: In Bezug auf die Frequenzquelle X | 0 | ☆ |
| P0-06 | Auswahl des Hilfsbereichs der überlagerten Frequenzquelle Y | 0 % ~ 150 % | 100% | ☆ |
| P0-07 | Auswahl der Quelle der überlagerten Frequenz | Bits: Auswahl der Frequenzquelle 0: Hauptfrequenzquelle X1: Ergebnis der Haupt- und Nebenoperationen (Die Abhängigkeit der Operation hängt von der Dezimalzahl ab)2: Umschaltung von Hauptfrequenzquelle X und Hilfsfrequenzquelle Y3: Hauptfrequenzquelle X, Haupt- und Hilfsoperationsergebnisschalter,4: Hilfsfrequenzquelle Y, Haupt- und Hilfsoperationsergebnisschalter,Dezimalstelle: Abhängigkeit vom Betrieb der Haupt- und Hilfsfrequenzquelle0: Haupt + Hilfs1: Haupt - Hilfs2: Max. von zwei3: Min. von zwei | 00 | ☆ |
| P0-08 | Sollfrequenz | 0.00 Hz ~ Max. Frequenz (P0-10) | 50.00Hz | ☆ |
| P0-09 | Betriebsrichtung | 1 : gleich2 : umgekehrt | 0 | ☆ |
| P0-10 | Frequenz max. | 50.00 Hz ~ 600.00 Hz | 50.00Hz | ★ |
| P0-11 | Obere Frequenzquelle | 0: P0-12 Einstellung1: AI1; 2: AI2; 3: AI3; 4: Impulseinstellung5: Kommunikationseinstellungen | 0 | ★ |
| P0-12 | Obere Frequenz | Obere Frequenz P0-14 ~ maximal Frequenz P0-10 | 50.00 Hz | ☆ |
| P0-13 | Obere Frequenzabweichung | 0.00 Hz ~ Max. Frequenz P0-10 | 0.00 Hz | ☆ |
| P0-14 | Untere Frequenz | 0.00 Hz ~ Obere Frequenz P0-12 | 0.00 Hz | ☆ |
| P0-15 | Trägerfrequenz | 0.5 kHz ~ 16.0 kHz | Maschinentyp | ☆ |
| P0-16 | Trägerfrequenz passt sich der Temperatur an | 0: nein1: ja | 1 | ☆ |
| P0-17 | Beschleunigungszeit 1 | 0.00 s ~ 65000 s | Maschinentyp | ☆ |
| P0-18 | Stoppzeit 1 | 0.00 s ~ 65000 s | Maschinentyp | ☆ |
| P0-19 | Beschleunigungs-/Stoppzeiteinheit | 0: 1 s1: 0.1 s2: 0.01 s | 1 | ★ |
| P0-21 | Die Quellpolarisationsfrequenz der überlagerten Hilfsfrequenz | 0.00 Hz ~ Max. Frequenz P0-10 | 0.00Hz | ☆ |
| P0-22 | Auflösung des Frequenzbefehls | 1: 0.1Hz2: 0.01Hz | 2 | ★ |
| P0-23 | Digitale Frequenzsollwert-Haltespeicherauswahl | 0: kein Speicher 1: Speicher | 0 | ☆ |
| P0-24 | Motorauswahl | 0: Motor 1, 1: Motor 2 | 0 | ★ |
| P0-25 | Referenzfrequenzen für Beschleunigungs-/ Stoppzeit | 0: Frequenz max. (P0-10)1: Sollfrequenz2: 100Hz | 0 | ★ |
| P0-26 | Standardfrequenzbefehl in UP / DOWN-Anordnung | 0: Betriebsfrequenz 1: Sollfrequenz | 0 | ★ |
| Code | Bezeichnung | Einstellungen Standard | Ändern | |
| P0-27 | Frequenzquelle und Befehlsquelle im Paket | Bits: Der Befehl vom Bedienterminal bindet die Frequenzquelle0: Ungebunden1: Digitale Frequenzreferenz2: AI13: AI24: AI35: PULSE-Einstellung (DI5)6: Multispeed (feste Geschwindigkeitsauswahl)7: Einfache SPS8: PID9: KommunikationseinstellungenZehner im Display: ein Terminalbefehl bindet die FrequenzquelleHunderte: Kommunikationsbefehl bindetFrequenzquelleTausende: Automatikbetrieb bindetFrequenzquelle | 0000 | ☆ |
| P0-28 | Typ der Kommunikationserweiterungskarte | 0: Kommunikationskarte Modbus1: Reserve2: Reserve3: Kommunikationskarte CANlink | 0 | ☆ |
| Gruppe P1. Motorparameter 1 | ||||
| P1-00 | Auswahl des Motortyps | 0: Standard-Asynchronmotor1: Asynchronmotor mit variabler Frequenz | 0 | ★ |
| P1-01 | Nennleistung [W] | 0.1 kW ~ 1000.0 kW | Maschinentyp | ★ |
| P1-02 Motornennspannung | 1 V ~ 400 V | Maschinentyp | ★ | |
| P1-03 | Motornennstrom | 0,01 A ~ 655,35 A (Leistung des Frequenzumrichters <= 55 kW)0.1 A ~ 6553.5 A (Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| P1-04 | Motornennfrequenz | 0.01Hz ~ Max. Frequenz | Maschinentyp | ★ |
| P1-05 | Motornenndrehzahl | 1 U/min ~ 65535 U/min | Maschinentyp | ★ |
| P1-06 | Statorwiderstand des Asynchronmotors | 0,001 Ω ~ 65,535 Ω (Leistung des Frequenzumrichters <= 55 kW) 0,0001 Ω ~ 6,5535 Ω (Leistung des Frequenzumrichters > 55 kW) | Abstimmung | ★ |
| P1-07 | Rotorwiderstand des Asynchronmotors | 0.001 Ω ~ 65.535 Ω (Leistung des Frequenzumrichters <= 55 kW)0.0001 Ω ~ 6.5535 Ω (Leistung des Frequenzumrichters > 55 kW) | Abstimmung | ★ |
| P1-08 | Induktive Ableitreaktanz des Asynchronmotors | 0.01 mH ~ 655.35 mH(Leistung des Frequenzumrichters <= 55 kW) 0.001 mH ~ 65.535 mHLeistung des Frequenzumrichters > 55 kW) | Abstimmungs parameter | ★ |
| P1-09 | Gegenseitige induktive Reaktanz des Asynchronmotors | 0.1 mH ~ 6553.5 mH(Leistung des Frequenzumrichters <= 55 kW) 0.01 mH ~ 655.35 mHLeistung des Frequenzumrichters > 55 kW) | Abstimmungs parameter | ★ |
| P1-10 | Strom des Asynchronmotors ohne Last | 0,01 A ~ P1-03 (Leistung des Frequenzumrichters <= 55 kW)0.1 A ~ P1-03 (Leistung des Frequenzumrichters > 55 kW) | Abstimmung sparameter | ★ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern | |
| P1-27 | Encoder-Zeilennummer | 1 ~ 65535 | 1024 | ★ | |
| P1-28 | Encodertyp | 0: Inkremental-Encoder ABZ 1: Reserve2: Drehtransformator | 0 | ★ | |
| P1-30 | AB-Phasenfolge des Inkremental-Encoders ABZ | 0: vorwärts1: rückwärts | 0 | ★ | |
| P1-34 | Anzahl der Polpaare des Drehtransformators | 1 ~ 65535 | 1 | ★ | |
| P1-36 | Erkennungszeit für PG-Unterbrechung in der Geschwindigkeitsrückmeldung | 0.0: keine Aktion0.1 s ~ 10.0 s | 0.0 | ★ | |
| F1-37 | Abstimmungsauswahl | 0: Keine Aktion1: Statische Abstimmung des Asynchronmotors2: Vollständige Abstimmung des Asynchronmotors | 0 | ★ | |
| Gruppe P2 - Vektorsteuerungsparameter des ersten Motors | |||||
| P2-00 | Proportionalverstärkung der Geschwindigkeitsschleife 1 | 1 ~ 100 | 30 | ☆ | |
| P2-01 | Integrationszeit für Geschwindigkeitsschleife 1 | 0.01 s ~ 10.00 s | 0.50s | ☆ | |
| P2-02 | Schaltfrequenz 1 | 0.00 ~ P2-05 | 5.0 0Hz | ☆ | |
| P2-03 | Proportionalverstärkung der Geschwindigkeitsschleife 2 | 1 ~ 100 | 20 | ☆ | |
| P2-04 | Integrationszeit für Geschwindigkeitsschleife 2 | 0.01 s ~ 10.00 s | 1.00s | ☆ | |
| P2-05 | Schaltfrequenz 2 | P2-02 ~ Max. Frequenz | 10.00 Hz | ☆ | |
| P2-06 | Schlupfverstärkung für Vektorregelung | 50 % ~ 200 % | 100% | ☆ | |
| P2-07 | Zeitkonstante für den Drehzahlregelfilter | 0.000 s ~ 0.100 s | 0.000 s | ☆ | |
| P2-08 | Vektorregelung der Anregungsverstärkung | 0 ~ 200 | 64 | ☆ | |
| P2-09 | Quelle der oberen Grenze im Geschwindigkeitsregelungsmodus | 0: Funktionscode-Einstellung P 2-10 1: AI12: AI23: AI34: Impulseinstellung (PULS)5: Kommunikationseinstellung6: MIN (AI1, AI2)7: MAX (AI1, AI2)Die vollständige Auswahl der Optionen 1-7 entspricht P2 - 10 | 0 | ☆ | |
| P2-10 | Digitale Drehmomenteinstellung im Geschwindigkeitsregelungsmodus | 0.0 % ~ 200.0 % | 150.0% | ☆ | |
| P2-13 | Anregungsproportionalverstärkung | 0 ~ 60000 | 2000 | ☆ | |
| P2-14 | Integrale Verstärkung der Anregung | 0 ~ 60000 | 1300 | ☆ | |
| P2-15 | Proportionalverstärkung für Drehmomentregelung | 0 ~ 60000 | 2000 | ☆ | |
| Code B | Bezeichnung Einstellungen Standard Ändern | |||
| P2-16 | Integrationsverstärkung der Drehmomentregelung | 0 ~ 60000 | 1300 | ☆ |
| U/f-Steuerungsparameter in Gruppe P3 | ||||
| P3-00 | Einstellung der U/f-Kurve | 0: gerade Linie U/f1: Multipunktlinic U/f2: Quadrat U/f3: 1,2 Leistung U/f4: 1,4 Leistung U/f6: 1,6 Leistung U/f8: 1,8 Leistung U/f9: Reserviert10: Voller U/f-Trennungsmodus11: Halber U/f-Trennungsmodus | 0 | ★ |
| P3-01 | Erhöhung des Drehmoments | 0.0 % : (automatische Drehmomenterhöhung)0.1 % ~ 30.0 % | Maschinentyp | ☆ |
| P3-02 | Abschaltfrequenz der Drehmomentverstärkung | 0.00 Hz ~ Max. Frequenz | 50.00 Hz | ★ |
| P3-03 | Punkt 1 der U/f-Frequenz | 0.00 Hz ~ P3-05 | 0.00Hz | ★ |
| P3-04 | Punkt 1 der U/f-Spannung | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-05 | Punkt 2 der U/f-Frequenz | P3-03 ~ P3-07 | 0.00 Hz | ★ |
| P3-06 | Punkt 2 der U/f-Spannung | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-07 | Punkt 3 der U/f-Frequenz | P3-05~ Motornennfrequenz (P1-04) | 0.00 Hz | ★ |
| P3-08 | Punkt 3 der U/f-Spannung | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-09 | Verstärkung der U/f-Schlupfkompensation | 0.0% ~ 200.0% | 0.0% | ☆ |
| P3-10 | U / f-Übererregungsverstärkung | 0 ~ 200 | 64 | ☆ |
| P3-11 | U / f-Leistungspendelungsverstärkung | 0 ~ 100 | Maschinentyp | ☆ |
| P3-13 | Isolierte Spannungsquelle UF | 0 : Digitale Einstellungen (P3-14) 1: A112: AI23: AI34: Impulseinstellung (DI5)5: Multi-Zustandsbefchl6: SPS7: PID8 KennwortcinstellungenAchtung! 100,0 % entspricht der Motornennspannung | 0 | ☆ |
| P3-14 | Digitale Einstellung der isolierten UF-Spannung | 0 V ~ Motornennspannung | 0V | ☆ |
| P3-15 | Isolierte Spannungsanstiegszeit UF | 0.0 s~1000.0sHinweis: Zeit zum Wechsel von 0 V auf Motornennspannung | 0.0s | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| Gruppe P4. Eingangsklemmen. | ||||
| P4-00 | Auswahl der DI1-Klemmenfunktion | 0: Funktion nicht vorhanden1: Vorwärtsgang (FWD)2: Rückwärtsgang (REV)3: Dreidraht-Stucrung4: Vorwärtsimpuls (Probelauf) (FJOG)5: Rückwärtsimpuls (RJOG)6: NACII OBEN7: NACH UNTEN8: Freilaufstopp9: Fehler zurücksetzen (RESET) | 1 | ★ |
| P4-01 | Auswahl der DI2-Klemmenfunktion | 4 | ★ | |
| P4-02 | Auswahl der DI3-Klemmenfunktion | 10: Betriebsunterbrechung11: Normalerweise offener externer Fehlereingang12: Multi-Zustandsbefehlsklemme 113: Multi-Zustandsbefehlsklemme 214: Multi-Zustandsbefehlsklemme 315: Multi-Zustandsbefehlsklemme 416: Beschleunigungs / Stoppzeitauswahl Klemme 117: Beschleunigungs / Stoppzeitauswahl Klemme 218: Schaltfrequenzquelle | 9 | ★ |
| P4-03 | Auswahl der DI4-Klemmenfunktion | 12 | ★ | |
| P4-04 | Auswahl der DI5-Klemmenfunktion | 19: Löschen der OBEN- / UNTEN-Einstellungen (Klemme und Tastatur)20: Klemme zum Umschalten von Befehlen zum Gang21: Beschleunigungs- / Stoppverbot22: PID-Pause23: SPS-Status zurücksetzen | 13 | ★ |
| P4-05 | Auswahl der DI6-Klemmenfunktion | 24: Unterbrechung der Schwungfrequenz25: Zählereingang26: Zähler zurücksetzen27: Längenzählcingang28: Längenzähler zurücksetzen29: Drehmomentregelung ausgeschaltet | 0 | ★ |
| P4-06 | Auswahl der DI7-Klemmenfunktion | 30: Impulsfrequenz-Eingang (gilt für DI5)31: Reserviert32: Gleichstrom-Hochgeschwindigkeits-Bremsen33: Normalerweise geschlossener externer Fehlereingang34: Frequenzverschiebung an | 0 | ★ |
| P4-07 | Auswahl der DI8-Klemmenfunktion | 35: Negieren der Richtung des PID36: Externe Klemme 137: Klemme zum Umschalten von Steuerbefehlen38: PID-Integrationspause39: Umschalten zwischen Frequenzquelle X und Sollfrequenz40: Umschalten zwischen Frequenzquelle Y und Sollfrequenz | 0 | ★ |
| P4-08 | Auswahl der DI9-Klemmenfunktion | 41: Motorauswahlklemme 142: Motorauswahlklemme 243: PID-Parameterschalter44: Benutzerdefinierter Fehler 1 | 0 | ★ |
| P4-09 | Auswahl der DI10-Klemmenfunktion | 45: Benutzerdefinierter Fehler 246: Schalter für Geschwindigkeitskontrolle / Drchmomentkontrolle47: Not-Aus48: Externe Stoppklemme 249: Langsame Gleichstrombremsung50: Betriebszeit gelöscht51 - 59: Reserviert | ||
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P4-10 | DI-Filterungszeit | 0.000 s ~ 1.000 s | 0.010s | ☆ |
| P4-11 | Klemmenbefehlsmodus | 0: Zweidraht 11: Zweidraht 22: Dreidraht 13: Dreidraht 2 | 0 | ★ |
| P4-12 | Geschwindigkeit des Wechsels der Klemmen OBEN / UNTEN | 0.001 Hz/s ~ 65.535 Hz/s | 1.00 Hz/s | ☆ |
| P4-13 | Minimaler Wert der AI1-Kurve am Eingang | 0.00 V ~ P4-15 | 0.00V | ☆ |
| P4-14 | Einstellung der AI1-Kurve am Eingang | -100.0% ~ +100.0% | 0.0% | ☆ |
| P4-15 | Maximaler Wert der AI1-Kurve am Eingang | P4-13 ~ +10.00V | 10.00V | ☆ |
| P4-16 | Einstellung der AI1-Kurve am Eingang | -100.0% ~ +100.0% | 100.0% | ☆ |
| P4-17 | AI1-Filtrungszeit | 0.00 s ~ 10.00 s | 0.10s | ☆ |
| P4-18 | Minimaler Wert der AI1-Kurve am Eingang | 0.00 V ~ P4-20 | 0.00V | ☆ |
| P4-19 | Einstellung der AI2-Kurve am Eingang | -100.0% ~ +100.0% | 0.0% | ☆ |
| P4-20 | Maximaler Wert der AI2-Kurve am Eingang. | P4-18 ~ +10.00V | 10.00V | ☆ |
| P4-21 | Einstellung der AI2-Kurve am Eingang | -100.0% ~ +100.0% | 100.0% | ☆ |
| P4-22 | AI2-Filterungszeit | 0.00 s ~ 10.00 s | 0.10s | ☆ |
| P4-23 | Minimaler Wert der AI3-Kurve am Eingang | -10.00V ~ P4-25 | -10.00V | ☆ |
| P4-24 | Einstellung der AI3-Kurve am Eingang | -100.0% ~ +100.0% | -100.0% | ☆ |
| P4-25 | Maximaler Wert der AI3-Kurve am Eingang | P4-23 ~ +10.00V | 10.00V | ☆ |
| P4-26 | Einstellung der AI3-Kurve am Eingang | -100.0% ~ +100.0% | 100.0% | ☆ |
| P4-27 | AI3-Filterungszeit | 0.00 s ~ 10.00 s | 0.10s | ☆ |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| P4-28 | Minimaler Wert am Impulseingang | 0.00kHz ~ P4-30 | 0.00kHz | ☆ |
| P4-29 | Einstellung am Impulseingang für minimalen Wert | -100.0% ~ 100.0% | 0.0% | ☆ |
| P4-30 | Maximaler Wert am Impulsein-gang | P4-28 ~ 100.00kHz | 50.00kHz | ☆ |
| P4-31 | Einstellung am Impulseingang für maximalen Wert | -100.0% ~ 100.0% | 100.0% | ☆ |
| P4-32 | IMPULS-Filterungszeit | 0.00 s ~ 10.00 s | 0.10s | ☆ |
| P4-33 | AI-Kurvenauswahl | Einheitsziffer: Auswahl der Kurve AI11: Kurve 1 (2 Punkte, siehe P4-13~P4-16)2: Kurve 2 (2 Punkte, siehe P4-18~P4-21)3: Kurve 3 (2 Punkte, siehe P4-23~P4-26)4: Kurve 4 (4 Punkte, siehe A6-00~A6-07)5: Kurve 5 (4 Punkte, siehe A6-08~A6-15)Zehner: AI2-Kurvenauswahl, wie obenHunderte: AI2-Kurvenauswahl, wie oben | 321 | ☆ |
| P4-34 | AI liegt unter der minimalen Eingangseinstellung | Einheitsziffer: AI1 liegt unterhalb der minimalen Eingangseinstellung 0: entspricht der minimalen Eingangseinstellung 1: 0,0%Zehner: AI2 liegt unter der minimalen EingangseinstellungAI3 liegt unter der minimalen Eingangseinstellung | 000 | ☆ |
| P4-35 | DI1-Verzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ★ |
| P4-36 | DI2-Verzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ★ |
| P4-37 | DI3-Verzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ★ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P4-38 | Betriebsart der Klemme 1 DI | 0: aktiv hoch1: aktiv niedrigEinheitsziffer: DI1 Zehner: DI2 Hunderte: DI3 Tausende: DI4 Zehntausende: DI15 | 00000 | ★ |
| P4-39 | Betriebsart der Klemme 2 DI | 0: aktiv hoch1: aktiv niedrigEinheitsziffer: DI6 Zehner: DI7 Hunderte: DI8 Tausende: DI9 Zehntausende: DI10 | 00000 | ★ |
| Ausgangsklemme der Gruppe P5 | ||||
| P5-00 | Betriebsart FM-Ausgang | 1: Impulsausgang (FMP)2: Zwei-Zustandsausgang (FMR) 0 | ☆ | |
| P5-01 | Auswahl der FMR-Ausgangsfunktion | 0: Kein Ausgang1: Betrieb des Frequenzumrichters2: Fehlerausgabe (Ausfallzeit)3: Ausgang zur Erkennung des FDT1-Frequenzpegels4: Erreichte Frequenz5: Betrieb mit Null-Drchzahl (kein Stoppen des Ausgangs)6: Voralarm bei Motorüberlast | 0 | ☆ |
| P5-02 | Auswahl der Funktion des Bedienfeldrelais (T / A-T / B-T / C) | 2 | ☆ | |
| P5-03 | Auswahl der Relaisfunktion der Erweiterungskarte (P / A-P / B-P / C) | 0 | ☆ | |
| P5-04 | Auswahl der DO1-Ausgangsfunktion | 1 | ☆ | |
| P5-05 | Auswahl des Ausgangs der DO2-Erweiterungskarte | 7: Voralarm bei Überlast des Frequenzumrichters8: Der Zählwert hat den eingestellten Wert erreicht9: Sollwert überschritten10: Erreichte Länge11: SPS-Zyklus abgeschlossen12: Einstellung der Gesamtbetriebszeit13: Frequenzschwelle14: Drehmoment-Schwelle15: Bereit zum Start16: AI1 > AI217: Obere Frequenzgrenze erreicht18: Untere Frequenzgrenze erreicht19: Spannungsabfall Ausgang21: Positionierung abgeschlossen (reserviert)22: Lokalisierung (reserviert)23: Betrieb mit Drehzahl Null 2 (Ausgang aus)24: Einstellung der Gesamteinschaltzeit25: Ausgang zur Erkennung des Frequenzpegels FDT226: 1 auf die Ausgangsfrequenz27: 2 auf die Ausgangsfrequenz28: 1 auf den Ausgangsstrom29: 2 auf den Ausgangsstrom30: Timing (Chronometer) zum Ausgang31: Eingang AI1 überschritten32: Ausführen33: Rückwärtsbewegung34: Null Stromzustand35: Modultemperatur erreicht36: Grenzwert des Ausgangsstroms37: Untere Frequenzerreichungsgrenze (Stoppausgang)38: Alarmausgang (Fortsetzung)39: Voralarm Motorübertemperatur40: Überschreitung der Arbeitszeit | 4 | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P5-06 | Auswahl der FMP-Ausgangsfunktion | 0: Betriebsfrequenz1: Einstellungsfrequenz2: Ausgangsstrom3: Ausgangsdrechnmoment4: Ausgangsleistung5: Ausgangsspannung6: Impulscingang (100 % entspricht 100,0 kHz) | 0 | ☆ |
| P5-07 | Auswahl der AO1-Ausgangsfunktion | 7: AI18: AI29: AI3 (Erweiterungskarte)10: Länge11: Wert12: Kommunikationseinstellungen13: Motordrehzahl14: Ausgangsstrom (100,0 % ist 1000,0 A)15: Ausgangsspannung (100,0 % ist 1000,0 V)16: Reserviert | 0 | ☆ |
| P5-08 | Auswahl der Ausgangsfunktion der AO2-Erweiterungskarte | 1 | ☆ | |
| P5-09 | Maximale Ausgangsfrequenz FMP | 0.01 kHz ~ 100.00 kHz | 50.00kHz | ☆ |
| P5-10 | Nullpunktverschiebungsfaktor AO1 | - 100.0 % ~ + 100.0 % | 0.0% | ☆ |
| P5-11 | AO1 Verstärkung | -10.00 ~ +10.00 | 1.00 | ☆ |
| P5-12 | Nullpunktverschiebungsfaktor der AO2-Erweiterungskarte | - 100.0 % ~ + 100.0 % | 0.0% | ☆ |
| P5-13 | Verstärkung der AO2-Erweiterungskarte | -10.00 ~ +10.00 | 1.00 | ☆ |
| P5-17 | FMR-Ausgangsverzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ☆ |
| P5-18 | RELAY1-Ausgangsverzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ☆ |
| P5-19 | RELAY2-Ausgangsverzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ☆ |
| P5-20 | DO1-Ausgangsverzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ☆ |
| P5-21 | DO2-Ausgangsverzögerungszeit | 0.0 s ~ 3600.0 s | 0.0s | ☆ |
| P5-22 | Auswahl des richtigen Zustands der DO-Ausgangsklemme | 0: positive Logik1: negative LogikEinheitsziffer: FMR Zehner: RELAY 1Hunderte: RELAY2 Tausende: DO1 Zehntausende: DO2 | 00000 | ☆ |
| Start / Stopp der P6-Gruppensteuerung | ||||
| P6-00 | Startmodus | 0: Direkter Start1: Geschwindigkeitsmessung neu starten2: Beginn der Vorerregung ( Wechselstrom-Asynchronmotor) | 0 | ☆ |
| P6-01 | Drehzahlverfolgungsmodus | 0: Start aus Stoppfrequenz1: Start aus Drehzahl Null2: Start aus max. Frequenz. | 0 | ★ |
| P6-02 | Rotationsverfolgungsgeschwindigkeit | 1 ~ 100 | 20 | ☆ |
| P6-03 | Anfangsfrequenz | 0.00Hz ~ 10.00Hz | 0.00Hz | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P6-04 | Zeit zum Halten der Anfangsfrequenz | 0.0 s ~ 100.0 s | 0.0s | ★ |
| P6-05 | Start des Gleichstrombremsstroms / Vorerregungsstroms | 0% ~ 100% | 0% | ★ |
| P6-06 | Startzeit des Gleichstrombremsstroms / Vorerregungszeit | 0.0 s ~ 100.0 s | 0.0s | ★ |
| P6-07 | Beschleunigungs- und Stoppmodus | 1: Lineare Beschleunigung und Verzögerung2: Beschleunigung und Verzögerung der S-, A-Kurve3: Beschleunigung und Verzögerung der S-, B-Kurve | 0 | ★ |
| P6-08 | Zeit des Anfangssegments der S-Kurve | 0.0 % ~ (100.0 % - P6-09) | 30.0% | ★ |
| P6-09 | Zeit des Anfangssegments der S-Kurve | 0.0 % ~ (100.0 % - P6-08) | 30.0% | ★ |
| P6-10 | Stoppmodus | 0: Abbremsen bis zum Stillstand,1: Freilaufstopp | 0 | ☆ |
| P6-11 | Anfangsfrequenz der Gleichstrombremsung | 0.00 Hz ~ Max. Frequenz | 0.00Hz | ☆ |
| P6-12 | Zeit zum Starten der Gleichstrombrem-sung | 0.0 s ~ 100.0 s | 0.0s | ☆ |
| P6-13 | Bremsstrom | 0 % ~ 100% | 0% | ☆ |
| P6-14 | Gleichstrombremszeit | 0.0 s ~ 100.0 s | 0.0s | ☆ |
| P6-15 | Nutzungsgrad der Bremse | 0 % ~ 100% | 100% | ☆ |
| Tastatur und Display Gruppe P7 | ||||
| P7-01 | Auswahl der JOG-Tastenfunktion | 0: Ungültiger JOG-Wert1: CMD-Kanal-Schalter für Bedienfeld und Remote-CMD-Kanal (CMD-Kanal-Klemme oder CMD-Kanal)2: Umkehrschalter3: Impulsierung nach vorne | 0 | ★ |
| P7-02 | Funktion der STOP / RESET-Taste | 0: Nur im Tastaturmodus ist die Stoppfunktion der STOP / RES-Taste aktiv1: in jeder Betriebsart ist die Stoppfunktion der STOP / RES-Taste aktiv | 1 | ☆ |
| P7-03 | Anzeige der Betriebsparameter1 | 0000 ~ FFFFBit00: Betriebsfrequenz 1 Hz)Bit01: Sollfrequenz Hz)Bit02: Sammelschienenspannung (V)Bit03: Ausgangsspannung (V)Bit04: Ausgangsstrom (A)Bit05: Ausgangsleistung (kW)Bit06: Ausgangsdrehmoment (%)Bit07: Status des DI-EingangsBit08: Status des DO-AusgangsBit09: Spannung AI1 (V)Bit10: Spannung AI2 (V)Bit11: Spannung AI3 (V)Bit12: ZählwertBit13: LängenwertBit14: Anzeige der LastgeschwindigkeitBit15: Sollwert des PID-Reglers | 1F | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P7-04 | Anzeige der Betriebsparameter2 | 0000 ~ FFFF Bit00: PID-KopplungBit01: SPS-StufeBit 02: Impulsfrequenz am Impulseingang (kHz)Bit03: Betriebsfrequenz 2 (Hz)Bit 04: Verbleibende BetriebszeitBit5: AI1-Spannung vor Korrektur [V]Bit6: AI2-Spannung vor Korrektur [V]Bit7: AI3-Spannung vor Korrektur [V]Bit8: linearc GeschwindigkeitBit9: Zeit seit dem Einschalten des Wechselrichters [Stunden]Bit10: Zeit vom Starten des Wechselrichters [min]Bit11: Impulssollfrequenz [Hz]Bit 12: KommunikationssollwertBit 13: Rückkopplungsgeschwindigkeit des Encoders (Hz)Bit 14: Hauptfrequenzanzeige X (Hz)Bit 15: Frequenzanzeige Y (Hz) | 0 | ☆ |
| P7-05 | Anzeige von Parametern im gestoppten Zustand | 0000 ~ FFFFBit00: Sollfrequenz (Hz)Bit01: Busspannung (V)Bit 02: Status des DI-EingangsBit 03: Status des DO-AusgangsBit 04: AI1 Spannung (V)Bit 05: AI2 Spannung (V)Bit 06: AI3 Spannung (V)Bit 07: ZählerwertBit 08: LängenwertBit09: SPS-PhaseBit 10: LastgeschwindigkeitBit 11: PID-KonfigurationBit12: Impulssollfrequenz (kHz) | 33 | ☆ |
| P7-06 | Angezeigter Multiplikator der Lastgeschwindigkeit | 0.0001 ~ 6.5000 | 1.0000 | ☆ |
| P7-07 | Temperatur des Kühlkörpermoduls des Wechselrichters | 0.0 °C ~ 100.0 °C | - | ● |
| P7-08 | Temperatur des Kühlkörpers der Gleichrichterbrücke | 0.0 °C ~ 100.0 °C | - | ● |
| P7-09 | Gesamtbetriebszeit | 0 h ~ 65535 h | - | ● |
| P7-10 | Produkt-Nr. | - | - | ● |
| P7-11 | Versionsnummer der Software | - | - | ● |
| P7-12 | Anzahl der Dezimalstellen in der Lastgeschwindigkeitsanzeige | 0: 0 Dezimalstellen1: 1 Dezimalstelle2: 2 Dezimalstellen3: 3 Dezimalstellen | 1 | ☆ |
| P7-13 | Gesamtzeit seit dem Einschalten | 0 h ~ 65535 h | - | ● |
| P7-14 | Gesamt-Energieverbrauch | 0 ~ 65535 KWh | - | ● |
| Hilfsfunktionen - Gruppe P8 | ||||
| P8-00 | Impulsfrequenz | 0.00 Hz ~ Max. Frequenz | 2.00Hz | ☆ |
| P8-01 | Impuls-Beschleunigungszeit | 0.0 s ~ 6500.0 s | 20.0s | ☆ |
| P8-02 | Impuls-Stoppzeit | 0.0 s ~ 6500.0 s | 20.0s | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P8-03 | Beschleunigungszeit 2 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-04 | Stoppzeit 2 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-05 | Beschleunigungszeit 3 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-06 | Stoppzeit 3 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-07 | Beschleunigungszeit 4 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-08 | Stoppzeit 4 | 0.0 s ~ 6500.0 s | Maschinentyp | ☆ |
| P8-09 | Sprungfrequenz 1 | 0.00 Hz ~ Max. Frequenz | 0.00Hz | ☆ |
| P8-10 | Sprungfrequenz 2 | 0.00 Hz ~ Max. Frequenz | 0.00Hz | ☆ |
| P8-11 | Sprungfrequenzbereich | 0.00 Hz ~ Max. Frequenz | 0.01Hz | ☆ |
| P8-12 | Zeit zwischen Drehrichtungswechsel | 0.0s ~ 3000.0s | 0.0s | ☆ |
| P8-13 | Erlaubte Rückwärtsdrehung | 0: erlauben 1: verbieten | 0 | ☆ |
| P8-14 | Betrieb mit einer Sollfrequenz kleiner als die untere Grenze | 0: Betrieb mit unterer Grenzfrequenz1: Stillstand2: Betrieb mit Drehzahl Null | 0 | ☆ |
| P8-15 | Lastausgleich | 0.00Hz ~ 10.00Hz | 0.00Hz | ☆ |
| P8-16 | Schwellwert für kumulative Aktivierungszeit | 0 h ~ 65000 h | 0h | ☆ |
| P8-17 | Schwellwert für die Gesamtbetriebszeit | 0 h ~ 65000 h | 0h | ☆ |
| P8-18 | Startschutz | 0: kein Schutz 1: Schutz | 0 | ☆ |
| P8-19 | Frequenzschwelle | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| P8-20 | Hysterese der Frequenzschwelle | 0,0 % ~ 100,0 % (FDT1-Pegel) | 5.0% | ☆ |
| P8-21 | Erfassungsbereich um Sollwertfrequenz | 0,0 % ~ 100,0 % (max. Frequenz) | 0.0% | ☆ |
| P8-22 | Aktivität der Frequenzschwellen während des Beschleunigens / Stoppens | 0: inaktiv 1: aktiv | 0 | ☆ |
| P8-25 | Umschaltfrequenz zwischen Beschleunigungszeit 1 und Beschleunigungszeit 2 | 0.00 Hz ~ Max. Frequenz | 0.00Hz | ☆ |
| P8-26 | Umschaltfrequenz zwischen Stoppzeit 1 und Stoppzeit 2 | 0.00 Hz ~ Max. Frequenz | 0.00Hz | ☆ |
| P8-27 | Testlaufbefehl mit hoher Priorität aus dem Terminal | 0: inaktiv1: aktiv | 0 | ☆ |
| P8-28 | Frequenzerkennungswert | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| P8-29 | Hysteresewert der Frequenzerkennung | 0.0 % ~ 100.0 % (FDT-Pegel2) | 5.0% | ☆ |
| P8-30 | Beliebiger Frequenzerkennungswert 1 | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| P8-31 | Beliebige Frequenzerfassungsbreite 1 | 0,0 % ~ 100,0 % (max. Frequenz) | 0.0% | ☆ |
| P8-32 | Beliebiger Frequenzerkennungswert 2 | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| P8-33 | Beliebige Frequenzerfassungsbreite 2 | 0,0 % ~ 100,0 % (max. Frequenz) | 0.0% | ☆ |
| P8-34 | Nullstrom-Erkennungsschwelle | 0.0 % ~ 300.0 %Der Nennstrom beträgt 100,0 % | 5.0% | ☆ |
| P8-35 | Verzögerungszeit für die Nullstromerkennung | 0.01s ~ 600.00s | 0.10s | ☆ |
| P8-36 | Grenzwert des Ausgangsstroms | 1.1 % (keine Erkennung)1.2 % ~ 300,0 % (Motornennstrom) | 200.0% | ☆ |
| P8-37 | Verzögerungszeit für die Erkennung der Ausgangsstromschwelle | 0.00 s ~ 600.00 s | 0.00s | ☆ |
| P8-38 | Beliebiger Strom erreicht 1 | 0,0 % ~ 300,0 % (Motornennstrom) | 100.0% | ☆ |
| P8-39 | Breite eines beliebigen Stroms erreicht 1 | 0,0 % ~ 300,0 % (Motornennstrom) | 0.0% | ☆ |
| P8-40 | Beliebiger Strom erreicht 2 | 0,0 % ~ 300,0 % (Motornennstrom) | 100.0% | ☆ |
| P8-41 | Breite eines beliebigen Stroms erreicht 2 | 0,0 % ~ 300,0 % (Motornennstrom) | 0.0% | ☆ |
| P8-42 | Auswahl der Timerfunktion | 0: inaktiv 1: aktiv | 0 | ☆ |
| P8-43 | Auswahl der Timer-Betriebszeit | 0: Einstellung P8-44; 1: AI1; 2: AI2; 3: AI3Der analoge Eingangsbereich entspricht P8-44 | ☆ | |
| P8-44 | Timer-Betriebszeit | 0.0 Min ~ 6500.0 Min | 0.0Min | ☆ |
| P8-45 | Eingangsspannungsschutz untere Schwelle AI1 | 0.00 V ~ P8-46 | 3.10V | ☆ |
| P8-46 | Eingangsspannungsschutz obere Schwelle AI1 | P8-45 ~ 10.00 V | 6.80V | ☆ |
| P8-47 | Modultemperatur erreicht | 0°C ~ 100°C | 75°C | ☆ |
| P8-48 | Lüfterregelung | 0: Nur während des Betriebs des Frequenzmrichters1: Ständig | 0 | ☆ |
| P8-49 | Erneuerungsfrequenz | Ruhefrequenz (P8-51) ~ Maximale Frequenz (P0-10) | 0.00Hz | ☆ |
| P8-50 | Erneuerungsverzögerung | 0.0 s ~ 6500.0 s | 0.0s | ☆ |
| P8-51 | Ruhefrequenz | 0.00 Hz ~ Erneuerungsfrequenz (P8-49) | 0.00Hz | ☆ |
| P8-52 | Verzögerung des Ruhezustands | 0.0 s ~ 6500.0 s | 0.0s | ☆ |
| P8-53 | Maximale Gesamtbetriebszeit | 0.0 Min ~ 6500.0 Min | 0.0Min | ☆ |
| Gruppe F09: Störungen und Schutz | ||||
| P9-00 | Auswahl des Motorüberlastschutzes | 0: erlaubt 1: verboten | 1 | ☆ |
| P9-01 | Verstärkung des Motorüberlastschutzes | 0.20 ~ 10.00 | 1.00 | ☆ |
| P9-02 | Auslösepegel für Motorüberlastwarnung | 50% ~ 100% | 80% | ☆ |
| P9-03 | Verstärkung Stillstandschutz | 0 ~ 100 | 0 | ☆ |
| P9-04 | Schutz vor Überspannung | 120% ~ 150% | 130% | ☆ |
| P9-05 | Inkrementeller Überstromstoß | 0 ~ 100 | 20 | ☆ |
| P9-06 | Schutzstrom vor Überspannung | 100% ~ 200% | 150% | ☆ |
| P9-07 | Schutz gegen Kurzschluss nach Masse | 0: inaktiv 1: aktiv | 1 | ☆ |
| P9-09 | Automatische Fehlerrückstellung | 0 ~ 20 | 0 | ☆ |
| P9-10 | Betrieb des DO-Ausgangs während der automatischen Fehlerrückstellung | 0: inaktiv1: aktiv | 0 | ☆ |
| P9-11 | Zeit zwischen Fehlerauftritt und automatischer Rückstellung | 0.1 s ~ 100.0 s | 1.0s | ☆ |
| P9-12 | Schutz vor Eingangsphasenverlust | 0: erlaubt 1: verboten | 1 | ☆ |
| P9-13 | Schutz vor Ausgangsphasenverlust | 0: erlaubt 1: verboten | 1 | ☆ |
| P9-14 | Erster Fehler | 0: kein Fehler1: reserviert2: Überstrom bei Beschleunigung3: Überstrom beim Stoppen4: Überstrom bei konstanter Geschwindigkeit5: Überspannung beim Beschleunigen6: Überspannung beim Stoppen7: Übrspannung bei konstanter Geschwindigkeit8: Überlast im Widerstandspuffer9: Spannungsabfall10: Überlastung des Wechselrichters11: Motorüberlastung12: Ausfall der Eingangsphase | — | ● |
| P9-15 | Zweiter Fehler | 13: Ausfall der Ausgangsphase14: Modulüberhitzung15: externer Gerätefehler16: Kommunikationsfehler17: Schützfehler18: Strommessfehler19: Motor-Auto-Abstimmungsfehler20: Encoder-/PG-Karten-Fehler21: Lese-/Schreibfehler in Parametern22: Hardwarefehler des Wechselrichters23: Hardwarefehler des Wechselrichters24: reserviert25: reserviert | — | ● |
| P9-16 | Zweiter (letzter) Fehler | 26: Überschreitung der Gesamtbetriebszeit27: Benutzerdefinierter Fehler 128: Benutzerdefinierter Fehler 229: Überschreitung der Gesamtversorgungszeit30: Last wird Null31: Unterbrechung der PID-Rückführung40: Kurzes Zeitlimit für Strombegrenzung41: Umschaltfehler bei laufendem Motor42: Überhöhte Geschwindigkeitsabweichung43: Überhöhte Motordrehzahl45: Motorüberhitzung51: Startpositionsfehler | — | ● |
| P9-17 | Frequenz des zweiten (letzten) Fehlers | — | — | ● |
| P9-18 | Strom des zweiten (letzten) Fehlers | — | — | ● |
| P9-19 | Busspannung beim zweiten (letzten) Fehler | — | — | ● |
| P9-20 | Zustand der Eingangsklemme beim zweiten (letzten) Fehler | — | — | ● |
| P9-21 | Zustand der Ausgangsklemme beim zweiten (letzten) Fehler | — | — | ● |
| P9-22 | Zustand des Wechselrichters beim zweiten (letzten) Fehler | — | — | ● |
| P9-23 | Versorgungszeit des Wechselrichters beim zweiten (letzten) Fehler | — | — | ● |
| P9-24 | Betriebszeit des Wechselrichters beim zweiten (letzten) Fehler | — | — | ● |
| P9-27 | Frequenz des zweiten Fehlers | — | — | ● |
| P9-28 | Strom des zweiten Fehlers | — | — | ● |
| P9-29 | Busspannung beim zweiten Fehler | — | — | ● |
| P9-30 | Eingangszustand beim zweiten Fehler | — | — | ● |
| P9-31 | Zustand der Ausgangsklemme beim zweiten Fehler | — | — | ● |
| P9-32 | Zustand des Wechselrichters beim zweiten Fehler | — | — | ● |
| P9-33 | Versorgungszeit beim zweiten Fehler | — | — | ● |
| P9-34 | Betriebszeit beim zweiten Fehler | — | — | ● |
| P9-37 | Frequenz des ersten Fehlers | — | — | ● |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| P9-38 | Strom des ersten Fehlers | — | — | ● |
| P9-39 | Busspannung beim ersten Fehler | — | — | ● |
| P9-40 | Frequenz des ersten Fehlers | — | — | ● |
| P9-41 | Ausgangszustand beim ersten Fehler | — | — | ● |
| P9-42 | Zustand des Wechselrichters beim ersten Fehler | — | — | ● |
| P9-43 | Versorgungszeit beim ersten Fehler | — | — | ● |
| P9-44 | Betriebszeit beim ersten Fehler | — | — | ● |
| P9-47 | Abhilfe bei Fehlertyp 1 | Einheitsziffer: Motorüberlast (11)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus2: Fortsetzung des BetriebsZehner: Eingangsphasenverlust 12)Einheitsziffer: 100 Ausfall der Ausgangsphase (13)Tausende: externer Gerätefehler (15)Zehntausend: Kommunikationsfehler (16) | 00000 | ☆ |
| P9-48 | Abhilfe bei Fehlertyp 2 | Einheitsziffer: Encoder- / PG-Karten-Fehler (20) 0: Freilaufstopp10: Fehler des Codelesers (21)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus100: Reserviert1000: Motorüberhitzung (25)10000: Überschreitung der Betriebszeit | 00000 | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| P9-49 | Abhilfe bei Fehlertyp 3 | Einheitsziffer: Benutzerdefinierter Fehler 1 (27)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus2: Fortsetzung des BetriebsHunderte: Überschreitung der Gesamtbetriebszeit (29)Tausende: Last wird Null (30)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus2: Fortsetzung des Betriebs bei 7 % er Motornennfrequenz und Rückkehr zur eingestellten Frequenz, wenn der Motor wieder belastet wird Zehntausend: PID-Rückkopplungsverlust(31)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus2: Fortsetzung des Betriebs | 00000 | ☆ |
| P9-50 | Abhilfe bei Fehlertyp 4 | Einheitsziffer: Überhöhte Geschwindigkeitsabweichung (42)0: Freilaufstopp1: Stopp, Übergang in den Stoppmodus2: Fortsetzung des BetriebsZehner: Überhöhte Motordrechzahl (43)Hunderte: Startpositionsfehler (51) | 00000 | ☆ |
| P9-54 | Fortsetzung der ausgewählten Frequenz, wenn ein Fehler auftritt | 0: Betrieb mit der aktuellen Betriebsfrequenz1: Inbetriebnahme mit voreingestellter Frequenz2: Inbetriebnahme mit oberer Frequenzschwelle3: Betrieb mit unterer Frequenzschwelle4: Betrieb mit einer alternativen abnormalen Frequenz | 0 | ☆ |
| P9-55 | Alternativer Frequenzfehler | 60,0 % ~ 100,0 % (100,0 % entspricht der max. Frequenz) P0-10) | 100.0% | ☆ |
| P9-56 | Typ des Motortemperatursensors | 0: kein Temperatursensor1: PT1002: PT1000 | 0 | ☆ |
| P9-57 | Schutzschwelle für Motorüberhitzung | 0 °C ~ 200 °C | 110 °C | ☆ |
| P9-58 | Warnschwelle für Motorüberhitzung | 0 °C ~ 200 °C | 90 °C | ☆ |
| P9-59 | Auswahl der Betriebsart bei vorübergehendem Stromausfall | 0: inaktiv1: Bremsen2: Lauf zum Stopp | 0 | ☆ |
| P9-60 | Reserviert | P9-62 ~ 100.0% | 100.0% | ☆ |
| P9-61 | Reaktionszeit bei Stromausfall | 0.00 s ~ 100.00 s | 0.50s | ☆ |
| P9-62 | Spannungsänderungswert für die Reaktion nach Stromausfall | 60.0 % ~ 100.0 %(Standard-Busspannung) | 80.0% | ☆ |
| P9-63 | Schutz, wenn die Last auf Null fällt | 0: inaktiv1: aktiv | 0 | ☆ |
| P9-64 | Lastabfall auf Erkennungsniveau Null | 0.0 ~ 100.0 % | 10.0% | ☆ |
| P9-65 | Erkennungszeit bei Lastabfall auf Null | 0.0 ~ 60.0 s | 1.0s | ☆ |
| P9-67 | Schwelle für Überdrehzahlerkennung | 0.0% ~ 50.0% (max. Frequenz) | 20.0% | ☆ |
| P9-68 | Überdrehzahl-Erkennungszeit | 0.0 s ~ 60.0 s | 5.0s | ☆ |
| P9-69 | Erkennungsschwelle für überhöhte Drehzahlabweichung | 0.0 % ~ 50.0 % (max. Frequenz) | 20.0% | ☆ |
| P9-70 | Erkennungszeit für überhöhte Drehzahlabweichung | 0.0 s ~ 60.0 s | 0.0s | ☆ |
| Gruppe PA - PID-Betrieb | ||||
| PA-00 | Auswahl der Sollwertquelle des PID-Reglers | 0: Einstellungen PA-011: AI1;2: AI2;3: AI34: Impulseingang (DI5)5: Kommunikationseinstellungen6: Mehrstufenregelung | 0 | ☆ |
| PA-01 | PID-Sollwerte | 0.0% ~ 100.0% | 50.0% | ☆ |
| PA-02 | PID-Rückkopplungssignalquelle | 0: AI1; 1: AI2; 2: AI3; 3: AI1-AI24: Impulseinstellungen (DI5)5: Kommunikationseinstellungen6: AI1 + AI27: MAX (|AI1|, |AI2|)8: MIN (|AI1|, |AI2|) | 0 | ☆ |
| PA-03 | Richtung des PID-Betriebs | 0: positiv1: negativ | 0 | ☆ |
| PA-04 | PID-Rückkopplungsbereich | 0 ~ 65535 | 1000 | ☆ |
| PA-05 | Inkrement des Proportionalglieds Kp1 | 0.0 ~ 100.0 | 20.0 | ☆ |
| PA-06 | Integrationszeit Ti1 | 0.01 s ~ 10.00 s | 2.00s | ☆ |
| PA-07 | Differenzierungszeit Td1 | 0.000 s ~ 10.000 s | 0.000s | ☆ |
| PA-08 | Grenzfrequenz für PID-Rückwärtsbetrieb | 0.00 ~ Max. Frequenz | 2.00Hz | ☆ |
| PA-09 | PID-Abweichungsgrenze | 0.0 % ~ 100.0% | 0.0% | ☆ |
| PA-10 | PID-Differenzierungsgrenze | 0.00% ~ 100.00% | 0.10% | ☆ |
| PA-11 | PID-Zeitänderung | 0.00 ~ 650.00 s | 0.00s | ☆ |
| PA-12 | PID-Rückkopplungsfilterzeit | 0.00 ~ 60.00 s | 0.00s | ☆ |
| PA-13 | PID-Ausgangsfilterzeit | 0.00 ~ 60.00 s | 0.00s | ☆ |
| PA-14 | Reserviert | - | - | ☆ |
| PA-15 | Verstärkungsfaktor des Proportionalglieds Kp2 | 0.0 ~ 100.0 | 20.0 | ☆ |
| PA-16 | Integrationszeit Ti2 | 0.01 s ~ 10.00 s | 2.00s | ☆ |
| PA-17 | Differenzierungszeit Td2 | 0.000 s ~ 10.000 s | 0.000s | ☆ |
| PA-18 | Schaltbedingungen für PI-Parameter | 0: ohne Umschaltung1: mittels DI-Klemmenschalter2: automatische Umschaltung auf Basis der Abweichung | 0 | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| PA-19 | Parameterumschaltabweichung 1 | 0.0% ~ PA-20 | 20.0% | ☆ |
| PA-20 | Parameterumschaltabweichung 2 | PA-19 ~ 100.0% | 80.0% | ☆ |
| PA-21 | PID-Anfangswert | 0.0% ~ 100.0% | 0.0% | ☆ |
| PA-22 | Haltezeit des Anfangswerts PID | 0.00 ~ 650.00 s | 0.00s | ☆ |
| PA-23 | Max. Abweichung zwischen zwei PID-Ausgängen im Vorwärtsbetrieb | 0.00% ~ 100.00% | 1.00% | ☆ |
| PA-24 | Max. Abweichung zwischen zwei PID-Ausgängen im Rückwärtsbetrieb | 0.00% ~ 100.00% | 1.00% | ☆ |
| PA-25 | Merkmale desPID-Integrators | Einheitsziffer: vollständige Isolierung 0: Inaktiv;1: Aktiv Zehner: Stoppen der Integration nach Erreichen des eingestellten Werts durch den Ausgang 0: Fortsetzung der Integration 1: Stoppen der Integration | 00 | ☆ |
| PA-26 | PID-Rückkopplungsverlust-Erkennungswert | 0.0%: Keine Rückkopplungsverlustanalyse 0.1% ~ 100.0% | 0.0% | ☆ |
| PA-27 | PID-Rückkopplungsverlust-Erkenungszeit | 0.0s ~ 20.0s | 0.0s | ☆ |
| PA-28 | PID-Betrieb nach dem Stoppen | 0: PID-Betrieb nach dem Stoppen deaktiviert;1: PID-Betrieb nach dem Stoppen | 0 | ☆ |
| Gruppe Pb: Oszillationsfrequenz, -länge und -zählung | ||||
| Pb-00 | Oszillationsfrequenzmodus | 0: Bezogen auf die Mittenfrequenz 1: Bezogen auf die Maximalfrequenz | 0 | ☆ |
| Pb-01 | Amplitude der Oszillationsfrequenz | 0.0% ~ 100.0% | 0.0% | ☆ |
| Pb-02 | Sprung der Oszillationsfrequenz | 0.0% ~ 50.0% | 0.0% | ☆ |
| Pb-03 | Zyklus der Oszillationsfrequenz | 0.1 s ~ 3000.0 s | 10.0s | ☆ |
| Pb-04 | Anstiegszeitkoeffizient einer Drei-eckswelle | 0.1% ~ 100.0% | 50.0% | ☆ |
| Pb-05 | Längeneinstellung | 0 m ~ 65535 m | 1000m | ☆ |
| Pb-06 | Laufende Länge | 0 m ~ 65535 m | 0m | ☆ |
| Pb-07 | Anzahl von Impulsen pro Meter | 0.1 ~ 6553.5 | 100.0 | ☆ |
| Pb-08 | Einstellung des Zählerwerts | 1 ~ 65535 | 1000 | ☆ |
| Pb-09 | Zählersollwert | 1 ~ 65535 | 1000 | ☆ |
| Gruppe PC – Multi-Zustandsbefehle und SPS-Funktionen | ||||
| PC-00 | Multi-Zustandsbefehl 0 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-01 | Multi-Zustandsbefehl 1 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-02 | Multi-Zustandsbefehl 2 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-03 | Multi-Zustandsbefehl 3 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-04 | Multi-Zustandsbefehl 4 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-05 | Multi-Zustandsbefehl 5 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-06 | Multi-Zustandsbefehl 6 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-07 | Multi-Zustandsbefehl 7 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-08 | Multi-Zustandsbefehl 8 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-09 | Multi-Zustandsbefehl 9 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-10 | Multi-Zustandsbefehl 10 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-11 | Multi-Zustandsbefehl 11 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-12 | Multi-Zustandsbefehl 12 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-13 | Multi-Zustandsbefehl 13 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-14 | Multi-Zustandsbefehl 14 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-15 | Multi-Zustandsbefehl 15 | -100.0% ~ 100.0% | 0.0% | ☆ |
| PC-16 | Einfache SPS-Betriebsart | 0: Stopp nach einem Zyklus1: Halten des Wertes nach einem Zyklus2: Wiederholung nach einem Zyklus | 0 | ☆ |
| PC-17 | Auswahl des Speichers nach einem Ausfall der SPS-Spannungsversorgung | Einheitsziffer: Speicher nach Stromausfall 0: Kein Speicher nach Stromausfall1: Speicher nach StromausfallZehner: Auswahl des Speichers nach Stopp0: kein Speicher nach Stopp1: Speicher nach Stopp | 00 | ☆ |
| PC-18 | SPS-Laufzeit für Punkt 0 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-19 | SPS-Beschleunigungs- und Stoppzeit für Punkt 0 | 0 ~ 3 | 0 | ☆ |
| PC-20 | SPS-Laufzeit für Punkt 1 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-21 | SPS-Beschleunigungs- und Stoppzeit für Punkt 1 | 0 ~ 3 | 0 | ☆ |
| PC-22 | SPS-Laufzeit für Punkt 2 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-23 | SPS-Beschleunigungs- und Stoppzeit für Punkt 2 | 0 ~ 3 | 0 | ☆ |
| PC-24 | SPS-Laufzeit für Punkt 3 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-25 | SPS-Beschleunigungs- und Stoppzeit für Punkt 3 | 0 ~ 3 | 0 | ☆ |
| PC-26 | SPS-Laufzeit für Punkt 4 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-27 | SPS-Beschleunigungs- und Stoppzeit für Punkt 4 | 0 ~ 3 | 0 | ☆ |
| PC-28 | SPS-Laufzeit für Punkt 5 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-29 | SPS-Beschleunigungs- und Stoppzeit für Punkt 5 | 0 ~ 3 | 0 | ☆ |
| PC-30 | SPS-Laufzeit für Punkt 6 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-31 | SPS-Beschleunigungs- und Stoppzeit für Punkt 6 | 0 ~ 3 | 0 | ☆ |
| PC-32 | SPS-Laufzeit für Punkt 7 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-33 | SPS-Beschleunigungs- und Stoppzeit für Punkt 7 | 0 ~ 3 | 0 | ☆ |
| PC-34 | SPS-Laufzeit für Punkt 8 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-35 | SPS-Beschleunigungs- und Stoppzeit für Punkt 8 | 0 ~ 3 | 0 | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| PC-36 | SPS-Laufzeit für Punkt 9 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-37 | SPS-Beschleunigungs- und Stoppzeit für Punkt 9 | 0 ~ 3 | 0 | ☆ |
| PC-38 | SPS-Laufzeit für Punkt 10 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-39 | SPS-Beschleunigungs- und Stoppzeit für Punkt 10 | 0 ~ 3 | 0 | ☆ |
| PC-40 | SPS-Laufzeit für Punkt 11 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-41 | SPS-Beschleunigungs- und Stoppzeit für Punkt 11 | 0 ~ 3 | 0 | ☆ |
| PC-42 | SPS-Laufzeit für Punkt 12 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-43 | SPS-Beschleunigungs- und Stoppzeit für Punkt 12 | 0 ~ 3 | 0 | ☆ |
| PC-44 | SPS-Laufzeit für Punkt 13 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-45 | SPS-Beschleunigungs- und Stoppzeit für Punkt 13 | 0 ~ 3 | 0 | ☆ |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| PC-46 | SPS-Laufzeit für Punkt 14 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-47 | SPS-Beschleunigungs- und Stoppzelt für Punkt 14 | 0 ~ 3 | 0 | ☆ |
| PC-48 | SPS-Laufzeit für Punkt 15 | 0.0 s (h) ~ 6553.5 s (h) | 0.0 s (h) | ☆ |
| PC-49 | SPS-Beschleunigungs- und Stoppzelt für Punkt 15 | 0 ~ 3 | 0 | ☆ |
| PC-50 | SPS-Betriebszeiteinheit | 0: s (Sekunde)1: h (Stunde) | 0 | ☆ |
| PC-51 | Parametricierung für Referenzpunkt 0 | 0: Vorgegebener Funktionscode PC-001: AI12: AI23: AI34 Impulseinstellungen5: PID6: über den Frequenzsollwert (P010) eingestellt, geändert mit UP/DOWN-Tasten | 0 | ☆ |
| Gruppe Pd – Kommunikationsparameter | ||||
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| Pd-00 | Übertragungsgeschwindigkeit | Einheitsziffer: MODBUS 0: 300BPS1: 600BPS2: 1200BPS3: 2400BPS4: 4800BPS5: 9600BPS6: 19200BPS7: 38400BPS8: 57600BPS9: 115200BPSZehner: reserviertHunderter: reserviertTausende: ÜbertragungsgeschwindigkeitCANlink0: 201: 502: 1003: 1254: 2505: 5006: 1M | 6005 | ☆ |
| Pd-01 | Datenformat | 0: : ohne Prüfung, Format <8, N, 2>1: Paritätsprüfung, Format <8, E, 1>2: Prüfung auf ungerade Parität, Format <8, O, 1>3: keine Prüfung, Format <8, N, 1> | 0 | ☆ |
| Pd-02 | Lokale Adresse | 1~247, 0: Rahmenadresse | 1 | ☆ |
| Pd-03 | Antwortverzögerung | 0 ms ~ 20 ms | 2 | ☆ |
| Pd-04 | Kommunikationsunterbrechungszeit | 0.0 (inaktiv), 0.1 s ~ 60.0 s | 0.0 | ☆ |
| Pd-05 | Auswahl des Datenübertragungsformats | Einheit auf dem Display: MODBUS-Protokoll0: Nicht-Standard Modbus-Protokoll1: Standard Modbus-ProtokollDezimalzahl auf dem Display: reserviert | 30 | ☆ |
| Pd-06 | Auflösung zum Lesen von Daten in der Kommunikation | 0: 0.01A1: 0.1A | 0 | ☆ |
| Grupoe PE - Benutzerdefinierte Funktionscodes | ||||
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| PE-00 | Benutzer-Funktionscode 0 | P0-00 ~ PP-xxA0-00 ~ Ax-xxU0-xx~U0-xx | P0.10 | ☆ |
| PE-01 | Benutzer-Funktionscode 1 | P0.02 | ☆ | |
| PE-02 | Benutzer-Funktionscode 2 | P0.03 | ☆ | |
| PE-03 | Benutzer-Funktionscode 3 | P0.07 | ☆ | |
| PE-04 | Benutzer-Funktionscode 4 | P0.08 | ☆ | |
| PE-05 | Benutzer-Funktionscode 5 | P0.17 | ☆ | |
| PE-06 | Benutzer-Funktionscode 6 | P0.18 | ☆ | |
| PE-07 | Benutzer-Funktionscode 7 | P3.00 | ☆ | |
| PE-08 | Benutzer-Funktionscode 8 | P3.01 | ☆ | |
| PE-09 | Benutzer-Funktionscode 9 | P4.00 | ☆ | |
| PE-10 | Benutzer-Funktionscode 10 | P4.01 | ☆ | |
| PE-11 | Benutzer-Funktionscode 11 | P4.02 | ☆ | |
| PE-12 | Benutzer-Funktionscode 12 | P5.04 | ☆ | |
| PE-13 | Benutzer-Funktionscode 13 | P5.07 | ☆ | |
| PE-14 | Benutzer-Funktionscode 14 | P6.00 | ☆ | |
| PE-15 | Benutzer-Funktionscode 15 | P6.10 | ☆ | |
| PE-16 | Benutzer-Funktionscode 16 | P0.00 | ☆ | |
| PE-17 | Benutzer-Funktionscode 17 | P0.00 | ☆ | |
| PE-18 | Benutzer-Funktionscode 18 | P0.00 | ☆ | |
| PE-19 | Benutzer-Funktionscode 19 | P0.00 | ☆ | |
| PE-20 | Benutzer-Funktionscode 20 | P0.00 | ☆ | |
| PE-21 | Benutzer-Funktionscode 21 | P0.00 | ☆ | |
| PE-22 | Benutzer-Funktionscode 22 | P0.00 | ☆ | |
| PE-23 | Benutzer-Funktionscode 23 | P0.00 | ☆ | |
| PE-24 | Benutzer-Funktionscode 24 | P0.00 | ☆ | |
| PE-25 | Benutzer-Funktionscode 25 | P0.00 | ☆ | |
| PE-26 | Benutzer-Funktionscode 26 | P0.00 | ☆ | |
| PE-27 | Benutzer-Funktionscode 27 | P0.00 | ☆ | |
| PE-28 | Benutzer-Funktionscode 28 | P0.00 | ☆ | |
| PE-29 | Benutzer-Funktionscode 29 | P0.00 | ☆ | |
| Gruppe PP - Verwaltung von Funktionscodes | ||||
| PP-00 | Benutzerpasswort | 0 ~ 65535 | 0 | ☆ |
| PP-01 | Rücksetzen auf die Standardcinstellungen | 0: nicht rücksetzen01: Alle Einstellungen außer den Motorparametern rücksetzen02: Datensätze löschen04: aktuelle Backup-Benutzerparameter501: Wiederherstellen der Sicherungsparameter des Benutzers | 0 | ★ |
| PP-02 | Auswahl der Anzeige der Funktionsparameter | Einheitsziffer: Auswahl der Anzeige der Gruppe U0: keine Anzeige1: AnzeigeZehner: Auswahl der Anzeige der Gruppe A0: keine Anzeige1: Anzeige | 11 | ★ |
| PP-03 | Auswahl der Anzeige der benutzerdefinierten Parametergruppe | Bit: Auswahl der Anzeige von benutzerdefinierten Parametergruppen0: keine Anzeige 1: AnzeigeEinheitsziffer: Auswahl der Anzeige der vom Benutzer geänderten Parametergruppe0: keine Anzeige 1: Anzeige | 00 | ☆ |
| PP-04 | Ändern des Funktionscodes | 0: kann geändert werden1: kann nicht geändert werden | 0 | ☆ |
| Gruppe A0 Drehmomentsteuerung und Parametergrenzen | ||||
| A0-00 | Auswahl Drehzahl-/Drehmomentregelung | 0: Drehzahlregelung1: Drehmomentregelung | 0 | ★ |
| A0-01 | Auswahl der Referenzquelle der Drehmomentsteuerung | 0: digitale Einstellung 1 (A0-03)1: AI12: AI23: AI34 Impulseinstellungen5: Kommunikationseinstellungen6: MIN (AI1, AI2)7: MAX (AI1, AI2) (Volle Skala 1-7, entsprechende digitale Einstellung A0-03) | 0 | ★ |
| A0-03 | Digitale Drehmomenteinstellung im Modus Drehmomentregelung | - 200.0 % ~ 200.0 % | 150.0% | ☆ |
| A0-05 | Positive maximale Frequenz der Drehmomentregelung | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| A0-06 | Negative maximale Frequenz der Drehmomentregelung | 0.00 Hz ~ Max. Frequenz | 50.00Hz | ☆ |
| A0-07 | Beschleunigungszeit für Drehmomentsteuerung | 0.00 s ~ 65000 s | 0.00s | ☆ |
| A0-08 | Stoppzeit für Drehmomentsteuerung | 0.00 s ~ 65000 s | 0.00s | ☆ |
| Gruppe A2 - Regelung des zweiten Gruppenmotors | ||||
| A2-00 | Auswahl des Motortyps | 0: Standard-Induktionsmotor1:Induktionsmotoren mit variabler Frequenz | 0 | ★ |
| A2-01 | Motornennleistung | 0.1 kW - 1000.0 kW | Maschinentyp | ★ |
| A2-02 | Motornennspannung | 1 V ~ 400 V | Maschinentyp | ★ |
| A2-03 | Motornennstrom | 0.01 A ~ 655.35 A(Leistung des Frequenzumrichters = 55 kW) 0.1 A ~ 6553.5 ALeistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-04 | Motornennfrequenz | 0.01Hz ~ Max. Frequenz | Maschinentyp | ★ |
| A2-05 | Motornenndrehzahl | 1 U/min ~ 65535 U/min | Maschinentyp | ★ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| A2-06 | Statorwiderstand des Asynchronmotors | 0.001 65.535 (Leistung des Frequenzumrichters <= 55 kW) 0.0001 6.5535 Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-07 | Rotorwiderstand des Asynchronmotors | 0.001 65.535 (Leistung des Frequenzumrichters <= 55 kW) 0.0001 6.5535 Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-08 | Induktive Ableitreaktanz eines Asynchronmotors | 0.01 ml 655.35 ml l (Leistung des Frequenzumrichters <= 55 kW) 0.001 mH 65.535 mH Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-09 | Gegenseitige induktive Reaktanz des Asynchronmotors | 0.1 mH 6553.5 mH (Leistung des Frequenzumrichters <= 55 kW) 0.001 ml 65.35 ml l Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-10 | Leerlaufstrom des Asynchronmotors | 0,01 A A2-03 (Leistung des Frequenzumrichters <= 55 kW) 0.1 A ~ A2-03 (Leistung des Frequenzumrichters > 55 kW) | Maschinentyp | ★ |
| A2-27 | Encoder-Zeilennummer | 1 ~ 65535 | 1024 | ★ |
| A2-28 | Encodertyp | 0: 0: Inkremental-Encoder ABZ1: Reserviert2: Resolver | 0 | ★ |
| A2-29 | Drehzahlrückführung PG-Auswahl | 0: lokales PG1: lokales PG2: Impulseingang (DI5) | 0 | ★ |
| A2-30 | AB-Phasenfolge des Inkremental-Encoders ABZ | 0: vorwärts1: rückwärts | 0 | ★ |
| A2-34 | Anzahl der Polpaare des Drehtransformators | 1 ~ 65535 | 1 | ★ |
| A2-36 | Erkennungszeit für PG-Unterbrechung in der Geschwindigkeitsrückmel dung | 0.0: keine Aktion0.1 s ~ 10.0 s | 0.0 | ★ |
| A2-37 | Abstimmungsauswahl | 0: Keine Aktion1: Statische Abstimmung des Asynchronmotors2: Vollständige Abstimmung des Asynchronmotors | 0 | ★ |
| A2-38 | Proportionalverstärkung der Geschwindigkeitsschleife 1 | 1 ~ 100 | 30 | ☆ |
| A2-39 | Integrationszeit für Geschwindigkeitsschleife 1 | 0.01 s ~ 10.00 s | 0.50s | ☆ |
| A2-40 | Schaltfrequenz 1 | 0.00 ~ A2-43 | 5.00Hz | ☆ |
| A2-41 | Proportionalverstärkung der Geschwindigkeitsschleife 2 | 1 ~ 100 | 20 | ☆ |
| A2-42 | Integrationszeit für Geschwindigkeitsschleife 2 | 0.01 s ~ 10.00 s | 1.00s | ☆ |
| A2-43 | Schaltfrequenz 2 | A2-40 ~ Max. Frequenz | 10.001lz | ☆ |
| A2-44 | Schlupfverstärkung für Vektorregelung | 50% ~ 200% | 100% | ☆ |
| A2-45 | Zeitkonstante für den Drehzahlregelfilter | 0.000 s ~ 0.100 s | 0.000s | ☆ |
| A2-46 | Vektorregelung der Anregungsverstärkung | 0 ~ 200 | 64 | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| A2-47 | Quelle der oberen Grenze im Geschwindigkeitsregelungsmodus | 0: A2-48 Einstellung1: AI12: AI23: AI34: Impulseinstellung5: Kommunikationseinstellungen6: MIN (AI1, AI2)7: MAX (AI1, AI2)Skalenendwert der Optionen 1-7 entspricht den digitalen Einstellungen A2-48 | 0 | ☆ |
| A2-48 | Digitale Drehmomenteinstellung im Geschwindigkeitsregelungs modus | 0.0% ~ 200.0% | 150.0% | ☆ |
| A2-51 | Anregungsproportionalverstärkung | 0 ~ 20000 | 2000 | ☆ |
| A2-52 | Integrale Verstärkung der Anregung | 0 ~ 20000 | 1300 | ☆ |
| A2-53 | Proportionalverstärkung für Drehmomentregelung | 0 ~ 20000 | 2000 | ☆ |
| A2-54 | Integrationsverstärkung der Drehmomentregelung | 0 ~ 20000 | 1300 | ☆ |
| A2-55 | Eigenschaften des integrierenden Glieds einer Drehzahlschleife | Einheitsziffer: Integrationstrennung0: nicht erlaubt1: erlaubt | 0 | ☆ |
| A2-61 | Motorregelungsart 2 | 0: Keine Drehzahlsensor-Vektorregelung (SVC)1: Drehzahlsensor-Vektorsteuerung (FVC)2: U/f-Steuerung | 0 | ★ |
| A2-62 | Beschleunigungs-/Bremszeit von Motor 2 | 0: wie bei Motor 11: Beschleunigungs-/Bremszeit 12: Beschleunigungs-/Bremszeit 23: Beschleunigungs-/Bremszeit 34: Beschleunigungs-/Bremszeit 4 | 0 | ☆ |
| A2-63 | Erhöhung des Motordrehmoments 2 | 0,0 %: Automatische Drehmomenterhöhung0.1% ~ 30.0% | Maschinentyp | ☆ |
| A2-65 | Dämpfungsverstärkung der Motorschwingung 2 | 0 ~ 100 | Maschinentyp | ☆ |
| Gruppe A5 Parameter für die Steuerungsoptimierung | ||||
| A5-00 | DPWM-Schalter für obere Frequenzschwelle | 0.00Hz ~ 15.00Hz | 12.00Hz | ☆ |
| A5-01 | PWM-Modulationsmodus | 0: asynchrone Modulation1: synchrone Modulation | 0 | ☆ |
| A5-02 | Auswahl des Totzonen-Kompensationsmodus | 0: keine Kompensation1: Kompensationsmodus Nr. 12: Kompensationsmodus Nr. 2 | 1 | ☆ |
| A5-03 | Zufällige PWM-Tiefe | 0: nicht erlaubt1~10: Zufallstiefe der Trägerfrequenz | 0 | ☆ |
| A5-04 | Schnellstrombegrenzung | 0: Inaktiv1: Aktiv | 1 | ☆ |
| A5-05 | Laufende Kompensationserkennung | 0 ~ 100 | 5 | ☆ |
| A5-06 | Schwelle für Spannungsabfall | 60.0% ~ 140.0% | 100.0% | ☆ |
| A5-07 | SVC-Optimierung | 0: keine Optimierung1: Optimierungsmodus Nr. 12: Optimierungsmodus Nr. 2 | 1 | ☆ |
| A5-08 | Totzeiteinstellung | 100% ~ 200% | 150% | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| Gruppe A6 – Einstellung der AI-Kurve | ||||
| A6-00 | Minimalwert der AI-Kurve an Eingang 4 | -10.00 V ~ A6-02 | 0.00V | ☆ |
| A6-01 | Einstellung des Minimalwerts der AI-Kurve an Eingang 4 | -100.0 % ~ + 100.0 % | 0.0% | ☆ |
| A6-02 | Wendepunkt Nr. 1 der AI-Kurve an Eingang 4 | A6-00 ~ A6-04 | 3.00V | ☆ |
| A6-03 | Einstellung des Wendepunkts Nr. 1 der AI-Kurve an Eingang 4 | -100.0 % ~ + 100.0 % | 30.0% | ☆ |
| A6-04 | Wendepunkt Nr. 2 der AI-Kurve an Eingang 4 | A6-02 ~ A6-06 | 6.00V | ☆ |
| A6-05 | Einstellung des Wendepunkts Nr. 2 der AI-Kurve an Eingang 4 | -100.0 % ~ + 100.0 % | 60.0% | ☆ |
| A6-06 | Maximalwert der AI-Kurve an Eingang 4 | A6-06 ~ +10.00V | 10.00V | ☆ |
| A6-07 | Einstellung des Maximalwerts der AI-Kurve an Eingang 4 | -100.0 % ~ + 100.0 % | 100.0% | ☆ |
| A6-08 | Minimalwert der AI-Kurve an Eingang 5 | -10.00 V ~ A6-10 | -10.00V | ☆ |
| A6-09 | Einstellung des Minimalwerts der AI-Kurve an Eingang 5 | -100.0 % ~ + 100.0 % | -100.0% | ☆ |
| A6-10 | Wendepunkt Nr. 1 der AI-Kurve an Eingang 5 | A6-08 ~ A6-12 | -3.00V | ☆ |
| A6-11 | Einstellung des Wendepunkts Nr. 1 der AI-Kurve an Eingang 5 | -100.0 % ~ + 100.0 % | -30.0% | ☆ |
| A6-12 | Wendepunkt Nr. 2 der AI-Kurve an Eingang 5 | A6-10 ~ A6-14 | 3.00V | ☆ |
| A6-13 | Einstellung des Wcndepunkts Nr. 2 der AI-Kurve an Eingang 5 | - 100.0 % ~ + 100.0 % | 30.0% | ☆ |
| A6-14 | Maximalwert der AI-Kurve an Eingang 5 | A6-12 ~ +10.00V | 10.00V | ☆ |
| A6-15 | Einstellung des Maximalwerts der AI-Kurve an Eingang 5 | - 100.0 % ~ + 100.0 % | 100.0% | ☆ |
| A6-24 | Sprung für AI1 | - 100.0% ~ + 100.0 % | 0.0% | ☆ |
| A6-25 | Hubbereich für AI1 | 0.0 % ~ 100.0% | 0.5% | ☆ |
| A6-26 | Sprung für AI2 | - 100.0% ~ + 100.0 % | 0.0% | ☆ |
| A6-27 | Hubbereich für AI2 | 0.0 % ~ 100.0% | 0.5% | ☆ |
| A6-28 | Sprung für AI3 | - 100.0% ~ + 100.0 % | 0.0% | ☆ |
| A6-29 | Hubbereich für AI3 | 0.0 % ~ 100.0% | 0.5% | ☆ |
| Code | Bezeichnung | Einstellungen | Standard | Ändern |
| A7-05 | Ausgang ein/aus | Binäre EinstellungEinheitsziffer:FMREinheitsziffer: Relais 1Hunderte: BIS | 1 | ☆ |
| A7-06 | Sollfrequenz derprogrammierbaren Karte | 0.00% ~ 100.00% | 0.0% | ☆ |
| A7-07 | Solldrechnmoment derprogrammierbaren Karte | -200.0% ~ 200.0% | 0.0% | ☆ |
| A7-08 | ProgrammierbarerKartenbefehl | 0: kein Befehl1: Vorwärts-Befehl2: Rückwärts-Befehl3: Vorwärts-Impuls4: Rückwärts-Impuls5: Freilaufstopp6: Bremsstopp7: Fehlerrücksetzung | 0 | ☆ |
| A7-09 | Programmierkartenfehler | 0: kein Fehler80~89: Fehlercode | 0 | ☆ |
| Gruppe AC - AI AO-Kalibrierung | ||||
| AC-00 | Gemessene Spannung AI1Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-01 | Angezeigte Spannung AI1Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-02 | Gemessene Spannung AI1Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-03 | Angezeigte Spannung AI1Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-04 | Gemessene Spannung AI2Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-05 | Angczeigte Spannung AI2Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-06 | Gemessene Spannung AI2Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-07 | Angczeigte Spannung AI2Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-08 | Gemessene Spannung AI3Nr. 1 | -9.999 V ~ 10.000 V | Kalibrierung | ☆ |
| AC-09 | Angezeigte Spannung AI3Nr. 1 | -9.999 V ~ 10.000 V | Kalibrierung | ☆ |
| AC-10 | Gemessene Spannung AI3Nr. 2 | -9.999 V ~ 10.000 V | Kalibrierung | ☆ |
| AC-11 | Angezeigte Spannung AI3Nr. 2 | -9.999 V ~ 10.000 V | Kalibrierung | ☆ |
| AC-12 | Zielspannung AO1 Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-13 | Gemessene Spannung AO1Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-14 | Zielspannung AO1 Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-15 | Gemessene Spannung Nr. 2 | AO1 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-16 | Zielspannung AO2 Nr. 1 | 0.500V ~ 4.000V | Kalibrierung | ☆ | |
| AC-17 | Gemessene Spannung Nr. 1 | AO2 | 0.500V ~ 4.000V | Kalibrierung | ☆ |
| AC-18 | Zielspannung AO2 Nr. 2 | 6.000V ~ 9.999V | Kalibrierung | ☆ | |
| AC-19 | Gemessene Spannung Nr. 2 | AO2 | 6.000V ~ 9.999V | Kalibrierung | ☆ |
| AC-20 | Gemessener Strom Al2 Nr. 1 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-21 | Abtaststrom Al2 Nr. 1 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-22 | Gemessener Strom Al2 Nr. 2 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-23 | Abtaststrom Al2 Nr. 2 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-24 | Idealstrom AO1 Nr. 1 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-25 | Gemessener Strom AO1 Nr. 1 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-24 | Idealstrom AO1 2 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ | |
| AC-25 | Gemessener Strom AO1 Nr. 2 | 0.000mA ~ 20.000mA | Kalibrierung | ☆ |
Tabelle der Überwachungsparameter
| Funktionscode | Bezeichnung Min. Einheit | |
| Gruppe U0. Grundlegende Überwachungsparameter | ||
| U0-00 | Betriebsfrequenz (Hz) | 0.01Hz |
| U0-01 | Frequenzeinstellung (Hz) | 0.01Hz |
| U0-02 | Busspannung (V) | 0.1V |
| U0-03 | Ausgangsspannung (V) | 1V |
| U0-04 | Ausgangsstrom (A) | 0.01A |
| U0-05 | Ausgangsleistung (kW) | 0.1kW |
| U0-06 | Ausgangsdrehmoment (%) | 0.1% |
| U0-07 | Status des DI-Eingangs | 1 |
| U0-08 | Status des DO-Ausgangs | 1 |
| U0-09 | AI1 Spannung (V) | 0.01V |
| U0-10 | AI2 Spannung (V) | 0.01V |
| U0-11 | AI3 Spannung (V) | 0.01V |
| U0-12 | Zählen von Werten | 1 |
| U0-13 | Längenwert | 1 |
| U0-14 | Anzeige der Lastgeschwindigkeit | 1 |
| U0-15 | PID-Einstellung | 1 |
| U0-16 PID-Rückkopplung 1 | ||
| U0-17 SPS-Stufe 1 | ||
| U0-18 | Eingangsimpulsfrequenz (Hz) | 0.01kHz |
| U0-19 | Rückkopplungsrate (0,1 Hz) | 0.1Hz |
| U0-20 Overdrive 0.1Min | ||
| U0-21 | AI1-Spannung vor der Kalibrierung | 0.001V |
| U0-22 | AI2-Spannung vor der Kalibrierung | 0.001V |
| U0-23 | AI3-Spannung vor der Kalibrierung | 0.001V |
| U0-24 | Lineare Geschwindigkeit | 1m/Min |
| U0-25 | Aktuelle Stromversorgungszeit | 1Min |
U0-26 Aktuelle Betriebszeit 0.1Min
| U0-27 | Eingangsimpulsfrequenz | 1Hz |
| U0-28 | Kommunikationseinstellungen 0.01% | |
| U0-29 | Rückkopplungsgeschwindigkeit des Encoders | 0.01Hz |
| U0-30 | Hauptfrequenzanzeige X | 0.01Hz |
| U0-31 | Anzeige der Hilfsfrequenz Y | 0.01Hz |
| U0-32 | Anzeige eines beliebigen Werts der Speicheradresse | 1 |
| U0-34 | Motortemperatur | 1 °C |
| U0-35 | Zieldrehmoment (%) | 0.1% |
| U0-36 | Ort der Drchung | 1 |
| U0-37 | Leistungsfaktorwinkel | 0.1 ° |
| U0-39 | Getrennte Zielspannung VF 1V | |
| U0-40 | Getrennte Ausgangsspannung VF | 1V |
| U0-41 | Anzeige des DI-Eingangsstatus | 1 |
| U0-42 | Anzeige des DO-Eingangsstatus | 1 |
| U0-43 | Anzeige 1 des DI-Betriebszustands (Funktion 01-Funktion 40) | 1 |
| U0-44 | Anzeige 2 des DI-Betriebszustands (Funktion 41-Funktion 80) | 1 |
| U0-59 | Einstellungsfrequenz (%) | 0.01% |
| U0-60 | Betriebsfrequenz (%) | 0.01% |
| U0-61 | Frequenzumrichterstatus | 1 |
Kapitel 6 Parameterbeschreibungen
Gruppe P0: Gruppe der Grundfunktionen
| P0-00 | Typenanzeige: GP | Werkseinstellungen | Gilt für Maschinentyp | |
| Einstellbereich | 1 | Typ G (konstante Drehmomentlast) | ||
| 2 | Typ P (Lüfter- und Pumpenlast) | |||
| Dieser Parameter ist nur für Benutzer zur Anzeige des Gerätetyps vorgesehen und kann nicht geändert werden. | ||||
| 1: Konstante Drehmomentlast mit spezifizierten Nennwerten | ||||
| 2: Variable Drehmomentlast mit spezifizierten Nennwerten (Lüfter- und Pumpenlast) | ||||
| P0-01 | Motorregelungsart 1 | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Keine Drehzahlsensor-Vektorregelung (SVC) | ||
| 1 | Drehzahlsensor-Vektorsteuerung (FVC) | |||
| 2 | U/f-Steuerung | |||
0: Keine Drehzahlsensor-Vektorregelung
1: Die Drehzahlsensor-Vektorregelung ist eine Vektorregelung mit geschlossenem Regelkreis. Auf der Motorseite muss ein Encoder installiert sein. Der Umrichter muss mit dem gleichen PG-Kartentyp wie der Encoder abgestimmt sein. Er ist für Präzisionsanwendungen zur Drehzahl- oder Drehmomentregelung geeignet. Ein Wechselrichter kann nur einen Motor anreiben, mit Lasten wie Papiermaschinen, Kränen, Aufzügen usw.
2: Die U/f-Steuerung eignet sich für geringere Lastanforderungen oder wenn ein Umrichter mehrere Motoren wie Lüfter und Pumpen antreibt. Ein Umrichter kann zur Regelung mehrerer Motoren verwendet werden.
Hlinweis: Bei Auswahl des Vektorregelungsmodus ist eine Motorparameteridentifikation erforderlich. Nur bei genauen Motorparametern kann der Vektorregelungsmodus verwendet werden. Durch Anpassung der Drehzahlreglerparameter im Funktionscode in Gruppe P2 (2 ist die zweite Gruppe) kann eine bessere Leistung erzielt werden.
| Auswahl einer Befehlsquelle | Werkseinstellungen | 0 | ||
| P0-02 | Einstellbereich | 0 | Befehlskanal des Bedienfelds (LED aus) | |
| 1 | Klemmen-Befehlskanal (LED leuchtet) | |||
| 2 | Befehlskanal (LED blinkt) | |||
Wählen Sie den Eingangskanal für den Umrichtersteuerungsbefehl.
Zu den Befehlen der Umrichtersteuerung gehören: Start, Stopp, Vorwärts, Rückwärts, Sprung usw. 0: Bedienfeld-Befehlskanal („LOCAL / REMOT“ leuchtet nicht);
Auf dem Bedienfeld steuern die Tasten RUN, STOP / RES die Startbefehle. 1: Klemmen-Befehlskanal („LOCAL / REMOT“ leuchtet); Die Multifunktionseingangsklemmen FWD, REV, JOG, JOG, usw. steuern den Startbefehl.
2: Befehlskanal („LOCAL / REMOT“ blinkt) Startbefehl wird vom Host-Computer im Kommunikationsmodus ausgegeben.
Die Auswahl der Kommunikationskarte ist optional (Modbus RTU, CANlink-Karte, frei programmierbare Steuerkarte usw.).
| P0-03 | Hauptfrequenzquelle X | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Digitale Einstellung (Frequenzsollwert P0-08, Verschiebung nach oben / unten, Speicher nach Stromausfall) | ||
| 1 | Digitale Einstellung (Frequenzsollwert P0-08, Verschiebung nach oben / unten, kein Speicher nach Stromausfall) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Impulscinstellung PULSE (DI5) | |||
| 6 | Multi-Zustandsbefehl | |||
| 7 | SPS | |||
| 8 | PID | |||
| 9 | Kommunikationscinstellungen | |||
Wählen Sie den Eingangskanal der angegebenen Umrichterfrequenz. Es gibt 10 Hauptfrequenzreferenzkanäle: 0: digitale Einstellungen (kein Speicher nach Stromausfall)
Der Anfangswert der Sollfrequenz ist P0-08 „Sollfrequenz“. Ändern Sie mit den Tasten ▲ ▼ (oder Multifunktionseingangsklemme UP, DOWN) den eingestellten Frequenzwert. Wenn der Frequenzumrichter nach einem Stromausfall eingeschaltet wird, kehrt der Frequenzsollwert auf die „digital eingestellte Sollfrequenz“ als Wert von P0-08 zurück.
1: digitale Einstellung (Speicher nach Stromausfall)
Der Anfangswert der Sollfrequenz ist P0-08 „Sollfrequenz“. Verwenden Sie die Tasten ▲, ▼ auf dem Tastenfeld (oder die Multifunktionseingangsklemme UP, DOWN), um den eingestellten Frequenzwert zu ändern.
Wenn der Frequenzumrichter nach einem Stromausfall eingeschaltet wird, ist die eingestellte Frequenz die zuletzt mit den Tasten ▲, ▼ auf dem Tastenfeld oder den Klemmen UP, DOWN eingestellte Frequenz, die Korrektur wird gespeichert.
Beachten Sie, dass P0-23 „digitale Frequenzabwärtsspeicherauswahl“ ist, P0-23 wird verwendet, um die Stoppzeit des Antriebs, den Korrekturbetrag oder die Speicherfrequenz auszuwählen. P0-23 bezieht sich auf die Ausfallzeit, und der Stromausfallspeicher hat keinen Bezug dazu. Achten Sie bei der Verwendung darauf.
2: All
3: AI2
4: AI3
Dies bedeutet, dass die Frequenz über die analoge Eingangsklemme eingestellt wird. Das VFD-Bedienfeld bietet zwei analoge Eingangsklemmen (A11, A12), die optionale E/A-Erweiterungskarte bietet eine zusätzliche analoge Eingangsklemme (A13).
Unter ihnen ist AI1 0V \~ 10V Spannungseingang, AI2 kann 0V \~ 10V Spannungseingang sein, es kann auch 4mA \~ 20mA Stromeingang sein. Sie wird mit dem Jumper J8 auf dem Bedienfeld ausgewählt. AI3 ist wiederum ein Spannungseingang -10V \~ 10V.
Der Benutzer kann die Korrelation zwischen der Eingangsspannung AI1, AI2, AI3 und der Zielfrequenz frei wählen. VFD bietet 5 Gruppen von Kurvenkorrelationen, darunter 3 Gruppen von linearen Beziehungskurven (2-Punkt-Korrespondenz), 2 Gruppen von willkürlichen 4-Punkt-Kurvenkorrelationen. Die Benutzergruppen können über den Gruppenfunktionscode P4 und A6 eingestellt werden.
5: Gegebener Impuls (DI5)
Die Frequenzeinstellung ist durch den Impuls an den Klemmen gegeben. Spezifikation der Impulsreferenz: Spannungsbereich 9 V \~ 30 V, Frequenzbereich 0 kHz \~ 100 kHz. Der Impulsreferenzwert kann nur über die Multifunktionseingangsklemme DI5 eingegeben werden.
Verhältnis Impulsfrequenz-Eingangsklemme DI5 entsprechend der Einstellung, eingestellt durch P4-28 \~ P4-31. Die Korrelation zwischen den beiden Punkten entspricht einer Geraden. Die entsprechende Impulseingangseinstellung ist 100,0 %, was dem Prozentsatz der relativen Maximalfrequenz von P0-10 entspricht.
6: Multi-Zustandsbefehl
Bei der Auswahl des Ausführungsmodus für multidirektionale Befehle sollten verschiedene Zustände, die verschiedenen Frequenzen des Sollwerts entsprechen, über die digitale Zusammensetzung an den DI-Klemmen eingegeben werden. Mit dem VFD können mehr als vier
Multistep-Befehlsklemmen konfiguriert werden, 16 Vier-Zustandsklemmen, der PC-Funktionscode kann jeder der 16 „Multidirektiven“ entsprechen. „Multidirektiv“ ist ein prozentuales Verhältnis der maximalen Frequenz von P0-10.
Die digitale Eingangsklemme DI als multidirektiver Klemmenblockbefehl - stellen Sie die entsprechende Gruppe P4. Einzelheiten finden Sie im entsprechenden Funktionsparameter der Gruppe P4.
7: Einfache SPS-Regelung
Wenn die Frequenzquelle eine einfache SPS ist, kann die Frequenz des Wechselrichters auf den Betrieb von 1 bis 16 beliebigen Frequenzbefehlen umgeschaltet werden. Der Benutzer kann die Haltezeit von 1 bis 16 Frequenzbefehlen und die entsprechende Beschleunigungs- und Bremszeit einstellen. Details finden Sie in den jeweiligen Handbüchern der PC-Gruppen.
8: PID
Der Ausgang der PID-Regelung wird für die Betriebsfrequenz verwendet. Wird typischerweise für Regelungsprozesse vor Ort verwendet, wie z. B. Regelung mit konstantem Druck, Regelung mit konstanter Spannung und andere Bedingungen.
Wenn Sie PID als Frequenzquelle verwenden, stellen Sie die Parameter „PID-Funktion“ der PA-Gruppe ein.
9: Kommunikationseinstellungen
Die Hauptfrequenzquelle ist der Host-Computer im Kommunikationsmodus.
VFD unterstützt zwei Arten der Kommunikation: Modbus und CANlink. Beide Arten der Kommunikation können nicht verwendet werden.
Zur Nutzung der Kommunikation muss eine Kommunikationskarte installiert sein. Es sind zwei Arten von VFD-Kommunikationskarten möglich. Der Benutzer muss entsprechend seinen eigenen Anforderungen wählen und die richtigen Parameter für P0-28 „Kommunikationserweiterungskartentyp“ einstellen.
| P0-04 | Hilfsfrequenzquelle Y | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Digitale Einstellung (Frequenzsollwert P0-08, Verschiebung nach oben / unten, Speicher nach Stromausfall) | ||
| 1 | Digitale Einstellung (Frequenzsollwert P0-08, Verschiebung nach oben / unten, kein Speicher nach Stromausfall) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Impulseinstellung (DI5) | |||
| 6 | Multi-Zustandsbefehl | |||
| 7 | SPS | |||
| 8 | PID | |||
| 9 | Kommunikationseinstellungen | |||
Wenn die Hilfsfrequenzquelle als unabhängiger Frequenzreferenzkanal verwendet wird (d. h. sie schaltet die Frequenzquelle von X auf Y um), ist ihre Verwendung die gleiche wie für die Hauptfrequenzquelle X. Anweisungen zur Verwendung finden Sie unter P0-03.
Wenn die Hilfsfrequenzquelle als die angegebene Überlagerung verwendet wird (d. h. Frequenzquelle X + Y, Umschalten von X auf X + Y oder Umschalten von Y auf X + Y), ist Folgendes zu beachten:
1) Wenn die Hilfsfrequenzquelle eine digitale Referenzquelle ist, hat der Frequenzsollwert (P0-08) keine Wirkung. Der Benutzer führt die Frequenzeinstellung mit den Tasten ▲, ▼ des Tastenfelds (oder den Multifunktionseingangsklemmen UP, DOWN) durch. Einstellung direkt auf Basis der Hauptreferenzfrequenz.
2) Wenn die Hilfsfrequenzquelle von einem Analogeingang (AI1, AI2, AI3) oder einem Impulseingang zum Takten gespeist wird, entspricht 100 % der Eingangsbereichseinstellung der Hilfsfrequenzquelle, die mit P0-05 und P0-06 eingestellt werden kann.
3) Wenn die Frequenzquelle zum Takten des Impulseingangs verwendet wird, verhält es sich ähnlich wie bei den analogen Daten. Hinweis: Die Auswahl der Hilfsfrequenzquelle Y und die Auswahl der Hauptfrequenzquelle X können nicht auf demselben Kanal eingestellt werden, d. h. wenn P0-03 und P0-04 auf denselben Wert eingestellt sind. Auf diese Weise kann es leicht zu Verwechslungen kommen.
| P0-05 | Quellbereich Y der überlagerter Hilfsfrequenz | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | im Vergleich zur maximalen Frequenz | ||
| 1 | im Vergleich zur Frequenzquelle X | |||
| P0-06 | Quellbereich Y der überlagerter Hilfsfrequenz | Werkseinstellungen | 0 | |
| Einstellbereich | 0 % ~ 150 % | |||
Wenn die Auswahl der Frequenzquelle „Frequenz-Overlay“ ist (d. h. P0-07 ist auf 1, 3 oder 4 eingestellt), werden diese beiden Parameter zur Bestimmung des Regelbereichs der Hilfsfrequenzquelle verwendet.
Wenn mit dem Parameter P0-05 der Frequenzbereich des Hilfsobjekts entsprechend der Quelle bestimmt wird, geschieht dies selektiv in Bezug auf die maximale Frequenz, die relativ zur Hauptfrequenzquelle X sein soll. Bei der Selektivität in Bezug auf die Primärfrequenzquelle wird die Hilfsfrequenzquelle als Hauptfrequenzbereich der Änderung X verwendet.
| Auswahl der überlagerten Frequenzquelle | Werkseinstellungen | 0 | ||
| Bit | Auswahl der Frequenzquelle | |||
| 0 | Hauptfrequenzquelle X | |||
| P0-07 | Einstellbereich | 1 | Ergebnis der Haupt- und Nebenoperationen | |
| 2 | Umschaltung von Hauptfrequenzquelle X und Hilfsfrequenzquelle Y | |||
| 3 | Hauptfrequenzquelle X, Umschalten zwischen Haupt- und Hilfsbetrieb | |||
| 4 | Hilfsfrequenzquelle Y, Umschalten zwischen Haupt- und Hilfsbetrieb | |||
| Zehner | Abhängigkeit vom Betrieb der Haupt- und Hilfsfrequenzquelle | |||
| 0 | Haupt + Hilfs | |||
| 1 | Haupt - Hilfs | |||
| 2 | Max. von zwei | |||
| 3 | Min. von zwei | |||
Verwenden Sie diesen Parameter, um den Frequenzreferenzkanal auszuwählen.
Einstellig: Auswahl der Frequenzquelle:
0: Hauptfrequenzquelle X
Die Hauptfrequenz X wird als Zielfrequenz verwendet.
1: Das Ergebnis des Haupt- und Hilfsquellenbetriebs als Zielfrequenz.
Siehe die Anweisungen für den Funktionscode der Beziehung der Haupt- und Hilfsoperationen „Zehner“.
2: Umschaltung von Hauptfrequenzquelle X und Hilfsfrequenzquelle Y. Wenn Klemme 18 des Multifunktionseingangs inaktiv ist (Frequenzschalter), ist die Hauptfrequenzquelle X die Zielfrequenz.
Wenn Klemme 18 des Multifunktionseingangs aktiv ist (Frequenzschalter), ist die Hilfsfrequenzquelle Y die Zielfrequenz.
3: Schalten der Hauptfrequenzquelle X und das Ergebnis des Haupt- und Hilfsbetriebs. Wenn Klemme 18 des Multifunktionseingangs inaktiv ist (Frequenzschalter), ist die Hauptfrequenzquelle X die Zielfrequenz. Wenn Klemme 18 des Multifunktionseingangs aktiv ist (Frequenzschalter), ist die Zielfrequenz das Ergebnis von Haupt- und Hilfsbetrieb.
- Schalten der Hilfsfrequenzquelle Y und das Ergebnis des Haupt- und Hilfsbetriebs. Wenn Klemme 18 des Multifunktionseingangs inaktiv ist (Frequenzschalter), ist die Hilfsfrequenzquelle Y die Zielfrequenz. Wenn Klemme 18 des Multifunktionscingangs aktiv ist (Frequenzschalter), ist die Zielfrequenz das Ergebnis von Haupt- und Hilfsbetrieb.
Zehner: Betriebsbeziehung von Haupt- und Hilfsfrequenzquelle: 0: Hauptfrequenzquelle X + Hilfsfrequenzquelle Y.
Als Zielfrequenz wird die Summe aus der Hauptfrequenz X und der Hilfsfrequenz Y verwendet. Es wird eine Überlagerung von Frequenzen für die Funktion erreicht.
1: Hauptfrequenzquelle X - Hilfsfrequenzquelle Y
Als Zielfrequenz wird die Differenz zwischen der Hauptfrequenzquelle X und der Hilfsfrequenzquelle Y verwendet.
2: MAX (Hauptfrequenzquelle X, Hilfsfrequenzquelle Y). Der maximale Absolutwert der Hauptfrequenz X und der Nebenfrequenz Y wird als Zielfrequenz genommen.
3: MIN (Hauptfrequenzquelle X, Hilfsfrequenzquelle Y). Der minimale Absolutwert von Hauptfrequenz X und Nebenfrequenz Y wird als Zielfrequenz genommen. Außerdem kann bei der Auswahl der Frequenzquelle aus Haupt- und Hilfsbetrieb der Frequenzoffset mit P0-21 eingestellt werden. Der dem Haupt- und Nebenbetrieb überlagerte Frequenz-Offset ermöglicht es Ihnen, flexibel auf unterschiedliche Anforderungen zu reagieren.
4: MIN (Hauptfrequenzquelle X, Hilfsfrequenzquelle Y). Der minimale Absolutwert der Hauptfrequenz X und der Nebenfrequenz Y wird als Zielfrequenz genommen. Außerdem kann bei der Auswahl der Frequenzquelle aus Haupt- und Hilfsbetrieb der Frequenzoffset mit P0-21 eingestellt werden. Der dem Haupt- und Nebenbetrieb überlagerte Frequenz-Offset ermöglicht es Ihnen, flexibel auf unterschiedliche Anforderungen zu reagieren.
| P0-08 | Sollfrequenz | Werkseinstellungen | 50.00Hz | ||
| Einstellbereich | 0,00 ~ max. Frequenz (Frequenzquellenauswahlmodus mit digitaler Einstellung ist aktiv) | ||||
| P0-09 | Betriebsrichtung | Werks-einstellung | 0 | ||
| Einstellbereich | 0 | Dieselbe Richtung | |||
| 1 | Gegenläufige Richtung | ||||
Durch eine Änderung des Funktionscodes können Sie die elektrische Verkabelung nicht ändern und eine Änderung der Motordrehung erreichen.
Hinweis: Nach der Initialisierung des Parameters kehrt die Motorrichtung in ihren ursprünglichen Zustand zurück. Seien Sie vorsichtig und verwenden Sie dies unter der Bedingung, dass nach dem Debuggen des Systems eine Änderung der Motorsteuerung streng verboten ist.
| P0-10 | Frequenz max. | Werkseinstellungen | 50.00 Hz |
| Einstellbereich | 50.00 Hz ~ 600.00 Hz | ||
VFD-Analogcingang, Impulscingang (DI5), Mehrschrittanweisungen usw., ist die Frequenzquelle 100,0 % in Bezug auf die entsprechende P0-10-Skalierung.
Die maximale Ausgangsfrequenz des VFDs beträgt bis zu 3200 Hz. Um die Frequenzauflösung und den Frequenzeingangsbereich für beide Anzeigen anzupassen, können die Nachkommastellen des Frequenzbefehls mit P0-22 ausgewählt werden.
Wenn P0-22 auf 1 gesetzt ist, beträgt die Frequenzauflösung 0,1 Hz. In diesem Fall wird P0-10 im Bereich von 50,0 Hz \~ 3200,0 Hz eingestellt;
Wenn P0-22 auf 2 gesetzt ist, beträgt die Frequenzauflösung 0,1 Hz. In diesem Fall wird P0-10 im Bereich 50,0 Hz \~ 600,00 Hz eingestellt.
| P0-11 | Obere Frequenzquelle | Werkseinstellungen | 0 | |
| Werkseinstellungen | 0 | P0-12 Einstellung | ||
| 1 | A11 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impulseinstellung | |||
| 5 | Kommunikationseinstellungen | |||
Definieren Sie die Quelle für die oberen Frequenzen. Die obere Grenzfrequenz kann digital eingestellt werden (P0-12), oder sie kann vom analogen Eingangskanal abgeleitet werden. Bei der Einstellung der oberen Frequenzgrenze des Analogeingangs entspricht die Einstellung des Analogeingangs 100 % P0-12.
Wenn Sie z. B. den Drehmomentregelungsmodus im Wicklungsregelungsbereich übernehmen, kann die analog eingestellte Frequenzgrenze verwendet werden, um Materialbruch und das Auftreten des Phänomens „Geschwindigkeit“ zu vermeiden. Wenn der Wechselrichter mit der oberen Frequenzgrenze arbeitet, behält er die höhere Frequenz bei.
| P0-12 | Obere Frequenz | Werkseinstellungen | 50.00Hz |
| Einstellbereich | Obere Frequenz P0-14 ~ Maximalfrequenz P0-10 | ||
| P0-13 | Oberer Frequenz-Offset | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz~ Maximale Frequenz P0-10 | ||
Wenn die obere Grenzfrequenz eine Analog- oder Impulseinstellung ist, dient P0-13 als Offset-Sollwert. Die Frequenzvorspannung und P0-11 legen die obere Grenzfrequenz fest, die dem eingestellten Wert als endgültige obere Grenzfrequenz überlagert wird.
| P0-14 | Untere Frequenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz~Obere Frequenz P0-12 | ||
Wenn der Frequenzsollwert unterhalb der in Parameter P0-14 eingestellten unteren Frequenz liegt, kann der Wechselrichter den Betrieb stoppen oder die Grenzfrequenz absenken oder mit Drehzahl Null arbeiten. Welche Betriebsart gewählt werden soll (wenn die Frequenz unterhalb der unteren Frequenzbetriebsart eingestellt ist), kann mit Parameter P8-14 eingestellt werden.
| P0-15 | Trägerfrequenz | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.5kHz ~ 16.0kHz | ||
Mit dieser Funktion wird die Trägerfrequenz des Wechselrichters eingestellt. Durch die Anpassung der Trägerfrequenz können die Motorgeräusche reduziert, der Resonanzpunkt des mechanischen Systems vermieden und die Störungen und der Leckstrom des Wechselrichters zwischen Leitungen und Erde reduziert werden.
Wenn die Trägerfrequenz niedrig ist, steigt der Anteil der Oberwellen des Ausgangsstroms, die Motorverluste nehmen zu und die Motortemperatur steigt. Wenn die Trägerfrequenz hoch ist, sinken die Motorverluste und die Motortemperatur, aber die Wechselrichterverluste steigen, die Wechselrichtertemperatur steigt und das Rauschen nimmt zu.
Die Einstellung der Trägerfrequenz wirkt sich auf die folgenden Eigenschaften aus:
| Trägerfrequenz | Anstieg |
| Wellenform des Ausgangsstroms | Rückgang |
| Motortemperatur | besser |
| Wechselrichtertemperatur | Rückgang |
| Leckstrom | Anstieg |
| Externe Störungen | Anstieg |
| Wellenform des Ausgangsstroms | Anstieg |
Die Werkseinstellungen der Trägerfrequenz sind für verschiedene Wechselrichter unterschiedlich. Der Benutzer kann sie zwar ändern, aber Vorsicht: Wenn der Wert der Trägerfrequenz höher ist als die Werkseinstellung, erhöht sich die Temperatur des Kühlkörpers des Wechselrichters. In diesem Fall muss der Benutzer die Wechselrichterleistung herabsetzen, sonst besteht die Gefahr der Überhitzung.
| P0-16 | Trägerfrequenz passt sich der Temperatur an | Werkseinstellungen | 0 |
| Einstellbereich | 0: nein1: ja | ||
Temperaturregelung der Trägerfrequenz bedeutet, dass der Wechselrichter, wenn er erkennt, dass die Temperatur seines Kühlkörpers hoch ist, automatisch die Trägerfrequenz reduziert, um den Temperaturanstieg des Wechselrichters zu verringern. Wenn die Kühlkörpertemperatur niedrig ist, wird die Trägerfrequenz allmählich auf den eingestellten Wert zurückgesetzt. Diese Funktion verringert die Wahrscheinlichkeit eines Überhitzungsalarms des Wechselrichters.
| P0-17 | Beschleunigungszeit 1 | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.00 s ~ 65000 s | ||
| P0-18 | Bremszeit 1 | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.00 s ~ 65000 s | ||
Die Beschleunigungszeit stellt die Zeit dar, die benötigt wird, um den Wechselrichter von der Frequenz Null auf die Beschleunigungs- und Bremsreferenzfrequenz (P0-25) zu beschleunigen. Siehe t1 in Abbildung 6-1. Die Bremszeit stellt die Zeit dar, die der Wechselrichter benötigt, um von der Beschleunigungs- und Bremsreferenzfrequenz (P0-25) auf die Nullfrequenz abzubremsen. Siehe t2 in Abbildung 6-1.
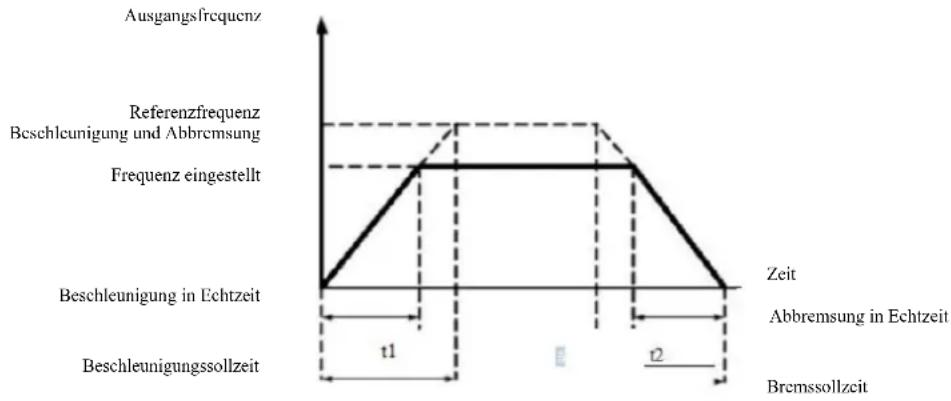
line
| Event | Time (t) | | :--- | :--- | | Ausgangsfrequenz | 0 | | Referenzfrequenz Beschleunigung und Abbremsung | t1 | | Frequenz eingestellt | t2 | | Beschleunigung in Echtzeit | t1 | | Beschleunigungssollzeit | t2 | | Zeit: Abbrevsung in Echtzeit | t2 | | Bremssollzeit | t2 |Abbildung 6-1 Beschleunigungs- und Bremszeitdiagramm
VFD bietet vier Gruppen von Beschleunigungs- und Bremszeiten. Der Benutzer kann den Schalter für die digitale Eingangsklemme DI verwenden. Die vier Gruppen von Beschleunigungs- und Bremszeiten, die durch den Funktionscode eingestellt werden, sind wie folgt:
Erste Gruppe: P0-17, P0-18
Zweite Gruppe: P8-03, P8-04
Zweite Gruppe: P8-05, P8-06
Vierte Gruppe: P8-07, P8-08
| P0-19 | Einheit der Beschleunigungszeit / Bremszeit | Werkseinstellungen | 1 | |
| Einstellbereich | 0 | 1s | ||
| 1 | 0.1s | |||
| 2 | 0.01s | |||
Um den Anforderungen aller Arten von Objekten gerecht zu werden, bietet der VFD drei Arten von Beschleunigungs- bzw. Bremszeiteinheiten: 1 Sekunde, 0,1 Sekunde und 0,01 Sekunde.
Achtung! Beim Ändern der Funktionsparameter werden in den Nachkommastellen der Gruppe 4 die geänderten Beschleunigungs- bzw. Bremszeiten angezeigt. Achten Sie besonders auf das Anwendungsverfahren.
| P0-21 | Vorspannung der Hilfsfrequenzquelle überlagerte Frequenz | 0.0Hz | |
| Einstellbereich | 0.00 Hz ~ Max. Frequenz F0-10 | ||
Der Funktionscode ist nur korrekt, wenn die Frequenzquellenauswahl die Haupt- und Hilfsberechnung ist.
Wenn die Frequenzquelle die Haupt- und Hilfsberechnung ist, P0-21 als Frequenzoffset, wird der Primär- und Sekundärbetrieb als Endergebnis der Überlagerungsfrequenzeinstellung verwendet, um die Frequenzeinstellung flexibler zu machen.
| P0-22 | BefehlsauflösungFrequenzquelle | Werkseinstellungen | 2 | |
| Einstellbereich | 1 | 0.1Hz | ||
| 2 | 0.01Hz | |||
Dieser Parameter wird verwendet, um alle frequenzabhängigen Funktionscodeauflösungen zu identifizieren.
Wenn die Frequenzauflösung 0,1 Hz beträgt, kann die maximale VFD-Ausgangsfrequenz 3200 Hz erreichen. Wenn die Frequenzauflösung 0,01 Hz beträgt, ist die maximale VFD-Ausgangsfrequenz 600,00 Hz.
Achtung! Wenn Sie Funktionsparameter ändern, ändern sich alle mit diesen Parametern verbundenen Frequenzdezimale. Die zugehörigen Frequenzwerte ändern sich ebenfalls. Achten Sie während des Betriebs besonders darauf.
| P0-23 | Digitale Auswahl des Frequenzspeichers | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Kein Speicher | ||
| 1 | Mit Speicher | |||
Diese Funktion funktioniert nur, wenn die Frequenzquelle als Ziffer eingestellt ist.
„Kein Speicher“ bedeutet, dass beim Stoppen des Wechselrichters der digitale Frequenzsollwert auf P0-08 (Frequenzsollwert) zurückkehrt. Die mit den Tasten ▲, ▼ oder den Klemmen UP, DOWN vorgenommene Korrektur wird gelöscht.
„Speicher“ bedeutet, dass beim Stoppen des Wechselrichters die digital eingestellte Frequenz für die zuletzt eingestellte Stoppfrequenz reserviert wird. Die mit den Tasten ▲, ▼ oder den Klemmen UP, DOWN vorgenommene Korrektur bleibt gültig.
| P0-24 | Motorauswahl | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Motor Nr. 1 | ||
| 1 | Motor Nr. 2 | |||
VFD unterstützt die Anwendung von zwei Motoren mit Stillstandsteilung. Für zwei Motoren können Motor-Typenschild-Parameter, unabhängige Abstimmungsparameter, verschiedene Regelungsmodi entsprechend eingestellt werden, leistungsbezogene Parameter können unabhängig voneinander eingestellt werden und andere.
Die relevante Parametergruppe der Motorfunktion 1 ist die Gruppe P1 und die Gruppe P2. Die relevante Parametergruppe der Motorfunktion 2 ist die Gruppe A2.
Der Benutzer kann den aktuellen Motor über den Funktionscode P0-24 auswählen, oder der Motor kann über die digitale Eingangsklemme DI eingeschaltet werden. Wenn Funktionscodeauswahl und Klemmenauswahl in Konflikt stehen, hat die Klemme Vorrang.
| P0-25 | Referenzfrequenzen für Beschleunigungs-/ Bremszeit | Werkseinstellungen | 0 | |
| Einstel lbereich | 0 | Maximale Frequenz (P0-10) | ||
| 1 | Frequenz eingestellt | |||
| 2 | 100Hz | |||
Beschleunigungs- und Bremszeit bedeutet die Beschleunigungs- und Bremszeit von Frequenz Null bis zur eingestellten Frequenz P0-25. Abbildung 6-1 zeigt das Beschleunigungs- und Bremszeitdiagramm.
Wenn P0-25 auf 1 gesetzt ist, beziehen sich die Verzögerungszeit und die Frequenz auf diese Einstellung. Wenn sich die Frequenz häufig ändert, ist die Motorbeschleunigung variabel, daher ist bei der Verwendung Vorsicht geboten.
| P0-26 | Frequenzbefehl UP/DOWN(Auf/Ab) | Werkseinstellungen | 0 | |
| Einstelbereich | 0 | Betriebsfrequenz | ||
| 1 | Frequenz eingestellt | |||
Dieser Parameter ist nur gültig, wenn die Frequenzquelle digital eingestellt ist.
Wenn das Tastenfeld zur Einstellung von ▲, ▼ oder den Klemmen AUF / AB verwendet wird, kann eine beliebige Frequenzkorrektur-einstellung übernommen werden. Die Zielfrequenz erhöht oder verringert sich entsprechend der Betriebsfrequenz oder der eingestellten Frequenz.
Der Unterschied zwischen den beiden Einstellungen ist wichtig, wenn der Wechselrichter beschleunigt und abbremst. Das heißt, wenn die Betriebsfrequenz und die eingestellte Frequenz des Wechselrichters nicht gleich sind, wird der Unterschied zwischen den verschiedenen gewählten Parametern groß sein.
| P0-27 | Frequenzquelle und gebündelte Befehlsquelle | Werkseinstellungen | 000 | |
| Bit | Befehl vom Bedienfeld bindet die Frequenzquelle | |||
| 0 | Ungebündelt | |||
| 1 | Digital eingestellte Frequenz | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Digital eingestellte Frequenz | |||
| Einstel lbereich | 6 | Multi-Zustandsbefehl | ||
| 7 | Einfache SPS | |||
| 8 | PID | |||
| 9 | Kommunikationseinstellungen | |||
| Zehner | Klemmenbefehl bindet Frequenzquelle (0 ~ 9, gleich wie Bit) | |||
| Hunderte | Kommunikationsbefehl bindet die Frequenzquelle (0 ~ 9, gleich wie Bit) | |||
Definiert ein Bündel von drei Kanälen mit Betriebsbefehlen und neun Sollfrequenzen zwischen den Kanälen, erleichtert die Implementierung von synchronem Schalten.
Für die oben genannten Frequenzen ist die Bedeutung des Frequenzkanals die gleiche wie die der Auswahl der Hauptfrequenzquelle X P0-03. Siehe die Beschreibung des Funktionscodes P0-03. Verschiedene Modi können demselben Frequenzkanal zugeordnet werden. Wenn die Frequenzbefehlsquelle eine zugehörige Quelle hat, wird die Frequenzquelle P0-03 \~ P0-07 während der Betriebszeit der Befehlsquelle außer Betrieb gesetzt.
| P0-28 | Typ der Kommunikationserweiterungskarte | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Modbus-Kommunikationskarte | ||
| 1 | Reserve | |||
| 2 | Reserve | |||
| 3 | CANlink-Kommunikationskarte | |||
VFD bietet zwei Arten der Kommunikation. Für diese Kommunikation ist eine optionale Kommunikationskarte erforderlich, bevor sie verwendet werden kann. Die beiden Kommunikationsarten können nicht gleichzeitig verwendet werden.
Verwenden Sie diesen Parameter, um den Typ der optionalen Kommunikationskarte einzustellen. Wenn der Benutzer die Kommunikationskarte austauscht, stellen Sie die Parameter korrekt ein.
Gruppe P1: Motorparameter 1
| P1-00 | Auswahl des Motortyps | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Standard-Asynchronmotor | ||
| 1 | Asynchronmotor mit variabler Frequenz | |||
| P1-01 | Nennleistung | Werkseinstellungen | Abhängig vom Maschinentyp | |
| Einstellbereich | 0.1 kW ~ 1000.0 kW | |||
| P1-02 | Nnnspannung | Werkseinstellungen | Abhängig vom Maschinentyp | |
| Einstellbereich | 1 V ~ 400 V | |||
| P1-03 | Nennstrom | Werkseinstellungen | Abhängig vom Maschinentyp | |
| Einstellbereich | 0.01 A ~ 655.35 A (Leistung des Wechselrichters <= 55 kW)0.1 A ~ 6553.5 A (Leistung des Wechselrichters > 55 kW) | |||
| P1-04 | Nennfrequenz | Werkseinstellungen | Abhängig vom Maschinentyp | |
| Einstellbereich | 0.01 Hz ~ Max. Frequenz | |||
| P1-05 | Nenndrehzahl | Werkseinstellungen | Abhängig vom Maschinentyp | |
| Einstellbereich | 1rpm ~ 65535rpm | |||
Für die genaue Einstellung der entsprechenden Parameter gemäß dem Motortypenschild, sowohl bei U/f-Steuerung als auch bei Vektorregelung, wird der Code dieser Parameter vom Motortypenschild benötigt.
Für eine bessere Leistung der U/f-Steuerung oder der Vektorregelung benötigen Sie eine Parameterabstimmung, eine Genauigkeit der Regelungsergebnisse und eine genaue Einstellung der Parameter vom Motortypenschild.
| P1- | Statorwiderstand des Asynchronmotors | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.001 Ω ~ 30.000 Ω | ||
| P1-07 | Rotorwiderstand des Asynchronmotors | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.001 Ω ~ 65.535 Ω (Leistung des Wechselrichters <= 55 kW)0.0001 Ω ~ 6.5535 Ω (Leistung des Wechselrichters > 55 kW) | ||
| Induktive Ableitreaktanz des Asynchronmotors | Werkseinstellungen | Abhängig vom Maschinentyp | |
| P1-08 | |||
| Einstellbereich | 0.01 mH ~ 655.35 mH (Leistung des Wechselrichters <= 55 kW)0.001 mH ~ 65.535 mH (Leistung des Wechselrichters > 55 kW) | ||
| P1-09 | Gegenseitige induktive Reaktanz des Asynchronmotors | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.1 mH ~ 6553.5 mH (Leistung des Wechselrichters <= 55 kW)0.01 mH ~ 655.35 mH (Leistung des Wechselrichters > 55 kW) | ||
| P1-10 | Strom des Asynchronmotors ohne Last | Werkseinstellungen | Abhängig vom Maschinentyp |
| Einstellbereich | 0.01 A ~ P1-03 (Leistung des Wechselrichters <= 55 kW)0.1 A ~ P1-03 (Leistung des Wechselrichters > 55 kW) | ||
P1-06 \~ P1-10 sind Asynchronmotorparameter. Diese Parameter sind in der Regel nicht auf dem Typenschild des Motors angegeben und werden durch den Umrichter automatisch eingestellt. Unter ihnen kann „Statische Abstimmung des Induktionsmotors“ nur drei Parameter P1-06 \~ P1-08 erhalten. Aber die „Gesamtabstimmung von Asynchronmotoren“ können Sie hier vornehmen. Zusätzlich zu allen fünf Parametern können Sie auch die Phasenfolge des Encoders, die PI-Parameter der Stromschleife und andere abrufen.
| P1-27 | Encoder-Zeilennummer | Werkseinstellungen | 1024 |
| Einstellbereich | 1 ~ 65535 | ||
Stellen Sie die ABZ-Encoder-Impulse pro Umdrehung ein.
Stellen Sie für den sensorlosen Vektorregelungsmodus die entsprechende Anzahl von Encoder-Impulsen ein, da der Motor sonst nicht ordnungsgemäß funktioniert.
| P1-28 | Encodertyp | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Inkremental-Encoder ABZ | ||
| 1 | Reserve | |||
| 2 | Drehtransformator | |||
VFD unterstützt mehrere Arten von Encodern. Unterschiedliche Encoder benötigen unterschiedliche PG-Karten, um angepasst zu werden. Achten Sie darauf, dass Sie die entsprechende PG-Karte auswählen. Stellen Sie nach der Installation der PG-Karte P1-28 entsprechend der tatsächlichen Situation richtig ein, da der Wechselrichter sonst möglicherweise nicht richtig funktioniert.
| P1-30 | AB-Phasenfolge des Inkremental-Encoders ABZ | Werkseinstellungen | 0 | |
| Einstellbereich | Vorwärts | |||
| Rückwärts | ||||
Dieser Funktionscode ist nur für den Inkremental-Encoder ABZ gültig, nur wenn P1-28 = 0. Zum Einstellen der AB-Phasenfolge des Inkremental-Encodersignals ABZ.
| P1-34 | Anzahl der Polpaare des Drehtransformators | Werkseinstellungen | 1 |
| Einstellbereich | 1 ~ 65535 | ||
Resolver - Polpaarzahl bei Verwendung eines solchen Encoders müssen die Parameter für die Polpaarzahl richtig eingestellt werden.
| P1-36 | PG-Abschalt-Erkennungszeit in der Drehzahlrückführung | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0: no action 0.1s~10.0s | ||
Dient zum Einstellen der Erkennungszeit für Encoder-Abschaltfehler. Bei einer Einstellung von 0,0 s erkennt der Wechselrichter einen Encoder-Abschaltfehler nicht.
Wenn der Wechselrichter einen Abschaltfehler feststellt und dieser länger als die eingestellte Zeit P1-36 dauert, erzeugt der Wechselrichter einen ERR20-Alarm.
| P1-37 | Abstimmungsauswahl | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Nicht funktionstüchtig | ||
| 1 | Statische Abstimmung des Asynchronmotors | |||
| 2 | Komplette Abstimmung des Asynchronmotors | |||
0: Es funktioniert nicht. Abstimmung verboten.
1: Die statische Abstimmung des Asynchronmotors ist ohne Last nicht einfach, aber es handelt sich nicht um eine vollständige Abstimmung. Bevor Sie eine asynchrone statische Abstimmung durchführen, stellen Sie den richtigen Motortyp und das Motortypenschild P1-00 \~ P1-05 ein. Für die Abstimmung der asynchronen statischen Maschine kann der Wechselrichter drei Parameter P1-06 \~ P1-08 erhalten. Betrieb: Stellen Sie den Funktionscode auf 1 ein und drücken Sie dann die RUN-Taste, der Wechselrichter führt eine statische Abstimmung durch.
2: Komplette Abstimmung der Asynchronmaschine. Um eine dynamische Regelung des Wechselrichters zu ermöglichen, wählen Sie die volle Abstimmung, der Motor
muss von der Last entkoppelt werden, um ihn im Leerlauf zu halten.
Während des vollständigen Abstimmungsvorgangs führt der Wechselrichter eine statische Abstimmung und anschließend eine Beschleunigungszeit durch, wobei P0-17 auf 80 % der Motornennfrequenz beschleumigt wird. Nach der Haltezeit bremst er P0-18 entsprechend der Bremszeit ab und beendet die Abstimmung, bevor die Asynchronmaschine vollständig abgestimmt ist. Zusätzlich zur Einstellung des Motortyps und der Motortypenschildparameter P1-00 \~ P1-05 müssen auch der richtige Encodertyp und die Encoderimpulse P1-27, P1-28 eingestellt werden. Vollständige Abstimmung der Asynchronmaschine: Der Antrieb kann fünf Motorparameter, P1-06 \~ P1-10, die AB-Phasenfolge (P1-3) des Encoders und die PI-Parameter der Vektorregelstromschleife P2-13 \~ P2-16 abrufen.
Beendigung der Abstimmung: Stellen Sie den Funktionscode auf 2 ein und drücken Sie dann die RUN-Taste, der Wechselrichter schließt die Abstimmung ab.
Gruppe P2: Parameter der Vektorsteuerung
Die Funktionscodes in Gruppe P2 funktionieren nur für die Vektorregelung, nicht für die U/f-Steuerung.
| P2-00 | Proportionalverstärkung der Geschwindigkeitsschleife 1 | Werkseinstellungen | 30 |
| Einstellbereich | 1 ~ 100 | ||
| P2-01 | Integrationszeit für Geschwindigkeitsschleife 1 | Werkseinstellungen | 0.50s |
| Einstellbereich | 0.01 s ~ 10.00 s | ||
| P2-02 | Schaltfrequenz 1 | Werkseinstellungen | 5.00Hz |
| Einstellbereich | 0.00 ~ F2-05 | ||
| P2-03 | Proportionalverstärkung der Geschwindigkeitsschleife 2 | Werkseinstellungen | 15 |
| Einstellbereich | 0 ~ 100 | ||
| P2-04 | Integrationszeit für Geschwindigkeitsschleife 2 | Werkseinstellungen | 1.00s |
| Einstellbereich | 0.01 s ~ 10.00 s | ||
| P2-05 | Schaltfrequenz 2 | Werkseinstellungen | 10.00Hz |
| Einstellbereich | F2-02~Maximale Ausgangsfrequenz | ||
Der Wechselrichter arbeitet mit verschiedenen Frequenzen, es können verschiedene PI-Parameter für den Drehzahlregelkreis gewählt werden. Wenn die Betriebsfrequenz niedriger ist als die Frequenzumtastung 1 (P2-02), lauten die Parameter der PI-Regelung des Drehzahlregelkreises P2-00 und P2-01. Wenn die Betriebsfrequenz größer als die Frequenzumtastung 2 ist, lauten die Parameter für die PI-Regelung des Drehzahlregelkreises P2-03 und P3-04. Die PI-Parameter des Drehzahlregelkreises zwischen Frequenzumtastung 1 und Frequenzumtastung 2 sind zwei Gruppen von PI-Linearschaltparametern.
Sie sind in Abbildung 6-2 dargestellt:
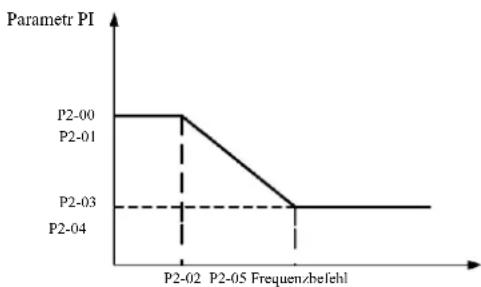
line
| Frequency/befehl | Parameter PI | |---|---| | P2-00 | 1 | | P2-01 | 1 | | P2-03 | 1 | | P2-04 | 1 |Abbildung 6-2 PI-Parameterschema
Durch Einstellen der Proportionalverstärkung des Drehzahlreglers und der Integrationszeit kann die dynamische Reaktionscharakteristik der Drehzahlvektorregelung angepasst werden.
Durch Erhöhen der Proportionalverstärkung und Verringern der Integrationszeit kann die dynamische Reaktionscharakteristik des Drehzahlregelkreises beschleunigt werden. Eine zu große Proportionalverstärkung oder eine zu kleine Integrationszeit kann jedoch zu Systemschwingungen führen. Empfohlene Einstellmethode:
Wenn die Werksparameter die Anforderungen nicht erfüllen können, sollte der Werksparameterwert angepasst werden. Erhöhen Sie zunächst die Proportionalverstärkung, um sicherzustellen, dass das System nicht schwingt; verringern Sie dann die Integrationszeit. Das System hat eine schnelle Reaktionscharakteristik und ein geringes Überschwingen.
Achtung! Wenn die PI-Parameter falsch eingestellt sind, kann es zu einem Überschwingen der Drehzahl kommen.
| P2-06 | Schlupfverstärkung für Vektorregelung | Werkseinstellung 100% |
| Einstellbereich | 50% ~ 200% |
Sensorlose Drehzahlvektorregelung. Dieser Parameter wird verwendet, um die konstante Geschwindigkeit des Motors präzise zu steuern: Wenn die Motorlast niedrig ist, den Drehzahlparameter erhöhen und umgekehrt.
Bei der Drehzahlsensor-Vektorregelung kann dieser Parameter auch die Ausgangsstromlast des Wechselrichters anpassen.
| P2-07 | Filterzeit für Drehzahlschleife | Werkseinstellungen | 0.000s |
| Einstellbereich | 0.000 s~0.100 s | ||
Strombefehl des Ausgangsdrehmoment des Drehzahlreglers, Filterparameter des Drehmomentbefehl im Vektorregelungsmodus.
Dieser Parameter muss im Allgemeinen nicht an die Drehzahlschwankungen angepasst werden, was für die Erhöhung der Filterzeit geeignet sein könnte; wenn jedoch Motorschwingungen vorhanden sind, reduzieren Sie diesen Parameter entsprechend.
Die Zeitkonstante des Drehzahlregelkreisfilters ist klein, das Ausgangsdrehmoment des Umrichters kann variabel sein, aber die Reaktionsgeschwindigkeit ist groß.
| P2-08 | Vektorregelung | Werkseinstellungen | 64 |
| Einstellbereich | 0 ~ 200 | ||
Während des Bremsens kann der Anstieg der Steuerbusspannung aufgrund von Überstrom unterdrückt werden, um eine Überspannung zu vermeiden. Je größer die Erhöhungen durch die Übererregung sind, desto stärker ist die Dämpfung.
Unter der Bremsbedingung durch den Wechselrichter ist es leichter, Überdruck zu erzeugen und den Alarm zu hören, dann sollte die Übererregungssteuerung verbessert werden. Ist die Übererregungsverstärkung jedoch zu groß, führt sie leicht zu einem Anstieg des Ausgangsstroms; dies sollte in der Anwendung ausgeglichen werden.
Bei geringer Trägheit tritt die Verzögerung des Motorspannungsanstiegs nicht auf. Es wird empfohlen, die Übererregungsverstärkung auf 0 zu setzen; für den Bremswiderstand in dieser Situation wird ebenfalls empfohlen, die Übererregungsverstärkung auf 0 zu setzen.
| P2-09 | Quelle der Drehmomentbegrenzung im Drehzahlregelungsmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | F2-10 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impulseinstellung | |||
| 5 | Bevorzugte Kommunikationseinstellungen | |||
| P2-10 | Einstellung im digitalen Drehmomentbegrenzungsregelungsmodus | Werkseinstellungen | 150.0% | |
| Einstellbereich | 0.0% ~ 200.0% | |||
Im Drehzahlregelungsmodus wird der Maximalwert des Ausgangsdrehmoments des Wechselrichters durch die Drehmomentgrenzwertquelle gesteuert.
Mit P2-09 wird die Quelle für die Einstellung des Geschwindigkeitslimits ausgewählt. Wenn die Kommunikationseinstellung analog, Impuls, 100 % ist, entspricht dies der entsprechenden Einstellung von P2-10, P2-10 und 100 % des Nennmoments des Wechselrichters.
| P2-13 | Proportionales Inkrement des Erregungsreglers | Werkseinstellungen | 2000 |
| Einstellbereich | 0 ~ 20000 | ||
| P2-14 | Integrationsverstärkung der Erregungssteuerung | Werkseinstellungen | 1300 |
| Einstellbereich | 0 ~ 20000 | ||
| P2-15 | Proportionalverstärkung für Drehmomentregelung | Werkseinstellungen | 2000 |
| Einstellbereich | 0 ~ 20000 | ||
| P2-16 | Integrationsverstärkung der Drehmomentregelung | Werkseinstellungen | 1300 |
| Einstellbereich | 0 ~ 20000 | ||
Einstellparameter der PI-Vektorregelung für die Stromschleife. Die vollständigen Abstimmungsparameter in der Asynchron- oder Synchronmaschine werden nach der Abstimmung automatisch geladen, sie müssen in der Regel nicht geändert werden.
Erinnern Sie sich, dass der Stromschleifen-Integrationsregler direkt die Integrationsverstärkung einstellt, anstatt die Integrationszeit als Dimension zu verwenden. Wenn die Verstärkung der PI-Stromschleife zu hoch eingestellt ist, kann dies dazu führen, dass der gesamte Regelkreis schwingt. Wenn die Stromschwingung oder die Drehmomentwelligkeit groß ist, kann sie hier manuell reduziert werden, um eine proportionale Verstärkung oder eine PI-Integrationsverstärkung zu erreichen.
Gruppe P3 - Parameter der U/f-Steuerung
Die Funktionscodes sind nur für die U/f-Steuerung wirksam. Sie funktionieren nicht mit der Vektorregelung.
Die U/f-Steuerung eignet sich für Lüfter, Pumpen und andere allgemeine Lasten oder einen Wechselrichter mit mehreren Motoren bzw. Wechselrichterleistung und Motorleistung mit ganz unterschiedlichen Anwendungen.
| P3-00 | Auswahl der U/f-Kurve | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | linear | ||
| 1 | Mehrpunkt | |||
| 2 | quadratisch | |||
| 3 | 1.2 quadratisch | |||
| 4 | 1.4 quadratisch | |||
| 6 | 1.6 quadratisch | |||
| 8 | 1.8 quadratisch | |||
| 9 | reserviert | |||
| 10 | U / f-Kurve mit vollständiger Trennung | |||
| 11 | U / f-Kurve mit halber Trennung | |||
0: Lineare U/f. Geeignet für normale Lasten mit konstantem Drehmoment.
1: U/f-Mehrpunktlinie. Geeignet für Entwässerungsmaschinen, Zentrifugen und andere Sonderlasten. Zu diesem Zeitpunkt kann durch die Einstellung der Parameter P3-03 \~ P3-08 eine beliebige U/f-Kurve erreicht werden.
2: U/f-quadratische Kurve. Geeignet für Ventilatoren, Pumpen und andere Zentrifugallasten. 3 \~ 8: U/f-Kurve zwischen Geraden, zwischen PF und U/f-Quadrat.
10: U / f-Kurve mit vollständiger Trennung. Dann sind die Ausgangsfrequenz und die Ausgangsspannung des Wechselrichters unabhängig voneinander. Die Ausgangsfrequenz wird durch die Frequenzquelle und die Ausgangsspannung wird durch P3-13 (isolierte U/f-Spannungsquelle) bestimmt.
Der volle U/f-Trennungsmodus wird in der Regel bei Induktionserwärmung, Stromrichter, Motordrehmomentregelung und anderen Anwendungen verwendet.
11: U / f-Kurve mit halber Trennung
In diesem Fall sind V und F durch die Einstellung P3-13 proportional zur Spannungsquelle, und die Beziehung zwischen V und F gilt auch für die Motornennspannung in Gruppe P1 in Bezug auf die Nennfrequenz.
Nehmen Sie an, dass die Eingangsspannungsquelle X ist (wobei X von 0 bis 100 % des Werts reicht). Die Ausgangsspannung V F in der Beziehung zwischen dem Wechselrichter und der Frequenz ist:
V / F = 2 * X * (Motornennspannung) / (Motornennfrequenz).
| P3-01 | Drehmomentverstärkung | Werkseinstellungen | Je nach Modell |
| Einstellbereich | 0.0% ~ 30% | ||
| P3-02 | Frequenz der Drehmomentabschaltung | Werkseinstellungen | 50.00Hz |
| Einstellbereich | 0.00Hz~maximale Ausgangsfrequenz | ||
Um den Drehmomentverlauf bei niedriger U/f-Steuerfrequenz zu kompensieren, erhöhen Sie die Ausgangsspannungskompensation des Wechselrichters. Wenn die Einstellung der Drehmomentverstärkung jedoch zu groß ist, überhitzt der Motor und es kommt zu einem Überstrom im Wechselrichter.
Wenn die Last groß und das Anlaufmoment des Motors unzureichend ist, empfiehlt es sich, diesen Parameter zu erhöhen. Wenn die Drehmomentverstärkung auf 0,0 eingestellt ist, erhöht der Wechselrichter zu diesem Zeitpunkt automatisch das Drehmoment gemäß den erforderlichen, automatisch berechneten Statorwiderstandsparametern des Antriebsmotors.
Technische Parameter eines Hochleistungs-Frequenzumrichters
Drehmomentanstieg vs. Drehmoment-Abschaltfrequenz: Bei dieser Frequenz ist die Drehmomenterhöhung wirksam. Oberhalb dieser eingestellten Frequenz versagt die Drehmomentverstärkung. Siehe Details in Abbildung 6-3.
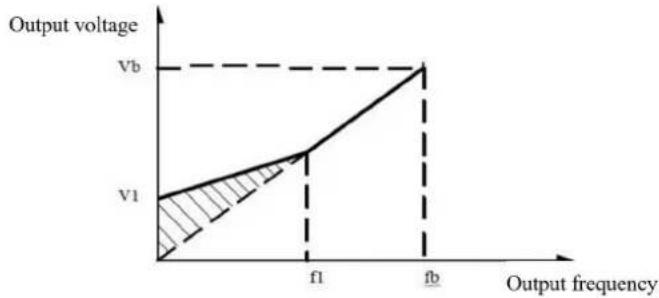
line
| Output frequency | Output voltage | | ---------------- | -------------- | | f1 | V1 | | fb | Vb |VI: Manuelle Drehmomentanhebung
Vb Maximale Ausgangsspannung
fl: Grenzfrequenz der manuellen Drehmomentverstärkung
fb: Nennbetriebsfrequenz
Abbildung 6-3 Diagramm der manuellen Drchmomenterhöhung
| P3-03 | Punkt 1 der U/f-Frequenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00 Hz ~ P3-05 | ||
| P3-04 | Punkt 1 der U/f-Spannung | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 100.0% | ||
| P3-05 | Punkt 2 der U/f-Frequenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | P3-03 ~ P3-07 | ||
| P3-06 | Punkt 2 der U/f-Spannung | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 100.0% | ||
| P3-07 | Punkt 3 der U/f-Frequenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | P3-05~ Motornennfrequenz (P1-04)Hinweis: Die zweite Motornennfrequenz ist A2-04 | ||
| P3-08 | Punkt 3 der U/f-Spannung | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 100.0% | ||
P3-03 \~ P3-08 sechs Parameter, die die Multisegment-U/f-Kurve definieren.
Die Mehrpunkt-U/f-Kennlinie muss entsprechend der Motorlastkennlinie eingestellt werden. Beachten Sie, dass die Beziehung zwischen Spannung und Frequenz an drei Punkten erfüllt sein muss: V1 < V2 < V3, F1 < F2 < F3.
Abbildung 6-4 zeigt ein Diagramm einer U/f-Kurve mit einer Mehrpunkteinstellung.
Eine zu hoch eingestellte Spannung kann dazu führen, dass der Motor bei niedrigen Frequenzen überhitzt oder sogar durchbrennt. Der Antrieb stoppt möglicherweise zu stark oder aktiviert den Überstromschutz.
| P3-09 | Verstärkung der U/f-Schlupfkompensation | Werkseinstellungen | 0 |
| Einstellbereich | 0% ~ 200.0% | ||
U/f-Schlupfkompensation. Bei Asynchronmotoren kann es kompensiert werden, wenn die Last die Drehzahlabweichung des Motors erhöht. Wenn sich die Last ändert, kann eine stabile Motordrezhahl erreicht werden.
Die Verstärkung der U/f-Schlupfkompensation ist auf 100,0 % eingestellt. Dieser gibt die Kompensation der Nennlast in Bezug auf den Nennschlupf des Motors an. Sie können aber auch eine eigene Berechnung auf Basis des Nennschlupfes des Motors, der Nennfrequenzgruppe des Antriebsmotors nach P1 und der Nenndrehzahl durchführen.
Sie können die Drehzahl der U/f-Schlupfkompensationsverstärkung einstellen, im Allgemeinen, wenn die Nennlast, die Motordrehzahl und die Zieldrehzahl grundsätzlich gleich sind. Wenn die Motordrehzahl und die Zielgeschwindigkeit nicht übereinstimmen, passen Sie die Verstärkung entsprechend an.
| P3-10 | U / f-Übererregungsverstärkung | Werkseinstellungen | 6 |
| Einstellbereich | 0~200 | ||
Während des Bremsens kann der Anstieg der Steuerbusspannung aufgrund von Überstrom unterdrückt werden, um eine Überspannung zu vermeiden. Je stärker die Verstärkung der Übererregung ist, desto stärker ist die Dämpfung.
Unter der Bremsbedingung durch den Wechselrichter ist es leichter, Überdruck zu erzeugen und den Alarm zu hören, dann sollte die Übererregungssteuerung verbessert werden. Ist die Überschwingverstärkung jedoch zu groß, führt sie leicht zu einem Anstieg des Ausgangsstroms; dies muss in der Anwendung ausgeglichen werden.
Technische Parameter eines Hochleistungs-Frequenzumrichters
Bei geringer Trägheit tritt die Verzögerung des Motorspannungsanstiegs nicht auf. Es wird empfohlen, die Überschwingverstärkung auf 0 zu setzen; für den Bremswiderstand in dieser Situation wird ebenfalls empfohlen, die Überschwingverstärkung auf 0 zu setzen.
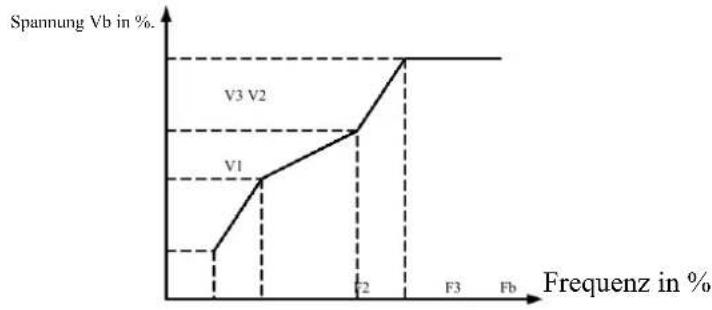
V1-V3: Spannungsprozentsatz des U / f-Segments mit mehreren Geschwindigkeiten 1-3
F1-F3: Frequenzprozentsatz des U / f-Segments mit mehreren Geschwindigkeiten 1-3
Vb: Motornennspannung
Fb: Nennbetriebsfrequenz des Motors
Abbildung 6-4 Schema der Mehrpunkt-U / f-Kurveneinstellung
| P3-11 | U / f-Leistungspendelungsverstärku ng | Werkseinstellungen | Modellbestätigung |
| Einstellbercich | 0 ~ 100 | ||
Die Methode der Verstärkungswahl unterdrückt wirksam Schwingungen. Wählen Sie eine kleine Verstärkung, um den U/f-Betrieb nicht zu beeinträchtigen. Wenn der Motor keine Schwingung hat, wählen Sie eine Verstärkung von 0. Erhöhen Sie die Verstärkung nur, wenn die Motorschwingung eindeutig ist. Je höher die Verstärkung, desto besser ist das Ergebnis der Schwingungsunterdrückung. Die Verwendung der Schwingungsunterdrückungsfunktion erfordert eine sorgfältige Beobachtung der Motornennstrom- und Leerlaufstromparameter, da sonst die Wirkung der U/f-Schwingungsunterdrückung nicht gut ist.
| P3-13 | Isolierte Spannung U / f | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Digitale Einstellung (P3-14) | ||
| 1 AI1 | ||||
| 2 AI2 | ||||
| 3 AI3 | ||||
| 4 | Impulseinstellung (DI5) | |||
| 5 | Multi-Zustandsbefehl | |||
| 6 | Einfache SPS | |||
| 7 PID | ||||
| 8 | Kommunikationseinstellungen | |||
| 100,0 % entspricht der Motornennspannung (P1-02, A4-02, A5-02, A6-02) | ||||
| P3-14 | Digitale Einstellung Isolierte Spannung U/f | Werkseinstellungen | 0V | |
| Einstellbereich | 0 V~ Motornennspannung | |||
Die U/f-Trennung wird typischerweise bei der Induktionserwärmung, bei Stromrichtern und bei der Drehmomentregelung von Motoren eingesetzt.
Durch die Auswahl der U/f-Trennungsregelung kann die Ausgangsspannung über den Funktionscode P3-14 eingestellt werden, aber auch Analog-, Multi-Stream-, SPS-, PID- oder Kommunikationseinstellungen. Bei nicht-digitaler Einstellung entspricht jede Einstellung 100 % der Motornennspannung, wenn der Prozentsatz des Absolutwerts der analogen Ausgangseinstellung usw. negativ ist. Er wird also als aktiver Sollwert eingestellt.
0: Die digitale Spannungseinstellung (P3-14) erfolgt direkt über P3-14. 1: AI1 2: AI2 3: AI3
Die Spannung von der analogen Eingangsklemme muss bestimmt werden.
-
Impulseinstellung (DI5) durch Einstellen des Spannungsimpulses an den Klemmen. Spezifikation der Impulsreferenz: Spannungsbereich 9 V \~ 30 V, Frequenzbereich 0 kHz \~ 100 kHz.
-
Für eine mehrstufige Spannungsanweisung von mehreren Quellen stellen Sie die PC-Gruppe P4 ein und parametrieren sie so, dass das gegebene Signal der Referenzspannung entspricht.
-
Einfache SPS-Regelung
Wenn die Spannungsquelle eine einfache SPS ist, muss ein Satz von PC-Parametern eingestellt werden, um die gegebene Ausgangsspannung zu bestimmen.
- PID
Der geschlossene Regelkreis erzeugt die Ausgangsspannung entsprechend dem PID-Regler. Die PID finden Sie in den Details zur Gruppe PA.
- Kommunikation bezieht sich auf die vom Host-Computer bereitgestellte Spannung im Kommunikationsmodus. Wenn die Spannungsquellen 1-8 ausgewählt sind, entspricht 0 100 % der Ausgangsspannung (0 V\~ Motornennspannung).
| P3-14 | IsolierteSpannungsanstiegszeitU/f | Werkseinstellungen 0.0s |
| Einstellbereich | 0.0 s~1000.0 s |
Die Anstiegszeit der U/f-Trennung bezieht sich auf die Änderung der Ausgangsspannung von 0 V auf die erforderliche Zeit der Motor-nennspannung.
Dies ist in Abbildung 6-5 dargestellt:
Ausgangsspannung V
Motornennspannung V
Ausgangsspannungszielwert
Zeit t
Tatsächliche Spannungsanstiegszeit
Tatsächliche Spannungsabfallzeit
Eingestellte Spannungsanstiegszeit Eingestellte Spannungsabfallzeit
Abbildung 6-5 V/F-Isolationsdiagramm
Gruppe P4 – Eingangsklemmen
Der Wechselrichter dieser Serie ist standardmäßig mit fünf digitalen Multifunktions-Eingangsklemmen ausgestattet (wobei DI5 als schnelle Impulseingangsklemme verwendet werden kann). Zwei analoge Eingangsklemmen. Wenn das System mehr Eingangs- und Ausgangsklemmen benötigt, kann eine optionale Multifunktions-Eingangs- und Ausgangserweiterungskarte verwendet werden.
Die Multifunktions-Eingangs- und Ausgangserweiterungskarte hat fünf digitale Multifunktions-Eingangsklemmen (DI6 \~ DI10) und eine analoge Eingangsklemme (AI3).
| P4-00 | Auswahl der DI1-Klemmenfunktion | Werkseinstellungen | 1 (Betrieb) |
| P4-01 | Auswahl der DI2-Klemmenfunktion | Werkseinstellungen | 4 (positive Bewegung des Wendepunkts) |
| P4-02 | Auswahl der DI3-Klemmenfunktion | Werkseinstellungen | 9 (Fehlerrücksetzung) |
| P4-03 | Auswahl der DI4-Klemmenfunktion | Werkseinstellungen | 12 (Multigeschwindigkeit 1) |
| P4-04 | Auswahl der DI5-Klemmenfunktion | Werkseinstellungen | 13 (Multigeschwindigkeit 2) |
| P4-05 | Auswahl der DI6-Klemmenfunktion | Werkseinstellungen | 0 |
| P4-06 | Auswahl der DI17-Klemmenfunktion | Werkseinstellungen | 0 |
| P4-07 | Auswahl der DI8-Klemmenfunktion | Werkseinstellungen | 0 |
| P4-08 | Auswahl der DI9-Klemmenfunktion | Werkseinstellungen | 0 |
| P4-09 | Auswahl der DI10-Klemmenfunktion | Werkseinstellungen | 0 |
Diese Parameter dienen zur Einstellung der Funktionen der digitalen Multifunktions-Eingangsklemmen und können wie folgt ausgewählt werden:
| Sollwert | Funktion | Erläuterung |
| 0 | Keine Funktion | Die Klemme wird im Modus „Keine Funktion“ nicht verwendet, um Fehlfunktionen zu vermeiden. |
| 1 | Vorwärtsrichtung (FWD) | Externe Klemme zur Steuerung der Vorwärts- und Rückwärtsantriebs. |
| 2 | Rückwärtsrichtung (REV) | |
| 3 | Drei-Draht-Steuerung | Diese Klemme dient zur Festlegung der Betriebsart des Wechselrichters im Drei-Draht-Steuerungsmodus. Einzelheiten finden Sie in der Anleitung zum Funktionscode P4-11 („Klemmenbefehlsmodus“). |
| 4 | Vorwärtsimpuls (FJOG) | JOG - vorwärts , JOG - rückwärts. Die Impulsfrequenz und die Beschleunigungs- und Bremszeiten im JOG-Modus beziehen sich auf die Funktionscodes P8-00, P8-01, P8-02. |
| 5 | Wendepunkte (RJOG) | |
| 6 | AUF-Klemme (UP0) | Über die externen Klemmen werden Befehle zur Frequenzänderung, Inkrementierung und Dekrementierung gegeben. Die Frequenzquelle ist digital eingestellt und kann zur Einstellung der Frequenz nach oben und unten verstellt werden. |
| 7 | AB-Klemme (DOWN)) | |
| 8 | Freilauf | Der Wechselrichter sperrt den Ausgang und stoppt dann den Motorsteuerungsprozess mit dem Wechselrichter.Gleiches gilt für den Freilauf P6-10. |
| 9 | Reset (RESET) | Funktion zum Zurücksetzen von Klemmenfehlern mit der Funktionstaste RESET auf der Tastatur. Diese Funktion dient dazu, Fehler aus der Ferne zurückzusetzen |
| 10 | Anhalten des Betriebs | Der Wechselrichter ist gestoppt, aber alle Betriebsparameter sind im Speicher. Parameter wie SPS-Parameter, Wobble-Parameter, PID-Parameter. Wenn dieses Klemmensignal verschwindet, kehrt der Antrieb in den Zustand vor dem Stoppen zurück. |
| 11 | Normalerweise offener Eingangfür externe Fehler | Wenn dieses Signal an den Wechselrichter gesendet wird, meldet der Wechselrichter den Fehler ERR15. Fehlersuche und Fehlerschutz entsprechend der Betriebsart (siehe auch Details zu Funktionscode P9-47). |
| 12 | Multigeschwindigkeitsklemme 1 | 16 Zustände von vier Klemmen für Geschwindigkeit oder 16 andere Befehlssätze. Siehe Tabelle 1 für Details. |
| 13 | Multigeschwindigkeitsklemme 2 | |
| 14 | Multigeschwindigkeitsklemme 3 | |
| 15 | Multigeschwindigkeitsklemme 4 | |
| 16 | Klemme zur Auswahl der Bremszeit 1 | Diese beiden Klemmen haben vier Zustände, vier Optionen, um die Beschleunigungs- und Bremszeit zu erhalten, siehe Tabelle 2 für Details. |
| 17 | Klemme zur Auswahl der Bremszeit 2 | |
| 18 | Schalter für Frequenzquelle | Schalter zur Auswahl einer anderen Frequenzquelle.Entsprechend dem Funktionscode zur Auswahl der Frequenzquelle (P0-07) wird diese Klemme zum Umschalten zwischen zwei Frequenzquellen verwendet. |
| 19 | Löschen der AUF/AB-Einstellung (Klemme, Tastatur) | In Bezug auf den digitalen Frequenzsollwert kann diese Klemme die AUF/AB-Änderungen löschen oder AUF/AB-Änderungen vornehmen, so dass die betreffende Frequenz zum Sollwert P0-08 zurückkehrt. |
| 20 | Umschalten der Klemmenbefehlsquelle | Wenn die Befehlsquelle auf Klemmensteuerung eingestellt ist (P0-02 = 1), kann diese Klemme auf Klemmensteuerung und Tastatursteuerung umgeschaltet werden.Wenn die Befehlsquelle auf Kommunikationssteuerung (P0-02 = 2) eingestellt ist, kann diese Klemme auf Kommunikationssteuerung und Tastatursteuerung umgeschaltet werden. |
| 21 | Beschleunigungs- und Stoppserre | Stellt sicher, dass der Antrieb nicht durch externe Signale angesteuert wird (außer bei einem Stoppbefehl), um die aktuelle Ausgangsfrequenz beizubehalten. |
| 22 | Ende der PID-Zeit | PID wird vorübergehend deaktiviert, der Wechselrichter behält die aktuelle Ausgangsfrequenz bei, es gibt keine PID-Regelung der Frequenzquelle mehr. |
| 23 | SPS-Status zurücksetzen | SPS-Pause bei der Implementierung können Sie den Wechselrichter über diese Klemme in den Ausgangszustand einer einfachen SPS zurückversetzen. |
| 24 | Schwingungsfrequenzpause | Antrieb auf Mittenfrequenzausgang. Wobbel-Funktionspause. |
| 25 | Zählereingang | Eingangsklemme des Impulszählers. |
| 26 | Zähler zurücksetzen | Status der Zählerrückstellung. |
| 27 | Eingang der Zählänge | Eingangsklemme für die Längenzählung. |
| Sollwert | Funktion | Erläuterung |
| 28 | Rücksetzen der Zählänge | Länge löschen |
| 29 | Deaktivieren der Drehmomentsteuerung | Deaktiviert die Drehmomentregelung des Antriebs, der Wechselrichter geht in den Drehzahlregelungsmodus |
| 30 | Impulsfrequenz-Eingang (nur D15) | D15 dient als Impulseingangsklemme. |
| 31 | Reserviert Reserviert | |
| 32 | Gleichstrombremsen | Wenn diese Klemme aktiv ist, geht der Wechselrichter direkt in den Zustand der Gleichstrombremsung. |
| 33 | Normalerweise geschlossener externer Fehlersignaleingang | Wenn ein normalerweise geschlossener Eingang dem Wechselrichter einen externen Fehler meldet, meldet der Wechselrichter ERR15 und einen Ausfall. |
| 34 | Frequenzverschiebung sspere ist eingeschaltet | Wenn diese Funktion aktiviert ist, reagiert der Frequenzumrichter bei einer Frequenzänderung erst dann auf die Änderung, wenn die Klemme inaktiv wird. |
| 35 | Änderung der PID-Betriebsrichtung | Wenn diese Klemme aktiv ist, wechselt die PID-Betriebsrichtung in die entgegengesetzte Richtung der eingestellten PA-03 |
| 36 | Stoppen durch externes Signal von Klemme 1 | Während der Tastatursteuerung kann diese Klemme zum Stoppen des Wechselrichters verwendet werden, sie entspricht der STOP-Taste auf der Tastatur. |
| 37 | Umschalten der Klemmenbefehlsquelle 2 | Zum Umschalten zwischen Klemmsteuerung und Kommunikationssteuerung. Wenn eine Klemme als Befehlsquelle ausgewählt wird, schaltet das System auf die effektive Steuerung der Kommunikationsklemme um und andersherum. |
| 38 | Anhalten des PID-Integrals | Wenn diese Klemme aktiv ist, wird die PID-Integralregelung gestoppt, aber das Verhältnis von PID-Regelung und Differenzialregelung bleibt gültig. |
| 39 | Umschalten zwischen Frequenzquelle X und Sollfrequenz | Wenn die Klemme aktiviert ist, steht die Frequenzquelle X mit eingestellter Frequenz (P0-08) als Alternative zur Verfügung. |
| 40 | Umschalten zwischen Frequenzquelle Y und Sollfrequenz | Wenn die Klemme aktiviert ist, steht die Frequenzquelle Y mit eingestellter Frequenz (P0-08) als Alternative zur Verfügung. |
| 41 | Motorauswahl an Klemme 1 | Diese zwei Zustände an zwei Klemmen, zwei Sätze von Motorparametern können geschaltet werden. Siehe Tabelle 3 für Details. |
| 42 | Motorauswahl an Klemme 2 | |
| 43 | PID-Parameterschalter | Wenn der PID-Parameter an der DI-Klemme (PA-18 = 1) im Schaltzustand inaktiv ist, wird der PID-Parameter PA-05 ~ PA-07 verwendet, PA-15 wenn diese Klemme aktiv ist ~ PA-17; |
| 44 | Benutzerdefinierter Fehler 1 | Wenn die benutzerdefinierten Fehler 1 und 2 aktiv sind, erzeugt der Wechselrichter die Alarme ERR27 bzw. ERR28. Der Frequenzmrichter wählt eine Fehlerschutzmaßnahme basierend auf der Verarbeitung in der gewählten Betriebsart P9-49. |
| 45 | Benutzerdefinierter Fehler 2 | |
| 46 | Umschalten zwischen Drehzahl- und Drehmomentregelung | Zwischen dem Modus der Antriebsdrehmomentregelung und dem Modus der Drehzahlregelung. Die Klemme ist inaktiv, der im Antrieb definierte Modus A0-00 (Drehzahl-/Drehmomentregelung) arbeitet, die Klemme ist aktiv und schaltet dann in einen anderen Modus. |
| 47 | Not-Aus | Wenn diese Klemme aktiv ist, stoppt der Wechselrichter den Antrieb so schnell wie möglich innerhalb der aktuell eingestellten Grenze. Diese Funktion dient dazu, die Bedingung zu erfüllen, dass der Antrieb so schnell wie möglich gestoppt werden muss, wenn sich das System in einem Fehlerzustand befindet. |
| 48 | Stoppen durch externes Signal von Klemme 2 | In jedem Steuermodus (Bedienfeld, Klemmensteuerung, Kommunikationssteuerung) kann diese Klemme zum Stoppen des Wechselrichters verwendet werden; in diesem Fall ist die Bremszeit die Festzeit 4. |
| 49 | Anhalten mit Gleichstrombremse | Wenn diese Klemme aktiv ist, verlangsamt der Wechselrichter, um die Anfangsfrequenz der Gleichstrombremsung zu stoppen und schaltet dann auf Gleichstrombremsung um. |
| 50 | Rücksetzen der Betriebszeit | Wenn diese Klemme aktiv ist, wird die vorgegebene Betriebszeit des Wechselrichters auf Null gesetzt, für diese Funktion muss die Betriebszeit eingestellt (P8-42) und erreicht werden (P8-53). |
Tabelle 1 Beschreibung der Funktionen des Mehrschrittbefehls
Mehr als vierstufige Befehlsklemmen, 16 Zustände können angeschlossen werden. Jeder Zustand entspricht 16 Befehlseinstellungen, wie in Tabelle 1 dargestellt:
| K4 | K3 | K2 | K1 | Befehlssatz | Relevante Parameter |
| OFF | OFF OFF | OFF MehrschrittigeAnweisungen 0 | PC-00 | ||
| OFF | OFF OFF | ON | MehrschrittigeAnweisungen 1 | PC-01 | |
| OFF | OFF ON | OFF MehrschrittigeAnweisungen 2 | PC-02 | ||
| OFF | OFF ON | ON MehrschrittigeAnweisungen 3 | PC-03 | ||
| OFF | ON OFF | OFF | MehrschrittigeAnweisungen 4 | PC-04 | |
| OFF | ON OFF | ON Mehrschrittige Anweisungen 5 | PC-05 | |
| OFF | ON ON | OFF | Mehrschrittige Anweisungen 6 | |
| OFF | ON ON | ON Mehrschrittige Anweisungen 7 | PC-07 | |
| ON | OFF OFF | OFF Mehrschrittige Anweisungen 8 | PC-08 | |
| ON | OFF OFF | ON | Mehrschrittige Anweisungen 9 | |
| ON | OFF ON | OFF Mehrschrittige Anweisungen 10 | PC-10 | |
| ON | OFF ON | ON | Mehrschrittige Anweisungen 11 | |
| ON | ON OFF | OFF | Mehrschrittige Anweisungen 12 | |
| ON | ON OFF | ON | Mehrschrittige Anweisungen 13 | |
| ON | ON ON | OFF Mehrschrittige Anweisungen 14 | PC-14 | |
| ON | ON ON | ON Mehrschrittige Anweisungen 15 | PC-15 |
Wenn die Frequenzquelle der Multigeschwindigkeitsfunktion PC-00 \~ PC-15 auf 100,0 % eingestellt ist, entspricht sie der maximalen Frequenz von P0-10. Neben der Verwendung für Multigeschwindigkeitsfunktion können mehrschrittige Befehle auch als PID-Sollreferenzquelle oder als Spannungsquelle U/f-Trennungssteuerung usw. verwendet werden, um den Anforderungen beim Wechsel zwischen Aufgaben gerecht zu werden.
Tabelle 2. Klemmenfunktionen zur Auswahl von Beschleunigungs- und Bremszeiten
| Klemme 2 Klemme 1 | Auswahl der Beschleunigungs- und Bremszeit | entspricht | |
| OFF OFF | Beschleunigungszeit 1 | P0-17、P0-18 | |
| OFF | ON Beschleunigungszeit 1 | P8-03、P8-04 | |
| ON OFF | Beschleunigungszeit 3 | P8-05、P8-06 | |
| ON | ON | Beschlcunigungszeit 4 | P8-07、P8-08 |
Tabelle 3. Klemmenfunktionen zur Motorauswahl
| Klemme 2 | Klemme 1 | Motorauswahl | Relevanter Parametersatz |
| OFF | OFF | Motor Nr. 1 | Gruppe P1, P2 |
| OFF | ON | Motor Nr. 2 | Gruppe A2 |
| P4-10 | DI-Filterungszeit | Werkseinstellungen | 0.010s | |
| Einstellung | 0.000 s ~ 1.000 s | |||
Einstellen des DI-Status der Filterungszeit in der Klmmensoftware. Wenn Sie eine störungsanfällige Eingangsklemme verwenden, können Sie diesen Parameter erhöhen, um den Störungsschutz zu verbessern. Dies erhöht zwar die Filterzeit, kann aber dazu führen, dass die DI-Klemme langsam reagiert.
| P4-11 | Klemmenbefehlsmodus | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | Zweidraht 1 | |||
| 1 | Zweidraht 2 | ||||
| 2 | Dreidraht 1 | ||||
| 3 | Dreidraht 2 | ||||
0: Zweidrahtmodus 1: Dieser Modus ist der am häufigsten verwendete Zweizeilenmodus. Über die Klemmen DI1 bestimmt DI2 den Vorwärts- und Rückwärtsantrieb des Motors.
Klemmfunktionen:
| Klemmen | Sollwert Beschreibung | |
| DI1 1 | Vorwärtsbewegung (FWD) | |
| DI2 2 | Rückwärtsbewegung (REV) | |
Da D11, D12 die Multifunktionseingangsklemme von D11 \~ D110 sind, ist der Pegel wirksam.
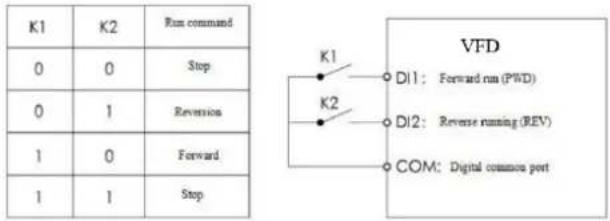
Abbildung 6-6 1: Zweidrahtmodus
1: Zweidrahtmodus
2: Verwenden Sie diesen Modus, wenn die aktive Klemme der Funktion D11 und D12 die Richtungsbestimmung ermöglicht.
Klemmfunktionen:
| Klemmen | Einstellung | Beschreibung |
| DI1 1 | Vorwärtsbewegung (FWD) | |
| DI2 2 | Rückwärtsbewegung (REV) |
DI1, DI2 sind Multifunktionseingangsklemmen.
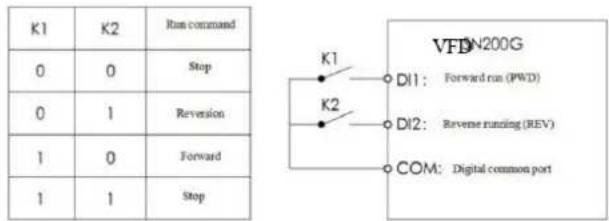
Abbildung 6-7 Zweizeilenmodus 2
2: Dreidraht-Steuerungsmodus
1: Dieser Modus wird an Klemme DI3 oder durch die Richtungssteuerung DI1, DI2 aktiviert
| Klemmen | Sollwert Beschreibung | |
| DI1 1 | Vorwärtsbewegung (FWD) | |
| DI2 2 | Rückwärtsbcwecgung (REV) | |
| DI3 3 | Dreidraht-Bewegungssteuerung |
Wenn ein Start erforderlich ist, muss die Klemme DI 3 zunächst durch die steigenden Flanken von DI1 oder DI2 geschlossen werden, um eine Vorwärts- oder Rückwärtssteuerung des Motors zu erreichen.
Wenn ein Stopp erforderlich ist, unterbrechen Sie das Signal von Klemme DI3. DI1, DI2, DI3 sind Multifunktionseingangsklemmen DI1 \~ DI10, DI1, DI2 Impulse sind wirksam und DI3 hat einen wirksamen Pegel.
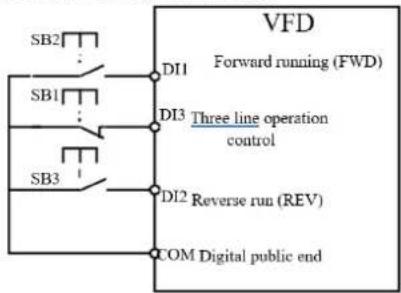
Abb. 6-8 Dreidraht-Steuerungsmodus 1
Technische Parameter eines Hochleistungs-Frequenzumrichters
Wo: SB1: Stopptaste SB2: Vorwärtstaste SB3: Rückwärtstaste
3: Dreidraht-Steuerungsmodus
2: Dieser Modus wird durch die Klemme DI3 eingeschaltet, gestartet durch den Befehl DI1, Richtung DI2 wie gewählt.
Klemmfunktionen:
| Klemmen | Sollwert Beschreibung | |
| DI1 | 1 | Vorwärtsbewegung (FWD) |
| DI2 | 2 | Rückwärtsbewegung (REV) |
| DI3 | 3 | Dreidraht-Bewegungssteuerung |
Wenn ein Start erforderlich ist, muss zuerst DI 3 geschlossen werden, der DI1-Impuls des Motorlaufsignals steigt, der DI2-Zustand der Motorrichtung steigt.
Wenn ein Stopp erforderlich ist, unterbrechen Sie das Signal von Klemme DI3. Unter den Klemmen, DI1, DI2, DI3 für DI1 \~ DI10 sind Multifunktioneingangsklemmen, DI1 effektiver Impuls, DI3, DI2 arbeiten.
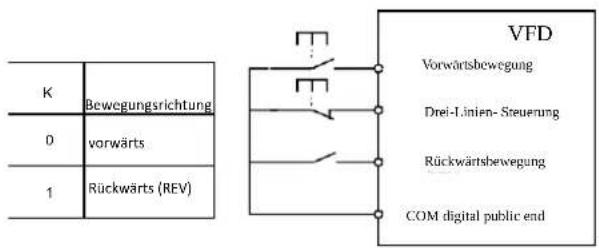
Abb. 6-9 Dreidraht-Steuerungsmodus 2
Wo: SB1: Stopptaste, SB2: Bewegungstaste.
| P4-12 | UP / DOWNVeränderungsgeschwindigkeit | Werkseinstellungen 1 | 00 Hz/s | |
| Einstellung | 0.01Hz/s ~ 65.535 Hz/s | |||
Während der Einstellung der Klemme UP / DOWN nach oben / unten stellen Sie die eingestellte Frequenz und die Frequenzänderungsrate ein, d. h. den Betrag der Frequenzänderung pro Sekunde.
Wenn P0-22 (Frequenzdezimalpunkt) 2 ist, liegt der Wert im Bereich von 0,001 Hz / s \~ 65,535 Hz / s.
Wenn P0-22 (Frequenzdezimalpunkt) 1 ist, liegt der Wert im Bereich von 0,01 Hz / s \~ 655,35 Hz / s.
| P4-13 | Minimaler Wert der AI1-Kurve am Eingang | Werkseinstellungen | 0.00V | |
| Einstellung | 0.00 V ~ P4-15 | |||
| P4-14 | Einstellung der AI1-Kurve am Eingang | Werkseinstellungen | 0.0% | |
| Einstellung | -100.00% ~ 100.0% | |||
| P4-15 | Maximaler Wer der AI1-Kurve am Eingang | Werkseinstellungen | 10.00V | |
| Einstellung | P4-13 ~ 10.00 V | |||
| P4-16 | Einstellung der AI1-Kurve am Eingang | Werkseinstellungen | 100.0% | |
| Einstellung | -100.00% ~ 100.0% | |||
| P4-17 | AI1-Filterungszeit | Werkseinstellungen | 0.10s | |
| Einstellung | 0.00s ~ 10.00s | |||
Die obigen Funktionscodes werden verwendet, um die Beziehung zwischen den Einstellungen der analogen Eingangsspannung festzulegen.
Wenn die analoge Eingangsspannung größer ist als der eingestellte „maximale Eingang“ (P4-15) wird die analoge Eingangsspannung entsprechend des „maximalen Eingangs“ berechnet. Ähnlich verhält es sich, wenn die analoge Eingangsspannung kleiner als der eingestellte „minimale EingangE ist (P4-13),... [Text unverständlich - Anm.].
Wenn der Analogeingang ein Stromeingang ist, entspricht ein Strom von 1 mA 0,5 V.
Die AI1-Eingangsfilterzeit wird verwendet, um die Filterzeit einzustellen, wenn die AI1-Software Störungen am simulierten Ort ausgesetzt ist. Die Filterzeit sollte erhöht werden, um die Erkennung der Simulation zu stabilisieren. Je länger jedoch die Filterzeit während der Simulation ist, desto langsamer ist die Reaktionszeit. Die Einstellmethode hängt von der Anwendung ab.
In verschiedenen Anwendungen ist die analoge Einstellung von 100,0 % des entsprechenden Nennwerts unterschiedlich, bitte beachten Sie die Beschreibung des jeweiligen Teils der Anwendung.
Ein Fall mit zwei typischen Einstellungen ist unten dargestellt:
Abbildung 6-10 Beziehung zwischen Simulation und Sollwert
| P4-18 | Minimaler Wert der AI1-Kurve am Eingang | Werkseinstellungen | 0.00V | |
| Einstellbereich | 0.00 V ~ P4-20 | |||
| P4-19 | Einstellung der AI2-Kurve am Eingang | Werkseinstellungen | 0.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-20 | Maximaler Wer der AI2-Kurve am Eingang | Werkseinstellungen | 10.00V | |
| Einstellbereich | P4-18 ~ 10.00 V | |||
| P4-21 | Einstellung der AI2-Kurve am Eingang | Werkseinstellungen | 100.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-22 | AI2-Filterungszeit | Werkseinstellungen | 0.10s | |
| Einstellbereich | 0.00s ~ 10.00s | |||
Funktion und Anwendung von Kurve 2, siehe Beschreibung von Kurve 1
| P4-23 | Minimaler Wert der AI3-Kurve am Eingang | Werkseinstellungen | 0.00V | |
| Einstellbereich | 0.00s ~ P4-25 | |||
| P4-24 | Einstellung der AI3-Kurve am Eingang | Werkseinstellungen | 0.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-25 | Maximaler Wer der AI3-Kurve am Eingang | Werkseinstellungen | 10.00V | |
| Einstellbereich | P4-23 ~ 10.00 V | |||
| P4-26 | Einstellung der AI3-Kurve am Eingang | Werkseinstellungen | 100.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-27 | AI3-Filterungszeit | Werkseinstellungen | 0.10s | |
| Einstellbereich | 0.00s ~ 10.00s | |||
Funktion und Anwendung von Kurve 3, siehe Beschreibung von Kurve 1
| P4-28 | Minimaler Eingangsimpuls | Werkseinstellungen | 0.00kHz | |
| Einstellbereich | 0.00kHz ~ P4-30 | |||
| P4-29 | Minimale Kompatibilität der Impulseingänge | Werkseinstellungen | 0.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-30 | Maximaler Eingangsimpuls | Werkseinstellungen | 50.00kHz | |
| Einstellbereich | P4-28 ~ 50.00 kHz | |||
| P4-31 | Maximale Kompatibilität der Impulseingänge | Werkseinstellungen | 100.0% | |
| Einstellbereich | -100.00% ~ 100.0% | |||
| P4-32 | Filterzeit für Impulseingang | Werkseinstellungen | 0.10s | |
| Einstellbereich | 0.00 s ~ 10.00 s | |||
Diese Funktionscodes werden verwendet, um die relative DI5-Impulsfrequenz entsprechend der Mittelwertbildung einzustellen.
Der Frequenzumrichterimpuls kann nur über den Kanal D15 eingegeben werden. Der Anwendungs- und Funktionsverlauf dieser Gruppe ist ähnlich
zu 1, siehe Hinweis zu Kurve 1.
| P4-33 | AI-Kurvenauswahl | Werkseinstellungen | 321 | ||
| Einstellbereich | Einheitsziffer | AI-Kurvenauswahl | |||
| 1 | Kurve 1 (2 Punkte, siehe P4-13~ P4-16) | ||||
| 2 | Kurve 2 (2 Punkte, siche P4-18~ P4-21) | ||||
| 3 | Kurve 3 (2 Punkte, siehe P4-23~ P4-26) | ||||
| 4 | Kurve 4 (4 Punkte, siche A6-00~ A6-07) | ||||
| 5 | Kurve 5 (4 Punkte, siehe A6-08~ A6-15) | ||||
| Zehner | A12-Kurvenauswahl(1~ 6, wie oben) | ||||
| Hunderte | A13-Kurvenauswahl(1~ 6, wie oben) | ||||
Die Bits zehn und einhundert des Funktionscodes werden zur Auswahl der entsprechenden analogen Eingangskurve AI1, AI2, AI3 verwendet. Sie können drei der fünf Kurventypen a auswählen.
Kurve 1, Kurve 2, Kurve 3 sind 2-Punkt-Kurven, die mit der Funktionscodegruppe P4 eingestellt werden, während Kurve 4 und Kurve 5 4-Punkt-Kurven sind, die mit der Funktionscodegruppe A8 eingestellt werden.
Dieser Standard-Wechselrichter bietet zwei analoge Eingänge. AI3 muss für die Verwendung der Multifunktionseingangs- und Ausgangserweiterungskarte konfiguriert werden.
| P4-34 | AI liegt unterhalb der minimalen Eingangseinstellung | Werkseinstellungen | 000 | ||
| Einstellbereich | Einheitsziffer | AI1 kleiner als die gewählte minimale Eingangseinstellung | |||
| 0 | Geeignete minimale Eingangseinstellung | ||||
| 1 | 0.0% | ||||
| Zehner | AI2 kleiner als die gewählte minimale Eingangseinstellung (0 ~ 1, darüber) | ||||
| Hunderte | AI3 kleiner als die gewählte minimale Eingangseinstellung (0 ~ 1, darüber) | ||||
Dieser Funktionscode wird verwendet, um einzustellen, wenn die analoge Eingangsspannung kleiner als der eingestellte „minimale Eingang“ ist. Option 0.
Funktionscodeeinheit Zehner, Hunderter entspricht dem Analogeingang AI1, AI2, AI3.
Wenn diese Option 1 ist und der AE-Eingang unter dem Minimum liegt, entspricht das Analog 0,0 %.
| P4-35 | DI1-Verzögerungszeit | Werkseinstellungen | 0.0s | |
| Einstellung | 0.0 s ~ 3600.0 s | |||
| P4-36 | DI2-Verzögerungszeit | Werkseinstellungen | 0.0s | |
| Einstellung | 0.0 s ~ 3600.0 s | |||
| P4-37 | DI3-Verzögerungszeit | Werkseinstellungen 0 | 0s | |
| Einstellung | 0.0 s ~ 3600.0 s | |||
Wenn sich die DI-Klemme für die Statuseinstellung ändert, kommt es zu Änderungen in der Zeitverzögerung des Wechselrichters. Derzeit ist nur für DI1, DI2 und DI3 die Zeitverzögerungsfunktion eingestellt.
| P4-38 | Auswahl des Aktivitätsmodus der DI 1 - Klemme | Werkseinstellungen | 00000 | ||
| Einstellbereich | Einheitsziffer | Aktive Klemme DI1 | |||
| 0 | Aktiv hoch | ||||
| 1 | Aktiv niedrig | ||||
| Zehner | Aktive Klemme DI2 (0-1, supra) | ||||
| Hunderte | Aktive Klemme DI3 (0-1, supra) | ||||
| Tausende | Aktive Klemme DI4 (0-1, supra) | ||||
| Zehntausend | Aktive Klemme DI5 (0-1, supra) | ||||
| P4-39 | Auswahl des Aktivitätsmodus der DI 2 - Klemme | Werkseinstellungen | 00000 | ||
| Einstellbereich | Einheitsziffer | Aktive Klemme DI6 | |||
| 0 | Aktiv hoch | ||||
| 1 | Aktiv niedrig | ||||
| Zehner | Aktive Klemme DI7 (0-1, supra) | ||||
| Hunderte | Aktive Klemme DI8 (0-1, supra) | ||||
| Tausende | Aktive Klemme DI9 (0-1, supra) | ||||
| Zehntausend | Aktive Klemme DI10 (0-1, supra) | ||||
Setzt die digitale Eingangsklemme in den aktiven Modus. Wenn der hohe Aktivmodus ausgewählt ist, kommunizieren die entsprechende S-Klemme und die COM-Kommunikation effektiv. Wenn der niedrige Aktivmodus ausgewählt ist, sind die entsprechende S-Klemme und die COM-Kommunikation inaktiv, d. h. die Verbindung ist unterbrochen.
Gruppe P5 – Eingangsklemmen
Diese Serie von Wechselrichtern ist standardmäßig mit einer Multifunktions-Analogausgangsklemme, einer Multifunktions-Digitalausgangsklemme, einer Multifunktions-Relaisausgangsklemme und einer FM-Klemme (ausgewählt als schnelle Impulsausgangsklemme, kann auch als Ausgangsklemme vom Typ Open Collector ausgewählt werden) ausgestattet. Da die Ausgangsklemme nicht mit der Anwendung verbunden werden kann, wird eine optionale Multifunktionseingangs- und Ausgangserweiterungskarte benötigt.
Die Multifunktionseingangs- und Ausgangsklemmen der Erweiterungskarte umfassen eine Multifunktions-Analogausgangsklemme (AO2), eine Multifunktions-Relaisausgangsklemme (Relais 2) und eine Multifunktions-Digitalausgangsklemme (DO2).
| P5-00 | Auswahl des Ausgangsmodus der FM-Klemme | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | Impulsausgang (FMP) | |||
| 1 | Zwei-Zustandsausgang (FMR) | ||||
Die FM-Klemme ist eine programmierbare Multiplexer-Klemme, die als schnelle Impulsausgangsklemme (FMP) verwendet werden kann. Er kann auch als Ausgangsklemme vom Typ Open Collector (FMR) verwendet werden.
Als FMP-Impulsausgang beträgt die maximale Ausgangsimpulsfrequenz 100 kHz, FMP-bezogene Funktionen finden Sie in den Betriebsanleitungen P5-06.
| P5-01 | Auswahl der FMRI-Funktion (Open-Collector-Ausgangsklemme l) | Werkseinstellungen | 0 |
| P5-02 | Auswahl der Funktion des Relaisausgangs (T / A-T / B-T / C) | Werkseinstellungen | 2 |
| P5-03 | Auswahl der Relaisausgangsfunktion der Erweiterungskarte (P / A-P / B-P / C) | Werkseinstellungen | 0 |
| P5-04 | Auswahl der Ausgangsfunktion DO1 (Open-Collector-Ausgangsklemme) | Werkseinstellungen | 1 |
| P5-05 | Auswahl der Funktion des DO2-Ausgangs der Erweiterungskarte | Werkseinstellungen | 4 |
Mit fünf Codes werden die Funktionen der fünf digitalen Ausgänge mit T / A-T / B-T / C bzw. P / A-P / B-P / C auf der Steuerkarte und dem Relais der Erweiterungskarte ausgewählt.
Die Funktionen der Multifunktionsausgangsklemmen sind wie folgt:
| Sollwert | Funktion | Erläuterung |
| 0 | Kein Signal am Ausgang Ausgangsklemme hat keine Funktion | |
| 1 | Der Wechselrichter ist in Betrieb | Was anzeigt, dass der Antrieb in Betrieb ist, die Ausgangsfrequenz ON-Signal wird ausgegeben (kann Null sein) |
| 2 | Stoppen nach einer Störung | Wenn der Umrichter ausfällt und anhält, sendet er ein ON-Signal. |
| 3 | Frequenzerkennung am FDT1-Ausgang | Bitte beachten Sie die Beschreibung der Funktionen P8-19, P8-20. |
| 4 | Erreichen der Sollfrequenz | Bitte beachten Sie die Beschreibung der Funktion P8-21. |
| 5 | Null-Drehzahl-Betrieb (ohne Abschaltung des Ausgangs) | Der Wechselrichter ist in Betrieb und die Ausgangsfrequenz ist 0, das Ausgangssignal ist ON. Wenn der Antrieb ausgeschaltet ist, ist das Signal OFF. |
| 6 | Warnung vor Motorüberlastung | Tritt vor dem Motorüberlastschutz auf, entsprechend der Auswertung des Motorüberlast-Voralarmschwellwertes, das Voralarmschwellwert-Ausgangsschaltsignal. Die Parametereinstellungen für die Motorüberlast finden Sie im Funktionscode P9-00 ~ P9-02. |
| 7 | Überlastwarnung des Wechselrichters | Bevor eine Überlast des Wechselrichters auftritt, wird 10s früher ein ON-Signal ausgegeben. |
| 8 | Einstellung des Zählersollwerts | Wenn der Zähler den PB-08-Sollwert erreicht, wird das ON-Signal ausgegeben. |
| 9 | Errichen des Zählersollwerts | Wenn der Zählwert den Gruppenwert PB-09 erreicht, wird das ON-Signal ausgegeben. |
| 10 | Länge auf dem Zähler erreicht | Wenn erkannt wird, dass die tatsächliche Länge die am PB-05 eingestellte Länge überschreitet, wird ein ON-Signal ausgegeben. |
| 11 | Bcendigung des SPS-Zyklus | Nach einem Zyklus durch eine einfache SPS beträgt die Impulsbreite des Ausgangs 250 ms. |
| 12 | Erreichen einer kumulierten Betriebszeit | Wenn die kumulierte Betriebszeit die mit Parameter P8-17 eingestellte Zeit überschreitet, wird das ON-Signal ausgegeben. |
| 13 | Frequenzschwelle | Wenn die Sollfrequenz den oberen oder unteren Schwellenwert überschreitet und die Ausgangsfrequenz den oberen oder unteren Schwellenwert erreicht, wird das Ausgangssignal ON eingeschaltet. |
| 14 | Drehmoment-Schwelle | Wenn das Ausgangsdrehmoment während des Antriebs im Drehzahlregelungsmodus den Grenzwert erreicht, geht der Wechselrichter in den Blockierschutzmodus über und ein ON-Signal wird ausgegeben. |
| 15 | Bereit für den Betrieb | Wenn sich die Spannungsversorgung des Wechselrichter-Hauptkreises und des Steuerkreises stabilisiert hat und der Frequenzumrichter keine Fehlerinformationen erkennt, befindet sich der Antrieb im Betriebszustand und am Ausgang erschint das Signal „ON“. |
| Sollwert | Funktion | Erläuterung |
| 16 A | 1 > AI2 | Wenn der Wert von AI1 größer als der Wert von AI2 ist, erscheint ein ON-Signal am Eingang und am Ausgang. |
| 17 | Erreichen der oberen Frequenzgrenze | Wenn die Betriebsfrequenz den oberen Grenzwert erreicht, wird das „ON“-Signal am Ausgang eingeschaltet. |
| 18 | Erreichen der unteren Frequenzgrenze (kein Signal bei Stillstand) | Wenn die Betriebsfrequenz den unteren Grenzwert erreicht, erscheint ein ON-Signal am Ausgang. Im Stillstand ist das Signal „OFF“. (AUS). |
| 19 | Ausgangsspannung zu niedrig | Wenn der Wechselrichter unter Spannung steht, ist das Ausgangssignal „ON“. |
| 20 | Kommunikationseinstellungen | Siehe Kommunikationsprotokoll. |
| 21 | Reserviert | Reserviert |
| 22 | Reserviert | Reserviert |
| 23 | Betrieb mit Nullgeschwindigkeit 2 (Ausgang gesperrt) | Die Ausgangsfrequenz des Wechselrichters ist 0, das Ausgangssignal ist EIN. Auch im Stillstand ist das Signal EIN („ON“). |
| 24 | Erreichen der kumulierten Leistung | Wenn die kumulierte Einschaltzeit des Wechselrichters (P7-13) P8-16 die eingestellte Zeit überschreitet, wird das Ausgangssignal aktiviert. |
| 25 | Erkennen des Frequenzpegels am FDT2-Ausgang | Siehe Beschreibung des Funktionscodes P8-28, P8-29. |
| 26 | Erreichen der Frequenz 1 | Siehe Beschreibung des Funktionscodes P8-30, P8-31. |
| 27 | Erreichen der Frequenz 2 | Siehe Beschreibung des Funktionscodes P8-32, P8-33. |
| 28 | Erreichen von Stromwert 1 | Siehe Beschreibung des Funktionscodes P8-38, P8-39. |
| 29 | Erreichen von Stromwert 2 | Siehe Beschreibung des Funktionscodes P8-40, P8-41. |
| 30 | Erreichen der Betriebszeit | Wenn die Funktion der Uhr Select (P8-42) aktiv ist und die Betriebszeit des Wechselrichters abgelaufen ist, wird das ON-Signal ausgegeben. |
| 31 | Überschreitung der Grenze des Signalaufretens am A11-Eingang | Wenn der Wert größer als der am Analogeingang A11 P8-46 (A11-Eingangsschutzgrenze) oder kleiner als der an P8-45 (A11-Eingangsschutzgrenze) ist, erscheint ein „ON“-Signal am Ausgang. |
| 32 | Nulllast | Wenn sich der Wechselrichter im Leerlauf befindet, wird ein „ON“-Signal ausgegeben. |
| 33 | Rückwärtsbetrieb | Rückwärtsantrieb ist in Betrieb, „ON“-Signal am Ausgang. |
| 34 | Nullstrom | Siehe Beschreibung des Funktionscodes P8-28, P8-29. |
| 35 | Modultemperatur zu hoch | Wenn die Kühlkörpertemperatur des Wechselrichtermoduls (P7-07) die eingestellte Temperatur, d. h. den Modulwert (P8-47), erreicht, wird das „ON“-Signal am Ausgang aktiviert. |
| 36 | Überschreitung der Software-Auslösezeit | Siehe Beschreibung des Funktionscodes P8-36, P8-37. |
| 37 | Erreichen der unteren Frequenzgrenze (Ausgangssignal bei Stopp) | Wenn die Betriebsfrequenz den unteren Grenzwert erreicht, wird ein ON-Signal ausgegeben. Im gestoppten Zustand ist das Signal ebenfalls EIN. |
| 38 | Alarm am Ausgang | Wenn ein Wechselrichterfehler auftritt und der Verarbeitungsmodus nicht fortgesetzt werden kann, wird ein Wechselrichteralarmsignal ausgegeben. |
| 39 | Alarm bei Motorübertemperatur | Wenn die Motortemperatur P9-58 (Warnschwelle für Motorüberhitzung) erreicht, schaltet das Ausgangssignal EIN. (Die Motortemperatur wird auf U0-34 angezeigt). |
| 40 | Erreichen der Betriebszeit | Wenn der Wechselrichter die mit Parameter P8-53 eingestellte Betriebszeit überschreitet, wird das Signal „ON“ ausgegeben. |
| P5-06 | Auswahlder FMP-Ausgangsfunktion(Impulsausgangsklemmen) | Werkseinstellungen | 0 |
| P5-07 | Auswahl der AO1-Ausgangsfunktion | Werkseinstellungen | 0 |
| P5-08 | Auswahl der AO2-Ausgangsfunktion | Werkseinstellungen | 1 |
Der Ausgangsbereich der Impulsfrequenz an der FMP-Klemme ist 0,01 kHz \~ P5-09 (maximale Ausgangsfrequenz des FMP).
P5-09 kann im Bereich von 0,01 kHz \~ 100,00 kHz eingestellt werden.
Der Ausgangsbereich der Analogausgänge AO1 und AO2 ist 0 V \~ 10 V oder 0 mA \~ 20 mA. Der Impulsausgangsbereich bzw. Analogausgangsbereich mit der entsprechenden Skalierungsfunktionsbeziehung ist in der folgenden Tabelle angegeben:
| Sollwert | Funktion | Impuls- oder Analogausgang entsprechend 0,0 % bis 100,0 % der Funktion |
| 0 | Betriebsfrequenz | 0 ~ maximale Ausgangsfrequenz |
| 1 | Sollfrequenz | 0 ~ maximale Ausgangsfrequenz |
| 2 | Ausgangsstrom | 0 ~ 2-facher Motornennstrom |
| 3 | Ausgangsdrchmoment | 0 bis 2-faches Motornennmoment |
| 4 | Ausgangsleistung | 0-2-fache Nennleistung |
| 5 | Ausgangsspannung | 0 bis 1,2-fache Ncnnspannung des Wcchscrichters |
| 6 | Impulseingang | 0.01kHz ~ 100.00kHz |
| 7 | AI1 | 0V ~ 10V |
| 8 | AI2 | 0V~10V (or 0 ~ 20mA) |
| 9 | AI3 | 0V ~ 10V |
| 10 | Länge | 0 bis maximal eingestellte Länge |
| 11 | Zählerwert | 0 bis zur maximalen Zahl |
| 12 | Kommunikationseinstellungen | 0.0% ~ 100.0% |
| 13 | Motordrehzahl | 0 ~ maximale Ausgangsfrequenz entsprechend der Drehzahl |
| 14 | Ausgangsstrom | 0.0A~ 1000.0A |
| 15 | Ausgangsspannung | 0.0V~ 1000.0V |
| P5-09 | Maximale Ausgangsfrequenz FMP | Werkseinstellungen | 50.00kHz |
| Einstellbereich | 0.01kHz ~ 100.00kHz |
Wenn FM als Impulsausgangsklemme gewählt ist, wird der Funktionscode zur Auswahl des maximalen Impulsfrequenz-Ausgangswerts verwendet.
| P5-10 | Nullpunktverschiebungsfaktor AO1 | Werkseinstellungen | 0.0% |
| Einstellbereich | - +100.0% 100.0% | ||
| P5-11 | AO1 Verstärkung | Werkseinstellungen | 1.00 |
| Einstellbereich | -10.00 +10.00 | ||
| P5-12 | Nullpunktverschiebungsfaktor der AO2-Erweiterungskarte | Werkseinstellungen | 0.00% |
| Einstellbereich | - +100.0% 100.0% | ||
| P5-13 | Verstärkung der AO2-Erweiterungskarte | Werkseinstellungen | 1.00 |
| Einstellbereich | -10.00 +10.00 | ||
Die obigen Funktionscodes werden typischerweise zur Polarisierung der Ausgangsamplitude und zur Korrektur der Nullpunktverschiebung des Analogausgangs verwendet. Sie können auch verwendet werden, um die gewünschte AO-Ausgangskurve einzustellen.
Wenn die Nullpunktverschiebung von „b“ eine Verstärkung von „k“ und die aktuelle Ausgangsleistung Y, X die Standardausgangsleistung darstellt, ist der aktuelle Ausgangswert:
Y = kX + b. Wobei für AO1, AO2 ein Nullpunktverschiebungsfaktor von 100 % 10 V (oder 20 mA) entspricht. Dies gilt für den Standardausgang bei fehlender Polaritäts- und Verstärkungskorrektur. Der Ausgang 0 V \~ 10 V (oder 0 mA \~ 20 mA) entspricht der Größe des Analogausgangs.
Zum Beispiel: Wenn der Analogausgang eine Betriebsfrequenz hat, bei Frequenz 0 beträgt der Ausgang 8 V, die Frequenz ist die maximale Ausgangsfrequenz von 3 V, die Verstärkung sollte auf "-0,50" und der Offset auf "80“ % " eingestellt werden.
| P5-17 | FMR-Ausgangsverzögerungszeit | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0 s ~ 3600.0 s | ||
| P5-18 | RELAY1-Ausgangsverzögerungszcit | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0 s ~ 3600.0 s | ||
| P5-19 | RELAY2-Ausgangsverzögerungszeit | Werkseinstellungen 0.0s | |
| Einstellbereich | 0.0 s ~ 3600.0 s | ||
| P5-20 | DO1-Ausgangsverzögerungszeit | Werkseinstellungen 0.0s | |
| Einstellbereich | 0.0 s ~ 3600.0 s | ||
| P5-21 | DO2-Ausgangsverzögerungszeit | Werkseinstellungen 0.0s | |
| Einstellbereich | 0.0 s ~ 3600.0 s | ||
Setzen Sie die Ausgangsklemmen FMR, RELAY 1, RELAY 2, DO1 und DO2 in einen solchen Zustand, dass die tatsächliche Ausgangsverzögerungszeitänderung erzeugt wird.
| P5-22 | Aktivierungszustand am Ausgang der DO-Klemme | Werkseinstellung en | 0 | ||
| Einstellbereich | Einheitsziffer | Aktive Auswahl des FMR | |||
| 0 | Positive Logik | ||||
| 1 | Inv | ||||
| Zehner | Klemme RELAY1 aktiv (0-1, supra) | ||||
| Hundertc | Klemme RELAY2 aktiv 2(0-1, supra) | ||||
| Tausende | Klemme DO1 aktiv (0-1, supra) | ||||
| Zehntauscnd | Klcmmc DO2 aktiv (0-1, supra) | ||||
Geben Sie die Ausgangsklemme von FMR-Logik, Relais 1, Relais 2, DO1 und DO2 an.
0: die positive logische digitale Ausgangsklemme und die entsprechende gemeinsame Klemme kommunizieren im aktiven Zustand, trennen sich im inaktiven Zustand;
1: negative logische digitale Ausgangsklemme und entsprechende gemeinsame Klemme kommunizieren im inaktiven Zustand, trennen sich im aktiven Zustand.
Gruppe P6 – Start- und Stoppsteuerung
| P6-00 | Startmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Dirktstart | ||
| 1 | Neustart im Drehzahlverfolgungsmodus | |||
| 2 | Vorerregung (Wechselstrom-Asynchronmotor) | |||
0: Direktstart
Wenn die Gleichstrombremszeit auf 0 gesetzt wird, startet der Wechselrichter den Betrieb ab der Anfangsfrequenz. Wenn die Gleichstrombremszeit ungleich 0 ist, wird zuerst die Gleichstrombremsung und dann der Betrieb ab der Anfangsfrequenz durchgeführt. Nützlich für kleine Trägheitslasten beim Starten eines Motors, der sich möglicherweise bereits gedreht hat.
1: Neustart im Modus Motordrehzahl- und Richtungsverfolgung und dann Motorstartfrequenzverfolgung.
Der Motor dreht sich beim Start ruckfrei und gleichmäßig. Momentanleistung geeignet für Wiederanlauf mit hoher Trägheit. Um einen korrekten Neustart im Drehzahlverfolgungsmodus zu gewährleisten, stellen Sie die Parameter der Motorgruppe F1 sorgfältig ein.
2: Das Starten des Übererregungs-Induktionsmotors, nur für Asynchronmotoren, wird vor dem Starten des Motors verwendet, um zuerst ein Magnetfeld zu erzeugen. Übererregungsstrom und Übererregungszeit sind die Codes P6-05, P6-06.
Wenn die Übererregungszeit auf 0 gesetzt ist, bricht der Wechselrichter den Übererregungsprozess ab und startet von der Startfrequenz. Wenn die Übererregungszeit nicht 0 ist, kann eine Übererregung die dynamischen Reaktionseigenschaften des Motors verbessern.
| P6-01 | Drehzahlverfolgungsmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Start aus Stoppfrequenz | ||
| 1 | Start aus Drchzahl Null | |||
| 2 | Start von maximaler Frequenz | |||
Um die Drehzahlerfassung in kürzester Zeit abzuschließen, wählen Sie den Modus Motordrehzahlerfassung:
0: Wird normalerweise verwendet, um die Frequenz zu verfolgen, die zum Zeitpunkt des Stromausfalls aufgetreten ist.
1: Startet die Verfolgung nach oben von der Nullfrequenz bei längerem Netzausfall.
2: Verfolgung von maximaler Frequenz, Gesamtlastleistung.
| P6-02 | Drehzahlverfolgungsgeschwindigkeit | Werkseinstellungen | 2 |
| Einstellbereich | 1 ~ 100 | ||
Wählen Sie beim Neustart im Drehzahlverfolgungsmodus die Drehzahlverfolgungsgeschwindigkeit. Je höher der Parameter, desto schneller die Verfolgung. Eine zu hohe Einstellung kann jedoch zu unzuverlässigen Verfolgungsergebnissen führen.
| P6-03 | Anfangsfrequenz Werkseinstellungen 0 | ||
| Einstellbereich | 0.00Hz ~ 10.00Hz | ||
| P6-04 | Zeit zum Halten der Anfangsfrequenz | Werkseinstellungen 0 | |
| Einstellbereich | 0.0 s ~ 100.0 s | ||
Um das Motordrehmoment beim Start zu gewährleisten, stellen Sie die entsprechende Anfangsfrequenz ein. Um den vollen Motorfluss beim Start herzustellen, halten Sie die Anfangsfrequenz für eine bestimmte Zeit.
Starten Sie an der unteren Grenze der Frequenz P6-03. Wenn die eingestellte Zielfrequenz jedoch niedriger ist als die Ausgangsfrequenz, startet der Wechselrichter nicht, sondern bleibt im Standby-Modus.
Beim Rückwärtsschalten hat die Haltezeit der Startfrequenz keine Auswirkung. Die Startfrequenz-Haltezeit ist nicht in der Beschleunigungszeit enthalten, sondern wird in die einfache SPS-Laufzeit eingerechnet.
Beispiel 1:
P0-03 = 0 Die Frequenzquelle ist digital.
P0-08 = 2,00 Hz. Digital eingestellte Frequenz ist 2,00 Hz P6-03 = 5,00 Hz. Die Startfrequenz beträgt 5,00 Hz.
P6-04 = 2,0 s. Die Startfrequenz-Haltezeit beträgt 2,0 s. Während dieser Zeit befindet sich der Wechselrichter im Standby-Modus und seine Ausgangsfrequenz beträgt 0,00 Hz.
Beispiel 2:
P0-03 = 0. Die Frequenzquelle ist digital
P0-08 = 10,00 Hz. Digital eingestellte Frequenz ist 10,00 Hz P6-03 = 5,00 Hz. Die Startfrequenz beträgt 5,00 Hz.
P6-04 = 2,0 s. Die Zeit zum Halten der Anfangsfrequenz beträgt 2,0 s.
Während dieser Zeit beschleunigt der Antrieb auf 5,00Hz, hält 2,0 s an und beschleunigt dann auf die eingestellte Frequenz von 10,00Hz.
| P6-05 | Gleichstrombremsstrom / Erregerstrom Werkseinstellungen 0% | |
| Einstellbereich | 0 % ~ 100% |
| P6-06 | Anfängliche Gleichstrombremszeit / Übererregungszeit | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0 s ~ 100.0 s | ||
Die Gleichstrombremsung (DC) wird typischerweise zum Stoppen und Starten eines Motors verwendet. Die Übererregung wird verwendet, um das Magnetfeld des Asynchronmotors aufzubauen und dann mit dem Aufbau und der Verbesserung der Reaktionsgeschwindigkeit zu beginnen.
Die Gleichstrombremsung ist gültig, wenn der Startmodus Direktstart ist. Starten Sie dann, nachdem Sie die Frequenz eingestellt haben, den Gleichstrombremsstart, die Gleichstrombremszeit nach dem Start und dann den Betrieb. Wenn die Gleichstrombremszeit auf 0 eingestellt ist, erfolgt kein Direktstart nach der Gleichstrombremsung. Je mehr der Bremsgleichstrom ansteigt, desto größer ist die Bremskraft.
Im Übererregungsstartmodus eines Asynchronmotors stellt der Wechselrichter nach der vor dem Start des Betriebs eingestellten Vormagnetisierungszeit auf einen voreingestellten Magnetfeldstrom ein. Wenn die eingestellte Vormagnetisierungszeit 0 ist, beginnen die Übererregungsprozesse nicht sofort.
Der Gleichstrombremsstrom / Übererregungsstrom ist ein Prozentsatz des Nennstroms des Wechselrichters.
| P6-07 | Beschleunigungs- und Verzögerungsmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Lineare Beschleunigung und Verzögerung | ||
| 1 | Beschleunigung und Verzögerung gemäß der S, A-Kurve | |||
| 2 | Beschleunigung und Verzögerung gemäß der S-, B-Kurve | |||
Auswählen, wie die Antriebsfrequenz am Anfang und am Ende des Prozesses geändert werden soll.
0: Lineare Beschleunigung und Verzögerung. Linearer Anstieg oder Abfall der Ausgangsfrequenz.
Es sind vier Arten von Beschleunigungs- und Verzögerungszeiten möglich. Diese können über die digitalen Multifunktionseingangsklemmen (P4-00 \~ P4-08) ausgewählt werden.
1: Beschleunigung und Verzögerung gemäß der S, A-Kurve
Die Ausgangsfrequenz erhöht oder verringert sich entsprechend der S-Kurve. Die S-Kurve wird für Anwendungen verwendet, die einen sanften Start oder Stopp erfordern, wie z. B. Aufzüge oder Förderbänder. Die Funktionscodes P6-08 und P6-09 geben in dieser Reihenfolge das Verhältnis der S-Kurven-Beschleunigungs- und Verzögerungszeiten des Startsegments und des Endsegments an.
2: Beschleunigung und Verzögerung gemäß der S-, B-Kurve
Beim Beschleunigen und Verzögern gemäß der S, B-Kurve liegt der Wendepunkt der Kurve immer bei der Nennfrequenz f des Motors. Dargestellt in Abbildung 6-12. Wird typischerweise für Anwendungen mit Drehzahlen weit oberhalb der Nennfrequenz verwendet, die eine schnelle Beschleunigung und Verzögerung erfordern.
Einstellung der Frequenz oberhalb der Nennfrequenz - Beschleunigungs- und Verzögerungszeit:
$$ t = \left(\frac {4}{9} \times \left(\frac {f}{f _ {b}}\right) ^ {2} + \frac {5}{9} \times T \right. $$
wobei f die Sollfrequenz ist, fb die Motornennfrequenz, T die Motornennfrequenzzeit fb
| P6-08 | Zeitfaktor des Anfangsabschnitts der Kurve S. | Werkseinstellungen 30.0% | |
| Einstellbereich | 0.0 % ~ (100.0 % - P6-09) | ||
| P6-08 | Zeitfaktor des Anfangsabschnitts der Kurve S. | Werkseinstellungen 30.0% | |
| Einstellbereich | 0.0 % ~ (100.0 % - P6-08) | ||
Die Funktionscodes P6-08 und P6-09 sind definiert. Die Beschleunigung und Verzögerung der Kurve S, A des Anfangssegments und die Endzeit sind das Verhältnis der beiden zu erfüllenden Funktionscodes: P6-08 + P6-09 ≤ 100,0%.
Abbildung 6-11 t1 ist der durch P6-08 definierte Parameter, zu diesem Zeitpunkt steigt die Steigung der Ausgangsfrequenz.
t2 ist die Zeit, die durch den Parameter P6-09 definiert ist, zu dieser Zeit geht die Steigung der Ausgangsfrequenz allmählich auf Null. In der Zeit zwischen t1 und t2 ist die Steigung der Ausgangsfrequenz konstant, so dass dieses Intervall eine lineare Beschleunigung und Verzögerung darstellt.
Technische Parameter eines Hochleistungs-Frequenzumrichters
Ausgangsfrequenz Hz
Sollwertfrequenz f
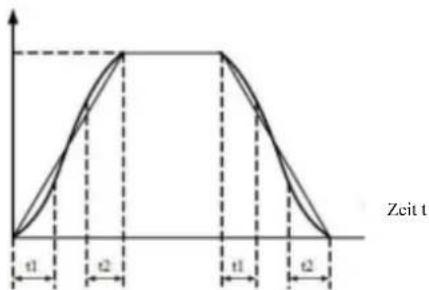
Abbildung 6-11 Kurve S, A
Ausgangsfrequenz Hz
Sollwertfrequenz f
Zeit t
Nennfrequenz fb
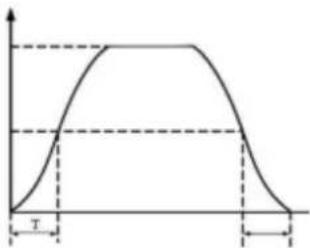
Abbildung 6-12 Kurve S, B
| P6-10 | Stoppmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Verzögerung bis zum Stillstand | ||
| 1 | Freilauf | |||
0: Verzögerungsstopp. Wenn der Stoppbefehl gültig ist, reduziert der Wechselrichter die Ausgangsfrequenz entsprechend der Verzögerungszeit. Wenn die Frequenz auf Null sinkt, wird angehalten.
1: Stopplauf Bei einem gültigen Stoppbefehl gibt der Wechselrichter sofort ein Signal aus und der Motor stoppt aufgrund mechanischer Trägheit.
| P6-11 | Anfangsfrequenz der Gleichstrombremsung | Werkseinstellungen 0.0Hz | |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P6-12 | Zeit zum Starten der Gleichstrombremsung | Werkseinstellungen 0.0s | |
| Einstellbereich | 0.0s ~ 36.0s | ||
| P6-13 | Bremsstrom | Werkseinstellungen 0% | |
| Einstellbereich | 0 % ~ 100% | ||
| P6-14 | Gleichstrombremszeit | Werkseinstellungen 0.0s | |
| Einstellbereich | 0.0s ~ 36.0s | ||
Startfrequenz der Gleichstrombremsung: Der Stoppvorgang beginnt, wenn die Betriebsfrequenz so weit reduziert wird, dass der Gleichstrombremsvorgang gestartet wird.
Zeit bis zum Start der Gleichstrombremsung: Die Betriebsfrequenz wird auf die Startfrequenz der Gleichstrombremsung reduziert, der Wechselrichter hält den Ausgang für einige Zeit an, bevor der Bremsvorgang beginnt. Das Verhindern des Starts der Gleichstrombremsung bei hoher Geschwindigkeit kann einen Überstromfehler verursachen.
Bremsstrom: Der Gleichstrombremsstrom ist der prozentuale Anteil des Ausgangsstroms bezogen auf den Motornennstrom. Je höher der Wert ist, desto größer ist die Gleichstrombremswirkung, desto größer ist jedoch auch die Erwärmung von Motor und Wechselrichter.
Gleichstrombremszeit: die Zeit zum Halten des Bremsstroms. Wenn dieser Wert 0 ist, wird der Gleichstrombremsvorgang abgebrochen. Eine schematische Darstellung des Gleichstrombremsvorgangs ist in Abbildung 6-13 dargestellt.
Technische Parameter eines Hochleistungs-Frequenzumrichters
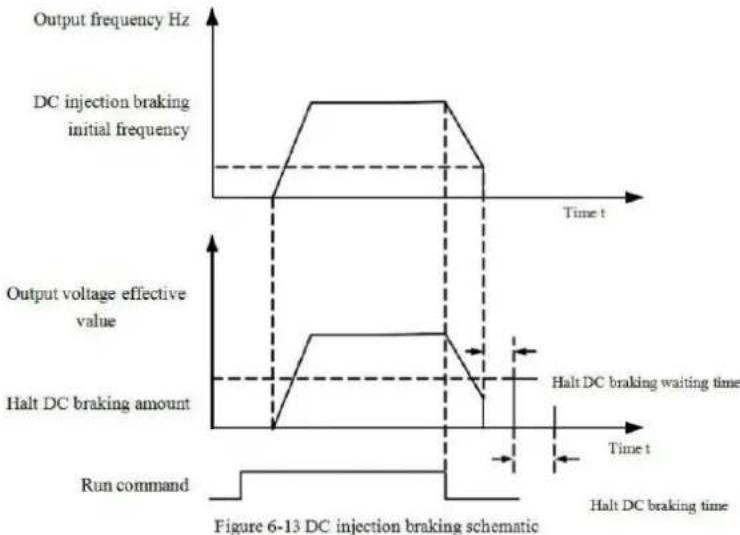
Bild 6-13 Schematische Darstellung des Gleichstrombremsvorgangs
| P6-15 | Bremsnutzungsanzeige | Werkseinstellungen | 100% |
| Einstellbereich | 0 % ~ 100% | ||
Nur die integrierte Bremseinheit wird aktiv sein.
Einschaltdauer der Bremseinheit. Die Bremsennutzungsanzeige dient zur Einstellung der Bremseinheit. Im Hochleistungszyklus der Bremseinheit ist die Bremswirkung stark, es gibt jedoch während des Bremsens Spannungsschwankungen auf dem Wechselrichterbus.
Gruppe P7 – Tastatur und Anzeige
| P7-01 | Auswahlder JOG-Tastenfunktion | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | JOG-Taste inaktiv | ||
| 1 | Bedienfeld-Befehlskanal und Fernbedienungskanal | |||
| 2 | Richtungsumkehrschalter | |||
| 3 | Vorwärtsimpuls (Probelauf) | |||
| 4 | Rückwärtsimpuls (Probelauf) | |||
JOG-Taste als Multifunktionstaste. Sie können die Funktionen der JOG-Taste mit dem Funktionscode einstellen. Er kann über den Schlüsselschalter bedient werden.
0: Die JOG-Taste hat keine Funktion.
1: Tastaturbefehle und Umschalten auf Fernbedienung. Zeigt einen Befehl zum Umschalten der Befehlsquelle an - die aktuelle Befehls- und Steuerungsquelle wird die Tastatur sein (lokale Bedienung). Wenn die aktuelle Befehlsquelle die Tastatur ist, ist diese Tastenfunktion deaktiviert.
2: Umschalten der Richtung über den Frequenzbefehl der Taste JOG.
3: Probelauf vorwärts (FJOG auf der Tastatur).
4: Probelauf rückwärts (RJOG auf der Tastatur).
| P7-02 | Tastenfunktionen von STOP/ RESET | Werkseinstellungen | 1 | |
| Einstellbereich | 0 | Die STOP / RES-Taste funktioniert nur im Tastaturbetrieb. | ||
| 1 | Die Funktion STOP / RES funktioniert in jeder Betriebsart. | |||
Mit diesen beiden Anzeigeparametern werden die Parameter eingestellt, die im Betriebszustand des Frequenzumrichters angezeigt werden sollen. Es können maximal 32 Betriebszustandsparameter angezeigt werden, die ab dem jüngsten Bit von P7-03 angezeigt werden.
| P7-05 | Angezeigte Werte im Stillstand | Werkseinstellungen | 0 | ||
| Einstel Ibereich | 0000~FFFF | 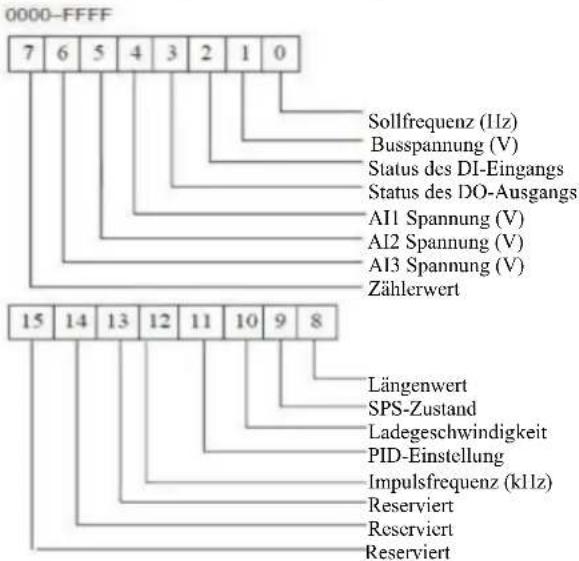 Wenn der Parameter während des Betriebs angezeigt werden soll, setzen Sie das entsprechende Bit auf 1 und setzen SieP7-0 5 auf die hexadezimale Entsprechung dieser Binärzahl. Wenn der Parameter während des Betriebs angezeigt werden soll, setzen Sie das entsprechende Bit auf 1 und setzen SieP7-0 5 auf die hexadezimale Entsprechung dieser Binärzahl. | |||
| P7-06 | Angezeigter Multiplikator der Lastgeschwindigkeit | Werkseinstellungen | 1.0000 |
| Einstellbereich | 0.0001 ~ 6.5000 | ||
Wenn die Lastdrchzahl angezeigt werden muss, sorgt dieser Parameter dafür, dass die Ausgangsfrequenz und die Lastdrchzahl übereinstimmen. Siehe Beschreibung P7-12.
| P7-07 | Temperatur des Kühlkörpermoduls des Wechselrichters | Werkseinstellungen | 0 |
| Einstellbereich | 0.0^ 100.0^ | ||
Temperaturanzeige des IGBT-Moduls des Wechselrichters.
Es gibt Unterschiede im Überhitzungsschutz für verschiedene Modelle von Wechselrichter-IGBT-Modulen.
| P7-08 | Kühlkörpertemperatur des Gleichrichters | Werkseinstellungen | 0 |
| Einstellbereich | 0.0 °C ~ 100.0 °C | ||
Anzeige der Gleichrichtertemperatur.
Es gibt Unterschiede im Wert des Überhitzungsschutzes bei den verschiedenen Gleichrichtermodellen.
| P7-09 | Gesamtbetriebszeit | Werkseinstellungen | 0h |
| Einstellbereich | 0 h ~ 65535 h | ||
Zeigt die Gesamtbetriebszeit des Wechselrichters an. Wenn die Laufzeit die eingestellte Zeit P8-17 erreicht, sendet der digitale Multifunktionsausgang (12) des Wechselrichters ein ON-Signal.
| P7-10 | Produkt-Nr. | Werkseinstellungen | ||
| Einstellbereich | Produktnummer des Wechselrichters | |||
| P7-11 | Versionsnummer der Software | Werkseinstellungen | ||
| Einstellbereich | Software-Versionsnummer des Bedienfelds. | |||
| P7-12 | Dezimalstellen der Lastgeschwindigkeitsanzeige | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | 0 Dezimalstellen | ||
| 1 | 1 Dezimalstelle | |||
| 2 | 2 Dezimalstellen | |||
| 3 | 3 Dezimalstellen | |||
Einstellen der Ladgeschwindigkeit mit Nachkommastellen. Das folgende Beispiel veranschaulicht die Berechnung der Lastgeschwindigkeit:
Wenn der Multiplikator der angezeigten Lastgeschwindigkeit 2.000 P7-06, wird die Lastgeschwindigkeit P7-12 auf zwei Nachkommastellen angezeigt. Wenn die Betriebsfrequenz des Wechselrichters 40,00 Hz beträgt, ist die Lastgeschwindigkeit 40,00 * 2.000 = 80,00 (Anzeige auf zwei Nachkommastellen).
Wenn der Wechselrichter ausgeschaltet ist, um z. B. eine Frequenz von 50,00 Hz einzustellen, beträgt die Lastgeschwindigkeit im gestoppten Zustand 50,00 * 2.000 = 100,00 (Anzeige mit zwei Nachkommastellen).
| P7-13 | Kumulierte Versorgungszeit | Werkseinstellungen | 0h |
| Einstellbereich | 0 h ~ 65535 h | ||
Werkseitige Einstellung der kumulierten Versorgungszeit..
Wenn die kumulierte Versorgungszeit (P8-17) erreicht ist, erzeugt der digitale Multifunktionsausgang (24) des Wechselrichters ein ON-Signal
| P7-14 | Gesamtleistungsaufnahme | Werkseinstellungen | - |
| Einstellbereich | 0 ist 65535 KWh | ||
Zeigt die bisherige Gesamtleistungsaufnahme des Antriebs an.
Gruppe P8 – Hilfsfunktionen
| P8-00 | Impulsfrequenz | Werkseinstellungen | 2.00Hz |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-01 | Impuls-Beschleunigungszeit | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.00s ~ 6500.0s | ||
| P8-02 | Impulsverzögerungszeit | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.00s ~ 6500.0s | ||
Einstellung des Antriebsimpulses, der Sollfrequenz und der Verzögerungszeit.
Für den Impulsbetrieb starten Sie den Direktstartmodus (P6-00 = 0). Der Stoppmodus ist auf gebremsten Stopp eingestellt (P6-10 = 0).
| P8-03 | Beschleunigungszeit 2 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
| P8-04 | Verzögerungszeit 2 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
| P8-05 | Beschleunigungszeit 3 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
Technische Parameter eines Hochleistungs-Frequenzumrichters
| P8-06 | Verzögerungszeit 3 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
| P8-07 | Beschleunigungszceit 4 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
| P8-08 | Verzögerungszeit 4 | Werkseinstellungen | 20.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
VFD bietet vier Sätze von Beschleunigungs- und Verzögerungszeiten, P0-17 bzw. P0-18, und die oben genannten drei Sätze von Beschleunigungs- und Verzögerungszeiten.
Der vierte Satz bestimmt die genaue Verzögerungszeit, siehe Anweisungen P0-17 und P0-18. Mit verschiedenen Kombinationen der Multifunktionsklemme für den Digitaleingang DI können Sie zwischen den vier Sätzen von Beschleunigungs- und Verzögerungszeiten umschalten. Siehe die Beschreibung der einzelnen Funktionscodes P4-01 \~ P4-05.
| P8-09 | Auslassfrequenz 1 | Werkscinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-10 | Auslassfrequenz 2 | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-11 | Sprungfrequenzbereich | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
Wenn der Sprungfrequenzbereich innerhalb der eingestellten Frequenz liegt, läuft die tatsächliche Betriebsfrequenz mit der Frequenz des nächstgelegenen eingestellten Sprungs. Durch die Einstellung der Sprungfrequenz kann der Wechselrichter mechanische Resonanzen der Last vermeiden. VFD kann zwei Auslassfrequenzen einstellen. Wenn beide Auslassfrequenzen auf 0 gesetzt werden, wird die Frequenzsprungfunktion aufgehoben. Siehe Abbildung 6-14 für die Sprungfrequenzregel und das Diagramm der Sprungfrequenzamplitude.
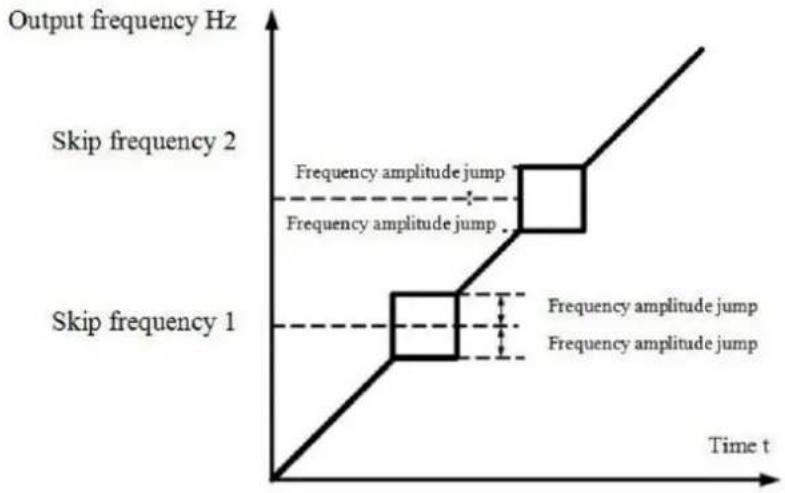
line
| Time t | Output frequency Hz | | ------ | ------------------- | | Start | 0 | | Mid | Jump | | End | Jump |Abbildung 6-14 Frequenzsprungdiagramm
| P8-12 | Totzeit beim Wechsel der Betriebsrichtung | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.00s ~ 3000.0s | ||
Der Wechselrichter wechselt die Betriebsrichtung, 0Hz Frequenz am Ausgang zum Zeitpunkt des Übergangs, siehe Abbildung 6-15:
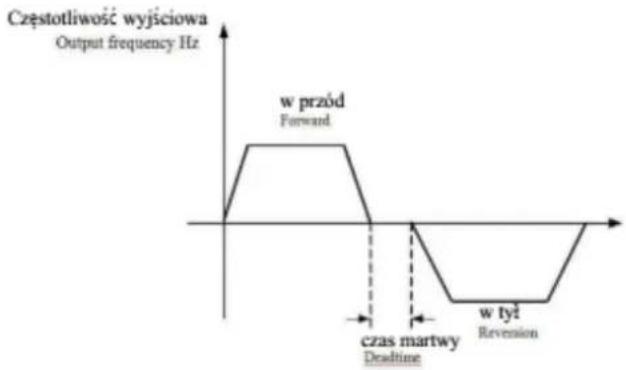
line
| Time Segment | Output Frequency (Hz) | |----------------------|------------------------| | w przód Forward | 10 | | czas martwy Deadline | 0 | | w ty? Reversion | 0 |Abbildung 6-15 Totzeit beim Wechsel der Betriebsrichtung
| P8-13 | Erlaubte Rückwärtsdrehung | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | erlaubt | ||
| 1 | verboten | |||
Wenn der Antrieb mit diesem Parameter konfiguriert ist, kann der Motor im Rückwärtsgang laufen. Wenn der Motor umgedreht ist, darf P8-13 nicht auf 1 gesetzt werden.
| P8-14 | Die Sollfrequenz ist niedriger als die untere Betriebsgrenzfrequenz. | Werkseinstellungen | ||
| Einstellbereich | 0 | Betrieb mit unterer Grenzfrequenz | ||
| 1 | Ausschalten | |||
| 2 | Null-Drehzahl-Betrieb | |||
Wenn die Sollfrequenz niedriger als die Minimalfrequenz ist, kann mit diesem Parameter ausgewählt werden, wie der Wechselrichter arbeiten soll. VFD bietet drei Betriebsarten, um die Anforderungen verschiedener Anwendungen zu erfüllen.
| P8-15 | Statische Regelung | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00Hz ~ 10.00Hz | ||
Diese Funktion wird normalerweise verwendet, um die Antriebslast auf mehrere Motoren zu verteilen.
Statische Regelung bedeutet, dass mit steigender Last die Ausgangsfrequenz des Wechselrichters sinkt. Wenn mehr als ein Motor mit der gleichen Last angetrieben wird, wird die Last der Motorausgangsfrequenz reduziert, um eine gleichmäßige Last über mehrere Motoren zu erreichen. Dieser Parameter gilt für die Nennausgangslast des Wechselrichters.
| P8-16 | Einstellung der kumulativen Einschaltzeit | Werkseinstellungen | 0h |
| Einstellbereich | 0h ~ 65000h | ||
Wenn die kumulierte Einschaltzeit (P7-13) von P8-16 die eingestellte Zeit erreicht, sendet der Multifunktions-Digitalausgang DO des Wechselrichters ein „ON“-Signal. Die folgenden Beispiele verdeutlichen dies:
Beispiel: In Kombination mit der virtuellen DIDO-Funktion sendet der Wechselrichterausgang bei Erreichen der eingestellten Einschaltzeit nach 100 Stunden eine Störmeldung. Programmierung:
Programm: Die virtuelle Klemmenfunktion DII ist auf den benutzerdefinierten Fehler 1 eingestellt: A1-00 = 44; Virtuelle Klemme DII ist aktiv, eingestellt auf virtuelles DO1: A105 = 0000; virtuelle Funktion DO1, Einschaltzeit einstellen: A1-11 = 24; eingestellte Einschaltzeit 100 Stunden erreicht: P8-16 = 100.
Wenn die Gesamteinschaltdauer 100 Stunden beträgt, erzeugt der Wechselrichterausgang den Fehler Err24.
| P8-17 | Einstellung der kumulativen Betriebszeit | Werkse instellungen | 0h |
| Einstellbereich | 0h ~ 65000h | ||
Hiermit wird die Betriebszeit des Wechselrichters eingestellt.
Wenn die Gesamtbetriebszeit (P7-09) die eingestellte Betriebszeit erreicht, gibt der digitale Multifunktionsausgang DO des Wechselrichters ein „ON“-Signal.
| P8-18 | Wahl des Schutzes Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | Kein Schutz | ||
| 1 | Schutz | |||
Dieser Parameter bezieht sich auf die Sicherheitsfunktion des Wechselrichters.
Wenn dieser Parameter auf 1 (Schutz) gesetzt ist und die Antriebsbetriebszeit aktiv ist (z. B. ein Ausführungsbefehl von einer Klemme vor dem Schließen der Stromversorgung), reagiert der Wechselrichter nicht auf einen Ausführungsbefehl. Sie müssen zuerst ... [völlig unverständlich - Anm. d. Übersetzers.
Wenn der Parameter auf 1 gesetzt ist und der Fehlerrücksetzbefehl ausgeführt wird, reagiert der Wechselrichter nicht auf den Befehl. Sie müssen zuerst den Befehl ausgeben, um den aktiven Schutzstatus zu löschen.
| P8-19 | Frequenzerkennungswert (FDT1) | Werkseinstellungen | 50.00Hz |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-20 | Hysteresewert der Frequenzerkennung (FDT1) | Werkseinstellungen | 5.0% |
| Einstellbereich | 0.0% ~ 100.0% (FDT1 level) | ||
Wenn die Betriebsfrequenz höher als der Frequenzerkennungswert ist, gibt der Multifunktionsausgang DO des Wechselrichters ein „ON“-Signal aus, und wenn die Frequenz niedriger als der Erkennungswert ist, wird das „ON“-Ausgangssignal nach der festgelegten Frequenz gelöscht.
Abbildung 6-16 zeigt ein Diagramm der FDT-Funktionalität.
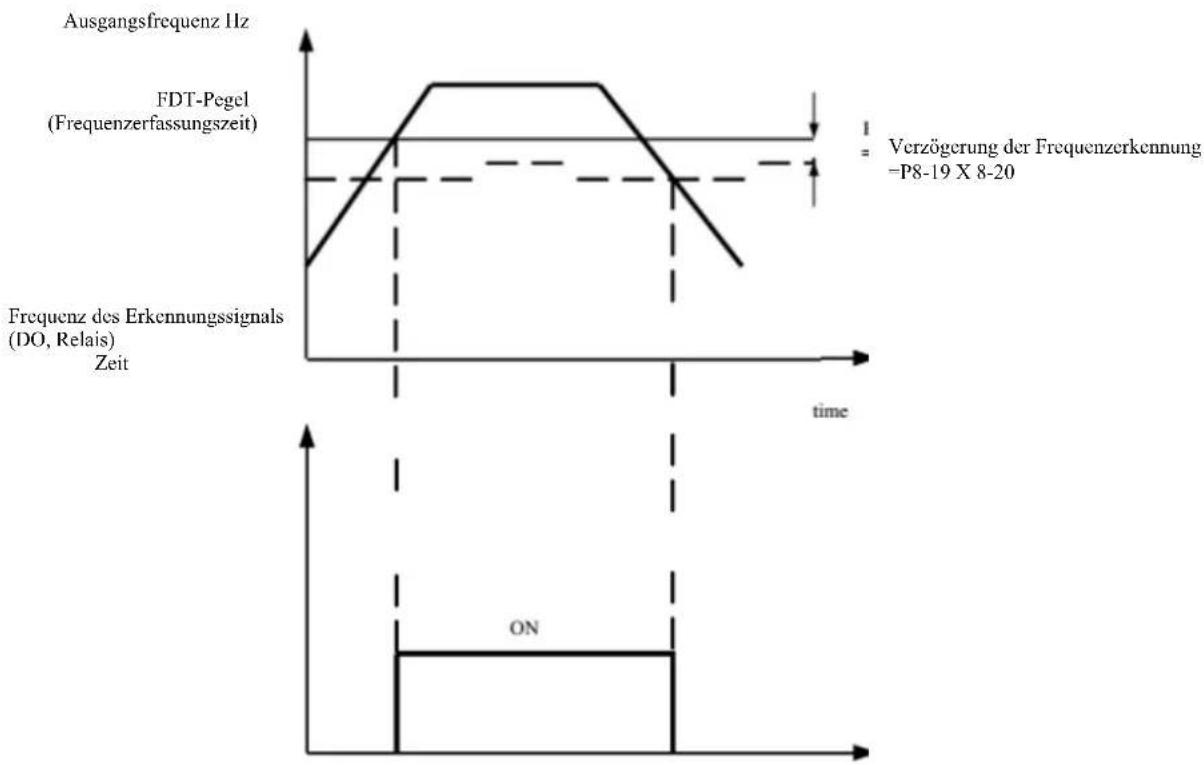
Abb. 6-16 FDT-Pegel
| P8-21 | Erfassungsbreite der Sollfrequenz | Werkseinstellungen | 0.0% |
| Einstellbereich | 0,0 % ist 100% (max. Frequenz) | ||
Technische Parameter eines Hochleistungs-Frequenzumrichters
Wenn die Betriebsfrequenz des Wechselrichters in den Zielfrequenzbereich fällt, gibt der digitale Multifunktionsausgang DO des Wechselrichters ein „ON“-Signal.
Mit diesem Parameter wird der Erfassungsbereich der erreichten Frequenz eingestellt. Dieser Parameter ist ein Prozentsatz der maximalen Frequenz. Abbildung 6-17 zeigt das erreichte Frequenzerkennungsschema.
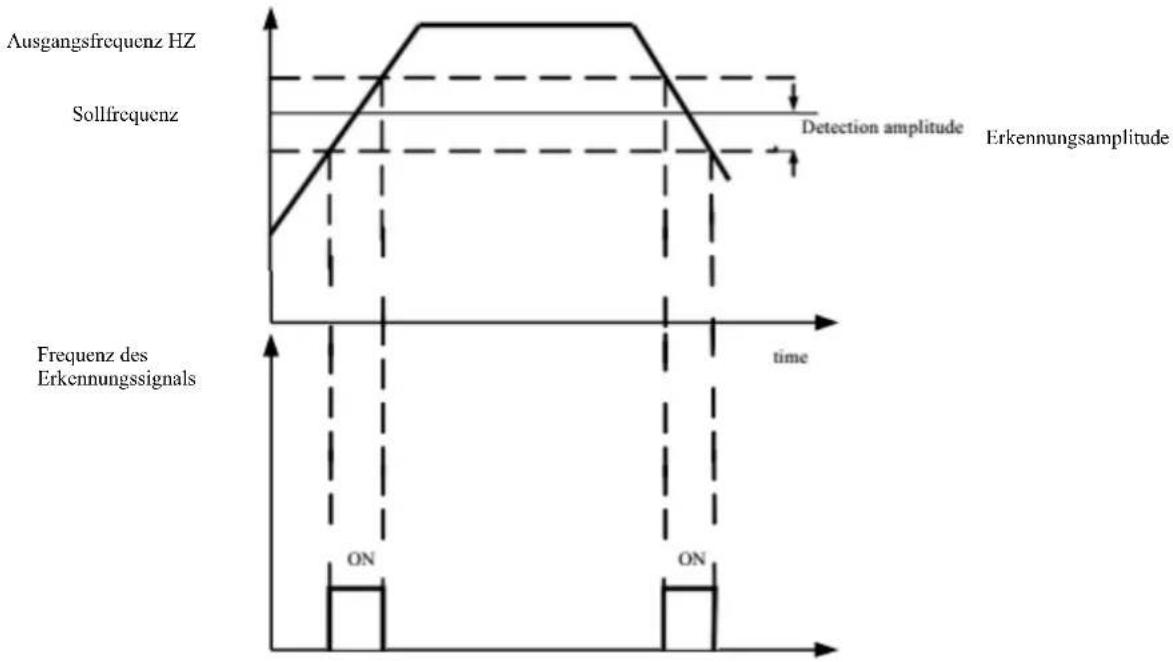
line
| Time | Ausgangsfrequenz HZ | Sollfrequenz | Frequency des Erkennungssignals | |------|---------------------|--------------|----------------------------------| | 0 | Low | Low | ON | | Peak | High | High | ON | | End | Decreasing | Decreasing | ON |Abbildung 6-17 Schematische Darstellung der erreichten Erkennungsamplitudenfrequenz
| P8-22 | Beschleunigungs- und Verzögerungsvorgang. Die Sprungfrequenz, ist sie wichtig | Werkseinstellungen | 0 |
| Einstellbereich | 0: nein1: ja | ||
Dieser Funktionscode wird verwendet, um während der Beschleunigung oder Verzögerung auszuwählen, ob die Sprungfrequenz gültig ist. Sie wird während des Frequenzsprungbetriebs als gültig eingestellt, wenn die tatsächliche Betriebsfrequenz die Frequenzeinstellgrenze überspringt. Abbildung 6-18 zeigt ein Diagramm der Sprungfrequenz bei Beschleunigung und Verzögerung
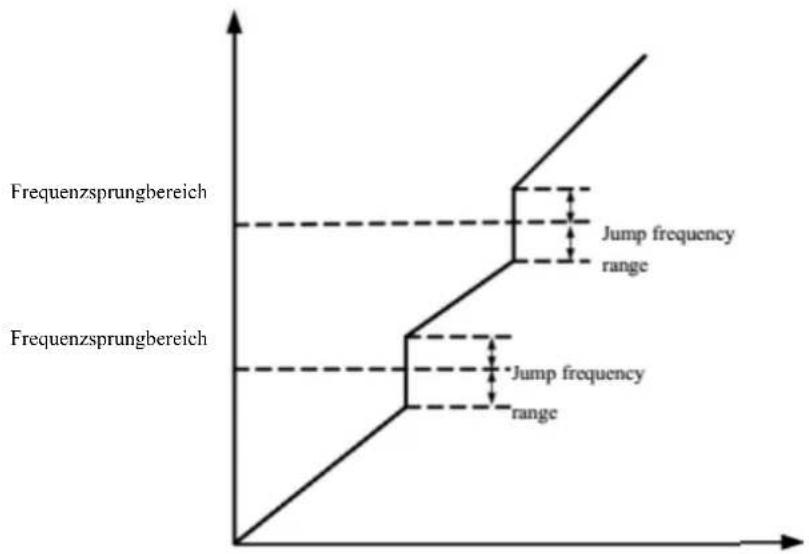
Abbildung 6-18 Beschleunigungs- und Verzögerungsvorgang, effektive Sprungfrequenz
| P8-25 | Beschleunigungszeit 1 und Beschleunigungszeit 2, Wendepunkt Frequenzquelle | Werkseinstellungen | 0.001Hz |
| Einstellbereich | 0.001Hz~ Max. Frequenz | ||
| P8-26 | Verzögerungszeit 2 und Verzögerungszeit 1,Frequenzwendepunkt | Werkseinstellungen | 0.0 |
| Einstellbereich | 0,00 Hz bis maximale Frequenz | ||
Wählen Sie diese Funktion an Motor 1. Schalten Sie nicht über die DI-Klemme, wenn die Auswahl der Beschleunigungs- / Verzögerungszeit aktiv ist. Wenn der Wechselrichter nicht innerhalb des Betriebsfrequenzbereichs arbeitet, [...] unterschiedliche Beschleunigungs- / Verzögerungszeiten über die DI-Klemmen.
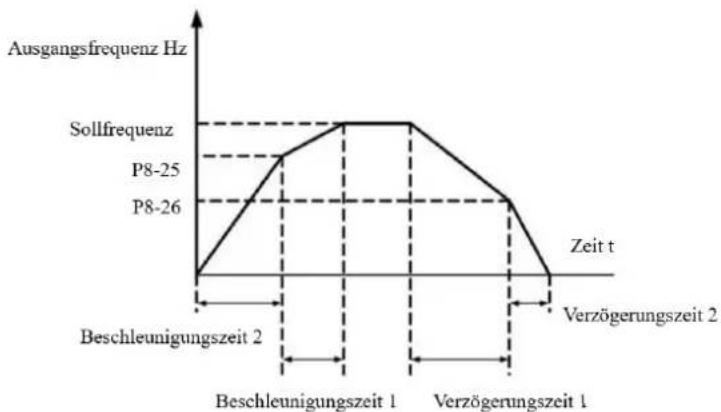
line
| Zeit t | Ausgangsfrequenz Hz | |---|---| | 0 | 0 | | 1 | Sollfrequenz | | 2 | Beschleunigungszeit 2 | | 3 | Beschleunigungszeit 1 | | 4 | Verzögerungszeit 1 | | 5 | Verzögerungszeit 2 |Abb. 6-19 Schaltdiagramm für Beschleunigungs- und Verzögerungszeit
Abbildung 6-19 ist das Schaltdiagramm der Beschleunigungs- und Verzögerungszeit. Während der Beschleunigung wird, wenn die Betriebsfrequenz kleiner als P8-25 ist, die Beschleunigungszeit 2 gewählt; wenn die Betriebsfrequenz größer als die Beschleunigungszeit 1 ist, wird P8-25 gewählt.
Während der Verzögerung wird, wenn die Betriebsfrequenz größer als P8-26 ist, die Verzögerungszeit 1 gewählt; wenn die Betriebsfrequenz kleiner als die Verzögerungszeit 2 ist, wird P8-26 gewählt.
| P8-27 | Priorität der Impuls-klemme (jogging) | Werkseinstellungen 0 | |
| Einstellbereich 0: | inaktiv 1: aktiv | ||
Mit diesem Parameter stellen Sie ein, ob die Impulsklemmenfunktion die höchste Priorität hat.
Wenn die Impulsklemmenpriorität aktiviert ist, wird der Antrieb auf Impulsklemmenbetrieb umgeschaltet, wenn während des Betriebs ein Befehl von der Klemme kommt.
| P8-28 | Frequenzerkennungswert (FDT2) | Werkseinstellungen 50.00Hz | |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-29 | Hysteresewert der Frequenzerkennung (FDT2) | Werkseinstellungen 5.0% | |
| Einstellbereich | 0.0% ~ 100.0% (FDT2 level) | ||
FDT1 Frequenzerkennungsfunktion - siehe P8-19, P8-20 Funktionscode
| P8-30 | 1 beliebigerFrequenzerkennungswert erreicht | Werkseinstellungen 50.00Hz | |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-31 | 1 beliebigerFrequenzerkennungsbereich erreicht | Werkseinstellungen 0.0% | |
| Einstellbereich | 0,0 % ist 100.0% (max. Frequenz) | ||
| P8-30 | 2 beliebigerFrequenzerkennungswert erreicht | Werkseinstellungen 50.00Hz | |
| Einstellbereich | 0.00Hz~ Max. Frequenz | ||
| P8-31 | 2 beliebigerFrequenzerkennungsbereich erreicht | Werkseinstellungen 0.0% | |
| Einstellbereich | 0,0 % ist 100.0% (max. Frequenz) | ||
Für die Ausgangsfrequenz wird der Multifunktions-Digitalausgang DO des Wechselrichters ein „ON“-Signal erzeugen, wenn der Wechselrichter nach Erreichen eines beliebigen Frequenzerkennungswertes den positiven und negativen Amplitudenbereich erkennt.
Die Frequenzerkennung des erreichten VFD bietet zwei Sätze beliebiger Parameter, bei denen der Frequenzwert und der Frequenzerkennungsbereich eingestellt werden. Abbildung 6-20 zeigt den Schaltplan für diese Funktion.
Betriebsfrequenz
Beliebige Frequenz erreicht
Zeit
Beliebiges Erkennungssignal Erreichter Frequenz am Ausgang DO oder Relais
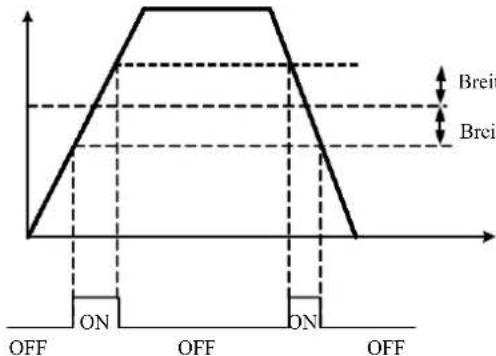
Breite des Frequenzerfassungsbereichs.
Breite des Frequenzerfassungsbereichs
Abb. 6-20 Diagramm zur Erkennung der erreichten beliebigen Frequenz
| P8-34 | Nullstrom-Erkennungspegel | Werkseinstellungen | 5.0% |
| Einstellbereich | 0,0% ~ 300,0% (Motornennstrom) | ||
| P8-35 | Verzögerung bei der Nullstromerkennung | Werkseinstellungen | 0.10s |
| Einstellbereich | 0.00s ~ 600.00s | ||
Wenn der Ausgangsstrom des Wechselrichters kleiner oder gleich dem Nullstromerkennungspegel ist und länger als die Nullstromerkennungsverzögerungszeit anhält, sendet der Multifunktions-DO-Ausgang des Wechselrichters ein „ON“-Signal. Siehe Abbildung 6-21 Nullstromerkennung.
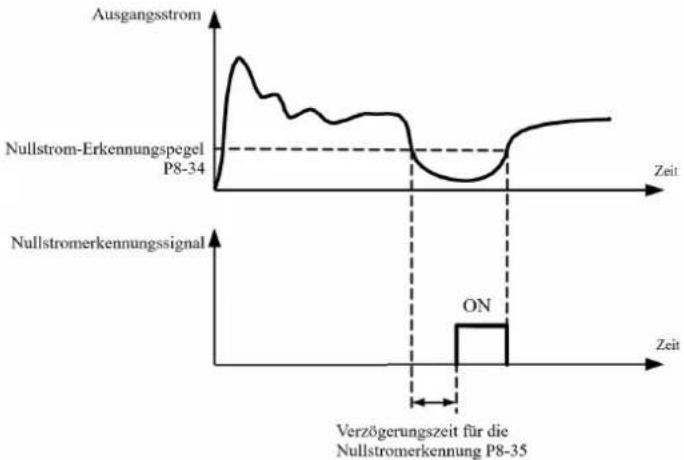
line
| Time Point | Ausgangsstrom | Nullstromerkennungssignal | | ---------- | ------------- | ------------------------- | | P8-34 | Peak | - | | Start | Low | - | | End | Rising | - | | P8-35 | Rising | ON |Abbildung 6-21 Nullstromerkennungsschema
| P8-36 | Ausgangsstromgrenze Werkseinstellungen 200.0% | ||
| Einstellbereich | 0.0% (keine Erkennung)0.1% ~ 300.0% (Motornennstrom) | ||
| P8-37 | Verzögerung bei der Erkennung der Ausgangsstromgrenze | Werkseinstellungen | 0.00s |
| Einstellbereich | 0.00s ~ 600.00s | ||
Wenn der Ausgangsstrom des Wechselrichters größer als der Erkennungspunkt ist und länger als die Software-Verzögerungszeit für die Überstromerkennung dauert, sendet das Multifunktionsausgangssignal des DO-Wechselrichters ein „ON“-Signal. Siehe Abbildung 6-22 Diagramm der Ausgangsstromgrenzfunktion.
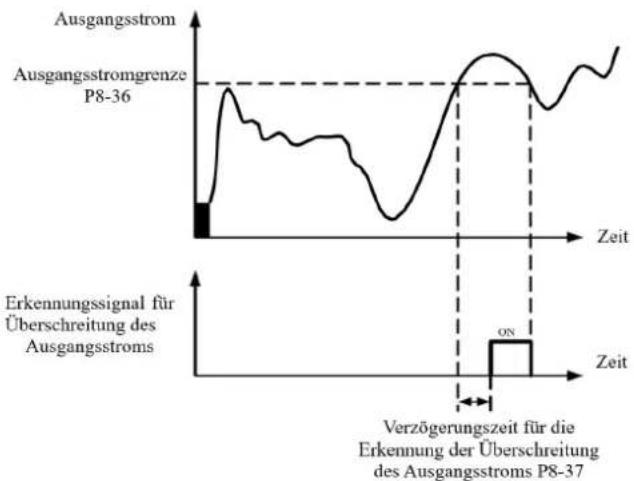
line
| Zeit | Ausgangsstrom | Erkennungssignal für Überschreitung des Ausgangsstroms | |------|---------------|--------------------------------------------------------| | 0 | Low | No | | Peak | High | On | | Peak 1 | Medium | No | | Peak 2 | Low | No | | Peak 3 | High | On | | Peak 4 | High | No |Abbildung 6-22 Erkennungsschema der Ausgangsstromgrenze
| P8-38 | Beliebiger Strom erreicht 1 | Werkseinstellungen | 100.0% |
| Einstellbereich | 0,0 % ~ 300,0% (Motornennstrom) | ||
| P8-39 | Breite eines beliebigen Stroms erreicht 1 | Werkseinstellungen | 0.0% |
| Einstellbereich | 0,0 % ~ 300,0% (Motornennstrom) | ||
| P8-40 | Beliebiger Strom erreicht 2 | Werkseinstellungen | 100.0% |
| Einstellbereich | 0,0 % ~ 300,0% (Motornennstrom) | ||
| P8-41 | Breite eines beliebigen Stroms erreicht 2 | Werkseinstellungen | 0.0% |
| Einstellbereich | 0,0 % ~ 300,0% (Motornennstrom) | ||
Wenn der Ausgangsstrom des Wechselrichters eine beliebige eingestellte positive oder negative Erfassungsbreite erreicht, sendet der Multifunktions-DO-Ausgang des Wechselrichters ein „ON“-Signal.
VFD bietet zwei Parametersätze für die Erfassungsbreite zum Erreichen eines beliebigen Stroms. Siehe dazu das Funktionsdiagramm in Abbildung 6-23.
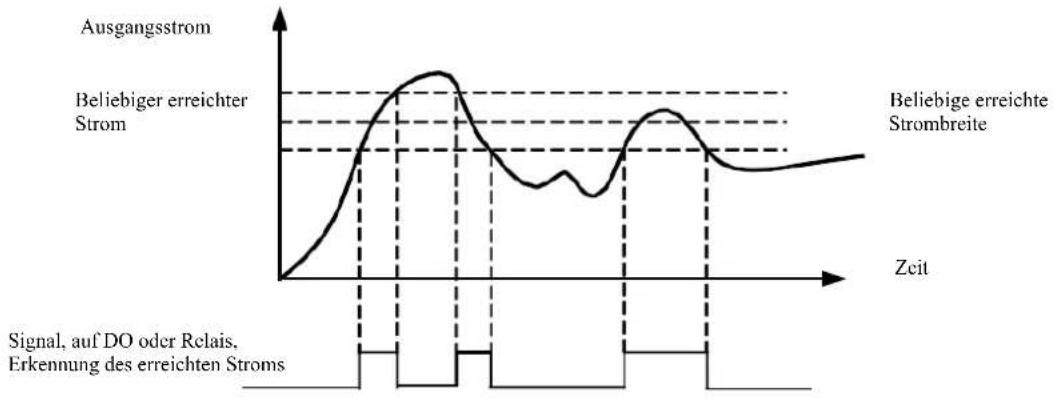
line
| Zeit | Ausgangsstrom | |------|---------------| | 0 | 0 | | Peak | ~1.2 | | Low | ~0.8 | | Mid | ~0.6 | | High | ~0.4 | | Late | ~0.3 |Abbildung 6-23 Schema zur Erkennung eines erreichten Stroms
| P8-42 | Auswahl der Zeitfunktion | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | inaktiv | ||
| 1 | aktiv | |||
| P8-43 | Auswahl einer bestimmten Betriebszeit (Timed Run) | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Einstellungen P8-44 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| Der analoge Eingangsbereich entspricht zu 100 % P8-44 | ||||
| P8-44 | Spezifische Betriebszeit (Timed Run) | Werkseinstellungen | 0.0Min | |
| Einstellbereich | 0.0Min ~ 6500.0Min | |||
Parametersatz, der zur Vervollständigung der Antriebsbetriebszeit verwendet wird.
Wenn die Timerfunktionsauswahl P8-42 aktiv ist, startet der Wechselrichter ab dem Beginn der eingestellten Zeit. Wenn der Timer abgelaufen ist, schaltet sich der Wechselrichter automatisch aus, während der Multifunktions-DO-Eingang ein „ON“ -Signal sendet.
Wenn der Wechselrichter gestartet wird, zählt er von 0 herunter. Die verbleibende Betriebszeit wird in U0-20 angezeigt. Die normale Betriebszeit wird mit den Parametern P8-43, P8-44 in Minuten eingestellt.
| P8-45 | Untere Schwelle des AI1-Eingangsspannungsschutzes | Werkseinstellungen | 3.10V |
| Einstellbereich | 0.00 V ~ P8-46 | ||
| P8-46 | Obere Schwelle des AI1-Eingangsspannungsschutzes | Werkseinstellungen | 6.80V |
| Einstellbereich | P8-45 ~ 10.00 V | ||
Wenn der Wert von P8-46 größer als der des Analogeingangs A11 und P8-47 kleiner als der des Eingangs A11 ist, sendet der Multifunktionsausgang DO des Wechselrichters das Signal „A11-Eingang überschritten“.
| P8-47 | Modultemperatur erreicht | Werkseinstellungen | 75 °C |
| Einstellbereich | 0.00 V ~ P8-46 | ||
Wenn der Kühlkörper des Wechselrichters die oben genannte Temperatur erreicht, zeigt der Multifunktionsausgang DO des Wechselrichters das Signal „ON“ für das Erreichen der Modultemperatur an.
| P8-48 | Lüfterregelung | Werkseinstellungen | 0 |
| Einstellbereich | 0: Nur während des Betriebs des Wechselrichters1: Ständig | ||
Hiermit wird die Betriebsart des Lüfters ausgewählt.
Auswahl 0. Der Lüfter läuft, wenn sich der Wechselrichter im Betriebszustand befindet. Er stoppt, wenn die Kühlkörpertemperatur höher als 40 Grad ist.
Auswahl 1. Nach dem Starten des Lüfters funktioniert er die ganze Zeit.
| P8-49 | Erneuerungsfrequenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | Ruheferquenz (P8-51)~ Maximale Frequenz (P0-10) | ||
| P8-50 | Erneuerungsverzögerung | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
| P8-51 | Ruheferquenz | Werkseinstellungen | 0.00Hz |
| Einstellbereich | 0.00 Hz~ Erneuerungsfrequenz (P8-49) | ||
| P8-52 | Verzögerung des Ruhezustands | Werkseinstellungen | 0.0s |
| Einstellbereich | 0.0s ~ 6500.0s | ||
Diese Gruppe wird verwendet, um Wasserversorgungssysteme mit Sleep- und Standby-Funktionen zu realisieren.
Der Wechselrichter läuft, wenn die eingestellte Frequenz kleiner als oder gleich P8-51 ist. Sleep-Frequenz, P8-52: Nach einer Verzögerungszeit geht der Antrieb in den Ruhezustand und schaltet sich automatisch ab. Wenn sich der Wechselrichter im Ruhezustand befindet und ein Ausführungsbefehl ausgegeben wird, startet der Wechselrichter nach einer Zeitverzögerung, wenn die eingestellte Frequenz größer oder gleich P8-49, P8-50 ist.
Stellen Sie im Allgemeinen die Resume- und Sleep-Frequenz auf größer oder gleich ein. Wenn die Sleep- und Resume-Frequenz 0,00 Hz beträgt, funktioniert die Sleep- und Resume-Funktion nicht.
Wenn der Ruhezustand aktiviert ist, wenn die Frequenzquelle PID verwendet und PID im Ruhezustand ist und PA-28 den Funktionscode beeinflusst, wählen Sie in diesem Fall den Abschaltvorgang bei PID (PA-28 = 1).
| P8-53 | Erreichen der Betriebszeit | Werkseinstellungen | 0.0Min |
| Einstellbereich | 0.0Min ~ 6500.0Min | ||
Wenn die Betriebszeit nach der Inbetriebnahme erreicht ist, gibt der Multifunktions-Digitalausgang DO des Wechselrichters das Signal „Betriebszeit erreicht ON“ aus.
Gruppe P9. Störungen und Schutz
| P9-00 | AuswahldesMotorüberlastschutzes | Werkseinstellungen | 1 | |
| Einstellbereich | 0 | nicht erlaubt | ||
| 1 | erlaubt | |||
| P9-01 | VerstärkungdesMotorüberlastschutzes | Werkseinstellungen | 1.00 | |
| Einstellbereich | 0.20~w10.00 | |||
P9-00 = 0: Ohne die Motorüberlastungsschutzfunktion besteht die Gefahr von Schäden durch Motorüberhitzung. Es wird empfohlen, ein Thermorelais zwischen dem Wechselrichter und dem Motor einzubauen;
P9-00 = 1: Der Wechselrichter ermittelt anhand der inversen Motorüberlastzeitkurve, ob der Motor überlastet ist. Inverse Motorüberlastschutzzeitkurve: 220 % × (P9-01) × Motornennstrom. Wenn die Last 1 Minute lang auf diesem Wert bleibt, wird ein Motorüberlastungsfehleralarm ausgelöst. Oder 150 % × (P9-01) × Motornennstrom. Wenn die Last 60 Minuten lang auf diesem Wert bleibt, wird ein Überlastalarm ausgelöst.
Der Parameter P9-01 sollte auf der Grundlage der tatsächlichen Überlastkapazität eingestellt werden. Ein zu hoch eingestellter Parameterwert kann zu einer Überhitzung des Motors führen und den Wechselrichter beschädigen, ohne dass ein Alarm vorliegt!
| P9-02 | Auslösepegel für Motorüberlastwarnung | Werkseinstellungen | 80% |
| Einstellbereich | 50% ~ 100% | ||
Diese Funktion wird vor der Motorüberlastschutzfunktion verwendet, sie sendet ein Warnsignal über den DO-Ausgang des Wechselrichters an das Steuersystem. Der Warnfaktor wird zur Bestimmung der Motorüberlast-Frühwarnstufe verwendet. Je höher der Wert, desto geringer ist die Anzahl der Frühwarnungen.
Wenn der kumulierte Ausgangsstrom des Wechselrichters größer ist als die inversen Überlastkurven und das Produkt von P9-02, schaltet der Multifunktions-DO-Ausgang des Wechselrichters das Signal „Motorüberlastwarnung EIN“ ein.
| P9-03 | Stillstandsschutzverstärkung | Werkseinstellungen | 0 |
| Einstellbereich | 0 (keine Verstärkung)~100 | ||
| P9-04 | Schutz vor Überspannung | Werkseinstellungen | 130% |
| Einstellbereich | 120%~150% (dreiphasig) | ||
Wenn die Spannung des Gleichstrombus während der Verzögerung die Überspannungsschutzspannung überschreitet, hält der Wechselrichter den Stopp bei der aktuellen Betriebsfrequenz aufrecht und die Spannung sinkt, bis der Bus weiter verzögert.
Die Stillstandsschutzverstärkung wird während der Verzögerung angepasst. Dies ist die Fähigkeit des Wechselrichters, die Überspannung zu unterdrücken. Je höher der Wert, desto stärker ist das Überspannungsschutzvermögen. Wenn keine Überspannungen vorhanden sind, wird die Schutzverstärkung auf den kleinstmöglichen Wert eingestellt.
Bei geringen Trägheitslasten sollte die Schutzverstärkung klein sein, da sonst die dynamische Reaktion des Systems langsam ist. Wenn die Trägheitslast groß ist, sollte der Wert groß sein, da sonst die Dämpfung unwirksam ist und ein Überspannungsfehler auftreten kann.
Wenn die Stillstandsschutzverstärkung auf 0 eingestellt ist, ist diese Funktion unwirksam.
| P9-05 | Überstrom-ÜberlastschutzverstärkungEinstellbereich | Werkseinstellungen 200 ~ 100 |
| P9-06 | ÜberstromschutzstromEinstellbereich | Werkseinstellungen 150%100% ~ 200% |
Wenn im Verzögerungsprozess des Wechselrichters der Ausgangsstrom den Überstromschutzstrom überschreitet, stoppt der Wechselrichter den Verzögerungsprozess und wird auf der aktuellen Betriebsfrequenz gehalten. Der Ausgangsstrom fällt ab und die Verzögerung wird fortgesetzt.
Die Schutzverstärkung dient zur Steuerung des Beschleunigungs- und Verzögerungsvorgangs und hängt mit der Fähigkeit des Wechselrichters zusammen, den Strom zu unterdrücken. Je höher der Wert, desto größer ist die Fähigkeit.
Bei geringen Trägheitslasten sollte die Schutzverstärkung klein sein, da sonst die dynamische Reaktion des Systems langsam ist. Wenn die Trägheitslast groß ist, sollte der Wert groß sein, da sonst die Dämpfung unwirksam ist und ein Überspannungsfehler auftreten kann.
Wenn die Stillstandsschutzverstärkung auf 0 eingestellt ist, ist diese Funktion unwirksam.
| P9-07 | Schutz gegen Kurzschluss nach Masse | Werkseinstellungen 1 | |
| Einstellbereich | 0 | inaktiv | |
| 1 | aktiv | ||
Schalten Sie den Wechselrichter ein, um zu prüfen, dass der Motor nicht gegen Masse kurzgeschlossen ist.
Wenn diese Funktion aktiv ist, prüfen Sie, ob die Spannung an den Ausgangsklemmen U, V, W des Wechselrichters aufrechterhalten wird.
| Automatische | Werkseinstellungen | 0 | |
| P9-09 | Fehlerrückstellung | ||
| Einstellbereich | 0 ~ 20 | ||
Legt die Anzahl der automatischen Rücksetzungen durch den Wechselrichter fest. Wenn diese Zahl überschritten wird, bleibt der Wechselrichter im Fehlerzustand.
| P9-10 | Betrieb des DO-Ausgangs während der automatischen Fehlerrückstellung Einstellbereich | Werkseinstellungen | 1 |
| 0: nicht funktionstüchtig | |||
| 1: funktionstüchtig |
Wenn der Wechselrichter auf automatische Fehlerrückstellung eingestellt ist, wird der DO-Ausgang ausgeführt, wenn P9-10 während der automatischen Fehlerrückstellung auf 1 gesetzt wird.
| P9-11 | Zeit zwischen Fehlerauftritt und automatischer Rückstellung | Werkseinstellungen | 1.0s |
| Einstellbereich | 0.1s ~ 100.0s | ||
Dies ist die Wartezeit für eine automatische Fehlerrückstellung vom Zeitpunkt des Felheralarms des Wechselrichters.
| P9-12 | Schutz vorEingangsphasenverlust | Werkseinstellungen | 1 |
| Einstellbereich | 0: nicht erlaubt1: erlaubt | ||
Dies ist eine Auswahl, ob am Eingang ein Phasenverlustschutz vorhanden sein soll.
Umrichter des Typs G mit einer Leistung von 18,5 kW und mehr verfügen über einen Phasenausfallschutz am Eingang. Umrichter des Typs P mit einer Leistung von 18,5 kW und darunter haben keinen solchen Schutz, unabhängig davon, ob P9-12 auf 0 oder 1 eingestellt ist.
| P9-13 | Schutz vorAusgangsphasenverlust | Werkseinstellungen | 1 |
| Einstellbereich | 0: nicht erlaubt1: erlaubt | ||
Auswahl des Schutzes vor Phasenverlust am Ausgang.
| P9-14 | Erster Fehler | 0 ~ 99 |
| P9-15 | Zweiter Fehler | |
| P9-16 | Zweiter (letzter) Fehler |
Speichern der letzten drei Wechselrichterfehler. 0 weist nicht auf einen Fehler hin. Hinweise zu möglichen Ursachen und Lösungen für jeden Fehlercode finden Sie in Abschnitt 8.
| P9-17 | Frequenz beim zweiten Fehler | Frequenz des letzten Fehlers | |
| P9-18 | Strom beim zweiten Fehler | Strom des letzten Fehlers | |
| P9-19 | Busspannung beim zweiten Fehler | Busspannung beim letzten Fehler | |
| P9-20 | Status der Digitaleingänge beim zweiten Fehler | Status der Digitaleingänge beim letzten Fehler Die Reihenfolge ist wie folgt: |c|c|c|c|c|c|c|c|c|c BIT9 & BIT8 & BIT7 & BIT6 & BIT5 & BIT4 & BIT3 & BIT2 & BIT1 & BIT0 \ DIO & DI9 & DI8 & DI7 & DI6 & DI5 & DI4 & DI3 & DI2 & DI1 \ \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ Wenn die Eingangsklemmen der jeweiligen zwei N auf 1, OFF oder 0 gesetzt sind, wird der Zustand aller DI in eine Dezimalanzeige umgewandelt. | |
| P9-21 | Status der Digitalausgänge beim zweiten Fehler | Zustand der digitalen Ausgangsklemmen beim letzten Fehler. Die Reihenfolge ist wie folgt:\[ \begin{array}{c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c|c: \\BIT4 & BIT3 & BIT2 & BIT1 & BIT0 \\DO2 & DO1 & REL2 & REL1 & FMP \\Wenn die Eingangsklemmen der entsprechenden zwei N auf 1, OFF oder 0 gesetzt sind, wird der Zustand aller DI in eine dezimale Anzeige umgewandelt. \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ / \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ | \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ ; \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ : \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ - \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ \\ |
| P9-30 | Eingangszustand beim zweiten Fehler | Gleich wie P9-17 ~ P9-24 |
| P9-31 | Ausgangszustand beim zweiten Fehler | |
| P9-32 | Zustand des Wechselrichters beim zweiten Fehler | |
| P9-33 | Versorgungszeit beim zweiten Fehler | |
| P9-34 | Betriebszeit beim zweiten Fehler | |
| P9-37 | Zustand des Wechselrichters beim ersten Fehler | Gleich wie P9-17 ~ P9-24 |
| P9-38 | Versorgungszeit beim ersten Fehler | |
| P9-39 | Betriebszeit beim ersten Fehler | |
| P9-40 | Frequenz des ersten Fehlers | |
| P9-41 | Strom des ersten Fehlers | |
| P9-42 | Busspannung beim ersten Fehler | |
| P9-43 | Ausgangszustand beim ersten Fehler | |
| P9-44 | Ausgangszustand beim ersten Fehler |
| P9-47 | Abhilfe bei Fehlertyp 1 | Werkseinstellungen | 00000 | ||
| Einstellbereich | Anzahl der Einheiten | Motorüberlast (Err11) | |||
| 0 | Freilaufstopp | ||||
| 1 | Stopp im Stoppmodus | ||||
| 2 | Fortsetzung des Betriebs | ||||
| Zehner | Keine Eingangsphase (Err12) (gleiche Einheit) | ||||
| Hunderte | Keine Eingangsphase (Err13) (gleiche Einheit) | ||||
| Tausende | Externer Fehler (Err15) (gleiche Einheit) | ||||
| Zehntausend | Kommunikationsfehler (Err16) (gleiche Einheit) | ||||
| P9-48 | Abhilfe bei Fehlertyp 2 | Werkseinstellungen | 00000 | ||
| Einstellbereich | Einheitsziffer | Encoder-Fehler (Err20) | |||
| 0 | Freilaufstopp | ||||
| 1 | Umschalten auf U/f, Wechsel in den Stoppmodus | ||||
| 2 | Umschalten auf U/f, Fortsetzung des Betriebs | ||||
| Zehner | Fehler des Codelesers (Err21) | ||||
| 0 | Freilaufstopp | ||||
| 1 | Stopp, Übergang in den Stoppmodus | ||||
| Hunderte | Reserviert | ||||
| Tausende | Motorüberhitzung (Err 25) (wie P9-47 ) | ||||
| Zehntausend | Überschreitung der Betriebszeit (Err26) (wie P9-47 ) | ||||
| P9-49 | Abhilfe bei Fehlertyp 3 | Werkseinstellungen | 00000 | ||
| Einstellbereich | Einheitsziffer | Benutzerdefinierter Fehler 1 (Err27) (wie P9-47 ) | |||
| Zehner | Benutzerdefinierter Fehler 2 (Err28) (wie P9-47 ) | ||||
| Hunderte | Überschreitung der Gesamtbetriebszeit (Err29) (wie P9-47 ) | ||||
| Tausende | Nullast (Err30) | ||||
| 0 | Freilaufstopp | ||||
| 1 | Stopp, Übergang in den Stoppmodus | ||||
| 2 | Fortsetzung des Betriebs bei 7% er Motornennfrequenz und Rückkehr zur eingestellten Frequenz, wenn der Motor wieder belastet wird | ||||
| Zehntausend | PID-Rückkopplungsverlust (Err31) (wie P9-47 ) | ||||
| P9-50 | Abhilfe bei Fehlertyp 4 | Einstellung einstellung | 00000 | ||
| Einheitsziffer | Überhöhte Geschwindigkeitsabweichung (Err42) (mit Bits P9-47) | ||||
| Einstellbereich | Zehner | Motorüberdrehzahl (Err43) (mit Bits P9-47) | |||
| Hunderte | Startpositionsfehler (Err51) (mit Bits P9-47) | ||||
| Tausende | Startpositionsfehler (Err52) (mit Bits P9-47) | ||||
| Zehntausend | Reserviert | ||||
Wenn „freies Parken“ gewählt ist, zeigt der Wechselrichter Err ** und direkt nach unten.
Wenn „Stopp im Stoppmodus“ ausgewählt ist, zeigt der Wechselrichter A ** an. Wenn „Stopp“ ausgewählt ist, wird Err ** angezeigt. Wenn „Weiter“ gewählt wird: Der Wechselrichter setzt seinen Betrieb fort und zeigt A ** an, die Betriebsfrequenz wird durch P9-54 eingestellt.
| P9-54 | Fortsetzung der ausgewählten Frequenz, wenn ein Fehler auftritt | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | 0: Betrieb mit der aktuellen Betriebsfrequenz | ||
| 1 | 1: Betrieb mit voreingestellter Frequenz | |||
| 2 | 2: Betrieb mit oberer Frequenzgrenze | |||
| 3 | 3: Betrieb mit unterer Frequenzgrenze | |||
| 4 | 4: Betrieb mit einer alternativen abnormalen Frequenz | |||
| P9-55 | Alternativer Frequenzfehler | Werkseinstellungen | 100.0% | |
| Einstellbereich | 60.0% ~ 100.0% | |||
Wenn der Wechselrichter mit einem Fehler arbeitet und der Fehlerbetrieb fortgesetzt wird, zeigt der Wechselrichter A ** an und arbeitet mit der in P9-54 festgelegten Frequenz.
Wenn der Betrieb mit der alternativen abnormalen Frequenz gewählt wird, ist der in P9-55 eingestellte Wert ein Prozentsatz der maximalen Frequenz.
| P9-56 | Typ des Motortemperatursensors | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Ohne Temperatursensor | ||
| 1 | PT100 | |||
| 2 | PT1000 | |||
| P9-57 | Schutzschwelle für Motorüberhitzung | Werkseinstellungen | 110 °C | |
| Einstellbereich | 0 °C ~ 200 °C | |||
| F9-58 | Warnschwelle für Motorüberhitzung | Werkseinstellungen | 90 °C | |
| Einstellbereich | 0 °C ~ 200 °C | |||
Schließen Sie den Motortemperatursignalsensor an die Multifunktionseingangs- und Ausgangserweiterungskarte an, die optional ist. Der AI3-Eingang der analogen Erweiterungskarte kann als Motortemperatursensoreingang, Motortemperatursensorsignal und als AI3-PGND-Klemme verwendet werden.
Der analoge Eingang VFD AI3 für PT100 und PT1000 unterstützt zwei Arten von Motortemperatursensoren, daher muss der Sensor auf den entsprechenden Typ eingestellt werden. Die Motortemperaturwerte werden auf U0-34 angezeigt.
Wenn die Motortemperatur den Schwellenwert des Motorüberhitzungsschutzes P9-57 überschreitet, sendet der Wechselrichter einen Fehleralarm, aktiviert den Fehlerschutz und verfährt entsprechend dem gewählten Modus.
Wenn die Motortemperatur den Schwellenwert des Motorüberhitzungsschutzes P9-58 überschreitet, erfolgt eine Motorüberhitzungswar-nung - der digitale Multifunktionsausgang DO des Wechselrichters erzeugt ein „ON“-Signal.
| P9-59 | Auswahl der Betriebsart bei vorübergehendem Stromausfall | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | inaktiv | ||
| 1 | Bremsen | |||
| 2 | Stopplauf | |||
| P9-60 | Schaltpunkt der Bremsfrequenz bei plötzlichem Netzausfall | Werkseinstellungen | 0.0% | |
| Einstellbereich | 0.0% ~ 100.0% | |||
| P9-61 | Reaktionszeit bei Stromausfall | Werkseinstellungen | 0.50s | |
| Einstellbereich | 0.00s ~ 100.00s | |||
| P9-62 | Spannungsänderungswert für die Reaktion nach Stromausfall | Werkseinstellungen | 80.0% | |
| Einstellbereich | 60,0 %~100,0 % (Standard-Busspannung) | |||
Diese Funktion bedeutet, dass der Wechselrichter bei einem kurzzeitigen Netzausfall oder einem plötzlichen Spannungsabfall durch Reduzierung der Ausgangsdrehzahl den Energieausgleich der Last (Gleichstrom-Bus des Wechselrichters) verringert, um den Antrieb aufrechtzuerhalten.
Wenn P9-59 = 1 und ein kurzzeitiger Netzausfall oder plötzlicher Spannungsabfall auftritt, bremst der Wechselrichter ab. Wenn die Busspannung wiederhergestellt ist, beschleunigt der Wechselrichter auf die eingestellte normale Betriebsfrequenz. Die Analyse der Busspannungswiederkehr basiert auf der normalen Busspannung von P9-61 und dauert länger als die eingestellte Zeit.
Wenn P9-59 = 2 und ein plötzlicher Netzausfall oder ein plötzlicher Spannungsabfall auftritt, verlangsamt der Wechselrichter bis zum Stillstand.
Abbildung 6-24 Betriebsdiagramm bei plötzlichem Netzausfall
| P9-63 | Schutz, wenn die Last auf Null fällt | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | inaktiv | ||
| 1 | aktiv | |||
| P9-64 | Lastabfall auf Erkennungsniveau Null | Werkseinstellungen | 10.0% | |
| Einstellbereich | 0,0 % ~ 100.0% (Motornennstrom) | |||
| P9-65 | Erkennungszeit bei Lastabfall auf Null | Werkseinstellungen | 1.0s | |
| Einstellbereich | 0.0s ~ 60.0s | |||
Wenn die Leerlaufschutzfunktion aktiviert ist, wenn der Ausgangsstrom des Wechselrichters unter dem Erkennungspegel P9-64 liegt und seine Dauer länger als die Erkennungszeit für Lastverluste P9-65 ist, wird die Ausgangsfrequenz automatisch auf 7 % der Nennfrequenz reduziert. Während des Leerlaufschutzes kehrt der Wechselrichter bei Wiederkehr der Last automatisch auf die eingestellte Frequenz zurück.
| P9-67 | Schwelle fürÜberdrchzahlcrkennung | Werkseinstellungen | 15.0% |
| Einstellbereich | 0,0 % ist 50.0% (max. Frequenz) | ||
| P9-68 | Überdrehzahl-Erkennungszeit | Werkseinstellungen | 2.0s |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| Einstellbereich | 0.0s ~ 60.0s |
Diese Funktion ist nur wirksam, wenn der Wechselrichter mit Drehzahlvektorregelung betrieben wird.
Wenn der Wechselrichter feststellt, dass die tatsächliche Motordrehzahl die eingestellte Frequenz überschreitet, der Überdrehzahlerkennungswert P9-67 überschritten wurde und die Dauer länger ist als die Überdrehzahlerkennungszeit P9-68, erzeugt der Wechselrichter einen Err43-Fehleralarm in Abhängigkeit vom Fehler- und Schutzmodus.
| P9-69 | Erkennungsschwelle für überhöhte Drchzahlabweichung | Werkseinstellungen | 20.0% | |
| Einstellbereich | 0,0 % bis 50.0% (max. Frequenz) | |||
| P9-70 | Erkennungszeit für überhöhte Drchzahlabweichung | Werkseinstellungen | 2.0s | |
| Einstellbereich | 0.0s ~ 60.0s | |||
Diese Funktion ist nur wirksam, wenn der Wechselrichter mit Drehzahlvektorregelung betrieben wird.
Wenn der Wechselrichter die Istdrehzahl des Motors und die Sollfrequenzabweichung erkennt, die Abweichung größer ist als sein Erkennungswert P9-69 und die Dauer länger ist als die Erkennungszeit P9-70 für diese Abweichung, erzeugt der Wechselrichter einen Err42-Fehleralarm und folgt dem Betriebsfehlerschutzmodus.
Wenn die Erkennungszeit der Drehzahlabweichung 0,0 s beträgt, funktioniert die Fehlererkennung der Drehzahlabweichung nicht.
Gruppe PA. Betrieb der PID-Regelung
Die PID-Regelung ist eine gängige Prozessregelungsmethode zur Regelung der Größendifferenz zwischen dem Rückkopplungssignal und dem Zielsignal. Es handelt sich um eine Proportional-, Integral-, Differenzialwirkung durch Verstellung der Ausgangsfrequenz zu einem geschlossenen Regelkreis.
Er eignet sich zur Durchflussregelung, Druck- und Temperaturregelung sowie zur Prozesssteuerung. Ein Blockdiagramm des PID-Regelprozesses ist in Abbildung 6-25 dargestellt.

flowchart
graph LR
A["Zielgröße"] --> B["×"]
B --> C["1/Ti S"]
B --> D["Td*s+1"]
B --> E["1"]
C --> F["+"]
D --> F
E --> F
F --> G["P"]
G --> H["PID-Ausgangsregelung"]
H --> I["-"]
I --> B
Abbildung 6-25 Grundlegendes Blockdiagramm des PID-Regelverfahrens
| PA-00 | Auswahl der Sollwertquelle des PID-Reglers | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Einstellungen PA-01 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls (DI5) | |||
| 5 | Kommunikationscinstellungen | |||
| 6 | Mehrstufige Zuordnung | |||
| PA-01 | PID-Sollwerte | Werkseinstellungen | 50.0% | |
| Einstellbereich | 0.0% ~ 100.0% |
Mit diesem Parameter wird das PID-Regelungsziel für den Kanal ausgewählt.
Die Einstellung der PID-Regelungszielgröße ist ein relativer Wert, Einstellbereich :0,0 % bis 100,0 %. Die gleiche Größe ist die relative Größe der PID-Rückkopplung.
| PA-02 | PID-Rückkopplungssignalquelle | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | AI1 | ||
| 1 | AI2 | |||
| 2 | AI3 | |||
| 3 | AI1 - AI2 | |||
| 4 | Kommunikationseinstellungen (DI5) | |||
| 5 | Kommunikationseinstellungen | |||
| 6 | AI1 + AI2 | |||
| 7 | MAX (|AI1|,|AI2|) | |||
| 8 | MIN (|AI1|,|AI2|) | |||
Mit diesem Parameter wird der PID-Rückkopplungssignalpfad ausgewählt.
Die PID-Rückkopplungsgröße für einen relativen Wert wird im Bereich von 0,0 % bis 100,0 % eingestellt.
| PA-03 | Richtung des PID-Betriebs | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | positiv | ||
| 1 | negativ | |||
0: Wenn das PID-Rückkopplungssignal niedriger als der eingestellte Wert ist, erhöht sich die Ausgangsfrequenz des Wechselrichters.
1: Wenn das PID-Rückkopplungssignal niedriger als der eingestellte Wert ist, sinkt die Ausgangsfrequenz des Wechselrichters.
Zum Beispiel erfordert die Wicklungsspannungsregelung, dass die PID-Regelung mit einem Ausgang von 0 und die Abwicklungsspannungsregelung erfordert eine PID-Regelung mit Ausgang 1.
| PA-04 | PID-Rückkopplungsbercich | Werkseinstellungen | 1000 |
| Einstellbereich | 0 ~ 65535 | ||
Der angegebene PID-Rückkopplungsbereich ist für die U0-15-Anzeige und die U0-16-PID-Rückmeldungsanzeige dimensionslos. Der eingestellte relative PID-Rückkopplungswert von 100,0 % entspricht dem eingestellten Bereich der PA-04-Rückkopplung. Wenn z. B. PA-40 auf 2000 eingestellt ist und der PID-Sollwert 100,0 % beträgt, ist der in Anzeige U0-15 angezeigte PID-Wert 2000.
| PA-05 | Inkrement des Proportionalglieds Kp1 | Werkseinstellungen | 20.0 |
| Einstellbereich | 0.0 ~ 100.0 | ||
| PA-06 | Integrationszeit Til | Werkseinstellungen | 2.00s |
| Einstellbereich | 0.01 s ~ 10.00 s | ||
| PA-07 | Differenzierungszeit Td11 | Werkseinstellungen | 0.000s |
| Einstellbereich | 0.00 ~ 10.000 | ||
Inkrement des Proportionalglieds Kp1.
Eeguliert die Intensität der gesamten PID-Regelung. Je größer Kp1 ist, desto größer ist die Intensität. 100,0 . Dieser Parameter gibt an, dass bei einer Abweichung des PID-Rückkopplungswerts und einem Sollwert von 100,0 % die PID-Regelamplitude des Ausgangsfrequenzbefehls die maximale Frequenz ist.
Die Integrationszeit Til bestimmt die Integrationsintensität des PID-Reglers. Je kürzer die Integrationszeit, desto stärker ist die Regelung und desto schneller wird die Abweichungskonstante korrigiert.
Die Differenzierungszeit Td 1 des PID-Reglers bestimmt die Änderungsgeschwindigkeit der Regelabweichungsintensität. Je länger die Differenzierungszeit ist, desto höher ist die Regelungsintensität. Die Differenzierungszeitkonstante bezicht sich auf den Betrag der Änderung, wenn die Rückkopplung zu diesem Zeitpunkt 100,0 % beträgt, um den Differenzierungsregelbetrag für die maximale Frequenz einzustellen.
| PA-08 | Grenzfrequenz für PID-Rückwärtsbetrieb | Werkseinstellungen | 2.00Hz |
| Einstellbereich | 0.00~ Max. Frequenz | ||
In einigen Fällen kann der PID nur dann, wenn die PID-Ausgangsfrequenz negativ ist (d. h Rückwärtsantrieb), die angegebene Menge und Rückkopplung [...] steuern, in einigen Fällen ist jedoch keine Hochfrequenzinversion zulässig. PA-08 wird verwendet, um die Frequenzinversionsbegrenzung zu bestimmen.
| PA-09 | PID-Abweichungsgrenze | Werkseinstellungen | 0.01% |
| Einstellbereich | 0.0% ~ 100.0% | ||
Wenn die PID-Abweichung und der Rückkopplungswert kleiner als PA-09 sind, stoppt die PID-Regelung. In Anbetracht der Rückkopplungsausgangszeit und der -frequenzabweichung mit geringerer Stabilität und Variabilität ist die Regelung in einigen Fällen sehr effektiv.
| PA-10 | PID-Differenzierungsgrenze | Werkseinstellungen | 0.10% |
| Einstellbereich | 0.00% ~ 100.00% | ||
PID-Regler Die Wirkung der Differenzierung ist empfindlicher und kann zu Schwingungen des Systems führen, daher ist die Wirkung der PID-Ableitung im Allgemeinen auf einen relativ kleinen Bereich beschränkt. PA-10 wird verwendet, um den PID-Differenzierungs-bereich einzustellen.
| PA-11 | PID-Zeitänderung | Werkseinstellungen | 0.00s |
| Einstellbereich | 0.00s ~ 650.00s | ||
PID-Zeitänderung bedeutet, dass sich der PID-Sollwert von 0,0 % der erforderlichen Zeit auf 100,0 % ändert.
Wenn der PID-Sollwert geändert wird, ändert sich der PID-Sollwert entsprechend der Änderung linear in der Zeit, wodurch die negative Auswirkung der Änderung auf das System reduziert wird.
| PA-12 | PID-Rückkopplungsfilterzeit | Werkseinstellungen 0 | 00s |
| Einstellbereich | 0.00s ~ 60.00s | ||
| PA-13 | PID-Ausgangsfilterzeit | Werkseinstellungen | 0.00s |
| Einstellbereich | 0.00s ~ 60.00s | ||
Erkennung von PID-Rückkopplungsverlust. Der Filter hilft, den Einfluss von Rauschen auf die Größe der Rückkopplung zu reduzieren, was sich auf die Reaktionsleistung des geschlossenen Regelkreises auswirkt.
PA-13: PID-Ausgangsfrequenzfilterung. Der Filter reduziert die Ausgangsfrequenz der Mutation, dies wirkt sich auch auf die Reaktionsleistung des geschlossenen Regelkreises aus.
| PA-15 | Verstärkungsfaktor des Proportionalglieds Kp2 | Werkseinstellungen 20.0 | ||
| Einstellbereich | 0.0 ~ 100.0 | |||
| PA-16 | Integrationszeit Ti 2 | Werkseinstellungen 2.00s | ||
| Einstellbereich | 0.01 s ~ 10.00 s | |||
| PA-17 | Differentialzeit Td 2 | Werkseinstellungen 0.000s | ||
| Einstellbereich | 0.00 ~ 10.000 | |||
| PA-18 | Bedingungen zum Umschalten der PI-Parameter | Werkseinstellungen 0 | ||
| Einstellbereich | 0 | 0: ohne Umschaltung | ||
| 1 | 1: mittels DI-Klemmenschalter | |||
| 2 | 2: automatische Umschaltung auf Basis der Abweichung | |||
| PA-19 | PID-Umschaltung | Werkseinstellungen 20.0% | ||
| Einstellbereich | 0.0 % ~ PA-20 | |||
| PA-20 | PID-Umschaltung | Werkseinstellungen 80.0% | ||
| Einstellbereich | PA-19 ~ 100.0% | |||
Durch Auswahl der DI-Multifunktionsklemmenumschaltung stellen Sie die Multifunktionsklemmenfunktion auf 43 (Umschaltklemme für PID-Parameter) ein. Wählen Sie Parametersatz 1 (PA-05 \~ PA-07), wenn die Klemme inaktiv ist. Wenn die Klemme aktiv ist, wählen Sie Parametersatz 2 (PA-15 \~ PA-17).
Wenn die automatische Umschaltung zwischen dem Referenzwert und der Rückkopplungsvorspannung so gewählt wird, dass sie kleiner als der Absolutwert der PA-19-PID-Abweichung 1 ist, wird der PID-Parameter auf 1 gesetzt. Um die Abweichung zwischen der Referenzabweichung und der PID-Rückkopplung so einzustellen, dass sie größer als der Absolutwert von PA-20 ist, wählen Sie die Parametergruppe 2 für den PID-Parameter. Basierend auf der Abweichung zwischen dem Referenzwert und der Rückkopplung sind die PID-
Technische Parameter eines Hochleistungs-Frequenzumrichters
Parameter beim Umschalten zwischen Abweichung 1 und Abweichung 2 eine lineare Interpolation zweier Sätze von PID-Parametern, wie in Abbildung 6-26 dargestellt.
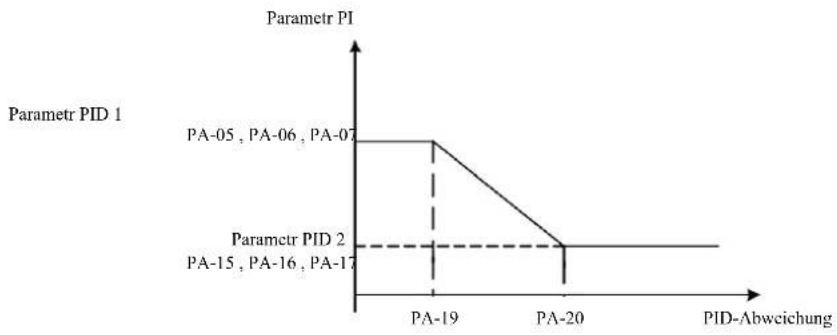
Abbildung 6-26 Umschalten von PID-Parametern
| PA-21 | PID-Anfangswert | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 100.0% | ||
| PA-22 | Haltezeit des PID-Anfangswerts | Werkseinstellungen | 0.00s |
| Einstellbereich | 0.00s ~ 650.00s | ||
Wenn der Wechselrichter startet, wird der PID-Ausgang auf den Anfangswert von PA-21 gesetzt. Der Anfangswert von PID PA-22 wird nach der Haltezeit fortgesetzt und die PID-Regelung beginnt.
Abbildung 6-27 zeigt ein Diagramm bezüglich des Anfangswerts der PID-Funktion.
Ausgangs-
Anfangs-
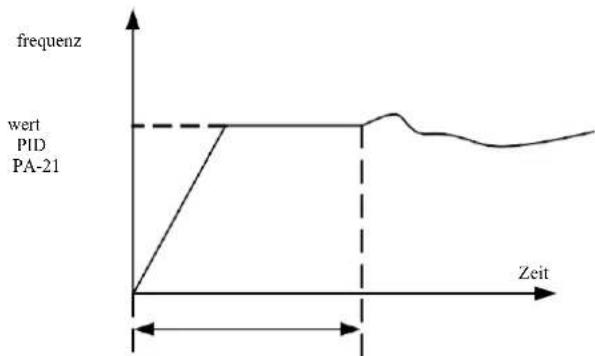
line
| Zeit | Frequenz | | ---- | -------- | | 0 | 0 | | Peak | wert PID PA-21 | | End | ~0.5 |Haltezeit des PID-Anfangswerts PID PA-22
Abbildung 6-27Diagramm des Haltens des PID-Anfangswerts
Diese Funktion wird verwendet, um die Welligkeitsdifferenz zwischen den beiden PID-Ausgängen zu begrenzen (2 ms / Welligkeit), um die Änderung schnell zu unterdrücken, damit sich der Wechselrichterbetrieb stabilisiert.
| PA-23 | Max. Abweichung zwischen zwei PID-Ausgängen im Vorwärtsbetrieb | Werkseinstellungen 1.00% | |
| Einstellbereich | 0.00% ~ 100.00% | ||
| PA-24 | Max. Abweichung zwischen zwei PID-Ausgängen im Rückwärtsbetrieb | Werkseinstellungen 1.00% | |
| Einstellbereich | 0.00% ~ 100.00% | ||
PA-23 und PA-24 sind der maximalen Abweichung und dem Absolutwert zugeordnet (in dieser Reihenfolge), für Vorwärts- und Rückwärtsbetrieb des Ausgangs.
| PA-25 | Merkmale des PID-Integrators | Werkseinstellungen | 00 | |
| Einstellbereich | Einheitsziffer | Getrennte Integration | ||
| 0 | Inaktiv | |||
| 1 | Aktiv | |||
| Zehner | Stoppen der Integration nach Erreichen des eingestellten Ausgangswerts | |||
| 0 | Fortsetzung der Integration | |||
| 1 | Stoppen der Integration | |||
Punkttrennung:
Wenn die aktive Integrationstrennung eingestellt ist, arbeiten bei aktiver DI-Pause des digitalen Integrations-Multifunktionsausgangs (Funktion 22) nur die proportionalen und differentiellen PID-Vorgänge.
Wenn die inaktive Integrationstrennung ausgewählt ist, ist die Integrationstrennung unabhängig davon, ob die digitale Multifunktionsklemme DI aktiv ist oder nicht. Sobald das PID-Ausgangssignal seinen Maximal- oder Minimalwert erreicht, kann die Integration gestoppt werden. Wenn Sie sich dafür entscheiden, die Integration zu stoppen, wird die PID-Integrationsberechnung an diesem Punkt angehalten, was dazu beitragen kann, das PID-Überschwingen zu reduzieren.
| PA-26 | PID-Rückkopplungsverlust-Erkennungswert | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0 %: Keine Rückkopplungsverlustanalyse | ||
| PA-27 | PID-Rückkopplungsverlust-Erkennungszeit | Werkseinstellungen 1.0s | |
| Einstellbereich | 0.0s ~ 20.0s | ||
Diese Funktionscodes werden verwendet, um festzustellen, ob ein PID-Rückkopplungsverlust aufgetreten ist.
Wenn die PID-Rückkopplung kleiner ist als der Erkennungswert für Rückkopplungsverluste PA-26 und länger dauert als die Erkennungszeit für PID_Rückkopplungsverluste PA-27, meldet der Wechselrichter Err31 und die Fehlerbehebung erfolgt entsprechend dem gewählten Modus.
| PA-28 | PID-Betrieb nach dem Stoppen | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | 0: PID-Betrieb nach dem Stoppen deaktiviert; | ||
| 1 | 1: PID-Betrieb nach dem Stoppen | |||
Auswahl des PID-Zustands beim nächsten Stopp, d. h. ob der PID den Betrieb fortsetzen soll. Bei den meisten Anwendungen sollte der PID den Betrieb einstellen, wenn er angehalten wird.
Gruppe PB. Oszillationsfrequenz, -länge und -zählung
Die Traversierfunktion des Wechselrichters wird in der Textil- und Stoffindustrie und überall dort eingesetzt, wo Traversen und Wicklungen erforderlich sind. Die Funktion „Wobble“ (oszillierend-rotierende Bewegung) bedeutet, dass die Ausgangsfrequenz des Wechselrichters so eingestellt wird, dass es zu einer Schwankung der Mittenfrequenz nach oben und unten auf der Zeitachse kommt.
Wie in Abbildung 6-28 (Schwankungsamplitude entsprechend den Einstellungen von PB-00 und PB-01) gezeigt, funktioniert die „Wobble“-Funktion nicht, wenn PB-01 auf 0 eingestellt ist.
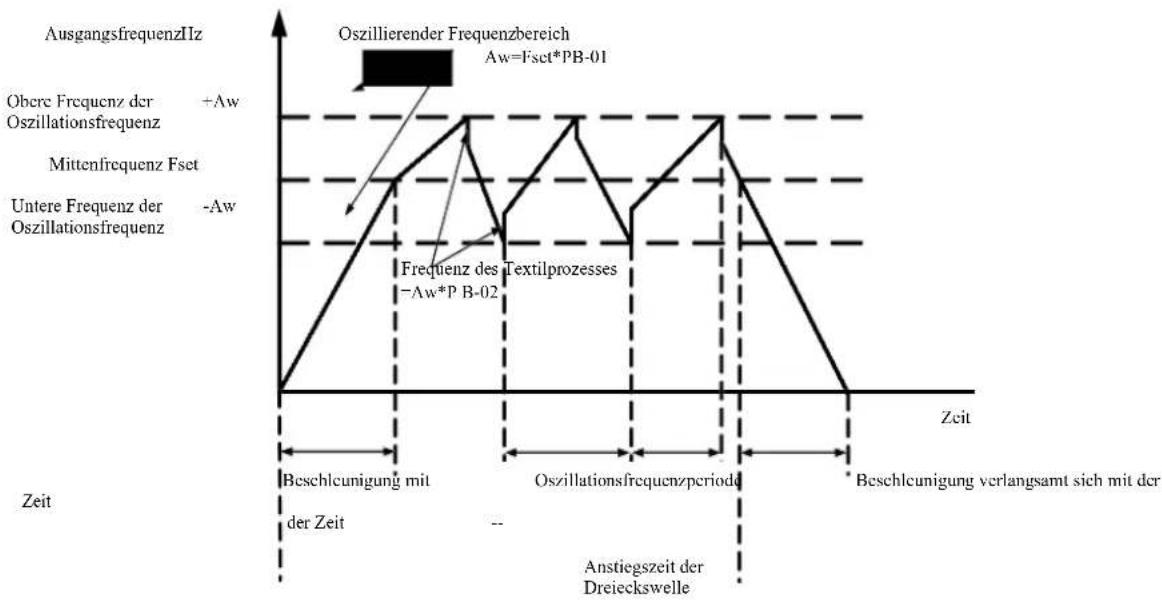
line
| Time Point | Oszillierender Frequenzbereich (Aw=Fset*PB-01) | | :--- | :--- | | Start | 0 | | Midpoint | Peak at -Aw*P B-02 | | End | 0 |Betriebsbefehl
Abbildung 6-28 Betriebsdiagramm der Frequenzschwankung
| PB-00 | Oszillationsfrequenzmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | 0: bezogen auf die Mittenfrequenz | ||
| 1 | 1: bezogen auf die maximale Frequenz | |||
Dieser Parameter wird in Abhängigkeit von der Oszillationsgröße bestimmt.
0: bezogen auf die Mittenfrequenz (Frequenzquelle P0-07), System mit variabler Schwingung. Schwingung mit Änderung der Mittenfrequenz (Sollfrequenz).
1: relativ zur Maximalfrequenz (P0-10), System mit konstanter Schwingung.
| PB-01 | Amplitude der Oszillationsfrequenz | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 100.0% | ||
| PB-02 | Sprung der Oszillationsfrequenz | Werkseinstellungen | 0.0% |
| Einstellbereich | 0.0% ~ 50.0% | ||
Bestimmen des Schwingungs- und Frequenzsprungwerts für diesen Parameter.
Bei der Einstellung der Schwingung relativ zur Mittenfrequenz (PB-00 = 0) ist die Schwingung AW = Frequenzquelle P0-07 × Schwingungsamplitude PB-01.
Bei der Einstellung der Schwingung relativ zur Maximalfrequenz (PB-00 = 1) ist die maximale Schwingung AW = P0-10 × Schwingungsamplitude PB-01.
Technische Parameter eines Hochleistungs-Frequenzumrichters
Amplitude der Frequenzsprünge in der Traverse. Die Sprungfrequenz bleibt als Prozentsatz der Frequenzschwingung erhalten, nämlich: Sprungfrequenz = Schwingung AW × Sprungfrequenzamplitude PB-02. Wenn die Schwingungsamplitude auf die Mittenfrequenz bezogen ist (PB-00 = 0), ist die Sprungfrequenz ein variabler Wert. Wenn sie sich auf die Maximalfrequenz bezieht (PB-00 = 1), ist die Sprungfrequenz ein konstanter Wert.
Die Betriebsschwingungsfrequenz, die Maximalfrequenz und die Minimalfrequenz sind miteinander verbunden.
| PB-03 | Zyklus der Oszillationsfrequenz | Werkseinstellung | 10.0s |
| Einstellbereich | 0.0s ~ 3000.0s | ||
| PB-04 | Anstiegszeitkoeffizient einer Dreieckswelle | Werkseinstellungen 50.0% |
| Einstellbereich | 0.0% ~ 100.0% |
Schwingungsfrequenzzyklus: Zeitwert eines kompletten Schwingungszyklus.
Dreieckswellen-Anstiegszeitfaktor PB-04: die Dreieckswellen-Anstiegszeit in Prozent der Schwingungszykluszeit PB-03.
Dreieckwellen-Anstiegszeit = PB-03 Frequenzschwingungszyklus × PB-04 Dreieckwellen-Anstiegszeitfaktor, in Sekunden.
Dreieckswellenabfallzeit = PB-03 Frequenzschwingungszyklus × (PB-04 Dreieckswellenanstiegszeit Faktor 1), in Sekunden.
| PB-05 | Längeneinstellung | Werkseinstellungen | 1000m |
| Einstellbereich | 0 m ~ 65535 m | ||
| PB-06 | Laufende Länge | Werkseinstellungen | 0m |
| Einstellbereich | 0 m ~ 65535 m | ||
| PB-07 | Anzahl von Impulsen pro Meter | Werkseinstellungen | 100.0 |
| Einstellbereich | 0.1 ~ 6553.5 | ||
Die obigen Funktionscodes werden zum Einstellen der festen Länge verwendet.
Die digitale Multifunktionsklemme wird verwendet, um die Längeninformationen zu sammeln, die Anzahl der Impulsklemmen und die Anzahl der Impulse pro Meter der Phase PB-07 zu prüfen und die tatsächliche Länge PB-06 zu berechnen.
Wenn die tatsächliche Länge größer ist als die eingestellte Länge PB-05, gibt der digitale Multifunktionsausgang DO das ON-Signal „Länge erreicht“ aus.
Während des Einstellvorgangs mit fester Länge wird der Längenrückstellvorgang über die Multifunktionsklemme DI (Funktionsauswahl DI 28) ausgeführt. Siche P4-00 \~ P4-09.
Für bestimmte Anwendungen stellen Sie die Funktion der entsprechenden Eingangsklemme „Eingang des Längenzählers“ ein (Funktion 27), bei höherer Impulsfrequenz verwenden Sie denDI5-Port.
| PB-08 | Einstellung des Zählerwerts | Werkseinstellungen | 1000 |
| Einstellbereich | 1 ~ 65535 | ||
| PB-09 | Zählersollwert | Werkseinstellungen | 1000 |
| Einstellbereich | 1 ~ 65535 | ||
Die digitale Multifunktionseingangsklemme erfasst den gewünschten Zählwert. Die Anwendung muss die entsprechende Funktion der Eingangsklemme auf „Zählereingang“ einstellen (Funktion 25). Bei höheren Impulsfrequenzen muss der DI5-Port verwendet werden.
Wenn der Zählwert den eingestellten Wert des PB-08-Zählers erreicht, erreicht der digitale Multifunktionsausgang DO „den eingestellten Zustand“ und sendet das ON-Signal und stoppt dann die Zählung.
Wenn der Zählwert den Sollwert des Zählers PB-09 erreicht, sendet der digitale Multifunktionsausgang DO das Signal „Erreichen des Sollwerts des Zählers“. Die Zählung wird fortgesetzt, bis der Zähler anhält.
Der Sollwert des Zählers PB-09 sollte nicht höher sein als der Sollwert des Zählers PB-08.
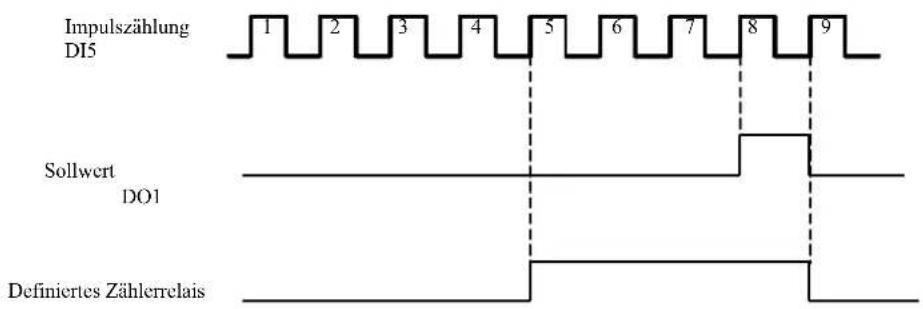
Abbildung 6-29 Einstellen des Zählerwerts und Sollwerts
PC-Gruppe - Multi-Zustandsbefehle und SPS-Funktionen
Der VFD-Multi-Zustandsbefehl ist häufiger als die übliche Multidrehzahlfunktion. Neben der Multi-Geschwindigkeitsfunktion kann er auch als isolierte U/f-Spannungsquelle und Quelle für einen bestimmten PID-Prozess verwendet werden.
Die einfache SPS-Funktion unterscheidet sich von der benutzerprogrammierbaren VFD-Funktion. Eine einfache SPS kann nur als einfache Kombination von Multi-Geschwindigkeits-Betriebsanweisungen erstellt werden. Weitere umfangreiche und nützliche benutzerprogrammierbare Funktionen finden Sie in der Betriebsanleitung zur Gruppe A7.
| PC-00 | Multi-Zustandsbefehl 0 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-01 | Multi-Zustandsbefehl 1 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-02 | Multi-Zustandsbefehl 2 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-03 | Multi-Zustandsbefehl 3 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-04 | Multi-Zustandsbefehl 4 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-05 | Multi-Zustandsbefehl 5 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-06 | Multi-Zustandsbefehl 6 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-07 | Multi-Zustandsbefehl 7 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-08 | Multi-Zustandsbefehl 8 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-09 | Multi-Zustandsbefehl 9 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-10 | Multi-Zustandsbefehl 10 | Werkseinstellungen | 0.0Hz |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-11 | Multi-Zustandsbefehl 11 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-12 | Multi-Zustandsbefehl 12 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-13 | Multi-Zustandsbefehl 13 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-14 | Multi-Zustandsbefehl 14 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
| PC-15 | Multi-Zustandsbefehl 15 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0% ~ 100.0% | ||
Die mehrstufigen Anweisungen können in drei Fällen verwendet werden: als Frequenzquelle, als separate U/f-Spannungsquelle und als PID-Prozesseinstellquelle.
In diesen drei Anwendungen hat der dimensionslose relative Wert des mehrstufigen Befehls einen Bereich von -100,0 % bis 100,0 %.
Technische Parameter eines Hochleistungs-Frequenzumrichters
Wenn die Frequenzquelle ein Prozentsatz der maximalen relativen Frequenz ist, wird U/f als unabhängige Spannungsquelle relativ zu einem Prozentsatz der Motornennspannung verwendet und PID wird zunächst als relativer Wert angegeben.
Je nach Zustand des digitalen Multifunktions-DI und der Schaltoptionen sind mehrstufige Anweisungen erforderlich, siehe spezifische Betriebsanweisungen der Gruppe P4.
| PC-16 | Einfache SPS-Betriebsart | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Stopp nach einem Zyklus | ||
| 1 | Halten der Werte nach einem Zyklus | |||
| 2 | Wiederholung nach einem kompletten Zyklus | |||
Eine einfache SPS hat zwei Rollen: als Frequenzquelle oder als separate U/f-Spannungsquelle. Abbildung 6-30 ist eine vereinfachte schematische Darstellung der SPS als Frequenzquelle. Wenn die einfache SPS als Frequenzquelle dient, bestimmt PC-00 \~ PC-15 die positive Richtung und die negative Richtung, negativ, wenn es bedeutet, den Antrieb in der entgegengesetzten Richtung zu starten.
Betriebsrichtung
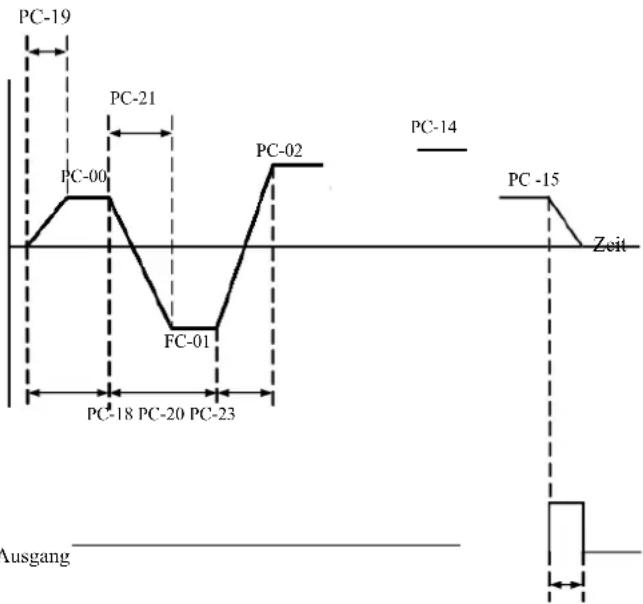
Impuls 250 ms
Abbildung 6-30 Schematische Darstellung einer einfachen SPS
Als Frequenzquelle arbeitet die SPS auf drei Arten, als Spannungsquelle gibt es keine U/f-Trennung dieser drei Arten:
0: Stopp am Ende eines einzelnen Laufs; Am Ende eines einzelnen Zyklus stoppt der Antrieb automatisch und es wird ein Neustartbefehl.
1: Am Ende eines Zyklus wird der Antriebsendwert bis zum Abschluss eines einzelnen Zyklus beibehalten,
die Frequenz und Betriebsrichtung des letzten Segments wird automatisch beibehalten.
2: Sobald der Antriebszyklus abgeschlossen ist, startet der nächste Zyklus automatisch, bis ein Stoppbefehl erfolgt.
| PC-17 | Auswahl des Speichers nach einem Ausfall der SPS-Spannungsversorgung | Werkseinstellungen | 00 | |
| Einstellbereich | Einheitsziffer | Beibchaltung des Zustands nach Stromausfall | ||
| 0 | Kein Speicher nach Stromausfall | |||
| 1 | Speicher nach Stromausfall | |||
| Zehner | Beibchaltung des Zustands nach STOPP-Befehl | |||
| 0 | Kein Speicher nach STOPP-Befehl | |||
| 1 | Speicher nach Stopp | |||
Das Zustandsverhalten nach SPS-Spannungsausfall bezieht sich auf den Wert vor dem Spannungsausfall und die SPS-Frequenz. Nach dem Einschalten läuft der Speicher weiter. Wenn kein Speicher ausgewählt ist, führt das Wiedereinschalten der Stromversorgung zu einem Neustart der SPS.
Der SPS-Speicher und die SPS-Betriebsfrequenz nach dem Stoppen des Antriebs werden vor der Abschaltphase gespeichert, in der nächsten Phase wird der Speicher nach dem Start fortgesetzt. Wenn kein Speicher ausgewählt ist, führt der Neustart zu einem Neustart der SPS.
| PC-18 | Einfache SPS-Betriebszeit, Schritt 0 | Werkseinstellungen 0.0s (h) | |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-19 | Einfache SPS-Verzögerungszeit, Schritt 0 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-20 | Einfache SPS-Betriebszeit, Schritt 1 | Werkseinstellungen 0.0s (h) | |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-21 | Einfache SPS-Verzögerungszeit, Schritt 1 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-22 | Einfache SPS-Betriebszeit, Schritt 2 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-23 | Einfache SPS-Verzögerungszeit, Schritt 2 | Werkseinstellungen | 0 |
| Einstellbereich 0 ~ 3 | |||
| PC-24 | Einfache SPS-Betriebszeit, Schritt 3 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-25 | Einfache SPS-Verzögerungszeit, Schritt 3 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-26 | Einfache SPS-Betriebszeit, Schritt 4 | Werkseinstellungen 0.0s (h) | |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-27 | Einfache SPS-Verzögerungszeit, Schritt 4 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-28 | Einfache SPS-Betriebszeit, Schritt 5 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-29 | Einfache SPS-Verzögerungszeit, Schritt 5 | Werkseinstellungen | 0 |
| Einstellbereich 0 ~ 3 | |||
| PC-30 | Einfache SPS-Betriebszeit, Schritt 6 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-31 | Einfache SPS-Verzögerungszeit, Schritt 6 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-32 | Einfache SPS-Betriebszeit, Schritt 7 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-33 | Einfache SPS-Verzögerungszeit, Schritt 7 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-34 | Einfache SPS-Betriebszeit, Schritt 8 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-35 | Einfache SPS-Verzögerungszeit, Schritt 8 | Werkseinstellungen | 0 |
| Einstellbereich 0 ~ 3 | |||
| PC-36 | Einfache SPS-Betriebszeit, Schritt 9 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-37 | Einfache SPS-Verzögerungszeit, Schritt 9 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-38 | Einfache SPS-Betriebszeit, Schritt 10 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-39 | Einfache SPS-Verzögerungszeit, Schritt 10 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| PC-40 | Einfache SPS-Betriebszeit, Schritt 11 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-41 | Einfache SPS-Verzögerungszeit, Schritt 11 | Werkseinstellungen | 0 |
| Einstellbereich 0 ~ 3 | |||
| PC-42 | Einfache SPS-Betriebszeit, Schritt 12 | Werkseinstellungen | 0.0s (h) |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-43 | Einfache SPS-Verzögerungszeit, Schritt 12 | Werkseinstellungen | 0 |
| Einstellbereich | 0 ~ 3 | ||
| Einfache SPS-Betriebszeit, Schritt 13 | Werkseinstellungen | 0.0s (h) | |
| PC-44 | Einstellbereich | 0.0s (h) ~6553.5s (h) | ||
| PC-45 | Einfache SPS-Verzögerungszeit, Schritt 13 | Werkseinstellungen | 0 | |
| Einstellbereich | 0 ~ 3 | |||
| PC-46 | Einfache SPS-Betriebszeit, Schritt 14 | Werkseinstellungen | 0.0s (h) | |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | |||
| PC-47 | Einfache SPS-Verzögerungszeit, Schritt 14 | Werkseinstellungen | 0 | |
| Einstellbereich | 0 ~ 3 | |||
| PC-48 | Einfache SPS-Betriebszeit, Schritt 15 | Werkseinstellungen | 0.0s (h) | |
| Einstellbereich | 0.0s (h) ~6553.5s (h) | |||
| PC-49 | Einfache SPS-Verzögerungszeit, Schritt 15 | Werkseinstellungen | 0 | |
| Einstellbereich | 0 ~ 3 | |||
| PC-50 | Betriebszeiteinheit einer einfachen SPS | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | S (s) | ||
| 1 | h (h) | |||
| PC-5 | Mehrschritt-Befehl 0 in einem bestimmten Modus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Vorgegebener Funktionscode FC-00 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls | |||
| 5 | PID | |||
| 6 | Bei der angegebenen Frequenz (P0-08) kann UPTOWN bearbeitet werden | |||
Dieser Parameter gibt den Multi-Befehl 0 für den angegebenen Kanal an.
Für mehrstufige Anweisungen 0 kann zusätzlich PC-00 ausgewählt werden, und es gibt viele andere Optionen, mit denen Sie einfach zwischen mehreren kurzen Anweisungen wählen können, die in anderen umschaltbaren Modi gegeben werden. Wenn mehrere Frequenzquellen oder Anweisungen so einfach sind wie SPS-Frequenzquellen, können Sie einfach zwischen ihnen wechseln, um die Frequenzquelle zu realisieren.
Kommunikationsparameter der Gruppe PD.
Siehe VFD-Protokoll.
Gruppe PE. Benutzerdefinierte Funktionscodes
| PE-00 | Benutzer-Funktionscode 0 Werkseinstellungen | P0.00 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-01 | Benutzer-Funktionscode 1 Werkseinstellungen | P0.02 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-02 | Benutzer-Funktionscode 2 | Werkseinstellungen | P0.03 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-03 | Benutzer-Funktionscode 3 | Werkseinstellungen | P0.07 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-04 | Benutzer-Funktionscode 4 Werkseinstellungen | P0.08 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-05 | Benutzer-Funktionscode 5 Werkseinstellungen | P0.17 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-06 | Benutzer-Funktionscode 6 | Werkseinstellungen | P0.18 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-07 | Benutzer-Funktionscode 7 | Werkseinstellungen | P3.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| Benutzer-Funktionscode 8 Werkseinstellungen | P3.01 | |||
| PE-08 | Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | ||
| PE-09 | Benutzer-Funktionscode 9 Werkseinstellungen | P4.00 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-10 | Benutzer-Funktionscode 10 | Werkseinstellungen | P4.01 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-11 | Benutzer-Funktionscode 11 | Werkseinstellungen | P4.02 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-12 | Benutzer-Funktionscode 12 | Werkseinstellungen | P5.04 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-13 | Benutzer-Funktionscode 13 | Werkseinstellungen | P5.07 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-14 | Benutzer-Funktionscode 14 Werkseinstellungen | P6.00 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-15 | Benutzer-Funktionscode 15 Werkseinstellungen | P6.10 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-16 | Benutzer-Funktionscode 16 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-17 | Benutzer-Funktionscode 17 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-18 | Benutzer-Funktionscode 18 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-19 | Benutzer-Funktionscode 19 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-20 | Benutzer-Funktionscode 20 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-21 | Benutzer-Funktionscode 21 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-22 | Benutzer-Funktionscode 22 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-23 | Benutzer-Funktionscode 23 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-24 | Benutzer-Funktionscode 24 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-25 | Benutzer-Funktionscode 25 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-26 | Benutzer-Funktionscode 26 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-27 | Benutzer-Funktionscode 27 | Werkseinstellungen | P0.00 | |
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-28 | Benutzer-Funktionscode 28 Werkseinstellungen | P0.00 | ||
| Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| Benutzer-Funktionscode 29 | Werkseinstellungen | P0.00 | ||
| PE-29 | Einstellbereich | P0.00~PP.xx, A0.00~Ax.xx, U0.xx |
Diese Funktionscodes sind benutzerdefinierte Parametersätze.
Benuter können alle VFD-Funktionscodes und die erforderlichen Parameterauswahlen in der Gruppe PE als benutzerdefinierte Parameter zur einfachen Ansicht und Änderung sammeln.
Die Gruppe PE bietet bis zu 30 benutzerdefinierte Parameter. Wenn der angezeigte Parameter aus der Gruppe PE P0.00 ist, bedeutet dies, dass der Benutzerfunktionscode leer ist. Beim Aufrufen des benutzerdefinierten Parametermodus werden die Anzeigefunktionscodes PE-00 \~ PE-31 in der gleichen Reihenfolge wie die Gruppenfunktionscodes PE definiert. Gehen Sie zu P0-00.
Gruppe PP. Benutzerpasswort
| PP-00 Benutzerpasswort Werkseinstellungen | |||
| Einstellbereich | 0 ~ 65535 | ||
Durch Einstellen einer beliebigen Zahl ungleich Null in PP-00 wird die Passwortschutzfunktion aktiviert. Beim nächsten Aufruf des Menüs muss das richtige Passwort eingegeben werden, sonst können Sie die Funktionsparameter nicht einsehen oder ändern. Merken Sie sich das vom Benutzer eingestellte Passwort.
Durch Setzen von PP-00 auf 00000 kann die Einstellung des Benutzerpassworts gelöscht werden. Die Passwortschutzfunktion funktioniert dann nicht.
| PP-01 | Rücksetzen auf die Standardeinstellungen | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Nicht rücksetzen | ||
| 1 | Rücksetzen auf Werkseinstellungen mit Ausnahme der Motorparameter | |||
| 2 | Datensätze löschen | |||
| 4 | Aktuelle Backup-Benutzerparameter | |||
| 501 | Wiederherstellen der Sicherungsparameter des Benutzers | |||
Wenn PP-01 auf 1 gesetzt ist, werden die meisten Funktionsparameter des Wechselrichters auf die Werkseinstellungen zurückgesetzt, aber die Motorparameter, der Dezimalpunkt des Frequenzsollwerts (P0-22), das Fehlerprotokoll, die Gesamtbetriebszeit (P7-09), die akkumulierte Leistungszeit (P7-13) und die Gesamtleistungsaufnahme (P7-14) werden nicht wiederhergestellt.
2. Datensätze löschen
Löschen von Fehlerinformationen des Antriebs, Gesamtbetriebszeit (P7-09), kumulierte Einschaltdauer (P7-13), Gesamtstromverbrauch (P7-14).
4. Aktuelle Backup-Benutzerparameter
Gilt für die aktuellen, vom Benutzer eingestellten Sicherungsparameter. Der aktuelle Wert aller Einstellfunktionsparameter wird zurückgeladen, um dem Benutzer die Einstellung der Parameter nach der Wiederherstellung zu erleichtern.
- Wiederherstellen von zuvor gesicherten Benutzer-Backup-Parametern, Wiederherstellen des Backups durch Setzen von PP-01 für die vier Backup-Parameter.
| PP-02 | Eigenschaften des Funktionsparameter-Anzeigemodus | Werkseinstellungen 11 | ||
| Einstellbereich | Einheitsziffer | Auswahl der Anzeige von Gruppe U | ||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
| Zehner | Auswahl der Anzeige von Gruppe A | |||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
| PP-02 | Eigenschaften des Funktionsparameter-Anzeigemodus | Werkseinstellungen 11 | ||
| Einstellbereich | Einheitsziffer | Auswahl der Anzeige von Gruppe U | ||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
| Zehner Auswahl der Anzeige von Gruppe A | ||||
| 0 | Keine Anzeige | |||
| 1 | Anzeige | |||
Die Einstellung des Parameteranzeigemodus dient hauptsächlich dazu, verschiedene Modi der Anordnung von Funktionsparametern entsprechend den aktuellen Benutzeranforderungen anzuzeigen. Es stehen drei Parameteranzeigemodi zur Verfügung.
| Bezeichnung | Beschreibung |
| Funktionsparameter modus | Sequentielle Anzeige der Wechselrichterparameter, Parametergruppen P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Benutzerdefinierter Parametermodus | Personalisierte Anzeige von benutzerdefinierten Funktionsparametern (bis zu 32 Parameter können angepasst werden), FE-Benutzergruppe bestimmt die Funktion des angezeigten Parameters |
| Änderungsmodus für Benutzerparameter | Änderung von Parametern, die nicht mit den werkseitig eingestellten Funktionsparametern kompatibel sind. |
Wenn der Auswahlparameter für den Zeichenanzeigemodus (PP-03) angezeigt wird, können Sie zu diesem Zeitpunkt mit der QSM-Taste zu anderen Parametern wechseln. Der Standardwert ist die einzige angezeigte Funktion.
Code für jeden Parameteranzeigemodus:
| Parameteranzeigemodus | Display |
| Funktionsparametermodus | -hASF |
| Benutzerdefinierter Parametermodus | -USEr |
| Änderungsmodus für Benutzerparameter | --F-- |
VFD bietet zwei personalisierte Parameteranzeigemodi: benutzerdefinierte Parameter und benutzergeänderte Parameter. Der benutzerdefinierte Parametersatz dient zur Einstellung der Parameter der Gruppe PE. Es können bis zu 32 Parameter ausgewählt werden. Diese Parameter werden aufsummiert und Kunden können einfach debuggen.
Benutzerdefinierter Parametermodus: Fügen Sie ein Standard-u-Symbol vor dem benutzerdefinierten Funktionscode ein, zum Beispiel: P1-00, im benutzerdefinierten Parametermodus ermöglicht der Anzeigebildschirm dem Benutzer das Ändern von Parametern und uP1-00 ermöglicht dem Benutzer und Hersteller das Ändern von Werkseinstellungen. Änderungen von Benutzerparametern sind für Kunden hilfreich, um aufsummierte Parameteränderungen zu überprüfen und Probleme an Ort und Stelle zu finden.
Der Benutzer ändert den Parametermodus vor der Anpassung des Funktionscodes durch Hinzufügen des Standardsymbols c.
Beispiel: Um den Parameter P1-00 im Benutzermodus zu ändern, zeigen Sie ihn als cP1-00 an.
| PP-04 | Ändern des Funktionscodes | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | kann geändert werden | ||
| 1 | kann nicht geändert werden | |||
Um das Risiko einer falschen Änderung von Funktionsparametern zu vermeiden, können bei der Einstellung 0 alle Funktionscodes geändert werden; bei der Einstellung 1 sind alle Funktionscodes nur eine Vorschau, sie können nicht geändert werden.
Gruppe A0 Drehmomentsteuerung und Parametergrenzen
| A0-00 | Auswahl des Drehzahl-/Drechmomentregelungsmodus | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | Drehzahlregelung | ||
| 1 | Drechmomentregelung | |||
Auswahl des Steuermodus des Wechselrichters: Drehzahlregelung oder Drehmomentregelung
Die digitalen Multifunktionsklemmen des DI VFD haben zwei Funktionen, die sich auf die Drehmomentregelung beziehen: Drehmomentregelung aus (Funktion 29) und eine Funktion zum Umschalten zwischen Drehzahlregelung und Drehmomentregelung (46). Diese beiden Klemmen halten die Verbindung A0-00 für die Umschaltung zwischen Drehzahl- und Drehmomentregelung aufrecht.
Wenn die Drehzahl-/Drehmomentregelungs-Schaltklemme inaktiv ist, wird die Regelungsart durch A0-00 bestimmt. Wenn die Drehzahl-/Drehmomentregelungs-Schaltklemme aktiv ist, ist die Regelungsart gleich dem Negationswert von A0-00.
Immer wenn die Sperrklemme für die Drehmomentregelung aktiv ist, regelt der Wechselrichter eine konstante Drehzahl.
| Auswahl der Referenzquelle der Drehmomentsteuerung | Werkseinstellungen | 0 | ||
| A0-01 | Einstellbereich | 0 | Digitale Einstellung (A0-03) | |
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impulseinstellung | |||
| 5 | Kommunikationseinstellungen | |||
| 6 | MIN (AI1, AI2) | |||
| 7 | MAX (AI1, AI2) | |||
| 0-03 | Digitale Drehmomenteinstellung im Drehmomentregelungsmodus | Werkseinstellungen | 0 | |
| Einstellbereich | -200.0% ~ 200.0% | |||
Die Drehmomenteinstellung A0-01 wird zur Quellenauswahl verwendet, es gibt insgesamt 8 Drehmomenteinstellmodi.
Drehmomenteinstellung mit einem relativen Wert, der 100,0 % des Nenndrehmoments des Wechselrichters entspricht. Der Einstellbereich von -200,0 % bis 200,0 % bedeutet, dass das maximale Drehmoment des Wechselrichters das zweifache des Antriebsnennmoments beträgt.
Wenn der Drehmomenteinstellbereich 1 bis 7 ist, entspricht Kommunikation, Analogeingang, Impulseingang 100 % A0-03.
| A0-05 | Positive maximale Frequenz der Drehmomentregelung | Werkseinstellungen | 50.00Hz |
| Einstellbereich | 0.00Hz~ Maximale Frequenz (P0-10) | ||
| A0-06 | Negative maximale Frequenz der Drehmomentregelung | Werkseinstellungen | 50.00Hz |
| Einstellbereich | 0.00Hz~ Maximale Frequenz (P0-10) | ||
Stellt die Drehmomentregelung und die maximale Betriebsfrequenz des Vorwärts- oder Rückwärtsantriebs ein.
Bei der Antriebsdrehmomentregelung wird die Motordrehzahl weiter erhöht, wenn das Lastdrehmoment kleiner als das Motorabtriebsdrehmoment ist. Um Unfälle in der Mechanik während des Auslaufens zu vermeiden, begrenzen Sie diese auf das maximale Drehmoment der Motordrehzahlregelung.
| A0-07 | Beschleunigungszeit für Drehmomentsteuerung | Werkseinstellungen | 0.00s | |
| Einstellbereich | 0.00 s ~ 65000 s | |||
| A0-08 | Stoppzeit für Drehmomentsteuerung | Werkseinstellungen | 0.00s | |
| Einstellbereich | 0.00 s ~ 65000 s | |||
Drehmomentregelungsmodus. Die Differenz zwischen dem Motorausgangsdrehmoment und dem Lastdrehmoment bestimmt die Drehzahlund Änderungsrate der Motorlast, so dass es möglich ist, die Motordrehzahl schnell zu ändern, was zu Geräuschen oder übermäßiger mechanischer Belastung und anderen Problemen führt. Durch die Einstellung der Beschleunigungs- und Verzögerungszeiten des Drehmoments kann die Motordrehzahl durch schrittweise Änderung gesteuert werden.
Für das Drehmoment ist jedoch eine schnelle Reaktion erforderlich. Die Einstellung der Beschleunigungs- und Verzögerungszeit der Drehmomentsteuerung beträgt 0,00 s. Zum Beispiel: Zwei fest angeschlossene Motoren treiben die gleiche Last an. Um eine gleichmäßige Lastverteilung zu gewährleisten, verwenden sie den Drehzahlregelungsmodus und nutzen den Schalter für die Steuerung des tatsächlichen Ausgangsdrehmoments, um die Steuerung für den Master als Slave einzustellen. Das Master-Drehmoment stellt das Drehmoment als Slave ein. Diesmal ist das Drehmoment erforderlich, um mit der schnellen Beschleunigungs- und Verzögerungszeit der Slave-Drehmomentregelung durch die Master-Maschine Schritt zu halten, die 0,00 s beträgt.
Gruppe A2. Zweiter Motor.
VFD kann zwischen zwei Motoren umschalten. Stellen Sie die beiden Motoren entsprechend dem Motortypenschild ein. Stellen Sie die Motorparameter entsprechend separat ein. Wählen Sie U/f-Steuerung oder Vektorregelung. Sie können die Encoder-Parameter separat über U/f-Steuerung oder Vektorregelung einstellen.
Der Funktionscode der Gruppe A2 entspricht dem Motor 2.
Gleichzeitig entsprechen alle Parameter der Gruppe A2, die den Inhalt definieren und verwenden, denen des ersten Motors und werden hier nicht wiederholt. Der Benutzer kann die auf den ersten Motor bezogene Parameterbeschreibung verwenden.
| A2-00 | Auswahl des Motortyps | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | 0: Standard-Induktionsmotor | |||
| 1 | 1:Induktionsmotoren mit variabler Frequenz | ||||
| A2-01 | Nennleistung Werkseinstellungen Abhängig vom Modell | ||||
| Einstellbereich | 0.1 kW ~ 1000.0 kW | ||||
| A2-02 | Nnspannung Werkseinstellungen | Abhängig vom Modell | |||
| Einstellbereich | 1 V ~ 400 V | ||||
| A2-03 | Nennstrom | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.01 A ~ 655.35 A (Leistung des Frequenzumrichters = 55 kW)0.1 A ~ 6553.5 A (Leistung des Frequenzumrichters > 55 kW) | ||||
| A2-04 | Nennfrequenz | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.01 Hz ~ Max. Frequenz | ||||
| A2-05 | Nenndrechzahl | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 1rpm ~ 65535rpm | ||||
| A2-06 | Statorwiderstand des Induktionsmotors | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.001 Ω ~ 65.535 Ω (Leistung des Frequenzumrichters <= 55 kW)0.0001 Ω ~ 6.5535 Ω (Leistung des Frequenzumrichters > 55 kW) | ||||
| A2-07 | Rotorwiderstand des Induktionsmotors | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.001 Ω ~ 65.535 ΩLeistung des Frequenzumrichters<= 55 kW)0.0001Ω ~ 6.5535ΩLeistung des Frequenzumrichters > 55 kW) | ||||
| A2-08 | Induktive Ableitreaktanz eines Induktionsmotors | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.01mH~655.35mH (Leistung des Frequenzumrichters <= 55 kW)0.001mH~65.535mH (Leistung des Frequenzumrichters > 55 kW) | ||||
| A2-09 | Gegenseitige induktive Reaklanz des Induktionsmotors | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.1mH ~ 6553.5mHLeistung des Frequenzumrichters<= 55 kW)0.01mH ~ 655.35mHLcistung des Frequenzumrichters > 55 kW) | ||||
| A2-10 | Leerlaufstrom des Induktionsmotors | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0.01 A ~ A2-03 (Leistung des Frequenzumrichters <= 55 kW)0.1 A ~ A2-03 (Leistung des Frequenzumrichters > 55 kW) | ||||
| A2-27 | Encoder-Zeilennummer | Werkseinstellungen | 1024 | ||
| Einstellbereich | 1 ~ 65535 | ||||
| A2-28 | Auswahl der Drehzahlrückführung | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | Inkremental-Encoder ABZ | |||
| 1 | Reserviert | ||||
| 2 | Drehtransformator | ||||
| A2-29 | Drehzahlrückführung PG-Auswahl | Werkseinstellungen | 0 | ||
| 0 | lokales PG | ||||
| 1 | lokales PG | ||||
| Einstellbereich | 2 | Impulscingang (DI5) | |||
| A2-30 | AB-Phasenfolge des Inkremental-Encoders ABZ | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | vorwärts | |||
| 1 | rückwärts | ||||
| A2-34 | Anzahl der Polpaare des Drehtransformators | Werkseinstellungen | 1 | ||
| Einstellbereich | 1 ~ 65535 | ||||
| A2-36 | Erkennungszeit für PG-Unterbrechung in der Geschwindigkeitsrückme Idung | Werkseinstellungen | 0.0s | ||
| Einstellbereich | 0.0: keine Aktion 0.1s ~ 10.0s | ||||
| A2-37 | Abstimmungsauswahl | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | 0: Keine Aktion | |||
| 1 | 1: Statische Abstimmung des Asynchronmotors | ||||
| 2 | 2: Vollständige Abstimmung des Asynchronmotors | ||||
| A2-38 | Proportionalverstärkung der Geschwindigkeitsschleife 1 | Werkseinstellungen | 30 | ||
| Einstellbereich | 1 ~ 100 | ||||
| A2-39 | Integrationszeit für Geschwindigkeitsschleife 1 | Werkseinstellungen | 0.50s | ||
| Einstellbereich | 0.01 s ~ 10.00 s | ||||
| A2-40 | Schaltfrequenz 1 | Werkseinstellungen | 5.00Hz | ||
| Einstellbereich | 0.00 ~ A2-43 | ||||
| A2-41 | Proportionalverstärkung der Geschwindigkeitsschleife 2 | Werkseinstellungen | 15 | ||
| Einstellbereich | 0 ~ 100 | ||||
| A2-42 | Integrationszeit für Geschwindigkeitsschleife 2 | Werkseinstellungen | 1.00s | ||
| Einstellbereich | 0.01 s ~ 10.00 s | ||||
| A2-43 | Schaltfrequenz 2 | Werkseinstellungen | 10.00 Hz | ||
| Einstellbereich | A2-40~Maximale Ausgangsfrequenz | ||||
| A2-44 | Schlupfverstärkung für Vektorregelung | Werkseinstellungen | 100% | ||
| Einstellbereich | 50% ~ 200% | ||||
| A2-45 | Zeitkonstante für den Drchzahlregelfilter | Werkseinstellungen | 0.000s | ||
| Einstellbereich | 0.000 s~0.100 s | ||||
| A2-46 | Vektorregelung der Anregungsverstärkung | Werkseinstellungen | 64 | ||
| Einstellbereich | 0 ~ 200 | ||||
| A2-47 | Quelle der oberen Grenze im Geschwindigkeitsregelungs modus | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | A2-48 Einstellung | |||
| 1 | A11 | ||||
| 2 | A12 | ||||
| 3 | A13 | ||||
| 4 | Impulseinstellung | ||||
| 5 | Kommunikationseinstellungen | ||||
| 6 | MIN (AI1, AI2) | ||||
| 7 | MAX (AI1, AI2) | ||||
| A2-48 | Digitale Drehmomenteinstellung im Geschwindigkeitsregelungs modus | Werkseinstellungen | 150.0% | ||
| Einstellbereich | 0.0% ~ 200.0% | ||||
| A2-51 | Anregungsproportionalverstärkung | Werkseinstellungen | 2000 | ||
| Einstellbereich | 0 ~ 20000 | ||||
| A2-52 | Integrale Verstärkung der Anregung | Werkseinstellungen | 1300 | ||
| Einstellbereich | 0 ~ 20000 | ||||
| A2-53 | Proportionalverstärkung für Drehmomentregelung | Werkseinstellungen | 2000 | ||
| Einstellbereich | 0 ~ 20000 | ||||
| A2-54 | Integrationsverstärkung der Drehmomentregelung | Werkseinstellungen | 1300 | ||
| Einstellbereich | 0 ~ 20000 | ||||
| A2-55 | Eigenschaften des integrierenden Glieds einer Drehzahlschleife | Werkseinstellungen | 0 | ||
| Einstellbereich | Einheitsziffer: Integrationstrennung0: nicht erlaubt1: erlaubt | ||||
| A2-61 | Motorregelungsart 2 | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | Keine Drehzahlsensor-Vektorregelung (SVC) | |||
| 1 | Drehzahlsensor-Vektorsteuerung (FVC) | ||||
| 2 | U/f-Steuerung | ||||
| A2-62 | Beschleunigungs-/Bremszeit von Motor 2 | Werkseinstellungen | 0 | ||
| Einstellbereich | 0 | 0: wie bei Motor 1 | |||
| 1 | 1: Beschleunigungs-/Bremszeit 1 | ||||
| 2 | 2: Beschleunigungs-/Bremszeit 2 | ||||
| 3 | 3: Beschleunigungs-/Bremszeit 3 | ||||
| 4 | 4: Beschleunigungs-/Bremszeit 4 | ||||
| A2-63 | Erhöhung des Motordrehmoments 2 | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0,0 %: Automatische Drehmomenterhöhung 0.1%~ 30.0% | ||||
| A2-65 | Dämpfungsverstärkung der Motorschwingung 2 | Werkseinstellungen | Abhängig vom Modell | ||
| Einstellbereich | 0 ~ 100 | ||||
Gruppe A5 Parameter für die Steuerungsoptimierung
| A5-00 | DPWM-Schalter für obere Frequenzschwelle | Werkseinstellungen | 12.00Hz |
| Einstellbereich | 0.00Hz ~ 15Hz | ||
Gilt nur für die U/f-Steuerung. Der Schaltverlust bei siebenstufiger Dauermodulation ist hoch, verursacht aber eine geringe Stromwelligkeit.
Im Gegensatz dazu hat der intermittierende 5-Schritt-Debug-Modus geringe Schaltverluste und eine große Stromwelligkeit, aber der Motor kann bei hohen Frequenzen instabil sein. Änderungen sind erforderlich.
Für einen instabilen Wechselrichterbetrieb siehe Funktionscode P3-11, für Schaltverlust und Temperaturanstieg des Wechselrichters siehe Funktionscode P0-15.
| A5-01 | PWM-Modulation | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | asynchrone Modulation | ||
| 1 | synchrone Modulation | |||
Gilt nur für die U/f-Steuerung. Die synchrone Modulation bezieht sich auf die Trägerfrequenzumsetzung, bei der die Ausgangsfrequenz linear variiert, um ein unverändertes Verhältnis (Trägerfaktor) zu erhalten, in der Regel bei höheren Ausgangsfrequenzen, zugunsten der Qualität der Ausgangsspannung.
Bei niedrigen Ausgangsfrequenzen (100 Hz oder weniger) ist eine synchrone Modulation in der Regel nicht erforderlich, da das Verhältnis von Trägerfrequenz zu Ausgangsfrequenz relativ hoch ist, einer der offensichtlicheren Vorteile der asynchronen Modulation.
Die synchrone Modulation funktioniert nur, wenn die Betriebsfrequenz höher als 85 Hz ist, und der asynchrone Modulationsmodus ist unterhalb dieser Frequenz festgelegt.
| A5-02 | Auswahl desTotzonen-Kompensationsmodus | Werkseinstellungen | 1 | |
| Einstellbereich | 0 | keine Kompensation | ||
| 1 | Kompensationsmodus 1 | |||
| 2 | Kompensationsmodus 2 | |||
Im Allgemeinen ist es nicht erforderlich, diesen Parameter zu ändern. Nur wenn die Qualität der Ausgangsspannungswellenform besondere Anforderungen stellt oder andere abnormale Motorschwingungen auftreten, sollten Sie versuchen, zwischen verschiedenen Kompensationsmodellen zu wählen. Modus 2 wird für die Kompensation hoher Leistungen empfohlen.
| A5-03 | Zufällige PWM-Tiefe | Werkseinstellungen | 0 | |
| Einstellbereich | 0 | nicht erlaubt | ||
| 1 ~ 10 | Zufallstiefe der Trägerfrequenz | |||
Die Einstellung der zufälligen PWM kann das monotone, raue Geräusch des Motors dämpfen und kann helfen, externe elektromagnetische Störungen zu reduzieren.
Wenn die zufällige PWM-Tiefe auf 0 gesetzt ist, ist die zufällige PWM deaktiviert. Die Einstellung der Zufalls-PWM mit unterschiedlichen Tiefen führt zu unterschiedlichen Ergebnissen.
| A5-04 | Schnellstrombegrenzung | Werkseinstellungen | 1 | |
| Einstellbereich | 0 | inaktiv | ||
| 1 | aktiv | |||
Die Aktivierung der schnellen Strombegrenzungsfunktion kann den maximal auftretenden Überstromfehler des Wechselrichters reduzieren. Der Wechselrichter wird einen unterbrechungsfreien Betrieb gewährleisten. Wenn der Wechselrichter lange Zeit mit schneller Strombegrenzung läuft, kann er überhitzen und andere Schäden können auftreten, daher ist dies nicht zulässig.
Der Wechselrichter arbeitet weiter mit schneller Strombegrenzung, bis ein Err40-Grenzwertfehleralarm auftritt, der anzeigt, dass der Wechselrichter überlastet ist und gestoppt wird.
| A5-05 | Laufende Kompensationserkennung | Werkseinstellungen | 5 |
| Einstellbereich | 0 ~ 100 | ||
Wenn Sie die Stromerkennungskompensation in der Wechselrichtersteuerung zu hoch einstellen, kann dies zu Leistungseinbußen führen. Im Prinzip ist keine Änderung erforderlich.
| A5-06 | Schwelle für Spannungsabfall | Werkseinstellungen | 100% |
| Einstellbereich | 60.0% ~ 140.0% | ||
Um den Wert der Unterspannungsfehlerspannung Err09 einzustellen, entsprechen die verschiedenen 100,0 %-Spannungspegel des Wechselrichters verschiedenen Spannungspunkten, nämlich: 220 V einphasig oder 220 V dreiphasig; 200 V dreiphasig 380 V; 350 V.
| SVC-Optimierung | Werkseinstellungen | 1 | ||
| 0 | keine Optimierung | |||
| A5-07 | Einstellbereich | 1 | Optimierungsmodus 1 | |
| 2 | Optimierungsmodus 2 | |||
Optimierungsmodus 1 Hohe Anforderungen an die Linearität der Drehmomentregelung.
Optimierungsmodus 2 Verwenden Sie höhere Anforderungen an die Geschwindigkeitsstabilität.
| A5-08 | Totzeiteinstellung | Werkseinstellungen | 150% |
| Einstellbereich | 100% ~ 200% | ||
Gruppe A6. Einstellung der AI-Kurve
| A6-00 | Minimalwert der AI-Kurve an Eingang 4 | Werkseinstellungen | 0.00V |
| Einstellbereich | -10.00V ~ A6-02 | ||
| A6-01 | Einstellung des Minimalwerts der AI-Kurve an Eingang 4 | Werkseinstellungen | 0.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-02 | Wendepunkt Nr. 1 der AI-Kurve an Eingang 4 | Werkseinstellungen | 3.00V |
| Einstellbereich | A6-00 ~ A6-04 | ||
| A6-03 | Einstellung des Wendepunkts Nr. 1 der AI-Kurve an Eingang 4 | Werkseinstellungen | 30.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-04 | Wendepunkt Nr. 2 der AI-Kurve an Eingang 4 | Werkseinstellungen | 6.00V |
| Einstellbereich | A6-02 ~ A6-06 | ||
| A6-05 | Einstellung des Wendepunkts Nr. 2 der AI-Kurve an Eingang 4 | Werkseinstellungen | 60.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-06 | Maximalwert der AI-Kurve an Eingang 4 | Werkseinstellungen | 10.00V |
| Einstellbereich | A6-06 ~ 10.00 V | ||
| A6-07 | Einstellung des Maximalwerts der AI-Kurve an Eingang 4 | Werkseinstellungen | 100.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-08 | Minimalwert der AI-Kurve an Eingang 5 | Werkseinstellungen | 0.00V |
| Einstellbereich | -10.00V ~ A6-10 | ||
| A6-09 | Einstellung des Minimalwerts der AI-Kurve an Eingang 5 | Werkseinstellungen | |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-10 | Wendepunkt Nr. 1 der AI-Kurve an Eingang 5 | Werkseinstellungen | |
| Einstellbereich | A6-08 ~ A6-12 | ||
| A6-11 | Einstellung des Wendepunkts Nr. 1 der AI-Kurve an Eingang 5 | Werkseinstellungen | |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-12 | Wendepunkt Nr. 2 der AI-Kurve an Eingang 5 | Werkseinstellungen | 6.00V |
| Einstellbereich | A6-10 ~ A6-14 | ||
| A6-13 | Einstellung des Wendepunkts Nr. 2 der AI-Kurve an Eingang 5 | Werkseinstellungen | 60.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
| A6-14 | Maximalwert der AI-Kurve an Eingang 5 | Werkseinstellungen | 10.00V |
| Einstellbereich | A6-14 ~ 10.00 V | ||
| A6-15 | Einstellung des Maximalwerts der AI-Kurve an Eingang 5 | Werkseinstellungen | 100.0% |
| Einstellbereich | -100.0 % ~ 100.0 % | ||
Die Kurven 4 und 5 ähneln der Kurve 1, aber die Linie der Kurven 1 bis 3 ist eine gerade Linie, während die Kurven 4 und 5 4-Punkt-Kurven sind, die eine flexiblere Einhaltung ermöglichen können. Abbildung 6-32 zeigt das Verbindungsschema der Kurven 4 und 5.
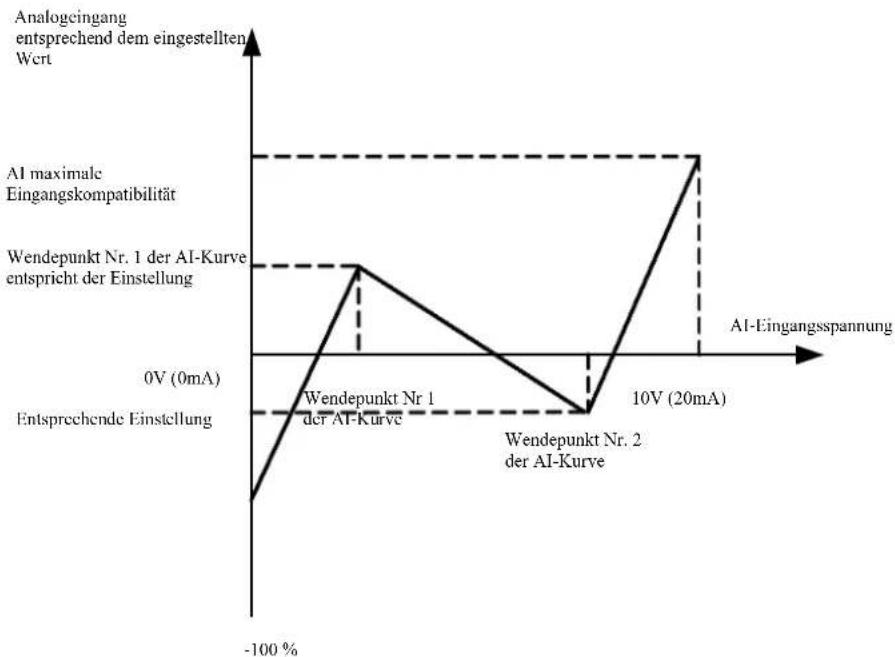
line
| Parameter | Value | | :--- | :--- | | Analogeingang entsprechend dem eingestellten Wert | -100% | | AI maximale Eingangskompatibilität | 0V (0mA) | | Wendepunkt Nr. 1 der AI-Kurve entspricht der Einstellung | 0V (0mA) | | Wendepunkt Nr. 2 der AI-Kurve | 10V (20mA) | | Entsprechende Einstellung | -100% |Abb. 6-32 Verbindungsschema für Kurven 4 und 5
Bei der Bestimmung der Kurven 4 und 5 ist zu beachten, dass die minimale Kurvenceingangsspannung, der Wendepunkt 1, der Wendepunkt 2 und der maximale Wendepunkt nacheinander ansteigen müssen. Mit der Auswahl P33 der AI-Kurve wird festgelegt, wie die fünf Kurven für den Analogeingang AI1 \~ AI3 ausgewählt werden sollen.
| A6-24 | Sprung für AI1 | Werkseinstellungen 0.0% | |
| Einstellbereich | -100.0% ~ 100.0% | ||
| A6-25 | Hubbereich für AI1 | Werkseinstellungen | |
| Einstellbereich | 0.0% ~ 100.0% | ||
| A6-26 | Sprung für AI2 | Werkseinstellungen | |
| Einstellbereich | -100.0% ~ 100.0% | ||
| A6-27 | Hubbereich für AI2 | Werkseinstellungen | |
| Einstellbereich | 0.0% ~ 100.0% | ||
| A6-28 | Sprung für AI3 | Werkseinstellungen 0.0% | |
| Einstellbereich | -100.0% ~ 100.0% | ||
| A6-29 | Hubbereich für AI3 | Werkseinstellungen 0.5% | |
| Einstellbereich | 0.0% ~ 100.0% | ||
Der Analogeingang VFD AI1 \~ AI3, hat eine Sollwertüberspringungsfunktion.
Die Sprungfunktion bedeutet, dass beim Auf- und Abspringen des analogen Sollwerts bei Intervalländerungen der dem Sollwert entsprechende Analogwert während des Sprungs konstant bleibt.
Beispiel: Wenn die analoge Eingangsspannung von A11 bei 5,00 V schwankt, beträgt der Schwankungsbereich 4,90 V \~ 5,10 V. Der minimale Eingangswert von A11 ist 0,00 V, was 0,0 % entspricht, und der maximale Eingangswert ist 10,00 V, was 100 % entspricht, dann wird die A11-Spannung im Bereich von 49,0 % \~ 51,0 % erkannt
Setzen Sie den AI1-Sprungpunkt A6-24 auf 50,0 %, setzen Sie die AI1-Sprungamplitude A6-25 auf 1,0 % und setzen Sie dann die Sprungfunktion des entsprechenden Eingangs auf den obigen AI1-Eingang, wodurch sich die AI1-Einstellung auf 50,0 % ergibt. Wandeln Sie AI1 in einen stabilen Eingang um, um Schwankungen zu eliminieren.
Gruppe A7. Benutzerprogrammierbare Funktionen
Siehe ergänzende Betriebsanleitung „Vom Benutzer programmierbare Steuerkarte“.
Gruppe AC. Kalibrierung der analogen Ein- und Ausgänge
| AC-00 | Gemessene Spannung AI1 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-01 | Angezeigte Spannung AI1 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-02 | Gemessene Spannung AI1 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-03 | Angezeigte Spannung AI1 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-04 | Gemessene Spannung AI2 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-05 | Angezeigte Spannung AI2 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-06 | Gemessene Spannung AI2 Nr. 2 | Werkseinstellungen | Kalibrierung |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-07 | Angezeigte Spannung AI2 Nr. 2 | Werkseinstellungen | |
| Einstellbereich | -9.999V ~ 10.000V | ||
| AC-08 | Gemessene Spannung AI3 Nr. 1 | Werkseinstellungen | |
| Einstellbereich | -9.999V ~ 10.000V | ||
| AC-09 | Angezeigte Spannung AI3 Nr. 1 | Werkseinstellungen | |
| Einstellbereich -9.999V ~ 10.000V | |||
| AC-10 | Gemessene Spannung AI3 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | -9.999V ~ 10.000V | ||
| AC-11 | Angezeigte Spannung AI3 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | -9.999V ~ 10.000V | ||
Dieser Funktionscode wird zur Korrektur des AI-Analogeingangs verwendet, um die Auswirkungen von AI-Eingangsoffset und -Verstärkung zu eliminieren. Die Gruppenfunktionsparameter wurden kalibriert und nach der Kalibrierung auf den Werkswert zurückgesetzt. Normalerweise ist keine Korrektur erforderlich.
Um die Spannung zu messen, können Sie z. B. ein Multimeter verwenden, um die tatsächliche Spannung zu messen. Der abgetastete Spannungswert wird angezeigt. Siehe AI der Gruppe U0, bevor Sie die Spannung korrigieren (U0-21, U0-22, U0 - 23).
Verwenden Sie bei der Korrektur der beiden Eingangsspannungswerte an jedem AI-Eingangsanschluss ein Multimeter, um den Gruppenwert zu messen und den Wert der Gruppe U0 abzulesen. Wenn der Funktionscode korrekt eingegeben wird, korrigiert der Wechselrichter automatisch die Nullpunktverschiebung und die Verstärkung von AI.
| AC-12 | Zielspannung AO1 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-13 | Gemessene Spannung AO1 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-14 | Zielspannung AO1 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-15 | Gemessene Spannung AO1 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-16 | Zielspannung AO2 Nr. 1 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 0.500V ~ 4.000V | ||
| AC-17 | Gemessene Spannung AO2 Nr. 1Einstellbereich | Werkseinstellungen Kalibrierung0.500V ~ 4.000V | |
| AC-18 | Zielspannung AO2 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
| AC-19 | Gemessene Spannung AO2 Nr. 2 | Werkseinstellungen Kalibrierung | |
| Einstellbereich | 6.000V ~ 9.999V | ||
Dieser Funktionscode wird zur Kalibrieren des AO-Analogeingangs verwendet, um die Auswirkungen von AO-Eingangsoffset und -Verstärkung zu eliminieren. Die Gruppenfunktionsparameter wurden kalibriert und nach der Kalibrierung auf den Werkswert zurückgesetzt. Grundsätzlich ist keine Korrektur erforderlich.
Die Zielspannung bezieht sich auf den theoretischen Wert der Ausgangsspannung des Wechselrichters.
Gemessene Spannung bezieht sich auf den tatsächlichen Wert der Ausgangsspannung, der mit einem Multimeter und anderen Instrumenten gemessen wird.
Gruppe U0. Überwachung des Wechselrichterbetriebs
Die Parametergruppe U0 dient der Überwachung von Betriebszustandsinformationen des Wechselrichters. Der Benutzer kann den Bildschirm anzeigen, um das Debuggen vor Ort zu erleichtern, oder den eingestellten Parameterwert auf dem PC-Monitor überwachen. In diesem Fall wird U0-00 \~ U0-31 gestoppt und die Überwachungsparameter P7-03 und P7-04 werden definiert.
Den Funktionscode des jeweiligen Parameters, den Parameternamen und seine Mindesteinheit entnehmen Sie bitte der Tabelle 6-1.
Tabelle 6-1 Parameter der Gruppe U0
| Funktionscode | Name des Parameters | Einheit |
| U0-00 | Betriebsfrequenz (Hz) | 0.01Hz |
| U0-01 | Frequenzeinstellung (Hz) | 0.01Hz |
| U0-02 | Busspannung (V) | 0.1V |
| U0-03 | Ausgangsspannung (V) | 1V |
| U0-04 | Ausgangsstrom (A) | 0.01A |
| U0-05 | Ausgangsleistung (kW) | 0.1kW |
| U0-06 | Ausgangsdrehmoment (%) | 0.1% |
| U0-07 | Status des DI-Eingangs | 1 |
| U0-08 | Status des DO-Ausgangs | 1 |
| U0-09 | AI1 Spannung (V) | 0.01V |
| U0-10 | AI2 Spannung (V) | 0.01V |
| U0-11 | AI3 Spannung (V) | 0.01V |
| U0-12 | Zählten von Werten | 1 |
| U0-13 | Längenwert | 1 |
| U0-14 | Anzeige der Lastgeschwindigkeit | 1 |
| U0-15 | PID-Einstellung | 1 |
| U0-16 | PID-Rückkopplung | 1 |
| U0-17 | SPS-Schritt | 1 |
| U0-18 | Eingangsimpulsfrequenz (Hz) | 0.01kHz |
| U0-19 | Rückkopplungsrate (0,1 Hz) | 0.1Hz |
| U0-20 | Verbleibende Betriebszeit | 0.1Min |
| U0-21 | AI1-Spannung vor der Kalibricierung | 0.001V |
| U0-22 | AI2-Spannung vor der Kalibrierung | 0.001V |
| U0-23 | AI3-Spannung vor der Kalibrierung | 0.001V |
| U0-24 | Lineare Geschwindigkeit | 1m/Min |
| U0-25 | Aktuelle Einschaltzeit | 1Min |
| U0-26 | Aktuelle Betriebszeit | 0.1Min |
| U0-27 | Eingangsimpulsfrequenz | 1Hz |
| U0-28 | Kommunikationseinstellungen | 0.01% |
| U0-29 | Rückkopplungsgeschwindigkeit des Encoders | 0.01Hz |
| U0-30 | Hauptfrequenzanzeige X | 0.01Hz |
| Funktionscode | Name des Parameters Einheit | |
| U0-31 | Anzeige der Hilfsfrequenz Y | 0.01Hz |
| U0-32 | Anzeige eines beliebigen Werts der Speicheradresse | 1 |
| U0-34 | Motortemperatur | 1 °C |
| U0-35 | Zieldrehmoment (%) | 0.1% |
| U0-36 | Ort der Drehung | 1 |
| U0-37 | Leistungsfaktorwinkel | 0.1 |
| U0-39 | Getrennte Zielspannung U/f | 1V |
| U0-40 | Getrennte Ausgangsspannung U/f | 1V |
| U0-41 | Anzeige des DI-Eingangsstatus | 1 |
| U0-42 | Anzeige des DO-Eingangsstatus | 1 |
| U0-43 | Anzeige 1 des DI-Betriebszustands (Funktion 01- Funktion 40) | 1 |
| U0-44 | Anzeige 2 des DI-Betriebszustands (Funktion 41- Funktion 80) | 1 |
| U0-45 | Einstellungsfrequenz (%) | 0 |
| U0-59 | Betriebsfrequenz (%) | 0.01% |
| U0-60 | Frequenzumrichterstatus | 0.01% |
| U0-61 | Anzeige der Hilfsfrequenz Y | 1 |
| U0-62 | Anzeige eines beliebigen Werts der Speicheradresse | 1 |
Kapitel 7 EMV (elektromagnetische Verträglichkeit)
7.1 Definition
Elektromagnetische Verträglichkeit bedeutet, dass das elektrische Gerät in einer elektromagnetisch gestörten Umgebung arbeitet, die elektromagnetische Umgebung jedoch nicht stört und seine Funktion stabil ausführt.
7.2 Einhaltung der EMV-Normen
Gemäß den Anforderungen der nationalen Norm GB / T12668.3 sollte der Frequenzumrichter die Anforderungen in zwei Aspekten erfüllen: elektromagnetische Störungen und elektromagnetische Interferenzen.
Unsere aktuellen Produkte entsprechen den neuesten internationalen Standards: IEC / EN61800-3: 2004 (Elektrische Antriebssysteme mit einstellbarer Drehzahl, Teil 3: EMV-Anforderungen und festgelegte Prüfverfahren), die der nationalen Norm GB / T12668.3 entspricht.
Die Norm IEC / EN61800-3 prüft den Frequenzumrichter hauptsächlich auf zwei Aspekte: die Emission elektromagnetischer Störungen und elektromagnetische Störfestigkeit. Elektromagnetische Störungen werden auf gestrahlte, leitungsgebundene und harmonische Störungen geprüft, die vom Frequenzumrichter emittiert werden (Anforderungen an Frequenzumrichter für zivile Nutzung). Die elektromagnetische Störfestigkeit muss auf Widerstand gegen leitungsgebundene und gestrahlte Störungen, Überspannungen, schnell wechselnde Impulsgruppen, elektrostatische Entladungen und Störfestigkeit gegen Schwachstromanschlüsse geprüft werden (spezifische Tests umfassen: 1. Beständigkeit gegen Eingangsspannungseinbrüche, -unterbrechungen und -schwankungen; 2. Beständigkeit gegen Kommutierungseinbrüche; 3. Beständigkeit gegen Oberschwingungseingang; 4. Prüfung der Eingangsfrequenzschwankungen; 5. Prüfung der Eingangsspannungsasymmetrie; 6. Prüfung der Eingangsspannungsschwankungen. Die Prüfung wird nach den strengen Anforderungen der Norm IEC / EN61800-3 durchgeführt. Bitte installieren Sie die Produkte unseres Unternehmens gemäß den Anweisungen in 7.3, sie haben eine gute elektromagnetische Verträglichkeit in allgemeiner Industrieumgebung.
7.3 EMV-Hinweise
7.3.1 Auswirkungen von Oberschwingungsstörungen: Oberschwingungsstörungen der Stromversorgung beschädigen den Wechselrichter, daher wird empfohlen, Wechselstrom-Eingangsdrosseln zu installieren, wenn die Qualität der Stromversorgung schlecht ist.
7.3.2 Elektromagnetische Störungen und Vorsichtsmaßnahmen bei der Installation: Es gibt zwei Arten von elektromagnetischen Störungen. Die eine ist die Störung des Wechselrichters im umgebenden elektromagnetischen Rauschen, die andere ist die vom Wechselrichter erzeugte Störung in den Peripheriegeräten.
Vorsichtsmaßnahmen bei der Installation:
1) Die Erdungsleitungen von elektrischen Produkten wie Wechselrichtern sollten gut geerdet sein;
2) Verlegen Sie die Eingangs- und Ausgangskabel des Wechselrichters sowie Niedrigstromsignalleitungen (z. B. Steuerkreise) nicht parallel. Ordnen Sie sie nach Möglichkeit vertikal an;
3) Es wird empfohlen, abgeschirmte Kabel oder Stahlrohrleitungen als Wechselrichterausgangsleitung zu verwenden, um eine zuverlässige Erdung der Abschirmschicht zu gewährleisten. Für geräuschbezogene Geräte wird empfohlen, ein doppelt verdrilltes Steuerkabel zu verwenden und die Abschirmungserdung zuverlässig zu machen.
4) Wenn das Motorkabel länger als 100 m ist, installieren Sie einen Ausgangsfilter oder eine elektrische Drossel.
7.3.3 Methoden zum Umgang mit Störungen, die von peripheren elektromagnetischen Geräten des Wechselrichters erzeugt werden: In der Regel wird die elektromagnetische Beeinflussung des Wechselrichters durch die Installation vieler Relais, Schütze oder elektromagnetischer Bremsen in der Nähe des Wechselrichters verursacht. Wenn der Wechselrichter aufgrund von Störungen ausfällt, werden die folgenden Methoden empfohlen:
1) Rüsten Sie das geräuscherzeugende Gerät mit einem Überspannungsschutz aus;
2) Installieren Sie einen Filter an der Eingangsklemme des Wechselrichters, wie in Abschnitt 7.3.6 gefordert;
3) Die Steuersignalleitung und die Leitung der Erkennungsschaltung sollten abgeschirmt sein und eine zuverlässige Masse haben.
7.3.4 Umgang mit Störungen, die von der Wechselrichterperipherie erzeugt werden: Es gibt zwei Arten von Störungen, nämlich gestrahlte Störungen des Wechselrichters und leitungsgebundene Störungen des Wechselrichters. Diese beiden Störungen führen zu elektromagnetischer oder elektrostatischer Induktion in den elektrischen Peripheriegeräten und verursachen dann Geräteausfälle. Unter Berücksichtigung dieser verschiedenen Störeinflüsse können folgende Lösungen in Betracht gezogen werden:
1) Das Signal der zu messenden Geräte, Empfänger und des Sensors ist im Allgemeinen schwach. Befinden sie sich in der Nähe des Wechselrichters oder im selben Schaltschrank, ist der Wechselrichter störanfällig und fehleranfällig. Es wird empfohlen, folgende Lösungen zu wählen: so weit wie möglich von Störquellen entfernt; Signal- und Stromkabel nicht parallel verlegen oder bündeln; das Signal- und Stromkabel abschirmen und eine zuverlässige Erdung sicherstellen; einen Ferritkern installieren
7.3.4 Umgang mit Störungen, die von der Wechselrichterperipherie erzeugt werden: Es gibt zwei Arten von Störungen, nämlich gestrahlte Störungen des Wechselrichters und leitungsgebundene Störungen des Wechselrichters. Diese beiden Störungen führen zu elektromagnetischer oder elektrostatischer Induktion in den elektrischen Peripheriegeräten und verursachen dann Geräteausfälle. Unter Berücksichtigung dieser verschiedenen Störeinflüsse können folgende Lösungen in Betracht gezogen werden: 1) Das Signal der zu messenden Geräte, Empfänger und des Sensors ist im Allgemeinen schwach. Befinden sie sich in der Nähe des Wechselrichters oder im selben Schaltschrank, ist der Wechselrichter störanfällig und fehleranfällig. Es wird empfohlen, folgende Lösungen zu wählen: so weit wie möglich von Störquellen entfernt; Signal- und Stromkabel nicht parallel verlegen oder bündeln; das Signal- und Stromkabel abschirmen und eine zuverlässige Erdung sicherstellen; einen Ferritkern installieren
(deckt den Frequenzbereich 30 \~ 1000 MHz ab) an der Ausgangsseite des Frequenzumrichters und
zwei bis drei Mal in die gleiche Richtung drehen. In verschärften Fällen können EMV-Ausgangsfilter installiert werden;
2) Wenn das störende Gerät die gleiche Leistung wie der Wechselrichter hat, kommt es zu leitungsgebundenen Störungen. Wenn diese Störung durch die obige Methode nicht beseitigt werden kann, installieren Sie einen EMV-Filter zwischen dem Wechselrichter und der Spannungsversorgung (siche 7.3.6 zur Modellauswahl);
3) Eine unabhängige Erdung der Peripheriegeräte kann Störungen durch Leckstrom der Erdungsleitung des Wechselrichters beseitigen.
2) Wenn das störende Gerät die gleiche Leistung wie der Wechselrichter hat, kommt es zu leitungsgebundenen Störungen. Wenn diese Störung durch die obige Methode nicht beseitigt werden kann, installieren Sie einen EMV-Filter zwischen dem Wechselrichter und der Spannungsversorgung (siche 7.3.6 zur Modellauswahl); 3) Eine unabhängige Erdung der Peripheriegeräte kann Störungen durch Leckstrom der Erdungsleitung des Wechselrichters beseitigen.
7.3.5 Leckstrom und Verfahren. Beim Betrieb des Wechselrichters treten zwei Formen von Leckstrom auf: Leckstrom gegen Erde und Leckstrom zwischen den Leitungen.
1) Faktoren, die den Leckstrom zur Erde beeinflussen und Lösungen:
Es besteht eine verteilte Kapazität zwischen dem Kabel und der Erde. Je größer die verteilte Kapazität ist, desto größer ist der Leckstrom. Daher sollte der Abstand zwischen Wechselrichter und Motor verringert werden, um die verteilte Kapazität zu reduzieren. Je höher die Trägerfrequenz, desto höher der Leckstrom, also senken Sie die Trägerfrequenz, um den Leckstrom zu reduzieren. Eine Reduzierung der Trägerfrequenz erhöht jedoch das Motorgräusch. Beachten Sie, dass eine effektive Möglichkeit zur Lösung des Leckstromproblems
die Installation einer Drossel ist. Der Leckstrom steigt mit zunehmendem Schleifenstrom, d. h. je höher die Motorleistung, desto höher der entsprechende Leckstrom.
2) Faktoren, die den Leckstrom zwischen Leitungen und Lösung beeinflussen:
Es besteht eine verteilte Kapazität zwischen der Ausgangsverkabelung des Wechselrichters. Wenn der durch den Stromkreis fließende Strom Oberschwingungen enthält, kann dies zu Resonanz führen und Leckstrom erzeugen. Wenn zu diesem Zeitpunkt ein Thermorelais verwendet wird, kann es zu Fehlfunktionen kommen.
Die Lösung besteht darin, die Trägerfrequenz zu reduzieren oder eine Ausgangsdrossel zu installieren. Bei Verwendung des Wechselrichters wird empfohlen, kein Thermorelais zwischen Wechselrichter und Motor zu installieren, sondern die Überstromschutzfunktion des Wechselrichters zu nutzen.
7.3.6 Vorsichtsmaßnahmen für die Installation des EMV-Eingangsfilters an der Netzeingangsklemme:
1) Hinweis: Beachten Sie bei der Verwendung des Filters unbedingt die Nenndaten. Da es sich bei dem Filter um ein elektrisches Gerät der Klasse 1 handelt, muss das Metallgehäuse des Filters in gutem Kontakt mit dem Metall des Installationsschranks stehen, und es ist eine gute Durchgängigkeit der elektrischen Leitung erforderlich, andernfalls besteht die Gefahr eines elektrischen Schlags, und es kann auch zu schwerwiegenden EMV-Auswirkungen kommen;
2) Gemäß der EMV-Prüfung sollte die PE-Klemme des Filters und des Wechselrichters mit der gleichen Masse verbunden werden, da es sonst zu einer schwerwiegenden Beeinträchtigung der EMV kommt;
3) Der Filter sollte möglichst in der Nähe der Eingangsklemme des Wechselrichters installiert werden.
1) Hinweis: Beachten Sie bei der Verwendung des Filters unbedingt die Nenndaten. Da es sich bei dem Filter um ein elektrisches Gerät der Klasse 1 handelt, muss das Metallgehäuse des Filters in gutem Kontakt mit dem Metall des Installationsschranks stehen, und es ist eine gute Durchgängigkeit der elektrischen Leitung erforderlich, andernfalls besteht die Gefahr eines elektrischen Schlags, und es kann auch zu schwerwiegenden EMV-Auswirkungen kommen; 2) Gemäß der EMV-Prüfung sollte die PE-Klemme des Filters und des Wechselrichters mit der gleichen Masse verbunden werden, da es sonst zu einer schwerwiegenden Beeinträchtigung der EMV kommt; 3) Der Filter sollte möglichst in der Nähe der Eingangsklemme des Wechselrichters installiert werden.
Kapitel 8 Fehlerdiagnose und Abhilfemaßnahmen
8.1 Fehlerwarnungen und Abhilfemaßnahmen
Der Frequenzumrichter verfügt über 24 Warn- und Schutzfunktionen. Wenn ein Fehler auftritt, beginnt die Schutzfunktion zu arbeiten und der Wechselrichter schaltet den Ausgang ab. Das Fehlerrelais des Frequenzumrichters beginnt zu kontaktieren und zeigt den Fehlercode auf dem Bildschirm des Wechselrichters an. Bevor der Benutzer um Hilfe bittet, kann er die Analyse gemäß den Anweisungen in diesem Kapitel selbst durchführen, um die Ursache des Fehlers zu ermitteln und eine Lösung zu finden. Wenn die Ursachen im Kasten angegeben sind, fordern Sie bitte den Service an und wenden Sie sich an die Vertretung des Frequenzumrichterherstellers oder direkt an unsere Firma.
| Fehlername Wechselrichterschutz | |
| Angezeigter Fehler Eröl | |
| Fehlerursache | 1. Kurzschluss im Ausgangsstromkreis des Wechselrichters2. Kabel zwischen Motor und Wechselrichter zu lang3. Überhitzung des Moduls4. Innenwicklung des Wechselrichters ist locker5. Fehlfunktion des Hauptbedienfelds6. Fehlfunktion des Treibermoduls7. Fehlfunktion des Inversionsmoduls |
| Lösung | 1. Fehlersuche am Peripheriegerät2. Elektrische Drossel oder Ausgangsfilter einbauen3. Prüfen Sie, ob der Luftkanal nicht blockiert ist und der Lüfter normal läuft, beheben Sie eventuelle Unregelmäßigkeiten4. Schieben Sie alle Anschlusskabel an das Ende5. Suchen Sie technische Unterstützung6. Suchen Sie technische Unterstützung7. Suchen Sie technische Unterstützung |
| Fehlername Überlast bei Beschleunigung | |
| Angezeigter Fehler | Err02 |
| Fehlerursache | 1. Überspannung gegen Erde oder Kurzschluss im Ausgangskreis des Wechselrichters2. Steuermodus ist vektoriell und es werden keine Parameter angegeben3. Beschleunigungszeit zu kurz4. Falsche manuelle Drehmomenterhöhung oder V/F-Kurve5. Niederspannung6. Motordrehzahl gestartet7. Stoßbelastung während des Beschleunigungsvorgangs8. Dieses Wechselrichtermodell hat eine zu niedrige Leistungsklasse |
| Lösung | 1. Fehlersuche am Peripheriegerät2. Motorparameter prüfen3. Beschleunigungszeit erhöhen4. Manuclle Drehmomentförderung oder V / F-Kurve einstellen5. Spannung auf normalen Bereich einstellen6. Drehzahlerfassung starten oder Neustart des Motors nach einem Stopp7. Stoßbelastung entfernen8. Wechselrichter mit einer höheren Leistungsklasse wählen |
| Fehlername | Überlast bei Beschleunigung |
| Angezeigter Fehler | Err03 |
| Fehlerursache | 1. Masse oder Kurzschluss der Ausgangsschleife des Wechselrichters2. Steuermodus ist vektoriell und es werden keine Parameter angegeben3. Beschleunigungszeit zu kurz4. Niederspannung5. Stoßbelastung beim Beschleunigen6. Es ist keine Bremseinheit oder kein Bremswiderstand installiert |
| Lösung | 1. Fehlersuche am Peripheriegerät2. Motorparameter prüfen3. Beschleunigungszeit erhöhen4. Spannung auf normalen Bereich einstellen5. Stoßbelastung entfernen6. Bremseinheit und Bremswiderstand installieren |
| Fehlcrname | Überstrom bei konstanter Geschwindigkeit |
| Angezeigter Fehler | Err04 |
| Fehlcrursache | 1. Masse oder Kurzschluss des Ausgangsstromkreises des Frequenzumrichters2. Steuermodus ist vektoriell und es werden keine Parameter angegeben3. Niederspannung4. Stoßbelastung beim Beschleunigen5. Dieses Wechselrichtermodell hat eine zu niedrige Leistungsklasse |
| Lösung | 1. Fehlersuche am Peripheriegerät2. Motorparameter prüfen3. Spannung auf normalen Bereich einstellen4. Stoßbelastung entfernen5. Wechselrichter mit einer höheren Leistungsklasse wählen |
| Fehlername Überlast bei Beschleunigung | |
| Angezeigter Fehler | Err05 |
| Fehlerursache | 1. Niedrige Eingangsspannung2. Äußere Kraft treibt den Motor beim Beschleunigen an3. Beschleunigungszeit zu kurz4. Bremseinheit und der Bremswiderstand sind nicht installiert |
| Lösung | 1. Spannung auf normalen Bereich einstellen2. Äußere Kraft entfernen oder einen Bremswiderstand installieren3. Beschleunigungszeit erhöhen4. Bremseinheit und Bremswiderstand installieren |
| Fehlername | Überspannung bei Verzögerung |
| Angezeigter Fehler | Err06 |
| Fehlerursache | 1. Hohe Eingangsspannung2. Äußere Kraft treibt den Motor beim Abremsen an3. Verzögerungszeit zu kurz4. Bremseinheit und der Bremswiderstand sind nicht installiert |
| Lösung | 1. Spannung auf normalen Bereich einstellen2. Äußere Kraft entfernen oder einen Bremswiderstand installieren3. Verzögerungszeit erhöhen4. Bremseinheit und Bremswiderstand installieren |
| Fehlername | Überspannung bei konstanter Geschwindigkeit |
| Angezeigter Fehler | Err07 |
| Fehlerursache | 1. Hohe Eingangsspannung2. Äußere Kraft treibt den Motor beim Abremsen an |
| Lösung | 1. Spannung auf normalen Bereich einstellen2. Äußere Kraft entfernen oder einen Bremswiderstand installieren |
| Fehlername | Ausfall der Steuerspannung |
| Angezeigter Fehler Err08 | |
| Fehlerursache | 1. Eingangsspannung liegt nicht im angegebenen Bereich |
| Lösung | 1. Spannung auf den angegebenen Bereich einstellen |
| Fehlername Spannung zu niedrig | |
| Angezeigter Fehler | Err09 |
| Fehlerursache | 1. Kurzzeitiger Stromausfall2. Spannung an der Eingangsklemme des Wechselrichters liegt außerhalb des angegebenen Bereichs3. Falsche Spannung am Bus4. Fehlfunktion der Gleichrichterbrücke und des Widerstandspuffers5. Unregelmäßiger Betrieb des Treibermoduls6. Fehlfunktion des Bedienfelds |
| Lösung | 1. Fehler rücksetzen2. Spannung auf normalen Bereich einstellen3. Suchen Sie technische Unterstützung4. Suchen Sie technische Unterstützung5. Suchen Sie technische Unterstützung6. Suchen Sie technische Unterstützung |
| Fehlername Wechselrichterüberlastung | |
| Angezeigter Fehler Err10 | |
| Fehlerursache | 1. Überlast oder blockierter Rotor2. Dieses Wechselrichtermodell hat eine zu niedrige Leistungsklasse |
| Lösung | 1. Last reduzieren, Motor und Maschine prüfen2. Wechselrichter mit einer höheren Leistungsklasse wählen |
| Fehlername Motorüberlastung | |
| Angezeigter Fehler | Err11 |
| Fehlerursache | 1. Motorschutzparameter P9-01 falsch eingestellt2. Überlast oder blockierter Rotor3. Dieses Wechselrichtermodell hat eine zu niedrige Leistungsklasse |
| Lösung | 1. Parameter richtig einstellen2. Last reduzieren, Motor und Maschine prüfen3. Wechselrichter mit einer höheren Leistungsklasse wählen |
| Fehlername Standardingangsphase | |
| Angezeigter Fehler | Err12 |
| Fehlerursache | 1. Unregelmäßige dreiphasige Eingangsleistung2. Fehlfunktion des Treibermoduls3. Falscher Blitzschutz4. Fehlfunktion des Hauptbedienfelds |
| Lösung | 1. Periphericprobleme überprüfen und beheben2. Suchen Sie technische Unterstützung3. Suchen Sie technische Unterstützung4. Suchen Sie technische Unterstützung |
| Fehlername | Standardausgangsphase |
| Angezeigter Fehler | Err13 |
| Fehlerursache | 1. Falscher Anschluss zwischen Wechselrichter und Motor2. Unsymmetrischer dreiphasiger Wechselrichterausgang bei Motorbetrieb3. Fehlfunktion des Treibermoduls4. Ungültiges Modul |
| Lösung | 1. Fehlersuche am Peripheriegerät2. Überprüfen, ob die dreiphasige Wicklung korrekt ist, und Fehler beheben3. Suchen Sie technische Unterstützung4. Suchen Sie technische Unterstützung |
| Fehlername Überhitzung des Moduls | |
| Angezeigter Fehler | Err14 |
| Fehlerursache | 1. Umgebungstemperatur zu hoch2. Blockierter Luftkanal3. Lüfter defekt4. Modulthermistor defekt5. Wechselrichtermodul defekt |
| Lösung | 1. Umgebungstemperatur reduzieren2. Lüfter reinigen3. Lüfter austauschen4. Thermistor ersetzen5. Wechselrichtermodul austauschen |
| Fehlername Peripheriegerätefehler | |
| Angezeigter Fehler | Err15 |
| Fehlerursache | 1. Externes Störeingangssignal über Multifunktionsklemme DI2. Externes Störeingangssignal über virtuelle E/A-Funktion |
| Lösung | 1. Zurücksetzen2. Zurücksetzen |
| Fehlername Kommunikationsfehler | |
| Angezeigter Fehler | Err16 |
| Fehlerursache | 1. Fehlerhafter Betrieb des Host-Computers2. Falsche Kommunikationsleitung3. Falsche Einstellung der Kommunikationserweiterungskarte P0-284. Falsche Einstellung der Kommunikationsparameter der Gruppe PD |
| Lösung | 1. Verkabelung des Host-Computers prüfen2. Verkabelung der Kommunikationsleitung prüfen3. Typ der Kommunikationserweiterungskarte richtig einstellen4. Kommunikationsparameter richtig einstellen |
| Fehlername | Schützfehler |
| Angezeigter Fehler | Err17 |
| Fehlerursache | 1. Funktionsstörung des Treibermoduls und der Stromversorgung2. Fehlfunktion des Schützes |
| Lösung | 1. Treiber oder Leistungsmodul ersetzen2. Schütz ersetzen |
| Fehlername | Stromerkennungsfehler |
| Angezeigter Fehler Err | 18 |
| Fehlerursache | 1. Fehlfunktion des Hall-Geräts2. Fehlfunktion des Treibermoduls |
| Lösung | 1. Hall-Gerät ersetzen2. Treibermodul ersetzen |
| Fehlername Motorabstimmungsfehler | |
| Angezeigter Fehler Ern19 | |
| Fehlerursache | 1. Motorparameter nicht gemäß Typenschild eingestellt2. Zeitlimit für Parametrierung überschritten |
| Lösung | 1. Motorparameter entsprechend dem Typenschild korrekt einstellen2. Kabel zwischen Wechselrichter und Motor überprüfen |
| Fehlername | Fehler der Codeplatte |
| Angezeigter Fehler | Err20 |
| Fehlerursache | 1. Encoder-Modell passt nicht2. Encoder nicht korrekt angeschlossen3. Encoder defekt4. Falsche PG-Karte |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| Lösung | 1. Encoder-Modell basierend auf der tatsächlichen Situation einstellen |
| 2. Verkablungsfehler reparieren | |
| 3. Encoder wechseln | |
| 4. PG-Karte wechseln |
Fehlername EEPROM-Lese- und Schreibfehler
Angezeigter Fehler Err21
Fehlerursache 1. Defekter EEPROM-Chip
Lösung 1. Ändern des Hauptbedienfelds
Fehlername Hardwarefehler des Wechselrichters
| Angezeigter Fehler | Err22 |
| Fehlerursache | 1. Überspannung liegt vor2. Überstrom liegt vor |
| Lösung | 1. Gemäß Überspannungsfehler handeln2. Gemäß Überstromfehler handeln |
Fehlername Kurzschluss gegen Masse
Angezeigter Fehler Err23
Fehlerursache 1. Kurzschluss des Motors gegen Masse
Lösung 1. Kabel oder Motor ersetzen
Fehlername Fehler beim Erreichen der Gesamtbetriebszeit
Angezeigter Fehler Err26
Fehlerursache 1. Gesamtbetriebszeit hat den eingestellten Wert erreicht
Lösung 1. Parameterinitialisierungsfunktion verwenden, um gespeicherte Informationen zu eliminieren
Fehlername Benutzerdefinierter Fehler 1
Angezeigter Fehler Err27
Fehlerursache 1. Eingangssignal des Fehlers 1 benutzerdefiniert über Multifunktionsklemme DI
- Eingangssignal des Fehlers 1 benutzerdefiniert über virtuelle Ein-/Ausgangsfunktion
Lösung 1. Zurücksetzen
- Zurücksetzen
Fehlername Benutzerdefinierter Fehler 2
Angezeigter Fehler Err28
Fehlerursache 1. Eingangssignal des Fehlers 2 benutzerdefiniert über Multifunktionsklemme DI
- Eingangssignal des Fehlers 2 benutzerdefiniert über virtuelle Ein-/Ausgangsfunktion
Lösung 1. Zurücksetzen
Fehlername Fehler des Erreichens der Gesamteinschaltzeit
Angezeigter Fehler Err29
Fehlerursache 1. Gesamteinschaltzeit hat den eingestellten Wert erreicht
Lösung 1. Parameterinitialisierungsfunktion verwenden, um gespeicherte Informationen zu eliminieren
Technische Parameter eines Hochleistungs-Frequenzumrichters
| Fehlername | Leerlauffehler |
| Angezeigter Fehler Err30 | |
| Fehlcrursache | 1. Der Betriebsstrom des Frequenzumrichters beträgt <P9-64 |
| Lösung | 1. Prüfen, ob die Last nicht getrennt ist und ob die Einstellungen der Parameter P9-64, P9-65 mit den tatsächlichen Betriebsbedingungen kompatibel sind. |
| Fehlername | PID-Rückkopplungsverlustfehler während des Betriebs |
| Angezeigter Fehler Err31 | |
| Fehlerursache | 1. PID-Rückkopplung ist kleiner als der eingestellte Wert von PA-26 |
| Lösung | 1. PID-Rückkopplungssignal überprüfen oder PA-26 auf den entsprechenden Wert einstellen. |
| Fehlername | Zyklusweiser Überstromfehler |
| Angezeigter Fehler | Err40 |
| Fehlerursache | 1. Überlast oder blockierter Rotor2. Dieses Wechselrichtermodell hat eine zu niedrige Leistungsklasse |
| Lösung | 1. Last reduzieren, Motor und Maschine prüfen2. Wechselrichter mit einer höheren Leistungsklasse wählen |
| Fehlername | Motorschalterfehler bei Wechselrichterbetrieb |
| Angezeigter Fehler | Err41 |
| Fehlerursache | 1. Aktuelle Motorauswahl über die Klemme ändern, wenn der Wechselrichter in Betrieb ist |
| Lösung | 1. Motor nach Stillstand des Wechselrichters einschalten |
| Fehlername | Fehler zu hoher Drehzahlabweichung |
| Angezeigter Fehler | Err42 |
| Fehlerursache | 1. Falsche Einstellung der Encoder-Parameter2. Parameter nicht identifiziert3. Drehzahlabweichung zu hoch, Parametereinstellungen P9-69, P9-60 sind unzulässig |
| Lösung | 1. Encoder-Parameter richtig einstellen2. Parameteridentifikation durchführen3. Erkennungsparameter vernünftig auf Basis der tatsächlichen Situation einstellen |
| Fehlername | Fehler überhöhter Motordrechzahl |
| Angeziegter Fehler | Err43 |
| Fehlerursache | 1. Falsche Einstellung der Encoder-Parameter2. Parameter nicht identifiziert3. Parametereinstellungen P9-69, P9-60 sind nicht sinnvoll |
| Lösung | 1. Encoder-Parameter richtig einstellen2. Parameterridentifikation durchführen3. Erkennungsparameter vernünftig auf Basis der tatsächlichen Situation einstellen |
| Fehlername | Motorüberhitzungsfehler |
| Angezeigter Fehler | Err45 |
| Fehlerursache | 1. Verkabelung des Temperatursensors ist lose2. Motortemperatur ist zu hoch |
| Lösung | 1. Temperatursensor erkennen und Fehler beheben2. Trägerfrequenz reduzieren oder andere Maßnahmen zur Wärmeableitung anwenden, um die Wärmeableitung des Motors zu verbessern |
| Fehlername | Falsche Startposition |
| Angezeigter Fehler | Err51 |
| Fehlerursache | 1. Motorparameter weicht deutlich vom Istwert ab |
| Lösung | 1. Erneut überprüfen, ob die Motorparameter korrekt sind, insbesondere wenn die Einstellung für den Nennstrom klein ist. |
8.2 Häufige Fehler und ihre Lösungen
Bei der Verwendung des Wechselrichters können die folgenden Fehler auftreten. Beachten Sie die unten aufgeführten einfachen Methoden zur Analyse:
Tabelle 8-1. Häufige Fehler und Vorgehensweisen
| Lf d. Nr. | Fehlerbeschreibung | Mögliche Ursachen | Lösungen |
| 1 | Keine Anzeige nach dem Einschalten | Keine oder zu niedrige Netzspannung; Fehler des Leistungsschalters auf der Steuerplatine des Wechselrichters; Gleichrichterbrücke defekt; Pufferwiderstand des Wechselrichters defekt; Fehler in der Steuertafel und der Tastatur; Kabel zwischen Steuertafel, Steuerplatine und Keypad nicht angeschlossen; | Eingangsleistung prüfen; Sammelschienenspannung prüfen; Flachbandkabel entfernen und wieder einstecken; Hilfe beim Hersteller anfordern |
| 2 | Anzeige von HC (Überhitzung) nach dem Einschalten | Schlechter Kontakt zwischen Steuerplatine und Bedienfeld; Zugehörige Geräte am Bedienfeld sind defekt; Kurzschluss zur Motormasse oder zum Motorkabel; Hall-Fehler; Netzspannung zu niedrig. | Flachbandkabel entfernen und wieder einstecken; Hilfe beim Hersteller anfordern |
| 3 | Anzeige von „Err23“ nach dem Einschalten | Lüfter beschädigt oder blockiert; Kurzschluss in peripheren Steuerklemmenleitungen. | Isolation zwischen Motor und Ausgangsleitung mit Trameger messen; Hilfe beim Hersteller anfordern |
| 4 | Normale Anzeige beim Einschalten, Anzeige von „HC“ nach dem Betrieb und Herunterfahren | Trägerfrequenzeinstellung zu hoch; Der Lüfter ist defekt oder der Luftkanal ist verstopft; beschädigte interne Komponenten des Wechselrichters beschädigt (Thermoelement oder andere). | Ersetzen Sie den Lüfter; externen Kurzschluss beseitigen |
| 5 | Häufiger Alarm Err14 (Überhitzung) | Trägerfrequenzeinstellung zu hoch; Der Lüfter ist defekt oder der Luftkanal ist verstopft; Interne Komponenten des Wechselrichters sind beschädigt (Thermoelement oder anderes). | Trägerfrequenz reduzieren (P0-15); Lüfter austauschen und Luftkanal reinigen; Hilfe beim Hersteller anfordern |
| 6 | Der Motor dreht sich nach dem Start des Wechselrichters nicht. | Motor und Motorverkabelung; falsche Parametereinstellung des Wechselrichters (Motorparameter); schlechter Kontakt zwischen Steuerplatine und Bedienfeld; Fehler der Steuerplatine | Verkabelung zwischen Wechselrichter und Motor überprüfen; Motor austauschen oder mechanischen Fehler beheben; Motorparameter überprüfen und zurücksetzen. |
| 7 | DI-Terminal nicht aktiv | Falsche Parametereinstellungen; externer Signalfehler; Loser OP-Jumper und + 24V; Fehlfunktion des Bedienfelds. | Parameter der Gruppe P4 überprüfen und zurücksetzen; Externe Signalleitung wieder anschließen; OP- und + 24V-Jumper prüfen; Hilfe beim Hersteller anfordern. |
| 8 | Keine Motordrehzahlförderung bei Vektorregelung im geschlosse nen Regelkreis | Encoder-Fehler; schlechte Verkabelung oder schlechter Encoder -Kontakt; Fehler der PG-Karte; Fehler des Bedienfelds. | Encoder-Platte austauschen und Verkabelung überprüfen; PG-Karte austauschen; technische Unterstützung anfordern. |
| 9 | Häufige Überspannungs- und Überstromalarme | Falsche Einstellung der Motorparameter; falsche Beschleunigungs- / Verzögerungszeit; Lastschwankungen. | Motorparameter zurücksetzen oder Motor einstellen; Beschleunigungs- und Verzögerungszeit einstellen; Hilfe beim Hersteller anfordern |
| Lfd.Nr. | Fehlerbeschreibung | Mögliche Ursachen | Lösungen |
| 10 | Anzeige von Err17 beim Einschalten (oder während des Betriebs) | Das Softstartschütz ist nicht geschlossen. | Überprüfen, ob das Schützkabel nicht locker ist; auf Schützfehler prüfen; überprüfen, ob keine Fehler an der 24-V-Stromversorgung des Schützes vorliegen; Hilfe beim Hersteller anfordern; |
| 11 | Anzeige „___”Nach dem Einschalten | Zugehörige Geräte des Bedienfelds sind beschädigt. | Bedienfeld ersetzen; |
Anhang A: Multifunktionskarte VFD-PC1
(Gilt für Maschinen von 3,7 kW und mehr)
1. Vorwort
Die Karte VFD-PC1 ist eine multifunktionale Erweiterungskarte aus unserem Hause, die für diese Serie von Wechselrichtern geeignet ist. Sie enthält die folgenden Ressourcen:
| Pos. | Parameter | Beschreibung |
| Eingangsklcm me | 5-poliger digitaler Signaleingang | |
| 1-poliger analoger Spannungssignaleingang | Unterstützt Spannungseingangssignal bei -10 V ~ 10 V. | |
| Ausgangsklcm me | 1-poliger Relais-Signalausgang | |
| 1-poliger digitaler Signalausgang | ||
| 1-poliger analoger Signalausgang | ||
| Kommunikation | Kommunikationsschnittstelle RS-485 | Unterstützt das Modbus-RTU-Kommunikationsprotokoll (Details in Anhang I: VFD - Modbus - Kommunikationsprotokoll) |
| Kommunikationsschnittstelle CAN | Unterstützt das CANlink-Kommunikationsprotokoll |
II. Mechanische Installation und Funktionsbeschreibungen der Steuerklemmen
- Installationsmethode, Funktionsbeschreibungen der Steuerklemmen und Jumperbeschreibungen - siehe Abbildung 1, Tabelle 1 und Tabelle 2 in Anhang 1
1) Nach vollständiger Abschaltung des Frequenzumrichters installieren;
2) Schnittstelle der Erweiterungskarte und die Öffnung für die Position der Multifunktionskarte am Bedienfeld des Laufwerks ausrichten.
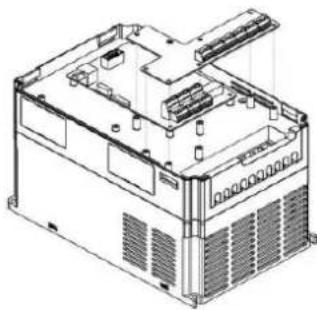
Anhang A: Abbildung 1. Einbau der Multifunktionskarte
Anhang A: Funktionsbeschreibungen der Steuerklemmen
| Kategorie | Klemmensymbol | Klemmenbezeichnung | Funktionsbeschreibung |
| Stromversorgung | +24 V - COM | Anschluss einer externen +24V-Spannungsversorgung | Stellt eine externe +24V-Spannungsversorgung bereit, sie wird für die Betriebsstromversorgung der digitalen Ein- und Ausgangsklemme und die externe Sensorversorgung verwendet; max: 200 mA |
| OP1 | Eingangsklemme (digitale) Spannungs-versorgung | OP1 und „+24V“ sind werksseitig über Jumper J8 verbunden. Bei Verwendung der externen Spannungsversorgung muss OP1 an die externe Spannungsversorgung angeschlossen und der Jumper J8 entfernt werden. | |
| Analogeingang | AI3-PGND | Analogeingangs klemme 3 | 1. Akzeptiert Optoisolator-Eingang, Differenzspannungseingang und Temperatursensor-Widerstandscingang2. Eingangsspannungsbereich: DC-10V ~ 10V3. Temperatursensor PT100, PT10004. Scheibenschalter S1 verwenden, um die Eingabemethode zu bestimmen, verwenden Sie nicht verschiedene Funktionen gleichzeitig. |
| Funktionen der digitalen Eingangsklemmen | DI6-OP1 | Digitaler Eingang 6 | 1. Optoisolator: kompatibel mit bipolarem Eingang2. Eingangsimpedanz: 2,4 kΩ3. Spannungsbereich am Eingangspegel: 9 ~ 30V |
| DI7-OP1 | Digitaler Eingang 7 | ||
| DI8-OP1 | Digitaler Eingang 8 | ||
| DI9-OP1 | Digitaler Eingang 9 | ||
| DI10-OP1 | Digitaler Eingang 10 | ||
| Analogausgang | AO2-GND | Analogausgang 2 | 1. Ausgangsspannungsspezifikation: 0 V ~ 10 V.2. Ausgangsstromspezifikation: 0mV ~ 20mV |
| Digitaler Ausgang | DO2-CME | Digitaler Ausgang 2 | Optoisolator, bipolarer Ausgangsspannungsbereich mit offenem Kollektor: 0 V ~ 24 V, Ausgangsstrombereich: 0 mA ~ 50 mA. Hinweis: Der digitale CME1-Ausgang und der digitale COM-Eingang sind intern isoliert; die J7-Verbindung ist standardmäßig. Wenn DO2 von einer externen Quelle gespeist werden soll, muss der Jumper J7 entfernt werden. |
| Relaisausgang (RELAY2) | PA- PB | Normalerweise geschlossene Klemme | Antriebskontaktkapazität: AC250V, 3A, COSφ = ,4. DC 30 V, 1 A. |
| PA- PC | Normalerweise offene Klemme | ||
| RS-485-Kommunikation | 485+/485- | Kommunikationsschnittstellenklemme | Klemmen der Eingangs- und Ausgangssignale der Modbus-RTU-Protokollkommunikation, isolierter Eingang. |
| CAN-Kommunikation | CANH/CANL | Kommunikationsschnittstellenklemme | CANlink-Kommunikationseingang, isolierter Eingang |
Anhang A: Tabelle 2. Jumper-Beschreibung
| Jumper Nr. Beschreibung | |
| J3 | Auswahl des AO2-Ausgangs - Spannung, Strom |
| J4 | Wählen Sie den angepassten Widerstand für die CAN-Klemme |
| J1 | Wählen Sie den angepassten Widerstand für die RS485-Klemme |
| J7 | Wählen Sie die Verbindungsmethode von CME1 |
| J8 | Wählen Sie die Verbindungsmethode von OP1 |
| S1 | Auswahl der Funktion AI3, PT100, PT1000 |
Anhang B: Anleitung für die E/A-Erweiterungskarte (VFD-IO1) (Karte für zusätzliche Ein- und Ausgänge)
(Gilt für Maschinen aller Serien)
I. Vorwort
Die E / A-Erweiterungskarte VFD-IO1 bietet einen 3-poligen DI-Eingang.
II. Mechanische Installation und Funktionsbeschreibungen der Steuerklemmen
1. Installationsmethode und Funktionsbeschreibungen der Verkabelungsklemmen - siehe Abbildung 1 und Tabelle 1 in Anhang 2.
1) Montage und Demontage nach vollständigem Ausschalten des Frequenzumrichters;
2) Anpassen der Schnittstelle der Erweiterungskarte und die E / A-Position der Erweiterungskarte an das Bedienfeld am Wechselrichter.
3) Montage der Kommunikationskarte mit der Schraube wie in Abbildung 1 gezeigt.
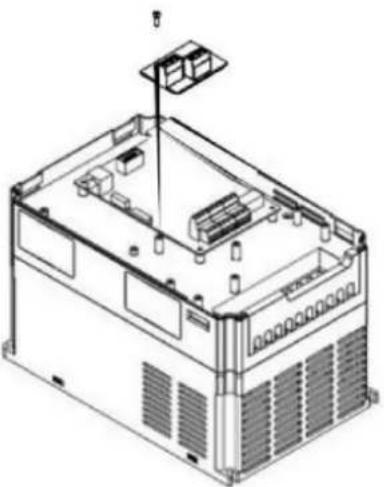
Anhang B: Abbildung 1. Einbau der Erweiterungskarte VFD-I01
Funktionsbeschreibung der Kabelklemmen
Anhang B: Tabelle 1. Funktionsbeschreibungen der Kabelklemmen
| Kategorie | Klemmens symbol | Klemmenbezeichnung | Funktionsbeschreibung |
| Stromversorgung | +24 V - COM | Anschluss einer externen Spannungsversorgung + 24V | Stellt eine externe +24-V-Spannungsversorgung bereit, Verwendung für die Betriebsspannungsversorgung der digitalen Ein- und Ausgangsklemme und die externe Sensorversorgung; maximaler Strom: 200 mA |
| OP2 | Eingangsklemme (digitalc) Spannungsversorgung | Kein werkseitiger Stromanschluss für OP2, Anschluss an externe Stromversorgung nach Bedarf. | |
| Funktionen der digitalen Eingangsklemmen | DI6-OP2 | Digitaler Eingang 6 | 1. Optoisolator: kompatibel mit bipolarem Eingang2. Eingangsimpedanz: DI6, DI7: 3,3 kΩ, DI8: 2,4 kΩ3. Spannungsbereich am Eingangspegel: 9 ~ 30V4. DI6, DI7 sind gemeinsame Eingangsklemmen, Eingangsfrequenz <100 Hz; DI8 ist ein schneller Impulseingang, maximale Eingangsfrequenz <100 kHz. |
| DI7-OP2 | Digitaler Eingang 7 | ||
| DI8-OP2 | Digitaler Eingang 8 |
Anhang C: Encoder-Erweiterungskarte
(Gilt für alle Maschinen der Serie)
I. Vorwort
VFD ist mit einer Erweiterungskarte für Allzweck-Encoder (PG-Karte) ausgestattet. Als optionales Zubehör wird es für den Wechselrichter zur Regelung der Vektorregelung benötigt. Wählen Sie die entsprechende PG-Karte entsprechend dem Encoder-Ausgang aus. Die spezifischen Modelle sind wie folgt:
| Optionales Zubehör | Beschreibung | Sonstiges |
| VFD-PGI | PG-Karte Differenzeingang ohne Frequenzteilungsausgang | Klemmenverkabelung |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| VFD-PG2 | PG-Karte für Drehtransformator-Interfacekarte | DB9-Bus-Steckplatz |
| VFD-PG3 | PG-Karte OC-Eingang, 1:1 gesplitteter Frequenzausgang | Klemmenverkabelung |
II. Mechanische Installation und Funktionsbeschreibungen der Steuerklemmen
- Siehe Abbildung 1 und Tabelle 1 in Anhang C für Installationsmethode, Aussehen, Spezifikation und Signalabschluss an der Verkabelungsklemme:
1) Installieren und deinstallieren Sie die PG-Karte, wenn der Frequenzumrichter vollständig ausgeschaltet ist.
2) Verbinden Sie den Jumper J3 auf dem Bedienfeld mit der Erweiterungskarte über den 18-poligen FFC-Stecker (achten Sie auf eine ordnungsgemäße Installation und korrekte Schnappverbindung).
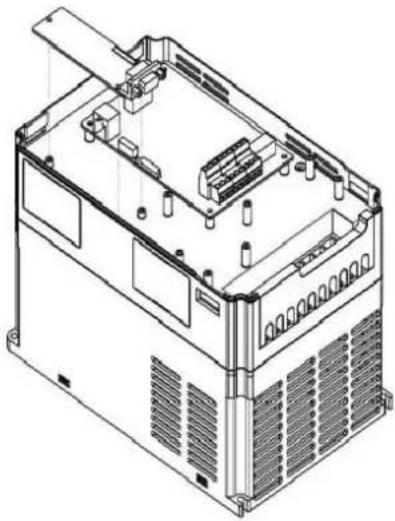
Anhang E: Abbildung 1. So installieren Sie die Erweiterungskarte für den Encoder
Parameter der Encoder-Erweiterungskarte und Bestimmung der Signalanschlüsse:
Anhang C: Tabelle 1. Erweiterungskartenparameter und Definition der Signalklemmen
| PG-Differenzkarte (VFD-PG1) | |||
| Parameter VFD-PG1 | |||
| Benutzeroberfläche abgeschragte Spitze | |||
| Entfernung | 3.5 mm | ||
| Schraube | gerade | ||
| Oder steckbar nein | |||
| Kabelquerschnitt | 16-26AWG | ||
| Maximale Drehzahl | 500 kHz | ||
| Amplitude des Differenzeingangssignals | ≤ 7 V | ||
| Definition der Signalleitung VFD-PG1 VFD-PG1 | |||
| Nr. | Symbol | Beschreibung | |
| 1 | A+ | positives Signal am Encoder-Ausgang A+ | |
| 2 | A- | negatives Signal am Encoder-Ausgang A- | |
| 3 | B+ | positives Signal am Encoder-Ausgang B+ | |
| 4 | B- | negatives Signal am Encoder-Ausgang B- | |
| 5 | Z+ | positives Signal am Encoder-Ausgang Z+ | |
| 6 | Z- | negatives Signal am Encoder-Ausgang A- | |
| 7 | 5 V | Bietet eine externe Spannungsversorgung von 5 V / 100 mA | |
| 8 | COM | Massc | |
| 9 | PE | Schirmklemme | |
| PG-Karte für Drehtransformator-Interfacekarte (VFD-PG2) | |||
| Kartenparameter VFD-PG2 | |||
| Benutzcroberfläche | DB9-Buchsc | ||
| Oder steckbar | ja | ||
| Kabelquerschnitt | >22 AWG | ||
| Auflösungsfaktor 12 Bits | |||
| Antriebsfrequenz | 10 kHz | ||
| VRMS | 7 V | ||
| VP-P 3.15 ± 27 % | |||
| Klemme VFD-PG2 | |||
| Nr. | Symbol | Beschreibung | |
| 1 | EXC1 | Antrieb - Drehtransformator | |
| 2 | EXC | Antrieb + Drehtransformator | |
| 3 | SIN | SIN-Rückkopplung + Drehtransformator | |
| 4 | SINLO | SIN-Rückkopplung - Drehtransformator | |
| 5 | COS | COS-Rückkopplung + Drehtransformator | |
| 6-8 | - | - | |
| 9 | COSLO | COS-Rückkopplung - Drehtransformator | |
| Karte OC PG (VFD-PG3) | ||
| Kartenparameter VFD-PG3 | ||
| Benutzeroberfläche abgeschrägte Spitze | ||
| Entfernung | 3.5 mm | |
| Schraube | gerade Schraube | |
| Oder steckbar nein | ||
| Kabelquerschnitt | 16-26AWG | |
| Maximale Drehzahl | 100 KHz | |
| Klemme VFD-PG3 | ||
| Nr. Symbol Beschreibung | ||
| 1 | A | Encoder-Ausgang A, Signal + |
| 2 | B | Encoder-Ausgang B, Signal- |
| 3 | Z | Encoder-Ausgangssignal Z |
| 4 | 15 V | Bietet eine externe Spannungsversorgung von 15 V / 100 mA |
| 5 | COM | Masse |
| 6 | COM | Masse |
| 7 | A1 | Signal 1: 1 am Ausgang A der rückgekoppelten PG-Karte |
| 8 | B1 | Signal 1: 1 am Ausgang B der rückgekoppelten PG-Karte |
| 9 | PE | Schirmklemme |
Anhang D: Anleitung für die Erweiterungskarte CANlink Kommunikation (VFD-CAN1)
(für die gesamte Serie)
I. Vorwort
Die Karte wurde speziell für die CANlink-Kommunikationsfunktion dieser Serie von Wechselrichtern entwickelt.
II. Mechanische Installation und Funktionsbeschreibungen der Steuerklemmen
- Installationsmethode - Anhang B: wie bei der IO-Erweiterungskarte (VFD-IO1). Siehe Abbildung 1, Tabelle 1 und Tabelle 2 in Anhang D für Funktionsbeschreibungen der Verkabelungsklemmen und Jumper-Beschreibungen.
Anhang D: Tabelle 1. Beschreibung der Bedienfeldklemme.
| Kategorie | Klemmensymbol | Klemmenbezeichnung | Funktionsbeschreibung |
| KommunikationCAN (CN1) | CANH/CANL | Kommunikationsschnittstellenklemme | Eingangsklemme der CAN-Kommunikation |
| COM | CAN-Kommunikationsstrommasse |
Anhang D: Tabelle 2. Jumper-Beschreibung
| Jumper-Nr. | Beschreibung |
| J2 | Wählen Sie den Widerstand, der zur CAN-Klemme passt |
Achtung!
Um das Kommunikationssignal vor externen Störungen zu schützen, kann für das Kommunikationskabel ein paarweise verdrilltes Kabel verwendet werden, und parallele Kabel sollten so weit wie möglich vermieden werden;
Anhang E: Anleitung für Kommunikationserweiterungskarte RS-485 (VFD-TX1)
I. Vorwort
(für die gesamte Serie)
Technische Parameter eines Hochleistungs-Frequenzumrichters
Die Karte wurde speziell für die 485-Kommunikationsfunktion dieser Serie von Wechselrichtern entwickelt. Dank des angewandten Isolationsschemas entsprechen die elektrischen Parameter den internationalen Standards und der Benutzer kann je nach Bedarf wählen, ob er den Wechselrichter steuern und die Parameter über die serielle Fernschnittstelle einstellen möchte;
II. Mechanische Installation und Funktionsbeschreibungen der Steuerklemmen
- Siehe Anhang B zur Installation: wie IO-Erweiterungskarte (VFD-IO1). Siehe Tabelle 1 und Tabelle 2 in Anhang E für die Beschreibungen der funktionalen Verkabelungsklemmen und die Definition der Einwahlverbindung:
Funktionsbeschreibung der Steuerklemmen
Anhang E: Tabelle 1.
Beschreibung der Bedienfeldklemme
| Kategorie | Klemmensymbol | Klemmenbezeichnung | Funktionsbeschreibung |
| Kommunikation 485 (CN1) | 485+/485- | Kommunikationsschnittstellenklemme | Kommunikationseingangklemme 485, Isolationseingang |
| CGND | 485-Kommunikationsstrommasse | Isolierte Leistung |
Jumper-Beschreibung:
Anhang E: Tabelle 2. Jumper-
Beschreibung
| Jumper Nr. Beschreibung | |
| J1 | Wählen Sie den Widerstand, der zur 485-Klemme passt. |
Anhang F: VFD-Modbus-Kommunikationsprotokoll
Diese Serie von Wechselrichtern verfügt über eine RS232-/RS485-Kommunikationsschnittstelle und unterstützt das Modbus-Kommunikationsprotokoll. Benutzer können eine zentrale Steuerung über PC oder SPS realisieren, den Startbefehl für den Umrichter über das
Kommunikationsprotokoll setzen, die Parameter des Funktionscodes ändern oder lesen, die Betriebsbedingungen und Fehlerinformationen des Wechselrichters ablesen usw.
I. Protokollinhalt
Das serielle Kommunikationsprotokoll bestimmt den Inhalt der übertragenen Informationen und verwendet das serielle Kommunikationsformat, einschließlich des Host-Polling- (oder Broadcasting-) Formats, der Host-Codierungsmethode wie z. B. des Funktionscodes der erforderlichen Operation, der Übertragungsdaten, der Fehlerprüfung usw. Die Antwort des Slaves (Slave-Gerät) nimmt ebenfalls die gleiche Struktur an, und ihr Inhalt umfasst Betriebsbestätigung, Datenrückgabe und Fehlerprüfung usw. Wenn ein Fehler auftritt, während der Slave Informationen empfängt oder die vom Master geforderte Operation nicht ausführt, organisiert der Slave die Fehlermeldung als Antwort zurück an den Master.
Anwendungsmodus: Der Frequenzumrichter greift über den RS232- / RS485-Bus auf ein PC- / SPS-Steuerungsnetzwerk vom Typ „Single Master und Multiple Slaves“ zu.
Busstruktur
(1) Schnittstellentyp: RS232 / RS485 Hardware-Schnittstelle
(2) Übertragungsmodus: asynchron seriell und halbduplex. Was Master und Slave betrifft, so kann zur gleichen Zeit einer nur Daten senden und der andere nur Daten empfangen. Bei der asynchronen seriellen Kommunikation werden die Daten Frame für Frame als Nachricht übertragen.
(3) Topologischer Aufbau: ein System mit einem Master und vielen Slaves. Der Einstellbereich der Slave-Adresse reicht von 1 \~ 247, wobei 0 die Adresse für die Broadcast-Kommunikation ist. Die Slave-Adresse im Netzwerk sollte eindeutig sein.
Protokollbeschreibung
Das Kommunikationsprotokoll dieser Serie von Frequenzumrichtern ist ein asynchrones serielles Master-Slave-Modbus-Kommunikationsprotokoll, und nur ein Gerät (Host/Master) im Netzwerk kann das Protokoll erstellen (genannt „Abfrage / Befehl“). Die Slave-Geräte können auf die „Abfrage / Befehl“ des Hosts nur reagieren, indem sie Daten bereitstellen oder eine entsprechende Aktion basierend auf der „Abfrage / Befehl“ des Hosts ausführen. Host bedeutet Personal Computer (PC), industrielle Steuerungsausrüstung oder speicherprogrammierbare Steuerung (SPS) usw., und Slave bedeutet den Frequenzumrichter dieser Serie. Der Host kann nicht nur mit einem bestimmten Slave separat kommunizieren, sondern auch Broadcast-Informationen an alle Slaves senden. Für eine Master-Abfrage / einen Master-Befehl, auf die / den separat zugegriffen wird, muss der Slave eine Nachricht (eine sogenannte Antwort) zurückgeben. Bei einer vom Master ausgegebenen Broadcasting-Information muss der Slave nicht mit einer Rückmeldung an den Master antworten.
Aufbau des Kommunikationsmaterials: Das Kommunikationsdatenformat des Modbus-Protokolls für den Frequenzumrichter dieser Serie ist wie folgt:
Im RTU-Modus beginnt die Nachrichtenübertragung mit einer Pause von mindestens 3,5 Zeichen. Das Variieren der Zeichenlänge bei der Netzwerkübertragungsrate ist einfach zu implementieren (wie in der folgenden Abbildung T1-T2-T3-T4 gezeigt). Das erste übertragene Feld ist die Geräteadresse.
Die verfügbaren Übertragungszeichen sind hexadezimal 0 ... 9, A ... F. Die Netzwerkhardware erkennt kontinuierlich den Netzwerkbus, einschließlich des Intervalls. Nach dem Empfang des ersten Feldes (Adressfeld) dekodiert jedes Gerät dieses, um festzustellen, ob es es an sein eigenes Gerät senden soll. Nach dem letzten übertragenen Zeichen markiert eine Pause von mindestens 3,5 Zeichen das Ende der Nachricht. Nach der Pause beginnt eine neue Meldung.
Der gesamte Datenrahmen wird kontinuierlich gestreamt. Wenn die Verweilzeit 1,5 Zeichen vor dem Ende des Frames überschreitet, aktualisiert das empfangende Gerät die unvollständige Nachricht und nimmt an, dass das nächste Byte das Adressfeld der neuen Nachricht ist. Ähnlich verhält es sich, wenn eine neue Nachricht innerhalb von 3,5 Zeichen nach der vorherigen Nachricht zu senden beginnt. Das empfangende Gerät behandelt dies als eine Verzögerung der vorherigen Nachricht und verursacht dann einen Fehler, weil der endgültige CRC-Feldwert falsch sein kann.
RTU-Frame-Format
| START Frame Header Zeit von 3,5 Zeichen | |
| Slave ADR Adresse: 1247 | |
| CMD-Code | 03: Slave-Parameter lesen; 06: Slave-Parameter speichern |
| DATA (N-1) | Dateninhalt: Adresse der Funktionscode-Parameter, Anzahl der Funktionscode-Parameter, Wert der Funktionscode-Parameter, usw. |
| DATA (N-2) | |
| ...... | |
| DATA0 | |
| CRC CHK (High Byte) | Erkennungswert: CRC-Wert |
| CRC CHK (Low Byte) | |
| END | Zeit von 3,5 Zeichen |
Technische Parameter eines Hochleistungs-Frequenzumrichters
CMD-Code: 03H, N Worte lesen (maximal 12 Worte). Beispiel: Die Startadresse F002 eines Wechselrichters mit der Slave-Adresse 01 liest 2 Werte nacheinander.
Host CMD-Meldung
| ADR 01H | |
| CMD 03H | |
| Startadresse (High Byte) F0H | |
| Startadresse (Low Byte) | 02H |
| Registernummer (High Byte) | 00H |
| Registernummer (Low Byte) | 02H |
| CRC CHK (High Byte) | Zu berechnender CRC CHK-Wert |
| CRC CHK (Low Byte) |
Slave-Antwortnachricht
PD-05 ist auf 0 gesetzt:
| ADR | 01H |
| CMD | 03H |
| Byte Nr. (High Byte) 00H | |
| Byte Nr. (Low Byte) | 04H |
| Daten F002H (High Byte) | 00H |
| Daten F002H (Low Byte) | 00H |
| Daten F003H (High Byte) | 00H |
| Daten F003H (Low Byte) | 01H |
| CRC CHK (Low Byte) | Zu berechnender CRC CHK-Wert |
| CRC CHK (High Byte) |
FD-05 ist auf 1 gesetzt:
| ADR 01H | |
| CMD 03H | |
| Byte Nr. | 04H |
| Daten F002H (High Byte) | 00H |
| Daten F002II (Low Byte) | 00II |
| Daten F003H (High Byte) | 00H |
| Daten F003H (Low Byte) | 01H |
| CRC CHK (Low Byte) | Zu berechnender CRC CHK-Wert |
| CRC C11K (High Byte) |
CMD-Code: 06H, einen Eintrag machen. Beispiel: Geben Sie 5000 (1388H) in die Adresse F00AH des Frequenzumrichters mit der Slave-Adresse 02H ein.
Die CMD-Nachricht des Masters
| ADR 02H | |
| CMD 06H | |
| Datenadresse (High Byte) F011 | |
| Datenadresse (Low Byte) | 0AH |
| Dateninhalt (High Byte) | 13H |
| Dateninhalt (Low Byte) | 88H |
| CRC CHK (Low Byte) | Zu berechnender CRC CHK-Wert |
| CRC CHK-Master |
Slave-Antwortnachricht
| ADR 02H | |
| CMD 06H | |
| Datenadresse (High Byte) F0H | |
| Datenadresse (Low Byte) | 0AH |
| Dateninhalt (High Byte) 13H | |
| Dateninhalt (Low Byte) | 88H |
| CRC CIK (Low Byte) | Zu berechnender CRC CHK-Wert |
| CRC CHK (High Byte) |
CRC-Überprüfungsmethode: CRC (Cyclic Redundancy Check) übernimmt das RTU-Frame-Format und die Nachricht enthält ein Fehlererkennungsfeld, das auf dem CRC-Verfahren basiert. Das CRC-Feld erkennt den Inhalt der gesamten Nachricht. Das CRC-Feld besteht aus zwei Bytes, darunter ein 16-Bit-Binärsystemwert. Das Übertragungsgerät errechnet ihn und fügt ihn der Nachricht hinzu. Das empfangende Gerät berechnet die CRC der empfangenen Nachricht neu und vergleicht sie mit dem Wert im empfangenen CRC-Feld. Wenn die beiden CRC-Werte nicht gleich sind, ist die Übertragung ungültig.
Der CRC speichert zunächst 0xFFFF und ruft dann einen Prozess auf, um die fortlaufenden 8-Bit-Bytes in der Nachricht und den Wert im aktuellen Register zu verarbeiten. Nur die 8 Datenbits in jedem Zeichen sind für CRC gültig, das Startbit, das Stoppbit und das Paritätsbit sind ungültig.
Bei der CRC-Generierung wird jedes 8-Bit-Byte mit einem eigenen Registerinhalt XOR-verknüpft. Anschließend wird es zum niederwertigen Bit hin verschoben und das höchstwertige Bit mit dem Wert 0 aufgefüllt. Der LSB wird zur Erkennung extrahiert. Wenn das LSB 1 ist, wird das Register mit dem Sollwert XOR-verknüpft. Wenn das LSB 0 ist, keine Aktion. Der gesamte Vorgang wird 8-mal wiederholt. Wenn das letzte Bit (achtes Bit) abgeschlossen ist, wird das nächste 8-Bit-Byte mit dem aktuellen Wert des Registers selbst XOR-verknüpft. Der Endwert im Register ist der CRC-Wert, nachdem alle Bytes in der Nachricht fertig sind.
Wenn Sie CRC zu einer Nachricht hinzufügen, fügen Sie zuerst das jüngere Byte und dann das ältere Byte hinzu. Berechnen Sie die CRC wie folgt:
unsigned int crc_chk_value (unsigned char *data_value, unsigned char length) {
unsigned int crc_value=0xFFFF;
int i;
while (length--) {
crc_value^=*data_value++;
for (i=0;i<8;i++) {
if (crc_value&0x0001)
{
crc_value=(crc_value>>1)
}
else crc_value=crc_value>>1;
{
}
}
}
return (crc_value);
}
Definition einer Kommunikationsparameteradresse
Dieser Abschnitt enthält Kommunikationsinhalte zur Steuerung des Frequenzumrichterbetriebs, zur Einstellung des Status und zugehöriger Parameter des Umrichters.
Funktionscode-Parameter lesen und schreiben (einige Funktionscodes können nicht geändert werden, sie können vom Hersteller verwendet oder überwacht werden).
Regeln zur Kennzeichnung der Adresse eines Funktionscode-Parameters:
Ausdrucksregel der Parameteradresse mit Gruppennummer und Bezeichnung der Funktionscodenummer, die Parameteradresse ist: High Byte: P0 \~ PF (Gruppe P), A0 \~ AF (Gruppe A), 70 \~ 7F (Gruppe U); Low Byte: 00 \~ FF,
z. B. P3-12, die Adresse wird als P30C ausgedrückt;
Hinweis: Die Gruppe PF kann keine Parameter lesen oder ändern. Die Gruppe U liest nur, ändert aber keine Parameter.
Einige Parameter können nicht geändert werden, wenn der Wechselrichter in Betrieb ist. Einige Parameter können unabhängig vom Zustand des Wechselrichters nicht geändert werden.
Beachten Sie beim Ändern von Funktionscode-Parametern auch den Parameterbereich, die Einheit und die zugehörigen Parameterbeschreibungen.
Wenn das EEPROM häufig überschrieben wird, verkürzt es außerdem seine Lebensdauer. Daher müssen im Kommunikationsmodus einige Funktionscodes nicht im EEPROM gespeichert werden, es genügt, den Wert im RAM zu ändern.
Handelt es sich um einen Parameter der Gruppe P, kann die Funktion durch Ändern des höheren F-Wertes der Funktionscodeadresse auf 0 realisiert werden. Wenn es sich um einen Parameter der Gruppe A handelt, kann die Funktion durch Ändern der höheren Ordnung A der Funktionscodeadresse auf 4 realisiert werden. Die entsprechende Funktionscode-Adresse wird wie folgt ausgedrückt: High Byte: 00 \~ 0F (Gruppe P), 40 \~ 4F (Gruppe A); Low Byte: 00 \~ FF
Zum Beispiel: Funktionscode P3-12 ist nicht im EEPROM gespeichert und die Adresse wird als 030C ausgedrückt; Funktionscode A0-05 ist nicht im EEPROM gespeichert und die Adresse wird als 4005 ausgedrückt; diese Adresse kann nur in den RAM geschrieben und aus dem RAM gelesen werden. Beim Lesen ist die Adresse nicht aktiv. Für alle Parameter kann auch der CMD-Code 07H verwendet werden, um Funktionen auszuführen.
Wenn der Wechselrichter in Betrieb ist, können einige Parameter nicht geändert werden. Einige Parameter können unabhängig vom Zustand des Wechselrichters nicht geändert werden. Beachten Sie beim Ändern der Parameter des Funktionscodes auch auf den Parameterbereich, die Einheit und die zugehörigen Beschreibungen.
Stop-/Run-Parameter:
| Parameteradresse | Parameterbeschreibung |
| 1000 | * Kommunikationseinstellungen (-10000 ~ 10000) (Dezimalformat) |
| 1001 | Betriebsfrequenz |
| 1002 | Busspannung |
| 1003 | Ausgangsspannung |
| 1004 | Ausgangsstrom |
| 1005 | Ausgangsleistung |
| 1006 | Ausgangsdrehmoment |
| 1007 | Betriebsgeschwindigkeit |
| 1008 | Zeichen des DI-Eingangs |
| 1009 | Zeichen des DO-Ausgangs |
| 100A | AI1 Spannung |
| 100B | AI2 Spannung |
| 100C | AI3 Spannung |
| 100D | Zählcreingang |
| 100E | Längenzähleingang |
| 100F | Lastrate |
| 1010 | PID-Einstellungen |
| 1011 | PID-Rückkopplung |
| 1012 | SPS-Schritt |
| 1013 | Impulsfrequenz, Einheit 0,01kHz |
| 1014 | Rückkopplungsrate, Einheit 0,1 Hz |
| 1015 | Überschreitung der Betriebszeit |
| 1016 | AI1-Spannung vor der Kalibrierung |
| 1017 | AI2-Spannung vor der Kalibrierung |
| 1018 | AI3-Spannung vor der Kalibrierung |
| 1019 | Lineare Geschwindigkeit |
| 101A | Aktuelle Stromversorgungszeit |
| 101B | Aktuelle Betriebszeit |
| 101C | Impulsfrequenz, Einheit 1Hz |
| 101D | Kommunikationseinstellungen |
| 101E | Tatsächliche Rückkopplungsgeschwindigkeit |
| 101F | Hauptfrequenzanzeige X. |
| 1020 | Anzeige der Hilfsfrequenz Y. |
Achtung!
Der Einstellwert für die Kommunikation ist ein Prozentsatz des relativen Werts, nämlich 10000 entspricht 100,00 %,
-10000 entspricht -100,00 %. Bei Frequenzdaten ist dies der Prozentsatz der relativ höchsten Frequenz (P0-10). Bei Daten zur Drehmomentabmessung ist dieser Prozentsatz P2-10, A2-48, A3-48, A4-48 (die obere Drehmomentgrenze entspricht jeweils dem ersten und zweiten Motor).
Reihenfolge der Befehle an den Wechselrichter: (nur schreiben)
| Steuerwortadresse | Steuerwortfunktion |
| 2000 | 0001: Vorwärtsbetrieb |
| 0002: Rückwärtsbetrieb | |
| 0003: Vorwärts-Impuls | |
| 0004: Rückwärts-Impuls | |
| 0005: Freilaufstopp | |
| 0006: Stoppen mit Verzögerung | |
| 0007: Fehlerrücksetzung |
Lesen des Wechselrichterstatus: (Schreibgeschützt)
| Statuswortadresse | Statuswortfunktion |
| 3000 | 0001: Vorwärtsbetrieb |
| 0002: Rückwärtsbetrieb | |
| 0003: Stillstand |
Prüfen Sie das Passwort für die Parametersperre: (bei Rückkehr zu 8888H, Passwort prüfen)
Passwortadresse
Inhalt des einzugebenden Passworts
1F00 ****
| Befchlsadresse Befchlsinhalt | |
| 2001 | BIT0: DO1-AusgangssteuerungBIT1: DO2-AusgangssteuerungBIT2: RELAY1-AusgangssteuerungBIT3: RELAY2-AusgangssteuerungBIT4: FMR-AusgangssteuerungBIT5: VDO1BIT6: VDO2BIT7: VDO3BIT8: VDO4BIT9: VDO5 |
Steuerung des Analogausgangs AO1: (nur schreiben)
| Befehlsadresse Befehlsinhalt | |
| 2002 | 0~7FFF bedeutet 0 %~100 % |
Steuerung des Analogausgangs AO2: (nur schreiben)
| Befehlsadresse Befehlsinhalt | |
| 2003 | 0~7FFF bedeutet 0 %~100 % |
Impulsausgangssteuerung: (nur schreiben)
| Befehlsadresse | Befehlsinhalt |
| 2004 | 0~7FFF bedeutet 0 %~100 % |
Fehlerbeschreibung des Wechselrichters
| Fehleradresse Fehlermeldung | |
| 8000 | 0000: kein Fehler0001: reserviert0002: Überstrom bei Beschleunigung0003: Überstrom bei Verzögerung0004: Überstrom bei konstanter Geschwindigkeit0005: Überspannung bei Beschleunigung0006: Überspannung bei Verzögerung0007: Überspannung bei konstanter Geschwindigkeit0008: Überlastung des Pufferwiderstands0009: Spannung zu niedrig000A: Wechselrichterüberlastung000B: Motorüberlastung000CL: Standardphasenfehler amEingang000D: Standardphasenfehler amAusgang000E: Überhitzung des Moduls000F: Fehler eines externen Geräts0010: Kommunikationsfehler0011: Schützfehler0012: Stromerkennungsfehler0013:Motorabstimmungsfunktionsfehler0014: Encoder- / PG-Karten-Fehler0015: Lese-- Schreibfehler des Parameters0016: Hardwarefehler des Wechselrichters0017: Kurzschluss zwischen Motor und Masse0018: reserviert0019: reserviert001A: Betriebszeit überschritten001B: Benutzerdefinierter Fehler 1001C: Benutzerdefinierter Fehler 2001D: Stromversorgungszeitüberschritten001E: Keine Last001F: PID-Rückkopplungsverlust während desBetriebs0028: Zeitüberschreitungsfehler für schnelles Strombegrenzung0029: Motorumschaltfehler während des Betriebs002A: Überdrchzahlabweichung002B: Überdrehzahl des Motors002D: Motorübertemperatur005A: Encoder - falsche Einstellung der Zeilennummer005B: Keine Verbindung zum Encoder005C: Ausgangspositionsfehler005E:Geschwindigkeitsrückkopplungsfehler |
| Kommunikationsfehleradresse | Funktionsbeschreibung des Fehlers |
| 8001 | 0000: kein Fehler0001: Kennwortfehler0002: falscher Befehlscode0003: falsche CRC-Überprüfung0004: ungültige Adresse0005: ungültiger Parameter0006: falsche Parameteränderung0007: System blockiert0008: EEPROM in Betrieb |
Beschreibung der Kommunikationsparameter der Gruppe PD
| Übertragungsgeschwindigkeit | Werkseinstellungen 6005 | |
| Pd-00 | Einstellbereich | Einheit: MODUBS-Übertragungsgeschwindigkeit0: 300BPS1: 600BPS2: 1200BPS3: 2400BPS4: 4800BPS5: 9600BPS6: 19200BPS7: 38400BPS8: 57600BPS9: 115200BPS |
Mit diesem Parameter wird die Datenübertragungsrate zwischen dem Host-Computer und dem Wechselrichter eingestellt. Beachten Sie, dass die Übertragungsgeschwindigkeit des Host-Computers und des Frequenzumrichters konsistent sein sollte. Andernfalls kann keine Kommunikation stattfinden. Je höher die Übertragungsgeschwindigkeit, desto schneller die Kommunikationsgeschwindigkeit.
| Fd-01 | Datenformat | Werkseinstellungen | 0 |
| Einstellbereich | 0: keine Überprüfung: Datenformat <8, N, 2>1: gerade Überprüfung: Datenformat <8, E, 1>2: ungerade Überprüfung: Datenformat <8, O., 1>3: keine Überprüfung: Datenformat <8-N-1> | ||
Das Datenformat des Host-Computers und des Wechselrichters sollte konsistent sein. Andernfalls findet keine Kommunikation statt.
| Pd-02 | Lokale Adresse | Werkseinstellungen | 1 |
| Einstellbereich | 1 ~ 247.0 ist eine Broadcast-Adresse | ||
Wenn die lokale Adresse auf 0 gesetzt ist, was eine Broadcast-Adresse ist, können Sie die Broadcast-Funktion des Host-Computers ausführen.
Die lokale Adresse ist eindeutig (mit Ausnahme der Broadcast-Adresse) und bildet die Grundlage für die Realisierung der Punkt-zu-Punkt-Kommunikation zwischen dem Host-Computer und dem Frequenzumrichter.
| Pd-03 | Antwortverzögerung | Werkseinstellungen | 2ms |
| Einstellbereich | 0~20ms | ||
Antwortverzögerung: Die Zeit zwischen dem Senden von Daten durch den Host-Computer und dem Wechselrichter endet mit dem Empfang von Daten. Wenn die Antwortverzögerung geringer als die Systemverarbeitungszeit ist, nimmt die Antwortverzögerung die Systemverarbeitungszeit in Anspruch. Wenn die Antwortverzögerung länger als die Systemverarbeitungszeit ist, müssen Sie auf eine Verzögerung warten, nachdem das System die Daten verarbeitet hat. Nach Erreichen der Antwortverzögerungszeit werden die Daten an den Host-Computer gesendet.
| Pd-04 | Überschreitung der Kommunikationszeit | Werkseinstellungen | 0.0 s |
| Einstellbereich | 0.0 s (inaktiv) 0.1~60.0s | ||
Wenn der Code für diese Funktion auf 0.0s eingestellt ist, ist der Parameter für das Kommunikationszeitlimit deaktiviert.
Wenn der Code für diese Funktion auf den richtigen Wert eingestellt ist, die Pausenzeit zwischen einer Kommunikation und der nächsten jedoch den Grenzwert überschreitet, generiert das System einen Kommunikationsfehleralarm (Err 16). Unter normalen Bedingungen ist die Funktion auf inaktiv eingestellt. Wenn Sie im kontinuierlichen Kommunikationssystem Unterparameter einstellen, können Sie dessen Status überwachen.
| Pd-05 | Kommunikationsprotokoll | Werkseinstellungen | 0 |
| Einstellbereich | 0: Benutzerdefiniertes Modbus-Protokoll1: Standard-Modbus-Protokoll | ||
PD-05 = 1: Auswahl des Standard-Modbus-Protokolls.
PD-05 = 0: Beim Lesen des Befehls ist die Anzahl der vom Slave zurückgegebenen Bytes ein Byte höher als beim Standard-Modbus-Protokoll. Details in „5 Kommunikationsdatenstruktur“ des Protokolls.
| Pd-05 | Auflösung zum Lesen von Daten in der Kommunikation | Werkseinstellungen | 0 |
Technische Parameter eines Hochleistungs-Frequenzumrichters
| Einstellbereich | 0: 0.01A1: 0.1A | ||
Wird verwendet, um die Einheit des Ausgangsstromwerts zu bestätigen, wenn die Kommunikation den Ausgangsstrom liest.
Introduction
Lásd a VFD protokollt.
Kapitel 2 Produktinformation
Punkter för rutininspektion:
2.7.2 Regelbunden inspektion
2) Funktionsbeskrivningar för kontrollterminaler
Figur 3-3 Funktionsbeskrivningar för frekvensomriktarens kontrollterminaler




