MODE D'EMPLOI MX-10 GRAUPNER
»Grundeinstellung « (Modèle)
Flächenmodell 36
| RX CURVE | <> |
| >CURVE1 CH : 02 | |
| TYPE : A | |
| CURVE2 CH : 05 | |
| TYPE : A | |
| CURVE3 CH : 04 | |
| TYPE : B | |
| 5CH FUNCTION: SERVO | |
| RX CURVE | <> |
| >CURVE1 CH : 02 | |
| TYPE : A | |
| CURVE2 CH : 05 | |
| TYPE : A | |
| CURVE3 CH : 04 | |
| TYPE : B | |
| 5CH FUNCTION: SERVO | |
| RX CURVE | <> |
| >CURVE1 CH : 02 | |
| TYPE : A | |
| CURVE2 CH : 05 | |
| TYPE : A | |
| CURVE3 CH : 04 | |
| TYPE : B | |
| 5CH FUNCTION: SERVO | |
Conseils de sécurité 137
Conseils de sécurité et utilisation des accus NiMH...141
Introduction. 143
Description de l'ensemble RC 144
Chargeurs conseillés 146
Alimentation émetteur 147... récepteur. 148
Réglage de la hauteur des manches de commande. 149
Ouverture du boîtier émetteur 150
Inversion du carottage des manches 150
Description de l'émetteur 152
Éléments de commande 152
Dos de l'émetteur 153
Prise DATA 153
Mise en route de l'émetteur 154
Mise à jour de l'émetteur 155
Mise en route du récepteur 158
Mise à jour du récepteur. 160
Conseils d'implantation 162
Alimentation de la réception 163
Glossaire 165
Trims digitaux et calibrage des manches. 166
Modèles à voilure fixe 167
Attribution des sorties récepteur 168
Hélicoptères 169
Attribution des sorties récepteur 169
Description des différents programmes
Réglages de base (modèle) Modèles à voilure fixe 170
Réglage selon le pays. 170
Configuration empennage 171
Procédure Binding pour récepteurs 172
Essai de portée 173
Hélicoptères 174
Réglage selon le pays 174
Procédure Binding pour récepteurs 176
Essai de portée 176
Réglage des servos 177
“Fail Safe” 177
« Télemétrie » 179
Réglages / Affichage 180
Émetteur. 180
Récepteur Dataview 181
Récepteur Servo 182
Récepteur Failsafe 183
Récepteur Mixage 186
Récepteur Expo 187
Récepteur Servo Test 187
AFFICHAGE DES DONNÉES. 191
Récepteur. 191
Module Général. 192
Module Électric Air 192
Module Vario 193
Module GPS. 193
Ecolage 194
Moniteur 194
Eleve 195
Annexe
Annexe. 200
Informations FCC 202
Déclaration de conformité 203
Garantie 204
Protection de l'environnement
Le symbole sur le produit, sur le mode d'emploi ou sur l'emballage, vous informe que ce matériel ne peut pas simplement être jeté en fin de vie. Il doit être confié à un centre de tri pour le recyclage des différents éléments électriques et électroniques.
Conformément à leur marquage, la plupart des matériels utilisés sont réutilisables pour d'autres applications. Par cette action, vous participez activement à la protection de notre environnement.

Les piles et accus doivent être enlevés de l'appareil et font l'objet d'un recyclage spécifique auprès de centres agréés. Renseignez-vous auprès de votre mairie ou des services compétents pour connaître les différents centres de ramassage et de recyclage.
Cette notice est avant tout une notice informative, et peut, sans avis préalable, être modifiée. La société Graupner décline toute responsabilité en cas d'erreurs ou d'inexactitudes qui pourraient apparaitre dans la partie Informations de ce manuel.
Conseils de sécurité
Afin de profiter pleinement et longtemps de votre passion, lisez impérativement cette notice, et respectez avant tout les conseils de sécurité qui y figurent. Vous devriez vous inscrire sous http://www.graupner.de/fr/service/enregisterProduit, c'est le seul moyen pour obtenir automatiquement par mail les dernières infos concernant votre produit.
Si vous êtes débutants dans le domaine du modélisme radiocommandé, avions, hélicoptères, bateaux ou voitures, faites-vous absolument assister par un pilote modéliste expérimenté.
Ce mode d'emploi est absolument à remettre au nouvel acquéreur en cas de revente de l'émetteur.
Domaine d'application
L'utilisation de cet ensemble de radiocommande est uniquement destinée à l'utilisation décrite par le fabricant dans ce manuel, c'est-à-dire au contrôle de modèles réduits ne transportant aucun passager. Tout autre utilisation ou application n'est pas autorisée.
Conseils de sécurité
LA SÉCURITÉ N'EST PAS DUE AU HASARD
LES MODELES RADIO-COMMANDES NE SONT PAS DES JOUETS
... car même de très petits modèles peuvent s'avérer être particulièrement dangereux par une mauvaise utilisation pour les personnes autour, pouvant causer des blessures physiques graves et occasionner des dégâts matériels aux infrastructures à proximité.
L'allumage inopiné des moteurs lié à un défaut mécanique ou électrique peut provoquer de graves blessures, et pas qu'à vous seuls!
Tout court-circuit de quelque nature que ce soit, est
absolument à éviter!
De plus, il peut endommager votre matériel, ainsi que vos accus, qui risquent de prendre feu, voir même d'exploser.
Toute motorisation entraînant des hélices d'avion ou de bateaux, de rotors d'hélicoptère, présentant à chaque instant un danger réel.
Ne les touchez pas lorsqu'ils sont en rotation!
Une hélice en mouvement peut facilement vous sectionner un doigt!
Portez une attention toute particulière à tout objet à proximité de la rotation de l'hélice qui pourrait être happé !
Dès que l'accu de propulsion est branché, ou que le moteur tourne, ne restez jamais à proximité de tout élément en mouvement, ou dans son champ de rotation!
Durant la programmation, veillez impérativement à ce que le moteur électrique ou thermique ne puisse pas se mettre inopinément en route. Si nécessaire coupez l'alimentation du carburant, en pinceant la durite, et, dans le cas d'un moteur électrique, débranchez l'accu de propulsion.
Protégez tout appareillage de la poussière, de la saleté, de l'humidité et de tout élément étranger. Ne soumettez jamais l'appareillage aux vibrations, à la chaleur ou au froid. L'ensemble radiocommande ne doit être utilisé que par des températures dites „normales“, c'est-à-dire dans une plage de - C à + 55° C.
Évitez les chocs, et les écrasements divers. Vérifiez régulièrement l'état général de votre ensemble, des fils et de sa connectique. Les éléments endommagés ou mouillés ne sont plus à utiliser même s'ils ont séchéés!
Seuls les éléments que nous préconisons doivent être utilisés. Au cas où vous décidiez de modifier ou de réparer un élément défectueux, n'utilisez que des pro
duits originaux Graupner compatibles entre eux, avec la même connectique et le même matériel.
Lorsque vous posez vos fils ou cordons dans le modèle, veillez à ce qu'ils ne soient pas sous tension et qu'ils ne soient pas pincés ou cassés. Les arêtes vives sont un réel danger pour l'isolement.
Veillez à ce que les branchements et la connectique soient fiables. En débranchant une prise, ne jamais tirer sur le cordon.
Aucune modification sur l'appareillage ne doit être effectuée. Évitez tout court-circuit et inversion de polarité, le matériel n'est pas pourvu de protection pour ce genre d'erreurs.
Implantation de l'ensemble de réception
Le récepteur doit être protégé à l'intérieur du modèle contre les chocs en l'enveloppant dans de la mousse, et fixé sur un couple résistant, et doit également être protégé contre toutes projections de poussière ou d'eau, notamment pour les modèles de voitures ou de bateaux. Le récepteur ne doit jamais être directement fixé sur le fuselage ou le châssis de la voiture à cause des vibrations du moteur et pour éviter que les chocs ne se transmettent directement au récepteur en cas d'atterrissage violent.
Lors du placement de l'ensemble de réception dans un modèle à moteur thermique, protégez toujours votre récepteur des gaz d'échappement et de toute projection d'huile. Ceci est particulièrement valable pour les modèles dont l'interrupteur ON/OFF est situé à l'extérieur du modèle.
Toujours placer le récepteur de façon à ce que l'antenne et les différents câblages vers les servos et vers
Conseils de sécurité
l'alimentation ne soient soumis à aucune tension et que l'antenne de réception soit à au moins 5 cm de toute partie métallique, ou câblage, qui ne sont pas directement branchés sur le récepteur. Cela comprend, non seulement les pièces métalliques ou en carbone, mais également les servos, moteurs électriques, pompes, tous types de cordons, etc.
Le, c'est de placer le récepteur à un endroit facilement accessible du modèle, en l'éloignant le plus possible de tous les autres éléments. Il ne faut en aucun cas enrouler l'antenne autour d'un fil servo ou de la faire passer à proximité!
Veillez également à ce que les cordons les plus proches de l'antenne ne puissent pas se déplacer en vol!
Positionnement de l'antenne de réception
Le récepteur et les antennes doivent être placés, de préférence, le plus loin possible de toute motorisation. Dans des fuselages carbone, il est impératif de faire ressortir l'extrémité de l'antenne du fuselage. Le sens dans lequel vous placer l'antenne de réception n'a pas grande importance. Il est néanmoins préféable de la monter verticalement dans le modèle. Dans le cas d'antennes Diversity (deux antennes), la deuxième ANTENNE doit être positionnée à par rapport à la première.
Montage des servos
Toujours fixer les servos avec les douilles caoutchouc anti-vibratoires fournies, seule cette solution permettra d'éviter les fortes vibrations.
Montage des tringles de commande
Ces commandes doivent toujours être positionnées et ajustées pour que leur mouvement soit souple et sans point dur. Il est particulièrement important que tous les servos puissent se déplacer librement, dans les deux
sens, sans être bloqué mécaniquement.
Pour pouvoir couper un moteur thermique, il faut que la commande soit installée de telle sorte que le carburateur soit complètement fermé quand le manche des gaz est au minimum ainsi que son trim.
Veillez tout particulièrement à ce que aucune partie métallique ne frotte à une autre partie métallique, lorsque vous déplacez une gouverne par exemple, lorsqu'il y a des vibrations ou lorsque des pièces sont en mouvement.
Vous risqueriez des „trops radio" qui poursaient endommager votre récepteur.
Positionnement de l'antenne d'émission
Une antenne déployée de manière rectiligne n'offre qu'un champ réduit de réception en bout d'antenne. Il est donc illusoire de penser qu'en pointant le bout de son antenne vers le modèle en évolution, on augmente la qualité de réception.
Lors de l'utilisation de votre ensemble RC avec d'autres pilotes, rapprochez-vous les uns des autres. Plus la distance entre pilotes est importante, plus vous risquez de perturber votre modèle et celui des autres.
Lorsque deux ou plusieurs pilotes avec des radios en 2,4 GHz sont regroupés à moins de 5 m, les uns des autres, il est possible que la voie de retour des données soit perturbée, et que cela déclenche une alerte de limite de portée. Dans ce cas, augmentez la distance entre les pilotes jusqu'à ce que l'alerte disparaisse.
Vérifications avant le vol
Avant d'allumer l'émetteur, assurez-vous que le manche de commande des gaz est en position arrêt/ralenti.
Toujours allumer d'abord l'émetteur et ensuite seulement le récepteur.
Toujours éteindre d'abord le récepteur, et ensuite seulement l'émetteur
Si cette procédure n'est pas respectée, c'est-à-dire récepteur sur ON et émetteur sur OFF, d'autres émetteurs utilisant la même fréquence peuvent prendre le contrôle de votre modèle et le rendre inconnable, pouvant occasionner des dégâts matériels ainsi que blesser les personnes se trouvant à proximité.
Ceci est particulièrement vrai pour les modèles équipés d'un gyroscope mécanique :
Avant de couper votre récepteur : coupez l'alimentation du moteur et assurez-vous que celui-ci ne peut plus se mettre en route de manière involontaire.
Un gyroscope qui vient d'être coupé peut générer une telle tension que le récepteur pense reconnaître un signal correct pour la commande des Gaz, et donc mettre en marche, involontairement, votre moteur!
Essai de portée
Avant chaque vol, vérifie toujours le bon fonctionnement de toutes les voies, et fais un essai de portée. Fixez correctement le modèle et veillez à ce que personne ne se trouve devant le modèle.
Au sol, testez toutes les voies/fonctions du modèle, en faisant une simulation complète de vol, pour déceler d'éventuelles erreurs de programmation ou autres. À ce sujet, suivez les conseils en pages 62 et 71.
Pour le pilotage de votre voiture ou avion RC, n'utilisez jamais votre émetteur sans antenne, et vérifiez que celle-ci soit montée correctement sur l'émetteur.
Évolution avec des avions, hélicoptères, voitures, bateaux
Ne survolez jamais le public ou les autres pilotes. Ne mettez jamais en danger les gens ou les animaux à proximité. Ne volez jamais à proximité des lignes à haute tension. Ne faites pas naviguer notre bateau à proximité des écluses ou sur les canaux réservés au traffic fluvial réel. Évitez de faire évoluer votre voiture sur des routes, autoroutes, chemins ouverts à la circulation des véhicules, etc.
Contrôle des accus d'émission et de réception
Quand la tension de la batterie de l'émetteur faiblit, une alerte visuelle sur l'écran apparaît « Rechargez l'accu » accompagné d'un signal d'alarme sonore, il est impératif d'arrêter immédiatement l'utilisation de l'émetteur et de procéder à la charge de l'accu.
Vérifiez régulièrement l'état de vos accus, notamment celui de l'accu de réception. N'attendez pas pour le recharger seulement lorsque vous remarquez la lenteur de déplacement des palonniers de vos servos!
Si vous avez le moindre doute, n'hésitez pas à remplacer vos accus usagés.
Respectez toujours les temps de charge ainsi que les valeurs de charge indiquées par le fabricant. Ne faites jamais charger un accu sans surveillance!
N'essayez jamais de recharger des piles sèches, non rechargeables (danger d'explosion).
Chaque accu doit être rechargé avant toute nouvelle utilisation. Afin d'éviter les courts-circuits, branchez en premier les fiches bananes sur votre chargeur en respectant la polarité, puis seulement le cordon de charge sur l'émetteur et l'accu de réception.
Débranche systématiquement tout accu de votre
modèle en cas d'une inutilisation prolongée.
Capacité et temps d'utilisation
Valable pour toute source d'énergie : la capacité de charge baisse à chaque nouvelle charge. En cas de températures très basses, la résistance interne augmente lorsque la capacité se réduit, et, dans ce cas, la capacité de restitution de l'énergie et le maintien de la tension se réduisent également.
Les charges fréquentes ou l'utilisation de chargeurs rapides peuvent déterminer plus rapidement l'état de vos accus et diminuer leur capacité. C'est pourquoi il est conseillé de vérifier tous les 6 mois au moins, leur état et leur capacité, et les remplacer immédiatement en cas de doute ou de défaut.
N'utilisez que des accus originaux Graupner!
Antiparasitage des moteurs électriques
Tous les moteurs électriques provoquent des étincelles entre le collecteur et les charbons, qui, selon le type de moteur, peuvent plus ou moins perturber le bon fonctionnement de la radiocommande.
Pour un fonctionnement correct, il est indispensable d'antiparasiter les moteurs électriques. C'est pourquoi, dans des modèles à motorisation électrique, il faut antiparasiter correctement les moteurs. Le fait de les antiparasiter diminue sensiblement le risque de perturbations, mesure qui devrait être appliquée dans tous les cas.
Suivez les conseils d'utilisation et de montage qui figurent dans la notice du moteur.
Pour de plus amples précisions relatives à
l'antiparasitage des moteurs, voir catalogue général FS Graupner ou notre site internet sous www.graupner.de.
Ferrites d'antiparasitage servos pour rallonges
Réf. Cde:1040
L'utilisation des ferrites (filtre) est indispensable si vous êtes obligés d'utiliser de grandes longueurs de fils pour le branchement des servos. Ce filtre est donc branché directement sur la sortie récepteur. Dans des cas extrêmes, un deuxième filtre peut être placé sur le servo lui-même.
Utilisation d'un variateur électronique
Le bon choix d'un variateur électronique dépend avant tout de la puissance du moteur utilisé.
Afin d'éviter une surcharge ou une dépréciation du variateur, la capacité de celui-ci devrait être au moins égale à la moitié de la tension de blocage supportée par le moteur.
Une attention toute particulière doit être apportée aux moteurs Tuning, qui, compte tenu de leur faible nombre d'enroulements, peuvent absorber, en cas de blocage, plusieurs fois la capacité nominale et déterminer ainsi le variateur.
Allumage électrique
Même des allumages de moteurs thermiques peuvent provoquer des interférences qui se traduisent par une influence négative sur le bon fonctionnement de la radiocommande.
Alimentez votre allumage électrique toujours à partir d'une source d'alimentation séparée
N'utilise que des bougies antiparasités, des connexions et câbles blindés.
Placez-vous toujours le plus loin possible du système d'allumage.
Électricité statique
Les fonctions de l'émetteur peuvent être perturbées par des ondes magnétiques générées par les éclairs des orages, même si ceux-ci se trouvent encore à plusieurs kilomètres de vous. C'est pourquoi...
... si vous voyez que le temps se met à l'orage, cessez toute activité!
Par ailleurs, le chargement d'électricité statique par l'antenne d'émission peut constituer un réel danger de mort!
Attention
- pour respecter correctement les conditions d'émission HF FCC d'un émetteur mobile, il faut, lors de son utilisation, respecter une distance d'au moins 20 cm ou plus entre l'antenne d'émission et les personnes. De ce fait, il est déconseilé de s'en servir à des distances inférieures.
- pour éviter des interférences et perturbations dues aux caractéristiques électriques et au mode d'émission, veillez à ce qu'il n'y ait aucun autre émetteur à moins de 20 cm.
- Côté émetteur, l'utilisation d'un ensemble de radio-commande nécessite une programmation correcte, en fonction du pays dans lequel vous vous trouvez. Ceci est nécessaire pour respecter les diverses législations et directives en vigueur, FCC, ETSI, CE, etc. Suivez les consignes données dans la notice de l'émetteur et de celles du récepteur.
- Avant chaque vol, faites un essai de portée et du bon fonctionnement de toutes les commandes en faisant une simulation de vol complète, pour déceler d'éventuelles erreurs de programmation ou autres.
- N'effectuez jamais de programmation au niveau
de l'émetteur, ni du récepteur durant l'utilisation du modèle.
Entretien
Ne jamais nettoyer le boîtier de l'émetteur, l'antenne etc. avec des produits d'entretien ménager, essence, eau, mais exclusivement avec un chiffon sec et doux.
Composants et accessoires
La Société Graupner GmbH & Co. KG commande, en temps que fabricant, de n'utiliser que des composants et accessoires de la société Graupner, produits qui ont été testés et contrôlés. Dans ce cas, la société Graupner accorde une garantie constructeur.
La société Graupner décline toute responsabilité en cas d'utilisation de pièces non homologuées ou accessoires d'autres fabricants et ne peut pas juger, pour chaque composant étranger, si celui-ci présente un risque ou non.
Exclusion de responsabilité / dédommagement
Le respect de la notice de montage et d'utilisation, ainsi que l'installation des différents éléments et l'entretien de la radiocommande, ne peuvent pas être surveillés par la société Graupner. C'est pourquoi, la société Graupner décline toute responsabilité en cas de perte, dommages ou autres coûts résultant d'une utilisation de composants non adaptés pouvant avoir un lien avec l'incident.
Dans la limite du cadre légal, la responsabilité de la société Graupner est limitée, quelque en soit la raison, à la valeur d'achat et à la quantité du produit fourni par la société Graupner lié à l'incident. Ceci n'est pas valable si la société Graupner, contrainte juridiquement, suite à un manquement grave constaté, porte l'entière responsabilité.
Conseils de sécurité et d'utilisation des accus nimh
Comme pour tous les produits de haute technologie, le respect des consignes de sécurité et des conseils d'utilisation ci-dessous est une condition incontournable pour une longue durée de vie, et pour un fonctionnement fiable en toute sécurité.
Conseils de sécurité
- Les accus ne sont pas des jouets, c'est pourquoi il ne faut pas que les enfants puissent jouer avec. C'est pour cette raison qu'il faut les stocker hors de portée des enfants.
- Avant chaque utilisation, vérifie l'état des accus. Ne plus jamais utiliser des accus endommagés ou défectueux.
- Les accus ne peuvent être utilisés que dans le cadre du domaine d'application et de leur caractéristiques techniques spécifiques.
- Ne jamais surchauffer les accus, ne pas les jeter au feu, ne pas les court-circuiter ou les charger avec des intensités trop élevées.
- Des accus composés : d'éléments branchés en parallèle, d'un mélange d'éléments neufs et usagés, d'éléments de différentes marques, de différentes tailles, de différentes capacités, ou de différents types d'éléments ne peuvent en aucun cas être utilisés.
- Retirez toujours les accus des appareils si vous ne vous en servez pas. Pour éviter toute décharge trop forte, fousez always l'appareil quand vous ne vous en servez plus. Rechargez les accus en temps et en heures.
- Durant la charge, placez les accus sur une surface résistant à la chaleur, non inflammable et non conductrice, loin de tout object facilement inflammable.
- Ne jamais laisser des accus en charge sans surveillance. La tension de charge rapide maximale indiquée sur chaque type d'accu ne doit jamais être dépassée.
- Si, durant la charge, l'accu chauffe à plus de C, il faut immédiatement interrompre la charge de l'accu et le laisser revenir à une température de C env.
- Ne jamais recharger des accus qui sont déjà chargés, des accus qui sont encore chauds ou des accus qui ne sont pas entièrement déchargés.
- Il est formellement interdit d'effectuer une modification quelconque sur le pack d'accus. Ne jamais faire de soudures ou de soudure à l'arc sur un élément.
- en cas de mauvaises manipulations, il y a risques d'incendies, d'explosions et de brûlures. Pour combattre un tel feu, seules des couvertures anti-feu, du sable ou des extincteurs CO² sont appropriés.
- L'électrolyte qui s'échappe d'un élément est corrosif. Évitez tout contact avec la peau ou avec les yeux. En cas de problèmes, rincez abondamment avec de l'eau et consultez immédiatement un médecin.
- les ouilles de refroidissement des éléments ne doivent en aucun cas être bouchées ou obturées par ex. par de l'étain. Lors des soudures à l'étain, il ne faut pas dépasser une température de 220°C pendant plus de 20 secondes. Pour éviter toute déformation, ne pas mettre les éléments sous contrainte mécanique.
- En cas de surcharge de l'accu, procédez de la manière suivante : Débranchez tout simplement l'accu et posez-le sur une surface non inflammable (par ex. sur une pierre) et laissez-le refroidir. Ne le gardez jamais en main, pour échapper au risque d'explosion.
- Veillez à ce que les instructions de charge et de décharge soient respectées.
Généralités
La capacité de votre accu se réduit au fur et à mesure des charges et des décharges. Même le stockage peut contribuer à une diminution de sa capacité.
Stockage
Un stockage correct de ces accus ne peut se faire que lorsque l'accu est totalement déchargé, dans un endroit sec, à des températures ambiantes de +5° C à +25° C. En cas de stockage de plus de 4 semaines, la tension des éléments ne doit pas chuter en dessous de 1,2 V.
Étalonnage des différences éléments de l'accu
- Pour étalonner de nouveaux éléments, amenez-les, par une charge normale, à leur capacité de charge maximale. Dans ce cas, on peut appliquer une formule empirique qui conseille de charger un accu vide pendant 12 heures à 1/10ème de la capacité indiquée. Dans ce cas, chaque élément aura absorbé la même capacité. Un tel étalonnage devrait être effectué à chaque fois, toutes les dix charges, de cette manière, les éléments sont toujours étalonnes, et leur durée de vie sera ainsi augmentée.
- Si vous avez la possibilité d'effectuer une décharge individuelle de chaque élément, il faut utiliser cette possibilité avant toute nouvelle charge. Sinon, il faut décharger le pack d'accus jusqu'à atteindre une tension de 0,9 V par élément. Cela correspond, si on prend l'exemple du pack de 4 éléments monté dans l'émetteur, à une tension de décharge de 3,6 V.
Charge
La charge ne peut se faire qu'avec des intensités, des temps de charge et des plages de températures de charge bien précises, et toujours sous surveillance. Si vous n'avez aucun changeur rapide sous la main, sur lequel vous pouvez régler la tension de charge avec précision, l'accu peut être rechargé, en charge normale, selon la méthode du 1/10 C, voir exemple ci-dessus.
En règle générale, et compte tenu des différents niveaux de charge des éléments, un accu d'émission ne devrait être charge qu'à 1/10 C. Mais l'intensité de charge ne doit en aucun cas dépasser l'intensité de charge maximale indiquée dans la notice de l'émetteur :
Charge rapide
- Si vous chargeur offre cette possibilité, réglez la coupure Deltapeak à 5 mV par élément. Néanmoins, la plupart des chargeurs sont réglés d'origine, de manière fixe à 15... 20 mV par élément, et peuvent de ce fait, être utilisés aussi bien pour la charge des accus NiCd que pour celle des accus NiMH. Si vous avez le moindre doute, consultez la notice ou renseignez-vous auprès de votre détaillant pour savoir si votre chargeur est adapté à la charge des accus NiMH. Si le doute persiste, vous pouvez tout de même charger votre accu avec une intensité réduite de moins, par rapport à l'intensité de charge maximale indiquée.
Décharge
Tous les accus distribués par Graupner et GM Racing sont adaptés, selon le type d'accu, à une décharge en continu maximale de 6... 13 C (respectez les consignes fabricant!) Plus l'intensité de décharge en continu est élevée, et plus la durée de vie est réduite.
Utilisez votre accu jusqu'à ce que son rendement diminue, c'est-à-dire, jusqu'au déclenchement de l'alarme de tension trop faible.
Attention :
Si vous stockez votre accu pendant une période assez longue, la tension des différents éléments ne doit pas chuter en dessous de 1,2. Si nécessaire, il faudra recharger l'accu avant de le stocker. - Les charges réflexes ou les programmes de charges / décharge réduisent inutilement la durée de vie des accus et ne sont destinées qu'à vérifier la qualité de l'accu ou à redrawnner une seconde chance à de nouveaux éléments. De la même manière, faire un cycle de charge/décharge avant utilisation de l'accu est sans intérêt, à moins que vous ne vouliez vérifier la qualité de ce dernier.
Recyclage des piles et accus usagés
Selon la loi allemande actuellement en vigueur, chaque utilisateur est tenu de rendre les piles ou accus usagés. Il est interdit de les jeter aux ordures ménagères. Vous pouvez les déposer dans un centre de tri ou de collecte de votre commune, dans un de nos points de vente, ou dans tout autre commerce qui revend ce type de produit. Vous pouvez également nous retourner les piles ou accus usagés que nous vous avons vendus, suffisamment affranchi, à l'adresse suivante :
Vous participez ainsi, de manière efficace, à la protection de l'environnement!
Attention:
Des accus endommagés nécessitent un emballage particulier et bien spécifique, car ils peuvent s'avérer dangereux !!!
Mx-10 1X11 une technologie de toute dernière génération
HoTT (Hopping Telemetry Transmission) est une synthèse du savoir-faire, d'Engineering et de nombreux essais réalisés à travers le monde par des pilotes professionnels dans le domaine des 2,4 GHz avec communication bi-directionnelle entre émetteur et récepteur grâce à une voie de return d'informations intégrée dans le récepteur. Basé sur le système de la Graupner/JR-Computer mc-24, introduite sur le marché en 1997, le système de commande mx-10 HoTT a spécialement été créé pour les débutants. Néanmoins, tous les types de modèles réduits classiques peuvent être pilotés avec la mx-10 HoTT, qu'il s'agisse d'avions, de planeurs, d'hélicoptères, de bateaux ou de voitures.
Des mixages complexes aux niveaux des gouvernes, lorsqu'il s'agit d'avions ou de planeurs, ou des mixages du plateau cyclique dans le cas d'un hélicoptère, sont souvent incontournables. Grâce à cette nouvelle technologie, on peut, de manière simple et rapide, activer ou désactiver l'un ou l'autre des programmes de mixage, requis par le modèle. Sélectionnez le type de modèle, et le logiciel activera automatiquement tous les réglages et mixages nécessaires à ce type de modèle.
De ce fait, plus besoin de modules à part au niveau de l'émetteur, et plus besoin de mixages mécaniques laborieux dans le cadre.
Même des hélicoptères équipés d'un système „Flybarless" peuvent être pilotés.
L'émetteur mx-10 HoTT offre une qualité et une fiabilité à toute épreuve.
Grâce à une structure claire des programmes, le débutant se familiarisera rapidement avec les différentes fonctions.
La technologie Graupner HoTT permit, en théorie, d'utiliser 200 modèles à la fois. Mais en pratique, et
compte tenu des différentes conditions d'homologation pour l'utilisation d'émetteurs dans la bande des 2,4 GHz ISM, ce nombre est sensiblement réduit. Néanmoins, vous pourrez toujours utiliser un bien plus grand nombre de modèles à la fois dans la bande des 2,4 GHz, que dans la bande des 35-/40 MHz conventionnelle. Mais le facteur déterminant qui limite tout cela est - comme c'est d'ailleurs souvent le cas - la dimension de l'espace aérien disponible. Mais le seul fait qu'il n'y a plus besoin de s'accorder sur les fréquences, notamment à la pente, où on ne doit pas toujours tous les pilotes, est un, enorme gain au niveau de la sécurité. Grâce à la Smart-Box en option, vous avez un accès simple et rapide aux données et à la programmation des récepteurs HoTT ainsi qu'aux capteurs et sondes de télémétrie.
On peut par exemple ajouter des sorties récepteur, répartir des fonctions de commande sur plusieurs servos et ajuster les débattements et le sens de rotation des servos entre eux.
Dans cette notice, chaque menu est précisé en détails. De nombreux conseils, recommandations et exemples de programmation complètent ces descriptions.
En annexe, vous trouverez également d'autres informations relatives au système HoTT. En conclusion, vous trouverez en fin de notice, une déclaration de conformité et la garantie de l'émetteur.
Respectez les consignes de sécurité et les recommandations techniques. Lisez attentivement la notice et testez les différentes possibilités en branchant simplement les servos au récepteur fourni. Mais suivez les instructions données en page 162. Vous apprendrez ainsi très rapidement comment s'en servir, et les différentes fonctions qu'offre l'émetteur mx-10 HoTT.
Ayez un comportement responsable lorsque vous utilisez votre émetteur et votre modèle, pour ne pas mettre les autres personnes en danger.
Tout le Team-Graupner vous souhaite de nombreux et beaux vols avec votre mx-10 Hott de toute dernière génération.
Kirchheim-Teck, Octobre 2011
Grande fiabilité et sécurité de fonctionnement de la technologie Graupner HoTT, grâce à une communication bi-directionnelle entre émetteur et récepteur, avec système téléétrique intégré (par Smart-Box en option) et temps de réaction ultra rapides.
Programmation simple par "Jumper".
- Système de commande Microcomputer avec une technologie 2,4 GHz Graupner HoTT de dernière génération
- Communication bidirectionnelle entre émetteur et récepteur Temps de réaction ultra rapides, grâce à une transmission directe des données du processeur principal au module HF en 2,4 GHz et ce, avec une transmission
sionfiable.
- Menu de télécommande (par la Smart-Box en option) pour l'affichage des données telémétriques ainsi que la programmation des sondes et capteurs que l'on peut y brancher (en option) et des sorties récepteur. Antenne courte, repliable
- Programmation simple et réglages précis par interrupteur et touche
- 3 interrupteurs montés : un interrupteur 3 positions pour l'échappement, 2 interrupteurs 2 positions pour Dual Rate et voie 5 sur interrupteur.
- Sauvegarde des réglages émetteur par un système Backup des plus récents, sans batterie
- 5 voies de commande dont 1 sur interrupteur Inversion du sens de rotation servos
- Mode Selector, qui permet de passer d'un mode de pilotage 1... 4 (Gaz à gauche/droite etc.) à l'autre. Tous les réglages concernés par ce changement de mode sont automatiquement réadaptés.
- Menu voilure pour: 1 QR (aileron), 2 QR (alérons), empennage en V, Delta/ailes volantes
- Les réglages ci-dessous ne peuvent se faire qu'avec la Smart-Box, en option: Temps cycle servos pour servos digitaux de 10 ms, sélectionnable
- Réglage débattements servos +/- 150% pour toutes les sorties récepteurs, chaque côté régulable séparément (Single Side Servo Throw)
- Sub-Trim pour le réglage du neutre des servos dans une plage de +/- 125%
Caractéristiques hott
- Procédure de liaison émetteur - récepteur rapide et simple
- Possibilité d'assigner plusieurs récepteurs par modèle, en parallèle
- Re-Binding extrêmement rapide, même à portée maximale. Utilisation satellitaire de deux récepteurs par liaison spécifique.
- Fonction Alarme et essai de portée
- Message d'alerte sur l'écran émetteur dès que la tension récepteur est trop faible
- Plage de tension de fonctionnement du récepteur très large, de 3,6 V à 8,4 V (encore fonctionnel à 2,5 V)
- Fail Safe
- Attribution libre des voies (Channel Mapping), fonctions de mixage, ainsi que différents règles servos sont programmables dans le menu de télémétrie
- Jusqu'à 4 servos peuvent être commandés simultanément, en bloc, avec un temps cycle servo de 10 ms (uniquement avec des servos digitaux !)
- Insensibilité maximale grâce à une fréquence Hopping optimisée et une plage de fréquence large. Transmission intelligente des données avec fonction corrective.
- Affichage des données telémétriques en temps réel
- possibilité d'utiliser plus de 200 ensembles en même temps
- Résolument tourné vers l'avenir grâce à la possibilité de mises à jour par port DATA
Le set ref. cde. 33110 contient
Émetteur Microcomputer mx-10 HoTT avec accu d'émission NiMH 4NH-1500 RX RTU plat (sous réserve de modification), récepteur bi-directionnel Graupner GR-12 HoTT, cordon interrupteur et chargeur secteur.
Chargeurs recommandés (Accessoires)
| Réf. Cde.: | Désignation | Branchem. 220 V | Branchement 12 V | pour accus de type | Cordon de charge, intégré |
| NiCd | Ni-MH | LiPo | Plomb |
| 6407 | Multilader 3 | x | | x | x | | | x |
| 6411 | Ultramat 8 | x | x | x | x | x | | |
| 6425 | Twin Charger | x | | | x | | | |
| 6427 | Multilader 3 | x | | x | x | | | x |
| 6455 | Multilader 7E | x | | x | x | | x | |
| 6463 | Ultramat 12 plus Pocket | | x | x | x | x | x | |
| 6464 | Ultramat 14 plus | x | x | x | x | x | x | |
| 6466 | Ultra Trio plus 14 | x | x | x | x | x | x | |
| 6468 | Ultramat 16S | x | x | x | x | x | x | |
| 6470 | Ultramat 18 | x | x | x | x | x | x | |
Pour la charge de l'accu d'émission il faut le cordon Réf. 3022, et pour l'accu de réception, le cordon Réf. 3021, si ce n'est pas spécifique dans le tableau ci-dessus. Vous trouvez autres chargeurs ainsi que des détails concernant les chargeurs mentionnés ci-dessus dans notre catalogue général FS Graupner ou sur notre site internet sous www.graupner.de
Caractéristiques techniques de l'émetteur mx-10
Hott
| Bande de fréquence | 2,4 ... 2,4835 GHz |
| Modulation | FHSS |
| Puisance émetteur | Voir réglages selon les pays, page 170 ou 174 |
| Nbre de voies | 5 voies, dont 4 régibles par trim |
| Plage de température | -10 ... +55 °C |
| Antenne | repliable |
| Tension | 3,4 ... 6 V |
| Consommation | ca. 125 mA |
| Dimensions | ca. 190 x 195 x 90 mm |
| Poids | ca. 630 g grs avec accu d'émission |
Accessoires
Réf. Cde. Désignation
1121 Sangle, largeur 20 mm
70 Sangle, largeur 30 mm
3097 Protection intempéries pour émetteur
Pièces de rechange
Réf. Cde. Désignation
33112.1 4NH-1500 RX RTU à plat
33800 Antenne Hott émetteur
Caractéristiques techniques du récepteur GR-12 Hott
| Tension | 3,6 ... 8,4 V |
| Consommation | ca. 70 mA |
| Bande de fréquence | 2,4 ... 2,4835 GHz |
| Modulation | FHSS |
| Antenne | long. 145 mm,
gainées sur 115 mm avec ca.
30 mm actif |
| Nbre de sorties | 6 |
| Nbre de sondes | 1 (à la place du servo 5) |
| Plage de température | -15° ... +70 °C |
| Dimensions | 36 x 21 x 10 mm |
| Poids | 7 g |
- La tension de fonctionnement autorisée ci-dessus ne s'applique qu'au récepteur! A ce sujet, sachez que la tension d'entrée du récepteur qui est retransmise aux sorties récepteur n'est pas régulée, alors que la plage de tension de la plupart des servos, variateurs, gyroscopes ou autres n'ont qu'une plage de tension de 4,8 à 6 Volt!
Vous trouvez d'autres accessoires en annexe ou sur notre site Internet sous www.graupner.de. Vous pouvez également vous renseigner auprès de votre détaillant, qui saura vous conseiller.
Alimentation de l'émetteur
D'origine, l'émetteur mx-10 Hott est fourni avec un accu rechargeable de haute capacité NiMH-4NH-1500 RX RTU (Réf. 33112.1). (Sous réserve de modification).
Durant l'utilisation, la tension de l'accu d'émission doit être surveillée en permanence, à l'écran.
Durant l'utilisation, la tension de l'accu d'émission, dont l'état est indiqué par une LED, doit être surveillée.
Lorsque la tension chute en dessous d'un certain seuil régulable sur la ligne „Seuil de déclenchement alarme accus“ du menu „TX“ de la Smart-Box en option, seuil réglé d'origine à 4.5 V, une alarme se déclenche et la LED orange se met à clignoter par une suite de 5 clignotements rapides.
| TX | > |
| ACTION | VOLT: | 05.4V |
| MAXIMUM | VOLT: | 05.5V |
| MINIMUM | VOLT: | 05.4V |
| ALARM | VOLT: | 04.7V |
| COUNTRY | : | GENERAL |
| RANGE TEST | : | OFF 90s |
Il est maintenant grand temps de poser, de couper l'émetteur et de recharger l'accu!
Charge de l'accu d'émission
L'accu d'émission Ni-MH peut être rechargé grâce à la prise de charge située sur le côté droit de l'émetteur, avec le chargeur (Réf. 33116.2) fourni avec l'émetteur. En ce qui concerne la durée de la charge, il existe une règle empirique qui dit qu'un accu vide peut être rechargé en 12 heures env. avec une tension de charge équivalente à 10% de la capacité de l'accu. Si vous êtes en possession du chargeur et de l'accu standard fourni,
La tension de charge est alors de 200 mA. Pour couper la charge, c'est à vous de le faire...
Durant toute la durée de la charge, l'émetteur doit être en position « OFF », c'est-à-dire coupé. Ne jamais allumer l'émetteur, tant qu'il est relié au chargeur!
Une interruption, aussi brève soit-elle, du processus de charge peut faire monter la tension de charge au point d'endommager immédiatement l'émetteur. C'est pourquoi il faut toujours veiller à ce que les connexions utilisées, prises, fiches, soient correctes et fiables.
Polarité de la prise de charge MX-10 hott
Les cordons de charge d'autres marques que l'on trouve dans le commerce ont souvent des polarités différentes. C'est pourquoi, n'utilisez que des cordons de charge originaux Graupner avec la Réf. 3022.

Charge avec des chargeurs automatiques
D'origine, la prise de charge de l'émetteur est équipée d'un détrompeur et peut néanmoins être utilisée, avec des chargeurs appropriés pour une charge rapide de l'accu d'émission.
Réglez votre chargeur rapide, conformément à sa notice, sur une différence de tension Delta Peak de 10 mV... 20 mV ou équivalent, afin qu'il soit compatible avec la charge rapide des accus Ni-MH.
Branchez d'abord les fiches bananes du cordon de charge sur le chargeur, puis branchez l'autre extrémité du cordon de charge dans la prise de charge de l'émetteur. Ne reliez jamais des extrémités dénudées à un cordon de charge branché sur l'émetteur! Pour éviter tous dégâts sur l'émetteur, ne dépassez pas une intensité de charge de 1 A. Vous pouvez régler
cela, si nécessaire, sur le chargeur.
Pour retirer l'accu d'émission
Pour retirer l'accu, il faut d'abord déverrouiller le couvercle du logement accu, au dos du boîtier, puis l'enlever.

Enlevez l'accu puis débranchez avec précaution la prise de l'accu d'émission en tirant soigneusement sur le cordon.
Remise en place de l'accu d'émission
Tenez la prise de l'accu d'émission de manière à ce que le fil noir ou brun soit en face de l'antenne et que la fiche inoccupée de la connexion de l'accu soit dirigée vers le bas, puis enfilez la prise de branchement de l'accu sur les trois plots de l'intérieur de l'émetteur (la prise de branchement de l'accu a deux arêtes cassées (détrompé).
pour éviter toute inversion de polarité (voir croquis ci-contre).
Remontez ensuite l'accu dans son logement et refermez le couvercle.
Polarité de la prise de l'accu émission
Alimentation du récepteur
Pour l'alimentation du récepteur, vous avez le choix entre différents accus 4-5 éléments NiMH de capacités différentes. Si vous utilisez des servos digitaux, nous vous conseillons un accu 5 éléments (6V) avec une capacité suffisante. Si vous utilisez des servos digitaux et analogiques, veillez à ne pas dépasser la tension maximale autorisée. Pour une alimentation stabilisée, régable de l'alimentation du récepteur, avec 1 ou 2 accus de réception, vous pouvez utiliser par ex. l'unité PRX Réf. Cde 4136, voir annexe.
Pour des raisons de sécurité, n'utilise jamais de boîtier portepiles, ou des piles sèches.
Pour des raisons de sécurité, n'utilise jamais de boîtier portepiles ou des piles sèches.
La tension de l'alimentation embarquée „R-VOLT“ est affichée durant toute l'évolution du modèle, sur l'écran de la Smart-Box, en option:
| RX DATAVIEW > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT :05.0V |
| L.R-VOLT:04.5V |
| SENSOR1 :00.0V 00°C |
| SENSOR2 :00.0V 00°C |
Dès dépassement du seuil mini, régable, enregistré dans le menu de télématique page 187, d'origine réglé à 3,8 Volt, un message d'alerte s'affiche à l'écran en cas de tension trop faible, accompagné d'un signal sonore. C'est pourquoi, il faut tout de même vérifier, à intervalles réguliers, l'état de vos accus. N'attendez pas le message d'alerte pour recharger vos accus.
Remarque:
Vous trouverez tout ce qui concerne les accus, les chargeurs et les différents appareils de mesure dans le catalogue général FS Graupner, ainsi que sur notre site internet sous www.graupner.de.
Charge de l'accu de réception
Le cordon de charge Réf. 3021 peut directement être branché sur l'accu de réception. Si l'accu dans le modèle, et relié à un des cordons Réf. 3046, 3934, 3934.1 ou 3943.3, la charge se fait par la prise de charge intégrée dans l'interrupteur. Pour la charge, l'interrupteur doit être en position « OFF » (Arrêt).
Polarité de la prise de l'accu de réception
Remarques générales pour la charge
- Il faut respecter les recommandations données par le fabricant du chargeur et celles données par le fabricant de l'accu.
- Respectez la tension de charge maxi donnée par le fabricant de l'accu. Afin d'éviter des dégradations sur l'émetteur, la tension de charge ne doit pas dépasser 1 A! Si nécessaire, limitez la tension à la sortie du chargeur.
- Si vous pouvez charger votre accu d'émission à plus de 1 A, il faut impérativement le retirer de l'émetteur! Faute de quoi, vous risquez d'endommager la platine du fait d'une intensité de charge trop forte et/ou de l'échauffement de l'accu. Assurez-vous toujours, en faisant un essai de charge, du bon fonctionnement de la coupure automatique dans le cas de chargeurs disposant de cette
fonction. Ceci est particulièrement valable si vous voulez charger l'accu NiMH fourni avec un chargeur automatique pour accus NiCd. Réglez éventellement le seuil de coupure, dans la mesure où le chargeur offre cette possibilité.
- N'effectuez jamais un cycle de décharge de l'accu ou un programme de maintenance accu à travers la prise de charge! Elle n'est pas prévue pour cela!
- Branchez d'abord le cordon de charge sur le chargeur, puis ensuite seulement l'accu d'émission ou de réception. Vous éviterez ainsi les court-circuits que pourraient provoquer les prises du cordon, si elles entraient en contact l'une avec l'autre.
- Si l'accu chauffe anormalement, vérifiez son état, changez-le si nécessaire ou réduisez l'intensité de charge.
- Ne laissez jamais un accu en charge sans surveillance!
- Respectez les consignes de sécurité et d'utilisation à partir de la page 37.
Réglage de la hauteur des manches de commande
Les deux manches de commande sont régibles en hauteur pour s'adapter aux convenances personnelles et permettre un pilotage plus fin et plus précis.
Maintenez la partie inférieure moletée du manche, puis desserrez en tournant la partie supérieure moletée du manche.
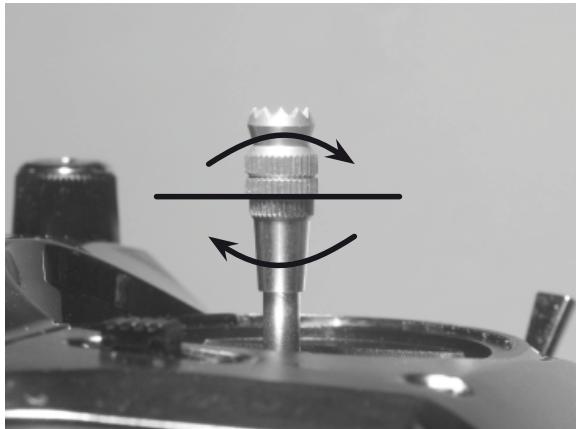
Vous pourrez maintenant augmenter ou diminuer la hauteur du manche en le tournant. Une fois la hauteur réglée, resserrez à nouveau les deux parties moletées en les tournant en sens contraire.
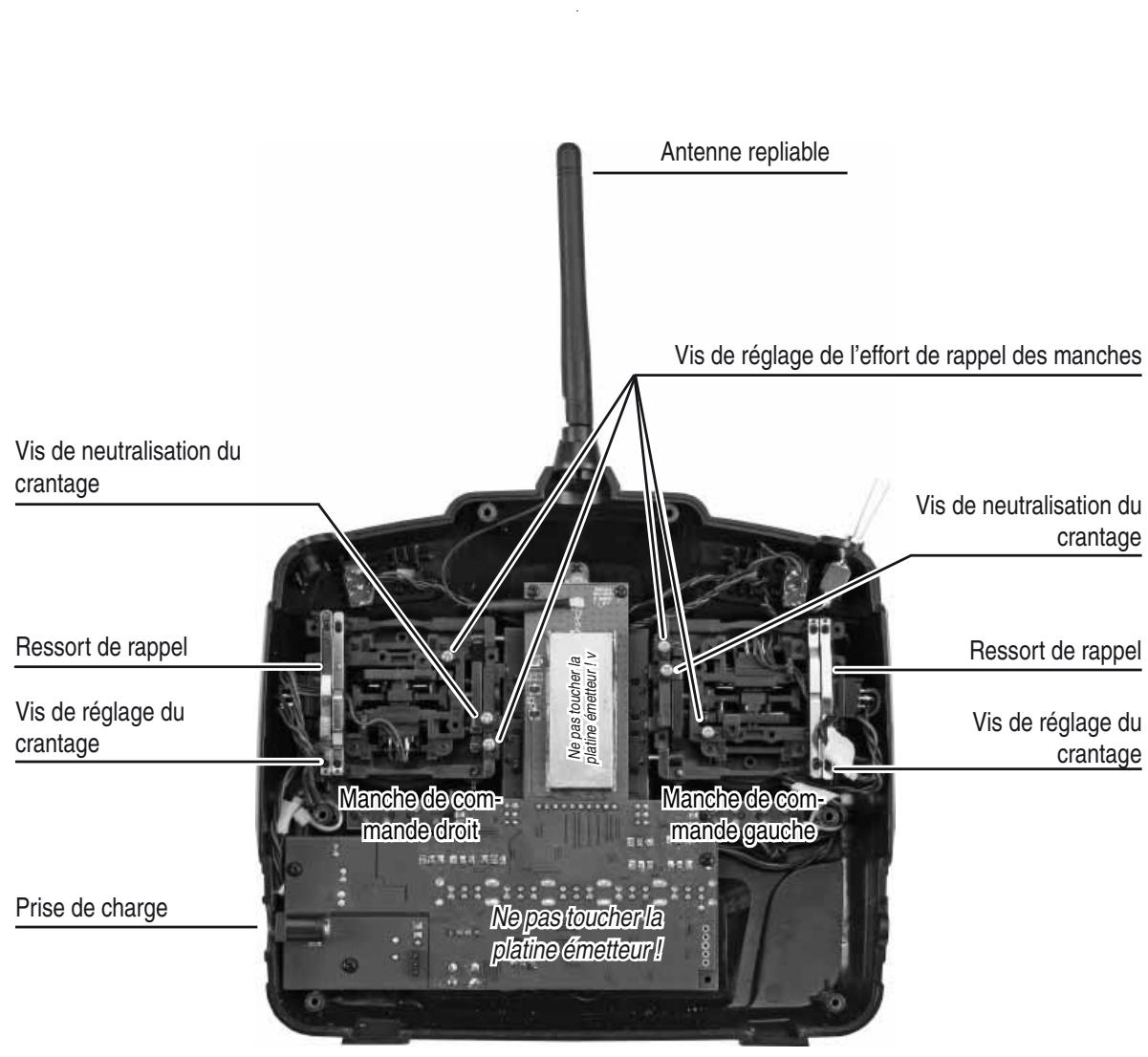
Ouverture du boîtier de l'émetteur
Lisez attentivement les conseils qui suivent, avant d'ouvrir le boîtier. Nous conseillons aux personnes qui n'ont jamais fait cela, de se rapprocher d'un Service Après-Vente Graupner.
Le boîtier ne doit être ouvert que dans les cas suivants :
- pour l'inversion du cranter du manche de commande des Gaz
- pour le réglage de la tension du ressort de rappel des manches
Avant l'ouverture du boîtier, couper l'émetteur (interrupteur sur « OFF »)
Ouvrez le logement accu et retirez l'accu d'émission comme décrit sur la double page précédente.
Au dos de l'émetteur, retirez les 6 vis avec un petit tournevis cruciforme de taille PH 1, voir vue ci-dessous :
Emplacement des vis du boîtier
Maintenez les deux moitiés de boîtier ensemble, puis retournez l'émetteur et laissez simplement tomber les
vis sur la table. Retirez maintenant avec soin le fond du boîtier en l'ouvrant vers la droite, comme si vous ouvriez un livre.
Attention:
Un cordon à deux fils relie le couvercle à la platine électronique de l'émetteur qui se trouve dans la partie supérieure. Ce cordon ne doit en aucun cas être endommagé !
- Ne faites aucune modifications, sinon vous perdez la garantie et de surcroît, l'homologation de l'émetteur!
- N'entrez pas en contact avec la platine des éléments métalliques. Ne touchez pas la platine, même avec les doigts.
- N'allumez jamais l'émetteur lorsqu'il est ouvert!
- ce qu'aucun fil ne soit coincé
- ce que les deux parties de l'émetteur s'adaptent parfaitement l'une sur l'autre. Ne jamais forcer pour ajuster les deux parties entrelles
ce que les deux parties de l'émetteur s'adaptent parfaitement l'une sur l'autre. Ne jamais forcer pour ajuster les deux parties entre elles
- ne pas trop serrer les vis de fixation du couvercle pour ne pas arracher le taraudage... à rebrancher l'accu.
Conseils d'utilisation
Inversion du crantage du manche de commande des gaz
Neutralisation du crantage
Le crantage du manche de commande peut être mis sur le manche de gauche ou sur celui de droite, au besoin. Ouvrez le boîtier de l'émetteur comme décrit précédemment.
Pour inverser le crantage monté d'origine, repérez la vis blanche moletée sur la vue du manche de gauche ci-dessous
Remarque:
Le manche de droite est configuré de la même manière, en inverse, de telle sorte que la vis recherchée se trouve à droite en dessous du milieu.
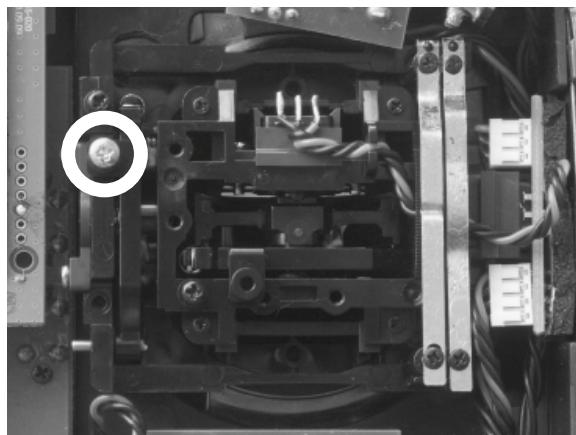
Vissez maintenant cette vis jusqu'à ce que le manche puisse se déplacer librement d'une fin de course à l'autre, c'est-à-dire jusqu'à ce que le manche revienne de lui-même au neutre.
Ressort et cranage
Avec les deux vis extérieures réperées sur la vue ci-dessous, vous pouvez régler avec l'une l'effort de rappel et avec l'autre, celle le plus à l'intérieur, l'effort du crantage, et ce, pour chaque manche de commande.
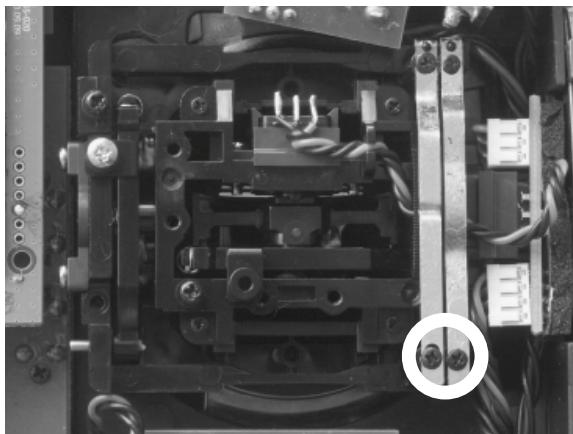
Remarque :
Le manche de droite est monté à l'inverse, c'est-à-dire que les vis recherchées sont situées en haut à gauche.
Effort de rappel des manches de commande
Cet effort de rappel est également réglable, selon les habitudes du pilote. Le système de réglage se trouve à côté du ressort de rappel. Voir marquage sur la vue ci-dessous.
En tournant la vis de réglage, avec un tournevis à empreinte cruciforme, on peut régler l'effort de rappel.
- en tournant vers la droite = l'effort de rappel sera plus important
- en tournant vers la gauche = l'effort de rappel sera moindre.
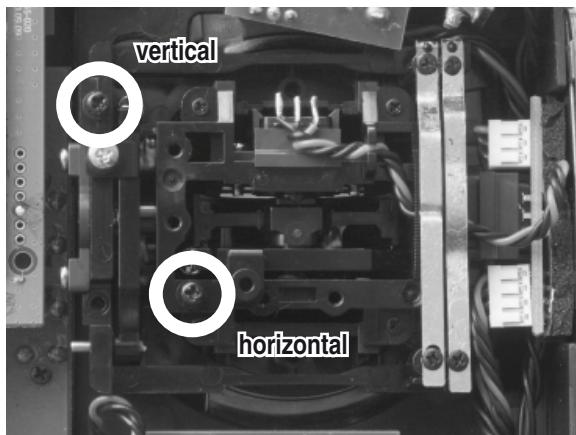
Remarque:
Le manche de commande de droite étant inversé, les vis recherchées se trouvent à droite du milieu.
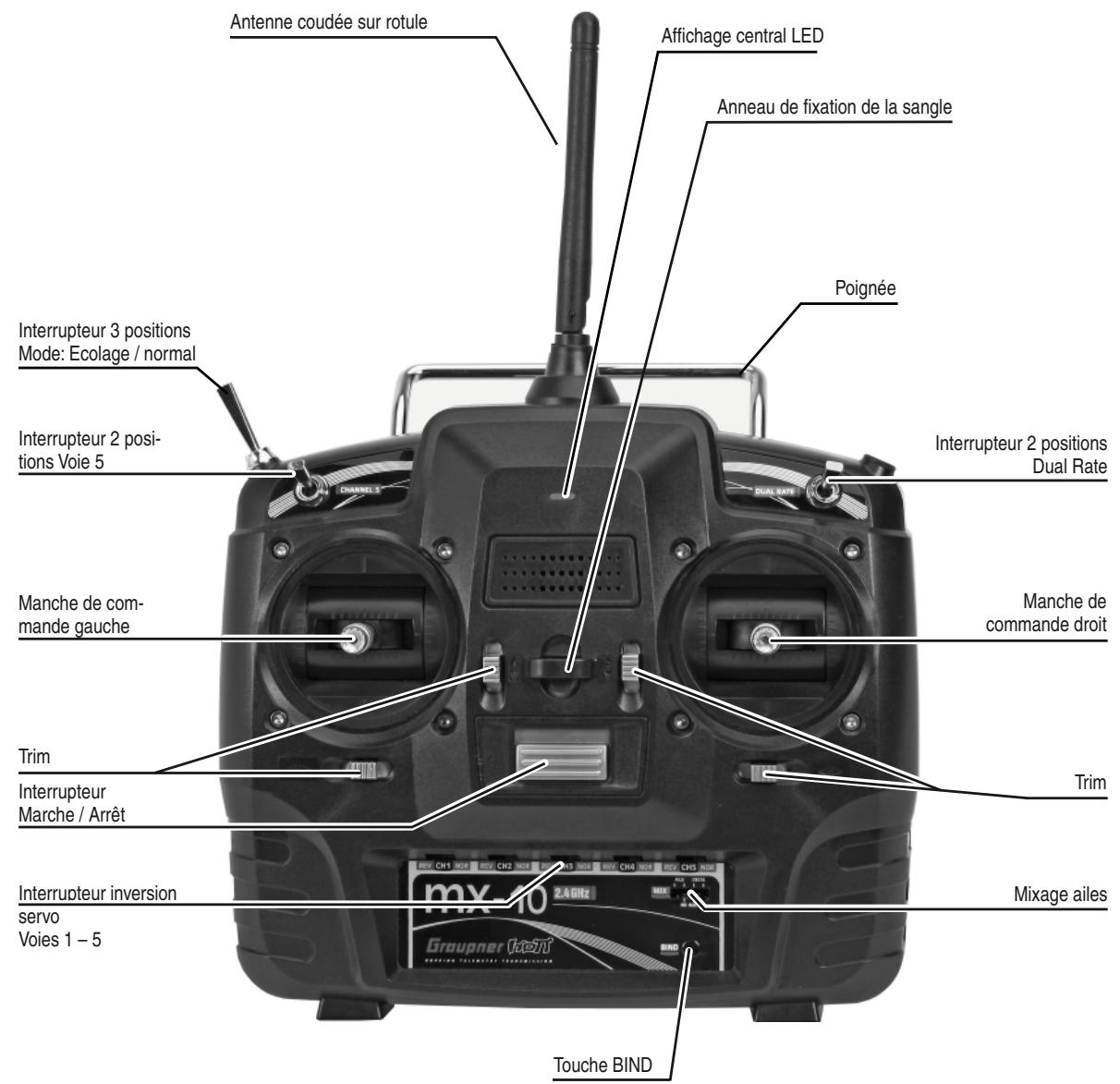
Éléments de commande de l'émetteur
Sur le dessus de l'émetteur mx-10 Hott se trouve un anneau de fixation, voir vue de droite, sur lequel vous pouvez fixer une sangle. La position de cet anneau permet à l'émetteur d'être équilibré lorsqu'il est accroché à la sangle.
Réf. Cde. 1121 Sangle, largeur 20 mm
Réf. Cde. 70 Sangle, largeur 30 mm

Prise data
Pour le branchement de la Smart-Box, en option, Réf. Cde. 33700.
Le HotT Smart-Box permet multiples autres fonctionnalités, p. ex. Expo, course ou temps de cycle des servos, channel mapping ou les fonctions de télémétrie - voir le paragraphe „Télémétrie“ à la page 179.
Vous trouverez de plus amples informations sur la Smart-Box dans le catalogue général FS Graupner ainsi que sur notre site internet, sous www.graupner.de.
Cette prise permet de relier l'émetteur à un PC équipé du système d'exploitation Windows XP, Vista ou 7 avec l'adaptateur USB Réf. Cde. 7168.6 en option, et le cordon Réf. Cde. 7168.6A. Vous pourrez télécharger les outils nécessaires, comme par exemple, le pilote USB qui va bien, sur notre page de téléchargement sous www.graupner.de.
Après installation, vous pourrez alors également mettre votre émetteur à jour (Update).
Utilisation de l'émetteur
Généralités relatives à l'émetteur mx-10 HoTT
Généralités
Théoriquement, le système Graupner HoTT permet d'utiliser plus de 200 modèles en même temps. Mais en pratique, et compte tenu des conditions d'homologation pour l'utilisation d'émetteurs dans la bande ISM des 2,4 GHz, ce nombre est sensiblement réduit. Néanmoins, vous pourrez toujours utiliser un bien plus grand nombre de modèles à la fois dans la bande des 2,4 GHz que dans la bande des 35/40 MHz conventionnelle. Mais le facteur déterminant qui limite tout cela est - comme c'est d'ailleurs souvent le cas - la dimension de l'espace aérien disponible. Mais le seul fait qu'il n'y a plus besoin de se mettre d'accord sur les fréquences, notamment à la pente, où on ne voit pas toujours tous les pilotes, est un énorme gain au niveau de la sécurité.
L'accu est-il chargé?
Comme l'émetteur est livré avec un accu non chargé, il faut, en respectant les conseils de charge, charger cet accu, voir page 7. Sinon, lorsque la tension chute en dessous d'un certain seuil régulable sur la ligne „Seuil de déclenchement alarme accu“ du menu „TX“ de la Smart-Box, page 180, une alarme se déclenche et la LED se met à clignoter par une suite de 5 clignotements rapides.
Mise en route de l'émetteur
Après avoir allumé l'émetteur, la LED de l'émetteur clignote ou reste allumée pour indiquer le mode dans lequel il se trouve.
Voir tableau ci-dessous:
| Affichage LED | Buzzer | Description |
| LED verte allumée | - | L'émetteur est allumé, maisaucun récepteur n'est assigné ou récepteur assigné, mais de télémétrie |
| LED orange allumée | - | Emetteur en mode normal, Réglage pays: général |
| LED orange clignote | - | Emetteur en mode normal, Réglage pays: France |
| LED orange clignote une fois | deux tonalités après la mise en route | Emetteur en mode Elève |
| LED orange clignote deux fois | 2x deux courtes tonalités après la mise en route | Emetteur en mode Moniteur |
| LED orange clignote trois fois | trois courtes tonalités rapi-des, l'une après l'autre | Mauvaise qualité de réception du récepteur |
| LED orange clignote quatre fois | quatre courtes tonalités rapides, l'une après l'autre | Mauvaise qualité de réception de la voie de return |
| LED orange clignote cinq fois | cinq courtes tonalités rapi-des, l'une après l'autre | Accu d'émission vide: Vous avez atteint le „seuil de déclenchement de l'alarme de l'accu“ du menu „TX“ de la Smart-Box en option, régable, page 180, seuil régéd'origine à 4.5 V. |
Il faut d'abord sélectionner le mode d'utilisation, soit „normal“, „Moniteur“ ou „Eleve“ avec l'interrupteur de mode situé en haut à gauche de l'émetteur:
Mode normal
moniteur
elève

D'origine, l'émetteur est livré en mode „normal“. Vous n'avez donc rien à modifier si vous êtes en utilisation classique, normale. Pour permettre l'émetteur en mode Moniteur ou Elève, consultez le chapitre consacré à l'écolage en page 194.
Pour changer de mode, il suffit de basculer l'interrupteur de mode dans la position souhaitée, d'appuyer sur la touche BIND de la maintenir enfoncée, puis d'allumer l'émetteur.
Attention: Après la programmation du mode „normal“, l'émetteur se trouve en mode de programmation Fail-Safe (voir page 177), mais si vous ne souhaitez pas effectuer de programmation ici, l'émetteur se coupe de lui-même.
La visualisation du mode de programmation se fait, après avoir allumé l'émetteur par LED et Buzzer, voir tableau ci-dessus.
Remarque importante :
- L'émetteur fourni dans le Set est réglé d'origine de telle sorte qu'il peut être utilisé dans la plupart des pays européens (à l'exception de la France). Si l'émetteur doit être utilisé en France, IL FAUT tout d'abord soit l'émetteur en mode « FRANCE», voir page 170 ou 174. IL EST INTERDIT D'UTILISER le mode Universal/EUROPE EN FRANCE!
- avec l'émetteur mx-10 HoTT et le récepteur assigné d'origine déjà à l'émetteur, vous pouvez commander jusqu'à 5 servos.
- Lorsque vous allumez l'émetteur, lorsque vous lancez la procédure Binding ou lors des réglages, veillez toujours à ce que l'antenne de l'émetteur soit suffisamment éloignée des antennes de réception! Si avec l'antenne d'émission vous êtes trop près des antennes de réception, le récepteur s'affole et la LED rouge du récepteur s'allume. Par ailleurs, la voie de retour d'informations n'est plus fonctionnelle, et les jauges de puissance sont remplacées à l'écran par « x», et la tension actuelle de l'accu de réception par 0,0 V. Simultanément l'émetteur est en mode Fail-Safe.
Dans ce cas, augmentez la distance entre les antennes jusqu'à ce que les affichages redeviennent « normaux »
Les mises à jour de l'émetteur se font, à ses propres risques et périls, par le port PC à 3 plots qui se trouve au dos de l'émetteur à l'aide d'un PC équipé d'un système d'exploitation Windows XP,
Vista ou 7.
Vous trouverez les mises à jour et informations actuellement disponibles et téléchargeables sur notre site, sous www.graupner.de
Remarque:
Après avoir enregistré votre émetteur sous http://www.graupner.de/de/service/productkregistrierung, vous serez informé automatiquement par mail des dernières mises à jour disponibles.
Pour la mise à jour du logiciel de l'émetteur, il vous faut le port USB Réf. Cde. 7168.6, en option, ainsi que le cordon adaptateur deux plots, également en option, Réf. Cde. 7168.6A. Celui-ci se branche directement dans la prise PC à trois plots située au dos de l'émetteur.
Remarque:
Avant toute mise à jour, vérifie l'état de charge de votre accu, rechargez-le par précaution et sauvegardez, avant toute mise à jour, toutes les mémoires de modèle utilisées, pour y avoir à nouveau accès en cas de besoin.
1. Installation des pilotes
Pour pouvoir utiliser le port USB Réf. Cde. 7168.6, il faut installer les pilotes nécessaires fournis avec le programme, vous les trouvez dans le réseau „Pilotes USB".
Lancer l'installation des pilotes par un double-clic sur le fichier correspondant et suivez les instructions. Une fois l'installation terminée, il faut redémarrer le PC. Cette installation n'est nécessaire qu'une seule fois.
2. Liaison émetteur / PC
Lorsque l'émetteur est coupé, branchez le cordon USB dans la prise PC à 3 plots située au dos de l'émetteur. Branchez-le de manière à ce que le fil orange soit vers la gauche, vers le milieu de l'émetteur, et le fil brun vers la droite, vers le bord de l'émette[teu]r. Ne forcez pas sur les prises.
- Mise à jour du logiciel de l'émetteur mx-10 HoTT Lancez le programme „Firmware_Update_grStudio_VerX.XX.exe" qui se trouve dans les fichiers téléchargeés du réseau „Firmware-Updater" avec un double-clic. (la version 1.3 actuelle, au moment de l'impression de ce manuel, se lance sans installation préalable):
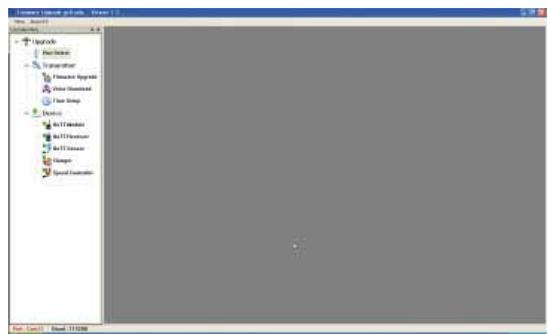
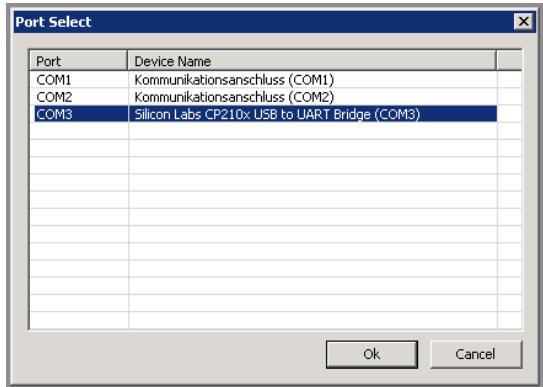
Dans „Menu“, Sélectionnez „Port Setup“ ou ouvrez „Controller Menu“ et cliquez sur „Port select“.
Dans „Menu“, Sélectionnez „Port Setup“ ou ouvrez „Controller Menu“ et cliquez sur „Port select“.
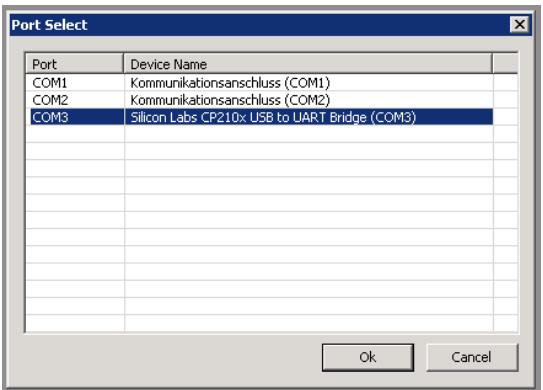
Dans la fenêtre „Port select“ sélectionnez le Port COM correct sur lequel est branché le port USB. Celui-ci est reconnaissable à sa désignation „Silicon Labs CP210x USB to UART Bridge“, dans la colonne „Device Name“. Dans la vue ci-dessus, il s'agirait du Port „COM 3“.
Dans „Menu“, allez sur l'option „HoTT Module Upgrade“, ou ouvrez „Controller Menu“ et cliquez sur „HoTT Module“.
Cliquez sur le Button marque „File Browse“ et sélectionnez dans la boîte de dialogue „Datei öffnen“ le fichier de mise à jour souhaité, avec l'extension „bin“.
Les fichiers Firmware sont codifiés selon le produit, cela signifie que si par inadvertance, vous sélectionnez un fichier qui ne correspond pas à l'article (par exemple un fichier de mise à jour du récepteur à la place du fichier de mise à jour de l'émetteur), une fenêtre Popup „Product code error“ apparait, et la procédure de mise à jour ne se lance pas.
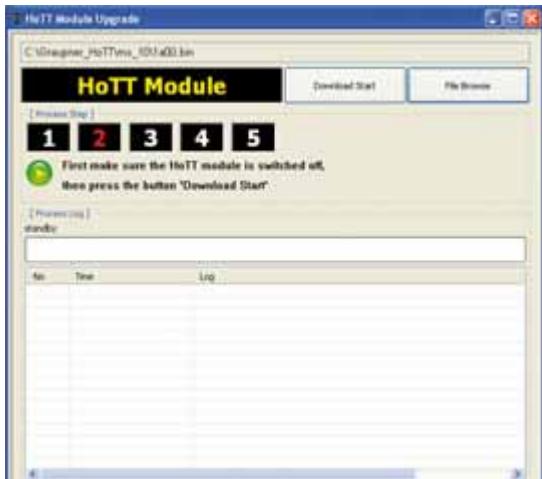
Cliquez maintenant sur le bouton „Download Start". Attendez que la barre de progression démarre.
En fonction des PC, cela peut prendre plusieurs secondes. Allumez maintenant l'émetteur en gardant la touche BIND enfoncée. Au bout de quelques secondes „Found Target device...“ s'affiche. Vous pouvez maintenant relâcher la touche.
Suite à cela, la procédure de mise à jour propre
dite se lance, et au-dessus du texte qui défile, une barre de progression s'affiche et démarre:
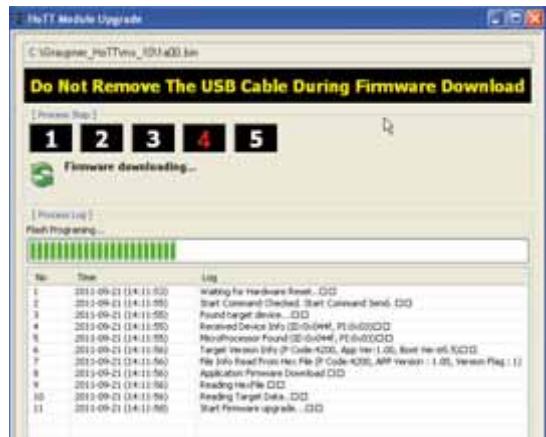
N'interrompez pas la procédure de mise à jour avant que la barre de progression n'ait atteint le bord droit et pas avant que le message „Firmware Download Success" n'apparaisse. Par ailleurs, l'émetteur émet une brève mélopée de confirmation, et la LED passe de l'orange au vert:
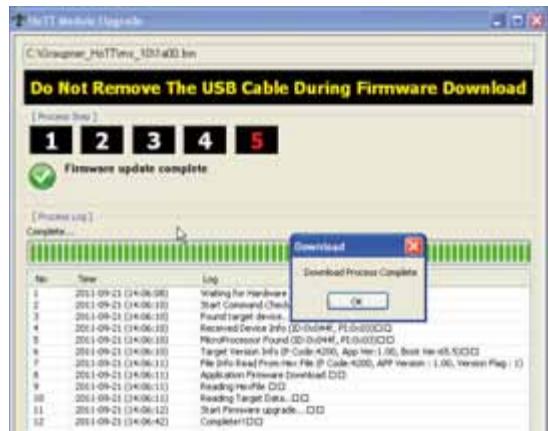
Cliquez sur OK. Coupez ensuite l'émetteur, et déconnectez l'émetteur du PC ou du portable.
Si la barre de progression n'avance pas, fermez le programme et relancez la procédure de mise à jour. Respecter les messages d'erreurs événuels
4. Initialisation de l'émetteur
Après une mise à jour réussie de l'émetteur, il FAUT, pour des raisons de sécurité, réinitialiser l'émetteur : Appuyez sur la touche BIND de l'émetteur, maintenez-la enfoncée et allumez l'émetteur. Relâchez maintenant la touche BIND. À l'exception des données de procédure Binding, tous les réglages effectués sur l'émetteur sont remis aux réglages d'origine et doivent, en cas de besoin, être reenregistrés.
Attention: après initialisation en mode „normal“, l'émetteur se trouve en mode de programmation Fail-Safe (voir page 177), mais si vous ne souhaitez pas effectuer de programmation ici, l'émetteur se coupe de lui-même.
Utilisation du récepteur
Généralités relatives au récepteur GR-12
Ensemble de réception
Un récepteur bi-directionnel, en 2,4 GHz de type GR-12 est fourni avec le set de l'émetteur mx-10 HoTT, qui permet de brancher jusqu'à 6 servos
Pour établir une liaison avec l'émetteur, il faut d'abord que le récepteur Graupner Hott soit lié à « son » émetteur Graupner Hott. Cette procédure est appelée « Binding ». Mais cette procédure n'est nécessaire qu'une seule fois par ensemble récepteur / mémoire, voir pages 172 ou 174, et a déjà été réalisée en usine pour les éléments fournis dans le Set, et ce, pour la mémoire de modèle Nr. 1, de telle sorte qu'une procédure Binding ne devra être faite que pour d'autres récepteurs ou si vous changez d'emplacement mémoire (procédure qui peut, par ex. en cas de changement d'émetteur, être reprise à tout moment).
Dès que vous avez branché le récepteur HoTT de type GR-12 livre avec le set, à l'alimentation, la LED du récepteur s'allume brièvement au vert, puis reste éteinte, lorsque « son » émetteur est hors de portée ou lorsqu'il est coupé. Lorsque la liaison est établie, la LED reste allumée au vert.
Remarque:
Si la LED reste allumée au vert et que malgré cela le récepteur ne réagit ni à la touche SET ni aux ordres de commande, vérifie la polarité de votre alimentation du récepteur.
Affichage de la tension à bord
Si la liaison téléétrique est établie, la tension de l'accu de réception est affichée à droite de l'écran „RX DATAVIEW" de la Smart-Box en option, sous RVOLT.
Alarme température
Si la température chute en-dessous d'une certaine valeur, (d'origine -10°C) ou si elle passe au-dessus d'une certaine valeur préenregistrée (d'origine + 70°C), une alarme sonore se déclenche au niveau de l'émetteur sous forme d'un bip régulier à intervalle d'une seconde.
Branchements servos et polarité
Les sorties récepteur des récepteurs Graupner HoTT sont numérotées. La connectique est équipée de détrompeurs. En branchant les fiches, attention aux petits chanfreins latéraux. Ne le montez en dernier cas avec force.
L'alimentation se fait par les différentes sorties servos. Si plus aucune sortie servo n'est libre, vous pouvez, avec un cordon en Y Réf. Cde. 3936.11, brancher un servo et l'alimentation sur la même sortie récepteur.
N'inversez pas la polarité de ce branchement! une telle inversion peut détruire le récepteur et les éléments qui y sont branchés.
La fonction de chaque voie est déterminée par l'émetteur, et non par le récepteur. Il n'y a pas que la sortie servo de commande des gaz qui peut être différente. Sur les radiocommandes Graupner, celle-ci se trouve par exemple sur la voie 1 pour des modèles à voilure fixe, et sur la voie 6 pour les hélicoptères.
Sortie SERVO 5: « SERVO » ou « capteur
Sur la sortie 5, répétée en plus d'un «T»...
Servo OU Capteur/Sonde
... on peut non seulement brancher un cordon adaptateur
télécommande Réf. Cde. 7168.6A pour la mise à jour du récepteur, mais également un capteur ou sonde de télémétrie. Mais pour que l'élément branché puisse être reconnu correctement par le récepteur, il FAUT que la sortie récepteur soit basculée soit sur « SERVO», soit sur « CAPTEUR ». Cela se fait dans le menu « Télémétrie », sur la page « Courbe RX » du sous menu « REG-LAGES/AFFICHAGE ». Pour plus de détails, voir à partir de la page 187 :
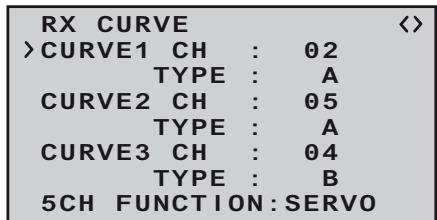
Sur cette page du menu, déplacez, avec la touche INC ou DEC le symbole 1 > " du bord gauche pour le mettre devant la ligne inférieure puis appuyez ensuite simultanément sur les touches INC+DEC:
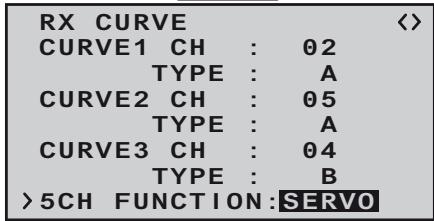
Avec une des deux touches INC ou DEC, sélectionnez le réglage „SENSOR (capteur)“:
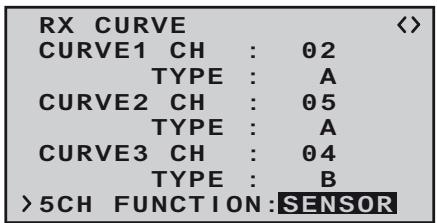
Une nouvelle impulsion sur les touches INC+DEC confirmera votre choix.
Dernières remarques:
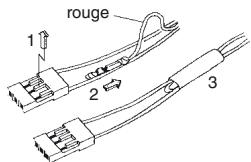
- La résolution servo du système HoTT, nettement supérieure, conduit à une réaction plus directe, en comparaison avec les technologies utilisées jusqu'à. Familiarisez-vous avec ce comportement beaucoup plus fin ! Si, parallèlement à l'accu de réception vous utilisez un variateur avec système BEC* intégré, il faudra éventuellement interrompre le fil rouge (Plus) en le reliant de la prise. Respectez impérativement les conseils donnés à ce sujet dans la notice du variateur.
tuteur. Avec un petit tournevis, soulever légèrement la patte centrale de la prise (1), retirer le fil rouge (2), et l'isoler pour éviter tout court-circuit (3).
Respectez les consignes de montage du récepteur, de l'antenne de réception et des servos en page 34.
Sortie servo 6: signal cumulé
D'origine, le signal cumulé SUMO 5 (voir également page 187) est activé sur la sortie 6, de ce fait, on peut l'utiliser, sans programmation préalable par la Smart-Box en option, pour le Mikrokopter ou pour simulateurs.
Pour effectuer un Reset du récepteur, appuyez sur la touche SET du récepteur et maintenez-la enfoncée pendant que vous allumez la réception. Relâchez ensuite la touche.
Si le Reset a été effectué émetteur coupé ou avec un récepteur non liée, la LED du récepteur clignotera alors au bout de 2 - 3 secondes au rouge, à cadence lente, et il sera possible, côté émetteur, de lancer une procédure Binding immédiatement après.
Si un Reset a été effectué avec un récepteur lié, et si la mémoire correspondante au modèle est activée lorsque l'émetteur est allumé, la LED se met au Vert peu de temps après, pour signaler que votre ensemble émetteur / récepteur est à nouveau opérationnel.
Attention :
Lors d'un Reset, TOUS les réglages récepteur sont remis aux réglages usine, à l'exception des données spécifiques à la méthode Binding!
Déclenché par inadvertance, il faudra reprendre, après un RESET, tous les réglages récepteur enregistrés précédemment dans le menu de télémetrie du récepteur.
Par contre, un RESET est vivement conseillé, lorsque vous placez le récepteur dans un autre modèle !
On peut, dans ce cas, éviter de reprendre des
réglages qui ne correspondraient plus à cette autre méthode.
Firmware-Update du récepteur
Les mises à jour du récepteur se font par la prise de télémetrie du récepteur à l'aide d'un PC équipé d'un système d'exploitation Windows XP, Vista ou 7. Pour cela, il vous faut le port USB Réf. Cde. 7168.6 en option ainsi que le cordon adaptateur Réf. Cde. 7168.6A. Vous trouvez également tous les fichiers et programmes nécessaires sur notre site internet www.graupner.de, sous Download.
Remarque:
Après avoir enregistré votre récepteur sous https://www.graupner.de/de/service/productkregistrierung, vous serez informé automatiquement par mail des dernières mises à jour disponibles.
Remarque:
Avant toute mise à jour, vérifie l'état de charge de votre accu, rechargez-le par précaution avant de lancer la mise à jour.
1. Installation des pilotes
Si ce n'est pas encore fait, installez les pilotes nécessaires pour le port USB Réf. Cde. 7168.6 comme décrit en page 155.
2. Liaison récepteur / PC
Branchez le cordon adaptateur Ref. Cde. 7168.6A sur le port USB Ref. Cde. 7168.6 et sur la sortie " + T " du récepteur. Les petites arêtes latérales font office de démonteurs. Ne forcez en aucun cas, la prise doit se monter sans effort.

Cordon adaptateur Réf. Cde. 7168.6A
Si présent: coupez le fil du milieu
Attention:
Si le cordon adaptateur Réf. Cde. 7168.6A est encore composé de 3 fils, coupez le fil rouge du milieu.
Reliez ensuite le cordon USB également livré avec (PC-USB/mini-USB) sur le port USB avec le PC ou avec un portable. Si le branchement est correct, une LED rouge située sur la platine du port doit s'allumer quelques secondes. Coupementant l'alimentation de votre récepteur.
Avec un double-clic, lancez le programme „Firmware_Update_grStudio_VerX.XX.exe" qui se trouve dans les fichiers Download du réseau „Firmware Updater". (au jour de l'impression de ce manuel, la version actuelle 1.3 se lance sans installation préalable.).

Sous „COM Port Setup“, sélectionnez le port sur le-
Quel le port USB est branché
Celui-ci est reconnaissable à sa désignation „Silicon Labs CP210x USB to UART Bridge“, dans la colonne „Device Name“. Dans la vue ci-dessus, il s'agirait du Port „COM 3“.
Dans „Menu“, allez ensuite sur l'option „HoTT Receiver Upgrade“, ou ouvrez „Controller Menu“ et cliquez sur „HoTT Receiver“.

Cliquez sur le Button marque „File Browse“ et sélectionnez
sélectionnez dans la boîte de dialogue „Datei öffnen“ le fichier de mise à jour souhaité, avec l'extension „bin“. Les fichiers Firmware sont codifiés selon le produit, cela signifie que si par inadvertance, vous sélectionnez un fichier qui ne correspond pas à l'article (par exemple un fichier de mise à jour de l'émetteur à la place du fichier de mise à jour du récepteur), une fenêtre Popup „Product code error“ apparait, et la procédure de mise à jour ne se lance pas.
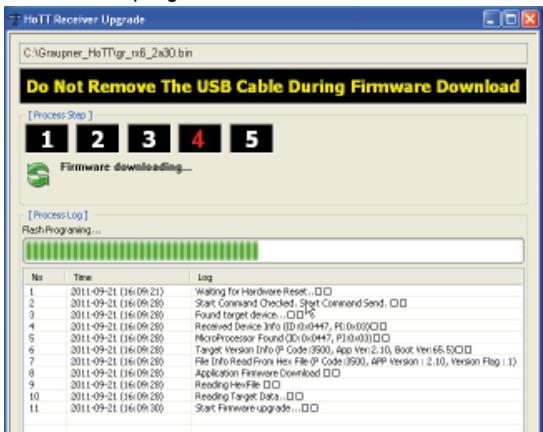
Cliquez maintenant sur le bouton „Download Start". Attendez que la barre de progression démarre.
En fonction des PC, cela peut prendre plusieurs secondes. Allumez maintenant le récepteur en gardant la touche SET enfoncée. Au bout de quelques secondes, „Found Target device...“ s'affiche. Vous pouvez maintenant relâcher la touche.
Si la reconnaissance ne se fait pas, la fenêtre Popup „Target device ID not found“ s'affiche.
Suite à cela, la procédure de mise à jour propre dite se lance, et au-dessus du texte qui défile, une barre de progression s'affiche et démarre:
Si la procédure s'interrompt avant d'avoir atteint les 100%, coupez l'alimentation de votre récepteur et relancez une nouvelle procédure de mise à jour. Répétez les différentes étapes ci-dessus à nouveau.
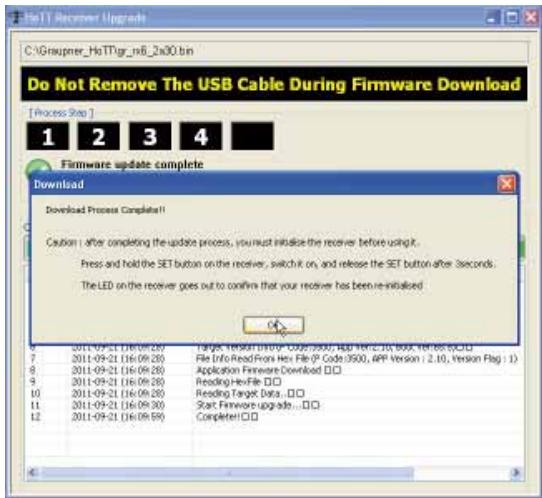
Sur l'écran et sur la barre de progression, vous pouvez suivre l'avancement de la mise à jour. La mise à jour est terminée si la fenêtre Popup „Download Process Complete!!" s'affiche:
Durant la mise à jour, la LED verte du récepteur est allumée. De plus, si la mise à jour s'est effectuée correctement, la LED verte s'éteint.
Coupez l'alimentation du récepteur et débranchez le cordon. Répétez cette manipulation pour d’éventuels autres récepteurs.
4. Initialisation du récepteur
Une fois que la procédure de mise à jour s'est effectuée avec succès, il FAUT, avant toute nouvelle mise
en route du récepteur, et pour des raisons de sécurité, faire une initialisation:
Pour cela, appuyez sur la touche SET du récepteur et branchez son alimentation. Relâchez la touche SET au bout de 3 secondes environ - dès que la LED verte s'éteint. Si après, vous allumez également votre émetteur, la LED verte du récepteur reste allumée durant 2 - 3 secondes au vert. A part les données relatives à la procédure Binding, tous les autres régages enregistrés dans le récepteur se remettent sur les régages d'origine, et doivent, en cas de besoin, être ré-enregistrés.
Installation du récepteur
Quelque soit le système de réception Graupner, la manière de le monter est pratiquement toujours la même : Veillez à ce que les antennes de réception soient à au moins 5 cm de toute grande partie métallique, ou câblages qui ne ressortent pas directement du récepteur et qui doivent être éloignés des antennes. Cela comprend, non seulement les pièces métalliques ou celles en carbone, mais également les servos, moteurs électriques, pompes, tous types de cordons, etc. Le mieux, c'est de placer le récepteur à un endroit facilement accessible du modèle, loin de tout autre emplacement. Il ne faut en aucun cas enrouler les cordons servo autour de l'antenne ou de la faire passer à proximité !
Veillez également à ce que les cordons les plus proches de l'antenne ne puissent pas se déplacer en vol! Des cordons qui bougent en vol peuvent perturber la réception.
Des tests ont démontré que le fait de placer une seule antenne à la verticale était la meilleure solution, lors de l'approche à grande distance. En mode Diversity (deux antennes), la deuxième antenne doit être positionnée de manière à former un angle de par rapport à la première.
Les sorties des récepteurs Graupner sont numérotées. L'alimentation est reliée à toutes les sorties numérotées et peut être branchée sur n'importe laquelle des 6 sorties récepteur. On peut éventuellement, avec le cordon en Y Réf. 3936.11, brancher également un servo en parallèle avec l'alimentation.
- Emballez le récepteur dans une mousse de minimum 6 mm d'épaisseur. Fixez la mousse avec des élastiques autour du récepteur pour le protéger contre les vibrations, les atterrissages un peu violents et les crashes.
- Les interrupteurs doivent impérativement être protégés contre les vibrations et être à l'abri des gaz d'échappement. Le bouton de l'interrupteur doit pouvoir se déplacer sur toute sa course.
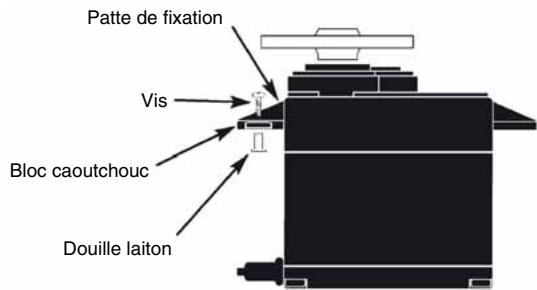
- Montez les servos sur les blocs caoutchouc avec les douilles en laiton, pour les protéger contre les vibrations. Ne serrez pas les vis trop fort, sinon les douilles caoutchouc seront écrasées et ne feront plus leur effet d'amortissement. Seulement si les vis sont serrées correctement que vos servos seront protégés efficacement contre les vibrations. La vue ci-dessous montre comment fixer correctement un servo. Les douilles en laiton sont montées, par le dessous, dans les blocs caoutchouc.
- Les palonniers des servos doivent pouvoir débattre librement sur toute la course du servo. Veillez à ce qu'il n'y ait aucun obstacle qui bloque le débattement.
du palonnier.
L'ordre dans lequel les servos doivent être branchés dépend du type de modèle. Voir affectation des sorties servos pages 168 et 169. De plus, respectez les consignes de sécurité données en pages 137... 140.
Pour éviter des frétillements incontrôlés des servos, lors de l'utilisation
Allumez toujours d'abord l'émetteur puis après seulement le récepteur
et lorsqu'il vol est terminé,
Coupez d'abord le récepteur puis après seulement l'émetteur.
Lors de la programmation de l'émetteur, veillez à ce que les moteurs électriques ne puissent pas démarrer par inadvertance ou si vous avez un moteur thermique avec démarrage automatique, que celui-ci ne puisse pas démarrer tout seul. Par mesure de sécurité, débranchez toujours l'accu de propulsion et coupez l'alimentation carburant s'il s'agit d'un moteur thermique.
Alimentation de la réception
L'utilisation du modèle ne peut se faire en toute sécurité qu'avec une alimentation correcte et fiable. Si, malgré des tringles de commande sans points durs, un accu chargé, des cordons accu de section suffisante, une résistance minimale au niveau des prises, etc, la tension récepteur affichée à l'écran de l'émetteur chute sans arrêt, donc trop basse, suivez les consignes qui suivent : En tout premier lieu, assurez-vous que l'accu est bel et bien chargé, lorsque vous mettez le modèle en route. Utilisez des contacts et des interrupteurs de résistance minimale. Mesurez éventuellement la chute de tension au niveau du cordon interrupteur, sous tension, car même les nouveaux interrupteurs haute intensité peuvent provoquer des chutes de tension de l'ordre de 0,2 Volt. En fonction du vieillissement et de l'oxydation au niveau des contacts, cette valeur peut être multipliée plusieurs fois. Les petites vibrations constantes auxquelles sont soumis les contacts peuvent également provoquer une lente augmentation de la résistance.
De plus, même de petits servos de type Graupner/JR DS-281 peuvent « tirer » jusqu'à 0,75 Ampère lorsqu'ils se bloquent. Quatre servos de ce type dans un « Foamie » par exemple, peuvent donc peser sur l'alimentation à bord, en consommant, sous contrainte, jusqu'à 3 Ampère...
C'est pour cette raison qu'il est judicieux de désirer une alimentation qui ne s'écroule pas sous fortes contraintes et qui est encore capable, dans ce cas, de délivrer une tension suffisante. Pour le calcul de la capacité nécessaire de l'accu, il faut partir du principe qu'il faut au moins 350 mAh pour chaque servo analogique et au moins 500 mAh pour chaque servo digital.
En partant de ce principe, un accu de 1400 mAh pour une réception avec 4 servos analogiques serait un minimum.
absolu.
Dans votre calcul, tenez également compte du récepteur, qui, de part sa fonction bi-directionnelle, absorbe env. 70mA
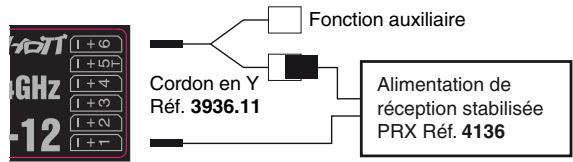
Indépendamment de cela, il est conseillé d'alimenter le récepteur avec deux cordons. Par exemple, si vous utilisez un interrupteur ou un régulateur de tension avec deux cordons d'alimentation qui vont sur le récepteur. Si vous avez besoin d'une ou des deux de ces sorties récepteur pour brancher un servo, un variateur etc., vous pouvez utiliser un cordon en Y Réf. 3936.11 qui se branche entre le cordon et le récepteur, voir vue ci-dessous. De ce fait, vous réduisez, par cette double liaison sur l'interrupteur ou sur le régulateur de tension, non seulement le risque d'une rupture du cordon, mais vous assurez une alimentation constante des servos.
Accus nimh 4 éléments
Avec les packs 4 éléments traditionnels vous pouvez alimenter sans crainte votre ensemble de réception Graupner HoTT, à condition de respecter les consignes ci-dessus, à savoir, capacité et tension suffisante!
Accus nimh 5 éléments
Contrairement aux packs 4 éléments, les packs accus 5 éléments offrent une plus grande plage de tension.
Sachez néanmoins que tous les servos du marché ne supportent pas la tension (en continu) d'un pack 5 éléments, notamment lorsque celui-ci vient d'être chargé. Certains de ces servos réagissant à cela, par exemple
par des « grognements » caractéristiques.
C'est pourquoi, consultez les spécifications des servos utilisés, avant de désirer l'option d'un pack 5 éléments.
À l'heure actuelle, ces nouveaux éléments sont sûrement le meilleur choix! Avec une enveloppe métallique protectrice, ces éléments, capables d'absorber la charge rapide, avec un chargeur approprié, sont beaucoup plus résistants. Par ailleurs, le nombre de cycles de charge/décharge de ces éléments est nettement supérieur par rapport à un accu LiPo.
La tension nominale de 6,6 Volt d'un pack d'accu Nanophosphate 2 éléments ne pose aucun problème aux récepteurs Graupner HoTT, ni aux servos, variateurs, gyroscopes etc. dont il est expressément spécifique qu'ils sont en mesure de fonctionner dans des plages de tension élevées. Sachez néanmoins que tous les servos, variateurs, gyroscopes etc, mis sur le marché par le passé, n'admettent qu'une tension de 4,8 à 6 Volt. Leur branchement sur le récepteur nécessite donc impérativement l'utilisation d'une alimentation régulée, stabilisée, par ex. PRX Réf. 4136, voir annexe. Sinon, le risque de voir se déterminer rapidement les appareils qui y sont branchés est très grand.
Accus lipo 2 éléments
A capacité égale, les packs LiPo sont nettement plus légers que les types d'accu cités précédemment, mais du fait de l'absence d'enveloppes métalliques, ils sont plus sensibles aux contraintes mécaniques et aux chocs. Par ailleurs, ils ne sont capables d'absorber des charges rapides que dans des conditions limitées, et n'atteignent pas un nombre de cycles de charge / décharge aussi important que les accus Nano-phosphate par exemple.
La tension nominale élevée de 7,4 Volt d'un pack d'accu LiPo 2 éléments ne pose aucun problème aux récepteurs Graupner HoTT, ni aux servos, variateurs, gyroscopes etc dont il est expressément spécifique qu'ils sont en mesure de fonctionner dans des plages de tension élevées. Sachez néanmoins que tous les servos, variateurs, gyroscopes etc, mis sur le marché par le passé, n'admettent qu'une tension de 4,8 à 6 Volt. Leur branchement sur le récepteur nécessite donc impérativement l'utilisation d'une alimentation régulée, stabilisée, par ex. PRX Réf. 4136, voir annexe. Sinon, le risque de voir se déterminer rapidement les appareils qui y sont branchés est très grand.
Glossaire - définitions
Fonction de commande, éléments de commande, entrée de fonction, voie de commande, mixage, interrupteur, Smart-Box
Pour vous faciliter l'utilisation de la notice de la mx-10 HoTT, vous trouvez ci-dessous les définitions de certaines expressions qui sont reprises tout au long de cette notice.
Fonctions de commande / voies
On entend par „fonction de commande“ – indépendamment du traitement du signal dans l'émetteur – le signal émis pour commander une fonction bien précise. Sur des modèles à voilure fixe, la commande des gaz, de la direction ou des ailerons par exemple représentent une telle fonction, sur hélicoptères, par exemple c'est le Pas, le tangage ou le roulis. Le signal d'une fonction de commande peut être transmis directement ou par un mixage à une ou plusieurs voies de commande. Un exemple typique est l'utilisation de deux servos séparés pour la commande des ailerons, ou pour la commande d'un empennage en V. La fonction de commande tient compte du déplacement mécanique du manche de commande par rapport au déplacement du servo en question.
Éléments de commande
On entend par éléments de commande, les manches et interrupteurs de l'émetteur à déplacer par le pilote pour que les servos, variateurs branchés côté récepteur, fonctionnent. Sont compris :
- les deux manches de commande pour les voies 1 à 4, sachant que pour les deux types de modèles (voilure fixe et tournante (hélicoptère)) ces modes de commande peuvent être inversés, par exemple gaz à gauche ou à droite. La fonction du manche pour la commande moteur/aérofreins est souvent désignée comme élément de commande V1 (voie 1). les interrupteurs pour la voie 5
- dans le cas d'éléments de commande proportionnels
dans le cas d'éléments de commande proportionnels, le déplacement des servos est proportionnel au déplacement de l'élément de commande, dans le cas d'un interrupteur deux ou trois positions, le servo ne se déplacera que de deux ou de trois positions.
Entrée de fonction
Il s'agit là d'un point imaginaire dans l'émission des signaux qui ne peut en aucun cas être comparé au branchement des éléments de commande sur la platine! Le choix du mode de pilotage influence notamment „derrière" ces branchements l'emplacement, qui peut conduire à des différences entre le numéro d'entrée de l'élément de commande et le numéro de la voie suivante.
Voies de commande
À partir de ce point, à partir duquel le signal contient toutes les informations pour un servo déterminé – que ce soit directement de l'objet de commande ou indirectement à travers un mixage – on parle d'une voie de commande. Ce signal, qui ne peut plus être influencé que par des réglages effectuels dans le menu « Réglage servos » quitte alors, par le module HF, l'émetteur. Une fois arrivé au récepteur, ce signal est encore eventuellement modifié par les réglages entreprises dans le menu de télémetrie, pour enfin commander le servo correspondant.
Mixages
Dans la software de l'émetteur, il y a de nombreuses fonctions de mixage pour différentes configurations des ailerons ou des ailes Delta. Elles sont destinées à influencer à travers différents programmes de mixage un ou plusieurs servos. Voir les nombreuses possibilités de mixage de la Smart-Box à partir de la page 168 de cette notice.
Interrupteurs
L'interrupteur, tout ou rien, déplace le servo branché sur la voie 5 soit en butée mini, soit en butée maxi.
Smart-Box
Cette Smart-Box, disponible en option, permet la mise en œuvre de nombreuses autres fonctions HoTT, par exemple :
- Affichage de la tension de l'émetteur avec seuil d'alarme réglable.
- Température du récepteur
- Course servo Saut de fréquence - Channel Mapping
- Réglages des mixages
- Qualité du signal Tension d'alimentation du récepteur
- Neutre des servos Temps de cycle Réglages Fail-Safe selon la voie Test des servos
À ce sujet, voir paragraphe „Télémetrie" en page 179. Vous trouverez de plus amples informations relatives à la Smart-Box dans le catalogue général FS Graupner ainsi que sur internet sous www.graupner.de
Trim digital avec affichage de la position à l'écran et signal sonore
Les deux manches de commandes sont équipées de trims digitaux. Une brève impulsion sur la touche de trim, déclic d'un „clic“ le neutre du servo d'une valeur déterminée. Si vous maintenez la touche plus longuement, la vitesse de déplacement du trim augmente dans la direction correspondante.
Ce décalage est également signalé de manière qualitative par des bips sonores de différentes tonalités. Pour retrouver le neutre en plein vol, inutile donc de jeter un coup d'œil sur l'écran : en dépassant le neutre, un petit temps d'arrêt est marqué.
Les positions des trims sont automatiquement enregistrées.
Le trim digital ne fonctionne que si l'émetteur est allumé. Si l'émetteur est éteint et que vous touchez par inadvertance les touches des trims, cela ne modifie en rien les valeurs de trim enregistrées.
Calibrage des manches de commande
Si vous avez l'impression que le rappel au neutre de votre manche de commande ne correspond pas exactement à 0% de la course de l'élément de commande, c'est-à-dire que la butée n'est pas exactement à 100%, vous pouvez corriger cela de la manière suivante:
Si ce n'est pas déjà fait, coupez l'émetteur et branchez la fiche de programmation fournie, dans la prise DATA située au dos de l'émetteur, et le Jumper en position „DELTA“ sur le devant de l'émetteur. Mettez maintenant les deux manches de commande au neutre (milieu). Allumez l'émetteur. Au bout d'une seconde, et pour une durée de 10 secondes, l'émetteur émettra un bip sonore toutes les secondes. Durant ces dix secondes, mettez les deux manches en butée (gauche, droite, haut, bas) pour que l'émetteur puisse enregistrer ces fins de course. Au bout des 10 secondes le calibrage est terminé, l'émetteur se remet en fonctionnement normal, et les bips sonores cessent. Coupez ensuite l'émetteur et retirez la fiche de programmation au dos de l'émetteur.
Ne jamais utiliser l'émetteur avec la fiche de programmation branchée! Mettez éventuellement encore le Jumper dans la position qui correspond à votre modèle.
Si dans les 10 secondes, vous n'avez pas placé les manches dans toutes les butées, refaites toute cette procédure.
Sur des modèles classiques, vous pouvez monter sans problèmes jusqu'à deux servos pour la commande des ailerons, pour un empennage en V, et pour des modèles Delta/Ailes volantes avec deux servos d'ailerons et de profondeur.
La plupart des avions et des planeurs appartiennent aux modèles au type d'empennage dit „normal“ avec respectivement un servo pour la profondeur, la direction, les ailerons et le moteur ou le variateur électronique (aérofreins sur un planeur).
Le logiciel de l'émetteur mx-10 HoTT comprend déjà des fonctions de couplage (=mixages) pour les types de modèles les plus courants, sur lesquels deux voies de commande sont mixées. On peut ainsi activer directement un mixage pour un empennage en V sur lequel les fonctions de commande de la direction et de la profondeur sont mixées entre elles, pour que chacune des gouvernes – qui sont commandées chacune par un servo séparé – puisse prendre la fonction de commande de la profondeur, mais également celle de la direction.
Sur des modèles Delta et des ailes volantes, la fonction de commande des ailerons et de la profondeur s'exerce sur une seule et même gouverne située de part et
d'autres de l'aile. Le programme de l'émetteur inclut le mixage nécessaire pour ces deux servos.
D'autres fonctions sont encore possibles avec la Smart-Box en option. À ce sujet, voir paragraphe „Télémétrie“ à partir de la page 179.
Mixages déjà programmés dans l'émetteur mx-10 HoTT:
- Aucun mixage I Type d'empennage « normal »
- Mixage ailerons → deux ailerons
- Mixage Delta Ailes volantes
- Mixage V-Tail Empennage en V
Voir croquis en bas de page.
Example: Mixage empennage en V
Type d'empennage "normal"
Mixage AILE,2 Aileron"
Mixage DELTA „Ailes volantes"
Mixage „Empannage en V“
Les servos doivent être branchés dans cet ordre-là sur le récepteur.
Les sorties non utilisées restent tout simplement inoccupées :
- Si un seul servo est utilisé pour la commande des ailerons, la sortie 5 du récepteur reste libre.
- Par ailleurs, suivez les instructions des pages qui suivent.
Modèles à voilure fixe, avec ou sans moteur, avec 2 servos de commande des ailerons...
... et avec empennage de type « normal »
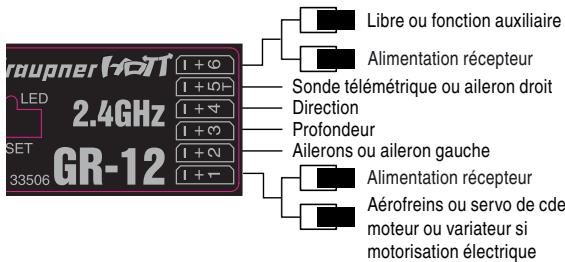
... et avec empennage « en V »

... et avec empennage de type « 2 servos de commande de profondeur » - uniquement avec la Smart-Box en option
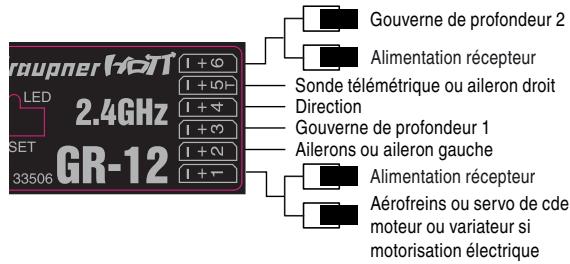
Delta / Ailes volantes avec ou sans moteur,...
... avec 2 servos ailerons/profondeur
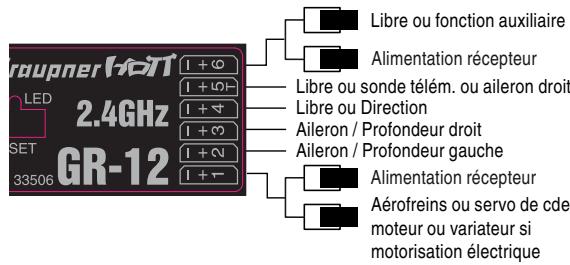
Etant donné les différents montages possibles des servos et la fixation des tringles de commande, il est tout à fait probable qu'il soit nécessaire d'inverser ici ou là le sens de rotation des servos. Le tableau ci-dessous donne quelques conseils bien pratiques :
| Type de modèle | Servos qui tournent à l'envers | Solution |
| Empenna-ge V | Direction et profondeur inversés | Inverser les servos 3 + 4 dans le menu «Réal. Servo« |
| Direction correcte, Profondeur inversée | Inverser le branchement des servos 3 + 4 sur le récepteur |
| Profondeur correcte, Direction inversée | Inverser le branchement des servos 3 + 4 dans le menu «Réal. Servo« ET sur le récepteur |
| Delta, Aile volantes | Profondeur et ailerons inversés | Inverser les sens de rota-tion des servos 2 + 3 dans le menu «Réal. Servo« ET sur le récepteur |
| Profondeur correcte, Ailerons inversés | Inverser les sens de rota-tion des servos 2 + 3 dans le menu «Réal. Servo« ET sur le récepteur |
| Ailerons corrects, Profondeur inversée | Inverser le branchement des Servos 2 + 3 sur le récepteur |
Les principaux menus des modèles à voilure fixe sont signalés, dans les « Descriptions des programmes » par le symbole ci-dessous...

... de telle sorte que vous n'avez à vous occuper, lors de la programmation d'un modèle à voilure fixe, que de ces menus-là.
L'évolution permanente des héliocôtères ainsi que celle des différents composants, tels que les gyroscopes, variateurs, pales de rotor, etc. permet aujourd'hui de maîtriser un héliocôtère, même en vol 3D. Ne peuvent être pilotés avec l'émetteur mx-10 HoTT que les héliocôtères équipés d'un système „Flybarless“, par ex. V-Stabi, Microbeast ou similaires. Celui-ci mixe alors tous les servos nécessaires à la commande du plateau cyclique et du rotor arrêté.
La commande moteur se fait par la voie 5.
Pour le branchement des servos, voir la notice de votre système Flybarless.
Si la fonction de télémetrie du récepteur doit être utilisée, il faut, à l'aide de la Smart-Box en option, „mapper“ la commande moteur sur la voie 6 (voir page 51, Channel Mapping) afin de pouvoir brancher les capteurs
télémetriques sur la voie 5.
Les principaux menus des hélicoptères sont signalés, dans les „Descriptions des programmes“ par le symbole ci-dessous...

... de telle sorte que vous n'avez plus à vous occuper, lors de la programmation d'un helicopter, que de ces menus là.
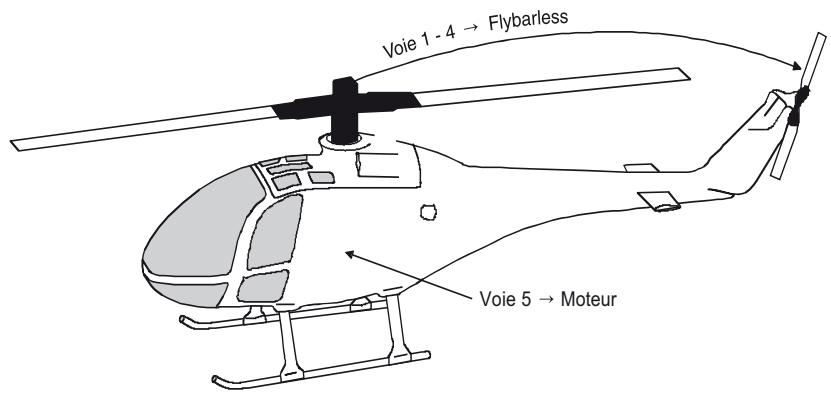
Conseils pour l'installation
Les servos DOIVENT être branchés dans cet ordre sur le récepteur.
Les sorties non utilisées restent tout simplement libres. De plus, nous vous conseillons de suivre attentivement les consignes qui figurent dans les pages qui suivent.
Affectation des sorties récepteur pour des hélicoptères...
... Avec système sans stabilisateurs (flybarless)

Libre ou régulation moteur (Channel Mapping avec Smart-Box en option) Capteur télécommande ou régulation moteur Servo anti-couple (système gyroscope) Servo cyclique Longitudinal Servo cyclique Lateral Servo cyclique Lateral 2 ou Longitudinal 2
Avant de commencer la programmation des paramètres proprement dite, il y a encore quelques réglages de base à faire.
Mode de pilotage
| »MODE 1« (Gaz droite) | »MODE 2« (Gaz gauche) |
| Profondeur | Gaz max | Gaz max | Profondeur | |
| Direction | uoluality | Aleron | Direction | uoluality | Aleron |
| Profondeur | Gaz min | Gaz min | Profondeur | |
| »MODE 3« (Gaz droite) | »MODE 4« (Gaz gauche) |
| Profondeur | Gaz max | Gaz max | Profondeur | |
| Direction | uoluality | Direction | Direction | Aleron | Direction |
| Profondeur | Gaz min | Gaz min | Profondeur | |
En principe, il existe quatre possibilités d'attribuer les fonctions de commande, ailerons, profondeur, direction et gaz/aérofreins d'un modèle à voilure fixe aux deux manches de commande. C'est le pilote lui-même, selon ses propres habitudes, qui désire l'une de ces quatre possibilités.
Pour sélectionner un mode de pilotage, il faut d'abord mettre l'interrupteur du mode de l'émetteur sur „normal“. Si ce n'est pas déjà fait, coupez l'émetteur et branchez la fiche de programmation fournie, dans la prise DATA située au dos de l'émetteur. Allumez l'émetteur : à chaque impulsion sur la touche BIND située sur le devant de l'émetteur on passe d'un mode à l'autre de manière circulaire.
| Buzzer | LED | Description |
| 1 x bip émetteur | LED orange allumée | Réglage pays Universal/Europe |
| 2 x bip émetteur | LED orange clignote | Réglage pays-France |
| Le réglage selon le pays est précrit en detail dans ce qui suit.. |
| 3 x bip émetteur | LED orange allumée | »MODE 1« |
| 4 x bip émetteur | LED orange allumée | »MODE 2« |
| 5 x bip émetteur | LED orange allumée | »MODE 3« |
| 6 x bip émetteur | LED orange allumée | »MODE 4« |
Vous sélectionnez votre réglage en appuyant sur la touche BIND durant 3 secondes env. Après avoir relâché la touche, une brève mélodie de confirmation se fait entendre et le bip s'arrête. Coupez ensuite l'émetteur et retirez la fiche de programmation au dos de l'émetteur. Ne jamais utiliser l'émetteur avec la fiche de programmation branchée!
Par la suite, pour vérifier le mode dans lequel se trouve votre émetteur, il faut se référer à la LED de l'émetteur.
Réglage selon le pays
Après avoir réglé le mode de pilotage, il faut, dans un deuxième temps, enregistrer le réglage pays. Ce réglage selon le pays dans lequel vous vous trouvez est nécessaire pour respecter les diverses législations.
et directives en vigueur (FCC, ETSI, CE, etc.). En France par exemple, l'utilisation de la radiocommande n'est autorisée que dans une bande de fréquence restreinte. C'est pourquoi, IL FAUT tout d'abord mesurer l'émetteur en mode „France“ si vous l'utilisez en France. Il est interdit d'utiliser le mode UNIVERSAL/EUROPE en France.
Si ce n'est pas déjà fait, coupez l'émetteur et branchez la fiche de programmation fournie, dans la prise DATA située au dos de l'émetteur, et le Jumper en position „NO MIX“ sur le devant de l'émetteur. Allumez l'émetteur : à chaque impulsion sur la touche BIND située sur le devant de l'émetteur on passe d'un réglage à l'autre de manière circulaire :
| Buzzer | LED | Description |
| 1 x bip émetteur | LED orange allumée | Réglage pays Universal/Europe |
| 2 x bip émetteur | LED orange clignote | Réglage pays France |
Vous sélectionnez votre réglage en appuyant sur la touche BIND durant 3 secondes env. Après avoir relâché la touche, une brève mélodie de confirmation se fait entendre et le bip s'arrête. Coupez ensuite l'émetteur et retirez la fiche de programmation au dos de l'émetteur. Ne jamais utiliser l'émetteur avec la fiche de programmation branchée!
Par la suite, pour vérifier avec quel réglage vous utilisez l'émetteur, réferez-vous à la LED de l'émetteur après l'avoir allumé.
Remarques:
- Lors de la programmation, veillez à ce que les moteurs électriques ne puissent pas démarrer par inadvertance ou si vous avez un moteur thermique avec démarrage automatique, que celui-ci ne puisse pas démarrer tout seul. Par mesure de sécurité, débranchez toujours l'accu de propulsion et coupez l'alimentation carburant s'il s'agit d'un moteur thermique.
Configuration empennage
La configuration de l'empennage est sélectionnée, avec le Jumper fourni, au niveau des barrettes de contact „MIX" sur le devant de l'émetteur.
Sélectionnez le type correspondant à votre modèle en positionnant le Jumper en conséquence.
"normal":
La profondeur et la direction sont commandées chacune par un servo.
Le Jumper relie les deux pins du milieu "NO MIX"

,2 ailerons":
Cette option est destinée aux modèles avec 1 ou deux servos de commande des ailerons. Lorsque vous bougez les ailerons le servo branché sur la sortie 5 se déplacera parallèlement au servo 2. Le trim des ailerons agit sur les deux servos.
Le Jumper relie les deux Pins de gauche "AILE"

"Delta/Ailes volantes"
La commande des ailerons et de la profondeur se fait avec un ou deux servos par aile, branché sur les voies 2 et 3. Le couplage nécessaire pour la commande des ailerons et de la profondeur est assuré automatiquement par le mixage de l'émetteur.
Le Jumper relie les deux Pins de droite "DELTA".

"Empennage en V"
La commande de la profondeur et de la direction est assurée par deux servos séparés fixés à deux gouvernes en V et branchés sur les voies 3 et 4. Le couplage nécessaire pour la commande de la direction et de la profondeur est assuré automatiquement par le mixage de l'émetteur.
Le Jumper relie les deux Pins de gauche et les deux Pins de droite.

Etant donné les différents montages possibles des servos et la fixation des tringles de commande, il est tout à fait probable qu’il soit nécessaire d’inverser ici ou là le sens de rotation des servos. Le tableau ci-dessous donne quelques conseils bien pratiques :
| Type de modèle | Servos qui tournent à l'envers | Solution |
| Empenna-ge V | Direction et profondeur inversés | Inverser les servos 3 + 4 dans le menu «Réal. Servo« |
| Direction correcte, Profondeur inversée | Inverser le branchement des servos 3 + 4 sur le récepteur |
| Profondeur correcte, Direction inversée | Inverser le branchement des servos 3 + 4 dans le menu «Réal. Servo« ET sur le récepteur |
| Delta, Aile volantes | Profondeur et ailerons inversés | Inverser les sens de rota-tion des servos 2 + 3 dans le menu «Réal. Servo« ET sur le récepteur |
| Profondeur correcte, Ailerons inversés | Inverser les sens de rota-tion des servos 2 + 3 dans le menu «Réal. Servo« ET sur le récepteur |
| Ailerons corrects, Profondeur inversée | Inverser le branchement des Servos 2 + 3 sur le récepteur |
Sorties récepteur
Pour un maximum de flexibilité en ce qui concerne l'affectation des sorties récepteur, la Smart-Box en option, avec le „Channel Mapping“ offre la possibilité d'intervertir toutes les sorties servos 1 à 6. À ce sujet, voir chapitre „Télémétrie“ en page 183.
Avec la fonction Channel-Mapping de la Smart-Box, les 5 voies de l'émetteur peuvent être réparties sur plusieurs récepteurs, mais une voie peut également être attribuée à plusieurs sorties récepteur avec la même fonction.
Par exemple pour la commande d'un volet d'aileron avec deux servos au lieu d'un seul, etc.
Récepteurs liés
Les récepteurs Graupner HoTT doivent être assignés, exclusivement à un modèle (mémoire) d'un émetteur Graupner HoTT afin de pouvoir communiquer. Cette procédure est appelée Binding, et n'a besoin d'être effectuée qu'une seule fois pour tout nouvel ensemble récepteur/modèle (et peut être reprise à tout moment).
Remarque importante :
Durant la procédure Binding, veillez impérativement à ce que l'antenne d'émission soit suffisamment éloignée des antennes de réception! À 1 mètre de distance, vous ne courez plus aucun risque. Si vous êtes trop près, la voie du retour d'informations risque d'être perturbée, avec comme conséquences, des dysfonctionnements.
Assignation (Binding) de plusieurs récepteurs par modèle
En cas de besoin, vous pouvez assigner plusieurs récepteurs à un seul et même modèle. Assignez tout d'abord un récepteur après l'autre, comme décrit ci-dessous : Par la suite, en cours d'utilisation, seul le récepteur assigné en dernier sera en mesure d'établir une liaison téléétrique avec l'émetteur.
C'est sur ce récepteur qu'il faudra brancher les sondes et capteurs téléélectriques du modèle étant donné que seul le récepteur assigné en dernier est capable de retransmettre les données par la voie retard. Le deuxième récepteur, et les autres fonctionnent en parallèle par rapport au dernier récepteur assigné à l'émetteur, néanmoins de manière indépendante, en mode Slave, avec voie de retard coupée!
Si un récepteur qui ne transmet pas des données de télémétrie est allumé, la LED de l'émetteur passe de
La LED de l'émetteur passe de orange au vert.
Assignation émetteur - récepteur
Attention: L'émetteur mx-10 HoTT ne peut être assigné que s'il est en mode „normal“. Assurez-vous, avant de lancer la procédure Binding, que l'émetteur se trouve bien dans ce mode. Voir page 20 sélection du mode.
Allumez l'émetteur et branchez ensuite l'alimentation de votre récepteur : Sur le récepteur, la LED verte clignote une seule fois puis reste éteinte.
La LED de l'émetteur est allumée au vert pour signaler qu'aucun récepteur assigné n'est branché.
Appuyez sur la touche SET du récepteur et restez dessus :
Lancez ensuite la procédure Binding d'un récepteur avec une impulsion sur la touche BIND du récepteur. Si au bout de 10 secondes la LED du récepteur reste allumée au vert, la procédure Binding a réussi. Vous pouvez relâcher la touche SET du récepteur et la touche BIND de l'émetteur.
Votre ensemble modèle/récepteur est maintenant fonctionnel. Parallèlement à cela, la LED de l'émetteur passe du vert à l'orange.
Si par contre, la LED verte du récepteur clignote plus de 10 secondes et que la LED de l'émetteur ne passe pas à l'orange, c'est que la procédure Binding a échoué. Modifiez éventuellement la position des antennes et reprenez toute la procédure.
Essai de portée
L'essai de portée intégrée réduit la puissance d'émission de telle sorte que vous pouvez effectuer un essai de portée dans les 50 mètres. Effectuez l'essai de portée du système Graupner HoTT selon les instructions qui seront. Pour cet essai, demandez à un de vos collègues de vous donner un coup de main.
- Montez le récepteur, qui a été assigné à l'émetteur, dans le modèle, selon les instructions de montage
- Allumez la radio et attendez que la LED verte du récepteur s'allume. Vous pouvez maintenant observer le déplacement des servos.
- Posez le modèle par terre sur un sol plat (bitume, herbe rase ou terre) de manière à ce que les antennes de réception soient au moins à 15 cm au-dessus du sol. Pour l'essai, il sera peut-être nécessaire de caler, surélever le modèle.
- Tenez l'émetteur à hauteur de hanches, sans toutefois le coller au corps. Ne visez pas directement le modèle avec l'antenne, mais tournez/repliez l'antenne de manière à ce qu'elle soit à la verticale durant l'utilisation.
- Assurez-vous que l'émetteur est bien en mode „normal“, c'est-à-dire l'interrupteur de mode vers l'arrière. Appuyez maintenant sur la touche BIND durant 5 secondes jusqu'à ce que l'émetteur émette un bip sonore en continu. Relâchez la touche BIND. Attention lorsque vous utilisez plusieurs récepteurs par modèle: L'essai de portée ne fonctionne qu'avec le récepteur qui transmet les données téléétriques – c'est-à-dire qu'avec le dernier récepteur assigné.
- Le fait de déclencher l'essai de portée, réduit la puissance d'émission de l'émetteur de manière significative. En même temps, une tonalité en continu
se déclenché.
Au bout des 99 secondes que dure l'essai de portée, l'émetteur reprend sa pleine puissance d'émission et la tonalité se coupe. Attention: you could stopper the essai de portée à tout moment en appuyant une nouvelle fois sur la touche BIND. 7. Pendant ce laps de temps, éloignez-vous du modèle en déplaçant les manches de commande. Si vous constatez une interruption dans la liaison, dans la limite des 50 mètres, essayez de la reproduire 8. Une vérification supplémentaire : si le modèle est équipé d'un moteur, lancez le moteur, pour vous assurer que ce dernier ne crée pas d'interférences 9. Continuez à vous éloigner du modèle jusqu'à ce qu'un contrôle correct ne soit plus possible 10. À cet endroit, attendez que le temps de l'essai soit écoulé, avec le modèle toujours prêt. Dès que le temps de l'essai est écoulé, le modèle doit à nouveau réagir aux ordres de commande. Si ce n'est pas le cas à 100%, ne persistez pas et contactez un Service Après Vente Graupner GmbH &Co. KG. 11. Avant chaque vol, faites cet essai de portée et simulez tous les déplacements servos susceptibles d'intervenir en vol. Pour une évolution en toute sécurité, la portée au sol doit toujours être d'au moins 50 mètres.
Attention:
Ne jamais lancer une procédure d'essai de portée en plein vol!
Avant de commencer la programmation des paramètres proprement dite, il y a encore quelques réglages de base à faire.
Mode de pilotage
| »MODE 1« (Gaz droite) | »MODE 2« (Gaz gauche) |
| Ante couple
Tangage | Moteur/Pitch
Roll plateau
Moteur/Pitch | Ante couple
Moteur/Pitch
Roll plateau
Moteur/Pitch | Tangage
Roll plateau
Tangage |
| »MODE 3« (Gaz droite) | »MODE 4« (Gaz gauche) |
| Roll plateau
Tangage | Moteur/Pitch
Roll plateau
Moteur/Pitch | Moteur/Pitch
Roll plateau
Moteur/Pitch | Tangage
Roll plateau
Tangage |
En principe, il existe quatre possibilités d'attribuer les fonctions de commande roulis (cyclique latéral), tangage (cyclique longitudinal), anti-couple et Gaz/Pas d'un hélicoptère, aux deux manches de commande. C'est le pilote lui-même, selon ses propres habitudes, qui désire l'une de ces quatre possibilités.
Pour sélectionner un mode de pilotage, il faut d'abord mettre l'interrupteur du mode de l'émetteur sur „normal". Si ce n'est pas déjà fait, coupez l'émetteur et branchez la fiche de programmation fournie, dans la prise DATA située au dos de l'émetteur. Allumez l'émetteur : à chaque impulsion sur la touche BIND située sur le devant de l'émetteur on passe d'un mode à l'autre de manière circulaire.
| Buzzer | LED | Description |
| 1 x bip émetteur | LED orange allumée | Réglage pays Universal/Europe |
| 2 x bip émetteur | LED orange clignote | Réglage pays-France |
| Le réglage selon le pays est précrit en detail dans ce qui suit.. |
| 3 x bip émetteur | LED orange allumée | »MODE 1« |
| 4 x bip émetteur | LED orange allumée | »MODE 2« |
| 5 x bip émetteur | LED orange allumée | »MODE 3« |
| 6 x bip émetteur | LED orange allumée | »MODE 4« |
Vous sélectionnez votre réglage en appuyant sur la touche BIND durant 3 secondes env. Après avoir relâché la touche, une brève mélodie de confirmation se fait entendre et le bip s'arrête. Coupez ensuite l'émetteur et retirez la fiche de programmation au dos de l'émetteur. Ne jamais utiliser l'émetteur avec la fiche de programmation branchée!
Par la suite, pour vérifier le mode dans lequel se trouve votre émetteur, il faut se référer à la LED de l'émetteur.
Réglage selon le pays
Après avoir réglé le mode de pilotage, il faut, dans un deuxième temps, enregistrer le réglage pays
Ce réglage selon le pays dans lequel vous vous trouvez est nécessaire pour respecter les diverses législations.
et directives en vigueur (FCC, ETSI, CE, etc.). En France par exemple, l'utilisation de la radiocommande n'est autorisée que dans une bande de fréquence restreinte. C'est pourquoi, IL FAUT tout d'abord mettre l'émetteur en mode „France“ si vous l'utilisez en France. Il est interdit d'utiliser le mode UNIVERSAL/EUROPE en France.
Si ce n'est pas déjà fait, coupez l'émetteur et branchez la fiche de programmation fournie, dans la prise DATA située au dos de l'émetteur, et le Jumper en position „NO MIX“ sur le devant de l'émetteur. Allumez l'émetteur : à chaque impulsion sur la touche BIND située sur le devant de l'émetteur on passe d'un réglage à l'autre de manière circulaire :
| Buzzer | LED | Description |
| 1 x bip émetteur | LED orange allumée | Réglage pays Universal/Europe |
| 2 x bip émetteur | LED orange clignote | Réglage pays France |
Vous sélectionnez vos réglages en appuyant sur la touche BIND durant 3 secondes env. Après avoir relâché la touche, une brève mélodie de confirmation se fait entendre et le bip s'arrête. Coupez ensuite l'émetteur et retirez la fiche de programmation au dos de l'émetteur. Ne jamais utiliser l'émetteur avec la fiche de programmation branchée!
Par la suite, pour vérifier avec quel réglage vous utilisez l'émetteur, réferez-vous à la LED de l'émetteur après l'avoir allumé.
Remarques:
- Lors de la programmation, veillez à ce que les moteurs électriques ne puissent pas démarrer par inadvertance ou si vous avez un moteur thermique avec démarrage automatique, que celui-ci ne puisse pas démarrer tout seul. Par mesure de sécurité, débranchez toujours l'accu de propulsion et coupez l'alimentation carburant s'il s'agit d'un moteur thermique.
Systèmes sans barre stabilisatrice
Selon votre type d'hélicoptère, branchez votre système Flybarless sur les voies 1-4 du récepteur. Respectez la notice de votre système.
Sorties récepteur
Pour un maximum de flexibilité en ce qui concerne l'affectation des sorties récepteur, la Smart-Box en option, avec le „Channel Mapping“ offre la possibilité d'intervertir toutes les sorties servos 1 à 6. À ce sujet, voir chapitre „Télémetrie“ en page 183.
Avec la fonction Channel-Mapping de la Smart-Box, les 5 voies de l'émetteur peuvent être réparties sur plusieurs récepteurs, mais une voie peut également être attribuée à plusieurs sorties récepteur avec la même fonction. Par exemple pour la commande d'un volet d'aileron avec deux servos au lieu d'un seul etc.
Récepteurs liés
Les récepteurs Graupner HoTT doivent être assignés, exclusivement à un modèle (mémoire) d'un émetteur Graupner HoTT afin de pouvoir communiquer. Cette procédure est appelée Binding, et n'a besoin d'être effectuée qu'une seule fois pour tout nouvel ensemble récepteur/modèle (et peut être reprise à tout moment).
Remarque importante :
Durant la procédure Binding, veillez impérativement à ce que l'antenne d'émission soit suffisamment éloignée des antennes de réception! À 1 mètre de distance, vous ne courez plus aucun risque. Si vous êtes trop près, la voie du retour d'informations risque d'être perturbée, avec comme conséquences, des dysfonctionnements.
Assignation (Binding) de plusieurs récepteurs par modèle
En cas de besoin, vous pouvez assigner plusieurs récepteurs à un seul et même modèle. Assignez tout d'abord un récepteur après l'autre, comme décrit ci-dessous : Par la suite, en cours d'utilisation, seul le récepteur assigné en dernier sera en mesure d'établir une liaison téléétrique avec l'émetteur. C'est sur ce récepteur qu'il faudra brancher les sondes et capteurs téléétriques du modèle étant donné que le récepteur assigné en dernier est capable de retransmettre les données par la voie retour. Le deuxième récepteur, et les autres fonctionnent en parallèle par rapport au dernier récepteur assigné à l'émetteur, néanmoins de manière indépendante, en mode Slave, avec voie de retour coupée!
Si un récepteur qui ne transmet pas des données de télémétrie est allumé, la LED de l'émetteur passe de
La LED de l'émetteur passe de orange au vert.
Assignation émetteur - récepteur
Attention: L'émetteur mx-10 HoTT ne peut être assigné que s'il est en mode „normal“. Assurez-vous, avant de lancer la procédure Binding, que l'émetteur se trouve bien dans ce mode. Voir page 20 sélection du mode.
Allumez l'émetteur et branchez ensuite l'alimentation de votre récepteur : Sur le récepteur, la LED verte clignote une seule fois puis reste éteinte.
La LED de l'émetteur est allumée au vert pour signaler qu'aucun récepteur assigné n'est branché.
Appuyez sur la touche SET du récepteur et restez dessus :
Lancez ensuite la procédure Binding d'un récepteur avec une impulsion sur la touche BIND du récepteur. Si au bout de 10 secondes la LED du récepteur reste allumée au vert, la procédure Binding a réussi. Vous pouvez relâcher la touche SET du récepteur et la touche BIND de l'émetteur.
Votre ensemble modèle/récepteur est maintenant fonctionnel. Parallèlement à cela, la LED de l'émetteur passe du vert à l'orange.
Si par contre, la LED verte du récepteur clignote plus de 10 secondes et que la LED de l'émetteur ne passe pas à l'orange, c'est que la procédure Binding a échoué. Modifiez éventuellement la position des antennes et reprenez toute la procédure.
Essai de portée
L'essai de portée intégrée réduit la puissance d'émission de telle sorte que vous pouvez effectuer un essai de portée dans les 50 mètres. Effectuez l'essai de portée du système Graupner HoTT selon les instructions qui seront. Pour cet essai, demandez à un de vos collègues de vous donner un coup de main.
- Montez le récepteur, qui a été assigné à l'émetteur, dans le modèle, selon les instructions de montage
- Allumez la radio et attendez que la LED verte du récepteur s'allume. Vous pouvez maintenant observer le déplacement des servos.
- Posez le modèle par terre sur un sol plat (bitume, herbe rase ou terre) de manière à ce que les antennes de réception soient au moins à 15 cm au-dessus du sol. Pour l'essai, il sera peut-être nécessaire de caler, surélever le modèle.
- Tenez l'émetteur à hauteur de hanches, sans toutefois le coller au corps. Ne visez pas directement le modèle avec l'antenne, mais tournez/repliez l'antenne de manière à ce qu'elle soit à la verticale durant l'utilisation.
- Assurez-vous que l'émetteur est bien en mode „normal“, c'est-à-dire l'interrupteur de mode vers l'arrière. Appuyez maintenant sur la touche BIND durant 5 secondes jusqu'à ce que l'émetteur émette un bip sonore en continu. Relâchez la touche BIND.
Attention lorsque vous utilisez plusieurs récepteurs par modèle: L'essay de portée ne fonctionne qu'avec le récepteur qui transmet les données téléétriques - c'est-à-dire qu'avec le dernier récepteur assigné.
- Le fait de déclencher l'essay de portée, réduit la puissance d'émission de l'émetteur de manière
significative. En même temps, une tonalité en continu se déclenche.
Au bout des 99 secondes que dure l'essay de portée, l'émetteur reprend sa pleine puissance d'émission et la tonalité se coupe.
Attention: vous pouvez stopper l'essay de portée à tout moment en appuyant une nouvelle fois sur la touche BIND.
- Pendant ce laps de temps, éloignez-vous du modèle en déplaçant les manches de commande. Si vous constatez une interruption dans la liaison, dans la limite des 50 mètres, essayez de la produire
- Une vérification supplémentaire : si le modèle est équipé d'un moteur, lancez le moteur, pour vous assurer que ce dernier ne crée pas d'interférences
- Continuez à vous éloigner du modèle jusqu'à ce qu'un contrôle correct ne soit plus possible
- À cet endroit, entendez que le temps de l'essai soit écoulé, avec le modèle toujours prêt. Dès que le temps de l'essai est écoulé, le modèle doit à nouveau réagir aux ordres de commande. Si ce n'est pas le cas à 100%, ne persistez pas et contactez un ServiceAprèsVente GraupnerGmbH&Co. KG.
- Avant chaque vol, faites cet essai de portée et simulez tous les déplacements servos susceptibles d'intervenir en vol. Pour une évolution en toute sécurité, la portée au sol doit toujours être d'au moins 50 mètres.
Attention:
Ne jamais lancer une procédure d'essai de portée en plein vol!
Avec l'émetteur mx-10 HoTT, vous avez la possibilité d'inverser le sens de rotation des servos et de modifier leurs débattements.
Sens de rotation des servos
Le sens de rotation des servos sera adapté en fonction de leur montage dans le modèle, de manière à ce que pour le montage des tringles vous n'ayez pas à tenir compte du sens de rotation des servos. Le sens de rotation de chaque servo peut être inversé séparément sur la barrette des interrupteurs Servoreverse située sur le devant de l'émetteur. Le sens de rotation est symbolisé par „NOR“ pour le sens de rotation normal, et par „REV“ lorsqu'il est inversé.
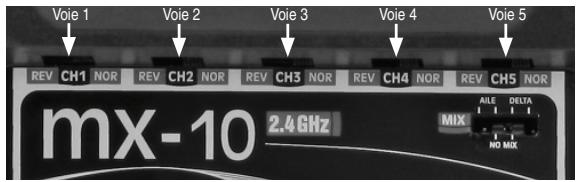
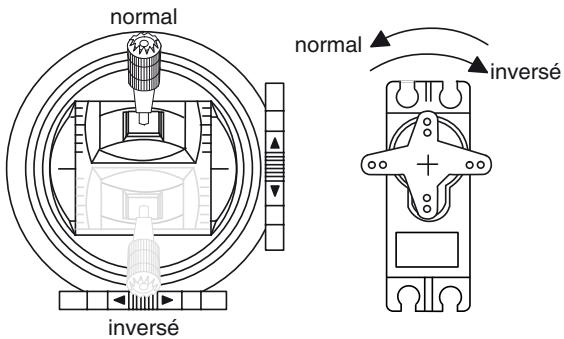
Débattements servos „dual rate
Pour un réglage symétrique du débattement de la profondeur, de la direction et des ailerons, quel que soit le côté du débattement.
Au niveau de l'émetteur, la course du servo est enregistrée de manière fixe et peut être réglée soit à 70% (en mettant l'interrupteur vers l'avant) ou 100% (en mettant l'interrupteur en position arrière).

Remarque:
Avec la Smart-Box en option, la course du servo peut être programmée également de manière asymétrique pour toutes les voies. Voir paragraphe „Télémetrie“ en page 183.
D'origine, le récepteur maintient, en cas de situation Fail Safe, les servos dans leurs dernières positions reconnues correctes (., hold). En cas de Fail Safe, la LED verte du récepteur s'éteint, et sur l'émetteur, la LED orange clignote 3 fois de suite consécutivement. Par ailleurs, celui-ci émet alors 3 bips sonores pour attirer l'attention, conformément au clignotement de la LED. Utilisez tout épérentiel de sécurité de cette option, pour que dans un cas Fail-Safe, qu'au moins le moteur thermique se mette au ralenti, ou dans le cas d'une motorisation électrique, que le moteur se coupe (Stop), et en programmant par ex. „Hold (maintien)" s'il s'agit d'un helicopter. En cas de perturbations ou d'interférences le modèle ne pourrait pas faire n'importe quoi aussi facilement et vous pourrez éviter des dégâts matériels, voir corporels.
Remarque importante:
Veuillez lancer les deux procédures „Binding" et „Essai de portée" indépendamment du fait que vous ayez programmé l'émetteur avec la touche de programmation ou avec la Smart-Box. Aucune de ces deux options n'a de conséquences réelles sur les réglages enregistrés sur le récepteur. Par contre, TOUS les réglages seront remis à leur valeur d'origine, également ceux entrepris avec la Smart-Box sur la page Fail-Safe (RX FAIL SAFE) si vous ouvrez la fonction Fail-Safe, comme décrit ci-dessous, avec la touche de programmation.
Si auparavant vous avez enregistré avec la touche de programmation le réglage pays „France“, celui-ci sera également perdu, voir ci-dessous!
De ce fait, il faudra refaire à nouveau ce réglage. Dans la mesure du possible, faites toujours vos réglages avec la Smart-Box!
Allumez votre ensemble de réception.
Mettez l'interrupteur de mode en position „normal". Appuyez et maintenez la touche BIND enfoncée pendant que vous allumez l'émetteur.
Ne relâchez la touche qu’une fois l’émetteur allumé. Le mode Fail-Safe souhaité (Fail-Safe ON/OFF, Hold ou Standard) pourra être sélectionné en appuyant à chaque fois brièvement sur la touche BIND située sur le devant de l’émetteur, de manière circulaire:
Mode Fail-Safe
Après avoir appuyé sur la touche BIND, l'émetteur émet une fois un bip sonore. La LED de l'émetteur clignote alternativement du vert à l'orange. Pour enregistrer la position que les servos doivent prendre en cas de Fail-Safe après un temps „Hold" de 0,75 sec., mettez les éléments de commande correspondants de votre émetteur EN MÉME TEMPS dans la position Fail-Safe souhaitée. Appuyez ensuite sur la touche BIND et restez dessus durant 3 à 4 secondes. Après avoir relâché la touche, la LED doit rester allumée à l'orange et le signal sonore de l'émetteur devrait disparaître. Celui-ci se retrouve de nouveau en mode de commande. Sinon, reprenez la procédure.
Mode hold (conseillé pour les hélicoptères!)
Réglage d'origine. L'émetteur émet deux bips sonores après impulsion sur la touche BIND, la LED de l'émetteur clignote, alternativement au vert et deux fois à l'orange. En cas de perturbations, tous les servos programmés sur „maintien“ resteront dans leur dernière position reconnue correcte jusqu'à réception d'un signal correct par le récepteur. Pour confirmer ce besoin, appuyez sur la touche BIND et restez dessus durant
3 à 4 secondes. Après avoir relâché la touche, la LED doit rester allumée à l'orange et le signal sonore de l'émetteur devrait disparaître. Celui-ci se retrouve de nouveau en mode de commande. Sinon, reprenez la procédure
Après avoir appuyé sur la touche BIND, l'émetteur émet trois bips sonores. La LED de l'émetteur clignote alternativement au vert et trois fois à l'orange. Pour confirmer ce choix, appuyez sur la touche BIND et restez dessus durant 3 à 4 secondes. Après avoir relâché la touche, la LED doit rester allumée à l'orange et le signal sonore de l'émetteur devrait disparître. Celui-ci se retrouve de nouveau en mode de commande. Sinon, reprenez la procédure.
- Mode standard (n'est ajusté qu'aux modèles à voilure fixe!)
Après avoir appuyé sur la touche BIND, l'émetteur émet quatre bips sonores. La LED de l'émetteur clignote alternatively au vert et quatre fois à l'orange. Dans ce mode, en cas de Fail-Safe, le servo de commande des gaz (voie 1) se mettra en position Fail-Safe enregistréeAAPARAVANT, toutes les autres voies resteront en Hold. Mettez alors le manche de commande des gaz dans la position souhaitée, puis appuyez, pour confirmer ce choix, sur la touche BIND durant 3 ou 4 secondes. Après avoir relâché la touche, la LED doit rester allumée à l'orange et le signal sonore de l'émetteur devrait disparaître pour confirmer ce choix, appuyez sur la touche BIND et restez dessus durant 3 à 4 secondes. Après avoir relâché la touche, la LED doit rester allumée à l'orange et le signal sonore de l'émetteur disparaît.
Celui-ci se retrouve de nouveau en mode de commande. Sinon, reprenez la procédure.
Remarque:
Avec la Smart-Box en option, on peut programmer des positions Fail-Safe séparément, pour toutes les voies. À ce sujet, voir paragraphe «Télémétrie» en page 183.
Avec ce menu « Télémétrie », vous avez accès, en temps réel, aux données de l'émetteur et du récepteur ainsi qu'aux données optionnelles transmises par les capteurs et sondes, voir annexe, ces données sont consultables et programmables.
Les données récepteur sont transmises à l'émetteur par la voie de return d'informations intégrée dans le récepteur HoTT.
Sur les récepteurs GR-12S HoTT (Réf. Cde 33505), GR-12 HoTT (Réf. Cde 33506), GR-16 (Réf. Cde 33508) et GR-24 HoTT (Réf. Cde 33512), vous pouvez brancher 1 capteur ou sonde de télémétrie sur la sortie télémétrique.
La possibilité de mise à jour (Update), par l'utilisateur lui-même, de ces récepteurs, et de ceux à venir, permet d'avoir toujours les menus de télémétrie correspondant à jour et permet d'assurer une extension des fonctions ou langues par la suite.
Remarque:
Après avoir enregistré votre produit sous http://www.graupner.de/fr/service/enregistrer_produit, vous serez informé automatiquement par Mail des dernières mises à jour disponibles.
Sauvegardez sur un portable ou sur un PC compatible, avant toute mise à jour de l'émetteur, toutes les mémoires de modèle occupées, pour y avoir à nouveau accès en cas de pertes de données.
Les mises à jour, ainsi que les sauvegardes évoquées ci-dessus se font par prise PC de l'émetteur avec le cordon adaptateur USB en option Réf. Cde. 7168.6 et le cordon de branchement Réf. Cde. 7168.6A sur PC équip-pé du système d'exploitation Windows XP, Vista ou 7. Vous trouvez les logiciels et informations nécessaires,
par produit, en téléchargement sur www.graupner.de. Il est toujours conseillé de télécharger les dernières mises à jour, pour être sur de toujours avoir un produit à la dernière version.
Remarques importantes :
- cette notice, à l'heure de sa mise sous presse, ne tient compte que des fonctions actuellement disponibles.
- comme déjà mentionné en pages 172 et 175 au paragraphe « Binding de plusieurs récepteurs », vous pouvez, en cas de besoin, assigner plusieurs récepteurs à un seul modèle. Mais ce n'est que le dernier récepteur assigné qui sera en mesure d'établir une liaison téléétrique avec l'émetteur. Mais cela signifie également que ce n'est que le dernier récepteur assigné qui permettra l'accès au menu de téléétrie! Il faudra éventuellement modifier la suite chronologique des procédures Binding avant de pouvoir effectuer des réglages particuliers sur un récepteur.
- Lors des réglages de l'émetteur, veillez impérativement à ce que l'antenne d'émission soit suffisamment éloignée des antennes de réception! À 1 mètre de distance, vous ne courez plus aucun risque. Si vous êtes trop près, la voie du retour d'informations risque d'être perturbée, avec comme conséquence des dysfonctionnements.
- Comme les données telémétriques entre émetteur et récepteur ne sont transmises que par paquet de quatre données à la fois, la transmission des données nécessite un peu de temps, la réaction lorsque vous appuyez sur un touché de fonction et lorsque vous modifiez des réglages ne pourrait donc pas se faire immédiatement. Dans ce cas, il ne s'agit pas d'un
dysfonctionnement.
- Des programmations au niveau du modèle ou des capteurs/sondes, ne peuvent se faire que si le modèle est au sol. Ne faites ces réglages que lorsque le moteur est coupé ou lorsque l'accu de propulsion est débranché! Sinon, des programmations non souhaitées ne sont pas à exclure.
Un test servos activé par inadvertance au niveau du récepteur peut conduire au crash du modèle avec toutes les conséquences matérielles et physiques qu'il pourrait entraîner. Respectez les consignes de sécurité en pages 137... 140 de cette notice et les instructions de chaque élément utilisé.
- Tous les réglages effectués dans le menu « Télemétrie » (Fail-Safe, sens de rotation servo, course servo, mixages et réglages des courbes) ne sont enregistrés que dans le récepteur, et seront repris automatiquement si vous montez ce récepteur dans un autre modèle. C'est pourquoi, il vaut mieux réinitialiser le récepteur si vous souhaitez le monter dans un autre modèle, voir « Reset», page 159.
- C'est pourquoi, ne programmez le sens de rotation servo, course servo, mixages et réglages des courbes qu'à travers les menus standards et spécifiques de l'émetteur mx-10 HoTT, « Réglages servos » (page 177), « Mixages » (page 171) et « Dual Rate » (page 177), sinon les réglages successifs peuvent s'écraser, ce qui peut se traduire par la suite, en utilisation, par une grande confusion, et dans le pire des cas, par de sérieux problèmes.
- Avec la fonction Channel-Mapping qui est intégrée dans le menu « Télémetrie » de l'a Smart-Box en option, des fonctions peuvent être réparties sur plusieurs récepteurs, mais plusieurs sorties récepteurs,
Reglage affichage
teur peuvent également être affectées à une seule et même fonction. Par exemple pour commander un aileron avec deux servos au lieu d'un seul, etc. La aussi, la plus grande attention est requise lors de la programmation.
Télémétrie
Tous les menus relatifs à la „Télémétrie“ sont accessibles avec la Smart-Box en option.
Fixez la SMART-BOX sur la poignée de l'émetteur, c'est un emplacement idéal. Avec le cordon à 3 fils, reliez la Box à l'émetteur. Branchez une extrémité du cordon dans la prise DATA de l'émetteur et l'autre dans la prise située sur le côté droit de la SMART-BOX. La connectique est équipée de détompeurs, il s'agit des petites arêtes latérales de la prise. Ne les montez pas en force, les prises doivent se brancher facilement. Les fiches sont également repérées: Fils noir (-), fils rouge (+) et fils orange (Signal).
Utilisation - généralités
La navigation dans le menu « Télémetrie » de la Smart-Box se fait avec les quatre touches de fonction en haut de la Box.
Les touches ESC et ENTER vous permettent d'aller d'une page d'écran à l'autre. En haut à droite de chaque page, le sens dans lequel vous allez sera indiqué par (< >), voir ci-contre. S'il n'y a qu'un seul signe, vous êtes soit sur la première ou la dernière page. Vous ne pouvez donc aller que dans le sens indiqué.
Avec les touches DEC et INC vous pouvez, sur une page, sélectionner les paramètres (INC déplace le curseur vers le bas, DEC vers le haut).
Vous soupiez marquer les lignes sur lesquelles des paramètres ont été modifiés en plaçant devant la ligne un sigle (>). En appuyant sur les touches INC ou DEC, le sigle ^> saute à la ligne suivante ou se place sur la ligne précédente. Les lignes non accessibles ne sont pas utilisables.
Pour modifier un paramètre, appuyez simultanément sur les touches INC+DEC (le paramètre s'affiche alors en surbrillance), modifiez la valeur dans la limite de la plage de réglage, avec les touches INC ou DEC et enregistrez la valeur en appuyant une nouvelle fois simultanément sur les touches INC+DEC. Avec une impulsion sur la touche ESC vous revenez au point de départ.
Reglage/affichage
MENU SETTING AND DATAVIEW
Sur la première page intitulée...
... du sous menu „REGLAGE/AFFICHAGE“ une partie seulement des réglages peut être effectuée. Cette page n'a le mérite d'exister que pour donner des informations sur les réglages généraux de l'émetteur.
| TX | > |
| ACTION | VOLT: | 05.4V |
| MAXIMUM | VOLT: | 05.5V |
| MINIMUM | VOLT: | 05.4V |
| ALARM | VOLT: | 04.7V |
| COUNTRY | : | GENERAL |
| RANGE TEST | : | OFF 90s |
| Dénomination | Signification | Réglages possibles |
| ACTION VOLT | Tension actuelle de l'émetteur en Volt | - |
| MAXIMUM VOLT | Tension maximale depuis la dernière mise en route | - |
| MINIMUM VOLT | Tension minimale depuis la dernière mise en route | - |
| ALARM VOLT | Tension à partir de laquelle l'émetteur déclenché un signal d'alerte. | 4 – 15 V par cran de 0.1 V
D'origine à 4.5 V |
| COUNTRY | Réglage pays | GENERAL / FRANCE |
| RANGE TEST | Indique si un essai de portée est en cours, si c'est la cas, le temps restant s'affiche | OFF / ON |
Alarme tension émetteur trop faible (ALARM VOLT)
Vous pouvez régler le seuil de déclenchement de l'alarme lorsque la tension passe en-dessous de ce seuil, qui est réglable entre 4 - 15 V. D'origine, il est réglé à 4,5 Volt.
Si cette alarme est activée, "VOLT. E" clignote en haut à droite de l'écran de la SMART-BOX, et les paramètres
ACTION VOLT et ALARM VOLT sont affichés en surbrillance.
Réglage pays (COUNTRY)
Ce réglage pays est nécessaire pour respecter les diverses législations et directives en vigueur dans les différents pays. Les radios HoTT 2,4 sont équipées d'un bande de fréquence restreinte, notamment pour la France. Si l'émetteur doit être utilisé en France, il faut tout d'abord restreindre l'émetteur en mode „Frankreich (France)". Il est interdit de l'utiliser en mode „GENERAL (EUROPA)”. Réglage d'origine, GENERAL.
Essai de portée (RANGE TEST)
permet de lancer ou de stopper l'essai de portée, le temps restant est affiché à l'écran. Cet affichage se fait également même si l'essai de portée a été déclenché avec la touche BIND de l'émetteur.
... du sous-menu « REGLAGE/AFFICHAGE » beaucoup de réglages ne peut être réalisé. Cette page n'est là qu'à titre informatif :
| RX DATAVIEW > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT:05.0V |
| L.R-VOLT:04.5V |
| SENSOR1:00.0V 00°C |
| SENSOR2:00.0V 00°C |
| Dénominat. | Signification |
| S-QUA | Qualité du signal en % |
| S-dBm | Puisance de réception en dBm |
| S-STR | Puisance du signal en % |
| R-TEM. | Température récepteur en °C |
| L PACK TIME | Affiche le laps de temps le plus long durant lequel des paquets de données ont été perdus lors de la transmission de l'émetteur vers le récepteur |
| R-VOLT | Tension actuelle du récepteur en Volt |
Qualité du signal (S-QUA)
La qualité du signal (S-QUA) est transmise à l'émetteur par la voie retard du récepteur, en temps réel, et indique la puissance du signal en %.
Puissance de réception (s-dbm)
La puissance de réception (S-dBm) est affichée avec des valeurs négatives, cela signifie qu'une valeur proche de zéro est la valeur maximale (= réception la plus forte), plus les valeurs diminuent, moins bonne sera la puissance de réception! Cela est important, entre autres lors de l'essai de portée, avant utilisation du modèle.
Remarque:
Dans le cas de valeurs négatives, l'estimation d'un chiffre s'inverse : plus la valeur qui suit le sigle Moins est élevée, plus sa valeur est minime.
Avant chaque vol, faites un essai de portée comme décrit en pages 173 et 176 et simulez toutes les déplacements servos susceptibles d'intervenir en vol. La portée, lorsque le mode essai de portée est activé, doit être de 50 m minimum. Pour garantir un fonctionnement en toute sécurité, il faut qu'à l'écran « RX DATAVIEW (Données RX) » sous « S-dBm » ne soit pas affichée une valeur supérieure à -80 dBm. Si la valeur est
en-dessous (par ex. - 85 dBm), il ne faut en aucun cas décoller avec votre modèle. Vérifie
ifique le montage de votre ensemble de réception et la position des antennes.
En vol, cette valeur ne devrait pas chuter en-dessous des -90 dBm, sinon rapprochez-vous du modèle. Mais normalement, avant d'atteindre cette valeur, une alarme de limite de portée sonore est déclenchée (tonalité à intervalle d'une seconde) pour garantir une utilisation en toute sécurité.
Puissance du signal (S-STR)
La puissance du signal (S-STR) est affichée en %. En règle générale, une alarme de limite de portée sonore est déclenchée (tonalité à intervalle d'une seconde) dès que le signal récepteur de la voie de retour est trop faible. Mais comme la puissance d'émission de l'émetteur est bien supérieure à celle du récepteur, le modèle peut encore être piloté de manière sure. Mais il faudra néanmoins réduire l'éloignement du modèle jusqu'à extinction de l'alarme.
Température récepteur (r-tem.)
Assurez-vous, quelque soient les conditions de vol, quevoire récepteur restedans la plaque de température autorisée (idéalement entre-10 et +55°C Les seuils de température du récepteur, à partir desquels l'alarme se déclenchè sont réglibes dans le sous-menu « RX SERVOTEST » sous « ALARM TEMP + (50... 80°C et sous« ALARM TEMP-»(-20 +10^). En cas de dépassement, versle haut ou vers le bas, une alarmé sonore déclenché, et dans tous les sous-menus récepteur « RX »apparait en haut à gauche « TEMPE ». Par ailleurs, sur la page « RX DATAVIEW», le paramètre « R-TEM » s'affiche en surbrillance.
Paquet de données (L PACK TIME)
Affiche le laps de temps le plus long durant lequel des paquets de données ont été perdus lors de la transmission de l'émetteur vers le récepteur. En pratique, c'est le temps le plus long durant lequel la radio a été en mode Fail Safe.
Tension de fonctionnement (r-volt)
Vérifiez toujours la tension d'alimentation de votre récepteur. Si elle est trop BASSE, pas question de décoller. Vérifiez toujours la tension d'alimentation de votre récepteur. Si elle est trop BASSE, pas question de décoller. Le seuil de déclenchement de l'alarme en cas de tension trop BASSE peut être réglé dans le sous-menu « RX SERVO TEST » sous « ALARM VOLT » entre 3,0 et 6,0 Volt. En cas de dépassement de ce seuil, une alarme sonore se déclenche (double tonalité courte/longue, répétitive) et dans tous les sous-menus récepteur « RX … » apparait en haut à droite « VOLTE ». Par ailleurs, dans le sous-menu « RX DATAVIEW », la paramètre « R-VOLT » s'affiche en surbrillance.
La tension actuelle de l'accu de réception est également affichée sur la page d'ouverture de l'écran, voir page 24.
Tension minimale (l. r-volt)
« L. R-VOLT » indique la tension minimale du récepteur depuis sa dernière mise en route.
Si l'écart de cette tension avait été trop important par rapport à la tension actuelle « R-VOLT », il est possible que l'accu de réception soit trop fortement sollicité par les servos. Il en résulte des chutes de tension. Dans ce cas, utilisez un accu de réception plus puissant, pour obtenir une plus grande fiabilité.
Capteur 1 + 2
Indique les valeurs des capteurs téléélectriques 1 et/ ou 2, en option, en Volt et en °C. Vous trouvez une description de ces sondes et capteurs en annexe.
| RX SERVO | <-> |
| OUTPUT CH: | 01 | |
| REVERSE: | OFF | |
| CENTER: | 1500μsec | |
| TRIM: | -000μsec | |
| TRAVEL- | 150% | |
| TRAVEL+ | 150% | |
| PERIOD: | 20msec | |
Avant toute programmation, consultez cette page et suivez les consignes disponibles en page 120.
| Dénominat. | Signification | Réglage possible |
| OUTPUT CH | Choix canal | 1 ... selon le récepteur |
| REVERSE | Inv. du sens du servo | OFF / ON |
| CENTER | Neutre servo en μs | si activé (invers) dépend de la pos. de l'élém. de cde |
| TRIM | Pos. du trim en μs Différént de la position CENTER (neutre) | -120 ... +120 μs |
| TRAVEL- | Limitation du débutment à % de la course servo | 30 ... 150% |
| TRAVEL+ | Limitation du débattement à % de la course serve | 30 ... 150% |
| PERIOD | Temps cycle en ms | 10 ou 20 ms |
OUTPUT CH (choix du canal)
Avec les touches INC ou DEC, sélectionnez la ligne « Canal ». Appuyez simultanément sur INC+DEC. Le champ en question s'affiche en surbrillance. Avec les flèches de la touche quadridirectionnelle droite, vous pouvez maintenant sélectionner le canal souhaité (par ex. 01). Les paramètres qui suivent se réfèrent toujours au canal enregistré ici :
Reverse (inversion du sens de rotation servo)
Permet de régler le sens de rotation du servo branché sur la voie de commande sélectionnée : ON / OFF
CENTER (neutre du servo)
Dans cette ligne « CENTER », lorsque le champ est activé, (en surbrillance) s'affiche le temps d'impulsion actuel en μs de la voie de commande sélectionnée dans la ligne « OUTPUT CH ».
La valeur affichée dépend de la position de l'élément de commande et éventuellement de la position de son trim. Un temps d'impulsion de 1500 s correspond au neutre, c'est standard et à la position milieu du servo.
Pour modifier cette valeur, sélectionnez la ligne « CENTER », puis appuyez sur touches INC+DEC. Déplacez maintenant l'élement de commande correspondant dans la position souhaitée et enregistrez la position actuelle de cet élément de commande en appuyant une nouvelle fois sur la touche INC+DEC. Cette position sera main-
maintenant retenue comme nouvelle position neutre.
TRIM (position TRIM)
Sur cette ligne « TRIM », vous pouvez ajuster de manière fine la position neutre du servo branché sur la voie de commande sélectionnée dans la ligne « OUTPUT CH » avec les flèches de la touche droite, par cran de 1 µs : la valeur Trim enregistrée ici est ajustable dans la ligne « CENTER » dans une plage de +/-120 µs.
Réglage d'origine: 0s
Cette option sert à régler la limitation d'un côté ou de l'autre de la course du servo (débattement de la gouverne) branché sur la voie de commande sélectionnée dans la ligne « OUTPUT CH »
Le réglage se fait séparément, de chaque côté, dans une plage de 30 % à 150 %.
Réglage d'origine : 150% de part et d'autre
PERIOD (temps cycle)
Sur cette ligne, vous déterminez l'intervalle de temps de chaque impulsion. Ce réglage sera le même pour toutes les voies.
Si vous n'utilisez que des servos digitaux, vous pouvez enregistrer un temps cycle de 10~ s
Si vous n'utilisez que des servos analogiques, ou si vous utilisez des servos digitaux et analogiques, vous devez impératifement enregistrer 20~ s, sinon les servos analogiques risquent d'être « surcharges », ils seront alors à « frétiller » et à « grogner »
| RX FAIL SAFE <> |
| OUTPUT CH: 01 |
| INPUT CH: 01 |
| MODE: HOLD |
| F.S(Pos.: 1500μsec |
| DELAY: 0.75sec |
| FAIL SAFE ALL: NO |
| POSITION: 1500μsec |
La description de ce menu nécessite quelques mots d'explication:
« Ne rien faire est la pire des choses ! ». D'origine, c'est le mode « HOLD (maintien en position) » qui est enregistré sur le récepteur HoTT. En cas de perturbations, et dans le meilleur des cas, le modèle poursuit une rectiligne pendant un certain temps et se « pose », du moins il faut l'espérer, quelque part sans faire trop de dégâts ! Si cela arrive au mauvais moment et au mauvais endroit, le modèle peut par exemple devenir incontrôlable, filer au-dessus du terrain en mettant les pilotes ou les spectateurs en danger !
C'est pourquoi, il faut tout de même se poser la question, pour diminuer les risques, s'il ne faut pas programmer, au moins, une coupure moteur!?
Et encore une petite remarque relative aux trois possibilités de réglage Fail Safe que propose l'émetteur mx-10 HoTT :
Pour le réglage Fail Safe, la manière la plus simple, et celle qui est d'ailleurs conseillée, est de passer par le menu « Fail Safe » que vous pouvez atteindre à partir de la liste Multifonctions, voir page 177.
De manière similaire, mais un peu plus compliqué à atteindre, vous pouvez également vous servir de l'option « FAIL SAFE ALL » décrite sur la double page qui suit.
En dernier ressort, vous avez encore à disposition une méthode relativement complexe pour un réglage individuel avec les options « MODE », « F. S. Pos », et « DELAY ». La description de ces différentes variantes débute avec l'option « MODE » ci-dessous.
| Dénominat. | Signification | Réglage possible |
| OUTPUT CH | Sortie récept.(branchement servo du récepteur) | 1 ... selon le récepteur |
| INPUT CH | Entrée (voie de cde venant de l'émetteur) | 1 ... 16 |
| MODE | Mode Fail Safe | HOLDFAIL SAFEOFF |
| F.S(Pos. | Position Fail Safe | 1000 ... 2000 μs |
| DELAY | Temps de réaction( retardement) | 0,25, 0,50, 0,75 et 1,00 s |
| FAIL SAFEALL | enregistre les positions Fail Safe de toutes les voies | NO / SAVE |
| POSITION | Affichage des positions Fail Safe enregistrées | entre 1000 et 2000 μs |
OUTPUT CH (branchement servo)
Dans cette ligne, vous sélectionnez OUTPUT CH (branchement servo sur le récepteur) à régler.
Comme déjà évoqué, vous avez la possibilité, en cas de besoin, de répartir les 6 voies de l'émetteur mx-10 HoTT sur plusieurs récepteurs, mais également d'attribuer une seule et même fonction à plusieurs sorties récepteur. Par exemple pour pouvoir commander une gouverne d'aileron avec deux servos ou une gouverne de direction surdimensionnée avec deux servos accouplés au lieu de les commander avec un seul servo. Une répartition sur plusieurs récepteurs HoTT est vivement conseillée, notamment sur les gros modèles, pour éviter, par exemple, des longueurs de fils trop importantes. Dans ce cas, n'oubliez pas que le dernier récepteur assigné vous donne accès au menu de « Télémétrie »!
Les 5 voies (INPUT CH) de l'émetteur mx-10 HoTT peuvent être générées en conséquence, avec « Channel Mapping » en attribuant à la sortie récepteur sélectionnée dans la ligne OUTPUT CH, une autre voie de commande, sur la ligne INPUT CH. MAIS ATTENTION : Si par exemple coté émetteur, vous avez enregistré « 2 AL » sur la ligne « Ailerons/Volets » du menu « Réglages de base », dans ce cas, sur l'émetteur, la fonction de commande 2 (ailerons) sera répartie sur les voies 2 + 5 pour la commande de l'aileron gauche et droit. Dans ce cas, la correspondance et ainsi également le mapping éventuel INPUT CH du récepteur seraient les voies 02 + 05.
- Sur un grand modèle, vous souhaitez commander un volet d'aileron avec deux servos : Attribuez à OUTPUT CH (branchement servo) le même INPUT CH (voie de commande). Dans ce cas, en fonction de l'aile gauche ou droite, comme INPUT
CH : c'est une des deux voies de commande standards des ailerons 2 + 5
- Sur un grand modèle vous souhaitez commander la gouverne de direction avec deux ou plusieurs servos :
Attribuez à OUTPUT CH (branchement servo) le même INPUT CH (voie de commande). Dans ce cas, la voie de commande standard de la direction 4.
Les réglages des options « MODE », « F. S. Pos », et « DELAY » déterminent le comportement du récepteur en cas de perturbations de la transmission de l'émetteur vers le récepteur.
Le réglage enregistré sous « MODE » se réfère toujours à la voie enregistrée dans la ligne OUTPUT CH.
Le réglage d'origine pour tous les servos est « HOLD »
Pour chaque OUTPUT CH (branchement servo du récepteur) sélectionné, vous avez le choix entre :
En cas de perturbations, le servo se met dans la position affichée sur la ligne « POSITION » après écoulement du temps « Retardement » enregistré sur la ligne « DELAY », et ce, pour la durée de la perturbation.
HOLD
Lors d'un réglage « HOLD », en cas de perturbations, le servo reste dans la position reconnue correcte, et ce, pour la durée de la perturbation.
OFF
Lors d'un réglage « OFF », en cas de perturbations, le récepteur coupe, pour ainsi dire, la transmission des signaux (enregistrés entre temps) de la sortie récepteur concernée pour la durée de la perturbation.
MAIS ATTENTION : en cas d'absence de signal, les servos analogiques et certains servos digitaux n'opposent plus aucune résistance à la contrainte exercée par la gouverne et peuvent donc être déplacés plus ou moins rapidement de leur position.
Pour chaque OUTPUT CH (branchement servo du récepteur), enregistrez avec les touches INC+DEC, dans la ligne „F. S. Pos.” après avoir activé le champ (en surbrillance) en appuyant simultanément sur la touche INC+DEC, la position du servo en question, dans laquelle il doit s'arrêter en cas de perturbation, en mode « FAI(L) SAFE ». Le réglage se fait par intervalle de 10μs.
Réglage d'origine: 1500 μs (neutre du servo)
Remarque importante :
Dans les trois modes, « OFF », « HOLD » et « FAIL SAFE », la fonction « F. S. Pos. » a une signification particulière, dans le cas où le récepteur est allumé, mais qu'il ne reçoit pas (encore) un signal correct : Le servo se met immédiatement dans la position préenregistrée dans la ligne « Position ». Vous pouvez ainsi éviter par exemple, que le train rentre, si vous alimentez par inadvertance le récepteur alors que l'émetteur est encore coupé. Par contre, en utilisation normale, le servo en question se comporte, en cas de perturbations, selon le « MODE » enregistré.
DELAY (temps de mise en position fail safe ou retardement)
Enregistrez ici le temps au bout duquel les servos doivent prendre leur position préenregistrée en cas d'interruption du signal. Ce réglage sera repris pour
toutes les voies et ne concerne que les servos qui ont été programmés en mode « FAIL SAFE ». Réglage d'origine : 0,75 sec.
FAIL SAFE ALL (réglage global fail-safe)
Ce sous-menu permet de manière simple de définir les positions Fail Safe des servos par simple impulsion sur une touche, comme décrit en page 118 dans le menu « Fail-Safe »:
Allez sur la ligne « FAIL SAFE ALL » et activez le champ d'enregistrement en appuyant sur les touches INC+DEC. « NO » s'affiche en surbrillance. Avec une des flèches de la touche quadridirectionnelle droite, mettez ensuite le paramètre sur « SAVE ». Avec les éléments de commande de l'émetteur, déplacez tous les servos dans la position souhaitée auxquels vous avez attribué, ou que vous pouvez attribuer plus tard, dans la ligne « MODE », « FAIL SAFE ». Dans la ligne inférieure « Position » s'affiche alors la position actuelle de l'objet de commande pour la voie que vous venez de régler :
| RX FAIL SAFE | <> |
| OUTPUT CH: 01 | |
| INPUT CH: 01 | |
| MODE : FAI-SAFE | |
| F.S(Pos. : 1500μsec | |
| DELAY : 0.75sec | |
| FAIL SAFE ALL: SAVE | |
| POSITION : 1670μsec | |
Une nouvelle impulsion sur la touche INC+DEC permet de passer de « SAVE » à « NO »
Les positions de tous les servos concernés par cette mesure sont ainsi enregistrées, et parallèlement à cela, reprises dans la ligne « F. S (Pos. » et affichées à l'écran pour l'actuel OUTPUT CH (branchement servo):
| RX FAIL SAFE () OUTPUT CH: 01INPUT CH: 01MODE : FAI-SAFEF.S(Pos. : 1670μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1670μsec |
Coupez l'émetteur et vérifiez les positions Fail Safe en observant les débattements des servos.
Pour être sûr, qu'en cas de perturbations les servos « mappings » - c'est-à-dire tous les servos qui sont commandés par une même voie (INPUT CH) - réagissent de la même manière, il faut savoir que ce sont les réglages correspondants de INPUT CH qui déterminent le comportement des servos mappings !!!
Si par exemple, les sorties 6, 7 et 8 du récepteur 8 voies GR-16 Réf. Cde. 33508 sont « mappés », en attribuant OUTPUT CH (sorties récepteur) servos 06, 07 et 08 en tant qu'INPUT CH la même voie de commande « 04 » …
| RX FAIL SAFE () OUTPUT CH: 06INPUT CH: 04MODE : OFFF.S(Pos. : 1670μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1670μsec |
| RX FAIL SAFE <> |
| OUTPUT CH: 07 |
| INPUT CH: 04 |
| MODE: OFF |
| F.S(Pos.: 1230μsec |
| DELAY: 0.75sec |
| FAIL SAFE ALL: NO |
| POSITION: 1670μsec |
| RX FAIL SAFE |
| OUTPUT CH: 08 |
| INPUT CH: 04 |
| MODE : HOLD |
| F.S(Pos. : 1770μsec |
| DELAY : 0.75sec |
| FAIL SAFE ALL: NO |
| POSITION : 1670μsec |
... c'est l'INPUT CH 04 qui détermine le comportement des trois servos branchés sur la voie 4, indépendamment des réglages individuels effectués dans OUTPUT CH :
| RX FAIL SAFE () OUTPUT CH: 04INPUT CH: 04MODE : FAI-SAFEF.S(Pos. : 1500μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1500μsec |
Egalement si celui-ci est « mappé » par exemple avec INPUT CH 01 :
| RX FAIL SAFE () OUTPUT CH: 04INPUT CH: 01MODE : FAI-SAFEF.S(Pos. : 1500μsecDELAY : 0.75secFAIL SAFE ALL: NOPOSITION : 1500μsec |
Dans ce cas, la sortie servo 04 réagirait en fonction du réglage Fail Safe de CH 01.
Les temps de réaction ou de retardement enregistrés dans la ligne « DELAY » s'appliqueront toujours à toutes les voies régées sur « FAI(L) SAFE »
| RX FREE MIXER |
| >MODE : 1 | |
| MASTER CH : 00 | |
| SLAVE CH : 00 | |
| S-TRAVEL-: 100 | |
| S-TRAVEL+: 100 | |
| RX WING MIXER | |
| TAIL TYPE: NORMAL | |
| Dénominat. | Signification | Réglage possible |
| MIXER | Choix du mixage | 1, 2 ou 3 |
| MASTER CH | Voie de cde | 0, 1 ... 6 |
| SLAVE CH | Voie entrainnée | 0, 1 ... selon le récepteur |
| S-TRAVEL- | Part de mixage négative | 0 ... 100% |
| S-TRAVEL+ | Part de mixage positive | 0 ... 100% |
| RX WING MIXER | Type d'empennage (TAIL TYPE) | NORMAL, V-TAIL (Empen. en V) ELEVON (Mixage Prof./ Ailerons pour Delta et ailes volantes) |
Vous pouvez programmer simultanément jusqu'à 3 mixages. Dans « MIXER », sélectionnez le mixage 1, mixage 2 ou mixage 3.
Les réglages ci-dessous concernent toujours le mixage sélectionné dans la ligne MIXER.
Remarque importante :
Si vous avez déjà programmé une fonction de mixage dans le menu « Mixages ailes » ou « Mixages libres », veillez à ce que les mixages ne se recouvrent pas avec ceux du menu « RX FREE MIXER » !
MASTER CH (« de »)
Selon le même principe, décrit en page 108 au paragraphe « Mixages libres », le signal de MASTER CH (source du signal) sera mixé, dans une part régulable à SLAVE CH (voie cible).
Si vous ne souhaitez aucun mixage, sélectionnez « 00 »
On mixe une part du signal de MASTER CH (voie de l'élément de cde) à SLAVE CH (voie entrainée). La part de mixage est déterminée par les valeurs en % enregistrées dans les lignes « TRAVEL - » et « TRAVEL + ». Si vous ne souhaitez aucun mixage, sélectionnez « 00 ».
Avec ces valeurs de réglages de ces deux lignes, on définit le pourcentage de la part du mixage, séparément dans les deux sens, en relation avec le signal MASTER.
TAIL Type (type d'empennage)
Les types de modèle qui suivent sont également accessibles en partie par les mixages qui figurent sur l'avant de l'émetteur, page 171, et il est conseillé de les enre
gisterer par là. Dans ce cas, laissez TAIL TYPE toujours sur NORMAL.
Si toutefois vous souhaitez utiliser des mixages intégrés au récepteur, vous pouvez alors choisir entre les différents mixages préenregistrés pour le type de modèle en question:
Ce réglage correspond à un empennage classique, avec gouverne de profondeur et gouverne de direction séparée. Pour ce type de modèle, aucune fonction de mixage n'est nécessaire.
V-tail (empennage en v)
Sur ce type de modèle, les fonctions de commandes de la profondeur et de la direction sont mixées de telle sorte que chaque gouverne de l'empennage est commandée chacune par un servo séparé. En règle générale, les servos sont branchés de la manière suivante sur le récepteur :
OUTPUT CH3: Empennage en V servo gauche OUTPUT CH4: Empennage en V servo droit Si le sens de rotation du servo devrait être inversé, suivez les instructions en page 177.
ELEVON (delta-/ailes volantes)
Les servos branchés sur les sorties 2 et 3 commandent les ailerons et la profondeur. Les servos se branchent sur le récepteur de la manière suivante :
OUTPUT CH 2 : Aileron/profondeur gauche
OUTPUT CH 3 : Aileron/profondeur droit Si le sens de rotation du servo doit être inversé, suivez les instructions en page 177.
RX CURVE (EXPO)
| RX CURVE | <> |
| >CURVE1 CH : 02 | |
| TYPE : A | |
| CURVE2 CH : 05 | |
| TYPE : A | |
| CURVE3 CH : 04 | |
| TYPE : B | |
| 5CH FUNCTION: SERVO | |
| Dénominat. | Signification | Réglage possible |
| CURVE1, 2 ou 3 CH | Attribution de la voie de la courbe correspondante | 1 ... selon le récepteur |
| TYPE | Type de courbe | A, B, C Voir vue |
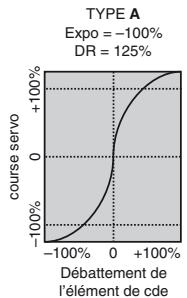
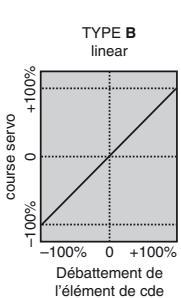
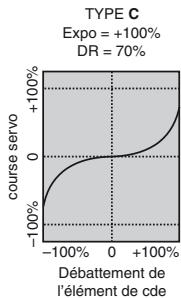
En règle générale, on utilise une courbe de commande non linéaire pour les ailerons (voie 2), la profondeur (voie 3) et la direction (voie 4). Cela correspond également aux réglages d'origine. Si par exemple, vous avez enregistré « AILE » sur l'émetteur et que vous pouvez vous servir de l'option RX CURVE dont on parle ici, il faut, dans ce cas, définir deux courbes :
| RX CURVE | <-> |
| >CURVE1 CH : 02 | |
| TYPE : A | |
| CURVE2 CH : 05 | |
| TYPE : A | |
| CURVE3 CH : 04 | |
| TYPE : B | |
| 5CH FUNCTION: SERVO | |
Sinon, l'aileron gauche et l'aileron droit ne présentaient pas les mêmes caractéristiques de commande.
Avec la fonction RX CURVE, vous pouvez : gérer les caractéristiques de commande de trois servos :
CURVE 1, 2 ou 3 CH
Choisissez une première voie de commande (INPUT CH) pour le premier servo.
Le réglage qui suit, dans TYPE, ne concerne que la voie sélectionnée ici.
Choisissez la courbe servo :
A: EXPO = -100% et DUAL RATE = 125%
Le servo de commande réagit violemment lorsque le manche de commande se déplace près du neutre. Plus le début de la gouverne augmente et plus la courbe s'aplatit.
B: Réglage linéaire.
Le servo suit les déplacements du manche de manière linéaire.
C: EXPO = +100% et DUAL RATE = 70%
Le servo réagit lentement lorsque le manche de commande se déplace près du neutre. Plus le début de la gouverne augmente et plus la courbe se relève.
Remarque:
Les caractéristiques de commande enregistrées ici agissent
sent également sur les sorties récepteur « mappées »
Sortie servo 5/ch fonction
Sur la sortie 5 qui en plus est repérée par un „T“, on peut également brancher un capteur de télémétrie.
Mais pour que le récepteur puisse reconnaître correctement le capteur qui y est branché, il FAUT passer la sortie 5 de „SERVO“ à „SENSOR“ ou inversement.
| RX SERVO TEST < |
| >ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| TEST : STOP |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
| Dénominat. | Signification | Réglage possible |
| ALL-MAX | Pour le Test servo, course servo coté « + » pour toutes les sorties servos | 1500 ... 2000 μs |
| ALL-MIN | Pour le Test servo, course servo coté « - » pour toutes les sorties servos | 1500 ... 1000 μs |
| TEST | Procédure Test | START / STOP |
| ALARM VOLT | Seuil de déclench. mini de l'alarme en cas de tension trop faible de l'accu | 3,0 ... 6,0 VRéglage d'origine :3,8 V |
| ALARM TEMP+ | Seuil de déclench. de l'alarme en cas de température trop élevé du récepteur | 50 ... 80 °CRéglage d'origine :70 °C |
| ALARM TEMP- | Seuil de déclench. de l'alarme en cas de température trop BASSE DU récepteur | -20 ... +10 °CRéglage d'origine :-10 °C |
| CH OUTPUT TYPE | Ordre chronologique des voies | ONCE, SAME, SUMI, SUMO |
ALL MAX (débattement maxi du servo)
Dans cette ligne, vous régler la course maximale du servo, côté plus, pour les test servo.
2000 s correspondent au débutment maximum, 1500 s correspondent à la position neutre.
ALL MIN (débattement mini du servo)
Dans cette ligne, vous régler la course maximale du servo, côté Moins, pour les Test servo.
1000 s correspondent au début maximum, 1500 s correspondent à la position neutre.
Dans cette ligne, vous pouvez lancer et stopper la
procédure de test servo, intégrée au récepteur.
Une impulsion sur la touche INC+DEC vous permet d'activer le champ d'enregistrement :
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : STOP |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
Avec l'une des touches INC ou DEC, sélectionnez START:
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : START |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
Une nouvelle impulsion sur la touche INC+DEC déclenche le Test. Le champ est alors de nouveau affiché en « normal » :
| RX SERVO TEST < |
| ALL-MAX : 2000μsec |
| ALL-MIN : 1000μsec |
| >TEST : START |
| ALARM VOLT : 3.8V |
| ALARM TEMP+: 70°C |
| ALARM TEMP-:-10°C |
| CH OUTPUT TYPE:ONCE |
Pour stopper le test, il suffit d'activer à nouveau le champ, comme décrit précédemment, de sélectionner STOP et de confirmer avec la touche INC+DEC.
Alarme récepteur en cas de tension trop faible
Avec ALARM VOLT, vous sur VElz la tension de l'alimentation du recepteur. L'intervalle peut se regler entre 3,0 et 6,0 Volt. Lorsque la tension chute en-dessous d'un seuil, enregistréAAParavant, un signal sonore se déclenché (tonalité courte/longue à intervalles) et sur tous les affichages « RX … » écran, « VOLTE » clignote en haut à droite :
| RX SERVO VOLT.E <> |
| OUTPUT CH: 01 |
| REVERSE: 0FF |
| CENTER: 1500μsec |
| TRIM: -000μsec |
| TRAVEL-: 150% |
| TRAVEL+: 150% |
| PERIOD: 20msec |
De plus, sur la page « RX DATAVIEW », le paramètre
« R-VOLT » s'affiche en surbrillance :
| RX DATAVIEW VOLT.E > |
| S-QUA100%S-dBM-030dBM |
| S-STR100% R-TEM.+28°C |
| L PACK TIME 00010msec |
| R-VOLT :03.7V |
| L.R-VOLT:03.5V |
| SENSOR1 :00.0V 00°C |
| SENSOR2 :00.0V 00°C |
Surveillance de la température du récepteur
Ces deux options surveillent la température du récepteur. Vous pouvez programmer un seuil mini « ALARM TEMP- » (-20... +10 °C) et un seuil maxi « ALARM TEMP+ » (50... 80 °C). En cas de dépassement d'un de ces seuils, un signal sonore retentit (tonalité longue) et sur tous les écrans récepteur apparaît en haut à droite « TEMPE ». De plus, sur la page « RX DATAVIEW »,
Le paramètre « R-TEM » s'affiche en surbrillance.
Assurez-vous toujours, quelque soient les conditions de vol, que vous êtes toujours dans la plage de température récepteur autorisée (dans le meilleur des cas, entre -10 et 55°C).
CH OUTPUT type (type de branchement)
Vous déterminez ici la manière dont les sorties récepteurs doivent être commandées :
Les sorties servo récepteur sont commandées les unes après les autres. Conseillé pour servos analogiques.
Avec ce réglage, les servos sont automatiquement réglés à 20 ms – pour un récepteur 12 voies (Réf.
Cde 33512), 30 ms – qu'importe ce qui a été enregistré dans « RX SERVO » sur la ligne « PERIOD » ou ce qui est affiché à l'écran!
Les sorties servos sont commandées par paquet de quatre, en parallèle. Cela signifie que, pour le cas du récepteur GR-12 livré avec l'émetteur, les voies 1 à 4 et voies 5 et 6 reçoivent leurs signaux respectifs en même temps.
Conseillé pour les servos digitaux lorsqu'elles servos sont utilisées pour une seule et même fonction (par ex. ailerons), pour que le déplacement des servos soit synchronisé.
En cas d'utilisation de servos digitaux, il est toutefois recommandé d'enregistrer 10 μs dans la ligne « PERIODE » de la page « RX SERVO » afin de pouvoir exploiter pleinement les réactions rapides des servos digitaux. Pour les servos analogiques, il est impératif d'enregistrer « 20 ms » !
Pour ce type de réglage, veillez toujours à ce que l'alimentation de votre récepteur soit de capacité suffisante. Comme ce sont toujours 4 servos qui se déplacent en même temps, l'alimentation sera plus fortement sollicitée.
SUMO (signal cumulé OUT)
Un récepteur HoTT configuré en tant que SUMO génère en permanence un soi-disant signal cumulé à partir des signaux de commande de toutes ses voies, et le rend disponible, par exemple avec un récepteur GR-12, sur la sortie 6. Par ailleurs, le signal cumulé, indépendamment du récepteur, peut être réparti sur un maximum de 16 voies, cela signifie qu'un récepteur 6 voies peut être mis en SUMO 12 et reporte alors les 12 voies sur la sortie.
Après avoir sélectionné et enregistré SUMO avec une impulsion simultanée sur les touches INC+DEC, le marquage en surbrillance passe sur le numéro de la voie, dans cet exemple, 06:
Avec les touches INC ou DEC vous pouvez sélectionner le numéro de la voie à transmettre comprise dans le signal cumulé. Une nouvelle impulsion simultanée sur les touches INC+DEC permet d'enregistrer ces réglages.
Les sorties récepteur sont commandées, l'une après l'autre, avec un cycle de 20 ms (30 ms sur le récepteur GR-24, Réf. Cde. 33512), même si 10 ms sont affichés sur la ligne «PERIOD» de la page «RX Servo»
Conçu dans un premier temps pour une utilisation en mode satellitaire décrit ci-dessous de deux récepteurs HoTT, le signal cumulé, généré par le récepteur définit en tant que SUMO, peut par exemple être utilisé pour la commande de systèmes Flybarless ou,
avec le cordon adaptateur Ref. Cde. 33310, être utilisé
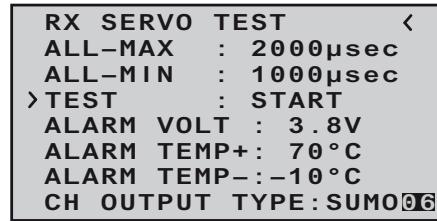
se pour des simulateurs.
En mode...
Satellitaire
... les deux récepteurs HoTT sont reliés entre eux avec un cordon 3 fils (Réf. Cde 33700.1 (300 mm) ou 33700.2 (100 mm)) puis branchés sur la sortie récepteur qui porte le numéro le plus grand. Vous trouvez tous les détails à ce sujet sur notre site Internet sous www.graupner.de.
C'est par cette liaison que toutes les voies du récepteur HoTT, configuré en tant que SUMO et désigné en tant que récepteur satellitaire, sont transmises en permanence au deuxième récepteur HoTT, le récepteur principal, qui lui, doit être programmé en tant que...
SUMI (signal cumulé IN)
Le signal va donc toujours en direction SUMI.
Par ailleurs, en cas d'absence de signaux, le récepteur défini en tant que SUMI utilise le signal cumulé venant du SUMO, si au moins 1 voie du SUMI a été programmée en mode Fail-Safe.
Si le récepteur satellitaire, programme en tant que SUMO, a une perte de réception, tous les servos branchés sur ce récepteur se mettent en position Fail-Safe, position enregistrée sur le récepteur satellitaire.
taire, indépendamment du récepteur principal.
Si par contre les deux récepteurs ont une perte de réception en même temps, en principe, les servos prendront la position Fail-Safe du SUMO, du moins à l'heure actuelle, au moment de l'impression de la présente notice. Selon le cas, on ne peut néanmoins pas exclure des effets interactifs, c'est pourquoi nous vous recommendons vivement de faire des tests AVANT d'utiliser un modèle.
Cette configuration est tout particulièrement recommandée, lorsque l'un des deux récepteurs est situé à un endroit du modèle qui ne favorise pas la réception, ou près des tuyères, ou à proximité d'éléments en carbone, là où il y a risques de réduction de la puissance du signal de réception, ce qui peut avoir comme conséquence une perte de portée.
C'est pourquoit, branchez toujours les fonctions de commande importantes sur le récepteur principal programme en tant que SUMI, pour que le modèle reste contrôleable en cas de perturbations, quand le récepteur satellitaire SUMO ne recoit plus de signal correct.
Par contre, seul le récepteur satellitaire configuré comme SUMO est capable de transmettre des données téléétriques vers l'émetteur, par ex. la tension d'alimentation à bord. D'où la nécessité de brancher les capteurs et sondes sur le récepteur satellitaire SUMO.
Chaque récepteur doit être équipé de son propre cordon d'alimentation mais chacun puise son énergie dans la même source. Lorsque les intensités sont fortes, il vaut même mieux les dédoubler.
Si par contre vous souhaitez une alimentation séparée pour chaque récepteur, il faut impératifement retirer le fil central d'une des deux prises du cordon satellitaire, voir ci-dessus.
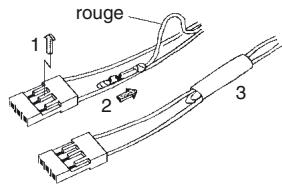
Si vous pouvez faire d'autres programmations, par ex. des réglages Fail-Safe, débranchez le cordon satellitaire trois fils entre les deux récepteurs et n'alimentez que le récepteur en question. Il faudra peut-être modifié l'ordre chronologique de la procédure Binding.
Choix d'un capteur
MENUMODELSELECT
Appuyez sur la touche INC pour aller sur la ligne, MODEL SELECT.
Appuyez ensuite sur ENTER...
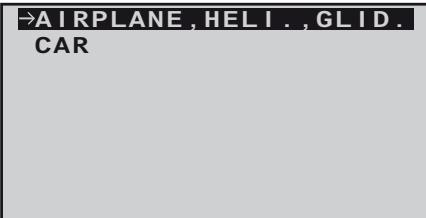
et une nouvelle fois sur ENTER...
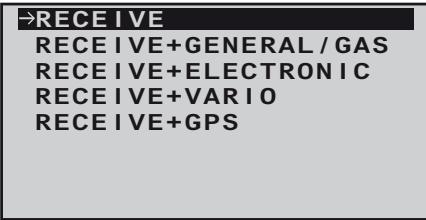
... puis sur la touche INC pourCHOISIR VOUE capteur avec le symbole de la flèche puis de le sélectionner en appuyant sur la touche ENTER :
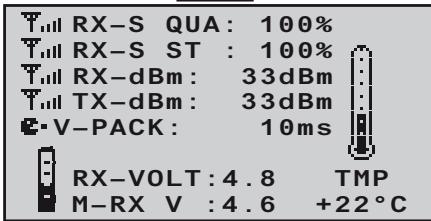
Comme décrit précédemment dans le menu, CHOIX D'UN CAPTEUR"...
RECEIVE+GENERAL/GAS RECEIVE+ELECTRONIC RECEIVE+VARIO RECEIVE+GPS
... vous pouvez activer un affichage sous forme de graphique des données d'un capteur ou d'une sonde branchée sur le récepteur. Ces données sont alors représentées sur une page graphique décrite ci-dessous.
Avec les touches INC ou DEC, vous pouvez passer d'un écran graphique à l'autre, et sélectionner avec ENTER. Avec ESC, vous revenez sur la page initiale.
Remarque:
L'ordre chronologique des pages d'écran décrites ci-dessous correspond aux impulsions de la touche INC.
Vous trouverez plus de détails concernant les modules évoqués par la suite, en annexe et sur Internet sous www.graupner.de
Récepteur
TXRX-SQUA100%
TXRX-SST : 100% TXRX-dBm : 33dBm
Till TX-dBm: 33dBm E-V-PACK: 10ms
RX-VOLT: 4.8 TMP M-RX V: 4.6 +22°C
Cet écran représenté également sous forme graphique, les données que l'on peut voir à l'écran « RX DATA VIEW » du menu de télémétrie « REGLAGES / AFFICHAGES ».
Cela signifie :
Dénominat. Signification
| RX-S QUA | Qualité du signal en % |
| RX-S ST | Puisance du signal en % |
| RX-dBm | Puisance de la réception en dBm |
| TX-dBm | Puisance d'émission en dBm |
| V PACK | Affiche le laps de temps le plus long durant lequel des paquets de données ont été perdus lors de la transmission de l'émetteur vers le récepteur |
| RX-VOLT | Tension actuelle du récepteur en Volt |
| M-RX V | Tension minimale de l'émetteur depuis la dernière mise en route |
| TMP | Ce thermomètre visualise la température actuelle du récepteur |
RX + MODULE GÉNÉRAL
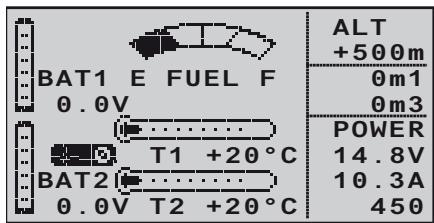
Cette page permet de visualiser les données d'un récepteur branché à un module Général-Engine, Réf. Cde 33610, ou à un module Général-Air, Réf. Cde 33611. Vous trouverez plus d'informations sur ces modules en annexe et sur notre site Internet sous www.graupner.de. En fonction du nombre de capteurs branchés sur ces modules, vous pouvez, sur cette page de l'écran, consulter en permanence les données suivantes :
La tension actuelle de maximum 2 accus (ACC1 et ACC2) ; le résultat de mesures de maximum 2 sondes de températures (T1 et T2) ainsi que le niveau du réservoir.
Sur le bord droit s'affiche en alternance, soit une liste des tensions actuelles des éléments pour des accus LiPo de 1 à 6 éléments, soit l'altitude par rapport au sol, les taux de montée et de chute en m/1s et m/3s, l'intensité actuelle en Ampère ainsi que la tension actuelle de l'accu qui est branché sur le capteur.
Cela signifie :
Dénominat. Signification
| BAT1/ BAT22 | Accu 1 / Accu 2 |
| FUEL | Niveau carburant / jauge réservoir |
| E / F | Vide / Plein |
| T1 / T2 | Température de la sonde 1 / 2 |
| CELL V | Tension par élément de 1 ... max. 6 élém. |
| 1500 | Vitesse de rot. actuelle en tours/min. |
| ALT | Altitude actuelle |
| 0m1 | Taux de montée / chute en m/1s |
| 0m3 | Taux de montée / chute en m/3s |
| POWER V | Tension actuelle de l'accu de propulsion |
| A | Intensité actuelle en Ampere |
| 450 | Capacité consommée en mAh |
RX + MODULE ELECTRIC'AIR
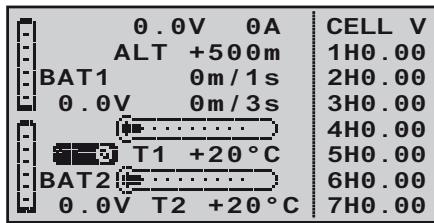
Cette page permet de visualiser les données d'un récepteur branché à un module Electric'Air, Réf. Cde 33620. Vous trouvez plus d'informations sur ces modules en annexe et sur notre site Internet sous www.graupner.de.
En fonction du nombre de capteurs branchés sur ces modules, vous pouvez, sur cette page de l'écran, consulter en permanence les données suivantes :
La tension actuelle de maximum 2 accus (ACC1 et ACC2) ; le résultat de mesures de maximum 2 sondes de températures (T1 et T2) ainsi que les taux de montée et de chute en m/1s et m/3s et, au milieu de l'écran, l'intensité consommée actuelle puisée dans la source d'énergie.
Sur le bord droit s'affiche en alternance, les tensions actuelles des éléments d'un pack d'accus LiPo de 7 éléments max. branché sur la prise Balancer 1 (L) ou 2 (H). Cela signifie :
Dénominat. Signification
| V | Tension actuelle de l'accu |
| A | Intensité actuelle en Ampere |
| ACC1 / ACC2 | Accu 1 / Accu 2 |
| ALT | Altitude actuelle |
| m/1s | Taux de montée / chute en m/1s |
| m/3s | Taux de montée / chute en m/3s |
| T1 / T2 | Température de la sonde 1 / 2 |
| CELL V | Tension par élément de 1 ... max. 14 éléments |
| L | Prise Balancer 1 |
| H | Prise Balancer 2 |
RX + VARIO
Cette page permet de visualiser les données d'un récepteur branché à un module Vario, Réf. Cde 33601. Vous trouverez plus d'informations sur ces modules en annexe et sur notre site Internet sous www.graupner.de. Cela signifie :
Dénomination. Signification RX + GPS
| ALT | Altitude actuelle |
| RXSQ | Puisance du signal qui arrive au récepteur en % |
| MAX | Altitude limite préenregistrée, par rapport au sol, qui déclenché une alarme en cas de dépassement du seuil |
| MIN | Le dépassement maximum su seuil par rapport au sol, à partir duquel une alarme se déclenché |
| m/1s | Taux de montée / chute en m/1s |
| m/3s | Taux de montée / chute en m/3s |
| m/10s | Taux de montée / chute en m/10s |
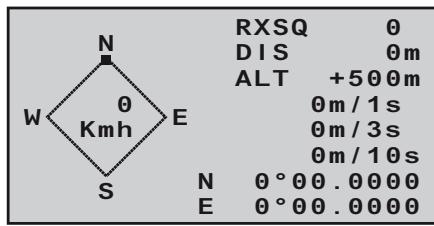
Cette page permet de visualiser les données d'un récepteur branché à un module GPS avec Vario intégré, Réf. Cde 33600. Vous trouvez plus d'informations sur ces modules en annexe et sur notre site Internet sous www.graupner.de.
En plus des données de position actuelles et de la vitesse du modèle, l'altitude actuelle par rapport au sol est également affichée au centre de l'écran ainsi que les taux de montée et de chute du modèle en m/1s, m/3s et m/10s, la qualité actuelle de la réception et l'éloignement du modèle par rapport au point de décollage.
Cela signifie :
Dénominat. Signification
| W / N / E / S | Ouest / Nord / Est / Sud |
| Kmh | Vitesse |
| RXSQ | Puisance du signal de la voie de retout |
| DIS | Eloignement |
| ALT | Altitude par rapport au sol |
| m/1s | Taux de montée / chute en m/1s |
| m/3s | Taux de montée / chute en m/3s |
| m/10s | Taux de montée / chute en m/10s |
Avec l'émetteur mx-10 HoTT, deux émetteurs HoTT peuvent être „reliés“ pour un écolage sans fils. Il n'est pas nécessaire que le deuxième émetteur soit une mx-10 HoTT, tout autre émetteur HoTT qui offre la possibilité d'un écolage sans fils peut être utilisé. À ce sujet, consultez la notice de votre radiocommande!
Le passage du Mode normal au mode écolage Moniteur ou Elève se fait avec l'interrupteur de mode situé en haut à gauche de l'émetteur:
Mode normal moniteur élève

Pour changer de mode, mettez l'interrupteur de mode dans la position souhaitée, appuyez sur la touche BIND et maintenez-la enfoncée pendant que vous allumez l'émetteur.
Identification du mode...
| Affichage LED | Buzzer | Description |
| La LED orange est allumée | | L'émetteur est en mode normal, Réglage pays: General |
| La LED orange clignote une fois | deux bips après mise en route | L'émetteur est en mode Elève |
| La LED orange clignote deux fois | deux fois deux bips brefs après mise en route | L'émetteur est en mode Moniteur |
Voir également LED et Signaux cumulés en page 154.
Remarque importante:
La description qui suit se base sur la version actuelle 1.00, au moment de l'impression de la présente notice, et est valable pour toutes les versions précédentes. Il est cependant probable qu'après une mise à jour du logiciel, cette description ne corresponde plus tout à fait au système écolage de l'émetteur.
Émetteur mx-10 HoTT en tant qu'émetteur-moniteur
L'avion-école doit être complet, c'est-à-dire équipé de toutes les voies, y compris les trims et les éventuelles fonctions de mixages et doit être enregistré dans une mémoire de l'émetteur HoTT du moniteur, et dans une mémoire de l'émetteur HoTT de l'é. L'avion-école, indépendamment d'autres émetteurs, doit donc être pilotable sans restriction, aussi bien avec l'émetteur-é qu'avec l'émetteur-moniteur. Évitez néanmoins de trop grandes différences dans les réglages! Sinon vous risquez d'avoir des contraintes trop brutes et importantes au niveau des servos et du modèle en passant l'émetteur é à celui du moniteur, ou l'inverse. Il est cependant judicieux de programmer des débattements moindres pour l'é, afin de lui faciliter l'apprentissage. Si les deux émetteurs sont prêts pour l'écolage, il faut assigner l'avion-école à l'émetteur-é.
Si vous utilisez l'émetteur mx-10 HoTT en tant qu'émetteur-élève, sachez qu'il ne pourra être assigné que s'il est en mode „normal“. Avant d'utiliser cet émetteur en tant qu'émetteur-élève, il faut donc assigner le modèle en mode „normal“, et ce n'est qu'après, que l'on
peut passer en mode „Elève“.
En outre, aucun mixage est actif. Déplacez le Jumper à la position "NO MIX", voir page 171.
Toutes les cinq voies de l'émetteur-moniteur mx-10 HoTT sont transmises à l'émetteur-élève.
Le mode de pilotage de l'émetteur-élève, par ex. mixages ailerons, peuvent être différents de ceux de l'émetteur-moniteur, étant donné que lors de la transmission des commandes à l'élève, les mixages sont également transmis. De ce fait, il faut que l'émetteur-moniteur soit programmé avec toutes les fonctions et mixages de l'avion-école.
Dès que l'émetteur-élève est assigné, mettez l'émetteur mx-10 HoTT en mode Moniteur. Pour ce faire, mettez l'interrupteur de mode au milieu, appuyez sur la touche BIND et maintenez-la enfoncée pendant que vous allumez l'émetteur.
Appuyez maintenez sur la touche BIND de l'émetteur é: mx-10 HoTT: Appuyez sur la touche et restez dessus
Dans ce qui suit, nous allons décrire comment configurer un émetteur mx-12/16/20 HoTT en tant qu'émetteur-élève. Consultez également la notice de votre émetteur!
Allumez l'émetteur, puis, avec les flèches de la touche quadridirectionnelle gauche ou droite, sélectionnez le point du menu „Écolage" du menu Multifonctions (l'ensemble de réception qui a été assigné précédemment à l'avion-école n'a pas besoin d'être allumé pour la procédure qui suit.)
| Réal Servo | Réal Contr |
| D/R Expo | Trim Phase |
| Mix ailes | Mix libres |
| Aff. Servo | Réal généré |
| Fail-Safe | Télé métrie |
| Ecolage | Aff.Infos |
Avec une impulsion sur la touche centrale SET de la touche quadridirectionnelle droite, vous ouvrez cette fenêtre :
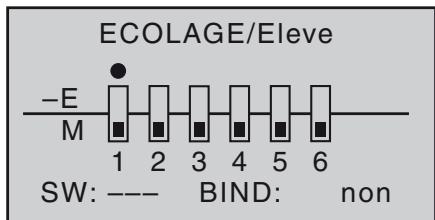
Avec les flèches de la touche quadridirectionnelle gauche ou droite, placez le curseur sur le champ d'enregistrement „BIND“. Si ça droite de „SW“ vous VOYZ un interrupteur, il faudra d'abord le supprimer, voir vue ci-dessous:
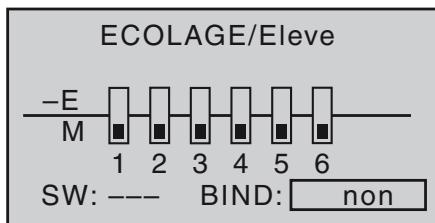
Avec une impulsion sur la touche centrale SET de la touche quadridirectionnelle droite, vous lancez la procédure Binding, l'affichage passe alors sur BINDING
Si vous utilisez un autre émetteur HoTT en tant
qu'émetteur-élève, consultez la notice relative au système d'écolage sans fils.
Remarque:
Durant la procédure Binding, la distance entre les deux émetteurs ne doit pas être trop grande. Il faudra peut-être positionner différemment les deux émetteurs si vous pouze relaxer une procédure.
L'émetteur-moniteur mx-10 HoTT doit MAINTANT être assigné à l'émetteur-élève. Appuyez sur la touche BIND. Au bout de quelques secondes, la procédure Binding, si elle a réussie, est confirmée par un bref bip sonore, l'avion-école peut MAINTANT être piloté avec l'émetteur-moniteur.
Sur les émetteurs mx-12/16/20 HoTT, BIND passage sur ON:
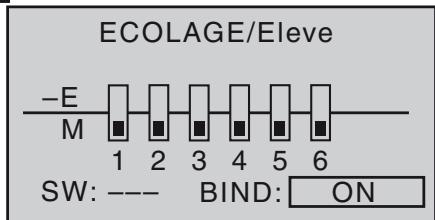
Afin de pouvoir effectuer la transmission, il faut mettre l'interrupteur de mode de la mx-10 HoTT vers l'avant, en mode "élève". Tant que vous maintenez cet interrupteur dans cette position, c'est l'émetteur-élève qui a le contrôle du modèle. Si vous relâchez l'interrupteur, c'est l'émetteur-moniteur qui reprend le contrôle du modèle.
Attention: Même si vous coupez brievement l'émetteur, le mode moniteur restera activé lorsque vous allumez à
nouveau l'émetteur.
Réglage de l'émetteur-élève
Le modèle qui doit être piloté par l'émetteur-élève doit être complété, et doit correspondre aux habitudes de pilotage de l'émetteur-élève. Toutes les autres options restent sur leurs réglages de base. Toutes les autres fonctions de mixages se font exclusivement sur l'émetteur-moniteur qui les retransmet au récepteur.
| Voie | Fonction |
| 1 | Moteur / Pas |
| 2 | Ailerons / Roulis |
| 3 | Profondeur / Tangage |
| 4 | Direction / Anti-couple |
Le récepteur HoTT du modèle concerné doit être assigné à l'émetteur-élève. Vous trouverez une description détaillée de la procédure Binding en pages 172 et 176.
Attention: l'émetteur mx-10 HoTT ne peut être assigné que s'il est en mode „normal“. Avant d'utiliser cet émetteur en tant qu'émetteur-élève, il faut donc assigner le modèle en mode „normal“, et ce n'est qu'après, que l'on peut passer en mode „Élève“. En outre, aucun mixage à être activé, déplacez le Jumper à la position du „NO MIX“, voir page 171.
Dès que l'émetteur est assigné, mettez l'émetteur mx-10 HoTT en mode élève. Pour ce faire, basculez, lorsque l'émetteur est coupé, l'interrupteur de mode vers l'avant, appuyez sur la touche BIND et maintenez-la enfonnée pendant que vous allumez l'émetteur.
Remarque:
Durant la procédure Binding, la distance entre les deux émetteurs ne doit pas être trop grande. Il faudra peut-être positionner différemment les deux émetteurs si vous pouze relaxer une procédure.
Appuyez et maintenez la touche BIND enfoncée de l'émetteur mx-10 HoTT de l'élève.
Émetteur moniteur:
MX-10 HoTT: Appuyer sur la touche BIND et la maintenir enfoncée
Au bout de quelques secondes, la procédure Binding, si elle a réussi, est confirmée par un bref bip sonore, l'avion-école peut maintenant être piloté avec l'émetteur-moniteur.
mx-12/16/20 HoTT: allumez l'émetteur, et avec les flèches de la touche quadridirectionnelle gauche ou droite sélectionnez le point du menu „Lehrer/Sch“ du menu Multifonctions (l'ensemble de réception qui a été assignéAAParavant à l'avion–école n'a pas besoin d'être allumé pour la procédure qui suit.):
| Réal Servo | Réal Contr |
| D/R Expo | Trim Phase |
| Mix ailes | Mix libres |
| Aff. Servo | Réal.génér |
| Fail-Safe | Télé métrie |
| Écolage | Aff.Infos |
Avec une impulsion sur la touche centrale SET de la touche quadridirectionnelle droite, vous ouvrez ce point du menu:
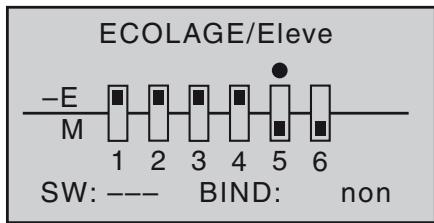
Libérez successivement, en appuyant à chaque fois sur la touche centrale SET de la touche quadridirectionnelle droite, les voies de commande qui doivent pouvoir être transmises à l'élove. Le symbole passe de à Par exemple:
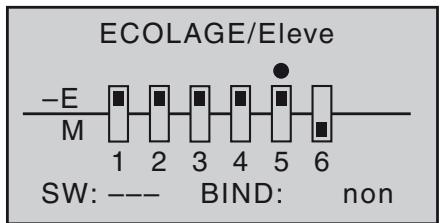
Remarque importante :
Dans le cas d'un système écolage HoTT sans fils, ce sont des VOIES DE COMMANDE qui sont transmises! Si par exemple, la fonction de commande des ailerons (2) doit être transmise, et si le modèle est équipé de deux servos d'ailerons, qui d'habitude sont branchés sur les sorties 2 et 5, il faudra, avec le système sans fils, transmettre également les voies 2 et 5, voir vue ci-dessus. Pour pouvoir transmettre les commandes, il faut encore attribuer, à l'émetteur-moniteur, un interrupteur, rien que pour l'écolage.
Avec les flèches de la touche quadridirectionnelle gauche ou droite, placez le repère en bas à droite, à côté de SW, et attribuez un interrupteur.
Choisissez de préférence un interrupteur de type SW 1,
avec lequel l'émetteur-moniteur pourrait reprendre à tout moment le contrôle du modèle:
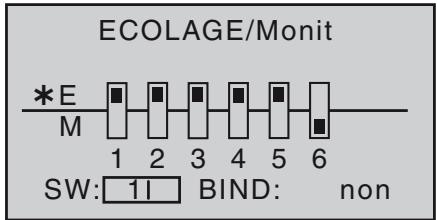
Avec les flèches de la touche quadridirectionnelle gauche ou droite allez sur „BIND: n/v“:
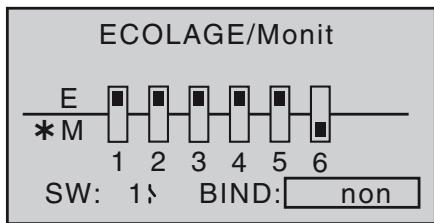
rebasculez l'interrupteur Écologie défini précédemment
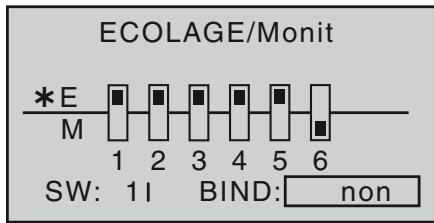
... et déclenchez la procédure Binding (BINDEN) avec une impulsion sur la touche centrale SET de la touche quadridirectionnelle droite.
Dès que la procédure est terminée, "ON" sera affiché à la place du „BINDEN" qui clignotait.
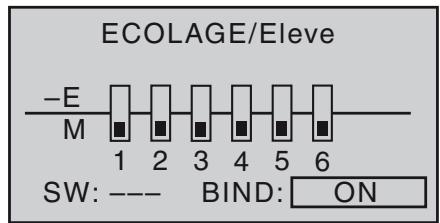
Attention: Même si vous coupez brievement l'émetteur, le mode élève restera activé lorsque vous allumez à nouveau l'émetteur.
Écolage
Les deux émetteurs sont reliés entre eux, sans fils, par la procédure BINDING.
Remarque importante:
AVANT de commencer la séance d'écolage, vérifie sur l'avion-école, si toutes les voies se transmettent correctement.
En cours d'écolage, moniteur et élève peuvent être éloignés l'un de l'autre. Une distance de 50 m entre les deux ne devrait néanmoins pas être dépassée, pour qu'ils puissent au moins encore se parler! De plus, aucune personne ne doit se trouver entre le moniteur et l'élève, ce qui pourrait réduire la portée de la voie de retour utilisée par les deux émetteurs. Par ailleurs, il faut savoir que la voie de retour étant utilisée en écolage sans fil, aucune transmission de données téléétriques ne peut avoir lieu.
Si durant l'écolage, il devait y avoir une perte de liaison entre l'émetteur-moniteur et l'émetteur-éléve, l'émetteur-moniteur reprend automatiquement le contrôle du modèle. Si dans cette situation, l'interrupteur écolage se
trouve en position „élevée“, la LED centrale de l'émetteur-moniteur mx-10 HoTT se met à clignoter 4 x à l'orange, et une alarme sonore se déclenche.
Dans les deux cas, un rapprochement des deux émetteurs devrait résoudre le problème. Si ce n'est pas le cas, atterrissez immédiatement et recherchez la cause de ce dysfonctionnement.
Causes possibles d'erreurs
L'émetteur n'est pas prêt. Absence de procédure Binding entre l'émetteur-moniteur et le récepteur HoTT de l'avion-école.
Écoulage sans fils avec le cordon moniteur pour émetteurs mx avec signal cumulé hott s-rx réf. cde. 33310
Avec le cordon moniteur HoTT 33310 en option et un récepteur HoTT avec une sortie de signal cumulé, tout émetteur HoTT avec prise DSC peut passer en écolage sans fils en émetteur-moniteur.
En tant qu'émetteur d'entrée de gamme, l'émetteur mx-10 HoTT peut donc être utilisé comme émetteur élève avec n'importe quel émetteur HoTT.
La transmission des signaux de l'émetteur-élève vers l'émetteur-moniteur se fait à travers un récepteur HoTT qui est fixé sur le boîtier de l'émetteur avec de la bande crochétée.
Ce récepteur doit être assigné à l'émetteur-élève! Branchez la prise JR du cordon sur la sortie du signal cumulé du récepteur, par ex. sur la sortie 6 s'il s'agit du récepteur GR-12, et l'autre extrémité dans la prise DSC de l'émetteur. L'alimentation de ce récepteur est assurée par un accu complémentaire ou un cordon à 3 fils qui va sur la prise DATA de l'émetteur.
Pour conculture, enregistrez pour ce récepteur le signal cumulé SUMO. À ce sujet, voir paragraphe „Télémétrie“ en page 179.
La transmission, une à une, des voies à l'émetteur-élève se fait par le menu „Écolage" de l'émetteur-moniteur. N'oubliez pas d'attribuer un interrupteur dans ce menu, interrupteur qui permettra de transmettre les voies libérées à l'émetteur-élève.
AVANT de commencer l'écolage, vérifie si tout fonctionne correctement.
Pour faire un essai, coupez l'émetteur-élève. Sur l'émetteur-moniteur doit alors s'afficher un message
d'alerte.
Le modèle est à nouveau pilotable par l'émetteur-moniteur. Si ce message d'alerte ne devrait pas s'afficher, mettez, dans le menu „Télétrie“ de l'émetteur-élève, sur le récepteur programme en tant que SUMO, le réglage de la position Fail-Safe de la voie 1 sur „AUS“ et une autre voie, n'importe laquelle, sur „FAIL SAFE“. Si des tonalités d'alarme se faisaient entendre, augmentez la distance entre l'émetteur-moniteur et l'émetteur-élève et respectez une distance suffisamment grande entre le récepteur programme en tant que SUMO et le module HF HoTT de l'émetteur-moniteur.
Alimentation de réception stabilisée avec Power-Management intelligent.
Cet élément garantit une alimentation stabilisée et régulable de l'alimentation de la réception, ce qui augmente encore davantage la fiabilité de l'alimentation. S'adapte à différents accus de réception, ce qui simplifie sa mise en œuvre et augmente sa plage d'utilisation. Si durant l'utilisation il doit y avoir une chute de tension, même momentanée, celle-ci est enregistrée et affichée, permettant de prévenir un accus défectueux, ou un accus de trop faible capacité.
- Pour l'utilisation avec un ou deux accus de réception. (décharge simultanée en cas d'utilisation de deux accus).
- Pour accus NiMH avec 5 ou 6 éléments, 2 éléments LiPo ou LiFe. Fiches Graupner/JR G3,5, G2 et BEC
- trois tensions de sorties régables pour l'alimentation du récepteur (5,1V, 5,5V, 5,9V)
- deux LEDs, très visibles, indiquent séparément l'état des accus (accu 1 et accu 2)
- interrupteur Marche / Arrêt, de qualité, intégré
- capable d'absorber de fortes intensités
- faible encombrement, conception plate au niveau interrupteur et LEDs pour ne pas ALTERER l'aspect et les caractéristiques du modèle.
- montage simple à plat, avec pattes de fixation, gabarit de perçage fourni.
Module Vario Graupner HoTT
Réf. Cde 33601
Vario avec tonalités de variation d'altitude et respectivement 5 tonalités de montée, et 5 de chute, affichage de l'altitude et enregistrement de l'altitude minimale et de l'altitude maximale.
- Seuils de déclenchement d'alarme supplémentaires, pour altitude minimale, altitude maximale, vitesse de montée et vitesse de chute, sur deux niveaux
- Temps d'alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en permanence
- Temps de répétition : en permanence, 1, 2, 3, 4, 5 min., une seule fois.
- Le vario se branche directement sur la sortie télémetrique du récepteur
\section*{Caractéristiques techniques :}
- Sensibilité vario: 0,5 m/3s, 1 m/3s, 0,5 m/s, 1 m/1s, 3 m/s programmable par tonalité
- Calcul de la valeur moyenne : 4-20 relevés programmables par mesure
Module GPS/Vario Graupner HoTT
Réf. Cde 33600
Variomètre avec tonalités de variation d'altitude et respectivement 5 tonalités de montée, et 5 de chute, GPS intégré avec mesure de l'éloignement, de la distance parcourue, affichage de la vitesse, du cap et des coordonnées.
- Seuils de déclenchement d'alarme supplémentaires pour l'altitude minimale, altitude maximale, vitesse de montée et vitesse de chute, sur deux niveaux
- Affichage de l'altitude et enregistrement de l'altitude minimale et maximale
- Temps d'alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en permanence Temps de répétition : en permanence, 1, 2, 3, 4, 5 min., une seule fois
- Le GPS/Vario se branche directement sur la sortie téléélectrique du récepteur
\section*{Caractéristiques techniques :}
- Sensibilité vario: 0,5 m/3s, 1 m/3s, 0,5 m/s, 1 m/1s, 3 m/s programmable par tonalité
- Calcul de la valeur moyenne : 4-20 relevés programmables par mesure

Réf. Cde 33610
Capteur universel pour récepteurs Graupner HoTT et modèles à motorisation thermique et électrique
- 2 x mesures de tension et de température avec seuils de déclenchement d'alarme pour tension mini, maxi et température mini, maxi
- Mesure de la tension de chaque élément, avec seuils pour tension mini.
- Mesure de la tension, de l'intensité et de la capacité, avec seuils pour tension mini et maxi, capacité maxi et intensité maxi
- Limitation programmable du courant
- Mesure du courant avec résistances Shunt 2 x 1 mOhm, parallèle = 0,5 mOhm
- Compte tours avec seuils de vitesse de rotation mini et maxi.
- Jauge carburant avec seuils par tranche de 25% (après mise à jour)
- Temps d'alarme réglable: OFF, 5, 10, 15, 20, 25, 30 secondes, en permanence Temps de répétition: en permanence, 1, 2, 3, 4, 5 min., une seule fois
- 2 x température, au besoin, de 0 à 120°C ou 200°C et mesure de courant jusqu'à 80V DC
- 1 x Compte tours jusqu'à 100 000 tours/min avec une hélice bipale
- 1 x entrée variateur/servo, 1 x entrée régulateur de vitesse de rotation
- 1 x sortie variateur/servo pour régulateur de vitesse de rotation
- 1 x mesure de l'intensité, de la tension et de la capacité jusqu'à 40 A (60 A en pointe 1 sec.) et jusqu'à 30 V, voir sous www.graupner.de

Réf. Cde 33611
Capteur universel pour récepteurs Graupner HoTT et modèles à motorisation thermique et électrique
- Vario avec tonalités de variation d'altitude, tonalités de montée, tonalités de chute et seuils de déclenchement d'alarme supplémentaires, pour altitude minimale, altitude maximale, vitesse de montée et vitesse de chute, sur deux niveaux
- Affichage de l'altitude (-500... +3000 m) et enregistrement de l'altitude minimale et maximale
- 2 x mesures de tension et de température avec seuils de déclenchement d'alarme pour tension mini, maxi et température mini, maxi
- Mesure de la tension de chaque élément avec seuils pour tension mini
- Mesure de la tension, de l'intensité et de la capacité, avec seuils pour tension mini et maxi, capacité maxi et intensité maxi
- Compte tours avec régulation de la vitesse (programmable) et seuils de vitesse de rotation mini et maxi
- Jauge carburant avec seuils par tranche de 25%
- Temps d'alarme réglable: OFF, 5, 10, 15, 20, 25, 30 secondes, en permanence Temps de répétition: en permanence, 1, 2, 3, 4, 5 min., une seule fois
- 2 x température, au besoin, de 0 à 120°C ou 200°C et mesure de courant jusqu'à 80V DC
- 1 x Compte tours jusqu'à 100 000 tours/min avec une hélice bipale
- 1 x entrée variateur/servo, 1 x entrée régulateur de vitesse de rotation etc., voir sous www.graupner.de

Module electric air graupner hott
Réf. Cde 33620
Capteur universel pour récepteurs Graupner HoTT et modèles à motorisation électrique
- Vario avec tonalités de variation d'altitude, tonalités de montée, tonalités de chute et seuils de déclenchement d'alarme supplémentaires, pour altitude minimale, altitude maximale, vitesse de montée et vitesse de chute, sur deux niveaux
- Affichage de l'altitude (-500... +3000 m) et enregistrement de l'altitude minimale et maximale
- 2 x mesures de tension et de température avec seuils de déclenchement d'alarme pour tension mini, maxi et température mini, maxi.
- Mesure de la tension de chaque élément 2... 14 S avec seuils pour tension mini.
- Mesure de la tension, de l'intensité et de la capacité, avec seuils pour tension mini et maxi, capacité maxi et intensité maxi.
- Temps d'alarme réglable: OFF, 5, 10, 15, 20, 25, 30 secondes, en permanence Temps de répétition: en permanence, 1, 2, 3, 4, 5 min., une seule fois
- 2 x température, au besoin, de 0 à 120°C ou 200°C et mesure de courant jusqu'à 80V DC
- 1 x entrée variateur, 1 x sortie variateur pour la régulation de la tension de chaque élément
- 1 x mesure de l'intensité, de la tension et de la capacité jusqu'à 150 A (320 A en pointe 1 sec.) et jusqu'à 60 V
- 1 x surveillance de chaque élément, pour accus LiPo, LiFe, de 2 - 14 S etc., voir sous www.graupner.de

Capteur magnétique RPM Graupner HoTT
Réf. Cde 33616
Capteur optique RPM Graupner HoTT
Réf. Cde 33615

Smart-Box Graupner HoTT
Réf. Cde 33700
Les différentes fonctions diverses et variées réunies dans un seul et même appareil font de la SMART-BOX votre meilleur ami. Que vous vouliez afficher des données téléétriques en temps réel ou effectuer des réglages sur tout système HoTT, l'écran largement dimensionné de 8 x 21 caractères vous facilite la tâche. Un Buzzer intégré pour l'émission de signaux sonores et tonalités d'alerte rend la manipulation de la BOX encore plus flexible.
Avec le set de montage fourni, cet appareil se monte sur les tiges support de l'émetteur ce qui permet un excellent positionnement, de manière à pouvoir consulter, durant le vol, les données téléétriques de votre modèle, et ce, en temps réel.
La possibilité de mise à jour, que l'utilisateur lui-même peut effectuer, permet de toujours mettre à jour la SMART-BOX au plus haut niveau, en assurant l'extension pour les fonctions futures.
- affichage de la tension émetteur, avec seuil réglable Essai de portée
- Température récepteur Inversion servos
- Course servos Inversion des voies
- Réglages mixages
- Réglage Pays
- Qualité du signal Tension récepteur
- Neutre servos Temps cycle
- Réglages Fail-Safe Test servos
Dimensions: 76mm× 72mm× 17mm (L × I × H)
Poids : 55grs

Graupner HoTT Port USB
Ref. Cde 7168.6
Ce câble d'interface USB est utilisé avec l'adaptateur disponible séparément Réf. Cde 7168.6A pour mise à jour des récepteurs et des capteurs.

Graupner HoTT Adaptateur port USB interface/JR
Réf. Cde 7168.6A
Ce adaptateur est utilisé avec le câble d'interface USB Réf. Cde 7168.6 disponible séparément pour mise à jour des récepteurs et des capteurs.
La société Graupner GmbH & Co. KG, Henriettenstraße 94-96, D-73230 Kirchheim/Teck, accorde sur ce produit une garantie de 24 mois à compter de la date d'achat. La garantie ne s'applique qu'aux défauts de matériel et de fonctionnement du produit acheté. Les dommages dus à une usure, à une surcharge, à l'emploi d'accessoires non compatibles ou à une manipulation non conforme sont exclus de la garantie. Cette garantie ne remet pas en cause les droits légaux des consommateurs. Avant toute réclamation ou retard de matériel, vérifie précisément les défauts ou vices constatés, car si le matériel est conforme et qu'aucun défaut n'a été constaté par nos services, nous nous verrions contraints de facturer le coût de cette intervention.
Warranty certificate / Certificat de garantie

Best.-Nr. 33110
Übergabedatum:
Cachet et signature du détaillant :