
FI-11000 - Przemiennik częstotliwości MSW - Bezpłatna instrukcja obsługi
Znajdź bezpłatnie instrukcję urządzenia FI-11000 MSW w formacie PDF.

| Typ produktu | Przetwornica częstotliwości |
| Marka | MSW |
| Model | FI-11000 |
| Zasilanie wejściowe | Trójfazowe 380 V, 50/60 Hz |
| Napięcie wyjściowe | 0 do 980 V (trójfazowe) |
| Częstotliwość wyjściowa | 0 do 300 Hz (sterowanie wektorowe) / 0 do 3200 Hz (sterowanie U/f) |
| Prąd wyjściowy (np. 0,75 kW) | 2,1 A |
| Moc nominalna | 0,75 do 15 kW (w zależności od wariantu) |
| Wymiary (W × S × G, np. 0,75 kW) | 186 × 125 × 159 mm |
| Waga (np. 0,75 kW) | 1,7 kg |
| Tryb sterowania | SVC (bezczujnikowe), FVC (z czujnikiem), U/f |
| Zdolność przeciążeniowa (typ G) | 150% przez 60 s, 180% przez 3 s |
| Częstotliwość nośna | 0,5 do 16 kHz (automatycznie regulowana) |
| Temperatura otoczenia podczas pracy | -10 do +40 °C (do 50 °C z obniżeniem parametrów) |
| Wilgotność względna | <95% RH, bez kondensacji |
| Maksymalna wysokość | 1000 m (obniżenie parametrów powyżej) |
| Zabezpieczenia | Przeciążeniowe, przepięciowe, podnapięciowe, przeciążeniowe, przegrzaniowe, zwarciowe, zanik fazy |
| Wejścia cyfrowe | 5 (w tym 1 wejście impulsowe wysokiej prędkości do 100 kHz) |
| Wejścia analogowe | 2 (0-10 V / 4-20 mA) |
| Wyjścia | 1 analogowe (0-10 V / 0-20 mA), 1 cyfrowe, 1 przekaźnikowe, 1 impulsowe |
| Komunikacja | Modbus-RTU, CANlink |
| Gwarancja | 18 miesięcy (od daty wyjścia z fabryki) |
Często zadawane pytania - FI-11000 MSW
Pytania użytkowników dotyczące FI-11000 MSW
0 pytanie dotyczące tego urządzenia. Odpowiedz na te, które znasz, lub zadaj własne.
Zadaj nowe pytanie dotyczące tego urządzenia
Pobierz instrukcję dla swojego Przemiennik częstotliwości w formacie PDF za darmo! Znajdź swoją instrukcję FI-11000 - MSW i weź swoje urządzenie elektroniczne z powrotem w ręce. Na tej stronie opublikowane są wszystkie dokumenty niezbędne do korzystania z urządzenia. FI-11000 marki MSW.
INSTRUKCJA OBSŁUGI FI-11000 MSW
Ogólne funkcje i opis przemiennika częstotliwości:
1) Klasy napięcia: urządzenie obsługuje trzy klasy napięcia: jednofazowe 220 V, trójfazowe 220 V i trójfazowe 380 V.
2) Bogaty tryb sterowania: oprócz sterowania wektorowego czujnika prędkości, bezczujnikowe sterowanie wektorowe i sterowanie skalarne U/f, sterowanie separacją U/f.
3) Bogata magistrala polowa: obsługa magistrali Modbus-RTU i CANlink.
4) Liczne typy enkoderów: obsługa enkodera różnicowego, enkodera o otwartym kolektorze, transformatora obrotowego itp.
5) Zupełnie nowy bezczujnikowy algorytm sterowania wektorowego.
Zupełnie nowe SVC (bezczujnikowe sterowanie wektorowe) zapewnia lepszą stabilność przy niskiej prędkości, większą obciążalność przy niskich częstotliwościach i obsługuje kontrolę momentu obrotowego SVC.
6) Potężne oprogramowanie w tle: przesyłanie, pobieranie parametrów, oscyloskop czasu rzeczywistego można zrealizować na oprogramowaniu w tle.
Funkcja Opis
| Zabezpieczenie silnika przed przegrzaniem | Po wybraniu karty rozszerzeń PC1, AI3 może odbierać sygnał wejściowy czujnika temperatury silnika (PT100, PT1000), aby realizować zabezpieczenie przed przegrzaniem. |
| Szybkie ograniczenie prądu | Unikanie błędu przetężenia przemiennika częstotliwości |
| Dwupozycyjny przełącznik silnika | Dwa zestawy parametrów silnika umożliwiają realizację dwupozycyjnego przełącznika silnika. |
| Przywracanie parametrów użytkownika | Użytkownicy mogą zapisywać lub przywracać własne ustawienia parametrów. |
| Dokładność we/wy analog. | Dokładność kalibracji pofabrycznej (lub kalibracji punktowej) we/wy może wynosić <20mv |
| Pokazywanie parametrów nicstandardowych | Użytkownicy mogą decydować które parametry funkcji mają być wyświetlane. |
| Pokazywanie zmienionych parametrów | Użytkownik może przeglądać parametry funkcji po modyfikacji. |
| Opcjonalne sposoby obsługi błędów | Użytkownicy mogą wybierać tryby pracy falownika po potwierdzeniu określonych usterek: zatrzymanie wybiegiem, zatrzymanie hamowaniem, praca ciągła. Użytkownicy mogą również wybrać częstotliwość pracy ciągłej. |
| Przełącznik parametrów PID | Dwa zestawy parametrów PID mogą być przełączane przez zaci sk lub na podstawie odchylenia. |
| Wykrywanie utraty sprzężenia zwrotnego PID | Wartość wykrywania utraty sprzężenia zwrotnego PID zapewnia ochronę podczas działania PID. |
| Logika dodatnia / ujemna DIDO | Użytkownicy mogą ustawić logikę dodatnią / ujemną DIDO. |
| Opóźnienie odpowiedzi DIDO | Użytkownicy mogą ustawić czas opóźnienia odpowiedzi DIDO. |
| Praca przy krótkiej przerwie zasilania | Przemiennik częstotliwości kontynuuje pracę przez krótki czas, jeśli wystąpi chwilowa przerwa w zasilaniu lub spadek napięcia. |
| Odliczanie czasu | Obsługą odliczania czasu, najwięcej 6500 minut. |
Otworzyć opakowanie w celu sprawdzenia.
Podczas otwierania pudełka należy dokładnie sprawdzić, czy model podany na tabliczce znamionowej i wartość znamionowa przemiennika częstotliwości są zgodne z zamówieniem. Opakowanie zawiera zamówione urządzenie, świadectwo kwalifikacyjne, instrukcję obsługi oraz kartę gwarancyjną.
W przypadku jakichkolwiek uszkodzeń podczas transportu lub braków prosimy o kontakt z naszą firmą lub dostawcą.
Rozdział 1 Informacje dotyczące bezpieczeństwa i środki ostrożności
Środki ostrożności są w niniejszej instrukcji podzielone na dwie kategorie:

Niebezpieczeństwo - mogą wystąpić poważne obrażenia i śmierć w wyniku obsługi niezgodnej z wymaganiami;

Uwaga: mogą wystąpić średnie lub drobne obrażenia i uszkodzenie sprzętu w wyniku działania niezgodnego z wymaganiami.
Należy przeczytać uważnie ten rozdział przed instalacją, debugowaniem i konserwacją systemu oraz postępować zgodnie ze środkami ostrożności. Firma nie ponosi odpowiedzialności za jakickolwick obrażenia i straty spowodowane działaniem niczgodnym z wymaganiami.
1.1 Kwestie bezpieczeństwa
1.1.1 Przed zainstalowaniem:
| ! | Niebezpieczeństwo |
| Jeśli do urządzenia dostala się woda, wystąpił brak lub uszkodzenie elementu po otwarciu opakowania, nie należy instalować urządzenia!W przypadku jakichkołówiek niezgodności między listą przewozową a urządzeniem, nie należy instalować! | |
| ! | Niebezpieczeństwo |
| Proszę delikatnie przenosić sprzęt, w przeciwnym razie może ulec uszkodzeniu!Jeśli falownik / przemiennik częstotliwości jest uszkodzony lub brakuje w nim części, nie używać! Istnieje ryzyko obrażeń!Nie dotykać elementów układu sterowania rękami, istnieje niebezpieczeństwo wyładowania elektrostatycznego! | |
1.1.2 Podczas instalacji:
| Niebezpieczeństwo |
| Instalować na podłożu o niskiej palności, takim jak metal, i utrzymywać z dala od materiałów łatwopalnych, w przeciwnym razie może dojść do pożaru.Nie należy wkręcać bez rozeznania śrub mocujących elementy, zwłaszcza tych oznaczonych na czerwono! |
| Ostrożnie |
| Nic wkładać końcówki przewodu ani śruby do falownika, ponicważ może to spowodować jego uszkodzenie! Zainstalować falownik w miejscu gdzie drgania są niewielkie i chronić go przed słońcem.Gdy w tej samej szafie instalowane są więcej niż dwa przetworniki częstotliwości, należy zwrócić uwagę na ich położenie, aby zapewnić efekt rozpraszania ciepła. |
1.1.3 Podczas podłączania przewodów
| Niebezpieczeństwo |
| Należy przestrzegać instrukcji obsługi i zatrudnić profesjonalny personel elektrotechniczny, w przeciwnym razie może wystąpić niebezpieczeństwo!Przemiennik częstotliwości powinien być oddzielony wyłącznikiem od zasilania, w przeciwnym razie może dojść do pożaru!Przed podłączaniem upcwnić się, że stan mocy jest zerowy, w przeciwnym razie może dojść do porażenia prądem!Proszę zapewnić prawidłowe uziemienie przemiennika zgodnie z normami, w przeciwnym razie może dojść do porażenia prądem! |
| Niebezpieczeństwo |
| Nie podłączać zasilania wejściowego do zacisków wyjściowych (U, V, W) na przemienniku częstotliwości. Zwracać uwagę na oznaczenia na zaciskach przewodów i nie podłączać nieprawidłowo, aby nie uszkodzić falownika.Upewnić się, że całe okablowanie jest zgodne z wymaganiami EMC (kompatybilności elektromagnetycznej) i miejscowymi normami bezpieczeństwa. Przekroje wszystkich przewodów powinny być takie, jak sugeruje instrukcja, w przeciwnym razie może dojść do wypadku!Nie podłączać rezystora hamowania bezpośrednio między zaciskami szyny DC (+) (-), w przeciwnym razie może dojść do pożaru!Do enkodera używać pojedynczego przewodu ekranowanego i zapewnić niezawodne uziemienie zacisku warstwy ekranującej! |
1.1.4 Przed włączeniem zasilania

Uwaga
- Sprawdzić zgodność pomiędzy klasą wejściowego napięcia zasilania a klasą napięcia znamionowego przemiennika częstotliwości, poprawność połączeń zacisków wejściowych zasilania (R, S, T) i wyjściowych (U, V, W). Sprawdzić, czy nie ma zwarcia w obwodzie peryferyjnym połączonym z falownikiem i czy przewody są dokręcone, w przeciwnym razie falownik może zostać uszkodzony!
- Żadna część przemiennika częstotliwości nie wymaga testu napięcia, ponieważ produkt został już przetestowany!

Niebezpieczeństwo
- Przemiennik częstotliwości podłączyć do prądu po założeniu osłony, w przeciwnym razie może dojść do porażenia!
- Okablowanie wszystkich akcesoriów peryferyjnych powinno być zgodne z instrukcją obsługi a przewody powinny być prawidłowo podłączone zgodnie ze sposobem łączenia obwodów podanym w instrukcji, w przeciwnym razie może dojść do wypadku!
1.1.5 Po włączeniu zasilania

Niebezpieczeństwo
- Nie otwierać osłony po włączeniu urządzenia, w przeciwnym razie może dojść do porażenia prądem!
- Nie dotykać falownika ani obwodu peryferyjnego mokrymi rękami, w przeciwnym razie może dojść do porażenia prądem!
- Nie dotykać zacisków wejściowych ani wyjściowych przemiennika częstotliwości, w przeciwnym razie może dojść do porażenia prądem!
- Przy pierwszym włączeniu, przemiennik częstotliwości przeprowadzi bezpieczne wykrywanie zewnętrznej pętli silnoprądowej - nie dotykać zacisków przewodów U, V, W falownika ani zacisków przewodów silnika, w przeciwnym razie może dojść do porażenia prądem!
1.1.6 Podczas obsługi urządzenia

Uwaga
- Nie dotykać wentylatora chłodzącego ani otworów wylotowych w celu sprawdzenia temperatury, w przeciwnym razie może dojść do poparzenia!
- Osobie nieprofesjonalnej nie wolno wykrywać sygnału, w przeciwnym razie może dojść do obrażeń ciała lub uszkodzenia urządzenia.

Niebezpieczeństwo
- Zapobiegać wpadaniu przedmiotów do urządzenia podczas pracy przemiennika częstotliwości, w przeciwnym razie może dojść do uszkodzenia!
- Nie sterować falownikiem przez włączanie lub wyłączanie stycznika, w przeciwnym razie może dojść do uszkodzenia!
1.1.7 Czynności konserwacyjne

Niebezpieczeństwo
- Nie naprawiać ani nie konserwować urządzenia gdy jest włączone, w przeciwnym razie może dojść do porażenia!
- Konserwować i naprawiać falownik tylko wtedy, gdy napięcie przemiennika <DC36V po upływie 2 minut od zaniku napięcia, w przeciwnym razie resztkowy ładunek elektryczny na kondensatorze może spowodować obrażenia ciała!
- Osoby bez profesjonalnego przeszkolenia nie mogą naprawiać ani konserwować przemiennika częstotliwości, w przeciwnym razie może dojść do obrażeń ciała lub uszkodzenia urządzenia.
- Po wymianie przemiennika częstotliwości należy ustawić parametry. Należy wetknąć na miejsce wszystkie wtyki przed ponownym podłączeniem urządzenia.
1.2 Środki ostrożności
1.2.1 Przegląd izolacji silnika
Przy pierwszym użyciu silnika, przy ponownym użyciu silnika po dłuższym odstawieniu i przy regularnym sprawdzaniu silnika, kontrola jego izolacji jest niezbędna, aby zapobiec uszkodzeniu przemiennika częstotliwości z powodu nieprawidłowej izolacji uzwojenia silnika. Podczas kontroli izolacji, odlączyć przewód silnika od przemiennika częstotliwości. Sugerujemy tramegger napięciowy 500 V, zmierzona rezystancja izolacji powinna być ≥ 5MΩ.
1.2.2 Zabezpieczenie termiczne silnika
Jeśli wybrany silnik nie odpowiada znamionowej mocy przemiennika częstotliwości, zwłaszcza jeśli jego moc znamionowa jest większa niż przemiennika częstotliwości, należy dostosować odnośne parametry ochrony silnika lub zainstalować przekaźnik termiczny przed silnikiem w celu zabezpieczenia.
1.2.3 Praca powyżej częstotliwości sieci
Przemiennik częstotliwości zapewnia częstotliwość wyjściową 0 Hz \~ 3200 Hz. Jeśli użytkownicy muszą pracować przy częstotliwości powyżej 50 Hz, należy wziąć pod uwagę tolerancję urządzenia mechanicznego.
1.2.4 Drgania urządzenia mechanicznego
Przy określonej częstotliwości wyjściowej przemiennika, może występować punkt rezonansu mechanicznego urządzenia obciążającego. Można ustawić parametr częstotliwości przeskoku, aby go uniknąć.
1.2.5 Informacje o nagrzewaniu się i hałasie silnika
Napięcie wyjściowe przemiennika częstotliwości to fala PWM zawierająca określone harmoniczne, więc temperatura, hałas i wibracje silnika wzrosną nieznacznie w stosunku do pracy na częstotliwości sieciowej.
1.2.6 Umiejscowienie po stronie wyjściowej elementów wrażliwych na napięcie lub kondensatora poprawiającego współczynnik mocy
Wyjście przemiennika częstotliwości to fala PMB. Jeśli po stronie wyjściowej zostanie zainstalowany kondensator poprawiający współczynnik mocy lub rezystor zależny od napięcia w celu ochrony przed wyładowaniami atmosferycznymi, można łatwo spowodować chwilowe przetężenie, a nawet uszkodzenie przemiennika częstotliwości. Proszę nie stosować.
1.2.7 Urządzenia przełączające, takie jak stycznik, dla zacisków wejściowych i wyjściowych przemiennika częstotliwości
Jeśli jest zainstalowany stycznik między zasilaniem a zaciskiem wejściowym przemiennika częstotliwości, stycznik ten nie powinien sterować uruchamianiem i zatrzymywaniem przemiennika. Jeśli wymaga się, by ten stycznik sterował uruchamianiem i zatrzymywaniem przemiennika, odstęp czasów nie powinien być krótszy niż jedna godzina. Częste ładowanie i rozładowywanie łatwo skróci żywotność kondensatora w przemienniku. Jeśli między zaciskiem wyjściowym a silnikiem są zainstalowane urządzenia przełączające, takie jak stycznik, należy zapewnić działanie przemiennika częstotliwości bez wyjścia, w przeciwnym razie może dojść do łatwego uszkodzenia modułu.
1.2.8 Stosowanie poza znamionową wartością napięcia
Nie należy używać przemiennika częstotliwości tej serii poza zakresem napięcia roboczego dozwolonego w instrukcji, w przeciwnym razie może dojść do uszkodzenia urządzenia. W razie potrzeby, do transformacji napięcia należy użyć odpowiedniego sprzętu zwiększającego lub obniżającego napięcie.
1.2.9 Zmiana wejścia trójfazowego na dwufazowe
Nie zmieniać trójfazowego przemiennika częstotliwości na dwufazowy, w przeciwnym razie może wystąpić usterka lub uszkodzenie.
1.2.10 Zabezpieczenie przed wyładowaniem atmosferycznym
W przemienniku częstotliwości znajduje się urządzenie zabezpieczające przed przepięciem spowodowanym uderzeniem pioruna, dzięki czemu ma on pewną zdolność samo-ochrony przed wyładowaniem indukcyjnym. W przypadku częstych uderzeń pioruna w lokalizacji klienta, konieczne jest dodatkowe zabezpieczenie umieszczone przed przemiennikiem.
1.2.11 Wysokość a obniżanie wartości znamionowych
W regionach o wysokości przekraczającej 1000 m, efekt rozpraszania ciepła przez przemiennik częstotliwości slabnie z powodu rozrzedzenia powietrza, dlatego konieczne jest obniżenie wartości znamionowych przed użyciem. Prosimy o kontakt z naszą firmą w celu konsultacji.
1.2.12 Silnik adaptacyjny
1) Standardowy silnik adaptacyjny to czterobiegunowy asynchroniczny silnik indukcyjny klatkowy. Należy wybrać przemiennik częstotliwości zgodnie z prądem znamionowym silnika.
2) Wentylator chłodzący i wrzeciono wirnika silnika o niezmiennej częstotliwości są połączeniem współosiowym. Jeśli prędkość obrotowa spadnie, efekt chłodzenia wentylatora zmniejszy się, dlatego w przypadku przegrzewania się silnika należy zainstalować silny wentylator wyciągowy lub zmienić silnik na silnik o zmiennej częstotliwości.
3) Standardowe parametry silnika adaptacyjnego zostały wbudowane w przemiennik częstotliwości. Konieczne jest zidentyfikowanie parametrów silnika lub zmodyfikowanie wartości domyślnej w oparciu o rzeczywistą sytuację, aby w miarę możliwości dostosować się do wartości rzeczywistej, w przeciwnym razie może to wpłynąć na funkcjonowanie i na działanie zabezpieczenia.
4) Zwarcie w przewodzie lub w silniku może prowadzić do alarmu, a nawet wybuchu przemiennika częstotliwości. Należy najpierw przeprowadzić test izolacji pod kątem zwarcia dla pierwszy raz zainstalowanego silnika i okablowania. Jest to również niezbędne przy codziennej konserwacji. Podczas przeprowadzania testu należy całkowicie oddzielić przemiennik od części testowanej.
Rozdział 2. Informacje o produkcie
2.1 Oznakowanie
2.2 Tabliczka znamionowa
KOD PASKOWY
Rys. 2 – 2 Tabliczka znamionowa
2.3 Przemiennik częstotliwości
Rysunek 2-1 Model i dane techniczne przemiennika częstotliwości
| Model przemiennika częstotliwości | Moc znamionowa (kVA) | Prąd wejścia (A) | Prąd wyjścia (A) | Silnik adapt. | |
| kW | KM | ||||
| Zasilanie trójfazowe: 380V, 50/60Hz | |||||
| 10061537 | 1.5 | 3.4 | 2.1 | 0.75 | 1 |
| 10061534 | 3.0 | 5.0 | 3.8 | 1.5 | 2 |
| 10061533 | 4.0 | 5.8 | 5.1 | 2.2 | 3 |
| 10061532 | 5.9 | 10.5 | 9.0 | 3.7 | 5 |
| 10061531 | 8.9 | 14.6 | 13.0 | 5.5 | 7.5 |
| 10061530 | 11.0 | 20.5 | 17.0 | 7.5 | 10 |
| 10061536 | 17.0 | 26.0 | 25.0 | 11.0 | 15 |
| 10061535 | 21.0 | 35.0 | 32.0 | 15.0 | 20 |
2.4 Dane techniczne
Tabela 2-2 Dane techniczne przemiennika częstotliwości
| Poz. | Wartości | ||
| Funkcje podsta-wowe | Częstotliwość najwyższa | Sterowanie wektorem: 0~300HzSterowanie U/f: 0~3200Hz | |
| Częstotliwość nośna | 0.5kHz~16kHzAutomatyczna regulacja częstotliwości nośnej na podstawie charakterystyki obciążenia | ||
| Rozdzielczość częstotliwości wejściowej | Ustawienia wartości: 0.01HzUstawienia symulacji: najwyższa częstotliwość ×0.025% | ||
| Tryb sterowania | SVCFVCSterowanie U/f | ||
| Moment rozruchowy | Maszyna typu G: 0.5Hz/150% (SVC); 0Hz/180% (FVC)Maszyna typu P: 0.5Hz/100% | ||
| Zakres regulacji prędkości | 1: 100 (SVC) | 1: 1000 (FVC) | |
| Dokładność stabilizacji prędkości | ±0.5% (SVC) | ±0.02% (FVC) | |
| Dokładność kontroli momentu obrotowego | ±5% (FVC) | ||
| Zdolność przeciążeniowa | Maszyna typu G: 150% prądu znam. przy 60s; 180% prądu znam. przy 3sMaszyna typu P: 120% prądu znam. przy 60s; 150% prądu znam. przy 3s | ||
| Promocja momentu obrotowego | Automatyczna promocja momentu obrotowego; ręczny moment obrotowy zwiększa się o 0,1% ~ 30,0% | ||
| Krzywa U/f | Trzy możliwości: typ liniowy; typ wielopunktowy; krzywa U/f typu mocy N-tej (moc 1,2, moc 1,4, moc 1,6, moc 1,8, moc 2) | ||
| Separacja U/f | 2 możliwości: pełna separacja, pół-separacja | ||
| Krzywe przyspieszania / zwalniania | Sposób przyspieszania / zatrzymywania liniowy lub krzywa S. Cztery rodzaje czasu przyspieszania / zwalniania. Zakres czasu przyspieszania / zwalniania: 0,0 ~ 6500,0 s | ||
| Hamowanie DC | Częstotliwość hamowania DC: 0.00Hz~maksymalna częstotliwość; czas hamowania: 0,0 s ~ 36,0 s działania hamującego; wielkość prądu: 0,0% ~ 100,0% | ||
| Sterowanie krokowe | Zakres częstotliwości krokowej: 0,00 Hz ~ 50,00 Hz; Czas przyspieszania / zwalniania krokowego 0,0 s ~ 6500,0 s | ||
| Prosty sterownik PLC, prędkość wielokrokowa | Realizuje 16 prędkości krokowych za pomocą wbudowanego sterownika PLC lub zacisku sterowania. | ||
| Wbudowany PID | Łatwe do zrealizowania sterowanie procesem, system sterowania w pętli zamkniętej | ||
| Automatyczna regulacja napięcia | Utrzymuje stałe napięcie wyjściowe automatycznie w przypadku jakiekolwiek zmiany napięcia w sieci | ||
| Przepięcie, przetężenie, kontrola utyku silnika | Automatyczne ograniczanie prądu / napięcia podczas pracy, zapobieganie częstym wyłączeniom spowodowanym przez przetężenie i przepięcie | ||
| Szybka funkcja ograniczenia prądu | Zmniejsza błąd przetężenia, chroni normalną pracę przemiennika. | ||
| Ograniczenie i kontrola momentu obrotowego | Znak „Nawy” ogranicza moment obrotowy podczas pracy, zapobiega częstym wyłączeniom wskutek przetężenia, tryb wektorowy w pętli zamkniętej może realizować sterowanie momentem obrotowym. | ||
| Poz. Wartości | ||
| Zindywidualizowane funkcje | Doskonała wydajność | Realizacja sterowania silnikiem dzięki wysokowydajnemu sterowaniu wektorem prądu |
| Działa przy krótkim zaniku napięcia | Redukcja napięcia jest kompensowana przez energię sprężenia zwrotnego obciążenia w przypadku chwilowego braku prądu, utrzymywanie ciągłej pracy przemiennika częstotliwości przez krótki czas. | |
| Szybkie ograniczenie prądu | Unikanie częstych błędów przetężenia falownika. | |
| Kontrola czasu | Funkcja kontroli czasu: ustawianie czasu w zakresie 0,0 min ~ 6500,0 min | |
| Przełącznik wielosilnikowy | 2 zestawy parametrów silnika umożliwiają sterowanie przełączaniem 2 silników | |
| Magistrala wielowątkowa | Obsługa dwóch rodzajów magistrali polowej typu spot: R S -4 8 5, C A N li n k | |
| Ochrona przed przegrzaniem | Opcjonalna karta wielofunkcyjna, wejście analogowe A13 może odbierać sygnał czujnika temperatury silnika (PT100, PT1000) | |
| Multi enkoder | Obsługuje różne enkodery, takie jak różnicowy, otwarty kolektor i transformator obrotowy | |
| Programowalne przez użytkowników | Opcjonalna karta programowalna przez użytkownika umożliwia opracowania wtórne. | |
| Potężne oprogramowanie działające w tle | Obsługa parametrów pracy i wirtualnego oscyloskopu. Realizacja graficznego monitorowania stanu wewnętrznego przemiennika częstotliwości poprzez wirtualny oscyloskop. | |
| Zaciski | Źródło poleceń | Dany panel operatorski, dany zacisk sterujący, dany port komunikacji szeregowej. Przełączanie na wiele sposobów |
| Źródło częstotliwości | 10 źródeł częstotliwości: dana cyfra, dane napięcie analogowe, dany prąd analogowy, dany impuls, dany port szeregowy. Przełączanie na wiele sposobów. | |
| Pomocnicze źródło częstotliwości | 10 pomocniczych źródeł częstotliwości. Elastyczna realizacja dostrajania pomocniczej częstotliwości i synteza częstotliwości | |
| Zaciski wejściowe | Standard:5 cyfrowych zacisków wejściowych, z których 1 obsługuje szybkie wejście impulsowe o częstotliwości 100 Hz,2 analogowe zaciski wejściowe, z których 1 obsługuje wejście napięciowe 0 ~ 10 V, 1 obsługuje napięcie 0 ~ 10 V lub wejście prądowe 4 ~ 20 mAMożliwość rozbudowy o:5 cyfrowych zacisków wejściowych1 analogowy zacisk wejściowy obsługujący napięcie 0 ~ 10 V. | |
| Zaciski wyjściowe | Standard:1 szybki zacisk wyjściowy impulsu (otwarty kolektor jest opcjonalny), obsługuje kwadratowy sygnał wyjściowy 0 ~ 100 kHz1 zacisk wyjścia cyfrowego1 zacisk wyjścia przekaźnikowego1 zacisk wyjścia analogowego obsługuje wejście prądowe 0 ÷ 20 mA lub napięcie 0 ÷ 10 V.Możliwość rozbudowy o:1 zacisk wyjścia cyfrowego1 zacisk wyjścia przekaźnikowego1 zacisk wyjścia analogowego obsługujący wejście prądowe 0 ÷ 20 mA lub napięcie 0 ~ 10 V. | |
| Poz. Wartości | ||
| Obsługawyświetlacza iklawiatury | Wyświetlacz LED | Parametry wyświetlania |
| Blokada klawiszy i wybór funkcji | Częściowe lub całkowite blokowanie klawiszy, określanie zakresu funkcjiniektorych klawiszy, aby zapobiec błędnemu użyciu. | |
| Funkcja ochrony | Wykrywanie zwarcia silnika po włączeniu, domyślna ochrona faz wejścia / wyjścia,zabezpieczenie nadprądowe, zabezpieczenie nadnapięciowe, zabezpieczeniepodnapięciowe, zabezpieczenie przed przegrzaniem, zabezpieczenie przedprzeciążeniem. | |
| Akcesoriaopcjonalne | Panel operatorski LCD, jednostka hamująca, wielofunkcyjna karta rozszerzeń, kartarozszerzeń IO (we/wy), karta komunikacyjna RS485, karta komunikacyjna CANlink,karta PG z wejściem różnicowym, karta PG transformatora obrotowego, karta PG zwejściem OC. | |
| Środowiskodziałania | Miejsceużytkowania | We wnętrzach bez bezpośredniego światła słonecznego, kurzu, gazów korozyjnych, gazówpalnych, mgły olejowej, pary wodnej, kapiącej wody lub zasolenia. |
| Wysokość | < 1,000m | |
| Temperaturaotoczenia | -10^ +40^ (przy temperaturze otoczenia 40^ 50^ , należy ją obniżyć, aby móc posługiwać się urządzeniem) | |
| Wilgotność | < 95%RH, bez skroplin | |
| Drgania | < 5.9m/s (0.6g) | |
| Temperaturaprzechowywania | -20^ +60^ | |
2.5.1 Rysunek zewnętrzny
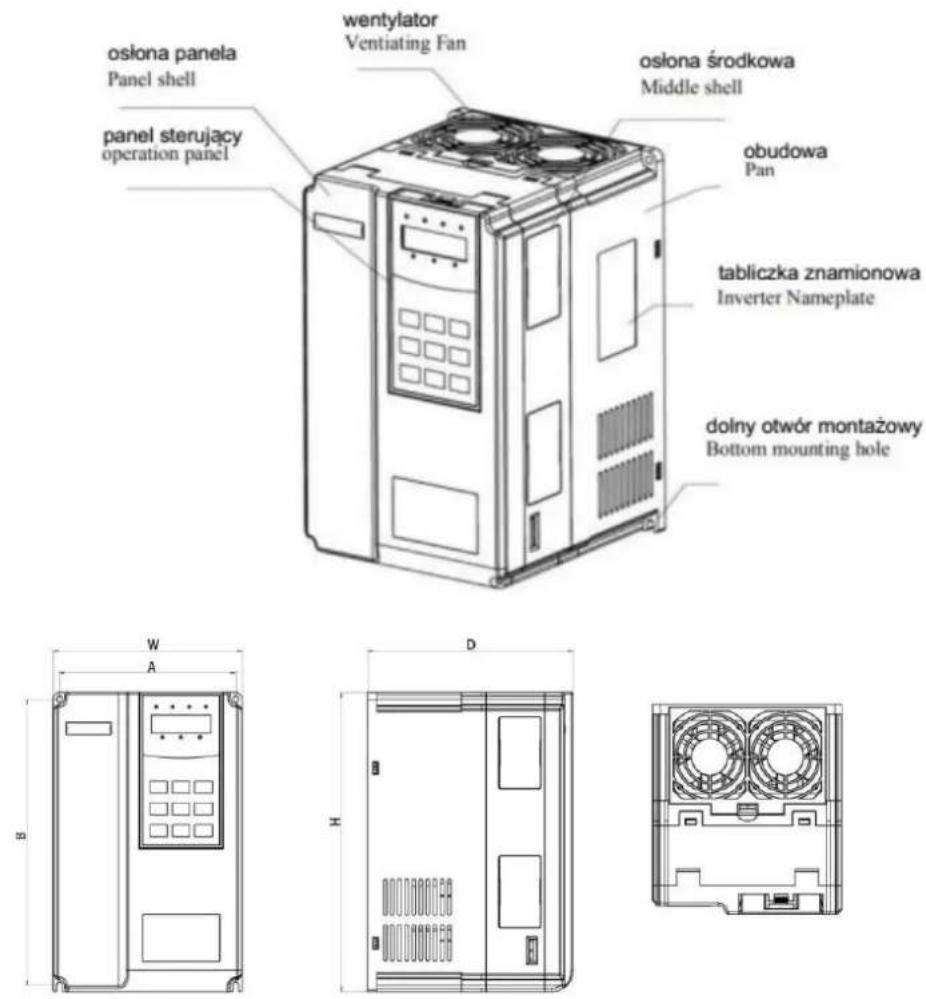
Rysunek 2-4 Rysunek schematyczny wymiarów zewnętrznych i montażowych elementów z tworzywa sztucznego

Rysunek 2-5 Rysunek schematyczny wymiarów zewnętrznych i montażowych elementów metalowych
Obudowy modeli są następujące:
Parametry techniczne wysokosprawnego przemiennika częstotliwości
| Model | Typ obudowy |
| Jednofazowy 220V | |
| 0.4kW~2.2kW | Obudowa plastikowa |
| Trójfazowy 220V | |
| 0.4kW~7.5kW | Obudowa plastikowa |
| 11kW~75kW | Obudowa metalowa |
| Trójfazowy 380V | |
| 0.75kW~15kW | Obudowa plastikowa |
| 18.5kW~400kW | Obudowa metalowa |
2.5.2 Do rysunku 2-3 Wymiary otworów montażowych (mm) przemiennika częstotliwości
| Model przemiennika częstotliwości | Otwór montażowy (mm) | Wymiar zewnętrzny (mm) | Średnica otworu | Masa (kg) | |||
| A | B | H | W | D | |||
| 10061537 | 114 172 | 186 125 | 159 | 5.0 | 1.7 | ||
| 10061534 | |||||||
| 10061533 | |||||||
| 10061532 | 149 237 | 218 160 | 174 | 5.0 | 3.2 | ||
| 10061531 | |||||||
| 10061530 | |||||||
| 10061536 | 190 305 | 322 208 | 192 | 6.0 | 6.5 | ||
| 10061535 | |||||||
2.5.3 Wymiary zewnętrzne panelu wyświetlacza
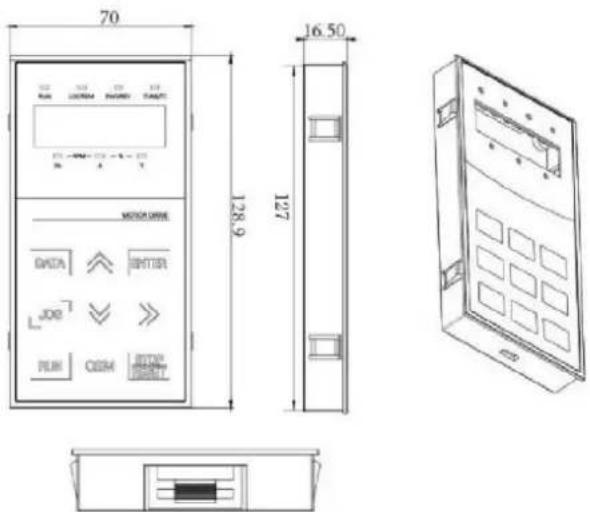
Rysunek 2-6 Zewnętrzne wymiary panelu wyświetlacza
Rozmiar otworów w panelu wyświetlacza:
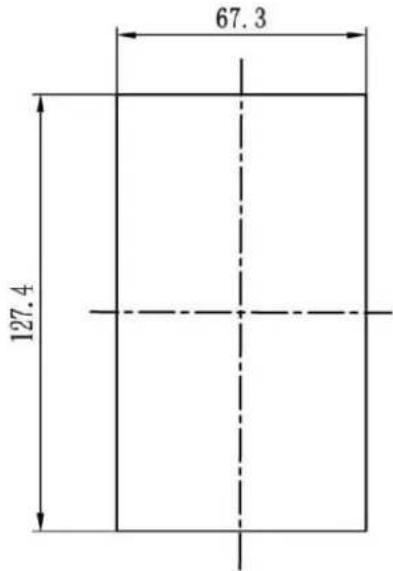
Rysunek 2-7 Rozmiar otworów w panelu wyświetlacza
2.5.4 Rysunek wymiarowy zewnętrznego dławika DC
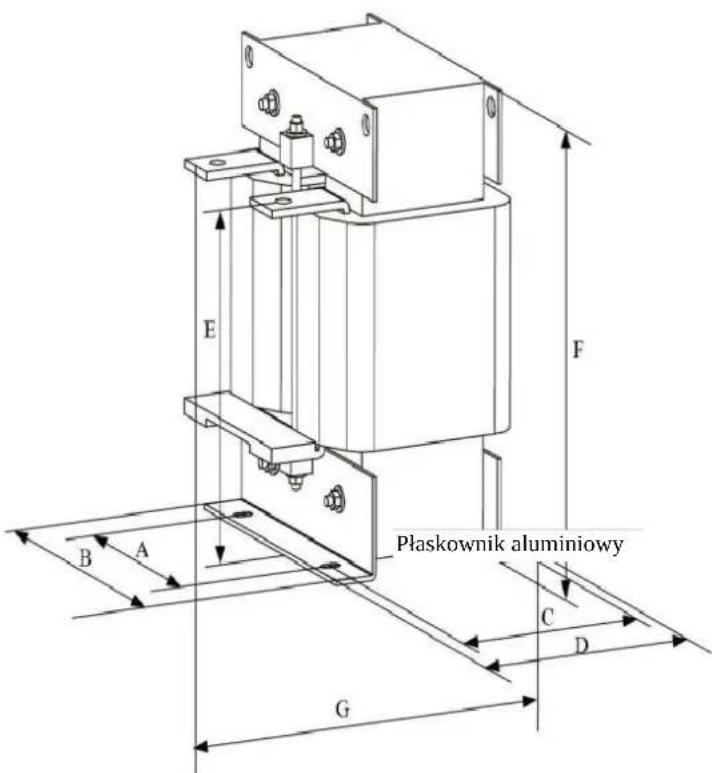
Rysunek 2-8 Rysunek wymiarowy zewnętrznego dławika DC
Uwaga: można dopasować niestandardowe elementy, jeśli występują specjalne wymagania.
Sposób instalacji zewnętrznego dławika DC: podczas instalowania przemiennika częstotliwości użytkownicy muszą usunąć zwore - miedzianą szynę między zaciskiem okablowania P1 i (+) głównej pętli, podłączyć dławik DC między P1 i (+). Uwaga na biegunowość przewodów między zaciskiem reaktora i zaciskiem przemiennika P1, (+). Po zainstalowaniu dławika DC, szyna miedziana między P1 i (+) nie jest z powrotem konieczna.
2.6 Akcesoria opcjonalne
Tabela 2-6 Akcesoria przemiennika częstotliwości
| Nazwa | Model | Funkcja | Uwagi |
| Zewnętrzna jednostka hamująca | SNBU | 18,5 kW i powyżej zewnętrznej jednostki hamowania | Od 75kW wzwyz przyjmuje połączenie multi-równoległe |
| Wielofunkcyjna karta rozszerzeń | IO-MINI-V03 | Dodaje wejście pięciocyfrowe i jedno analogowe wejście napięciowe. AI3 to izolowana wielkość analogowa, która może łączyć się z PT100 i PT1000; jedno wyjście przekaźnikowe, jedno wyjście cyfrowe i jedno analogowe wyjście napięciowe z RS485 / CAN | Nadaje się do modeli o mocy 3,7 kW i więcej |
| Karta rozszerzeń I/O (we / wy) | IO1 | Dodaje wejście trzycyfrowe | Pasuje do całej serii |
| Karta komunikacyjna MODBUS | RS485 | Z izolującą kartą komunikacyjną RS-485 | Pasuje do całej serii |
| Karta rozszerzeń komunikacyjnych CANlink | CANLINK-V03 | Karta adaptera komunikacyjnego CANlink | Pasuje do całej serii |
| Karta interfejsu enkodera różnicowego | PG1 | Karta interfejsu różnicowego enkodera obrotowego, przystosowana do źródła zasilania 5V | Pasuje do całej serii |
| Karta interfejsu transformatora obrotowego | PG2 | Nadaje się do enkodera obrotowego, częstotliwość napędu 10 kHz, interfejs DB9 | Pasuje do całej serii |
| Karta interfejsu enkodera z otwartym kolektorem | PG3 | Karta interfejsu enkodera z otwartym kolektorem z dzieleniem częstotliwości wyjściowej 1: 1, adaptacyjna dla źródła zasilania 15 V. | Pasuje do całej serii |
| Pulpit sterowniczy LED | SNKE | Wyświetlacz LED i klawiatura operatora | Pasuje do całej serii SN |
| Przedłużacz | SNCAB | Przedłużacz | W konfiguracji standardowej ma długość 3 metry |
2.7 Rutynowa konserwacja przemiennika częstotliwości
2.7.1 Rutynowa konserwacja
Wpływ temperatury otoczenia, wilgotności, kurzu i drgań prowadzi do starzenia się elementów wewnętrznych i potencjalnych usterek i skraca żywotność przemiennika częstotliwości, dlatego konieczne jest przeprowadzanie rutynowej i regularnej konserwacji.
Elementy rutynowej kontroli:
1) w przypadku nienormalnej zmiany dźwięku podczas pracy silnika;
2) w przypadku drgań podczas pracy silnika
3) w przypadku zmiany środowiska zainstalowania przemiennika częstotliwości
4) w przypadku nienormalnej pracy wentylatora chłodzącego przemiennik częstotliwości
5) w przypadku przegrzania przemiennika częstotliwości
2.7.2 Regularne przeglądy, regularne kontrole:
1) Sprawdzać i regularnie czyścić kanał powietrza.
2) Sprawdzać, czy nie nastąpiło poluzowanie śrub.
3) Sprawdzać, czy nie ma śladów działania łuku elektrycznego na zaciskach przewodów
2.7.3 Przechowywanie przemiennika częstotliwości
Po zakupie przemiennika częstotliwości użytkownicy powinni o niego zadbać w przypadku tymczasowego i długoterminowego przechowywania:
-
Umieścić w oryginalnym opakowaniu naszej firmy.
-
Długotrwałe przechowywanie doprowadzi do pogorszenia stanu kondensatora elektrolitycznego. Zapewnić włączenie na co najmniej
5 godzin w ciągu 2 lat i należy użyć regulatora napięcia w celu stopniowego zwiększenia napięcia wejściowego do wartości znamionowej.
Bezpłatna konserwacja dotyczy tylko przemiennika częstotliwości. W przypadku jakichkolwick usterek lub uszkodzeń podczas normalnego użytkowania nasza firma jest odpowiedzialna za naprawę przez 18 miesięcy (od daty opuszczenia fabryki przez wyrób i daty kodu kreskowego na urządzeniu). Po przekroczeniu 18 miesięcy, będzie naliczana opłata za naprawę. Nawet w ciągu pierwszych 18 miesięcy zostanic naliczona opłata za: uszkodzenie urządzenia spowodowane naruszeniem postanowień instrukeji, szkody spowodowane pożarem, powodzią, nieprawidłowym napięciem itp., uszkodzenia spowodowane użyciem przemiennika częstotliwości do nienormalnych zastosowań. Odnośna opłata za usługę zostanie naliczona zgodnie z ujednoliconym cennikiem producenta. Jeśli istnieje jakakolwiek umowa, która stanowi inaczej, umowa ta ma pierwszeństwo.
2.9 Wskazówki dotyczące wyboru modelu części hamujących
Tabela 2-7 przedstawia wytyczne. Użytkownicy mogą wybierać różne wartości rezystancji i moc w oparciu o rzeczywistą sytuację (jednak wartość rezystancji nie powinna być niższa niż wartość zalecana w tabeli, moc może być duża). Wybór rezystora hamowania zależy od mocy silnika w rzeczywistym zastosowanym układzie i jest związany z bezwładnością układu, czasem zatrzymywania i potencjalnym obciążeniem energią, więc użytkownicy powinni wybierać na podstawie istniejącej sytuacji. Im większa bezwładność układu, tym krótszy będzie czas hamowania i jego częstotliwość, dlatego rezystor hamowania powinien mieć dużą moc i małą wartość oporu.
2.9.1 Wybór wartości oporu
Podczas hamowania energia odzyskana z silnika jest prawie w całości zużywana na opór hamowania. Oto wzór: U * U / R = Pb U - napięcie hamowania stabilnego (różni się w zależności od układu, zwykle 700 V)
Pb - siła hamowania
2.9.2 Wybór mocy rezystora hamowania
Teoretycznie moc rezystora hamowania jest zgodna z siłą hamowania.
Można zastosować obniżenie do 70%.
Wzór: 0,7 * Pr = Pb * D gdzie
Pr - moc rezystora; D - częstotliwość hamowania (udział w całym procesie podczas odzysku) winda - 20% \~ 30%,
odwijak / nawijak - 20 \~ 30%,
wirówka - 50% \~ 60%
przypadkowe obciążenie hamowania - 5%
ogólnie 10%
Rys. 2-7 Wybór elementów hamujących zależnie od modelu
| Model przemien-nika częstotliwości | Zalecana moc | Zalecana wartość rezystancji | Jednostka hamująca | Uwagi |
| 10061537 150W ≥ 300 | Wbudowana stan-dardowo | Brak szczególnych wskazówek | ||
| 10061534 150W ≥ 220 | ||||
| 10061533 | 250W ≥ 200 | |||
| 10061532 | 300W ≥ 130 | |||
| 10061531 | 400W ≥ 90 | |||
| 10061530 | 500W | ≥ 65 | ||
| 10061536 | 800W ≥ 43 | |||
| 10061535 | 1000W | ≥ 32 |
Rozdział 3 Instalacja mechaniczna i elektryczna
3.1 Instalacja mechaniczna
3.1.1 Środowisko instalacji:
1) Temperatura otoczenia: temperatura otoczenia ma duży wpływ na żywotność przemiennika częstotliwości, dlatego temperatura otoczenia podczas pracy przemiennika częstotliwości nie może przekraczać zakresu (-10 °C \~ 50 °C).
2) Umieścić przemiennik częstotliwości na powierzchni słabo palnej i pozostawić wystarczająco dużo miejsca wokół na rozpraszanie się ciepła. Podczas pracy przemiennika wytwarza się dużo ciepła. Zainstalować pionowo na wsporniku montażowym za pomocą śruby.
3) Zainstalować w miejscu o słabych drganiach <0,6 G. Nie narażać na uderzenia.
4) Unikać montażu w miejscu narażonym na bezpośrednie działanie promieni słonecznych, wilgoci, kapiącej wody itp.
5) Unikać instalowania w miejscach gdzie w powietrzu znajduje się gaz korozyjny, łatwopalny i wybuchowy.
6) Unikać instalowania w miejscu gdzie występują plamy oleju, kurz i pył metalowy.
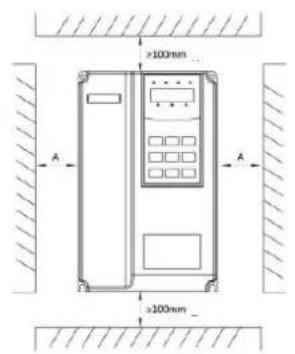
Montaż od góry i od dołu
Rysunek 3-1 Schemat instalacji przemiennika częstotliwości
Montaż korpusu: Wymiar ten nie musi być brany pod uwagę, jeśli moc przemiennika częstotliwości wynosi ≤22kW. Powinien natomiast wynosić > 50 mm, jeśli moc przemiennika częstotliwości wynosi > 22 kW. Montaż od góry i od dołu: należy zainstalować płytę do izolacji termicznej zgodnie z rysunkiem.
| Moc | Wymiar instalacyjny | |
| B | A | |
| ≤15kW ≥100mm | brak wymagań | |
| 18.5kW - 30kW | ≥200mm | ≥50mm |
| ≥37kW ≥300mm | ≥50mm | |
3.1.2 Przy montażu mechanicznym należy uwzględnić rozpraszanie ciepła. Wziąć pod uwagę mieszki:
1) Zamontować przemiennik częstotliwości pionowo, aby ciepło mogło rozpraszać się w górę, odwracanie zabronione. Jeśli w szafie znajduje się wiele przemienników, sugeruje się zainstalowanie ich obok siebie. W przypadkach wymagających montażu od góry i od dołu, należy zainstalować płytę izolacji termicznej zgodnie z rysunkiem 3-1.
2) Przestrzeń montażową przedstawiono na rysunku 3-1 uwzględniając zapewnienie przestrzeni do rozpraszania ciepła przemiennika. Należy wziąć pod uwagę rozpraszanic ciepła innych elementów w szafie.
3) Wspornik montażowy powinien być materiałem o słabej palności.
4) W przypadku obecności pyłu metalowego sugerujemy zainstalowanie grzejnika poza szafą. Przestrzeń w całkowicie uszczelnionej szafie powinna być jak największa.
3.1.3 Demontaż i montaż dolnej pokrywy
Przemiennik częstotliwości <18,5 kW ma obudowę z tworzywa sztucznego. Demontaż dolnej osłony obudowy z tworzywa sztucznego przedstawia rysunek 3-2, 3-3. Wypechnąć od wewnątrz zaczep dolnej płyty osłonowej za pomocą narzędzia.
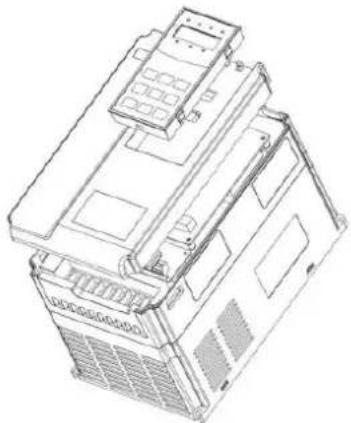
Rysunek 3-2 Rysunek demontażowy dolnej pokrywy obudowy z tworzywa sztucznego
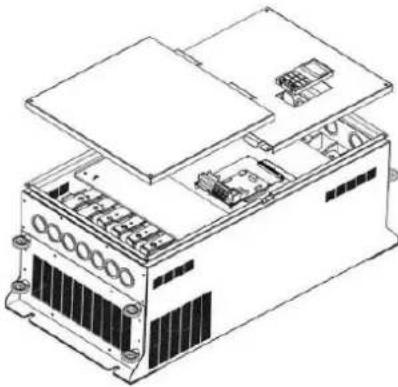
Rysunek 3-3 Rysunek demontażowy dolnej pokrywy obudowy z blachy
Przemiennik częstotliwości > 18,5 kW ma obudowę z blachy. Demontaż dolnej pokrywy metalowej przedstawia rysunek 3-3. Odkręcić śrubę dolnej pokrywy za pomocą narzędzia.
| Niebezpieczeństwo | |
| Podczas demontażu dolnej płyty osłonowej uważać by nie upadła powodując obrażenia ciała lub uszkodzenie urządzenia. |
3.2 Instalacja elektryczna
3.2.1 Wskazówki dotyczące wyboru modelu peryferyjnych elementów elektrycznych.
Tabela 3-1 Wskazówki dotyczące wyboru modelu peryferyjnych elementów elektrycznych dla przemiennika częstotliwości
| Model przemiennika częstotliwość | (MCCB) A | Zalecany stycznik A | Przewody głównego obwodu po stronie wejściowej, mm^2 | Przewody głównego obwodu po stronie wyjściowej, mm^2 | Zalecane przewody obwodu sterowania, mm^2 |
| Trzy fazy 380V | |||||
| 10061537 | 10 | 10 | 2.5 | 2.5 | 1.0 |
| 10061534 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061533 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061532 | 25 | 16 | 4.0 | 4.0 | 1.0 |
| 10061531 | 32 | 25 | 4.0 | 4.0 | 1.0 |
| 10061530 | 40 | 32 | 4.0 | 4.0 | 1.0 |
| 10061536 | 63 | 40 | 4.0 | 4.0 | 1.0 |
| 10061535 | 63 | 40 | 6.0 | 6.0 | 1.0 |
3.2.2 Wskazówki dotyczące peryferyjnych elementów elektrycznych
Tabela 3-2 Wskazówki dotyczące peryferyjnych elementów elektrycznych przemiennika częstotliwości
| Nazwa części Miejsce instalacji Funkcja | |
| Przelącznik powietrza | Przed obwodem wejściowym |
| Stycznik | Od strony wejściowej przelącznika powietrza i przemiennika |
| Dławik wejściowy AC | Od strony wejściowej przemiennika |
| Filtr wejściowy EMC | Od strony wejściowej przemiennika |
| Dławik DC | Od strony szyny DC przemiennika | Promowanie współczynnika mocy po stronie wejściowej; zwiększanie wydajności i stabilności cieplnej przemiennika. Eliminacja wpływu wyższych harmonicznych po stronie wejściowej przemiennika, zmniejszanie przewodnictwa zewnętrznego i zakłóceń. |
| Dławik wyjściowy AC | Między wyjściem przemiennika a silnikiem. Instalować w pobliżu przemiennika częstotliwości | Strona wyjściowa przemiennika zawiera znacznie wyższe harmoniczne. Jeśli silnik jest daleko od przemiennika, w obwodzie występuje dużo rozproszonej pojemności. Pewne harmoniczne mogą powodować rezonans w obwodzie, który uszkadza właściwości izolacyjne silnika a nawet silnik, wytwarza duży prąd upływowy i powoduje często zabezpieczanie przemiennika. Jeśli odległość między przemiennikiem a silnikiem ogólnie przekracza 50 m, sugeruje się zainstalowanie wyjściowego dławika AC. |
3.2.3 Sposób okablowania
Schemat połączeń przemiennika częstotliwości:
Uwaga:
1) Ⓞ dotyczy zacisku obwodu głównego, ⚙ dotyczy zacisku pętli sterującej.
2) Rezystor hamujący należy dobrać na podstawie wymagań użytkownika, więcej szczegółów znajduje się w wytycznych dotyczących wyboru modelu rezystora hamującego.
3.2.4 Zaciski i okablowanie obwodu głównego
1) Opis zacisków obwodu głównego jednofazowego przemiennika częstotliwości
| Oznakowanie zacisku Nazwa Opis | ||
| L1, L2 | Zacisk wejściowy zasilania jednofazowego | Punkt zasilania jednofazowego 220V AC |
| (+), (-) | Zaciski dodatnie / ujemne szyny DC | Punkt wejściowy szyny DC |
| (+), PB | Zacisk przyłączeniowy rezystora hamowania | Podłączenie rezystora hamowania |
| U, V, W | Zacisk wyjściowy przemiennika | Podłączenie silnika trójfazowego |
| PE\ | Zacisk uziemiający Zacisk uziemiający | |
2) Opis zacisków obwodu głównego trójfazowego przemiennika częstotliwości
| Oznakowanie zacisku | Nazwa | Opis |
| R、S、T | Zacisk wejściowy zasilania trójfazowego | Punkt podłączenia trójfazowej mocy wejściowej AC |
| (+), (-) | Zaciski dodatnie / ujemne szyny DC | Punkt wejściowy szyny DC i jednostki hamowania |
| (+), PB | Zacisk przyłączeniowy rezystora hamowania | Podłączenie rezystora hamowania |
| P1, (+) | Zacisk przyłączeniowy zewnętrznego dławika DC | Punkt podłączenia zewnętrznego dławika DC |
| U, V, W | Zacisk wyjściowy przemiennika | Podłączenie silnika trójfazowego |
| PE | Zacisk uziemiający | Zacisk uziemiający |
Ostrzeżenia dotyczące okablowania:
a) Moc wejściowa L1, L2 lub R, S, T:
b) Okablowanie po stronie wejściowej przemiennika nie wymaga kolejności faz. Środki ostrożności dotyczące okablowania:
1: (+) (-) zaciski szyny DC: występuje napięcie resztkowe na szynie DC (+) (-) bezpośrednio po wyłączeniu. Odczekać do zgaśnięcia lampki CHARGE i potwierdzenia, że jest <36V, w przeciwnym razie istnieje ryzyko porażenia prądem.
2: Wybierając zewnętrzny element hamujący, należy unikać odwrotnego podłączenia biegunowości (+) (-), w przeciwnym razie doprowadzi to do uszkodzenia przemicennika częstotliwości, a nawet pożaru.
3: Długość kabli jednostki hamującej nie powinna przekraczać 10 m. Do połączenia równoległego należy użyć skrętki lub szczelnego przewodu podwójnego. Nie podłącać rezystora hamowania bezpośrednio do szyny DC, w przeciwnym razie doprowadzi to do uszkodzenia przemiennika częstotliwości, a nawet pożaru.
c) Zacisk przyłączeniowy (+), PB rezystora hamowania:
Sprawdzić model wbudowanej jednostki hamującej i zacisk przyłączeniowy rezystora hamowania. Wybór modelu rezystora hamowania powinien odpowiadać zaleceanej wartości a odległość między przewodami powinna wynosić <5 m, w przeciwnym razie przemiennik częstotliwości może zostać uszkodzony.
d) Zacisk przyłączeniowy P1, (+) zewnętrznego dławika DC
W przypadku przemiennika częstotliwości powyżej 220V37KW i 380V75kW, pasek łączący między zaciskami P1 i (+) należy usunąć podczas zewnętrznej instalacji dławika DC i podłączyć dławik DC między dwoma zaciskami.
e) U, V, W po stronie wyjściowej przemiennika częstotliwości: po stronie wyjściowej przemiennika częstotliwości nie podłącać kondensatora ani tłumika przepięć, w przeciwnym razic doprowadzi to do częstego zabezpieczania, a nawet uszkodzenia przetwornika. Zc względu na wpływ rozproszonej pojemności, jeśli kabel silnika jest zbyt długi, łatwo powstanie rezonans elektryczny, który uszkodzi izolacje silnika lub wytworzy dużo prąd upływu i spowoduje częste zabezpieczanie przemiennika. Jeśli kabel silnika ma >100 m, należy zainstalować dławik wejściowy AC.
f) Zacisk uziemiający PE
W przypadku różnych modeli, oznaczenie zacisku uziemiającego może być inne, ale znaczenie jest takie samo. W powyższych opisach ( ) oznacza, że oznakowanie uziemienia to PE lub ( )
Należy utrzymywać niezawodne uziemienie zacisku uziemiającego, a opór przewodu uziemiającego powinien wynosić <0,1 Ω, w przeciwnym razie doprowadzi to do nieprawidłowej pracy, a nawet uszkodzenia urządzenia. Nie używać razem zacisku uziemiającego PE lub 3-N na tym samym przewodzie uziemienia.
3.2.5 Zacisk sterujący i okablowanie
1) Schemat rozmieszczenia zacisków w obwodzie sterującym jest następujący: (Uwaga: nie ma paska zwarciowego między CME a COM, OP i +24V przemiennika częstotliwości. Użytkownicy wybierają sposób okablowania CME i OP odpowiednio poprzez J10, J9).

Rys. 3-5 Schemat rozmieszczenia zacisków w obwodzie sterującym
2) Opis funkcjonalny zacisków sterujących
Tabela 3-3 Opis funkcjonalny zacisków sterujących przemiennika częstotliwości.
| Typ | Symbolzacisku | Nazwa zacisku | Funkcja |
| Zasilanic | +10V-GND | Podłączenie zasilania zewnętrznego + 10V | Umożliwia zasilanie zewnętrzne + 10 V, maks. prąd wyjściowy: 10mA.Powszechnie używane jako zasilanie robocze zewnętrznego potencjometru, zakres wartości rezystancji potencjometru: 1 kΩ ~ 5 kΩ. |
| +24V-COM | Podłączenie zasilania zewnętrznego + 24V | Umożliwia zasilanie zewnętrzne + 24 V, używane jako zasilanie robocze cyfrowego zacisku wejścia / wyjścia i zasilanie czujnika zewnętrznego. Maks. prąd wyjściowy: 200mA. | |
| OP | Zacisk wejściowy zasilania zewnętrznego | Podłączyć +24 V lub COM poprzcz zworę J9 na panclu sterowania. Jeśli używa się zewnętrznego sygnału do napędu D11 ~ D15, OP musi być połączone z zewnętrznym zasilaniem i należy wyciągnąć zworę J9. | |
| Wejście analogowe | AI1-GND | Zacisk wejścia analogowego 1 | 1. Zakres napięcia wejściowego: DC 0 V ~ 10 V.2. Impedancja wejściowa: 22kΩ |
| AI2-GND | Zacisk wejścia analogowego 2 | 1. Zakres wejściowy: DC 0 V ~ 10 V / 4 mA ~ 20 mA, w zależności od zwory J8 na panelu sterowania2. Impedancja wejściowa: 22kΩ dla wejścia napięciowego, 500Ω dla wejścia prądowego. |
| Typ | Symbolzacisku | Nazwazacisku | Funkcja |
| Wejściecyfrowe | DI1- OP | Wejście cyfrowe 1 | 1. Izolowane sprzęenie optyczne, kompatybilne z wejściem bipolarnym2. Impedancja wejściowa: 2,4 kΩ3. Zakres napięcia dla wejścia poziomu: 9 V ~ 30 V. |
| DI2- OP | Wejście cyfrowe 2 | ||
| DI3- OP | Wejście cyfrowe 3 | ||
| DI4- OP | Wejście cyfrowe 4 | ||
| DI5- OP | Szybkie wejście impulsowe | Oprócz funkcji DI1 ~ DI4, może to być kanał wejścia impulsowego o dużej szybkości. Maks. częstotliwość wejściowa: 100 kHz | |
| Wyjścieanalogowe | AO1-GND | Wyjścieanalogowe 1 | Zwora J5 na panelu sterowania decyduje o wyjściu napięciowym lub prądowym.Zakres napięcia wyjściowego: 0 V ~ 10 V.Zakres prądu wyjściowego: 0mA ~ 20mA |
| Wyjściecyfrowe | DO1-CME | Wyjście cyfrowe 1 | Izolowane sprzęcenie optyczne, bipolarne wyjście typu otwarty kolektorZakres napięcia wyjściowego: 0 V ~ 24 V; zakres prądu wyjściowego: 0mA ~ 50mA Uwaga: wyjście cyfrowe CME i wejście cyfrowe COM są wewnętrznie izolowane, ale zwarcie CME i COM realizowane jest przez zworę J10 na panelu sterującym (DO1 to domyślnie napęd +24 V).Jeśli DO1 wymaga zewnętrznego zasilania, wyciągnąć zworę J10. |
| FM- CME | Szybkie wyjście impulsowe | Jest ograniczane przez kod funkcji F5-00 „wybór sposobu wyjścia terminala FM”.Jako szybkie wyjście impulsowe, maks. częstotliwość wynosi 100 kHz.Jako wyjście z otwartym kolektorem jest zgodne ze specyfikacją DO1. | |
| Wyjścieprzekaznikowe | T/A-T/B | Zacisk normalnie zamknięty | Zdolność styku:AC250V, 3A, COSr = 0,4 DC 30V, 1A |
| T/A-T/C | Zacisk normalnie otwarty |
3) Opis funkcjonalny zwór i zacisków pomocniczych
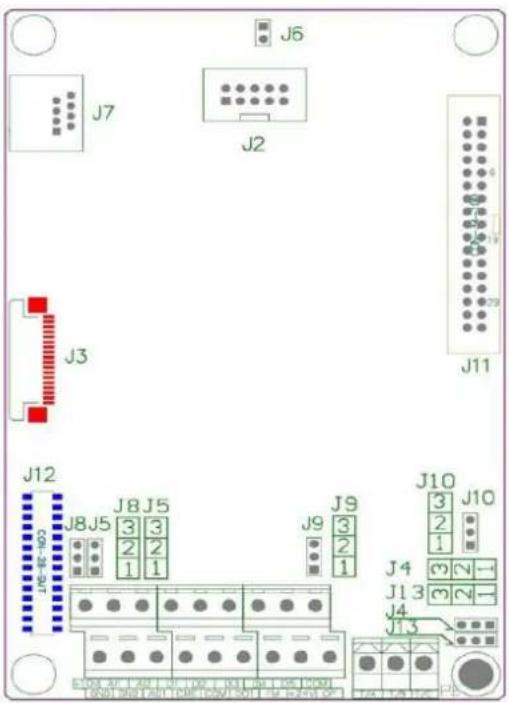
Rysunek 3-6 Schemat lokalizacji zwór i zacisków pomocniczych
Tabela 3-4 Opis funkcjonalny zwór i zacisków pomocniczych dla przemiennika częstotliwości
| Oznakowanie zwór | Nazwa | Opis | |
| Zacisk pomo-cniczy | J12 | Wielofunkcyjny port kart rozszerzeń | 28-żyłowe złącze do kart opcjonalnych (karta rozszerzeń we / wy, karta PLC, różne karty magistrali itp.) |
| J3 | Port karty PG | Opcje: OC, różnicowy transformator obrotowy itp | |
| J7 | Port klawiatury zewnętrznej | Klawiatura zewnętrzna | |
| Zwora | J4 | Wybór zwory do połączenia PE i GND | Wybrać, jeśli PE łączy się z GND. W przypadku zakłóceń połączyć PE z GND, aby wzmocnić przeciwdziałanie zakłóceniom. Połączenie domyślne. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to połączenie między PE i GND, zwarcie 2-3 to brak połączenia między PE i GND) |
| J13 | Wybór zwory do połączenia PE i COM | Wybrać, jeśli PE łączy się z COM. W przypadku zakłóceń, połączyć PE z COM, aby wzmocnić przeciwdziałanie zakłóceniom. Połączenie domyślne. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to połączenie między PE i COM, zwarcie 2-3 to brak połączenia między PE i COM). | |
| J10 | Wybór zwory do połączenia CME i COM | Wybrać, jeśli CME łączy się z COM. Brak połączenia domyślnie. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to połączenie między CME i COM, zwarcie 2-3 to brak połączenia między CME i COM). | |
| J5 | Wybór wyjścia analogowego AO1 | Zdecydować, czy zacisk wyjścia analogowego AO1 to ma być wyjście napięciowe czy prądowe. Domyślnie to wyjście napięciowe. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to wyjście napięciowe, zwarcie 2-3 to wyjście prądowe).Zakres napięcia wyjściowego: 0 V-10 V.Zakres prądu wyjściowego: 0mA -20mA | |
| J8 | Wybór wejścia analogowego AI2 | Zdecydować, czy zacisk wyjścia analogowego AO1 to ma być wyjście napięciowe czy prądowe. Domyślnie to wyjście napięciowe. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to wyjście napięciowe, zwarcie 2-3 to wyjście prądowe)Zakres napięcia wyjściowego: 0 V-10 V.Zakres prądu wyjściowego: 0mA -20mA | |
| J9 | Wybór połączenia terminala OP | Zacisk OP łączy + 24V lub COM poprzez zworę J9. Połączenie + 24V domyślnie. (Jak pokazano na rysunku 3-6, zwarcie 1-2 to połączenie OP i +24 V, zwarcie 2-3 to połączenie OP i COM).Jeśli do napędu DI1 ~ DI5 używany jest sygnał zewnętrzny , OP należy połączyć z zasilanien zewnętrznym i wyciągnąć zworę J9. | |
4) Opis połączeń zacisków sterujących
a) Zacisk wejścia analogowego:
Słaby analogowy sygnał napięciowy łatwo ulega zakłóceniom zewnętrznym. Powszechnie stosuje się kabel ekranowany a długość przewodu jest możliwie jak najkrótsza i nie powinna przekraczać 20 m, jak pokazano na rysunku 3-7. W przypadku, gdy jakiś sygnał analogowy jest poważnie zakłócany, po stronie źródła sygnału analogowego należy zainstalować kondensator filtrujący lub rdzeń ferrytowy, jak pokazano na rysunku 3-7.
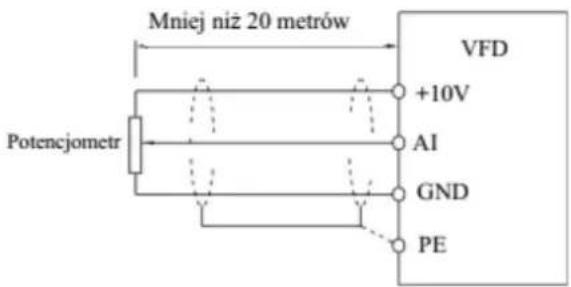
Rysunek 3-7 Schemat połączeń zacisku wejścia analogowego
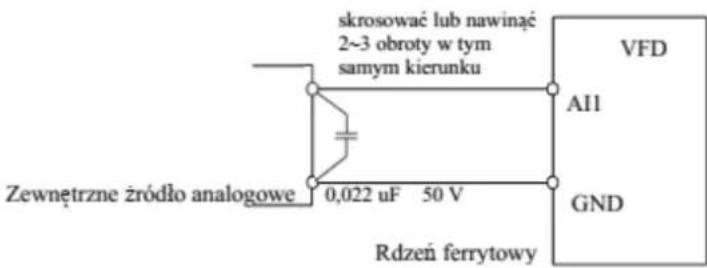
Rysunek 3-8 Schemat montażowy połączeń zacisku wejścia analogowego
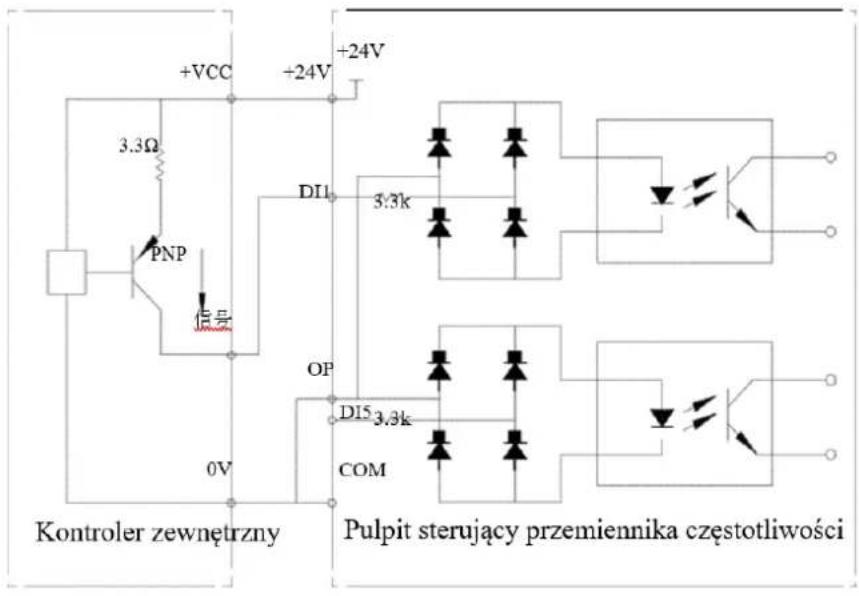
b) Cyfrowy zacisk wejściowy: metoda połączeń zacisku DI
Powszechnie stosuje się przewód ekranowany, możliwe najkrótszy, który nie powinien przekraczać 20 m. W przypadku korzystania z aktywnego napędu należy zastosować niezbędne środki wyrównujące w razie przesłuchów mocy. Sugeruje się sterowanie stycznikiem.
Kontroler zewnętrzny
Pulpit sterujący przemiennika częstotliwości
Rysunck 3-9 Okablowanie
Jest to najpopularniejszy sposób okablowania. Jeśli używa się zasilania zewnętrznego, należy wyciągnąć zworę J9 między +24 V i OP, podłączyć biegun dodatni zasilania zewnętrznego do OP, a biegun ujemny zasilania zewnętrznego do CME.
Okablowanie typu źródłowego
Rys. 3-10 Okablowanie typu źródłowego
Ten rodzaj okablowania wymaga zwarcia OP zworą J9 do COM, podłączenia + 24 V do wspólnego portu zewnętrznego kontrolera. Jeśli stosuje się zasilanie zewnętrzne, należy podłączyć biegun ujemny zasilania zewnętrznego do OP.
c) zacisk "DO" wyjścia cyfrowego: jeśli zacisk wyjścia cyfrowego wymaga sterowania przekaźnikiem, dioda absorbera powinna być zainstalowana po dwóch stronach cewki przekaźnika, w przeciwnym razie może dojść do uszkodzenia zasilania DC 24V.
Uwaga: należy prawidłowo zainstalować biegunowość diody absorbera, jak pokazano na rysunku 3-11. W przeciwnym razie jakikolwiek sygnał z zacisku wyjścia cyfrowego spowoduje natychmiastowe uszkodzenie zasilania DC 24 V.
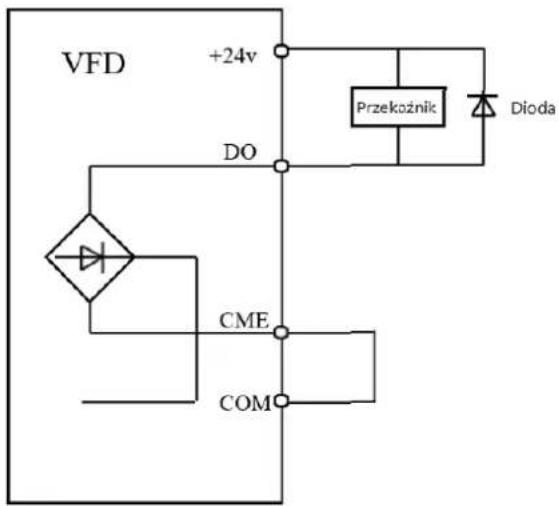
Rysunek 3-11 Schemat połączeń zacisku wyjścia cyfrowego
Rozdział 4. Obsługa i wyświetlacz
4.1 Wprowadzenie do interfejsu obsługowego i wyświetlacza
Panelem operatorskim można modyfikować parametry funkejonowania przemiennika częstotliwości, monitorować jego stan roboczy i sterować jego pracą (start, zatrzymanie) itp. Wygląd zewnętrzny i pole funkcji przedstawiono poniżej:
RUN: lampka wyłączona oznacza, że przemiennik jest w stanie zatrzymania. Ciągłe światło oznacza, że przemiennik jest w stanie pracy.
LOCAL / REMOTE: lampka kontrolna obsługi klawiaturą, obsługi zacisków i obsługi zdalnej (sterowanie komunikacja). Zgaszona kontrolka oznacza stan sterowania z klawiatury. Ciągle świecąca oznacza sterowanie zaciskami. Jeśli lampka migocze, oznacza to, że jest w stanie zdalnego sterowania.
FWD / REV: Kontrolka zmiany kierunku pracy silnika, świecąca kontrolka oznacza normalny stan pracy.
TUNE / TC: Strojenie / sterowanie momentem obrotowym / kontrolka błędu. Ciągłe świecenie kontrolki oznacza, że jest w trybie sterowania momentem obrotowym. Powolne migotanie oznacza, że urządzenie jest dostrojone. Szybkie migotanie oznacza, że jest w stanie błędu.
2) Kontrolka jednostki: Hz: jednostka częstotliwości, A: jednostka prądu, V: jednostka napięcia, RMP (Hz + A) jednostka prędkości obrotowej % (A + V).
3) Cyfrowy wyświetlacz:
Wyświetlacz LED 5-cyfrowy wyświetla ustawianie częstotliwości, częstotliwość wyjściową, rodzaje danych monitorowanych, kody ostrzeżeń itp.
4) Klawisze klawiatury:
| Klawisz | Nazwa | Funkcja |
| DATA | Klawisz programowania | Wejście lub wyjście z menu pierwszego poziomu. |
| ENTER | Klawisz „Enter” | Wejście do menu krok po kroku, ustawianie parametrów i zatwierdzanie ich. |
| Klawisz zwiększania wartości | Zwiększanie danych lub ustawianie kodu funkcji. | |
| Klawisz zmniejszania wartości | Zmniejszanie danych lub ustawianie kodu funkcji | |
| Klawisz „Shift” | Na wyświetlaczu, w trybie zatrzymania lub pracy można cyklicznie wyświetlać parametry. Naciskając ten przycisk można zmienić parametr. | |
| RUN | Klawisz wykonawczy | Uruchamianie operacji w trybie sterowania z klawiatury. |
| STOP/REST | Stop / Reset | W trybie pracy, można użyć tego klawisza do zatrzymania pracy. W przypadku alarmu awarii można użyć go do zresetowania falownika bez ograniczeń kodu P7-02. |
| QSM | Klawisz wyboru trybu | Przełącznik funkcji oparty na PP-03 |
| JOG | Klawisz „log” (bieg próbny) | Przełącznik funkcji oparty na P7-01, źródło poleceń lub szybkie przełączanie kierunku. |
4.2 Metody przeglądania i zmiany kodu funkcji
Panel operatorski - przemiennik częstotliwości ma trójpoziomową strukturę menu do ustawiania parametrów i innych czynności. Trzy-poziomowe menu to: grupa parametrów funkcji (pierwszy poziom) → kod funkcji (drugi poziom) → ustawianie kodu funkcji (drugi poziom). Przepływ operacyjny pokazano na rysunku 4-2.
Zmiana wartości param. Wybór parametru funkc. Zmiana wartości parametru funkc.

flowchart
graph LR
A["50.00"] -->|DATA| B["P0"]
B -->|ENTER| C["P0-08"]
C -->|ENTER| D["050.00"]
B -->|DATA| C
C -->|DATA| B
D -->|Δ▽| B
Menu poziomu 0
Menu poziomu I
Menu poziomu II
Menu poziomu II
Rysunek 4-2 Schemat blokowy menu trójpoziomowych
Wskazówki: w celu obsługi menu drugiego poziomu należy wcisnąć klawisz DATA (DANE) lub klawisz ENTER, aby wejść do menu drugiego poziomu. Wciśnij ENTER, aby zapisać ustawiony parametr i powrócić do menu drugiego poziomu, a następnie automatycznie przejść do następnego kodu funkcji; naciśnięcie klawisza SET spowoduje bezpośredni powrót do menu drugiego poziomu bez zapisywania parametrów i powrót do wcześniejszego kodu funkcji.
Przykład: zmieniono kod funkeji P3-02 z 10,00 Hz na 15,00 Hz. (Pogrubiony tekst wskazuje migającą cyfrę.)
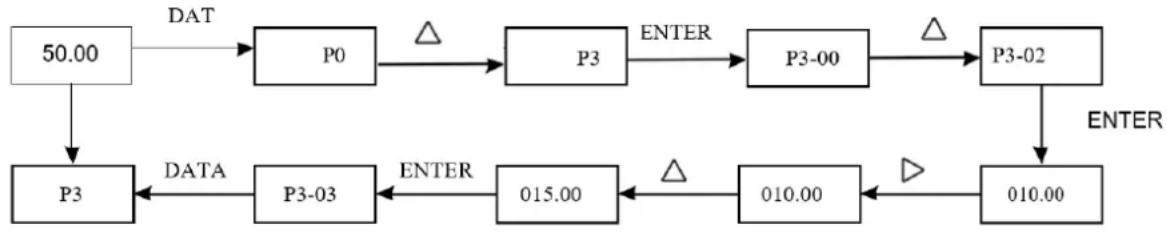
flowchart
graph TD
A["50.00"] -->|DAT| B["P0"]
B -->|Δ| C["P3"]
C -->|ENTER| D["P3-00"]
D -->|Δ| E["P3-02"]
E -->|ENTER| F["010.00"]
F -->|Δ| G["015.00"]
G -->|DATA| H["P3"]
H -->|P3-03| I["015.00"]
I -->|ENTER| J["010.00"]
DATA = DANE
W stanie menu drugiego poziomu, kodu funkcji nie można zmodyfikować jeśli nie miga cyfra parametru na wyświetlaczu. Możliwe przyczyny:
1) Ten kod funkcji to parametr, którego nie można zmienić, taki jak rzeczywisty wykryty parametr, parametr zapisu operacji itp.
2) Kodu funkcji nie można zmienić w stanie działania urządzenia i można go zmienić dopiero po zatrzymaniu.
4.3 Tryb wyświetlania parametrów
Tryb wyświetlania parametrów służy użytkownikom do przeglądania parametrów funkcjonowania z różnymi zakresami w zależności od rzeczywistego zapotrzebowania. Dostępne są trzy tryby wyświetlania parametrów.
| Nazwa Opis | |
| Tryb parametrów funkcjonowania | Wyświetlanie parametrów funkcjonowania przemiennika częstotliwości w kolejności, w tym parametr funkcjonowania P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Tryb parametrów zdefiniowanych przez użytkownika | Parametry funkcjonowania zdefiniowane przez użytkownika (maksymalnie 32 parametry), użytkownicy mogą zatwierdzić parametry funkcjonowania, które mają być wyświetlane przez grupę PE. |
| Tryb modyfikacji parametrów przez użytkownika | Parametry funkcjonowania nie będą zgodne z ustawieniami fabrycznymi. |
Powiązane parametry funkcjonowania to PP-02 i PP-03, jak niżej:
| Właściwości trybu wyświetlania parametrów funkcji | Ustawienie fabryczne | 11 | ||
| Jedności | Wybór wyświetlania grupy U | |||
| PP-02 | Zakres ustawień | 0 | Brak wyświetlania | |
| 1 | Wyświetlanie | |||
| Dziesiętne | Wybór wyświetlania grupy A | |||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
| PP-03 | Wybór trybu wyświetlania zdefiniowancego parametru | Ustawienie fabryczne | 00 | |
| Zakres ustawień | Jedności | Wybór wyświetlania parametrów zdefiniowanych przez użytkownika | ||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
| Dziesiętne | Wybór wyświetlania parametrów zdefiniowanych przez użytkownika | |||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
Jeśli wybrany tryb wyświetlania parametrów (PP-03) jest pojedynczy, wyświetlanie poszczególnych parametrów można przełącać za pomocą klawisza QSM.
Kod trybu wyświetlania każdego parametru jest następujący:
| Tryb wyświetlania parametrów | Wyświetlacz |
| Tryb parametrów funkcjonowania | -6ASE |
| Tryb parametrów zdefiniowanych przez użytkownika | -115Fr |
| Tryb parametrów zmodyfikowanych przez użytkownika | --[-- |
Tryb przełączania jest następujący:
Aktualne parametry funkcjonowania: przełącz na parametry niestandardowe.
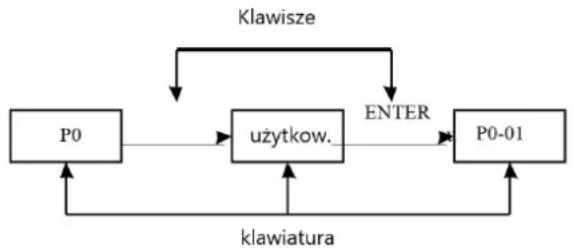
flowchart
graph TD
P0 --> użytkow.
użytkow. --> ENTER
P0-01 --> Uwarko
Uwarko --> P0
P0-01 --> klawiatura
klawiatura --> P0
klawiatura --> P0-01
klawiatura --> P0
klawiatura --> P0-01
klawiatura --> P0
klawiatura --> P0-01
klawiatura --> P0-01
klawiatura --> P0
klawiatura --> P0-01
klawiatura --> P0-01
klawiatura --> P0
klawiatura --> P0-01
klawiatura --> P0-01
klawiatura --> P0
4.4 Niestandardowe parametry użytkownika
Utworzenie niestandardowego menu użytkownika ma głównie na celu ułatwienie użytkownikom przeglądania i zmiany powszechnie używanych parametrów. Parametry niestandardowego menu wyświetlane są w postaci „uP3-02”. Funkcją parametru P3-02 w menu nie-standardowym jest zmiana parametrów i wyników odnośnego programowania warunków ogólnych.
Przykładowo, ustawiamy np. na 30; jeśli menu wyświetla "NULL", to oznacza, że użytkownik dostosowuje menu. Pojawia się niestandardowe menu użytkownika dotyczące powszechnie używanych 16 parametrów, aby ułatwić użytkownikowi następujące ustawienia:
P0-01: tryb sterowania
P0-02: wybór źródła poleceń
P0-03: wybór dominującego źródła częstotliwości
P0-07: wybór źródła częstotliwości
P0-08: zadana częstotliwość
P0-17: czas przyspieszania
P0-18: czas zatrzymywania
P3-00: ustawienie krzywej U/f
P3-01: zwiększanie momentu obrotowego
P4-00: Wybór funkcji zacisku DII
P4-01: wybór funkcji zacisku DI2
P4-02: Wybór funkcji zacisku DI3
P5-04: wybór wyjścia DOI
P5-07: Wybór wyjścia AO1
P6-00: tryb uruchamiania
P6-10: tryb zatrzymania
Użytkownicy mogą dostosowywać parametry do własnych potrzeb i edytować je.
4.5 Metoda przeglądania parametrów stanu
W stanie wyłączenia lub pracy, można za pomocą klawisza Shift „” wyświetląć różne parametry stanu. Kod funkcji P7-03 (parametry pracy 1), P7-04 (parametry pracy 2), P7-05 (parametry) wyłączanie wyświetlania parametrów, cyfrą binarną wybiera się, czy mają być wyświetlane parametry.
W stanie zatrzymania, łącznie 16 parametrami, można wybrać, czy wyświetlać warunki zatrzymania, ustawioną częstotliwość, napięcie magistrali, stan wejścia DI, stan wyjścia DO, napięcie wejścia analogowego AI1, napięcie wejścia analogowego AI2, napięcie wejścia
analogowego AI3, aktualną wartość licznika, aktualną wartość długości, krok działania sterownika PLC, wyświetlanie prędkości obciążania, nastawę PID, częstotliwość impulsu na wejściu PULSE i trzy parametry rezerwowe. Sukcesywne przełączanie sekwencji pokazuje wybrane parametry
W stanie uruchomienia, stan pięciu parametrów: częstotliwość robocza, częstotliwość zadana, napięcie szyny zbiorczej, napięcie wyjściowe, prąd wyjściowy wyświetlany domyślnie; inne wyświetlane parametry to: moc wyjściowa, moment obrotowy wyjściowy, stan wejścia DI, stan wyjścia DO, napięcie wejścia analogowego AI1, napięcie wejścia analogowego AI2, napięcie wejścia analogowego AI3, aktualny stan licznika, aktualna długość, prędkość liniowa, PID; sprzęenie zwrotne PID jest wyświetlane za pomocą kodu funkcji P7-03, P7-04 bitowo (konwertowane na binarne ). Sukcesywne przełączanie sekwencji pokazuje wybrane parametry.
4.6 Ustawienia hasła
Przemiennik częstotliwości posiada funkcję ochrony hasłem użytkownika, PP - 00 jest ustawione na zero, jest to hasło użytkownika. Ponownie nacisnąć DATE, wyświetli się "----". Wprowadzone hasło użytkownika musi być poprawne, musi być wprowadzane w zwykłym menu, w przeciwnym razie nie da się wprowadzić.
Jeśli chcemy anulować funkcję ochrony hasłem, wystarczy podac hało, a PP - 00 zamienić na 0.
4.7 Automatyczne dostrajanie parametrów silnika
Przed pracą przemiennika częstotliwości, wybrać tryb sterowania wektorowego,. Przestrzegać dokładnych parametrów wejściowych z tabliczki znamionowej silnika. Ten przemiennik częstotliwości musi pasować do standardowych parametrów z tabliczki znamionowej silnika. Istnieje silny związek między metodą sterowania wektorowego a parametrami silnika. Dobre parametry sterowania zależą od dokładnego dopasowania parametrów maszyny.
Kroki automatycznego dostrajania parametrów silnika są następujące:
Wybieramy najpierw źródło poleceń (P0-02) dla kanału poleceń panelu operatora. Następnie wprowadzamy parametry silnika do właściwych wejść parametrów (zgodnie z aktualnym wyborem silnika):
Wybór silnika
Parametr
| Silnik 1 | P1-00: wybór typu silnika, P1-01: znamionowa moc silnika, P1-02: znamionowe napięcie silnika, P1-03: znamionowy prąd silnika, P1-04: znamionowa częstotliwość silnika, P1-05: znamionowa prędkość obrotowa silnika. |
| Silnik 2 | A2-00: wybór typu silników do wyboru A2-01: moc znamionowa silnika A2-02: napięcie znamionowe silnika A2-03: prąd znamionowy silnika A2-04: A2-05: częstotliwość znamionowa silnika, znamionowa prędkość obrotowa silnika. |
Przy silniku całkowicie odciążonym, należy wybrać P1-37 (silnik 2 A2 \ do 37) i wybrać 2 (silnik asynchronouszny kończy dostrajanie), a następnie nacisnąć klawisz RUN na panelu klawiatury, falownik automatycznie obliczy następujące parametry:
Wybór silnika
Parametr
| Silnik 1 | P1-06: rezystancja stojana maszyny synchronicznej, P1-07: indukcyjność osi D maszyny synchronicznej,P1-08: indukcyjność synchronicznej osi Q, P1-09: indukcyjność wzajemna silnika asynchronousznego,P1-10: prąd jałowy silnika asynchronousznego.A2-06: rezystancja stojana maszyny synchronicznej, A2-07: indukcyjność osi D maszyny synchronicznej,A2-08: indukcyjność synchronicznej osi Q, A1-09: wzajemna indukcyjność silnika asynchronousznego,A1-10: prąd jałowy silnika asynchronousznego. |
| Silnik 2 |
Parametry silnika są dostrajane automatycznie.
Jeśli nie można całkowicie wyłączyć silnika i obciążenia, wówczas na P1-37 (silnik 2 A2-37) wybrać 1 (maszyna asynchronouszna, strojenie statyczne), a następnie nacisnąć klawisz RUN na panelu klawiatury.
Rozdział 5 Tabela parametrów funkcjonowania
PP-00 ustawia się na wartość niezerową, czyli ustala się hasło ochrony parametrów. W trybie parametrów funkcjonowania i parametrów zmodyfikowanych przez użytkownika, dostęp do menu parametrów można uzyskać tylko po wprowadzeniu prawidłowego hasła. Aby anulować hasło, PP-00 należy ustawić na 0. Wtedy menu parametrów w trybie parametrów modyfikowanych przez użytkownika nie jest chronione hasłem. Grupa P i grupa A to podstawowe parametry funkcjonowania, grupa U to parametry monitorujące. Symbole w tabeli funkcji są następujące:
„☆”: wskazuje, że ustawioną wartość parametru można zmienić w stanie zatrzymania i pracy przemiennika częstotliwości;
„★”: wskazuje, że ustawionej wartości parametru nie można zmienić w stanie pracy przemiennika częstotliwości;
„•”: wskazuje, że wartość tego parametru jest wartością faktycznie zmierzoną więc nie można jej zmienić;
„*”: Wskazuje, że parametr ma „ustawienie fabryczne” i może być ustawiony tylko przez producenta a użytkownicy mają tu zakaz ustawiania.
Tabela podstawowych parametrów funkcjonowania:
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| Grupa podstawowa funkcyjna P0 | ||||
| P0-00 | Typ wyświetlania G / P | 1: Typ G (model ze stałym momentem obrotowym)2: Typ P (model z wentylatorem i obciążeniem pompą) | Zalczy od typu maszyny | ● |
| P0-01 | Tryb sterowania silnikiem 1 | 0: Brak sterowania wektorowego czujnika prędkości (SVC)1: Sterowanie wektorowe czujnika prędkości (FVC)2: Sterowanie U/f | 0 | ★ |
| P0-02 | Wybór źródła poleceń | 0: Kanał CMD panclu operatora (dioda LED wył.)1: Kanał CMD zacisku (dioda LED świeci)2: Kanał Cmd (dioda LED miga) | 0 | ☆ |
| P0-03 | Wybór głównego źródła częstotliwości X. | 0: ustawienie cyfrowe (częstotliwość zadaną P0-08, góra / dół można modyfikować, jest pamięć po awarii zasilania)1: ustawienie cyfrowe (częstotliwość zadaną P0-08, góra / dół można modyfikować, brak pamięci po awarii zasilania)2: AI13: AI24: AI35: ustawianic impulsów (DI5)6: komenda wielostanowa7: prosty PLC8: PID9: ustawienia komunikacji | 0 | ★ |
| P0-04 | Wybór pomocniczego źródła częstotliwości Y | Jak P0-03 (jak wybór głównego źródła częstotliwości X) | 0 | ★ |
| P0-05 | Wybór zakresu pomocniczego źródła częstotliwości nałożonej Y | 0: W odniesieniu do maksymalnej częstotliwości1: W odniesieniu do źródła częstotliwości X | 0 | ☆ |
| P0-06 | Wybór zakresu pomocniczego źródła częstotliwości nałożonej Y | 0%~150% | 100% | ☆ |
| P0-07 | Wybór źródła częstotliwości nałożonej | Bity: Wybór źródła częstotliwości 0: Główne źródło częstotliwości X1: Wynik operacji głównej i pomocniczej (Zależność działania zależy od liczby dziesiętnej)2: Przełącznik głównego źródła częstotliwości X i pomocniczego źródła częstotliwości Y3: Główne źródło częstotliwości X, przełącznik wyniku operacji głównej i pomocniczej,4: Pomocnicze źródło częstotliwości Y, przełącznik wyniku operacji głównej i pomocniczejDziesiętne: zależność działania głównego i pomocniczego źródła częstotliwości0: Główne + pomocnicze1: Główne - pomocnicze2: Maks. z dwóch3: Min. z dwóch | 00 | ☆ |
| P0-08 | Częstotliwość zadana | 0.00Hz~częstotliwość maks. (P0-10) | 50.00Hz | ☆ |
| P0-09 | Kierunek pracy | 1 : ten sam2 : przeciwny | 0 | ☆ |
| P0-10 | Częstotliwość maks. | 50.00Hz~600.00Hz | 50.00Hz | ★ |
| P0-11 | Źródło częstotliwości górnej | 0: ustawienie P0-121: AI1; 2: AI2; 3: AI3; 4: ustawienie impulsu5: ustawienia komunikacji | 0 | ★ |
| P0-12 | Częstotliwość górna | Górna częstotliwość P0-14 ~ maksymalna częstotliwość P0-10 | 50.00Hz | ☆ |
| P0-13 | Przesunięcie częstotliwości górnej | 0.00Hz~częstotliwość maks. P0-10 | 0.00Hz | ☆ |
| P0-14 | Częstotliwość dolna | 0.00Hz~częstotliwość górna P0-12 | 0.00Hz | ☆ |
| P0-15 | Częstotliwość nośna | 0.5kHz~16.0kHz | typ maszyny | ☆ |
| P0-16 | Częstotliwość nośna dostosowuje się do temperatury | 0: nie1: tak | 1 | ☆ |
| P0-17 | Czas przyspieszania 1 | 0.00s~65000s | typ maszyny | ☆ |
| P0-18 | Czas zatrzymywania 1 | 0.00s~65000s | typ maszyny | ☆ |
| P0-19 | Jednostka czasu przyspieszania / zatrzymywania | 0: 1s1: 0.1s2: 0.01s | 1 | ★ |
| P0-21 | Częstotliwość polaryzacji źródła nałożonej częstotliwości pomocniczej | 0.00Hz~częstotliwość maks. P0-10 | 0.00Hz | ☆ |
| P0-22 | Rozdzielczość polecenia dot. częstotliwości | 1: 0.1Hz2: 0.01Hz | 2 | ★ |
| P0-23 | Wybór pamięci zatrzymania cyfrowego zadawania częstotliwości | 0: brak pamięci 1: pamięć | 0 | ☆ |
| P0-24 | Wybór silnika | 0: Motor 1, 1: Motor 2 | 0 | ★ |
| P0-25 | Częstotliwości odniesienia czasu przyspieszania / zatrzymywania | 0: Częstotliwość maks. (P0-10)1: Częstotliwość zadana2: 100Hz | 0 | ★ |
| P0-26 | Standardowa komenda częstotliwości w układzie UP / DOWN | 0: Częstotliwość robocza, 1: Częstotliwość zadana | 0 | ★ |
| Kod | Nazwa | Nastawy | Domyślne | Zmi ana |
| P0-27 | Źródło częstotliwości i źródło poleczeń w pakiecie | Bity: polecenie z panelu operatorskiego wiąże źródło częstotliwości0: Nic związane1: Częstotliwość cyfrowa zadana2: AI13: AI24: AI35: Ustawienie PULSE (DI5)6: Multispeed (wybór prędkości stałej)7: Proste PLC8: PID9: Ustawienia komunikacjiDziesiątki na wyświetlaczu: polecenie zacisku wiąże źródło częstotliwościSetki: polecenie komunikacji wiąże źródło częstotliwościTysiące: działanie automatyczne wiąże źródło częstotliwości | 0000 | ☆ |
| P0-28 | Rodzaj karty rozszerzeń komunikacyjnych | 0: Karta komunikac. Modbus1: Zapas2: Zapas3: Karta komunikac. CANlink | 0 | ☆ |
| Grupa P1. Parametry silnika 1 | ||||
| P1-00 | Wybór typu silnika | 0: zwykły silnik asynchronouszny1: silnik asynchronouszny o zmiennej częstotliwości | 0 | ★ |
| P1-01 | Moc znamionowa silnika | 0.1kW~1000.0kW | typmaszyny | ★ |
| P1-02 Napięcie znamionowe silnika | 1V~400V | typmaszyny | ★ | |
| P1-03 | Prąd znamionowy silnika | 0.01A~655.35A (moc przemiennika <=55kW)0.1A~6553.5A (moc przemiennika >55kW) | typmaszyny | ★ |
| P1-04 | Częstotliwość znamionowa silnika | 0.01Hz~częstotliwość maks. | typmaszyny | ★ |
| P1-05 | Obroty znamionowe silnika | 1 obr/min ~65535 obr/min | typmaszyny | ★ |
| P1-06 | Rezystancja stojana silnika asynchronousznego | 0.001Ω~65.535Ω (moc przemiennika <=55kW) 0.0001Ω~6.5535Ω (moc przemiennika >55kW) | Strojenie | ★ |
| P1-07 | Rezystancja wirnika silnika asynchronousznego | 0.001Ω~65.535Ω (moc przemiennika <=55kW)0.0001Ω~6.5535Ω (moc przemiennika >55kW) | Strojenie | ★ |
| P1-08 | Indukcyjna reaktancja upływu silnika asynchronousznego | 0.01mH~655.35mH(moc przemiennika <=55kW) 0.001mH~65.535mH(moc przemiennika >55kW) | Parametrstrojenia | ★ |
| P1-09 | Reaktancja indukcyjna wzajemna silnika asynchronousznego | 0.1mH~6553.5mH(moc przemiennika <=55kW) 0.01mH~655.35mH(moc przemiennika >55kW) | Parametrstrojenia | ★ |
| P1-10 | Prąd silnika asynchronousznego bez obciążenia | 0.01A~P1-03 (moc przemiennika <=55kW)0.1A~P1-03 (moc przemiennika >55kW) | Parametr strojenia | ★ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana | |
| P1-27 | Numer linii enkodera | 1~65535 | 1024 | ★ | |
| P1-28 | Typ enkodera | 0: Enkoder inkrementalny ABZ 1: Zapas2: Transformator obrotowy | 0 | ★ | |
| P1-30 | Sekwencja faz AB enkoderainkrementalnego ABZ | 0: w przód1: w tył | 0 | ★ | |
| P1-34 | Liczba par biegunów transformatoraobrotowego | 1~65535 | 1 | ★ | |
| P1-36 | Czas wykrywania rozłączenia PG wsprzężeniu zwrotnym prędkości | 0.0: brak działania0.1s~10.0s | 0.0 | ★ | |
| F1-37 | Wybór strojenia | 0: Brak działania1: Statyczne strojenie silnika asynchronousznego2: Pełne strojenie silnika asynchronousznego | 0 | ★ | |
| Grupa P2 - Parametry sterowania wektorowego pierwszego silnika | |||||
| P2-00 | Wzmocnienie proporcjonalne pętliprędkości 1 | 1~100 | 30 | ☆ | |
| P2-01 | Czas całkowania pętli prędkości 1 | 0.01s~10.00s | 0.50s | ☆ | |
| P2-02 | Częstotliwość przełączania 1 | 0.00 ~P2-05 | 5.00Hz | ☆ | |
| P2-03 | Wzmocnienie proporcjonalne pętliprędkości 2 | 1~100 | 20 | ☆ | |
| P2-04 | Czas całkowania pętli prędkości 2 | 0.01s~10.00s | 1.00s | ☆ | |
| P2-05 | Częstotliwość przełączania 2 | P2-02 ~częstotliwość maks. | 10.00Hz | ☆ | |
| P2-06 | Wzmocnienie poślizgu sterowaniawektorowego | 50%~200% | 100% | ☆ | |
| P2-07 | Stała czasowa dla filtra pętliprędkości | 0.000s~0.100s | 0.000s | ☆ | |
| P2-08 | Sterowanie wektorowe wzmocnieniawzbudzenia | 0~200 | 64 | ☆ | |
| P2-09 | Źródło górnego limitu w trybiesterowania prędkością | 0: ustawienie kodu funkcji P 2-10 1: AI12: AI23: AI34: ustawianie impulsu (PULSE)5: ustawianie komunikacji6: MIN (AI1, AI2)7: MAX (AI1, AI2)Pełna skala opcji 1-7 odpowiada P2-10 | 0 | ☆ | |
| P2-10 | Cyfrowe ustawianie momentuobrotowego w trybie sterowaniaprędkością | 0.0%~200.0% | 150.0% | ☆ | |
| P2-13 | Wzmocnicnie proporcjonalnewzbudzenia | 0~60000 | 2000 | ☆ | |
| P2-14 | Wzmocnicnie całkowe wzbudzenia | 0~60000 | 1300 | ☆ | |
| P2-15 | Wzmocnicnie proporcjonalneregulacji momentu obrotowego | 0~60000 | 2000 | ☆ | |
| Kod Na | Nazwa Nastawy Domyślne | Zmiana | ||
| P2-16 | Wzmocnicnie całkowania regulacji momentu obrotowego | 0~ 60000 | 1300 | ☆ |
| Parametry sterowania U/f w grupie P3 | ||||
| P3-00 | Ustawianie krzywej U/f | 0: linia prosta U/f1: linia wielopunktowa U/f2: kwadrat U/f3: 1,2 mocy U/f4: 1,4 mocy U/f6: 1,6 mocy U/f8: 1,8 mocy U/f9: Zastrzeżone10: Tryb pełnej separacji U/f11: Tryb pół-separacji U/f | 0 | ★ |
| P3-01 | Zwiększanie momentu obrotowego | 0.0% : (automatyczne zwiększanie momentu)0.1%~30.0% | typ maszyny | ☆ |
| P3-02 | Częstotliwość wyłączenia wzmocnienia momentu | 0.00Hz~częstotliwość maks. | 50.00Hz | ★ |
| P3-03 | Punkt 1 częstotliwości U/f | 0.00Hz~P3-05 | 0.00Hz | ★ |
| P3-04 | Punkt 1 napięcia U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-05 | Punkt 2 częstotliwości U/f | P3-03~P3-07 | 0.00Hz | ★ |
| P3-06 | Punkt 2 napięcia U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-07 | Punkt 3 częstotliwości U/f | P3-05~znamionowa częstotliwość silnika (P1-04) | 0.00Hz | ★ |
| P3-08 | Punkt 3 napięcia U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-09 | Wzmocnienie kompensacji poślizgu U/f | 0.0%~200.0% | 0.0% | ☆ |
| P3-10 | Wzmocnienie przewzbudzenia U/f | 0~200 | 64 | ☆ |
| P3-11 | Wzmocnienie tłumienia oscylacji U/f | 0~100 | typ maszyny | ☆ |
| P3-13 | Izolowane źródło napięcia UF | 0 : ustawienia cyfrowe (P3-14) 1: AI12: AI23: AI34: ustawienia impulsu (DI5)5: Komenda wielostanowa6: PLC7: PID8: ustawienie komunikacjiUwaga: 100,0% odpowiada napięciu znamionowemu silnika | 0 | ☆ |
| P3-14 | Nastawianie cyfrowe izolowanego napięcia UF | 0V~napięcie znamionowe silnika | 0V | ☆ |
| P3-15 | Czas narastania napięcia izolowanego UF | 0.0s~1000.0sUwaga: czas zmiany napięcia 0 V na napięcie znamionowe silnika | 0.0s | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmi ana |
| Grupa P4. Zaciski wejściowe. | ||||
| P4-00 | Wybór funkcji zacisku DI1 | 0: Brak funkcji1: Bieg do przodu (FWD)2: Bieg wsteczny (REV)3: Sterowanie biegiem trójprzewodowym4: Impulsowanie (bieg próbny) do przodu (FJOG)5: Impulsowanie do tyłu (RJOG)6: W GÓRĘ7: W DÓŁ8: Zatrzymanie wybiegiem9: Resetowanie błędu (RESET)10: Wstrzymanie operacji11: Wejście normalnie otwarte usterki zewnętrznej12: Komenda wielostanowa zacisk 113: Komenda wielostanowa zacisk 214: Komenda wielostanowa zacisk 315: Komenda wielostanowa zacisk 416: Zacisk wyboru czasu przyspieszania / zatrzymywania 117: Zacisk wyboru czasu przyspieszania / zatrzymywania 218: Przełączanie źródła częstotliwości | 1 | ★ |
| P4-01 | Wybór funkcji zacisku DI2 | 4 | ★ | |
| P4-02 | Wybór funkcji zacisku DI3 | 9 | ★ | |
| P4-03 | Wybór funkcji zacisku DI4 | 12 | ★ | |
| P4-04 | Wybór funkcji zacisku DI5 | 19: Wyczyszczenie ustawień GÓRA / DÓŁ (zacisk i klawiatura)20: Zacisk przełączania poleceń dot. biegu21: Zakaz przyspieszania / zatrzymywania22: Pauza PID23: Reset stanu PLC24: Przerwa w częstotliwości kołysania | 13 | ★ |
| P4-05 | Wybór funkcji zacisku DI6 | 25: Wejście licznika26: Reset licznika27: Wejście zliczania długości28: Reset długości29: Kontrola momentu wyłączona30: wejście częstotliwości impulsowej (dotyczy DI5) | 0 | ★ |
| P4-06 | Wybór funkcji zacisku DI7 | 31: Zastrzeżone32: Szybkie hamowanie prądem stałym33: Wejście normalnie zamknięte usterki zewnętrznej34: Zmiana częstotliwości włączona35: Negowanie kierunku działania PID | 0 | ★ |
| P4-07 | Wybór funkcji zacisku DI8 | 36: Zewnętrzny terminal 137: Zacisk przełączania poleceń sterujących 238: Przerwa całkowania PID39: Przełączanie źródła częstotliwości X i częstotliwości zadanej40: Przełączanie źródła częstotliwości Y i częstotliwości zadanej | 0 | ★ |
| P4-08 | Wybór funkcji zacisku DI9 | 41: Zacisk wyboru silnika 142: Zacisk wyboru silnika 243: Przełączanie parametrów PID44: Błąd zdefiniowany przez użytkownika 145: Błąd zdefiniowany przez użytkownika 246: Przecłącznik kontroli prędkości / kontroli momentu obrotowego | 0 | ★ |
| P4-09 | Wybór funkcji zacisku DI10 | 47: Zatrzymanie awaryjne48: Zacisk zatrzymania zewnętrznego 249: Spowolnione hamowanie prądem stałym50: Czas pracy wyczyszczony51-59: Zastrzeżone | ||
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P4-10 | Czas filtrowania DI | 0.000s~1.000s | 0.010s | ☆ |
| P4-11 | Tryb komend zacisków | 0: dwuprzewodowe 11: dwuprzewodowe 22: trójprzewodowe 13: trójprzewodowe 2 | 0 | ★ |
| P4-12 | Szybkość zmiany zacisków GÓRA / DÓŁ | 0.001Hz/s~65.535Hz/s | 1.00Hz/s | ☆ |
| P4-13 | Minimalna wartość krzywej AI1 na wejściu | 0.00V~P4-15 | 0.00V | ☆ |
| P4-14 | Ustawienie krzywej AI1 na wejściu | -100.0%~+100.0% | 0.0% | ☆ |
| P4-15 | Maksymalna wartość krzywej AI1 na wejściu | P4-13~+10.00V | 10.00V | ☆ |
| P4-16 | Ustawienie krzywej AI1 na wejściu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-17 | Czas filtrowania AI1 | 0.00s~10.00s | 0.10s | ☆ |
| P4-18 | Minimalna wartość krzywej AI2 na wejściu | 0.00V~P4-20 | 0.00V | ☆ |
| P4-19 | Ustawienie krzywej AI2 na wejściu | -100.0%~+100.0% | 0.0% | ☆ |
| P4-20 | Maksymalna wartość krzywej AI2 na wejściu. | P4-18~+10.00V | 10.00V | ☆ |
| P4-21 | Ustawienie krzywej AI2 na wejściu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-22 | Czas filtrowania AI2 | 0.00s~10.00s | 0.10s | ☆ |
| P4-23 | Minimalna wartość krzywej AI3 na wejściu | -10.00V~P4-25 | -10.00V | ☆ |
| P4-24 | Ustawienie krzywej AI3 na wejściu | -100.0%~+100.0% | -100.0% | ☆ |
| P4-25 | Maksymalna wartość krzywej AI3 na wejściu | P4-23~+10.00V | 10.00V | ☆ |
| P4-26 | Ustawienie krzywej AI3 na wejściu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-27 | Czas filtrowania AI3 | 0.00s~10.00s | 0.10s | ☆ |
| P4-28 | Wartość minimalna na wejściu impulsowym | 0.00kHz~P4-30 | 0.00kHz | ☆ |
| P4-29 | Ustawienie wejscia imp. dla wartości min. | -100.0%~100.0% | 0.0% | ☆ | |
| P4-30 | Wartość maksymalna na wej-ściu impulsowym | P4-28~100.00kHz | 50.00kHz | ☆ | |
| P4-31 | Ustawienie wejscia imp. dla wartości maks. | -100.0%~100.0% | 100.0% | ☆ | |
| P4-32 | Czas filtrowania IMPULSU | 0.00s~10.00s | 0.10s | ☆ | |
| P4-33 | Wybór krzywej AI | Cyfra jedności: wybór krzywej AI11: krzywa 1 (2 punkty, patrzP4-13~P4-16)2: krzywa 2 (2 punkty, patrzP4-18~P4-21)3: krzywa 3 (2 punkty, patrzP4-23~P4-26)4: krzywa 4 (4 punkty, patrzA6-00~A6-07)5: krzywa 5 (4 punkty, patrzA6-08~A6-15)Dziesiątki: Wybór krzywej AI2, tak samo jal powyżejSetki: Wybór krzywej AI2, tak samoCyfra jedności: AI1 jest poniżej ustawienia minimalnego wejścia 0: odpowiada ustawieniu min. wejścia 1: 0,0%Dziesiątki: AI2 jest poniżej ustawienia min wejściaAI3 jest poniżej ustawienia min. wejścia | 321 | ☆ | |
| P4-34 | AI jest poniżej ustawienia wejścia min. | 000 | ☆ | ||
| P4-35 | Czas opóźnienia DI1 | 0.0s~3600.0s | 0.0s | ★ | |
| P4-36 | Czas opóźnienia DI2 | 0.0s~3600.0s | 0.0s | ★ | |
| P4-37 | Czas opóźnicnia DI3 | 0.0s~3600.0s | 0.0s | ★ | |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana | |
| P4-38 | Tryb pracy zacisku 1 DI | 0: aktywny wysoki1: aktywny niskiCyfra jedności: DI1 Dziesiątki: DI2 Setki: DI3Tysiące: DI4 Dziesięć tysięcy: DI150: aktywny wysoki1: aktywny niskiCyfra jedności: DI6 Dziesiątki: DI7 Setki: DI8Tysiące: DI9 Dziesięć tysięcy: DI10 | 00000 | ★ | |
| P4-39 | Tryb pracy zacisku 2 DI | 00000 | ★ | ||
| Zacisk wyjściowy grupy P5 | |||||
| P5-00 | Tryb pracy wyjścia FM | 1: wyjście impulsowe (FMP)2: wyjście dwustanowe (FMR) 0 | ☆ | ||
| P5-01 | Wybór funkcji wyjścia FMR | 0: Brak wyjścia1: Praca przemiennika częstotliwości2: Wyjście błędu (przestój)3: Wyjście wykrywania poziomu częstotliwości FDT1 | 0 | ☆ | |
| P5-02 | Wybór funkcji przekaźnika panelu sterowania (T / A-T / B-T / C) | 2 | ☆ | ||
| P5-03 | Wybór funkcji przekaźnika karty rozszerzeń (P / A-P / B-P / C) | 4: Częstotliwość osiągnięta5: Praca przy zerowej prędkości (brak zatrzymania wyjścia) | 0 | ☆ | |
| P5-04 | Wybór funkcji wyjścia DO1 | 6: Alarm wstępny przeciążenia silnika | 1 | ☆ | |
| P5-05 | Wybór wyjścia karty rozszerzeń DO2 | 7: Alarm wstępny przeciążenia przemiennika8: Wartość zliczania osiągnięta nastawioną9: Przekroczenie nastawy10: Długość osiągnięta11: Cykl PLC zakończony12: Nastawa łącznego czasu pracy13: Próg częstotliwości14: Próg momentu obrotowego15: Gotowy do uruchomienia16: AI1> AI217: Górna granica częstotliwości osiągnięta18: Dolna granica częstotliwości osiągnięta19: Wyjście spadku napięcia21: Pozycjonowanie zakończone (zastrzeżone)22: Lokalizacja (zastrzeżone)23: Praca z prędkością zerową 2 (wyłączenie również wyjścia)24: Ustawianie łącznego czas włączenia25: Wyjście wykrywania poziomu częstotliwości FDT226: 1 do częstotliwości wyjściowej27: 2 do częstotliwości wyjściowej28: 1 do prądu wyjściowego29: 2 do prądu wyjściowego30: Timing (chronometraż) do wyjścia31: Przekroczenie wejścia AI132: Wykonywanie33: Działanie wstecz34: Zerowy stan prądu35: Temperatura modułu osiągnięta36: Wartość graniczna prądu wyjściowego37: Dolna granica osiągnięcia częstotliwości (wyjście stop)38: Wyjście alarmowe (kontynuacja)39: Alarm wstępny nadmiernej temperatury silnika40: Przekroczenie czasu pracy | 4 | ☆ |
| Kod | Nazwa | Nastawy | Domy Ślne | Zmiana |
| P5-06 | Wybór funkcji wyjścia FMP | 0: Częstotliwość pracy1: Częstotliwość ustawiania2: Prąd wyjściowy3: Moment wyjściowy4: Moc wyjściowa5: Napięcie wyjściowe6: Wejście impulsowe(100% odpowiada 100,0 kHz) | 0 | ☆ |
| P5-07 | Wybór funkcji wyjścia AO1 | 7: AI18: AI29: AI3 (karta rozszerzeń)10: Długość11: Wartość12: Ustawienia komunikacji13: Prędkość silnika14: Prąd wyjściowy (100,0% to 1000,0 A)15: Napięcie wyjściowe (100,0% to 1000,0 V)16: Zastrzeżone | 0 | ☆ |
| P5-08 | Wybór funkcji wyjścia karty rozszerzeń AO2 | 1 | ☆ | |
| P5-09 | Maksymalna częstotliwość wyjściowa FMP | 0.01kHz~100.00kHz | 50.00kHz | ☆ |
| P5-10 | Współczynnik przesunięcia punktu zerowego AO1 | -100.0%~+100.0% | 0.0% | ☆ |
| P5-11 | Wzmocnienie AO1 | -10.00~+10.00 | 1.00 | ☆ |
| P5-12 | Współczynnik przesunięcia punktu zerowego karty rozszerzeń AO2 | -100.0%~+100.0% | 0.0% | ☆ |
| P5-13 | Wzmocnienie karty rozszerzeń AO2 | -10.00~+10.00 | 1.00 | ☆ |
| P5-17 | Czas opóźnicnia wyjścia FMR | 0.0s~3600.0s | 0.0s | ☆ |
| P5-18 | Czas opóźnienia wyjścia RELAY1 | 0.0s~3600.0s | 0.0s | ☆ |
| P5-19 | Czas opóźnicnia wyjścia RELAY2 | 0.0s~3600.0s | 0.0s | ☆ |
| P5-20 | Czas opóźnienia wyjścia DO1 | 0.0s~3600.0s | 0.0s | ☆ |
| P5-21 | Czas opóźnienia wyjścia DO2 | 0.0s~3600.0s | 0.0s | ☆ |
| P5-22 | Wybór poprawnego stanu zacisku wyjściowego DO | 0: logika pozytywna1: logika negatywnaCyfra jedności: FMR Dziesiątki: RELAY 1Setki: RELAY2 Tysiące: DO1 Dziesięć tysięcy: DO2 | 00000 | ☆ |
| Uruchamianie / zatrzymywanie sterowania grupą P6 | ||||
| P6-00 | Tryb uruchamiania | 0: Bezpośredni start1: Ponowne uruchomienie śledzenia prędkości2: Rozpoczęcie wzbudzanie wstępnego (silnik asynchronouszny AC) | 0 | ☆ |
| P6-01 | Tryb śledzenia prędkości | 0: Start od częstotliwości zatrzymania1: Start od prędkości zerowej2: Start od częstotliwości maks. | 0 | ★ |
| P6-02 | Prędkość śledzenia obrotów | 1~100 | 20 | ☆ |
| P6-03 | Częstotliwość początkowa | 0.00Hz~10.00Hz | 0.00Hz | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P6-04 | Czas utrzymania częstotliwości początkowej | 0.0s~100.0s | 0.0s | ★ |
| P6-05 | Uruchomienie prądu hamowania DC / prąd przed wzbudzeniem | 0%~100% | 0% | ★ |
| P6-06 | Czas uruchomicnia hamowania prądem stałym / Czas wstępnego wzbudzenia | 0.0s~100.0s | 0.0s | ★ |
| P6-07 | Tryb przyspieszania i zatrzymywania | 1: Liniowe przyspieszenie i opóźnienie2: Przyspieszanie i zwalnianie krzywej S, A3: Przyspieszanie i zwalnianie krzywej S, B | 0 | ★ |
| P6-08 | Czas segmentu początkowego krzywej S | 0.0%~ (100.0%-P6-09) | 30.0% | ★ |
| P6-09 | Czas segmentu końcowego krzywej S | 0.0%~ (100.0%-P6-08) | 30.0% | ★ |
| P6-10 | Tryb zatrzymywania | 0: hamowanie do zatrzymania,1: zatrzymanie wybiegiem | 0 | ☆ |
| P6-11 | Częstotliwość początkowa hamowania prądem stałym | 0.00Hz~ częstotliwość maks. | 0.00Hz | ☆ |
| P6-12 | Czas do rozpoczęcia hamowania prądem stałym | 0.0s~100.0s | 0.0s | ☆ |
| P6-13 | Prąd hamowania | 0%~100% | 0% | ☆ |
| P6-14 | Czas hamowania prądem stałym | 0.0s~100.0s | 0.0s | ☆ |
| P6-15 | Stopień użycia hamulca | 0%~100% | 100% | ☆ |
| Klawiatura i wyświetlacz grupy P7 | ||||
| P7-01 | Wybór funkcji klawisza JOG | 0: Nieprawidłowa wartość JOG1: Przełącznik kanału CMD panelu operator-skiego i kanału zdalnego CMD (zacisk kanału CMD lub kanał CMD)2: Przełącznik nawrotny3: Impulsowanie do przodu | 0 | ★ |
| P7-02 | Funkcja klawisza STOP / RESET | 0: Tylko w trybie klawiatury, funkcja zatrzymania klawisza STOP / RES jest aktywna1: w każdym trybie pracy, funkcja zatrzymania STOP / RES jest aktywna | 1 | ☆ |
| P7-03 | Wyświetlanie parametrów pracy 1 | 0000 ~ FFFFBit00: częstotliwość pracy 1 Hz)Bit01: częstotliwość zadana Hz)Bit02: napięcie szyny zbiorczej (V)Bit03: napięcie wyjściowe (V)Bit04: prąd wyjściowy (A)Bit05: moc wyjściowa (kW)Bit06: moment obrotowy wyjściowy (%)Bit07: stan wejścia DIBit08: stan wyjścia DOBit09: napięcie AI1 (V)Bit10: napięcie AI2 (V)Bit11: napięcie AI3 (V)Bit12: wartość zliczanaBit13: wartość długościBit14: wyświetlanie prędkości obciążeniaBit15: wartość zadana regulatora PID | 1F | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P7-04 | Wyświetlanie parametrów pracy 2 | 0000 ~ FFFF Bit00: Sprzężenie PIDBit01: stopień PLCBit02: Częstotliwość impulsu na wejściu impulsowym (kHz) Bit03: Częstotliwość pracy 2 (Hz)Bit04: Pozostały czas pracyBit5: napięcie AI1 przed korekcją [V]Bit6: napięcie AI2 przed korekcją [V]Bit7: napięcie AI3 przed korekcją [V]Bit8: prędkość liniowaBit9: czas od włączenia falownika [godz.]Bit10: czas od uruchomienia falownika [min]Bit11: zadana częstotliwość impulsów [Hz]Bit12: Wartość zadana komunikacjiBit13: Prędkość sprężenia zwrotnego enkodera (Hz)Bit14: Wyświetlanie częstotliwości głównej X (Hz)Bit15: Wyświetlanie częstotliwości Y (Hz) | 0 | ☆ |
| P7-05 | Wyświetlanie parametrów w stanie zatrzymania | 0000 ~ FFFFBit00: częstotliwość zadana (Hz)Bit01: napięcie szyny (V)Bit02: Stan wejścia DIBit03: Stan wyjścia DOBit04: Napięcie AI1(V)Bit05: Napięcie AI2 (V)Bit06: Napięcie AI3 (V)Bit07: Wartość licznikaBit08: Wartość długościBit09: faza PLCBit10: Prędkość obciążeniaBit11: Konfiguracja PIDBit12: zadana częstotliwość impulsów (kHz) | 33 | ☆ |
| P7-06 | Mnożnik wyświetlanej prędkości obciążenia | 0.0001~6.5000 | 1.0000 | ☆ |
| P7-07 | Temperatura modułu radiatora falownika | 0.0°C~100.0°C | - | ● |
| P7-08 | Temperatura radiatora mostka prostowniczego | 0.0°C~100.0°C | - | ● |
| P7-09 | Łączny czas pracy | 0h~65535h | - | ● |
| P7-10 | Nr produktu | - | - | ● |
| P7-11 | Nr wersji oprogramowania | - | - | ● |
| P7-12 | Liczba miejsce po przecinku przy wyświetlaniu prędkości obciążenia | 0: 0 miejsc po przecinku1: 1 miejsce po przecinku2: 2 miejsca po przecinku3: 3 miejsca po przecinku | 1 | ☆ |
| P7-13 | Łączny czas od włączenia | 0h~65535h | - | ● |
| P7-14 | Łączne zużycie energii | 0~65535KWh | - | ● |
| Funkcje pomocnicze – grupa P8 | ||||
| P8-00 | Częstotliwość impulsowania | 0.00Hz~częstotliwość maks. | 2.00Hz | ☆ |
| P8-01 | Czas przyspieszania impulsowania | 0.0s~6500.0s | 20.0s | ☆ |
| P8-02 | Czas zatrzymywania impulsowania | 0.0s~6500.0s | 20.0s | ☆ |
| P8-03 | Czas przyspieszania 2 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-04 | Czas zatrzymywania 2 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-05 | Czas przyspieszania 3 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-06 | Czas zatrzymywania 3 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-07 | Czas przyspieszania 4 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-08 | Czas zatrzymywania 4 | 0.0s~6500.0s | typ maszyny | ☆ |
| P8-09 | Częstotliwość przeskoku 1 | 0.00Hz~częstotliwość maks. | 0.00Hz | ☆ |
| P8-10 | Częstotliwość przeskoku 2 | 0.00Hz~częstotliwość maks. | 0.00Hz | ☆ |
| P8-11 | Zakres częstotliwości przeskoku | 0.00Hz~częstotliwość maks. | 0.01Hz | ☆ |
| P8-12 | Czas pomiędzy zmianą kierunku obrotu | 0.0s~3000.0s | 0.0s | ☆ |
| P8-13 | Zezwolenie na obroty do tyłu | 0: zezwolenie 1: zakaz | 0 | ☆ |
| P8-14 | Tryb pracy z częstotliwością zadaną niższą od dolnej granicy | 0: praca na dolnej częstotliwości granicznej 1: zatrzymanie2: praca przy zerowej prędkości | 0 | ☆ |
| P8-15 | Równoważenie obciążenia | 0.00Hz~10.00Hz | 0.00Hz | ☆ |
| P8-16 | Próg łącznego czasu załączenia | 0h~65000h | 0h | ☆ |
| P8-17 | Próg łącznego czasu pracy | 0h~65000h | 0h | ☆ |
| P8-18 | Ochrona startu | 0: bcz ochrony 1: ochrona | 0 | ☆ |
| P8-19 | Próg częstotliwości | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| P8-20 | Histereza progu częstotliwości | 0.0%~100.0% (poziom FDT1) | 5.0% | ☆ |
| P8-21 | Zakres detekcji wokół częstotliwości zadanej | 0.0%~100.0% (częstotliwość maks.) | 0.0% | ☆ |
| P8-22 | Aktywność progów częstotliwości w czasie przyspieszania/zatrzymywania | 0: nicaktywne 1: aktywne | 0 | ☆ |
| P8-25 | Częstotliwość przełączenia pomiędzy czasem przyspieszania 1 a czasem przyspieszania 2 | 0.00Hz~częstotliwość maks. | 0.00Hz | ☆ |
| P8-26 | Częstotliwość przełączania pomiędzy czasem zatrzymywania 1 a czasem zatrzymywania 2 | 0.00Hz~częstotliwość maks. | 0.00Hz | ☆ |
| P8-27 | Wysoki priorytet rozkazu bicgu próbnego z terminala | 0: nicaktywny1: aktywny | 0 | ☆ |
| P8-28 | Wartość detekcji częstotliwości | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| P8-29 | Wartość histerezy detekcji częstotliwości | 0.0%~100.0% (poziom FDT2) | 5.0% | ☆ |
| P8-30 | Dowolna wartość detekcji częstotliwości 1 | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| P8-31 | Dowolna szerokość detekcji częstotliwości 1 | 0.0%~100.0% (częstotliwość maks.) | 0.0% | ☆ |
| P8-32 | Dowolna wartość detekcji częstotliwości 2 | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| P8-33 | Dowolna szerokość detekcji częstotliwości 2 | 0.0%~100.0% (częstotliwość maks.) | 0.0% | ☆ |
| P8-34 | Próg detekcji prądu zerowego | 0.0%~300.0%prąd znamionowy to 100.0% | 5.0% | ☆ |
| P8-35 | Czas opóźnienia detekcji prądu zerowego | 0.01s~600.00s | 0.10s | ☆ |
| P8-36 | Wartość graniczna prądu wyjściowego | 1% (brak detekcji)2%~300.0% (prąd znamionowy silnika) | 200.0% | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P8-37 | Czas opóźnienia detekcji progu prądu wyjściowego | 0.00s~600.00s | 0.00s | ☆ |
| P8-38 | Dowolny prąd osiągnięty 1 | 0.0%~300.0% (prąd znamionowy silnika) | 100.0% | ☆ |
| P8-39 | Szerokość dowolnego prądu osiągniętego 1 | 0.0%~300.0% (prąd znamionowy silnika) | 0.0% | ☆ |
| P8-40 | Dowolny prąd osiągnięty 2 | 0.0%~300.0% (prąd znamionowy silnika) | 100.0% | ☆ |
| P8-41 | Szerokość dowolnego prądu osiągniętcego 2 | 0.0%~300.0% (prąd znamionowy silnika) | 0.0% | ☆ |
| P8-42 | Wybór funkcji czasomierza | 0: nieaktywny 1: aktywny | 0 | ☆ |
| P8-43 | Wybór czasu pracy czasomicrza | 0: ustawianie P8-44; 1: AI1; 2: AI2; 3: AI3Zakres wejścia analogowego odpowiada P8-44 | ☆ | |
| P8-44 | Czas pracy czasomierza | 0.0Min~6500.0Min | 0.0Min | ☆ |
| P8-45 | Dolny próg ochrony napięcia wejściowego AI1 | 0.00V~P8-46 | 3.10V | ☆ |
| P8-46 | Górny próg ochrony napięcia wejściowego AI1 | P8-45~10.00V | 6.80V | ☆ |
| P8-47 | Temperatura modułu osiągnięta | 0°C~100°C | 75°C | ☆ |
| P8-48 | Sterowanie wentylatorcm | 0: Tylko w czasie pracy falownika1: Cały czas | 0 | ☆ |
| P8-49 | Częstotliwość wznowicnia | Częstotliwość uśpicnia (P8-51) ~ częstotliwość maksymalna (P0-10) | 0.00Hz | ☆ |
| P8-50 | Opóźnicnie wznowicnia | 0.0s~6500.0s | 0.0s | ☆ |
| P8-51 | Częstotliwość uśpienia | 0.00Hz~częstotliwość wznowienia (P8-49) | 0.00Hz | ☆ |
| P8-52 | Opóźnicnie przejścia w stan uśpienia | 0.0s~6500.0s | 0.0s | ☆ |
| P8-53 | Maksymalny łączny czas pracy | 0.0Min~6500.0Min | 0.0Min | ☆ |
| Grupa F09: Błędy i zabezpieczenia | ||||
| P9-00 | Wybór ochrony silnika przed przeciążeniem | 0: dozwolony 1: zabroniony | 1 | ☆ |
| P9-01 | Wzmocnienie ochrony silnika przed przeciążeniem | 0.20~10.00 | 1.00 | ☆ |
| P9-02 | Poziom wyzwolcnia ostrzeżeniaprzeciążeniowego silnika | 50%~100% | 80% | ☆ |
| P9-03 | Wzmocnienie zabezpieczenia przed utykiem | 0~100 | 0 | ☆ |
| P9-04 | Napięcie ochronne przed utykiem przepięciowym | 120%~150% | 130% | ☆ |
| P9-05 | Przyrost utyku przetężeniowego | 0~100 | 20 | ☆ |
| P9-06 | Prąd ochrony przed utykiem przetężeniowym | 100%~200% | 150% | ☆ |
| P9-07 | Zabezpieczenie przed zwarciem do masy | 0: nieaktywna 1: aktywna | 1 | ☆ |
| P9-09 | Automatyczne resetowanie błędu | 0~20 | 0 | ☆ |
| P9-10 | Działanie wyjścia DO podczas automatycznego resetowania błędu | 0: nieaktywne1: aktywne | 0 | ☆ |
| P9-11 | Czas pomiędzy wystąpieniem błędu a jego automatycznym zresetowaniem | 0.1s~100.0s | 1.0s | ☆ |
| P9-12 | Zabezpieczenie przed utratą fazy na wejściu | 0: dozwolone 1: zabronione | 1 | ☆ |
| P9-13 | Zabezpieczenie przed utratą fazy na wyjściu | 0: dozwolone 1: zabronione | 1 | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P9-14 | Pierwszy błąd | 0: brak błędu1: zastrzeżone2: przetężenie podczas przyśpieszania3: przetężenie podczas zatrzymywania4: przetężenie przy stałej prędkości5: przepięcie podczas przyśpieszania6: przepięcie podczas zatrzymywania7: przepięcie przy stałej prędkości8: przeciążenie bufora rezystancji9: spadek napięcia10: przeciążenie przemicennika11: przeciążenie silnika12: zanik fazy na wejściu | — | ● |
| P9-15 | Drugi błąd | 13: zanik fazy na wyjściu14: przegrzanie modułu15: błąd urządzeń zewnętrznych16: błąd komunikacji17: błąd stycznika18: błąd pomiaru prądu19: błąd auto-tuningu silnika20: błąd enkodera / karty PG21: błąd odczytu / zapisu parametrów22: błąd sprzętowy przemiennika23: błąd sprzętowy przemiennika24: zastrzeżone25: zastrzeżone | — | ● |
| P9-16 | Drugi (ostatni) błąd | 26: Przekroczenie łącznego czasu pracy27: Błąd zdefiniowany przez użytkownika 128: Błąd zdefiniowany przez użytkownika 229: przekroczenie łącznego czasu zasilania30: obciążenie staje się zerowe31: przerwanie sprzężenia zwrotnego PID40: Krótki limit czasu ograniczenia prądu41: Błąd podczas przełączania pracującego silnika42: Nadmierne odchylenie prędkości43: Nadmicrna prędkość silnika45: Przegrzanie silnika51: Błąd pozycji początkowej | — | ● |
| P9-17 | Częstotliwość drugiego (ostatniego) błędu | — | — | ● |
| P9-18 | Prąd drugiego (ostatniego) błędu | — | — | ● |
| P9-19 | Napięcie na szynie przy drugim (ostatnim) błędzie | — | — | ● |
| P9-20 | Stan zacisku wejść przy drugim (ostatnim) błędzie | — | — | ● |
| P9-21 | Stan zacisku wyjść przy drugim (ostatnim) błędzie | — | — | ● |
| P9-22 | Stan przemicennika przy drugim (ostatnim) błędzie | — | — | ● |
| P9-23 | Czas zasilania falownika przy drugim (ostatnim) błędzie | — | — | ● |
| P9-24 | Czas pracy falownika przy drugim (ostatnim) błędzie | — | — | ● |
| P9-27 | Częstotliwość drugiego błędu | — | — | ● |
| P9-28 | Prąd drugiego błędu | — | — | ● |
| P9-29 | Napięcie na szynie przy drugim błędzie | — | — | ● |
| P9-30 | Stan wejść przy drugim błędzie | — | — | ● |
| P9-31 | Stan zacisku wyjść przy drugim błędzie | — | — | ● |
| P9-32 | Stan falownika przy drugim błędzie | — | — | ● |
| P9-33 | Czas zasilania przy drugim błędzie | — | — | ● |
| P9-34 | Czas pracy przy drugim błędzie | — | — | ● |
| P9-37 | Częstotliwość pierwszego błędu | — | — | ● |
| P9-38 | Prąd pierwszego blędu | — | — | ● |
| P9-39 | Napięcie na szynie przy pierwszym błędzie | — | — | ● |
| P9-40 | Częstotliwość pierwszego blędu | — | — | ● |
| P9-41 | Stan wyjść przy pierwszym błędzie | — | — | ● |
| P9-42 | Stan falownika przy pierwszym błędzie | — | — | ● |
| P9-43 | Czas zasilania przy pierwszym błędzie | — | — | ● |
| P9-44 | Czas pracy przy pierwszym błędzie | — | — | ● |
| P9-47 | Środki zaradcze dla blędu typu 1 | Cyfra jedności: przeciążenie silnika (11)0: zatrzymywanie wybiegiem1: zatrzymanie, przejście w tryb stop2: kontynuacja pracyDziesiątki: zanik fazy na wejściu 12)Cyfra jedności: 100 zanik fazy na wyjściu (13)Tysiące: błąd urządzeń zewnętrznych (15)Dziesięć tysięcy: błąd komunikacji (16) | 00000 | ☆ |
| P9-48 | Środki zaradcze dla blędu typu 2 | Cyfra jedności: błąd enkodera / karty PG (20)0: Zatrzymanie wybiegiem10: Błąd czytnika kodów (21)0: Zatrzymanie wybiegiem1: Zatrzymanie, przejście w tryb stop100: Zastrzeżone1000: Przecgrzanie silnika (25)10000: Przekroczenie czasu pracy (26) | 00000 | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| P9-49 | Środki zaradcze dla błędu 3 | Cyfra jedności: Błąd zdefiniowany przez użytkownika 1 (27)0: Zatrzymanie wybiegiem1: Zatrzymanie, przejście w tryb stop2: Kontynuacja pracySetki: Przekroczenie łącznego czasu pracy (29)Tysiące: obciążenie staje się zerowe (30)0: Zatrzymanie wybiegiem1: Zatrzymanie, przejście w tryb stop2: kontynuacja pracy na 7 % wartości częstotliwości nominalnej silnika i powrót do ustawionej częstotliwości, gdy silnik odzyska obciążenieDziesięć tysięcy: utrata sprężenia zwrotnego przez PID (31)0: Zatrzymanie wybiegiem1: Zatrzymanie, przejście w tryb stop2: kontynuacja pracy | 00000 | ☆ |
| P9-50 | Środki zaradcze dla błędu 4 | Cyfra jedności: Nadmierne odchylenie prędkości (42)0: Zatrzymanie wybiegiem1: Zatrzymanie, przejście w tryb stop2: Kontynuacja pracyDziesiątki: Nadmierna prędkość silnika (43)Setki: Błąd pozycji początkowej (51) | 00000 | ☆ |
| P9-54 | Kontynuacja wybranej częstotliwości, gdy wystąpi błąd | 0: Prac z aktualną częstotliwością roboczą1: Uruchamianie z nastawioną częstotliwością2: Uruchamianie z górnym progiem częstotliwości3: Praca z dolnym progiem częstotliwości4: Praca z alternatywną częstotliwością anormalną | 0 | ☆ |
| P9-55 | Błąd częstotliwość alternatywnej | 60.0%~100.0% (100.0% Odpowiada częstotliwości maks. P0-10) | 100.0% | ☆ |
| P9-56 | Typ czujnika temperatury silnika | 0: brak czujnika temperatury1: PT1002: PT1000 | 0 | ☆ |
| P9-57 | Próg ochrony silnika przed przegrzaniem | 0°C~200°C | 110°C | ☆ |
| P9-58 | Próg ostrzegawczy przegrzania silnika | 0°C~200°C | 90°C | ☆ |
| P9-59 | Wybór sposobu działania w przypadku chwilowego zaniku zasilania | 0: nicaktywny1: hamowanie2: wybieg do zatrzymania | 0 | ☆ |
| P9-60 | Zastrzeżone | P9-62~100.0% | 100.0% | ☆ |
| P9-61 | Czas reakcji w przypadku zaniku zasilania | 0.00s~100.00s | 0.50s | ☆ |
| P9-62 | Wartość zmiany napięcia dla reakcji po zaniku zasilania | 60.0%~100.0% (standardowe napięcie szyny) | 80.0% | ☆ |
| P9-63 | Ochrona po spadku obciążenia do zera | 0: nieaktywna1: aktywna | 0 | ☆ |
| P9-64 | Poziom wykrywania spadku obciążenia do zera | 0.0~100.0% | 10.0% | ☆ |
| P9-65 | Czas wykrywania spadku obciążenia do zera | 0.0~60.0s | 1.0s | ☆ |
| P9-67 | Próg detekcji nadmiernej prędkości | 0.0%~50.0% (częstotliwość maks.) | 20.0% | ☆ |
| P9-68 | Czas detekcji nadmiernej prędkości | 0.0s~60.0s | 5.0s | ☆ |
| P9-69 | Próg detekcji nadmiernego uchybu prędkości | 0.0%~50.0% (częstotliwość maks.) | 20.0% | ☆ |
| P9-70 | Czas detekcji nadmiernego uchybu prędkości | 0.0s~60.0s | 0.0s | ☆ |
| Grupa PA - działanie PID | ||||
| PA-00 | Wybór źródła wartości zadanej regulatora PID | 0: nastawy PA-011: A11;2: A12;3: A134: wejście impulsowe (DI5)5: ustawienia komunikacji6: sterowanie wielokrokowe | 0 | ☆ |
| PA-01 | Wartości zadane PID | 0.0%~100.0% | 50.0% | ☆ |
| PA-02 | Źródło sygnału sprężenia zwrotnego PID | 0: A11; 1: A12; 2: A13; 3: A11-A124: nastawa impulsu (DI5)5: ustawienia komunikacji6: A11+A127: MAX (|AI1|, |AI2|)8: MIN (|AI1|, |AI2|) | 0 | ☆ |
| PA-03 | Kierunck działania PID | 0: dodatni1: ujemny | 0 | ☆ |
| PA-04 | Zakres sprężenia zwrotnego PID | 0~65535 | 1000 | ☆ |
| PA-05 | Przyrost członu proporcjonalnego Kp1 | 0.0~100.0 | 20.0 | ☆ |
| PA-06 | Czas całkowania Ti1 | 0.01s~10.00s | 2.00s | ☆ |
| PA-07 | Czas różniczkowania Td1 | 0.000s~10.000s | 0.000s | ☆ |
| PA-08 | Częstotliwość odcięcia dla działania PID do tyłu | 0.00~częstotliwość maks. | 2.00Hz | ☆ |
| PA-09 | Limit odchylenia PID | 0.0%~100.0% | 0.0% | ☆ |
| PA-10 | Limit różniczkowania PID | 0.00%~100.00% | 0.10% | ☆ |
| PA-11 | Zmiana czasu PID | 0.00~650.00s | 0.00s | ☆ |
| PA-12 | Czas filtra sprężenia zwrotnego PID | 0.00~60.00s | 0.00s | ☆ |
| PA-13 | Czas filtra wyjściowego PID | 0.00~60.00s | 0.00s | ☆ |
| PA-14 | Zastrzeżone | - | - | ☆ |
| PA-15 | Współczynnik wzmocnienia członu proporcjonalnego Kp2 | 0.0~100.0 | 20.0 | ☆ |
| PA-16 | Czas całkowania Ti2 | 0.01s~10.00s | 2.00s | ☆ |
| PA-17 | Czas różniczkowania Td2 | 0.000s~10.000s | 0.000s | ☆ |
| PA-18 | Warunki przełączania parametrów PI | 0: bez przełączenia1: za pomocą przełącznika zacisków DI2: automatyczne przełączanic w oparciu o odchylenic | 0 | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| PA-19 | Odchylenie przełączenia parame-trów 1 | 0.0%~PA-20 | 20.0% | ☆ |
| PA-20 | Odchylenie przełączenia parame-trów 2 | PA-19~100.0% | 80.0% | ☆ |
| PA-21 | Wartość początkowa PID | 0.0%~100.0% | 0.0% | ☆ |
| PA-22 | Czas wstrzymania wartości początkowej PID | 0.00~650.00s | 0.00s | ☆ |
| PA-23 | Maks. odchylenie pomiędzy dwoma wyjściami PID w działaniu do przodu | 0.00%~100.00% | 1.00% | ☆ |
| PA-24 | Maks. odchylenie pomiędzy dwoma wyjściami PID w działaniu do tyłu | 0.00%~100.00% | 1.00% | ☆ |
| PA-25 | Właściwości członu całkującego PID | Cyfra jedności: całkowite odseparowanie0: Nieaktywne;1: AktywneDziesiątki: zatrzymanie całkowania po osiągnięciu na wyjściu ustawionej wartości0: kontynuacja pracy z całkowaniem1: wstrzymanie całkowania | 00 | ☆ |
| PA-26 | Wartość wykrywania zaniku sprzęcenia zwrotnego PID | 0.0%: brak analizy utraty sprzęenia0.1%~100.0% | 0.0% | ☆ |
| PA-27 | Czas wykrywania zaniku sprzęt. zwrotnego PID | 0.0s~20.0s | 0.0s | ☆ |
| PA-28 | Działanie PID po zatrzymaniu | 0: wyłączenie PID po zatrzymaniu;1: działanie PID po zatrzymaniu | 0 | ☆ |
| Grupa Pb: Częstotliwość oscylacyjna, długość i zliczanie | ||||
| Pb-00 | Tryb częstotliwości oscylacyjnej | 0: powiązana z częstotliwością środkową1: powiązana z częstotliwością maksy-malną | 0 | ☆ |
| Pb-01 | Amplituda częstotliwości oscyla-cyjnej | 0.0%~100.0% | 0.0% | ☆ |
| Pb-02 | Skok częstotliwości oscylacyjnej | 0.0%~50.0% | 0.0% | ☆ |
| Pb-03 | Cykl częstotliwości oscylacyjnej | 0.1s~3000.0s | 10.0s | ☆ |
| Pb-04 | Współczynnik czasu narastania fali trójkątnej | 0.1%~100.0% | 50.0% | ☆ |
| Pb-05 | Ustawienie długości | 0m~65535m | 1000m | ☆ |
| Pb-06 | Długość bicząca | 0m~65535m | 0m | ☆ |
| Pb-07 | Liczba impulsów na metr | 0.1~6553.5 | 100.0 | ☆ |
| Pb-08 | Ustawicnie wartości licznika | 1~65535 | 1000 | ☆ |
| Pb-09 | Wartość zadana licznika | 1~65535 | 1000 | ☆ |
| Grupa PC – Polecenia wieloetapowe i funkcje PLC | ||||
| PC-00 | Komenda wielostanowa 0 | -100.0%~100.0% | 0.0% | ☆ |
| PC-01 | Komenda wielostanowa 1 | -100.0%~100.0% | 0.0% | ☆ |
| PC-02 | Komenda wielostanowa 2 | -100.0%~100.0% | 0.0% | ☆ |
| PC-03 | Komenda wielostanowa 3 | -100.0%~100.0% | 0.0% | ☆ |
| PC-04 | Komenda wielostanowa 4 | -100.0%~100.0% | 0.0% | ☆ |
| PC-05 | Komenda wielostanowa 5 | -100.0%~100.0% | 0.0% | ☆ |
| PC-06 | Komenda wielostanowa 6 | -100.0%~100.0% | 0.0% | ☆ |
| PC-07 | Komenda wielostanowa 7 | -100.0%~100.0% | 0.0% | ☆ |
| PC-08 | Komenda wielostanowa 8 | -100.0%~100.0% | 0.0% | ☆ |
| PC-09 | Polecenie wieloetapowe 9 | -100.0%~100.0% | 0.0% | ☆ |
| PC-10 | Komenda wielostanowa 10 | -100.0%~100.0% | 0.0% | ☆ |
| PC-11 | Komenda wielostanowa 11 | -100.0%~100.0% | 0.0% | ☆ |
| PC-12 | Komenda wielostanowa 12 | -100.0%~100.0% | 0.0% | ☆ |
| PC-13 | Komenda wielostanowa 13 | -100.0%~100.0% | 0.0% | ☆ |
| PC-14 | Komenda wielostanowa 14 | -100.0%~100.0% | 0.0% | ☆ |
| PC-15 | Komenda wielostanowa 15 | -100.0%~100.0% | 0.0% | ☆ |
| PC-16 | Tryb pracy prostego PLC | 0: zatrzymanie po wykonaniu jednego cyklu1: utrzymywanie wartości po wykonaniu jednego cyklu2: powtórzenie po wykonaniu pełnego cyklu | 0 | ☆ |
| PC-17 | Wybór pamięci po awarii zasilania PLC | Cyfra jedności: praca po zaniku zasilania0: brak pamięci po awarii zasilania1: pamięć po awarii zasilaniaDziesiątki: wybór pamięci po zatrzymaniu0: brak pamięci po zatrzymaniu1: pamięć po zatrzymaniu | 00 | ☆ |
| PC-18 | Czas pracy PLC dla pkt. 0 | 0.0s (h) ~6553.5s (h) | 0.0s (h) | ☆ |
| PC-19 | Czas przyśpieszenia i zatrzymania PLC dla pkt. 0 | 0~3 | 0 | ☆ |
| PC-20 | Czas pracy PLC dla pkt. 1 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-21 | Czas przyśpieszenia i zatrzymania PLC dla pkt 1 | 0~3 | 0 | ☆ |
| PC-22 | Czas pracy PLC dla pkt. 2 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-23 | Czas przyśpieszenia i zatrzymania PLC dla pkt 2 | 0~3 | 0 | ☆ |
| PC-24 | Czas pracy PLC dla pkt. 3 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-25 | Czas przyśpieszenia i zatrzymania PLC dla pkt 3 | 0~3 | 0 | ☆ |
| PC-26 | Czas pracy PLC dla pkt. 4 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-27 | Czas przyśpieszenia i zatrzymania PLC dla pkt 4 | 0~3 | 0 | ☆ |
| PC-28 | Czas pracy PLC dla pkt. 5 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-29 | Czas przyśpieszenia i zatrzymania PLC dla pkt 5 | 0~3 | 0 | ☆ |
| PC-30 | Czas pracy PLC dla pkt. 6 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-31 | Czas przyśpieszenia i zatrzymania PLC dla pkt 6 | 0~3 | 0 | ☆ |
| PC-32 | Czas pracy PLC dla pkt. 7 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-33 | Czas przyśpieszenia i zatrzymania PLC dla pkt 7 | 0~3 | 0 | ☆ |
| PC-34 | Czas pracy PLC dla pkt. 8 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-35 | Czas przyśpieszenia i zatrzymania PLC dla pkt 8 | 0~3 | 0 | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| PC-36 | Czas pracy PLC dla pkt. 9 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-37 | Czas przyśpieszenia i zatrzymania PLC dla pkt 9 | 0~3 | 0 | ☆ |
| PC-38 | Czas pracy PLC dla pkt. 10 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-39 | Czas przyśpieszenia i zatrzymania PLC dla pkt 10 | 0~3 | 0 | ☆ |
| PC-40 | Czas pracy PLC dla pkt. 11 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-41 | Czas przyśpieszenia i zatrzymania PLC dla pkt 11 | 0~3 | 0 | ☆ |
| PC-42 | Czas pracy PLC dla pkt. 12 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-43 | Czas przyśpieszenia i zatrzymania PLC dla pkt 12 | 0~3 | 0 | ☆ |
| PC-44 | Czas pracy PLC dla pkt. 13 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-45 | Czas przyśpieszenia i zatrzymania PLC dla pkt 13 | 0~3 | 0 | ☆ |
| PC-46 | Czas pracy PLC dla pkt. 14 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-47 | Czas przyśpieszenia i zatrzymania PLC dla pkt 14 | 0~3 | 0 | ☆ |
| PC-48 | Czas pracy PLC dla pkt. 15 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-49 | Czas przyśpieszenia i zatrzymania PLC dla pkt 15 | 0~3 | 0 | ☆ |
| PC-50 | Jednostka czasu pracy PLC | 0: s (sekunda)1: h (godzina) | 0 | ☆ |
| PC-51 | Zadawanie parametrów dla punktu referencyjnego 0 | 0: podany kod funkcji PC-001: AI12: AI23: AI34: ustawienia impulsu5: PID6: ustawiany za pomocą częstotliwości zadanej (P010),modyfikowany przyciskami UP/DOWN | 0 | ☆ |
| Grupa Pd – Parametry komunikacyjne | ||||
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| Pd-00 | Prędkość transmisji | Cyfra jedności: MODBUS 0: 300BPS1: 600BPS2: 1200BPS3: 2400BPS4: 4800BPS5: 9600BPS6: 19200BPS7: 38400BPS8: 57600BPS9: 115200BPSDziesiąłki: zastrzeżoneSetki: zastrzeżoneTysiące: Prędkość transmisji CANlink0: 201: 502: 1003: 1254: 2505: 5006: 1M | 6005 | ☆ |
| Pd-01 | Format danych | 0: bez sprawdzania, format <8, N, 2>1: sprawdzanie parzystości, format <8, E, 1>2: sprawdzanie nicparzystości, format <8, O, 1>3: brak sprawdzania, format <8, N, 1> | 0 | ☆ |
| Pd-02 | Adres lokalny | 1~247, 0: adres ramki | 1 | ☆ |
| Pd-03 | Opóźnienie odpowiedzi | 0ms~20ms | 2 | ☆ |
| Pd-04 | Czas przerwy w komunikacji | 0.0 (nieaktywny), 0.1s~60.0s | 0.0 | ☆ |
| Pd-05 | Wybór formatu transmisji danych | Jednostka na wyświetlaczu: protokół MODBUS0: niestandardowy protokół Modbus1: standardowy protokół ModbusDziesiętna na wyświetlaczu: zastrzeżone | 30 | ☆ |
| Pd-06 | Rozdzielczość dla odczytu danych w komunikacji | 0: 0.01A1: 0.1A | 0 | ☆ |
| Grupa PE - Kody funkcji zdefiniowane przez użytkownika | ||||
| Kod | Nazwa | Nastawy | Domyśl ne | Zmiana |
| PE-00 | Kod funkcji użytkownika 0 | P0-00 ~ PP-xxA0-00 ~ Ax-xxU0-xx~U0-xx | P0.10 | ☆ |
| PE-01 | Kod funkcji użytkownika 1 | P0.02 | ☆ | |
| PE-02 | Kod funkcji użytkownika 2 | P0.03 | ☆ | |
| PE-03 | Kod funkcji użytkownika 3 | P0.07 | ☆ | |
| PE-04 | Kod funkcji użytkownika 4 | P0.08 | ☆ | |
| PE-05 | Kod funkcji użytkownika 5 | P0.17 | ☆ | |
| PE-06 | Kod funkcji użytkownika 6 | P0.18 | ☆ | |
| PE-07 | Kod funkcji użytkownika 7 | P3.00 | ☆ | |
| PE-08 | Kod funkcji użytkownika 8 | P3.01 | ☆ | |
| PE-09 | Kod funkcji użytkownika 9 | P4.00 | ☆ | |
| PE-10 | Kod funkcji użytkownika 10 | P4.01 | ☆ | |
| PE-11 | Kod funkcji użytkownika 11 | P4.02 | ☆ | |
| PE-12 | Kod funkcji użytkownika 12 | P5.04 | ☆ | |
| PE-13 | Kod funkcji użytkownika 13 | P5.07 | ☆ | |
| PE-14 | Kod funkcji użytkownika 14 | P6.00 | ☆ | |
| PE-15 | Kod funkcji użytkownika 15 | P6.10 | ☆ | |
| PE-16 | Kod funkcji użytkownika 16 | P0.00 | ☆ | |
| PE-17 | Kod funkcji użytkownika 17 | P0.00 | ☆ | |
| PE-18 | Kod funkcji użytkownika 18 | P0.00 | ☆ | |
| PE-19 | Kod funkcji użytkownika 19 | P0.00 | ☆ | |
| PE-20 | Kod funkcji użytkownika 20 | P0.00 | ☆ | |
| PE-21 | Kod funkcji użytkownika 21 | P0.00 | ☆ | |
| PE-22 | Kod funkcji użytkownika 22 | P0.00 | ☆ | |
| PE-23 | Kod funkcji użytkownika 23 | P0.00 | ☆ | |
| PE-24 | Kod funkcji użytkownika 24 | P0.00 | ☆ | |
| PE-25 | Kod funkcji użytkownika 25 | P0.00 | ☆ | |
| PE-26 | Kod funkcji użytkownika 26 | P0.00 | ☆ | |
| PE-27 | Kod funkcji użytkownika 27 | P0.00 | ☆ | |
| PE-28 | Kod funkcji użytkownika 28 | P0.00 | ☆ | |
| PE-29 | Kod funkcji użytkownika 29 | P0.00 | ☆ | |
| Grupa PP - Zarządzanie kodami funkcji | ||||
| PP-00 | Hlasło użytkownika | 0~65535 | 0 | ☆ |
| PP-01 | Przywrócenie ustawicń domyślnych | 0: nie przywracać01: przywrócenie ustawicń oprócz parametrów silnika02: usunięcie zapisów04: bieżące zapasowe parametry użytkownika501: Odzyskanie parametrów zapasowych użytkownika | 0 | ★ |
| PP-02 | Wybór wyświetlania parametrów funkcji | Cyfra jedności: wybór wyświetlania grupy U0: brak wyświetlania1: wyświetlanieDziesiątki: wybór wyświetlania grupy A0: brak wyświetlania1: wyświetlanie | 11 | ★ |
| PP-03 | Wybór wyświetlania grupy parametrów zdefiniowanych przez użytkownika | Bit: wybór wyświetlania grupy parametrów zdefiniowanych przez użytkownika0: brak wyświetlania 1: wyświetlanieCyfra jedności: wybór wyświetlania grupy parametrów zmodyfikowanych przez użytkownika0: brak wyświetlania 1: wyświetlanie | 00 | ☆ |
| PP-04 | Modyfikowanie kodu funkcji | 0: można modyfikować1: nie można modyfikować | 0 | ☆ |
| Grupa A0 Sterowanie momentem obrotowym i ograniczenia parametrów | ||||
| A0-00 | Wybór sterowania prędkość/moment | 0: sterowanie prędkością1: sterowanie momentem | 0 | ★ |
| A0-01 | Wybór źródła zadawania sterowania momentem | 0: ustawienia cyfrowe 1 (A0-03)1: AI12: AI23: AI34: ustawienia impulsu5: ustawienia komunikacji6: MIN (AI1, AI2)7: MAX (AI1, AI2) (Opcja pełnej skali 1-7, odpowiednie ustawienie cyfrowe A0-03) | 0 | ★ |
| A0-03 | Cyfrowe ustawianie momentu w trybie sterowania momentem | -200.0%~200.0% | 150.0% | ☆ |
| A0-05 | Dodatnia maks. częstotliwość regulacji momentu obrotowego | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| A0-06 | Ujemna maks. częstotliwość regulacji momentu obrotowego | 0.00Hz~częstotliwość maks. | 50.00Hz | ☆ |
| A0-07 | Czas przyśpieszania dla sterowania momentem | 0.00s~65000s | 0.00s | ☆ |
| A0-08 | Czas zatrzymywania dla sterowania momentem | 0.00s~65000s | 0.00s | ☆ |
| Grupa A2 - Sterowanie drugim silnikiem grupy | ||||
| A2-00 | Wybór typu silnika | 0: Zwykły silnik indukcyjny1: Silniki indukcyjne o zmiennej częstotliwości | 0 | ★ |
| A2-01 | Moc znamionowa silnika | 0.1kW~1000.0kW | typ maszyny | ★ |
| A2-02 | Napięcie znamionowe silnika | 1V~400V | typ maszyny | ★ |
| A2-03 | Prąd znamionowy silnika | 0.01A~655.35A(moc przemiennika =55kW)0.1A~6553.5A(moc przemiennika >55kW) | typ maszyny | ★ |
| A2-04 | Częstotliwość znamionowa silnika | 0.011lz~częstotliwość maks. | typ maszyny | ★ |
| A2-05 | Prędkość znamionowa silnika | 1 obr/min~65535 obr/min | typ maszyny | ★ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| A2-06 | Rezystancja stojana silnika asynchronousznego | 0.001 65.535 (moc przemiennika <=55kW ) 0.0001 6.5535 (moc przemicniska >55kW ) | typ maszyny | ★ |
| A2-07 | Rezystancja wirnika silnika asynchronousznego | 0.001 65.535 (moc przemicniska <=55kW ) 0.0001 6.5535 (moc przemicniska >55kW ) | typ maszyny | ★ |
| A2-08 | Reaktancja indukcyjna upływu silnika asynchronousznego | 0.01mH 655.35mH (moc przemicnika <=55kW ) 0.001mH 65.535mH (moc przemicnika >55kW ) | typ maszyny | ★ |
| A2-09 | Wzajemna reaktancja indukcyjna silnika asynchronousznego | 0.1mH 6553.5mH (moc przemicnika <=55kW ) 0.01mH 655.35mH (moc przemicnika >55kW ) | typ maszyny | ★ |
| A2-10 | Prąd bez obciążeniowy silnika asynchronousznego | 0.01A A2-03(moc przemicnika \( <=55kW ) 0.1A A2-03 (moc przemicnika \( >55kW ) | typ maszyny | ★ |
| A2-27 | Numer linii enkodera | 1 65535 | 1024 | ★ |
| A2-28 | Typ enkodera | 0: 0: Enkoder inkrementalny ABZ1: Zastrzeżone2: Resolwcr | 0 | ★ |
| A2-29 | Wybór PG sprężenia zwrotnego prędkości | 0: miejscowe PG1: miejscowe PG2: wejścic impulsowe (DI5) | 0 | ★ |
| A2-30 | Sekwencja faz AB enkodera inkrementalnego ABZ | 0: w przód1: w tył | 0 | ★ |
| A2-34 | Liczba par biegunów transformatora obrotowego | 1~65535 | 1 | ★ |
| A2-36 | Czas wykrywania rozłączenia PG w sprzężeniu zwrotnym prędkości | 0.0: brak działania0.1s~10.0s | 0.0 | ★ |
| A2-37 | Wybór strojenia | 0: Brak działania1: Statyczne strojenie silnika asynchronousnego2: Pełne strojenie silnika asynchronousnego | 0 | ★ |
| A2-38 | Wzmocnienie proporcjonalne pętli prędkości 1 | 1~100 | 30 | ☆ |
| A2-39 | Czas całkowania pętli prędkości 1 | 0.01s~10.00s | 0.50s | ☆ |
| A2-40 | Częstotliwość przełączania 1 | 0.00~A2-43 | 5.00Hz | ☆ |
| A2-41 | Wzmocnienie proporcjonalne pętli prędkości 2 | 1~100 | 20 | ☆ |
| A2-42 | Czas całkowania pętli prędkości 2 | 0.01s~10.00s | 1.00s | ☆ |
| A2-43 | Częstotliwość przełączania 2 | A2-40~częstotliwość maks. | 10.00Hz | ☆ |
| A2-44 | Wzmocnienie poślizgu sterowania wektorowego | 50%~200% | 100% | ☆ |
| A2-45 | Stała czasowa dla filtra pętli prędkości | 0.000s~0.100s | 0.000s | ☆ |
| A2-46 | Sterowanie wektorowe wzmocnienia wzbudzenia | 0~200 | 64 | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| A2-47 | Źródło górnego limitu w trybie sterowania prędkością | 0: Ustawienie A2-481: AI12: AI23: AI34: Ustawienie impulsu5: Ustawienia komunikacji6: MIN (AI1, AI2)7: MAX (AI1, AI2)Pełna skala opcji 1 -7 odpowiada ustawieniom cyfrowym A2-48 | 0 | ☆ |
| A2-48 | Cyfrowe ustawianie momentu obrotowego w trybic sterowania prędkością | 0.0%~200.0% | 150.0% | ☆ |
| A2-51 | Wzmocnienie proporcjonalne wzbudzenia | 0~20000 | 2000 | ☆ |
| A2-52 | Wzmocnienie całkowe wzbudzenia | 0~20000 | 1300 | ☆ |
| A2-53 | Wzmocnienie proporcjonalne regulacji momentu obrotowego | 0~20000 | 2000 | ☆ |
| A2-54 | Wzmocnienie całkowania regulacji momentu | 0~20000 | 1300 | ☆ |
| A2-55 | Właściwości członu całkującego pętli prędkościowej | Cyfra jedności: separacja całkowania0: niedozwolone1: dozwolone | 0 | ☆ |
| A2-61 | Tryb sterowania silnikiem 2 | 0: Brak sterowania wektorowego czujnika prędkości (SVC)1: Sterowanie wektorowe czujnika prędkości (FVC)2: Sterowanie U/f | 0 | ★ |
| A2-62 | Czas przyspieszania / hamowania silnika 2 | 0: tak jak silnik 11: Czas przyspieszania / hamowania 12: Czas przyspieszania / hamowania 23: Czas przyspieszania / hamowania 34: Czas przyspieszania / hamowania 4 | 0 | ☆ |
| A2-63 | Zwiększanie momentu obrotowego silnika 2 | 0.0%: automatyczne zwiększanie momentu0.1%~30.0% | typ maszyny | ☆ |
| A2-65 | Wzmocnienie tłumienia oscylacji silnika 2 | 0~100 | typ maszyny | ☆ |
| Grupa A5 - Parametry optymalizacji sterowania | ||||
| A5-00 | Przełącznik górnego progu częstotliwości DPWM | 0.00Hz~15.00Hz | 12.00Hz | ☆ |
| A5-01 | Tryb modulacji PWM | 0: modulacja asynchronousna1: modulacja synchroniczna | 0 | ☆ |
| A5-02 | Wybór trybu kompensacji strefy martwej | 0: brak kompensacji1: tryb kompensacji nr 12: tryb kompensacji nr 2 | 1 | ☆ |
| A5-03 | Losowa głębokość PWM | 0: niedozwolona1~10: losowa głębokość częstotliwości nośncj | 0 | ☆ |
| A5-04 | Limit szybkiego prądu | 0: Nieaktywny1: Aktywny | 1 | ☆ |
| A5-05 | Bieżące wykrywanie kompensacji | 0~100 | 5 | ☆ |
| A5-06 | Próg spadku napięcia | 60.0%~140.0% | 100.0% | ☆ |
| A5-07 | Optymalizacja SVC | 0: brak optymalizacji1: tryb optymalizacji nr 12: tryb optymalizacji nr 2 | 1 | ☆ |
| A5-08 | Regulacja czasu martwcgo | 100%~200% | 150% | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| Grupa A6 – ustawianie krzywej AI | ||||
| A6-00 | Minimalna wartość krzywej AI na wejściu 4 | -10.00V~A6-02 | 0.00V | ☆ |
| A6-01 | Ustawienie minimalnej wartość krzywej AI na wejściu 4 | -100.0%~+100.0% | 0.0% | ☆ |
| A6-02 | Przegięcie nr 1 krzywej AI na wejściu 4 | A6-00~A6-04 | 3.00V | ☆ |
| A6-03 | Ustawienie przegięcia nr 1 krzywej AI na wejściu 4 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-04 | Przegięcie nr 2 krzywej AI na wejściu 4 | A6-02~A6-06 | 6.00V | ☆ |
| A6-05 | Ustawienie przegięcia nr 2 krzywej AI na wejściu 4 | -100.0%~+100.0% | 60.0% | ☆ |
| A6-06 | Maksymalna wartość krzywej AI na wejściu 4 | A6-06~+10.00V | 10.00V | ☆ |
| A6-07 | Ustawienie maksymalnej wartości krzywej AI na wejściu 4 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-08 | Minimalna wartość krzywej AI na wejściu 5 | -10.00V~A6-10 | -10.00V | ☆ |
| A6-09 | Ustawienie minimalnej wartości krzywej AI na wejściu 5 | -100.0%~+100.0% | -100.0% | ☆ |
| A6-10 | Przegięcie nr 1 krzywej AI na wejściu 5 | A6-08~A6-12 | -3.00V | ☆ |
| A6-11 | Ustawienie przegięcia nr 1 krzywej AI na wejściu 5 | -100.0%~+100.0% | -30.0% | ☆ |
| A6-12 | Przegięcie nr 2 krzywej AI na wejściu 5 | A6-10~A6-14 | 3.00V | ☆ |
| A6-13 | Ustawienie przegięcia nr 2 krzywej AI na wejściu 5 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-14 | Maksymalna wartość krzywej AI na wejściu 5 | A6-12~+10.00V | 10.00V | ☆ |
| A6-15 | Ustawienie maksymalnej wartości krzywej AI na wejściu 5 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-24 | Skok dla AI1 | -100.0%~100.0% | 0.0% | ☆ |
| A6-25 | Zakres skoku dla AI1 | 0.0%~100.0% | 0.5% | ☆ |
| A6-26 | Skok dla AI2 | -100.0%~100.0% | 0.0% | ☆ |
| A6-27 | Zakres skoku dla AI2 | 0.0%~100.0% | 0.5% | ☆ |
| A6-28 | Skok dla AI3 | -100.0%~100.0% | 0.0% | ☆ |
| A6-29 | Zakres skoku dla AI3 | 0.0%~100.0% | 0.5% | ☆ |
| Kod | Nazwa | Nastawy | Domyślne | Zmiana |
| A7-05 | Wyjście zał/wył | Ustawienie binarneCyfra jedności:FMRCyfra jedności:przekaźnik 1Setki: DO | 1 | ☆ |
| A7-06 | Zadana częstotliwość karty programowalnej | 0.00%~100.00% | 0.0% | ☆ |
| A7-07 | Zadany moment karty programowalnej | -200.0%~200.0% | 0.0% | ☆ |
| A7-08 | Polecenie z karty programowalnej | 0: brak polecenia1: polecenie do przodu2: poleccnie do tyłu3: impulsowanie do przodu4: impulsowanie do tyłu5: zatrzymanie wybicgicm6: zatrzymanie hamowania7: reset błędu | 0 | ☆ |
| A7-09 | Błąd karty programowalnej | 0: brak błędu80~89: kod błędu | 0 | ☆ |
| Grupa AC – kalibracja AI AO | ||||
| AC-00 | Napięcie zmierzone AI1 nr1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-01 | Napięcie wyświetlanc AI1 nr1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-02 | Napięcie zmierzone AI1 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-03 | Napięcie wyświetlanc AI1 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-04 | Napięcie zmierzone AI2 nr1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-05 | Napięcie wyświetlanc AI2 nr1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-06 | Napięcie zmierzone AI2 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-07 | Napięcie wyświetlanc AI2 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-08 | Napięcie zmierzone AI3 nr1 | -9.999V~10.000V | kalibracja | ☆ |
| AC-09 | Napięcie wyświetlanc AI3 nr 1 | -9.999V~10.000V | kalibracja | ☆ |
| AC-10 | Napięcie zmierzone AI3 nr 2 | -9.999V~10.000V | kalibracja | ☆ |
| AC-11 | Napięcie wyświetlanc AI3 nr 2 | -9.999V~10.000V | kalibracja | ☆ |
| AC-12 | Napięcie docelowe AO1 nr 1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-13 | Napięcie zmierzone AO1 nr 1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-14 | Napięcie docelowe AO1 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-15 | Napięcie zmierzone AO1 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-16 | Napięcie docelowe AO2 nr 1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-17 | Napięcie zmierzone AO2 nr 1 | 0.500V~4.000V | kalibracja | ☆ |
| AC-18 | Napięcie docelowe AO2 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-19 | Napięcie zmierzone AO2 nr 2 | 6.000V~9.999V | kalibracja | ☆ |
| AC-20 | Prąd zmierzony AI2 nr 1 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-21 | Prąd próbkujący AI2 nr 1 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-22 | Prąd zmierzony AI2 nr 2 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-23 | Prąd próbkujący AI2 nr 2 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-24 | Prąd idealny AO1 nr 1 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-25 | Prąd zmierzony AO1 nr 1 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-24 | Prąd idealny AO1 2 | 0.000mA~20.000mA | kalibracja | ☆ |
| AC-25 | Prąd zmierzony AO1 nr 2 | 0.000mA~20.000mA | kalibracja | ☆ |
Tabela parametrów monitorowania
| Kod funkcji | Nazwa | Min. jednostka |
| Grupa U0. Podstawowe parametry monitorowania | ||
| U0-00 | Częstotliwość pracy (Hz) | 0.01Hz |
| U0-01 | Ustawienie częstotliwości (Hz) | 0.01Hz |
| U0-02 | Napięcie na szynie (V) | 0.1V |
| U0-03 | Napięcie wyjściowe (V) | 1V |
| U0-04 | Prąd wyjściowy (A) | 0.01A |
| U0-05 | Moc wyjściowa (kW) | 0.1kW |
| U0-06 | Moment wyjściowy (%) | 0.1% |
| U0-07 | Stan wejścia DI | 1 |
| U0-08 | Stan wyjścia DO | 1 |
| U0-09 | Napięcie AI1 (V) | 0.01V |
| U0-10 | Napięcie AI2 (V) | 0.01V |
| U0-11 | Napięcie AI3 (V) | 0.01V |
| U0-12 | Zliczanie wartości | 1 |
| U0-13 | Wartość długości | 1 |
| U0-14 | Wskaźnik prędkości obciążenia | 1 |
| U0-15 | Ustawienie PID | 1 |
| U0-16 Sprzężenie | zwrotne PID | 1 |
| U0-17 | Etap PLC | 1 |
| U0-18 | Częstotliwość impulsu wejściowego (Hz) | 0.01kHz |
| U0-19 | Szybkość sprężenia zwrotnego (0,1 Hz) | 0.1Hz |
| U0-20 | Nadbieg | 0.1Min |
| U0-21 | Napięcie AI1 przed kalibracją | 0.001V |
| U0-22 | Napięcie AI2 przed kalibracją | 0.001V |
| U0-23 | Napięcie AI3 przed kalibracją | 0.001V |
| U0-24 | Prędkość liniowa | 1m/Min |
| U0-25 | Aktualny czas zasilania | 1Min |
| U0-26 | Aktualny czas pracy | 0.1Min |
| U0-27 | Częstotliwość impulsu wejściowego | 1Hz |
| U0-28 | Ustawienia komunikacji | 0.01% |
| U0-29 | Prędkość sprężenia zwrotnego enkodera | 0.01Hz |
| U0-30 | Wyświetlanie częstotliwości głównej X | 0.01Hz |
| U0-31 | Wyświetlanie częstotliwości pomocniczej Y | 0.01Hz |
| U0-32 | Wyświetlanie dowolnej wartości adresu pamięci | 1 |
| U0-34 | Temperatura silnika | 1°C |
| U0-35 | Docelowy moment obrotowy (%) | 0.1% |
| U0-36 | Umicjscowicnie obrotu | 1 |
| U0-37 | Kąt współczynnika mocy | 0.1° |
| U0-39 | Oddzielone napięcie docelowe VF | 1V |
| U0-40 | Oddzielone napięcie wyjściowe VF | 1V |
| U0-41 | Zobrazowanie stanu wejścia DI | 1 |
| U0-42 | Zobrazowanie stanu wejścia DO | 1 |
| U0-43 | Zobrazowanie 1 stanu funkcjonowania DI (funkcja 01- funkcja 40) | 1 |
| U0-44 | Zobrazowanie 2 stanu funkcjonowania DI (funkcja 41- funkcja 80) | 1 |
| U0-59 | Częstotliwość ustawiania (%) | 0.01% |
| U0-60 | Częstotliwość pracy (%) | 0.01% |
| U0-61 | Stan przemiennika częstotliwości | 1 |
Rozdział 6 Opisy parametrów
Grupa P0: Grupa funkcji podstawowych
| P0-00 | Wyświetlanic typu: GP | Ustawienia fabryczne | Dotyczy typu maszyny | |
| Zakres ustawień | 1 | Typ G (obciążenie stałym momentem obrotowym) | ||
| 2 | Typ P (obciążenie wentylatora i pompy) | |||
Ten parametr jest przeznaczony tylko dla użytkowników do przeglądania typu maszyny i nie można go zmienić.
1: obciążenie stałym momentem obrotowym o określonych parametrach znamionowych
2: obciążenie zmiennym momentem obrotowym o określonych parametrach znamionowych (obciążenie wentylatora i pompy)
| P0-01 | Tryb sterowania silnikiem 1 | Ustawienia fabryczne | 0 | |
| Zakres ustawień | 0 | Brak sterowania wektorowego czujnika prędkości (SVC) | ||
| 1 | Sterowanie wektorowe czujnika prędkości (FVC) | |||
| 2 | Sterowanie U/f | |||
0: Brak sterowania wektorowego czujnika prędkości
1: Sterowanie wektorowe czujnika prędkości to sterowanie wektorowe w zamkniętej pętli. Po stronie silnika należy zainstalować enkoder. Przemiennik częstotliwości musi być dopasowany z tym samym typem karty PG co enkoder. Nadaje się do zastosowań związanych z precyzyjną kontrolą prędkości lub momentu obrotowego. Jeden falownik może napędzać tylko jeden silnik, z obciążeniem takim jak maszyny papiernicze, dźwigi, windy itp.
2: Sterowanie U/f jest odpowiednie w przypadku mniejszego zapotrzebowania na obciążenie lub gdy jeden przemiennik częstotliwości napędza wiele silników, takich jak wentylatory i pompy. Jeden przemiennik może być używany do sterowania wieloma silnikami.
Wskazówka: przy wyborze trybu sterowania wektorowego wymagana jest procedura identyfikacji parametrów silnika. Tylko przy dokładnych parametrach silnika można korzystać z trybu sterowania wektorowego. Dzięki dostosowaniu parametrów regulatora prędkości w kodzie funkcji w grupie P2 (2 to druga grupa), można uzyskać lepszą wydajność.
| P0-02 | Wybór źródła poleceń | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | kanał poleceń panelu operatorskiego (dioda LED zgaszona) | ||
| 1 | kanał poleceń zacisku (dioda LED świcci) | |||
| 2 | kanał poleceń (dioda LED miga) | |||
Wybrać kanał wejściowy polecenia sterującego przemiennika.
Polecenia sterujące przemiennika częstotliwości obejmują: start, stop, naprzód, wstecz, skok i tak dalej. 0: Kanał poleceń panelu operatorskiego („LOCAL / REMOT” nie świeci się);
Na panelu sterowania, klawisze RUN, STOP / RES sterują poleceniami uruchomienia. 1: Kanał polecen zaciskowy (świeci się „LOCAL / REMOT”);
Wielofunkcyjne zaciski wejściowe FWD, REV, JOG, JOG itp., sterują poleceniem uruchomienia.
2: Kanał poleczeń (miga „LOCAL / REMOT”) polecenie uruchomienia jest wydawane przez komputer hosta w trybie komunikacji.
Wybór karty komunikacyjnej jest opcjonalny (Modbus RTU, karta CANlink, karta sterująca programowana przez użytkownika itp.).
| P0-03 | Główne źródło częstotliwości X | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Ustawienie cyfrowe (zadana częstotliwość P0-08, zmiana w górę / w dół, pamięć po awarii zasilania) | ||
| 1 | Ustawienie cyfrowe (zadana częstotliwość P0- 08, zmiana w górę / w dół, brak pamięci po awarii zasilania) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Ustawianie impulsu PULSE (DI5) | |||
| 6 | komcenda wiclostanowa | |||
| 7 | PLC | |||
| 8 | PID | |||
| 9 | Ustawienia komunikacji | |||
Wybrać kanał wejściowy o danej częstotliwości przemiennika. Istnieje 10 głównych kanałów częstotliwości odniesienia: 0: ustawienia cyfrowe (brak pamięci po awarii zasilania)
Wartość początkowa częstotliwości zadanej to P0-08 „częstotliwość zadana”. Za pomocą przycisków ▲ ▼ (lub wielofunkcyjnego zaci-sku wejściowego UP, DOWN) można zmienić ustawioną wartość częstotliwości. Gdy przemiennik zostanie włączony po zaniku zasilania, wartość zadana częstotliwości powraca do „częstotliwości zadanej ustawionej cyfrowo” jako wartość P0-08.
1: ustawienie cyfrowe (pamięć po awarii zasilania)
Wartość początkowa częstotliwości zadanej to P0-08 „częstotliwość zadana”. Za pomocą przycisków ▲, ▼ na klawiaturze (lub wejściowych zacisków wielofunkcyjnych UP, DOWN) można zmienić ustawioną wartość częstotliwości.
Kiedy przemiennik zostaje włączony po zaniku zasilania, ustawiona częstotliwość jest częstotliwością ostatnio ustawioną za pomocą klawiszy klawiatury ▲, ▼ lub zacisków UP, DOWN, korekcja jest zapamiętywana.
Należy przypomnieć, że P0-23 to „wybór pamięci cyfrowego obniżania częstotliwości”, P0-23 służy do wyboru momentu zatrzymania napędu, wielkości korekcji lub częstotliwości pamięci. P0-23 jest powiązana z przestojem, a pamięć wyłączania zasilania nie jest powiązana. Należy zwrócić uwagę przy stosowaniu.
2: All
3: A12
4: AI3
Oznacza to, że częstotliwość jest ustawiana za pomocą zacisku wejścia analogowego. Panel sterowania VFD zapewnia dwa analogowe zaciski wejściowe (AI1, AI2), opcjonalna karta rozszerzeń we / wy zapewnia dodatkowy analogowy zacisk wejściowy (AI3).
Spośród nich, AI1 to wejście napięciowe 0V \~ 10V, AI2 może być wejściem napięciowym 0V \~ 10V, może to być również wejście prądowe 4mA \~ 20mA. Jest wybierane zworą J8 na panelu sterowania. AI3 to z kolei wejście napięciowe -10V \~ 10V.
Użytkownik może dowolnie wybierać korelację między napięciem wejściowym AI1, AI2, AI3 i częstotliwością docelową. VFD zapewnia 5 grup korelacji między krzywymi, w tym 3 grupy krzywych zależności liniowych (2-punktowa zgodność), 2 grupy dowolnych 4-punktowych korelacji krzywych. Grupy użytkowników można ustawiać za pomocą kodu funkcji grupy P4 i A6.
5: Podany impuls (DI5)
Ustawienie częstotliwości podawane jest przez impuls na zaciskach. Specyfikacja sygnału odniesienia impulsu: zakres napięcia 9 V \~ 30 V, zakres częstotliwości 0 kHz \~ 100 kHz. Wartość odniesienia impulsu można wprowadzić tylko z wielofunkcyjnego zacisku wejściowego DI5.
Relacje częstotliwość impulsu wejściowego zacisku DI5 odpowiadająca ustawieniom, ustawianie przez P4-28 \~ P4-31. Korelacja między dwoma punktami odpowiada linii prostej. Odpowiednie ustawienie wejścia impulsowego wynosi 100,0%, co oznacza procent względnej maksymalnej częstotliwości P0-10.
6: komenda wielostanowa
Wybierając tryb wykonywania komendy wielostanowej, należy wprowadzić do zacisków DI poprzez kompozycję cyfrową różne stany odpowiadające różnym częstotliwościom ustawionej wartości. Dzięki VFD można skonfigurować więcej niż cztery zaciski poleczeń wielokrokowych, 16 zacisków czterostanowych, kod funkcji PC może odpowiadać dowolnemu z 16 „multi-dyrecktyw”. "Multidyrektywa" to stosunek procentowy maksymalnej częstotliwości P0-10.
Cyfrowy zacisk wejściowy DI jako polecenie wielofunkcyjnego bloku zacisków - należy ustawić odpowiednią grupę P4. Aby uzyskać szczegółowe informacje, patrz odpowiedni parametr funkcji grupy P4.
7: Prosty sterownik PLC
Gdy źródłem częstotliwości jest prosty sterownik PLC, częstotliwość pracy falownika można przełączyć na pracę w zakresie od 1 do 16 dowolnych poleceń częstotliwości. Użytkownik może ustawić czas utrzymywania od 1 do 16 poleceń częstotliwości oraz odpowiedni czas przyspieszania i hamowania. Szczegółowe informacje można znaleźć w odpowiednich instrukcjach grupy PC.
8: PID
Wyjście sterujące PID jest używane do częstotliwości roboczej. Zwykle stosowane do procesów sterowania w pętli zamkniętej na miejscu, takich jak sterowanie w pętli zamkniętej stałego ciśnienia, sterowanie w pętli zamkniętej stałego napięcia i inne warunki.
Stosując PID jako źródło częstotliwości, należy ustawić parametry „Funkcja PID” grupy PA.
9: Ustawienia komunikacji
Głównym źródłem częstotliwości jest komputer hosta w trybie komunikacji.
VFD obsługuje dwa rodzaje komunikacji: Modbus i CANlink. Oba rodzaje komunikacji nie mogą być używane.
Do korzystania z komunikacji musi być zainstalowana karta komunikacyjna. Możliwe są dwa rodzaje kart komunikacyjnych VFD, użytkownicy muszą wybrać zgodnie z własnymi wymaganiami i należy ustawić prawidłowe parametry dla P0-28 „typ karty rozszerzeń komunikacyjnych”.
| P0-04 | Pomocnicze źródlo częstotliwości Y | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Ustawianie cyfrowe (zadana częstotliwość P0-08, zmiana w górę / w dół, pamięć po awarii zasilania) | ||
| 1 | Ustawianie cyfrowe (zadana częstotliwość P0-08, zmiana w górę / w dół, brak pamięci po awarii) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Ustawianie impulsu (DI5) | |||
| 6 | komcenda wielostanowa | |||
| 7 | PLC | |||
| 8 | PID | |||
| 9 | Ustawienia komunikacji | |||
Gdy pomocnicze źródło częstotliwości jest używane jako niezależny kanał odniesienia częstotliwości (to znaczy przełącza źródło częstotliwości z X na Y), jego użycie jest takie samo jak w przypadku głównego źródła częstotliwości X. Instrukcje użytkowania można odnieść do P0-03.
Gdy pomocnicze źródło częstotliwości jest używane jako podana superpozycja (tj. źródło częstotliwości X + Y, przełącznik X do X + Y lub przełącznik Y do X + Y), należy zwrócić uwagę że:
1) Gdy pomocnicze źródło częstotliwości jest cyfrowym źródłem odniesienia, częstotliwość zadana (P0-08) nie działa. Użytkownik przeprowadza regulację częstotliwości za pomocą przycisków ▲, ▼ klawiatury (lub zacisków wielofunkcyjnych wejść UP, DOWN). Należy regulować bezpośrednio na podstawie głównej częstotliwości odniesienia.
2) Gdy pomocnicze źródło częstotliwości jest podawane przez wejście analogowe (A11, A12, A13) lub wejście impulsowe do taktowania, 100% odpowiada ustawieniu zakresu wejściowego pomocniczego źródła częstotliwości, które można ustawić za pomocą P0-05 i P0-06.
3) Kiedy źródło częstotliwości jest używane do taktowania wejścia impulsowego, jest podobne jak w przypadku danych analogowych. Wskazówka: Wyboru pomocniczego źródła częstotliwości Y i wyboru głównego źródła częstotliwości X nie można ustawić na jednym kanale, to znaczy gdy P0-03 i P0-04 sa ustawione na te sama wartość. W ten sposób można łatwo wprowadzić zamicszanie.
| P0-05 | Zakres źródła Y częstotliwości pomocniczej nałożonej | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | w stosunku do maksymalnej częstotliwości | ||
| 1 | w stosunku do źródła częstotliwości X | |||
| P0-06 | Zakres źródła Y częstotliwości pomocniczej nałożonej | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0%~150% | |||
Gdy wybór źródła częstotliwości jest „nakładaniem częstotliwości” (tzn. P0-07 jest ustawione na 1, 3 lub 4), te dwa parametry są używane do określenia zakresu regulacji pomocniczego źródła częstotliwości.
Gdy parametr P0-05 jest używany do określenia zakresu częstotliwości pomocniczych obiektu odpowiadającego źródłu, odbywa się to selektywnie w odniesieniu do maksymalnej częstotliwości która ma być relatywna do głównego źródła częstotliwości X. W przypadku wybierania w odniesieniu do pierwotnego źródła częstotliwości, pomocnicze źródło częstotliwości używane jest jako główny zakres częstotliwości zmian X.
| P0-07 | Nałożony wybór źródła częstotliwości | Ustawienie fabryczne | 0 | |
| Zakres ustawień | Bit | Wybór źródła częstotliwości | ||
| 0 | Główne źródło częstotliwości X | |||
| 1 | Wynik operacji głównej i pomocniczej | |||
| 2 | Przełącznik głównego źródła częstotliwości X i pomocniczego źródła częstotliwości Y | |||
| 3 | Główne źródło częstotliwości X, przełączanie wyniku pracy głównej i pomocniczej | |||
| 4 | Pomocnicze źródło częstotliwości Y, przełączanie wyniku pracy głównej i pomocniczej | |||
| Dziesiątki | zależność działania głównego i pomocniczego źródła częstotliwości | |||
| 0 | Główne + pomocnicze | |||
| 1 | Główne - pomocnicze | |||
| 2 | Maks. z dwóch | |||
| 3 | Min. z dwóch | |||
Za pomocą tego parametru można wybrać kanał odniesienia częstotliwości.
Pojedyncza cyfra: Wybór źródła częstotliwości:
0: Główne źródło częstotliwości X
Częstotliwość główna X jest używana jako częstotliwość docelowa.
1: Wynik pracy źródła głównego i pomocniczego jako częstotliwość docelowa.
Zobacz instrukcje dotyczące kodu funkeji relacji operacji głównych i pomocniczych „Dziesiątki”..
2: Przełączanie głównego źródła częstotliwości X i pomocniczego źródła częstotliwości Y. Gdy zacisk 18 wejścia wielofunkcyjnego jest nieaktywny (przełącznik częstotliwości), główne źródło częstotliwości X jest częstotliwością docelową.
Gdy jest aktywny zacisk 18 wejścia wielofunkcyjnego (przełącznik częstotliwości), pomocnicze źródło częstotliwości Y jest częstotliwością docelową.
3: Przełączanie głównego źródła częstotliwości X oraz wynik pracy głównej i pomocniczej. Gdy zacisk 18 wejścia wielofunkcyjnego jest nieaktywny (przełącznik częstotliwości), główne źródło częstotliwości X jest częstotliwością docelową. Gdy zacisk 18 wejścia wielofunkcyjnego jest aktywny (przełącznik częstotliwości), częstotliwość docelowa jest wynikiem pracy głównej i pomocniczej.
- Przełączanie pomocniczego źródła częstotliwości Y oraz wynik pracy głównej i pomocniczej. Gdy zacisk 18 wejścia wielofunkcyjnego jest nieaktywny (przełącznik częstotliwości), pomocnicze źródło częstotliwości Y jest częstotliwością docelową. Gdy zacisk 18 wejścia wielofunkcyjnego jest aktywny (przełącznik częstotliwości), częstotliwość docelowa jest wynikiem pracy głównej i pomocniczej.
Dziesiątki: Zależność operacyjna głównego i pomocniczego źródła częstotliwości: 0: Główne źródło częstotliwości X + pomocnicze źródło częstotliwości Y.
Jako częstotliwość docelowa, używana jest suma częstotliwości głównej X i częstotliwości pomocniczej Y. Osiągana jest superpozycja częstotliwości dla danej funkcji.
1: Główne źródło częstotliwości X - pomocnicze źródło częstotliwości Y
Jako częstotliwość docelowa, używana jest różnica między głównym źródłem częstotliwości X a pomocniczym źródłem częstotliwości Y
2: MAX (główne źródło częstotliwości X, pomocnicze źródło częstotliwości Y). Jako częstotliwość docelową przyjmuje się maksymalną wartość bezwzględną częstotliwości głównej X i częstotliwości pomocniczej Y.
3: MIN (główne źródło częstotliwości X, pomocnicze źródło częstotliwości Y). Jako częstotliwość docelową przyjmuje się minimalną wartość bezwzględną częstotliwości głównej X i częstotliwości pomocniczej Y. Ponadło, gdy wybór źródła częstotliwości jest z pracy głównej i pomocniczej, offset częstotliwości można ustawić za pomocą P0-21. Offset częstotliwości nałożony na pracę główną i pomocniczą pozwala elastycznie reagować na różne potrzeby.
4: MIN (główne źródło częstotliwości X, pomocnicze źródło częstotliwości Y). Jako częstotliwość docelową przyjmuje się minimalną wartość bezwzględną częstotliwości głównej X i częstotliwości dodatkowej Y. Ponadto, gdy wybór źródła częstotliwości jest z pracy głównej i pomocniczej, offset częstotliwości można ustawić za pomocą P0-21. Offset częstotliwości nałożony na pracę główną i pomocniczą pozwala elastycznie reagować na różne potrzeby.
| P0-08 | Częstotliwość zadana | Ustawienie fabryczne | 50.00Hz | |
| Zakres ustawień | 0,00 ~ maks. częstotliwość (działa tryb wyboru źródła częstotliwości z ustawianiem cyfrowym) | |||
| P0-09 | Kierunek pracy | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Ten sam kierunck | ||
| 1 | Przeciwny kierunek | |||
Zmieniając kod funkcji, nie można zmienić okablowania elektrycznego i osiągnąć zmiany obrotów silnika.
Wskazówka: Po inicjalizacji parametru, kierunek pracy silnika wróci do stanu pierwotnego. Należy zachować ostrożność i używać tego pod warunkiem, że po debugowaniu systemu, zmiana sterowania silnikiem jest surowo zabroniona.
| P0-10 | Częstotliwość maks. | Ustawienie fabryczne | 50.00 Hz |
| Zakres ustawiciń | 50.00Hz~600.00Hz | ||
Wejście analogowe VFD, wejście impulsowe (DI5), instrukcje wieloetapowe itp., źródło częstotliwości wynosi 100,0% w odniesieniu do odpowiedniego skalowania P0-10.
Maksymalna częstotliwość wyjściowa VFD wynosi do 3200 Hz. Aby uwzględnić rozdzielczość częstotliwości i zakres wejściowy częstotliwości dla obu wskaźników, można wybrać miejsca dziesiętne połecenia częstotliwości za pomocą P0-22. Gdy P0-22 jest ustawione na 1, rozdzielczość częstotliwości wynosi 0,1 Hz. W tym przypadku P0-10 ustawia się w zakresie 50,0 Hz \~ 3200,0 Hz;
Gdy P0-22 jest ustawione na 2, rozdzielczość częstotliwości wynosi 0,1 Hz. W tym przypadku P0-10 ustawia się w zakresie 50,0 Hz \~ 600,00 Hz.
| P0-11 | Źródło górnej częstotliwości | Ustawienie fabryczne | 0 | |
| Ustawienie fabryczne | 0 | Ustawienic P0-12 | ||
| 1 | A11 | |||
| 2 | A12 | |||
| 3 | A13 | |||
| 4 | Ustawienie impulsu | |||
| 5 | Ustawienia komunikacji | |||
Zdefiniować źródło górnych częstotliwości. Górną częstotliwość graniczną można ustawić cyfrowo (P0-12), można ją również wyprowadzić z analogowego kanału wejściowego. Przy ustawianiu górnego limitu częstotliwości wejścia analogowego, ustawienie wejścia analogowego 100% odpowiada P0-12.
Na przykład, przyjmując tryb sterowania momentem obrotowym w zakresie sterowania uzwojeniem, aby uniknąć zerwania materiału i pojawienia się zjawiska „prędkości”, można zastosować analogowe ograniczanie częstotliwości zadanej. Gdy falownik pracuje z górną granicą częstotliwości, utrzymuje częstotliwość wyższą.
| P0-12 | Górna częstotliwość | Ustawienie fabryczne | 50.00Hz |
| Zakres ustawień | Częstotliwość górna P0-14 ~ częstotliwość maksymalna P0-10 | ||
| P0-13 | Offset górnej częstotliwości | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz~częstotliwość maksymalna P0-10 | ||
Gdy górna częstotliwość graniczna jest nastawą analogową lub impulsową, P0-13 służy jako wartość zadana ofłsetu. Bias częstotliwości i P0-11 ustawiają górną częstotliwość graniczną nałożoną na ustawioną wartość jako końcową górną częstotliwość graniczną.
| P0-14 | Dolna częstotliwość | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz~górna częstotliwość P0-12 | ||
Gdy komenda częstotliwości jest poniżej dolnej częstotliwości ustawionej w parametrze P0-14, falownik może zatrzymać pracę lub obniżyć częstotliwość graniczną lub pracować przy zerowej prędkości. Jaki rodzaj trybu pracy należy wybrać (przy ustawieniu częstotliwości poniżej trybu pracy z dolną częstotliwością) można ustawić parametrem P8-14.
| P0-15 | Częstotliwość nośna | Ustawienie fabryczne | Zależy od rodzaju maszyny |
| Zakres ustawień | 0.5kHz~16.0kHz | ||
Ta funkcja dostosowuje częstotliwość nośną falownika. Dostosowując częstotliwość nośną, można zmniejszyć hałas silnika, uniknąć punktu rezonansu układu mechanicznego oraz zmniejszyć zakłócenia i prąd upływowy falownika między przewodami a ziemią.
Gdy częstotliwość nośna jest niska, składowa wyższych harmonicznych prądu wyjściowego wzrasta, straty silnika rosną, a temperatura silnika wzrasta. Gdy częstotliwość nośna jest wysoka, straty silnika maleją, temperatura silnika spada, ale straty falownika rosną, temperatura falownika wzrasta i rosną zakłóccnia.
Regulacja częstotliwości nośnej wpłynie na następujące właściwości:
| Częstotliwość nośna | wzrost |
| Przebieg prądu wyjściowego | spadek |
| Temperatura silnika | lcpsza |
| Temperatura falownika | spadek |
| Prąd upływu | wzrost |
| Zakłócenia zewnętrzne | wzrost |
| Przebieg prądu wyjściowego | wzrost |
Ustawienia fabryczne częstotliwości nośnej są różne dla różnych falowników. Chociaż użytkownicy mogą je modyfikować, ale uwaga: jeśli wartość częstotliwości nośnej będzie wyższa niż ustawiona fabrycznie, spowoduje to wzrost temperatury radiatora falownika. W takim przypadku użytkownik musi obniżyć wartość znamionową falownika lub istnieje niebezpieczeństwo jego przegrzania.
| P0-16 | Częstotliwość nośna dostosowuje się do temperatury | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: nie1: tak | ||
Regulacja temperaturowa częstotliwości nośnej oznacza, że gdy falownik wykryje, że temperatura jego radiatora jest wysoka, automatycznie zmniejszy częstotliwość nośną, aby zmniejszyć wzrost temperatury falownika. Gdy temperatura radiatora jest niska, częstotliwość nośna jest stopniowo przywracana do zadanej wartości. Ta funkcja zmniejsza prawdopodobieństwo alarmu przegrzania falownika.
| P0-17 | Czas przyspieszania 1 | Ustawienie fabryczne | Zależy od rodzaju maszyny |
| Zakres ustawień | 0.00s~65000s | ||
| P0-18 | Czas hamowania 1 | Ustawienie fabryczne | Zależy od rodzaju maszyny |
| Zakres ustawień | 0.00s~65000s | ||
Czas przyspieszania oznacza czas potrzebny na przyspieszenie falownika od częstotliwości zerowej do częstotliwości odniesienia przyspieszania i hamowania (P0-25). Zobacz t1 na rysunku 6-1. Czas hamowania oznacza czas potrzebny falownikowi na zwolnienie od częstotliwości odniesienia przyspieszania i hamowania (P0-25) do częstotliwości zerowej. Zobacz t2 na rysunku 6-1.
Częstotliwość wyjściowa
Częstotliwość odniesienia przyspieszania i hamowania
Częstotliwość nastawiona
Czas rzeczywisty przyspieszania
Czas nastawiony przyspieszania
Czas
Czas rzeczywisty hamowania
Czas nastawiony hamowania
Rysunek 6-1 Wykres czasu przyspieszania i hamowania
VFD zapewnia cztery grupy czasów przyspieszania i hamowania. Użytkownicy mogą skorzystać z przełącznika cyfrowego terminala wejściowego DI. Cztery grupy czasów przyspieszania i hamowania ustawiane kodem funkcji są następujące:
Pierwsza grupa: P0-17, P0-18
Druga grupa: P8-03, P8-04
druga grupa: P8-05, P8-06
Czwarta grupa: P8-07, P8-08
| Jednostka czasu przyspieszania / hamowania | Ustawienie fabryczne | 1 | |
| P0-19 | 0 | 1s | |
| Zakres | 1 | 0.1s | |
| ustawień | 2 | 0.01s |
Aby zaspokoić potrzeby wszystkich typów obiektów, VFD zapewnia trzy rodzaje jednostek czasu przyspieszania i zwalniania, odpowiednio: 1 sekunda, 0,1 sekundy i 0,01 sekundy.
Uwaga: Podczas modyfikacji parametrów funkcji, miejsca dziesiętne grupy 4 wyświetla zmieniony czas przyspieszania i hamowania, odpowiednio do zmian czasu przyspieszania i zwalniania. Należy zwrócić szczególnie uwagę na proces aplikacji.
| P0-21 | Bias częstotliwości źródła pomocniczejnałożonej częstotliwości | 0.0Hz |
Zakres ustawień 0.00Hz\~częstotliwość maks. F0-10
Kod funkcji jest poprawny tylko wtedy, gdy wybór źródła częstotliwości to obliczenia główne i pomocnicze.
Gdy źródło częstotliwości jest obliczeniem głównym i pomocniczym, P0-21 jako offset częstotliwości, jako końcowy wynik nastawy częstotliwości superpozycji używa się pracy pierwotnej i wtórnej, aby ustawienie częstotliwości było bardziej elastyczne.
| P0-22 | Rozdzielczość komendy częstotliwości | Ustawienie fabryezne | 2 | |
| Zakres ustawień | 1 | 0.1Hz | ||
| 2 | 0.01Hz |
Parametr ten służy do identyfikacji wszystkich rozdzielczości kodów funkcji zależnych od częstotliwości.
Gdy rozdzielczość częstotliwości wynosi 0,1 Hz, maksymalna częstotliwość wyjściowa VFD może osiągnąć 3200 Hz. Gdy rozdzielczość częstotliwości wynosi 0,01 Hz, maksymalna częstotliwość wyjściowa VFD wynosi 600,00 Hz.
Uwaga: Podczas modyfikacji parametrów funkcji, wszystkie związane z tymi parametrami miejsca dziesiętne częstotliwości ulegną zmianic. Odnośne wartości częstotliwości również ulegną zmianic. Należy zwrócić na to}szecgólną uwagę podczas pracy.
| P0-23 | Cyfrowy wybór pamięci zatrzymania częstotliwości | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Brak pamięci | ||
| 1 | Z pamięcią | |||
Ta funkcja działa tylko wtedy, gdy źródło częstotliwości jest ustawione jako liczby.
„Brak pamięci” oznacza, że po zatrzymaniu falownika cyfrowa wartość zadana częstotliwości powraca do wartości P0-08 (częstotliwość zadana). Korekcja wykonana klawiszami ▲, ▼ lub zaciskami UP, DOWN jest kasowana.
„Pamięć” oznacza, że po zatrzymaniu falownika, cyfrowo zadana częstotliwość jest zarezerwowana dla ostatniej ustawionej częstotliwości zatrzymania. Korekcja wykonana klawiszami ▲, ▼ lub zaciskami UP, DOWN pozostaje ważna.
| P0-24 | Wybór silnika | Ustawienie fabryczne | 0 | |
| Zakres ustawićń | 0 | Silnik 1 | ||
| 1 | Silnik 2 | |||
VFD obsługuje aplikację dwóch silników z dzieleniem przeciągania. Dla dwóch silników można odpowiednio ustawić parametry z tabliczki znamionowej silnika, niezależne parametry strojenia, wybrać inny tryb sterowania, niezależnie ustawić parametry związane z wydajnością i inne.
Odnośną grupą parametrów funkcji silnika 1 jest grupa P1 i grupa P2. Odnośną grupą parametrów funkcji silnika 2 jest grupa A2.
Użytkownik może wybrać bieżący silnik za pomocą kodu funkcji P0-24, można również załączyć silnik za pomocą zacisku wejścia cyfrowego DI. Gdy wybór kodu funkcji i wybór zacisku są sprzeczne, zacisk ma pierwszeństwo.
| P0-25 | Częstotliwości odniesienia czasu przyspieszania / hamowania | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Częstotliwość maksymalna (P0-10) | ||
| 1 | Częstotliwość nastawiona | |||
| 2 | 100Hz | |||
Czas przyspieszania i hamowania oznacza czas przyspieszania i hamowania od częstotliwości zerowej do częstotliwości zadanej P0-25. Rysunek 6-1 przedstawia schemat czasu przyspieszania i hamowania.
Gdy P0-25 jest ustawione na 1, czas zwalniania i częstotliwość są związane z tą nastawą. Jeśli częstotliwość zmienia się często, przyspieszenie silnika jest zmienne, dlatego należy zwrócić uwagę przy stosowaniu.
| P0-26 | Komenda częstotliwości UP/DOWN(w góre / w dół) | Ustawienie fabryczne | 0 | |
| Zakresustawicń | 0 | Częstotliwość robocza | ||
| 1 | Częstotliwość nastawiona | |||
Parametr ten jest ważny tylko wtedy, gdy źródło częstotliwości jest ustawione cyfrowo.
Kiedy do ustawień ▲, ▼ lub zacisków W GÓRE / W DÓŁ jest używana klawiatura, można przyjąć dowolny sposób ustawienia korekcji częstotliwości. Częstotliwość docelowa wzrasta lub maleje w zależności od częstotliwości roboczej lub ustawionej.
Różnica między tymi dwoma ustawieniami jest istotna, gdy falownik jest w trakcie przyspieszania i hamowania. Oznacza to, że jeśli częstotliwość robocza i częstotliwość zadana falownika nie są takie same, różnica między różnymi wybranymi parametrami będzie duża.
| P0-27 | Źródło częstotliwości i źródło polecení powiązane w pakiecie | Ustawienie fabryczne | 000 | |
| Zakres ustawień | Bit | Komenda z panclu operatorskiego wiąże źródło częstotliwości | ||
| 0 | Niepowiązane | |||
| 1 | Częstotliwość ustawiona cyfrowo | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Częstotliwość ustawiona cyfrowo | |||
| 6 | Komeda wielostanowa | |||
| 7 | Prosty PLC | |||
| 8 | PID | |||
| 9 | Ustawienia komunikacji | |||
| Dziesiątki | Polecenie z zacisku wiąże źródło częstotliwości (0 ~ 9, takie samo jak bit) | |||
| Setki | Polecenie komunikacyjne wiąże źródło częstotliwości (0 ~ 9, takie samo jak bit) | |||
Definiuje pakiet trzech kanałów komend pracy i dziewięciu zadanych częstotliwości między kanałami, ułatwia realizację przełączania synchronicznego.
Dla powyższych częstotliwości znaczenie kanału częstotliwości jest takie samo jak dla wyboru głównego źródła częstotliwości X P0-03. Zobacz opis kodu funkcji P0-03. Różne tryby mogą być powiązane z tym samym kanałem częstotliwości. Gdy źródło komend częstotliwości ma powiązane źródło, w okresie działania źródła komend, źródło częstotliwości P0-03 \~ P0-07 przestaje działać.
| P0-28 | Typ karty rozszerzeń komunikacyjnych | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Karta komunikacyjna Modbus | ||
| 1 | zapas | |||
| 2 | zapas | |||
| 3 | Karta komunikacyjna CANlink | |||
VFD zapewnia dwa rodzaje komunikacji. Komunikacja ta wymaga opcjonalnej karty komunikacyjnej przed użyciem. Dwa rodzaje komunikacji nie mogą być używane w tym samym czasie.
Ten parametr służy do ustawiania typu opcjonalnej karty komunikacyjnej. Kiedy użytkownik wymieni kartę komunikacyjną, należy poprawnie ustawić parametry.
Grupa P1: Parametry silnika 1
| P1-00 | Wybór typu silnika | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Zwykły silnik asynchronouszny | ||
| 1 | Silnik asynchronouszny o zmiennej częstotliwości | |||
| P1-01 | Moc znamionowa | Ustawienie fabryczne | Zależnie od typu maszyny | |
| Zakres ustawień | 0.1kW~1000.0kW | |||
| P1-02 | Napięcie znamionowe | Ustawienie fabryczne | Zaleźnic od typu maszyny | |
| Zakres ustawień | 1V~400V | |||
| P1-03 | Prąd znamionowy | Ustawienie fabryczne | Zależnie od typu maszyny | |
| Zakres ustawień | 0.01A~655.35A (moc falownika <=55kW) 0.1A~6553.5A (moc falownika >55kW) | |||
| P1-04 | Częstotliwość znamionowa | Ustawienie fabryczne | Zaleźnic od typu maszyny | |
| Zakres ustawień | 0.01Hz~ częstotliwość maksymalna | |||
| P1-05 | Prędkość znamionowa | Ustawienie fabryczne | Zależnie od typu maszyny | |
| Zakres ustawień | 1rpm~65535rpm | |||
Do dokładnego ustawienia odpowiednich parametrów zgodnie z tabliczką znamionową silnika, zarówno sterowania U/f jak i sterowania wektorowego, potrzebny jest kod tych parametrów z tabliczki znamionowej silnika.
W celu uzyskania lepszej wydajności sterowania U/f lub sterowania wcktorowego, potrzeba dostrojenia parametrów, dokładności wyników regulacji oraz dokładnego ustawienia parametrów z tabliczki znamionowej silnika.
| P1- | Rezystancja stojana silnika asynchronousznego | Ustawienie fabryczne | Zależnie od typu maszyny |
| Zakres ustawień | 0.001Ω~30.000Ω | ||
| P1-07 | Rezystancja wirnika silnika asynchronousznego | Ustawienie fabryczne | Zależnie od typu maszyny |
| Zakres ustawień | 0.001Ω~65.535Ω (moc falownika <=55kW)0.0001Ω~6.5535Ω (moc falownika >55kW) | ||
| P1-08 | Indukcyjna reaktancja upływu silnika asynchronousznego | Ustawienie fabryczne | Zależnie od typu maszyny |
| Zakres ustawień | 0.01mH~655.35mH (moc falownika<=55kW) 0.001mH~ 65.535mH (moc falownika >55kW) | ||
| P1-09 | Ręaktancja indukcyjna wzajemna silnika asynchronousznego | Ustawienie fabryczne | Zależnie od typu maszyny |
| Zakres ustawień | 0.1mH~6553.5mH (moc falownika<=55kW) 0.01mH~ 655.35mH (moc falownika >55kW)) | ||
| P1-10 | Prąd silnika asynchronousznego bez obciążenia | Ustawienie fabryczne | Zależnie od typu maszyny |
| Zakres ustawień 0.01A~ | P1-03 (moc falownika<=55kW) 0.1A~ P1-03 (moc falownika >55kW) | ||
P1-06 \~ P1-10 to parametry silnika asynchronicznego. Parametry te generalnie nie są na tabliczce znamionowej silnika i są automatyczne dostrajanie, aby przejść przez przemiennik. Wśród nich „Strojenie statyczne silnika indukcyjnego” może uzyskać tylko trzy parametry
P1-06 \~ P1-08. Ale można tutaj uzyskać „całkowite dostrojenie silników asynchronicznych”. Oprócz wszystkich pięciu parametrów, można również uzyskać kolejność faz enkodera, parametry PI pętli prądowej i inne.
| P1-27 | Numer linii enkodera | Ustawienie fabryczne | 1024 |
| Zakres ustawień | 1~65535 | ||
Ustawienie impulsów enkodera ABZ na obrót.
W przypadku trybu beczuzujnikowego sterowania wektorowego należy ustawić odpowiednią liczbę impulsów enkodera, inaczej silnik nie będzie działał prawidłowo.
| P1-28 | Typ enkodcra | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Enkoder inkrementalny ABZ | ||
| 1 | Zapas | |||
| 2 | Transformer obrotowy | |||
VFD obsługuje wiele typów enkoderów. Różne enkodery wymagają dopasowania różnych kart PG. Należy dobrać odpowiednią kartę PG. Po zainstalowaniu karty PG należy odpowiednio ustawić P1-28 zgodnie z rzeczywistą sytuacją, w przeciwnym razie falownik może nie działać prawidłowo.
| P1-30 | Kolcjność faz AB enkodera inkrementalnego ABZ | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Do przodu | ||
| 1 | Do tyłu | |||
Ten kod funkcji jest ważny tylko dla enkodera inkrementalnego ABZ, tylko gdy P1-28 = 0. Do ustawiania kolejności faz AB sygnału enkodera inkrementalnego ABZ.
| P1-34 | Liczba par biegunów transformatora obrotowego | Ustawienie fabryczne | 1 |
| Zakres ustawień | 1~65535 | ||
Resolwer - liczba par biegunów przy zastosowaniu takiego enkodera należy poprawnie ustawić parametry ilości par biegunów.
| P1-36 | Czas wykrywania odłączenia PG w sprzęzeni zwrotnym prędkości | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0: no action 0.1s~10.0s | ||
Służy do ustalenia czasu wykrywania błędu odłączenia enkodera, przy ustawieniu 0,0 s falownik nie wykryje błędu odłączenia enkodera.
Gdy falownik wykryje błąd odłączenia i trwa on dłużej niż ustawiony czas P1-36, falownik generuje alarm ERR20.
| P1-37 | Wybór strojenia | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Nie działa | ||
| 1 | Statyczne strojenie silnika asynchronousznego | |||
| 2 | Kompletne strojenie silnika asynchronousznego | |||
0: Nie działa, strojenie zabronione.
1: Statyczne dostrojenie silnika asynchronousznego nie jest łatwe bez obciążenia, ale nie jest to strojenie pełne. Przed przeprowadzeniem asynchronousznego strojenia statycznego należy ustawić prawidłowy typ silnika i tabliczkę znamionową silnika P1-00 \~ P1-05. W przypadku asynchronousznego strojenia statycznego maszyny, falownik może uzyskać trzy parametry P1-06 \~ P1-08. Sposób działania: ustawić kod funkcji na 1, następnie nacisnąć klawisz RUN, falownik przeprowadzi strojenie statyczne.
2: Kompletne strojenie maszyny asynchronousznej. Aby zapewnić dynamiczne sterowanie falownikiem, wybrać pełne dostrojenie, silnik musi być oddzielony od obciążenia, aby utrzymać go w stanie bez obciążenia.
Podczas procesu pełnego strojenia, falownik przeprowadzi strojenie statyczne, a następnie wykona czas przyspieszania, przyspieszając P0-17 do 80% częstotliwości znamionowej silnika. Po okresie utrzymywania, nastąpi hamowanie P0-18 zgodnie z czasem hamowania i zatrzymanie strojenia przed pełnym dostrojением maszyny asynchronousnej. Oprócz konieczności ustawienia typu silnika i parametrów z tabliczki znamionowej silnika P1-00 \~ P1-05, nalczy również ustawić prawidłowy typ enkodera i impulsy enkodera P1-27, P1-28. Pełne dostrojenie maszyny asynchronousnej: napęd może uzyskać pięć parametrów silnika, P1-06 \~ P1-10, kolejność faz AB (P1-3) enkodera i parametry PI pętli prądowej sterowania wektorowego P2-13 \~ P2-16.
Zakończenie strojenia: Ustawić kod funkcji na 2, następnie nacisnąć klawisz RUN, falownik zakończy strojenie.
Grupa P2: Parametry sterowania wektorowego
Kody funkcji w grupie P2 działają tylko przy sterowaniu wektorowym, a nie przy sterowaniu U/f.
| P2-00 | Wzmocnienie proporcjonalne pętli prędkości 1 | Ustawienie fabryczne | 30 |
| Zakres ustawień | 1~100 | ||
| P2-01 | Czas całkowania pętli prędkości 1 | Ustawienie fabryczne | 0.50s |
| Zakres ustawień | 0.01s~10.00s | ||
| P2-02 | Częstotliwość przełączania 1 | Ustawienie fabryczne | 5.00Hz |
| Zakres ustawień | 0.00~F2-05 | ||
| P2-03 | Wzmocnienie proporcjonalne pętli prędkości 2 | Ustawienie fabryczne | 15 |
| Zakres ustawień | 0~100 | ||
| P2-04 | Czas całkowania pętli prędkości 2 | Ustawienie fabryczne | 1.00s |
| Zakres ustawień | 0.01s~10.00s | ||
| P2-05 | Częstotliwość przełączania 2 | Ustawienie fabryczne | 10.00Hz |
| Zakres ustawień | F2-02~Maksymalna częstotliwość wyjściowa | ||
Falownik pracuje z różnymi częstotliwościami, można wybrać różne parametry PI pętli prędkości. Gdy częstotliwość robocza jest mniejsza niż częstotliwość kluczowania 1 (P2-02), parametry regulacji PI pętli prędkości to P2-00 i P2-01. Gdy częstotliwość robocza jest większa niż częstotliwość kluczowania 2, parametry regulacji PI pętli prędkości to P2-03 i P3-04. Parametry PI pętli prędkości między częstotliwością kluczowania 1 a częstotliwością kluczowania 2 to dwie grupy parametrów przełączania liniowego PI.
Przedstawione na rysunku 6-2:
Parametr PI
P2-00
P2-01
P2-03
P2-04
P2-02
P2-05
Komenda częstotliwości
Rysunek 6-2 Schemat parametrów PI
Poprzez ustawienie współczynnika proporejonalności regulatora prędkości i czasu całkowania można dostosować charakterystykę dynamicznej odpowiedzi sterowania wektorowego prędkością.
Zwiększenie proporcjonalnego wzmocnienia, skrócenie czasu całkowania może przyspieszyć odpowiedź dynamiczną pętli prędkości. Jednak wzmocnienie proporcjonalne zbyt duże lub zbyt mały czas całkowania może powodować wibracje układu. Zalecana metoda regulacji:
Jeśli parametry fabryczne nie mogą spełnić wymagań, to wartość parametru fabrycznego należy dostroić. Najpierw zwiększyć proporcjonalne wzmocnienie, aby upewnić się, że system nie oscyluje; następnie skrócić czas całkowania. Układ posiada charakterystykę szybkiej odpowiedzi i małe przeregulowanie.
Uwaga: Gdy parametry PI są ustawione nieprawidłowo, może to spowodować duże przeregulowanie prędkości.
| P2-06 | Wzmocnicie poślizgu sterowania wcktorowego | Ustawianie fabryczne | 100% |
| Zakres ustawień | 50%~200% |
Bezczujnikowe sterowanie wektorowe prędkości. Ten parametr służy do precyzyjnej regulacji stałej prędkości silnika: Gdy obciążenie silnika jest niskie, aby zwiększyć parametr prędkości i odwrotnie.
W przypadku sterowania wektorowego czujnika prędkości ten parametr może również regulować obciążenie prądu wyjściowego falownika.
| P2-07 | Czas | Ustawienie | 0.000s |
| filtrowania | fabryczne | ||
| pętli prędkości | |||
| Zakres | 0.000s~0.100s | ||
| ustawicń |
Komenda prądowa wyjściowego momentu obrotowego regulatora pętli prędkości, parametry filtru komendy momentu w trybie sterowania wektorowego.
Ten parametr generalnie nie ma potrzeby dostosowywania wahań prędkości, która mogłaby być odpowiednia dla zwiększenia czasu filtrowania; Jeżeli jednak występują oscylacje silnika, należy odpowiednio zmniejszyć ten parametr.
Stała czasowa filtra pętli prędkości jest mała, wyjściowy moment obrotowy przemiennika może być zmienny, ale szybkość reakcji jest duża.
| P2-08 | Sterowanie wektorowe | Ustawicnic fabryczne | 64 |
| Zakres ustawień | 0~200 | ||
Podczas hamowania, wzrost napięcia szyny sterującej wskutek przewzbudzenia może być stłumiony, aby uniknąć błędu przepięcia. Im większe wzrosty wskutek przewzbudzenia, tym silniejsze tłumienie.
W warunkach hamowania przez falownik łatwiej powstaje nadmierne ciśnienie i słychać alarm, należy wtedy poprawić regulację przewzbudzenia. Ale jeśli wzmocnienie przewzbudzenia jest zbyt duże, łatwo doprowadzi do wzrostu prądu wyjściowego; należy to wyważyć w aplikacji.
W przypadku małej bezwładności, opóźnienie wzrostu napięcia silnika nie pojawia się. Zaleca się, aby wzmocnienie przewzbudzenia wynosiło 0; W przypadku oporu hamowania w tej sytuacji sugeruje się również ustawienie wzmocnienia przewzbudzenia na 0.
| P2-09 | Źródło ograniczenia momentu obrotowego w trybie sterowania prędkością | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | F2-10 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Ustawianie impulsu | |||
| 5 | Preferowane ustawienia komunikacji | |||
| P2-10 | Nastawa w cyfrowym trybie sterowania ograniczeniem momentu obrotowego | Ustawienie fabryczne | 150.0% | |
| Zakres ustawień | 0.0%~200.0% | |||
W trybie sterowania prędkością, maksymalna wartość wyjściowego momentu obrotowego falownika jest kontrolowana przez źródło ograniczenia momentu.
P2-09 służy do wyboru źródła do ustawienia progu prędkości. Kiedy ustawienia komunikacji są analogowe, impulsowe, 100% odpowiada odpowiednicemu ustawicniu P2-10, P2-10 i 100% znamionowemu momentowi obrotowemu falownika.
| P2-13 | Przyrost proporcjonalnyregulatora wzbudzenia | Ustawienie fabryczne | 2000 |
| Zakres ustawień | 0~20000 | ||
| P2-14 | Wzmocnienie całkowaniaregulacji wzbudzcnia | Ustawienie fabryczne | 1300 |
| Zakres ustawień | 0~20000 | ||
| P2-15 | Wzmocnienieproporcjonalne regulacjimomentu obrotowego | Ustawienie fabryczne | 2000 |
| Zakres ustawień | 0~20000 | ||
| P2-16 | Wzmocnienie całkowaniaregulacji momentuobrotowego | Ustawienie fabryczne | 1300 |
| Zakres ustawień | 0~20000 | ||
Parametry regulacji pętli prądowej PI sterowania wektorowego. Pełne parametry strojenia w maszynie asynchronousnej lub synchronicznej zostaną automatycznie załadowane po dostrojeniu, generalnie nie trzeba ich modyfikować.
Należy przypomnieć, że regulator całkowania pętli prądowej zamiast używać czasu całkowania jako wymiaru, bezpośrednio ustawia wzmocnienie całkowania. Jeśli wzmocnienie pętli prądowej PI jest ustawione zbyt wysoko, może to powodować oscylację całej pętli sterowania, więc gdy oscylacja prądu lub tętnienie momentu jest duże, można je tutaj zmniejszyć ręcznie, aby uzyskać wzmocnienie proporcjonalne lub wzmocnienie całkowania PI.
Grupa P3 - Parametry sterowania U / f
Kody funkcji działają tylko przy sterowaniu U/f. W przypadku sterowania wektorowego nie działają.
Sterowanie U/f jest odpowiednie dla wentylatorów, pomp i innych ogólnych obciążení lub falownika z wieloma silnikami, lub mocy falownika i mocy silnika o całkiem różnych zastosowaniach.
| P3-00 | Wybór krzywej U/f | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | liniowa | ||
| 1 | wielopunktowa | |||
| 2 | kwadratowa | |||
| 3 | 1.2 kwadratowa | |||
| 4 | 1.4 kwadratowa | |||
| 6 | 1.6 kwadratowa | |||
| 8 | 1.8 kwadratowa | |||
| 9 | zastrzeżone | |||
| 10 | krzywa U/f z pełną separacją | |||
| 11 | krzywa U/f z połowiczną separacją | |||
0: Liniowe U/f. Odpowiednie do zwykłego obciążenia stałym momentem obrotowym.
1: Wielopunktowa linia U/f. Odpowiednia do maszyn do odwadniania, wirówek i innych specjalnych obciążeń. W tym momencie ustawiając parametry P3-03 \~ P3-08, można je uzyskać na dowolnej krzywej U/f.
2: Krzywa kwadratowa U/f. Odpowiednia do wentylatorów, pomp i innych obciążeń ośrodkowych. 3\~8: Krzywa U/f pomiędzy linią prostą, pomiędzy PF i kwadratem U/f.
10: Krzywa U/f z pełną separacją. Wtedy częstotliwość wyjściowa i napięcie wyjściowe falownika są niezależne od siebie. Częstotliwość wyjściowa jest określana przez źródło częstotliwości a napięcie wyjściowe jest określane przez P3-13 (izolowane źródło napięcia U/f).
Tryb pełnej separacji U/f stosuje się zwykle w nagrzewaniu indukcyjnym, przetworniku mocy, sterowaniu momentem obrotowym silnika i w innych zastosowaniach.
11: Krzywa U/f z połowiczną separacją
W tym przypadku V i F są proporcjonalne do źródła napięcia przez ustawienie P3-13, a relacja między V i F dotyczy też napięcia znamionowego silnika w grupie P1 w odniesieniu do częstotliwości znamionowej.
Załóżmy, że źródłem napięcia wejściowego jest X (gdzie X wynosi od 0 do 100% wartości). Napięcie wyjściowe V F w relacji między falownikiem a częstotliwością wynosi:
V / F = 2 * X * (napięcie znamionowe silnika) / (częstotliwość znamionowa silnika).
| P3-01 | Wzmocnienie momentu obrotowego | Ustawienie fabryczne | Zależnie od modelu |
| Zakres ustawień | 0,0% ~ 30% | ||
| P3-02 | Częstotliwość wyłączania momentu obrotowego | Ustawicnic fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ maksymalna częstotliwość wyjściowa | ||
Aby skompensować charakterystykę momentu obrotowego przy niskiej częstotliwości sterowania U/f, należy zwiększyć kompensację napięcia wyjściowego falownika. Jeśli jednak ustawienie wzmocnienia momentu obrotowego jest zbyt duże, silnik przegrzewa się i występuje przetężenic falownika.
Gdy obciążenie jest duże i moment rozruchowy silnika jest niewystarczający, zaleca się zwiększenie tego parametru, można lekko zmniejszyć, gdy nastąpi zwiększenie. Gdy wzmocnicnie momentu jest ustawione na 0,0, falownik automatycznie zwiększa moment, przy czym w tym momencie moment zwiększa się zgodnie z wymaganymi automatycznie obliczonymi parametrami rezystancji stojana silnika napędowego.
Zwiększenie momentu obrotowego a częstotliwość odcięcia momentu: Przy tej częstotliwości, zwiększenie momentu obrotowego jest sku- teczne.
Powyżej tej ustawionej częstotliwości, wzmocnienie momentu nie powiedzie się. Patrz szczegóły na rysunku 6-3.
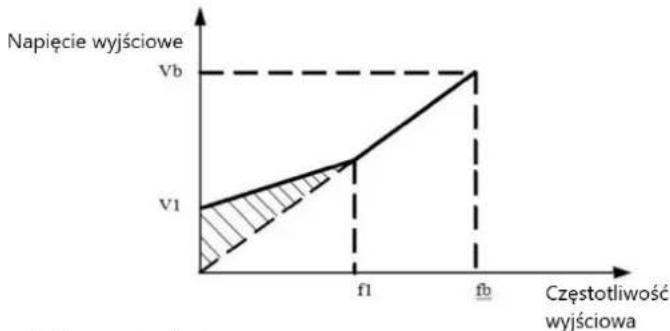
line
| Częstotliwość wyjściowa | Napięcie wyjściowe | | ------------------------- | ------------------ | | f1 | V1 | | fb | Vb |VI: Ręczne wzmocnienie napięcia momentu obrotowego
Vb Maksymalne napięcie wyjściowe
fl: Częstotliwość odcięcia ręcznego wzmacniania momentu obrotowego
fb: znamionowa częstotliwość pracy
Rys. 6-3 Schemat ręcznego wzmocnienia momentu obrotowego
| P3-03 | Punkt 1 częstotliwości U/f | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz~P3-05 | ||
| P3-04 | Punkt 1 napięcia U/f | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~100.0% | ||
| P3-05 | Punkt 2 częstotliwości U/f | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | P3-03~P3-07 | ||
| P3-06 | Punkt 2 napięcia U/f | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~100.0% | ||
| P3-07 | Punkt 3 częstotliwości U/f | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | P3-05 ~ częstotliwość znamionowa silnika (P1-04)Uwaga: druga częstotliwość znamionowa silnika to A2-04 | ||
| P3-08 | Punkt 3 napięcia U/f | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~100.0% | ||
P3-03 \~ P3-08 sześć parametrów definiujących wielosegmentową krzywą U/f.
Charakterystykę wielopunktową U/f należy ustawić zgodnie z charakterystyką obciążenia silnika. Należy być świadomym tego, że zależność między napięciem a częstotliwością musi być spełniona w trzech punktach: V1 < V2 < V3, F1 < F2 < F3.
Rysunek 6-4 przedstawia schemat krzywej U/f z nastawą wielopunktową.
Ustawienie zbyt wysokiego napięcia może spowodować przegrzanie silnika, a nawet spalenie go przy niskich częstotliwościach. Napęd może za bardzo utykać lub włączać zabezpieczenie nadprądowe.
| P3-09 | Wzmocnienie kompensacji poślizgu U/f | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0% ~ 200.0% | ||
Kompensacja poślizgu U/f. Może być kompensowana w przypadku silnika indukcyjnego gdy obciążenie zwiększa odchylenie prędkości silnika. Gdy zmienia się obciążenie, można uzyskać stabilną prędkość silnika.
Wzmocnienie kompensacji poślizgu U/f jest ustawione na 100,0%. co wskazuje kompensację obciążenia znamionowego w stosunku do poślizgu znamionowego silnika. Ale można też wykonać własne obliczenia w oparciu o poślizg znamionowy silnika, grupę częstotliwości znamionowej silnika napędowego według P1 oraz prędkości znamionowej.
Można regulować obr./min wzmocnienia kompensacji poślizgu U/f, ogólnie gdy obciążenie znamionowe, prędkość silnika i prędkość docelowa są zasadniczo takie same. Gdy prędkość silnika i wartość docelowa nie są takie same, należy odpowiednio dostroić wzmocnienie.
| P3-09 | Wzmocnienie przewzbudzenia | Ustawienie fabryczne | 0 |
| Zakres ustawie | 0%~200.0% | ||
Podczas hamowania, wzrost napięcia szyny sterującej wskutek przewzbudzenia może być stłumiony, aby uniknąć błędu przepięcia. Im większe wzmocnienie przewzbudzenia, tym silniejsze tłumienie.
W warunkach hamowania przez falownik łatwiej powstaje nadmierne ciśnienie i słychać alarm, należy wtedy poprawić regulację przewzbudzenia. Ale jeśli przyrost przewzbudzenia jest zbyt dużo, łatwo doprowadzi do wzrostu prądu wyjściowego; należy to wyważzyć w aplikacji.
W przypadku małej bezwładności, opóźnienie wzrostu napięcia silnika nie pojawia się. Zaleca się, aby przyrost przewzbudzenia wynosiło 0; W przypadku oporu hamowania w tej sytuacji sugeruje się również ustawienie wzmościenia przewzbudzenia na 0.
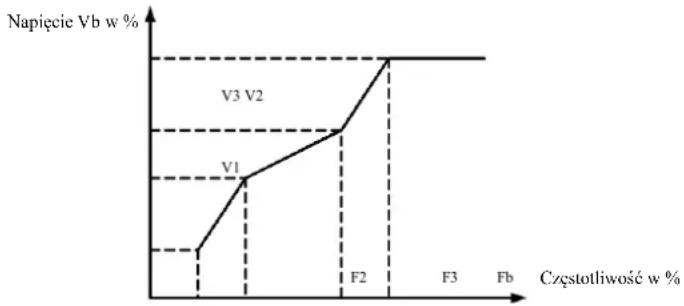
line
| Częstotliwość w % | Napięcie Vb w % | |---|---| | F1 | V1 | | F2 | V2 | | F3 | 100 |V1-V3: Procent napięcia Multi-speed U / f segmentu 1-3
F1-F3: Procent częstotliwości Multi-speed U / f segmentu 1-3
Vb: znamionowe napięcie silnika
Fb: znamionowa częstotliwość robocza silnika
Rysunek 6-4 Schemat ustawienia wielopunktowej krzywej U/f
| P3-11 | Wzmocnienie tłumienia oscylacji U/f | Ustawienie fabryczne | Potwierdzenie modelu |
| Zakres ustawień | 0~100 | ||
Metoda doboru wzmocnienia jest skuteczna w tłumieniu oscylacji. Należy wybierać małe wzmocnienie, aby nie wpływać niekorzystnie na działanie U/f. Gdy silnik nie ma oscylacji, wybrać wzmocnienie 0. Wzmocnicnie należy tylko zwiększyć przy wyraźnej oscylacji silnika, im większe wzmocnienie, tym lepszy wynik tłumienia oscylacji. Korzystanie z funkcji tłumienia oscylacji wymaga dokładnego przestrzegania parametrów prądu znamionowego silnika i prądu jałowego lub efekt tłumienia oscylacji U/f nie będzie dobry.
| P3-13 | Napięcie izolowane U/f | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Ustawianie cyfrowe (P3-14) | ||
| 1 AI1 | ||||
| 2 AI2 | ||||
| 3 AI3 | ||||
| 4 | Ustawianie impulsu (DI5) | |||
| 5 | Komendy wielostanowe | |||
| 6 | Prosty PLC | |||
| 7 PID | ||||
| 8 | Ustawienia komunikacji | |||
| 100,0% odpowiada napięciu znamionowemu silnika (P1-02, A4-02, A5-02, A6-02) | ||||
| P3-14 | Ustawianie cyfrowe Napięcia izolowanego U/f | Ustawienie fabryczne | 0V | |
| Zakres ustawień | 0V ~ napięcie znamionowe silnika | |||
Separacja U/f jest zwykle używana w zastosowaniach związanych z nagrzewaniem indukcyjnym, przemiennikiem mocy i sterowaniem momentem obrotowym silnika.
Wybierając sterowanie separacją U/f, napięcie wyjściowe można ustawić za pomocą kodu funkcji P3-14, ale także analogowo, wielostrumieniowo, przez PLC, PID lub ustawienia komunikacji. W przypadku ustawienia niecyfrowego każde ustawienie odpowiada 100% napięcia znamionowego silnika, gdy procent wartości bezwzględnej ustawienia wyjścia analogowego itp. jest ujemny. Zatem ustawia się jako aktywną wartość zadaną.
0: Cyfrowe nastawianie napięcia (P3-14) jest bezpośrednio przez P3-14. 1: AI1 2: AI2 3: AI3 Napięcie z zacisku wejścia analogowego do ustalenia.
-
Ustawienie impulsu (DI5) poprzez nastawę impulsu napięcia na zaciskach. Specyfikacja sygnału odniesienia impulsu: zakres napięcia 9 V \~ 30 V, zakres częstotliwości 0 kHz \~ 100 kHz.
-
W przypadku wielostopniowej instrukcji napięcia z wielu źródeł, należy ustawić grupę P4 PC i ustawić parametry tak, aby dany sygnał odpowiadał napięciu odniesienia.
-
Prosty sterownik PLC Gdy źródłem napięcia jest prosty PLC, należy ustawić zestaw parametrów komputera PC, aby ustalić dane napięcie wyjściowe.
-
PID Zamknięta pętla generuje napięcie wyjściowe zgodnie z regulatorem PID. Patrz informacje szczegółowe Grupy PA dla PID.
-
Komunikacja dotyczy napięcia podawanego przez komputer główny w trybie komunikacji. Gdy wybrano źródła napięcia 1–8, 0 odpowiada 100% napięcia wyjściowego (0V\~ napięcie znamionowe silnika).
| P3-14 | Czas narastania napięcia izolowanego U/f | Ustawicnic fabryczne | 0.0s |
| Zakres ustawićń | 0.0s~1000.0s | ||
Czas narastania separacji U/f odnosi się do zmian napięcia wyjściowego od 0 V do wymaganego czasu znamionowego napięcia silnika.
Pokazano to na rysunku 6-5:
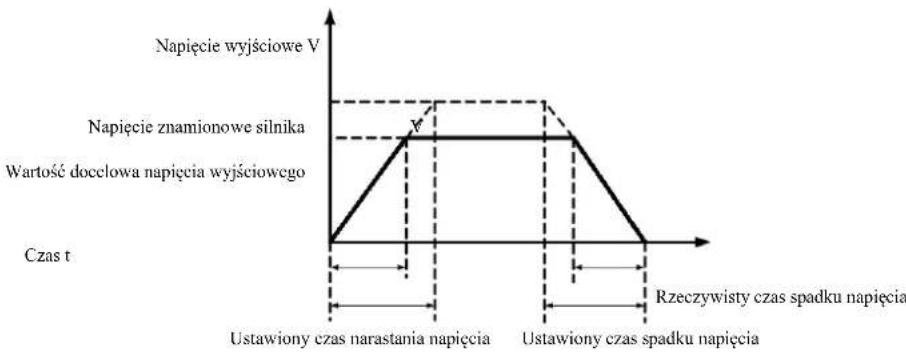
line
| Period | Napięcie wyjściowe V | Rzejeczywisty czas spadku napięcia | |---|---|---| | Ustawiony czas narastania napięcia | 0 | | | Ustawiony czas spadku napięcia | 1 | | | Wartość docelowa napięcia wyjściowego | 1 | | | Napięcie znamionowe silnika | 1 | | | Czas t | 0 | |Rysunek 6-5 Schemat separacji V / F
Grupa P4 – Zaciski wejściowe
Falownik tej serii jest standardowo wyposażony w pięć wielofunkcyjnych zacisków wejść cyfrowych (gdzie D15 może być używane jako zacisk wejścia szybkiego impulsu). Dwa analogowe zaciski wejściowe. Jeśli system potrzebuje więcej zacisków wejściowych i wyjściowych, można skorzystać z opcjonalnej wielofunkcyjnej karty rozszerzeń wejść i wyjść.
Wielofunkcyjna karta rozszerzeń wejść i wyjść ma pięć wielofunkcyjnych zacisków wejść cyfrowych (DI6 \~ DI10) i jedno złącze wejścia analogowego (A13).
| P4-00 | Wybór funkcji zacisków D11 | Ustawienie fabryczne | 1 (praca) |
| P4-01 | Wybór funkcji zacisków D12 | Ustawienie fabryczne | 4 (ruch dodatni punktu zwrotnego) |
| P4-02 | Wybór funkcji zacisków D13 | Ustawienie fabryczne | 9 (reset błędu) |
| P4-03 | Wybór funkcji zacisków D14 | Ustawienie fabryczne | 12 (multi speed 1) |
| P4-04 | Wybór funkcji zacisków D15 | Ustawienie fabryczne | 13 (multi speed 2) |
| P4-05 | Wybór funkcji zacisków D16 | Ustawienie fabryczne | 0 |
| P4-06 | Wybór funkcji zaciskó D17w | Ustawienie fabryczne | 0 |
| P4-07 | Wybór funkcji zacisków D18 | Ustawienie fabryczne | 0 |
| P4-08 | Wybór funkcji zacisków D19 | Ustawienie fabryczne | 0 |
| P4-09 | Wybór funkcji zacisków D110 | Ustawienie fabryczne | 0 |
Parametry te są używane do ustawiania funkcji zacisków wielofunkcyjnych wejść cyfrowych i mogą być wybierane w następujący sposób:
| Punkt nastawy | Funkcja | Objaśnienie |
| 0 | Bez funkcji | Zacisk nie będzie używany w trybie „Brak funkcji”, aby zapobiec nieprawidłowemu działaniu. |
| 1 | Kierunek do przodu (FWD) | Zacisk zewnętrzny do sterowania napędu do przodu i do tyłu. |
| 2 | Kierunek do tyłu (REV) | |
| 3 | Sterowanie trójprzewodowe | Ten zacisk służy do określenia trybu pracy falownika w trybie sterowania trójprzewodowego. Aby uzyskać szczegółowe informacje, patrz instrukcje dotyczące kodu funkcji P4-11 („tryb komend zacisków”). |
| 4 | Impulsowanie do przodu (FJOG) | JOG - impulsowanie do przodu, JOG - impulsowanie do tyłu. Częstotliwość impulsowania oraz czas przyspieszania i hamowania w trybie JOG dotyczy kodu funkcji P8-00, P8-01, P8-02. |
| 5 | Punkty zwrotne (RJOG) | |
| 6 | Zacisk W GÓRE (UP0 | |
| 7 | Zacisk W DÓŁ (DOWN) | Poprzez zaciski zewnętrzne, zadawane są polecenia dotyczące modyfikacji częstotliwości, jej inkrementacji i dekrementacji. Źródło częstotliwości jest ustawione na nastawy cyfrowe, można je regulować w górę i w dół, aby ustawić częstotliwość. |
| 8 | Wybieg | Falownik blokuje wyjście, a następnie zatrzymuje proces sterowania silnika falownikiem. To samo dotyczy wolnobiegu P6-10. |
| 9 | Reset (RESET) | Funkcja resetowania błędu terminala z klawiszem funkcyjnym RESET na klawiaturze. Funkcja ta służy do zdalnego resetowania błędów |
| 10 | Wstrzymanie działania | Falownik zostaje zatrzymany, ale wszystkie parametry pracy są w pamięci. Parametry takie jak PLC, parametry Wobble, parametry PID. Po zaniku tego sygnału z zacisku, napęd powraca do stanu sprzed zatrzymania. |
| 11 | Wejście normalnie otwarte dla błędu zewnętrznego | Kiedy ten sygnał zostaje wysyłany do falownika, falownik zgłasza błąd ERR15. Usuwanie usterek i ochrona przed błędami zgodnie z trybem pracy (patrz też szczegóły dotyczące kodu funkcji P9-47). |
| 12 | Zacisk Multi-speed 1 | 16 stanów czterech zacisków dla prędkości lub 16 innych zestawów instrukcji. Szczegóły w Tabeli 1. |
| 13 | Zacisk Multi-speed 2 | |
| 14 | Zacisk Multi-speed 3 | |
| 15 | Zacisk Multi-speed 4 | |
| 16 | Zacisk wyboru czasu hamowania 1 | Te dwa zaciski mają cztery stany, cztery opcje uzyskania czasu przyspieszania i hamowania, szczegóły patrz Tabela 2. |
| 17 | Zacisk wyboru czasu hamowania 2 | |
| 18 | Przełącznik źródła częstotliwości | Przełączanie, aby wybrać inne źródło częstotliwości.Zgodnie z kodem funkcji wyboru źródła częstotliwości (P0-07) ten zacisk służy do przełączania między dwoma źródłami częstotliwości. |
| 19 | Wyczyszczenie ustawienia W GÓRĘ / W DÓŁ (zacisk, klawiatura) | W odniesieniu do zadancj częstotliwość cyfrowej odniesienia, zacisk ten może wyczyścić zmiany W GÓRĘ / W DÓŁ lub wprowadzić zmiany W GÓRĘ / W DÓŁ, tak że dana częstotliwość powróci do wartości zadanej P0-08. |
| 20 | Przełączanie źródła zadawania poleceń zaciskiem | Gdy źródło poleceń jest ustawione na sterowanie zaciskiem (P0-02 = 1), zacisk ten można przełączyć na sterowanie zaciskiem i sterowanie za pomocą klawiatury.Gdy źródło poleceń jest ustawione na sterowanie komunikacją (P0-02 = 2), zacisk ten można przełączyć na sterowanie komunikacją i sterowanie za pomocą klawiatury. |
| 21 | Blokada przyspieszania i zatrzymywania | Zapewnia, że napęd nie jest sygnałami zewnętrznymi (z wyjątkiem polecenia zatrzymania), aby utrzymać bieżącą częstotliwość wyjściową. |
| 22 | Koniec czasu PID | PID jest tymczasowo wyłączony, falownik utrzymuje bieżącą częstotliwość wyjściową, nie ma już regulacji PID źródła częstotliwości. |
| 23 | Reset stanu PLC | Pauza PLC w procesie implementacji, można przywrócić falownik poprzez ten zacisk do stanu początkowego prostego PLC. |
| 24 | Pauza częstotliwości oscylacyjnej | Napęd na wyjście częstotliwości środkowej. Wstrzymanie funkcji Wobble. |
| 25 | Wejście licznika | Zacisk wejściowy licznika impulsów. |
| 26 | Reset licznika | Stan zresetowania licznika. |
| 27 | Wejście długości zliczania | Zacisk wejściowy zliczania długości. |
| Punkt nastawy | Funkcja | Objaśnienie |
| 28 | Reset długości zliczania | Wyczyszczenie długości |
| 29 | Blokada sterowania momentem | Zablokowanie sterowania momentem napędu, falownik przechodzi w tryb sterowania prędkością |
| 30 | Wejście częstotliwości impulsów (dotyczy tylko DI5) | DI5 pełni funkcję zacisku wejścia impulsowego. |
| 31 | Zastrzeżone | Zastrzeżone |
| 32 | Hamowanie prądem stałym | Gdy ten zacisk jest aktywny, falownik przechodzi bezpośrednio w stan hamowania prądem stałym. |
| 33 | Wejście sygnału usterki zewnętrznej normalnie zamknięte | Gdy normalnie zamknięte wejście sygnalizuje błąd zewnętrzny do falownika, falownik zgłasza błąd ERR15 i przestój. |
| 34 | Blokada zmian częstotliwości włączona | Jeśli ta funkcja jest aktywna, po zmianie częstotliwości przemiennik nie reaguje na zmianę aż zacisk stanie się nieaktywny. |
| 35 | Zmiana kierunku działania PID | Kiedy ten zacisk jest aktywny, kierunek działania PID zmienia się na przeciwny do ustawionego PA-03 |
| 36 | Zatrzymanie sygnałem zewnętrznym z zacisku 1 | Podczas sterowania klawiaturą, ten zacisk może być użyty do zatrzymania falownika, odpowiada klawiszowi STOP na klawiaturze. |
| 37 | Przelączanie źródła zada-wania poleceń zaciskiem 2 | Do przełączania między sterowaniem zaciskowym a sterowaniem komunikacyjnym. Jeżeli wybrano zacisk jako źródło poleceń, system przełącza się na efektywne sterowanie terminalem komunikacyjnym i odwrotnie. |
| 38 | Wstrzymanie działania członu całkującego PID | Kiedy ten zacisk jest aktywny, regulacja całkująca PID jest wstrzymywana, ale proporcja regulacji PID i regulacji różniczkującej pozostaje nadal ważna. |
| 39 | Przelączanie pomiędzy źródłem częstotliwości X a częstotliwością zadaną | Gdy zacisk jest włączony, dostępne jest źródło częstotliwości X z ustawioną częstotliwością (P0-08) jako alternatywa. |
| 40 | Przelączanie pomiędzy źródłem częstotliwości Y a częstotliwością zadaną | Gdy zacisk jest włączony, dostępne jest źródło częstotliwości Y z ustawioną częstotliwością (P0-08) jako alternatywa. |
| 41 | Wybór silnika zaciskiem 1 | Te dwa stany na dwóch zaciskach, dwa zestawy parametrów silnika mogą być przełączane. Szczegóły patrz Tabela 3. |
| 42 | Wybór silnika zaciskiem 2 | |
| 43 | Przelączanie parametrów PID | Gdy w warunkach przełączania parametru PID na zacisku DI (PA-18 = 1) zacisk ten jest nieaktywny, użyty będzie parametr PID PA-05 ~ PA-07, PA-15 gdy zacisk ten będzie aktywny ~ PA-17; |
| 44 | Błąd 1 zdefiniowany przez użytkownika | Gdy zdefiniowane przez użytkownika błędy 1 i 2 są aktywne, falownik generuje odpowiednio alarmy ERR27 i ERR28, przemiennik częstotliwości wybierze działanie zabezpieczenia błędu w oparciu o przetwarzanie w wybranym trybie pracy P9-49. |
| 45 | Błąd 2 zdefiniowany przez użytkownika | |
| 46 | Przelączanie między sterowaniem prędkością a momentem | Między trybem sterowania momentem napędu a trybem sterowania prędkością. Zacisk jest nieaktywny, tryb A0-00 (sterowanie prędkością / momentem obrotowym) zdefiniowany w napędzie działa, zacisk jest aktywny a następnie przełącza się w inny tryb. |
| 47 | Zatrzymanie awaryjne | Gdy zacisk ten jest aktywny, falownik zatrzymuje napęd najszybciej jak to możliwe w ramach aktualnie ustawionego limitu. Ta funkcja służy do spełnicnia warunku, że napęd musi zostać zatrzymany tak szybko, jak to możliwe, gdy system znajduje się w stanie awaryjnym. |
| 48 | Zatrzymanie sygnałem zewnętrznym z zacisku 2 | W dowolnym trybie sterowania (panel sterujący, sterowanie zaciskiem, sterowanie komunikacja) zacisk ten może służyć do zatrzymania falownika, wówczas czas hamowania jest stałym czasem 4. |
| 49 | Zatrzymanie hamowaniem prądem stałym | Gdy ten zacisk jest aktywny, falownik zwolni, aby zatrzymać częstotliwość początkową hamowania prądem stałym, a następnie przełączy się na hamowanie prądem stałym. |
| 50 | Kasowanie czasu pracy | Gdy zacisk ten jest aktywny, dany czas pracy falownika zostaje wyzerowany, funkcja ta wymaga nastawienia czasu pracy (P8-42) i jego osiągnięcia (P8-53). |
Tabela 1 Opis funkcji polecenia wielokrokowego
Zacisk poleczeń więcej niż cztero-krokowy można połączyć 16 stanów. Każdy stan odpowiada 16 nastawom poleczeń, jak w tabeli 1:
| K4 | K3 | K2 | K1 | Zestaw poleceń | Odnosne parametry |
| OFF | OFF | OFF | OFF | Instrukcja wielokrokowa 0 | PC-00 |
| OFF | OFF | OFF | ON | Instrukcja wielokrokowa 1 | PC-01 |
| OFF | OFF | ON | OFF | Instrukcja wielokrokowa 2 | PC-02 |
| OFF | OFF | ON | ON | Instrukcja wielokrokowa 3 | PC-03 |
| OFF | ON | OFF | OFF | Instrukcja wielokrokowa 4 | PC-04 |
| OFF | ON | OFF | ON | Instrukcja wielokrokowa 5 | PC-05 |
| OFF | ON | ON | OFF | Instrukcja wielokrokowa 6 | PC-06 |
| OFF | ON | ON | ON | Instrukcja wielokrokowa 7 | PC-07 |
| ON | OFF | OFF | OFF | Instrukcja wielokrokowa 8 | PC-08 |
| ON | OFF | OFF | ON | Instrukcja wielokrokowa 9 | PC-09 |
| ON | OFF | ON | OFF | Instrukcja wielokrokowa 10 | PC-10 |
| ON | OFF | ON | ON | Instrukcja wielokrokowa 11 | PC-11 |
| ON | ON | OFF | OFF | Instrukcja wielokrokowa 12 | PC-12 |
| ON | ON | OFF | ON | Instrukcja wielokrokowa 13 | PC-13 |
| ON | ON | ON | OFF | Instrukcja wielokrokowa 14 PC-14 | |
| ON | ON | ON | ON | Instrukcja wielokrokowa 15 | PC-15 |
Gdy źródło częstotliwości funkcji wielu prędkości PC-00 \~ PC-15 jest wybrane jako 100,0%, odpowiada to maksymalnej częstotliwości P0-10. Oprócz tego, że są używane do funkcji wielu prędkości, instrukcje wielokrokowe mogą być również używane jako źródło odniesicnia PID lub jako kontrola separacji U/f źródła napięcia itp., aby spełnić potrzeby przecączania między zadaniami.
Tabela 2. Funkcje zacisków dotyczące wyboru czasu przyspieszania i hamowania
| Zacisk 2 Zacisk 1 | Wybór czasu przyspieszania i hamowania odpowiada | ||
| OFF OFF | Czas przyspieszania 1 | P0-17、P0-18 | |
| OFF | ON Czas | przyspieszania 1 | P8-03、P8-04 |
| ON OFF | Czas przyspieszania 3 | P8-05、P8-06 | |
| ON | ON | Czas przyspieszania 4 | P8-07、P8-08 |
Tabela 3. Funkcje zacisków dotyczące wyboru silnika
| Zacisk 2 | Zacisk 1 | Wybór silnika | Odnośny zestaw parametrów |
| OFF OFF Silnik 1 | Grupa P1, P2 | ||
| OFF ON | Silnik 2 | Grupa A2 | |
| P4-10 | Czas filtrowania DI | Ustawienie fabryczne | 0.010s | |
| Ustawienie | 0.000s~1.000s | |||
Ustawianie statusu DI czasu filtrowania w oprogramowaniu zacisku. Jeśli używa się zacisku wejściowego podatnego na zakłócenia spowodowane nieprawidłowym działaniem tego parametru, można zwiększyć ten parametr w celu zwiększenia zdolności przeciwzakłóceniowej. Chociaż wydłuża to czas filtrowania, może powodować powolną odpowiedź zacisku DI.
| P4-11 | Tryb komend zacisku | Ustawienie fabryczne | 0 | ||
| Zakres ustawień | 0 | Dwuprzewodowy 1 | |||
| 1 | Dwuprzewodowy 2 | ||||
| 2 | Trojprzewodowy 1 | ||||
| 3 | Trojprzewodowy 2 | ||||
0: Tryb dwuprzewodowy 1: Ten tryb jest najczęściej używanym trybem dwuliniowym. Poprzez zaciski DI1, DI2 określa napęd silnika w przód i w tył.
Funkcje zacisków:
| Zaciski | Punkt nastawy | Opis |
| DI1 | 1 | Ruch do przodu (FWD) |
| DI2 | 2 | Ruch do tyłu (REV) |
Ponieważ. DI1, DI2 są wielofunkcyjnym terminalem wejściowym DI1 \~ DI10, poziom jest skuteczny.
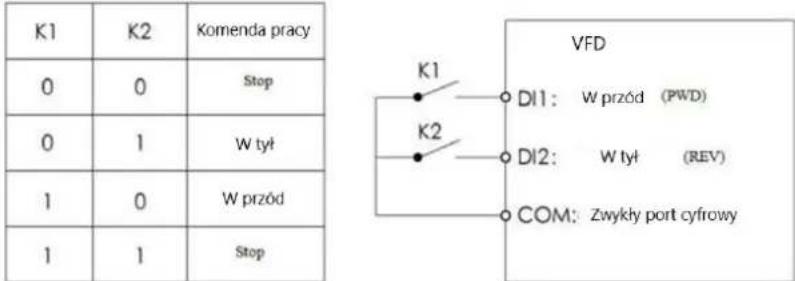
Rysunek 6-6 1: Tryb dwuprzewodowy
1: Tryb dwuprzewodowy
2: Tego trybu używać, gdy aktywny zacisk funkcji DI1 i funkcji DI2 umożliwia określenie kierunku.
Funkcje zacisków:
| Zaciski Naštawa Opis | ||
| DI1 | 1 | Ruch do przodu (FWD) |
| DI2 | 2 | Ruch do tyłu (REV) |
DI1, DI2 są wielofunkcyjnymi zaciskami wejściowymi.
| K1 | K2 | Komenda pracy |
| 0 | 0 | Stop |
| 0 | 1 | W tył |
| 1 | 0 | W przód |
| 1 | 1 | Stop |
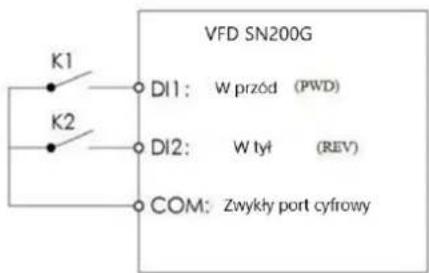
Rysunek 6-7 Tryb dwuliniowy 2
2: Tryb sterowania trójprzewodowego
1: Ten tryb jest aktywowany na zacisku DI3, względnie przez sterowanie kierunkiem DI1, DI2
| Zaciski | Punkt nastawy Opis | |
| DI1 | 1 | Ruch do przodu (FWD) |
| DI2 | 2 | Ruch do tyłu (REV) |
| DI3 | 3 | Trójprzewodowe sterowanie ruchem |
Kiedy zachodzi potrzeba uruchomienia, musi najpierw zostać zamknięty zacisk DI 3 przez narastające brzegi DI1 lub DI2, aby uzyskać sterowanie silnikiem w przód lub w tyl.
Kiedy trzeba zatrzymać, odłączyć sygnał zacisku DI3. DI1, DI2, DI3 to wielofunkcyjne terminale wejściowei DI1 \~ DI10, DI1, impulsy DI2 są skuteczne a DI3 ma skuteczny poziom.
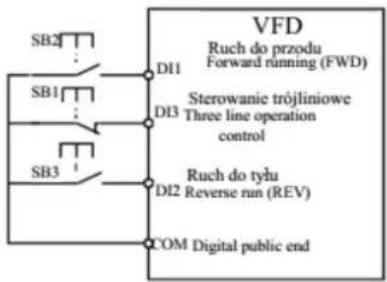
flowchart
graph TD
A["SB2"] --> B["DI1"]
C["SB1"] --> D["DI3"]
E["SB3"] --> F["DI2 Reverse run (REV)"]
G["VFD"] --> H["Ruch do przodu Forward running (FWD)"]
I["Ruch do tyłu"] --> J["DI2"]
K["STEROWANIE TRÓJINIOWE Three line operation control"] --> L["DI3"]
M["COM Digital public end"] --> N["DI2"]
Rys. 6 -8 Trójprzewodowy tryb sterowania 1
Gdzie: SB1: przycisk stop SB2: przycisk „do przodu” SB3: przycisk „do tyłu”
3: Tryb sterowania trójprzewodowego
2: Ten tryb włącza się zaciskiem DI 3, uruchamia poleceniem podanym przez DI1, kierunek DI2 według wyboru.
Funkcje zacisków:
| Zaciski | Punkt nastawy Opis | |
| DI1 | 1 | Ruch do przodu (FWD) |
| DI2 | 2 | Ruch do tyłu (REV) |
| DI3 | 3 | Trójprzewodowe sterowanie ruchem |
Kiedy zachodzi potrzeba uruchomienia, musi najpierw zostać zamknięty zacisk DI 3, wzrasta impuls DI1 sygnału pracy silnika, stan DI2 kierunku ruchu silnika.
Kiedy trzeba zatrzymać, odłączyć sygnał zacisku D13. Spośród zacisków, D11, D12, D13 dla D11 \~ D110 to wielofunkcyjne terminale wejściowe, D11 skuteczny impuls, D13, D12 działają efektywnie.
| K | Kierunek ruchu |
| 0 | W przód |
| 1 | W tyl (REV) |
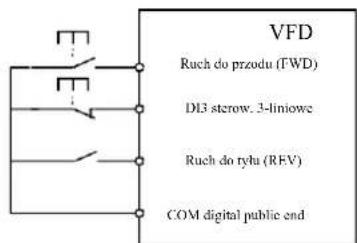
Rys. 6-9 Trójprzewodowy tryb sterowania 2
Gdzie: SB1: przycisk „stop”, SB2: przycisk „ruch”.
| P4-12 | UP / DOWN szybkość zmiany Ustawienie fabryczne | 1.00Hz/s |
| Ustawienie 0.01Hz/s~65.535Hz/s |
Podczas ustawiania zacisku UP / DOWN w górę / w dół, wyregulować zadaną częstotliwość i szybkość zmian częstotliwości, czyli wielkość zmiany częstotliwości na sekundę.
Gdy P0-22 (punkt dziesiętny częstotliwości) wynosi 2, wartość mieści się w zakresie 0,001 Hz / s \~ 65,535 Hz / s.
Gdy P0-22 (punkt dziesiętny częstotliwości) wynosi 1, wartość mieści się w zakresie 0,01 Hz / s \~ 655,35 Hz / s.
| P4-13 | Minimalna wartość krzywej AI1 na wejściuUstawianie 0.00V~P4-15 | Ustawienie fabryczne | 0.00V |
| P4-14 | Ustawienie krzywej AI1 na wejściu | Ustawienie fabryczne | 0.0% |
| Ustawianie -100.00%~100.0% | |||
| P4-15 | Maksymalna wartość krzywej AI1 na wejściuUstawianie P4-13~10.00V | Ustawienie fabryczne | 10.00V |
| P4-16 | Ustawienie krzywej AI1na wejściu | Ustawienie fabryczne | 100.0% |
| Ustawianie -100.00%~100.0% | |||
| P4-17 | Czas filtrowania AI1Ustawianie 0.00s~10.00s | Ustawienie fabryczne | 0.10s |
Powyższe kody funkeji służą do ustawiania zależności między nastawami analogowego napięcia wejściowego.
Gdy analogowe napięcie wejściowe jest większe niż ustawione „maksymalne wejście” (P4-15), napięcie analogowe jest obliczane zgodnie z „maksymalnym wejściem”. Podobnic, gdy analogowe napięcie wejściowe jest mniejsze niż ustawione „minimalne wejście” (P4-13), ... /tekst niezrozumiały – przyp tłum.
Gdy wejście analogowe jest wejściem prądowym, prąd 1mA odpowiada 0,5V.
Czas filtra wejściowego AI1 służy do ustawienia czasu filtrowania, gdy oprogramowanie AI1 jest podatne na zakłócenia w symulowanej lokalizacji. Należy zwiększyć czas filtrowania, aby ustabilizować wykrywanie symulacji. Jednak im dłuższy czas filtrowania w czasie symulacji, tym wolniejszy czas odpowiedzi. Sposób ustawienia zależy od zastosowania.
W różnych zastosowaniach ustawienie analogowe 100,0% odpowiedniej wartości nominalnej jest różne, proszę zapoznać się z opisem każdej części aplikacji.
Poniżej przedstawiono przypadek z dwoma typowymi ustawieniami:
| P4-18 | Minimalna wartość krzywej AI2 na wejściu | Ustawienie fabryczne | 0.00V | |
| Zakres ustawień | 0.00V~P4-20 | |||
| P4-19 | Ustawienie krzywej AI2 na wejściu | Ustawienie fabryczne | 0.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-20 | Maksymalna wartość krzywej AI2 na wejściu | Ustawienie fabryczne | 10.00V | |
| Zakres ustawień | P4-18~10.00V | |||
| P4-21 | Ustawienie krzywej AI2 na wejściu | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-22 | Czas filtrowania AI2 | Ustawienie fabryczne | 0.10s | |
| Zakres ustawień | 0.00s~10.00s | |||
Funkcja i zastosowanie krzywej 2, patrz opis krzywej 1
| P4-23 | Minimalna wartość krzywej AI3 na wejściu | Ustawienie fabryczne | 0.00V | |
| Zakres ustawień | 0.00s~P4-25 | |||
| P4-24 | Ustawienie krzywej AI3 na wejściu | Ustawienie fabryczne | 0.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-25 | Maksymalna wartość krzywej AI3 na wejściu | Ustawienie fabryczne | 10.00V | |
| Zakres ustawień | P4-23~10.00V | |||
| P4-26 | Ustawienie krzywej AI3 na wejściu | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-27 | Czas filtrowania AI3 | Ustawienie fabryczne | 0.10s | |
| Zakres ustawień | 0.00s~10.00s | |||
Funkcja i zastosowanie krzywej 3, patrz opis krzywej 1
| P4-28 | Minimalny impuls wejściowy | Ustawicnic fabryczne | 0.00kHz | |
| Zakres ustawień | 0.00kHz~P4-30 | |||
| P4-29 | Minimalna zgodność wejściowa impulsu | Ustawicnic fabryczne | 0.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-30 | Maksymalny impuls wejściowy | Ustawicnic fabryczne | 50.00kHz | |
| Zakres ustawień | P4-28~50.00kHz | |||
| P4-31 | Maksymalna zgodność wejściowa impulsu | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | -100.00%~100.0% | |||
| P4-32 | Czas filtrowania wejścia impulsowego | Ustawienie fabryczne | 0.10s | |
| Zakres ustawień | 0.00s~10.00s | |||
Te kody funkeji służą do ustawienia relatywnej częstotliwości impulsów DI5 odpowiadającej ustawieniu średniemu.
Impuls przemiennika częstotliwości można wprowadzić tylko przez kanał DI5. Zastosowanie i krzywa funkcji tej grupy jest podobna do 1, patrz uwaga dotycząca krzywej 1.
| P4-33 | Wybór krzywej AI | Ustawicnie fabryczne | 321 | ||
| Cyfra jedności | Wybór krzywej AI | ||||
| 1 | Krzywa 1 (2 punkty, patrz P4-13 ~ P4-16) | ||||
| 2 | Krzywa 2 (2 punkty, patrz P4-18 ~ P4-21) | ||||
| 3 | Krzywa 3 (2 punkty, patrz P4-23 ~ P4-26) | ||||
| Zakres ustawiciń | 4 | Krzywa 4 (4 punkty, patrz A6-00 ~ A6-07) | |||
| 5 | Krzywa 5 (4 punkty, patrz A6-08 ~ A6-15) | ||||
| Dziesiątki | Wybór krzywcj AI2 (1 ~ 6, jak wyżej) | ||||
| Setki | Wybór krzywej AI3 (1 ~ 6, jak wyżej) | ||||
Bity dziesieć i sto kodu funkcji służą do wyboru odpowiedniej krzywej wejścia analogowego A11, A12, A13. Można wybrać 3 z pięciu rodzajów krzywej a.
Krzywa 1, krzywa 2, krzywa 3 są krzywymi 2-punktowymi, ustawianymi kodem funkcji grupy P4, podczas gdy krzywa 4 i krzywa 5 są krzywymi 4-punktowymi, które należy ustawiać kodami funkcji grupy A8.
Ten standardowy falownik zapewnia dwa wejścia analogowe. AI3 musi być skonfigurowane do korzystania z wielofunkcyjnej karty rozszerzeń wejść i wyjść.
| P4-34 | AI jest poniżej minimalnego ustawienia wejściowego | Ustawienie fabryczne | 000 | ||
| Zakres ustawień | Cyfra jedności | AI1 niższe niż wybrane minimalne ustawienia wejściowe | |||
| 0 | Odpowiednie minimalne ustawienie wejściowe | ||||
| 1 | 0,0% | ||||
| Dziesiątki | AI2 niższe niż wybrane minimalne ustawienia wejściowe (0 ~ 1, powyżej) | ||||
| Setki | AI3 niższe niż wybrane minimalne ustawienia wejściowe (0 ~ 1, powyżej) | ||||
Ten kod funkcji służy do ustawiania, gdy analogowe napięcie wejściowe jest mniejsze niż ustawione „minimalne wejście”. Opcja 0.
Jednostka kodu funkcji Dziesiątki, Setki odpowiada wejściu analogowemu AI1, AI2, AI3.
Jeśli ta opcja ma wartość 1 a wejście AE jest poniżej minimalnego, analogowe odpowiada 0,0%.
| P4-35 | Czas opóźnienia DI1 | Ustawienie fabryczne | 0.0s | |
| Ustawianie | 0.0s~3600.0s | |||
| P4-36 | Czas opóźnienia DI2 | Ustawienie fabryczne | 0.0s | |
| Ustawianie | 0.0s~3600.0s | |||
| P4-37 | Czas opóźnienia DI3 | Ustawienie fabryczne | 0.0s | |
| Ustawianie | 0.0s~3600.0s | |||
Gdy zacisk DI do ustawiania stanu zmienia się, następują zmiany w czasie opóźnienia falownika. Obecnie tylko DI1, DI2, DI3 mają ustawioną funkcję opóźnienia czasowego.
| P4-38 | Wybór trybu aktywności zacisku DI 1 | Ustawienie fabryczne | 00000 | ||
| Zakres ustawień | Cyfra jedności | Aktywny zacisk DI1 | |||
| 0 | Aktywny wysoki | ||||
| 1 | Aktywny niski | ||||
| Dziesiątki | Aktywny zacisk DI2 (0-1, supra) | ||||
| Setki | Aktywny zacisk DI3 (0-1, supra) | ||||
| Tysiące | Aktywny zacisk DI4 (0-1, supra) | ||||
| Dziesięć tysięcy | Aktywny zacisk DI5 (0-1, supra) | ||||
| P4-39 | Wybór trybu aktywności zacisku DI 2 | Ustawienie fabryczne | 00000 | ||
| Zakres ustawień | Cyfra jedności | Aktywny zacisk DI6 | |||
| 0 | Aktywny wysoki | ||||
| 1 | Aktywny niski | ||||
| Dziesiątki | Aktywny zacisk DI7 (0-1, supra) | ||||
| Setki | Aktywny zacisk DI8 (0-1, supra) | ||||
| Tysiące | Aktywny zacisk DI9 (0-1, supra) | ||||
| Dziesięć tysięcy | Aktywny zacisk DI10 (0-1, supra) | ||||
Służy do ustawiania zacisku wejścia cyfrowego w trybie aktywnym. Po wybraniu trybu aktywnego wysokiego, odpowiedni zacisk S i łączność COM komunikują się skutecznie. Po wyborze trybu aktywnego niskiego, odpowiedni zacisk S i łączność COM są nieaktywne, skutecznie rozłączone.
Grupa P5 – zaciski wyjściowe
Falownik tej serii jest standardowo wyposażony w wielofunkcyjny zacisk wyjścia analogowego, wielofunkcyjny zacisk wyjścia cyfrowego, zacisk wielofunkcyjnego wyjścia przekaźnikowego, zacisk FM (wybrany jako zacisk wyjścia szybkiego impulsu, może być również wybrany jako zacisk wyjścia typu otwarty kolektor). Ponieważ zacisk wyjściowy nie może łączyć się z aplikacją, potrzeba opcjonalnej wielofunkcyjnej karty rozszerzeń wejść i wyjść.
Wielofunkcyjne zaciski wejściowe i wyjściowe karty rozszerzeń obejmują wielofunkcyjny zacisk wyjścia analogowego (AO2), 1 zacisk wielofunkcyjnego wyjścia przekaźnikowego (przekaźnik 2), wielofunkcyjny zacisk wyjścia cyfrowego (DO2).
| P5-00 | Wybór trybu wyjścia zacisku FM | Ustawienie fabryczne | 0 | ||
| Zakres ustawień | 0 | Wyjście impulsowe (FMP) | |||
| 1 | Wyjście dwustanowe (FMR) | ||||
Terminal FM to programowalny zacisk multipleksujący, który może być używany jako zacisk szybkiego wyjścia impulsowego (FMP). Może być również używany jako zacisk wyjścia typu otwarty kolektor (FMR).
Jako wyjście impulsowe FMP, maksymalna wyjściowa częstotliwość impulsów wynosi 100 kHz, funkeje związane z FMP można znaleźć w instrukcjach P5-06.
| P5-01 | Wybór funkcji FMRI (zacisk wyjściowy typu otwarty kolektor 1) | Ustawienie fabryczne | 0 |
| P5-02 | Wybór funkcji wyjścia przekaźnikowego (T / A-T / B-T / C) | Ustawienie fabryczne | 2 |
| P5-03 | Wybór funkcji wyjścia przekaźnikowego karty rozszerzeń (P / A-P / B-P / C) | Ustawienie fabryczne | 0 |
| P5-04 | Wybór funkcji wyjścia DO1 (zacisk wyjściowy typu otwarty kolektor) | Ustawienie fabryczne | 1 |
| P5-05 | Wybór funkcji wyjścia DO2 karty rozszerzeń | Ustawienie fabryczne | 4 |
Pięć kodów jest używanych do wyboru funkeji pięciu wyjść cyfrowych, gdzie T / A-T / B-T / C i P / A-P / B-P / C, odpowiednio na płycie sterującej i przekaźniku karty rozszerzeń.
Funkcje wielofunkcyjnych zacisków wyjściowych są następujące:
| Punkt nastawy | Funkcja | Objaśnienie |
| 0 | Brak sygnału na wyjściu | Zacisk wyjściowy nie pełni żadnej funkcji |
| 1 | Falownik pracuje | Co wskazuje, że napęd jest w stanie pracy, wysyłany jest sygnał ON (ZAŁ.) częstotliwości wyjściowej (może wynosić zero) |
| 2 | Zatrzymanie po błędzie | Gdy przemicnnik ulegnie awarii i przecstoju, wysyła sygnał ON. |
| 3 | Wykrywanie częstotliwości na wyjściu FDT1 | Proszę zapoznać się z opisem funkcji P8-19, P8-20. |
| 4 | Osiągnięcie zadanej częstotliwości | Proszę zapoznać się z opisem funkcji P8-21. |
| 5 | Praca przy zerowej prędkości (bez wyłączenia wyjścia) | Falownik pracuje, a częstotliwość wyjściowa wynosi 0, sygnał wyjściowy ZAŁ (ON). Gdy napęd jest wyłączony, sygnał jest wyłączony (OFF). |
| 6 | Ostrzeżenie o przeciążeniu silnika | Występuje przed zabezpieczeniem przeciążeniowym silnika, zgodnie z oceną wartości progowej wstępnego alarmu przeciążenia, sygnał załączenia wyjścia wartości progowej alarmu wstępnego. Ustawienia parametrów przeciążenia silnika, patrz kod funkcji P9-00 ~ P9-02. |
| 7 | Ostrzeżenie o przeciążeniu falownika | Zanim nastąpi przeciążenie falownika, 10s wcześniej na wyjściu pojawi się sygnał ON. |
| 8 | Określenie zadanej wartości licznika | Gdy licznik osiągnie wartość zadaną PB-08, na wyjściu pojawi się sygnał ON. |
| 9 | Osiągnięcie zadanej wartości licznika | Gdy wartość liczona osiągnie wartość grupy PB-09, na wyjściu pojawi się sygnał ON. |
| 10 | Osiągnięta długość na liczniku | W przypadku wykrycia, że rzeczywista długość przekracza długość ustawioną PB-05, na wyjściu pojawia się sygnał ON. |
| 11 | Ukończenie cyklu PLC | Po wykonaniu jednego cyklu przez prosty PLC, szerokość impulsu na wyjściu wynosi 250 ms. |
| 12 | Osiągnięcie skumulowanego czasu pracy | Gdy skumulowany czas pracy przekroczy czas ustawiony parametrem P8-17, na wyjściu pojawi się sygnał ON. |
| 13 | Próg częstotliwości | Gdy częstotliwość ustawiona przekroczy górny lub dolny próg a częstotliwość wyjściowa osiągnie górny lub dolny próg, załącza się sygnał ON na wyjściu. |
| 14 | Próg momentu | Podczas napędu w trybie sterowania prędkością, kiedy wyjściowy moment obrotowy osiąga wartość graniczną, falownik przechodzi w stan ochrony przed utknięciem i wysyłany jest sygnał ON. |
| 15 | Gotowość do pracy | Gdy zasilanie obwodu głównego falownika i obwodu sterującego ustabilizuje się a przemiennik częstotliwości nie wykryje żadnych informacji o błędzie, napęd jest w stanie roboczym i na wyjściu pojawia się sygnał "ON". |
| Punkt nastawy | Funkcja Objasnienie | |
| 16 AI | 1>AI2 | W przypadku gdy wartość AI1 jest większa niż wartość AI2, na wejściu i wyjściu pojawia się sygnał ON (ZAL.). |
| 17 | Osiągnięcie górnej granicy częstotliwości | Gdy częstotliwość robocza osiągnic górną granię, na wyjściu zostanic włączony sygnał "ON". |
| 18 | Osiągnięcie dolnej granicy częstotliwości (brak sygnału przy postoju) | Gdy częstotliwość robocza osiągnic dolną granię, pojawi się sygnał ON na wyjściu. Przy postoju, sygnał jest "OFF" (wyłączony). |
| 19 | Zbyt niskie napięcie na wyjściu | Gdy falownik jest pod napięciem, sygnał wyjściowy jest "ON". |
| 20 | Ustawienia komunikacji | Patrz protokół komunikacyjny. |
| 21 | Zastrzeżony | Zastrzeżony |
| 22 | Zastrzeżony | Zastrzeżony |
| 23 | Praca z prędkością zerową 2 (wyjście wyłączone) | Częstotliwość wyjściowa falownika wynosi 0, sygnał wyjściowy jest włączony. Także w stanie postoju sygnał jest włączony ("ON"). |
| 24 | Osiągnięcie skumulowanego czasu zasilania | Gdy skumulowany czas włączenia falownika (P7-13) P8-16 przekracza ustawiony czas, sygnał wyjściowy jest włączony. |
| 25 | Wykrywanie poziomu częstotliwości na wyjściu FDT2 | Patrz opis kodu funkcji P8-28, P8-29. |
| 26 | Osiągnięcie częstotliwości 1 | Patrz opis kodu funkcji P8-30, P8-31. |
| 27 | Osiągnięcie częstotliwości 2 | Patrz opis kodu funkcji P8-32, P8-33. |
| 28 | Osiągnięcie wartości prądu 1 | Patrz opis kodu funkcji P8-38, P8-39. |
| 29 | Osiągnięcie wartości prądu 2 | Patrz opis kodu funkcji P8-40, P8-41. |
| 30 | Osiągnięcie czasu pracy | Gdy funkcja zegara Select (P8-42) jest aktywna i upłynie czas pracy falownika, na wyjściu pojawia się sygnał ON. |
| 31 | Przekroczenie limitu pojawienia się sygnału na wejściu AI1 | Gdy wartość jest większa niż wartość na wejściu analogowym AI1 P8-46 (wartość graniczna zabezpieczenia wejścia AI1) lub mniejsza niż na P8-45 (wartość graniczna zabezpieczenia wejścia AI1), na wyjściu pojawia się sygnał "ON". |
| 32 | Zerowe obciążenie | Gdy falownik jest w stanie bez obciążenia, na wyjściu pojawia się sygnał „ON”. |
| 33 | Praca do tyłu | Działa napęd wsteczny, sygnał "ON" na wyjściu. |
| 34 | Prąd zerowy | Patrz opis kodu funkcji P8-28, P8-29. |
| 35 | Zbyt wysoka temperatura modułu | Gdy temperatura radiatora modułu falownika (P7-07) osiąga temperaturę zadańą, czyli wartość modułu (P8-47), załącza się sygnał "ON" na wyjściu. |
| 36 | Przekroczenie czasu zadziałania oprogramowania | Patrz opis kodu funkcji P8-36, P8-37. |
| 37 | Osiągnięcie dolnego progu częstotliwości (sygnał na wyjściu po zatrzymaniu) | Gdy częstotliwość robocza osiągnie dolną granię, na wyjściu pojawia się sygnał ON. W stanie zatrzymania sygnał jest również włączony. |
| 38 | Alarm na wyjściu | Gdy wystąpi awaria falownika i brak kontynuacji trybu przetwarzania, na wyjściu pojawi się sygnał alarmu falownika. |
| 39 | Alarm przekroczenia temperatury silnika | Gdy temperatura silnika osiągnie P9-58 (próg ostrzeżenia o przegrzaniu silnika), włącza się sygnał na wyjściu. (Temperatura silnika wyświetła się na U0-34). |
| 40 | Osiągnięcie czasu pracy | Gdy falownik przekroczy czas pracy ustawiony parametrem P8-53, na wyjściu pojawia się sygnał "ON". |
| P5-06 | Wybór funkcji wyjścia FMP (zaciski wyjściowe impulsów) | Ustawienie fabryczne | 0 |
| P5-07 | Wybór funkcji wyjścia AO1 | Ustawienie fabryczne | 0 |
| P5-08 | Wybór funkcji wyjścia AO2 | Ustawienie fabryczne | 1 |
Zakres wyjściowy częstotliwości impulsów na zacisku FMP wynosi 0,01 kHz \~ P5-09 (maksymalna częstotliwość wyjściowa FMP).
P5-09 można ustawić w zakresie 0,01 kHz \~ 100,00 kHz.
Zakres wyjściowy wyjść analogowych AO1 i AO2 wynosi 0 V \~ 10 V lub 0 mA \~ 20 mA. Zakres wyjścia impulsowego lub wyjścia analogowego, z odpowiednią zależnością funkcji skalowania podano w poniższej tabeli:
| Punkt nastawy | Funkcja | Wyjście impulsowe lub analogowe odpowiadające od 0,0% do 100,0% funkcji |
| 0 | Częstotliwość robocza | 0 ~ maksymalna częstotliwość wyjściowa |
| 1 | Częstotliwość zadana | 0 ~ maksymalna częstotliwość wyjściowa |
| 2 | Prąd wyjściowy | 0 ~ 2 razy prąd znamionowy silnika |
| 3 | Moment wyjściowy | 0 do 2 razy znamionowy moment obrotowy silnika |
| 4 | Moc wyjściowa | 0-2 razy moc znamionowa |
| 5 | Napięcie wyjściowe | 0 do 1,2-krotności napięcia znamionowego falownika |
| 6 | Wejście impulsowe | 0.01kHz~100.00kHz |
| 7 | AI1 | 0V~10V |
| 8 | AI2 | 0V~10V (or 0 ~ 20mA) |
| 9 | AI3 | 0V~10V |
| 10 | Długość | 0 do maksymalnej ustawionej długości |
| 11 | Wartość licznika | 0 do maksymalnej liczby |
| 12 | Ustawienia komunikacji | 0.0%~100.0% |
| 13 | Prędkość silnika | 0 ~ maksymalna częstotliwość wyjściowa odpowiadająca prędkości obrotowej |
| 14 | Prąd wyjściowy | 0.0A~1000.0A |
| 15 | Napięcie wyjściowe | 0.0V~1000.0V |
| P5-09 | Maksymalna częstotliwość wyjściowa FMP | Ustawienie fabryczne | 50.00kHz |
| Zakres ustawień | 0.01kHz~100.00kHz | ||
Gdy FM jest wybrany jako zacisk wyjściowy impulsów, kod funkcji służy do wyboru maksymalnej wartości wyjściowej częstotliwości impulsów.
| P5-10 | Współczynnik przcsunięcia punktu zerowego AO1 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~+100.0% | ||
| P5-11 | Wzmocnienie AO1 | Ustawienie fabryczne | 1.00 |
| Zakres ustawień | -10.00~+10.00 | ||
| P5-12 | Współczynnik przcsunięcia punktu zerowego karty rozszerzeń AO2 | Ustawicnic fabryczne | 0.00% |
| Zakres ustawień | -100.0%~+100.0% | ||
| P5-13 | Wzmocnienie karty rozszerzeń AO2 | Ustawienie fabryczne | 1.00 |
| Zakres ustawień | -10.00~+10.00 | ||
Powyższe kody funkcji służą zwykle do polaryzacji amplitudy wyjściowej i korekcji odchylenia zerowego wyjścia analogowego. Można ich również użyć do dostosowania żądanej krzywej wyjściowej AO.
Jeżeli przesunięcie punktu zerowego o „b” reprezentuje wzmocnienie o „k” a rzeczywista moc wyjściowa Y, X reprezentuje standardową moc wyjściową, rzeczywista wartość wyjściowa wynosi:
Y = kX + b. Gdzie dla AO1, AO2 współczynnik odchylenia zerowego 100% odpowiada 10 V (lub 20 mA). Dotyczy to standardowego wyjścia przy braku korekcji polaryzacji i wzmocnienia. Wyjście 0 V \~ 10 V (lub 0 mA \~ 20 mA) odpowiada wielkości wyjścia analogowego.
Na przykład: jeśli wyjście analogowe ma częstotliwość roboczą, przy częstotliwości 0 wyjście ma 8 V, częstotliwość jest maksymalną częstotliwością wyjściową 3 V, wzmocnienie powinno być ustawione na „-0,50”, a przesunięcie na „80” %”.
| P5-17 | Czas opóźnienia wyjścia FMR | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~3600.0s | ||
| P5-18 | Czas opóźnienia wyjścia RELAY1 | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~3600.0s | ||
| P5-19 | Czas opóźnienia wyjścia RELAY2 | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~3600.0s | ||
| P5-20 | Czas opóźnienia wyjścia DO1 | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~3600.0s | ||
| P5-21 | Czas opóźnienia wyjścia DO2 | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~3600.0s | ||
Ustawić zaciski wyjściowe FMR, RELAY 1, RELAY 2, DO1 i DO2, do takiego stanu, aby wygenerować rzeczywistą zmianę czasu opóźnicnia wyjścia.
| P5-22 | Stan aktywności na wyjściu zacisku DO | Ustawienie fabryczne | 0 | ||
| Zakres ustawień | Cyfra jedności | Aktywny wybór FMR | |||
| 0 | Logika pozytywna | ||||
| 1 | Inv | ||||
| Dziesiątki | Zacisk RELAY1 aktywny (0-1, supra) | ||||
| Setki | Zacisk RELAY2 aktywny 2 (0-1, supra) | ||||
| Tysiące | Zacisk DO1 aktywny (0-1, supra) | ||||
| Dziesięć tysięcy | Zacisk DO2 aktywny (0-1, supra) | ||||
Określić zacisk wyjściowy logiki FMR, przekaźnika 1, przekaźnika 2, DO1 i DO2.
0: zacisk wyjścia cyfrowego logiki dodatniej i odpowiedni zacisk wspólny komunikują się w stanie aktywnym, rozłączają się w stanie nieaktywnym;
1: zacisk wyjścia cyfrowego logiki ujemnej i odpowiedni zacisk wspólny komunikują się w stanie nieaktywnym, rozłączają się w stanie aktywnym.
Grupa P6 – Sterowanie uruchamianiem i zatrzymywaniem
| P6-00 | Tryb uruchamiania | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Start bezpośredni | ||
| 1 | Restart w trybie śledzenia prędkości | |||
| 2 | Przedwzbudzenie ( silnik indukcyjny AC ) | |||
0: Start bezpośredni
Gdy czas hamowania prądem DC jest ustawiony na 0, falownik rozpoczyna pracę od częstotliwości początkowej. Gdy czas hamowania DC jest różny od 0, najpierw następuje hamowanie DC, a następnie praca od częstotliwości początkowej. Przydatny do małych obciążení bezwładnościowych podczas uruchamiania silnika, który mógł się już obracać.
1: ponowne uruchomienie w trybie śledzenia prędkości silnika i kierunku a następnie śledzenie częstotliwości rozruchowej silnika.
Silnik obraca się płynnie bez szarpnięcia przy rozruchu. Moc chwilowa odpowiednia do restartu przy dużej bezwładności. Aby zapewnić poprawny restart w trybie śledzenia prędkości, należy dokładnie ustawić parametry grupy silnika F1.
2: Rozruch silnika indukcyjnego z przewzbudzeniem, tylko dla silników asynchronicznych, stosowany przed uruchomieniem silnika, aby najpierw wytworzyć pole magnetyczne. Prąd przewzbudzenia, czas przewzbudzenia to kody P6-05, P6-06.
Jeśli czas przewzbudzenia jest ustawiony na 0, falownik anuluje procesu przewzbudzenia i rozpoczyna od częstotliwości początkowej. Gdy czas przewzbudzenia nie wynosi 0, przewzbudzenie może poprawić charakterystykę odpowiedzi dynamicznej silnika.
| P6-01 | Tryb śledzenia prędkości | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Start od częstotliwości zatrzymania | ||
| 1 | Start od prędkości zerowej | |||
| 2 | Start od częstotliwości maksymalnej | |||
Aby zakończyć proces śledzenia prędkości w najkrótszym czasie, należy wybrać tryb śledzenia obrotów silnika :
0: Zwykle stosuje się do śledzenia od częstotliwości występującej w chwili awarii zasilania.
1: Rozpoczęcie śledzenia w górę od częstotliwości zerowej w przypadku długotrwałej awarii zasilania.
2: Śledzenie od maksymalnej częstotliwości, ogólna moc obciążenia.
| Szybkość śledzenia prędkości | Ustawienie fabryczne | 2 | |
| P6-02 | Zakres ustawień | 1~100 |
W przypadku restartu w trybie śledzenia prędkości, wybrać szybkość śledzenia prędkości. Im parametr większy, tym szybsze śledzenie. Jednak ustawienie zbyt wysokie może dać niewiarygodne wyniki śledzenia.
| P6-03 | Częstotliwość początkowa | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0.00Hz~10.00Hz | ||
| P6-04 | Czas utrzymania częstotliwości początkowej | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0.0s~100.0s |
Aby zapewnić moment obrotowy silnika przy rozruchu, należy ustawić odpowiednią częstotliwość początkową. W celu ustalenia pełnego strumienia silnika podczas rozruchu, należy utrzymać częstotliwość początkową przez określony czas.
Rozpocząć od dolnej granicy częstotliwości P6-03. Gdy jednak ustawiona częstotliwość docelowa jest mniejsza niż częstotliwość początkowa, falownik nie uruchamia się, pozostaje w trybie gotowości.
Przy procesie przełączania wstecznego, czas utrzymania częstotliwości początkowej nie działa. Czas utrzymania częstotliwości początkowej nie jest wliczany do czasu przyspieszania, ale jest wliczany do czasu pracy prostego PLC.
Przykład 1:
P0-03 = 0 Źródło częstotliwości jest cyfrowe.
P0-08 = 2,00 Hz. Cyfrowa częstotliwość zadana wynosi 2,00 Hz P6-03 = 5,00 Hz. Częstotliwość początkowa wynosi 5,00 Hz
P6-04 = 2,0 s. Czas utrzymania częstotliwości rozruchu wynosi 2,0 s. W tym czasie falownik jest w stanie gotowości a jego częstotliwość wyjściowa wynosi 0,00 Hz.
Przykład 2:
P0-03 = 0. Źródło częstotliwości jest cyfrowe
P0-08 = 10,00 Hz. Cyfrowa częstotliwość zadana wynosi 10,00 Hz P6-03 = 5,00 Hz. Częstotliwość początkowa wynosi 5,00 Hz
P6-04 = 2,0 s. Czas utrzymania częstotliwości początkowej wynosi 2,0 s.
W tym czasie napęd przyspiesza do 5,00Hz, kontynuuje przez 2,0 s a następnie przyspiesza do zadanej częstotliwości 10,00Hz.
| P6-05 | Prąd hamowania DC / prąd wzbudzenia | Ustawienie fabryczne | 0% | |
| Zakres ustawień | 0%~100% | |||
| P6-06 | Początkowy czas hamowania DC / czasprzewzbudzenia | Ustawienie fabryczne | 0.0s | |
| Zakres ustawień | 0.0s~100.0s |
Hamowanie prądem stałym (DC) jest zwykle używane do zatrzymywania i uruchamiania silnika. Przewzbudzenie służy do wytworzenia pola magnetycznego silnika indukcyjnego a następnie do rozpoczęcia ustalania i poprawiania szybkości odpowiedzi.
Hamowanie prądem stałym obowiązuje jeśli tryb rozruchu to start bezpośredni. Wówczas po nastawieniu częstotliwości, uruchomić start hamowania DC, czas hamowania DC po rozruchu, a następnie rozpocząć pracę. Jeśli czas hamowania DC jest ustawiony na 0, nie ma bezpośredniego startu po hamowaniu DC. Im bardziej wzrasta prąd hamowania DC, tym większa jest siła hamowania.
W trybie rozruchu z przewzbudzeniem silnika asynchronicznego, falownik ustawia wstępnie ustalony prąd pola magnetycznego, po ustawionym czasie magnesowania wstępnego przed rozpoczęciem pracy. Jeżeli ustawiony czas magnesowania wstępnego wynosi 0, procesy przewzbudzenia nie rozpoczynają się bezpośrednio.
Prąd hamowania DC / prąd przewzbudzenia, to wartość procentowa względem znamionowego prądu falownika.
| Tryb przyspieszania i zwalniania | Ustawienie fabryczne | 0 | ||
| P6-07 | Zakres ustawień | 0 | Liniowe przyspieszanie i zwalnianie | |
| 1 | Przyspieszanie i zwalnianie według krzywej S, A | |||
| 2 | Przyspieszanie i zwalnianie według krzywej S, B | |||
Wybieranie sposobu zmiany częstotliwości napędu na początku i na końcu procesu.
0: Liniowe przyspieszanie i zwalnianie. Liniowy przyrost lub spadek częstotliwości wyjściowej.
Możliwe są cztery rodzaje czasu przyspieszania i zwalniania. Można je wybrać za pomocą wielofunkcyjnych zacisków wejść cyfrowych (P4-00 \~ P4-08).
1: Przyspieszanie i zwalnianie według krzywej S, A
Częstotliwość wyjściowa rośnie lub maleje zgodnie z krzywą S. Krzywa S służy do zastosowań wymagających łagodnego uruchamiania lub zatrzymywania, takiego jak windy czy przenośnik taśmowy. Kody funkcji P6-08 i P6-09, w tej kolejności, określają stosunek czasu przyspieszania i hamowania krzywej S segmentu początkowego i segmentu końcowego.
2: Przyspieszanie i zwalnianie według krzywej S, B
Przy przyspieszaniu i zwalnianiu według krzywej S, B punktem przegięcia krzywej jest zawsze znamionowa częstotliwość f silnika. Pokazana na rysunku 6-12. Zwykle używana do zastosowań o prędkości dużo powyżej częstotliwości znamionowej, wymagających gwałtownego przyspieszania i zwalniania.
Ustawianie częstotliwości powyżej częstotliwości znamionowej - czas przyspieszania i zwalniania:
gdzie f jest częstotliwością zadaną, fb jest częstotliwością znamionową silnika, T jest czasem częstotliwości znamionowej silnika fb
| P6-08 | Współczynnik czasu początkowego odcinka krzywej S. | Ustawienie fabryczne | 30.0% |
| Zakres ustawień | 0.0%~(100.0%-P6-09) | ||
| P6-08 | Współczynnik czasu początkowego odcinka krzywej S. | Ustawicnie fabryczne | 30.0% |
| Zakres ustawień | 0.0%~(100.0%-P6-08) | ||
Kody funkcji P6-08 i P6-09 są zdefiniowane. Przyśpieszenie i opóźnienie krzywej S, A segmentu początkowego i czas zakończenia to stosunek dwóch kodów funkcji do spełnienia: P6-08 + P6-09≤100,0%.
Rysunek 6-11 tl przedstawia parametry zdefiniowane przez P6-08, w tym czasie zwiększa się nachylenie częstotliwości wyjściowej.
t2 jest czasem zdefiniowanym przez parametr P6-09, w tym czasie nachylenie częstotliwości wyjściowej zmienia się stopniowo do zera. W czasie między t1 i t2 nachylenie częstotliwości wyjściowej jest stałe, także przedział ten jest przyspieszaniem i zwalnianiem liniowym.
Częstotliwość wyjściowa Hz
Częstotliwość zadana f
Czas t
Rys. 6-11 Krzywa S, A
Częstotliwość wyjściowa Hz
Częstotliwość zadana f
Czas t
Częstotliwość znamionowa Ib
Rys. 6-12 Krzywa S, B
| P6-10 | Tryb zatrzymywania | Ustawienie fabryczne | 0 | |
| Zakres | 0 | Zwalnianie do zatrzymania | ||
| ustawić | 1 | Swobodny wybieg | ||
0: Zatrzymanie zwalniania. Gdy polecenie zatrzymania jest prawidłowe, falownik zmniejsza częstotliwość wyjściową zgodnie z czasem zwalniania. Gdy częstotliwość spadnie do zera, następuje zatrzymanie.
1: Wybieg do zatrzymania. Po wydaniu prawidłowego polecenia zatrzymania, falownik natychmiast wyprowadza sygnał, a silnik zatrzymuje się wybiegiem w wyniku bezwładności mechanicznej.
| P6-11 | Częstotliwość początkowa hamowania prądem stałym | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P6-12 | Czas do rozpoczęcia hamowania prądem stałym | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~36.0s | ||
| P6-13 | Prąd hamowania | Ustawienie fabryczne | 0% |
| Zakres ustawień | 0%~100% | ||
| P6-14 | Czas hamowania prądem stałym | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s~36.0s | ||
Częstotliwość początkowa hamowania prądem stałym: proces zatrzymywania rozpoczyna się, gdy częstotliwość robocza zmniejsza się na tyle, aby rozpocząć proces hamowania prądem stałym.
Czas do rozpoczęcia hamowanie prądem stałym: częstotliwość pracy zostaje zmniejszona do częstotliwości początkowej hamowania prądem stałym, falownik zatrzyma wyjście na pewien czas przed rozpoczęciem procesu hamowania. Zapobieganie rozpoczęciu hamowania prądem stałym przy dużej prędkości może spowodować błąd przetężenia.
Prąd hamowania: prąd hamowania DC to procent prądu wyjściowego względem prądu znamionowego silnika. Im wyższa wartość, tym większy efekt hamowania prądem stałym, ale tym większe ciepło silnika i falownika.
Czas hamowania prądem stałym - czas utrzymania prądu hamowania. Gdy ta wartość wyniesie 0, proces hamowania prądem stałym zostaje anulowany. Schemat ideowy procesu hamowania prądem stałym pokazano na rysunku 6-13.
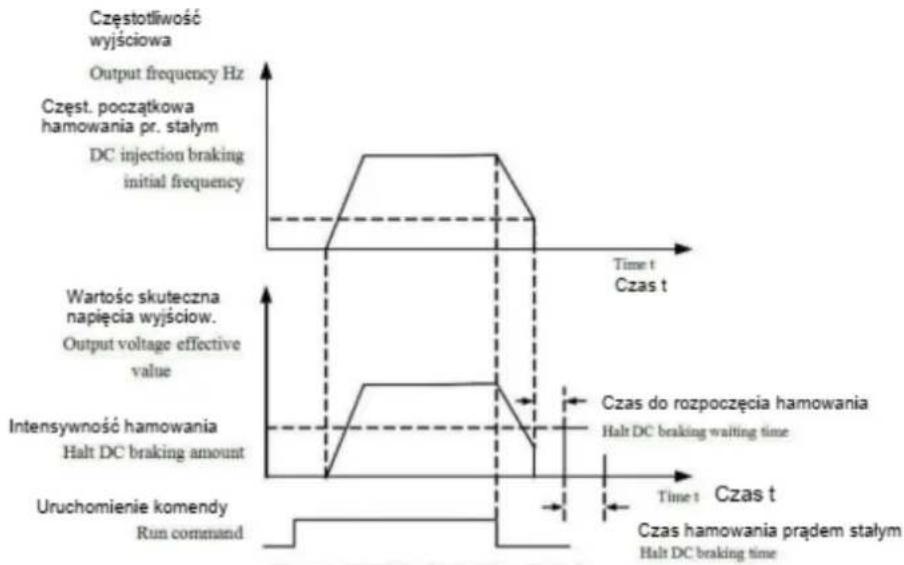
line
| Metric | Value | | --- | --- | | Częstotliwość wyjściowa | 1 Hz | | Wartość skuteczna napięcia wyjściow. Output voltage effective value | 1 Hz | | Intensywność hamowania Halt DC braking amount | 1 Hz | | Uruchomienie komendy Run command | 0 Hz |Rysunek 6-13 Schemat ideowy procesu hamowania prądem stałym
| P6-15 | Wskaźnik użycia hamulca | Ustawienie fabryczne | 100% |
| Zakres ustawień | 0%~100% | ||
Aktywna będzie tylko wbudowana jednostka hamująca.
Cykl pracy jednostki hamującej. Wskaźnik użycia hamulca służy do regulacji jednostki hamującej. W cyklu wysokiej wydajności pracy jednostki hamującej efekt hamowania jest silny, ale występują wahania napięcia na szynie falownika przy hamowaniu.
Grupa P7 – Klawiatura i wyświetlacz
| P7-01 | Wybór funkcji klawisza JOG | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Klawisz JOG nieaktywny | ||
| 1 | Kanał polecćń z panclu operatora i kanał zdalnego sterowania | |||
| 2 | Przecłącznik zmiany kicrunku | |||
| 3 | Impulsowanie (bieg próbny) do przodu | |||
| 4 | Impulsowanie (bieg próbny) do tyłu | |||
Klawisz JOG jako klawisz wielofunkcyjny. Można ustawić funkcje klawisza JOG za pomocą kodu funkcji. Może być uruchamiany przez przełącznik kluczykowy.
0: Klawisz JOG nie ma żadnej funkcji.
1: Polecenia z klawiatury i przełączanie na zdalne sterowanie. Oznacza polecenie przełączenia źródła komend - bieżącym źródłem poleceń i sterowania będzie klawiatura (obsługa lokalna). Jeśli bieżącym źródłem poleceń jest klawiatura, ta funkcja klawisza jest nieczynna.
2: Przelączanie kierunku za pomocą komendy częstotliwości klawisza JOG.
3: Bieg próbny do przodu (FJOG na klawiatuzre).
4: Bieg próbny do tyłu, (RJOG na klawiaturze).
Te dwa parametry wyświetlania służą do ustawiania parametrów które mają być wyświetlane, gdy przemiennik częstotliwości jest w stanic pracy. Można wyświetlić maksymalnic 32 parametry stanu pracy, które są wyświetlane od najmłodszego bitu P7-03.
| P7-02 | Funkcje klawisza STOP/ RESET | Ustawienie fabryczne | 1 | ||
| Zakres ustawicń | 0 | Klawisz STOP / RES działa tylko w trybie klawiatury. | |||
| 1 | Funkcja STOP / RES działa w każdym trybic pracy. | ||||
| P7-03 | Parametry pracy wyświetlacza LED 1 | Ustawienie fabryczne | 1F | ||
| Zakres ustawień | 0000~ FFFF | 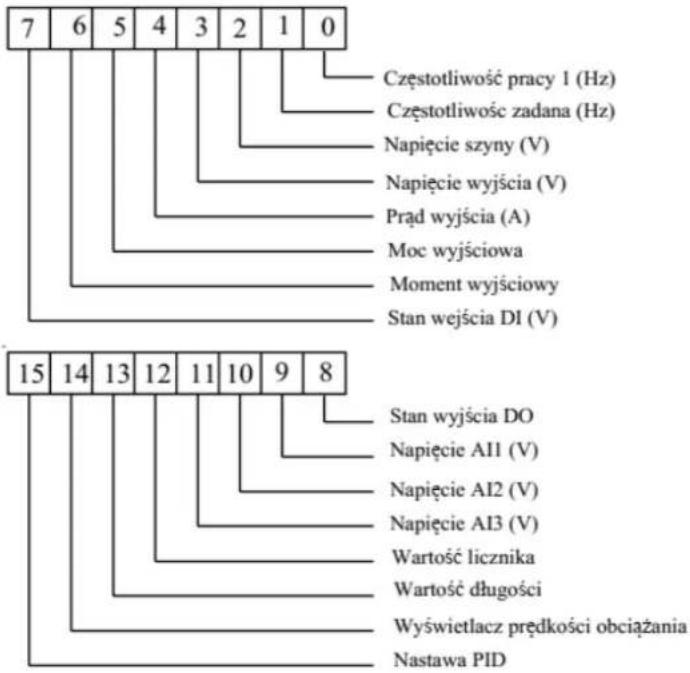 Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 3 na szesnastkowy odpowiednik tej liczby dwóchkowej. Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 3 na szesnastkowy odpowiednik tej liczby dwóchkowej. | |||
| P7-04 | Parametry pracy wyświetlacza LED 2 | Ustawienie fabryczne | 0 | ||
| Zakres ustawień | 0000~ FFFF | 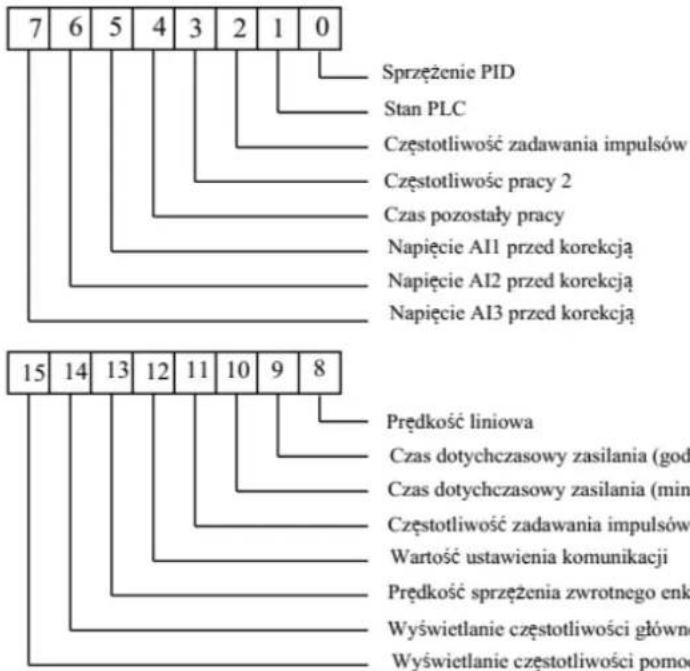 (kHz)Z.) )(Hz)odera( )j X (H :niczej Y (Hz)Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 4 na szesnastkowy odpowiednik tej liczby dwóchkowej. (kHz)Z.) )(Hz)odera( )j X (H :niczej Y (Hz)Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 4 na szesnastkowy odpowiednik tej liczby dwóchkowej. | |||
| P7-05 | Wyświetlanc wartości podczas zatrzymania | Ustawienie fabryczne | 0 | ||
| Zakres ustawień | 0000~FFFF | 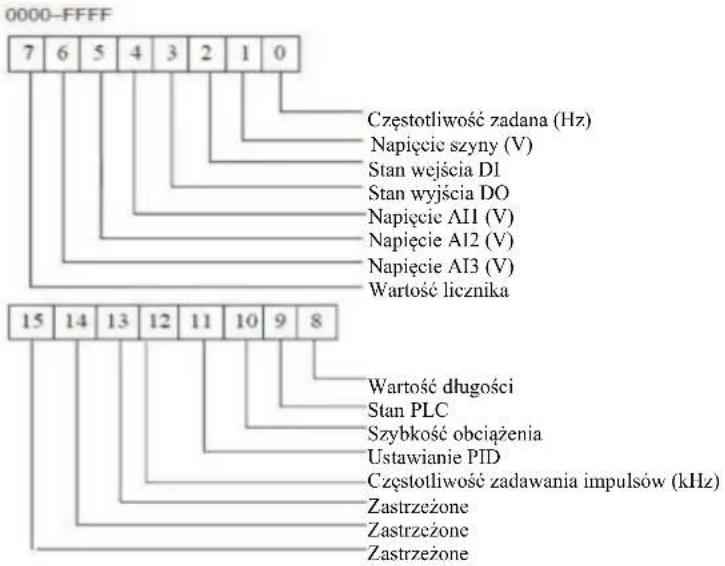 Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 5 na szesnastkowy odpowiednik tej liczby dwóchkowej. Jeśli parametr ma być wyświetlany podczas pracy, ustawić odpowiedni bit na 1 i ustawić P7-0 5 na szesnastkowy odpowiednik tej liczby dwóchkowej. | |||
| P7-06 | Mnożnik wyświetlanej prędkości obciążenia | Ustawienic fabryczne | 1.0000 |
| Zakres ustawićn | 0.0001~6.5000 | ||
Kiedy trzeba wyświetlić prędkość obciążenia, ten parametr zapewnia zgodność między częstotliwością wyjściową a prędkością obciążania. Patrz opis P7-12.
| P7-07 | Temperatura modułu radiatora falownika | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0.0^ 100.0^ | ||
Wyświetlanie temperatury modułu IGBT falownika.
Występują tu różnice w zabezpieczeniach przed przegrzaniem w różnych modelach modułu IGBT falownika.
| P7-08 | Temperatura radiatora prostownika | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0.0^ 100.0^ | ||
Wyświetlanie temperatury prostownika.
Występują tu różnice w wartości zabezpieczenia przed przegrzaniem w różnych modelach prostownika.
| P7-09 | Łączny czas pracy | Ustawicnic fabryczne | 0h |
| Zakres ustawień | 0h~65535h | ||
Wyświetla łączny czas pracy falownika. Gdy czas pracy osiągnie ustawiony czas P8-17, wielofunkcyjne wyjście cyfrowe (12) przekształtnika wysyla sygnał ON (ZAL.).
| P7-10 | Nr produktu | Ustawienie fabryczne | ||
| Zakres ustawień | Numer produktu falownika | |||
| P7-11 | Numer wersji oprogramowania | Ustawienie fabryczne | ||
| Zakres ustawień | Numer wersji oprogramowania pulpit sterowniczego. | |||
| P7-12 | Miejsca dziesiętne wyświetlania prędkości obciążenia | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | 0 miejsc po przecinku | ||
| 1 | 1 miejsce po przecinku | |||
| 2 | 2 miejsca po przecinku | |||
| 3 | 3 miejsca po przecinku | |||
Ustawianie prędkości obciążenia z miejscami po przecinku. Poniższy przykład ilustruje obliczenie prędkości obciążenia:
Jeśli mnożnik wyświetlanej prędkości obciążenia 2.000 P7-06, prędkość obciążenia P7-12 wyświetla się do 2 miejsc po przecinku. Gdy częstotliwość pracy falownika wynosi 40,00 Hz, prędkość obciążenia wynosi 40,00 * 2,000 = 80,00 (wyświetlanie z dwoma miejscami po przecinku).
Jeśli falownik jest wyłączony, to na przykład, aby ustawić częstotliwość 50,00 Hz, prędkość obciążenia w stanie zatrzymania wynosi 50,00 * 2,000 = 100,00 (wyświetlanie z dwoma miejscami po przecinku).
| P7-13 | Skumulowany czas zasilania | Ustawienie fabryczne | 0h |
| Zakres ustawień | 0h~65535h | ||
Ustawienie fabryczne skumulowanego czasu zasilania.
W momencie osiągnięcia skumulowanego czasu zasilania (P8-17), wielofunkcyjne wyjście cyfrowe (24) falownika generuje sygnał ON.
| P7-14 | Całkowity pobór mocy | Ustawienie fabryczne | - |
| Zakres ustawień | 0 to 65535 KWh | ||
Pokazuje całkowity dotychczasowy pobór mocy przez napęd.
Grupa P8 – Funkcje pomocnicze
| P8-00 | Częstotliwość impulsowania | Ustawienie fabryczne | 2.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-01 | Czas przyspieszania impulsowania | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.00s~6500.0s | ||
| P8-02 | Czas spowalniania impulsowania | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.00s~6500.0s | ||
Ustalanie impulsowania, zadanej częstotliwości i czasu zwalniania napędu.
Do pracy impulsowej, uruchomić tryb rozruchu bezpośredniego (P6-00 = 0). Tryb zatrzymania jest ustawiony na zatrzymanie z wyhamowaniem (P6-10 = 0).
| P8-03 | Czas przyspieszania 2 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
| P8-04 | Czas zwalniania 2 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
| P8-05 | Czas przyspieszania 3 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
| P8-06 | Czas zwalniania 3 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
| P8-07 | Czas przyspieszania 4 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
| P8-08 | Czas zwalniania 4 | Ustawienie fabryczne | 20.0s |
| Zakres ustawień | 0.0s~6500.0s | ||
VFD zapcwnia 4 zestawy czasów przyspieszania i zwalniania, odpowiednio P0-17 / P0-18, oraz powyższe 3 zestawy czasów przyspieszania i zwalniania.
Czwarty zestaw określa dokładny czas zwalniania, patrz instrukeje P0-17 i P0-18. Dzięki różnym kombinacjom wielofunkcyjnego zaci-sku wejścia cyfrowego DI można przełączać między 4 zestawami czasu przyspieszania i zwalniania. Patrz opis poszczególnych kodów funkcji P4-01 \~ P4-05.
| P8-09 | Częstotliwość pomijana 1 | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-10 | Częstotliwość pomijana 2 | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-11 | Zakres częstotliwości przeskoku | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
Gdy zakres częstotliwości przeskoku mieści się w ramach ustawionej częstotliwości, rzeczywista częstotliwość pracy będzie przebiegać z częstotliwością od najbliższego ustawionego przeskoku. Ustawienie częstotliwości przeskoku pozwala falownikowi uniknąć mechanicznego rezonansu obciążenia. VFD może ustawić dwie częstotliwości pomijane. Gdy obie częstotliwości pomijane są ustawione na 0, funkcja przeskoku częstotliwości zostaje anulowana. Zasada częstotliwości przeskoku i schemat amplitudy przeskoku częstotliwości - patrz Rysunek 6-14.
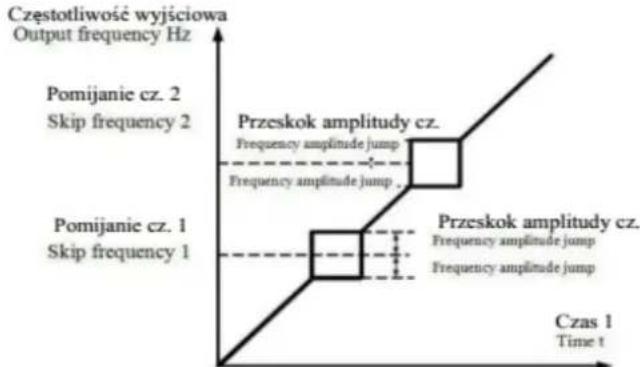
Rysunek 6-14 Schemat przeskoku częstotliwości
| P8-12 | Czas martwy przy zmianie kierunku pracy | Ustawicnie fabryczne | 0.0s |
| Zakres ustawiciń | 0.00s~3000.0s | ||
Falownik zmienia kierunek pracy, częstotliwość 0Hz na wyjściu w momencie przejścia, patrz rysunek 6-15:
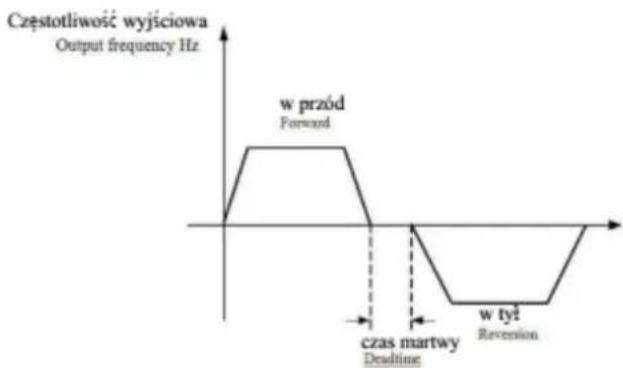
line
| Time Segment | Output Frequency (Hz) | |----------------------|------------------------| | w przód Forward | High | | czas martwy Deadline | 0 | | w ty? Reversion | Low |Rys. 6-15 Czas martwy przy zmianie kierunku pracy
| P8-13 | Zezwolenie na obroty do tyłu | Ustawienie fabryczne | 0 | |
| Zakres ustawiciń | 0 | dozwolone | ||
| 1 | zakaz | |||
Po skonfigurowaniu napędu poprzez z tym parametrem, silnik może pracować do tyłu. W przypadku odwrócenia pracy silnika nie wolno ustawiać P8-13 = 1.
| P8-14 | Zadana częstotliwość jest niższa niż dolna częstotliwość graniczna pracy | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Praca z dolną częstotliwością graniczną | ||
| 1 | Wyłączenie | |||
| 2 | Praca z prędkością zerową | |||
Gdy częstotliwość zadana jest niższa od częstotliwości minimalnej, za pomocą tego parametru można wybrać sposób pracy falownika. VFD zapewnia trzy tryby pracy, aby spełnić wymagania stawiane przez różne zastosowania.
| P8-15 | Kontrola statyzmu | Ustawicnic fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz~10.00Hz | ||
Ta funkcja jest zwykle używana do rozkładania obciążenia napędu wielu silników.
Kontrola statyzmu oznacza, że wraz ze wzrostem obciążenia częstotliwość wyjściowa falownika spada. Kiedy jest napędzany więcej niż jeden silnik o tym samym obciążeniu, obciążenie częstotliwości wyjściowej silnika jest zmnicjszane, aby osiągnąć równomierne obciążenie wielu silników. Parametr ten dotyczy znamionowego obciążenia wyjściowego falownika.
| P8-16 | Nastawa skumulowanego czasu załączenia | Ustawienie fabryczne | 0h |
| Zakres ustawiciń | 0h~65000h | ||
Gdy skumulowany czas załączenia (P7-13) P8-16 osiągnie ustawiony czas, wielofunkcyjne wyjście cyfrowe DO falownika wysyła sygnał "ON". Poniższe przykłady ilustrują to:
Przykład: w połączeniu z wirtualną funkcją DIDO, po osiągnięciu ustawionego czasu załączenia, po przekroczeniu 100 godzin, wyjście falownika wysyła alarm awarii. Programowanie:
Program: funkcja wirtualnego zacisku D11 jest ustawiona na błąd zdefiniowany przez użytkownika 1: A1-00 = 44; Wirtualny zacisk D11 jest aktywny, ustawiony na wirtualne DO1: A105 = 0000; wirtualna funkcja DO1, ustawiony czas załączenia: A1-11 = 24; ustawione załączenie skumulowane 100 godzin osiągnięte: P8-16 = 100.
Gdy łączny czas załączenia wyniesie 100 godzin, wyjście falownika generuje błąd Err24.
| P8-17 | Ustawianie skumulowanego czasu pracy | Ustawienie fabryczne | 0h |
| Zakres ustawień | 0h~65000h | ||
Służy do ustawiania czasu pracy falownika.
Gdy całkowity czas pracy (P7-09) osiągnie ustawiony czas pracy, wielofunkcyjne wyjście cyfrowe DO falownika daje sygnał "ON".
| P8-18 | Wybór ochrony Ustawienie | fabryczne | 0 | |
| Zakres ustawień | 0 | Brak ochrony | ||
| 1 | Ochrona | |||
Parametr ten jest związany z funkcją bezpieczeństwa falownika.
Gdy ten parametr jest ustawiony na 1 (ochrona), to jeśli czas pracy napędu jest aktywny (na przykład polecenie uruchomienia z zacisku, zanim zasilanie będzie w stanie zamkniętym), falownik nie zareaguje na polecenie Uruchom. Należy najpierw... [kompletnie niezrozumiałe – przyp. tłumacza.
Ponadto, jeśli parametr jest ustawiony na 1, jeśli działa komenda resetowania błędu, falownik nie zadziała w odpowiedzi na polecenie. Należy najpierw wydać polecenie usunięcia działającego stanu ochrony.
Parametry techniczne wysokosprawnego przemiennika częstotliwości
| P8-19 | Wartość detekcji częstotliwości (FDT1) | Ustawienie fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-20 | Wartość histerezy detekcji częstotliwości (FDT1) | Ustawienie fabryczne | 5.0% |
| Zakres ustawień | 0.0% ~ 100.0% (FDT1 level) | ||
Gdy częstotliwość robocza jest wyższa niż wartość wykrywania częstotliwości, wyjście wielofunkcyjne DO falownika wysyła sygnał "ON", a gdy częstotliwość jest niższa niż wartość wykrywania, po upływie określonej częstotliwości sygnał wyjściowy "ON" zostaje anulowany.
Rysunek 6-16 przedstawia schemat funkcjonalności FDT.
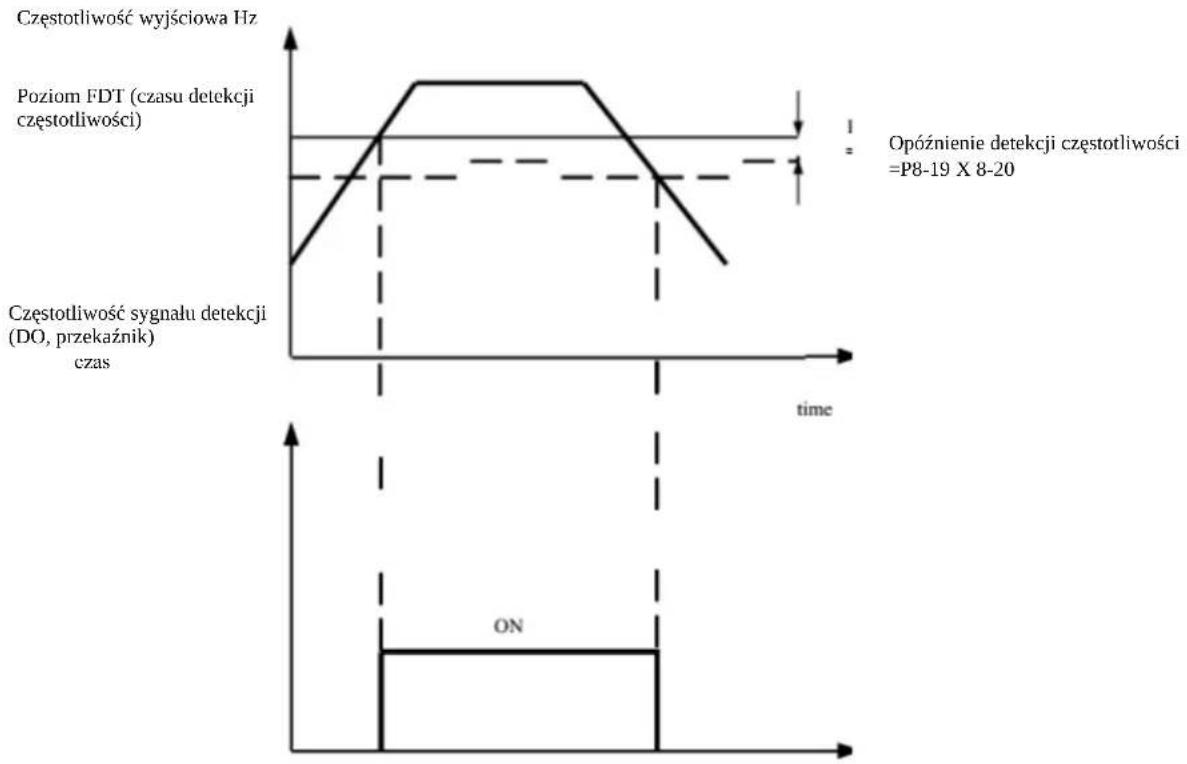
line
| time | Częstotliwość wyjściowa Hz | Poziom FDT (czasu detekcji częstotliwości) | Częstotliwość sygnału detekcji (DO, przekaźnik) czas | Opóźnienie detekcji częstotliwości =P8-19 X 8-20 | |------|-----------------------------|-----------------------------------------------|--------------------------------------------------|----------------------------------------------------| | 0 | 0 | 0 | 0 | 0 | | 1 | 1 | 1 | 1 | 1 | | 2 | 2 | 2 | 2 | 2 | | 3 | 3 | 3 | 3 | 3 | | 4 | 4 | 4 | 4 | 4 | | 5 | 5 | 5 | 5 | 5 | | 6 | 6 | 6 | 6 | 6 | | 7 | 7 | 7 | 7 | 7 | | 8 | 8 | 8 | 8 | 8 | | 9 | 9 | 9 | 9 | 9 | | 10 | 10 | 10 | 10 | 10 | | 11 | 11 | 11 | 11 | 11 | | 12 | 12 | 12 | 12 | 12 | | 13 | 13 | 13 | 13 | 13 | | 14 | 14 | 14 | 14 | 14 | | 15 | 15 | 15 | 15 | 15 | | 16 | 16 | 16 | 16 | 16 | | 17 | 17 | 17 | 17 | 17 | | 18 | 18 | 18 | 18 | 18 | | 19 | 19 | 19 | 19 | 19 | | 20 | 20 | 20 | 20 | 20 | | 21 | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |Rys. 6-16 Poziom FDT
| P8-21 | Szerokość wykrywania zadanej częstotliwości | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0% to 100% (częstotliwość maksymalna) | ||
Jeśli częstotliwość robocza falownika i zmieści się w docelowym zakresie częstotliwości, wielofunkcyjne wyjście cyfrowe DO falownika daje sygnał "ON".
Ten parametr służy do ustawiania zakresu wykrywania osiągniętej częstotliwości. Parametr ten jest procentem maksymalnej częstotliwości. Rysunek 6-17 przedstawia schemat wykrywania osiągniętej częstotliwości.
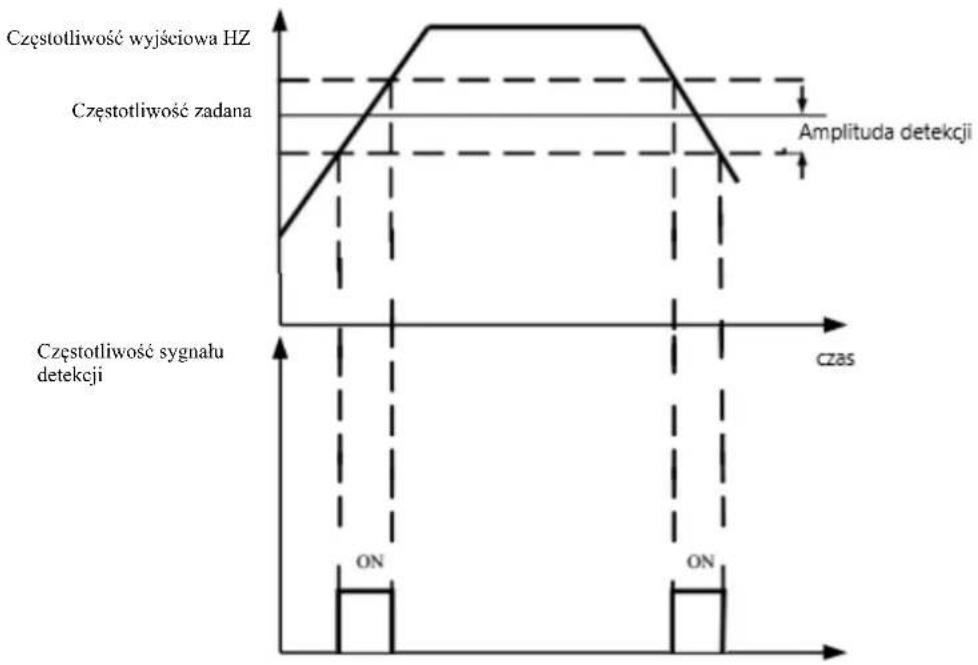
Rysunek 6-17 Schemat detekcji amplitudy osiągniętej częstotliwości
| P8-22 | Proces przyspieszania i zwalniania. Częstotliwość skoków, czy jest ważna | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: nic1: tak | ||
Kod tej funkcji jest używany do wyboru, podczas przyspieszania lub zwalniania, czy częstotliwość skoków jest ważna. Ustawia się jako ważną podczas pracy z częstotliwością przeskakującą zakres, gdy rzeczywista częstotliwość robocza przeskoczy granieę nastawy częstotliwości. Rysunek 6-18 przedstawia schemat częstotliwości skoków w procesie przyspieszania i zwalniania
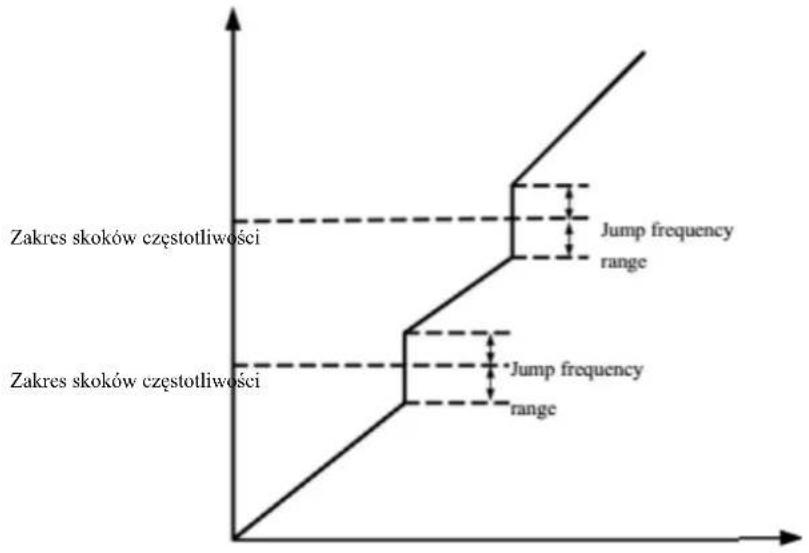
Rys. 6-18 Proces przyspieszania i zwalniania, efektywna częstotliwość przeskoku
| P8-25 | Czas przyspieszania 1 i czas przyspieszania 2, punkt przełączania częstotliwości | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-26 | Czas zwalniania 2 i czas zwalniania 1, punkt przełączania częstotliwości | Ustawienie fabryczne | 0.0 |
| Zakres ustawień | 0.00Hz do częstotliwości maksymalnej | ||
Wybrać tę funkcję w silniku 1. Nie przełączać przez zacisk DI, gdy aktywny jest wybór czasu przyspieszania / zwalniania. Gdy falownik pracuje niczgodnie z zakresem częstotliwości roboczej, [...] różne czasy przyspieszania / hamowania przez zaciski DI.
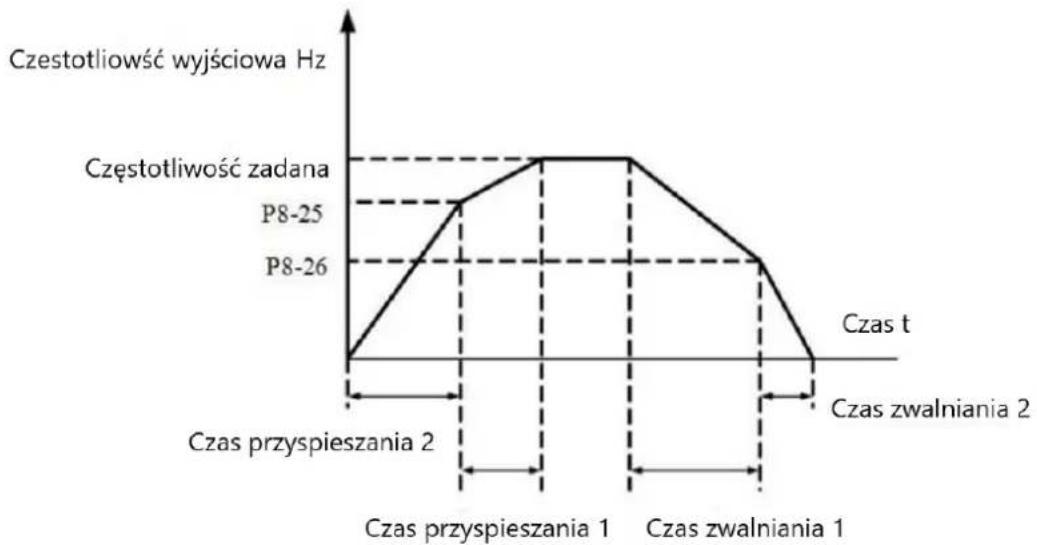
line
| Czas zwalniania | Czas przyspieszania 1 | Czas przyspieszania 2 | | --------------- | --------------------- | --------------------- | | P8-25 | Peak | Low | | P8-26 | Peak | Low | | Czas t | High | Low | | Czas zwalniania 1 | Low | Low | | Czas zwalniania 2 | Low | Low |Rys. 6-19 Schemat przełączania czasu przyspieszania i zwalniania
Rysunek 6-19 to schemat przełączania czasu przyspieszania i zwalniania. Podczas przyspieszania, jeżeli częstotliwość robocza jest mniejsza niż P8-25, wybierany jest czas przyspieszania 2; jeśli częstotliwość robocza jest większa niż czas przyspieszania 1, wybiera się P8-25.
Podczas zwalniania, jeśli częstotliwość robocza jest większa niż P8-26, wybiera się czas zwalniania 1, jeśli częstotliwość robocza jest mniejsza niż czas zwalniania 2, wybiera się P8-26.
| P8-27 | Pierwszeństwo zaci-sku impulsowania (jogging) | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: nieaktywne 1: aktywne | ||
Za pomocą tego parametru można ustawić, czy funkcja zacisku impulsowania ma najwyższy priorytet.
Gdy priorytet zacisku impulsowania jest załączony, jeśli podczas pracy nastąpi komenda z zacisku, napęd jest przełączany na pracę w trybie impulsowania z zacisku.
| P8-28 | Wartość detekcji częstotliwości (FDT2) | Ustawienie fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-29 | Wartość histerezy detekcji częstotliwości (FDT2) | Ustawienie fabryczne | 5.0% |
| Zakres ustawień | 0.0% ~ 100.0% (FDT2 level) | ||
Funkcja wykrywania częstotliwości FDT1 - patrz wskazówki dot. kodu funkcji P8-19, P8-20
| P8-30 | Dowolna osiągnięta wartość 1 detekcji częstotliwości | Ustawienie fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-31 | Dowolny osiągnięty zakres 1 detekcji częstotliwości | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0% to 100.0% (częstotliwość maksymalna) | ||
| P8-30 | Dowolna osiągnięta wartość 2 detekcji częstotliwości | Ustawienie fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna | ||
| P8-31 | Dowolny osiągnięty zakres 2 detekcji częstotliwości | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0% to 100.0% (częstotliwość maksymalna) | ||
W przypadku częstotliwości wyjściowej, gdy falownik, po osiągnięciu dowolnej wartości wykrywania częstotliwości, wykryje dodatni i ujemny zakres amplitudy, wielofunkcyjne wyjście cyfrowe DO falownika wygeneruje sygnał "ON".
Wykrywanie częstotliwości osiągniętej VFD zapewnia dwa zestawy dowolnych parametrów, w których ustawiono wartość częstotliwości i zakres wykrywania częstotliwości. Rys. 6-20 przedstawia schemat ideowy tej funkcji.
Częstotliwość robocza
Szerokość strefy wykrywania częstot.
Dowolna częstotliwość osiągnięta
Szerokość strefy wykrywania często.
czas
| Dowolny sygnał wykrywania | ON | ON | |
| częstotliwości osiągniętej na wyjściu DO lub przekaźniku | OFF | OFF | OFF |
Rys. 6-20 Schemat detekcji osiągnięcia dowolnej częstotliwości
| P8-34 | Poziom wykrywania prądu zerowegoZakres ustawień | Ustawienie fabryczne0.0%~300.0% (prąd znamionowy silnika) | 5.0% |
| P8-35 | Opóźnienie wykrycia prądu zerowegoZakres ustawień | Ustawienie fabryczne0.00s~600.00s | 0.10s |
Gdy prąd wyjściowy falownika jest mniejszy lub równy poziomowi wykrywania prądu zerowego i trwa dłużej niż czas opóźnienia wykrywania prądu zerowego, wielofunkcyjne wyjście DO falownika wyśle sygnał "ON". Patrz rysunek 6-21 Detekcja prądu zerowego.
Rysunek 6-21 Schemat wykrywania prądu zerowego
| P8-36 | Limit prądu wyjściowego | Ustawienie fabryczne | 200.0% |
| Zakres ustawień | 1.1 % (brak wykrycia) | ||
| 1.2 %~300.0% (prąd znamionowy silnika) | |||
| P8-37 | Opóźnienie wykrycia limitu prądu wyjściowego | Ustawienie fabryczne | 0.00s |
| Zakres ustawień | 0.00s~600.00s |
Gdy prąd wyjściowy falownika jest większy niż punkt detekcji i trwa dłużej niż programowy czas opóźnienia wykrywania przetężenia, wielo-funkcyjny sygnał wyjściowy falownika DO wysłe sygnał "ON". Patrz rysunek 6-22 Schemat funkcji limitu prądu wyjściowego.
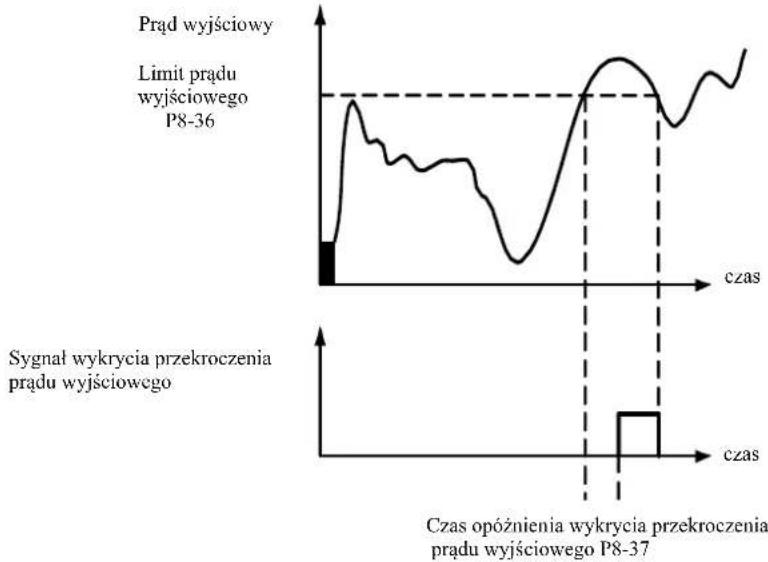
Rysunek 6-22 Schemat wykrywania limitu prądu wyjściowego
| P8-38 | Dowolny prąd osiągnięty 1 | Ustawienie fabryczne | 100.0% |
| Zakres ustawień | 0.0%~300.0% (prąd znamionowy silnika) | ||
| P8-39 | Szerokość dowolnego prądu osiągniętcego 1 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~300.0% (prąd znamionowy silnika) | ||
| P8-40 | Dowolny prąd osiągnięty 2 | Ustawienie fabryczne | 100.0% |
| Zakres ustawień | 0.0%~300.0% (prąd znamionowy silnika) | ||
| P8-41 | Szerokość dowolnego prądu osiągniętcego 2 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~300.0% (prąd znamionowy silnika) | ||
Gdy prąd wyjściowy falownika osiągnie dowolną ustawioną dodatnią lub ujemną szerokość wykrywania, wielofunkcyjne wyjście DO falownika wysłe sygnał "ON".
VFD zapewnia dwa zestawy parametrów szerokości wykrywania osiągnięcia dowolnego prądu. Patrz schemat funkcjonalny na rysunku 6-23.
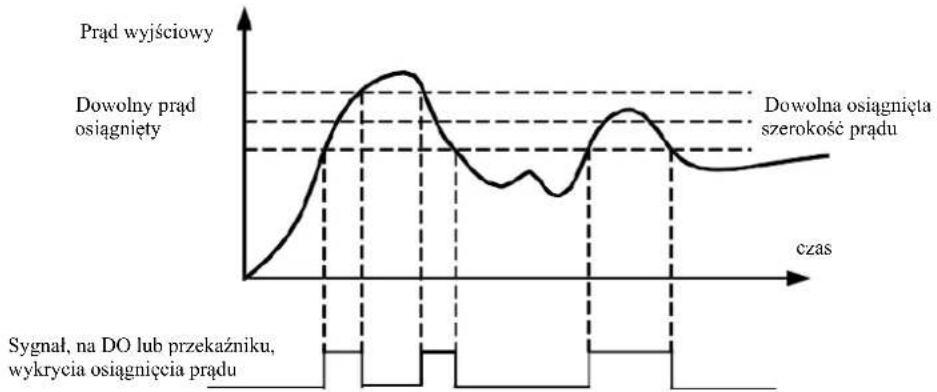
line
| czas | Prąd wyjściowy | | ---- | -------------- | | 0 | 0 | | Peak | Dowolny prąd osiągnięty | | Mid | Low | | End | Low |Rysunek 6-23 Schemat detekcji dowolnego prądu osiągniętego
| P8-42 | Wybór funkcji czasowej | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | nieaktywny | ||
| 1 | aktywny | |||
| P8-43 | Wybór określonego czasu pracy (Timed Run) | Ustawienie fabryczne | 0 | |
| 0 | Nastawa P8-44 | |||
| 1 | A11 | |||
| 2 | A12 | |||
| Zakres ustawień | 3 | AI3 | ||
| Zakres wejścia analogowego 100% odpowiada P8-44 | ||||
| P8-44 | Określony czas pracy (Timed Run) | Ustawienie fabryczne | 0.0Min | |
| Zakres ustawień | 0.0Min ~ 6500.0Min | |||
Zestaw parametrów używanych do uzupełniania czasu pracy napędu.
Gdy wybór funkcji czasowej P8-42 jest aktywny, falownik uruchamia się od początku zadanego czasu. Po osiągnięciu czasu pracy na czasomierzu, falownik automatycznie wyłącza się, podczas gdy wielofunkcyjne wejście DO wysyła sygnał "ON".
Gdy przemiennik jest uruchamiany, za każdym razem odliczanie zaczyna się od 0. Pozostały czas pracy jest widoczny w U0-20. Normalny czas pracy ustawia się parametrami P8-43, P8-44 w minutach.
| P8-45 | Dolny próg zabezpieczenia napięcia wejściowego AI1 | Ustawienie fabryczne | 3.10V |
| Zakres ustawień | 0.00V ~ P8-46 | ||
| P8-46 | Górny próg zabezpieczenia napięcia wejściowego AI1 | Ustawienie fabryczne | 6.80V |
| Zakres ustawień | P8-45 ~ 10.00V | ||
Gdy wartość P8-46 jest większa niż na wejściu analogowym AI1 a P8-47 mniejsza niż na wejściu AI1, wyjście wielofunkcyjne DO falownika wysyła sygnał ON „Przekroczenie wejścia AI1”.
| P8-47 | Temperatura modułu osiągnięta | Ustawienie fabryczne | 75°C |
| Zakres ustawień | 0.00V ~ P8-46 | ||
Kiedy radiator falownika osiąga powyższą temperaturę, na wyjściu wielofunkcyjnym DO falownika pojawia się sygnał „ON” osiągnięcia temperatury modułu.
| P8-48 | Sterowanie wentylatorem chłodzącym | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: Tylko w czasie pracy falownika1: Cały czas | ||
Służy do wyboru trybu pracy wentylatora chłodzącego.
Wybór 0. Wentylator pracuje gdy falownik jest w stanie roboczym. Następuje zatrzymanie, jeśli temperatura radiatora jest wyższa niż 40 stopni.
Wybór 1. Wentylator po uruchomieniu działa cały czas.
| P8-49 | Częstotliwość wznowienia | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | Częstotliwość uśpienia (P8-51) ~ częstotliwość maksymalna (P0-10) | ||
| P8-50 | Opóźnienie wznowienia | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s ~ 6500.0s | ||
| P8-51 | Częstotliwość uśpicnia | Ustawienie fabryczne | 0.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość wznowienia (P8-49) | ||
| P8-52 | Opóźnienie przejścia w stan uśpienia | Ustawienie fabryczne | 0.0s |
| Zakres ustawień | 0.0s ~ 6500.0s | ||
Grupa ta służy do realizacji układów zaopatrzenia w wodę z funkcją uśpienia i czuwania.
Falownik pracuje, gdy ustawiona częstotliwość jest mniejsza lub równa P8-51. Częstotliwość uśpienia, P8-52: po czasie opóźnienia, napęd przechodzi w stan uśpienia i automatycznie wyłącza się. Jeżeli falownik jest w stanie uśpienia a wydano polecenie uruchomienia, to gdy ustawiona częstotliwość jest większa lub równa częstotliwości P8-49, P8-50, po opóźnieniu czasowym falownik uruchamia się.
Ogólnie, należy ustawić częstotliwość wznowienia i uśpienia na większą lub równą. Jeśli częstotliwość uśpienia i wznowienia wynosi 0,00 Hz, funkcja uśpienia i wznowienia nie działa.
Gdy włączona jest hibernacja, jeśli źródło częstotliwości używa PID, a PID jest w trybie uśpicnia i PA-28 wpływa na kod funkcji, należy w takim przypadku wybrać operację wyłączania, gdy PID (PA-28 = 1).
| P8-53 | Osiągnięcie czasu pracy | Ustawienie fabryczne | 0.0Min |
| Zakres ustawień | 0.0Min~6500.0Min | ||
Gdy po uruchomieniu zostanie osiągnięty czas pracy, wielofunkcyjne wyjście cyfrowe DO falownika wysyła sygnał „Osiągnięcie czasu pracy ON (ZAL.)
Grupa P9. Błędy i ochrona
| P9-00 | Wybór ochrony silnika przed przeciążeniem | Ustawienie fabryczne | 1 | |
| Zakres ustawień | 0 | nie dozwolona | ||
| 1 | dozwolona | |||
| P9-01 | Wzmocnienie ochrony silnika przed przeciążeniem | Ustawienie fabryczne | 1.00 | |
| Zakres ustawień | 0.20~w10.00 | |||
P9-00 = 0: Bez funkcji ochrony silnika przed przeciążeniem może wystąpić ryzyko uszkodzenia wskutek przegrzania silnika. Zaleca się dodanie przekaźnika termicznego między falownikiem a silnikiem;
P9-00 = 1: przemiennik częstotliwości na podstawie odwrotnej krzywej czasowej przeciążenia silnika określa, czy silnik jest przeciążony. Odwrotna krzywa czasowa zabezpieczenia przed przeciążeniem silnika: 220% × (P9-01) × prąd znamionowy silnika. Jeśli obciążenie pozostanie na tej wartości przez 1 minutę, nastąpi alarm błędu przeciążenia silnika. Albo 150% × (P9-01) × prąd znamionowy silnika. Jeśli obciążenie pozostanie na tej wartości przez 60 minut, nastąpi alarm przeciążenia.
Parametr P9-01 należy ustawić w oparciu o rzeczywistą zdolność przeciążenia. Jeżeli wartość parametru jest ustawiona zbyt wysoko, może to spowodować przegrzanie silnika i uszkodzenie falownika przy braku alarmu!
| P9-02 | Poziom wyzwolenia ostrzeżenia przeciążeniowego silnika | Ustawienie fabryczne | 80% |
| Zakres ustawień | 50%~100% | ||
Ta funkcja jest używana przed funkcją zabezpieczenia przed skutkami przeciążenia silnika, wysyła sygnał ostrzegawczy poprzez wyjście DO falownika do układu sterowania. Współczynnik ostrzegawczy służy do określenia poziomu wczesnego ostrzegania przed przeciążeniem silnika. Im wyższa wartość, tym mniejsza liczba ostrzeżeń z wyprzedzeniem.
Gdy skumulowany prąd wyjściowy falownika jest większy niż odwrotne krzywe przeciążenia i iloczyn P9-02, wyjście wielofunkcyjne DO falownika załącza sygnał „ostrzeżenie o przeciążeniu silnika ZAŁ.”
| P9-03 | Wzmocnienie zabezpieczenia przed utykiem | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0 (brak wzmocnienia) ~100 | ||
| P9-04 | Napięcie ochronne przed utykiem przepięciowym | Ustawienie fabryczne | 130% |
| Zakres ustawień | 120%~150% (trzy fazy) | ||
Podczas zwalniania, gdy napięcie szyny DC przekracza napięcie zabezpieczenia przed przepięciem, falownik podtrzymuje zatrzymywanie na aktualnej częstotliwości roboczej a napięcie spada do momentu kontynuacji zwalniania przez szynę.
Wzmocnienie zabezpieczenia przed utykiem jest regulowane podczas zwalniania. Jest to zdolność falownika do tłumienia przepięcia. Im większa wartość, tym silniejsza zdolność tłumienia przepięcia. Jeśli nie występują przepięcia, wzmocnienie zabezpieczenia ustawia się na możliwe najmniejsze.
Przy małym obciążeniu bezwładnościowym, wzmocnienie zabezpieczenia powinno być małe, w przeciwnym razie dynamiczna odpowiedź układu będzie powolna. Przy dużych obciążeniach bezwładnościowych wartość ta powinna być duża, w przeciwnym razie tłumienie będzie nieskuteczne i może wystąpić błąd przepięcia.
Gdy wzmocnienie zabezpieczenia przed utykiem jest ustawione na 0, funkcja ta jest nieczynna.
| P9-05 | Wzmocnienie zabezpieczenia przed przeciążeniem nadprądowym | Ustawienie fabryczne | 20 |
| Zakres ustawień | 0~100 | ||
| P9-06 | Prąd ochrony przed utykiem nadprądowym | Ustawienie fabryczne | 150% |
| Zakres ustawień | 100%~200% | ||
Parametry techniczne wysokosprawnego przemiennika częstotliwości
W procesie zwalniania falownika, gdy prąd wyjściowy przekracza prąd zabezpieczenia przed przeciążeniem nadprądowym, falownik zatrzymuje proces zwalniania i jest on utrzymywany na bieżącej częstotliwości roboczej. Prąd wyjściowy spada, a następnie zwalnianie jest kontynuowane.
Wzmocnienie zabezpieczenia służy do regulacji procesu przyspieszania i zwalniania i jest związane ze zdolnością falownika do tłumienia prądu. Im większa wartość, tym większa zdolność.
Przy małym obciążeniu bezwładnościowym, wzmocnienie zabezpieczenia powinno być małe, w przeciwnym razie dynamiczna odpowiedź układu będzie powolna. Przy dużych obciążeniach bezwładnościowych wartość ta powinna być duża, w przeciwnym razie tłumienie będzie nieskuteczne i może wystąpić błąd przepięcia.
Gdy wzmocnienie zabezpieczenia przed utykiem jest ustawione na 0, funkcja ta jest nieczynna.
| P9-07 | Zabczpieczenie przed zwar-ciem do masy | Ustawienie fabryczne | 1 | |
| Zakres ustawień | 0 | nieczynne | ||
| 1 | czynne | |||
Załączyć falownik, aby sprawdzić czy silnik nie jest zwarty do masy.
Jeśli ta funkcja jest czynna, sprawdzić czy napięcie na zaciskach wyjściowych U, V, W falownika utrzymuje się.
| P9-09 | Automatyczne resetowaniebłędu | Ustawieniefabryczne | 0 |
| Zakresustawień | 0~20 | ||
Ustawianie liczby automatycznego resetowania przez falownik. Po przekroczeniu tej liczby, falownik pozostaje w stanie błędu.
| P9-10 | Działanie wyjścia DO podczas automatycznego resetowania blędu | Ustawienie fabryczne | 1 |
| Zakres ustawień | 0: nie działa1: działa | ||
Jeśli w przemienniku ustawiono funkcję automatycznego resetowania błędu, wówczas podczas automatycznego resetowania błędu wyjście DO działa, jeśli kod P9-10 jest ustawiony na 1.
| P9-11 | Czas pomiędzy wystąpieniem błędu a jego automatycznym zresetowaniem | Ustawienie fabryczne | 1.0s |
| Zakres ustawicń | 0.1s ~ 100.0s | ||
Jest to czas oczekiwania na automatyczny reset błędu od momentu alarmu błędu przez falownik.
| P9-12 | Zabezpieczenie przed utratą fazy na wcjściu | Ustawienie fabryczne | 1 |
| Zakres ustawień | 0: niedozwolone1: dozwolone | ||
Jest to wybór, czy ma być ochrona przed utratą fazy na wejściu.
Przemienniki typu G o mocy 18,5kW i więcej, mają zabezpieczenie fazy na wejściu. Przemienniki typu P o mocy 18,5kW i mniejszej nie mają takiego zabezpieczenia niezależnie od ustawienia P9-12 na 0 lub 1.
| P9-13 | Zabezpieczenie przed utratą fazy na wyjściu | Ustawienie fabryczne | 1 |
| Zakres ustawień | 0: niedozwolone1: dozwolone | ||
Wybór zabezpieczenia przed utratą fazy na wyjściu.
| P9-14 | Błąd pierwszy | 0~99 |
| P9-15 | Błąd drugi | |
| P9-16 | Błąd drugi (ostatni) |
Zapisywanie ostatnich trzech błędów falownika. 0 nie oznacza błędu. Wskazówki dotyczące możliwych przyczyn i rozwiązań dla każdego kodu błędu znajdują się w rozdziale 8.
| P9-17 | Częstotliwość przy drugim błędzie | Częstotliwość ostatniego błędu |
| P9-18 | Prąd przy drugim błędzie | Prąd ostatniego błędu |
| P9-19 | Napięcie na szynie przy drugim błędzie | Napięcie na szynie przy ostatnim błędzie |
| P9-20 | Stan wejść cyfrowych przy drugim błędzie | Stan wejść cyfrowych przy ostatnim błędzie. Kolejność jest następująca:BIT9 BIT3 BIT7 BIT6 BIT3 BIT4 BIT3 BIT2 BIT1 BIT0D10 D19 D18 D17 D16 D15 D14 D13 D12 D11Gdy zaciski wejściowe odpowiednich dwóch N są ustawione na 1, OFF lub 0, stan wszystkich DI jest konwertowany na wyświetlanie dziesiętne. |
| P9-21 | Stan wyjść cyfrowych przy drugim błędzie | Stan zacisków wyjścia cyfrowego przy ostatnim błędzie. Kolejność jest następująca:BIT4 BIT3 BIT2 BIT1 BIT0DO2 DO1 REL2 REL1 FMPGdy zaciski wejściowe odpowiednich dwóch N są ustawione na 1, OFF lub 0, stan wszystkich DI jest konwertowany na wyświetlanie dziesiętne.. |
| P9-22 | Stan falownika przy drugim błędzie | Zastrzeżone |
| P9-23 | Czas zasilania falownika przy drugim błędzie | Czas zasilania falownika przy ostatnim błędzie |
| P9-24 | Czas pracy falownika przy drugim błędzie | Czas pracy falownika przy ostatnim błędzie |
| P9-27 | Częstotliwość drugiego błędu | Tak jak P9-17~P9-24 |
| P9-28 | Prąd drugiego błędu | |
| P9-29 | Napięcie szyny przy drugim błędzie | |
| P9-30 | Stan wejść przy drugim błędzie | |
| P9-31 | Stan wyjść przy drugim błędzie | |
| P9-32 | Stan falownika przy drugim błędzie | |
| P9-33 | Czas zasilania przy drugim błędzie | |
| P9-34 | Czas pracy przy drugim błędzie | |
| P9-37 | Stan falownika przy pierwszym błędzie | Tak jak P9-17~P9-24 |
| P9-38 | Czas zasilania przy pierwszym błędzie | |
| P9-39 | Czas pracy przy pierwszym błędzie | |
| P9-40 | Częstotliwość pierwszego błędu | |
| P9-41 | Prąd pierwszego błędu | |
| P9-42 | Napięcie magistrali przy pierwszym błędzie | |
| P9-43 | Stan wyjść przy pierwszym błędzie | |
| P9-44 | Stan wyjść przy pierwszym błędzie |
| P9-47 | Środki zaradcze dla błędu 1 | Ustawicnic fabryczne | 00000 | |
| Zakres ustawiciń | Liczba jedności | Przeciążcnie silnika (Err11) | ||
| 0 | Zatrzymanie wybiegiem | |||
| 1 | Zatrzymanie w trybie stop | |||
| 2 | Kontynuacja pracy | |||
| Dziesiątki | Brak fazy wejściowej (Err12) (ta sama jednostka) | |||
| Setki | Brak fazy wyjściowej (Err13) (ta sama jednostka) | |||
| Tysiące | Błąd zewnętrzny (Err15) (ta sama jednostka) | |||
| Dziesieć tysięcy | Błąd komunikacji (Err16) (ta sama jednostka) | |||
| P9-48 | Środki zaradcze dla błędu 2 | Ustawienie fabryczne | 00000 | |
| Zakres ustawień | Cyfra jedności | Błąd enkodera (Err20) | ||
| 0 | Zatrzymanic wybiegiem | |||
| 1 | Przełączenie na U/f, przejście w tryb stop | |||
| 2 | Przełączenie na U/f, kontynuacja pracy | |||
| Dziesiątki | Błąd czytnika kodów (Err21) | |||
| 0 | Zatrzymanie wybiegiem | |||
| 1 | Zatrzymanie, przejście w tryb stop | |||
| Setki | Zastrzeżone | |||
| Tysiące | Przegrzanie silnika (Err 25) (tak jak P9-47 ) | |||
| Dziesieć tysięcy | Przekroczenie czasu pracy (Err26) (tak jak P9-47 ) | |||
| P9-49 | Środki zaradcze dla błędu 3 | Ustawienie fabryczne | 00000 | |
| Zakres ustawień | Cyfra jedności | Błąd zdefiniowany przez użytkownika 1 (Err27) (tak jak P9-47 ) | ||
| Dziesiątki | Błąd zdefiniowany przez użytkownika 2 (Err28) (tak jak P9-47 ) | |||
| Setki | Przekroczenie łącznego czasu pracy (Err29) (tak jak P9-47 ) | |||
| Tysiące | Zerowe obciążenie (Err30) | |||
| 0 | Zatrzymanie wybiegiem | |||
| 1 | Zatrzymanie, przejście w tryb stop | |||
| 2 | Kontynuacja pracy na 7 % wartości częstotliwości nominalnej silnika i powrót do ustawionej częstotliwości, gdy silnik odzyska obciążenie | |||
| Dziesieć tysięcy | Utrata sprzężenia zwrotnego przez PID (Err31) (tak jak P9-47 ) | |||
| P9-50 | Środki zaradcze dla błędu 4 | Ustawienie fabryczne | 00000 | |
| Zakres ustawień | Cyfra jedności | Nadmierne odchylenie prędkości (Err42) (z bitami P9-47) | ||
| Dziesiątki | Nadmierna prędkość silnika (Err43) (z bitami P9-47) | |||
| Setki | Błąd pozycji początkowej (Err51) (z bitami P9-47) | |||
| Tysiące | Błąd pozycji początkowej (Err52) (z bitami P9-47) | |||
| Dziesieć tysięcy | Zastrzeżone | |||
Po wybraniu „swobodnego parkowania” falownik wyświetlę Err ** i bezpośrednio w dół.
W przypadku wyboru „stop w trybie zatrzymania” falownik wyświetla A **. Wcisnąć „stop”, po wyłączeniu wyświetli się Err **.
Po wybraniu „kontynuuj”: przemiennik kontynuuje pracę i wyświetla A **, częstotliwość robocza jest ustawiana przez P9-54.
| P9-54 | Kontynuacja wybranej częstotliwości, gdy wystąpi błąd | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | 0: Praca z aktualną częstotliwością roboczą | ||
| 1 | 1: Praca z nastawioną częstotliwością | |||
| 2 | 2: Praca z górnym limitem częstotliwości | |||
| 3 | 3: Praca z dolnym limitem częstotliwości | |||
| 4 | 4: Praca z alternatywną częstotliwością anormalną | |||
| P9-55 | Błąd częstotliwość alternatywnej | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | 60.0%~100.0% | |||
Gdy falownik pracuje z błędem i obsługa z błędem jest kontynuowana, napęd wyświetla A ** i pracuje z częstotliwością określoną w P9-54.
W przypadku wybrania pracy z alternatywną częstotliwością anormalną, wartość ustawiona w parametrze P9-55 stanowi procent częstotliwości maksymalnej.
| P9-56 | Typ czujnika temperatury silnika | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Bez czujnika temperatury | ||
| 1 | PT100 | |||
| 2 | PT1000 | |||
| P9-57 | Próg ochrony silnika przed przegrzaniem | Ustawienie fabryczne | 110°C | |
| Zakres ustawień | 0°C~200°C | |||
| F9-58 | Próg ostrzegawczy przegrzania silnika | Ustawienie fabryczne | 90°C | |
| Zakres ustawień | 0°C~200°C | |||
Czujnik sygnalizujący temperaturę silnika należy podłączyć do karty rozszerzeń wielofunkeyjnych wejść i wyjść, która jest opcjonalna. Wejście AI3 analogowej karty rozszerzeń może być użyte jako wejście czujnika temperatury silnika, sygnał czujnika temperatury silnika a następnie jako zacisk AI3 PGND.
Wejście analogowe VFD A13 dla PT100 i PT1000 obsługuje dwa typy czujników temperatury silnika, więc czujnik musi być ustawiony na odpowiedni typ. Wartości temperatury silnika są wyświetlane na U0-34.
Gdy temperatura silnika przekroczy próg ochrony silnika przed przegrzaniem P9-57, falownik nadaje alarm awarii, uruchamia zabezpieczenie przed uszkodzeniem i postępuje zgodnie z wybranym trybem.
Gdy temperatura silnika przekroczy wartość progową P9-58 następuje ostrzeżenie o przegrzaniu silnika - wielofunkcyjne wyjście cyfrowe DO przemiennika generuje sygnał "ON".
| P9-59 | Wybór sposobu działania w przypadku chwilowego zaniku zasilania | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | nieaktywny | ||
| 1 | hamowanie | |||
| 2 | wybieg do zatrzymania | |||
| P9-60 | Punkt przełączenia częstotliwości hamowania przy nagłym zaniku zasilania | Ustawienie fabryczne | 0.0% | |
| Zakres ustawień | 0.0%~100.0% | |||
| P9-61 | Czas reakcji w przypadku zaniku zasilania | Ustawienie fabryczne | 0.50s | |
| Zakres ustawień | 0.00s~100.00s | |||
| P9-62 | Wartość zmiany napięcia dla reakcji po zaniku zasilania | Ustawienie fabryczne | 80.0% | |
| Zakres ustawień | 60.0%~100.0% (standardowe napięcie magistrali) | |||
Ta funkcja oznacza, że w przypadku chwilowej awarii zasilania lub nagłego spadku napięcia, falownik, zmniejszając prędkość na wyjściu zmniejsza kompensację energii obciążenia (napięcie szyny DC falownika), aby utrzymać napęd.
Jeśli P9-59 = 1 i następuje magła awaria zasilania lub nagły spadek napięcia, falownik zwalnia. Po przywróceniu napięcia magistrali, falownik przyspiesza do ustawionej normalnej częstotliwości pracy. Analiza powrotu do normalnego napięcia magistrali jest oparta na normalnym napięciu magistrali P9-61 i trwa to dłużej niż ustawiony czas.
Jeśli P9-59 = 2 i następuje nagła awaria zasilania lub nagły spadek napięcia, falownik zwalnia do zatrzymania.
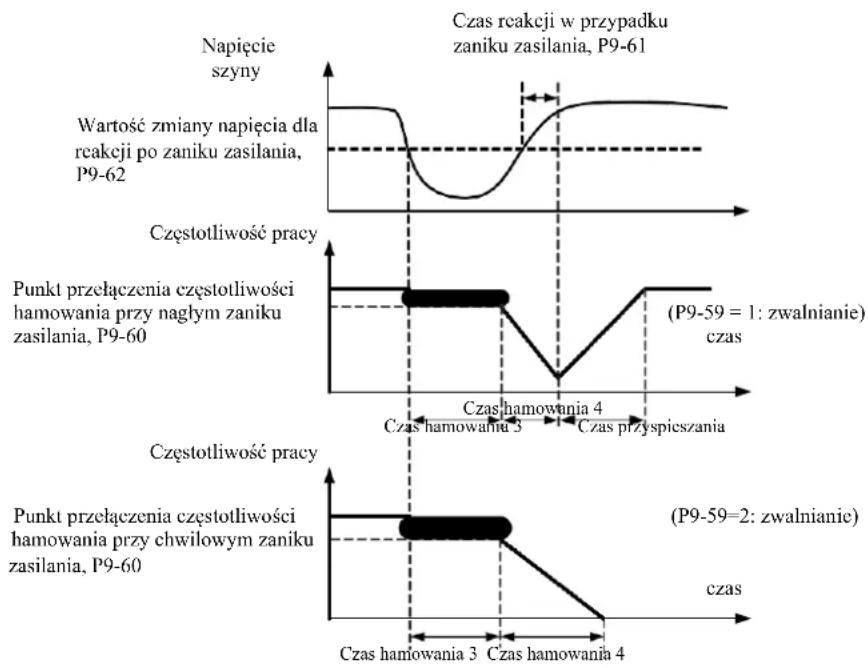
line
| Policy Description | Period | Description | | --- | --- | --- | | Napięcie szyny | P9-61 | Czas reakcji w przypadku zaniku zasilania, P9-61 | | Wartość zmiany napięcia dla reakcji po zaniku zasilania, P9-62 | P9-61 | Czas reakcji w przypadku zaniku zasilania, P9-61 | | Częstotliwość pracy | P9-60 | Punkt przełączenia częstotliwości hamowania przy nagłym zaniku zasilania, P9-60 | | Częstotliwość pracy | P9-60 | Punkt przełączenia częstotliwości hamowania przy chwilowym zaniku zasilania, P9-60 | | Czas hamowania 3 | Czas hamowania 4 | (P9-59 = 1: zwalnianie) czas | | Czas hamowania 4 | Czas hamowania 4 | (P9-59 = 2: zwalnianie) czas | | Czas hamowania 3 | Czas hamowania 4 | (P9-59 = 2: zwalnianie) czas | | Czas hamowania 4 | Czas hamowania 4 | (P9-59 = 2: zwalnianie) czas |Rysunek 6-24 Schemat działania przy naglej awarii zasilania
| P9-63 | Ochrona po spadku obciążenia do zera | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | nieaktywna | ||
| 1 | aktywna | |||
| P9-64 | Poziom wykrywania spadku obciążenia do zera | Ustawicnic fabryczne | 10.0% | |
| Zakres ustawień | 0.0%~100.0% (prąd znamionowy silnika) | |||
| P9-65 | Czas wykrywania spadku obciążenia do zera | Ustawicnic fabryczne | 1.0s | |
| Zakres ustawień | 0.0s~60.0s | |||
Jeśli funkcja ochrony przed brakiem obciążenia jest włączona, gdy prąd wyjściowy falownika jest mniejszy niż poziom wykrywania P9-64, a czas jego trwania jest dłuższy niż czas wykrywania utraty obciążenia P9-65, to częstotliwość wyjściowa jest automatycznie zmniejszana do 7% częstotliwości znamionowej. Podczas trwania ochrony przed brakiem obciążenia, jeśli zostanie ono przywrócone, falownik automatycznie powraca do pracy z zadaną częstotliwością.
| P9-67 | Próg dętcęcji nadmiernej prędkości | Ustawicnie fabryczne | 15,0% | |
| Zakres ustawień | 0.0% to 50.0% (częstotliwość maksymalna) | |||
| P9-68 | Czas detekcji nadmiernej prędkości | Ustawienie fabryczne | 2.0s | |
| Zakres ustawień | 0.0s~60.0s | |||
Ta funkcja jest skuteczna tylko wtedy, gdy falownik pracuje ze sterowaniem wektorowym prędkości.
Gdy falownik wykryje, że rzeczywista prędkość silnika przekracza ustawioną częstotliwość, wartość wykrywania przekroczenia prędkości P9-67 została przekroczona a czas trwania jest dłuższy niż czas wykrywania przekroczenia prędkości P9-68, falownik wygeneruje alarm błędu Err43, w zależności od usterki i trybu ochrony.
| P9-69 | Próg detekcji nadmiernego uchybu prędkości | Ustawienie fabryczne | 20.0% | |
| Zakres ustawień | 0.0% do 50.0% (częstotliwość maks.) | |||
| P9-70 | Czas detekcji nadmiernego uchybu prędkości | Ustawienie fabryczne | 2.0s | |
| Zakres ustawień | 0.0s~60.0s | |||
Ta funkcja jest skuteczna tylko wtedy, gdy falownik pracuje ze sterowaniem wektorowym prędkości.
Gdy przemiennik wykrywa rzeczywistą prędkość silnika i ustawione odchylenie częstotliwości, odchylenie to jest większe niż wartość jego wykrywania P9-69, a czas trwania jest dłuższy niż czas wykrywania tego odchylenia P9-70, falownik generuje alarm błędu Err42 i postępuje zgodnie z trybem ochrony przed błędami pracy.
Gdy czas wykrywania odchylenia prędkości wynosi 0,0 s, wykrywanie błędu odchylenia prędkości nie działa.
Grupa PA. Działanie regulacji PID
Regulacja PID jest powszechną metodą sterowania procesem, polegającą na kontrolowaniu różnicy wielkości między sygnałem sprężenia zwrotnego a sygnałem docelowym. Jest to działanie proporcjonalne, całkowe, różnicowe poprzez regulację częstotliwości wyjściowej w celu utworzenia układu z zamknięta pętłą.
Nadaje się do kontroli przepływu, regulacji ciśnienia i temperatury oraz sterowania procesem. Schemat blokowy procesu regulacji PID przedstawiono na rysunku 6-25.
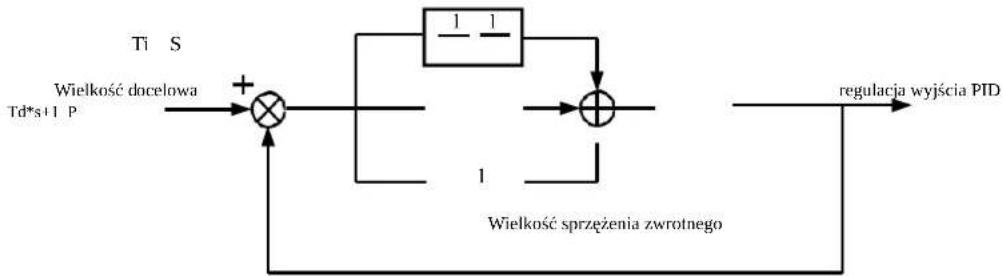
flowchart
graph LR
A["Wielkość docelowa"] --> B["+"]
C["Td*s+1 P"] --> B
B --> D["1"]
D --> E["+"]
F["1"] --> E
E --> G["regulacja wyjścia PID"]
H["Wielkość sprężenia zwrotnego"] --> E
I["Td*s+1 P"] --> J["+"]
J --> K["1"]
K --> E
Rysunek 6-25 Podstawowy schemat blokowy procesu regulacji PID
| PA-00 | Wybór źródła wartości zadanej regulatora PID | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Nastawy PA-01 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls (DI5) | |||
| 5 | Nastawy komunikacji | |||
| 6 | Zadawanie wielostopniowe | |||
| PA-01 | Wartości zadane PID | Ustawienie fabryczne | 50.0% | |
| Zakres ustawień | 0.0%~100.0% | |||
Ten parametr służy do wyboru docelowej regulacji PID dla danego kanału.
Nastawa docelowej wielkości regulacji PID to wartość względna, zakres nastaw :0,0% do 100,0%. Ta sama wielkość jest względną wielkością sprzęenia zwrotnego PID.
| PA-02 | Źródło sygnału sprężenia zwrotnego PID | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | AI1 | ||
| 1 | AI2 | |||
| 2 | AI3 | |||
| 3 | AI1-AI2 | |||
| 4 | Ustawienia komunikacji (DI5) | |||
| 5 | Ustawienia komunikacji | |||
| 6 | AI1+AI2 | |||
| 7 | MAX (|AI1|,|AI2|) | |||
| 8 | MIN (|AI1|,|AI2|) | |||
Ten parametr jest używany do wyboru ścieżki sygnału sprężenia zwrotnego PID.
Wielkość sprężenia zwrotnego PID dla wartości względnej jest ustawiana w zakresie od 0,0% do 100,0%.
| PA-03 | Kierunek działania PID | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | dodatni | ||
| 1 | ujemny | |||
0: Gdy sygnał sprężenia zwrotnego PID jest niższy niż wartość zadana, częstotliwość wyjściowa falownika wzrasta.
1: Gdy sygnał spreżenia zwrotnego PID jest niższy niż wartość zadana, częstotliwość wyjściowa falownika maleje.
Przykładowo, sterowanie naprężeniem nawijania wymaga działania regulacji PID z wyjściem 0 a sterowanie naprężeniem odwijania wymaga działania regulacji PID z wyjściem 1.
| PA-04 | Zakres sprzęcenia zwrotnego PID | Ustawienie fabryczne | 1000 |
| Zakres ustawicń | 0~65535 | ||
Podany zakres sprzężenia zwrotnego PID to jednostki bezwymiarowe dla wyświetlacza U0-15 i wyświetlacza sprzężenia zwrotnego PID U0-16.
Zadana względna wartość sprężenia zwrotnego PID 100,0% odpowiada zadanemu zakresowi sprężenia zwrotnego PA-04. Na przykład, jeśli PA-40 jest ustawiony na 2000, to gdy nastawa PID jest 100,0%, PID podany na wyświetlaczu U0-15 wynosi 2000.
| PA-05 | Przyrost członu proporcjonalnego KpI | Ustawienie fabryczne | 20.0 |
| Zakres ustawień | 0.0~100.0 | ||
| PA-06 | Czas całkowania Til | Ustawienie fabryczne | 2.00s |
| Zakres ustawień | 0.01s~10.00s | ||
| PA-07 | Czas różniczkowania Td11 | Ustawienie fabryczne | 0.000s |
| Zakres ustawień | 0.00~10.000 | ||
Przyrost członu proporcjonalnego Kp1.
Reguluje intensywność całej regulacji PID. Im większy Kp1, tym większa intensywność. 100,0. Ten parametr wskazuje, że gdy odchylenie wartości sprężenia zwrotnego PID i zadana wielkość wynosi 100,0%, amplituda regulatora PID regulacji polecenia częstotliwości wyjściowej jest częstotliwością maksymalną.
Czas całkowania Til determinuje intensywność całkowania regulatora PID. Im krótszy czas całkowania, tym mocniejsza regulacja i tym szybciej korygowana jest stała wartość odchylenia.
Czas różniczkowania Td I regulatora PID określa szybkość zmiany intensywności regulacji odchylenia. Im dłuższy czas różniczkowania, tym większa intensywność regulacji. Stała czasowa różniczkowania odnosi się do wielkości zmiany, gdy sprzęenie zwrotne wynosi 100,0% w tym czasie, w celu dostosowania wielkości regulacji różniczkowej dla uzyskania maksymalnej częstotliwości.
| PA-08 | Częstotliwość odcięcia dla działania PID do tyłu | Ustawienie fabryczne | 2.00Hz |
| Zakres ustawień | 0.00 ~ częstotliwość maksymalna | ||
W niektórych przypadkach tylko wtedy, gdy częstotliwość wyjściowa PID jest ujemna (tj. napęd do tyłu), PID może sterować daną wielkością i sprężeniem zwrotnym [...] ale inwersja wysokiej częstotliwości nie jest dozwolona w niektórych przypadkach. PA-08 służy do określenia ograniczenia inwersji częstotliwości.
| PA-09 | Limit odchylenia PID | Ustawienie fabryczne | 0.01% |
| Zakres ustawień | 0.0%~100.0% | ||
Gdy odchylenie PID i wartość sprężenia zwrotnego są mniejsze niż PA-09, PID zatrzymuje regulację. Tak więc, biorąc pod uwagę czas i odchylenie częstotliwości wyjściowej sprężenia zwrotnego, przy mniejszej stabilności i zmienności, sterowanie w pętli zamkniętej w niektórych przypadkach jest bardzo skuteczne.
| PA-10 | Limit różniczkowania PID | Ustawienie fabryczne | 0.10% |
| Zakres ustawicń | 0.00%~100.00% | ||
Regulator PID. Efekt różniczkowania jest bardziej czuły i może powodować oscylację układu, dlatego ogólnie działanie pochodnej PID jest ograniczone do stosunkowo małego obszaru. PA-10 służy do ustawiania zakresu różniczkowania PID.
| PA-11 | Zmiana czasu PID Ustawic | 0.00 fabryczne s |
| Zakres ustawień | 0.00s~650.00s |
Zmiana czasu PID oznacza, że wartość nastawy PID zmienia się od 0,0% wymaganego czasu do 100,0%.
W przypadku zmiany nastawy PID, wartość nastawy PID będzie zmieniać się liniowo w czasie zgodnie z daną zmianą, zmniejszając tym samym niekorzystny wpływ danej zmiany na system.
| PA-12 | Czas filtra separzȩzenia zwrotnego PID | Ustawienie fabryczne | 0.00s |
| Zakres ustawień | 0.00s~60.00s | ||
| PA-13 | Czas filtra wyjsciowego PID | Ustawienie fabryczne | 0.00s |
| Zakres ustawień | 0.00s~60.00s | ||
PA-12: filtrowanie sprzężenia zwrotnego PID. Filtr pomaga zmniejszyć wpływ zakłóceń na wielkość sprężenia zwrotnego, ma to wpływ na wydajność odpowiedzi układu zamkniętej pętli.
PA-13: filtrowanie częstotliwości wyjściowej PID. Filtr zmniejsza częstotliwość wyjściową mutacji, co ma również wpływ na wydajność odpowiedzi układu zamkniętей pętli.
| PA-15 | Współczynnik wzmocnienia członu proporcjonalnego Kp2 | Ustawienie fabryczne | 20.0 | |
| Zakres ustawień | 0.0~100.0 | |||
| PA-16 | Czas całkowania Ti 2 | Ustawienie fabryczne | 2.00s | |
| Zakres ustawień | 0.01s~10.00s | |||
| PA-17 | Czas różniczkowania Td 2 | Ustawienie fabryczne | 0.000s | |
| Zakres ustawień | 0.00~10.000 | |||
| PA-18 | Warunki przełączania parametrów PI | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | 0: bez przełączenia | ||
| 1 | 1: za pomocą przełącznika zacisków DI | |||
| 2 | 2: automatyczne przełączanie w oparciu o odchylenie | |||
| PA-19 | Przełączanie PID | Ustawienie fabryczne | 20.0% | |
| Zakres ustawień | 0.0%~PA-20 | |||
| PA-20 | Przełączanie PID | Ustawienie fabryczne | 80.0% | |
| Zakres ustawień | PA-19~100.0% | |||
Wybierając przełączanie zacisku wielofunkcyjnego DI, ustaw funkcję zacisku wielofunkcyjnego na 43 (zacisk przełączający parametr PID). Wybrać zestaw parametrów 1 (PA-05 \~ PA-07), gdy zacisk jest nicaktywny. Gdy zacisk jest aktywny, wybrać zestaw parametrów 2 (PA-15 \~ PA-17).
Gdy automatyczne przełączanie między wartością odniesienia a odchyleniem sprzężenia zwrotnego zostanie wybrane jako mniejsze niż wartość bezwzględna odchylenia PID 1 PA-19, parametr PID jest ustawiany na 1. Aby ustawić odchyleniem między odchyleniem odniesienia a sprzężeniem zwrotnym PID na większe niż wartość bezwzględna PA-20, wybierz grupę parametrów 2 dla parametru PID. Na podstawie odchylenia między wartością odniesienia a sprzężeniem zwrotnym, podczas przełączania między odchyleniem 1 i odchyleniem 2, parametry PID są liniową interpolacją dwóch zestawów parametrów PID, jak pokazano na rysunku 6-26.
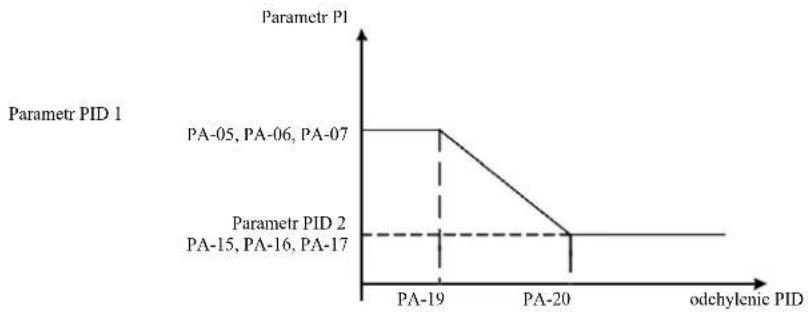
line
| odehylenic PID | Parametr PID 1 | | -------------- | -------------- | | PA-05 | PA-06, PA-07 | | PA-15 | PA-16, PA-17 | | PA-20 | PA-16, PA-17 |Rysunek 6-26 Przełączanie parametrów PID
| PA-21 | Wartość początkowa PID | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~100.0% | ||
| PA-22 | Czas wstrzymania wartości po-czątkowej PID | Ustawienie fabryczne | 0.00s |
| Zakres ustawień | 0.00s~650.00s | ||
Kiedy inwerter uruchamia się, wyjście PID jest ustawione na wartość początkową PA-21. Wartość początkowa PID PA-22 jest kontynuowana po czasie jej wstrzymania, rozpoczyna się regulacja pętli PID.
Rysunek 6-27 przedstawia schemat dotyczący początkowej wartość funkcji PID.
Częstotliwość
Wartość
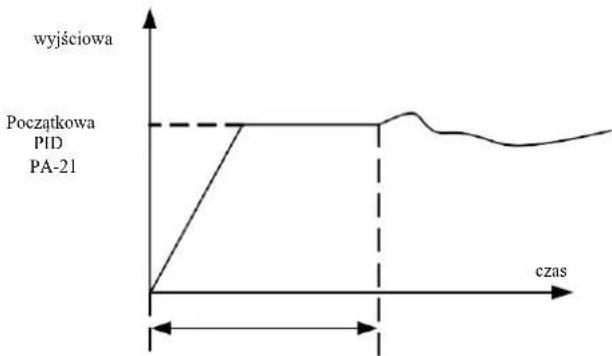
Czas wstrzymania wartości początkowej PID PA-22
Rysunek 6-27 Schemat wstrzymania wartości początkowej PID
Funkcja ta służy do ograniczenia różnicy tętnienia między dwoma wyjściami PID (2 ms / tętnienie) aby szybko stłumić zmianę, tak aby praca falownika ustabilizowała się.
| PA-23 | Maks. odchylenie pomiędzy dwoma wyjściami PID w działaniu do przodu | Ustawienie fabryczne | 1.00% |
| Zakres ustawień | 0.00%~100.00% | ||
| PA-24 | Maks. odchylenie pomiędzy dwoma wyjściami PID w działaniu do tyłu | Ustawienie fabryczne | 1.00% |
| Zakres ustawień | 0.00%~100.00% | ||
PA-23 i PA-24 są powiązane z maksymalnym odchyleniem i wartością bezwzględną (w tej kolejności), w przypadku działania wyjścia do przodu i do tyłu.
| PA-25 | Właściwości członu całkującego PID | Ustawienie fabryczne | 00 | |
| Zakres ustawień | Cyfra jedności | Całkowanie odseparowane | ||
| 0 | Nicaktywne | |||
| 1 | Aktywne | |||
| Dziesiątki | Zatrzymanie całkowania po osiągnięciu na wyjściu ustawionej wartości | |||
| 0 | Kontynuacja pracy z całkowaniem | |||
| 1 | Wstrzymanie całkowania | |||
Separacja punktów:
W przypadku ustawienia aktywnej separacji całkowania, gdy aktywna jest pauza DI wielofunkcyjnego wyjścia cyfrowego całkowania (funkcja 22), działają tylko operacje proporcjonalne i różniczkujące PID.
W przypadku wybrania nieaktywnej separacji całkowania, niezależnie od tego, czy cyfrowy zacisk wielofunkcyjny DI jest aktywny, separacja całkowania jest nieaktywna. Po osiągnięciu przez sygnał wyjściowy PID wartości maksymalnej lub minimalnej, można zatrzymać całkowanie. Jeśli zdecydujemy się zatrzymać całkowanie, w tym momencie obliczanie całkowania PID jest zatrzymane, co może pomóc zmniejszyć przeregułowanie PID.
| PA-26 | Wartość wykrywania zaniku sprzężenia zwrotnego PID | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%: brak analizy utraty sprzężenia | ||
| PA-27 | Czas wykrywania zaniku sprzcz. zwrotnego PID | Ustawienie fabryczne | 1.0s |
| Zakres ustawień | 0.0s~20.0s | ||
Te kody funkcji służą do określenia, czy nastąpiła utrata sprzężenia zwrotnego PID.
Gdy sprzęenie zwrotne PID jest mniejsze niż wartość wykrywania utraty sprzęenia zwrotnego PA-26 i trwa to dłużej niż czas wykrywania utraty sprzęenia zwrotnego PID PA-27, falownik sygnalizuje błąd Err31 i następuje proces rozwiązywania problemu zgodnie z wybranym trybem.
| PA-28 | Działanie PID po zatrzymaniu | Ustawienie fabryczne | 0 | |
| Zakres ustawicń | 0 | 0: wyłączenie PID po zatrzymaniu; | ||
| 1 | 1: działanie PID po zatrzymaniu | |||
Wybór stanu PID przy następnym zatrzymaniu, tzn. czy PID ma kontynuować operacje. Przy większości zastosowań, po zatrzymaniu pracy, PID powinien przestać działać.
Grupa PB: Częstotliwość oscylacyjna, długość i zliczanie
Funkeja trawersu falownika stosowana jest w przemyśle tekstylnym, włókienniczym i tam gdzie występuje konieczność wykonywania trawersu i nawijania. Funkeja "Wobble" (ruch oscylująceo-obrotowy) oznacza, że częstotliwość wyjściowa falownika ustawiona jest tak, by występowało wahanie częstotliwości środkowej w góre i w dół na osi czasu.
Jak pokazano na rysunku 6-28 (amplituda wahania zgodnie z ustawieniami PB-00 i PB-01), gdy PB-01 jest ustawiony na 0, funkcja "Wobble" nie działa.
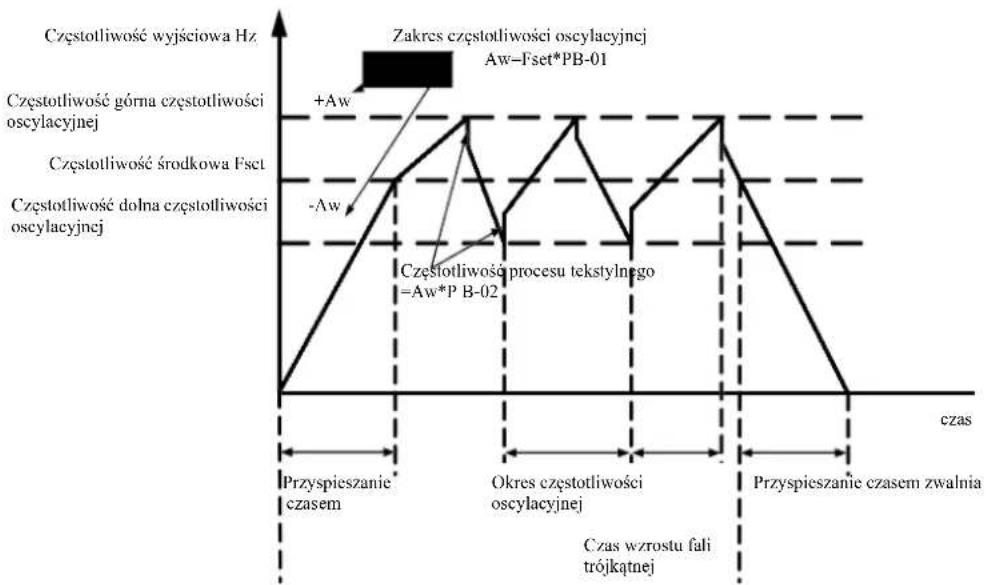
line
| czas | Częstotliwość wycjiściowa Hz | | ---- | ----------------------------- | | Przyspieszanie czasem | 0 | | Okres czestotliwości oscylacyjnej | +Aw | | Okres czestotliwości oscylacyjnej | -Aw | | Przyspieszanie czasem zwalnia | 0 |Komenda pracy
Rysunek 6-28 Schemat roboczy wahań częstotliwości
| PB-00 | Tryb częstotliwości oscylacyjnej | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | 0: powiązana z częstotliwością środkową | ||
| 1 | 1: powiązana z częstotliwością maksymalną | |||
Ten parametr jest określany w odniesieniu do wielkości oscylacji.
0: w odniesieniu do częstotliwości środkowej (źródło częstotliwości P0-07), układ ze zmienną oscylacją. Oscylacja ze zmianą częstotliwości środkowej (częstotliwości zadanej).
1: w odniesieniu do częstotliwości maksymalnej (P0-10), układ ze stałą oscylacją.
| PB-01 | Amplitudaczęstotliwości oscylacyjnej | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~100.0% | ||
| PB-02 | Skok częstotliwości oscylacyjnej | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | 0.0%~50.0% | ||
Określanie wartości oscylacji i skoku częstotliwości dla tego parametru.
Przy ustawianiu oscylacji względem częstotliwości środkowej (PB-00 = 0), oscylacja AW = źródło częstotliwości P0-07 × amplituda oscylacji PB-01.
Przy ustawianiu oscylacji względem częstotliwości maksymalnej (PB-00 = 1), maksymalna oscylacja AW = P0-10 × amplituda oscylacji PB-01.
Amplituda skoków częstotliwości w trawersie. Częstotliwość skokowa pozostaje w stosunku procentowym do oscylacji częstotliwości, a mianowicie: częstotliwość skokowa = oscylacja AW × amplituda częstotliwości skokowej PB-02. Jeśli amplituda oscylacji jest powiązana z częstotliwością środkową (PB-00 = 0), częstotliwość skokowa jest wartością zmienną. Jeśli jest powiązana z częstotliwością maksymalną (PB-00 = 1) częstotliwość skokowa jest wartością stałą.
Częstotliwość oscylacyjna robocza, częstotliwość maksymalna i minimalna są powiązane.
| PB-03 | Cykl częstotliwości oscylacyjnej | Ustawienie fabr. | 10.0s |
| Zakres ustawień | 0,0s~3000.0s | ||
| PB-04 | Współczynnik czasu narastania fali trójkątnej | Ustawicnie fabryczne | 50.0% |
| Zakres ustawień | 0.0%~100.0% | ||
Cykl częstotliwości oscylacyjnej: wartość czasu pełnego cyklu oscylacyjnego.
Współczynnik czasu narastania fali trójkątnej PB-04: fala trójkątna narasta procentowo w stosunku do czasu cyklu oscylacji PB-03.
Czas narastania fali trójkątnej = cykl oscylacji częstotliwości PB-03 × współczynnik czasu narastania fali trójkątnej PB-04, w sekundach. Czas opadania fali trójkątnej = cykl oscylacji częstotliwości PB-03 × (współczynnik czasu narastania fali 1 trójkątnej PB-04), w sekundach.
| PB-05 | Ustawienie długości | Ustawienie fabryczne | 1000m |
| Zakres ustawień | 0m~65535m | ||
| PB-06 | Długość bieżąca | Ustawienie fabryczne | 0m |
| Zakres ustawień | 0m~65535m | ||
| PB-07 | Liczba impulsów na metr | Ustawienie fabryczne | 100.0 |
| Zakres ustawień | 0.1~6553.5 | ||
Powyższe kody funkcji służą do ustawienia stałej długości.
Za pomocą wielofunkcyjnego zacisku cyfrowego zbierane są informacje o długości, sprawdzenie liczby zacisków impulsowych i liczby impulsów na metr fazy PB-07 i obliczenie rzeczywistecj długość PB-06.
Gdy rzeczywista długość jest większa niż ustawiona długość PB-05, wielofunkcyjne wyjście cyfrowe DO nada sygnał ON „Osiągnięcie długości”.
Podczas procesu regulacji stałej długości operacja zerowania długości jest wykonywana poprzez zacisk wielofunkcyjny DI (wybór funkcji DI 28). Patrz P4-00 \~ P4-09.
Do konkretnych zastosowań, należy ustawić funkcję odpowiedniego zacisku wejściowego „wejście licznika długości” (funkcja 27), przy wyższej częstotliwości impulsów należy użyć portu D15.
| PB-08 | Ustawienie wartości licznika | Ustawienie fabryczne | 1000 |
| Zakres ustawień | 1~65535 | ||
| PB-09 | Wartość zadana licznika | Ustawienie fabryczne | 1000 |
| Zakres ustawień | 1~65535 | ||
Wielofunkcyjny zacisk wejścia cyfrowego zbiera wymaganą wartość zliczania. Aplikacja musi ustawić odpowiednią funkcję zacisku wejściowego na „wejście licznika” (funkcja 25). Przy wyższych częstotliwościach impulsów należy używać port DI5.
Gdy zliczana wartość osiągnie zadaną wartość licznika PB-08, wielofunkcyjne wyjście cyfrowe DO „osiągnie zadany stan” i wysłe sygnał ON, a następnie przestanic zliezać.
Gdy zliczana wartość osiągnie zadaną wartość licznika PB-09, wielofunkcyjne wyjście cyfrowe DO wysłe sygnał "ON" "osiągnięcie zadanej wielkości zliczania". Zliczanie będzie kontynuowane do zatrzymania licznika.
Zadana wartość licznika PB-09 nie powinna być większa niż zadana wartość licznika PB-08.
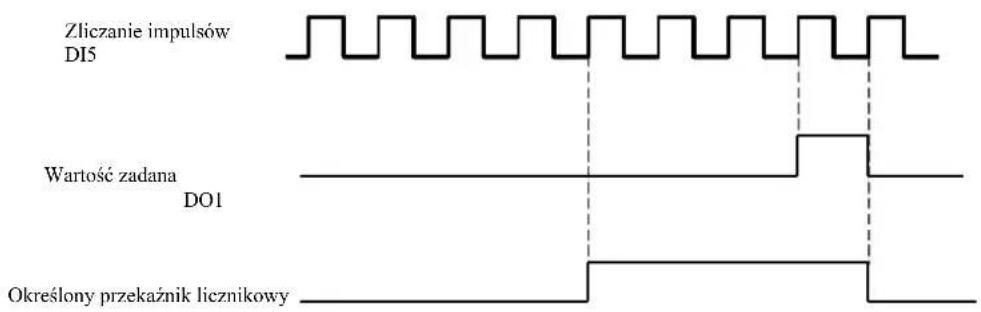
Rysunek 6-29 Ustawianie wartości licznika i wartości zadanej
Grupa PC – Komendy wielostanowe i funkcje PLC
Komenda wielostanowa VFD jest bardziej powszechna niż zwykła funkcja wielu prędkości. Oprócz funkcji wielu prędkości, może być również używana jako izolowanc źródło napięcia U/f i źródło danego procesu PID.
Prosta funkcja PLC różni się od funkcji VFD programowalnych przez użytkownika. Prosty sterownik PLC można wykonać tylko jako prostą kombinację wieloetapowych instrukcji pracy. Aby uzyskać szersze i bardziej przydatne funkcje programowalne przez użytkownika, należy zapoznać się z instrukcjami grupy A7.
| PC-00 | Komenda wielostanowa 0 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-01 | Komenda wielostanowa 1 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-02 | Komenda wielostanowa 2 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-03 | Komenda wielostanowa 3 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-04 | Komenda wielostanowa 4 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-05 | Komenda wielostanowa 5 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-06 | Komenda wielostanowa 6 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-07 | Komenda wielostanowa 7 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-08 | Komenda wielostanowa 8 | Ustawienic fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-09 | Komenda wielostanowa 9 | Ustawienic fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-10 | Komenda wielostanowa 10 | Ustawienic fabryczne | 0.0Hz |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-11 | Komenda wielostanowa 11 | Ustawienic fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-12 | Komenda wielostanowa 12 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-13 | Komenda wielostanowa 13 | Ustawienic fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-14 | Komenda wielostanowa 14 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
| PC-15 | Komenda wielostanowa 15 | Ustawienie fabryczne | 0.0% |
| Zakres ustawień | -100.0%~100.0% | ||
Instrukcje wieloetapowe mogą być używane w trzech przypadkach: jako źródło częstotliwości, jako oddzielne źródło napięcia U/f i jako źródło nastaw procesu PID.
W tych trzech zastosowaniach, wieloetapowa bezwymiarowa wartość względna komendy ma zakres od -100,0% do 100,0%.
Kiedy źródło częstotliwości jest procentem maksymalnej częstotliwości względnej, U/f jest używane jako niezależne źródło napięcia w stosunku do procentu napięcia znamionowego silnika a PID jest początkowo podawany jako wartość względna.
Instrukcje wieloetapowe wymagane są w zależności od stanu wielofunkcyjnego cyfrowego DI i opcji przełączania, patrz instrukcje specyficzne dla grupy P4.
| PC-16 | Tryb pracy prostego PLC | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Zatrzymanie po wykonaniu jednego cyklu | ||
| 1 | Utrzymywanie wartości po wykonaniu jednego cyklu | |||
| 2 | Powtórzenie po wykonaniu pełnego cyklu | |||
Prosty PLC ma dwie role: jako źródło częstotliwości lub jako oddzielne źródło napięcia U/f.
Rysunek 6-30 to uproszczony schemat ideowy sterownika PLC jako źródła częstotliwości. Gdy prosty PLC działa jako źródło częstotliwości, PC-00 \~ PC-15 określa kierunek dodatni i ujemny, ujemny, jeśli oznacza to uruchomienie napędu w przeciwnym kierunku.
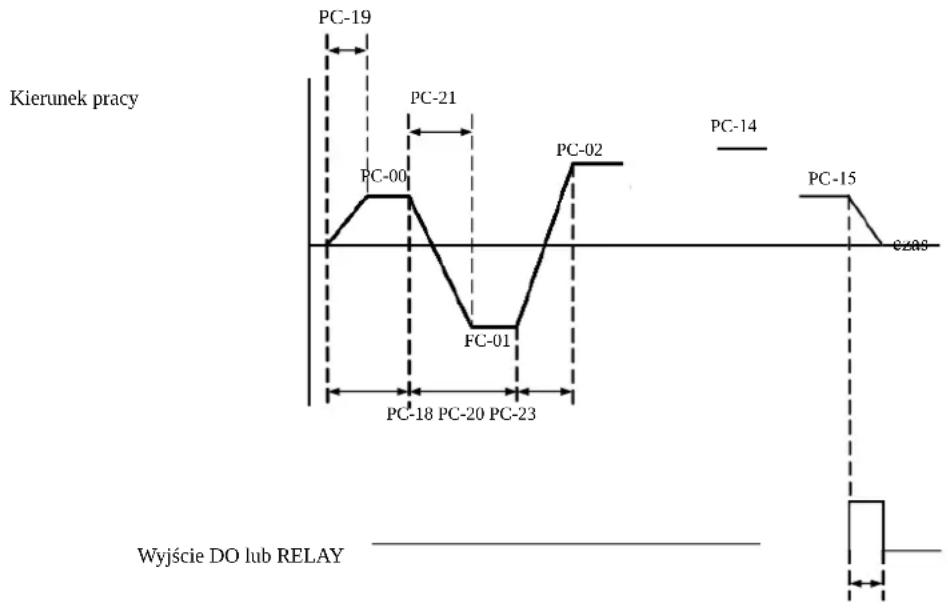
Impuls 250 ms
Rys. 6-30 Schemat prostego PLC
Jako źródło częstotliwości PLC działa na trzy sposoby, jako źródło napięcia nie ma rozdzielenia U/f tych trzech sposobów:
0: zatrzymanie na końcu pojedynczego biegu; kończąc pojedynczy cykl, napęd zatrzymuje się automatycznie, wydawane jest polecenie ponownego uruchomienia.
1: na końcu cyklu, zostaje utrzymana wartość napędu końcowego do ukończenia pojedynczego cyklu, następuje automatyczne utrzymanie częstotliwości i kierunku pracy ostatniego segmentu.
2: Po zakończeniu cyklu napędu, następny cykl rozpoczyna się automatycznie, aż wystąpi polecenie zatrzymania.
| PC-17 | Wybór pamięci po zaniku zasilania prostego PLC | Ustawienie fabryczne | 00 | |
| Zakres ustawień | Cyfra jedności | Zachowanie stanu po zaniku zasilania | ||
| 0 | Brak pamięci stanu po zaniku zasilania | |||
| 1 | Pamięć po zaniku zasilania | |||
| Dziesiątki | Zachowanie stanu po komendzie STOP | |||
| 0 | Brak pamięci po komendzie STOP | |||
| 1 | Pamięć po zatrzymaniu | |||
Zachowanie stanu po zaniku zasilania PLC odnosi się do wartości przed zanikiem zasilania i częstotliwości pracy sterownika PLC. Po włączeniu zasilania pamięć będzie kontynuowana. Jeśli wybrano brak pamięci, ponowne zasilenie powoduje restart PLC.
Pamięć PLC i częstotliwość pracy PLC po zatrzymaniu napędu jest zapisywana przed fazą wyłączania, następna faza będzie kontynuować pamięć po uruchomieniu. Jeśli wybrano brak pamięci, ponowne uruchomienie powoduje restart PLC.
| PC-18 | Czas pracy prostego PLC, krok 0 | Ustawienie fabryczne 0.0s (h) | |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-19 | Czas zwalniania prostego PLC, krok 0 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-20 | Czas pracy prostego PLC, krok 1 | Ustawienie fabryczne 0.0s (h) | |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-21 | Czas zwalniania prostego PLC, krok 1 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-22 | Czas pracy prostego PLC, krok 2 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-23 | Czas zwalniania prostego PLC, krok 2 | Ustawienie fabryczne | 0 |
| Zakres ustawień 0~3 | |||
| PC-24 | Czas pracy prostego PLC, krok 3 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-25 | Czas zwalniania prostego PLC, krok 3 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-26 | Czas pracy prostego PLC, krok 4 | Ustawienie fabryczne 0.0s (h) | |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-27 | Czas zwalniania prostego PLC, krok 4 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-28 | Czas pracy prostego PLC, krok 5 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-29 | Czas zwalniania prostego PLC, krok 5 | Ustawienie fabryczne | 0 |
| Zakres ustawień 0~3 | |||
| PC-30 | Czas pracy prostego PLC, krok 6 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-31 | Czas zwalniania prostego PLC, krok 6 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-32 | Czas pracy prostego PLC, krok 7 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-33 | Czas zwalniania prostego PLC, krok 7 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-34 | Czas pracy prostego PLC, krok 8 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-35 | Czas zwalniania prostego PLC, krok 8 | Ustawienie fabryczne | 0 |
| Zakres ustawień 0~3 | |||
| PC-36 | Czas pracy prostego PLC, krok 9 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-37 | Czas zwalniania prostego PLC, krok 9 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-38 | Czas pracy prostego PLC, krok 10 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-39 | Czas zwalniania prostego PLC, krok 10 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-40 | Czas pracy prostego PLC, krok 11 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-41 | Czas zwalniania prostego PLC, krok 11 | Ustawienie fabryczne | 0 |
| Zakres ustawień 0~3 | |||
| PC-42 | Czas pracy prostego PLC, krok 12 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| PC-43 | Czas zwalniania prostego PLC, krok 12 | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0~3 | ||
| PC-44 | Czas pracy prostego PLC, krok 13 | Ustawienie fabryczne | 0.0s (h) |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | ||
| Czas zwalniania prostego PLC, krok 13 | Ustawienie fabryczne | 0 | |
| PC-45 | Zakres ustawień | 0~3 | ||
| PC-46 | Czas pracy prostego PLC, krok 14 | Ustawienie fabryczne | 0.0s (h) | |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | |||
| PC-47 | Czas zwalniania prostego PLC, krok 14 | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0~3 | |||
| PC-48 | Czas pracy prostego PLC, krok 15 | Ustawienie fabryczne | 0.0s (h) | |
| Zakres ustawień | 0.0s (h) ~6553.5s (h) | |||
| PC-49 | Czas zwalniania prostego PLC, krok 15 | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0~3 | |||
| PC-50 | Jednostka czasu pracy prostego PLC | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | S (s) | ||
| 1 | h (h) | |||
| PC-5 | Instrukcja wielokrokowa 0 w danym trybie | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | Dany kod funkcji FC-00 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls | |||
| 5 | PID | |||
| 6 | Przy zadanej częstotliwości (P0-08) można edytować UPTOWN | |||
Ten parametr określa komendę multi-0 dla danego kanału.
W przypadku instrukcji wielokrokowej 0 można dodatkowo wybrać PC-00 i istnieje wiele innych opcji umożliwiających łatwy wybór między wieloma krótkimi instrukcjami podanymi w innych przełączanych trybach. Gdy wiele źródeł częstotliwości lub instrukcji jest tak prostych, jak źródła częstotliwości PLC, można łatwo przełączeń między nimi, aby zrealizować źródło częstotliwości.
Parametry komunikacji grupowej PD.
Patrz protokół VFD.
Grupa PE. Kody funkcji zdefiniowane przez użytkownika
| PE-00 | Kod funkcji użytkownika 0 Ustawienie fabryczne | P0.00 | ||
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-01 | Kod funkcji użytkownika 1 | Ustawienie fabryczne | P0.02 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-02 | Kod funkcji użytkownika 2 | Ustawienie fabryczne | P0.03 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-03 | Kod funkcji użytkownika 3 | Ustawienie fabryczne | P0.07 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-04 | Kod funkcji użytkownika 4 | Ustawienie fabryczne | P0.08 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-05 | Kod funkcji użytkownika 5 Ustawienie fabryczne | P0.17 | ||
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-06 | Kod funkcji użytkownika 6 | Ustawienie fabryczne | P0.18 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-07 | Kod funkcji użytkownika 7 | Ustawienie fabryczne | P3.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-08 | Kod funkcji użytkownika 8 | Ustawienie fabryczne | P3.01 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-09 | Kod funkcji użytkownika 9 | Ustawienie fabryczne | P4.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-10 | Kod funkcji użytkownika 10 | Ustawienie fabryczne | P4.01 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-11 | Kod funkcji użytkownika 11 | Ustawienie fabryczne | P4.02 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-12 | Kod funkcji użytkownika 12 | Ustawienie fabryczne | P5.04 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-13 | Kod funkcji użytkownika 13 | Ustawienie fabryczne | P5.07 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-14 | Kod funkcji użytkownika 14 | Ustawienie fabryczne | P6.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-15 | Kod funkcji użytkownika 15 | Ustawienie fabryczne | P6.10 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-16 | Kod funkcji użytkownika 16 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-17 | Kod funkcji użytkownika 17 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-18 | Kod funkcji użytkownika 18 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-19 | Kod funkcji użytkownika 19 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-20 | Kod funkcji użytkownika 20 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-21 | Kod funkcji użytkownika 21 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-22 | Kod funkcji użytkownika 22 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-23 | Kod funkcji użytkownika 23 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-24 | Kod funkcji użytkownika 24 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-25 | Kod funkcji użytkownika 25 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-26 | Kod funkcji użytkownika 26 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-27 | Kod funkcji użytkownika 27 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-28 | Kod funkcji użytkownika 28 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-29 | Kod funkcji użytkownika 29 | Ustawienie fabryczne | P0.00 | |
| Zakres ustawień | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
Te kody funkcji to zestawy parametrów dostosowane do potrzeb użytkownika.
Użytkownicy mogą zgromadzić wszystkie kody funkcji VFD i wymagane wybory parametrów w grupę PE jako parametry zdefiniowane przez użytkownika w celu łatwego przeglądania i modyfikacji.
Grupa PE zapewnia do 30 parametrów niestandardowych. Jeśli wyświetlany parametr z grupy PE wynosi P0.00 oznacza to, że kod funkcji użytkownika jest pusty. Po wejściu w tryb parametrów niestandardowych, kody funkcji wyświetlacza PE-00 \~ PE-31 definiuje się w tej samej kolejności, co kody funkcji grupy PE. Przejść do P0-00.
Grupa PP. Hasło użytkownika
| PP-00 | Hasło użytkownika | Ustawienie fabryezne | |
| Zakres ustawicń | 0~65535 | ||
Ustawienie dowolnej liczby niezerowej w PP-00 uruchamia funkcję ochrony hasłem. Przy następnym wejściu do menu należy podać poprawne hasło, w przeciwnym razie nie będzie można przeglądać i modyfikować parametrów funkcji. Zapamiętać hasło ustawione przez użytkownika.
Ustawiając PP-00 na 00000, można wyczyść ustawienie hasła użytkownika. Funkcja ochrony hasłem nie będzie wtedy działać.
| PP-01 | Przywrócenie ustawień domyślnych | Ustawienia fabryczne | 0 | |
| Zakres ustawień | 0 | Nie przywracać | ||
| 1 | Przywrócenie ustawień fabrycznych oprócz parametrów silnika | |||
| 2 | Usunięcie zapisów | |||
| 4 | Bieżące zapasowe parametry użytkownika | |||
| 501 | Odzyskanie parametrów zapasowych użytkownika | |||
Gdy PP-01 jest ustawiony na 1, większość parametrów funkcji falownika jest przywracana do domyślnych parametrów fabrycznych, ale nie są przywracane parametry silnika, punkt dziesiętny zadawania częstotliwości (P0-22), rejestr błędów, całkowity czas pracy (P7-09), skumulowany czas zasilania (P7-13) i całkowity pobór mocy (P7-14).
2. Usunięcie zapisów
Kasowanie informacji o błędach napędu, całkowitego czasu pracy (P7-09), skumulowanego czasu załączenia (P7-13), całkowitego poboru mocy (P7-14).
4. Bieżące zapasowe parametry użytkownika
Dotyczy bieżących parametrów kopii zapasowej ustawionych przez użytkownika. Aktualna wartość wszystkich parametrów funkcji ustawień zostaje załadowana z powrotem, aby ułatwić użytkownikowi regulację parametrów po odzyskaniu.
- Odzyskanie parametrów zapasowych użytkownika, które zostały wcześniej zapisane w kopii zapasowej, przywrócenie kopii zapasowej przez ustawienie PP-01 dla czterech parametrów kopii zapasowej.
| PP-02 | Właściwości trybu wyświetlania parametrów funkcji | Ustawienia fabryczne | 11 | |
| Zakres ustawicń | Cyfra jedności | Wybór wyświetlania grupy U | ||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
| Dziesiątki | Wybór wyświetlania grupy A | |||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
| PP-02 | Właściwości trybu wyświetlania parametrów funkcji | Ustawienia fabryczne | 11 | |
| Cyfra jedności | Wybór wyświetlania grupy U | |||
| 0 | Brak wyświetlania | |||
| Zakres ustawień | 1 | Wyświetlanie | ||
| Dziesiątki | Wybór wyświetlania grupy A | |||
| 0 | Brak wyświetlania | |||
| 1 | Wyświetlanie | |||
Ustawienie trybu wyświetlania parametrów służy głównie do podglądu różnych trybów aranżacji parametrów funkcji zgodnie z aktualnymi potrzebami użytkownika. Dostępne są trzy tryby wyświetlania parametrów.
| Nazwa | Opis |
| Tryb parametrów funkcji | Sekwencyjne wyświetlanie parametrów falownika, po kolei grupy parametrów P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Tryb parametrów zdefiniowanych przez użytkownika | Spersonalizowane wyświetlanie dostosowanych parametrów funkcji (można dostosować do 32 parametrów), grupa użytkowników FE określa funkcję wyświetlanego parametru |
| Tryb zmiany parametrów przez użytkownika | Zmiana na parametry niezgodne z parametrami funkcji ustawionymi fabrycznie. |
Gdy pojawi się parametr wyboru trybu wyświetlania znaków (PP-03), można w tym momencie przełącać się na inne parametry za pomocą klawisza QSM, a wartość domyślna jest jedyną wyświetlaną funkcją.
Kod każdego trybu wyświetlania parametrów:
| Tryb wyświetlania parametrów | Wyświetlacz |
| Tryb parametrów funkcji | -hASF |
| Tryb parametrów zdefiniowanych przez użytkownika | -USEr |
| Tryb zmiany parametrów przez użytkownika | --Γ-- |
VFD zapewnia dwa spersonalizowane tryby wyświetlania parametrów: parametry zdefiniowane przez użytkownika i zmiana parametrów przez użytkownika. Niestandardowy zestaw parametrów służy do ustawiania parametrów grupy PE. Można wybrać do 32 parametrów. Parametry te są sumowane razem, a klienci mogą łatwo debugować.
Tryb parametrów zdefiniowanych przez użytkownika: dodać domyślny symbol u przed kodem funkcji niestandardowej, na przykład: P1-00, w trybie parametrów zdefiniowanych przez użytkownika ekran wyświetlacza umożliwia użytkownikom zmianę parametrów a uP1-00 umożliwia użytkownikom i producentom zmianę ustawień fabrycznych. Zmiany ustawień parametrów użytkownika są pomocne klientom przy przeglądaniu zsumowanych zmian parametrów i znajdowaniu problemów na miejscu.
Użytkownik zmienia tryb parametrów przed dostosowaniem kodu funkcji dodając domyślny symbol c.
Na przykład: aby zmienić parametr P1-00 w trybie użytkownika, należy wyświetlić go jako cP1-00.
| PP-04 | Modyfikowanie kodu funkcji | Ustawienia fabryczne | 0 | |
| Zakres ustawień | 0 | można modyfikować | ||
| 1 | nie można modyfikować | |||
Aby zapobiec ryzyku nieprawidłowej zmiany parametrów funkcji, gdy kod funkcji jest ustawiony na 0 wszystkie kody funkcji można modyfikować; gdy jest ustawiony na 1 wszystkie kody funkcji mają tylko podgląd, nie można ich modyfikować.
Grupa A0 Sterowanie momentem obrotowym i ograniczenia parametrów
| A0-00 | Wybór trybu sterowania prędkość/moment | Ustawienia fabryczne | 0 | |
| Zakres ustawień | 0 | sterowanie prędkością | ||
| 1 | sterowanie momentem | |||
Wybór trybu sterowania falownika: sterowanie prędkością lub sterowanie momentem
Wielofunkcyjne zaciski cyfrowe DI VFD mają dwie funkcje związane ze sterowaniem momentem obrotowym: sterowanie momentem wyłączone (funkcja 29) i funkcja przełączania między sterowaniem prędkością a sterowaniem momentem (46). Te dwa zaciski utrzymują połączenie A0-00 w celu przełączania między sterowaniem prędkością a momentem obrotowym.
Gdy zacisk przełącznika sterowania prędkością / momentem obrotowym jest nieaktywny, tryb sterowania jest określany przez A0-00. Jeśli przełącznik sterowania prędkością / momentem obrotowym jest aktywny, tryb sterowania jest równy wartości negacji A0-00.
W każdym przypadku, gdy zacisk zakazujący regulacji momentu obrotowego jest aktywny, falownik steruje stałą prędkością.
| A0-01 | Wybór źródła zadawania sterowania momentem | Ustawienia fabryczne | 0 | |
| Zakres ustawień | 0 | ustawienia cyfrowe (A0-03) | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | ustawienia impulsu | |||
| 5 | ustawienia komunikacji | |||
| 6 | MIN (AI1, AI2) | |||
| 7 | MAX (AI1, AI2) | |||
| A0-03 | Cyfrowe ustawianie momentu w trybie sterowania momentem | Ustawienia fabryczne | 0 | |
| Zakres ustawień | -200.0%~200.0% | |||
Ustawienie momentu obrotowego A0-01 służy do wyboru źródła, jest łącznie 8 trybów ustawiania momentu obrotowego.
Ustawienie momentu obrotowego za pomocą wartości względnej odpowiadającej 100,0% znamionowego momentu obrotowego falownika. Zakres ustawień -200,0% do 200,0%, wskazuje, że maksymalny moment obrotowy falownika jest 2 razy większy od znamionowego momentu napędowego.
W przypadku ustawienia momentu obrotowego w zakresie od 1 do 7, komunikacja, wejście analogowe, wejście impulsowe 100% odpowiada A0-03.
| A0-05 | Dodatnia maks. częstotliwość regulacji momentu obrotowego | Ustawienia fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna (P0-10) | ||
| A0-06 | Ujemna maks. częstotliwość regulacji momentu obrotowego | Ustawienia fabryczne | 50.00Hz |
| Zakres ustawień | 0.00Hz ~ częstotliwość maksymalna (P0-10) | ||
Służy do ustawiania sterowania momentem obrotowym i maksymalnej częstotliwości roboczej napędu do przodu lub do tyłu.
W sterowaniu momentem napędowym, jeśli moment obciążenia jest mniejszy niż wyjściowy moment obrotowy silnika, prędkość silnika będzie nadal rosła. Aby zapobiec wypadkom w układzie mechanicznym podczas wybiegu, należy go ograniczyć do maksymalnego momentu obrotowego kontroli prędkości silnika.
| A0-07 | Czas przyspieszania dla sterowania momentem | Ustawienia fabryczne | 0.00s | |
| Zakres ustawień | 0.00s~65000s | |||
| A0-08 | Czas zatrzymywania dla sterowania momentem | Ustawienia fabryczne | 0.00s | |
| Zakres ustawień | 0.00s~65000s | |||
Tryb sterowania momentem obrotowym. Różnica między wyjściowym momentem obrotowym silnika i momentem obciążenia determinuje prędkość i szybkość zmiany obciążenia silnika, dzięki czemu możliwa jest szybka zmiana prędkości silnika powodującego hałas lub nadmierne naprężenia mechaniczne i inne problemy. Ustawiając czas przyspieszania i zwalniania momentu, można sterować prędkością silnika zmieniając ją stopniowo.
Jednak w przypadku momentu obrotowego wymagana jest szybka reakcja, ustawianie czasu przyspieszania i zwalniania kontroli momentu obrotowego wynosi 0,00s. Na przykład: dwa podłączone na stałe silniki napędzają to samo obciążenie. Aby zapewnić równomierne rozłożenie obciążenia, używają trybu sterowania prędkością i używają przełącznika kontroli rzeczywistego wyjściowego momentu obrotowego, aby ustawić sterownik dla nadrzędnego jako podrzędny. Moment nadrzędny zadaje moment obrotowy jako podrzędny, tym razem moment wymagany do nadążania za szybkim czasem przyspieszania i zwalniania sterowania momentem podrzędnym przez maszynę główną wynosi 0,00s.
Grupa A2. Drugi silnik.
VFD może przelęcaże się między dwoma silnikami. Dwa silniki ustawić odpowiednio według tabliczki znamionowej silnika. Odpowiednio dostroić parametry silnika osobno. Wybrać sterowanie U/f lub sterowanie wektorowe. Parametry enkodera można ustawić oddzielnie za pomocą sterowania U/f lub sterowania wektorowego.
Kod funkcji grupy A2 odpowiada silnikowi 2.
Jednocześnie wszystkie parametry grupy A2, definiowanie i korzystanie z zawartości, są zgodne z parametrami pierwszego silnika i nie będą tu powtarzane. Użytkownik może korzystać z opisu parametrów związanych z pierwszym silnikiem.
| A2-00 | Wybór typu silnika | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | 0: Zwykły silnik indukcyjny | |||
| 1 | 1: Silniki indukcyjne o zmiennej częstotliwości | ||||
| A2-01 | Moc znamionowa | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.1kW~1000.0kW | ||||
| A2-02 | Napięcie znamionowe Ustawienia fabryczne | Zależy od modelu | |||
| Zakres ustawień | 1V~400V | ||||
| A2-03 | Prąd znamionowy Ustawienia fabryczne | Zależy od modelu | |||
| Zakres ustawień | 0.01A~655.35A (moc przemiennika =55kW)0.1A~6553.5A (moc przemiennika >55kW) | ||||
| A2-04 | Częstotliwość znamionowa | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.01Hz~ częstotliwość maksymalna | ||||
| A2-05 | Prędkość znamionowa | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 1rpm~65535rpm | ||||
| A2-06 | Rezystancja stojana silnika indukcyjnego | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.001Ω~65.535Ω (moc przemiennika <=55kW)0.0001Ω~6.5535Ω (moc przemiennika >55kW) | ||||
| A2-07 | Rezystancja wirnika silnika indukcyjnego | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.001Ω~65.535Ω(moc przemiennika <=55kW)0.0001Ω~6.5535Ω(moc przemiennika >55kW) | ||||
| A2-08 | Reaktancja indukcyjna upływu silnika indukcyjnego | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.01mH~655.35ml (moc przemiennika <=55kW)0.001mH~65.535mH (moc przemiennika >55kW) | ||||
| A2-09 | Wzajemna reaktancja indukcyjna silnika indukcyjnego | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.1mH~6553.5mH(moc przemiennika <=55kW)0.01mH~655.35mH(moc przemiennika >55kW) | ||||
| A2-10 | Prąd bez obciążeniowy silnika indukcyjnego | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.01A~A2-03(moc przemiennika <=55kW)0.1A~A2-03 (moc przemiennika >55kW) | ||||
| A2-27 | Numer linii cukodera | Ustawienia fabryczne | 1024 | ||
| Zakres ustawień | 1~65535 | ||||
| A2-28 | Wybór sprężenia zwrotnego prędkości | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | Enkoder inkrementalny ABZ | |||
| 1 | Zastrzeżone | ||||
| 2 | Transformer obrotowy | ||||
| A2-29 | Wybór PG sprężenia zwrotnego prędkości | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | Miejscowe PG | |||
| 1 | Miejscowe PG | ||||
| 2 | Wejście impulsowe (D15) | ||||
| A2-30 | Sekwencja faz ABenkoderainkrementalnego ABZ | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | W przód | |||
| 1 | W tyt | ||||
| A2-34 | Liczba par bicgunów transformatora obrotowego | Ustawienia fabryczne | 1 | ||
| Zakres ustawień | 1~65535 | ||||
| A2-36 | Czas wykrywaniarozłączenia PG wsprzężeniu zwrotnymprędkości | Ustawienia fabryczne | 0.0s | ||
| Zakres ustawień | 0.0: brak działania 0.1s~10.0s | ||||
| A2-37 | Wybór strojenia | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | 0: Brak działania | |||
| 1 | 1: Statyczne strojenie silnika asynchronousznego | ||||
| 2 | 2: Pelné strojenie silnika asynchronousznego | ||||
| A2-38 | Wzmocnienieproporcjonalne pętliprędkości 1 | Ustawienia fabryczne | 30 | ||
| Zakres ustawień | 1~100 | ||||
| A2-39 | Czas całkowania pętliprędkości 1 | Ustawienia fabryczne | 0.50s | ||
| Zakres ustawień | 0.01s~10.00s | ||||
| A2-40 | Częstotliwość przełączania 1 | Ustawienia fabryczne | 5.00Hz | ||
| Zakres ustawień | 0.00~A2-43 | ||||
| A2-41 | Wzmocnienieproporcjonalne pętliprędkości 2 | Ustawienia fabryczne | 15 | ||
| Zakres ustawień | 0~100 | ||||
| A2-42 | Czas całkowania pętliprędkości 2 | Ustawienia fabryczne | 1.00s | ||
| Zakres ustawień | 0.01s~10.00s | ||||
| A2-43 | Częstotliwość przełączania 2 | Ustawienia fabryczne | 10.00Hz | ||
| Zakres ustawień | A2-40~ maks. częstotliwość wyjściowa | ||||
| A2-44 | Wzmocnienie poślizgusterowania wektorowego | Ustawienia fabryczne | 100% | ||
| Zakres ustawień | 50%~200% | ||||
| A2-45 | Stała czasowa dla filtra pętliprędkości | Ustawienia fabryczne | 0.000s | ||
| Zakres ustawień | 0.000s~0.100s | ||||
| A2-46 | Sterowanie wektorowewzmocnienia wzbudzenia | Ustawienia fabryczne | 64 | ||
| Zakres ustawień | 0~200 | ||||
| A2-47 | Źródło górnego limitu wtrybie sterowania prędkością | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | Ustawicnic A2-48 | |||
| 1 | AI1 | ||||
| 2 | AI2 | ||||
| 3 | AI3 | ||||
| 4 | Ustawienie impulsu | ||||
| 5 | Ustawienia komunikacji | ||||
| 6 | MIN (AI1, AI2) | ||||
| 7 | MAX (AI1, AI2) | ||||
| A2-48 | Cyfrowe ustawianie momentu obrotowego w trybie sterowania prędkością | Ustawienia fabryczne | 150.0% | ||
| Zakres ustawień | 0.0%~200.0% | ||||
| A2-51 | Wzmocnienie proporcjonalne wzbudzenia | Ustawienia fabryczne | 2000 | ||
| Zakres ustawień | 0~20000 | ||||
| A2-52 | Wzmocnicnie całkowe wzbudzenia | Ustawienia fabryczne | 1300 | ||
| Zakres ustawień | 0~20000 | ||||
| A2-53 | Wzmocnienie proporcjonalne regulacji momentu obrotowego | Ustawienia fabryczne | 2000 | ||
| Zakres ustawień | 0~20000 | ||||
| A2-54 | Wzmocnienie całkowania regulacji momentu | Ustawienia fabryczne | 1300 | ||
| Zakres ustawień | 0~20000 | ||||
| A2-55 | Właściwości członu całkującego pętli prędkościowej | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | Cyfra jedności: separacja całkowania0: niedozwolone1: dozwolone | ||||
| A2-61 | Tryb sterowania silnikiem 2 | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | Brak sterowania wektorowego czujnika prędkości (SVC) | |||
| 1 | sterowanie wcktorowego czujnika prędkości (FVC) | ||||
| 2 | Sterowanie U/f | ||||
| A2-62 | Czas przyspieszania / hamowania silnika 2 | Ustawienia fabryczne | 0 | ||
| Zakres ustawień | 0 | 0: tak jak silnik 1 | |||
| 1 | 1: Czas przyspieszania / hamowania 1 | ||||
| 2 | 2: Czas przyspieszania / hamowania 2 | ||||
| 3 | 3: Czas przyspieszania / hamowania 3 | ||||
| 4 | 4: Czas przyspieszania / hamowania 4 | ||||
| A2-63 | Zwiększanie momentu obrotowego silnika 2 | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0.0%: automatyczne zwiększanie momentu 0.1%~30.0% | ||||
| A2-65 | Wzmocnienie tłumienia oscylacji silnika 2 | Ustawienia fabryczne | Zależy od modelu | ||
| Zakres ustawień | 0~100 | ||||
Grupa A5 Parametry optymalizacji sterowania
| A5-00 | Przełącznik górnego progu częstotliwości DPWM | Ustawienie fabryczne | 12.00Hz |
| Zakres ustawień | 0.00Hz~15Hz | ||
Dotyczy tylko sterowania U/f. Strata przełączania przy 7-krokowej ciągłej modulacji jest duża, ale powoduje niewielkie tętnienia prądu. Z kolei, 5-krokowy przerywany tryb debugowania ma niskie straty przełączania i duże tętnienia prądu, jednak silnik może być niestabilny przy wysokich częstotliwościach. Konieczna jest modyfikacja.
Odnośnie niestabilnej pracy falownika, patrz kod funkcji P3-11, odnośnie straty przełączania i wzrostu temperatury falownika, patrz kod funkcji P0-15.
| A5-01 | Modulacja PWM | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | modulacja asynchronouszna | ||
| 1 | modulacja synchroniczna | |||
Dotyczy tylko sterowania U/f. Modulacja synchroniczna oznacza konwersję częstotliwości nośnej, gdy częstotliwość wyjściowa zmienia się liniowo, aby zapewnić niezmieniony stosunck (współczynnik nośnej), zwykle przy stosowaniu wyższych częstotliwości wyjściowych, na korzyść jakości napięcia wyjściowego.
Przy niższej częstotliwości wyjściowej (100 Hz lub mniej) generalnie nie jest potrzebna modulacja synchroniczna, ponieważ stosunek częstotliwości nośnej do częstotliwości wyjściowej jest stosunkowo wysoki, jedna z bardziej oczywistych zalet modulacji asynchronousnej.
Modulacja synchroniczna działa tylko wtedy, gdy częstotliwość robocza jest wyższa niż 85 Hz, a tryb modulacji asynchronousznej jest ustalony poniżej tej częstotliwości.
| A5-02 | Wybór trybu kompensacji strefy martwej | Ustawienie fabryczne | 1 | |
| Zakres ustawień | 0 | brak kompensacji | ||
| 1 | tryb kompensacji nr 1 | |||
| 2 | tryb kompensacji nr 2 | |||
Zasadniczo nie ma potrzeby modyfikowania tego parametru. Tylko gdy jakość przebiegu napięcia wyjściowego ma specjalne wymagania lub występują inne nieprawidłowe oscylacje silnika, należy spróbować przełączyć, aby wybrać spośród różnych modeli kompensacji. Tryb 2 jest zalecany do kompensacji dużej mocy.
| A5-03 | Losowa głębokość PWM | Ustawienie fabryczne | 0 | |
| Zakres ustawień | 0 | niedozwolona | ||
| 1~10 | losowa głębokość częstotliwości nośnej | |||
Ustawienie losowego PWM może ściszyć monotonny, ostry dźwięk silnika i może pomóc zmniejszyć zewnętrzne zakłócenia elektromagnetyczne.
Po ustawieniu losowej głębokości PWM na 0, losowy PWM jest nieaktywny. Regulacja losowego PWM z różnymi głębokościami da różne wyniki.
| A5-04 | Limit szybkiego prądu | Ustawienie fabryczne | 1 | |
| Zakres ustawień | 0 | nieaktywny | ||
| 1 | aktywny | |||
Włączenie funkcji limitu szybkiego prądu może zmniejszyć maksymalny występujący błąd przetężenia przemiennika. Falownik zapewni nieprzerwaną pracę. Jeśli falownik będzie działał przez długi czas z szybkim ograniczeniem prądu, może się przegrzać i mogą wystąpić inne uszkodzenia, więc jest to niedozwolone.
Falownik będzie działał z szybkim ograniczeniem prądu, aż wystąpi alarm błędu limitu Err40, wskazujący, że falownik jest przeciążony i zostanie zatrzymany.
| A5-05 | Bieżące wykrywanie kompensacji | Ustawienia fabryczne | 5 |
| Zakres ustawień | 0~100 | ||
Ustawienie zbyt wysokiej kompensacji wykrywania prądu w sterowaniu falownikiem może spowodować pogorszenie wydajności. Zasadniczo nie jest wymagana żadna modyfikacja.
| A5-06 | Próg spadku napięcia | Ustawienia fabryczne | 100% |
| Zakres ustawień | 60.0%~140.0% | ||
Aby ustawić wartość napięcia błędu podnapięcia Err09, różne poziomy napięcia 100,0% falownika odpowiadają różnym punktom napięcia, a mianowicie: 220 V jednofazowe lub trójfazowe 220 V: 200 V trójfazowe 380 V: 350 V.
| Optymalizacja SVC | Ustawienie fabryczne | 1 | |
| A5-07 | Zakres ustawień | 0 | brak optymalizacji |
| 1 | tryb optymalizacji nr 1 | ||
| 2 | tryb optymalizacji nr 2 |
Tryb optymalizacji nr 1: Wysokie wymagania dotyczące liniowości sterowania momentem obrotowym. Tryb optymalizacji nr 2: Użyć wyższych wymagań dotyczących stabilności prędkości.
| A5-08 | Regulacja czasu martwego | Ustawienie fabryczne | 150% |
| Zakres ustawień | 100%~200% | ||
Grupa A6. Ustawianie krzywej AI
| A6-00 | Minimalna wartość krzywej AI na wejściu 4 | Ustawienie fabryczne | 0.00V | |
| Zakres ustawień | -10.00V~A6-02 | |||
| A6-01 | Ustawienie minimalnej wartość krzywej AI na wejściu 4 | Ustawienie fabryczne | 0.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
| A6-02 | Przegięcie nr 1 krzywej AI na wejściu 4 | Ustawienie fabryczne | 3.00V | |
| Zakres ustawień | A6-00~A6-04 | |||
| A6-03 | Ustawienie przecięcia nr 1 krzywej AI na wejściu 4 | Ustawienie fabryczne | 30.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
| A6-04 | Przegięcie nr 2 krzywej AI na wejściu 4 | Ustawienie fabryczne | 6.00V | |
| Zakres ustawień | A6-02~A6-06 | |||
| A6-05 | Ustawienie przecięcia nr 2 krzywej AI na wejściu 4 | Ustawienie fabryczne | 60.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
| A6-06 | Maksymalna wartość krzywej AI na wejściu 4 | Ustawienie fabryczne | 10.00V | |
| Zakres ustawień | A6-06~10.00V | |||
| A6-07 | Ustawienie maksymalnej wartości krzywej AI na wejściu 4 | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
| A6-08 | Minimalna wartość krzywej AI na wejściu 5 | Ustawienie fabryczne | 0.00V | |
| Zakres ustawień | -10.00V~A6-10 | |||
| A6-09 | Ustawienie minimalnej wartości krzywej AI na wejściu 5 | Ustawienie fabryczne | ||
| Zakres ustawień | -100.0%~100.0% | |||
| A6-10 | Przegięcie nr 1 krzywej AI na wejściu 5 | Ustawienie fabryczne | ||
| Zakres ustawień | A6-08~A6-12 | |||
| A6-11 | Ustawienie przecięcia nr 1 krzywej AI na wejściu 5 | Ustawienie fabryczne | ||
| Zakres ustawień | -100.0%~100.0% | |||
| A6-12 | Przegięcie nr 2 krzywej AI na wejściu 5 | Ustawienie fabryczne | 6.00V | |
| Zakres ustawień | A6-10~A6-14 | |||
| A6-13 | Ustawienie przecięcia nr 2 krzywej AI na wejściu 5 | Ustawienie fabryczne | 60.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
| A6-14 | Maksymalna wartość krzywej AI na wejściu 5 | Ustawienie fabryczne | 10.00V | |
| Zakres ustawień | A6-14~10.00V | |||
| A6-15 | Ustawienie maksymalnej wartości krzywej AI na wejściu 5 | Ustawienie fabryczne | 100.0% | |
| Zakres ustawień | -100.0%~100.0% | |||
Krzywe 4 i 5 są podobne do krzywej 1, ale linia krzywej 1 do 3 jest linią prostą, podczas gdy krzywa 4 i 5 to krzywe 4-punktowe, które mogą zapcwnić bardziej clastyczną zgodność. Rys. 6-32 przedstawia schcmat połączeń krzywych 4 i 5.
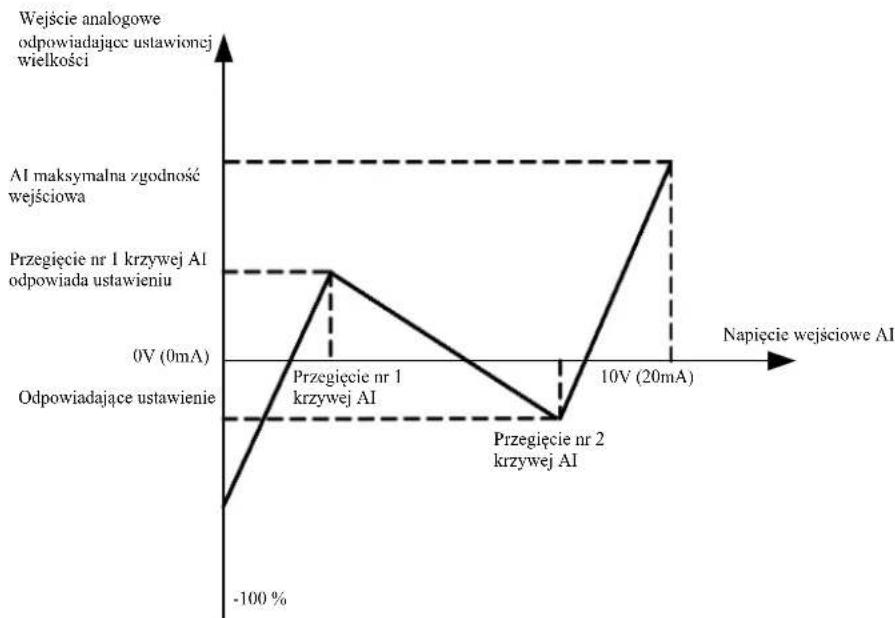
line
| Napięcie wejściowe AI | Wielkości | |---|---| | 0V (0mA) | -100% | | 10V (20mA) | 0V | | 10V (2mA) | 10V | | 10V (2mA) | 10mA | | 10V (2mA) | 1mA | | 10V (2mA) | 0mA | | 10V (2mA) | -1mA | | 10V (2mA) | -10mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA | | 10V (2mA) | -1mA |Rys. 6-32. Schemat połączeń krzywych 4 i 5
Przy wyznaczaniu krzywych 4 i 5 należy zwrócić uwagę, że minimalne napięcie wejściowe krzywej, przegięcie 1, przegięcie 2 i przegięcie maksymalne muszą kolejno rosnąć.
Wybór P33 krzywej AI służy do określenia, jak wybrać 5 krzywych dla wejścia analogowego A11 \~ A13.
| A6-24 | Skok dla AI1 | Ustawienie fabryczne 0.0% | |
| Zakres ustawień | -100.0%~100.0% | ||
| A6-25 | Zakres skoku dla AI1 | Ustawienie fabryczne | |
| Zakres ustawień | 0.0%~100.0% | ||
| A6-26 | Skok dla AI2 | Ustawienie fabryczne | |
| Zakres ustawień | -100.0%~100.0% | ||
| A6-27 | Zakres skoku dla AI2 | Ustawienie fabryczne | |
| Zakres ustawień | 0.0%~100.0% | ||
| A6-28 | Skok dla AI3 | Ustawicnic fabryczne 0.0% | |
| Zakres ustawień | -100.0%~100.0% | ||
| A6-29 | Zakres skoku dla AI3 | Ustawienie fabryczne 0.5% | |
| Zakres ustawień | 0.0%~100.0% | ||
Wejście analogowe VFD AI1 \~ AI3, posiada funkcję pomijania wartości zadanej.
Funkeja pomijania oznacza, że gdy analogowa wartość zadana przeskakuje w górę i w dół, gdy zmienia się interwał, wartość analogowa odpowiadająca wartości zadanej pozostaje stała przy skoku..
Przykład: Gdy napięcie wejścia analogowego AI1 waha się przy 5,00 V, zakres wahań wynosi 4,90 V \~ 5,10 V. Minimalna wartość wejściowa AI1 wynosi 0,00 V co odpowiada 0,0%, a maksymalna wartość wejściowa 10,00 V co odpowiada 100%, następnie wykrywane jest napięcie AI1 w zakresie 49,0% \~ 51,0%
Ustawić punkt skoku AI1 A6-24 na 50,0%, ustawić amplitudę skoku AI1 A6-25 na 1,0%, a następnie na powyższym wejściu AI1 ustawić funkcję skoku odpowiedniego wejścia, która daje ustawienie AI1 na 50,0%. Konwertować AI1 na stabilne wejście, aby wyeliminować fluktuacje.
Grupa A7. Funkcje programowalne przez użytkownika
Patrz instrukcja dodatkowa „Karta sterownika programowalna przez użytkownika”.
Grupa AC. Kalibracja wejść / wyjść analogowych
| AC-00 | Napięcie zmierzone AI1 nr 1 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-01 | Napięcie wyświetlane AI1 nr 1 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-02 | Napięcie zmierzone AI1 nr 2 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-03 | Napięcie wyświetlane AI1 nr 2 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-04 | Napięcie zmierzone AI2 nr 1 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-05 | Napięcie wyświetlane AI2 nr 1 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-06 | Napięcie zmierzone AI2 nr 2 | Ustawienie fabryczne | Kalibracja |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-07 | Napięcie wyświetlane AI2 nr 2 | Ustawienie fabryczne | |
| Zakres ustawień | -9.999V~10.000V | ||
| AC-08 | Napięcie zmierzone AI3 nr 1 | Ustawienie fabryczne | |
| Zakres ustawień | -9.999V~10.000V | ||
| AC-09 | Napięcie wyświetlane AI3 nr 1 | Ustawienie fabryczne | |
| Zakres ustawień | -9.999V~10.000V | ||
| AC-10 | Napięcie zmierzone AI3 nr 2 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | -9.999V~10.000V | ||
| AC-11 | Napięcie wyświetlane AI3 nr 2 | Ustawienie fabryczne Kalibracja | |
| Zakres ustawień | -9.999V~10.000V | ||
Ten kod funkcji jest używany do korekcji wejścia analogowego AI w celu wyeliminowania wpływu przesunięcia i wzmocnienia wejścia AI. Parametry funkcji grupowych zostały skalibrowane i przywrócono wartość fabryczną po kalibracji. Zwykle nie wymaga poprawiania. Aby zmierzyć napięcie, można na przykład użyć multimetru do pomiaru rzeczywistego napięcia. Wyświetlana jest próbkowana wartość napięcia. Patrz AI z grupy U0 przed korektą napięcia (U0-21, U0-22, U0 - 23).
Podezas korygowania dwóch wartości napięcia wejściowego na każdym porcie wejściowym AI, należy użyć multimetru do pomiaru wartości grupy i odczytać wartość grupy U0. Po dokładnym wprowadzeniu kodu funkcji, falownik automatycznie skoryguje przesunięcie zera i wzmocnienie AI.
| AC-12 | Napięcie docelowe AO1 nr 1 | Ustawicnie fabryczne Ka | ibracja |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-13 | Napięcie zmierzone AO1 nr 1 | Ustawicnie fabryczne Ka | ibracja |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-14 | Napięcie docelowe AO1 nr 2 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-15 | Napięcie zmierzone AO1 nr 2 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-16 | Napięcie docelowe AO2 nr 1 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-17 | Napięcie zmierzone AO2 nr 1 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 0.500V~4.000V | ||
| AC-18 | Napięcie docelowe AO2 nr 2 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 6.000V~9.999V | ||
| AC-19 | Napięcie zmierzone AO2 nr 2 | Ustawienie fabryczne Ka | ibracja |
| Zakres ustawień | 6.000V~9.999V | ||
Ten kod funkcji jest używany do kalibracji wejścia analogowego AO w celu wyeliminowania wpływu przesunięcia i wzmocnienia wejścia AO. Parametry funkcji grupy zostały skalibrowane i przywrócono wartość fabryczną po kalibracji. Zasadniczo nie wymaga poprawiania.
Napięcie docelowe odnosi się do teoretycznej wartości napięcia wyjściowego falownika.
Napięcie zmierzone odnosi się do rzeczywistej wartości napięcia wyjściowego zmierzonej za pomocą multimetru i innych przyrządów.
Grupa U0. Monitorowanie pracy falownika
Grupa parametrów U0 służy do monitorowania informacji o stanie pracy falownika. Użytkownik może przeglądać ekran w celu ułatwienia debugowania na miejscu lub monitorować ustawioną wartość parametru na monitorze komputera PC. W tym przypadku następuje zatrzymanie U0-00 \~ U0-31 i zdefiniowanie parametrów monitorowania P7-03 i P7-04.
Proszę zapoznać się z kodem funkcji konkretnego parametru, nazwą parametru i jego minimalną jednostką w Tabeli 6-1.
Tabela 6-1 Parametry grupy U0
| Kod funkcji | Nazwa parametru | Jednostka |
| U0-00 | Częstotliwość pracy (Hz) | 0.01Hz |
| U0-01 | Ustawienie częstotliwości (Hz) | 0.01Hz |
| U0-02 | Napięcie na szynie (V) | 0.1V |
| U0-03 | Napięcie wyjściowe (V) | 1V |
| U0-04 | Prąd wyjściowy (A) | 0.01A |
| U0-05 | Moc wyjściowa (kW) | 0.1kW |
| U0-06 | Moment wyjściowy (%) | 0.1% |
| U0-07 | Stan wejścia DI | 1 |
| U0-08 | Stan wyjścia DO | 1 |
| U0-09 | Napięcie AI1 (V) | 0.01V |
| U0-10 | Napięcie AI2 (V) | 0.01V |
| U0-11 | Napięcie AI3 (V) | 0.01V |
| U0-12 | Zliczanie wartości | 1 |
| U0-13 | Wartość długości | 1 |
| U0-14 | Wskaźnik prędkości obciążenia | 1 |
| U0-15 | Ustawienic PID | 1 |
| U0-16 | Sprzeżenie zwrotne PID | 1 |
| U0-17 | Krok PLC | 1 |
| U0-18 | Częstotliwość impulsu wejściowego (Hz) | 0.01kHz |
| U0-19 | Szybkość sprężenia zwrotnego (0,1 Hz) | 0.1Hz |
| U0-20 | Pozostały czas pracy | 0.1Min |
| U0-21 | Napięcie AI1 przed kalibracją | 0.001V |
| U0-22 | Napięcie AI2 przed kalibracją | 0.001V |
| U0-23 | Napięcie AI3 przed kalibracją | 0.001V |
| U0-24 | Prędkość liniowa | 1m/Min |
| U0-25 | Aktualny czas załączenia | 1Min |
| U0-26 | Aktualny czas pracy | 0.1Min |
| U0-27 | Częstotliwość impulsu wejściowego | 1Hz |
| U0-28 | Ustawienia komunikacji | 0.01% |
| U0-29 | Prędkość sprężenia zwrotnego enkodera | 0.01Hz |
| U0-30 | Wyświetlanie częstotliwości głównej X | 0.01Hz |
| Kod funkcji | Nazwa parametru Jednostka | |
| U0-31 | Wyświetlanie częstotliwości pomocniczej Y | 0.01Hz |
| U0-32 | Wyświetlanie dowolnej wartości adresu pamięci | 1 |
| U0-34 | Temperatura silnika | 1 °C |
| U0-35 | Docelowy moment obrotowy (%) | 0.1% |
| U0-36 | Umiejscowienie obrotu | 1 |
| U0-37 | Kąt współczynnika mocy | 0.1 |
| U0-39 | Oddzielone napięcie docelowe U/f | IV |
| U0-40 | Oddzielone napięcie wyjściowe U/f | IV |
| U0-41 | Zobrazowanie stanu wejścia DI | 1 |
| U0-42 | Zobrazowanie stanu wejścia DO | 1 |
| U0-43 | Zobrazowanie 1 stanu funkcjonowani. DI (funkcja 01- funkcja 40) | 1 |
| U0-44 | Zobrazowanie 2 stanu funkcjonowani. DI (funkcja 41- funkcja 80) | 1 |
| U0-45 | Częstotliwość ustawiania (%) | 0 |
| U0-59 | Częstotliwość pracy (%) | 0.01% |
| U0-60 | Stan przeciennika częstotliwości | 0.01% |
| U0-61 | Wyświetlanie częstotliwości pomocniczej Y | 1 |
| U0-62 | Wyświetlanie dowolnej wartości adresu pamięci | 1 |
Rozdział 7 EMC (kompatybilność elektromagnetyczna)
7.1 Definicja
Kompatybilność elektromagnetyczna oznacza, że sprzęt elektryczny działa w środowisku zakłóceń elektromagnetycznych, ale nie zakłóca środowiska elektromagnetycznego i stabilnie realizuje swoją funkcję.
7.2 Zgodność z normami EMC
Zgodnie z wymaganiami normy krajowej GB / T12668.3, przetwornica częstotliwości powinna spełniać wymagania w dwóch aspektach: zakłócanie elektromagnetyczne i odporność na zakłócenia elektromagnetyczne.
Nasze obecne produkty spełniają najnowsze normy międzynarodowe: IEC / EN61800-3: 2004 (Systemy napędów elektrycznych o regulowanej prędkości, część 3: Wymagania EMC i określone metody badań), co odpowiada normie krajowej GB / T12668.3.
Norma IEC / EN61800-3 sprawdza przetwornik częstotliwości głównie pod kątem dwóch aspektów: emitowania zakłóceń elektromagnetycznych i odporności na zakłócenia elektromagnetyczne. Zakłócanie elektromagnetyczne bada się pod kątem zakłóceń promieniowanych, przewodzonych i harmonicznych emitowanych przez przetwornicę częstotliwości (wymagania dotyczące przetwornicy częstotliwości do użytku cywilnego). Odporność na zakłócenia elektromagnetyczne bada się pod kątem odporności na przewodzenie, promieniowanie, przepięcia, szybko zmieniające się grupy impulsów, wyładowania elektrostatyczne oraz odporność zacisku zasilania o niskim natężeniu (konkretne testy obcjmują: 1. test odporności na zapady, przerwy i zmiany napięcia wejściowego; 2. test odporności na karb komutacyjny 3. test odporności na wejście harmoniczne 4. test zmiany częstotliwości wejściowej 5. test asymetrii napięcia wejściowego 6. test fluktuacji napięcia wejściowego. Test jest przeprowadzany zgodnie z rygorystycznymi wymogami normy IEC / EN61800-3 i prosimy o instalowanie produktów naszej firmy zgodnie z instrukcjami podanymi w punkcie 7.3, posiadają one dobrą kompatybilność elektromagnetyczną w ogólnym środowisku przemysłowym.
7.3 Wskazówki dotyczące EMC
7.3.1 Wpływ zakłóceń harmonicznych: zakłócenia harmoniczne zasilania spowodują uszkodzenie falownika, dlatego zaleca się instalowanie dławików wejściowych AC tam, gdzie jakość sieci energetycznej jest słaba.
7.3.2 Zakłócenia elektromagnetyczne i środki ostrożności dotyczące instalacji: Istnieją dwa rodzaje zakłóceń elektromagnetycznych. Jednym z nich są zakłócenia falownika w otaczającym szumie elektromagnetycznym, a drugim zakłócenia wytwarzane przez falownik w urządzeniach peryferyjnych.
Środki ostrożności dotyczące instalacji:
1) Przewody uziemiające produktów elektrycznych, takich jak falowniki, powinny być dobrze uziemione;
2) Nie układać równolegle przewodów wejściowych i wyjściowych zasilania falownika lub słaboprądowych przewodów sygnałowych (takich jak obwody sterowania). Jeśli to możliwe, należy je układać pionowo;
3) Zaleca się użycie przewodu ekranowanego lub linii zasilającej w stalowej rurze jako linii wyjściowej przetwornicy częstotliwości, należy zapewnić niezawodne uziemienie warstwy ekranującej. W przypadku sprzętu z zakłóceniami, sugeruje się użycie przewodu sterującego z podwójną skrętką i zapewnienie niezawodnego uziemienia osłony.
4) Jeśli przewód silnika jest dłuższy niż 100 m należy zainstalować filtr wyjściowy lub dławik elektryczny.
7.3.3 Metody radzenia sobie z zakłóceniami generowanymi przez peryferyjne urządzenia elektromagnetyczne falownika: Zwykle oddziaływanie elektromagnetyczne na falownik jest spowodowane instalacją wielu przekaźników, styczników lub hamulców elektromagnetycznych w pobliżu falownika. Jeśli falownik ulegnie awarii z powodu zakłóceń, zalecane są następujące metody:
1) Urządzenie wytwarzające zakłócenia wyposażć w tłumik przepięć;
2) Zainstalować filtr na zacisku wejściowym falownika zgodnie z wymaganiami punktu 7.3.6;
3) Linia sygnału sterującego i przewód obwodu detekcji powinny być ekranowane i mieć niezawodne uziemienie.
7.3.4 Sposób postępowania z zakłóceniami wytwarzanymi przez urządzenia peryferyjne falownika: istnieją dwa rodzaje szumów, a mia- nowicie zakłócenia wypromieniowane przez falownik i zakłócenia przewodzone przez falownik. Te dwie interferencje prowadzą do indukcji elektromagnetycznej lub elektrostatycznej w peryferyjnych urządzeniach elektrycznych, a następnie powodują awarię sprzętu. Mając na uwadze te różne zakłócenia, można rozważyć poniższe rozwiązania:
1) Sygnał przyrządów, odbiorników i czujnika do pomiaru jest ogólnie słaby. Jeśli są one w pobliżu przemiennika częstotliwości lub w tej samej szafie sterowniczej, falownik jest podatny na zakłócenia i usterki. Sugeruje się przyjęcie poniższych rozwiązań: jak najdalej od źródeł zakłóceń; nie układać równolegle przewodów sygnałowych ani zasilających ani nie łączyć ich we wiązki; linię sygnałową i linię zasilającą ekranować, zapewniając niezawodne uziemienie; zainstalaować rdzeń ferrytowy
(obejmujący zakres częstotliwości 30 \~ 1000 MHz) po stronie wyjściowej przemiennika częstotliwości i
obrócić 2 do 3 razy w tym samym kierunku. W cięższych przypadkach, można zainstalować filtry wyjściowe EMC;
2) Jeśli urządzenia, w których występują zakłócenia, mają taką samą moc jak falownik, wystąpią zakłócenia przewodzone. Jeżeli nie można wyeliminować tych zakłóceń powyższą metodą, należy zainstalować filtr EMC między falownikiem a zasilaczem (patrz 7.3.6 w celu wyboru modelu);
3) Niezależne uziemienie urządzeń peryferyjnych może wyeliminować zakłócenia powodowane przez prąd upływowy przewodu uziemiającego falownik.
7.3.5 Prąd upływu i postępowanie. Podczas korzystania z falownika występują dwie formy prądu upływowego: prąd upływowy do ziemi i prąd upływowy między liniami.
1) Czynniki wpływające na prąd upływu do ziemi i rozwiązania:
Między przewodem a masą występuje rozproszona pojemność. Im większa pojemność rozproszona, tym większy prąd upływu, dlatego należy zmniejszyć odległość między falownikiem a silnikiem, aby zmniejszyć pojemność rozproszoną. Im większa częstotliwość nośna, tym większy prąd upływowy, dlatego należy obniżyć częstotliwość nośną, aby zmniejszyć prąd upływowy. Jednak zmniejszenie częstotliwości nośnej spowoduje wzrost hałasu silnika. Należy pamiętać, że skutecznym sposobem rozwiązania problemu prądu upływowego
jest instalacja dławika. Prąd upływu rośnie wraz ze wzrostem prądu pętli, dlatego im większa moc silnika, tym większy odpowiadający mu prąd upływu.
2) Czynniki wpływające na prąd upływu między liniami i rozwiązanie:
Między okablowaniem wyjściowym falownika występuje rozproszona pojemność. Jeśli prąd płynący przez obwód zawiera wyższe harmoniczne, może to spowodować rezonans i wygenerowanie prądu upływowego. Jeśli w tym czasie używany jest przekaźnik termiczny, może on działać nieprawidłowo.
Rozwiązaniem jest zmniejszenie częstotliwości nośnej lub zainstalowanie dławika wyjściowego. Podczas korzystania z falownika zaleca się, aby nie instalować przekaźnika termicznego między falownikiem a silnikiem, ale używać funkcji zabezpieczenia nadprądowego falownika.
7.3.6 Środki ostrożności dotyczące instalowania filtra wejściowego EMC na zacisku wejściowym zasilania:
1) Uwaga: podczas korzystania z filtra należy ściśle przestrzegać wartości znamionowej. Ponieważ filtr jest urządzeniem elektrycznym klasy I, metalowa obudowa filtra powinna dobrze stykać się z metałem szalki instalacyjnej i wymagana jest dobra ciągłość przecwodzenia elektrycznego, w przeciwnym razie istnieje ryzyko porażenia prądem i może też wystąpić poważny wpływ na EMC;
2) Zgodnie z testem EMC, zacisk PE filtra i falownik powinny być podłączone do tego samego uziemienia, w przeciwnym razie wystąpi poważny wpływ na EMC;
3) Filtr powinien być instalowany w miarę możliwości w pobliżu zacisku wejściowego zasilania falownika.
Rozdział 8 Diagnozowanie błędów i środki zaradcze
8.1 Ostrzeżenia o błędach i środki zaradcze
Przemiennik częstotliwości posiada 24 funkcje ostrzegawcze i zabezpieczające. Po wystąpieniu błędu, funkcja zabezpieczająca zaczyna działać a falownik wyłącza wyjście. Przekaźnik błędu przemiennika częstotliwości zaczyna kontaktować i wyświetla kod błędu na ekranie wyświetlacza falownika. Zanim użytkownicy zwróćą się o pomoc, mogą samodzielnie przeprowadzić analizę zgodnie z instrukcjami zawartymi w niniejszym rozdziale, aby rozpatrzeć przyczynę usterki i znaleźć rozwiązanie. Jeśli przyczyny są podane w ramce wykonanej linią przerywaną, należy zwrócić się do serwisu i skontaktować się bezpośrednio z przedstawicielem producenta przemiennika częstotliwości lub bezpośrednio z naszą firmą.
| Nazwa błędu | Zabezpieczenie falownika |
| Błąd wyświetlony Errół | 1 |
| Przyczyna błędu | 1. Zwarcie obwodu wyjściowego falownika2. Za długie przewody między silnikiem a falownikiem3. Przegrzanie modułu4. Połuzowanie się wewnętrznego uzwojenia falownika5. Nieprawidłowe działanie głównego panelu sterowania6. Nieprawidłowa praca modułu sterownika7. Nieprawidłowa praca modułu inwersji |
| Rozwiązanie | 1. Usunąć usterkę urządzenia peryferyjnego2. Zainstalować dławik elektryczny lub filtr wyjściowy3. Sprawdzić, czy nie blokuje się kanał powietrza a wentylator pracuje normal-nie, usunąć ew. nieprawidłowości4. Wetknąć do końca wszystkie przewody łączące5. Szukać pomocy technicznej6. Szukać pomocy technicznej7. Szukać pomocy technicznej |
| Nazwa błędu Przctężenie przy przyspieszaniu | |
| Błąd wyświetlony Err02 | |
| Przyczyna błędu | 1. Przebicie do masy lub zwarcic obwodu wyjściowego falownika2. Sposób sterowania jest wektorowy a nie określono parametrów3. Zbyt krótki czas przyspieszania4. Niewłaściwe ręczne zwiększanie momentu obrotowego lub krzywa V / F5. Niskie napięcie6. Uruchomione obroty silnika7. Obciążenie udarowe podczas procesu przyspieszania8. Ten model falownika ma za niską klasę mocy |
| Rozwiązanie | 1. Usunąć usterkę urządzenia peryferyjnego2. Sprawdzić parametry silnika3. Zwiększyć czas przyspieszania4. Ustawić ręczną promocję momentu obrotowego lub krzywą V / F5. Wyrcgulować napięcie do normalnego zakresu6. Rozpocząć śledzenie prędkości obrotowej lub uruchomić silnik ponownie po zatrzymaniu7. Usunąć obciążenie udarowe8. Wybrać przemiennik częstotliwości z wyższą klasą mocy |
| Nazwa błędu Przetężenie przy przyspieszaniu | |
| Bład wyświetlony | Err03 |
| Przyczyna błędu | 1. Masa lub zwarcie pętli wyjściowej falownika2. Sposób sterowania jest wektorowy a nie określono parametrów3. Zbyt krótki czas przyspieszania4. Niskie napięcie5. Obciążenie udarowe podczas przyspieszania6. Nie jest zainstalowana jednostka hamująca ani rezystor hamowania |
| Rozwiązanie | 1. Usunąć usterkę urządzenia peryferyjnego2. Sprawdzić parametry silnika3. Zwiększyć czas przyspieszania4. Wyregulować napięcie do normalnego zakresu5. Usunąć obciążenie udarowe6. Zainstalować jednostkę hamującą i rezystor hamowania |
| Nazwa błędu | Przetężenie przy stałej prędkości |
| Błąd wyświetlony | Err04 |
| Przyczyna błędu | 1. Masa lub zwarcie obwodu wyjściowego przemiennika częstotliwości2. Sposób sterowania jest wektorowy a nie określono parametrów3. Niskie napięcie4. Obciążenie udarowe podczas przyspieszania5. Ten model falownika ma za niską klasę mocy |
| Rozwiązanie | 1. Usunąć usterkę urządzenia peryferyjnego2. Sprawdzić parametry silnika3. Wyregulować napięcie do normalnego zakresu4. Usunąć obciążenie udarowe5. Wybrać przemiennik częstotliwości z wyższą klasą mocy |
| Nazwa błędu Przetężenie przy przyspieszaniu | |
| Błąd wyświetlony | Err05 |
| Przyczyna błędu | 1. Niskie napięcie wejściowe2. Zewnętrzna siła napędza silnik podczas przyspieszania3. Zbyt krótki czas przyspieszania4. Nie zainstalowano zespołu hamulca ani rezystora hamowania |
| Rozwiązanie | 1. Wyregulować napięcie do normalnego zakresu2. Usunąć działanie siły zewnętrznej lub zainstalować rezystor hamulca3. Zwiększyć czas przyspieszania4. Zainstalować jednostkę hamującą i rezystor hamowania |
| Nazwa błędu | Przepięcie przy zwalnianiu |
| Błąd wyświetlony | Err06 |
| Przyczyna błędu | 1. Wysokie napięcie wejściowe2. Zewnętrzna siła napędza silnik podczas zwalniania3. Zbyt krótki czas zwalniania4. Nie zainstalowano zespołu hamulca ani rezystora hamowania |
| Rozwiązanie | 1. Wyregulować napięcie do normalnego zakresu2. Usunąć działanie siły zewnętrznej lub zainstalować rezystor hamowania3. Zwiększyć czas zwalniania4. Zainstalować jednostkę hamującą i rezystor hamowania |
| Nazwa błędu | Przepięcie przy stałej prędkości |
| Błąd wyświetlony | Err07 |
| Przyczyna błędu | 1. Wysokie napięcie wejściowe2. Zewnętrzna siła napędza silnik podczas zwalniania |
| Rozwiązanie | 1. Wyregulować napięcie do normalnego zakresu2. Usunąć działanic siły zewnętrznej lub zainstalować reczystor hamowania |
| Nazwa błędu Usterka zasilania sterowania | |
| Błąd wyświetlony Err08 | |
| Przyczyna błędu | 1. Napięcie wejściowe nie mieści się w określonym zakresie |
| Rozwiązanie | 1. Dostosować napięcie do określonego zakresu |
| Nazwa błędu | Za niskie napięcie |
| Błąd wyświetlony Err09 | |
| Przyczyna błędu | 1. Chwilowa awaria zasilania2. Napięcie na zacisku wejściowym falownika poza określonym zakresem3. Nieprawidłowe napięcie na szynie zbiorczej4. Nieprawidłowe działanie mosłka prostowniczego i bufora rezystancji5. Nienormalna praca modułu sterownika6. Nieprawidłowe działanie panelu sterowania |
| Rozwiązanie | 1. Zresetować błąd2. Wyregulować napięcie do normalnego zakresu3. Szukać pomocy technicznej4. Szukać pomocy technicznej5. Szukać pomocy technicznej6. Szukać pomocy technicznej |
| Nazwa błędu Przeciążenie falownika | |
| Błąd wyświetlony Err10 | |
| Przyczyna błędu | 1. Zbyt duże obciążenie lub zablokowany wirnik silnika2. Ten model falownika ma za niską klasę mocy |
| Rozwiązanie | 1. Zmniejszyć obciążenie, sprawdzić silnik i maszynę2. Wybrać falownik z wyższą klasą mocy |
| Nazwa błędu Przeciążenie silnika | |
| Błąd wyświetlony | Err11 |
| Przyczyna błędu | 1. Nieprawidłowo ustawiony parametr zabezpieczenia P9-01 silnika2. Zbyt duże obciążenie lub zablokowany wirnik silnika3. Ten model falownika ma za niską klasę mocy |
| Rozwiązanie | 1. Ustawić poprawnie parametr2. Zmniejszyć obciążenie, sprawdzić silnik i maszynę3. Wybrać przemiennik częstotliwości z wyższą klasą mocy |
| Nazwa błędu Faza domyślna wejścia | |
| Błąd wyświetlony | Err12 |
| Przyczyna błędu | 1. Nienormalna trójfazowa moc wejściowa2. Nieprawidłowa praca modułu sterownika3. Nieprawidłowa ochrona przed wyładowaniami atmosferycznymi4. Nieprawidłowa praca głównego panelu sterowania |
| Rozwiązanie | 1. Sprawdzić i usunąć problemy w obwodzie peryferyjnym2. Szukać pomocy technicznej3. Szukać pomocy technicznej4. Szukać pomocy technicznej |
| Nazwa błędu | Faza domyślna wyjścia |
| Błąd wyświetlony Err13 | |
| Przyczyna błędu | 1. Nieprawidłowe połączenie falownika z silnikiem2. Niesymetryczne wyjście trójfazowe falownika podczas pracy silnika3. Nieprawidłowa praca modułu sterownika4. Nieprawidłowy moduł |
| Rozwiązanie | 1. Usunąć usterkę urządzenia peryferyjnego2. Sprawdzić, czy uzwojenie trójfazowe jest prawidłowe i usunąć usterkę3. Szukać pomocy technicznej4. Szukać pomocy technicznej |
| Nazwa błędu Przegrzanie modułu | |
| Błąd wyświetlony | Err14 |
| Przyczyna błędu | 1. Zbyt wysoka temperatura otoczenia2. Zablokowany kanał powietrza3. Uszkodzony wentylator4. Uszkodzony termistor modułu5. Uszkodzony moduł inwertera |
| Rozwiązanie | 1. Zmniejszyć temperaturę otoczenia2. Wyczyścić wentylator3. Wymienić wentylator4. Wymienić termistor5. Wymienić moduł inwertera |
| Nazwa błędu | Błąd urządzeń peryferyjnych |
| Błąd wyświetlony | Err15 |
| Przyczyna błędu | 1. Sygnał wejściowy błędu zewnętrznego poprzez zacisk wielofunkcyjny DI2. Sygnał wejściowy błędu zewnętrznego poprzez funkcję wirtualnego we/wy |
| Rozwiązanie | 1. Zresetować2. Zresetować |
| Nazwa błędu Błąd komunikacji | |
| Błąd wyświetlony Err16 | |
| Przyczyna błędu | 1. Nieprawidłowa praca komputera hosta2. Nieprawidłowa linia komunikacyjna3. Nieprawidłowe ustawienie karty rozszerzeń komunikacyjnych P0-284. Nieprawidłowe ustawienie parametru komunikacyjnego grupy PD |
| Rozwiązanie | 1. Sprawdź okablowanie komputera głównego2. Sprawdź okablowanie linii komunikacyjnej3. Ustawić poprawnie typ karty rozszerzeń komunikacyjnych4. Ustawić poprawnie parametry komunikacji |
| Nazwa błędu Błąd stycznika | |
| Błąd wyświetlony | Err17 |
| Przyczyna błędu | 1. Nienormalna praca modułu sterownika i zasilania2. Nieprawidłowa praca stycznika |
| Rozwiązanie | 1. Wymienić moduł sterownika lub zasilania2. Wymienić stycznik |
| Nazwa błędu Błąd wykrywania prądu | |
| Błąd wyświetlony | Err18 |
| Przyczyna błędu | 1. Nieprawidłowa praca urządzenia halla2. Nieprawidłowa praca modułu sterownika |
| Rozwiązanie | 1. Wymienić urządzenie halla2. Wymienić moduł sterownika |
| Nazwa błędu | Błąd dostrojenia silnika |
| Błąd wyświetlony | Err19 |
| Przyczyna błędu | 1. Parametr silnika nie jest ustawiony zgodnie z tabliczką znamionową2. Przekroczono limit czasu określenia parametrów |
| Rozwiązanie | 1. Ustawić poprawnie parametry silnika zgodnie z tabliczką znamionową2. Sprawdzić przewód między falownikiem a silnikiem |
| Nazwa błędu | Błąd dysku kodowego |
| Błąd wyświetlony | Err20 |
| Przyczyna błędu | 1. Model enkodera nie pasuje2. Nieprawidłowe podłączenie enkodera3. Enkoder jest uszkodzony4. Nieprawidłowa karta PG |
| Rozwiązanie | 1. Ustawić model enkodera w oparciu o rzeczywistą sytuację2. Usunąć usterkę okabłowania3. Zmienić enkoder4. Zmienić kartę PG |
| Nazwa błędu Błąd odczytu i zapisu EEPROM | |
| Błąd wyświetlony Err21 | |
| Przyczyna błędu | 1. Uszkodzony układ EEPROM |
| Rozwiązanie | 1. Zmienić główny pulpit sterowania |
| Nazwa błędu Błąd sprzętowy falownika | |
| Błąd wyświetlony | Err22 |
| Przyczyna błędu | 1. Występuje przepięcie2. Występuje przetężenie |
| Rozwiązanie | 1. Postępować zgodnie z błędem przepięcia2. Postępować zgodnie z błędem przetężenia |
| Nazwa błędu | Zwarcie do masy |
| Błąd wyświetlony | Err23 |
| Przyczyna błędu | 1. Zwarcie silnika do masy |
| Rozwiązanie | 1. Wymicnić przewód lub silnik |
| Nazwa błędu Błąd osiągnięcia sumarycznego czasu pracy | |
| Błąd wyświetlony | Err26 |
| Przyczyna błędu | 1. Sumaryczny czas pracy osiągnął ustawioną wartość |
| Rozwiązanie | 1. Użyć funkeji iniejalizacji parametrów, aby wyeliminować zapisane informacje |
| Nazwa błędu | Błąd 1 zdefiniowany przez użytkownika |
| Błąd wyświetlony Err27 | |
| Przyczyna błędu | 1. Sygnał wejściowy błędu 1 zdefiniowanego przez użytkownika za pośrednictwem zacisku wielofunkcyjnego DI2. Sygnał wejściowy błędu 1 zdefiniowanego przez użytkownika poprzez funkcję wirtualnego wejścia / wyjścia |
| Rozwiązanie | 1. Zresetować2. Zresetować |
| Nazwa błędu | Błąd 2 zdefiniowany przez użytkownika |
| Błąd wyświetlony | Err28 |
| Przyczyna błędu | 1. Sygnał wejściowy błędu 2 zdefiniowanego przez użytkownika za pośrednictwem zacisku wielofunkcyjnego DI2. Sygnał wejściowy błędu 2 zdefiniowanego przez użytkownika poprzcz funkcję wirtualnego wejścia / wyjścia |
| Rozwiązanie | 1. Zresetować2. Zresetować |
| Nazwa błędu Błąd osiągnięcia sumarycznego czasu załączenia | |
| Błąd wyświetlony Erż29 | |
| Przyczyna błędu | 1. Sumaryczny czas załączenia osiągnął ustawioną wartość |
| Rozwiązanie | 1. Użyć funkcji inicjalizacji parametrów, aby wyeliminować zapisane informacje |
| Nazwa błędu | Błąd braku obciążenia |
| Błąd wyświetlony Ern30 | |
| Przyczyna błędu | 1. Prąd roboczy przemiennika częstotliwości jest <P9-64 |
| Rozwiązanie | 1. Sprawdzić, czy obciążenie nie jest oddzielone i czy ustawienia parametrów P9-64, P9-65 są zgodne z rzeczywistymi warunkami pracy. |
| Nazwa błędu | Błąd utraty sprzężenia zwrotnego PID podczas pracy |
| Błąd wyświetlony Err31 | |
| Przyczyna błędu | 1. Sprzężenie zwrotne PID jest mniejsze niż ustawiona wartość PA-26 |
| Rozwiązanie | 1. Sprawdź sygnał sprzężenia zwrotnego PID lub ustaw PA-26 na odpowiednią wartość. |
| Nazwa błędu | Błąd przetężenia cykl po cykłu |
| Błąd wyświetlony | Err40 |
| Przyczyna błędu | 1. Zbyt duże obciążenie lub zablokowany wirnik silnika2. Ten model falownika ma za niską klasę mocy |
| Rozwiązanie | 1. Zmniejszyć obciążenie, sprawdzić silnik i maszynę2. Wybrać falownik z wyższą klasą mocy |
| Nazwa błędu | Błąd przełącznika silnika podczas pracy falownika |
| Błąd wyświetlony | Err41 |
| Przyczyna błędu | 1. Zmienić aktualny wybór silnika poprzez zacisk podczas pracy falownika |
| Rozwiązanie | 1. Włączyć silnik po zatrzymaniu falownika |
| Nazwa błędu | Błąd zbyt dużej odchyłki prędkości |
| Błąd wyświetlony | Err42 |
| Przyczyna błędu | 1. Nieprawidłowe ustawienie parametrów enkodera2. Nie zidentyfikowano parametrów3. Zbyt duże odchylenie prędkości, ustawienia parametrów P9-69, P9-60 są nicracjonalne |
| Rozwiązanie | 1. Ustawić poprawnie parametry enkodera2. Przeprowadzić identyfikację parametrów3. Ustawić parametry wykrywania racjonalnie w oparciu o rzeczywistą sytuację |
| Nazwa błędu | Błąd nadmiernej prędkości silnika |
| Błąd wyświetlony | Err43 |
| Przyczyna błędu | 1. Nieprawidłowe ustawienie parametrów enkodera2. Nie zidentyfikowano parametrów3. Ustawienia parametrów P9-69, P9-60 są nieracjonalne |
| Rozwiązanie | 1. Ustawić poprawnie parametry enkodera2. Przeprowadzić identyfikację parametrów3. Ustawić parametry wykrywania racjonalnie w oparciu o rzeczywistą sytuację |
| Nazwa blędu | Błąd przegrzania silnika |
| Błąd wyświetlony | Err45 |
| Przyczyna blędu | 1. Okablowanie czujnika temperatury jest połuzowane2. Temperatura silnika jest zbyt wysoka |
| Rozwiązanie | 1. Wykryć czujnik temperatury i usunąć usterkę2. Zmniejszyć częstotliwość nośną lub zastosować inne środki rozpraszania ciepła, aby poprawić rozpraszanie ciepła silnika |
| Nazwa błędu | Nieprawidłowa pozycja początkowa |
| Błąd wyświetlony | Err51 |
| Przyczyna błędu | 1. Parametr silnika znacznie odbiega od wartości rzeczywistej |
| Rozwiązanie | 1. Upcwnić się ponownic, czy parametry silnika są prawidłowe, zwłaszcza jeśli ustawienie prądu znamionowego jest małe. |
8.2 Popularne błędy i ich rozwiązywanie
Następujące błędy mogą wystąpić podczas użytkowania falownika. Należy zapoznać się z podanymi niżej prostymi metodami ich analizowania:
Tabela 8-1. Typowe błędy i metody postępowania
| Lp. | Opis błędu | Możliwe przyczyny | Rozwiązania |
| 1 | Brak wyświetlania po włączeniu | Brak napięcia lub zbyt niskie napięcie sieciowe; usterka przełącznika zasilania na płycie sterownika falownika; mostek prostowniczy uszkodzony; rezystor buforowy falownika uszkodzony; usterka panelu sterującego i klawiatury; rozłączone przewody między pulpitem sterowania, płytą sterownika i klawiaturą; | Sprawdzić moc wejściową; sprawdzić napięcie na szynie zbiorczej; wyciągnąć i ponownie włożyć płaski kabel; zwrócić się o pomoc do producenta |
| 2 | Wyświetlenie HC (przegrzanic) po włączeniu | Słaby kontakt między płytą sterownika a panelem sterowania; Powiązane urządzenia na panelu sterowania są uszkodzone; zwarcie do masy silnika lub przewodu silnika; Bład halla; za niskie napięcie sieciowe. | Wyciągnąć i ponownie włożyć płaski kabel; zwrócić się o pomoc do producenta |
| 3 | Wyświetlenie“Err23” po włączeniu | Wentylator uszkodzony lub zablokowany; zwarcie w przewodach zacisku sterowania peryferyjnego. | Zmierzyć izolację między silnikiem a linią wyjściową za pomocą tramegera; zwrócić się o pomoc do producenta |
| 4 | Normalne wyświetlanie podczas włączenia, wyświetlanie „HC” po pracy i wyłączeniu | Za wysokie ustawicnie częstotliwości nośnej; wentylator jest uszkodzony lub kanał powietrza jest zablokowany; uszkodzone wewnętrzne elementy falownika uszkodzone (termopara lub inne). | Wymienić wentylator; wycliminować zewnętrzne zwarcie |
| 5 | Częsty alarm Err14 (przegrzanie) | Za wysokie ustawienie częstotliwości nośnej; wentylator jest uszkodzony lub kanał powietrzny jest zablokowany; wewnętrzne elementy falownika są uszkodzone (termopara lub inne). | Zmniejszyć częstotliwość nośną (P0-15); wymienić wentylator, wyczyścić kanał powietrza; zwrócić się o pomoc do producenta |
| 6 | Silnik nie obraca się po uruchomieniu falownika. | Silnik i przewody silnika; złę ustawienie parametrów falownika (parametry silnika); zły kontakt między płytą sterownika a panelem sterowania; usterka płyty sterownika | Sprawdź przewody między falownikiem a silnikiem; wymienić silnik lub usunąć usterkę mechaniczną; sprawdzić i zresetować parametry silnika. |
| 7 | Nieczynny zacisk DI | Niewłaściwe ustawienia parametrów; błąd sygnału zewnętrznego; Luźna zwora OP i + 24V; usterka panelu sterowania. | Sprawdzić i zresetować parametry grupy P4; ponownie podłączyć zewnętrzną linię sygnałową; sprawdzić zwory OP i + 24V; zwrócić się o pomoc do producenta. |
| 8 | Brak promocji prędkości silnika gdy jest sterowanie wcktorowe w pętli zamkniętej | Błąd enkodera; złę podłączenie przewodów lub słaby kontakt enkodera; usterka karty PG; usterka panelu sterowania. | Wymienić dysk kodowy i sprawdzić przewody; wymienić kartę PG; szukać pomocy technicznej. |
| 9 | Częste alarmy przepięcia i przetężenia | Nieprawidłowe ustawienie parametrów silnika; niewłaściwy czas przyspieszania / zwalniania; fluktuacja obciążenia. | Zresctować parametry silnika lub dostroić silnik; ustawić czas przyspieszania i zwalniania; zwrócić się o pomoc do producenta. |
| Lp. | Opis blędu | Możliwe przyczyny | Rozwiązania |
| 10 | Wyświetlanie Err17 po włączeniu (lub podczas pracy) | Stycznik łagodnego rozruchu nie jest zamknięty; | Sprawdzić, czy kabel stycznika nie jest luźny; sprawdzić, czy nie ma usterek i stycznika; sprawdzić, czy nie ma usterek przy zasilaniu 24V stycznika; zwrócić się o pomoc do producenta; |
| 11 | Wyświetlanie „____” Po włączeniu | Powiązane urządzenia na panelu sterowania są uszkodzone; | Wymienić panel sterowania; |
Załącznik A: Karta wielofunkcyjna VFD-PC1
(Dotyczy maszyn o mocy 3,7 kW i wyższej)
I. Wstęp
Karta VFD-PC1 to wielofunkcyjna karta rozszerzeń wydana przez naszą firmę, pasująca do tej serii przemienników częstotliwości. Zawiera następujące zasoby:
| Poz. Parametry Opis | ||
| Terminal wejściowy | 5-pinowe cyfrowe wejście sygnału | |
| 1-pinowe analogowe wejście sygnału napięciowego | Obsługuje sygnał wejściowy napięcia przy -10 V ~ 10 V. | |
| Terminal wyjściowy | 1-pinowe wyjście przekaźnikowe sygnału | |
| 1-pinowe cyfrowe wyjście sygnału | ||
| 1-pinowe analogowe wyjście sygnału | ||
| Komunikacja | Interfejs komunikacyjny RS-485 | Obsługuje protokół komunikacyjny Modbus-RTU (szczegóły w Załączniku I: VFD - Protokół komunikacyjny Modbus) |
| Interfejs komunikacyjny CAN | Obsługuje protokół komunikacyjny CANlink | |
II. Instalacja mechaniczna i opisy funkcjonalne zacisków sterujących
- Sposób instalacji, opisy funkcjonalne zacisków sterujących i opisy zwór - patrz Rysunek 1, Tabela 1 i Tabela 2 w Załączniku 1
1) Instalować po całkowitym wyłączeniu przemiennika częstotliwości;
2) Dopasować interfejs karty rozszerzeń i otwór lokalizacyjny karty wielofunkcyjnej do panelu sterowania na przemienniku częstotliwości;
3) Zamocować wkrętem.

Załącznik A: Rysunek 1. Sposób instalacji karty wielofunkcyjnej
Załącznik A: Funkcjonalne opisy zacisków sterujących
| Kategoria | Symbol zacisku | Nazwa zacisku | Opis funkcjonalny |
| Zasilanic | +24V-COM | Podłączenie zewnętrznego zasilania + 24V | Zapewnia zewnętrzne zasilanie +24 V, używa się go do roboczego zasilania zacisku cyfrowego wejścia i wyjścia oraz zasilania czujnika zewnętrznego; maksymalny prąd: 200mA. |
| OP1 | Zacisk wejściowy (cyfrowy) zasilania | OP1 i „+ 24V” są połączone przez zworę J8 fabrycznie. W przypadku korzystania z zasilania zewnętrznego OP1 należy połączyć się z zasilaniem zewnętrznym i wyciągnąć zworę J8. | |
| Wejście analogowe | AI3-PGND | Zacisk wejścia analogowego 3 | 1. Akceptuje wejście optoizolatora, wejście napięcia różnicowego i wejście rezystora czujnika temperatury2. Zakres napięcia wejściowego: DC -10V ~ 10V3. Czujnik temperatury PT100, PT10004. Użyć przełącznika tarczowego S1, aby zdecydować o sposobie wejścia, nie używać różnych funkcji w tym samym czasie. |
| Funkcje zacisków wejść cyfrowych | DI6-OP1 | Wejście cyfrowe 6 | 1. Optoizolator: kompatybilny z wejściem bipolarnym2. Impedancja wejściowa: 2,4 kΩ3. Zakres napięcia na poziomic wejściowym: 9 ~ 30V |
| DI7-OP1 | Wejście cyfrowe 7 | ||
| DI8-OP1 | Wejście cyfrowe 8 | ||
| DI9-OP1 | Wejście cyfrowe 9 | ||
| DI10-OP1 | Wejście cyfrowe 10 | ||
| Wyjście analogowe | AO2-GND | Wyjście analogowe 2 | 1. Specyfikacja napięcia wyjściowego: 0 V ~ 10 V.2. Specyfikacja prądu wyjściowego: 0mV ~ 20mV |
| Wyjście cyfrowe | DO2-CME | Wyjście cyfrowe 2 | Optoizolator, zakres napięcia wyjściowego bipolarnego kolektora otwartego: 0 V ~ 24 V, zakres prądu wyjściowego: 0 mA ~ 50 mA.Uwaga: wyjście cyfrowe CME1 i wejście cyfrowe COM są wewnętrznie izolowane, połączenie J7 jest domyślne.Jeśli DO2 ma być zasilany z zewnętrznego źródła, zwora J7 musi zostać odłączona. |
| Wyjście przekaźnikowe (RELAY2) | PA- PB | Zacisk normalnie zamknięty | Zdolność styków napędu: AC250V, 3A, COSφ = ,4. DC 30 V, 1 A. |
| PA- PC | Zacisk normalnie otwarty | ||
| Komunikacja RS-485 | 485+/485- | Zacisk interfcjsu komunikacyjnego | Zaciski sygnałów wejściowych i wyjściowych komunikacji protokołu Modbus-RTU, wejście izolowane. |
| Komunikacja CAN | CANH/CANL | Zacisk interfejsu komunikacyjnego | Zacisk wejściowy komunikacji protokołu CANlink, wejście izolowane |
Załącznik A: Tabela 2. Opis zwór
| Zwora nr Opis | |
| J3 | Wybór wyjścia AO2 - napięcie, prąd |
| J4 | Wybrać dopasowaną rezystancję dla zacisku CAN |
| J1 | Wybrać dopasowaną rezystancję dla zacisku RS485 |
| J7 | Wybrać sposób podłączenia CME1 |
| J8 | Wybrać sposób podłączenia OP1 |
| S1 | Wybór funkcji AI3, PT100, PT1000 |
Załącznik B: Instrukcje dotyczące karty rozszerzeń IO (VFD-IO1) (karta dodatkowych wejść i wyjść)
(Dotyczy maszyn wszystkich serii)
- Wstęp
Karta rozszerzeń IO VFD-IO1 zapewnia 3-pinowe wejście DI.
II. Instalacja mechaniczna i opisy funkcjonalne zacisków sterujących
- Sposób instalacji i opisy funkcjonalne zacisków okablowania - patrz rysunek 1 i tabela 1 w załączniku 2.
1) Montować i zdemontować po całkowitym wyłączeniu zasilania przemiennika częstotliwości;
2) Dopasować interfejs karty rozszerzeń i otwór lokalizacyjny karty rozszerzeń we / wy do panelu sterowania na falowniku;
3) Zamocować kartę komunikacyjną za pomocą wkrętu, jak pokazano na rysunku 1.
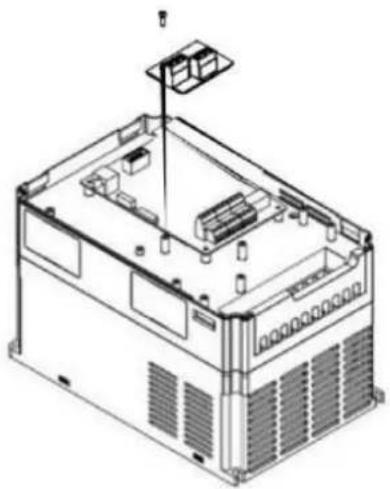
Załącznik B: Rysunek 1. Sposób instalacji karty rozszerzeń VFD-IO1
Funkcjonalne opisy zacisków przewodów
Załącznik B: Tabela 1. Opisy funkcjonalne zacisków przewodów
| Kategoria | Symbol zacisku | Nazwa zacisku | Opis funkcjonalny |
| Zasilanie | +24V-COM | Podłączenie zasilania zewnętrznego + 24V | Zapewnia zewnętrzne zasilanie +24 V, używa się do roboczego zasilania zacisku wejścia i wyjścia cyfrowego oraz zasilania czujnika zewnętrznego; maksymalny prąd: 200mA. |
| OP2 | Zacisk wejściowy (cyfrowy) zasilania | Brak fabrycznego podłączenia zasilania OP2, podłączyć do zewnętrznego zasilania w zależności od potrzeb. | |
| Funkcje zacisków wejść cyfrowych | DI6-OP2 | Wejście cyfrowe 6 | 1. Optoizolator: kompatybilny z wejściem bipolarnym2. Impedancja wejściowa: DI6, DI7: 3,3 kΩ, DI8: 2,4 kΩ3. Zakres napięcia na poziomie wejściowym: 9 ~ 30V4. DI6, DI7 to wspólnę zaciski wejściowe, częstotliwość wejściowa <100 Hz; DI8 to wejście szybkich impulsów, maks. częstotliwość wejściowa <100 kHz. |
| DI7-OP2 | Wejście cyfrowe 7 | ||
| DI8-OP2 | Wejście cyfrowe 8 |
Załącznik C: Instrukcje dotyczące karty rozszerzeń dla enkodera
(Dotyczy wszystkich maszyn w serii)
- Wstep
VFD jest wyposażony w kartę rozszerzeń dla enkoderów ogólnego przeznaczenia (kartę PG). Jako akcesorium opcjonalne jest ona niezbędna dla falownika do wektorowego sterowania w zamkniętej pętli. Wybrać odpowiednią kartę PG zgodnie z wyjściem enkodera. Konkretne modele są następujące:
| Akcesoria opcjonalne | Opis Pozostał | c |
| VFD-PG1 | Wejście różnicowe karty PG bez wyjścia z podziałem częstotliwości | Okablowanie zacisku |
| VFD-PG2 | Karta PG transformatora obrotowego | Gniazdo magistrali DB9 |
| VFD-PG3 | Wejście OC karty PG, wyjście z podziałem częstotliwości w stosunku 1:1 | Okablowanie zacisku |
II. Instalacja mechaniczna i opisy funkcji zacisków sterowania
- Sposób instalacji, wygląd, specyfikacja i określenie sygnału na zacisku okablowania - patrz rysunek 1 i tabela 1 w załączniku C:
1) Kartę PG instalować i deinstalować po całkowitym wyłączeniu przemiennika częstotliwości.
2) Podłączyć zworę J3 na panelu sterowania z kartą rozszerzeń przez 18-pinowe złącze FFC (zapewnić prawidłową instalację i prawidłowe połączenie zatrzaskowe).
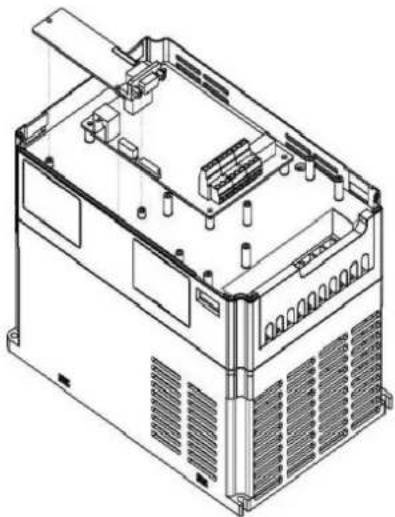
Załącznik E: Rysunek 1. Sposób instalacji karty rozszerzeń dla enkodera
Parametry karty rozszerzeń enkodera i określenie zacisków sygnałowych:
Załącznik C: Tabela 1. Parametry karty rozszerzeń i określenie zacisków sygnałowych
| Karta różnicowa PG (VFD-PG1) | |||
| Parametry VFD-PG1 | |||
| Interfejs użytkownika | końcówka fazowana | ||
| Dystans | 3.5mm | ||
| Wkręt prosty | |||
| Czy wtykowa nie | |||
| Przekrój przewodu | 16-26AWG | ||
| Maksymalna szybkość | 500kHz | ||
| Różnicowa amplituda sygnału wejściowego | ≤7V | ||
| Określenie przewodów sygnałowych VFD-PG1 VFD-PG1 | |||
| Nr Symbol Opis | |||
| 1 | A+ | sygnał dodatni na wyjściu A+ enkodera | |
| 2 | A- | sygnał ujemny na wyjściu A- enkodera | |
| 3 | B+ | sygnał dodatni na wyjściu B+ enkodera | |
| 4 | B- | sygnał ujemny na wyjściu B- enkodera | |
| 5 | Z+ | sygnał dodatni na wyjściu Z+ enkodera | |
| 6 | Z- | sygnał ujemny na wyjściu A- enkodera | |
| 7 | 5V | podajc zewnętrzne zasilanic 5 V / 100 mA | |
| 8 | COM | masa | |
| 9 | PE | zacisk ekranowania | |
| Karta PG transformatora obrotowego (VFD-PG2) | |||
| Parametry karty VFD-PG2 | |||
| Interfejs użytkownika | styk żeński DB9 | ||
| Czy wtykowa | tak | ||
| Przekrój przewodu | >22AWG | ||
| Współczynnik rozdzielczości | 12 bitów | ||
| Częstotliwość napędu | 10kHz | ||
| VRMS 7V | |||
| VP-P | 3.15±27% | ||
| Zacisk VFD-PG2 | |||
| Nr Symbol Opis | |||
| 1 | EXC1 | Napęd - transformatora obrotowego | |
| 2 | EXC | Napęd + transformatora obrotowego | |
| 3 | SIN | Sprzeżenie zwrotne SIN + transformatora obrotowego | |
| 4 | SINLO | Sprzeżenie zwrotne SIN - transformatora obrotowego | |
| 5 | COS | Sprzeżenie zwrotne COS + transformatora obrotowego | |
| 6-8 | - | - | |
| 9 | COSLO | Sprzeżenie zwrotne COS - transformatora obrotowego | |
| Karta OC PG (VFD-PG3) | ||
| Parametry karty VFD-PG3 | ||
| Interfejs użytkownika końcówka fazowana | ||
| Dystans | 3.5mm | |
| Wkręt | wkręt prosty | |
| Czy wtykowa nie | ||
| Przekrój przewodu | 16-26AWG | |
| Maksymalna szybkość | 100KHz | |
| Zacisk VFD-PG3 | ||
| No. Symbol Opis | ||
| 1 | A | wyjście A enkodera, sygnał + |
| 2 | B | wyjście B enkodera sygnał - |
| 3 | Z | sygnał wyjściowy Z enkodera |
| 4 | 15V | podaje zewnętrzne zasilanie 15 V / 100 mA |
| 5 | COM | masa |
| 6 | COM | masa |
| 7 | A1 | sygnał 1: 1 na wyjściu A sprzęzenia zwrotnego karty PG |
| 8 | B1 | sygnał 1: 1 na wyjściu B sprzęzenia zwrotnego karty PG |
| 9 | PE | zacisk ekranowania |
Załącznik D: Instrukcje dotyczące karty rozszerzeń komunikacyjnych CANlink (VFD-CAN1)
(do calej serii)
I. Wstęp
Karta została specjalnie opracowana do funkcji komunikacyjnej CANlink tej serii przemienników częstotliwości.
II. Instalacja mechaniczna i opisy funkcji zacisków sterujących
- Sposób instalacji - załącznik B: tak jak karta rozszerzeń IO (VFD-IO1). Opisy funkcji zacisków okablowania i opisy zwór - patrz Rystunek 1, Tabela 1 i Tabela 2 w Załączniku D.
Załącznik D: Tabela 1. Opis funkcji zacisku sterowania.
| Kategoria | Symbol zacisku | Nazwa zacisku | Opis funkcjonalny |
| Komunikacja CAN (CN1) | CANH/CANL | Zacisk interfejsu komunikacyjnego | Zacisk wejściowy komunikacji CAN |
| COM | Masa zasilania komunikacji CAN |
Załącznik D: Tabela 2. Opis zwór
| Nr zwory | Opis |
| J2 | Wybierz rezystancję dopasowaną do zacisku CAN |
Uwaga:
Aby zabezpieczyć sygnał komunikacyjny przed zakłóceniami zewnętrznymi, do przewodu komunikacyjnego można użyć skrętkę i unikać używania przewodów równoległych w miarę możliwości;
Załącznik E: Instrukcje dotyczące karty rozszerzeń komunikacyjnych RS-485 (VFD-TX1)
I. Wstęp
(do całej serii)
Karta została specjalnie opracowana dla funkcji komunikacyjnej 485 tej serii przemienników częstotliwości. dzięki przyjętemu schematowi izolacji, parametry elektryczne są zgodne z międzynarodowymi standardami, a użytkownicy mogą wybierać w oparciu o swoje wymagania tak, aby sterować pracą przemiennika i ustawiać parametry przez zdalny port szeregowy;
II. Instalacja mechaniczna i opisy funkcji zacisków sterujących
- Sposób instalacji - patrz załącznik B: tak samo jak karta rozszerzeń IO (VFD-IO1). Opisy funkejonalne zacisków okabłowania i określenie połączeń dial-up -patrz Tabela 1 i Tabela 2 w Załączniku E:
Opis funkcjonalny zacisku sterującego:
Załącznik E: Tabela 1.
Opis funkcji zacisku sterowania
| Kategoria | Symbol zacisku | Nazwa zacisku | Opis funkcjonalny |
| Komunikacja 485 (CN1) | 485+/485- | Zacisk interfejsu komunikacyjnego | Zacisk wejściowy komunikacji 485, wejście izolacyjne |
| CGND | Masa zasilania komunikacji 485 | Moc izolowana |
Opis zwory:
Załącznik E: Tabela 2. Opis zwory
| Zwora nr Opis | |
| J1 | Wybrać rezystancję dopasowaną do zacisku 485. |
Załącznik F: protokół komunikacyjny VFD-Modbus
Ta seria falowników zapewnia interfejs komunikacyjny RS232 / RS485 i obsługuje protokół komunikacyjny Modbus. Użytkownicy mogą realizować scentralizowane sterowanie za pomocą komputera lub PLC, ustawiać polecenie uruchomienia przemiennika za pomocą protokołu komunikacyjnego, modyfikować lub odczytywać parametry kodu funkcji, odczytywać warunki pracy i informacje o błędach falownika, itp.
1. Zawartość protokolu
Protokół komunikacji szeregowej określa zawartość transmitowanej informacji i wykorzystuje format komunikacji szeregowej, w tym format odpytywania hosta (lub rozgłaszania), metodę kodowania hosta, taką jak kod funkcji wymagancj operacji, dane transmisji, weryfikację błędów itp. Odpowiedź slave'a (urządzenia podrzędnego) również przyjmuje tę samą strukturę, a jej treść obejmuje potwierdzenie operacji, zwrot danych i weryfikację błędów, itp. Jeśli wystąpi jakikolwiek błąd podczas odbierania informacji przez slave'a lub nieukończenie działania wymaganego przez mastera, slave organizuje komunikat o błędzie jako odpowiedź zwrotną do mastera.
Tryb aplikacji: przemiennik częstotliwości uzyskuje dostęp do sieci sterującej PC / PLC typu „pojedynczy master i wiele urządzeń podrżednych” za pomocą magistrali RS232 / RS485.
Struktura magistrali
(1) Rodzaj interfejsu: interfejs sprzętowy RS232 / RS485
(2) Tryb transmisji: asynchroniczny szeregowy i półdupleksowy. Co do mastera i slave'a, w tym samym momencie jeden może tylko wysyłać dane a drugi tylko odbierać dane. Podczas procesu szeregowej komunikacji asynchronicznej dane przesyłane są w postaci wiadomości ramka po ramce.
(3) Struktura topologiczna: układ z jednym masterem i wieloma urządzeniami podrzednymi. Zakres ustawień adresu slave'a wynosi od 1 \~ 247, a 0 to adres do komunikacji rozgłoszeniowej. Adres slave'a w sieci powinien być unikalny.
Opis protokolu
Protokół komunikacyjny tej serii przemienników częstotliwości to asynchroniczny szeregowy protokół komunikacyjny Modbus typu master-slave i tylko jedno urządzenie (host/master) w sieci może ustanowić protokół (nazywany „zapytaniem / poleceniem”). Urządzenia podrzędne (slave) mogą odpowiedzieć na „zapytanie / polecenie” hosta tylko poprzez dostarczanie danych lub podjęcie odpowiednich działań w oparciu o „zapytanie / polecenie” hosta. Host oznacza komputer osobisty (PC), przemysłowy sprzęt sterujący lub programowalny sterownik logiczny (PLC) itp., a slave oznacza przemiennik częstotliwości niniejszej serii. Host może nie tylko komunikować się z określonym slave’em oddzielnie, ale także przekazywać informacje rozgłoszeniowe do wszystkich podrzędnych slave’ów. W przypadku zapytania / polecenia mastera, do którego dostęp jest uzyskiwany osobno, slave musi zwrócić komunikat (nazywany odpowiedzią). W przypadku rozgłaszania informacji wydanych przez mastera, slave nie musi odpowiadać informacją zwrotną do mastera.
Struktura materiałów komunikacyjnych: format danych komunikacyjnych protokołu Modbus dla przemiennika częstotliwości niniejszej serii jest następujący:
W trybie RTU transmisja komunikatu rozpoczyna się od przerwy o długości co najmniej 3,5 znaku. Zróżnicowany czas znaków przy szybkości transmisji sieci jest łatwy do zrealizowania (jak pokazano na poniższym rysunku T1-T2-T3-T4). Pierwsze przesyłane pole to adres urządzenia.
Dostępne znaki transmisji są szesnastkowe 0 ... 9, A ... F. Sprzęt sieciowy stale wykrywa magistrałe sieciową, łącznie z okresem przerwy. Po odebraniu pierwszego pola (pola adresu) każde urządzenie zdekoduje je, aby określić, czy wysłać je do swojego. Po ostatnim przestanym znaku przerwa wynosząca co najmniej 3,5 znaku oznacza koniec komunikatu. Po przerwie rozpoczę nie się nowa wiadomość.
Cała ramka danych będzie ciągłą transmisją strumieniową. Jeżeli czas pobytu przekroczy 1,5 znaku przed końcem ramki, urządzenie odbierające odświeży niekompletną wiadomość i przyjmie, że następny bajt jest polem adresowym nowej wiadomości. Podobnie, jeśli nowy komunikat zacznie być wysyłany w ciągu 3,5 znaku poprzedniego komunikatu, urządzenie odbierające potraktuje to jako opóźnie- nie poprzedniego komunikatu a następnie spowoduje błąd, ponieważ końcowa wartość pola CRC może być niepoprawna.
Format ramki RTU
| Naglówek ramki START Czas 3,5 znaku | |
| Slave ADR Adres: 1~247 | |
| Kod CMD | 03: odczyt parametrów slave; 06: zapis parametrów slave |
| DATA (N-1) | Treść danych: adres parametrów kodu funkcji, liczba parametrów kodu funkcji, wartość parametrów kodu funkcji itp. |
| DATA (N-2) | |
| ...... | |
| DATA0 | |
| CRC CHK (starszy bajt) | Wartość wykrywania: wartość CRC |
| CRC CHK (młodszy bajt) | |
| END | Czas 3,5 znaku |
CMD i DANE
Kod CMD: 03H, odczyt N słów (maksymalnie 12 słów). Na przykład: adres początkowy F002 przemiennika częstotliwości z adresem slave 01 odczytuje kolejno 2 wartości.
Komunikat CMD hosta
| ADR 01H | |
| CMD 03H | |
| Adres startu (starszy bajt) F0H | |
| Adres startu (młodszy bajt) | 02H |
| Nr rejestru (starszy bajt) | 00H |
| Nr rejestru (młodszy bajt) | 02H |
| CRC CHK (starszy bajt) | wartość CRC CHK do obliczenia |
| CRC CHK (młodszy bajt) |
Komunikat odpowiedzi slave
PD-05 jest ustawiony na 0:
| ADR | 01H |
| CMD | 03H |
| Nr bajtu (starszy bajt) | 00H |
| Nr bajtu (młodszy bajt) | 0411 |
| Dane F002H (starszy bajt) | 00H |
| Dane F002H (młodszy bajt) | 00H |
| Dane F003H (starszy bajt) | 00H |
| Dane F003II (młodszy bajt) | 0111 |
| CRC CHK (młodszy bajt) | wartość CRC CHK do obliczenia |
| CRC CHK (starszy bajt) |
FD-05 jest ustawiony na 1:
| ADR 01H | |
| CMD 03H | |
| Nr bajtu | 04H |
| Dane F002H (starszy bajt) | 00H |
| Dane F002H (młodszy bajt) | 00H |
| Dane F003H (starszy bajt) | 00H |
| Dane F003H (młodszy bajt) | 01H |
| CRC CHK (młodszy bajt) | wartość CRC CHK do obliczenia |
| CRC CIK (starszy bajt) |
Kod CMD: 06H, zrobić jeden wpis. Na przykład: wpisać 5000 (1388H) w adresie F00AH przemiennika częstotliwości z adresem slave 0211.
Komunikat CMD mastera
| ADR 02H | |
| CMD 06H | |
| Adres danych (starszy bajt) F0H | |
| Adres danych (młodszy bajt) | 0AH |
| Zawartość danych (starszy bajt) | 13H |
| Zawartość danych (młodszy bajt) | 88H |
| CRC CHK (młodszy bajt) | wartość CRC CHK do obliczenia |
| CRC CHK nadrzędne |
Komunikat odpowiedzi slave'a
| ADR | 02H |
| CMD | 06H |
| Adres danych (starszy bajt) F0H | |
| Adres danych (młodszy bajt) | 0AH |
| Zawartość danych (starszy bajt) 13H | |
| Zawartość danych (młodszy bajt) | 88H |
| CRC CHK (młodszy bajt) | wartość CRC CIHK do obliczenia |
| CRC CHK (starszy bajt) |
Metoda weryfikacji - metoda weryfikacji CRC: CRC (cykliczna kontrola nadmiarowa) przyjmuje format ramki RTU, a komunikat zawiera pole detekcji błędu oparte na metodzie CRC. Pole CRC wykrywa zawartość całej wiadomości. Pole CRC ma dwa bajty, w tym 16-bitową binarną wartość systemową. Urządzenie transmisyjne oblicza je i dodaje do wiadomości. Urządzenie odbierające ponownie oblicza CRC odebranego komunikatu i porównuje go z wartością w odebranym polu CRC. Jeśli dwie wartości CRC nie są równe, transmisja jest nieprawidłowa.
CRC najpierw przechowuje 0xFFFF, a następnie wywołuje proces do przetwarzania ciągłych 8-bitowych bajtów w komunikacie i wartości w bieżącym rejestrze. Tylko 8 bitów danych w każdym znaku jest ważnych dla CRC, a bit startu, bit stopu i bit parzystości są nieważne.
W procesie generowania CRC każdy 8-bitowy bajt jest poddawany XOR-owaniu z osobną zawartością rejestru. Na koniec przesuwa się w kierunku najmniej znaczącego bitu, a najbardziej znaczący bit jest wypełniany wartością 0. LSB jest wyodrebniany w celu wykrycia. Jeśli LSB ma wartość 1, rejestr zostanie XORowany z wartością zadaną. Jeśli LSB ma wartość 0, brak działania. Cały proces jest powtarzany 8 razy. Po zakończeniu ostatniego bitu (ósmy bit), następny 8-bitowy bajt zostanie XORowany z bieżącą wartością samego rejestru. Wartością końcową w rejestrze jest wartość CRC po wykonaniu wszystkich bajtów we wiadomości.
Dodając CRC do wiadomości, najpierw dodać młodszy bajt, a następnie starszy bajt. Obliczanie CRC jak niżej:
unsigned int crc_chk_value (unsigned char *data_value, unsigned char length) {
unsigned int crc_value=0xFFFF;
int i;
while (length--) {
crc_value^=*data_value++;
for (i=0;i<8;i++) {
if (crc_value&0x0001)
{
crc_value=(crc_value>>1)
}
else crc_value=crc_value>>1;
{
}
}
}
return (crc_value);
}
Definicja adresu parametru komunikacyjnego
W tej części znajdują się treści komunikacyjne służące do sterowania pracą przemiennika częstotliwości, ustawiania stanu i powiązanych parametrów przemiennika.
Parametr kodu funkcji do odczytu i zapisu (niektorych kodów funkcji nie można modyfikować, mogą być używane lub monitorowane przez producenta).
Zasady oznaczania adresu parametru kodu funkeji:
Reguła wyrażenia adresu parametru z numerem grupy i oznaczeniem nr kodu funkcji będącego adresem parametru: starszy bajt: P0 \~ PF (grupa P), A0 \~ AF (grupa A), 70 \~ 7F (grupa U); młodszy bajt: 00 \~ FF,
np.: P3-12, adres jest wyrażony jako P30C;
Uwaga: grupa PF: nie czyta ani nie modyfikuje parametrów. Grupa U: tylko odczytuje, ale nie modyfikuje parametrów.
Niektórych parametrów nie można modyfikować gdy falownik jest w stanie pracy. Niektórych parametrów nie można modyfikować bez względu na stan falownika.
Modyfikując parametry kodu funkcji, należy również zwrócić uwagę na zakres parametrów, jednostkę i powiązane opisy parametrów.
Poza tym, jeśli pamięć EEPROM będzie często zapisywana, skróci to jej żywotność. Dlatego w trybie komunikacji niektóre kody funkcji nie muszą być przechowywane w EEPROM, wystarczy zmiana wartości w pamięci RAM.
Jeśli jest to parametr grupy P, funkcję można zrealizować zmieniając wyższą wartość F adresu kodu funkcji na 0. Jeśli jest to parametr grupy A, funkcję można zrealizować poprzez zmianę wyższego rzędu A adresu kodu funkcji na 4. Odpowiedni adres kodu funkcji jest wyrażony następująco: starszy bajt: 00 \~ 0F (grupa P), 40 \~ 4F (grupa A); młodszy bajt: 00 \~ FF
Na przykład: kod funkcji P3-12 nie jest przechowywany w pamięci EEPROM, a adres jest wyrażony jako 030C; kod funkcji A0-05 nie jest przechowywany w pamięci EEPROM a adres jest wyrażony jako 4005; adres ten można zapisać i odczytywać tylko w pamięci RAM. Podczas odczytu adres nie jest aktywny. Dla wszystkich parametrów można również użyć kodu CMD 07H do realizacji funkcji.
Podczas pracy falownika niektórych parametrów nie można modyfikować. Nicktórych parametrów nie można modyfikować bez względu na stan falownika,. Modyfikując parametry kodu funkcji, należy również zwrócić uwagę na zakres parametrów, jednostkę i powiązane opisy.
Parametry zatrzymania / pracy:
| Adres parametru Opiś parametru | |
| 1000 | *Nastawy komunikacji (-10000~10000) (format dziesiętny) |
| 1001 Częstotliwość pracy | |
| 1002 Napięcie na szynie zbiorczej | |
| 1003 | Napięcie wyjściowe |
| 1004 Prąd wyjściowy | |
| 1005 Moc wyjściowa | |
| 1006 | Moment wyjściowy |
| 1007 Prędkość robocza | |
| 1008 | Znak wejścia DI |
| 1009 | Znak wyjścia DO |
| 100A | Napięcie AI1 |
| 100B | Napięcie AI2 |
| 100C Napięcie AI3 | |
| 100D | Wejście licznika |
| 100E | Wejście licznika długości |
| 100F Szybkość obciążania | |
| 1010 | Nastawy PID |
| 1011 | Sprzężenie zwrotne PID |
| 1012 | Krok PLC |
| 1013 | Częstotliwość impulsów, jednostka 0,01kHz |
| 1014 | Szybkość sprzęcenia zwrotnego, jednostka 0,1 Hz |
| 1015 Nadwyżka czasu pracy | |
| 1016 | Napięcie AI1 przed kalibracją |
| 1017 | Napięcie AI2 przed kalibracją |
| 1018 | Napięcie AI3 przed kalibracją |
| 1019 | Prędkość liniowa |
| 101A | Aktualny czas zasilania |
| 101B | Aktualny czas pracy |
| 101C | Częstotliwość impulsów, jednostka 1Hz |
| 101D Nastawy komunikacji | |
| 101E | Rzeczywista prędkość sprężenia zwrotnego |
| 101F | Wyświetlanie częstotliwości głównej X. |
| 1020 | Wyświetlanie częstotliwości pomocniczej Y. |
Uwaga:
Wartość ustawienia komunikacji jest procentem wartości względnej, a mianowicie 10000 odpowiada 100,00%,
-10000 odpowiada -100,00%. W przypadku danych dotyczących częstotliwości, ten procent jest procentem relatywnie największej częstotliwości (P0-10). Dla danych wymiaru momentu obrotowego ten procent wynosi P2-10, A2-48, A3-48, A4-48 (górna granica momentu obrotowego odpowiada odpowiednio pierwszemu i drugiemu silnikowi).
Kolejność poleceń do falownika: (tylko zapis)
| Adres słowa sterującego Funkcja słowa sterującego | |
| 2000 | 0001: praca w przód |
| 0002: praca w tył | |
| 0003: impulsowanie w przód | |
| 0004: impulsowanie w tył | |
| 0005: zatrzymanie wybiegiem | |
| 0006: zatrzymanie ze zwalnianiem | |
| 0007: resetowanie błędu | |
Odczyt statusu falownika: (tylko do odczytu)
| Adres słowa statusowego | Funkcja słowa statusowego |
| 3000 | 0001: praca w przód |
| 0002: praca w tył | |
| 0003: zatrzymanie |
Sprawdzić hasło blokady parametrów: (jeśli powrót do 8888H, sprawdzić hasło)
Adres hasta
Treść wprowadzanego hasła
1F00 ****
| Adres komendy Zawartość komendy | |
| 2001 | BIT0: DO1 sterowanie wyjściemBIT1: DO2 sterowanie wyjściemBIT2: RELAY1 sterowanie wyjściemBIT3: RELAY2 sterowanie wyjściemBIT4: FMR sterowanie wyjściemBIT5: VDO1BIT6: VDO2BIT7: VDO3BIT8: VDO4BIT9: VDO5 |
Sterowanie wyjściem analogowym AO1: (tylko zapis)
| Adres komendy Zawartość komendy | |
| 2002 | 0~7FFF oznacza 0%~100% |
Sterowanie wyjściem analogowym AO2: (tylko zapis)
| Adres komendy Zawartość komendy | |
| 2003 | 0~7FFF oznacza 0%~100% |
Sterowanie wyjściem impulsowym: (tylko zapis)
| Adres komendy | Zawartość komendy |
| 2004 | 0~7FFF oznacza 0%~100% |
Opis błędu falownika
| Adres błędu Komunikat | błędu |
| 8000 | 0000: brak błędu0001: zastrzeżone0002: przetężenie przy przyspieszaniu0003: przetężenie przy zwalnianiu0004: przetężenie przy stałej prędkości0005: przepięcie przy przyspieszaniu0006: przepięcie przy zwalnianiu0007: przepięcie przy stałej prędkości0008: przeciążenie reczystora buforowego0009: za niskie napięcie000A: przeciążenie falownika000B: przeciążecnic silnika000CL: błąd fazy domyślnej na wejściu000D: błąd fazy domyślnej na wyjściu000E: przegrzanic się modułu000F: błąd urządzenia zewnętrznego0010: błąd komunikacji0011: błąd stycznika0012: błąd detekcji prądu0013: błąd funkcji dostrojenia silnika0014: błąd enkodera/karty PG0015: błąd odczytu-zapisu parametru0016: błąd sprzętowy falownika0017: błąd zwarcia silnika do masy0018: zastrzeżone0019: zastrzeżone001A: przekroczony czas pracy001B: błąd zdefiniowany przez użytkownika 1001C: błąd zdefiniowany przez użytkownika 2001D: przekroczono czas zasilania001E: brak obciążenia001F: utrata sprzężenia zwrotnego PID podczas pracy0028: błąd przekroczenia czasu szybkiego ograniczenia prądu0029: błąd przełączenia silnika podczas pracy002A: nadwymiarowe odchylenie prędkości002B: przekroczenie prędkości silnika002D: nadmierna temperatura silnika005A: enkoder - błędna nastawa numeru wiersza005B: brak połączenia z enkoderem005C: błąd położenia początkowego005E: błąd sprężenia zwrotnego prędkości |
| Adres błędu komunikacji | Funkcjonalny opis błędu |
| 8001 | 0000: brak błędu0001: błędne hasło0002: błędny kod komendy0003: błędna weryfikacja CRC0004: nieprawidłowy adres0005: nieprawidłowy parametr0006: nieprawidłowa zmiana parametru0007: układ zablokowany0008: trwa działanie EEPROM |
Opis parametrów komunikacji grupy PD
| Pd-00 | Szybkość transmisji | Ustawienie fabryczne | 6005 |
| Zakres ustawień | Jednostka: szybkość transmisji MODUBS0: 300BPS1: 600BPS2: 1200BPS3: 2400BPS4: 4800BPS5: 9600BPS6: 19200BPS7: 38400BPS8: 57600BPS9: 115200BPS | ||
Parametr ten służy do ustawiania szybkości transmisji danych między komputerem głównym a falownikiem. Należy pamiętać, że szybkość transmisji komputera głównego i przetwornika częstotliwości powinna być spójna. W przeciwnym razie komunikacja nie może się odbywać. Im większa szybkość transmisji, tym większa szybkość komunikacji.
| Fd-01 | Format danych | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: brak weryfikacji: format danych <8, N, 2>1: weryfikacja parzysta: format danych <8, E, 1>2: weryfikacja nieparzysta: format danych <8, O, 1>3: brak weryfikacji: format danych < 8-N-1> | ||
Format danych komputera głównego i falownika powinien być spójny. W przeciwnym razie komunikacja nie odbędzie się.
| Pd-02 | Adres lokalny | Ustawicnic fabryczne | 1 |
| Zakres ustawień | 1~247, 0 jest adresem rozgłoszeniowym | ||
Jeśli adres lokalny jest ustawiony na 0, czyli jako adres rozgłoszeniowy, można realizować funkcję rozgłoszeniową komputera hosta. Adres lokalny jest unikalny (z wyjątkiem adresu rozgłoszeniowego) i stanowi podstawę do realizacji komunikacji punkt-punkt między komputerem głównym a przetwornikiem częstotliwości.
| Pd-03 | Opóźnienie odpowiedzi | Ustawienie fabryczne | 2ms |
| Zakres ustawień | 0~20ms | ||
Opóźnienie odpowiedzi: czas między wysłaniem danych z komputera hosta a zakończeniem odbioru danych przez falownik. Jeśli opóźnienie odpowiedzi jest krótsze niż czas przetwarzania przez system, opóźnienie odpowiedzi przyjmuje czas przetwarzania przez system. Jeśli opóźnienie odpowiedzi jest dłuższe niż czas przetwarzania przez system, potrzebne jest oczekiwanie na opóźnienie po przetworzeniu danych przez system. Po osiągnięciu czasu opóźnienia odpowiedzi dane zostaną przesłane do komputera hosta.
| Pd-04 | Przekroczenie czasu komunikacja | Ustawienie fabryczne | 0.0 s |
| Zakres ustawień | 0.0 s (niektywne) 0.1~60.0s | ||
Jeśli kod tej funkcji jest ustawiony na 0,0s, parametr przekroczenia czasu komunikacji jest nieaktywny.
Jeśli kod tej funkcji jest ustawiony na prawidłową wartość, ale czas przerwy między jedną komunikacją a następną przekroczy limit, system wygeneruje alarm błędu komunikacji (Err 16). W normalnych warunkach funkcja jest ustawiona jako nieaktywna. Jeśli ustawi się parametry podrzędne w systemic komunikacji ciągłej, można monitorować jej stan.
| Pd-05 | Protokół komunikacyjny Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: niestandardowy protokół Modbus1: standardowy protokół Modbus |
PD-05 = 1: wybór standardowego protokolu Modbus.
PD-05 = 0: podczas odczytu komendy, liczba bajtów zwracanych przez slave'a ma o jeden bajt więcej niż standardowy protokół Modbus. Szczegóły w „5 struktura danych komunikacyjnych” protokołu.
| Pd-05 | Rozdzielczość dla odczytu danych w komunikacji | Ustawienie fabryczne | 0 |
| Zakres ustawień | 0: 0.01A1: 0.1A | ||
Służy do potwierdzania jednostki wartości prądu wyjściowego, gdy komunikacja odczytuje prąd wyjściowy.
Úvod
Czas przyspieszania i hamowania oznacza czas przyspieszania i hamowania od częstotliwości zerowej do częstotliwości zadanej P0-25. 6-1 ábra A gyorsulási és lassulási idő grafikonja
Rysunek 6-24 Schemat działania przy naglej awarii zasilania



