BEDIENUNGSANLEITUNG MX-10 GRAUPNER
Sicherheitschinweise 3
Sicherheitshinweise und Behandlungsvorschriften
für Nickel-Metall-Hybrid Akkumulatoren 7
Vorwort 9
Beschreibung des Fernlenksets 10
Empfohlene Ladegerate 12
Stromversorgung des Senders. 13
des Empfängers 14
Llangenverstellung der Steuerknuppel. 15
Sendergehauseoffnen 15
Umstellen der Kreuzknuppel 16
Senderbeschreibung 18
Bedienelemente 18
Senderrückseite 19
Data-Buchse. 19
Inbetriebnahme des Senders 20
Firmware-Update des Senders 21
Inbetriebnahme des Empfängers 24
Firmware-Update des Empfängers 26
Installationshinweise. 28
Stromversorgung der Empfangsanlage. 29
Begriffsdefinitionen 31
Digitale Trimmung und Knuppelkalibrierung 32
Flächenmodelle 33
Empfängerbelegung 34
Helikoptermodelle 35
Empfängerbelegung 35
Programmbeschreibungen
Ländereinstellung 36
Leitwerkskonfiguration 37
Binden von Empfängern 38
Reichweitetest 38
Hubschraubermodell 40
Ländereinstellung 40
Binden von Empfängern 42
Reichweitetest 42
Servoeinstellung 43
Fail Safe Einstellung< 43
»Telemetri«
EINSTELLLEN/ANZEIGEN 46
TX Display 46
RX Datenanzeige 47
RX Servo. 48
RX Fail Safe 49
RX Freie Mischer. 52
RX Expo 53
RX Servotest 53
GRAFISCHE SENSORANZEIGE 57
Empfänger 57
General Modul. 58
Electric Air Modul 58
Vario Modul. 59
GPS Modul. 59
Lehrer/Schuler
Lehrer-Betrieb 60
Schuler-Betrieb 61
Anhang
Anhang 65
FCC Information 202
Konformitätserklung 203
Garantieurkunde 204
Hinweise zum Umweltschutz
Das Symbol auf dem Produkt, der Gebrauchsanleitung oder der Verpackung weist daraufhin, dass these Produkte am Ende seiner Lebensdauer nicht über den normalen Haushaltsabfall entsorgt werden darf. Es muss an einem Sammelpunkt für das Recycling von elektrischen und elektronischen Geräten abgegeben werden.
Die Werkstoffe sind gemäß ihrer Kennzeichnung wiederverwertbar. Mit der Wiederverwendung, der stofflichen Verwertung oder anderen Formen der Verwertung von Altgeräten leisten Sie einen wichtigen Beitrag zum Umweltschutz.


Batterien und Akkus mösen aus dem Gerät entfernt werden und bei einer entsprechenden Sammelstelle getrennt entsorgt werden.
Bitte ergundigen Sie sich ggf. bei der Gemeindeverwaltung nach der zuständigen Entsorgungsstelle.
Dieses Handbuch dient ausschließlich Informationszwecken und kann ohne Vorankündigung geändert werden.
Die Firma Graupner übernimmt keine Verantwortung oder Haftung für Fehler bzw. Ungenaugigkeiten, die im Informationsteil these Handbuches auftreten können.
Sicherheitshinweise
Bitte unbedingt beachten!
Um noch lange Freude an Ihr dem Modellbauhobby zu haben,lesen Sie diese Anleitung unbedingt genau durch und beachten Sie vor alle den Sicherheitshinweise. Auch sollenen Sie sich umgehend unter http://www. graupner.de/de/service/produktregistrierung registrieren, Denn nur so erhalten Sie automatisch per E-Mail aktuelle Informationen zu Ihr dem Produkt.
Wenn Sie Anfänger im Bereich ferngesteuerter Modellflugzeuge, -schiffe oder -autos sind, sollen den Sie unbedingt einen erfahrenen Modellpiloten um Hilfeitten.
These Anleitung ist bei Weitergabe des Senders unbedingt mit auszuhändigen.
Anwendungsbereich
These Fernsteueranlage sind auchschließlich nur für den vom Hersteller vorgesehenen Zweck, für den Betrieb in nicht mannantragen den Fernsteuermodellen eingesetzt werden. Eine anderweite Verwendung ist unzulässig.
Sicherheitshinweise
SICHERHEIT IST KEIN ZUFALL
und
FERNGESTEUERTE MODELLE SIND KEINSPIELZEUG
... Denn auch keine Modelle können durch unsachgemäße Handhabung, aber auch durch fremdes Verschulden, erhebliche Sach- und/oder Personenschäden verursachen.
Technische Defekte elektrischer oder Mechanischer Art können zum unverhofften Anlaufen eines Motors und/oder zu herumfliegenden Teilen führen, die nicht nur Sieerheblich verletzen können!
Kurzschlüsse jeglicher Art sind unbedingt zu vermeiden! Durch Kurzschluss konnen nicht nur Teile der Fernsteuerung zerstört werden, sondern je nach dessen Umstan
den und dem Energieehalt des Akkus besteht darüber hinaus akute Verbrennungs- bis Explosionsgefahr.
Alle durch einen Motor angetriebenen Teile wie Luft- und Schiffsschrauben, Rotoren bei Hubschraubern, offene Getriebe usw. stellen eine ständige Verletzungsgefahr dar. Sie dürfen keinesfalls berührt werden! Eine schnell drehende Luftschraube kann z.B. einen Finger abslangen! Achten Sie daraufuf, dass auch kein sonstiger Gegenstand mit angetriebenen Teilen in Berührung kommt! Bei angeschlossen Antriebsakku oder laufendem Motor gilt: Halten Sie sich niemals im Gefährungsbereich des Antriebs auf!
Achten Sie auch während der Programmierung unbedingt darauf, dass ein angeschlossener Verbrennungs- oder Elektromotor nicht unbeabsichtigt anlauft. Unterbrechen Sie ggf. die Treibstoffversorgung bzw. klemmen Sie den Antriebsakku zuvor ab.
Schützen Sie alle Geräte vor Staub, Schmutz, Feuchtigkeit und anderen Fremdtelen. Setzen Sie diese niemals Vibrationen sowie übermögiger Hitze oder Kälte aus. Der Fernsteuerbetriebarf nur bei „normalen“ Außentemperaturen durchgeführt werden, d.h. in einem Bereich von -10 °C bis +55 °C.
Vermeiden Sie Stoß- und Druckbelastung. Überprüfen Sie die Geräte stets auf Beschädigungen an Gehäusen und Kabeln. Beschädigte oder nass gewordene Geräte, selbst wenn sie wieder trocken sind, nicht mehr verwenden!
Es dürfen nur die von uns empfohlenen Komponenten und Zubehörteile verwendet werden. Verwenden Sie immer nur zueinander passende, original Graupner-Steckverbindungen gleicher Konstruktion und gleichen Materials.
Achten Sie beim Verlegen der Kabel darauf, dass diese
nicht auf Zug belastet, übermäßig geknigt oder gebrochen sind. Auch sind scharfe Kanten eine Gefahr für die Isolation.
Achten Sie darauf, dass alle Steckverbindungen fest sitzen. Beim Lösen der Steckverbindung nicht an den Kabelnziehen.
Es dürfen keinerlei Veränderungen an den Geräten durchgeführt werden. Andernfalls erlischt die Betriebserlaubnis und Sie verlieren jeglichen Versicherungsschutz.
Einbau der Empfangsanlage
Der Empfänger wird stoßgesichert in Schaumgummi gelagert, im Flugmodell hinter einem kräftigen Spant bzw. im Auto- oder Schiffsmodell gegen Staub und Spritzwasser geschützt untergebracht.
Der Empfänger damit keiner Stelle unmittelbar am Rumpf oder Chassis anliegen, da sonst Motorerschüttungen oder Landestöbe direkt aufihn übertragen werden. Beim Einbau der Empfangsanlage in ein Modell mit Verbrennungsmotor alle Teile immer geschützt einbauen, damit keine Abgase oder Ölreste eindringen können. Dies gilt vor allem für den mein ist in der Außen Haut des Modells eingebauten EIN-/AUS-Schalter.
Den Empfänger so festlegen, dass die Anschlusskabel zu den Servos und zum Stromversorgungsteil locker liegen und die Empfangsantenne mindestens 5 cm von allen großen Metalteilen oder Verdrahtungen, die nicht direkt aus dem Empfänger kommt, entfernt ist. Das umfasst besoin Stahl- auch Kohlefaserteile, Servos, Elektromotoren, Kraftstoffpumpen, alle Sorten von Kabeln usw..
Am besten wird der Empfänger abseits aller anderen Einbauten an gut zugänglicher Stelle im Modell ange-
bracht. Unter keinen Umständen)dürfen Servokabel um die Antenne gewickelt oder damit daran vorbei verlegt werden!
Stellen Sie safer, dass sich Kabel in der früheren Umgebung der Antenne im Fluge nicht bewegen konnen!
Verlegender Empfangsantenne
Der Empfänger und die Antennen sollenen möglichst welt weg von Antriben aller Art angebracht werden. Bei Kohlefaserrümpfen sollen den Antennenenden auf jeder Fall aus dem Rumpf hers aus geführt werden.
Die Ausrichtung der Antenne(n) ist unkritisch. Vorteil- haft ist aber eine vertikale (aufrechte) Montage der Empfängerantenne(n) im Modell. Bei Diversity-Antennen (zwei Antennen) sollen die zweite Antenne im 90^ Winkel zur ersten Antenne ausgerichtet werden.
Einbau der Servos
Servos stets mit den beigefugten Vibrationsdämpfergummis befestigen. Nur so sind diese vor allzu harten Vibrationsschlagen einigermaßen geschützt.
Einbau der Gestange
Grundsätzlich muss der Einbau so erfolgen, dass die Gestänge frei und leichtgangig laufen. Besonderss wichtig ist, dass alle Ruderhebel ihre vollen Ausschläge ausführten können, also nicht Mechanisch begrenzt werden.
Um einen laufenden Motor jederzeit anhalten zu konnen, muss das Gestänge so eingestellt sein, dass das Vergaserküken ganz geschlossen wird, wenn Steu-erknüppel und Trimmhebel in die Leerlaufendstellung gebracht werden.
Achten Sie daraufuf, dass keine Metalteile, z.B. durch Ruderbetätigung, Vibration, drehende Teile usw., anei
nander reiben. Hierbei entstehen so genannte Knackimpulse, die den Empfänger stären.
Ausrichtung Senderantenne
In geradliniger Veränderung der Senderantenne bildet sich nur eine geringe Feldstarke aus. Es ist demnach falsch, mit der Antenne des Senders auf das Modell zu „zielen“, um die Empfangsverhältnisse günstig zu beeinflussen.
Bei gleichzeitigem Betrieb von Fernlenkanlagen sollen die Piloten in einer losen Gruppe beieinander stehen. Abseits stehende Piloten gefährden sowohl die eigenen als auch die Modelle der anderen.
Wenn 2 oder mehr Piloten mit 2.4-GHz-Fernsteuersystem naher als 5m beieinander stehen kann das allerdings ein Übersteuern des Rückkanals zur Folge haben und infolgedessen deutlich zu früh eine Reichweitewarnings auslösen. Vergörbern Sie den Abstand, bis die Reichweitewarnings wieder verstummt.
Überprüfung vor dem Start
Bevor Sie den Empfänger einschalten, vergewissern Sie sich, dass der Gasknuppel auf Stopp/Leerlauf stehen. Immer zuerst den Sender einschalten und dann erst den Empfänger.
Immer zuerst den Empfänger ausschalten und dann erst den Sender.
Wenn these Reihenfolge nicht eingehalten wird, also der Empfänger eingeschaltet ist, der dazugehörige Sender jedoch auf „AUS" steht, kann der Empfänger durch andere Sender, Störungen usw. zum Ansprechen gebracht werden. Das Modell kann in der Folge unkontrollierte Steuerbewegungen ausführren und dadurch ggf. Sach-und/oder Personenschäden verursachen.
Insbesondere bei Modellen mit mechanischem Kreisel gilt:
Bevor Sie ihren Empfänger ausschalten: Stellen Sie durch Unterbrechen der Energieversorgung safer, dass der Motor nicht ungewollt hochlaufen kann.
Ein auslaufender Kreisel erzeugt oftmans so viel Spannung, dass der Empfänger gültige Gas-Signale zu erkennen glaubt. Daraufhin kann der Motor unbeabsichtigt anlaufen!
Reichweitetest
Vor jedem Einsatz korrekte Funktion und Reichweite überprüfen. Befestigen Sie das Modell ausreichend und achten Sie darauf, dass sich keine Personen vor dem Modell aufhalten.
Führer Sie am Boden mindestens einen vollständigen Funktionstest und eine komplette Flugsimulation durch, um Fehler im System oder der Programmierung des Modells auszuschreiben. Beachten Sie dazu unbedingt die Hinweise auf den Seiten 72/73 bzw. 81/82.
Betreiben Sie im Modellbetrieb, also beim Fliegen oder Fahren, den Sender niemals ohne Antenne. Achten Sie auf einen festen Sitz der Antenne.
Modellbetrieb Fläche-Heli-Schiff-Auto
Überfliegen Sie niemals Zuschauer oder andere Piloten. Gefährden Sie niemals Menschen oder Tiere. Fliegen Sie niemals in der Höhe von Hochspannungsleitungen. Betreiben Sie Ihr Modell auch nicht in der Höhe von Schleusen und öffentlicher Schiffahrt. Betreiben Sie Ihr Modell ebenso weniger auf öffentlichen Straßen und Autobahnen, Wegen und Plätzen etc..
Kontrolle Sender- und Empfängerbatterie
Spätestens, wenn bei sinkender Sender-Akku-Span
Sicherheitshinweise
nung die Anzeige „Akku muss geladen werden!!" im Display erscheint und ein akustisches Warnsignal abgegeben wird, ist der Betrieb sofort einzustellen und der Senderakku zu laden.
Kontrollieren Sie regelmäßig den Zustand der Akkus, insbesondere des Empfängerakkus. Warten Sie nicht so lange, bis die Bewegungen der Rudermaschinen merklich langsamer geworden sind! Ersetzen Sie verbrauchte Akkusrechtzeitig.
Es sind stets die Ladehinweise des Akkuherstellers zu beachten und die Ladezeiten unbedingt/genau einzuhalten. Laden Sie Akkus niemals unbeaufsichtigt auf! Versuchen Sie niemals, Trockenbatterien aufzuladen (Explosionsgefahr).
Alle Akkus müssen vor jedem Betrieb geladen werden. Um Kurzschlüsse zu vermeiden, zuerst die Bananenstecker der Ladekabel polungsrichtig am Ladegerät anschließen, dann erst Stecker des Ladekabels an den Ladebuchsen von Sender und Empfängerakku anschließen.
Trennen Sie immer alle Stromquellen von ihrem Modell, wenn Sie es längerere Zeit nicht mehr benutzten wollen. Verwenden Sie niemals defekte oder beschädigte Akkus bzw. Batterien mit entsprechenden Zellentypen. Mischungen aus alten und neuen Zellen oder Zellen unterschiedlicher Fertigung.
Kapazität und Betriebszeit
Für alle Stromquellen gilt: Die Kapazität verringert sich mit jeder Ladung. Bei niedrigen Temperaturen steigt der Innenwiderstand bei zusätzlich reduzierter Kapazität. Infolgedessen verringert sich die Fähigkeit zur Stromabgabe und zum Halten der Spannung. Häufiges Laden oder Benutzen von Batteriepflegepro
grammen kann ebenfalls zu allmählicher Kapazitätsmin
derung führen. Deshalb sollenn Stromquellen spätestens
alle 6 Monate auf ihre Kapazität hin überprüft und bei
deutlichem Leistungsabfall ersetzt werden.
Erwerben Sie nur original Graupner-Akkus!
Entstörung von Elektromotoren
Alle konventionellen Elektromotoren erzeugen zwischen Kollektor und Bürsten Funken, die je nach Art des Motors die Funktion der Fernlenkanlage mehr oder weniger stären.
Zu einer technisch einwandfrei Anlage gehoren deshalb entstörte Elektromotoren. Besonderss aber in Modellen mit Elektroantrieb muss jeder MotorDMArsorgfaltig entstört werden. Entstörfilter unterrücken solche Storimpulseweitgehend und sollen grundsatzlich eingebaut werden.
Beachten Sie die entsprechenden Hinweise in der Bedienungs- und Montageanleitung des Motors. Weitere Details zu den Entstörflattern siehe Graupner Hauptkatalog FS oder im Internet unter www.graupner.de.
Servo-Entstörfilter für Verlängerungskabel Best.-Nr.1040
Das Servo-Entstörfilter ist bei Verwendung überlanger Servokabel erforderlich. Das Filter wird direkt am Empfängerausgang angeschlossen. In kritischen Fällen kann ein zweites Filter am Servo angeordnet werden.
Einsatz elektronischer Drehzahlsteller
Die richtige Auswahl eines elektronischen Drehzahlstellers besteht sich vor allem nach der Leistung des verwendeten Elektromotors.
Um ein Überlasten/Beschädigden des Drehzahlstellers zu
verhindern, sollte die Strombelastbarkeit des Drehzahlstellers mindestens die Häufe des maximalen Blockierstromes des Motors betragen.
Besondere Vorsicht ist bei so genannten Tuning-Motoren angebracht, die auf Grund ihrer niedrigen Windungs-zahlen im Blockierfall ein Vielfaches ihres Nennstromes aufnehmen und somit den Drehzahlsteller zerstoren konnen.
Elektrische Zündungen
Auch Zündungen von Verbrennungsmotoren erzeugen Störungen, die die Funktion der Fernsteuerung negativ beeinflussen konnen.
Versorgen Sie elektrische Zündungen immer aus einer separaten Stromquelle.
Verwenden Sie nur entstörte Zündkerzen, Zündkerzenstecker und abgeschirmte Zündkabel.
Halten Sie mit der Empfangsanlage ausreichenden Abstand zu einer Zündanlage.
Statische Aufladung
Die Funktion einer Fernlenkanlage wird durch die bei Blitzschlagen entstehenden magnetischen Schockwellen gestört, auch wenn das Gewitter noch kilometerweit entfernt ist. Deshalb ...
... bei Annaherung eines Gewitters sofort den Flugbetrieb einstehen! Durch statische Aufladung über die Antenne besteht darüber hinaus Lebensgefahr!
Achtung
- Um die FCC HF-Abstrahlungsanforderungen für mobile Sendeanlage zu erfällen, muss beim Betrieb der Anlage eine Entführung zwischen der Antenne der Anlage und Personen von 20 cm oder mehr eingehalten werden. Ein Betrieb in einer geringeren
Entfernung wird dazu nicht empfohlen.
- Um störende Beeinflussungen der elektrischen Eigenschaften und der Abstrahlcharakteristik zu vermeiden, achten Sie darauf, dass sich kein anderer Sender;naher als in 20 cm Entfernung befindet.
- Der Betrieb der Fernsteueranlage erfordert senderseitig eine korrekte Programmierung der Ländereinstellung. Dies ist erforderlich, um diversen Richtlinien, FCC, ETSI, CE usw. gerecht zu werden. Beachten Sie hierzu die jeweilige Anleitung zum Sender und Empfänger.
- Führer Sie vor jedem Flug einen vollständigen Funktion- und Reichweitetest mit kompletter Flugsimulation durch, um Fehler im System oder der Programmierung des Modells auszuschreiben.
- Programmieren Sie weder Sender noch Empfänger während des Modellbetriebs.
Pflegehinweise
Reinigen Sie Gehäuse, Antenne etc. niemals mit Reinigungsmitteln, Benzin, Wasser und dergleichen, sondern ausschließlich mit einem trockenen, weichen Tuch.
K componenten und Zubehör
Die Firma Graupner GmbH & Co. KG als Hersteller empfeihlt, nur Komponenten und Zubehörprodukte zu verwenden, die von der Firma Graupner auf Tauglichkeit, Funktion und Sicherheit geprüft und freiigegeben sind. Die Fa. Graupner übernimmt in thisem Fall für Sie die Produktverantwortung.
Die Fa. Graupner übernimmt für nicht freiigegebene Teile oder Zubehörprodukte von anderen Herstellern keine Haftung und kann auch nicht jeder einzeln Fremdprodukt beurteilen, ob es ohne Sicherheitsrisiko eingesetzt werden kann.
Haftungsausschluss/Schadenersatz
Sowohl die Einhaltung der Montage- und Betriebsanleitung als auch die Bedingungen und Methoden bei Installation, Betrieb, Verwendung und Wartung der Fernsteuerkomponenten konnen von der Fa. Graupner nicht überwacht werden. Daher übernimmt die Fa. Graupner keinerlei Haftung für Verluste, Schäden oder Kosten, die sich aus fehlerhafter Verwendung und Betrieb ergeben oder in irgendeiner Weise damit zusammenhängen.
Soweit gesetzlich zulässig, ist die Verpflichtung der Fa. Graupner zur Leistung von Schadenersatz, gleich aus welchem Rechtsgrund, begrenzt auf den Rechnungswert der an dem schadensstiftenden Ereignis unmittelbar beteiligten Warenmenge der Fa. Graupner. Dies gilt nicht, soweit die Fa. Graupner nach zwingenden gesetzlichen Vorschriften wegen Vorsatzes oder grober Fahrlässigkeit unbeschrankt haftet.
Wie für alle technisch hochwertigen Produkte ist die Be-. achung der nachfolgenden Sicherheitshinweise sowie der Behandlungsvorschriften für einen langen, störungs-. freien und ungebährlichen Einsatz unerländlich.
Sicherheitshinweise
- Akkus sind kein Spielzeug und)dürfen deshalb nicht in die Hände von Kinder gelangen. Akkus deshalb außerhalb der Reichweite von Kindern aufbewahren.
- Vor jedem Gebrauch den einwandfrei den Zustand der Akkus überprüfen. Defekte oder beschädigte Akkus nicht mehr verwenden.
- Akkus dürfen nur innerhalb der für den jeweiligen Zellentyp spezifizierten technischen Daten eingesetzt werden.
- Akkus nicht erhitzen, verbrennen, kurzschlieben oder mit überhöhten oder verpolten Strömen la-den.
- Akkus aus parallel geschalteten Zellen, Kombinationen aus alten und neuen Zellen, Zellen unterscheidlicher Fertigung, große, Kapazität, Hersteller, Marken oder Zellentypen)dürfen nicht verwendet werden.
- In Geräte eingebaute Akkus immer aus den Geräten entnahmen, wenn das Gerät gerade nicht verwendet wird. Geräte nach dem Gebrauch immer aushalte, um Tiefentladungen zu vermeiden. Akkus immerrechtzeitig aufladen.
- Der zu ladende Akku muss während des Ladevorgangs auf einer nicht brennbaren, hitzebeständigen und nicht leitenden Unterlage stehen! Auch sind brennbare oder weniger entzündliche Gegenstände von der Ladeanordnung fernzuhalten.
- Akkus)durfen nur unter Aufsicht geladen werden.
Der für den jeweiligen Akkutyp angegebene max. Schnelladestrom darf niemals übersritten werden.
- Erwärt mit der Akku während des Ladevorgangs auf mehr als 60^ , ist der Ladevorgang sehr zu unterbrechen und der Akku auf ca. 30^ abkühlen zu laßen.
- Niemals bereits geladene, heiße oder nicht vollig entleerte Akkus aufladen.
- An den Akkus)durfen keine Veränderungen vorgenommen werden. Niemals direkt an den Zellen loten oder schweißen.
- Bei falscher Behandlung besteht Entzündungs-, Explosions-, Veratzungs- und Verbrennungsgefahr. Geeignete Löschmittel sind Löschdecke, CO_2 -Feuer-löscher oder Sand.
- Auslaufendes Elektrolyt ist atzend, nicht mit Haut oder Augen in Berührung bringen. Im Notfall sofort mit reichlich Wasser ausspüssen und anschließend einen Arzt aufsuchen.
Die Ventilöffnungen der Zellen dürfen auf keinen Fall blockiert oder versiegelt werden, z.B. durch Lützinn. Beim Loten dar eine Löttemperatur von hochstens 220^ nicht länger als 20 Sek. einwirken.
Um eine Deformation zu vermeiden, daß kein übermaßiger mechanischer Druck einwirken.
- Bei eventuellem Überladen der Akkus gehen Sie wie folgt vor:
Stocken Sie den Akku einfach ab und legen Sie diesen auf einen unbrennbaren Untergrund (z.B. Steinboden) bis er abgekühlt ist. Behalten Sie den Akku niemals in der Hand, um dem Risiko einer Explosion aus dem Wege zu gehen.
- Achten Sie darauf, dass die Lade- und Entladevor
schriften eingehalten werden.
Allgemeine Hinweise
Die Kapazität Ihres Akkus verringert sich mit jeder Ladung/Entladung. Auch die Lagerung kann eine allmähliche Verringerung der Kapazität zur Folge haben.
Lagerung
Eine Lagerung sollte nur im nicht vollständig entla-denem Zustand in trockenen Räumen bei einer Umge-bungstemperatur von +5^ bis +25^ erfolgen. Die Zellenspannung sollte bei Lagerung über 4 Wochen 1,2 V nicht entsprechieren.
Angleichen der einzelnen Akkuzellen
- Um neue Zellen anzugleichen, bringen Sie diese über die sogenannte Normalladung auf den max. Ladezustand. Als Faustregel gilt in thisem Fall, dass ein leerer Akku 12 Stunden lang mit einem Strom in der Höhe eines Zehntels der aufgedruckten Kapazität geladen wird („1/10 C“-Methode). Die Zellen sind dann alle gleich voll. Eine solche Angleichung sollte in etwa bei jeder 10. Ladung wiederholt werden, damit die Zellen immer wieder angeglichen werden und somit die Lebensdauer erhöht wird.
- Wenn Sie die Möglichkeit der Einzelzellentladung haben, sollen den Sie diese vor jeder Ladung nutzen. Ansonsten sollte der Akkupack bis zu einer Entladespannung von 0,9 V pro Zelle entladen werden. Dies entspricht beispisseweise bei dem im Sender verwendeten 4er-Pack einer Entladeschluxsspannung von 3,6 V.
Ladung
Laden ist nur mit den spezifizierten Strömen, Lade-zeiten, Temperaturbereichen und ständiger Aufsicht
zulässig. Steht kein geeignetes Schnelladegerät zur Verfügung, an dem sich der Ladestrom GENU einstellen latent, so ist der Akku durch Normalladung nach der 1/10 C-Methode aufzuladen, siehe Beispiel oben.
Senderakkus sollenen wegen der unterschiedlichen Ladezustände der Zellen, wenn immer möglich, mit 1/10 C geladen werden. Der Ladestromarf aber keinesfalls den in der jeweiligen Senderanleitung als maximal zulässig angegebenen Wert überschreiben!
Schnell-Ladung
- Sollte Ihr Ladegerät diese Möglichkeit bieten, dann stellen Sie die Deltapeak-Ladeabschaltspannung auf 5 mV pro Zelle. Die meisten Ladegeräte sind jedoch fest auf 15 ... 20 mV pro Zelle eingestellt und können davon sowohl für NiCd-Akkus wie auch NiMH-Akkus verwendet werden. Erkundigen Sie sich im Zweifelsfalle in der Bedienungsanleitung oder beim Fachhändler, ob auch Ihr Gerät für NiMH-Akkus geeignet ist. Im Zweifelsfalle laden Sie ihre Akkus mit der Hälfte der angegebenen max. Ladeströme.
Entladung
Alle von Graupner und GM-Racing vertriebenen Akkus sind je nach Akkutyp für eine maximale Dauerstrombelastung von 6 ... 13 C geeignet (Herstellerangaben beachten!). JeHigher die Dauerstrombelastung, um so niedriger ist die Lebensdauer.
- Benutzen Sie ihren Akku, bis die Leistung nachlässt, bzw. die Unterspannungswannung ertont.
Achtung:
Die Zellenspannung sollte bei längerer Lagerung 1,2 V nicht unterschreiben. Ggf. müssen Sie den Akku vor dem Einlagern aufladen.
- Reflexladen wie auch Lade-/Entlade-Programme
verkurzenunnötg die Lebensdauer von Akkus und sind nur zum Überprüfen der Akkuqualität oder zum „Wiederbeleben“ ätherer Zellen geeignet. Genausowenig macht das Laden-/Entladen eines Akkus vor einem Einsatz Sinn. Es sei dann, Sie möchten dessen Qualität überprüfen.
Entsorgung verbrauchter Batterien und Akkus
Jeder Verbraucher ist nach der deutschen Batterieverordnung gesetzlich zur Rückgabe aller bebrauchten und verbrauchten Batterien bzw. Akkus verpflichtet.
Eine Entsorgung über den Hausmull ist verboten. Alte Batterien und Akkus konnen unentgeltlich bei den öffentlichen Sammelstellen der Gemeinde, in unseren Verkaufsstellen und überall Dort abgegeben werden, wo Batterien und Akkus der betreffenden Art verkauf werden. Sie konnen die von uns gelieferten Batterien nach Gebrauch aber auch ausreichend frankiert an folgende Adresse zurücksenden:
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien
Henriettensr. 94 - 96
D-73230 Kirchheim unter Teck
Sie leisten damit einen wesentlichen Beitrag zum Umweltschutz!
Vorsicht:
Beschädigte Akkus bedürfen für den Versand u.U. einer besonderen Verpackung, da z.T. sehr gifting!!!
mx-10 Fernsteuertechnologie der neuesten Generation
HoTT (Hopping Telemetry Transmission) ist die Synthese aus Know-How, Engineering und weltweiten Tests durch Profi-Piloten im 2,4-GHz-Bereich mit bidirektionaler Kommunikation zwischen Sender und Empfänger über einen im Empfänger integrierten Rückkanal.
Basierend auf dem bereits 1997 eingeführte Graupner/ JR-Computer-Fernlenk-System mc-24, wurde das Fernlenk-System mx-10 HoTT speziell für den Einsti- ger entwickelt. Dennoch konnen alle gängigen Modelltypen problemlos mit der mx-10 HoTT betrieben werden, gleichgültig ob Flächen- und Hubschraubermodelle oder Schiffs- und Automodelle.
Gerade im Flächenmodellbau sind oft komplizierte Mischfunktionen der jeweiligen Ruderklappen erforderlich. Dank der Computertechnologie sind die entsprechiedlichsten Modellforderungen mit dem einfachen Setzen eines „Jumperes" aktivierbar. Wahlen Sie lediglich den jeweiligen Modelltyp aus, dann stellt die Software alle bedeutsamen Misch- und Koppelfunktionen automatisch zusammen. Im Sender entfallen dadurch separate Module für die Realisierung komplexer Koppelfunktionen, und im Modell werden aufwendige mechanische Mischerkonstruktionen überflüssig.
Auch Helikoptermodelle können über ein „Flybarless“-System gesteuert werden.
Die mx-10 HoTT bietet ein Höchstmaß an Sicherheit und Zuverlösigkeit.
Der Einsteiger wird durch die klare und übersichtliche Programmstruktur schnell mit den entsprechenden Funktionen vertraut.
Das Graupner HoTT-Verfahren erlaubt theoretisch mehr als 200 Modelle gleichzeitig zu betreiben. Aufgrund des zulassungsbedingten funktechnischen Mischbetriebes im 2,4-GHz-ISM-Band wird aber diese Anzahl in der
Praxis erheblich geringer sein. In der Regel werden aber immer noch mehr Modelle im 2,4-GHz-Band gleichzeitig betrieben werden konnen als in den konventionellen 35-/40-MHz-Frequenzbereichen. Der letztendlich limitierende Faktor dürfte aber—wie möglich schon bisher—doch erheder die Grüße des zur Verfugung stehenden (Luft-) Raumes sein. Allein aber in der Tatsache, dass keine Frequenzabsprache mehr erfolgen muss, ist besonders bei in unübersichtlichem Gelände verteilt stehenden Pilotengruppen, wie es z.B. beim Hangflug gelegentlich vorkommen kann, ein enormer Sicherheitsgewinn zu sehen.
Die durch die optionale Smart-Box wird ein einfacher Zugriff auf Daten und Programmierung der HoTT-Empfänger sowie der optionalen Telemetriessensoren möglich. Beispielsweise konnen auf thisem Wege Empfängerausgabe gemappt, Steuerfunktionen auf mehrere Servos aufgeteilt wie auch Wege und Drehrichtungen von Servos aufeinander abgestimmt werden.
In dem vorliegenden Handbuch wird jeder Menü ausfuhrlich beschrieben. Tipps, weitere Hinweise und Programmierbeispiele ergänzen die Beschreibungen. Im Anhang finden Sie weitere Informationen zum HoTT-System. Abgeschlossen wird diese Handbuch mit der Konformitätserklärung und der Garantieurkunde des Senders.
Beachten Sie die Sicherheitshinweise und technischen Hinweise. Lesen Sie die Anleitung aufmerksam durch und testen Sie vor dem Einsatz zunachst alle Funktionen durch einfaches Anschlieben von Servos an dem beiliegenden Empfänger. Beachten Sie aber bzw die entsprechenden Hinweise auf Seite 28. So erlernen Sie in kürzester Zeit die wesentlichen Bedienschritte und Funktionen der mx-10 HoTT.
Gehen Sie verantwortungsvoll mit ihrer ferngesteuerten Modell um, damit Sie sich und andere nicht gefährden.
Das Graupner-Team wünscht Ihnen viel Freude und Erfolg mit Ihr demx-10 HoTT-Fernlenksystem der neuesten Generation.
Kirchheim-Teck, im Oktober 2011
Hohe Funktionssicherheit der Graupner HoTT-Technologie durch bidirektionale Kommunikation zwischen Sender und Empfänger mit integrierter Telemetrie (durch optionale Smart-Box) und ultraschnellen Reaktionszeiten.
Einfache Programmierung durch „Jumper".
- Microcomputer-Fernlenksystem in modernster 2,4 GHz Graupner HoTT-Technology
- Bidirektionale Kommunikation zwischen Sender und Empfänger
- Ultraschnelle Reaktionszeiten durch direkte Übertragung der Daten vom Hauptprozessor zum 2.4-GHz-HF-Modul mit zuverlässiger Übertragung.
Telemetri-Menu (optional durch Smart-Box) zur
Anzeige der Telemetrié-Daten sowie zur Programmierung der optional anschließbaren Sensoren und der Empfängerausgänge
- Kurze Antenne, klappbar
- Einfache Programmierung und prazise Einstellung durch Kippschalter und einen Taster
3 Schalter: ein Drei-Stufen-Schalter für L/S-Betrieb, 2 Zwei-Stufen-Schalter für Dual Rate und Schaltkanal 5 sind bereits eingebaut
- 5 Steuerfunktionen, davon 1 Schaltkanal
- Servoreverse
- Mode-Selector zur einfen Umschaltung des Betriebs-MODES 1 ... 4 (Gas links/rechts usw.) Alle davon betroffenen Einstellungen werden automatisch mit umgestellt.
Flächen-Menü für: 1 QR, 2 QR, V-Leitwerk, Delta/Nurflügel
Die folgenden Einstellungen können nur über die optionale Smart-Box erfolgen:
Servozykluszeiten fur Digitalservos von 10 ms wahlbar
Servo-Verstellung ± 150% fur alle Servoausgabe, getrennt einstellbar je Seite (Single Side Servo Throw)
- Sub-Trimm im Bereich von ±125% zur Einstellung der Neutralstellung aller Servos
Allgemeine HoTT-Merkmale
- Einfaches und extrem schnelles Binden von Sender und Empfänger
- Binden auch mehrerer Empfänger pro Modell im Parallelbetrieb möglich
- Extrem Schnelles Re-Binding auch bei maximaler
- Satellitenbetrieb zweier Empfänger über spezielle Kabelverbindung
- Reichweite Test- und Warnfungtion
- Empfänger-Unterspannungswarnung im Senderdisplay
- Extrem breiter Empfänger-Betriebsspannungsbereich von 3,6 V bis 8,4 V (voll funktionsfähig bis 2,5 V)
- Fail Safe
- freie Kanalzuordnung (Channel Mapping), Mischfunktionen sowie ähnliche Servoeinstellungen sind im Telemetri-Menu programmierbar
- Bis zu 4 Servos können blockweise mit einer Servo-Zykluszeit von 10 ms gleichzeitig angesteuert werden (nur Digital-Servos!)
- Maximale Störunempfindlichkeit durch optimiertes Frequenzhopping und breiter Kanalspreizung
- Intelligente Datenübertragung mit Korrekturfunktion
- Telemtrieiaeuswertung in Echtzeit
- Über 200 Systeme gleichzeitig einsetzbar
- Zukunftssicher durch Updatefähigkeit über DataSchnittstelle

Das Set Best.-Nr. 33110 enthalt
Microcomputer-Sender mx-10 HoTT mit eingebautem NiMH-Senderakku 4NH-1500 RX RTU flach (Änderung vorbehalten), Steckerladegerät und bidirektionale Graupner Empfänger GR-12 HoTT.
Empfohlene Ladegeräte (Zubehör)
| Best.-Nr. | Bezeichnung | Anschluss 220 V | Anschluss 12 V | geeignet für folgende Akkutypen | integr. Balancer |
| NiCd | NiMH | LiPo | Bleiakku |
| 6411 | Ultramat 8 | x | x | x | x | x | | |
| 6463 | Ultramat 12 plus | | x | x | x | x | x | x |
| 6424 | Ultramat 14 plus | x | x | x | x | x | x | x |
| 6466 | Ultra Trio plus 14 | x | x | x | x | x | x | x |
| 6468 | Ultramat 16S | x | x | x | x | x | x | x |
| 6469 | Ultra Trio Plus 16 | x | x | x | x | x | | x |
| 6470 | Ultramat 18 | x | x | x | x | x | x | x |
| 6475 | Ultra Duo Plus 45 | x | x | x | x | x | x | x |
| 6478 | Ultra Duo Plus 60 | x | x | x | x | x | x | x |
| 6480 | Ultra Duo Plus 80 | x | x | x | x | x | x | x |
Für die Aufladung ist zusätzlich für den Sender das Ladekabel Best.-Nr. 3022 und für den Empfängerakku das Ladekabel Best.-Nr. 3021 erforderlich.
Weitere Ladegeräe sowie Einzelheiten zu den aufgeführten Ladegeräten finden Sie im Graupner Hauptkatalog FS oder im Internet unter www.graupner.de.
Technische Daten Sender mx-10 HoTT
| Frequenzband | 2,4 ... 2,4835 GHz |
| Modulation | FHSS |
| Sendeleistung | s. Ländereinstellung
Seite 36/40 |
| Steuerfunktionen | 5 Funktionen, davon 4 trimmbar |
| Temperaturbereich | -10 ... +55 °C |
| Antenne | klappbar |
| Betriebsspannung | 3,4 ... 6 V |
| Stromaufnahme | ca. 125 mA |
| Abmessungen | ca. 190 x 195 x 90 mm |
| Gewicht | ca. 630 g mit Senderakku |
Zubehör
Best.-Nr. Beschreibung
1121 Umhängeriemen, 20 mm breit
70 Umhängieremen, 30 mm breit
3097 Windschutz fur Handsender
Ersatzteile
Best.-Nr. Beschreibung
33112.1 4NH-1500 TX RTU flach
33800 Senderantenne HoTT
Technische Daten Empfänger GR-12 HoTT
| Betriebsspannung | 3,6 ... 8,4 V* |
| Stromaufnahme | ca. 70 mA |
| Frequenzband | 2,4 ... 2,4835 GHz |
| Modulation | FHSS |
| Antenne | ca. 145 mm lang,
ca. 115 mm gekapselt und
ca. 30 mm aktiv |
| Ansteckbare Servos | 6 |
| Ansteckbare Sensoren | 1 (anstelle von Servo 5) |
| Temperaturbereich ca. | -10 ° ... +55 °C |
| Abmessungen ca. | 36 x 21 x 10 mm |
| Gewicht | ca. 7 g |
- Die Angabe des zulässigen Betriebspannungsbereiches gilt ausschließlich für den Empfänger!itte beachten Sie in thisem Zusammenhang, dass die Eingangsspannung des Empfängers ungeregt an den Servoanschlüssen bereitgestellt wird, der zulässige Betriebsspannungsbereich der überwiegenden Mehrzahl der anschließbaren Servos, Drehzahlsteller, Gyros usw. aber nur 4,8 bis 6 Volt beträgt!
Weiteres Zubehör im Anhang oder im Internet unter www.graupner.de. Wenden Sie sich auch an ihren Fachhändler. Er berät SieGREne.
Betriebshinweise
Sender-Stromversorgung
Der Sender mx-10 HoTT ist seriennäbig mit einem wiederaufladbaren hochkapazitiven NiMH-Akku 4NH-1500 RX RTU (Best.-Nr. 33112.1) ausgestattet. (Änderung vorbehalten.) Der seriennäbig eingebaute Akku ist bei Auslieferung jedoch nicht geladen.
Die Senderakkuspannung ist während des Betriebs durch die Status-LED zu überwachen. Bei Unterschieden einer in der Zeile „Warnschwelle Akku" des Menüx « der optionalen Smart-Box, Seite 46, einstellbaren Spannung, standardmäßig 4.5 V, ertönt ein akustisches Warnsignal und die orangene Status-LED beginnt in schneller Abfolge jeweils 5-mal kurz hinterinander zu blinken.
| TX | > |
| ACTION | VOLT: | 05.4V |
| MAXIMUM | VOLT: | 05.5V |
| MINIMUM | VOLT: | 05.4V |
| ALARM | VOLT: | 04.7V |
| COUNTRY | : | GENERAL |
| RANGE TEST | : | OFF 90s |
Spätestens jetzt ist der Betrieb unverzüglich einzustellen und der Senderakku wieder zu laden!
Laden des Senderakkus
Der wiederaufladbare NiMH-Senderakku kann über die auf der rechten Seite des Senders angebrachte Ladebuchse mit dem mitgelieferten Ladegerät (Best.-Nr. 33116.2) geladen werden.
Als Faustregel für die Ladedauer gilt, dass ein leerer Akku 12 Stunden lang mit einem Strom in der Höhe eines Zehntels der aufgedruckten Kapazität geladen wird. Im Falle des standardmäßigen Senderakkus und dem mitgelieferten Ladegerät sind das 200mA . Für die
rechtzeitige Beendigung des Ladevorganges müssen Sie jedoch selbst sorgen ...
Der Sender muss während des gesamten Ladevorgangs auf "OFF" (AUS) geschalteit sein. Niemals den Sender, solange er mit dem Ladegerät verbunden ist, einschalten! Eine auch nur kurzzeitige Unterbrechung des Ladevorgangs kann die Ladespannung derart ansteigen halten, dass der Sender durch Überspannung sofort beschädigt wird. Achten Sie deshalb auch immer auf einen sicheren und gutekontakt aller Steckverbindungen.
Polarität der mx-10 HoTT-Ladebuchse
Die auf dem Markt befindlichen Ladekabel anderer Hersteller weisen oft entsprechliche Polaritäten auf. Verwenden Sie deshalb nur original Graupner-Ladekabel mit der Best.-Nr. 3022.

Laden mit Automatik-Ladegeräten
Die Ladebuchse des Senders ist bzw serialmäßig gegen Verpolung geschützt, kann aber mit geeigneten Ladegeräten davon nach Schnellladung des Senderakkus benutzt werden.
Stellen Sie ggf. Ihr Schnelladegerät entsprechend dessen Anleitung auf eine Delta-Peak-Spannungsdifferenz von 10 mV ... 20 mV oder äquivalent ein, sodass es sich zur Schnellladung von NiMH-Zellen eignet.
Verbinden Sie erst die Bananenstecker des Ladekabels mit dem Ladegerät und stecken Sie dann erst das andere Ende des Ladekabels in die Ladebuchse am Sender. Verbinden Sie niemals die blanken Enden der Stecker eines bereits am Sender angeschlossenen Ladekabels miteinander! Um Schäden am Sender zu vermeiden, damit der Ladestrom gene
rell 1 A nicht überschreiben! Begrenzen Sie ggf. den Strom am Ladegerät.
Entnahme des Senderakkus
Zur Entnahme des Senderakkus zunachst den Deckel des Akkuschachtes auf der Senderrückseite entriegeln und abnehmer:

Den Akku entnehmer und dann Stecker des Senderakkus durch vorsichtigiges Ziehen am Zuleitungskabel offen.
Einsetzen des Senderakkus
Halten Sie den Stecker des Senderakkus so, dass sich das schwarze bzw. braune Kabel auf der zur Antenne weisenden Seite und die unbelegte
Buchse des Akkusteckers auf der zum Boden zeigenden Seite befindet und schieben Sie dann den Akkuanschluss in Richtung Platine auf die drei aus dem Senderinneren ragenden Stifte.
Polarität
Senderakkustecker
(Der Akkuanschluss ist durch zwei angeschragte Kanten gegen Verpolung beim Wiedereinstecken geschützt, siehe Abbildung.)
Legen Sie anschließend den Akku in das Fach und schreiben Sie den Deckel.
Betriebshinweise
Empfänger-Stromversorgung
Zur Stromversorgung des Empfängers stehen 4- und 5-zellige NiMH-Akkus unterschiedlicher Kapazität zur Auswahl. Bei einem Einsatz von Digitalservos empfehlen wir, einen 5-zelligen Akku (6 V) ausreichender Kapazität zu verwenden. Im Falle eines Mischbetriebes von Analog- und Digitalservos achten Sie noch unbedingt auf die jeweils maximal zulässige Betriebsspannung. Für eine stabilisierte und einstellbare Stromversorgung des Empfängers mit 1 oder 2 Empfängerakkus sorgt z.B. die PRX-Einheit Best.-Nr. 4136, siehe Anhang.
Verwenden Sie aus Sicherheitsgründen keinesfalls Batterieboxen und auch keine Trockenbatterien.
Die Spannung der Bordstromversorgung „R-VOLT“ wird während des Modellbetriebs im Display der optionalen Smart-Box angezeigt:
| RX DATAVIEW > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT:05.0V |
| L.R-VOLT:04.5V |
| SENSOR1:00.0V 00°C |
| SENSOR2:00.0V 00°C |
Beim Unterschieden einer im Telemetrié-Menu Seite 53, einstellbaren Warnschwelle, standardmäßig 3,8 Volt, erfolgt eine optische und akustische Unterspannungswannung.
Überprüfen Sie dennoch in regelmäßigen Abständen den Zustand der Akkus. Warten Sie mit dem Laden der Akkus nicht, bis das Warnsignal ertont.
Hinweis:
Eine Gesamtübersicht der Akkus, Ladegeräte sowie Messgeräte zur Überprüfung der Stromquellen ist im Graupner Hauptkatalog FS bzw. im Internet unter www.
graupner.de zu finden.
Laden des Empfängerakkus
Das Ladekabel Best.-Nr. 3021 kann zum Laden direkt an den Empfängerakku angesteckt werden. Ist der Akku im Modell über eines der Stromversorgungskabel Best.-Nr. 3046, 3934, 3934.1 bzw. 3934.3 angeschlossen, dann erfolgt die Ladung über die im Schalter integrierte Ladebuchse bzw. den gesonderten Ladeanschluss. Der Schalter des Stromversorgungskabels muss zum Laden auf „AUS" stehen.
Polarität Empfängerakkustecker
Allgemeine Ladehinweise
- Es sind stets die Ladeanweisungen des Ladegerätesowie des Akkuherstellers einzuhalten.
- Achten Sie auf den maximal zulässigen Ladestrom des Akkuherstellers. Um Schäden am Sender zu vermeiden, darf der Ladestrom aber generell 1 A nicht überschreiben! Begrenzen Sie ggf. den Strom am Ladegerät.
- Soll der Senderakku-DDoch mit mehr als 1 A geladen werden, muss dieser unbedingt außerhalb des Senders geladen werden! Andernfalls risikieren Sie Schaden an der Platine durch Überlastung der Leiterbahnen und/oder eine Überhitzung des Akkus.
- Vergewissern Sie sich durch eine Probeladungen von der einwandfrei Funktion der Abschaltautomatik bei Automatik-Ladegeräten. Dies gilt insbesondere, wenn Sie den serialmöbig eingebauten NiMH-Akku mit einem Automatik-Ladegerät für NiCd-Akkus aufladen wollen. Passen Sie ggf. das Abschaltver
haltan, sofern das verwendete Ladegerat diese Option besitzt.
- Führer Sie keine Akku-Entladungen oder Akkupflegeprogramme über die Ladebuchse durch! Die Ladebuchse ist für diese Verwendung nicht geeignet!
- Immer zuerst das Ladekabel mit dem Ladegerät verbinden, dann erst mit dem Empfänger- oder Senderakku. So verhindern Sie einen versehentlichen Kurzschluss mit den blanken Enden der Ladekabelstecker.
- Bei starker Erwärung des Akkus überprüfen Sie den Zustand des Akkus, tauschen diesen ggf. aus oder reduzieren den Ladestrom.
- Lassen Sie den Ladevorgang eines Akkus niemals unbeaufsichtigt!
- Beachten Sie die Sicherheitshinweise und Behandlungsvorschriften ab Seite 7.
Längenverstellung der Steuerknüppel
Beide Steuerknüppel setzen sich in der Länge stufenlos verstehen, um die Sendersteuerung an die Gewohnheiten des Piloten anpassen zu konnen.
Halten Sie die untere Hälfte des gerändelten Griff-stückes fest und Lösen Sie durch Drehen des oberen Teiles die Verschraubung:
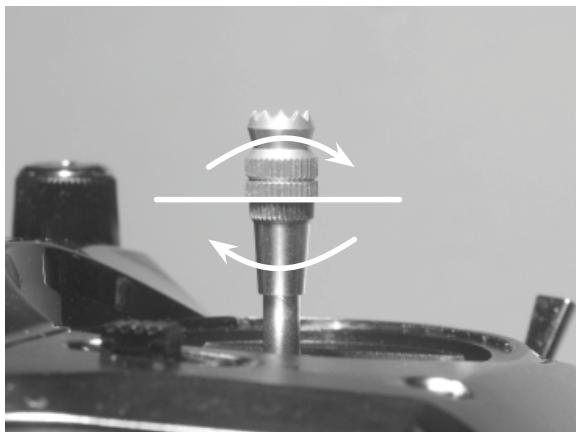
Nun durch Hoch- bzw. Herunterdrehen den Steuerknüppel verlangern oder verkurzen. Anschließend den oberen und unteren Teil des Griffstücks durch Gegenananderverdrehen wieder festlegen.
Sendergehauseffnen
Lesen Sie sorgfältig die nachfolgenden Hinweise, bevor Sie den Sender öffnen. Wir empfehlen Unerfahrenen, die nachfolgend beschriebenen Eingriffe ggf. im Graupner-Service durchführten zu halten.
Der Sender sollte nur in folgenden Fällen geöffnet werden:
- wenn ein neutralisierender Steuerknüppel auf nichtneutralisierend oder ein nichtneutralisierender Steuerknüppel auf neutralisierung umgebaut werden soll,
- zur Einstellung der Steuerknüppelrückstellkraft.
Vor dem Öffnen des Gehäuses Sender ausschalten (Power-Schalter auf „OFF").
Öffnen Sie den Akkuschacht und entnehmen Sie wie auf der vorherigen Doppelseite beschreiben, den Senderakku.
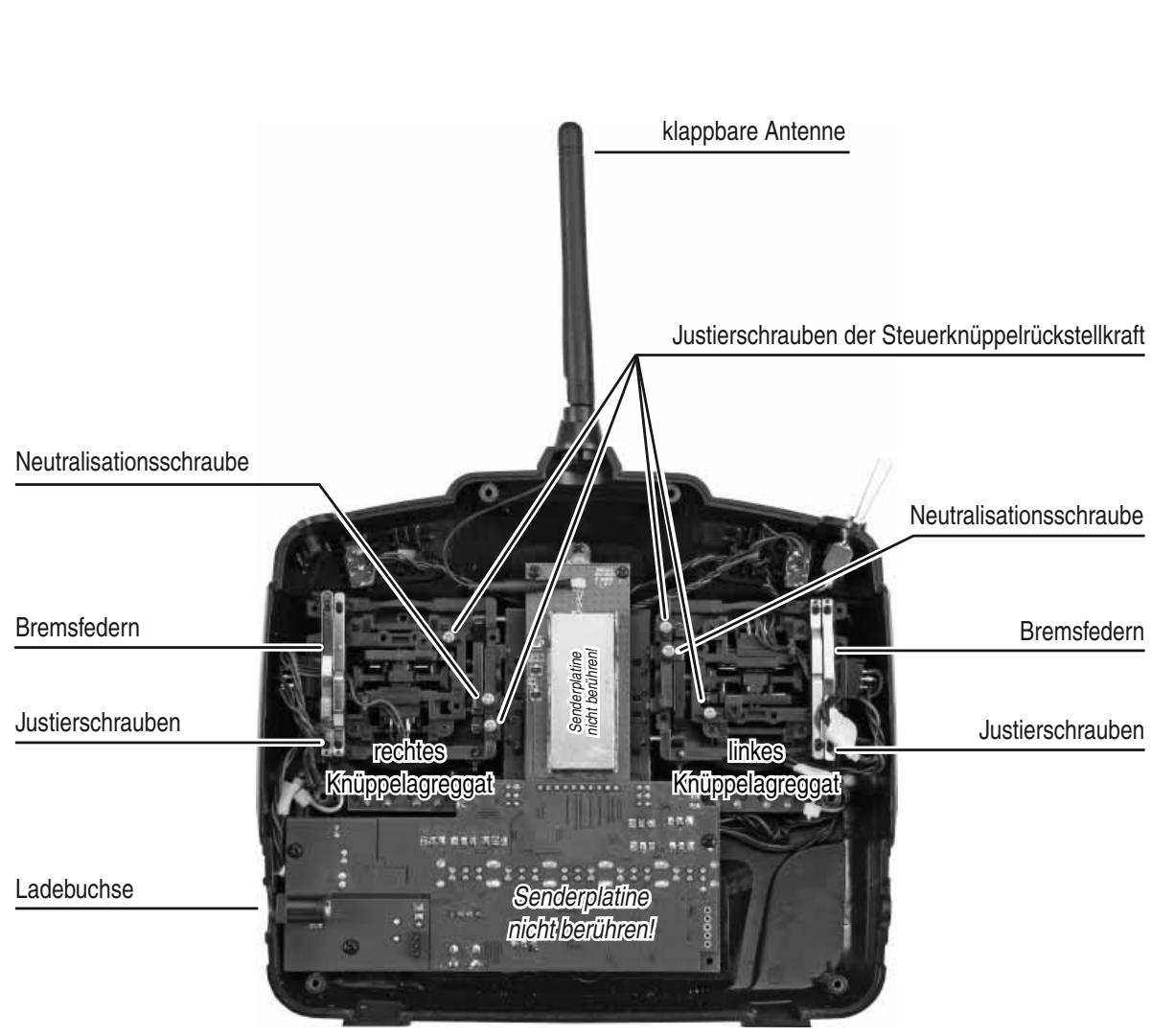
Lösen Sie hernach die auf der Senderrückseite versenkt angebrachten sechs Schrauben mit einem Kreuzschlitz-schraubendreher der Höhe PH1, siehe Abbildung:

Anordnung der Gehäueschrauben
Halten Sie die beiden Gehauseteile mit der Hand zusammen und setzen Sie diese 6 Schrauben durch Umdrehen des Senders zunachst auf eine geeignete Unterlage hersaufallen. Hebien Sie nun die Unterschale vorsichtig an und klappen Sie diese nach rechts auf, so, als ob Sie ein Buch öffnen wurden.
Wichtige Hinweise:
- Nehmen Sie keinerlei Veränderungen an der Schaltung vor, da ansonsten der Garantianspruch und auch die behörliche Zulassung erlöschen!
- Berühren Sie keinesfalls die Platinen mit metallischen Gegenständen. Berühren Sie Kontakte auch nicht mit den Fingern.
- Schalten Sie bei geöffnetem Sendergehäuse niemals den Sender ein!
Beim Schlieben des Senders achten Sieitte da- rauf, dass ...
- ... keine Kabel beim Aufsetzen der Unterschale eingeklemmt werden.
... die beiden Gehäuseteile vor dem Verschrauben bündig aufeinander sitzen. Niemals die beiden Gehäuseteile mit Gewalt zusammen.
- Drehen Sie die Gehäuseschrauben mit Gefühl in die bereits vorhandenen Gewindegänge, damit diese nicht ausreißen.
... Si wieder den Akku anschließen.
Betriebshinweise
Umstellen der Kreuzknuppel
Neutralisierung
Wahlweise kann sowohl der linke wie auch der rechte Steuerknüppel von neutralisierend auf nichtneutralisierend umgestellt werden: Sender wie auf der Seite zuvor beschrieben öffnen.
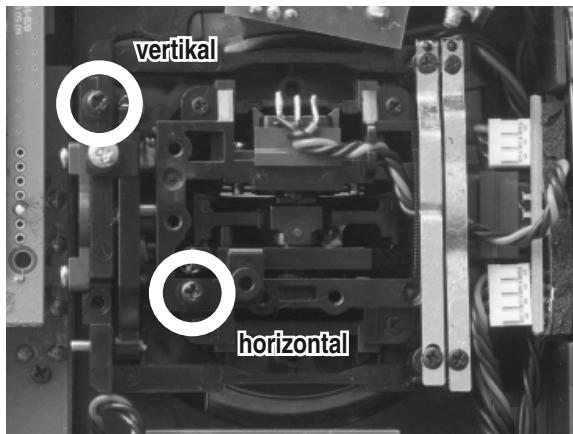
Zum Wechsel der seriemäßigen Einstellung des Steu-erknuppels lokalisieren Sie die auf der nachfolgenden Abbildung des linken Knuppelaggregates weiß umrandete Schraube.
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich aufgebaut, sodass bei thisem die gesuchte Schraube rechts unterhalb der Mitte zu finden ist.
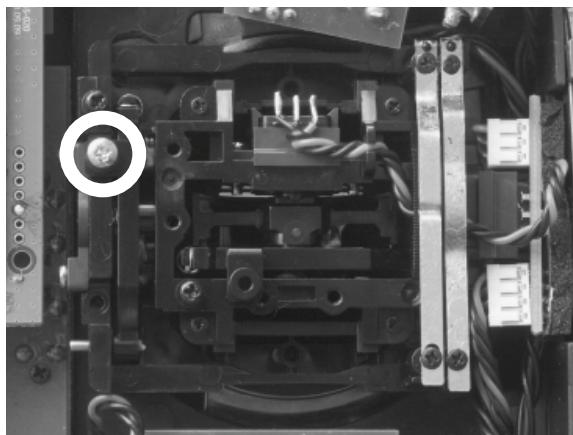
Drehen Sie nun diese Schraube hinein, bis der betreffende Steuerknüppel von Anschlag bis Anschlag frei beweglich ist bzw. drehen Sie diese hereaus, bis der Steuerknüppel wieder komplett selbstrückstellend ist.
Bremsfeder und Ratsche
Mit der äußeren der beiden in der{nachsten Abbildung markierten Schrauben stellen Sie die Bremskraft ein und mit der inneren die Stärke der Ratsche des jeweiligen Steuerknuppels:
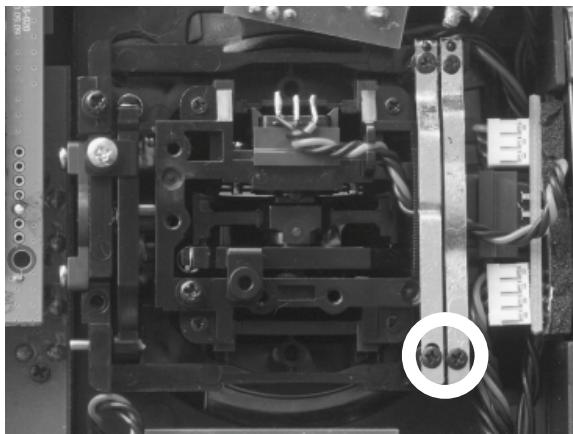
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich aufgebaut, sodass bei thisem die gesuchten Schrauben links oben zu finden sind.
Steuerknuppelrückstellkraft
Die Rückstellkraft der Steuerknuppel ist ebenfalls auf die Gewohnheiten des Piloten einstellbar. Das Justiersystem befindet sich darüber den Rückholfedern, siehe Markierungen auf der folgenden Abbildung.
Durch Drehen der jeweiligen Einstellschraube mit einem (Kreuz)-Schlitzschraubendreher kann die gewünschte Federkraft justiert werden:
- Rechtsdrehung = Rückstellung härter,
- Linksdrehung = Rückstellkraft weicher.
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich aufgebaut, sodass bei thisem die gesuchten Schrauben rechts der Mitte zu finden sind.
Senderbeschreibung
Bedienelemente am Sender
Befestigen des Sendertragegurts
An der Oberseite des mx-10 HoTT-Senders finden Sie eine Befestigungsose, siehe Abbildung rechts, an der Sie einen Tragegurt anbringen konnen. Dieder Haltepunkt ist so ausgerichtet, dass der Sender optimal ausbalanciert ist, wenn er am Gurt hangt. Best.-Nr. 1121 Umhängeriemen, 20mm breit Best.-Nr. 70 Umhängeriemen, 30mm breit
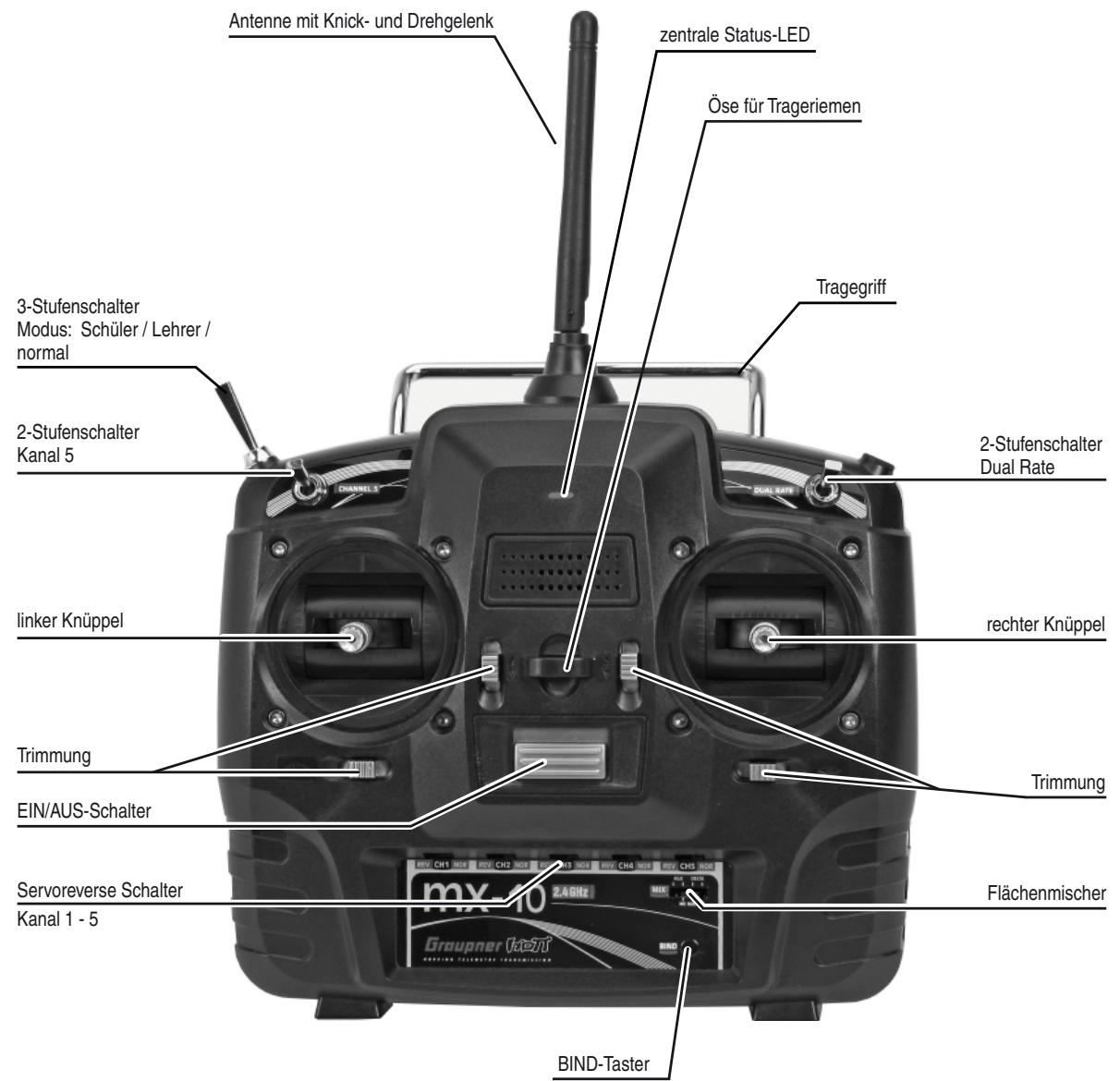

DATA-Buchse
Zum Anschluss der optional erhältlichen Smart-Box Best.-Nr. 33700.
Die Smart-Box erlaubt die Nutzung vieler weiterer HoTT-Funktionen wie z.B. Servokurven, Servoweg, Servo-Zykluszeit oder Channel-Mapping sowie die HoTT Telemetrie - siehe dazu den Abschnitt „Telemetrie" auf Seite 45.
Naheres zur Smart-Box finden Sie im Graupner Hauptkatalog FS sowie im Internet unter www.graupner.de bei dem jeweiligen Produkt.
Über diese Anschlussbuchse wird auch ggf. eine Verbindung über den optionalen USB-Adapter Best.-Nr. 7168.6 und das Anschlusskabel Best.-Nr. 7168.6A zu einem PC mit einem der Windows-Betriebssysteme XP, Vista oder 7 hergestellt.
Die PC-seitig nötige Software wie beispelsweise den passenden USB-Treiber finden Sie auf der Downloadseite des jeweiligen Produkts unter www.graupner.de.
Nach Installation der nötigen Software kann dann über diese Verbindung der Sender auch upgedatet werden.
Inbetriebnahme des Senders
Vorbemerkungen zum Sender mx-10 HoTT
Vorbemerkungen
Theoretisch erlaubt das Graupner-HoTT-System den gleichzeitigen Betrieb von mehr als 200 Modellen. Aufgrund des zulassungsbedingten funktechnischen Mischbetriebes im 2,4-GHz-ISM-Band wird aber diese Anzahl in der Praxis erheblich geringer sein. In der Regel werden aber immer noch mehr Modèle im 2,4-GHz-Band gleichzeitig betrieben werden können als in den konventionellen 35-/40-MHz-Frequencybereichen. Der letztendlich limitierende Faktor dürfte aber—wiehäufig schon bisher—doch erheder die Grübe des zur Verfügung stehenden (Luft-) Raumes sein. Allein aber in der Tatsache, dass keine Frequenzabsprache mehr erfolgen muss, ist nicht nur komfortabel, sondern darin ist insbesondere bei in unübersichtlichem Gelände verteil stehenden Pilotengruppen auch ein enormer Zugewinn an Sicherheit zu sehen.
Akku geladen?
Da der Sender mit ungeladenem Akku ausgeliefert wird, mussen Sie ein unter Beachtung der Ladevorschriften auf Seite 7 aufladen. Ansonsten ertont bei Unterschieden einer bestimmten Spannung, die in der Zeile „Warnschwelle Akku" des Menus »TX « der Smart-Box, Seite 46, eingestellt werden kann, bereits nach kurzer Zeit ein Warnsignal und die LED blinkt jeweils fünfmal kurz hinterinander.
Senderinbetriebnahme
Nach dem Einsatz leuchtet/blinkt die Status-LED des Senders, um den aktuellen Modus anzuzeigen
Siehe die folgende Tabelle:
| LED Anzeige | Summer | Beschreibung |
| grüne LED leuchtet | - | Sender eingeschaltet, aber kein Empfänger gebunden oder Empfänger gebunden, aber keine Telemetrié |
| orange LED leuchtet | - | Sender in Modus normal, Ländereinstellung: general |
| orange LED blinkt | - | Sender in Modus normal, Ländereinstellung: Frankreich |
| orange LED blinkt einmal | zwei Pieptöne nach dem Einsatzalten | Sender in Schüler Modus |
| orange LED blinkt zweimal | 2x zwei kurze Pieptöne nach dem Einsatzalten | Sender in Lehrer Modus |
| orange LED blinkt dreimal | drei kurze Pieptöne schnell hintereinander | schlechte Empfangsleistung des Empfängers |
| orange LED blinkt viermal | vier kurze Pieptöne schnell hintereinander | schlechte Empfangsleistung des Rückkanals |
| orange LED blinkt fünf mal | fünf kurze Pieptöne schnell hintereinander | Senderakku leer. Erreichen der in der Zeile „Warn-schwelle Akku“ des Menüs »TX« der optionalen Smart-Box, Seite 46, eingestillten Spannung, standardmübig 4.5 V. |
Zuerst,müssen Sie den Betriebsmodus „normal“, „Lehrer-“ oder „Schüler-“ Sender durch den Modus-Schalter auf der linken Oberseite des Senders auswahlen:
Modus Normal
Lehrer
Schuler

Der Sender wird im Modus „normal“ ausgeliefert. Für den normalen Betrieb müssen Sie also nichts verändern. Um den Sender in den Lehrer- oder Schülermodus
zu bringen,lesen Sie das Kapitel „Lehrer/Schüler“ auf Seite 60.
Um den Modus zu wechseln, bringen Sie den Modus-Schalter bei ausgeschaltetem Sender in die gewünschte Position, drücken und halten den BIND-Taster und schalten anschließend den Sender ein.
Beache: nach dem Programmieren des Modus „normal" ist der Sender im Fall-Safe Programmiermodus (siehe Seite 43), wenn Sie hier nichts programmieren wollen, schalten Sie den Sender jetzt wieder aus.
Die Anzeige des programmierten Modus erfolgt nach dem Einsatz den Senders durch LED- und Summer-signale, siehe dazu die obige Tabelle.
Firmware-Update des Senders
Wichtige Hinweise:
- Der im Set enthaltene Sender ist ab Werk auf die korrekten Einstellungen für den Betrieb in den meisten Ländern Europas (außer Frankreich) eingestellt.
Wird dagegen das Fernsteuer-System in Frankreich betrieben, MUSs zuerst die Ländereinstellung am Sender auf den Modus „FRANKREICH“ gestellt werden, siehe Seite 36/40. AUF KEINEN FALL DARF IN FRANKREICH der Universal/EUROPE-Modus verwendet werden!
- Mit dem Sender mx-10 HoTT 2.4 können an dem dem Set beiliegenden und werkseitig bereits an den Sender gebundenen Empfänger bis zu 5 Servos betriebenen werden.
- Achten Sie beim Einschalten, Binden oder Einstellen der Fernsteuerung unbedingt daraufuf, dass die Senderantenne immer ausreichend welt von den Empfängerantennen entwickelten ist! Behinden Sie sichathamich mit der Senderantenne zu nahe an den Empfängerantennen, ubersteuert der Empfänger und die grune LED am Empfänger erlischt. Parallel dazu falttd der Rückkanal aus und infolgedessen blinkt die orange Status-LED viermal kurz hinterinander und die korrespondierenden Warntone beginnen. Die Fernsteuerung befindet sich zeitgleich im Fail-Safe-Modus.
Vergroßern Sie in thisem Fall den Abstand solange, bis die Anzeigen wieder „normal“ sind.
Firmware-Updates des Senders werden über die auf der Rückseite des Senders befindliche dreipolige PC-Schnittstelle mit Hilfe eines PCs unter Windows XP, Vista oder 7 auf eigene Gefahr durchgeführt.
Aktuelle Software und Informationen finden Sie bei dem entsprechenden Produkt unter Download auf www.graupner.de.
Hinweis:
Nach Registierung Ihr's Senders unter http://www.graupner.de/de/service/produktregistrierung werden Sieautomatisch per E-Mail über neue Updates informiert.
Für ein Update der Sendersoftware benötigen Sie die optionale USB-Schnittstelle Best.-Nr. 7168.6 sowie das optionale zweipolige Adapterkabel mit der Best.-Nr. 7168.6A. Dieses wird direkt in die 3-polige PC-Anschlussbuchse auf der Rückseite des Senders eingesteckt.
Update der mx-10 HoTT-Software
Hinweis:
Überprüfen Sie vor jedem Update unbedingt den Ladezustand Ihres Senderakkus bzw. laden Sie diesen vorsichtshalber und sichern Sie alle belegten Modellspeicher, um sie ggf. wiederherstellen zu können.
1. Treiber installmenten
Installieren Sie die erforderliche Treibersoftware, die den Programmpaketen im Verzeichnis „USB Treiber" beigefügt ist, um die USB-Schnittstelle Best.-Nr. 7168.6 in Betriebnehmen zu können.
Starten Sie die Treiberinstallation durch einen Doppelklick auf die entsprechende Datei und folgen Sie den Anweisungen. Nach erfolglicher Installation
muss der Computer neu gestartet werden. Der Treiber ist nur einmal zu installieren.
2. Verbindung Sender / PC herstellen
Verbinden Sie das USB-Kabel mit der 3-poligen PC-Buchse auf der Senderrückseite bei ausgeschaltelem Sender. Stecken Sie das Kabel so ein, dass die orange Leitung nach links, zur Sendermitte zeigt und die braune nach rechts, zum Rand des Senders. Wenden Sie keine Gewalt an.
3. Update mx-10 HoTT-Sendersoftware
Starten Sie das unter den Download-Dateien im Verzeichnis „Firmware-Updater“ enthaltene Programm „Firmware_Uptegrate_grStudio_VerX.XX.exe“ durch einen Doppelklick. (Die zum Zeitpunkt der Drucklegung theses Handbuches aktuelle Version 1.3 startet ohne zuvor erfolgte Installation.).
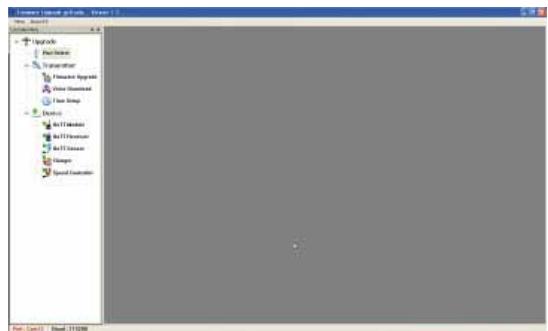
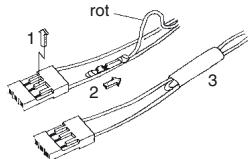
Wahlen Sie unter „Menu“, „Port Setup“, oder öffnen Sie das „Controller Menu“ und klien auf „Port select“:

Wahlen Sie nun im Fenster „Port select“ den korrekten COM-Port aus, an welcher die USB-Schnittstellte angeschlossen ist. Erkennbar ist diese an der Bezeichnung „Silicon Labs CP210x USB to UART Bridge" in der Spalte „Device Name". In obiger Abbildung ware dieser Port „COM 3".
Rufen Sie anschließend unter „Menu“ die Option „HoTT Module Upgrade“ auf oder öffnen Sie das „Controller Menu“ und klichen auf „HoTT Module“:
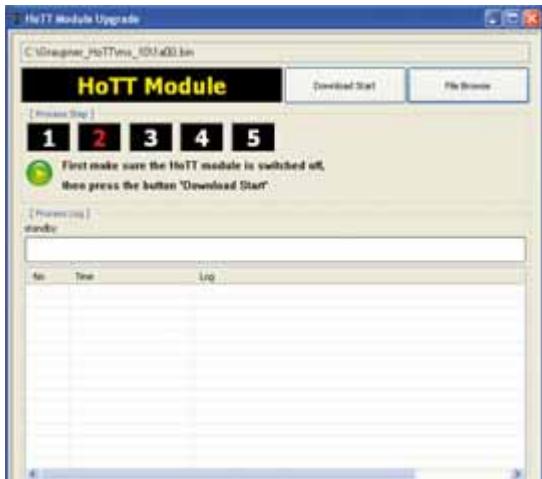
Klicken Sie auf den Button mit der Aufschrift „File Browse" und wahren Sie in dem nun erscheinenden „Datei offen"-Dialog die gewünschte Firmware-Up-date-Datei mit der Endung „bin" aus.
Die Firmware-Dateien sind Produktspezifisch codiert, d.h., sollen den Sie aus Versehen eine nicht zum Produkt passende Datei auswahlen (z.B. Empfänger-Up- date-Datei anstatt Sender-Update-Datei) erscheint das Popup-Fenster „Product code error" und der Up- date-Vorgang lasst sich nicht starten.
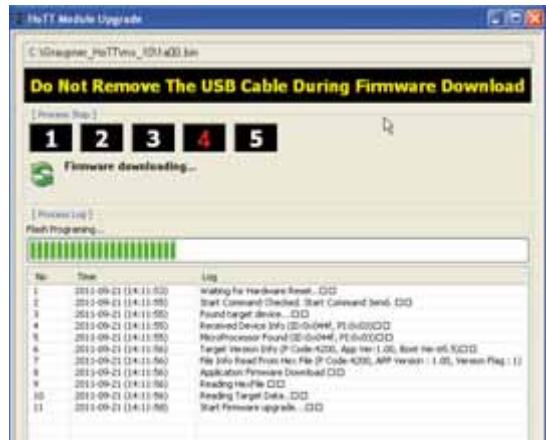
Drücken Sie nun den Button „Download Start". Warten Sie, bis der Balken in der Progress-Leiste anlauf. Dies kann je nach Computer bis zu mehreren Sekunden dauern. Nun schalten Sie den Sender bei gedruckt gehaltenem BIND-Taster ein. Nach ein paar Sekunden erscheint im Status Display „Found target device ...”. Nun können Sie den Taster wieder los-lassen.
Daraufhin startet der eigentliche Update-Vorgang und oberhalb durchlaufender Textzeilen beginnnt ein
Fortschrittsbalken zu laufen:
Unterbrechen Sie den Update-Vorgang nicht, bevord der Fortschrittsbalken den rechten Rand erreicht hat und die Meldung „Firmware Download Success" erscheint - ausserdem ertönt eine kurze Betsätigungs-melodie des Senders und die Status-LED wechsel von orange zu grün:
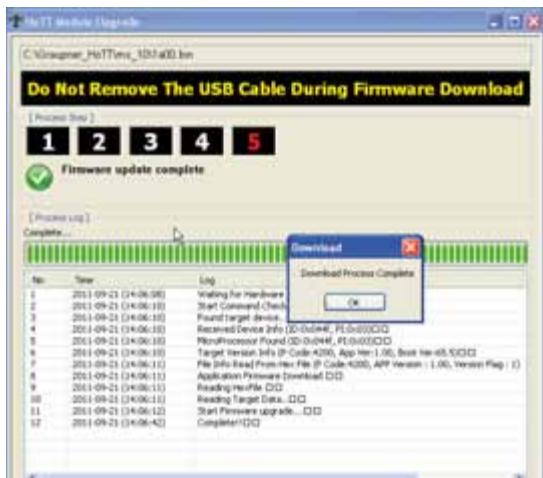
Klicken Sie auf „OK“. Schalten Sie anschließend den Sender aus und trennen Sie schließlich die Verbindung zum PC oder Laptop.
Sollte der Fortschrittsbalken nicht vorrücken, schlieben Sie das Programm und wiederholen Sie den Update-Vorgang. Beachten Sie ggf. erscheinende Fehlermeldungen.
4. Initialisierung des Senders
Nach erfolgreichem Update-Vorgang MÜSSEN Sie vor der erneuten Benutzung des Sendersss aus Sicherheitsgründen eine Initialisierung durchführten: Drücken und halten Sie dazu den BIND-Taster am Sender und schaltenihn ein. Lassen Sie nun den BIND-Taster wieder los. Außer den Bindungs-Informationen sind darauf alle anderen ggf. zuvor programmierten Einstellungen im Sender auf die Werkseinstellungen zurückgesetzt und müssen bei Bedarf neu eingegeben werden.
Beache: nach der Initialisierung im Modus „normal“ ist der Sender im Fail-Safe Programmiermodus (siehe Seite 43), wenn Sie hier nichts programmieren wollen, schalten Sie den Sender jetzt wieder aus.
Inbetriebnahme des Empfängers
Vorbemerkungen zum GR-12 Empfänger
Empfangsanlage
Im Lieferumfang des Fernsteuer-Sets mx-10 HoTT ist ein bidirektionaler 2,4-GHz-Empfänger vom Typ GR-12 für den Anschluss von bis zu 6 Servos enthalten. Um eine Verbindung zum Sender aufbauen zu konnen, muss zunachst der Graupner-HoTT-Empfänger mit „seinem“ Modellspeicher in „seinem“ Graupner-HoTT-Sender „verbunden“ werden. Diese Vorgang bezeichnet man als „Binding“. Dieses „Binding“ ist allerdings nur einmal je Empfänger-/Modellspeicher-Kombination erforderlich, siehe die Seiten 38 bzw. 42, und wurde bei den jeweils zusammen im Set gelieferten Geräten bereits werkseitig vorgenommen, sodass Sie das „Binden“ nur bei weiteren Empfängern durchführten müssen (und - z. B. nach einem Senderwechsel - jederzeit wiederholen konnen).
Nachdem Sie den mitgelieferten HoTT-Empfänger vom Typ GR-12 an eine Stromversorgung angeschlossen und diese eingeschaltet haben, leuchtet deshalb dessen LED einzelmal kurz grün auf und bleibt dann dunkel, wenn „sein“ Sender nicht in Reichweite bzw. ausgeschaltet ist. Ist eine Verbindung hergestellt, leuchtet die LED dauerhaft grün.
Hinweis:
Leuchtet die LED dauerhaft grün und der Empfänger reagiert dennoch weder auf den SET-Taster noch auf Steuerbefehle, dann überprüfen Sieitte die Polarität ihrer Empfängerstromversorgung.
Bordspannungsanzeige
Die aktuelle Spannung der Empfängerstromversorgung wird bei bestehender Telemetrie-Verbindung im Display "RX DATAVIEW" der optionalen Smart-Box unter RVOLT angezeigt.
Temperaturwarnung
Sinkt die Temperatur des Empfängers unter einen im Empfänger einstellbaren Grenzwert (standardmaßig -10 °C) oder übersteigt diese die ebenfalls im Empfänger einstellbare obere Warnschwelle (standardmaßig +55 °C), erfolgt eine Warnung durch den Sender in Form eines gleichmäßigen Piepsen im Rhythmus von ca. einer Sekunde.
Servoanschlussüsse und Polarität
Die Servoanschlüsse der Graupner-HoTT-Empfänger sind nummeriert. Das Stecksystem ist verpolungssicher. Achten Sie beim Einstecken der Stecker auf die klinen seitlichen Phasen. Wenden Sie auf keinen Fall Gewalt an.
Die Versorgungsspannung ist über sümmtliche num- merierten Anschlüsse durchverbunden. Sollte kein Servosteckplatz frei sein, kann über ein V- bzw. Y-Kabel Best.-Nr. 3936.11 ein Servo auch gemeinsam mit der Stromversorgung angeschlossen werden.
Verpolen Sie diesen Anschluss nicht! Der Empfänger und ggf. daran angeschlossene Geräte können zerstört werden.
Die Funktion jeges einzelnen Kanals wird bestimmt durch den verwendeten Sender, nicht durch den Empfänger. Nicht nur der Gasservoanschluss ist je nach Fabrikat und Modelltyp unterschiedlich. Bei Graupner-Fernsteuerungen liegt dieser beispisseweise beim Flächenmodell auf Kanal 1 und beim Helikopter auf Kanal 6.
Servoanschluss 5: „SERVO“ oder „SENSOR“
Am, mit einem zusätzlichen „T“ gekennzeichneten, Servoanschluss 5 ...
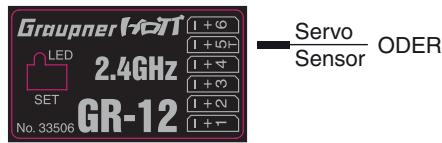
... kann alternative nicht nur das Adapterkabel Best.-Nr. 7168.6A zum Updaten des Empfängers sondern auch ein Telemetri-E Sensor angeschlossenen werden.
Damit das jeweils angeschlossene Gerät jedoch vom Empfänger auch richtig erkannt wird, MUSS der Servoanschluss 5 entsprechend von „SERVO“ auf „SENSOR“ und vice versa umgestellt werden. Dies erfolgt durch die optionale Smart-Box auf der Seite „RX CURVE“ des Untermenüs »SETTING AND DATAVIEW«. Nähres dazu siehe ab Seite 53:
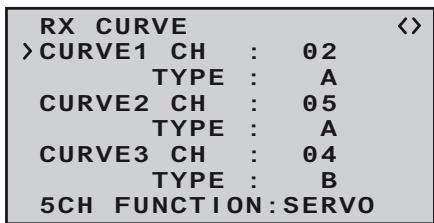
Auf dieser Menüseite verschiben Sie mit der INC oder DEC-Taste das Symbol „>“ am linken Rand vor die unterste Zeile und Drücken dann die INC+DEC Tasten gemeinsam:
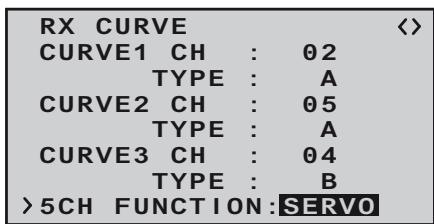
Mit einer der beiden NC oder DEC Tasten wahlen Sie
nun die alternative Einstellung „SENSOR“:
Mit einem weiteren Druck auf die INC+DEC Tasten schlieBen Sie ihre Wahl ab.
AbschlieBende Hinweise:
Die erheblich höhere Servoauflösung des HoTT-Systems führt zu einem spürbar direkteren Ansprechverhalten im Vergleich zur bisherigen Technologie. Bittle machen Sie sich mit dem feinfühligeren Verhalten vertraut!
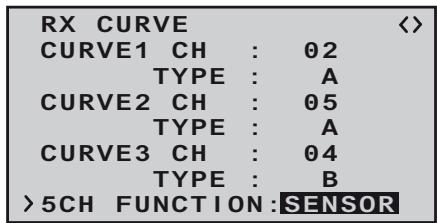
- Falls Sie parallel zum Empfängerakku einen Drehzahlsteller mit integriertem BEC^* -System verwenden, muss drehzahlstellerabhängig gegebenenfalls der Pluspol (rotes Kabel) aus dem 3-poligen Stecker herausgelöst werden. Beachten Sie diesbezüglich unbedingt die entsprechenden Hinweise in der Anleitung des verwendenten Drehzahlstellers.
Mit einem kleinen Schraubendreher vorsichtig die
mittlere Lasche des Steckers etwas anheben (1), rotes Kabel Herausziehen (2) und mit Isolierband gegen mögliche Kurzschlussere sichern (3).
Servoanschluss 6: Summensignal
Am Servoanschluss 6 ist serialnitätig das Summen-signal SUMO 05 (siehe auch Seite 55) aktiviert, somit kann der Empfänger direkt ohne vorherige Programmierung durch die optionale Smart-Box z.B. für Mikrokopter oder Flugsimulatoren verwendet werden.
Reset
Um einen Reset des Empfängers durchzuführen, Drucken und Halten Sie den SET-Taster auf der Oberseite des Empfängers, während Sie dessen Stromversorgung einschalten. Lassen Sie anschließend den Taster wieder los.
Wurde der Reset bei abgeschalteten Sender oder mit einem ungebundenen Empfänger durchgeführt, erlischt die LED des Empfänger nach ca. 3 Sekunden und es kann senderseitig unmittelbar anschließend ein Bind-Prozess eingeleitet werden.
Wurde bei einem bereits gebundenen Empfänger ein Reset durchgeführt und ist der zugehörige Modellspeicher im eingeschalteten Sender aktiv, leuchtet die LED nach kurzer Zeit grün als Zeichen davon, dass ihre Sende-/Empfangsanlage wieder betriebsbereit ist.
Beachten Sieitte:
Durch einen RESET werden mit Ausnahme von Bindings-Informationen ALLE Einstellungen im Empfänger auf die Werkseinstellungen zusückgesetzt!
Unbeabsichtigt ausgelöst, sind deshalb nach einem RESET alle ggf. zuvor per Telemetri-Menu im Empfänger vorgenommen Einstellungen wiederherzustellen.
Ein absichtlicher RESET empfeht sich dagegen
insbesondere dann, wenn ein Empfänger in ein anderes Modell „versetzt“ werden soll! Hierdurch kann ggf. ohne große Aufwand die Übernahme unpassender Einstellungen vermieden werden.
Firmware-Update des Empfängers
Firmware-Updates des Empfängers werden über den Telemetrié-Anschluss des Empfängers mit Hilfe eines PCs unter Windows XP, Vista oder 7 durchgeführt. Dazu benötigen Sie die optionale USB-Schnittstelle Best.-Nr. 7168.6 sowie das optionale zweipolige Adapterkabel Best.-Nr. 7168.6A. Die dazu ebenfls nötigen Programme und Dateien finden Sie beim entspruchenden Produkt unter Download auf www.graupner.de.
Hinweis:
Nach Regelierung Ihres Empfängers unter https://www.graupner.de/de/service/productregistrierung werden Sie automatisch per E-Mail über neue Updates informiert.
Update der Empfänger-Firmware
Hinweis:
Überprüfen Sie vor jedem Update unbedingt den Ladzustand des Empfängerakkus. Laden Sie diesen ggf. auf, bevor Sie ein Update starten.
- Treiber installmenten
Installieren Sie, falls noch nicht erfolgt, die erforderliche Treibersoftware für die USB-Schnittstelle Best.-Nr. 7168.6 wie auf Seite 21 beschrieben.
- Verbindung Empfänger / PC herstellen
Verbinden Sie die USB-Schnittstelle Best.-Nr. 7168.6 über das Adapterkabel Best.-Nr. 7168.6A mit dem Anschluss, -+ T am Empfänger. Das Stecksystem ist verpolungssicher, achten Sie auf die kleinen seitlichen Phasen. Wenden Sie auf keinen Fall Gewalt an, der Stecker sollte leicht einrasten:

Adapterkabel
Best.-Nr. 7168.6A
falls vorhanden:
mittlere, rote Litze trennen
Achtung:
Sollte das Adapterkabel noch 3-adrig ausgeführrt sein, trennen Sie zuvor die mittlere, rote Litze des Adapter-Kabels Best.-Nr. 7168.6A durch.
Verbinden Sie anschließend die USB-Schnittstelle über das mitgelieferte USB-Kabel (PC-USB/mini-USB) mit dem PC bzw. Laptop. Bei ordnungsgemäßem Anschluss sollte für ein paar Sekunden eine rote LED auf der Schnittstellenplatine aufleuchten. Schalten Sie spätestens jetzt die Stromversorgung Ihres Empfängers ab.
- Firmware-Update Utility
Starten Sie das unter den Download-Dateien im Verzeichnis „Firmware-Updater“ enthaltene Programm „Firmware_Uptegrate_grStudio_VerX.XX.exe“ durch einen Doppelklick. (Die zum Zeitpunkt der Drucklegung theses Handbuches aktuelle Version 1.3 startet ohne zuvor erfolgte Installation.):

Wahlen Sie unter „Port Select“ den COM-Port aus, an dem die USB-Schnittstelle angeschlossen ist.
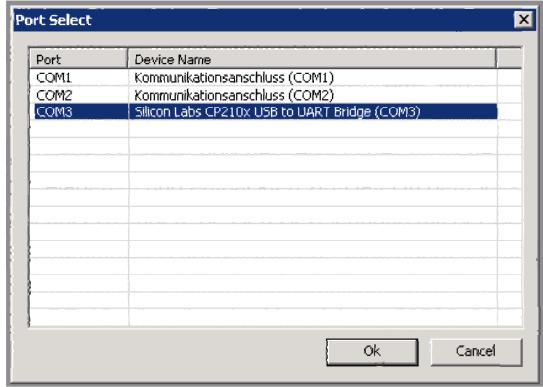
Erkennbar ist diese an der Bezeichnung „Silicon Labs CP210x USB to UART Bridge" in der Spalte "Device Name". In obiger Abbildung ware dieser Port „COM 3".
Rufen Sie anschließend unter „Menu“ die Option „HoTT Receiver Upgrade“ auf oder öffnen Sie das „Controller Menu“ und klichen auf „HoTT Receiver“:

Die Firmware-Dateien sind Produktspezifisch codiert, d.h., sollen den Sie aus Versehen eine nicht zum Produkt passende Datei auswahlen (z.B. Sender-Up date-Datei anstatt Empfängerdatei) erscheint das Popup-Fenster „Product code error" und der Update-Vorgang lässt sich nicht starten.
Drücken Sie nun den Button „Download Start". Warten Sie, bis der Balken in der Progress-Leiste anlauft. Dies kann je nach Computer bis zu mehreren Sekunden dauern. Nun schalten Sie den Empfänger bei gebrachte gehaltenem SET-Taster ein. Nach ein paar Sekunden erscheint im Status Display „Found target device ...”. Nun können Sie den Taster wieder loslassen.
Wird das Gerät hingegen nicht erkannt, erscheint das Popup- Fenster „Target device ID not found".
Daraufhin startet der eigentliche Update-Vorgang und oberhalb durchlaufender Textzeilen beginnt ein Fortschrittsbalken zu laufen:
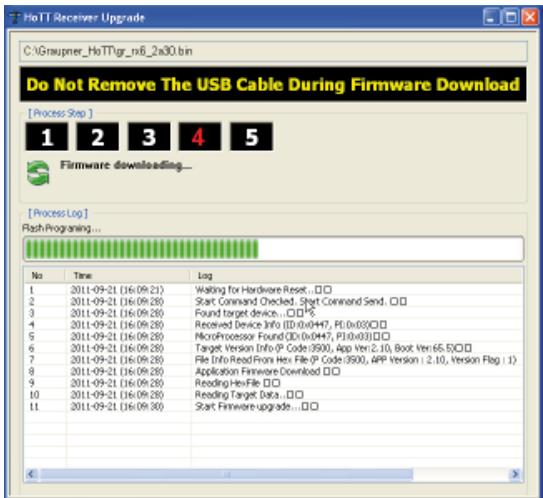
Bricht der Prozess vor Erreichen der 100% -Marke ab, dann schalten Sie die Stromversorgung Ihres Empfängers ab und starten anschließen einen weiteren Updateversuch. Führn Sie dazu die obigen Schritte erneut aus.
Im Status-Display und in der Progress-Leiste sehen Sie den Fortschritt des Firmware-Updates. Das Update ist abgeschlossen, wenn das Popup-Fenster „Download Process Complete!!" erscheint:
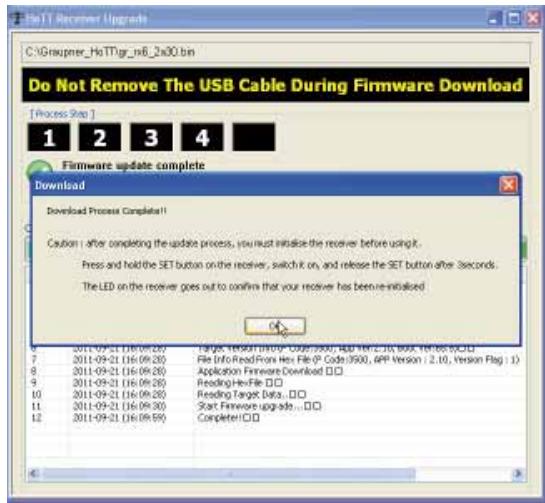
Während des Update-Vorgangs leuchtet am Empfänger die grüne LED. Parallel zum erfolgreichem Abschluss des Updates erlischt die grüne LED.
Schalten Sie den Empfänger aus und entfernen Sie das Schnittstellenkabel. Ggf. wiederholen Sie den Vorgang bei weiteren Empfängern.
4. Initialisierung des Empfängers
Nach erfolgreichem Update-Vorgang MÜSSEN Sie vor der erneuten Benutzung des Empfängers aus Si
cherheitsgründen eine Initialisierung durchführten: Drücken und halten Sie dazu den SET-Taster am Empfänger und schalten Sie dann dessen Stromversorgung ein. Lassen Sie den den SET-Taster nach ca. 3 Sekunden wieder los - bzw. sobald die grüne LED erlischt. Wenn Sie anschließend auch den Sonder wieder einschalten, leuchtet nach ca. 2 bis 3 Sekunden die grüne LED des Empfängers dauerhaft. Außer den Bindungs-Informationen sind jedoch alle anderen ggf. zuvor programmierten Einstellungen im Empfänger auf die Werkseinstellungen zusammen gesetzt und müssen bei Bedarf neu eingegeben werden.
Installationsinweise
Einbau des Empfängers
Gleichgültig, welches Graupner-Empfangssystem Sie verwenden, die Vorgehensweise ist stets die gleiche:itte beachten Sie, dass die Empfangsantennen mindestens 5 cm von allen groBen Metallteilen oder Verdrahtungen, die nicht direkt aus dem Empfänger kommt, entfernt angeordnet werden,müssen. Das umfasst..., sie Stahl- auch Kohlefaserteile, Servos, Kraftstoffpumpen, alle Sorten von Kabeln usw.. Am besten wird der Empfänger abseits aller anderen Einbauten an gutzuganglicher Stelle im Modell angebracht. Unter keinen Umständen durren Servokabel um die Antennen gewicckelt oder dicht daran vorbei verlegt werden!
Bitte beachten Sie, dass Kabel unter dem Einfluss der im Fluge auftretenden Beschleunigungskräfte u.U. ihre Lage verändern konnten. Stellen Sie daher sich, dass sich die Kabel in der Umgebung der Antennen nicht bewegen konnen. Sich bewegende Kabel konnen)namlich den Empfang stären.
Tests ergaben, dass eine vertikale (aufrechte) Montage einer einzeln Antenne bei weiten Anflügen die besten Ergebnisse liefert. Bei Diversity-Antennen (zwei Antennen) sollen die zweite Antenne im 90^ Winkel zur ersten Antenne ausgerichtet werden.
Die Servoanschluss der Graupner-Empfänger sind nummeriert. Die Stromversorgung ist über samtliche nummerierten Anschlusses durchverbunden und kann prinzipiell an jedem beliebigen der 6 Anschlusses erfolgen. Ggf. kann über ein V- bzw. Y-Kabel Best.-Nr. 3936.11, parallel zur Stromversorgung auch ein Servo angeschlossen werden.
Im Folgenden einige Hinweise und Anregungen für den Einbau von Fernsteuerkomponenten im Modell:
- Wickeln Sie den Empfänger in einen mindestens 6 mm dicken Schaumgummi. Fixieren Sie den Schaumgummi mit Gummibändern am Empfänger, um diesen gegen Vibrationen, harte Landungen oder einen Crash zu schützen.
- Alle Schalter müssen unbehelligt von Auspuffgasen oder Vibrationen eingebaut sein. Der Schalterknauf muss über seinen gesamten Arbeitsbereich frei zugänglich sein.
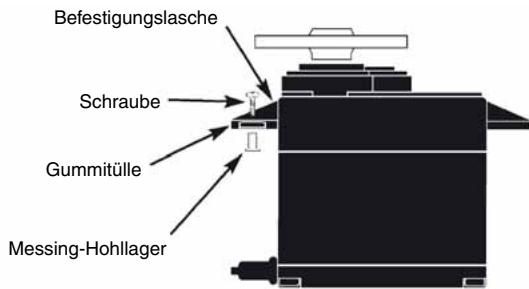
- Montieren Sie die Servos auf Gummitüllen mit Messing-Hohllagern, um diese vor Vibration zu schützen. Ziehen Sie die Befestigungsschrauben aber nicht zu fest an, sonst wird der Vibrationsschutz durch die Gummitüllen hinfällig. Nur wenn die Servo-Befestigungsschrauben richtig angezogen sind, bietet these System Sicherheit sowie einen Vibrationschutz für ihre Servos. Im Bild unterehen Sie, wie ein Servo richtig montiert wird. Die Messinglager werden von unter in die Gummitüllen eingeschoben.
- Die Servoarme müssen im gesamtten Ausschlagbereich frei beweglich sein. Achten Sie darauf, dass keine Gestängeteile den freien Servoausschlag behindern können.
Die Reihenfolge, in der die Servos anzuschlieben sind, ist modelltypabhängig vorgegeben. Beachten Sie dazu die Anschlussbelegungen auf den Seiten 34 und 35.
Beachten Sie darüber hinaus die Sicherheitshinweise auf den Seiten 3 ... 6.
Um unkontrollierte Bewegungen der an der Empfangs-anlage angeschlossenen Servos zu vermeiden, bei der Inbetriebnahme
zuerst den Sender
dann den Empfänger einschalten
und bei Einstellung des Betriebs
erst den Empfänger
dann den Sender ausschalten.
Achten Sie beim Programmieren des Senders unbedingt darauf, dass Elektromotoren nicht unkontrolliert anlaufen konnen oder ein mit einer Startautomatik betriebener Verbrennungsmotor nicht unbeabsichtigt startet. Trennen Sie Sicherheitshalber den Antriebsakku ab bzw. unterbrechen Sie die Treibstoffzufuhr.
Stromversorgung der Empfangsanlage
Ein{sicherer Modellbetrieb setzt u.a. eine zuverlassice Stromversorgung voraus.Solletriotzleichtgangiger Gestange,vollem Akku,Akku-Anschlusskabel mit genugend Querschnitt, minimalen Übergangswiderstanden an den Steckverbindungen usw. die auf dem Senderdisplay angezeigte Empfängerspannung immer wieder einbrenchen bzw.generell (zu) niedrig sein,beachten Sieitte die nachfolgenden Hinweise:
Achten Sie zuvorderst darauf, dass die Akkus bei Aufnahme des Modellbetriebs stets vollgeladen sind. Achten Sie auch auf widerstandsmarme Kontakte und Schalter. Messen Sie ggf. den Spanningsabfall über das verbaute Schalterkabel unter Last, da bereits selbst hochbelastbare, neue Schalter einen Spanningsabfall von bis zu 0,2 Volt verursachen. Infolge von Alterung und Oxydation der Kontakte kann sich dieser Wert auf ein mehrfaches erhöhen. Zudem „nagen" andauernde Vibrationen und Erschütterungen an den Kontakten und sorgen solcherart ebenfalls für eine schleichende Erhöhung der Übergangswiderstände.
Darüber hinaus können selbst keine Servos wie ein Graupner/JR DS-281 bis zu 0,75 Ampere „ziehen“ wenn Sie unter Last blockieren. Allein vier dieser Servos in einem „Foamie“ konnen somit schon dessen Bordstrom-versorgung mit bis zu 3 Ampere belasten ...
Sie sollen den deshalb eine Stromversorgung wahren, welche auch unter hoher Last nicht zusammenbricht, sondern auch dann eine immer noch ausreichende Spannung liefert. Zur „Berechnung" der notigen Akku-kapazität sollenn Sie mindestens 350 mAh für jedem analoge Servo und mindestens 500 mAh für jedem digitale Servo ansetzen.
Unter thisem Gesichtspunkt wurde beispielsweise ein Akku mit 1400 mAh zur Stromversorgung einer
Empfangsanlage mit insgesamt 4 Analogservos das absolute Minimum darstellen. Berücksichtigten Sie bei ihren Berechnungen aber auch den Empfänger, der auf Grund seiner bidirektonalen Funktion etwa 70mA an Strom besteht.
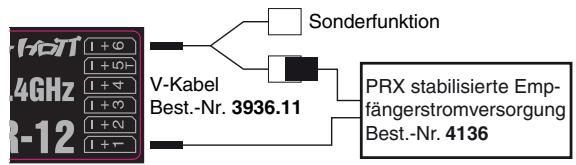
Unabhängig davon empfeht es sich generell, den Empfänger über zwei Kabel an die Stromversorgung anzuschlieben. Beispielsweise, indem Sie einen Schalter oder Spanningsregler mit zwei zum Empfänger führenden Stromversorgungskabel verwenden. Benutzen Sie ggf. zwischen Kabel und Empfänger ein V- bzw- Y-Kabel Best.-Nr.: 3936.11, siehe Abbildung, falls Sie einen oder beide Anschlüsse des Empfängers auch zum Anschluss eines Servos, Drehzahlstellers etc. benötigen. Sie reduzieren durch die doppelte Anbindung an den Schalter bzw. Spanningsregler nicht nur das Risiko eines Kabelbruchs, sondern sorgen auch für eine gleichmäßige Stromversorgung der angeschlossenen Servos.
NiMH-Akku-Packs mit 4 Zellen
Mit den traditionellen 4-Zellen-Packs konnen Sie ihre Graupner-HoTT-Empfangsanlage unter Beachtung der vorstehend beschrieben Bedingungen gut betreiben, vorausgesetzt, die Packs haben ausreichende Kapazität und Spannungslage!
NiMH-Akku-Packs mit 5 Zellen
Akku-Packs mit f芮 Zellen bieten einen größeren Spannungsspielraum im Vergleich zu 4-Zellen-Packs.
Beachten Sie jedochitte,dass nicht{jedes auf
dem Markt erhältliche Servo die Spannung eines 5-Zellen-Packs (auf Dauer) verträgt, insbesondere dann, wenn diese frisch geladen sind. Manche dieser Servos reagieren darauf beispielsweise mit deutlich vernehmbarem „knurren".
Achten Sie deshalb auf die Spezifikation der von Ihn den verwendeten Servos, bevor Sie sich für den Einsatz eines 5-Zellen-Pack entscheiden.
LiFe, 6,6 V mit 2 Zellen
Unter den derzeit gegebenen Gesichtspunkten sind.
diese neuartigen Zellen die Beste Wahl!
Zum Schutz gegen Mechanische Beschädigungen sind LiFe-Zellen auch in Hardcase-Plastikgehausen lieferbar. LiFe-Zellen sind ebenso wie LiPo-Zellen in Verbindung mit geeigneten Ladegerätenchnellladefähig und vergleichsweise robust.
Darüber hinaus wird thisem Zellentyp eine deutlich höhere Anzahl von Lade-/Entladezyklen als beispelsweise LiPo-Akkus zugeschrieben. Die Nennspannung von 6,6 Volt eines zweizelligen LiFe-Akku-Packs bereiten weder den Graupner-HoTT-Empfängern Probleme noch den ausdrücklich zum Betrieb in thisem- hoheren-Spannungsbereich zugelassenen Servos, Drehzahlsteller, Gyros usw..itte beachten Sie jedoch, dass praktisch alle in der Vergangenheit und auch die meisten der derzeit am Markt angebotenen Servos, Drehzahlsteller, Gyros usw. nur einen zulässigen Betriebsspannungsbereich von 4,8 bis 6 Volt haben.Deren Anschluss an den Empfänger erfordert also zwingend den Einsatz einer stabilisierten Spanningsregelung wie z.B. dem PRX mit der Best.-Nr.4136, siehe Anhang. Anderenfalls besteht die Gefahr, dass die angeschlossenen Geräte in kürzester Zeit Schaden erleiden.
LiPo Packs mit 2-Zellen
Bei gleicher Kapazität sind LiPo-Akkus leichter als z.B. NiMH-Akkus. Zum Schutz gegen Mechanische Beschädigungen sind LiPo-Akkus auch mit einem Hardcase-Plastikgehäuse lieferbar.
Die vergleichsweise hohe Nennspannung von 7,4 Volt eines zweizelligen LiPo-Packs bereiten dagegen weder den Graupner-HoTT-Empfängern Probleme noch den ausdrücklich zum Betrieb in thisem- hohenen-Spannungsbereich zugelassenen Servos, Drehzahlsteller, Gyros usw.. Bitte beachten Sie jedoch, dass praktisch alle in der Vergangenheit und auch die meisten der derzeit am Markt angebotenen Servos, Drehzahlsteller, Gyros usw. nur einen zulässigen Betriebsspannungsbereich von 4,8 bis 6 Volt haben. Deren Anschluss an den Empfänger erfordert also zwingend den Einsatz einer stabilisierten Spanningsregelung wie z.B. dem PRX mit der Best.-Nr. 4136, siehe Anhang. Anderenfalls besteht die Gefahr, dass die angeschlossenen Geräte in kürzester Zeit Schaden erleiden.
Begriffsdefinitionen
Steuerfunktion, Geber, Funktionseingang, Steuerkanal, Mischer, Schalter, Smart-Box
Um Ihnen den Umgang mit dem mx-10 HoTT-Handbuch zu erreichtern, finden Sie nachfolgend einige Definitionen von Begriffen, die im laufenden Text immer wieder verwendet werden.
Steuerfunktion
Unter „Steuerfunktion“ ist-vorerst einmal unabhängig vom Signalverlauf im Sender-das Signal für eine bestimmte Steuerfunktion zu verstehen. Bei Flächenflugzeugen stellen z.B.Gas,Seite oder Quer eine solche dar,bei Hubschraubern z.B.Pitch,Rollen oder Nicken.Das Signal einer Steuerfunktion kann direkt einem bzw.über Mischer auch mehreren Steuerkanalen zugeführrt werden.Ein typisches Beispiel fur Letzteres sind getrennte Querruderservos oder ein V-Leitwerk. Die Steuerfunktion schlieBt insbesondere den Einfluss des mechanischen Geberweges auf das entsprechende Servo ein.
Geber
Unter „Geber“ sind die vom Piloten unmittelbar zu betätigenden Bedienelemente am Sender zu verstehen, mit denen empfängerseitig die angeschlossenen Servos, Drehzahlsteller etc. betrieben werden. Dazu zahlen:
- die beiden Kreuzknüppel für die Steuerfunktionen 1 bis 4, wobei diese vier Funktionen in beiden Modelltypen ("Fläche" und „Hubschrauber") mittels „Mode"-Einstellung softwaremäßig beliebig unteiner nander vertauschbar sind, z.B. Gas links oder rechts. Die Kreuzknüppelfunktion zur Gas-/Bremsklappensteuerung wird*hufig auch mit K1-Geber (Kanal 1) bezeichnet.
die Schalter fur Kanal 5
- Bei den proportionalen Bedienelementen werden die Servos der Geberposition entsprechend direkt
folgen, während im Falle eines der Schaltmodule nur eine zwei- bzw. dreistufige Verstellung möglich ist.
Funktionseingang
Dieser ist ein eher imaginärer Punkt im Signafluss und darf keinesfalls mit dem Geberanschluss auf der Platine gleichgesetzt werden! Die Wahl der „Steueranordnung" beeinflusst tatsächlich „hinter" diesen Anschlusspunkten noch die Reihenfolge, wodurch durchaus Differenzen zwischen der Nummer des Gebereinganges und der Nummer des nachfolgenden Steuerkanals entstehen können.
Steuerkanal
Ab dem Punkt, ab dem im Signal für ein bestimmtes Servo alle Steuerinformationen – ob direkt vom Geber oder indirectly über Mischer – enthalten sind, wird von einem Steuerkanal gesprochen. Dieses Signal wird nur noch von den im Menu « Servoeinstellung « vorgenommen Einstellungen beeinflusst und verlässt dann über das HF-Modul den Sender. Im Empfänger angekommen, wird diese Sonig ggf. noch von den per Telemetri-Etten « Servo vorgenommen Einstellungen modifiziert um dann letztlich das zugehörige Servo zu steuern.
Mischer
In der Software des Sender sind Mischer für verschiedene Ruderanordnungen wie Querruder oder Deltaflügel enthalten. Diese dienen dazu, eine Steuerfunktion gegebenenfalls auch auf mehrere Servos oder auch um mehrere Steuerfunktion auf ein Servo wirken zu halten. Beachten Sieitte die Mischfunktionen der optionalen Smart-Box ab Seite 53 im Handbuch.
Schalter
Der seriennäbeta Kippschalter fur Kanal 5 bewegt das
angeschlossene Servo in die max./min. Endposition.
Smart-Box
Die optional erhältliche Smart-Box erlaubt die Nutzung vieler weiterer HoTT-Funktionen wie z.B.
- Senderspannungsanzeige mit instellbarer Warnschwelle
- Empfängertemperatur
- Servoweg
- Kanalvertauschung - Channel Mapping
- Mischereinstellungen
Signalqualitat
- Empfängerspannung
- Servoneutralstellung
Zykluszeit
- kanalabhängige Fail-Safe-Einstellungen
- Servotest
siehe dazu den Abschnitt „Telemetriè“ auf Seite 45. Nähres zur Smart-Box finden Sie im Graupner Hauptkatalog FS sowie im Internet unter www.graupner.de bei dem jeweiligen Produkt.
Digitale Trimmung und Knüppelkalibrierung
Funktionsbeschreibung
Digitale Trimmung mit akustischer Anzeige
Die beiden Kreuzknüppel sind mit einer digitalen Trimmung ausgestattet. Kurzes Drücken der Trimmschalter verstellt mit jedem „Klick" die Neutralposition der Kreuzknüppel um einen bestimmen Wert. Bei längerem Festhalten lauft die Trimmung mit zunehmender Geschwindigkeit in die entsprechendeichtigung.
Die Verstellung wird auch akustisch durch entsprechlich hohe TONE „höbar“ gemacht. Während des Fluges die Mittenposition wiederzufinden, ist darauf auch ohne Blick auf das Display problemlos: Bei Überfahren der Mittenposition wird eine kurze Pause eingelegt.
Die aktuellen Trimmwerte werden automatisch abgespeichert.
Die digitale Trimmung Funktioniert nur bei eingeschaltetem Sender, ist der Sender hingegegen aus, ändert auch ein versehentliches Berühren der Trimmhebel nicht die eingestillten Werte.
Knüppelkalibrierung
Sollten Sie das Gefühl haben, dass die Mittelstellung ihrer selbstneutralisierenden Steuerknüppel nicht exakt 0 % Geberweg entspricht bzw. die Endposition nicht exakt 100%, dann können Sie dies folgendermaBen korrigieren:
Schalten Sie den Sender, wenn noch nicht geschehen aus, und strecken den mitgelieferten Programmierstecker in die DATA-Buchse auf der Rückseite und den Jumper in die Position „DELTA" auf der Vorderseite des Senders. Bringen Sie nun beiden Steuerknüppel in die Mittelstellung. Schalten Sie den Sender ein. Der Sender beginnnt nach einer Sekunde für 10 Sek. einmal pro Sek. zu piepsen. Bewegen Sie während dieser 10 Sekunden beide Steuerknüppel in alle Endpositionen, damit der Sender diese speichern kann. Nach Ablauf der 10 Sek. ist die Kalibrierung beendet und der Sender gehen in den Normalbetrieb über, die Pieptone verstummen. Schalten Sie den Sender aus und entfern den Sie anschließend den Programmierstecker auf der Rückseite. Benutzen Sie keinesfalls die Fernsteuerung mit eingestecktem Programmierstecker!
Gegebenfalls stecken Sie noch den Jumper in die korrekte Position für Ihr Modell.
Sollten Sie während dieser 10 Sek. nicht alle Knüppel-Endpositionen erreicht haben, wiederholen Sie den gesamten Vorgang.
Bis zu zwei Querruderservos bei Normalmodellen sowie V-Leitwerk und Nurlflugel/Delta-Modelle mit zwei Quer-/ Höhenruderservos werden komfortabel unterstützt. Der große Teil der Motor- und Segelflugmodelle wird aber zum Leitwerkstyp „normal" gehören und mit jeweils einem Servo für Höhen-, Seiten- und Querruder sowie Motordrossel oder elektronischem Fahrtregler (bzw. Bremsklappen beim Segelflugmodell) ausgestattet sein.
Die Software des Senders mx-10 HoTT enthalt bereits vorprogrammierter Koppelfunktionen (= Mischer) für die gängigsten Modelltypen, bei denen zwei Steuerkanäe miteinander vermisch werden. So kann z.B. ein „V-Leitwerk" softwaremäßig aktiviert werden, die Steuerfunktionen von Höhen- und Seitenruder werden so miteinander verknüpf, dass jeder der beiden Leitwerksklappen – durch je ein separates Servo angesteuert – sowohl Höhen- als auch Seitenruderfungtion übernehmen.
Bei den Delta- und Nurlflügelmodellen wird die Quer- und Höhenruderfungtion über je eine gemeinsame Ruderklappe an der Hinterkante der rechten und linken Tragfläche ausgeführrt. Der Sender enthalt die entspre
chenden Mischfunktionen der beiden Servos.
Weitere Funktionen sind mit der optionalen Smart-Box möglich. Sehen Sie dazu den Abschnitt „Telemetri" ab Seite 45.
In der mx-10 HOTT installierte Mischer:
- Kein Mischer Leitwerkstyp „normal“
- Mischer AILERON zwei Querruder
- Mischer DELTA Nurflugelmodelle
- Mischer V-TAIL V-Leitwerk
Siehe auch die Abbildungen unter auf dieser Seite.
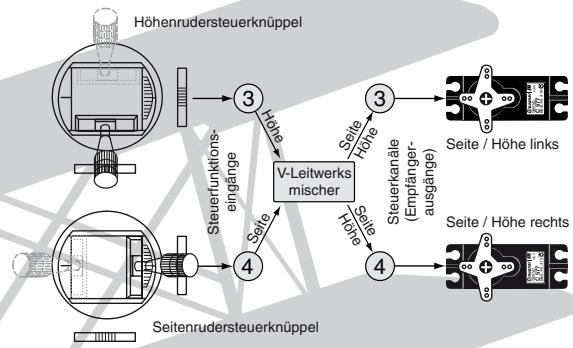
Beispiel: V-Leitwerksmischer
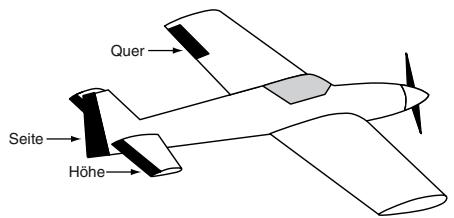
Leitwerkstyp „normal“
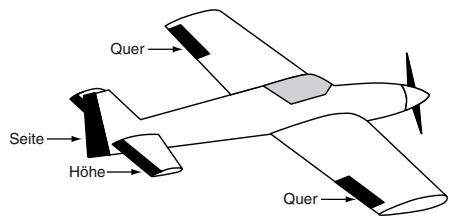
Mischer AILE ,2 Querrudert
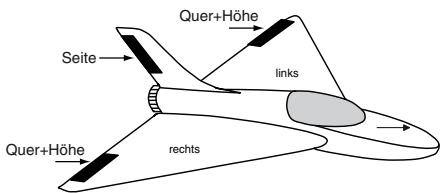
Mischer DELTA „Nurflugel“
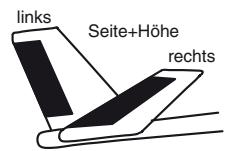
Mischer V-Tail „V-Leitwerk“
Installationshinweise
Die Servos MÜSSEN in der hier abgebildeten Reihenfolge am Empfänger angeschlossen sein.
Nicht benötigte Ausgänge werden einfach nicht belegt.
Insbesondere gilt:
- Bei Verwendung von nur 1 Querruderservo bleibt der Empfängerausgang 5 für das rechte Querruder frei
- Beachten Sie darüber hinaus die Hinweise auf den folgenden Seiten.
Flächenmodèle mit und ohne Motor, mit bis zu 2 Querruderservos ...
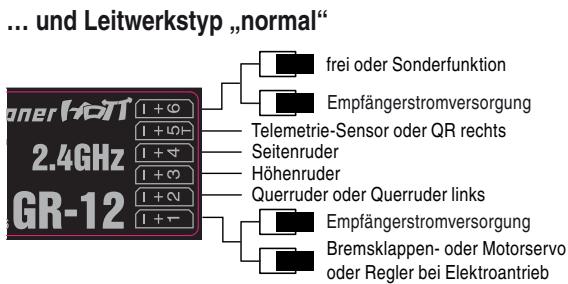
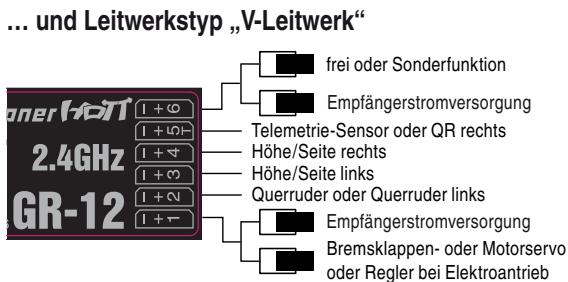
... und Leitwerkstyp „2 Höhenruderservos“ - nur mit optionaler Smart-Box
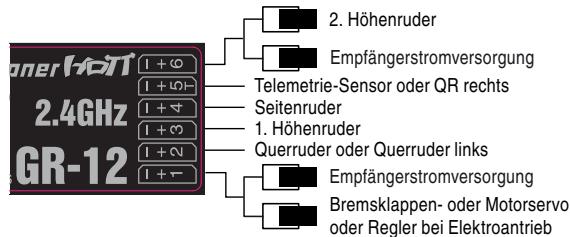
Delta-/Nurflugelmodelle mit und ohne Motor, ...
... mit 2 Quer-/Hohenruderservos
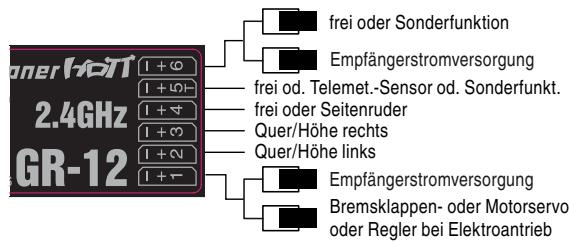
Bedingt durch den entsprechlichen Einbau der Servos und Ruderanlenkungen kann anfangs die Servolaufrichtung bestimmter Servo verkehrt sein. Nachfolgende Tabelle gibt Hinweise zur Abhile.
| Modell Typ | Servo mit falscher Drehrichtigung | Abhilfe |
| V-Leit-werk | Seiten- und Höhenruder verkehrt | Servo 3 + 4 im Menu «Servoeinstellung « umpolen |
| Seitenruder richtig, Höhenruder verkehrt | Servo 3 + 4 am Empfänger vertauschen |
| Höhenruder richtig, Seitenruder verkehrt | Servo 3 + 4 im Menu «Servoeinstellung « umpolen UND am Empfänger vertauschen |
| Delta, Nurlflügel | Höhen- und Querruder verkehrt | Servo 2 + 3 im Menu «Servoeinstellung « umpolen |
| Höhenruder richtig, Querruder verkehrt | Servo 2 + 3 im Menu «Servoeinstellung « umpolen UND am Empfänger vertauschen |
| Querruder richtig, Höhenruder verkehrt | Servo 2 + 3 am Empfänger vertauschen |
Alle für ein Flächenmodell relevanten Menüs sind bei den „Programmbeschreibungen" mit dem Symbol eines Flächenflugzeuges ...

... gekennzeichnet, sodass Sie sich bei einer Flächenmodellprogrammierung nur mit diesen Menüs befassen,müssen.
Die Weiterentwicklung der Modellhubschrauber und deren Komponenten wie Gyrosensoren, Drehzahlregler, Rotorblätter usw. erfolglicht heute, einen Hubschrauber sareg im 3D-Kunstflug zu beherrschen.
Hubschraubermodelle können mit der mx-10 HoTT nur mit stabilisatorlosen Systemen „flybarless" wie zum Beispiel V-Stabi, Microbeast oder ähnliche betrieben werden. Dieser mischt dann alle für die Taumelscheibe und Heckrotor nötigen Servos.
Die Motorsteuerung erfolgt über den Schaltkanal 5. Den genauen Anschluss der Servos entnehmer Sie der Anleitung zu Ihrm Flybarless-System.
Soll die Telemetriefunktion des Empfängers genutzt werden, muss die Motorsteuerung mit Hilfe der optionalen Smart-Box auf Kanal 6 gemappt werden (siehe Seite 51 Channel Mapping), um die Telemtriesensoren an Kanal
5 anschließen zu können.
Alle für ein Hubschraubermodell relevanten Menüssind im Abschnitt „Programmbeschreibung" mit einem Heli-Symbol gekennzeichnet ...

... sodass Sie sich bei einer Hubschrauberprogrammierung nur mit diesen Menüs befassen müssen.
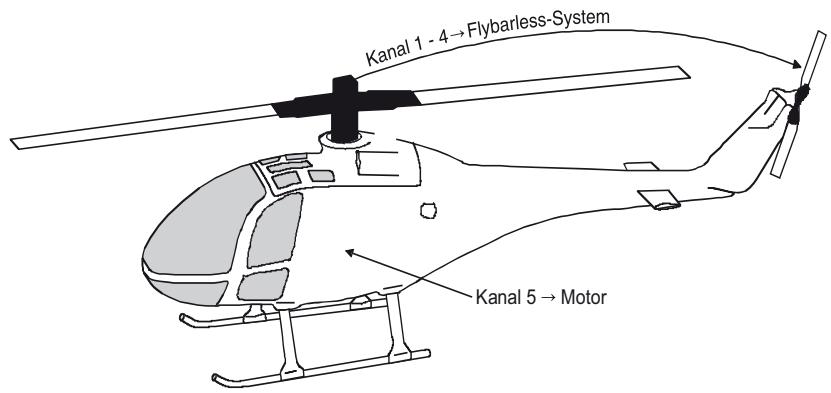
Installationshinweise
Die Servos werden in der hier abgebildeten Reihenfolge am Empfänger angeschlossen.
Nicht benötigte Ausgänge werden einfach nicht belegt. Beachten Sie darüber hinaus die Hinweise Ihres stabilisatorlosen Systems.
Empfängerbelegung von Hubschraubermodellen ...
... mit stabilisatorlosen Systemen

frei oder Motorregelung (Channel Mapping mit optionaler Smart-Box)
Telemetrie-Sensor oder Motorregelung Heck-Servo (Gyro-System)
Nick-Servo
Roll-Servo
Pitch- oder Roll-2 oder Nick-2-Servo
Bevor mit der Programmierung spezifischer Parameter begonnen wird, sind eine Grundeinstellungen vorzunehmen.
Steueranordnung
| »MODE 1 « (Gas rechts) | »MODE 2 « (Gas links) |
| Tiefenruder
Höhenruder | Motor Volgas
Quer. links
Motor Leerlauf | Motor Volgas
Skiel, lager
Quer. rechts
Motor Leerlauf | Tiefenruder
Quer. rechts
Höhenruder |
| »MODE 3 « (Gas rechts) | »MODE 4 « (Gas links) |
| Tiefenruder
Quer. links
Höhenruder | Motor Volgas
Quer. links
Motor Leerlauf | Motor Volgas
Skiel, lager
Quer. rechts
Motor Leerlauf | Tiefenruder
Quer. rechts
Höhenruder |
Grundsätzlich gibt es 4 verschiedene möglichekeiten, die vier Steuerfunktionen Quer-, Höhen- und Seitenruder sowie Gas bzw. Bremsklappen eines Flächenmodells den beiden Steuerknüppeln zuzuordnen. Welche dieser möglichekeiten benutzt wird, hangt von den individuellen Gewohnheiten des einzelnen Modellfliegers ab.
Um die Steueranordnung auszuwahlen, muss zuerst der Schalter für den Sendermodus auf «normal« gestellt werden. Schalten Sie den Sender, wenn noch nicht geschehen aus, und stecken den mitgelieferten Programmierstecker in die DATA-Buchse auf der Rückseite des Senders. Schalten Sie den Sender ein: durch jeweils einem kurzen Druck auf den BIND-Taster auf der Sendervorderseite kann nun zwischen folgenden Einstellungen im Rotationsverfahren gewechselt werden.
| Summer | LED | Beschreibung |
| Sender piept 1x | orange LED an | Ländereinstellung Universal/Europe |
| Sender piept 2x | orange LED blinkt | Ländereinstellung Frankreich |
| Die Ländereinstellung wird im folgenden detailiert beschrieben. |
| Sender piept 3x | orange LED an | »MODE 1« |
| Sender piept 4x | orange LED an | »MODE 2« |
| Sender piept 5x | orange LED an | »MODE 3« |
| Sender piept 6x | orange LED an | »MODE 4« |
Die gewährte Einstellung übernehmen Sie in den Sender, indem Sie den BIND-Taster für ca. 3 Sekunden drücken. Nach dem Loslassen ertönt eine kurze Bestätigungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfern den AnschlieBend den Programmierstecker. Benutzen Sie keinesfalls die Fernsteuerung mit eingestecktem Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Einstellung der Sender betrieben wird, achten Sie auf die LED des Senders.
Ländereinstellung
Nachdem Sie die Steueranordnung eingestellt haben, muss in einem zweiten Schritt die Länderinstellung erfolgen.
Die Länderinstellung ist erforderlich, um diversen Richtlinien (FCC, ETSI, IC etc.) gerecht zu werden. In Frankreich beispelseweise, ist der Betrieb einer Fern-
steuerung nur in einem eingeschränktem Frequenzband zulässig. Deshalb MUSS die Länderinstellung des Senders auf den Modus „Frankreich“ umgestellt werden, sobald dieser in Frankreich betrieben wird. Auf keinen Fallarf der UNIVERSAL/EUROPE-Modus verwendet werden!
Schalten Sie den Sender, wenn noch nicht geschehen aus, und steken den mitgelieferten Programmierstecker in die DATA-Buchse auf der Rückseite und den Jumper in die Position „NO MIX" auf der Vorderseite des Senders. Schalten Sie den Sender ein: durch jeweils einem kurzen Druck auf den BIND-Taster auf der Sendervorderseite kann nun zwischen folgenden Einstellungen im Rotationsverfahren gewechselt werden:
| Summer | LED | Beschreibung |
| Sender piept 1x | orange LED an | Ländereinstellung Universal/Europe |
| Sender piept 2x | orange LED blinkt | Ländereinstellung Frankreich |
Die gewährte Einstellung übernehmen Sie in den Sender, indem Sie den BIND-Taster für ca. 3 Sekunden drücken. Nach dem Loslassen ertönt eine kurze Bestätigungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfern den Sie anschlieBend den Programmierstecker. Benutzen Sie keinesfalls die Fernsteuerung mit eingstecktem Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Einstellung der Sender betrieben wird, achten Sie nach dem Einsatzen auf die Status-LED des Senders.
Hinweise:
- Achten Sie während der Programmierung unbedingt darauf, dass ein angeschlossener Verbrennungs- oder Elektromotor nicht unbeabsichtigt anlauft. Unterbrechen Sie ggf. die Treibstoffversorgung bzw. klemmen Sie den Antriebsakku zuvor ab.
Leitwerkskonfiguration
Die Leitwerkskonfiguration wird mit dem beiliegenden Jumper in der Kontakteleste «MIX« auf der Vorderseite des Senders ausgewählt.
Wahlen Sie durch die Positionierung des Jumpers den auf Ihr Modell zutreffenden Typ aus:
normal": Das Hohen- und Seitenruder wird über jeweils nur ein Servo betätigt. Der Jumper verbindet die beiden mittle-ren Pins ,NO MIX".

"2 Querruder": These Option ist für Modelle mit 1 oder 2 Querruder gedacht. Bei Querruderbeitigung lauft das am Ausgang 5 ange-schlossene Servo parallel zum Servo 2. Die Querrudertimmung wirkt auf beiden Servos. Der Jumper verbindet die beiden linken Pins „AILE".

"Delta/Nf": Die Quer- und Höhenrudersteuerung erfolgt über ein oder zwei Servos je Tragflächenhäfte, angeschlossen an Kanal 2 und 3. Die Koppelfunktion für die Querund Höhenrudersteuerung wird vom Sondereinlicher automatisch vorgenommen. Der Jumper verbindet die beiden rechten Pins „DELTA".

"V-Leitwerk": Die Höhen- und Seitenrudersteuerung erfolgt über zwei getrennt angelenkte, V-förmig angeordnete Ruder, angeschlossen an Kanal 3 und 4. Die Koppelfunktion für die Seiten- und Höhenrudersteuerung wird vom Sendermischer automatisch vorgenommen.
Zwei Jumper verbinden jeweils die beiden linken „AILE" und die beiden rechten „DELTA" Pins.

Bedingt durch den entsprechlichen Einbau der Servos und Ruderanlenkungen kann anfangs die Servolaufrichtung bestimmter Servo verkehrt sein. Nachfolgende Tabelle gibt Hinweise zur Abhilfe.
| Modell Typ | Servo mit falscher Drehrichtigung | Abhilfe |
| V-Leit-werk | Seiten- und Höhenruder verkehrt | Servo 3 + 4 in der Schalterleiste «Servore- verse« umpolen |
| Seitenruder richtig, Höhenruder verkehrt | Servo 3 + 4 am Empfänger vertauschen |
| Höhenruder richtig,-Seitenruder verkehrt | Servo 3 + 4 in der Schalterleiste «Servoreverse« umpolen UND am Empfänger vertauschen |
| Delta, Nurlflügel | Höhen- und Querru- der verkehrt | Servo 2 + 3 in der Schalterleiste «Servore- verse« umpolen |
| Höhenruder richtig, Querruder verkehrt | Servo 2 + 3 in der Schalterleiste «Servoreverse« umpolen UND am Empfänger vertauschen |
| Querruder richtig, Höhenruder verkehrt | Servo 2 + 3 am Empfänger vertauschen |
Empfängerausgang
Um maximale Flexibilität hinsichtlich der Empfängerbelegung zu erreichen, bietet die optionale Smart-Box mit dem „Channel Mapping" die Möglichkeit zum beliebigen Vertauschen der Servoausgabe 1 bis 6. Siehe dazu das Kapitel „Teimetrie" auf Seite 46.
Mit der Channel-Mapping Funktion der Smart-Box konnen die 5 Steuerfunktionen des Senders auch beliebig auf mehrere Empfänger aufgeteilt oder aber auch mehrere Empfängerausgänge mit derselben Steuerfung. tion beegt werden. Beispielsweise um je Querruderblatt zwei Servos anstatt mit nur einem einzeln ansteuern zu konnen usw.
gebundener Empfänger
Graupner-HoTT-Empfänger müssen „angewiesen“ werden, ausschließlich mit einem bestimmten Modell(-speicher) eines Graupner-HoTT-Senders zu kommunizieren. Diese Vorgang wird als „Binding“ bezeichnet und ist lediglich einmal für jeder neue Empfänger/Modellspeicherplatz-Kombination erforderlich (und kann jederzeit wiederholt werden).
Wichtiger Hinweis:
Achten Sie beim Binden unbedingt darauf, dass die Senderantenne immer ausreichend welt von den Empfängerantennen entfernt ist! Mit etwa 1 m Abstand sind Sie diesbezüglich auf der sicheren Seite. Andernfalls riskieren Sie eine gestörte Verbindung zum Rückkanal und in Folge Fehlverhalten.
",Binding" mehrerer Empfänger pro Modell
Bei Bedarf können auch mehrere Empfänger pro Modell gebunden werden. Binden Sie dazu die jeweiligen Empfänger zuerst einzeln wie nachfolgend beschrieben. Beim späteren Betrieb baut allerings nur derjenige Empfänger, der zuletzt gebunden wurde, eine Telemetriè-Verbindung zum Sender auf. An thisem sind deshalb auch ggf. im Modell eingebaute Telemetriè-sensoren anzuschreiben, da nur dieser zuletzt gebundene Empfänger in der Lage ist, deren Daten über den Rückkanal zu senden. Der zweite und alle weiteren Empfänger laufen parallel zum zuletzt an den Sender gebundenen Empfänger, jedoch vollig unabhängig von thisem, im Slave-Mode mit abgeschalteten Rückkanal! Ist ein Empfänger eingeschaltet, der keine Telemetriè sendet, wechselt die Sender-LED von orange auf grün.
"Binden" von Sender und Empfänger
Bechte: die mx-10 HoTT kann nur im Modus „normal" gebunden werden. Vergewissern Sie sich vor dem Start des Bindingvorgangs, dass der Sender in thisem Modus programmiert ist. Siehe Seite 20 zur Mode-Einstellung.
Schalten Sie den Sender und anschließend die Strom- versorgung Ihres Empfängers ein: Am Empfänger blinkt die grüne LED einmal kurz auf und bleibt dann dunkel. Die LED des Senders leuchtet grün, um zu zeigen, dass kein gebundener Empfänger angeschlossen ist.
Drücken und halten Sie den SET-Taster am Empfänger: Die grüne LED beginnnt zu blinken.
Starten Sie anschließend das so genannte Binden eines Empfängers mit einem Druck auf die BIND-Taste des Senders.
Leuchtet innerhalb von etwa 10 Sekunden die LED des Empfängers dauerhaft grün, wurde der Linde-Vorgang erfolgreich abgeschlossen. Sie können nun den SET-Ta-ster des Empfängers und die BIND-Taste des Senders loslassen.
Ohre Modell-/Empfängerkombination ist nun betriebsbereit. Parallel dazu wechselt die Sender-LED von grün auf orange.
Blinkt dagegen die grüne LED am Empfänger länger als ca. 10 Sekunden und wechselt die Sender-LED nicht auf orange, ist der Linde-Vorgang fehlgeschlagen. Verändern Sie ggf. die Positionen der Antennen und wiederholen Sie die gesamte Prozedur.
Test Reichweite
Der integrierte Reichweitetest reduziert die Sendeleistung derart, dass Sie einen Funktionstest bereits in einem Abstand von bis zu etwa 50m durchfuhren konnen.
Führer Sie den Reichweitetest des Graupner-HoTT-Systems entsprechend den nachfolgenden Anweisungen durch. Lassen Sie sich ggf. von einem Helfer beim Reichweitetest unterstützen.
- Bauen Sie den vorzugsweise bereits an den Sonder gebundenen Empfänger, wie vorgesehen, im Modell ein.
- Schalten Sie die Fernsteuerung ein und warten Sie, bis am Empfänger die grüne LED leuchtet. Nun konnen die Servobewegungen beobachtet werden.
- Stellen Sie das Modell so auf ebenen Untergrund (Pflaster, kurzer Rasen oder Erde), dass die Empfängeranten mindestens 15 cm über dem Erdboden liegen. Es ist deshalb ggf. nötig, das Modell während des Tests entsprechend zu unterlagen.
- Halten Sie den Sender in Hüfthöhe und mit Abstand zum Körper. Zielen Sie aber mit der Antenne nicht direkt auf das Modell, sondern drehen und/oder knicken Sie die Antennenspitze so, dass sie während des Betriebs senkrecht ausgerichtet ist.
- Vergewissern Sie sich, dass sich der Sender im „normal« Modus befindet - Modus Schalter nach hinten. Drücken Sie nun ca. 5 s den BIND-Taster, bis der Sender dauerhaft zu piepsen beginnt. Lassen Sie den BIND-Taster wieder los.
Beache bei Verwendung mehrerer Empfänger pro Modell: der Reichweitentest Funktioniert nur mit dem Empfänger, der die Telemetrie sendet - also mit dem zuletzt gebundenen Empfänger.
- Mit dem Auslösen des Reichweitetestis wird die Ausgangsleistung des Senders signifikant reduziert. Zeitgleich ertont ein Dauersignalton.
Nach Ablauf des 99 Sekunden währenden Reichweitetestests schaltet der Sender wieder auf volte Aus
gangsleistung und der Signalton verstummt.
Beache: Sie können den Reichweitentest auch jederzeit durch erneutes Drucken des BIND-Tasters stoppen.
- Bewegen Sie sich innerhalb dieser Zeitspanne vom Modell weg und bewegen Sie währenddessen die Knuppel. Wenn Sie innerhalb einer Entfernung von ca. 50m zu irgendinem Zeitpunkt eine Unterbrechung der Verbindung feststellen, versuchen Sie diese zu reproduzieren.
- Gegebenenfalls einen vorhandenen Motor einschalten, um zusätzlich die Störlicherheit zu überprüfen.
- Bewegen Sie sich weiter vom Modell weg, solange bis keine perfekte Kontrolle mehr möglich ist.
Warten Sie an dieser Stelle den Ablauf des Testzeitraumes mit dem weiterhin betriebsbereiten Modell ab. Dieses sollte auf Steuerbefehle wieder reagieren, sobald der Reichweitetest beendet ist. Falls dies nicht 100% -ig der Fall ist, benutzen Sie das System nicht und kontaktieren Sie den zuständigen Service der Graupner GmbH & Co. KG.
10.Führn Sie den Reichweitetest vor jedem Flug durch und simulieren Sie darauf alle Servobewegungen, die auch im Flug vorkommen. Die Reichweite muss bereits immer mindestens 50m am Boden betragen, um einen sicheren Modellbetrieb zu gewährleisten.
Achtung:
Während des normalen Modellbetriebs keinesfalls den Reichweitetest am Sender starten!
Grundeinstellung
Modellspezifische Basisinstellungen für Hubschraubermodelle
Bevor mit der Programmierung spezifischer Parameter begonnen wird, sind einige Grundeinstellungen vorzunehmen.
Steuieranordnung
| »MODE 1 « (Gas rechts) | »MODE 2 « (Gas links) |
| TS-Nick
Heck
TS-Nick | Motor/Pitch
IQR-SL
Motor/Pitch | Motor/Pitch
Heck
Motor/Pitch | TS-Nick
Heck
TS-Nick |
| »MODE 3 « (Gas rechts) | »MODE 4 « (Gas links) |
| TS-Nick
Heck
TS-Nick | Motor/Pitch
Heck
Motor/Pitch | Motor/Pitch
Heck
Motor/Pitch | TS-Nick
Heck
TS-Nick |
Grundsätzlich gibt es vier verschiedene Möglichkeit, die vier Steuerfunktionen Rollen, Nicken, Heckrotor und Gas bzw. Pitch eines Hubschraubers den beiden Steuerverkneppeln zuzuordnen. Wieche dieser Möglichkeit benutzt wird, hängt von den individuellen Gewohnheiten des einzelnen Modellpiloten ab.
Um die Steueranordnung auszuwahlen, muss zuerst der Schalter für den Sendermodus auf «normal» gestellt werden. Schalten Sie den Sender, wenn noch nicht geschehen aus, und stecken den mitgelieferten Programmierstecker in die DATA-Buchse auf der Rückseite des Senders. Schalten Sie den Sender ein: durch jeweils einem kurzen Druck auf den BIND-Taster auf der Sendervorderseite kann nun zwischen folgenden Einstellungen im Rotationsverfahren gewechselt werden.
| Summer | LED | Beschreibung |
| Sender piept 1x | orange LED an | Ländereinstellung Universal/Europe |
| Sender piept 2x | orange LED blinkt | Ländereinstellung Frankreich |
| Die Ländereinstellung wird im folgenden detailiert beschrieben. |
| Sender piept 3x | orange LED an | »MODE 1« |
| Sender piept 4x | orange LED an | »MODE 2« |
| Sender piept 5x | orange LED an | »MODE 3« |
| Sender piept 6x | orange LED an | »MODE 4« |
Die gewählte Einstellung übernehmen Sie in den Sender, indem Sie den BIND-Taster für ca. 3 Sekunden drücken. Nach dem Loslassen ertönt eine kurze Bestätigungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfern den sie anschlieBend den Programmierstecker. Benutzten Sie keinesfalls die Fernsteuerung mit eingestecktem Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Einstellung der Sender betrieben wird, achten Sie auf die LED des Senders.
Ländereinstellung
Nachdem Sie die Steueranordnung eingestellt haben, muss in einem zweiten Schritt die Länderinstellung erfolgen.
Die Länderinstellung ist erforderlich, um diversen Richtlinien (FCC, ETSI, IC etc.) gerecht zu werden. In Frankreich beispelseweise, ist der Betrieb einer Fern
steuerung nur in einem eingeschränktem Frequenzband zulässig. Deshalb MUSS die Länderinstellung des Senders auf den Modus „Frankreich“ umgestellt werden, sobald dieser in Frankreich betrieben wird. Auf keinen Fallarf der UNIVERSAL/EUROPE-Modus verwendet werden!
Schalten Sie den Sender, wenn noch nicht geschehen aus, und steken den mitgelieferten Programmierstecker in die DATA-Buchse auf der Rückseite und den Jumper in die Position „NO MIX" auf der Vorderseite des Senders. Schalten Sie den Sender ein: durch jeweils einem kurzen Druck auf den BIND-Taster auf der Sendervorderseite kann nun zwischen folgenden Einstellungen im Rotationsverfahren gewechselt werden:
| Summer | LED | Beschreibung |
| Sender piept 1x | orange LED an | Ländereinstellung Universal/Europe |
| Sender piept 2x | orange LED blinkt | Ländereinstellung Frankreich |
Die gewählte Einstellung übernehmen Sie in den Sender, indem Sie den BIND-Taster für ca. 3 Sekunden drücken. Nach dem Loslassen ertönt eine kurze Bestätigungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfern den Sie anschlieBend den Programmierstecker. Benutzen Sie keinesfalls die Fernsteuerung mit eingstecktem Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Einstellung der Sender betrieben wird, achten Sie nach dem Einsatzen auf die Status-LED des Senders.
Hinweise:
- Achten Sie während der Programmierung unbedingt darauf, dass ein angeschlossener Verbrennungs- oder Elektromotor nicht unbeabsichtigt anlauft. Unterbrechen Sie ggf. die Treibstoffversorgung bzw. klemmen Sie den Antriebsakku zuvor ab.
Stabilisatorlose Systeme
SchlieBen Sie Ihr Flybarless System entsprechend
Hjem Helikoptotyp an die Kanäle 1 - 4 an den Empfänger an.
Beachten Sie dazu die Anleitung Ihres Systems.
Empfangerausgang
Um maximale Flexibilität hinsichtlich der Empfängerbelegung zu erreichen, bietet die optionale Smart-Box mit dem „Channel Mapping" die Möglichkeit zum beliebigen Vertauschen der Servoausgabe 1 bis maximal 6. Siehedazu das Kapitel „Teimetrie" auf Seite 46.
Mit der Channel-Mapping Funktion der Smart-Box konnen die 5 Steuerfunktionen des Senders auch beliebig auf mehrere Empfänger aufgeteilt oder aber auch mehrere Empfängerausgänge mit derselben Steuerfungtion beegt werden. Beispelsweise um je Querruderblatt zwei Servos anstatt mit nur einem einzeln ansteuern zu konnen usw.
gebundener Empfänger
Graupner-HoTT-Empfänger mussen „angewiesen“ werden, ausschließlich mit einem bestimmten Modell(-speicher) eines Graupner-HoTT-Senders zu kommunizieren. Diese Vorgang wird als „Binding“ bezeichnet und ist lediglich einmal für jeder neue Empfänger/Modellspeicherplatz-Kombination erforderlich (und kann jederzeit wiederholt werden).
Wichtiger Hinweis:
Achten Sie beim Binden unbedingt darauf, dass die Senderantenne immer ausreichend welt von den Empfängerantennen entfernt ist! Mit etwa 1 m Abstand sind Sie diesbezüglich auf der sicheren Seite. Andernfalls riskieren Sie eine gestörte Verbindung zum Rückkanal und in Folge Fehlverhalten.
"Binding" mehrerer Empfänger pro Modell Bei Bedarf können auch mehrere Empfänger pro Modell gebunden werden. Binden Sie dazu die jeweiligen Empfänger zuerst einzeln wie nachfolgend beschrieben. Beim späteren Betrieb baut allerdings nur derjenige Empfänger, der zuletzt gebunden wurde, eine Telemetri-Verbindung zum Sender auf. An thisem sind deshalb auch ggf. im Modell eingebaute Telemetriessensoren anzuschreiben, da nur dieser zuletzt gebundene Empfänger in der Lage ist, deren Daten über den Rückkanal zu senden. Der zweite und alle weiteren Empfänger laufen parallel zum zuletzt an den Sender gebundenen Empfänger, jedoch vollig unabhängig von thisem, im Slave-Mode mit abgeschalteten Rückkanal! Ist ein Empfänger eingeschaltet, der keine Telemetri sendet, wechselt die Sender-LED von orange auf grün.
"Binden" von Sender und Empfänger
Bechte: die mx-10 HoTT kann nur im Modus „normal" gebunden werden. Vergewissern Sie sich vor dem Start des Bindingvorgangs, dass der Sender in thism Modus programmiert ist. Siehe Seite 20 zur Mode-Einstellung.
Schalten Sie den Sender ein und anschließend die Stromversorgung Ihres Empfängers ein: Am Empfänger blinking die grüne LED einzel kurz auf und bleibt dann dunkel.
Die LED des Senders leuchtet grün, um zu zeigen, dass kein gebundener Empfänger angeschlossen ist.
Drücken und halten Sie den SET-Taster am Empfänger: Die grüne LED beginnnt zu blinken.
Starten Sie anschließend das so genannte Binden eines Empfängers mit einem Druck auf die BIND-Taste des Senders.
Leuchtet innerhalb von etwa 10 Sekunden die LED des Empfängers dauerhaft grün, wurde der Linde-Vorgang erfolgreich abgeschlossen. Sie können nun den SET-Ta-ster des Empfängers und die BIND-Taste des Senders loslassen.
Ohre Modell-/Empfängerkombination ist nun betriebsbereit. Parallel dazu wechselt die Sender-LED von grün auf orange.
Blinkt dagegen die grüne LED am Empfänger länger als ca. 10 Sekunden und wechselt die Sender-LED nicht auf orange, ist der Linde-Vorgang fehlgeschlagen. Verändern Sie ggf. die Positionen der Antennen und wiederholen Sie die gesamte Prozedur.
Test Reichweite
Der integrierte Reichweitetest reduziert die Sendeleistung derart, dass Sie einen Funktionstest bereits in ei
nem Abstand von bis zu etwa 50m durchfuhren konnen. Führen Sie den Reichweitetest des Graupner-HoTT-Systems entsprechend den nachfolgenden Anweisun-gen durch. Lassen Sie sich ggf. von einem Helfer beim Reichweitetest unterstützen.
- Bauen Sie den vorzugsweise bereits an den Sonder gebundenen Empfänger, wie vorgesehen, im Modell ein.
- Schalten Sie die Fernsteuerung ein und warten Sie, bis am Empfänger die grüne LED leuchtet. Nun konnen die Servobewegungen beobachtet werden.
- Stellen Sie das Modell so auf ebenen Untergrund (Pflaster, kurzer Rasen oder Erde), dass die Empfängeranten mindestens 15 cm über dem Erdboden liegen. Es ist deshalb ggf. nötig, das Modell während des Tests entsprechend zu unterlagen.
- Halten Sie den Sender in Hūfthöhe und mit Abstand zum Körper. Zielen Sie aber mit der Antenne nicht direkt auf das Modell, sondern drehen und/oder knicken Sie die Antennenspitze so, dass sie während des Betriebs senkrecht ausgerichtet ist.
- Vergewissern Sie sich, dass sich der Sender im „normal« Modus befindet - Modus Schalter nach hinten. Drücken Sie nun ca. 5 s den BIND-Taster, bis der Sender dauerhaft zu piepsen beginnt. Lassen Sie den BIND-Taster wieder los.
Beache bei Verwendung mehrerer Empfänger pro Modell: der Reichweitentest Funktioniert nur mit dem Empfänger, der die Telemetrie sendet - also mit dem zuletzt gebundenen Empfänger.
- Mit dem Auslösen des Reichweitetestis wird die Ausgangsleistung des Senders signifikant reduziert. Zeitgleich ertont ein Dauersignalton. Nach Ablauf des 99 Sekunden währendn Reich-
weitetestschaltet der Sender wieder auf volle Ausgangsleistung und der Signalton verstummt.
Beache: Sie können den Reichweitentest auch jederzeit durch erneutes Drucken des BIND-Tasters stoppen.
- Bewegen Sie sich innerhalb dieser Zeitspanne vom Modell weg und bewegen Sie währenddessen die Knuppel. Wenn Sie innerhalb einer Entfernung von ca. 50m zu irgendinem Zeitpunkt eine Unterbrechung der Verbindung feststellen, versuchen Sie diese zu reproduzieren.
- Gegebenenfalls einen vorhandenen Motor einschalten, um zusätzlich die Störlicherheit zu überprüfen.
- Bewegen Sie sich weiter vom Modell weg, solange bis keine perfekte Kontrolle mehr möglich ist.
- Warten Sie an dieser Stelle den Ablauf des Testzeitraumes mit dem weiterhin betriebsbereiten Modell ab. Dieses sollte auf Steuerbefehle wieder reagieren, sobald der Reichweitetest beendet ist. Falls dies nicht 100% -ig der Fall ist, benutzen Sie das System nicht und kontaktieren Sie den zuständigen Service der Graupner GmbH & Co. KG.
- Führer Sie den Reichweitetest vor jedem Flug durch und simulieren Sie darauf alle Servobewegungen, die auch im Flug vorkommen. Die Reichweite muss bereits immer mindestens 50 m am Boden betragen, um einen sicheren Modellbetrieb zu gewährleisten.
Achtung:
Während des normalen Modellbetriebs keinesfalls den Reichweitetest am Sender starten!
Bei der mx-10 HoTT haben Sie die Möglichkeit die Servodrehrichtung und den Servoweg zu verändern.
Servodrehrichtung
Die Servodrehrichtung wird an die praktischen Gegebenheiten im jeweiligen Modell angepasst, sodass bei der Montage der Steuergestänge und Anlenkungen keinerlei Rücksicht auf den vorgegebenen Drehsinn der Servos genommen werden muss. Die Laufrichtung kann mit den Servoreverse-Schaltern auf der Frontseite des Senders für jeder Kanal getrennt eingestellt werden. Die Laufrichtung wird symbolisiert durch „NOR“ für normale Drehrichtung und „REV“ für die umgekehrte Drehrichtung.
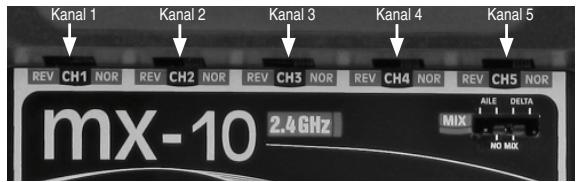
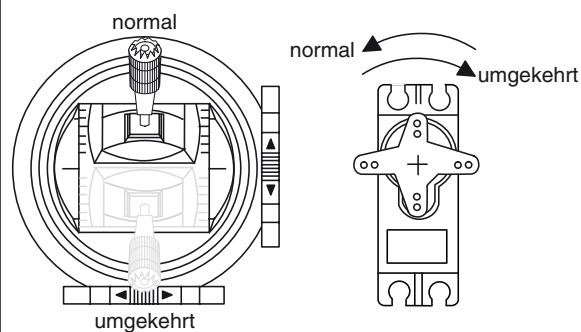
Zur Einstellung eines symmetrischen, d.h. steuerseiten-unabhängigen Weges für das Höhen-, Seiten- und Querruder.
Der Servoweg ist senderseitig fest eingestellt und kann zwischen 70% (Schalter in unterer Position) und 100% (Schalter in oberer Position) verändert werden.

Hinweis:
Mit der optional erhältlichen Smart-Box kann der Servoweg getrennt und auch asymmetrisch für alle Kanäle programmiert werden. Siehe dazu den Abschnitt „Teimetrie" auf Seite 46.
Fail Safe
Im Lieferzustand des Empfängers gehalten die Servos im Falle einer Fall-Safe-Situation ihre zuletzt als gültig erkannten Positionen bei (,hold) . Im Fall-Safe-Fall erlischt die grüne LED am Empfänger und am Sender beginnnt die orange LED 3x kurz hintereinander zu blinke. Darüber hinaus piet thiser entsprechend der Status-LED 3x kurz hintereinander zur akustischen Warnung.
Nutzen Sie das Sicherheitspotenzial dieser Option, indem Sie für einen Fall-Safe-Fall wichtstens die Motordrosselposition bei Verbrennermodellen auf Leerlauf bzw. die Motorfunktion bei Elektromodellen auf „Stopp“ bzw. bei Heli-Modellen auf „Hold“ programmieren. Das Modell kann sich dann im Störungsfall nicht so leicht selbstständig machen und so Sach- oder gar Personenenschäden hervorrufen.
Wichtiger Hinweis:
Die beiden Einstellungen „Binding“ und „Reichweitetest“ (siehe Seite 38/42) konnen Sie vollig unabhängig davon, ob Sie den Sender zuletzt per Programmiertaster oder aber per Smart-Box programmiert haben, tätigen. Keine dieser beiten Optionen hat nennenswerte Änderungen an den im Empfänger gespeicherten Einstellungen zur Folge. Im Gegensatz dazu werden jedoch ALLE, und somit auch die über die Mochlkeiten des Programmiertasters hinausgehenden Einstellungen der optionalen Smart-Box im Display Failsafe (RX FAIL SAFE) zurückgesetzt, wenn Sie, wie nachfolgend beschrieben, die Fail-Safe-Funktion per Programmiertaster aufrufen. Ebenso verloren Goes aber auch eine ggf. zuvor per Programmiertaster vorgenommene Umstellung der Länderinstellung auf „Frankreich“, siehe weiter unter! Sie MÜSSEN deshalb gg.f. die Länderinstellung erneut
vornehmen. Sie sollen den shalb wenn immer möglich, die Programmierung über die Smart-Box beibehalten! Schalten Sie ihre Empfangsanlage ein.
Bringen Sie den Modus-Schalter in die Position „normal". Drücken und Halten Sie den BIND-Taster auf der Vorderseite des Senders während Sie diesen anschließend einschalten.
Lassen Sie diesen Taster nach dem Einsatz des Senders wieder los.
Der gewünschte Fail-Safe-Modus (Fail-Safe ein/aus, Hold, oder Standard) wird durch jeweils einen kurzen Druck auf den BIND-Taster auf der Sendervorderseite im Rotationsverfahren aufgerufen:
Der SenderPiept nach dem Druck auf den BIND-Tasteromal.Die Status-LED des Senders blinkt abwechseld grun und orange.Um die im Fail-Safe-Fall nach einer"Hold"-Zeit von 0,75 Sekunden von den Servos einzunehmenden Positionen zu programmieren,bringen Sie die betreffenden Steuerorgane Ihres Senders GLEICHZEITIG in die gewünschte Fail-Safe-Position.
Drucken Sie anschlieBend den BIND-Taster drei bis vier Sekunden.Nach dem Loslassen des Tasters sollen sowohl die Status-LED konstant orange leuchten und das akustische Signal des Senders verstummt sein.Dieser befindet sich nun wieder im Steuermodus.Anderenfalls wiederholen Sie die Prozedur.
- Hold-Modus (empfohlen für Helikoptermodelle!) Werkseinstellung. Der Sender piept nach dem Druck auf den BIND-Taster zweimal, die Status-LED des Senders blinkt abwechselnd grün und zweimal kurz orange Alle auf „halten" programmierten Servos bleiben im Falle einer Übertragungsstörung so lange an den vom
Empfänger zuletzt noch als korrekt erkannten Positionen stehen, bis ein neues, korrektes Steuersignal beim Empfänger eintrift.
Zum Speichern dieser Wahl drücken Sie den BIND-Taster drei bis vier Sekunden. Nach dem Loslassen des Tasters sollen den sowohl die Status-LED konstant orange leuchten und das akustische Signal des Senders verstummt sein. Diese befindet sich nun wieder im Steuermodus. Anderenfalls wiederholen Sie die Prozedur.
Der Sender piet nach dem Druck auf den BIND-Taster dreimal. Die Status-LED des Senders blinkt abwechselnd grün und dreimal kurz orange. Zum Speichern dieser Wahl drücken Sie den BIND-Taster drei bis vier Sekunden. Nach dem Loslassen des Tasters sollen sowahl die Status-LED konstant orange leuchten und das akustische Signal des Senders verstummt sein. Dieser befindet sich nun wieder im Steuermodus. Anderenfalls wiederholen Sie die Prozedur.
- Standard-Modus (nur für Flächenmodelle geeignet!)
Der Sender piept nach dem Druck auf den BIND-Taster viermal. Die Status-LED des Senders blinkt abwechselnd grün und viermal kurz orange. In this Modus bewegt sich im Fail-Safe-Fall das Gasservo (Kanal 1) in die für diesen Fall vorgegebene Fail-Safe-Position, alle anderen Kanäle bleiben auf „Hold". Bringen Sie also den Gas-Steuerknuppel sowie ggf. dessen Trimmung in die gewünschte Position und drücken Sie dann zum Speichern dieser Wahl den BIND-Taster drei bis vier Sekunden. Nach dem Loslassen des Tasters sollen sowohl die Status-LED konstant orange leuchten und das akustische Signal des Senders verstummt sein. Diese
befindet sich nun wieder im Steuermodus. Anderenfalls wiederholen Sie die Prozedur.
Hinweis:
Mit der optional erhältlichen Smart-Box kann Fail Safe auch getrennt für alle Kanäle programmiert werden. Siehe dazu den Abschnitt „Telemetrie" auf Seite 46.
Über das «Telemetri«-Menu sind in Echtzeit Sender- und Empfängerdaten sowie Daten optional angeschlossener Telemetri-Sensoren, siehe Anhang, abrufbar und programmierbar.
Die Empfängerdaten werden über den im HoTT-Empfänger integrierten Rückkanal an den Sender übertragen. An den Empfängern GR-12S HoTT (Best.-Nr. 33505), GR-12 HoTT (Best.-Nr. 33506), GR-16 (Best.-Nr. 33508) sowie GR-24 HoTT (Best.-Nr. 33512) kann über den Telemetri-Eingang jeweils 1 Telemetri-Sensor ange-schlossen werden.
Die Updatefähigkeit dieser und zukünftiger Empfänger durch den Anwender halt die zugehörigen «Telemetri«-Menus immer auf dem neusten Stand und sichert die Erweiterung um zukünftige Funktionen oder Sprachen.
Hinweis:
Nach der Regelierung Ihres Produkts unter http://www.graupner.de/de/service/produktregistrierung werden Sie automatisch per E-Mail über neue Updates informiert.
Vor einem Update der Sendersoftware sollenn Sie jeder noch unbedingt alle belegten Modellspeicher auf einem kompatiblen Laptop bzw. PC sichern, um einem evtl. Datenverlust vorzubeugen.
Firmware-Updates wie auch die vorstehend erwähnten Sicherungen werden über den PC-An Schluss des Senders mittels des optionalen USB-Adapters Best.-Nr. 7168.6 und dem An Schlusskabel Best.-Nr. 7168.6A mit Hilfe eines PCs mit dem Betriebssystem Windows XP, Vista oder 7 durchgeführt.
Die erforderlichen Programme und Informationen finden Sie beim entsprechenden Produkt jeweils unter Download auf www.graupner.de. Es wird empfohlen, immer die aktuelle Firmware auf die Geräte zu übertragen, um
so auf dem neuesten Stand zu bleiben.
Wichtige Hinweise:
- These Anleitung stellt die zum Zeitpunkt der Drucklegung zur Verfugung stehenden Funktionen dar.
- Wie bereits im Abschnitt „Binding mehrerer Empfänger" auf Seite 38 bzw. 42 angemerkt, konnen bei Bedarf auch mehrere Empfänger pro Modell gebunden werden. Beim späteren Betrieb ist jeder nur derjenige Empfänger, der zuletzt gebunden wurde, imstande, eine Telemetriè Verbindung zum Sonder aufzubauen! Das bedeutet aber umgekehrt, dass nur der zuletzt gebundene Empfänger auch per Telemetriè-Menu angesprochen werden kann! Ggf. ist also die Bindungs-Reihenfolge zu ändern, bevora einem bestimmten Empfänger Einstellungen vorgenommen werden konnen.
- Achten Sie beim Einstellen der Fernsteuerung unbedingt darauf, dass die Senderantenne immer ausreichend welt von den Empfängerantennen entfernt ist! Mit etwa 1 m Abstand sind Sie thisbezüglich auf der sicheren Seite. Andernfalls risikieren Sie eine gestörte Verbindung zum Rückkanal und in Folge Fehlverhalten.
- Da die Telemetriiedaten zwischen Sender und Empfänger nur nach jedem vierten Datenpaket ausge-tauscht werden, besteht die Datenübertragung technisch bedingt eine gewisse Zeit, sodass die Reaktion auf Bedientasten und Einstellungsänderungen nur verzogert erfolgt. Hierbei handelt es sich also nicht um einen Fehler.
- Programmierungen am Modell oder an Sensoren)dürfen nur erfolgen, wenn sich das Modell am Boden befindet. Nehmen Sie Einstellungen nur bei ausgeschaltetem Motor bzw. abgeklemmtem Antriebsakku
vor! Ungewollte Programmierungen sind sonst nicht auszuschreiben.
Ein z. B. aus Versehen im Empfänger aktivierter Servotest konnte ggf. das Modell zum Absturz bringen und Personen- und/oder Sachschäden verursachen. Beachten Sie die Sicherheitseinweise auf den Seiten 3 ... 6这点 Handbuches und in den jeweiligen Einzelanleitungen.
- Alle Einstellungen (wie Fail-Safe, Servodrehrich-tungsumkehr, Servoweg, Mischer- und Kurveneinstellungen usw.), die Sie über das »Telemetri«-Menü vornehmen, werden ausschließlich im Empfänger gespeichert und ggf. im Zuge des Umsetzens eines Empfängers in ein anderes Modell mit übernommen. Initialisieren Sie ihren HoTT-Empfänger davon sicherechtshalber neu, wenn Sie den Empfänger in einem anderen Modell einsetzen wollen, siehe „Reset" auf Seite 41.
- Programmieren Sie deshalb Servodrehrichtigungsumkehr, Servoweg und Mischereinstellungen vorzugsweise nur über die mx-10-spezifischen Einstellmöglichkeiten «Servoeinstellung« (Seite 43), «Mixer« (Seite 37) und «Dual Rate« (Seite 43). Anderenfalls überlagern sich die Einstellungen gegenseitig, was im späteren Betrieb gänstigstenfalls zu Unübersichtlichkeit, ungünstigstenfalls zu Problemen führen kann.
- Mit der Channel-Mapping-Funktion der optionalen Smart-Box konnen Steuerfunktionen auch beliebig auf mehrere Empfänger aufgeteilt oder aber auch mehrere Empfängerausgänge mit derselben Steuerfunktion belegt werden. Beispisseweise um je Querrudrblatt zwei Servos anstatt nur einem einzeln ansteuern zu konnen usw.. Auch hierbei wird drin
EINSTELLEN/ANZEIGEN
gend empfohlen, beim Programmieren hochste Vorsicht walten zu{lassen.
Telemetrie
Die unter dem Oberbegriff « Telemetri « zusammengefassten Menü’s können mit der optional erhältlichen Smart-Box aufgerufen werden.
Montieren Sie die SMART-BOX idealerweise am Haltebügel Ihr's Senders. Verbinden Sie die Box anschließend mit dem 3-poligen Kabel mit dem Sender. Stecken Sie dazu ein Ende des Kabels in die DATA-Buchse des Senders und das andere in die Buchse auf der rechten Seite der SMART-BOX. Das Stecksystem ist verpolungssicher, achen Sie auf die kleinen seitlichen Fasen. Wenden Sie auf keinen Fall Gewalt an, der Stecker sollene leicht einrasten. Die Buchsen sind auch entsprechend beschriftet: schwarze Litze (-), rote Litze (+) und orangefarbene Litze (S).
Grundsätzliche Bedienung
Die Bedienung des «Telemetri«-Menüs der Smart-Box geschlossen über die vier oben angebrachten Tasten. Mit den Tasten ESC und ENTER können Sie zwischen den verschiedenen Displays umschalten. Die korrespondierenden Richtungshinweise finden Sie auf jeder Displayseite rechts oben in Form von spitzen Klammern ( >) , siehe Abbildungen. Ist nur eine spitze Klammer zu sehen, dann befinden Sie sich auf der jeweils ersten bzw. letzten Seite. Ein Seitenwechsel ist dann nur noch in der angezeigten Richtung möglich.
Mit den Tastern DEC und INC können Sie die Parameter innerhalb der Display-Anzeige anwahlen (INC bewegt den Cursor nach unten, DEC nach oben).
Menüzeilen, in denen Parameter geändert werden konnen, sind durch eine vorangestellte spitze Klammer (>)
markiert. Durch Drücken der Pfeiltasten INC oder DEC-Taste springt der ^> Zeiger eine Zeile vor bzw. darüber. Nicht ansprungbare Zeilen sind nicht veränderbar. Um einen Parameter zu ändern, drücken Sie die INC+DEC Tasten gleichzeitig (der Parameter wird invers dargestellt), verändern den Wert innerhalb des möglichen Einstellbereiches mit der INC oder DEC Taste und übernehmen den Wert durch nochmaliges gleichzeitiges Drucken der INC+DEC Tasten. Mit einem Druck auf die ESC Taste kehren Sie wieder zur Ausgangsposition darüber.
EINSTELLLEN/ANZEIGEN
MENÜ SETTING AND DATAVIEW
Auf der ersten, mit ...
TX
... überschreiben den Displayeite des Untermenus »EINSTELLEN/ANZEIGEN « können nur teilweise Einstellungen vorgenommen werden. Diese Seite dient zur Information der allgemeinen Sendereinstellungen:
| TX | > |
| ACTION | VOLT: | 05.4V |
| MAXIMUM | VOLT: | 05.5V |
| MINIMUM | VOLT: | 05.4V |
| ALARM | VOLT: | 04.7V |
| COUNTRY | : | GENERAL |
| RANGE TEST | : | OFF 90s |
| Wert | Erläuterung | mögliche Einstellungen |
| ACTION VOLT | Aktuelle Betriebsspannung des Senders in Volt | - |
| MAXIMUM VOLT | maximale Betriebsspannung seit dem letzten Einsatz in Volt | - |
| MINIMUM VOLT | minimale Betriebsspannung seit dem letzten Einsatz in Volt | - |
| ALARM VOLT | Spannung, bei der das Sender-Unterspannungs-warnsignal erfürt | 4-15 V in 0.1 V Schritten Werkseinstellung 4.5 V |
| COUNTRY | Ländereinstellung | GENERAL / FRANCE |
| RANGE TEST | zeigt an, ob der Reichweitentestläuft, bei laufendem Test wird die Restzeit angezeigt | OFF / ON |
Unterspannungswarnung Sender (ALARM VOLT)
Sie können die Spannung, bei denen Unterschiedung der Alarm (Dauer Piepton) ausgelöst wird, zwischen 4 - 15 V einstellen - Werkseinstellung 4.5 Volt.
Ist der Alarm aktiv, blinkt oben rechts im Sender Display
der SMART-BOX „VOLT.E“, die Parameter ACTION VOLT und ALARM VOLT werden invers dargestellt.
Ländereinstellung (COUNTRY)
Die Ländereinstellung ist erforderlich, um den diversen Richtlinien der einzelnen Länder gerecht zu werden. Das Fernsteuer-System HoTT 2.4 verfügt über ein eingeschranktes Frequenzband für Frankreich. Wird das Fernsteuer-System in Frankreich betrieben, muss zuerst die Ländereinstellung auf den Modus „Frankreich (FRANCE)" gestellt werden. Auf keinen Fall darf der „GENERAL (EUROPA)"-Modus verwendet werden! Werkseinstellung ist GENERAL.
Reichweitentest (RANGE TEST)
schaltet den Reichweitentest ein oder aus, die verbleibende Restzeit wird im Display angezeigt. Die Anzeige Funktioniert auch, wenn der Reichweitentest über den BIND-Taster am Sender gestartet wird.
RX DATAVIEW
... überschreiben Den Displayseite des Untermenus »EINSTELLLEN/ANZEIGEN« können keine Einstellungen vorgenommen werden. Diese Seite dient nur zur Information:
| RX DATAVIEW > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT :05.0V |
| L.R-VOLT:04.5V |
| SENSOR1 :00.0V 00°C |
| SENSOR2 :00.0V 00°C |
| Wert | Erläuterung |
| S-QUA | Signalqualität in % |
| S-dBm | Empfangsleistung in dBm |
| S-STR | Signalstärke in % |
| R-TEM. | Empfängertemperatur in °C |
| L PACK TIME | zeigt die Zeit in ms an, in der das langste Datenpaket bei der Übertragung Sender zum Empfänger verlorengegangen ist |
| R-VOLT | Aktuelle Betriebsspannung des Empfängers in Volt |
| L.R-VOLT | minimalste Betriebsspannung des Empfängers seit dem letzten Einschalten in Volt |
| SENSOR1 | Zeigt die Werte des optionalen Telemetrié-Sensors 1 in Volt und °C an |
| SENSOR2 | Zeigt die Werte des optionalen Telemetrié-Sensors 2 in Volt und °C an |
Signalquallität (S-QUA)
Die Signalqualität (S-QUA) wird über den Rückkanal des Empfängers „live" an den Sender gesendet und zeit die Signalstärke in % an.
Empfangsleistung (S-dbm)
Die Empfangsleistung (S-dbm) wird mit negativen Werten angezeigt, d.h., ein Wert gegen Null ist der Maximalwert (= bester Empfang), je niedriger die Werte werden,esto schlechter ist die Empfangsleistung! Wichtig ist dies unter anderen beim Reichweitetest vordem Betrieb.
Anmerkung:
Bei negativen Zahlen kehrt sich die Bewertung einer Zahl um: Je higher die auf das Minus-Zeichen folgende Zahl,esto niedriger ist deren Wert.
Führer Sie den Reichweitetest, wie auf Seite 38 bzw. 42 beschreiben, vor jedem Flug durch und simulierten Sie damit alle Servobewegungen, die auch im Flug vorkommen. Die Reichweite muss bei aktiviertem Reichweitetest min. 50m am Boden betragen. Bei dieser Entfernung darf im „RX DATAVIEW“-Display unter „S-dBm“ hochstens -80 dBm angezeigt werden, um einen sicheren Betrieb zu gewährleisten. Liegt der Wert darunter (z.B. -85 dBm), sollenn Sie Ihr Modell keines-falls in Betriebnehmen. Überprüfen Sie den Einbau ihrer Empfangsanlage und die Lage der Antennen. Im Betrieb sollte dieser Wert nicht unter -90 dBm fallen, ansonsten sollenn Sie die Entfernung des Modells ver-ringern. Normalerweise wird aber vor Erreichen theses Wertes die akustische Reichweitewarnings (Piepton-Interval 1 s) ausgelöst, um einen sicheren Betrieb zu gewährleisten.
Signalärke (S-STR)
Die Signalstarke (S-STR) wird in % angezeigt. Generell wird eine akustische Reichweitenwarnung (Piepton-Interval 1 s) ausgegeben, sobald das Empfängersignal im Rückkanal zu schwach wird. Da der Sender aber eine wesentlich höhere Sendeleistung besitzt als der Empfänger, kann das Modell immer noch safer betrieben werden. Die Modellentfernung solle aber dennoch sicherheitshalber verringgert werden, bis der Warnton wieder verstummt.
Empfangertemperatur (R-TEM.)
Vergewissern Sie sich, unter allen Flugbedingungen im
Rahmen der erlaubten Temperaturen Ihres Empfängers zu bleiben (idealerweise zwischen -10 und 55^ ). Die Empfänger-Temperaturgrenzwerte, ab denen eine Warnung erfolgt, können im Untermenü «RX SER-VOTEST« unter „ALARM TEMP+“ (50 ... 80 °C und „ALARM TEMP-“ (-20 ... +10 °C) eingestellt werden. Bei Unter- oder Überschreitung erfolgt ein akustisches Signal (Dauer-Piepton) und in allen Empfänger-Untermenü „RX“ erscheint oben rechts „TEMP.“ Auf der Display-Seite «RX DATAVIEW« wird außer dem der Parameter „R-TEM“ invers dargestellt.
Datumpakete (L PACK TIME)
Zeigt den langsten Zeitraum in ms an, in dem Datenpakte bei der Übertragung vom Sender zum Empfänger verloren gegangen sind. In der Praxis ist das der langste Zeitraum, in dem das Fernsteuersystem in den Fail-Safe-Modus gegangen ist.
Betriebsspannung (R-VOLT)
Kontrollieren Sie immer die Betriebsspannung des Empfängers. Sollte sie zu niedrig sein,)dürfen Sie Ihr Modell auf keinen Fall weiter betreiben bzw. überhaupt starten. Die Empfänger-Unterspannungswarnung kann im Untermenü RX SERVOTEST1 unter ,ALARM VOLT" zwischen 3,0 und 6,0 Volt eingestellt werden. Bei Unterschreitung erfolgt ein akustisches Signal (sich wiederholender Doppel-Piepton (lang/kurz)) und in allen Empfänger-Untermenus RX ..1 erscheidt oben rechts "VOLTE". Im Untermenü RX DATAVIEW1 wird auBerdem der Parameter "R - VOLT" invers dargestellt.
Die aktuelle Empfängerakkuspannung wird auch im Grunddisplay, siehe Seite 24, angezeigt.
Minimale Betriebsspannung (L.R-VOLT)
"L.R-VOLT" zeigt die minimale Betriebsspannung des Empfängers seit dem letzten Einschalten an. Sollte diese Spannung deutlich von der aktuellen Betriebsspannung „R-VOLT" abweichen, wird der Empfängerakku durch die Servos möglicherweise zu stark belastet. Spannungseinbrüche sind die Folge. Verwenden Sie in thisum Fall eine leistungsfähige Spanningsversorgung, um maximale Betriebssicherheit zu erreichen.
Sensor 1 + 2
Zeigt die Werte des optionalen Telemetrié-Sensors 1 und ggf. 2 in Volt und ^ C an. Eine Beschreibung dieser Sensoren ist im Anhang zu finden.
RX SERVO
| RX SERVO | <-> |
| OUTPUT CH: | 01 | |
| REVERSE: | OFF | |
| CENTER: | 1500μsec | |
| TRIM: | -000μsec | |
| LIMIT- | 150% | |
| LIMIT+ | 150% | |
| PERIOD: | 20msec | |
| Wert | Erläuterung | mögliche Einstellungen |
| OUTPUT CH | Kanalausbahl | 1 ... je nach Empfänger |
| REVERSE | Servoumkehr | AUS / EIN |
| CENTER | Servomitte in μs | wenn aktiv (invers), abhängig von Geberposition |
| TRIM | Trimmposition in μs Abweichung von der CENTER-Position | -120 ... +120 μs |
| LIMIT- | Wegbegrenzung bei % Servoweg | 30 ... 150 % |
| LIMIT+ | Wegbegrenzung bei % Servoweg | 30 ... 150 % |
| PERIOD | Zykluszeit in ms | 10 oder 20 ms |
OUTPUT CH (Kanalauswahl)
Wahlen Sie ggf. mit der INC oder DEC Tasten die Zeile „Kanal" an. Drücken Sie INC+DEC gleichzeitig. Das Wertefeld wird invers darestellt. Stellen Sie nun den gewünschten Kanal (z.B. 01) mit der INC oder DEC Taste ein. Die nachfolgenden Parameter beziehen sich immer auf den hier eingestillten Kanal:
Reverse (Servo-Umkehr)
Stellt die Drehrichtung des an den gewählten Steuerkanal angeschlossenen Servos ein: ON / OFF
CENTER (Servo-Mitte)
In der Zeile „CENTER“ wird bei aktivem Wertefeld (inverse Darstellung) die aktuelle Impulszeit des in der Zeile „OUTPUT CH“ gewährten Steuerkanals in μs angezeigt.
Der angezeigte Wert ist abhängig von der aktuellen Stellung des diesen Steuerkanal beeinflussenden Gebers und ggf. der Stellung von dessen Trimmung.
Eine Kanalimpulszeit von 1500 μs entspricht der standardmäßigen Mittenposition und damit der üblichen Servomitte.
Um diesen Wert zu verändern, wahren Sie die Zeile
"CENTER" an und drücken Sie die Tasten INC+DEC. Nun bewegen Sie den entsprechenden Geber, Steuerknüppel und/oder Trimmhebel in die gewünschte Position und speichern die aktuelle Geberposition durch erneutes Drücken der Tasten INC+DEC. Diese Position wird als neue Neutralposition abgespeichert.
TRIM (Trimmposition)
In der Zeile „TRIM“ konnen Sie die Neutralposition eines an den in der Zeile „OUTPUT CH“ gewählten Steuerkanal angeschlossenen Servos mittels der Pfeiltasten der rechten 4-Wege-Taste in 1-μs-Schritten feinfühlig nachjustieren: Um den hier eingestelltten TRIM-Wert ist der Wert in der Zeile „CENTER“ im Bereich von ±120 μs anpassbar.
Werkseinstellung: 0 s
LIMIT-/+ (Servo-Wegbegrenzung -/+)
These Option dient zur Einstellung einer Seitenabhängigen Begrenzung (Limitierung) des Servowegs (Ruderausschlag) des am in der Zeile „OUTPUT CH" gewählten Steuerkanal angeschlossenen Servos.
Die Einstellung erfolgt getrennt für beiden Richtungen im Bereich von 30 ... 150%.
Werkseinstellung: je 150% .
PERIOD (Zykluszeit)
In dieser Zeile bestimmen Sie den Zeitabstand der einzelnen Kanalimpulse. Diese Einstellung wird für alle Steuerkanäe übernommen.
Bei ausschließlich Verwendung von Digitalservos kann eine Zykluszeit von 10 ms eingestellt werden.
Im Mischbetrieb oder bei ausschließlich Verwendung von Analogservos sollte unbedingt 20 ms eingestellt sein, da letztere andernfalls „überforder“ sein konnen
und infolgedessen mit „Zittern" oder „Knurren" reagieren.
RX FAIL SAFE
| RX FAIL SAFE <> |
| OUTPUT CH: 01 |
| INPUT CH: 01 |
| MODE: HOLD |
| F.S(Pos.: 1500μsec |
| DELAY: 0.75sec |
| FAIL SAFE ALL: NO |
| POSITION: 1500μsec |
Der Beschreibung theses Menüs vorangestellt seien ein paar mahnende Worte:
"Nichts tun" ist das schlechterste, was diesbezüglich getan werden kann. In der Grundeinstellung des HoTT-Empfängers istathamlich"HOLD"vorgegeben.
Im Falle einer Störung fliegt gunstigstenfalls das Flugmodell unbestimmte Zeit geradeaus und „landet" dann hoffentlich irgendwo, ohne größeren Schaden anzurichten! Passiert so etwas allerdings an unrechtem Ort und zu unrechter Zeit, dann konnte z.B. das Motormodell unsteuerbar und somit auch unkontrollierbar übers Flugfeld „rasen" und Piloten oder Zuschauer gefährden!
Deshalb sollte schon bedacht werden, ob zur Vermeidung derartiger Risiken nicht noch wichtstens „Motor aus" programmiert werden sollen?
Und nach dem erhobenen Zeigefinger noch ein kurzer Hinweis auf die drei möglichen Varianten des Senders mx-10 HoTT zur Einstellung von Fail Safe:
Der einfache Weg zu Fail-Safe-Einstellungen ist die Benutzung der sendereigenen, mit dem BIND-Taster erreichbaren »Fail Safe«, siehe Seite 43.
Ähnlich, wenn auch etwas umständlicher zu erreichen, Funktioniert die auf der{nachsten Doppelseite beschriebene Option „FAIL SAFE ALL".
Und zuletzt steht noch die relativ aufwendige Methode der individuellen Einstellung mittels der Optionen MODE", F.S(Pos." und ,DELAY" zur Verfügung. Die Beschreibung dieser Variante beginnt mit der Option MODE" weiter unten.
| Wert | Erläuterung | mögliche Einstellungen |
| OUTPUT CH | Ausgangskanal (Servoanschluss des Empfängers) | 1 ... je nach Empfänger |
| INPUT CH | Eingangskanal (vom SenderCOMMender Steuerkanal) | 1 ... 16 |
| MODE | Fail-Safe-Modus | HOLDFAIL SAFE OFF |
| F.S.P.O.S. | Fail-Safe-Position | 1000 ... 2000 μs |
| DELAY | Reaktionszeit (Verzögerung) | 0,25, 0,50, 0,75 und 1,00 s |
| FAIL SAFE ALL | Speichern derFail-Safe-Positionen aller Steuerkanäle | NO / SAVE |
| POSITION | Anzeige der gespeichertenFail-Safe-Position | zwischen ca. 1000 und 2000 μs |
OUTPUT CH (Servoanschluss)
In dieser Zeile wahren Sie den jeweils einzustellenden OUTPUT CH (Servoanschluss des Empfängers) aus.
Wie schon erhält, können die 5 Steuerfunktionen des Senders mx-10 HoTT bei Bedarf mit der optionalen Smart-Box beliebig auf mehrere Empfänger aufgeteilt oder aber auch mehrere Empfängerausgänge mit derselben Steuerfungtion belegt werden. Beispielsweise um je Querruderblatt zwei Servos oder ein übergroßes Seitenruder mit miteinander gekoppelten Servos anstelle eines einzelnen ansteuern zu konnen.
Eine Aufteilung auf mehrere HoTT-Empfänger wiederum bietet sich u.a. in Großmodellen an, um beispielsweise lange Servokabel zu vermeiden. Bedenken Sie in dieSEM Fall, dass per «Telemetri«-Menü immer nur der zuletzt gebundene Empfänger angesprochen werden kann!
Die 5 Steuerkanäe (INPUT CH) der mx-10 HoTT können entsprechend verwaltet werden, indem durch so genannten „Channel Mapping" dem in der Zeile OUTPUT CH ausgewählten Servoanschluss des Empfängers in der Zeile INPUT CH ein anderer Steuerkanal zugewiesen wird. ABER AchtUNG: Wenn Sie beispieleweise senderseitig die Mischer „Querruder - AILE" oder „DELTA" durch den Jumper vorgegeben haben, dann wird bereits im Sender die Steuerfungtion 2 (Querruder) auf die Steuerkanäe 2 + 5 für linkes und rechts Querruder aufgeteilt. Die korrespondierenden und damit ggf. auch zu mappen den INPUT CH des Empfängers waren in thisem Fall dann die Kanäle 02 + 05 , siehe nachfolgenden Beispiel.
Beispiele:
- Sie möchten bei einem Modell jeder Querruderklappe über zwei oder mehr Servos ansteuern:
Weisen Sie den betreffenden OUTPUT CH (Servananschlüssen) jeweils ein und denselben INPUT CH
(Steuerkanal) zu. In dieser Fall abhängig von linker oder rechter Tragfläche, als INPUT CH jeweils einen der beiden standardmaßigen Querrudersteuerkanäle 2 + 5 .
- Sie möchten bei einem Modell das Seitenruder mit zwei oder mehr Servos ansteuern:
Weisen Sie den betreffenden OUTPUT CH (Servoanschlüssen) jeweils ein und denselben INPUT CH (Steuerganal) zu. In thisem Fall den standardmaßigen Seitenruderkanal 4.
MODE
Die Einstellungen der Optionen „MODE“, „F.S(Pos.“ und „DELAY“ bestimm den Verhalten des Empfängers im Falle einer Störung der Übertragung vom Sender zum Empfänger.
Die unter „MODE“ programmierte Einstellung bezieht sich immer auf den in der Zeile OUTPUT CH eingestellten Kanal.
Die Werkseinstellung ist für alle Servos „HOLD".
Für jeder angewählten OUTPUT CH (Servoanschluss des Empfängers) können Sie wahlen zwischen:
Bei dieser Wahl bewegt sich das entsprechende Servo im Falle einer Störung nach Ablauf der in der Zeile „DELAY“ eingestellten „Verzögerungszeit“ für die Restdauer der Störung in die in der Zeile „POSITI-ON“ angezeigte Position.
HOLD
Bei einer Einstellung von „HOLD“ besteht das Servo im Falle einer Störung die zuletzt als korrekt empfangene Servoposition für die Dauer der Störung bei.
OFF
Bei einer Einstellung von „OFF“ stellen der Empfan
ger im Falle einer Störung die Weitergabe von (zwischengespeicherten) Steuerimpulsen für den betreffenden Servoausgang für die Dauer der Störung ein. Der Empfänger schaltet die Impulsleitung sozusagen „ab".
ABER ACHTUNG: Analogservos und auch so manches Digitalservo setzen während des Ausfalls der Steuerimpulse dem nach wie vorvorhandenen Steu erdruck keinen Widerstand mehr entgegen und werden infolgedessen mehr oder weniger schnell aus ihrer Position gedrück.
F.SPOS. (Fail-Safe-Position)
Für jeder OUTPUT CH (Servoanschluss des Empfängers) stellen Sie in der Zeile „F.S.POS." nach Aktivierung des Wertefeldes (inverse Darstellung) durch gleichzeitiges Drücken der Taste INC+DEC, mit den Tasten INC oder DEC diejenige Servoposition ein, die das Servo im Störfall im Modus „FAI(L) SAFE" einheiten soll. Die Einstellung erfolgt in 10-μs-Schritten. Werkseinstellung: 1500 μs (Servomitte).
Wichtiger Hinweis:
Die Funktion „F.SPOS.“ hat darüber hinaus in allen drei Modi „OFF“, „HOLD“ und „FAI(L) SAFE“ noch eine besondere Bedeutung für den Fall, dass der Empfänger eingeschaltet wird, aber (noch) kein gültiges Signal erhält:
Das Servo fahrrotsofar in die in der Zeile „Position“ voreingestellte Fail-Safe-Position. Dadurch konnen Sie z.B. verhindern, dass beim versehentlichen Einschalten des Empfängers bei ausgeschalteten Sender ein Fahrwerk einfahrt o.. Im normalen Modellbetrieb verhält sich dagegen das entsprechende Servo im Störungsfall gemäß dem eingestillten „MODE".
DELAY (Fail-Safe-Reaktionszeit oder Verzögerung)
Stellen Sie hier die Verzögerungszeit ein, nach der die Servos bei Signalunterbrechung in ihre vorgewählten Positionen laufen sollen. Diese Einstellung wird für alle Kanäle übernommen und betrifft nur die auf den Mode „FAI(L) SAFE" programmierten Servos.
Werkseinstellung: 0,75 s.
FAIL SAFE ALL (Globale Fail-Safe-Einstellung)
Dieses Untermenü gestattet auf ähnlich einfache Weise wie das auf Seite 128 beschriebene Menu »Fail Safe «, die Fail-Safe-Positionen von Servos mit einem „Knopfdruck" festzulegen:
Wechseln Sie zur Zeile „FAIL SAFE ALL“ und aktivieren Sie das Wertefeld mit einem gleichzeitigen Druck auf die INC+DEC Tasten. „NO“ wird invers dargestellt. Stellen
Sie anschließend den Parameter mit einer der Tasten INC oder DEC auf SAVE. Nun bewegen Sie mit den Bedienelementen des Senders alle Servos, denen Sie in der Zeile MODE" ,FAI(L) SAFE" zugeordnet haben oder später zuordenen wollen, in die gewünschte Fail-Safe-Position. In der untersten Zeile ,Position" wird die aktuelle Stellung des Gebers für den gerade eingestillten Kanal angezeigt:
| RX FAIL SAFE | <> |
| >OUTPUT CH: 01 | |
| INPUT CH: 01 | |
| MODE : FAI-SAFE | |
| F.S(Pos. : 1500μsec | |
| DELAY : 0.75sec | |
| FAIL SAFE ALL: SAVE | |
| POSITION : 1670μsec | |
Nach einem erneuten gleichzeitigen Druck auf die INC+DEC Tasten wechselt die Anzeige wieder von SAVE" nach ,NO". Die Positionen aller von dieser Maβ-
nahme betroffenen Servos wurden damit abgespeichert und parallel dazu in die Zeile „F.S(Pos." übernommen und für den aktuellen OUTPUT CH (Servoanschluss) im Display auch unmittelbar angezeigt:
| RX FAIL SAFE () OUTPUT CH: 01INPUT CH: 01MODE : FAI-SAFEF.S(Pos. : 1670μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1670μsec |
Schalten Sie den Sender aus und überprüfen Sie die Fail-Safe-Positionen anhand der Servoausschläge.
"Fail Safe" in Kombination mit „Channel Mapping“ Um sicherzustellen, dass auch im Störungsfall gemappte Servos-also Servos, welche von einem gemeinsamen Steuerkanal (INPUT CH) angesteuert werden-gleichartig reagieren, bestimm den entspruchenden Einstellungen des INPUT CH das Verhalten gemappter Servos!!!
Werden demnach beisplesiweise die Servoanschlüsse 6, 7 und 8 des 8-Kanal-Empfängers GR-16, Best.-Nr. 33508, miteinander gemappt, indem den OUTPUT CH (Servoanschlüssen) 06, 07 und 08 als INPUT CH der jeweils gleiche Steuerkanal „04“ zugewiesen wird ...
| RX FAIL SAFE () OUTPUT CH: 06INPUT CH: 04MODE : OFFF.S(Pos. : 1670μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1670μsec |
| RX FAIL SAFE <> |
| OUTPUT CH: 07 |
| INPUT CH: 04 |
| MODE: OFF |
| F.S(Pos.: 1230μsec |
| DELAY: 0.75sec |
| FAIL SAFE ALL: NO |
| POSITION: 1670μsec |
| RX FAIL SAFE | <> |
| >OUTPUT CH: 08 | |
| INPUT CH: 04 | |
| MODE : HOLD | |
| F.S(Pos. : 1770μsec | |
| DELAY : 0.75sec | |
| FAIL SAFE ALL: NO | |
| POSITION : 1670μsec | |
... dann bestimmt vollig unabhängig von den individuellen Einstellungen der jeweiligen OUTPUT CH der INPUT CH 04 das Fail-Safe-Verhalten dieser drei mit dem Steuerkanal 4 verbundenen Servos:
| RX FAIL SAFE () OUTPUT CH: 04INPUT CH: 04MODE : FAI-SAFEF.S(Pos. : 1500μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1500μsec |
Dies auch dann, wenn dieser seinerseits beispielsweise mit INPUT CH 01 gemappt ist:
| RX FAIL SAFE | <> |
| >OUTPUT CH: 04 | |
| INPUT CH: 01 | |
| MODE: FAI-SAFE | |
| F.S(Pos.: 1500μsec | |
| DELAY: 0.75sec | |
| FAIL SAFE ALL: NO | |
| POSITION: 1500μsec | |
In dieser Fall wurde der Servoanschluss 04 wiederum entsprechend der Fail-Safe-Einstellungen von CH 01 reagieren.
Die in der Zeile „DELAY“ eingesetzte Reaktions- oder Verzögerungszeit dagegen gilt immer einheitlich für alle auf „FAI(L) SAFE“ gestellten Kanäle.
RX FREE MIXER
| RX FREE MIXER |
| >MODE : 1 | |
| MASTER CH : 00 | |
| SLAVE CH : 00 | |
| S-TRAVEL-: 100 | |
| S-TRAVEL+: 100 | |
| RX WING MIXER | |
| TAIL TYPE: NORMAL | |
| Wert | Erläuterung | mögliche Einstellungen |
| MIXER | Mischerauswahl | 1, 2 oder 3 |
| MASTER CH | Signalquelle bzw. Quellkanal | 0, 1 ... je nach Empfänger |
| SLAVE CH | Zielkanal | 0, 1 ... je nach Empfänger |
| S-TRAVEL- | Zumischung negativ | 0 ... 100 % |
| S-TRAVEL+ | Zumischung positiv | 0 ... 100 % |
| RX WING MIXER | Leitwerkstyp (TAIL TYPE) | NORMAL, V-TAIL (V-LW) ELEVON (Höhe/Quer-Mischer für Delta und Nurflügel) |
MIXER
Bis zu drei Mischer konnen gleichzeitig programmiert werden. Wechseln Sie über „MIXER" zwischen Mischer 1, Mischer 2 und Mischer 3.
Die folgenden Einstellungen in thisem Display betreffen immer nur den in der Zeile „MIXER" ausgewählten Mischer.
Wichtiger Hinweis:
Falls Sie im Menu »Tail type« auf der Sendervorderseite bereits Mischerfunktionen programmiert haben, achten Sie unbedingt daraufuf, dass sich jene Mischer mit denen des Menü „RX FREE MIXER“ nicht überschneiden!
MASTER CH (.,von“)
Das am MASTER CH (Signalquelle) anliegende Signal in einstellbarem Maße dem SLAVE CH (Zielkanal) zugemischt.
Wahlen Sie, 00^ , wenn kein Mischer gesetzt werden soll.
SLAVE CH (,zu^ )
Dem SLAVE CH (Zielkanal) wird anteilig das Signal des MASTER CH (Quellkanal) zugemischt. Der Mischanteil wird von den in den Zeilen „TRAVEL-“ und „TRAVEL+“ eingetragenen Prozentsätzen bestimmt.
Wahlen Sie ^,00^ , wenn kein Mischer gesetzt werden soll.
TRAVEL- + (Anteil der Zumischung in %
Mit den Einstellwerten dieser beiden Zeilen wird der Prozentsatz der Zumischung in Relation zum MASTER-Signal getrennt für beiden Richtungen vorgegeben.
TAIL TYPE (Leitwerkstyp)
Die nachfolgenden Modelltypen stehen Ihnen teilweise auch im Mischer auf der Sendervorderseite, Seite 37,
zur Verflugung und sollenn vorzugsweise Dort voreingestellt werden. In thisem Fall belassen Sie den TAIL TYPE immer auf NO MIX.
Möchten Sie davon noch die im Empfänger integrierten Mischer nutzen, dann können Sie die bereits voreingestellte Mischerfungtion für den entsprechenden Modelltyp auswahlen:
NORMAL
These Einstellung entspricht dem klassischen Flugzeugtyp mit Heck-Leitwerk und getrenntem Seitenund Hohenruder. Für diesen Modelltyp wird keine Mischfunktion besteht.
V-TAIL (V-Leitwerk)
Bei diesen Modelltyp werden die Steuerfunktionen Höhen- und Seitenruder so miteinander verknüpf, dass jeder der beiden Leitwerksklappen-durch je ein separates Servo angesteuert-sowohl die Höhen- als auch Seitenruderfungtion übernimmt.
Die Servos werden üblicherweise wie folgt am Empfänger angeschlossen:
OUTPUT CH 3: V-Leitwerksservo links
OUTPUT CH 4: V-Leitwerksservo rechts
Sollte die Servodrehrichtung falsch sein, beachten Sieitte die Hinweise auf Seite 43.
ELEVON (Delta-/Nurflugelmodelle)
Die an den Ausgängen 2 und 3 angeschlossenen Servos übernehmen Quer- und Höhenruderfung. Die Servos werden üblicherweise wie folgt am Empfänger angeschlossen:
OUTPUT CH 3: Quer/Höhe rechts
Sollete die Servodrehrichtung falsch sein, beachten Sieitte die Hinweise auf Seite 43.
RX CURVE (EXPO)
| Wert | Erläuterung | mögliche Einstellungen |
| CURVE1, 2 oder 3 CH | Kanalzuordnung der jeweiligen Kurveneinstellung | 1 ... je nach Empfänger |
| TYPE | Kurventyp | A, B, C siehe Abbildung |
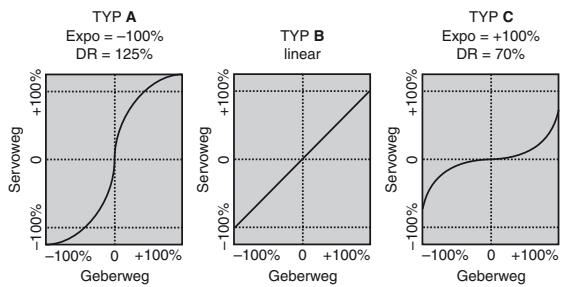
In der Regel wird eine nichtlineare Steuerfunktion ggf. verwendet für Querruder (Kanal 2), Höhenruder (Kanal 3) und Seitenruder (Kanal 4). Diese Kanal-Vorgaben entsprechen auch der Werkseinstellung. Wenn Sie also beispiselsweise senderseitig „AILE" vorgegeben haben und die hier zu besprechende Option RX CURVE nutzen möchten, dann sind 2 Kurven zu setzen:
Andernfalls wurden linkes und rechts Querruder unterscheidliche Steuercharakteristiken aufweisen.
Mit der Funktion RX CURVE können Sie die Steuercharakteristiken für bis zu drei Servos verhalten:
CURVE 1,2 oder 3 CH
Wahlen Sie den gewünschten Steuerkanal (INPUT CH) des ersten Servos aus.
Die folgende Einstellung in TYPE betriffn nur den hier ausgewählten Kanal.
TYPE
Wahlen Sie die Servokurve aus:
A: EXPO = -100 % und DUAL RATE = 125 %
Das Servo reagiert stark auf Knüppelbewegungen um die Neutralstellung. Mit zunehmendem Ruderausschlag verläuft die Kurve flacher.
B: Lineare Einstellung.
Das Servo folgt der Knüppelbewegung linear.
C: EXPO = +100 % und DUAL RATE = 70 %
Das Servo reagiert schwach auf Knüppelbewegungen um die Neutralstellung. Mit zunehmendem Ruderausschlag verläuft die Curve steiler.
Hinweis:
Die hier programmierten Steuercharakteristiken wirken auch auf gemappte Empfängerausgänge.
Servoanschluss 5: 5CH FUNCTION
,SERVO"oder,SENSOR
Am, mit einem zusätzlichen „T“ gekennzeichneten, Servoanschluss 5 kann auch ein Telemetri-E Sensor angeschlossenen werden.
Damit das jeweils angeschlossene Gerät jeder vom Empfänger auch richtig erkannt wird, MUSS der Servoanschluss 5 entsprechend von „SERVO“ auf „SENSOR“ und vice versa umgestellt werden.
RX SERVO TEST
| RX SERVO TEST < |
| >ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| TEST : STOP |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
| Wert | Erläuterung | mögliche Einstellungen |
| ALL-MAX | Servoweg auf der „+“-Seite für alle Servoausgänge für den Servotest | 1500 ... 2000 μs |
| ALL-MIN | Servoweg auf der „-“-Seite für alle Servoausgänge für den Servotest | 1500 ... 1000 μs |
| TEST | Testprozedur | START / STOP |
| ALARM VOLT | Alarmgrenze der Unterspannungs-warning des Empfängers | 3,0 ... 6,0 V Werkseinstellung: 3,8 V |
| ALARM
TEMP+ | Alarmgrenze für zu hohe Temperatur des Empfängers | 50 ... 80 °C
Werkseinstellung:
70 °C |
| ALARM
TEMP- | Alarmgrenze für zu niedrige Temperatur des Empfängers | -20 ... +10 °C
Werkseinstellung:
-10 °C |
| CH OUTPUT
TYPE | Kanal-Reihenfolge | ONCE, SAME, SUMI, SUMO |
ALL MAX (Maximaler Servoweg)
In dieser Zeile stellen Sie den maximalen Servoweg auf der Plus-Seite des Steuerweges für den Servotest ein. 2000 μs entspricht dem Vollausschlag, 1500 μs entspricht der Neutralposition.
Achten Sie darauf auf dass die Servos während der Testroutine nicht Mechanisch auflaufen.
ALL MIN (Minimaler Servoweg)
In dieser Zeile stellen Sie den maximalen Servoweg auf der Minus-Seite des Steuerweges für den Servotest ein. 1000 s entspricht dem Vollausschlag, 1500 s entspricht der Neutralposition.
TEST
In dieser Zeile starten und stoppen Sie den in den Empfänger integrierten Servotest.
Mit einem gleichzeitigen Druck auf die INC+DEC Taster aktivieren Sie das Eingabefeld:
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : STOP |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
Mit einer Tasten NC oder DEC wahlen Sie nun
START:
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : START |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
Mit einem weiteren gleichzeitigen Druck auf die NC+DEC Tasten starten Sie nun den Testlauf. Das Eingabefeld wird wieder „normal“ dargestellt:
| RX SERVO TEST <ALL-MAX : 2000μsecALL-MIN : 1000μsec>TEST : STARTALARM VOLT : 3.8VALARM TEMP+: 70°CALARM TEMP:-: -10°CCH OUTPUT TYPE:ONCE |
Zum Stopen des Servotest aktivieren Sie wie zuvor beschreiben wieder das Eingabefeld, wahren STOP und bestätigkeiten diese Wahl mit den INC+DEC Tasten.
ALARM VOLT (Empfänger-Unterspannungswannung)
Über ALARM VOLT wird die Empfängerspannung überwacht. Das Interval kann zwischen 3,0 und 6,0 Volt eingestellt werden. Bei Unterschiedung der eingestillten Alarmgrenze erfolgt ein akustisches Signal (Intervall-
Piepton lang/kurz) und in allen »RX … «-Displays blinkt rechts oben „VOLT.E":
| RX SERVO VOLT.E <> |
| OUTPUT CH: 01 |
| REVERSE: OFF |
| CENTER: 1500μsec |
| TRIM: -000μsec |
| TRAVEL-: 150% |
| TRAVEL+: 150% |
| PERIOD: 20msec |
Im Display RX DATAVIEW « wird außerdem der Parameter „R-VOLT" invers dargestellt:
| RX DATAVIEW VOLT.E > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT :03.7V |
| L.R-VOLT:03.5V |
| SENSOR1 :00.0V 00°C |
| SENSOR2 :00.0V 00°C |
ALARM TEMP +/- (Empf.-Temperaturüberwachung)
These beiten Optionen überwachen die Empfangertemperatur. Ein unterer Grenzwert „ALARM TEMP-“ (-20 ... +10 °C) und ein oberer Grenzwert „ALARM TEMP+“ (50 ... 80 °C) können programmiert werden. Bei Unter- oder Überschreitung dieser Vorgaben ertont ein akustisches Signal (Dauer Piepton) und in allen Empfänger-Displayserecht offen rechts „TEMP-E". Auf der Displayseite »RX DATAVIEW « wird außer dem Parameter „R-TEM" invers darestellt.
Vergewissern Sie sich, dass Sie unter allen Flugbedingungen im Rahmen der erlaubten Temperaturen Ihres Empfängers bleiben (idealerweise zwischen -10 und 55^ C).
CH OUTPUT TYPE (Anschlusstyp)
Hier wahlen Sie aus, wie Empfangerausgabe angesteuert werden.
ONCE
Die Servoanschlüsse des Empfängers werden nacheinander angesteuert. Empfohlen für Analogservos. Bei dieser Einstellung werden die Servos automatisch in einem Zyklus von 20 ms-beim 12-Kanal-Empfänger (Best.-Nr.33512) 30 ms-betrieben, egal was im Display RX SERVO« in der Zeile „PERIOD“ eingestellt bzw. angezeigt wird!
- SAME
Die Servoanschlüsse des Empfängers werden in Viererblöcken parallel angesteuert. D.h., beim im Set enthaltenen Empfänger GR-12 gekommen Kanal 1 bis 4 und Kanal 5 und 6 die Steuersignale jeweils gleichzeitig.
Empfohlen bei Digitalservos, wenn mehrere Servos für eine Funktion eingesetzt werden (z.B. Querrud), damit die Servos absolut synchron laufen. Bei ausschließlich Verwendung von Digitalservos empfehlts sich, in der Zeile „PERIOD“ des Displays »RX SERVO« 10 ms einzustellen, um die schnele Reaktion von Digitalservos nutzen zu konnen. Bei Verwendung von Analogservos oder im Mischbetrieb ist unbedingt „20 ms“ zu wahren!
Achten Sie bei dieser Einstellung sondern auf eine ausreichende Dimensionierung der Empfängerstromversorgung. Da immer bis zu vier Servos gleichzeitig anlaufen, wird diese stärker belastet.
SUMO (Summensignal OUT)
Ein als SUMO konfigurierter HoTT-Empfänger generiert permanent aus den Steuersignalen aller seiner
Steuerkanäle ein so genannten Summensignal und stellt diesen beispielsweise beim Empfänger GR-12 am Servoanschluss 6 bereit.
Des weiteren kann das Summensignal unabhängig vom Empfänger auf max. 16 Kanäle eingestellt werden, d.h. auch ein 6-Kanal Empfänger kann z.B. auf SUMO 12 gestellt werden und überträgt dann alle 12 Kanäle auf den Ausgang.
Nachdem Sie SUMO angewählt und mit einem gleichzeitigen Druck auf die INC+DEC gespeichert haben, springt die inverse Markierung weiter auf die Kanalzahl, hier 06:
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : START |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:SUMO96 |
Durch Drücken der INC oder DEC Taste kann die im Summensignal zu übertragende Kanalzahl gewählt werden. Ein erneutes gleichzeitiges Drucken der
INC+DEC Tasten speichert die Einstellungen.
Die Empfängerausgabe werden nacheinander in einem Zyklus von 20 ms (beim Empfänger GR-24, Best.-Nr. 33512, 30 ms) angesteuert, auch wenn auf der Display-Section «RX SERVO« in der Zeile „PERI-OD“ 10 ms voreingestellt ist.
In erster Linie für den nachfolgend beschrieben „Satellitenbetrieb“ zweier HoTT-Empfänger gedacht, kann das von einem als SUMO definierten Empfänger generierte Summensignal beispisseweise aber auch zur Ansteuerung von Flybarless-Systemen oder
über das Adapterkabel mit der Best.-Nr. 33310 zur Ansteuerung von Flugsimulatoren genutzt werden. Im ...
Satellitenbetrieb
... werden zwei HoTT-Empfänger über ein 3-adriges Verbindungskabel (Best.-Nr. 33700.1 (300 mm) oder 33700.2 (100 mm)) am Servoanschluss mit der jeweils hochsten Nummer miteinander verbunden. Nähere Einzelheiten hierzu finden Sie im Internet unter www.graupner.de.
Über diese Verbindung werden alle Kanäle desjenigen HoTT-Empfängers, der als SUMO konfiguriert wurde, und als Satellitenempfänger bezeichnet wird, permanent auf den zweiten HoTT-Empfänger, den Hauptempfänger, welcher als ...
... zu programmieren ist, übertragen. Das Signal besteht also immer nur in Richtung SUMI.
Der als SUMI definierte Empfänger wiederum nutzen bei Empfangsausfall jedoch nur dann das vom SUMOCOMMende Summensignal, wenn mindestens 1 Kanal im SUMI auf Fail-Safe programmiert ist.
Hat der als Satellitenempfänger SUMO programmierte Empfänger einen Empfangsausfall, behnme die an thisem Empfänger angeschlossenen Servos vollig unabhängig vom Hauptempfänger, die im Satellitenempfänger programmierten Fail-Safe-Positionen ein. Kommt es dagegen bei beiden Empfängern gleichzeitig zu einem Empfangsausfall, dann greifen bei der zum Zeitpunkt der Drucklegung dieser Anleitung aktuellen Empfängersoftware im Prinzip die Fail-Safe-Einstellungen des SUMO's. Im Einzelfall sind jeder Wechselwirkungen keinesfalls ausschlussgeben,
weshalb hier nur dringend empfohlen werden kann, VOR Inbetriebnahme eines Modells entsprechende Tests durchzuführen.
These Empfänger-Konfiguration ist dann zu empfehlen, wenn z.B. einer der beiden Empfänger an empfangstechnisch ungunstiger Stelle im Modell eingebaut ist oder infolge Dusen, Kohlefasermaterial oder dergleichen die Gefahr besteht, dass das Empfangssignal fluglagenabhängig abgeschwacht wird, sodass mit Einbruchen der Reichweite zu rechnen ist.
Schlieben Sie daher die wichtigen Steuerfunktionen unbedingt an den als SUMI programmierten Hauptempfänger an, damit das Modell im Störungsfall auch dann steuerbar bleibt, sobald der Satellitenempfänger SUMO kein gultiges Signal mehr erhalten. Telemetrie-Daten wie z.B. die Spannung der Bordstromversorgung sendet dagegen nur der als SUMO konfigurierte Satellitenempfänger zum Sender. Telemetrie-Sensoren sind demzufolge an den Satellitenempfänger (SUMO) anzuschlieben.
Jeder Empfänger sollte mit einer eigenen Zuleitung aus der gemeinsamen Spanningsversorgung angeschlossen werden. Bei hohen Strömen eventuell sogg in doppelter Ausführung. Soll dagegen jeder der beiden Empfänger aus einer eigenen Spannings
quelle versorgt werden, dann ist unbedingt das mittlere Kabel aus einem der beiden Stecker des Satellitenkabels zu entfern, siehe Abbildung.
Falls Sie weitere Programmierungen wie z.B. Fail-Safe-Einstellungen vornehmen möchten, trennen Sie
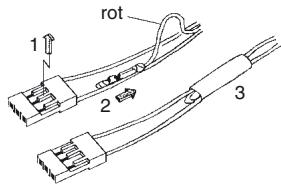
die dreipolige Satelliten-Verbindung zwischen den beiden Empfängern und schalten Sie nur den be-treffenden Empfänger ein. Ggf. müssen Sie auch die Bindungs-Reihenfolge ändern.
GRAFISCHE SENSORANZEIGE
SENSOR AUSWÄHLEN
MENÜ MODEL SELECT
Drucken Sie die INC-Taste um in die Zeile ,MODEL
SELECT" zu wechseln.
Drucken Sie anschließend ENTER ...
→AIRPLANE,HEL.I.,GLID.
CAR
und nocheinmal ENTER ...
RECEIVE
RECEIve+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
... und nachfolgend die INC-Taste, um ihren Sensor mit dem Pfeilsymbol anzuwahlen und abschiedeND durch drucken der ENTER-Taste auszuwahlen:
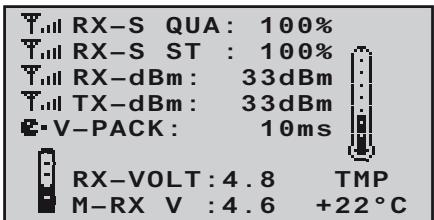
Anzeige Telemetrie-Daten
Wie gerade im Menu »SENSOR AUSWÄHLEN « ...
RECEIVE
RECEIve+GENERAL/GAS
RECEIve+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
... beschreiben, kann die Ausgabe grafisch aufbereitet. Daten eines ggf. an den Empfänger angeschlossenen Sensors aktiviert werden. Diese Daten werden dann in den nachfolgend beschriebenen Grafikdisplays entsprechend dargestellt.
Zwischen den einzelnen Grafikdisplays blättern Sie mit der INC oder DEC Taste hin und her und wahlen mit EN-TER aus, mit ESC kehren Sie wieder zur Grundanzeige darüber.
Hinweis:
Die Reihenfolge der nachfolgend beschriebenen Displays folgt dem Antippen der INC-Taste.
Naheres zu den nachfolgend genannten Modulen finden Sie im Anhang sowie im Internet unter www.graupner.de bei dem jeweiligen Produkt.
EMPFÄNGER „RECEIVE“
TXRX-SQUA:100%
TXRX-SST 100%
T.RX-dBm: 33dBm
TTX-dBm: 33dBm
E·V-PACK: 10ms

RX-VOLT:4.8 TMP
M-RX V :4.6 +22°C
Dieses Display stellt die im Display »RX DATAVIEW « des Telemetriè-Menùs »EINSTELLLEN/ANZEIGEN«, Seite 46, dargestellt den Daten grafisch aufbereitet dar. Es bedeutet:
| Wert | Erläuterung |
| RX-S QUA | Signalqualität in % |
| RX-S ST | Signalstärke in % |
| RX-dBm | Empfangsleistung in dBm |
| TX-dBm | Sendeleistung in dBm |
| V PACK | zeigt den langsten Zeitraum in ms an, in dem Datenpakete bei der Übertragung vom Sender zum Empfänger verlorengegangen sind |
| RX-VOLT | Aktuelle Betriebsspannung des Empfängers in Volt |
| M-RX V | minimalste Betriebsspannung des Empfängers seit der letzten Inbetriebnahme in Volt |
| TMP | das Thermometer visualisiert die aktuelle Betriebstemperatur des Empfängers |
GENERAL MODUL
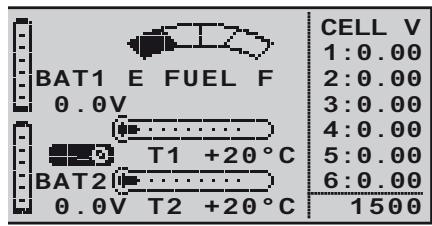
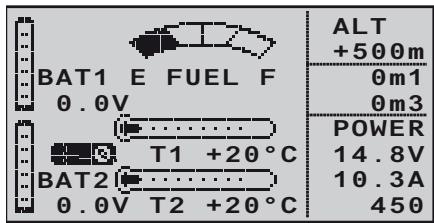
Dieses Display visualisiert die Daten eines ggf. an den Empfänger angeschlossenen General-Engine-Moduls, Best.-Nr. 33610, oder eines General-Air-Moduls, Best.-Nr. 33611. Naheres zu diesen Modulen finden Sie im Anhang oder im Internet unter www.graupner.de bei dem jeweiligen Produkt.
Abhängig von der Bestückung der Module mit Sensoren, können in this dem Display folgende Daten permanent ausgegeben werden:
Die aktuelle Spannung von bis zu zwei Akkus (BAT1 und BAT2); die Messergebnisse von bis zu zwei Temperatur-sensoren (T1 und T2) sowie eine Füllstandsanzeige des Treibstofftankes.
Am rechten Rand wird alternierend entweder eine Auflistung der aktuellen Zellenspannungen eines bis zu sechszelligen LiPo-Akkus ausgegeben oder die aktuelle Höhe relativ zum Standort, Steigen/Sinken in m/1s und m/3 s, der aktuelle Strom in Ampere sowie die aktuelle
Spannung des am Sensor angeschlossenen Akkus.
Es bedeutet:
| Wert | Erläuterung |
| BAT1 / BAT2 | Akku 1 bzw. Akku 2 |
| FUEL | Treibstoffstand / Tankanzeige |
| E / F | Leer / Voll |
| T1 / T2 | Temperatur von Sensor 1 bzw. 2 |
| CELL.V | Zellenspannung von Zelle 1 ... max. 6 |
| 1500 | aktuelle Drehzahl in U/min |
| ALT | aktuelle Höhe |
| 0m1 | m/1 s Steigen/Sinken |
| 0m3 | m/3 s Steigen/Sinken |
| POWER V | aktuelle Spannung des Antriebsakkus |
| A | aktueller Strom in A |
| ,450" | entnommene Kapazität in mAh |
ELECTRIC AIR-MODUL
| 0.0V | 0A | CELL V |
| ALT +500m | 1L0.00 |
| BAT1 | 0m/1s | 2L0.00 |
| 0.0V | 0m/3s | 3L0.00 |
| T1 +20°C | 4L0.00 |
| BAT2 | | 5L0.00 |
| 0.0V T2 +20°C | 6L0.00 |
| 0.0V | | 7L0.00 |
| 0.0V | 0A | CELL V |
| ALT +500m | 1H0.00 |
| BAT1 | 0m/1s | 2H0.00 |
| 0.0V | 0m/3s | 3H0.00 |
| T1 +20°C | 4H0.00 |
| BAT2 | | 5H0.00 |
| 0.0V T2 +20°C | 6H0.00 |
Dieses Display visualisiert die Daten eines ggf. an den Empfänger angeschlossenen Electric-Air-Moduls Best.-Nr. 33620. Naheres zu diesen Modul finden Sie im Anhang oder im Internet unter www.graupner.de bei dem jeweiligen Produkt.
Abhängig von der Bestückung des Moduls mit Sensoren, können in thisem Display folgende Daten permanent ausgegeben werden:
Die aktuelle Spannung von bis zu zwei Akkus (BAT1 und BAT2); die Messergebnisse von bis zu zwei Temperatursensoren (T1 und T2); die aktuelle Höhe relativ zum Standort sowie das Steigen/Sinken des Modells in m/1 s und m/3 s und in der Mitte des Displays noch der aktuellen einer Spanningsquelle entnommene Strom angezeigt Am rechten Rand werden alternierend die aktuellen Zellenspannungen der an Balancer-An Schluss 1 (L) oder 2 (H) angeschlossenen je max. 7-zelligen Akku-Packs ausgegeben.
Es bedeutet:
| Wert | Erläuterung |
| V | aktuelle Spannung |
| A | aktueller Strom |
| BAT1 / BAT2 | Akku 1 bzw. Akku 2 |
| ALT | aktuelle Höhe |
| m/1s | m/1 s Steigen/Sinken |
| m/3s | m/3 s Steigen/Sinken |
| T1 / T2 | Temperatur von Sensor 1 bzw. 2 |
| L bzw. H | Zellenspannung von Zelle 1 ... max. 14
L = Balancer-Anschluss 1
H = Balancer-Anschluss 2 |
Vario
Dieses Display visualisiert die Daten eines ggf. an den Empfänger angeschlossenen Vario-Moduls Best.-Nr. 33601.
Es bedeutet:
| Wert | Erläuterung |
| HÖHE | aktuelle Höhe |
| RXSQ | Signalstarke des beim Empfänger ankommenden Signals in % |
| MAX | das voreingestellte Höhenlimit relativ zum Startort, bei denen Überschreitung akustische Warnsignale ausgegeben werden |
| MIN | die voreingestellte maximale Unterschiedlung des Startortes, ab welchecher akustische Warnsignale ausgegeben werden |
| m/1s | m/1 s Steigen/Sinken |
| m/3s | m/3 s Steigen/Sinken |
| m/10s | m/10 s Steigen/Sinken |
GPS
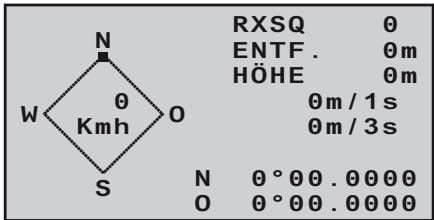
Dieses Display visualisiert die Daten eines ggf. an den Empfänger angeschlossenen GPS-Moduls mit integriertem Vario, Best.-Nr. 33600.
Neben den aktuellen Positionsdaten und der Geschwindigkeit des Modells im Zentrum des Displays wird noch die aktuelle Höhe in Relation zum Startort sowie das Steigen/Sinken des Modells in m/1 s, m/3 s und m/10s; die aktuelle Empfangsqualität sowie die Entfernung des Modells vom Startort angezeigt.
Es bedeutet:
| Wert | Erläuterung |
| W / N / O / S | Westen / Norden / Osten / Süden |
| Kmh | Geschwindigkeit |
| RXSQ | Signalstärke des Rückkanals |
| ENTF. | Entfernung |
| HÖHE | aktuelle Höhe relativ zum Startort |
| m/1s | m/1 s Steigen/Sinken |
| m/3s | m/3 s Steigen/Sinken |
| m/10s | m/10 s Steigen/Sinken |
Mit der mx-10 HoTT können zwei HoTT-Sender auch kabellos zu einem Lehrer-/Schüler-System kombiniert werden. Dabei muss der zweite Sender keine mx-10 HoTT sein, auch jeder andere HoTT-Sender mit der Möglichkeit des kabellosen L/S-Betriebs ist dazu geeignet. Lesen Sie dazu die Bedienungsanleitung Ihres HoTT-Fernsteuersystems!
Die Umschaltung vom normalen Betriebsmodus zum Lehrer- oder Schuler Sender erfolgt durch den Modus-Schalter auf der linken Oberseite des Senders:
Modus Normal
Lehrer Schuler

Um den Modus zu wechseln, bringen Sie den Modus-Schalter bei ausgeschaltetem Sender in die gewünschte Position, drücken und halten den BIND-Taster und schalten anschließend den Sender ein.
Zur Anzeige des eingestellen Modus...
| LED Anzeige | Summer | Beschreibung |
| orange LED leuchtet | - | Sender in Modus normal, Länderein-stellung: general |
| orange LED blinkt einmal | zwei Pieptö-ne nach dem Einsatzen | Sender in Schüler Modus |
| orange LED blinkt zweimal | 2x zwei kurze Pieptöne nach dem Einsatz | Sender in Lehrer Modus |
Siehe auch LED und Summersignale auf Seite 20.
Wichtiger Hinweis:
Die nachfolgende Beschreibung basiert auf der zum Zeitpunkt der Drucklegung dieser Anleitung aktuellen Version 1.00 der Sendersoftware und ist gleichermaßen gültig für alle vorangegangenen Softwareversionen. Es ist jedoch nicht auszuschlieben, dass nach einem der{nachsten Updates die nachfolgende Beschreibung nicht mehr mit der dann gegebenen Funktionalität des LS-Systems des Senders übereinstimmt.
mx-10 HoTT als Lehrer-Sender
Das Schulungsmodell muss komplett, d.h. mit all seinen Funktionen einschließlich Trimmung und etwaigen Mischfunktionen im HoTT-Lehrer-Sender einprogrammiert sein. Das zur Schulung vorgesehene Modell muss somit vollig unabhängig vom jeweils anderen Sender, vom Lehrer-Sender uneingeschränkt steuerbar sein. Zum Abschluss der Vorbereitungen ist jeder das Schulungsmodell an den Schüler-Sender zu binden.
Beachte beim Einsatz der mx-10 HoTT als Schüller-sender: die mx-10 HoTT kann nur im Modus „normal“ gebunden werden. Vor einem Einsatz als Schüller-Sen-der ist das Modell also im Modus „normal“ zu binden, erst dann kann in den „Schüler“-Modus umgeschaltet werden.
AuBerdemarfkeinMischeraktiviertsein,steckenSiedenJumperdaherindemittlerePosition"NO MIX" siehe dazuSeite37.
Alle f芮 Kanale des Lehrer-Senders mx-10 HoTT werden an den Schuler-Sender übergeben.
Die Steueranordnung des Schüler-Senders kann vom Lehrer-Sender abweichen, da bei der Übergabe an den Schüler-Sender auch Steueranordnung und die Mischer übergeben werden. Der Lehrer-Sender muss dazu aber mit allen Funktionen und Mischern für das Schulungsmodell programmiert werden.
Nachdem der Schüler-Sender gebunden ist, bringen Sie die mx-10 HoTT in den Lehrer-Modus. Bringen Sie dazu bei ausgeschalteten Sender den Modus-Schalter in die Mittelstellung, drücken und halten den BIND-Taster und schalten anschließend den Sender ein.
Drücken Sie nun den BIND-Taster des Schüler-Senders:
mx-10 HoTT: drucken und halten
Nachfolgend wird die Einstellung der mx-12/16/20 HoTT zum Schüler-Sender beschreiben. Lesen Sie dazu auch die Anleitung Ihres Fernsteuersystems! Schalten Sie den Sender ein und blättern Sie mit den Pfeiltasten der linken oder rechten 4-Wege-Taste zum Menüpunkt «Lehrer/Sch« des Multifunktionsmenus. (Die zuvor an den Schüler-Sender gebundene Empfangsanlage des Schulungsmodells muss während des folgenden Prozesses nicht zwingend eingeschaltet sein.):
Servoeinst Gebereinst D/R Expo Phasentrim Flachenmix Freie Mix Servoanz. Allg.Einst Fail-Safe Telemetrie Lehrer/Sch Info Anz.
Mit einem Druck auf die zentrale SE-Taste der rechten 4-Wege-Taste öffnen Sie diesen Menüpunkt:
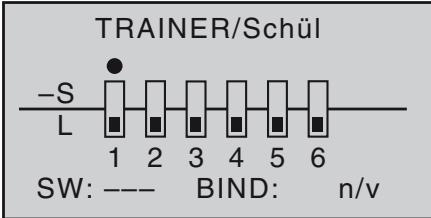
Bringen Sie den Marker / Cursor mit den Pfeiltasten der linken oder rechten 4-Wege-Taste zum Eingabefeld „BIND". Solle rechts besoin „SW:“ ein Schalter zu sehen sein, ist dieser zuvor zwingend zu Löschen, siehe Abbildung:
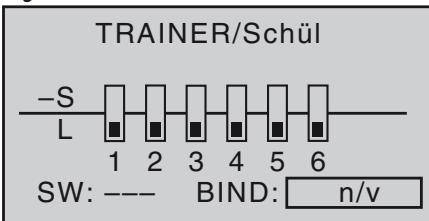
Mit einem Druck auf die zentrale SE-Taste der rechten 4-Wege-Taste aktivieren Sie den Binding-Prozess, die Anzeige n/v wechselt zu BINDING.
Bei Verwendung eines andereren HoTT-Senders als Schüler-Sender lesen Sieitte die entsprechende Anlei
tung zum kabellosen Lehrer/Schuler-System.
Binden des Schüler-Senders an den Lehrer-Sender
Hinweis:
Während des Binde-Vorganges sollte der Abstand der beiden Sender nicht allzu groß sein. Ggf. ist die Positionierung der beiden Sender zuändern und der Binde-Prozess erneut auszulösen.
Der Lehrer-Sender mx-10 HoTT muss abschließlich an den Schüler-Sender gebunden werden. Drücken Sie dazu den BIND-Taster an der Vorderseite. Nach ein paar Sekunden wird der erfolggreiche Binding-Vorgang durch einen kurzen Piepton bestätigt, das Schulungsmodell kann mit dem Lehrer-Sender gesteuert werden.
Beim Schüler-Sender mx-12/16/20 HoTT wechseln
BINDEN zu EIN:
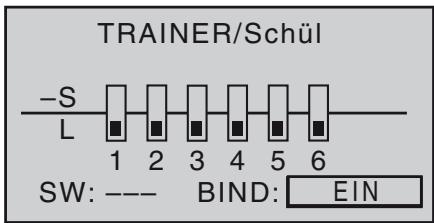
Um die Übergabe durchfuhren zu konnen, müssen Sie den Modus-Schalter der mx-10 HoTT nach vorne drücken - in den Modus „Schüler". Solange dieser Schalter gedrückt bleibt, hat der Schüler-Sender die Kontrolle über das Modell. Lassen Sie den Schalter wieder los, um die Steuerkontrolle wieder dem Lehrer-Sender zu übergeben.
Bechte: auch wenn der Sender vorübergehend ausgeschaltet wird, bleibt der Lehrer-Modus beim erneuten Einsatzen aktiv.
Einstellung Schüler-Sender
Das vom Schüler zu steuernde Modell muss komplett im Lehrersender programmiert werden. Im Schülersender verbleibt die Programmierung in der Grundstellung. Alle anderen Einstellungen sowie alle Misch- und Koppelfunktionen erfolgen ausschließlich im Lehrer-Sender und werden von thisem zum Empfänger übertragen. Bei der Zuordnung der Steuerfungtionen sind die üblichen Konventionen einzuhalten:
| Kanal | Funktion |
| 1 | Motordrossel/Pitch |
| 2 | Querruder/Rollen |
| 3 | Höhenruder/Nicken |
| 4 | Seitenruder/Heckrotor |
Der HoTT-Empfänger des betreffenden Modells muss an den Schüler-Sender „gebunden“ sein. Eine ausfuhrliche Beschreibung des Linde-Vorganges finden Sie auf Seite 38 bzw. 42.
Bechte: die mx-10 HoTT kann nur im Modus „normal“ gebunden werden. Vor einem Einsatz als Schüler-Sender ist das Modell also im Modus „normal“ zu binden, erst dann kann in den „Schüler“-Modus umgeschaltet werden. Außer demarfkein Mischer aktiviert sein, stecken Sie den Jumper daher in die mittlere Position „NO MIX“, siehe dazu Seite 37.
Nachdem der Sender gebunden ist, bringen Sie die mx-10 HoTT in den Schüler-Modus. Bringen Sie dazu bei ausgeschaltetem Sender den Modus-Schalter in die vordere Stellung, drücken und halten den BIND-Taster und schalten anschließend den Sender ein.
Binden des Schüler-Senders an den Lehrer-Sender
Hinweis:
Während des Linde-Vorganges sollte der Abstand der beiden Sender nicht allzu groß sein. Ggf. ist die Positionierung der beiden Sender zu ändern und der Linde-Prozess erneut auszulösen.
Drucken und halten Sie nun den BIND-Taster des Schüler-Senders mx-10 HoTT.
Lehrer-Sender:
mx-10 HoTT: BIND-Taster drücken und halten Nach ein paar Sekunden wird der erfolgreiche Binding-Vorgang durch einen kurzen Piepton bestätigt, das Schulungsmodell kann mit dem Lehrer-Sender gesteuerert werden.
mx-12/16/20 HoTT: Schalten Sie den Sender ein und blättern Sie mit den Pfeiltasten der linken oder rechten 4-Wege-Taste zum Menüpunkt «Lehrer/Sch « des Multifunktionsmenus. (Die zuvor an den Schüler-Sender gebundene Empfangsanlage des Schulungsmodells muss während des folgenden Prozesses nicht zwingend eingeschaltet sein):
Servoeinst
Gebereinst
D/R Expo
Phasentrim
Flächenmix
Freie Mix
Servoanz.
Allg.Einst
Fail-Safe
Telemetrie
Lehrer/Sch
Info Anz.
Mit einem Druck auf die zentrale SET-Taste der rechten 4-Wege-Taste öffnen Sie diesen Menüpunkt:
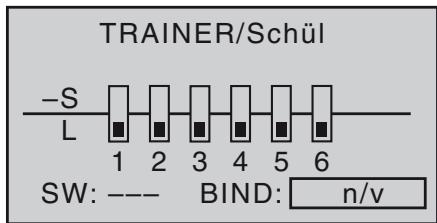
Geben Sie mit jeweils einem Druck auf die zentrale SE-Taste der rechten 4-Wege-Taste die an den Schüler zu übergebenden Steuerkanäle frei. Das Symbol wechselt jeweils von zu Beispelsweise:
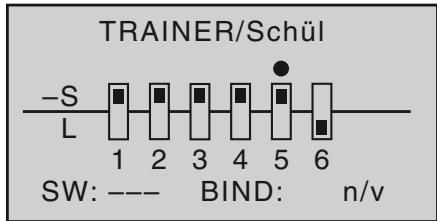
Wichtiger Hinweis:
Beim hier zu beschreibenbenden kabellosen HoTT-System werden STEUERKANÄLE übergeben!
Soll also beispielsweise die Querruder-Funktion (2) übergeben werden und ist das Modell mit zwei Querruderservos ausgestattet, welche üblicherweise an den Empfängeranschlüssen 2 und 5 angeschlüssen sind, dann sind beim kabellosen System folglich auch die Steuerkanäle 2 und 5 zu übergeben - siehe obige Abbildung. Um die Übergabe durchführten zu können, müssen Sie noch einen Lehrer-Schüler-Umschalter zuordnen. Platzieren Sie dazu die Markierung mit den Pfeiltasten der linken oder rechten 4-Wege-Taste links unternehmen „SW:“ und weisen Sie einen Schalter zu. Verwenden Sie dazu vorzugsweise den Momentschalter
SW 1, um die Steuerung jederzeit an den Lehrer-Sender zurücknahmen zu konnen:
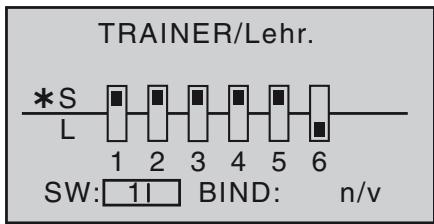
bringen Sie nun die Markierung mit den Pfeiltasten der linken oder rechten 4-Wege-Taste nach rechts, zu „BIND: n/v“:
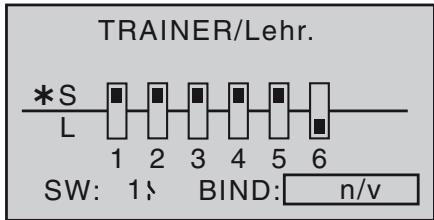
Schließen Sie ggf. den zuvor definierten Lehrer-/Schü-ler-Umschalter ...
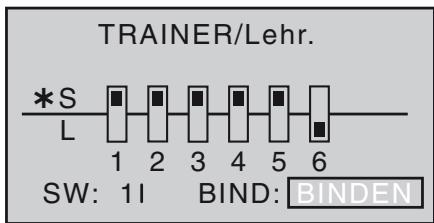
... und lösen mit einem Druck auf die zentrale SE-Taste der rechten 4-Wege-Taste den „BINDEN“-Prozess aus. Sobald dieser Prozess abgeschlossen ist, erscheint im Display anstelle des blinkenden „BINDEN“ „EIN“.
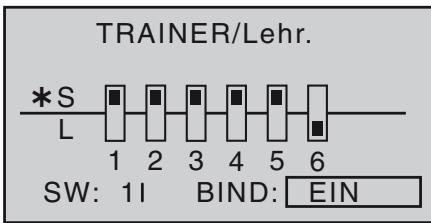
Bechte: auch wenn der Sender vorübergehend ausgeschaltet wird, bleibt der Schüler-Modus beim erneuten Einsatzen aktiv.
Lehrer-Schüler Betrieb
Beide Sender werden kabellos per „BINDUNG“ miteinander verbunden.
Wichtiger Hinweis: Überprüfen Sie unbedingt VOR der Aufnahme eines Lehrer-/Schüler-Betriebs am betriebsbereiten Modell alle Funktionen auf korrekte Übergabe.
Während des Schulungsbetriebs konnen Lehrer und Schüler durchaus lockeren Abstand halten. Die so genannte Rufweite (max. 50 m)sollte allerdings keinesfalls übersritten werden, und es sollen den sich auch keine weitere Personen zwischen Lehrer und Schüler befinden, da dies die Reichweite des zur Verbindung der beiden Sender genutzten Rückkanals verringern kann. Desweiteren ist zu beachten, dass wegen der Nutzung des Rückkanals für die kabellose Lehrer-/Schüler-Funktion in this modus keine Telemetriedaten des Modells übertragen werden konnen.
Sollte es während des Schulungsbetriebes Dennoch einmal geschehen, dass die Verbindung zwischen Lehrer- und Schüler-Sender verloren besteht, dann übernimmt automatisch der Lehrer-Sender die Steuerung
des Modells. Befindet sich in dieser Situation der LS-Umschalter in der „Schüler“-Position, dann beginnnt für die Dauer des Signalverlustes die zentrale LED des Lehrer-Senders mx-10 HoTT 4x orange zu blinken und es erten die korrespondierenden akustischen Warnsignale.
In beiden Fällen sollen den Sie vordergrundig für geringeren Abstand zwischen den beiden Sendern sorgen. Hilft dies nicht, dann sollen den Sie umgehend landen und nach der Ursache suchen.
Funktionsüberprüfung
Mögliche Fehlerursachen:
Schuler-Sender nicht bereit
- Fehlendes „Binding“ zwischen Lehrer-Sender und HoTT-Empfänger im Schulungsmodell.
Kabelloser L/S-Betrieb mit dem HoTT Lehrer-Kabel für mx-Sender mit HoTT S-RX Summensignal Best.-Nr. 33310
Mit dem optional erhähtlichen HoTT Lehrer-Kabel 33310 und einem HoTT-Empfänger mit Summensignalausgang kann jeder HoTT-Sender mit DSC-Buchse zum kabellosen Lehrer-Sender ausgebaut werden.
Damit lassst sich die mx-10 HoTT als preisgünstiger Schüler-Sender mit allen HoTT-Sendern kombinieren. Die Übertragung der Signale des Schüler-Senders zur Lehrer-Sender erfolgt über einen HoTT Empfänger, der am Sendergehause z. B. mittels selbstklobendem Klettband befestigt wird.
Dieser Empfänger muss mit dem Schüler-Sender gebunden" sein!
Verbinden Sie den JR-Stecker des Kabels mit dem Summensignalausgang Ihres Empfängers, z.B. beim Empfänger GR-12 Kanal 6 und den Klinkenstecker mit der DSC-Buchse des Senders. Die Stromversorgung these Empfängers übernimmt ein zusätzlicher Akku oder ein dreipoliges Verbindungskabel zur DATA-Buchse des Senders.
Programmieren Sie das abschreiben für diesen Empfänger das Summensignal SUMO. Siehe dazu den Abschnitt „Teimetrie" auf Seite 55.
Die Freigabe einzeln der Kanäle an den Schüler-Sender erfolgt über das «Lehrer/Schüler«-Menu des Lehrer-Senders. Vergessen Sie nicht, innerhalb desses Menü einen Lehrer-Schüler-Schalter zu setzen, um die freiigegebenen Kanäle auf den Schüler-Sender übergeben zu konnen.
Überprüfen Sie VOR dem Einsatz des Lehrer-Schüter-Betriebs die einwandfrei Funktion.
Schalten Sie für einen Test den Schüler-Sender aus. Im Lehrer-Sender sollte eine Warnanzeige erscheinen. Das Modell ist wieder über den Lehrer-Sender steuerbar. Sollte diese Anzeige nicht aufleuchten, dann setzen Sie im »Telemetri«-Menu des Schüler- Senders beim als SUMA-programmierten Empfänger die Fail-Safe-Einstellung des Kanals 1 auf „AUS" und die eines beliebigen anderen Kanals auf „FAIL SAFE". Sollten vereinzt „Warntone" zu horen sein, vergroßern Sie den Abstand zwischen Lehrer- und Schüler-Sender und achten Sie auf einen möglichst großen Abstand des als SUMO-programmierten Empfängers vom HoTT-HF-Modul des Lehrer-Senders.
Anhang
Hoch entwickelte, stabilisierte Empfängerstromversorgung mit intelligentem Power-Management.
Die Einheit sorgt für eine stabilisierte und einstellbare Stromversorgung des Empfängers, um die Zuverlösigkeit der Stromversorgung noch weiter zu erhöhen. Passend für entsprechliche Empfänger-Akkus, um einen unkomplizierten und breit gefächerten Einsatz zu garantieren. Soltte während des Betriebs die Akku-Spannung auch nur kurzzeitig einbremen, wird dies gespeichert und angezeigt, um mit thisem Hinweis einer Unterdimensionierung oder gar Ausfall des Empfänger-Akkus entgegenzuwirken.
Zum Betrieb mit einem oder zwei Empfänger-Akkus. (Simultane Entladung bei Betrieb mit zwei Akkus)
Passend fur 5- oder 6-zelligen NiMH bzw. 2-zelligen LiPo- oder LiFe-Akku. Graupner/JR-, G3,5-, G2- und BEC-Stecksysteme.
- Drei einstellbare Pegel für die Ausgangsspannung zur Versorgung des Empfängers (5,1V / 5,5V / 5,9V).
Zwei ultrahelle LEDs zeigen getrennt den Betriebszustand von Akku 1 und Akku 2 an.
- Integrierter, hochwertiger Ein-/Aus-Schalter
- Hochstromfähige Ausführung
- Flacher Aufbau des Schalters und der LEDs um die Optik und Eigenschaften des Modells nicht zu beeinflussen.
- Geradliniger Aufbau von Befestigungslaschen, LEDs und Schalter für eine einfache Montage mittels beiliegender Bohrschablone.

GPS-/Vario-Modul Graupner HoTT
Best.-Nr. 33600
Vario mit Höhensignalen und je 5 Steig- und Sinksignalen sowie integriertes GPS mit Enternungsmessung, Streckenmessung, Geschwindigkeitsanzeige, Anzeige der Flugrichtung und der Koordinaten
- Zusätzliche Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkgeschwindigkeit in zwei Stufen
- Höhenanzeige und Speicherung der min. und max. Höhe.
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer
Einstellbare Warniederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal
- Der GPS/Vario Sensor kann direkt am Telemetrieeingang des Empfängers angeschlossen werden.
Technische Daten Vario:
- Höhenmessung: -500 m ... +3000 m
- Auflösung: 0,1 m
- Empfindlichkeit Vario: 0,5 m/3s, 1 m/3 s, 0,5 m/s, 1 m/1 s, 3 m/s pro Ton programmierbar
- Mittelwertberechnung: 4 - 20 Messungen pro Messwert programmierbar

Vario-Modul Graupner HoTT
Best.-Nr.33601
Vario mit Höhensignalen und je 5 Steig- und Sinksignaltönen, Höhenanzeige und Speicherung der min. und max. Höhe.
- Zusätzliche Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkgeschwindigkeit in zwei Stufen
- Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer
Einstellbare Warniederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal
- Der Vario Sensor kann direkt am Telemetrieeingang des Empfängers angeschlossen werden.
Technische Daten
- Höhenmessung: -500 m ... +3000 m
- Auflösung: 0,1 m
- Empfindlichkeit Vario: 0,5 m/3s, 1 m/3 s, 0,5 m/s, 1 m/1 s, 3 m/s pro Ton programmierbar
- Mittelwertberechnung: 4 - 20 Messungen pro Messwert programmierbar

General Engine-Module Graupner HoTT
Best.-Nr. 33610
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit Verbrennungs- oder Elektromotor:
- 2x Temperatur- und Spannungsmessungen mit Warnschwellen für min. und max. Spannung und min. und max. Temperatur
- Einzelzellenmessung mit Warnschwellen für min. Spannung
- Spannings-, Strom- und Kapazitätssmessung mit Warnschwellen für min. und max. Spannung, max. Kapazität und max. Strom
- Strombegrenzung programmierbar
- Strommessung mit Shuntwiderständen 2 × 1 mOhm parallel = 0,5 mOhm
- Drehzahlmessung und Warnschwellen für min. und max. Drehzahl
- Treibstoffmessung mit Warnschwellen in 25% Schritten (nach Softwareupdate).
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal
- 2x Temperatur wahlweise 0 bis 120^ oder 200^ und Spannungsmessung bis 80 V DC
- 1x Drehzahlmessung bis 100 000 U/min mit Zweiblattluftschaube
- 1x Fahrenregler/Servo Eingang, 1x Eingang Drehzahlregelung, 1x Fahrenregler/Servo Ausgang für Drehzahlregelung
- 1x Strom-, Spannungs- und Kapazitätsmessung bis 40 A (Puls 1 s bis 60 A) und bis 30 V
- 1x Einzelzellenüberwachung für 2 - 6S Lithium-Akkus (LiPo, Lilo, LiFe)
- usw., siehe www.graupner.de bei dem jeweiligen Produkt

General Air-Module Graupner HoTT
Best.-Nr. 33611
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit Verbrennungs- oder Elektromotor:
- Vario mit Höhensignalen und Steig- und Sinksignalen und zusätzlichen Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkgeschwindigkeit in zwei Stufen
- Höhenanzeige (-500 ... +3000 m) und Speicherung der min. und max. Höhe.
- 2x Temperatur- und Spannungsmessungen mit Warnschwellen für min. und max. Spannung und min. und max. Temperatur
- Einzelzellennmessung mit Warnschwellen für min. Spannung
- Spannings-, Strom- und Kapazitätssmessung mit Warnschwellen für min. und max. Spannung, max. Kapazität und max. Strom
- Drehzahlmessung mit Drehzahlregelung (programmierbar) und Warnschwellen für min. und max. Drehzahl
- Treibstoffmessung mit Warnschwellen in 25% Schritten.
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min,omal
- 2x Temperatur wahlweise 0 bis 120^ oder 200^ und Spannungsmessung bis 80 V DC
- 1x Drehzahlmessung bis 100 000 U/min mit Zweiblattluftschaube
- 1x Fahrtenregler/Servo Eingang, 1x Eingang Drehzahlregelung, 1x Fahrtenregler/Servo Ausgang für Drehzahlregelung
- 1x Strom- und Spannungs- und Kapazitätsmessung bis 40 A (Puls 1s: 60 A) und bis 30 V
- usw., siehe www.graupner.de bei dem jeweiligen Produkt

Electric Air-Module Graupner HoTT
Best.-Nr. 33620
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit Elektromotor
- Vario mit Höhensignalen, Steig und Sinksignalen sowie zusätzlichen Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkgeschwindigkeit in zwei Stufen
- Höhenanzeige (-500 ... +3000 m) und Speicherung der min. und max. Höhe.
- 2x Temperatur- und Spannungsmessungen mit Warnschwellen für min. und max. Spannung und min. und max. Temperatur
- Einzelzellenmessung 2 ... 14S mit Warnschwellen für min. Spannung
- Spannings-, Strom- und Kapazitätssmessung mit Warnschwellen für min. und max. Spannung, max. Kapazität und max. Strom
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer
- Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal
- 2x Temperatur wahlweise 0 bis 120^ oder 200^ und Spannungsmessung bis 80 V DC
- 1x Fahrtenregler Eingang, 1x Fahrtenregler Ausgang für Einzelzellenunterspannungsbregelung
- 1x Strom- und Spannungs- und Kapazitätsmessung bis 150 A (kurzz. 1 Sek. 320 A) und bis 60 V
- 1x Einzelzellenüberwachung für 2 - 14S Lithium-Akkus (LiPo, Lilo, LiFe)
1x Telemetrianschluss fur Empfänger

RPM Magnet-Sensor Graupner HoTT
Best.-Nr. 33616
Zum Anschluss an das General-Engine-(Best.-Nr. 33610), General-Air-(Best.-Nr. 33611) oder Electric-Air-Modul (Best.-Nr. 33620).
Die jeweilige Blattzahl ist im Telemetrié-Menü des Moduls vorzuwahlen.
RPM Optik-Sensor Graupner HoTT
Best.-Nr. 33615
Zum Anschluss an das General-Engine-(Best.-Nr. 33610), General-Air-(Best.-Nr. 33611) oder Electric-Air-Modul (Best.-Nr. 33620).
Die jeweilige Blattzahl ist im Telemetrié-Menü des Moduls vorzuwahlen.

Graupner HoTT Smart-Box
Best.-Nr. 33700
Unterschiedlichste Funktionen vereint in einem Gerät machen die SMART-BOX zu ihrem künftigen smarten Begleiter. Egal ob Echtzeit Telemetriedaten angezeigt oder Einstellungen an ihrem HoTT System vorgenommen werden sollen, 8 x 21 Zeichen auf einem großzügigen Display machen ein einfaches Handling möglich. Ein integrierter Summer zur Ausgabe akustischer Signal- und Warntöne erweitert zudem nochmals die flexible Verwendung der BOX.
Mittels des beigelegten Montagesets, kann das Gerät an den Haltebügeln der Handsender befestigt werden und ist damit optimal positioniert, um auch während des Steuerns Ihres Modells in Echtzeit Telemetriedaten ablesen zu konnen.
Die Updatefähigkeit durch den Anwender hält die SMART-BOX immer auf dem neusten Stand und sichert die Erweiterung um zukünftige Funktionen.
- Senderspanningsanzeige mit einstellbarer Warnschwelle
- Reichweitetest
- Empfangertemperatur
Servoumkehr
- Servoweg
- Kanalvertauschung
- Mischereinstellungen
Ländereinstellung
- Signalqualität
- Empfängerspannung
- Servoneutralstellung
- Zykluszeit
- Fail-Safe-Einstellungen
Servotest
Abmessungen: ca. 76mm× 72mm× 17mm (LxBH)
Gewicht: ca. 55 g

Graupner HoTT USB-Schnittstelle
Best.-Nr. 7168.6
These USB-Schnittstelle wird zusammen mit dem separat lieferbaren Adapterkabel Best.-Nr. 7168.6A zum Updaten von Empfängern und Sensoren bestehtigt.

Graupner HoTT Adapterkabel
Best.-Nr. 7168.6A
Dieses Adapterkabel wird zusammen mit der separat lieferbaren USB-Schnittstelle Best.-Nr. 7168.6 zum Updaten von Empfängern und Sensoren bestehtigt.
Contents
Safety Notes 71
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien (Used batteries)
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien (Used batteries)
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
Konformitätserklung gemäß dem Gesetz über Funkanlagen und Telekomunikationsendeinrichtungen (FTEG) und der Richtlinie 1999/5/EG (R&TTE) Declaration of Conformity in accordance with the Radio and Telecomunikations Terminal Equipment Act (FTEG) and Directive 1999/5/EG (R&TTE)
Graupner GmbH & Co. KG
Hemmetenstraße 9490 D-73230 Kirchheim/Teck
erhält, does das Pro
erklärt, dass das Produkt: declares that the product
#
Geräteklasse: Equipment class
den grundlegenden Anforderungen des 3 und den übrigen einschlädigen Bestimmungen des FTEG (Artikel 3 der R&TTE) entspricht. complies with the essential requirements of 3 and the other relevant provisions of the FTEG (Article 3 of the R&TTE Directive).
Angewendete harmonisierte Normen:
Harmattanee standardae appn
Gesundheit und Sicherheit gemäß § 3 (1) 1. (Article 3 (1)a) Health and safety requirements pursuant to § 3 (1) 1. (Article 3 (1) a))
Schutzanforderungen in Bezug auf elektromagnetische Verträglichkeit § 3 (1) 2, Artikel 3 (1) b))
Protection requirement concernig electromagnetic compatibility § 3 (1) 2, Artikel 3 (1) b))
Maßnahmen zur effizienten Nutzung des Frequenzspektrums § 3 (2) (Article 3 (2))
Kirchheim, 09. März 2011
Graupner GmbH & Co. KG Henriettenstraße 94-96 D-73230 Kirchheim/Teck Germany
Tel: 07021/722-0 Fax: 07021/722-188 Email: info@graupner.de
Servicestellen / Service / Service après-venture
Graupner-Zentralservice
Graupner GmbH & Co. KG
Henriettensstrasse 94 - 96
D-73230 Kirchheim
Servicehotline
(+49) 01805472876*
Montag - Freitag
9:30-11:30 + 13:00-15:00 Uhr
c.dunkel@graupner.ch
Espana
Anguera Hobbies
C/Terrassa 14
E 43206 Reus (Tarragona).
( +34) 977755320
info@anguera-hobbies.com
Sverige
Baltechno Electronics
Box 5307
S 40227 Göteborg
(+)317073000
France
Graupner France
Gérard Altmayer
86, rue St. Antoine
F 57601 Forbach-Oeting
( +33 ) 387856212
United Kingdom
Graupner Service
Brunel Drive
GB, NEWARK, Nottinghamshire
NG242EG
(44) 1636610539
Italia
GiMax
Via Manzoni, no. 8
I 25064 Gussago
(+)39)0302522732
- 0,14 Cent / Minute aus dem
Festnetz der deutschen
T-Com. Abweichende Preisefur Anrufe aus Mobilfunknetzden oder aus dem Festnetz.
2014-06-30: das zum 1. Januar 2014, anderer Anbieter möglich.
Die Fa. Graupner GmbH & Co. KG, Henriettensstraße 94 - 96, D-73230 Kirchheim/Teck gewährt ab dem Kaufdatum auf diese Produkte eine Garantie von 24 Monaten. Die Garantie gilt nur für die bereits beim Kauf des Produktes vorhandenen Material- oder Funktionsmängel. Schäden, die auf Abnützung, Überlastung, falsches Zubehor oder unsachgemäß Behandlung zurückzuführen sind, sind von der Garantie ausgeschlossen. Die gesetzlichen Rechte und Gewährleistungsansprüche des Verbrauchers werden durch diese Garantie nicht berührt.itte überprüfen Sie vor einer Reklamation oder Rücksendung das Produkt genau auf Mängel, da wir Ihnen bei Mängelfreiheit die entstandenen Unkosten in Rechnung stellen müssen.
Firmenstempel und Unterschrift des Einzelhändlers:
D-73220 KIRCHHEIM/TECK
GERMANY
http://www.graupner.de
Änderungen sowie Liefermöglichkeiten vorbehalten.
Lieferung nur durch den Fachhandel. Bezugsquellen
werden nachgewiesen. Für Druckfehler kann keine Haftung
übernommen werden.
Obwohl die in dieser Anleitung enthaltenen Informationen sorgfältig auf ihre Funktion
hin überprüft wurden, kann für Fehler, Unvollständigkeiten und Druckfehler keinerlei
Haftung übernommen werden. Graupner besteht sich das Recht vor, die beschriebenen
Software- und Hardwareeremarkmale jederzeit unangekündigt zu ändern.