
RM9006 - Capteur industriel IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil RM9006 IFM au format PDF.

| Type de produit | Codeur absolu magnétique avec interface CANopen |
| Marque | IFM |
| Modèle | RM9006 |
| Alimentation | 24 V DC |
| Interface | CANopen (CiA DS 301, DS 406) |
| Connecteur | M12, 5 pôles |
| Résolution mono-tour | Jusqu'à 12 bits (paramétrable) |
| Résolution multi-tour | Jusqu'à 12 bits (paramétrable) |
| Débits de transmission supportés | 20, 50, 100, 125, 250, 500, 800, 1000 kbit/s |
| Numéro de nœud | 1 à 127 (réglable par SDO ou LSS) |
| Modes de fonctionnement | RTR, Event Time, Sync |
| Fonctions | PDO, SDO, Node Guarding, Heartbeat, Emergency, Bootloader |
| Indicateurs LED | LED rouge/verte pour état bus et alimentation |
| Protection | IP67 (estimation) |
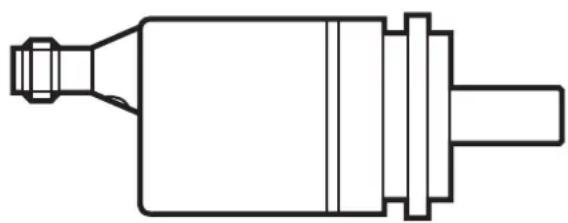
| Dimensions | Diamètre boîtier : 36 mm, hauteur : 60 mm (estimation) |
| Poids | Environ 200 g |
| Température de fonctionnement | -25 °C à +85 °C (estimation) |
| Entretien | Nettoyer avec un chiffon sec ; éviter l'humidité et les chocs |
| Sécurité | Respecter les consignes de montage et de raccordement ; déconnecter l'alimentation avant intervention |
| Pièces détachées | Contacter le service après-vente IFM |
| Réparabilité | Appareil non réparable par l'utilisateur ; renvoyer au fabricant |
FOIRE AUX QUESTIONS - RM9006 IFM
Questions des utilisateurs sur RM9006 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Capteur industriel au format PDF gratuitement ! Retrouvez votre notice RM9006 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil RM9006 de la marque IFM.
MODE D'EMPLOI RM9006 IFM
Codeur absolu magnétique avec interface CANopen
FR
RM8xxx
RM9xxx
1 Remarque préliminaire 4
1.1 Symboles utilisés .... 4
1.2 Avertissements utilisés 4
2 Consignes de sécurité 4
3 Informations générales 5
3.1 Technologie CANopen 5
3.1.1 Modes de fonctionnement supportés.... 5
3.2 Références 5
4 Fonctionnement et caractéristiques 6
5 Montage 6
6 Installation du codeur 7
6.1 Réglages dans le codeur 7
6.2 Affectation du signal 7
6.3 Réglage du numéro de nœud 7
6.3.1 Réglage du numéro de nœud via des objets SDO 7
6.3.2 Réglage du débit de transmission via des objets SDO ..... 7
6.3.3 Réglage du numéro de nœud et du débit de transmission via LSS. . 7
6.3.4 Terminaison de bus 8
7.1 Modes de fonctionnement 8
7.1.1 Information générale 8
7.1.2 Mode Preoperational 9
7.1.3 Mode Start/Operational 9
7.1.4 Mode Start/Stop 9
7.1.5 Réinitialisation du codeur....9
7.2 Mode de fonctionnement normal (modes de transmission CAN). ..... 10
7.3 Enregistrer les paramètres 10
7.3.1 Répertoire objets 10
7.3.2 L'opération de mémorisation .....11
7.3.3 Sauvegarder sans reset....11
7.3.4 Sauvegarder avec reset....11
7.3.5 Restaurer les paramètres .....11
7.3.6 Layer Setting Service (LSS).... 12
8 Paramètres programmables 13
8.1 Répertoire objets 13
8.2 Exemple de programmation valeur présélectionnée 13
8.2.1 Régler la valeur présélectionnée (maître au codeur avec numéro de nœud 1).... 14
8.3 Objets du DS301 de 1000h à 1FFFh spécifiques à la communication (profil de communication DS301 V4.02)....15
8.4 Objets spécifiques au fabricant de 2000h à 5FFFh ..... 21
8.5 Objets spécifiques à l'appareil de 6000h à 9FFFF....26
9 Termes et abréviations 32
Licences et marques
Microsoft ^® , Windows ^® , Windows XP ^® et Windows Vista ^® sont des marques enregistrées de Microsoft Corporation.
Adobe ^® et Acrobat ^® sont des marques enregistrées de Adobe Systems Inc.
Toutes les marques et raisons sociales utilisées sont soumises au copyright des sociétés respectives.
1 Remarque préliminaire
1.1 Symboles utilisés
▶ Action à faire
Retour d'information, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence croisée

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations.

Information
Remarque supplémentaire
1.2 Avertissements utilisés
ATTENTION
Avertissement de dommages matériels.
2 Consignes de sécurité
Cette notice fait partie de l'appareil. Elle fournit des textes et des figures pour l'utilisation correcte de l'appareil et doit être lue avant installation ou emploi.
Respecter les indications de cette notice.
Le non-respect des consignes, l'emploi non conforme par rapport aux prescriptions, un montage ou une manipulation incorrect peuvent porter atteinte à la sécurité des personnes et des installations.
Le montage et le raccordement doivent être conformes aux normes nationales et internationales en vigueur. La personne qui installe l'appareil en est responsable.
Seuls les signaux indiqués dans les données techniques ou imprimés sur l'appareil doivent être raccordés aux connexions.
3 Informations générales
3.1 Technologie CANopen
Le profil de communication CANopen est basé sur la spécification CAN Application Layer (CAL) de l'organisation CiA (CAN in Automation). CANopen est considéré comme un bus de terrain robuste avec des options de configuration très flexibles. Il est utilisé dans de nombreuses applications différentes, qui toutes reposent sur des profils d'applications différents. CANopen contient un concept pour la configuration et la communication de données de temps réel, utilisant des messages synchrones et asynchrones. On distingue quatre types de messages (objets):
- Messages d'administration (Layer Management, Network Management et Identifier Distribution)
- Service Data Objects (SDO) / objets de données service
- Process Data Objects (PDO) / données process objets
- Predefined Objects (Synchronisation, Time Stamp, Emergency) / objets prédéfinis
Pour plus d'informations voir la spécification CiA-CAN (CiA 406 - codeurs; CiA 301 - CANopen).
3.1.1 Modes de fonctionnement supportés
Les codeurs avec interface CANopen supportent les modes de fonctionnement suivants:
• RTR (demande)
La valeur de position est uniquement donnée sur le bus sur demande.
• EVENT Time (temps événement)
La valeur de position est donnée sur le bus cycliquement (l'intervalle est réglable).
• Cyclique/synchrone
Après la réception du télégramme sync via l'hôte, le codeur absolu transmet la valeur process actuelle. Un temporisateur sync peut être programmé de sorte que le codeur ne transmet qu'après un nombre de télégrammes sync défini est transmis.
De plus, d'autres fonctions peuvent être paramétrées (sens de rotation, résolution etc.).
3.2 Références
http://www.can-cia.org
CAN Application Layer, DS 201...207 CiA
Profil LSS
DS305 CiA
Profil de communication basé sur CAL, DS 301 CiA
Profils de l'appareil pour codeurs DS 406 CiA
Spécification
CAN
version
2.0
A
Robert
Bosch
GmbH
Commande
CAN
CANary
Atmel
4 Fonctionnement et caractéristiques
- Il y a 1 serveur SDO et 2 PDO valeurs standard selon CiA DS 301. Le mapping PDO peut être changé (mapping PDO dynamique). Les identifiants valeur standard sont affectés selon le "predefined connection set" défini dans la spécification CANopen.
- Les COB-ID des PDO et leurs types de transmission peuvent être configurés.
- Le module attend un objet sync. L'identifiant CAN des objets sync peut être configuré.
- Le module supporte "Node Guarding" et "Heartbeat".
- Le module supporte un objet Emergency. Le COB-ID de l'objet EMCY peut être configuré.
- Le module mémorise le dernier défaut apparu. Le code d'erreur de l'objet Emergency correspondant est mémorisé.
- Le module supporte la commande Load (fonction reset pour restaurer le réglage usine).
- Des alarmes et des avertissements ne sont pas indiqués.
5 Montage
▶ Mettre l'installation hors tension.
▶ S'assurer que la machine est à l'arrêt.
▶ Ne pas mettre en marche le moteur lors du montage.
Eviter tous types d'impacts sur l'arbre ; ne pas utiliser de lime ou d'outil similaire sur l'arbre. Risque de destruction.

Ce produit est un appareil de mesure de précision. De ce fait, il doit être utilisé avec soin par un personnel compétent. Les avertissements suivants sont valables pour des influences en dehors des valeurs limites indiquées dans la fiche technique.
Des détériorations sur le produit peuvent être causées comme suit :
• par de trop grandes forces appliqués sur l'arbre
- par la présence d'humidité et de liquides chimiques (ne pas installer de câbles orientés vers le haut)
• par des températures extrêmes
• par de trop grandes valeurs de chocs et vibrations
- par un court-circuit ou une tension d'alimentation trop haute
- par des chocs et impacts ou d'autres influences physiques
6 Installation du codeur
Attention : Ce produit correspond à la norme EN 61000-6-4. L'appareil peut causer des problèmes de radiodiffusion dans des maisons. Le cas échéant, l'utilisateur doit prendre des mesures appropriées pour éviter ces problèmes.
6.1 Réglages dans le codeur
Régler l'adresse du nœud du codeur, le débit de transmission et la terminaison de bus avant la mise en service de l'appareil.
6.2 Affectation du signal
| Signal Connecteur M12, 5 pôles | 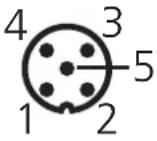 | |
| CAN GND broche 1 | ||
| Tension d'alimentation 24 V broche 2 | ||
| GND (PE) broche 3 | ||
| CAN haut broche 4 | ||
| CAN bas broche 5 |
▶ Utiliser un câble blindé.
6.3 Réglage du numéro de nœud
6.3.1 Réglage du numéro de nœud via des objets SDO
Avec des appareils sans couvercle de connexion, l'adresse ne peut être réglée que via les objets SDO. L'adresse du codeur sans couvercle de connexion est réglée à 32 comme standard. Détails sur la modification du numéro de nœud → chapitre 7.4.
6.3.2 Réglage du débit de transmission via des objets SDO
Avec des appareils sans couvercle de connexion, le débit de transmission ne peut être réglé que via les objets SDO. Le débit de transmission est réglé à 125 Kbits/s comme valeur standard. Détails sur la modification du débit de transmission → chapitre 8.4.
6.3.3 Réglage du numéro de nœud et du débit de transmission via LSS
Une autre possibilité de régler le numéro de nœud et le débit de transmission est Layer Setting Services. Informations supplémentaires : → chapitre 6.3.6
6.3.4 Terminaison de bus
Si le codeur est le dernier participant, il faut utiliser une résistance de terminaison externe ou un connecteur T de terminaison.
6.4 Indications LED
| LED Etat Description | ||
| rouge clignote 1 Hz tension d'alimentation ok, | connexion bus défectueux | |
| rouge allumée "BUS OFF" | causé par exemple par un court- | circuit, une rupture du câble, un connecteurdéfectueux. |
| verte clignote 2,5 Hz tension d'alimentation ok, connexion bus ok | ||
| verte / rouge verte clignote | 2,5 Hzet rouge clignote 1x à chaque3e impulsion de la LED verte | erreur Guarding, soit Nodeguard soitHeartbeat |
| verte clignote 1 Hz bus arrêté | ||
| verte allumée défaillance du maître, | codeur reste dans l'état de fonctionnementPreoperational> erreurs Guard et Heartbeat ne sont pasindiquées | |
| verte / rouge verte allumée /rouge clignote 2,5 Hz | indication non reproductible (aucunedescription unique de l'indication) | |
7 Configuration
Ce chapitre décrit la configuration des paramètres d'un codeur absolu avec interface CANopen.
7.1 Modes de fonctionnement
7.1.1 Information générale
Dans le mode Preoperational, le codeur répond sur le bus CAN après avoir transmis son message boot up (démarrage).
Message boot up 700 hexa + numéro de nœud (plus de détails dans le Profil de communication chapitre 7.3)
▶ Ne modifier les paramètres que dans le mode Preoperational.
Ce mode réduit la charge du bus et simplifie le contrôle des messages transmis et reçus. Il n'est pas possible de transmettre ou de recevoir des messages PDO dans ce mode.
Pour mettre le codeur dans le mode Preoperational, le maître doit transmettre le message suivant :
| Identifiant Byte 0 Byte 1 | Description | ||
| 0h 80h 00 NMT-PreOp, tous les | nœuds | ||
| 0h 80h NN NMT-PreOp, N | N |
NN : Node Number (numéro de nœud)
Il est possible de mettre tous les nœuds (byte 1 = 0) ou des nœuds individuels (byte 1 NN) dans le mode Preoperational.
Pour mettre le codeur dans le mode Operational, le maître doit transmettre le message suivant :
| Identifiant Byte 0 Byte 1 | Description | ||
| 0h 01h 00 NMT-Start, tous les | nceuds | ||
| 0h 01h NN NMT-Start, NN |
NN : Node Number (numéro de nœud)
Il est possible de mettre tous les nœuds (byte 1 = 0) ou des nœuds individuels (byte 1 NN) dans le mode Operational.
7.1.4 Mode Start/Stop
Pour mettre le codeur dans le mode Stop, le maître doit transmettre le message suivant :
| Identifiant Byte 0 Byte 1 | Description | ||
| 0h 02h 00 NMT-Stop, tous les | nceuds | ||
| 0h 02h NN NMT-Stop, NN |
NN : Node Number (numéro de nœud)
Il est possible de mettre tous les nœuds (byte 1 = 0) ou des nœuds individuels (byte 1 NN) dans le mode Stop.
7.1.5 Réinitialisation du codeur
En cas de fonctionnement incorrect, faire une réinitialisation.
| Identifiant Byte 0 Byte 1 | Description | ||
| 0h 81h 00 Reset tous les nœuds | |||
| 0h 81h NN Reset nœud |
NN : Node Number (numéro de nœud)
Il est possible de remettre tous les nœuds (byte 1 = 0) ou des nœuds individuels (byte 1 NN) (reset). Après la réinitialisation, l'appareil répond de nouveau dans le mode Preoperational.
7.2 Mode de fonctionnement normal (modes de transmission CAN)
| RTR Mode Un hôte raccordé scrute la valeur de position actuelle via un télégrammeRemote Transmission Request. Le codeur lit la position actuelle, traite les paramètres mis éventuellement et renvoie la valeur de position via le même identifiant CAN. | |
| EVENT Time (temps événement) | Le codeur absolu transmet cycliquement - sans demande de la part de l'hôte - la valeur de position actuelle. Le temps de cycle peut être programmable en pas de millisecondes pour des valeurs entre 1 ms et 65536. |
| Sync Mode Après la réception du télégramme sync par l'hôte, le codeur transmet la valeur process actuelle. Si plusieurs nœuds répondent au télégramme sync, les nœuds individuels répondent l'un après l'autre selon leur identifiant CAN. La programmation d'un temps Offset n'est plus nécessaire. Un temporisateur sync peut être programmé de sorte que le codeur ne transmette qu'après un nombre de télégrammes sync défini soit transmis. | |
7.3 Enregistrer les paramètres
7.3.1 Répertoire objets
| Index objet Description de l'objet | |
| 1005h COB-ID-Sync | |
| 100Ch Guard Time | |
| 100Dh Life Time Factor | |
| 1016h Consumer Heartbeat Time | |
| 1017h Producer Heartbeat Time | |
| 1020h Verify configuration | |
| 1800h Communication parameter PDO 1 | |
| 1801h Communication parameter PDO 2 | |
| 1A00h Transmit PDO1 Mapping Parameter | |
| 1A01h Transmit PDO2 Mapping Parameter | |
| 2100h Operating Parameters | |
| 2101h Resolution per Revolution | |
| 2102h Total Resolution | |
| 2103h Preset Value | |
| 2104h Limit Switch, min. | |
| 2105h Limit Switch, max. | |
| 2160h Customer Storage | |
| 2200h Cyclic Timer | |
| 3000h Node Number (NN) | |
| 3001h Baudrate | |
| 6000h Operating Parameter | |
| 6001h Steps per Revolution | |
| 6002h Total Resolution | |
| 6003h Preset Value | |
| 6200h EVENT | |
7.3.2 L'opération de mémorisation
Les paramètres sont mémorisés dans une EEPROM rémanente. Les modifications faites sont tout d'abord sauvegardées dans la mémoire de travail du codeur. Quand tous les paramètres ont été vérifiés, ils peuvent être transférés dans l'EEPROM lors d'un cycle d'écriture.

Les paramètres sauvegardés ne deviennent actifs qu'après un reset (Power on, NMT-Reset).
7.3.3 Sauvegarder sans reset
Quand l'opération de mémorisation est terminée par l'utilisation de l'objet 1010, il n'y a pas de reset automatique pour activer les paramètres.
7.3.4 Sauvegarder avec reset
L'objet 2300 du répertoire spécifique au fabricant fait une mémorisation avec un reset automatique. Les paramètres deviennent actifs immédiatement. Il faut le prendre en compte pour une modification du numéro de nœud et du débit de transmission parce que le bus peut être perturbé.
7.3.5 Restaurer les paramètres
Les paramètres préréglés en usine peuvent être restaurés. Les réglages mémorisés dans l'EEPROM ne sont pas remplacés. Les réglages de défaut ne sont pas mémorisés dans l'EEPROM et ne sont protégés contre la coupure secteur qu'après une retransmission de la commande de sauvegarde. Les paramètres restaurés sont identiques pour chaque codeur CANopen de ce type et il est possible qu'ils ne correspondent pas aux paramètres originaux. Vérifier les paramètres restaurés en vue de leur validité avant d'exécuter l'opération de mémorisation de nouveau.
7.3.6 Layer Setting Service (LSS)
Pour configurer le codeur via LSS, le codeur est traité en tant qu'esclave. L'automate programmable doit avoir la fonctionnalité de maître LSS. L'appareil maître LSS demande les données du codeur. Le maître LSS scrute les informations LSS (Vendor ID, code produit, numéro de révision, numéro série) de l'esclave. Dans ce cas, l'esclave est clairement reconnu et les paramètres, le numéro de nœud et le débit de transmission peuvent être réglés.
8 Paramètres programmables
Les objets sont basés sur le profil d'appareil CiA 406 DS V3.2 : Profil CANopen pour codeurs (www.can-cia.org).
Description détaillée du byte de commande
| Commande Longueur de données Type de données | ||
| 43h 4 bytes Unsigned 32 | ||
| 47h 3 bytes Unsigned 24 | ||
| 4Bh 2 bytes Unsigned 16 | ||
| 4Fh 1 byte Unsigned 8 | ||
| 23h 4 bytes Unsigned 32 | ||
| 27h 3 bytes Unsigned 24 | ||
| 2Bh 2 bytes Unsigned 16 | ||
| 2Fh 1 byte Unsigned 8 | ||
8.1 Répertoire objets
La transmission des données selon CAL n'est exécutée que via des télégrammes de message orientés vers l'objet. Ces objets sont classifiés selon des groupes via un registre index. Chaque entrée dans le registre index peut être subdivisée via un sous-index. L'aperçu général des répertoires objets standard est représenté dans le tableau suivant :
| Index (hexa) Objet | |
| 0000 non utilisé | |
| 0001-001F types de données statiques | |
| 0020-003F types de données complexes | |
| 0040-005F types de données spécifiques au fabricant | |
| 0060-0FFF réservé | |
| 1000-1FFF zone du profil de communication | |
| 2000-5FFF zone spécifique au fabricant | |
| 6000-9FFF zone spécifique à l'appareil | |
| A000-FFFF | réservé |
8.2 Exemple de programmation valeur présélectionnée
La réception de la réponse SDO est à surveiller dans le programme parce que la demande est transmise de façon permanente sans accusé de réception.
Quand un appareil CANopen est raccordé au bus et configuré avec le débit de transmission et le numéro de nœud corrects, il répond au bus avec un message boot up.
8.2.1 Régler la valeur présélectionnée (maître au codeur avec numéro de nœud 1)
Régler la valeur présélectionnée (valeur 1000)
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download | 6003 | h byte 4 byte 5 byte 6 byte 7 | |||||||
| 601 8 23h 03 | h 60h 00 | h 00h 10h | 00h | 00h | |||||
Réponse du codeur
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download | 6003h byte 4 byte 5 byte 6 byte 7 | ||||||||
| 581 8 60h 03 | h 60h 00h | 00h | 00h | ||||||
Lire la valeur présélectionnée du codeur
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download | 6003h byte 4 byte 5 byte 6 byte 7 | ||||||||
| 601 8 40h 03 | h 60h 00h | 00h | 00h | 00h | |||||
Réponse du codeur
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download | 6003h byte 4 byte 5 byte 6 byte 7 | ||||||||
| 581 8 43h 03 | h 60h 00 | h 00h 10h | 00h | 00h | |||||
Mémorisation protégée contre la coupure secteur de la valeur présélectionnée
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download | 1010h byte 4 byte 5 byte 6 byte 7 | ||||||||
| 601 8 23h 10 | h 10h 01 | h 73h 61h | 76h | 65h | |||||
Réponse du codeur
| Identifiant D | LC Com | mande Index Sous- | index | Données services | |||||
| NN 1 Download 6003h byte 4 byte 5 byte 6 byte 7 | |||||||||
| 581 8 60h 10h 10h 00h 00h 00h 00h 00h | |||||||||
8.3 Objets du DS301 de 1000h à 1FFFh spécifiques à la communication (profil de communication DS301 V4.02)
| Index | S-Idx | Nom | Type, accès | Valeur standard | Description |
| 1000 | 0 | Device Type | u32, ro | N/A | Type et profil de l'appareil |
| 1001 | 0 | Error Register | u8, ro | N/A | Indication des erreurs d'appareils internes0b 0000 0000 generic error |
| 1003 | 0 | Pre-Defined Error Field | u8, ro | 0 | Une liste d'erreurs avec 10 entrées est supportée. |
| 1...10 | Error history | u32, ro | S-Idx 1 dernière erreurS-Idx 2 avant-dernière erreur......Effacement de la mémoire de défautsLa mémoire de défauts est effacée par l'écriture d'un zéro au sous-index 0. | ||
| 1005 | 0 | COB-ID Sync object | u32, rw 80h | L'objet contient l'identifiant pour l'objet SYNC. | |
| 1006 | 0 | Com Cycle Period | u32, rw 0h | L'objet définit le cycle de communication (SYNC Producer) en μs (temps max entre 2 objets sync.). | |
| 1007 | 0 | Synchronous Window Length | u32, rw 0h | L'objet contient la longueur de la fenêtre sync pour les PDO synchrones en μs. | |
| 1008 | 0 | Manufacturer Device Name | str, ro | RM9000 Désignation d'appareil | |
| 1009 | 0 | Manufacturer Hardware Version | str, ro | x.x | Version du matériel |
| 100A 0 | Manufacturer Software Version | str, ro | x.x | Software Version | |
| 100C | 0 | Guard Time | u16, rw | 0 | Cet objet contient le 'guard time' en millisecondes. |
| 100D | 0 | Life Time Factor | u8, rw 0 | Cet objet contient le Life Time Factor Parameter. Le Life Time Factor multiplié par le Guard Time résulte en Life Time pour le protocole Guarding. | |
| Index S-Idx Nom Type, | accès | Valeur standard | Description | ||||
| 1010 Store | Parameters | Cet objet est utilisé pour écrire des paramètres dans la mémoire non-volatile. | |||||
| 0 Nombre des sous-indices | u8, ro 1 | ||||||
| 1 Store all parameters | u32, rw "save" Pour écrire les paramètres dans la mémoire non-volatile, il faut transmettre le mot "save" au nœud correspondant. | ||||||
| Mot de poids fort Mot de poids faible | |||||||
| ASCII e v a s | |||||||
| Valeur hexa 65h 76h 61h | 73h | ||||||
| 1011 Restore | Parameters | L'objet est utilisé pour restaurer les réglages usines. | |||||
| 0 Nombre des sous-indices | u8, ro 1 | ||||||
| 1 Restore all parameters | u32, rw "load" Pour restaurer le réglage usine, il faut transmettre le mot "load" dans le nœud correspondant. Après la restauration des paramètres, vérifier les paramètres avant d'exécuter la commande de sauvegarde de nouveau. Les paramètres restaurés ne deviennent actifs qu'après un reset ou Power up. | ||||||
| Mot de poids fort | Mot de poids faible | ||||||
| ASCII | d | a | o l | ||||
| Valeur hexa | 64h | 61h | 6Fh | 6Ch | |||
| Index | S-Idx | Nom | Type, accès | Valeur standard | Description |
| 1012 | 0 | COB-ID objet Time Stamp | u32, rw | 100h L'objet contient le COB-ID de l'objet Time Stamp. | |
| 1013 | 0 | High Resolution Time Stamp | u32, rw | 0 | L'objet contient un marquage temporel avec une résolution de 1 μs. |
| 1014 | 0 | COB-ID objet Emergency | u32, rw | 80h + ID nœud | L'objet contient l'EMCY Emergency Message Identifier. |
| Index $-Idx Nom Type, | accès | Valeur standard | Description | ||||
| 1016 Consumer | Heartbeat Time | Le temps Consumer Heartbeat définit le temps de cycle Heartbeat à attendre en ms. Le codeur ne peut surveiller qu'un appareil. Quand le temps est réglé à zéro, ce service n'est pas activé. Le temps réglé doit être supérieur au temps correspondant (objet 1017) de l'appareil à surveiller. | |||||
| u16, rw 0 Cet objet contient l'intervalle en millisecond dans laquelle il doit transmettre un message Heartbeat. | |||||||
| 1018 Objet Identity | Cet objet contient les informations sur l'appareil | ||||||
| Index S-Idx Nom Type, | accès | Valeur standard | Description | ||||
| 1029 E | ror beha | viour L'objet montre le comportement en cas | de défaut. | ||||
| 0h Nombre des saisies | u8, ro 1h | ||||||
| 1h Erreur de communication | u8, rw 0x0 | ||||||
| 1800 P | Paramètres de communication du 1er Transmit PDO | Cet objet contient les paramètres de communication du premier Transmit PDO. | |||||
| 0 Nombre des sous-indices | u8, ro 5 | ||||||
| 1 COB-ID u32, rw 180h + | numéro de nœud | ||||||
| 2 Mode de transmission | u8, rw FE | ||||||
| 3 Inhibit Time u32, rw 0 | |||||||
| 4 non disponible | |||||||
| 5 Event Timer u32, rw 0x64 or 0 | |||||||
| Index $-Idx Nom Type, | accès | Valeur standard | Description | ||||||||
| 1801 Paramètres de communication du 2eTransmit PDO | L'objet contient les paramètres de communication du deuxième Transmit PDO. A noter ! Cet objet n'est actif que pour les codeurs CANopen C6. | ||||||||||
| x | x PDO transmetteur sur | x PDO transmetteur | x PDO transmetteur | x PDO transmetteur | |||||||
Inhibit Time (temps d'inhibition)
Pour "Transmit PDOs". L' "inhibit time" pour les transmissions PDO peut être réglé comme une valeur 16 bits. Quand les données changent, le PDO vérifie si l' "inhibit time" s'est déjà écoulé depuis la dernière transmission des données. Une nouvelle transmission des données peut avoir lieu uniquement si l' "inhibit time" s'est écoulé. Le réglage d'un temps est utile pour des transmissions asynchrones (mode de transmission 254 et 255) afin d'éviter des surcharges sur le bus.
Event Time
L' "event timer" ne fonctionne qu'en modes de transmission asynchrones (modes de transmission 254 et 255). Si les données changent avant que l' "event timer" s'écoule, un télégramme temporaire est envoyé. Si la valeur du temporisateur est > 0, les données sont transmises après l'écoulement du timer. La valeur du temporisateur est écrite dans le sous-index 5 du PDO correspondant. Le transfert de données a lieu sans modifications des données. La plage de valeurs se trouve entre 1 et 65536 ms.
| Index S- | Idx Nom | Type, | accès | Valeur standard | Description |
| 1A00 P | Paramètres de mapping du 1er Transmit PDO | L'objet contient le paramètre mapping du 1e Transmit PDO | |||
| 0 Nombre des sous-indices | u8, ro 2 | ||||
| 1 1er objet mappé | u32, rw - | ||||
| 1A01 2e | Transmit PDO Mapping Parameter | L'objet contient le paramètre mapping du 2e Transmit PDO. | |||
| 0 Nombre des sous-indices | u8, ro 2 | ||||
| 1 2e object mappé | u32, rw - | ||||
| 1F50 D | Download | Program Area | C'est un objet spécial pour la fonctionnalité Bootloader.Utiliser cette saisie pour lire le fichier Intel hex avec les données de programme. Vous trouvez des informations détaillées sur le domain download et le transfert bloc dans le CiA Draft Standard 301 Couche application et profil de communication. | ||
| 0h Nombre des sous-indices | u8, ro 2h | ||||
| 1h Domaine, | wo | ||||
| Index $-Idx Nom Type, | accès | Valeur standard | Description | ||
| 1F51 Program | Control | C'est un objet Bootloader spécial pour actualiser le progiciel.Cette zone de données contrôle le programme dans l'index 0X1F50. | |||
8.4 Objets spécifiques au fabricant de 2000h à 5FFFh
| Index $-Idx Nom Type, | accès | Valeur standard | Description | ||
| 2000 0 | Position | Value u32, ro Valeur de position | |||
| 2100 0 | Operating Parameters | u16, rw 0h | Comme paramètre de fonctionnement, le sens du comptage du codeur peut être changé et les deux fins de course peuvent être activés/désactivés.Le paramètre sens du comptage (Complement) définit le sens du comptage du codeur. Avec le même sens du comptage la valeur peut être indiquée comme additionnelle ou soustractive. Le sens du comptage est réglé par bit 0 de l'objet à 2100h. De plus, les deux fins de course peuvent être activés ou désactivés. Bit 1 et bit 2 servent à ce but.Remarque : Le sens du comptage est toujours vu sur l'arbre. Dans le cas du sens de rotation de l'arbre en sens horaire (CW), le sens de rotation est montant.Exemple de calculation :Objectif : Codeur avec sens du comptage descendant (CCW) et les deux fins de course désactivés.Matrix bit :bit 0 = 1 direction descendant (CCW)bit 1 = 0 fin de course min. disabledbit 2 = 0 fin de course max. disabled résultat = 01h | ||
| 2101 0 | Resolution per Revolution | u16, rw Points par tour désirés | (mono-tour résolution jusqu'à 12 bits) | ||
| 0 Resolution per Revolution | u32, rw Points par tour désirés | (résolution mono-tour > 12 bits)Si la résolution par tour désirée dépasse la résolution physique, la valeur réglée n'est pas transférée.► Régler la résolution correcte. | |||
| 2102 0 | Total | Resolution | u32, rw 0x1 | 1000000 Résolution | on totale du codeurCe paramètre est utilisé pour régler la résolution totale désirée. Ce paramètre ne doit pas dépasser la plage de mesure physique du codeur. La résolution totale et la résolution par tour doivent être saisies à l'aide de la formule suivante:GA = (PGA x AU) / PAUPGARésolution physique totale du codeur (voir étiquette)PAUrésolution physique par tour du codeur (voir étiquette)GARésolution totale (spécifique au client)AURésolution par tour (spécifique au client)Si la résolution totale désirée est inférieure à la résolution physique total, le paramètre Total Resolution doit être un multiple de la résolution physique par tour. |
| 2103 0 | Preset Value u32, rw 0 La valeur Preset est une valeur de positionqui doit être indiquée avec une certaine position physique de l'axe. La valeur Preset ne doit pas dépasser la résolution totale physique afin d'éviter des erreurs runtime. | ||||
| Index S-Idx Nom Type, | Valeur | Description | |
| accès | standard | ||
| 2104 0 Limit Switch, min | u32, rw 0 Deux valeurs de position peuvent être programmées en tant que positions de fins de course. Si une de ces valeurs est atteinte, un bit de la valeur de position de 32 bits est réglée. Les deux valeurs ne doivent pas dépasser la résolution physique totale du codeur afin d'éviter des erreurs runtime. | ||
La fin de course (min) met le bit 30=1 avec le prochain télégramme transmis, si la valeur de position réglée est atteinte ou pas atteinte.
| 2105 0 Limit Switch, max. | u32, rw 0 Deux valeurs de position peuvent être programmées en tant que positions de fins de course. Si une de ces valeurs est atteinte, un bit de la valeur de position de 32 bits est réglé. Les deux valeurs ne doivent pas dépasser la résolution physique totale du codeur afin d'éviter des erreurs runtime. |
La fin de course (max) met le bit 31=1 avec le prochain télégramme transmis, si la valeur de position réglée est atteinte ou dépassée.
| 2160 | Customer storage | u8, rw | 4h | L’objet permet à l’utilisateur de sauvegarder une valeur quelconque. | |
| 0h | Nombre de sous-indices | u32, rw 0x0 | |||
| 1h | Customer Storage1 | u32, rw 0x0 | |||
| 2h | Customer Storage2 | u32, rw 0x0 | |||
| 3h | Customer Storage3 | u32, rw 0x0 | |||
| 4h | Customer Storage4 | u32, rw 0x0 |
| 2200 0 Cyclic TimerPDO | u16, ro | 0 | L'objet contient la valeur du Event Timer en ms. |
| 2300 0 SaveParameter with Reset | u32, wo | 55AAAA55h Utilisant cet objet, les paramètres réglés peuvent être écrits dans la mémoire non-volatile. Après la transmission du code d'accès, un reset est fait. | |
| Index $-Idx Nom Type, | accès | Valeur standard | Description | ||
| 3000 0 | Node Number u8, rw - L'objet contient le numéro de nœud de l'appareil.Le numéro de nœud doit être ≠ 0.Toujours additionner un 1 au numéro de nœud.Exemple : 1Fh+1h = 20h = 32 (dec) | ||||
| 3001 0 | Débit de transmission | u8, rw 0x3 | L'objet contient le débit de transmission de l'appareil. | ||
| Huit débits de transmission différents sont supportés. Uniquement un byte est utilisé pour régler le débit de transmission. | |||||
| Débit de transmission [Kbits/s] | Byte | ||||
| 20 0x00 | |||||
| 50 0x01 | |||||
| 100 0x02 | |||||
| 125 0x03 | |||||
| 250 0x04 | |||||
| 500 0x05 | |||||
| 800 0x06 | |||||
| 1000 0x07 | |||||
| 3010 | Speed Control | Mesure de vitesse, la mesure est désactivée dans le réglage usine. | |||
| 0h | Number of sub indices | u8, ro 2h | |||
| 1h | Enable speed | u8, rw 0h | 1h2h | Mesure de vitesse désactivéeMesure de vitesse activée [pas/s]Mesure de vitesse activée [tr/min.] | |
| 2h | Speed mode | u8, rw 0h | 1h2h | Filtre - taille de mémoire 10 valeursFiltre - taille de mémoire 100 valeursFiltre - taille de mémoire 1000 valeurs | |
| 3011 | 0h | Speed Value | u8, romap | Valeur de vitesse [dig/s] | |
| 4000 0h | Bootloader Control | u32, wo L'objet contrôle la fonctionnalité | Bootloader. Si le code de sécurité est écrit dans l'objet, l'EEProm et les informations dans la mémoire flash sont effacés. En outre, l'appareil est soumis à un reset. Après une nouvelle mise en service, le Bootloader vérifie l'application de l'utilisateur et ne trouve plus d'autre information. Le Bootloader commence par le numéro de nœud CANopen prédéfini (0x1) et un débit de transmission fixe de 125 Kbits.L'activation du Bootloader résulte dans une opération d'effacement. Après, uniquement un petit nombre d'objets est disponible. Le codeur attend une nouvelle programmation. A cause de ce comportement, le code de sécurité pour une prévention n'est pas publié dans ce manuel mais il n'est disponible que sur demande chez ifm electronic gmbh. | ||
8.5 Objets spécifiques à l'appareil de 6000h à 9FFFF
| Index S-Idx Nom Type, | accès | Valeur standard | Description | |||||||||
| 6000 Operating parameters | u16, rw 1h | L'objet règle le sens du comptage, la fonction de diagnostic et la fonction de mise à l'échelle.Remarque : Le sens du comptage est toujours vu sur l'arbre. Dans le cas du sens de rotation de l'arbre en sens horaire (CW), le sens de rotation est montant. | ||||||||||
| Fonction de mise à l'échelle :Avec la fonction de mise à l'échelle, la valeur de position transmise peut être adaptée aux besoins de l'application via le logiciel. Les objets 6001 et 6002 du profil de l'appareil sont les paramètres de la mise à l'échelle. Quand le bit de mise à l'échelle est mis à zéro, la mise à l'échelle est désactivée.Structure de bit | ||||||||||||
| Bit 15 14 13 12 1...4 3 | 2 1 0 | |||||||||||
| Description MS MS MS | MS R MD SFC CD | CS | ||||||||||
| Abréviations :MS = fonction spécifique au fabricant (non disponible)R = réservéMD = sens de mesure (non disponible)SFC = fonction de mise à l'échelle (0 = désactivée, 1 = activée)CD = Commissioning Diagnostic Control (non disponible)CS = sens du comptage 0 = CW (en sens horaire) ; 1 = CCW (en sens anti-horaire) | ||||||||||||
| 6001 0 | Measuring units per revolution | u32, rw voir | étiquette | Réglage | ||||||||
| 6002 0 | Total measuring range in measuring units | u32, rw voir | étiquette | Réglage de la résolution totale de la plage de mesure | ||||||||
| 6003 | 0 | Preset Value | u32, rw | 0 | Réglage de la valeur préréglée pour le codeur | |||||||
| 6004 0 | Position value u32, romap | - | L'objet contient la valeur de position | |||||||||
| Index $-Idx Nom Type, | accès | Valeur standard | Description | |||||||||
| 6030 S | Speed Value Valeur de vitesse | Si la valeur maximale est dépassée, la valeur reste sur celle-ci. L'utilisateur peut utiliser l'objet 3010h (32 bits). | ||||||||||
| 0h Number of sub indices | u8, ro 1h | |||||||||||
| 1h Speed value channel1 | entier 16, romap | - | ||||||||||
| 6200 0 | EVENT | Time u16, rw 0x64 | Cet objet contient la valeur du | EventTimer des PDO correspondants. La valeur peut être réglée entre 1 et 65538 ms. | ||||||||
| 6300 Cam state register | L'objet décrit le registre état des cames.L'objet contient la position actuelle de la came de 1 à 8. | |||||||||||
| u8, ro 1h | ||||||||||||
| u8, romap 4h | ||||||||||||
| 6301 Cam enable register | L'objet décrit l'état des cames. | |||||||||||
| 0h Number of sub indices | u8, ro 1h | |||||||||||
| 1h Cam enable channel 1 | u8, rw | |||||||||||
| 6302 Cam polarity register | L'objet décrit le comportement des cames. | |||||||||||
| 0h Number of sub indices | u8, ro 1h | |||||||||||
| 1h Cam polarity channel 1 | u8, rw 0h | |||||||||||
List of Cam objets
| 6310h Cam1 low limit | ||||||
| 0h | VAR Highest sub-index supported | u32 | ro 0x1 | |||
| 1h | VAR Cam1 low limit channel1 | u32 | rw 0x0 | |||
| 6311h | Cam2 low limit | |||||
| 0h | VAR Highest sub-index supported | u32 | ro 0x1 | |||
| 1h | VAR Cam2 low limit channel1 | u32 | rw 0x0 | |||
| 6312h Cam3 low limit | ||||||
| 0h | VAR | Highest sub-index supported | u8 | ro | 0x1 | |
| 1h VAR | Cam3 low | limit channel1 u32 rw 0x0 | ||||
| 6313h Cam4 low lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam4 low | limit channel1 u32 rw 0x0 | ||||
| 6314h Cam5 low lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam5 low | limit channel1 u32 rw 0x0 | ||||
| 6315h Cam6 low lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam6 low | limit channel1 u32 rw 0x0 | ||||
| 6316h Cam7 low lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam7 low | limit channel1 u32 rw 0x0 | ||||
| 6317h Cam8 low lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam8 low | limit channel1 u32 rw 0x0 | ||||
| 6320h Cam1 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam1 high | limit channel1 u32 rw 0x0 | ||||
| 6321h Cam2 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam2 high | limit channel1 u32 rw 0x0 | ||||
| 6322h Cam3 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam3 high | limit channel1 u32 rw 0x0 | ||||
| 6323h Cam4 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam4 high | limit channel1 u32 rw 0x0 | ||||
| 6324h Cam5 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam5 high | limit channel1 u32 rw 0x0 | ||||
| 6325h Cam6 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam6 high | limit channel1 u32 rw 0x0 | ||||
| 6326h Cam7 high lim | t | |||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam7 high | limit channel1 u32 rw 0x0 | ||||
| 6327h Cam8 high limit | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam8 high limit channel1 u32 rw 0x0 | |||||
| 6330h Cam1 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam1 hysteresis channel1 u32 rw 0x0 | |||||
| 6331h Cam2 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam2 hysteresis channel1 u32 rw 0x0 | |||||
| 6332h Cam3 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam3 hysteresis channel1 u32 rw 0x0 | |||||
| 6333h Cam4 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam4 hysteresis channel1 u32 rw 0x0 | |||||
| 6334h Cam5 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam5 hysteresis channel1 u32 rw 0x0 | |||||
| 6335h Cam6 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam6 hysteresis channel1 u32 rw 0x0 | |||||
| 6336h Cam7 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam7 hysteresis channel1 u32 rw 0x0 | |||||
| 6337h Cam8 hysteresis | ||||||
| 0h VAR | Highest sub-index supported u8 ro 0x1 | |||||
| 1h VAR | Cam8 hysteresis channel1 u32 rw 0x0 | |||||
| Index S-Idx Nom Type, | accès | Valeur standard | Description | |||||||
| 6400 Area state register | L'objet décrit le registre état de la plage. Dans cet objet l'état des valeurs du codeur est indiqué dans la plage définie auparavant. | |||||||||
| 0h Measuring units per revolution | u8, ro 1h | |||||||||
| 1h Total measuring range in measuring units | u8, romap - | |||||||||
| Structure du bit | ||||||||||
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |||
| R | r | r | r | r | Range underflow | Range overflow | Out of range | |||
| MSB LSB | ||||||||||
| Signal Valeur Définition | ||||||||||
| Out of range 0 Position between | low and high limit | |||||||||
| 1 Position out of range (refer to module identification object, 650Ah) is reached | ||||||||||
| Range overflow 0 No range overflow | ||||||||||
| 1 Position is lower than the position value set in object 6402h "work area low limit" | ||||||||||
| Range underflow | 0 No range underflow | |||||||||
| 1 Position is higher than the position value set in object 6401h "work area high limit" | ||||||||||
| r | 0 reserved | |||||||||
| 6401 Work area low limit | - | L'objet indique la valeur inférieure de la portée de travail. Bit 2 de l'état de portée de travail présent dans l'objet 6400h changera quand la plage de fonctionnement n'est pas atteinte. Cet objet est directement relié à l'objet 2104h (Limit Switch MIn). | ||||||||
| 0h Number of sub indices | entier 32, ro | 1h | ||||||||
| 1h Work area low limit channel 1 | entier 32, rw | 0h | ||||||||
| Index $-Idx Nom Type, | accès | Valeur standard | Description | |||||||
| 6402 W | Work area | high limit | - L'objet indique la valeur supérieure de la portée de travail. Bit 1 de l'état de portée de travail présent dans l'objet 6400h changera quand la plage de fonctionnement est dépassée.Cet objet est directement relié à l'objet 2105h (Limit Switch Max). | |||||||
| 0h Number of sub indices | entier 32, ro | 1h | ||||||||
| 1h Work area high limit channel 1 | entier 32, rw | 0h | ||||||||
| 6500 0 | Operating status | u16, ro - Etat de fonctionnement du codeur.L'objet Operating Status est relié à la valeur de l'objet 6000. | ||||||||
| 6501 0 | Single-turn resolution | u32, ro voir l'étiquette Cet objet indique la résolution physique par tour du codeur. | ||||||||
| 6502 0 | Number of distinguishable revolutions | u16, ro voir l'étiquette L'objet indique le nombre physique de tours du codeur. | ||||||||
| 6504 0 | Supported alarms | u16, ro - Non supporté. | ||||||||
| 6507 0 | Profile and software version | u32, ro - L'objet contient la version profil implémentée et la version du logiciel spécifique au fabricant du codeur. | ||||||||
| MSB LSB | ||||||||||
| Software Version (version du logiciel) Version | on Profil | |||||||||
| Upper Software Version | Lower Software Version | Upper Profile Version | Lower Profile Version | |||||||
| 6509 0 | Offset value entier | 32, ro | 0 Valeur Offset du codeur. Cette valeur est déterminée par la valeur présélectionnée et décale la position physique par cette valeur Offset. | |||||||
| Index S-Idx Nom Type, | accès | Valeur standard | Description | |||||||
| 650A Module | identification | L'objet indique l'offset spécifique au fabricant, le minimum et le maximum de la valeur de position spécifique au fabricant. | ||||||||
9 Termes et abréviations
0b ... Valeur numérique binaire (pour le décodage des bits), par ex. 0b0001 0000
0d ... Valeur numérique décimale, par ex. 0d100
0x ... Valeur numérique hexadécimale, par ex. 0x64 (= 100 décimale)
Baudrate Débit de transmission (1 baud = 1 bit/s)
CAL CAN Application Layer
Protocole réseau basé sur CAN sur le niveau application
CAN Controller Area Network (système bus pour les engins mobiles)
CAN_H CAN haut ; raccordement/câble CAN d'un niveau de tension haut
CAN_L CAN bas ; raccordement/câble CAN d'un niveau de tension bas
CANopen Protocole réseau basé sur CAN sur le niveau application avec une interface de communication ouverte (répertoire objets).
(organisation regroupant des fabricants et utilisateurs en Allemagne / Erlan
gen)
organe de définition et contrôle pour CAN et des protocoles réseaux basés sur CAN
CiA DS Draft Standard (spécification CiA publié qui n'a ni été modifiée ni étendue depuis un an)
CiA DSP Draft Standard Proposal (conception d'une spécification CiA)
CiA WD Work Draft (document de travail interne de CiA accepté pour discussion)
CiA DS 301 Spécification pour le profil de communication CANopen ;
décrit les mécanismes de base de communication entre les participants ré
seaux comme par ex. la transmission de données process en temps réel,
l'échange de données entre des appareils ou la phase de configuration.
Selon l'application complémentée par les spécifications CiA suivantes:
CiA DS 401 Profil d'appareil pour des ensembles entrée/sortie TOR et analogiques
CiA DS 402 Profi l d'appareil pour des entraînements
CiA DS 403 Profi I d'appareil pour des organes de commande
CiA DS 404 Profil d'appareil pour des systèmes de mesure et des régulateurs
CiA DS 405 Spécification pour l'interface vers des systèmes programmables (IEC 61131-3)
CiA DS 406 Profi l d'appareil pour des codeurs
CiA DS 407 Profi I d'application pour le transport en commun
COB CANopen Communication Object (PDO, SDO, EMCY, ...)
COB-ID Identifi ant CANopen d'un objet de communication
Communication Le temps de synchronisation à surveiller ; temps max. entre 2 cycles cycle objets sync
EMCY Object Objet d'urgence (message d'alarme ; appareil signale une erreur)
Error Reg Registre erreur (saisie avec une reconnaissance d'erreur)
Guarding Error Nœud ou participant de réseau n'était pas ou n'est plus trouvé Guard-MASTER : un ou plusieurs esclaves ne répondent plus. Guard-SLAVE : l'appareil (SLAVE) n'est plus scruté.
Guard Time Pendant ce temps, le participant réseau attend un "Node Guarding" du maître réseau.
Heartbeat Surveillance cyclique paramétrable parmi les participants réseau. Contrairement au "Node Guarding" le maître NMT supérieure n'est pas nécessaire.
ID Identifiant ; marque un message CAN. La valeur numérique de l'ID (identifiant) contient aussi une priorité pour l'accès bus.
ID 0 = niveau de priorité le plus haut.
Idx Index ; avec l'index S, il compose l'adresse d'une saisie dans le répertoire objets.
Life Time Factor Nombre d'essais si la réponse guarding manque
Surveillance Est utilisée pour décrire une classe erreur (surveillance guarding, sync etc.). NMT Network Management
Maître/esclaves NMT Le maître NMT contrôle les états de fonctionnement des esclaves NMT
Node Guarding Surveillance cyclique paramétrable des participants réseau esclave par le nœud maître supérieur ainsi que la surveillance de ce mécanisme de scrutation par les participants esclaves.
ID nœud Identifiant point nœud (identification d'un participant dans le réseau CANopen)
Objet (également OBJ) Terme générique pour les données/messages interchangeables à l'intérieur du réseau CANopen
Répertoire objets Contient tous les paramètres de communication CANopen d'un appareil ainsi que des paramètres et données spécifiques à l'appareil.
Les saisies individuelles sont accédées via l'index et l'index S.
Operational Etat de fonctionnement d'un participant CANopen.
Dans ce mode, les SDO, les commandes NMT et les PDO peuvent être transmis.
PDO Process Data Object ;
dans le réseau CANopen, pour la transmission des données process en temps réel, comme par ex. la vitesse de rotation d'un moteur.
Les PDO ont un niveau de priorité plus haut que les SDO ; contrairement aux SDO ils sont transférés sans confirmation.
Les PDO consistent en un message CAN avec identifi ant et des données utiles jusqu'à 8 bytes.
Mapping PDO Décrit les données applications qui sont transférées avec un PDO.
Pre-Op Preoperational ; état de fonctionnement d'un participant CANopen.
Après la mise sous tension chaque participant passe automatique
ment dans cet état.
Dans le réseau CANopen, uniquement les SDO et les commandes
NMT peuvent être transférés dans ce mode, cependant aucune
donnée process.
Prepared (également stopped) Etat de fonctionnement d'un participant CANo pen.
Dans ce mode uniquement les commandes NMT sont transférés.
ro read only (unidirectionnel ; seulement lecture)
rw read-write (bidirectionnel ; lecture - écriture)
Rx-Queue Tampon de réception
s16 Type de données signed 16 bits (avec signe, format 16 bits)
SDO Service Data Object ;
Avec cet objet, un répertoire objets d'un participant réseau est
atteint de façon ciblée (lire/écrire). Un SDO peut consister en
plusieurs messages CAN. La transmission de messages individuels
est confi rmée par le participant adressé.
Utilisant les SDO, les appareils peuvent être configurés et paramé très.
Serveur SDO Mécanisme et paramètres pour rendre accessible son propre
répertoire objets d'un participant réseau à d'autres participants
(clients).
S-Idx (également SIdx) Sous index dans le répertoire objets d'un appareil pour CANo
pen.
Start Guarding Commencement de la surveillance des nœuds
str Type de données String (variable pour des chaînes de caractères
comme par ex. le texte "load")
Sync Error Absence du Sync OBJ durant le temps de synchronisation
paramétrable
Sync OBJ L'objet de synchronisation pour l'actualisation simultanée dans le réseau entier ou la validation des données process des PDO para
métrés.
Sync Windows Fenêtre temporelle pendant laquelle les PDO synchrones doivent
être transférés.
Time Stamp Marquage temporel pour le réglage des horloges éventuellement présents dans les participants réseau
Trans Type Type de transmission des données process ; synchrone, asynchrone
Trans PDO Transmit Process Data Object
(également Tx PDO)
Trans SDO Transmit Service Data Object
(également Tx SDO)
Tx-Queue(Transmit) Tampon de transmission
u8 (16, 32) Type de données unsigned 8 (16, 32) bits (sans signe, format de bits
8 (16, 32)
wo write only (seulement écriture)





- Licences et marques
- Remarque préliminaire
- Symboles utilisés
- Avertissements utilisés
- ATTENTION
- Consignes de sécurité
- Informations générales
- Technologie CANopen
- Modes de fonctionnement supportés
- Références
- Fonctionnement et caractéristiques
- Montage
- Installation du codeur
- Réglages dans le codeur
- Affectation du signal
- Réglage du numéro de nœud
- Réglage du numéro de nœud via des objets SDO
- Réglage du débit de transmission via des objets SDO
- Réglage du numéro de nœud et du débit de transmission via LSS
- Terminaison de bus
- Indications LED
- Configuration
- Modes de fonctionnement
- Information générale
- Mode Start/Stop
- Réinitialisation du codeur
- Enregistrer les paramètres
- L'opération de mémorisation
- Sauvegarder sans reset
- Sauvegarder avec reset
- Restaurer les paramètres
- Layer Setting Service (LSS)
- Paramètres programmables
- Répertoire objets
- Exemple de programmation valeur présélectionnée
- Régler la valeur présélectionnée (maître au codeur avec numéro de nœud 1)
- Inhibit Time (temps d'inhibition)
- Event Time
- Objets spécifiques au fabricant de 2000h à 5FFFh
- Objets spécifiques à l'appareil de 6000h à 9FFFF
- Termes et abréviations
Marque : IFM
Modèle : RM9006
Catégorie : Capteur industriel