
FI-11000 - Frekvensomriktare MSW - Gratis bruksanvisning och manual
Hitta enhetens manual gratis FI-11000 MSW i PDF-format.

| Produkttyp | Frekvensomriktare |
| Märke | MSW |
| Modell | FI-11000 |
| Matningsspänning | 3-fas 380 V, 50/60 Hz |
| Utspänning | 0 till 980 V (3-fas) |
| Utgångsfrekvens | 0 till 300 Hz (vektorstyrning) / 0 till 3200 Hz (U/f-styrning) |
| Utström (t.ex. 0,75 kW) | 2,1 A |
| Märkeffekt | 0,75 till 15 kW (beroende på variant) |
| Mått (H × B × D, t.ex. 0,75 kW) | 186 × 125 × 159 mm |
| Vikt (t.ex. 0,75 kW) | 1,7 kg |
| Styrningsläge | SVC (sensorlös), FVC (med sensor), U/f |
| Överlastkapacitet (typ G) | 150 % i 60 s, 180 % i 3 s |
| Bärvågsfrekvens | 0,5 till 16 kHz (automatiskt justerbar) |
| Driftomgivningstemperatur | -10 till +40 °C (upp till 50 °C med nedsättning) |
| Relativ luftfuktighet | <95 % RH, utan kondens |
| Maximal höjd | 1000 m (nedsättning över) |
| Skydd | Överström, överspänning, underspänning, överlast, överhettning, kortslutning, fasfel |
| Digitala ingångar | 5 (varav 1 höghastighets pulsingång upp till 100 kHz) |
| Analoga ingångar | 2 (0-10 V / 4-20 mA) |
| Utgångar | 1 analog (0-10 V / 0-20 mA), 1 digital, 1 relä, 1 puls |
| Kommunikation | Modbus-RTU, CANlink |
| Garanti | 18 månader (från och med fabriksutleveransdatum) |
Vanliga frågor - FI-11000 MSW
Användarfrågor om FI-11000 MSW
0 fråga om denna apparat. Svara på dem du kan eller ställ din egen.
Ställ en ny fråga om denna apparat
Ladda ner instruktionerna för din Frekvensomriktare i PDF-format gratis! Hitta din manual FI-11000 - MSW och ta tillbaka ditt elektroniska enhet i hand. På denna sida publiceras alla dokument som behövs för att använda din enhet. FI-11000 av märket MSW.
BRUKSANVISNING FI-11000 MSW
Allmänna funktioner och beskrivningar av frekvensomriktaren:
1) Många spänningsklasser: stöd för tre spänningsklasser, nämligen enfas 220 V, trefas 220 V och trefas 380 V.
2) Många styrsätt: förutom vektorkontroll av hastighetssensor, sensorlös vektorkontroll och V/F-kontroll, stöd för V/F-separationskontroll.
3) Många fältbussar: stöd för Modbus-RTU och CANlink-fältbuss.
4) Många olika typer av kodare: stöd för differential-encoders, kodare med open-collector-encoders och roterande transformator, etc.
5) Toppmodern algorithm för sensorlös vektorstyrning
Toppmodern SVC ger bättre stabilitet vid låga hastigheter, starkare lastkapacitet vid låga frekvenser och stöder vridmomentreglering av SVC.
6) Kraftfull bakgrundsprogramvara: uppladdning, nedladdning av parametrar, realtidsoscilloskop kan realiseras med bakgrundsprogramvara.
| Funktioner Beskrivning | ar |
| Överhettningsskydd för motor | Efter val av PC1-expansionskort kan AI3 ta emot temperatursensorns ingång från motorn (PT100, PT1000) för att realisera överhettningsskydd |
| Snabb strömbegränsning | Undvik överströmsfel i frekvensomriktaren |
| Tvåstegs motorbrytare | Två uppsättningar motorparametrar möjliggör dubbel motoromkoppling |
| Återställ användarparametrar | Användare kan spara eller återställa egna parameterinställningar |
| Exakt AIAO | Efter fabrikskalibrering (eller punktkalibrering) kan AIAO-noggrannheten vara<20mv |
| Visa anpassade parametrar | Användare kan anpassa funktionsparametrar som ska visas |
| Visa ändrade parametrar | Användaren kan se funktionsparametrar efter modifiering |
| Valfria sätt att hantera fel | Användare kan välja driftsätt för omriktaren efter att ha bekräftat vissa fel: fri stoppning, retardationsstoppning, kontinuerlig drift. Användaren kan också välja frekvens för kontinuerlig drift. |
| Omväxlare för PID-parameter | Två uppsättningar PID-parametrar kan växlas via terminal eller baserat på avvikelse |
| PID återkoppling förlustdetektering | Detekteringsvärde för förlust av PID-feedback realiserar skydd under PID-drift |
| DIDO positiv/negativ logik | Användare kan ställa in positiv/negativ logik för DIDO |
| Fördröjning av svar från DIDO | Användare kan ställa in svarsfördröjningstid för DIDO |
| Kör under omedelbart stopp | Frekvensomvandlaren fortsätter att gå inom kort tid vid omedelbart strömavbrott eller spänningsfall |
| Tidsbestämning | Stöd för tidsinställd drift i högst 6 500 minuter |
Öppning för inspektion:
När du öppnar kartongen ska du noggrant kontrollera att typskyltens modell och frekvensomvandlarens nominella värde överensstämmer med beställningen. Paketet innehåller beställd
Säkerhetsinformation och
Specifikation av högpresterande frekvensomriktare
maskin, kvalifikationsbevis, bruksanvisning och garantibevis.
Vid eventuell skada under transport eller viss försummelse, vänligen kontakta vårt företag eller leverantör.
Kapitel 1 Säkerhetsinformation och försiktighetsåtgärder
Säkerhetsdefinition: I bruksanvisningen delas säkerhetsföreskrifterna in i två

kategorier: Fara: allvarliga personskador eller dödsfall kan uppstå på grund av

användning på icke föreskrivet sätt;
Varning: mättliga eller lindriga personskador och skador på utrustning kan uppstå på grund av användning på icke föreskrivet sätt;
Läs detta kapitel noggrant innan installation, felsökning och underhåll av systemet, och använd i enlighet med säkerhetsföreskrifterna. Företaget är inte ansvarigt för skador och förluster som orsakas av icke avsedd användning.
1.1 Säkerhetsfrågor
1.1.1 Före installation:
 Fara Fara |
| Om det finns vatten i systemet eller om någon komponent saknas eller är skadad när förpackningen öppnas får du inte installera apparaten! |
 Fara Fara |
| Flytta apparaten försiktigt, annars kan den skadas!Om drivdonet eller frekvensomriktaren är skadade eller saknar delar får de inte användas! Det finns risk för skador! |
1.1.2 Under installationen:
 Fara Fara |
| • Installera på flamskyddade föremål, som exempelvis metall, och håll borta från brännbart material, annars kan brand uppstå |
| • |
 Varning Varning |
| ● Sätt inte in kabelhuvuden eller skruvar i drivdonet, eftersom drivdonet i så fall kan● skadas! Installera drivdonet på en plats med låg vibration och skydda det från● solen.positionering, för att säkerställa |
1.1.3 Under anslutning av kablar:

Fara
- Följ bruksanvisningen och anlita professionell elteknisk personal för installation, annars kan fara uppstå!
- Frekvensomriktaren och strömförsörjningen ska vara separerade genom en brytare, annars kan brand uppstå!
Se till att strömmen/spänningsstatusen är noll innan du ansluter kabeln, annars kan elektriska stötar uppstå!

Fara
- Anslut inte ingångseffekten till utgångsterminalen (U, V, W) på frekvensomriktaren. Var märkningen på kabelterminalen och koppla inte kablarna fel, eftersom drivdonet annars
- Säkerställ att alla kablar uppfyller kraven för EMC (elektromagnetisk kompabilitet) och regionala måste överensstämma med anvisningarna i bruksanvisningen,
- Anslut inte bromsmotståndet direkt mellan DC-(+) (-) terminalerna, eftersom brand annars kan uppstå!
●
1.1.4 Innan du slår på strömmen:

Varning
- Vänligen bekräfta att spänningsklassen för ingångseffekten och märkspänningsklassen för frekvensomriktaren; korrektheten för positionerna av anslutningarna för nätingångsterminalerna (R, S, T) och utgångsterminalerna (U, V, W). Kontrollera så att det inte finns någon kortslutning i periferikretsen som ansluter till drivdonet och om kablarna är åtdragna, annars kan växelriktaren skadas!
- Ingen av frekvensomriktarens delar behöver genomgå spänningsprov eftersom produkten har testats!

Fara
- Anslut frekvensomriktaren till elektriciteten först efter att ha monterat täckplåten, annars kan elektriska stötar uppstå!
Kabeldragning av alla periferitillbehör ska ske i enlighet med anvisningarna i bruksanvisningen och
1.1.5 Efter att strömmen har kopplats till:

Fara
- Öppna inte den täckande plattan efter att strömmen kopplats till, annars kan elektriska stötar uppstå!
Rör inte vid drivdonet eller periferikretsen med våtahänder, annars kan elektriska stötar uppstå!
Rör inte vid frekvensomriktarens ingångs- eller utgångsterminaler, annars kan elektriska stötar uppstå! - Första gången elen kopplas till kommer frekvensomriktaren att utföra en säkerhetsdetektering av den externa
starkströmsslingan - rör inte vid drivdonets U, V, W-kabelterminal eller motorns
1.1.6 Under drift:
Fara
Vidrör inte kylfläkten eller urladdningsmotståndet för att känna temperaturen, eftersom brännskador i så fall kan uppstå!
!
Varning
Undvik att saker faller in i apparaten under drift av frekvensomriktaren, annars kan skador uppstå!
Styr inte drivdonet genom att slå på eller av kontaktorn, eftersom skador i så fall kan uppstå!
1.1.7 Under underhåll:
Fara
Reparera eller underhåll inte enheten när den är tillkopplad till strömmen, annars kan elektriska stötar uppstå!
Underhåll och reparation av drivdonet får endast ske när spänningen 2 minuter efter ett
strömavbrott är <DC36V, annars kan kvarvarande elektrisk laddning på kapacitans orsaka
1
personskador eller skador på
Efter byte av frekvensomriktare måste alla parametrar ställas in, alla anslutningsbara kontakter ska anslutas efter
När man använder motorn för första gången, använder motorn igen efter en längre tids stillestånd och vid regelbundna kontroller av motorn, är isoleringskontroll av motorn avgörande för att förhindra att frekvensomriktaren skadas på grund av ogiltig isolering av motorlindningen. Vid inspektion av isolering, separera motorkabeln från frekvensomriktaren. En spänningsmätare på 500 V föreslås, säkerställ en uppmätt isoleringsresistans på ≥5MΩ.
1.2.2 Termiskt skydd av motorn
Om den valda motorn inte överensstämmer med frekvensomriktarens nominella kapacitet, särskilt om den nominella effekten är större än frekvensomriktarens, ska du justera relaterade parametervärden för motorskydd eller installera ett termiskt relä framför motorn för skydd.
1.2.3 Drift över effektfrekvens
Frekvensomvandlaren erbjuder en utgångsfrekvens på 0Hz ∼3200Hz. Om användare behöver arbeta vid över 50 Hz, vänligen beakta toleransen för mekanisk utrustning.
Lastenhetens mekaniska resonanspunkt kan finnas vid en viss utgångsfrekvens för frekvensomriktaren, och parametern för hoppfrekvens kan ställas in för att undvika detta.
1.2.5 Om uppvärmning och motorljud
Frekvensomvandlarens utgångsspänning är PWM-våg som innehåller vissa övertoner, så temperaturökning, buller och vibrationer i motorn kommer att öka något i jämförelse med nätfrekvensdrift.
1.2.6 Spänningskänsliga delar eller kapacitans för att förbättra effektfaktorn finns på utgångssidan
Frekvensomriktarens utgång är PMB-våg. Om kapacitans för att förbättra effektfaktorn eller spänningsberoende motständ för att förhindra åska installeras på utgångssidan, kan omedelbar överström och till och med skador på frekvensomriktaren lätt orsakas. Vänligen använd inte detta.
1.2.7 Omkopplingsanordningar såsom kontaktor för frekvensomriktarens in- och utgångsterminaler
Om en kontaktor är installerad mellan frekvensomriktarens strömförsörjning och ingångsterminal, får denna kontaktor inte styra frekvensomriktarens start och stopp. Om denna kontaktor krävs för att styra start och stopp av frekvensomriktaren, bör tidsintervallet vara minst en timme. Frekvent laddning och urladdning förkortar livslängden på kondensatorn i frekvensomriktaren. Om omkopplingsanordningar som kontaktorer är installerade mellan utgångsterminalen och motorn, se till att frekvensomriktaren drivs utan utgång, annars kan modulskador lätt uppstå.
1.2.8 Användning utanför nominellt spänningsvärde
Det är inte lämpligt att använda denna serie frekvensomriktare utanför det driftspänningsområde som tillåts enligt manualen, annars kan skador på apparaten uppstå. Använd vid behov motsvarande utrustning för spänningsökning eller spänningsminskning för spänningsomvandling.
1.2.9 Ändring från trefas-inmatning till tvåfas-inmatning
Byt inte en trefasig frekvensomriktare till tvåfasig, eftersom fel eller skador i sådant fall kan uppstå.
1.2.10 Skydd mot blixtnedslag
Frekvensomriktaren har ett överströmsskydd mot blixtnedslag, vilket gör att den har ett en viss självskyddsförmåga mot induktiv åska. Om blixtnedslag är vanligt förekommande på den plats där kunden befinner sig är det nödvändigt med ytterligare skydd framför frekvensomriktaren.
1.2.11 Användning på höjd och nedgradering
I områden på en höjd som överstiger 1000 m försvagas frekvensomriktarens värmeavledningseffekt på grund av tunn luft, så det är nödvändigt att nedgradera före användning. Kontakta vårt företag för konsultation.
1.2.12 Om adaptiv motor
1) Den adaptiva standardmotorn är en fyrpolig ekorrburs-asynkron induktionsmotor. Om det inte är ovanstående motor, välj frekvensomriktare enligt motorns märkström.
2) Kylfläkten och rotorspindeln på motorn med icke-variabel frekvens är koaxialkopplade. Om rotationshastigheten minskar kommer fläktens kylande effekt att minska, så vid överhettning bör motorn installeras med en stark frånluftsfläkt eller bytas ut mot en motor med variabel frekyens.
3) Standardparametrar för adaptiv motor har byggts in i frekvensomriktaren. Det är nödvändigt att identifiera motorparametrar eller ändra standardvärdet baserat på den faktiska situationen för att överensstämma med det faktiska värdet så långt som möjligt, annars kan driftseffekten och skyddsprestandan påverkas.
4) En kortslutning i en kabel eller motorn kan leda till larm och till och med att frekvensomriktaren exploderar. Utför först ett kortslutningstest av isoleringen för den först
Specifikation av högpresterande frekvensomriktare
Information om
installerade motorn och kabeln, och det är också viktigt för det dagliga underhållet. Separera frekvensomriktaren helt från den testade delen när du utför testet.
2.1 Princip för namnsättning
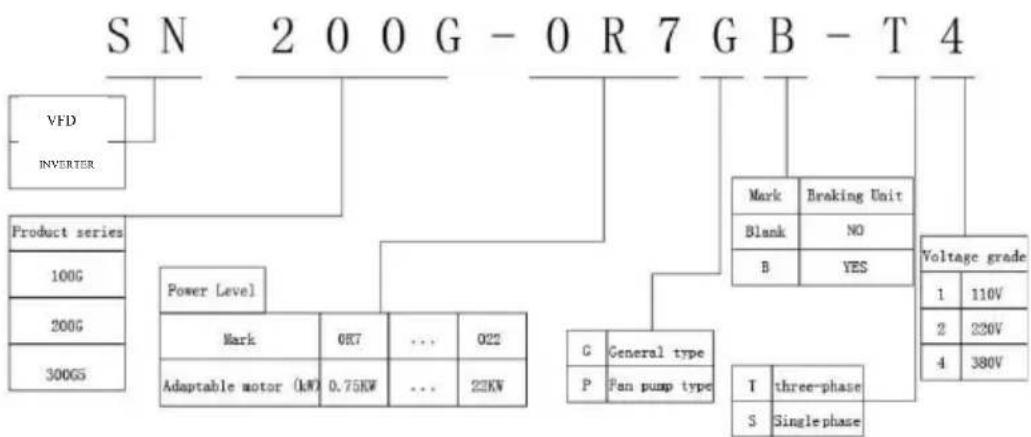
flowchart
graph TD
A["SN 200G - OR7 GB - T 4"] --> B["VFD"]
A --> C["INVERTER"]
A --> D["Product series"]
D --> E["100G"]
D --> F["200G"]
D --> G["300GS"]
A --> H["Power Level"]
H --> I["Mark"]
I --> J["OK7"]
I --> K["..."]
I --> L["O22"]
I --> M["Adaptable motor (kW)"]
M --> N["0.75KW"]
M --> O["..."]
M --> P["22KW"]
A --> Q["Mark"]
Q --> R["Braking Unit"]
Q --> S["Blank"]
Q --> T["B"]
Q --> U["YES"]
A --> V["G General type"]
V --> W["P Fan pump type"]
V --> X["T three-phase"]
V --> Y["S Single phase"]
Z["Voltage grade"] --> AA["1 110V"]
Z --> AB["2 230V"]
Z --> AC["4 380V"]
Figur 2-1 Namnspecifikation
2.2 Typskylt
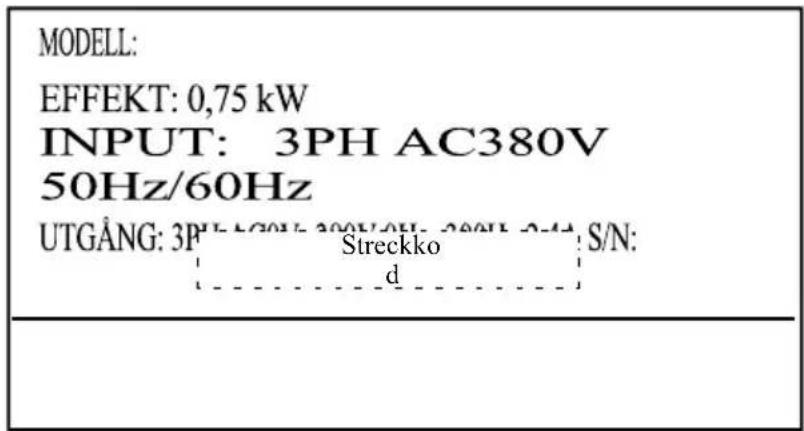
Figur 2-2 Typskylt
Figur 2-1 Modell och tekniska data för frekvensomriktaren
| Modell av frekvensomriktare | Effektkapacitet (kVA) | Ingångsström (A) | Utgångsström (A) | Adaptiv motor kW HP | |
| Trefas strömförsörjning: 380V, 50/60Hz | |||||
| 10061537 | 1,5 | 3,4 | 2,1 | 0,75 | 1 |
| 10061534 | 3,0 | 5,0 | 3,8 | 1,5 | 2 |
| 10061533 | 4,0 | 5,8 | 5,1 | 2,2 | 3 |
| 10061532 | 5,9 | 10,5 | 9,0 | 3,7 | 5 |
| 10061531 | 8,9 | 14,6 | 13,0 | 5,5 | 7,5 |
| 10061530 | 11,0 | 20,5 | 17,0 | 7,5 | 10 |
| 10061536 | 17,0 | 26,0 | 25,0 | 11,0 | 15 |
| 10061535 | 21,0 | 35,0 | 32,0 | 15,0 | 20 |
2.4 Tekniska specifikationer
Figur 2-2 Tekniska specifikationer för frekvensomriktare
| Föremål | Specifikationer | ||
| Grundläggande funktione | Högsta frekvens | Vektorkontroll: 0~300 HzV/F-kontroll: 0~3200 Hz | |
| Bärfrekvens | 0,5 kHz ~16 kHzJustera bärfrekvensen automatiskt baserat på belastningskarakteristik | ||
| Upplösning föringångsfrekvens | Inställning av antal: 0,01HzSimuleringsinställning: högsta frekvens ×0,025%. | ||
| Kontrolläge | SVCFVCV/F-kontroll | ||
| Startmoment | Maskin i G-stil: 0,5Hz/150% (SVC); 0Hz/180% (FVC)Maskin i P-stil: 0,5Hz/100% (SVC) | ||
| Område förhastighetsreglering | 1: 100 (SVC) 1: 1000 (FVC) | ||
| Hastighetsstabiliserandeprecision | ±0,5% (SVC) | ±0,02% (FVC) | |
| Precision vid styrning avvridmoment | ±5% (FVC) | ||
| Överbelastningskapacitet | Maskin i G-stil: 150% märkström vid 60s; 180% märkström vid 3sMaskin i P-stil: 120% märkström vid 60s; 150% märkström vid 3s | ||
| Främjande av vridmoment | Automatisk momentstyrning; manuell momentstyrning med0,1%~30,0% | ||
| V/F-kurva | Tre möjligheter: linjär typ; multipoint-typ; ^Nth power-typ V/F-kurva(1,2 effekt, 1,4 effekt, 1,6 effekt, 1,8 effekt, 2 effekt) | ||
| V/F-separation | 2 möjligheter: fullständig separation, delvis separation | ||
| Kurvor föracceleration/retardation | Linjär eller S-kurva för acceleration/deceleration.Fyra typer av accelerations-/decelerationstidAccelerations-/decelerationstidsintervall:0.0~6500.0s | ||
| DC-bromsning | DC-bromsfrekvens: 0.00Hz~maximum frekvens; Bromstid:0.0s~36.0s bromsverkan; Aktuellt värde: 0.0%~100.0% | ||
| Inching-kontroll | Frekvensområde för inching: 0,00Hz~50,00Hz;Acceleration/deceleration av inching 0.0s~6500.0s | ||
| Enkel PLC, flera steghastighetsmanövrering | Realisera 16-stegs hastighetsdrift som mest genom inbyggd PLC ellerkontrollterminal | ||
| Inbyggd PID | Lätt att realisera processtyrning, styrsystem med sluten slinga | ||
| Automatiskspänningsreglering | Håller automatiskt utspänningen konstant om nätspänningen ändras | ||
| Överspänning, överström,stoppkontroll | Begränsa ström/spänning automatiskt under drift, förhindra frekventaavbrott orsakade av överström och överspänning | ||
| Snabb strömbegränsandefunktion | Minskar överströmsfel, skyddar normal drift av omriktaren | ||
| Vridmomentbegränsning ochstyrning | "Nawy"-tecknet begränsar vridmomentet underdrift, förhindrar frekventa överströmsutlösningar,closed-loop vektorläge kan realiseravridmomentsreglering | ||
| Föremål | Specifikationer | ||
| Individualiserade funktioner | Utmärkt prestanda | Förverkliga motorstyrningen med högpresterande strömvektorstyrning | |
| Arbete under omedelbart stopp | Kompensation för reducerad spänning genom återkoppling av belastningsenergi vid omedelbart avbrott, bibehåller kontinuerlig drift av frekvensomriktaren inom kort tid | ||
| Snabb strömbegränsning | Undvik frekventa överströmsfel i frekvensomriktaren | ||
| Kontroll av tidsinställning | Funktion för tidsstyrning: ställ in tidsintervall 0,0Min ~6500,0Min | ||
| Strömbrytare för flera motorer | 2 uppsättningar av motorparametrar realiserar omkopplingsstyrning av 2 motorer | ||
| Bus för flera trådar | Stöd för två typer av spot field bus: R S -4 8 5 , C A N li n k | ||
| Skydd mot överhettning | Valfritt multifunktionskort, analog ingång A13 kan ta emot ingång från motortemperaturgivare (PT100, PT1000) | ||
| Multi-encoder | Stöd för olika encoders, t.ex. differentiering, öppen kollektor och roterande transformator | ||
| Programmerbar av användare | Valfritt användarprogrammerbart kort genomför sekundär utveckling | ||
| Kraftfull bakgrundsprogramvara | Stöd för parameterdrift och virtuell oscilloskopfunktion. Realiserar grafisk övervakning av frekvensomriktarens interna status med hjälp av virtuellt oscilloskop | ||
| Användning | Källa för kommandot | Given manöverpanel, given kontrollterminal, given seriell kommunikationsport. Växla på flera olika sätt | |
| Frekvenskälla | 10 frekvenskällor: given siffra, given analog spänning, given analog ström, given puls, given seriell port. Växla på flera olika sätt | ||
| Hjälpfrekvenskälla | 10 extra frekvenskällor. Realisera trimning av hjälpfrekvenser och frekvenssyntes på ett flexibelt sätt | ||
| Ingångsanslutningar | Standard:5 digitala ingångsterminaler, varav 1 terminal stöder höghastighets impulsingång vid 100 Hz2 analoga ingångsterminaler, där 1 stöder spänningsingång vid 0~10V.1 stöder spänningsstöd vid 0~10V eller stromminmatning vid 4~20mA Expansionsförmåga:5 digitala ingångsterminaler1 analog ingångsterminal stöder spänningsstöd vid 0~10V | ||
| Utgångsterminaler | Standard:1 utgångsterminal för höghastighetspuls (öppen kollektor är valfri), stöd för fyrkantig signalutgång vid 0~100 kHz1 digitalutgångsterminal 1reläutgångsterminal1 analog utgångsterminal stöder strömingång vid 0~20mA eller spänningsstöd vid 0~10VExpansionsförmåga:1 digitalutgångsterminal 1reläutgångsterminal1 analog utgångsterminal stöder ströminmatning vid 0~20 mA eller spännings | ||
Specifikation av högpresterande frekvensomriktare
Information om
| stöd vid 0~10V | ||
| Föremål | Specifikationer | |
| Användning av display och tangentbord | LED-display | Parametrar för visning |
| Tangentlåsning och val av funktion | Delvis eller fullständig låsning av tangenter, definiering av funktionsområde för vissa tangenter för att förhindra felaktig användning | |
| Skyddsfunktion | Kortslutningsdetektering av motorn vid elektrifiering, ingång/utgång standardfasskydd, överströmsskydd, överspänningsskydd, underspänningsskydd, överhettingsskydd, överbelastningsskydd | |
| Valfria tillbehör | LCD-manöverpanel, bromsenhet, multifunktionellt expansionskort, IO-expansionskort, RS485-kommunikationskort, CANlink-kommunikationskort, PG-kort för differentiell ingång, PG-kort för roterande transformator, PG-kort för OC-ingång | |
| Driftmiljö | Använd plats | Inomhus utan direkt solljus, damm, korrosiv gas, brännbar gas, oljedimma, vattenånga, droppande vatten eller salthalt |
| Höjd | < 1000 m | |
| Omgivningstemperatur | - 10 °C ~ + 40 °C (omgivningstemperatur vid 40 °C ~50 °C , vänligen nedgradera för användning | |
| Luftfuktighet | < 95%RH, inga kondensdroppar | |
| Vibration | < 5,9 m2/s (0,6 g) | |
| Lagringstemperatur | -20°C~+60°C | |
2.5 Utvändig ritning, dimensioner för monteringshål
2.5.1 Utvändig ritning
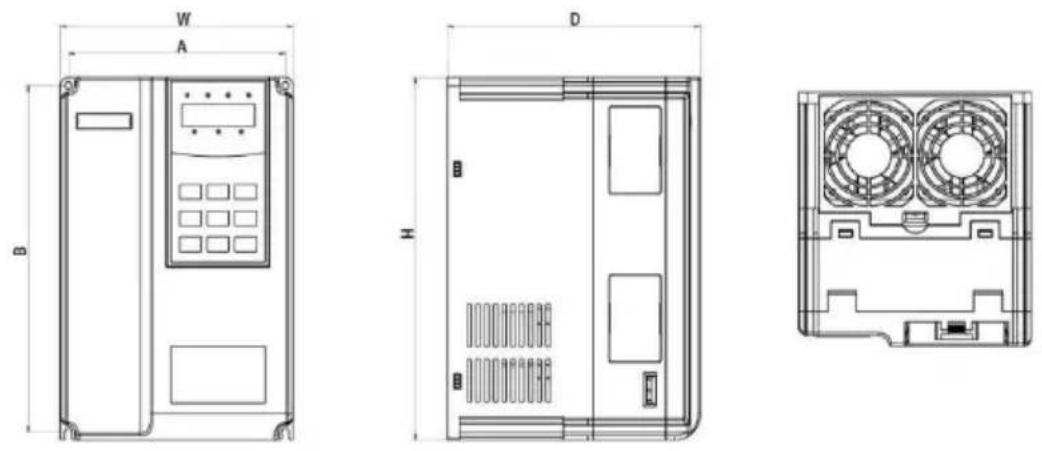
Figur 2-4 Schematiskt diagram över plastkonstruktionens yttermått och monteringsmätt
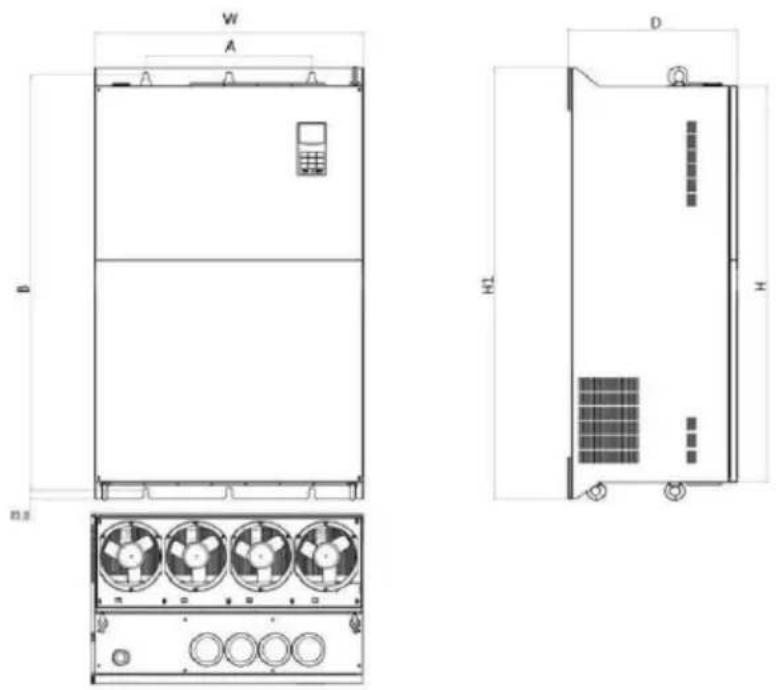
Figur 2-5 Schematiskt diagram över yttre mått och monteringsmått för metallplåtskonstruktionen
Modellernas höljeskonstruktioner är följande
| Model1 | Typ avhölje |
| Enfas 220V | |
| 0,4 kW ~2,2 kW | Plastkonstruktion |
| Trefas 220V | |
| 0,4 kW ~7,5 kW | Plastkonstruktion |
| 11 kW~75 kW | Struktur av metallplåt |
| Trefas 380 V | |
| 0,75 kW~15 kW | Plastkonstruktion |
| 18,5 kW~400 kW | Struktur av metallplåt |
5.5.2 Utvändig ritning och mått på monteringshål (mm) för frekvensomriktare Figur 2-3
Utvändig ritning och mått på monteringshål
| Modell av frekvensom riktare | Monteringshål (mm) Ytre dimension (mm) | Håldiame ter | Vikt (kg) | ||||
| A B H | W D | ||||||
| 10061537 | 114 | 172 | 186 | 125 | 159 | 5.0 | 1.7 |
| 10061534 | |||||||
| 10061533 | |||||||
| 10061532 | 149 | 237 | 218 | 160 | 174 | 5.0 | 3.2 |
| 10061531 | |||||||
| 10061530 | |||||||
| 10061536 | 190 | 305 | 322 | 208 | 192 | 6.0 | 6.5 |
| 10061535 | |||||||
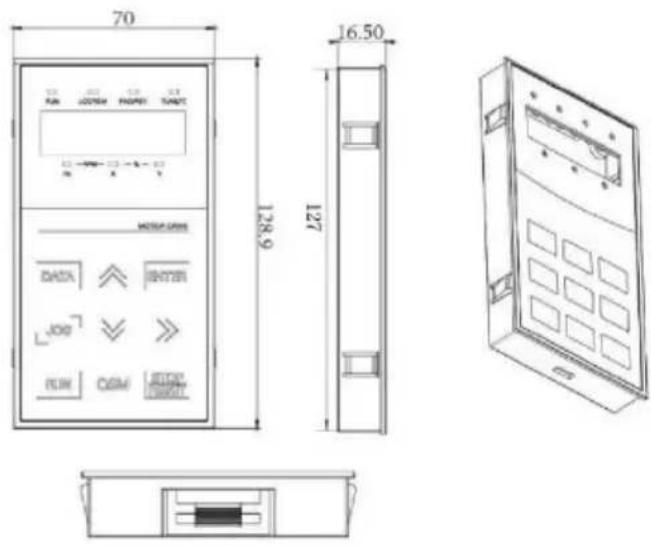
2.5.3 Displaypanelens yttre mått
Displaypanelens hålstorlek:
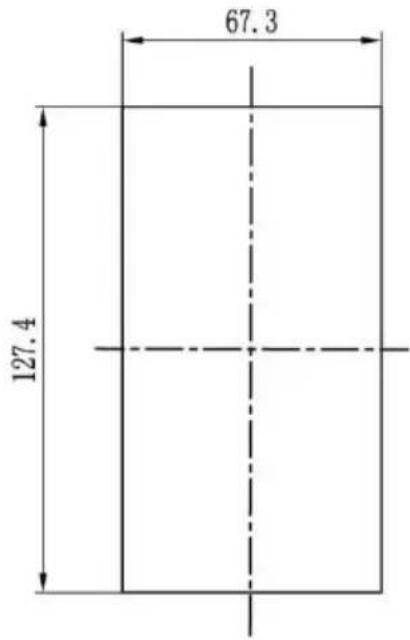
Figur 2-7 Hålstorlek för bildskärm
2.5.4 Måttritning av extern DC-reaktor
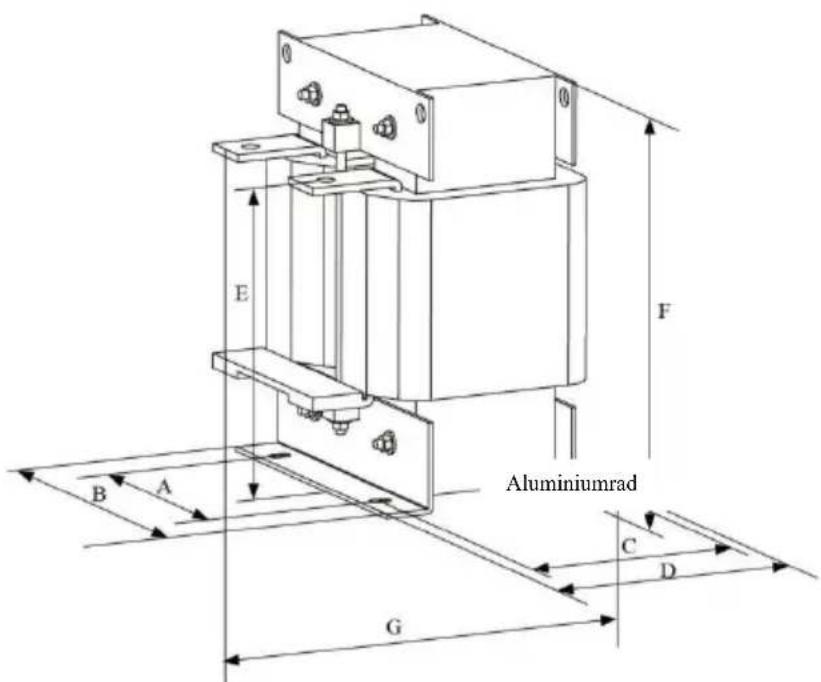
Notera: icke-standardiserade kan anpassas om särskilda krav föreligger
Installationssätt för extern DC-reaktor: vid installation av frekvensomriktare måste användarna ta bort kopparbygeln mellan ledningsterminalen P1 och (+) för huvudslinga och ansluta DC-reaktor mellan P1 och (+), var uppmärksam på polariteten på kablarna mellan reaktorterminalen och omvandlarterminalen P1, (+). Efter installation av DC-reaktor är kopparbygeln mellan P1 och (+) inte nödvändig.
2.6 Tillval tillbehör
Tabell 2-6 Tillbehör för frekvensomriktare
| Benämning | Modell | Funktion | Anmärk ning |
| Extern bromsenhet | SNBU | 18,5 kW och högre extern bromsenhet | 75 kW och högre använder multi-parallellskoppling |
| Multifunktionellt expansionskort | IO-MINI-V03 | Kan lägga till femsiffrig ingång och en analog spänningsingång. AI3 är en isolerad analog mängd som kan anslutas till PT100 och PT1000; en reläutgång, en figurutgång och en analog spänningsutgång med RS485 / CAN | Lämplig för modeller från 3,7 kW och uppåt |
| I/O-expansionskort | IO1 | Kan lägga till tresiffrig ingång | Lämpligt för hela serien |
| MODBUS-kommunikationskort | RS485 | Med isolerande RS-485-kommunikationskort | Lämpligt för hela serien |
| CANlink-kommunikations-expansionskort | CANLINK-V03 | CANlink-kommunikations-adapterkort | Lämpligt för hela serien |
| Gränssnittskort för differentiell encoder | PG1 | Interface-kort för differentiell rotationsencoder, anpassat för 5V strömkälla | Lämpligt för hela serien |
| Interface-kort för roterande transformator | PG2 | Lämpligt för roterande encoder, drift-frekvens 10 kHz, DB9-gränssnitt | Lämpligt för hela serien |
| Gränssnittskort för encoder med öppen kollektor | PG3 | Gränssnittskort för öppen kollektor encoder, med 1: 1 frekvensdelnings-utgång, anpassningsbar för 15 V strömkälla | Lämpligt för hela serien |
| LED-driftpanel | SNKE | Introducerad LED-display och tangentbord | Lämplig för SN-serien |
| Förlängningskabel | SNCAB | Introducerad förlängningskabel | Standardkonfiguration 3 meter |
2.7 Rutinmässigt underhåll av frekvensomriktare
2.7.1 Rutinmässigt underhåll
Påverkan genom miljötemperatur, fuktighet, damm och vibrationer kommer att leda till åldrande av interna komponenter och möjliga fel, eller minska livslängden för frekvensomriktaren, så det är nödvändigt att utföra rutinmässigt och regelbundet underhåll.
1) Om onormal förändring av ljudet sker under motordrift
2) Om vibrationer uppstår under motordrift
3) Om någon ändring av installationsmiljön för frekvensomriktaren sker
4) Om kylfläkten för frekvensomriktaren fungerar normalt
5) Om överhettning av frekvensomriktaren uppstår
Specifikation av högpresterande frekvensomriktare inspektion:
Information om
1) Inspektera luftkanalen och rengör den regelbundet
2) Kontrollera om någon skruv har lossnat
3) Inspektera om det finns något ljusbågespår på kabelterminalen
2.7.3 Förvaring av frekvensomriktare
Efter inköp av frekvensomriktaren bör användare vara uppmärksamma på följande vid tillfällig och långvarig förvaring:
- Lägg i förpackningslådan från vårt företag enligt originalförpackningen för förvaring.
- Långvarig förvaring leder till att den elektrolytiska kondensatorn försämras. Säkerställ att apparaten är tillkopplad till elen och påslagen en gång under
minst 5 timmar inom 2 år, och en spänningsregulator bör användas för att gradvis öka ingångsspänningen till nominellt värde.
2.8 Garanti
Gratis underhåll gäller endast för frekvensomriktaren. Vid fel eller skada vid normal användning är vårt företag ansvarigt för underhåll i 18 månader (från det datum då maskinen lämnade fabriken och streckkoden på maskinen gäller). Om fler än 18 månader har gått debiteras en rimlig underhållsavgift. Under nedanstående förutsättningar kommer vissa underhållsavgifter att debiteras inom 18 månader: skador på enheten som orsakats av att bestämmelserna i manualen inte följts; skador som orsakats av brand, översvämning och onormal spänning etc; skador som orsakats av att frekvensomriktaren använts för onormala tillämpningar. Avgiften för relaterade tjänster kommer att beräknas enligt tillverkarens enhetliga standard. Om något annat avtalats, kommer detta avtal att gälla.
2.9 Guide för val av bromsdelar
Figur 2-7 är vägledande information. Användaren kan välja olika motständsvärde och effekt baserat på den faktiska situationen (men motständsvärdet bör inte vara lägre än det rekommenderade värdet i figuren, effekten kan vara stor). Valet av bromsmotstånd beror på motoreffekten i det faktiska tillämpningssystemet, och det är relaterat till systemets tröghet, retardationstid, potentiell energibelastning, så att användarna kan välja baserat på den faktiska situationen. Ju högre tröghetsmomentet i systemet är, desto kortare är retardationstid och bromsfrekvens, så bromsmotståndet bör välja stor effekt och litet motständsvärde.
2.9.1 Val av motständsvärde
Vid inbromsning förbrukas motorns återvunna energi nästan helt av bromsmotståndet. Formeln finns nedan: U*U/R=Pb
U----bromsspänning för stabil inbromsning (varierar med olika system, i allmänhet 700V för 380VAC) Pb----bromskraft
2.9.2 Val av bromsmotständseffekt
I teorin överensstämmer bromsmotständets effekt med bromskraften.
Nedgradering till 70% kan användas.
Formel: 0,7*Pr=Pb*D
Pr---- motständseffekt; D---- bromsfrekvens (andel i hela processen under regenerering) Lyft---- 20% \~30%
Figur 2-7 Urval av bromselement utifrån modell
| Modell av frekvensomriktare | Rekommenderad effekt | Rekommenderat resistansvärde | Bromsenhet | Anmärkning |
| 10061537 | 150 W | ≥300Ω | Standard inbyggd | Inga särskilda instruktioner |
| 10061534 | 150 W | ≥220Ω | ||
| 10061533 | 250W | ≥200Ω | ||
| 10061532 | 300 W | ≥130Ω | ||
| 10061531 | 400 W | ≥90Ω | ||
| 10061530 | 500 W | ≥65Ω | ||
| 10061536 | 800 W | ≥43Ω | ||
| 10061535 | 1000 W | ≥32Ω |
Kapitel 3 Mekanisk och elektrisk installation
3.1 Mekanisk installation
3.1.1 Installationsmiljö:
1) Omgivningstemperatur: Omgivningstemperaturen har stor inverkan på frekvensomriktarens livslängd, så frekvensomriktarens driftstemperatur får inte överstiga temperaturområdet (-10 °C \~ 50 °C).
2) Placera frekvensomriktaren på ytan av ett flamskyddat föremål och lämna tillräckligt med utrymme för värme-
spridning runt. Stor värme produceras när frekvensomriktaren arbetar. Montera dessutom vertikalt på installationsstödet med skruv.
3) Installera på plats med låg vibrationsnivå. Vibrationen ska vara < 0,6G. Utsätt inte apparaten för slag eller stötar.
4) Undvik installation på platser med direkt solljus, fukt och droppande vatten m.m.
5) Undvik installation i omgivningar med korrosiva, brandfarliga och explosiva gaser i luften.
6) Undvik installation på platser med oljefläckar, damm och metalldamm.

Ritning för installation av hölje

Ritning för installation, ovan och under
Figur 3-1 Installationsschema för frekvensomriktare
Installation i kaross: En dimension kan inte beaktas om frekvensomriktarens effekt är ≤22kW. A skall vara >50mm om frekvensomriktarens effekt är >22kW.
Installation, ovan och under: installera värmeisoleringsskivan enligt ritningen.
| Effektklass | Installationsmått | |
| B | A | |
| ≤15kW ≥100mm | Inga krav | |
| 18,5 kW–30 kW | ≥200 mm | ≥50 mm |
| ≥37 kW | ≥300 mm | ≥50 mm |
3.1.2 Värmeavledning bör uppmärksammas vid mekanisk installation. Var uppmärksam på bälgen:
1) Installera frekvensomriktaren vertikalt så att värmen kan avledas uppåt, förhindra invertering. Om det finns flera frekvensomriktare i skåpet rekommenderas att de installeras bredvid varandra.
För de tillfällen som kräver topp- och botteninstallation, installera värmeisoleringsskivan enligt ritning 3–1.
2) Installationsutrymmet följer ritning 3-1 för att säkerställa värmeavledningsutrymme för frekvensomriktaren. Beakta värmeavledningssituationen för andra komponenter i skåpet.
3) Installationsfästet ska vara tillverkat av flamskyddat material.
4) Om metalldamm finns i omgivningen föreslås installation av värmeelementet utanför skåpet. Utrymmet för skåp med full tätning bör vara så stort som möjligt.
3.1.3 Demontering och montering av nedre täckplatta
En frekvensomriktare <18,5 kW har ett plasthölje. Demontering av den nedre täckplattan på plasthöljet beskrivs i figur 3-2, 3-3. Tryck ut den nedre täckplattans krok från insidan med hjälp av verktyget.
Figur 3-2 Demonteringsritning av den nedre täckplattan på plasthölje
Figur 3-3 Demonteringsritning av den nedre täckplattan på metallplåtshölje
En frekvensomriktare >18,5 kW har ett hölje av metallplåt. Demonteringen av den nedre täckplattan på metallplåtshöljet beskrivs i figur 3-3. Skruva loss skruven på den nedre täckplattan direkt med ett verktyg.

Fara

Vid demontering av den nedre täckplåten, undvik att plåten faller ned och skadar enheten
3.2 Elektrisk installation
3.2.1 Vägledning för val av modell för perifera elektriska komponenter
Figur 3-1 Vägledning för modellval av elektriska periferikomponenter för frekvensomriktare
| Modell av frekvensomriktare | (MCCB) A | Rekommende rad kontaktor A | Ledning för huvudslinga på ingångssidan mm^2 | Ledning för huvudslinga på utgångssidan mm^2 | Rekommenderad ledningsdragning för styrslinga mm^2 |
| Trefas 380 V | |||||
| 10061537 | 10 | 10 | 2,5 | 2,5 | 1,0 |
| 10061534 | 16 | 10 | 2,5 | 2,5 | 1,0 |
| 10061533 | 16 | 10 | 2,5 | 2,5 | 1,0 |
| 10061532 | 25 | 16 | 4,0 | 4,0 | 1,0 |
| 10061531 | 32 | 25 | 4,0 | 4,0 | 1,0 |
| 10061530 | 40 | 32 | 4,0 | 4,0 | 1,0 |
| 10061536 | 63 | 40 | 4,0 | 4,0 | 1,0 |
| 10061535 | 63 | 40 | 6,0 | 6,0 | 1,0 |
3.2.2 Instruktioner för perifera elektriska komponenter
Figur 3-2 Instruktioner för perifera elektriska komponenter för frekvensomriktare
| Delens namn | Installation Funktionsbeskrivning | |
| Luftomkopplare | Framsidan av ingångskretsen | Brytande av strömmen vid eventuell överström i nedströmsutrustning |
| Kontaktor | På ingångssidan för luftomkopplare och omriktare | Påslagning/avstängning av strömmen till omriktaren. Undvik frekvent på- /avslagning av omriktaren via kontaktorn (< två gånger per minut) eller starta driften direkt |
| Reaktor för AC-ingång | På ingångssidan av omriktaren | Förbättring av effektfaktorn på ingångssidan, eliminering av högre övertoner på ingångssidan och förhindrande av skador på enheten som orsakas av distorsion av spänningsvågformen;eliminering av obalanserad ingångsström orsakad av obalans mellan strömfaser |
| EMC-ingångsfilter | På ingångssidan av omriktaren | Minskande av frekvensomriktarens externa ledningsförmåga och utstrålade störning; minskande av ledningsstörning från kraftänden till omriktaren, främjande av omriktarens förmåga att motverka störningar |
| DC-reaktor | DC-buss-sidan av omvandlaren | Förbättring av effektfaktorn på ingångssidan, öka effektiviteten och värmestabiliteten hos omvandlaren. Eliminering av påverkan av högre övertoner på ingångssidan av omriktaren, minskning av extern konduktion och utstrålad störning |
| Reaktor för AC-utgång | Mellan omriktarens utgångssida och motorn. Installera nära frekvensomriktare | Utgångssidan av omriktaren innehåller mycket högre övertoner. Om motorn är långt ifrån omriktaren finns det mycket distribuerad kapacitans i kretsen. Vissa övertoner kan skapa resonans i kretsen, vilket skadar motorns isolering och även motorn, skapar stor läckström och orsakar ett frekvent skydd av omriktaren. Om avståndet mellan omriktare och motor i allmänhet överstiger 50 m, rekommenderas det att en AC-utgångsreaktor installeras. |
3.2.3 Kopplingssätt
Kopplingsschema för frekvensomriktare:
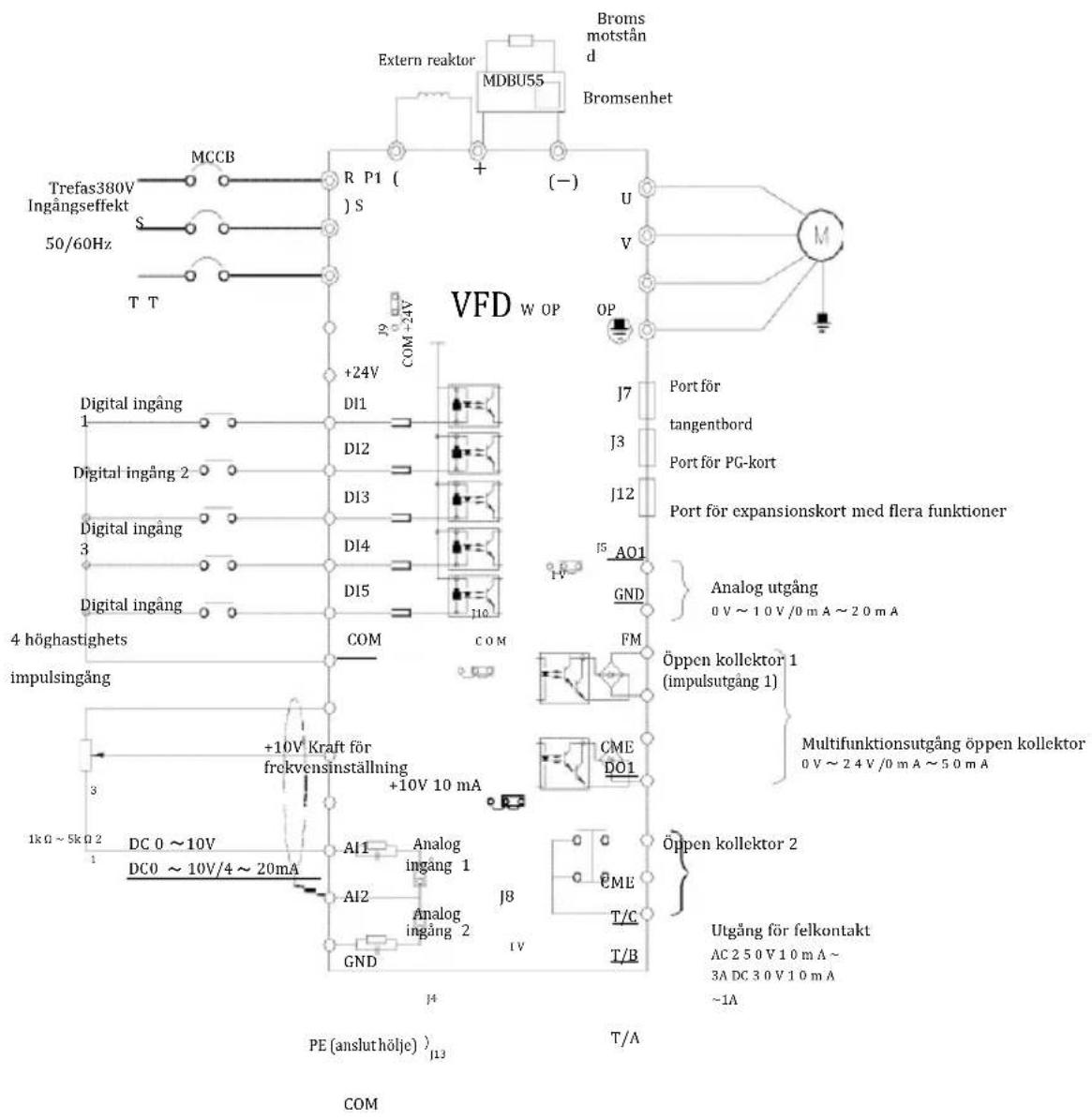
Figur 3-4 Kopplingsschema för frekvensomriktare
Försiktighetsåtgärder:
1) © avser huvudkretsens terminal, ○ avser styrkretsens terminal.
2) Bromsmotståndet måste väljas baserat på användarens krav, se mer information i riktlinjerna för val av modell för bromsmotstånd.
3.2.4 Huvudkretsterminaler och kabeldragning
1) Beskrivning av terminaler för huvudkrets för enfasig frekvensomriktare
| Märkning av terminal | Benä mning | Beskrivning |
| L1, L2 | Ingångsterminal för enfasig effekt | Kontaktpunkt för enfasig 220 V växelström |
| (+), (-) | Positiva/negativa terminaler för DC-buss | Ingångspunkt för DC-buss |
| (+), PB | Anslutningsterminal för bromsmotstånd | Anslutning av bromsmotstånd |
| U, V, W | Utgångsterminal för omriktare | Anslutning trefasmotor |
| PE ^1 | Jordningsterminal | Jordningsterminal |
2) Beskrivning av terminaler för huvudkrets för enfasig frekvensomriktare
| Märkning av terminal | Benä mning | Beskrivning |
| R、S、T | Ingångsterminal för trefasig effekt | Anslutningspunkt för AC-ingång trefas-effekt |
| (+), (-) | Plus-/minusterminaler för DC-bus | Ingångspunkt för DC-bus och bromsenhet |
| (+), PB | Anslutningsterminal för bromsmotstånd | Anslutning av bromsmotstånd |
| P1, (+) | Anslutningsterminal för extern DC-reaktor | Anslutningspunkt för extern DC-reaktor |
| U, V, W | Utgångsterminal för omriktare | Anslutning trefasmotor |
| PE + | Jordningsterminal | Jordningsterminal |
Försiktighetsåtgärder vid kabeldragning:
a) Ingångseffekt L1, L2 eller R, S, T:
b) Ledningarna på omriktarens ingångssida har inget krav på fasföljd. Försiktighetsåtgärder vid kabeldragning:
1: (+) (-) terminaler på DC-bussen: det finns en restspänning för DC-bussen (+) (-) omedelbart efter frånkoppling. Vänta tills efter att CHARGE-lampan slocknat och bekräfta att spänningen är <36V, annars finns det risk för elektrisk stöt.
2: Vid val av extern bromskomponent, undvik omvänd anslutning av (+) (-) polaritet, annars kommer det att leda till skador på frekvensomriktaren och till och med brand.
3: Kabellängden för bromsenheten får inte överstiga 10 m. För parallellkoppling bör partvinnad eller tätad dubbelkabel användas. Anslut inte bromsmotståndet direkt till DC-bussen, eftersom det annars leder till skador på frekvensomriktaren och till och med brand.
c) Anslutningsterminal (+), PB för bromsmotstånd:
Bekräfta att modellen har inbyggd bromsenhet och att anslutningsterminalen för bromsmotståndet är godkänd. Valet av modellen för bromsmotstånd ska motsvara rekommenderat värde och kabelavståndet bör vara
d) Anslutningsterminal P1, (+) för extern DC-reaktor
För frekvensomriktare över 220V37KW och 380V75kW måste anslutningsbandet mellan P1 och (+) terminalerna tas bort när DC-reaktorn installeras externt, och DC-reaktorn anslutas mellan två terminaler.
e) U, V, W på frekvensomriktarens utgångssida: kondensator eller överspännningsskydd får inte anslutas till frekvensomriktarens utgångssida, eftersom det i så fall kommer att leda till frekvent skydd och till och med skada på omriktaren. Om motorkabeln är för lång kommer elektrisk resonans lätt att uppstå på grund av påverkan av distribuerad kapacitans, vilket skadar motorisoleringen eller ger stor läckström och frekvent skydd av omriktaren. Om motorkabeln är >100 m måste en AC-ingångsreaktor installeras.
f) Jordningsterminal PE
För olika modeller kan märkningen av jordningsterminalen vara olika, men innebörden är densamma. I ovanstående beskrivningar betyder ⏚ att märkningen för jordning är PE eller ⏚.
Tillförlitlig jordning av jordningsterminalen måste säkerställas, och jordningskabelns resistansvärde bör vara <0,1Ω, annars kan det leda till onormal drift och till och med skador på enheten. Använd inte jordningsterminalen PE eller ⏚ och N-terminalen på nollledning för kraft gemensamt.
3.2.5 Kontrollterminal och kabeldragning
1) Layoutdiagrammet för terminalerna på styrkretsen ser ut som följer:
(Observera: det finns ingen kortslutningsledare mellan CME och COM, OP och +24V på frekvensomriktaren. Användare väljer kabeldragning för CME respektive OP genom J10 och J9)
| +10V | AI1 | AI2 | DI1 | DI2 | DI3 | DI4 | DI5 | COM | |||
| GND | GND | AO1 | CME | COM | DO1 | FM | +24V | OP | T/A | T/B | T/C |
Figur 3-5 Layoutdiagram för terminaler på styrkretsen
| Typ | Terminalsymbol | Terminalnamn | Funktions beskrivning |
| Effekt | +10V-GND | Anslut + 10V effekt externt | Tillför +10V extern spänning, max. utgångsström: 10mA Används ofta som driftsström för extern potentiometer, potentiometerns resistansvärdesområde: 1kΩ~5kΩ |
| +24V-COM | Anslut + 24V effekt externt | Erbjuder +24 V extern effekt, kan användas som arbetsström för digital in-/utgångsterminal och strömförsörjning för extern sensor Max. utgångsström: 200mA | |
| OP | Ingångsterminal för extern strömförsörjning | Anslut +24V eller COM via bygeln J9 på kontrollpanelen. Om en extern signal används för att driva DI1~DI5 måste OP anslutas till extern strömförsörjning och J9-bygeln dras ur | |
| Analog ingång | AI1-GND | Terminal för analog ingång 1 | 1. Område för ingångsspänning: DC 0V~10V2. Ingångsimpedans: 22kΩ |
Specifikation av högpresterande frekvensomriktare
Mekanisk och elektrisk installation
| AI2-GND | Terminal för analog ingång 2 | 1. Ingångsområde: DC 0V~10V/4mA~20mA, beroende på J8-bygel på kontrollpanelen2. Ingångsimpedans: 22kΩ för spänningsingång, 500Ω för strömingång | |
| Typ | Terminalsymbol | Terminalnamn | Funktions beskrivning |
| Digitalingång | DI1- OP | Digital ingång 1 | 1. Optisk kopplingsisolering, kompatibel med bipolär ingång2. Ingångsimpedans: 2,4 kΩ3. Spänningsområde för nivåingång: 9V~30V |
| DI2- OP | Digital ingång 2 | ||
| DI3- OP | Digital ingång 3 | ||
| DI4- OP | Digital ingång 4 | ||
| DI5- OP | Höghastighetsimpuls-ingångsterminal | Förutom funktionerna i DI1~DI4 kan den vara enhöghastighets-impulsingångskanal. Max. ingångsfrekvens: 100 kHz | |
| Analogutgång | AO1-GND | Analog utgång 1 | Bygel J5 på kontrollpanelen bestämmer spänning eller strömutgång. Utgångsspänningsområde: 0V~10VUtgångsströmområde: 0mA~20mA |
| Digitalutgång | DO1-CME | Digital utgång 1 | Isolering av optisk koppling, bipolär Open-Collector-utgångUtgångsspänningsområde: 0V~24V; utgångsströmområde: 0mA~50mA Varning: digital utgång CME och digital ingång COM är internt isolerade, men kortslutning av CME och COM realiseras genom J10-bygeln på kontrollpanelen (DO1 är en +24V-drivenhet som standard). Om DO1 behöver drivas med extern ström, dra ut bygeln J10 |
| FM- CME | höghastighets- impulsutgång | Begränsas genom funktionskod F5-00 "val av utmatningssätt för FM-terminal"Som höghastighets impulsutgång är max. frekvens 100 kHzSom open-collector-utgång är det samma som DO1-specifikationen | |
| Reläutgång | T/A-T/B | Normalt sluten terminal | Driftförmåga för kontakt:AC250V, 3A, COSø=0,4DC 30V, 1A |
| T/A-T/C | Normalt öppen terminal |
3) Funktionsbeskrivning av byglar och hjälpterminaler
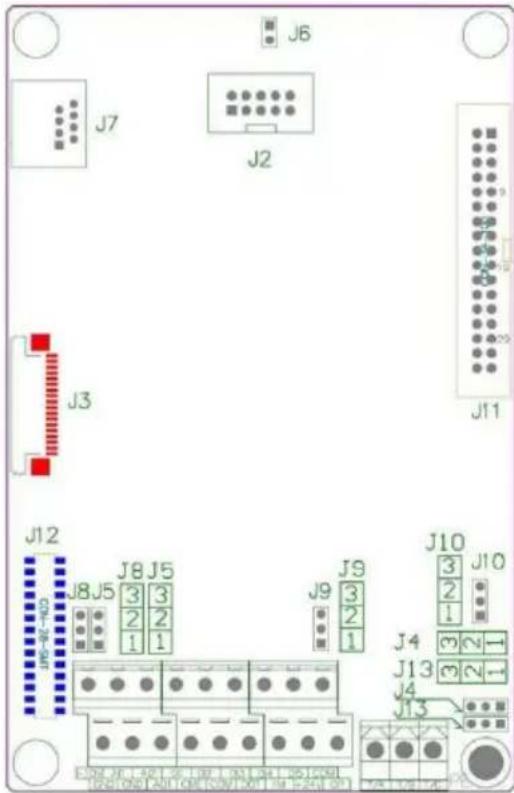
Figur 3-6 Placeringsschema för byglar och hjälpterminaler
Figur 3-4 Funktionsbeskrivning av byglar och hjälpterminaler för frekvensomriktare
| Märkning av bygel | Benä mning | Beskrivning | |
| Iijälpter minal | J12 | Port för expansionskort med flera funktioner | 28-kärnig terminal, anslutning med optionskort (I/O-expansionskort, PLC-kort, olika buss-kort etc.) |
| J3 | Port för PG-kort | Val: OC, differentiering, roterande transformator, etc. | |
| J7 | Port för externt tangentbord | Externt tangentbord | |
| Bygel | J4 | Välj bygel för att ansluta PE och GND | Välj om PE ska anslutas till GND. Vid störningar, anslut PE till GND för att förbättra störningsskyddet. Standard anslutning. (Som visas i figur 3-6 är kortslutning av 1-2 anslutning mellan PE och GND, kortslutning av 2-3 är ingen anslutning mellan PE och GND) |
| J13 | Välj bygel för att ansluta PE och COM | Välj om PE ska anslutas till COM. I fall med störningar förekommer, anslut PE till COM för att förbättra skyddet mot störningar. Anslutning som standard. (Som visas i figur 3-6 är kortslutning av 1-2 anslutningen mellan PE och COM, kortslutning av 2-3 är ingen anslutning mellan PE och COM) | |
| J10 | Välj bygel för att ansluta CME och COM | Välj om CME ska anslutas till COM. Ingen anslutning är standard. (Som visas i figur 3-6 är kortslutning av 1-2 anslutningen mellan CME och COM, kortslutning av 2-3 är ingen anslutning mellan CME och COM) | |
| J5 | AO1 val av analog utgång | Bestäm den analoga utgångsterminalen AO1 ska vara en spännings- eller strömutgång. Spänningsutgång är standardinställningen. (Som visas i figur 3-6 är kortslutning av 1-2 spänningsutgång, kortslutning av 2-3 är strömutgång)Utgångsspänningsområde: 0V-10VUtgångsströmområde: 0mA -20mA | |
| J8 | AI2 val av analog ingång | Bestäm ingångstyp för analog ingångsterminal AO1: spänning eller ström. Spänningsingång som standard. (Som visas i figur 3-6 är kortslutning av 1-2 spänningsingång, kortslutning av 2-3 är strömingång)Område för ingångsspänning: DC 0V-10VOmråde för ingångsström: 0mA -20mA | |
| J9 | Val av anslutning för OP-terminal | OP-terminalen ansluts till +24V eller COM via bygel J9. +24V- anslutning som standard. (Som visas i figur 3-6 är kortslutning av 1-2 OP och +24V-anslutning, kortslutning av 2-3 är OP och COM- anslutning)Om en extern signal används för att driva DI1~DI5 måste OP anslutas till extern strömförsörjning, och J9-bygeln måste dras ut | |
4) Kopplingsbeskrivning för kontrollterminaler
a) Analog ingångsterminal:
Eftersom den analoga spänningssignalen är svag och lätt påverkas av yttre störningar används ofta skärmkabel och en så kort kabellängd som möjligt, som inte bör överstiga 20 m enligt figur 3-7. Om en viss analog signal störs allvarligt bör den sida där den analoga signalen kommer ifrån förses med en filterkondensator eller ferritkärna enligt figur 3-7.

Figur 3-7 Kopplingsschema för analog ingångsterminal
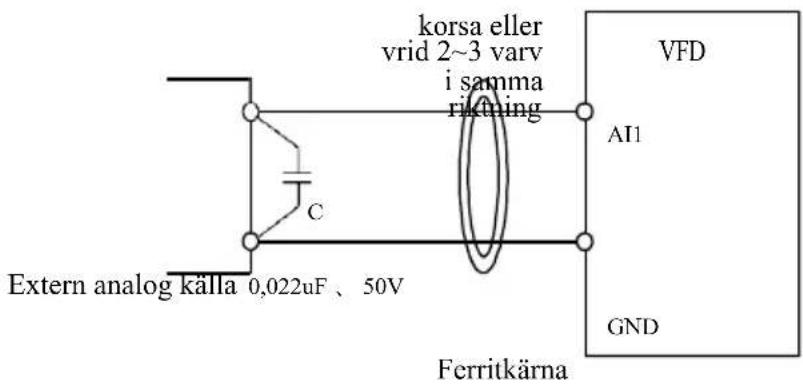
Figur 3-8 Kopplingsschema för behandling av analog ingångsterminal
b) Digital ingångsterminal: kopplingsmetod för DI-terminal
Skärmkabel används ofta och en så kort kabellängd möjligt, som inte bör överstiga 20 m. Om aktiv drivning används bör nödvändiga utjämningsåtgärder vidtas för överhörning av kraft. Det rekommenderas att använda kontaktor som styrsätt.
Kabelkopplingssätt av läck-typ
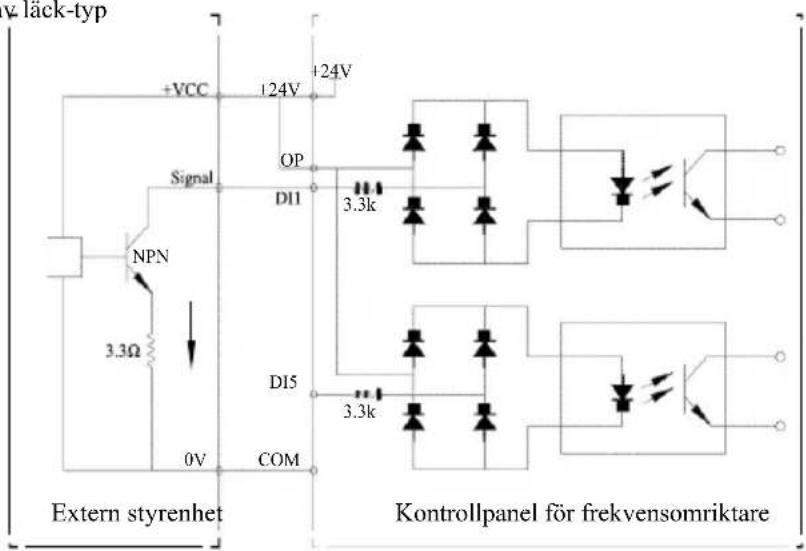
Figur 3-9 Kopplingssätt för läck-typ
Detta är den vanligaste kabeldragningen. Om en extern strömförsörjning används, dra ut bygeln J9 mellan +24V och OP, anslut den externa strömförsörjningens pluspol till OP och den externa strömförsörjningens minuspol till CME.
Kopplingssätt av källtyp
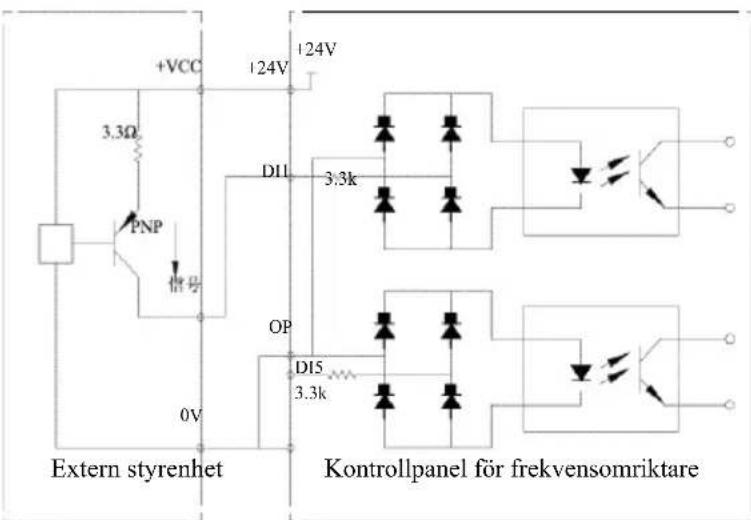
Figur 3-10 Kopplingssätt av källtyp
Denna typ av koppling kräver att OP hoppar till COM med bygel J9, anslut +24V till den gemensamma porten på den externa styrenheten. Om extern strömförsörjning används, anslut den externa strömförsörjningens minuspol till OP.
c) DO digital utgångsterminal: om den digitala utgångsterminalen behöver driva ett relä bör en absorberande diod installeras på båda sidor av reläspolen, annars kan DC 24V-effekten skadas.
Varning: Installera absorberdioden med rätt polaritet enligt figur 3-11. I annat fall kommer utmatning från den digitala utgångsterminalen att omedelbart skada DC 24V-strömförsörjningen.

Figur 3-11 Kopplingsschema för digital utgångsterminal
Kapitel 4 Användning och display
4.1 Gränssnittsintroduktioner av drift och display
Manöverpanelen kan ändra frekvensomriktarens funktionsparametrar, övervaka frekvensomriktarens driftstatus, styra frekvensomriktarens drift (start, stopp) etc. Exteriör och funktionsområde visas enligt nedan:
Figur 4-1 Schematiskt diagram över manöverpanelen
1) Instruktioner för funktionsindikatorlampa:
RUN: När lampan är släckt betyder det att omriktaren är i stoppläge. När lampan lyser starkt betyder det att omriktaren är i driftläge.
LOCAL / REMOTE: Lampan visar tangentbordsdrift, terminaldrift och fjärrdrift (kommunikationskontroll). När lampan är släckt betyder det att tangentbordsdrift-kontroll är aktiverat. Om lampan lyser starkt betyder det att terminaldrift-kontroll är aktiverat. Om lampan blinkar betyder det att fjärrkontroll är aktiverat.
FWD / REV: Lampa för reversering, när lampan lyser starkt betyder det att den är i normalt driftläge.
TUNE / TC: Tune / Torque Control / Fellampa, starkt lysande lampa betyder att den är i Torque Control-läge. Långsamt blinkande ljus betyder att den är i inställningsläge. Snabbt blinkande ljus betyder att fel finns.
2) Indikatorlampa för enhet:
Hz: frekvensenhet A: strömenhet V:
spänningsenhet RMP (Hz+A) Rotationshastighetsenhet %
(A+V) Procentuell andel
3) Digital display:
5-bit LED-display visar frekvensinställning, utmatningsfrekvens, olika typer av övervakningsdata och varningskod etc.
4) Instruktioner för tangentbordsknapp
Tabell 4-1 Tangentbordsfunktion
| Tangent | Benämning | Funktion |
| DATA | Programmeringstangent | Gå till eller lämna menyn för första nivå |
| ENTER | Enter-tangent | Gå in i menyn steg för steg, ställ in parametrar och bekräfta dem |
 | Tangent för ökning | Ökning av data eller funktionskod |
| [0773] | Tangent för minskning | Minskning av data eller funktionskod |
| [COWD] | Skift-tangent | I gränssnittet för stoppdisplay och kördisplay kan du växla mellan displayparametrar; när du ändrar parametrar kan du ändra parametrarna. |
| RUN | Drifttangent | Används för att köra operationen i tangentbordsläge. |
| STOPP/REST | Stopp / Reset | Vid drift kan denna knapp användas för att stoppa operationen; Vid fellarm kan den användas för att återställa de tangentfunktioner som begränsar funktionskoden P7-02 |
| QSM | Knapp för val av menyläge | Funktionsomriktare baserad på PP-03 |
| JOG | Jog-tangent | Funktionsomkopplare baserad på P7-01, definierad som styrningskälla eller snabbt växlande av riktning |
4.2 Metoder för visning och ändring av funktionskod
Frekvensomriktarens kontrollpanel har en menystruktur med tre nivåer för parameterinställningar och andra funktioner. Menyn på tre nivåer består av: funktionsparametergrupp (första nivån) → funktionskod (andra nivån) → inställning av funktionskod (andra nivån). Det operativa flödet visas i figur 4-2.

flowchart
graph LR
A["50.00 P0 P0-08 050.00"] -->|DATA ENTER| B["Δ▽"]
B -->|DATA DATA| C["Menynivå 1 Menynivå 2"]
C -->|ENTER| D["PRG Menynivå 2"]
D -->|Δ▽| E["End"]
Figur 4-2 Flödesschema för menyer i tre nivåer
Instruktioner: När du använder menyn på andra nivån, tryck på DATA-knappen eller ENTER-knappen för att återgå till menyn på andra nivån. Skillnaden är följande: tryck på ENTER för att spara den inställda parametern och återgå till menynivå 2, och sedan automatiskt växla till nästa funktionskod; tryck på SET-knappen för att direkt återgå till menynivå 2 utan att spara parametrarna, och återgå till den aktuella funktionskoden.
Exempel: funktionskoden P3-02 är inställd på att ändras från 10,00 Hz till 15,00 Hz. (Fetstilt text visar blinkande siffror)

flowchart
graph TD
A["50.00"] -->|DAT| B["P0"]
B -->|Δ| C["P3"]
C -->|ENTER| D["P3-00"]
D -->|Δ| E["P3-02"]
E -->|ENTER| F["010.00"]
F -->|Δ| G["015.00"]
G -->|DATA| H["P3"]
H -->|DATA| I["P3-03"]
I -->|ENTER| J["015.00"]
Om det inte finns något blinkande för parametrar under status för menynivå 2, kan funktionskoden inte modifieras, och de möjliga orsakerna är nedan:
1) Funktionskoden är en parameter som inte kan ändras, t.ex. den faktiska detekteringsparametern och driftregistreringsparametern.
2) Funktionskoden kan inte ändras under körning, och den kan endast ändras efter stopp.
4.3 Visningsläge för parametrar
Parametervisningsläget är främst avsett för användare som vill visa funktionsparametrar med olika spridningsmönster baserat på det faktiska behovet, och det finns tre parametervisningslägen.
| Benämning | Beskrivning |
| Funktionsparameterläge | Visa funktionsparametrar för frekvensomriktaren i ordning, inklusive funktionsparameter P0 ~PF, A0 ~AF, U0 ~UF |
| Användardefinierat parameterläge | Användardefinierade funktionsparametrar (definiera högst 32 parametrar), användare kan bekräfta funktionsparametrar som ska visas via PE-gruppen |
| Användarmodifierat parameterläge | Funktionsparametrar överensstämmer inte med faktorns standard |
Relaterade funktionsparametrar är PP-02 och PP-03 enligt nedan:
| PP-02 | Egenskaper förfunktionsparameter | Fabriksinställning | 11 | |
| Inställningsområde | Enhet | Val av gruppvisning U | ||
| 0 | Ingen visning | |||
| 1 Visning | ||||
| Decimal plats | Val av visning från grupp A | |||
| 0 | Ingen visning | |||
| 1 Visning | ||||
| PP-03 | Val av visning fördefinierat parameterläge | Fabriksinställning | 00 | |
| Inställningsområde | Enhet | Val av uppvisning av användardefinierade parametrar | ||
| 0 Ingen visning | ||||
| 1 | Visning | |||
| Decimal plats | Användarmodifierat val av parametervisning | |||
| 0 Ingen visning | ||||
| 1 | Visning | |||
Om det valda parametervisningsläget (PP-03) visas, kan olika parametervisningslägen växlas med QSM-tangenten.
Displaykoden för varje parameters visningsläge är som följer:
| Läge för visning av parametrar | Visning |
| Funktionsparameterläge | -6ASE |
| Användardefinierat parameterläge | -119Fr |
| Användarmodifierat parameterläge | --[- - - |
Omkopplingsläget är som följer:
Det aktuella sättet för funktionsparametrar, växla till anpassade parametrar
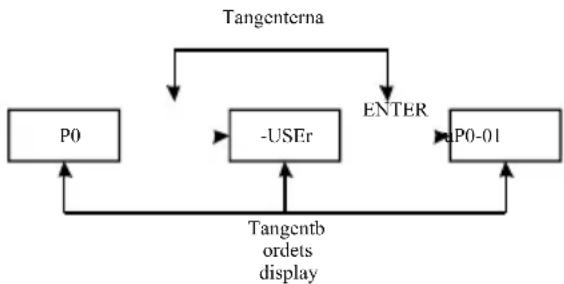
flowchart
graph TD
A["P0"] --> B["-USEr"]
B --> C["ENTER"]
C --> D["P0-01"]
D --> E["Tangenterna"]
E --> A
F["Tangentb ordets display"] --> B
4.4 Användaranpassade parametrar
Syftet med att skapa en användardefinierad meny är främst att underlätta för användarna att visa och ändra ofta använda funktionsparametrar. Parametrarna för den anpassade menyn visas i form av "uP3-02". Funktionen för parameter P3-02 i den anpassade menyn är för att ändra parametrarna och ändra parametrarna för effekten av motsvarande programmering i allmänt skick är densamma.
Den användaranpassade menyns funktionsparametrar från PE-gruppen, av PE-gruppen för val av funktionsparametrar, inställd på P0-00 är inte vald Välj, kan ställas in på 30; om menyn visar "NULL", vilket innebär att användaren anpassar menyn.
När den första användaren använder den anpassade menyn har de 16 vanligt använda parametrarna lagts in, för att underlätta följande inställningar för användaren:
P0-01: kontrolläge P0-02: val av kommandokälla
P0-03: val av källa för dominerande frekvens P0-07: val av frekvenskälla P0-
08: förinställd frekvens P0-17: accelerationstid
P0-18: retardationstid P3-00: Inställning av V/F-kurva
P3-01: Förstärkning av vridmoment P4-00:DI1 val av terminalfunktion
P4-01: Val av DI2 terminalfunktion P4-02: Val av DI3 terminalfunktion P5-
04: Val av DO1-utgång P5-07: Val av AO1-utgång
P6-00: startläge P6-10: stoppläge
Användare kan anpassa enligt sina egna specifika
behov för att användaren ska kunna redigera.
4.5 Metod för visning av statusparameter
Under avbrott eller drifttillständ, Genom tangenten shift" ▷ "kan en mängd olika statusparametrar visas, respektive. Genom funktionskoden P7-03 (körparametrar 1), P7-04 (driftparametrar (2), P7-05 (parametrar) driftstopp med binär siffra väljer om du vill visa parametrarna.
I stoppläge kan totalt 16 parametrar väljas för visning av stopptillständ respektive: inställd frekvens, bussens elektriska tryck, DI-ingångstillständ, DO-utgångstillständ, den analoga ingångsspänningen AI1, den analoga ingångsspänningen AI2, den analoga ingångsspänningen AI3, det aktuella räknevärdet, det aktuella längdvärdet, PLC-driftsteg, lasthastighetsvisning, PID-inställning, PULSE-ingång PULSE-frekvens och tre reservparametrar, switch-ingångssekvenser visar de valda parametrarna. Växling av ingångssekvenser visar de valda parametrarna.
I driftläge visas driftläget för de fem parametrarna: driftfrekvens, inställd frekvens, samlingsskenes-pänning, utgångsspänning, utgångsström för standardvisning, andra visningsparametrar: uteffekt, utgångsmoment, DI-ingångstillstånd, DO-utgångstillstånd, analog ingångspänning AI1, analog ingångsspänning AI2, analog ingångsspänning AI3, faktiskt räknevärde, faktiskt längdvärde, linjär hastighet, PID, PID-feedback visas av funktionskoden P7-03, P7-04 bitvis (omvandlat till binärt) val, valda parametrar visas genom växling av ingångssekvenser.
Inverter återgår till el, visningsparametern är standard för växelriktaren ström förlorad före valet av
parametrar.
4.6 Lösenordsinställningar
Frekvensomriktaren ger användaren lösenordsskyddsfunktion, när PP - 00 är inställd på noll, är användarens lösenord, avsluta funktionskodsredigerare tillstånd lösenordsskydd är effektiv, återigen, tryck på DATA, kommer att visa "-- -- -- -- --", input användarlösenord måste vara korrekt, kan gå in i vanlig meny, annars kan inte gå in.
Om du vill avbryta lösenordsskyddsfunktionen är det bara genom lösenordet för att ange, och PP - 00 till 0.
4.7 Automatisk inställning av motorparametrar
Välj vektorstyrningsdriftläge, framför frekvensomriktarens drift, måste vara korrekta inmatade motortypskyltsparametrar, denna frekvensomriktare på grundval av standard-motor-märkskyltsparametrar matchande parametrar; Vektorstyrningsmetod för motorparametrar beroende är mycket stark, för att få bra kontrollprestanda, måste laddas med maskinens korrekta parametrar.
Motorparametrarnas automatiska inställningssteg är följande
Första kommandokällan (P0-02) väljs för manöverpanelens kommandokanal. Klicka sedan på motorparametrarna under den faktiska parameterinmatningen (enligt det aktuella motorvalet):
| Motor urval | parameter |
| Motor 1 | P1-00: val av motortyp P1-01: motorns märkeffekt P1-02: motorns märkspänning P1-03: motorns märkström P1-04: motorns märkfrekvens P1-05: motorns märkhastighet |
| Motor 2 | A2-00: Motortyper att välja A2-01: Motorns märkeffekt A2-02: Motorns märkspänning A2-03: Motorns märkström A2-04: A2-05: Motorns märkfrekvens Motorns märkhastighet |
Om motorn kan vara helt avlastad, och sedan P1-37 (motor 2 A2 \ till 37) välj 2 (asynkron maskin fullständig inställning), och tryck sedan på RUN-tangenten på tangentbordspanelen, omriktaren kommer automatiskt att beräkna motorn för följande parametrar:
| Motor urval | parameter |
| Motor 1 | P1-06: synkronmaskinens statorresistans P1-07: synkronmaskinens D-axelinduktans P1-08: synkronmaskinens Q-axelinduktans P1-09: asynkronmotorns ömsesidiga induktans P1-10: asynkronmotorns tomgångsström |
| Motor 2 | A2-06: synkronmaskinens statorresistans A2-07: synkronmaskinens D-axelinduktans A2-08: induktans synkron Q-axel A1-09: ömsesidig induktans för asynkronmotorn A1-10: asynkronmotorns tomgångsström |
Motorparametrarna ställs in automatiskt.
Om motorn och lasten inte kan tas bort fullständigt, väljer du 1 (asynkronmaskin, statisk inställning) på P1-37 (motor 2 A2-37) och tryck sedan på RUN-tangenten på tangentbordspanelen
Kapitel 5 Tabell över funktionsparametrar
PP-00 är inställt på ett värde som inte är noll, vilket innebär att lösenordet för parameterskydd ställs in. I läget för funktionell parameter och användarmodifierad parameter kan parametermenyn endast nås efter att rätt lösenord har angetts. För att avbryta lösenordet måste PP-00 ställas in som 0.
Parametermenyn i läget för användarmodifierad parameter är inte skyddad med lösenord. P-gruppen och A-gruppen är grundläggande funktionsparametrar, U-gruppen är övervakningsparameter. Symbolerna i funktionstabellen är följande:
"☆": Det indikerar att det inställda värdet för parametern kan ändras under stopp- och körstatus för frekvensomvandlare;
"★": Det indikerar att det inställda värdet för parametern inte kan ändras under driftstatus för frekvensomvandlaren;
"●": Det indikerar att värdet på denna parameter är det faktiskt uppmätta värdet och kan inte ändras; "*": Det indikerar att parametern är "fabriksinställning" och endast kan ställas in av tillverkaren, och
användare är förbjudna att arbeta;
Tabell över grundläggande funktionsparametrar
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| P0 grundläggande funktionsgrupp | ||||
| P0-00 | G / P Typ av display | 1: Typ G (belastningsmodell med konstant vridmoment) 2: Typ P (belastningsmodell med fläkt och pump) | Beror på maskintyp | ● |
| P0-01 | ^1 :a motorstyrningsläge | 0: Ingen vektorstyrning av hastighetssensor (SVC) 1: Vektorstyrning av hastighetssensor (FVC)2: V / F kontroll | 0 | ★ |
| P0-02 | Val av kommandokälla | 0: Manöverpanelens CMD-kanal (LED släckt) 1: Terminalens CMD-kanal (LED tänd)2: Cmd-kanal (LED blinkar) | 0 | ☆ |
| P0-03 | Val av huvudfrekvenskälla X | 0: Digital inställning (förinställd frekvens P0-08, UP / DOWN kan ändras, minne efter strömavbrott)1: Digital inställning (förinställd frekvens P0-08, UP / DOWN kan ändras, inget minne efter strömavbrott)2: AI13: AI24: AI35: Pulsinställning (DI5)6: Kommando för flera steg7: Enkel PLC8: PID9: Kommunikation ges | 0 | ★ |
| P0-04 | Hjälpfrekvenskälla Y urval | Samma som P0-03 (Huvudfrekvenskälla X urval) | 0 | ★ |
| P0-05 | Extra överlagrad frekvenskälla Y-område urval | 0 : Relativ till maximal frekvens 1 : Relativ till frekvenskälla X | 0 | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P0-06 | Hjälpmedel överlagrad frekvens källa Y val av intervall | 0%~150% | 100% | ☆ |
| Kod Berä mning | Inställningsområde Standard | Förändring | ||
| P0-07 | Val av överlagrad frekvenskälla | Bits: Val av frekvenskälla 0:Huvudfrekvenskälla X1: Resultat av huvud- och hjälpdrift(Driftförhållandet beror på decimal) 2:Omkoppling av huvudfrekvenskälla Xoch hjälpfrekvenskälla Y3: Huvudfrekvenskälla X,resultatomkopplare för huvud- ochhjälpdrift4: Hjälpfrekvenskälla Y, huvud- ochhjälpdrift resultatomkopplareDecimal: driftförhållande för huvud-och hjälpfrekvenskälla0: Huvud + extra1: Huvud- extra 2:Max. av de två3: Min. av de två | 00 | ☆ |
| P0-08 | Förinställd frekvens | 0.00Hz~maximalfrekvens (P0-10) | 50,00 Hz | ☆ |
| P0-09 | Körriktning | 0 : Samma riktning1 : Motsatt riktning | 0 | ☆ |
| P0-10 | Maximal frekvens | 50,00 Hz ~ 600,00 Hz | 50,00 Hz | ★ |
| P0-11 | Källa för övre frekvens | 0: P0-12 inställning1: AI1; 2: AI2; 3: AI3; 4: PULSE-inställning5: Kommunikation ges | 0 | ★ |
| P0-12 | Övre frekvens | Övre frekvens P0-14~maximumfrekvens P0-10 | 50,00 Hz | ☆ |
| P0-13 | Övre frekvens offset | 0,00Hz~maximalfrekvens P0-10 | 0,00 Hz | ☆ |
| P0-14 | Lägre frekvens | 0,00 Hz ~övre frekvens P0-12 | 0,00 Hz | ☆ |
| P0-15 | Bärfrekvens | 0,5 kHz ~16,0 kHz | typ avmaskin | ☆ |
| P0-16 | bärfrekvensen justeras med temperaturen | 0: nej1: ja | 1 | ☆ |
| P0-17 | Accelerationstid 1 | 0.00s~65000s | typ avmaskin | ☆ |
| P0-18 | Decelerationstid 1 | 0.00s~65000s | typ avmaskin | ☆ |
| P0-19 | Tidsenhet för acceleration/retardation | 0: 1s1: 0.1s2: 0.01s | 1 | ★ |
| P0-21 | Extra överlagrad frekvens källa biasfrekvens | 0,00Hz~maximalfrekvens P0-10 | 0,00 Hz | ☆ |
| P0-22 | Kommando för upplösningsfrekvens | 1: 0,1 Hz2: 0,01 Hz | 2 | ★ |
| P0-23 | Val av minne för digital inställning av frekvensstopp | 0: inget minne 1: minne | 0 | ☆ |
| P0-24 | Val av motor | 0: Motor 1, 1: Motor 2 | 0 | ★ |
| P0-25 | Tidsreferensfrekvenser för acceleration/retardation | 0: maximal frekvens (P0-10) 1:inställd frekvens2: 100Hz | 0 | ★ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P0-26 | Frekvensstyrning i drift UPP/NER standard | 0: Driftfrekvens, 1: Inställd frekvens | 0 | ★ |
| Kod | Benä mning | Inställningso mråde | Standard | Förändring |
| P0-27 | Frekvenskälla och frekvensstyrning källa i paket | Bits: manöverpanelens kommando binder frekvenskälla0: Obunden1: Digital inställd frekvens2: AI13: AI24: AI35: Inställning av PULS (DI5)6: Multihastighet7: Enkel PLC8: PID9: Kommunikation gesTio bitar: terminalkommando binder frekvens källaHundra bitar: kommunikationskommando binder frekvens källaTusen bitar: automatisk drift binder frekvenskälla | 0000 | ☆ |
| P0-28 | Expansionskort för kommunikation typ | 0: Modbus kommunikationskort1: Reserv2: Reserv3: Kommunikationskort CANlink | 0 | ☆ |
| Parameter för ^1 :a motor i P1-gruppen | ||||
| P1-00 | Typval av motor | 0: vanlig asynkronmotor1: asynkronmotor med variabel frekvens | 0 | ★ |
| P1-01 | Motorns märkeffekt | 0,1 kW ~1000,0 kW | typ av maskin | ★ |
| P1-02 | Motorns märkspänning | 1V~400V | typ av maskin | ★ |
| P1-03 | Nominell ström för motorn | 0,01A ~655.35A (omvandlareffekt <=55kW) 0,1A ~ 6553,5A (omvandlareffekt >55kW) | typ av maskin | ★ |
| P1-04 | Motorns nominella frekvens | 0,01 Hz ~max. frekvens | typ av maskin | ★ |
| P1-05 | Motorns märkvarvtal | 1rpm~65535rpm | typ av maskin | ★ |
| P1-06 | Statorresistans för asynkronmotor | 0.001 Ω ~65.535Ω (omvandlareffekt <=55kW) 0.0001Ω~6.5535Ω (omvandlareffekt >55kW) | Tunning | ★ |
| P1-07 | Rotorresistans för asynkronmotor | 0.001 Ω ~65.535Ω (omvandlareffekt <=55kW)0,0001 Ω ~6,5535Ω (omvandlareffekt >55kW) | Tunning | ★ |
| P1-08 | Läckage induktiv reaktans hos asynkronmotor | 0,01 mH ~655.35 mH (omvandlareffekt <=55kW)0,001mH ~65.535mH (omvandlareffekt >55kW) | Parameter förtuning | ★ |
| P1-09 | Ömsesidig induktiv reaktans för asynkronmotor | 0,1 mH ~ 6553,5 mH (omvandlareffekt <=55kW)0.01mH~655.35mH (omvandlareffekt >55kW) | Parameter förtuning | ★ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P1-10 | Asynkronmotornstomgångsström | 0,01A ~ P1-03 (omvandlareffekt <=55kW)0,1A ~ P1-03 (omvandlareffekt >55kW) | Parameter förtunning | ★ |
| Kod Benämning | Inställningsområde Standard | Förändring | ||
| P1-27 | Encoderns radnummer | 1~65535 | 1024 | ★ |
| P1-28 | Typ av kodare | 0: ABZ inkrementellpulsgivare 1: Reserv2: Roterande transformator | 0 | ★ |
| P1-30 | ABZ inkrementell kodare ABfassekvens | 0: Framåt1: Omvänd | 0 | ★ |
| P1-34 | Antal polpar för roterandetransformator | 1~65535 | 1 | ★ |
| P1-36 | Detekteringstid för fränkopplingav PG för hastighetsåterkoppling | 0.0: ingen åtgård0,1 s ~10,0 s | 0.0 | ★ |
| F1-37 | Val av inställning | 0: Ingen drift1: Statisk inställning av asynkronmotor2: Komplett inställning av asynkronmotor | 0 | ★ |
| Vektorstyrparametrar för ^1 a motorn i P2-gruppen | ||||
| P2-00 | Proportionell förstärkning avvarvtalsslinga 1 | 1~100 | 30 | ☆ |
| P2-01 | Integraltid för varvtalsslinga 1 | 0.01s~10.00s | 0.50s | ☆ |
| P2-02 | Kopplingsfrekvens 1 | 0.00~P2-05 | 5,00 Hz | ☆ |
| P2-03 | Proportionell förstärkning avvarvtalsslinga 2 | 1~100 | 20 | ☆ |
| P2-04 | Integraltid för varvtalsslinga 2 | 0.01s~10.00s | 1.00s | ☆ |
| P2-05 | Kopplingsfrekvens 2 | P2-02~max. frekvens | 10,00 Hz | ☆ |
| P2-06 | Förstärkning av slip förvektorstyrning | 50%~200% | 100% | ☆ |
| P2-07 | Filtertidskonstant förvarvtalsloop | 0.000s~0.100s | 0.000s | ☆ |
| P2-08 | Vektorkontroll överexcitationsförstärkning | 0~200 | 64 | ☆ |
| P2-09 | Källa för övre gräns underhastighetsreglering | 0: Inställning av funktionskod P2-10 1: AI12: AI23: AI34: Inställning av PULSE5: Kommunikation given6: MIN (AI1, AI2)7: MAX (AI1, AI2)Full skala för 1-7 alternativet motsvarar P2-10 | 0 | ☆ |
| P2-10 | Digital inställning avvridmoment ivarvtalsregleringsläge | 0.0%~200.0% | 150.0% | ☆ |
| P2-13 | Proportionell förstärkning avexcitation | 0~60000 | 2000 | ☆ |
| P2-14 | Integral förstärkning avexcitation | 0~60000 | 1300 | ☆ |
| P2-15 | Proportionell förstärkning avmomentstyrning | 0~60000 | 2000 | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| Kod Benä | mning | Inställningsområde Standard | Förändring |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P2-16 | Integral förstärkning av momentstyrning | 0~60000 | 1300 | ☆ |
| V/F-kontrollparametrar i P3-gruppen | ||||
| P3-00 | Inställning av VF-kurva | 0: Rak linje V/F 1: Multipunkt V/F 2: Kvadratisk V/F3: 1,2 effekt V/F4: 1,4 effekt V/F6: 1.6 effekt V/F8: 1.8 kraft V/F9: Reserv10: VF fullständigt separationsläge 11: VF semi-separationsläge | 0 | ★ |
| P3-01 | Förhöjt vridmoment | 0,0% : (Automatisk momentförstärkning)0.1%~30.0% | typ avmaskin | ☆ |
| P3-02 | Brytfrekvens för momentökning | 0,00 Hz ~max. frekvens | 50,00 Hz | ★ |
| P3-03 | Flerpunkts VF frekvenspunkt 1 | 0,00Hz~P3-05 | 0,00 Hz | ★ |
| P3-04 | Flerpunkts VF spänning punkt 1 | 0.0%~100.0% | 0.0% | ★ |
| P3-05 | Flerpunkts VF frekvens punkt 2 | P3-03~P3-07 | 0,00 Hz | ★ |
| P3-06 | Flerpunkts VF spänningspunkt 2 | 0.0%~100.0% | 0.0% | ★ |
| P3-07 | Flerpunkts VF frekvens punkt 3 | P3-05~Motorns beräknade frekvens (P1-04) | 0,00 Hz | ★ |
| P3-08 | Flerpunkts VF spänningspunkt 3 | 0.0%~100.0% | 0.0% | ★ |
| P3-09 | Förstärkning av VFsirkompensation | 0.0%~200.0% | 0.0% | ☆ |
| P3-10 | VF över excitationsförstärkning | 0~200 | 64 | ☆ |
| P3-11 | Förstärkning för dämpning av VF-svängningar | 0~100 | typ avmaskin | ☆ |
| P3-13 | VF isolerad spänningskälla | 0: Digital inställning(P3-14) 1: AI12: AI23: AI34: Pulsinställning (DI5)5: Flerstegsstyrning 6:Enkel PLC7: PID8: Kommunikation gesObs: 100,0% motsvarar motornsmärkspänning | 0 | ☆ |
| P3-14 | VF isolerad digital spänning inställning | 0V ~motorns beräknade spänning | 0V | ☆ |
| P3-15 | VF isolerad spännings stigtid | 0.0s ~1000.0sObs: tid för 0V ändras till märkspänning av motor | 0.0s | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| Ingångsterminal för P4-gruppen | ||||
| P4-00 | Val av funktion för DI1-terminalen | 0: Ingen funktion1: Körning framåt (FWD)2: Körning bakåt (REV) 3:Styrning av körning med tre trådar 4: Joggning framåt (FJOG)5: Jog bakåt (RJOG) 6:Plintar UP7: Plintar NER8: Gratis stopp9: Återställ fel (RESET) 10: Pausa driften11: Normalt öppen ingång för externt fel 12: Terminal för flerstegsstyrning 113: Terminal för flerstegsstyrning 214: Kommandoterminal med flera steg 315: Terminal för flerstegsstyrning 416: Tid för acceleration/retardation valterminal 117: Tid för acceleration/retardation valterminal 218: Omkoppling av frekvenskälla19: UP / DOWN-inställning klar (terminal och tangentbord)20: Terminal för växling av körkommando 21: Förbud mot acceleration/deceleration22: PID paus23: Återställning av PLC-status24: Paus för svängningsfrekvens25: Ingång för räknare 26: Återställning av räknare 27: Inmatning av längdräkning28: Återställning av längd 29: Momentstyrning inaktiverad30: Pulsfrekvensingång (giltig för DI5) 31: Reserv32: Uppmaning till DC-bromsning33: Ingång för externt fel normalt stängd 34: Frekvensmodifiering aktiverad 35: PID-riktning negerad36: Utvändigt stopp terminal 137: Kopplingsplint för styrkommando 238: PID integral paus39: Omkoppling av frekvenskälla X och förinställd frekvens40: Omkoppling av frekvenskälla Y och förinställd frekvens41: Terminal för motorval 142: Motorvalsplint 2 43: PID-parameteromkoppling 44: Användardefinierat fel 145: Användardefinierat fel 246: Brytare för varvtalsreglering / | 1 | ★ |
| P4-01 | Val av funktion för DI2-terminalen | 4 | ★ | |
| P4-02 | Val av funktion för DI3-terminalen | 9 | ★ | |
| P4-03 | Val av funktion för DI4-terminalen | 12 | ★ | |
| P4-04 | Val av funktion för DI5-terminalen | 13 | ★ | |
| P4-05 | Val av funktion för DI6-terminalen | 0 | ★ | |
| P4-06 | Val av funktion för terminal DI7 | 0 | ★ | |
| P4-07 | Val av funktion för DI8-terminalen | 0 | ★ | |
| P4-08 | Val av funktion för DI9-terminalen | 0 | ★ | |
| P4-09 | Val av funktion för DI10 terminal | |||
Specifikation av högpresterande frekvensomriktare
Tabell över
| momentreglering 47: Nödstopp48: Terminal 2 för yttre stopp 49: DC-bromsning med retardation50: Drifttiden nollställs 51-59: Reserv | ||||
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| P4-10 | DI filtreringstid | 0.000s~1.000s | 0.010s | ☆ |
| P4-11 | Kommandoläge för terminal | 0: tvåtrådig 1 1: tvåtrådig 22: tre ledningar 1 3: tre ledningar 2 | 0 | ★ |
| P4-12 | Terminal UP/DOWN förändringstakt | 0,001Hz/s ~65,535Hz/s | 1,00 Hz/s | ☆ |
| P4-13 | AI-kurva 1 Min. ingång | 0,00V~P4-15 | 0.00V | ☆ |
| P4-14 | Inställning av AI-kurva 1 Min. inmatning | -100.0%~+100.0% | 0.0% | ☆ |
| P4-15 | AI-kurva 1 Max. ingång | P4-13 ~ +10,00 V | 10.00V | ☆ |
| P4-16 | Inställning av AI-kurva 1 Max. inmatning | -100.0%~+100.0% | 100.0% | ☆ |
| P4-17 | Filtreringstid AI1 | 0.00s~10.00s | 0.10s | ☆ |
| P4-18 | AI-kurva 2 Min. ingång | 0,00V~P4-20 | 0.00V | ☆ |
| P4-19 | Inställning av AI-kurva 2 Min. inmatning | -100.0%~+100.0% | 0.0% | ☆ |
| P4-20 | AI-kurva 2 Max. ingång | P4-18 ~ +10,00 V | 10.00V | ☆ |
| P4-21 | Inställning av AI-kurva 2 Max. inmatning | -100.0%~+100.0% | 100.0% | ☆ |
| P4-22 | AI2 filtreringstid | 0.00s~10.00s | 0.10s | ☆ |
| P4-23 | AI-kurva 3 Min. ingång | -10,00V ~ P4-25 | -10.00V | ☆ |
| P4-24 | Inställning av AI-kurva 3 Min. inmatning | -100.0%~+100.0% | -100.0% | ☆ |
| P4-25 | AI-kurva 3 Max. ingång | P4-23 ~ +10,00 V | 10.00V | ☆ |
| P4-26 | Inställning av AI-kurva 3 Max. inmatning | -100.0%~+100.0% | 100.0% | ☆ |
| P4-27 | AI3 filtreringstid | 0.00s~10.00s | 0.10s | ☆ |
| P4-28 | PULS Min. ingång | 0.00kHz~P4-30 | 0,00 kHz | ☆ |
| P4-29 | Inställning av PULSE Min. ingång | -100.0%~100.0% | 0.0% | ☆ |
| P4-30 | PULS Max. ingång | P4-28 ~100,00 kHz | 50,00 kHz | ☆ |
| P4-31 | Inställning av PULSE Max. ingång | -100.0%~100.0% | 100.0% | ☆ |
| P4-32 | Filtreringstid för PULSE | 0.00s~10.00s | 0.10s | ☆ |
| P4-33 | Val av AI-kurva | Bit: Val av AI1-kurva1: Kurva 1 (2 poäng, se P4-13~P4-16)2: Kurva 2 (2 punkter, se P4-18~P4-21)3: Kurva 3 (2 poäng, se P4-23~P4-26)4: Kurva 4 (4 punkter, se A6-00~A6-07)5: Kurva 5 (4 punkter, se A6-08~A6-15)Tio bitar: Val av AI2-kurva, samma som ovanHundra bitar: AI2-kurvval, samma | 321 | ☆ |
| P4-34 | AI är lägre än Min. val av ingångsinställning | Bit: AI1 är under min. ingångsinställning 0: motsvarar min. ingångsinställning 1: 0,0% Tio bit: AI2 är under min. inställning för ingång AI3 är under min. inställning för ingång | 000 | ☆ |
| P4-35 | DI1 fördröjningstid | 0.0s ~ 3600.0s | 0.0s | ★ |
| P4-36 | DI2 fördröjningstid | 0.0s ~ 3600.0s | 0.0s | ★ |
| P4-37 | DI3 fördröjningstid | 0.0s ~ 3600.0s | 0.0s | ★ |
| Kod Benä mning | Inställningsområde | Standard | Föränd ring | |
| P4-38 | Val av effektivt läge 1 för DI-terminalen | 0: giltig hög nivå1: giltig låg nivåBit: DI1 Tio bit: DI2 Hundra bit: DI3Tusen bit: DI4 Tio tusen bit: DI5 | 00000 | ★ |
| P4-39 | Val av effektivt läge 2 för DI-terminalen | 0: giltig hög nivå1: giltig låg nivåBit:DI6 Tio bit: DI7 Hundra bit:DI8Tusen bit: DI9 Tio tusen bit: DI10 | 00000 | ★ |
| Utgångsterminal för P5-gruppen | ||||
| P5-00 | Val av utmatningsläge för FM-terminalen | 0 : Pulsutgång (FMP)1 : Kopplingsutgång (FMR) | 0 | ☆ |
| P5-01 | Val av funktion för FMR-utgång | 0: Ingen utmatning1: Drift av frekvensomvandlare 2:Felutgång (stilleståndstid)3: Utgång för detektering av frekvensnivå | 0 | ☆ |
| P5-02 | Val av reläfunktion för kontrollpanelen (T/A-T/B-T/C) | 2 | ☆ | |
| P5-03 | Val av reläfunktion för expansionskort (P/A-P/B-P/C) | FDT1 4: Frekvensankomst5: Drift med nollhastighet (ingen stoppad utgång) 6: Förlarm vid | 0 | ☆ |
| P5-04 | Val av funktion för DO1-utgång | 1 | ☆ | |
| P5-05 | Val av utgång för expansionskort DO2 | överbelastning av motorn7: Förlarm vid överbelastning av omvandlaren 8: Räknevärdet när det inställda värdet9: Nå det inställda antalet10: Längd ankomst11: PLC-cykeln är avslutad12: Ställ in den ackumulerade drifttiden 13: Frekvensgräns14:Momentgräns15: Klar för körning 16:A11>AI217: Övre gräns frekvens ankomst18: Nedre gränsfrekvens uppnådd (körs runt) 19: Brun-status utgång20: Kommunikationspreferenser21: Positionering komplett (reservera) 22: Positionering nära (reservera)23: Nollhastighetsdrift 2 (även utgång för avstängning) 24: Ställ in ackumulerad tillslagstid25: Utgång för detektering av frekvensnivå FDT2 26: 1 till utgångsfrekvens27: 2 till utgångsfrekvensen28: 1 till utgångsströmmen29: 2 till utgångsströmmen30: Tidpunkten för utgången 31: AI1-ingång överskridning32: Utförande av33: Reversera drift34: Nollställa aktuellt tillstånd35: Modultemperatur uppnådd36: Gränsvärde för utgående ström37: Den undre gränsfrekvensens ankomst (stoppa utmatning) 38: Larmutmatning (fortsätt)39: Förlarm vid övertemperatur i motorn40: Den körda tiden ankomst | 4 | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| P5-06 | Val av funktion för FMP-utgång | 0: Driftfrekvens1: Inställning av frekvens2: Utgångsström3: Utgående vridmoment4: Uteffekt5: Utgångsspänning6: PULSE-ingång(100,% motsvarar 100,0 kHz) 7: AI18: AI29: AI3 (expansionskort)10: Längd11: Värde12: Inställning av kommunikation13: Motorhastighet14: Utgångsström (100,0% är 1000,0A)15: Utgångsspänning (100,0% är 1000,0V)16: Reserv | 0 | ☆ |
| P5-07 | Val av funktion för AO1-utgång | 0 | ☆ | |
| P5-08 | Val av utmatningsfunktion för expansionskort AO2 | 1 | ☆ | |
| P5-09 | FMP maximal utmatningsfrekvens | 0,01 kHz ~100,00 kHz | 50,00 kHz | ☆ |
| P5-10 | AO1 koefficient för nollförskjutning | -100.0%~+100.0% | 0.0% | ☆ |
| P5-11 | AO1 förstärkning | -10.00~+10.00 | 1.00 | ☆ |
| P5-12 | Nollförskjutningskoefficient för expansionskort AO2 | -100.0%~+100.0% | 0.0% | ☆ |
| P5-13 | AO2 förstärkning av expansionskort AO2 | -10.00~+10.00 | 1.00 | ☆ |
| P5-17 | Fördröjningstid för FMR-utgång | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-18 | RELAY1 fördröjningstid för utgång | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-19 | RELAY2 fördröjningstid för utgång | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-20 | Fördröjningstid för DO1-utgång | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-21 | Fördröjningstid för DO2-utgång | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-22 | Val av giltigt tillstånd för DO-utgångsterminal | 0: positiv logik1: negativ logikBit: FMR Tio bitar: RELÄ1Hundra bit: RELAY2 Tusen bitar: DO1 Tio tusen bit: DO2 | 00000 | ☆ |
| Start/Halt-kontroll av P6-gruppen | ||||
| P6-00 | Startläge | 0: Direkt start1: Omstart för hastighetskontroll2: Starta förexcitation (AC asynkronmotor) | 0 | ☆ |
| P6-01 | Läge för hastighetsövervakning | 0: Start från stoppfrekvens1: Start från nollhastighet2: Starta från maximal frekvens | 0 | ★ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P6-02 | Hastighet spårning av hastighet | 1~100 | 20 | ☆ |
| P6-03 | Startfrekvens | 0,00 Hz ~10,00 Hz | 0,00 Hz | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| P6-04 | Startfrekvens retentionstid | 0.0s ~ 100.0s | 0.0s | ★ |
| P6-05 | Start DC bromsström / Förex citationsström | 0% ~ 100% | 0% | ★ |
| P6-06 | Start DC-bromsningstid/ Tid före excitation | 0.0s ~ 100.0s | 0.0s | ★ |
| P6-07 | Läge för acceleration och retardation | 0: Linjär acceleration och retardation1: S-kurva acceleration och retardation A2: S-kurva acceleration och retardation B | 0 | ★ |
| P6-08 | S kurva start sektion tid förhållande | 0.0% ~ (100.0%-P6-09) | 30.0% | ★ |
| P6-09 | S kurva slut sektion tidsförhållande | 0.0% ~ (100.0%-P6-08) | 30.0% | ★ |
| P6-10 | Halt-läge | 0: Deceleration till stopp, 1: Fritt stopp | 0 | ☆ |
| P6-11 | Initial frekvens för stoppaikströmsbromsning | 0,00 Hz ~ max. frekvens | 0,00 Hz | ☆ |
| P6-12 | Väntetid för stopp DC-bromsning | 0.0s ~ 100.0s | 0.0s | ☆ |
| P6-13 | Ström för stopp DC-bromsning | 0% ~ 100% | 0% | ☆ |
| P6-14 | Tid för stopp DC-bromsning | 0.0s ~ 100.0s | 0.0s | ☆ |
| P6-15 | Användning av bromsar | 0% ~ 100% | 100% | ☆ |
| Tangentbord och display för P7-gruppen | ||||
| P7-01 | Val av funktion för JOG-tangent | 0: Ogiltig JOG1: Omkoppling av manöverpanelensCMD-kanal och fjärr-CMD-kanal(terminalens CMD-kanal eller CMD-kanal)2:Reverseringsknapp3: Jogga framåt | 0 | ★ |
| P7-02 | Funktion för tangent STOP/RESET | 0: Endast i tangentbordsläge,stoppfunktionen för STOP / RES-tangenten är giltig1: i alla driftlägen, stoppfunktionSTOP/RES är giltig | 1 | ☆ |
| P7-03 | LED driftindikering parameter 1 | 0000 ~FFFFBit00: kõrfrekvens 1 (Hz)Bit01: inställningsfrekvens (Hz) Bit02:samlingsspänning (V) Bit03:utspänning (V) Bit04:utgångsström (A) Bit05:uteffekt (kW) Bit06:utgående vridmoment (%)Bit07: DI-ingångsstatusBit08: DO-utgångens tillstånd Bit09: AI1-spänning (V) Bit10:AI2-spänning (V)Bit11: AI3-spänning (V) Bit12:Räknevärde Bit13:LängdvärdeBit14: Visning av lasthastighet Bit15: PID-inställning | 1F | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| 0000 ~FFFFBit00: Återkoppling av PIDBit01: PLC stegBit02: Puls Ingångens pulsfrekvens (kHz) Bit03: Driftfrekvens 2 (Hz) Bit04: Återstående drifttidBit05: AI1 före korrigeringsspänningen (V)Bit06: AI2 före korrigeringsspänningen (V)Bit07: AI3 före korrigeringsspänningen (V) | ||||
| P7-04 | LED driftindikering parameter 2 | Bit08: LinjehastighetBit09: Aktuell starttid (timme) Bit10: Aktuell drifttid (min)Bit11: PULSE Ingångspulsfrekvens (Hz)Bit12: Inställt värde för kommunikationBit13: Encoderns återkopplingsshastighet (Hz)Bit14: Visning av huvudfrekvens X (Hz) Bit15: Visning av frekvens Y (Hz) | 0 | ☆ |
| 0000 ~FFFFBit00: Inställd frekvens (Hz)Bit01: Busspänning (V)Bit02: DI IngångsstatusBit03: DOUtgångsstatus Bit04: | ||||
| P7-05 | Parametrar för visning av LED-stopp | AI1 Spänning (V)Bit05: AI2 Spänning (V) Bit06: AI3Spänning (V) Bit07:Räknevärde Bit08:Längdvärde Bit09:PLC-läge Bit10:Lasthastighet Bit11:PID-inställningBit12: Puls Ingångens pulsfrekvens (kHz) | 33 | ☆ |
| P7-06 | Koefficient för visning av lasthastighet | 0.0001~6.5000 | 1.0000 | ☆ |
| P7-07 | Omriktarens radiatortemperatur | 0.0°C~100.0°C | - | ● |
| P7-08 | Kylartemperatur för likriktare | 0.0°C~100.0°C | - | ● |
| P7-09 | Total körtid | 0h~65535h | - | ● |
| P7-10 | Produktnr. | - | - | ● |
| P7-11 | Programvarans versionsnummer | - | - | ● |
| 0: 0 decimaler | ||||
| P7-12 | Visning av lasthastighet med decimalsiffror | 1: 1 decimal2: 2 decimaler3: 3 decimaler | 1 | ☆ |
| P7-13 | Ackumulerad starttid | 0h~65535h | - | ● |
| P7-14 | Total effektförbrukning | 0~65535KWh | - | ● |
Hjälpfunktion för grupp P8
Specifikation av högpresterande frekvensomriktare
Tabell över
| P8-00 | Frekvens för joggning | 0,00 Hz ~max. frekvens | 2,00 Hz | ☆ |
| P8-01 | Accelerationstid för jog | 0.0s ~6500.0s | 20.0s | ☆ |
| P8-02 | Retardationstid för jog | 0.0s ~6500.0s | 20.0s | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| P8-03 | Accelerationstid 2 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-04 | Decelerationstid 2 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-05 | Accelerationstid 3 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-06 | Decelerationstid 3 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-07 | Accelerationstid 4 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-08 | Decelerationstid 4 | 0.0s ~6500.0s | typ av maskin | ☆ |
| P8-09 | Hoppfrekvens 1 | 0,00 Hz ~max. frekvens | 0,00 Hz | ☆ |
| P8-10 | Hoppfrekvens 2 | 0,00 Hz ~max. frekvens | 0,00 Hz | ☆ |
| P8-11 | Frekvensområde för hoppning | 0,00 Hz ~max. frekvens | 0,01 Hz | ☆ |
| P8-12 | Reversibel dödtid | 0.0s ~3000.0s | 0.0s | ☆ |
| P8-13 | Inversion av kontroll möjliggör | 0: tillåta 1: förbjuda | 0 | ☆ |
| P8-14 | Driftläge för inställd frekvens som är lägre än den nedre gränsfrekvensen | 0: drift vid lägre gränsfrekvens 1: stopp2: Drift med nollhastighet | 0 | ☆ |
| P8-15 | Droppkontroll | 0,00 Hz ~10,00 Hz | 0,00 Hz | ☆ |
| P8-16 | Ställ in ackumulerad starttid | 0h ~65000h | 0h | ☆ |
| P8-17 | Ställ in ackumulerad körtid | 0h ~65000h | 0h | ☆ |
| P8-18 | Starta val av skydd | 0: inget skydd 1: skydd | 0 | ☆ |
| P8-19 | Värde för frekvensdetektering | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| P8-20 | Hysteresvärde för frekvensdetektering | 0,0% ~100,0% (FDT1-nivå) | 5.0% | ☆ |
| P8-21 | Detekteringsbredd för frekvensankomst | 0,0% ~100,0% (max. frekvens) | 0.0% | ☆ |
| P8-22 | Om hoppfrekvensen är giltig i acceleration/deceleration | 0: ogiltig 1: giltig | 0 | ☆ |
| P8-25 | Växla frekvens mellan accelerationstid 1 och 2 | 0,00 Hz ~max. frekvens | 0,00 Hz | ☆ |
| P8-26 | Växla frekvens mellan retardationstid 1 och 2 | 0,00 Hz ~max. frekvens | 0,00 Hz | ☆ |
| P8-27 | Terminal jog prioritet | 0: ogiltig 1: giltig | 0 | ☆ |
| P8-28 | Värde för frekvensdetektering | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| P8-29 | Hysteresvärde för frekvensdetektering | 0,0% ~100,0% (FDT2-nivå) | 5.0% | ☆ |
| P8-30 | Värde för detektering av valfri frekvens 1 | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| P8-31 | Valfri frekvens detekteringsbredd 1 | 0,0% ~100,0% (max. frekvens) | 0.0% | ☆ |
| P8-32 | Värde för detektering av valfri frekvens 2 | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| P8-33 | Valfri frekvens | 0,0% ~100,0% (max. frekvens) | 0.0% | ☆ |
| detekteringsbredd 2 | ||||
| P8-34 | Nivå för detektering av nollström | 0,0%~300,0% 100,0% är märkström | 5.0% | ☆ |
| P8-35 | Fördröjningstid för detektering av nollström | 0.01s~600.00s | 0.10s | ☆ |
| P8-36 | Gränsvärde för utgående ström | 0.0% (ingen detektering)0.1%~300.0% (motorns märkström) | 200.0% | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| P8-37 | Utgångsströmgräns detekterar fördröjningstid | 0.00s ~ 600.00s | 0.00s | ☆ |
| P8-38 | Eventuell ankomst ström 1 | 0,0% ~300,0% (motorns märkström) | 100.0% | ☆ |
| P8-39 | Bredd på eventuell ankomstström 1 | 0,0% ~300,0% (motorns märkström) | 0.0% | ☆ |
| P8-40 | Eventuell ankomst ström 2 | 0,0% ~300,0% (motorns märkström) | 100.0% | ☆ |
| P8-41 | Bredd på eventuell ankomstström 2 | 0,0% ~300,0% (motorns märkström) | 0.0% | ☆ |
| P8-42 | Val av tidsfunktion | 0: ogiltig 1: giltig | 0 | ☆ |
| P8-43 | Val av tid för tidsstyrning | 0: P8-44-inställning; 1: AI1; 2: AI2; 3: AI3 Anolog ingångsområde motsvarar P8-44 | 0 | ☆ |
| P8-44 | Timing drifttid | 0.0Min ~6500.0Min | 0,0 Min | ☆ |
| P8-45 | Nedre gräns för skyddsvärde för AI1-ingångsspänning | 0,00 V ~ P8-46 | 3.10V | ☆ |
| P8-46 | Övre gräns för AI1-ingångsspänning skyddsvärde | P8-45 ~10,00 V | 6.80V | ☆ |
| P8-47 | Modultemperatur uppnådd | 0°C~100°C | 75°C | ☆ |
| P8-48 | Styrning av kylfläkt | 0: Fläkten arbetar när den är igång 1: Fläkten har varit igång | 0 | ☆ |
| P8-49 | Väckningsfrekvens | Sömnfrekvens (P8-51)~maximum frekvens (P0-10) | 0,00 Hz | ☆ |
| P8-50 | Fördröjningstid för uppvakning | 0.0s ~6500.0s | 0.0s | ☆ |
| P8-51 | Sömnfrekvens | 0.00Hz~Väckningsfrekvens (P8-49) | 0,00 Hz | ☆ |
| P8-52 | Latens vid insomning | 0.0s ~6500.0s | 0.0s | ☆ |
| P8-53 | Inställning av ankomsttid för drift | 0.0Min ~6500.0Min | 0,0 Min | ☆ |
| Fel och skydd av grupp P9 | ||||
| P9-00 | Skydd mot överbelastning av motorn | 0: tillåta 1: förbjuda | 1 | ☆ |
| P9-01 | Förstärkning av motoröverbelastningsskydd | 0.20~10.00 | 1.00 | ☆ |
| P9-02 | Koefficient för varning för överbelastning av motor | 50%~100% | 80% | ☆ |
| P9-03 | Förstärkning vid överspänning | 0~100 | 0 | ☆ |
| P9-04 | Skyddsspänning för överspänning vid stall | 120%~150% | 130% | ☆ |
| P9-05 | Förstärkning vid överström | 0~100 | 20 | ☆ |
| P9-06 | Skydd mot överström vid stallström | 100%~200% | 150% | ☆ |
| P9-07 | Skydd mot kortslutning till jord | 0: ogiltig 1: giltig | 1 | ☆ |
| P9-09 | Automatisk återställning vid fel | 0~20 | 0 | ☆ |
| P9-10 | DO-åtgård under automatisk | 0: ingen åtgård | 0 | ☆ |
| P9-14 | Typ av första fel | 0: Inget fel1: Reserv2: Överström vid acceleration3: Överström vid retardation 4: Konstant överström5: Acceleration av överspänning6: Överspänning vid retardation 7: Överspänning konstant hastighet 8: Buffertens överbelastningsresistans 9: Brun10: Överbelastning av omvandlare11: Överbelastning av motor12: Ingångsfas | — | ● |
| P9-15 | Typ av andra fel | 13: Utgångsfas14: Modul överhettad15: Externt fel16: Onormal kommunikation17: Onormal kontakt18: Onormal strömavkänning19: Onormal motorinställning20: Onormal pulsgivare / PG-kort21: Onormala parametrar för läsning/skrivning 22: Hårdvarufel i omvandlaren23: Maskinvaruundantag för omvandlaren 24: Reserv25: Reserv | — | ● |
| P9-16 | Typ av andra (senaste) fel | 26: Drifttid ankomst 27: Användardefinierat fel 128: Användardefinierat fel 229: Uppstartstiden har uppnåtts 30: Utförande31: PID-återkopplingsförlust under körning 40: Timeout för snabb strömbegränsning41: Vid omkoppling av motorns drift42: För hög hastighetsavvikelse43: Motor övervarv45: Övertemperatur i motorn51: Fel i den ursprungliga positionen | — | ● |
| P9-17 | Frekvens för andra (nyligen) fel | — | — | ● |
| P9-18 | Ström för andra (senaste) felet | — | — | ● |
| P9-19 | Samlingsspänning för andra (senaste) felet | — | — | ● |
| P9-20 | Status för ingångsterminal förandra (senaste) felet | — | — | ● |
| P9-21 | Status för utgångsterminalen för det andra (senaste) felet | — | — | ● |
| P9-22 | Omvandlarens status vid det andra (senaste) felet | — | — | ● |
| P9-23 | Elektrifierande tid för andra (senaste) felet | — | — | ● |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| P9-24 | Körtid för det andra (senaste) felet | — | — | ● |
| P9-27 | Frekvens för andra felet | — | — | ● |
| P9-28 | Ström för andra felet | — | — | ● |
| P9-29 | Samlingsspänning för andra felet | — | — | ● |
| P9-30 | Status för ingångsterminal för andra felet | — | — | ● |
| P9-31 | Status för den andra utgångsterminalen fel | — | — | ● |
| P9-32 | Omvandlarens status vid andra felet | — | — | ● |
| P9-33 | Elektrifierande tid för andra felet | — | — | ● |
| P9-34 | Körtid för andra felet | — | — | ● |
| P9-37 | Frekvens för första fel | — | — | ● |
| P9-38 | Ström för första felet | — | — | ● |
| P9-39 | Samlingsspänning vid första felet | — | — | ● |
| P9-40 | Status för ingångsterminal vid första felet | — | — | ● |
| P9-41 | Status för utgångsterminal vid första felet | — | — | ● |
| P9-42 | Omvandlarens status vid första felet | — | — | ● |
| P9-43 | Elektrifierande tid för första felet | — | — | ● |
| P9-44 | Körtid för första felet | — | — | ● |
| P9-47 | Val av åtgård för felskydd 1 | Bit:Motoröverbelastning(11) 0: Fritt stopp1: Stopp enligt stoppläge 2:Fortsätt att köraTio bit: Ingångsfas (12) Hundra bit: Utgångsfas (13) Tusen bitar: Externt fel (15)Tio tusen bit: Onormal kommunikation (16) | 00000 | ☆ |
| P9-48 | Val av åtgård för felskydd 2 | Bit: Onormal pulsgivare / PG-kort(20) 0: Fritt stoppTio bitar: Kodläsare för onormal funktion(21) 0: Fritt stopp1: Stopp enligt stopplägeHundred bit: ReservTusen bitar: Överhettning av motor (25)Tio tusen bit: Körtid ankomst (26) | 00000 | ☆ |
| P9-49 | Val av åtgård för felskydd 3 | Bit: Användardefinierat fel 1 (27)0: Fritt stopp1: Stopp enligt stoppläge 2:Fortsätt att köraHundra bitar: Uppstartstiden är uppnådd (29) Tusen bitar: Utförande (30)0: Fritt stopp1: Retardation till stopp2: bromsad till 7% av den nominella motorfrekvensen fortsätter att gå, när du inte har råd att ladda automatiskt återställs till den inställda frekvensen driftTio tusen bit: Runtime PID feedback förlust (31)0: Fritt stopp1: Stopp enligt stoppläge 2:Fortsätt att köra | 00000 | ☆ |
| P9-50 | Val av åtgård för felskydd 4 | Bit: Avvikelse från för hög hastighet (42) 0: Fritt stopp1: Stopp enligt stoppläge 2:Fortsätt att köraTio bitar: Motor med superhastighet (43)Hundra bitar: Det ursprungliga positionsfelet (51) | 00000 | ☆ |
| P9-54 | Fortsätt att köra frekvensval när fel uppstår | 0: I den aktuella driftsfrekvensen drift1: Kör med inställd frekvens2: Kör vid övre gränsfrekvens3: Nedre gräns för frekvensdrift4: Alternativ onormal frekvensdrift | 0 | ☆ |
| P9-55 | Onormal alternativ frekvens | 60,0% ~100,0% (100,0% Motsvarande den maximala frekvensenP0-10) | 100.0% | ☆ |
| P9-56 | Typ av givare för motortemperatur | 0: ingen temperaturgivare 1: PT1002: PT1000 | 0 | ☆ |
| P9-57 | Tröskelvärde för skydd mot överhettning av motor | 0°C~200°C | 110°C | ☆ |
| P9-58 | Gränsvärde för varning vid överhettning av motor | 0°C~200°C | 90°C | ☆ |
| P9-59 | Val av åtgård för omedelbart strömavbrott | 0: ogiltig1: retardation2: retardation till stopp | 0 | ☆ |
| P9-60 | Bevarande | P9-62~100.0% | 100.0% | ☆ |
| P9-61 | Momentan effekt spänning återhämtning bedömningstid | 0.00s~100.00s | 0.50s | ☆ |
| P9-62 | Omedelbar bedömning av strömavbrott spänning | 60,0% ~100,0% (standard samlingsskenespänning) | 80.0% | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| P9-63 | Val av skydd för last som saknas | 0: ogiltig1: giltig | 0 | ☆ |
| P9-64 | Last saknar detektionsnivå | 0.0~100.0% | 10.0% | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| P9-65 | Last saknas testtid | 0.0~60.0s | 1.0s | ☆ |
| P9-67 | Värde för detektering av överhastighet | 0,0%~50,0%(max. frekvens) | 20.0% | ☆ |
| P9-68 | Tid för detektering av överhastighet | 0.0s ~60.0s | 5.0s | ☆ |
| P9-69 | Detekteringsvärde för avvikelse från för hög hastighet | 0,0%~50,0%(max. frekvens) | 20.0% | ☆ |
| P9-70 | Detekteringstid för avvikelse från för hög hastighet | 0.0s~60.0s | 0.0s | ☆ |
| PID-funktion för FA-grupp | ||||
| PA-00 | PID given källa | 0: Uppställning av PA-011: AI1; 2: AI2; 3: AI34: Inställning av puls (DI5)5: Kommunikation ges6: Instruktioner för flera sektioner ges | 0 | ☆ |
| PA-01 | PID-värden givna | 0.0%~100.0% | 50.0% | ☆ |
| PA-02 | Källa för PID-återkoppling | 0: AI1; 1: AI2; 2: AI3; 3: AI1-AI24: PULSE-inställning (DI5) 5: Kommunikation given6: AI1+AI27: MAX(|AI1|, |AI2|)8: MIN(|AI1|, |AI2|) | 0 | ☆ |
| PA-03 | PID åtgårdsriktning | 0: positiv åtgård1: negativ åtgård | 0 | ☆ |
| PA-04 | PID givet återkopplingsintervall | 0~65535 | 1000 | ☆ |
| PA-05 | Proportionell förstärkning Kp1 | 0.0~100.0 | 20.0 | ☆ |
| PA-06 | Integrationstid Ti1 | 0.01s~10.00s | 2.00s | ☆ |
| PA-07 | Differentialtid Td1 | 0,000 s ~10,000 s | 0.000s | ☆ |
| PA-08 | PID-begränsningsfrekvens för omvänd | 0,00 ~max. frekvens | 2,00 Hz | ☆ |
| PA-09 | Gräns för PID-avvikelse | 0.0%~100.0% | 0.0% | ☆ |
| PA-10 | PID differentialbegränsning | 0.00%~100.00% | 0.10% | ☆ |
| PA-11 | PID given ändringstid | 0.00~650.00s | 0.00s | ☆ |
| PA-12 | Filtertid för PID-återkoppling | 0.00~60.00s | 0.00s | ☆ |
| PA-13 | Filtertid för PID-utgång | 0.00~60.00s | 0.00s | ☆ |
| PA-14 | Bevarande | - | - | ☆ |
| PA-15 | Proportionell förstärkningKp2 | 0.0~100.0 | 20.0 | ☆ |
| PA-16 | Integrationstid Ti2 | 0.01s~10.00s | 2.00s | ☆ |
| PA-17 | Differentialtid Td2 | 0,000 s ~10,000 s | 0.000s | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
PA-18 PID-parametrar omkopplingsvillkor
0: Ingen brytare
1: Med DI terminalbrytare
0
2: Automatisk växling baserat på bias
☆
| Kod | Benämning | Inställningsområde | Standard | Förändring |
| PA-19 | PID-parameterns omkopplingsavvikelse 1 | 0,0% ~ PA-20 | 20.0% | ☆ |
| PA-20 | PID-parameterns omkopplingsavvikelse 2 | PA-19~100.0% | 80.0% | ☆ |
| PA-21 | Initial PID | 0.0%~100.0% | 0.0% | ☆ |
| PA-22 | Hålltid för inledande PID | 0.00~650.00s | 0.00s | ☆ |
| PA-23 | Vidarebefordra max. av två utgångsbias | 0.00%~100.00% | 1.00% | ☆ |
| PA-24 | Reverse max. av två utgångsbias | 0.00%~100.00% | 1.00% | ☆ |
| PA-25 | PID integrerad egenskap | Bit: Integral separation0: Invalid; 1: ValidTio bitar: Integral för omutmatningsgränsen ska stoppas0: Fortsatt integration1: Stoppunkter | 00 | ☆ |
| PA-26 | Detekteringsvärde för förlust av PID-återkoppling | 0.0%: bedömer inte feedbackförlust0.1%~100.0% | 0.0% | ☆ |
| PA-27 | Detekteringstid för förlust av PID-återkoppling | 0.0s ~20.0s | 0.0s | ☆ |
| PA-28 | PID stoppar drift | 0: Stoppa drift; 1: Avstängning av drift | 0 | ☆ |
| Svängningsfrekvens, längd och antal för Pb-gruppen | ||||
| Pb-00 | Inställningssätt för svängningsfrekvens | 0: Relativt till centralfrekvensen1: i förhållande till den maximala frekvensen | 0 | ☆ |
| Pb-01 | Frekvensområde för svängning | 0.0%~100.0% | 0.0% | ☆ |
| Pb-02 | Frekvensområde för kick | 0.0%~50.0% | 0.0% | ☆ |
| Pb-03 | Sparkfrekvens cyle | 0.1s ~3000.0s | 10.0s | ☆ |
| Pb-04 | Triangulär vågs stigtid | 0.1%~100.0% | 50.0% | ☆ |
| Pb-05 | Inställd längd | 0m~65535m | 1000m | ☆ |
| Pb-06 | Faktisk längd | 0m~65535m | 0m | ☆ |
| Pb-07 | Antal pulser per meter | 0.1~6553.5 | 100.0 | ☆ |
| Pb-08 | Ställ in räknevärde | 1~65535 | 1000 | ☆ |
| Pb-09 | Utpekat värde för räkning | 1~65535 | 1000 | ☆ |
| Flerstegsstyrning och enkel PLC i PC-grupp | ||||
| PC-00 | Kommando i flera steg 0 | -100.0%~100.0% | 0.0% | ☆ |
| PC-01 | Kommando i flera steg 1 | -100.0%~100.0% | 0.0% | ☆ |
| PC-02 | Kommando i flera steg 2 | -100.0%~100.0% | 0.0% | ☆ |
| PC-03 | Kommando i flera steg 3 | -100.0%~100.0% | 0.0% | ☆ |
| PC-04 | Kommando i flera steg 4 | -100.0%~100.0% | 0.0% | ☆ |
| PC-05 | Kommando i flera steg 5 | -100.0%~100.0% | 0.0% | ☆ |
| PC-06 | Kommando i flera steg 6 | -100.0%~100.0% | 0.0% | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| PC-07 | Kommando i flera steg 7 | -100.0%~100.0% | 0.0% | ☆ |
| PC-08 | Kommando i flera steg 8 | -100.0%~100.0% | 0.0% | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| PC-09 | Kommando i flera steg 9 | -100.0%~100.0% | 0.0% | ☆ |
| PC-10 | Kommando i flera steg 10 | -100.0%~100.0% | 0.0% | ☆ |
| PC-11 | Kommando i flera steg 11 | -100.0%~100.0% | 0.0% | ☆ |
| PC-12 | Kommando i flera steg 12 | -100.0%~100.0% | 0.0% | ☆ |
| PC-13 | Kommando i flera steg 13 | -100.0%~100.0% | 0.0% | ☆ |
| PC-14 | Kommando i flera steg 14 | -100.0%~100.0% | 0.0% | ☆ |
| PC-15 | Kommando i flera steg 15 | -100.0%~100.0% | 0.0% | ☆ |
| PC-16 | Enkelt PLC-driftsätt | 0: Stopp vid slutet av enkel körning1: Slut på enstaka körning som håller slutvärde 2: Har cirkulerat | 0 | ☆ |
| PC-17 | Minnesval efter strömavbrott i enkel PLC | Bit: val av minne efter strömavbrott 0: inget minne efter strömavbrott1: minne efter strömavbrottTio bit: val av minne efter stopp 0: inget minne efter stopp1: minne efter stopp | 00 | ☆ |
| PC-18 | Enkel PLC drifttid för seg. 0 | 0,0 s (h) ~ 6553,5 s (h) | 0,0s (h) | ☆ |
| PC-19 | Enkel PLC acceleration/retardationstid för segment 0 | 0~3 | 0 | ☆ |
| PC-20 | Enkel PLC drifttid för seg. 1 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-21 | Enkel PLC acceleration/retardationstid för segment 1 | 0~3 | 0 | ☆ |
| PC-22 | Enkel PLC drifttid för seg. 2 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-23 | Enkel PLC acceleration/retardationstid för segment 2 | 0~3 | 0 | ☆ |
| PC-24 | Enkel PLC drifttid för seg. 3 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-25 | Enkel PLC acceleration/retardationstid för segment 3 | 0~3 | 0 | ☆ |
| PC-26 | Enkel PLC drifttid för seg. 4 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-27 | Enkel PLC acceleration/retardationstid för segment 4 | 0~3 | 0 | ☆ |
| PC-28 | Enkel PLC drifttid för seg. 5 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-29 | Enkel PLC acceleration/retardationstid för segment 5 | 0~3 | 0 | ☆ |
| PC-30 | Enkel PLC drifttid för seg. 6 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-31 | Enkel PLC acceleration/retardationstid för segment 6 | 0~3 | 0 | ☆ |
| PC-32 | Enkel PLC drifttid för seg. 7 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| PC-33 | Enkel PLCacceleration/retardationstid för segment 7 | 0~3 | 0 | ☆ |
| PC-34 | Enkel PLC driftid för seg. 8 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-35 | Enkel PLCacceleration/retardationstid för segment 8 | 0~3 | 0 | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| PC-36 | Enkel PLC drifttid för seg. 9 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-37 | Enkel PLC acceleration/retardationstid för segment 9 | 0~3 | 0 | ☆ |
| PC-38 | Enkel PLC drifttid för seg. 10 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-39 | Enkel PLC acceleration/retardationstid för segment 10 | 0~3 | 0 | ☆ |
| PC-40 | Enkel PLC drifttid för seg. 11 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-41 | Enkel PLC acceleration/retardationstid för segment 11 | 0~3 | 0 | ☆ |
| PC-42 | Enkel PLC drifttid för seg. 12 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-43 | Enkel PLC acceleration/retardationstid för segment 12 | 0~3 | 0 | ☆ |
| PC-44 | Enkel PLC drifttid för seg. 13 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-45 | Enkel PLC acceleration/retardationstid för segment 13 | 0~3 | 0 | ☆ |
| PC-46 | Enkel PLC drifttid för seg. 14 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-47 | Enkel PLC acceleration/retardationstid för segment 14 | 0~3 | 0 | ☆ |
| PC-48 | Enkel PLC drifttid för seg. 15 | 0,0 s (h)~6553,5 s (h) | 0,0s (h) | ☆ |
| PC-49 | Enkel PLC acceleration/retardationstid för segment 15 | 0~3 | 0 | ☆ |
| PC-50 | Enkel PLC-körtidsenhet | 0: s (sekund)1: h (timme) | 0 | ☆ |
| PC-51 | Givna sätt för flerstegsstyrning 0 | 0: PC-00 funktionskod given1: AI12: AI23: AI34: PULS5: PID6: Förinställd frekvens (P0-08) given, UP / DOWN Kan ändras | 0 | ☆ |
| Kommunikationsparameter för Pd-grupp | ||||
| Pd-00 | Baud-hastighet | Bit: MODBUS0: 300BPS1: 600BPS2: 1200BPS3: 2400BPS4: 4800BPS5: 9600BPS6: 19200BPS7: 38400BPS8: 57600BPS9: 115200BPSTio bit: reservHundra bit: reservTusen bit: CANlinkBaudhastighet 0: 201: 502: 1003: 1254: 2505: 5006: 1M | 6005 | ☆ |
| Pd-01 | Dataformat | 0: Ingen inspektion (8-N-2)1: Enven paritetskontroll (8-E-1) 2: Even paritet (8-O-1)3: 8-N-1 | 0 | ☆ |
| Pd-02 | Ursprunglig adress | 1 ~247, 0 är sändningsadress | 1 | ☆ |
| Pd-03 | Fördröjning av svar | 0ms~20ms | 2 | ☆ |
| Pd-04 | Övertid för kommunikation | 0.0 (ogiltig), 0.1s~60.0s | 0.0 | ☆ |
| Pd-05 | Val av format för dataöverföring | Ensiffrig: MODBUS0: Icke-standard MODBUS-protokoll 1: Standard MODBUS-protokollTio bit: Reserverad | 30 | ☆ |
| Pd-06 | Kommunikation läser aktuell upplösning | 0: 0.01A1: 0.1A | 0 | ☆ |
| Användardefinierad funktionskod för PE-grupp | ||||
| PE-00 | Användarfunktion kod 0 | P0-00 ~ PP-xxA0-00 ~ Ax-xxU0-xx ~ U0-xx | P0.10 | ☆ |
| PE-01 | Användarfunktion kod 1 | P0.02 | ☆ | |
| PE-02 | Användarfunktion kod 2 | P0.03 | ☆ | |
| PE-03 | Användarfunktion kod 3 | P0.07 | ☆ | |
| PE-04 | Användarfunktion kod 4 | P0.08 | ☆ | |
| PE-05 | Användarfunktion kod 5 | P0.17 | ☆ | |
| PE-06 | Användarfunktion kod 6 | P0.18 | ☆ | |
| PE-07 | Användarfunktion kod 7 | P3.00 | ☆ | |
| PE-08 | Användarfunktion kod 8 | P3.01 | ☆ | |
| PE-09 | Användarfunktion kod 9 | P4.00 | ☆ | |
| PE-10 | Användarfunktion kod 10 | P4.01 | ☆ | |
| PE-11 | Användarfunktion kod 11 | P4.02 | ☆ | |
| PE-12 | Användarfunktion kod 12 | P5.04 | ☆ | |
| PE-13 | Användarfunktionskod 13 | P5.07 | ☆ | |
| PE-14 | Kod för användarfunktion 14 | P6.00 | ☆ | |
| PE-15 | Användarfunktion kod 15 | P6.10 | ☆ | |
| PE-16 | Användarfunktion kod 16 | P0.00 | ☆ | |
| PE-17 | Kod för användarfunktion 17 | P0.00 | ☆ | |
| PE-18 | Användarfunktion kod 18 | P0.00 | ☆ | |
| PE-19 | Användarfunktionskod 19 | P0.00 | ☆ | |
| PE-20 | Användarfunktion kod 20 | P0.00 | ☆ | |
| PE-21 | Användarfunktion kod 21 | P0.00 | ☆ | |
| PE-22 | Användarfunktion kod 22 | P0.00 | ☆ | |
| PE-23 | Användarfunktion kod 23 | P0.00 | ☆ | |
| PE-24 | Användarfunktion kod 24 | P0.00 | ☆ | |
| PE-25 | Användarfunktion kod 25 | P0.00 | ☆ | |
| PE-26 | Användarfunktion kod 26 | P0.00 | ☆ | |
| PE-27 | Användarfunktionskod 27 | P0.00 | ☆ | |
| PE-28 | Användarfunktion kod 28 | P0.00 | ☆ | |
| PE-29 | Användarfunktionskod 29 | P0.00 | ☆ | |
| Hantering av funktionskod för PP-gruppen | ||||
| PP-00 | Lösenord för användare | 0~65535 | 0 | ☆ |
| PP-01 | Initialisering av parametrar | 0: Ingen drift01: Återställ fabriksinställningarna,exklusive motorparametrarna02: Radera historikinformation04: Aktuella säkerhetskopieradeanvändarparametrar 501: Återställsäkerhetskopieradeanvändarparametrar | 0 | ★ |
| Kod Benä | mning | Inställningsområde | Standard | Föränd ring |
| PP-02 | Val av visning av funktionsparameter | Bit: Val av visning av U-grupp 0: visas inte1: displayTio bit: Val av visning av gruppA 0: visas inte1: display | 11 | ★ |
| PP-03 | Individuellt val av display för parametergrupp | Bit: val av visning av användardefinierad parametergrupp0: visas inte 1: displayBit: val av visning av användarmodifierad parametergrupp0: visas inte 1: display | 00 | ☆ |
| PP-04 | Modifierande egenskap hos funktionskod | 0: vara modifierad1: ej modifierad | 0 | ☆ |
| Parametrar för vridmomentstyrning i A0-gruppen | ||||
| A0-00 | Kontroll av hastighet/moment | 0: varvtalsreglering1: Momentstyrning | 0 | ★ |
| A0-01 | Inställning av vridmomentets källa under vridmomentkontrol l | 0: Digital inställning 1 (A0-03)1: AI12: AI23: AI34: PULS5: Kommunikation given6: MIN (AI1, AI2)7: MAX (AI1, AI2) (1 -7 fullskaligt alternativ, motsvarande digital inställning A0-03) | 0 | ★ |
| A0-03 | Digital inställning av vridmoment under vridmomentkontroll | -200.0%~200.0% | 150.0% | ☆ |
| A0-05 | Positiv max. frekvens för vridmoment kontroll | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| A0-06 | Negativ max. frekvens för Vridmomentskontroll | 0,00 Hz ~max. frekvens | 50,00 Hz | ☆ |
| A0-07 | Accelerationstid för momentstyrning | 0.00s~65000s | 0.00s | ☆ |
| A0-08 | Decelerationstid för momentstyrning | 0.00s~65000s | 0.00s | ☆ |
| A1 grupp | ||||
| Styrning av den andra motorn i A2-gruppen | ||||
| A2-00 | Typval av motor | 0: Vanlig induktionsmotor1: Induktionsmotorer med variabel frekvens | 0 | ★ |
| A2-01 | Motorns märkeffekt | 0,1 kW ~1000,0 kW | typ av maskin | ★ |
| A2-02 | Motorns märkspänning | 1V~400V | typ av maskin | ★ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| A2-03 | Nominell ström för motorn | 0,01A ~655,35A (omvandlareffekt <=55kW) 0,1A ~ 6553,5A (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-04 | Motorns nominella frekvens | 0,01 Hz ~max. frekvens | typ av maskin | ★ |
| A2-05 | Motorns märkvarvtal | 1rpm~65535rpm | typ av maskin | ★ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| A2-06 | Statorresistans för asynkronmotor | 0.001Ω ~ 65.535Ω (omvandlareffekt <=55kW)0.0001Ω ~ 6.5535Ω (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-07 | Rotorresistans för asynkronmotor | 0.001Ω ~ 65.535Ω (omvandlareffekt <=55kW)0.0001Ω ~ 6.5535Ω (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-08 | Läckage induktiv reaktans hos asynkronmotor | 0,01 mH ~ 655,35 mH (omvandlareffekt <=55kW)0,001mH ~ 65,535mH (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-09 | Ömsesidig induktiv reaktans för asynkronmotor | 0,1mH ~ 6553,5mH (omvandlareffekt <=55kW)0.01mH ~ 655.35mH (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-10 | Asynkronmotorns tomgångsström | 0.01A ~ A2-03 (omvandlareffekt <=55kW)0,1A ~ A2-03 (omvandlareffekt >55kW) | typ av maskin | ★ |
| A2-27 | Encoderns radnummer | 1 ~ 65535 | 1024 | ★ |
| A2-28 | Typ av kodare | 0: ABZ inkrementell kodare1: Reserverad2: Resolver | 0 | ★ |
| A2-29 | Hastighetsåterkoppling PG-val | 0: Lokal PG1: Lokal PG2: Pulsingång (DI5) | 0 | ★ |
| A2-30 | ABZ inkrementell kodare AB fassekvens | 0: Framåt1: Omvänd | 0 | ★ |
| A2-34 | Polpar antal roterande transformator | 1 ~ 65535 | 1 | ★ |
| A2-36 | Detekteringstid för fränkoppling av hastighetsåterkoppling PG | 0.0: ingen åtgård0,1 s ~ 10,0 s | 0.0 | ★ |
| A2-37 | Val av inställning | 0: Ingen drift1: asynkron maskin statisk inställning2: asynkron maskin komplett inställning | 0 | ★ |
| A2-38 | Proportionell förstärkning av varvtalsslinga 1 | 1 ~ 100 | 30 | ☆ |
| A2-39 | Integraltid för varvtalsslinga 1 | 0.01s ~ 10.00s | 0.50s | ☆ |
| A2-40 | Kopplingsfrekvens 1 | 0.00 ~ A2-43 | 5,00 Hz | ☆ |
| A2-41 | Proportionell förstärkning av varvtalsslinga 2 | 1 ~ 100 | 20 | ☆ |
| A2-42 | Integraltid för varvtalsslinga 2 | 0.01s ~ 10.00s | 1.00s | ☆ |
| A2-43 | Kopplingsfrekvens 2 | A2-40~max. frekvens | 10,00 Hz | ☆ |
| A2-44 | Förstärkning av slip för vektorstyrning | 50% ~ 200% | 100% | ☆ |
| A2-45 | Filtertidskonstant för varvtalsloop | 0.000s ~ 0.100s | 0.000s | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| A2-46 | Vektorkontroll över excitation vinst | 0~200 | 64 | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| A2-47 | Källa för övre gräns under hastighetsreglering | 0: A2-48Sätt upp1: AI12: AI23: AI34: PULS5: Kommunikation given6: MIN (AI1, AI2)7: MAX (AI1, AI2)1-7 Fullskaligt alternativ, motsvarande digital inställning A2-48 | 0 | ☆ |
| A2-48 | Digital inställning av vridmoment i varvtalsregleringsläge | 0.0%~200.0% | 150.0% | ☆ |
| A2-51 | Proportionell förstärkning av excitation | 0~20000 | 2000 | ☆ |
| A2-52 | Integral förstärkning av excitation | 0~20000 | 1300 | ☆ |
| A2-53 | Proportionell förstärkning av vridmoment | 0~20000 | 2000 | ☆ |
| A2-54 | Integrerad förstärkning av vridmoment | 0~20000 | 1300 | ☆ |
| A2-55 | Integrerad egenskap hos varvtalsring | Enstaka siffra: Integral separation 0: Ogiltig1: Giltig | 0 | ☆ |
| A2-61 | Styrsätt för ^nd motor | 0: Ingen vektorstyrning av hastighetssensor (SVC) 1: vektorstyrning av hastighetssensor (FVC)2: V / F kontroll | 0 | ★ |
| A2-62 | Accelerations-/retardationstid för ^2 : a motorn | 0: Samma som den första motorn1: Accelerations- och retardationstid 12: Accelerations- och retardationstid 23: Accelerations- och retardationstid 34: Accelerations- och retardationstid 4 | 0 | ☆ |
| A2-63 | Momentförstärkning av ^2 : a motorn | 0.0%: Automatisk ökning av vridmomentet 0.1%~30.0% | typ av maskin | ☆ |
| A2-65 | Oscillationsdämpande förstärkning av ^2 : a motorn | 0~100 | typ av maskin | ☆ |
| Kontroll av optimeringsparametrar för A5-gruppen | ||||
| A5-00 | DPWM växlar övre gräns för frekvens | 0,00 Hz ~15,00 Hz | 12,00 Hz | ☆ |
| A5-01 | Moduleringsläge PWM | 0: Asynkron modulation1: Synkron modulationv | 0 | ☆ |
| A5-02 | Kompensationsläge för dödtid | 0: Utan kompensation1: kompensationsläge 12: Kompensationsläge 2 | 1 | ☆ |
| A5-03 | Slumpmässigt PWM-djup | 0: Slumpmässig PWM ogiltig1 ~10: PWM bärfrekvens slumpmässigt djup | 0 | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| A5-04 | Möjliggör snabb strömbegränsning | 0: Ej aktiverad1: Aktivera | 1 | ☆ |
| A5-05 | Kompensation för strömdetektering | 0~100 | 5 | ☆ |
| A5-06 | Inställning av brunpunkt | 60.0%~140.0% | 100.0% | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| A5-07 | Optimeringsmodell för SVC | 0: inte optimera1: Optimeringsmodell 12: Optimeringsmodell 2 | 1 | ☆ |
| A5-08 | Justering av dödtid | 100%~200% | 150% | ☆ |
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| Inställning av AI-kurva för A6-gruppen | ||||
| A6-00 | Min. ingång för AI-kurva 4 | -10,00 V ~ A6-02 | 0.00V | ☆ |
| A6-01 | Inställning för min. ingång för AI-kurva 4 | -100.0%~+100.0% | 0.0% | ☆ |
| A6-02 | Ingång för vändpunkt 1 på AI-kurva 4 | A6-00~A6-04 | 3.00V | ☆ |
| A6-03 | Inställning för inmatning av vändpunkt 1 för AI-kurva 4 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-04 | Ingång för vändpunkt 2 på AI-kurva 4 | A6-02~A6-06 | 6.00V | ☆ |
| A6-05 | Inställning för inmatning av vändpunkt 2 på AI-kurva 4 | -100.0%~+100.0% | 60.0% | ☆ |
| A6-06 | Max. ingång för AI-kurva 4 | A6-06 ~ +10,00 V | 10.00V | ☆ |
| A6-07 | Inställning för max. ingång för AI-kurva 4 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-08 | Min. ingång för AI-kurva 5 | -10,00V ~ A6-10 | -10.00V | ☆ |
| A6-09 | Inställning för min. inmatning av AI-kurva 5 | -100.0%~+100.0% | -100.0% | ☆ |
| A6-10 | Ingång för vändpunkt 1 på AI-kurva 5 | A6-08~A6-12 | -3.00V | ☆ |
| A6-11 | Inställning för inmatning av böjpunkt 1 för AI-kurva 5 | -100.0%~+100.0% | -30.0% | ☆ |
| A6-12 | Ingång för vändpunkt 2 på AI-kurva 5 | A6-10~A6-14 | 3.00V | ☆ |
| A6-13 | Inställning för inmatning av vändpunkt 2 på AI-kurva 5 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-14 | Max. ingång för AI-kurva 5 | A6-12 ~ +10,00 V | 10.00V | ☆ |
| A6-15 | Inställning för max. ingång för AI-kurva 5 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-24 | AI1 sätter hoppunkt | -100.0%~100.0% | 0.0% | ☆ |
| A6-25 | AI1 ställer in hoppintervall | 0.0%~100.0% | 0.5% | ☆ |
| A6-26 | AI2 sätter hoppunkt | -100.0%~100.0% | 0.0% | ☆ |
| A6-27 | AI2 ställer in hoppintervall | 0.0%~100.0% | 0.5% | ☆ |
| A6-28 | AI3 sätter hoppunkt | -100.0%~100.0% | 0.0% | ☆ |
| A6-29 | AI3 ställer in hoppintervall | 0.0%~100.0% | 0.5% | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| Kod | Benä mning | Inställningsområde | Standard | Föränd ring |
| A7-05 | On-off utgång | Binär inställningBit: FMRTio bit: relä 1Hundra bit: DO | 1 | ☆ |
| A7-06 | Frekvens som ges av programmerbart kort | 0.00%~100.00% | 0.0% | ☆ |
| A7-07 | Vridmoment givet för programmerbart kort | -200.0%~200.0% | 0.0% | ☆ |
| A7-08 | Kommando givet för programmerbart kort | 0: inget kommando1: Förordskommando2: omvänt kommando3: framåtgående inching4: omvänd inching5: fritt stopp6: stopp för retardation7: Återställning av fel | 0 | ☆ |
| A7-09 | Felindikering för programmerbart kort | 0: inget fel80 ~89: felkod | 0 | ☆ |
| AIAO-kalibrering av AC-gruppen | ||||
| AC-00 | AI1 uppmätt spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-01 | AI1 display spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-02 | AI1 uppmätt spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-03 | AI1 display spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-04 | AI2 uppmätt spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-05 | AI2 display spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-06 | AI2 uppmätt spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-07 | AI2 display spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-08 | AI3 uppmätt spänning 1 | -9,999V ~10,000V | Kalibrering | ☆ |
| AC-09 | AI3 display spänning 1 | -9,999V ~10,000V | Kalibrering | ☆ |
| AC-10 | AI3 uppmätt spänning 2 | -9,999V ~10,000V | Kalibrering | ☆ |
| AC-11 | AI3 display spänning 2 | -9,999V ~10,000V | Kalibrering | ☆ |
| AC-12 | AO1 målspänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-13 | AO1 uppmätt spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-14 | AO1 målspänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-15 | AO1 uppmätt spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-16 | AO2 målspänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-17 | AO2 uppmätt spänning 1 | 0,500V ~4,000V | Kalibrering | ☆ |
| AC-18 | AO2 målspänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-19 | AO2 uppmätt spänning 2 | 6,000 V ~9,999 V | Kalibrering | ☆ |
| AC-20 | AI2 uppmätt ström 1 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| AC-21 | AI2 samplingsström 1 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
Specifikation av högpresterande frekvensomriktare
Tabell över
| Kod | Benä mning | Inställningsområde | Standard | Förändring |
| AC-22 | AI2 uppmätt ström 2 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
| AC-23 | AI2 samplingsström 2 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
| AC-24 | AO1 idealström 1 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
| AC-25 | AO1 uppmätt ström 1 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
| AC-24 | AO1 idealström 2 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
| AC-25 | AO1 uppmätt ström 2 | 0,000 mA ~20,000 mA | Kalibrering | ☆ |
Tabell över övervakningsparametrar
| Funktionskod Benä | mning | Min. enhet |
| Grundläggande övervakningsparametrar för U0-gruppen | ||
| U0-00 | Driftfrekvens (Hz) | 0,01 Hz |
| U0-01 | Inställningsfrekvens (Hz) | 0,01 Hz |
| U0-02 | Samlingsskenans spänning (V) | 0.1V |
| U0-03 | Utgångsspänning (V) | 1V |
| U0-04 | Utgångsström (A) | 0.01A |
| U0-05 | Utgående effekt (kW) | 0,1 kW |
| U0-06 | Utgående vridmoment (%) | 0.1% |
| U0-07 | DI ingångsläge | 1 |
| U0-08 | Status för DO-utgång | 1 |
| U0-09 | AI1 spänning (V) | 0.01V |
| U0-10 | AI2 spänning (V) | 0.01V |
| U0-11 | AI3 spänning (V) | 0.01V |
| U0-12 | Räkna värde | 1 |
| U0-13 | Längd värde | 1 |
| U0-14 | Visning av lastningshastighet | 1 |
| U0-15 | PID-inställning | 1 |
| U0-16 | PID-återkoppling | 1 |
| U0-17 | PLC-steg | 1 |
| U0-18 | Inmatad pulsfrekvens (Hz) | 0,01 kHz |
| U0-19 | Återkopplingshastighet (0,1 Hz) | 0,1 Hz |
| U0-20 | Överskottsoperation run | 0,1 Min |
Specifikation av högpresterande frekvensomriktare
Tabell över
| U0-21 | AI1-spänning före kalibrering | 0.001V |
| U0-22 | AI2-spänning före kalibrering | 0.001V |
| U0-23 | AI3-spänning före kalibrering | 0.001V |
Specifikation av högpresterande frekvensomriktare
Tabell över
| U0-24 | Linjär hastighet | 1m/Min |
| U0-25 | Nuvarande elektrifierande tid | 1Min |
| U0-26 | Aktuell körtid | 0,1 Min |
| U0-27 | Ingång PULS-frekvens | 1Hz |
| U0-28 | Kommunikation givet värde | 0.01% |
| U0-29 | Återkopplad hastighet för pulsgivare | 0,01 Hz |
| U0-30 | Visning av huvudfrekvens X | 0,01 Hz |
| U0-31 | Visning av hjälpfrekvens Y | 0,01 Hz |
| U0-32 | Visa valfritt värde för minnesadress | 1 |
| U0-34 | Motorns temperatur | 1°C |
| U0-35 | Mål för vridmoment (%) | 0.1% |
| U0-36 | Roterande plats | 1 |
| U0-37 | Vinkel för effektfaktor | 0.1° |
| U0-39 | VF separerar målspänning | 1V |
| U0-40 | VF separerar utgångsspänningen | 1V |
| U0-41 | Visuell visning av DI-ingångens status | 1 |
| U0-42 | Visuell visning av DO-ingångens tillstånd | 1 |
| U0-43 | Visuell display 1 för DI-funktionsstatus (funktion 01-funktion 40) | 1 |
| U0-44 | Visuell display 2 av DI-funktionsstatus (funktion 41-funktion 80) | 1 |
| U0-59 | Inställningsfrekvens (%) | 0.01% |
| U0-60 | Löpfrekvens (%) | 0.01% |
| U0-61 | Status för frekvensomvandlare | 1 |
Kapitel 6 Beskrivning av parametrar
P0 grupp : Grundläggande funktionsgrupp
| P0-00 | Visning av GP-typ | Fabriksinställning | Relaterat till maskintyp | |
| Inställningsområde | 1 | Typ G (last med konstant vridmoment) | ||
| 2 | P-typ (belastning av fläkt och pump) | |||
Parametern är bara för användare att visa maskintyp och kan inte ändras.
1: vara lämplig för konstant vridmomentbelastning av angivna nominella parametrar
2: vara lämplig för variabel momentbelastning av angivna nominella parametrar (belastning av fläkt och pump)
| P0-01 | Styrläge för: a motor | Fabriksinställning | 0 | |
| Inställningsområde | 0 | Ingen hastighet Sensorvektorstyrning (SVC) | ||
| 1 | Vektorstyrning av hastighetssensor (FVC) | |||
| 2 | V / F kontroll | |||
0: Ingen hastighet Sensor vektorstyrning
Vektorstyrningen med öppen slinga är lämplig för allmänna högpresterande styrtillämpningar. En frekvensomvandlare kan endast driva en motor, t.ex. en mängd verktygsmaskiner, centrifuger, träddragningsmaskiner, formsprutningsmaskiner etc.
1: Varvtalsgivarens vektorreglering är en vektorreglering med sluten slinga. Motorsidan måste vara installerad med encoder. Frekvensomvandlaren måste vara kopplad till samma typ av PG-kort med kodare. Den är lämplig för applikationer med högprecisionshastighetsstyrning eller momentstyrning. En omriktare kan endast driva en motor, t.ex. pappersmaskiner, kranar, hissar osv.
2: V / F-styrning är lämplig för ooccasion med mindre efterfrågan på belastning, eller en frekvensomvandlare driver flera motorer såsom fläktar och pumpar belastning. Den kan användas för att driva flera motorer med en frekvensomvandlare.
Prompt: Identifiering av motorparametrar krävs vid val av vektorstyrningsläge. Endast exakta motorparametrar kan dra nytta av vektorstyrningsläget. Genom att justera parametrarna för hastighetsregulatorn i funktionskoden i P2-gruppen (2 är andra gruppen) kan bättre prestanda uppnås.
| P0-02 | Val av kommandokälla | Fabriksinställning | 0 | |
| Inställningsområde | 0 | Manöverpanelens kommandokanal (LED släckt) | ||
| 1 | Terminalens kommandokanal (LED lyser) | |||
| 2 | Kommandokanal (LED blinkar) | |||
Välj ingångskanal för styrkommando för frekvensomvandlare.
Styrkommandon för frekvensomvandlaren inkluderar: start, stopp, framåt, bakåt, jogga och så vidare. 0: Manöverpanelens kommandokanal ("LOCAL / REMOT" släckt);
På manöverpanelen kan knapparna RUN, STOP / RES användas för körkommandon.
1: Terminalens kommandokanal ("LOCAL / REMOT" tänds);
Multifunktionella ingångar FWD, REV, JOG, JOG, etc. för styrning av körkommandon.
Parameterbeskrivning
Specifikation av högpresterande frekvensomriktare
2: Kommandokanal ("LOCAL / REMOT" blinkar) Körkommandot ges av värddatorn via kommunikationsläget.
När detta väljs måste kommunikationskort finnas som tillval (Modbus RTU, CANlink-kort, användarprogrammerbart styrkort etc.).
| P0-03 | Källa för huvudfrekvens X | Fabriksinställning | 0 | |
| Inställningsområde | 0 | Digital inställning (förinställd frekvens P0-08, UP/DOWN modifieras, minne efter strömavbrott) | ||
| 1 | Digital inställning (förinställd frekvens P0-08, UP/DOWN är modifierad, inget minne efter strömavbrott | |||
| 2 AI1 | ||||
| 3 AI2 | ||||
| 4 AI3 | ||||
| 5 | Inställning av PULS (DI5) | |||
| 6 | Kommando i flera steg | |||
| 7 PLC | ||||
| 8 PID | ||||
| 9 | Kommunikation ges | |||
Välj ingångskanal för given frekvens för omvandlaren. Det finns 10 huvudsakliga referensfrekvenskanaler: 0: Digital inställning (inget minne efter strömavbrott)
Värde som dess inställda frekvens initialt värde är P0-08 "förinställd frekvens". Använd knapparna ▲ ▼ (eller multifunktionsingångarna UP, DOWN) för att ändra det inställda frekvensvärdet.
Och när omriktaren slås på efter strömavbrott återställs frekvensinställningsvärdet till "digital setup preset frequency" som värde P0-08.
1: Digital inställning (minne efter strömavbrott)
Värde som dess inställda frekvens initialvärde är P0-08 "förinställd frekvens". Med knapparna ▲, ▼ (eller multifunktionsingångarna UP, DOWN) på tangentbordet ändras det inställda frekvensvärdet.
Och när omvandlaren slås på efter ett strömavbrott är den inställda frekvensen den frekvens som senast ställdes in med tangentbordets ▲, ▼-tangenter eller terminalerna UP, DOWN korrigering memoreras.
Det är viktigt att komma ihåg att P0-23 är "digital inställning av frekvens för minnesval", P0-23 används för att välja korrigeringsbelopp eller frekvens för minnet när drivenheten är stoppad. P0-23 är relaterad till driftstopp, och power-down-minnet är inte relaterat. Du måste vara uppmärksam på ansökan.
2: AI1
3: AI2
4: AI3
Det innebär att frekvensen ställs in av den analoga ingångsterminalen för att bestämma. VFD-kontrollpanelen har två analoga ingångsterminaler (AI1, AI2), ett valfritt I/O-expansionskort ger ytterligare en analog ingångsterminal (AI3).
Bland dem är AI1 0V \~ 10V spänningsingång, AI2 kan vara 0V \~ 10V spänningsingång, det kan också vara 4mA \~ 20mA strömingång. Väljs med bygel J8 på kontrollpanelen, AI3 är -10V \~ 10V spänningsingång.
Korrespondens mellan ingångsspänningen AI1, AI2, AI3 och målfrekvensen, som användaren kan välja fritt. VFD ger 5 grupper av korrespondens mellan kurvorna, inklusive 3 gruppkurvor med linjärt förhållande (2-punktskorrespondens), 2 grupper med 4-punktskorrespondens mellan kurvorna.
Specifikation av högpresterande frekvensomriktare
Parameter
Användargrupper kan ställas in via P4 och A6 gruppfunktionskod.
P4-33 funktionskod används för att ställa in AI1 \~ AI3 trevägs analog ingång. Välj en cuve i 5-gruppen och se sedan instruktionerna för P4 och A6 Gruppfunktionskod för detaljerad korrespondens för 5-gruppen av kurvor.
5: Puls given (DI5)
Frekvensinställningen ges av terminalpulsen. Specifikation för pulsreferenssignal: spänningsområde 9V \~ 30V, frekvensområde 0kHz \~ 100kHz. Pulsreferens kan endast anges från ingångsterminalen DI5 multifunktion.
Relationer DI5 terminal ingång pulsfrekvens som motsvarar den inställda, och ställs in av P4-28 \~ P4-31. Korrespondensen mellan de två punkterna är en rät linje som motsvarar förhållandet. Pulsingångens motsvarande inställning är 100,0%, vilket innebär procentandelen av den relativa maxfrekvensen P0-10.
6: Instruktion i flera steg
När du väljer exekveringsläge för flera instruktioner måste du ange DI-terminalerna via digital sammansättning olika tillständ som motsvarar olika frekvenser för det inställda värdet. VFD kan ställa in mer än fyra segment kommandoterminal, 16 tillständ fyra terminaler, PC-funktionskod kan motsvara någon av 16 "multi-directive". Multi-direktiv" är den relativa procentandelen av den maximala frekvensen P0-10.
DI digital ingångsterminal som ett multifunktionellt terminalblockkommando, du måste ställa in motsvarande grupp P4. För detaljer, se relevant funktionsparameter i grupp P4.
7: Enkel PLC
När frekvenskällan är en enkel PLC kan frekvensomriktarens körfrekvens ställas om till mellan 1 och 16 godtyckliga frekvenskommandon. Retentionstid för 1 till 16 frekvenskommandon och respektive accelerations- och retardationstid kan ställas in av användaren. För detaljerat innehåll hänvisas till PC-gruppens anvisningar.
8: PID
PID-regleringens utgång används som arbetsfrekvens vid val av process. Används i allmänhet för sluten reglering på plats, t.ex. sluten reglering av konstant tryck, sluten reglering av konstant spänning och andra förhållanden.
När PID används som frekvenskälla måste PA-gruppens parametrar för "PID-funktion" ställas in.
Avser den huvudsakliga frekvenskällan är värddatorn via kommunikationsläget.
VFD stöder två typer av kommunikation: Modbus. CANlink, Dessa två typer av kommunikation kan inte användas.
Kommunikationskort måste installeras när kommunikation används, VFD två typer av kommunikationskort är valfria, Användare måste välja enligt sina egna krav, Och du måste ställa in rätt parametrar för P0-28 "kommunikation expansionskort typ."
| P0-04 | Hjälpfrekvenskälla Y | Fabriksinställning | 0 | |
| Inställningsområde | 0 | Digital inställning (förinställd frekvens P0-08, UP/DOWN modifieras, minne efter strömavbrott) | ||
| 1 | Digital inställning (förinställd frekvens P0-08, UP/DOWN modifieras, inget minne efter fel) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Inställning av PULS (DI5) | |||
| 6 | Kommando i flera steg | |||
| 7 | PLC | |||
| 8 | PID | |||
| 9 | Kommunikation ges | |||
När extra frekvenskälla används som oberoende frekvensreferenskanal (dvs. frekvenskälla X till Yväxling), är dess användning densamma som för huvudfrekvenskälla X. Användningsinstruktioner kan hänvisas till P0-03.
När den extra frekvenskällan används som superposition (dvs. frekvenskälla X + Y, X till X + Y-omkopplare eller Y till X + Y-omkopplare), måste du vara uppmärksam på:
1) När den extra frekvenskällan är digital referens fungerar inte den förinställda frekvensen (P0-08). Användaren kan justera frekvensen med knapparna ▲, ▼ på tangentbordet (eller med multifunktionsingångarna UP, DOWN). Justera direkt på grundval av den huvudsakliga referensfrekvensen.
2) När hjälpfrekvenskällan ges av analog ingång (AI1, AI2, AI3) eller pulsingång till tidsinställningen, motsvarar 100% ingångens inställning för hjälpfrekvenskällans intervall kan ställas in med P0-05 och P0-06.
3) När en frekvenskälla används som pulsinmatning är det på samma sätt som när en analog källa används. Prompt: Val av hjälpfrekvenskälla Y och val av huvudfrekvenskälla X kan inte ställas in i samma kanal, det vill säga P0-03 och P0-04 är inställda på samma värde. Eller så leder det lätt till förvirring.
| P0-05 | Hjälpmedel överlagrad frekvens källa Y intervall | Fabriks inställning | 0 | |
| Inställningsområde | 0 | Relativt till den maximala frekvensen | ||
| 1 | Relativt till frekvenskälla X | |||
| P0-06 | Hjälpmedel överlagrad frekvens källa Y intervall | Fabriksinställning | 0 | |
| Inställningsområde | 0%~150% | |||
När val av frekvenskälla är "frequency overlay" (dvs P0-07 är inställd på 1, 3 eller 4), används dessa två parametrar för att bestämma justeringsområdet för hjälpfrekvenskällan.
När P0-05 används för att bestämma objektets hjälpfrekvensområde motsvarande källan, kan du välja att den maximala frekvensen ska vara relativ till huvudfrekvenskällan X. Om du väljer relativ till den primära frekvenskällan, används hjälpfrekvenskällan som huvudfrekvensområde för X-ändringar.
| P0-07 | Val av överlagrad frekvenskälla | Fabriksinställning | 0 | |
| Inställ ningso mråde | Bit | Val av frekvenskälla | ||
| 0 | Källa för huvudfrekvens X | |||
| 1 | Resultat av huvud- och hjälpdrift | |||
| 2 | Omkoppling av huvudfrekvenskälla X och hjälpfrekvenskälla Y | |||
| 3 | Huvudfrekvenskälla X, resultatomkopplare för huvud- och hjälpdrift | |||
| 4 | Hjälpfrekvenskälla Y, resultatomkopplare för huvud- och hjälpdrift | |||
| Tio bitar | driftförhållande mellan huvud- och hjälpfrekvenskälla | |||
| 0 | Huvud + extra | |||
| 1 | Huvud- och sidoverksamhet | |||
| 2 | Max. av de två | |||
| 3 | Min. av de två | |||
Med denna parameter väljer du kanal för frekvensreferens. Realiserad genom frekvenssammansättning primär frekvenskälla X och hjälpfrekvenskälla Y ges.
En siffra: Val av frekvenskälla: 0:
Huvudfrekvenskälla X
Huvudfrekvens X används som målfrekvens.
1: Resultat av huvud- och hjälpdrift Resultat av huvud- och hjälpdrift som målfrekvens.
Se instruktionerna för huvud- och hjälpdriftsrelationerna för funktionskod "Ten Bit".
2: Omkoppling av huvudfrekvenskälla X och hjälpfrekvenskälla Y. När multifunktionsingång 18 (frekvensomkopplare) är ogiltig, är huvudfrekvenskälla X målfrekvens. När multi-
funktion ingångsterminal 18 är (frekvensomkopplare) giltig, hjälpfrekvenskälla Y är målfrekvens.
3: Omkoppling av huvudfrekvenskälla X och huvud- och hjälpdriftresultat. När multifunktionsingång 18 är (frekvensomkopplare) ogiltig, är huvudfrekvenskälla X målfrekvens. När multifunktionsingång 18 är (frekvensomkopplare) giltig, är huvud- och hjälpdriftens resultat målfrekvens.
4. Omkoppling av hjälpfrekvenskälla Y och resultat av huvud- och hjälpdrift. När multifunktionsingång 18 är (frekvensomkopplare) ogiltig, är hjälpfrekvenskälla Y målfrekvens. När multifunktionsingång 18 är (frekvensomkopplare) giltig, är huvud- och hjälpdriftens resultat målfrekvens.
Tio bit: Driftförhållande mellan huvud- och hjälpfrekvenskälla: 0:
Huvudfrekvenskälla X + hjälpfrekvenskälla Y
Summan av huvudfrekvens X och accessfrekvens Y används som målfrekvens. Uppnå frekvensöverlagring givet funktion.
1: Huvudfrekvenskälla X- hjälpfrekvenskälla Y
Skillnaden mellan huvudfrekvenskälla X och hjälpfrekvenskälla Y används som målfrekvens.
2: MAX (huvudfrekvenskälla X, hjälpfrekvenskälla Y) Ta det högsta absoluta värdet av huvudfrekvens X och hjälpfrekvens Y som målfrekvens.
3: MIN (huvudfrekvenskälla X, hjälpfrekvenskälla Y) Ta det lägsta absoluta värdet för huvudfrekvens X och hjälpfrekvens Y som målfrekvens. Dessutom kan offsetfrekvensen ställas in med P0-21 när frekvensvalskällan är huvud- och hjälpdrift. Offsetfrekvens överlagrad på huvud- och hjälpdriftresultatet för att flexibelt svara på olika behov.
4: MIN (huvudfrekvenskälla X, hjälpfrekvenskälla Y) Ta det lägsta absoluta värdet för huvudfrekvens X och hjälpfrekvens Y som målfrekvens. Dessutom kan offsetfrekvensen ställas in med P0-21 när frekvensvalskällan är huvud- och hjälpdrift. Offsetfrekvens överlagrad på huvud- och hjälpdriftresultatet för att flexibelt svara mot olika behov.
| P0-08 | Förinställd frekvens | Fabriksinställning | 50,00 Hz |
| Inställningsområ de | 0.00~max. frekvens (val av frekvenskälla till digital inställning är effektiv) | ||
När frekvenskällan väljs för "Digital setup" eller "terminal UP / DOWN", är den digitala frekvensomriktarens funktionskod det ursprungliga inställningsvärdet.
| P0-09 | Körriktning | Fabriksinställning | 0 | |
| Inställningsområde | 0 | Samma riktning | ||
| 1 | Motsatt riktning | |||
Genom att ändra funktionskoden kan man inte ändra de elektriska ledningarna och uppnå syftet att ändra motorrotationen. Vilka åtgärder för att justera motorn (U, V, W) för att konvertera två rader av motorns rotationsriktning.
Uppmaning: Efter initialisering av parametern kommer motorns körriktning att återställa det ursprungliga tillståndet. Var försiktig om du använder den under förutsättning att motorstyrningen inte får ändras efter det att systemet har felsökts.
| P0-10 | Max. frekvens | Fabriksinställning | 50,00 Hz |
| Inställningsområde | 50,00 Hz ~ 600,00 Hz | ||
VFD analog ingång, pulsingång (DI5), flerstegsinstruktioner etc., som frekvenskälla är 100,0% i förhållande till respektive skalning P0-10.
VFD har en maximal utmatningsfrekvens på upp till 3200 Hz. För att ta hänsyn till frekvensupplösning och frekvensinmatningsområde för båda indikatorerna, kan man välja decimaler för frekvensinstruktion med P0-22.
När P0-22 är valt som 1 är frekvensupplösningen 0,1Hz. I detta fall är P0-10 inställd i intervallet 50,0Hz \~ 3200,0Hz;
När P0-22 är valt som 2 är frekvensupplösningen 0,1Hz. I detta fall är P0-10 inställd i intervallet 50,0Hz \~ 600,00Hz.
Specifikation av högpresterande frekvensomriktare Parameter
| P0-11 | Källa för övre frekvens | Fabriksinställning | 0 | |
| Fabriksinställning | 0 | P0-12 inställning | ||
| 1 AI1 | ||||
| 2 AI2 | ||||
| 3 | AI3 | |||
| 4 | Inställning av PULSE | |||
| 5 | Kommunikation ges | |||
Definiera källan till de övre frekvenserna. Övre gränsfrekvens kan ställas in från den digitala (P0-12), den kan också härledas från den analoga ingångskanalen. Vid inställning av den övre gränsfrekvensen för analog ingång, motsvarar 100% av inställningen för analog ingång P0-12.
Till exempel, när du använder vridmomentstyrning inom området för lindningskontroll, för att undvika att bryta materialet och uppträda "hastighetsfenomen", kan du använda de analoga inställda frekvenshattarna. När omriktaren körs vid den övre frekvensgränsen fortsätter omriktaren att köra i den övre frekvensen.
| P0-12 | Övre frekvens | Fabriksinställning | 50,00 Hz |
| Inställningsom rade | Övre frekvens P0-14~maximalfrekvens P0-10 | ||
| P0-13 | Övre frekvens offset | Fabriksinställning | 0,00 Hz |
| Inställningsom rade | 0,00Hz~maximalfrekvens P0-10 | ||
När den övre gränsfrekvensen är analog eller pulsinställning, används P0-13 som inställningsvärde för förskjutningen. Biasfrekvensen och P0-11 ställer in en övre gränsfrekvens som överlagras på det inställda värdet som den slutliga övre gränsfrekvensen.
| P0-14 | Lägre frekvens | Fabriksinställning | 0,00 Hz |
| Inställningsområde | 0,00Hz ~övre frekvens P0-12 | ||
När frekvensstyrningen understiger den lägre frekvens som ställts in av P0-14, kan omriktaren stoppa eller sänka gränsfrekvensen för drift eller nollhastighetskörning. Vilken typ av driftläge som ska väljas kan ställas in med P8-14 (inställning av frekvens under driftläge för lägre frekvens).
| P0-15 | Bärfrekvens | Fabriksinställning | Relaterat till maskintyp |
| Inställningsom rade | 0,5 kHz ~16,0 kHz | ||
Denna funktion justerar omriktarens bärfrekvens. Genom att justera bärfrekvensen kan man minska motorbullret, undvika resonanspunkten i det mekaniska systemet och minska störningarna och läckströmmen från linje till jord i växelriktaren.
När bärfrekvensen är låg ökar utgångsströmmens högre harmoniska komponent, motorförlusten ökar och motortemperaturen ökar. När bärfrekvensen är hög minskar motorförlusten och motortemperaturen, men växelriktarens förlust ökar, växelriktarens temperatur ökar och störningarna ökar.
Justering av bärfrekvensen kommer att påverka följande egenskaper:
| Bärfrekvens | Låg → hög |
| Motorbuller | Stor → liten |
| Vågform för utgående ström | Dålig → bra |
| Motorns temperaturökning | Hög → låg |
| Temperaturökning av omvandlaren | Låg → hög |
| Läckström | Liten → stor |
| Externt utstrålad störning | Liten → stor |
För olika växelriktare är bärfrekvensens fabriksinställningar olika. Även om användarna kan ändra, men observera: Om värdet på bärfrekvensen är högre än det fabriksinställda, kommer det att orsaka




