
CR413S - Contrôleur IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil CR413S IFM au format PDF.

| Type de produit | Contrôleur programmable (série ecomatBasic) |
| Marque | IFM |
| Modèle | CR413S |
| Dimensions (L x l) | 162,2 x 139,2 mm |
| Alimentation | 12 V DC ou 24 V DC (réseau de bord) / TBTS ou TBTP |
| Nombre d'entrées | 16 |
| Nombre de sorties | 16 |
| Types d'entrées | Analogiques, résistance, TOR niveau haut, multifonctions |
| Types de sorties | TOR, PWM (jusqu'à 4 A) |
| Interfaces | 2x CAN, Ethernet (M12 codage D) |
| Programmation | CODESYS V3.5 (conforme CEI 61131-3) |
| Plage de température ambiante | Voir données techniques (non précisée dans cet extrait) |
| Indice de protection | IP20 (zones de raccordement), voir données techniques |
| Montage | Sur surface plane, 3 trous de fixation M4 |
| Dissipation thermique | Nécessite une dissipation suffisante, boîtier chaud |
| Entretien | Sans entretien |
| Nettoyage | Chiffon microfibre doux, sec, non traité chimiquement |
| Réparabilité | Non réparable, contacter ifm |
| Sécurité | Protection contre inversion de polarité partielle, fusibles externes requis |
| Documents fournis | Notice d'utilisation, déclarations de conformité, rivets tubulaires |
FOIRE AUX QUESTIONS - CR413S IFM
Questions des utilisateurs sur CR413S IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur au format PDF gratuitement ! Retrouvez votre notice CR413S - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil CR413S de la marque IFM.
MODE D'EMPLOI CR413S IFM
Notice d'utilisation
ecomatBasic
CR413S
1 Remarques préliminaires 3
1.1 Symboles utilisés 3 1.2 Avertissements 3 1.3 Symbole de sécurité sur l'appareil 3
2 Consignes de sécurité 4
3 Usage prévu 5
3.1 Mauvais usage prévisible 5
4 Fourniture 6
4.1 Accessoires 6
5 Montage 7
5.1 Emplacement d'installation 7 5.2 Surface de montage 7 5.3 Dissipation thermique 7 5.4 Fixation 8
6 Raccordement électrique 9
6.1 Connecteur M12 9 6.2 Connecteurs plats 6,3 x 0,8 mm 9 6.3 Schéma de branchement 10
6.3.1 Connexion Ethernet 13 6.3.2 Borne Shield/terre fonctionnelle 13
6.4 Fusibles 13 6.5 Principe de raccordement 14
6.5.1 Connexions GND 15
6.6 Entrées analogiques 15 6.7 Entrées résistance 16 6.8 Entrées TOR niveau haut (CSO) 16 6.9 Sorties TOR/PWM 17 6.10 Fonctionnement mixte (12 V / 24 V) 17
7 Mise en service 19
7.1 Interfaces et configuration minimum 19 7.2 Documentation nécessaire 19
8 Maintenance, réparation et élimination 20
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
1.1 Symboles utilisés
√ Condition préalable Action à effectuer Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
1.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :

AVERTISSEMENT
Avertissement de dommages corporels graves
Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.

ATTENTION
Avertissement de dommages corporels légers à modérés
Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE
Avertissement sur les dommages matériels
Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
1.3 Symbole de sécurité sur l'appareil

Symbole de sécurité sur l'appareil :
▶ Prendre en compte la notice d'utilisation pour le fonctionnement sûr de l'appareil.
2 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
- L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
- Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, la programmation, la configuration, l'utilisation et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé pour la tâche concernée.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- Remplacer les appareils endommagés, car autrement les données techniques et la sécurité sont affectées.
- Observer les documents applicables.
INFORMATION IMPORTANTE
Surcharge en courant, projections de soudure et souillure par des travaux de soudage
▷ Endommagement de l'appareil, influence sur la sécurité électrique. Les travaux de soudage sur le cadre de châssis ne doivent être effectués que par un personnel qualifié. ▶ Retirer et couvrir les bornes positives et négatives des piles. Avant le soudage sur le véhicule ou sur l'installation, déconnecter l'appareil de tous les contacts du réseau de bord. Raccorder la borne de masse de l'appareil de soudage directement à la pièce à souder. ▶ Ne pas toucher l'appareil ni les câbles électriques avec l'électrode de soudage ou la borne de masse de l'appareil de soudage. Protéger l'appareil, tous les connecteurs et tous les câbles de raccordement contre les projections de soudage et les autres souillures.
3 Usage prévu
Les systèmes de contrôle-commande programmables de la série « ecomatBasic » sont conçus pour être utilisés dans des conditions sévères : plage de température étendue, fortes vibrations, perturbations CEM élevées.
Usage autorisé :
- dans les engins mobiles, alimentés par le système électrique du véhicule (avec pile) d'une tension nominale de 12 V DC ou de 24 V DC
- dans des environnements industriels, l'appareil étant installé de façon fixe avec alimentation selon TBTS, TBTP conformément aux données techniques

Il s'agit d'un produit de la classe A. Dans les environnements domestiques, ce produit peut provoquer des problèmes de radiodiffusion.
En cas de besoin, prendre des mesures de blindage CEM.
- Deux programmes séparés :
- Les deux sont programmés avec le logiciel CODESYS V3.5 (version approuvée par ifm).
- N'utiliser l'appareil que dans les limites des données techniques : → Données techniques.
- Lieu de montage : → Emplacement d'installation

La connexion directe de l'appareil aux infrastructures informatiques n'est pas prévue. Si cette utilisation est souhaitée, elle doit être réalisée par l'utilisateur (par ex. en ajoutant des composants supplémentaires).
Observer le document suivant : « Operating instructions (supplement) - Cyber Security » via documentation.ifm.com
Nombre d'entrées : 16
Nombre de sorties : 16
Nombre de groupes de sorties : 3 (alimentés via VBB 0...2)
3.1 Mauvais usage prévisible :
- Un fonctionnement permanent 24h/24, 7j/7 n'est pas admis.
- Ne pas utiliser l'appareil dans les applications de sécurité.
- Ne pas monter l'appareil sur le moteur.
- L'utilisation près de rayonnements ionisants n'est pas admise.
4 Fourniture
CR413S :
- 1 ecomatBasic • 4 rivets tubulaires avec 4 rondelles • Déclaration de conformité CE • Déclaration de conformité UK
▶ Si la livraison est incomplète ou endommagée, contacter ifm.

Notice d'utilisation, manuel de programmation et logiciel (firmware de l'appareil et environnement de programmation) sur documentation.ifm.com.
4.1 Accessoires

Informations sur les accessoires disponibles sur www.ifm.com
5 Montage
5.1 Emplacement d'installation

La stabilité de la surface de montage et de la fixation sur le lieu de montage est sous la responsabilité de l'installateur du système. Le poids de l'appareil, les conditions environnantes de l'application et les réglementations locales doivent être pris en compte.
Les lieux de montage suivants sont permis en cas d'utilisation mobile :
• À l'intérieur de la cabine - Carrosserie - Châssis de véhicule
Le montage sur le moteur n'est pas permis.
Les réglementations applicables doivent être observées en tenant compte des conditions environnantes spécifiées.
Conditions environnantes : → Données techniques
▶ Tenir compte de l'indice de protection et du degré de pollution. L'installateur du système est responsable de la protection de l'appareil dans l'application si l'indice de protection ou le degré de pollution requis pour l'appareil n'est pas respecté.
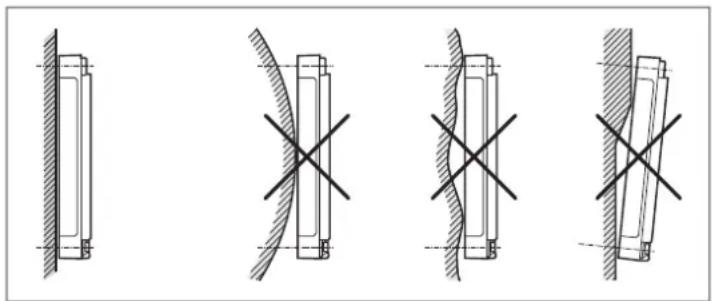
5.2 Surface de montage

Le boîtier ne doit pas être soumis à des forces de torsion ni à des contraintes mécaniques.
Si une surface de montage plane n'est pas disponible, utiliser des éléments de compensation appropriés.
Lors du montage et du stockage, s'assurer que le degré de pollution est de 2 ou mieux (CEI 60664-1).
5.3 Dissipation thermique
Le boîtier peut s'échauffer considérablement.
Lors du montage, veiller à avoir une dissipation de chaleur suffisante sur le lieu de montage. ▶ Respecter la température ambiante maximale. ▶ Respecter les paramètres et les indications indiqués dans la fiche technique pour la température, l'altitude au-dessus du niveau de la mer et la fréquence des sorties.
5.4 Fixation
▶ Insérer par l'arrière de l'appareil les rivets tubulaires fournis dans les 3 trous de fixation. ▶ Fixer l'appareil avec 3 rondelles et vis à tête cylindrique M4. Couple de serrage : 1,5 ± 0,2 Nm Serrer les vis en alternance.
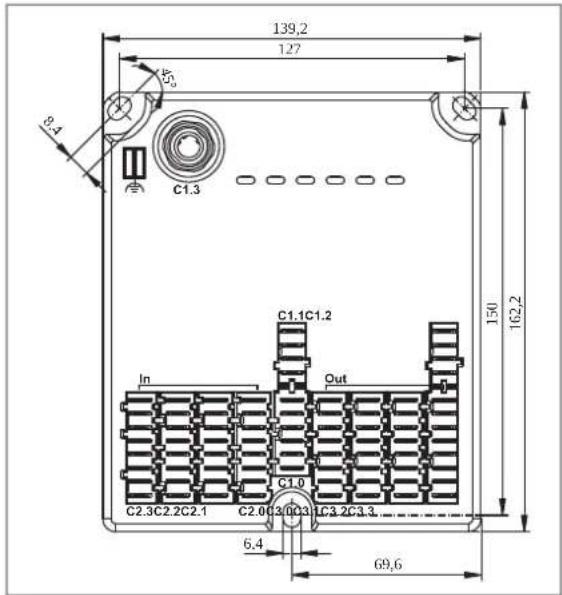
Fig. 2: Dimensions pour les trous
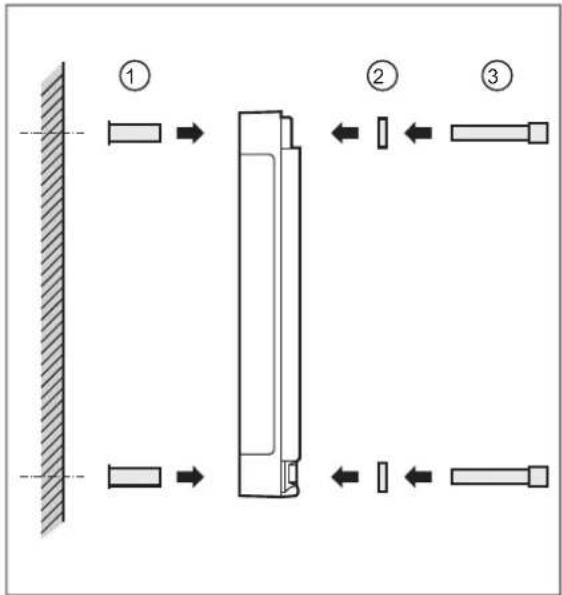
Fig. 3: Insertion des rivets tubulaires
1 Rivets tubulaires
2 Rondelles
6 Raccordement électrique

Avant le raccordement de l'appareil mettre l'installation hors tension, ainsi que les circuits de charge d'entrée / de sortie alimentés indépendamment. ▶ Respecter les réglementations nationales et internationales relatives à l'installation de matériel électrique. ▶ Prendre en compte les exigences de la norme EN 60204.
Le circuit est isolé des surfaces facilement accessibles de l'appareil par une isolation de base selon CEI 61010-1 (circuit secondaire avec max. 32 V DC, dérivé du courant de réseau jusqu'à 300 V de catégorie de surtension II).
L'isolation de base ne s'applique pas aux zones de raccordement (IP20).
Le câblage externe doit être effectué de manière à garantir l'isolation nécessaire des autres circuits.
L'interface Ethernet est isolée des surfaces facilement accessibles de l'appareil avec une isolation de base selon EN61010-1 (circuit secondaire avec max. 32 V DC, dérivé du courant de réseau jusqu'à 300 V de catégorie de surtension II).

La masse GND de l'alimentation est raccordée à la borne Shield/terre fonctionnelle de l'appareil via des condensateurs d'antiparasitage.

Respecter toutes les remarques concernant le raccordement.

S'assurer que l'appareil a été mis hors tension avant de raccorder les connecteurs. Le « hot-plugging » n'est pas admis.

Les sections de câble doivent être adaptées aux courants de fonctionnement/valeurs des fusibles.
▶ Respecter l'étiquette de l'appareil. ▶ Munir les raccords non utilisés de boîtiers de contact non occupés.
6.1 Connecteur M12
Les filetages dans l'appareil correspondent au standard M12. Afin de garantir l'indice de protection spécifié, seuls des câbles qui correspondent à ce standard doivent être utilisés. Pour les câbles coupés par l'utilisateur, le fabricant du système est responsable du type de protection.
▶ Utiliser des connecteurs avec contacts dorés. Placer verticalement les connecteurs lors du montage afin que l'écrou moleté n'endommage pas le filetage. ▶ Respecter le codage des connecteurs lors du montage. ▶ Visser le connecteur mâle à 1,3 ± 0,1 Nm. ▶ Equiper tous les câbles sortants à partir de 200 mm maximum d'une décharge de traction appropriée. Respecter le rayon de courbure minimal des câbles (→ indications du fabricant de câbles).
6.2 Connecteurs plats 6,3 x 0,8 mm
Câbles coupés par l'utilisateur :
- Les boîtiers de contact doivent être conformes à une classification d'inflammabilité d'au moins V-2 (V-0, V-1, V-2) selon CEI 60695.
- Les câbles isolés doivent être difficilement inflammables (VW-1 selon ANSI/UL 2556 ou équivalent)
- La température maximale pour les boîtiers de contacts des accessoires ifm est de 105 °C.
L'installateur du système doit garantir cette température dans l'application.
La température atteinte dépend de la section du câble et des courants maximaux.
En cas d'utilisation de câbles d'une section de 1,5 mm², les caractéristiques techniques du boîtier de contact sont garanties et les caractéristiques techniques de l'appareil restent valables.
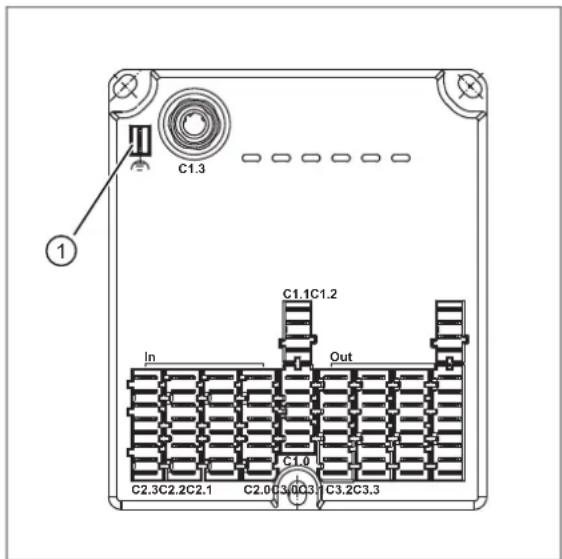
6.3 Schéma de branchement
Schéma de branchement des connecteurs : Données techniques : www.ifm.com
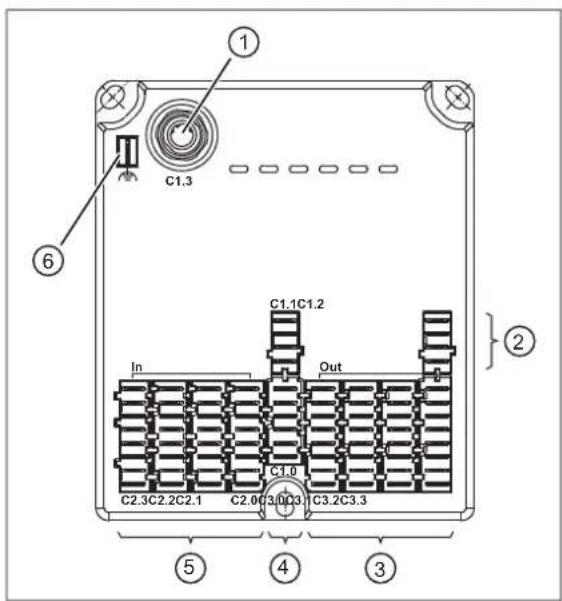
1 : Connexion Ethernet C1.3 (connecteur M12) 2 : Alimentation et RESET-COM C1.2 (connecteur plat) 3 : Sorties C3.0 - C3.3 (connecteur plat) 4 : Alimentation et connexions CAN C1.0 et C1.1 (connecteur plat) 5 : Entrées C2.0 - C2.3 (connecteur plat) 6 : Borne Shield/terre fonctionnelle (connecteur plat)
Affectation des barrettes de connexion :
Toutes les connexions VBB 30 des barrettes de connexion sont raccordées entre elles dans l'appareil.
Toutes les connexions GND sont raccordées entre elles dans l'appareil.
| Barrette de connexion | Connexion Fonction | |
| C1.0 VBB | 30 | Alimentation du contrôleur |
| VBB0 | Alimentation du groupe de sorties 0 | |
| VBB1 | Alimentation du groupe de sorties 1 | |
| GND0 | GND du contrôleur | |
| CAN0_H Interface CAN 0 (haut) | ||
| CAN0_L Interface CAN 0 (bas) | ||
| C1.1 VBB | 30 | Alimentation du contrôleur |
| GND1 | GND du contrôleur | |
| CAN1_H Interface CAN 1 (haut) | ||
| CAN1_L Interface CAN 1 (bas) | ||
| C1.2 VBB | 2 | Alimentation du groupe de sorties 2 |
| GND2 | GND du contrôleur | |
| NC non utilisée | ||
| RESET-COM Entrée de service du contrôleur | ||
Tab. 1: Barrettes de connexion C1.0, C1.1, C1.2
| Barrette de connexion | Connexion Fonction | |
| C2.0 VBB | 30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) |
| IN0400 Entrée de fréquence (IN FREQUENCY-B) | ||
| IN0401 Entrée de fréquence (IN FREQUENCY-B) | ||
| GND GND des capteurs | ||
| GND GND des capteurs | ||
| IN0500 Entrée de fréquence (IN FREQUENCY-B) | ||
| IN0501 Entrée de fréquence (IN FREQUENCY-B) | ||
| VBB30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) | |
| C2.1 VBB | 30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) |
| IN0200 Entrée résistance (IN RESISTOR-A) | ||
| IN0201 Entrée résistance (IN RESISTOR-A) | ||
| GND GND des capteurs | ||
| GND GND des capteurs | ||
| IN0300 Entrée résistance (IN RESISTOR-A) | ||
| IN0301 Entrée résistance (IN RESISTOR-A) | ||
| VBB30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) | |
| C2.2 VBB | 30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) |
| IN0000 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| IN0001 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| GND GND des capteurs | ||
| GND GND des capteurs | ||
| IN0100 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| IN0101 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| VBB30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) | |
| C2.3 VBB | 30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) |
| IN0600 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| IN0601 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| GND GND des capteurs | ||
| GND GND des capteurs | ||
| IN0700 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| IN0701 Entrée multifonctionnelle (IN MULTIFUNCTION-A) | ||
| VBB30 | Alimentation des capteurs (alimentée par VBB30 de C1.0 / C1.1) | |
Tab. 2: Barrettes de connexion C2.0, C2.1, C2.2, C2.3
| Barrette de connexion | Connexion Fonction | |
| C3.0 OUT0000 Sortie T | OR / PWM / PWM-I 2,5 A (OUT PWM-25-A) | |
| GND GND des actionneurs | ||
| OUT0001 Sortie TOR / PWM / PWM-I 2,5 A (OUT PWM-25-A) | ||
| GND GND des actionneurs | ||
| OUT0002 Sortie TOR / PWM 2,5 A (OUT PWM-25-B) | ||
| GND GND des actionneurs | ||
| OUT0003 Sortie TOR / PWM 2,5 A (OUT PWM-25-B) | ||
| GND GND des actionneurs | ||
| C3.1 OUT0004 Sortie T | OR / PWM 1 A (OUT PWM-10-D) | |
| Barrette de connexion | Connexion Fonction | |
| C3.1 GND GND des act | onneurs | |
| OUT0005 Sortie TOR / PWM 1 A (OUT PWM-10-D) | ||
| GND GND des actionneurs | ||
| OUT0006 Sortie TOR / PWM 1 A (OUT PWM-10-D) | ||
| GND GND des actionneurs | ||
| OUT0007 Sortie TOR / PWM 1 A (OUT PWM-10-D) | ||
| GND GND des actionneurs | ||
| C3.2 OUT0100 Sortie T | DR / PWM 2,5 A (OUT PWM-25-B) | |
| GND GND des actionneurs | ||
| OUT0101 Sortie TOR / PWM 2,5 A (OUT PWM-25-B) | ||
| GND GND des actionneurs | ||
| OUT0102 Sortie TOR / PWM 4,0 A (OUT PWM-40-B) | ||
| GND GND des actionneurs | ||
| OUT0103 Sortie TOR / PWM 4,0 A (OUT PWM-40-B) | ||
| GND GND des actionneurs | ||
| C3.3 OUT0200 Sortie T | DR / PWM / PWM-I 2,5 A (OUT PWM-25-A) | |
| GND GND des actionneurs | ||
| OUT0201 Sortie TOR / PWM / PWM-I 2,5 A (OUT PWM-25-A) | ||
| GND GND des actionneurs | ||
| OUT0202 Sortie TOR / PWM 2,5 A (OUT PWM-25-B) | ||
| GND GND des actionneurs | ||
| OUT0203 Sortie TOR / PWM 2,5 A (OUT PWM-25-B) | ||
| GND GND des actionneurs | ||
Tab. 3: Barrettes de connexion C3.0, C3.1, C3.2, C3.3

Seuls les signaux indiqués dans les données techniques doivent être raccordés aux bornes de raccordement.
VBB30 est protégé contre l'inversion de polarité.
INFORMATION IMPORTANTE
Absence de protection contre l'inversion de polarité pour VBB 0...2
La protection contre l'inversion de polarité n'est assurée qu'en cas d'alimentation par le réseau de bord (via une batterie), si la polarité de cette alimentation est inversée dans son ensemble (batterie mal raccordée). La protection contre l'inversion de polarité est basée sur le fait qu'en cas d'inversion de polarité, les fusibles en amont sont désactivés rapidement en raison de la surintensité de courant. En cas d'alimentation par TBTS/TBTP, la protection contre l'inversion de polarité n'est pas garantie. ▷ Endommagement de l'appareil Assurer le raccordement correct au connecteur avant son montage sur l'appareil, également en cas de fonctionnement avec le réseau de bord.

L'appareil est conçu pour une alimentation par un réseau de bord mobile (12/24 V DC de tension nominale) ou TBTS/TBTP selon les données techniques et les règlements nationaux. L'alimentation est transmise directement sans isolation galvanique aux capteurs/actionneurs connectés.
Raccorder tous les câbles d'alimentation nécessaires (VBB 30, VBB 0, VBB 1, VBB 2) et toutes les connexions GND (GND 0, GND 1, GND 2) ainsi que Shield/la terre fonctionnelle. VBB 30 peut être raccordé à C1.0 ou C1.1.
6.3.1 Connexion Ethernet
Schéma de branchement (M12, codage D) :

1: TD + 2: RD + 3: TD - 4: RD - 5: non utilisé
Raccorder l'appareil via la connexion Ethernet (connecteur M12 C1.3). N'utiliser que des câbles de catégorie 5 (Cat 5) minimum pour la connexion Ethernet.
6.3.2 Borne Shield/terre fonctionnelle
1 : Borne Shield/terre fonctionnelle

Afin de garantir la protection contre les interférences électriques et le fonctionnement correct de l'appareil, la borne Shield/terre fonctionnelle doit être raccordée à la carrosserie (réseau de bord) – ou, pour les installations fixes, à la terre – par le chemin le plus court.
6.4 Fusibles

ATTENTION
Les courants d'entrée des tensions d'alimentation ne sont pas limités.
▷ Pas de protection contre l'incendie sans fusibles externes. Protéger les circuits.
Pour protéger le système complet, protéger les circuits individuellement.
Nous recommandons des fusibles automobiles (lamellaires).
| Connexion Valeur nominale du fusible | Caractéristique de déclenchement nécessaire | |
| VBB30 VBB0 | 2 A T≤ 15 A - | fuse ≤ 120 s à max. 6,25 A |
| VBB1 | ≤ 15 A - | |
| VBB2 | ≤ 15 A - | |
| Alimentation des capteurs (en cas de raccordement direct à l'alimentation) | ≤ 2 A T | fuse ≤ 120 s à max. 6,25 A |

Protection contre le load-dump et les surtensions :
Une protection contre le load-dump et les surtensions est intégrée dans l'appareil.
En cas d'utilisation de la protection, utiliser un fusible de 15 A et un câble d'une section de 1,5 mm² pour VBB₁. En cas d'utilisation de la protection, raccorder VBB1 et VBB30 à un point neutre commun.
6.5 Principe de raccordement
![graph TD A["supply"] --> B["Component Block"] B --> C1["Component Block ①"] B --> C2["Component Block ②"] C1 --> D1["Sensor C10"] C1 --> D2["Sensor C11"] C1 --> D3["Sensor C12"] C2 --> E1["Output C3n"] C2 --> E2["Output C3n"] C2 --> E3["Load"] C2 --> E4["Load"] C2 --> E5["Load"] C2 --> E6["Load"] C2…](/content/2026/04/701292/images/8ec8bb29d124dca01756ef75da9c3b51acb2c8e252a7370a144a7d69ee8eaf22.jpg)
Fig. 5: Raccordement des câbles d'alimentation et de signalisation (X = non admis)
1 : Point neutre GND 2 : Retour de la charge au point neutre commun 3 : Retour de la charge via la broche GND correspondante des barrettes de connexion C3.n 4 : Alimentation des capteurs via les contacts VBB 30 et GND des barrettes de connexion C2.n 5 : Alimentation des capteurs par fusible : Fusibles (→ 13)

Shunter des câbles dans les connecteurs est interdit.
RESET-COM est une entrée de service permettant de réinitialiser les paramètres de communication (voir manuel de programmation).
Pour le fonctionnement du contrôleur, raccorder RESET-COM au point neutre GND ①.

Guidage incorrect des câbles d'alimentation et de signalisation
▷ Possibilité de la dégradation de la CEM Raccorder tous les câbles d'alimentation et de signalisation séparément, prendre en compte la CEM / l'application Raccorder les câbles d'alimentation et les fils de masse au contrôleur et aux capteurs/actionneurs par un point neutre commun ou via les barrettes de connexion C2.x / C3.x correspondantes.

Si un câble de raccordement préfabriqué est utilisé, enlever les fils non utilisés.
En cas de perturbation des signaux, utiliser des câbles blindés. Raccorder les blindages à la borne Shield/terre fonctionnelle d'un côté.

AVERTISSEMENT
Surtension > 36 V (non protégé)
Risque de dommages corporels et/ou matériels. Comportement dangereux incontrôlable et imprévisible du contrôleur, par exemple toutes les sorties activées. ▶ Prévoir une protection externe contre les surtensions.
Le bus CAN est protégé en interne contre un court-circuit au VBB et GND.

En cas de câbles CAN ≥ 30 m, assurer une protection suffisante contre la surtension (par ex. utiliser des câbles blindés).
6.5.1 Connexions GND
Raccorder les connexions GND 0...2 individuellement au point neutre GND commun ①. Raccorder les connexions GND des capteurs aux connexions GND de la barrette de connexion correspondante. Raccorder les connexions GND des actionneurs (charges) au point neutre GND commun ou aux connexions GND de la barrette de connexion correspondante.
6.6 Entrées analogiques
![graph TD A["supply"] --> B["+"] B --> C["①"] C --> D["②"] D --> E["控制信号"] E --> F["控制信号1"] E --> G["控制信号2"] F --> H["电容C2.n"] G --> I["电容C2.n"] H --> J["输入输出"] I --> K["输出输出"] L["COMPS"] --> M["电阻符号"] M --> N["电阻符号与按钮符号"] O["电容C2.n"] --> P["输入输出"] Q["电容C2.n"] --> R["输出输出"]](/content/2026/04/701292/images/c2baa7a3cc25b349bc56de6611a92d56ddee130a5d4318f18cf8208ae3882d86.jpg)
Fig. 6: Raccordement des entrées analogiques (X= non admis)
1 : Point neutre GND 2 : Fusible pour l'alimentation des capteurs : Fusibles (→ 13)
Raccorder GND de la source du signal à la connexion GND correspondante de la barrette de connexion C2.n.
Ne pas raccorder GND de la source du signal au point neutre GND commun ①.
6.7 Entrées résistance
![graph TD A["supply"] --> B["Pin 1"] B --> C["Pin 2"] C --> D["Pin 3"] D --> E["Pin 4"] E --> F["Pin 5"] F --> G["Pin 6"] G --> H["Pin 7"] H --> I["Pin 8"] I --> J["Pin 9"] J --> K["Pin 10"] K --> L["Pin 11"] L --> M["Pin 12"] M --> N["Pin 13"] N --> O["Pin 14"] O --> P["Pin 15"] P --> Q["Pin 16"] Q…](/content/2026/04/701292/images/a8750b3ca15ad55fb95a0c6bf71d40da19272ccf35c01bf6ad37186868ab11b7.jpg)
Fig. 7: Raccordement des entrées résistance (X= non admis)
1 : Point neutre GND
Raccorder GND de la source du signal à la connexion GND correspondante de la barrette de connexion C2.n. Ne pas raccorder GND de la source du signal au point neutre GND commun ①.
▶ Ne pas raccorder les entrées résistance à une VBB.
6.8 Entrées TOR niveau haut (CSO)
![graph TD A["supply"] --> B["①"] B --> C["②"] C --> D["C2.n input"] C --> E["C2.nVBB 30"] C --> F["C2.ninput"] C --> G["C2.n GND"] C --> H["C2.nGND"] D --> I["ecomatBasic"] E --> I F --> I G --> I H --> I I --> J["Ground"]](/content/2026/04/701292/images/e528d513df3833f5159c071a59a1098f2f05162ba0907edb936b8e2143c41b32.jpg)
Fig. 8 : Raccordement des entrées niveau haut (X = non admis)
1 : Point neutre GND
2 : Fusible pour l'alimentation des capteurs : Fusibles (→ □ 13)
Raccorder le GND de la source du signal à la connexion GND correspondante de la barrette de connexion C2.n ou au point neutre GND commun.
6.9 Sorties TOR/PWM
![graph TD A["supply"] --> B["Resistors"] B --> C["VBB0-C10"] B --> D["VBB1-C10"] B --> E["VBB2-C12"] F["Resistors"] --> G["GND0-C10"] F --> H["GND1-C11"] F --> I["GND2-C12"] J["Load"] --> K["output C3.n"] J --> L["output C3.n"] M["Load"] --> N["output C3.n"] M --> O["GND C3.n"] P["×"] --> Q["Ground"]](/content/2026/04/701292/images/70e56298c1710874e605318599de8a06b88ff34c59e451d46b5e3ba92eb7855e.jpg)
Fig. 9 : Raccordement des sorties TOR niveau haut (X = non admis)
1 : Point neutre GND

AVERTISSEMENT
Déconnexion du point neutre GND alors que les charges connectées aux sorties sont toujours connectées au GND de l'alimentation (voir figure ci-dessus, ligne pointillée)
Ceci peut générer des courants de fuite circulant à travers le contrôleur et la charge pouvant entraîner un état non défini du contrôleur et du système.
▷ Perte du fonctionnement correct. Toujours raccorder le fil de masse du contrôleur et des charges (actionneurs) via le point neutre GND commun ① (voir image ci-dessus). Cela garantit que les charges ne sont plus connectées au GND si la ligne d'alimentation est interrompue.
Le contrôleur peut être utilisé avec les charges suivantes :
- charges ohmiques
- charges capacitives (adapter les réglages de diagnostic à la charge, voir manuel de programmation)
- charges inductives. La charge raccordée ne doit pas dépasser les valeurs maximum admissibles de la sortie correspondante (→ Données techniques).

Tout autre raccordement est interdit.
6.10 Fonctionnement mixte (12 V / 24 V)

En cas d'une alimentation par TBTS/TBTP, le fonctionnement mixte n'est pas autorisé. Le fonctionnement mixte n'est autorisé qu'en cas d'alimentation par le réseau de bord.
![graph TD A["supply"] --> B["24 V 12V"] B --> C["①"] C --> D["②"] D --> E["sensor"] D --> F["sensor"] E --> G["C2.n input"] E --> H["C2.n input"] F --> I["C2.n input"] F --> J["C2.n input"] G --> K["VBB30"] H --> L["VBB2"] I --> M["GND1"] J --> N["GND2"] K --> O["output C3.n"] L --> P["output C3.n"]…](/content/2026/04/701292/images/1ca615a07cf341d08373092acc2335dfbc83ab54c8d39eb255257889bc5eae0e.jpg)
Fig. 10: Exemple de raccordement à une alimentation en tension 24 V et 12 V
1 : Point neutre GND
2 : Fusible pour l'alimentation des capteurs : Fusibles (→ □ 13)
7 Mise en service
7.1 Interfaces et configuration minimum
Le programmeur crée le programme d'application en utilisant l'environnement de développement CODESYS conforme à CEI 61131-3. Il transfère ensuite les applications dans le contrôleur via l'interface Ethernet ou CAN. Vous trouverez les informations nécessaires concernant l'installation et la mise en service dans le manuel de programmation.
Composants nécessaires :
- Version utilisable du logiciel CODESYS
- Plugins pour CODESYS
- Package logiciel CODESYS pour le contrôleur
- Firmware
- Notes de version
Les personnes doivent être familières avec le logiciel CODESYS pour programmer le contrôleur.
De plus, ces personnes doivent avoir des connaissances dans les domaines suivants :
- Normes spécifiques à l'application
7.2 Documentation nécessaire
Outre le système de programmation CODESYS, les documents suivants sont nécessaires pour la mise en service et la programmation du contrôleur :
• Manuel de programmation CODESYS V3.5 - Notice d'utilisation (complément) – Cyber Security Whitepaper
Pour télécharger les manuels visitez le site web :
www.ifm.com
Aide en ligne CODESYS : inclus dans l'installation CODESYS (www.ifm.com, dans la zone de téléchargement avec login)
8 Maintenance, réparation et élimination
L'appareil est sans entretien.
En cas de mauvais fonctionnement de l'appareil prendre contact avec ifm. L'appareil ne peut pas être réparé. S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
Nettoyage :
▶ Mettre l'appareil hors tension. Enlever les salissures avec un chiffon en microfibre doux, sec et non traité chimiquement.





- 1 REMARQUES PRÉLIMINAIRES
- 1.1 SYMBOLES UTILISÉS
- 1.2 AVERTISSEMENTS
- AVERTISSEMENT
- ATTENTION
- INFORMATION IMPORTANTE
- 1.3 SYMBOLE DE SÉCURITÉ SUR L'APPAREIL
- 2 CONSIGNES DE SÉCURITÉ
- 3 USAGE PRÉVU
- 3.1 MAUVAIS USAGE PRÉVISIBLE
- 4 FOURNITURE
- CR413S
- 4.1 ACCESSOIRES
- 5 MONTAGE
- 5.1 EMPLACEMENT D'INSTALLATION
- 5.2 SURFACE DE MONTAGE
- 5.3 DISSIPATION THERMIQUE
- 5.4 FIXATION
- 6 RACCORDEMENT ÉLECTRIQUE
- 6.1 CONNECTEUR M12
- 6.2 CONNECTEURS PLATS 6,3 X 0,8 MM
- 6.3 SCHÉMA DE BRANCHEMENT
- 6.3.1 CONNEXION ETHERNET
- 6.3.2 BORNE SHIELD/TERRE FONCTIONNELLE
- 6.4 FUSIBLES
- 6.5 PRINCIPE DE RACCORDEMENT
- 6.5.1 CONNEXIONS GND
- 6.6 ENTRÉES ANALOGIQUES
- 6.7 ENTRÉES RÉSISTANCE
- 6.8 ENTRÉES TOR NIVEAU HAUT (CSO)
- 6.9 SORTIES TOR/PWM
- 6.10 FONCTIONNEMENT MIXTE (12 V / 24 V)
- 7 MISE EN SERVICE
- 7.1 INTERFACES ET CONFIGURATION MINIMUM
- 7.2 DOCUMENTATION NÉCESSAIRE
- 8 MAINTENANCE, RÉPARATION ET ÉLIMINATION
Marque : IFM
Modèle : CR413S
Catégorie : Contrôleur